Embed Size (px)
Citation preview

1
2
Übersicht Gliederung 2 Kurzzusammenfassung 3 Aufgabenstellung 4-6 -Projekt
- Definition Projekt 7 - Meilensteine 8 - Teamarbeit 9
Das Team 10 - Gruppe I 11
- Präsentation - Tag I-VIII 12-14
- Gruppe II 15 - Präsentation - Tag I-X 16-18
- Gruppe III 19 - Präsentation - Tag I- VIII 20-22
- Gruppe IV 23 - Präsentation - Tag I- VIII 24-26
- Gruppe V 27 - Tag I-VIII 28-30
Tageszusammenfassung 31 - Tag I-VIII 32-37
Digitale Programme - Solid Edge V20 - FluidSIM V4.2 - COSIPROG
Medien 38-45 -Bilder -Film
Schlusswort 46
Quellen 47
.
3
Abschlussprojekt Robotik MFT12a
Engagiert und zielstrebig arbeiteten die Schüler der Klasse
MFT12a mit ihrer Lehrkraft Herrn Höllein an ihrem
Abschlussprojekt Robotik. Innerhalb von zehn Projekttagen
realisiert die Klasse eine Prüfstation mit integrierter Ablage-
und Sortiereinheit, bei welcher Werkstücke mittels
verschiedener Sensoren nach Werkstoffart und Farbe
selektiert werden. Zwei Roboter des Typs Mitsubishi
Movemaster RV-M1 entnehmen die Werkstücke aus einem
Schachtmagazin und sollen diese auf Fertigungspaletten
ablegen.
Mit einem Umzug in das ehemalige Kunststofflabor am
07.02.2011, dem ersten Projekttag, begann der
Arbeitsauftrag. Folgende fünf Gruppen für Sicherheits-
technik (I), Prüfroboter und Magazin(II), Prüfstation und
Förderband(III), Ablageroboter und Magazin(IV) und
Presseabteilung (V) gingen an den Start. Gelegentliche
Schwierigkeiten wurden durch gutes Teamwork und
Zielstrebigkeit gemeistert. Dazu gehörten beispielsweise der
Umgang mit der speicherprogrammierbaren Steuerung
LOGO! von Siemens. In diesem Fall wurde die Not zu einer
Tugend gemacht und von Schülern mittels eines
Selbstlehrgangs die Kenntnisse angeeignet und in
Schulungen umgesetzt, sowie diese an Übungsständen
vertieft. Mit dieser Steuerung lassen sich kleine
Automatisierungsprojekte realisierten sowie maßgeblich
vereinfachen, da dieses Logikmodul viele Relais und Zähler
ersetzen kann. Des Weiteren wurde das Zeichenprogramm
Solid Edge V20 zur Erstellung des Dreidimensionalen
Aufbaues der Anlage angewandt. Das Rückgrat des
elektropneumatischen Aufbaues bildete die Software
FluidSIM V4.2. Johannes Klee, MfT12A
4
Arbeitsauftrag:
1. Du sollst mittels der beiden Roboter der Marke Mitsubishi Movemaster RV-M1 und
der entsprechenden Peripheriegeräte, den untenstehenden Fertigungsauftrag be-
arbeiten. Dazu stehen dir die folgenden Unterlagen zur Verfügung.
Handbuch der Fa. FESTO DIDACIC Robotik
Handbuch über Robotergrundlagen der Fa. Reis Robotics
CULT-Lern-CD Robotertechnik
diverse Unterlagen, diverses Werkzeug
2 Computer, über die eine textuelle Eingabe und Programmierung der Roboter
erfolgen kann.
PC/Notebook mit Open Office (Impress, Writer, Calc, …), Scanner, Drucker,
…
Digitalkamera mit Überspielkabel
FESTO - Inventarliste der Schule
Peripheriegeräte (Förderband, Sortierstrecke, …) der Abteilung Metalltechnik
2. Alle Arbeitsschritte sollen von dir so dokumentiert werden (logische Reihenfolge,
benötigte Arbeitszeit und Arbeitsmittel, Seitenangabe (-n), Datum, Zuordnung der
Arbeitsschritte, …), dass nach einer Demontage – beispielsweise aus Gründen einer
Verschickung an den Kunden – die gesamte Anlage wieder störungsfrei in Betrieb
genommen werden kann. Auf eine saubere äußere Form sowie eine ordentliche
Rechtschreibung und Grammatik ist zu achten (Verwende diese digitale Vorlage samt
Inhaltsverzeichnis)!
3. Eine Arbeitsteilung ist bei diesem Projekt dringend notwendig. Vorschlag:
I) zweckmäßige Positionierung der Roboter (samt Notebooks für die textuelle
Programmierung) und der Peripherieteile
II) Positionierung von Magazinen, Förderbändern, …
III) Ablaufschema und Lageplan sowie Anschlussplan (pneumatisch und
elektrisch)
IV) Einbindung der LOGO! – Steuerung zum Verwalten der Ein- und
Ausgänge
V) Niederschrift der einzelnen Arbeitsschritte und Beschriftung der einzelnen
Stationen, …
5
Arbeitsgruppen: Gruppe I Sicherheitstechnik (Verdrahtung, Schalterboxen, Kennzeichnung,
Normen u. Vorschriften, …)
Gruppe II Prüfroboter, Magazin (Positionierung, Kennzeichnung,
Programmierung, Sensoren, Signale, …)
Gruppe III Prüfstation/Förderband (Positionierung, el. /pneum. Anschlüsse,
Sensoren, Signale, …)
Gruppe IV Ablageroboter, Magazin (Positionierung, Kennzeichnung,
Programmierung, Sensoren, Signale, …) Gruppe V Pressegruppe
(Niederschrift der einzelnen Arbeitsschritte und Beschriftung der
einzelnen Stationen/Gruppen, Vorbereitung von Präsentationen und
Internetauftritten)
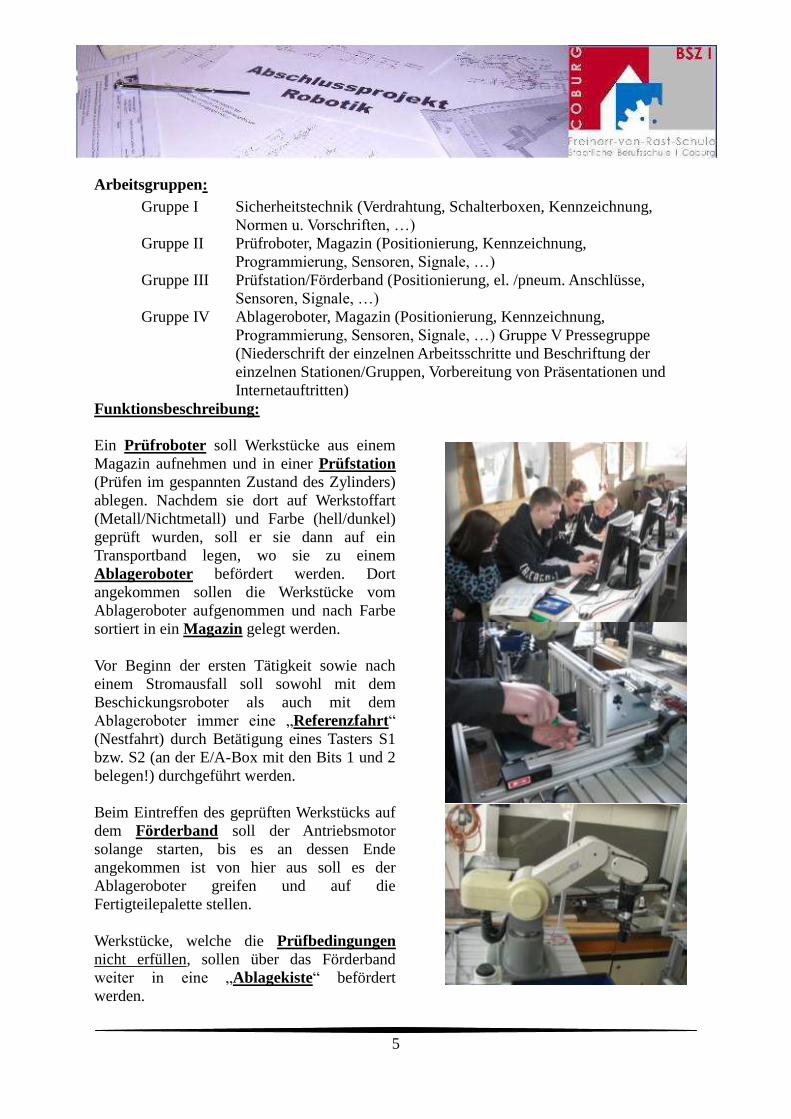
Funktionsbeschreibung:
Ein Prüfroboter soll Werkstücke aus einem
Magazin aufnehmen und in einer Prüfstation
(Prüfen im gespannten Zustand des Zylinders)
ablegen. Nachdem sie dort auf Werkstoffart
(Metall/Nichtmetall) und Farbe (hell/dunkel)
geprüft wurden, soll er sie dann auf ein
Transportband legen, wo sie zu einem
Ablageroboter befördert werden. Dort
angekommen sollen die Werkstücke vom
Ablageroboter aufgenommen und nach Farbe
sortiert in ein Magazin gelegt werden.
Vor Beginn der ersten Tätigkeit sowie nach
einem Stromausfall soll sowohl mit dem
Beschickungsroboter als auch mit dem
Ablageroboter immer eine „Referenzfahrt“
(Nestfahrt) durch Betätigung eines Tasters S1
bzw. S2 (an der E/A-Box mit den Bits 1 und 2
belegen!) durchgeführt werden.
Beim Eintreffen des geprüften Werkstücks auf
dem Förderband soll der Antriebsmotor
solange starten, bis es an dessen Ende
angekommen ist von hier aus soll es der
Ablageroboter greifen und auf die
Fertigteilepalette stellen.
Werkstücke, welche die Prüfbedingungen
nicht erfüllen, sollen über das Förderband
weiter in eine „Ablagekiste“ befördert
werden.
6
Sicherheitsanforderungen: Der
Ablageroboter darf nur dann fahren, wenn der
Prüfroboter wieder in seiner Warteposition
angelangt ist (Output-Bit auf entsprechenden
Eingang der E/A-Box). Nach Betätigung der
Not-Aus-Schalter soll erst wieder gestartet
werden können, wenn jeweils eine
Referenzfahrt durchgeführt wurde (optional).
Gruppeneinteilung
Gruppe I Sicherheitstechnik (Verdrahtung, Schalterboxen, Kennzeichnung,
Normen u. Vorschriften, …)
Gruppe II Prüfroboter, Magazin (Positionierung, Kennzeichnung,
Programmierung, Sensoren, Signale, …)
Gruppe III Prüfstation/Förderband (Positionierung, el. /pneum. Anschlüsse,
Sensoren, Signale, …)
Gruppe IV Ablageroboter, Magazin (Positionierung, Kennzeichnung,
Programmierung, Sensoren, Signale, …)
Gruppe V Pressegruppe (Niederschrift der einzelnen Arbeitsschritte und
Beschriftung der einzelnen Stationen/Gruppen, Vorbereitung von
Präsentationen und Internetauftritten), muss Bedarfe der Gruppen
erfragen und umsetzen, beispielsweise nach einer Schulung in LOGO!
und entsprechende Vorbereitungen treffen
Projektstart:
24.01.11
Abgabe der Projektordner und Gesamtinbetriebnahme:
11.04.2011 (10 Wochen!)
7
Projekt Projekt leitet sich vom lateinischen projectus (Neutrum von projectum) her und bedeutet „nach vorn
geworfen“. Ein Projekt ist ein einzigartiges Vorhaben, welches durch ein Sachziel, Kostenziel und
Terminziel definiert wird. Neben der Zeit müssen auch Ressourcen wie Finanzen, Personal oder
Kompetenzen berücksichtigt werden.
Weitere Definitionen sind,
„Vorhaben, das im Wesentlichen durch die Einmaligkeit der Bedingungen in ihrer Gesamtheit
gekennzeichnet ist, wie z. B. Zielvorgabe, zeitliche, finanzielle, personelle und andere
Begrenzungen; Abgrenzung gegenüber anderen Vorhaben; projektspezifische Organisation.“
– DIN 69901 des Deutschen Instituts für Normung e.V.
„Ein Projekt ist ein zeitlich begrenztes Unternehmen, das unternommen wird, um ein
einmaliges Produkt, eine Dienstleistung oder ein Ergebnis zu erzeugen.“
– Project Management Body of Knowledge des amerikanischen Project Management Institute
„ein zeit- und kostenbeschränktes Vorhaben zur Realisierung einer Menge definierter
Ergebnisse entsprechend vereinbarter Qualitätsstandards und Anforderungen (Erfüllung der
Projektziele) …“
– IPMA Competence Baseline der International Project Management Association (IPMA)
„sachlich und zeitlich begrenzte Aufgabe, die interdisziplinär angegangen wird.“
– Blazek, 1991
Projektarten:
Bauprojekte / Investitionsprojekte
IT-Projekte / Softwareentwicklungsprojekte
Produktentwicklungsprojekte / Innovationsprojekte
Forschungs- und Entwicklungsprojekte
Logistikprojekte
Qualitätsprojekte / Methoden(einführungs)projekte
Marketingprojekte

8
Meilensteine
Als Meilensteine versteht man im allgemeinen Zwischenziele in einem
Projekt, welche essentiell für den weiteren Fortschritt des Projektes sind.
Meilensteine sind beispielsweise das Ende der Projektplanung, der
Abschluss der Konstruktion, Materialbeschaffung, die Beendigung der
Vormontage oder die Kundenabnahme.
Meilensteine dienen prinzipiell zur Überwachung des Projektfortschritts.
Meilensteine werden in einem Netzplan (Bild I) oder Gantt-Diagramm(Bild II)
gekennzeichnet.
(Bild I) Bild:Quelle Wikipedia
(B ild II)
9
Teamarbeit
Ein Team sind mehrere Mitarbeiter eines
oder mehrerer Unternehmen, aus unter-
schiedlichen Abteilungen, welche über
einen befristeten Zeitraum, ein
gemeinsames Ziel verfolgen und umsetzen
und so eine kleine funktionelle Arbeits-
gruppe bilden.
Vorteile der Teamarbeit:
- Verringerung des Aufwandes der Kontrolle und Planung
- Die Teams agieren flexibler
- Die Mittarbeiter werden sich wesentlich mehr mit der Firma/ dem Unternehmen
identifizieren
- Besserer Fluss von Informationen in der kleinen Gruppe
- Bessere Problembewältigung, da diese ihr konkretes Ziel haben und mit ihren
Arbeitsmethoden und Hintergrundwissen diese gezielter bewältigen
- Interne Fortbildung durch Übernahme positiver Arbeitsmethoden sowie von
Fachkenntnissen der Kollegen
Nachteile der Teamarbeit:
- Nichtkooperation der Teammitglieder untereinander
- Fehlerhafte Zusammensetzung
10
Gruppen und Projekttage
- Gruppe I
- Präsentation
- Tag I-VIII
- Gruppe II
- Präsentation
- Tag I-VIII
- Gruppe III
- Präsentation
- Tag I-VIII
- Gruppe IV
- Präsentation
- Tag I-VIII
- Gruppe V
- Tag I-VIII

11
Gruppenprofil
Gruppe I
Sicherheitstechnik
Aufgabe der Gruppe I:
Die Aufgabe der Gruppe I ist die Verdrahtung der Schalterboxen und deren Kennzeichnung.
Sie muss auf Sicherheitsvorschriften und Normen achten sowie diese mit den nötigen
Bauteilen herstellen.
Mitglieder:
– Sebastian Scheidemann
– Marc Bähring
– Colin Amerson
– Lisa Wagner
Gruppen Präsentation
-Tag I
-Tag II
-Tag III
-Tag IV
-Tag V
-Tag VI
-Tag VII
-Tag VIII
12
Gruppe I Tag I
-Definition der Gesamtaufgabe
-Informieren über geltende Sicherheitsbestimmungen und
Normen
Fazit: Die nötigen Sicherheitsrelevanten Normen und
Vorschriften wurden erfasst.
Gruppe I Tag II
- Risikobeurteilung
Fazit: Die Bosch Sicherheitsrichtlinien wurden
zusammengefasst
Gruppe I Tag III
- Logo-Schulung
- Erstellung des elektronischen Schaltplanes
- Zusammenfassung von Normen und Richtlinien
- Erstellen eines Prüfprotokolles der Sicherheit
Fazit: Das Prüfprotokoll wurde erstellt sowie überarbeitet
und die Sicherheitsrichtlinien weiter zusammengefasst.
Des Weiteren wurde eine Schulung an der speicher-
programmierbaren Steuerung Logo durchgeführt.
13
Gruppe I Tag IV
- Beginn der Erstellung der Präsentation
- Normen, Richtlinien und Informationen im Internet bzw.
Fachkundebüchern zusammengefasst
Fazit: Normen und Richtlinien wurden weitestgehend
erfasst und mit der Präsentation begonnen
Gruppe I Tag V
- Beginn der Erstellung eines Logo-Programmes
- COSIPROG - Unterweisung
Fazit: Einweisung und Übungen zur Programmierung von
COSIPROG wurden erfolgreich durchgeführt. Die
Programmierung des Roboterarms wurde begonnen.
Gruppe I Tag VI
- Abschließen der LOGO-Schulung
- Übungen zum Programmieren des Roboters
- Bearbeiten der Präsentation
Fazit: Die LOGO-Schulung sowie mehrere Übungen zur
Programmierung des Roboters sind abgeschlossen. Der
Roboter ist programmiert und mit der Gruppe 2 wurde das
Förderband aufgebaut.
14
Gruppe I Tag VII
-Programm für den Roboter schreiben
-Überprüfen der Postionen des Roboters auf Kollision
-Aufgabenbesprechung in der Gruppe
Fazit: Die Punkte für die weiterreichende Programmierung
wurden festgelegt. Des Weiteren wurde mit der
Programmierung des Abnahmeroboters begonnen.
Gruppe I Tag VIII
-Programm für den Roboter fertigstellen
- Fertigstellung der Gruppenpräsentation
- Allgemeine Dokumentation
Fazit: Das Roboterprogramm, sowie die Gruppen-
präsentation, wurden fertiggestellt
15
Gruppe II
Prüfroboter und Magazin
Aufgabe der Gruppe III:
Die Gruppe II hate die Aufgabe einen Mitsubishi Movemaster RV-M1 Roboter so zu
programmieren und zu positionieren, dass er Werkstücke aus einem Magazin entnimmt und in
eine Prüfstation legt. Ist die Prüfung abgeschlossen, muss der Roboter das Werkstück auf die
Fördereinheit ablegen.
Mitglieder:
– Willi Leipold
– Robin Jugendheimer
– Stefan Bernhard
– Sebastian Böhmer
Gruppen Präsentation
-Tag I
-Tag II
-Tag III
-Tag IV
-Tag V
-Tag VI
-Tag VII
-Tag VIII
16
Gruppe II Tag I:
- Erstellen des Wartungsplanes für den Roboter
- Bestandsaufnahme der Arbeitsmittel
- Erfassen der Aufgabenstellung
Fazit: Die Erstellung des Wartungsplanes, sowie des
vorläufigen Lageplanes wurde gemeistert. Die Ziele
wurden definiert und der Bestand der Arbeitsmittel erfasst.
Gruppe II Tag II:
- Erstellung des CAD Modelles des Magazins
- Setzen der Meilensteine
- Erstellung eines elektropneumatischen Planes
Fazit: Die Definierung der Meilensteine. Erste Arbeiten an
dem Prüfprotokoll. Die Erstellung eines CAD 3D
Modelles des Magazins wurde in Angriff genommen.
Gruppe II Tag III:
- Schaltplan für Elektropneumatik erstellen
- Fertigstellung des Magazinmodells
- Erstellen eines Wartungsplanes
- Erstellung eines Prüfprotokolles für den Roboter und das
Magazin
Fazit: Das Prüfprotokoll wurde erfolgreich fertiggestellt,
sowie mit der Optimieren des elektropneumatischen
Schalt- und Wartungsplanes begonnen.
17
Gruppe II Tag IV:
- Arbeitsvorbereitungen abschließen
(Elektropneumatikplan, Wartungsplan)
- Beginn der Vormontage (Baugruppen positionieren)
- Fertigstellung der Präsentation (Grundgerüst ohne
Optimierung)
Fazit: Die Erstellung der Präsentation wurde fortgeführt.
Es wurde die CAD Zeichnung der Prüfstation
vervollständigt und der Elektropneumatikschaltplan
optimiert.
Gruppe II Tag V:
- Montage der Baugruppen für den Roboterbetrieb
- Montage der elektropneumatischen Hardware
Fazit: Die CAD Zeichnung für den Tisch wurde
fertiggestellt. Fortführung der Präsentation sowie die
Arbeit an der Elektropneumatischen Schaltung für das
Magazin.
Gruppe II Tag VI:
- Programmieren des Roboters
- Anschließen der elektropneumatischen Steuerung
Fazit: Die Erstellung der elektrischen Verbindungen der
Elektropneumatik erzielte große Fortschritte. Desweiteren
wurden die Speicherpunkte des Roboters programmiert,
die Baugruppe ist montiert und die Programmierung des
Roboters ist optimiert.
18
Gruppe II Tag VII:
- Programmierung des Roboters
- Elektropneumatik für den Prüfroboter fertigstellen
Fazit: Die Softwareinstallation vom Rechner zur LOGO
sowie die Optimierung des Programms für den Roboter
wurde durchgeführt. Auch die Elektropneumatik und die
Präsentation wurde fortgeführt.
Gruppe II Tag VIII:
-Fertigstellung der Präsentation
-Überarbeiten der Meilensteine
-Allgemeine Dokumentation
Fazit: Die Gruppenpräsentation wurde abgeschlossen und
die Meilensteine überarbeitet.
19
Gruppenprofil
Gruppe III
Prüfstation und Förderband
Aufgabe der Gruppe III:
Die Gruppe hat die Aufgabe eine Prüfstation zu erstellen, welche Werkstoffarten
(Metall/Nichtmetall), sowie Farbe (hell/dunkel) unterscheiden soll, die die folgenden
geprüften Werkstücke zum Entladen fährt. Zusätzlich muss die Gruppe III eine Fördereinheit
erstellen, die die geprüften Werkstücke zum Entladen fährt.
Mitglieder:
– Luca Schultheiß
– Normen Zapf
– Pascal Hohenstein
– Paul Groß
20
Gruppe III Tag I:
- Definieren des Gruppenzieles
- Erstellen eines Positionierungsplanes mit Gruppe IV
Fazit: Erstellung des vorläufigen Aufbauplanes des
Projektes, definieren der benötigten Sensoren.
Positionsoptimierung der Ablagestation mit Gruppe IV.
Gruppe III Tag II:
- Setzung der Meilensteine
- Zeichnung des Förderbands in CAD
- Einzelteile in CAD zeichnen
- Stücklistenerstellung
Fazit: Die Erstellung der Stückliste und die Setzung der
Meilensteine wurde abgeschlossen. Die Erstellung der
Zeichnungen befindet sich noch in Arbeit.
Gruppe III Tag III:
- Fertigstellung 3D CAD Einzelteile
- Fertigstellung Stückliste
Fazit: CAD Zeichnungen wurden weitestgehend
fertiggestellt. Ein Prüfprotokoll und Preisliste erfolgreich
erstellt. Mit der Arbeit an einem Wartungsplan wurde
begonnen.
21
Gruppe III Tag IV:
- Vervollständigen des Wartungsplanes
- Aufstellen einer Preisliste
- Fortführung der Gesamtzeichnung
- Erstellen einer Bestellliste
Fazit: Die CAD Gesamtzeichnung und der Wartungsplan
wurden weitestgehend fertiggestellt. Der Zusammenbau
des Förderbandes wurde geplant.
Gruppe III Tag V:
- Fertigstellen des Wartungsplanes
- Fertigstellen der Gesamtzeichnung
- Montage des Förderbandes
Fazit: Die Gesamtzeichnung und der Wartungsplan sind
fertiggestellt. Die Montage des Förderbandes hat
begonnen.
22
Gruppe III Tag VI:
- Abschließen der LOGO!-Schulung
- Erstellen einer Gruppenpräsentation
Fazit: Die LOGO!-Schulung wurde mit allen Gruppen-
mitgliedern absolviert, die Präsentation bearbeitet und die
Gesamtzeichnungen fertig gestellt.
Gruppe III Tag VII:
- Interne Schulung
- Erstellen der Endpräsentation
- Arbeitsverteilung in der Gruppe
Fazit: Arbeitsverteilung der Gruppenmitglieder wurde neu
strukturiert. Die Präsentation wurde fertiggestellt.
Gruppe III Tag VIII:
- Überarbeitung der Meilensteine und Arbeitsverteilung
- Präsentation weiter überarbeitet
Fazit: Fertigstellung der Präsentation sowie Projekt-
fertigstellung.
23
Gruppenprofil
Gruppe IV
Ablageroboter und Magazin
Aufgabe der Gruppe IV:
Die Gruppe soll die Aufgabe erfüllen einen Mitsubishi Movemaster RV-M1 Roboter zu
programmieren, welcher Werkstücke, die von der Fördereinheit geliefert werden, farblich in
die Magazine einordnet.
Foto
Mitglieder:
– Lukas Streicher
– Christian Dorsch
– Florian Mildenberger
– Rene Sollmann
– Alexander Skrzypczak
24
Gruppe IV Tag I
- Definieren des Gesamtzieles
- Erstellen eines Positionierungsplanes
- Skizzenerstellung
- Bauteil und Baugruppenpositionierung
Fazit: Erstellen des vorläufigen Aufbauplanes,
Gruppenziel wurde erfasst.
Gruppe IV Tag II
- Erstellung der Meilensteine
- CAD Modellerstellung Roboter und Magazin
- Optimierung der Positionierungsplanes
Fazit: Erstellung von 3D Modellen Verbesserung des
Positionierungsplanes der Komponenten.
Gruppe IV Tag III
- Erstellung des CAD Modelles des Roboters und des
Sensorhalters
- Logo-Schulung
- Ergänzen der Meilensteine
- Optimierung des Positionierungsplanes
Fazit: Die CAD Zeichnung der Sensorhalterung,
Robotergelenk, Roboterarm wurde abgeschlossen und eine
Logo!-Einführung von Mitgliedern der Gruppe V
durchgeführt.
25
Gruppe IV Tag IV
- Beginn der Vormontage (Baugruppen positionieren)
- Fertigstellung der Präsentation
- Überprüfung der Elektropneumatik
- CAD Zeichnung: Prüfstation
- Verbesserung des Wartungsplanes
Fazit: Die Präsentation wurde weiter erstellt, die Vor-
montage begonnen und der Wartungsplan überarbeitet.
Gruppe IV Tag V
- Logo-Schulung
- Rechnungen in der Elektrotechnik
- CAD Zeichnungen vom Roboter fertigstellen
- Dokumentation und Einarbeitung LOGO!
Fazit: Die Logo-Schulung für die gesamte Gruppen-
mitglieder durchgeführt. Das Ohmsche Gesetzt sowie die
dazugehörigen Rechenaufgaben wurden bearbeitet.
Gruppe IV Tag VI
- Gesamtzeichnung zusammenstellen
- Beginnen der Montagearbeiten
Fazit: Die Gesamtzeichnungen wurde fertig gestellt und
mit der Präsentation wurde begonnen. Die Sensoren sind
an die Baugruppe montiert und ausgerichtet. Die
Einzelteilzeichnungen wurden gedruckt.
26
Gruppe IV Tag VII
- Präsentation fortführen
- Förderband montieren
- Positionierung der Sensoren
Fazit: Förderband an der Platte wurde befestigt und
ausgerichtet. In Solid Edge Teile zusammengefügt. Des
Weiteren wurden Meilensteine gesetzt und die Sensoren
am Roboter positioniert.
Gruppe III Tag VIII:
- Überarbeitung der Meilensteine und Arbeitsverteilung
- Präsentation weiter überarbeitet
Fazit: Fertigstellung der Präsentation sowie der
Meilensteine und Arbeitsverteilung.

27
Gruppe V
Presseabteilung
Aufgabe der Gruppe V:
Die Presseabteilung musste die einzelnen Arbeitsschritte aller Gruppen sowie die Aufgaben in
der Gruppe dokumentieren. Dazu musste sie eine Präsentation des Projektes erstellen, und
war für Schulungen verantwortlich, z.B. LOGO!.
Mitglieder:
– Jörg Heynlein
– Artur Lesser
– Andreas Wimmer
– Johannes Klee
28
Gruppe V Tag I
-Erarbeitung der Aufgabenstellung
- Layoutdefinition
-Gruppen und Gesamtziele
-Dokumentation Tagesziele der Teilprojekte
-Überprüfung der erreichten Ziele
Fazit: Die Aufgabenstellung, sowie das Layout wurden
erfolgreich ermittelt. Tagesgruppenziele sowie Tages-
zusammenfassung stehen kurz vor der Vervollständigung.
Gruppe V Tag II
-Erstellen der Tageszusammenfassung
-Bilderstellung
- Definition der Meilensteine
- Vervollständigen der Gruppenprofile
- Logoschulung
- Abteilungsoptimierung
Fazit: Die Tageszusammenfassung des ersten Tages sowie
Definierung der Meilensteine und Gruppenprofile wurden
abgeschlossen. LOGO!-Schulung und Bilder stehen noch
aus.
29
Gruppe V Tag III
- Erstellen der Tageszusammenfassung Tag II und Tag III
- Bilderstellung
- LOGO!-Schulung
Fazit: LOGO!-Schulung sowie Bildererstellung und
Tageszusammenfassung Tag II wurde erfolgreich
gemeistert
Gruppe V Tag IV
-Fortführung der Logoschulung
- Erstellen des Tagesberichts Tag IV
- Vervollständigung der Gruppenprofile
Die Arbeit an den Gruppenprofilen und des Tagesberichtes
sowie der LOGO!-Schulung wurde fortgesetzt
Gruppe V Tag V
- Fertigstellung der Logoschulung
- Erstellen des Tagesberichts Tag IV
- Vervollständigung der Gruppenprofile
Fazit: Die LOGO!-Schulung wurde abgeschlossen und die
Gruppenprofile ergänzt.
30
Gruppe V Tag VI
- Beenden der LOGO!-Schulung
- Erstellen des Tagesberichts Tag V
- Gruppenprofil
Fazit: Fast alle Schüler haben die LOGO!-Schulung
erhalten. Es wurde mit der Erstellung des Tagesberichtes 5
begonnen und die Gruppenprofile erstellt.
Gruppe V Tag VII
- Fertigstellung der LOGO!-Schulung
- Erstellen des Tagesberichts Tag IV
- Vervollständigung der Gruppenprofile
Fazit: LOGO!-Schulung abgeschlossen und Tagesbericht
erstellt. Meilensteine ergänzt und Gruppenprofile
vervollständigt.
Gruppe V Tag VIII
-Allgemeine Dokumentation
Fazit: Die einzelnen Teilberichte wurden korrigiert und die
Meilensteine aktualisiert.
31
Tage im Überblick
Tag I
Tagesfazit
- Aufgaben und Ziele wurden definiert
- Einrichten des Projektraumes abgeschlossen
- Fertigstellung des vorläufigen Lageplanes der Projektbaugruppen
Mitteilung
Anlaufschwierigkeiten
Tag I: Trotz der Verzögerung, aufgrund der Einrichtung der Räumlichkeiten, schritt das
Projekt nur schleppend voran. Die Anlaufschwierigkeiten zogen sich durch den gesamten
Tagesverlauf. Nichtsdestotrotz wurden die Gruppenziele erarbeitet. Durch die gute
Zusammenarbeit wurde die Alphaversion des Lageplanes erstellt. Für die Sicherheit ist
gesorgt. Dank der Gruppe für Sicherheitstechnik wurde wie folgt gesorgt und die nötigen
sicherheitsrelevanten Normen und Vorschriften erfasst.
32
Tag II
Tagesfazit
- Zusammenfassung der Risikobeurteilung, Zusammenfassung der Bosch
Sicherheitsrichtlinien.
-Die Definierung der Meilensteine ist abgeschlossen.
- Erste CAD 3D Modelle des Magazines sind fertiggestellt.
- Fortschritt bei der Stücklistenerstellung
- Fertigstellung der ersten Tageszusammenfassung.
Mitteilungen
Arbeiten im neuen Umfeld
Tag II: Nach dem erfolgreichen Umzug in das ehemalige „Kunststofflabor“ nimmt das
Projekt Form an. Nachdem die Aufgabenstellungen erfasst und definiert wurden, konnte
konsequent an der Weiterführung des Projektes gearbeitet werden. Für die Sicherheit ist
gesorgt! Dank der Gruppe „Sicherheitstechnik“ wurde eine Risikobeurteilung erstellt und die
Bosch Sicherheitsrichtlinien zusammengefasst. Die Gruppen Prüfroboter/Magazin;
Prüfstation/Förderband und Ablageroboter/Ablagemagazin begannen mit der Erstellung der
ersten 3D CAD Modelle der Einzelkomponenten. Unter anderem stellte die Gruppe
Prüfstation/Förderband eine Stückliste der benötigten Komponenten wie z.B. Sensoren oder
Halterungen fertig.
33
Tag III
Tagesfazit
- Bilderstellung
- LOGO!-Schulung ist fast abgeschlossen
- Fortschritt an den CAD Zeichnungen z.B. Sensorhalter, Robotergelenk, Roboterarm
- Prüfprotokoll und Preisliste erfolgreich erstellt.
Meldung
Mit frischen Wind in den Segeln
Tag III: Mit frischem Wind in den Segeln wird fieberhaft an der Weiterführung des Projektes
gearbeitet. Die CAD Zeichnung der Sensorhalterung, des Robotergelenks und dem
Roboterarm wurde abgeschlossen und eine LOGO!-Schulung für Mitglieder der verschieden
Gruppen gegeben. Gruppe II stellte das Prüfprotokoll erfolgreich fertig sowie mit der
Optimieren des elektropneumatische Schalt- und Wartungsplanes wurde begonnen.
34
Tag V
Tagesfazit
- CAD Zeichnungen z.B. Roboterarm, Tisch, Robotergelenk wurden abgeschlossen
- Die LOGO!-Schulung wurde bis auf wenige Schüler abgeschlossen
- Das Thema Elektrotechnik wurde von allen Schülern angefangen
Meldung
Tag V: Die Hälfte ist geschafft. Trotz der Schwächung des Teams durch Fortbildung und
Krankheit wurde mit der Programmierung des Roboters begonnen. Erste Testprogramme
wurden mit dem Programmierprogramm COSIPROG erstellt. Die einzelnen Positionen des
Roboters z.B. Magazin oder Förderband werden mittels einer manuellen Steuerung „Toolbox“
angefahren und gespeichert. Und diese dann im späteren Programm in Reihenfolge gebracht.
Des Weiteren unterwies Gruppe V weitere Gruppen mit der speicherprogrammierbaren
Steuerung „LOGO!“.
35
Tag VI
Tagesfazit
- LOGO!-Schulung abgeschlossen
- Übungen zur Programmierung des Roboters
- Programmierung des Roboters
- Aufbau des Förderbandes
- Stecken der Elektropneumatik für den Prüfroboter
-Fertigstellung der Teilzeichungen im CAD (Vgl. Medien S.38 Bild)
Meldung
Tag VI: Alle Gruppenmitglieder haben die LOGO!-Schulung absolviert. Die einzelnen
Gruppen begannen damit ihre Baugruppen zu fügen. Es wurde mit der Optimierung der
Robotersteuerung begonnen. Die Gruppe II hat die elektropneumatische Steuerung für den
Prüfroboter gesteckt und die Speicherpunkte der Robotersteuerung festgelegt. Die
Teilzeichnungen des Projektes wurde fertiggestellt.
36
Tag VII
Tagesfazit
-Montage der Förderbandes und Positionierung der Sensoren
-Zusammensetzung der Baugruppen im CAD
-Erstellung der Gruppenpräsentationen
-Programmierungsoptimierung am Prüfroboter
-Programmimport zu den Robotern
Meldung
Tag VII: Endspurt! Am vorletzten Projekttag schritt die Endmontage der Baugruppen weit
voran. Die Paletten der Ablagestation sowie das Förderband wurden gefügt und die
Positionierung der Sensoren nun vollzogen. Die Gruppe für Sicherheitstechnik überprüfte die
Verfahrwege der Roboter auf etwaige Kollisionen oder anderweitige Risiken. Die einzelnen
Projektgruppen trieben ihre Präsentationen voran und die Presseabteilung nahm eine
Umstrukturierung der Dokumentation vor.
37
Tag VIII
Tagesfazit
-Fertigstellung der Präsentationen
-Projektabschluss
-Gruppeninterne Dokumentation
Meldung
Tag VIII: Das Ende ist erreicht. Mit der Beendigung des achten Projekttages wurde die
Hauptphase abgeschlossen. Die Gruppen stellten ihre internen Präsentationen fertig und
nahmen noch einige organisatorische Arbeitsgänge bzw. Dokumentationen vor. Alles in allem
fand das Projekt einen ruhigen Abschluss. In kurzer Zeit folgt noch eine Optimierungsphase
bei welcher offene Probleme behandelt werden und wir weitere Abläufe verbessern.
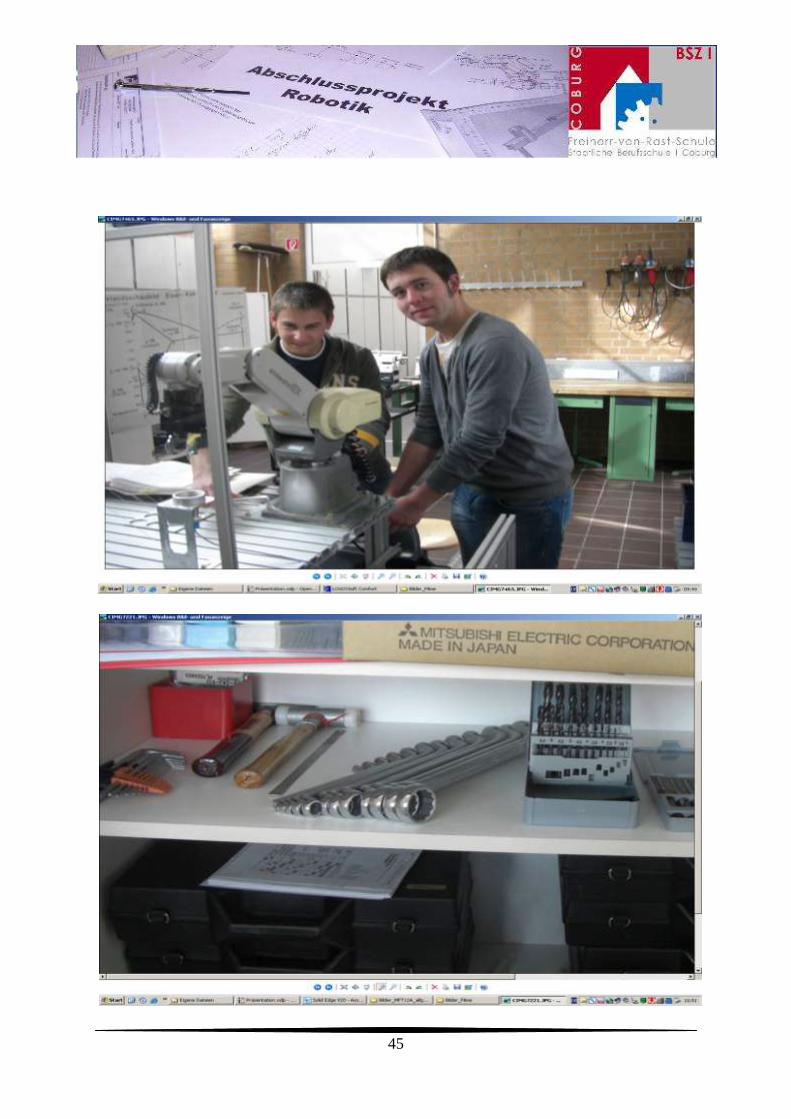
38
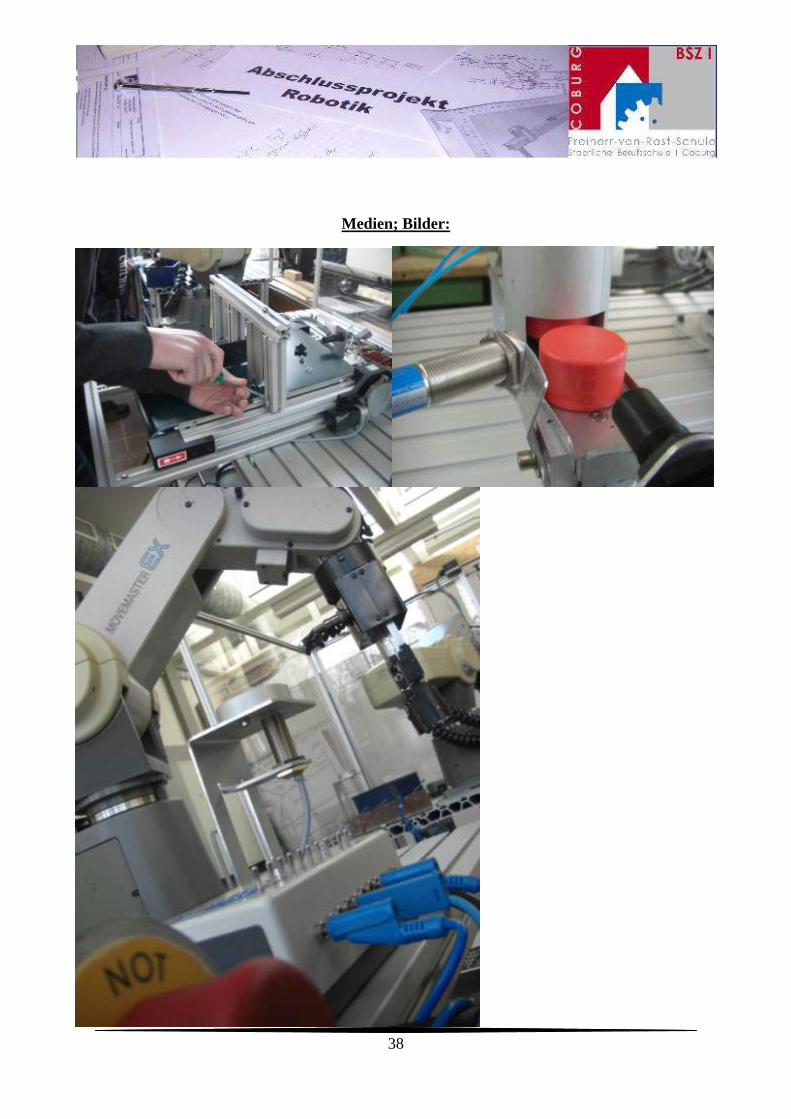
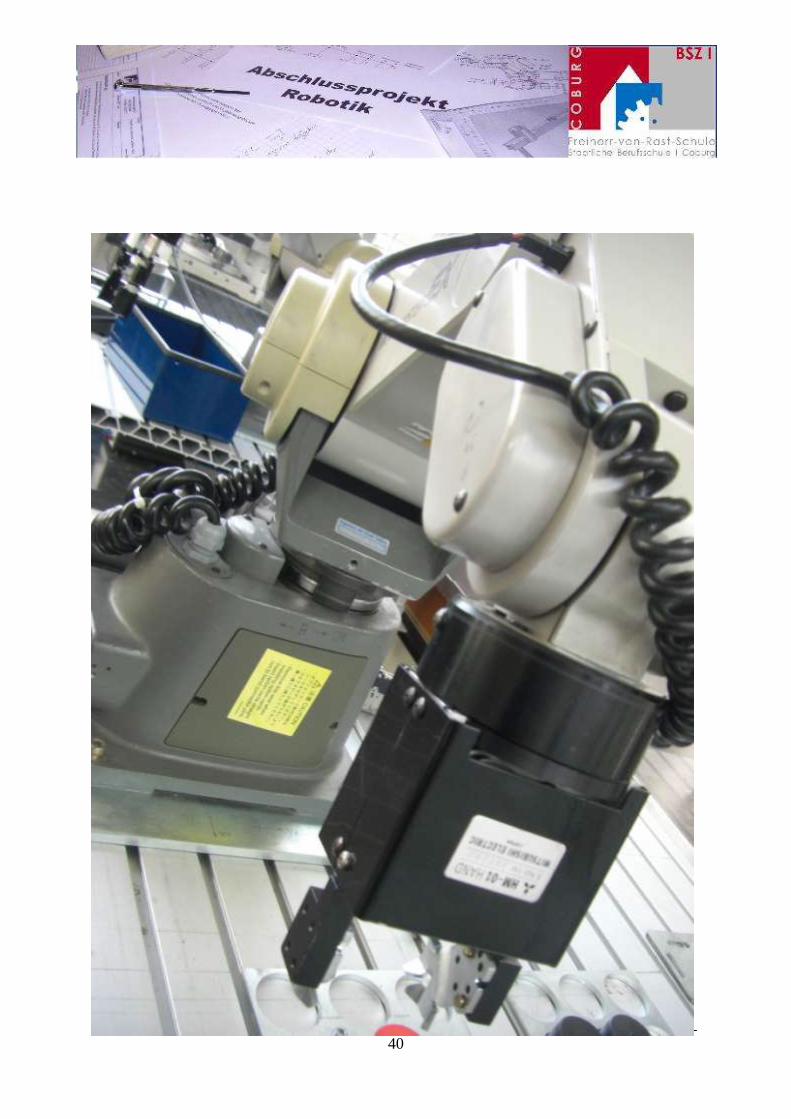
Medien; Bilder:
39
40

41

42
43
44
45
46
Schlusswort:
Wir möchten uns hiermit für die Möglichkeit bedanken, ein solches Projekt durchführen zu
können. Besonderer Dank gilt auch unserer Lehrkraft Herrn Höllein und meinen Kollegen in
der Presseabteilung, welche immer tatkräftige Unterstützung lieferten.

47
Quellen
S.6. „Weitere Definitionen“ Wikipedia (Einzelquellnachweis jeweils unter der Definition)
S.8.Meilensteine: Bilds Netzplan Quelle Wikipedia
Weitere Quellen:
Fachkenntnisse 2 Industriemechaniker 2. Auflage
Buisness-wissen.de





























