Embed Size (px)
Citation preview

Zuverlässige Windkraftgetriebe ohne Micropitting Das drehzahlvariable Mittelspannungs-Differenzialsystem „DSgen-set“ (Bild 1), entwickelt von der Firma SET,
verfügt über eine Nennleistung von 9 2 MW. Das dabei zum Einsatz kommende Planetengetriebe wird durch einen
Servoantrieb gesteuert und kompensiert damit die unterschiedlichen Geschwindigkeiten des Windanlagenrotors,
wodurch eine konstante Drehzahl des Synchron-Generators garantiert wird. Im neuen optimierten System wird ein
sehr hoher System-Gesamtwirkungsgrad von 97 % erreicht, während die Kosten unter Benchmark-Niveau bleiben.
Das Entwerfen eines solchen Getriebes erfordert eine sorgfältige Prüfung und Analyse der Getriebestufe zusammen
mit allen anderen Komponenten. SET verwendet dabei verschiedene innovative Berechnungsprogramme wie z. B.
„AVL Excite“, „KISSsoft/KISSsys“ und „Ansys“.
Autoren
Dipl.-Ing. Miha Erjavec
SET Sustainable Energy
Technologies
9020 Klagenfurt, Österreich
Tel.: +43 (0) 50 89 89
E-Mail: [email protected]
www.ghp-set.com
Dipl.-Ing. Jürg Langhart
Uetzikon 4
8634 Hombrechtikon, Schweiz
Tel.: +41 (0) 55/2 54 20-50
E-Mail: [email protected]
www.kisssoft.AG
Zahnenden sorgfältig ausgelegt werden müssen. Mit innovativen Ansätzen der Mehrkörpersimula-tion (MKS) und der Simulation der Achsbewegungen, kann die dazu fehlende Information ermit-telt werden.
Die Einführung dieser neuen Design-Methodik ist ein wesentli-cher Vorteil bei der Bestimmung des Achslagefehlers.
1.1 MKS-Modell
SET führt die MKS-Simula-tion mit „AVL Excite“-Software durch, wobei kondensierte Matrizen mit genau den gleichen Eigenschaften wie die echten Bauteile verwendet werden. Die Bauteile werden dann mit Verbin-dungselementen verknüpft, die den reellen Verbindungen ent-sprechen.
1 MKS-Simulation als Werkzeug zur Analyse von Achslagefehlern
Die Berücksichtigung von Herstellungsprozessen, Ferti-gungstoleranzen und sogar Achs-lagefehlern ist Stand der Technik, wie auch die Optimierung des Verzahnungseingriffes.
Der Umgang mit kompakten Designs bei Planetenstufen be-deutet in der Regel die Paarung eines kleinen Sonnenrades mit einem großen Planetenrad (hohes Verhältnis von Ritzelbreite zu Rit-zeldurchmesser). Bei solchen Anwendungen besteht neben der Gefahr eines ungünstigen Zahn-kontaktes unter anderem auch ein erhöhtes Risiko für Grau- fleckigkeit. Die Abhilfe besteht in den Verzahnungskorrekturen, welche insbesondere an den
Die Eigenschaften der Welle-Nabe-Verbindungen werden mit-tels FEM-Analyse bestimmt. Da-bei wird die Geometrie in „KISS-soft“ ermittelt (Fertigungstole-ranzen sind enthalten).
Die Eigenschaften der Lager (radiale und axiale Steifigkeit) werden nach Angaben des Lager-herstellers berücksichtigt. Die Lagerverbindung wird zwischen dem Verbindungsknoten am in-neren und äußeren Lagersitz her-gestellt. Die Massenträgheiten der Lagerringe und Rollkörper wer-den ebenfalls dem jeweiligen Knoten als Parameter zugeordnet.
Die Eigenschaften des Zahn-kontaktes werden in KISSsoft ermittelt. Es wird dabei die theo-retische Verzahnungssteifigkeit verwendet, ohne Berücksichti-gung von Verzahnungskorrektu-ren. In einer zweiten Optimie-
2 Konstruktion September 9-2012
SONDERTEIL Windenergietechnik
Bild 1 Das drehzahlvariable Mittel-
spannungs-Differenzial-
system „DSgen-set“
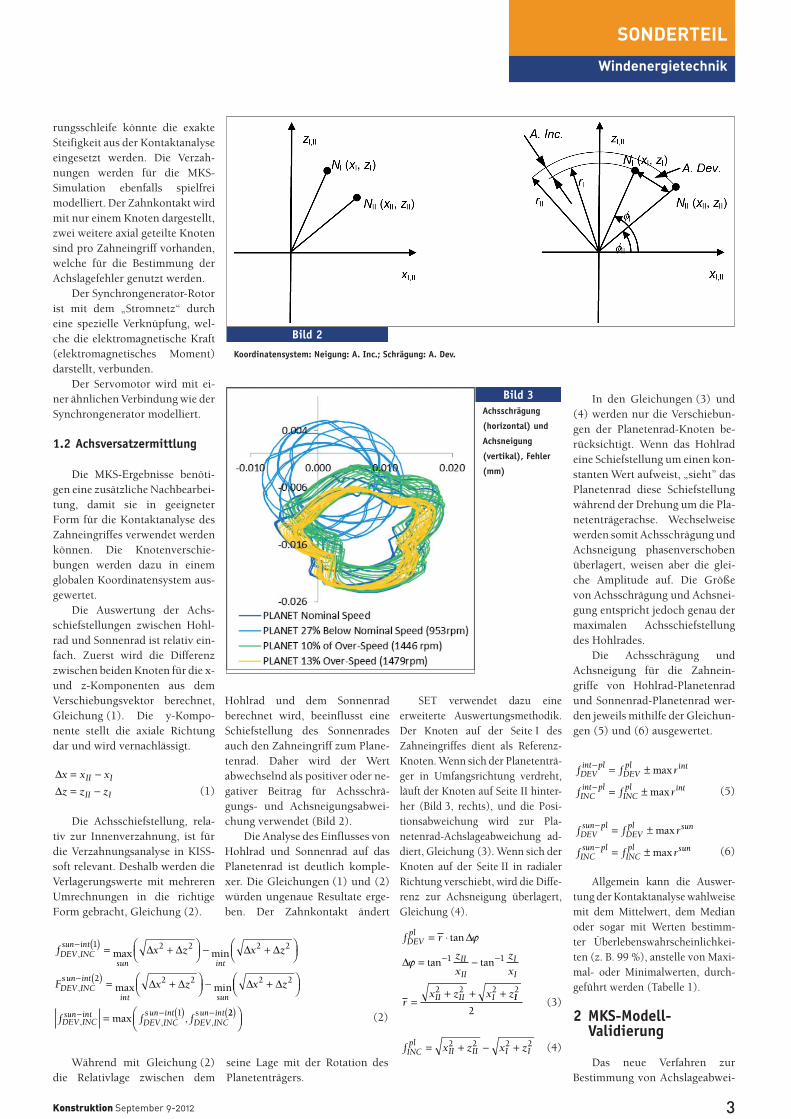
rungsschleife könnte die exakte Steifigkeit aus der Kontaktanalyse eingesetzt werden. Die Verzah-nungen werden für die MKS- Simulation ebenfalls spielfrei modelliert. Der Zahnkontakt wird mit nur einem Knoten dargestellt, zwei weitere axial geteilte Knoten sind pro Zahneingriff vorhanden, welche für die Bestimmung der Achslagefehler genutzt werden.
Der Synchrongenerator-Rotor ist mit dem „Stromnetz“ durch eine spezielle Verknüpfung, wel-che die elektromagnetische Kraft (elektromagnetisches Moment) darstellt, verbunden.
Der Servomotor wird mit ei-ner ähnlichen Verbindung wie der Synchrongenerator modelliert.
1.2 Achsversatzermittlung
Die MKS-Ergebnisse benöti-gen eine zusätzliche Nachbearbei-tung, damit sie in geeigneter Form für die Kontaktanalyse des Zahneingriffes verwendet werden können. Die Knotenverschie-bungen werden dazu in einem globalen Koordinatensystem aus-gewertet.
Die Auswertung der Achs-schiefstellungen zwischen Hohl-rad und Sonnenrad ist relativ ein-fach. Zuerst wird die Differenz zwischen beiden Knoten für die x- und z-Komponenten aus dem Verschiebungsvektor berechnet, Gleichung (1). Die y-Kompo-nente stellt die axiale Richtung dar und wird vernachlässigt.
∆
∆
x x x
z z z
II I
II I
= −
= − (1) Die Achsschiefstellung, rela-
tiv zur Innenverzahnung, ist für die Verzahnungsanalyse in KISS-soft relevant. Deshalb werden die Verlagerungswerte mit mehreren Umrechnungen in die richtige Form gebracht, Gleichung (2).
In den Gleichungen (3) und (4) werden nur die Verschiebun-gen der Planetenrad-Knoten be-rücksichtigt. Wenn das Hohlrad eine Schiefstellung um einen kon-stanten Wert aufweist, „sieht” das Planetenrad diese Schiefstellung während der Drehung um die Pla-netenträgerachse. Wechselweise werden somit Achsschrägung und Achsneigung phasenverschoben überlagert, weisen aber die glei-che Amplitude auf. Die Größe von Achsschrägung und Achsnei-gung entspricht jedoch genau der maximalen Achsschiefstellung des Hohlrades.
Die Achsschrägung und Achsneigung für die Zahnein-griffe von Hohlrad-Planetenrad und Sonnenrad-Planetenrad wer-den jeweils mithilfe der Gleichun-gen (5) und (6) ausgewertet.
f f r
f f r
DEVpl
DEVpl
INCpl
INCpl
int int
int int
−
−
= ±
= ±
max
max (5) f f r
f f r
DEVpl
DEVpl sun
INCsun pl
INCpl sun
sun−
−
= ±
= ±
max
max (6) Allgemein kann die Auswer-
tung der Kontaktanalyse wahlweise mit dem Mittelwert, dem Median oder sogar mit Werten bestimm- ter Überlebenswahrscheinlichkei-ten (z. B. 99 %), anstelle von Maxi-mal- oder Minimalwerten, durch-geführt werden (Tabelle 1).
2 MKS-Modell- Validierung
Das neue Verfahren zur Bestimmung von Achslageabwei-
SET verwendet dazu eine erweiterte Auswertungsmethodik. Der Knoten auf der Seite I des Zahneingriffes dient als Referenz-Knoten. Wenn sich der Planetenträ-ger in Umfangsrichtung verdreht, läuft der Knoten auf Seite II hinter-her (Bild 3, rechts), und die Posi -tionsabweichung wird zur Pla -netenrad-Achslageabweichung ad-diert, Gleichung (3). Wenn sich der Knoten auf der Seite II in radialer Richtung verschiebt, wird die Diffe-renz zur Achsneigung überlagert, Gleichung (4).
f r
z
x
z
x
rx z x z
DEVpl
II
II
I
I
II II I
= ⋅
= −
=+ + +
− −
tan
tan tan
∆
∆
ϕ
ϕ1 1
2 2 2II2
2 (3)
f x z x zINCpl
II II I I= + − +2 2 2 2 (4)
Bild 2
Bild 3 Achsschrägung
(horizontal) und
Achsneigung
(vertikal), Fehler
(mm)
Konstruktion September 9-2012 3
SONDERTEIL
Windenergietechnik
Während mit Gleichung (2) die Relativlage zwischen dem
Hohlrad und dem Sonnenrad berechnet wird, beeinflusst eine Schiefstellung des Sonnenrades auch den Zahneingriff zum Plane-tenrad. Daher wird der Wert abwechselnd als positiver oder ne-gativer Beitrag für Achsschrä-gungs- und Achsneigungsabwei-chung verwendet (Bild 2).
Die Analyse des Einflusses von Hohlrad und Sonnenrad auf das Planetenrad ist deutlich komple-xer. Die Gleichungen (1) und (2) würden ungenaue Resultate erge-ben. Der Zahnkontakt ändert
f x z x zDEV INCsun
sun, max min
− ( ) = +
− +
int
int
1 2 2 2 2∆ ∆ ∆ ∆
max min,s 2 2 2 2 2F x z x zDEV INCun
sun
− ( ) = +
− +
int
int
∆ ∆ ∆ ∆
=− − ( ) −f f fDEV INC
sunDEV INC
unDEV INC
un, ,
s,
smax ,int int int1 22( )
(2)
seine Lage mit der Rotation des Planetenträgers.
Koordinatensystem: Neigung: A. Inc.; Schrägung: A. Dev.
chungen hängt unmittelbar von der Genauigkeit des MKS-Model-les und der Eingabedaten ab und wurde mittels Tests validiert.
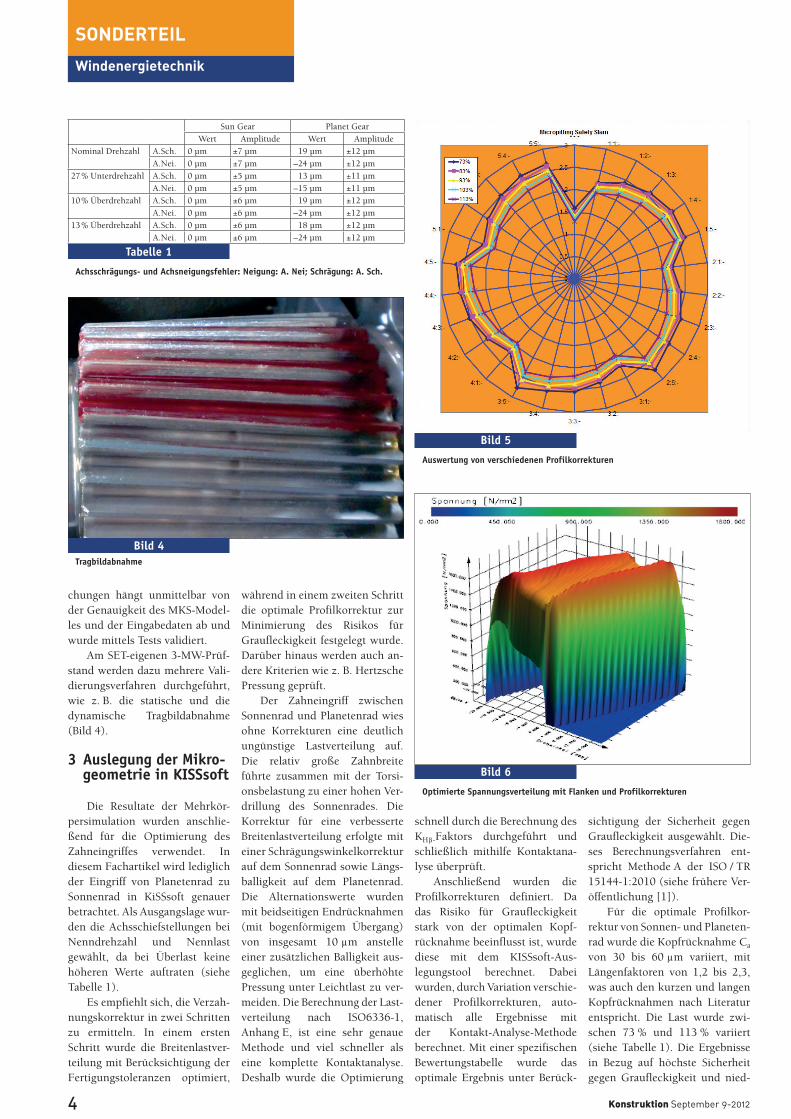
Am SET-eigenen 3-MW-Prüf-stand werden dazu mehrere Vali-dierungsverfahren durchgeführt, wie z. B. die statische und die dynamische Tragbildabnahme (Bild 4).
3 Auslegung der Mikro- geometrie in KISSsoft
Die Resultate der Mehrkör-persimulation wurden anschlie-ßend für die Optimierung des Zahneingriffes verwendet. In diesem Fachartikel wird lediglich der Eingriff von Planetenrad zu Sonnenrad in KiSSsoft genauer betrachtet. Als Ausgangslage wur-den die Achsschiefstellungen bei Nenndrehzahl und Nennlast gewählt, da bei Überlast keine höheren Werte auftraten (siehe Tabelle 1).
Es empfiehlt sich, die Verzah-nungskorrektur in zwei Schritten zu ermitteln. In einem ersten Schritt wurde die Breitenlastver-teilung mit Berücksichtigung der Fertigungstoleranzen optimiert,
sichtigung der Sicherheit gegen Graufleckigkeit ausgewählt. Die-ses Berechnungsverfahren ent-spricht Methode A der ISO / TR 15144-1:2010 (siehe frühere Ver-öffentlichung [1]).
Für die optimale Profilkor-rektur von Sonnen- und Planeten-rad wurde die Kopfrücknahme Ca von 30 bis 60 mm variiert, mit Längenfaktoren von 1,2 bis 2,3, was auch den kurzen und langen Kopfrücknahmen nach Literatur entspricht. Die Last wurde zwi-schen 73 % und 113 % variiert (siehe Tabelle 1). Die Ergebnisse in Bezug auf höchste Sicherheit gegen Graufleckigkeit und nied-
während in einem zweiten Schritt die optimale Profilkorrektur zur Minimierung des Risikos für Graufleckigkeit festgelegt wurde. Darüber hinaus werden auch an-dere Kriterien wie z. B. Hertzsche Pressung geprüft.
Der Zahneingriff zwischen Sonnenrad und Planetenrad wies ohne Korrekturen eine deutlich ungünstige Lastverteilung auf. Die relativ große Zahnbreite führte zusammen mit der Torsi-onsbelastung zu einer hohen Ver-drillung des Sonnenrades. Die Korrektur für eine verbesserte Breitenlastverteilung erfolgte mit einer Schrägungswinkelkorrektur auf dem Sonnenrad sowie Längs-balligkeit auf dem Planetenrad. Die Alternationswerte wurden mit beidseitigen Endrücknahmen (mit bogenförmigem Übergang) von insgesamt 10 mm anstelle einer zusätzlichen Balligkeit aus-geglichen, um eine überhöhte Pressung unter Leichtlast zu ver-meiden. Die Berechnung der Last-verteilung nach ISO6336-1, Anhang E, ist eine sehr genaue Methode und viel schneller als eine komplette Kontaktanalyse. Deshalb wurde die Optimierung
schnell durch die Berechnung des KHb-Faktors durchgeführt und schließlich mithilfe Kontaktana-lyse überprüft.
Anschließend wurden die Profilkorrekturen definiert. Da das Risiko für Graufleckigkeit stark von der optimalen Kopf-rücknahme beeinflusst ist, wurde diese mit dem KISSsoft-Aus-legungstool berechnet. Dabei wurden, durch Variation verschie-dener Profilkorrekturen, auto-matisch alle Ergebnisse mit der Kontakt-Analyse-Methode berechnet. Mit einer spezifischen Bewertungstabelle wurde das optimale Ergebnis unter Berück-
Bild 5
Bild 6
Bild 4 Tragbildabnahme
4 Konstruktion September 9-2012
SONDERTEIL Windenergietechnik
Sun Gear Planet Gear
Wert Amplitude Wert Amplitude
Nominal Drehzahl A.Sch. 0 µm ±7 µm 19 µm ±12 µm
A.Nei. 0 µm ±7 µm –24 µm ±12 µm
27 % Unterdrehzahl A.Sch. 0 µm ±5 µm 13 µm ±11 µm
A.Nei. 0 µm ±5 µm –15 µm ±11 µm
10 % Überdrehzahl A.Sch. 0 µm ±6 µm 19 µm ±12 µm
A.Nei. 0 µm ±6 µm –24 µm ±12 µm
13 % Überdrehzahl A.Sch. 0 µm ±6 µm 18 µm ±12 µm
A.Nei. 0 µm ±6 µm –24 µm ±12 µm
Tabelle 1
Achsschrägungs- und Achsneigungsfehler: Neigung: A. Nei; Schrägung: A. Sch.
Optimierte Spannungsverteilung mit Flanken und Profilkorrekturen
Auswertung von verschiedenen Profilkorrekturen

Literatur
[1] U. Kissling: The application of the
first international calculation method
for Micropitting, AGMA FTM fall tech-
nical meeting, 2012.
rigste Hertzsche Pressung sind in Bild 5 dargestellt, während die erste Lösung (mit dem Vermerk „-: -: -“) den völlig unveränderten Zahneingriff darstellt.
Es wurde deutlich sichtbar, dass die Sicherheit gegen Grau- fleckigkeit mit der Kombination „01.05: -“ am höchsten war und eine Sicherheit von 2,5 erreichte. Auch die Hertzsche Pressung war bei dieser Variante optimal. Somit wurden das Sonnenrad mit Ca = 40 mm und Längenfak-
tor 1,2 und das Planetenrad mit Ca = 50 mm Längenfaktor 2,3 korrigiert und mit der Span-nungsverteilung in der Kontakt-analyse dokumentiert (Bild 6). Eine sorgfältige Überprüfung der Situation von Kontakt „Plane-tenrad zu Hohlrad“ schließt die Optimierung ab.
4 Zusammenfassung
Graufleckigkeit in Zahnrä-dern ist ein Phänomen, das vor
allem in Getrieben für Windener-gieanlagen auftritt und entspre-chend analysiert werden muss. Das Unternehmen SET nutzt in-novative Berechnungs-Tools, um eine detaillierte Analyse der Planetengetriebe und ein optima-les Design zu erhalten. Die MKS-Software AVL Excite bestimmt die Verformungen innerhalb des Pla-netensystems, während mit KISS-soft die optimale Verzahnungs-korrektur definiert wird. Im auf-gezeigtem Fall konnte die Sicher-
Konstruktion September 9-2012 5
SONDERTEIL
Windenergietechnik
heit gegen Graufleckigkeit bis 2,5 erhöht werden, was ein perfektes Ergebnis mit sehr geringem Schadensrisiko bedeutet.