Embed Size (px)
Citation preview
UNIVERSITAT DES SAARLANDES
Lehrstuhl fur Technische Mechanik
Prof. Dr.-Ing. Stefan Diebels
Materialmodellierung
Version vom 20.10.2015
c© 2015

i
Inhaltsverzeichnis
1 Einleitung 1
2 Wiederholung: Lineare Elastizitat 5
2.1 Klassifizierung von Materialverhalten . . . . . . . . . . . . . . . . . . . . . 5
2.2 Einachsialer Zugversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Ingenieurverzerrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4 Spannungstensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Elastizitatsgesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.6 Randwertproblem der Elastostatik . . . . . . . . . . . . . . . . . . . . . . . 20
3 Kinematik 22
3.1 Materielle Korper und Bewegung . . . . . . . . . . . . . . . . . . . . . . . 22
3.2 Geschwindigkeit und Beschleunigung . . . . . . . . . . . . . . . . . . . . . 25
3.3 Materielle Zeitableitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4 Transport materieller Linien, Flachen, Volumen . . . . . . . . . . . . . . . 28
3.5 Deformations- und Verzerrungstensoren . . . . . . . . . . . . . . . . . . . . 31
3.5.1 Polare Zerlegung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.5.2 Deformations- und Verzerrungstensoren . . . . . . . . . . . . . . . . 33
3.5.3 Definition weiterer Verzerrungsmaße . . . . . . . . . . . . . . . . . 36
3.5.4 Darstellung mittels Verschiebungsgradient . . . . . . . . . . . . . . 37
3.5.5 Linearisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.6 Geschwindigkeitsgradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.7 Interpretation der Verzerrungsgeschwindigkeit und des Wirbeltensors . . . 41
3.8 Zeitableitungen der Verzerrungstensoren . . . . . . . . . . . . . . . . . . . 42
4 Vektor- und Tensorrechnung in naturlichen Basissystemen 44
4.1 Exkurs: Vektor- und Tensoralgebra . . . . . . . . . . . . . . . . . . . . . . 44
ii
4.2 Vektor- und Tensoranalysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3 Materielle Linien und naturliche Basis . . . . . . . . . . . . . . . . . . . . 51
4.3.1 Verzerrungstensoren in naturlichen Koordinaten . . . . . . . . . . . 52
5 Bilanzgleichungen 55
5.1 Massenbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2 Impulsbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.3 Impulsbilanz in materieller Darstellung . . . . . . . . . . . . . . . . . . . . 62
5.4 Drallbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.5 Energiebilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.6 Entropiebilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.7 Allgemeine Bilanzgleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.8 Sprungbedingungen uber singulare Flachen . . . . . . . . . . . . . . . . . . 71
5.8.1 Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6 Materialtheorie 77
6.1 Allgemeine Prinzipien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6.2 Materielle Objektivitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6.2.1 Wechsel des Bezugssystems . . . . . . . . . . . . . . . . . . . . . . 79
6.2.2 Objektive Großen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.2.3 Bezugsinvarianz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.3 Materielle Symmetrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6.4 Das Entropie-Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.5 Inkompressibilitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7 Elastischer Festkorper 93
7.1 Hyperelastizitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7.2 Invariantendarstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
iii
7.3 Zur Wahl der freien Energiefunktion . . . . . . . . . . . . . . . . . . . . . 96
8 Viskose Fluide 102
8.1 Newtonsches Fluid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
8.2 Navier-Stokes-Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
9 Rheologie 106
10 Plastischer Festkorper 116
10.1 Experimentelle Beobachtungen . . . . . . . . . . . . . . . . . . . . . . . . . 116
10.2 Zerlegung der Deformation . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
10.3 Fließfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
10.3.1 Spannungsraum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
10.3.2 Fließkriterium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
10.3.3 Fließregel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
10.3.4 Verfestigung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
20.10.2015 1
1 Einleitung
Inhalt der Veranstaltung: Einfuhrung in die Kontinuumsmechanik
Definition: Kontinuumsmechanik ist die Mechanik kontinuierlich verteilter,deformierbarer Korper (Festkorper, Fluide).
Die Kontinuumsmechanik beschaftigt sich mit der Beschreibung der Bewegung und De-formation von Korpern unter der Einwirkung außerer Krafte und Temperaturanderungen.Die Beschreibung erfolgt phanomenologisch, ohne den atomistischen Aufbau der Materieexplizit zu berucksichtigen (makroskopische Sichtweise). Die Grundlage der Beschreibungbilden wenige Axiome, die als a priori richtig vorausgesetzt werden.
Die Kontinuumsmechanik bedient sich der Mathematik als Hilfsmittel, insbesondere derVektor- und Tensorrechnung und der Differenzialgeometrie.
Zur erfolgreichen Anwendung der Kontinuumsmechanik benotigt man die folgenden dreiBereiche:
• Theorie
• Experiment
• Numerik
Grundlage kontinuumsmechanischer Uberlegungen ist das Experiment, in dem bestimmtePhanomene beobachtet werden. Im Rahmen theoretischer Uberlegungen versucht man, dieBeobachtungen in einem mathematischen Modell abzubilden. Die Losung der resultieren-den Gleichungen, die im Allgemeinen nichtlinear sind, geschieht meißtens numerisch. Einerfolgreicher Vergleich der berechneten mit den experimentell beobachteten Problemen va-lidiert die Theorie. Konnen die Berechnungen nicht mit den Experimenten in Einklanggebracht werden, so ist das theoretisch abgeleitete Modell zu modifizieren.
In der Vorlesung Kontinuumsmechanik werden wir uns mit den grundlegenden Aspektender theoretischen Formulierung von mechanischen Modellen befassen. Eine kontinuumsme-chanische Theorie selbst besteht wiederum aus drei Teilen:
• Kinematik
Beschreibung der Bewegung und der Deformation
• Bilanzgleichungen
In der klassischen Physik axiomatisch eingefuhrte Erhaltungssatze fur Masse, Impuls,Drall, Energie, Entropie
2 Materialmodellierung
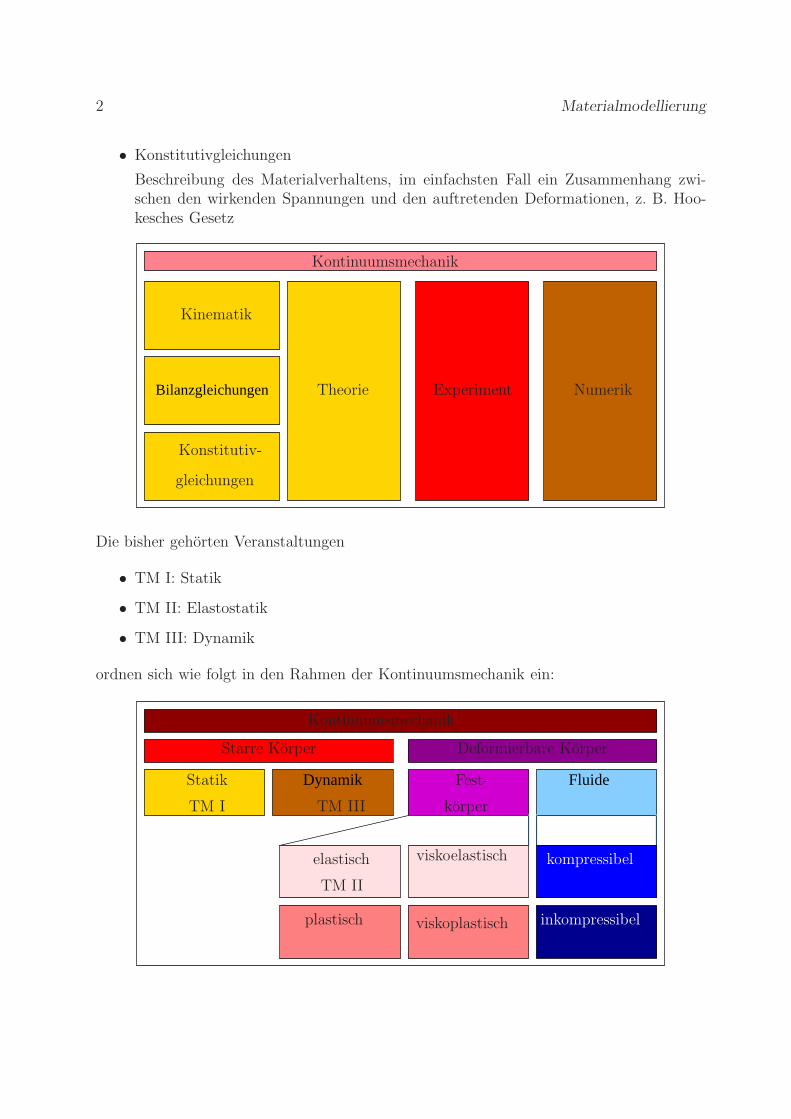
• Konstitutivgleichungen
Beschreibung des Materialverhaltens, im einfachsten Fall ein Zusammenhang zwi-schen den wirkenden Spannungen und den auftretenden Deformationen, z. B. Hoo-kesches Gesetz
Bilanzgleichungen
Kontinuumsmechanik
Kinematik
Konstitutiv-
gleichungen
Theorie Experiment Numerik
Die bisher gehorten Veranstaltungen
• TM I: Statik
• TM II: Elastostatik
• TM III: Dynamik
ordnen sich wie folgt in den Rahmen der Kontinuumsmechanik ein:
Dynamik Fluide
Kontinuumsmechanik
Starre Korper Deformierbare Korper
Statik
TM I TM III
Fest-
korper
elastisch
TM II
viskoelastisch kompressibel
plastisch viskoplastisch inkompressibel

20.10.2015 3
Literaturauswahl
1. Greve: Kontinuumsmechanik, Ein Grundkurs, 1. Aufl., Springer, Berlin 2003
2. Holzapfel: Nonlinear Solid Mechanics, 1. Aufl., Wiley, Chichester 2006
3. Haupt: Continuum Mechanics and Theory of Materials, 2. Aufl., Springer, Berlin2002
4. Truesdell & Toupin: The Classical Field Theories, Handbuch der Physik III/1, Hrsg.Flugge, Springer, Berlin 1960, pp.226–793

4 Materialmodellierung
20.10.2015 5
2 Wiederholung: Lineare Elastizitat
Das grundsatzliche Vorgehen im Rahmen der Kontinuumsmechanik wird bereits bei der Be-handlung der linearen Elastizitatstheorie deutlich, die die Grundlage fur die VeranstaltungElastostatik im zweiten Semester bildet. Exemplarisch fur die kontinuumsmechanische Mo-dellbildung werden die wesentlichen Punkte, die auf die Grundgleichung der Elastostatik,die Navier-Lamesche Verschiebungsgleichung, fuhren, hier wiederholt.
2.1 Klassifizierung von Materialverhalten
Das Materialverhalten wird in Versuchen ermittelt. Ziel der Versuche ist es, das Defor-mationsverhalten eines bestimmten Materials mit den wirkenden Kraften zu verknupfen.Klassische Versuche, die dazu herangezogen werden, sind
• der einachsiale Zugversuch,
• der Schubversuch (i. d. R. realisiert als Torsionsversuch an dunnwandigen Rohren),
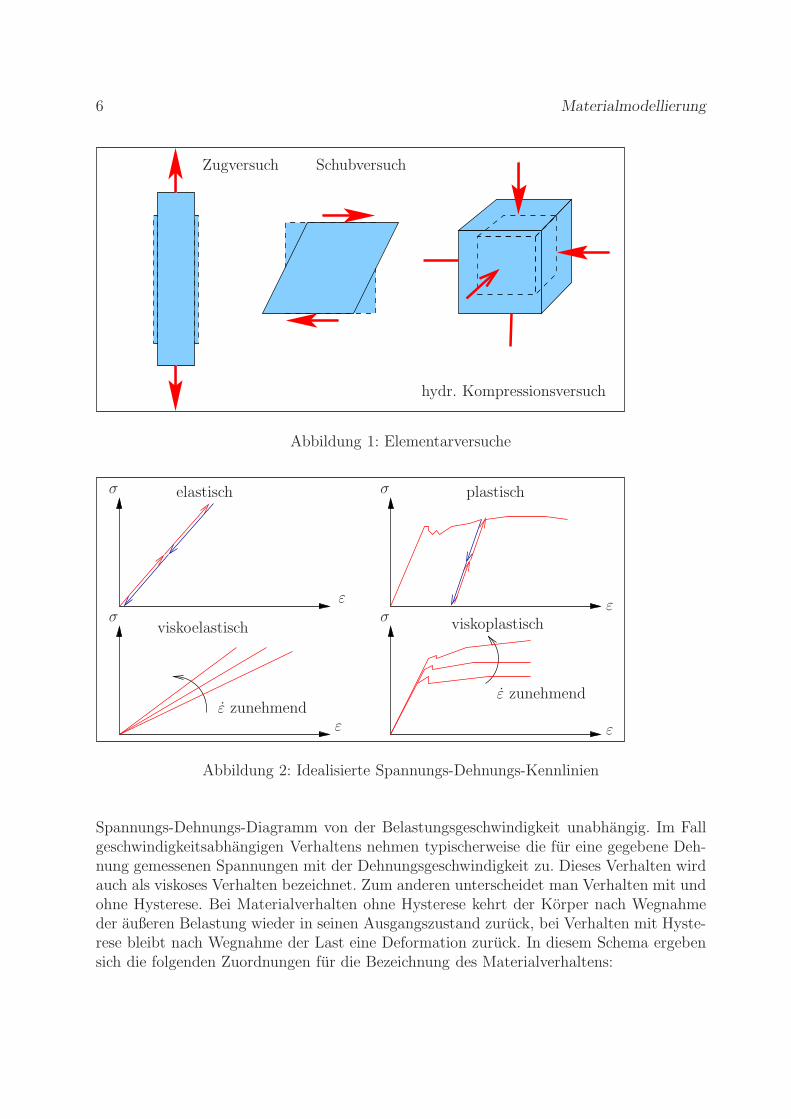
• der hydrostatische Kompressionsversuch.
Idealisierend sind diese Versuche in Abb. 1 dargestellt. Die tatsachliche Realisierung kannunter Umstanden sehr aufwandig sein. Idealerweise treten in diesen Elementarversuchenhomogene Spannungszustande und homogene Deformationszustande auf, so dass im Pro-bekorper uberall die gleichen Spannungen und Dehnungen gemessen werden und globaleund lokale Großen identisch sind.
Im Rahmen des Zugversuchs (oder auch der anderen grundsatzlichen Elementarversuche)kann man folgende Arten von Materialverhalten feststellen:
• Elastisches Verhalten
• Viskoelastisches Verhalten
• Plastisches Verhalten
• Viskoplastisches Verhalten
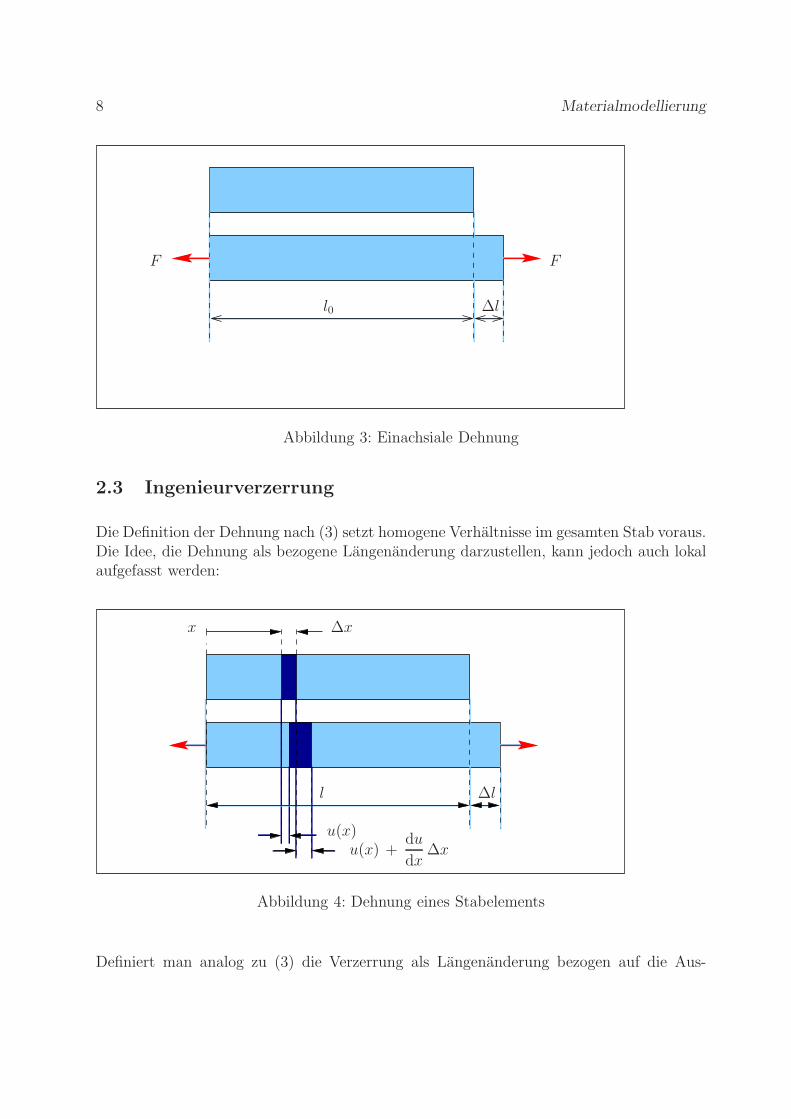
Typische idealisierte Spannungs-Dehnungs-Kennlinien, wie sie dabei aufgenommen werdenkonnen, sind in Abb. 2 gezeigt.
Grundsatzlich kann man das Materialverhalten in zwei mal zwei Klassen einteilen. Manunterscheidet zum einen geschwindigkeitsunabhangiges und geschwindigkeitsabhangigesVerhalten. Im Fall geschwindigkeitsunabhangigen Verhaltens sind die Messergebnisse im
6 Materialmodellierung
Zugversuch Schubversuch
hydr. Kompressionsversuch
Abbildung 1: Elementarversuche
σ
σσ
σ
ε
ε
ε
ε
ε zunehmendε zunehmend
elastisch plastisch
viskoelastisch viskoplastisch
Abbildung 2: Idealisierte Spannungs-Dehnungs-Kennlinien
Spannungs-Dehnungs-Diagramm von der Belastungsgeschwindigkeit unabhangig. Im Fallgeschwindigkeitsabhangigen Verhaltens nehmen typischerweise die fur eine gegebene Deh-nung gemessenen Spannungen mit der Dehnungsgeschwindigkeit zu. Dieses Verhalten wirdauch als viskoses Verhalten bezeichnet. Zum anderen unterscheidet man Verhalten mit undohne Hysterese. Bei Materialverhalten ohne Hysterese kehrt der Korper nach Wegnahmeder außeren Belastung wieder in seinen Ausgangszustand zuruck, bei Verhalten mit Hyste-rese bleibt nach Wegnahme der Last eine Deformation zuruck. In diesem Schema ergebensich die folgenden Zuordnungen fur die Bezeichnung des Materialverhaltens:

20.10.2015 7
• Geschwindigkeitsunabhangiges Verhalten ohne Hysterese ↔ Elastizitat
• Geschwindigkeitsunabhangiges Verhalten mit Hysterese ↔ Plastizitat
• Geschwindigkeitsabhangiges Verhalten ohne Hysterese ↔ Viskoelastizitat
• Geschwindigkeitsabhangiges Verhalten mit Hysterese ↔ Viskoplastizitat
In Experimenten beobachtet man typischerweise Uberlagerungen der unterschiedlichen Ef-fekte, wobei je nach Material einzelne Anteile uberwiegen, ggf. sind noch weitere Effekte ausden Versuchen ableitbar (z. B. Schadigung). Die Materialtheorie als Teil der Kontinuums-mechanik beschaftigt sich mit der Formulierung der entsprechenden Konstitutivgleichun-gen, die den Zusammenhang zwischen der Spannung und der Deformation beschreiben.
2.2 Einachsialer Zugversuch
Zugversuche werden i. d. R. an Staben konstanten Querschnitts durchgefuhrt. Dabei wirdeine Kraft F aufgebracht, die zu einer Verlangerung des Stabs fuhrt. Die Verlangerung desStabes nimmt zu, wenn
• die Kraft F großer wird,
• die Querschnittsflache A des Stabes kleiner wird,
• der Stab eine großere Ausgangslange besitzt.
Gemaß Abb. 3 folgt
∆l ∼ F l0A
(1)
Dabei wird lineares Verhalten vorausgesetzt.
Man definiert das Verhaltnis
σ =F
A(2)
als Normalspannung, die Große
ε =∆l
l0(3)
als Dehnung des Stabs. Die Proportionalitatskonstante, die nach (1) erforderlich ist, umdas Materialverhalten zu beschreiben, heißt Elastizitatsmodul
E =σ
ε. (4)
Im Rahmen der linearen Elastizitat ist E konstant, zur Beschreibung nicht-linearer Elasti-zitat mussen die hier angefuhrten Beziehungen erweitert werden.
8 Materialmodellierung
l0
FF
∆l
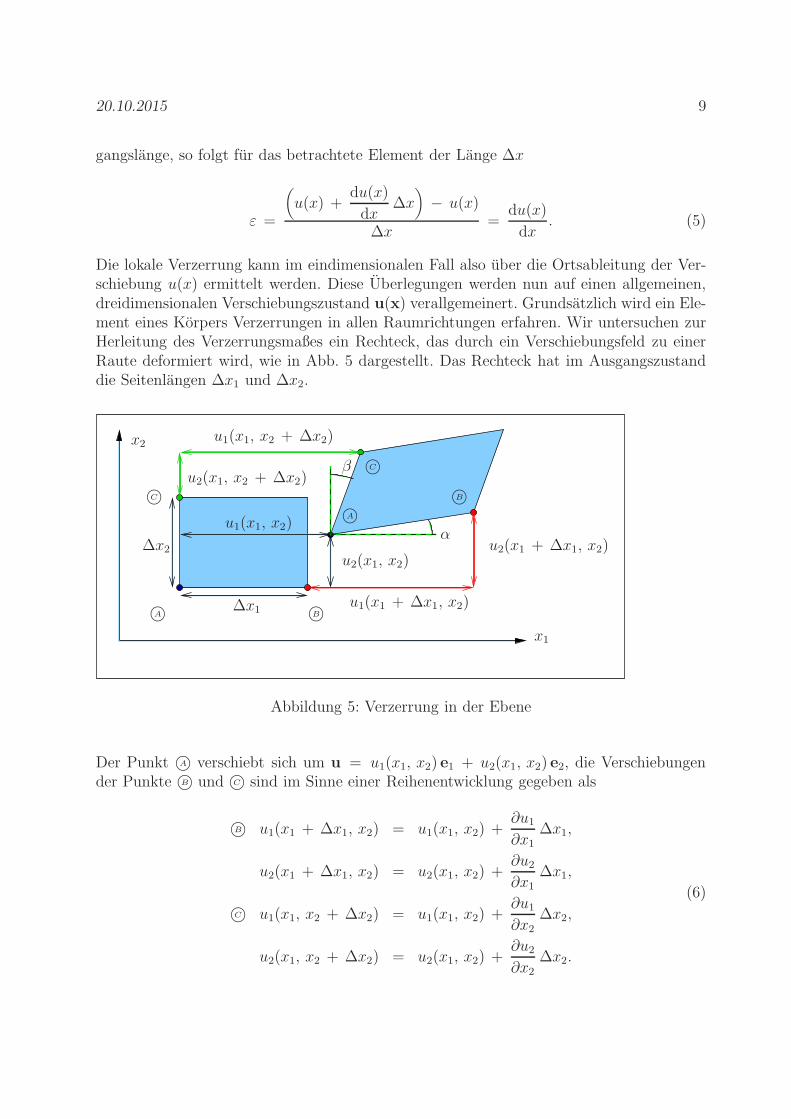
Abbildung 3: Einachsiale Dehnung
2.3 Ingenieurverzerrung
Die Definition der Dehnung nach (3) setzt homogene Verhaltnisse im gesamten Stab voraus.Die Idee, die Dehnung als bezogene Langenanderung darzustellen, kann jedoch auch lokalaufgefasst werden:
x ∆x
l ∆l
u(x)u(x) +
du
dx∆x
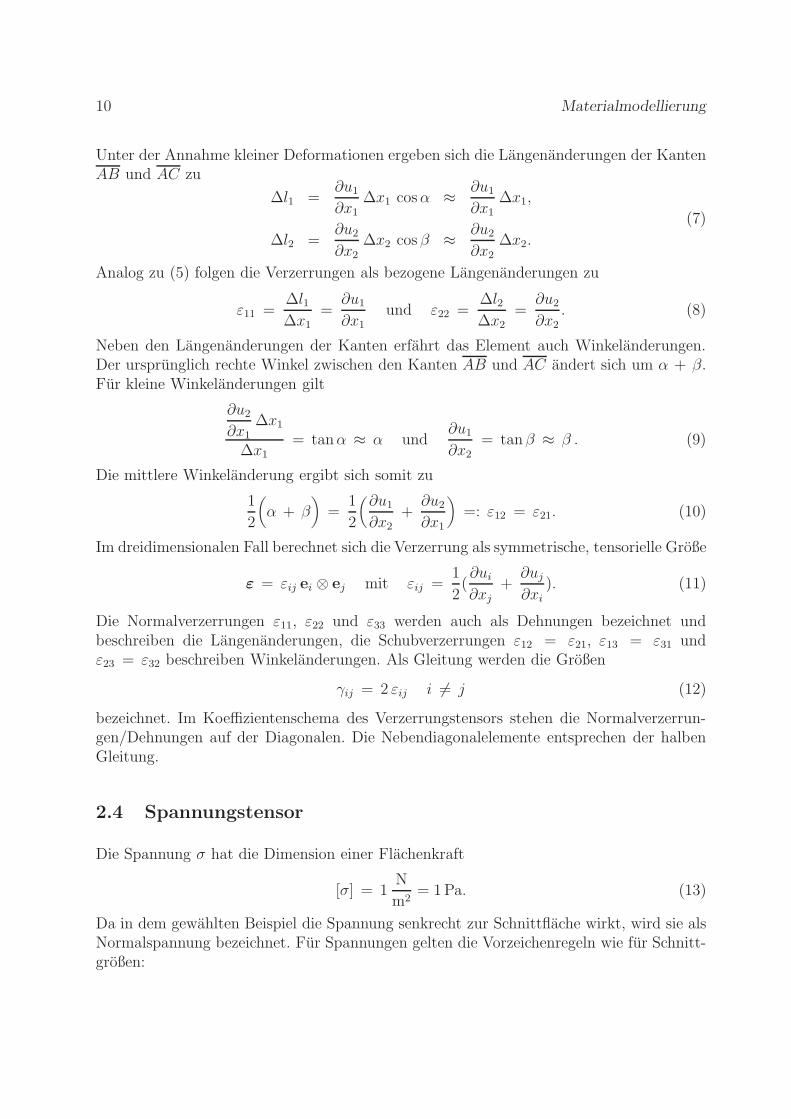
Abbildung 4: Dehnung eines Stabelements
Definiert man analog zu (3) die Verzerrung als Langenanderung bezogen auf die Aus-
20.10.2015 9
gangslange, so folgt fur das betrachtete Element der Lange ∆x
ε =
(
u(x) +du(x)
dx∆x
)
− u(x)
∆x=
du(x)
dx. (5)
Die lokale Verzerrung kann im eindimensionalen Fall also uber die Ortsableitung der Ver-schiebung u(x) ermittelt werden. Diese Uberlegungen werden nun auf einen allgemeinen,dreidimensionalen Verschiebungszustand u(x) verallgemeinert. Grundsatzlich wird ein Ele-ment eines Korpers Verzerrungen in allen Raumrichtungen erfahren. Wir untersuchen zurHerleitung des Verzerrungsmaßes ein Rechteck, das durch ein Verschiebungsfeld zu einerRaute deformiert wird, wie in Abb. 5 dargestellt. Das Rechteck hat im Ausgangszustanddie Seitenlangen ∆x1 und ∆x2.
x1
x2
α
β
∆x1
∆x2
u1(x1, x2)
u2(x1, x2)
u1(x1 + ∆x1, x2)
u2(x1 + ∆x1, x2)
u1(x1, x2 + ∆x2)
u2(x1, x2 + ∆x2)
A©
A©
B©
B©C©
C©
Abbildung 5: Verzerrung in der Ebene
Der Punkt A© verschiebt sich um u = u1(x1, x2) e1 + u2(x1, x2) e2, die Verschiebungender Punkte B© und C© sind im Sinne einer Reihenentwicklung gegeben als
B© u1(x1 + ∆x1, x2) = u1(x1, x2) +∂u1
∂x1∆x1,
u2(x1 + ∆x1, x2) = u2(x1, x2) +∂u2
∂x1∆x1,
C© u1(x1, x2 + ∆x2) = u1(x1, x2) +∂u1
∂x2
∆x2,
u2(x1, x2 + ∆x2) = u2(x1, x2) +∂u2
∂x2
∆x2.
(6)
10 Materialmodellierung
Unter der Annahme kleiner Deformationen ergeben sich die Langenanderungen der KantenAB und AC zu
∆l1 =∂u1
∂x1∆x1 cosα ≈ ∂u1
∂x1∆x1,
∆l2 =∂u2
∂x2
∆x2 cosβ ≈ ∂u2
∂x2
∆x2.
(7)
Analog zu (5) folgen die Verzerrungen als bezogene Langenanderungen zu
ε11 =∆l1∆x1
=∂u1
∂x1und ε22 =
∆l2∆x2
=∂u2
∂x2. (8)
Neben den Langenanderungen der Kanten erfahrt das Element auch Winkelanderungen.Der ursprunglich rechte Winkel zwischen den Kanten AB und AC andert sich um α + β.Fur kleine Winkelanderungen gilt
∂u2
∂x1∆x1
∆x1= tanα ≈ α und
∂u1
∂x2= tanβ ≈ β . (9)
Die mittlere Winkelanderung ergibt sich somit zu
1
2
(
α + β)
=1
2
(∂u1
∂x2+∂u2
∂x1
)
=: ε12 = ε21. (10)
Im dreidimensionalen Fall berechnet sich die Verzerrung als symmetrische, tensorielle Große
ε = εij ei ⊗ ej mit εij =1
2(∂ui
∂xj
+∂uj
∂xi
). (11)
Die Normalverzerrungen ε11, ε22 und ε33 werden auch als Dehnungen bezeichnet undbeschreiben die Langenanderungen, die Schubverzerrungen ε12 = ε21, ε13 = ε31 undε23 = ε32 beschreiben Winkelanderungen. Als Gleitung werden die Großen
γij = 2 εij i 6= j (12)
bezeichnet. Im Koeffizientenschema des Verzerrungstensors stehen die Normalverzerrun-gen/Dehnungen auf der Diagonalen. Die Nebendiagonalelemente entsprechen der halbenGleitung.
2.4 Spannungstensor
Die Spannung σ hat die Dimension einer Flachenkraft
[σ] = 1N
m2= 1 Pa. (13)
Da in dem gewahlten Beispiel die Spannung senkrecht zur Schnittflache wirkt, wird sie alsNormalspannung bezeichnet. Fur Spannungen gelten die Vorzeichenregeln wie fur Schnitt-großen:
20.10.2015 11
Positive Spannungen wirken an positiven Schnittufern in positiver Koordina-tenrichtung, positive Spannungen wirken an negativen Schnittufern in negativeKoordinatenrichtung.
Bemerkung: Positive Normalspannungen sind Zugspannungen, negative Normalspannun-gen sind Druckspannungen.
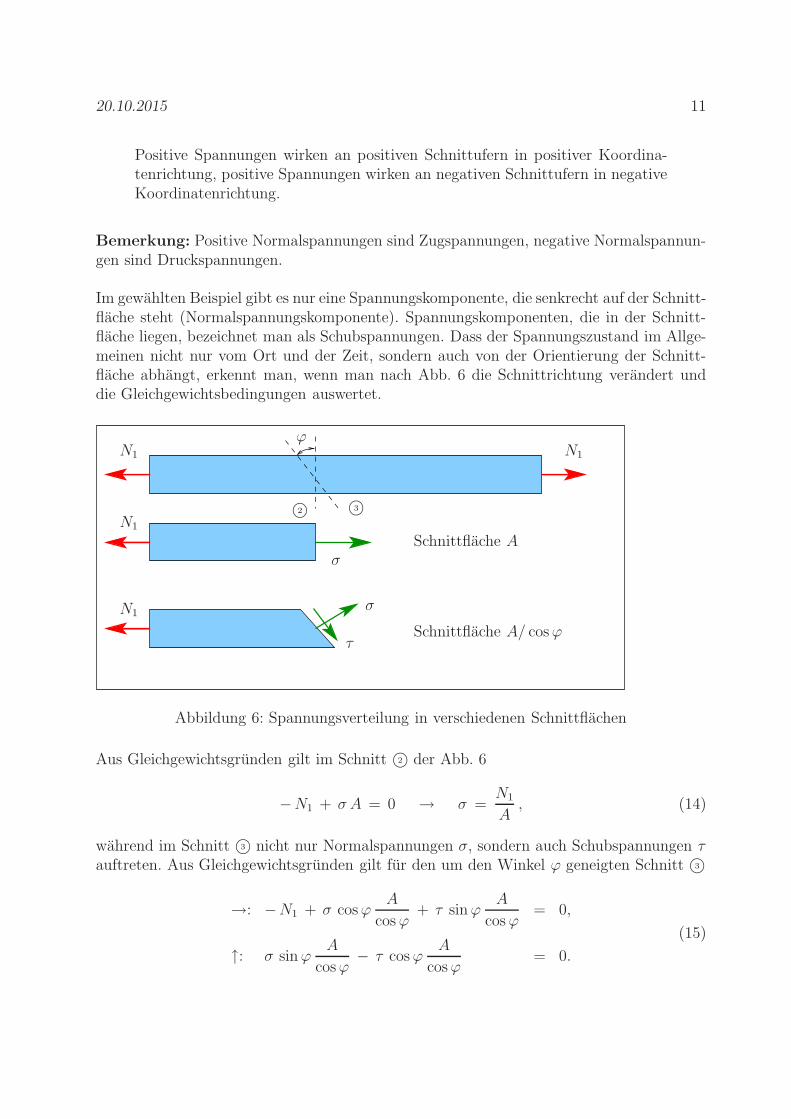
Im gewahlten Beispiel gibt es nur eine Spannungskomponente, die senkrecht auf der Schnitt-flache steht (Normalspannungskomponente). Spannungskomponenten, die in der Schnitt-flache liegen, bezeichnet man als Schubspannungen. Dass der Spannungszustand im Allge-meinen nicht nur vom Ort und der Zeit, sondern auch von der Orientierung der Schnitt-flache abhangt, erkennt man, wenn man nach Abb. 6 die Schnittrichtung verandert unddie Gleichgewichtsbedingungen auswertet.
N1
N1
N1N1
2© 3©
σ
σ
τ
ϕ
Schnittflache A
Schnittflache A/ cosϕ
Abbildung 6: Spannungsverteilung in verschiedenen Schnittflachen
Aus Gleichgewichtsgrunden gilt im Schnitt 2© der Abb. 6
−N1 + σ A = 0 → σ =N1
A, (14)
wahrend im Schnitt 3© nicht nur Normalspannungen σ, sondern auch Schubspannungen τauftreten. Aus Gleichgewichtsgrunden gilt fur den um den Winkel ϕ geneigten Schnitt 3©
→: −N1 + σ cosϕA
cosϕ+ τ sinϕ
A
cosϕ= 0,
↑: σ sinϕA
cosϕ− τ cosϕ
A
cosϕ= 0.
(15)

12 Materialmodellierung
Aus diesen beiden Gleichungen folgen die Normalspannung σ und die Schubspannung τ ineinem Schnitt, der um den Winkel ϕ gedreht ist, zu
σ =1
1 + tan2 ϕ
N1
A, τ =
tanϕ
1 + tan2 ϕ
N1
A. (16)
Der Spannungsvektor t in einer Schnittflache mit der Normalen en kann immer in Normal-spannungen σ und Schubspannungen τ zerlegt werden (Abb. 7):
t = σ en + τ et. (17)
Dabei bezeichnet et einen Tangentenvektor in der Schnittflache, et ⊥ en.
Fi
en
et t
σ en
τ et
x
e1e2
e3
Abbildung 7: Zerlegung des Spannungsvektors
Die Abhangigkeit des Spannungszustands an einem Punkt x von der Schnittrichtung en
kann vollstandig beschrieben werden, wenn die Spannungsvektoren in drei aufeinandersenkrecht stehenden Schnitten bekannt sind. Um das zu zeigen, betrachtet man ein Tetra-eder mit den drei Flachen A1, A2 und A3, deren Normalen jeweils −e1, −e2 und −e3 sind.Die vierte Flache A hat die Normale en. Die Spannungsvektoren auf den drei Flachen Ai
sind t1, t2 und t3.
Fur orientierte Flachen mit dem Normalenvektor n gilt der Flachensatz (ohne Beweis)∮
A
n da = 0, (18)
d. h. das Integral uber die Normalenvektoren einer orientierten geschlossen Flache ist Null.Fur den vorliegenden Fall sind die Normalenvektoren en und −ei, i = 1,2,3 auf den jewei-ligen Flachen A bzw. Ai konstant. Der Flachensatz kann somit als
3∑
i=1
−Aiei + A en = 0 (19)

20.10.2015 13
A
t
nt1
t2
t3
e1
e2
e3
Abbildung 8: Gleichgewicht am Tetraederelement
geschrieben werden. Das Verhaltnis der Flachen folgt dann durch skalare Multiplikationvon Gleichung (19) mit dem Basisvektor ei zu
Ai
A= n · ei. (20)
Die Flachen Ai stellen also die Projektionen der Flache A auf die jeweils von zwei Basisvek-toren aufgespannte Ebene dar. Geht man im Weiteren davon aus, dass das Tetraeder infi-nitesimal klein ist, d. h. dass die Kantenlangen unter Beibehaltung der Flachenverhaltnissegegen Null gehen, dann entsteht aus den Spannungsvektoren eine zentrale Kraftegruppe,fur die die folgenden Gleichgewichtsbedingungen gelten:
i = 1, 2, 3 : − t1 · eiA1 − t2 · eiA2 − t3 · eiA3 + t · eiA = 0. (21)
Mit dem Zusammenhang zwischen den Flachen nach (20) folgt die Beziehung
ti = (t1 · ei) (n · e1) + (t2 · ei) (n · e2) + (t3 · ei) (n · e3)
= (t1)i n1 + (t2)i n2 + (t3)i n3,(22)
wobei die ti = t · ei die Koeffizienten des Spannungsvektors t bezuglich der Basis ei
darstellen und die ni die Koeffizienten des Normalenvektors en der Flache A.
Bei Kenntnis der drei Spannungsvektoren ti auf den Flachen Ai kann also der Spannungs-vektor t in der beliebig gewahlten Schnittflache A eindeutig bestimmt werden. Der Span-nungszustand ist damit vollstandig und unabhangig von der aktuellen Schnittrichtung fest-gelegt.
Die Darstellung (22) legt die Einfuhrung des Spannungstensors T nahe, durch den derSpannungszustand vollstandig charakterisiert wird. Haufig werden die neun Zahlenwerte
14 Materialmodellierung
der Koeffizienten der drei senkrecht aufeinander stehenden Spannungsvektoren ti in einemMatrixschema zusammengefasst
e1 · t1 e1 · t2 e1 · t3
e2 · t1 e2 · t2 e2 · t3
e3 · t1 e3 · t2 e3 · t3
=
T11 T12 T13
T21 T22 T23
T31 T32 T33
. (23)
Der erste Index i an den Koeffizienten der Spannungsmatrix Tij gibt dabei die Richtungder Komponente des jeweiligen Spannungsvektors an, wahrend der zweite Index j dieRichtung der Schnittnormalen darstellt. Man identifiziert somit Spannungskoeffizienten mitgleichen Indices als Normalspannung (Richtung der Spannungskomponente und Richtungder Schnittnormalen stimmen uberein) und die Elemente mit unterschiedlichen Indicesals Schubspannungen. Die Koeffizienten eines Spannungsvektors ti in einem Schnitt derRichtung n wird nach diesen Uberlegungen durch ein Matrix-Vektor-Produkt berechnet
T11 T12 T13
T21 T22 T23
T31 T32 T33
n1
n2
n3
=
t1t2t3
. (24)
Diese Darstellung setzt voraus, dass ein kartesisches Basissystem ei zugrunde liegt. Eineallgemeingultige Darstellung ergibt sich durch die Einfuhrung eines Spannungstensors, derneben den Koeffizienten auch Information uber die Basissysteme beinhaltet. Zur weite-ren Behandlung dieser Problematik ist es notwendig, einige Elemente der Tensorrechnungeinzufuhren. Anstelle des Matrixschemas mit den Koeffizienten Tij tritt dann der Span-nungstensor T mit der Eigenschaft
T · n = t. (25)
Fur ein ebenes Element werden nun die Gleichgewichtsbedingungen untersucht. Ein Span-nungszustand, der nur in der Ebene definiert ist, heißt ebener Spannungszustand. In diesemFall sind nur die Spannungskomponenten z. B. in x1- und x2-Richtung ungleich Null. Span-nungsvektoren auf einer Schnittflache mit der Normalen ±e3 sind identisch Null.
Von den ursprunglich neun Koeffizienten des Spannungstensors bleiben im ebenen Falllediglich vier ubrig, namlich
T11 T12 0T21 T22 00 0 0
→
(
T11 T12
T21 T22
)
. (26)
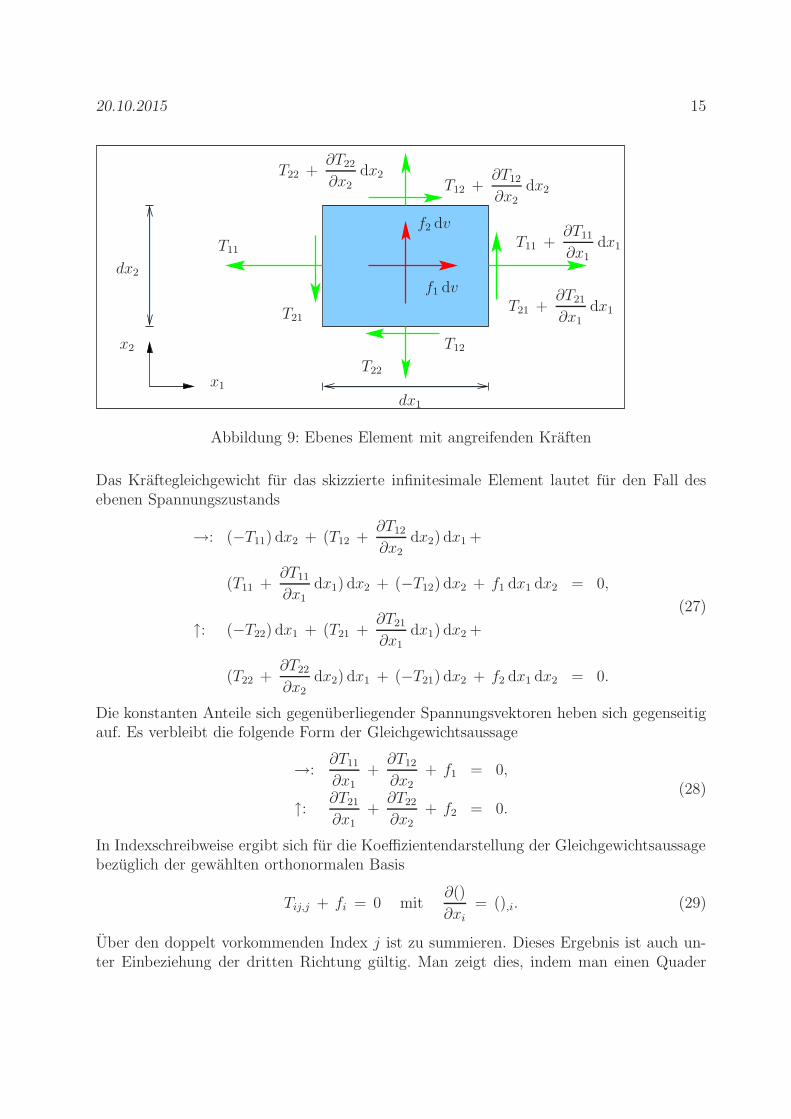
Wenn das betrachtete Element hinreichend klein ist, kann die Veranderung des Span-nungszustandes uber die Lange dx1 bzw. dx2 , wie in Abb. 9 dargestellt, im Sinn einerReihenentwicklung berucksichtigt werden.
20.10.2015 15
T11T11 +
∂T11
∂x1dx1
T12
T12 +∂T12
∂x2
dx2
T21T21 +
∂T21
∂x1dx1
T22
T22 +∂T22
∂x2
dx2
dx1
dx2
x1
x2
f1 dv
f2 dv
Abbildung 9: Ebenes Element mit angreifenden Kraften
Das Kraftegleichgewicht fur das skizzierte infinitesimale Element lautet fur den Fall desebenen Spannungszustands
→: (−T11) dx2 + (T12 +∂T12
∂x2
dx2) dx1 +
(T11 +∂T11
∂x1dx1) dx2 + (−T12) dx2 + f1 dx1 dx2 = 0,
↑: (−T22) dx1 + (T21 +∂T21
∂x1dx1) dx2 +
(T22 +∂T22
∂x2dx2) dx1 + (−T21) dx2 + f2 dx1 dx2 = 0.
(27)
Die konstanten Anteile sich gegenuberliegender Spannungsvektoren heben sich gegenseitigauf. Es verbleibt die folgende Form der Gleichgewichtsaussage
→:∂T11
∂x1
+∂T12
∂x2
+ f1 = 0,
↑: ∂T21
∂x1+∂T22
∂x2+ f2 = 0.
(28)
In Indexschreibweise ergibt sich fur die Koeffizientendarstellung der Gleichgewichtsaussagebezuglich der gewahlten orthonormalen Basis
Tij,j + fi = 0 mit∂()
∂xi
= (),i. (29)
Uber den doppelt vorkommenden Index j ist zu summieren. Dieses Ergebnis ist auch un-ter Einbeziehung der dritten Richtung gultig. Man zeigt dies, indem man einen Quader

16 Materialmodellierung
der Kantenlangen dx1, dx2 und dx3 untersucht und fur einen allgemeinen Spannungszu-stand die drei Gleichgewichtsbedingungen anschreibt. Der Differentialoperator, der in (29)angewandt wird, heißt Divergenz (abgekurzt div). Die Divergenz besteht bezuglich derorthonormalen Basis aus einer Summe von partiellen Ableitungen. In der symbolischenSchreibweise lautet die differentielle Beziehung (29)
divT + f = 0. (30)
2.5 Elastizitatsgesetz
Das im Weiteren untersuchte Materialverhalten wird durch die lineare Elastizitat hinrei-chend gut beschrieben. Fur die meisten Materialien stellt das lineare Elastizitatsgesetz imBereich kleiner Deformationen eine hinreichend gute Naherung dar. Im Rahmen der li-nearen Elastizitatstheorie geht man davon aus, dass der Spannungszustand linear mit demVerzerrungszustand verknupft ist. Die entsprechende tensorielle Beziehung, die einen linea-ren Zusammenhang zwischen dem Spannungstensor und dem Verzerrungstensor herstellt,lautet
T = 2µ ε + λ(trε) I. (31)
Die auftretenden Parameter sind die sogenannten Lameschen Konstanten µ und λ. Derzweite Summand beinhaltet die lineare Volumendehnung
trε = εii = divu = e. (32)
Das lineare Materialgesetz (31) wird als verallgemeinertes Hookesches Gesetz bezeichnetund stellt die dreidimensionale Verallgemeinerung der Beziehung (4) dar.
Im Rahmen weiterfuhrender Untersuchungen kann man zeigen, dass unter der Annahme derIsotropie (Richtungsunabhangigkeit des Materialverhaltens) der Ansatz (31) vollstandig ist,d. h. linear-elastisches, isotropes Verhalten ist durch die Gleichungen (31) und den zweiMaterialparametern µ und λ vollstandig charakterisiert.
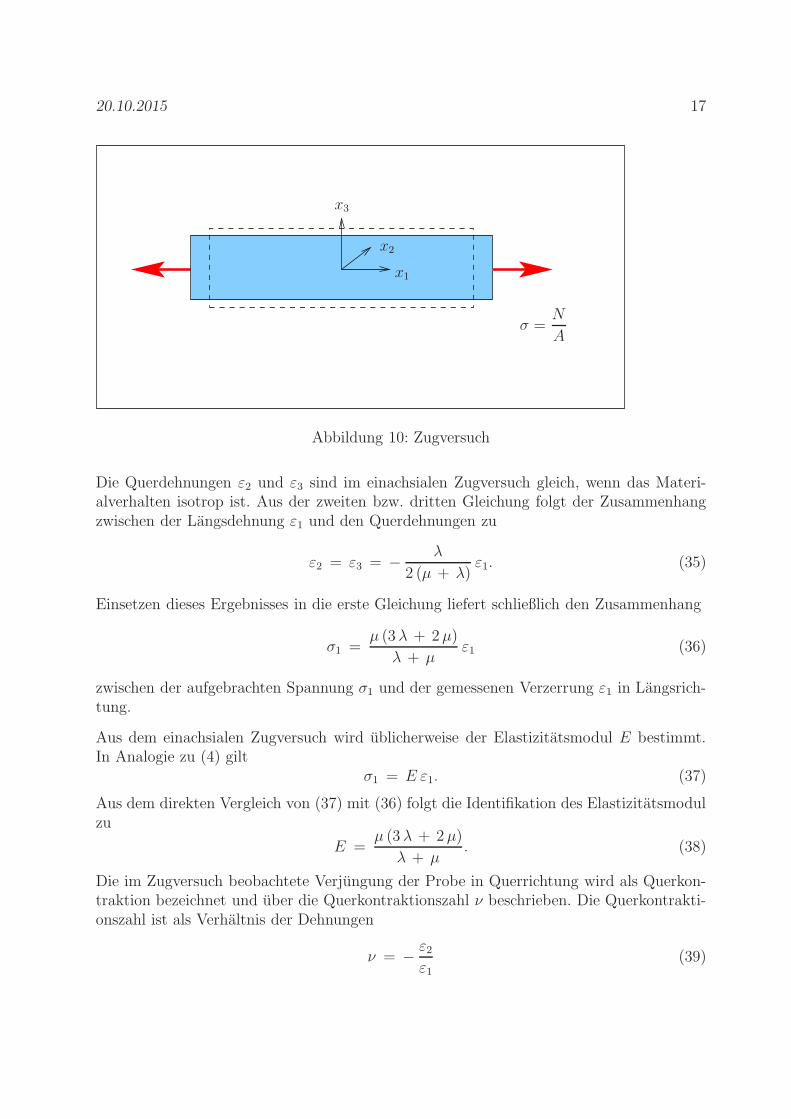
Ublicherweise werden die Materialparameter aus den o. g. Elementarversuchen ermittelt.Im Zugversuch nach Abb. 10 liegt ein einachsialer Spannungszustand vor, der durch fol-genden Hauptspannungszustand beschrieben wird:
σ = σ1, σ2 = σ3 = 0. (33)
Der zugehorige Verzerrungszustand besitzt Dehnungen in Langsrichtung ε11 = ε1 undi. d. R. Dehnungen in Querrichtung ε22 = ε2 6= 0 und ε33 = ε3 6= 0.
Das allgemeine Materialgesetz der linearen Elastizitat (31) geht mit diesen Annahmen bzgl.des Spannungs- und Dehnungszustands uber in die Koeffizientendarstellung
σ1 0 00 0 00 0 0
= 2µ
ε1 0 00 ε2 00 0 ε3
+ λ (ε1 + ε2 + ε3)
1 0 00 1 00 0 1
. (34)
20.10.2015 17
σ =N
A
x1
x2
x3
Abbildung 10: Zugversuch
Die Querdehnungen ε2 und ε3 sind im einachsialen Zugversuch gleich, wenn das Materi-alverhalten isotrop ist. Aus der zweiten bzw. dritten Gleichung folgt der Zusammenhangzwischen der Langsdehnung ε1 und den Querdehnungen zu
ε2 = ε3 = − λ
2 (µ + λ)ε1. (35)
Einsetzen dieses Ergebnisses in die erste Gleichung liefert schließlich den Zusammenhang
σ1 =µ (3 λ + 2µ)
λ + µε1 (36)
zwischen der aufgebrachten Spannung σ1 und der gemessenen Verzerrung ε1 in Langsrich-tung.
Aus dem einachsialen Zugversuch wird ublicherweise der Elastizitatsmodul E bestimmt.In Analogie zu (4) gilt
σ1 = E ε1. (37)
Aus dem direkten Vergleich von (37) mit (36) folgt die Identifikation des Elastizitatsmodulzu
E =µ (3 λ + 2µ)
λ + µ. (38)
Die im Zugversuch beobachtete Verjungung der Probe in Querrichtung wird als Querkon-traktion bezeichnet und uber die Querkontraktionszahl ν beschrieben. Die Querkontrakti-onszahl ist als Verhaltnis der Dehnungen
ν = − ε2
ε1
(39)
18 Materialmodellierung
definiert. Das negative Vorzeichen berucksichtigt, dass die Probe normalerweise unter Zug-belastung dunner wird. Mit dem Zusammenhang zwischen Quer- und Langsdehnung gemaß(35) folgt
ν =λ
2 (µ + λ). (40)
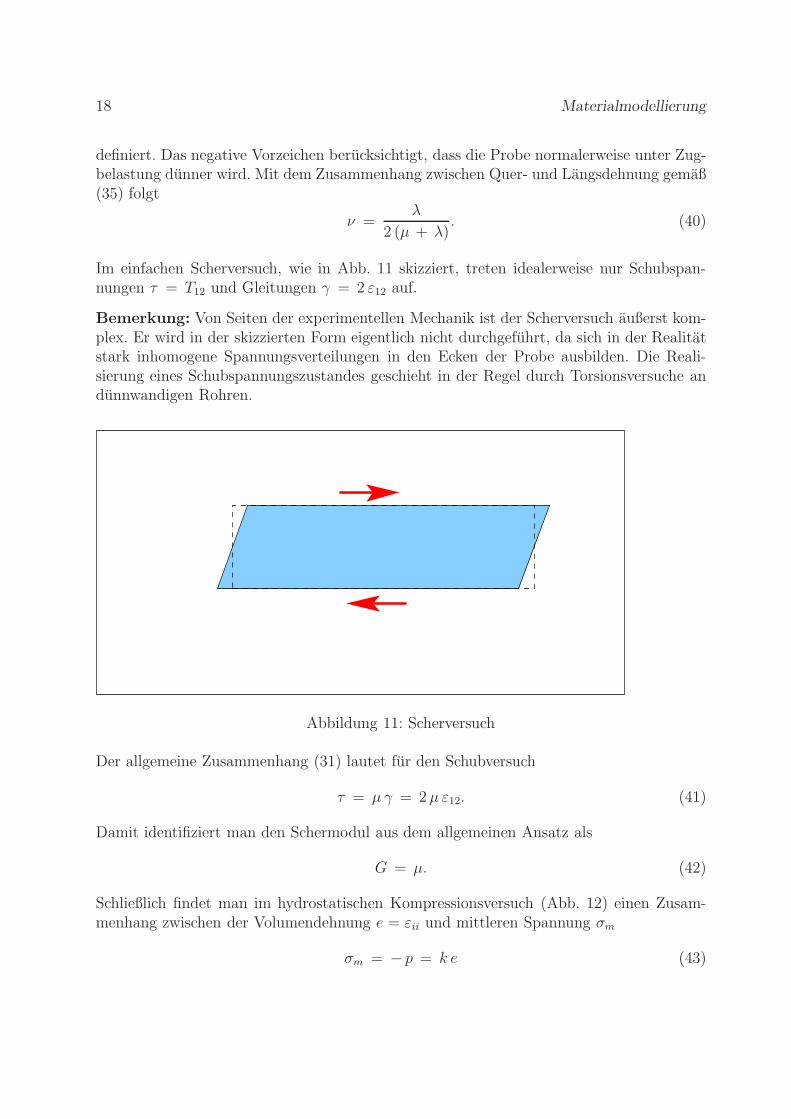
Im einfachen Scherversuch, wie in Abb. 11 skizziert, treten idealerweise nur Schubspan-nungen τ = T12 und Gleitungen γ = 2 ε12 auf.
Bemerkung: Von Seiten der experimentellen Mechanik ist der Scherversuch außerst kom-plex. Er wird in der skizzierten Form eigentlich nicht durchgefuhrt, da sich in der Realitatstark inhomogene Spannungsverteilungen in den Ecken der Probe ausbilden. Die Reali-sierung eines Schubspannungszustandes geschieht in der Regel durch Torsionsversuche andunnwandigen Rohren.
Abbildung 11: Scherversuch
Der allgemeine Zusammenhang (31) lautet fur den Schubversuch
τ = µ γ = 2µ ε12. (41)
Damit identifiziert man den Schermodul aus dem allgemeinen Ansatz als
G = µ. (42)
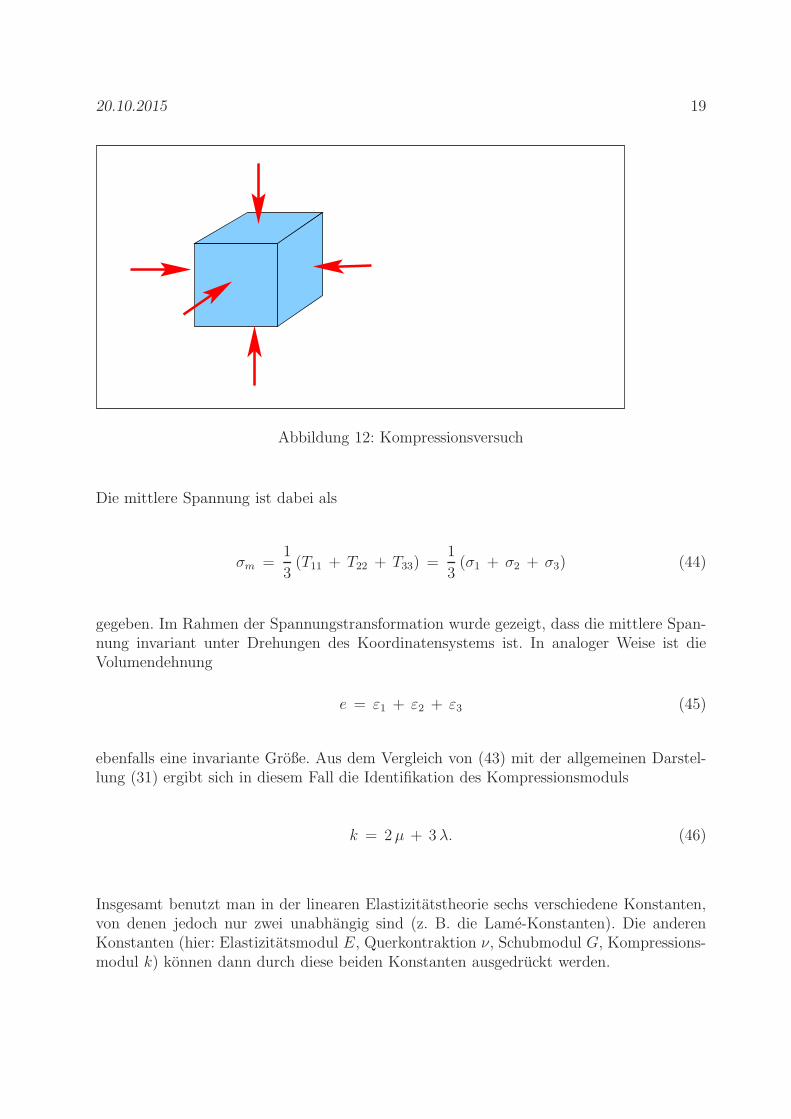
Schließlich findet man im hydrostatischen Kompressionsversuch (Abb. 12) einen Zusam-menhang zwischen der Volumendehnung e = εii und mittleren Spannung σm
σm = − p = k e (43)
20.10.2015 19
Abbildung 12: Kompressionsversuch
Die mittlere Spannung ist dabei als
σm =1
3(T11 + T22 + T33) =
1
3(σ1 + σ2 + σ3) (44)
gegeben. Im Rahmen der Spannungstransformation wurde gezeigt, dass die mittlere Span-nung invariant unter Drehungen des Koordinatensystems ist. In analoger Weise ist dieVolumendehnung
e = ε1 + ε2 + ε3 (45)
ebenfalls eine invariante Große. Aus dem Vergleich von (43) mit der allgemeinen Darstel-lung (31) ergibt sich in diesem Fall die Identifikation des Kompressionsmoduls
k = 2µ + 3 λ. (46)
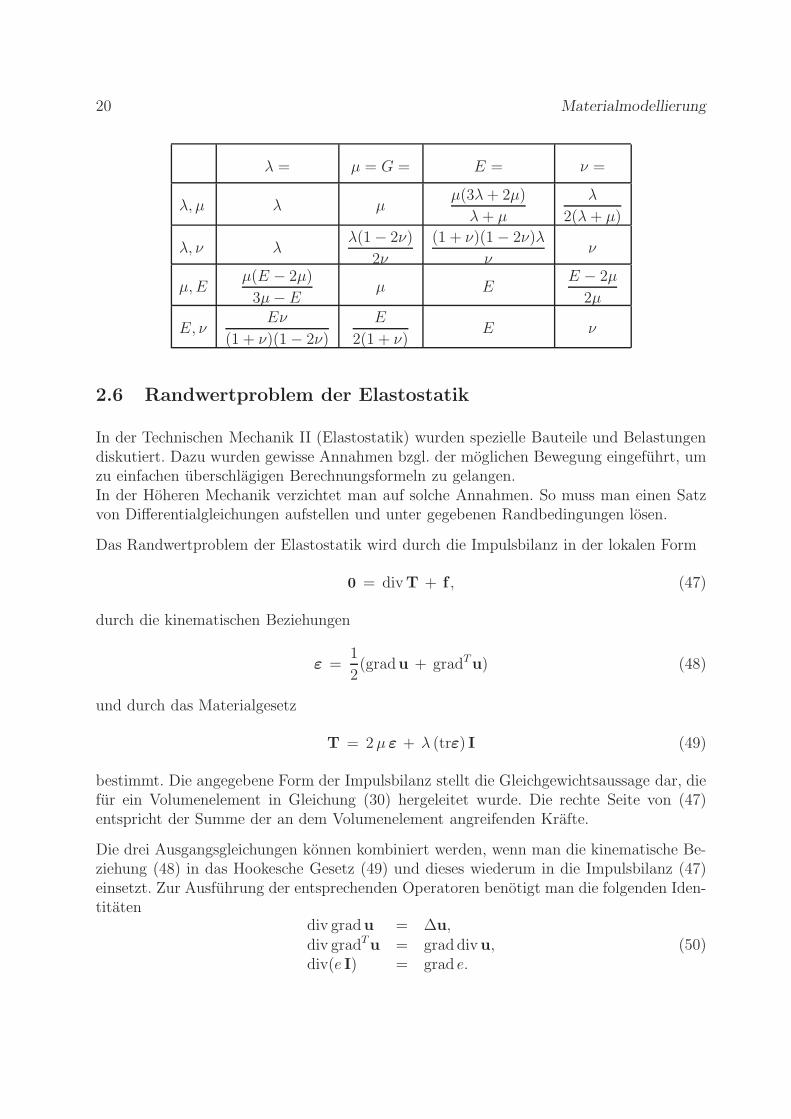
Insgesamt benutzt man in der linearen Elastizitatstheorie sechs verschiedene Konstanten,von denen jedoch nur zwei unabhangig sind (z. B. die Lame-Konstanten). Die anderenKonstanten (hier: Elastizitatsmodul E, Querkontraktion ν, Schubmodul G, Kompressions-modul k) konnen dann durch diese beiden Konstanten ausgedruckt werden.
20 Materialmodellierung
λ = µ = G = E = ν =
λ, µ λ µµ(3λ+ 2µ)
λ+ µ
λ
2(λ+ µ)
λ, ν λλ(1 − 2ν)
2ν
(1 + ν)(1 − 2ν)λ
νν
µ,Eµ(E − 2µ)
3µ−Eµ E
E − 2µ
2µ
E, νEν
(1 + ν)(1 − 2ν)
E
2(1 + ν)E ν
2.6 Randwertproblem der Elastostatik
In der Technischen Mechanik II (Elastostatik) wurden spezielle Bauteile und Belastungendiskutiert. Dazu wurden gewisse Annahmen bzgl. der moglichen Bewegung eingefuhrt, umzu einfachen uberschlagigen Berechnungsformeln zu gelangen.In der Hoheren Mechanik verzichtet man auf solche Annahmen. So muss man einen Satzvon Differentialgleichungen aufstellen und unter gegebenen Randbedingungen losen.
Das Randwertproblem der Elastostatik wird durch die Impulsbilanz in der lokalen Form
0 = divT + f , (47)
durch die kinematischen Beziehungen
ε =1
2(gradu + gradTu) (48)
und durch das Materialgesetz
T = 2µ ε + λ (trε) I (49)
bestimmt. Die angegebene Form der Impulsbilanz stellt die Gleichgewichtsaussage dar, diefur ein Volumenelement in Gleichung (30) hergeleitet wurde. Die rechte Seite von (47)entspricht der Summe der an dem Volumenelement angreifenden Krafte.
Die drei Ausgangsgleichungen konnen kombiniert werden, wenn man die kinematische Be-ziehung (48) in das Hookesche Gesetz (49) und dieses wiederum in die Impulsbilanz (47)einsetzt. Zur Ausfuhrung der entsprechenden Operatoren benotigt man die folgenden Iden-titaten
div gradu = ∆u,div gradTu = graddivu,div(e I) = grad e.
(50)
20.10.2015 21
Dabei stellt ∆(·) den Laplace-Operator dar, der aus den zweiten Ableitungen gebildet wird.Unter Ausnutzung dieser Identitaten folgt
0 = µ∆u + (µ + λ) grad divu + f . (51)
Diese Grundgleichung der linearen Elastizitatstheorie ist eine partielle Differenzialgleichungzweiter Ordnung im Raum, die unter Vorgabe von geeigneten Randbedingungen gelostwerden kann. Die Gleichung ist als Lame-Naviersche Verschiebungsgleichung bekannt. DieLosung dieser Gleichung ist das Verschiebungsfeld u, das sich unter den gegebenen Bela-stungen einstellt. Die Belastungen erfolgen dabei einerseits uber die Volumenkraft f undandererseits uber Randlasten t, die durch entsprechende Randbedingungen vorgegebenwerden. Ist das Verschiebungsfeld bekannt, so konnen die Verzerrungen und die Spannun-gen aus den Beziehungen (48) und (49) berechnet werden.
In Sonderfallen kann die Lame-Naviersche Gleichung analytisch gelost werden, haufig be-dient man sich numerischer Naherungsverfahren, z. B. der Methode der Finiten Elemente(FEM), um die Losung zu approximieren.
Bemerkung: Das hier skizzierte Vorgehen ist typisch fur die Entwicklung eines mecha-nischen Modells. Grundsatzlich werden Bilanzgleichungen (physikalische Erhaltungsglei-chungen, hier Gleichgewichtsbedingung als Sonderfall) mit kinematischen Beziehungen(Beschreibung des Bewegungs- oder Verschiebungszustands) und mit Stoffgesetzen (hier:lineare Elastizitat, verallgemeinertes Hookesches Gesetz) kombiniert. Das entstehende Sy-stem von Differenzialgleichungen kann dann bei Vorgabe von Randbedingungen (meistnumerisch) gelost werden.
22 Materialmodellierung
3 Kinematik
3.1 Materielle Korper und Bewegung
Die Kontinuumsmechanik beschreibt das Verhalten von Korpern unter der Wirkung vonKraften. Die beobachteten Eigenschaften sind an Materie gebunden. Man spricht daherauch von materiellen Korpern.
Definition: Ein materieller Korper B ist die dreidimensionale, zusam-menhangende Menge aller Korperpunkte X(x,t). Der Rand Sdes materiellen Korpers ist die zusammenhangende Menge derRandpunkte.
Es wird vorausgesetzt, dass die Materie in einem materiellen Korper kontinuierlich verteiltist. Der atomare Aufbau eines Korpers wird bei dieser Betrachtung nicht berucksichtigt,vielmehr ist die Skala, auf der die Betrachtung stattfindet, groß gegenuber atomistischenDimensionen. Gemaß dieser Kontinuumsannahme besteht der materielle Korper aus un-endlich vielen materiellen Punkten. Diese sind die kleinste betrachtete Einheit. Sie sindTrager der physikalischen Eigenschaften des Korpers. Die Kontinuumsannahme gestattetdie Einfuhrung von Feldern zur Beschreibung der physikalischen Eigenschaften. Es wirdangenommen, dass diese Felder hinreichend stetig und differenzierbar sind, so dass dieMethoden der Differenzialrechnung angewandt werden konnen.
Die Bewegungs- oder Plazierungsfunktion χ wird fur jeden materiellen Punkt des Korperseingefuhrt. Sie gibt an, wie sich der materielle Punkt bewegt. Auf Grund des feldlichenCharakters der Bewegungsfunktion ist der Begriff der Deformation automatisch enthalten.
Zum Zeitpunkt t0 (o. b. d. A. t0 = 0) befindet sich der Korper B in der Referenzkonfigura-tion. Durch die Wirkung der angreifenden Krafte, z. B. der Oberflachenspannung t bewegtsich der Korper zum Zeitpunkt t > t0 in die Momentankonfiguration. Die materiellen Punk-te X, Y des Korpers legen dabei eine Bahn zuruck, die durch die Bewegungsfunktion χbeschrieben wird. Die Symbole X, Y werden zur Unterscheidung verschiedener materiellerPunkte des Korpers eingefuhrt und konnen als
”Namen“ der Punkte betrachtet werden.
Die Lage des materiellen Punktes X in der Referenzkonfiguration wird durch den Vek-tor X gekennzeichnet, die Lage in der Momentankonfiguration durch den Vektor x. Furdie mathematische Modellierung wird der materielle Punkt X mit seinem Ortsvektor Xzum Zeitpunkt t0 ein-eindeutig identifiziert, d. h. ein materieller Punkt nimmt genau einenmathematischen Punkt in der Referenzkonfiguration des Korpers ein und an einem mathe-matischen Punkt liegt genau ein materieller Punkt.
Mit der Bewegungsfunktion gilt dann
x = χ(X, t), (52)
20.10.2015 23
Ref.-konf. Mom.-konf.
SB
t = t0 t > t0
t
X
X
YY
dXdx
X x
e1
e2
e3
OBahn von X
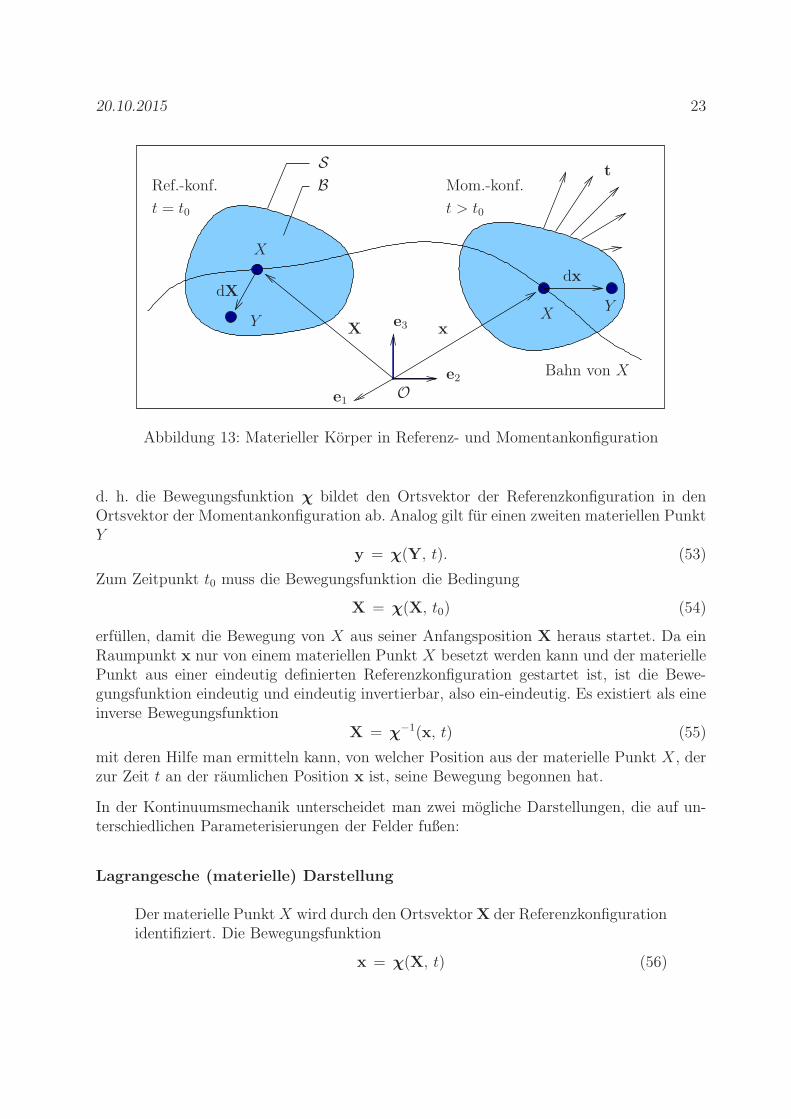
Abbildung 13: Materieller Korper in Referenz- und Momentankonfiguration
d. h. die Bewegungsfunktion χ bildet den Ortsvektor der Referenzkonfiguration in denOrtsvektor der Momentankonfiguration ab. Analog gilt fur einen zweiten materiellen PunktY
y = χ(Y, t). (53)
Zum Zeitpunkt t0 muss die Bewegungsfunktion die Bedingung
X = χ(X, t0) (54)
erfullen, damit die Bewegung von X aus seiner Anfangsposition X heraus startet. Da einRaumpunkt x nur von einem materiellen Punkt X besetzt werden kann und der materiellePunkt aus einer eindeutig definierten Referenzkonfiguration gestartet ist, ist die Bewe-gungsfunktion eindeutig und eindeutig invertierbar, also ein-eindeutig. Es existiert als eineinverse Bewegungsfunktion
X = χ−1(x, t) (55)
mit deren Hilfe man ermitteln kann, von welcher Position aus der materielle Punkt X, derzur Zeit t an der raumlichen Position x ist, seine Bewegung begonnen hat.
In der Kontinuumsmechanik unterscheidet man zwei mogliche Darstellungen, die auf un-terschiedlichen Parameterisierungen der Felder fußen:
Lagrangesche (materielle) Darstellung
Der materielle PunktX wird durch den Ortsvektor X der Referenzkonfigurationidentifiziert. Die Bewegungsfunktion
x = χ(X, t) (56)

24 Materialmodellierung
liefert die Antwort auf die Frage: Wo befindet sich der materielle Punkt X,
der zum Anfangszeitpunkt t0 am Raumpunkt X war, zum Zeitpunkt t? In derLagrangeschen Darstellungen werden die Felder in Abhangigkeit von X pa-rameterisiert. Die Anwendung findet ublicherweise in der Festkorpermechanikstatt.
Eulersche (raumliche) Darstellung
Der materielle Punkt X wird durch den Ortsvektor x der Momentankonfigura-tion identifiziert. Die inverse Bewegungsfunktion
X = χ−1(x, t) (57)
liefert die Antwort auf die Frage:Wo war der materielle Punkt X, der zur
Zeit t den Raumpunkt x einnimmt, zum Anfangszeitpunkt t0? Die feldlichenGrossen werden in Abhangigkeit von x parameterisiert. Die Anwendung ist inder Stromungsmechanik ublich, da es hier keine ausgezeichnet Referenzkonfi-guration gibt.
Aus mathematischer Sicht ist die Bewegungsfunktion ein-eindeutig (eindeutig und eindeu-tig invertierbar), wenn die Jacobi-Determinante J immer ungleich Null ist, d. h.
J = det∂x
∂X6= 0 (58)
Eine weitere physikalische Interpretation der Beziehung (58) wird noch gegeben.
Neben dem materiellen Korper und den materiellen Punkten kann man auch materielleLinien, materielle Flachen und materielle Volumen definieren.
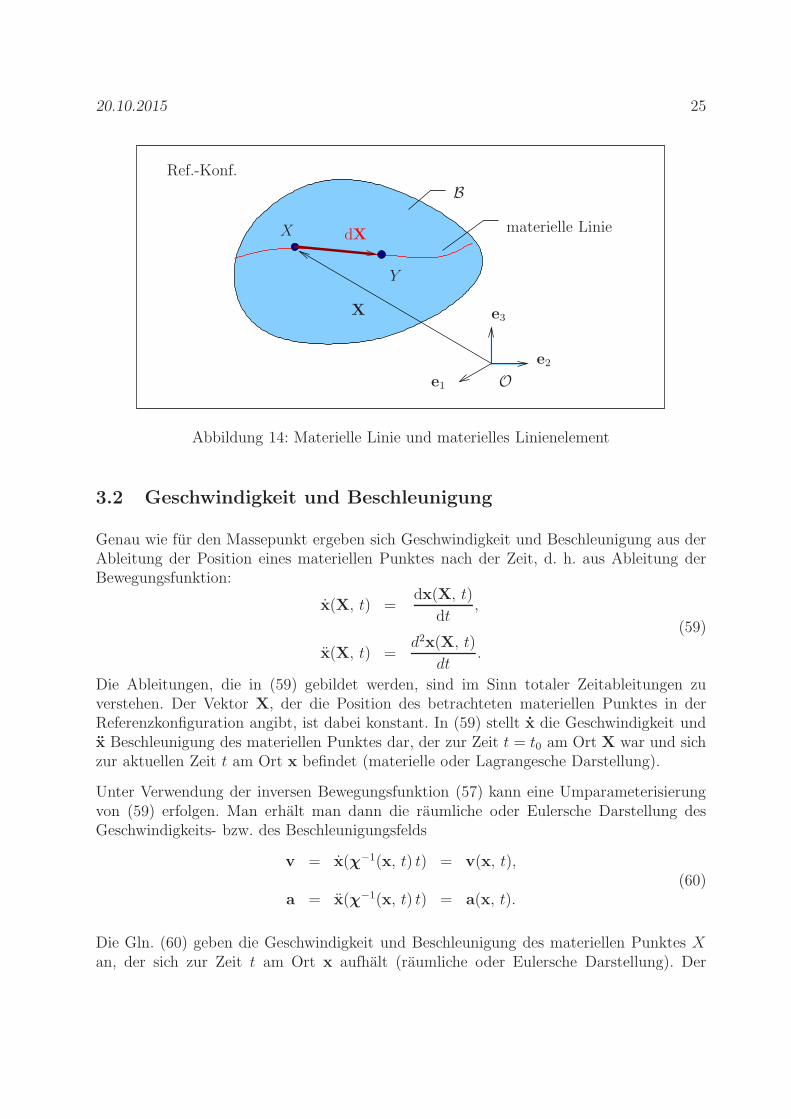
Definition: Eine materielle Linie ist die Verbindungslinie infinitesimal be-nachbarter materieller Punkte. Eine materielle Linie wird immervon den selben materiellen Punkten gebildet und bewegt sich mitdiesen materiellen Punkten mit.
Ein materielles Linienelement ist der Verbindungsvektor zwischen zwei infinitesimal be-nachbarten materiellen Punkten X und Y , die auf einer materiellen Linie liegen. Be-trachtet man den Verbindungsvektor der materiellen Punkte in der Referenzkonfiguration∆X = Y − X bzw. in der Momentankonfiguration ∆x = y − x, so kann man die Punk-te im Grenzwert gegeneinander wandern lassen. Die Differenzvektoren ∆X und ∆x gehendann in die materiellen Linienelemente dX bzw. dx uber, die als Tangentenvektoren an diematerielle Linie interpretierbar sind.
20.10.2015 25
Ref.-Konf.
B
materielle LinieX
Y
X
Oe1
e2
e3
dX
Abbildung 14: Materielle Linie und materielles Linienelement
3.2 Geschwindigkeit und Beschleunigung
Genau wie fur den Massepunkt ergeben sich Geschwindigkeit und Beschleunigung aus derAbleitung der Position eines materiellen Punktes nach der Zeit, d. h. aus Ableitung derBewegungsfunktion:
x(X, t) =dx(X, t)
dt,
x(X, t) =d2x(X, t)
dt.
(59)
Die Ableitungen, die in (59) gebildet werden, sind im Sinn totaler Zeitableitungen zuverstehen. Der Vektor X, der die Position des betrachteten materiellen Punktes in derReferenzkonfiguration angibt, ist dabei konstant. In (59) stellt x die Geschwindigkeit undx Beschleunigung des materiellen Punktes dar, der zur Zeit t = t0 am Ort X war und sichzur aktuellen Zeit t am Ort x befindet (materielle oder Lagrangesche Darstellung).
Unter Verwendung der inversen Bewegungsfunktion (57) kann eine Umparameterisierungvon (59) erfolgen. Man erhalt man dann die raumliche oder Eulersche Darstellung desGeschwindigkeits- bzw. des Beschleunigungsfelds
v = x(χ−1(x, t) t) = v(x, t),
a = x(χ−1(x, t) t) = a(x, t).(60)
Die Gln. (60) geben die Geschwindigkeit und Beschleunigung des materiellen Punktes Xan, der sich zur Zeit t am Ort x aufhalt (raumliche oder Eulersche Darstellung). Der
26 Materialmodellierung
Referenzkonfig.Referenzkonfig. Momentankonfig.Momentankonfig.
t = t1 t = t2X
XX
X Y
YY
Y
OO
xx
X Y
Bahn von XBahn von Y
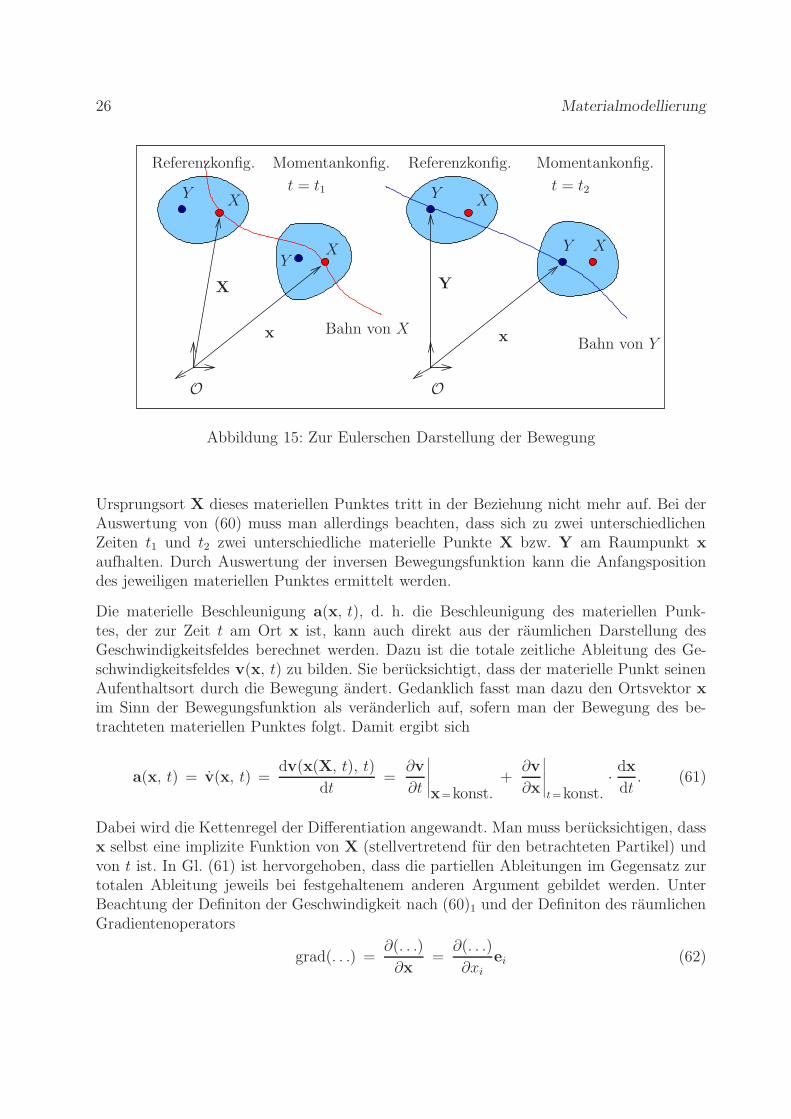
Abbildung 15: Zur Eulerschen Darstellung der Bewegung
Ursprungsort X dieses materiellen Punktes tritt in der Beziehung nicht mehr auf. Bei derAuswertung von (60) muss man allerdings beachten, dass sich zu zwei unterschiedlichenZeiten t1 und t2 zwei unterschiedliche materielle Punkte X bzw. Y am Raumpunkt xaufhalten. Durch Auswertung der inversen Bewegungsfunktion kann die Anfangspositiondes jeweiligen materiellen Punktes ermittelt werden.
Die materielle Beschleunigung a(x, t), d. h. die Beschleunigung des materiellen Punk-tes, der zur Zeit t am Ort x ist, kann auch direkt aus der raumlichen Darstellung desGeschwindigkeitsfeldes berechnet werden. Dazu ist die totale zeitliche Ableitung des Ge-schwindigkeitsfeldes v(x, t) zu bilden. Sie berucksichtigt, dass der materielle Punkt seinenAufenthaltsort durch die Bewegung andert. Gedanklich fasst man dazu den Ortsvektor xim Sinn der Bewegungsfunktion als veranderlich auf, sofern man der Bewegung des be-trachteten materiellen Punktes folgt. Damit ergibt sich
a(x, t) = v(x, t) =dv(x(X, t), t)
dt=
∂v
∂t
∣∣∣∣∣x=konst.
+∂v
∂x
∣∣∣∣∣t =konst.
· dx
dt. (61)
Dabei wird die Kettenregel der Differentiation angewandt. Man muss berucksichtigen, dassx selbst eine implizite Funktion von X (stellvertretend fur den betrachteten Partikel) undvon t ist. In Gl. (61) ist hervorgehoben, dass die partiellen Ableitungen im Gegensatz zurtotalen Ableitung jeweils bei festgehaltenem anderen Argument gebildet werden. UnterBeachtung der Definiton der Geschwindigkeit nach (60)1 und der Definiton des raumlichenGradientenoperators
grad(. . .) =∂(. . .)
∂x=
∂(. . .)
∂xi
ei (62)

20.10.2015 27
lautet Gl.(61)
a(x, t) =∂v(x, t)
∂t+ gradv(x, t) · v(x, t). (63)
Der erste Summand ∂v/∂t wird als lokaler Anteil der materiellen Beschleunigung bezeich-net, da er bei festgehaltenem Raumpunkt x = konst. gebildet wird, der zweite Summandgradv · v heißt konvektiver Anteil. Er beschreibt den Einfluss der inhomogenen raumli-chen Geschwindigkeitsverteilung auf die Beschleunigung des materiellen Punktes. Allge-mein kann die folgende Interpretation der materiellen Beschleunigung in der raumlichenoder Eulerschen Darstellung gegeben werden: Die materielle Beschleunigung (in raumlicherDarstellung) stellt die Beschleunigung dar, die ein Beobachter erfahrt, der sich mit demmateriellen Punkt bewegt.
3.3 Materielle Zeitableitung
Das am Beispiel der materiellen Beschleunigung entwickelte Konzept der materiellen Zeita-bleitung laßt sich auf beliebige Feldfunktionen ubertragen. Dabei sind Feldfunktionen fdefiniert als Funktionen des Orts x und der Zeit t, d. h. die Parameterisierung erfolgtim Sinn der Eulerschen oder der raumlichen Darstellung. Die zeitlichen Anderungen, diegesucht werden, sind jedoch Anderungen, die sich fur die bewegte Materie einstellen. Dasfuhrt zu der folgenden Definition:
Definition: Die materielle Zeitableitung einer Feldfunktion f(x, t) stellt danndie zeitliche Anderung von f dar, die ein Beobachter messenwurde, der sich mit dem materiellen Punkt bewegt, der zur Zeitt gerade am Ort x ist. Mathematisch entspricht die materielleZeitableitung der totalen Zeitableitung.
Die materielle Zeitableigung
f(x, t) =df(x, t)
dt, (64)
berucksichtigt, dass der materielle Punkt wahrend der Beobachtung seinen Aufenthaltsortandert, d. h. man beachtet die implizite Abhangigkeit x = x(X, t) bei der Bildung dertotalen Zeitableitung. Dann folgt
f(x, t) =∂f
∂t+ grad f · v. (65)
Der lokale Anteil ∂f/∂t beschreibt wiederum die Anderung von f an dem festgehaltenenOrt x, der konvektive Anteil grad f ·v beschreibt die Anderung von f infolge der Bewegungdes materiellen Punktes.
28 Materialmodellierung
Definition: Ein Vorgang heißt stationar, wenn die lokale Zeitableitung iden-tisch Null ist, er heißt materiell konstant, wenn die materielleZeitableitung identisch Null ist. Ein Feld heißt homogen, wenn derGradient identisch Null ist.
In einem stationaren Prozeß sind die Werte von f an einem festen Raumpunkt x immergleich, es gilt ∂f/∂t = 0. Wenn das Feld inhomogen ist, d. h. grad f 6= 0, dann istdie materielle Zeitableitung in diesem Fall trotzdem von Null verschieden, da sich diemateriellen Punkte von einem Ort zum anderen bewegen und dabei die raumliche Anderunggrad f mit der Geschwindigkeit v verspuren.
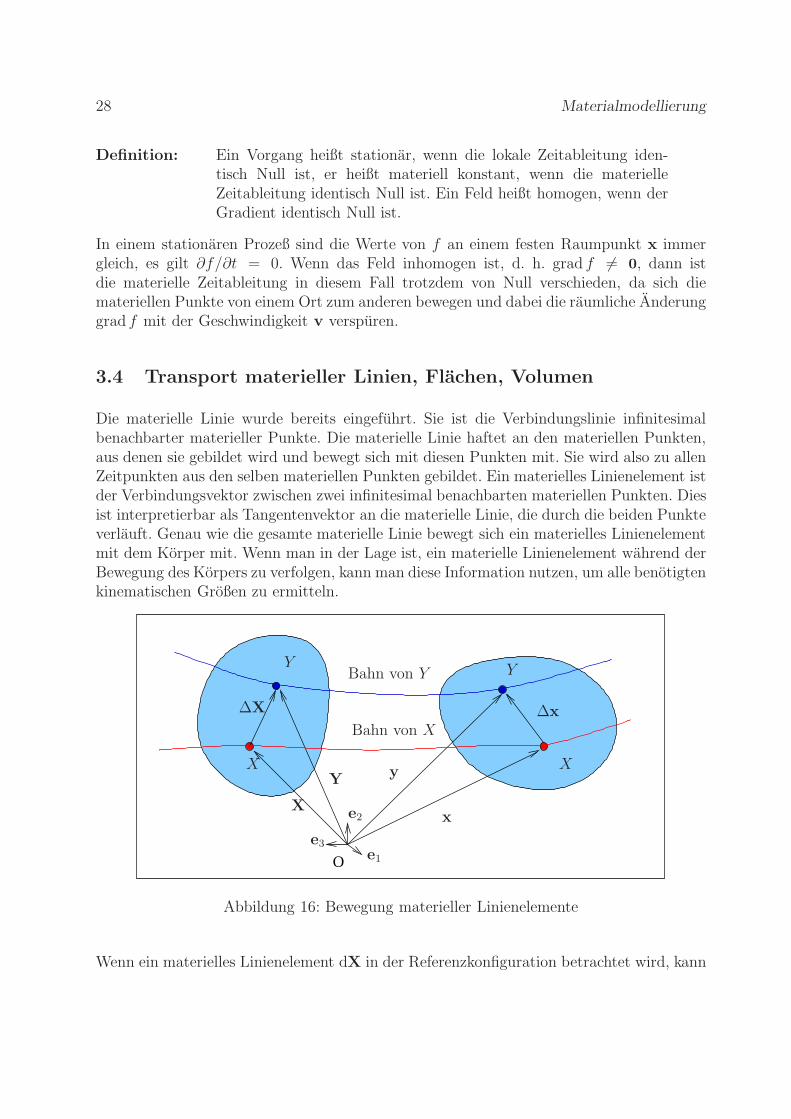
3.4 Transport materieller Linien, Flachen, Volumen
Die materielle Linie wurde bereits eingefuhrt. Sie ist die Verbindungslinie infinitesimalbenachbarter materieller Punkte. Die materielle Linie haftet an den materiellen Punkten,aus denen sie gebildet wird und bewegt sich mit diesen Punkten mit. Sie wird also zu allenZeitpunkten aus den selben materiellen Punkten gebildet. Ein materielles Linienelement istder Verbindungsvektor zwischen zwei infinitesimal benachbarten materiellen Punkten. Diesist interpretierbar als Tangentenvektor an die materielle Linie, die durch die beiden Punkteverlauft. Genau wie die gesamte materielle Linie bewegt sich ein materielles Linienelementmit dem Korper mit. Wenn man in der Lage ist, ein materielle Linienelement wahrend derBewegung des Korpers zu verfolgen, kann man diese Information nutzen, um alle benotigtenkinematischen Großen zu ermitteln.
O e1
e2
e3
XX
YY
X
Y
x
y
∆x∆X
Bahn von X
Bahn von Y
Abbildung 16: Bewegung materieller Linienelemente
Wenn ein materielles Linienelement dX in der Referenzkonfiguration betrachtet wird, kann
20.10.2015 29
man mit Hilfe der Bewegungsfunktion sein Bild dx in der aktuellen Konfiguration finden.Der Differenzvektor zwischen den benachbarten Punkten X und Y ist in der Referenzkon-figuration gegeben als
∆X = Y − X. (66)
In der Momentankonfiguration ist der Verbindungsvektor zwischen den beiden betrachtetenPunkten durch
∆x = y − x = χ(Y, t) − χ(X, t) (67)
gegeben. Geht man davon aus, dass die Punkte in direkter Nachbarschaft liegen, so kannman die Bewegungsfunktion in eine Taylor-Reihe eintwickeln
χ(Y, t) = χ(X, t) +∂χ(X, t)
∂X· (Y − X) + hohere Terme. (68)
Unter Vernachlassigung der hoheren Terme in dem Differenzvektor ∆X kann man dieGleichungen (66), (67) und (68) kombinieren und erhalt
∆x =∂χ(X, t)
∂X· ∆X. (69)
Fur direkt benachbarte materielle Punkte gehen die Differenzvektoren ∆X und ∆x in dieentsprechenden materiellen Linienelemente dX und dx uber
dx = Gradχ(X, t) · dX = F · dX. (70)
Diese Gleichung definiert den Deformationsgradienten
F = Gradχ(X, t) =∂x
∂X. (71)
Der Deformationsgradient bildet also die Linienelemente dX der Referenzkonfigurationauf die Linienelemente dx der Momentankonfiguration ab. Der in Gl. (71) auftretendematerielle Gradientenoperator entspricht der partiellen Ableitung nach den Ortsvektorender Referenzkonfiguration
Grad(. . .) =∂(. . .)
∂X=
∂(•)∂Xi
ei. (72)
Das letzte Gleichheitszeichen gilt unter Voraussetzung einer kartesichen Basis ei.
Analog kann man eine Beziehung fur die materiellen Volumenelemente ermitteln. Diesesind durch das Spatprodukt von jeweils drei nicht-kolinearen materiellen Linienelementendefiniert
dV = (dX1 × dX2) · dX3, dv = (dx1 × dx2) · dx3. (73)
Unter Ausnutzung des Transporttheorems (70) schreibt man
dv =(
(F · dX1) × (F · X2))
· (F · dX3). (74)

30 Materialmodellierung
Mit der Berechnungsmoglichkeit fur die Determinante, einer der algebraischen Identitaten,gilt fur Tensoren A und beliebige Vektoren a, b und c
((A · a) × (A · b)) · (A · c) = (detA)(a × b) · c. (75)
Wahlt man A = F und identifiziert die Vektoren a, b und c mit drei materiellen Lini-enelementen, so kann Gl. (75) umformuliert werden zu
detF =
(
(F · dX1)×(F · dX2) · (F · dX3))
(dX1 × dX2) · dX3. (76)
Es folgt schließlich mit Gl. (73)dv = (detF) dV. (77)
Ein materielles Flachenelement ergibt sich aus dem Kreuzprodukt von zwei nicht-parallelenmateriellen Linienelementen dX1 und dX2 bzw. dx1 und dx2. In der Referenzkonfigurationgilt
dA = dX1 × dX2 (78)
und in der Momentankonfiguration
da = dx1 × dx2. (79)
Mit der Vorschrift fur den Transport von Linienelementen (70) kann die Beziehung (79)durch die Elemente der Referenzkonfiguration ausgedruckt werden
da = (F · dX1) × (F · dX2) (80)
Um den Zusammenhang zwischen den Flachenelementen dA der Referenz- und da derMomentankonfiguration herzuleiten, betrachtet man Gl. (75) fur feste Vektoren a und bund fur beliebige Vektoren c. Mit der Beliebigkeit von c folgt dann
AT · ((A · a) × (A · b)) = (detA)(a× b), (81)
und mit den Gln. (78) und (80) ergibt sich
da = (detF)FT−1 dA. (82)
Da es sich bei den Großen dA und da um die gerichteten Flachenelemente dAN unddan handelt, kann (82) auch als Transporttheorem fur die Normalenvektoren N und n aufmateriellen Flachen interpretiert werden.
Der Zusammenhang (82) kann alternativ hergeleitet werden. Dazu definiert man ein außeresTensorprodukt zwischen zwei Tensoren zweiter Stufe mit der Eigenschaft
(A ♯B) · (a × b) = (A · a) × (B · b) − (A · b) × (B · a). (83)

20.10.2015 31
Dann kann (83) als
da =1
2(F ♯F) · (dX1 × dX2) =
1
2(F ♯F) · dA (84)
dargestellt werden. Man kann weiterhin zeigen, dass das Produkt
+
F= 12(F ♯F) (85)
dem adjungierten Tensor mit der Eigenschaft
+
F= (detF)FT−1 (86)
entspricht (hier ohne Beweis, vgl. dazu R. de Boer: Tensorrechnung fur Ingenieure, Springer-Verlag). Damit folgt fur den Transport von materiellen Flachenelementen wiederum dieBeziehung (82).
ZusammenfassungDie folgenden kinematischen Zusammenhange ergeben sich zwischen materiellen Elementender Referenz- und der Momentankonfiguration.
dx = F · dX,
da = (detF)FT−1 · dA,
dv = (detF) dV.
(87)
3.5 Deformations- und Verzerrungstensoren
3.5.1 Polare Zerlegung
Der Deformationsgradient F(X, t) ist zur Beschreibung der Deformation eines materiel-len Korpers nicht geeignet, da er neben der Deformation der Linienelemente auch derenDrehung (Rotation) beinhaltet. Dies wird in der polaren Zerlegung deutlich.
Man kann einen Tensor eindeutig in einen eigentlich orthogonalen Tensor und einen sym-metrisch positiv definiten Tensor zerlegen, so dass gilt
F = R · U = V · R. (88)
Dabei gilt fur den orthogonalen Tensor
R · RT = I bzw. RT = R−1. (89)
Fur eigentlich orthogonale Tensoren gilt weiterhin
detR = +1. (90)
32 Materialmodellierung
Dadurch werden aus der Gruppe der orthogonalen Tensoren die Spiegelungen ausgeschlos-sen. Ein Tensor R ∈ SO+ aus der Gruppe der eigentlich orthogonalen Tensoren beschreibtsomit eine reine Rotation. Fur die symmetrischen Tensoren U und V gilt
U = UT und V = VT (91)
mita · U · a > 0 ∀a und a · V · a > 0 ∀a. (92)
Wahrend der orthogonale Tensor eine Rotation beschreibt, stellen die beiden symmetrischpositiv definiten Tensoren Streckungen dar. Gemaß der Stellung in der polaren Zerlegung(88) heißenU: rechter Cauchyscher Strecktensor undV: linker Cauchyscher Strecktensor.
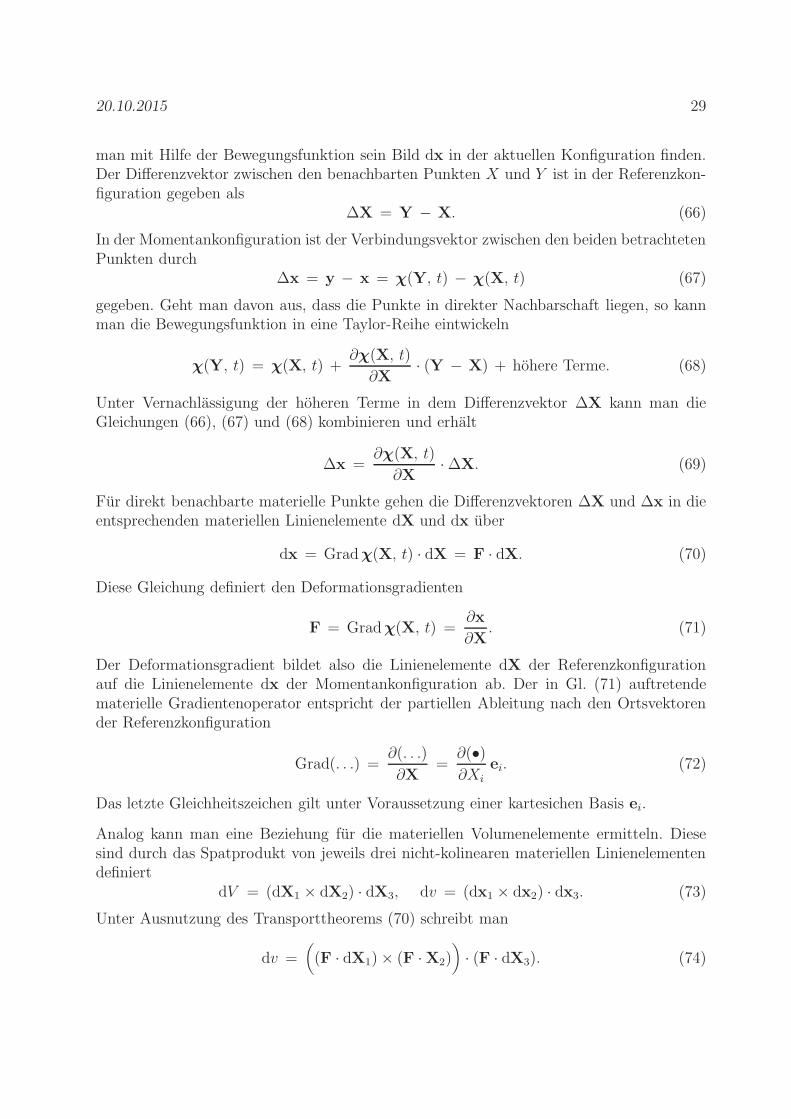
Wenn die materiellen Linienelemente entlang der Hauptachsen der Strecktensoren aus-gerichtet sind, dann kann die polare Zerlegung graphisch interpretiert werden. Im Fallder Zerlegung F = R · U werden die Linienlemente dX der Referenzkonfiguration erstgestreckt und dann mittels einer Rotation auf die Linienelemente dx der Momentankonfi-guration abgebildet. Im Fall von F = V ·R werden die Linienelemente dX in die Richtungder Linienelemente dx gedreht und anschließend gestreckt.
F = R · U
dXdX
U · dX
dx = R · U · dX
F = V ·R
R · dX
dx = V · R · dX
Die Strecktensoren U und V sind durch die Vorwarts- bzw. Ruckwartsrotation mit einanderverknupft. Aus der Multiplikation von (88) mit RT von rechts folgt
V = R ·U ·RT (Vorwartsrotation), (93)
bzw. aus der Multiplikation mit RT von links
U = RT · V · R (Ruckwartsrotation) (94)

20.10.2015 33
Gemaß der Interpretation der Drehung und Streckung der Linienelemente ist U ein Tensorder Referenzkonfiguration, V ein Tensor der Momentankonfiguration, und R ist ein Zwei-feldtensor, der beide Konfigurationen miteinander verbindet. Die Begriffe der Vorwarts-und Ruckwartsrotation beziehen sich dabei auf die zeitlich Abfolge der Konfigurationen.Die Vorwartsrotation transportiert ein Objekt der Referenzkonfiguration auf die Geometrieder aktuellen Konfiguration, wahrend die Ruckwartskonfiguration ein Objekt der aktuellenKonfiguration auf die Referenzkonfiguration abbildet.
3.5.2 Deformations- und Verzerrungstensoren
Da die Berechnung der Strecktensoren U und V aufwendig (Losung eines Eigenwertpro-blems) ist, fuhrt man Deformationsmaße uber das Quadrat von Linienelementen ein. Dazudefiniert man das Quadrat der Lange eines Linienelementes in der Referenz- und der Mo-mentankonfiguration als
dS2 = dX · dX, ds2 = dx · dx. (95)
Die beiden Großen dS und ds lassen sich durch Anwendung des Transporttheorems furLinienelemente (87)1 ineinander uberfuhren:
ds2 = dx · dx = (F · dX) · (F · dX) = dX · (FT · F) · dX =: dX · C · dX. (96)
Dabei wird das Quadrat ds der Linienelemente der Momentankonfiguration durch die Lini-enelemente der Referenzkonfiguration und durch den rechten Cauchy-Green-Deformations-tensor C ausgedruckt. Der rechte Cauchy-Green-Deformationstensor ist dabei als
C := FT · F (97)
definiert. Unter Ausnutzung der polaren Zerlegung (88) und der Regel fur die Transpositionfolgt
C = FT · F = (R · U)T · (R · U) = UT ·RT · R︸ ︷︷ ︸
=I
·U. (98)
Durch die Symmetrie von U vereinfacht sich das zu
C = U · U = U2. (99)
Der rechte Cauchy-Green-Deformationstensor ist demnach durch das Quadrat des rechtenStrecktensors gegeben. Da C in (96) auf Linienelemente der Referenzkonfiguration ange-wandt wird, bezieht sich C auf die Geometrie der Referenzkonfiguration. Dies wird auchbei der Darstellung des Deformationsgradienten in den naturlichen Basissystemen deutlich.
Druckt man analog das Quadrat der Linienelemente der Referenzkonfiguration durch dieLinienelemente der Momentankonfiguration aus, so entsteht der linke Cauchy-Green-Defor-mationstensor:
dS2 = dX · dX = (F−1 · dx) · (F−1 · dx) = dx · B−1 · dx (100)

34 Materialmodellierung
mit der DefinitionB = F · FT → B−1 = FT−1 · F−1. (101)
Mit der polaren Zerlegung (88) folgt außerdem
B = V2, (102)
B bezieht sich somit auf die Geometrie der aktuellen Konfiguration.
Wie man an den Darstellungen (99) und (102) sieht, beinhalten die Deformationstensorennur noch Information uber die Langenanderung der Linienelemente, nicht aber uber dieDrehung die die Linienelemente von der Referenz- in die Momentankonfiguration erfahrenhaben.
Unter Ausnutzung der polaren Zerlegung bzw. des Zusammenhangs zwischen den Streck-tensoren U = RT · V · R bzw. V = R · U · RT folgt
C = U2 = (RT · V · R) · (RT · V · R) = RT · V2 · R = RT · B ·R. (103)
Genau wie die Strecktensoren U und V konnen die Deformationstensoren C und B durchVorwarts- bzw. Ruckwartsrotation mit dem orthogonalen Tensor R aus der polaren Zerle-gung in einander abgebildet werden.
Eine Moglichkeit der Berechnung der polaren Zerlegung ergibt sich auf Basis der Bezie-hungen (102) bzw. (103). Dazu wird die Eigenwertdarstellung des rechten Cauchy-GreenDeformationstensors C benotigt. C ist symmetrisch und nach (103) als quadratischer Aus-druck darstellbar, d. h. C ist symmetrisch und positiv definit. Dann existiert die Losungdes Eigenwertproblems
C · v = λv (104)
mit drei reellen Eigenwerten λi > 0, i = 1, 2, 3 und drei orthonormalen Eigenvektoren vi.Fur die Eigenvektoren gilt auf Grund der Orthonormalitat vi · vj = δij. Fur den rechtenCauchy-Green-Deformationstensor erhalt man die Eigenwertdarstellung
C =3∑
i=1
λi vi ⊗ vi. (105)
In dieser Darstellung kann die positive Wurzel U =√
C berechnet werden, in dem dieWurzel aus den positiven Eigenwerten λi gezogen wird
U =3∑
i=1
√
λi vi ⊗ vi. (106)
Da die Eigenrichtungen vi normiert sind und orthogonal zueinander stehen, folgt
U2 =∑
i
∑
j
√
λi
√
λj(vi ⊗ vi) · (vj ⊗ vj) =∑
i
λi vi ⊗ vi = C. (107)

20.10.2015 35
Wenn C bekannt ist, kann U uber die Eigenwertdarstellung berechnet werden. Der ortho-gonale Tensor R der polaren Zerlegung folgt dann nach einer Invertierung von U
R = F · U−1. (108)
Analoge Uberlegungen folgen fur B und V.
Im undeformierten Zustand ist F = I. Dann nehmen die Deformationstensoren C und Bebenfalls den Wert I an. Da man es gewohnt ist, sich bei der Angabe der Deformation aufdie Ausgangsgroße zu beziehen, fuhrt man im weiteren Verzerrungstensoren ein, die sichaus der Differenz der Quadrate der Linienelemente in den beiden Konfigurationen ergeben.Man betrachtet dazu die Differenz
ds2 − dS2 = dx · dx − dX · dX (109)
und druckt entweder die Linienelemente der Referenzkonfiguration durch die der Momen-tankonfiguration aus oder andersherum. Im ersten Fall erhalt man
ds2 − dS2 = dX · (C − I) · dX. (110)
Analog ergibt sich im zweiten Fall
ds2 − dS2 = dx · (I − B−1) · dx. (111)
Uber die Beziehung (110) wird der Green-Lagrangesche Verzerrungstensor (auch nur alsGreenscher Verzerrungstensor bezeichtnet) definiert als
ds2 − dS2 = dX · 2E · dX → E :=1
2(C − I). (112)
Der Faktor 1/2 in der Definition von E ist Konvention. Er wird eingefuhrt, damit die lineari-sierte Variante des Greenschen Verzerrungstensors mit den klassischen Ingenieurdehnungenubereinstimmt. E ist wie C ein Tensor der Referenzkonfiguration. Analog definiert sich der(Euler-)Almansi-Verzerrungstensor
A =1
2(I − B−1). (113)
Er stellt im Gegensatz zum Lagrangeschen Verzerrungstensor einen Tensor der Momen-tankonfiguration dar.
Die beiden eingefuhrten Verzerrungstensoren E und A lassen sich durch push forward bzw.durch pull back in einander transformieren. Der Transport einer tensoriellen Große derReferenzkonfiguration in eine Große der Momentankonfiguration wird dabei als Vorwart-stransport (engl. push forward) bezeichnet, der Transport einer Große der Momentankon-figuration zuruck in die Referenzkonfiguration als Ruckwartstransport (engl. pull back).

36 Materialmodellierung
Vergleicht man die Definitionen der beiden Verzerrungstensoren (112) und (113) miteinan-der, so sieht man, dass aus diesen Definitionen die Regeln fur die Transportorperationenableitbar sind. Es ergibt sich
E = FT · A · F (pull back),
A = FT−1 · E · F−1 (push forward).(114)
Verwendet man anstelle des vollstandigen Transports nur die durch R ausgedruckten Rota-tionen, vgl. (93) und (94), so entstehen die Karni-Reiner-Verzerrungstensoren der Referenz-und der Momentankonfiguration (werden hier nicht weiter behandelt).
3.5.3 Definition weiterer Verzerrungsmaße
Betrachtet man anstelle der materiellen Linienelemente materielle Flachenelemente undmaterielle Volumenelemente, so kann man weitere Verzerrungstensoren definieren. DasVerhaltnis von Flachen- zu Volumenelement beschreibt dabei eine Große einer inversenLange
1
L2=
dA · dAdV 2
und1
l2=
da · dadv2
. (115)
Die Differenz 1/l2 − 1/L2 kann mit den Transportvorschriften der Flachenelemente und derVolumenelemente nach Gl. (87) durch die folgenden Verzerrungsmaße ausgedruckt werden:
• Piolaverzerrungstensor (Referenzkonfiguration)
EP =1
2
(
C−1 − I)
(116)
• Fingertensor (Momentankonfiguration)
AF =1
2(I − B) (117)
Eine weitere Moglichkeit zur Definition von Verzerrungstensoren besteht in der Betrach-tung rotierter Linienelemente dx = R · X, wobei R der eigentlich orthogonale Tensorder polaren Zerlegung von F ist. Vergleicht man Langen von materiellen Linienlementenmit den Langen der rotierten Linienelemente, so ergeben sich die beiden Karni-Reiner-Verzerrungstensoren.
• Karni-Reiner-Tensor der Referenzkonfiguration
KR =1
2
(
I − C−1)
= −EP (118)
20.10.2015 37
• Karni-Reiner-Tensor der Momentankonfiguration
K =1
2(B − I) = −AF (119)
Ubung: Zeigen Sie, dass die Karni-Reiner-Tensoren durch Rotation mit R des Green-Lagrangeschen bzw. des Euler-Almansischen Verzerrungstensors entstehen.
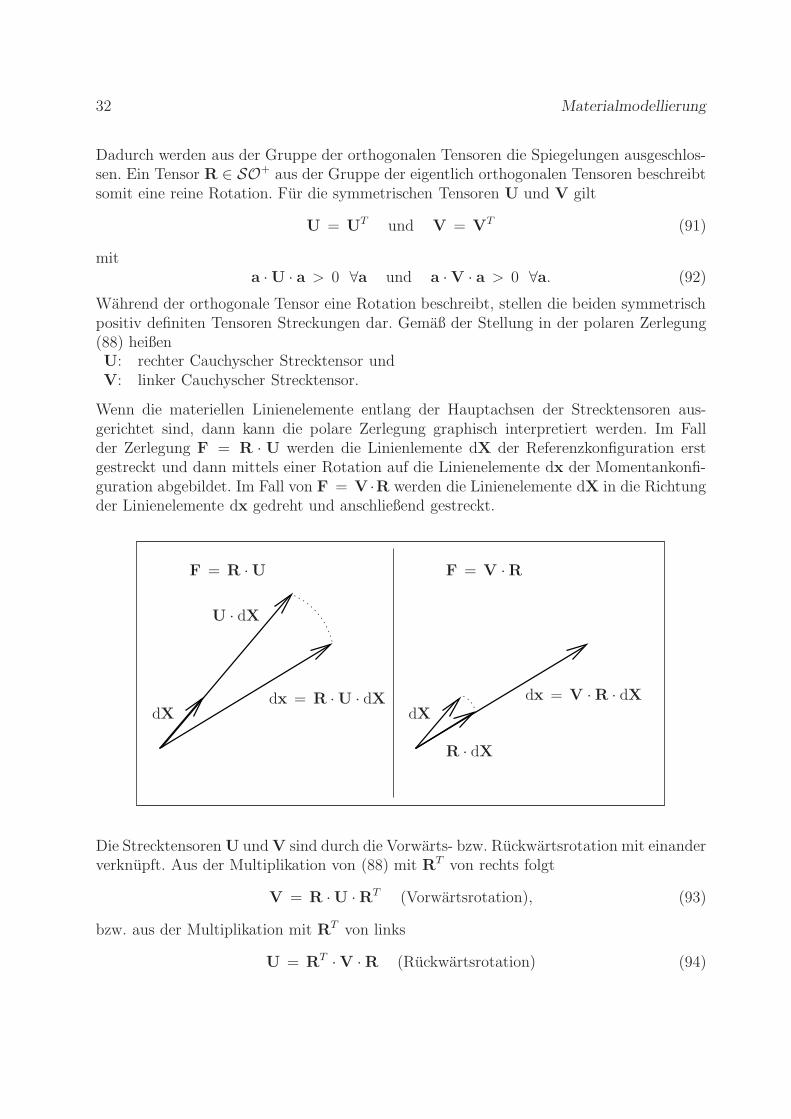
3.5.4 Darstellung mittels Verschiebungsgradient
Die Verschiebung u eines materiellen Punktes ist der Differenzvektor zwischen den Orts-vektoren der Referenz- und der Momentankonfiguration:
u = x − X. (120)
Ref.-konf. Mom.-konf.
SB
t = t0 t > t0
t
X
X
YY
dXdx
X x
e1
e2
e3
O
u
Bahn von X
Abbildung 17: Verschiebungsvektor
Mit der Vektoridentitat
GradX =∂X
∂X= I (121)
und dem Verschiebungsvektor gemaß (120) kann der Deformationsgradient F als
F =∂(X + u)
∂X= I + Gradu (122)
dargestellt werden. Fur den inversen Deformationsgradienten findet man die Darstellung
F−1 =∂(x − u)
∂x= I − gradu. (123)

38 Materialmodellierung
Die zwei Beziehungen (122) und (123) konnen genutzt werden, um die VerzerrungstensorenE und A durch die Verschiebungsgradienten Gradu der Referenzkonfiguration oder graduder Momentankonfiguration auszudrucken. Man findet
E = 12(FT · F − I) = 1
2(Gradu + GradT u + GradT u · Gradu),
A = 12(I − FT−1 · F−1) = 1
2(gradu + gradT u + gradT u · gradu).
(124)
3.5.5 Linearisierung
Die Verzerrungstensoren E und A sind bezuglich des Verschiebungsvektors nichtlinear (estreten quadratische Terme auf). Oft ist man an einer Linearisierung um einen als bekanntangenommenen Verschiebungszustand u0 interessiert. Die Linearisierung kann formal uberdie Richtungsableitung bestimmt werden.
Fur den Verschiebungszustand nimmt man an
u = u0 + ε∆u. (125)
Dabei stellt u0 den bekannten Bezugszustand dar, ∆u ist ein Verschiebungsinkrement, ε einGroßenordnungssymbol. Fur ein beliebiges Funktional F(u) ergibt sich die Linearisierung
lin (F(u)) = F(u)|ε=0 +dF(u)
dε|ε=0 = F(u0) + dF . (126)
Fur den Deformationsgradienten findet man auf diese Weise
lin (F) = lin(I + Gradu) = I + Gradu0 + dF (127)
mit
dF =d [I + Grad(u0 + ε∆u)]
dε|ε=0. (128)
Auswertung der Ableitung liefert
dF = Grad∆u. (129)
Somit liefert die formale Linearisierung des Deformationsgradienten
lin (F) = F0 + Grad∆u. (130)
Fur den Greenschen Verzerrungstensor verfahrt man bei der Linearisierung analog:
2 lin (E) = Gradu0 + GradT u0 + GradT u0 · Gradu0
+d
dε
{
(Grad (u0 + ε∆u) + GradT (u0 + ε∆u)
+ GradT (u0 + ε∆u) · Grad (u0 + ε∆u)}
|ε=0.
(131)

20.10.2015 39
Ausfuhren der Differentiation liefert fur den linearisierten Greenschen Verzerrungstensor
lin (E) = 12
(
Gradu0 + GradT u0 + GradT u0 · Gradu0
+ Grad∆u + GradT ∆u + GradT u0 · Grad∆u + GradT ∆u · Gradu0
)
.
(132)
Im Fall der Linearisierung um den Referenzzustand gilt
u0 = 0, (133)
so dass sich als Linearisierung die Ingenieurverzerrung
ε = lin (E(u0 = 0)) =1
2
(
Grad∆u + GradT ∆u)
(134)
ergibt. Bezuglich eines orthonormierten Koordinatensystems mit den Basisvektoren ei undder Identifikation u = ∆u ergibt sich
ε =1
2
(
ui,j + uj,i
)
ei ⊗ ej (135)
oder als Koeffizientenschema
εij =
u1,112(u1,2 + u2,1)
12(u1,3 + u3,1)
12(u1,2 + u2,1) u2,2
12(u2,3 + u3,2)
12(u1,3 + u3,1)
12(u2,3 + u3,2) u3,3
. (136)
Ubung: Linearisieren Sie den Almansischen Verzerrungstensor. Bachten Sie dabei, dasssich der Ortsvektor x der aktuellen Konfiguration ebenfalls mit dem Verschiebungszu-stand verandert. Stellen Sie A durch den Push forward von E dar, damit sich die auftre-tenden Gradientenoperatoren auf die konstanten Ortsvektoren der Referenzkonfigurationbeziehen.
3.6 Geschwindigkeitsgradient
Die Anderungsgeschwindigkeit von Linienelementen ergibt sich aus der materiellen Zeit-ableitung von (70)
(dx)• =d
dt(F · dX). (137)
Da die materiellen Linienelemente dX in der Referenzkonfiguration zu einem festen Zeit-punkt t0 ausgewahlt werden, sind sie zeitlich konstant, (dX)• = 0. Damit ergibt sich unterBeachtung der Produktregel der Differentiation
(dx)• = F · dX. (138)

40 Materialmodellierung
Berucksichtigt man weiterhin den Zusammenhang v = x zwischen dem Ortsvektor und derGeschwindigkeit eines materiellen Punktes sowie die Definition des Deformationsgradienten(71), so findet man die Darstellung
F =∂v
∂X= Gradv (139)
fur den materiellen Geschwindigkeitsgradienten. Dabei wird vorausgesetzt, dass die mate-rielle Zeitableitung d(•)/dt und die Ableitung nach den Ortsvektoren X der Referenzkon-figuration vertauschbar sind, da t und X von einander unabhangig sind.
Der raumliche Geschwindigkeitsgradient entsteht, wenn man in (138) das Linienelementder Referenzkonfiguration mittels (70) durch das Linienelement der aktuellen Konfigurationausdruckt:
(dx)• = F ·[
F−1 · dx]
= L · dx. (140)
Damit ist der raumliche Geschwindigkeitsgradient
L = F · F−1 (141)
definiert. Er bestimmt die Anderungsgeschwindigkeit eines Linienelements als lineare Funk-tion des Linienelements selbst. Faßt man (141) als Vorwartstransport (push forward) desmateriellen Geschwindigkeitsgradienten (139) auf oder als eine Darstellung der Kettenregelder Differentiation, so gelangt man zu der Darstellung
L = gradv. (142)
An manchen Stellen benotigt man fur die Herleitungen auch die Zeitableitung des inver-sen Deformationsgradienten. Da Zeitableitung und Invertierung nicht vertauscht werdendurfen, geht man zur Berechnung von der folgenden Identitat aus
F · F−1 = I. (143)
Durch Bildung der materiellen Zeitableitung erhalt man einen Ausdruck fur die Ableitungdes inversen Deformationsgradienten
(F · F−1)• = 0 ⇒ (F−1)• = −F−1 · F · F−1 = −F−1L. (144)
Ublicherweise wird der raumliche Geschwindigkeitsgradient in einen symmetrischen und ineinen schiefsymmetrischen Tensor aufgespalten
L = D + W. (145)
Dabei heißt die symmetrische Große
D = DT (146)

20.10.2015 41
Deformationsgeschwindigkeitstensor oder kurz Deformationsgeschwindigkeit. Man beachte,dass es sich um eine tensorielle Große handelt, auch wenn dies bei der zweiten Bezeichnungnicht zum Ausdruck kommt. Die schiefsymmetrische Große
W = −WT (147)
wird als Drehgeschwindigkeitstensor oder Wirbeltensor bezeichnet. Die Zerlegung (145) isteindeutig und fuhrt auf die Berechnungsvorschrift
D =1
2(L + LT ), W =
1
2(L − LT ). (148)
3.7 Interpretation der Verzerrungsgeschwindigkeit und des Wir-
beltensors
So wie die Verzerrungstensoren zur Formulierung von Materialgesetzen fur Festkorper her-angezogen werden, dient die Deformationsgeschwindigkeit D der Formulierung von Stoff-gleichungen fur viskose Fluide. Die Interpretation der Deformationsgeschwindigkeit ergibtsich aus der Anderungsgeschwindigkeit von Quadraten von Linienelementen
(dx · dx)• = dx · dx + dx · dx = (L · dx) · dx + dx · (L · dx)
= dx · (L + LT ) · dx = dx · 2D · dx.(149)
Die Struktur von (149) entspricht der Struktur (96), die zur Einfuhrung des GreenschenVerzerrungstensors in (112) bzw. des Almansischen Verzerrungstensors gefuhrt hat.
Eine Interpretation des Wirbeltensors W kann angegeben werden, wenn man die Richtunge eines materiellen Linienelements betrachtet. Die Richtung eines Linienelements ist durch
e =dx
|dx| =dx√
dx · dx(150)
gegeben. Man berechnet fur die Anderung der Richtung
e =dx
√dx · dx − dx(
√dx · dx)•
dx · dx
=L · dx|dx| − dx · D · dx
|dx|3 .
(151)
Mit der Zerlegung L = D + W erhalt man schließlich
e = W · e + (D − (e ·D · e) I) · e. (152)

42 Materialmodellierung
Wenn e eine Eigenrichtung des Verzerrungsgeschwindigkeitstensors ist, gilt
De = λ e (153)
mit dem Eigenwert λ. Das fuhrt auf
D · e − (e · D · e)e = λe − (e · λ e) e = 0, (154)
so dass schließlich aus (151)e = W · e (155)
resultiert. Der Wirbeltensor W beschreibt somit die Drehgeschwindigkeit der Hauptachsendes Deformationsgeschwindigkeitstensors. Er gibt an, wie schnell die Hauptachsen von Dihre Richtung verandern.
Ubung: Zeigen Sie, dass der Wirbelvektor
w = rotv (156)
der axiale Vektor zum Wirbeltensor ist.
w =1
2
3
E : WT . (157)
3.8 Zeitableitungen der Verzerrungstensoren
Die zeitliche Anderung der Verzerrungstensoren E und A steht in Zusammenhang mit derDeformationsgeschwindigkeit. Aus (112) berechnet man
E =1
2(FT · F)• =
1
2(FT · F + FT · F). (158)
Ersetzt man nun die materielle Zeitableitung F durch die Identitat
F = L · F, FT = FT · LT (159)
nach (141), so ergibt sich
E =1
2(FT · LT · F + FT · L · F) = FT · 1
2(L + LT ) · F. (160)
Die Verzerrungsgeschwindigkeit D stellt somit den Vorwartstransport der materiellen Zeit-ableitung des Greenschen Verzerrungstensors dar
E = FT · D · F (pull back),
D = FT−1 · E · F−1 (push forward).
(161)
20.10.2015 43
Ersetzt man E in (161) durch den Ruckwartstransport des Almansitensors A nach (114),so erhalt man
D = FT−1 · (FT · A · F + FT · A · F + FT · A · F) · F−1. (162)
Mit der Definiton des raumlichen Geschwindigkeitsgradienten nach (141) folgt daraus
D = FT−1 · (FT · LT · A · F + FT · A · F + FT ·A · L · F) · F−1
= A + LT · A + A · L.(163)
Die Verzerrungsgeschwindigkeit kann demnach uber eine Rate des Almansitensors be-rechnet werden, die keine materielle Zeitableitung darstellt, sondern die sogenannte obereOldroyd-Ableitung oder die obere Lie-Ableitung
D =△A . (164)
Die obere Lie-Ableitung eines zweistufigen Tensors T ist dabei allgemein definiert als pushforward der materiellen Zeitableitung des pull backs einer tensoriellen Große, die sich aufdie Momentankonfiguration bezieht. Die obere Lie-Ableitung wird als
△A= A + LT ·A + A · L (165)
berechnet.
Eine elegante Interpretation der Lie-Ableitung ergibt sich in einer Darstellung von Abezuglich einer konvektiven Basis. Da in einem mitbewegten Basissystem die Basisvektorenveranderlich sind, mussen sie bei der Bildung der materiellen Zeitableitung mit differenziertwerden. In einem mitbewegten Basissystem entspricht die Lie-Ableitung einer materiellenAbleitung, die nur auf die Koeffizienten des Tensors, nicht aber auf die konvektive Basisangewandt wird, vgl. Vorlesung Tensorrechnung.
Bemerkung: Neben der oberen Lie-Ableitung, die Zeitableitung der Koeffizienten desAlmansischen Verzerrungstensors bei festgehaltener konvektiver Basis interpretiert werdenkonnen, kann man mit einer analogen Interpretation die untere Lie-Ableitung
▽T= T − L ·T − T · LT (166)
fur spannungsartige Großen einfuhren.

44 Materialmodellierung
4 Vektor- und Tensorrechnung in naturlichen Basis-
systemen
4.1 Exkurs: Vektor- und Tensoralgebra
Vektoren sind gerichtete Großen. Sie besitzen eine Richtung und eine Lange (Betrag).Zur Darstellung von Vektoren benotigt man einen Bezugspunkt O und eine Basis. In denBeispielen wurde bisher eine orthonormierte Basis mit den Basisvektoren ei, i = 1, 2, 3gewahlt, dies muss nicht so sein. Mit Bezug auf eine beliebige Basis mit den Basisvektorenhi wird der Vektor v als Summe von Vielfachen der Basisvektoren dargestellt
v = v1 h1 + v2 h2 + v3 h3 =3∑
i=1
vi hi. (167)
Es heißen vi hi die Komponenten von v und vi die Koeffizienten von v. Im weiteren giltdie Summenkonvention.
Definition: Die Einsteinsche Summenkonvention besagt, dass uber gleiche(gegenstandige) Indizes summiert wird. Bei drei Raumdimensionenlaufen die Summationsindizes von 1 bis 3, bei zwei Raumdimensio-nen nur von 1 bis 2.
Damit kann der Vektor v dargestellt werden als
v = vi hi. (168)
Die Basisvektoren hi heißen”kovariante Basisvektoren“, die Koeffizieten vi heißen
”kon-
travariante Koeffizienten“. Merkregel zur Stellung der Indices: kovariant: wer ko ist, istunten, kontravariant: wer kontra gibt, ist oben.
• Summe von Vektoren (Summe der Koeffizienten)
u + v = ui hi + vi hi = (ui + vi)hi (169)
• Skalarprodukt von zwei Vektoren (inneres Produkt)
u · v = ui hi · vj hj = ui vj hi · hj = ui vj hij = ui vi (170)
Das Skalarprodukt zwischen zwei Basisvektoren liefert die Metrik
hi · hj = hij (171)
In (170) wurde die kontravariante Darstellung fur den Vektor v benutzt. Demnachgilt
v = vi hi = vi hj . (172)

20.10.2015 45
Die zu hi duale (kontravariante) Basis hj besitzt die Eigenschaft
hi · hj = δij , (173)
wobei das Kronecker-Symbol δij folgendermaßen definiert ist
δij =
{
1 fur i = j0 fur i 6= j
(174)
Multipliziert man (172) skalar mit einem Basisvektor
v · hj = vi hi · hj = vi hi · hj , (175)
so folgt die Regel vom”Herauf- und Herunterziehen von Indices“:
vi hij = vi δij = vj (176)
bzw.
vi hij = vi δj
i = vj . (177)
In einem orthonormierten Basissystem gilt
ei · ej = δij, (178)
so dass in diesem Sonderfall die Basis und die duale Basis identisch sind. Man mussdann nicht zwischen oben und untenstehenden Indices unterscheiden.
• Betrag eines Vektors
|v| =√
v · v =√
vi vi (179)
• Vektorprodukt von zwei Vektoren (außeres Produkt)
w = u× v = −v × u (180)
In einem orthonomierten Basissystem kann man das Kreuzprodukt uber die”Deter-
minantenregel“ berechnen. Formal berechnet man
u× v = det
∣∣∣∣∣∣∣
e1 e2 e3
u1 u2 u3
v1 v2 v3
∣∣∣∣∣∣∣
(181)
= (u2v3 − u3v2) e1 + (u3v1 − u1v3) e2 + (u2v1 − u1v2) e3
Im allgemeinen Fall kann das Vektorprodukt uber den Permutationstensor berechnetwerden (spater).

46 Materialmodellierung
• Tensorprodukt von zwei Vektoren
T = u ⊗ v = ui vj hi ⊗ hj = T ij hi ⊗ hj . (182)
Genau wie ein Vektor besteht ein Tensor aus der Summe seiner Komponenten, diesich wiederum aus den Koeffizienten T ij = ui vj und aus der Tensorbasis hi ⊗ hj
zusammensetzen.
Die Tensorbasis stellt (im dreidimensionalen Raum) neun linear unabhangige”Rich-
tungen“ dar. Der Tensor beschreibt eine lineare Abbildung von Vektoren auf Vekto-ren. Es gilt mit dem Tensor T und einem Vektor w
T · w = (u⊗ v) · w = (v · w)u (183)
oder in Indexnotation
T ij hi ⊗ hj · wk hk = T ij wk (hj · hk)hi = T ij wj hi. (184)
Die Koeffizienten eines Tensors konnen in einem Matrixschema angeordnet werden(Voigtsche Schreibweise):
T ij =
T 11 T 12 T 13
T 21 T 22 T 23
T 31 T 32 T 33
. (185)
Dann entsprechen die Koeffizienten des Vektors T ·w den Koeffizienten des Matrix-Vektor-Produktes, sofern orthonormierte Basissysteme vorliegen bzw. wenn die ent-sprechenden dualen Darstellungen fur T und w gewahlt werden:
T ij wj =
T 11w1 + T 12w2 + T 13w3
T 21w1 + T 22w2 + T 23w3
T 31w1 + T 32w2 + T 33w3
. (186)
• Transponierter TensorT = u⊗ v ,TT = v ⊗ u (187)
oder in IndicesTT = ui vj hj ⊗ hi = uj vi h
i ⊗ hj. (188)
Beim transponierten Tensor ist die Stellung der Indizes an den Koeffizienten ge-genuber der Stellung der Indizes in der Basis vertauscht. Bei der Matrizendarstellungder Koeffizienten entspricht die Transposition der Spiegelung des Koeffizientensche-mas an der Hauptdiagonalen.
Mit dem transponierten Tensor gilt fur zwei Vektoren a und b (Beweis durch Aus-rechnen)
(T · a) · b = a · (TT · b) (189)

20.10.2015 47
• Zweistufiger Identitatstensor I mit der Eigenschaft
a = I · a. (190)
Der Identitatstensor kann unterschiedlich dargestellt werden. Es gilt (Beweis?)
I = hij hi ⊗ hj = hij hi ⊗ hj = δji h
i ⊗ hj = δijhi ⊗ hj. (191)
• Inverser Tensor mit der Eigenschaft
a = T · b −→ b = T−1 · a (192)
bzw.T · T−1 = I (193)
• Orthogonaler Tensor
R · RT = I bzw. RT = R−1 mit det R = ±1. (194)
Orthogonale Tensoren beschreiben Drehungen und Drehspiegelungen. In der Gruppeder eigentlich orthogonalen Tensoren sind Spiegelungen ausgeschlossen, dann gilt
R · RT = I mit det R = +1. (195)
• Skalarprodukt zwischen zwei Tensoren
S : T = Sij hi ⊗ hj : T kl hk ⊗ hl = Sij T kl (hi · hk) (hj · hl)
= Sij T kl hik hjl = Sij Tij
(196)
• Spur eines TensorstrT = T : I = T ij hij = T i
j (197)
• Fundamentaltensor dritter Stufe, Ricci-Tensor oder Permutationstensor
3
E =1√hεijk hi ⊗ hj ⊗ hk (198)
mit dem Permutationssymbol
εijk =
1 fur i, j, k = 1, 2, 3/2, 3, 1/3, 1, 2 (gerade Permutation)−1 fur i, j, k = 1, 3, 2/3, 2, 1/2, 1, 3 (ungerade Perm.)0 sonst
(199)
und mit der Determinante der Metrik
h = det ||hij|| (200)
Mit dem Ricci-Tensor kann allgemein das Vektorprodukt zwischen zwei Vektorenausgedruckt werden als (Beweis?)
u× v =3
E : (u⊗ v) (201)
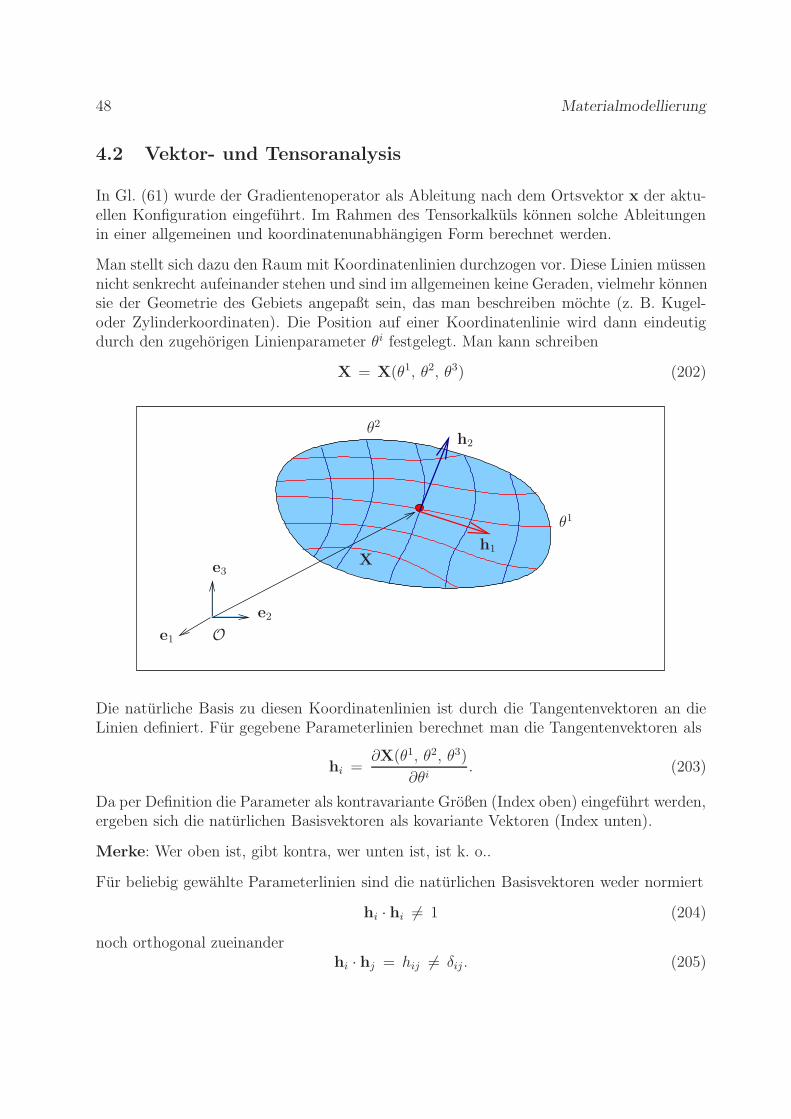
48 Materialmodellierung
4.2 Vektor- und Tensoranalysis
In Gl. (61) wurde der Gradientenoperator als Ableitung nach dem Ortsvektor x der aktu-ellen Konfiguration eingefuhrt. Im Rahmen des Tensorkalkuls konnen solche Ableitungenin einer allgemeinen und koordinatenunabhangigen Form berechnet werden.
Man stellt sich dazu den Raum mit Koordinatenlinien durchzogen vor. Diese Linien mussennicht senkrecht aufeinander stehen und sind im allgemeinen keine Geraden, vielmehr konnensie der Geometrie des Gebiets angepaßt sein, das man beschreiben mochte (z. B. Kugel-oder Zylinderkoordinaten). Die Position auf einer Koordinatenlinie wird dann eindeutigdurch den zugehorigen Linienparameter θi festgelegt. Man kann schreiben
X = X(θ1, θ2, θ3) (202)
Oe1
e2
e3X
θ1
θ2
h1
h2
Die naturliche Basis zu diesen Koordinatenlinien ist durch die Tangentenvektoren an dieLinien definiert. Fur gegebene Parameterlinien berechnet man die Tangentenvektoren als
hi =∂X(θ1, θ2, θ3)
∂θi. (203)
Da per Definition die Parameter als kontravariante Großen (Index oben) eingefuhrt werden,ergeben sich die naturlichen Basisvektoren als kovariante Vektoren (Index unten).
Merke: Wer oben ist, gibt kontra, wer unten ist, ist k. o..
Fur beliebig gewahlte Parameterlinien sind die naturlichen Basisvektoren weder normiert
hi · hi 6= 1 (204)
noch orthogonal zueinanderhi · hj = hij 6= δij . (205)

20.10.2015 49
Da die Beziehung (202) ein-eindeutig ist, gilt
θi = θi(X). (206)
Die dualen oder kontravarianten Basisvektoren ergeben sich dann als
hi =∂θi
∂X. (207)
In der Basisdarstellung kann nun der Gradient einer skalarwertigen, einer vektorwertigenund einer tensorwertigen Funktion α(X) = α(θi(X)), a(X) = a(θi(X)) und A(X) =a(θi(X)) berechnet werden. Mit
Grad(. . .) =∂(. . .)
∂X=
∂(. . .)
∂θi⊗ ∂θi
∂X=
∂(. . .)
∂θi⊗ hi (208)
folgt
Gradα =∂α
∂θihi,
Grada =∂(ai hi)
∂θj⊗ hj,
GradA =∂(Aij hi ⊗ hj)
∂θk⊗ hk.
(209)
Dabei fallen folgende Dinge auf:
1. Gradientenbildung erhoht die”Stufe“. Fasst man Skalare als Tensoren 0.ter Stufe und
Vektoren als Tensoren 1.ter Stufe auf, dann erhoht sich die tensorielle Stufe durch dieGradientenbildung. Der Gradient einer skalarwertigen Funktion ist ein Vektor, derGradient einer vektorwertigen Funktion ein Tensor (2.ter Stufe) und der Gradienteiner tensorwertigen (2.ter Stufe) Funktion ist ein Tensor 3.ter Stufe.
2. Falls die Basisvektoren von den Parametern θi abhangen, muss diese Abhangigkeitbei der Auswertung der Ableitungen in (209) beachtet werden. Das fuhrt auf denBegriff der kovarianten Ableitung.
3. Wenn die Ableitung nach dem Vektor θi hi gebildet wird, erscheint der duale Basis-vektor hi im Ergebnis.
Die Ableitung der Basisvektoren hi nach den Parameter θj wird durch die Christoffel-Symbole ausgedruckt
∂hi
∂θj= Γij
k hk, (210)
wobei die Christoffelsymbole auch aus der Metrik berechnet werden konnen
Γijk = 1
2hkl(hjl,i + hil,j − hij,l). (211)

50 Materialmodellierung
Abkurzend steht dabei das Komma fur die partielle Ableitung
(. . .),i =∂(. . .)
∂θi. (212)
Mit der Einfuhrung der Christoffel-Symbole und der Definition der kovarianten Ableitung
ai|j = ai,j + ak Γkj
i
Aij |k = Aij,k + Alj Γlk
i + Ail Γlkj
(213)
kann der Gradient einer vektorwertigen und einer tensorwertigen Funktion nach (209)berechnet werden. Es gilt dann (Beweis?)
Grada = ai|j hi ⊗ hj
GradA = Aij|k hi ⊗ hj ⊗ hk(214)
Auf dieser Stufe lassen sich auch die Differentialoperatoren Divergenz Div(. . .) und Rot(. . .)definieren:
Div a = Grada : I,
DivA = GradA : I.(215)
Im Gegensatz zur Gradientenbildung, die die tensorielle Stufe einer Funktion erhoht, er-niedrigt die Divergenzbildung die Stufe. Formal berechnet man aus (215)
Div a = ai|j hi ⊗ hj : hk ⊗ hk = ai|i (216)
fur die Divergenz eines Vektorfelds und fur die Divergenz eines Tensorfelds
DivA = Aij|k hi ⊗ hj ⊗ hk : hl ⊗ hl = Aij |j. (217)
Die Rotation wird schließlich als
Rota =3
E(Grada)T ,
RotA =3
E(GradA)13
T
(218)
definiert. In (218)2 bedeutetij
T die Transposition bezuglich des i.ten und j.ten Basissystems
(Aijk hi ⊗ hj ⊗ hk)13
T = Aijk hk ⊗ hj ⊗ hi. (219)

20.10.2015 51
4.3 Materielle Linien und naturliche Basis
Die Uberlegungen zu den materiellen Linienelementen konnen auf die naturlichen Basisvek-toren ubertragen werden, wenn man als spezielle Parameterlinien materielle Linien wahlt.Diese Parameterlinien deformieren sich dann mit den Korper und stellen sowohl in derReferenz- als auch in der Momentankonfiguration ein angepaßtes Koordinatensystem zurVerfugung. Die Ortsvektoren sind dann als Funktion der Linienparameter aufzufassen
X = X(θ1, θ2, θ3),x = x(θ1, θ2, θ3). (220)
Außerdem sind beide Vektoren durch die Bewegungsfunktion miteinander verknupft.
e1
e2
e3
O
XdX
B
materielle Linien
θ1
θ2
Die naturlichen Basisvektoren in den beiden Konfigurationen sind als Tangentenvektorenan die undeformierten und an die deformierten Parameterlinien definiert. Sie stellen somitspezielle materielle Linienelemente dar. Fur die Basisvektoren gilt
hi =∂X
∂θi, ai =
∂x
∂θi. (221)
Die dualen Basen ergeben sich entweder uber die Dualitatsbedingung
hi · hj = δij, ai · aj = δi
j (222)
oder uber die zu (221) inverse Darstellung
hi =∂θi
∂X, ai =
∂θi
∂x. (223)
Nach diesen Vorbemerkungen kann der Deformationsgradient in den naturlichen Basissy-stemen dargestellt werden. Ausgehend von der Definition
F =∂x
∂X(224)
52 Materialmodellierung
ergibt sich mit der Anwendung der Kettenregel
F =∂x
∂θi⊗ ∂θi
∂X= ai ⊗ hi. (225)
An dieser Darstellung wird klar, dass der Deformationsgradient ein Zweifeldtensor ist, d. h.seine Basis besteht aus Elementen der Momentankonfiguration und der Referenzkonfigu-ration. Die Eigenschaft, Linienelemente aus einer in die andere Konfiguration abzubilden,wird in dieser Darstellung ebenfalls sofort deutlich
F · hi = (aj ⊗ hj) · hi = aj δji = ai, (226)
wobei in der vorliegenden Interpretation die Basisvektoren hi und ai als materielle Lini-enelemente der Referenz- und der Momentankonfiguration zu interpretieren sind (Tangen-tenvektoren an die materiellen Parameterlinien). Diese Darstellung liefert eine differential-geometrische Interpretation der Deformations- und Verzerrungstensoren sowie eine an-schauliche Deutung der Transporte zwischen den Konfigurationen (Push-forward und Pull-back).
4.3.1 Verzerrungstensoren in naturlichen Koordinaten
Die in (112) und (113) definierten Lagrangeschen und Almansischen Verzerrungstensorenkonnen mit Hilfe der Darstellung (225) des Deformatinsgradienten
F = ai ⊗ hi (227)
in naturlichen Koordinaten dargestellt werden und einer differentialgeometrischen Interpre-tation zugefuhrt werden. Analog zu F findet man fur den inversen Deformationsgradienten
F−1 =∂X
∂x=
∂X
∂θi⊗ ∂θi
∂x= hi ⊗ ai. (228)
Die zugehorigen transponierten Großen lauten
FT = hi ⊗ ai, FT−1 = ai ⊗ hi. (229)
Ein Vergleich von (226) mit (70) zeigt, dass die naturlichen Basisvektoren als Linienelemen-te der Referenzkonfiguration und der Momentankonfiguration aufgefaßt werden konnen.Der Deformationsgradient (225) und der inverse Deformationsgradient (228) bilden dienaturlichen Basisvektoren (oder die entsprechenden Linienelemente) der beiden Konfigura-tionen aufeinander ab. Bildet man das Produkt des transponierten Deformationsgradientenmit einem dualen Basisvektor der aktuellen Konfiguration
FT · aj = hi δji = hj, (230)

20.10.2015 53
so stellt man fest, dass der transponierte Deformationsgradient und seine Inverse die dualenBasisvektoren zwischen den Konfigurationen transportieren.
Fur den Greenschen Verzerrungstensor
E =1
2
(
FT · F − I)
(231)
ergibt sich durch Einsetzen
E =1
2
(
(hi ⊗ ai · aj ⊗ hj) − hij hi ⊗ hj)
. (232)
Dabei wurde fur den Identitatstensor die Darstellung
I = hij hi ⊗ hj (233)
bezuglich der Referenzkonfiguration gewahlt. Fuhrt man in (232) das Produkt aus, soerhalt man
E =1
2
(
aij − hij
)
hi ⊗ hj . (234)
Diese Darstellung verdeutlicht, dass es sich beim Lagrangeschen Verzerrungstensor E umeinen Tensor der Referenzkonfiguration handelt. Die Koeffizienten ergeben sich gerade alsDifferenz der Metriken der Momentan- und der Referenzkonfiguration.
In analoger Weise findet man mit (228) und (229) fur den Almansischen Verzerrungstensor
A =1
2(I − FT−1 · F−1) =
1
2
(
aij − hij
)
ai ⊗ aj . (235)
Die Basis des Almansischen Verzerrungstensors wird aus den Basisvektoren der aktuellenKonfiguration gebildet wahrend das Koeffizientenschema (Differenz der Metriken) demKoeffizientenschema des Greenschen Verzerrungstensors entspricht. In dieser Interpretationwird auch der Transport (pull back / push forward) nach (114) klar.
Im weiteren werden noch die Deformationsgeschwindigkeit bzw. die Verzerrungsraten imnaturlichen Basissystem betrachtet. Eine Interpretation der oberen Lie-Ableitung folgt ausder Darstellung des Almansitensors in der naturlichen Basis. Man stellt dazu die Zeita-bleitung der dualen Basisvektoren der Momentankonfiguration nach (228) folgendermaßendar:
ai = (FT−1 · hi). = FT−1 · hi. (236)
Durch Ausnutzung der IdentitatF · F−1 = I (237)
erhalt man einen Ausdruck fur die Ableitung des inversen Deformationsgradienten
(F · F−1). = 0
⇒ (F)−1 = −F−1 · F · F−1 = −F−1L
⇒ (F)T−1 = −LT FT−1
(238)

54 Materialmodellierung
Damit ergibt sich aus (236) der Zusammenhang
ai = −LT · FT−1 · hi = −LT ai. (239)
Damit kann die materielle Zeitableitung des Almansischen Verzerrungstensors in der dualenBasisdarstellung (235) berechnet werden
A = 12
(
aij ai ⊗ aj + (aij − hij) ai ⊗ aj + (aij − hij) ai ⊗ aj)
= 12
(
aijai ⊗ aj − (aij − hij) (LT · ai) ⊗ aj − (aij − hij) ai ⊗ (LT · aj)
)
.
(240)
Umgruppierung der Terme liefert schließlich
A + LT · A + A · L =△A=
1
2aij ai ⊗ aj . (241)
Die obere Lie-Ableitung des Almansischen Verzerrungstensors entspricht also der materi-ellen Zeitableitung des Koeffizientenschemas bei festgehaltener Basis. Man beachte, dassbei materieller Zeitableitung des Almansitensors nicht nur das Koeffizientenschema diffe-renziert wird, sondern auch die Basis, da sie sich im Lauf der Bewegung andert. Fur denGreenschen Verzerrungstensor ist die materielle Zeitableitung identisch mit der materiel-len Zeitableitung des Koeffizientenschemas, da die Basisvektoren der Referenzkonfigurationkonstant sind
E =1
2aij hi ⊗ hj. (242)
Aus der Kombination von (230) und (242) ergibt sich wiederum die Transportvorschriftfur die Raten der kinematischen Großen
E =1
2aij (FT · ai) ⊗ (FT · aj) = FT
△A ·F. (243)

20.10.2015 55
5 Bilanzgleichungen
Die kinematischen Beziehungen des letzten Kapitels gelten unabhangig von den stofflichenEigenschaften und unabhangig von den wirkenden Kraften. Sie dienen ausschliesslich derDarstellung der Bewegung ohne auf die wirkenden Krafte einzugehen. Im Rahmen derklassischen (nicht-relativistischen) Mechanik gelten als weiterer Block materialunabhangi-ger Gleichungen die Bilanzaussagen, die den Erhaltungsaussagen fur Masse, Impuls, Drallund Energie entsprechen.Die Bilanzaussagen werden axiomatisch eingefuhrt, d. h. sie entstammen der Erfahrungund sind innerhalb der Theorie nicht beweisbar. Der prominenteste Vertreter dieser Grup-pe materialunabhangiger Gleichungen ist die Gleichgewichtsaussage, die als Sonderfall desNewtonschen Axioms eingefuhrt wird. Im vorliegenden Kapitel werden die notwendigenAxiome zur Formulierung der Bilanzaussagen eingefuhrt und in die Sprache der Mathema-tik ubersetzt.
5.1 Massenbilanz
Die Massenbilanz beruht auf dem Axiom der Massenerhaltung.
Axiom: Die Masse eines materiellen Korpers andert sich wahrend seinerBewegung nicht.
Ein materieller Korper behalt also wahrend der Bewegung seine Masse. Falls der materielleKorper wahrend der Bewegung in mehrere Teile zerfallt, z. B. durch Bruchvorgange, bleibtdie Masse des Gesamtsystems (also aller Teilkorper) erhalten. Dieser Fall wird im weiterenaber nicht diskutiert.
Mathematisch kann die Massenerhaltung fur einen materiellen Korper B folgendermaßenformuliert werden:
m(B, t) =∫
B
dm =∫
B
ρ dv = konst. (244)
Darin bezeichnet B den materiellen Korper, dm ein Massenelement, dv ein Volumenelementund
ρ =dm
dv(245)
die Dichte. Die Masse eines materiellen Korpers ergibt sich demnach aus der Integrationuber die Massendichte ρ. Die Kontinuumsannahmen fuhren dazu, dass die Dichte in jedemmateriellen Punkt des Kopers definiert ist.
Bildet man von (244) die zeitliche Ableitung, so folgt
d
dt
∫
B
ρ dv = 0. (246)
56 Materialmodellierung
Gl. (246) stellt die globale Form der Massenerhaltung dar, d. h. eine Aussage, die fur dengesamten Korper gultig ist.
Oft ist man im Gegensatz zu (246) jedoch an sogenannten lokalen Aussagen interessiert,die fur jeden einzelnen Punkt im Inneren des Korpers B gelten. Dazu mussen die Inte-gration und die Differentiation vertauscht werden. Allerdings ist dabei zu beachten, dasssich das von dem betrachteten Korper eingenommene Volumen wahrend der Bewegungverandern kann, so dass sich die Integration uber ein zeitlich veranderliches Gebiet er-streckt (vgl. Leibnizsche Regel). Formal kann man dieses Problem umgehen, indem manden Korper auf die konstante Geometrie B0 der Referenzkonfiguration zuruckzieht. Mitdem Zusammenhang (77) folgt dann
d
dt
∫
B
ρ dv =d
dt
∫
B0
ρ det F dV = 0. (247)
Da in Gl. (247) (rechts) das Integrationsgebiet B0 konstant ist, konnen Integration undDifferentiation vertauscht werden, sofern die Felder hinreichend stetig und differenzierbarsind. Man findet
∫
B0
(dρ
dtdet F + ρ
d
dt[det F]
)
dV = 0. (248)
Im weiteren soll, sofern nichts anderes erwahnt wird, immer vorausgesetzt werden, dass dienotwendigen Stetigkeitsanforderungen erfullt sind.
Es gilt (an dieser Stelle ohne Beweis)
(det F)• = divv det F = J divv, (249)
so dass in (248) der Faktor det F ausgeklammert werden kann. Der Vorwartstransport (pu-sh forward) auf die aktuelle Konfiguration unter Beachtung von Gl. (77) liefert schließlich
∫
B
(ρ + ρ div v) dv = 0. (250)
Dieses Ergebnis erhalt man auch, wenn man in (246) die Reihenfolge von Integration undDifferentiation umkehrt und formal die Produktregel der Differentiation anwendet, d. h.man beachtet, dass sowohl die Dichte ρ als auch die materiellen Volumenelemente dvzeitlich veranderlich sind. Es folgt mit dieser Argumentation
d
dt
∫
B
ρ dv =∫
B
d
dt(ρ dv) = 0. (251)
Mit den Zusammenhangen (77) und (249) gilt
(dv)• = divv dv, (252)

20.10.2015 57
so dass sich der Zusammenhang (250) direkt ergibt.
Da man die entsprechenden Uberlegungen auch fur beliebige Teilkorper von B, insbeson-dere auch fur beliebig kleine Teilkorper, anstellen kann, muss der Integrand in (250) Nullsein, damit die integrale Aussage gilt fur beliebige Teilkorper gelten. Damit gelangt manschließlich zur lokalen Form der Massenbilanz
ρ + ρ divv = 0. (253)
Setzt man nach (249)
divv =(det F)•
det F(254)
in (253) ein, so folgt die Trennung der Veranderlichen
ρ
ρ= −(det F)•
det F(255)
Diese Form der Massenbilanz kann integriert werden
t∫
t0
ρ
ρdt = −
t∫
t0
(det F)
det Fdt. (256)
Mit den Variablentransformationen
ρ dt→ dρ, (det F) dt→ d(det F) (257)
und der Transformation der Integrationsgrenzen ergibt sich
ρ∫
ρ0
dρ
ρ= −
det F∫
1
d(detF)
det F(258)
Dabei wurden zum Anfangszeitpunkt t0 die Bedingungen ρ = ρ0 und det F = 1 und zumZeitpunkt t die Werte ρ und det F = J eingesetzt. Die Abkurzung J steht dabei fur dieJacobi-Determinante. Auswertung der Integrale fuhrt schließlich auf die Beziehung
ρ = ρ0 (det F)−1 = ρ0 J−1. (259)
Diese Form der Massenbilanz gestattet es, aus der Anfangsdichte ρ0 und der DeterminanteJ des Deformationsgradienten den aktuellen Dichtewert zu berechnen. Diese Darstellung istvor allem in der Festkorpermechanik bei finiten Deformationen gebrauchlich. Die Beziehung(259) kann auch direkt aus der Gl. (244) motiviert werden, wenn man die Dichte und dieVolumenelemente auf die Referenzkonfiguration zuruckzieht. Mit dem Argument, dass auchdie Masse beliebig kleiner materieller Korper unverandert bleibt, folgt dann
ρ dv = ρ0 dV, (260)

58 Materialmodellierung
und mit der Verknupfung dv = J dV folgt schließlich der Ausdruck
ρ dv = ρ0 J−1dv → ρ = ρ0 J
−1 (261)
Neben der Darstellung (253) sind noch andere Formen der lokalen Massenbilanz ublich, diesich durch die Ausnutzung mathematischer Identitaten ergeben. Einsetzen der materiellenZeitableitung (65) in die lokale Form der Massenbilanz Gl. (253) ergibt
∂ρ
∂t+ grad ρ · v + ρ div v = 0. (262)
Der zweite und dritte Term konnen noch zusammengefasst werden. In Verallgemeinerungder Produktregel der Differentiation gilt fur ein differenzierbares Skalarfeld a und ein dif-ferenzierbares Vektorfeld a
div(a a) = grad a · a + a div a. (263)
Somit ergibt sich eine weitere Alternativdarstellung von (253) zu
∂ρ
∂t+ div(ρv) = 0. (264)
Die Form (264) der Massenbilanz gestattet eine neue Interpretation der Massenerhaltungin Eulerscher Darstellung. Wahrend die globale Form der Massenerhaltung (250) aus derLagrangeschen oder materiellen Darstellung erhalten wurde und fur einen bewegten mate-riellen Korper gilt, kann die lokale Aussage (264) uber ein raumfestes Kontrollvolumen imEulerschen Sinn integriert werden,
∫
V
(∂ρ
∂t+ div(ρv)
)
dv = 0. (265)
Auf den zweiten Summanden kann der Gaußsche Integralsatz∫
V
div a dv =∫
∂V
a · n da (266)
angewandt werden. Dabei bezeichnen V ein raumfestes Volumen (Kontrollvolumen) und∂V den zu V gehorenden Rand, n ist der nach außen gerichteten Normaleneinheitsvektorund da = n da ein gerichtetes Oberflachenelement. Aus (265) wird somit
∫
V
∂ρ
∂tdv = −
∫
∂V
ρv · nda. (267)
Da das Integrationsvolumen V zeitlich und raumlich konstant ist, konnen Integration undpartielle Differentiation auf der linken Seite von Gl. (267) in ihrer Reihenfolge vertauschtwerden. Damit ergibt sich
∂
∂t
∫
V
ρt dv = −∫
∂V
ρv · n da. (268)
20.10.2015 59
Demnach andert sich die in V gespeicherte Masse m =∫
Vρdv durch den Ausfluss von
Masse uber den Rand ∂V .
Bemerkung: Die Vorzeichenregelung zahlt einen Massenausfluss positiv, da die positiveRichtung durch den außeren Normalenvektor n festgelegt ist. Ein positiver Massenausflussbewirkt eine Massenabnahme im Volumen, daher das Minuszeichen, das sich formal in(267) ergibt.
Die Formen (264) bzw. (267) finden ublicherweise in der Stromungsmechanik Anwendung.
5.2 Impulsbilanz
Die Impulsbilanz beruht auf dem dritten Newtonschen Axiom oder der Impulserhaltung.
Axiom: Der Impuls eines materiellen Korpers andert sich durch die an ihmangreifenden Krafte.
Dieses Axiom beinhaltet die Gleichgewichtsaussage: Der Impuls andert sich nicht, wenndie resultierende Kraft der Nullvektor ist.
In der globalen Formulierung kann man somit die Impulsbilanz als
l = f (269)
angeben. Der Impuls eines materiellen Korpers ist dabei durch seine Dichte und seineGeschwindigkeit bestimmt
l(B, t) =∫
B
x dm =∫
B
ρ x dv. (270)
Die auf den Korper einwirkende Kraft kann man in die Summe aus den Nah- und Fernwir-kungskraften aufteilen. Die Nahwirkungskrafte wirken dabei uber die Oberflache ∂B aufden Korper ein und haben ihre Ursache in der direkten Umgebung, die mit dem Korperuber seine Oberflache in Kontakt steht. Die Fernwirkungskrafte haben ihre Ursache nichtin der direkten Umgebung des Korpers und wirken in seinem Inneren. Eine typische Fer-wirkungskraft ist die Gravitationskraft. Damit erhalt man mit dieser Aufteilung
f =∫
∂B
t da +∫
B
ρb dv. (271)
Dabei stellt t die Oberflachenspannung dar, die durch Kontakt des Korpers mit seinerUmgebung ubertragen wird, wahrend ρb die Volumenkraftdichte ist, die im Inneren desKorpers wirkt.
60 Materialmodellierung
Die globale Form der Impulsbilanz lautet unter Beachtung von (270) und (271)
d
dt
∫
B
ρ x dv =∫
∂B
t da +∫
B
ρb dv. (272)
Gl. (272) stellt eine globale Aussage dar, die fur den Korper als Ganzes Gultigkeit besitzt.
Genau wie bei der Massenbilanz ist man an einer lokalen Aussage interessiert, die an deneinzelnen materiellen Punkten innerhalb des Korpers gultig ist. Dazu muss wiederum dieZeitableitung mit der Integration uber den deformierbaren materiellen Korper vertauschtwerden.
d
dt
∫
B
ρ xdv =∫
B
(ρ xdv)•. (273)
Mit dem Transporttheorem fur Volumenelemente (252) und der Produktregel der Differen-tiation erhalt man
l =∫
B
(ρ x + ρ x + ρ x div x) dv. (274)
Dieser Ausdruck kann unter Berucksichtigung der lokalen Form der Massenbilanz (253)weiter zusammengefaßt werden, und es verbleibt
l =∫
B
ρ x dv (275)
Allgemein gilt fur massenbezogene Großen Ψ = ρψ
d
dt
∫
B
Ψ dv =∫
B
(Ψ + Ψ divx)dv =∫
B
(ρ ψ + ρ ψ + ρψ div x) dv. (276)
Die zwei letzten Summanden entsprechen der mit ψ multiplizierten lokalen Form der Mas-senbilanz. Damit erhalt man das Reynoldssche Transporttheorem in der Form
d
dt
∫
B
ρψ dv =∫
B
ρ ψ dv. (277)
Um in Gl. (272) zu einer lokalen Aussage zu gelangen, muss weiterhin das Oberflacheninte-gral der Nahwirkungskrafte in ein Volumenintegral transformiert werden. Die ist moglich,wenn fur die Oberflachenkraftdichte t auf dem Rand des Korpers das Cauchy-Theorem gilt
t = T · n, (278)
wenn also ein Spannungstensor T existiert, der mit der Schnittnormalen n den Spannungs-vektor auf der Oberflache (oder einer beliebigen Schnittflache durch den Korper) erzeugt.In diesem Fall kann der Gaußsche Satz (Divergenztheorem) angewandt werden
∫
∂B
tda =∫
∂B
T · n da =∫
B
divT dv. (279)

20.10.2015 61
Die Kombination der Gleichungen (272), (275) und (279) fuhrt auf
∫
B
(ρ x − divT − ρb) dv = 0. (280)
Da die Impulsbilanz (280) auch fur beliebige Teilkorper gilt, muss der Integrand selbst Nullsein. Damit gelangt man zur lokalen Form der Impulsbilanz
ρ x = divT + ρb. (281)
Formulierung in der Geschwindigkeit v = x und Auflosung der materiellen Zeitableitungfuhrt auf die folgende in der Stromungsmechanik genutzte Form der Impulsbilanz
ρ (∂v
∂t+ L · v) = divT + ρb. (282)
Addiert man zur linken Seite von (282) eine Null in Form der mit v multiplizierten Kon-tinuitatsgleichung (264), so gelangt man zu der Darstellung
v (∂ρ
∂t+ div(ρv))
︸ ︷︷ ︸
=0
+ ρ∂v
∂t+ (gradv) · (ρv) =
∂(ρv)
∂t+ div(ρv ⊗ v) (283)
des Beschleunigungsterms. Dabei macht man von der Vektoridentitat
div(a ⊗ b) = (grada) · b + (divb) a (284)
Gebrauch. Kombination von (284) mit (282) und Integration uber ein festes Volumen Vfuhrt auf die Eulersche Darstellung
∫
V
∂(ρv)
∂tdv =
∂
∂t
∫
V
ρv dv =∫
∂V
(T − ρv ⊗ v) · n da +∫
V
ρb dv. (285)
Differentiation und Integration durfen hier in der Reihenfolge vertauscht werden, weil sichdie Integration uber ein festgewahltes, zeitlich konstantes Gebiet V erstreckt. Der Ober-flachenterm entsteht dabei durch Anwendung des Gaußschen Integralsatzes auf die Diver-genzterme. Der Integrand des Oberflachenintegrals kann mit dem Cauchy-Theorem nochweiter umgeformt werden zu
∫
∂V
(T − ρv ⊗ v) · n da =∫
∂V
t − (v · n) ρv da. (286)
Der Impuls∫
Vρv dv innerhalb eines Kontrollvolumens V andert sich demnach durch die
Spannungsvektoren t, die am Rand ∂V des Kontrollvolumens angreifen, durch den Impuls,der mit der Normalengeschwindigkeit v · n uber den Rand transportiert wird, und durchdie Volumenkrafte, die im Inneren des Volumens angreifen.

62 Materialmodellierung
5.3 Impulsbilanz in materieller Darstellung
Im Rahmen der Festkorpermechanik stellt man oft die Impulsbilanz im Bezug auf dieGeometrie der Referenzkonfiguration dar, d. h. man bezieht sich auf die undeformierteAusgangskonfiguration des Korpers. Um die entsprechende Darstellung der Impulsbilanzanzugeben, startet man von der globalen Formulierung
d
dt
∫
B
ρ x dv =∫
∂B
T · da +∫
B
ρb dv (287)
und transformiert diese auf den Bereich B0 des undeformierten Korpers zuruck. Dazumussen die Volumen- und Flachenelemente gemaß (87) transformiert werden
d
dt
∫
B0
ρ x det F dV =∫
∂B0
T · ((det F)FT−1 · dA) +∫
B0
ρb det F dV. (288)
In den Volumenintegralen kann die Dichte ρ uber die Massenbilanz (259) durch die Dichteρ0 der Referenzkonfiguration ersetzt werden
d
dt
∫
B0
ρ0 x dV =∫
∂B0
T · (det FFT−1 · dA) +∫
B0
ρ0 bdV. (289)
In dem Oberflachenintegral wird die Große
P = (det F)T · FT−1 (290)
eingefuhrt, sie heißt erster Piola-Kirchhoff-Spannungstensor. Wahrend die Cauchy-Spannungt = T · n die wirkende Kraft auf ein Flachenelement der aktuellen Konfiguration be-zieht, bezieht die erste Piola-Kirchhoff-Spannung die selbe Kraft auf ein undeformiertesFlachenelement der Referenzkonfiguration. Man bezeichnet daher die erste Piola-Kirchhoff-Spannung auch als Nominalspannung. Im Gegensatz dazu stellt die Cauchy-Spannung diewahre Spannung dar. Gemaß der Einfuhrung dieser Spannungsgroßen gilt also
T · da = P · dA. (291)
Unter Anwendung des Gaußschen Integralsatzes und unter der ublichen Annahme derStetigkeit des Integranden gelangt man schließlich zu der lokalen Form der Impulsbilanz
ρ0d2 x
dt2= DivP + ρ0 b. (292)
Der Divergenzoperator in (292) bezieht sich dabei auf die Ortsvektoren der Referenzkonfi-guration.
Bemerkung: Neben dem ersten Piola-Kirchhoff-Spannungstensor P werden in der Lite-ratur auch die gewichtete Cauchy-Spannung oder die Kirchhoff-Spannung
τ = (det F)T (293)

20.10.2015 63
und der zweite Piola-Kirchhoff-Tensor
S = (det F)F−1 · T · FT−1 (294)
eingefuhrt. Die Bedeutung dieser Großen wird im Rahmen der Energiebilanz diskutiert.
5.4 Drallbilanz
Axiom: Der Drall eines materiellen Korpers andert sich durch die an ihmangreifenden Momente
Das Momentengleichgewicht ist wieder als Sonderfall enthalten. Der Drall eines materiellenKorpers bleibt in diesem Fall unverandert.
Die globale Form der Drallbilanz kann gemaß dem zugrunde liegenden Axiom als
hp = mp (295)
angegeben werden. Der Index p kennzeichnet dabei einen beliebigen aber festen Bezugs-punkt xp, ohne Beschrankung der Allgemeinheit kann dazu der Ursprung des Koordina-tensystems verwendet werden.
Der Drall eines materiellen Korpers ist durch das Moment des Impuls definiert und be-rechnet sich daher zu
hp =∫
B
(x − xp) × ρ xdv (296)
In der englisch-sprachigen Literatur wird der Drall als”moment of momentum“ bezeichnet.
Die auf den Korper einwirkenden Momente resultieren aus den Momenten der angreifendenKrafte mit Bezug auf den Punkt xp. Mit der bereits oben einguhrten Aufteilung in Nah-und Fernwirkungskrafte bzw. in Oberflachen- und Volumenkrafte folgt fur die zugehorigenMomente
mp =∫
∂B
(x − xp) × t da +∫
B
(x − xp) × ρb dv. (297)
Setzt man die Beziehungen (296) und (297) in die Drallbilanz ein, so gelangt man zu derfolgenden globalen Darstellung der Drallbilanz
d
dt
∫
B
(x − xp) × ρ x dv =∫
∂B
(x − xp) × (T · n) da +∫
B
(x − xp) × ρbdv. (298)
Vertauscht man auch hier auf der linken Seite die materielle Zeitableitung mit der Integra-tion uber das von dem Korper eingenommene, veranderliche Volumen, so ergibt sich unter

64 Materialmodellierung
Beachtung des Reynoldsschen Transporttheorems (277)
d
dt
∫
B
(x − xp) × ρ xdv =∫
B
[(x − xp) × (ρ x)• + (x − xp) × ρ x divx] dv
=∫
B
(x − xp) × ρ x dv.(299)
Dabei wurde beachtet, dass das Kreuzprodukt zwischen zwei parallelen Vektoren Null ist,
x × ρ x = 0, (300)
und dass der Bezugspunkt xp fest gewahlt ist, d. h. xp = 0. Weiterhin wurde von derMassenbilanz Gebrauch gemacht.
Um das Oberflachenintegral wieder in ein Volumenintegral umformen zu konnen, muss dasKreuzprodukt zwischen einem Vektor und einem Tensor definiert werden
a × B =3
E : (a⊗ B). (301)
Der dreistufige Tensor3
E ist der Fundamentaltensor 3. Stufe, der Permutations- oder Ric-citensor. Bezuglich einer kartesischen Basis besitzt der die Darstellung
3
E = ǫijkei ⊗ ej ⊗ ek mit ǫijk =
1 falls ijk = 123/231/312−1 falls ijk = 213/132/321
0 sonst(302)
Falls der Tensor B selbst als Dyadenprodukt zweier Vektoren b und c dargestellt werdenkann, folgt aus (301)
a× (b⊗ c) = (a × b) ⊗ c. (303)
Das Ergebnis ist also ein Tensor zweiter Stufe, der aus dem Dyadenprodukt von a×b undc gebildet wird. Fur das Oberflachenintegral in (298) heißt das
(x − xp) × (T · n) = [(x − xp) × T] · n. (304)
Als Konsequenz dieser Uberlegungen kann nun der Gaußsche Integralsatz angewandt wer-den, so dass man
∫
∂B
(x − xp) × (T · n) da =∫
B
div[(x − xp) ×T] dv (305)
erhalt.
Ubung: Zeigen Sie, dass fur den Divergenzausdruck auf der rechten Seite von (305) gilt
div[(x − xp) × T] = I× T + (x − xp) × divT. (306)

20.10.2015 65
Das Vektorprodukt zwischen Tensoren
A ×B =3
E : (A · BT ) (307)
liefert in dem hier auftretenden Fall den zweifachen axialen Vektor des Spannungstensors
At =
1
2I × T. (308)
Ubung: Berechnen Sie den axialen Vektor zum Tensor T. Zeigen Sie, dass der axialeVektor eines symmetrischen Tensors T = TT der Nullvektor ist.
Kombination der Zwischenergebnisse fuhrt auf∫
B
[
(x − xp) × (ρ x) − (x − xp) × divT − (x − xp) × ρb]
dv
︸ ︷︷ ︸
= 0
=∫
B
I× T dv. (309)
Man erkennt, dass die linke Seite von (309) durch die mit x− xp multiplizierte Impulsbilanz(281) gegeben ist. Als endgultiges Ergebnis der Drallbilanz erhalt man daher die Aussage
I× T = 2At = 0. (310)
Der axiale Vektor des Spannungstensors ist identisch mit dem Nullvektor. Der Spannungs-tensor ist also symmetrisch.
Bemerkung: Fur den Spannungstensor wird in einer kontinuumsmechanischen Theorieeine Verknupfung mit kinematischen Großen, z. B. mit Verzerrungstensoren, postuliert.Die wohl bekannteste Beziehung der sogenannten Konstitutivgleichungen ist das verall-gemeinerte Hookesche Gesetz. Die Formulierung der Konstitutivgleichung orientiert sichan Beobachtungen, die in Experimenten gemacht werden. In diesen Beziehungen hat manjedoch so viel Freiheit, dass durch eine entsprechende Wahl des funktionalen Zusammen-hangs zwischen Spannung und Verzerrung die Symmetrie der Cauchy-Spannung garantiertwerden kann. Aus diesem Grund tritt die Drallbilanz bei der Formulierung von kontinu-umsmechanischen Fragestellungen in der Regel nicht explizit auf.
Bemerkung: Startet man alternativ zu der axiomatischen Einfuhrung der Drallbilanz vondem Boltzmann-Axiom, das die Symmetrie des Spannungstensors postuliert, so ergibt sichdie Drallbilanz als direkte Konsequenz der Impulsbilanz. Die beiden Axiome sind daheraquivalent und aus der Wahl eines von beiden folgt jeweils das andere. Die Wahl derDrallbilanz als Axiom hat den Vorteil, dass leicht Erweiterungen vorgenommen werdenkonnen (→ erweiterte Kontinuumstheorie, z. B. Cosserat-Kontinua), die durch einfacheErweiterungen des Boltzmann-Axioms nicht gewonnen werden konnen.

66 Materialmodellierung
Mit der Definition des 1. Piola-Kirchhoff-Spannungstensors nach Gl. (290)
P = (det F)T · FT−1 (311)
und der Symmetrie der Cauchy-Spannung folgt
P · FT = F · PT . (312)
Die 1. Piola-Kirchhoff-Spannung ist also im Allgemeinen ein unsymmetrischer Tensor.
Ubung: Zeigen Sie, dass außer der Cauchy-Spannung T auch der Piola-Kirchhoff-Span-nungstensor S = (det F)F−1 ·T · FT−1 symmetrisch ist.
5.5 Energiebilanz
Die Bilanzen fur Massen, Impuls und Drall sind ausreichend bei der Behandlung mecha-nischer Probleme. In vielen Fallen ist jedoch auch die Entwicklung des Temperaturfel-des von Interesse, die z. B. durch die dissipierte mechanische Energie getrieben werdenkann. Man spricht dann von thermomechanischer Kopplung. Ein klassisches Beispiel istdie Erwarmung von Bremsscheiben wahrend des Bremsvorgangs. In diesem Fall ist nebenden mechanischen Bilanzen auch die Energiebilanz zu berucksichtigen. In ihrer allgemeinenForm entspricht die Energiebilanz dem ersten Hauptsatz der Thermodynamik.
Axiom: Die Energie eines materiellen Korpers andert sich durch die anihm verrichtete mechanische und thermische Leistung.
Die globale Formulierung kann damit als
e = p (313)
angegeben werden. Die Energie des Korpers besteht dabei aus zwei Anteilen, namlich ausder kinetischen Energie und aus der inneren Energie
e =∫
B
(ρ ε + 12ρ x · x) dv. (314)
In Gl. (314) stellt ε die spezifische innere Energiedichte dar.
Bemerkung: An dieser Stelle ist Vorsicht mit den Bezeichnungen geboten. Die Mechanikist im Allgemeinen nicht so stringent wie die klassische Thermodynamik und verzichtet oftauf Details in der Bezeichnung. So wird bei den Bezeichnungen oft nicht zwischen spezi-fischen Großen und Gesamtgroßen unterschieden. Klarheit kann man sich jedoch immeruber die Einheiten der entsprechenden Großen verschaffen.
20.10.2015 67
Die mechanische Leistung setzt sich aus der Leistung der Oberflachenkrafte und aus derLeistung der Volumenkrafte zusammen
pmechanisch =∫
∂B
x · t da +∫
B
x · ρb dv. (315)
Die thermische Leistung besteht aus dem Warmefluss q uber den Rand des Korpers undaus der Strahlungswarme ρ r, die im Inneren des Korpers freigesetzt wird
pthermisch = −∫
∂B
q · n da +∫
B
ρ r dv. (316)
Der Vorzeichenkonvention nach werden Flusse in Richtung der außeren Normalen n desKorpers positiv gezahlt. Ein Warmefluss in den Korper hinein, also entgegen der positivenNormalen, fuhrt aber zu einer Energieerhohung, so dass in (316) das negative Vorzeichenin dem Oberflachenterm auftritt. An dieser Stelle weichen die Konventionen der Thermo-dynamik und der Mechanik auch von einander ab.
Somit erhalt man die globale Formulierung der Energiebilanz
d
dt
∫
B
(ρ ε + 12ρ x · x) dv =
∫
∂B
(x · t − q · n) da +∫
B
(x · ρb + ρ r) dv. (317)
Mit dem Reynoldsschen Transporttheorem (277) kann die linke Seite von (317) zu
d
dt
∫
B
(ρ ε + 12ρ x · x) dv =
∫
B
(ρ ε + ρ x · x) dv (318)
umgeformt werden. Mit dem Cauchy-Theorem und dem Gaußschen Integralsatz wird dasOberflachenintegral in (317) in ein Volumenintegral der Form
∫
∂B
(x · t − q · n) da =∫
B
div(x · T − q) dv (319)
uberfuhrt. Unter der Voraussetzung hinreichender Stetigkeit und Differenzierbarkeit ergibtsich schließlich die lokale Form der Energiebilanz
ρ ε + ρ x · x = div(x · T − q) + x · ρb + ρ r. (320)
In (320) sind die Anderung der inneren Energie (eigentlich: der spezifischen inneren Ener-giedichte, s.o.) und der kinetischen Energie nur in der Summe enthalten. Man kann dieseAussage jedoch durch die Einfuhrung einer Bilanz der kinetischen Energie nach ihren Ur-sachen separieren.
Die Bilanz der kinetischen Energie ergibt sich dabei als Konsequenz der Impulsbilanz, wennman diese mit x skalar-multipliziert
x · ρ x − x · divT − x · ρb = 0. (321)

68 Materialmodellierung
Ubung: Zeigen Sie, dass der erste Summand in (321) als Ableitung der kinetischen Energiegeschrieben werden kann
d
dt(1
2ρ x · x) = x · ρ x. (322)
Mit der Identitat
div(A · b) = divAT · b + AT : gradb (323)
und unter Beachtung der notwendigen Transpositionen lautet die Bilanz der kinetischenEnergie
d
dt(1
2ρ x · x) = div(TT · x) − L : T + x · ρb. (324)
Subtrahiert man die Bilanz der kinetischen Energie von der Energiebilanz in der Form(320), so gelangt man zur Bilanz der inneren Energie
ρ ε = L : T − divq + ρ r. (325)
Die innere Energie andert sich also durch die thermische Leistung in Form der Divergenzdes Warmeflusses und der Strahlungswarme und durch einen mechanischen Anteil, namlichdurch die sogenannte Spannungsleistung L : T. Da gemaß der Drallbilanz der Spannungs-tensor eine symmetrische Große ist, kann die Spannungsleistung als Skalarprodukt derDeformationsgeschwindigkeit D und des Spannungstensors T dargestellt werden
L : T = D : T + W : T = D : T, (326)
da das Skalarprodukt eines symmetrischen und eines schiefsymmetrischen Tensors Null er-gibt.Bezieht man die Spannungsleistung auf die Dichte, so ergibt sich die spezifische Spannungs-leistung
wi =1
ρD : T. (327)
Neben der Darstellung (327) kann die spezifische Spannungsleistung auch in Großen derReferenzkonfiguration ausgedruckt werden. Mit der Massenbilanz (259)
ρ = ρ0 J−1, (328)
dem Ruckwartstransport (161) der Deformationsgeschwindigkeit
E = FT · D · F (329)
und der Definition (294) der zweiten Piola-Kirchhoff-Spannung
S = J F−1 · T · FT−1 (330)

20.10.2015 69
kann die spezifische Spannungsleistung bezuglich der Referenzkonfiguration dargestellt wer-den
wi =1
ρD : T =
1
ρ0E : S. (331)
Damit wird die Interpretation der zweiten Piola-Kirchhoff-Spannung klar. Sie ist die kon-jugierte Spannung zur referenziellen Deformationsgeschwindigkeit E mit der Eigenschaft,dass die Spannungsleistung beim Wechsel der Darstellung unverandert bleibt.
5.6 Entropiebilanz
Aus der Erfahrung weiß man, dass physikalische Prozesse im allgemeinen nicht reversibelsind, d. h. sie laufen freiwillig nur in eine Richtung ab. Als Konsequenz kann thermischeEnergie nie vollstandig in mechanische Energie umgewandelt werden. Dieser Sachverhaltkann durch die Entropie beschrieben werden.
Fur die Entropie fordert man ebenfalls die Existenz einer Bilanz in der Form
d
dt
∫
B
ρ η dv =∫
∂B
− q
ϑ· n da +
∫
B
ρ r
ϑdv +
∫
B
η dv. (332)
Fur den Entropiefluss wird dabei a priori der Quotient von Warmefluss q zu absoluterTemperatur ϑ angesetzt, fur die Entropiezufuhr der Quotient aus Warmezufuhr ρ r undabsoluter Temperatur ϑ. Dabei wird vorausgesetzt, dass eine absolute Temperatur ϑ > 0existiert. Die entsprechenden Uberlegungen sind Bestandteil der klassischen Thermodyna-mik.
Neben dem Entropiefluss und der Entropiezufuhr tritt in (332) eine weitere Große auf,namlich die Entropieproduktion η. Das Prinzip der Irreversibilitat oder der zweite Haupt-satz der Thermodynamik kann nun in der folgenden Weise postuliert werden:
Axiom: Die Entropieproduktion in einem materiellen Korper ist nichtnegativ.
Die lokale Formulierung des Prinzips der Irreversibilitat erhalt man, in dem man in Gl. (332)die materielle Zeitableitung und die Integration unter Anwendung des Reynoldsschen Trans-porttheorems vertauscht und auf der rechten Seite unter Verwendung des Gaußschen In-tegralsatzes das Oberflachen- in ein Volumenintegral umformt. Die lokale Formulierunglautet dann
ρ η + div(q
ϑ
)
− ρ r
ϑ= η ≥ 0. (333)
Grundsatzlich sei an dieser Stelle bemerkt, dass (333) Prozesse im thermischen Gleich-gewicht oder zumindest in der Nahe des thermischen Gleichgewichts beschreibt. Die Be-schreibung beliebiger Nichtgleichgewichtsprozesse, wie es im Rahmen einer allgemeinenKontinuumsmechanik erforderlich ist, erfordert eine erweiterte Fassung des Prinzips der

70 Materialmodellierung
Irreversibilitat. Allerdings findet man in der Literatur dazu viele unterschiedliche Fassun-gen. Man kann diesen Bereich der Thermodynamik nicht als abgeschlossen bezeichnen.
Die hier vorgestellte Fassung des zweiten Hauptsatzes (333) fuhrt auf eine spezielle Formu-lierung des Prinzips der Irreversibilitat in Form der Clausius-Duhem-Ungleichung, wenn dieExistenz einer freien Helmholtzschen Energie und der zugehorigen Legendretransformationpostuliert wird.
Man fuhrt die folgende Legendre-Transformation als Zusammenhang zwischen der freienEnergie, der inneren Energie und der Entropie ein
ψ = ε − ϑ η (334)
Die freie Helmholtzsche Energie ψ charakterisiert dabei den Anteil der im Korper gespei-cherten Energie, der fur die Verrichtung mechanischer Arbeit herangezogen werden kann.
Mit (334) kann die Entropie als Differenz der inneren Energie ε und der freien Energie ψausgedruckt werden
η =ε − ψ
ϑ. (335)
Dann gilt fur die materielle Anderung der Entropie
η =ϑ (ε − ψ) − (ε − ψ) ϑ
ϑ2=
ε − ψ
ϑ− η ϑ
ϑ. (336)
Kombination der Gleichungen (333) mit (336) fuhrt schließlich mit der Annahme einerpositiven absoluten Temperatur ϑ > 0 auf
ρ ε − ρ ψ − ρ η ϑ + divq − 1
ϑq · gradϑ − ρ r = ϑ η ≥ 0. (337)
Gemaß der Bilanz der inneren Energie (325) kann die Rate der inneren Energie aus derGleichung eliminiert werden. Dadurch wird die Spannungsleistung in die Gleichung ein-gefuhrt
− ρ ψ − ρ η ϑ − q
ϑ· gradϑ + D : T ≥ 0. (338)
Die Gleichung (338) wird als Clausius-Duhem-Ungleichung bezeichnet und stellt die in derKontinuumsmechanik ublich Formulierung des zweiten Hauptsatzes oder des Prinzips derIrreversibilitat dar.
Fur isotherme Prozesse reduziert sich die Clausius-Duhem-Ungleichung zur Clausius-Planck-Ungleichung
− ρ ψ + D : T ≥ 0. (339)
Sie besagt, dass die Anderung der freien Energie, die in einem Korper gespeichert wird,hochstens der zugefuhrten Spannungsleistung entspricht. Die positive Differenz zwischenSpannungsleistung und Anderung der freien Energie wird wahrend des Vorgangs dissipiertund steht fur den mechanischen Prozess im weiteren nicht mehr zur Verfugung.

20.10.2015 71
5.7 Allgemeine Bilanzgleichung
Alle der behandelten Bilanzgleichungen fur Masse, Impuls, Drall, Energie und Entropie ha-ben dieselbe Struktur. In allen Gleichungen wird die Anderung einer physikalischen Großebilanziert mit einem Fluss dieser Große uber die Oberflache des Korpers, einer Zufuhr imInneren des Korpers und einer Produktion im Inneren des Korpers. Vom mathematischenStandpunkt aus besitzten die Zufuhr- und die Produktionsterme dieselbe Struktur, aber siehaben eine unterschiedliche physikalische Interpretation. Wahrend die Zufuhr durch eineFernwirkung außerhalb des Korpers verursacht wird (z. B. Volumenkraft) hat die Produk-tion ihre Ursache im Korper selbst. In den o. g. Bilanzen tritt die Produktion nur in derEntropiebilanz auf.Mathematisch kann man den Sachverhalt folgendermaßen formulieren
d
dt
∫
B
ψ(x, t) dv =∫
∂B
φ(x, t)da +∫
B
σ(x, t) dv +∫
B
ψ(x, t) dv. (340)
In (340) ist ψ die physikalische Große, die bilanziert wird, φ = Φ ·n, wobei Φ der Fluss vonψ uber den Rand des Korpers ist (Ausfluss positiv!), σ ist die Zufuhr und ψ die Produktionvon ψ im Inneren.Mit dem Reynoldsschen Transporttheorem (277) und dem Gaußschen Integralsatz gelangtman zu der lokalen Darstellung
ψ + ψ div x − divΦ − σ = ψ, (341)
sofern die Felder stetig und stetig differenzierbar sind.Vergleicht man die allgemeine Form (341) mit den individuellen Bilanzen, so findet mandie folgende Identifikation fur die auftretenden Großen
Bilanz phys. Große ψ Fluss φ Zufuhr σ Produktion ψ
Massenbilanz ρ 0 0 0
Impulsbilanz ρx t ρb 0
Drallbilanz (x − xp) × ρ x (x − xp) × t (x − xp) × ρb 0
Energiebilanz ρε + 12ρ x · x TT · x − q x · ρb + ρ r 0
Entropie ρη ρηρ rϑ
= sη η ≥ 0
5.8 Sprungbedingungen uber singulare Flachen
In den bisherigen Uberlegungen wurde vorausgesetzt, dass die Feldgroßen in den Bilanz-gleichungen
”hinreichend“ glatt sind, so dass die Stetigkeits- und Differenzierbarkeitsan-
forderungen zur Anwendung des Gaußschen Integralsatzes und des Reynoldsschen Trans-porttheorems erfullt sind. Im Allgemeinen konnen in den Feldgroßen jedoch Sprunge und
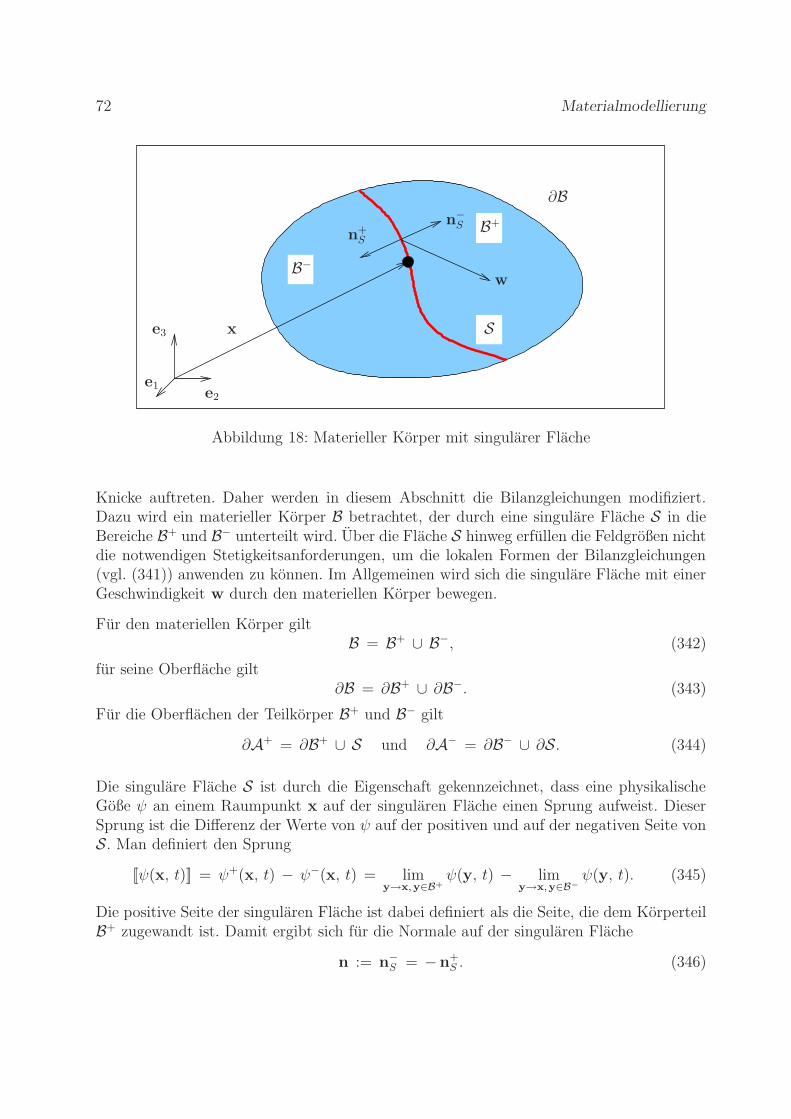
72 Materialmodellierung
∂B
B+
B−
n+S
n−S
S
e1e2
e3 x
w
Abbildung 18: Materieller Korper mit singularer Flache
Knicke auftreten. Daher werden in diesem Abschnitt die Bilanzgleichungen modifiziert.Dazu wird ein materieller Korper B betrachtet, der durch eine singulare Flache S in dieBereiche B+ und B− unterteilt wird. Uber die Flache S hinweg erfullen die Feldgroßen nichtdie notwendigen Stetigkeitsanforderungen, um die lokalen Formen der Bilanzgleichungen(vgl. (341)) anwenden zu konnen. Im Allgemeinen wird sich die singulare Flache mit einerGeschwindigkeit w durch den materiellen Korper bewegen.
Fur den materiellen Korper giltB = B+ ∪ B−, (342)
fur seine Oberflache gilt∂B = ∂B+ ∪ ∂B−. (343)
Fur die Oberflachen der Teilkorper B+ und B− gilt
∂A+ = ∂B+ ∪ S und ∂A− = ∂B− ∪ ∂S. (344)
Die singulare Flache S ist durch die Eigenschaft gekennzeichnet, dass eine physikalischeGoße ψ an einem Raumpunkt x auf der singularen Flache einen Sprung aufweist. DieserSprung ist die Differenz der Werte von ψ auf der positiven und auf der negativen Seite vonS. Man definiert den Sprung
[[ψ(x, t)]] = ψ+(x, t) − ψ−(x, t) = limy→x,y∈B+
ψ(y, t) − limy→x,y∈B−
ψ(y, t). (345)
Die positive Seite der singularen Flache ist dabei definiert als die Seite, die dem KorperteilB+ zugewandt ist. Damit ergibt sich fur die Normale auf der singularen Flache
n := n−S = −n+
S . (346)

20.10.2015 73
Spungstelle Schnittlinie
ψ
[[ψ]]
Abbildung 19: Schnitt durch den Korper mit singularer Flache
Um die Bilanzgleichungen im Bereich der singularen Flache auswerten zu konnen, ist eserforderlich, das Konzept der materiellen Ableitung auszuweiten. Gesucht ist in diesem Falldie zeitliche Anderung einer physikalischen Große, die ein Beobachter feststellt, der sichmit einer beliebigen Geschwindigkeit w bewegt (z. B. mit der Geschwindigkeit, mit dersich auch die singulare Flache bewegt). Die totale Anderung einer Feldgroße ψ bezuglicheiner Bewegung mit der Geschwindigkeit w ist
dw(ψ)
dt= ψ′ =
∂ψ
∂t︸︷︷︸
lokal
+ gradψ · w︸ ︷︷ ︸
konvektiv
. (347)
Zwischen der materiellen Zeitableitung und der Zeitableitung bezuglich der Geschwindig-keit w besteht der Zusammenhang
ψ = ψ′ + gradψ · (v − w). (348)
Weiterhin ist zu beachten, dass ein mit w bewegter Beobachter gegenuber (252) auch eineandere Anderungsgeschwindigkeit von Volumenelementen feststellt
(dv)′ = (divw) dv (349)
Damit folgt ein modifiziertes Reynoldssches Transporttheorem in der Form
dw
dt
∫
B
ψ dv =∫
B
(ψ′ + ψ div w) dv. (350)

74 Materialmodellierung
Setzt man nun noch (349) ein, berucksichtigt die Vektoridentitat analog zu (284) und wen-det schließlich den Gaußschen Integralsatz an, so gelangt man zu der folgenden Darstellung
dw
dt
∫
B
ψ dv =∫
B
∂ψ
∂tdv +
∫
∂B
ψw · n da. (351)
Falls w mit der materiellen Geschwindigkeit v = x zusammenfallt, ergibt sich wieder derbekannte Zusammenhang
dv
dt
∫
B
ψ dv =∫
B
∂ψ
∂tdv +
∫
∂B
ψ v · n da =d
dt
∫
B
ψ dv. (352)
Insbesondere gilt
d
dt
∫
B
ψ dv =dw
dt
∫
B
ψ dv +∫
∂B
ψ (v − w) · n da. (353)
Mit diesen Uberlegungen konnen nun aus den Bilanzgleichungen die Sprungbedingungenhergeleitet werden. Dazu betrachtet man die Bilanzgleichungen in den beiden TeilkorpernB+ und B−. Es gilt in B+
d
dt
∫
B+
ψ dv =dw
dt
∫
B+
ψ dv +∫
∂B+
ψ (v − w) · n da +∫
S
ψ (v − w) · n+ da. (354)
Mit (351) kann man die zwei ersten Summanden der rechten Seite noch umformen, so dassman schließlich die Aussage
d
dt
∫
B+
ψ dv =∫
B+
∂ψ
∂tdv +
∫
∂B+
ψ v · n da +∫
S
ψ (v − w) · n+ da (355)
erhalt. Kombiniert man schließlich diese Gleichung mit der analogen Aussage fur denKorperteil B−, so erhalt man eine Aussage fur den Gesamtkorper B, wenn eine singulareFlache S in diesem Korper vorhanden ist
d
dt
∫
B
ψ dv =d
dt
∫
B−
ψ dv +d
dt
∫
B+
ψ dv =
∫
B
∂ψ
∂tdv +
∫
∂B
ψ v · n da +∫
S
ψ (v − w) · n− da +∫
S
ψ (v − w) · n+ da.(356)
Berucksichtigt man noch die Definition des Sprungs (345) und die Definition der Normalenn auf der singularen Flache gemaß (346), so kann man die beiden letzten Summandenzusammenfassen und erhalt
d
dt
∫
B
ψ dv =∫
B
∂ψ
∂tdv +
∫
∂B
ψ v · n da −∫
S
[[ψ (v − w)]] · n da. (357)

20.10.2015 75
Das Integral uber die Diskontinuitatsflache liefert keinen Beitrag, wenn sich die Flache mitder materiellen Geschwindigkeit v bewegt. Handelt es sich jedoch um eine nichtmaterielleFlache, die sich mit w 6= v bewegt, so liefert das Integral uber S einen Beitrag, der deninneren Fluss [[ψ (v − w)]] uber die singulare Flache beschreibt.
Auf die gleiche Art und Weise kann man nun die globale Bilanzgleichung fur die beidenTeilkorper B+ und B− angeben, wobei zu beachten ist, dass die auftretenden Großen in-nerhalb der Teilkorper stetig sind.
d
dt
∫
B+
ψ dv =∫
B+
Φ · n da −∫
S
Φ+ · n da +∫
B+
σ dv,
d
dt
∫
B−
ψ dv =∫
B−
Φ · n da +∫
S
Φ− · n da +∫
B−
σ dv,(358)
Addiert man die beiden Gleichungen (358) und kombiniert man das Ergebnis mit (357), soergibt sich die allgemeine Bilanzgleichung fur einen materiellen Korper mit einer singularenFlache in der Form
d
dt
∫
B
ψ dv −∫
S
[[ψ (v − w)]] · nda =∫
∂B
Φ · n da −∫
S
[[Φ]] · n da +∫
B
σ dv. (359)
In einem letzten Schritt werden die Oberflachenintegrale in (359) mit dem Gaußschen Satzin Volumenintegrale transformiert. Da die Großen in B mit Ausnahme der Flache S stetigund differenzierbar sind, ist dies moglich. Man findet so
∫
B\S
(ψ − divΦ − σ) dv =∫
S
[[ψ (v − w) − Φ]] · n da. (360)
Da innerhalb von B die Felder stetig sind, ist die linke Seite von (360) identisch Null.Damit verbleibt die rechte Seite, die auf der singularen Flache und insbesondere in jedemTeil davon Gultigkeit hat. Man erhalt so die Sprungbedingung uber die singulare Flacheals lokale Aussage
[[ψ (v − w) − Φ]] · n = 0. (361)
Stellt man die entsprechenden Uberlegungen fur eine vektorwertige Große ψ und die zu-gehorige Bilanzgleichung an, erhalt man als Sprungbedingung
[[ψ ⊗ (v − w) − Φ]] · n = 0. (362)
5.8.1 Randbedingungen
Aus den Uberlegungen des letzten Abschnitts lassen sich sofort Randbedingungen herleiten.Dazu betrachtet man den Rand eines Korpers als singulare, materielle Flache, die sich mit

76 Materialmodellierung
der Geschwindigkeit w = v bewegt. Die Sprungbedingung (361) bzw. (362) reduziert sichdann auf die Aussage
[[Φ]] · n = 0. (363)
Betrachtet man die B+-Seite als die außer Seite, so findet man die Randbedingungen furdie Spannungen und den Warmefluss in der From:
T · n = t+ = gegeben,
(TT · v − q) · n = t+ · v − q+ = gegeben.(364)
20.10.2015 77
6 Materialtheorie
6.1 Allgemeine Prinzipien
Die Gleichungen der Kinematik und die Bilanzgleichungen sind in ihrer Formulierung mate-rialunabhangig. Mit ihnen allein kann man kein Randwertproblem losen. Die unbekanntenGroßen in einem kontinuumsmechanischen Randwertproblem sind die Bewegung χ(X, t) (3skalarwertige Großen), die Dichte ρ (1 Skalar), die Spannungen T (6 skalarwertige Großen– unter Ausnutzung der Symmetrie), die Temperatur ϑ (1 Skalar), die innere Energie ε (1Skalar) und der Warmefluss q (3 skalarwertige Großen). Dazu stehen insgesamt die Mas-senbilanz (1 skalarwertige Gleichung), die Impulsbilanz (3 skalarwertige Gleichungen) unddie Energiebilanz (1 skalarwertige Gleichung) zur Verfugung. Da bereits die Symmetriedes Cauchyspannungstensors vorausgesetzt wurde, darf die Drallbilanz im weiteren nichtmitgezahlt werden. Den insgesamt 3+1+6+1+1+3 = 15 Unbekannten stehen somit nur1+3+1 = 5 Gleichungen gegenuber. Um das Problem aus mathematischer Sicht prinzipielllosen zu konnen, muss die Anzahl der Gleichungen und die Anzahl der Unbekannten gleichsein. Die fehlenden Gleichungen werden als Materialgleichungen oder Konstitutivgleichun-gen fur den Spannungstensor (6 Gleichungen), fur die innere Energie (1 Gleichung) und furden Warmefluss (3 Gleichungen) postuliert. Damit ist das System geschlossen und kanngelost werden. Die Konstitutivgleichungen, mit denen das System mathematisch losbarwird, sind materialspezifisch und mussen in Anlehnung an Experimente formuliert werden.Typische Vertreter der Konstitutivgleichungen sind z. B. das Hookesche Gesetzt (linearerZusammenhang zwischen Spannung und Verzerrung) und das Fouriersche Warmeleitgesetz(linearer Zusammenhang zwischen Warmefluss und Temperaturgradient).
Die lineare Elastizitat stellt mit dem Hookeschen Gesetz in diesem Rahmen einen dereinfachsten Falle dar. Wenn komplexeres Materialverhalten beschrieben werden soll, ist dieFormulierung der Konstitutivgleichungen ein schwieriges Unterfangen. Um formale Fehlerzu vermeiden werden daher in der Materialtheorie einige Uberlegungen angestellt, die einenallgemeinen Rahmen fur die Formulierung der Konstitutivgleichungen bereit stellen. ImFolgenden werden diese Uberlegungen konkretisiert.
In dem allgemeinen Rahmen der Materialtheorie bezeichnet man die gesuchten Material-gesetze auch als Auswirkungsfunktionen. Gesucht werden
R = {ψ, η, T, q} (365)
als Funktionale der Bewegung x = χ(X, t) und der Temperatur, allgemein in Abhangig-keit eines Satzes S von Prozessvariablen. Die freie Helmholtzsche Energie ψ wird dabeian Stelle der inneren Energie ε genutzt, weil sich damit einige Vorteile in der Darstellungergeben. Es gilt der Zusammenhang
ψ = ε − ϑ η, (366)
78 Materialmodellierung
der hier als Definition eingefuhrt wird aber im Rahmen der klassischen Thermodynamikaus einer Legendre-Transformation folgt.
Bei der Formulierung der Materialfunktionale lasst man sich von einigen Prinzipien leitenund verfugt nicht ad hoc uber die entsprechenden Zusammenhange. Die entsprechendnPrinzipien sind zum Teil mathematischer Natur, zum Teil enspringen sie der physikalischenAnschauung:
1. Determinismus: Die Auswirkungsfunktionen an einem beliebigen materiellen Punktsind eindeutig durch die Geschichte des Korpers festgelegt. Das Prinzip des Determi-nismus ist die Voraussetzung, dass eine eindeutige Materialgleichung existiert. DieseExistenz soll im Weiteren vorausgesetz werden.
2. Aquiprasenz: Alle Auswirkungsfunktionen hangen grundsatzlich vom gleichen Satzvon Prozessvariablen ab. Man schließt damit aus, dass a priori gewisse Abhangigkei-ten unberucksichtigt bleiben.
3. Lokale Wirkung: Die Auswirkungsfunktionen an einem materiellen Punkt sinddurch die Geschichte des Punktes und seiner Umgebung festgelegt und hangen nichtvon der Geschichte aller Korperpunkte ab. Durch die Annahme der lokalen Wirkungwird das Integralkontinuum von den Betrachtungen ausgenommen. Die Konstitu-tivgleichungen sind dann eine Funktion der Primarvariablen und ihrer raumlichenAbleitungen und kein Funktional der Bewegung.
4. Schwindendes Gedachtnis: Die Auswirkungsfunktionen an einem materiellen Punkthangen nicht von der vollstandigen Geschichte ab, sondern weiter in der Zeit zuruck-liegende Ereignisse haben einen geringeren Einfluss als weniger weit zuruckliegende.Dem Prinzip wird bei der Behandlung viskosen Materialverhaltens Rechnung getra-gen, in dem nur die Werte zum aktuellen Zeitpunkt und deren Zeitableitungen indie Formulierung der Materialgleichungen eingehen. Das Prinzip des SchwindendenGedachtnisses entspricht dem Prinzip der Lokalen Wirkung mit Bezug auf die Zeit.
Bemerkung: Plastisches Materialverhalten entspricht einem perfekten Gedachtnis.Das Material
”erinnert“ sich an alle zuruckliegenden Ereignisse. Zur Modellierung
werden in diesem Fall”interne Variablen“ eingefuhrt, die das Gedachtnis des Mate-
rials reprasentieren.
5. Beobachter-Invarianz: Das Prinzip der Beobachter-Invarianz oder der materiel-len Objektivitat fordert, dass die Konstitutivlgeichungen unabhangig von der Wahldes Bezugssystems sein mussen, sie bleiben daher bei dem Wechsel in ein anderesBezugssystem invariant.
6. Materielle Symmetrie: Die Materialgleichungen mussen materielle Symmetrienwiderspiegeln. Demnach mussen die Materialgleichungen unter Transformationen, diedie Symmetrie des Materials erhalten, invariant bleiben.
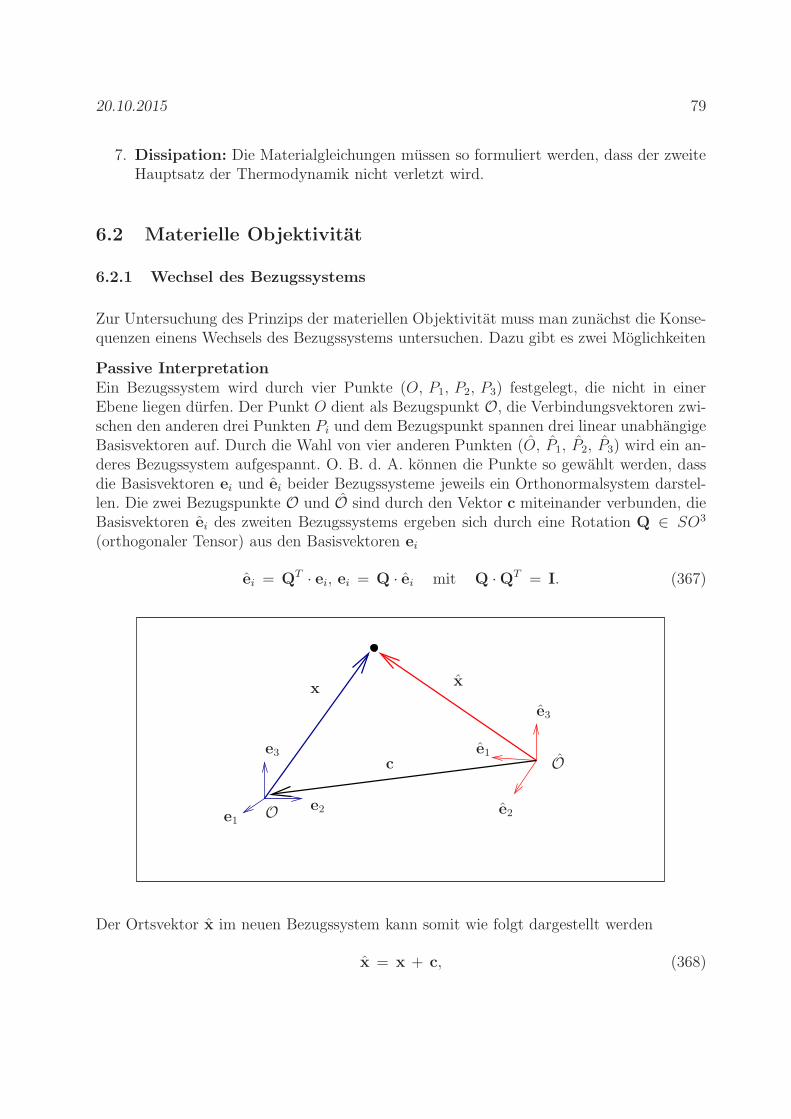
20.10.2015 79
7. Dissipation: Die Materialgleichungen mussen so formuliert werden, dass der zweiteHauptsatz der Thermodynamik nicht verletzt wird.
6.2 Materielle Objektivitat
6.2.1 Wechsel des Bezugssystems
Zur Untersuchung des Prinzips der materiellen Objektivitat muss man zunachst die Konse-quenzen einens Wechsels des Bezugssystems untersuchen. Dazu gibt es zwei Moglichkeiten
Passive InterpretationEin Bezugssystem wird durch vier Punkte (O, P1, P2, P3) festgelegt, die nicht in einerEbene liegen durfen. Der Punkt O dient als Bezugspunkt O, die Verbindungsvektoren zwi-schen den anderen drei Punkten Pi und dem Bezugspunkt spannen drei linear unabhangigeBasisvektoren auf. Durch die Wahl von vier anderen Punkten (O, P1, P2, P3) wird ein an-deres Bezugssystem aufgespannt. O. B. d. A. konnen die Punkte so gewahlt werden, dassdie Basisvektoren ei und ei beider Bezugssysteme jeweils ein Orthonormalsystem darstel-len. Die zwei Bezugspunkte O und O sind durch den Vektor c miteinander verbunden, dieBasisvektoren ei des zweiten Bezugssystems ergeben sich durch eine Rotation Q ∈ SO3
(orthogonaler Tensor) aus den Basisvektoren ei
ei = QT · ei, ei = Q · ei mit Q ·QT = I. (367)
Oe1
e2
e3
x
Oe1
e2
e3
x
c
Der Ortsvektor x im neuen Bezugssystem kann somit wie folgt dargestellt werden
x = x + c, (368)

80 Materialmodellierung
wobei x den Ortsvektor zu dem selben Punkt im Bezug auf das Ausgangssystem beschreibt.Mit der Darstellung
x = xi ei, x = xi ei, und c = ci ei (369)
ergibt sich der Zusammenhang
x = xi ei = xi ei + ci ei. (370)
Unter Berucksichtigung der orthogonalen Transformation (367) folgt dann
xi ei = xi Q · ei + ci ei. (371)
Skalare Multiplikation mit einem Basisvektor ek fuhrt schließlich auf
x · ek = xk = xi (Q · ei) · ek + ck. (372)
Mit Einfuhrung der orthogonalen Matrix
Qki = ek · Q · ei (373)
ergibt sich zwischen den Koeffizienten der beiden Vektoren x und x die folgende Matrizen-gleichung als Zusammenhang
xk = Qki xi + ck. (374)
In der passiven Interpretation ist der Wechsel des Bezugssystems durch die Translation cund die Rotation Q der Basisvektoren eindeutig festgelegt. Die Gleichung (374) beschreibteine Koordinatentransformation der xi auf die xi.
Aktive InterpretationIn der aktiven Interpretation wird der Bezugspunkt verschoben, und die Ortsvektorenwerden einer orthogonalen Transformation unterzogen
x∗ = Q · x + c. (375)
Q · x x∗
c
O
O∗

20.10.2015 81
Der wesentliche Unterschied zwischen der passiven und der aktiven Interpretation ist der,dass die passive Interpretation zu einer Koordinatentransformation in der Form (374) fuhrt,wahrend die aktive Interpretation zu der Vektortransformation (375) fuhrt, die unabhangigvom gewahlten Koordinatensystem ist. Die aktive Interpretation kann auch als Uberlage-rung einer Starrkorperbewegung interpretiert werden.
6.2.2 Objektive Großen
In der physikalischen Interpretation kann ein Bezugssystem mit einem Beobachter iden-tifiziert werden, da ein Beobachter einen physikalischen Prozess z. B. durch die Angabevon Abstanden und Richtungen beschreibt. Wir lassen nun zu, dass ein Prozess durchzwei Beobachter beschrieben wird, die sich mit unterschiedlichen Geschwindigkeiten bewe-gen durfen. Im Rahmen der aktiven Interpretation gelangt man so zu der zeitabhangigenVektortransformation
x∗ = Q(t) · x + c(t). (376)
Da sich die beiden Beobachter nicht auf den gleichen Zeitnullpunkt beziehen mussen, wirdebenfalls eine Zeittransformation
t∗ = t − a (377)
zugelassen. Die durch (376) und (377) festgelegte Transformation ist eine Euklidsche Trans-formation. Sie erhalt die Langen von Vektoren. Eine Untermenge der Euklidschen Trans-formationen ist durch die Galilei-Transformation gegeben. Fur die Galilei-Transformationgilt
Q(t) = Q0 = konst. und c(t) = c0 + c1 t. (378)
Physikalische Großen heißen objektive Großen, wenn sie bei dem Wechsel eines Bezugssy-stems (Wechsel des Beobachters) bestimmten Transformationsvorschriften genugen:
1. Objektive skalare Großen sind vom Bezugssystem unabhangig
φ∗ = φ. (379)
2. Objektive vektorielle Großen genugen der Transformation
v∗ = Q · v, (380)
d. h. sie andern ihre Lange nicht.
Da sich der Ortsvektor eines Punktes bei einem Bezugssystemwechsel gemaß (376)transformiert, ist er kein objektiver Vektor. Die Differenz wischen zwei Ortsvektorenist allerdings objektiv:
x∗P − x∗
Q = Q(t) · xp + c(t) − Q(t) · xQ − c(t) = Q(t) ·(
xP − xQ
)
. (381)

82 Materialmodellierung
3. Objektive Tensoren bilden objektive Vektoren auf objektive Vektoren ab. Aus w =T · v wird im anderen Bezugssystem w∗ = T∗ · v∗. Wenn w und v jeweils objektiveVektoren sind, so gilt fur sie w∗ = Q · w und v∗ = Q · v. Fur die Transformationergibt sich
w∗ = Q · (T · v)︸ ︷︷ ︸
w
= T∗ · (Q · v)︸ ︷︷ ︸
v∗
. (382)
Wenn T also ein objektiver Tensor sein soll, muss er sich gemaß
T∗ = Q · T · QT (383)
transformieren.
Die folgenden physikalischen Großen sind objektive Großen: Masse, Massendichte, Kraft,Cauchyspannungsvektor, Cauchyspannungstensor, Volumenkraftdichte, innere Energie, spe-zifische innere Energie, Warme, Warmefluss, Entropie, spezifische Entropie, Entropiefluss,Temperatur, materielle Linien-, Flachen-, Volulmenelemente.
Ubung: Zeigen Sie, dass die Geschindigkeit x und die Beschleunigung x keine objektivenVektoren sind.
Da die Geometrie der Referenzkonfiguration nicht vom Beobachter abhangen kann, trans-formieren sich geometrische Objekte der Referenzkonfiguration bei einem Wechsel des Be-zugssystems nicht. Fur Linien-, Flachen- und Volumenelemente in der Referenzkonfigura-tion gilt
dX∗ = dX, dA∗ = dA, dV ∗ = dV. (384)
Insbesondere mit (384)1 folgt
dx∗ = Q · dx = F∗ · dX = Q · F · dX. (385)
Der Deformationsgradient transformiert sich also gemaß
F∗ = Q · F (386)
und nicht wie ein objektiver Tensor. Ursache ist der Zweifeldcharakter des Deformations-gradienten, durch den sich nur ein Basisvektor auf die Momentankonfiguration bezieht.
Ubung: Untersuchen Sie, ob die folgenden Großen objektive Großen sind: Rechter undLinker Cauchy-Green-Deformationstensor, Greenscher und Almansischer Verzerrungsten-sor, Geschwindigkeitsgradient, Deformationsgeschwindigkeit, Wirbeltensor.
6.2.3 Bezugsinvarianz
Nach dem Prinzip des Determinismus existieren die Materialgleichungen (Auswirkungs-funktionen) als Funktionale der Prozessvariablen. Es gilt dann
R = R(S) (387)

20.10.2015 83
Bei einem Wechsel des Bezugssystems
x∗ = Q(t) · x + c(t) (388)
gehen die Prozessvariablen uber inS → S∗. (389)
In dem geanderten Bezugssystem findet man die Auswirkungsfunktionen
R = R(S) → R∗ = R∗(S∗). (390)
Das Prinzip der materiellen Objektivitat fordert die Unabhangigkeit der Materialfunktio-nale R von dem Bezugssystem. Dann muss gelten
R∗ = R∗(S∗) = R(S∗), (391)
z. B. gilt aufgrund der Objektivitat des Spannungstensors T
T∗ = Q · T︸︷︷︸
RT (S)
·QT = RT (S∗). (392)
Auf dieser Basis kann man zeigen, dass der Spannungszustand an einem materiellen PunktP nicht von der Position xP des Punktes abhangt, sondern nur von der Differenz zwischenzwei Punkten P und Q. Außerdem kann der Zustand nicht explizit von der Zeit t abhangen.
Gemaß dem Prinzip der materiellen Objektivitat gilt
T∗ = Q · T · QT = Q · RT (xp, t) ·QT = RT (Q · xP − c, t − a) (393)
Die oben getroffene Aussage ergibt sich fur eine spezielle Wahl der Euklidschen Transfor-mation zwischen den zwei Bezugssystemen, namlich
Q(t) = I, c(t) = xQ, a(t) = − t. (394)
Mit dieser willkurlichen Wahl folgt aus dem Prinzip der materiellen Objektivitat
RT (xP , t) = RT (xP − xQ, 0). (395)
Legt man im Weiteren das Prinzip der lokalen Wirkung zu Grunde, so hangt der Zustand imPunkt P nur von der Nachbarschaft ab, der Einfluss von weiter entfernt liegenden Punktenauf den Zustand in P ist gering. Dann kann die Differenz xP − xQ in eine Taylor-Reiheentwickelt werden. Das erste Glied einer solchen Reihe ist
∂x
∂X· (xP − xQ) = F · (xP − xQ). (396)
Wenn in den Materialgleichungen die n-ten Ortsableitungen der Bewegungsfunktion auf-treten, spricht man von einem Material des Grades n. Ein Material vom Grad n = 1 heißtauch einfaches Material. In diesem Fall hat die Konstitutivbeziehung das Aussehen
T = RT (F). (397)

84 Materialmodellierung
Auch diese Beziehung lasst sich weiter mit dem Prinzip der materiellen Objektivitat ver-einfachen. Es gilt demnach
T∗ = RT (F∗) = RT (Q · F) = Q ·T · QT . (398)
Eine zulassige Wahl ist
Q = RT mit F = R · U. (399)
Die reduzierte Form von (398) lautet dann
T∗ = RT ·T ·R = RT (U). (400)
Die Konstitutivgleichung fur die Spannungen hangt also nicht von dem gesamten Defor-mationsgradienten F, sondern nur von dem Rechten Cauchyschen Strecktensor ab. Uberden Zusammenhang C = U2 bzw. E = 1
2(C − I) kann die Anhangigkeit auch durch den
Rechten Cauchy-Green-Tensor oder den Greenschen Verzerrungstensor formuliert werden.
Wahlt man grundsatzlich als Prozessvariablen
S = {ϑ, gradϑ,F, L}, (401)
so fuhrt das Prinzip der materiellen Objektivitat auf die Aussage
{ψ, η, Q · T · QT , Q · q} = R(ϑ∗, gradϑ∗, F∗, L∗). (402)
Auf ahnliche Weise wie oben konnen auch diese allgemeinen Ausdrucke untersucht unddurch spezielle Wahlen von Q und c eingeschrankt werden. Es verbleiben dann reduzierteAbhangigkeiten, die sich in einer Einschrankung der Prozessvariablen niederschlagen.
6.3 Materielle Symmetrie
Das Prinzip der materiellen Objektivitat beruht auf einem Wechsel des Bezugssystems, derauch als Wechsel des Beobachters interpretierbar ist. Die Konstitutivgleichungen durfen indieser Interpretation nicht vom Beobachter abhangig sein. Außerdem mussen die Aus-wirkungsfunktionen materielle Symmetrien widergeben. Eine spezielle Transformation derungestorten Referenzkonfiguration vor Ausfuhrung der Belastung darf also keinen Einflussauf das Ergebnis der Belastung haben, wenn die Transformation zu der Symmetriegruppedes Korpers gehort.
Man definiert auf dieser Basis zwei aquivalente Referenzkonfigurationen, die durch eineentsprechende lineare Transformation ineinander uberfuhrbar sind.
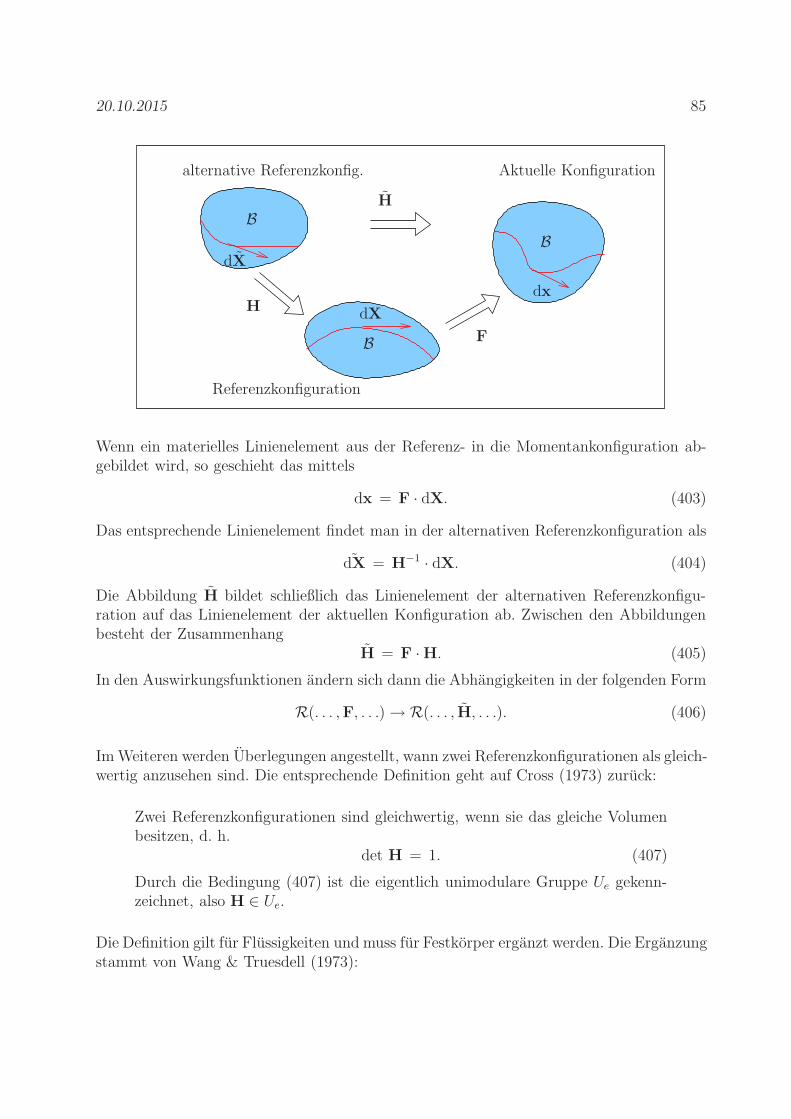
20.10.2015 85
alternative Referenzkonfig. Aktuelle Konfiguration
Referenzkonfiguration
B
B
B
F
H
H
dX
dX
dx
Wenn ein materielles Linienelement aus der Referenz- in die Momentankonfiguration ab-gebildet wird, so geschieht das mittels
dx = F · dX. (403)
Das entsprechende Linienelement findet man in der alternativen Referenzkonfiguration als
dX = H−1 · dX. (404)
Die Abbildung H bildet schließlich das Linienelement der alternativen Referenzkonfigu-ration auf das Linienelement der aktuellen Konfiguration ab. Zwischen den Abbildungenbesteht der Zusammenhang
H = F ·H. (405)
In den Auswirkungsfunktionen andern sich dann die Abhangigkeiten in der folgenden Form
R(. . . ,F, . . .) → R(. . . , H, . . .). (406)
Im Weiteren werden Uberlegungen angestellt, wann zwei Referenzkonfigurationen als gleich-wertig anzusehen sind. Die entsprechende Definition geht auf Cross (1973) zuruck:
Zwei Referenzkonfigurationen sind gleichwertig, wenn sie das gleiche Volumenbesitzen, d. h.
det H = 1. (407)
Durch die Bedingung (407) ist die eigentlich unimodulare Gruppe Ue gekenn-zeichnet, also H ∈ Ue.
Die Definition gilt fur Flussigkeiten und muss fur Festkorper erganzt werden. Die Erganzungstammt von Wang & Truesdell (1973):

86 Materialmodellierung
Bei Festkorpern ist jede nicht-orthogonale Transformation zwischen den Refe-renzkonfigurationen spurbar. Zwischen gleichwertigen Referenzkonfigurationenkonnen nur Drehungen stattfinden. Damit muss H aus der eigentlich orthogo-nalen Gruppe stammen:
det H = 1, H · HT = I → H ∈ Oe ⊂ Ue. (408)
Aus dem Prinzip der materiellen Symmetrie kann man fur den isotropen, nicht-viskosenFestkorper den folgenden Schluss ziehen: Die Auswirkungsfunktionen hangen zunachst vondem Deformationsgradienten F ab, vgl. (406). Da beliebige orthogonale Transformationenzwischen den Referenzkonfigurationen zulassig sind, ergibt sich aus der speziellen Wahl
H = RT ∈ Oe mit F = V ·R, (409)
dass die Auswirkungsfunktionen nur von dem linken Strecktensor V abhangen konnen
R(. . . ,F, . . .) → R(. . . ,V, . . .). (410)
Entsprechend B = V2 kann die Abhangigkeit im linken Cauchy-Green Deformationstensorformuliert werden.
Fur ein ideales (nicht-viskoses) Fluid kann H aus der Gruppe der eigentlich unimodularenTensoren gewahlt werden. Ein spezieller Tensor, der die Bedingung det H = 1 erfullt, lasstsich aus dem Deformationsgradienten konstruieren. Fur die Große
F = (detF)−1/3 F (411)
gilt namlichdet F = ((detF)−1/3)3 det F = 1 (412)
Wahlt man nun H = F−1
als zulassige Transformation zwischen den Referenzkonfigura-tionen, so folgt
R(. . . ,F, . . .) → R(. . . , (detF)1/3, . . .) (413)
Unter Berucksichtigung der Massenbilanz
ρ = ρ0 detF−1 (414)
kann die allgemeine Abhangigkeit der Auswirkungsfunktionen eines Fluids von dem Defor-mationsgradienten durch eine Abhangigkeit von der Dichte ersetzt werden.
6.4 Das Entropie-Prinzip
Die Auswirkungsfunktionen mussen so formuliert sein, dass das Prinzip der Irreversibilitat
ρ η + div(q
ϑ) − ρ r
ϑ= η ≥ 0. (415)

20.10.2015 87
nicht verletzt werden kann. Mit der Legendre-Transformation (366) kann die Entropie alsDifferenz der inneren Energie ε und der freien Energie ψ ausgedruckt werden. Dies fuhrt,wie oben gezeigt, auf die Clausius-Duhem-Ungleichung
− ρ ψ − ρ η ϑ − q
ϑ· gradϑ + D : T ≥ 0. (416)
Diese ist Ausgangspunkt der weiteren Uberlegungen mit denen die Auswirkungsfunktionen
R = {η(S), ψ(S), q(S), T(S)} (417)
eingeschrankt werden konnen um das Dissipationsprinzip a priori zu erfullen. Es sollendamit nur Konstitutivgleichungen zugelassen werden, die so konstruiert sind, dass die Dis-sipation grundsatzlich positiv ist und eine Verletzung des zweiten Hauptsatzes der Ther-modynamik fur alle denkbaren Prozesses ausgeschlossen werden kann.
Die im Folgenden skizzierten Untersuchungen orientieren sich an der Auswertung derClausius-Duhem-Ungleichung im Sinne von Coleman & Noll. Dabei wird vorausgesetzt,dass ein thermodynamischer Prozess grundsatzlich die Bilanzgleichungen erfullt. Diese An-nahme wird durch die Losung der konkreten Randwertprobleme, die in den Anwendungenuntersucht werden, erfullt. Fur einen beliebigen Punkt innerhalb des thermodynamischenProzesses liegen die Werte der Prozessvariablen S fest. Es wird angenommen, dass die Aus-wirkungsfunktionen R explizit nur von den Prozessvariablen S abhangen. Diese wiederumwerden im Allgemeinen Funktionen des Ortes x und der Zeit t sein. Fur R sind die Orts-und Zeitabhangigkeiten jedoch nur implizit uber S vorhanden. Gemaß dieses Gedankensgilt also R = R (S(x, t)).
Zur Auswertung des Dissipationsprinzips muss ein Satz S von Prozessvariablen gewahltwerden, der der zu beschreibenden Materialklasse gerecht wird. Ist aus grundlegendenVersuchen zur mechanischen Charakterisierung bekannt, ob das Material eine Gleichge-wichtshysterese besitzt oder nicht und ob es ratenabhangiges Verhalten zeigt oder nicht,dann ist bekannt, welche Großen als Prozessvariablen in Frage kommen. Die Kenntnis,ob elastisches, plastisches oder viskoses Verhalten beschrieben werden soll, muss an dieserStelle fur die Auswertung des Entropieprinzips vorausgesetzt werden.
Im Weiteren wird exemplarisch ein thermoelastischer Festkorper gewahlt. Der Satz derProzessvariablen lautet in diesem Fall
S = {E, ϑ, gradϑ}. (418)
Da elastisches Verhalten ratenunabhangig und hysteresefrei ist, tritt nur der GreenscheVerzerrungstensor E auf. Deformationsraten spielen bei der Beschreibung elastischen Ver-haltens keine Rolle, hohere Ableitungen der Bewegungsfunktion als die ersten werden nichtberucksichtigt, da nur einfache Materialien (Materialien vom Grad 1) untersucht werdensollen. Analog dazu treten auch nur die Temperatur ϑ und ihre raumliche Ableitung gradϑals Prozessvariablen auf, um die thermischen Einflusse beschreiben zu konnen.
88 Materialmodellierung
Mit der Wahl der Prozessvariablen gemaß (418) kann die materielle Anderung der freienEnergie uber die Kettenregel folgendermaßen ausgedruckt werden
ψ(S) =∂ψ
∂S S =∂ψ
∂E: E +
∂ψ
∂ϑϑ +
∂ψ
∂gradϑ· (gradϑ).. (419)
Mit dem pull back der Deformationsgeschwindigkeit (161)
E = FT · D · F (420)
und der Rechenregel fur das Skalarprodukt von Tensoren
∂ψ
∂E: (FT · D · F) = (F · ∂ψ
∂E· FT ) : D (421)
folgt
ψ = (F · ∂ψ∂E
· FT ) : D +∂ψ
∂ϑϑ +
∂ψ
∂gradϑ· (gradϑ)., (422)
so dass sich fur die Dissipationsungleichung schließlich die folgende Form ergibt
D :(
T − F ·ρ ∂ψ∂E
·FT)
− ϑ(
ρ η + ρ∂ψ
∂ϑ
)
− ∂ψ
∂gradϑ·(gradϑ). − q
ϑ·gradϑ ≥ 0. (423)
Bemerkung: Da sich der Gradientenoperator grad(•) auf die aktuelle Konfiguration be-zieht, durfen bei der Berechnung von (gradϑ). die raumliche Ableitung und die materielleZeitableitung nicht getauscht werden. Die Schwarzsche Regel gilt nur fur die Vertauschungvon partiellen Ableitungen.
Die Argumentation zur Auswertung des Entropieprinzips beruht auf der Tatsache, dass in(423) sowohl die Prozessvariablen als auch deren zeitliche bzw. raumliche Ableitungen auf-treten. Im Rahmen des betrachteten thermodynamischen Prozesses liegen die Werte S derProzessvariablen fest, nicht jedoch die Werte ihrer zeitlichen und raumlichen Ableitungen.Da der Zustand innerhalb des Prozesses vollstandig durch die Prozessvariablen bestimmtist, kann der Prozess selber von außen so gesteuert werden, dass fur bestimmte Werte derProzessvariablen ihre Ableitungen beliebige Werte annehmen, d. h. fur eine bestimmte Ver-zerrung E kann der Prozess mit verschiedenen Raten der Verzerrungsgeschwindigkeit E, dievon aussen gesteuert werden konnen, weiterlaufen . Dies entspricht zwar unterschiedlichenRandwertproblem, die gelost werden, aber jedes davon muss thermodynamisch zulassigsein. Als Beispiel kann man sich in einem isothermen Zugversuch die Be- und Entlastungvorstellen. Mit der vorgestellten Argumentation muss dann fur einen bestimmten Wert derVerzerrung sowohl bei Be- als auch bei Entlastung der gleiche Spannungswert gemessenwerden. Die Verzerrungsrate wechselt jedoch zwischen den Be- und Entlastungszyklen ihrVorzeichen.
Aus dieser Uberlegung folgt, dass die Terme, die in Kombination mit Ableitungen vonProzessvariablen auftreten, jeweils zu Null werden mussen. Andernfalls konnte in einem

20.10.2015 89
anderen Randwertproblem durch die Anderung des Vorzeichens dieser Ableitung (Pro-zessumkehr) bei ansonsten gleichen Werten der Prozessvariablen das Dissipationsprinzipverletzt werden.
Man gelangt mit dieser Argumentation zu den folgenden Beziehungen
T = F · ρ ∂ψ∂E
· FT ,
η = − ∂ψ
∂ϑ
(424)
und∂ψ
∂gradϑ= 0. (425)
Mit der Definition des zweiten Piola-Kirchhoffschen Spannungstensors nach (294) kann dieGleichung fur die Spannung auch als
S = ρ0∂ψ
∂E(426)
dargestellt werden.
Die freie Energie ψ kann also nicht vom Temperaturgradienten gradϑ abhangen, da sonstbei einer Prozessumkehr das Dissipationsprinzip verletzt werden kann. Fur die Spannun-gen und fur die Entropie besitzt die freie Energie nach (424) bzw. (426) Potenzialeigen-schaften in dem Sinn, dass η und T bzw. S aus Ableitungen der freien Energie nach derTemperatur bzw. nach den Verzerrungen folgen. Diese Aussagen entsprechen der Legendre-Transformation der klassischen Gleichgewichtsthermodynamik, nach der die jeweils dualenPaare (η, ϑ) und (S, E) sind. Die Dualitat, die bereits zwischen S und E bei Betrachtungder Spannungsleistung gefunden wurde, wird hier in einem anderen Kontext nochmalsbestatigt.
Da diese Ergebnisse fur alle Werte der Prozessvariablen des Variablensatzes S geltenmussen, reduziert sich die Dissipationsungleichung auf die Aussage
− q
ϑ· gradϑ ≥ 0 bzw. q · gradϑ ≤ 0. (427)
Man sieht an dieser Restungleichung, dass das Fouriersche Warmeleitungsgesetz in derForm
q = −κ gradϑ mit κ > 0 (428)
thermodynamisch konsistent ist und dass es das Dissipationsprinzip erfullt.
Fur den Fall, dass die Restungleichung ebenfalls das Gleichheitszeichen erfullt, wird dieDissipation gleich Null. Man spricht von einem Gleichgewichtsprozess. Ein solcher liegtdemnach vor, wenn
gradϑ = 0 (429)

90 Materialmodellierung
ist. Die Gleichgewichtsvariablen eines thermoelastischen Materials sind also die Verzerrun-gen E und die Temperatur ϑ. Dies zeigt wiederum, dass die Legendre-Transformationen(424) oder (426) nur von Gleichgewichtsvariablen abhangen.
Unter der Annahme, dass die Dissipation im Gleichgewicht minimal wird, kann man fol-gende Untersuchung der Restungleichung durchfuhren: Betrachtet man einen Zustand inder Nahe des Gleichgewichts, so gilt mit einem Großenordnungsparameter ι fur die Nicht-gleichgewichtsvariable (hier den Temperaturgradienten)
gradϑ = ι gradϑ∗. (430)
Fur immer kleinere Werte von ι nahert man sich dem thermodynamischen Gleichgewicht,bis es fur ι = 0 schließlich erreicht wird. Damit im Gleichgewicht die Dissipation minimalwird, muss gelten
d(q · ι gradϑ∗)
dι
∣∣∣∣∣ι = 0
= 0, (431)
d. h. die Richtungsableitung der Restungleichung fur beliebige vorgegebene Temperatur-gradienten muss zu Null werden. Dies ist nur erfullt, wenn der Warmefluss im Gleichge-wicht q0 gleich Null ist. Das Fouriersche Warmeleitgesetzt folgt nun durch eine Taylor-Reihenentwicklung des Warmeflusses bezuglich der Nichtgleichgewichtsvariablen
q = q0︸︷︷︸
=0
+∂q
∂grad ϑ
∣∣∣∣∣0
· gradϑ + · · · , (432)
wobei die Ableitung ∂ q / ∂gradϑ im Gleichgewicht auszuwerten ist und somit noch vonden Werten der Gleichgewichtsvariablen E und ϑ abhangen kann.
Wahrend die Gleichgewichtsaussagen der Legendre-Transformation hinreichend und not-wendig fur die Erfullung des Dissipationsprinzips sind, ist die Auswertung der Restunglei-chung auf die Nahe des Gleichgewichts beschrankt. Fur Prozesse, die auch uber Zustandeweit ab vom thermodynamischen Gleichgewicht verfugen, ist der lineare Ansatz (432) zu re-striktiv. In diesem Fall mussen auch nichtlineare Terme in den Nichtgleichgewichtsgrossenberucksichtigt werden.
Der vorgestellte Weg zur Auswertung der Restungleichung ist nur hinreichend zur Erfullungdes Dissipationsprinzips aber nicht unbedingt notwendig. Allgemeine notwendige Bedin-gungen fur die Nichtgleichgewichtsgroßen wie den Warmefluss konnen in der Regel nichtaus dem Prinzip gewonnen werden. Das hier skizzierte physikalisch motivierte Vorgehen beider Auswertung des Entropieprinzips kann theoretisch-mathematisch untermauert werden.Den Hintergrund dazu liefert der Satz von Liu.
Die Auswertung des Entropieprinzips im Sinne von Coleman & Noll setzt voraus, dass dieBilanzgleichungen fur einen physikalischen Prozess immer erfullt sind. Hier setzen allgemei-nere Fassungen des Prinzips an. Neben der Auswertung nach Coleman & Noll findet man in

20.10.2015 91
der Literatur auch haufig die Auswertung des Prinzips nach Liu & Muller, bei der vorausge-setzt wird, dass die Bilanzgleichungen den thermodynamischen Prozess einschranken, d. h.sie stellen Zwangsbedingungen dar, die erfullt werden mussen. Daher werden die Bilanzglei-chungen mit Lagrange-Multiplikatoren versehen und zu der Clausius-Duhem-Ungleichunghinzugefugt. Aufgrund der Multiplikatoren entsteht eine großere Allgemeinheit der Ergeb-nisse, da bei der Auswertung mehr Freiheitsgrade zur Verfugung stehen. Auf der anderenSeite mussen die eingefuhrten Multiplikatoren bestimmt werden. Dies geschieht aus physi-kalisch motivierten Annahmen heraus und kann u. U. sehr aufwendig sein.
6.5 Inkompressibilitat
Am Beispiel der Inkompressibilitat soll im Weiteren gezeigt werden, wie man bei der Aus-wertung des Dissipationsprinzips Zwangsbedingungen berucksichtigen kann. Der Einfach-heit halber wird nur ein elastischer Festkorper mit dem reduzierten Satz an Prozessvaria-blen
S = {E} (433)
behandelt.
Bei inkompressiblem Materialverhalten gilt
ρ = konst. (434)
Die Massenbilanz
ρ + ρ div v = 0 (435)
entartet somit zu einer Volumenbilanz
div v = 0 bzw. det F = 1. (436)
Wahrend aus (435) die Dichte als unabhangige Große ermittelt wird, stellt (436) eineZwangsbedingung dar, die das Geschwindigkeitsfeld einschrankt.
Um die Zwangsbedingung der Volumenkonstanz sichern zu konnen, wird die Volumenbilanzin der Form (436)1 mit einem Multiplikator P versehen und zum Entropieprinzip hinzu-gefugt. Die Einfuhrung des Lagrange-Multiplikators P verschafft die notwendigen Frei-heiten, die man benotigt, um die zusatzliche Zwangsbedingung (436) erfullen zu konnen.Mit
divv = D : I (437)
hat das Entropieprinzip dann unter Vernachlassigung thermischer Effekte das folgendeAussehen
D :(
T + P I − F · ρ ∂ψ∂E
· FT)
≥ 0. (438)

92 Materialmodellierung
Mit der oben angefuhrten Argumentation ergibt sich fur den Spannungszustand in eineminkompressiblen, elastischen Festkorper
T = −P I + F · ρ ∂ψ∂E
· FT . (439)
Die Spannung besteht demnach aus einem Druckanteil −P I und aus einer ExtraspannungTE . Wahrend der Druck P als Lagrange-Parameter zur Erfullung der Volumenkonstanzeingefuhrt wurde und nicht mit einer Deformation des Korpers verknupft ist, ist die Ex-traspannung deformationsabhangig.
Im Rahmen eines hydrostatischen Druckversuchs, in dem der inkompressible Korper keineDeformation erfahren darf, erkennt man, dass der Lagrange-Parameter P gerade dem auf-gebrachten Druck p entspricht. In diesem Fall liefert die Ableitung der freien Energie nurdie sogenannten Extraspannungen, die lediglich von der Gestaltanderung abhangen durfen.

20.10.2015 93
7 Elastischer Festkorper
7.1 Hyperelastizitat
Das Verhalten elastischer Korper ist reversibel und ratenunabhangig, d. h. nach Wegnah-me der Last geht der elastische Korper sofort wieder in seinen Ausgangszustand uber.Das elastische Verhalten ist vollstandig uber den Deformationszustand beschrieben. Nachden Prinzipien der Objektivitat und der materiellen Symmetrie konnen dann der rechteCauchy-Green Deformationstensor C bzw. der linke Cauchy-Green Deformationstensor B(oder entsprechende Verzerrungstensoren) benutzt werden, um das elastische Verhalten zubeschreiben.
Die Untersuchung des Entropie-Prinzip liefert das Konzept der Hyperelastizitat
T = F · ρ ∂ψ∂E
· FT . (440)
Demnach stellt die freie Energie ψ ein Potenzial fur die Spannungen dar, das von derDeformation abhangig ist:
ψ = ψ(E) (441)
Mit der Definition des zweiten Piola-Kirchhoff-Tensors S gemaß (294)
S = J F−1 · T · FT−1 (442)
folgt die Darstellung
S = ρ0∂ψ
∂E. (443)
Im Sinn der Legendre-Transformation stellt S die thermodynamisch konjugierte Kraft zuder Verzerrung E dar.
Die spezifische Spannungsleistung (327)
wi =1
ρT : D =
1
ρ0S : E =
∂ψ
∂E: E = ψ(E) (444)
ist also im Fall elastischen Materialverhaltens als materielle Zeitableitung der freien Ener-gie darstellbar. Die Arbeit, die bei einem Deformationsprozeß in dem Zeitinkrement dtverrichtet wird, ist dann durch
dA = ρwi dt = ψ(E) dt =∂ψ
∂E: dE (445)
gegeben, wobei das Verzerrungsinkrement
dE = E dt (446)

94 Materialmodellierung
eingefuhrt wurde. Die insgesamt in einem Zeitraum geleistete Arbeit ist durch
A =
t∫
t0
dA = ψ(t) − ψ(t0) = ψ(E(t)) − ψ(E(t0)) (447)
gegeben und hangt nur von den Verzerrungen im Anfangs- und Endzustand ab, die Arbeitlangs eines geschlossenen Wegs (Anfangspunkt gleich Endpunkt) ist daher immer Null.Damit besitzt die freie Energie den bereits angesprochenen Potenzialcharakter.
7.2 Invariantendarstellung
Die freie Energie ist eine skalarwertige Funktion, die von einer tensorwertigen Variablenabhangt. Nach dem Prinzip der materiellen Objektivitat muß ψ von C (oder aquivalentvon E) abhangen, im Fall der Isotropie hangt ψ von B ab. Dieser scheinbare Widerspruchlost sich, wenn man die Abhangigkeit im Rahmen der Invariantentheorie untersucht (vgl. z.B. Boehler, 1987). Demnach kann die skalarwertige freie Energie nur in bestimmter Weisevon den tensorwertigen Argumenten abhangen, namlich uber die Invarianten.
Fur einen symmetrischen Tensor existieren drei unabhangige Invarianten, z. B. die dreiHauptinvarianten, die bei der Behandlung des Eigenwertproblems auftreten. Das Eigen-wertproblem des rechten Cauchy-Green-Deformationstensors lautet
(C − λ I) · v = 0 (448)
mit den Eigenwerten λ und den Eigenvektoren v. Bei der Berechnung des rechten Streck-tensors U wurde das Eigenwertproblem bereits angesprochen, vgl. (104). Gl. (448) hat einenicht-triviale Losung, falls die Koeffizientendeterminante Null wird
det(C − λ I) = 0. (449)
Auswertung dieser Beziehung liefert die charakteristische Gleichung in der Form
λ3 − Iλ2 + II λ − III = 0. (450)
Hierbei sind die Hauptinvarianten durch
I = trC = C : I,
II =1
2
(
(C : I)2 − CT : C)
,
III = detC = (det F)2
(451)
gegeben. In (93), (94) wurde der Zusammenhang zwischen dem rechten und linken Streck-tensor durch Vorwarts- bzw. Ruckwartsrotation gezeigt. Dieser Zusammenhang gilt auchfur die Deformationstensoren
B = F · FT = (V ·R) · (RT ·VT ) = (R · U · RT )︸ ︷︷ ︸
=V
· (R · UT · RT )︸ ︷︷ ︸
=VT
= R · C · RT . (452)

20.10.2015 95
Ubung:Zeigen Sie auf der Basis von (452), daß die Hauptinvarianten von C und B identisch sind.
Da C und B durch Vorwarts- bzw. Ruckwartsrotation ineinander abgebildet werden konnen,sind die Invarianten identisch. Da somit auch die charakteristische Gleichung (450) fur bei-de Tensoren identisch ist, besitzen C und B die selben Eigenwerte λi, i = 1, 2, 3, die alsHauptstreckungen interpretierbar sind. Die Eigenwerte stehen mit den Hauptinvariantenin der folgenden Beziehung
I = λ1 + λ2 + λ3,
II = λ1 λ2 + λ2 λ3 + λ3 λ1,
III = λ1 λ2 λ3.
(453)
Diese Zusammenhange konnen leicht gezeigt werden, wenn die Eigenwertdarstellung derTensoren genutzt wird, d. h. wenn eine Darstelllung gewahlt wird, in der nur die Diago-nalelemente mit den jeweiligen Eigenwerten besetzt sind.
Im Fall isotroper Festkorper hangt die freie Energie nur von den Invarianten von C bzw.B ab. Da weiterhin die Invarianten durch die Eigenwerte ausgedruckt werden konnen, gilt
ψ = ψ(C) = ψ(B) = ψ(I, II, III) = ψ(λ1, λ2, λ3). (454)
Anstelle der Hauptinvarianten I, II, III oder der Eigenwerte λi konnen beliebige andereInvarianten benutzt werden, um die Abhangigkeit darzustellen. Man kann zu Berechnungweiterer Invarianten das Theorem von Cayley-Hamilton ausnutzen, das besagt, daß jederTensor seine charakteristische Gleichung erfullt:
C ·C · C − IC · C + II C − III I = 0. (455)
Stellt man wiederum den Tensor C in seiner Eigenwertdarstellung dar, so sieht man, dass(455) der skalarwertigen charakteristischen Gleichung entspricht.
Als Konsequenz des Theorems von Cayley-Hamilton konnen alle Potenzen n des Tensorsfur n > 2 durch die drei “Tensorgeneratoren
”I, C und C2 sowie durch die Hauptinva-
rianten dargestellt werden. Zur Berechnung weiterer Invarianten kann man (455) skalarmit beliebigen Potenzen von C multiplizieren. Weitere Hinweise zur Wahl und zur Kon-struktion der Invarianten liefert die Theorie isotroper Tensorfunktionen, vgl. u. a. Boehler,1987). Diese mathematische Theorie regelt die moglichen Abhangigkeiten skalarwertiger,vektorwertiger und tensorwertiger Funktionen von entsprechenden Argumenten.
Zur Berechnung der Spannung aus der freien Energie benotigt man gemaß der Kettenregel

96 Materialmodellierung
der Differentiation die Ableitung der Invarianten nach dem zugehorigen Tensor. Es gilt
∂IC
∂C= I,
∂IIC
∂C= I I − CT ,
∂IIIC
∂C= (detC)CT−1.
(456)
Die Ableitung der ersten und zweiten Hauptinvarianten kann in einem kartesischen Basis-system leicht berechnet werden. Es gilt
IC = C : I = (Cijei ⊗ ej) : (δklek ⊗ el) = . . . = Cii. (457)
Die Ableitung der Spur bestimmt man zu
∂IC
∂C=
∂Cii
∂Cjk
ej ⊗ ek = δijδikej ⊗ ek = ei ⊗ ei = I. (458)
Analog verfahrt man bei der Berechnung der Ableitung der zweiten Invarianten. Zur Be-rechnung der Ableitung der dritten Invarianten, d. h. der Determinanten, bemuht man dasTheorem von Caley-Hamiton. Uberschiebt man das Theorem zweimal mit der Identitat I,so entsteht die folgende Moglichkeit zur Berechnung der Determinanten (3. Hauptinvari-ante)
3 III = C3 : I − IC2 : I + IIC : I. (459)
Die rechte Seite hangt nur von den beiden polynomialen Invarianten I und II sowie wei-teren Polynomausdrucken C3 : I, C2 : I und C : I ab, von denen die entsprechendenAbleitungen nach C ermittelt werden konnen.
Auf Basis der Invariantentheorie und des Theorems von Cayley-Hamilton folgt schließlich,daß die Spannung im Fall hyperelastischen Materialverhaltens folgendermaßen dargestelltwerden kann
S = ϕ0 I + ϕ1 E + ϕ2 E2. (460)
Die drei skalarwertigen Faktoren ϕi konnen dabei noch Funktionen der drei Eigenwer-te λi oder der drei Hauptinvarianten I, II und III sein. Die Darstellung der allgemeinenSpannungs-Dehnungs-Beziehung (460) fur hyperelastisches Materialverhalten verlangt vomExperimentator, dass er im allgemeinen Fall drei skalare Funktionen ϕi in Abhangigkeitvon jeweils drei Argumenten experimentell ermittelt, um das Material vollstandig charak-terisieren zu konnen.
7.3 Zur Wahl der freien Energiefunktion
Wahrend die kinematischen Beziehungen und die Bilanzgleichungen von dem im Speziellenzu untersuchenden Material unabhangig sind, beschreiben die Konstitutivgleichungen das

20.10.2015 97
konkrete Materialverhalten. Die Restriktionen aus den Prinzipien Objektivitat, Symmetrieund Dissipation liefern zwar Einschrankungen fur die Materialgleichungen, aber sie gebenkeinen Hinweis auf ihre konkrete Gestalt.
Zur Konkretisierung der Materialgleichungen, insbesondere zur Konstuktion der freienEnergiefunktion kann man noch einige Randbedingungen angeben:
• Im undeformierten Zustand ist die freie Energie Null. Dies entspricht einer willkurli-chen Festlegung des Nullniveaus, hat sich jedoch als sinnvoll herausgestellt, da Ener-gien immer nur bis auf eine Konstante bestimmt sind.
• Im undeformierten Zustand muß die Spannung, die sich aus der freien Energie ablei-tet, ebenfalls Null sein.
• Bei unendlichen Deformationen (Kompression des Korpers auf einen Punkt, Exten-sion auf unendliche Lange) muß die Energie gegen Unendlich gehen.
• Die Spannungen mussen bei Kompression auf einen Punkt gegen minus Unendlichstreben (unendliche Druckspannung), bei unendlicher Extension gegen plus Unend-lich (Zug).
• Linearisierung der finiten Spannungs-Verzerrungs-Beziehung soll das verallgemeinerteHookesche Gesetz liefern.
• Um entfestigendes Materialverhalten auszuschließen, muß die freie Energie eine kon-vexe Funktion sein. Dann stellt die Spannung eine monotone Funktion dar. In derLiteratur werden unterschiedliche Konvexitatsbegriffe verwendet. Man stellt fest, daßPolykonvexitat ausreichend fur die Stabilitat ist, d. h. Konvexitat bezuglich der ein-zelnen Argumente anstelle der positiven Definitheit der Hessematrix (Matrix derzweiten Ableitungen).
Das einfachste elastische Materialgesetz ist das St. Venantsche Gesetz, das im Sinne einerphysikalischen Linearisierung aus jedem finiten Elastizitatsgesetz folgt. In diesem Rahmenkann der Spannungstensor als Funktion des Greenschen Verzerrungstensors dargestellt wer-den
S = 2µ︸︷︷︸
ϕ1
E + λ tr(E)︸ ︷︷ ︸
ϕ0
I. (461)
Die vorliegende Form entsteht, wenn man den allgemeinen Ansatz der Hyperelastizitat(460) auf einen linearen Ausdruck in der Verzerrung reduziert. Dazu muss ϕ0 linear von Eabhangig sein, die Funktion ϕ1 muss proportional zu trE = IE sein und die Funktion ϕ2
muss identisch Null sein.
Das Materialgesetz entspricht einer physikalischen Linearisierung, da der Green-Lagran-gesche Verzerrungstensor E ein finites Verzerrungsmass ist und quadratische Anteile im

98 Materialmodellierung
Verschiebungsgradienten enthalt. Damit stellt (461) ein geometrisch nichtlineares Materi-algesetz dar.
In dem St. Venanteschen Materialgesetz (461) treten zwei unabhangige Materialparameter,die Lameschen Konstanten µ und λ auf. Die zugehorige Freie Energie ist durch
ρ0 ψ = µE : E +λ
2tr(E)2 (462)
gegeben. Im Rahmen der Hyperelastizitat erhalt man die Spannungen durch Ableitung derFreien Energie ψ, vgl. (443).
Aufgrund der physikalischen Linearisierung erfullt das lineare Materialgesetz (461) nichtdie Bedingung, daß im Fall der Kompression auf einen Punkt, F → 0, die Spannungengegen −∞ gehen.
Im Rahmen kleiner Verzerrungen kann (461) noch einer geometrischen Linearisierung un-terzogen werden. Dann ist der Transport zwischen der Referenzkonfiguration und der Mo-mentankonfiguration vernachlassigbar, so dass der 2. Piola-Kirchhoff-Spannungstensor mitdem Cauchy-Spannungstensor ubereinstimmt. Des Weiteren sind die quadratischen Antei-le des Verschiebungsgradienten im Verzerrungstensor vernachlassigbar. Der Green-Lagran-gesche Verzerrungstensor kann dann durch die lineare Ingenieurverzerrung ε ersetzt werden.Die entsprechende vollstandig linearisierte Form des Materialgestzes liefert das verallgemei-nerte Hookesche Gesetz (vgl. Technische Mechanik 2) und lautet
S ≈ T = 2µ ε + λ(trε) I. (463)
Es stellt den Ausgangspunkt fur die lineare (klassische) Elastizitatstheorie dar, vgl. Ab-schnitt 2.6.
Polynomiale Ansatze fur die Freie Energiefunktion ψ sind in der Literatur ausfuhrlich furinkompressibles Materialverhalten diskutiert worden. In diesem Fall sind nur die erste unddie zweite Invariante als Variablen verfugbar, da die dritte Invariante identisch Eins ist,
IIIC = detC = (detF)2 = 1. (464)
Das Mooney-Rivlin-Gesetz, das ursprunglich fur inkompressibles Materialverhalten ent-wickelt wurde, ist der einfachste Vertreter dieser Klasse und beinhaltet die zwei unabhangi-gen Materialparameter µ und ν. Die Verzerrungsenergie hat in diesem Fall die Form
ρ0 ψ =µ
2(IC − 3) +
ν
2(IIC − 3). (465)
Im Sonderfall ν = 0 entsteht die Freie Energiefunktion des Neo-Hookeschen Materialge-setzes
ρ0 ψ =µ
2(IC − 3). (466)
Fur diesen Ansatz ist der Parameter µ identisch mit dem entsprechenden Lameschen Pa-rameter bzw. mit dem Schubmodul G der linearen Theorie.

20.10.2015 99
Im Allgemeinen kann fur inkompressibles Materialverhalten der polynomiale Ansatz in derForm
ρ0 ψ =N∑
i=1
µi(IC − 3)i +M∑
j=1
νj(IIC − 3)j (467)
angegeben werden. Dabei muss allerdings bemerkt werden, dass durch eine Erhohung derAnzahl der Glieder des Ansatzes die Qualitat des Materialgesetzes in der Regel nicht ver-bessert wird. Einachsige Experimente wie etwa der Zugversuch konnen mit grossen WertenfurN undM zwar gut angepasst werden, man stellt jedoch bei der Simulation mehrachsigerSpannungszustande fest, dass es dabei zu grossen Abweichungen zwischen experimentellenund theoretischen Daten kommt.
Bei der Berechnung der Spannungen ist weiterhin zu beachten, dass die Ansatze (465), (466)und (467) nur die Extraspannungen beschreiben. Die Gesamtspannung beinhaltet nebenden Extraspannungen noch die Zwangskraft p zur Erfullung der Inkompressibilitatsneben-bedingung. Aus der entsprechenden Aufteilung der Cauchy-Spannung
T = −p I + TE (468)
folgt mit dem zugehorigen Rucktransport auf die Referenzkonfiguration die 2. Piola-Kirch-hoff-Spannung
S = −pC−1 + SE mit SE = 2 ρ0∂ψ
∂C. (469)
Der Druck p muss aus den vorgegebenen Randbedingungen des Problems ermittelt werden.
Zur Beschreibung kompressiblen Materialverhaltens wurden in der Literatur zahlreichevolumetrische Erweiterungsterme zu (465) vorgeschlagen, die nur von der volumetrischenDehnung
J = det F =√
IIIC (470)
abhangen, z. B.
• Blatz & Ko (1962)
ρ0 ψvol =µ
β(J−β − 1) mit β =
2 ν
1 − 2 ν. (471)
• Ogden (1972)
ρ0 ψvol = −µ ln J +λ
β2(J−β − 1 + β ln J). (472)
• Ciarlet & Geymonat (1982)
ρ0 ψvol = c J2 − d ln J mit c, d > 0. (473)

100 Materialmodellierung
Diese Terme werden mit den Ansatzen der Freien Energie fur inkompressibles Materialver-halten additiv kombiniert. Eine bislang in der Literatur nicht eindeutig beantwortete Fragebetrifft dabei die Wahl der Variabeln. Haufig werden die ersten beiden Invarianten IC undIIC bei diesem Vorgehen durch ihre isochoren Gegenstucke ersetzt. Die isochoren Invari-anten erhalt man, in dem man den volumetrischen Anteil aus der Deformation abspaltet.Dazu bildet man
F = (detF )−1/3F mit det F = 1. (474)
Der zugehorige Deformationstensor bestimmt sich dann zu
C = FT · F (475)
mit den Invarianten
IC = trC, IIC =1
2
(
(trC2 − C
T: C
)
, IIIC = 1. (476)
Im Fall inkompressiblen Verhaltens gilt F = F und entsprechend C = C, so dass dieInvarianten des isochoren Deformationstensors mit den Invarianten im Fall inkokmpressi-blen Verhaltens ubereinstimmen. Ob die volumetrisch-isochore Entkopplung im Fall starkkompressiblen Verhaltens geeignete Ergebnisse liefert, wird in der Literatur umstrittendiskutiert.
Einen anderen Ansatz als die bislang aufgezeigten verfolgt das von Ogden (1972) ent-wickelte Materialmodel. Hier wird die Verzerrungsenergie nicht in den Hauptinvariantensondern in den Hauptstreckungen formuliert, also in den Eigenwerten des linken bzw. rech-ten Strechtensors
ρ0 ψi =3∑
i=1
µi
αi(λαi
1 + λαi2 + λαi
3 ). (477)
Dieses ursprunglich ebenfalls fur inkompressibles Materialverhalten formulierte Konstitu-tivgesetz muß im kompressiblen Fall ebenfalls um volumetrische Terme der Form (471),(472) oder (473) erweitert werden.
Grundsatzlich existieren in der Literatur vielfaltige Ansatze fur die Verzerrungsenergie,die die o. g. Kriterien erfullen. Wahrend die Anzahl der Materialparameter im Fall linear-elastischen Verhaltens (Hookesches Gesetz) auf zwei begrenzt ist (z. B. µ und λ), konnen inden finiten Gesetzen wesentlich mehr Parameter auftreten, die dann aus weiteren Versuchenzu ermitteln sind. Haufig ist eine direkte Interpretation der Parameter nicht moglich. Indiesen Fallen mussen Methoden des Inversen Rechnens und der Optimierung angewandtwerden, um die Werte der Parameter aus den experimentellen Daten zu ermitteln.
Mit der Wahl der Freien Energiefunktion ψ(E) und der daraus resultierenden Spannungs-Dehnungsbeziehung ergibt sich das Randwertproblem der Elastodynamik als i. A. nichtli-neare Differentialgleichung zu
ρ u(x, t) = divT (gradu(x, t)) + ρb. (478)

20.10.2015 101
Die Integration dieser Differentialgleichung erfolgt bezuglich Raum und Zeit. Dazu sinddie notwendigen Rand- und Anfangsbedingungen erforderlich. Da eine analytische Inte-gration im allgemeinen Fall auf Grund der Nichtlinearitat nicht moglich ist, wendet manmeistens numerische Verfahren an. In der Literatur hat sich die raumliche Diskretisie-rung des Problems mit Finiten Elementen (vgl. gesonderte Vorlesung
”Finite Elemente
in der Mechanik“) etabliert. Durch die raumliche Integration entsteht aus der partiellenDifferentialgleichung ein Satz von gewohnlichen Differentialgleichungen in der Zeit. Diezeitliche Integration kann dann mit Zeitschrittverfahren, z. B. dem Newmark-Verfahren,durchgefuhrt werden. Neuere Techniken basieren auf der Formulierung sogenannter Raum-Zeit-Finiter Elemente, bei denen eine Finite Elemente Diskretisierung sowohl im Raumals auch in der Zeit durchgefuhrt wird. Unter Ausnutzung der Moglichkeiten, die moderneComputer zur Verfugung stellen, konnen Probleme mit komplexen Geometrien untersuchtund analysiert werden.

102 Materialmodellierung
8 Viskose Fluide
8.1 Newtonsches Fluid
Ein Fluid (Gas oder Flussigkeit) ist gegenuber einem Festkorper dadurch ausgezeichnet,dass im Zustand der Ruhe, d. h. im mechanischen Gleichgewicht, nur Druckkrafte ubert-ragen werden konnen. Mit den auftretenden Drucken sind Volumendehnungen verbunden.Bei Flussigkeiten sind diese Volumendehnungen oft klein, so dass die Annahme inkompres-siblen Verhaltens in guter Naherung erfullt wird.
Bringt man auf ein Fluid eine Schubbelastung auf, so fuhrt dies immer zu einem Fließvor-gang. Schubspannungen konnen also nur ubertragen werden, wenn das Fluid eine Scherrateerfahrt. Das Verhalten ist geschwindigkeitsabhangig und wird als viskos bezeichnet.
Auf Basis dieser Uberlegungen sind die kinematischen Variablen, die den mechanischenZustand eines Fluids beschreiben, die Volumendehnung J = detF und die Deformations-geschwindigkeit D = 1
2(gradv + gradTv). Da die Volumendehnung nicht direkt zugangig
ist aber uber die Massenbilanz mit der Dichte verknupft ist, wird im Satz der Prozessva-riablen die Volumendehnung durch die Dichte ρ ersetzt. Man wahlt zur Auswertung derClausius-Planck-Ungleichung die Prozessvariablen
S = {ρ, D}. (479)
Im thermomechanisch gekoppelten Fall ist der Satz der Prozessvariablen noch um dieTemperatur und den Temperaturgradienten zu erweitern. Mit dem Variablensatz (479)wird die Clausius-Planck-Ungleichung
− ρ ψ + D : T ≥ 0 (480)
gemaß der zuvor diskutierten Argumentation ausgewertet. Die Ausfuhrung der Zeitablei-tung mittels der Kettenregel der Differentiation liefert
− ρ∂ψ
∂ρρ − ρ
∂ψ
∂D: D + D : T ≥ 0. (481)
Zu Beachten ist an dieser Stelle, dass die materielle Ableitung der Dichte uber die Mas-senbilanz mit der Spur der Deformationsgeschwindigkeit verknupft ist
ρ = −ρ div v = −ρD : I. (482)
Damit erhalt man schlielich
− ρ∂ψ
∂D: D + D :
(
T + ρ2 ∂ψ
∂ρ
)
≥ 0. (483)

20.10.2015 103
Da die Rate D der Deformationsgeschwindigkeit keine Prozessvariable ist, kann nach derublichen Argumentation die Freie Energie nicht von D abhangen, da
ρ∂ψ
∂D= 0 (484)
gilt. Damit verbleibt fur die Auswertung nur noch die Dissipations-Restungleichung
D :
(
T + ρ2 ∂ψ
∂ρ
)
≥ 0. (485)
Die Auswertung von (485) erfolgt in zwei Schritten, zunachst im mechanischen Gleichge-wicht und dann in der Nahe des Gleichgewichts. Fur die Gleichgewichtsauswertung wahltman einen beliebigen Geschwindigkeitszustand D∗, den man gegen Null gehen lasst. DieDeformationsgeschwindigkeit lasst sich mit einem Großenordnungsparameter dann als
D = ιD∗, ι→ 0 (486)
darstellen. Gleichzeitig zerlegt man die Spannung T in die Gleichgewichtsspannung Teq =− p I und in die Nichtgleichgewichts- oder Extraspannung TE . Fur ein Fluid, das im Ru-hezustand nur Druckkrafte ubertragen kann, lautet die entsprechende Zerlegung
T = − p I︸ ︷︷ ︸
Teq
+TE. (487)
Damit die Dissipation im Gleichgewicht minimal wird, muss die Ableitung der Restun-gleichung bei der Annaherung an das Gleichgewicht zu Null werden. Dies kann durch dieRichtungsableitung der Restungleichung nach dem Großenordnungsparameter ι dargestelltwerden. Die Ableitung von (485) nach ι liefert
D∗ :
(
Teq + ρ2 ∂ψ
∂ρ
)
= 0. (488)
Da die Extraspannungen im Gleichgewicht zu Null werden mussen, werden nur die Gleich-gewichtsanteile der Spannung berucksichtigt. Damit (488) fur beliebige D∗ erfullt werdenkann, muss die Klammer selbst zu Null werden. Die Gleichgewichtsspannung ergibt sichalso zu
Teq = − ρ2 ∂ψ
∂ρ= − p(ρ). (489)
Der Druck hangt im isothermen Fall nur von der Dichte ρ ab, man bezeichnet die Beziehung(489) als barotrope Zustandsgleichung.
Mit dieser Identifikation reduziert sich die Restungleichung weiter zu
D : TE ≥ 0. (490)

104 Materialmodellierung
Betrachtet man die Extraspannung in der Nahe des Gleichgewichts, so kann sie im Sinneiner Taylorreihe als lineare Funktion der Nichtgleichgewichtsvariablen, hier also der De-formationsgeschwindigkeit D dargestellt werden,
TE =4
C : D. (491)
Da ein Fluid per Definition isotrop sind, reduziert sich der positiv definite Materialtensor4
Cauf die zwei skalarwertigen Parameter µ und ζ . Die Nichtgleichgewichtsspannung bekommtdie Form
TE = 2µDD + ζ (trD) I. (492)
Der Deviator
DD = D − 1
3(trD) I (493)
stellt den spurfreien Anteil der Deformationsgeschwindigkeit dar. Er charakterisiert dieSchubdeformation, wahrend der zweite Term
trD = divv (494)
die Volumendehnung charakterisiert. Die beiden Materialparameter sind die Zahigkeit oderdie dynamische Viskositat µ und die Volumenzahigkeit ζ . Ein Fluid, fur das das lineareMaterialgesezt (492) gultig ist, wird als Newtonsches Fluid bezeichnet.
Da die Volumenzahigkeit eine experimentell schwer zu ermittelnde Große ist, bedient mansich haufig der Stokesschen Annahme, nach der die Volumenzahigkeit Null ist (ζ = 0). Dieexperimentellen Resultate werden unter dieser Annahme in vielen Fallen gut widergegeben.
Im Fall inkomressiblen Materialverhaltens geht die Volumenzahigkeit gegen Unendlich,wahrend die Volumendehnung gegen Null geht. Die Extraspannung hangt dann nur nochvon der Schubdeformation ab
TE = 2µDD = 2µD mit div v = 0. (495)
Unter der Annahme der Inkompressibilitat wird aus der Massenbilanz
ρ + ρ div v = 0 (496)
eine Volumenbilanz
div v = 0. (497)
Bei der Auswertung des Entropieprinzips ist die Volumenbilanz im Sinn einer Zwangsbedin-gung zu berucksichtigen. Die Gleichgewichtsspannung kann dann mit dem entsprechendenLagrange-Parameter identifiziert werden. Der Druck ist in diesem Fall kein thermodya-mischer Druck mehr sonder entspricht einer Zwangskraft, die aus den Randbedingungenberechnet werden kann.

20.10.2015 105
8.2 Navier-Stokes-Gleichung
Zur Losung von Randwertproblemen der Stromungsmechanik wird das Materialgesetz
T = − p I + 2µD (498)
in die Impulsbilanz
ρ∂v
∂t+ ρ (gradv) · v = divT + ρb (499)
eingesetzt. Mit der Identitatdiv(p I) = grad p (500)
erhaltl man die Beziehung
ρ v = − grad p + divTE + ρb, (501)
wobei der Punkt die materielle Zeitableitung in der Eulerschen Darstellung kennzeichnet.Setzt man weiter noch die Beziehung fur die Extraspannung z. B. in der Form (495) ein,so erhalt man
ρ v = − grad p + µ∆v + ρb. (502)
In Kombination mit der Inkomressibilitatsbedingung (497) stehen insgesamt vier skala-re Gleichungen zur Verfugung, um die drei Koeffizienten des Geschwindigkeitsvektors vund den Druck p zu berechnen. Die Gleichung (502) wird als Navier-Stokes-Gleichung furinkompressible Fluide bezeichnet.
Zur Losung der Gleichung gehoren noch Anfangs- und Randbedingungen. Wie bei derLame-Navierschen Gleichung kann auch hier zwischen Dirichlet- und Neumann-Randbedin-gungen unterschieden werden.
Losungen der Navier-Stokes-Gleichung sind in Sonderfallen als analytische Losungen be-kannt. Eine wesentliche Schwierigkeit stellt dabei die Behandlung des konvektiven (nicht-linearen) Terms der materiellen Zeitableitung
v =∂v
∂t+ (gradv) · v, (503)
dar, der bei der Lame-Navier-Gleichung entfallt. Als numerische Losungsverfahren kom-men fur die Navier-Stokes-Gleichung sowohl Finite-Volumen-Verfahren als auch die Finite-Elemente-Methode in Betracht.
106 Materialmodellierung
9 Rheologie
Bisher haben wir uns mit dem hyperelastischen sowie dem viskosen Materialverhaltenbefasst. Diese Materialmodelle stellen zwei Extremfalle dar, die durch charakteristischeEigenschaften beschrieben werden konnen:
• Hyperelastisches Verhalten - Festkorper
– reversibel
– keine Dissipation
– ratenunabhangig
– Freie Energie als Potential
– Zustand eindeutig durch Verzerrung charakterisiert
• Viskoses Verhalten - Fluid
– dissipativ
– ratenabhangig
– Zustand wird uber die Deformationsgeschwindigkeit charakterisiert(Nicht-Gleichgewicht)
Um das Materialverhalten eines Werkstoffes zu charakterisieren sind grundsatzliche Uber-legungen notwendig. Dabei muss die Ratenabhangigkeit sowie das Hystereseverhalten desWerkstoffes bewertet werden. Man unterscheidet die Materialeigenschaften:
ratenunabhangig ↔ ratenabhangig
ohne Gleichgewichtshysterese ↔ mit Gleichgewichtshysterese.
Die Kombination dieser Eigenschaften fuhrt auf vier Materialklassen:
• Elastizitat:Elastisches Materialverhalten ist ratenunabhangig und es existiert keine Hysterese.Fur den Be- und Entlastungsvorgang einer Probe wird dieselbe Spannungs-Dehnungs-kurve registriert.
• Viskoelastizitat:Viskoelastisches Verhalten ist ratenabhangig. Im Gleichgewichtsfall, wenn die Bela-stungsgeschwindigkeit gering ist und der Grossenordnung der Geschwindigkeiten derinternen Werkstoffvorgange entspricht, findet keine Hysterese statt und die Be- undEntlastungskurven liegen ubereinander. Mit zunehmender Belastungsgeschwindigkeitlaufen die Kurven jedoch auseinander und es tritt Hysterese auf. Die Flache zwischemBe- und Entlastungspfad ist ein Maß fur die dissipierte Energie.
20.10.2015 107
• Plastizitat:Plastisches Materialverhalten ist ratenunabhangig und weist eine Gleichgewichtshy-sterese auf. Plastisches Materialverhalten tritt ein, wenn ein bestimmter Spannungs-wert, die Fließspannung, uberschritten wird. Oberhalb dieses Wertes finden irreversi-ble Veranderungen im Werkstoff statt, die zu bleibenden Verformungen fuhren. Dabeiunterscheidet man plastisches Verhalten ohne und mit Verfestigung. Wahrend sichder Werkstoff bei plastischem Materialverhalten ohne Verfestigung bei konstanterKraft weiter verformt (vgl. Kurven a) und b) in Abbildung 21), muss die Kraft beiverfestigendem Materialverhalten erhoht werden, um eine weitere Verformung her-vorzurufen (vgl. Kurven c) und d)).Im Anfangsbereiches differenziert man zwischen starrem und elastischem Verhalten.Wahrend bei starrem Materialverhalten eine Verformung erst nach Erreichen derFließgrenze stattfindet (vgl. Kurven a) und c)), finden bei elastisch plastischem Ma-terialverhalten im Anfangsbereich elastische Verformungen statt (vgl. Kurven b) undd)).
• Viskoplastizitat:Viskoplastisches Materialverhalten ist ratenabhangig und zeigt wie plastisches Mate-rialverhalten eine Gleichgewichtshysterese. Mit steigender Belastungsgeschwindigkeitvergrossert sich die Flache zwischem Be- und Entlastungspfad und die dissipierteEnergie nimmt zu. Viskoplastisches Materialverhalten kann ebenfalls einen elasti-schen Anfangsbereich beinhalten.
Abbildung 20 und 21 zeigen die idealisierten Kraft-Verschiebungsdiagramme aus einachsi-gen Zugversuchen fur elastisches und viskoelastisches sowie fur plastisches und viskoplasti-sches Materialverhalten.
Das Materialverhalten dieser vier Klassen kann mit einfachen Modellen abgebildet werden,die sich auf eindimensionales und lineares Verhalten beschranken. Die drei GrundelementeFeder, Dampfer und Reibelement sind in Abbildung 22 dargestellt.Zur Beschreibung der Elastizitat bedient man sich der Modellvorstellung einer Feder. DieBezeichnung Hookscher Korper fur dieses Modell leitet sich aus dem Gultigkeitsgesetz
σ = E ε (504)
ab, das als Hooksches Gesetz bekannt ist. Viskoses Materialverhalten wird durch einenDampfer modelliert, dessen Spannung σ uber die Viskositat η proportional zur Anderungder Verzerrung ε ist:
σ = η ε. (505)
Das Dampfermodell wird auch als Newtonscher Korper bezeichnet.Zur Abbildung der Plastizitat ist ein Reibelement zweckmaßig, dessen Einsetzen uber dieFließspannung σF gesteuert wird.
ε =
{
0, wenn σ < σF
f(σ), wenn σ = σF(506)
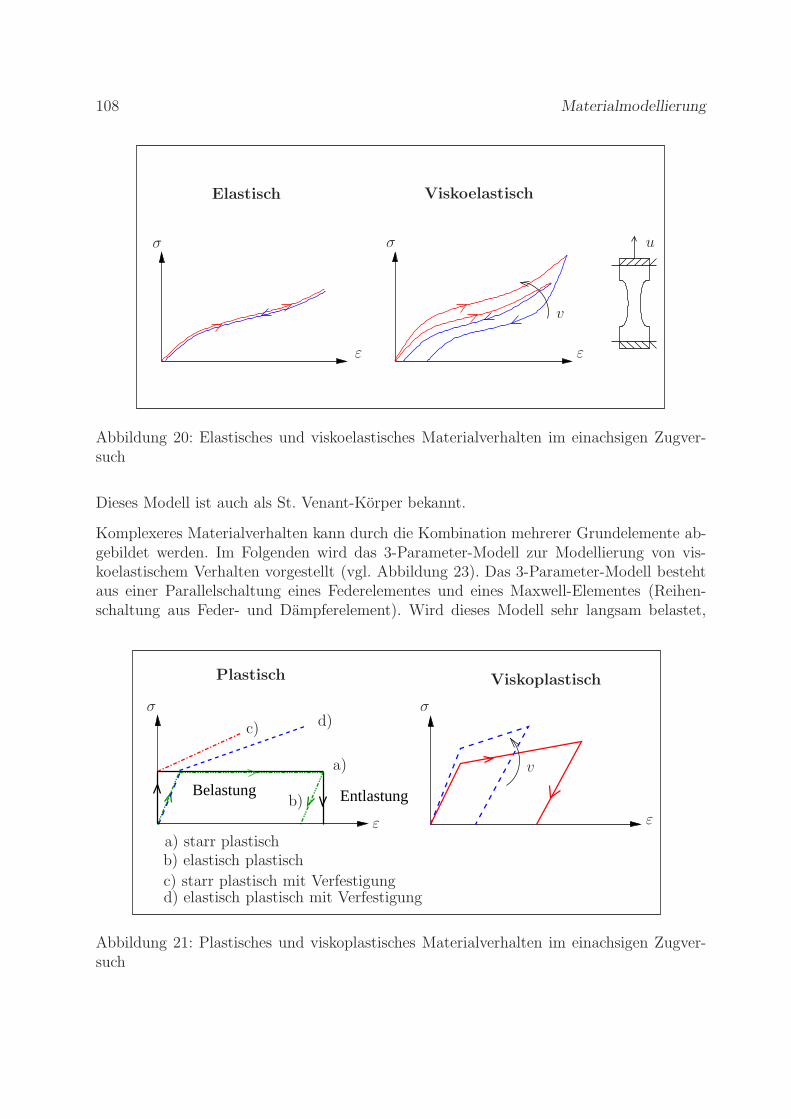
108 Materialmodellierung
Elastisch Viskoelastisch
ε ε
σ σ
v
u
Abbildung 20: Elastisches und viskoelastisches Materialverhalten im einachsigen Zugver-such
Dieses Modell ist auch als St. Venant-Korper bekannt.
Komplexeres Materialverhalten kann durch die Kombination mehrerer Grundelemente ab-gebildet werden. Im Folgenden wird das 3-Parameter-Modell zur Modellierung von vis-koelastischem Verhalten vorgestellt (vgl. Abbildung 23). Das 3-Parameter-Modell bestehtaus einer Parallelschaltung eines Federelementes und eines Maxwell-Elementes (Reihen-schaltung aus Feder- und Dampferelement). Wird dieses Modell sehr langsam belastet,
Belastung Entlastung
Plastisch Viskoplastisch
εε
σσ
va)
b)
c) d)
a) starr plastischb) elastisch plastisch
c) starr plastisch mit Verfestigungd) elastisch plastisch mit Verfestigung
Abbildung 21: Plastisches und viskoplastisches Materialverhalten im einachsigen Zugver-such
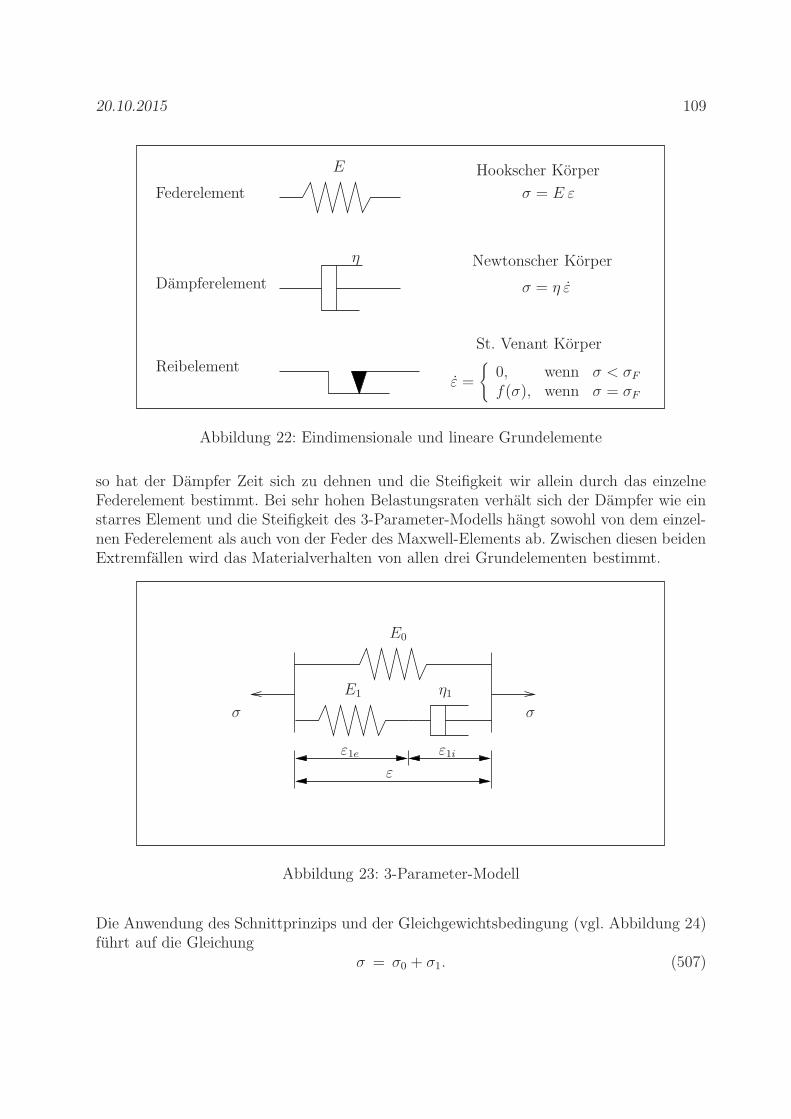
20.10.2015 109
σ = E ε
σ = η ε
ε =
{
0, wenn σ < σF
f(σ), wenn σ = σF
Federelement
Dampferelement
Reibelement
E
η
Hookscher Korper
Newtonscher Korper
St. Venant Korper
Abbildung 22: Eindimensionale und lineare Grundelemente
so hat der Dampfer Zeit sich zu dehnen und die Steifigkeit wir allein durch das einzelneFederelement bestimmt. Bei sehr hohen Belastungsraten verhalt sich der Dampfer wie einstarres Element und die Steifigkeit des 3-Parameter-Modells hangt sowohl von dem einzel-nen Federelement als auch von der Feder des Maxwell-Elements ab. Zwischen diesen beidenExtremfallen wird das Materialverhalten von allen drei Grundelementen bestimmt.
ε
ε1iε1e
E0
E1 η1
σσ
Abbildung 23: 3-Parameter-Modell
Die Anwendung des Schnittprinzips und der Gleichgewichtsbedingung (vgl. Abbildung 24)fuhrt auf die Gleichung
σ = σ0 + σ1. (507)
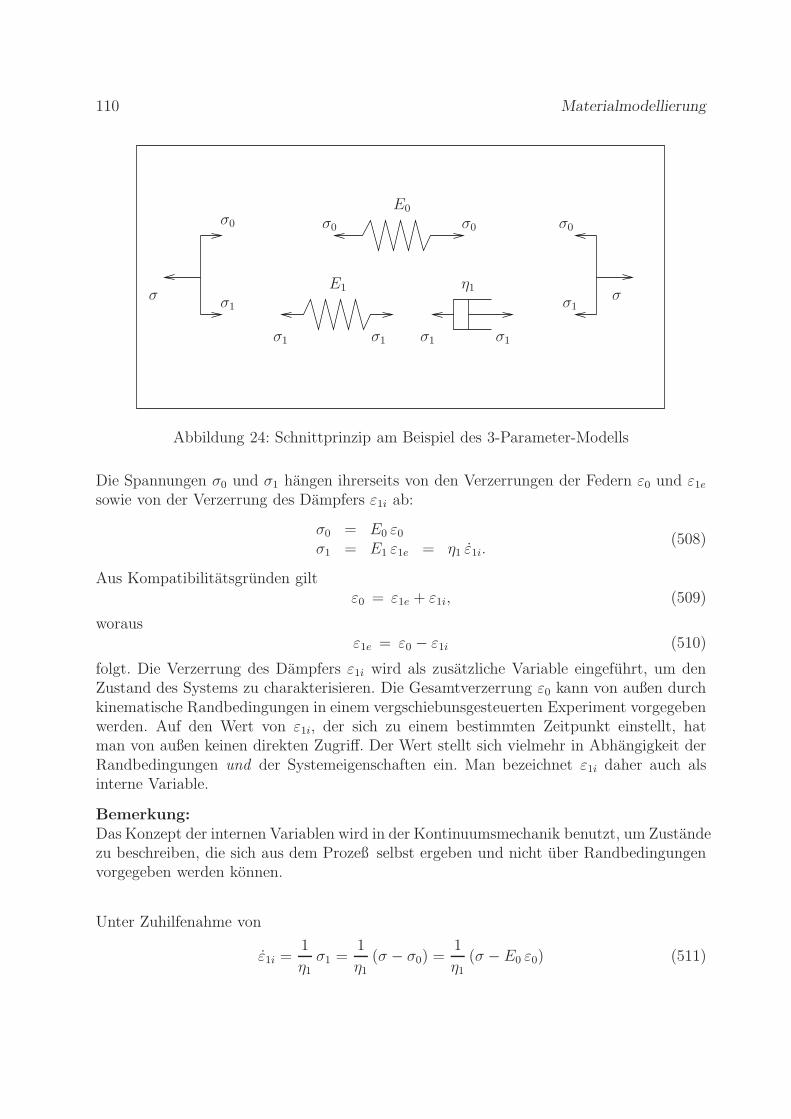
110 Materialmodellierung
E0
E1 η1
σ1
σ1
σ1σ1σ1
σ1
σ0 σ0σ0σ0
σσ
Abbildung 24: Schnittprinzip am Beispiel des 3-Parameter-Modells
Die Spannungen σ0 und σ1 hangen ihrerseits von den Verzerrungen der Federn ε0 und ε1e
sowie von der Verzerrung des Dampfers ε1i ab:
σ0 = E0 ε0
σ1 = E1 ε1e = η1 ε1i.(508)
Aus Kompatibilitatsgrunden giltε0 = ε1e + ε1i, (509)
worausε1e = ε0 − ε1i (510)
folgt. Die Verzerrung des Dampfers ε1i wird als zusatzliche Variable eingefuhrt, um denZustand des Systems zu charakterisieren. Die Gesamtverzerrung ε0 kann von außen durchkinematische Randbedingungen in einem vergschiebunsgesteuerten Experiment vorgegebenwerden. Auf den Wert von ε1i, der sich zu einem bestimmten Zeitpunkt einstellt, hatman von außen keinen direkten Zugriff. Der Wert stellt sich vielmehr in Abhangigkeit derRandbedingungen und der Systemeigenschaften ein. Man bezeichnet ε1i daher auch alsinterne Variable.
Bemerkung:Das Konzept der internen Variablen wird in der Kontinuumsmechanik benutzt, um Zustandezu beschreiben, die sich aus dem Prozeß selbst ergeben und nicht uber Randbedingungenvorgegeben werden konnen.
Unter Zuhilfenahme von
ε1i =1
η1σ1 =
1
η1(σ − σ0) =
1
η1(σ − E0 ε0) (511)

20.10.2015 111
kann die interne Variable ε1i im vorliegenden Fall eliminiert werden:
σ = σ0 + σ1 = E0 ε0 + E1 (ε0 − ε1i)
σ = E0 ε0 + E1 (ε0 − ε1i)
σ = (E0 + E1) ε0 −E1
η1(σ − E0 ε0)
σ +E1
η1σ =
E1E0
η1ε0 + (E0 + E1)ε0.
(512)
Auf der linken Seite der Gleichung (512) stehen Terme, die nur von der Spannung abhangen.Bei kraftgesteuerten Versuchen ist diese Seite bekannt und es muss daher nur eine Differen-tialgleichung fur ε(t) gelost werden. Bei dehnungsgesteuerten Versuchen ist entsprechenddie Wegregelung bekannt und die Spannung σ(t) wird durch Losung der Differentialglei-chung bestimmt.
a) Relaxationsexperiment
Zum Zeitpunkt t = 0 wird ein Dehnungssprung ε0 = ε vorgegeben und dann konstantgehalten. Dies impliziert, dass die zeitliche Anderung der Verzerrung ε0 verschwindetund zur Bestimmung des Spannungsverlaufes muss daher
σ +E1
η1σ =
E1E0
η1ε (513)
gelost werden. Man erhalt die homogene Losung
σh = A exp
(
−E1
η1t
)
(514)
und mit einem Ansatz der rechten Seite die partikulare Losung
σp = E0 ε. (515)
Die Konstante A kann aus den Anfangsbedingungen berechnet werden. Zum Zeit-punkt t = 0 gilt fur das Relaxationsexperiment
σ(t = 0) = (E0 + E1) ε. (516)
Bemerkung:
Wenn bei t = 0 ein Dehnungssprung ε aufgebracht wird, wird in dem Maxwell-Element (Reihenschaltung von Feder E1 und Dampfer η1) zwar eine Spannung σ1 =E1 ε ubertragen, es liegt aber noch keine Aufweitung des Dampfers vor, εi(t = 0) = 0.
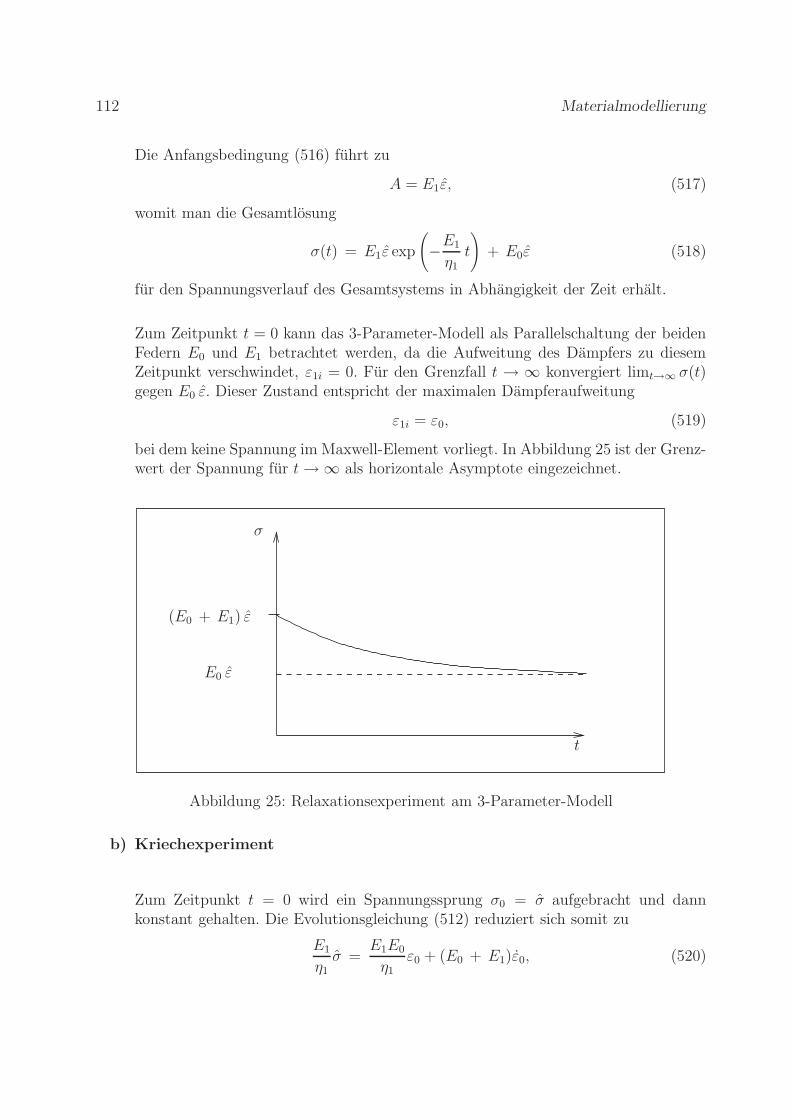
112 Materialmodellierung
Die Anfangsbedingung (516) fuhrt zu
A = E1ε, (517)
womit man die Gesamtlosung
σ(t) = E1ε exp
(
−E1
η1t
)
+ E0ε (518)
fur den Spannungsverlauf des Gesamtsystems in Abhangigkeit der Zeit erhalt.
Zum Zeitpunkt t = 0 kann das 3-Parameter-Modell als Parallelschaltung der beidenFedern E0 und E1 betrachtet werden, da die Aufweitung des Dampfers zu diesemZeitpunkt verschwindet, ε1i = 0. Fur den Grenzfall t → ∞ konvergiert limt→∞ σ(t)gegen E0 ε. Dieser Zustand entspricht der maximalen Dampferaufweitung
ε1i = ε0, (519)
bei dem keine Spannung im Maxwell-Element vorliegt. In Abbildung 25 ist der Grenz-wert der Spannung fur t→ ∞ als horizontale Asymptote eingezeichnet.
σ
t
(E0 + E1) ε
E0 ε
Abbildung 25: Relaxationsexperiment am 3-Parameter-Modell
b) Kriechexperiment
Zum Zeitpunkt t = 0 wird ein Spannungssprung σ0 = σ aufgebracht und dannkonstant gehalten. Die Evolutionsgleichung (512) reduziert sich somit zu
E1
η1σ =
E1E0
η1ε0 + (E0 + E1)ε0, (520)
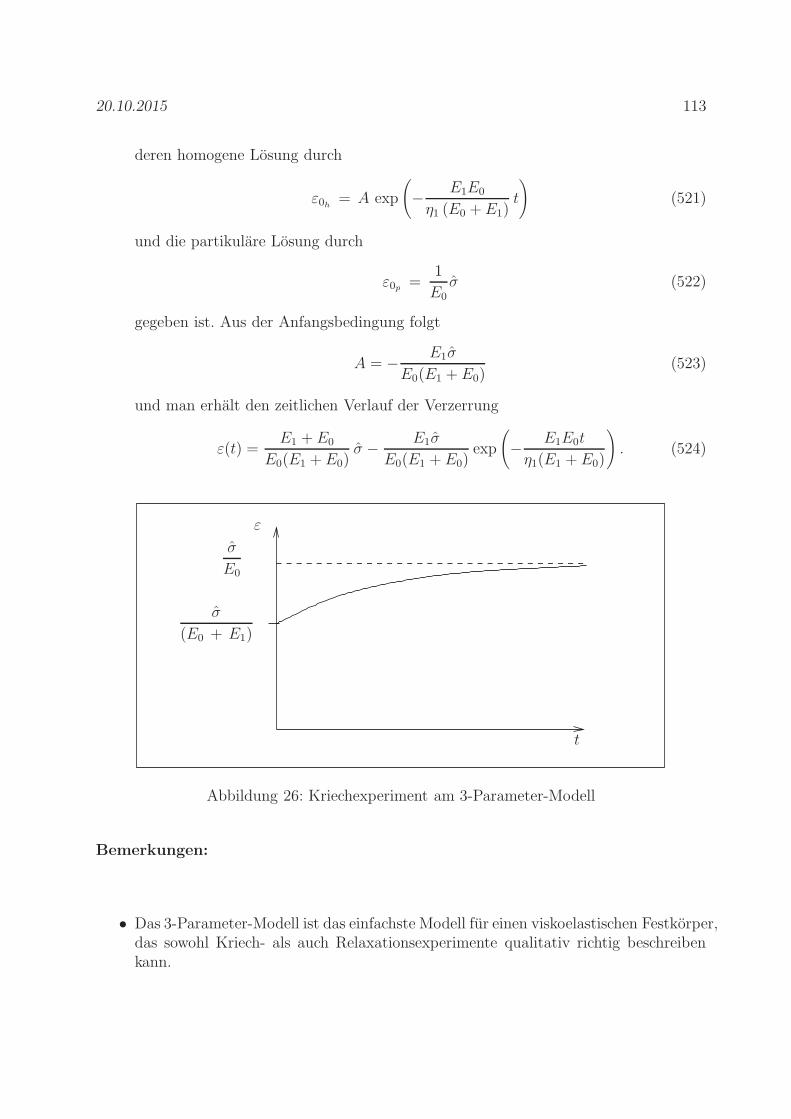
20.10.2015 113
deren homogene Losung durch
ε0h= A exp
(
− E1E0
η1 (E0 + E1)t
)
(521)
und die partikulare Losung durch
ε0p =1
E0σ (522)
gegeben ist. Aus der Anfangsbedingung folgt
A = − E1σ
E0(E1 + E0)(523)
und man erhalt den zeitlichen Verlauf der Verzerrung
ε(t) =E1 + E0
E0(E1 + E0)σ − E1σ
E0(E1 + E0)exp
(
− E1E0t
η1(E1 + E0)
)
. (524)
t
σ
(E0 + E1)
σ
E0
ε
Abbildung 26: Kriechexperiment am 3-Parameter-Modell
Bemerkungen:
• Das 3-Parameter-Modell ist das einfachste Modell fur einen viskoelastischen Festkorper,das sowohl Kriech- als auch Relaxationsexperimente qualitativ richtig beschreibenkann.
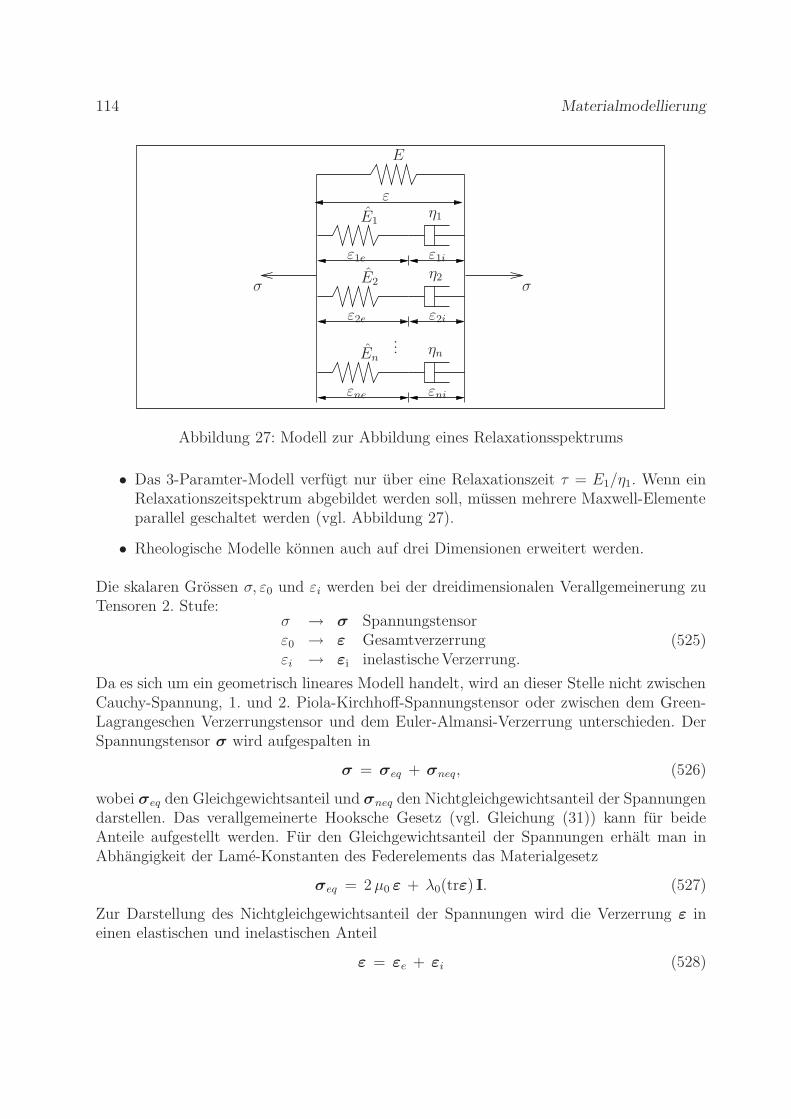
114 Materialmodellierungreplacemen
ε1i
ε2i
εni
ε1e
ε2e
εne
E1
E2
En
η1
η2
ηn
ε
E
...
σσ
Abbildung 27: Modell zur Abbildung eines Relaxationsspektrums
• Das 3-Paramter-Modell verfugt nur uber eine Relaxationszeit τ = E1/η1. Wenn einRelaxationszeitspektrum abgebildet werden soll, mussen mehrere Maxwell-Elementeparallel geschaltet werden (vgl. Abbildung 27).
• Rheologische Modelle konnen auch auf drei Dimensionen erweitert werden.
Die skalaren Grossen σ, ε0 und εi werden bei der dreidimensionalen Verallgemeinerung zuTensoren 2. Stufe:
σ → σ Spannungstensorε0 → ε Gesamtverzerrungεi → εi inelastische Verzerrung.
(525)
Da es sich um ein geometrisch lineares Modell handelt, wird an dieser Stelle nicht zwischenCauchy-Spannung, 1. und 2. Piola-Kirchhoff-Spannungstensor oder zwischen dem Green-Lagrangeschen Verzerrungstensor und dem Euler-Almansi-Verzerrung unterschieden. DerSpannungstensor σ wird aufgespalten in
σ = σeq + σneq, (526)
wobei σeq den Gleichgewichtsanteil und σneq den Nichtgleichgewichtsanteil der Spannungendarstellen. Das verallgemeinerte Hooksche Gesetz (vgl. Gleichung (31)) kann fur beideAnteile aufgestellt werden. Fur den Gleichgewichtsanteil der Spannungen erhalt man inAbhangigkeit der Lame-Konstanten des Federelements das Materialgesetz
σeq = 2µ0 ε + λ0(trε) I. (527)
Zur Darstellung des Nichtgleichgewichtsanteil der Spannungen wird die Verzerrung ε ineinen elastischen und inelastischen Anteil
ε = εe + εi (528)

20.10.2015 115
aufgespalten, sodass manσneq = 2µ1 εe + λ1(trεe) I, (529)
in Abhangigkeit der Lame-Konstanten der Feder des Maxwell-Elements erhalt. Damit lau-tet die Evolutionsgleichung fur die inelastischen Dehnungen
εi =1
ησneq. (530)
Rheologische Modelle besitzen auch im thermodynamischen Kontext ihre Gultigkeit. Aus-gangspunkt fur isotherme Prozesse ist die Clausius-Planck-Ungleichung, die fur geometrischlineare Beziehungen
−ρ ψ + σ : ε ≥ 0 (531)
lautet. Als Prozessvariablen wahlt man die Gesamtverzerrungen und elastischen Verzer-rungen
S = {ε, εe}. (532)
Die Ausfuhrung der Zeitableitung mittels der Kettenregel der Differentiation liefert furGleichung (531)
−ρ ∂ψ∂ε
: ε − ρ∂ψ
∂εe
: εe + σ : ε ≥ 0. (533)
Mit den elastischen Verzerrungenεe = ε− εi (534)
erhalt man
ε :
(
−ρ ∂ψ∂ε
− ρ∂ψ
∂εe
+ σ
)
︸ ︷︷ ︸
σeq= ρ∂ψ
∂ε;σneq = ρ
∂ψ
∂εe
+ ρ∂ψ
∂εe︸ ︷︷ ︸
σneq
: εi ≥ 0. (535)
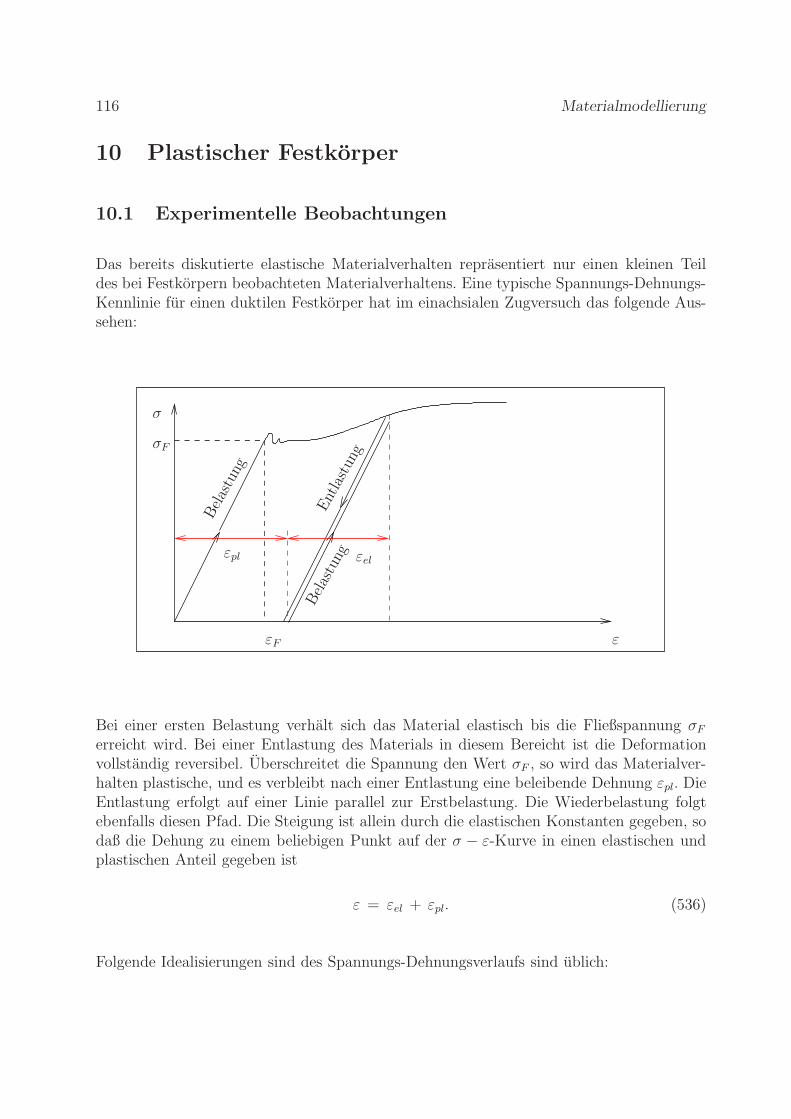
116 Materialmodellierung
10 Plastischer Festkorper
10.1 Experimentelle Beobachtungen
Das bereits diskutierte elastische Materialverhalten reprasentiert nur einen kleinen Teildes bei Festkorpern beobachteten Materialverhaltens. Eine typische Spannungs-Dehnungs-Kennlinie fur einen duktilen Festkorper hat im einachsialen Zugversuch das folgende Aus-sehen:
σ
σF
εpl εel
εF ε
Belas
tung
Belas
tung
Ent
last
ung
Bei einer ersten Belastung verhalt sich das Material elastisch bis die Fließspannung σF
erreicht wird. Bei einer Entlastung des Materials in diesem Bereicht ist die Deformationvollstandig reversibel. Uberschreitet die Spannung den Wert σF , so wird das Materialver-halten plastische, und es verbleibt nach einer Entlastung eine beleibende Dehnung εpl. DieEntlastung erfolgt auf einer Linie parallel zur Erstbelastung. Die Wiederbelastung folgtebenfalls diesen Pfad. Die Steigung ist allein durch die elastischen Konstanten gegeben, sodaß die Dehung zu einem beliebigen Punkt auf der σ − ε-Kurve in einen elastischen undplastischen Anteil gegeben ist
ε = εel + εpl. (536)
Folgende Idealisierungen sind des Spannungs-Dehnungsverlaufs sind ublich:
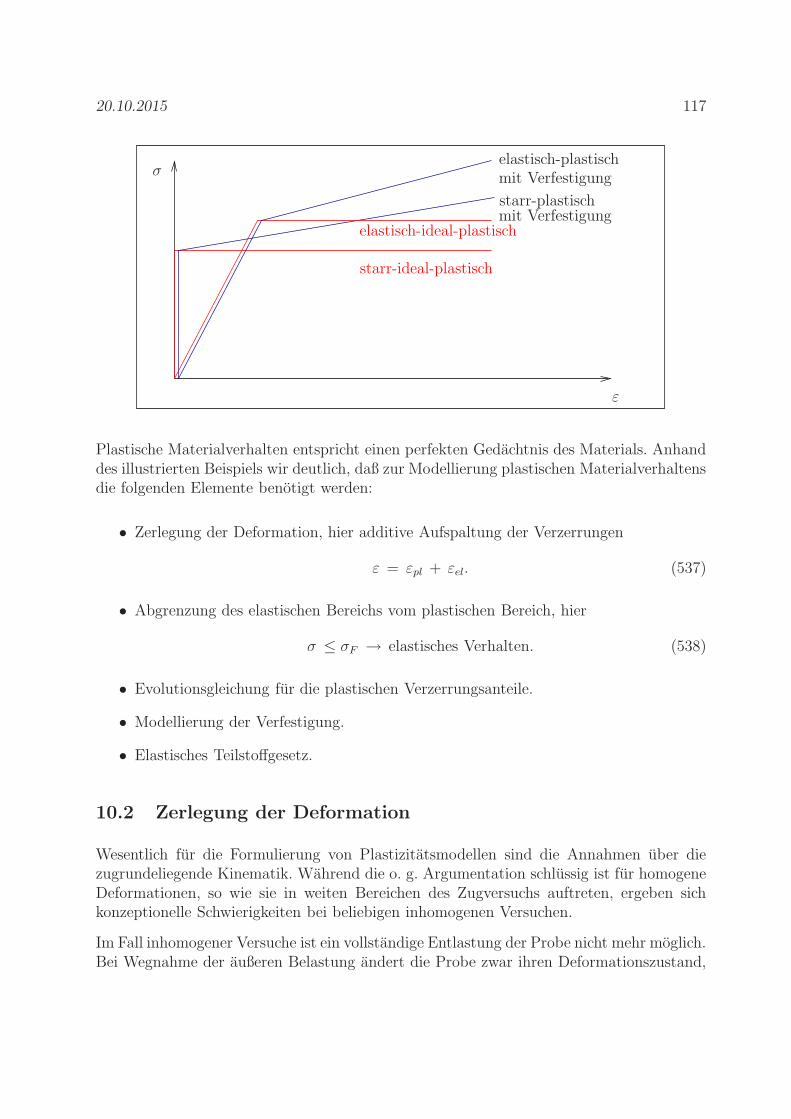
20.10.2015 117
σ
ε
elastisch-plastisch
mit Verfestigung
mit Verfestigung
elastisch-ideal-plastisch
starr-plastisch
starr-ideal-plastisch
Plastische Materialverhalten entspricht einen perfekten Gedachtnis des Materials. Anhanddes illustrierten Beispiels wir deutlich, daß zur Modellierung plastischen Materialverhaltensdie folgenden Elemente benotigt werden:
• Zerlegung der Deformation, hier additive Aufspaltung der Verzerrungen
ε = εpl + εel. (537)
• Abgrenzung des elastischen Bereichs vom plastischen Bereich, hier
σ ≤ σF → elastisches Verhalten. (538)
• Evolutionsgleichung fur die plastischen Verzerrungsanteile.
• Modellierung der Verfestigung.
• Elastisches Teilstoffgesetz.
10.2 Zerlegung der Deformation
Wesentlich fur die Formulierung von Plastizitatsmodellen sind die Annahmen uber diezugrundeliegende Kinematik. Wahrend die o. g. Argumentation schlussig ist fur homogeneDeformationen, so wie sie in weiten Bereichen des Zugversuchs auftreten, ergeben sichkonzeptionelle Schwierigkeiten bei beliebigen inhomogenen Versuchen.
Im Fall inhomogener Versuche ist ein vollstandige Entlastung der Probe nicht mehr moglich.Bei Wegnahme der außeren Belastung andert die Probe zwar ihren Deformationszustand,
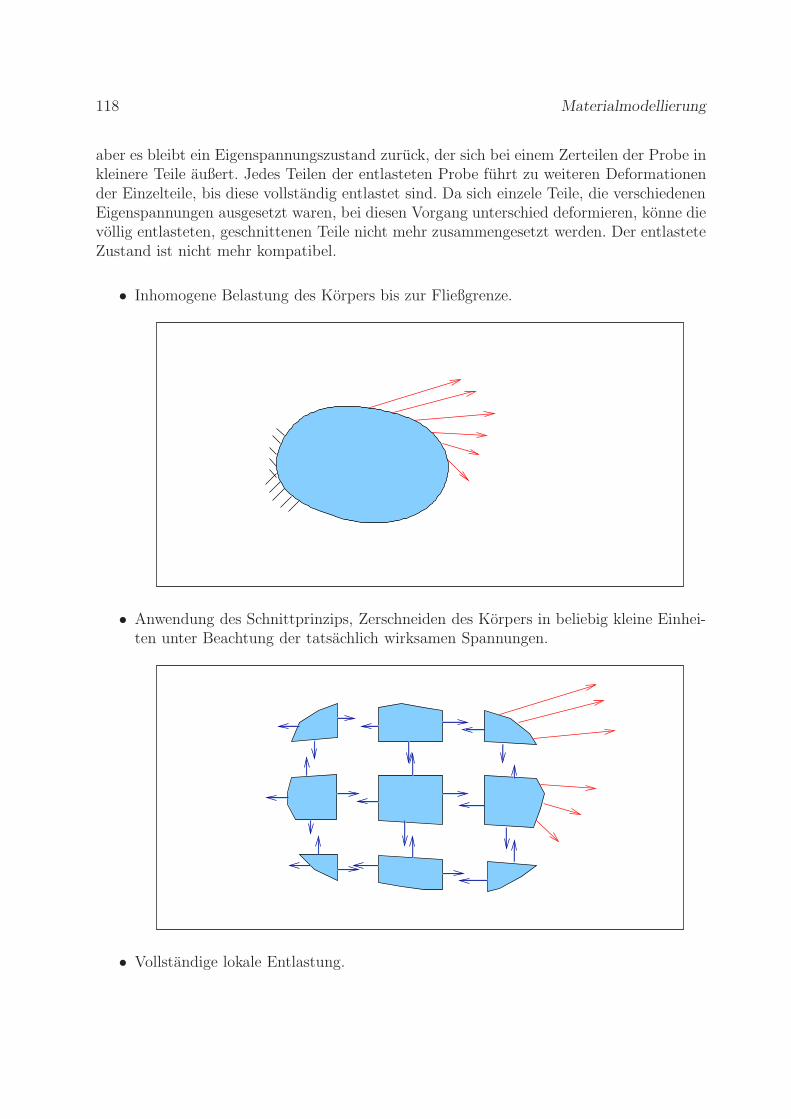
118 Materialmodellierung
aber es bleibt ein Eigenspannungszustand zuruck, der sich bei einem Zerteilen der Probe inkleinere Teile außert. Jedes Teilen der entlasteten Probe fuhrt zu weiteren Deformationender Einzelteile, bis diese vollstandig entlastet sind. Da sich einzele Teile, die verschiedenenEigenspannungen ausgesetzt waren, bei diesen Vorgang unterschied deformieren, konne dievollig entlasteten, geschnittenen Teile nicht mehr zusammengesetzt werden. Der entlasteteZustand ist nicht mehr kompatibel.
• Inhomogene Belastung des Korpers bis zur Fließgrenze.
• Anwendung des Schnittprinzips, Zerschneiden des Korpers in beliebig kleine Einhei-ten unter Beachtung der tatsachlich wirksamen Spannungen.
• Vollstandige lokale Entlastung.
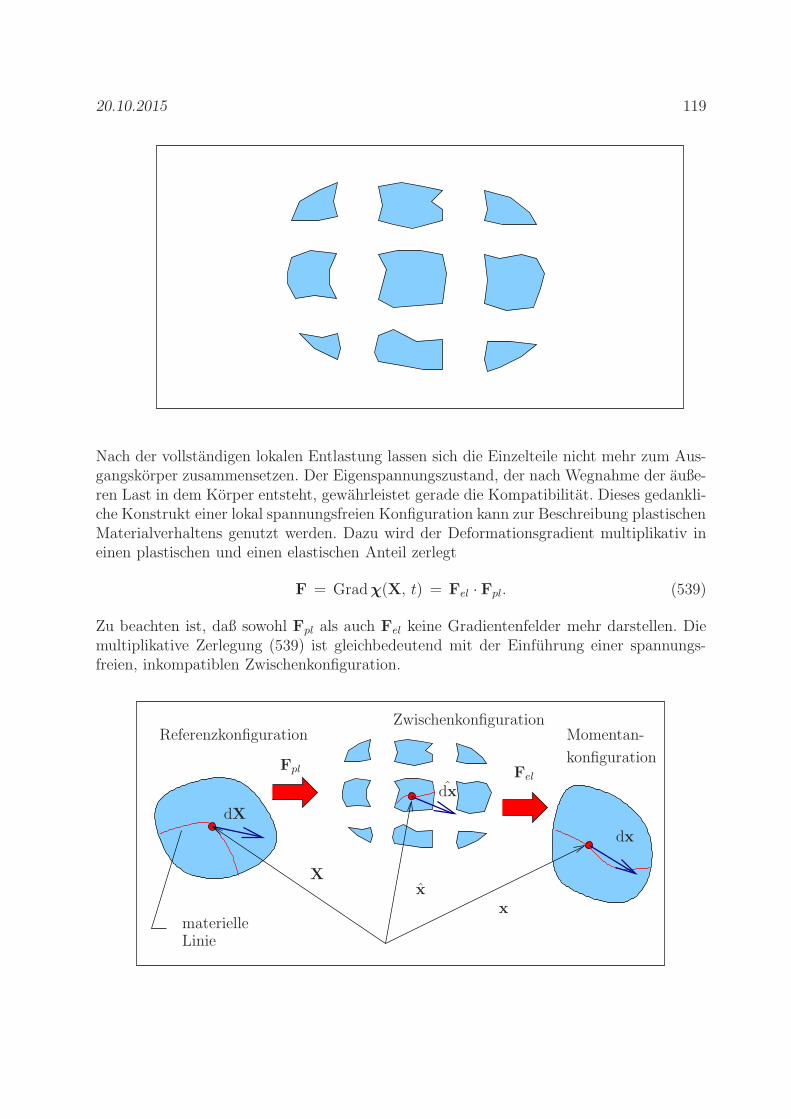
20.10.2015 119
Nach der vollstandigen lokalen Entlastung lassen sich die Einzelteile nicht mehr zum Aus-gangskorper zusammensetzen. Der Eigenspannungszustand, der nach Wegnahme der auße-ren Last in dem Korper entsteht, gewahrleistet gerade die Kompatibilitat. Dieses gedankli-che Konstrukt einer lokal spannungsfreien Konfiguration kann zur Beschreibung plastischenMaterialverhaltens genutzt werden. Dazu wird der Deformationsgradient multiplikativ ineinen plastischen und einen elastischen Anteil zerlegt
F = Gradχ(X, t) = Fel · Fpl. (539)
Zu beachten ist, daß sowohl Fpl als auch Fel keine Gradientenfelder mehr darstellen. Diemultiplikative Zerlegung (539) ist gleichbedeutend mit der Einfuhrung einer spannungs-freien, inkompatiblen Zwischenkonfiguration.
ReferenzkonfigurationZwischenkonfiguration
Momentan-
konfiguration
Xx
x
Fpl Fel
materielleLinie
dX
dx
dx

120 Materialmodellierung
Fur ein Linienelement dX gilt dann das Transportverhalten
dx = F · dX = Fel · Fpl · dX = Fel · dx mit dx = Fpl · dX. (540)
Die Linienelemente der Referenzkonfiguration dX werden mittels des Anteils Fpl von F indie sogenante inkompratible Zwischenkonfiguration abgebildet. Dieser Transport geht ohneden Aufbau von Spannungen vonstattet. Die Linienelemente der Zwischenkonfiguration dxwerden dann in die Momentankonfiguration abgebildet. Dieser Deformationsanteil ist mitdem Aufbau von Spannungen verbunden.
Die Zerlegung von F in elastische und plastische Anteile ist nicht eindeutig. Man kann derZwischenkonfiguration einen beliebigen orthogonalen Tensor uberlagern, so daß gilt
F = Fel · Fpl = Fel · QT ·Q︸ ︷︷ ︸
=I
·Fpl = Fel · Fpl. (541)
Die Lage der einzelnen Teilstucke in der Zwischenkonfiguration ist also bis auf eine Rota-tion bestimmt. Diese Rotation, die nur durch zusatzliche Konstitutiveannahmen bestimmtwerden kann, wird auch als plastischer Spin bezeichnet.
Die Zerlegung von F kann bei der Formulierung von Verzerrungstensoren benutzt werden.Analog zu der Einfuhrung des rechten Greenschen Deformationstensors
dx · dx = dX · CdX mit C = FT · F (542)
kann man einen plastischen Deformationstensor definieren:
dx · dx = (Fpl · dX) · (Fpl · dX) = dX · Cpl · dX (543)
mitCpl = FT
pl · Fpl. (544)
Der plastische rechte Cauchy-Green-Tensor Cpl bezieht sich genau wie C auf die Geometrieder Referenzkonfiguration. Analog zur Konstruktion zum Greenschen Verzerrungstensorermittelt man einen plastischen Verzerrungstensor vom Greenschen Typ aus
dx · dx − dX · dX = dX · 2Epl · dX mit Epl =1
2
(
Cpl − I)
. (545)
Neben diesen Beziehungen, die sich auf die Geometrie der Referenzkonfiguration bezie-hen, kann man auch Deformationstensoren und Verzerrungstensoren mit Bezug auf dieGeometrie der aktuellen Konfiguration herleiten. Dann gilt
dx · dx = dx · B−1el · dx mit Bel = Fel · FT
el (546)
und
dx · dx − dx · dx = dx · 2Ael · dx mit Ael =1
2
(
I − B−1el
)
. (547)

20.10.2015 121
Die Großen Cpl und Bel sind jeweils nur in den plastischen Anteilen bzw. elastischenAnteilen von F formuliert. Um allerdings eine additive Zerlegung der Verzerrungstensorenanalog zu (537) zu erhalten, muß man einen Verzerrungstensor definieren, der sich aufdie Geometrie der Referenzkonfiguration bezieht. Ausgangspunkt fur die Definition desentsprechenden Verzerrungstensors ist das Transportverhalten, das durch pull back undpush forward gemaß (114) charakterisiert ist:
E = FT · A · F (pull back),
A = FT−1 · E · F−1 (push forward).(548)
Anstelle des vollstandigen Transports von der Referenz- in die Momentankonfigurationmittels F wird jetzt der Transport nur mit dem plastischen Anteil Fpl durchgefuhrt. Wirdefinieren zunachst einen Verzerrungstensor der Zwischenkonfiguration
Γ = FT−1pl ·E · F−1
pl , (549)
der aus dem Greenschen Verzerrungstensor motiviert wird. Bezuglich einer Interpretationin naturlichen Basisvektoren transformiert (549) die Basis der Referenzkonfiguration indie Zwischenkonfiguration. Setzt man weiter die Definiton von E und die multiplikativeZerlegung F = Fel · Fpl ein, so erhalt man
Γ =1
2(FT
el · Fel − FT−1pl · F−1
pl ) =1
2(FT
el · Fel − I + I − FT−1pl · F−1
pl ). (550)
Es ergibt sich also die folgende additive Aufteilung
Γ = Γel + Γpl (551)
mit den beiden Verzerrungstensoren
Γel = 12(FT
el · Fel − I),
Γpl = 12(I − FT−1
pl · F−1pl ).
(552)
Die additive Zerlegung des Verzerrungstensors Γ gestattet folgende Interpretation: In denbeiden Verzerrungstensoren Γel und Γpl stecken jeweils nur elastische oder plastische Großen.
Der elsatische Anteil Γel hat die Struktur des Greenschen Verzerrungstensors. Die plastischeZwischenkonfiguration ubernimmt fur das elastische Teilverhalten die Rolle der Referenz-konfiguration. Der plastische Verzerrungsanteil Γpl besitzt die Struktur des AlmansischenVerzerrungstensors, somit stellt die plastische Zwischenkonfiguration bezuglich des plasti-schen Verhaltens den aktuellen Zustand dar.
Ubung:Zeigen Sie das man das Resultat (551), (552) auch erhalten kann, indem man den Alman-sitensor mit Fel auf die Zwischenkonfiguration zuruckzieht.
Zusmmenfassend erhalt man aus der multiplikativen Zerlegung des Deformationsgradientendie folgenden additiven Konzept fur die Verzerrungsmaße:

122 Materialmodellierung
RK:
MK:
ZK:
E = 12(FT · F − I)
Epl = 12(FT
pl · Fpl − I)
Eel = E − Epl
A = 12(I − FT−1 · F−1)
Apl = A − Ael
Ael = 12(I − FT−1
el · F−1el )
Γ = 12(FT
el · Fel − FT−1pl · FT
pl)
Γ = Γel + Γpl
Γpl = 12(I − FT−1
pl · F−1pl )
Γel = 12(FT
el · Fel − I)
FT−1 · (. . .) · F−1
FT−1pl · (. . .) · F−1
pl
FT−1el · (. . .) · F−1
el
Basierend auf der multiplikativen Zerlegung des Deformationsgradienten wird der plasti-sche Geschwindigkeitsgradient eingefuhrt. Analog zu (141) gilt
˙dx = Fpl · dX = Fpl · F−1
pl · dx =: Lpl · dx. (553)
Da die Zwischenkonfiguration geometrisch nicht kompatibel ist, handelt es sich bei Lpl
(genau wie bei Fpl) nicht um ein Gradientenfeld. Folgt man den Uberlegungen des Kapitels
3, so kann man Lpl in symmetrische und schiefsymmetrische Anteile aufspalten:
Lpl = Dpl + Wpl mit Dpl = DT
pl undWpl = −Wpl. (554)
Ubung:Zeigen Sie die Gultigkeit der folgenden Zusammenhange:
Dpl = FT−1pl · Epl · F−1
pl ,
(Γpl)△pl = Dpl,
(555)
wobei die plastische Oldroyd- oder Lieableitung folgendermaßen definiert ist:
(Γpl)△pl =
˙Γpl + L
T
pl · Γpl + Γpl · Lpl. (556)
Die Invarianz der Spannungsleistung definiert einen weiteren Spannungstensor, der sich aufdie Zwischenkonfiguration bezieht. Aus
wi = τ : D = S : E =: τ : Dpl (557)
folgt mit der Definition von Dpl die Darstellung des Spannungstensors mit Bezug auf dieZwischenkonfiguration
τ = Fpl · S · FTpl = F−1
el · τ · FT−1el . (558)

20.10.2015 123
Dabei stellt τ = 1ρT die Kirchhoffspannung oder die gewichtete Cauchyspannung dar.
Im Rahmen einer geometrisch linearen Beschreibung fallen die drei moglichen Konfiguratio-nen zusammen. Das multiplikative Konzept reduziert sich dann auf die klassische additiveZerlegung
ε = εpl + εel (559)
Die Spannungstensoren T, τ , S und τ sind dann gleichwertig.
10.3 Fließfunktionen
10.3.1 Spannungsraum
Fur viele Materialien kann in einachsialen Zugversuchen eine Spannung σF ermittelt wer-den, ab der plastisches Fließen auftritt. Man unterschiedet gemaß des Verhaltens einenelastischen Bereich σ < σF und einen plastischen Bereich σ ≥ σF . Nimmt die gemesseneSpannung nach Uberschreiten der Fließgrenze σF weiter zu, so spricht man von Verfesti-gung. Fur beliebige Materialien ist eine dreidimensionale Verallgemeinerung dieses Kon-zepts notwendig. Die Einfuhrung einer Fließspannung fuhrt dann auf eine Betrachtung imSpannungsraum.
Bem.:Eine duale Formulierung im Dehnungsraum ist grundsatzlich auch moglich, wird aber inder Praxis kaum genutzt.
Im dreidimensionalen Fall ist der Fließbeginn durch das Erreichen einer kritischen Span-nung festgelegt
F (T) = 0. (560)
Im Fall isotropen Materialverhaltens ist der Spannungszustand eindeutig durch die dreiHauptspannungen (Eigenwerte von T) festgelegt. Die Darstellungstheorem isotroper Funk-tionen verlangen, daß die Fließfunktion F nur von den Eigenwerten von T oder allgemeinvon drei unabhangigen Invarianten von T abhangen kann (vgl. Abschnitt 7.2). Dann giltz. B.
F (T) = F (IT , IIT , IIIT ). (561)
Zur Entwicklung von Fließfunktionen hat es sich als gunstig erwiesen, den allgemeinenSpannungszustand in einen isotropen Anteil und einen Deviatoranteil aufzuspalten
T = − p I + TD (562)
mit
p = − 1
3T : I = − 1
3trT = − 1
3IT (563)
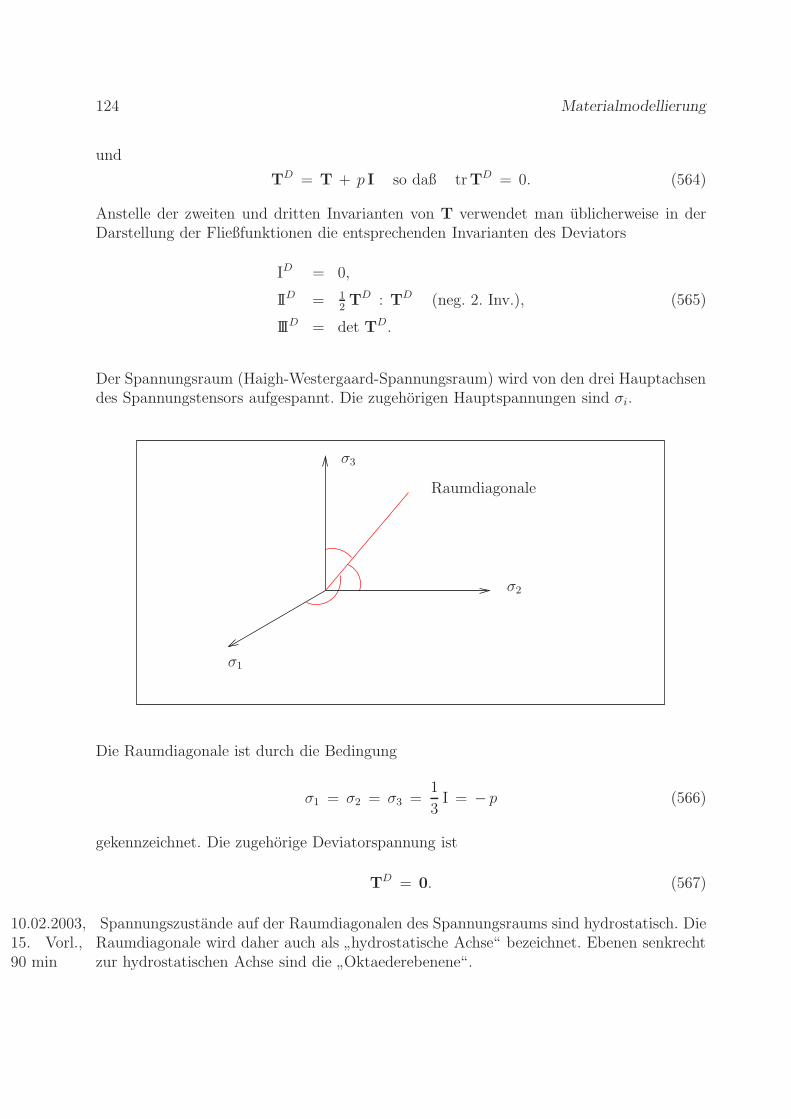
124 Materialmodellierung
und
TD = T + p I so daß trTD = 0. (564)
Anstelle der zweiten und dritten Invarianten von T verwendet man ublicherweise in derDarstellung der Fließfunktionen die entsprechenden Invarianten des Deviators
ID = 0,
IID = 12TD : TD (neg. 2. Inv.),
IIID = det TD.
(565)
Der Spannungsraum (Haigh-Westergaard-Spannungsraum) wird von den drei Hauptachsendes Spannungstensors aufgespannt. Die zugehorigen Hauptspannungen sind σi.
σ1
σ2
σ3
Raumdiagonale
Die Raumdiagonale ist durch die Bedingung
σ1 = σ2 = σ3 =1
3I = − p (566)
gekennzeichnet. Die zugehorige Deviatorspannung ist
TD = 0. (567)
Spannungszustande auf der Raumdiagonalen des Spannungsraums sind hydrostatisch. Die10.02.2003,15. Vorl.,90 min
Raumdiagonale wird daher auch als”hydrostatische Achse“ bezeichnet. Ebenen senkrecht
zur hydrostatischen Achse sind die”Oktaederebenene“.
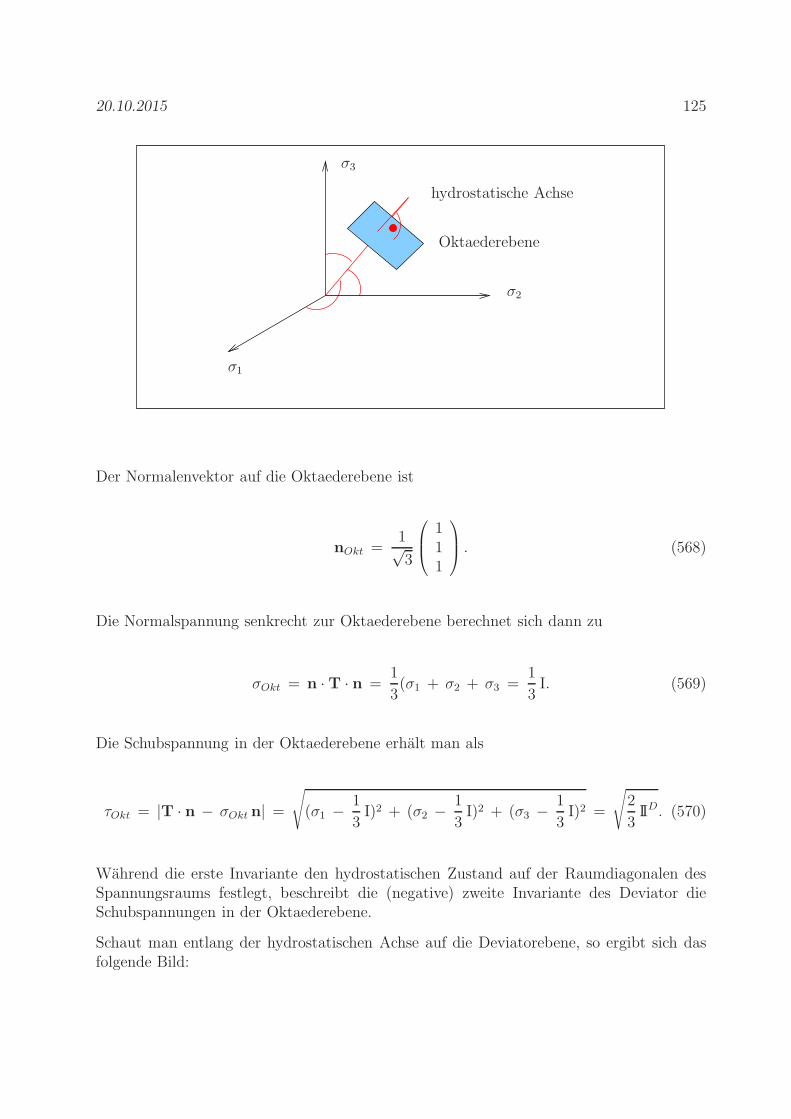
20.10.2015 125
σ1
σ2
σ3
hydrostatische Achse
Oktaederebene
Der Normalenvektor auf die Oktaederebene ist
nOkt =1√3
111
. (568)
Die Normalspannung senkrecht zur Oktaederebene berechnet sich dann zu
σOkt = n · T · n =1
3(σ1 + σ2 + σ3 =
1
3I. (569)
Die Schubspannung in der Oktaederebene erhalt man als
τOkt = |T · n − σOkt n| =
√
(σ1 − 1
3I)2 + (σ2 − 1
3I)2 + (σ3 − 1
3I)2 =
√
2
3IID. (570)
Wahrend die erste Invariante den hydrostatischen Zustand auf der Raumdiagonalen desSpannungsraums festlegt, beschreibt die (negative) zweite Invariante des Deviator dieSchubspannungen in der Oktaederebene.
Schaut man entlang der hydrostatischen Achse auf die Deviatorebene, so ergibt sich dasfolgende Bild:
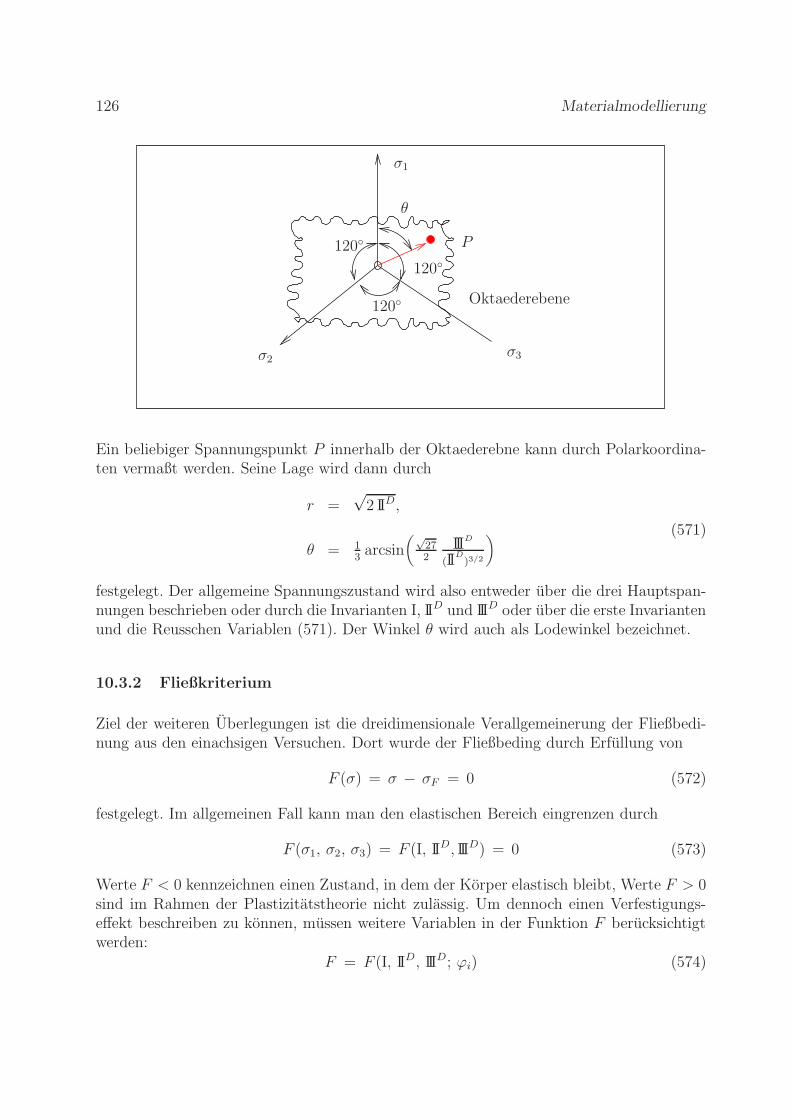
126 Materialmodellierung
σ1
σ2σ3
θ
P
Oktaederebene
120◦
120◦
120◦
Ein beliebiger Spannungspunkt P innerhalb der Oktaederebne kann durch Polarkoordina-ten vermaßt werden. Seine Lage wird dann durch
r =√
2 IID,
θ = 13arcsin
(√272
IIID
(IID)3/2
) (571)
festgelegt. Der allgemeine Spannungszustand wird also entweder uber die drei Hauptspan-nungen beschrieben oder durch die Invarianten I, IID und IIID oder uber die erste Invariantenund die Reusschen Variablen (571). Der Winkel θ wird auch als Lodewinkel bezeichnet.
10.3.2 Fließkriterium
Ziel der weiteren Uberlegungen ist die dreidimensionale Verallgemeinerung der Fließbedi-nung aus den einachsigen Versuchen. Dort wurde der Fließbeding durch Erfullung von
F (σ) = σ − σF = 0 (572)
festgelegt. Im allgemeinen Fall kann man den elastischen Bereich eingrenzen durch
F (σ1, σ2, σ3) = F (I, IID, IIID) = 0 (573)
Werte F < 0 kennzeichnen einen Zustand, in dem der Korper elastisch bleibt, Werte F > 0sind im Rahmen der Plastizitatstheorie nicht zulassig. Um dennoch einen Verfestigungs-effekt beschreiben zu konnen, mussen weitere Variablen in der Funktion F berucksichtigtwerden:
F = F (I, IID, IIID; ϕi) (574)
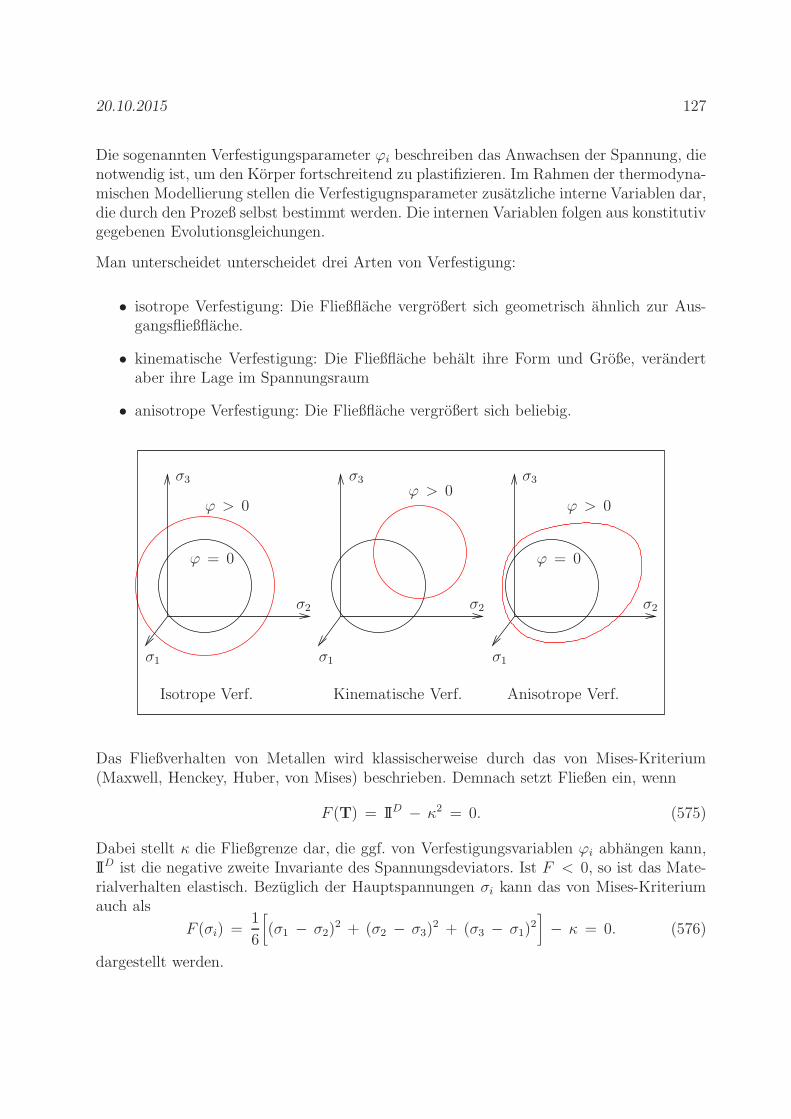
20.10.2015 127
Die sogenannten Verfestigungsparameter ϕi beschreiben das Anwachsen der Spannung, dienotwendig ist, um den Korper fortschreitend zu plastifizieren. Im Rahmen der thermodyna-mischen Modellierung stellen die Verfestigugnsparameter zusatzliche interne Variablen dar,die durch den Prozeß selbst bestimmt werden. Die internen Variablen folgen aus konstitutivgegebenen Evolutionsgleichungen.
Man unterscheidet unterscheidet drei Arten von Verfestigung:
• isotrope Verfestigung: Die Fließflache vergroßert sich geometrisch ahnlich zur Aus-gangsfließflache.
• kinematische Verfestigung: Die Fließflache behalt ihre Form und Große, verandertaber ihre Lage im Spannungsraum
• anisotrope Verfestigung: Die Fließflache vergroßert sich beliebig.
σ1σ1σ1
σ2σ2σ2
σ3σ3σ3
ϕ = 0ϕ = 0
ϕ > 0ϕ > 0
ϕ > 0
Kinematische Verf.Isotrope Verf. Anisotrope Verf.
Das Fließverhalten von Metallen wird klassischerweise durch das von Mises-Kriterium(Maxwell, Henckey, Huber, von Mises) beschrieben. Demnach setzt Fließen ein, wenn
F (T) = IID − κ2 = 0. (575)
Dabei stellt κ die Fließgrenze dar, die ggf. von Verfestigungsvariablen ϕi abhangen kann,IID ist die negative zweite Invariante des Spannungsdeviators. Ist F < 0, so ist das Mate-rialverhalten elastisch. Bezuglich der Hauptspannungen σi kann das von Mises-Kriteriumauch als
F (σi) =1
6
[
(σ1 − σ2)2 + (σ2 − σ3)
2 + (σ3 − σ1)2]
− κ = 0. (576)
dargestellt werden.

128 Materialmodellierung
Die graphische Interpretation des von Mises-Kriteriums in der Oktaederebene ist ein Kreis,bzgl. des Hautpspannungsraums stellt das Kriterium einen Zylinder dar, dessen Achse diehydrostatische Achse ist. Da das von Mises-Kriterium nicht von der ersten Invariantenabhangt, ist das plastische Materialverhalten, das beschrieben wird, druckunabhangig.
Unter der Voraussetzung linear-elastischen Materialverhaltens kann das von Mises-Kriteriumals kritischer Wert der Gestaltanderungsarbeit interpretiert werden. Fur die Formande-rungsarbeit gilt
W = 12T : E = 1
2
(
TD − p I)
:(
ED + ε I)
=1
2TD : ED
︸ ︷︷ ︸
Gestaltanderungsarbeit
− 1
2p ε
︸ ︷︷ ︸
Volumenanderungsarbeit
(577)
Mit dem linearen Elastizitatsgesetz in der Form
T = 2GED + k ε I (578)
bzw.
ED =1
2GTD (579)
folgt fur die Gestaltanderungsarbeit
WG =1
4GTD : TD =
1
2GIID. (580)
Im Zugversuch mißt man die Fließgrenze σF unter einachsialer Belastung. Aus dem Span-nungszustand
T = σ11 e1 ⊗ e1 (581)
ergibt sich fur die zweite deviatorische Invariante der Wert
IID =2
3σ2
11. (582)
Damit kann die Konstante κ identifiziert werden zu
κ2 =2
3σ2
F . (583)
Ein weiteres klassisches Fließkriterium, das das plastische Verhalten von Boden oder Gra-nulaten beschreibt, ist das Drucker-Prager-Kriterium. Anders als beim von Mises-Kriteriumhangt das Drucker-Prager-Kriterium von der ersten Invarianten ab. Die Fließgrenze steigtmit dem Druck an. Mikromechanisch kann stellt man sich vor, daß bei hoheren Drucken

20.10.2015 129
die einzelnen Korner fest gegeneinander gepresst werden. Dadurch steigt die notwendi-ge Schubbelastung, um zwei Korner gegeneinander zu verschieben. Formelmaßig wird dasDrucker-Prager-Kriterium durch
F (T) =√
IID + β I − κ = 0 (584)
erfaßt. In der graphischen Interpretation stellt das Drucker-Prager-Kriterium einen Kegeldar, der um die hydrostatische Achse angeordnet ist und sich in den Bereich zunehmenderDrucke offnet.
10.3.3 Fließregel
Wenn wahrend eines Belastungsprozeßes die Fließgrenze erreicht wird, beginnt der Fließ-vorgang. Zur Modellierung des Fließens muß die Rate der plastischen Verzerrung durch eineKonstitutivgleichung, die sog. Fließregel, gegeben sein. Dazu geht man von einem Fließpo-tential G aus, das vom Spannungszustand abhangt. Die Rate der plastischen Verzerrungenfolgt dann aus
Dp = Λ∂G(τ )
∂τ. (585)
Wahrend durch die Ableitung ∂G/∂τ die Fließrichtung festgelegt wird, wird der Betrag desFließens uber den Proportionalitatsfaktor Λ gesteuert. Dieser kann z. B. aus der Konsistenz-bedinung ermittelt werden, also aus der Bedingung, daß der Spannungszustand wahrenddes Fließvorgangs auf der Fließflache bleibt:
F = 0. (586)
Falls das FließpotentialGmit der Fließbedingung F identisch ist, spricht man von assoziier-tem Fließen. Bei assoziiertem Fließen steht die Fließrichtung senkrecht auf der Fließflache.Man spricht daher auch von der Normalenregel fur die Fließregel. Die Normalenregel oderassoziiertes Fließen fuhren auf die maximale plastische Dissipation. Das Verhalten vonmetallischen Werkstoffen wird durch die Normalenregel recht gut beschrieben, im Fall gra-nularer Materialien wird die experimentell beobachtete Volumenaufweitung beim Fließendurch eine assoziierte Fließregel allerdings uberschatzt. Wenn G = F ist, spricht man vonassoziiertem Flißen.
10.3.4 Verfestigung
Im Experiment stellt man fest, daß die Fließgrenze vieler Materialien im Lauf steigenderBelastung ansteigt. Man spricht von Verfestigung. Das Verfestigungsverhalten kann durchdie Einfuhrung weiterer interner Variablen beschrieben werden, fur die ebenfalls Evoluti-onsgleichungen postuliert werden. Ein ublicher Ansatz ist z. B. die Arbeitsverfestigung.

130 Materialmodellierung
In diesem Fall geht man davon aus, daß die Verfestigungsvariablen ϕi durch die geleisteteplastische Arbeit gesteuert werden
ϕi = f(τ : D). (587)
Die Evolutionsgleichungen mussen dann zusammen mit der Fließregel integriert werden,wenn man den Fließvorgang beschreibt. In der Regel entsteht ein gekoppeltes System vonnichtlinearen Differentialgleichungen, das man zur Ermittlung der plastischen Verzerrungenzusatzlich Losen muß.
Die analytische Behandlung von Modellen plastischen Fließens ist nur in Sonderfallenmoglich. In der Regel bedient man sich der Finiten-Elemente-Methode, um plastischesVerhalten zu berechnen. Weitere Informationen bzgl. Plastizitat folgen in den Veranstal-tungen
”Plastizitatstheorie“ und
”Finite Elemente Methode“.
E N D E