Embed Size (px)
Citation preview
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 1
Systemkonzept und Flugerprobung Systemkonzept und Flugerprobung eines VTOL UAV eines VTOL UAV DemonstratorsDemonstrators
Vortrag von Vortrag von
F. Thielecke, J. Dittrich, A. F. Thielecke, J. Dittrich, A. BernatzBernatz
DLR DLR -- Institut für FlugsystemtechnikInstitut für Flugsystemtechnik
BraunschweigBraunschweig
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 2
InhaltInhalt
Motivation und Ziele
Basishubschrauber
Systemkonzept und Avionik
Modellierung & Flugregler
Bodenstation und Missionsmanagement
On-board Kamera-System und bildgestützter Schwebeflug
Zusammenfassung
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 3
ARTIS Projekt ARTIS Projekt -- Motivation und ZieleMotivation und Ziele
Autonomous Rotorcraft Testbed for Intelligent Systems
Entwicklung einer low-cost VTOL UAV Testplattform für die Untersuchung von autonomen intelligenten Funktionen
Flugerprobung von Schlüsseltechnologien und Multi-Agenten-Systeme in einem realen Umfeld
Untersuchungen zur Mensch-Maschine-Schnittstelle und zum erforderlichen Autonomie-Level als Funktion der Mission
-> Umfangreiche Flugerprobung in Kombination mit Simulation
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 4
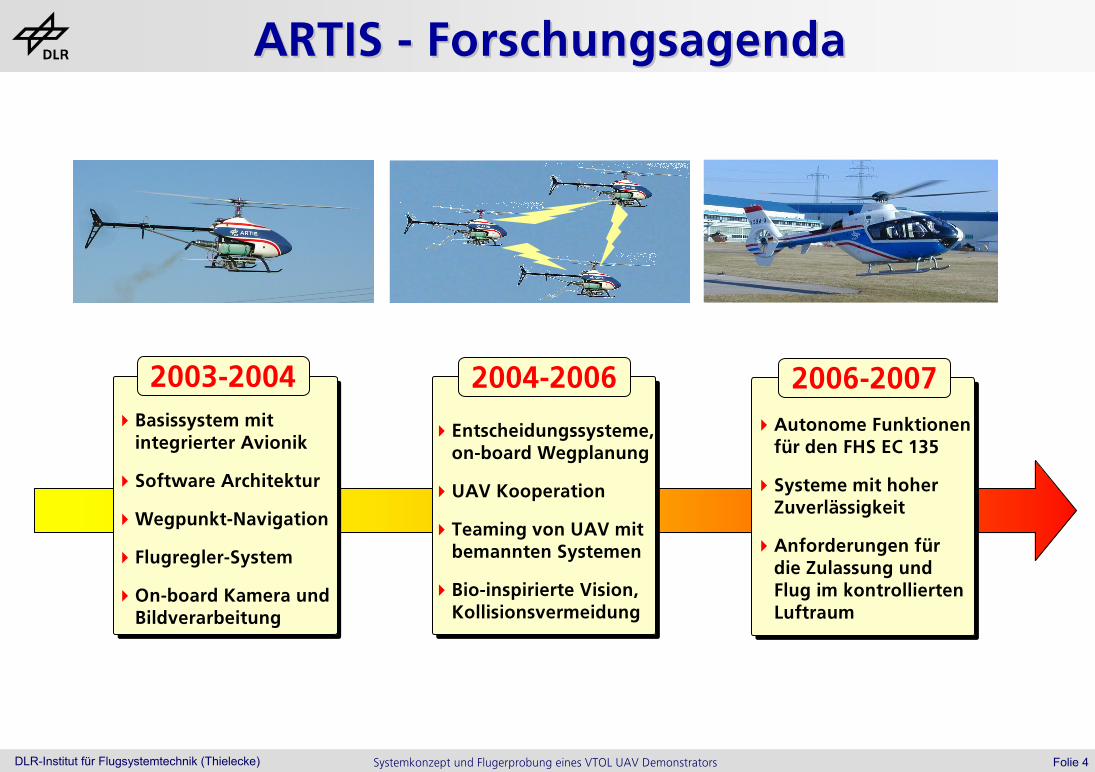
ARTIS ARTIS -- ForschungsagendaForschungsagenda
2003-2004Autonome Funktionen für den FHS EC 135
Systeme mit hoher Zuverlässigkeit
Anforderungen für die Zulassung und Flug im kontrollierten Luftraum
Entscheidungssysteme, on-board Wegplanung
UAV Kooperation
Teaming von UAV mit bemannten Systemen
Bio-inspirierte Vision, Kollisionsvermeidung
Basissystem mit integrierter Avionik
Software Architektur
Wegpunkt-Navigation
Flugregler-System
On-board Kamera und Bildverarbeitung
2004-2006 2006-2007
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 5
BasisBasis--SystemSystem
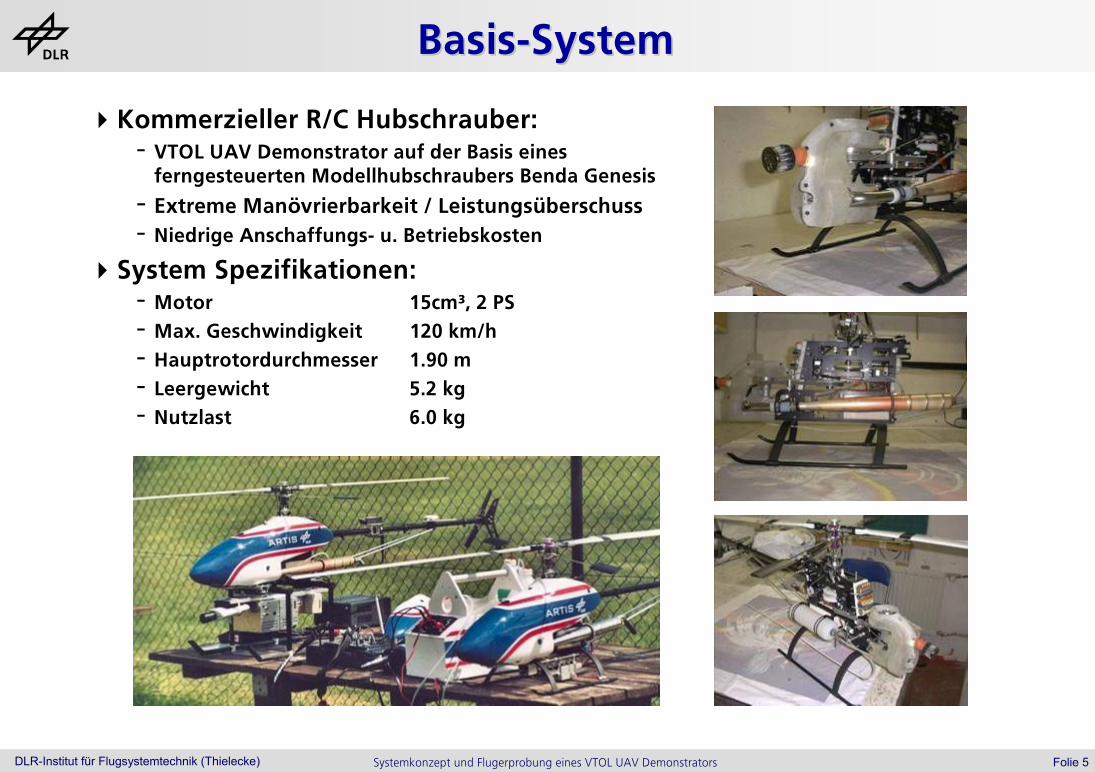
Kommerzieller R/C Hubschrauber:- VTOL UAV Demonstrator auf der Basis eines
ferngesteuerten Modellhubschraubers Benda Genesis
- Extreme Manövrierbarkeit / Leistungsüberschuss- Niedrige Anschaffungs- u. Betriebskosten
System Spezifikationen:- Motor 15cm³, 2 PS- Max. Geschwindigkeit 120 km/h- Hauptrotordurchmesser 1.90 m- Leergewicht 5.2 kg- Nutzlast 6.0 kg
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 6
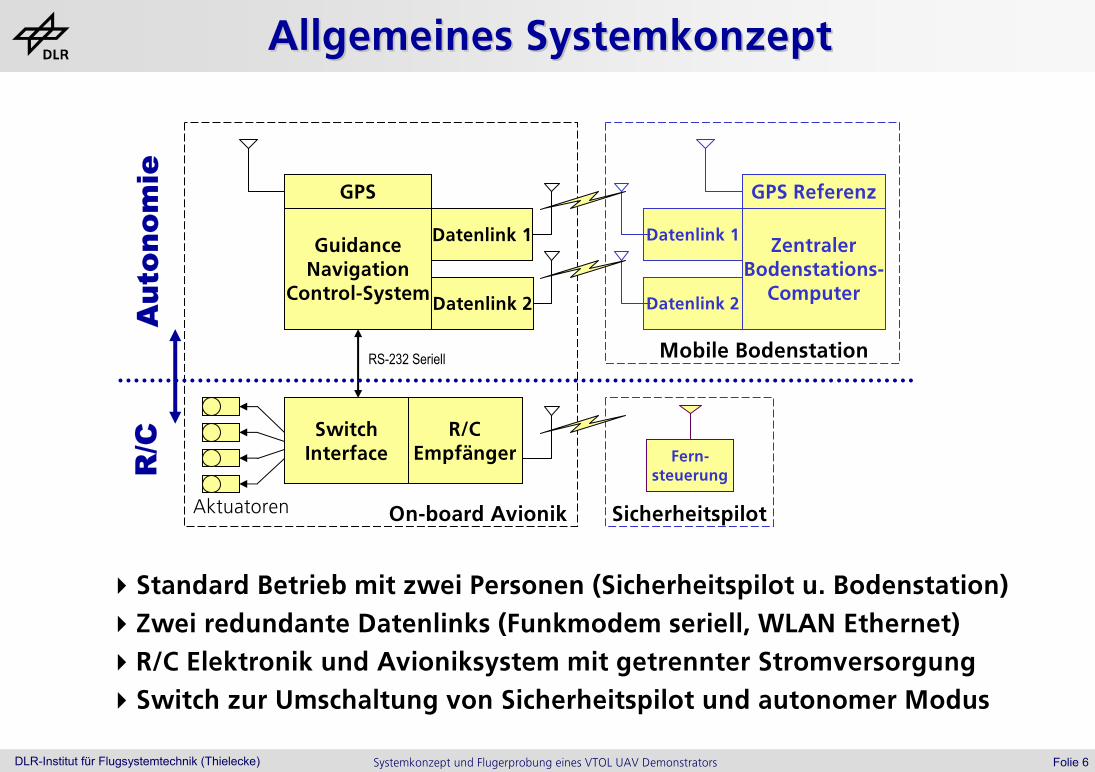
Allgemeines SystemkonzeptAllgemeines Systemkonzept
GuidanceNavigation
Control-System
R/CEmpfänger
Datenlink 1
Fern-steuerung
Datenlink 1 ZentralerBodenstations-
Computer
GPS Referenz
On-board Avionik
Mobile Bodenstation
Sicherheitspilot
Switch Interface
Datenlink 2 Datenlink 2
GPS
Aktuatoren
Autonom
ieR/C
RS-232 Seriell
Standard Betrieb mit zwei Personen (Sicherheitspilot u. Bodenstation)Zwei redundante Datenlinks (Funkmodem seriell, WLAN Ethernet)R/C Elektronik und Avioniksystem mit getrennter Stromversorgung Switch zur Umschaltung von Sicherheitspilot und autonomer Modus

Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 7
Design der Avionik KomponentenDesign der Avionik Komponenten
Flexibilität durch einfache Rekonfiguration
Modulare Upgrade-Fähigkeit
Einfache Wartungim Forschungsumfeld

Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 8
ARTIS ARTIS -- Basis KonfigurationBasis Konfiguration
Stromversorgung
Flight Control Computer Telemetrie Modul
GPS Antenne
Magnetometer
GPS & IMU
Telemetrie AntenneDigital-Kamera

Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 9
ARTIS ARTIS -- Kamera KonfigurationKamera Konfiguration
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 10
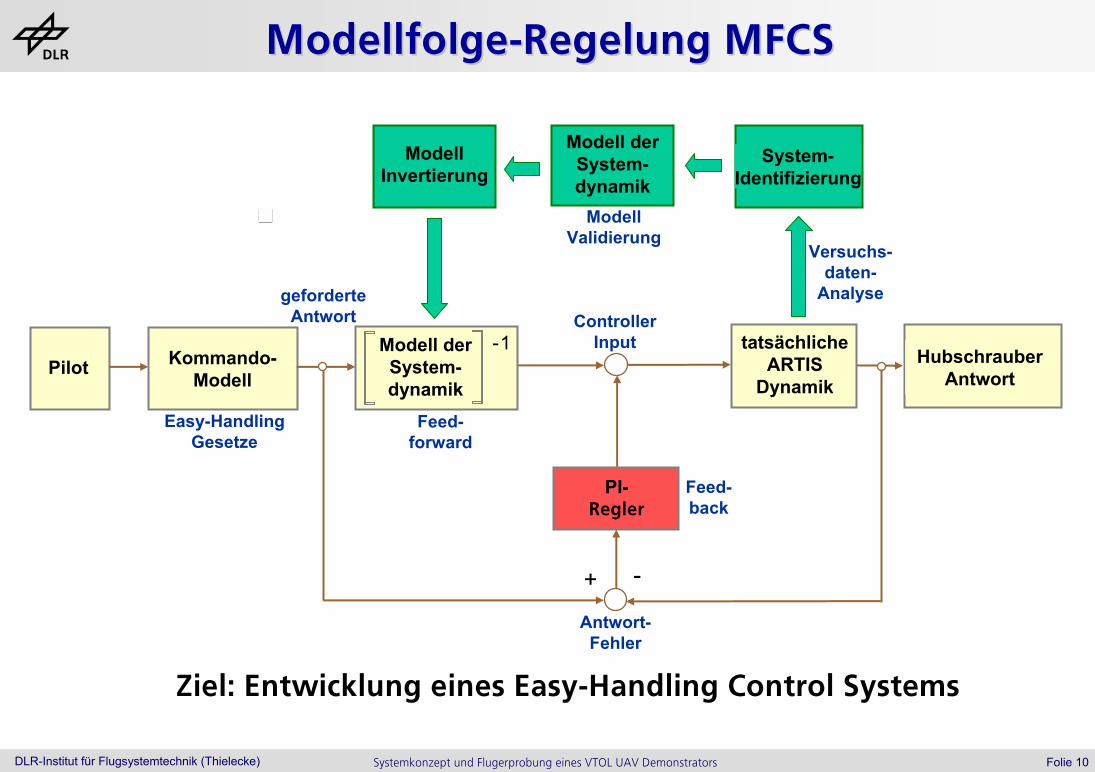
ModellfolgeModellfolge--Regelung MFCSRegelung MFCS
ModellInvertierung
Versuchs-daten-
Analyse
System-Identifizierung
Modell derSystem-dynamik
ModellValidierung
HubschrauberAntwort
Easy-HandlingGesetze
Pilot Kommando-Modell
tatsächlicheARTIS
Dynamik
geforderteAntwort
Modell derSystem-dynamik
-1
Feed-forward
ControllerInput
Antwort-Fehler
PI-Regler
-+
Feed-back
Ziel: Entwicklung eines Easy-Handling Control Systems
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 11
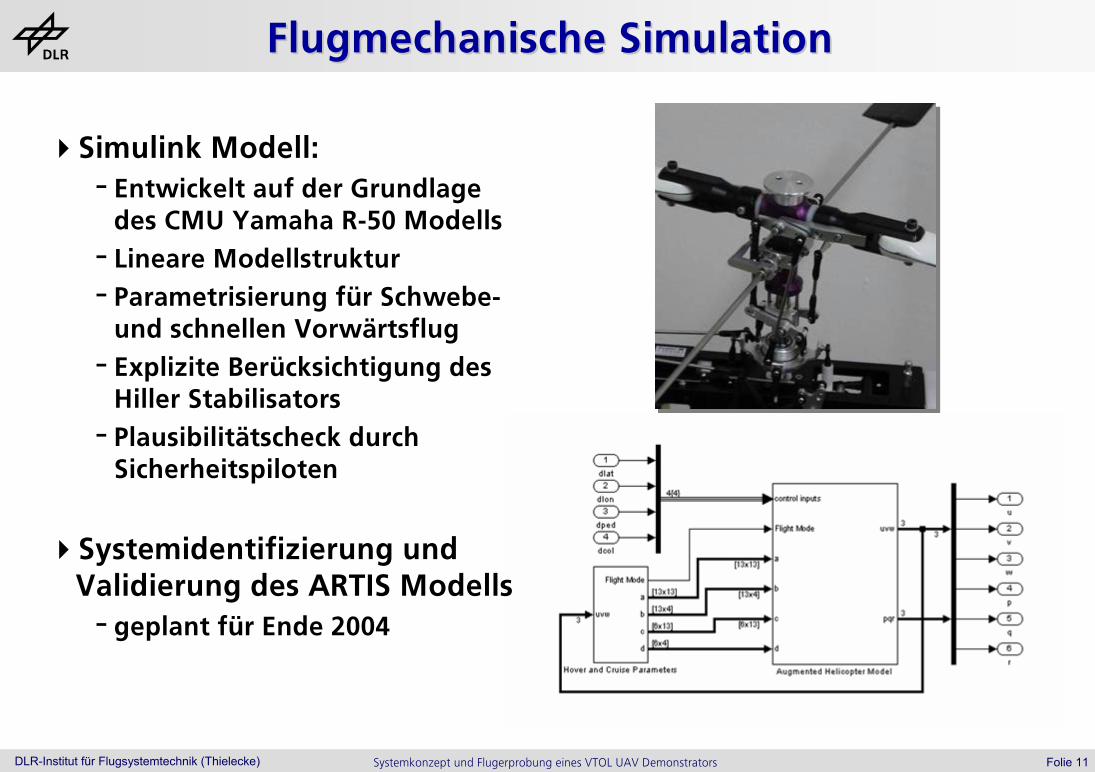
Flugmechanische SimulationFlugmechanische Simulation
Simulink Modell:- Entwickelt auf der Grundlage
des CMU Yamaha R-50 Modells- Lineare Modellstruktur- Parametrisierung für Schwebe-
und schnellen Vorwärtsflug- Explizite Berücksichtigung des
Hiller Stabilisators - Plausibilitätscheck durch
Sicherheitspiloten
Systemidentifizierung und Validierung des ARTIS Modells - geplant für Ende 2004
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 12
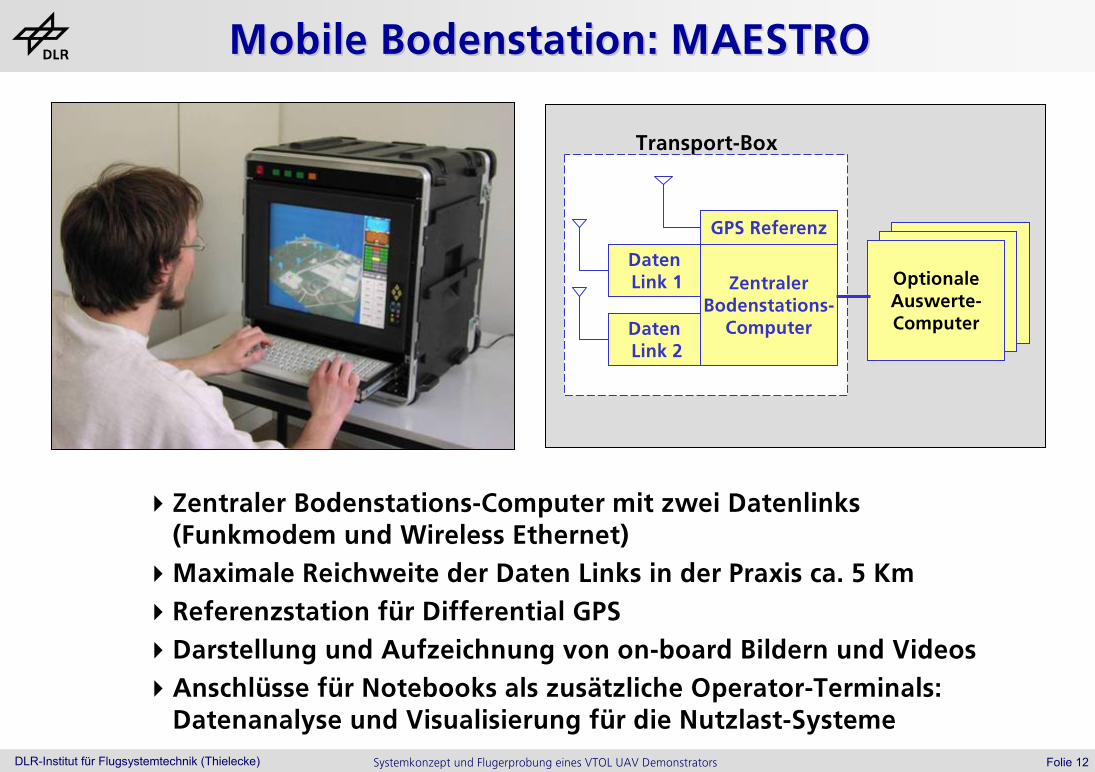
Mobile Bodenstation: MAESTROMobile Bodenstation: MAESTRO
Optionale Auswerte-Computer
Optionale Auswerte-Computer
DatenLink 1 Zentraler
Bodenstations-Computer
GPS Referenz
Transport-Box
DatenLink 2
Optionale Auswerte-Computer
Zentraler Bodenstations-Computer mit zwei Datenlinks(Funkmodem und Wireless Ethernet)Maximale Reichweite der Daten Links in der Praxis ca. 5 KmReferenzstation für Differential GPSDarstellung und Aufzeichnung von on-board Bildern und Videos Anschlüsse für Notebooks als zusätzliche Operator-Terminals: Datenanalyse und Visualisierung für die Nutzlast-Systeme
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 13
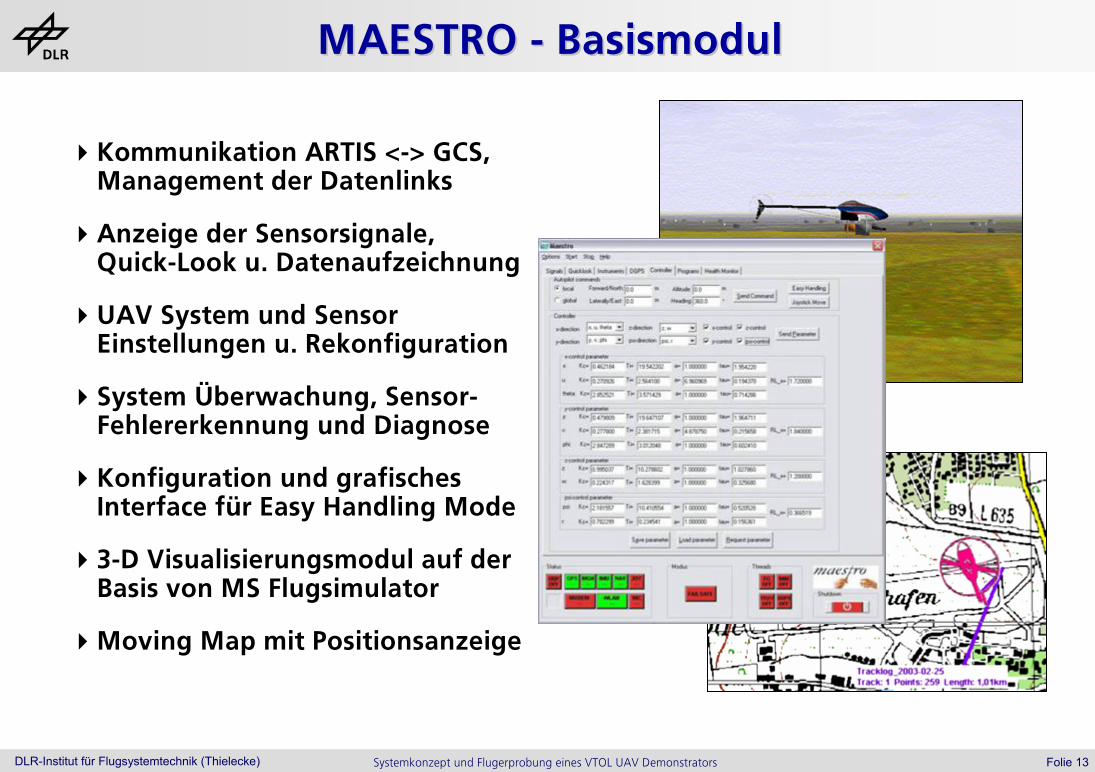
MAESTRO MAESTRO -- BasismodulBasismodul
Kommunikation ARTIS <-> GCS,Management der Datenlinks
Anzeige der Sensorsignale, Quick-Look u. Datenaufzeichnung
UAV System und Sensor Einstellungen u. Rekonfiguration
System Überwachung, Sensor-Fehlererkennung und Diagnose
Konfiguration und grafisches Interface für Easy Handling Mode
3-D Visualisierungsmodul auf der Basis von MS Flugsimulator
Moving Map mit Positionsanzeige

Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 14
MAESTRO MAESTRO -- MissionsmanagementMissionsmanagement
Grafisches Interface zum Missionsmanagement
Planung und Anpassung von Flugrouten
Trajektorien werden über Basismodul an ARTIS geschickt.
2D/3D Visualisierung von Einsatzgebietes u. Mission
Darstellung der aktuellen Flugposition und des Missionsstatus
Online Überwachung während des Fluges
Entwicklung des DLR-Instituts für Flugführung (Dr. Hecker, J. Strohmeyer)
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 15
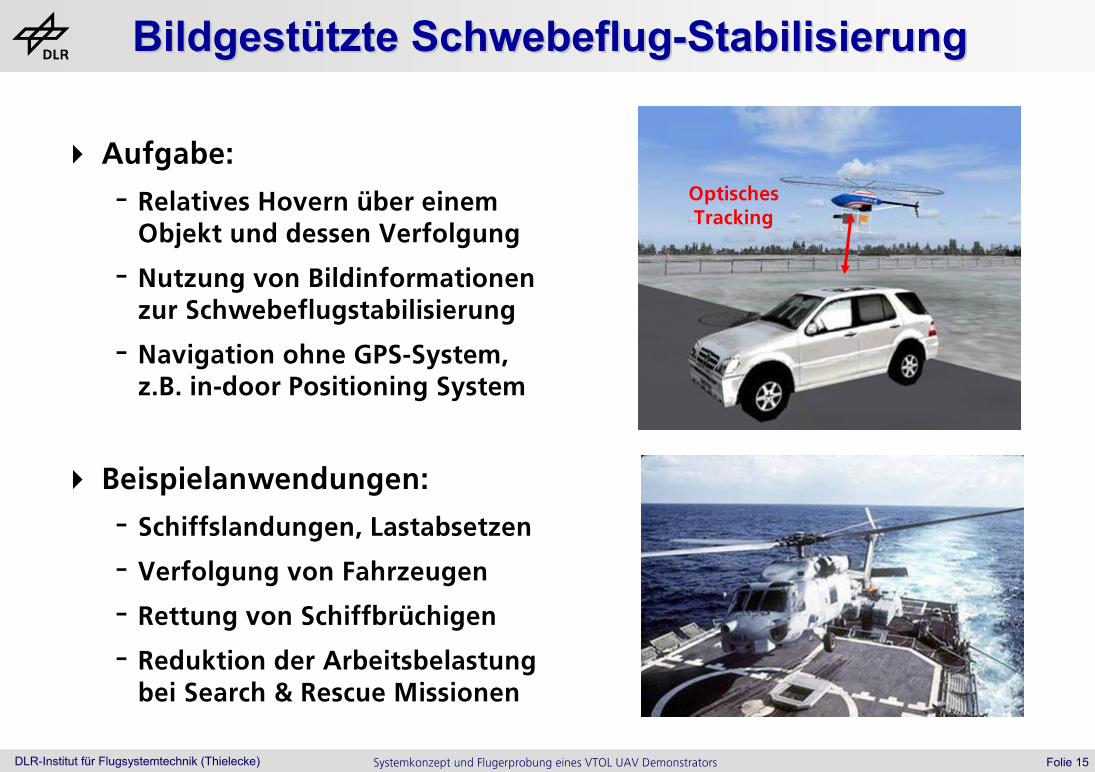
Bildgestützte SchwebeflugBildgestützte Schwebeflug--StabilisierungStabilisierung
Optisches Tracking
Aufgabe:
- Relatives Hovern über einem Objekt und dessen Verfolgung
- Nutzung von Bildinformationenzur Schwebeflugstabilisierung
- Navigation ohne GPS-System,z.B. in-door Positioning System
Beispielanwendungen:
- Schiffslandungen, Lastabsetzen
- Verfolgung von Fahrzeugen
- Rettung von Schiffbrüchigen
- Reduktion der Arbeitsbelastungbei Search & Rescue Missionen
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 16
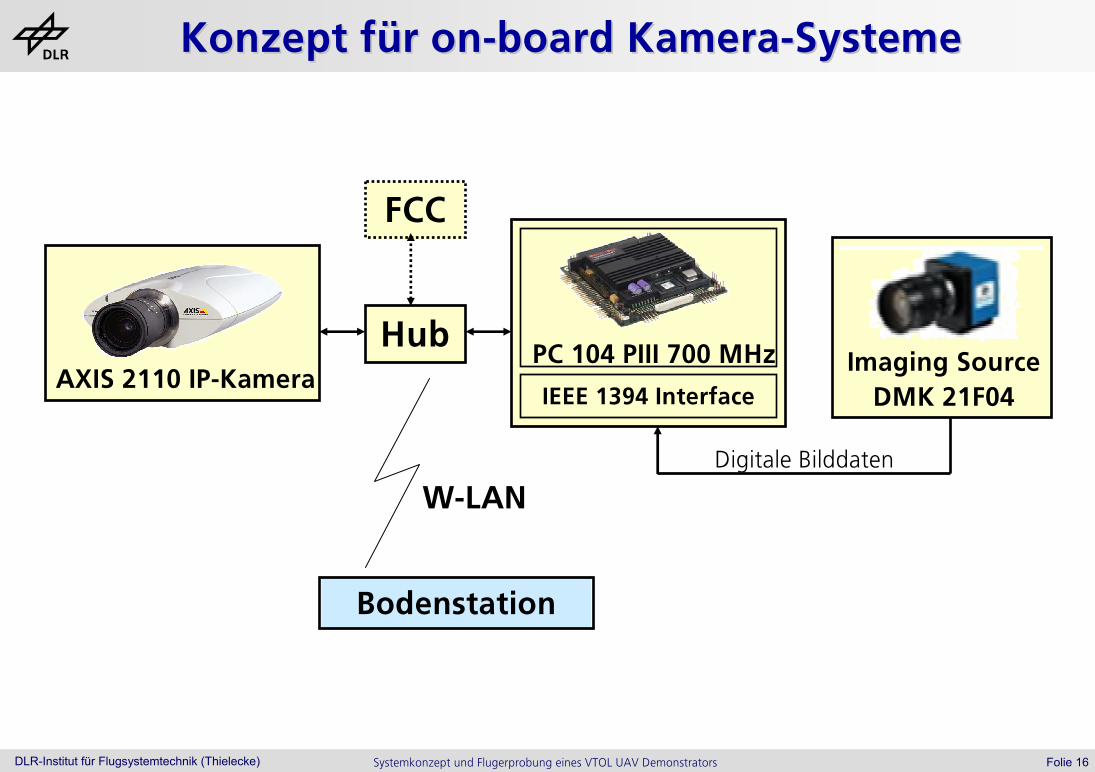
Konzept für onKonzept für on--board Kameraboard Kamera--SystemeSysteme
PC 104 PIII 700 MHz
IEEE 1394 InterfaceImaging Source
DMK 21F04
Hub
Digitale Bilddaten
FCC
W-LAN
AXIS 2110 IP-Kamera
Bodenstation
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 17
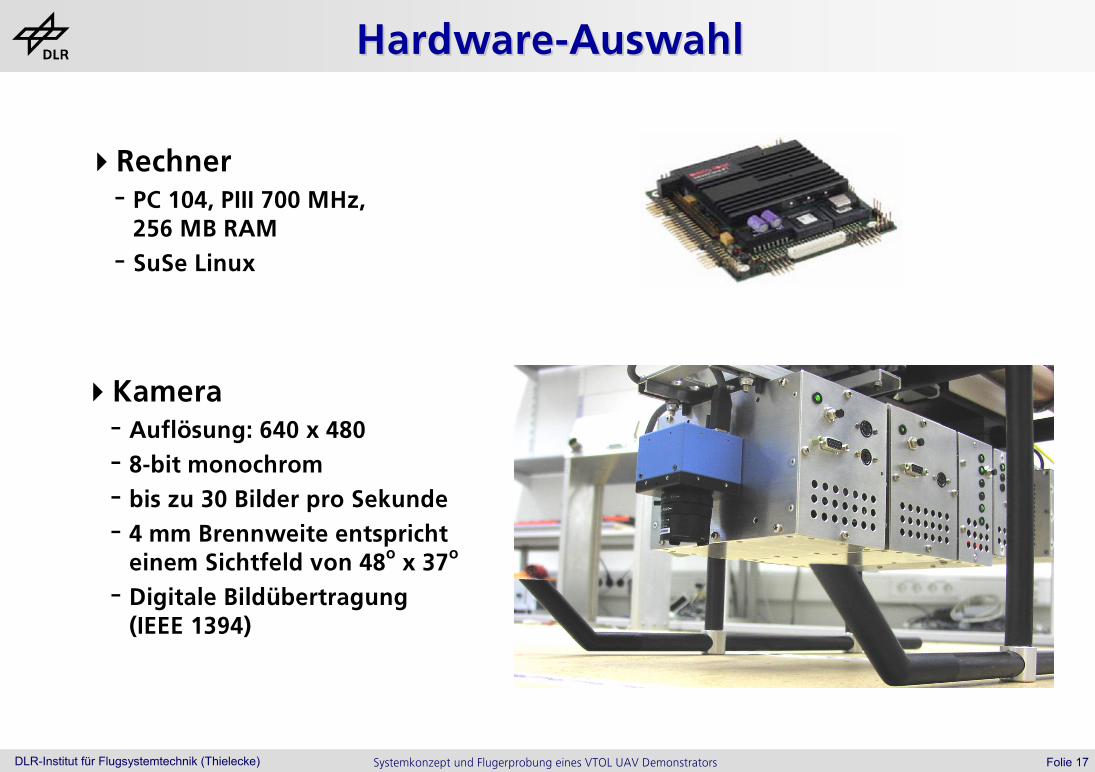
HardwareHardware--AuswahlAuswahl
Rechner- PC 104, PIII 700 MHz,
256 MB RAM- SuSe Linux
Kamera- Auflösung: 640 x 480- 8-bit monochrom- bis zu 30 Bilder pro Sekunde- 4 mm Brennweite entspricht
einem Sichtfeld von 48o x 37o
- Digitale Bildübertragung(IEEE 1394)
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 18
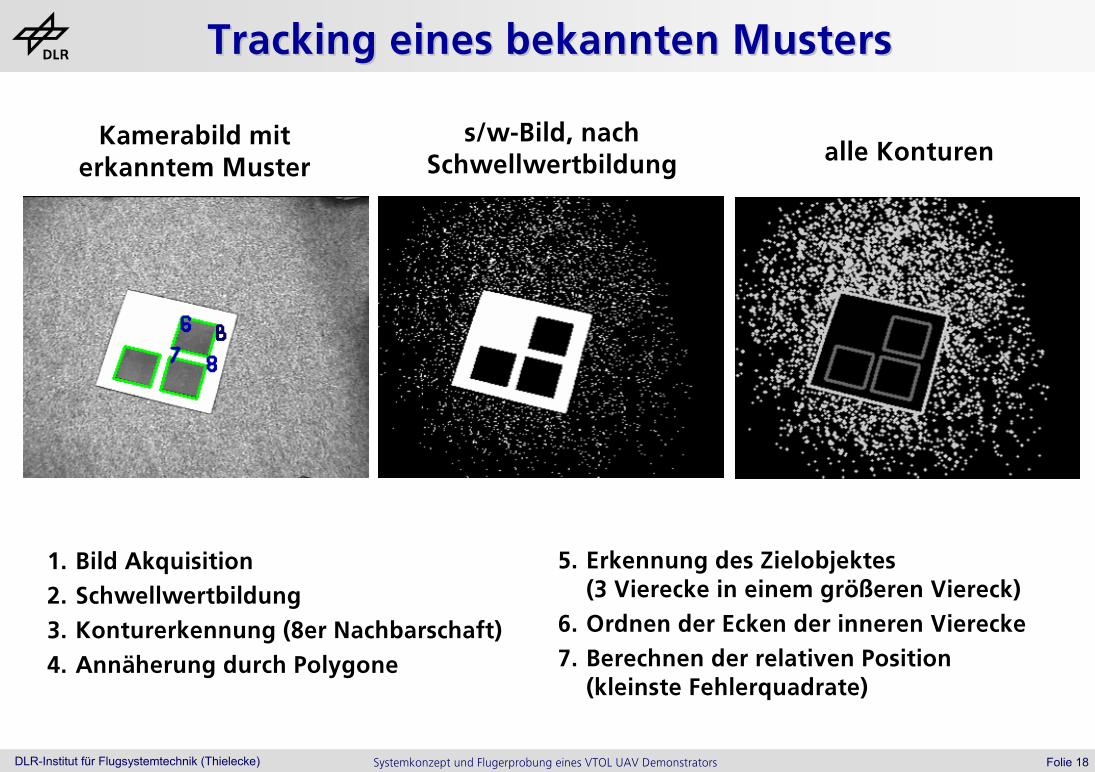
TrackingTracking eines bekannten Musterseines bekannten Musters
s/w-Bild, nach Schwellwertbildung
Kamerabild mit erkanntem Muster
alle Konturen
5. Erkennung des Zielobjektes (3 Vierecke in einem größeren Viereck)
6. Ordnen der Ecken der inneren Vierecke7. Berechnen der relativen Position
(kleinste Fehlerquadrate)
1. Bild Akquisition2. Schwellwertbildung3. Konturerkennung (8er Nachbarschaft)4. Annäherung durch Polygone
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 19
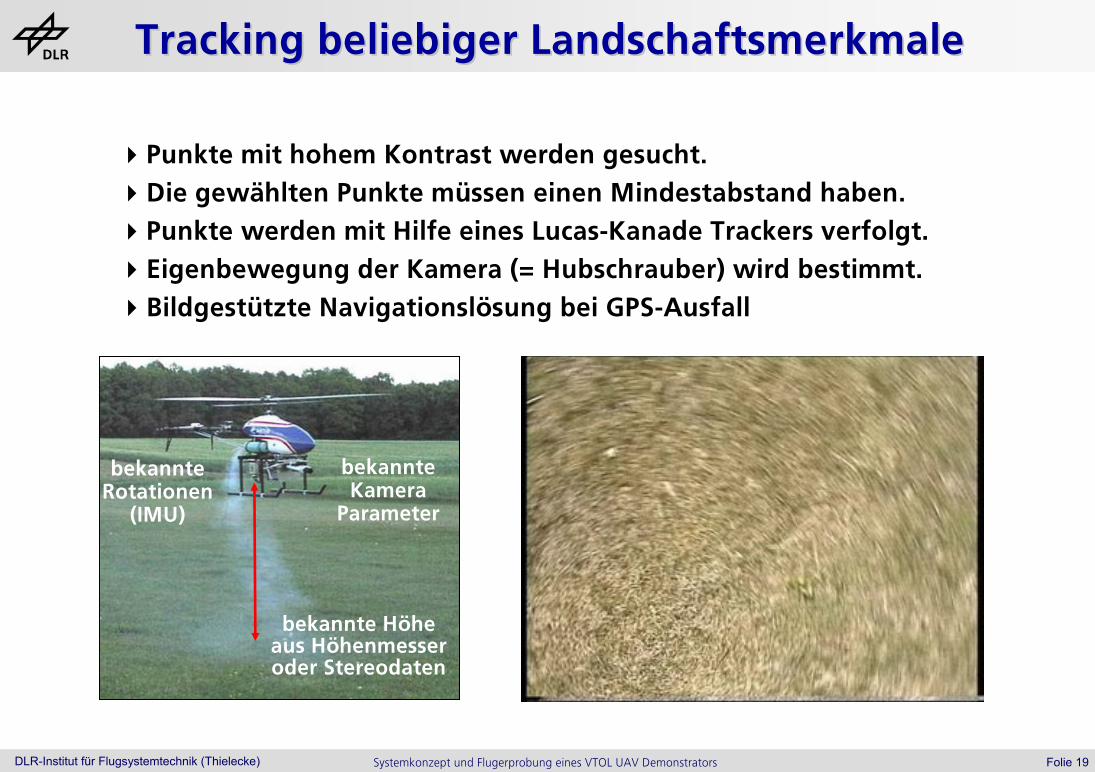
TrackingTracking beliebiger Landschaftsmerkmalebeliebiger Landschaftsmerkmale
Punkte mit hohem Kontrast werden gesucht.Die gewählten Punkte müssen einen Mindestabstand haben.Punkte werden mit Hilfe eines Lucas-Kanade Trackers verfolgt.Eigenbewegung der Kamera (= Hubschrauber) wird bestimmt.Bildgestützte Navigationslösung bei GPS-Ausfall
bekannteKamera
Parameter
bekannte Rotationen
(IMU)
bekannte Höheaus Höhenmesser oder Stereodaten
Systemkonzept und Flugerprobung eines VTOL UAV DemonstratorsDLR-Institut für Flugsystemtechnik (Thielecke) Folie 20
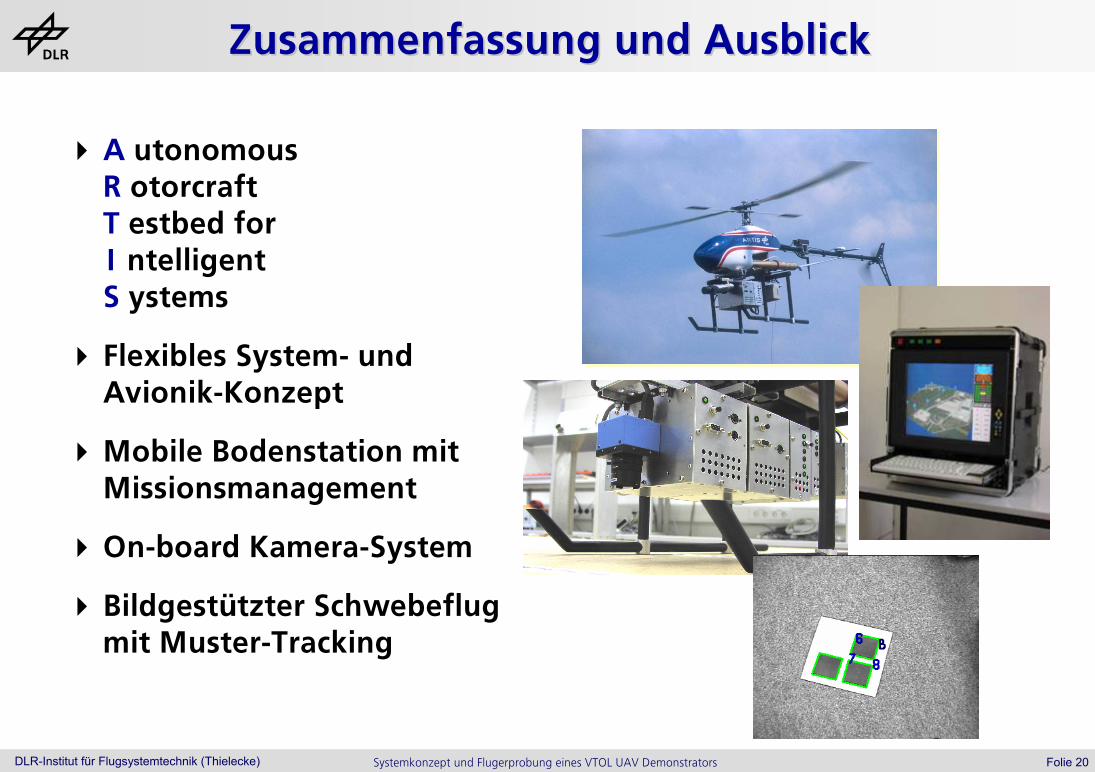
Zusammenfassung und AusblickZusammenfassung und Ausblick
A utonomousR otorcraftT estbed forI ntelligentS ystems
Flexibles System- und Avionik-Konzept
Mobile Bodenstation mitMissionsmanagement
On-board Kamera-System
Bildgestützter Schwebeflug mit Muster-Tracking





























