Embed Size (px)
Citation preview

INSTITUT FÜR ANGEWANDTE INFORMATIK UND FORMALE BESCHREIBUNGSVERFAHREN
AIFB
KIT – Universität des Landes Baden-Württemberg undnationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu
Software Engineering (Praktikum)Programmierung des Lego Mindstorms NXT
Raumabbildung mittels eines NXT-Radarfahrzeugs

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
2 01.02.11 AIFB
EinleitungAufbau des NXTPC-ProgrammZusammenfassung & Ausblick
Übersicht

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
3 01.02.11 AIFB
EinleitungFilmScreenshotsSVN
Aufbau des NXTDas ProgrammZusammenfassung & Ausblick
Übersicht

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
4 01.02.11 AIFB
Einleitung: Film – Vorschau

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
5 01.02.11 AIFB
Einleitung: Film

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
6 01.02.11 AIFB
Einleitung: Screenshots – Anfahrtsvektor 0/0BlueCove version 2.1.0 on winsockFound: NXT2Range:255.0Range:27.0Range:28.0…Range:27.0Range:27.0Range:27.0Sonderfall Abwaerts am Anfangrichtung:truek-NEGATIV:2richtung:truek-NEGATIV:2NXT-Befehle werden aufgerufenAnfahrtslueckengroesse:15.64719060195324Anfahrtslueckengroesse:2.258707580237991Anfahrtslueckengroesse:19.17912235533945*********Sonderfall erste Runde!************Es gibt keine Anfahrtsluecken, die fuer den NXT geeignet sind!Daher Drehung um 1800.0Rotation-Keine Luecke gefundenGrad:180Weiterscannen...

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
7 01.02.11 AIFB
Einleitung: Screenshots – Anfahrtsvektor 1/0Range:44.0richtung:truek-POSITIV:2k-NEGATIV:3NXT-Befehle werden aufgerufenAnfahrtslueckengroesse:49.70322753276816Anfahrtsvektork:1i:00.0RotationGrad:-9.391373147454829RadialeAbstandmessungAbstand:23.87839Translatorische Bewegung-SOLLLaenge-SOLL:40.50799048590869AbstandmessungTranslatorischAbstand:44.0Translatorische Bewegung-ISTLaenge-IST:40.50799048590869RadialeAbstandmessung2Abstand:34.0Fand eine Kollision statt?Float-in:0.0RotationGrad:0.0Weiterscannen...

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
8 01.02.11 AIFB
Einleitung: Screenshots – Anfahrtsvektor 2/0Range:75.0richtung:truek-NEGATIV:2NXT-Befehle werden aufgerufenAnfahrtslueckengroesse:70.60185591874682Anfahrtsvektork:2i:040.50799048590869RotationGrad:25.285535995470454RadialeAbstandmessungAbstand:34.0Translatorische Bewegung-SOLLLaenge-SOLL:62.52874926949309AbstandmessungTranslatorischAbstand:53.0Der Anfahrtsvektor wurde gekuerzt!Translatorische Bewegung-ISTLaenge-IST:52.99999999999999RadialeAbstandmessung2Abstand:38.868576Fand eine Kollision statt?Float-in:0.0RotationGrad:-30.49093146827029Weiterscannen...

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
9 01.02.11 AIFB
Einleitung: Screenshots – Anfahrtsvektor 3/0Range:70.0Range:70.0Range:70.0Range:70.0Range:70.0Range:70.0richtung:truek-POSITIV:2k-NEGATIV:3richtung:truek-NEGATIV:2richtung:truek-NEGATIV:2richtung:truek-NEGATIV:2NXT-Befehle werden aufgerufenAnfahrtslueckengroesse:51.21571890305503Anfahrtsvektork:3i:052.99999999999999RotationGrad:-9.439995807373293RadialeAbstandmessungAbstand:18.693762Um eine Kollision zu vermeiden, wird dieser Anfahrtsvektor nicht genutzt!...

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
10 01.02.11 AIFB
Einleitung: Screenshots – Anfahrtsvektor 3/i Anfahrtslueckengroesse:5.580449625592849Anfahrtslueckengroesse:1.883896323180394Anfahrtslueckengroesse:4.735217773710122Momentaner Scanpunkt: 3Zurueck zum letzten Scanpunkt!

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
11 01.02.11 AIFB
Einleitung: Screenshots – Rückwärts 3 → 2 Rotation-LINKS:149.50906853172972Vorwärts:52.99999999999999Rotation-RECHTS:154.71446400452953Momentaner Scanpunkt: 2Zurueck zum letzten Scanpunkt!

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
12 01.02.11 AIFB
Einleitung: Screenshots – Rückwärts 2 → 1Rotation-RECHTS:180.0Vorwärts:40.50799048590869Rotation-LINKS:170.60862685254517Momentaner Scanpunkt: 1Zurueck zum letzten Scanpunkt!

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
13 01.02.11 AIFB
Einleitung: Screenshots – Rückwärts 1 → 0Rotation-RECHTS:180.0Vorwärts:0.0Rotation-RECHTS:0.0Anfahrtslueckengroesse:15.64719060195324Anfahrtslueckengroesse:2.258707580237991Anfahrtslueckengroesse:19.17912235533945NXT ausschalten!EXIT

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
14 01.02.11 AIFB
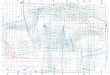
Einleitung: Screenshots – Raumabbildung I

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
15 01.02.11 AIFB
Einleitung: Screenshots – Raumabbildung II

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
16 01.02.11 AIFB
Einleitung: SVN I

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
17 01.02.11 AIFB
Einleitung: SVN II

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
18 01.02.11 AIFB
EinleitungAufbau des NXTPC-ProgrammZusammenfassung & Ausblick
Übersicht

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
19 01.02.11 AIFB
EinleitungAufbau des NXT
ElementeModule
Das ProgrammZusammenfassung & Ausblick
Übersicht

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
20 01.02.11 AIFB
Aufbau des NXT: Elemente
Aktoren1 Motor – Radar & Abstandsmessung2 Motoren - Fortbewegung
Sensoren 1 Ultraschallsensor – Radar & Abstandsmessung1 Tastsensor - Kollisionserkennung
(Bluetooth-Schnittstelle)Bidirektionale Funkverbindung PC ↔ NXT
NXT-Haupteinheit & Bauelemente

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
21 01.02.11 AIFB
Aufbau des NXT: Module I
Modul1: RadarParallele Motorbewegung und SensornutzungRadar2-Klasse (Runnable1)
Modul2: FortbewegungTripodDriver-Klasse
Modul3: Bluetooth-KommunikationSteuerung: PC → NXTSensorwertübergabe: NXT → PC Communication-Klasse (Runnable2)

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
22 01.02.11 AIFB
Aufbau des NXT: Module II
Modul4: KollisionserkennungKollisionserkennung (Runnable3)Präventiver STOP & Speicherung der zurückgelegten DistanzWertübergabe an die Schnittstelle NXT → PC
Modul5: AbstandsmessungAbstandsmessung90°- Kegelmessung (tranlatorische Bewegung)270°- Kegelmessung (rotatorische Bewegung)Wertübergabe an die Schnittstelle NXT → PC

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
23 01.02.11 AIFB
EinleitungAufbau des NXTPC-ProgrammZusammenfassung & Ausblick
Übersicht

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
24 01.02.11 AIFB
EinleitungAufbau des NXTPC-Programm
AufbauAblauf
Zusammenfassung & Ausblick
Übersicht

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
25 01.02.11 AIFB
PC-Programm: Aufbau I
GUIEchtzeit Radarbild & ParametereingabeGrafische AuswertungErgebnis-Raumabbildung
Informationsverarbeitung-GrafikRadarbilderstellung (Echtzeit)Radarbildauswertung
Sensorwertbereinigung → MedianSchnittmengeInformationstransformation(Lücken, Anfahrtslücken, Anfahrtsvektoren)
Raumabbildung

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
26 01.02.11 AIFB
PC-Programm: Aufbau II
Informationsverarbeitung-BefehleRobotersteuerungKollisionsvermeidung
Bluetooth SchnittstelleNXTKommunikation
DatenspeicherungDynamicDataStore (RAM)

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
27 01.02.11 AIFB
Lückenpunkte&
Lückenlinien
Medianglättung(Ausreißer)Anfahrtslücken
PC-Programm: Ablauf
Medianglättung(Ausreißer)
Radarbilderstellung (Echtzeit) Schnittmenge
Nächste Iteration Raumabbildung(Koordinatentrans.)
AnfahrtsvektorenAnfahrtsvektorwahl
&Rückwärtsschritt
NXT-Befehle
NXT-Com.

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
28 01.02.11 AIFB
EinleitungAufbau des NXTPC-ProgrammZusammenfassung & Ausblick
Übersicht

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
29 01.02.11 AIFB
Zusammenfassung & Ausblick
Zusammenfassung:Ungenauigkeiten: Servomotor, Ultraschallsensor, Zahlenbereiche!Es gilt die richtigen Lücken zu finden (Radarschatten)!Geschwindigkeit vs. Genauigkeit (Radar) Es muß ein Tastsensor zur Sicherheit eingesetzt werden!Es gibt viele Einstellmöglichkeiten für die Parameter!Problemfall: Ecke!
Ausblick:Optimierung der Baustruktur und des dynamischen VerhaltensWeitere Filter für die Sensorwerte Speicherung nicht nur im RAMVerbesserung der Stream-KommunikationVerb. der Kollisionserkennung u. Abstandsmessung (hinten)

Sascha Friedrich:Raumabbildung mittels eines NXT-Radarfahrzeugs
30 01.02.11 AIFB
Ich danke für Ihre Aufmerksamkeit!