Embed Size (px)
Citation preview

Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
Tutoriumsaufgaben
1. Aufgabe
a) In der Ebene können höchstens drei unabhängige Gleichgewichtsbedingungen aufgestellt werden,welche nicht ausreichen, um die vier unbekannten Lagerreaktionen zu bestimmen. Das Systemist daher statisch unbestimmt. Dies können wir anhand der notwendigen Bedingung für statischeBestimmtheit erkennen: 3𝑘
!= 𝑟 + 𝑠 . Für dieses System gilt 𝑘 = 1 , 𝑠 = 0 und 𝑟 = 4 . Damit istdie notwendige Bedingung verletzt.
b) Die Differentialgleichung der Biegelinie mit konstantem 𝐸-Modul und 𝐼𝑦𝑦 lautet:
𝑀(𝑥) = −𝐸𝐼𝑦𝑦𝑤′′(𝑥) . (1)
Unter Verwendung der bekannten Schnittlastendifferentialgleichungen
d𝑀
d𝑥= 𝑄(𝑥) ,
d𝑄
d𝑥= −𝑞(𝑥) (2)
finden wir durch zweifaches Differenzieren von Gl. (1) den Zusammenhang
𝐸𝐼𝑦𝑦𝑤𝐼𝑉 (𝑥) = 𝑞 (𝑥) . (3)
Die Biegelinie 𝑤 (𝑥) lässt sich also durch vierfache Integration der Streckenlast 𝑞 (𝑥) bestimmen.Unter Verwendung des von Null linear ansteigenden Verlaufs
𝑞 (𝑥) = 𝑞0𝑥
𝐿(4)
ergibt sich
𝐸𝐼𝑦𝑦𝑤𝐼𝐼𝐼 (𝑥) = 𝑞0𝐿
[12
(𝑥
𝐿
)2+ 𝐶1
]= −𝑄 (𝑥) , (5a)
𝐸𝐼𝑦𝑦𝑤′′ (𝑥) = 𝑞0𝐿2[
16
(𝑥
𝐿
)3+ 𝐶1
(𝑥
𝐿
)+ 𝐶2
]= −𝑀 (𝑥) , (5b)
𝐸𝐼𝑦𝑦𝑤′ (𝑥) = 𝑞0𝐿3[
124
(𝑥
𝐿
)4+ 𝐶1
2
(𝑥
𝐿
)2+ 𝐶2
(𝑥
𝐿
)+ 𝐶3
], (5c)
𝐸𝐼𝑦𝑦𝑤 (𝑥) = 𝑞0𝐿4[
1120
(𝑥
𝐿
)5+ 𝐶1
6
(𝑥
𝐿
)3+ 𝐶2
2
(𝑥
𝐿
)2+ 𝐶3
(𝑥
𝐿
)+ 𝐶4
]. (5d)
c) Die erste Randbedingungen in A, dem Loslager, ist, dass die Durchbiegung Null ist. Da dieLoslager kein Biegemoment aufnimmt, muss das Biegemoment dort verschwinden. In B ist dieDurchbiegung wegen des festen Einspannung ebenfalls Null. Die Steigung bzw. die Verdrehungist im Punkt B ebenfalls Null. Damit ergibt sich das Gleichungssystem zu{
𝑤 (0) = 0 𝑀 (0) = 0𝑤 (𝐿) = 0 𝑤′ (𝐿) = 0
⇔{
𝑤 (0) = 0 𝑤′′ (0) = 0𝑤 (𝐿) = 0 𝑤′ (𝐿) = 0
. (6a)
Im zweiten Schritt der obigen Gleichungen ist Gl. (2) verwendet worden. Die Auswertung der
S. 1/12
Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
linken Seiten der obigen Gleichungen unter Verwendung der Gln. (5) liefert
𝑤 (0) = 𝑞0𝐿4
𝐸𝐼𝑦𝑦[𝐶4] , 𝑤′′ (0) = 𝑞0𝐿2
𝐸𝐼𝑦𝑦[𝐶2] ,
𝑤 (𝐿) = 𝑞0𝐿4
𝐸𝐼𝑦𝑦
[ 1120 + 𝐶1
6 + 𝐶22 + 𝐶3 + 𝐶4
], 𝑤′ (𝐿) = 𝑞0𝐿3
𝐸𝐼𝑦𝑦
[ 124 + 𝐶1
2 + 𝐶2 + 𝐶3
].
(6b)
Die obigen Ausdrücke sind genau dann Null, wenn die Terme in den eckigen Klammern verschwinden. Diese Bedingung liefert ein lineares Gleichungssystem für die Integrationskonstanten𝐶𝑖 . In Matrix-Vektor-Schreibweise lautet das lineare Gleichungssystem und dessen Lösung⎡⎢⎢⎢⎣
0 0 0 10 1 0 0
1/6 1/2 1 11/2 1 1 0
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣
𝐶1𝐶2𝐶3𝐶4
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎣00
−1/120−1/24
⎤⎥⎥⎥⎦ ⇔
⎡⎢⎢⎢⎣𝐶1𝐶2𝐶3𝐶4
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎣−1/10
01/120
0
⎤⎥⎥⎥⎦ (6c)
Damit lautet die Biegelinie
𝑤 (𝑥) = 𝑞0𝐿4
120𝐸𝐼𝑦𝑦
[(𝑥
𝐿
)5− 2
(𝑥
𝐿
)3+
(𝑥
𝐿
)]. (7)
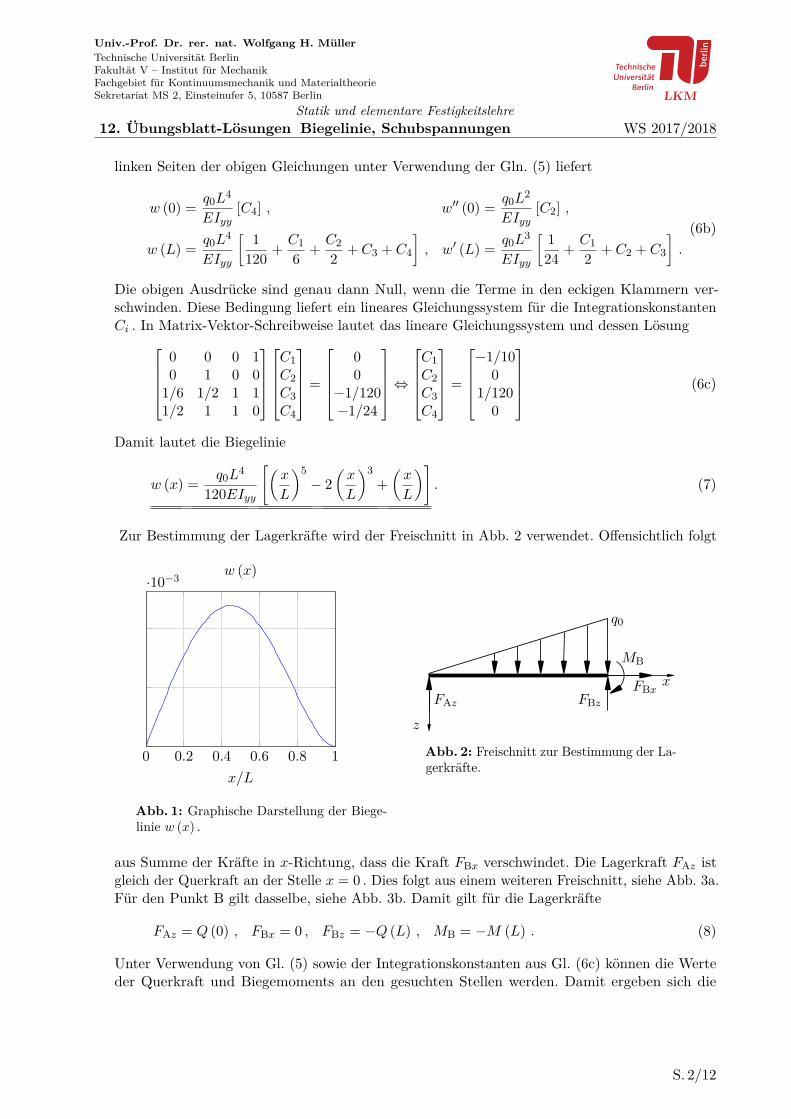
Zur Bestimmung der Lagerkräfte wird der Freischnitt in Abb. 2 verwendet. Offensichtlich folgt
0 0.2 0.4 0.6 0.8 1
·10−3
𝑥/𝐿
𝑤 (𝑥)
Abb. 1: Graphische Darstellung der Biegelinie 𝑤 (𝑥) .
𝑧
𝑥
𝑞0
𝐹A𝑧 𝐹B𝑧
𝐹B𝑥
𝑀B
Abb. 2: Freischnitt zur Bestimmung der Lagerkräfte.
aus Summe der Kräfte in 𝑥-Richtung, dass die Kraft 𝐹B𝑥 verschwindet. Die Lagerkraft 𝐹A𝑧 istgleich der Querkraft an der Stelle 𝑥 = 0 . Dies folgt aus einem weiteren Freischnitt, siehe Abb. 3a.Für den Punkt B gilt dasselbe, siehe Abb. 3b. Damit gilt für die Lagerkräfte
𝐹A𝑧 = 𝑄 (0) , 𝐹B𝑥 = 0 , 𝐹B𝑧 = −𝑄 (𝐿) , 𝑀B = −𝑀 (𝐿) . (8)
Unter Verwendung von Gl. (5) sowie der Integrationskonstanten aus Gl. (6c) können die Werteder Querkraft und Biegemoments an den gesuchten Stellen werden. Damit ergeben sich die
S. 2/12
Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
𝑧
𝑥
𝐹A,𝑧
𝑄 (0)
(a) Punkt A.𝑧
𝑥
𝐹B,𝑧
𝑄 (𝐿)𝑀B𝑀 (𝐿)
(b) Punkt B.
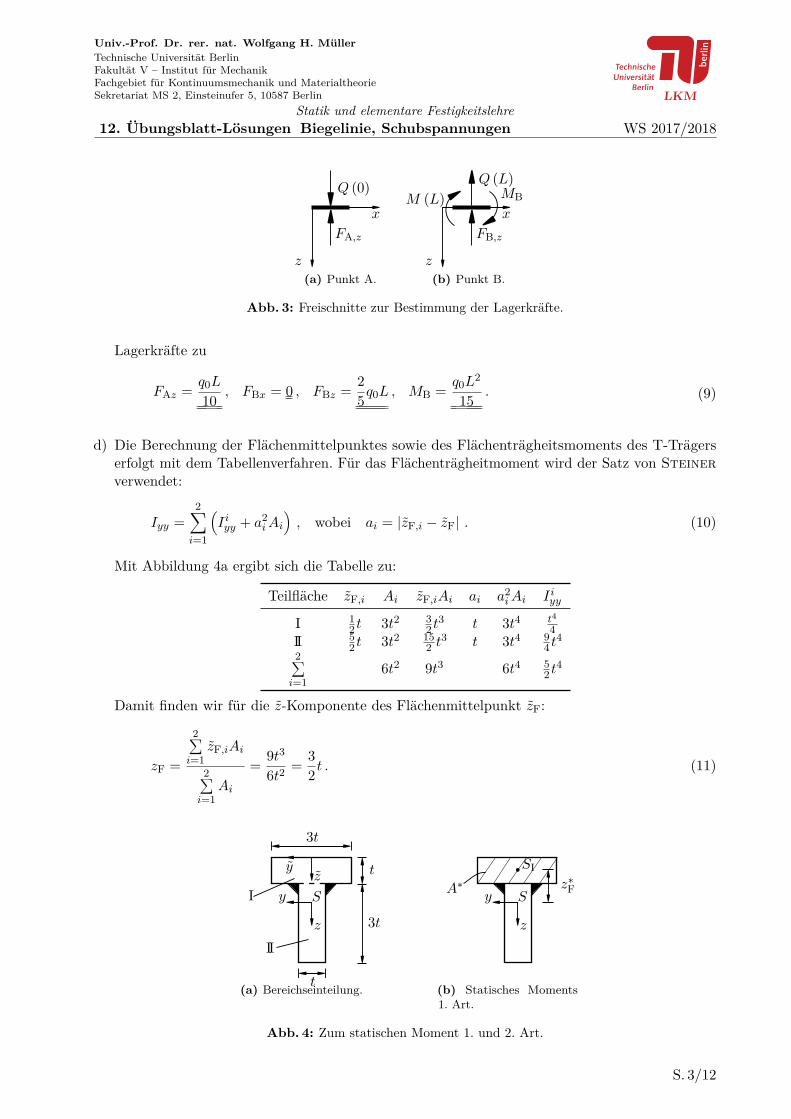
Abb. 3: Freischnitte zur Bestimmung der Lagerkräfte.
Lagerkräfte zu
𝐹A𝑧 = 𝑞0𝐿
10 , 𝐹B𝑥 = 0 , 𝐹B𝑧 = 25𝑞0𝐿 , 𝑀B = 𝑞0𝐿2
15 . (9)
d) Die Berechnung der Flächenmittelpunktes sowie des Flächenträgheitsmoments des T-Trägerserfolgt mit dem Tabellenverfahren. Für das Flächenträgheitmoment wird der Satz von Steinerverwendet:
𝐼𝑦𝑦 =2
ÿ
𝑖=1
(𝐼𝑖
𝑦𝑦 + 𝑎2𝑖 𝐴𝑖
), wobei 𝑎𝑖 = |𝑧F,𝑖 − 𝑧F| . (10)
Mit Abbildung 4a ergibt sich die Tabelle zu:
Teilfläche 𝑧F,𝑖 𝐴𝑖 𝑧F,𝑖𝐴𝑖 𝑎𝑖 𝑎2𝑖 𝐴𝑖 𝐼𝑖
𝑦𝑦
I 12 𝑡 3𝑡2 3
2 𝑡3 𝑡 3𝑡4 𝑡4
4II 5
2 𝑡 3𝑡2 152 𝑡3 𝑡 3𝑡4 9
4 𝑡4
2ř
𝑖=16𝑡2 9𝑡3 6𝑡4 5
2 𝑡4
Damit finden wir für die 𝑧-Komponente des Flächenmittelpunkt 𝑧F:
𝑧F =
2ř
𝑖=1𝑧F,𝑖𝐴𝑖
2ř
𝑖=1𝐴𝑖
= 9𝑡3
6𝑡2 = 32 𝑡 . (11)
3𝑡
𝑡
3𝑡
𝑡
𝑆𝑦
𝑧
𝑦𝑧
II
I
(a) Bereichseinteilung.
𝑆𝑦
𝑧
𝑆I𝑧*
F𝐴*
(b) Statisches Moments1. Art.
Abb. 4: Zum statischen Moment 1. und 2. Art.
S. 3/12

Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
Für das Flächenträgheitsmoment bezüglich der 𝑦-Achse gilt somit:
𝐼𝑦𝑦 =2
ÿ
𝑖=1
(𝐼𝑖
𝑦𝑦 + 𝑎2𝑖 𝐴𝑖
)= 5
2 𝑡4 + 6𝑡4 = 172 𝑡4 . (12)
e) Die Schubspannung in der Schweißnaht berechnet sich gemäß
𝜏 (𝑥, 𝑧) =𝑄 (𝑥) 𝑆*
𝑦 (𝑧)𝐼𝑦𝑦𝑏 (𝑧) . (13)
Dabei bezeichnet 𝑏 die Breite des belasteten Querschnitts. Als ingenieurmäßige Approximation von Schweißnahtbreiten wird i. A. 𝑏 = 2𝑑 benutzt. 𝑆*
𝑦 ist das 1. statische Moment derüber der Schweißnaht liegenden Fläche, siehe Abb. 4b. Für dieses gilt unter Verwendung desFlächenmittelpunktes:
𝑆*𝑦 (𝑡/2) =
ij
𝐴*
𝑧 d𝐴 = 𝑧*F𝐴* . (14a)
Da die über der Schweißnaht liegende Fläche das horizontale Rechteck (Körper I) ist, gilt
𝑆*𝑦 (𝑡/2) = 3𝑡3 (mit 𝑧*
F = 𝑡) . (14b)
Mit dem Flächenträgheitsmoment aus dem vorherigen Aufgabenteil ergibt sich für die Schubspannung
𝜏 (𝑥, 𝑡/2) = 317𝑡𝑑
𝑄 (𝑥) . (15)
Die Schubspannung ist proportional zur Querkraft. Der Querkraftverlauf ist bereits bestimmt,da bei der Berechnung der Biegelinie die Schnittlastendifferentialgleichungen schon gelöst wordensind. Unter Verwendung von Gl. (5) ergibt sich mit den bekannten Integrationskonstanten ausGl. (6c)
𝑄 (𝑥) = −𝑞0𝐿
[12
(𝑥
𝐿
)2− 1
10
]. (16)
Um das Maximum des Betrages der Schubspannung zu bestimmen, wird das Maximum desBetrages der Querkraft benötigt. Da die Streckenlast 𝑞 (𝑥) an der Stelle 𝑥 = 0 gleich Null ist(𝑞 (𝑥) = 0), liegt die einzige Extremstelle der Querkraft ebenfalls bei 𝑥 = 0 . Von dieser Stelle istdie Querkraft monoton fallend. Beachten Sie dazu auch den Querkraftverlauf in Abb. 5. Deshalbist das Maximum des Betrages entweder an der Stelle 𝑥 = 0 oder 𝑥 = 𝐿 . Die Auswertung liefert
𝑄 (0) = 𝑞0𝐿
10 , 𝑄 (𝐿) = −2𝑞0𝐿
5 , 𝑄max = |𝑄 (𝐿)| = 2𝑞0𝐿
5 . (17)
Damit gilt für das Maximum des Betrages der Schubspannung
𝜏max = |𝜏 (𝐿, 𝑡/2)| = 685
𝑞0𝐿
𝑡𝑑. (18)
S. 4/12
Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
0 0.2 0.4 0.6 0.8 1−0.4
−0.2
0
0.2
𝑥/𝐿
𝑄 (𝑥) /𝑞0𝐿
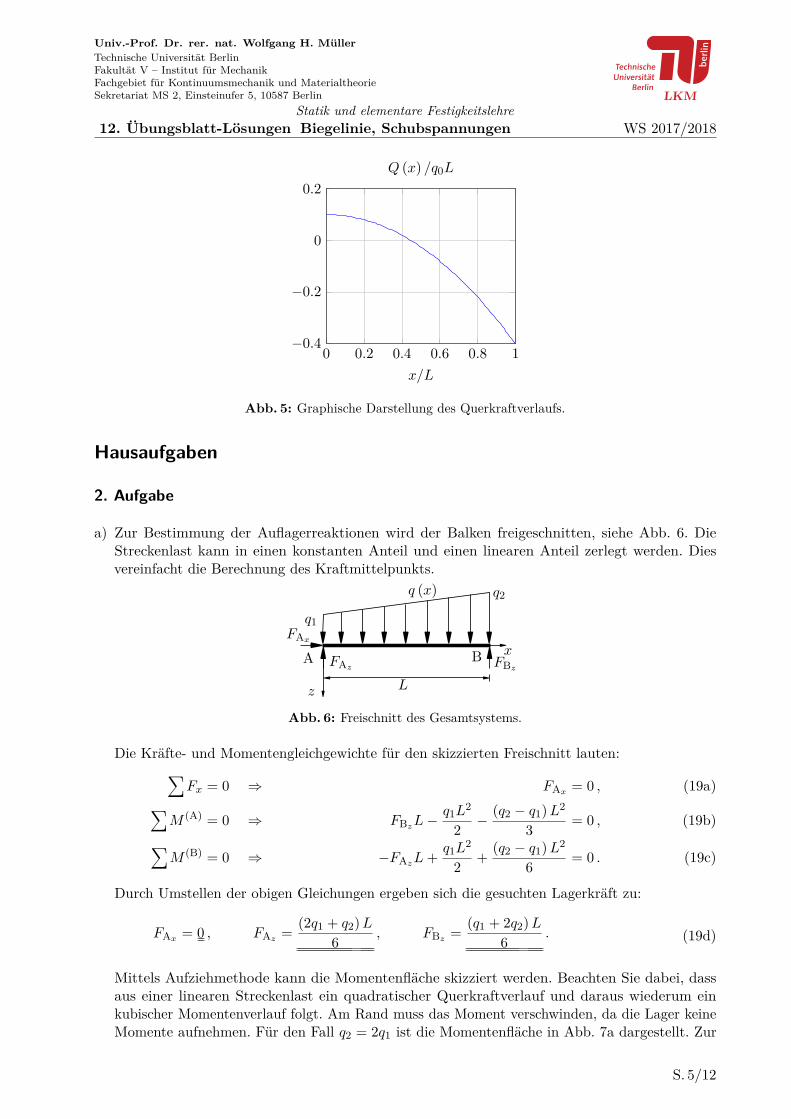
Abb. 5: Graphische Darstellung des Querkraftverlaufs.
Hausaufgaben
2. Aufgabe
a) Zur Bestimmung der Auflagerreaktionen wird der Balken freigeschnitten, siehe Abb. 6. DieStreckenlast kann in einen konstanten Anteil und einen linearen Anteil zerlegt werden. Diesvereinfacht die Berechnung des Kraftmittelpunkts.
𝑧 𝐿
𝑞 (𝑥)
𝑥
𝑞1
𝑞2
A B𝐹A𝑧
𝐹A𝑥
𝐹B𝑧
Abb. 6: Freischnitt des Gesamtsystems.
Die Kräfte- und Momentengleichgewichte für den skizzierten Freischnitt lauten:ÿ
𝐹𝑥 = 0 ⇒ 𝐹A𝑥 = 0 , (19a)ÿ
𝑀 (A) = 0 ⇒ 𝐹B𝑧 𝐿 − 𝑞1𝐿2
2 − (𝑞2 − 𝑞1) 𝐿2
3 = 0 , (19b)ÿ
𝑀 (B) = 0 ⇒ −𝐹A𝑧 𝐿 + 𝑞1𝐿2
2 + (𝑞2 − 𝑞1) 𝐿2
6 = 0 . (19c)
Durch Umstellen der obigen Gleichungen ergeben sich die gesuchten Lagerkräft zu:
𝐹A𝑥 = 0 , 𝐹A𝑧 = (2𝑞1 + 𝑞2) 𝐿
6 , 𝐹B𝑧 = (𝑞1 + 2𝑞2) 𝐿
6 . (19d)
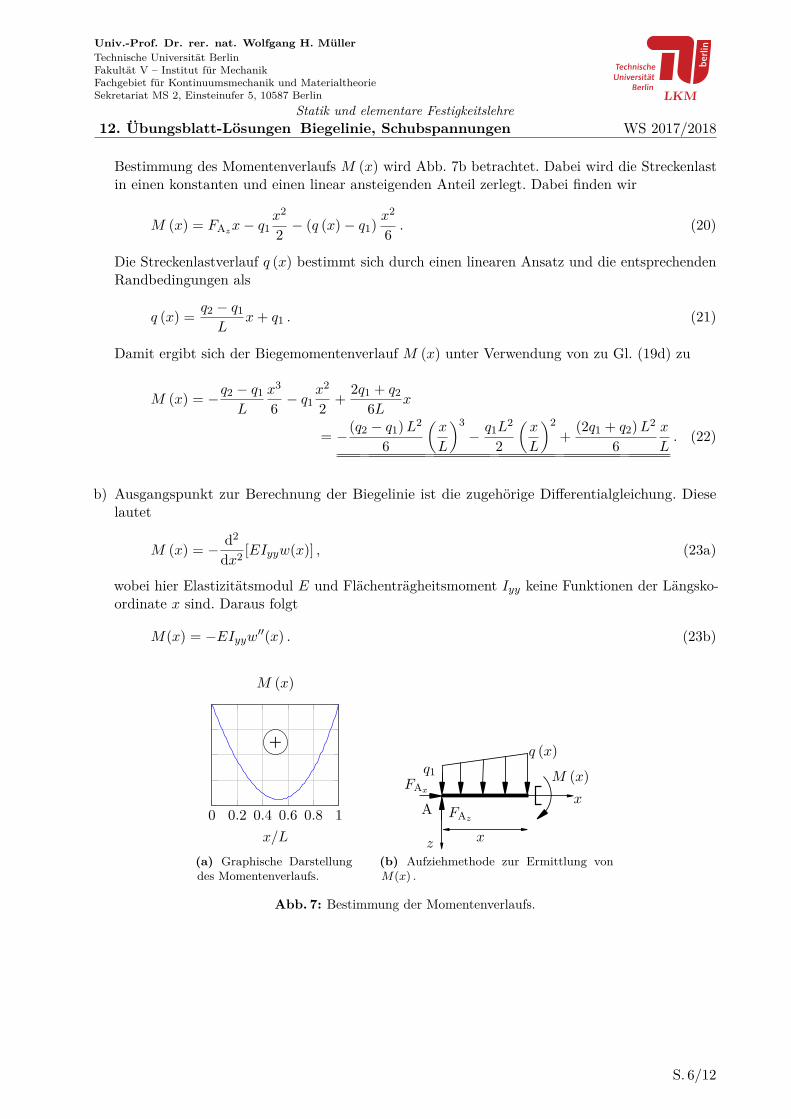
Mittels Aufziehmethode kann die Momentenfläche skizziert werden. Beachten Sie dabei, dassaus einer linearen Streckenlast ein quadratischer Querkraftverlauf und daraus wiederum einkubischer Momentenverlauf folgt. Am Rand muss das Moment verschwinden, da die Lager keineMomente aufnehmen. Für den Fall 𝑞2 = 2𝑞1 ist die Momentenfläche in Abb. 7a dargestellt. Zur
S. 5/12
Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
Bestimmung des Momentenverlaufs 𝑀 (𝑥) wird Abb. 7b betrachtet. Dabei wird die Streckenlastin einen konstanten und einen linear ansteigenden Anteil zerlegt. Dabei finden wir
𝑀 (𝑥) = 𝐹A𝑧 𝑥 − 𝑞1𝑥2
2 − (𝑞 (𝑥) − 𝑞1) 𝑥2
6 . (20)
Die Streckenlastverlauf 𝑞 (𝑥) bestimmt sich durch einen linearen Ansatz und die entsprechendenRandbedingungen als
𝑞 (𝑥) = 𝑞2 − 𝑞1𝐿
𝑥 + 𝑞1 . (21)
Damit ergibt sich der Biegemomentenverlauf 𝑀 (𝑥) unter Verwendung von zu Gl. (19d) zu
𝑀 (𝑥) = −𝑞2 − 𝑞1𝐿
𝑥3
6 − 𝑞1𝑥2
2 + 2𝑞1 + 𝑞26𝐿
𝑥
= −(𝑞2 − 𝑞1) 𝐿2
6
(𝑥
𝐿
)3− 𝑞1𝐿2
2
(𝑥
𝐿
)2+ (2𝑞1 + 𝑞2) 𝐿2
6𝑥
𝐿. (22)
b) Ausgangspunkt zur Berechnung der Biegelinie ist die zugehörige Differentialgleichung. Dieselautet
𝑀 (𝑥) = − d2
d𝑥2 [𝐸𝐼𝑦𝑦𝑤(𝑥)] , (23a)
wobei hier Elastizitätsmodul 𝐸 und Flächenträgheitsmoment 𝐼𝑦𝑦 keine Funktionen der Längskoordinate 𝑥 sind. Daraus folgt
𝑀(𝑥) = −𝐸𝐼𝑦𝑦𝑤′′(𝑥) . (23b)
0 0.2 0.4 0.6 0.8 1
+
𝑥/𝐿
𝑀 (𝑥)
(a) Graphische Darstellungdes Momentenverlaufs.
𝑧 𝑥
𝑞 (𝑥)
𝑥
𝑞1
A 𝐹A𝑧
𝐹A𝑥
𝑀 (𝑥)
(b) Aufziehmethode zur Ermittlung von𝑀(𝑥) .
Abb. 7: Bestimmung der Momentenverlaufs.
S. 6/12

Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
Gl. (23b) wird nun unter Verwendung von Gl (22) dreimal integriert:
−𝐸𝐼𝑦𝑦𝑤′′(𝑥) = −(𝑞2 − 𝑞1) 𝐿2
6
(𝑥
𝐿
)3− 𝑞1𝐿2
2
(𝑥
𝐿
)2+ (2𝑞1 + 𝑞2) 𝐿2
6𝑥
𝐿, (24a)
−𝐸𝐼𝑦𝑦𝑤′(𝑥) = −(𝑞2 − 𝑞1) 𝐿3
24
(𝑥
𝐿
)4− 𝑞1𝐿3
6
(𝑥
𝐿
)3+ (2𝑞1 + 𝑞2) 𝐿3
12
(𝑥
𝐿
)2+ 𝐶1 , (24b)
−𝐸𝐼𝑦𝑦𝑤(𝑥) = −(𝑞2 − 𝑞1) 𝐿4
120
(𝑥
𝐿
)5− 𝑞1𝐿4
24
(𝑥
𝐿
)4+ (2𝑞1 + 𝑞2) 𝐿4
36
(𝑥
𝐿
)3+ 𝐶1𝑥 + 𝐶2 .
(24c)
Die Integrationskonstanten werden über Randbedingungen an linken und rechten Rand bestimmt.Dort gibt es aufgrund der Lager keine Durchbiegung. Es gilt{
𝑤 (0) = 0 ,
𝑤 (𝐿) = 0 .(24d)
Die Auswertung der linken Seiten der obigen Gleichungen unter Verwendung der Gln. (24c)liefert
𝑤 (0) = − 𝐶2𝐸𝐼𝑦𝑦
, (24e)
𝑤 (𝐿) = 1𝐸𝐼𝑦𝑦
[(𝑞2 − 𝑞1) 𝐿4
120 + 𝑞1𝐿4
24 − (2𝑞1 + 𝑞2) 𝐿4
36 − 𝐶1𝐿 − 𝐶2
](24f)
= − 1𝐸𝐼𝑦𝑦
[(8𝑞1 + 7𝑞2) 𝐿4
360 + 𝐶1𝐿 + 𝐶2
].
Die Integrationskonstanten können somit durch Lösung des entstehenden linear Gleichungssystembestimmt werden. Es gilt
𝐶1 = −(8𝑞1 + 7𝑞2) 𝐿3
360 , 𝐶2 = 0 . (24g)
Damit ergibt sich die Biegelinie des Balken schließlich zu
𝑤 (𝑥) = 𝐿4
360𝐸𝐼𝑦𝑦
[3 (𝑞2 − 𝑞1)
(𝑥
𝐿
)5+ 15𝑞1
(𝑥
𝐿
)4− 10 (2𝑞1 + 𝑞2)
(𝑥
𝐿
)3+ (8𝑞1 + 7𝑞2) 𝑥
𝐿
]. (25)
c) Die Funktion 𝑤(𝑥) nimmt ihre Maximum an der Stelle 𝑥max an, bei der die Ableitung nach 𝑥Null ist. Die Bedingung lautet also
d𝑤
d𝑥
𝑥max
= 0 , (26)
Die Verdrehung 𝑤′ ist bereits bei der Integration der Biegeliniendifferentialgleichung berechnetworden. Durch Einsetzen von Gl. (24g) in Gl. (24c) finden wir
𝑤′ (𝑥) = 𝐿3
360𝐸𝐼𝑦𝑦
[15 (𝑞2 − 𝑞1)
(𝑥
𝐿
)4+ 60𝑞1
(𝑥
𝐿
)3− 30 (2𝑞1 + 𝑞2)
(𝑥
𝐿
)2+ (8𝑞1 + 7𝑞2)
]. (27)
Zur Bestimmung der Nullstellen der Verdrehung 𝑤′ genügt es die Terme in der eckigen Klammer
S. 7/12
Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
0 0.2 0.4 0.6 0.8 1
+
𝑥/𝐿
𝑤 (𝑥)
Abb. 8: Graphische Darstellung der Biegelinie für 𝑞2 = 2𝑞0.
zu betrachten. Es gilt somit
d𝑤
d𝑥
𝑥max
= 0 ⇔ 15 (𝑞2 − 𝑞1) 𝑧4max + 30𝑞1𝑧3
max − 60 (2𝑞1 + 𝑞2) 𝑧2max + (8𝑞1 + 7𝑞2) = 0 , (28)
wobei 𝑧max = 𝑥max/𝐿 ist. Die obige eine sog. quartische Gleichung. Es gibt für diese Gleichungnoch eine geschlossene Lösung. Wir verwenden die für den Fall 𝑞2 = 2𝑞1 angenäherte Nullstelle
𝑧max ≈ 0,506 477 , ⇒ 𝑥max ≈ 0,506 477𝐿 . (29)
Die anderen Lösungen liegen außerhalb des Intervall 0 ≤ 𝑥 ≤ 𝐿 und müssen deshalb nichtberücksichtigt werden. Somit liegt die maximale Durchbiegung etwa in der Mitte des Balkens.Die numerische Auswertung der Durchbiegung liefert für den Fall 𝑞2 = 2𝑞1
𝑤max = 𝑤 (𝑥max) ≈ 7,032 67 𝑞1𝐿4
360𝐸𝐼𝑦𝑦≈ 0,019 535 𝑞1𝐿4
𝐸𝐼𝑦𝑦. (30)
3. Aufgabe
a) Das System ist statische unbestimmt. Es sind 4 Lagerreaktionen zu bestimmen, wofür im ebenenFall jedoch lediglich drei unabhängige Gleichungen zur Verfügung stehen. Wegen der statischenUnbestimmtheit des Systems können die Schnittgrößen insbesondere der Momentenverlauf nichtmit der Aufzieh- bzw. Freischnittmethode ermittelt werden. Deshalb wird die Differentialgleichungder Biegelinie verwendet. Diese Differentialgleichung 4. Ordnung lautet
𝐸𝐼𝑦𝑦𝑤𝐼𝑉 (𝑥) = 𝑞 (𝑥) = 𝑞0𝑥
𝐿. (31)
S. 8/12

Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
b) Die allgemeine Lösung ergibt sich durch viermalige Integration der Streckenlast 𝑞. Es gilt
𝐸𝐼𝑦𝑦𝑤𝐼𝐼𝐼 (𝑥) = 𝑞0𝐿
[12
(𝑥
𝐿
)2+ 𝐶1
], (32a)
𝐸𝐼𝑦𝑦𝑤′′ (𝑥) = 𝑞0𝐿2[
16
(𝑥
𝐿
)3+ 𝐶1
𝑥
𝐿+ 𝐶2
], (32b)
𝐸𝐼𝑦𝑦𝑤′ (𝑥) = 𝑞0𝐿3[
124
(𝑥
𝐿
)4+ 𝐶1
2
(𝑥
𝐿
)2+ 𝐶2
𝑥
𝐿+ 𝐶3
], (32c)
𝐸𝐼𝑦𝑦𝑤 (𝑥) = 𝑞0𝐿4[
1120
(𝑥
𝐿
)5+ 𝐶1
6
(𝑥
𝐿
)3+ 𝐶2
2
(𝑥
𝐿
)2+ 𝐶3
𝑥
𝐿+ 𝐶4
]. (32d)
Der Ausdruck 𝑥/𝐿 ermöglicht es, dimensionslose Integrationskonstanten 𝐶𝑖 zu bestimmen.Entsprechend wird bei jeder Integration die Potenz 𝑝 von 𝐿 im Ausdruck 𝑞0𝐿𝑝 um Eins erhöht.Natürlich wäre eine andere Schreibweise wie
𝐸𝐼𝑦𝑦𝑤 (𝑥) = 𝑞0120𝐿
𝑥5 + 𝑘16 𝑥3 + 𝑘2
2
2+ 𝑘3𝑥 + 𝑘4
auch richtig und würde zum gleichem Ergebnis führen. Die dimensionsbehafteten Integrationskonstanten wären selbstverständlich andere.
c) Um die Integrationskonstanten 𝐶𝑖 zu bestimmen, sind vier Randbedingungen bei 𝑥 = 0 und𝑥 = 𝐿 nötig. Dazu werden die Lager genauer betrachtet. Offensichtlich gibt es in A keine Moment,da es sich um ein gelenkiges Lager handelt. Wegen der fest Einspannung in B gibt es dort keineDurchbiegung und auch keine Neigung. Damit sind drei Bedingungen formuliert. Die vierteRandbedingung ergibt sich daraus, dass die Querkraft in A genau der eingeprägten Kraft 𝐹entsprechen muss, da das Lager dort lediglich Kräfte in 𝑥-Richtung aufnimmt. Dies ergibt sichaus einem Freischnitt in A. Der Querkraftverlauf ist durch die Integration der Streckenlastbereits durch Gl. (32a) implizit bestimmt. Gleiches gilt für den Momentenverlauf, Gl. (32b).Zusammengefasst ergeben sich die vier Randbedingung zu{
𝑀 (0) = 0 𝑄 (0) = 𝐹
𝑤 (𝐿) = 0 𝑤′ (𝐿) = 0⇔
{−𝐸𝐼𝑦𝑦𝑤′′ (0) = 0 −𝐸𝐼𝑦𝑦𝑤𝐼𝐼𝐼 (0) = 𝐹
𝑤 (𝐿) = 0 𝑤′ (𝐿) = 0. (33a)
d) Die Bestimmung der Integrationskonstanten erfolgt durch Auswertung der linken Seiten derobigen Gleichungen unter Verwendung von Gl. (32). Dies liefert
−𝐸𝐼𝑦𝑦𝑤′′ (0) = −𝐶2 , (33b)−𝐸𝐼𝑦𝑦𝑤𝐼𝐼𝐼 (0) = −𝑞0𝐿𝐶1 , (33c)
𝑤 (𝐿) = 𝑞0𝐿4
𝐸𝐼𝑦𝑦
[ 1120 + 𝐶1
6 + 𝐶22 + 𝐶3 + 𝐶4
], (33d)
𝑤′ (𝐿) = 𝑞0𝐿4
𝐸𝐼𝑦𝑦
[ 124 + 𝐶1
2 + 𝐶2 + 𝐶3
]. (33e)
S. 9/12
Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
0 0.2 0.4 0.6 0.8 1
–
𝑥/𝐿
𝑤 (𝑥)
(a) Für 𝐹 = 𝑞0𝐿.
0 0.2 0.4 0.6 0.8 1
+
𝑥/𝐿
𝑤 (𝑥)
(b) Für 𝐹 = 𝑞0𝐿/10.
Abb. 9: Graphische Darstellung der Biegelinie für zwei Fälle.
Damit ergibt sich das lineare System für die Konstanten 𝐶𝑖 und dessen Lösung zu⎡⎢⎢⎢⎣0 −1 0 0
−𝑞0𝐿 0 0 01/6 1/2 1 11/2 1 1 0
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣
𝐶1𝐶2𝐶3𝐶4
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎣0𝐹
−1/120−1/24
⎤⎥⎥⎥⎦ ⇔
⎡⎢⎢⎢⎣𝐶1𝐶2𝐶3𝐶4
⎤⎥⎥⎥⎦ = 𝐹
𝑞0𝐿
⎡⎢⎢⎢⎣−10
1/2−1/3
⎤⎥⎥⎥⎦ +
⎡⎢⎢⎢⎣00
−1/241/30
⎤⎥⎥⎥⎦ . (33f)
Damit lautet die Biegelinie
𝑤 (𝑥) = 𝑞0𝐿4
𝐸𝐼𝑦𝑦
[1
120
(𝑥
𝐿
)5− 𝐹
6𝑞0𝐿
(𝑥
𝐿
)3+
(𝐹
2𝑞0𝐿− 1
24
)𝑥
𝐿+
( 130 − 𝐹
3𝑞0𝐿
)]. (34)
e) Der Verdrehwinkel 𝜙𝐴 im Lager A ist mit der Steigung über die Tangensfunktion verknüpft. Fürden Tangens des Verdrehwinkels ergibt sich aus Gl. (32c) und (42e)
tan (𝜙𝐴) = 𝑤′ (0) = 𝑞0𝐿3
𝐸𝐼𝑦𝑦[𝐶3] = 𝑞0𝐿3
𝐸𝐼𝑦𝑦
[𝐹
2𝑞0𝐿− 1
24
]. (35)
Der Verdrehwinkel kann nun mit dem Arkustangens bestimmt werden.
f) Die Kraft 𝐹 ergibt sich aus der Bedingung 𝑤 (𝑥 = 0) = 0 mit Gl. (32d) und (42e)
𝑤 (0) = 𝑞0𝐿4
𝐸𝐼𝑦𝑦[𝐶4] = 0 ⇒ 𝐶4 = − 𝐹
3𝑞0𝐿+ 1
30 = 0 ⇔ 𝐹 = 𝑞0𝐿
10 . (36)
4. Aufgabe
a) Die Momentfläche wird vom freien Ende also von B aufgezogen. Das Moment ist in B Nullund nimmt aufgrund der konstanten Streckenlast quadratisch zu. In A endet die Streckenlastund das Moment geht dort stetig und stetig differenzierbar, da es keine eingeprägten Kräfteoder Momente gibt. Von A bis zur Einspannung gibt es einen linearen Anstieg aufgrund des
S. 10/12

Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
wachsenden Hebelarms. Die Steigung ist offensichtlich durch die Querkraft in A gegeben. Um
0 0.5 1 1.5 20
0.5
1
1.5
–
𝑥/𝐿
𝑀 (𝑥) /𝑞0𝐿2
Abb. 10: Momentenfläche und Aufziehmethode für den Balken.
die Momentenverläufe bereichweise anzugeben kann das Aufziehverfahren oder das elementareSchnittprinzip verwendet werden. Für Bereich II ergibt sich
𝑀II (𝑥) = −𝑞0 [2𝐿 − 𝑥] 2𝐿 − 𝑥
2 = −𝑞0 (2𝐿 − 𝑥)2 = 𝑞0𝐿2[−1
2
(𝑥
𝐿
)2+ 2 𝑥
𝐿− 2
]. (37)
Analog gilt für Bereich I
𝑀I (𝑥) = −𝑞0𝐿
[32𝐿 − 𝑥
]= 𝑞0𝐿2
[𝑥
𝐿− 3
2
]. (38)
b) Durch Integration der Differentialgleichung der Biegelinie wird diese bestimmt. Da der Momentverlauf bereichweise gegeben ist, wird auch bereichsweise integriert. Für Bereich II ergibt sichmit Gl. (37)
𝐸𝐼𝑦𝑦𝑤′II (𝑥) = −𝑞0𝐿3
[−1
6
(𝑥
𝐿
)3+
(𝑥
𝐿
)2− 2 𝑥
𝐿+ 𝐶II
1
], (39a)
𝐸𝐼𝑦𝑦𝑤II (𝑥) = −𝑞0𝐿4[− 1
24
(𝑥
𝐿
)4+ 1
3
(𝑥
𝐿
)3−
(𝑥
𝐿
)2+ 𝐶II
1𝑥
𝐿+ 𝐶II
2
]. (39b)
Analog folgt für Bereich I unter Verwendung von Gl. (38)
𝐸𝐼𝑦𝑦𝑤′I (𝑥) = −𝑞0𝐿3
[12
(𝑥
𝐿
)2− 3
2𝑥
𝐿+ 𝐶I
1
], (40a)
𝐸𝐼𝑦𝑦𝑤I (𝑥) = −𝑞0𝐿4[
16
(𝑥
𝐿
)3− 3
4
(𝑥
𝐿
)2+ 𝐶I
1𝑥
𝐿+ 𝐶I
2
]. (40b)
Die Integrationskonstante in Bereich I ergeben sich zu Null, da die Durchbiegung sowie die Neigungbei der festen Einspannung verschwinden: 𝐶I
1 = 0 sowie 𝐶I2 = 0. Somit für die Durchbiegung in
S. 11/12

Univ.-Prof. Dr. rer. nat. Wolfgang H. MüllerTechnische Universität BerlinFakultät V – Institut für MechanikFachgebiet für Kontinuumsmechanik und MaterialtheorieSekretariat MS 2, Einsteinufer 5, 10587 Berlin
Statik und elementare Festigkeitslehre12. Übungsblatt-Lösungen Biegelinie, Schubspannungen WS 2017/2018
diesem Bereich
𝑤I (𝑥) = − 𝑞0𝐿4
𝐸𝐼𝑦𝑦
[16
(𝑥
𝐿
)3− 3
4
(𝑥
𝐿
)2]
, 0 ≤ 𝑥 ≤ 𝐿 . (41)
Die Integrationskonstante für Bereich II ergeben sich aus der Stetigkeit der Biegelinie in A. Dasheißt {
𝑤I (𝐿) = 𝑤II (𝐿)𝑤′
I (𝐿) = 𝑤′II (𝐿)
⇔{
𝑤II (𝐿) = 7𝑞0𝐿4/12𝐸𝐼𝑦𝑦
𝑤′II (𝐿) = 𝑞0𝐿3/𝐸𝐼𝑦𝑦
. (42a)
Im zweiten Schritt ist die Biegelinie 𝑤I bereits ausgewertet worden. Die Auswertung der linkenSeiten der obigen Gleichung liefert unter Verwendung von Gl. sowie Gl.
𝑤II (𝐿) = − 𝑞0𝐿4
𝐸𝐼𝑦𝑦
[−17
24 + 𝐶II1 + 𝐶II
2
], (42b)
𝑤′II (𝐿) = − 𝑞0𝐿3
𝐸𝐼𝑦𝑦
[−7
6 + 𝐶II1
]. (42c)
(42d)
Damit ergibt sich das folgende lineare System und dessen Lösung zu[−1 −1−1 0
] [𝐶II
1𝐶II
2
]=
[−1/8−1/6
]⇔
[𝐶II
1𝐶II
2
]=
[1/6
−1/24
](42e)
Damit ergibt sich die Biegelinie im Bereich II zu
𝑤II (𝑥) = − 𝑞0𝐿4
𝐸𝐼𝑦𝑦
[− 1
24
(𝑥
𝐿
)4+ 1
3
(𝑥
𝐿
)3−
(𝑥
𝐿
)2+ 1
6𝑥
𝐿− 1
24
]. (43)
0 0.5 1 1.5 2
+
𝑥/𝐿
𝑤 (𝑥)
Abb. 11: Biegelinie des Balkens.
Die Absenkung von Punkt B ergibt sich durch Auswertung der Biegelinie an der Stelle 𝑥 = 2𝐿
𝑤 (2𝐿) = 𝑤II (2𝐿) = − 𝑞0𝐿4
𝐸𝐼𝑦𝑦
[−2
3 + 83 − 4 + 1
3 − 124
]= 41
24𝑞0𝐿4
𝐸𝐼𝑦𝑦. (44)
S. 12/12





























