Embed Size (px)
Citation preview

D I P L O M A R B E I T
Untersuchungen an dünnen Molybdän/Wolfram- und Chromschichten am computerunterstützten Vier-Spitzen-Messplatz
ausgeführt zum Zwecke der Erlangung des akademischen Grades eines Diplom-Ingenieurs unter der Leitung von
Univ. Prof. Dipl.-Ing. Dr. techn. Rupert Chabicovsky und
Ao. Univ. Prof. Dipl.-Ing. Dr. techn. Karl Riedling E366
Institut für Industrielle Elektronik und Materialwissenschaften
eingereicht an der Technischen Universität Wien Fakultät für Elektrotechnik und Informationstechnik
von
Martin Gombotz
Matr. Nr. 8930274 Punitzer Straße 41 A-7540 Güssing
Wien, im September 2002
Danksagung Die vorliegende Diplomarbeit entstand auf Anregung von Univ. Prof. Dipl.-Ing. Dr. techn.
Rupert Chabicovsky (Institut für Industrielle Elektronik und Materialwissenschaften) und
Doz. Dipl.-Ing. Dr. techn. Peter Rödhammer (Firma Plansee AG, Reutte/Tirol), der die
verwendeten Sputtertargets zur Verfügung gestellt hat.
Ich möchte mich bei den Mitarbeitern des Instituts für Industrielle Elektronik und
Materialwissenschaften bedanken, die zum Gelingen dieser Diplomarbeit beigetragen haben.
Besonderer Dank gebührt Ao. Univ. Prof. Dipl.-Ing. Dr. techn. Karl Riedling für die rasche
Beschaffung der computertechnischen Ausrüstung und Univ. Lektor Günther Stangl für die
Strukturierung der Metallschichten. Weiters möchte ich mich bei der Firma Jakob Uhl (Wien)
für die kostenlose Fertigung der Temperatursensorarmatur bedanken. Die Fa. Hartmann &
Braun Sensycon Gerätetechnik (Alzenau, Deutschland) stellte dankenswerter Weise den
Temperatursensor kostenlos zur Verfügung.
Mein besonderer Dank gilt Univ. Prof. Dipl.-Ing. Dr. techn. Rupert Chabicovsky für die
Herstellung der Metallschichten und die begleitende hervorragende Dokumentation. Nur
dadurch ist es möglich gewesen, die für die Bewertung der Messergebnisse notwendigen
Rückschlüsse auf den Herstellungsvorgang zu ziehen. Herzlichen Dank für die Ermöglichung
und Betreuung der Diplomarbeit.
Nicht zuletzt möchte ich mich bei meiner Freundin Sylvia bedanken, die mich in den
schwierigen Phasen der Arbeit besonders unterstützt hat.
Die Diplomarbeit ist meinem vor kurzem verstorbenen Bruder Stefan gewidmet.
„Der einzig wahre Realist ist der Visionär“
(Federico Fellini)
Kurzfassung Die Mikroelektronik ist ein wichtiges Einsatzgebiet der Dünnschichttechnologie. Hier
kommen qualitativ hochwertige Schichten, die unter anderem durch Kathoden-Zerstäubung
hergestellt werden, zur Anwendung. Die Kathodenzerstäubung (Sputtering) zählt zu den
physikalischen Vakuumbeschichtungsverfahren (PVD) und bietet wesentliche Vorteile gegen-
über anderen Herstellungsvarianten. Mit dem Hochfrequenz-Sputtern können sowohl metal-
lische als auch dielektrische Schichten hergestellt werden. Zur Beschleunigung des Schicht-
wachstums kommen in industriellen Sputteranlagen und in Laboranlagen Magnetron-
Kathoden zum Einsatz. Die im Rahmen dieser Arbeit untersuchten metallischen Schichten
wurden mit diesen genannten Verfahren hergestellt. Mit der Variation von Prozess-
parametern können die Schichteigenschaften bei der Herstellung beeinflusst werden. Die
elektrische Leitfähigkeit eines aufgestäubten Metallfilms ist stark vom Gasdruck in der
Sputterkammer abhängig. Die Beeinflussung durch die Veränderung des Gasdrucks ist nicht
singulär, sie wirkt sich unter anderem auch auf die mechanischen Schichtspannungen aus.
Die Messung der Schichteigenschaften kann in-situ oder nach beendetem Herstellungsprozess
erfolgen. Die Vier-Spitzen-Methode zählt zum Letztgenannten und ist ein weitverbreitetes
Messverfahren zur Feststellung der elektrischen Leitfähigkeit in leitenden und halbleitenden
Materialien. Es wird ein Messplatz vorgestellt, der die gleichzeitige Erfassung von Flächen-
widerstand und Schichttemperatur erlaubt. Er besteht aus einer mechanischen Apparatur zur
elektrischen und thermischen Substratkontaktierung. Messgeräte mit integrierten IEEE-488-
Schnittstellen dienen zur Messwerterfassung. Die Steuerung der Messgeräte sowie die
Messdatenauswertung erfolgt über Programme, die in der Entwicklungsumgebung LabVIEW
am Personal-Computer ablaufen.
Es wurden Proben aus Chrom und Molybdän/Wolfram (50/50) hergestellt, um festzustellen
bei welchem Sputtergasdruck die maximale elektrische Leitfähigkeit auftritt. Die Ergebnisse
werden unter Berücksichtigung der Homogenitätsuntersuchungen durch Anwendung der
lokalen Sensitivität der Vier-Spitzen-Methode ausgewertet und dargestellt. Weitere Schwer-
punkte der Arbeit liegen in der Ermittlung des Temperaturverhaltens der aufgestäubten
metallischen Schichten und in der Bewertung der mechanischen Schichtspannungen.

Abstract
The thin film technology is very important for microelectronics. In this area high quality thin
films mainly produced by cathode-sputtering are used. This method belongs to physical
vapour deposition techniques (PVD) and offers many advantages compared to other
deposition methods. With high-frequency-sputtering it is possible to produce both metallic
and dielectric films. Magnetron cathodes are used in industrial and laboratory plants to
increase the deposition rate of films. All metallic films discussed in this work were produced
by the above mentioned methods. The properties of the films can be influenced by the sputter
parameters. The electrical resistivity of a film is strongly dependent on the gas pressure in the
sputtering chamber. However, the influence of pressure variation is not singular, it can also
change the mechanical stress in a film.
It is possible to measure film properties in-situ or after sputtering. The well known Four-
Point-Probe-Measurement is one of the latter and is used to determine the electrical
conductivity of metallic and semi-conducting layers. In this work a measurement station is
presented, which allows the determination of sheet-resistance and film-temperature
simultaneously. It consists of a contact-probe-station which conducts the film both electrically
and thermally. The measurement is carried out by using devices equipped with IEEE-488-
Interfaces and is controlled by computer-programs based on the development environment
LabVIEW running on a conventional personal-computer.
The examinations were carried out with samples of chromium and an alloy of molybdenum
and tungsten (50/50). The intention of the work is to find out the sputter gas pressure for
maximal film conductivity. The homogeneity of films has been investigated and the results
are evaluated by using the local sensitivity of the Four-Point-Probe-Measurement. Other
points of emphasis are the determination of sheet-resistance in context with film-temperature
and mechanical stress in the samples.
Inhaltsverzeichnis
1 Einleitung 1
2 Herstellung dünner Schichten durch Kathodenzerstäubung 3
2.1 Allgemeines 3
2.2 Das Diodenverfahren 4
2.3 HF-Sputtering 6
2.4 Bias-Sputtering 7
2.5 Magnetron-Sputtering 8
2.6 Perkin-Elmer-Sputteranlage 9
3 Die Vier-Spitzen-Methode 12
3.1 Allgemeines 12
3.2 Leitungsmechanismen in metallischen Schichten 14
3.3 Der Flächenwiderstand 16
3.4 Dicke Schichten 17 3.4.1 Potenzialverteilung in dicken Schichten 17 3.4.2 Spezifischer Widerstand 19
3.5 Dünne Schichten 19 3.5.1 Potenzialverteilung in einer unendlich ausgedehnten Schicht 19 3.5.2 Flächenwiderstand, spezifischer Widerstand 21 3.5.3 Potenzialverteilung in einer rechteckigen dünnen Schicht 22 3.5.4 Korrekturfaktor bei zentrischer Messkopf-Position 24 3.5.5 Korrekturfaktor bei beliebiger Messkopf-Position 27
4 Messung der Substrattemperatur 30
4.1 Messfühler 30
4.2 Messschaltung 31
4.3 Auswertung, Messfehler 32 4.3.1 Mathematische Auswertung 32 4.3.2 Eigenerwärmung 32 4.3.3 Wärmeableitung 32 4.3.4 Nachlaufabweichung 33
5 Messplatzkonfiguration 34
5.1 Allgemeines 34
5.2 Mechanischer Aufbau 35 5.2.1 Contact Probe Station 35 5.2.2 Vier-Spitzen Messkopf 36 5.2.3 Temperaturmesskopf 38
5.3 Grundlegendes zum IEEE-488.2-Bus 39 5.3.1 Historischer Abriss 39 5.3.2 Aufbau und Funktion 40 5.3.3 IEEE-488-Bus Befehle 44
5.4 Messgeräte/Busteilnehmer 45 5.4.1 Keithley 236 (Stromquelle) 46 5.4.2 Digitalmultimeter Keithley 197A (Spannungsmessung) 50 5.4.3 Digitalmultimeter Keithley 197A (Widerstandsmessung) 52 5.4.4 Interfacekarte National Instruments GPIB 52
6 Der Messplatz als virtuelles Instrument 54
6.1 Grundlagen zur Software LabVIEW 54 6.1.1 Das Frontpanel 57 6.1.2 Das Block-Diagramm 57 6.1.3 Programmstrukturen 58 6.1.4 Datentypen und Datenstrukturen 60 6.1.5 Graphen, Charts 61 6.1.6 LabVIEW und der IEEE-488 Bus 62 6.1.7 Debugging-Werkzeuge 63
6.2 Virtuelles Gesamtinstrument zur Flächenwiderstandsmessung 64 6.2.1 Frontpanel des Programms SRM 64 6.2.2 Frontpanel des Programms SRTC 65 6.2.3 Hierarchischer Aufbau der Anwendungen SRM und SRTC 67 6.2.4 Blockdiagramm des Programms SRM 70 6.2.5 Blockdiagramm des Programms SRTC 74
7 Experimentelle Datenerfassung 78
7.1 Einführende Messungen 78 7.1.1 Untersuchung von Molybdänschicht 1 78 7.1.2 Untersuchung von Molybdänschicht 2 82
7.2 Probenbearbeitung 83
7.3 Untersuchungsergebnisse der Chrom-Schichten 84
7.4 Untersuchungsergebnisse der Molybdän/Wolfram-Schichten 86
7.5 Mechanische Spannungen in dünnen Schichten 89
8 Zusammenfassung und Ausblick 91
9 Literaturverzeichnis 92
Anhang A: Mathlab-Programme zu Kapitel 3 95
Anhang B: Maßzeichnungen für Teile des Temperaturmesskopfs 99
Anhang C: Messwerte zu Kapitel 7 101
Kapitel 1: Einleitung Martin Gombotz
- 1 -
1 Einleitung
In den letzten Jahren gewann die Dünnschichttechnologie aufgrund zunehmender
Einsatzbereiche dünner Schichten sehr stark an Bedeutung. Sie werden unter anderem in der
Industrie für die Vergütung von Architekturglas, die Beschichtung von Papier oder
Kunststofffolien und die Veredelung von Metallen zum Schutz gegen Korrosion eingesetzt. In
der Mikroelektronik werden dünne Schichten zum Beispiel als Leitermaterial und
Isoliermaterial bei der Bauteilherstellung oder als aktives Sensormaterial verwendet. Ein
neues Anwendungsgebiet der Dünnschichttechnologie ist die Mikromechanik.
Die Anforderungen an diese Schichten sind so mannigfaltig wie deren Einsatzgebiete, wobei
die Forderung nach ausreichender Härte und guter Haftfähigkeit für alle Applikationen
besteht [1]. Bei der Entwicklung moderner Flachdisplays wird die Gegensätzlichkeit mancher
Schichtanforderungen deutlich. Einerseits werden gut leitende Schichten für große
Displayflächen bei hoher Auflösung benötigt, andererseits besteht die Notwendigkeit von
hoher Transparenz um gute Kontrastverhältnisse zu erzielen [2]. Durch die Variation eines
Herstellungsparameters ist es auch unmöglich nur eine bestimmte Schichteigenschaft zu
verändern. Die Beschäftigung mit Phänomenen an dünnen Schichten sowie die Beeinflussung
und Messung der Eigenschaften bei deren Herstellung ist ein stark wachsender und
zukunftsorientierter Forschungsbereich.
Die vorliegende Diplomarbeit beschäftigt sich mit Chrom- und Molybdän/Wolfram-Filmen.
Sie wurden in der Kathodenzerstäubungsanlage am Institut für Industrielle Elektronik und
Materialwissenschaften der Technischen Universität Wien hergestellt. Mit der Absicht einen
möglichst geringen spezifischen Widerstand zu erzielen und die dafür notwendigen
Prozessparameter ermitteln zu können, wurden die Schichten unter verschiedenen
Argongasdrücken aufgestäubt. Voraussetzung war der Einsatz von hochreinem gesinterten
Zerstäubungsmaterial und optimaler Restgasverhältnisse in der Sputterkammer.
Kapitel 1: Einleitung Martin Gombotz
- 2 -
Die Widerstands- und Schichtdickenmessungen erfolgten nach beendetem
Beschichtungsprozess außerhalb der Beschichtungsanlage. Mit Hilfe der Vier-Spitzen-
Methode wurde der Flächenwiderstand gemessen und daraus der spezifische Widerstand
bestimmt. Ebenso erfolgte die Erfassung der Temperaturabhängigkeit des Widerstandes.
Für die Durchführung der Messaufgaben wurde im Rahmen der Diplomarbeit ein Messplatz
entwickelt. Er basiert auf Messgeräten, die über den IEEE-488-Bus steuerbar sind und auf
Steuerungsprogrammen, die in der graphischen Entwicklungsumgebung „LabVIEW“ erstellt
wurden.
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 3 -
2 Herstellung dünner Schichten durch Kathodenzerstäubung
2.1 Allgemeines
Die Festkörperzerstäubung mit Plasma-Unterstützung zählt zu den physikalischen
Vakuumbeschichtungsverfahren (PVD). Die Herstellung der Schichten erfolgt bei dieser
Technik durch den Beschuss von Festkörpern mit energiereichen Partikelstrahlen (Ionen). Die
aus der Oberfläche des Festkörpers durch unmittelbare Impulsübertragung und infolge
thermischer Verdampfung abgelösten Teilchen sind fast ausschließlich neutral. Sie besitzen
kinetische Energie und lagern sich am entsprechend positionierten Substrat als dünne,
amorphe Schicht ab. Da sowohl Metalle als auch Nichtleiter zerstäubt werden können, findet
die Methode der Kathodenzerstäubung ein immer breiteres Anwendungsfeld. Beim
Zerstäuben von Mehrkomponentensystemen, zum Beispiel wurden zur Untersuchung
Schichten aus einer Mischung von Molybdän und Wolfram hergestellt, treten durch die hohe
Energie der Partikel kaum Fraktionierungsunterschiede auf, was einen großen Vorteil
gegenüber dem thermischen Verdampfen darstellt. Ein weiterer Vorteil des Aufstäubungs-
oder Sputter-Verfahrens liegt in der wesentlich besseren Haftfähigkeit der erzeugten Schicht
verglichen mit anderen industriellen Verfahren.
Die untersuchten Schichten wurden am Institut für Industrielle Elektronik und
Materialwissenschaften in der Perkin-Elmer-Sputteranlage hergestellt. Diese
Zerstäubungsanlage arbeitet im Diodenverfahren in planarer Kathoden-Substrat-Anordnung.
Bei der Herstellung kamen folgende Verfahrensvarianten zum Einsatz:
• Hochfrequenz-Zerstäuben (Hf-Sputtering)
• Sputtern mit Substratvorspannung (Bias-Sputtering)
• Hochleistungszerstäuben mit Magnetron (Magnetron-Sputtering)
• Sputtern ohne reaktivem Gas
• Sputtern ohne Relativbewegung zwischen Kathode und Substrat
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 4 -
2.2 Das Diodenverfahren
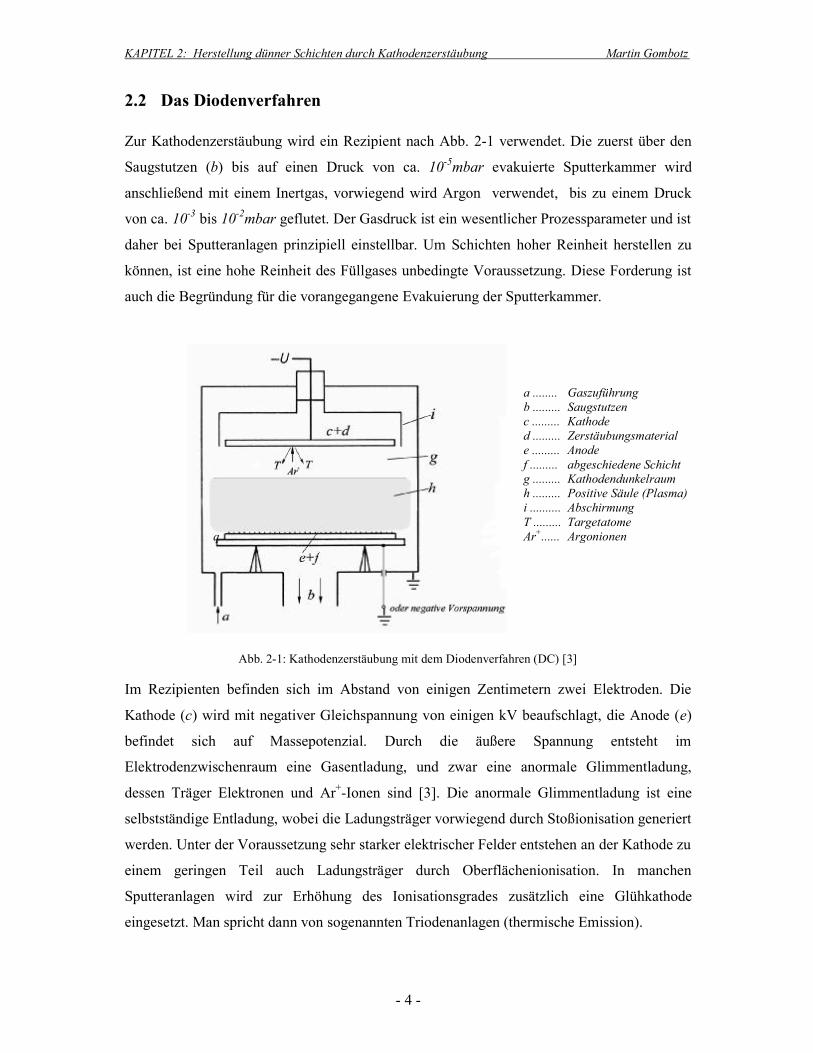
Zur Kathodenzerstäubung wird ein Rezipient nach Abb. 2-1 verwendet. Die zuerst über den
Saugstutzen (b) bis auf einen Druck von ca. 10-5mbar evakuierte Sputterkammer wird
anschließend mit einem Inertgas, vorwiegend wird Argon verwendet, bis zu einem Druck
von ca. 10-3 bis 10-2mbar geflutet. Der Gasdruck ist ein wesentlicher Prozessparameter und ist
daher bei Sputteranlagen prinzipiell einstellbar. Um Schichten hoher Reinheit herstellen zu
können, ist eine hohe Reinheit des Füllgases unbedingte Voraussetzung. Diese Forderung ist
auch die Begründung für die vorangegangene Evakuierung der Sputterkammer. a ........ Gaszuführung b ......... Saugstutzen c ......... Kathode d ......... Zerstäubungsmaterial e ......... Anode f ......... abgeschiedene Schicht g ......... Kathodendunkelraum h ......... Positive Säule (Plasma) i .......... Abschirmung T ......... Targetatome q Ar+...... Argonionen
Abb. 2-1: Kathodenzerstäubung mit dem Diodenverfahren (DC) [3]
Im Rezipienten befinden sich im Abstand von einigen Zentimetern zwei Elektroden. Die
Kathode (c) wird mit negativer Gleichspannung von einigen kV beaufschlagt, die Anode (e)
befindet sich auf Massepotenzial. Durch die äußere Spannung entsteht im
Elektrodenzwischenraum eine Gasentladung, und zwar eine anormale Glimmentladung,
dessen Träger Elektronen und Ar+-Ionen sind [3]. Die anormale Glimmentladung ist eine
selbstständige Entladung, wobei die Ladungsträger vorwiegend durch Stoßionisation generiert
werden. Unter der Voraussetzung sehr starker elektrischer Felder entstehen an der Kathode zu
einem geringen Teil auch Ladungsträger durch Oberflächenionisation. In manchen
Sputteranlagen wird zur Erhöhung des Ionisationsgrades zusätzlich eine Glühkathode
eingesetzt. Man spricht dann von sogenannten Triodenanlagen (thermische Emission).
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 5 -
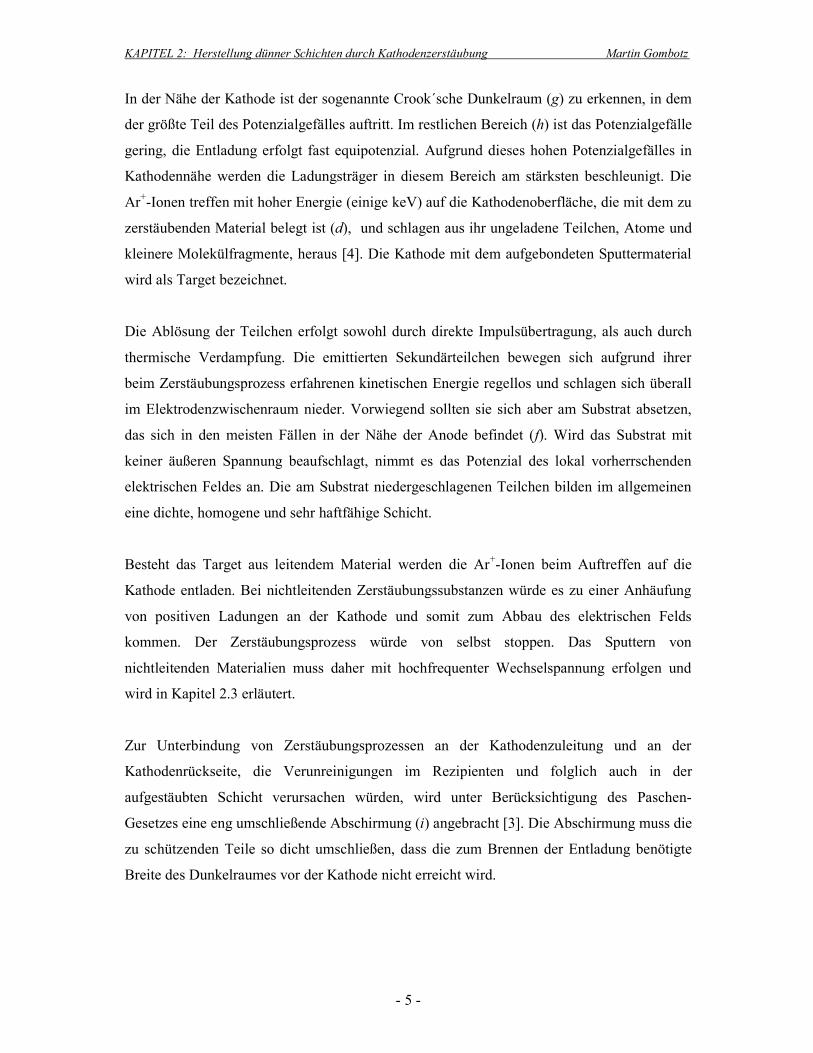
In der Nähe der Kathode ist der sogenannte Crook´sche Dunkelraum (g) zu erkennen, in dem
der größte Teil des Potenzialgefälles auftritt. Im restlichen Bereich (h) ist das Potenzialgefälle
gering, die Entladung erfolgt fast equipotenzial. Aufgrund dieses hohen Potenzialgefälles in
Kathodennähe werden die Ladungsträger in diesem Bereich am stärksten beschleunigt. Die
Ar+-Ionen treffen mit hoher Energie (einige keV) auf die Kathodenoberfläche, die mit dem zu
zerstäubenden Material belegt ist (d), und schlagen aus ihr ungeladene Teilchen, Atome und
kleinere Molekülfragmente, heraus [4]. Die Kathode mit dem aufgebondeten Sputtermaterial
wird als Target bezeichnet.
Die Ablösung der Teilchen erfolgt sowohl durch direkte Impulsübertragung, als auch durch
thermische Verdampfung. Die emittierten Sekundärteilchen bewegen sich aufgrund ihrer
beim Zerstäubungsprozess erfahrenen kinetischen Energie regellos und schlagen sich überall
im Elektrodenzwischenraum nieder. Vorwiegend sollten sie sich aber am Substrat absetzen,
das sich in den meisten Fällen in der Nähe der Anode befindet (f). Wird das Substrat mit
keiner äußeren Spannung beaufschlagt, nimmt es das Potenzial des lokal vorherrschenden
elektrischen Feldes an. Die am Substrat niedergeschlagenen Teilchen bilden im allgemeinen
eine dichte, homogene und sehr haftfähige Schicht.
Besteht das Target aus leitendem Material werden die Ar+-Ionen beim Auftreffen auf die
Kathode entladen. Bei nichtleitenden Zerstäubungssubstanzen würde es zu einer Anhäufung
von positiven Ladungen an der Kathode und somit zum Abbau des elektrischen Felds
kommen. Der Zerstäubungsprozess würde von selbst stoppen. Das Sputtern von
nichtleitenden Materialien muss daher mit hochfrequenter Wechselspannung erfolgen und
wird in Kapitel 2.3 erläutert.
Zur Unterbindung von Zerstäubungsprozessen an der Kathodenzuleitung und an der
Kathodenrückseite, die Verunreinigungen im Rezipienten und folglich auch in der
aufgestäubten Schicht verursachen würden, wird unter Berücksichtigung des Paschen-
Gesetzes eine eng umschließende Abschirmung (i) angebracht [3]. Die Abschirmung muss die
zu schützenden Teile so dicht umschließen, dass die zum Brennen der Entladung benötigte
Breite des Dunkelraumes vor der Kathode nicht erreicht wird.
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 6 -
2.3 HF-Sputtering
Hochfrequenz kann einerseits zur Erhöhung des Plasma-Ionisationsgrades eingesetzt werden,
und andererseits um die Zerstäubung nichtleitender Stoffe zu ermöglichen. Natürlich schließt
das HF-Sputtern die Zerstäubung von leitenden Materialien nicht aus. Das Verfahren erlaubt
vielmehr das Aufstäuben mehrlagiger, resistiver und dielektrischer Schichten in einem
Sputtervorgang.
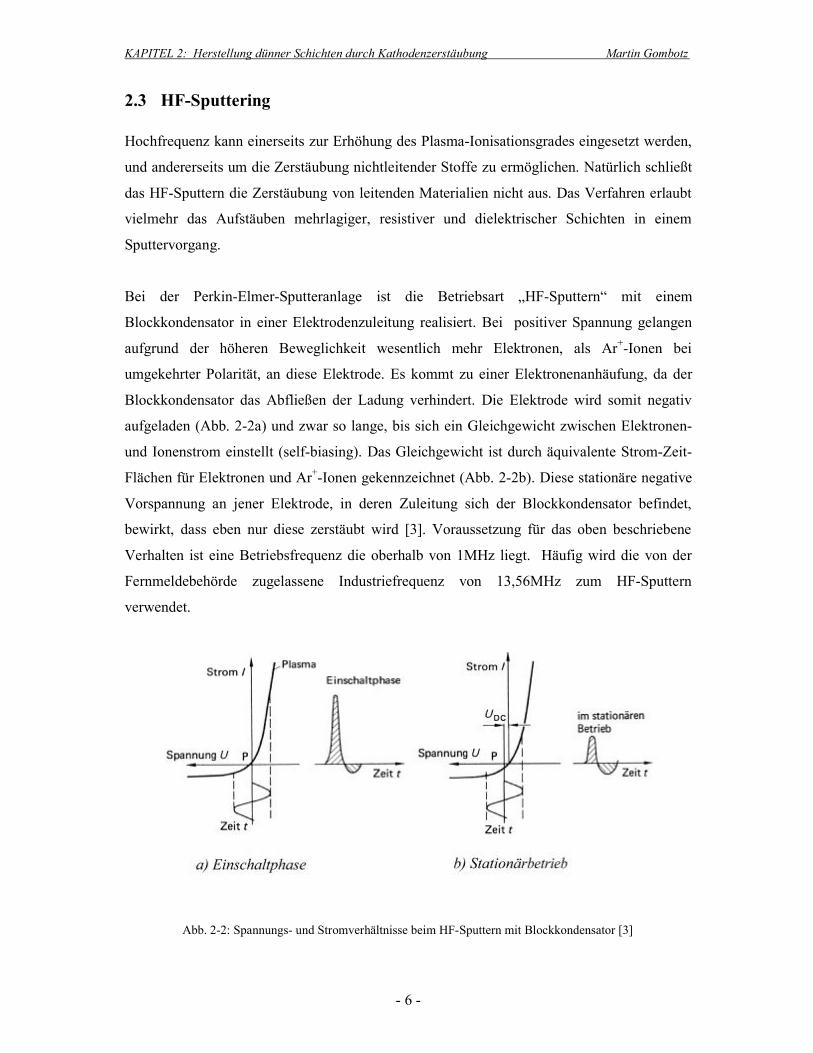
Bei der Perkin-Elmer-Sputteranlage ist die Betriebsart „HF-Sputtern“ mit einem
Blockkondensator in einer Elektrodenzuleitung realisiert. Bei positiver Spannung gelangen
aufgrund der höheren Beweglichkeit wesentlich mehr Elektronen, als Ar+-Ionen bei
umgekehrter Polarität, an diese Elektrode. Es kommt zu einer Elektronenanhäufung, da der
Blockkondensator das Abfließen der Ladung verhindert. Die Elektrode wird somit negativ
aufgeladen (Abb. 2-2a) und zwar so lange, bis sich ein Gleichgewicht zwischen Elektronen-
und Ionenstrom einstellt (self-biasing). Das Gleichgewicht ist durch äquivalente Strom-Zeit-
Flächen für Elektronen und Ar+-Ionen gekennzeichnet (Abb. 2-2b). Diese stationäre negative
Vorspannung an jener Elektrode, in deren Zuleitung sich der Blockkondensator befindet,
bewirkt, dass eben nur diese zerstäubt wird [3]. Voraussetzung für das oben beschriebene
Verhalten ist eine Betriebsfrequenz die oberhalb von 1MHz liegt. Häufig wird die von der
Fernmeldebehörde zugelassene Industriefrequenz von 13,56MHz zum HF-Sputtern
verwendet.
Abb. 2-2: Spannungs- und Stromverhältnisse beim HF-Sputtern mit Blockkondensator [3]
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 7 -
2.4 Bias-Sputtering
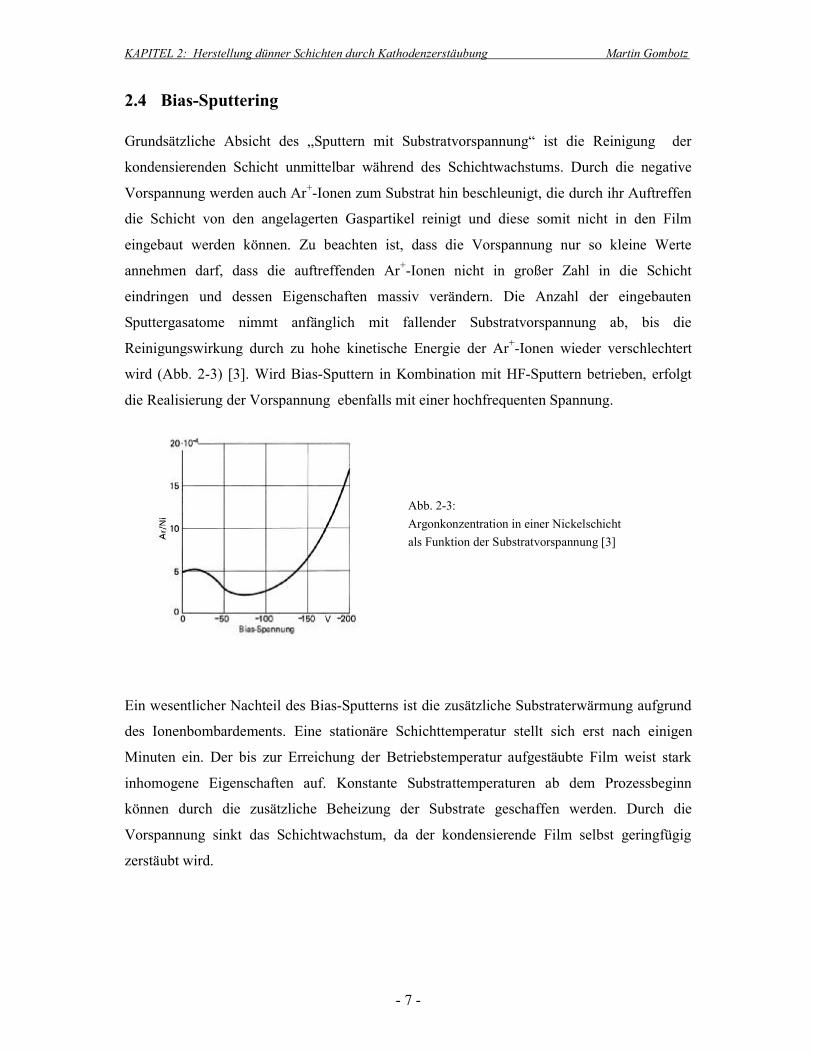
Grundsätzliche Absicht des „Sputtern mit Substratvorspannung“ ist die Reinigung der
kondensierenden Schicht unmittelbar während des Schichtwachstums. Durch die negative
Vorspannung werden auch Ar+-Ionen zum Substrat hin beschleunigt, die durch ihr Auftreffen
die Schicht von den angelagerten Gaspartikel reinigt und diese somit nicht in den Film
eingebaut werden können. Zu beachten ist, dass die Vorspannung nur so kleine Werte
annehmen darf, dass die auftreffenden Ar+-Ionen nicht in großer Zahl in die Schicht
eindringen und dessen Eigenschaften massiv verändern. Die Anzahl der eingebauten
Sputtergasatome nimmt anfänglich mit fallender Substratvorspannung ab, bis die
Reinigungswirkung durch zu hohe kinetische Energie der Ar+-Ionen wieder verschlechtert
wird (Abb. 2-3) [3]. Wird Bias-Sputtern in Kombination mit HF-Sputtern betrieben, erfolgt
die Realisierung der Vorspannung ebenfalls mit einer hochfrequenten Spannung.
Abb. 2-3: Argonkonzentration in einer Nickelschicht als Funktion der Substratvorspannung [3]
Ein wesentlicher Nachteil des Bias-Sputterns ist die zusätzliche Substraterwärmung aufgrund
des Ionenbombardements. Eine stationäre Schichttemperatur stellt sich erst nach einigen
Minuten ein. Der bis zur Erreichung der Betriebstemperatur aufgestäubte Film weist stark
inhomogene Eigenschaften auf. Konstante Substrattemperaturen ab dem Prozessbeginn
können durch die zusätzliche Beheizung der Substrate geschaffen werden. Durch die
Vorspannung sinkt das Schichtwachstum, da der kondensierende Film selbst geringfügig
zerstäubt wird.
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 8 -
2.5 Magnetron-Sputtering
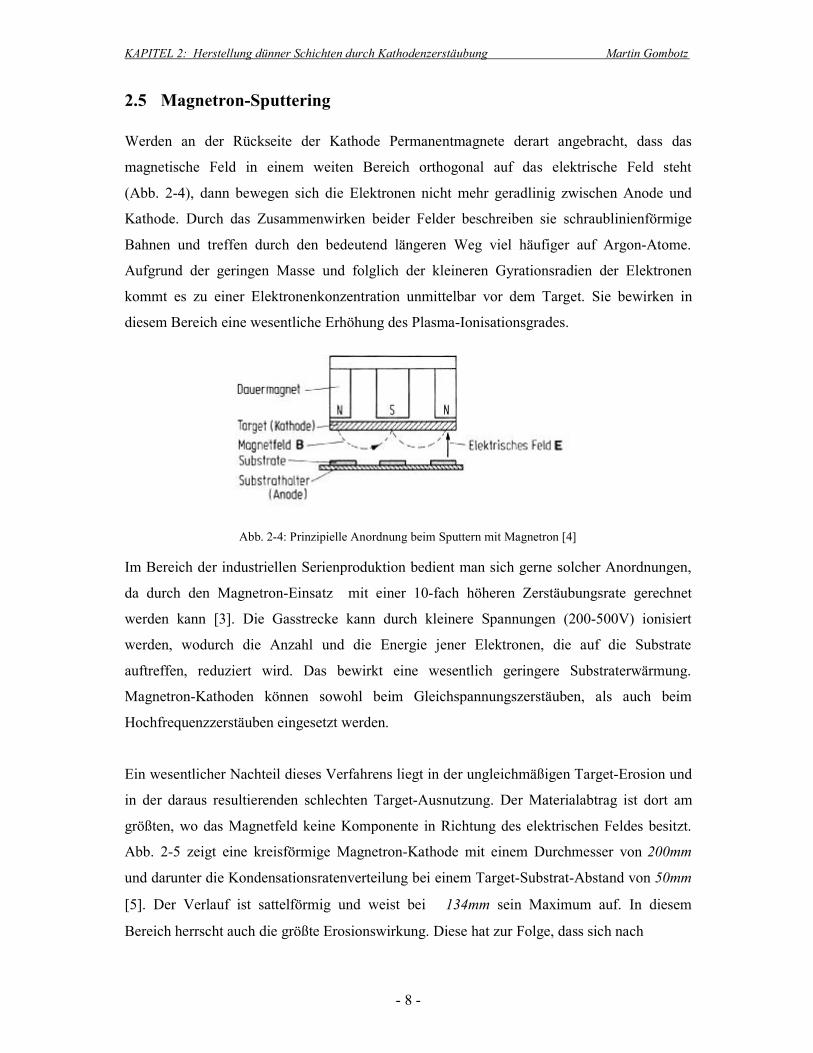
Werden an der Rückseite der Kathode Permanentmagnete derart angebracht, dass das
magnetische Feld in einem weiten Bereich orthogonal auf das elektrische Feld steht
(Abb. 2-4), dann bewegen sich die Elektronen nicht mehr geradlinig zwischen Anode und
Kathode. Durch das Zusammenwirken beider Felder beschreiben sie schraublinienförmige
Bahnen und treffen durch den bedeutend längeren Weg viel häufiger auf Argon-Atome.
Aufgrund der geringen Masse und folglich der kleineren Gyrationsradien der Elektronen
kommt es zu einer Elektronenkonzentration unmittelbar vor dem Target. Sie bewirken in
diesem Bereich eine wesentliche Erhöhung des Plasma-Ionisationsgrades.
Abb. 2-4: Prinzipielle Anordnung beim Sputtern mit Magnetron [4] Im Bereich der industriellen Serienproduktion bedient man sich gerne solcher Anordnungen,
da durch den Magnetron-Einsatz mit einer 10-fach höheren Zerstäubungsrate gerechnet
werden kann [3]. Die Gasstrecke kann durch kleinere Spannungen (200-500V) ionisiert
werden, wodurch die Anzahl und die Energie jener Elektronen, die auf die Substrate
auftreffen, reduziert wird. Das bewirkt eine wesentlich geringere Substraterwärmung.
Magnetron-Kathoden können sowohl beim Gleichspannungszerstäuben, als auch beim
Hochfrequenzzerstäuben eingesetzt werden.
Ein wesentlicher Nachteil dieses Verfahrens liegt in der ungleichmäßigen Target-Erosion und
in der daraus resultierenden schlechten Target-Ausnutzung. Der Materialabtrag ist dort am
größten, wo das Magnetfeld keine Komponente in Richtung des elektrischen Feldes besitzt.
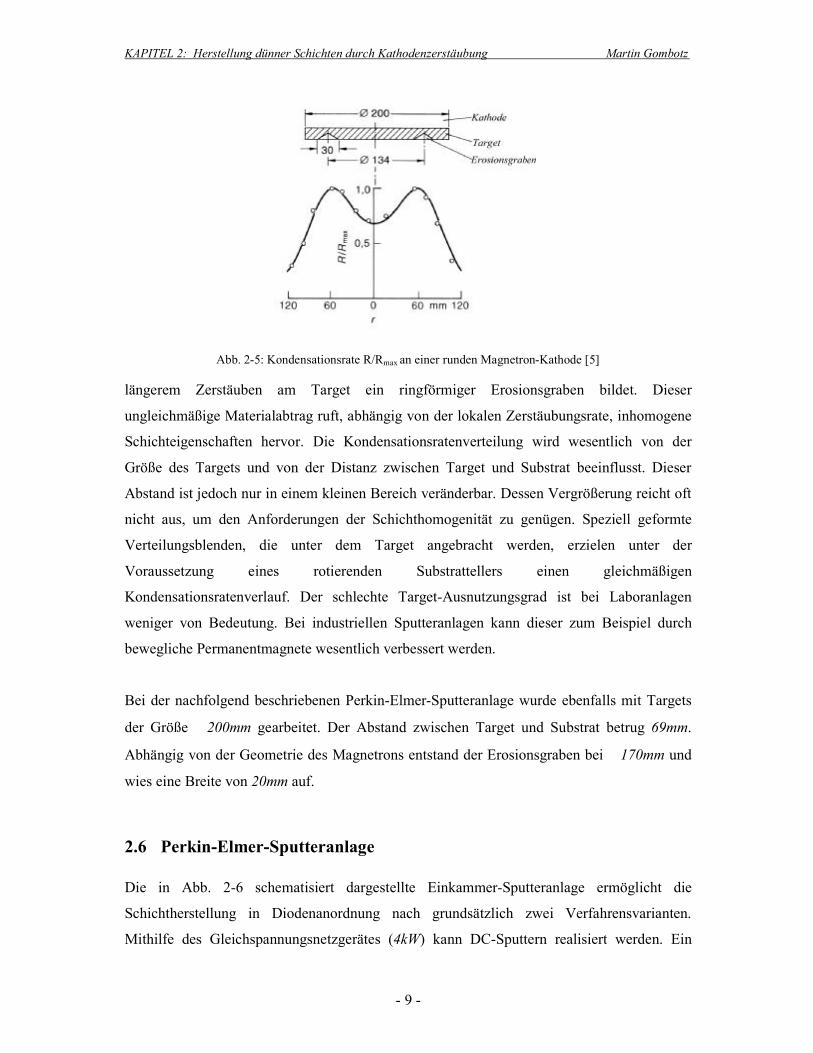
Abb. 2-5 zeigt eine kreisförmige Magnetron-Kathode mit einem Durchmesser von 200mm
und darunter die Kondensationsratenverteilung bei einem Target-Substrat-Abstand von 50mm
[5]. Der Verlauf ist sattelförmig und weist bei ∅134mm sein Maximum auf. In diesem
Bereich herrscht auch die größte Erosionswirkung. Diese hat zur Folge, dass sich nach
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 9 -
Abb. 2-5: Kondensationsrate R/Rmax an einer runden Magnetron-Kathode [5] längerem Zerstäuben am Target ein ringförmiger Erosionsgraben bildet. Dieser
ungleichmäßige Materialabtrag ruft, abhängig von der lokalen Zerstäubungsrate, inhomogene
Schichteigenschaften hervor. Die Kondensationsratenverteilung wird wesentlich von der
Größe des Targets und von der Distanz zwischen Target und Substrat beeinflusst. Dieser
Abstand ist jedoch nur in einem kleinen Bereich veränderbar. Dessen Vergrößerung reicht oft
nicht aus, um den Anforderungen der Schichthomogenität zu genügen. Speziell geformte
Verteilungsblenden, die unter dem Target angebracht werden, erzielen unter der
Voraussetzung eines rotierenden Substrattellers einen gleichmäßigen
Kondensationsratenverlauf. Der schlechte Target-Ausnutzungsgrad ist bei Laboranlagen
weniger von Bedeutung. Bei industriellen Sputteranlagen kann dieser zum Beispiel durch
bewegliche Permanentmagnete wesentlich verbessert werden.
Bei der nachfolgend beschriebenen Perkin-Elmer-Sputteranlage wurde ebenfalls mit Targets
der Größe ∅200mm gearbeitet. Der Abstand zwischen Target und Substrat betrug 69mm.
Abhängig von der Geometrie des Magnetrons entstand der Erosionsgraben bei ∅170mm und
wies eine Breite von 20mm auf.
2.6 Perkin-Elmer-Sputteranlage
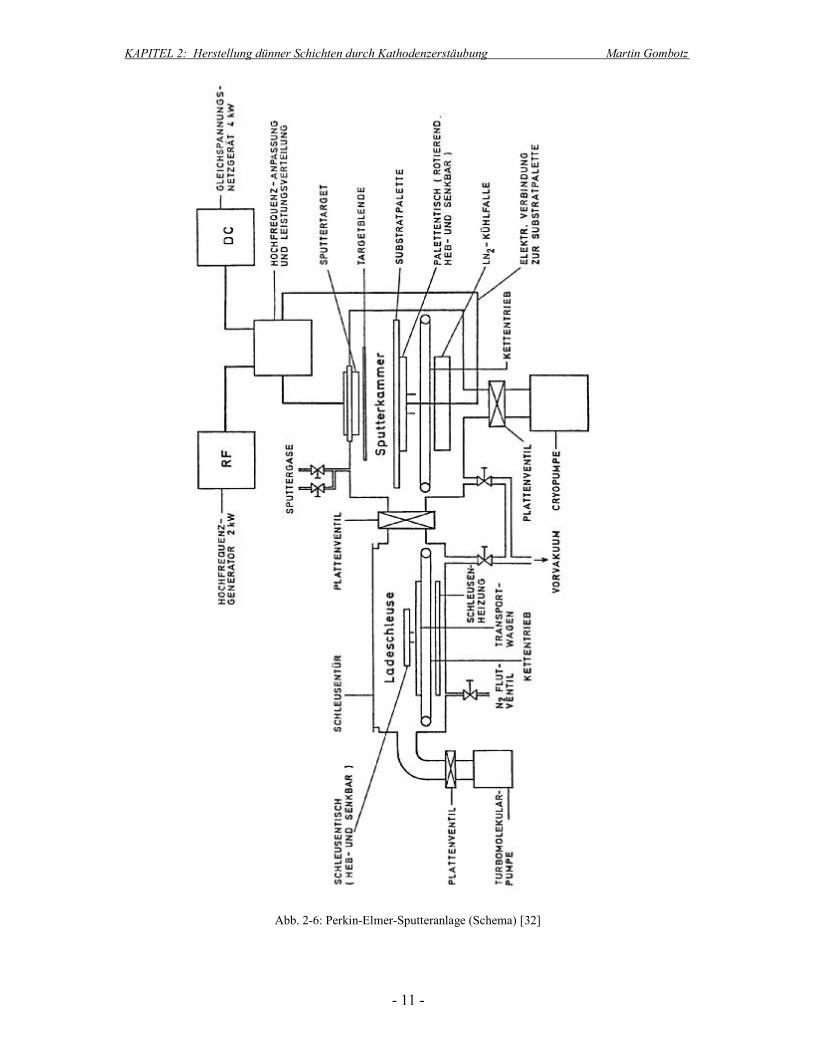
Die in Abb. 2-6 schematisiert dargestellte Einkammer-Sputteranlage ermöglicht die
Schichtherstellung in Diodenanordnung nach grundsätzlich zwei Verfahrensvarianten.
Mithilfe des Gleichspannungsnetzgerätes (4kW) kann DC-Sputtern realisiert werden. Ein
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 10 -
Hochfrequenzgenerator (2kW) steht zum HF-Sputtern zur Verfügung. Die Anbindung der
Elektroden erfolgt über die Komponenten Leistungsverteilung und Hochfrequenz-
Leistungsanpassung. Die HF-Anpassung übernimmt die Abstimmung der Quellenimpedanz
auf die Plasmaimpedanz, um möglichst hohe Leistung ins Plasma einbringen zu können [4].
Die Anlage kann gleichzeitig mit drei Sputtertargets bestückt werden. Welches Target
zerstäubt werden soll, ist von außen wählbar und bietet beim Aufstäuben mehrlagiger
Schichten den Vorteil, dass der Rezipient zum Targetwechsel nicht geöffnet werden muss.
Dies hat zur Folge, dass die Kammer nicht belüftet wird und somit schnell und sauber
gearbeitet werden kann. Vor dem Target befindet sich eine Blende, die beim Vorsputtern das
Target von den gegenüberliegenden Substraten abschottet. Das Vorsputtern ist notwendig um
die Targetoberfläche von Verunreinigungen zu befreien und um Gasrückstände im
Rezipienten zu gettern. Um die Sputterkammer beim Be- und Entladen nicht zu belüften,
werden die Substrate über eine Ladeschleuse in die Anlage eingebracht. Dadurch kann man
beim Aufstäuben von Schichtserien mit gleichen Restgasverhältnissen rechnen. Dies hat
besondere Bedeutung, da die Restgase einen wesentlichen Einfluss auf die
Schichteigenschaften nehmen.
Beim Einbringen der Substratplättchen befindet sich die Substratpalette zur besseren
Zugänglichkeit im gehobenen Zustand. Nach dem Absenken des Tisches wird die Palette
mithilfe des Transportwagens und einem Kettentrieb in die Sputterkammer befördert. In der
Kammer befindet sich ebenfalls ein heb- und absenkbarer Palettentisch, der beim Aufstäuben
durch Rotation eine Relativbewegung zwischen Target und Substrat ermöglicht. Durch
Rotation der Substratpalette können mehrere Plättchen gleichzeitig unter den selben
Prozessbedingungen beschichtet werden. Sputterkammer und Ladeschleuse sind durch ein
Plattenventil voneinander getrennt, da diese Bereiche mit verschiedenen Vakuumpumpen
evakuiert werden, wobei das Vorvakuum über ein gemeinsames System realisiert wird. Die
Evakuierung der Ladeschleuse erfolgt über eine Turbomolekularpumpe. Die Sputterkammer
wird mit einer Kyropumpe evakuiert. In der Ladeschleuse werden die Substrate beheizt
(Schleusenheizung) und gekühlt (N2-Flutventil). Um reaktives Sputtern zu ermöglichen,
können neben dem Inertgas Argon auch weitere Gase in die Sputterkammer eingeleitet
werden.
KAPITEL 2: Herstellung dünner Schichten durch Kathodenzerstäubung Martin Gombotz
- 11 -
Abb. 2-6: Perkin-Elmer-Sputteranlage (Schema) [32]
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 12 -
3 Die Vier-Spitzen-Methode
3.1 Allgemeines
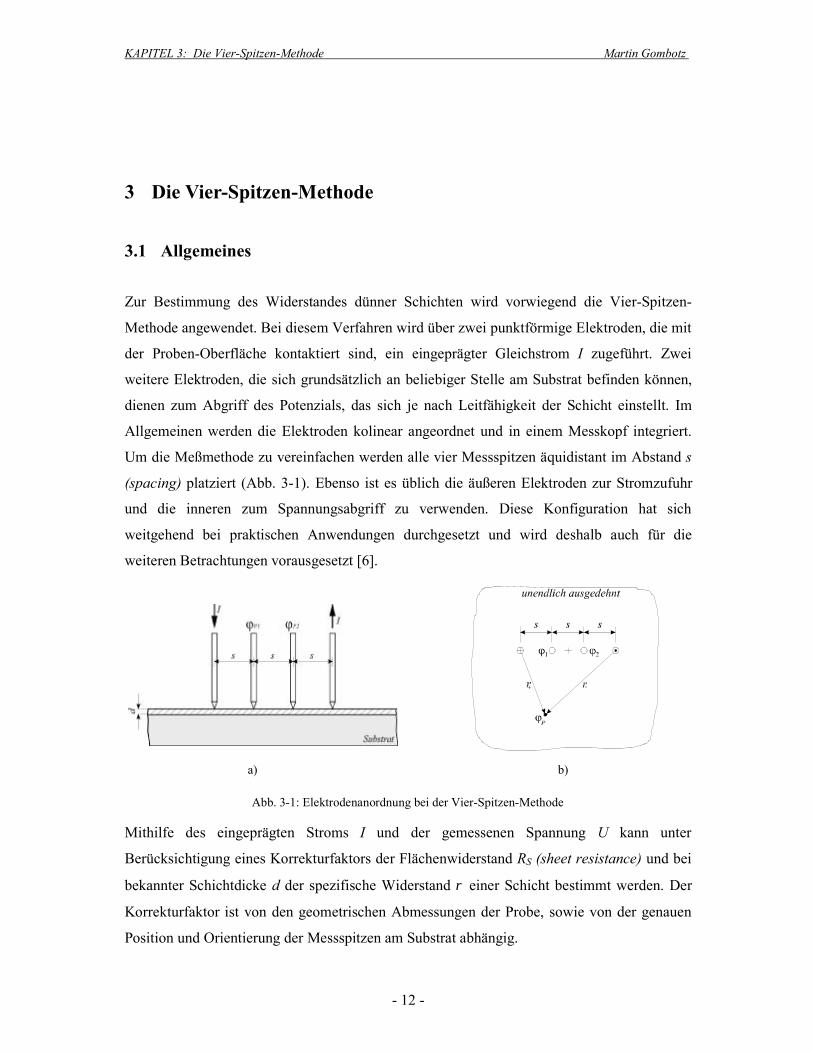
Zur Bestimmung des Widerstandes dünner Schichten wird vorwiegend die Vier-Spitzen-
Methode angewendet. Bei diesem Verfahren wird über zwei punktförmige Elektroden, die mit
der Proben-Oberfläche kontaktiert sind, ein eingeprägter Gleichstrom I zugeführt. Zwei
weitere Elektroden, die sich grundsätzlich an beliebiger Stelle am Substrat befinden können,
dienen zum Abgriff des Potenzials, das sich je nach Leitfähigkeit der Schicht einstellt. Im
Allgemeinen werden die Elektroden kolinear angeordnet und in einem Messkopf integriert.
Um die Meßmethode zu vereinfachen werden alle vier Messspitzen äquidistant im Abstand s
(spacing) platziert (Abb. 3-1). Ebenso ist es üblich die äußeren Elektroden zur Stromzufuhr
und die inneren zum Spannungsabgriff zu verwenden. Diese Konfiguration hat sich
weitgehend bei praktischen Anwendungen durchgesetzt und wird deshalb auch für die
weiteren Betrachtungen vorausgesetzt [6].
a) b)
Abb. 3-1: Elektrodenanordnung bei der Vier-Spitzen-Methode Mithilfe des eingeprägten Stroms I und der gemessenen Spannung U kann unter
Berücksichtigung eines Korrekturfaktors der Flächenwiderstand RS (sheet resistance) und bei
bekannter Schichtdicke d der spezifische Widerstand ρ einer Schicht bestimmt werden. Der
Korrekturfaktor ist von den geometrischen Abmessungen der Probe, sowie von der genauen
Position und Orientierung der Messspitzen am Substrat abhängig.
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 13 -
Grundlage der Untersuchungen ist die Bestimmung des elektrischen Potenzials ϕ in
beliebigen Punkten der Probenoberfläche. Um nachfolgend korrekte Aussagen bezüglich des
spezifischen Widerstandes ρ treffen zu können, muss die untersuchte Schicht unbedingt
homogene Eigenschaften aufweisen. Ebenso wird vom Spannungsmessgerät ein sehr hoher
Eingangswiderstand gefordert, um die Potenzialverteilung nicht zu stören.
Ursprünglich wurde die Meßmethode zur Ermittlung des spezifischen Widerstandes von
Halbleiterschichten entwickelt. Da Halbleiterschichten einen wesentlich höheren spezifischen
Widerstand als Metallschichten aufweisen, sind die Empfehlungen in [7] für die Wahl des
Messstromes nicht repräsentativ. Deshalb wurden in der vorliegenden Arbeit messtechnische
und mathematische Untersuchungen durchgeführt, um einerseits einen vernünftigen
Messstrom zu erhalten und andererseits einen Vergleich der Potenzialverläufe bei den
verschiedenen Geometrien zu ermöglichen. Ausgangspunkt der Betrachtungen ist die
Potenzialverteilung in einem massiven halb-unendlich ausgedehnten Körper. Danach erfolgt
der Übergang auf eine sehr dünne unendliche Schicht. Zuletzt werden dünne Schichten mit
rechteckiger beziehungsweise quadratischer Geometrie betrachtet. Bei allen berechneten
Varianten wurde Molybdän als Schicht-Material herangezogen. Als Bulk-Material weist
Molybdän einen spezifischen Widerstand von ρM=5,7µΩcm auf. Bei der untersuchten
Molybdän-Schicht wird ein Flächenwiderstand von Rs=2Ω /o angenommen (ρ=40µΩcm bei
einer Schichtdicke von 200nm). Zur Berechnung und Darstellung der Potenzialfelder wurden
Programme in der Entwicklungsumgebung „Matlab“ erstellt [31], die im Anhang A zu finden
sind. Die Grafiken beziehen sich alle auf einen Messstrom von I=10mA und jenen Messkopf,
der bei den später durchgeführten Messungen zur Anwendung gekommen ist. Der
Spitzenabstand, der einen wichtigen Parameter der Messmethode darstellt, beträgt 1.5875mm
(0,0625“)[8].
Bei den Untersuchungen wurde der Schwerpunkt auf rechteckige Proben gelegt. Die
Berechnung der Potenzialverteilung und die exakte Ermittlung des Korrekturfaktors ist für
diese Geometrie aufwendig und meist nur auf numerischem Weg möglich. In der industriellen
Praxis werden aber sehr häufig Messungen an Wafern, also an kreisförmigen Substraten
durchgeführt. Der Korrekturfaktor lässt sich bei runden Substraten wesentlich einfacher
ermitteln, da in diesem Fall eine analytische Berechnung möglich ist. Die mathematischen
Zusammenhänge sind in [9] angegeben und können aus [10] abgeleitet werden.
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 14 -
3.2 Leitungsmechanismen in metallischen Schichten
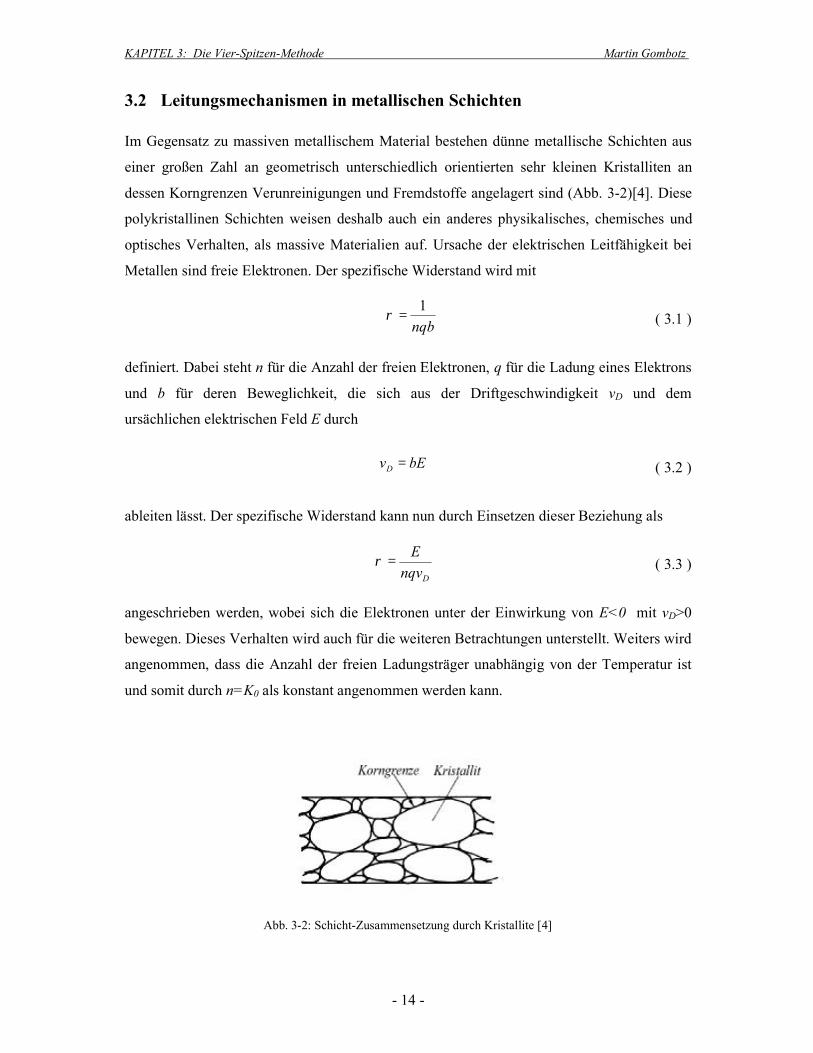
Im Gegensatz zu massiven metallischem Material bestehen dünne metallische Schichten aus
einer großen Zahl an geometrisch unterschiedlich orientierten sehr kleinen Kristalliten an
dessen Korngrenzen Verunreinigungen und Fremdstoffe angelagert sind (Abb. 3-2)[4]. Diese
polykristallinen Schichten weisen deshalb auch ein anderes physikalisches, chemisches und
optisches Verhalten, als massive Materialien auf. Ursache der elektrischen Leitfähigkeit bei
Metallen sind freie Elektronen. Der spezifische Widerstand wird mit
( 3.1 )
definiert. Dabei steht n für die Anzahl der freien Elektronen, q für die Ladung eines Elektrons
und b für deren Beweglichkeit, die sich aus der Driftgeschwindigkeit vD und dem
ursächlichen elektrischen Feld E durch
( 3.2 )
ableiten lässt. Der spezifische Widerstand kann nun durch Einsetzen dieser Beziehung als
( 3.3 )
angeschrieben werden, wobei sich die Elektronen unter der Einwirkung von E<0 mit vD>0
bewegen. Dieses Verhalten wird auch für die weiteren Betrachtungen unterstellt. Weiters wird
angenommen, dass die Anzahl der freien Ladungsträger unabhängig von der Temperatur ist
und somit durch n=K0 als konstant angenommen werden kann.
Abb. 3-2: Schicht-Zusammensetzung durch Kristallite [4]
nqb1
=ρ
bEvD =
DnqvE
=ρ
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 15 -
Mit zunehmender Temperatur werden die freien Elektronen stärker abgebremst. Die
Temperaturabhängigkeit der Driftgeschwindigkeit kann vereinfacht durch
( 3.4 )
angeschrieben werden, wobei KD<0 gilt. Setzt man dieses Temperaturverhalten von vD in
(3.3) ein, so ergibt sich
( 3.5 )
und durch Bildung der ersten Ableitung
( 3.6 )
mit K‘>0. Nach der Matthiesen´schen Regel setzt sich der Widerstand in dünnen Schichten
aus zwei Teilen durch
( 3.7 )
zusammen. Mit ρM ist der spezifische Widerstand des massiven Materials gemeint, der ein
Temperaturverhalten nach ( 3.6 ) aufweist. Der Anteil ρK wird durch den Einfluss der
Korngrenzen und durch Verunreinigungen verursacht und ist nahezu von der Temperatur
unabhängig. Bei Schichten mit einer Dicke von weniger als 50nm würde dieser Anteil durch
Größeneffekte weiter erhöht werden. Das Temperaturverhalten des spezifischen Widerstandes
kann durch die Entwicklung einer Taylorreihe bei einer Bezugstemperatur von T0
beschrieben werden [11]. Für die Untersuchung von Metallen in einem kleinen
Temperaturbereich ist eine Näherung durch Abbruch beim linearen Glied zulässig. Es gilt
dann
( 3.8 )
und weiter
( 3.9 )
TKv D
D =
DKKT
qE
0
=ρ
'1
0
KKKq
EdTd
D
==ρ
KM ρρρ +=
)()()( 00
0
TTdTdTT
T
−+=ρ
ρρ
)]()(
11)[()(00
0 TdTd
TTT
T
∆+=ρ
ρρρ

KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 16 -
dRS
ρ=
Der lineare Temperaturkoeffizient α bei der Temperatur T0 kann aus ( 3.9 ) durch
( 3.10 )
bestimmt werden. Da aber nur ρM eine Temperaturabhängigkeit zeigt, kann nun folgende
Beziehung angeschrieben werden
( 3.11 )
Dies bedeutet, dass bei Schichten der Temperaturkoeffizient geringer als bei massivem
Material ist. Wird eine Serie von Schichten aus gleichem Material untersucht, ist das Produkt
aus Temperaturkoeffizient und spezifischem Widerstand bei einer Bezugstemperatur T0 eine
konstante Größe.
3.3 Der Flächenwiderstand
Betrachten wir einen kubischen Ausschnitt der Länge l, der Breite b, und der Dicke d in einer
Schicht, die vom eingeprägten Messstrom I in Längsrichtung durchflossen wird. Der
Widerstand R [Ω] dieser Anordnung berechnet sich aus
( 3.12 )
wobei mit ρ [Ωcm] der spezifische Widerstand und mit A die Querschnittfläche bezeichnet
wird. Mit
( 3.13 )
oder
( 3.14 )
wird nun der Flächenwiderstand RS definiert (Abb. 3-3). Sind die Länge l und die Breite b des
Schichtausschnittes gleich, ergibt sich ein von der Fläche unabhängiger Widerstandswert mit
der Dimension Ω /o [12].
bl
dAlR ρρ
=⋅
=
blSRR =
0)(
1
0 TdTd
Tρ
ρα =
'.)( KdT
d MKM ==+
ρρρα
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 17 -
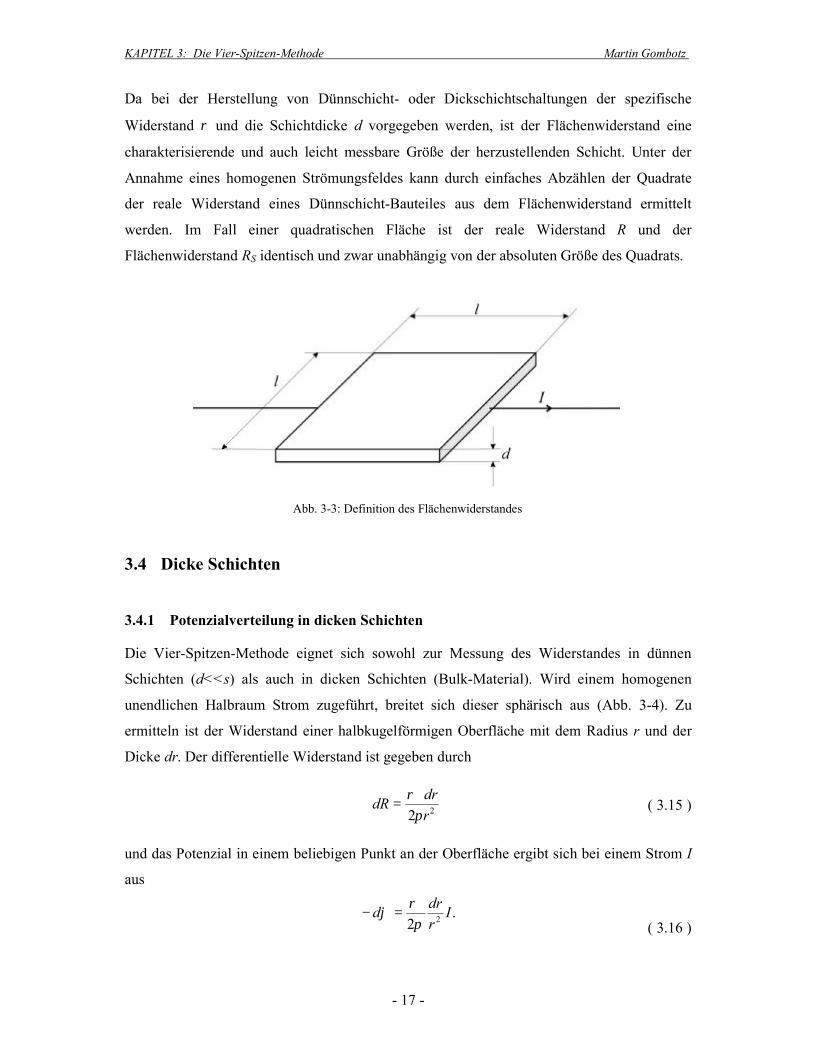
Da bei der Herstellung von Dünnschicht- oder Dickschichtschaltungen der spezifische
Widerstand ρ und die Schichtdicke d vorgegeben werden, ist der Flächenwiderstand eine
charakterisierende und auch leicht messbare Größe der herzustellenden Schicht. Unter der
Annahme eines homogenen Strömungsfeldes kann durch einfaches Abzählen der Quadrate
der reale Widerstand eines Dünnschicht-Bauteiles aus dem Flächenwiderstand ermittelt
werden. Im Fall einer quadratischen Fläche ist der reale Widerstand R und der
Flächenwiderstand RS identisch und zwar unabhängig von der absoluten Größe des Quadrats.
Abb. 3-3: Definition des Flächenwiderstandes
3.4 Dicke Schichten
3.4.1 Potenzialverteilung in dicken Schichten
Die Vier-Spitzen-Methode eignet sich sowohl zur Messung des Widerstandes in dünnen
Schichten (d<<s) als auch in dicken Schichten (Bulk-Material). Wird einem homogenen
unendlichen Halbraum Strom zugeführt, breitet sich dieser sphärisch aus (Abb. 3-4). Zu
ermitteln ist der Widerstand einer halbkugelförmigen Oberfläche mit dem Radius r und der
Dicke dr. Der differentielle Widerstand ist gegeben durch
( 3.15 )
und das Potenzial in einem beliebigen Punkt an der Oberfläche ergibt sich bei einem Strom I
aus
( 3.16 )
22 rdrdR
πρ ⋅
=
.2 2 I
rdrd
πρ
ϕ⋅
=−

KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 18 -
Durch Integration von
( 3.17 )
folgt
( 3.18 )
wobei das Potenzial ϕ0 am Nadelradius r0 angenommen wird. Da das Potenzial mit größer
werdendem Abstand zum Einspeisepunkt sinkt, ergibt sich ein negativer Potenzialgradient.
Für die zweite Nadel mit umgekehrter Stromrichtung gilt analog
( 3.19 )
Abb. 3-4: Stromausbreitung in einer dicken Schicht
Somit ergibt sich durch die Superposition der beiden Potenzialfelder und unter Voraussetzung
exakt gleicher Nadelradien das Potenzial in einem beliebigen Punkt P zu
( 3.20 )
(Abb. 3-1b) [13]. Äquipotenzialflächen genügen der Beziehung
( 3.21 )
∫∫+⋅
=−r
r rdrId
0
1
0
22
ϕ
ϕ πρ
ϕ
,112 0
0
−
⋅−=
++ rr
Iπ
ρϕϕ
.112 0
0
−
⋅+−=
−− rr
Iπ
ρϕϕ
−
⋅=+=
−+−+ rr
IP
112πρ
ϕϕϕ
.11 constrr
=−−+

KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 19 -
Für die Grenzfläche (horizontale Ebene) wurde das Potenzialfeld numerisch berechnet und in
Abb. 3-5 dargestellt. Aufgrund des niedrigen spezifischen Widerstandes des Bulk-Materials
liegen die Äquipotenziallinien sehr dicht. Außerdem weichen sie stark von einer Kreisform
ab.
3.4.2 Spezifischer Widerstand
Durch Subtraktion der Potenziale 1ϕ und 2ϕ (Abb. 3-1b) resultiert die Spannung
( 3.22 )
und der spezifische Widerstand
( 3.23)
Abb. 3-5: Potenzialverlauf in der Grenzfläche eines unendlichen Halbraumes in [mV]
3.5 Dünne Schichten
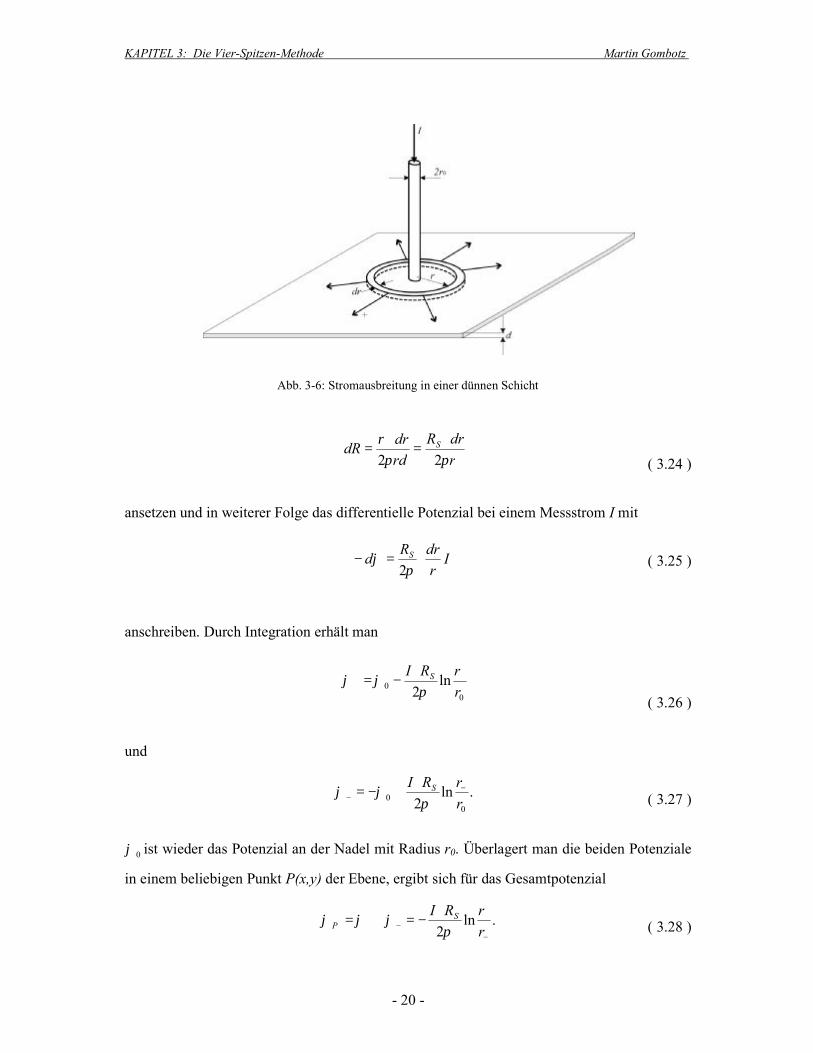
3.5.1 Potenzialverteilung in einer unendlich ausgedehnten Schicht Zur Untersuchung der Potenzialverteilung in einer dünnen Schicht wird vorausgesetzt, dass
sich ein über Messspitzen zugeführter Strom radial in der Ebene ausbreitet (Abb. 3-6). Der
differentielle Widerstand lässt sich unter Berücksichtigung von ( 3.13 ) mit Hilfe von
πρ
πρ
ϕϕs
Issss
IU2
121
211
2112⋅
=
−−
−
⋅=−=
.2 2,1
IU
sπρ =
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 20 -
Abb. 3-6: Stromausbreitung in einer dünnen Schicht
( 3.24 )
ansetzen und in weiterer Folge das differentielle Potenzial bei einem Messstrom I mit
( 3.25 )
anschreiben. Durch Integration erhält man
( 3.26 )
und
( 3.27 )
0ϕ ist wieder das Potenzial an der Nadel mit Radius r0. Überlagert man die beiden Potenziale
in einem beliebigen Punkt P(x,y) der Ebene, ergibt sich für das Gesamtpotenzial
( 3.28 )
rdrR
rddrdR S
ππρ
22⋅
=⋅
=
IrdrRd S ⋅=−
πϕ
2
00 ln
2 rrRI S +
+⋅
−=π
ϕϕ
.ln2 0
0 rrRI S −
−⋅
+−=π
ϕϕ
.ln2 −
+−+
⋅−=+=
rrRI S
P πϕϕϕ

KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 21 -
Zur besseren Darstellung des Potenzialfeldes sind folgende Terme in (3.28) einzusetzen:
( 3.29 )
( 3.30 )
Ist das Verhältnis Krr =−+ konstant, bewegt man sich auf einer Äquipotenziallinie, die im
ebenen Fall kreisförmig ist und daher analytisch berechnet werden kann. K<1 bedeutet
positives Potenzial. Somit liegen die Äquipotenziallinien in Abb. 3-7 in der linken Halbebene.
Für K>1 ergibt sich negatives Potenzial, die dazugehörigen Äquipotenziallinien sind daher in
der rechten Halbebene zu finden [13].
K<1 K>1
Abb. 3-7: Potenzialfeldverlauf in der Ebene in [mV]
3.5.2 Flächenwiderstand, spezifischer Widerstand Werden die Radien in ( 3.28 ) entsprechend den Abständen der Spannungsspitzen eingesetzt,
erhält man für die Spannung
( 3.31 )
22)5,1( ysxr ++=+
22)5,1( ysxr +−=−
.2ln2
ln2ln22112 ππ
ϕϕ SS RI
ss
ssRIU ⋅=
−
⋅=−=
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 22 -
Um den Flächenwiderstand aus der Spannungsmessung zu erhalten, ist nach ( 3.31 ) dem
Strom-Spannungs-Verhältnis ein geometrischer Korrekturfaktor 53236,42ln == πC
beizufügen. Schließlich lässt sich der Flächenwiderstand mit
( 3.32 )
und der spezifische Widerstand durch Umformung von ( 3.13 ) durch
( 3.33 )
berechnen.
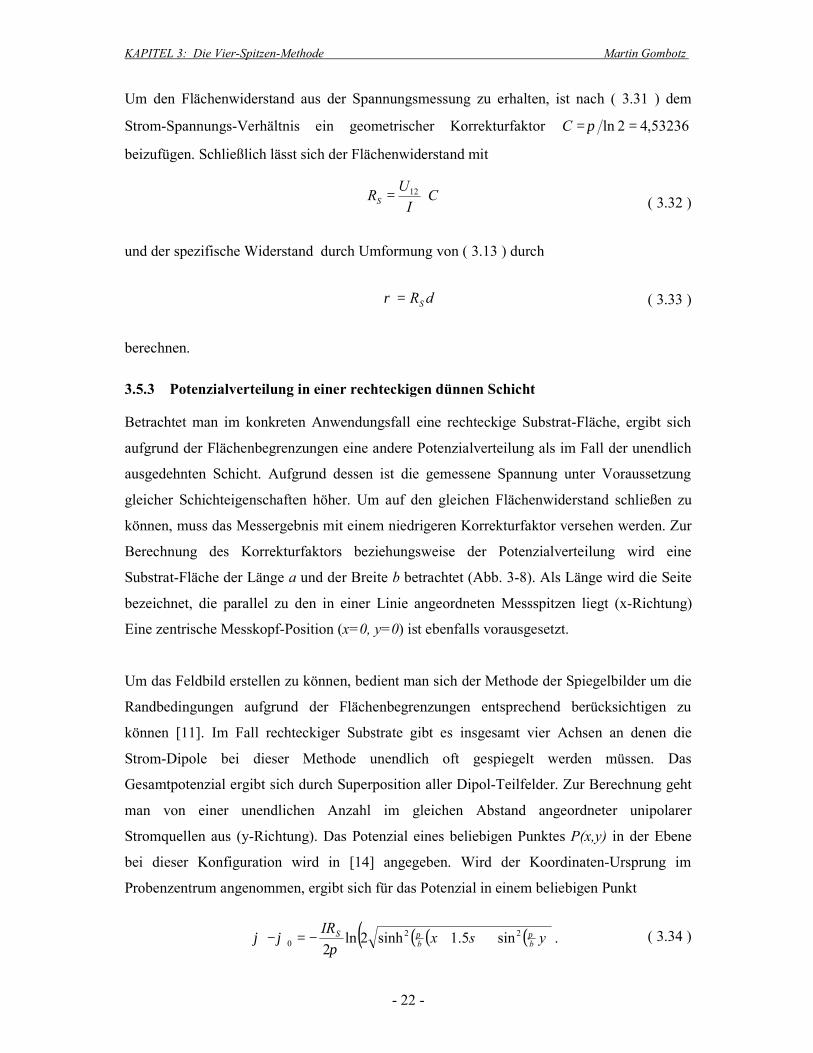
3.5.3 Potenzialverteilung in einer rechteckigen dünnen Schicht
Betrachtet man im konkreten Anwendungsfall eine rechteckige Substrat-Fläche, ergibt sich
aufgrund der Flächenbegrenzungen eine andere Potenzialverteilung als im Fall der unendlich
ausgedehnten Schicht. Aufgrund dessen ist die gemessene Spannung unter Voraussetzung
gleicher Schichteigenschaften höher. Um auf den gleichen Flächenwiderstand schließen zu
können, muss das Messergebnis mit einem niedrigeren Korrekturfaktor versehen werden. Zur
Berechnung des Korrekturfaktors beziehungsweise der Potenzialverteilung wird eine
Substrat-Fläche der Länge a und der Breite b betrachtet (Abb. 3-8). Als Länge wird die Seite
bezeichnet, die parallel zu den in einer Linie angeordneten Messspitzen liegt (x-Richtung)
Eine zentrische Messkopf-Position (x=0, y=0) ist ebenfalls vorausgesetzt.
Um das Feldbild erstellen zu können, bedient man sich der Methode der Spiegelbilder um die
Randbedingungen aufgrund der Flächenbegrenzungen entsprechend berücksichtigen zu
können [11]. Im Fall rechteckiger Substrate gibt es insgesamt vier Achsen an denen die
Strom-Dipole bei dieser Methode unendlich oft gespiegelt werden müssen. Das
Gesamtpotenzial ergibt sich durch Superposition aller Dipol-Teilfelder. Zur Berechnung geht
man von einer unendlichen Anzahl im gleichen Abstand angeordneter unipolarer
Stromquellen aus (y-Richtung). Das Potenzial eines beliebigen Punktes P(x,y) in der Ebene
bei dieser Konfiguration wird in [14] angegeben. Wird der Koordinaten-Ursprung im
Probenzentrum angenommen, ergibt sich für das Potenzial in einem beliebigen Punkt
( 3.34 )
CI
URS ⋅= 12
dRS=ρ
( )( ) ( )( ).sin5.1sinh2ln2
220 ysxIR
bbS ππ
πϕϕ ++−=−

KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 23 -
Berücksichtigt man auch die negativen Pole dieser Stromquellen, die parallel im Abstand
∆x=3s zu den positiven Polen platziert sind, lässt sich das Potenzial hervorgerufen durch die
‚Dipol-Linie‘ mit
( 3.35 )
Abb. 3-8: System der durch Spiegelung entstandenen Ströme bei zentrischer Messkopf-Position [9] anschreiben. Das vorliegende Problem konnte nun auf die alternierende Summation von
Feldern, die durch eine unendliche Anzahl solcher Dipol-Linien erzeugt werden, reduziert
werden [9]. Jede Dipol-Linie liefert den Beitrag
( 3.36 )
zum Gesamtpotenzial. Der Abstand der Dipole in x-Richtung ist der Substratlänge a gleich
und wird daher mit an ⋅ in ( 3.36 ) berücksichtigt. Mit
( 3.37 )
( )( ) ( )( )( ) ( )ynasx
ynasxIR
bb
bbSππ
ππ
πϕ 22
22
sin5.1sinhsin5.1sinh
ln4 ++−
+++−=∆
ϕϕ ∆−= ∑∞
−∞=n
nP )1(
( )( ) ( )( )( ) ( )ysx
ysxIR
bb
bbSππ
ππ
πϕϕ 22
22
0 sin5.1sinhsin5.1sinh
ln4 +−
++−=−

KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 24 -
ergibt sich das Potenzial in einem beliebigen Punkt P(x,y) der untersuchten Fläche.
In Abb. 3-9 ist der Feldverlauf für ein Substrat der Größe 50x50mm dargestellt. Alle offenen
Äquipotenziallinien laufen orthogonal in die Flächenumrandung ein. Bewegt man sich radial
zu den Strom-Elektroden, wird der Potenzialverlauf durch die Flächenbegrenzungen immer
geringer beeinflusst. Die Äquipotenziallinien nähern sich wie im Fall der unendlich
ausgedehnten Schicht der Kreisform.
Abb. 3-9: Feldverlauf bei einem Substrat der Größe 50x50mm in [mV]
3.5.4 Korrekturfaktor bei zentrischer Messkopf-Position
Betrachtet man die Messpunkte 1 und 2 zwischen den stromführenden Elektroden, wird bei
zentrischer Messkopf-Position y=0 gesetzt. Punkt 1 und Punkt 2 befinden sich in x-Richtung
symmetrisch im Abstand ±0.5s am Substrat (Abb. 3-8). Werden die entsprechenden
Koordinaten in ( 3.36 ) beziehungsweise ( 3.37 ) eingesetzt, ergibt sich für die Spannung
( 3.38 )
( )( ) ( )( )( )( ) ( )( ).
2sinh2sinhsinhsinh
ln)1(22112 snasna
snasnaIRUbb
bb
n
nS
+−−+
−−=−= ∑∞
−∞=ππ
ππ
πϕϕ

KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 25 -
Der Flächenwiderstand lässt sich durch weiteres Umformen darstellen
( 3.39 )
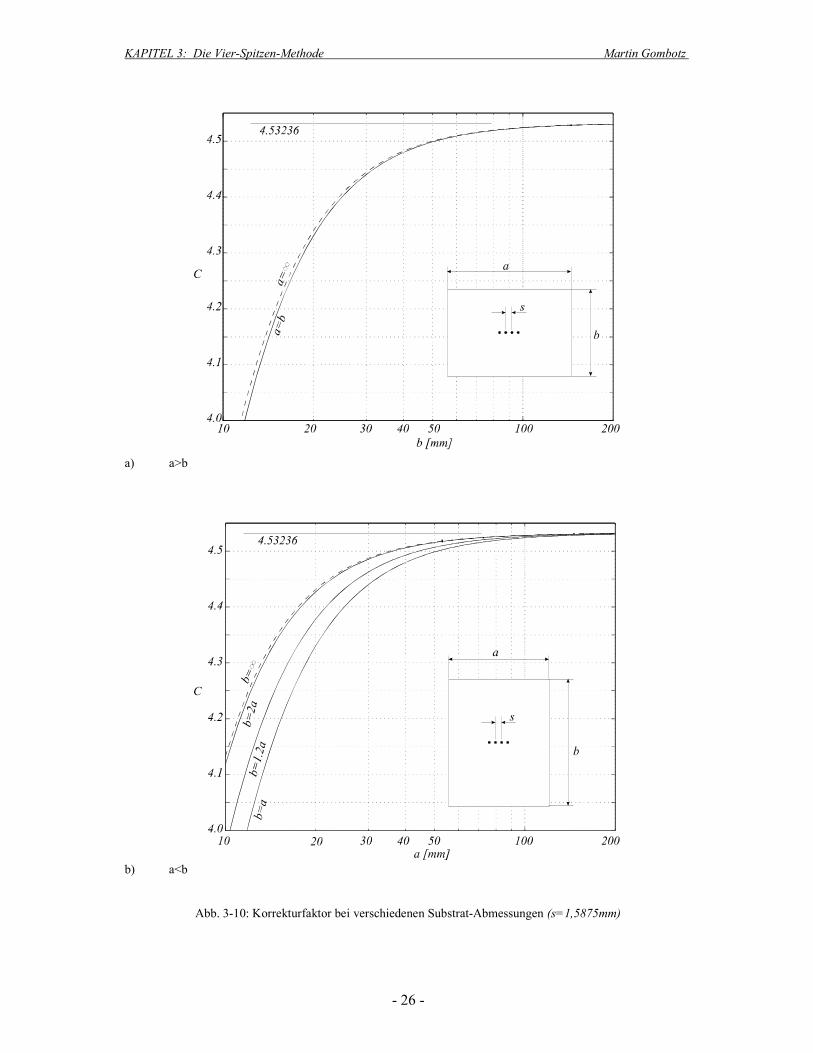
Aus ( 3.38 ) ist zu erkennen, dass der Korrekturfaktor C vom Abstand der Messspitzen (s) und
von den Substrat-Abmessungen (a und b) abhängig ist. In Abb. 3-10 sind Kennlinien für
Korrekturfaktoren bei verschiedenen Substrat-Abmessungen im halb-logarithmischen
Maßstab dargestellt. Die Kennlinien sind jeweils über das Seitenverhältnis a/b parametriert
und laufen bei immer größer werdenden Flächen asymptotisch dem Wert π/ln2, also dem
Korrekturfaktor einer unendlich ausgedehnten Flache, zu.
Für Anordnungen a>b (dargestellt in Abb. 3-10a) kann eine wesentliche Vereinfachung bei
der Berechnung des Korrekturfaktors vorgenommen werden. Durch die Vereinbarung a= ∞
erfolgt die Spiegelung der Stromdipole nur an zwei zur x-Achse parallelen Spiegelachsen
(Abb. 3-8). Die Berechnung der Spannung beziehungsweise des Korrekturfaktors kann daher
durch entsprechendes Einsetzen in ( 3.36 ) mit
( 3.40)
analytisch erfolgen, da nur eine Dipol-Linie berücksichtigt werden muss. Der Fehler der
durch diese Vereinfachung entsteht, ist wie aus Abb. 3-10a) leicht erkennbar sehr klein.
Sind Anordnungen wie in Abb. 3-10b) mit a<b gegeben, ist eine Vereinfachung erst ab b=2a
angebracht. b= ∞ führt bei der Spiegelungsmethode wieder auf zwei Spiegelachsen, die hier
parallel zur y-Achse liegen (Abb. 3-8). Betrachtet man die auf der x-Achse liegenden Ströme,
so kann man vier Gruppen (zwei positive und zwei negative) unipolarer Stromquellen
gleichen Abstands der Größe 2a erkennen. Wird in ( 3.34 ) die Breite b durch den Abstand 2a
substituiert und die Koordinaten x und y getauscht, wobei x=0 gesetzt wird, kann das Problem
wieder einer analytischen Lösung zugeführt werden. Durch entsprechendes Einsetzen der
Abstände der vorher beschriebenen Stromquellen-Gruppen zu den Messpunkten 1 und 2 und
durch weitere Vereinfachung ergibt sich für die Spannung
( 3.41)
( )( ) ( )ssS
b
bS bb eeIRs
sIRUππ
ππϕϕ
π
π−−=−=−= ln
2sinhsinh
ln2112
( ) ( )( )( )( ) .
2sinsin
cos2ln2
222112
−−
=−=sa
sasIRU
a
aa
Sπ
ππ
πϕϕ
.;12
⋅=
bs
baC
IURS
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 26 -
a) a>b
b) a<b
Abb. 3-10: Korrekturfaktor bei verschiedenen Substrat-Abmessungen (s=1,5875mm)

KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 27 -
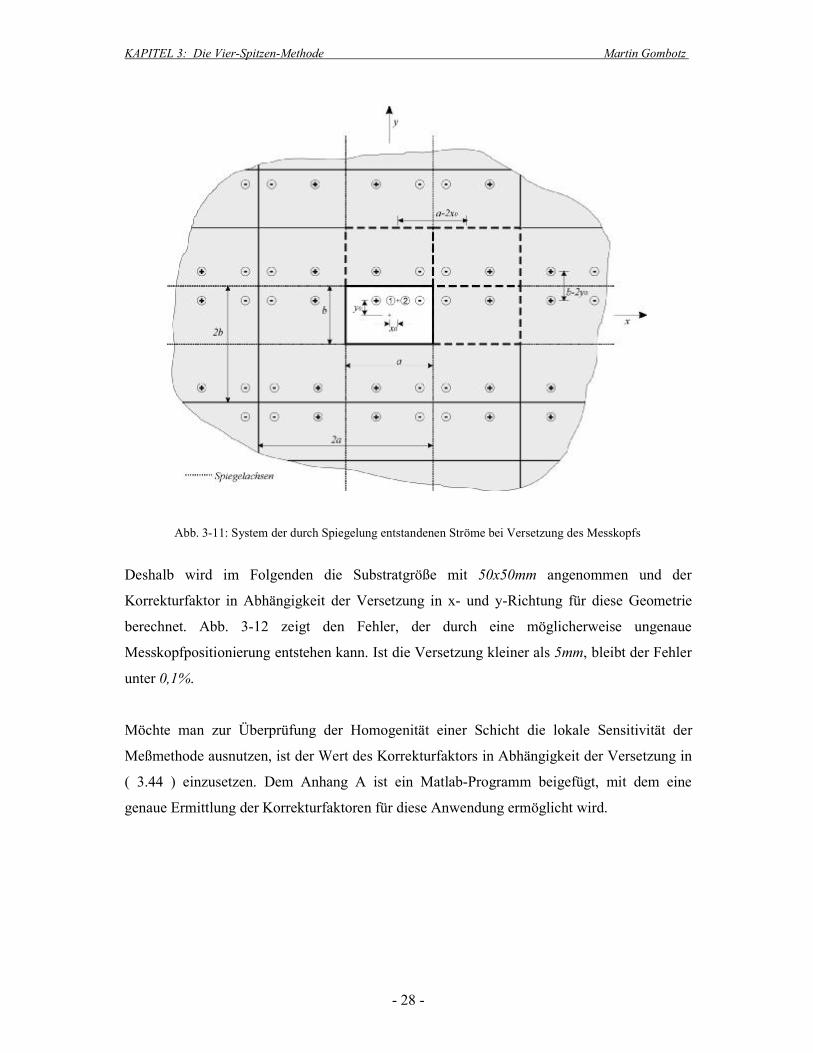
3.5.5 Korrekturfaktor bei beliebiger Messkopf-Position
Abhängig von der Position des Messkopfes am Substrat lässt sich jeweils ein entsprechender
Korrekturfaktor angeben. Wendet man für dessen Berechnung wie im Abschnitt 3.5.4 wieder
die Methode der Strom-Spiegelung an, entsteht das in Abb. 3-11 dargestellte System. Die
Berechnung der Spannung zwischen den Messpunkten 1 und 2 geht hier grundsätzlich von
der dargestellten Anordnung (4 symmetrisch um die Spiegelachsen bei x=a/2 und y=b/2
angeordnete Strom-Dipole) aus. Die Abstände der Dipole lassen sich mit ∆x=a-2x0 und
∆y=b-2y0 angeben, wobei mit x0, y0 die Versetzung des Messkopfmittelpunkts aus dem
Probenzentrum bezeichnet wird. Dieses Dipol-Quartett setzt sich durch Spiegelung in x-
Richtung mit A=2na und in y-Richtung mit B=2mb unendlich oft fort. Unter
Berücksichtigung von ( 3.28 ) kann der Spannungsbeitrag eines solchen Dipol-Quartetts mit
( 3.42 )
angegeben werden. Dabei gibt zum Beispiel der Radius r+1 die Entfernung eines positiven
Stromes zum Messpunkt 1, der Radius r-2 die Entfernung eines negativen Stromes zum
Messpunkt 2 an. Analog sind alle anderen Abstände dieser Anordnung zu multiplizieren. Die
Multiplikation hinter dem natürlichen Logarithmus ergibt sich aufgrund der Summation der
Spannungsbeiträge der realen und der gespiegelten Ströme auf Grundlage der Gleichung
( 3.28 ). Durch zweifache Summation (über m und n) lässt sich die Gesamtspannung
numerisch durch
( 3.43 )
berechnen. Aus der gemessenen Spannung U12 und dem bekannten Strom ist der
Flächenwiderstand analog zu Abschnitt 3.5.4 durch
( 3.44 )
bestimmbar. Bei festgelegtem Spitzenabstand s ist der Korrekturfaktor bei versetzter
Messkopfposition von insgesamt vier Variablen abhängig und dadurch schwer graphisch
darstellbar.
∏ ∏∏ ∏
+−
−+−=∆21
21ln2 rr
rrIRS
πϕ
∑ ∑∞
−∞=
∞
−∞=
∆=m n
U ϕ12
( )syxbaCI
URS ,,,, 0012 ⋅=
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 28 -
Abb. 3-11: System der durch Spiegelung entstandenen Ströme bei Versetzung des Messkopfs
Deshalb wird im Folgenden die Substratgröße mit 50x50mm angenommen und der
Korrekturfaktor in Abhängigkeit der Versetzung in x- und y-Richtung für diese Geometrie
berechnet. Abb. 3-12 zeigt den Fehler, der durch eine möglicherweise ungenaue
Messkopfpositionierung entstehen kann. Ist die Versetzung kleiner als 5mm, bleibt der Fehler
unter 0,1%.
Möchte man zur Überprüfung der Homogenität einer Schicht die lokale Sensitivität der
Meßmethode ausnutzen, ist der Wert des Korrekturfaktors in Abhängigkeit der Versetzung in
( 3.44 ) einzusetzen. Dem Anhang A ist ein Matlab-Programm beigefügt, mit dem eine
genaue Ermittlung der Korrekturfaktoren für diese Anwendung ermöglicht wird.
KAPITEL 3: Die Vier-Spitzen-Methode Martin Gombotz
- 29 -
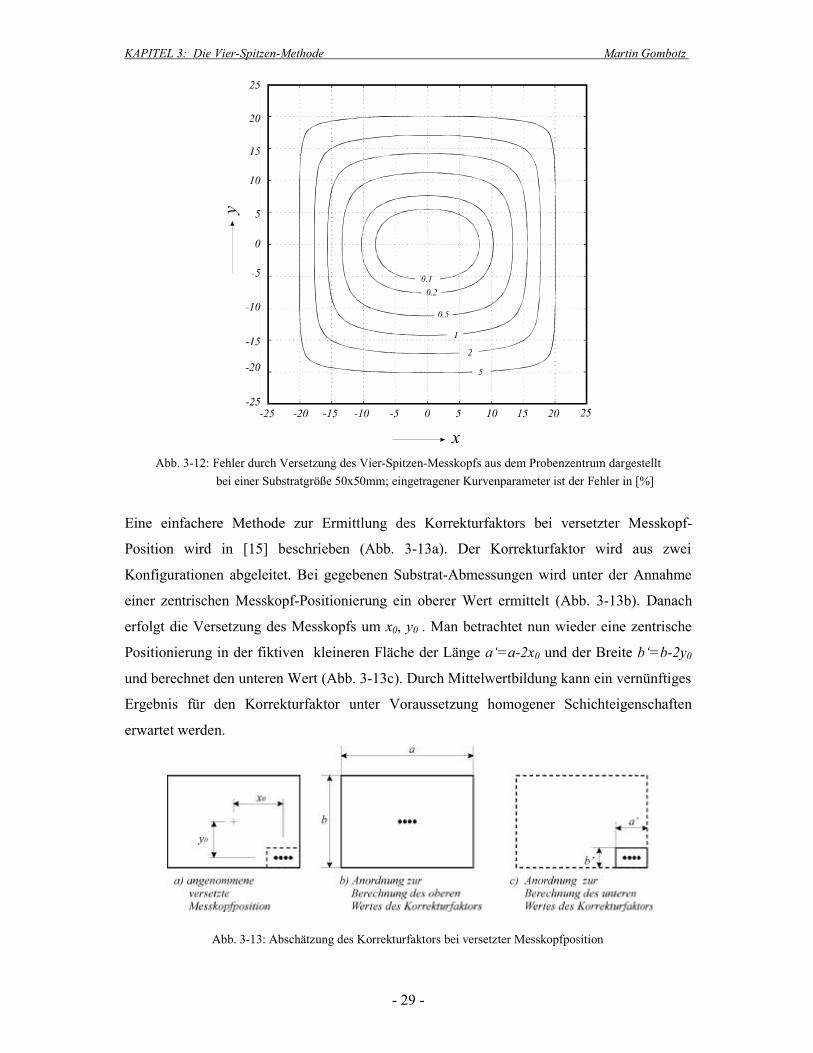
Abb. 3-12: Fehler durch Versetzung des Vier-Spitzen-Messkopfs aus dem Probenzentrum dargestellt bei einer Substratgröße 50x50mm; eingetragener Kurvenparameter ist der Fehler in [%]
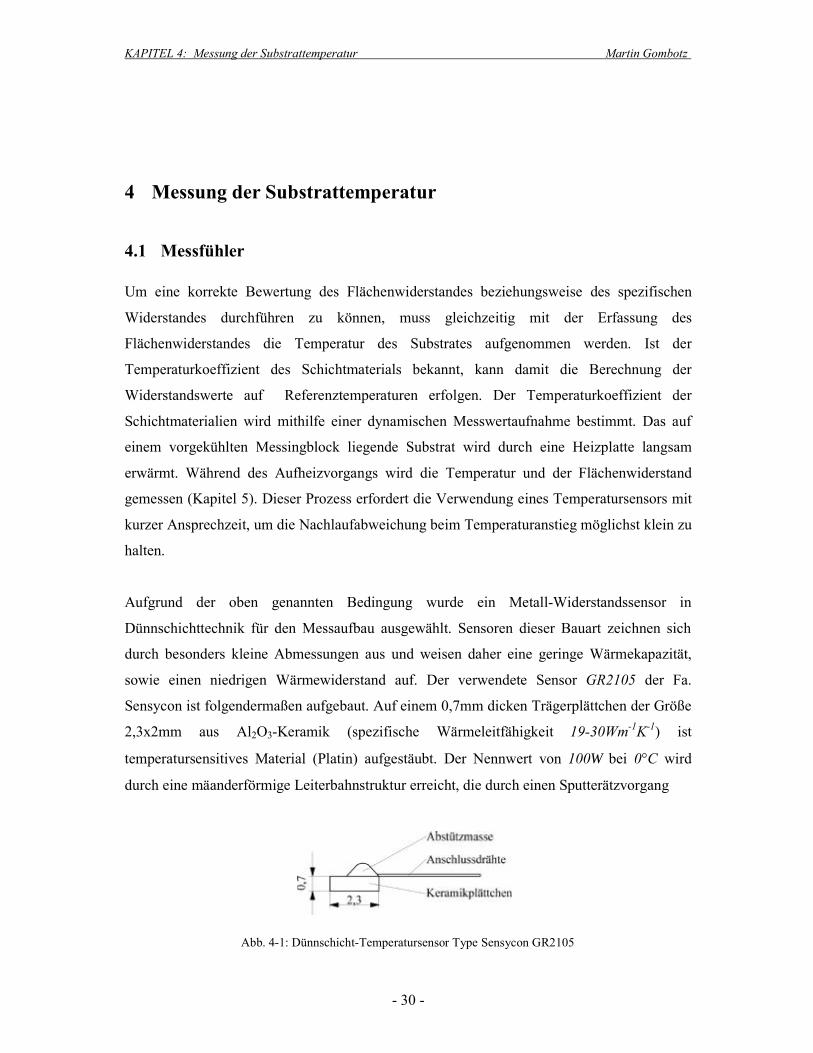
Eine einfachere Methode zur Ermittlung des Korrekturfaktors bei versetzter Messkopf-
Position wird in [15] beschrieben (Abb. 3-13a). Der Korrekturfaktor wird aus zwei
Konfigurationen abgeleitet. Bei gegebenen Substrat-Abmessungen wird unter der Annahme
einer zentrischen Messkopf-Positionierung ein oberer Wert ermittelt (Abb. 3-13b). Danach
erfolgt die Versetzung des Messkopfs um x0, y0 . Man betrachtet nun wieder eine zentrische
Positionierung in der fiktiven kleineren Fläche der Länge a‘=a-2x0 und der Breite b‘=b-2y0
und berechnet den unteren Wert (Abb. 3-13c). Durch Mittelwertbildung kann ein vernünftiges
Ergebnis für den Korrekturfaktor unter Voraussetzung homogener Schichteigenschaften
erwartet werden.
Abb. 3-13: Abschätzung des Korrekturfaktors bei versetzter Messkopfposition
KAPITEL 4: Messung der Substrattemperatur Martin Gombotz
- 30 -
4 Messung der Substrattemperatur
4.1 Messfühler
Um eine korrekte Bewertung des Flächenwiderstandes beziehungsweise des spezifischen
Widerstandes durchführen zu können, muss gleichzeitig mit der Erfassung des
Flächenwiderstandes die Temperatur des Substrates aufgenommen werden. Ist der
Temperaturkoeffizient des Schichtmaterials bekannt, kann damit die Berechnung der
Widerstandswerte auf Referenztemperaturen erfolgen. Der Temperaturkoeffizient der
Schichtmaterialien wird mithilfe einer dynamischen Messwertaufnahme bestimmt. Das auf
einem vorgekühlten Messingblock liegende Substrat wird durch eine Heizplatte langsam
erwärmt. Während des Aufheizvorgangs wird die Temperatur und der Flächenwiderstand
gemessen (Kapitel 5). Dieser Prozess erfordert die Verwendung eines Temperatursensors mit
kurzer Ansprechzeit, um die Nachlaufabweichung beim Temperaturanstieg möglichst klein zu
halten.
Aufgrund der oben genannten Bedingung wurde ein Metall-Widerstandssensor in
Dünnschichttechnik für den Messaufbau ausgewählt. Sensoren dieser Bauart zeichnen sich
durch besonders kleine Abmessungen aus und weisen daher eine geringe Wärmekapazität,
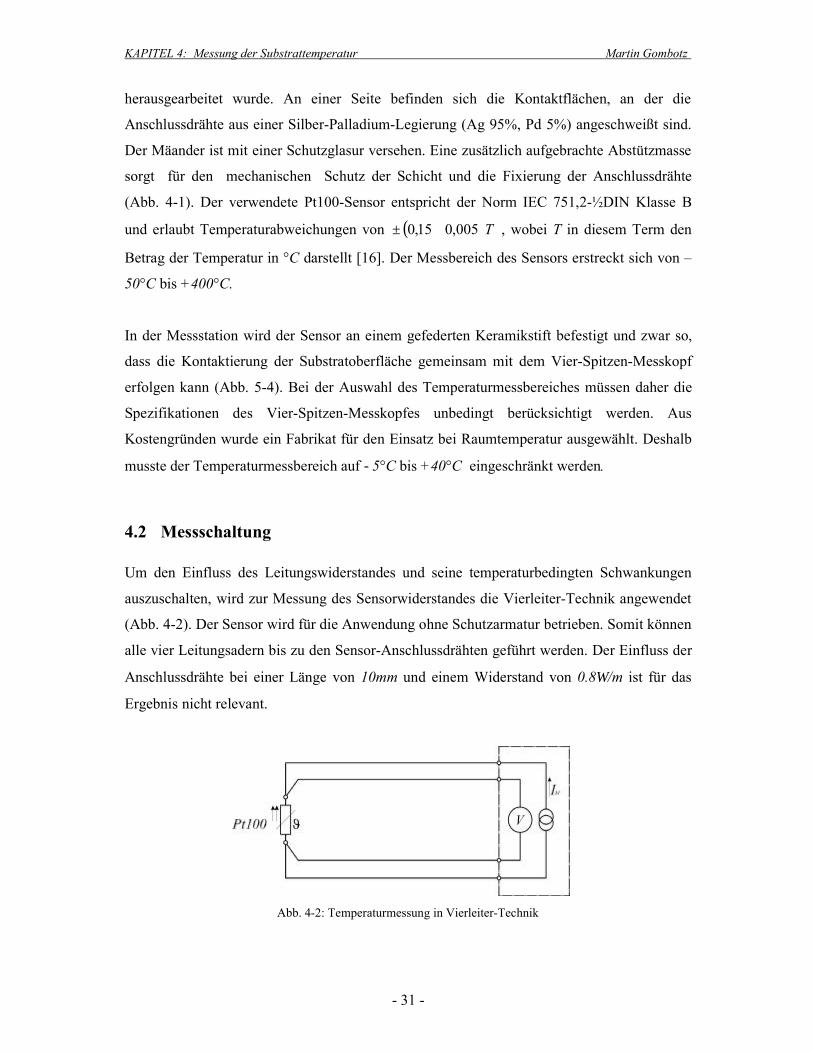
sowie einen niedrigen Wärmewiderstand auf. Der verwendete Sensor GR2105 der Fa.
Sensycon ist folgendermaßen aufgebaut. Auf einem 0,7mm dicken Trägerplättchen der Größe
2,3x2mm aus Al2O3-Keramik (spezifische Wärmeleitfähigkeit 19-30Wm-1K-1) ist
temperatursensitives Material (Platin) aufgestäubt. Der Nennwert von 100Ω bei 0°C wird
durch eine mäanderförmige Leiterbahnstruktur erreicht, die durch einen Sputterätzvorgang
Abb. 4-1: Dünnschicht-Temperatursensor Type Sensycon GR2105
KAPITEL 4: Messung der Substrattemperatur Martin Gombotz
- 31 -
herausgearbeitet wurde. An einer Seite befinden sich die Kontaktflächen, an der die
Anschlussdrähte aus einer Silber-Palladium-Legierung (Ag 95%, Pd 5%) angeschweißt sind.
Der Mäander ist mit einer Schutzglasur versehen. Eine zusätzlich aufgebrachte Abstützmasse
sorgt für den mechanischen Schutz der Schicht und die Fixierung der Anschlussdrähte
(Abb. 4-1). Der verwendete Pt100-Sensor entspricht der Norm IEC 751,2-½DIN Klasse B
und erlaubt Temperaturabweichungen von ( )T⋅+± 005,015,0 , wobei T in diesem Term den
Betrag der Temperatur in °C darstellt [16]. Der Messbereich des Sensors erstreckt sich von –
50°C bis +400°C.
In der Messstation wird der Sensor an einem gefederten Keramikstift befestigt und zwar so,
dass die Kontaktierung der Substratoberfläche gemeinsam mit dem Vier-Spitzen-Messkopf
erfolgen kann (Abb. 5-4). Bei der Auswahl des Temperaturmessbereiches müssen daher die
Spezifikationen des Vier-Spitzen-Messkopfes unbedingt berücksichtigt werden. Aus
Kostengründen wurde ein Fabrikat für den Einsatz bei Raumtemperatur ausgewählt. Deshalb
musste der Temperaturmessbereich auf −5°C bis +40°C eingeschränkt werden.
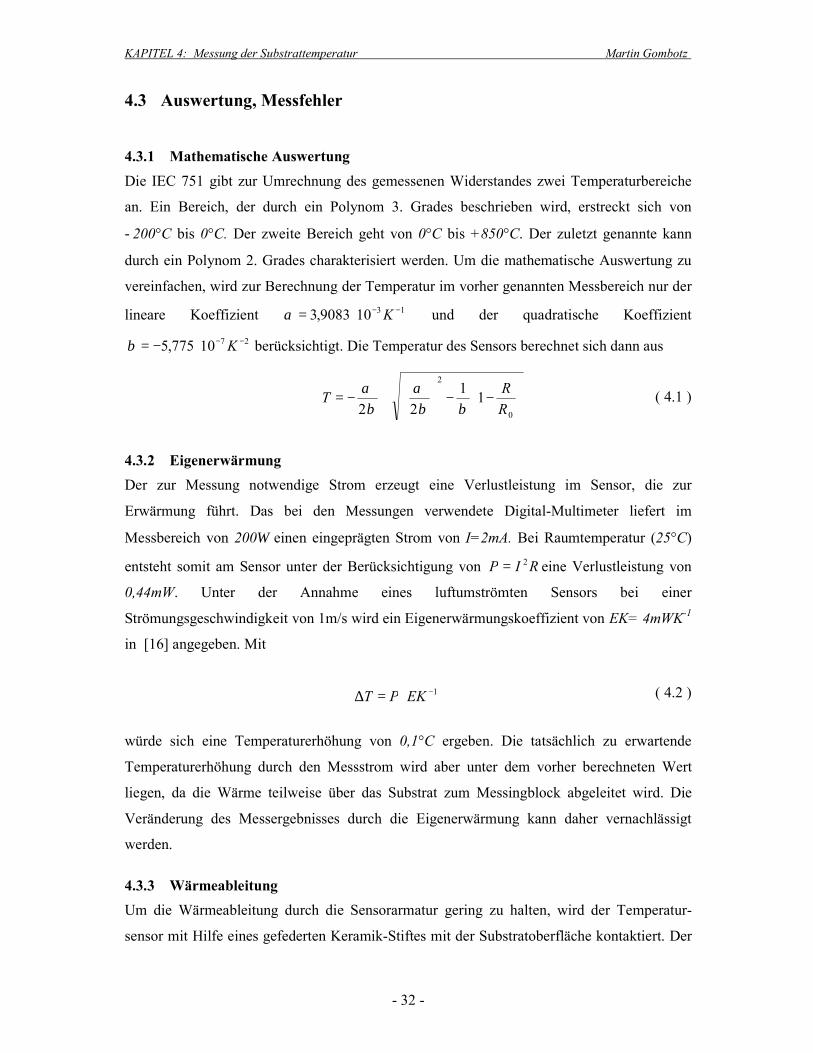
4.2 Messschaltung
Um den Einfluss des Leitungswiderstandes und seine temperaturbedingten Schwankungen
auszuschalten, wird zur Messung des Sensorwiderstandes die Vierleiter-Technik angewendet
(Abb. 4-2). Der Sensor wird für die Anwendung ohne Schutzarmatur betrieben. Somit können
alle vier Leitungsadern bis zu den Sensor-Anschlussdrähten geführt werden. Der Einfluss der
Anschlussdrähte bei einer Länge von 10mm und einem Widerstand von 0.8Ω/m ist für das
Ergebnis nicht relevant.
Abb. 4-2: Temperaturmessung in Vierleiter-Technik
KAPITEL 4: Messung der Substrattemperatur Martin Gombotz
- 32 -
4.3 Auswertung, Messfehler
4.3.1 Mathematische Auswertung Die IEC 751 gibt zur Umrechnung des gemessenen Widerstandes zwei Temperaturbereiche
an. Ein Bereich, der durch ein Polynom 3. Grades beschrieben wird, erstreckt sich von
−200°C bis 0°C. Der zweite Bereich geht von 0°C bis +850°C. Der zuletzt genannte kann
durch ein Polynom 2. Grades charakterisiert werden. Um die mathematische Auswertung zu
vereinfachen, wird zur Berechnung der Temperatur im vorher genannten Messbereich nur der
lineare Koeffizient 13109083,3 −−⋅= Kα und der quadratische Koeffizient 2710775,5 −−⋅−= Kβ berücksichtigt. Die Temperatur des Sensors berechnet sich dann aus
( 4.1 )
4.3.2 Eigenerwärmung Der zur Messung notwendige Strom erzeugt eine Verlustleistung im Sensor, die zur
Erwärmung führt. Das bei den Messungen verwendete Digital-Multimeter liefert im
Messbereich von 200Ω einen eingeprägten Strom von I=2mA. Bei Raumtemperatur (25°C)
entsteht somit am Sensor unter der Berücksichtigung von RIP 2= eine Verlustleistung von
0,44mW. Unter der Annahme eines luftumströmten Sensors bei einer
Strömungsgeschwindigkeit von 1m/s wird ein Eigenerwärmungskoeffizient von EK= 4mWK-1
in [16] angegeben. Mit
( 4.2 )
würde sich eine Temperaturerhöhung von 0,1°C ergeben. Die tatsächlich zu erwartende
Temperaturerhöhung durch den Messstrom wird aber unter dem vorher berechneten Wert
liegen, da die Wärme teilweise über das Substrat zum Messingblock abgeleitet wird. Die
Veränderung des Messergebnisses durch die Eigenerwärmung kann daher vernachlässigt
werden.
4.3.3 Wärmeableitung Um die Wärmeableitung durch die Sensorarmatur gering zu halten, wird der Temperatur-
sensor mit Hilfe eines gefederten Keramik-Stiftes mit der Substratoberfläche kontaktiert. Der
1−⋅=∆ EKPT
−−
+−=
0
2
1122 R
RTββ
αβ
α
KAPITEL 4: Messung der Substrattemperatur Martin Gombotz
- 33 -
( )21 TTAd
−=λ
φ
verwendete Stift aus Hochfrequenz-Steatit (Bezeichnung. nach IEC 672: C221) ist ein sehr
schlechter Wärmeleiter und besitzt eine Wärmeleitfähigkeit von λ=2-3Wm-1K-1. Bei einem
Stiftdurchmesser von 2mm und einer wirksamen Länge von d=10mm ergibt sich bei
maximaler Substrattemperatur T1=40°C und einer Umgebungstemperatur T2=25°C der
abfließende Wärmestrom aus
( 4.3 )
und liegt für λ=2-3Wm-1K-1 im Bereich von 0,63-0,94mW, der das Messergebnis kaum
beeinflusst.
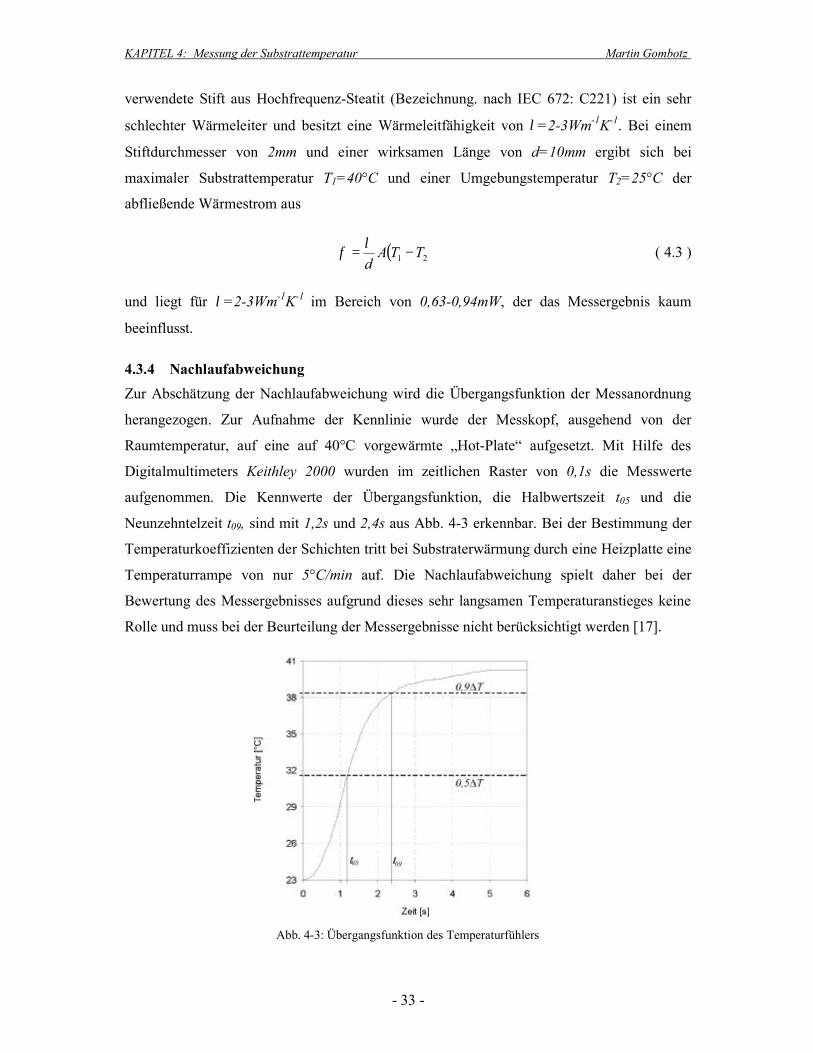
4.3.4 Nachlaufabweichung Zur Abschätzung der Nachlaufabweichung wird die Übergangsfunktion der Messanordnung
herangezogen. Zur Aufnahme der Kennlinie wurde der Messkopf, ausgehend von der
Raumtemperatur, auf eine auf 40°C vorgewärmte „Hot-Plate“ aufgesetzt. Mit Hilfe des
Digitalmultimeters Keithley 2000 wurden im zeitlichen Raster von 0,1s die Messwerte
aufgenommen. Die Kennwerte der Übergangsfunktion, die Halbwertszeit t05 und die
Neunzehntelzeit t09, sind mit 1,2s und 2,4s aus Abb. 4-3 erkennbar. Bei der Bestimmung der
Temperaturkoeffizienten der Schichten tritt bei Substraterwärmung durch eine Heizplatte eine
Temperaturrampe von nur 5°C/min auf. Die Nachlaufabweichung spielt daher bei der
Bewertung des Messergebnisses aufgrund dieses sehr langsamen Temperaturanstieges keine
Rolle und muss bei der Beurteilung der Messergebnisse nicht berücksichtigt werden [17].
Abb. 4-3: Übergangsfunktion des Temperaturfühlers
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 34 -
5 Messplatzkonfiguration
5.1 Allgemeines
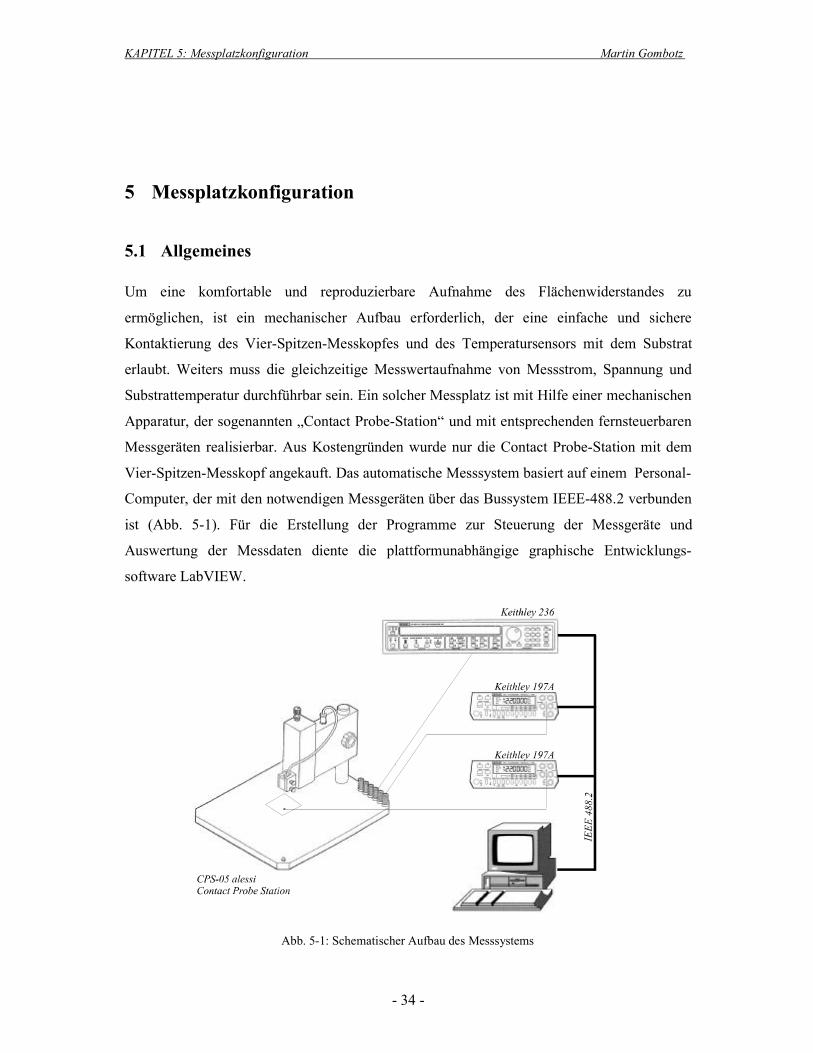
Um eine komfortable und reproduzierbare Aufnahme des Flächenwiderstandes zu
ermöglichen, ist ein mechanischer Aufbau erforderlich, der eine einfache und sichere
Kontaktierung des Vier-Spitzen-Messkopfes und des Temperatursensors mit dem Substrat
erlaubt. Weiters muss die gleichzeitige Messwertaufnahme von Messstrom, Spannung und
Substrattemperatur durchführbar sein. Ein solcher Messplatz ist mit Hilfe einer mechanischen
Apparatur, der sogenannten „Contact Probe-Station“ und mit entsprechenden fernsteuerbaren
Messgeräten realisierbar. Aus Kostengründen wurde nur die Contact Probe-Station mit dem
Vier-Spitzen-Messkopf angekauft. Das automatische Messsystem basiert auf einem Personal-
Computer, der mit den notwendigen Messgeräten über das Bussystem IEEE-488.2 verbunden
ist (Abb. 5-1). Für die Erstellung der Programme zur Steuerung der Messgeräte und
Auswertung der Messdaten diente die plattformunabhängige graphische Entwicklungs-
software LabVIEW.
Abb. 5-1: Schematischer Aufbau des Messsystems
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 35 -
5.2 Mechanischer Aufbau
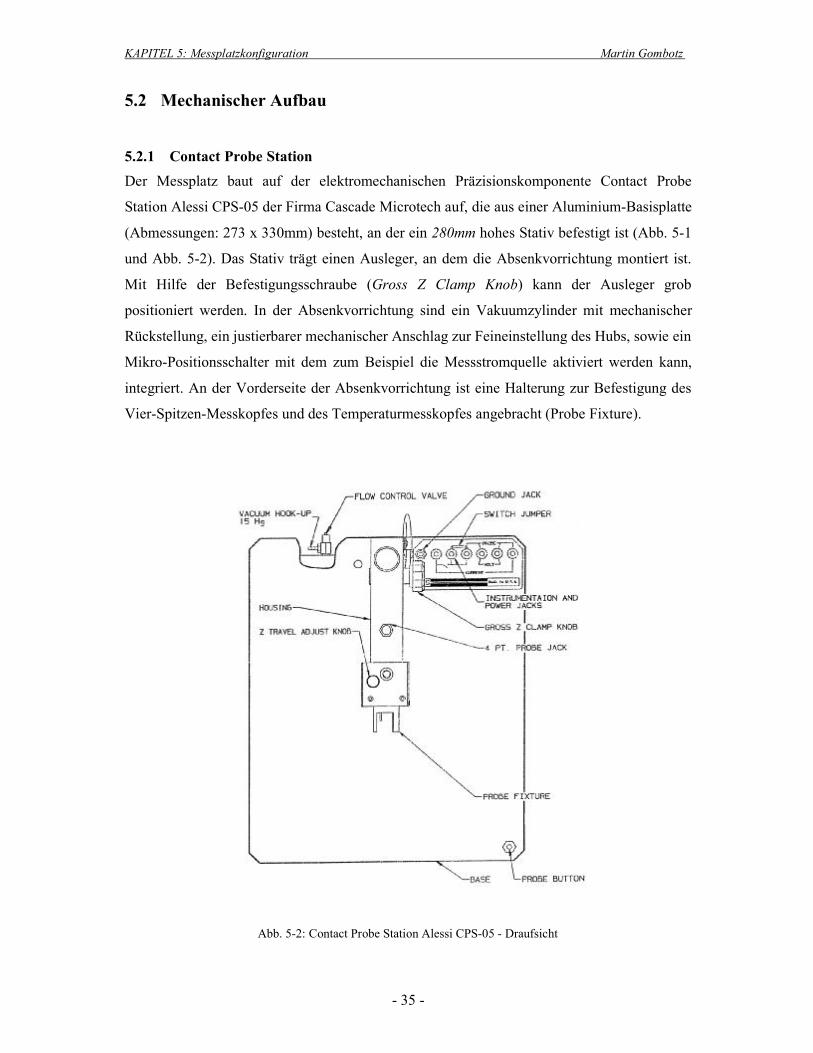
5.2.1 Contact Probe Station Der Messplatz baut auf der elektromechanischen Präzisionskomponente Contact Probe
Station Alessi CPS-05 der Firma Cascade Microtech auf, die aus einer Aluminium-Basisplatte
(Abmessungen: 273 x 330mm) besteht, an der ein 280mm hohes Stativ befestigt ist (Abb. 5-1
und Abb. 5-2). Das Stativ trägt einen Ausleger, an dem die Absenkvorrichtung montiert ist.
Mit Hilfe der Befestigungsschraube (Gross Z Clamp Knob) kann der Ausleger grob
positioniert werden. In der Absenkvorrichtung sind ein Vakuumzylinder mit mechanischer
Rückstellung, ein justierbarer mechanischer Anschlag zur Feineinstellung des Hubs, sowie ein
Mikro-Positionsschalter mit dem zum Beispiel die Messstromquelle aktiviert werden kann,
integriert. An der Vorderseite der Absenkvorrichtung ist eine Halterung zur Befestigung des
Vier-Spitzen-Messkopfes und des Temperaturmesskopfes angebracht (Probe Fixture).
Abb. 5-2: Contact Probe Station Alessi CPS-05 - Draufsicht
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 36 -
Das Absenken des Auslegers und somit die Kontaktierung des Substrats erfolgt durch die
Betätigung eines pneumatischen Tasters (Probe Button), der im vorderen Bereich der
Basisplatte integriert ist. Das Vakuum wird von einer externen Drehschieberpumpe zur
Verfügung gestellt, wobei der Systemdruck über ein Regelventil (Flow Control Valve) justiert
werden kann. Die Contact Probe Station darf maximal mit einem Unterdruck von 20mbar
betrieben werden. Das vorliegende System ist für den Einsatz bei Raumtemperatur bestimmt.
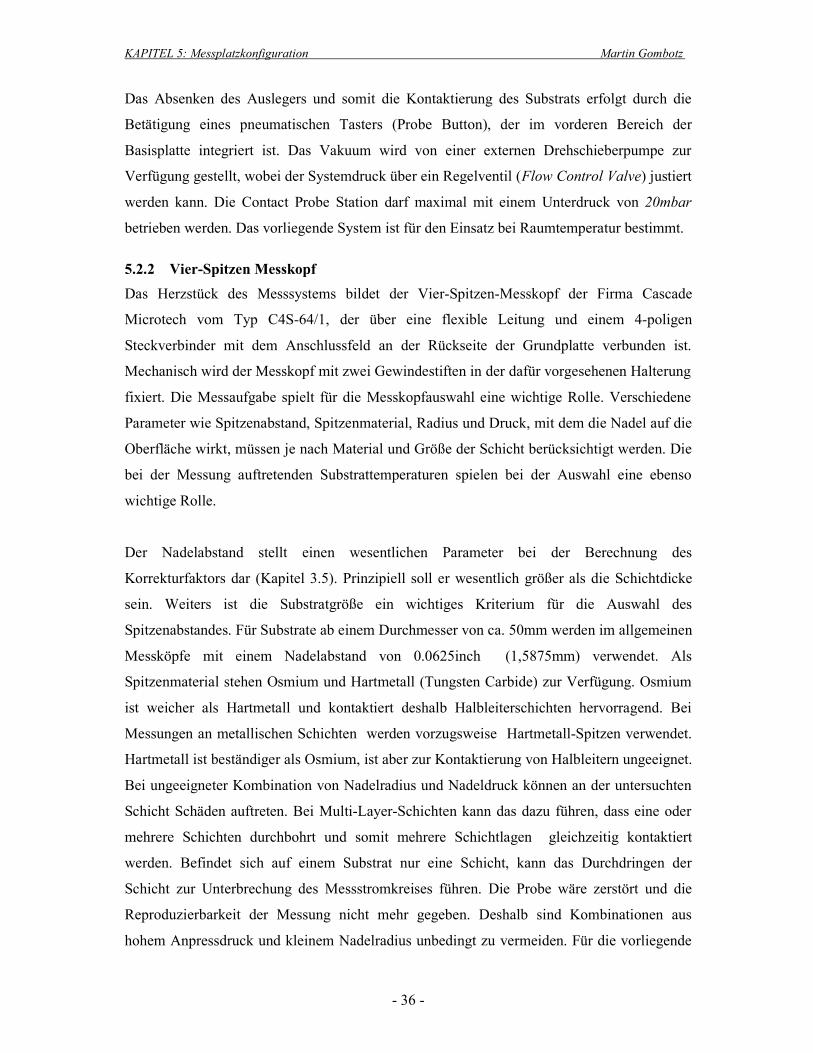
5.2.2 Vier-Spitzen Messkopf Das Herzstück des Messsystems bildet der Vier-Spitzen-Messkopf der Firma Cascade
Microtech vom Typ C4S-64/1, der über eine flexible Leitung und einem 4-poligen
Steckverbinder mit dem Anschlussfeld an der Rückseite der Grundplatte verbunden ist.
Mechanisch wird der Messkopf mit zwei Gewindestiften in der dafür vorgesehenen Halterung
fixiert. Die Messaufgabe spielt für die Messkopfauswahl eine wichtige Rolle. Verschiedene
Parameter wie Spitzenabstand, Spitzenmaterial, Radius und Druck, mit dem die Nadel auf die
Oberfläche wirkt, müssen je nach Material und Größe der Schicht berücksichtigt werden. Die
bei der Messung auftretenden Substrattemperaturen spielen bei der Auswahl eine ebenso
wichtige Rolle.
Der Nadelabstand stellt einen wesentlichen Parameter bei der Berechnung des
Korrekturfaktors dar (Kapitel 3.5). Prinzipiell soll er wesentlich größer als die Schichtdicke
sein. Weiters ist die Substratgröße ein wichtiges Kriterium für die Auswahl des
Spitzenabstandes. Für Substrate ab einem Durchmesser von ca. 50mm werden im allgemeinen
Messköpfe mit einem Nadelabstand von 0.0625inch (1,5875mm) verwendet. Als
Spitzenmaterial stehen Osmium und Hartmetall (Tungsten Carbide) zur Verfügung. Osmium
ist weicher als Hartmetall und kontaktiert deshalb Halbleiterschichten hervorragend. Bei
Messungen an metallischen Schichten werden vorzugsweise Hartmetall-Spitzen verwendet.
Hartmetall ist beständiger als Osmium, ist aber zur Kontaktierung von Halbleitern ungeeignet.
Bei ungeeigneter Kombination von Nadelradius und Nadeldruck können an der untersuchten
Schicht Schäden auftreten. Bei Multi-Layer-Schichten kann das dazu führen, dass eine oder
mehrere Schichten durchbohrt und somit mehrere Schichtlagen gleichzeitig kontaktiert
werden. Befindet sich auf einem Substrat nur eine Schicht, kann das Durchdringen der
Schicht zur Unterbrechung des Messstromkreises führen. Die Probe wäre zerstört und die
Reproduzierbarkeit der Messung nicht mehr gegeben. Deshalb sind Kombinationen aus
hohem Anpressdruck und kleinem Nadelradius unbedingt zu vermeiden. Für die vorliegende
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 37 -
Messaufgabe wurde ein Messkopf mit einer Anpresskraft von 40-70gram und einem Radius
von 0.01inch (0.254mm) ausgewählt. Die Federkraft kann für alle Spitzen gemeinsam am
Messkopf eingestellt werden. Ziel der Justage ist ein möglichst geringer Übergangswiderstand
der Messanordnung. Um eine optimale Substratkontaktierung zu gewährleisten, ist jede Spitze
im Messkopf separat abgefedert [18].
Bedingt durch Fertigungstoleranzen können unterschiedliche Nadelradien sowie
unterschiedliche Nadelabstände auftreten. Beim verwendeten Messkopf wird eine zulässige
Toleranz von ±1% angegeben, der Einfluss auf das Messergebnis wird in [19] beschrieben.
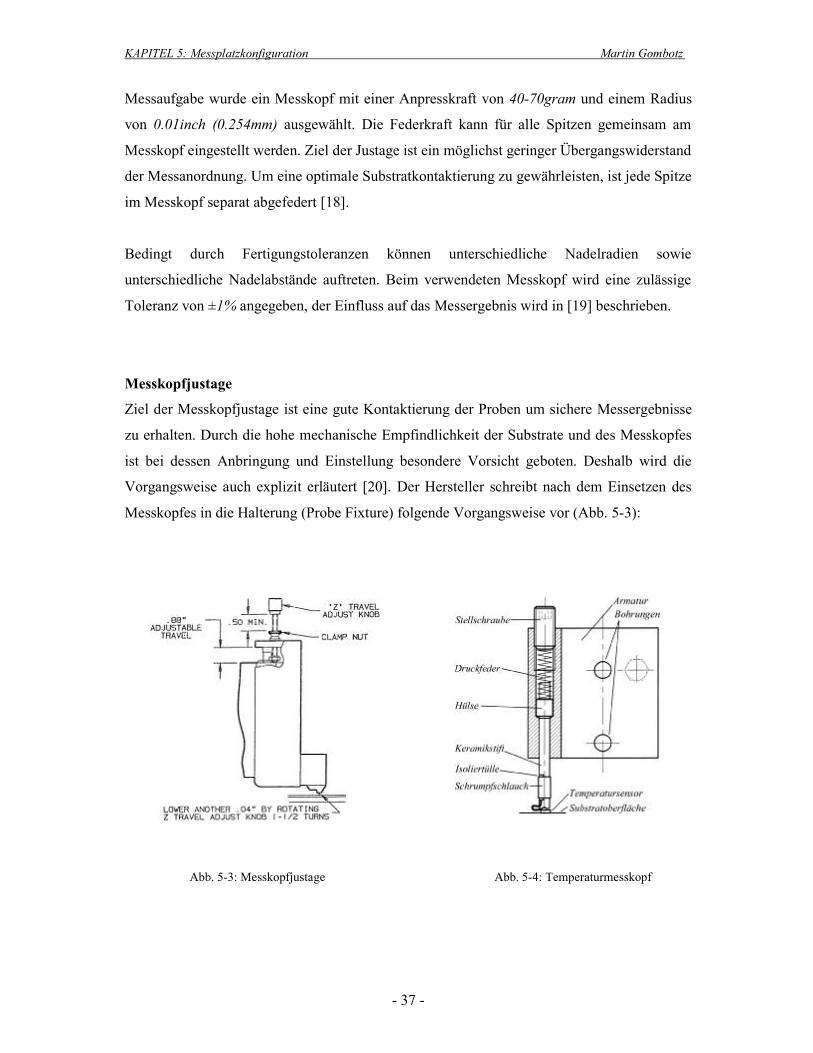
Messkopfjustage
Ziel der Messkopfjustage ist eine gute Kontaktierung der Proben um sichere Messergebnisse
zu erhalten. Durch die hohe mechanische Empfindlichkeit der Substrate und des Messkopfes
ist bei dessen Anbringung und Einstellung besondere Vorsicht geboten. Deshalb wird die
Vorgangsweise auch explizit erläutert [20]. Der Hersteller schreibt nach dem Einsetzen des
Messkopfes in die Halterung (Probe Fixture) folgende Vorgangsweise vor (Abb. 5-3):
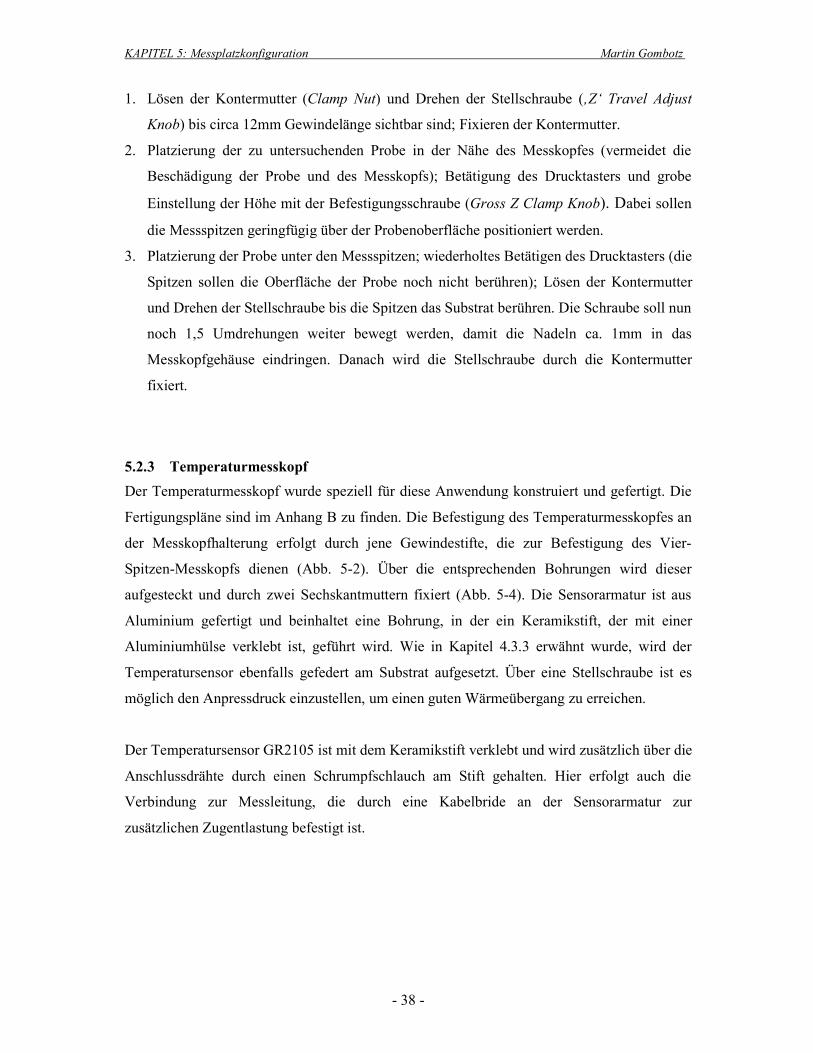
Abb. 5-3: Messkopfjustage
Abb. 5-4: Temperaturmesskopf
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 38 -
1. Lösen der Kontermutter (Clamp Nut) und Drehen der Stellschraube (‚Z‘ Travel Adjust
Knob) bis circa 12mm Gewindelänge sichtbar sind; Fixieren der Kontermutter.
2. Platzierung der zu untersuchenden Probe in der Nähe des Messkopfes (vermeidet die
Beschädigung der Probe und des Messkopfs); Betätigung des Drucktasters und grobe
Einstellung der Höhe mit der Befestigungsschraube (Gross Z Clamp Knob). Dabei sollen
die Messspitzen geringfügig über der Probenoberfläche positioniert werden.
3. Platzierung der Probe unter den Messspitzen; wiederholtes Betätigen des Drucktasters (die
Spitzen sollen die Oberfläche der Probe noch nicht berühren); Lösen der Kontermutter
und Drehen der Stellschraube bis die Spitzen das Substrat berühren. Die Schraube soll nun
noch 1,5 Umdrehungen weiter bewegt werden, damit die Nadeln ca. 1mm in das
Messkopfgehäuse eindringen. Danach wird die Stellschraube durch die Kontermutter
fixiert.
5.2.3 Temperaturmesskopf Der Temperaturmesskopf wurde speziell für diese Anwendung konstruiert und gefertigt. Die
Fertigungspläne sind im Anhang B zu finden. Die Befestigung des Temperaturmesskopfes an
der Messkopfhalterung erfolgt durch jene Gewindestifte, die zur Befestigung des Vier-
Spitzen-Messkopfs dienen (Abb. 5-2). Über die entsprechenden Bohrungen wird dieser
aufgesteckt und durch zwei Sechskantmuttern fixiert (Abb. 5-4). Die Sensorarmatur ist aus
Aluminium gefertigt und beinhaltet eine Bohrung, in der ein Keramikstift, der mit einer
Aluminiumhülse verklebt ist, geführt wird. Wie in Kapitel 4.3.3 erwähnt wurde, wird der
Temperatursensor ebenfalls gefedert am Substrat aufgesetzt. Über eine Stellschraube ist es
möglich den Anpressdruck einzustellen, um einen guten Wärmeübergang zu erreichen.
Der Temperatursensor GR2105 ist mit dem Keramikstift verklebt und wird zusätzlich über die
Anschlussdrähte durch einen Schrumpfschlauch am Stift gehalten. Hier erfolgt auch die
Verbindung zur Messleitung, die durch eine Kabelbride an der Sensorarmatur zur
zusätzlichen Zugentlastung befestigt ist.
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 39 -
5.3 Grundlegendes zum IEEE-488.2-Bus
5.3.1 Historischer Abriss Die Firma Hewlett Packard entwickelte in den späten 60iger Jahren ein Bussystem zur
Verbindung von programmierbaren Messgeräten mit dem Ziel kostengünstige
Realisierungsmöglichkeiten von automatisierten Messsystemen anzubieten. Der Bus wurde
als HP-IB (Hewlett Packard - Interface Bus) bezeichnet und diente ausschließlich zur
Anschaltung firmeneigener Geräte. Durch die rasante Entwicklung der Mikrocontroller und
deren vermehrten Einsatz in der Messtechnik wurde eine Vereinheitlichung der
Kommunikationsverfahren zwischen Messgeräten unbedingt notwendig. Durch diese
Standardisierung, die 1975 durch ANSI und dem IEEE (Institute of Electrical and Electronic
Engineers) als Norm IEEE-488 erfolgte, sollte die Möglichkeit des Aufbaues von
Multivendor-Messsystemen geboten werden. 1978 wurde die Norm von der Internationalen
Elektrotechnischen Kommission als IEC-625 übernommen. Dieses Bussystem wird weltweit
in der Labormesstechnik verwendet und ist auch unter anderen Namen wie zum Beispiel
GPIP (General Purpose Interface Bus), IEC-Bus oder als DIN-Messbus bekannt.
In der Norm IEEE-488 von 1975 wurden nur die elektrischen, mechanischen und
funktionellen Spezifikationen des Interface-Systems festgelegt. 1978 wurde die IEEE-488 auf
IEEE-488.1 umbenannt und um den Nachtrag IEEE-488.2 erweitert. Da in der
ursprünglichen Fassung keine Inhalte bezüglich Syntax und Formatkonventionen enthalten
waren, wurden in IEEE-488.2 Codes, Formate, Protokolle und gemeinsame Befehle
standardisiert, um die Systemkompatibilität weiter zu erhöhen [21].
1990 erfolgte die Aufnahme der SCPI (Standard Commands for Programmable
Instrumentation) in das Normungsdokument. Die SCPI entstand unter der Mitarbeit der
führenden Messgerätehersteller Brüel&Kjaer, Fluke, Hewlett Packard, Wavetec, National
Instruments, Keithley Instruments, Tektronix, Philips und Racal-Dana. In der SCPI sind
spezifische Befehle, bezogen jeweils auf eine Klasse von Messgeräten definiert. Geräte
verschiedener Hersteller, die der Norm IEEE-488.2 (1990) im vollen Umfang entsprechen,
garantieren eine vollkommene Systemkompatibilität und können aufgrund dessen ohne
Änderung des Anwenderprogramms ausgetauscht werden.
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 40 -
Mit der Definition des High-Speed-Protokolls HS488 wurde ein Schritt in Richtung
Maximierung des Gesamtsystemdurchsatzes getätigt. Geräte, die HS488-tauglich sind,
benutzen dieses Protokoll zur schnellen Datenübertragung. Bei gemischter Konfiguration, das
heißt bei einem Datenaustausch zwischen einem traditionellen und einem HS488-tauglichen
Gerät, stellen sich die Geräte automatisch auf den nach IEEE-488.1 definierten Dreileitungs-
Handshake ein. Beim HS488-Protokoll werden Datenraten über 7Mbyte/s erreicht.
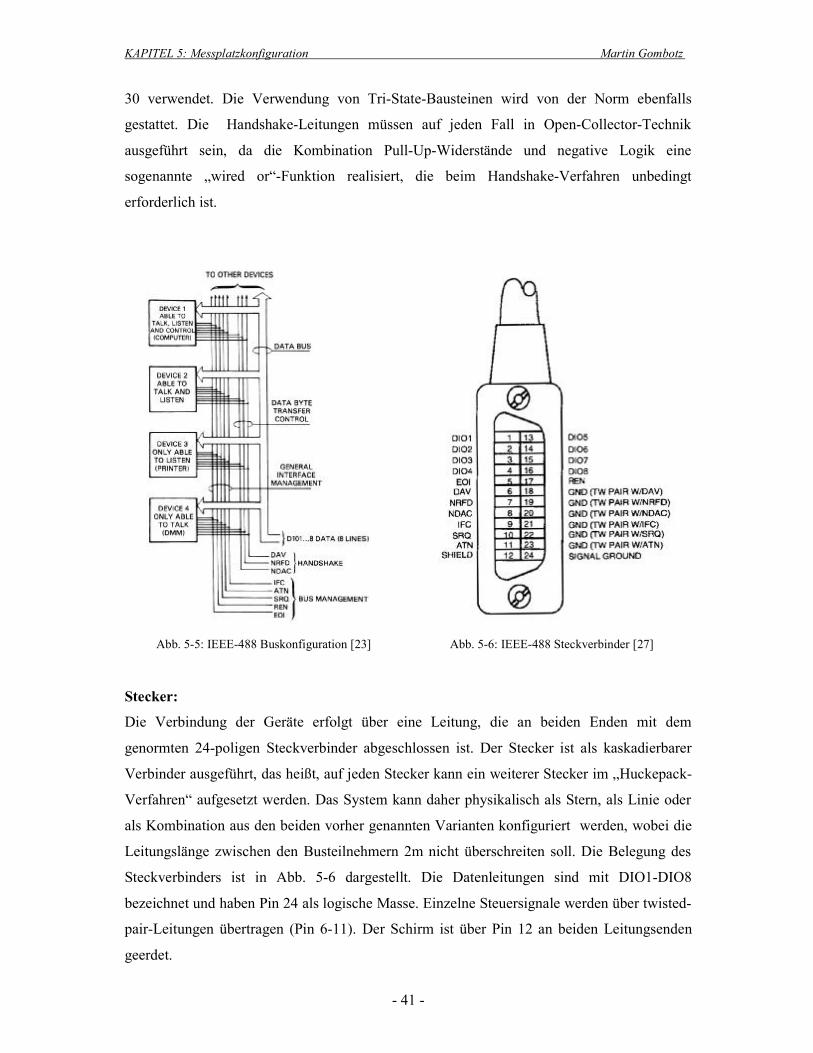
5.3.2 Aufbau und Funktion Der IEEE-488 Bus arbeitet als asynchroner Parallelbus (party line bus structure) und besteht
aus acht Datenleitungen und acht Steuerleitungen. Der Datenaustausch erfolgt bitparallel und
byteseriell und wird über drei Handshake-Leitungen gesteuert. Die restlichen fünf Leitungen
werden als Bus-Management-Leitungen bezeichnet und dienen zur Steuerung der Geräte-
Interfaces (Abb. 5-5). Sie sichern den geordneten Kommunikationsablauf beim
Datenaustausch.
Geräte am IEEE-488 Bussystem können als Talker (Datensender), als Listener
(Datenempfänger) oder als Controller arbeiten. Der Controller steuert alle anderen Teilnehmer
über den Bus. Ein Talker sendet Nachrichten an einen oder mehrere Listener. Grundsätzlich
ist es möglich, dass ein Gerät Talker, Listener und Controller sein kann, wobei aber zu
beachten ist, dass ein System nur einen aktiven Controller besitzen darf. Dieser wird als
Systemcontroller oder Controller in Charge bezeichnet und nimmt eine Sonderstellung im
System ein, da nur er die Befehle IFC (Interface Clear) und REN (Remote Enable) ausgeben
darf.
Insgesamt können an den Bus bis zu 15 Teilnehmer angeschlossen werden. Die Leitungslänge
des Systems darf maximal 20m betragen. Um aber die in der Norm festgelegte maximale
Transferrate von 1Mbyte/s zu erreichen, darf eine Leitungslänge von 10m nicht überschritten
werden und die Verbindung zwischen den Geräten nicht länger als 1m sein. Geräte am Bus
werden durch eine eindeutige Adresse zwischen 0 und 30 identifiziert. Die Einstellung dieser
erfolgt direkt am Gerät durch DIP-Schalter oder bei modernen Geräten über die
Frontplattentastatur.
Der IEEE-488-Bus arbeitet mit TTL-Pegeln und zwar mit negativer Logik. Als
Geräteausgangstreiber werden vorwiegend Open-Collector-Bausteine mit einem Fan-Out von
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 41 -
30 verwendet. Die Verwendung von Tri-State-Bausteinen wird von der Norm ebenfalls
gestattet. Die Handshake-Leitungen müssen auf jeden Fall in Open-Collector-Technik
ausgeführt sein, da die Kombination Pull-Up-Widerstände und negative Logik eine
sogenannte „wired or“-Funktion realisiert, die beim Handshake-Verfahren unbedingt
erforderlich ist.
Abb. 5-5: IEEE-488 Buskonfiguration [23]
Abb. 5-6: IEEE-488 Steckverbinder [27]
Stecker:
Die Verbindung der Geräte erfolgt über eine Leitung, die an beiden Enden mit dem
genormten 24-poligen Steckverbinder abgeschlossen ist. Der Stecker ist als kaskadierbarer
Verbinder ausgeführt, das heißt, auf jeden Stecker kann ein weiterer Stecker im „Huckepack-
Verfahren“ aufgesetzt werden. Das System kann daher physikalisch als Stern, als Linie oder
als Kombination aus den beiden vorher genannten Varianten konfiguriert werden, wobei die
Leitungslänge zwischen den Busteilnehmern 2m nicht überschreiten soll. Die Belegung des
Steckverbinders ist in Abb. 5-6 dargestellt. Die Datenleitungen sind mit DIO1-DIO8
bezeichnet und haben Pin 24 als logische Masse. Einzelne Steuersignale werden über twisted-
pair-Leitungen übertragen (Pin 6-11). Der Schirm ist über Pin 12 an beiden Leitungsenden
geerdet.
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 42 -
Datenleitungen:
• Über die Datenleitungen DIO1-DIO8 werden sowohl Daten als auch Befehle gesendet.
Die Empfänger können die Information unter Berücksichtigung der ATN-Leitung beim
Empfang richtig decodieren.
Bus Management Leitungen:
• IFC (Interface Clear) entspricht einem Reset-Befehl für alle Geräte-Interfaces.
Eventuelle Talker und Listener verlieren ihre Funktion und werden in einen definierten
Ausgangszustand übergeführt. Dieser Befehl darf nur vom Systemcontroller gegeben
werden und erfolgt normalerweise nach dem Einschalten des Systems.
• ATN (Attention) dient dem Controller um anderen Geräten die Qualität der Information
am Datenbus anzuzeigen. Werden IEEE-488-Befehle gesendet, ist die Leitung aktiv. Bei
gerätespezifischen Daten ist diese Leitung im inaktiven Zustand.
• REN (Remote Enable) darf nur vom Systemcontroller gesendet werden und versetzt
angeschlossene Geräte in den Fernsteuerbetrieb. Ist ein Gerät als Listener definiert, wird
automatisch die Frontplattentastatur deaktiviert.
• EOI (End Or Identify) beinhaltet zwei Funktionen. In Abhängigkeit der ATN-Leitung
wird entweder das letzte Byte eines Datenblocks angezeigt (ATN ist inaktiv) oder bei
einer Parallelabfrage (Parallel Poll) vom Systemcontroller die Aufforderung zur
Identifizierung eingeleitet (ATN ist aktiv).
• SRQ (Service Request) ist eine Leitung für alle Busteilnehmer und entspricht etwa einer
Interrupt-Leitung. Möchte ein Gerät vom Controller bedient werden, wird SRQ aktiviert.
Damit unterbricht der Controller seinen Programmablauf und stellt fest, welches Gerät
den Service Request angefordert hat (Serial Poll).
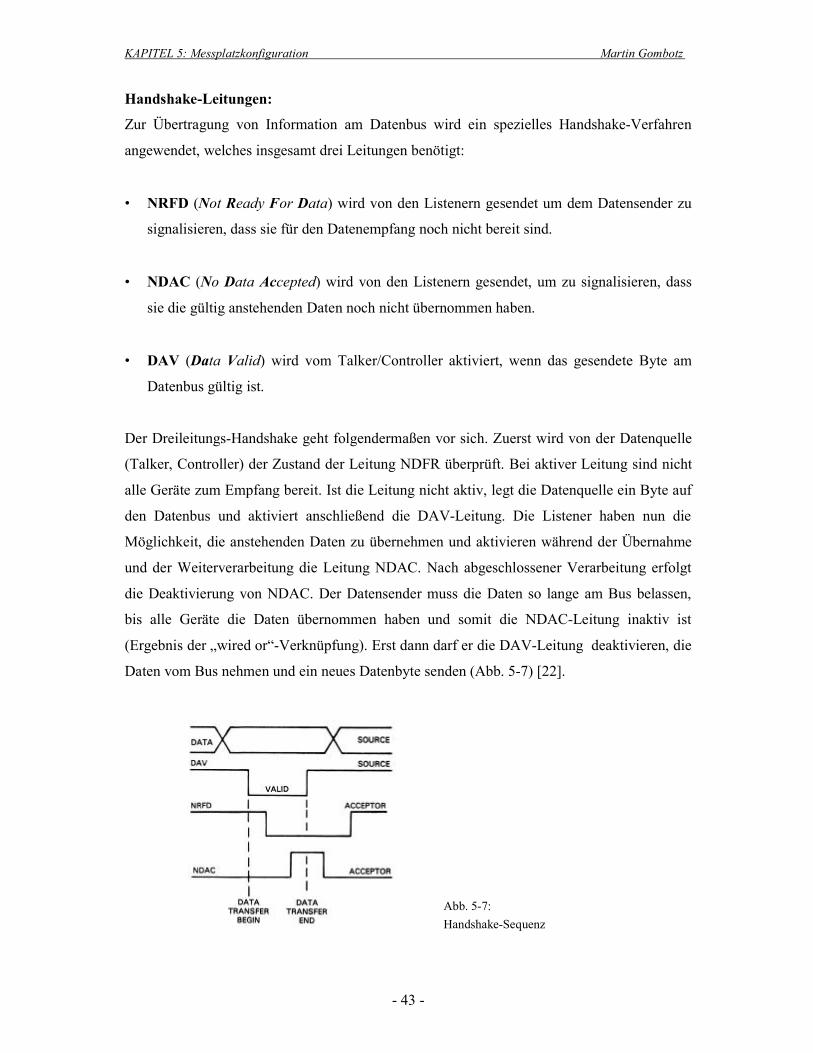
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 43 -
Handshake-Leitungen:
Zur Übertragung von Information am Datenbus wird ein spezielles Handshake-Verfahren
angewendet, welches insgesamt drei Leitungen benötigt:
• NRFD (Not Ready For Data) wird von den Listenern gesendet um dem Datensender zu
signalisieren, dass sie für den Datenempfang noch nicht bereit sind.
• NDAC (No Data Accepted) wird von den Listenern gesendet, um zu signalisieren, dass
sie die gültig anstehenden Daten noch nicht übernommen haben.
• DAV (Data Valid) wird vom Talker/Controller aktiviert, wenn das gesendete Byte am
Datenbus gültig ist.
Der Dreileitungs-Handshake geht folgendermaßen vor sich. Zuerst wird von der Datenquelle
(Talker, Controller) der Zustand der Leitung NDFR überprüft. Bei aktiver Leitung sind nicht
alle Geräte zum Empfang bereit. Ist die Leitung nicht aktiv, legt die Datenquelle ein Byte auf
den Datenbus und aktiviert anschließend die DAV-Leitung. Die Listener haben nun die
Möglichkeit, die anstehenden Daten zu übernehmen und aktivieren während der Übernahme
und der Weiterverarbeitung die Leitung NDAC. Nach abgeschlossener Verarbeitung erfolgt
die Deaktivierung von NDAC. Der Datensender muss die Daten so lange am Bus belassen,
bis alle Geräte die Daten übernommen haben und somit die NDAC-Leitung inaktiv ist
(Ergebnis der „wired or“-Verknüpfung). Erst dann darf er die DAV-Leitung deaktivieren, die
Daten vom Bus nehmen und ein neues Datenbyte senden (Abb. 5-7) [22].
Abb. 5-7: Handshake-Sequenz

KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 44 -
5.3.3 IEEE-488-Bus Befehle Die in der Norm beschriebenen Bus-Befehle lassen sich generell in drei Kategorien einteilen:
• Uniline Commands
• Multiline Commands
• Device Dependent Commands
Uniline Commands
Die unter Busmanagement-Leitungen beschriebenen Funktionen werden als Single-oder
Uniline-Befehle bezeichnet, da die Aktivierung einer dieser Leitungen die Ausführung eines
der Leitung zugeordneten IEEE-488-Befehls zur Folge hat.
Multiline Commands
Unter Multiline Commands werden Befehle verstanden, die über den Datenbus bei aktivierter
Attention-Leitung vom Controller gesendet werden. Der Befehlscode wird dabei als ASCII-
Zeichen gesendet, wobei nur 7 Bit verwendet werden. Nicht alle Geräte können die unten
genannten Befehle ausführen, da es für die Art des Gerätes vielleicht nicht notwendig oder gar
nicht möglich ist, auf einen bestimmten Befehl zu reagieren. Multiline-Befehle können in
Universal-Befehle, Adressierte Befehle, Adressierbefehle und in Sekundärbefehle eingeteilt
werden. Die drei erst genannten Typen werden als Primärbefehle bezeichnet und sind in
Tabelle 5-1 zusammengestellt.
Universalbefehle: Alle am System angeschlossen Geräte sind von diesen Befehlen
betroffen.
Adressierte Befehle: Diese Befehle betreffen nur jene Geräte, die momentan als Talker oder
Listener aktiv sind.
Adressierbefehle: Der Befehl beinhaltet die Adresse des Gerätes, das als Talker oder
Listener aktiviert wird (mit Ausnahme von UNL und UNT).
Sekundärbefehle: Sekundärbefehle oder auch Sekundäradressen werden zur Adressierung
von Geräten mit erweiterten Funktionen angewendet. Damit können
Subeinheiten des Gerätes aktiviert werden. Deshalb sind diese Befehle
auch immer gerätespezifisch. Da der Sekundärbefehl immer erst nach
einem Primärbefehl gesendet werden darf, kann der Code auch
mehrdeutig sein (Tabelle 5-2).
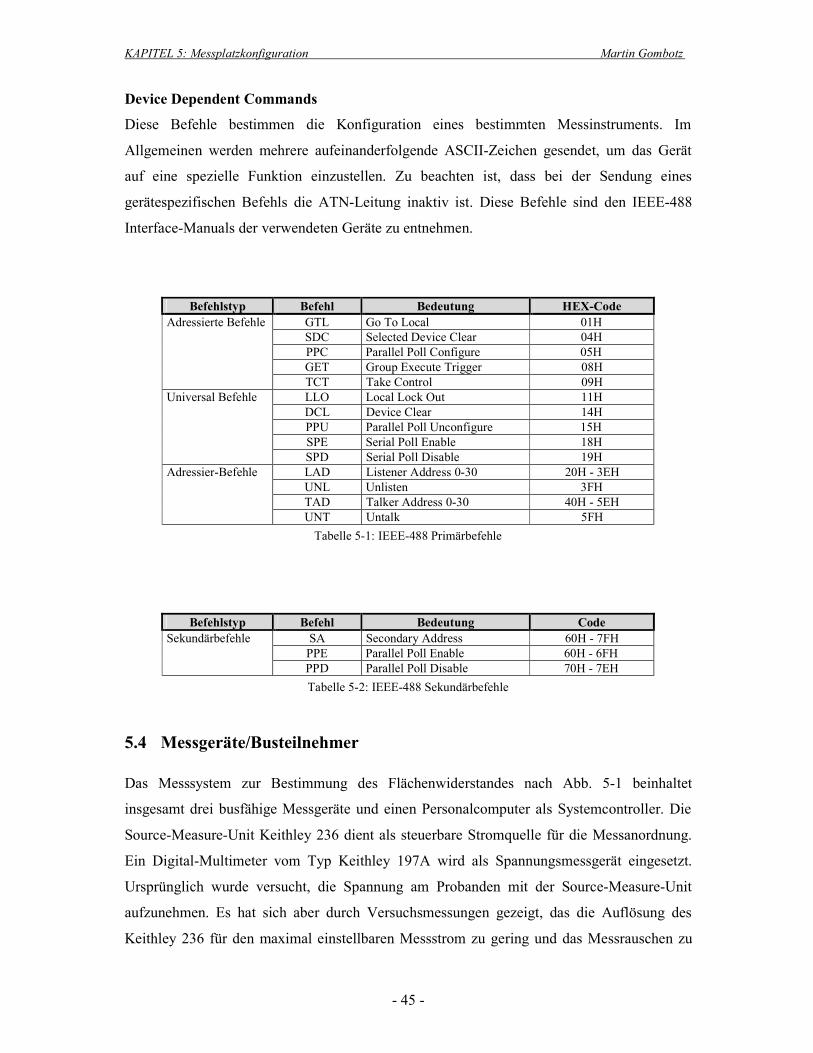
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 45 -
Device Dependent Commands
Diese Befehle bestimmen die Konfiguration eines bestimmten Messinstruments. Im
Allgemeinen werden mehrere aufeinanderfolgende ASCII-Zeichen gesendet, um das Gerät
auf eine spezielle Funktion einzustellen. Zu beachten ist, dass bei der Sendung eines
gerätespezifischen Befehls die ATN-Leitung inaktiv ist. Diese Befehle sind den IEEE-488
Interface-Manuals der verwendeten Geräte zu entnehmen.
Befehlstyp Befehl Bedeutung HEX-Code GTL Go To Local 01H SDC Selected Device Clear 04H PPC Parallel Poll Configure 05H GET Group Execute Trigger 08H
Adressierte Befehle
TCT Take Control 09H LLO Local Lock Out 11H DCL Device Clear 14H PPU Parallel Poll Unconfigure 15H SPE Serial Poll Enable 18H
Universal Befehle
SPD Serial Poll Disable 19H LAD Listener Address 0-30 20H - 3EH UNL Unlisten 3FH TAD Talker Address 0-30 40H - 5EH
Adressier-Befehle
UNT Untalk 5FH Tabelle 5-1: IEEE-488 Primärbefehle
Befehlstyp Befehl Bedeutung Code SA Secondary Address 60H - 7FH PPE Parallel Poll Enable 60H - 6FH
Sekundärbefehle
PPD Parallel Poll Disable 70H - 7EH Tabelle 5-2: IEEE-488 Sekundärbefehle
5.4 Messgeräte/Busteilnehmer
Das Messsystem zur Bestimmung des Flächenwiderstandes nach Abb. 5-1 beinhaltet
insgesamt drei busfähige Messgeräte und einen Personalcomputer als Systemcontroller. Die
Source-Measure-Unit Keithley 236 dient als steuerbare Stromquelle für die Messanordnung.
Ein Digital-Multimeter vom Typ Keithley 197A wird als Spannungsmessgerät eingesetzt.
Ursprünglich wurde versucht, die Spannung am Probanden mit der Source-Measure-Unit
aufzunehmen. Es hat sich aber durch Versuchsmessungen gezeigt, das die Auflösung des
Keithley 236 für den maximal einstellbaren Messstrom zu gering und das Messrauschen zu
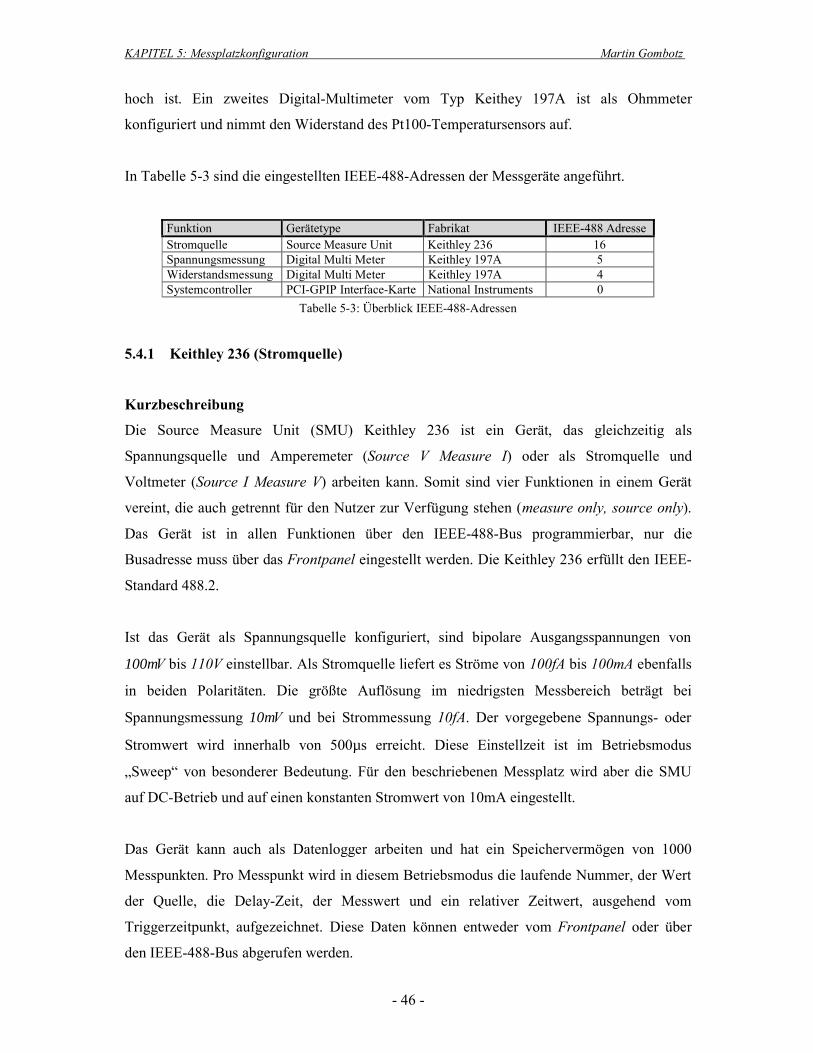
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 46 -
hoch ist. Ein zweites Digital-Multimeter vom Typ Keithey 197A ist als Ohmmeter
konfiguriert und nimmt den Widerstand des Pt100-Temperatursensors auf.
In Tabelle 5-3 sind die eingestellten IEEE-488-Adressen der Messgeräte angeführt.
Funktion Gerätetype Fabrikat IEEE-488 Adresse Stromquelle Source Measure Unit Keithley 236 16 Spannungsmessung Digital Multi Meter Keithley 197A 5 Widerstandsmessung Digital Multi Meter Keithley 197A 4 Systemcontroller PCI-GPIP Interface-Karte National Instruments 0
Tabelle 5-3: Überblick IEEE-488-Adressen
5.4.1 Keithley 236 (Stromquelle)
Kurzbeschreibung
Die Source Measure Unit (SMU) Keithley 236 ist ein Gerät, das gleichzeitig als
Spannungsquelle und Amperemeter (Source V Measure I) oder als Stromquelle und
Voltmeter (Source I Measure V) arbeiten kann. Somit sind vier Funktionen in einem Gerät
vereint, die auch getrennt für den Nutzer zur Verfügung stehen (measure only, source only).
Das Gerät ist in allen Funktionen über den IEEE-488-Bus programmierbar, nur die
Busadresse muss über das Frontpanel eingestellt werden. Die Keithley 236 erfüllt den IEEE-
Standard 488.2.
Ist das Gerät als Spannungsquelle konfiguriert, sind bipolare Ausgangsspannungen von
100µV bis 110V einstellbar. Als Stromquelle liefert es Ströme von 100fA bis 100mA ebenfalls
in beiden Polaritäten. Die größte Auflösung im niedrigsten Messbereich beträgt bei
Spannungsmessung 10µV und bei Strommessung 10fA. Der vorgegebene Spannungs- oder
Stromwert wird innerhalb von 500µs erreicht. Diese Einstellzeit ist im Betriebsmodus
„Sweep“ von besonderer Bedeutung. Für den beschriebenen Messplatz wird aber die SMU
auf DC-Betrieb und auf einen konstanten Stromwert von 10mA eingestellt.
Das Gerät kann auch als Datenlogger arbeiten und hat ein Speichervermögen von 1000
Messpunkten. Pro Messpunkt wird in diesem Betriebsmodus die laufende Nummer, der Wert
der Quelle, die Delay-Zeit, der Messwert und ein relativer Zeitwert, ausgehend vom
Triggerzeitpunkt, aufgezeichnet. Diese Daten können entweder vom Frontpanel oder über
den IEEE-488-Bus abgerufen werden.
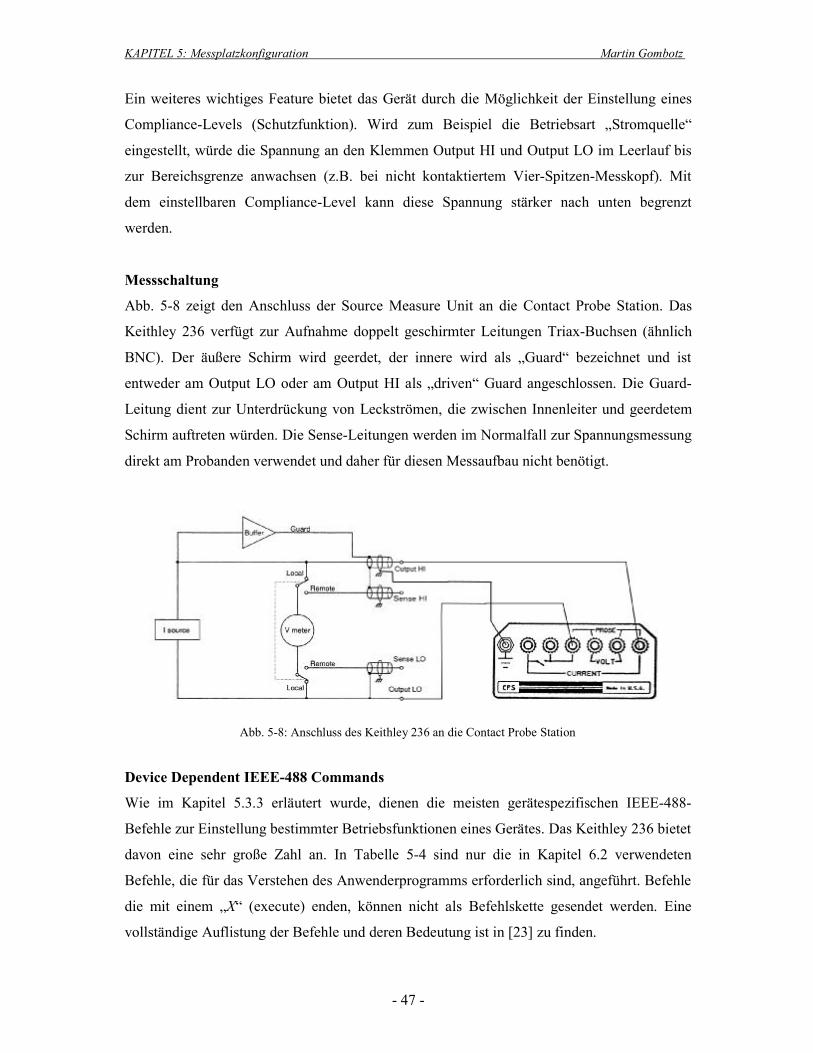
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 47 -
Ein weiteres wichtiges Feature bietet das Gerät durch die Möglichkeit der Einstellung eines
Compliance-Levels (Schutzfunktion). Wird zum Beispiel die Betriebsart „Stromquelle“
eingestellt, würde die Spannung an den Klemmen Output HI und Output LO im Leerlauf bis
zur Bereichsgrenze anwachsen (z.B. bei nicht kontaktiertem Vier-Spitzen-Messkopf). Mit
dem einstellbaren Compliance-Level kann diese Spannung stärker nach unten begrenzt
werden.
Messschaltung
Abb. 5-8 zeigt den Anschluss der Source Measure Unit an die Contact Probe Station. Das
Keithley 236 verfügt zur Aufnahme doppelt geschirmter Leitungen Triax-Buchsen (ähnlich
BNC). Der äußere Schirm wird geerdet, der innere wird als „Guard“ bezeichnet und ist
entweder am Output LO oder am Output HI als „driven“ Guard angeschlossen. Die Guard-
Leitung dient zur Unterdrückung von Leckströmen, die zwischen Innenleiter und geerdetem
Schirm auftreten würden. Die Sense-Leitungen werden im Normalfall zur Spannungsmessung
direkt am Probanden verwendet und daher für diesen Messaufbau nicht benötigt.
Abb. 5-8: Anschluss des Keithley 236 an die Contact Probe Station Device Dependent IEEE-488 Commands
Wie im Kapitel 5.3.3 erläutert wurde, dienen die meisten gerätespezifischen IEEE-488-
Befehle zur Einstellung bestimmter Betriebsfunktionen eines Gerätes. Das Keithley 236 bietet
davon eine sehr große Zahl an. In Tabelle 5-4 sind nur die in Kapitel 6.2 verwendeten
Befehle, die für das Verstehen des Anwenderprogramms erforderlich sind, angeführt. Befehle
die mit einem „X“ (execute) enden, können nicht als Befehlskette gesendet werden. Eine
vollständige Auflistung der Befehle und deren Bedeutung ist in [23] zu finden.
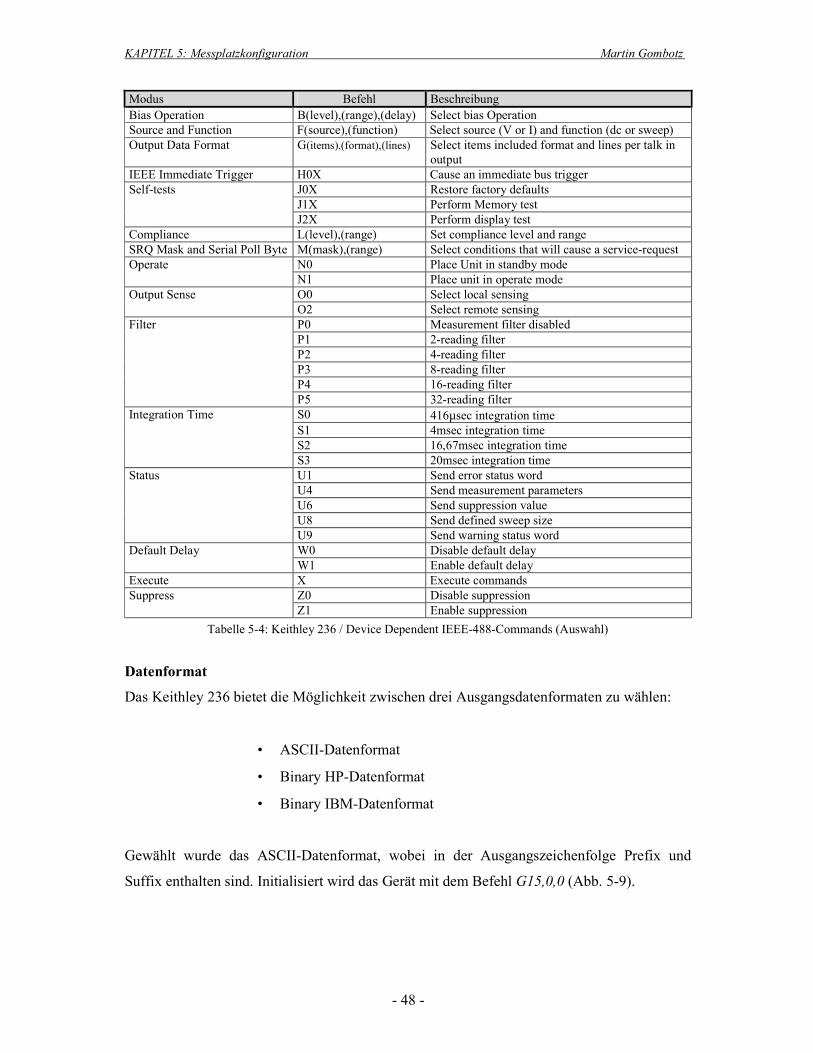
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 48 -
Modus Befehl Beschreibung Bias Operation B(level),(range),(delay) Select bias Operation Source and Function F(source),(function) Select source (V or I) and function (dc or sweep) Output Data Format G(items),(format),(lines) Select items included format and lines per talk in
output IEEE Immediate Trigger H0X Cause an immediate bus trigger
J0X Restore factory defaults J1X Perform Memory test
Self-tests
J2X Perform display test Compliance L(level),(range) Set compliance level and range SRQ Mask and Serial Poll Byte M(mask),(range) Select conditions that will cause a service-request
N0 Place Unit in standby mode Operate N1 Place unit in operate mode O0 Select local sensing Output Sense O2 Select remote sensing P0 Measurement filter disabled P1 2-reading filter P2 4-reading filter P3 8-reading filter P4 16-reading filter
Filter
P5 32-reading filter S0 416µsec integration time S1 4msec integration time S2 16,67msec integration time
Integration Time
S3 20msec integration time U1 Send error status word U4 Send measurement parameters U6 Send suppression value U8 Send defined sweep size
Status
U9 Send warning status word W0 Disable default delay Default Delay W1 Enable default delay
Execute X Execute commands Z0 Disable suppression Suppress Z1 Enable suppression
Tabelle 5-4: Keithley 236 / Device Dependent IEEE-488-Commands (Auswahl)
Datenformat
Das Keithley 236 bietet die Möglichkeit zwischen drei Ausgangsdatenformaten zu wählen:
• ASCII-Datenformat
• Binary HP-Datenformat
• Binary IBM-Datenformat
Gewählt wurde das ASCII-Datenformat, wobei in der Ausgangszeichenfolge Prefix und
Suffix enthalten sind. Initialisiert wird das Gerät mit dem Befehl G15,0,0 (Abb. 5-9).
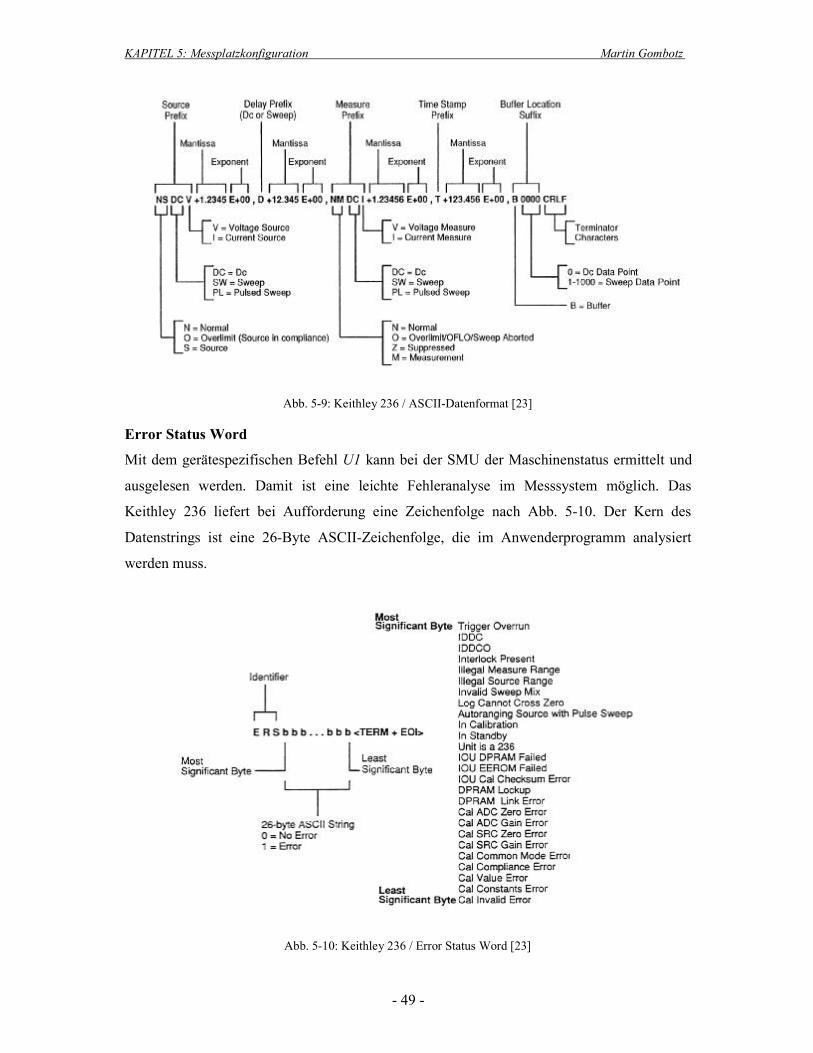
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 49 -
Abbildung 5-9: Datenformat Keithley 236
Abb. 5-9: Keithley 236 / ASCII-Datenformat [23] Error Status Word
Mit dem gerätespezifischen Befehl U1 kann bei der SMU der Maschinenstatus ermittelt und
ausgelesen werden. Damit ist eine leichte Fehleranalyse im Messsystem möglich. Das
Keithley 236 liefert bei Aufforderung eine Zeichenfolge nach Abb. 5-10. Der Kern des
Datenstrings ist eine 26-Byte ASCII-Zeichenfolge, die im Anwenderprogramm analysiert
werden muss.
Abb. 5-10: Keithley 236 / Error Status Word [23]
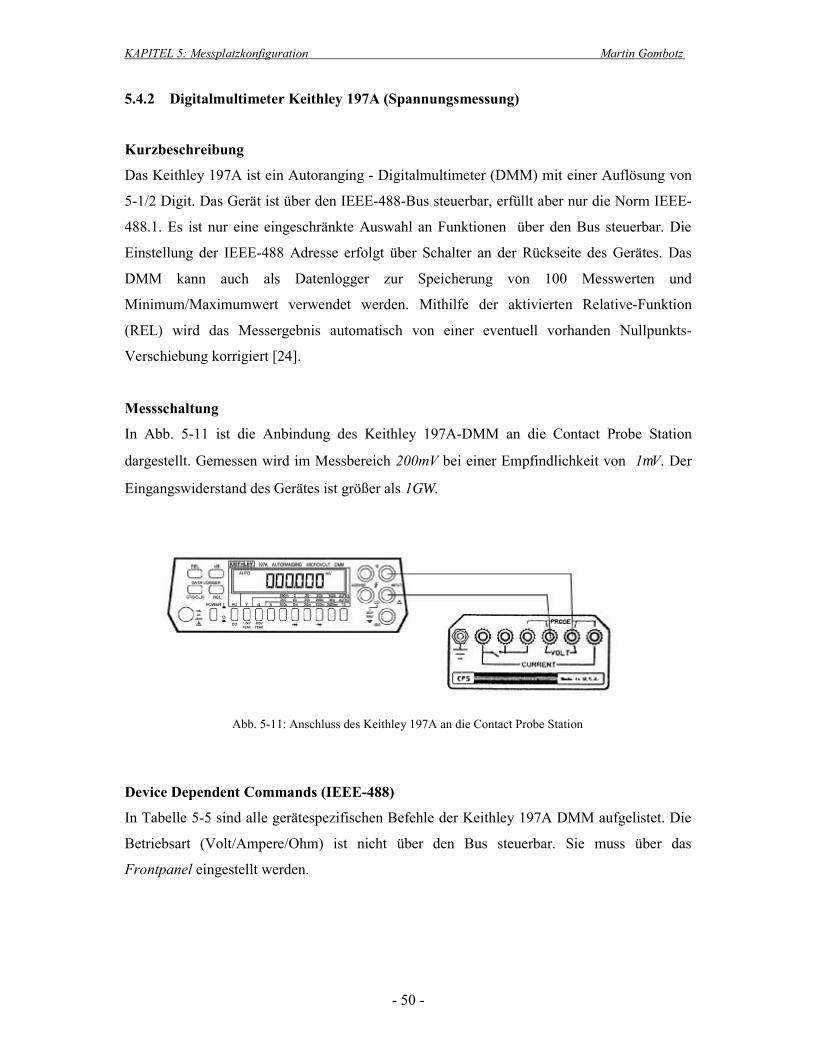
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 50 -
5.4.2 Digitalmultimeter Keithley 197A (Spannungsmessung)
Kurzbeschreibung
Das Keithley 197A ist ein Autoranging - Digitalmultimeter (DMM) mit einer Auflösung von
5-1/2 Digit. Das Gerät ist über den IEEE-488-Bus steuerbar, erfüllt aber nur die Norm IEEE-
488.1. Es ist nur eine eingeschränkte Auswahl an Funktionen über den Bus steuerbar. Die
Einstellung der IEEE-488 Adresse erfolgt über Schalter an der Rückseite des Gerätes. Das
DMM kann auch als Datenlogger zur Speicherung von 100 Messwerten und
Minimum/Maximumwert verwendet werden. Mithilfe der aktivierten Relative-Funktion
(REL) wird das Messergebnis automatisch von einer eventuell vorhanden Nullpunkts-
Verschiebung korrigiert [24].
Messschaltung
In Abb. 5-11 ist die Anbindung des Keithley 197A-DMM an die Contact Probe Station
dargestellt. Gemessen wird im Messbereich 200mV bei einer Empfindlichkeit von 1µV. Der
Eingangswiderstand des Gerätes ist größer als 1GΩ.
Abb. 5-11: Anschluss des Keithley 197A an die Contact Probe Station
Device Dependent Commands (IEEE-488)
In Tabelle 5-5 sind alle gerätespezifischen Befehle der Keithley 197A DMM aufgelistet. Die
Betriebsart (Volt/Ampere/Ohm) ist nicht über den Bus steuerbar. Sie muss über das
Frontpanel eingestellt werden.
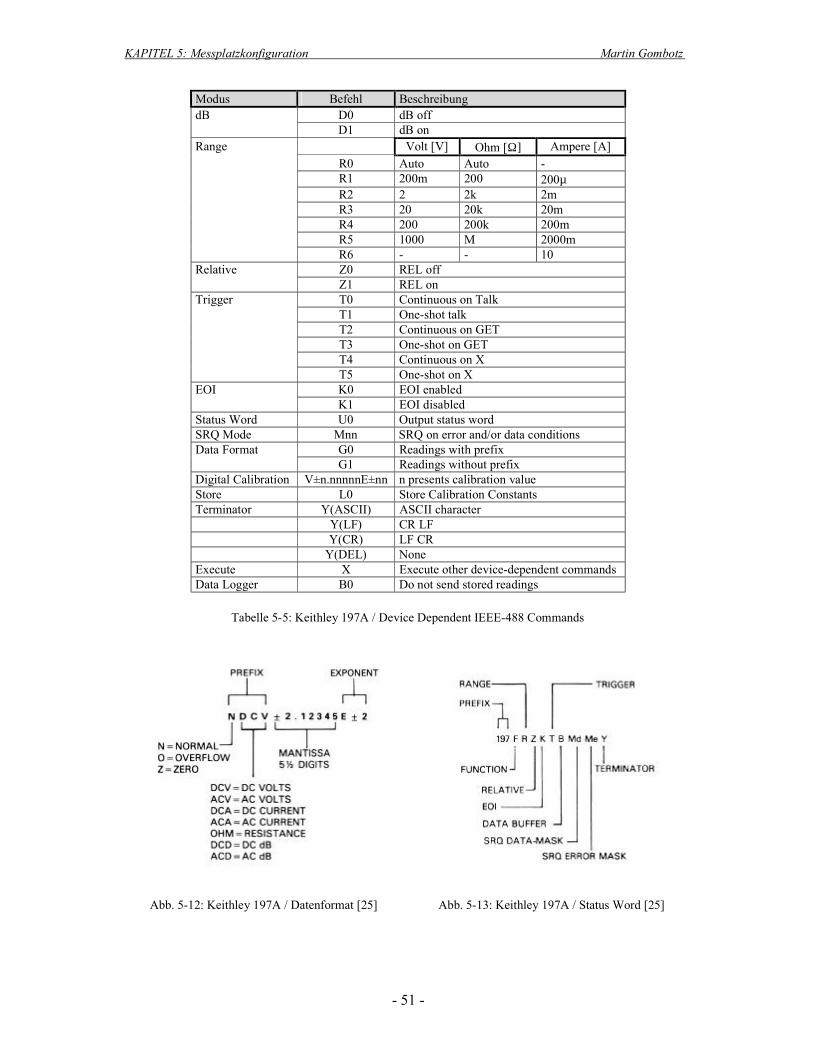
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 51 -
Modus Befehl Beschreibung D0 dB off dB D1 dB on
Volt [V] Ohm [Ω] Ampere [A] R0 Auto Auto - R1 200m 200 200µ R2 2 2k 2m R3 20 20k 20m R4 200 200k 200m R5 1000 M 2000m
Range
R6 - - 10 Z0 REL off Relative Z1 REL on T0 Continuous on Talk T1 One-shot talk T2 Continuous on GET T3 One-shot on GET T4 Continuous on X
Trigger
T5 One-shot on X K0 EOI enabled EOI K1 EOI disabled
Status Word U0 Output status word SRQ Mode Mnn SRQ on error and/or data conditions
G0 Readings with prefix Data Format G1 Readings without prefix
Digital Calibration V±n.nnnnnE±nn n presents calibration value Store L0 Store Calibration Constants Terminator Y(ASCII) ASCII character Y(LF) CR LF Y(CR) LF CR Y(DEL) None Execute X Execute other device-dependent commands Data Logger B0 Do not send stored readings
Tabelle 5-5: Keithley 197A / Device Dependent IEEE-488 Commands
Abb. 5-12: Keithley 197A / Datenformat [25]
Abb. 5-13: Keithley 197A / Status Word [25]
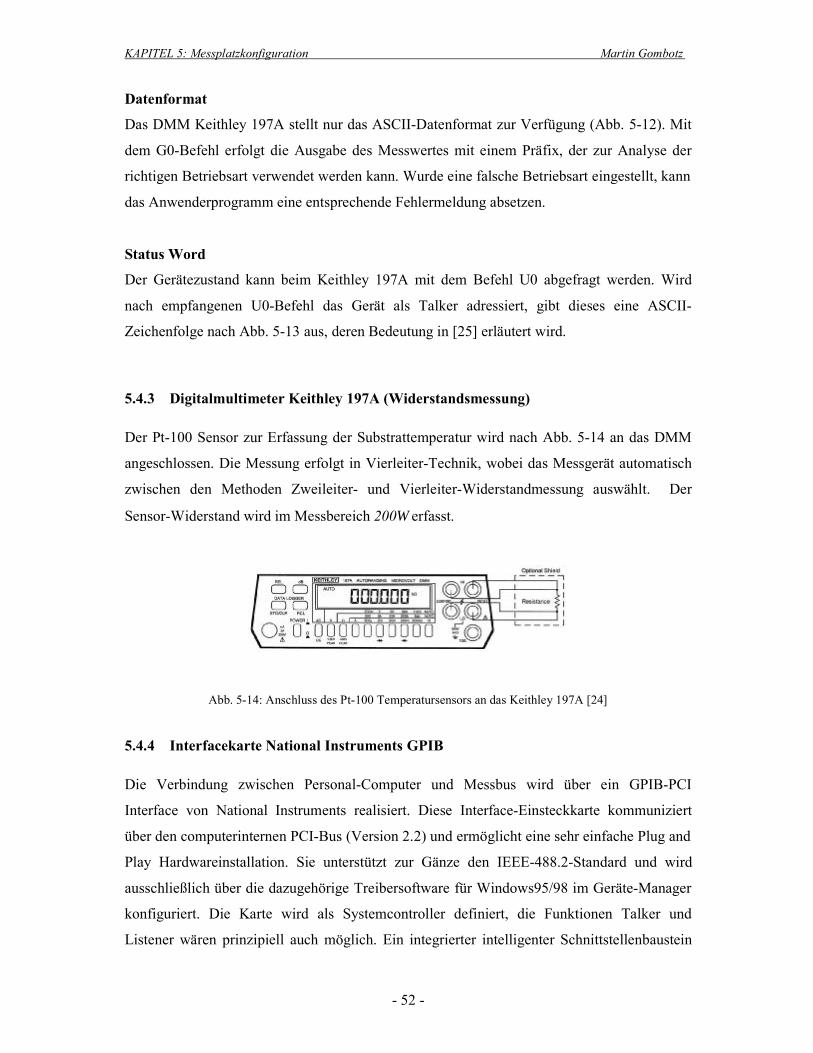
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 52 -
Datenformat
Das DMM Keithley 197A stellt nur das ASCII-Datenformat zur Verfügung (Abb. 5-12). Mit
dem G0-Befehl erfolgt die Ausgabe des Messwertes mit einem Präfix, der zur Analyse der
richtigen Betriebsart verwendet werden kann. Wurde eine falsche Betriebsart eingestellt, kann
das Anwenderprogramm eine entsprechende Fehlermeldung absetzen.
Status Word
Der Gerätezustand kann beim Keithley 197A mit dem Befehl U0 abgefragt werden. Wird
nach empfangenen U0-Befehl das Gerät als Talker adressiert, gibt dieses eine ASCII-
Zeichenfolge nach Abb. 5-13 aus, deren Bedeutung in [25] erläutert wird.
5.4.3 Digitalmultimeter Keithley 197A (Widerstandsmessung) Der Pt-100 Sensor zur Erfassung der Substrattemperatur wird nach Abb. 5-14 an das DMM
angeschlossen. Die Messung erfolgt in Vierleiter-Technik, wobei das Messgerät automatisch
zwischen den Methoden Zweileiter- und Vierleiter-Widerstandmessung auswählt. Der
Sensor-Widerstand wird im Messbereich 200Ω erfasst.
Abb. 5-14: Anschluss des Pt-100 Temperatursensors an das Keithley 197A [24]
5.4.4 Interfacekarte National Instruments GPIB Die Verbindung zwischen Personal-Computer und Messbus wird über ein GPIB-PCI
Interface von National Instruments realisiert. Diese Interface-Einsteckkarte kommuniziert
über den computerinternen PCI-Bus (Version 2.2) und ermöglicht eine sehr einfache Plug and
Play Hardwareinstallation. Sie unterstützt zur Gänze den IEEE-488.2-Standard und wird
ausschließlich über die dazugehörige Treibersoftware für Windows95/98 im Geräte-Manager
konfiguriert. Die Karte wird als Systemcontroller definiert, die Funktionen Talker und
Listener wären prinzipiell auch möglich. Ein integrierter intelligenter Schnittstellenbaustein
KAPITEL 5: Messplatzkonfiguration Martin Gombotz
- 53 -
erledigt einen großen Teil des Busmanagements, vor allem aber den Quittierungsablauf. Im
Modus „3-Leitungs-Handshake“ sind Datentransferraten bis zu 1,5Mbyte/s möglich. Für das
Hochgeschwindigkeits-GPIB-Protokoll HS488 werden Datenraten von mehr als 7,7Mbytes/s
erreicht.
Die Schlüsselkomponenten der Interface-Karte sind die ASIC-Bausteine PCI-MITE
(Peripheral Component Interconnect; MIPS Interface To External) und TNT4882C. Der
erstgenannte Baustein realisiert die Anknüpfung an den PCI-Bus und beinhaltet die vom PCI-
Standard definierten Konfigurationsregister, sowie Steuer- und Statusregister. Er dekodiert
die Adress- und Steuersignale des PCI-Bus. Ein zusätzlicher DMA-Controller steigert die
Performance beim Datenaustausch. Der TNT4882C ist das erste singlechip IEEE-488.2
Talker-, Listener- und Controller-Interface mit integriertem GPIB-Transceiver.
Übertragungsfunktionen wie automatischer Handshake, Holdoff nach einem Read-Befehl,
sowie die automatische Übertragung der END-Anweisung nach einem Write-Befehl werden
vom ASIC selbstständig ausgeführt. Das Zeitmanagement der CPU, in dem das
Anwenderprogramm abläuft, wird durch diese Funktionen wesentlich verbessert. Die
Transceiver sind als Tri-State-Treiber aufgebaut und schützen den GPIB-Bus in der power-
up/power-down -Phase. Bei einem Parallel-Poll-Befehl werden die Treiber automatisch auf
Open-Collector Betrieb umgeschaltet [26].
Die physikalische Kopplung an den Bus erfolgt durch den 24-poligen IEEE-488 Standard-
Steckverbinder, der sich an der Rückseite der Karte befindet. Da diese Interface-Karte als
Systemcontroller arbeitet, wird die IEEE-488 Busadresse "0" eingestellt.
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 54 -
6 Der Messplatz als virtuelles Instrument
In der modernen Messtechnik sind in den letzten Jahren „virtuelle Instrumente“ zum
Schlagwort geworden, da sie den Aufbau komplexer Messsysteme, basierend auf
Standardcomputersystemen und kosteneffizienter messtechnischer Hardware, erlauben. Der
Vorteil eines derartigen softwarebezogenen Systems ist die Nutzung der rechentechnischen,
graphischen und netzwerktechnischen Ressourcen herkömmlicher Computersysteme. Daraus
resultiert eine hohe Leistungsfähigkeit und Flexibilität aller messtechnischen Funktionen und
Anwendungen. Der Grund für die weitverbreitete Verwendung virtueller Instrumente ist in
diesen Merkmalen zu finden. Nicht nur in der klassischen Laborautomatisierung, sondern
auch in der Prozesssteuerung und -visualisierung, in der Automobil- und Luftfahrtindustrie
und bei medizinischen Anwendungen hat sich die virtuelle Instrumentierung immer stärker
etablieren können.
Auf dem Markt werden von verschiedenen Herstellern Werkzeuge zur Entwicklung von
Instrumentierungssystemen angeboten (z.B. LabWindows, HP-VEE, LabTechNotebook, etc.).
National Instruments stellt seit 1986 mit dem Produkt LabVIEW eine Software zur
Verfügung, mit der eine sehr komfortable und effiziente Erstellung virtueller Instrumente
vorgenommen werden kann.
6.1 Grundlagen zur Software LabVIEW
Die Entwicklungsumgebung LabVIEW (Laboratory Virtual Instrument Engineering
Workbench) mit seiner Programmiersprache „G“ stützt sich auf die oben beschriebene
Metapher der virtuellen Instrumente. Die Software wird für die Betriebssysteme
Windows95/98/NT, SunSPARC, Mac OS sowie HP-UX angeboten. Die in LabVIEW
erstellten virtuellen Instrumente (VI) können ohne Einschränkung der Portabilität auf den
vorher genannten Betriebssystemen verwendet werden.
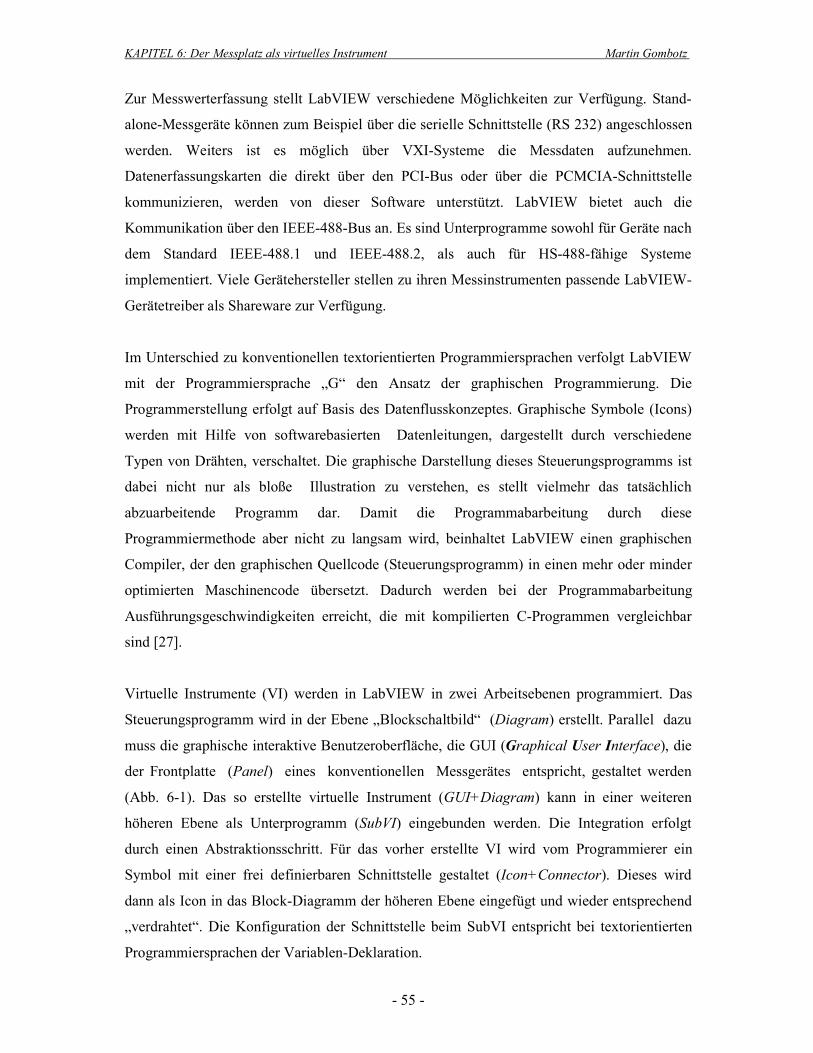
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 55 -
Zur Messwerterfassung stellt LabVIEW verschiedene Möglichkeiten zur Verfügung. Stand-
alone-Messgeräte können zum Beispiel über die serielle Schnittstelle (RS 232) angeschlossen
werden. Weiters ist es möglich über VXI-Systeme die Messdaten aufzunehmen.
Datenerfassungskarten die direkt über den PCI-Bus oder über die PCMCIA-Schnittstelle
kommunizieren, werden von dieser Software unterstützt. LabVIEW bietet auch die
Kommunikation über den IEEE-488-Bus an. Es sind Unterprogramme sowohl für Geräte nach
dem Standard IEEE-488.1 und IEEE-488.2, als auch für HS-488-fähige Systeme
implementiert. Viele Gerätehersteller stellen zu ihren Messinstrumenten passende LabVIEW-
Gerätetreiber als Shareware zur Verfügung.
Im Unterschied zu konventionellen textorientierten Programmiersprachen verfolgt LabVIEW
mit der Programmiersprache „G“ den Ansatz der graphischen Programmierung. Die
Programmerstellung erfolgt auf Basis des Datenflusskonzeptes. Graphische Symbole (Icons)
werden mit Hilfe von softwarebasierten Datenleitungen, dargestellt durch verschiedene
Typen von Drähten, verschaltet. Die graphische Darstellung dieses Steuerungsprogramms ist
dabei nicht nur als bloße Illustration zu verstehen, es stellt vielmehr das tatsächlich
abzuarbeitende Programm dar. Damit die Programmabarbeitung durch diese
Programmiermethode aber nicht zu langsam wird, beinhaltet LabVIEW einen graphischen
Compiler, der den graphischen Quellcode (Steuerungsprogramm) in einen mehr oder minder
optimierten Maschinencode übersetzt. Dadurch werden bei der Programmabarbeitung
Ausführungsgeschwindigkeiten erreicht, die mit kompilierten C-Programmen vergleichbar
sind [27].
Virtuelle Instrumente (VI) werden in LabVIEW in zwei Arbeitsebenen programmiert. Das
Steuerungsprogramm wird in der Ebene „Blockschaltbild“ (Diagram) erstellt. Parallel dazu
muss die graphische interaktive Benutzeroberfläche, die GUI (Graphical User Interface), die
der Frontplatte (Panel) eines konventionellen Messgerätes entspricht, gestaltet werden
(Abb. 6-1). Das so erstellte virtuelle Instrument (GUI+Diagram) kann in einer weiteren
höheren Ebene als Unterprogramm (SubVI) eingebunden werden. Die Integration erfolgt
durch einen Abstraktionsschritt. Für das vorher erstellte VI wird vom Programmierer ein
Symbol mit einer frei definierbaren Schnittstelle gestaltet (Icon+Connector). Dieses wird
dann als Icon in das Block-Diagramm der höheren Ebene eingefügt und wieder entsprechend
„verdrahtet“. Die Konfiguration der Schnittstelle beim SubVI entspricht bei textorientierten
Programmiersprachen der Variablen-Deklaration.
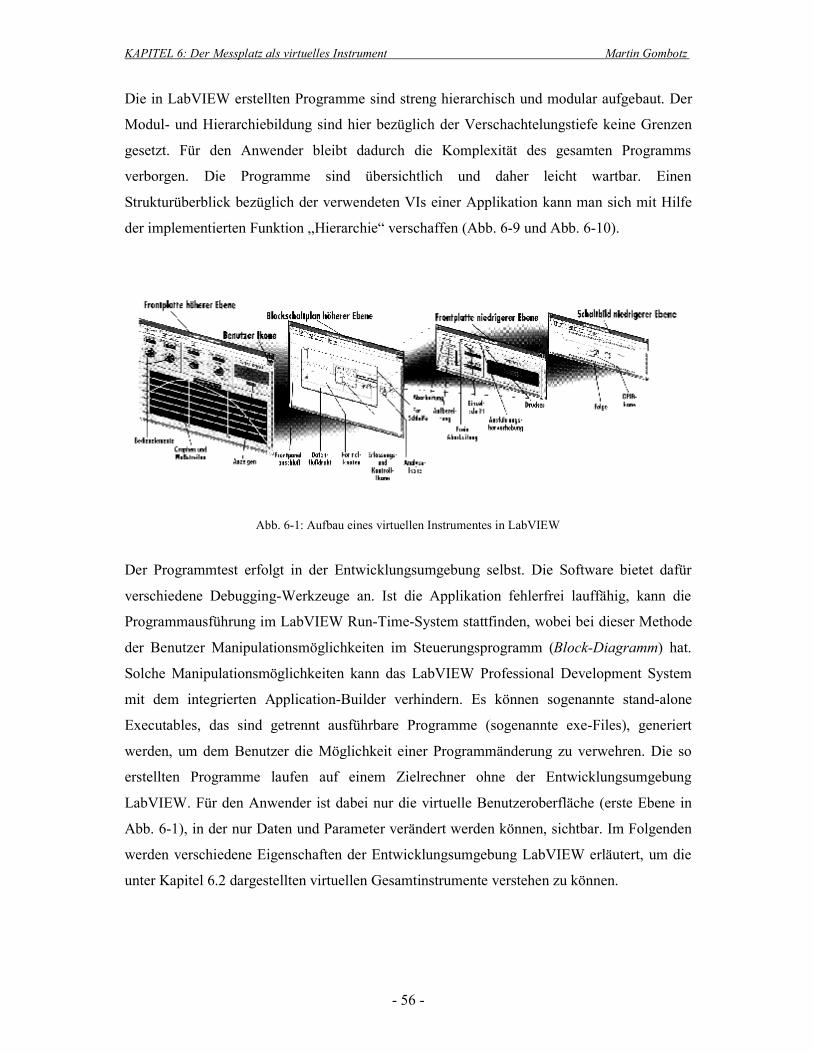
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 56 -
Die in LabVIEW erstellten Programme sind streng hierarchisch und modular aufgebaut. Der
Modul- und Hierarchiebildung sind hier bezüglich der Verschachtelungstiefe keine Grenzen
gesetzt. Für den Anwender bleibt dadurch die Komplexität des gesamten Programms
verborgen. Die Programme sind übersichtlich und daher leicht wartbar. Einen
Strukturüberblick bezüglich der verwendeten VIs einer Applikation kann man sich mit Hilfe
der implementierten Funktion „Hierarchie“ verschaffen (Abb. 6-9 und Abb. 6-10).
Abb. 6-1: Aufbau eines virtuellen Instrumentes in LabVIEW Der Programmtest erfolgt in der Entwicklungsumgebung selbst. Die Software bietet dafür
verschiedene Debugging-Werkzeuge an. Ist die Applikation fehlerfrei lauffähig, kann die
Programmausführung im LabVIEW Run-Time-System stattfinden, wobei bei dieser Methode
der Benutzer Manipulationsmöglichkeiten im Steuerungsprogramm (Block-Diagramm) hat.
Solche Manipulationsmöglichkeiten kann das LabVIEW Professional Development System
mit dem integrierten Application-Builder verhindern. Es können sogenannte stand-alone
Executables, das sind getrennt ausführbare Programme (sogenannte exe-Files), generiert
werden, um dem Benutzer die Möglichkeit einer Programmänderung zu verwehren. Die so
erstellten Programme laufen auf einem Zielrechner ohne der Entwicklungsumgebung
LabVIEW. Für den Anwender ist dabei nur die virtuelle Benutzeroberfläche (erste Ebene in
Abb. 6-1), in der nur Daten und Parameter verändert werden können, sichtbar. Im Folgenden
werden verschiedene Eigenschaften der Entwicklungsumgebung LabVIEW erläutert, um die
unter Kapitel 6.2 dargestellten virtuellen Gesamtinstrumente verstehen zu können.
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 57 -
6.1.1 Das Frontpanel Abb. 6-2 zeigt ein LabVIEW-Frontpanel in dem sich nur ein Drehknopf befindet. Dieser
wurde aus der Controls-Palette eingefügt, in der sich alle interaktiven Frontpanel-Objekte
befinden. Unterschieden wird bei diesen Objekten zwischen Controls (Eingabe- oder
Steuerelemente) und Indicators (Anzeigeelemente). In der Controls-Palette befinden sich
hinter den dargestellten Symbolen Subpaletten mit einer großen Auswahl verschiedener
Varianten dieser interaktiven Objekte (z.B. Knöpfe, Schalter Graphen), die einfach per
Mausklick in das geöffnete Frontpanel eingefügt werden können. Parallel zum
Einfügevorgang entsteht im Blockdiagramm ein Terminal mit derselben Bezeichnung (Label).
Neben der Controls-Palette ist auch die Tools-Palette im Frontpanel verfügbar. Sie
ermöglicht zum Beispiel das Verändern der Drehknopfstellung mit dem Bedien-Tool
(Zeigefinger).
Abb. 6-2: LabVIEW-Frontpanel
6.1.2 Das Block-Diagramm Das Block-Diagramm in Abb. 6-3 enthält korrespondierend zu Abb. 6-2 bereits die Variable
„Pegel [mV]“, die mit „DBL“ (Double-precission-floating-point) charakterisiert wird. In das
Block-Diagramm werden weiters die Symbole eingefügt, die verschiedene Funktionen und
VIs repräsentieren. Sie werden alle aus der Functions-Palette ausgewählt, wobei jeweils
hinter den dargestellten Symbolen eine Subpalette zu finden ist. Die Symbole werden im
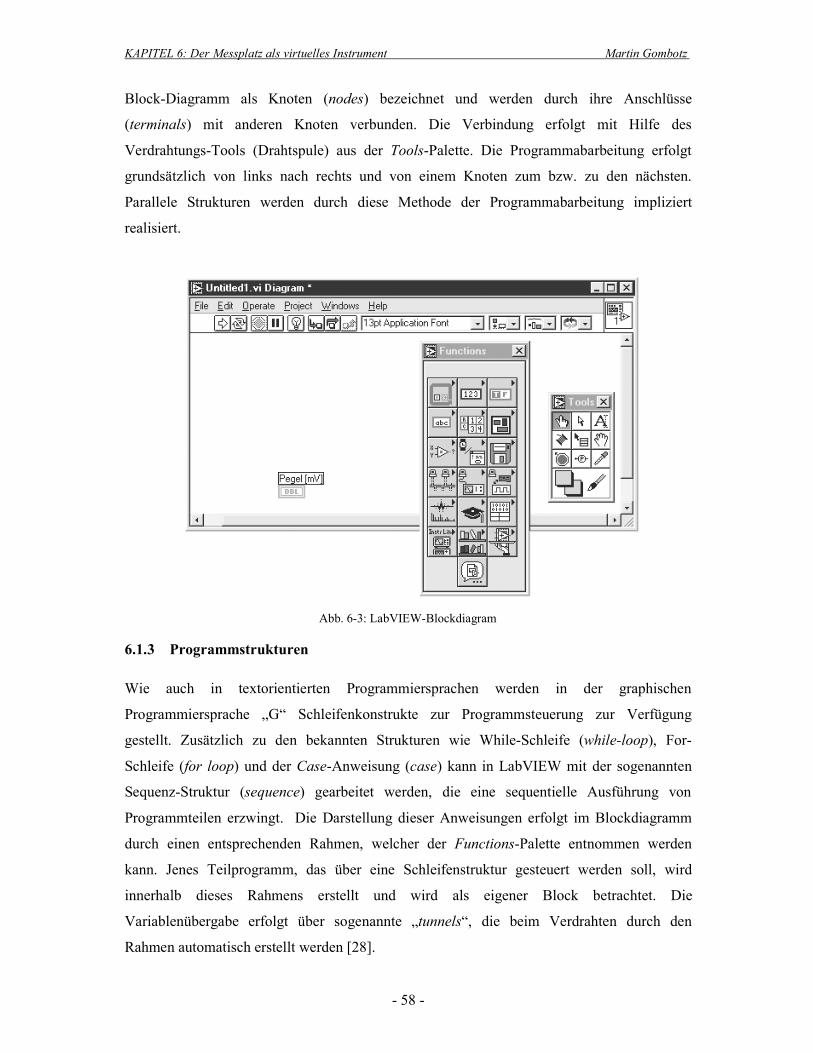
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 58 -
Block-Diagramm als Knoten (nodes) bezeichnet und werden durch ihre Anschlüsse
(terminals) mit anderen Knoten verbunden. Die Verbindung erfolgt mit Hilfe des
Verdrahtungs-Tools (Drahtspule) aus der Tools-Palette. Die Programmabarbeitung erfolgt
grundsätzlich von links nach rechts und von einem Knoten zum bzw. zu den nächsten.
Parallele Strukturen werden durch diese Methode der Programmabarbeitung impliziert
realisiert.
Abb. 6-3: LabVIEW-Blockdiagram
6.1.3 Programmstrukturen Wie auch in textorientierten Programmiersprachen werden in der graphischen
Programmiersprache „G“ Schleifenkonstrukte zur Programmsteuerung zur Verfügung
gestellt. Zusätzlich zu den bekannten Strukturen wie While-Schleife (while-loop), For-
Schleife (for loop) und der Case-Anweisung (case) kann in LabVIEW mit der sogenannten
Sequenz-Struktur (sequence) gearbeitet werden, die eine sequentielle Ausführung von
Programmteilen erzwingt. Die Darstellung dieser Anweisungen erfolgt im Blockdiagramm
durch einen entsprechenden Rahmen, welcher der Functions-Palette entnommen werden
kann. Jenes Teilprogramm, das über eine Schleifenstruktur gesteuert werden soll, wird
innerhalb dieses Rahmens erstellt und wird als eigener Block betrachtet. Die
Variablenübergabe erfolgt über sogenannte „tunnels“, die beim Verdrahten durch den
Rahmen automatisch erstellt werden [28].
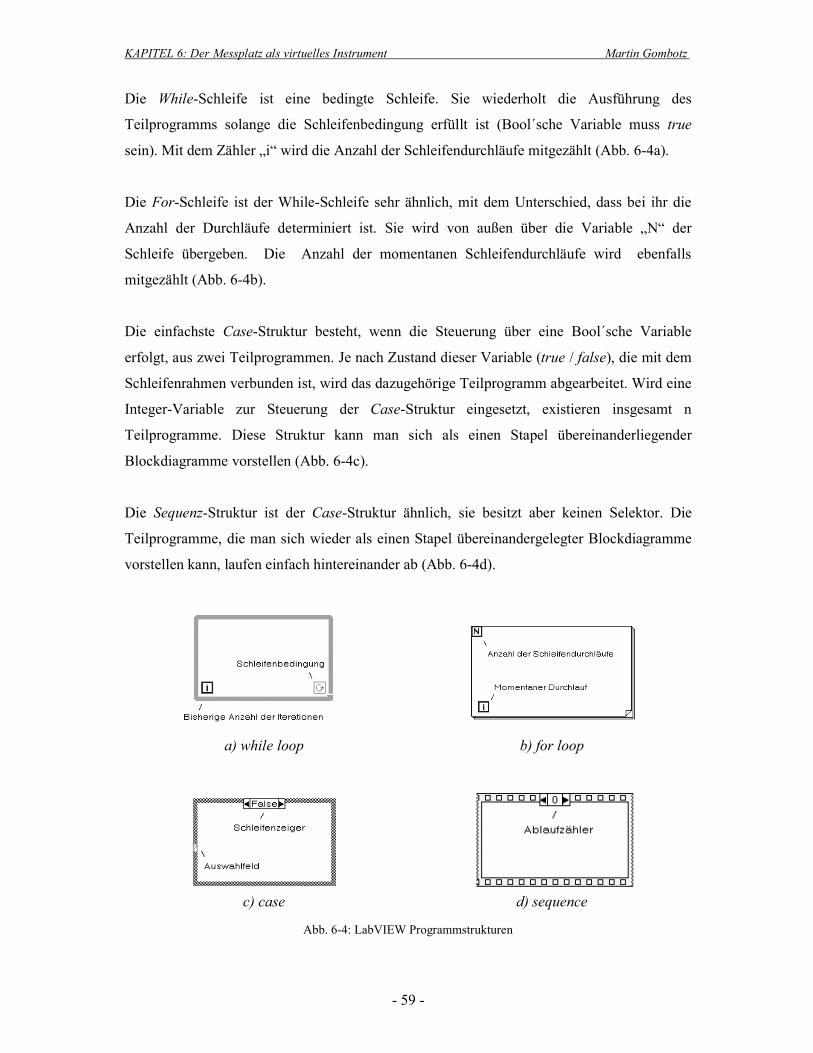
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 59 -
Die While-Schleife ist eine bedingte Schleife. Sie wiederholt die Ausführung des
Teilprogramms solange die Schleifenbedingung erfüllt ist (Bool´sche Variable muss true
sein). Mit dem Zähler „i“ wird die Anzahl der Schleifendurchläufe mitgezählt (Abb. 6-4a).
Die For-Schleife ist der While-Schleife sehr ähnlich, mit dem Unterschied, dass bei ihr die
Anzahl der Durchläufe determiniert ist. Sie wird von außen über die Variable „N“ der
Schleife übergeben. Die Anzahl der momentanen Schleifendurchläufe wird ebenfalls
mitgezählt (Abb. 6-4b).
Die einfachste Case-Struktur besteht, wenn die Steuerung über eine Bool´sche Variable
erfolgt, aus zwei Teilprogrammen. Je nach Zustand dieser Variable (true / false), die mit dem
Schleifenrahmen verbunden ist, wird das dazugehörige Teilprogramm abgearbeitet. Wird eine
Integer-Variable zur Steuerung der Case-Struktur eingesetzt, existieren insgesamt n
Teilprogramme. Diese Struktur kann man sich als einen Stapel übereinanderliegender
Blockdiagramme vorstellen (Abb. 6-4c).
Die Sequenz-Struktur ist der Case-Struktur ähnlich, sie besitzt aber keinen Selektor. Die
Teilprogramme, die man sich wieder als einen Stapel übereinandergelegter Blockdiagramme
vorstellen kann, laufen einfach hintereinander ab (Abb. 6-4d).
a) while loop
b) for loop
c) case
d) sequence
Abb. 6-4: LabVIEW Programmstrukturen
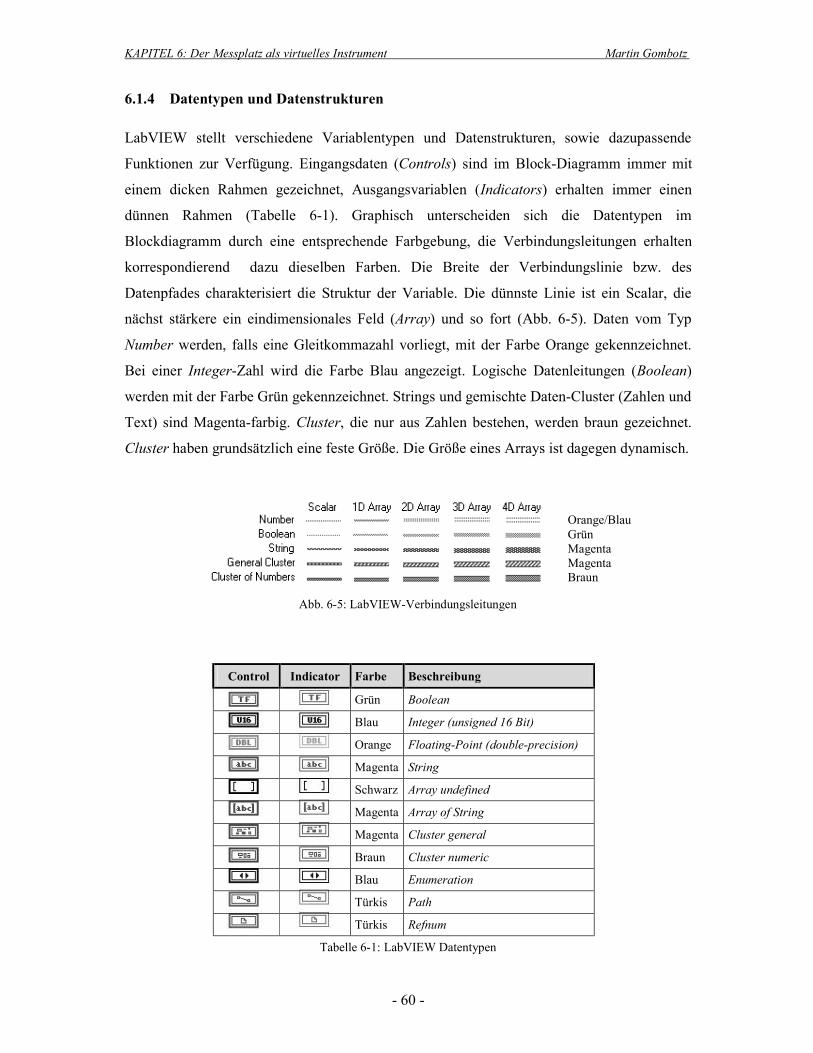
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 60 -
6.1.4 Datentypen und Datenstrukturen LabVIEW stellt verschiedene Variablentypen und Datenstrukturen, sowie dazupassende
Funktionen zur Verfügung. Eingangsdaten (Controls) sind im Block-Diagramm immer mit
einem dicken Rahmen gezeichnet, Ausgangsvariablen (Indicators) erhalten immer einen
dünnen Rahmen (Tabelle 6-1). Graphisch unterscheiden sich die Datentypen im
Blockdiagramm durch eine entsprechende Farbgebung, die Verbindungsleitungen erhalten
korrespondierend dazu dieselben Farben. Die Breite der Verbindungslinie bzw. des
Datenpfades charakterisiert die Struktur der Variable. Die dünnste Linie ist ein Scalar, die
nächst stärkere ein eindimensionales Feld (Array) und so fort (Abb. 6-5). Daten vom Typ
Number werden, falls eine Gleitkommazahl vorliegt, mit der Farbe Orange gekennzeichnet.
Bei einer Integer-Zahl wird die Farbe Blau angezeigt. Logische Datenleitungen (Boolean)
werden mit der Farbe Grün gekennzeichnet. Strings und gemischte Daten-Cluster (Zahlen und
Text) sind Magenta-farbig. Cluster, die nur aus Zahlen bestehen, werden braun gezeichnet.
Cluster haben grundsätzlich eine feste Größe. Die Größe eines Arrays ist dagegen dynamisch.
Orange/Blau Grün Magenta Magenta Braun
Abb. 6-5: LabVIEW-Verbindungsleitungen
Control Indicator Farbe Beschreibung
Grün Boolean
Blau Integer (unsigned 16 Bit)
Orange Floating-Point (double-precision)
Magenta String
Schwarz Array undefined
Magenta Array of String
Magenta Cluster general
Braun Cluster numeric
Blau Enumeration
Türkis Path
Türkis Refnum
Tabelle 6-1: LabVIEW Datentypen
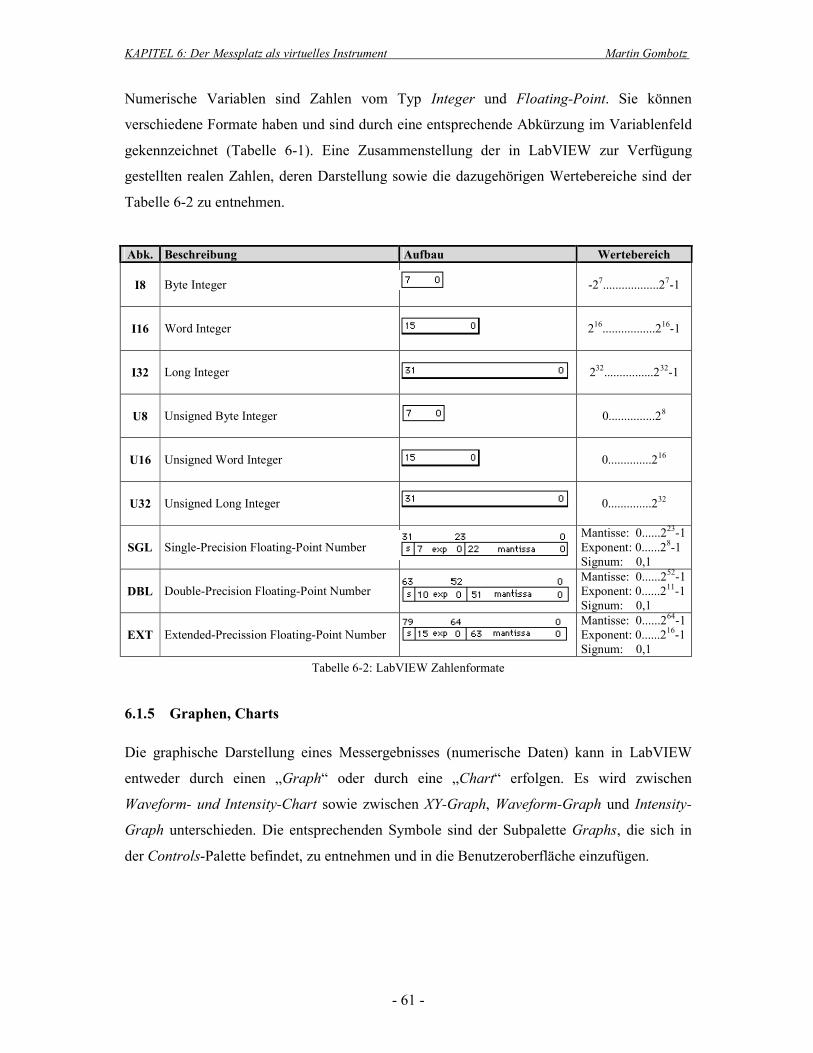
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 61 -
Numerische Variablen sind Zahlen vom Typ Integer und Floating-Point. Sie können
verschiedene Formate haben und sind durch eine entsprechende Abkürzung im Variablenfeld
gekennzeichnet (Tabelle 6-1). Eine Zusammenstellung der in LabVIEW zur Verfügung
gestellten realen Zahlen, deren Darstellung sowie die dazugehörigen Wertebereiche sind der
Tabelle 6-2 zu entnehmen.
Abk. Beschreibung Aufbau Wertebereich
I8
Byte Integer
-27..................27-1
I16
Word Integer
216.................216-1
I32
Long Integer
232................232-1
U8
Unsigned Byte Integer
0...............28
U16
Unsigned Word Integer
0..............216
U32
Unsigned Long Integer
0..............232
SGL
Single-Precision Floating-Point Number
Mantisse: 0......223-1 Exponent: 0......28-1 Signum: 0,1
DBL
Double-Precision Floating-Point Number
Mantisse: 0......252-1 Exponent: 0......211-1 Signum: 0,1
EXT
Extended-Precission Floating-Point Number
Mantisse: 0......264-1 Exponent: 0......216-1 Signum: 0,1
Tabelle 6-2: LabVIEW Zahlenformate
6.1.5 Graphen, Charts Die graphische Darstellung eines Messergebnisses (numerische Daten) kann in LabVIEW
entweder durch einen „Graph“ oder durch eine „Chart“ erfolgen. Es wird zwischen
Waveform- und Intensity-Chart sowie zwischen XY-Graph, Waveform-Graph und Intensity-
Graph unterschieden. Die entsprechenden Symbole sind der Subpalette Graphs, die sich in
der Controls-Palette befindet, zu entnehmen und in die Benutzeroberfläche einzufügen.
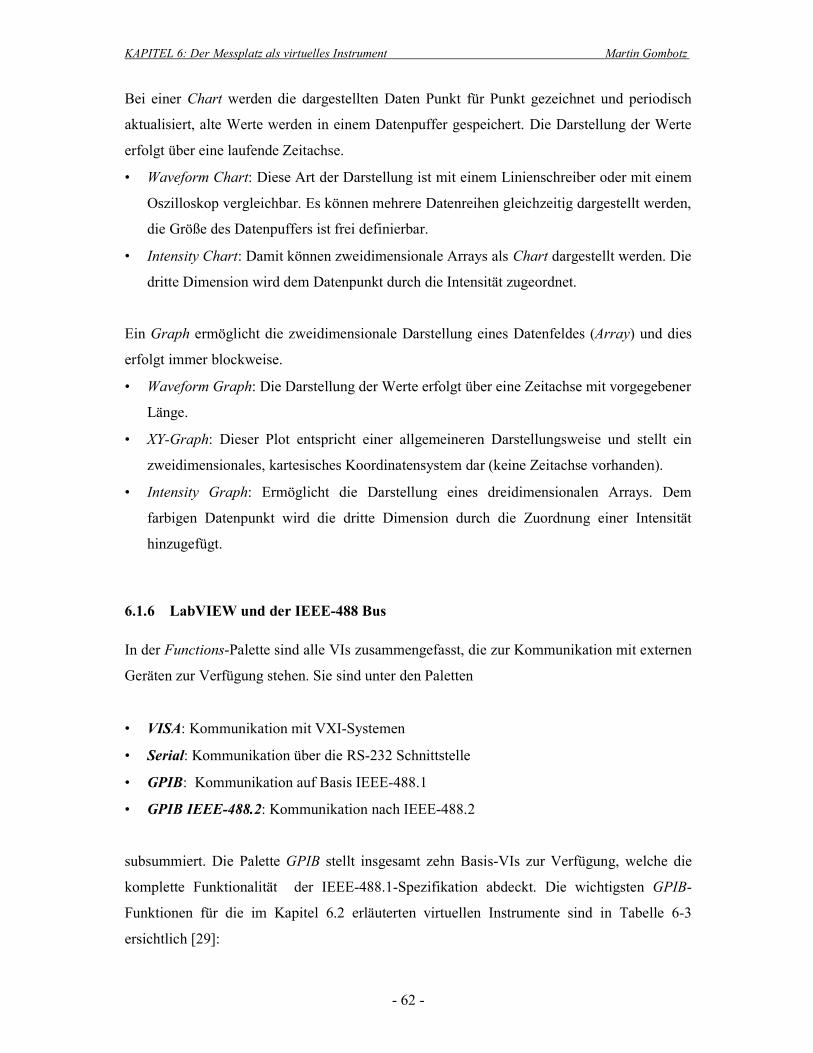
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 62 -
Bei einer Chart werden die dargestellten Daten Punkt für Punkt gezeichnet und periodisch
aktualisiert, alte Werte werden in einem Datenpuffer gespeichert. Die Darstellung der Werte
erfolgt über eine laufende Zeitachse.
• Waveform Chart: Diese Art der Darstellung ist mit einem Linienschreiber oder mit einem
Oszilloskop vergleichbar. Es können mehrere Datenreihen gleichzeitig dargestellt werden,
die Größe des Datenpuffers ist frei definierbar.
• Intensity Chart: Damit können zweidimensionale Arrays als Chart dargestellt werden. Die
dritte Dimension wird dem Datenpunkt durch die Intensität zugeordnet.
Ein Graph ermöglicht die zweidimensionale Darstellung eines Datenfeldes (Array) und dies
erfolgt immer blockweise.
• Waveform Graph: Die Darstellung der Werte erfolgt über eine Zeitachse mit vorgegebener
Länge.
• XY-Graph: Dieser Plot entspricht einer allgemeineren Darstellungsweise und stellt ein
zweidimensionales, kartesisches Koordinatensystem dar (keine Zeitachse vorhanden).
• Intensity Graph: Ermöglicht die Darstellung eines dreidimensionalen Arrays. Dem
farbigen Datenpunkt wird die dritte Dimension durch die Zuordnung einer Intensität
hinzugefügt.
6.1.6 LabVIEW und der IEEE-488 Bus In der Functions-Palette sind alle VIs zusammengefasst, die zur Kommunikation mit externen
Geräten zur Verfügung stehen. Sie sind unter den Paletten
• VISA: Kommunikation mit VXI-Systemen
• Serial: Kommunikation über die RS-232 Schnittstelle
• GPIB: Kommunikation auf Basis IEEE-488.1
• GPIB IEEE-488.2: Kommunikation nach IEEE-488.2
subsummiert. Die Palette GPIB stellt insgesamt zehn Basis-VIs zur Verfügung, welche die
komplette Funktionalität der IEEE-488.1-Spezifikation abdeckt. Die wichtigsten GPIB-
Funktionen für die im Kapitel 6.2 erläuterten virtuellen Instrumente sind in Tabelle 6-3
ersichtlich [29]:
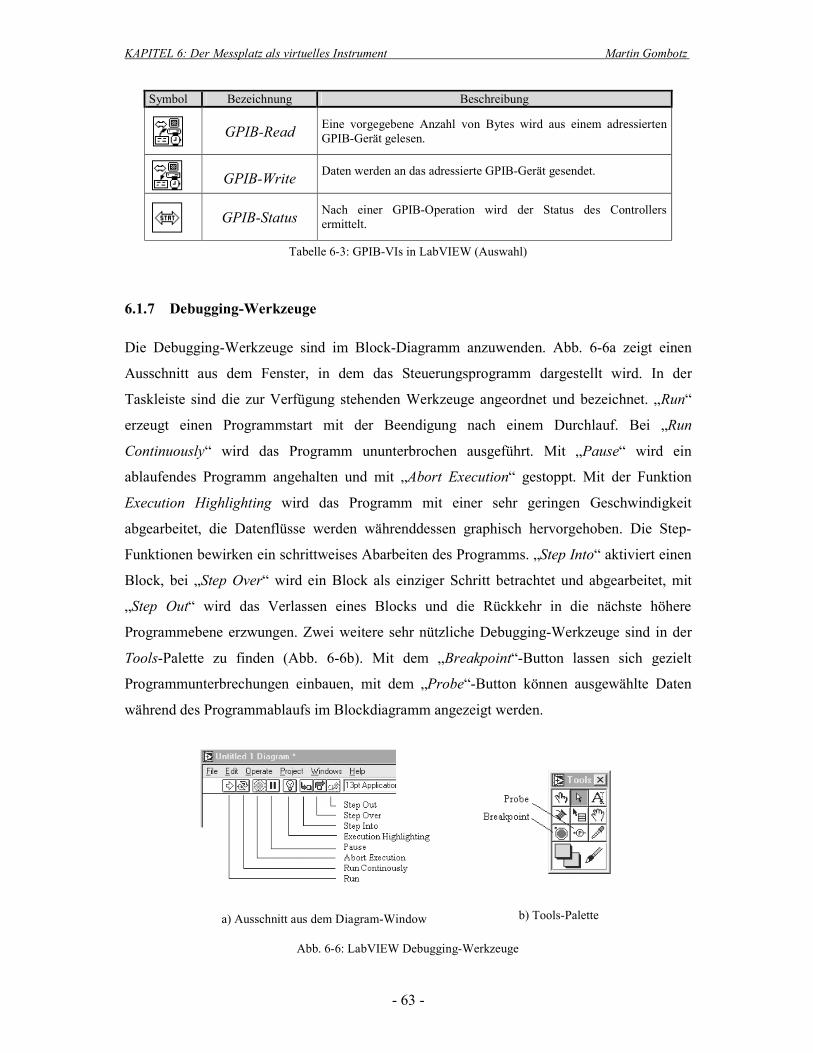
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 63 -
Symbol Bezeichnung Beschreibung
GPIB-Read Eine vorgegebene Anzahl von Bytes wird aus einem adressierten GPIB-Gerät gelesen.
GPIB-Write Daten werden an das adressierte GPIB-Gerät gesendet.
GPIB-Status Nach einer GPIB-Operation wird der Status des Controllers
ermittelt.
Tabelle 6-3: GPIB-VIs in LabVIEW (Auswahl)
6.1.7 Debugging-Werkzeuge Die Debugging-Werkzeuge sind im Block-Diagramm anzuwenden. Abb. 6-6a zeigt einen
Ausschnitt aus dem Fenster, in dem das Steuerungsprogramm dargestellt wird. In der
Taskleiste sind die zur Verfügung stehenden Werkzeuge angeordnet und bezeichnet. „Run“
erzeugt einen Programmstart mit der Beendigung nach einem Durchlauf. Bei „Run
Continuously“ wird das Programm ununterbrochen ausgeführt. Mit „Pause“ wird ein
ablaufendes Programm angehalten und mit „Abort Execution“ gestoppt. Mit der Funktion
Execution Highlighting wird das Programm mit einer sehr geringen Geschwindigkeit
abgearbeitet, die Datenflüsse werden währenddessen graphisch hervorgehoben. Die Step-
Funktionen bewirken ein schrittweises Abarbeiten des Programms. „Step Into“ aktiviert einen
Block, bei „Step Over“ wird ein Block als einziger Schritt betrachtet und abgearbeitet, mit
„Step Out“ wird das Verlassen eines Blocks und die Rückkehr in die nächste höhere
Programmebene erzwungen. Zwei weitere sehr nützliche Debugging-Werkzeuge sind in der
Tools-Palette zu finden (Abb. 6-6b). Mit dem „Breakpoint“-Button lassen sich gezielt
Programmunterbrechungen einbauen, mit dem „Probe“-Button können ausgewählte Daten
während des Programmablaufs im Blockdiagramm angezeigt werden.
a) Ausschnitt aus dem Diagram-Window
b) Tools-Palette
Abb. 6-6: LabVIEW Debugging-Werkzeuge
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 64 -
6.2 Virtuelles Gesamtinstrument zur Flächenwiderstandsmessung
Die fertige Implementierung zur Bearbeitung der messtechnischen Aufgabe wird in
LabVIEW als virtuelles Gesamtinstrument bezeichnet. Der Aufbau des Frontpanels (höchste
Hierarchie-Ebene des Programms) ist für den Anwender von besonderer Bedeutung. Bei
dessen Gestaltung sollte grundsätzlich darauf geachtet werden, dass nur die wichtigsten
Messparameter sichtbar beziehungsweise veränderbar sein sollen. Grundeinstellungen des
Programms und der angeschlossenen Messgeräte dürfen für den Anwender nicht sofort
zugänglich sein, die Einstellung derer hat in den Frontpanels der diversen SubVIs zu erfolgen.
Dadurch bleibt das System übersichtlich und Fehlbedienungen können reduziert werden.
Für das vorliegende messtechnische Problem war es notwendig insgesamt zwei virtuelle
Gesamtinstrumente zu erstellen. Wie in Kapitel 1 erläutert wurde, sind Substrate zu
untersuchen, die durch die gezielte Variation eines Sputter-Parameters, nämlich des Argon-
Drucks, hergestellt wurden. Nach dem Sputtern wurden die Substrate in mehrere Stücke
geteilt. Der Flächenwiderstand dieser Teilstücke wurde mit dem Programm „SRM“ (Sheet
Resistance Measurement) mit der Absicht, Mittelwerte für den spezifischen Widerstand
berechnen zu können, aufgezeichnet. Zur Bestimmung des Temperaturkoeffizienten wurde
aufgrund des hohen zeitlichen Aufwandes bei der Messung je Herstellungsvorgang nur ein
Plättchen untersucht. Das Programm „SRTC“ (Sheet Resistance and Temperature-Coefficient
Measurement) wurde für diese Messaufgabe erstellt. Diese beiden Programme benutzen
größtenteils die gleichen SubVIs und werden deshalb im folgenden parallel erläutert.
6.2.1 Frontpanel des Programms SRM Das Frontpanel des Programms SRM gliedert sich in die drei Bereiche Parameter, Messung
und Ergebnisse (Abb. 6-7). Im linken Teil des Bildschirms erfolgen alle Eingaben betreffend
das Substrat. Im oberen Feld werden die Probenparameter eingegeben, beginnend mit dem
Material und einer zusätzlichen Bezeichnung zur genauen Identifikation. Im Feld
„Probengeometrie“ kann zwischen den Formaten „rechteckig“ und „kreisförmig“ ausgewählt
werden. Bei rechteckigem Format muss anschließend die Länge und die Breite des Substrates
eingegeben werden und bei kreisförmiger Geometrie der Durchmesser. Jene Parameter, die
bei der Herstellung der Proben in der Zerstäubungsanlage eingestellt wurden, sind im darunter
liegenden Feld einzutragen. Einige dieser Werte werden nur zur Dokumentation eingegeben.
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 65 -
Für die untersuchte Serie ist die Veränderung des Argon-Druckes bei den
Schichtherstellungen von Bedeutung. Im Feld Systemparameter sind Daten bezüglich des
Messsystems einzutragen. Es sind die Daten „PIN-Spacing“ des Vierspitzen-Messkopfs für
die Berechnung des Korrekturfaktors, der Typ des Temperatursensors zur Messung der
Substrattemperatur (man kann zwischen Pt100 und Ni100 auswählen) und der einzustellende
Messstrom notwendig.
Im mittleren Bereich der Oberfläche befinden sich zwei Taster mit denen der Messablauf
gesteuert werden kann. Mit der Taste „Start“ wird die Stromquelle aktiviert. Haben sich
stabile Messwerte eingestellt, wird durch die Betätigung des Tasters „Save“ die Speicherung
der angezeigten aktuellen Daten (eingegebene Parameter, Messdaten und
Berechnungsergebnisse) veranlasst. Im Feld „Datensicherung“ ist vorher das Verzeichnis
anzugeben und zu kennzeichnen, ob ein neues Datenfile erstellt oder die aktuellen Daten an
ein bestehendes File der Probenserie angehängt werden sollen.
Im rechten Bildschirmabschnitt sind die Messergebnisse beziehungsweise die daraus
abgeleiteten Berechnungen ersichtlich. Es werden der Flächenwiderstand, der
Korrekturfaktor, die aktuelle Probentemperatur sowie als entgültiges Resultat der spezifische
Widerstand der Schicht angezeigt.
6.2.2 Frontpanel des Programms SRTC Die virtuelle Oberfläche dieses Gesamtinstruments ist ebenso wie im Fall 6.2.1 in drei
Bereiche gegliedert, wobei im linken Bildschirmbereich wieder die Parametereingabe
vorgesehen ist (Abb. 6-8). Zusätzlich zu den in 6.2.1 schon besprochenen Proben- und
Sputterparametern muss bei den Systemparametern ein maximaler Temperaturwert und ein
Messintervall angegeben werden. Im darunter liegenden Feld „Datensicherung“ ist ein
Filename zur Datenspeicherung einzutragen. Im mittleren Bereich ist ein XY-Graph zu sehen,
in dem der Widerstandsverlauf in Abhängigkeit von der Temperatur während der Messung
dargestellt wird. Der Messvorgang wird mit der Start-Taste initiiert und endet entweder
automatisch, wenn der eingestellte maximale Temperaturwert überschritten wird oder manuell
durch die Betätigung der Stop-Taste. Während der Messung wird die verstrichene Messzeit
und die aktuelle Probentemperatur angezeigt. Die Messwertaufnahme erfolgt grundsätzlich
mit einer Abtastrate von 1/s.
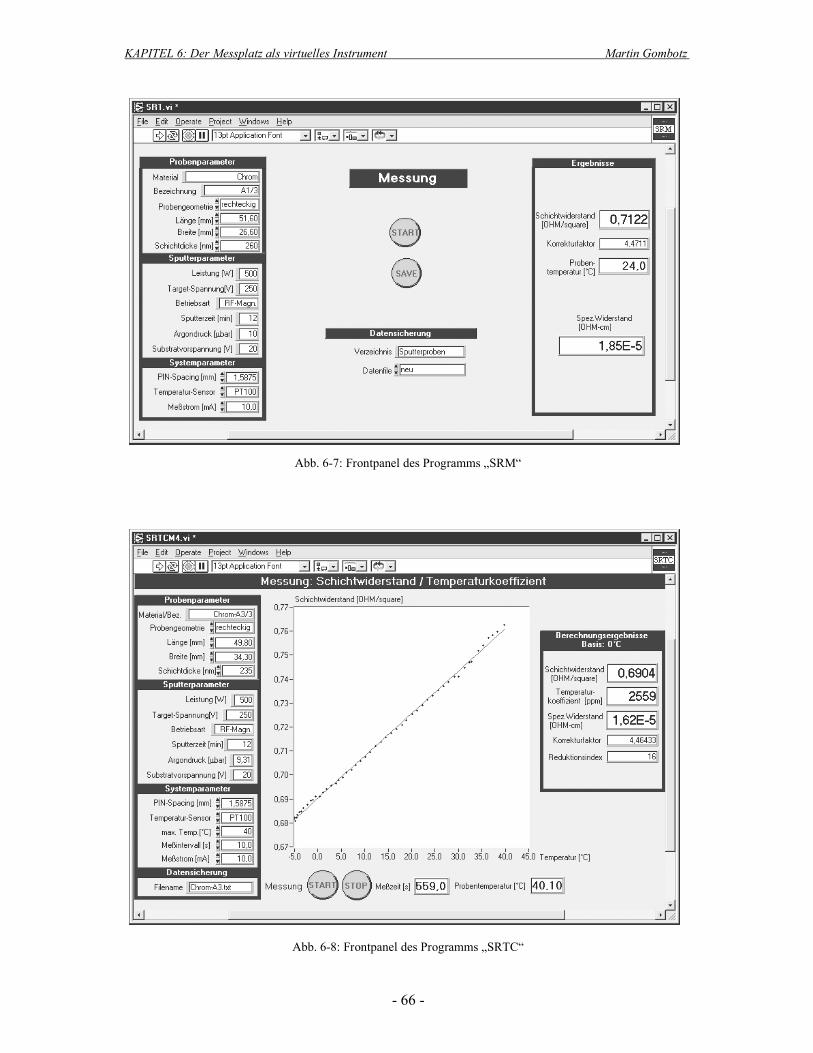
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 66 -
Abb. 6-7: Frontpanel des Programms „SRM“
Abb. 6-8: Frontpanel des Programms „SRTC“
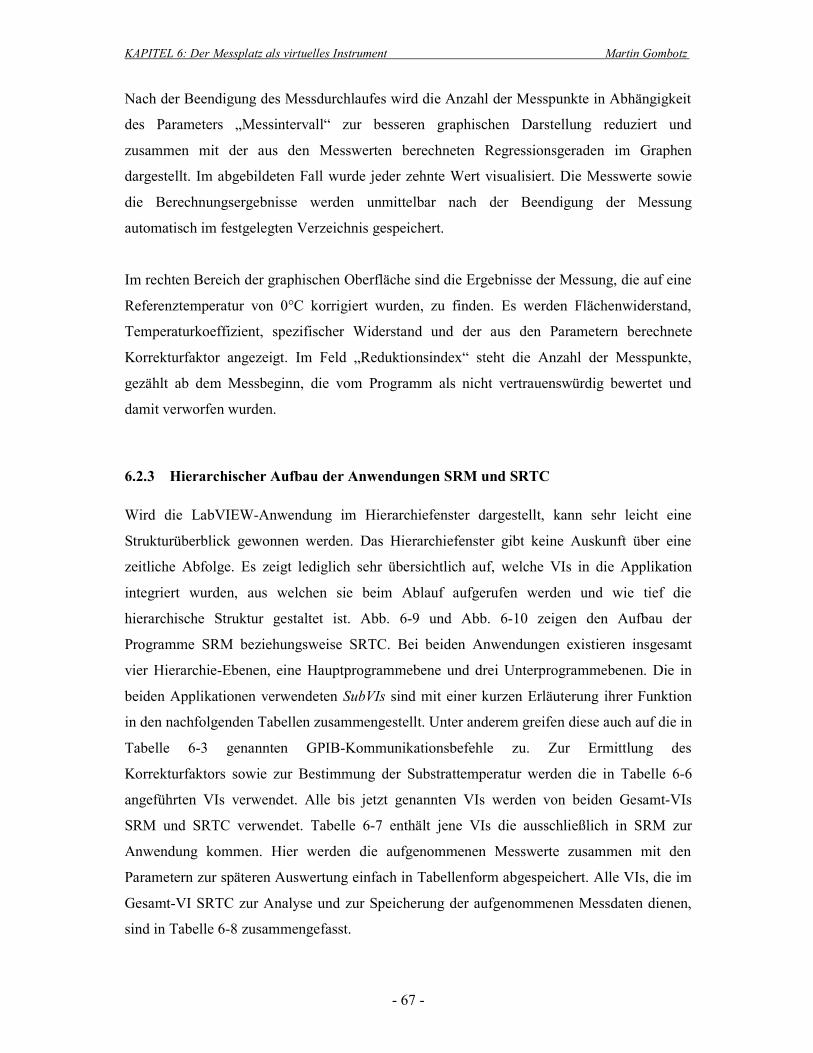
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 67 -
Nach der Beendigung des Messdurchlaufes wird die Anzahl der Messpunkte in Abhängigkeit
des Parameters „Messintervall“ zur besseren graphischen Darstellung reduziert und
zusammen mit der aus den Messwerten berechneten Regressionsgeraden im Graphen
dargestellt. Im abgebildeten Fall wurde jeder zehnte Wert visualisiert. Die Messwerte sowie
die Berechnungsergebnisse werden unmittelbar nach der Beendigung der Messung
automatisch im festgelegten Verzeichnis gespeichert.
Im rechten Bereich der graphischen Oberfläche sind die Ergebnisse der Messung, die auf eine
Referenztemperatur von 0°C korrigiert wurden, zu finden. Es werden Flächenwiderstand,
Temperaturkoeffizient, spezifischer Widerstand und der aus den Parametern berechnete
Korrekturfaktor angezeigt. Im Feld „Reduktionsindex“ steht die Anzahl der Messpunkte,
gezählt ab dem Messbeginn, die vom Programm als nicht vertrauenswürdig bewertet und
damit verworfen wurden.
6.2.3 Hierarchischer Aufbau der Anwendungen SRM und SRTC Wird die LabVIEW-Anwendung im Hierarchiefenster dargestellt, kann sehr leicht eine
Strukturüberblick gewonnen werden. Das Hierarchiefenster gibt keine Auskunft über eine
zeitliche Abfolge. Es zeigt lediglich sehr übersichtlich auf, welche VIs in die Applikation
integriert wurden, aus welchen sie beim Ablauf aufgerufen werden und wie tief die
hierarchische Struktur gestaltet ist. Abb. 6-9 und Abb. 6-10 zeigen den Aufbau der
Programme SRM beziehungsweise SRTC. Bei beiden Anwendungen existieren insgesamt
vier Hierarchie-Ebenen, eine Hauptprogrammebene und drei Unterprogrammebenen. Die in
beiden Applikationen verwendeten SubVIs sind mit einer kurzen Erläuterung ihrer Funktion
in den nachfolgenden Tabellen zusammengestellt. Unter anderem greifen diese auch auf die in
Tabelle 6-3 genannten GPIB-Kommunikationsbefehle zu. Zur Ermittlung des
Korrekturfaktors sowie zur Bestimmung der Substrattemperatur werden die in Tabelle 6-6
angeführten VIs verwendet. Alle bis jetzt genannten VIs werden von beiden Gesamt-VIs
SRM und SRTC verwendet. Tabelle 6-7 enthält jene VIs die ausschließlich in SRM zur
Anwendung kommen. Hier werden die aufgenommenen Messwerte zusammen mit den
Parametern zur späteren Auswertung einfach in Tabellenform abgespeichert. Alle VIs, die im
Gesamt-VI SRTC zur Analyse und zur Speicherung der aufgenommenen Messdaten dienen,
sind in Tabelle 6-8 zusammengefasst.
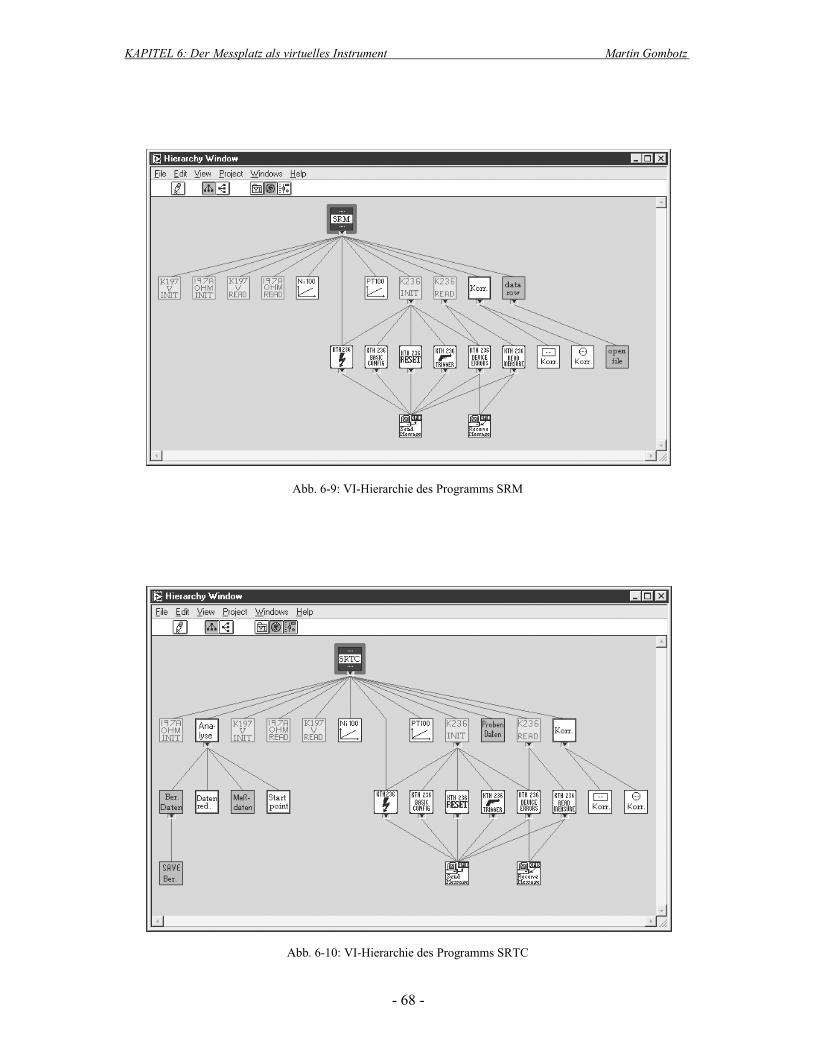
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 68 -
Abb. 6-9: VI-Hierarchie des Programms SRM
Abb. 6-10: VI-Hierarchie des Programms SRTC
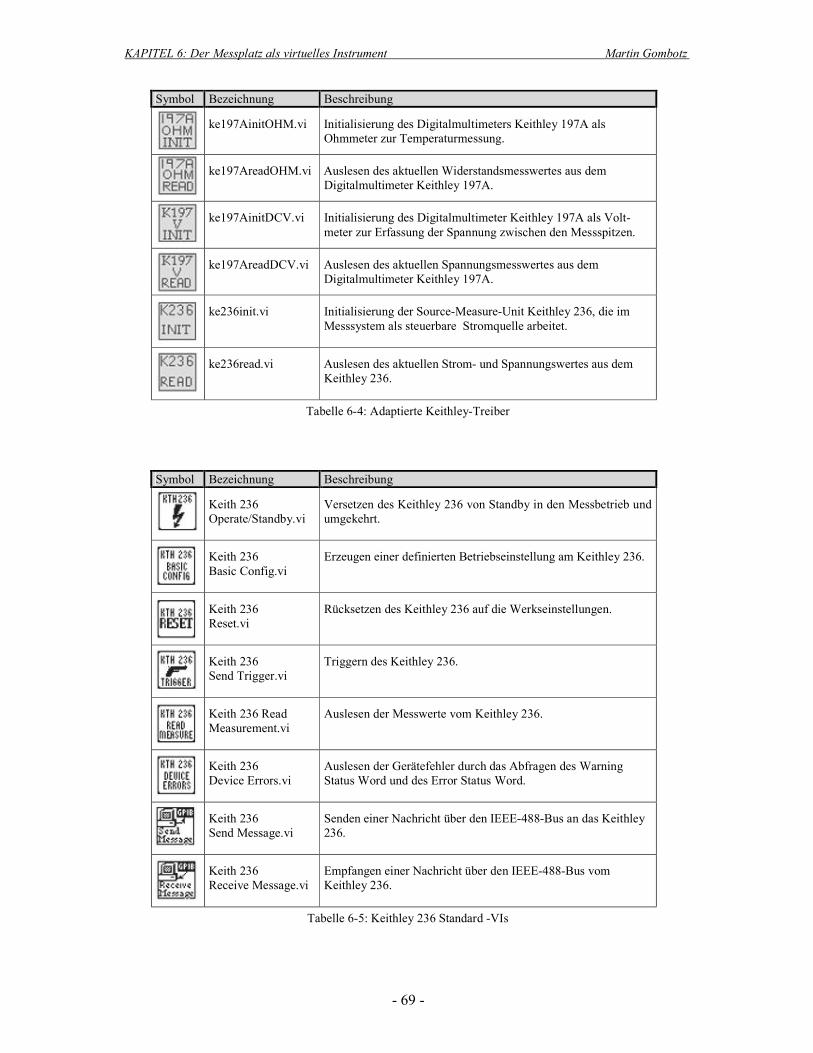
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 69 -
Symbol Bezeichnung Beschreibung ke197AinitOHM.vi Initialisierung des Digitalmultimeters Keithley 197A als
Ohmmeter zur Temperaturmessung.
ke197AreadOHM.vi Auslesen des aktuellen Widerstandsmesswertes aus dem Digitalmultimeter Keithley 197A.
ke197AinitDCV.vi Initialisierung des Digitalmultimeter Keithley 197A als Volt-meter zur Erfassung der Spannung zwischen den Messspitzen.
ke197AreadDCV.vi Auslesen des aktuellen Spannungsmesswertes aus dem Digitalmultimeter Keithley 197A.
ke236init.vi Initialisierung der Source-Measure-Unit Keithley 236, die im
Messsystem als steuerbare Stromquelle arbeitet.
ke236read.vi Auslesen des aktuellen Strom- und Spannungswertes aus dem
Keithley 236.
Tabelle 6-4: Adaptierte Keithley-Treiber
Symbol Bezeichnung Beschreibung
Keith 236 Operate/Standby.vi
Versetzen des Keithley 236 von Standby in den Messbetrieb und umgekehrt.
Keith 236 Basic Config.vi
Erzeugen einer definierten Betriebseinstellung am Keithley 236.
Keith 236 Reset.vi
Rücksetzen des Keithley 236 auf die Werkseinstellungen.
Keith 236 Send Trigger.vi
Triggern des Keithley 236.
Keith 236 Read Measurement.vi
Auslesen der Messwerte vom Keithley 236.
Keith 236 Device Errors.vi
Auslesen der Gerätefehler durch das Abfragen des Warning Status Word und des Error Status Word.
Keith 236 Send Message.vi
Senden einer Nachricht über den IEEE-488-Bus an das Keithley 236.
Keith 236 Receive Message.vi
Empfangen einer Nachricht über den IEEE-488-Bus vom Keithley 236.
Tabelle 6-5: Keithley 236 Standard -VIs
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 70 -
Symbol Bezeichnung Beschreibung
Korrekt.vi
VI in dem die Eingaben (Geometrie, Substratabmessungen, Spitzenabstand) zur Berechnung des Korrekturfaktors erfolgen.
. Korrekt1.vi
VI zur Berechnung des Korrekturfaktors für rechteckige Substrate. Länge und Breite sowie Spitzenabstand sind die benötigten Eingabegrößen.
Korrekt2.vi
VI zur Berechnung des Korrekturfaktors für runde Substrate. Durchmesser und Spitzenabstand sind die notwendigen Eingabegrößen.
KennliniePT100.vi
VI zur Berechnung der Temperatur aus einem gegebenen Widerstandswert bei Verwendung eines Temperatursensors vom Typ Pt 100.
KennlinieNi100.vi
VI zur Berechnung der Temperatur aus einem gegebenen Widerstandswert bei Verwendung eines Temperatursensors vom Typ Ni 100.
Tabelle 6-6: Diverse VIs der Programme SRM und SRTC
Symbol Bezeichnung Beschreibung
Tabellenkopf.vi
Dieses VI öffnet ein File und erzeugt einen Tabellenkopf und schließt das File.
Tabellendaten.vi
Dieses VI öffnet ein File, schreibt einen neuen Datensatz in das vorher durch „open file“ angelegte File und schließt es wieder.
Tabelle 6-7: VIs zur Datenspeicherung in SRM
6.2.4 Blockdiagramm des Programms SRM Die Anwendung SRM setzt sich aus insgesamt vier Sequenzen zusammen. Nachdem das
Programm in den „Run-Modus“ versetzt wurde, ist Sequenz 0 aktiv (Abb. 6-11). Hier können
die Parameter eingegeben werden, solange der Messvorgang nicht aktiviert wurde (Programm
verharrt in der while-Schleife). Unmittelbar nach der Eingabe der Substratabmessungen wird
der Korrekturfaktor berechnet und angezeigt. Durch Betätigung der „Start“-Taste erfolgt die
Quittierung der eingegebenen Parameter und die Einleitung der nächsten Sequenz, in der die
Initialisierung der peripheren Messgeräte erfolgt (Abb. 6-12). Für diesen
Initialisierungsvorgang stehen 2s zur Verfügung. Danach wird Sequenz 3 automatisch aktiv.
Werden von den VIs, die für die Initialisierung der einzelnen Messgeräte zuständig sind,

KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 71 -
Initialisierungsfehler erkannt, erfolgt eine Alarm-Meldung am Frontpanel und der sofortige
Abbruch des Programmablaufs. Aufgrund der Decodierung des Warning Status Words und
des Error Status Words kann beim Keithley 236 auch ein entsprechender Fehlercode
diagnostiziert und angezeigt werden. In Sequenz 2 (Abb. 6-13) erfolgt die Aufnahme der
Messwerte mit einer Abtastrate von 1/s. Unter Berücksichtigung des Korrekturfaktors wird
der Flächenwiderstand sofort am Frontpanel angezeigt. Die Probentemperatur wird ebenfalls
laufend dargestellt. Liegen stabile Messwerte vor, kann im nächsten Schritt die Messung
beendet und die Datenspeicherung durchgeführt werden. Sequenz 3 (Abb. 6-14) beinhaltet das
Schalten des Keithley 236 in den Standby-Modus, die Berechnung und Darstellung des
spezifischen Widerstandes und die Sicherung aller Daten. Der Datensatz wird durch das VI
„data row“ in Form einer neuen Zeile in eine Tabelle eingetragen, wobei aber zu beachten ist,
dass zu Beginn einer Messreihe eine neue Tabelle beziehungsweise ein neues Datenfile zu
erstellen ist.
Symbol Bezeichnung Beschreibung
Analyse.vi VI zur Auswertung der aufgezeichneten Messwerte. Dieses
VI bedient sich der beiden VIs „Startpoint“ und „Datenreduktion“.
Startpoint.vi
Aus den aufgezeichneten Messwerten wird jener Datenpunkt ermittelt, ab dem seriöse Messwerte vorhanden sind.
Datenreduktion.vi
In diesem VI wird die Anzahl der Messpunkte in Abhängigkeit des Parameters „Messintervall“ zur besseren Darstellbarkeit reduziert.
Probendaten.vi
Jene Daten, die das untersuchte Substrat charakterisieren, werden als Zeichenkette zusammengefasst. Den gespei-cherten Messergebnissen und Berechnungsergebnissen sind diese Probendaten als Dateikopf vorangestellt.
Messdatensicherung.vi
Speichert die aufgenommenen Messdaten mit den Probendaten in ein File.
Berechnungsdaten.vi
Die berechneten Daten Flächenwiderstand, Temperatur-koeffizient und spez. Widerstand werden der Zeichenkette „Probendaten“ hinzugefügt und zur Sicherung weiter gegeben.
Datensicherung.vi
Die im VI „Analyse“ ermittelten Ergebnisse werden als Tabelle zusammen mit der Zeichenkette aus dem VI „Ber. Daten“ abgespeichert.
Tabelle 6-8: VIs im Programm SRTC
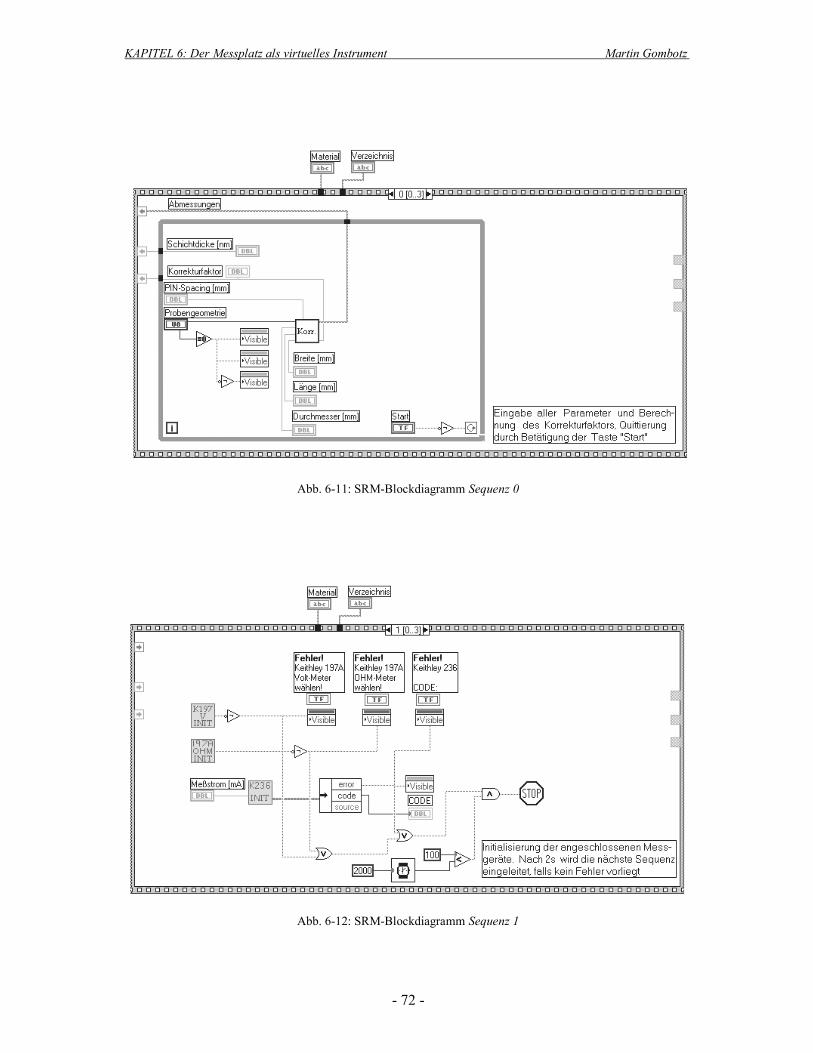
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 72 -
Abb. 6-11: SRM-Blockdiagramm Sequenz 0
Abb. 6-12: SRM-Blockdiagramm Sequenz 1
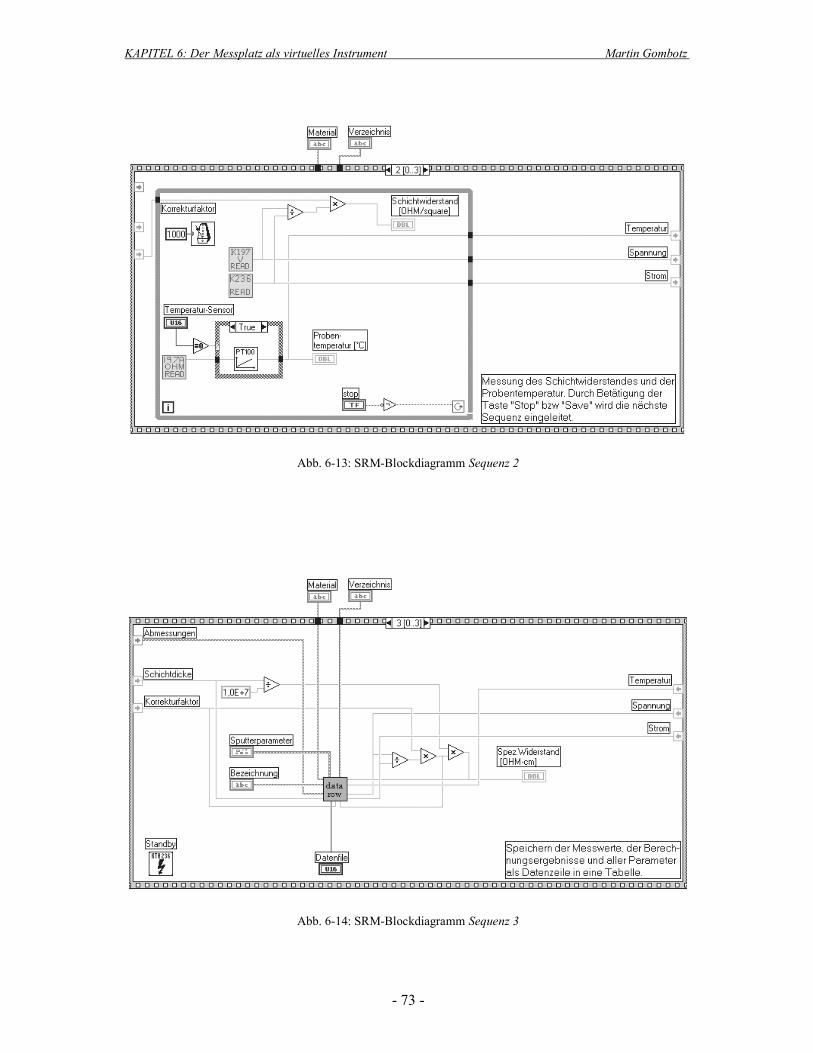
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 73 -
Abb. 6-13: SRM-Blockdiagramm Sequenz 2
Abb. 6-14: SRM-Blockdiagramm Sequenz 3
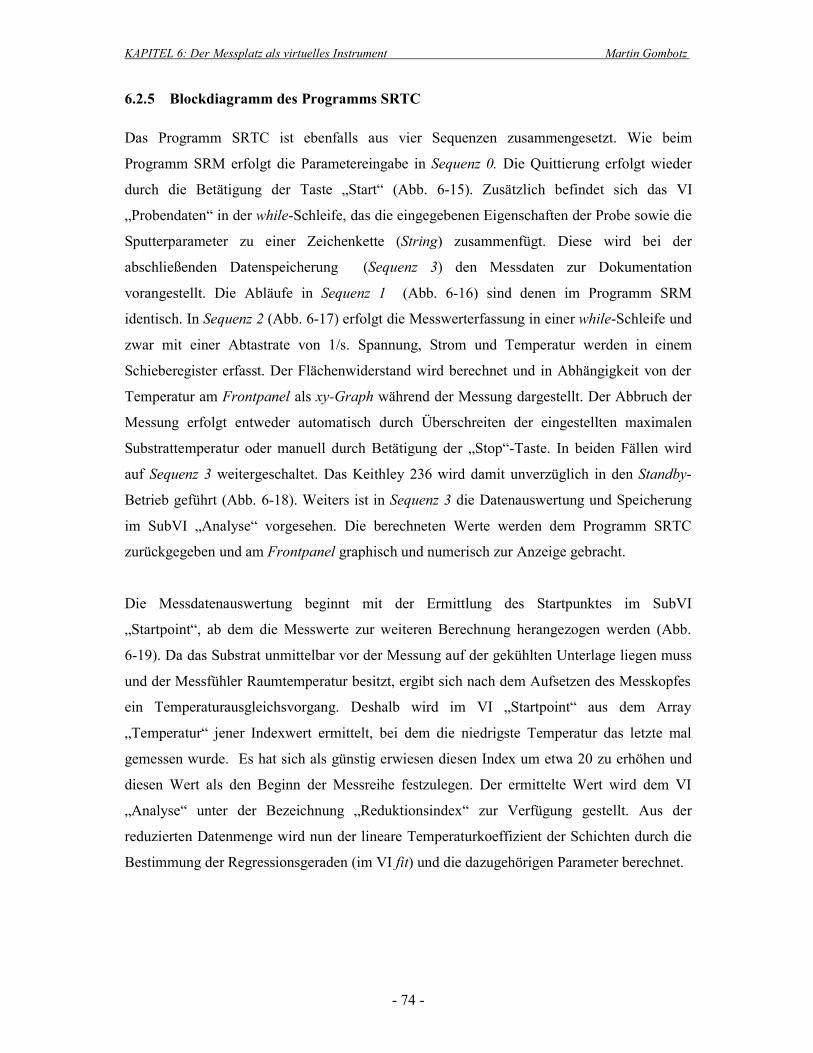
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 74 -
6.2.5 Blockdiagramm des Programms SRTC Das Programm SRTC ist ebenfalls aus vier Sequenzen zusammengesetzt. Wie beim
Programm SRM erfolgt die Parametereingabe in Sequenz 0. Die Quittierung erfolgt wieder
durch die Betätigung der Taste „Start“ (Abb. 6-15). Zusätzlich befindet sich das VI
„Probendaten“ in der while-Schleife, das die eingegebenen Eigenschaften der Probe sowie die
Sputterparameter zu einer Zeichenkette (String) zusammenfügt. Diese wird bei der
abschließenden Datenspeicherung (Sequenz 3) den Messdaten zur Dokumentation
vorangestellt. Die Abläufe in Sequenz 1 (Abb. 6-16) sind denen im Programm SRM
identisch. In Sequenz 2 (Abb. 6-17) erfolgt die Messwerterfassung in einer while-Schleife und
zwar mit einer Abtastrate von 1/s. Spannung, Strom und Temperatur werden in einem
Schieberegister erfasst. Der Flächenwiderstand wird berechnet und in Abhängigkeit von der
Temperatur am Frontpanel als xy-Graph während der Messung dargestellt. Der Abbruch der
Messung erfolgt entweder automatisch durch Überschreiten der eingestellten maximalen
Substrattemperatur oder manuell durch Betätigung der „Stop“-Taste. In beiden Fällen wird
auf Sequenz 3 weitergeschaltet. Das Keithley 236 wird damit unverzüglich in den Standby-
Betrieb geführt (Abb. 6-18). Weiters ist in Sequenz 3 die Datenauswertung und Speicherung
im SubVI „Analyse“ vorgesehen. Die berechneten Werte werden dem Programm SRTC
zurückgegeben und am Frontpanel graphisch und numerisch zur Anzeige gebracht.
Die Messdatenauswertung beginnt mit der Ermittlung des Startpunktes im SubVI
„Startpoint“, ab dem die Messwerte zur weiteren Berechnung herangezogen werden (Abb.
6-19). Da das Substrat unmittelbar vor der Messung auf der gekühlten Unterlage liegen muss
und der Messfühler Raumtemperatur besitzt, ergibt sich nach dem Aufsetzen des Messkopfes
ein Temperaturausgleichsvorgang. Deshalb wird im VI „Startpoint“ aus dem Array
„Temperatur“ jener Indexwert ermittelt, bei dem die niedrigste Temperatur das letzte mal
gemessen wurde. Es hat sich als günstig erwiesen diesen Index um etwa 20 zu erhöhen und
diesen Wert als den Beginn der Messreihe festzulegen. Der ermittelte Wert wird dem VI
„Analyse“ unter der Bezeichnung „Reduktionsindex“ zur Verfügung gestellt. Aus der
reduzierten Datenmenge wird nun der lineare Temperaturkoeffizient der Schichten durch die
Bestimmung der Regressionsgeraden (im VI fit) und die dazugehörigen Parameter berechnet.
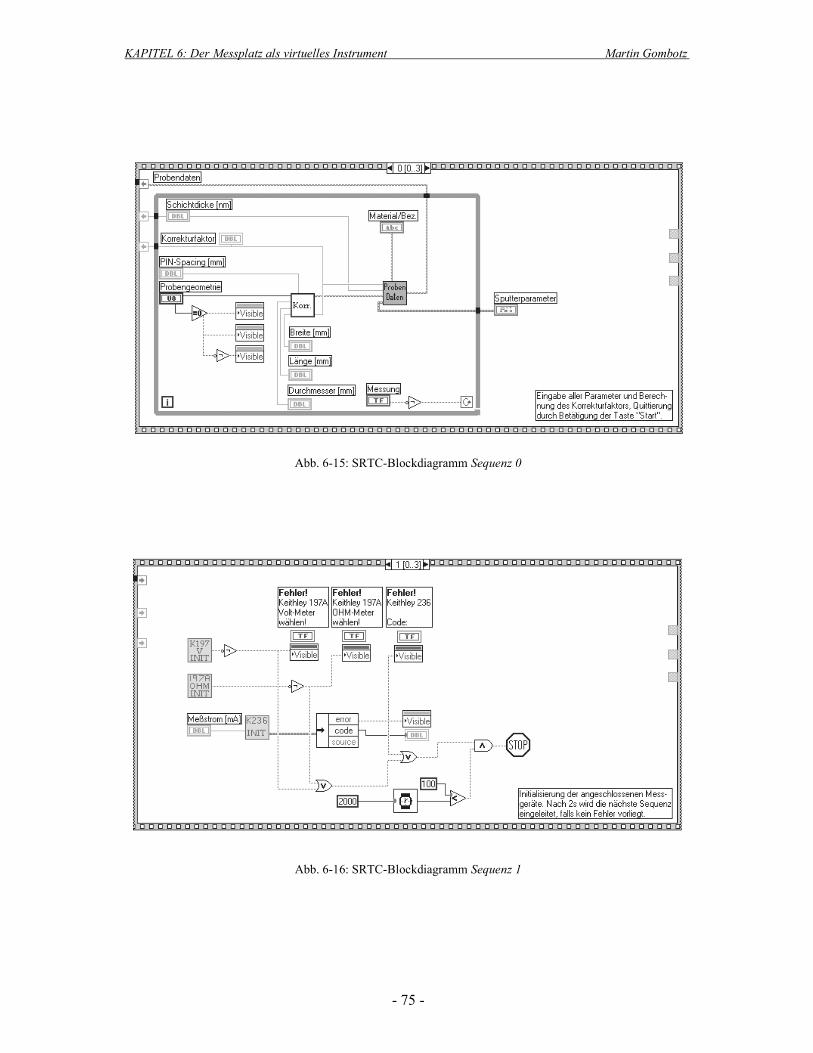
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 75 -
Abb. 6-15: SRTC-Blockdiagramm Sequenz 0
Abb. 6-16: SRTC-Blockdiagramm Sequenz 1
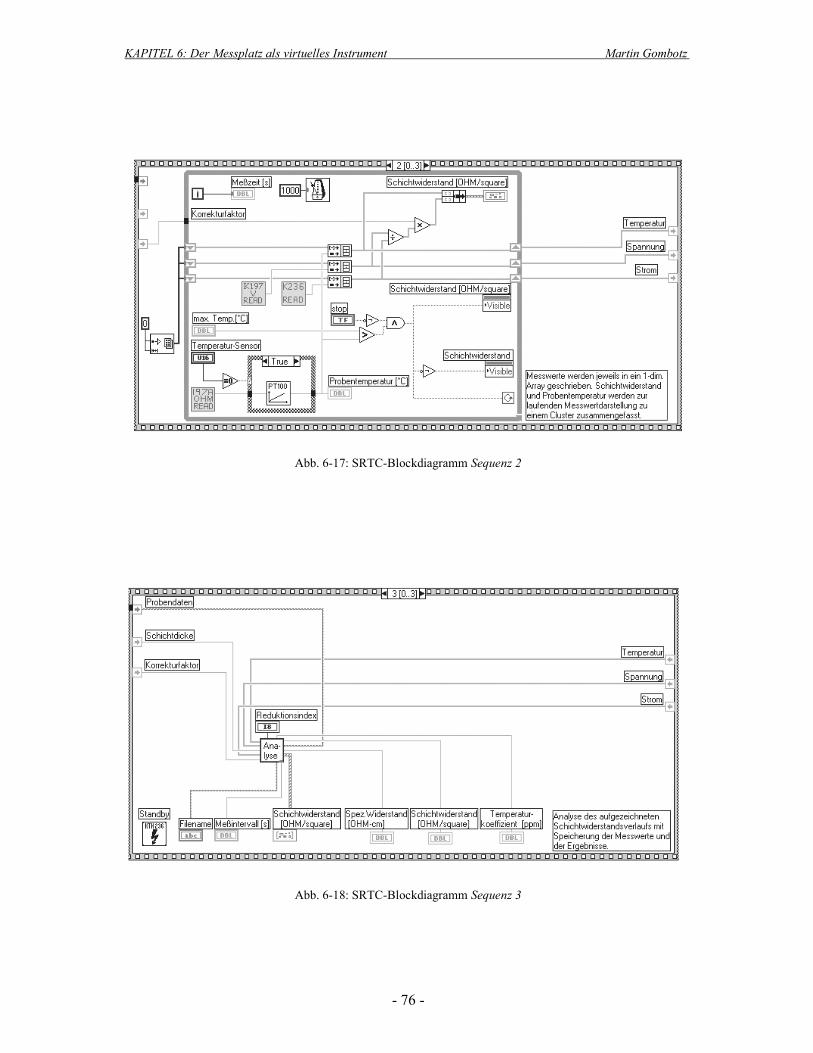
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 76 -
Abb. 6-17: SRTC-Blockdiagramm Sequenz 2
Abb. 6-18: SRTC-Blockdiagramm Sequenz 3
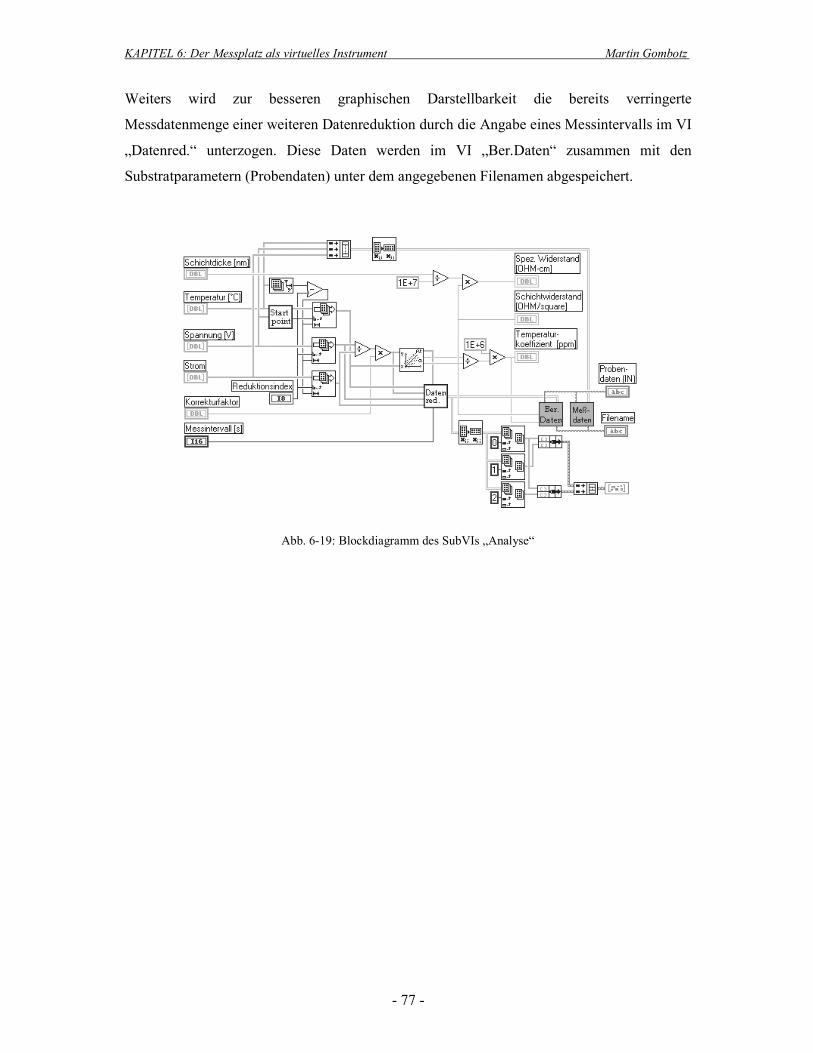
KAPITEL 6: Der Messplatz als virtuelles Instrument Martin Gombotz
- 77 -
Weiters wird zur besseren graphischen Darstellbarkeit die bereits verringerte
Messdatenmenge einer weiteren Datenreduktion durch die Angabe eines Messintervalls im VI
„Datenred.“ unterzogen. Diese Daten werden im VI „Ber.Daten“ zusammen mit den
Substratparametern (Probendaten) unter dem angegebenen Filenamen abgespeichert.
Abb. 6-19: Blockdiagramm des SubVIs „Analyse“
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 78 -
7 Experimentelle Datenerfassung
7.1 Einführende Messungen
Bevor die hergestellten Molybdän/Wolfram- und Chromschichten untersucht und die
Ergebnisse ausgewertet wurden, war es notwendig, die durch den Herstellungsvorgang
festgelegten physikalischen Eigenschaften der Schichten etwas genauer zu beleuchten. Dabei
war die Homogenität der Metallschicht bezüglich der Schichtdicke und des spezifischen
Widerstandes von besonderer Bedeutung, da die Homogenität dieser Größen die
Voraussetzung für die richtige Interpretation der Messergebnisse unter Anwendung der Vier-
Spitzen-Methode ist. Für diesen Zweck wurden zwei Referenzschichten aus Molybdän durch
Hochleistungssputtern mit Magnetron-Kathode hergestellt. Gesputtert wurde grundsätzlich
unter gleichen Prozessbedingungen wie bei den erstgenannten Schichten. Lediglich die
Substratbewegung während des Aufstäubens war bei Molybdänschicht 1 und
Molybdänschicht 2 unterschiedlich.
7.1.1 Untersuchung von Molybdänschicht 1 Ausgangspunkt der Probenherstellung war ein Displayglassubstrat (Fabrikat Hoya) der Größe
100x100x0,6mm, das unmittelbar unter der Magnetron-Target-Anordnung in der
Sputterkammer platziert wurde. Die Lage des Substrats konnte sich während des
Sputtervorgangs nicht verändern (Abb. 7-1). Zur weiteren Untersuchung wurde vom fertig
beschichteten Substrat ein Teilstück der Größe 51x51mm nach Abb. 7-2 abgetrennt.
Die Messungen wurden unter Berücksichtigung der lokalen Sensitivität der Vier-Spitzen-
Methode durchgeführt (Kapitel 3.5.5). Ausgangspunkt war die zentrische Messkopf-
positionierung am Substrat. Danach wurde der Messkopf im Raster 2x2mm versetzt und jeder
Messwert mit dem dazugehörigen Korrekturfaktor versehen. Die ermittelten Werte sind
graphisch in Abb. 7-3 dargestellt. Bei der Bewertung sind hier nicht die absoluten
Flächenwiderstandswerte von besonderer Bedeutung, sondern deren Verlauf.
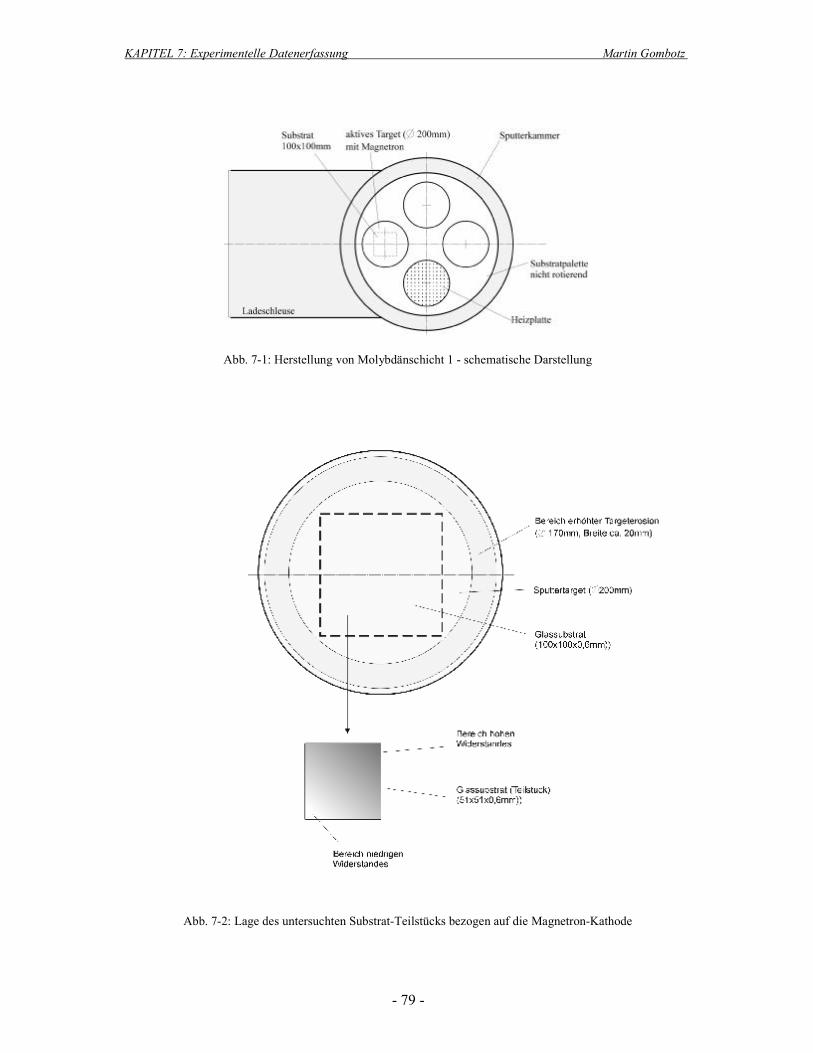
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 79 -
Abb. 7-1: Herstellung von Molybdänschicht 1 - schematische Darstellung
Abb. 7-2: Lage des untersuchten Substrat-Teilstücks bezogen auf die Magnetron-Kathode
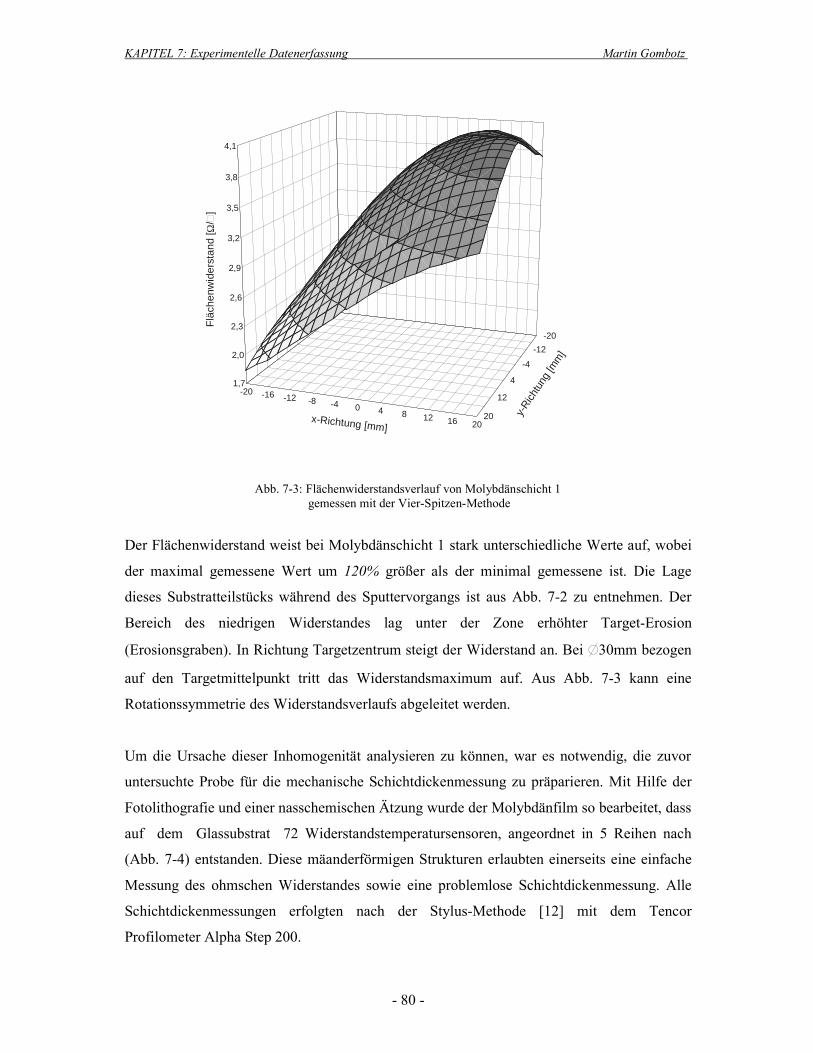
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 80 -
Abb. 7-3: Flächenwiderstandsverlauf von Molybdänschicht 1 gemessen mit der Vier-Spitzen-Methode
Der Flächenwiderstand weist bei Molybdänschicht 1 stark unterschiedliche Werte auf, wobei
der maximal gemessene Wert um 120% größer als der minimal gemessene ist. Die Lage
dieses Substratteilstücks während des Sputtervorgangs ist aus Abb. 7-2 zu entnehmen. Der
Bereich des niedrigen Widerstandes lag unter der Zone erhöhter Target-Erosion
(Erosionsgraben). In Richtung Targetzentrum steigt der Widerstand an. Bei n30mm bezogen
auf den Targetmittelpunkt tritt das Widerstandsmaximum auf. Aus Abb. 7-3 kann eine
Rotationssymmetrie des Widerstandsverlaufs abgeleitet werden.
Um die Ursache dieser Inhomogenität analysieren zu können, war es notwendig, die zuvor
untersuchte Probe für die mechanische Schichtdickenmessung zu präparieren. Mit Hilfe der
Fotolithografie und einer nasschemischen Ätzung wurde der Molybdänfilm so bearbeitet, dass
auf dem Glassubstrat 72 Widerstandstemperatursensoren, angeordnet in 5 Reihen nach
(Abb. 7-4) entstanden. Diese mäanderförmigen Strukturen erlaubten einerseits eine einfache
Messung des ohmschen Widerstandes sowie eine problemlose Schichtdickenmessung. Alle
Schichtdickenmessungen erfolgten nach der Stylus-Methode [12] mit dem Tencor
Profilometer Alpha Step 200.
-20 -16 -12 -8 -4 0 4 8 12 16 20
-20-12
-4
4
12
20
1,7
2,0
2,3
2,6
2,9
3,2
3,5
3,8
4,1
Fläc
henw
ider
stan
d [ Ω
/o]
x-Richtung [mm]
y-Ri
chtu
ng [m
m]
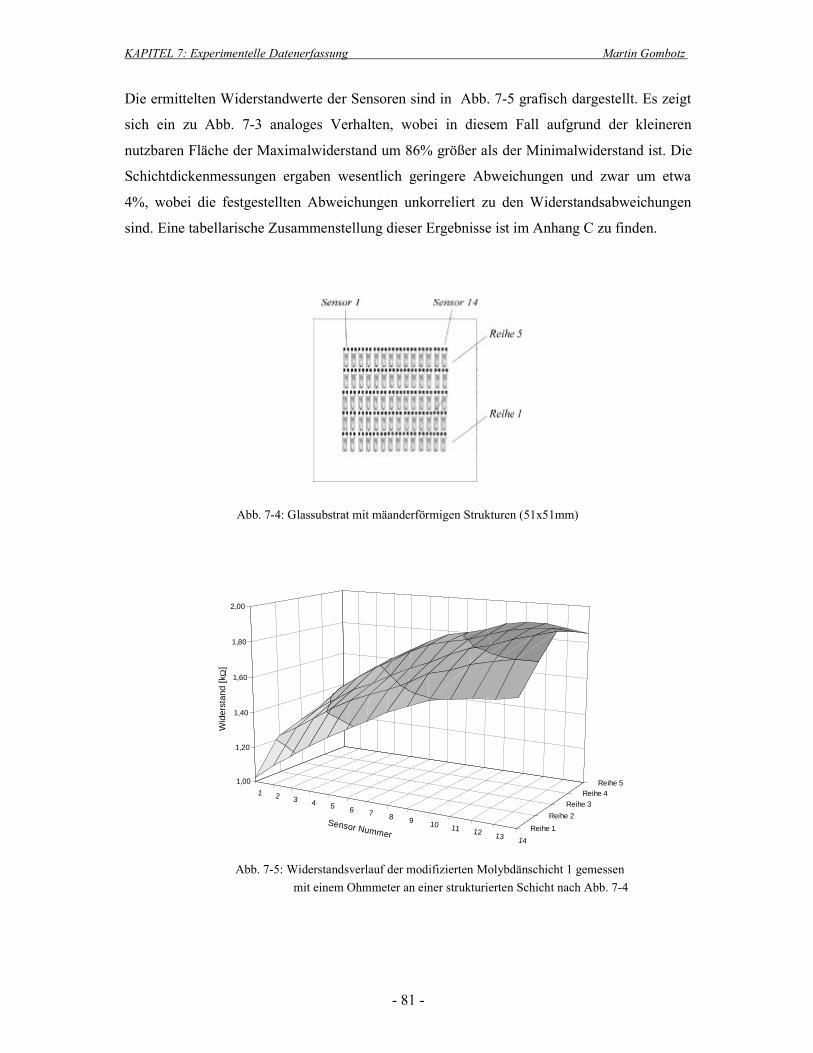
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 81 -
Die ermittelten Widerstandwerte der Sensoren sind in Abb. 7-5 grafisch dargestellt. Es zeigt
sich ein zu Abb. 7-3 analoges Verhalten, wobei in diesem Fall aufgrund der kleineren
nutzbaren Fläche der Maximalwiderstand um 86% größer als der Minimalwiderstand ist. Die
Schichtdickenmessungen ergaben wesentlich geringere Abweichungen und zwar um etwa
4%, wobei die festgestellten Abweichungen unkorreliert zu den Widerstandsabweichungen
sind. Eine tabellarische Zusammenstellung dieser Ergebnisse ist im Anhang C zu finden.
Abb. 7-4: Glassubstrat mit mäanderförmigen Strukturen (51x51mm)
Abb. 7-5: Widerstandsverlauf der modifizierten Molybdänschicht 1 gemessen mit einem Ohmmeter an einer strukturierten Schicht nach Abb. 7-4
1 2 3 4 5 6 7 8 9 10 11 12 13 14Reihe 1
Reihe 2Reihe 3
Reihe 4Reihe 51,00
1,20
1,40
1,60
1,80
2,00
Wid
erst
and
[kΩ
]
Sensor Nummer
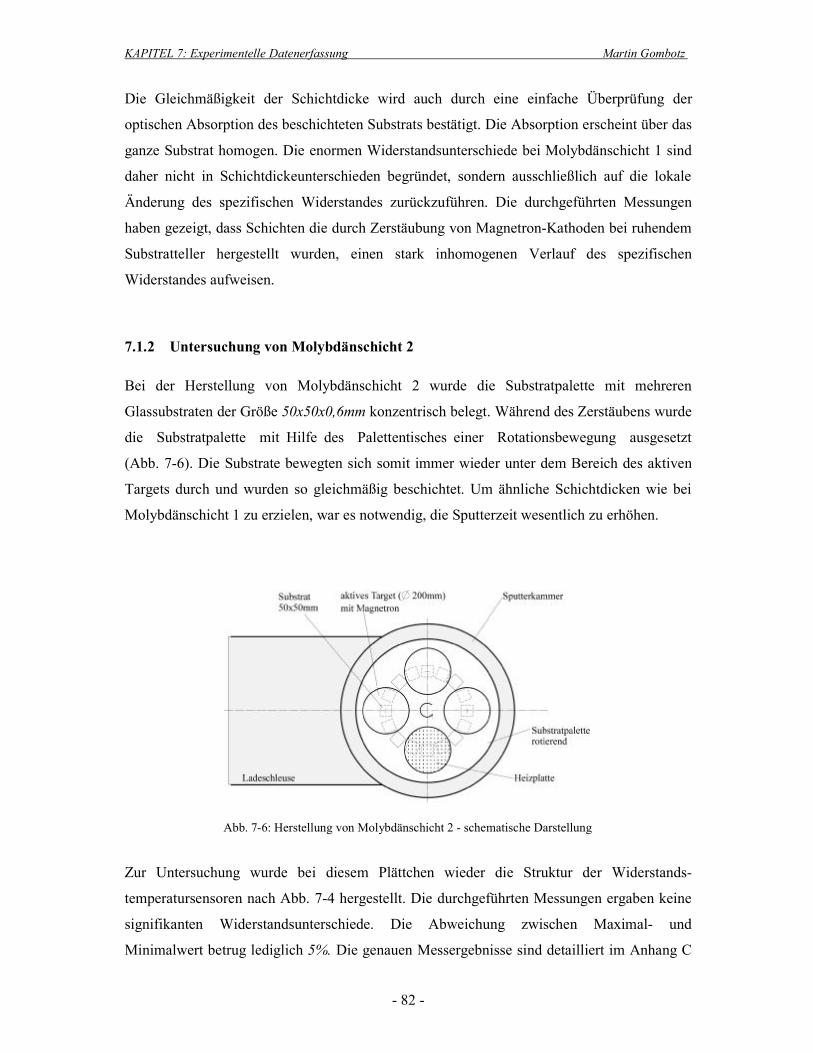
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 82 -
Die Gleichmäßigkeit der Schichtdicke wird auch durch eine einfache Überprüfung der
optischen Absorption des beschichteten Substrats bestätigt. Die Absorption erscheint über das
ganze Substrat homogen. Die enormen Widerstandsunterschiede bei Molybdänschicht 1 sind
daher nicht in Schichtdickeunterschieden begründet, sondern ausschließlich auf die lokale
Änderung des spezifischen Widerstandes zurückzuführen. Die durchgeführten Messungen
haben gezeigt, dass Schichten die durch Zerstäubung von Magnetron-Kathoden bei ruhendem
Substratteller hergestellt wurden, einen stark inhomogenen Verlauf des spezifischen
Widerstandes aufweisen.
7.1.2 Untersuchung von Molybdänschicht 2 Bei der Herstellung von Molybdänschicht 2 wurde die Substratpalette mit mehreren
Glassubstraten der Größe 50x50x0,6mm konzentrisch belegt. Während des Zerstäubens wurde
die Substratpalette mit Hilfe des Palettentisches einer Rotationsbewegung ausgesetzt
(Abb. 7-6). Die Substrate bewegten sich somit immer wieder unter dem Bereich des aktiven
Targets durch und wurden so gleichmäßig beschichtet. Um ähnliche Schichtdicken wie bei
Molybdänschicht 1 zu erzielen, war es notwendig, die Sputterzeit wesentlich zu erhöhen.
Abb. 7-6: Herstellung von Molybdänschicht 2 - schematische Darstellung Zur Untersuchung wurde bei diesem Plättchen wieder die Struktur der Widerstands-
temperatursensoren nach Abb. 7-4 hergestellt. Die durchgeführten Messungen ergaben keine
signifikanten Widerstandsunterschiede. Die Abweichung zwischen Maximal- und
Minimalwert betrug lediglich 5%. Die genauen Messergebnisse sind detailliert im Anhang C
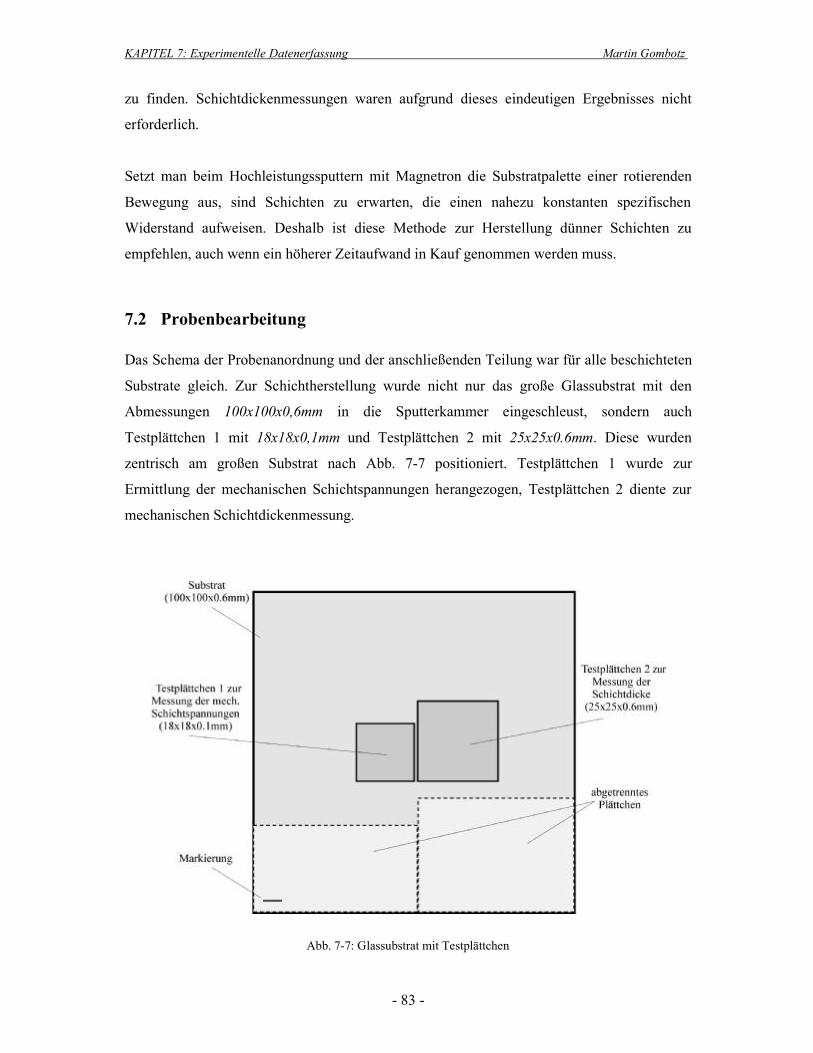
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 83 -
zu finden. Schichtdickenmessungen waren aufgrund dieses eindeutigen Ergebnisses nicht
erforderlich.
Setzt man beim Hochleistungssputtern mit Magnetron die Substratpalette einer rotierenden
Bewegung aus, sind Schichten zu erwarten, die einen nahezu konstanten spezifischen
Widerstand aufweisen. Deshalb ist diese Methode zur Herstellung dünner Schichten zu
empfehlen, auch wenn ein höherer Zeitaufwand in Kauf genommen werden muss.
7.2 Probenbearbeitung
Das Schema der Probenanordnung und der anschließenden Teilung war für alle beschichteten
Substrate gleich. Zur Schichtherstellung wurde nicht nur das große Glassubstrat mit den
Abmessungen 100x100x0,6mm in die Sputterkammer eingeschleust, sondern auch
Testplättchen 1 mit 18x18x0,1mm und Testplättchen 2 mit 25x25x0.6mm. Diese wurden
zentrisch am großen Substrat nach Abb. 7-7 positioniert. Testplättchen 1 wurde zur
Ermittlung der mechanischen Schichtspannungen herangezogen, Testplättchen 2 diente zur
mechanischen Schichtdickenmessung.
Abb. 7-7: Glassubstrat mit Testplättchen
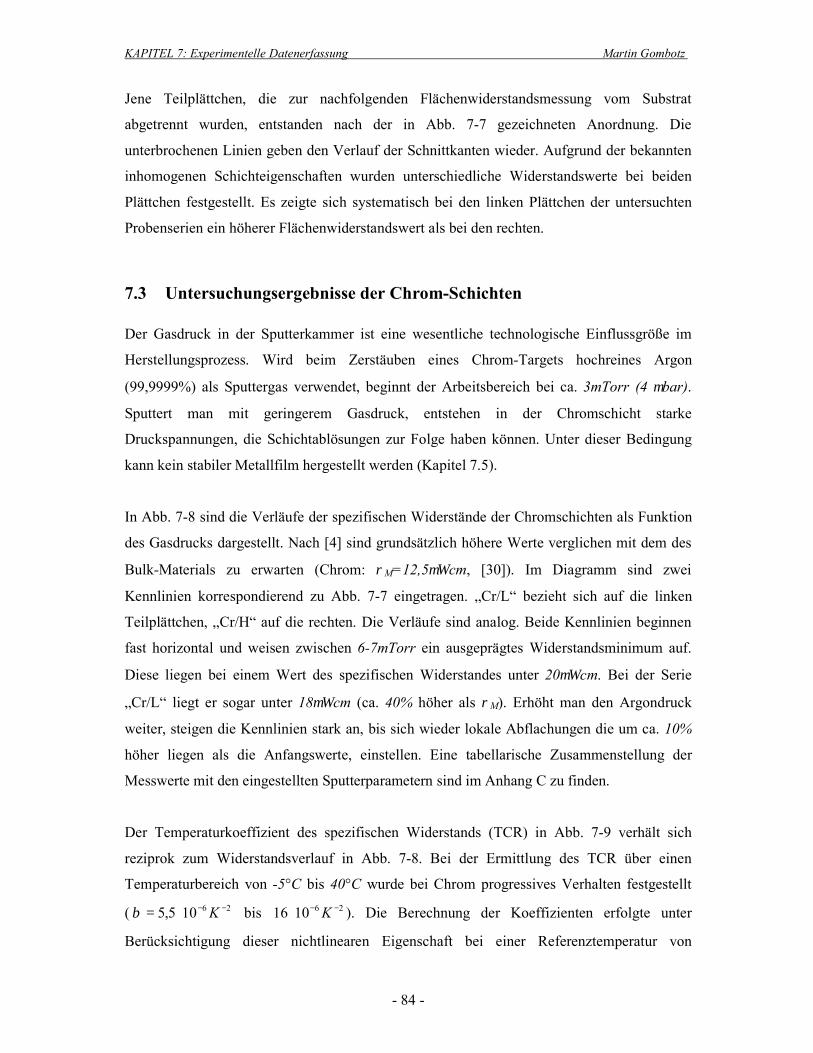
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 84 -
Jene Teilplättchen, die zur nachfolgenden Flächenwiderstandsmessung vom Substrat
abgetrennt wurden, entstanden nach der in Abb. 7-7 gezeichneten Anordnung. Die
unterbrochenen Linien geben den Verlauf der Schnittkanten wieder. Aufgrund der bekannten
inhomogenen Schichteigenschaften wurden unterschiedliche Widerstandswerte bei beiden
Plättchen festgestellt. Es zeigte sich systematisch bei den linken Plättchen der untersuchten
Probenserien ein höherer Flächenwiderstandswert als bei den rechten.
7.3 Untersuchungsergebnisse der Chrom-Schichten
Der Gasdruck in der Sputterkammer ist eine wesentliche technologische Einflussgröße im
Herstellungsprozess. Wird beim Zerstäuben eines Chrom-Targets hochreines Argon
(99,9999%) als Sputtergas verwendet, beginnt der Arbeitsbereich bei ca. 3mTorr (4 µbar).
Sputtert man mit geringerem Gasdruck, entstehen in der Chromschicht starke
Druckspannungen, die Schichtablösungen zur Folge haben können. Unter dieser Bedingung
kann kein stabiler Metallfilm hergestellt werden (Kapitel 7.5).
In Abb. 7-8 sind die Verläufe der spezifischen Widerstände der Chromschichten als Funktion
des Gasdrucks dargestellt. Nach [4] sind grundsätzlich höhere Werte verglichen mit dem des
Bulk-Materials zu erwarten (Chrom: ρM=12,5µΩcm, [30]). Im Diagramm sind zwei
Kennlinien korrespondierend zu Abb. 7-7 eingetragen. „Cr/L“ bezieht sich auf die linken
Teilplättchen, „Cr/H“ auf die rechten. Die Verläufe sind analog. Beide Kennlinien beginnen
fast horizontal und weisen zwischen 6-7mTorr ein ausgeprägtes Widerstandsminimum auf.
Diese liegen bei einem Wert des spezifischen Widerstandes unter 20µΩcm. Bei der Serie
„Cr/L“ liegt er sogar unter 18µΩcm (ca. 40% höher als ρM). Erhöht man den Argondruck
weiter, steigen die Kennlinien stark an, bis sich wieder lokale Abflachungen die um ca. 10%
höher liegen als die Anfangswerte, einstellen. Eine tabellarische Zusammenstellung der
Messwerte mit den eingestellten Sputterparametern sind im Anhang C zu finden.
Der Temperaturkoeffizient des spezifischen Widerstands (TCR) in Abb. 7-9 verhält sich
reziprok zum Widerstandsverlauf in Abb. 7-8. Bei der Ermittlung des TCR über einen
Temperaturbereich von -5°C bis 40°C wurde bei Chrom progressives Verhalten festgestellt
( 26105,5 −−⋅= Kβ bis 261016 −−⋅ K ). Die Berechnung der Koeffizienten erfolgte unter
Berücksichtigung dieser nichtlinearen Eigenschaft bei einer Referenztemperatur von
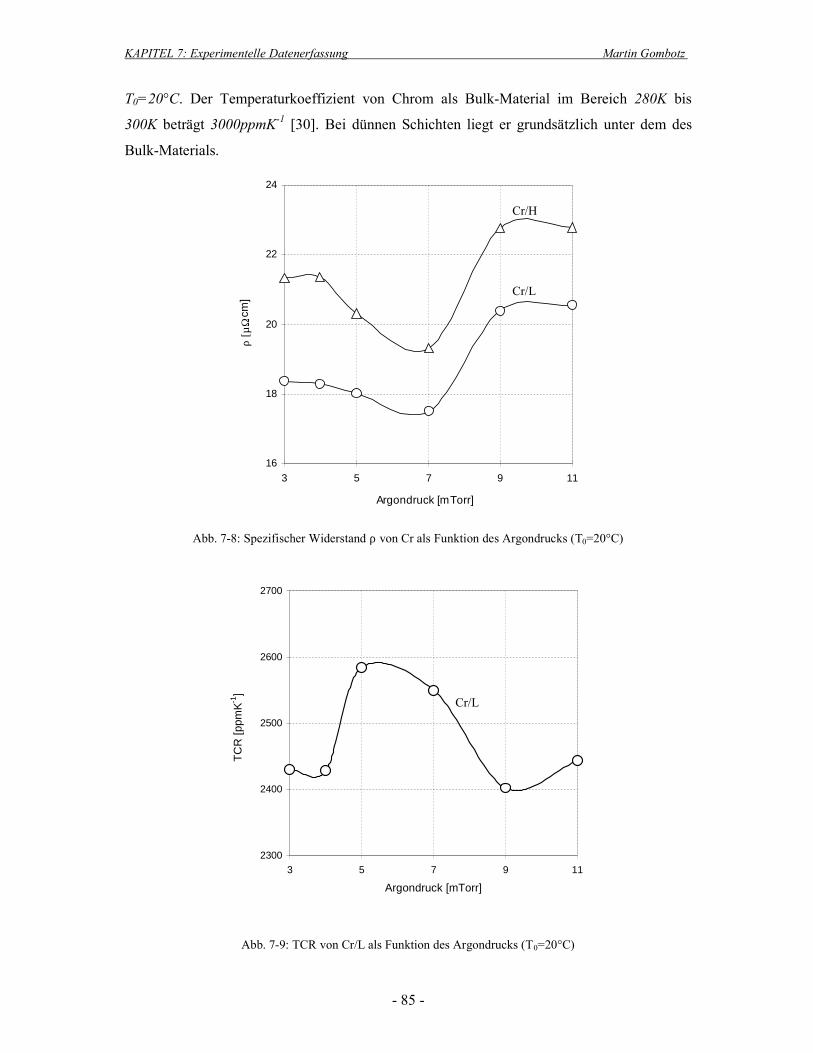
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 85 -
16
18
20
22
24
3 5 7 9 11
Argondruck [mTorr]
ρ [µ
Ωcm
]
2300
2400
2500
2600
2700
3 5 7 9 11
Argondruck [mTorr]
TC
R [p
pmK-1
]
T0=20°C. Der Temperaturkoeffizient von Chrom als Bulk-Material im Bereich 280K bis
300K beträgt 3000ppmK-1 [30]. Bei dünnen Schichten liegt er grundsätzlich unter dem des
Bulk-Materials.
Abb. 7-8: Spezifischer Widerstand ρ von Cr als Funktion des Argondrucks (T0=20°C)
Abb. 7-9: TCR von Cr/L als Funktion des Argondrucks (T0=20°C)
Cr/L
Cr/H
Cr/L
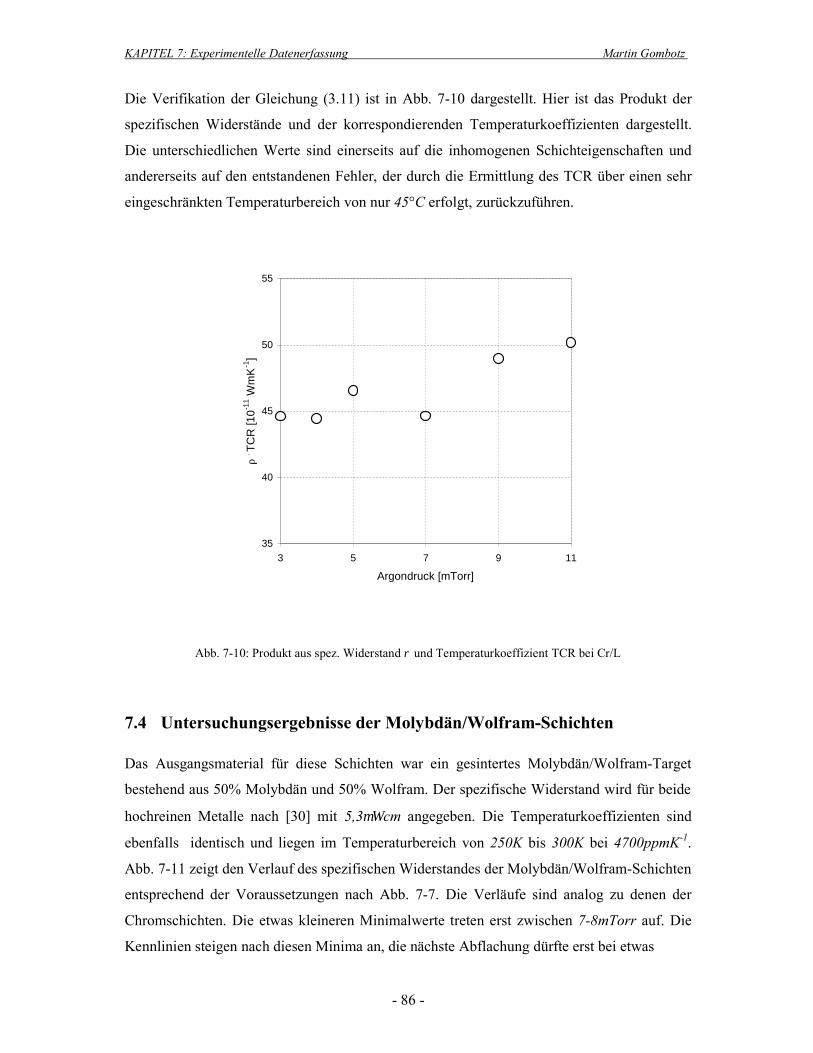
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 86 -
Die Verifikation der Gleichung (3.11) ist in Abb. 7-10 dargestellt. Hier ist das Produkt der
spezifischen Widerstände und der korrespondierenden Temperaturkoeffizienten dargestellt.
Die unterschiedlichen Werte sind einerseits auf die inhomogenen Schichteigenschaften und
andererseits auf den entstandenen Fehler, der durch die Ermittlung des TCR über einen sehr
eingeschränkten Temperaturbereich von nur 45°C erfolgt, zurückzuführen.
Abb. 7-10: Produkt aus spez. Widerstand ρ und Temperaturkoeffizient TCR bei Cr/L
7.4 Untersuchungsergebnisse der Molybdän/Wolfram-Schichten
Das Ausgangsmaterial für diese Schichten war ein gesintertes Molybdän/Wolfram-Target
bestehend aus 50% Molybdän und 50% Wolfram. Der spezifische Widerstand wird für beide
hochreinen Metalle nach [30] mit 5,3µΩcm angegeben. Die Temperaturkoeffizienten sind
ebenfalls identisch und liegen im Temperaturbereich von 250K bis 300K bei 4700ppmK-1.
Abb. 7-11 zeigt den Verlauf des spezifischen Widerstandes der Molybdän/Wolfram-Schichten
entsprechend der Voraussetzungen nach Abb. 7-7. Die Verläufe sind analog zu denen der
Chromschichten. Die etwas kleineren Minimalwerte treten erst zwischen 7-8mTorr auf. Die
Kennlinien steigen nach diesen Minima an, die nächste Abflachung dürfte erst bei etwas
35
40
45
50
55
3 5 7 9 11
Argondruck [mTorr]
ρ . TC
R [1
0-11 W
mK
-1]
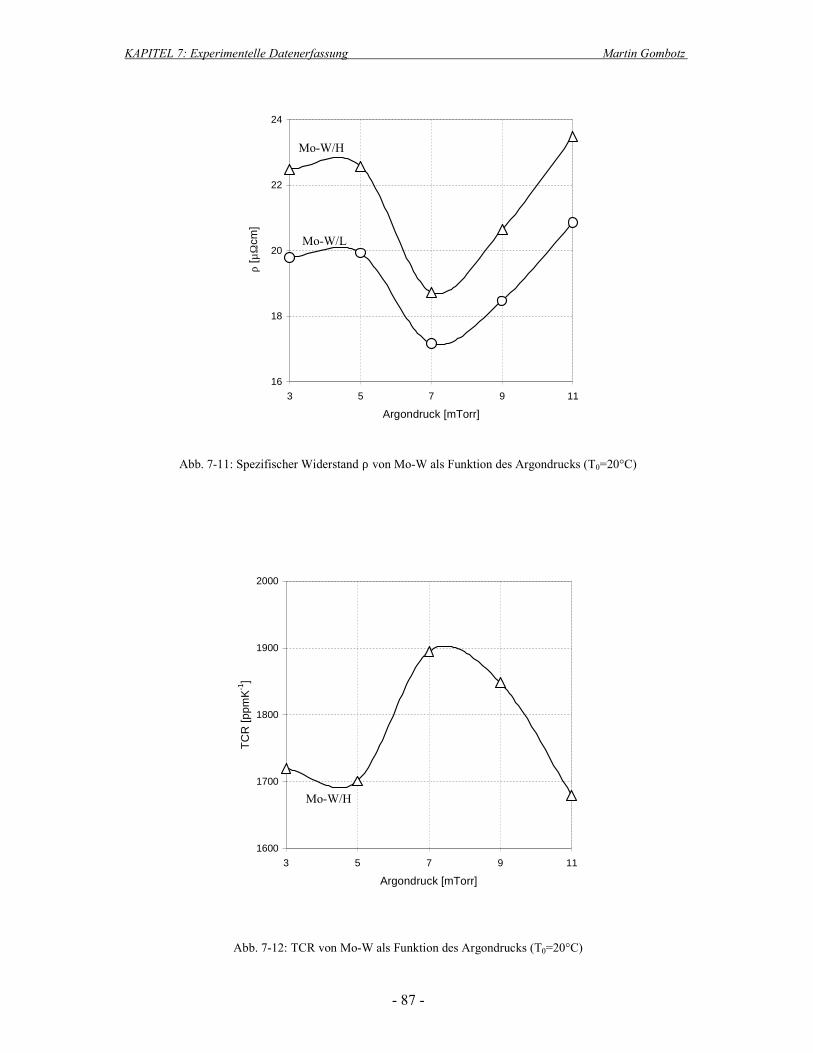
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 87 -
1600
1700
1800
1900
2000
3 5 7 9 11
Argondruck [mTorr]
TCR
[ppm
K-1]
16
18
20
22
24
3 5 7 9 11
Argondruck [mTorr]
ρ [ µ
Ωcm
]
Abb. 7-11: Spezifischer Widerstand ρ von Mo-W als Funktion des Argondrucks (T0=20°C)
Abb. 7-12: TCR von Mo-W als Funktion des Argondrucks (T0=20°C)
Mo-W/L
Mo-W/H
Mo-W/H
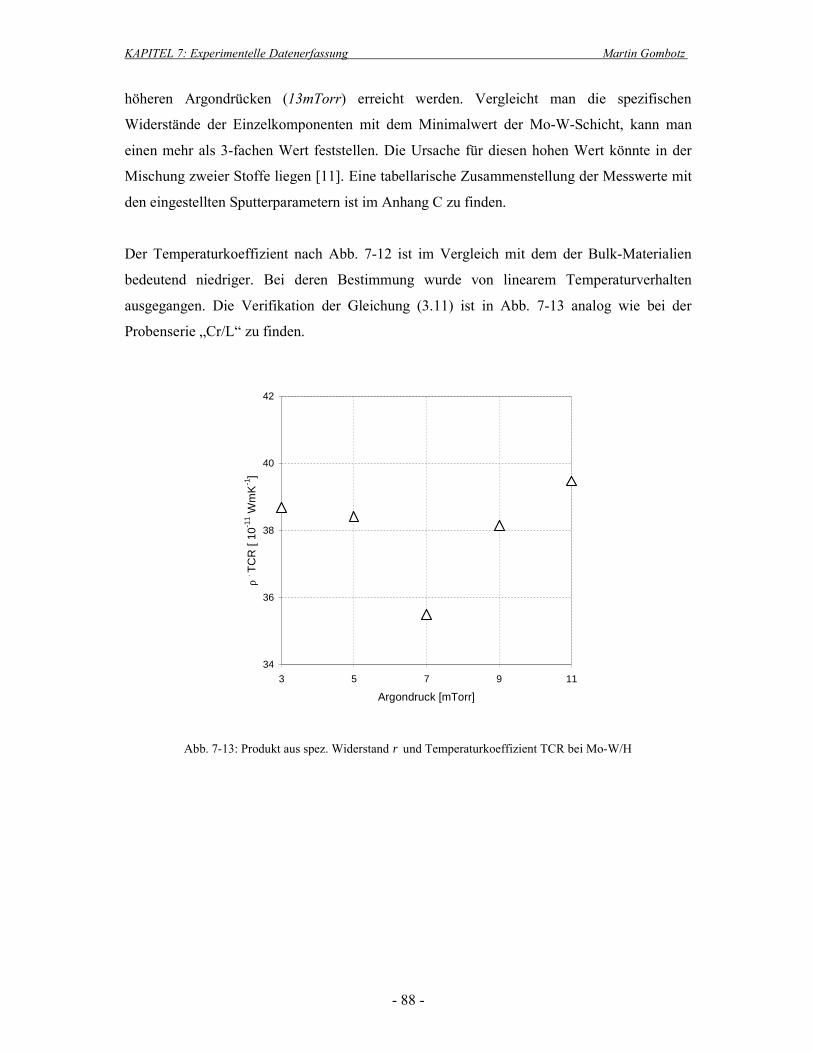
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 88 -
höheren Argondrücken (13mTorr) erreicht werden. Vergleicht man die spezifischen
Widerstände der Einzelkomponenten mit dem Minimalwert der Mo-W-Schicht, kann man
einen mehr als 3-fachen Wert feststellen. Die Ursache für diesen hohen Wert könnte in der
Mischung zweier Stoffe liegen [11]. Eine tabellarische Zusammenstellung der Messwerte mit
den eingestellten Sputterparametern ist im Anhang C zu finden.
Der Temperaturkoeffizient nach Abb. 7-12 ist im Vergleich mit dem der Bulk-Materialien
bedeutend niedriger. Bei deren Bestimmung wurde von linearem Temperaturverhalten
ausgegangen. Die Verifikation der Gleichung (3.11) ist in Abb. 7-13 analog wie bei der
Probenserie „Cr/L“ zu finden.
Abb. 7-13: Produkt aus spez. Widerstand ρ und Temperaturkoeffizient TCR bei Mo-W/H
34
36
38
40
42
3 5 7 9 11
Argondruck [mTorr]
ρ . TC
R [
10-1
1 Wm
K-1
]
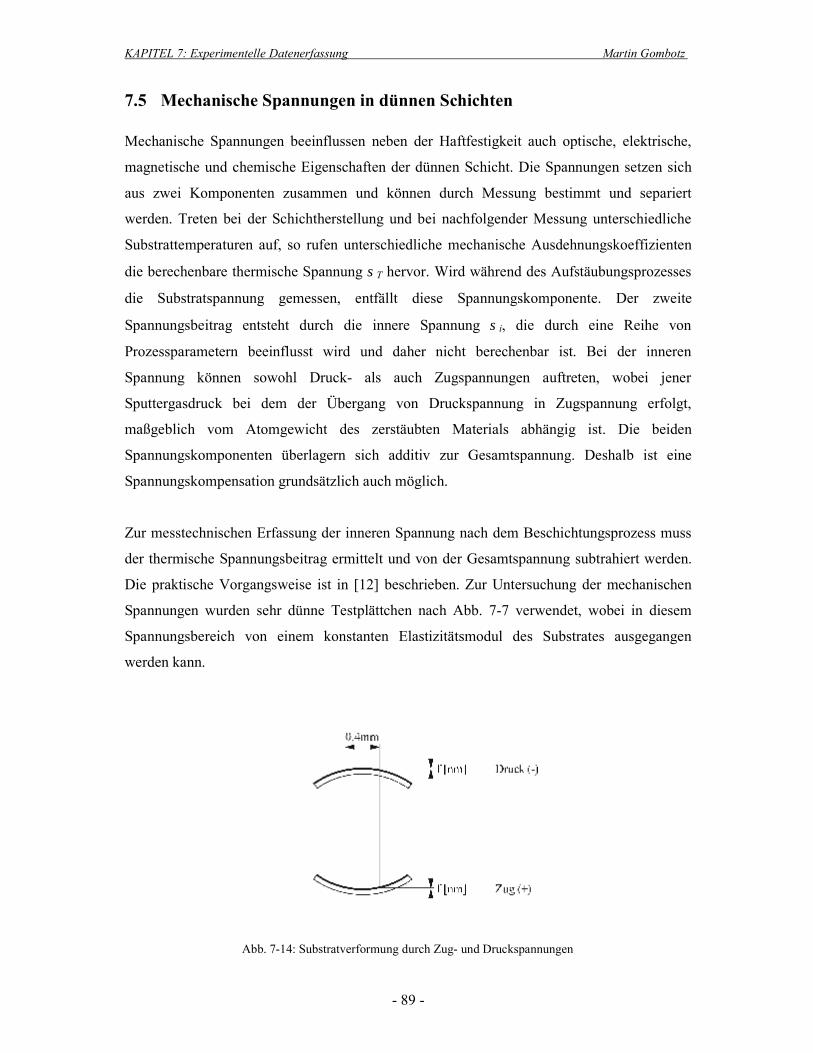
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 89 -
7.5 Mechanische Spannungen in dünnen Schichten
Mechanische Spannungen beeinflussen neben der Haftfestigkeit auch optische, elektrische,
magnetische und chemische Eigenschaften der dünnen Schicht. Die Spannungen setzen sich
aus zwei Komponenten zusammen und können durch Messung bestimmt und separiert
werden. Treten bei der Schichtherstellung und bei nachfolgender Messung unterschiedliche
Substrattemperaturen auf, so rufen unterschiedliche mechanische Ausdehnungskoeffizienten
die berechenbare thermische Spannung σT hervor. Wird während des Aufstäubungsprozesses
die Substratspannung gemessen, entfällt diese Spannungskomponente. Der zweite
Spannungsbeitrag entsteht durch die innere Spannung σi, die durch eine Reihe von
Prozessparametern beeinflusst wird und daher nicht berechenbar ist. Bei der inneren
Spannung können sowohl Druck- als auch Zugspannungen auftreten, wobei jener
Sputtergasdruck bei dem der Übergang von Druckspannung in Zugspannung erfolgt,
maßgeblich vom Atomgewicht des zerstäubten Materials abhängig ist. Die beiden
Spannungskomponenten überlagern sich additiv zur Gesamtspannung. Deshalb ist eine
Spannungskompensation grundsätzlich auch möglich.
Zur messtechnischen Erfassung der inneren Spannung nach dem Beschichtungsprozess muss
der thermische Spannungsbeitrag ermittelt und von der Gesamtspannung subtrahiert werden.
Die praktische Vorgangsweise ist in [12] beschrieben. Zur Untersuchung der mechanischen
Spannungen wurden sehr dünne Testplättchen nach Abb. 7-7 verwendet, wobei in diesem
Spannungsbereich von einem konstanten Elastizitätsmodul des Substrates ausgegangen
werden kann.
Abb. 7-14: Substratverformung durch Zug- und Druckspannungen
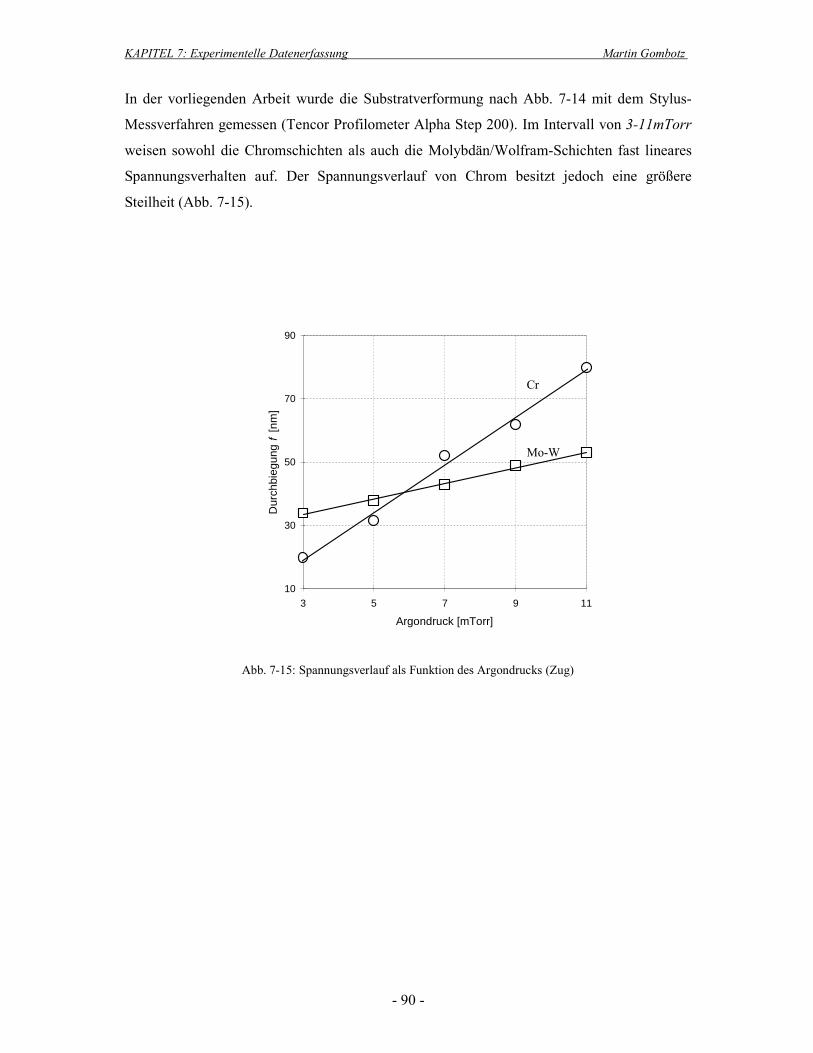
KAPITEL 7: Experimentelle Datenerfassung Martin Gombotz
- 90 -
10
30
50
70
90
3 5 7 9 11
Argondruck [mTorr]
Dur
chbi
egun
g f
[nm
]
In der vorliegenden Arbeit wurde die Substratverformung nach Abb. 7-14 mit dem Stylus-
Messverfahren gemessen (Tencor Profilometer Alpha Step 200). Im Intervall von 3-11mTorr
weisen sowohl die Chromschichten als auch die Molybdän/Wolfram-Schichten fast lineares
Spannungsverhalten auf. Der Spannungsverlauf von Chrom besitzt jedoch eine größere
Steilheit (Abb. 7-15).
Abb. 7-15: Spannungsverlauf als Funktion des Argondrucks (Zug)
Mo-W
Cr
KAPITEL8: Zusammenfassung und Ausblick Martin Gombotz
- 91 -
8 Zusammenfassung und Ausblick Es wurden Schichtproben zum Zweck der Ermittlung jener Sputterparameter hergestellt, bei
denen ein möglichst geringer spezifischer Widerstand erzielt wird. Die Widerstands-
messungen konnten mit dem entwickelten Vier-Spitzen-Messplatz durchgeführt werden.
Durch die Berechnung der Korrekturfaktoren, die von der Substratgröße und vom Ort der
Messkopfposition am Substrat abhängig sind, war es möglich, die durch den
Herstellungsprozess inhärent festgelegte Inhomogenität der Schichten zu analysieren. Der
Temperaturkoeffizient konnte ebenso durch Variation der Substrattemperatur ermittelt
werden. Die Ergebnisse der Untersuchungen sind eindeutig. Mit den hochreinen
Sputtertargets (Produkte der Fa. Plansee AG) aus Chrom und Molybdän-Wolfram gelang es
unter Variation des Argondrucks sehr niederohmige Schichten herzustellen. Die besten
erzielbaren Werte des spezifischen Widerstandes liegen bei beiden Materialien unter
18µΩcm.
Zur Verbesserung der Performance des Messsystems bezüglich der Temperatur-
koeffizientenermittlung sollte die Substrattemperatur über einen größeren Bereich
veränderbar sein. Das erfordert den Austausch des bisher verwendeten Vier-Spitzen-
Messkopfes gegen einen Messkopf, bei dem die Messspitzen in einem Keramik- oder
Glasgehäuse gelagert sind. Dann könnte zur Vermeidung von Kondensat am Substrat der
Messbereich bei Raumtemperatur beginnen. Im Zuge dessen sollte das Analyseprogramm zur
Bestimmung des thermischen Widerstandsverhaltens der Schichten auf die Berechnung und
Berücksichtigung des quadratischen Temperaturkoeffizienten erweitert werden und die
Referenztemperatur frei wählbar sein.
Die Ergebnisse der Homogenitätsuntersuchungen sollten Anlass geben dem Phänomen auf
den Grund zu gehen, warum trotz inhomogener Magnetfeldverteilung beim
Magnetronsputtern und ohne Relativbewegung zwischen Substrat und Target Schichten
aufwachsen, die nahezu homogene Schichtdickenverteilung haben aber inhomogenen
Widerstandsverlauf aufweisen.
KAPITEL9: Literaturverzeichnis Martin Gombotz
- 92 -
9 Literaturverzeichnis
[1] Kienel G.: Vakuumbeschichtung 4 Anwendungen Teil I, VDI Verlag GmbH. Düsseldorf 1993, ISBN 3-18-401314-6 [2] Kienel G.: Vakuumbeschichtung 5 Anwendungen Teil II,
VDI Verlag GmbH. Düsseldorf 1993, ISBN 3-18-401315-4
[3] Frey H.: Vakuumbeschichtung 1 Plasmaphysik - Plasmadiagnostik - Analytik, VDI Verlag GmbH. Düsseldorf 1995, ISBN 3-18-401311-1
[4] Lüder E.: Bau hybrider Mikroschaltungen Einführung in die Dünn- und Dickschichttechnologie, Springer-Verlag Berlin Heidelberg New York 1977
[5] Kienel G., Röll K.: Vakuumbeschichtung 2 Verfahren und Anlagen, VDI Verlag GmbH. Düsseldorf 1995, ISBN 3-18-401312-X [6] Maissel L. I., Glang R.: Handbook of Thin Film Technology, McGraw-Hill Book Company New York St. Louis Düsseldorf 1970 [7] Valdes L. B.: Proceedings of the IRE Volume 42-1954, Seite 420-427
Resistivity Measurements on Germanium for Transistors, The Institute of Radio Engineers Inc. New York 1954 [8] Datenblatt der Firma Cascade Microtech:
Technical Data of Four-Point Probe Head C4S-64/1, Cascade Microtech Inc. Beaverton, Oregon USA, www.cascademicrotech.com [9] Smits F. M.: The Bell System Technical Journal Volume 37-1958, Seite 711-718
Measurement of Sheet Resistivities with the Four-Point Probe, American Telephone and Telegraph Company New York [10] Klein F.: Vorlesungen über höhere Geometrie, Verlag von Julius Springer Berlin 1926 [11] Philippow E.: Grundlagen der Elektrotechnik,
Verlag Technik Berlin 1992, ISBN 3-341-01241-9
[12] Kienel G.: Vakuumbeschichtung 3 Anlagenautomatisierung, Mess- und Analysetechnik, VDI-Verlag GmbH. Düsseldorf 1994, ISBN 3-18-401313-8
KAPITEL9: Literaturverzeichnis Martin Gombotz
- 93 -
[13] Veeco application note: Four-point probe measurements - geometrical considerations; Resistivity Probe No. 304,
Veeco Instruments Inc New York, www.veeco.com [14] Ollendorf F.: Potentialfelder in der Elektrotechnik,
Verlag von Julius Springer Berlin 1932
[15] Berry R. W., Hall P. M., Harris M. T.: Thin Film Technology, Van Nostrand Reinhold Company New York London 1968 [16] Produktkatalog der Firma Sensycon: Katalog Nr.8123, ABB Automation Products Alzenau Deutschland 1997, www.abb.de/automation [17] Firmenschrift der Fa. Jumo: Weber D., Nau M.: Elektrische Temperaturmessung mit
Thermoelementen und Widerstandsthermometern, M. K. Juchheim Fulda Deutschland 1991, www.jumo.de [18] Veeco application note: The importance of proper probe head selection;
Resistivity Probe No. 303, Veeco Instruments Inc New York, www.veeco.com
[19] Veeco application note: effects of variations in probe tip diameter and spacing on measurements of sheet resistivity using the four-point probe; Resistivity Probe No. 305, Veeco Instruments Inc New York, www.veeco.com
[20] Datenblatt der Firma Cascade Microtech: Cascade Microtech CPS-05 alessi Contact Probe Station; Users Manual 110-909,
Cascade Microtech Inc. Beaverton, Oregon USA, www.cascademicrotech.com [21] National Instruments Application Note 047, Dehe T. Golla L.:
Increasing Test System Compatibility and Productivity with IEEE-488.2, National Instruments Corporation, Austin Texas 1993, www.ni.com [22] Institut für Elektrische Messtechnik der TU Wien: Messwerterfassung mit dem PC,
Unterlagen zur Laborübung Messwerterfassung mit dem PC [23] Keithley Instruments Operators Manual: Model 236 Source Measure Unit, Keithley Instruments Inc, Cleveland Ohio, www.keithley.com [24] Keithley Instruments Instruction Manual: Model 197A Autoranging Microvolt DMM, Keithley Instruments Inc, Cleveland Ohio 1990, www.keithley.com [25] Keithley Instruments Instruction Manual: Model 1973/1972 IEEE-488 Interface, Keithley Instruments Inc, Cleveland Ohio 1991, www.keithley.com [26] National Instrument online Katalog: High-Perforemance GPIP Interface for PCI, National Instruments Corporation, Austin Texas 1993, www.ni.com
KAPITEL9: Literaturverzeichnis Martin Gombotz
- 94 -
[27] Jahmal R., Pichlik H.: LabVIEW Programmiersprache der vierten Generation, Prentice Hall München New York 1997, ISBN 3-8272-9542-4 [28] National Instruments: LabVIEW User Manual for Windows, National Instruments Corporation, Austin Texas 1994, www.ni.com [29] National Instruments: LabVIEW Function Reference Manual National Instruments Corporation, Austin Texas 1994, www.ni.com [30] Landold-Börnstein:
Numerical Data and Functional Relationships in Science and Technology, Springer-Verlag Berlin Heidelberg New York 1982
[31] Hanselman D., Littlefield B.: Matlab The Language of Technical Computing Prentice Hall Inc. London 1997, ISBN 0-13-272550-9 [32] Chabicovsky R.: Dünnschichttechnologie für Mikrosensoren Unterlagen zur Laborübung Industrielle Elektronik am Institut für Industrielle
Elektronik und Materialwissenschaften der TU Wien
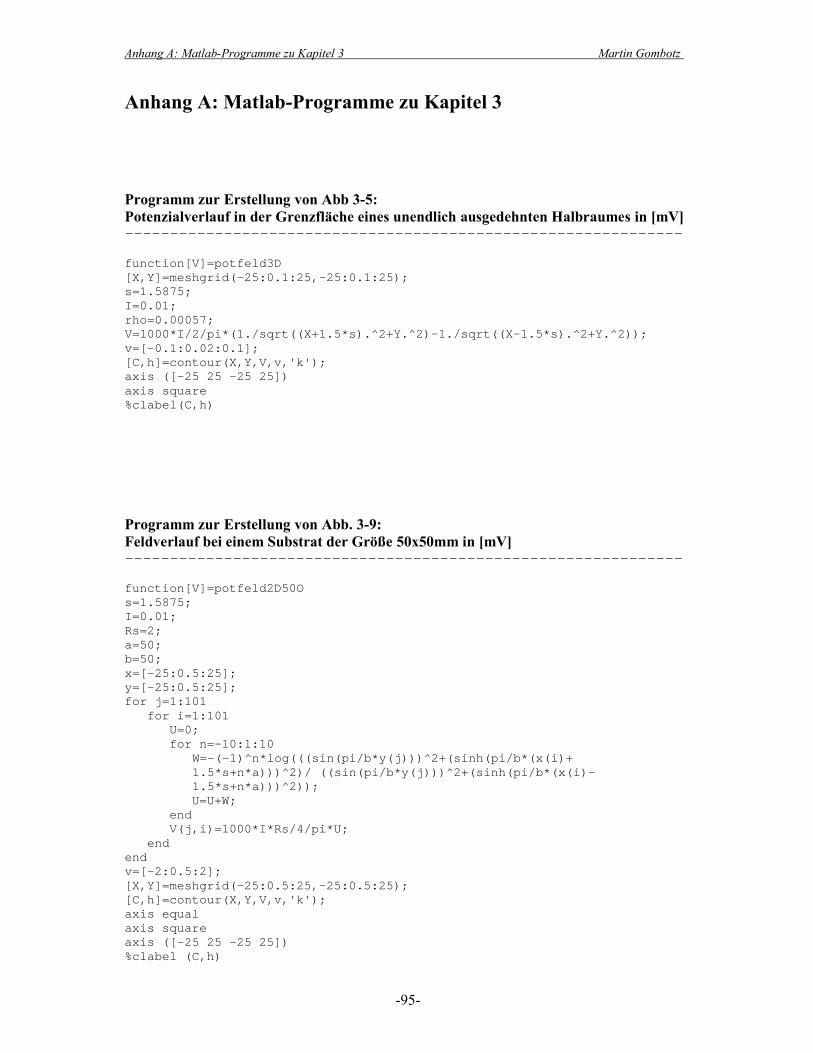
Anhang A: Matlab-Programme zu Kapitel 3 Martin Gombotz
-95-
Anhang A: Matlab-Programme zu Kapitel 3
Programm zur Erstellung von Abb 3-5: Potenzialverlauf in der Grenzfläche eines unendlich ausgedehnten Halbraumes in [mV] -------------------------------------------------------------- function[V]=potfeld3D [X,Y]=meshgrid(-25:0.1:25,-25:0.1:25); s=1.5875; I=0.01; rho=0.00057; V=1000*I/2/pi*(1./sqrt((X+1.5*s).^2+Y.^2)-1./sqrt((X-1.5*s).^2+Y.^2)); v=[-0.1:0.02:0.1]; [C,h]=contour(X,Y,V,v,'k'); axis ([-25 25 -25 25]) axis square %clabel(C,h)
Programm zur Erstellung von Abb. 3-9: Feldverlauf bei einem Substrat der Größe 50x50mm in [mV] -------------------------------------------------------------- function[V]=potfeld2D50O s=1.5875; I=0.01; Rs=2; a=50; b=50; x=[-25:0.5:25]; y=[-25:0.5:25]; for j=1:101 for i=1:101 U=0; for n=-10:1:10
W=-(-1)^n*log(((sin(pi/b*y(j)))^2+(sinh(pi/b*(x(i)+ 1.5*s+n*a)))^2)/ ((sin(pi/b*y(j)))^2+(sinh(pi/b*(x(i)-1.5*s+n*a)))^2));
U=U+W; end V(j,i)=1000*I*Rs/4/pi*U; end end v=[-2:0.5:2]; [X,Y]=meshgrid(-25:0.5:25,-25:0.5:25); [C,h]=contour(X,Y,V,v,'k'); axis equal axis square axis ([-25 25 -25 25]) %clabel (C,h)
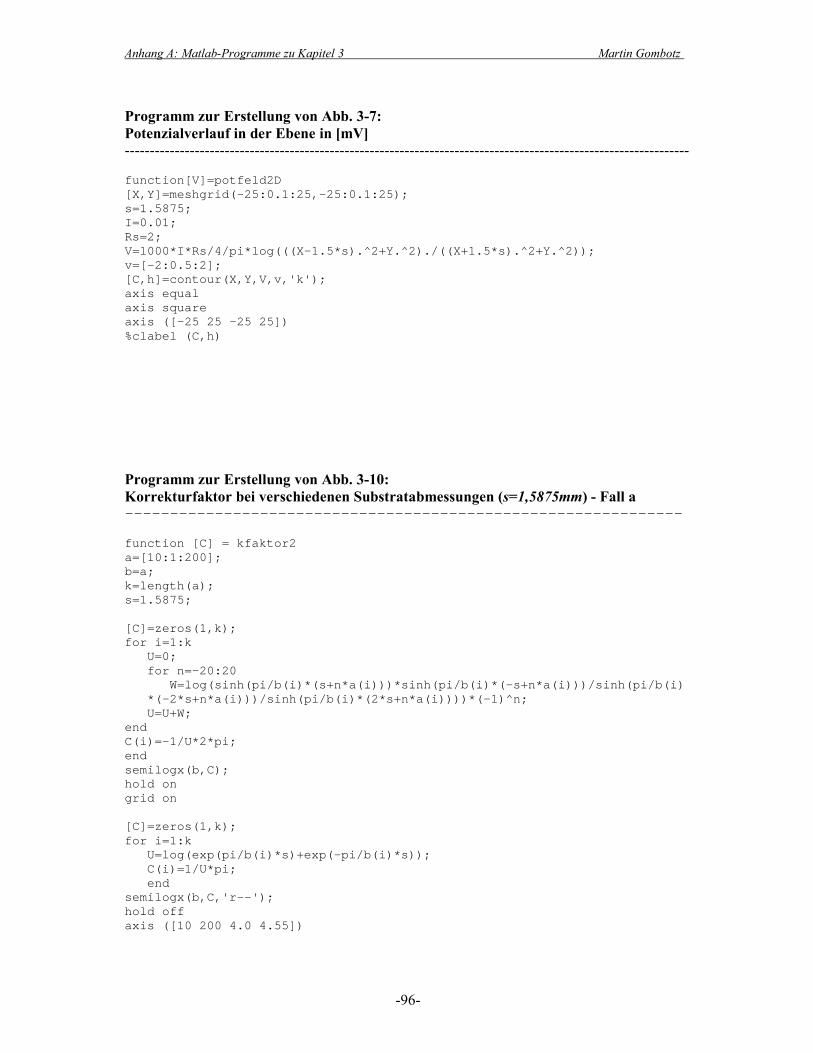
Anhang A: Matlab-Programme zu Kapitel 3 Martin Gombotz
-96-
Programm zur Erstellung von Abb. 3-7: Potenzialverlauf in der Ebene in [mV] ----------------------------------------------------------------------------------------------------------------- function[V]=potfeld2D [X,Y]=meshgrid(-25:0.1:25,-25:0.1:25); s=1.5875; I=0.01; Rs=2; V=1000*I*Rs/4/pi*log(((X-1.5*s).^2+Y.^2)./((X+1.5*s).^2+Y.^2)); v=[-2:0.5:2]; [C,h]=contour(X,Y,V,v,'k'); axis equal axis square axis ([-25 25 -25 25]) %clabel (C,h) Programm zur Erstellung von Abb. 3-10: Korrekturfaktor bei verschiedenen Substratabmessungen (s=1,5875mm) - Fall a -------------------------------------------------------------- function [C] = kfaktor2 a=[10:1:200]; b=a; k=length(a); s=1.5875; [C]=zeros(1,k); for i=1:k U=0; for n=-20:20
W=log(sinh(pi/b(i)*(s+n*a(i)))*sinh(pi/b(i)*(-s+n*a(i)))/sinh(pi/b(i) *(-2*s+n*a(i)))/sinh(pi/b(i)*(2*s+n*a(i))))*(-1)^n;
U=U+W; end C(i)=-1/U*2*pi; end semilogx(b,C); hold on grid on [C]=zeros(1,k); for i=1:k U=log(exp(pi/b(i)*s)+exp(-pi/b(i)*s)); C(i)=1/U*pi; end semilogx(b,C,'r--'); hold off axis ([10 200 4.0 4.55])
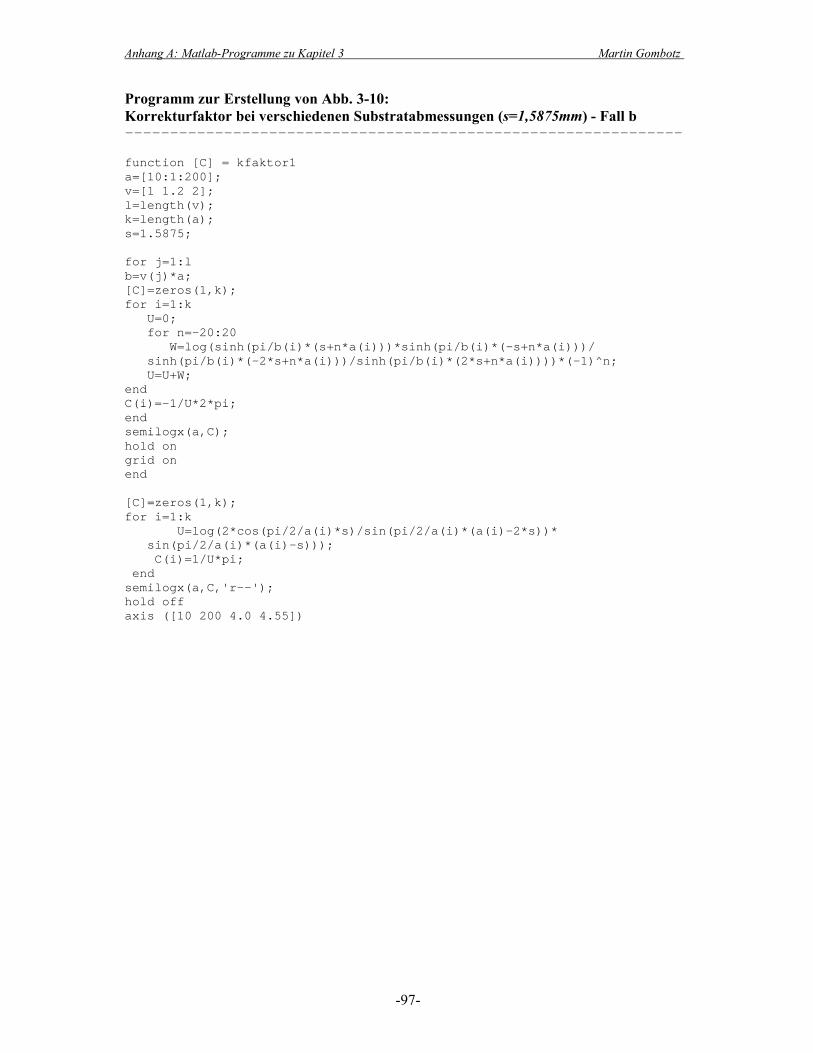
Anhang A: Matlab-Programme zu Kapitel 3 Martin Gombotz
-97-
Programm zur Erstellung von Abb. 3-10: Korrekturfaktor bei verschiedenen Substratabmessungen (s=1,5875mm) - Fall b -------------------------------------------------------------- function [C] = kfaktor1 a=[10:1:200]; v=[1 1.2 2]; l=length(v); k=length(a); s=1.5875; for j=1:l b=v(j)*a; [C]=zeros(1,k); for i=1:k U=0; for n=-20:20
W=log(sinh(pi/b(i)*(s+n*a(i)))*sinh(pi/b(i)*(-s+n*a(i)))/ sinh(pi/b(i)*(-2*s+n*a(i)))/sinh(pi/b(i)*(2*s+n*a(i))))*(-1)^n;
U=U+W; end C(i)=-1/U*2*pi; end semilogx(a,C); hold on grid on end [C]=zeros(1,k); for i=1:k
U=log(2*cos(pi/2/a(i)*s)/sin(pi/2/a(i)*(a(i)-2*s))* sin(pi/2/a(i)*(a(i)-s)));
C(i)=1/U*pi; end semilogx(a,C,'r--'); hold off axis ([10 200 4.0 4.55])
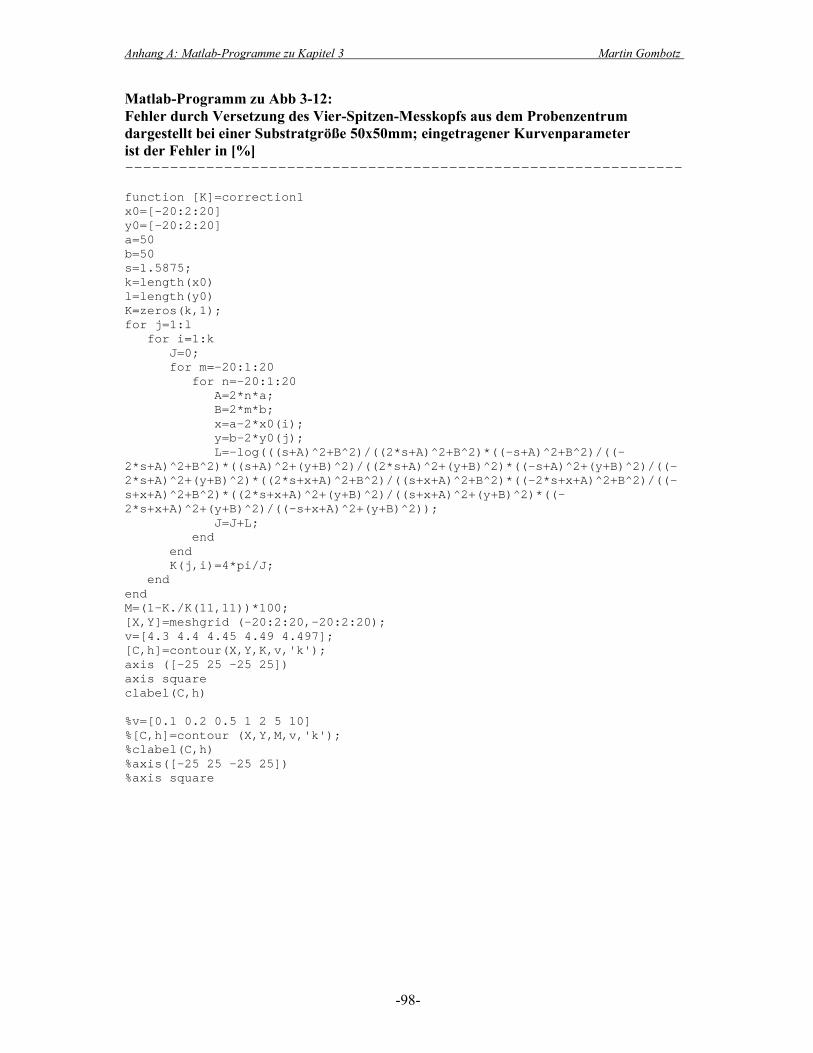
Anhang A: Matlab-Programme zu Kapitel 3 Martin Gombotz
-98-
Matlab-Programm zu Abb 3-12: Fehler durch Versetzung des Vier-Spitzen-Messkopfs aus dem Probenzentrum dargestellt bei einer Substratgröße 50x50mm; eingetragener Kurvenparameter ist der Fehler in [%] -------------------------------------------------------------- function [K]=correction1 x0=[-20:2:20] y0=[-20:2:20] a=50 b=50 s=1.5875; k=length(x0) l=length(y0) K=zeros(k,1); for j=1:l for i=1:k J=0; for m=-20:1:20 for n=-20:1:20 A=2*n*a; B=2*m*b; x=a-2*x0(i); y=b-2*y0(j); L=-log(((s+A)^2+B^2)/((2*s+A)^2+B^2)*((-s+A)^2+B^2)/((-2*s+A)^2+B^2)*((s+A)^2+(y+B)^2)/((2*s+A)^2+(y+B)^2)*((-s+A)^2+(y+B)^2)/((-2*s+A)^2+(y+B)^2)*((2*s+x+A)^2+B^2)/((s+x+A)^2+B^2)*((-2*s+x+A)^2+B^2)/((-s+x+A)^2+B^2)*((2*s+x+A)^2+(y+B)^2)/((s+x+A)^2+(y+B)^2)*((-2*s+x+A)^2+(y+B)^2)/((-s+x+A)^2+(y+B)^2)); J=J+L; end end K(j,i)=4*pi/J; end end M=(1-K./K(11,11))*100; [X,Y]=meshgrid (-20:2:20,-20:2:20); v=[4.3 4.4 4.45 4.49 4.497]; [C,h]=contour(X,Y,K,v,'k'); axis ([-25 25 -25 25]) axis square clabel(C,h) %v=[0.1 0.2 0.5 1 2 5 10] %[C,h]=contour (X,Y,M,v,'k'); %clabel(C,h) %axis([-25 25 -25 25]) %axis square
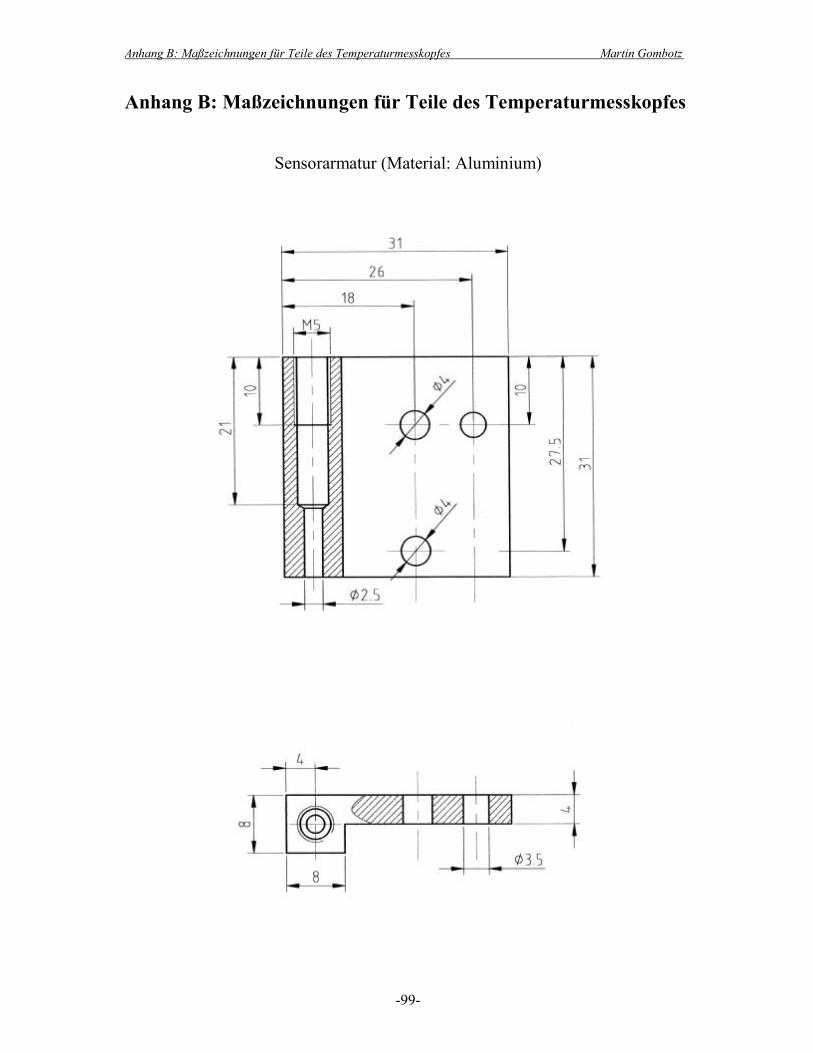
Anhang B: Maßzeichnungen für Teile des Temperaturmesskopfes Martin Gombotz
-99-
Anhang B: Maßzeichnungen für Teile des Temperaturmesskopfes
Sensorarmatur (Material: Aluminium)
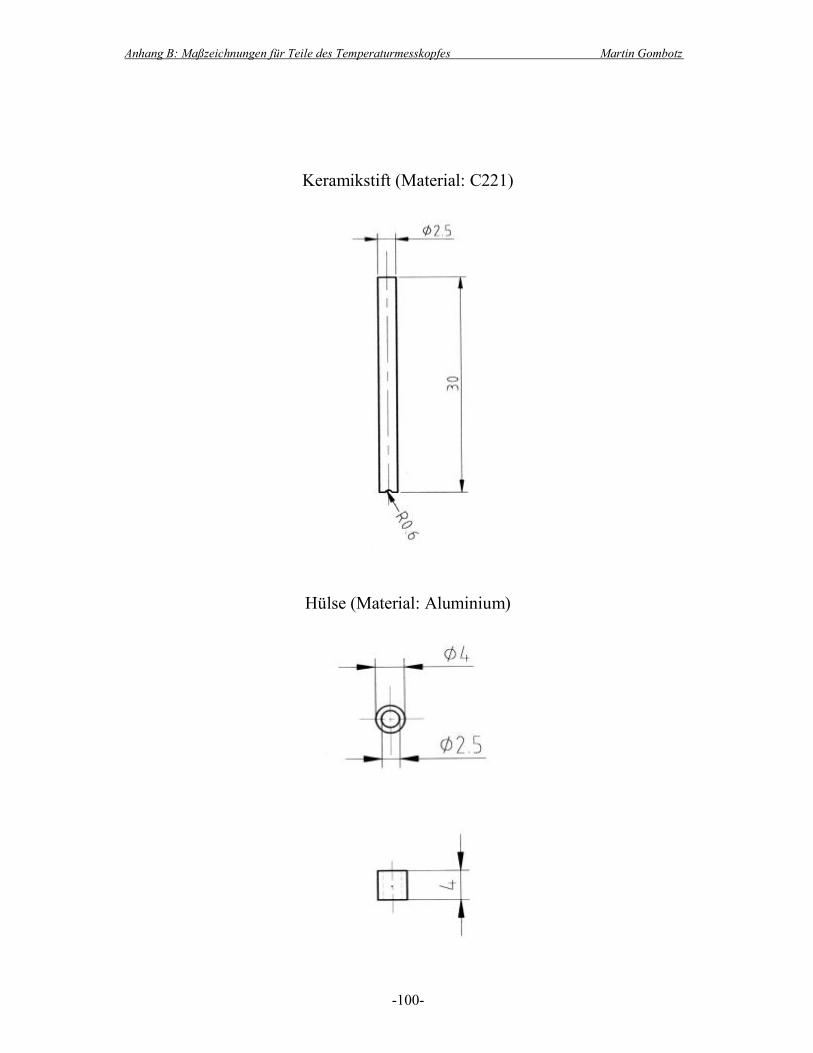
Anhang B: Maßzeichnungen für Teile des Temperaturmesskopfes Martin Gombotz
-100-
Keramikstift (Material: C221)
Hülse (Material: Aluminium)
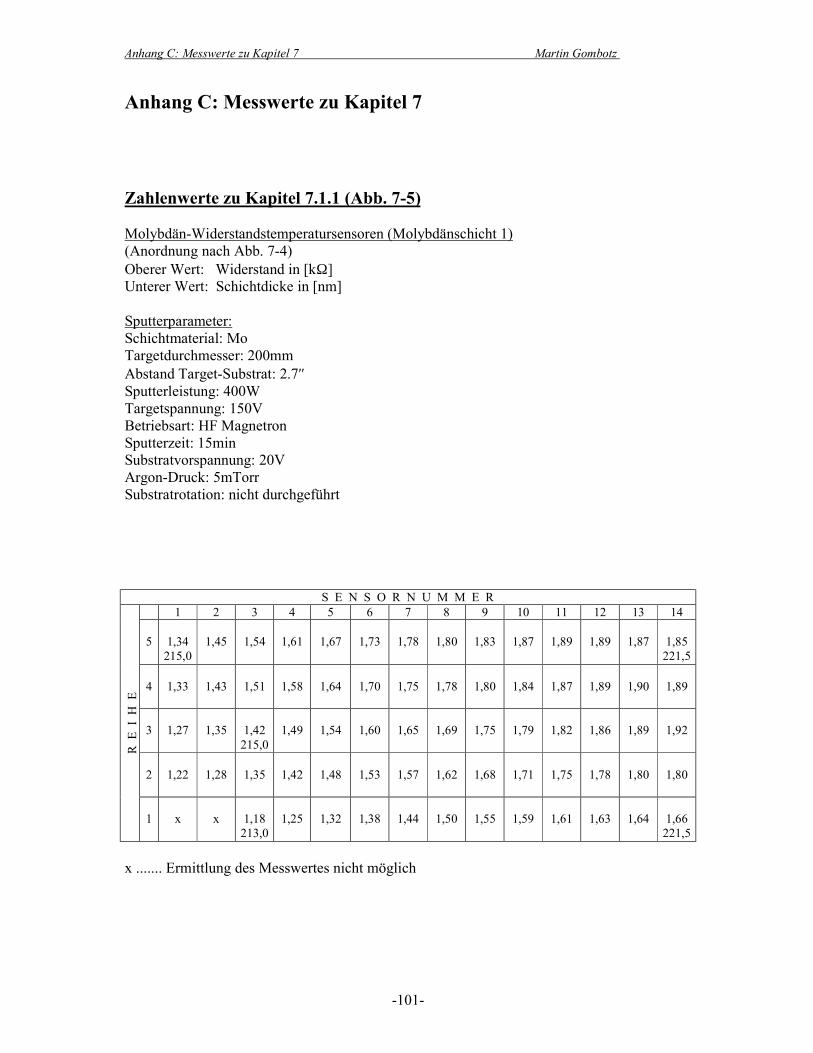
Anhang C: Messwerte zu Kapitel 7 Martin Gombotz
-101-
Anhang C: Messwerte zu Kapitel 7 Zahlenwerte zu Kapitel 7.1.1 (Abb. 7-5) Molybdän-Widerstandstemperatursensoren (Molybdänschicht 1) (Anordnung nach Abb. 7-4) Oberer Wert: Widerstand in [kΩ] Unterer Wert: Schichtdicke in [nm] Sputterparameter: Schichtmaterial: Mo Targetdurchmesser: 200mm Abstand Target-Substrat: 2.7″ Sputterleistung: 400W Targetspannung: 150V Betriebsart: HF Magnetron Sputterzeit: 15min Substratvorspannung: 20V Argon-Druck: 5mTorr Substratrotation: nicht durchgeführt
S E N S O R N U M M E R 1 2 3 4 5 6 7 8 9 10 11 12 13 14
5
1,34 215,0
1,45
1,54
1,61
1,67
1,73
1,78
1,80
1,83
1,87
1,89
1,89
1,87
1,85
221,5
4
1,33
1,43
1,51
1,58
1,64
1,70
1,75
1,78
1,80
1,84
1,87
1,89
1,90
1,89
3
1,27
1,35
1,42
215,0
1,49
1,54
1,60
1,65
1,69
1,75
1,79
1,82
1,86
1,89
1,92
2
1,22
1,28
1,35
1,42
1,48
1,53
1,57
1,62
1,68
1,71
1,75
1,78
1,80
1,80
R E
I H
E
1
x
x
1,18
213,0
1,25
1,32
1,38
1,44
1,50
1,55
1,59
1,61
1,63
1,64
1,66
221,5 x ....... Ermittlung des Messwertes nicht möglich
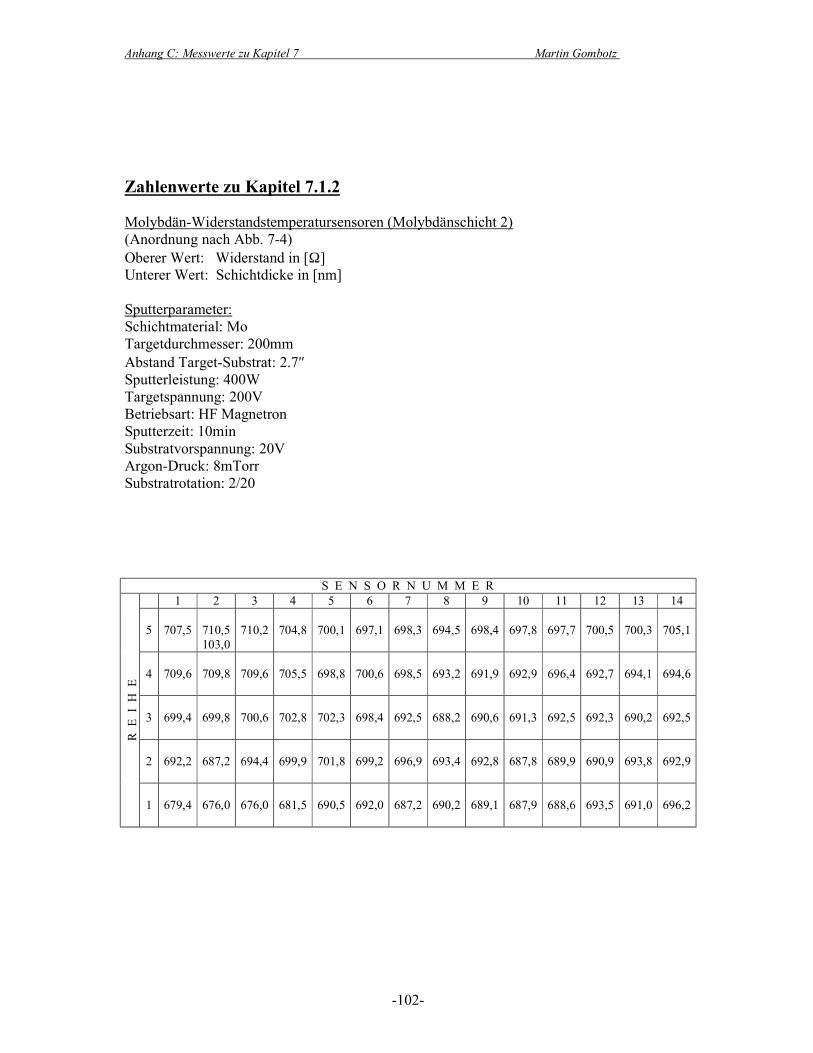
Anhang C: Messwerte zu Kapitel 7 Martin Gombotz
-102-
Zahlenwerte zu Kapitel 7.1.2 Molybdän-Widerstandstemperatursensoren (Molybdänschicht 2) (Anordnung nach Abb. 7-4) Oberer Wert: Widerstand in [Ω] Unterer Wert: Schichtdicke in [nm] Sputterparameter: Schichtmaterial: Mo Targetdurchmesser: 200mm Abstand Target-Substrat: 2.7″ Sputterleistung: 400W Targetspannung: 200V Betriebsart: HF Magnetron Sputterzeit: 10min Substratvorspannung: 20V Argon-Druck: 8mTorr Substratrotation: 2/20
S E N S O R N U M M E R 1 2 3 4 5 6 7 8 9 10 11 12 13 14
5
707,5
710,5 103,0
710,2
704,8
700,1
697,1
698,3
694,5
698,4
697,8
697,7
700,5
700,3
705,1
4
709,6
709,8
709,6
705,5
698,8
700,6
698,5
693,2
691,9
692,9
696,4
692,7
694,1
694,6
3
699,4
699,8
700,6
702,8
702,3
698,4
692,5
688,2
690,6
691,3
692,5
692,3
690,2
692,5
2
692,2
687,2
694,4
699,9
701,8
699,2
696,9
693,4
692,8
687,8
689,9
690,9
693,8
692,9
R E
I H
E
1
679,4
676,0
676,0
681,5
690,5
692,0
687,2
690,2
689,1
687,9
688,6
693,5
691,0
696,2
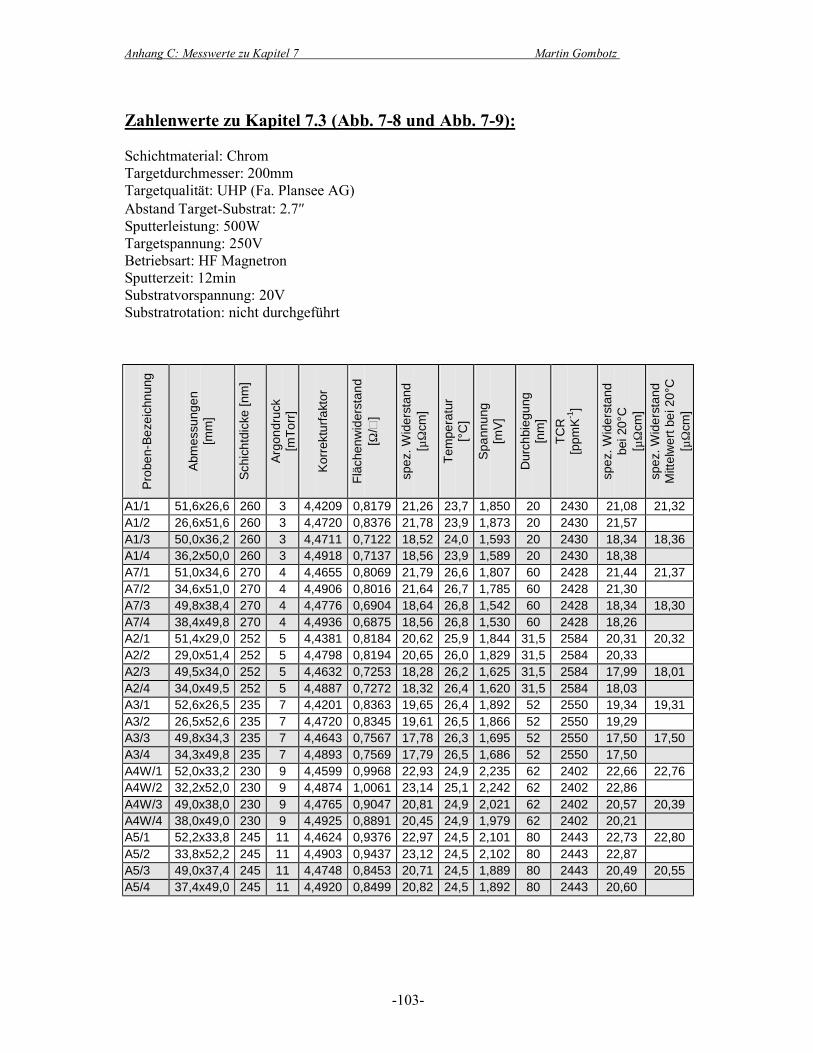
Anhang C: Messwerte zu Kapitel 7 Martin Gombotz
-103-
Zahlenwerte zu Kapitel 7.3 (Abb. 7-8 und Abb. 7-9): Schichtmaterial: Chrom Targetdurchmesser: 200mm Targetqualität: UHP (Fa. Plansee AG) Abstand Target-Substrat: 2.7″ Sputterleistung: 500W Targetspannung: 250V Betriebsart: HF Magnetron Sputterzeit: 12min Substratvorspannung: 20V Substratrotation: nicht durchgeführt
Pr
oben
-Bez
eich
nung
Ab
mes
sung
en
[mm
]
Schi
chtd
icke
[nm
]
Argo
ndru
ck
[mTo
rr]
Ko
rrekt
urfa
ktor
Fläc
henw
ider
stan
d [ Ω
/o]
spez
. Wid
erst
and
[µΩ
cm]
Tem
pera
tur
[°C]
Span
nung
[m
V]
Dur
chbi
egun
g [n
m]
TCR
[p
pmK-1
]
spez
. Wid
erst
and
bei 2
0°C
[ µ
Ωcm
] sp
ez. W
ider
stan
d M
ittel
wer
t bei
20°
C
[ µΩ
cm]
A1/1 51,6x26,6 260 3 4,4209 0,8179 21,26 23,7 1,850 20 2430 21,08 21,32 A1/2 26,6x51,6 260 3 4,4720 0,8376 21,78 23,9 1,873 20 2430 21,57 A1/3 50,0x36,2 260 3 4,4711 0,7122 18,52 24,0 1,593 20 2430 18,34 18,36 A1/4 36,2x50,0 260 3 4,4918 0,7137 18,56 23,9 1,589 20 2430 18,38 A7/1 51,0x34,6 270 4 4,4655 0,8069 21,79 26,6 1,807 60 2428 21,44 21,37 A7/2 34,6x51,0 270 4 4,4906 0,8016 21,64 26,7 1,785 60 2428 21,30 A7/3 49,8x38,4 270 4 4,4776 0,6904 18,64 26,8 1,542 60 2428 18,34 18,30 A7/4 38,4x49,8 270 4 4,4936 0,6875 18,56 26,8 1,530 60 2428 18,26 A2/1 51,4x29,0 252 5 4,4381 0,8184 20,62 25,9 1,844 31,5 2584 20,31 20,32 A2/2 29,0x51,4 252 5 4,4798 0,8194 20,65 26,0 1,829 31,5 2584 20,33 A2/3 49,5x34,0 252 5 4,4632 0,7253 18,28 26,2 1,625 31,5 2584 17,99 18,01 A2/4 34,0x49,5 252 5 4,4887 0,7272 18,32 26,4 1,620 31,5 2584 18,03 A3/1 52,6x26,5 235 7 4,4201 0,8363 19,65 26,4 1,892 52 2550 19,34 19,31 A3/2 26,5x52,6 235 7 4,4720 0,8345 19,61 26,5 1,866 52 2550 19,29 A3/3 49,8x34,3 235 7 4,4643 0,7567 17,78 26,3 1,695 52 2550 17,50 17,50 A3/4 34,3x49,8 235 7 4,4893 0,7569 17,79 26,5 1,686 52 2550 17,50 A4W/1 52,0x33,2 230 9 4,4599 0,9968 22,93 24,9 2,235 62 2402 22,66 22,76 A4W/2 32,2x52,0 230 9 4,4874 1,0061 23,14 25,1 2,242 62 2402 22,86 A4W/3 49,0x38,0 230 9 4,4765 0,9047 20,81 24,9 2,021 62 2402 20,57 20,39 A4W/4 38,0x49,0 230 9 4,4925 0,8891 20,45 24,9 1,979 62 2402 20,21 A5/1 52,2x33,8 245 11 4,4624 0,9376 22,97 24,5 2,101 80 2443 22,73 22,80 A5/2 33,8x52,2 245 11 4,4903 0,9437 23,12 24,5 2,102 80 2443 22,87 A5/3 49,0x37,4 245 11 4,4748 0,8453 20,71 24,5 1,889 80 2443 20,49 20,55 A5/4 37,4x49,0 245 11 4,4920 0,8499 20,82 24,5 1,892 80 2443 20,60
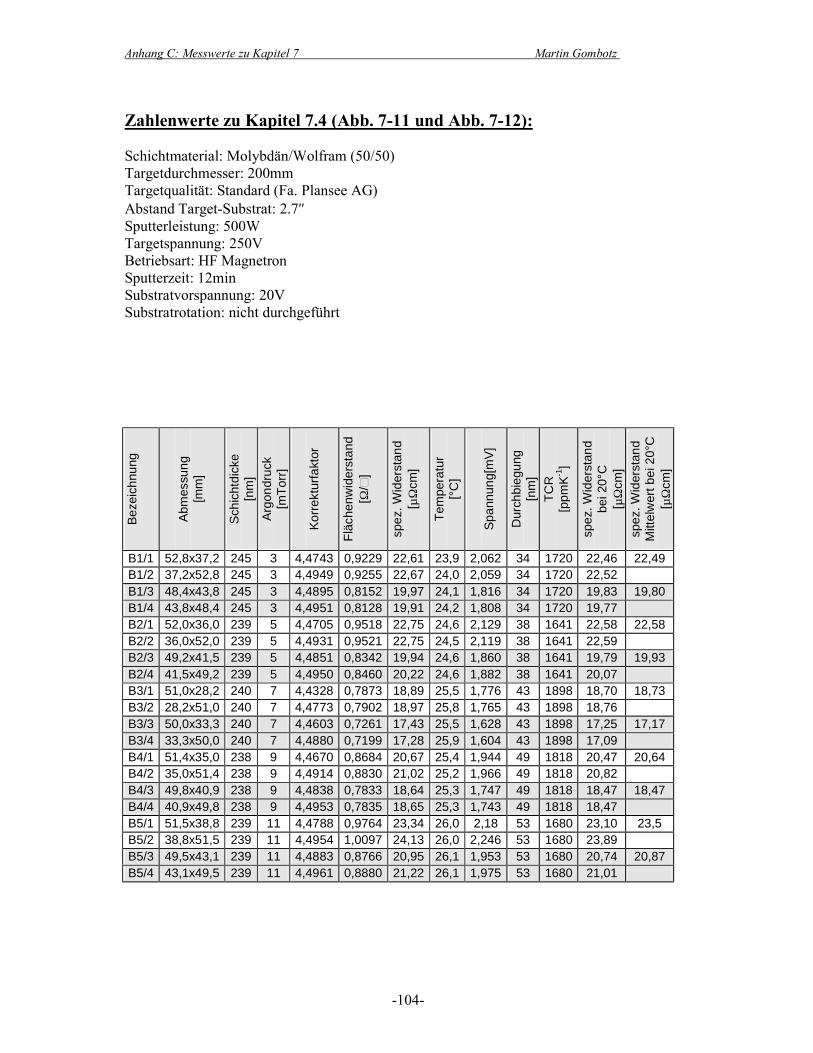
Anhang C: Messwerte zu Kapitel 7 Martin Gombotz
-104-
Zahlenwerte zu Kapitel 7.4 (Abb. 7-11 und Abb. 7-12): Schichtmaterial: Molybdän/Wolfram (50/50) Targetdurchmesser: 200mm Targetqualität: Standard (Fa. Plansee AG) Abstand Target-Substrat: 2.7″ Sputterleistung: 500W Targetspannung: 250V Betriebsart: HF Magnetron Sputterzeit: 12min Substratvorspannung: 20V Substratrotation: nicht durchgeführt
Beze
ichn
ung
Ab
mes
sung
[m
m]
Schi
chtd
icke
[n
m]
Argo
ndru
ck
[mTo
rr]
Ko
rrekt
urfa
ktor
Fläc
henw
ider
stan
d [Ω
/o]
spez
. Wid
erst
and
[ µΩ
cm]
Tem
pera
tur
[°C]
Span
nung
[mV]
Dur
chbi
egun
g [n
m]
TCR
[p
pmK-1
]
spez
. Wid
erst
and
bei 2
0°C
[ µ
Ωcm
] sp
ez. W
ider
stan
d M
ittel
wer
t bei
20°
C
[ µΩ
cm]
B1/1 52,8x37,2 245 3 4,4743 0,9229 22,61 23,9 2,062 34 1720 22,46 22,49 B1/2 37,2x52,8 245 3 4,4949 0,9255 22,67 24,0 2,059 34 1720 22,52 B1/3 48,4x43,8 245 3 4,4895 0,8152 19,97 24,1 1,816 34 1720 19,83 19,80 B1/4 43,8x48,4 245 3 4,4951 0,8128 19,91 24,2 1,808 34 1720 19,77 B2/1 52,0x36,0 239 5 4,4705 0,9518 22,75 24,6 2,129 38 1641 22,58 22,58 B2/2 36,0x52,0 239 5 4,4931 0,9521 22,75 24,5 2,119 38 1641 22,59 B2/3 49,2x41,5 239 5 4,4851 0,8342 19,94 24,6 1,860 38 1641 19,79 19,93 B2/4 41,5x49,2 239 5 4,4950 0,8460 20,22 24,6 1,882 38 1641 20,07 B3/1 51,0x28,2 240 7 4,4328 0,7873 18,89 25,5 1,776 43 1898 18,70 18,73 B3/2 28,2x51,0 240 7 4,4773 0,7902 18,97 25,8 1,765 43 1898 18,76 B3/3 50,0x33,3 240 7 4,4603 0,7261 17,43 25,5 1,628 43 1898 17,25 17,17 B3/4 33,3x50,0 240 7 4,4880 0,7199 17,28 25,9 1,604 43 1898 17,09 B4/1 51,4x35,0 238 9 4,4670 0,8684 20,67 25,4 1,944 49 1818 20,47 20,64 B4/2 35,0x51,4 238 9 4,4914 0,8830 21,02 25,2 1,966 49 1818 20,82 B4/3 49,8x40,9 238 9 4,4838 0,7833 18,64 25,3 1,747 49 1818 18,47 18,47 B4/4 40,9x49,8 238 9 4,4953 0,7835 18,65 25,3 1,743 49 1818 18,47 B5/1 51,5x38,8 239 11 4,4788 0,9764 23,34 26,0 2,18 53 1680 23,10 23,5 B5/2 38,8x51,5 239 11 4,4954 1,0097 24,13 26,0 2,246 53 1680 23,89 B5/3 49,5x43,1 239 11 4,4883 0,8766 20,95 26,1 1,953 53 1680 20,74 20,87 B5/4 43,1x49,5 239 11 4,4961 0,8880 21,22 26,1 1,975 53 1680 21,01





























