Embed Size (px)
Citation preview

Ztschr. f. angew. Math. und Mech. 270 We i n h o 1 d , Uber die Kipp-Stabilitlt von Holm-Rippenrosten
Uber die Kipp-Stabilitat von Holm-Rippenrosten. Von Josef Weinhold in Briinn.
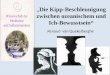
1. Problemstellung. Es sei ein Holm-Rippenrost gebildet aus zwei Tragholmen 1 und 2 von der Liinge 1 und einer beliebigen Zdil gleicher Rippen von der LBnge 2 h. Die Rippen- enden seien an die Holme in gleichen Abstanden biegesteif angeschlossen. Im unbelasteten Zustand des Rostes sind die Mittellinien der Holme und Rippen Gerade, die in einer Ebene - der Rostebene - liegen und ein Rechtecknetz bilden. Der Querschnittsverlauf der Holme und Rippen sei unveriinderlich. Als Querschnittsfonn der Holme ist die rechteckige oder eine solche ohne ausgeprsgte Flanschwirkung vorausgesetzt. Die Steifigkeit der Holme sei B,') bzw. B,, wenn die Verbiegung senkrecht zur Rostebene erfolgt, A , bzw. A , , wenn die Verbiegung in der Rostebene stattfindet. Die Torsionssteifigkeiten seien C , bzw. C,. In der gleichen Weise seien die Steifigkeiten einer der n gleichen Pippen mit B,./n, A , / n und C,/n festgelegt. Wie in Abb. 1 ersichtlich, liegt der Ursprung des Kotensystemes xi y, Z , bzw. 2, y, z, im Mittelpunkt einer Endflilche des Holmes 1 bzw. 2, die Achsen x,, 2, fallen
Schniff X-X
IX Abb. 1.
mit den Holmachsen im unbelasteten Zustand zusammen, die Achseri y,, yz haben dann die Richtung der Rippenachsen und die Achsen I,, z, weisen mit Bezug auf die Rostebene senkrecht nach oben. - Die iluhere Belastung wird in einem Endquerschnitt der Holme ein- geleitet und ist gegeben durch Biegeinomente MI bzw. M , und Druckkrilfte S, hzw. S,. Wahrend der Kippbewegung bleibt die Ebene der Biegemomente und die Richtung der Druckkriifte erhalten, wie es in Abb. 1 schematisch dargestellt ist.
Zur Behandlung des Problems werden die K i r c h h o f f . C1 e b s c h schen Gleichungen fur das Gleicligewicht dunner Stilbe in der Loveschen Schreibweise [l] und in der nach R e i s s n e r [2] variierten Form verwendet. Hierbei gelten die mit einem Zeiger Null versehenen GrBPen fur die urspriinglich stabile Form, von welcher aus der Verschiebungszustand variiert und die im folgenden als ,,statischer Fall" bezeichnet wird. Die entsprechenden Grijfien far den neuen Verschiebungszustand bleiben ohne Zeiger und ohne vorgesetztes Variationszeichen.
Um die Behandlung des Problems einfacher zu gestalten, werden drei Annahmeii gemacht: a) Alle Verschiebungen sind sehr klein gegen- iiber den Langen 1 und h, insbesondere ist die Verscliiebung durch die Hauptbiegung wegen B > A , B > C selir klein. Es kann infolgedessen die Bogenliinge s gleich x und mit F e d e r - h o f e r [3] die Krtimmung der Querbiegung
2. Allgemeine vereinfachende Annahmen.
d2 3 d x2 )L = . . . . . . . . . . . . . .
und der Drall
d B t = - d z . . . . . . . . . . . . . .
1) Die Zeiger 1 bzw. 2 weisen auf deli Holm 1 bzw. 2 hin, welehein die betreffende GriiBe zugeorduet ist. Sind die Zeiger I. 2 weggelassen, d a m bezieht sich die betreffende GroEe auf beide Holme, wenn riiehts anderes festgelegt wurde.

W e i n h o 1 d , Uber die Kipp-StabilitBt von Holm-Rippenrosten 27 1
gesetzt werden (/I ist der Kippwinkel). b) Die Rippensteifigkeiten werden gleichmiifiig auf die Holmlange 2 aufgeteilt. Die auf die Holmlhge eins bezogenen Rippensteifigkeiten sind also A r / l , Br/l, Cr/L (Allfallige stsrkere Endrippen k6nnen gesondert beracksichtigt werden.) c) Die Ltingsdehnung der Rippen ist sehr klein gegentiber der seitlichen Auslenkung der AnscliluBpunkte wahrend des Kippvorganges. Daraus folgt im Zusammenhang mit dem Obigen
Band 17, Heft 5 Oktober 1Y37 -
y t = y g = y . . . . . . . . . . . . . . (3).
3. Losung tiir den Fall gleicher Holme und gleicher Momenten-Belastung, In diesem Fall gilt fur die Krummung der Hauptbiegung niiherungsweise
x', = ~ = X f U . . . . . . . . . . . . . (4)
mit
Weiters ist ebenso
, M x u = - - . . . . . . B . . . . . . .
. . . . . . . . . . T U 1 = .- S I ? T o g = - S s , . (6).
Die Krummung der Querbiegung des statischen Falles x , , die Querkraft No' sowie der Drall 7u sind exakt Null. Die von der Hauptbiegung herrhhrende Querkraft No karin nach Punkt 26 vernachltissigt werden. Aus den1 gleichen Grunde k6nnen die G1. (4) bis (6) angeschriehen werden. In rliesem Falle sind also die Kenngr6fien des statischen Falles sehr einfach, im Gegensatz zu allgemeineren FLllena), wie sie z. B. in den Arbeiten llber Rippenverbund- wirkung [a] [5] vorkommen. - Die Differentialgleichung 1Bht sich durch Zusammcnfassung der zweiten, der vierten und der sechsten der K.-C1.-Gleichungen gewinnen. Zur Beschreibung der Rippenwirkiing braucht also nur K, 0, und 0, eingefalirt werden. Hierbei wird der Einflufi der Rippen auf die Hauptbiegung vernachltssigt. Die Beriicksichtigung einer Art statischen Rippenverbundwirkung wahrend des Kippvorganges scheint vorderhand aussichtslos zu sein. Fkfit man eine Rippe als einen an den Enden frei aufliegenden Trgger auf, so ergibt sich in einfncher Weise
. . . . . . .
und
Br 6 ) 8, =-: - (3 p, + /?,) . . . . . . . . . . . (8 b). 1 Ic
Man erhiilt mit den Einfuhrungen
p , + p 2 = p . . . . . . . . . . . . .
x = ( l . . . . . . . . . . . . .
. . . (9)
. . . (10)
2) In dem noch verhaltnisinaEig einfaehen Falle. daE in den freien Endquerschnitten der Holrne 1 , 2 eines ein- sritig eingespannten Rostes Biegrmumente M;, M 2 wirken und Br gleieh Null gesetzt wird. ware in die variierten K..Cl.-Gleichungen z. B. fur die Krummung I deu statiscllen Falles der schon verhliltnismaEig kornplizierende Ausdruck
eirizufiihren. Hicrin bedculet

Ztsehr. f.an ew. Math. und &ch. 272
schliefilich als Differentialgleichung
W e i n h o 1 d , Ober die Kipp-StabiIitBt von Holm-Rippenrosten
d Z B - ZG /? = 0 . . . . . . . . . . (11). d t' d t !!Y + (v - w>
Hierin bedeutet
w = 3 - -+- . . . . . . . . .:(: 2) . . .
und
Die allgemeiiie L6sung von G1. (12) lautet mit den vier Integrationskonstanten
sctzt. - I m Folgenden wird vorderhand die nunierische Losung fur die G r e n z b ed i I1
* * (W,
. . (13)
. . (14).
6,. . . . B,
. * (151,
. . (16)
n g u n g e n
. . (17)
angegeben. Diese treffen zu, wenn die Mittelpunkte der Holmendquersclinitte in der Rostebene unterstutzt sind und durch Parallelfuhrungen am Unikippen verhindert werden. Die Kipp- bedingung lautet
sin vz.= 0, oder u. + (v - w ) (n n)l= (n n)', n = I, 2,3, . . . . . . . . (18)
[6] [7]. Zum Zwecke einer einfacheren Rechnung wird noch eingefuhrt
weiters
(20). m = c S und p=(nn)2+3(a+b)+-- . . . . . . . . . 9 a b
Damit ergibt sich die Belastung an der Stabilitiltsgrenze in der Form
Die beiden Faktoren in G1. (21) sind fur die Ausbiegung mit einer Halbwelle (%=I) in der Tabelle 1 und 2 fur eine Reihe von Werten b/nz, 6/a und c ziffernmilfiig angegeben. Diese Stabilitatsgrenze ist mafigebend bis zu einem Wert b/n2 = 40 bei b/a L 100 bis c 5 9,817, bei b/a 2 1 bis c 5 1,042: also wenn b/a grofi ist und wenn die Druckbeanspruchung iiberwiegt. Die Lastgrenze nach G1. (21) kann auch als Kenngrdfie bei der Behandlung von Tragflugel- schwingungen herangezogen werden, wenn es sich urn Schwingungen von Holmen zwischen zwei Abstutzungen

W e i n I1 o 1 d , Uber die Kipp-StabilitPt von Holm-Rippenrosten 273 Band 17. Heft 5 Oktober 1937
5,20 11,20 28,6 85,O
170$ 284,2 427,O
1573,O 910,o
T a b e 1 I e 1. Werte von @/a9.
0,s 1 1 5 10 100
1,000 1,000 1,000 I 1,000 1,000 0,714 ' 0,769 0,909 0,948 0,994 0,333 0,400 0,667 0,786 0,971 0,200 0,260 0,500 0,647 0,944 0,111 0,143 0,333 0,478 0,894 0,0588 0,0769 0,200 0,314 0,808 0,0400 0,0526 0,143 0,234 0,737 0,0303 0,0400 0,111 0,186 0,678 0,0244 0,0323 0,0909 0,155 0,627
0 0-2 170 2,o 470 870
12,o
20,o 16,O
30,O 40,O
W
1,000
100
1 1,61 4,12
14,56 31,OO 50.32 72,52 97,60
172,90 266,20
7,42
0,0164 0,0217 0,0625 0,0124 0,0164 i 0,0476
50
0,109 0,529 0,0840 I 0,457 I 1,000
1 1,62
7,84 16,12 37,OO 63,64 96,04
134,20 254.80 411,40
4,a
b/a = 2
1 2,08
10 28 91
325 703
1225 1891 4096 7381
1
1 2,56
16 49
169 625
1369 2401 3721 8281
14641
T a b e l l e 2. Werte VOII ( c + l ) :
0.6
1
24 77
273 1025 2257 3969 6161
13741 24321
392
0.4
1 4
34 112 403
1525 3367 5929 9211
20566 36421
0
1,000
0,250 0,625
0,143 0,0769 0,0400 0,0270 0,0204 0,0164 0,0110 0,00826
handelt. (Innenfeld eines abgestrebten Eindeckers, bei Doppeldeckern die Felder zwischen den Streben und die an den Rumpf anschliefienden.) Der Einflufi einer allfiilligen elastischen Einspannung der Triigerenden kann vorderhand abgeschiitzt werden [S].
4. Losung fur den Sonderfall Z = I c = O = O . Hier ist also angenommen, dafi durch entsprechende Gelenke in den Rippenanschlussen alle Krlifte und Momente ausgeschaltet sind, die nicht in der Rostebene wirken. Es kommen demnach nur zur Wirkung X, Yund K. Fur den statischen Fall besteht hier keinerlei gegenseitige Beeinflussung der Holmbiegung. - Als Differentialgleichung dieses Falles erhlilt man in tlhnlicher Weise wie im vorigen Punkt
. . d'y d2 y - + P - -0 dx' dx'-
Hierin bedeutet mit den Abkiirzungen
und
. . . . . . (22).
1'Z2=m+I -36 , . . . . . . . . . . . (24).

Ztschr. f . angew. Math. und Mech. 274
Die allgemeine Losung der Differen tialgleichung (22)
W e i n 11 o 1 d , Ober die Kipp-Stabilittit yon Holm-Rippenroaten
5 m
5 - 3 6
. . . . . . . . . 3== c, cos 1 s+ c, sin i x + c, x + c, (25)
( 2 M) 0,000 0,278 0,358 0,414 0,480 0,500 0,000 1,071 1,670 2,298 3,627 4,936 2,468 2,782 2,996 3,253 3,930 4.936
fuhrt irn Verein niit den Bezieliungen
welche man aus der sechsten der K.-C1.-Gleichungen erhitlt, auf die Ausdrucke ftir die Kipp- winkel,
. . . . . . . (27). cos 1 s + c, sin t 2 + c, x + c,>
und p2 = M 6 (I - g ) A , \c, I cos t x + c, sin r~ x + c,x -t c,>
Im folgenden ist fur fiinf verscliiedene Befestigungsm6glichkeiten der TrQerenden die Kippbedingung und der daraus gefolgerte Zusarnrnenhang der Gr6fien m, I und b an der tiefsten Stabilittitsgrenze angegeben. Durch die Spezialisieriing rn = 0 und b = 0 erhitlt man die Para. rneterwerte der Standardknickftille.
Fall 1. Die TrQer sind an einern Ende fest eingeklernmt, am anderen Ende frei. Die Grenzbedingungen lauten
Es ergibt sich
. . . . .
mit
Wirkt MI und M, allein, dann mtifite 5 2 1 sein, was nacli G1. (29) unm6glich ist. Kippen tritt also nicht ein. Diesen Fall hat bereits L o r e n z [9] behandelt. Hleibt walirend der Kippbewegung der Vektor M wohl parallel zur x FEbene, sonst aber entgegen den Annalimen unter Punkt 1 senkrecht zur Tr%gernclise, dann ist nach F o p p l und K a r a s [lo], [ll] 1 Z=n/2. Die Auswertung der Kippbedingung, G1. (29), ist in der Tabelle 3 angegeben.
T a b e l l e 3.
n 7 3 4 8
--n --.n ti 11 16 8 -n -n 1
2 -~ n I 1
1,571 1,963 2,180 2,356 2,749 3,142
Die eingeklamnierten Werte 1 2 = 0 und C = ? w entsprechen keinen von Null verscliiedenen Auslen kungen.

We i 11 h o 1 d , Uber die Kipp-Stabilitlt von Holm-Rippenrosten 27 6
Fall 11, 111 und IV. Sind die Triiger an beiden Enden in Parallelfuhrungen gehalten, - an einem Ende in Parallelfuhrungen gehalten iind am anderen Ende fest eingeklemmt, - an beiden Enden fest eingeklemtnt, dann ergeben sich der Reihe nach die bekannten Bedingungen sin 12 = O , 12 = tg12 , cos 11 = 1 , denen a19 Parameterwerte der Reihe nach 7t2, 4,4Y, 4 nz zugeordnet sind.
Fall V. Die Trtiger sind am linken Ende fest eingeklemmt und am rechten Ende in Parallelfuhrungen gehalten. Autierdem sind die Enden rechts durch eine starke Endrippe mit der Biegungssteifigkeit A , verbunden, die Biegungsmomente in der x y -Ebene t iber t rw. Die Grenzbedingungen lauten demnach :
Band 17, Heft 5 Oktober 1937
. . . . . (31).
d y . A ' Q ( A , + A z - d x ) - - - b ~ h fiir x = o d X l
y = pi= p2 = 0,
I fur x=Z
Man erhalt als Kippbedingung
. . . . . . . . . . . . . 1 1 = tg 1 1 (1 - l/n) (3% mit
(33). h A , + A , . . . . . . . . . . . . . . 11=--.. 1 6 A , 7
Zusammengehlirende Werte 1 I und 11 enthtilt die Tabelle 4.
T a b e l l e 4.
0 ~~- .__- ..
10 1 035 012 091 0,02 0.01 4 * r l l I 4,49 4,52 4,71 5,23 5,54 5,80 6,15 6,22 6,28
5. SchluBbemerkung. Die in den Punkten 3 und 4 mitgeteilten Ergebnisse gehliren zu Vorarbeiten fur allgemeinere Untersuchungen der Kippstabilitst eines Holm-Rippenrostes, welche bisher in der technischen Literatur noch fehlen. Das Ziel dieser Untersuchungen ist die Bestimmung der Kipplasten fnr praktisch vorkommende Steifigkeitsverhiiltnisse und Be. lastungsarten. Es wird auch vermutet, dak gewisse Tragflugelschwingungen auf eine zu starke Annaherung an die hier in Betracht gezogene StabilitAtsgrenze zuruckzufnhren siad. 683
Schrifttum. [ 11 L o v e - T i m p e : Lehrbuch der ElastizitSlt. [2] H. R e i s s n e r : Uber die StabilitSlt der Biegung. *Sitz.-Ber. der Berliner Math. Ges. 1904, 111. Jhg. 131 F e d e r h of e r : Neue Beitrlge zur Berechnung der Kipplasten gerader Stlbe. Sitz.-Ber. der Akad.
der Wiss. in Wien. Math.-Naturwiss. Klasse, Abt. lIa, 140. Bd. 1931. [4] H. R e i s s n e r : Neuere Probleme aus der Flugzeugstatik. ZFM 1926. [5] T h a 1 a u : Uber die Verbundwirkung von Hippen im freitragenden, zweiliolmigen und verspannungs-
IS] G r a m m e 1 : Kritische Drehzahlen und Kreiselwirkung. Zschr. des VDI 1920. [7] K a r a s : Kritische Drehzahlen stetig mit Masse belegter Wellen mit Langsbelastung und Kreisel-
[8] der Verfasser: Zur StabilitPt eines auf Druck und Biegung beanspruchten, a n den Enden elastisch
[9] L o r e n z : Lehrbuch der Techn. Physik, Bd. IV.
losen Flugzeugflfigel. ZFM 1925.
wirkung. 1ng.-Archiv Rd. I, 1930.
eingespannten Trlgers. Mitt. des Hauptvereins Deutscher Ingenieure i. d. CSR, Jhg. 1934.
[lo] A. u. L. F B p p l : Drang und Zwang, Bd. 11. [ 111 K a r a s : Vorlesungen iiber Stabilitltsprobleme, gehalten a. d. DTH, BrIinn 1926/27.