ZHAW, ASV, FS2008, 6-1
Kapitel 7 Filtertheorie
Inhaltsverzeichnis
7.0 EINLEITUNG................................................................................................................................................... 2 7.1 REALISIERUNGSFORMEN UND ANWENDUNGSBEREICHE ................................................................................ 3 7.2 FILTERAPPROXIMATIONEN, TABELLEN UND TRANSFORMATIONEN ............................................................... 6
7.2.1 Spezifikation .......................................................................................................................................... 6 7.2.2 Filter - Übertragungsfunktion ............................................................................................................... 8 7.2.3 Die wichtigsten Filterfamilien für Tiefpassfunktionen.......................................................................... 10 7.2.4 Filtertabellen ....................................................................................................................................... 13 7.2.5 Der Hochpass ...................................................................................................................................... 14 7.2.6 Der Bandpass ..................................................................................................................................... 16 7.2.7 Bandsperrfilter .................................................................................................................................... 19 7.2.8 Beispiel Bandpass............................................................................................................................... 20
7.3 LC-FILTER DESIGN: ANWENDUNG VON TABELLENBÜCHERN...................................................................... 22 7.3.1 Impedanz-Normierung......................................................................................................................... 22 7.3.2 Frequenznormierung ........................................................................................................................... 22 7.3.3 Ermittlung der Filterordnung.............................................................................................................. 23 7.3.4 Übersicht über die tabellierten Chebishev-Tiefpässe .......................................................................... 23 7.3.5 Schaltungsstrukturen der Chebishev-Tiefpässe ................................................................................... 23 7.3.6 Kennzeichnung der Chebishev-Tiefpässe ............................................................................................ 25 7.3.7 Normierte Schaltelemente ................................................................................................................... 25 7.3.8 Betriebsdämpfung as im Sperrbereich ................................................................................................. 25 7.3.9 Frequenztransformationen .................................................................................................................. 26 7.3.10 Hochpass .......................................................................................................................................... 26 7.3.11 Bandpass .......................................................................................................................................... 27 7.3.12 Bandsperre ....................................................................................................................................... 29 7.3.13 Anwendungsbeispiele ........................................................................................................................ 31 Berechnungsbeispiele eines Tiefpasses ........................................................................................................ 31 Berechnungsbeispiel eines Hochpasses........................................................................................................ 32 Berechnungsbeispiel eines Bandpasses........................................................................................................ 33
7.4 LITERATURHINWEISE ................................................................................................................................... 34 ANHANG 1: FILTERTABELLEN: TEIL AKTIVE RC FILTER ................................................................................. 35 ANHANG 1: TEIL PASSIVE LC FILTER................................................................................................................ 38 ANHANG 2: MERKBLATT FREQUENZTRANSFORMATIONEN................................................................................ 42 ANHANG 3: MERKBLATT FILTERTABELLE ......................................................................................................... 43 ANHANG 4: VERGLEICH DER FILTERAPPROXIMATIONEN ................................................................................... 44
ZHAW, ASV, FS2008, 6-2
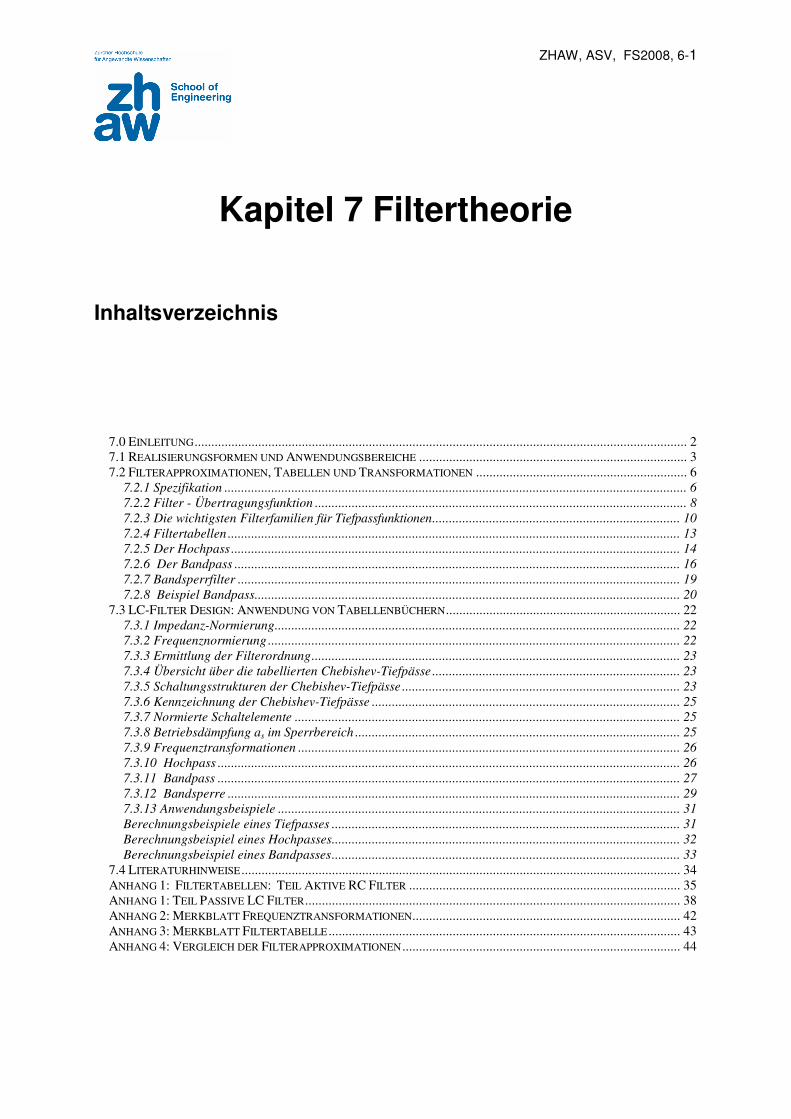
7.0 Einleitung Als Filterung von Signalen bezeichnet man das Abtrennen von bestimmten Signalanteilen. In der Messtechnik geht es zumeist um die Trennung von Nutzsignal und Störsignalen, während es in der Nachrichtentechnik oft um die Trennung von Nutzsignal – Nutzsignal oder Nutzsignal –Trägersignal geht. Das Kapitel behandelt nur die Filterung im Frequenzbereich, das heisst spektral verschieden liegende Signale werden getrennt. Ziele der Filterung sind eine Verringerung der notwendigen Dynamik und die Gewinnung eines möglichst unverfälschten Nutzsignals Fig. 6-1 zeigt als Applikation ein medizinisches Ultraschall Messgerät, welches mit Frequenzen zwischen 2 und 20 MHz arbeitet. Die schwach reflektierten Empfangsignale jedes Transducer-Elements eines Arrays werden nacheinander verstärkt und gefiltert. Die unterschiedliche Absorption im Gewebe bewirkt eine Amplitudenveränderung mit einer Dynamik von bis zu 100 dB. Es ist daher nahe liegend, dass jegliche Verfälschung durch Rauschanteile die Präzision beeinträchtig. Da die Dämpfung logarithmisch mit der Eindringtiefe verknüpft ist, werden die gefilterten Echosignale logarithmisch komprimiert und dann in einem Detektor demoduliert.
Fig. 6-1: Ultraschall Messgerät Blockdiagramm (Quelle: Intersil) Die verzögerten Echos werden nun nochmals „gefiltert“ bevor sie einem Analog/Digitalwandler zugeführt werden. Diese zweite Filterung ist aber eine zeitliche Trennung der Echos, häufig als Fensterfunktion bezeichnet. Diese Operation entspricht der Eingrenzung der zu betrachteten Eindringtiefe. Für dieses Kapitel werden Kenntnisse über Darstellung von Signalen im Zeit- und Frequenzbereich, über die Berechnung von Transferfunktionen im Laplace-Bereich und über Grundlagen von Operationsverstärkern vorausgesetzt. Ein Notfall-Set für dieses Kapitel befindet sich im Anhang.
ZHAW, ASV, FS2008, 6-3
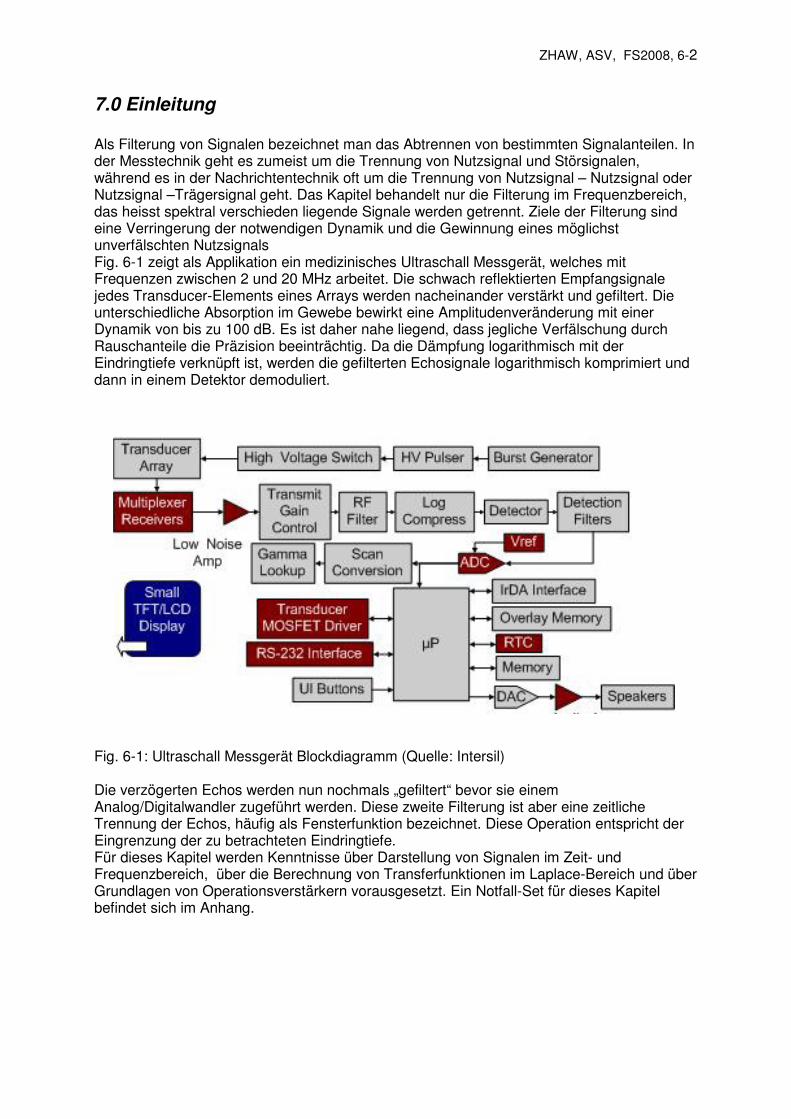
7.1 Realisierungsformen und Anwendungsbereiche Passive LC-Filter (Reaktanzfilter) bestehen aus Induktivitäten (L) und Kapazitäten (C). Man verwendet sie vorzugsweise bei höheren Frequenzen, weil dort die Induktivitäten nur kleine Werte besitzen und daher einfacher herstellbar sind. In der Sendertechnik sind sie wegen der hohen Strom/Spannungsfestigkeit bevorzugt aber auch in der Empfängertechnik dank SMD-Bauformen einsetzbar. Aktive Filter scheiden in hochfrequenten Anwendungen aus, weil die Bandbreite der Operationsverstärker nicht ausreicht, oder weil ihr Stromverbrauch zu gross ist (entscheidend bei Batteriebetrieb).
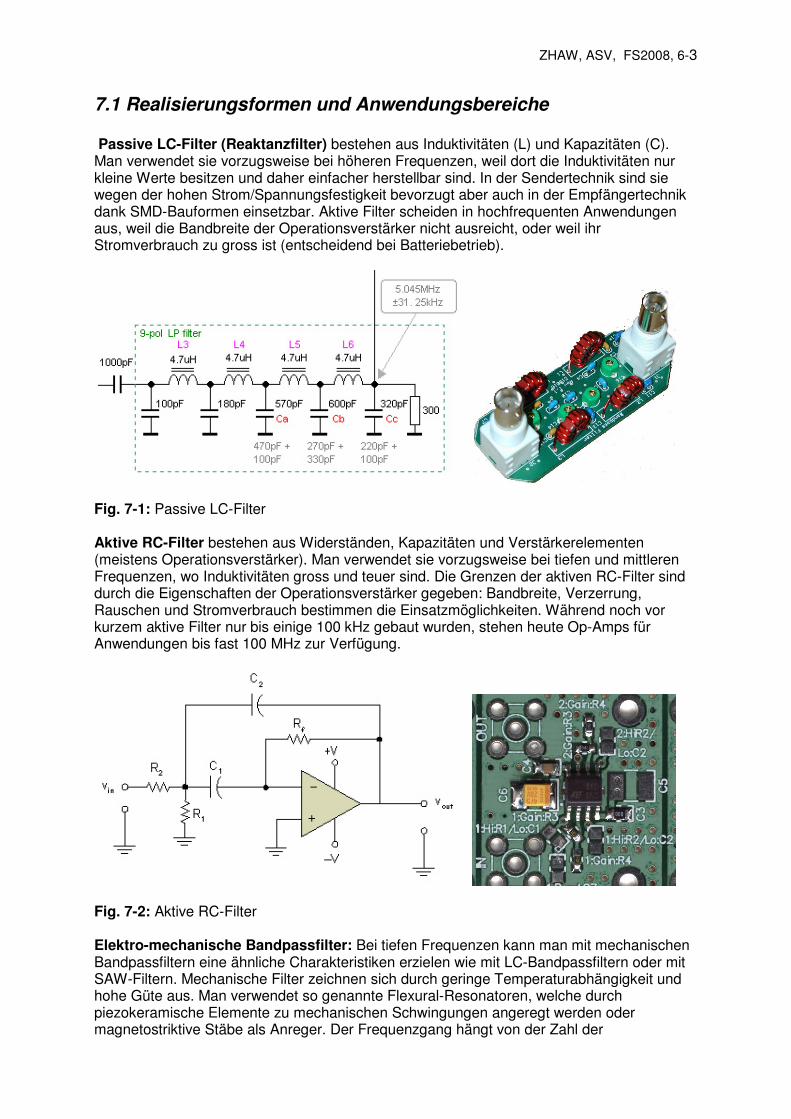
Fig. 7-1: Passive LC-Filter Aktive RC-Filter bestehen aus Widerständen, Kapazitäten und Verstärkerelementen (meistens Operationsverstärker). Man verwendet sie vorzugsweise bei tiefen und mittleren Frequenzen, wo Induktivitäten gross und teuer sind. Die Grenzen der aktiven RC-Filter sind durch die Eigenschaften der Operationsverstärker gegeben: Bandbreite, Verzerrung, Rauschen und Stromverbrauch bestimmen die Einsatzmöglichkeiten. Während noch vor kurzem aktive Filter nur bis einige 100 kHz gebaut wurden, stehen heute Op-Amps für Anwendungen bis fast 100 MHz zur Verfügung.
Fig. 7-2: Aktive RC-Filter Elektro-mechanische Bandpassfilter: Bei tiefen Frequenzen kann man mit mechanischen Bandpassfiltern eine ähnliche Charakteristiken erzielen wie mit LC-Bandpassfiltern oder mit SAW-Filtern. Mechanische Filter zeichnen sich durch geringe Temperaturabhängigkeit und hohe Güte aus. Man verwendet so genannte Flexural-Resonatoren, welche durch piezokeramische Elemente zu mechanischen Schwingungen angeregt werden oder magnetostriktive Stäbe als Anreger. Der Frequenzgang hängt von der Zahl der
ZHAW, ASV, FS2008, 6-4
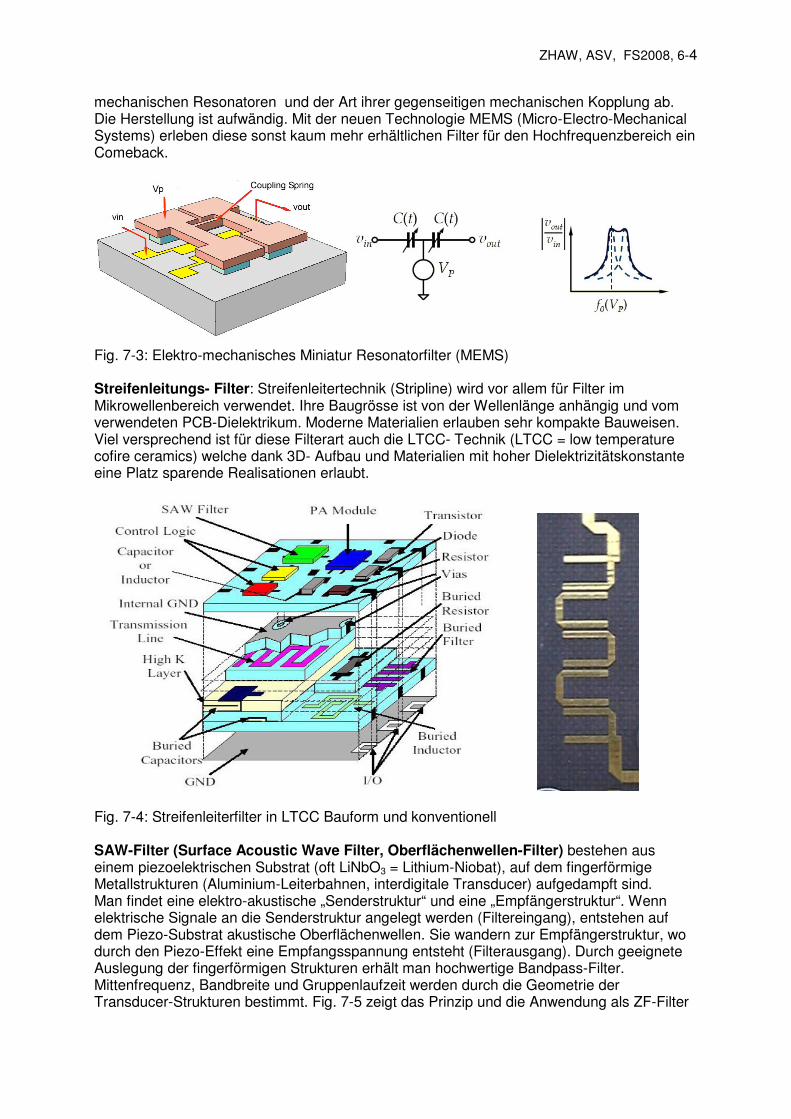
mechanischen Resonatoren und der Art ihrer gegenseitigen mechanischen Kopplung ab. Die Herstellung ist aufwändig. Mit der neuen Technologie MEMS (Micro-Electro-Mechanical Systems) erleben diese sonst kaum mehr erhältlichen Filter für den Hochfrequenzbereich ein Comeback.
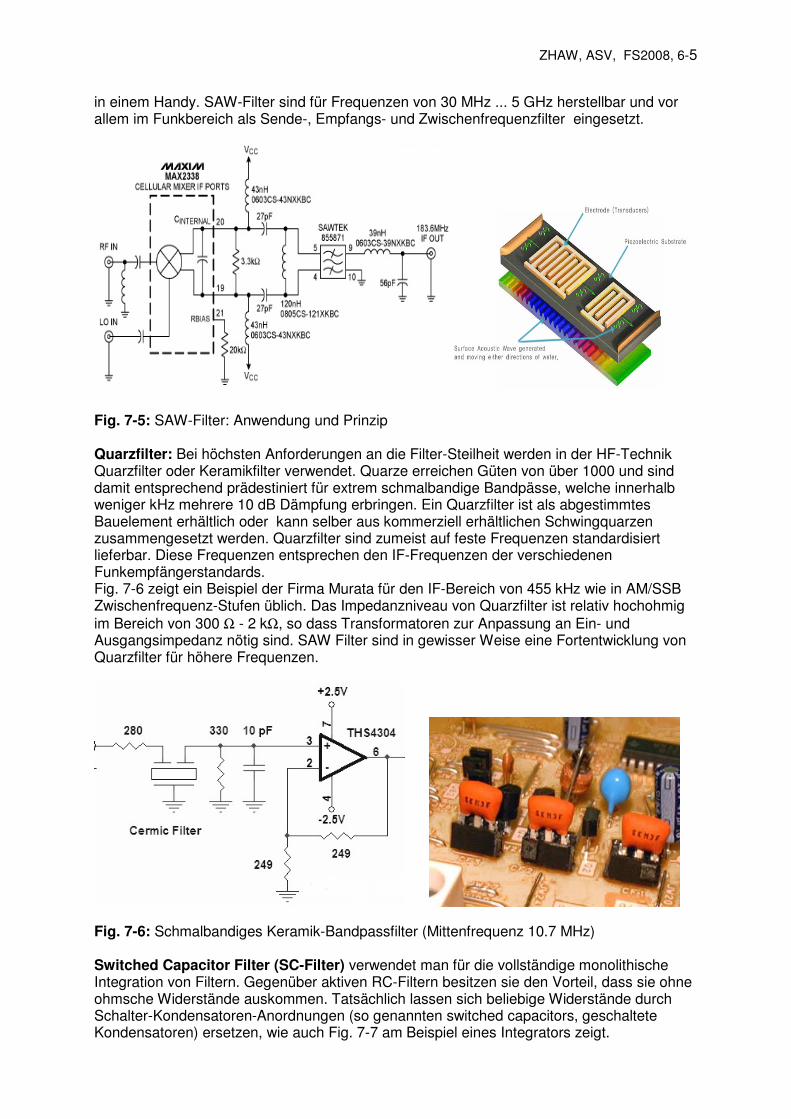
Fig. 7-3: Elektro-mechanisches Miniatur Resonatorfilter (MEMS) Streifenleitungs- Filter: Streifenleitertechnik (Stripline) wird vor allem für Filter im Mikrowellenbereich verwendet. Ihre Baugrösse ist von der Wellenlänge anhängig und vom verwendeten PCB-Dielektrikum. Moderne Materialien erlauben sehr kompakte Bauweisen. Viel versprechend ist für diese Filterart auch die LTCC- Technik (LTCC = low temperature cofire ceramics) welche dank 3D- Aufbau und Materialien mit hoher Dielektrizitätskonstante eine Platz sparende Realisationen erlaubt.
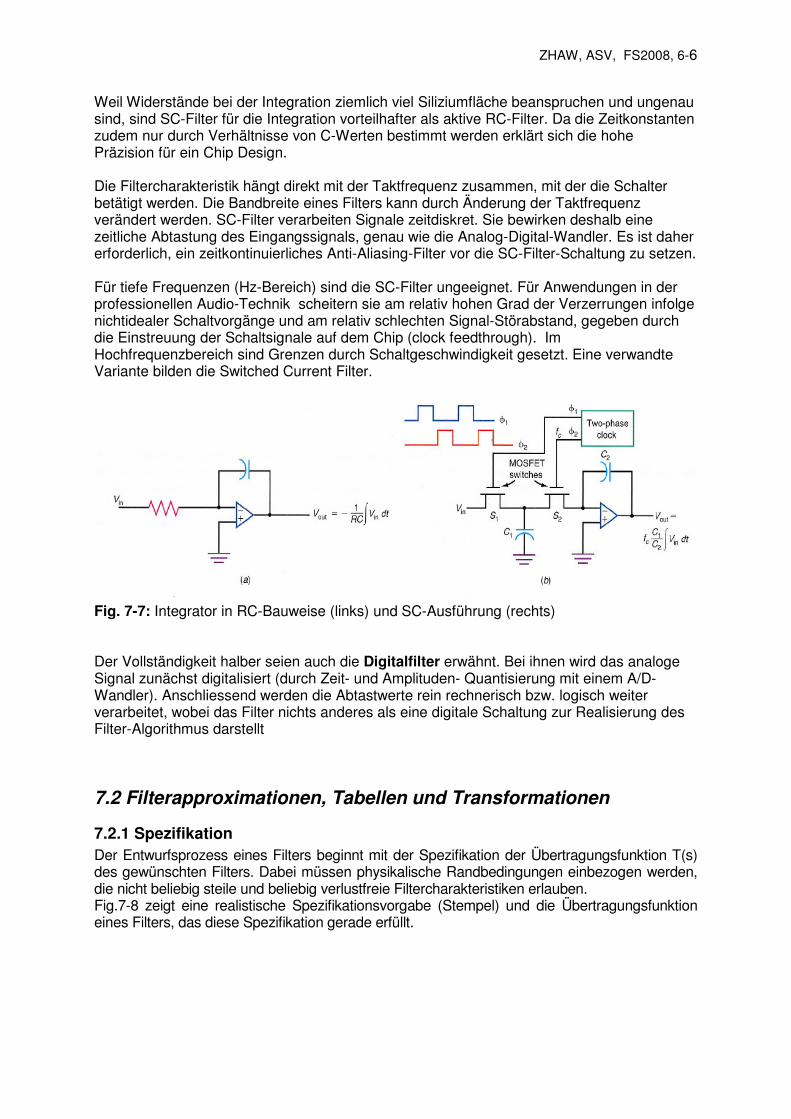
Fig. 7-4: Streifenleiterfilter in LTCC Bauform und konventionell SAW-Filter (Surface Acoustic Wave Filter, Oberflächenwellen-Filter) bestehen aus einem piezoelektrischen Substrat (oft LiNbO3 = Lithium-Niobat), auf dem fingerförmige Metallstrukturen (Aluminium-Leiterbahnen, interdigitale Transducer) aufgedampft sind. Man findet eine elektro-akustische „Senderstruktur“ und eine „Empfängerstruktur“. Wenn elektrische Signale an die Senderstruktur angelegt werden (Filtereingang), entstehen auf dem Piezo-Substrat akustische Oberflächenwellen. Sie wandern zur Empfängerstruktur, wo durch den Piezo-Effekt eine Empfangsspannung entsteht (Filterausgang). Durch geeignete Auslegung der fingerförmigen Strukturen erhält man hochwertige Bandpass-Filter. Mittenfrequenz, Bandbreite und Gruppenlaufzeit werden durch die Geometrie der Transducer-Strukturen bestimmt. Fig. 7-5 zeigt das Prinzip und die Anwendung als ZF-Filter
ZHAW, ASV, FS2008, 6-5
in einem Handy. SAW-Filter sind für Frequenzen von 30 MHz ... 5 GHz herstellbar und vor allem im Funkbereich als Sende-, Empfangs- und Zwischenfrequenzfilter eingesetzt.
Fig. 7-5: SAW-Filter: Anwendung und Prinzip Quarzfilter: Bei höchsten Anforderungen an die Filter-Steilheit werden in der HF-Technik Quarzfilter oder Keramikfilter verwendet. Quarze erreichen Güten von über 1000 und sind damit entsprechend prädestiniert für extrem schmalbandige Bandpässe, welche innerhalb weniger kHz mehrere 10 dB Dämpfung erbringen. Ein Quarzfilter ist als abgestimmtes Bauelement erhältlich oder kann selber aus kommerziell erhältlichen Schwingquarzen zusammengesetzt werden. Quarzfilter sind zumeist auf feste Frequenzen standardisiert lieferbar. Diese Frequenzen entsprechen den IF-Frequenzen der verschiedenen Funkempfängerstandards. Fig. 7-6 zeigt ein Beispiel der Firma Murata für den IF-Bereich von 455 kHz wie in AM/SSB Zwischenfrequenz-Stufen üblich. Das Impedanzniveau von Quarzfilter ist relativ hochohmig im Bereich von 300 Ω - 2 kΩ, so dass Transformatoren zur Anpassung an Ein- und Ausgangsimpedanz nötig sind. SAW Filter sind in gewisser Weise eine Fortentwicklung von Quarzfilter für höhere Frequenzen.
Fig. 7-6: Schmalbandiges Keramik-Bandpassfilter (Mittenfrequenz 10.7 MHz) Switched Capacitor Filter (SC-Filter) verwendet man für die vollständige monolithische Integration von Filtern. Gegenüber aktiven RC-Filtern besitzen sie den Vorteil, dass sie ohne ohmsche Widerstände auskommen. Tatsächlich lassen sich beliebige Widerstände durch Schalter-Kondensatoren-Anordnungen (so genannten switched capacitors, geschaltete Kondensatoren) ersetzen, wie auch Fig. 7-7 am Beispiel eines Integrators zeigt.
ZHAW, ASV, FS2008, 6-6
Weil Widerstände bei der Integration ziemlich viel Siliziumfläche beanspruchen und ungenau sind, sind SC-Filter für die Integration vorteilhafter als aktive RC-Filter. Da die Zeitkonstanten zudem nur durch Verhältnisse von C-Werten bestimmt werden erklärt sich die hohe Präzision für ein Chip Design. Die Filtercharakteristik hängt direkt mit der Taktfrequenz zusammen, mit der die Schalter betätigt werden. Die Bandbreite eines Filters kann durch Änderung der Taktfrequenz verändert werden. SC-Filter verarbeiten Signale zeitdiskret. Sie bewirken deshalb eine zeitliche Abtastung des Eingangssignals, genau wie die Analog-Digital-Wandler. Es ist daher erforderlich, ein zeitkontinuierliches Anti-Aliasing-Filter vor die SC-Filter-Schaltung zu setzen. Für tiefe Frequenzen (Hz-Bereich) sind die SC-Filter ungeeignet. Für Anwendungen in der professionellen Audio-Technik scheitern sie am relativ hohen Grad der Verzerrungen infolge nichtidealer Schaltvorgänge und am relativ schlechten Signal-Störabstand, gegeben durch die Einstreuung der Schaltsignale auf dem Chip (clock feedthrough). Im Hochfrequenzbereich sind Grenzen durch Schaltgeschwindigkeit gesetzt. Eine verwandte Variante bilden die Switched Current Filter.
Fig. 7-7: Integrator in RC-Bauweise (links) und SC-Ausführung (rechts) Der Vollständigkeit halber seien auch die Digitalfilter erwähnt. Bei ihnen wird das analoge Signal zunächst digitalisiert (durch Zeit- und Amplituden- Quantisierung mit einem A/D-Wandler). Anschliessend werden die Abtastwerte rein rechnerisch bzw. logisch weiter verarbeitet, wobei das Filter nichts anderes als eine digitale Schaltung zur Realisierung des Filter-Algorithmus darstellt
7.2 Filterapproximationen, Tabellen und Transformationen
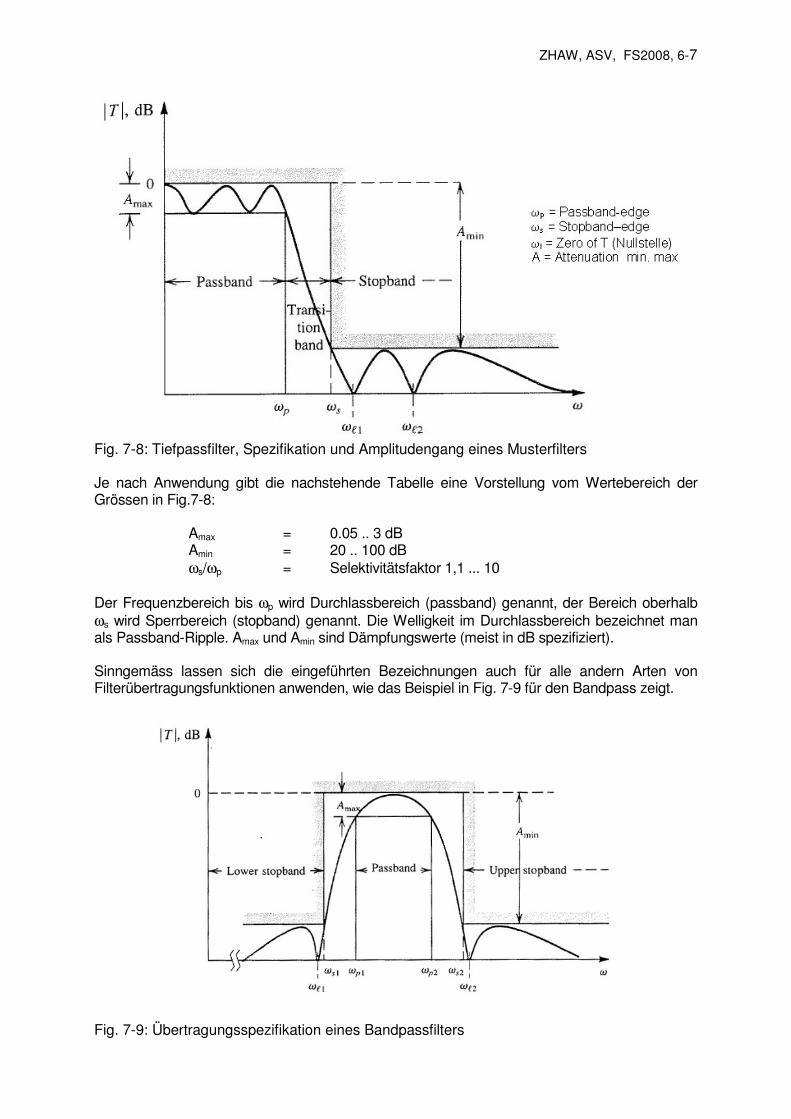
7.2.1 Spezifikation Der Entwurfsprozess eines Filters beginnt mit der Spezifikation der Übertragungsfunktion T(s) des gewünschten Filters. Dabei müssen physikalische Randbedingungen einbezogen werden, die nicht beliebig steile und beliebig verlustfreie Filtercharakteristiken erlauben. Fig.7-8 zeigt eine realistische Spezifikationsvorgabe (Stempel) und die Übertragungsfunktion eines Filters, das diese Spezifikation gerade erfüllt.
ZHAW, ASV, FS2008, 6-7
Fig. 7-8: Tiefpassfilter, Spezifikation und Amplitudengang eines Musterfilters Je nach Anwendung gibt die nachstehende Tabelle eine Vorstellung vom Wertebereich der Grössen in Fig.7-8: Amax = 0.05 .. 3 dB Amin = 20 .. 100 dB ωs/ωp = Selektivitätsfaktor 1,1 ... 10 Der Frequenzbereich bis ωp wird Durchlassbereich (passband) genannt, der Bereich oberhalb ωs wird Sperrbereich (stopband) genannt. Die Welligkeit im Durchlassbereich bezeichnet man als Passband-Ripple. Amax und Amin sind Dämpfungswerte (meist in dB spezifiziert). Sinngemäss lassen sich die eingeführten Bezeichnungen auch für alle andern Arten von Filterübertragungsfunktionen anwenden, wie das Beispiel in Fig. 7-9 für den Bandpass zeigt.
Fig. 7-9: Übertragungsspezifikation eines Bandpassfilters
ZHAW, ASV, FS2008, 6-8
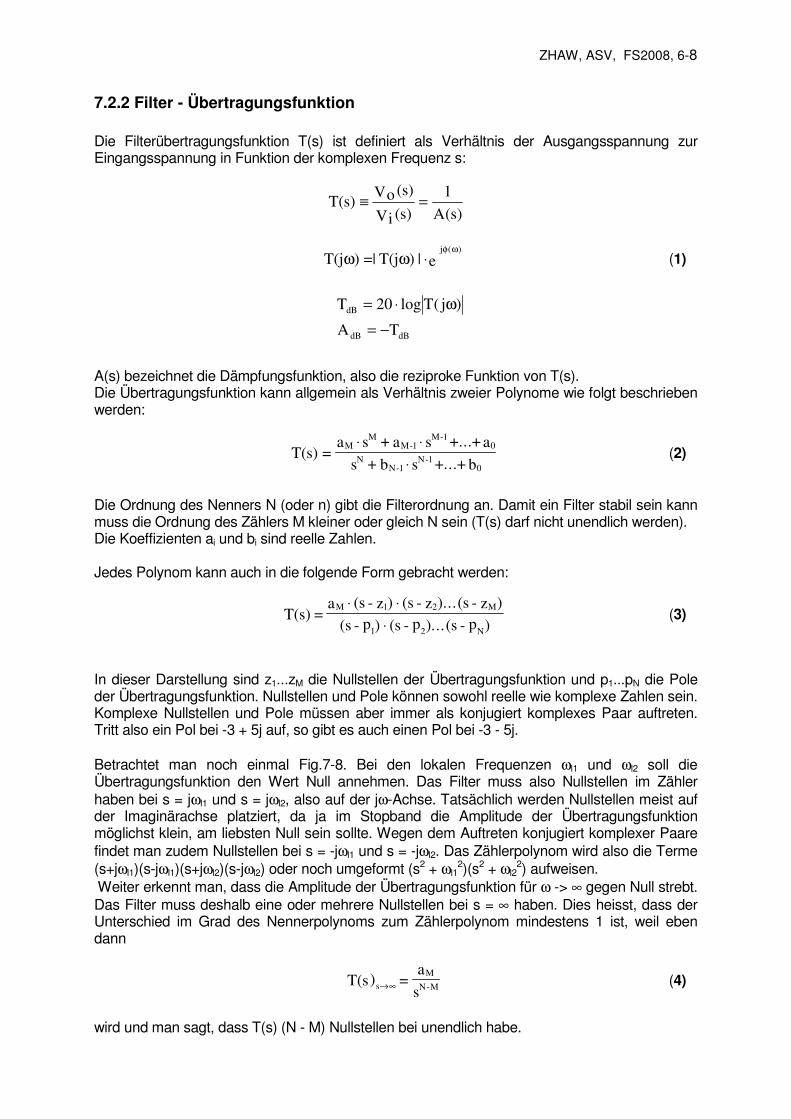
7.2.2 Filter - Übertragungsfunktion Die Filterübertragungsfunktion T(s) ist definiert als Verhältnis der Ausgangsspannung zur Eingangsspannung in Funktion der komplexen Frequenz s:
A(s) bezeichnet die Dämpfungsfunktion, also die reziproke Funktion von T(s). Die Übertragungsfunktion kann allgemein als Verhältnis zweier Polynome wie folgt beschrieben werden:
Die Ordnung des Nenners N (oder n) gibt die Filterordnung an. Damit ein Filter stabil sein kann muss die Ordnung des Zählers M kleiner oder gleich N sein (T(s) darf nicht unendlich werden). Die Koeffizienten ai und bi sind reelle Zahlen. Jedes Polynom kann auch in die folgende Form gebracht werden:
In dieser Darstellung sind z1...zM die Nullstellen der Übertragungsfunktion und p1...pN die Pole der Übertragungsfunktion. Nullstellen und Pole können sowohl reelle wie komplexe Zahlen sein. Komplexe Nullstellen und Pole müssen aber immer als konjugiert komplexes Paar auftreten. Tritt also ein Pol bei -3 + 5j auf, so gibt es auch einen Pol bei -3 - 5j. Betrachtet man noch einmal Fig.7-8. Bei den lokalen Frequenzen ωl1 und ωl2 soll die Übertragungsfunktion den Wert Null annehmen. Das Filter muss also Nullstellen im Zähler haben bei s = jωl1 und s = jωl2, also auf der jω-Achse. Tatsächlich werden Nullstellen meist auf der Imaginärachse platziert, da ja im Stopband die Amplitude der Übertragungsfunktion möglichst klein, am liebsten Null sein sollte. Wegen dem Auftreten konjugiert komplexer Paare findet man zudem Nullstellen bei s = -jωl1 und s = -jωl2. Das Zählerpolynom wird also die Terme (s+jωl1)(s-jωl1)(s+jωl2)(s-jωl2) oder noch umgeformt (s2 + ωl1
2)(s2 + ωl22) aufweisen.
Weiter erkennt man, dass die Amplitude der Übertragungsfunktion für ω -> ∞ gegen Null strebt. Das Filter muss deshalb eine oder mehrere Nullstellen bei s = ∞ haben. Dies heisst, dass der Unterschied im Grad des Nennerpolynoms zum Zählerpolynom mindestens 1 ist, weil eben dann
wird und man sagt, dass T(s) (N - M) Nullstellen bei unendlich habe.
dBdB
dB
)(j
TA
)j(Tlog20T
e|)T(j=|)T(j
)s(A
1
(s)Vi
(s)VoT(s)
−=
ω⋅=
⋅ωω
=≡
ωφ
(1)
T(s) =a s + a s +...+ a
s + b s +...+ bM
MM-1
M-10
NN-1
N-10
⋅ ⋅
⋅ (2)
T(s) =a (s - z ) (s - z )...(s - z )
(s - p ) (s - p )...(s - p )M 1 2 M
1 2 N
⋅ ⋅
⋅ (3)
T(s) =a
ss
M
N-M→∞ (4)
ZHAW, ASV, FS2008, 6-9
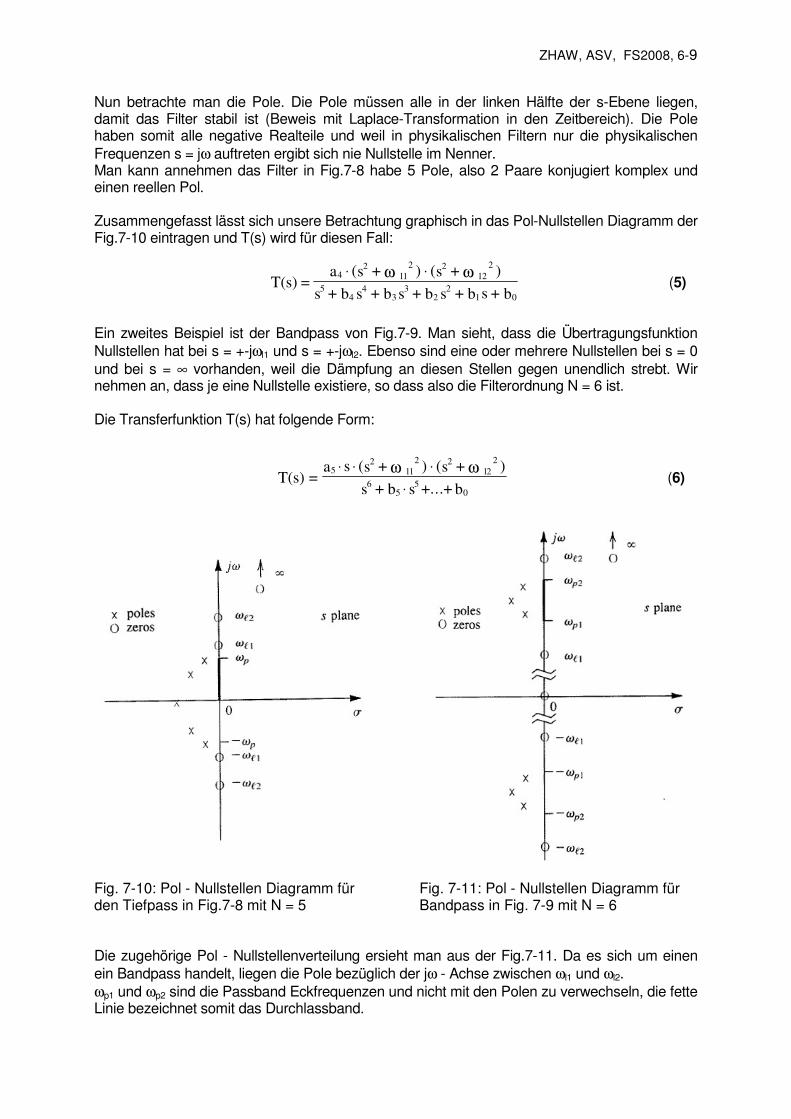
Nun betrachte man die Pole. Die Pole müssen alle in der linken Hälfte der s-Ebene liegen, damit das Filter stabil ist (Beweis mit Laplace-Transformation in den Zeitbereich). Die Pole haben somit alle negative Realteile und weil in physikalischen Filtern nur die physikalischen Frequenzen s = jω auftreten ergibt sich nie Nullstelle im Nenner. Man kann annehmen das Filter in Fig.7-8 habe 5 Pole, also 2 Paare konjugiert komplex und einen reellen Pol. Zusammengefasst lässt sich unsere Betrachtung graphisch in das Pol-Nullstellen Diagramm der Fig.7-10 eintragen und T(s) wird für diesen Fall:
Ein zweites Beispiel ist der Bandpass von Fig.7-9. Man sieht, dass die Übertragungsfunktion Nullstellen hat bei s = +-jωl1 und s = +-jωl2. Ebenso sind eine oder mehrere Nullstellen bei s = 0 und bei s = ∞ vorhanden, weil die Dämpfung an diesen Stellen gegen unendlich strebt. Wir nehmen an, dass je eine Nullstelle existiere, so dass also die Filterordnung N = 6 ist. Die Transferfunktion T(s) hat folgende Form:
Fig. 7-10: Pol - Nullstellen Diagramm für den Tiefpass in Fig.7-8 mit N = 5
Fig. 7-11: Pol - Nullstellen Diagramm für Bandpass in Fig. 7-9 mit N = 6
Die zugehörige Pol - Nullstellenverteilung ersieht man aus der Fig.7-11. Da es sich um einen ein Bandpass handelt, liegen die Pole bezüglich der jω - Achse zwischen ωl1 und ωl2. ωp1 und ωp2 sind die Passband Eckfrequenzen und nicht mit den Polen zu verwechseln, die fette Linie bezeichnet somit das Durchlassband.
T(s) =a (s + ) (s + )
s + b s + b s + b s + b s + b4
2l
2l
54
43
32
21 0
⋅ ⋅12
22
ω ω (5)
T(s) =a s (s + ) (s + )
s + b s +...+ b5
2l
2l2
65
50
⋅ ⋅ ⋅
⋅1
2 2ω ω
(6)
ZHAW, ASV, FS2008, 6-10
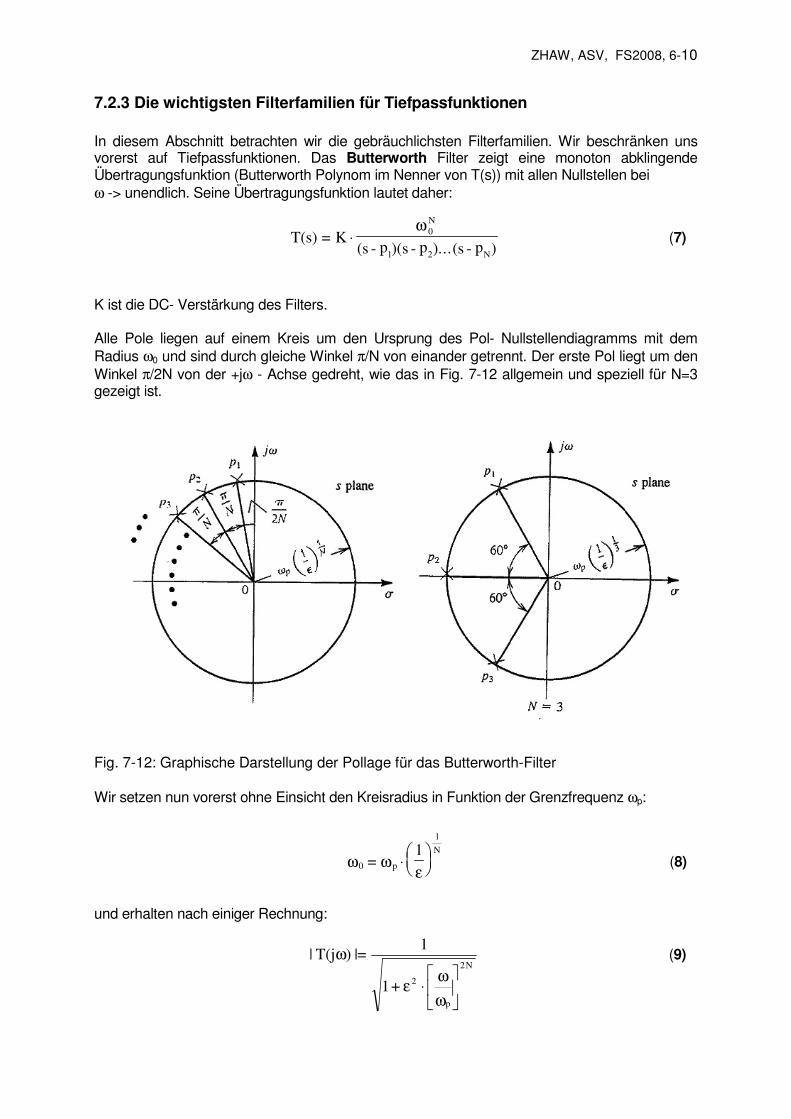
7.2.3 Die wichtigsten Filterfamilien für Tiefpassfunktionen In diesem Abschnitt betrachten wir die gebräuchlichsten Filterfamilien. Wir beschränken uns vorerst auf Tiefpassfunktionen. Das Butterworth Filter zeigt eine monoton abklingende Übertragungsfunktion (Butterworth Polynom im Nenner von T(s)) mit allen Nullstellen bei ω -> unendlich. Seine Übertragungsfunktion lautet daher:
K ist die DC- Verstärkung des Filters. Alle Pole liegen auf einem Kreis um den Ursprung des Pol- Nullstellendiagramms mit dem Radius ω0 und sind durch gleiche Winkel π/N von einander getrennt. Der erste Pol liegt um den Winkel π/2N von der +jω - Achse gedreht, wie das in Fig. 7-12 allgemein und speziell für N=3 gezeigt ist.
Fig. 7-12: Graphische Darstellung der Pollage für das Butterworth-Filter Wir setzen nun vorerst ohne Einsicht den Kreisradius in Funktion der Grenzfrequenz ωp:
und erhalten nach einiger Rechnung:
T(s) = K(s - p )(s - p )...(s - p )
N
1 2 N
⋅ω 0 (7)
0 p
N
=ω ωε
⋅
11
(8)
N2
p
2+1
1|=)T(j|
ω
ω⋅ε
ω (9)
ZHAW, ASV, FS2008, 6-11
Die Einsicht, dass obige Festlegung sinnvoll ist kommt sofort, wenn man T(jωp) und T(jω0) berechnet, ωp ist ja die Grenze des Durchlassbereichs (Passband) und ω0 entpuppt sich als 3 dB Grenzfrequenz:
ε bestimmt also die maximale Dämpfung im Durchlassbereich und lässt sich einfach aus einer Vorgabe für die maximale Dämpfung Amax errechnen:
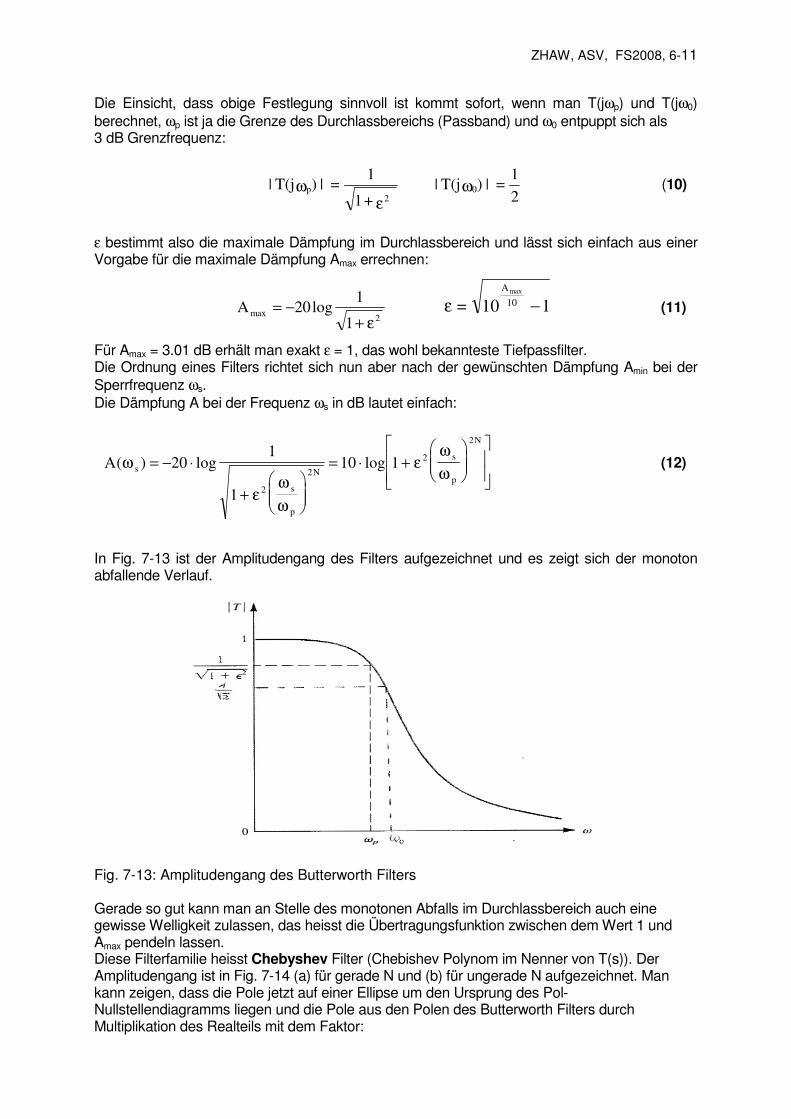
Für Amax = 3.01 dB erhält man exakt ε = 1, das wohl bekannteste Tiefpassfilter. Die Ordnung eines Filters richtet sich nun aber nach der gewünschten Dämpfung Amin bei der Sperrfrequenz ωs. Die Dämpfung A bei der Frequenz ωs in dB lautet einfach:
In Fig. 7-13 ist der Amplitudengang des Filters aufgezeichnet und es zeigt sich der monoton abfallende Verlauf.
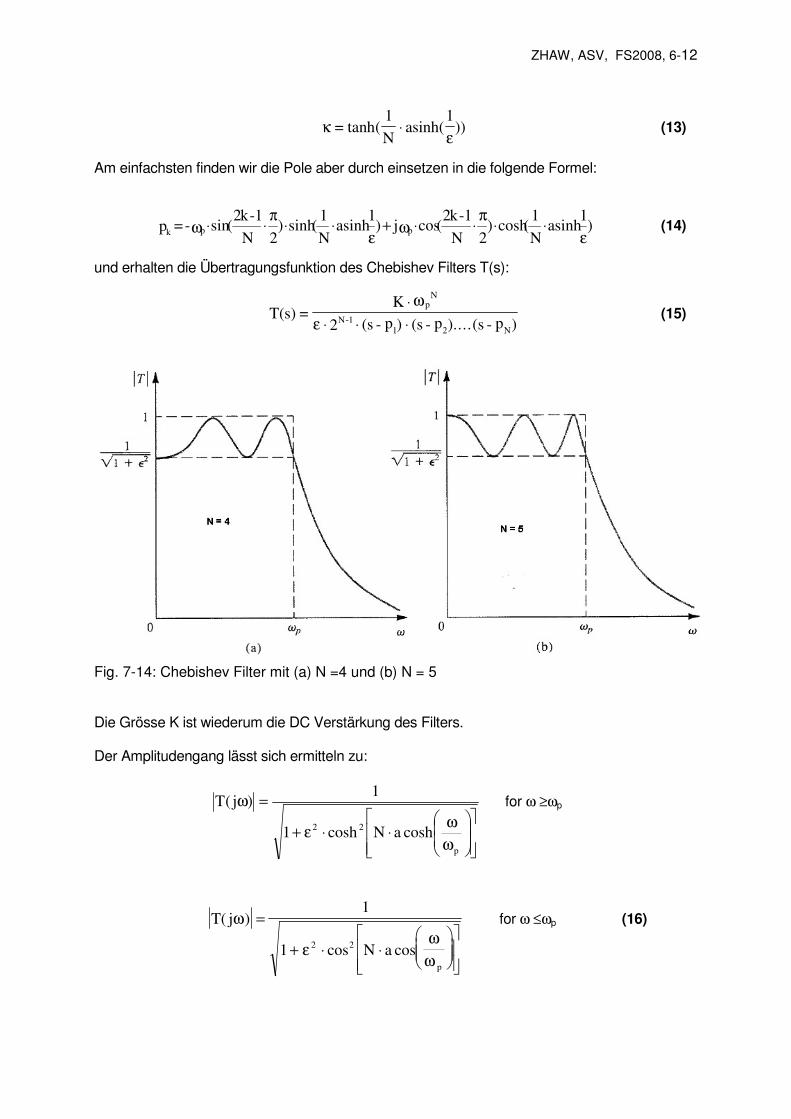
Fig. 7-13: Amplitudengang des Butterworth Filters Gerade so gut kann man an Stelle des monotonen Abfalls im Durchlassbereich auch eine gewisse Welligkeit zulassen, das heisst die Übertragungsfunktion zwischen dem Wert 1 und Amax pendeln lassen. Diese Filterfamilie heisst Chebyshev Filter (Chebishev Polynom im Nenner von T(s)). Der Amplitudengang ist in Fig. 7-14 (a) für gerade N und (b) für ungerade N aufgezeichnet. Man kann zeigen, dass die Pole jetzt auf einer Ellipse um den Ursprung des Pol- Nullstellendiagramms liegen und die Pole aus den Polen des Butterworth Filters durch Multiplikation des Realteils mit dem Faktor:
2
1=|)T(j|
+1
1=|)T(j| 0
2p ω
εω (10)
2
max1
1log20A
ε+−= 110= 10
Amax
−ε (11)
A s
s
p
N
s
p
N
( ) log logω
εω
ω
εω
ω= − ⋅
+
= ⋅ +
201
1
10 1
2
2
2
2
(12)
ZHAW, ASV, FS2008, 6-12
Am einfachsten finden wir die Pole aber durch einsetzen in die folgende Formel:
und erhalten die Übertragungsfunktion des Chebishev Filters T(s):
Fig. 7-14: Chebishev Filter mit (a) N =4 und (b) N = 5 Die Grösse K ist wiederum die DC Verstärkung des Filters. Der Amplitudengang lässt sich ermitteln zu:
ω
ω⋅⋅ε+
=ω
p
22 coshaNcosh1
1)j(T for ω ≥ωp
T( j
N ap
ω
εω
ω
)
cos cos
=
+ ⋅ ⋅
1
1 2 2
for ω ≤ωp (16)
κε
= (N
asinh( ))tanh1 1
⋅ (13)
)1
asinhN
1(cosh)
2N
1-k2(cosj)
1asinh
N
1(sinh)
2N
1-k2(sin-=p ppk
ε⋅⋅
π⋅⋅ω+
ε⋅⋅
π⋅⋅ω (14)
T(s) =K
2 (s - p ) (s - p )....(s - p )
Np
N-11 2 N
⋅
⋅ ⋅ ⋅
ω
ε (15)
ZHAW, ASV, FS2008, 6-13
Die Chebishev Filter sind deutlich steiler als die Butterworth Filter, dies auf Kosten der Welligkeit. Bis jetzt wurde nichts über den Phasengang der Filter gesagt. Dieser ist im Durchlassbereich nicht linear und es entstehen somit Laufzeitverzerrungen. Man kann auch versuchen den Phasengang linear zu halten auf Kosten der Steilheit. Es entsteht dann die Familie der Bessel Filter. Auf die mathematische Ableitung zur Bestimmung der Pollagen wird an dieser Stelle verzichten. Grundsätzlich setzt man aber für die Gruppenlaufzeit denselben Verlauf in Funktion der Frequenz an, wie beim Butterworth Filter. Als Resultat liegen die Pole auf einem Kreis, dessen Zentrum aber auf der positiven reellen Achse des Polstellendiagrams liegt. Wie auch für alle andern gebräuchlichen Filter sind die Lage der Pole längst berechnet worden und tabelliert in Funktion der Ordnung und des Parameters ε für die Welligkeit. Diese Betrachtungen über die mathematische Seite der Filtertechnik soll genügen. Es folgt der Gebrauch der Tabellen für die Dimensionierung von Filtern und anschliessend Schaltungen die passive und aktive Realisation dieser Filter in LC- und RC-Technik.
7.2.4 Filtertabellen Zuerst wird die Tabellierungsart für aktive RC-Filter und SC-Filter behandelt, basierend auf der Zerlegung von T(s) in Teilstufen 1. und 2. Ordnung. Diese lassen sich besonders bequem mit je einem Op-Amp realisieren. Für passive LC-Filter wird auf Abschnitt 7.3 verwiesen. Im Folgenden geht man von einem Tiefpassfilter mit der Grenzfrequenz ω3dB = ω0 aus. Da der Zusammenhang Filterkurve - Polstellen für die gebräuchlichsten Filter mit der normierten Grenzfrequenz ω0 = 1 einmal berechnet für immer gültig bleibt, gibt es diverse Tabellen dazu. Eine dieser Tabellen soll nun behandelt werden um zu sehen, wie daraus ein Filter dimensioniert werden kann. Zuerst formt man die Übertragungsfunktion T(s) um und erhält eine andere sehr oft gebrauchte Form:
Die oben aufgeführte Darstellung gilt für eine gerade Ordnung n. Analog gilt für n ungerade:
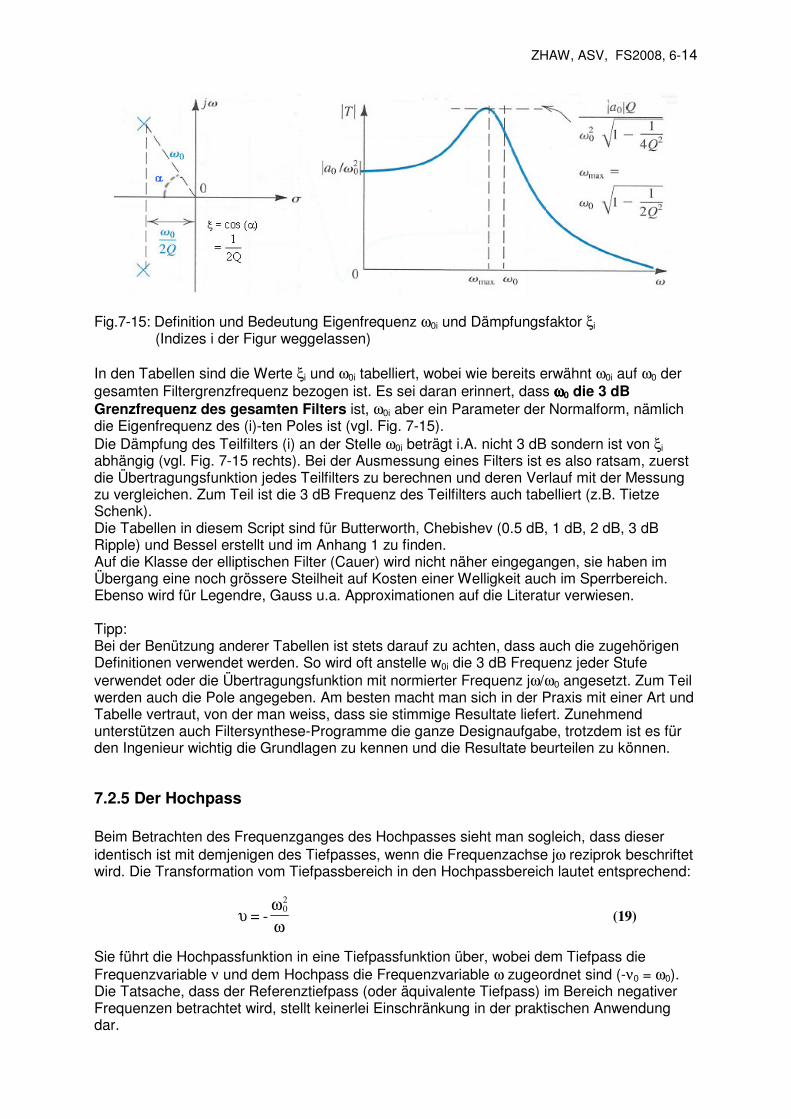
Die neu erhaltene Form heisst Normalform, ωωωω0i wird Eigenfrequenz genannt und ξξξξi ist der Dämpfungsfaktor (manchmal auch mit D bezeichnet). Trägt man die Pole in der komplexen s-Ebene ein, so entspricht ω0i der Länge des Ortsvektors, der den Pol mit dem Ursprung des Koordinatensystems verbindet. Der Dämpfungsfaktor ξi ist gleich dem Cosinus des Winkels α, den der Ortsvektor mit der negativen reellen Achse einschliesst (siehe Fig.7-15). Die Bedeutung der beiden Begriffe sind aus der Theorie der Laplace-Transformation bekannt. Ein komplexes Polpaar ergibt ja als Stossantwort eine gedämpfte Schwingung. Die englische Literatur verwendet oft auch die Polgüte Q anstelle von ξ.
[ ] [ ]T(s) =
+ s + (s
) + s + (s
) .....1
01 01
2
02 02
1
12
122 2
⋅⋅
⋅ ⋅⋅ξ
ω ω
ξ
ω ω
(17)
[ ] [ ] [ ]T(s) =
( +s
) + s + (s
) + s + (s
) .....01
2
02 02
3
03 03
1
1 12
122 2
ω
ξ
ω ω
ξ
ω ω⋅ ⋅
⋅⋅ ⋅
⋅ (18)
ZHAW, ASV, FS2008, 6-14
Fig.7-15: Definition und Bedeutung Eigenfrequenz ω0i und Dämpfungsfaktor ξi (Indizes i der Figur weggelassen) In den Tabellen sind die Werte ξi und ω0i tabelliert, wobei wie bereits erwähnt ω0i auf ω0 der gesamten Filtergrenzfrequenz bezogen ist. Es sei daran erinnert, dass ωωωω0 die 3 dB Grenzfrequenz des gesamten Filters ist, ω0i aber ein Parameter der Normalform, nämlich die Eigenfrequenz des (i)-ten Poles ist (vgl. Fig. 7-15). Die Dämpfung des Teilfilters (i) an der Stelle ω0i beträgt i.A. nicht 3 dB sondern ist von ξi abhängig (vgl. Fig. 7-15 rechts). Bei der Ausmessung eines Filters ist es also ratsam, zuerst die Übertragungsfunktion jedes Teilfilters zu berechnen und deren Verlauf mit der Messung zu vergleichen. Zum Teil ist die 3 dB Frequenz des Teilfilters auch tabelliert (z.B. Tietze Schenk). Die Tabellen in diesem Script sind für Butterworth, Chebishev (0.5 dB, 1 dB, 2 dB, 3 dB Ripple) und Bessel erstellt und im Anhang 1 zu finden. Auf die Klasse der elliptischen Filter (Cauer) wird nicht näher eingegangen, sie haben im Übergang eine noch grössere Steilheit auf Kosten einer Welligkeit auch im Sperrbereich. Ebenso wird für Legendre, Gauss u.a. Approximationen auf die Literatur verwiesen. Tipp: Bei der Benützung anderer Tabellen ist stets darauf zu achten, dass auch die zugehörigen Definitionen verwendet werden. So wird oft anstelle w0i die 3 dB Frequenz jeder Stufe verwendet oder die Übertragungsfunktion mit normierter Frequenz jω/ω0 angesetzt. Zum Teil werden auch die Pole angegeben. Am besten macht man sich in der Praxis mit einer Art und Tabelle vertraut, von der man weiss, dass sie stimmige Resultate liefert. Zunehmend unterstützen auch Filtersynthese-Programme die ganze Designaufgabe, trotzdem ist es für den Ingenieur wichtig die Grundlagen zu kennen und die Resultate beurteilen zu können.
7.2.5 Der Hochpass Beim Betrachten des Frequenzganges des Hochpasses sieht man sogleich, dass dieser identisch ist mit demjenigen des Tiefpasses, wenn die Frequenzachse jω reziprok beschriftet wird. Die Transformation vom Tiefpassbereich in den Hochpassbereich lautet entsprechend:
υω
ω= -
02
(19)
Sie führt die Hochpassfunktion in eine Tiefpassfunktion über, wobei dem Tiefpass die Frequenzvariable ν und dem Hochpass die Frequenzvariable ω zugeordnet sind (-ν0 = ω0). Die Tatsache, dass der Referenztiefpass (oder äquivalente Tiefpass) im Bereich negativer Frequenzen betrachtet wird, stellt keinerlei Einschränkung in der praktischen Anwendung dar.
ZHAW, ASV, FS2008, 6-15
Am Beispiel des einfachen Tiefpasses 1. Ordnung mit der Übertragungsfunktion:
0
-
j+1
1=)(jT
0
TP ≤ν
υ
υυ (20)
ergibt sich durch Einsetzen für ν:
0j+1
j
j-1
1=)(jT
0
0
0
20
HP ≥ω
ω
ω⋅
ω
ω⋅
=
ω⋅ω
ωω (21, 25)
Diese Frequenztransformation kann auch direkt mit der komplexen Variable s durchgeführt werden indem die Variable s der Tiefpassfunktion transformiert wird:
HP
20TP00
s
sund- ω→ω→υ (22)
Praxis: Die Hochpass Spezifikationen werden in eine Tiefpass Spezifikation transformiert Minuszeichen ingnorieren!), der Tiefpass wird berechnet und in den Tabellen nachgeschlagen. Nun ergibt sich die Übertragungsfunktion T(s) für den Hochpass n.ter Ordnung durch Transformation der Übertragungsfunktion des Tiefpasses. Mit der Transformationsgleichung sHP = ω2
o / sTP erhält man die Hochpasswerte ωoi und ξi durch Einsetzen der komplexen Pole sTP, d.h. in der Praxis direkt zu:
ii0i
20
0i = ξ=ξυ
ωω (23)
Für die Übertragungsfunktion des Hochpasses gilt somit für gerade n:
......][][02
2
2
02
2
012
2
01
1
0i2
2
n
1=i
n
s2s+1
s2s+1
s
=T(s)
⋅⋅
∏
ω+
ω
ξ⋅⋅
ω+
ω
ξ⋅⋅
ω (24)
Für ungerade n gilt analog:
......][][02
2
2
02
2
01
0i2
2
1+n
2=i
01n
s2s+1
s+1
s
=T(s)
⋅⋅
∏
ω+
ω
ξ⋅⋅
ω
ωω
(25)
Aus diesen Formeln sieht man, dass das Nennerpolynom des Hochpasses mit dem Nennerpolynom des Tiefpasses sehr eng verwandt ist, ja im Falle des Butterworth Filters sogar identisch ist (ω0i = ω0).
ZHAW, ASV, FS2008, 6-16
Die Pole eines Hochpasses mit der Grenzfrequenz ω0 weisen dieselben Dämpfungsfaktoren ξi auf, wie die Pole eines gleichartigen Tiefpasses mit derselben Grenzfrequenz. Ihre Eigenfrequenzen ω0i werden aber mit der Beziehung ω0
2/ν0i transformiert. Zusätzlich weist das n-polige Hochpass Filter eine n-fache Nullstelle bei s=0 auf. Die Realisation von Filtern hoher Ordnung geschieht genau gleich wie beim Tiefpass durch Aneinanderfügen von Blöcken 1. und 2. Ordnung. Die Tabellen können dazu sehr einfach benützt werden, indem lediglich ω0i für den Hochpass zusätzlich zu berechnen ist:
0i02
0i
0
0i 0
0
0i 0
= =[ / ]
=[ / ]
ωω
υ
ω
υ ω
ω
υ υ ii ξ=ξ (26)
ν0i/ν0 ist direkt der Tabelle zu entnehmen (es gilt ja ν0 = ω0). Allerdings werden wir sehen, dass die Schaltung für Hochpass natürlich anders aufgebaut sein müssen, da sie zusätzlich Nullstellen erzeugen muss (siehe Kapitel 8). Die Definitionen der 3-dB Frequenz ω0 in verschiedenen Tabellenwerken und Filterprogrammen werden oft unterschiedlich gehandhabt. Die Tabellen in diesem Skript beziehen sich alle auf die Definition dass der 3 dB Punkt bei ω0 definiert als Ort mit 3.01 dB Dämpfung bezüglich der Durchlass-Asymptote durch den Punkt 0 Hz (DC).
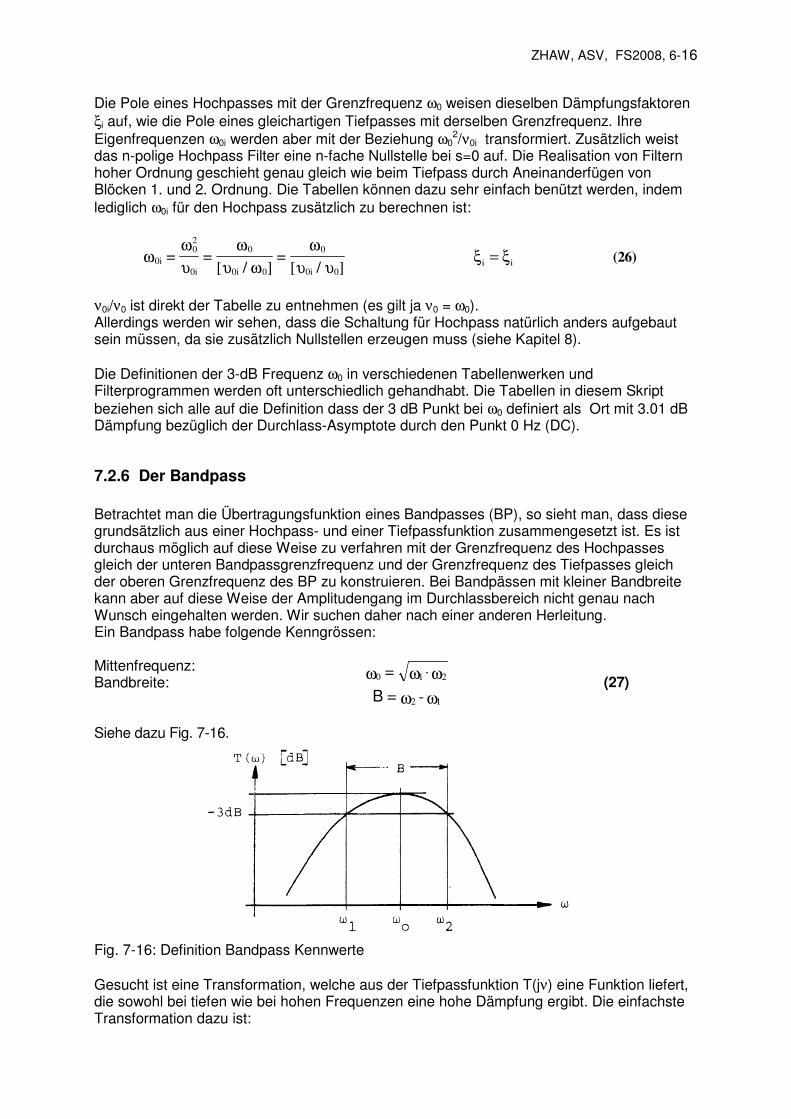
7.2.6 Der Bandpass Betrachtet man die Übertragungsfunktion eines Bandpasses (BP), so sieht man, dass diese grundsätzlich aus einer Hochpass- und einer Tiefpassfunktion zusammengesetzt ist. Es ist durchaus möglich auf diese Weise zu verfahren mit der Grenzfrequenz des Hochpasses gleich der unteren Bandpassgrenzfrequenz und der Grenzfrequenz des Tiefpasses gleich der oberen Grenzfrequenz des BP zu konstruieren. Bei Bandpässen mit kleiner Bandbreite kann aber auf diese Weise der Amplitudengang im Durchlassbereich nicht genau nach Wunsch eingehalten werden. Wir suchen daher nach einer anderen Herleitung. Ein Bandpass habe folgende Kenngrössen: Mittenfrequenz: Bandbreite: (27) Siehe dazu Fig. 7-16.
Fig. 7-16: Definition Bandpass Kennwerte Gesucht ist eine Transformation, welche aus der Tiefpassfunktion T(jν) eine Funktion liefert, die sowohl bei tiefen wie bei hohen Frequenzen eine hohe Dämpfung ergibt. Die einfachste Transformation dazu ist:
ωω
ω⋅ωω
12
210
-=
=
B
ZHAW, ASV, FS2008, 6-17
s
+ssv20
0ω
→→ B (28)
Wiederum geht man von einem Tiefpass mit Grenzfrequenz ν0 aus und ersetzen ν0 und s durch die obigen Ausdrücke. Daraus entsteht für das Beispiel des Tiefpasses 1.Ordnung:
ωω
⋅ω
⋅
ω⋅
⋅
20
2
20
20
20
2 s+s
+1
s
=+s+s
s=T(s)
B
B
BB
(29)
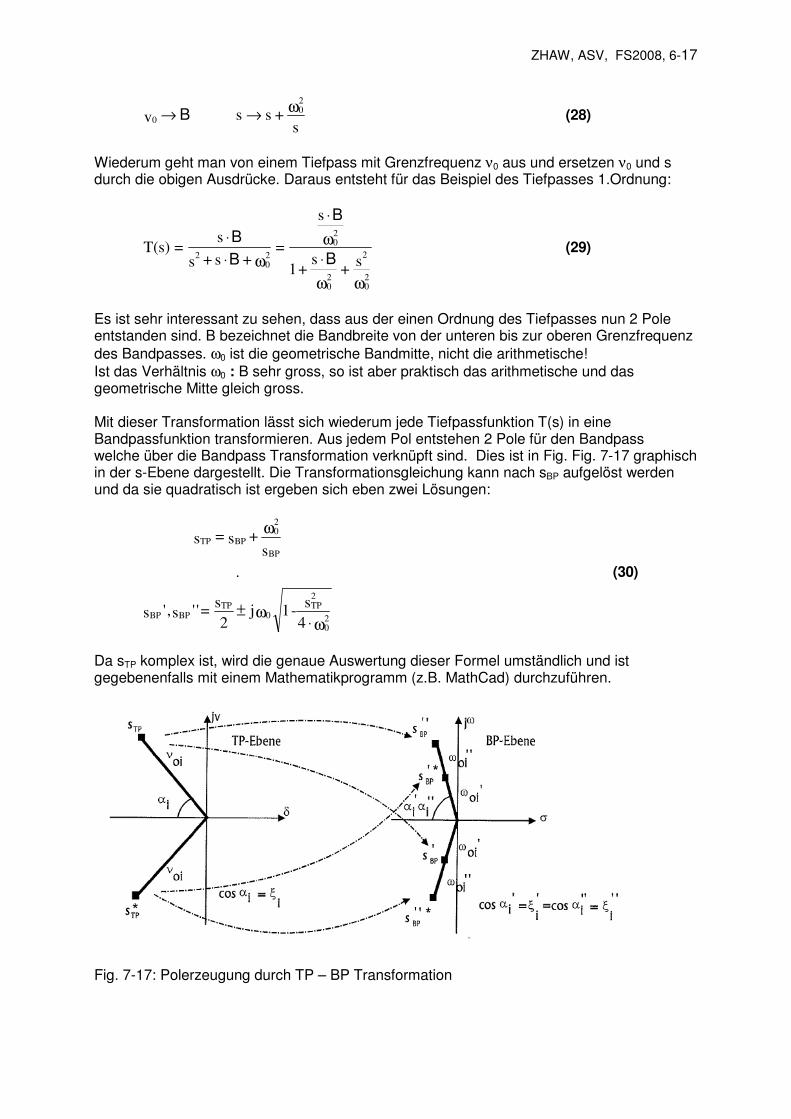
Es ist sehr interessant zu sehen, dass aus der einen Ordnung des Tiefpasses nun 2 Pole entstanden sind. B bezeichnet die Bandbreite von der unteren bis zur oberen Grenzfrequenz des Bandpasses. ω0 ist die geometrische Bandmitte, nicht die arithmetische! Ist das Verhältnis ω0 : B sehr gross, so ist aber praktisch das arithmetische und das geometrische Mitte gleich gross. Mit dieser Transformation lässt sich wiederum jede Tiefpassfunktion T(s) in eine Bandpassfunktion transformieren. Aus jedem Pol entstehen 2 Pole für den Bandpass welche über die Bandpass Transformation verknüpft sind. Dies ist in Fig. Fig. 7-17 graphisch in der s-Ebene dargestellt. Die Transformationsgleichung kann nach sBP aufgelöst werden und da sie quadratisch ist ergeben sich eben zwei Lösungen:
ω⋅ω±
ω
20
2TP
0TP
BPBP
BP
20
BPTP
4s-1j
2s=''s,'s
.
s+s=s
(30)
Da sTP komplex ist, wird die genaue Auswertung dieser Formel umständlich und ist gegebenenfalls mit einem Mathematikprogramm (z.B. MathCad) durchzuführen.
Fig. 7-17: Polerzeugung durch TP – BP Transformation
ZHAW, ASV, FS2008, 6-18
Für den häufigen Fall, wo die Bandbreite B mindestens 5 x kleiner ist als die Mittenfrequenz ωωωω0, wird die Wurzel in obiger Formel ungefähr 1. Durch Einsetzen der komplexen Pole für sTP lassen sich dann für die entstehenden Eigenfrequenzen ω0i und Dämpfungsfaktor ξi nach einigem Rechnen, welche an dieser Stelle erspart bleiben soll, folgende Näherungen ermitteln:
ξ ξ ξυ
ωi i i
i' ' '= ≈ ⋅⋅
0
02
2
1' i0
2i
0i0
υ⋅ξ−+ω≈ω ω ω
ξ υ0 0
201
2i
i i' ' ≈ −
− ⋅
0b2
geraden,n......1i
υ=⋅π⋅=
=
B (31)
ν0i kann einfach aus den Tabellenwerten berechnet werden. Die Tabellenwerte entsprechen direkt den Werten ν0i/B . Für ungerade n kommt noch ein 2-poliger Bandpass dazu mit:
ξ
υ
ω
ω ω
1
01 0
2'
'
=
=
01
0⋅ (32)
sBP' und sBP'' besitzen je ein ω0 und ein gemeinsames ξ, wie aus Fig. 7-17 zu ersehen ist. Die Übertragungsfunktion für den Bandpass lautet damit allgemein für gerade Ordnung n:
( ) ( )
v1
=K
......]''
s+''
''2s+1[]
'
s+'
'2s+1[
Ks=T(s)
20i
2
n
1=i2n0
2
01
2
01
1
2
01
2
01
1
n
∏⋅ω
⋅ωω
ξ⋅⋅⋅
ωω
ξ⋅⋅
⋅
(33)
Für ungerade n gilt:
( ) ( ) ( )
υω
υ
⋅ωω
ξ⋅⋅⋅
ωω
ξ⋅⋅⋅
ωω
ξ⋅⋅
⋅
∏ 20i
2
1+n
2=i2n0
01
2
02
2
02
22
02
2
02
22
01
2
01
1
n
=K
......]''
s+''
''2s+1[]
'
s+'
'2s+1[]
'
s+'
'2s+1[
Ks=T(s)
(34)
Die Bandmittenverstärkung ergibt sich durch einsetzen von K und s = jω0 in T(s) und anschliessender Betragsbestimmung von T(s).
ZHAW, ASV, FS2008, 6-19
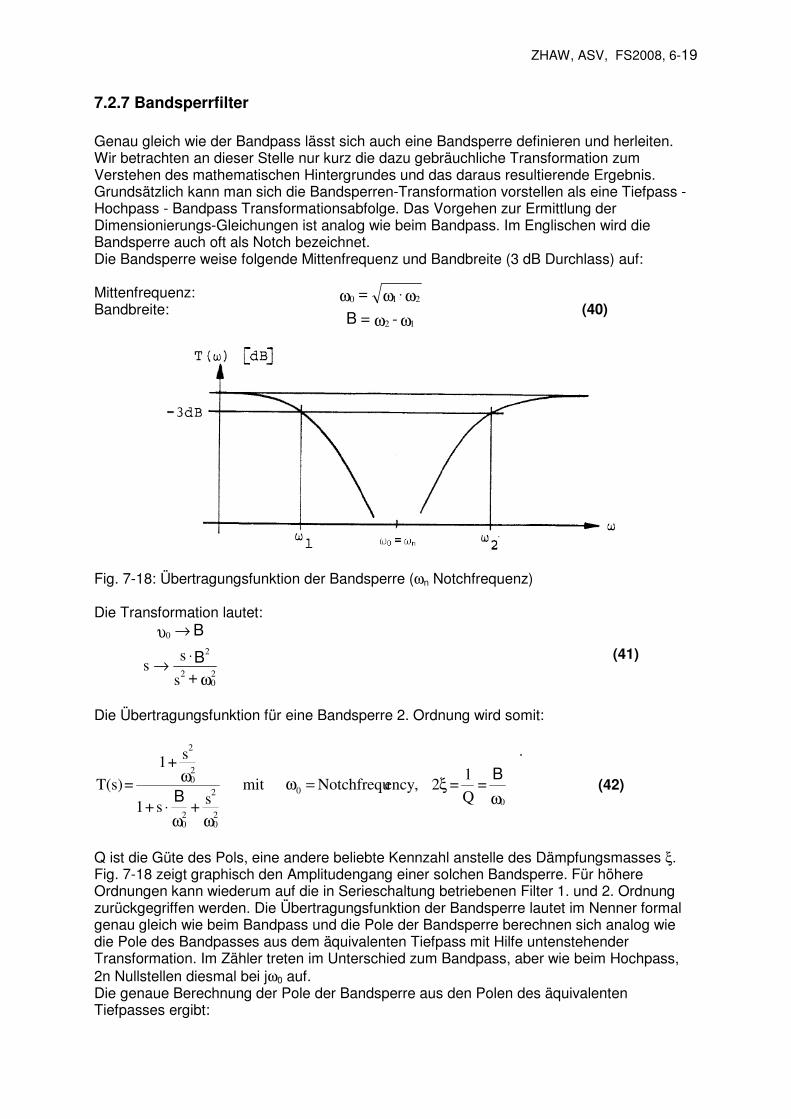
7.2.7 Bandsperrfilter Genau gleich wie der Bandpass lässt sich auch eine Bandsperre definieren und herleiten. Wir betrachten an dieser Stelle nur kurz die dazu gebräuchliche Transformation zum Verstehen des mathematischen Hintergrundes und das daraus resultierende Ergebnis. Grundsätzlich kann man sich die Bandsperren-Transformation vorstellen als eine Tiefpass - Hochpass - Bandpass Transformationsabfolge. Das Vorgehen zur Ermittlung der Dimensionierungs-Gleichungen ist analog wie beim Bandpass. Im Englischen wird die Bandsperre auch oft als Notch bezeichnet. Die Bandsperre weise folgende Mittenfrequenz und Bandbreite (3 dB Durchlass) auf: Mittenfrequenz: Bandbreite: (40)
Fig. 7-18: Übertragungsfunktion der Bandsperre (ωn Notchfrequenz) Die Transformation lautet:
ω
⋅→
→υ
20
2
2
0
+s
ss B
B
(41)
Die Übertragungsfunktion für eine Bandsperre 2. Ordnung wird somit:
.
=Q
1=2,encyNotchfrequmit
s+s+1
s+1
=T(s)0
0
20
2
20
20
2
ωξ=ω
ωω⋅
ω BB
(42)
Q ist die Güte des Pols, eine andere beliebte Kennzahl anstelle des Dämpfungsmasses ξ. Fig. 7-18 zeigt graphisch den Amplitudengang einer solchen Bandsperre. Für höhere Ordnungen kann wiederum auf die in Serieschaltung betriebenen Filter 1. und 2. Ordnung zurückgegriffen werden. Die Übertragungsfunktion der Bandsperre lautet im Nenner formal genau gleich wie beim Bandpass und die Pole der Bandsperre berechnen sich analog wie die Pole des Bandpasses aus dem äquivalenten Tiefpass mit Hilfe untenstehender Transformation. Im Zähler treten im Unterschied zum Bandpass, aber wie beim Hochpass, 2n Nullstellen diesmal bei jω0 auf. Die genaue Berechnung der Pole der Bandsperre aus den Polen des äquivalenten Tiefpasses ergibt:
ωω
ω⋅ωω
12
210
-=
=
B
ZHAW, ASV, FS2008, 6-20
4
4-s
s2=''s,'s
202
TP
4
TP
2
BSBS
ω⋅
±⋅
BB (43)
sBS' und sBS'' sind wiederum durch ihr ω0 und ξ beschreibbar. Die Übertragungsfunktionen für die Bandsperre lauten demnach für gerade n:
( ) ( )....]
''
s+''
''2s+1[]
'
s+'
'2s+1[
]s+1[
=T(s)
2
01
2
01
12
01
2
1o
1
n
02
2
⋅ωω
ξ⋅⋅⋅
ωω
ξ⋅⋅
ω (44)
Für ungerade n kommt noch ein 2-poliges Sperrglied dazu mit:
ωω
ω⋅
υξ 001
0
011
='
2=' (45)
Für ungerade n gilt:
( )
( ) ( ) ( ).....]
''
s+''
''2s+1[]
'
s+'
'2s+1[]
'
s+'
'2s+1[
]s+1[]
'
s+1[
=T(s)
2
02
2
02
22
02
2
02
22
01
2
01
1
n
02
2
2
01
2
⋅ωω
ξ⋅⋅⋅
ωω
ξ⋅⋅⋅
ωω
ξ⋅⋅
ω⋅
ω (46)
Eine spezielle Vereinfachung ergibt sich für Butterworth Bandsperren. Da die Pole von TP und HP identisch sind, kann die Dimensionierung exakt gleich wie ein Bandpass mit gleichem ω0 und B erfolgen. In diesem Fall können die Näherungen des Bandpasses zur Ermittlung von ω0i', ω0i'' und ξi', ξi'' benutzt werden. In der Übertragungsfunktion von Bandsperren fällt auf, dass die Teilübertragungsfunktionen i.A. asymmetrisch ausfallen (Pollage ungleich Nullstelle). Man nennt die so entstehenden Teilfilter Notch und unterscheidet drei Versionen, das Tiefpass Notch LPN und das Hochpass Notch HPN. Der symmetrische Spezialfall ist das gewöhnliche Notch und entsteht aus dem äquivalenten Tiefpassglied erster Ordnung. 7.2.8 Beispiel Bandpass
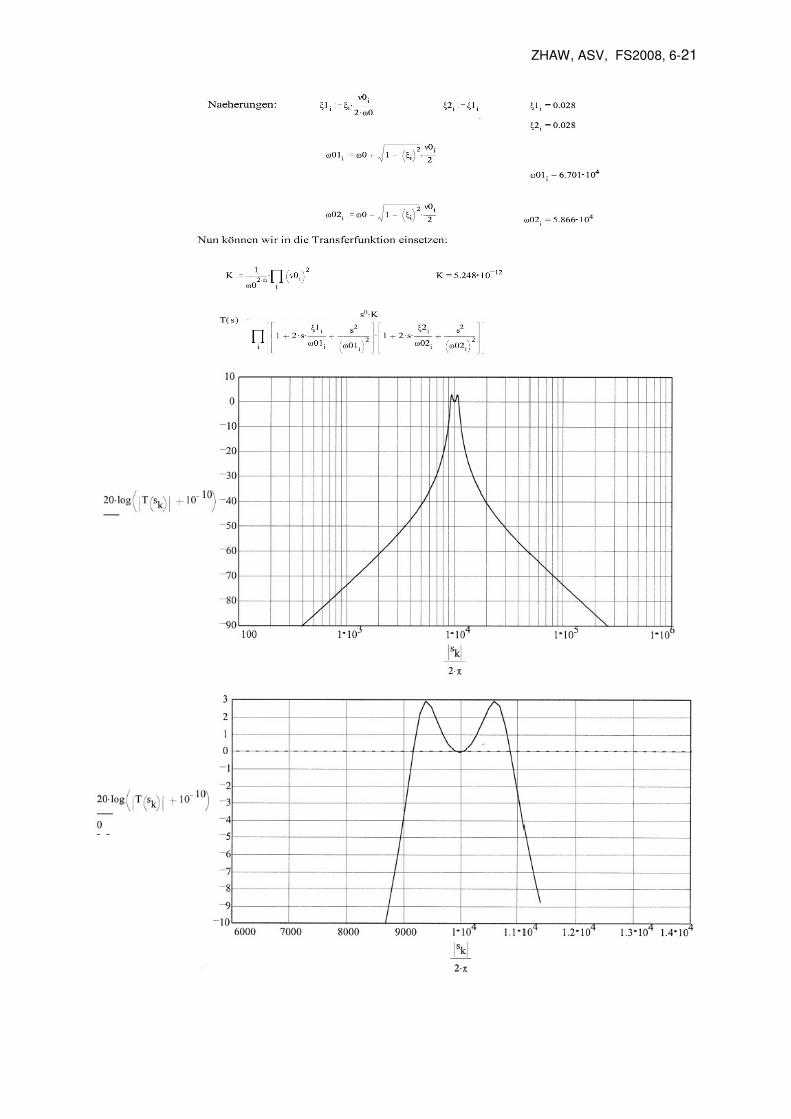
f0 = 10 kHz, b = 2 kHz, Ordnungszahl 2n = 4, Chebishev 3 dB Lösung:
Äquivalenter Tiefpass: n = 2, B = 2πb, Tabelle: υ01 = 0.7197 B, ξ1 = 0.3833
ZHAW, ASV, FS2008, 6-21
ZHAW, ASV, FS2008, 6-22
7.3 LC-Filter Design: Anwendung von Tabellenbüchern Das Design von LC-Filtern ist etwas anders aufgebaut als in Abschnitt 7.2.4 im Hinblick auf die aktiven Filter behandelt. Man steuert direkt auf die Bauelemente L und C los. Zudem wird meist der Frequenzbereich f direkt verwendet und nicht der Kreisfrequenzbereich ω. (Behandelt am Beispiel Tabellenbuch Tiefpässe G. Pfitzenmaier Siemens AG, auszugsweise auch Randall Rhea, FH Filter Design). Tabellen finden sich im Anhang.
7.3.1 Impedanz-Normierung Die Normierung der Elementwerte geht von einer Schaltung aus, die zwischen gleichen Ohmschen Widerständen R1 = R2 betrieben wird (z.B. Fig. 7-19c). Allgemein erhält man mit den in Tabelle 1 aufgeführten Bezeichnungen die physikalischen Grössen der Bauelemente aus den normierten Werten zu BRrR ⋅= [Ω] , BLlL ⋅= [ H], BCcC ⋅= [F] Tabelle 1
Grösse entnormiert normiert Frequenz Ohmscher Widerstand Induktivität Kapazität
f in Hz R in Ω L in H C in F
Ω r l c
Hierbei sind: RB Bezugswiderstand in Ω R2 R1 R B ==
LB Bezugsinduktivität in H LR
fBB
B
=⋅ ⋅
2 π
CB Bezugskapazität in F Cf RB
B B
=⋅ ⋅ ⋅
1
2 π
fB eine Bezugsfrequenz in Hz
7.3.2 Frequenznormierung Butterworth-Tiefpässe: Normiert auf 3.01 dB Grenzfrequenz Chebishev-Tiefpässe: Nach der üblichen Frequenznormierung bei LC-Tiefpässen sind alle angegebenen Daten der Chebishev-Tiefpässe auf deren theoretische Grenzfrequenz fd bezogen, bei der im Anstieg zum Sperrbereich die im Durchlassbereich maximal zulässige Betriebsdämpfung ab = abmax erreicht wird (Fig. 7-19a). Sie heisst darum auch Bezugsfrequenz fB. Die normierte Frequenz f/fB wird mit Ω bezeichnet:
Bf
f=Ω
Die Bezugsfrequenz fB des Tiefpass ist also: dB f f = (LC1)
ZHAW, ASV, FS2008, 6-23
7.3.3 Ermittlung der Filterordnung Die Ordnung des notwendigen Filters lässt sich mit den Formeln aus dem Abschnitt 7.2.3 (Aktive RC Filter) ermitteln. In Tabellenwerken kann diese auch einfach herausgelesen werden.
7.3.4 Übersicht über die tabellierten Chebishev-Tiefpässe Chebishev Tiefpässe sind beliebt, weil sie eine gute Steilheit im Übergang zu Stande bringen und noch akzeptable Verzerrungen im Phasengang besitzen (Gruppenlaufzeit). Die Realisation und der Abgleich von Filtern mit Ordnung > 9 ist i.A. wegen der Toleranzen und Nichtidealitäten der Bauteile (v.a. Güte von L) für serienmässigen Einsatz wenig beliebt. Der neben dem Filtergrad n zur Tabellierung der Chebishev-Tiefpässe nötige Parameter ist die im Durchlassbereich maximal zugelassene Betriebsdämpfung abmax. Gleichwertig damit ist die Angabe des maximalen Reflexionsfaktors rmax, der im Durchlassungsbereich nicht überschritten, bzw. der minimalen Echodämpfung R.L. (Return Loss), die bis zur Grenzfrequenz fd nicht unterschritten werden darf. Letztere Grössen sind in der Leitungstheorie und HF-Technik gebräuchlich. Zwischen den genannten Grössen gelten die unten aufgeführten Umrechnungsbeziehungen:
−⋅−=
−
2
20max
101log10..ba
LR (LC2)
2120max
10 Sba
=−
(LC3)
r S S221
2
11
21= − = r rmax max% = ⋅100 (LC4)
Bsp.: R.L. = 24 dB
rmax = 6.3% ; abmax = 0.017 dB
R.L. = 26 dB ... 50 dB rmax = 5% ... 0.32% ; abmax = 0.011 ... 0.00004 dB
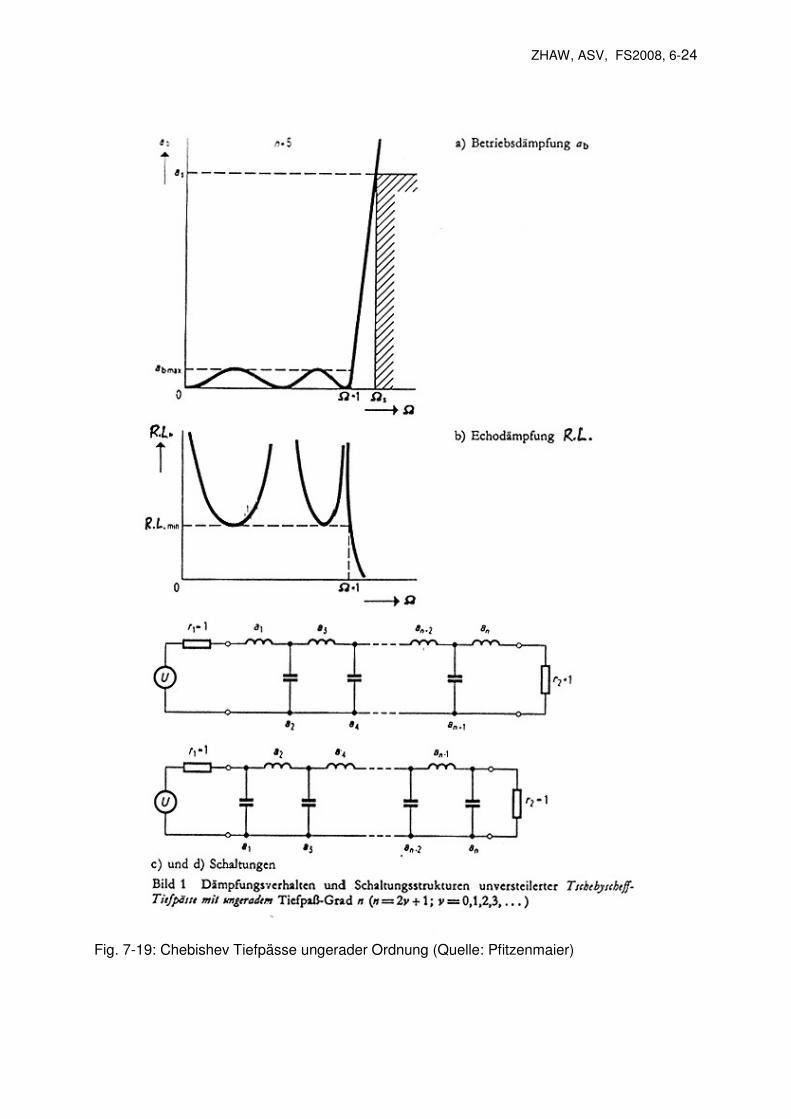
7.3.5 Schaltungsstrukturen der Chebishev-Tiefpässe Die den Chebishev-Tiefpässen entsprechende Schaltung ist von kettenartiger Struktur; man spricht deshalb auch von Chebishev-Ketten. Die Schaltung enthält eine dem Tiefpassgrad n entsprechende Anzahl von Schaltelementen und kann entweder mit einer Längsinduktivität (T-Schaltung) oder mit einer Querkapazität (π-Schaltung) beginnen. Bei Betrieb zwischen gleichen Ohmschen Widerständen gelten für Chebishev-Tiefpässe mit ungerader Gradzahl die in den Fig. 7-19c und 7-19d dargestellten Schaltungen, während bei Chebishev-Tiefpässen mit gerader Gradzahl ein idealer Übertrager mit dem Übersetzungsverhältnis ü erforderlich ist um die Impedanzgleichheit herzustellen (wird hier nicht weiter behandelt). Bei Butterworth- und Bessel- Tiefpässen entfällt der Transformator auch bei gerader Ordnungszahl. Die Widerstände R1, R2 entsprechen Quellen- und Lastwiderstand der Anwendung.
ZHAW, ASV, FS2008, 6-24
Fig. 7-19: Chebishev Tiefpässe ungerader Ordnung (Quelle: Pfitzenmaier)
ZHAW, ASV, FS2008, 6-25
7.3.6 Kennzeichnung der Chebishev-Tiefpässe Die einen Tiefpass beschreibenden Daten sind in Pfitzenmaier jeweils auf einer Buchseite zusammengefasst, wobei eine Überschrift in Kurzform die charakteristischen Eigenschaften des Tiefpasses beschreibt (siehe Beispiele Anhang 1). Der Tiefpassgrad n und die im Durchlassbereich nicht zu unterschreitende Echodämpfung R.L. sind in der Form T - n - R.L. dargestellt, wobei T für Chebishev-Tiefpass steht; beispielsweise bedeutet T 05/17 dB: Chebishev-Tiefpass, Grad n = 5, Mindest-Echodämpfung R.L. = 17 dB. Unter dieser Überschrift wird die Echodämpfung auch in Np als aemin angegeben; ausserdem sind zur leichteren Orientierung der entsprechende, grösstzulässige Reflexionsfaktor in Prozent rmax sowie die im Durchlassbereich maximal erlaubte Betriebsdämpfung abmax in dB vermerkt.
7.3.7 Normierte Schaltelemente Die Berechnung der Schaltelemente von Chebishev-Tiefpässen mittels expliziten Formeln ist über die Übertragungsfunktion möglich aber kompliziert. Einfacher ist die Dimensionierung aus den Tiefpasskoeffizienten a1, a2,...an, welche je nach Schaltungstyp (siehe Fig. 7-19c und 7-19d) die gemäss Abschnitt 7.3.2 normierten Elementwerte der Induktivitäten bzw. Kapazitäten darstellen. Bei symmetrischen Chebishev-Tiefpässen (n ungerade) sind spiegelsymmetrische Koeffizienten einander gleich. Unter der Überschrift „Tiefpass-Koeffizienten“ werden die Zahlenwerte für av (v = 1...n) mit einer Genauigkeit von sechs Stellen nach dem Komma angegeben.
7.3.8 Betriebsdämpfung as im Sperrbereich
Zum Abschätzen der Sperrforderungen werden diejenigen Frequenzen Ωs aufgeführt, bei denen die Betriebsdämpfung ab die Werte as = 6 dB, 8 dB,...in Stufen von 2 dB...100 dB erreicht. Diese Darstellung hat den Vorteil, dass die zu einer geforderten, meist ganzzahligen Sperrdämpfung as, z.B. 32 dB, gehörende Tiefpassfrequenz Ωs ohne Interpolation sofort abgelesen und mit der Soll-Frequenz Ωsoll verglichen werden kann. Ausserdem ist leicht festzustellen welcher Gewinn an Sperrdämpfung erzielt wird, wenn ein Tiefpass höheren Grades oder ein solcher mit anderer Echodämpfung im Durchlassbereich gewählt wird. Bedingt durch die feine Abstufung der Dämpfungswerte ist bei linearer Interpolation von Zwischenwerten eine hohe Genauigkeit für das Ergebnis zu erwarten. In manchen Anwendungsfällen ist es nützlich, diejenige Frequenz Ω3dB zu kennen, bei der genau die Hälfte der eingespeisten Leistung am Filterausgang erscheint. Dies entspricht dem Wert von 3.01 dB. Am Kopf jeder Dämpfungstabelle wird für diesen Dämpfungswert, der als „3“ bezeichnet wird, die zugehörige Frequenz Ω3dB ausgeduckt. Die Frequenzen Ωs werden mit einer Genauigkeit von vier Stellen nach dem Komma angegeben. Etwas weniger komfortabel aber zum dimensionieren genügend sind die Tabellen aus Quelle (Randall Rhea) mit den normierten Filterkoeffizienten g(v). Der jeweils letzte g-Wert ist das Übertragungsverhältnis ü2 des Transformators bei den geraden Ordnungszahlen, der ja bei ungerader Ordnungszahl entfällt (g=1).
ZHAW, ASV, FS2008, 6-26
7.3.9 Frequenztransformationen Durch geeignete Frequenztransformationen kann man aus den normierten Tiefpässen die Schaltungen und Betriebsgrössen von Hochpässen, Bandpässen und Bandsperren gewinnen. Solche Filter können einfach und ohne Schwierigkeiten mit Hilfe der Tiefpasstabellen entworfen werden. Nachstehend sind für die gebräuchlichsten Frequenztransformationen auszugsweise die wichtigsten Berechnungsunterlagen zusammengestellt. Dabei ist grundsätzlich zu beachten, dass die normierte Frequenzvariable in den transformierten Schaltungen mit η = f/fB bezeichnet wird, wobei fB die Bezugsfrequenz des neuen Systems ist.
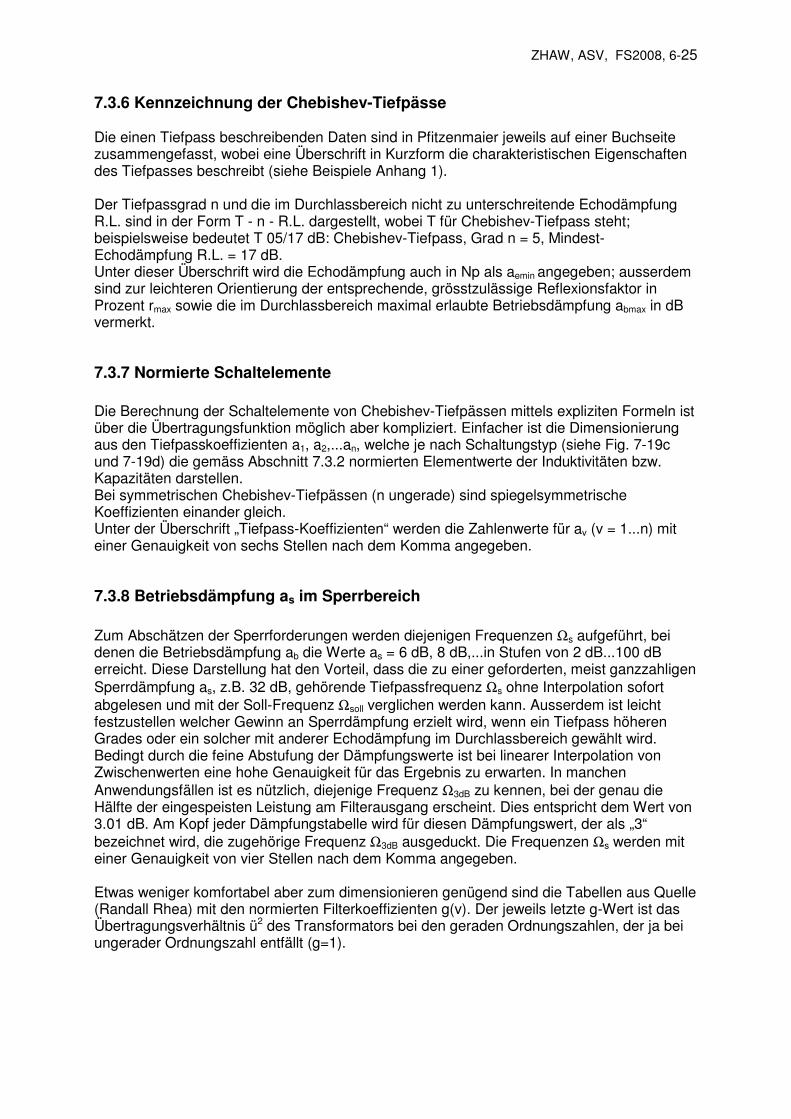
7.3.10 Hochpass Durch die Transformation
Ω =1
η (LC8)
wird die Charakteristik eines Tiefpasses in die eines Hochpasses übergeführt (Fig.7-20). Dabei ist die Bezugsfrequenz fB gleich der Grenzfrequenz fd des Hochpasses: f fB d= (LC9)
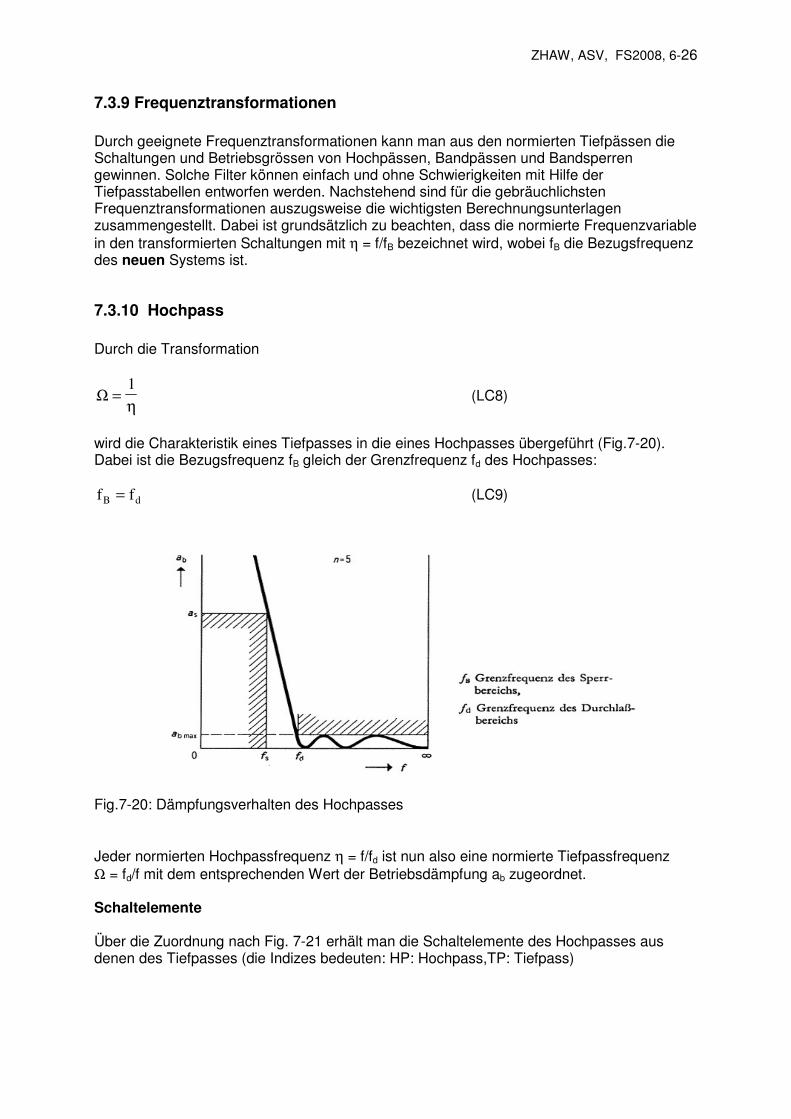
Fig.7-20: Dämpfungsverhalten des Hochpasses Jeder normierten Hochpassfrequenz η = f/fd ist nun also eine normierte Tiefpassfrequenz Ω = fd/f mit dem entsprechenden Wert der Betriebsdämpfung ab zugeordnet. Schaltelemente Über die Zuordnung nach Fig. 7-21 erhält man die Schaltelemente des Hochpasses aus denen des Tiefpasses (die Indizes bedeuten: HP: Hochpass,TP: Tiefpass)
ZHAW, ASV, FS2008, 6-27
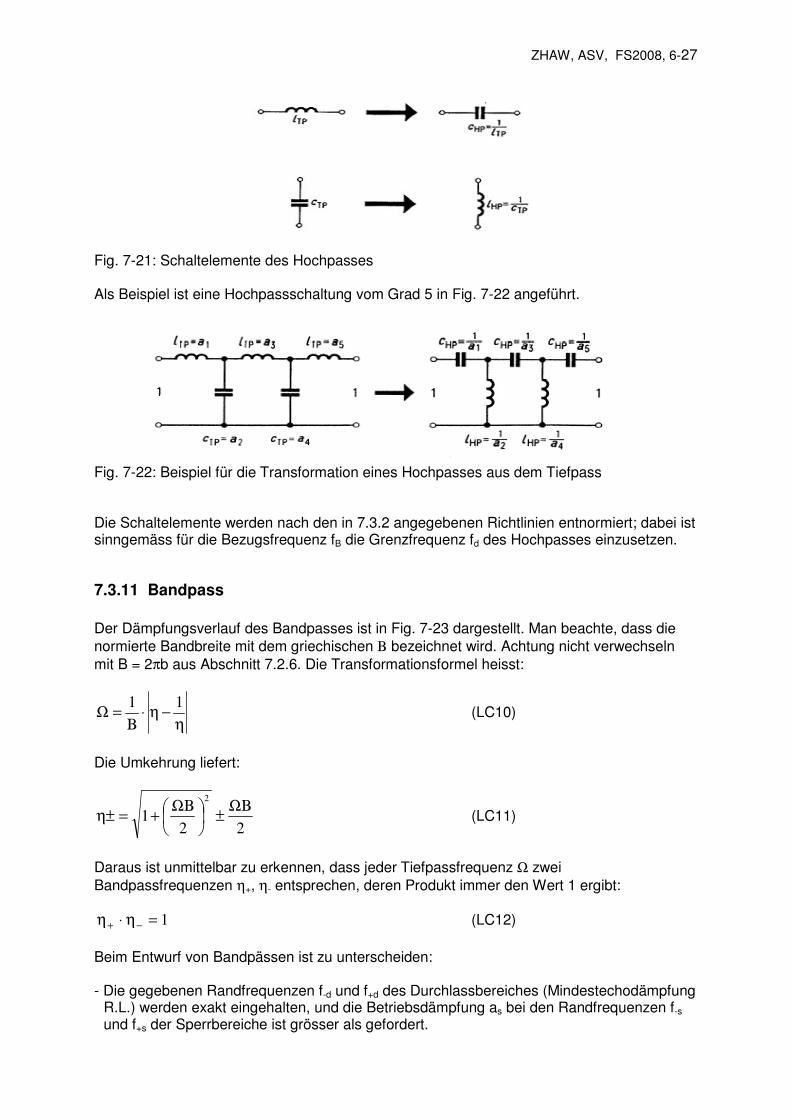
Fig. 7-21: Schaltelemente des Hochpasses Als Beispiel ist eine Hochpassschaltung vom Grad 5 in Fig. 7-22 angeführt.
Fig. 7-22: Beispiel für die Transformation eines Hochpasses aus dem Tiefpass Die Schaltelemente werden nach den in 7.3.2 angegebenen Richtlinien entnormiert; dabei ist sinngemäss für die Bezugsfrequenz fB die Grenzfrequenz fd des Hochpasses einzusetzen.
7.3.11 Bandpass Der Dämpfungsverlauf des Bandpasses ist in Fig. 7-23 dargestellt. Man beachte, dass die normierte Bandbreite mit dem griechischen Β bezeichnet wird. Achtung nicht verwechseln mit B = 2πb aus Abschnitt 7.2.6. Die Transformationsformel heisst:
η−η⋅
Β=Ω
11 (LC10)
Die Umkehrung liefert:
221
2ΩΒ
±
ΩΒ+=±η (LC11)
Daraus ist unmittelbar zu erkennen, dass jeder Tiefpassfrequenz Ω zwei Bandpassfrequenzen η+, η- entsprechen, deren Produkt immer den Wert 1 ergibt: η η+ −⋅ = 1 (LC12) Beim Entwurf von Bandpässen ist zu unterscheiden: - Die gegebenen Randfrequenzen f-d und f+d des Durchlassbereiches (Mindestechodämpfung
R.L.) werden exakt eingehalten, und die Betriebsdämpfung as bei den Randfrequenzen f-s und f+s der Sperrbereiche ist grösser als gefordert.
ZHAW, ASV, FS2008, 6-28
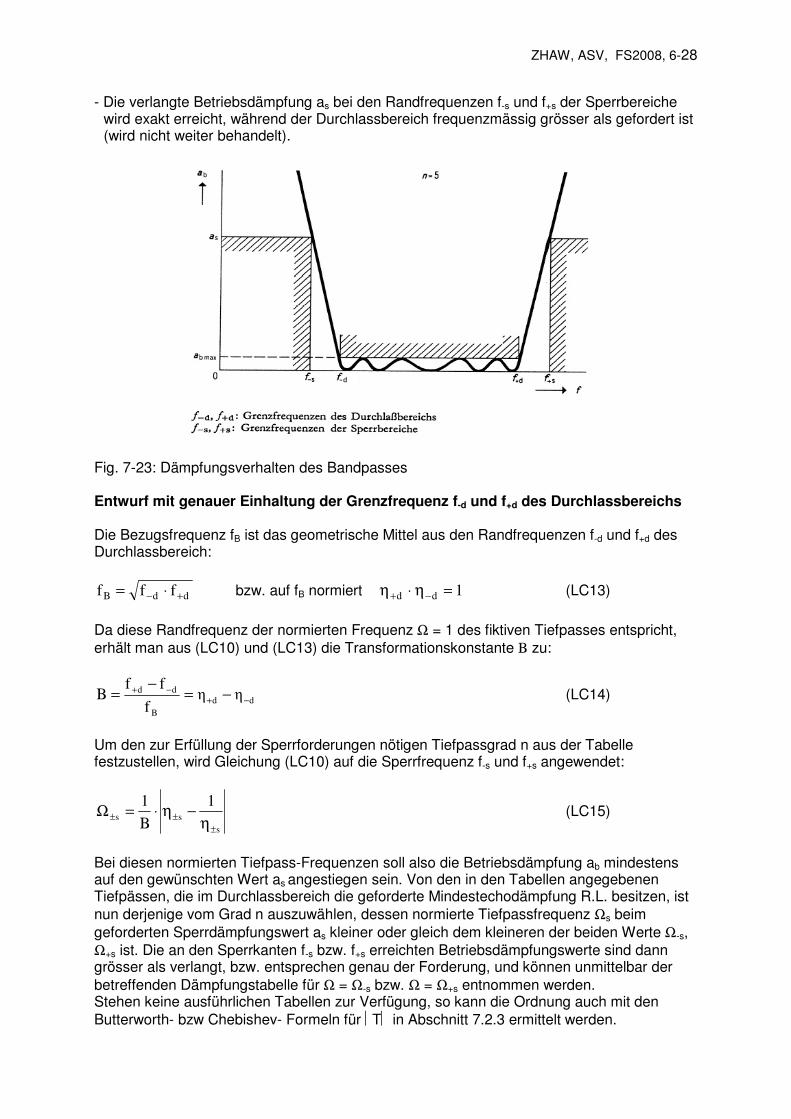
- Die verlangte Betriebsdämpfung as bei den Randfrequenzen f-s und f+s der Sperrbereiche wird exakt erreicht, während der Durchlassbereich frequenzmässig grösser als gefordert ist (wird nicht weiter behandelt).
Fig. 7-23: Dämpfungsverhalten des Bandpasses Entwurf mit genauer Einhaltung der Grenzfrequenz f-d und f+d des Durchlassbereichs Die Bezugsfrequenz fB ist das geometrische Mittel aus den Randfrequenzen f-d und f+d des Durchlassbereich:
f f fB d d= ⋅− + bzw. auf fB normiert η η+ −⋅ =d d 1 (LC13)
Da diese Randfrequenz der normierten Frequenz Ω = 1 des fiktiven Tiefpasses entspricht, erhält man aus (LC10) und (LC13) die Transformationskonstante Β zu:
dd
B
ddηη
f
ff−+
−+ −=−
=Β (LC14)
Um den zur Erfüllung der Sperrforderungen nötigen Tiefpassgrad n aus der Tabelle festzustellen, wird Gleichung (LC10) auf die Sperrfrequenz f-s und f+s angewendet:
s
ss
11
±
±±η
−η⋅Β
=Ω (LC15)
Bei diesen normierten Tiefpass-Frequenzen soll also die Betriebsdämpfung ab mindestens auf den gewünschten Wert as angestiegen sein. Von den in den Tabellen angegebenen Tiefpässen, die im Durchlassbereich die geforderte Mindestechodämpfung R.L. besitzen, ist nun derjenige vom Grad n auszuwählen, dessen normierte Tiefpassfrequenz Ωs beim geforderten Sperrdämpfungswert as kleiner oder gleich dem kleineren der beiden Werte Ω-s, Ω+s ist. Die an den Sperrkanten f-s bzw. f+s erreichten Betriebsdämpfungswerte sind dann grösser als verlangt, bzw. entsprechen genau der Forderung, und können unmittelbar der betreffenden Dämpfungstabelle für Ω = Ω-s bzw. Ω = Ω+s entnommen werden. Stehen keine ausführlichen Tabellen zur Verfügung, so kann die Ordnung auch mit den Butterworth- bzw Chebishev- Formeln für T in Abschnitt 7.2.3 ermittelt werden.
ZHAW, ASV, FS2008, 6-29
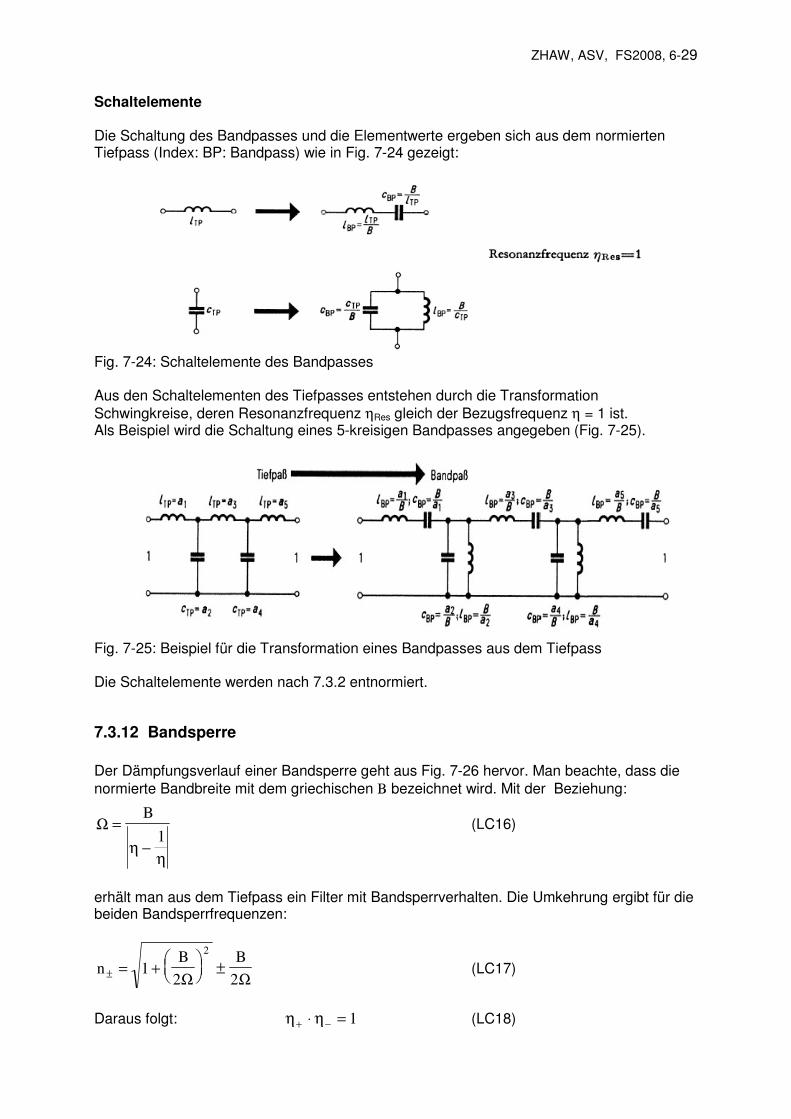
Schaltelemente Die Schaltung des Bandpasses und die Elementwerte ergeben sich aus dem normierten Tiefpass (Index: BP: Bandpass) wie in Fig. 7-24 gezeigt:
Fig. 7-24: Schaltelemente des Bandpasses Aus den Schaltelementen des Tiefpasses entstehen durch die Transformation Schwingkreise, deren Resonanzfrequenz ηRes gleich der Bezugsfrequenz η = 1 ist. Als Beispiel wird die Schaltung eines 5-kreisigen Bandpasses angegeben (Fig. 7-25).
Fig. 7-25: Beispiel für die Transformation eines Bandpasses aus dem Tiefpass Die Schaltelemente werden nach 7.3.2 entnormiert.
7.3.12 Bandsperre Der Dämpfungsverlauf einer Bandsperre geht aus Fig. 7-26 hervor. Man beachte, dass die normierte Bandbreite mit dem griechischen Β bezeichnet wird. Mit der Beziehung:
Ω =
−
B
ηη
1 (LC16)
erhält man aus dem Tiefpass ein Filter mit Bandsperrverhalten. Die Umkehrung ergibt für die beiden Bandsperrfrequenzen:
nB B
± = +
±1
2 2
2
Ω Ω (LC17)
Daraus folgt: η η+ −⋅ = 1 (LC18)
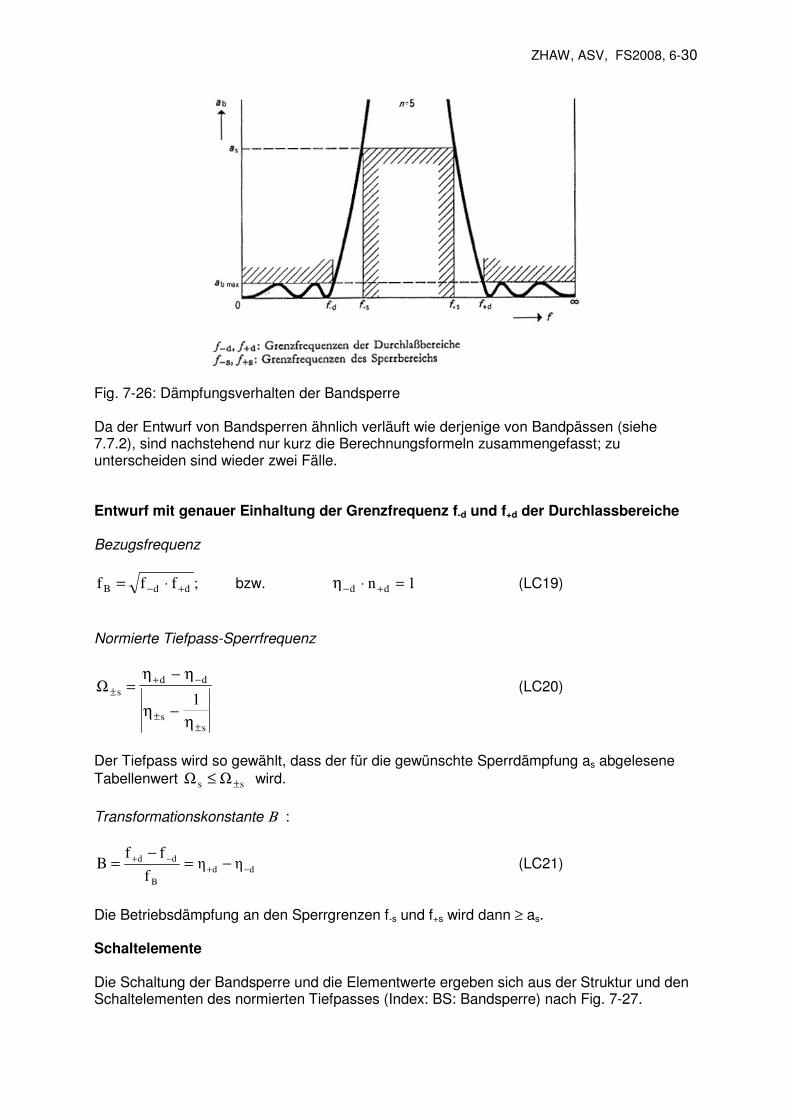
ZHAW, ASV, FS2008, 6-30
Fig. 7-26: Dämpfungsverhalten der Bandsperre Da der Entwurf von Bandsperren ähnlich verläuft wie derjenige von Bandpässen (siehe 7.7.2), sind nachstehend nur kurz die Berechnungsformeln zusammengefasst; zu unterscheiden sind wieder zwei Fälle. Entwurf mit genauer Einhaltung der Grenzfrequenz f-d und f+d der Durchlassbereiche Bezugsfrequenz
f f fB d d= ⋅− + ; bzw. η− +⋅ =d dn 1 (LC19)
Normierte Tiefpass-Sperrfrequenz
Ω ±+ −
±±
=−
−
sd d
ss
η η
ηη
1 (LC20)
Der Tiefpass wird so gewählt, dass der für die gewünschte Sperrdämpfung as abgelesene Tabellenwert Ω Ωs s≤ ± wird. Transformationskonstante Β :
dd
B
ddηη
f
ffB −+
−+ −=−
= (LC21)
Die Betriebsdämpfung an den Sperrgrenzen f-s und f+s wird dann ≥ as. Schaltelemente Die Schaltung der Bandsperre und die Elementwerte ergeben sich aus der Struktur und den Schaltelementen des normierten Tiefpasses (Index: BS: Bandsperre) nach Fig. 7-27.
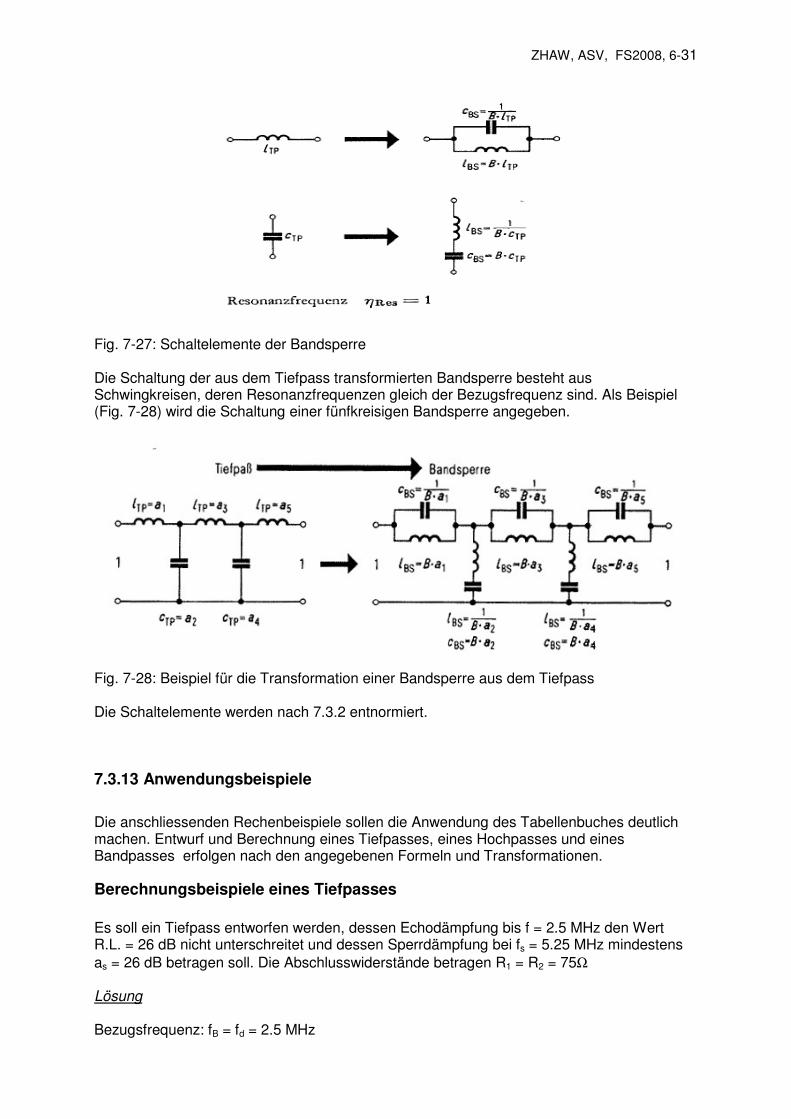
ZHAW, ASV, FS2008, 6-31
Fig. 7-27: Schaltelemente der Bandsperre Die Schaltung der aus dem Tiefpass transformierten Bandsperre besteht aus Schwingkreisen, deren Resonanzfrequenzen gleich der Bezugsfrequenz sind. Als Beispiel (Fig. 7-28) wird die Schaltung einer fünfkreisigen Bandsperre angegeben.
Fig. 7-28: Beispiel für die Transformation einer Bandsperre aus dem Tiefpass Die Schaltelemente werden nach 7.3.2 entnormiert.
7.3.13 Anwendungsbeispiele
Die anschliessenden Rechenbeispiele sollen die Anwendung des Tabellenbuches deutlich machen. Entwurf und Berechnung eines Tiefpasses, eines Hochpasses und eines Bandpasses erfolgen nach den angegebenen Formeln und Transformationen.
Berechnungsbeispiele eines Tiefpasses Es soll ein Tiefpass entworfen werden, dessen Echodämpfung bis f = 2.5 MHz den Wert R.L. = 26 dB nicht unterschreitet und dessen Sperrdämpfung bei fs = 5.25 MHz mindestens as = 26 dB betragen soll. Die Abschlusswiderstände betragen R1 = R2 = 75Ω Lösung Bezugsfrequenz: fB = fd = 2.5 MHz
ZHAW, ASV, FS2008, 6-32
Damit wird die normierte Sperrgrenze Ωs = fs/fd = 5.25/2.5 = 2.1 Nun ist unter den Tiefpässen mit R.L. = 26 dB derjenige auszusuchen, dessen Sperrdämpfung bei 2.1 ≥ Ωs auf as = 26 dB angestiegen ist. Während der Tiefpass vom Grad n = 4 erst bei Ωs = 2.7485 die gewünschte Sperrdämpfung erreicht, ist für n = 5 bereits bei Ωs = 2.0324 die Dämpfung auf 26 dB angestiegen; d.h. der Sperrbereich beginnt schon bei f = 2.0324 · fd = 5.081 MHz. Bei f = 5.25 MHz wird der Dämpfungswert as = 27.61 dB erreicht, wie sich durch eine lineare Interpolation für Ωs = 2.1 ergibt. Die Betriebsdämpfung im Durchlassbereich erreicht maximal abmax = 0.011 dB. Die bei f = 5.25 MHz zu erwartende Sperrdämpfung ist as = 27.6 dB. Zur Realisierung werden die Tiefpasskoeffizienten dem Tabellenbuch entnommen: a1 = a5 = 0.767000 = c1 = c5 a2 = a4 = 1.310629 = l2 = l4 a3 = 1.589077 = c3 r1 = r2 = 1 Die Entnormierung liefert.: RB = R1 = R2 = 75Ω LB = 4.77465 µH fB = 2.5 MHz CB = 848.826 pF Schaltelemente C1 = C5 = 651.05 pF L2 = L4 = 6.2578 µH C3 = 1348.8 pF
Berechnungsbeispiel eines Hochpasses Gesucht sind die Schaltelemente eines Hochpasses, der für f ≥ 1 MHz einen Reflexionsfaktor 10% ≥ r und für 435 kHz ≥ f eine Sperrdämpfung as ≥ 60 dB haben soll. Der Quellenwiderstand sei 150 Ω. Lösung Bezugsfrequenz fB = fd = 1 MHz Normierte Sperrfrequenz ηs = fs/fB = 0.435 Entsprechend der Hochpass-Transformation (LC8) wird daraus die normierte Tiefpass-Frequenz Ωs = 1/ηs = 2.2988 Unter Tiefpässen mit R.L. = 20 dB (aus r = 10%) erweist sich derjenige von Grad 7 als ausreichend zur Erfüllung der Dämpfungsforderung (as = 60 dB, Ωs = 2.1778). Die bei f = 1 MHz zu erwartende Dämpfung ab ist unter Vernachlässigung der Spulenverluste: ab = 0.044 dB Durch Interpolation erhält man für fs = 435 kHz den Dämpfungswert ab = 63.5 dB. Nachstehend sind die normierten und entnormierten Schalelemente angegeben: fB = 1 MHz LB = 23.8732 µH CB = 1061.03 pF RB = R1 = 150 Ω
ZHAW, ASV, FS2008, 6-33
Schaltelemente: c1 = c7 = 1/a1 = 0.990365 C1 = C7 = 1056 pF
c3 = c5 = 1/a3 = 0.515089 C3 = C5 = 550 pF l2 = l6 = 1/a2 = 0.695981 L2 = L6 = 16.62 µH l4 = 1/a4 = 0.616678 L4 = 14.72 µH
Berechnungsbeispiel eines Bandpasses Ein Bandpass soll im Durchlassbereich von f-d = 776 kHz bis f+d = 818 kHz eine Echodämpfung von mindestens R.L. = 26 dB besitzen. Bei den Randfrequenzen der gewünschten Sperrbereiche f-s = 730 kHz und f+s = 870 kHz soll die Betriebsdämpfung Werte von as ≥ 48 dB erreichen. Abschlusswiderstände Quelle und Last :R1 = R2 = 150 Ω Gesucht sind Schaltelemente. Lösung Man wählt die Bezugsfrequenz nach (LC13), um an den Filterkanten gleiche Dämpfungswerte zu erhalten.
f f fB d d= ⋅ =− + 796 7. kHz
Zur Bestimmung des erforderlichen Grades werden nach (LC15) die Werte Ω-s = 3.32 und Ω+s = 3.34 bestimmt. Vergleicht man nun die normierten Frequenzen der Tiefpässe mit R.L. = 26 dB für as = 48 dB, so erkennt man, dass Grad 5 zur Erfüllung der Forderungen mit Ωs = 3.23 < Ω±s (as = 48 dB) ausreicht. Die Transformationskonstante Β aus (LC14) berechnet sich zu: Β = 0.05272 Die Schaltelemente werden für Schaltung Fig.7-19d nach Fig. 7-24 berechnet. Tiefpass-Koeffizienten: a1 = a5 = 0.767000 a2 = a4 = 1.310629 a3 = 1.589077 Mit fB = 796.7 kHz und RB = 150 Ω ergeben sich nach 7.3.2 die Bezugswerte für Induktivität und Kapazität und die Schaltelemente: LB = 29.9 µH C1 = C5 = 19.4 nF L1 = L5 = 2.06 µH CB = 1.33 nF C2 = C4 = 53.5 pF L2 = L4 = 0.743 mH C3 = 40.1 nF L3 = 0.992µH
ZHAW, ASV, FS2008, 6-34
7.4 Literaturhinweise Analoge Schaltungen , Manfred Seifart, ISBN 10: 3-3410-1298-2, Verlag Technik, 6. Aufl. 2003 Halbleiter Schaltungstechnik (mit Nachrichtentechnik), U. Tietze, Ch. Schenk, ISBN 10: 3540428496, Springer Verlag 2002 Weiterführende Literatur Filtertheorie: z.B. A.I. Zverev, Handbook of Filter Synthesis, Wiley 1967; W. Rupprecht, Netzwerksynthese, Springer 1972. Tabellenbuch Tiefpässe, Pfitzenmaier, G., Siemens AG (Hrsg.). Siemens AG, Berlin, 1972. HF-Filter Design, Randall Rhea, ISBN 0-07-052055-0, McGraw-Hill Verlag, 1995 Active Filter Cookbook, Don Lancaster, ISBN 0-7506-2986-X, Elsevier, reprint 2007 Aktive Filter in RC und SC-Technik, L. von Wangenheim, ISBN- 3-7785-1894-1, Hüthig, 1991 Electronic Filter Analysis and Synthesis, (LC und RC Filter), M. G. Ellis, ISBN 0-89006-616-7, Artech House 1994
ZHAW, ASV, FS2008, 6-35
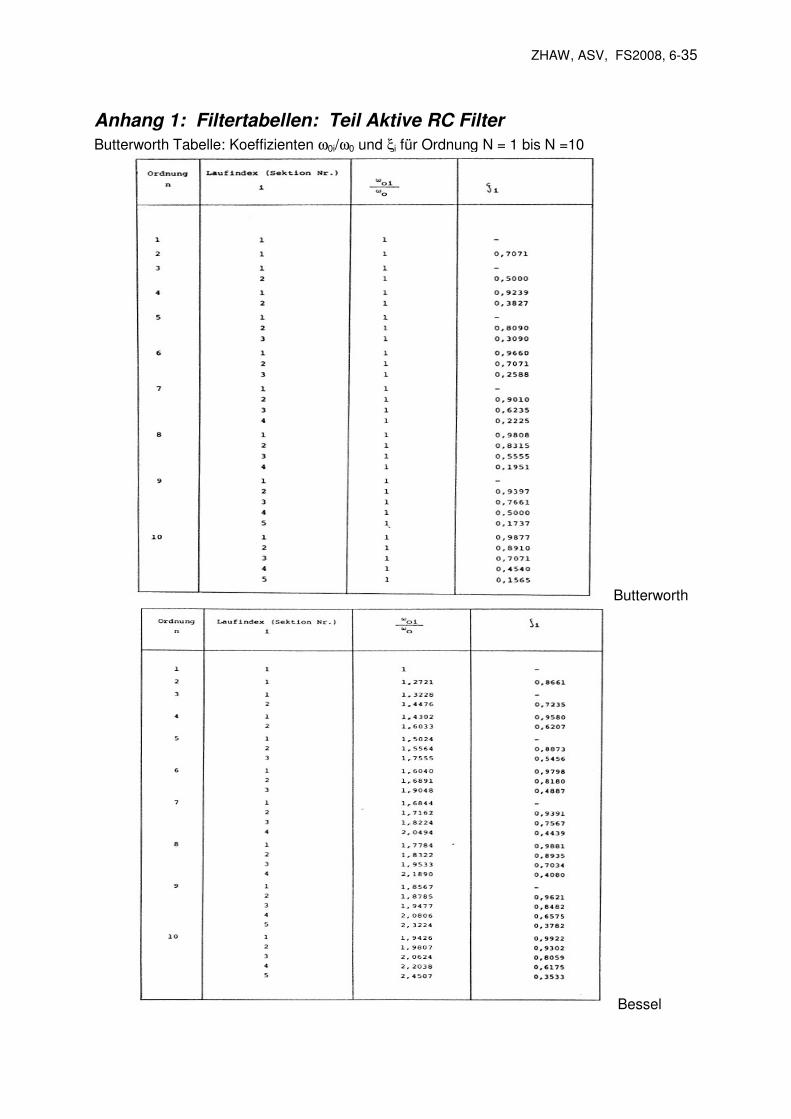
Anhang 1: Filtertabellen: Teil Aktive RC Filter
Butterworth Tabelle: Koeffizienten ω0i/ω0 und ξi für Ordnung N = 1 bis N =10
Butterworth
Bessel
ZHAW, ASV, FS2008, 6-36
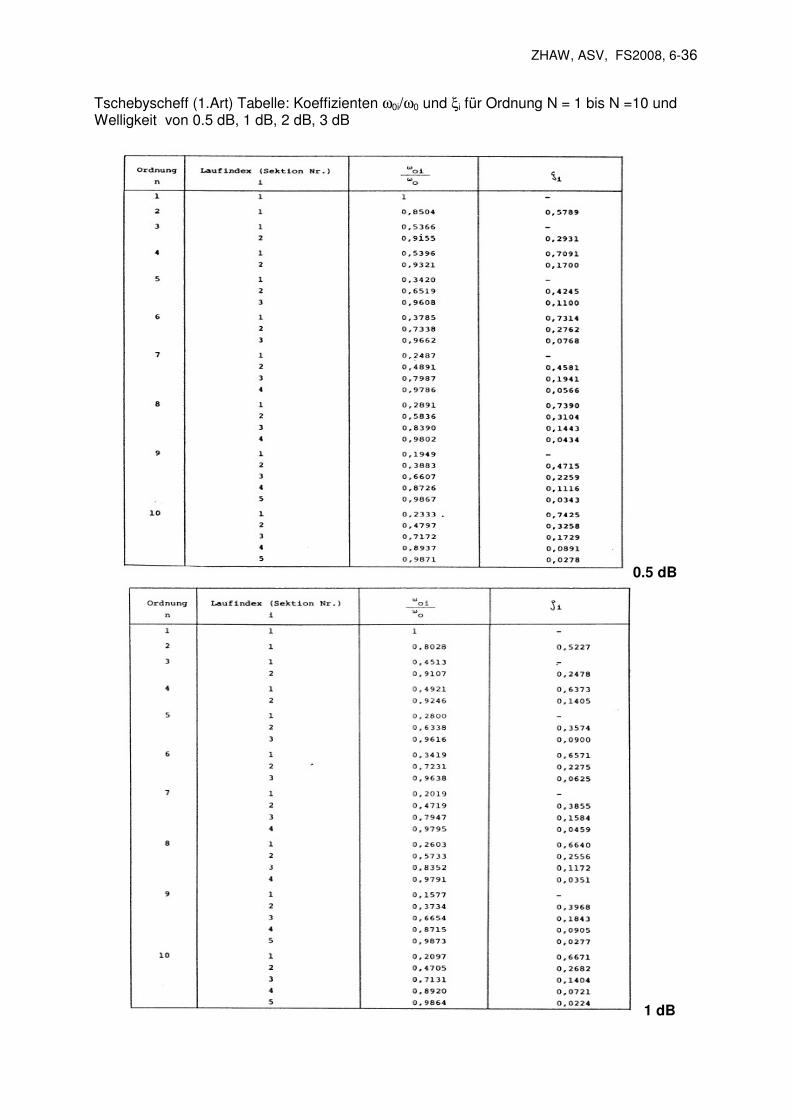
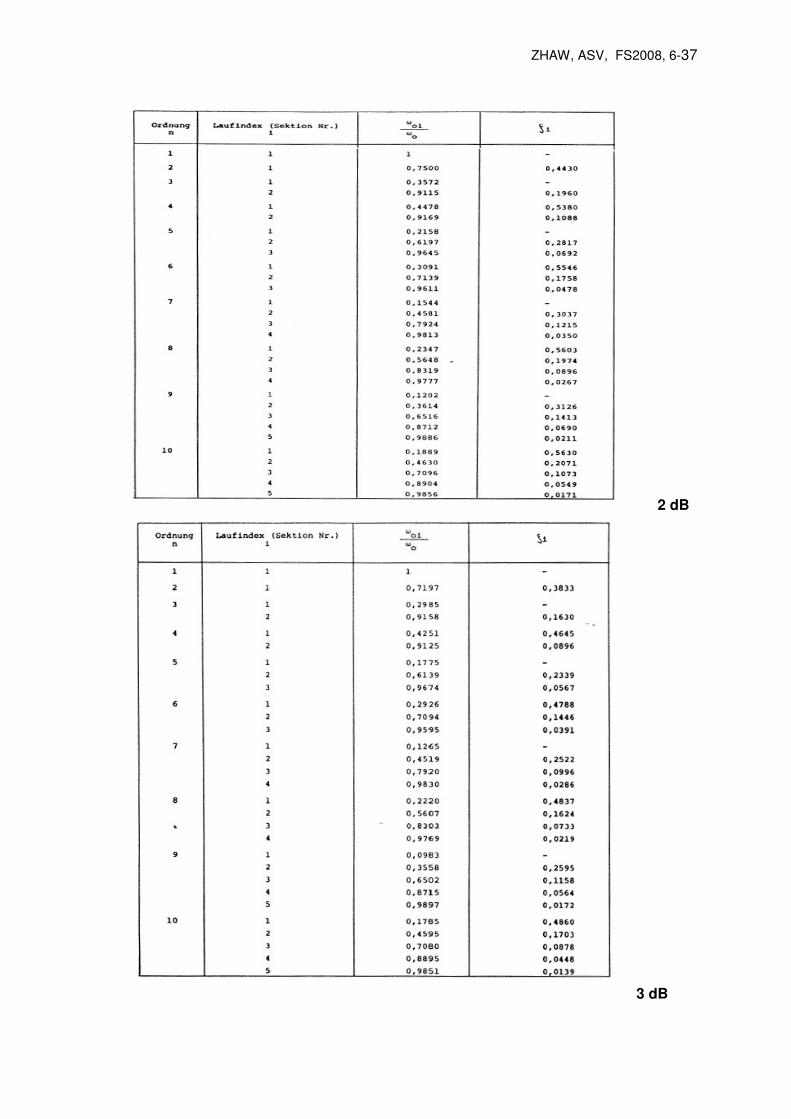
Tschebyscheff (1.Art) Tabelle: Koeffizienten ω0i/ω0 und ξi für Ordnung N = 1 bis N =10 und Welligkeit von 0.5 dB, 1 dB, 2 dB, 3 dB
0.5 dB
1 dB
ZHAW, ASV, FS2008, 6-37
2 dB
3 dB
ZHAW, ASV, FS2008, 6-38
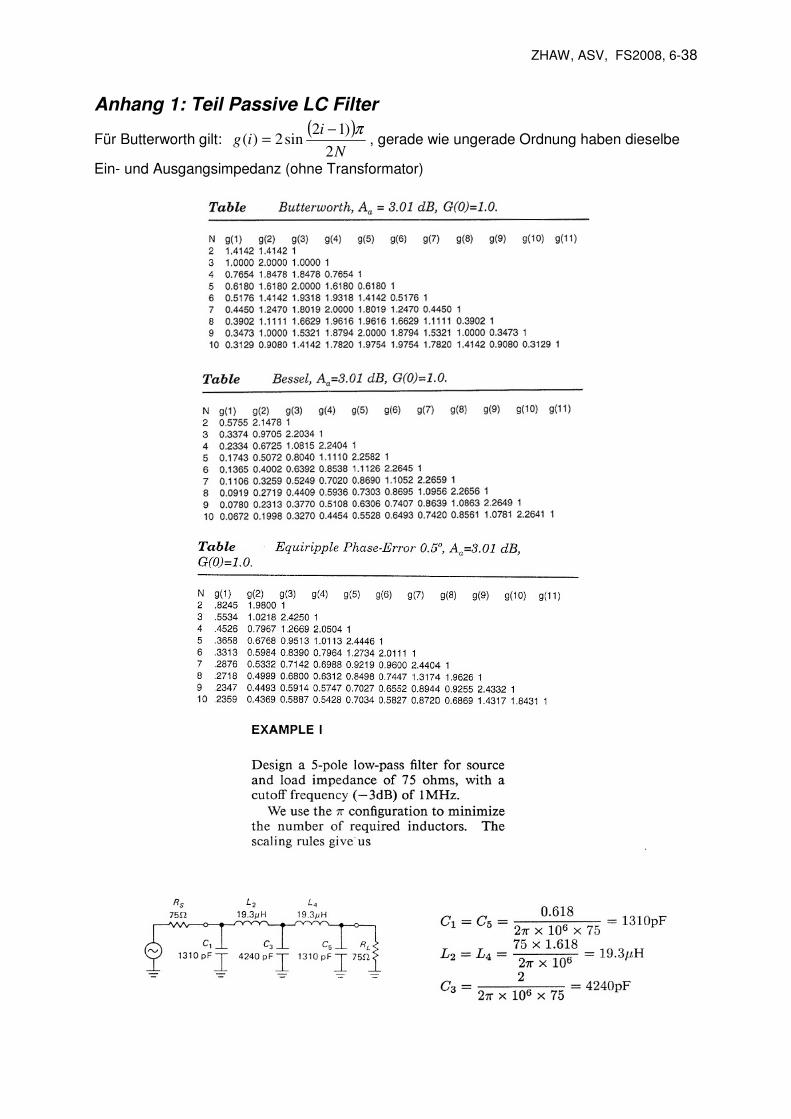
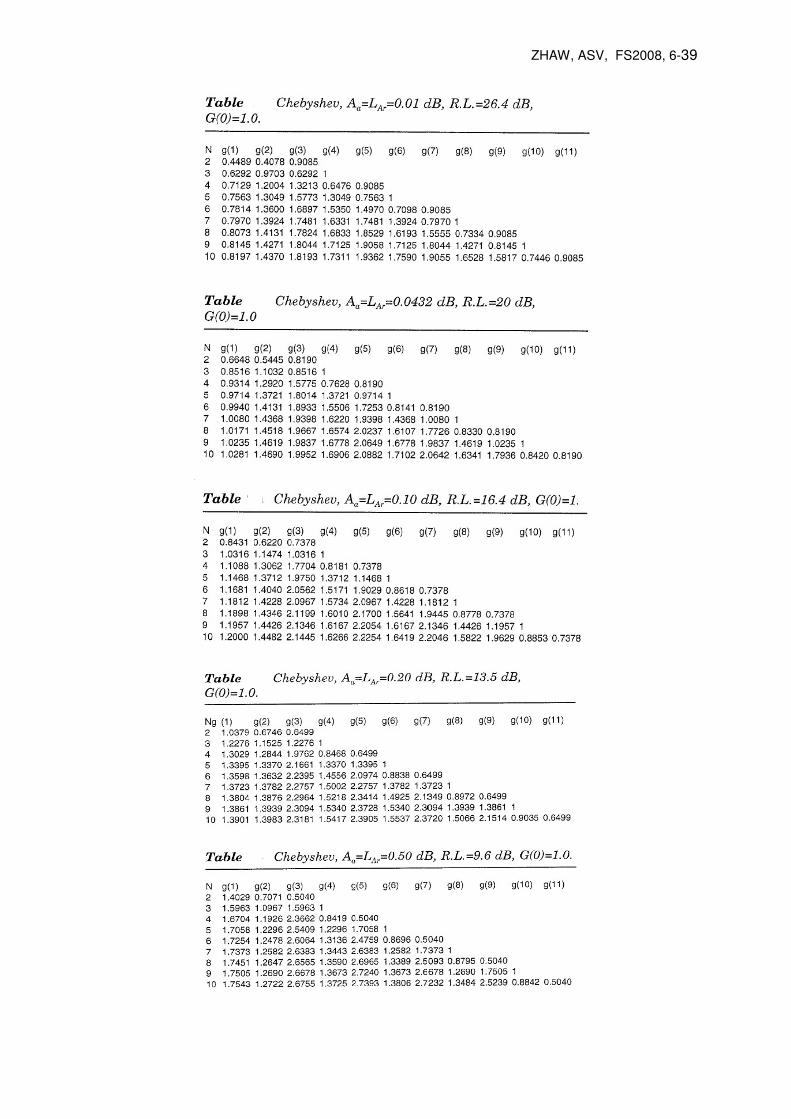
Anhang 1: Teil Passive LC Filter
Für Butterworth gilt: ( )
N
iig
2
)12sin2)(
π−= , gerade wie ungerade Ordnung haben dieselbe
Ein- und Ausgangsimpedanz (ohne Transformator)
ZHAW, ASV, FS2008, 6-39
ZHAW, ASV, FS2008, 6-40
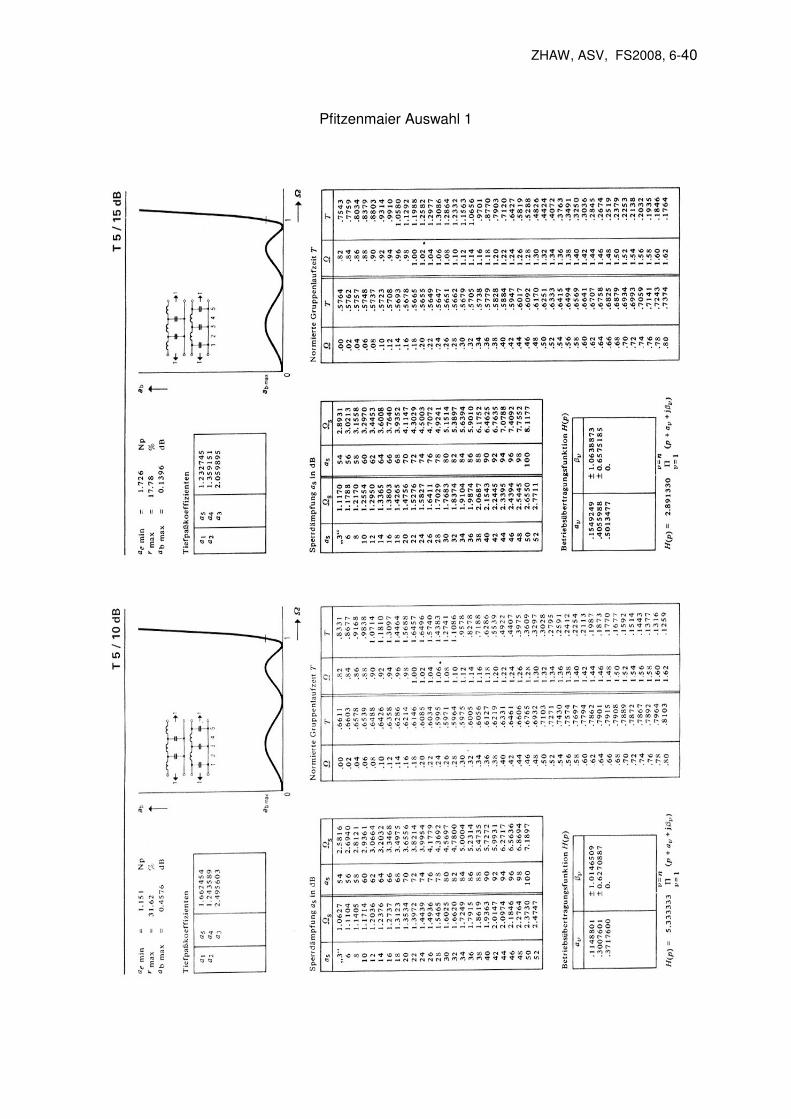
Pfitzenmaier Auswahl 1
ZHAW, ASV, FS2008, 6-41
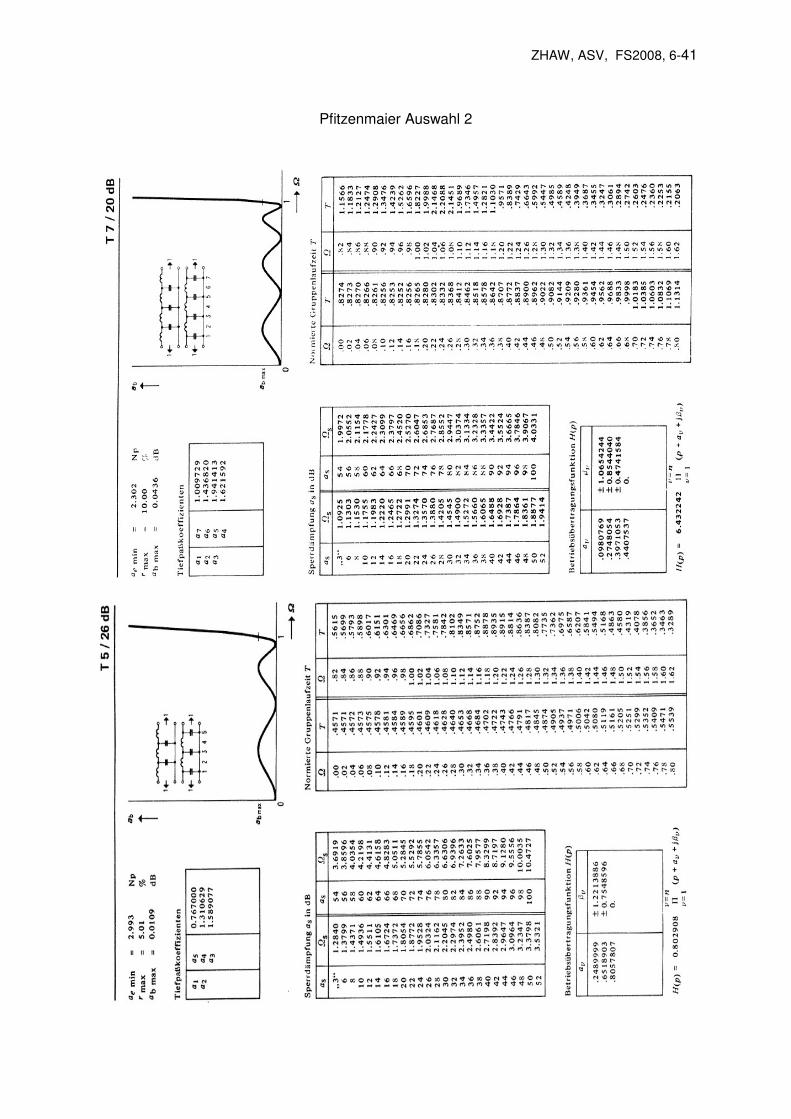
Pfitzenmaier Auswahl 2
ZHAW, ASV, FS2008, 6-42
Anhang 2: Merkblatt Frequenztransformationen
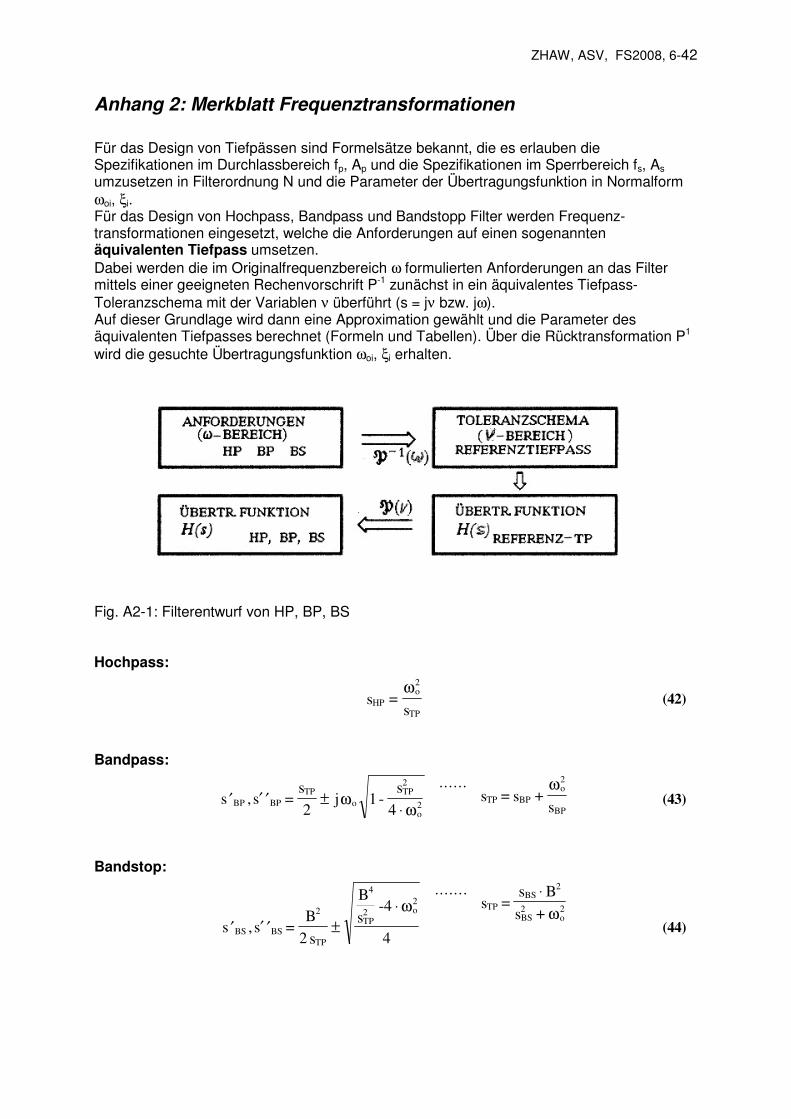
Für das Design von Tiefpässen sind Formelsätze bekannt, die es erlauben die Spezifikationen im Durchlassbereich fp, Ap und die Spezifikationen im Sperrbereich fs, As umzusetzen in Filterordnung N und die Parameter der Übertragungsfunktion in Normalform ωoi, ξi. Für das Design von Hochpass, Bandpass und Bandstopp Filter werden Frequenz-transformationen eingesetzt, welche die Anforderungen auf einen sogenannten äquivalenten Tiefpass umsetzen. Dabei werden die im Originalfrequenzbereich ω formulierten Anforderungen an das Filter mittels einer geeigneten Rechenvorschrift P-1 zunächst in ein äquivalentes Tiefpass- Toleranzschema mit der Variablen ν überführt (s = jν bzw. jω). Auf dieser Grundlage wird dann eine Approximation gewählt und die Parameter des äquivalenten Tiefpasses berechnet (Formeln und Tabellen). Über die Rücktransformation P1 wird die gesuchte Übertragungsfunktion ωoi, ξi erhalten.
Fig. A2-1: Filterentwurf von HP, BP, BS Hochpass:
Bandpass:
Bandstop:
HPo2
TP
s =s
ω (42)
s , s =s
j -s ......
s = s +sBP BP
TPo
TP2
o2
TP BPo2
BP′ ′ ′ ±
⋅21
4ω
ω
ω (43)
s , s =B
s
B
s-
.......s =
s B
s +BS BS
2
TP
4
TP2 o
2TP
BS2
BS2
o2
′ ′ ′ ±
⋅⋅
2
4
4
ω ω (44)
ZHAW, ASV, FS2008, 6-43
Anhang 3: Merkblatt Filtertabelle
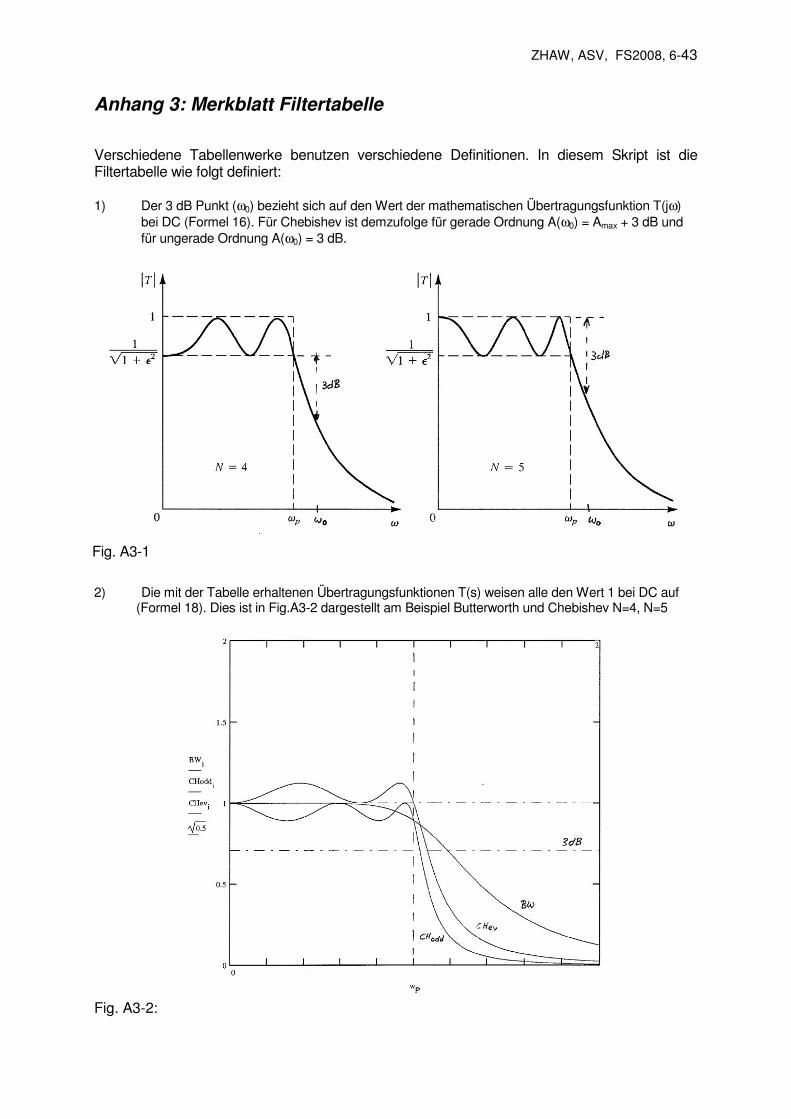
Verschiedene Tabellenwerke benutzen verschiedene Definitionen. In diesem Skript ist die Filtertabelle wie folgt definiert: 1) Der 3 dB Punkt (ω0) bezieht sich auf den Wert der mathematischen Übertragungsfunktion T(jω)
bei DC (Formel 16). Für Chebishev ist demzufolge für gerade Ordnung A(ω0) = Amax + 3 dB und für ungerade Ordnung A(ω0) = 3 dB.
Fig. A3-1
2) Die mit der Tabelle erhaltenen Übertragungsfunktionen T(s) weisen alle den Wert 1 bei DC auf (Formel 18). Dies ist in Fig.A3-2 dargestellt am Beispiel Butterworth und Chebishev N=4, N=5
Fig. A3-2:
ZHAW, ASV, FS2008, 6-44
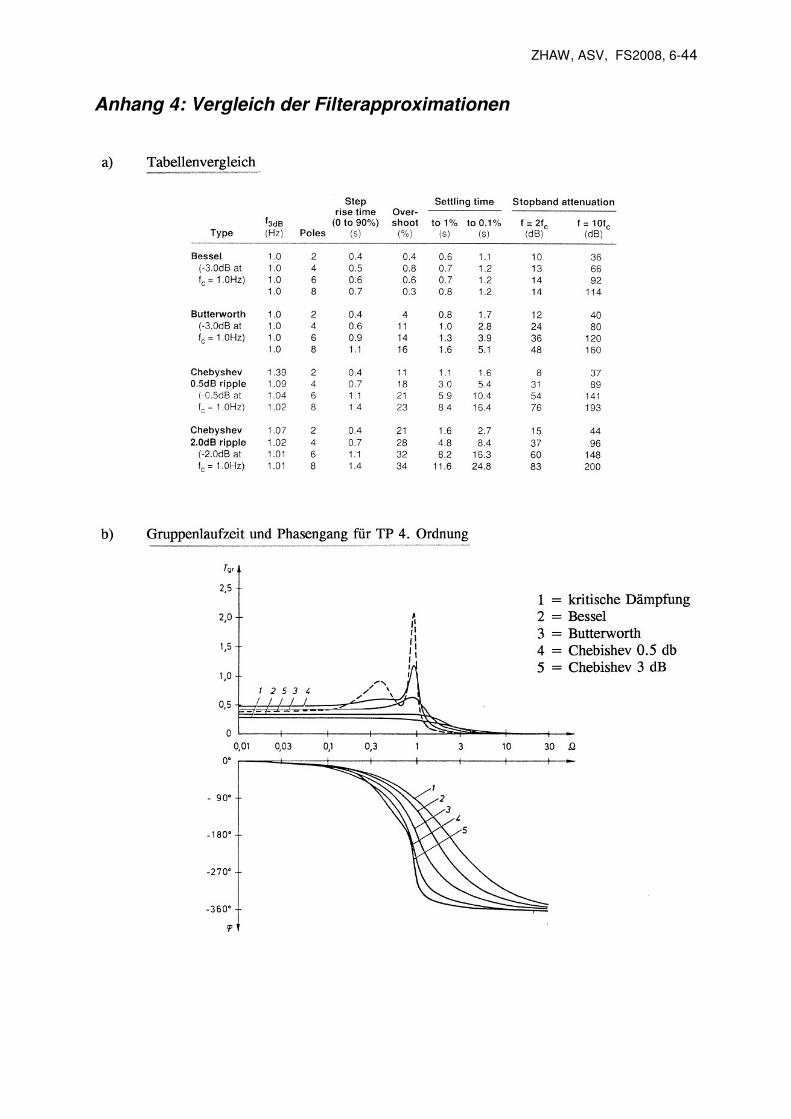
Anhang 4: Vergleich der Filterapproximationen
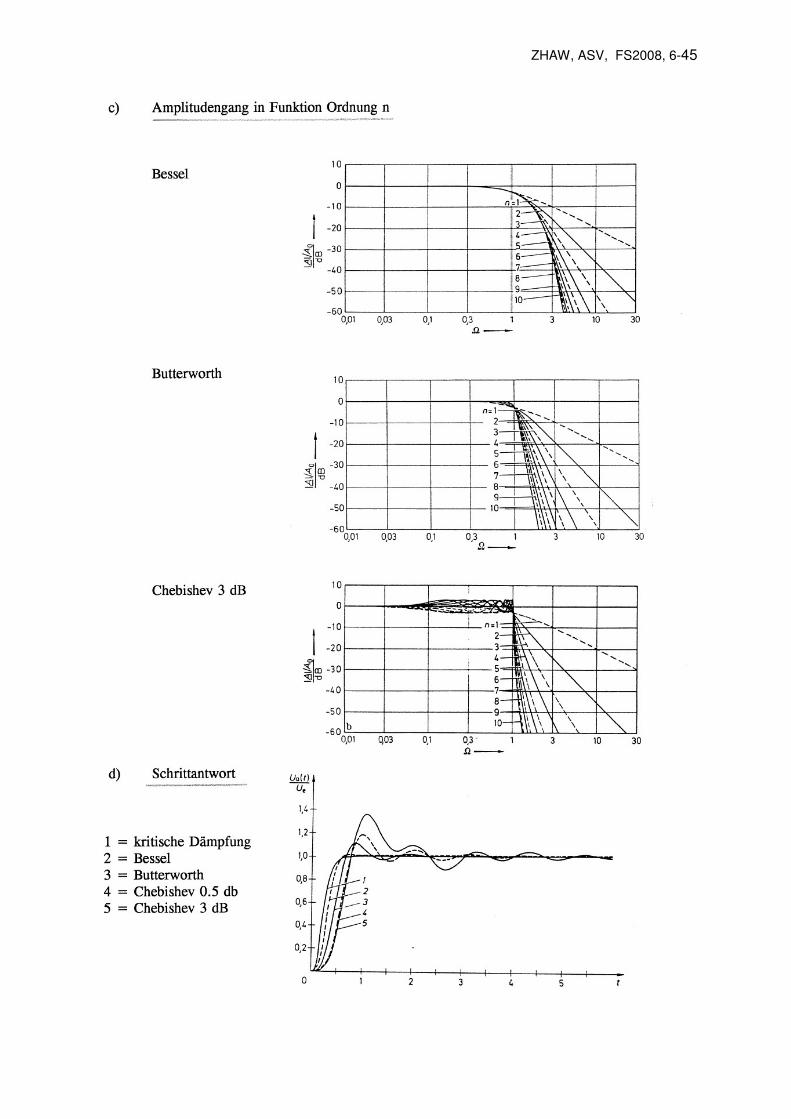
ZHAW, ASV, FS2008, 6-45
Recommended