Embed Size (px)
Citation preview
Steuerung und Regelung
Fakultät Informatik Institut für Angewandte Informatik, Professur für Technische Informationssysteme
Dresden, den 03.08.2011
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 2 von 76
Gliederung
Vorbemerkungen
Überblick
Steuerung
Regelung
Zusammenfassung und Ausblick
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 3 von 76
Gliederung
Vorbemerkungen
Überblick
Steuerung
Regelung
Zusammenfassung und Ausblick
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 4 von 76
Vorbemerkungen
Bei Fragen oder Problemen
• Autor und Ansprechpartner: Dipl.-Inf. Denis Stein
• E-Mail: [email protected]
• Webseite: http://www.iai.inf.tu-dresden.de/tis
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 5 von 76
Gliederung
Vorbemerkungen
Überblick
Wiederholung
Spielarten
Aufgaben
Steuerung
Regelung
Zusammenfassung und Ausblick
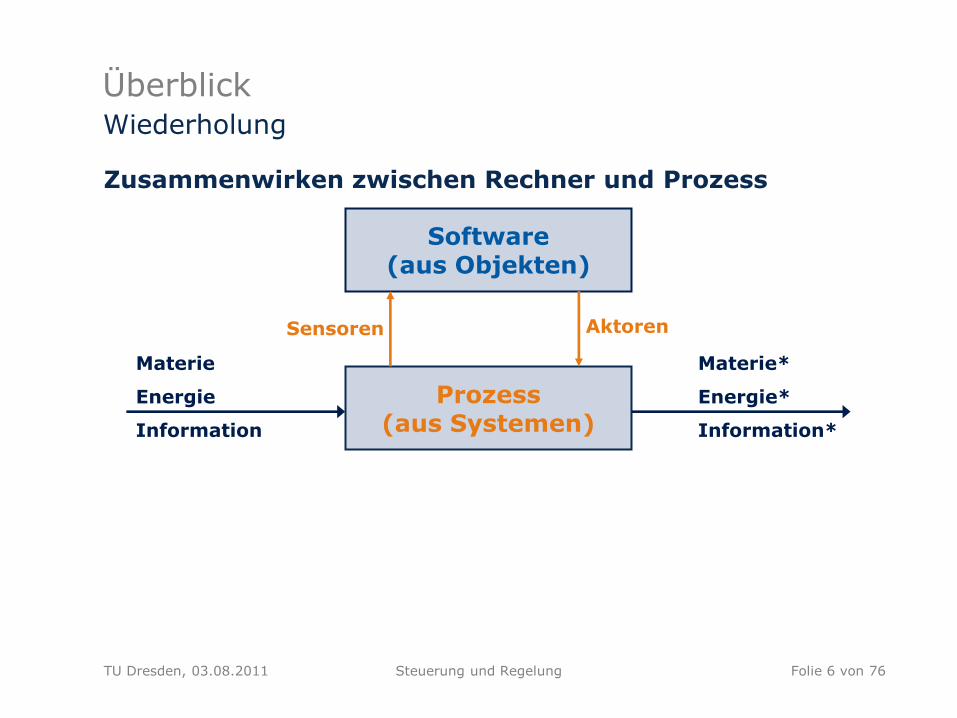
Prozess (aus Systemen)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 6 von 76
Überblick
Zusammenwirken zwischen Rechner und Prozess
Wiederholung
Software (aus Objekten)
Materie
Energie
Information
Materie*
Energie*
Information*
Sensoren Aktoren
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 7 von 76
Überblick
Definition Sensor
• Erfasst Ein-, Ausgangs- und/oder Zustandsgrößen durch Wandlung der physikalischen Größen und leitet diese über die Messperipherie zum Rechner.
• Beispiel: Temperaturfühler im Heizkessel
Definition Aktor
• Ist eine Stelleinrichtung, über die aktiv in den Prozess eingegriffen werden kann.
• Beispiel: Mischbatterie („Wasserhahn“) an der Spüle
Wiederholung
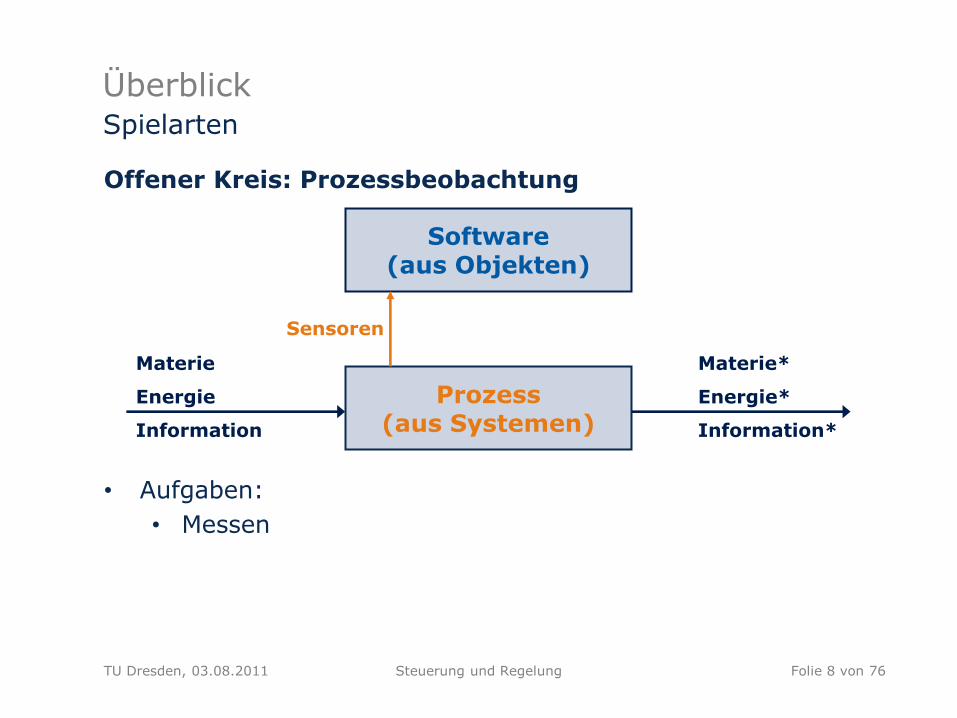
Prozess (aus Systemen)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 8 von 76
Überblick
Offener Kreis: Prozessbeobachtung
• Aufgaben:
• Messen
Spielarten
Software (aus Objekten)
Materie
Energie
Information
Materie*
Energie*
Information*
Sensoren
Prozess (aus Systemen)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 9 von 76
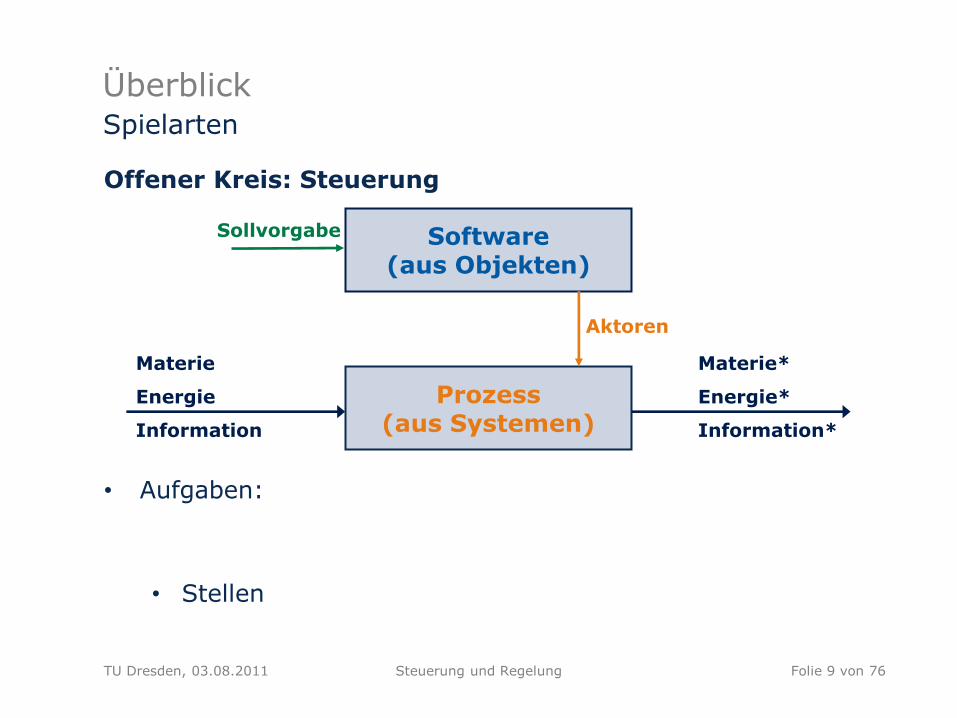
Überblick
Offener Kreis: Steuerung
• Aufgaben:
• Stellen
Spielarten
Software (aus Objekten)
Materie
Energie
Information
Materie*
Energie*
Information*
Aktoren
Sollvorgabe
Prozess (aus Systemen)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 10 von 76
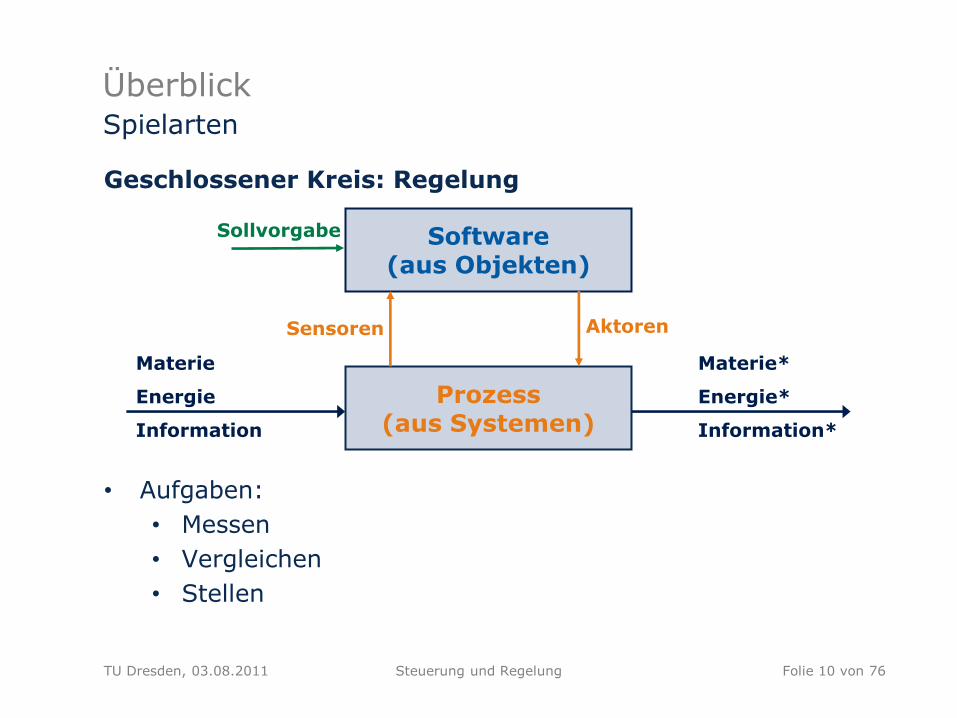
Überblick
Geschlossener Kreis: Regelung
• Aufgaben:
• Messen
• Vergleichen
• Stellen
Spielarten
Software (aus Objekten)
Materie
Energie
Information
Materie*
Energie*
Information*
Sensoren Aktoren
Sollvorgabe
Prozess (aus Systemen)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 11 von 76
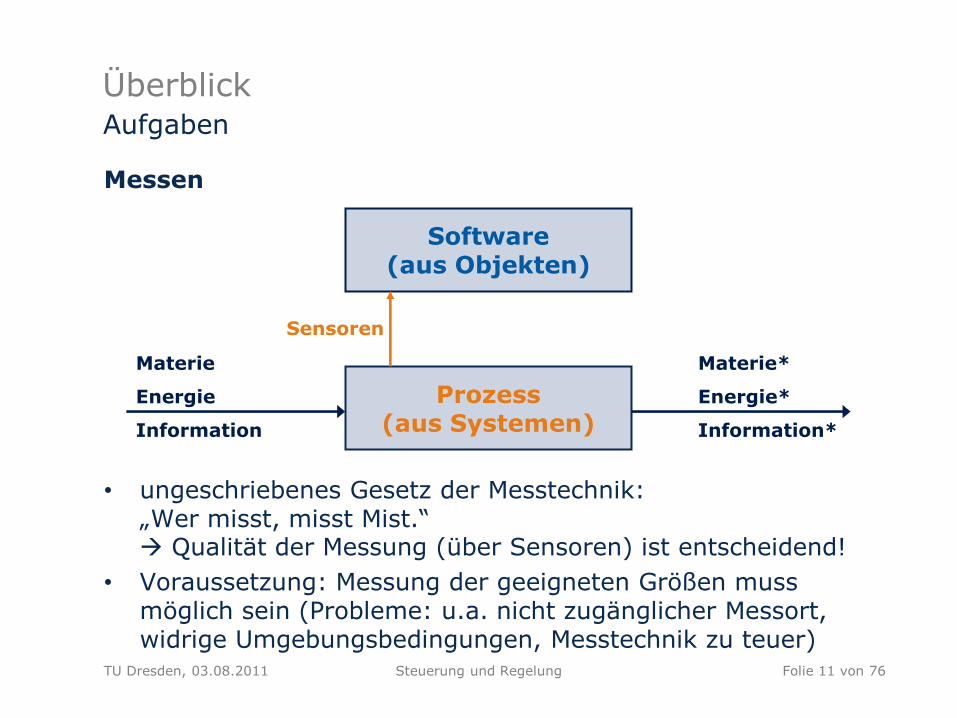
Überblick
Messen
• ungeschriebenes Gesetz der Messtechnik: „Wer misst, misst Mist.“ Qualität der Messung (über Sensoren) ist entscheidend!
• Voraussetzung: Messung der geeigneten Größen muss möglich sein (Probleme: u.a. nicht zugänglicher Messort, widrige Umgebungsbedingungen, Messtechnik zu teuer)
Aufgaben
Software (aus Objekten)
Materie
Energie
Information
Materie*
Energie*
Information*
Sensoren
Prozess (aus Systemen)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 12 von 76
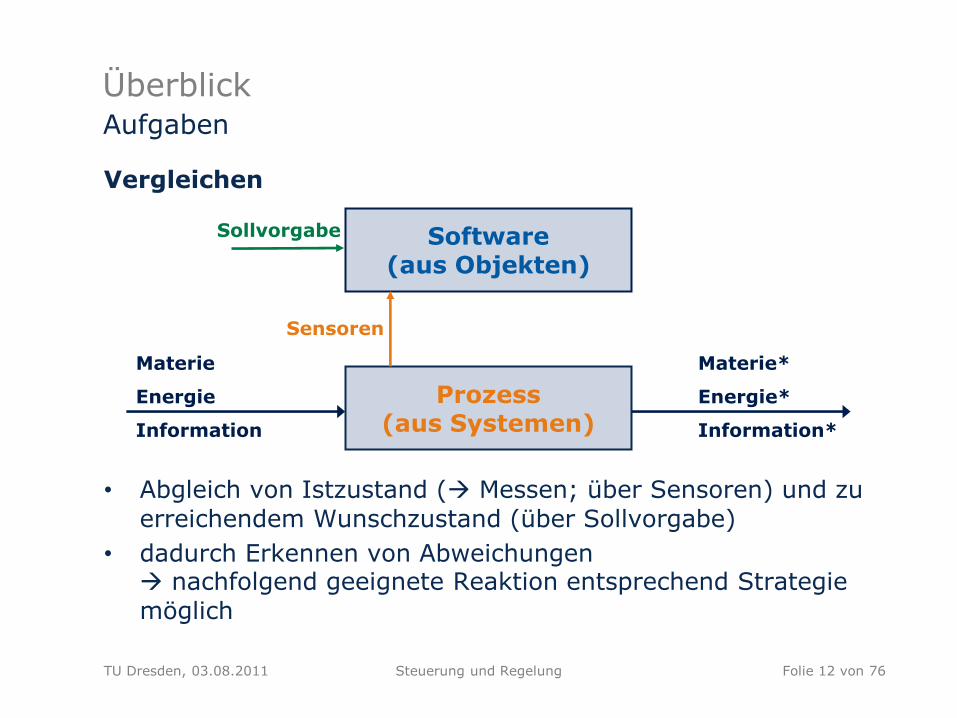
Überblick
Vergleichen
• Abgleich von Istzustand ( Messen; über Sensoren) und zu
erreichendem Wunschzustand (über Sollvorgabe)
• dadurch Erkennen von Abweichungen nachfolgend geeignete Reaktion entsprechend Strategie
möglich
Aufgaben
Software (aus Objekten)
Materie
Energie
Information
Materie*
Energie*
Information*
Sensoren
Sollvorgabe
Prozess (aus Systemen)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 13 von 76
Überblick
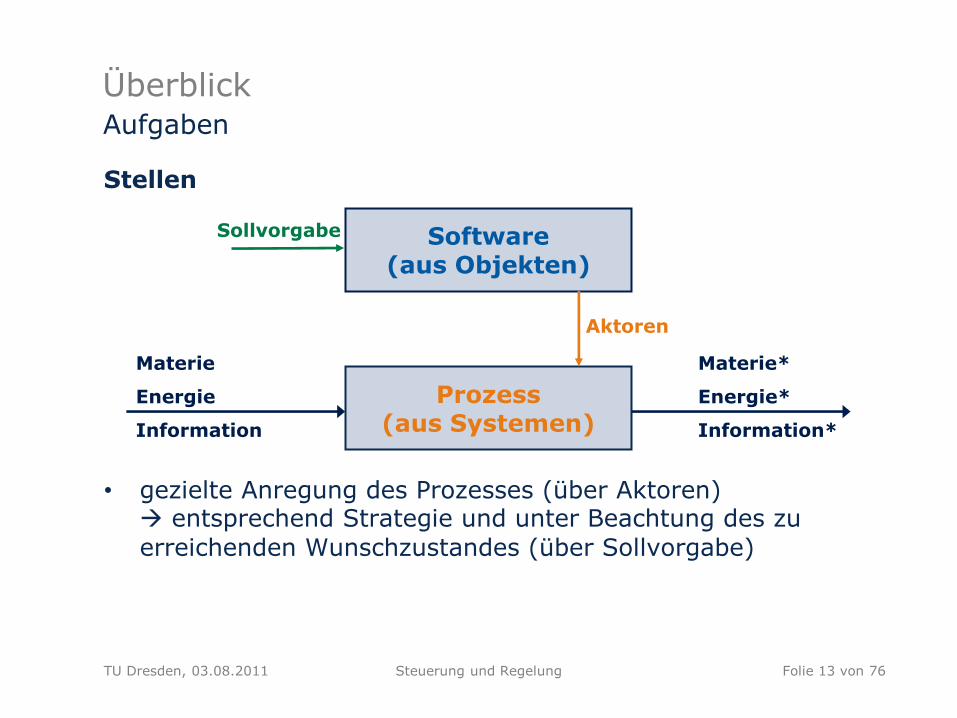
Stellen
• gezielte Anregung des Prozesses (über Aktoren) entsprechend Strategie und unter Beachtung des zu
erreichenden Wunschzustandes (über Sollvorgabe)
Aufgaben
Software (aus Objekten)
Materie
Energie
Information
Materie*
Energie*
Information*
Aktoren
Sollvorgabe
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 14 von 76
Gliederung
Vorbemerkungen
Überblick
Steuerung
Regelung
Zusammenfassung und Ausblick
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 15 von 76
Steuerung
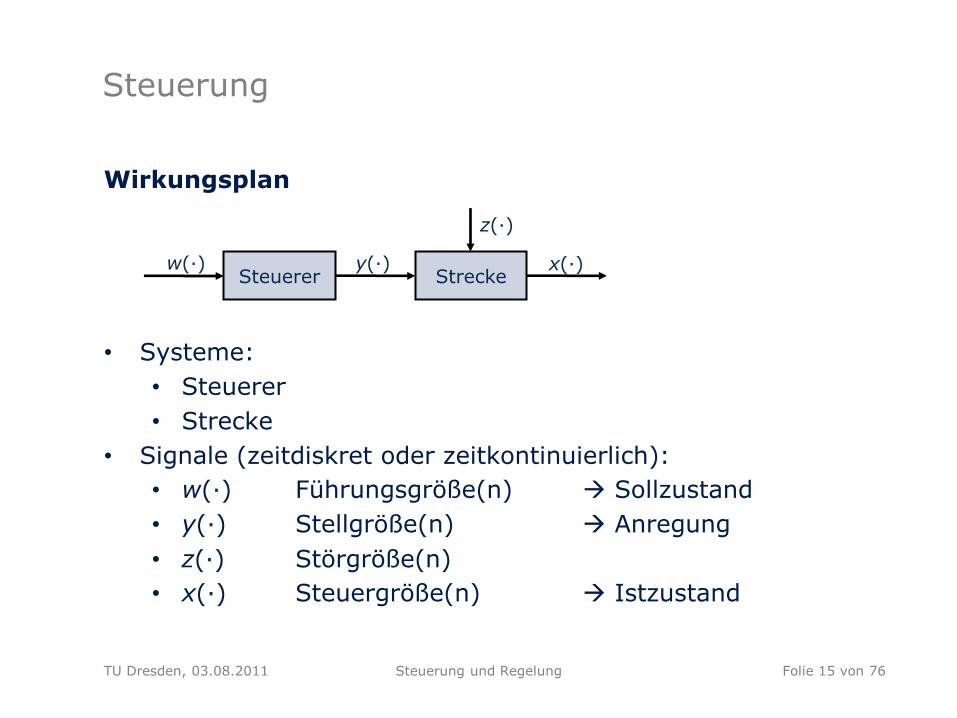
Wirkungsplan
• Systeme:
• Steuerer
• Strecke
• Signale (zeitdiskret oder zeitkontinuierlich):
• w(·) Führungsgröße(n) Sollzustand
• y(·) Stellgröße(n) Anregung
• z(·) Störgröße(n)
• x(·) Steuergröße(n) Istzustand
Steuerer Strecke
w(·) y(·)
z(·)
x(·)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 16 von 76
Steuerung
Wirkungsplan II
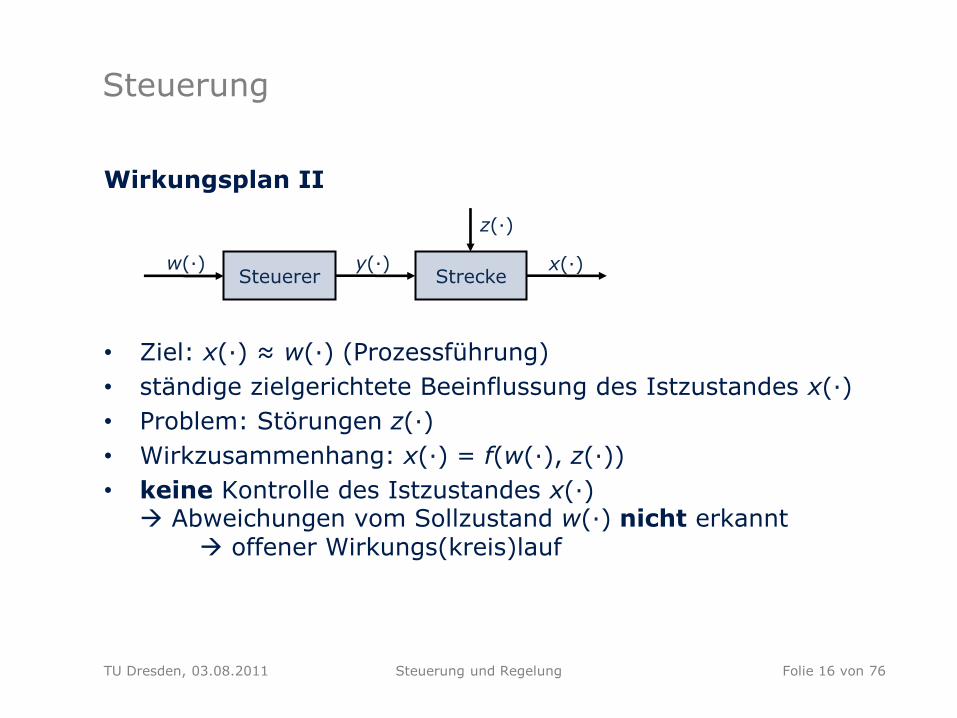
• Ziel: x(·) ≈ w(·) (Prozessführung)
• ständige zielgerichtete Beeinflussung des Istzustandes x(·)
• Problem: Störungen z(·)
• Wirkzusammenhang: x(·) = f(w(·), z(·))
• keine Kontrolle des Istzustandes x(·) Abweichungen vom Sollzustand w(·) nicht erkannt offener Wirkungs(kreis)lauf
Steuerer Strecke
w(·) y(·)
z(·)
x(·)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 17 von 76
Steuerung
Beispiele
• Vorgabe der Raumtemperatur in Abhängigkeit vom Zeitpunkt (Wochentag, Uhrzeit) und/oder Außentemperatur (beachte: das Thermostatventil führt eine Regelung durch):
• Wunschraumtemperatur w(t) abhängig vom Zeitpunkt festgelegt (z.B. in Tabelle hinterlegt)
• Ventilstellung (komplett geschlossen … komplett offen) ist Stellgröße y(t)
• mögliche Störgrößen z(t): geöffnetes Fenster, Wärmeeintrag von Mensch, Maschine oder Beleuchtung
• aktuelle Raumtemperatur ist Steuergröße x(t)
• Steuerung der Rot-, Gelb- und Grünphasen durch „einfache“ Verkehrsampeln nach Zeitplan (beachte: bei Berücksichtigung von Informationen zu Verkehrsfluss, Stau etc. wird es zur Regelung)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 18 von 76
Gliederung
Vorbemerkungen
Überblick
Steuerung
Regelung
Eigenschaften
Reglerparametrierung
PID-Regler
Besonderheiten zeitdiskreter Regler
Zusammenfassung und Ausblick
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 19 von 76
Regelung
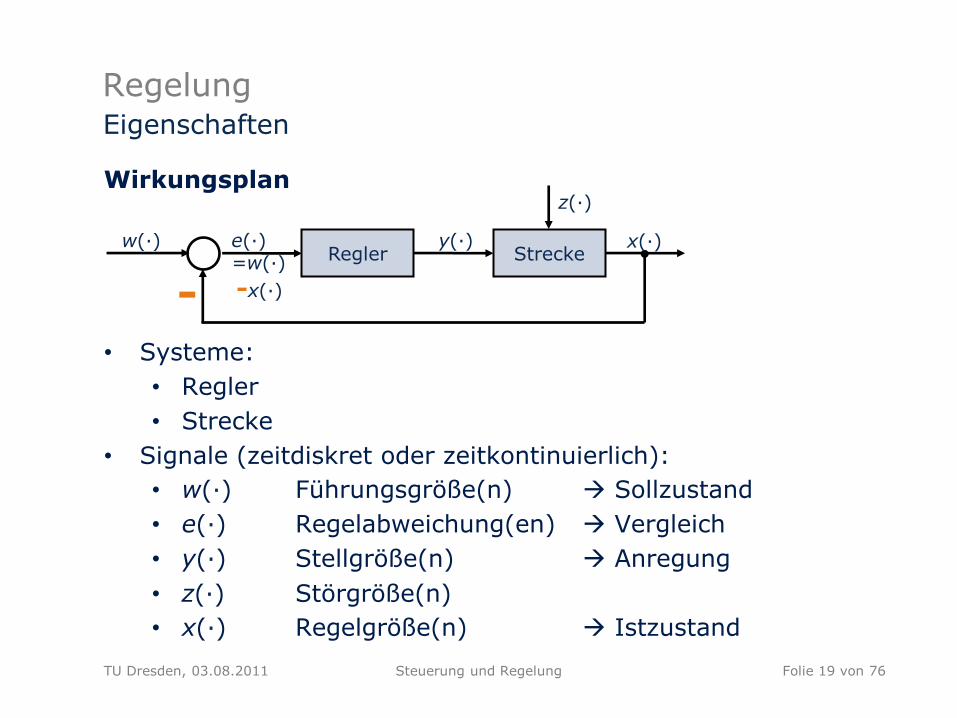
Wirkungsplan
• Systeme:
• Regler
• Strecke
• Signale (zeitdiskret oder zeitkontinuierlich):
• w(·) Führungsgröße(n) Sollzustand
• e(·) Regelabweichung(en) Vergleich
• y(·) Stellgröße(n) Anregung
• z(·) Störgröße(n)
• x(·) Regelgröße(n) Istzustand
Eigenschaften
e(·) =w(·)
-x(·)
w(·) Regler Strecke
y(·)
z(·)
x(·)
-
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 20 von 76
Regelung
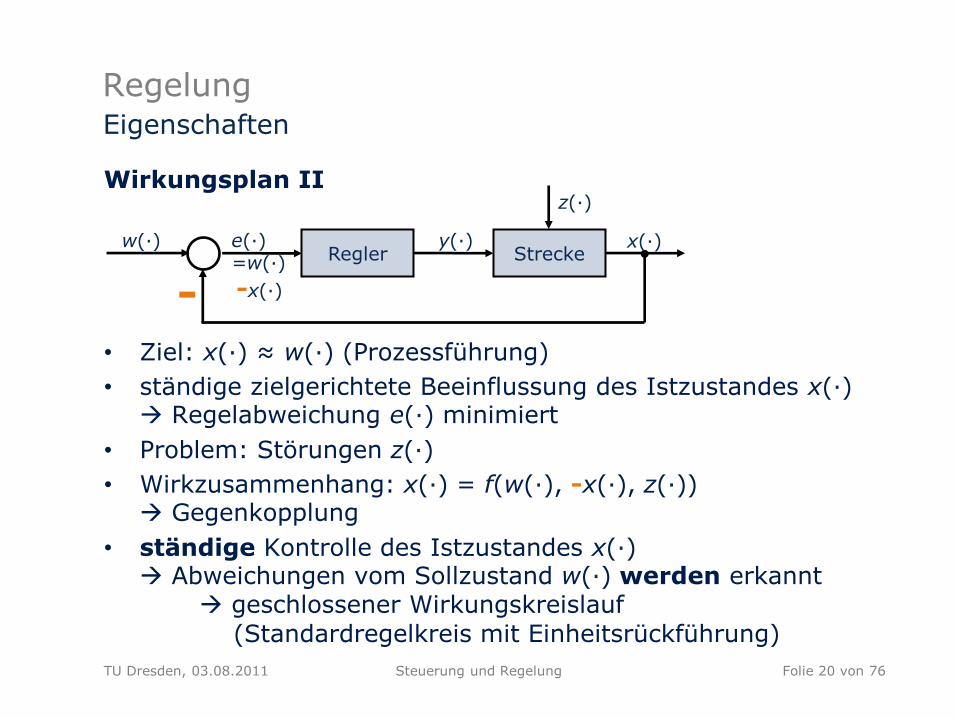
Wirkungsplan II
• Ziel: x(·) ≈ w(·) (Prozessführung)
• ständige zielgerichtete Beeinflussung des Istzustandes x(·) Regelabweichung e(·) minimiert
• Problem: Störungen z(·)
• Wirkzusammenhang: x(·) = f(w(·), -x(·), z(·)) Gegenkopplung
• ständige Kontrolle des Istzustandes x(·) Abweichungen vom Sollzustand w(·) werden erkannt geschlossener Wirkungskreislauf
(Standardregelkreis mit Einheitsrückführung)
Eigenschaften
e(·) =w(·)
-x(·)
w(·) Regler Strecke
y(·)
z(·)
x(·)
-
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 21 von 76
Regelung
Beispiele
• Anpassung der Raumtemperatur über ein Thermostat:
• Wunschraumtemperatur w(t) durch Drehstellung des Thermostatkopfes eingestellt
• Regelabweichung e(t) (qualitativ (zu kalt … zu warm) und quantitativ (-2,4 K))
• Ventilstellung (komplett geschlossen … komplett offen) ist Stellgröße y(t)
• mögliche Störgrößen z(t): geöffnetes Fenster, Wärmeeintrag von Mensch, Maschine oder Beleuchtung
• aktuelle Raumtemperatur ist Regelgröße x(t)
• verkehrsflussabhängige Steuerung der Rot-, Gelb- und Grünphasen durch intelligente Verkehrsampeln
• Radfahrer im Straßenverkehr (siehe Handout)
Eigenschaften
Regelung
Ausgewählte Anforderungen an das Verhalten des Regelkreises
• qualitativ: Anforderungen (eher) verbale Formulierung des Wunsches
• quantitativ: Gütekriterien (Formeln) Messbarkeit „Performance“-Vergleich
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 22 von 76
Regelung
Ausgewählte Anforderungen an das Verhalten des Regelkreises II
1. Stabilität, u.a.:
BIBO-Stabilitätskriterium
Lage der Polstellen der Übertragungsfunktion des geschlossenen Regelkreises (sogenanntes CLCP (englische Abkürzung für Closed-Loop Characteristic Polynomial))
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 23 von 76
Regelung
Ausgewählte Anforderungen an das Verhalten des Regelkreises III
2. Genauigkeit (x(·) ≈ w(·)) im Führungs-* und Störübertragungsverhalten**, u.a.:
bleibende Regelabweichung Min.
(stationäres Verhalten)
Integral- und Summenkriterien (transientes bzw. gesamtes Verhalten), u.a.:
- Integral des absoluten Fehlers (Fläche unter Betrag der Regelabweichung ; IAE) Min.
- Integral bzw. Summe des quadratischen Fehlers ( ; ISE bzw. MSE) Min.
* z(·) = 0 Sollwertfolge ** w(·) = 0 Ausregelung von Störungen
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 24 von 76
e
2
e
e
Regelung
Ausgewählte Anforderungen an das Verhalten des Regelkreises IV
3. „Regeldynamik“ (insbesondere bei sprunghafter Anregung), u.a.:
schnelle Reaktion: Anstiegszeit tans (Dauer von der Anregung bis zum erstmaligen Erreichen des stationären Endwertes )
kurzer Ausgleichsvorgang: Beruhigungszeit tstat (Dauer von der Anregung bis zum endgültigem Eintritt in ein Toleranzband um den stationären Endwert der Regelgröße x(·))
geringes Überschwingen: Überschwingen Δü (prozentualer Anteil, den der größte Regelgrößenwert xmax über dem stationären Endwert liegt)
Siehe auch Handout.
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 25 von 76
x
x
x
x
Regelung
Ausgewählte Anforderungen an das Verhalten des Regelkreises V
• weitere mögliche Anforderungen:
• Stabilisierung instabiler Strecken
• Beschränkung des Stellaufwandes, u.a.:
• Begrenzung der Stellgröße y(·) ( )
• Integral- und Summenkriterien über der Stellgröße y(·) Min.
• Störungskompensation (x(·) ≈ w(·)) auch bei (nicht-) messbaren Störungen z(·) (z.B. stochastische Störungen, Drift)
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 26 von 76
min max
y y y
Regelung
Ausgewählte Anforderungen an das Verhalten des Regelkreises VI
• weitere mögliche Anforderungen:
• „akzeptables“ Regelkreisverhalten auch bei ungenau bekannter (Unbestimmtheiten) oder sich verändernder Strecke (Zeitvarianz) Robustheit („Toleranz“)
• Einschwingverhalten ohne Sprung (Schadensrisiko!) z.B. Übergangsfunktion des geschlossenen
Regelkreises als P-Tn-Verhalten
• Folgen einer Verlaufsvorgabe (sogenannte Trajektorie)
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 27 von 76
Regelung
Möglichkeiten zum Finden passender Reglerparameter
• theoretische Synthese (Herleitung der optimalen Werte)
• Einstellregeln, dazu:
• Messungen an der Strecke (z.B. Sprungantwort)
• Reglerparameter aus Tabellen ablesen (meist Erfahrungswerte)
• Probieren vor Ort (z.B. an der realen Anlage)
• Optimierungsverfahren an Modellen Mehr dazu im 8. Foliensatz zu „SOI“ (S. 105ff.)
aus dem Sommersemester 2009 bzw. im Skript (S. 100ff.).
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 28 von 76
Regelung
Beobachtungen
• Kommen im Regelkreis (insbesondere in der Strecke) Totzeiten vor, besteht eine deutlich größere Gefahr von Schwingungen und Instabilität im geschlossenen Regelkreis. Grund: „zeitlicher Informationsverzug“ durch die Totzeit
• I-Glieder im offenen Kreis (Reihenschaltung aus Regler und Strecke) verhindern bleibende Regelabweichung * I-Anteil kann auch in der Strecke vorhanden sein
* abhängig vom Eingangssignal und nur wenn mehr I-Anteile als D-Anteile im offenen Kreis in Reihe geschaltet vorhanden sind (d.h. auch abhängig von der Art der Strecke)
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 29 von 76
e
Regelung
Beobachtungen II
• Anforderungen und Eigenschaften der Strecke bestimmen Auswahl und Parametrierung des Reglers
• Anforderungen sind oft widersprüchlich, u.a.:
• (im Standardregelkreis mit Einheitsrückführung) nicht gleichzeitig gutes Führungs- und Störübertragungsverhalten möglich
• robust vs. genau
• schnell vs. keine Schwingungen
Kompromisse notwendig
• Mehr zur geeigneten Reglerauswahl und -parametrierung in der Lehrveranstaltung „Methoden der Qualitätssteuerung in technischen Prozessen“ im Sommersemester 2012.
Reglerparametrierung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 30 von 76
Regelung
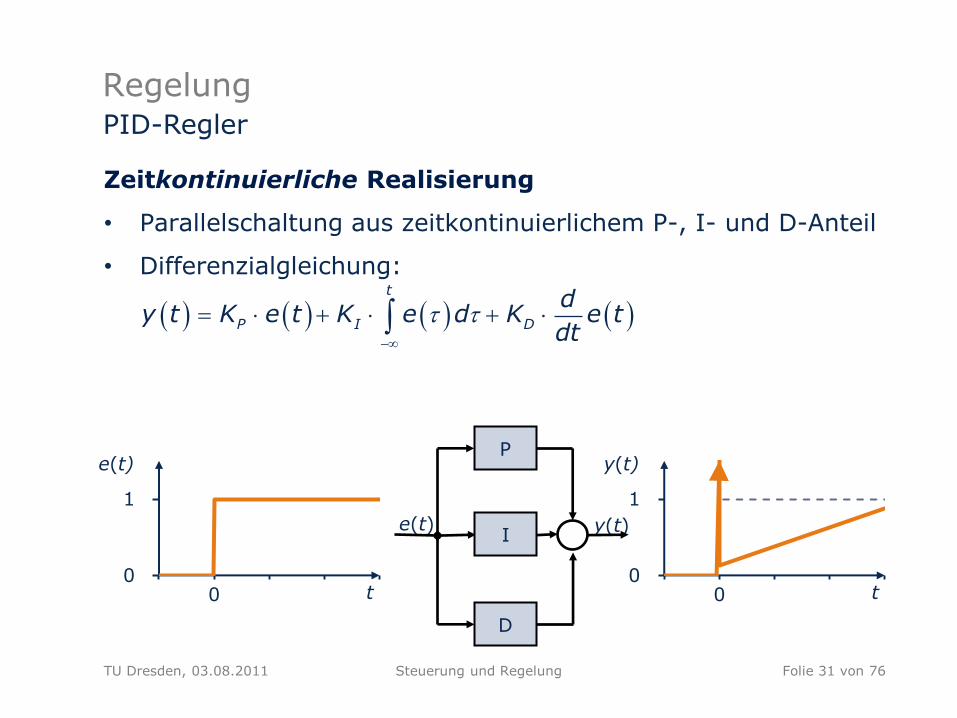
Zeitkontinuierliche Realisierung
• Parallelschaltung aus zeitkontinuierlichem P-, I- und D-Anteil
• Differenzialgleichung:
PID-Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 31 von 76
0
1
e(t)
t 0 0
1
y(t)
t 0
P
e(t) y(t) I
D
t
P I D
dy t K e t K e d K e t
dt
Regelung
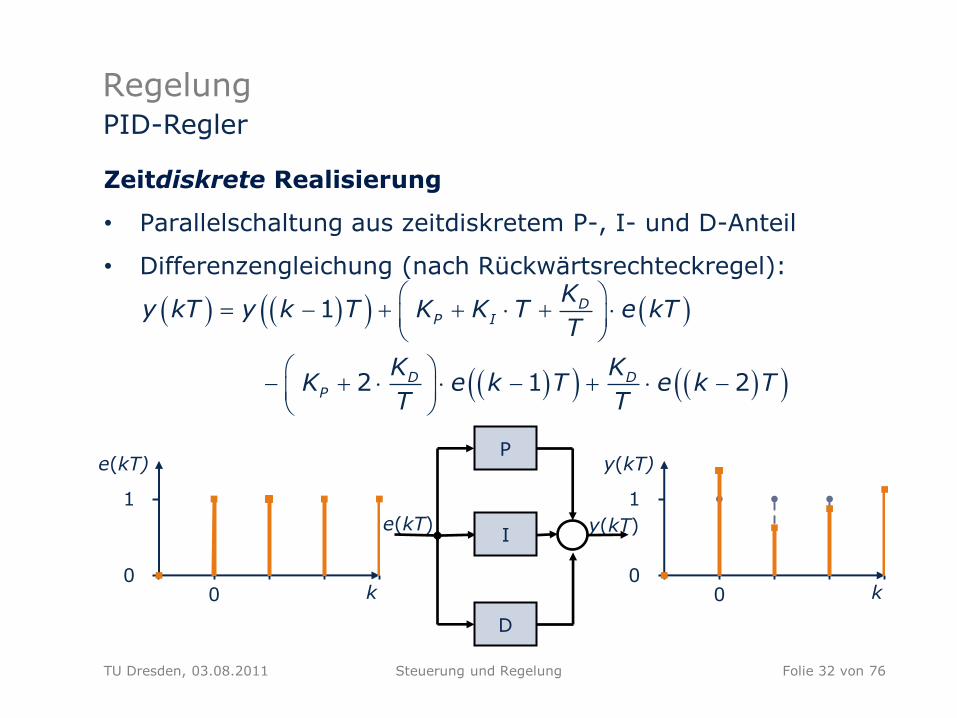
Zeitdiskrete Realisierung
• Parallelschaltung aus zeitdiskretem P-, I- und D-Anteil
• Differenzengleichung (nach Rückwärtsrechteckregel):
PID-Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 32 von 76
P
e(kT) y(kT) I
D
0
1
e(kT)
k 0 0
1
y(kT)
k 0
1
2 1 2
DP I
D DP
Ky kT y k T K K T e kT
T
K KK e k T e k T
T T
Regelung
Eigenschaften
• P-Anteil:
+ am Anfang: schnelle Reaktion (genauer: unmittelbare Reaktion, da statisches System)
− am Ende: bleibende Regelabweichung* **
* abhängig vom Eingangssignal und nur wenn mehr I-Anteile als D-Anteile im offenen Kreis in Reihe geschaltet vorhanden sind (d.h. auch abhängig von der Art der Strecke)
** optimierbar durch Erhöhung von KP; dadurch jedoch Gefahr von Schwingungen und Instabilität im geschlossenen Regelkreis
PID-Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 33 von 76
Regelung
Eigenschaften II
• I-Anteil:
− am Anfang: langsame Reaktion*
+ am Ende: keine bleibende Regelabweichung**
* optimierbar durch Erhöhung von KI; dadurch jedoch Gefahr von Schwingungen und Instabilität im geschlossenen Regelkreis
** abhängig vom Eingangssignal und nur wenn mehr I-Anteile als D-Anteile im offenen Kreis in Reihe geschaltet vorhanden sind (d.h. auch abhängig von der Art der Strecke)
PID-Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 34 von 76
Regelung
Eigenschaften III
• D-Anteil:
+ am Anfang: schnelle Reaktion
+ generell: erkennt Neigung („Zukunft“) des Signals
− generell: verstärkt Rauschen
− generell: Gefahr von Schwingungen und Instabilität im geschlossenen Regelkreis
− am Ende: wenn keine Änderung der Regelabweichung, dann keine Änderung der Stellgröße wirkungslos
PID-Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 35 von 76
Regelung
Eigenschaften IV
• PID als Ganzes:
+ Vererbung der positiven Eigenschaften der verwendeten Anteile bei Zusammenschaltung
+ „nur“ drei Reglerparameter (zeitdiskret vier)
+ einfache Theorie
+ allgemein bekannt und weit verbreitet Industriestandard
• auch in Teilen realisierbar nichtverwendete Reglerparameter (KP, KI bzw. KD) null Siehe auch Handout (Bild 5.3).
PID-Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 36 von 76
Regelung
Eigenschaften V
• z.B. PI-Regler (d.h. KD = 0):
• Differenzialgleichung:
• Differenzengleichung:
• Wirkung:
+ am Anfang: schnelle Reaktion (P-Anteil)
+ am Ende: keine bleibende Regelabweichung* (I-Anteil) * abhängig vom Eingangssignal und […] der Art der Strecke […]
PID-Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 37 von 76
t
P Iy t K e t K e d
1
1
P I
P
y kT y k T
K K T e kT
K e k T
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 38 von 76
Regelung
Wiederholung: Klassifizierung von Signalen
• Die Parameter im Zeit- und Wertebereich sind jeweils:
• kontinuierlich (unendlich viele Ausprägungen) oder
• diskret (endlich viele Ausprägungen).
• Es ergeben sich also vier Möglichkeiten:
• zeitkontinuierlich, wertkontinuierlich
• zeitkontinuierlich, wertdiskret
• zeitdiskret, wertkontinuierlich
• zeitdiskret, wertdiskret.
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 39 von 76
Regelung
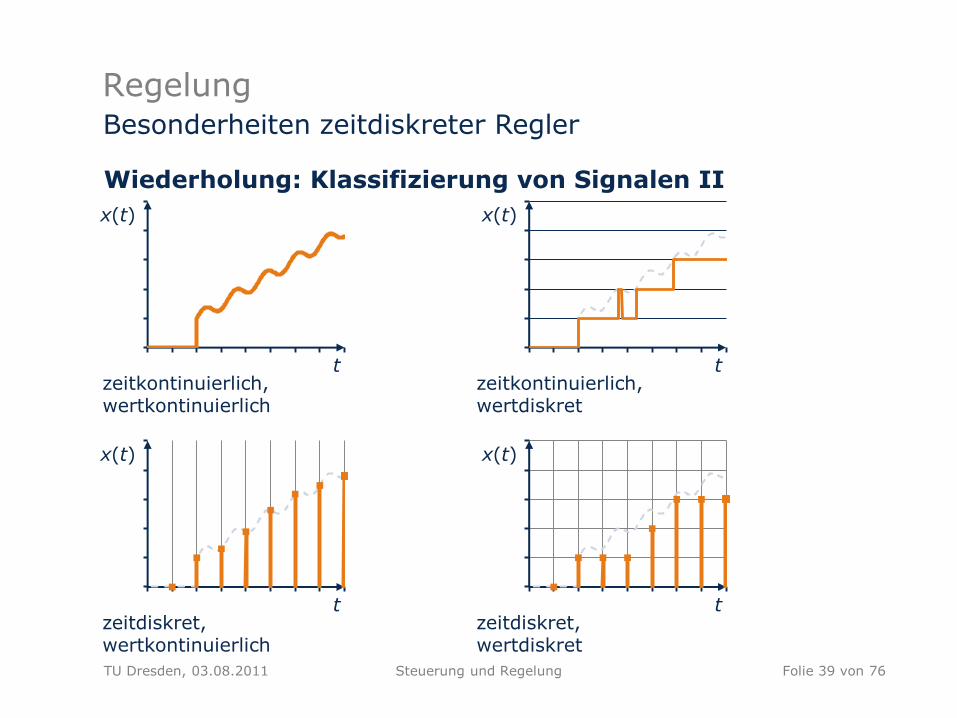
Wiederholung: Klassifizierung von Signalen II
zeitkontinuierlich, wertkontinuierlich
zeitkontinuierlich, wertdiskret
zeitdiskret, wertkontinuierlich
zeitdiskret, wertdiskret
x(t)
t
x(t)
t
x(t)
t
x(t)
t
Besonderheiten zeitdiskreter Regler
Regelung
Überblick
• Zusätzlich zu den Bestandteilen des Standardregelkreises mit Einheitsrückführung sind beim Einsatz eines zeitdiskreten Reglers an einer zeitkontinuierlichen Strecke weitere drei/vier Verarbeitungsschritte notwendig:
• (periodische) Abtastung Abtaster
• Digitalisierung (Quantisierung) ADU (Analog-Digital-Umsetzer)
• Analogisierung/Halten DAU (Digital-Analog-Umsetzer)
• Oft – auch hier – werden Abtastung und Digitalisierung (Quantisierung) zum ADU zusammengefasst.
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 40 von 76
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 41 von 76
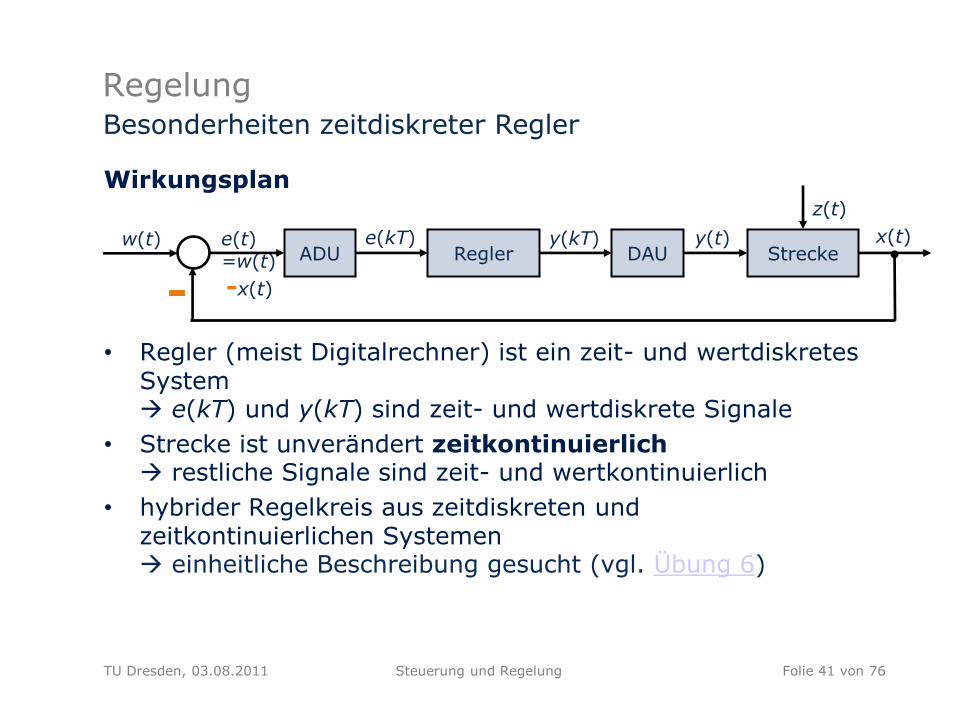
Regelung
Wirkungsplan
• Regler (meist Digitalrechner) ist ein zeit- und wertdiskretes System e(kT) und y(kT) sind zeit- und wertdiskrete Signale
• Strecke ist unverändert zeitkontinuierlich restliche Signale sind zeit- und wertkontinuierlich
• hybrider Regelkreis aus zeitdiskreten und zeitkontinuierlichen Systemen einheitliche Beschreibung gesucht (vgl. Übung 6)
Besonderheiten zeitdiskreter Regler
e(t) =w(t)
-x(t)
w(t) ADU Regler
e(kT)
z(t)
- Strecke
y(t) x(t) DAU
y(kT)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 42 von 76
Regelung
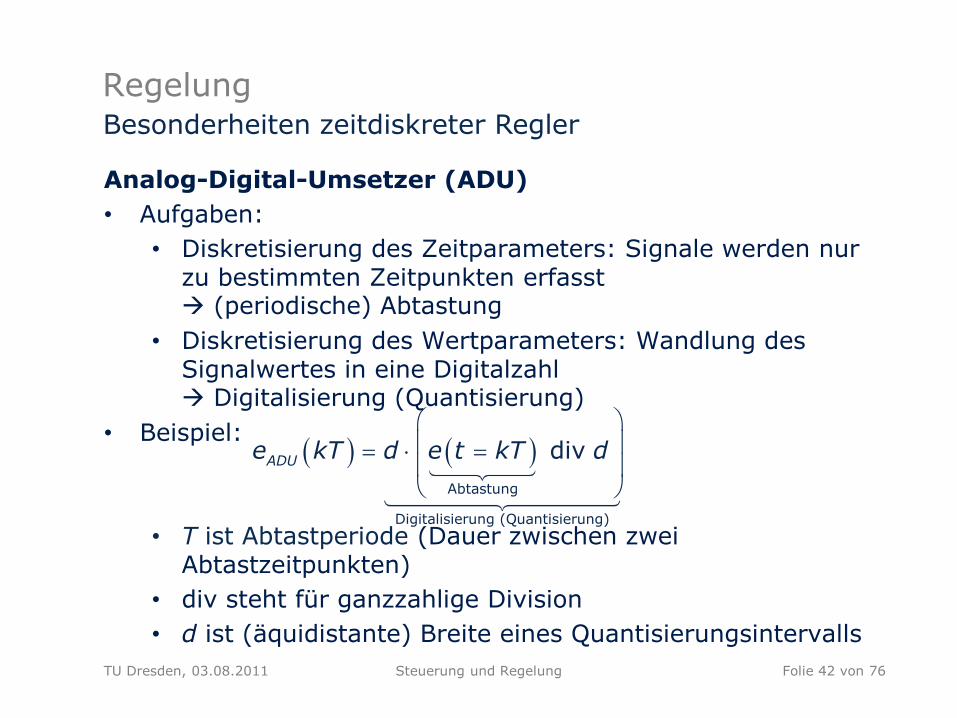
Analog-Digital-Umsetzer (ADU)
• Aufgaben:
• Diskretisierung des Zeitparameters: Signale werden nur zu bestimmten Zeitpunkten erfasst (periodische) Abtastung
• Diskretisierung des Wertparameters: Wandlung des Signalwertes in eine Digitalzahl Digitalisierung (Quantisierung)
• Beispiel:
• T ist Abtastperiode (Dauer zwischen zwei Abtastzeitpunkten)
• div steht für ganzzahlige Division
• d ist (äquidistante) Breite eines Quantisierungsintervalls
Besonderheiten zeitdiskreter Regler
Abtastung
Digitalisierung (Quantisierung)
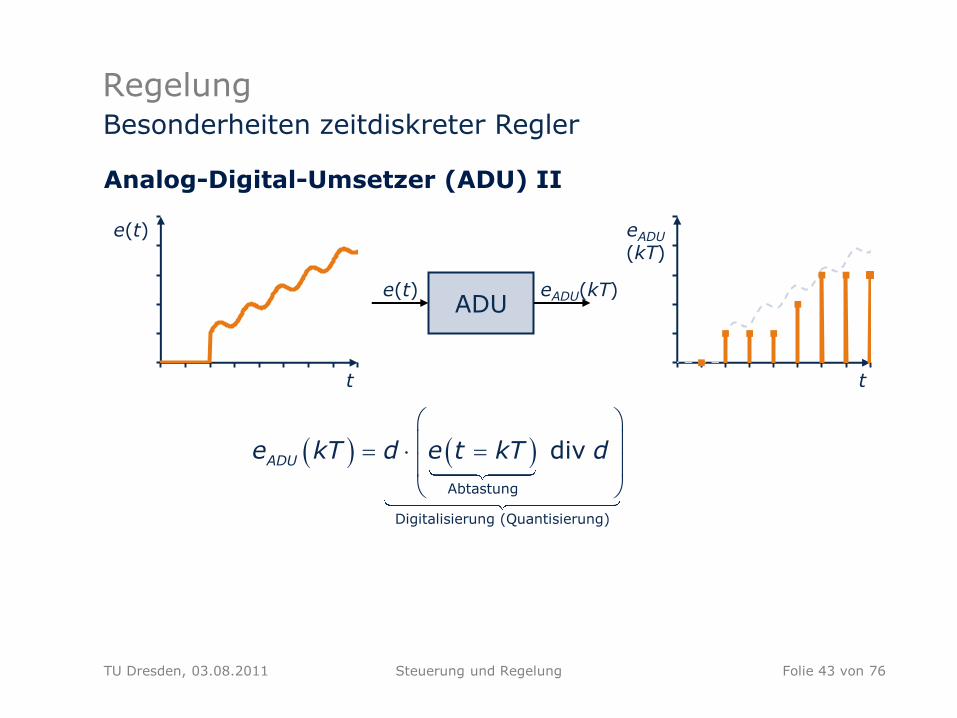
div ADU
e kT d e t kT d
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 43 von 76
Regelung
Analog-Digital-Umsetzer (ADU) II
Besonderheiten zeitdiskreter Regler
ADU
e(t) eADU(kT)
e(t)
t
eADU
(kT)
t
Abtastung
Digitalisierung (Quantisierung)
div ADU
e kT d e t kT d
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 44 von 76
Regelung
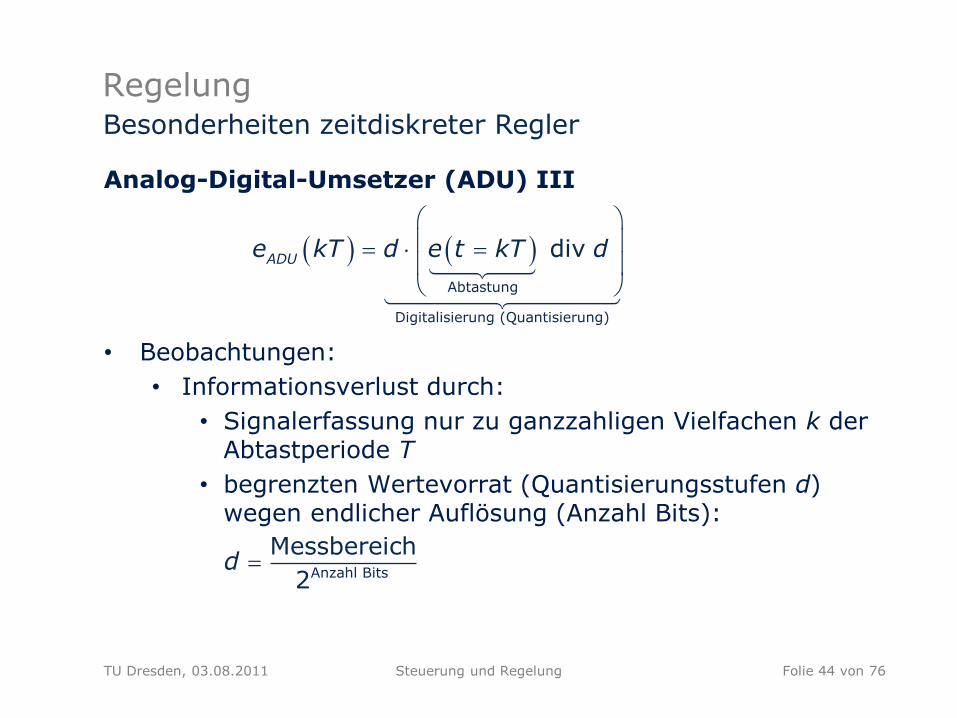
Analog-Digital-Umsetzer (ADU) III
• Beobachtungen:
• Informationsverlust durch:
• Signalerfassung nur zu ganzzahligen Vielfachen k der Abtastperiode T
• begrenzten Wertevorrat (Quantisierungsstufen d) wegen endlicher Auflösung (Anzahl Bits):
Besonderheiten zeitdiskreter Regler
Abtastung
Digitalisierung (Quantisierung)
div ADU
e kT d e t kT d
Anzahl Bits
Messbereich
2d
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 45 von 76
Regelung
Analog-Digital-Umsetzer (ADU) IV
• Beobachtungen:
• Zwischen Abtastung und Digitalisierung (Quantisierung) ist ein Halteglied notwendig, damit Signalwert für Analog-Digital-Umsetzung konstant gehalten wird. zeitliche „Verzögerung“ (Totzeit!) durch Dauer für
Umsetzung
• Quantisierungsfehler (maximal d) aufgrund des begrenzten Zahlenvorrats hat zusätzlichen Einfluss auf die (Regel-)Güte (wird jedoch meist vernachlässigt).
Besonderheiten zeitdiskreter Regler
Regelung
Wahl der Abtastperiode
• Bei der (periodischen) Abtastung ist das Abtasttheorem (nach Nyquist und Shannon bzw. Kotelnikow) zu beachten:
mit
• T ist Abtastperiode (Dauer zwischen zwei Abtastzeitpunkten)
• f ist Abtastfrequenz (Reziproke der Abtastperiode)
• fGrenze ist Grenzfrequenz (größte im abzutastenden Signal vorkommende Frequenz)
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 46 von 76
12
Grenzef f
T
Regelung
Wahl der Abtastperiode II
• Bei der (periodischen) Abtastung ist das Abtasttheorem (nach Nyquist und Shannon bzw. Kotelnikow) zu beachten:
• mit anderen Worten: Pro Schwingung sind mehr als zwei Abtastungen notwendig, sonst kommt es zu irreparablem Informationsverlust. Aliasing-Effekt es entstehen „Muster“, die im Original nicht
vorkommen (z.B. Artefakte in der Bildverarbeitung)
• Siehe auch Handout (Abb. 10.11, 10.3 sowie 10.4).
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 47 von 76
12
Grenzef f
T
Regelung
Wahl der Abtastperiode III
• Probleme:
• Nicht jedes Signal ist periodisch und besitzt somit eine (endliche) Grenzfrequenz.
• Zusätzlich treten Störungen (z.B. Rauschen) auf.
• Lösung: Einsatz eines Anti-Aliasing-Filters (analoger Tiefpass; z.B. P-Tn-System) vor dem „eigentlichen“ ADU „Abschneiden“ (real: starke Dämpfung) hoher
Frequenzen, um Auswirkung des Aliasing-Effektes bei der Verletzung des Abtasttheorems zu verhindern (real: zu verringern)
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 48 von 76
Regelung
Wahl der Abtastperiode IV
• Überlegungen:
• höchste Genauigkeit bei :
• Folge: quasikontinuierliches Verhalten
• aber unrealistisch, da Rechen- und Wandlungszeiten
• geringster Aufwand bei :
• Folgen:
• Informationsverlust
• Gefahr von Schwingungen und Instabilität im geschlossenen Regelkreis
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 49 von 76
0T
0T
T
T
Regelung
Wahl der Abtastperiode V
• Überlegungen:
• Fazit:
• Kompromiss für (maximale) Abtastperiode gesucht
• Ziel: Übererfüllung des Abtasttheorems wegen Abweichungen durch Quantisierung und Störungen
• Faustregeln je nach Autor:
• gutes Verhalten:
• drohende Instabilität:
• quasikontinuierliches Verhalten: zeitkontinuierliche Entwurfsmethoden
anwendbar
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 50 von 76
1
Grenze
Tn f
6 20n
5n
30n
Regelung
Wahl der Abtastperiode VI
• Mehr zur Abtastung – insbesondere deren Betrachtung im Frequenzbereich – im 7. Foliensatz zu „SOI“ aus dem Sommersemester 2009.
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 51 von 76
Regelung
Besonderheiten zeitdiskreter Regler
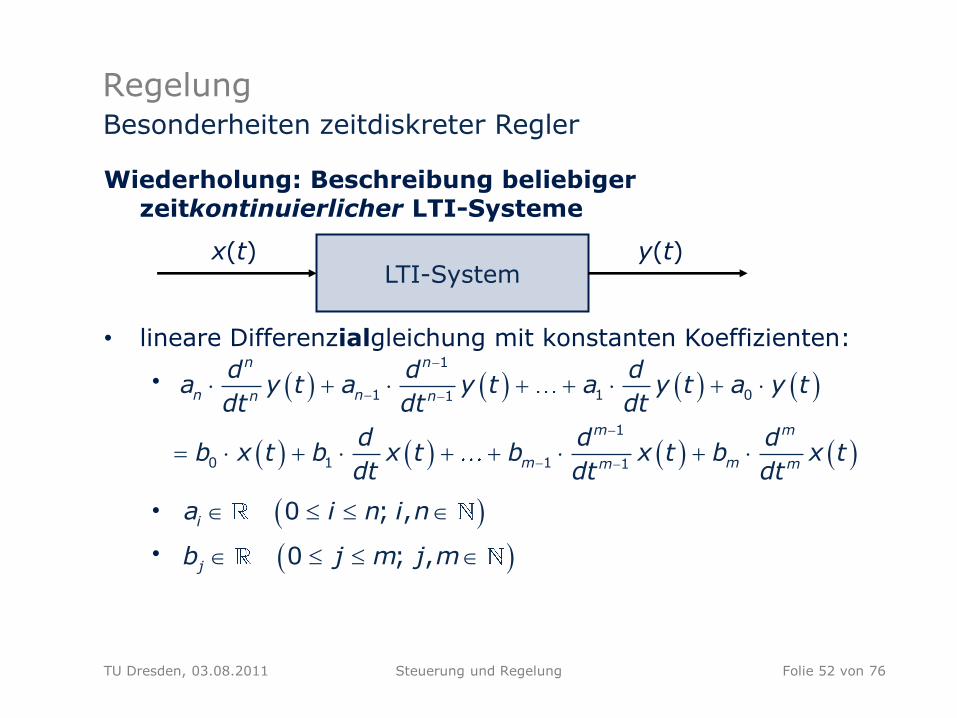
Wiederholung: Beschreibung beliebiger zeitkontinuierlicher LTI-Systeme
• lineare Differenzialgleichung mit konstanten Koeffizienten:
•
•
•
1
1 1 01
1
0 1 1 1
n n
n nn n
m m
m mm m
d d da y t a y t a y t a y t
dtdt dt
d d db x t b x t b x t b x t
dt dt dt
0 ; ,i
a i n i n
0 ; ,j
b j m j m
x(t) y(t) LTI-System
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 52 von 76
Regelung Besonderheiten zeitdiskreter Regler
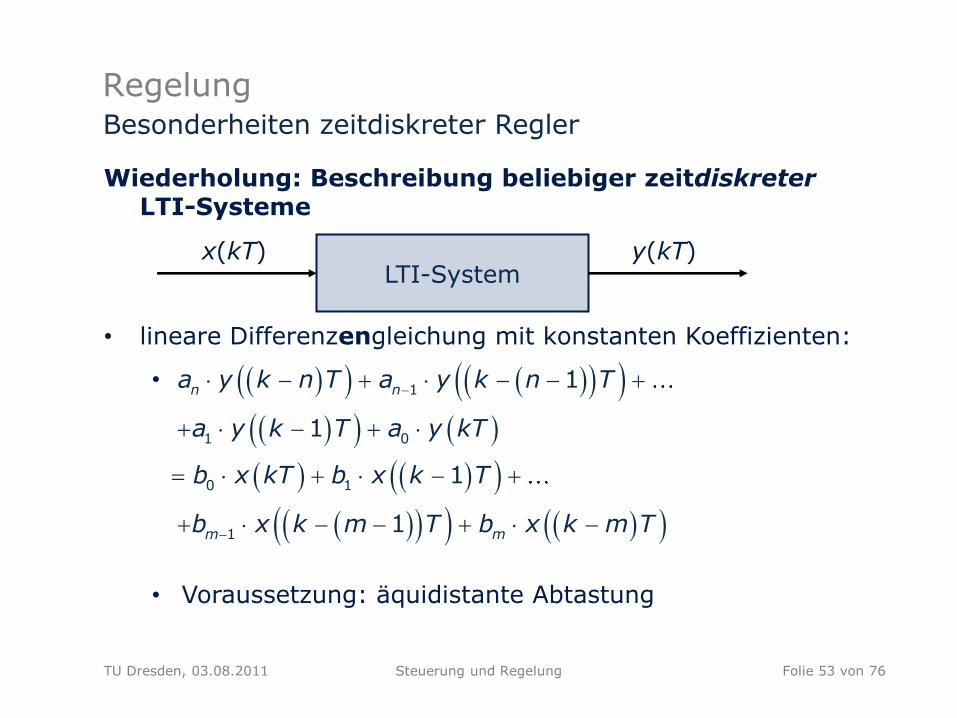
Wiederholung: Beschreibung beliebiger zeitdiskreter LTI-Systeme
• lineare Differenzengleichung mit konstanten Koeffizienten:
•
• Voraussetzung: äquidistante Abtastung
x(kT) y(kT) LTI-System
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 53 von 76
1
1 0
0 1
1
1
1
1
1
n n
m m
a y k n T a y k n T
a y k T a y kT
b x kT b x k T
b x k m T b x k m T
Regelung
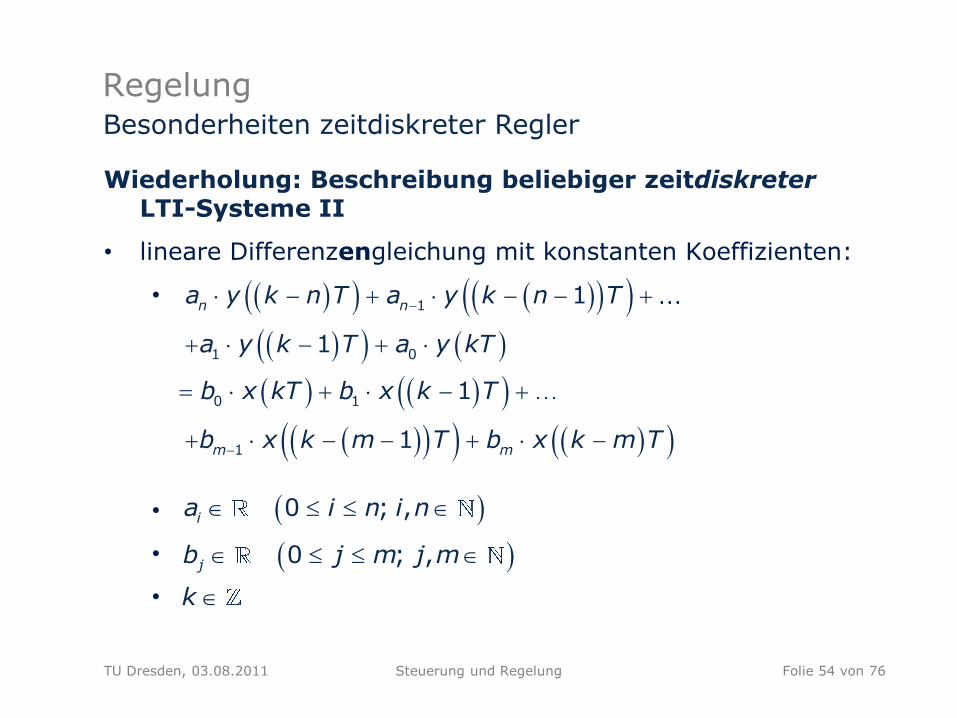
Wiederholung: Beschreibung beliebiger zeitdiskreter LTI-Systeme II
• lineare Differenzengleichung mit konstanten Koeffizienten:
•
•
•
•
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 54 von 76
1
1 0
0 1
1
1
1
1
1
n n
m m
a y k n T a y k n T
a y k T a y kT
b x kT b x k T
b x k m T b x k m T
0 ; ,i
a i n i n
0 ; ,j
b j m j m
k
Regelung
Wiederholung: Diskretisierung beliebiger zeitkontinuierlicher LTI-Systeme
• Diskretisierung ist die Ermittlung von Differenzengleichun-gen aus Differenzialgleichungen (jeweils linear und mit konstanten Koeffizienten)
• oftmals Einsatz der Rückwärtsrechteckregel: z.B. in Form dreier einfacher Ersetzungsregeln, die auf beliebige Differenzialgleichungen angewendet werden können.
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 55 von 76

Regelung
Wiederholung: Diskretisierung beliebiger zeitkontinuierlicher LTI-Systeme II
• Vorgehen Rückwärtsrechteckregel: Ersetze in der Differenzialgleichung alle Vorkommen von
1. dt durch T,
2. t durch kT sowie
3. d durch .
• Es gilt:
• T ist Abtastperiode,
• k ist deren ganzzahliges Vielfaches sowie
• angewendet auf beliebiges zeitdiskretes Signal x(kT):
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 56 von 76
1 (Rückwärtsdifferenz).x kT x kT x k T
Regelung
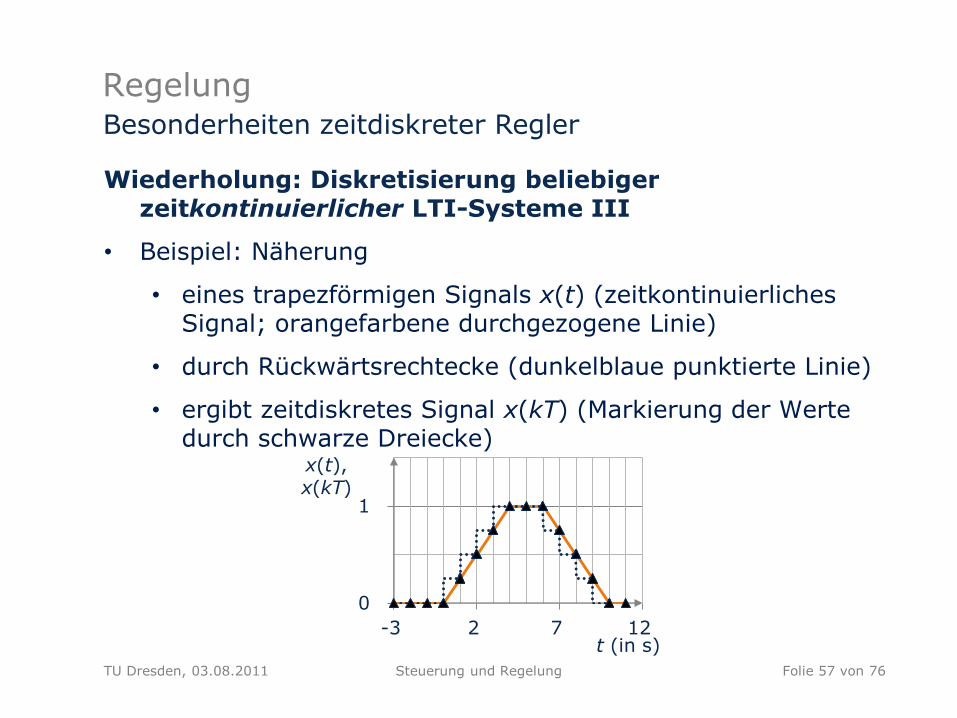
Wiederholung: Diskretisierung beliebiger zeitkontinuierlicher LTI-Systeme III
• Beispiel: Näherung
• eines trapezförmigen Signals x(t) (zeitkontinuierliches Signal; orangefarbene durchgezogene Linie)
• durch Rückwärtsrechtecke (dunkelblaue punktierte Linie)
• ergibt zeitdiskretes Signal x(kT) (Markierung der Werte durch schwarze Dreiecke)
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 57 von 76
0
1
-3 2 7 12
x(t), x(kT)
t (in s)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 58 von 76
Regelung
Regler
• Abarbeitung auf dem Digitalrechner erfolgt zyklisch nach dem EVA-Prinzip:
• Eingabe (über ADU) Bestimmung des Wertes der Regelabweichung
(z.B. als 16-Bit-Zahl)
• getaktete Verarbeitung eines Algorithmus (über Regler) Bestimmung des Stellwertes
(z.B. durch Abarbeitung einer Differenzengleichung)
• Ausgabe (über DAU) Wandlung des Stellwertes in Stellsignal
(z.B. als 5-V-Spannungssignal)
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 59 von 76
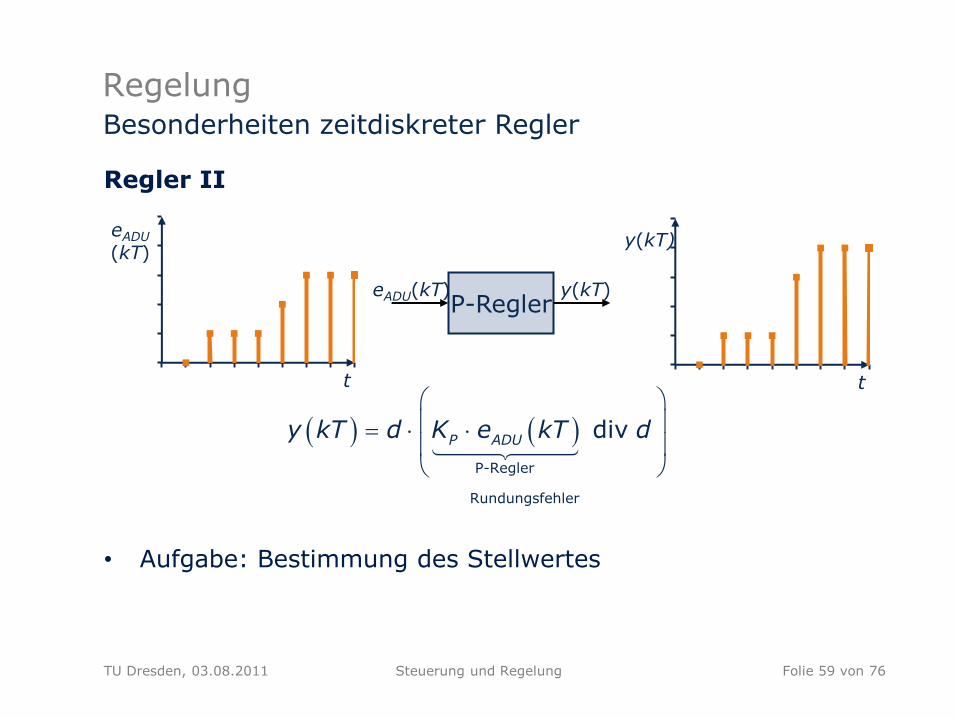
Regelung
Regler II
• Aufgabe: Bestimmung des Stellwertes
Besonderheiten zeitdiskreter Regler
P-Regler
eADU(kT) y(kT)
eADU
(kT)
t
eADU
()
t
y(kT)
P-Regler
Rundungsfehler
div P ADU
y kT d K e kT d
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 60 von 76
Regelung
Regler III
• Beobachtungen:
• Digitalrechner kann nur mit (zeit- und wertdiskreten) Werte(folge)n arbeiten.
• Rundungsfehler (maximal d) aufgrund des begrenzten Zahlenvorrats hat zusätzlichen Einfluss auf die (Regel-) Güte (wird jedoch meist vernachlässigt).
Besonderheiten zeitdiskreter Regler
P-Regler
Rundungsfehler
div P ADU
y kT d K e kT d
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 61 von 76
Regelung
Regler IV
• Beobachtungen:
• Abtastperiode T hat – im Gegensatz zum Zeitkontinuierlichen – einen Einfluss auf das Systemverhalten (z.B. I-Regler):
• T ist nicht nur Bestandteil des Zeitparameters (t = kT),
• sondern hat auch neben den bisherigen Systemparametern (z.B. b0 = KI im Zeitkontinuierlichen) einen Einfluss auf den Wertparameter (z.B. b0 = KI · T im Zeitdiskreten).
• Dauer für Abarbeitung der Differenzengleichungen zeitliche „Verzögerung“ (Totzeit!) durch Rechenzeit
(wird jedoch meist vernachlässigt)
Besonderheiten zeitdiskreter Regler
Regelung
Digital-Analog-Umsetzer (DAU)
• Aufgabe: Wandlung des zeit- und wertdiskreten Signals in ein zeit- und wertkontinuierliches Signal
• einfachste Realisierung ist die eines ZOH (englische Abkürzung für Zero Order Hold; Halteglied nullter Ordnung): Konstanthalten des letzten (Stell-)Wertes für die Dauer
einer Abtastperiode
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 62 von 76
1ZOH
y t y kT kT t k T
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 63 von 76
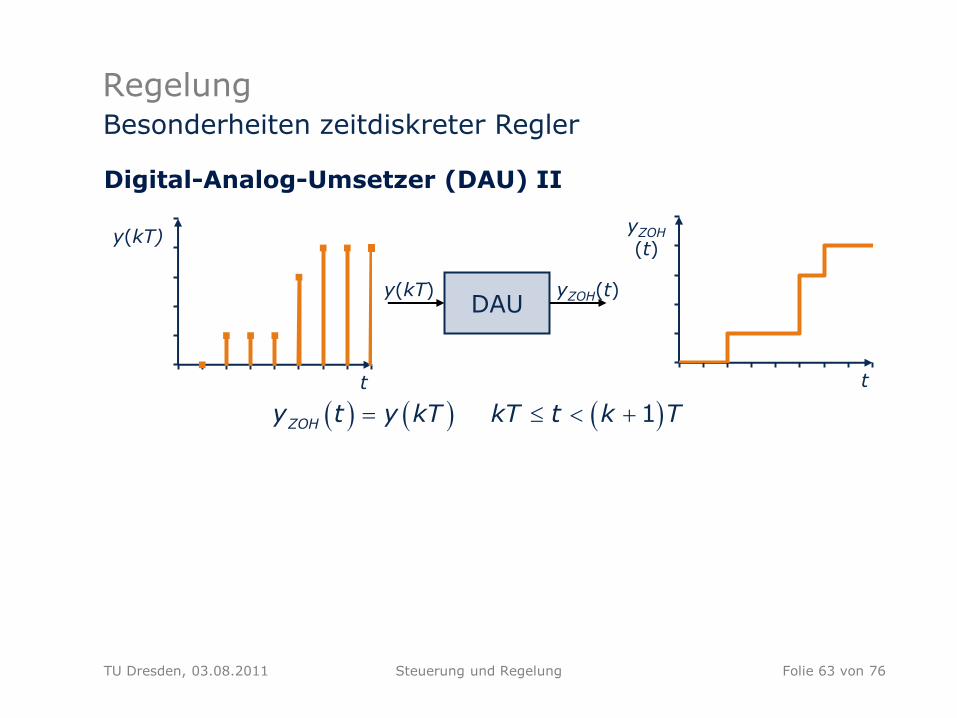
Regelung
Digital-Analog-Umsetzer (DAU) II
Besonderheiten zeitdiskreter Regler
1ZOH
y t y kT kT t k T
DAU
y(kT) yZOH(t)
yZOH
(t)
t
y(kT) yZOH
(t)
t
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 64 von 76
Regelung
Digital-Analog-Umsetzer (DAU) III
• Beobachtungen:
• zeitliche „Verzögerung“ (Totzeit!) durch Dauer für Umsetzung
• Strecke wird mit einer Serie von Sprüngen angeregt
• aufgrund der Abtastung der Regelabweichung interessiert nur das Verhalten der Strecke an den Abtastzeitpunkten Diskretisierung der Serie ( Überlagerungsprinzip
(Superpositionsprinzip)) von Sprungantworten der zeitkontinuierlichen Strecke, um zeitdiskretes Streckenmodell zu erhalten (Sprungantwortäquivalenzverfahren) Siehe auch Handout (Bild 10.2).
Besonderheiten zeitdiskreter Regler
Regelung
Wiederholung: Beobachtung(en)
• Kommen im Regelkreis (insbesondere in der Strecke) Totzeiten vor, besteht eine deutlich größere Gefahr von Schwingungen und Instabilität im geschlossenen Regelkreis. Grund: „zeitlicher Informationsverzug“ durch die Totzeit
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 65 von 76
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 66 von 76
Regelung
Fazit
• Eine zeitdiskrete Reglerrealisierung bedingt eine zeitliche „Verzögerung“ (Totzeit!) durch die Dauer für die Umsetzungen in ADU und DAU. Gefahr von Schwingungen und Instabilität im
geschlossenen Regelkreis
• Unabhängig von deren Lage im Regelkreis werden diese (bei einer rein zeitkontinuierlichen Beschreibung) oft als zusätzliche, „gemeinschaftliche“ Totzeit im offenen Kreis zusammengefasst:
Besonderheiten zeitdiskreter Regler
,2
t ADU DAU
TT
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 67 von 76
Regelung
Fazit II
• Im Rahmen (der Übung zu) dieser Lehrveranstaltung keine Betrachtung von:
• Aliasing sowie Quantisierung und den daraus resultierenden Fehlern
• Übertragungsfunktionen (und deren Polstellen)
• Störungen im geschlossenen Regelkreis
• Regelung totzeitbehafteter Strecken
• Rechen- und Wandlungszeiten (insbesondere zusätzliche, „gemeinschaftliche“ Totzeit im offenen Kreis durch die Wirkung von ADU und DAU)
• Mehr zur geeigneten Reglerauswahl und -parametrierung in der Lehrveranstaltung „Methoden der Qualitätssteuerung in technischen Prozessen“ im Sommersemester 2012.
Besonderheiten zeitdiskreter Regler
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 68 von 76
Gliederung
Vorbemerkungen
Überblick
Steuerung
Regelung
Zusammenfassung und Ausblick
Lehrveranstaltung Prozesssteuerung
Weitere Lehrveranstaltungen (u.a. des Lehrstuhls TIS)
Noch mehr Möglichkeiten
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 69 von 76
Zusammenfassung
Wiederholung: Lösung: Systemorientierte Informatik
• Wie werden Sensoren und Aktoren an den Rechner angeschlossen?
• Wie zerlegt man einen großen Prozess in kleine, einfache Systeme? Grundsystemtypen, Grundstrukturen,
Systemidentifikation, …
• Nach welchen Gesetzen verhalten sich diese Systeme (z.B. Zeitverläufe)? Faltung, Systemeigenschaften, Grundsystemtypen, …
• Wie kann man deren Verhalten durch Rechner nachbilden (Simulation)? Simulation und C-Programme
• Welche Algorithmen braucht der Rechner, um den Prozess gezielt zu beeinflussen? (zeitdiskrete) Filter und Regler
Lehrveranstaltung Prozesssteuerung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 70 von 76
Zusammenfassung
Zusammenfassung
• Als zweiter Anwendungsfall wurden Steuerung und Regelung vorgestellt.
• Im Gegensatz zur Steuerung ist die Regelung durch einen geschlossen Wirkungskreislauf gekennzeichnet, der Abweichungen vom Sollzustand erkennt.
• Bei der Auswahl und Parametrierung von Reglern sind viele, oft widersprüchliche Anforderungen zu berücksichtigen.
• Der am weitesten verbreitete Regler ist der PID-Regler.
• Die meisten Regler können sowohl zeitkontinuierlich als auch zeitdiskret realisiert werden.
• Bei der zeitdiskreten Regelung sind zusätzliche Elemente im Regelkreis zu integrieren: ADU und DAU.
• Neben den „bisherigen“ Reglerparametern hat bei der zeitdiskreten Regelung auch die Abtastperiode einen Einfluss auf das Systemverhalten.
Lehrveranstaltung Prozesssteuerung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 71 von 76
Ausblick
Übung 6
• Übung 6 vertieft den Umgang mit Regelkreisen.
• Außerdem werden zeitdiskrete Regler untersucht.
Lehrveranstaltung Prozesssteuerung
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 72 von 76
Ausblick
Grundstudium
• Für Nach- und Wiederholer „SOI“: ab Wintersemester 2011/12 tritt an die Stelle von „SOI“ das Modul INF-B-3A0/INF-D-430
• Proseminar Technische Informationssysteme (3. oder 4. Semester)
• Wahl eines technischen Nebenfachs (ab 3. Semester) Kombinationsmöglichkeiten vgl. Skript (S. 9)
Weitere Lehrveranstaltungen (u.a. des Lehrstuhls TIS)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 73 von 76
Ausblick
Hauptstudium
• Angewandte Datenanalyse und Modellbildung (Wintersemester)
• Angewandte Zeitreihenanalyse (Sommersemester)
• Drahtgebundene und drahtlose Sensor-Aktor-Netzwerke (Sommersemester)
• Einführung in die Angewandte Informatik (Wintersemester), u.a.:
• Prof. Kabitzsch: Test und Diagnose
• Dr. Plönnigs: ambient assisted living
• Hauptseminar Technische Informationssysteme (in jedem Semester)
Weitere Lehrveranstaltungen (u.a. des Lehrstuhls TIS)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 74 von 76
Ausblick
Hauptstudium II
• Komplexpraktikum und Praktikum Technische Informationssysteme (jeweils in jedem Semester)
• Methoden der Qualitätssteuerung in technischen Prozessen (Sommersemester)
• Monitoring und Diagnose (Sommersemester)
• Projekt Technische Informationssysteme (Sommersemester)
• Softwareentwicklung für Echtzeitsteuerungen (Teil I im Wintersemester, Teil II im Sommersemester)
• Aktuelle Informationen befinden sich auf unserer Homepage und der Webseite zur jeweiligen Lehrveranstaltung.
Weitere Lehrveranstaltungen (u.a. des Lehrstuhls TIS)
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 75 von 76
Ausblick
Weitere Betätigungsmöglichkeiten am Lehrstuhl TIS
• Mitarbeit als studentische Hilfskraft (SHK)
• Anfertigung von Bakkalaureats-, Beleg- und Diplomarbeiten
• Mitarbeit als wissenschaftlicher Mitarbeiter
• Weitere Informationen dazu siehe unsere Webseite.
Noch mehr Möglichkeiten
TU Dresden, 03.08.2011 Steuerung und Regelung Folie 76 von 76





























