Industrial wind tunnel analysis based on current modeling
and future outlook
Rafael José Mateus Vicente
Thesis to obtain the Master of Science Degree in
Mechanical Engineering
Supervisors: Dr. José Manuel da Silva Chaves Ribeiro Pereira
Prof. José Carlos Fernandes Pereira
Eng. João Rodrigues Lima Carvalho
Examination Committee
Chairperson: Prof. Viriato Sérgio de Almeida Semião
Supervisor: Dr. José Manuel da Silva Chaves Ribeiro Pereira
Member of the Committee: Prof. Filipe Szolnoky Ramos Pinto Cunha
June 2015

To my Family, Friends and Sara C.
And to our beloved Professors J. Toste Azevedo and J. Mendes Lopes


“Be the change you want to see in the world”
Mahatma Gandhi
“When something does not exist, design it”
Sir Henry Royce
“The improvement of understanding is for two ends: First, our own increase of knowledge; secondly to
enable us to deliver that knowledge to others.”
John Locke

i
Acknowledgements
Looking back to a journey shows us all the steps that were made to reach a certain objective. It is nice
to look back and sense the difficulties and joys of the past, remember who were there and gave their
unconditional support. A journey is not always made by one person, there is always someone by ones’
side to give support and be a part of our team. Thus, I am grateful to many people who helped me in
the course of this work.
First, I would like to thank my two supervisors, José Manuel Chaves Pereira and Professor José Carlos.
It was them who helped me when I got stuck in my thoughts and did not know which path to follow. All
those meetings where we debated and new ideas came to mind, were really important to me, and even
with time shortage, there was always a little moment for us to meet. To João de Deus, S.A. research
and development (R&D) department by helping me and trust me during the course of this project.
To Professor Luís Gonçalves de Sousa who assisted me on understanding faster ways to obtain the
required Star-CCM geometry from Solidworks 3D CAD.
To all wonderful colleagues and professionals that I met during this academic journey that will for sure
become future scientists and engineers bringing innovation and knowledge to the world.
To all my LASEF colleagues by their positive impact on some important steps throughout the bachelor
and specially during this master on understanding the beautiful world of applied sciences.
I also want to thank my family, who gave me all so that I could be writing this dissertation.
Last, but not least, to all my friends. Without whom my academic journey would be a lot more painful,
and for those who inspire me, do not ever stop being who you are.

ii

iii
Abstract
The purpose of this work is to study the wind tunnel used by JDEUS, a Portuguese company part of the
Denso Corporation. JDEUS produces and develops intercoolers and radiators in their factory unit lo-
cated in Samora Correia, Portugal where a closed circuit wind tunnel is used to support both certification
and R&D activities. Given the amount of different geometries that JDEUS has in his portfolio the wind
tunnel is required to accommodate a wide range of applications reason, hence having a variable geom-
etry and therefore being a challenge for the main goal of this work that is to uniformize the flow reaching
the testing area where the intercooler is located during the test.
To study the existing air flow a number of Computational Fluid Dynamics (CFD) simulations of the wind
tunnel have been performed focused on three main cases representing different intercooler categories:
box, down face and full face. A special case of the box category was also included because of already
existing data.
Through misalignment correction, geometrical simplifications, settling chamber volume increase, duct
diameter reduction and pressure loss in addition to the flow path have resulted in an overall improvement
of the air flow in the wind tunnel. In addition, two solutions (one based on spheres and another one
based on fabric or cloth filters) are also presented to uniformize the air flow reaching the test area.
Keywords: Computational Fluid Dynamics, Wind Tunnel, Aerodynamics, Intercooler.

iv
v
Resumo
O propósito deste trabalho é estudar o túnel de vento utilizado pela JDEUS, uma empresa portuguesa
que é parte integrante da Denso Corporation. A JDEUS produz e desenvolve intercoolers e radiadores
na sua unidade fabril localizada em Samora Correia, Portugal, onde um túnel de vento é utilizado para
dar suporte a actividades de certificação e I&D. Devido à quantidade de geometrias existentes
no portfolio da JDEUS o túnel de vento necessita de acomodar várias aplicações, pelo que tem uma
geometria variável, representando assim um desafio para o objectivo principal deste trabalho que é
uniformizar o escoamento que chega à zona de testes onde o intercooler está localizado durante o
ensaio.
Por forma a estudar o escoamento de ar efectuaram-se simulações CFD do túnel de vento em três
casos representando diferentes categorias de intercoolers: box, down face e full face. Para isso utilizou-
se também um caso especial da categoria box uma vez que este tinha dados disponíveis.
Após correcção de desalinhamentos, simplificações geométricas, aumento do volume da câmara de
estabilização e com a adição de perdas de carga ao longo do percurso do escoamento foi possível
melhorar a qualidade do escoamento de ar no túnel de vento. Ainda assim duas soluções (uma baseada
em esferas e outra baseada em filtros de tecido) são também apresentadas para uniformizar o
escoamento de ar utilizado na área de testes.
Palavras-chave: Dinâmica de fluidos computacional, Túnel de Vento, Aerodinâmica, Intercooler.

vi
vii
Contents
Acknowledgements i
Abstract ii
Resumo iii
Contents iv
List of Figures vii
List of Tables viii
Nomenclature ix
1 Introduction .............................................................................................................. 1
1.1 Objective ................................................................................................................................ 1
1.2 Background ............................................................................................................................ 1
1.3 Limitations .............................................................................................................................. 6
1.4 Dissertation outline ............................................................................................................... 6
2 Methodology ............................................................................................................. 7
2.1 Geometry ............................................................................................................................... 7
2.1.1 Wind tunnel geometry A .............................................................................................. 7
2.1.2 Wind tunnel geometry A2 ............................................................................................ 9
2.1.3 Intercooler geometries ............................................................................................... 10
2.1.4 Wind tunnel testing section ....................................................................................... 10
2.1.5 Geometric issues ........................................................................................................ 12
2.2 Physical Properties and relevant non-dimensional Numbers ...................................... 13
2.2.1 Physical Properties ..................................................................................................... 13
2.2.2 Reynolds number ........................................................................................................ 13
2.3 Mathematical and Numerical Model ................................................................................ 14
2.3.1 Governing equations .................................................................................................. 14
2.3.2 SIMPLE algorithm ....................................................................................................... 15
2.3.3 Turbulence Modeling .................................................................................................. 16
2.3.4 Boundary conditions ................................................................................................... 17
2.3.5 The near wall flow ....................................................................................................... 18
2.3.6 Additional physics models ......................................................................................... 19
2.4 Discretization ....................................................................................................................... 22
2.5 Star CCM+ and the CFD Methodology................................................................................... 25
2.5.1 Pre-processing ............................................................................................................ 25
2.5.2 Simulation .................................................................................................................... 25

viii
2.5.3 Verification and validation of the solution ................................................................ 26
2.5.4 Post-processing .......................................................................................................... 26
3 Error Analysis ........................................................................................................ 27
3.1 Realizability .......................................................................................................................... 27
3.2 Estimating errors ................................................................................................................. 27
3.3 Validation ............................................................................................................................. 28
3.3.1 Modeling errors ........................................................................................................... 28
3.3.2 Compare CFD results to experimental data ........................................................... 28
3.4 Verification ........................................................................................................................... 30
3.4.1 Compare CFD results to highly accurate solutions ............................................... 30
3.4.2 Examine Iterative Convergence ............................................................................... 30
3.4.3 Examine Consistency ................................................................................................. 32
3.4.4 Discretization errors ................................................................................................... 32
3.5 Conclusion ........................................................................................................................... 38
4 Results and Discussion ........................................................................................ 39
4.1 Geometry A2 ....................................................................................................................... 39
4.1.1 Central .......................................................................................................................... 39
4.2 Geometry A .......................................................................................................................... 41
4.2.1 Computational domain and boundary conditions .................................................. 41
4.2.2 Central .......................................................................................................................... 42
4.3 Conclusions so far .............................................................................................................. 44
4.4 Geometry changes ............................................................................................................. 44
4.5 Geometry B .......................................................................................................................... 45
4.6 Wind tunnel test section ..................................................................................................... 46
4.7 Filter 1 and Filter 2 .............................................................................................................. 47
4.8 Results and discussion ...................................................................................................... 47
4.8.1 Computational domain and boundary conditions .................................................. 47
4.8.2 Box ................................................................................................................................ 48
4.8.3 Down Face ................................................................................................................... 50
4.8.4 Conclusions ................................................................................................................. 52
5 Flow homogenization ............................................................................................ 53
5.1 Results .................................................................................................................................. 54
5.1.1 Box ................................................................................................................................ 54
5.1.2 Down Face ................................................................................................................... 56

ix
5.2 Packed bed solution ........................................................................................................... 57
5.3 Fabric filter ........................................................................................................................... 55
5.4 Conclusions ......................................................................................................................... 56
6 Conclusions ............................................................................................................ 57
6.1 Achievements ...................................................................................................................... 57
6.2 Further work ........................................................................................................................ 60
7 References .............................................................................................................. 62
8 Attachments ........................................................................................................... 66
8.1 Packed bed solution ........................................................................................................... 66
8.2 Packed bed for BOX flow homogenization ..................................................................... 66
x
List of Figures
Figure 1.1 - Closed loop (left) vs open loop (right) wind tunnel [1] ............................................... 1
Figure 1.2- 3D model of the JDEUS closed circuit wind tunnel (this 3D representation was
produced as part of this work) ............................................................................................................ 2
Figure 1.3- Inner side view of the JDEUS wind tunnel 3D model where it is possible to
identify the Settling Chamber (A) Test Section (B and Cyan colored), the Air Cooler (C) and
the Drive Section (D and Magenta colored)) (this 3D representation was produced as part of
this work) ................................................................................................................................................ 2
Figure 1.4 –JDEUS portfolio sample, an Intercooler on the left and a radiator on the right [2] 3
Figure 1.5 - A Subaru Impresa geared with a box intercooler mounted on top. ......................... 3
Figure 1.6 - A Ford F250 geared with a full face intercooler mounted at the very front of the
vehicle. ................................................................................................................................................... 3
Figure 1.7 - A Volskwagen Beettle geared with a down face intercooler mounted on the front
bumper. .................................................................................................................................................. 4
Figure 1.8 - A Fiat 500 Abarth geared with a box intercooler mounted close to the wheels.
(Figure supplied by JDEUS) ............................................................................................................... 4
Figure 1.9 - Intercooler nomenclature ............................................................................................... 4
Figure 1.10 – Test section apparatus (a picture on the left and the CAD model on the right)
(both 3D representation and the picture were produced as part of this work) ............................ 5
Figure 2.1 – Geometry side view perspective of the settling chamber and the testing area. 3D
geometry to the left and corresponding pictures to the right. ........................................................ 7
Figure 2.2 – Geometry top view, heat exchangers.......................................................................... 8
Figure 2.3 – Wind tunnel geometry front view, detailed view of the ceiling heat exchangers
and internal deflectors.......................................................................................................................... 8
Figure 2.4 – Wind tunnel geometry top view, detailed view of the settling chamber inlet duct. 8
Figure 2.5- Sketch of the air flow, the Drive Section (colored in Magenta) ................................. 9
Figure 2.6- Sketch of the air flow ....................................................................................................... 9
Figure 2.7 – Front view of the test section apparatus (a picture on the left and the CAD model
on the right) .......................................................................................................................................... 11
Figure 2.8 – Test section geometry configuration. (Clockwise starting from top left) Box,
Central, Full-face and Down face. It is also possible to see the outlet duct through the testing
area. ...................................................................................................................................................... 11
Figure 2.9 – Detailed side view of the test section with the intercooler colored in cyan the
arrows represent the air flow. ........................................................................................................... 12
Figure 2.10 - Wind tunnel back view, outlet and inlet duct. .......................................................... 12
Figure 2.11 –Side view of the wind tunnel geometry A2 (inlet, outlet and Intercooler) ........... 17
Figure 2.12 – Mean velocity magnitude plotted on the longitudinal plane ................................. 18
Figure 2.13 –Side view of the wind tunnel geometry B (D-fan) ................................................... 18
Figure 2.14 – Near Wall formulation (on the left) and a fine mesh (on the right) ..................... 19
Figure 2.15 – Pressure loss and velocity data points obtained from the apparatus using a
central geometry (presented in section 2.1.3 and 2.1.4) .............................................................. 20
Figure 2.16 – Example of a tetrahedral mesh ................................................................................ 23
Figure 2.17 - Example of a polyhedral mesh ................................................................................. 24
Figure 2.18 – Example of a trimmed mesh ..................................................................................... 25
xi
Figure 3.1 – Sources of error ............................................................................................................ 27
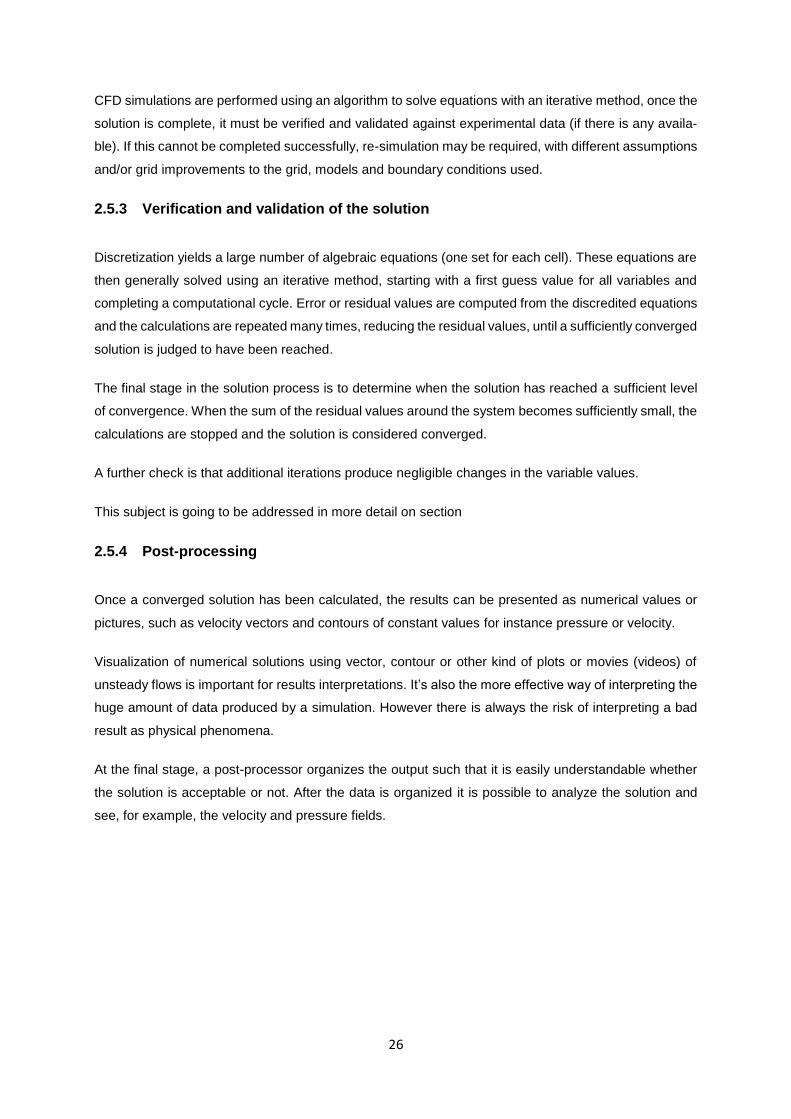
Figure 3.2 – Detailed view of testing area pressure magnitude plotted on the longitudinal
plane presenting the wind tunnel in a box configuration. ............................................................. 29
Figure 3.3 –Geometry B1 with box geometry incident velocity magnitude on intercooler’s
upstream face. .................................................................................................................................... 29
Figure 3.4 - Convergence workflow using L2 norm error ............................................................. 32
Figure 3.5 - Cell quality example, good cell to the left and a bad cell to the right (image from
[4]) ......................................................................................................................................................... 33
Figure 3.6 –Cell quality parameter on a polyhedral mesh with 4 Million cell geometry
(Geometry B) ....................................................................................................................................... 34
Figure 3.7 – Detail of a trimmed mesh of around 4Milliion cells on the left and the
corresponding cell quality parameter on the right (Geometry B) ................................................ 34
Figure 3.8 - Cell quality parameter on a trimmed mesh with 4 Million cells (Geometry B) ..... 34
Figure 3.9 – Based on the already presented trimmed mesh of around 4 Million cells with a
further refined area with 25% base cell volume reduction to increase results detail on the test
section duct (Geometry B)................................................................................................................. 35
Figure 3.10 – Velocity value along test duct, intercooler is positioned at from x cord 1,6 up to
x cord 1,8 ............................................................................................................................................. 36
Figure 3.11 – Pressure value along test duct, intercooler is positioned at from x cord 1,6 up
to x cord 1,8 ......................................................................................................................................... 36
Figure 3.12 - Velocity vector plotted on already presented coarse mesh. ................................. 37
Figure 3.13 - Velocity vector plotted on mesh 1M ......................................................................... 37
Figure 3.14 - Velocity vector plotted on already presented 4M mesh ........................................ 37
Figure 3.15 - Velocity vector plotted on already presented 4M25 mesh .................................... 38
Figure 3.16 - Velocity vector plotted on already presented 9M mesh ........................................ 38
Figure 4.1 – The mean pressure field plotted on the cross section plane presenting the wind
tunnel in a central configuration ....................................................................................................... 39
Figure 4.2 – Detailed view of testing area mean pressure magnitude plotted on the cross
section presenting the wind tunnel in a central configuration. ..................................................... 39
Figure 4.3 – Incident mean pressure magnitude on intercooler’s upstream face ..................... 40
Figure 4.4 – Mean velocity magnitude plotted on the longitudinal plane ................................... 40
Figure 4.5 – Mean velocity magnitude plotted on the longitudinal plane (Detailed view of
testing area with central configuration) ........................................................................................... 40
Figure 4.6 – Mean Velocity profile 50mm upstream of the intercooler position (on the left) and
at the intercooler’s face (on the right) .............................................................................................. 41
Figure 4.7 –Side view of the wind tunnel geometry A. .................................................................. 41
Figure 4.8 – The mean pressure field plotted on the cross section plane presenting the wind
tunnel in a central configuration ....................................................................................................... 42
Figure 4.9 – Detailed view of testing area mean pressure magnitude plotted on the cross
section presenting the wind tunnel in a central configuration. ..................................................... 42
Figure 4.10 – Incident mean pressure magnitude on intercooler’s upstream face .................. 43
Figure 4.11 – Detailed view of testing area average velocity magnitude plotted on the
longitudinal plane presenting the wind tunnel in a central configuration the scale is used in
Figure 4.23 ........................................................................................................................................... 43
xii
Figure 4.12 –Geometry A with central geometry mean velocity profile 50 mm of the testing
duct (On the left); Incident mean velocity magnitude on intercooler’s upstream face (on the
right) ...................................................................................................................................................... 43
Figure 4.13 – Wind tunnel outlet duct (E1-Filter 1, E2-Filter 2, V-Vortex and ventilator) ........ 44
Figure 4.14 – Wind tunnel cross section where it is possible to identify the Settling Chamber
(A), the Test Section (B and Cyan colored), the Air Cooler (C), the Drive Section (D and
Magenta colored)) and two additional pressure losses (E1 and E2) .......................................... 45
Figure 4.15 – Wind tunnel top view, ceiling heat exchangers and inlet duct. ........................... 45
Figure 4.16 – Wind tunnel geometry front view, ceiling heat exchangers (A) and cable tray
(B). ........................................................................................................................................................ 46
Figure 4.17- Sketch of the air flow the Drive Section is colored in Magenta ............................. 46
Figure 4.18 – Test section geometry configuration (clockwise starting from top left: central,
box, full-face and down face) ............................................................................................................ 46
Figure 4.19 - Cross section of the wind tunnel geometry B with the proposed extra filters (1
and 2).................................................................................................................................................... 47
Figure 4.20 - Pressure magnitude plotted on the longitudinal plane presenting the wind
tunnel in a box configuration ............................................................................................................. 48
Figure 4.21 – Detailed view of testing area pressure magnitude plotted on the longitudinal
plane presenting the wind tunnel in a box configuration. ............................................................. 48
Figure 4.22 – Incident pressure magnitude on intercooler’s upstream face ............................. 48
Figure 4.23 - Velocity magnitude plotted on the longitudinal plane presenting the wind tunnel
in a box configuration ......................................................................................................................... 49
Figure 4.24 – Detailed view of testing area velocity magnitude plotted on the longitudinal
plane presenting the wind tunnel in a box configuration the scale is used in Figure 4.23 ...... 49
Figure 4.25 –Geometry B1 with box geometry velocity profile 50 mm of the testing duct (On
the left); Incident velocity magnitude on intercooler’s upstream face (on the right) ................. 49
Figure 4.26 – Pressure magnitude plotted on the longitudinal plane presenting the wind
tunnel in a down face configuration ................................................................................................. 50
Figure 4.27 – Detailed view of testing area pressure magnitude plotted on the longitudinal
plane presenting the wind tunnel in a down face configuration. .................................................. 50
Figure 4.28 - Geometry B1 with down face geometry velocity profile 50 mm of the testing
duct (On the left); Incident velocity magnitude on intercooler’s upstream face (on the right). 50
Figure 4.29 – Detail of Geometry B1 testing duct with down face configuration ...................... 51
Figure 4.30 - Geometry B1 with down face geometry velocity profile 50 mm of the testing
duct (On the left); Incident velocity magnitude at the intercooler’s upstream face (on the
right). ..................................................................................................................................................... 51
Figure 4.31 - Geometry B1 with down face geometry incident velocity magnitude at the
intercooler’s upstream face. .............................................................................................................. 52
Figure 5.1 – Test section detail of the wind tunnel geometry B cross section, a screen placed
at the test section entrance as a possible solution to increase flow homogenization. ............. 53
Figure 5.2 - Geometry B2 with box configuration, testing area detail. ....................................... 54
Figure 5.3 - Geometry B2 with box configuration, testing area detail. ....................................... 54
Figure 5.4 - Geometry B1 with box configuration, velocity profile at 50 mm away from the
testing duct (On the left); Incident velocity magnitude on intercooler’s upstream face (on the
right). ..................................................................................................................................................... 55
xiii
Figure 5.5 - Pressure magnitude plotted on the longitudinal plane presenting the wind tunnel
in a box configuration ......................................................................................................................... 55
Figure 5.6 – Detailed view of testing area pressure magnitude plotted on the longitudinal
plane presenting the wind tunnel in a box configuration. ............................................................. 55
Figure 5.7 - Geometry B2 with down face configuration, testing area detail. ............................ 56
Figure 5.8 – Geometry B2 with down face geometry velocity profile 50 mm of the testing duct
(On the left); Incident velocity magnitude on intercooler’s upstream face (on the right). ........ 56
Figure 5.9 – Test section detail of the wind tunnel geometry B cross section, a packed bed of
spheres is represented as a possible solution to increase flow homogenization. .................... 57
Figure 5.10 – Ergum correlation computed for a wide range of spheres and compared with
the CFD simulation (a packing bed with a length of 150mm was considered (blue dots) CFD
data in red. ........................................................................................................................................... 55
Figure 5.11 - Test section detail of the wind tunnel geometry B cross section, a piece of
fabric/cloth is represented as a possible solution to increase flow homogenization. ............... 55
Figure 5.12 – Test section detail of the wind tunnel geometry B cross section, a packed bed
of spheres is represented as a possible solution to increase flow homogenization................. 56
Figure 6.1- Initial wind tunnel geometry .......................................................................................... 57
Figure 6.2- Improved wind tunnel geometry ................................................................................... 58
Figure 6.3 –Geometry A with central geometry mean velocity profile 50 mm of the testing
duct (On the left); Incident mean velocity magnitude on intercooler’s upstream face (on the
right) ...................................................................................................................................................... 58
Figure 6.4 –Geometry B1 with box geometry velocity profile 50 mm of the testing duct (On
the left); Incident velocity magnitude on intercooler’s upstream face (on the right) ................. 58
Figure 6.5 – Two possible solutions (a cloth based solution on the left and a spheres based
solution at the right) ............................................................................................................................ 59
Figure 6.6 - Geometry B1 with box configuration, velocity profile at 50 mm away from the
testing duct (On the left); Incident velocity magnitude on intercooler’s upstream face (on the
right). ..................................................................................................................................................... 59
Figure 6.7 – Test section detail of the wind tunnel geometry B cross section, a packed bed of
spheres is represented as a possible solution to increase flow homogenization. .................... 60
xiv
List of Tables
Table 1.1 - Intercooler geometries ..................................................................................................... 5
Table 2.1 - Central geometry, also included in the analysis ........................................................ 10
Table 2.2 - Constant physical properties of the air ........................................................................ 13
Table 2.3 – Central case pressure loss experimental data (kindly supplied by JDEUS) ........ 20
Table 3.1 – Mesh characterization for the grid refinement study ................................................ 35
Table 4.1 - Geometry B2 with down face configuration ................................................................ 51
Table 5.1 - Geometry B2 with down face configuration. ............................................................... 56
Table 5.2 - Ergum equation by Zou and Yu ................................................................................... 58
Table 8.1 - List of commercially available spheres ........................................................................ 66
Table 8.2 – Corrected Ergum equation results for commercially available spheres. .............. 67
xv
Nomenclature
Acronyms
CFD Computational Fluid Dynamics
3D Three Dimensions
2D Two Dimensions
IC Intercooler
CAD Computer Aided Design
Symbols
𝑐𝑝 Pressure coefficient
𝑟 Compression ratio
Dh Hydraulic diameter
µ Viscosity
ρ density
Re Reynolds Number
P Absolute Pressure
𝑢𝑟𝑓 Under-relaxation factor for pressure.
Subscripts
𝑥, 𝑦, 𝑧 Cartesian components
𝑖, 𝑗, 𝑘 Computational indexes
𝑎𝑖𝑟 Air
𝑔𝑒𝑜𝑚 A particular intercooler geometry
1
1 Introduction
1.1 Objective
The main goal for this dissertation is to understand the air flow and provide a better understanding of
the wind tunnel through the use of Computational Fluid Dynamics (CFD) simulations, obtained results
analyzed and then validated against experimental data so that relevant conclusions can be withdrawn
and, eventually, propose changes to improve the wind tunnel performance.
This study is in the Mechanical Engineering interest as it requires information from several disciplines
ranging from Thermodynamics to Aerodynamics, Fluid Mechanics and also Computational Fluid Me-
chanics.
1.2 Background
JDEUS is a thermal equipment manufacturer focused on the automotive market part of the Denso
Corporation. In JDEUS facilities in Samora Correia Portugal a closed circuit wind tunnel is used to sup-
port both certification and R&D activities
A wind tunnel is an apparatus with air moving inside used in aerodynamic research to study the effect
of air moving pass solid objects. Due to a wide range of existing applications to be studied by wind
tunnels there are different geometries and technologies that can be combined to create different families
of wind tunnels such as:
Low speed wind tunnels
High speed wind tunnels
Supersonic wind tuunels
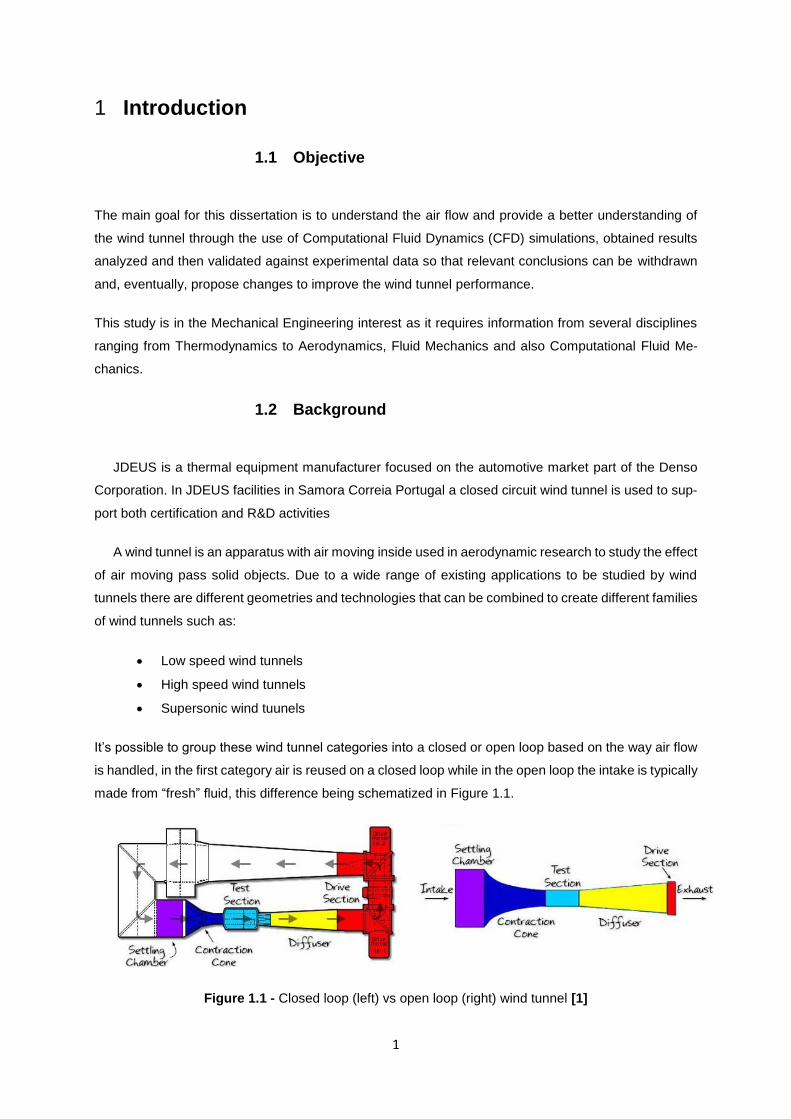
It’s possible to group these wind tunnel categories into a closed or open loop based on the way air flow
is handled, in the first category air is reused on a closed loop while in the open loop the intake is typically
made from “fresh” fluid, this difference being schematized in Figure 1.1.
Figure 1.1 - Closed loop (left) vs open loop (right) wind tunnel [1]
2
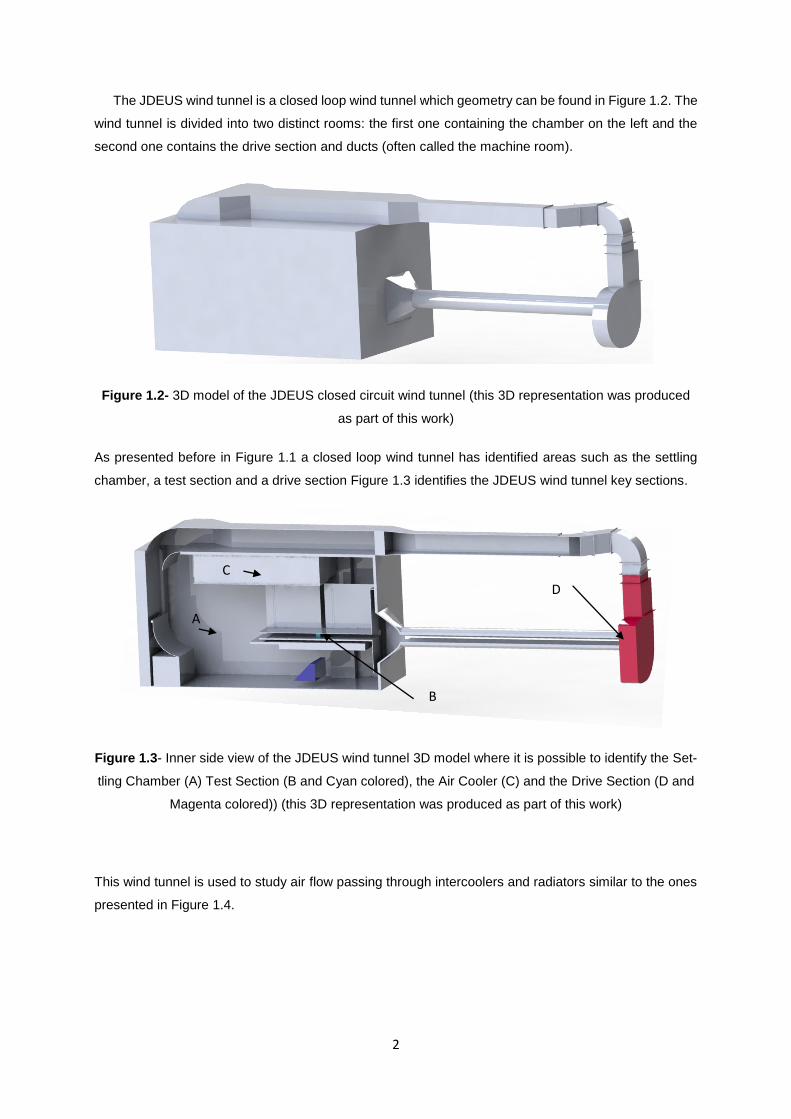
The JDEUS wind tunnel is a closed loop wind tunnel which geometry can be found in Figure 1.2. The
wind tunnel is divided into two distinct rooms: the first one containing the chamber on the left and the
second one contains the drive section and ducts (often called the machine room).
Figure 1.2- 3D model of the JDEUS closed circuit wind tunnel (this 3D representation was produced
as part of this work)
As presented before in Figure 1.1 a closed loop wind tunnel has identified areas such as the settling
chamber, a test section and a drive section Figure 1.3 identifies the JDEUS wind tunnel key sections.
Figure 1.3- Inner side view of the JDEUS wind tunnel 3D model where it is possible to identify the Set-
tling Chamber (A) Test Section (B and Cyan colored), the Air Cooler (C) and the Drive Section (D and
Magenta colored)) (this 3D representation was produced as part of this work)
This wind tunnel is used to study air flow passing through intercoolers and radiators similar to the ones
presented in Figure 1.4.
A
B
D
C
3
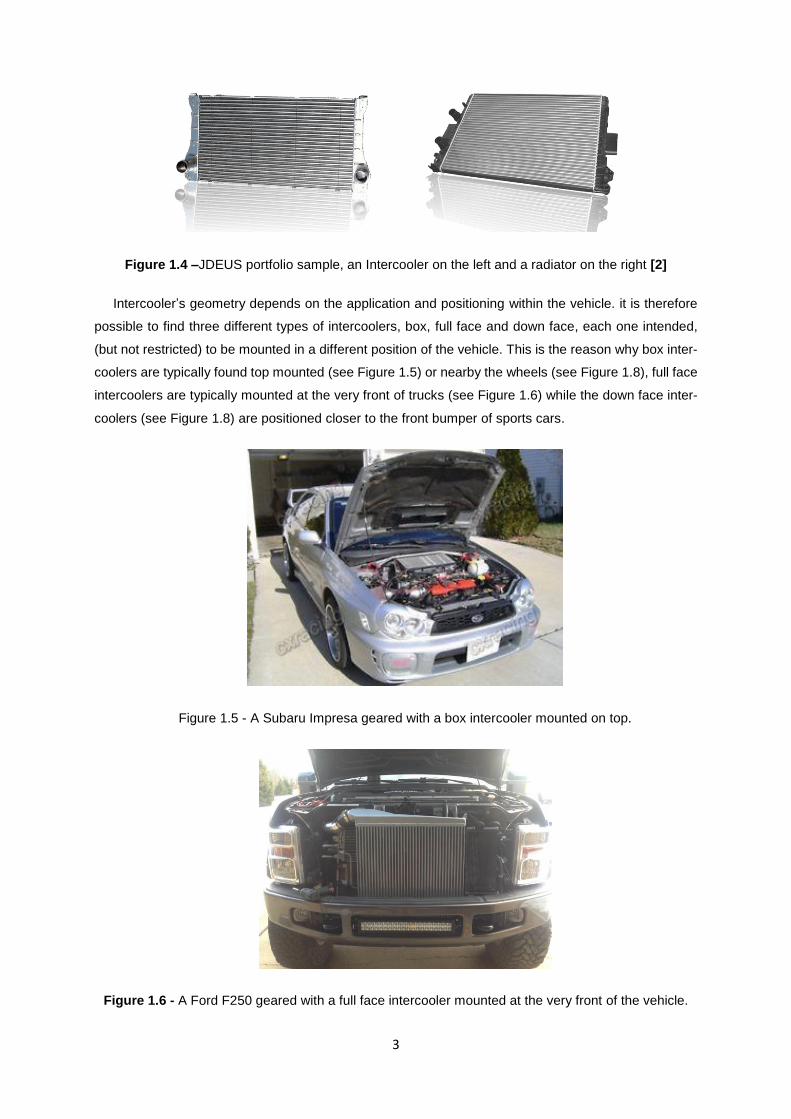
Figure 1.4 –JDEUS portfolio sample, an Intercooler on the left and a radiator on the right [2]
Intercooler’s geometry depends on the application and positioning within the vehicle. it is therefore
possible to find three different types of intercoolers, box, full face and down face, each one intended,
(but not restricted) to be mounted in a different position of the vehicle. This is the reason why box inter-
coolers are typically found top mounted (see Figure 1.5) or nearby the wheels (see Figure 1.8), full face
intercoolers are typically mounted at the very front of trucks (see Figure 1.6) while the down face inter-
coolers (see Figure 1.8) are positioned closer to the front bumper of sports cars.
Figure 1.5 - A Subaru Impresa geared with a box intercooler mounted on top.
Figure 1.6 - A Ford F250 geared with a full face intercooler mounted at the very front of the vehicle.

4
Figure 1.7 - A Volskwagen Beettle geared with a down face intercooler mounted on the front bumper.
Figure 1.8 - A Fiat 500 Abarth geared with a box intercooler mounted close to the wheels. (Figure
supplied by JDEUS)
These types are given according to the intercooler geometric characteristics such as width and height
following the automobile industry nomenclature, see Figure 1.9.
Figure 1.9 - Intercooler nomenclature
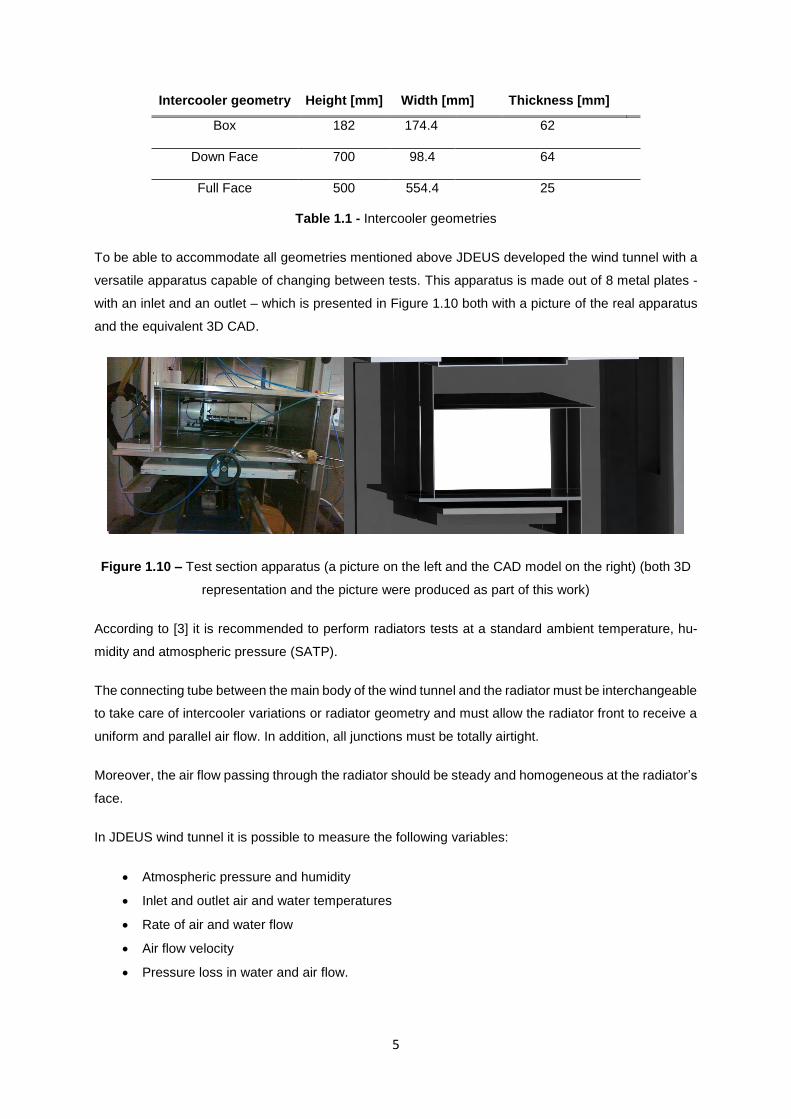
Table 1.1 describes the dimensions of covered geometries in this work, where differences between
intercooler types are clear.
5
Intercooler geometry Height [mm] Width [mm] Thickness [mm]
Box 182 174.4 62
Down Face 700 98.4 64
Full Face 500 554.4 25
Table 1.1 - Intercooler geometries
To be able to accommodate all geometries mentioned above JDEUS developed the wind tunnel with a
versatile apparatus capable of changing between tests. This apparatus is made out of 8 metal plates -
with an inlet and an outlet – which is presented in Figure 1.10 both with a picture of the real apparatus
and the equivalent 3D CAD.
Figure 1.10 – Test section apparatus (a picture on the left and the CAD model on the right) (both 3D
representation and the picture were produced as part of this work)
According to [3] it is recommended to perform radiators tests at a standard ambient temperature, hu-
midity and atmospheric pressure (SATP).
The connecting tube between the main body of the wind tunnel and the radiator must be interchangeable
to take care of intercooler variations or radiator geometry and must allow the radiator front to receive a
uniform and parallel air flow. In addition, all junctions must be totally airtight.
Moreover, the air flow passing through the radiator should be steady and homogeneous at the radiator’s
face.
In JDEUS wind tunnel it is possible to measure the following variables:
Atmospheric pressure and humidity
Inlet and outlet air and water temperatures
Rate of air and water flow
Air flow velocity
Pressure loss in water and air flow.
6
1.3 Limitations
This work will focus on the air flow reaching the test section (upstream of the intercooler), this flow will
be considered adiabatic as heat transfers between the intercooler body and the air passing through will
not be accounted for.
There is a room temperature control mechanism installed at the settling chamber ceiling, it’s a set of
heat exchangers and fans to force the air passing through while cools, this mechanism is only activated
when room temperature is outside the test bottom and top temperature thresholds, while at work this
cause secondary flows inside the settling chamber and works for short periods of time, reason why this
forced motion of the air will not be accounted.
The 3D-model of the wind tunnel is simplified to only include objects of at least approximately 40mm,
which means that small objects for example cables and pipes are not modeled.
Each geometry of the wind tunnel has at least 4 different variations based on the test section configura-
tion, and it was not possible to simulate all of them.
1.4 Dissertation outline
This dissertation is structured in 6 chapters, with the following content:
Chapter 1 – In chapter 1, an introduction to the subject is made.
Chapter 2 – In chapter 2, the methodology used to create the mathematical and numerical
model is presented along with essential concepts behind the CFD process.
Chapter 3 – In chapter 3 common CFD errors will be presented along with the method used to
verify and validate the results will also be present the results, still in this chapter the mesh con-
vergence procedure is described along with the validation of simulated results compared against
the ones obtained on the real wind tunnel.
Chapter 4 – In chapter 4, results will be presented and some conclusions will be made in order
to propose changes to the existing wind tunnel geometry leading, a new geometry based on
remarks made on chapters 2 and 4, CFD results will be presented for this new geometry are
also included in this chapter along with
Chapter 5 – In chapter 5 flow homogenization will be discussed and three different techniques
will be presented.
Chapter 6 – In chapter 6 conclusions and final remarks will be presented along with some ideas
for future works.

7
2 Methodology
2.1 Geometry
In this sub-section, the wind tunnel and the different intercooler geometries will be presented. All these
geometries are based on the real apparatus except for the simplified version (geometry A2) that was
created for validation purposes only.
2.1.1 Wind tunnel geometry A
The 3D wind tunnel geometry was created based on measurements and observations performed on site
using both laser and standard measuring tools, considerations must be made because as stated in
section 1.3 the wind tunnel geometry is simplified to only include objects that are at least approximately
40mm, which means that small objects for example cables are not modeled.. A comparison between
the 3D model and the real apparatus can be found in Figure 2.1.
Figure 2.1 – Geometry side view perspective of the settling chamber and the testing area. 3D geome-
try to the left and corresponding pictures to the right.
The ceiling of the apparatus consists of a complex set of heat exchangers (coolers) and fans to control
the air temperature, these are presented in Figure 2.2 and Figure 2.3. These heat exchangers are made
of the same material as the geometries of the intercoolers and use a cold water circuit while the fans
are set in motion, so that air is forced to pass through the heat exchangers while cooling therefore the
existence of these coolers caused secondary flows to appear inside the settling chamber.
8
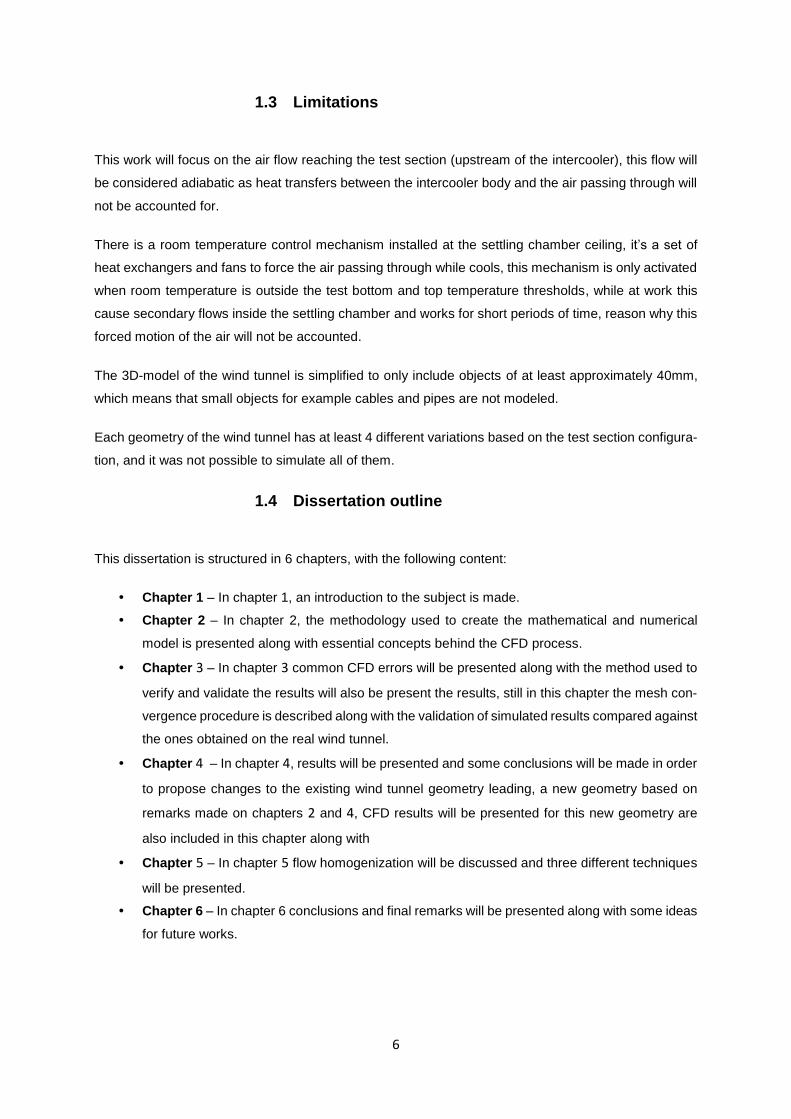
Figure 2.2 – Geometry top view, heat exchangers
Between the two sets of heat exchangers, there are two deflectors that can be seen in Figure 2.3.
Figure 2.3 – Wind tunnel geometry front view, detailed view of the ceiling heat exchangers and internal
deflectors.
Above the ceiling is located the settling chamber inlet duct, which is presented in Figure 2.4.
Figure 2.4 – Wind tunnel geometry top view, detailed view of the settling chamber inlet duct.
As already presented in section 1.2 the JDEUS uses a closed loop wind tunnel, the complete geometry
is presented in Figure 2.5 where the air flow motion is also sketched.
9
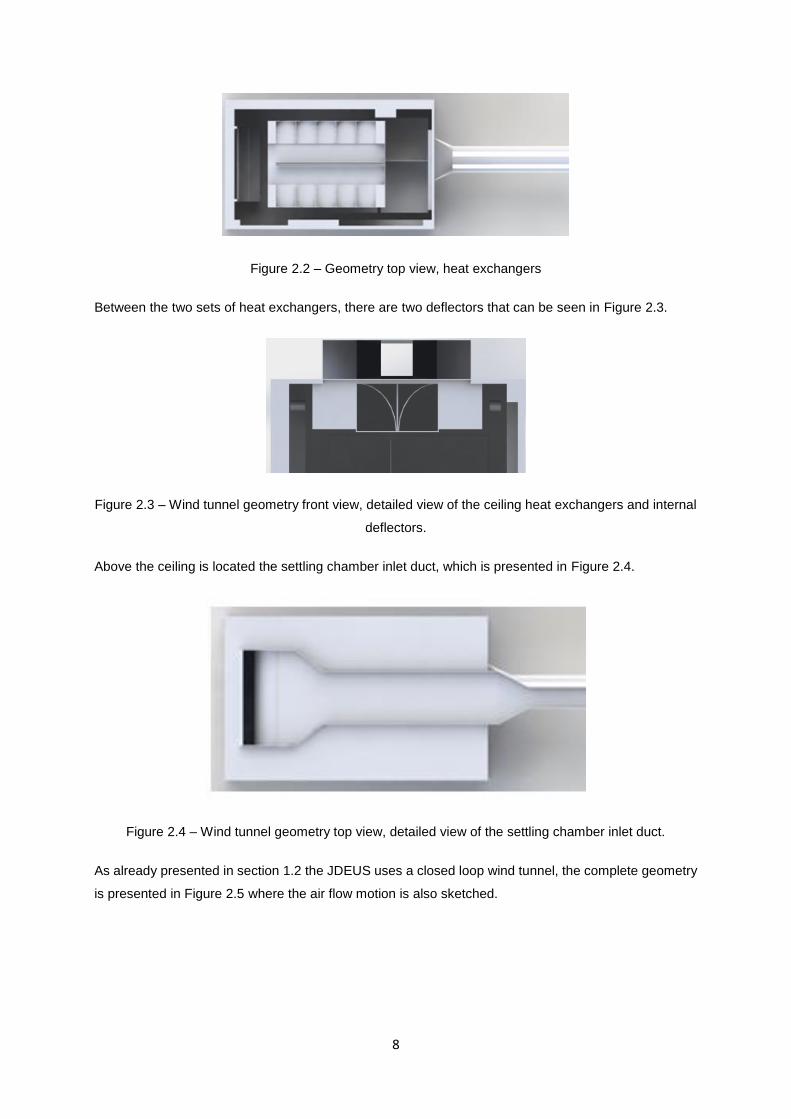
Figure 2.5- Sketch of the air flow, the Drive Section (colored in Magenta)
As a first geometry to be simulated this would represent a huge effort and therefore the wind tunnel
geometry A2 was proposed as a first geometry for CFD simulations. This geometry will be presented in
the next sub-section.
2.1.2 Wind tunnel geometry A2
Wind tunnel geometry A2 represents a simplified version of the wind tunnel geometry and also the first
geometry to be simulated. This geometry is composed by the settling chamber, the cooler, the testing
area, an inlet and an outlet duct. To achieve the intended prescribed velocity in the test section both
inlet and outlet boundary condition should be selected in the simulation, the results of this geometry are
presented in section 4.1.
Figure 2.6- Sketch of the air flow
It is possible to see in the differences between Figure 2.5 and Figure 2.6 the simplification made to the
wind tunnel geometry A were the drive section and a few ducts were removed.

10
2.1.3 Intercooler geometries
As stated in section 1.2 there is a wide variety of products developed and produced by JDEUS, this
section will introduce the reader to the reason behind the wide range of geometries. As specific appli-
cations require different intercooler’s output such as the required heat to be exchanged and not less
important the available space and positioning for the intercooler to be mounted therefore it exists a vast
range of products to provide tailored solutions for each set of requirements.
It is possible to encounter three different types of intercoolers: box, full face and down face, each one
of each is intended, but not restricted to be mounted in a different position of the vehicle. Reason why
box intercoolers are typically founded in top mounted or nearby the wheels, full face intercoolers are
typically mounted at the very front of trucks, the down face intercoolers (similar to the one presented
below) are positioned closer to the front bumper of sports cars.
These requirements can be translated into geometric parameters such as 𝐻 x 𝑊 x T according to the
terminology used across the automotive industry, this definition is presented in Figure 1.9.
For this study particular intercoolers were selected and can be found on the table Table 1.1
In addition to these models a central case with a Box type geometry was also selected for this study
because experimental data was available when this study was conducted, the central case geometry is
presented in Table 2.1.
Intercooler geometry Height [mm] Width [mm] Thickness [mm]
Central 300 144 80
Table 2.1 - Central geometry, also included in the analysis
2.1.4 Wind tunnel testing section
As presented in section 1.2, to be able to accommodate all the wide range of geometries presented in
section 2.1.3 JDEUS developed the wind tunnel with a versatile apparatus capable of changing between
tests, this apparatus is made out of 8 metal plates that the test section with an inlet and an outlet. A
picture of the apparatus and the equivalent 3D CAD is presented in Figure 2.7.

11
Figure 2.7 – Front view of the test section apparatus (a picture on the left and the CAD model on the
right)
In Figure 2.8 the test section is presented configured for each of the types presented in section 2.1.3, in
addition the central case configuration is also presented.
Figure 2.8 – Test section geometry configuration. (Clockwise starting from top left) Box, Central, Full-
face and Down face. It is also possible to see the outlet duct through the testing area.
As said, test section is the area of the wind tunnel where the part subjected to the test is placed, and
were both upstream and downstream faces of the intercooler are exposed to the external air flow (also
represented in Figure 2.9).
12
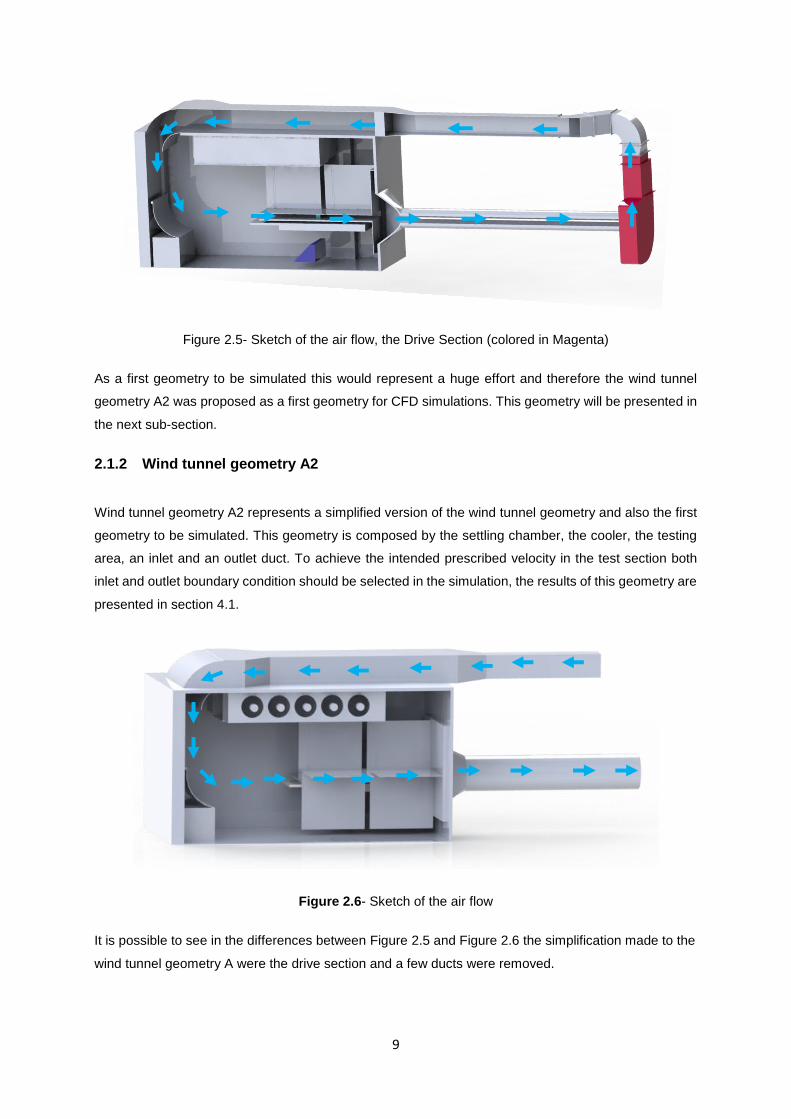
Figure 2.9 – Detailed side view of the test section with the intercooler colored in cyan the arrows rep-
resent the air flow.
2.1.5 Geometric issues
Despite being the first geometry and without any CFD simulation so far it is possible to point out some
geometrical problems that might affect the air flow. The lack of symmetry due to physical restrictions
inside the wind tunnel chamber, in Figure 2.8 it is possible to see a concrete column on the left that does
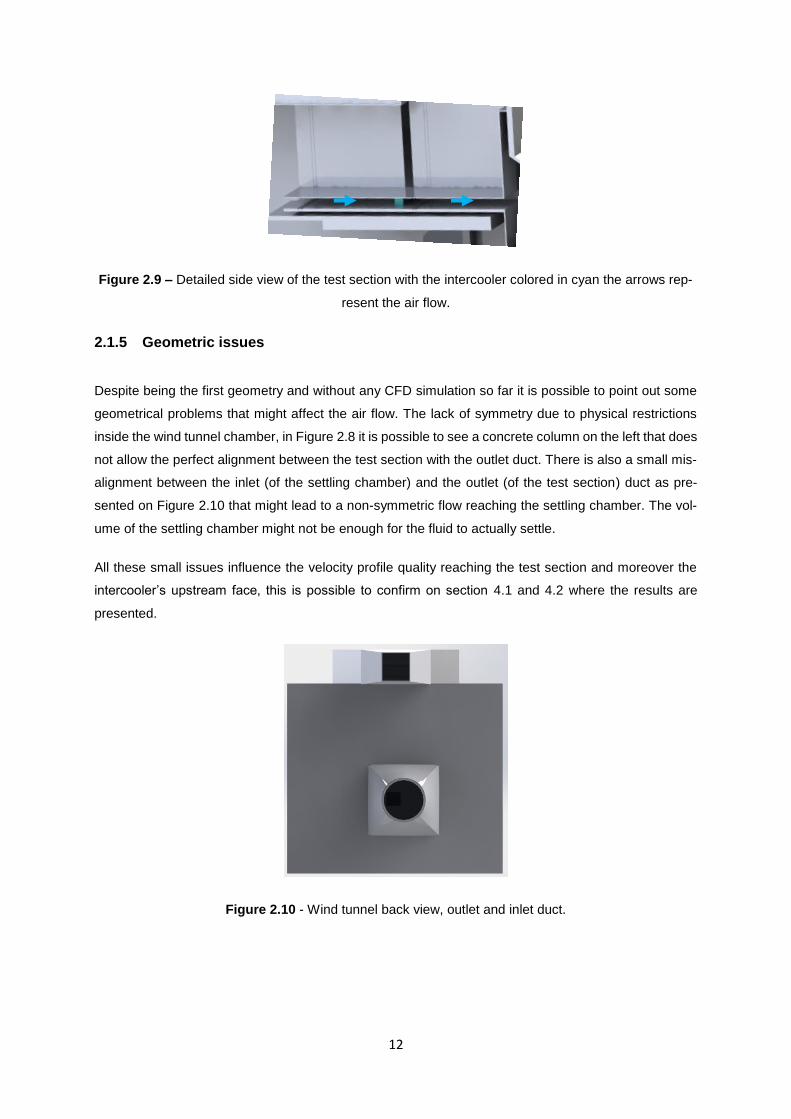
not allow the perfect alignment between the test section with the outlet duct. There is also a small mis-
alignment between the inlet (of the settling chamber) and the outlet (of the test section) duct as pre-
sented on Figure 2.10 that might lead to a non-symmetric flow reaching the settling chamber. The vol-
ume of the settling chamber might not be enough for the fluid to actually settle.
All these small issues influence the velocity profile quality reaching the test section and moreover the
intercooler’s upstream face, this is possible to confirm on section 4.1 and 4.2 where the results are
presented.
Figure 2.10 - Wind tunnel back view, outlet and inlet duct.

13
2.2 Physical Properties and relevant non-dimensional
Numbers
In this sub-section physical properties, considerations and adimensional numbers will be described and
presented.
2.2.1 Physical Properties
In Table 2.2 a list of relevant constant variables can be found.
Variable Value
𝜌 1.18415 𝐾𝑔/𝑚3
𝜇 1.85508x10-5 𝑃𝑎. 𝑠
P 101325 𝑃𝑎
Table 2.2 - Constant physical properties of the air
2.2.2 Reynolds number
By definition similarity between flows and in this case simulations is granted if the same Reynolds num-
ber is used and it can be defined using the following definition
Re =
ρ𝑣L
µ
(1)
where L is the caractheristic length based on testing duct’s hydraulic diameter(Dh), and therefore it can
be presented as follows:
𝑅𝑒𝑛 =
𝜌𝑎𝑖𝑟𝑣𝐷𝐻
𝜇𝑎𝑖𝑟
(2)
Let the index 𝑛 represent the considered geometry, with 𝑛 = 1 representing the reference geometry.
𝑅𝑒1 = 𝑅𝑒2 (3)
(𝜌𝑎𝑟𝑣𝐷𝐻
𝜇𝑎𝑟
)1
= (𝜌𝑎𝑟𝑣𝐷𝐻
𝜇𝑎𝑟
)2
(4)
14
where 𝐷𝐻 stands for the hydraulic diameter.
Considering an incompressible and isothermal regime:
𝑣1𝐷𝐻1 = 𝑣2𝐷𝐻2 (5)
Hence
𝑣1𝐷𝐻1
𝐷𝐻2
= 𝑣2 (6)
where index 1 and 2 stands for a given simulation.
2.3 Mathematical and Numerical Model
In this sub-section the theory behind the numerical simulations performed in this dissertation is briefly
stated and explained. For more detailed information one is directed to the STAR-CCM user’s Manual
[4]. Some important aspects of this work will also be addressed.
2.3.1 Governing equations
In this section only essential modeling aspects of this work will be covered, further information can be
obtained from [5] [6] and [7].
This work, much like all CFD, is based on the three fundamental governing equations – continuity
(Mass conservation), momentum (Newton’s second law) and energy (Energy conservation). This sec-
tion will briefly address those equations and the complementary models (i.e. turbulence) required to fully
understand this work.
The equation that express mass and momentum balance in the flow, latter being named as the Navier-
Stokes equations, are expressed equation (7) and equation (8) in their tensorial form [6] [7],
𝜕𝜌
𝜕𝑡+
𝜕
𝜕𝑥𝑖
(𝜌𝑢𝑗) = 𝑠𝑚 (7)
𝜕(𝜌 𝑢𝑖)
𝜕𝑡+
𝜕
𝜕𝑥𝑗
(𝜌 𝑢𝑗 − 𝜏𝑖𝑗) = −𝜕𝑝
𝜕𝑥𝑖
+ 𝑠𝑖 (8)

15
where 𝑡 stands for time; 𝑥𝑖 the Cartesian coordinates (𝑖=1,2,3,); 𝑢𝑖 is the velocity component in the 𝑥𝑖
direction; 𝑝 represents the static pressure; 𝜌 the density; 𝜏𝑖𝑗 the components of the stress tensor; 𝑠𝑚 the
mass source and 𝑠𝑖 the momentum sources. In this case 𝑠𝑚 = 0 since there are no mass sources.
As suggested by [8] and [9] air can be considered incompressible for these CFD simulations, in addition
and as stated in section 1.4, no account for temperature effects are being taken into account, hence
density (ρ) can be considered constant both in space and time. It is therefore possible to simplify equa-
tions (7) and (8) and present them as follows:
𝜕𝑢𝑖
𝜕𝑥𝑖
= 0 (9)
𝜌
𝜕( 𝑢𝑖)
𝜕𝑡+ 𝜌
𝜕 𝑢𝑗
𝜕𝑥𝑗
− 𝜕 𝜏𝑖𝑗
𝜕𝑥𝑗
= −𝜕𝑝
𝜕𝑥𝑖
+ 𝑠𝑖 (10)
Cast in discrete form, this forms the basis for finite element computations. Since the segregated flow
approach is used, flow equations (velocity and pressure) will be solved in a segregated or uncoupled
manner. The link between the momentum and continuity equations is achieved with a predictor-corrector
approach and with a SIMPLE solver algorithm [6].
2.3.2 SIMPLE algorithm
As stated in 2.3.1 the model will make use of a SIMPLE solver algorithm [4] whose basics steps in the
solution update are as follows:
1. Set the boundary conditions
2. Compute the gradients of velocity and pressure
3. Solve the discretized momentum equation to compute the intermediate velocity field.
4. Compute the uncorrected mass fluxes at cell faces
5. Solve the pressure correction equation to produce cell values of the pressure correction.
6. Update the pressure field 𝑝𝑘+1 = 𝑝𝑘 + 𝑢𝑟𝑓 ∙ 𝑝′, where 𝑢𝑟𝑓 is the under-relaxation factor for pres-
sure.
7. Update boundary pressure corrections 𝑝𝑏′.
8. Correct the cell face mass fluxes: �̇�𝑓𝑘+1 − �̇�𝑓
∗ + �̇�𝑓′
9. Correct cell velocities: �⃗⃗� 𝑘+1 − �⃗� ∗ −𝑉∆𝑝′
𝑎𝑃𝑣 ; where ∆𝑝′ is the pressure corrections gradient, 𝑎𝑃
𝑣 is
the central coefficients vector for discretized linear system representing the velocity equations
and V is the cell volume.
16
2.3.3 Turbulence Modeling
Turbulence is present in the almost every flows encountered in nature and among several industrial
applications. Turbulent flows are characterized by fluctuating velocity fields. These fluctuations mixes
transported quantities such as momentum, energy causing transported quantities to fluctuate as well.
[10]
Instead of directly compute governing equations (DNS) these can be time-averaged (RANS), ensemble-
averaged, or otherwise manipulated to remove small scales (LES), resulting in a modified set of equa-
tions that are computationally less expensive to solve [6], that said one conclude that RANS and LES
are less computational expensive than DNS but RANS is still less expensive than LES. However,
modified equations contain additional unknown variables, and turbulence models are needed to deter-
mine these variables in terms of known quantities.
In this work, as will be seen, there was the need to investigate some turbulence models in order to obtain
a good agreement between computational results and experiments. All models considered throughout
this work are available in STAR-CCM.
2.3.3.1 Reynolds Average Navier Stokes (RANS)
Due to the computationally expensive DNS and LES for most geophysical and engineering applications,
modelers are restricted to RANS approaches commonly based on turbulent kinetic energy (TKE) closure
schemes. The most widely used RANS models today are two equation models which solve two transport
equations for the properties of the turbulence from which the eddy viscosity can be computed. The best
known of these models is the k- ε model which requires the solutions of the turbulent kinetic energy
equation and dissipation of turbulent kinetic energy equation [11]. The other model addressed in this
work is the k − ω model.
2.3.3.1.1 𝐤 − 𝛆
This turbulence model is a two-equation model in which transport equations are solved to the turbulence.
The values of k and ε come from transport equations for turbulent kinetic energy k and turbulent dissi-
pation rate ε. And although STAR-CCM+ has the most significant improvements made so far to this
model [6] it is not suitable to solve adverse gradient flows [12] reason why this model was not selected
for the present analysis.
2.3.3.1.2 𝐤 − 𝛚
Commonly addressed as the standard k − ω is also a two-equation model. A transport equation for the
turbulence kinetic energy k and a quantity ω defined as the specific dissipation rate.
17
One reported advantage of the k − ω model over the k − ε is its performance for boundary layers under
adverse pressure gradients [6], it was also formulated to better compute low-Reynolds number effects,
compressibility and shear flow spreading [13].
The biggest disadvantage of the k − ω model, in its original form, is that boundary layer computations
are sensitive to the values of ω in the free stream [6] However, for this analysis free stream boundary
layer condition is not used (boundary conditions are addressed in section 2.3.4)
2.3.4 Boundary conditions
Apart from the geometry definition and a consequent mesh, there is the need to for boundary conditions.
In closed wind tunnels, air flows by the action of a ventilator, represented in these simulations as a
constant pressure increase on momentum equation.
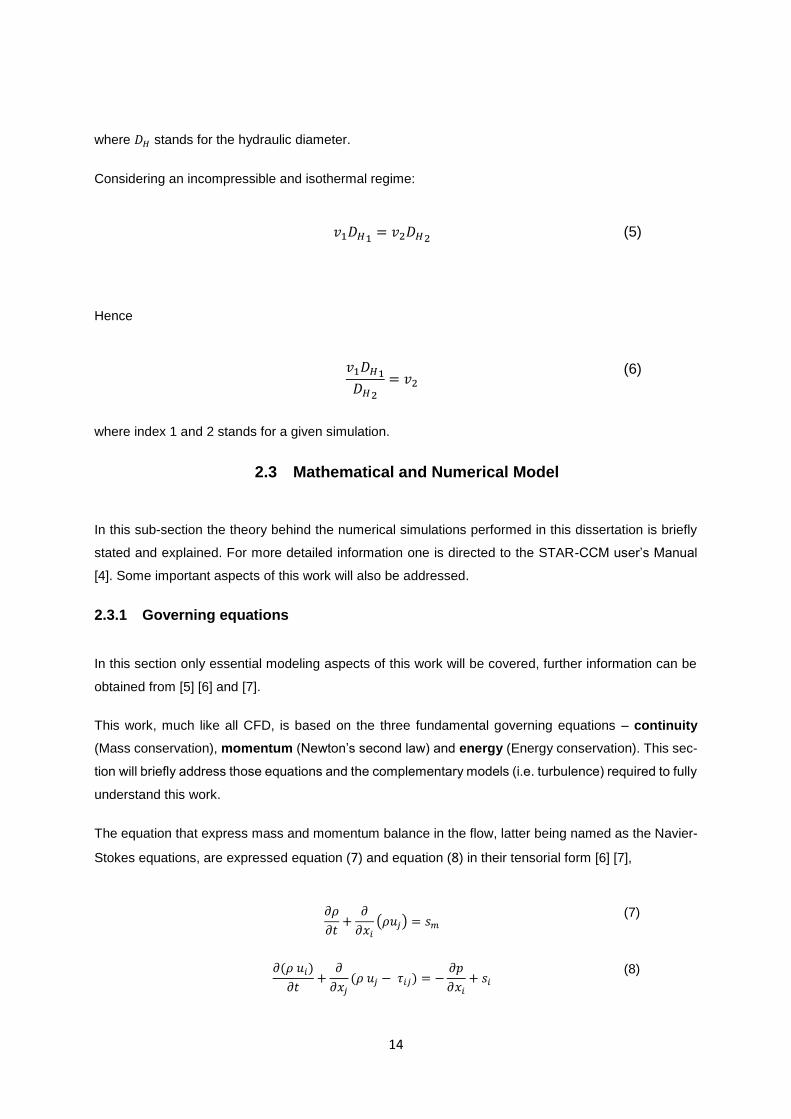
A different approach for the boundary conditions is required to compute the flow, using a constant inlet
flow (inlet) with 𝑢0 = 1,4 m/s and with a pressure outlet. To reduce the inlet and outlet each both ducts
were virtually stretched around 5 meters away from the settling chamber.
Figure 2.11 –Side view of the wind tunnel geometry A2 (inlet, outlet and Intercooler)
This detail is possible to identify in Figure 2.12 by comparing the outlet duct with the 3D model in Figure
2.11.
Inlet
Intercooler Outlet
18
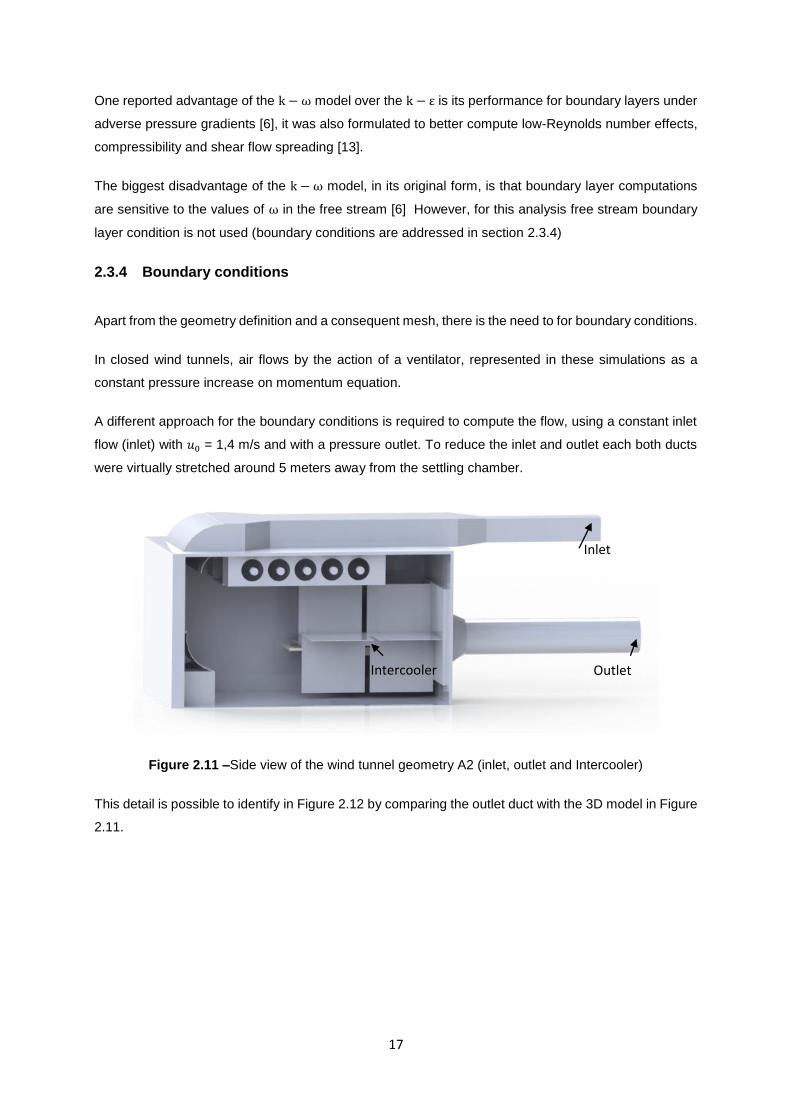
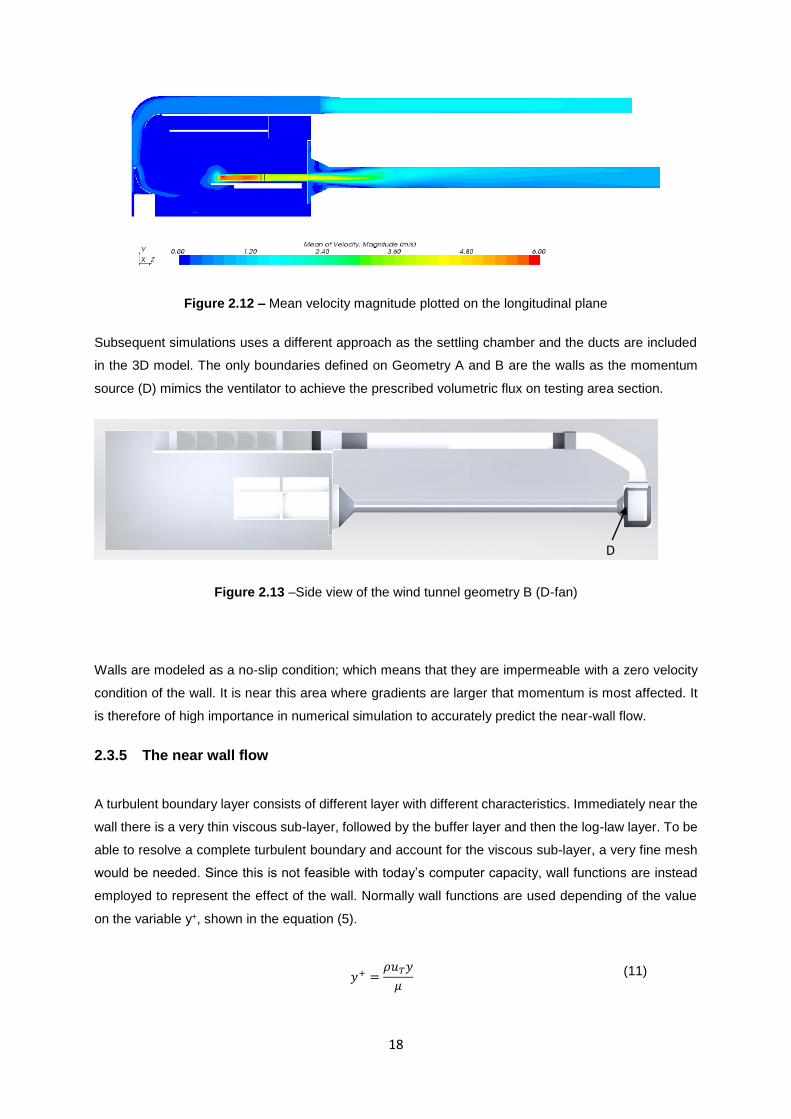
Figure 2.12 – Mean velocity magnitude plotted on the longitudinal plane
Subsequent simulations uses a different approach as the settling chamber and the ducts are included
in the 3D model. The only boundaries defined on Geometry A and B are the walls as the momentum
source (D) mimics the ventilator to achieve the prescribed volumetric flux on testing area section.
Figure 2.13 –Side view of the wind tunnel geometry B (D-fan)
Walls are modeled as a no-slip condition; which means that they are impermeable with a zero velocity
condition of the wall. It is near this area where gradients are larger that momentum is most affected. It
is therefore of high importance in numerical simulation to accurately predict the near-wall flow.
2.3.5 The near wall flow
A turbulent boundary layer consists of different layer with different characteristics. Immediately near the
wall there is a very thin viscous sub-layer, followed by the buffer layer and then the log-law layer. To be
able to resolve a complete turbulent boundary and account for the viscous sub-layer, a very fine mesh
would be needed. Since this is not feasible with today’s computer capacity, wall functions are instead
employed to represent the effect of the wall. Normally wall functions are used depending of the value
on the variable y+, shown in the equation (5).
𝑦+ =𝜌𝑢𝑇𝑦
𝜇 (11)
D
19
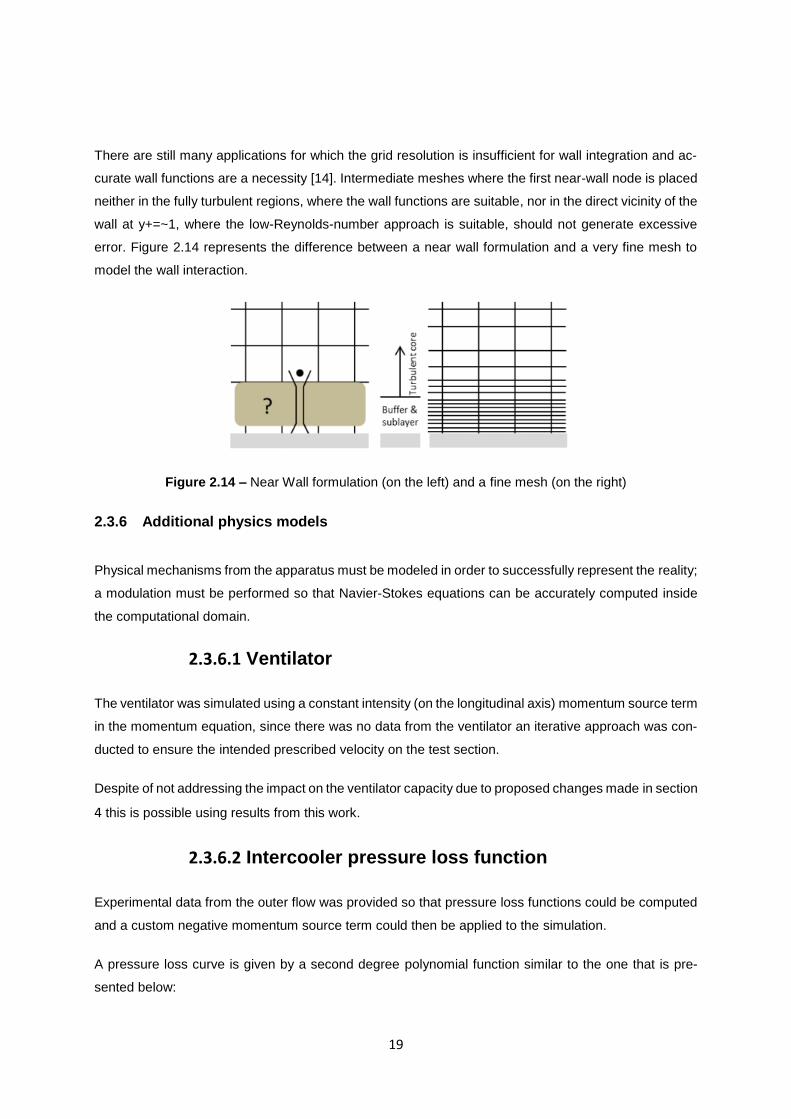
There are still many applications for which the grid resolution is insufficient for wall integration and ac-
curate wall functions are a necessity [14]. Intermediate meshes where the first near-wall node is placed
neither in the fully turbulent regions, where the wall functions are suitable, nor in the direct vicinity of the
wall at y+=~1, where the low-Reynolds-number approach is suitable, should not generate excessive
error. Figure 2.14 represents the difference between a near wall formulation and a very fine mesh to
model the wall interaction.
Figure 2.14 – Near Wall formulation (on the left) and a fine mesh (on the right)
2.3.6 Additional physics models
Physical mechanisms from the apparatus must be modeled in order to successfully represent the reality;
a modulation must be performed so that Navier-Stokes equations can be accurately computed inside
the computational domain.
2.3.6.1 Ventilator
The ventilator was simulated using a constant intensity (on the longitudinal axis) momentum source term
in the momentum equation, since there was no data from the ventilator an iterative approach was con-
ducted to ensure the intended prescribed velocity on the test section.
Despite of not addressing the impact on the ventilator capacity due to proposed changes made in section
4 this is possible using results from this work.
2.3.6.2 Intercooler pressure loss function
Experimental data from the outer flow was provided so that pressure loss functions could be computed
and a custom negative momentum source term could then be applied to the simulation.
A pressure loss curve is given by a second degree polynomial function similar to the one that is pre-
sented below:

20
∆𝑃 = 𝑎𝑉2 + 𝑏𝑉 (12)
Experimental data from an intercooler model of the box type with the following geometry [H x W] = 300
x 144 are listed in Table 2.3:
Case 𝑣𝑖−𝑒𝑥𝑡𝑒𝑟𝑛𝑎𝑙 𝑎𝑖𝑟 𝑓𝑙𝑜𝑤
[m/s]
ΔPext [Pa]
1 2 95
2 4 275
3 6 534
4 8 848
5 10 1340
Table 2.3 – Central case pressure loss experimental data (kindly supplied by JDEUS)
One can approximate intercooler longitudinal pressure loss to
−
𝜕𝑃𝑖,𝑗,𝑘
𝜕𝑥𝑖,𝑗,𝑘
= 𝑎𝑣𝑖,𝑗,𝑘2 + 𝑏𝑣𝑖,𝑗,𝑘
(13)
By plotting provided data into a chart and interpolating it with a second degree polynomial equation, one
can compute 𝑎 and 𝑏, see Figure 2.15.
y = 11.07x2 + 21.597x
0
400
800
1200
1600
0 5 10
Pre
ssu
re lo
ss d
P (
Pa)
Velocity (m/s)
External air flow
Case
Polinomial (Case)
Figure 2.15 – Pressure loss and velocity data points obtained from the apparatus using a central ge-
ometry (presented in section 2.1.3 and 2.1.4)
21
The polynomial data interpolation provides required coefficients with a maximum error of 6.14% (for V
= 2𝑚
𝑠) and an average error of 2.98%:
𝑎 = 11,07 𝑘𝑔
𝑚5𝑠
𝑏 = 21,597 𝑘𝑔
𝑚2𝑠
Replacing coefficient 𝑎 and 𝑏 on equation (13), one gets an equation to describe the pressure loss for
the central geometry.
∆𝑃𝑖(𝑣) = 11,07 𝑣𝑖2 + 21,697𝑣𝑖 (14)
Equation (14) was written for the total pressure drop the following linearization for the pressure per
length unit will be used:
∆𝑃𝑖
∆𝑥𝑐𝑒𝑛𝑡𝑟𝑎𝑙
(𝑣, 𝑥𝑔𝑒𝑜𝑚) =11,07 𝑣𝑖
2 + 21,697 𝑣𝑖
∆𝑥𝑐𝑒𝑛𝑡𝑟𝑎𝑙
𝑥𝑔𝑒𝑜𝑚 (15)
where 𝑥𝑔𝑒𝑜𝑚 is the thickness of the intercooler geometry.
Please note that a total pressure drop will depend on both air stream velocity and thickness of the
pressure loss (intercooler or filter), resulting in equation (10)
∆𝑃𝑖(𝑣, 𝑥𝑔𝑒𝑜𝑚) =
11,07 𝑣𝑖2 + 21,697 𝑣𝑖
80 × 10−3∆𝑥𝑖−𝑔𝑒𝑜𝑚𝑒𝑡𝑟𝑦
(16)
As there are no available data regarding the pressure loss other directions a homogeneous pressure
drop will be assumed and therefore the following relation applies:
𝜕𝑃𝑖
𝜕𝑥𝑖
= 𝑐𝑡𝑒 (17)
This data set was the only one available and therefore no available data for other intercooler geometries,
the following approximation will be applied to extrapolate this dataset for other geometries presented in
section 2.1.3.
22
(𝜕𝑃𝑖,𝑗,𝑘
𝜕𝑥𝑖,𝑗,𝑘
) (𝑣)𝐶𝑒𝑛𝑡𝑟𝑎𝑙
= (𝜕𝑃𝑖,𝑗,𝑘
𝜕𝑥𝑖,𝑗,𝑘
) (𝑣)𝐵𝑜𝑥
= (𝜕𝑃𝑖,𝑗,𝑘
𝜕𝑥𝑖,𝑗,𝑘
) (𝑣)𝐷𝑜𝑤𝑛 𝐹𝑎𝑐𝑒
= (𝜕𝑃𝑖,𝑗,𝑘
𝜕𝑥𝑖,𝑗,𝑘
) (𝑣)𝐹𝑢𝑙𝑙 𝐹𝑎𝑐𝑒
(18)
Approximation (17) will also be applied across each geometry.
2.4 Discretization
STAR-CCM+ uses the finite volume method to discretize the volume into smaller volumes (control vol-
umes or cells) where equations are solved, the following advantages and disadvantages can be pointed
out for the this method.
Advantages:
Can accommodate any type of grid, so it is suitable for complex geometries as the one addressed in
this work. [15]
The grid defines the control volume boundaries [15] and there is no need of a given cell to be related to
a coordinate system.
The method is conservative by construction and preserves the mass to the machine precision [16]
Disadvantages:
Methods of higher than second order are more difficult to develop in 3D, due to the fact that the finite
volume approach requires three levels of approximation (interpolation, differentiation, and integration),
however all terms that need to be approximated have physical meaning [17].
It is therefore easy to understand that meshing is a vital step for CFD simulation because in this step
individual cells are created on model geometry to be solved by mathematical methods connected and
formed within the boundary region of the model. STAR-CCM+ volume mesher contain three different
types of grids:
Tetrahedral
Polyhedral
Trimmed
Each of which offers advantages and disadvantages, some of them are presented below:
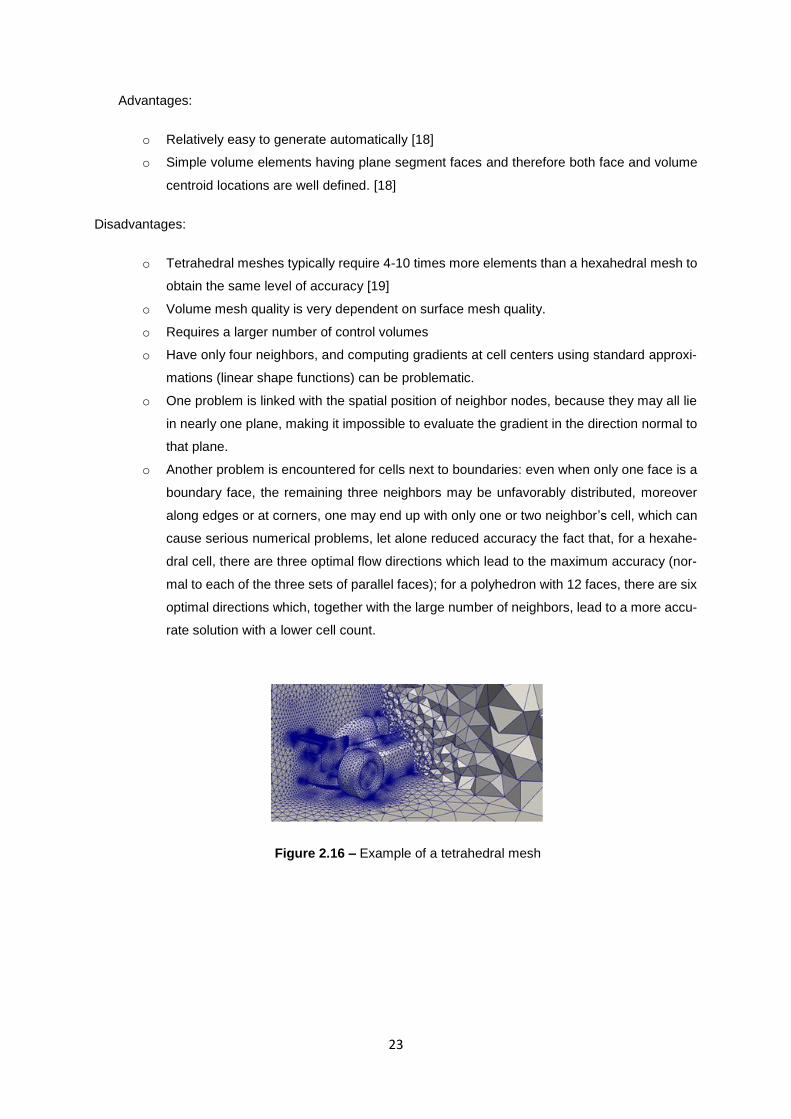
Tetrahedral
An example of a tetrahedral mesh can be found on Figure 2.16
23
Advantages:
o Relatively easy to generate automatically [18]
o Simple volume elements having plane segment faces and therefore both face and volume
centroid locations are well defined. [18]
Disadvantages:
o Tetrahedral meshes typically require 4-10 times more elements than a hexahedral mesh to
obtain the same level of accuracy [19]
o Volume mesh quality is very dependent on surface mesh quality.
o Requires a larger number of control volumes
o Have only four neighbors, and computing gradients at cell centers using standard approxi-
mations (linear shape functions) can be problematic.
o One problem is linked with the spatial position of neighbor nodes, because they may all lie
in nearly one plane, making it impossible to evaluate the gradient in the direction normal to
that plane.
o Another problem is encountered for cells next to boundaries: even when only one face is a
boundary face, the remaining three neighbors may be unfavorably distributed, moreover
along edges or at corners, one may end up with only one or two neighbor’s cell, which can
cause serious numerical problems, let alone reduced accuracy the fact that, for a hexahe-
dral cell, there are three optimal flow directions which lead to the maximum accuracy (nor-
mal to each of the three sets of parallel faces); for a polyhedron with 12 faces, there are six
optimal directions which, together with the large number of neighbors, lead to a more accu-
rate solution with a lower cell count.
Figure 2.16 – Example of a tetrahedral mesh
24
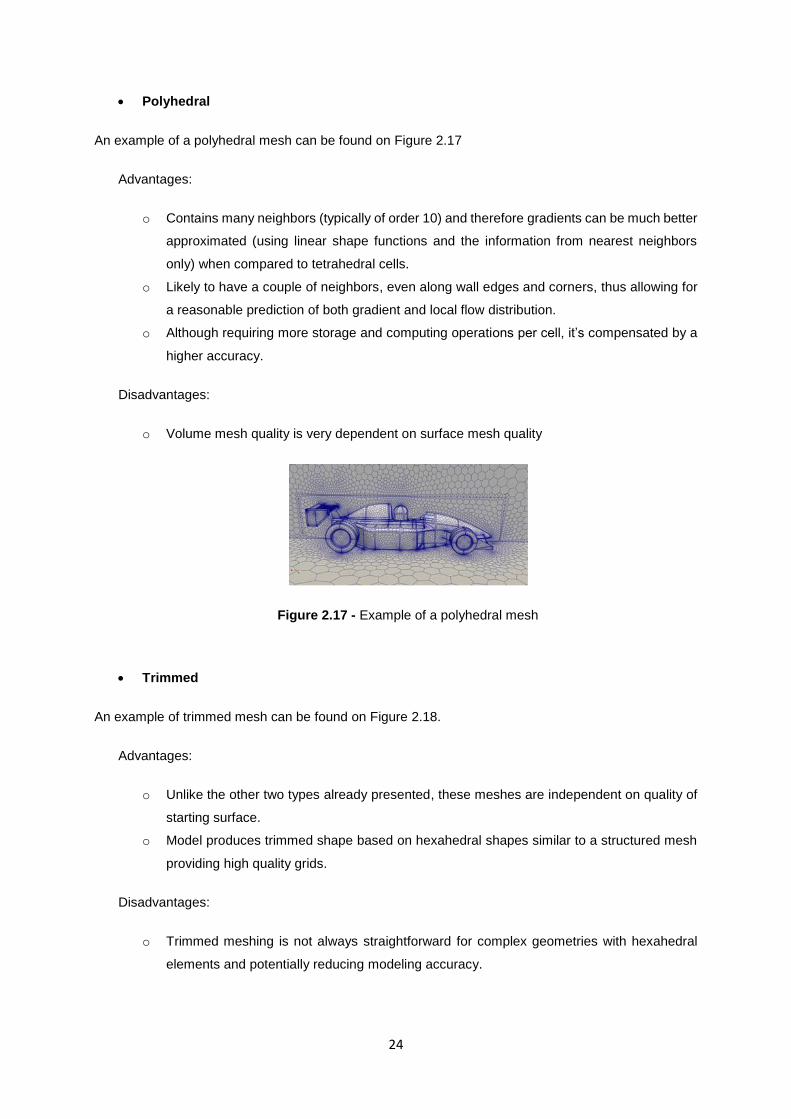
Polyhedral
An example of a polyhedral mesh can be found on Figure 2.17
Advantages:
o Contains many neighbors (typically of order 10) and therefore gradients can be much better
approximated (using linear shape functions and the information from nearest neighbors
only) when compared to tetrahedral cells.
o Likely to have a couple of neighbors, even along wall edges and corners, thus allowing for
a reasonable prediction of both gradient and local flow distribution.
o Although requiring more storage and computing operations per cell, it’s compensated by a
higher accuracy.
Disadvantages:
o Volume mesh quality is very dependent on surface mesh quality
Figure 2.17 - Example of a polyhedral mesh
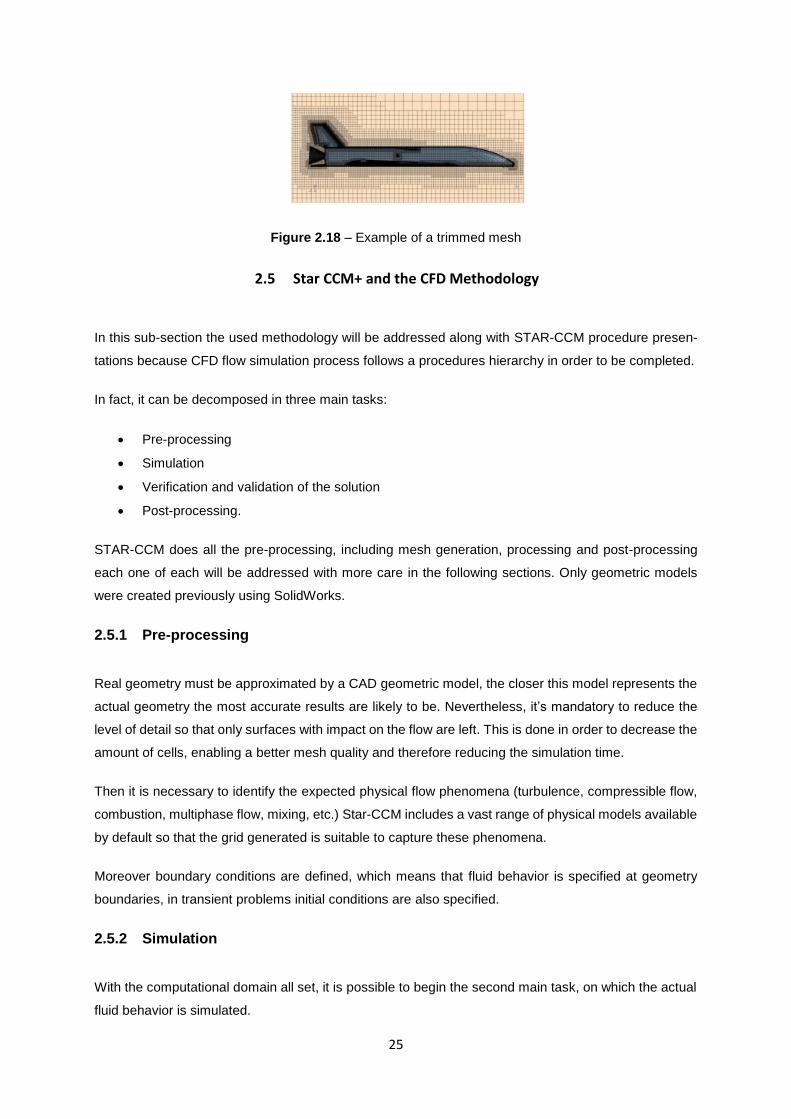
Trimmed
An example of trimmed mesh can be found on Figure 2.18.
Advantages:
o Unlike the other two types already presented, these meshes are independent on quality of
starting surface.
o Model produces trimmed shape based on hexahedral shapes similar to a structured mesh
providing high quality grids.
Disadvantages:
o Trimmed meshing is not always straightforward for complex geometries with hexahedral
elements and potentially reducing modeling accuracy.
25
Figure 2.18 – Example of a trimmed mesh
2.5 Star CCM+ and the CFD Methodology
In this sub-section the used methodology will be addressed along with STAR-CCM procedure presen-
tations because CFD flow simulation process follows a procedures hierarchy in order to be completed.
In fact, it can be decomposed in three main tasks:
Pre-processing
Simulation
Verification and validation of the solution
Post-processing.
STAR-CCM does all the pre-processing, including mesh generation, processing and post-processing
each one of each will be addressed with more care in the following sections. Only geometric models
were created previously using SolidWorks.
2.5.1 Pre-processing
Real geometry must be approximated by a CAD geometric model, the closer this model represents the
actual geometry the most accurate results are likely to be. Nevertheless, it’s mandatory to reduce the
level of detail so that only surfaces with impact on the flow are left. This is done in order to decrease the
amount of cells, enabling a better mesh quality and therefore reducing the simulation time.
Then it is necessary to identify the expected physical flow phenomena (turbulence, compressible flow,
combustion, multiphase flow, mixing, etc.) Star-CCM includes a vast range of physical models available
by default so that the grid generated is suitable to capture these phenomena.
Moreover boundary conditions are defined, which means that fluid behavior is specified at geometry
boundaries, in transient problems initial conditions are also specified.
2.5.2 Simulation
With the computational domain all set, it is possible to begin the second main task, on which the actual
fluid behavior is simulated.
26
CFD simulations are performed using an algorithm to solve equations with an iterative method, once the
solution is complete, it must be verified and validated against experimental data (if there is any availa-
ble). If this cannot be completed successfully, re-simulation may be required, with different assumptions
and/or grid improvements to the grid, models and boundary conditions used.
2.5.3 Verification and validation of the solution
Discretization yields a large number of algebraic equations (one set for each cell). These equations are
then generally solved using an iterative method, starting with a first guess value for all variables and
completing a computational cycle. Error or residual values are computed from the discredited equations
and the calculations are repeated many times, reducing the residual values, until a sufficiently converged
solution is judged to have been reached.
The final stage in the solution process is to determine when the solution has reached a sufficient level
of convergence. When the sum of the residual values around the system becomes sufficiently small, the
calculations are stopped and the solution is considered converged.
A further check is that additional iterations produce negligible changes in the variable values.
This subject is going to be addressed in more detail on section
2.5.4 Post-processing
Once a converged solution has been calculated, the results can be presented as numerical values or
pictures, such as velocity vectors and contours of constant values for instance pressure or velocity.
Visualization of numerical solutions using vector, contour or other kind of plots or movies (videos) of
unsteady flows is important for results interpretations. It’s also the more effective way of interpreting the
huge amount of data produced by a simulation. However there is always the risk of interpreting a bad
result as physical phenomena.
At the final stage, a post-processor organizes the output such that it is easily understandable whether
the solution is acceptable or not. After the data is organized it is possible to analyze the solution and
see, for example, the velocity and pressure fields.

27
3 Error Analysis
This chapter is devoted to the importance of being aware of existing errors, and even more to try to
distinguish each one of them. A small review of different errors is made, so that one understands all
steps taken in order to validate and verify that simulation results in use are representing the reality and
are trustworthy.
3.1 Realizability
It is necessary to verify if obtained results are actually a solution for the equations that it is being solved
and if obtained values are truthful. Typically, intended simulations are based on phenomena which are
too complex to treat directly (for example: turbulence, combustion, or multiphase flow), therefore models
should be designed to guarantee physically realistic solutions. This is not a numerical issue per si but
models that are not realizable may result in unphysical solutions or cause numerical methods to diverge.
In order to ensure that a realizable model is in use, results and data from duct flows were used to validate
the velocity and the pressure value, non-sense simulations were discarded.
3.2 Estimating errors
Numerical solutions of fluid flow and heat transfer problems are only approximate solutions. In addition
to the errors that might be introduced by setting up boundary conditions (as seen on section 2.3.4),
numerical solutions always include three kinds of systematic errors:
Modeling
Discretization
Iteration
While modeling errors alone are more default to quantify, discretization and iterative errors can be esti-
mated, Figure 3.1 contains the source of errors throughout the process.
Figure 3.1 – Sources of error

28
Following sections addresses each one of them by explaining and estimating an absolute or relative
value.
3.3 Validation
Validation is defined as “the process of determining the degree to which a model is an accurate repre-
sentation of the real world from the perspective of the intended uses of the model.” [20] And can be
summarized as trying to understand the modeling errors and by comparing CFD results to experimental
data results, this result in a quantification of compounding errors.
3.3.1 Modeling errors
Modeling errors are defined as the difference between the actual flow and the exact solution of the
mathematical model. The only way to estimate modeling errors is to compare experimental data to com-
putational results. These errors depend on the assumptions made by deriving the transport equations
like it was present in section 2.3.1. And it may be considered negligible when laminar flows are investi-
gated, since the Navier-Stokes equations represent a sufficiently accurate flow model. However, for
turbulent flows modeling errors may be considerably larger because the exact solution of the model
equations may be qualitatively wrong.
Modeling errors are also introduced by simplifications made to the geometry while modeling the domain
or even by simplification of boundary conditions like it was described on section 2.5.1. These errors are
not known a priori; they can only be evaluated by comparing solutions in which discretization and con-
vergence errors are negligible with accurate experimental data or data obtained from more accurate
models (e.g. data from direct simulation of turbulence). It is therefore essential to estimate and control
the convergence and discretization errors before models and physical phenomena (such as turbulence
models) can be judged.
For turbulent flows, multiphase flows, combustion, etc., modeling errors may be very large, and the
exact solution of the model equations may be qualitatively wrong
As exclusively modeling errors are difficult to obtain one will compare real experimental data with CFD
data and as stated on section 3.2 results of this analysis might be affected by compounding errors.
Therefore the need to validate the solution of the equations using experimental testing, this result must
be compared to the ones obtained using computational simulations.
3.3.2 Compare CFD results to experimental data
Experimental data is the observation of the "real world" in some controlled manner. Even this data is not
immune to errors, although of different sources that the ones presented before and usually can be re-
lated to the complexity of the experiment [20]. For this application the wind tunnel is the best source of
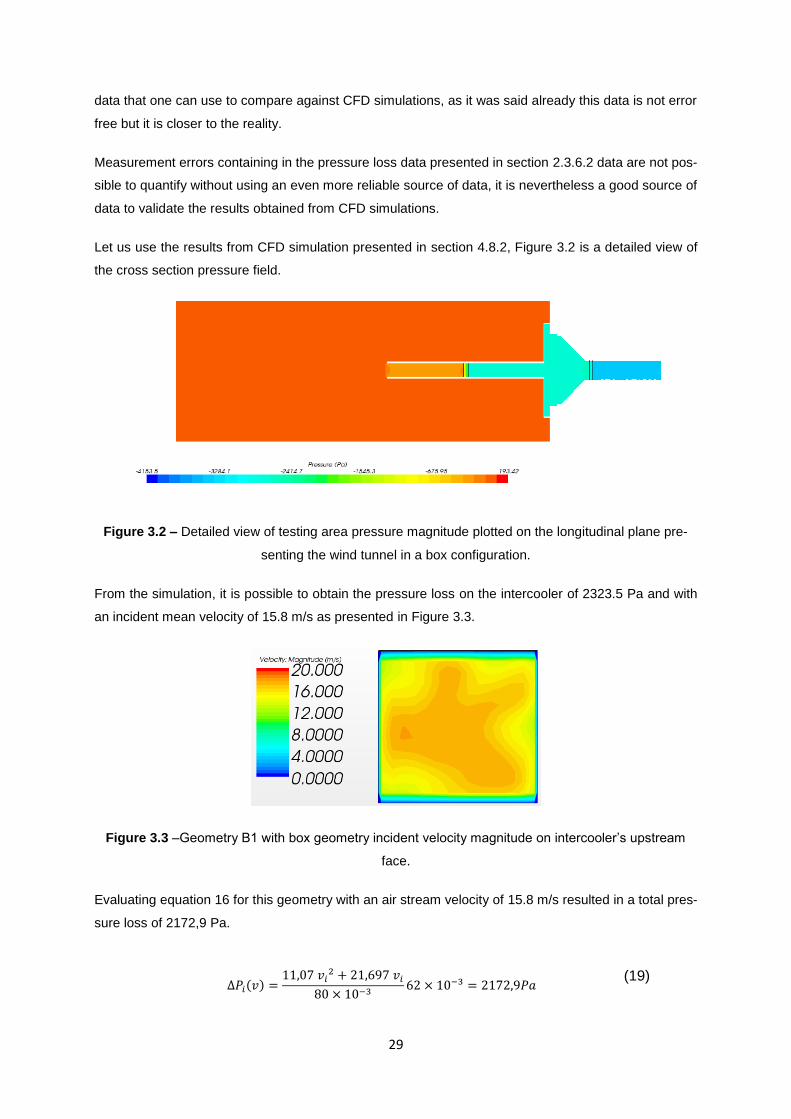
29
data that one can use to compare against CFD simulations, as it was said already this data is not error
free but it is closer to the reality.
Measurement errors containing in the pressure loss data presented in section 2.3.6.2 data are not pos-
sible to quantify without using an even more reliable source of data, it is nevertheless a good source of
data to validate the results obtained from CFD simulations.
Let us use the results from CFD simulation presented in section 4.8.2, Figure 3.2 is a detailed view of
the cross section pressure field.
Figure 3.2 – Detailed view of testing area pressure magnitude plotted on the longitudinal plane pre-
senting the wind tunnel in a box configuration.
From the simulation, it is possible to obtain the pressure loss on the intercooler of 2323.5 Pa and with
an incident mean velocity of 15.8 m/s as presented in Figure 3.3.
Figure 3.3 –Geometry B1 with box geometry incident velocity magnitude on intercooler’s upstream
face.
Evaluating equation 16 for this geometry with an air stream velocity of 15.8 m/s resulted in a total pres-
sure loss of 2172,9 Pa.
∆𝑃𝑖(𝑣) =
11,07 𝑣𝑖2 + 21,697 𝑣𝑖
80 × 10−362 × 10−3 = 2172,9𝑃𝑎
(19)
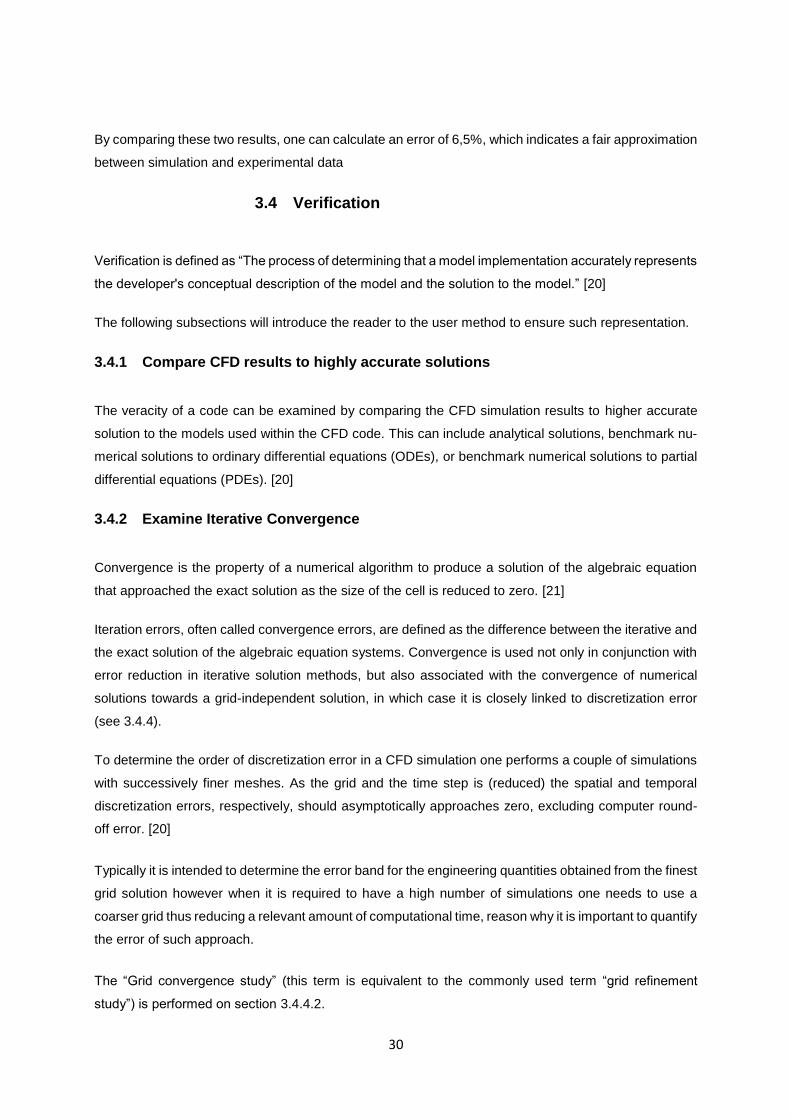
30
By comparing these two results, one can calculate an error of 6,5%, which indicates a fair approximation
between simulation and experimental data
3.4 Verification
Verification is defined as “The process of determining that a model implementation accurately represents
the developer's conceptual description of the model and the solution to the model.” [20]
The following subsections will introduce the reader to the user method to ensure such representation.
3.4.1 Compare CFD results to highly accurate solutions
The veracity of a code can be examined by comparing the CFD simulation results to higher accurate
solution to the models used within the CFD code. This can include analytical solutions, benchmark nu-
merical solutions to ordinary differential equations (ODEs), or benchmark numerical solutions to partial
differential equations (PDEs). [20]
3.4.2 Examine Iterative Convergence
Convergence is the property of a numerical algorithm to produce a solution of the algebraic equation
that approached the exact solution as the size of the cell is reduced to zero. [21]
Iteration errors, often called convergence errors, are defined as the difference between the iterative and
the exact solution of the algebraic equation systems. Convergence is used not only in conjunction with
error reduction in iterative solution methods, but also associated with the convergence of numerical
solutions towards a grid-independent solution, in which case it is closely linked to discretization error
(see 3.4.4).
To determine the order of discretization error in a CFD simulation one performs a couple of simulations
with successively finer meshes. As the grid and the time step is (reduced) the spatial and temporal
discretization errors, respectively, should asymptotically approaches zero, excluding computer round-
off error. [20]
Typically it is intended to determine the error band for the engineering quantities obtained from the finest
grid solution however when it is required to have a high number of simulations one needs to use a
coarser grid thus reducing a relevant amount of computational time, reason why it is important to quantify
the error of such approach.
The “Grid convergence study” (this term is equivalent to the commonly used term “grid refinement
study”) is performed on section 3.4.4.2.
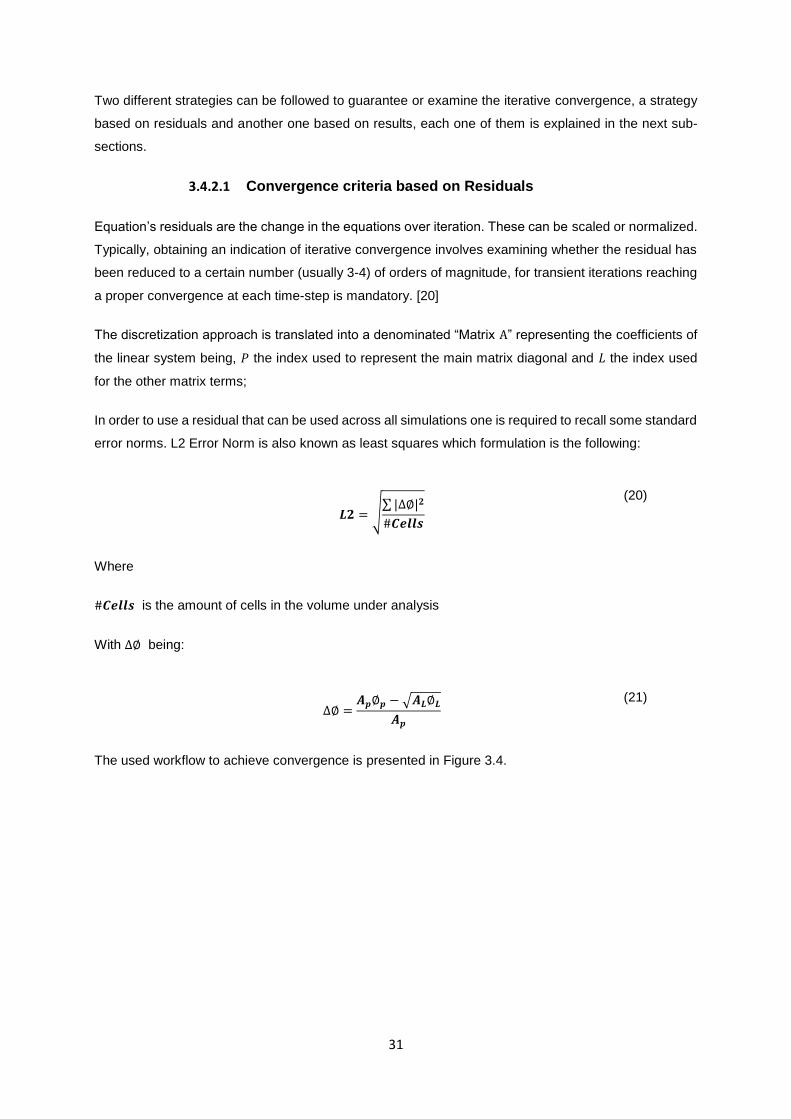
31
Two different strategies can be followed to guarantee or examine the iterative convergence, a strategy
based on residuals and another one based on results, each one of them is explained in the next sub-
sections.
3.4.2.1 Convergence criteria based on Residuals
Equation’s residuals are the change in the equations over iteration. These can be scaled or normalized.
Typically, obtaining an indication of iterative convergence involves examining whether the residual has
been reduced to a certain number (usually 3-4) of orders of magnitude, for transient iterations reaching
a proper convergence at each time-step is mandatory. [20]
The discretization approach is translated into a denominated “Matrix A” representing the coefficients of
the linear system being, 𝑃 the index used to represent the main matrix diagonal and 𝐿 the index used
for the other matrix terms;
In order to use a residual that can be used across all simulations one is required to recall some standard
error norms. L2 Error Norm is also known as least squares which formulation is the following:
𝑳𝟐 = √∑ |∆∅|𝟐
#𝑪𝒆𝒍𝒍𝒔
(20)
Where
#𝑪𝒆𝒍𝒍𝒔 is the amount of cells in the volume under analysis
With ∆∅ being:
∆∅ =
𝑨𝒑∅𝒑 − √𝑨𝑳∅𝑳
𝑨𝒑
(21)
The used workflow to achieve convergence is presented in Figure 3.4.
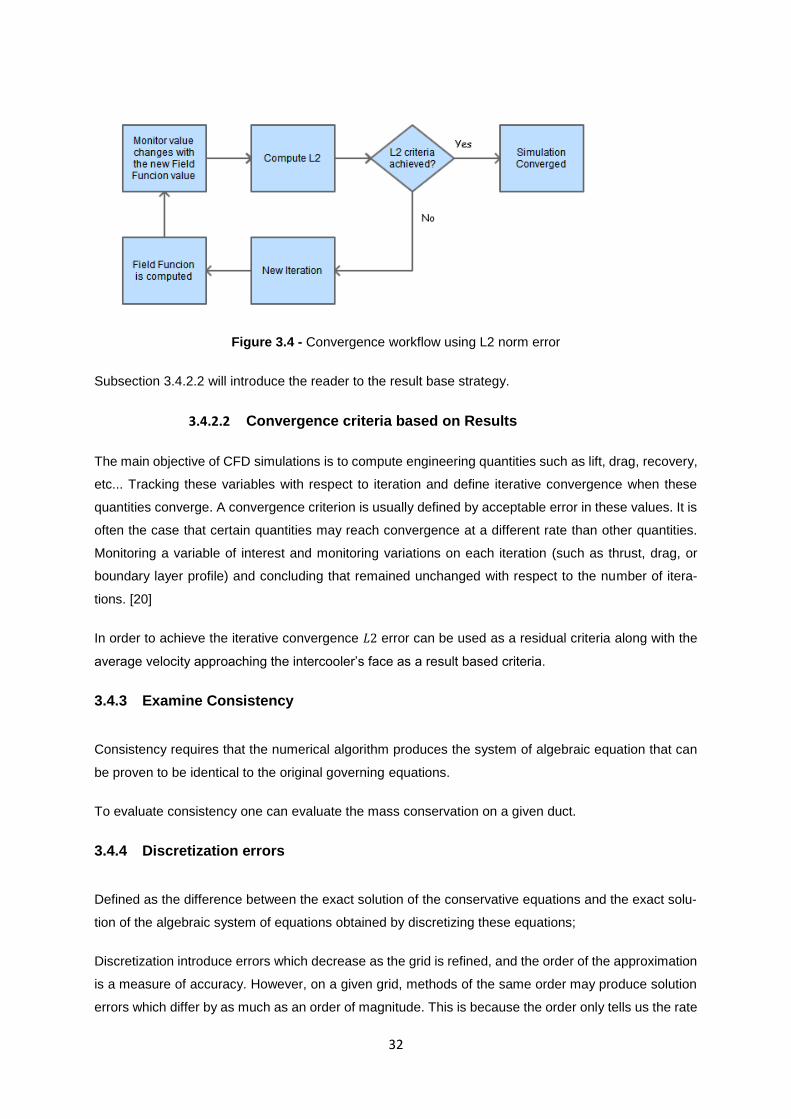
32
Figure 3.4 - Convergence workflow using L2 norm error
Subsection 3.4.2.2 will introduce the reader to the result base strategy.
3.4.2.2 Convergence criteria based on Results
The main objective of CFD simulations is to compute engineering quantities such as lift, drag, recovery,
etc... Tracking these variables with respect to iteration and define iterative convergence when these
quantities converge. A convergence criterion is usually defined by acceptable error in these values. It is
often the case that certain quantities may reach convergence at a different rate than other quantities.
Monitoring a variable of interest and monitoring variations on each iteration (such as thrust, drag, or
boundary layer profile) and concluding that remained unchanged with respect to the number of itera-
tions. [20]
In order to achieve the iterative convergence 𝐿2 error can be used as a residual criteria along with the
average velocity approaching the intercooler’s face as a result based criteria.
3.4.3 Examine Consistency
Consistency requires that the numerical algorithm produces the system of algebraic equation that can
be proven to be identical to the original governing equations.
To evaluate consistency one can evaluate the mass conservation on a given duct.
3.4.4 Discretization errors
Defined as the difference between the exact solution of the conservative equations and the exact solu-
tion of the algebraic system of equations obtained by discretizing these equations;
Discretization introduce errors which decrease as the grid is refined, and the order of the approximation
is a measure of accuracy. However, on a given grid, methods of the same order may produce solution
errors which differ by as much as an order of magnitude. This is because the order only tells us the rate

33
at which the error decreases at the mesh spacing is reduced; it gives no information about the error on
as single grid [22]
Discretization errors can be reduced by using more accurate interpolations or by applying the approxi-
mations to smaller regions but this will increase both time and cost of a solution. Compromise is always
needed as the ultimate goal is to obtain a compromise between maximum desired accuracy and with
the available resources and effort required.
However it’s important to have in mind that various errors may cancel each other, so that sometimes a
solution obtained on a course grid may agree better with the experiment than a solution on a finer grid
- which, by definition, should be more accurate, or the maximum accuracy with the available resources.
To ensure that a given solution is not affected by the prescribed mesh it requires to evaluate how does
the solution change with a mesh parameter, another important parameter aspect for time dependent
simulations is that errors might be affected by stopping the iteration process to soon.
3.4.4.1 Cell Quality
Cell quality in Star-CCM is based on a metric algorithm based on a both Gauss and least squares
methods. It is a function not only of the relative geometric distribution of the cell centroids of the neighbor
cells, but also on cell face’s orientation. Based on this criterion a cell quality with 1.0 is considered
perfect, and a degenerated cell will have a cell quality close to zero. One needs to take into account that
depending on the physics the cell quality can be fairly low and still provide a valid solution. It is also
possible to use weight functions to reduce the negative impact of lower quality cells. Figure 3.5 repre-
sents the difference between a good quality and a bad quality cell according to the STAR-CCM user’s
manual.
Figure 3.5 - Cell quality example, good cell to the left and a bad cell to the right (image from [4])
Figure 3.6 represents the wind tunnel geometry with a polyhedral grid where it is possible to conclude
that it is far from having an overall high quality mesh parameter moreover, this parameter is not constant
along the domain thus increasing the difficulty of reaching a stable solution.
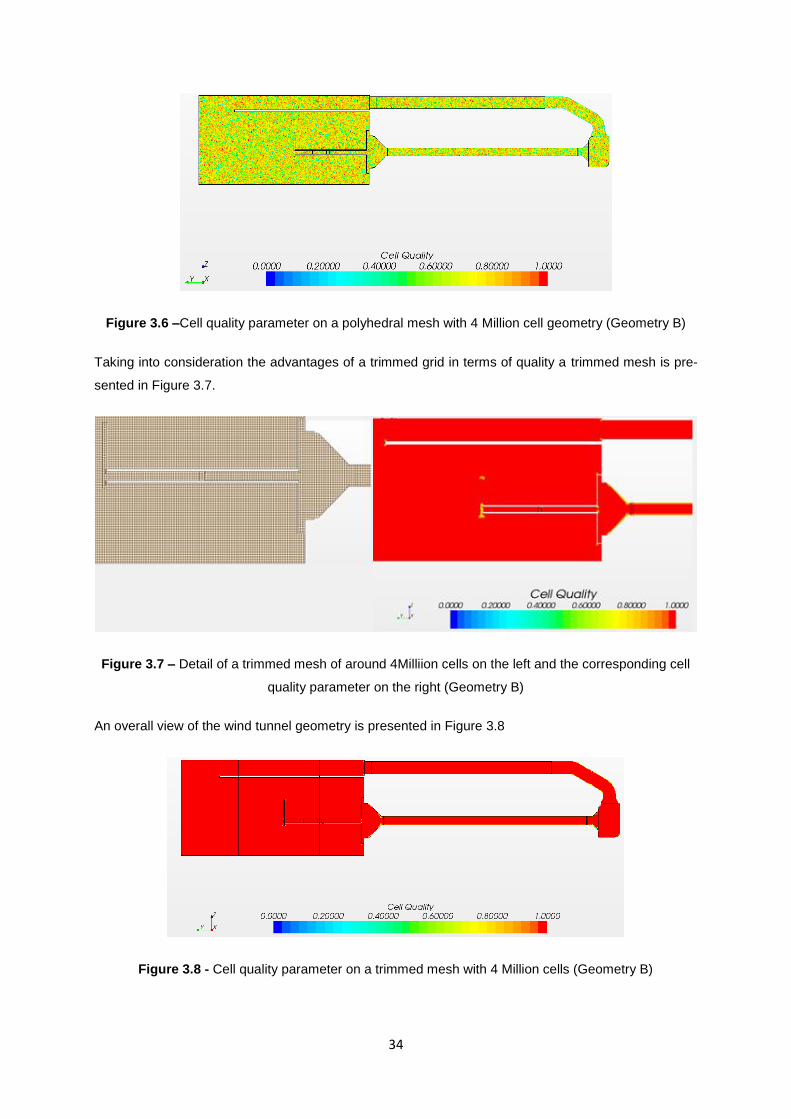
34
Figure 3.6 –Cell quality parameter on a polyhedral mesh with 4 Million cell geometry (Geometry B)
Taking into consideration the advantages of a trimmed grid in terms of quality a trimmed mesh is pre-
sented in Figure 3.7.
Figure 3.7 – Detail of a trimmed mesh of around 4Milliion cells on the left and the corresponding cell
quality parameter on the right (Geometry B)
An overall view of the wind tunnel geometry is presented in Figure 3.8
Figure 3.8 - Cell quality parameter on a trimmed mesh with 4 Million cells (Geometry B)
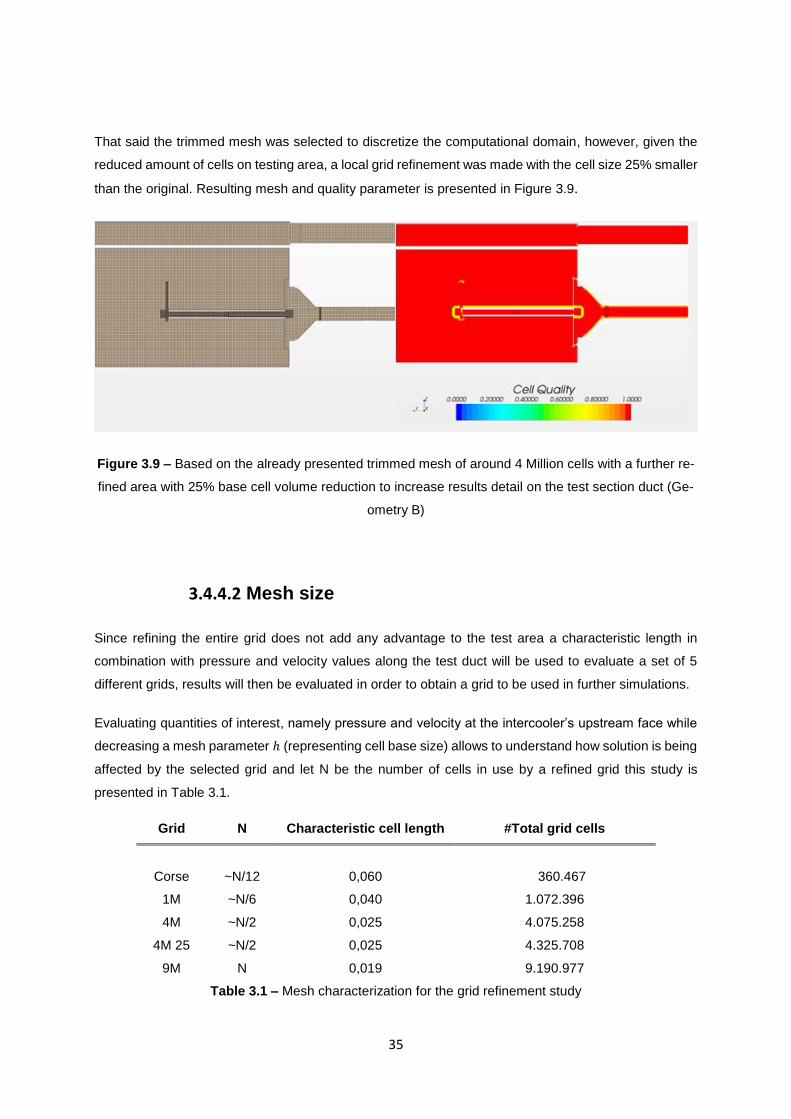
35
That said the trimmed mesh was selected to discretize the computational domain, however, given the
reduced amount of cells on testing area, a local grid refinement was made with the cell size 25% smaller
than the original. Resulting mesh and quality parameter is presented in Figure 3.9.
Figure 3.9 – Based on the already presented trimmed mesh of around 4 Million cells with a further re-
fined area with 25% base cell volume reduction to increase results detail on the test section duct (Ge-
ometry B)
3.4.4.2 Mesh size
Since refining the entire grid does not add any advantage to the test area a characteristic length in
combination with pressure and velocity values along the test duct will be used to evaluate a set of 5
different grids, results will then be evaluated in order to obtain a grid to be used in further simulations.
Evaluating quantities of interest, namely pressure and velocity at the intercooler’s upstream face while
decreasing a mesh parameter ℎ (representing cell base size) allows to understand how solution is being
affected by the selected grid and let N be the number of cells in use by a refined grid this study is
presented in Table 3.1.
Grid N Characteristic cell length #Total grid cells
Corse
~N/12
0,060 360.467
1M ~N/6 0,040 1.072.396
4M ~N/2 0,025 4.075.258
4M 25 ~N/2 0,025 4.325.708
9M N 0,019 9.190.977
Table 3.1 – Mesh characterization for the grid refinement study
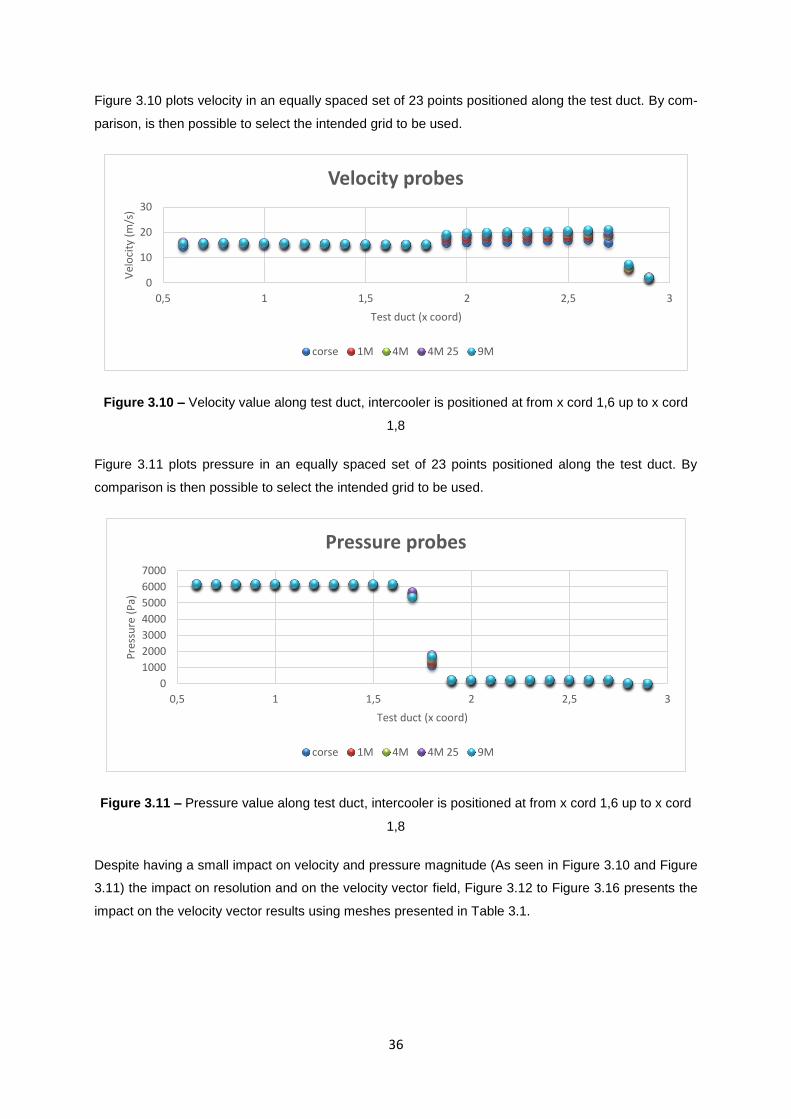
36
Figure 3.10 plots velocity in an equally spaced set of 23 points positioned along the test duct. By com-
parison, is then possible to select the intended grid to be used.
Figure 3.10 – Velocity value along test duct, intercooler is positioned at from x cord 1,6 up to x cord
1,8
Figure 3.11 plots pressure in an equally spaced set of 23 points positioned along the test duct. By
comparison is then possible to select the intended grid to be used.
Figure 3.11 – Pressure value along test duct, intercooler is positioned at from x cord 1,6 up to x cord
1,8
Despite having a small impact on velocity and pressure magnitude (As seen in Figure 3.10 and Figure
3.11) the impact on resolution and on the velocity vector field, Figure 3.12 to Figure 3.16 presents the
impact on the velocity vector results using meshes presented in Table 3.1.
0
10
20
30
0,5 1 1,5 2 2,5 3
Vel
oci
ty (
m/s
)
Test duct (x coord)
Velocity probes
corse 1M 4M 4M 25 9M
0
1000
2000
3000
4000
5000
6000
7000
0,5 1 1,5 2 2,5 3
Pre
ssu
re (
Pa)
Test duct (x coord)
Pressure probes
corse 1M 4M 4M 25 9M

37
Figure 3.12 - Velocity vector plotted on already presented coarse mesh.
Figure 3.13 - Velocity vector plotted on mesh 1M
Figure 3.14 - Velocity vector plotted on already presented 4M mesh
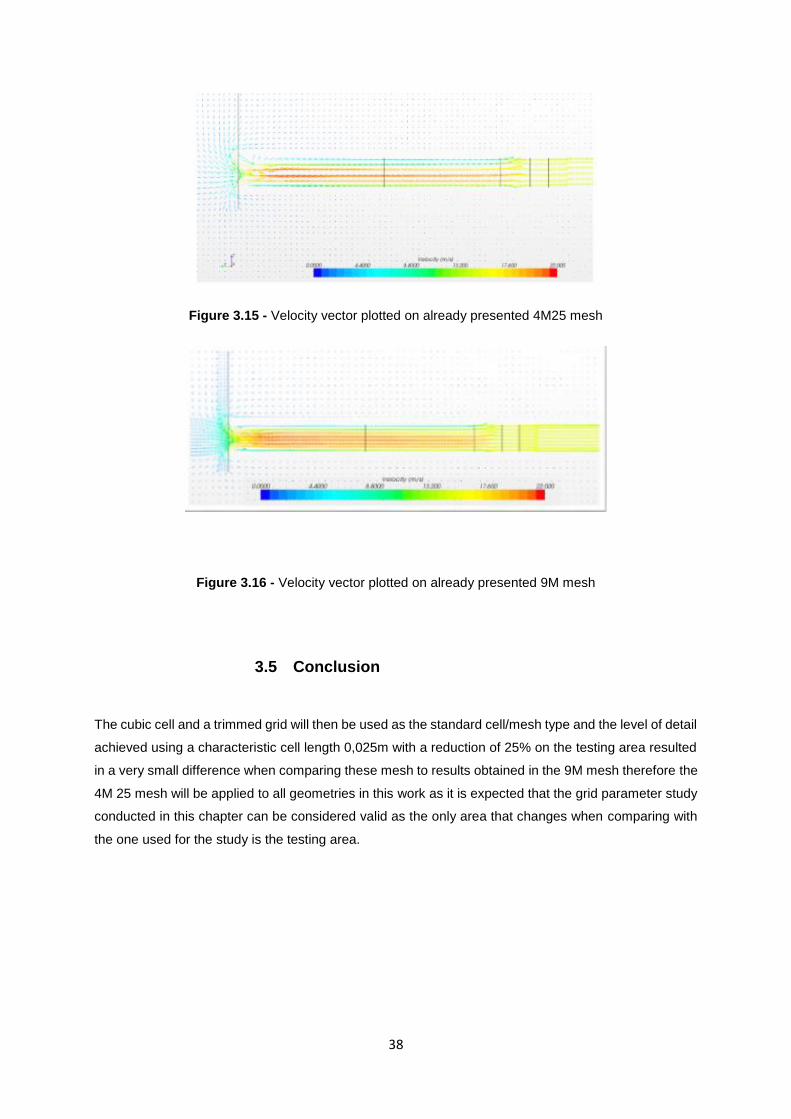
38
Figure 3.15 - Velocity vector plotted on already presented 4M25 mesh
Figure 3.16 - Velocity vector plotted on already presented 9M mesh
3.5 Conclusion
The cubic cell and a trimmed grid will then be used as the standard cell/mesh type and the level of detail
achieved using a characteristic cell length 0,025m with a reduction of 25% on the testing area resulted
in a very small difference when comparing these mesh to results obtained in the 9M mesh therefore the
4M 25 mesh will be applied to all geometries in this work as it is expected that the grid parameter study
conducted in this chapter can be considered valid as the only area that changes when comparing with
the one used for the study is the testing area.
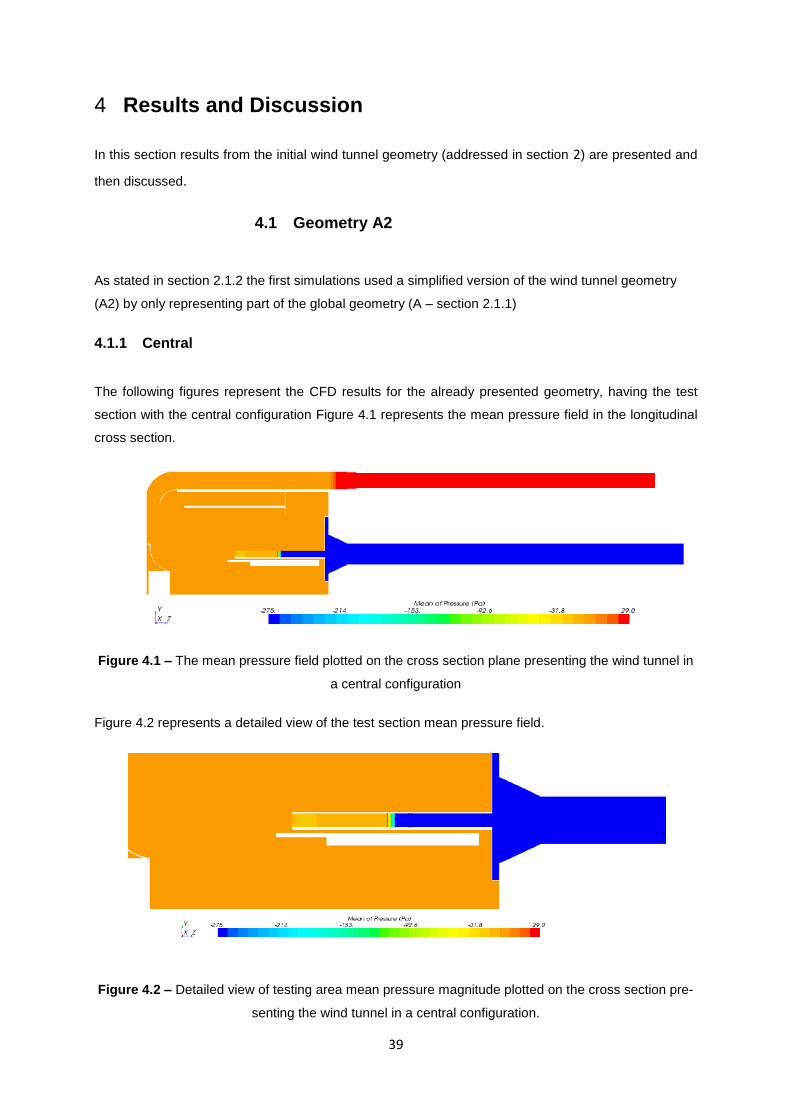
39
4 Results and Discussion
In this section results from the initial wind tunnel geometry (addressed in section 2) are presented and
then discussed.
4.1 Geometry A2
As stated in section 2.1.2 the first simulations used a simplified version of the wind tunnel geometry
(A2) by only representing part of the global geometry (A – section 2.1.1)
4.1.1 Central
The following figures represent the CFD results for the already presented geometry, having the test
section with the central configuration Figure 4.1 represents the mean pressure field in the longitudinal
cross section.
Figure 4.1 – The mean pressure field plotted on the cross section plane presenting the wind tunnel in
a central configuration
Figure 4.2 represents a detailed view of the test section mean pressure field.
Figure 4.2 – Detailed view of testing area mean pressure magnitude plotted on the cross section pre-
senting the wind tunnel in a central configuration.
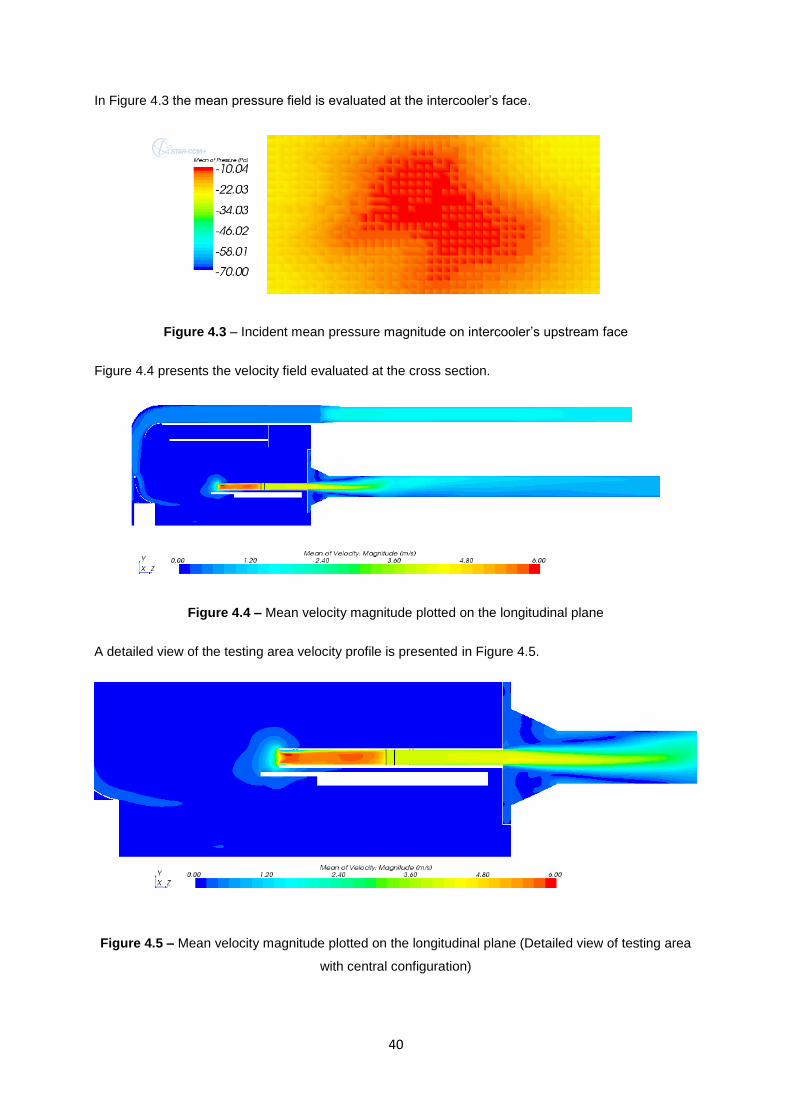
40
In Figure 4.3 the mean pressure field is evaluated at the intercooler’s face.
Figure 4.3 – Incident mean pressure magnitude on intercooler’s upstream face
Figure 4.4 presents the velocity field evaluated at the cross section.
Figure 4.4 – Mean velocity magnitude plotted on the longitudinal plane
A detailed view of the testing area velocity profile is presented in Figure 4.5.
Figure 4.5 – Mean velocity magnitude plotted on the longitudinal plane (Detailed view of testing area
with central configuration)
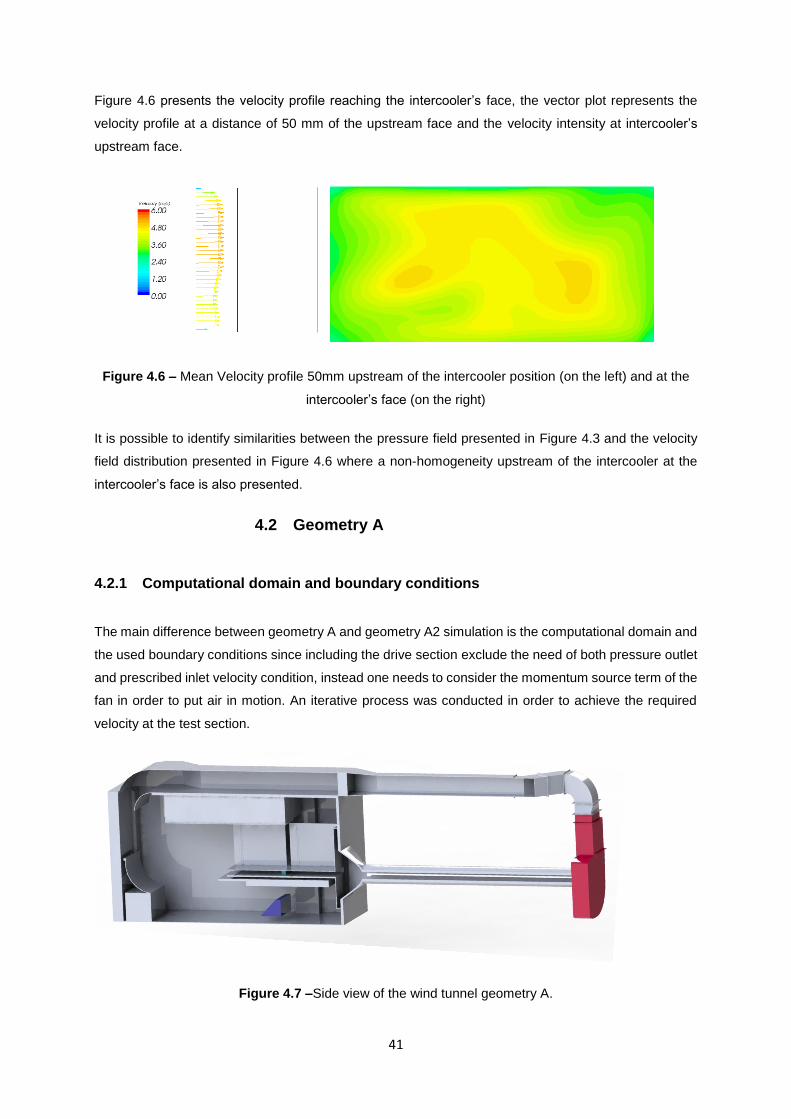
41
Figure 4.6 presents the velocity profile reaching the intercooler’s face, the vector plot represents the
velocity profile at a distance of 50 mm of the upstream face and the velocity intensity at intercooler’s
upstream face.
Figure 4.6 – Mean Velocity profile 50mm upstream of the intercooler position (on the left) and at the
intercooler’s face (on the right)
It is possible to identify similarities between the pressure field presented in Figure 4.3 and the velocity
field distribution presented in Figure 4.6 where a non-homogeneity upstream of the intercooler at the
intercooler’s face is also presented.
4.2 Geometry A
4.2.1 Computational domain and boundary conditions
The main difference between geometry A and geometry A2 simulation is the computational domain and
the used boundary conditions since including the drive section exclude the need of both pressure outlet
and prescribed inlet velocity condition, instead one needs to consider the momentum source term of the
fan in order to put air in motion. An iterative process was conducted in order to achieve the required
velocity at the test section.
Figure 4.7 –Side view of the wind tunnel geometry A.
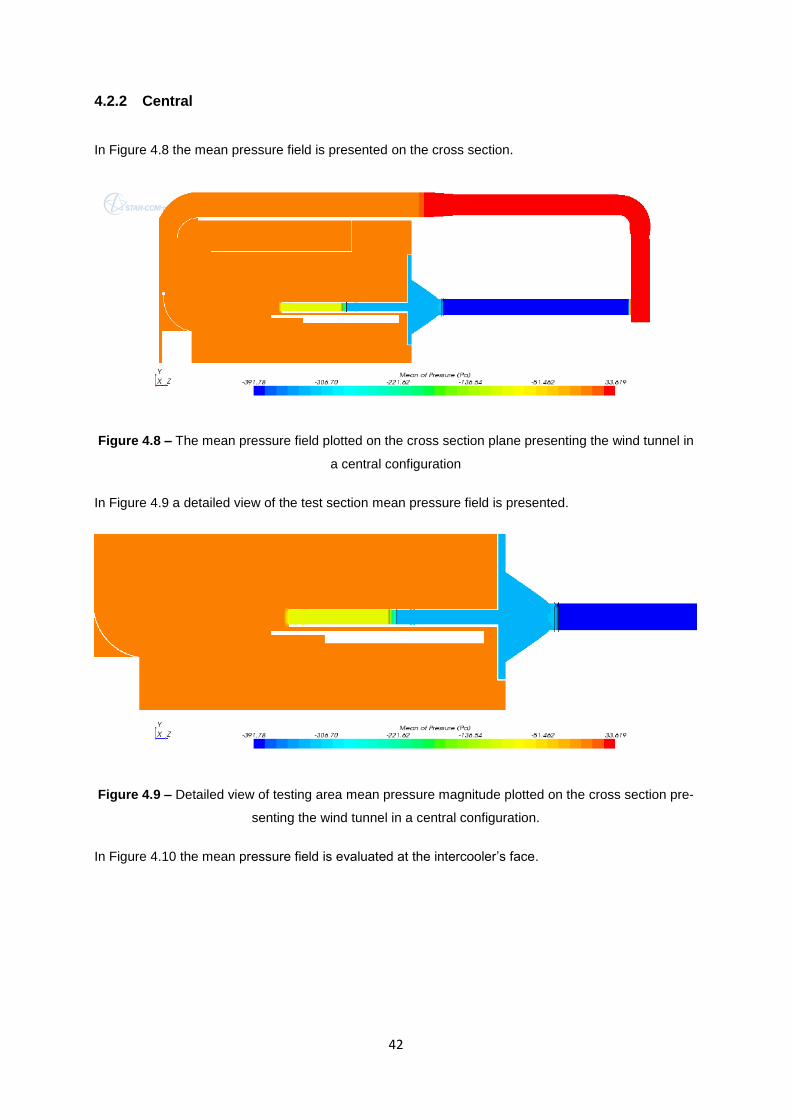
42
4.2.2 Central
In Figure 4.8 the mean pressure field is presented on the cross section.
Figure 4.8 – The mean pressure field plotted on the cross section plane presenting the wind tunnel in
a central configuration
In Figure 4.9 a detailed view of the test section mean pressure field is presented.
Figure 4.9 – Detailed view of testing area mean pressure magnitude plotted on the cross section pre-
senting the wind tunnel in a central configuration.
In Figure 4.10 the mean pressure field is evaluated at the intercooler’s face.
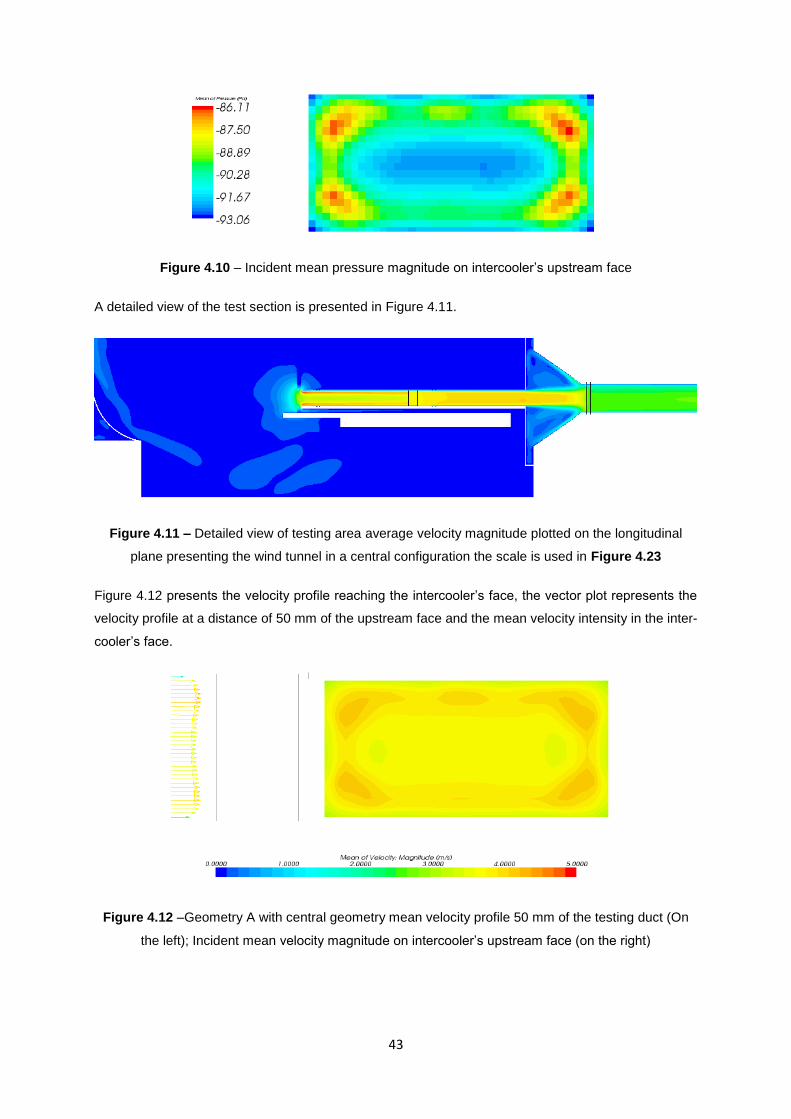
43
Figure 4.10 – Incident mean pressure magnitude on intercooler’s upstream face
A detailed view of the test section is presented in Figure 4.11.
Figure 4.11 – Detailed view of testing area average velocity magnitude plotted on the longitudinal
plane presenting the wind tunnel in a central configuration the scale is used in Figure 4.23
Figure 4.12 presents the velocity profile reaching the intercooler’s face, the vector plot represents the
velocity profile at a distance of 50 mm of the upstream face and the mean velocity intensity in the inter-
cooler’s face.
Figure 4.12 –Geometry A with central geometry mean velocity profile 50 mm of the testing duct (On
the left); Incident mean velocity magnitude on intercooler’s upstream face (on the right)
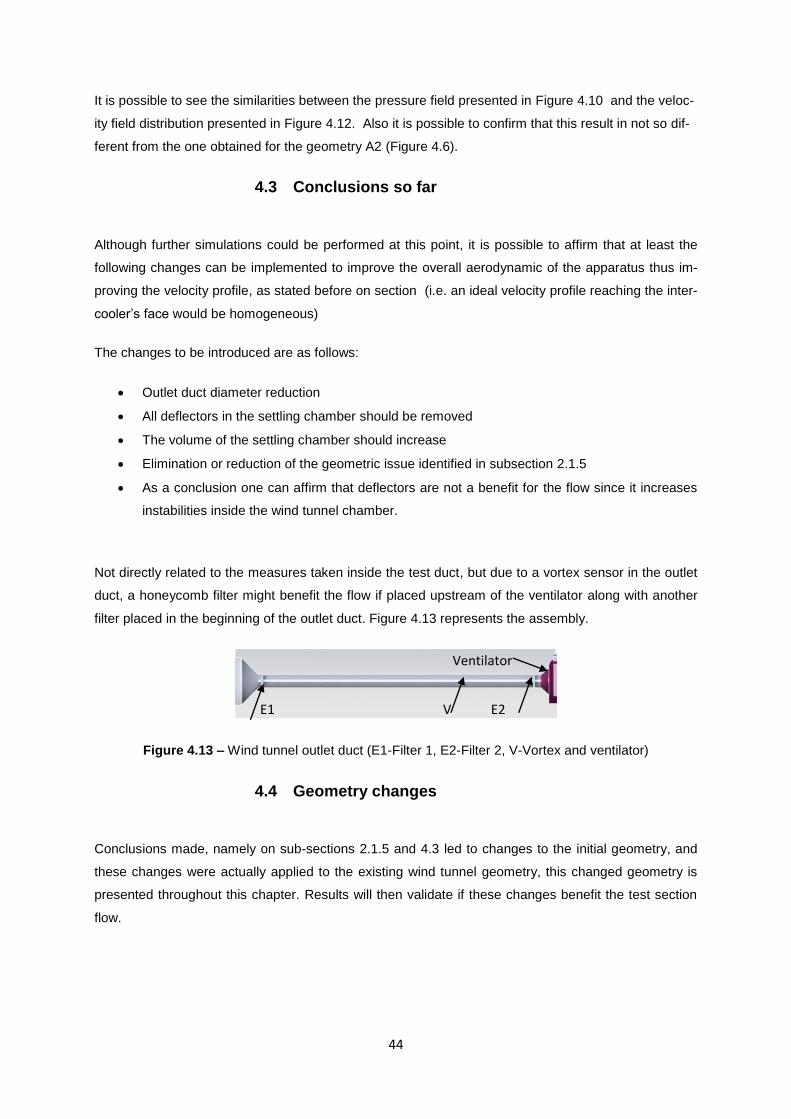
44
It is possible to see the similarities between the pressure field presented in Figure 4.10 and the veloc-
ity field distribution presented in Figure 4.12. Also it is possible to confirm that this result in not so dif-
ferent from the one obtained for the geometry A2 (Figure 4.6).
4.3 Conclusions so far
Although further simulations could be performed at this point, it is possible to affirm that at least the
following changes can be implemented to improve the overall aerodynamic of the apparatus thus im-
proving the velocity profile, as stated before on section (i.e. an ideal velocity profile reaching the inter-
cooler’s face would be homogeneous)
The changes to be introduced are as follows:
Outlet duct diameter reduction
All deflectors in the settling chamber should be removed
The volume of the settling chamber should increase
Elimination or reduction of the geometric issue identified in subsection 2.1.5
As a conclusion one can affirm that deflectors are not a benefit for the flow since it increases
instabilities inside the wind tunnel chamber.
Not directly related to the measures taken inside the test duct, but due to a vortex sensor in the outlet
duct, a honeycomb filter might benefit the flow if placed upstream of the ventilator along with another
filter placed in the beginning of the outlet duct. Figure 4.13 represents the assembly.
Figure 4.13 – Wind tunnel outlet duct (E1-Filter 1, E2-Filter 2, V-Vortex and ventilator)
4.4 Geometry changes
Conclusions made, namely on sub-sections 2.1.5 and 4.3 led to changes to the initial geometry, and
these changes were actually applied to the existing wind tunnel geometry, this changed geometry is
presented throughout this chapter. Results will then validate if these changes benefit the test section
flow.
E1 E2 V
Ventilator

45
4.5 Geometry B
The 3D module was changed to accommodate the new geometry where the outlet duct diameter was
reduced from 500m to 300mm, all deflectors were removed, the overall volume of the settling chamber
increased, the concrete column was removed, the misalignment between the inlet and outlet duct was
corrected and the heat exchangers (coolers) were merged with the inlet duct reducing the secondary
flows within the settling chamber, the resulting geometry is presented in the next figures.
Figure 4.14 – Wind tunnel cross section where it is possible to identify the Settling Chamber (A), the
Test Section (B and Cyan colored), the Air Cooler (C), the Drive Section (D and Magenta colored))
and two additional pressure losses (E1 and E2)
The ceiling has been changed from the initial geometry to accommodate both the inlet and the cooler
that control air temperature.
Figure 4.15 – Wind tunnel top view, ceiling heat exchangers and inlet duct.
The two deflectors presented in Figure 2.7 were removed and the new front view is presented in Figure
4.16, it is also possible to see that a new duct appears on the right, this duct is a pipe and cabling tray.
D
B
A
C
E1 E2

46
Figure 4.16 – Wind tunnel geometry front view, ceiling heat exchangers (A) and cable tray (B).
In Figure 4.17 the air flow motion is sketched.
Figure 4.17- Sketch of the air flow the Drive Section is colored in Magenta
4.6 Wind tunnel test section
Despite all changes the testing section remained unchanged hence all configurations already presented
are still possible to be tested, nevertheless it is still interesting to have an insight of it after all these
changes, this can be found in Figure 4.18 containing the already presented changes made to the test
section surroundings.
Figure 4.18 – Test section geometry configuration (clockwise starting from top left: central, box, full-
face and down face)
A B
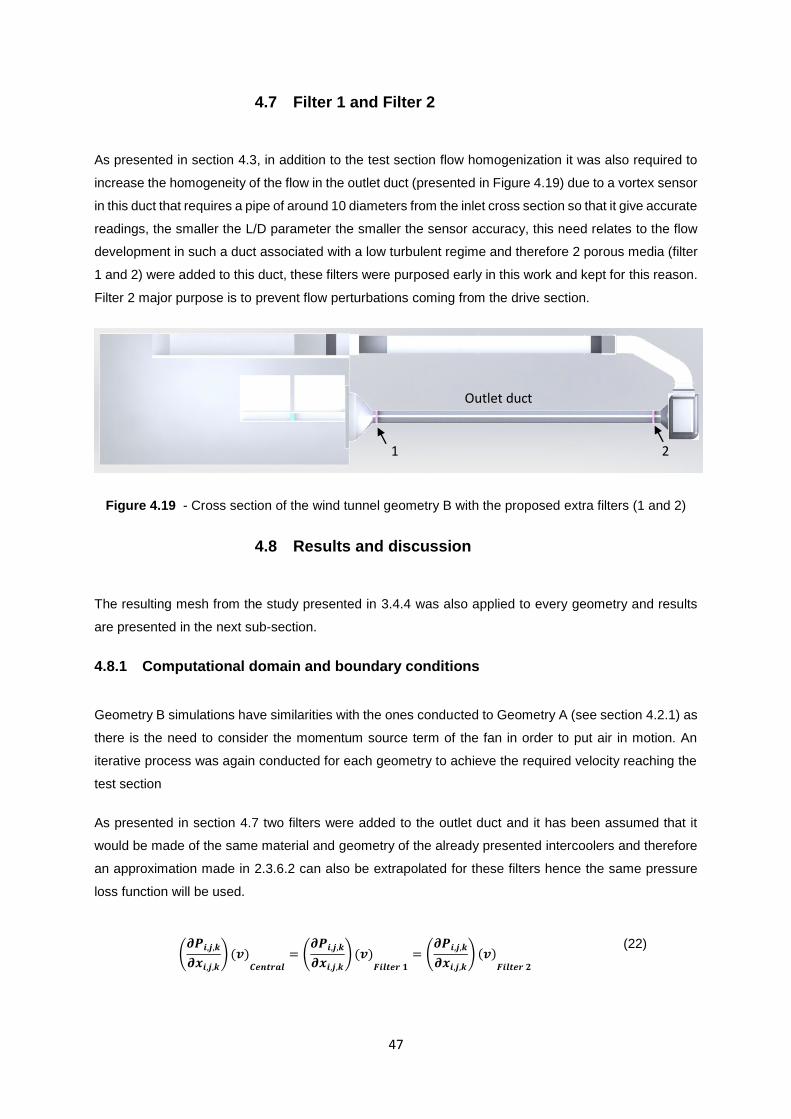
47
4.7 Filter 1 and Filter 2
As presented in section 4.3, in addition to the test section flow homogenization it was also required to
increase the homogeneity of the flow in the outlet duct (presented in Figure 4.19) due to a vortex sensor
in this duct that requires a pipe of around 10 diameters from the inlet cross section so that it give accurate
readings, the smaller the L/D parameter the smaller the sensor accuracy, this need relates to the flow
development in such a duct associated with a low turbulent regime and therefore 2 porous media (filter
1 and 2) were added to this duct, these filters were purposed early in this work and kept for this reason.
Filter 2 major purpose is to prevent flow perturbations coming from the drive section.
Figure 4.19 - Cross section of the wind tunnel geometry B with the proposed extra filters (1 and 2)
4.8 Results and discussion
The resulting mesh from the study presented in 3.4.4 was also applied to every geometry and results
are presented in the next sub-section.
4.8.1 Computational domain and boundary conditions
Geometry B simulations have similarities with the ones conducted to Geometry A (see section 4.2.1) as
there is the need to consider the momentum source term of the fan in order to put air in motion. An
iterative process was again conducted for each geometry to achieve the required velocity reaching the
test section
As presented in section 4.7 two filters were added to the outlet duct and it has been assumed that it
would be made of the same material and geometry of the already presented intercoolers and therefore
an approximation made in 2.3.6.2 can also be extrapolated for these filters hence the same pressure
loss function will be used.
(𝝏𝑷𝒊,𝒋,𝒌
𝝏𝒙𝒊,𝒋,𝒌
) (𝒗)𝑪𝒆𝒏𝒕𝒓𝒂𝒍
= (𝝏𝑷𝒊,𝒋,𝒌
𝝏𝒙𝒊,𝒋,𝒌
) (𝒗)𝑭𝒊𝒍𝒕𝒆𝒓 𝟏
= (𝝏𝑷𝒊,𝒋,𝒌
𝝏𝒙𝒊,𝒋,𝒌
) (𝒗)𝑭𝒊𝒍𝒕𝒆𝒓 𝟐
(22)
Outlet duct
1 2
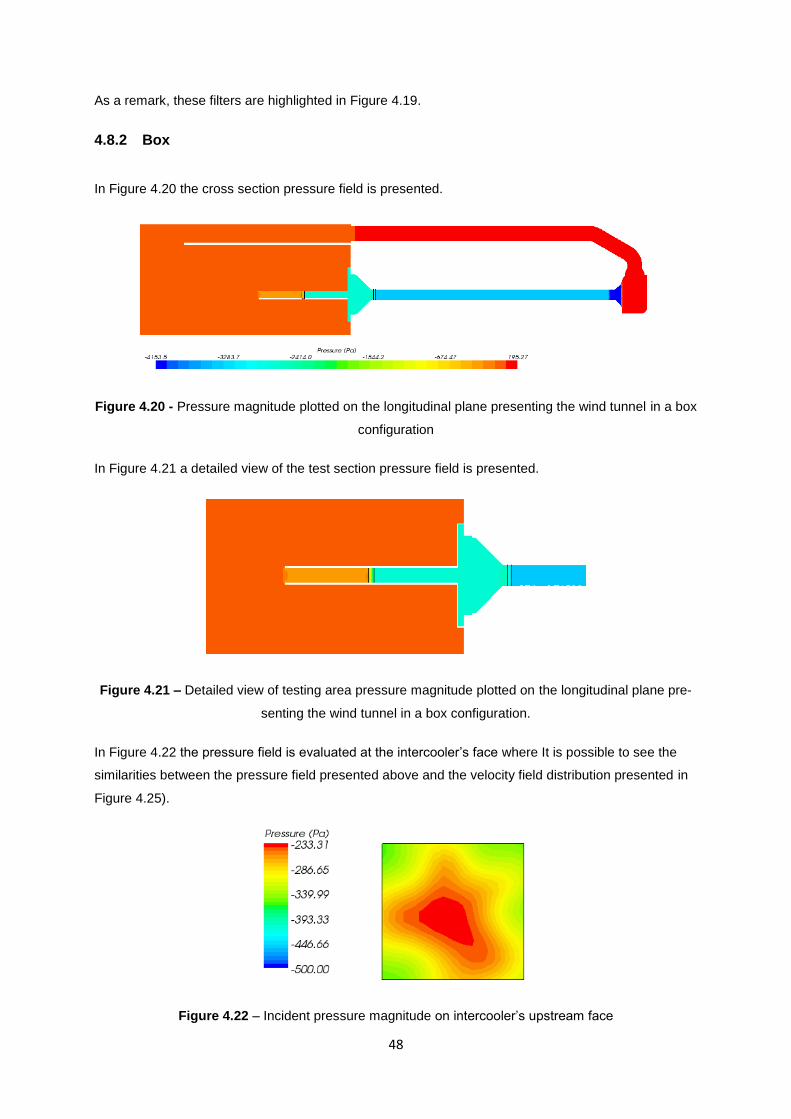
48
As a remark, these filters are highlighted in Figure 4.19.
4.8.2 Box
In Figure 4.20 the cross section pressure field is presented.
Figure 4.20 - Pressure magnitude plotted on the longitudinal plane presenting the wind tunnel in a box
configuration
In Figure 4.21 a detailed view of the test section pressure field is presented.
Figure 4.21 – Detailed view of testing area pressure magnitude plotted on the longitudinal plane pre-
senting the wind tunnel in a box configuration.
In Figure 4.22 the pressure field is evaluated at the intercooler’s face where It is possible to see the
similarities between the pressure field presented above and the velocity field distribution presented in
Figure 4.25).
Figure 4.22 – Incident pressure magnitude on intercooler’s upstream face
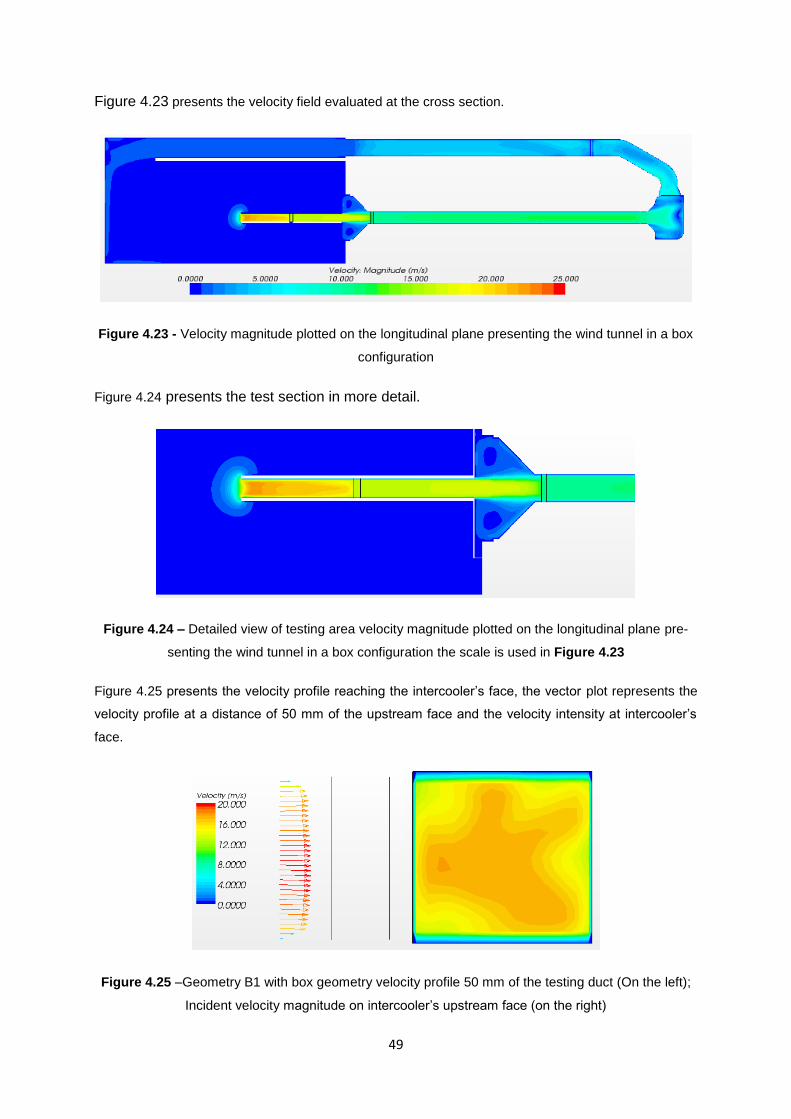
49
Figure 4.23 presents the velocity field evaluated at the cross section.
Figure 4.23 - Velocity magnitude plotted on the longitudinal plane presenting the wind tunnel in a box
configuration
Figure 4.24 presents the test section in more detail.
Figure 4.24 – Detailed view of testing area velocity magnitude plotted on the longitudinal plane pre-
senting the wind tunnel in a box configuration the scale is used in Figure 4.23
Figure 4.25 presents the velocity profile reaching the intercooler’s face, the vector plot represents the
velocity profile at a distance of 50 mm of the upstream face and the velocity intensity at intercooler’s
face.
Figure 4.25 –Geometry B1 with box geometry velocity profile 50 mm of the testing duct (On the left);
Incident velocity magnitude on intercooler’s upstream face (on the right)
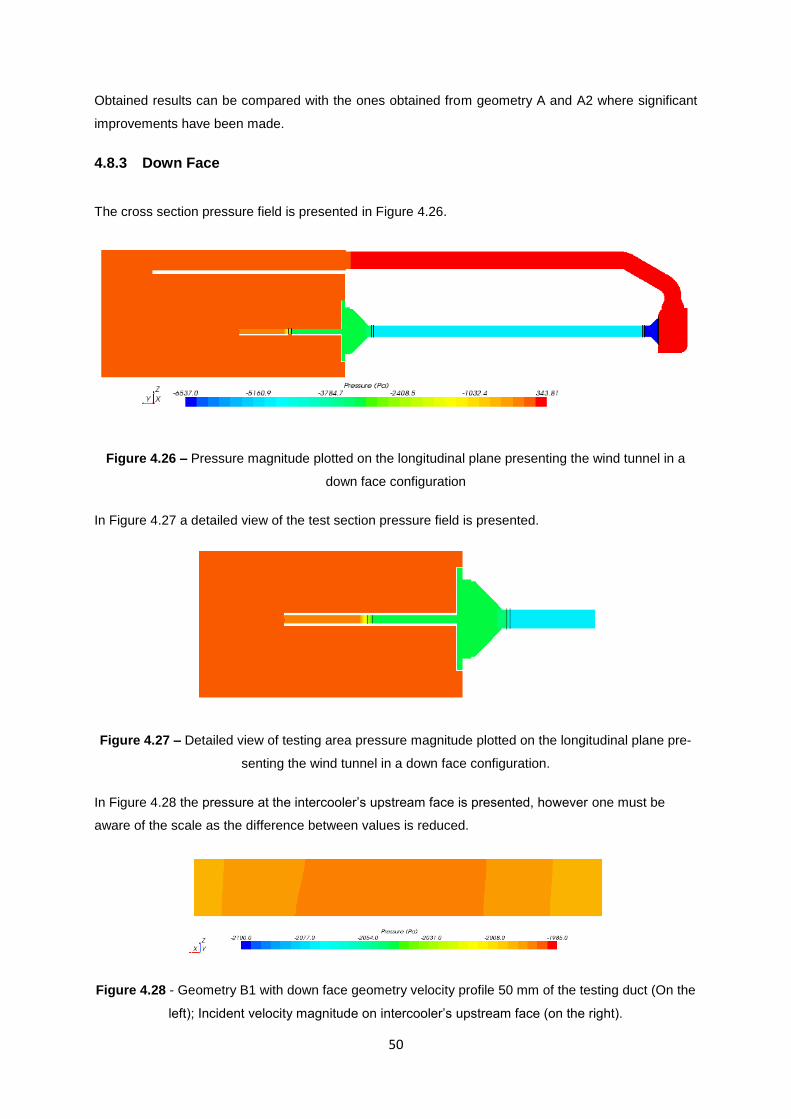
50
Obtained results can be compared with the ones obtained from geometry A and A2 where significant
improvements have been made.
4.8.3 Down Face
The cross section pressure field is presented in Figure 4.26.
Figure 4.26 – Pressure magnitude plotted on the longitudinal plane presenting the wind tunnel in a
down face configuration
In Figure 4.27 a detailed view of the test section pressure field is presented.
Figure 4.27 – Detailed view of testing area pressure magnitude plotted on the longitudinal plane pre-
senting the wind tunnel in a down face configuration.
In Figure 4.28 the pressure at the intercooler’s upstream face is presented, however one must be
aware of the scale as the difference between values is reduced.
Figure 4.28 - Geometry B1 with down face geometry velocity profile 50 mm of the testing duct (On the
left); Incident velocity magnitude on intercooler’s upstream face (on the right).
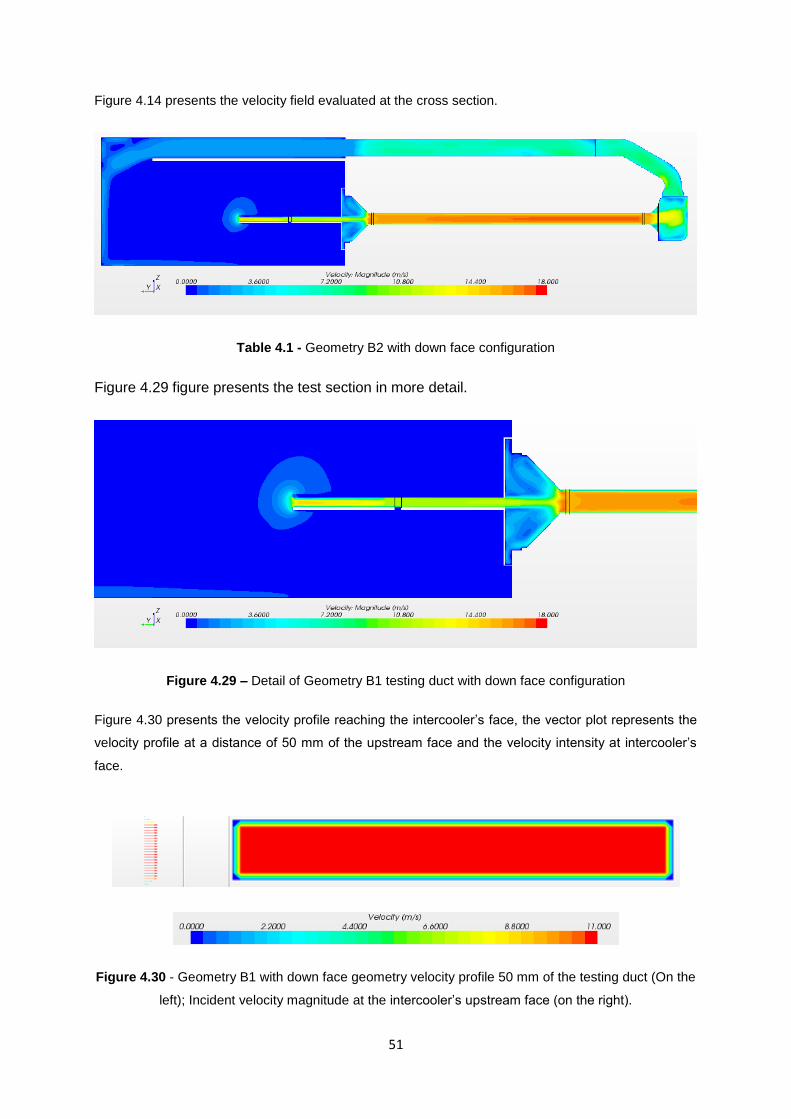
51
Figure 4.14 presents the velocity field evaluated at the cross section.
Table 4.1 - Geometry B2 with down face configuration
Figure 4.29 figure presents the test section in more detail.
Figure 4.29 – Detail of Geometry B1 testing duct with down face configuration
Figure 4.30 presents the velocity profile reaching the intercooler’s face, the vector plot represents the
velocity profile at a distance of 50 mm of the upstream face and the velocity intensity at intercooler’s
face.
Figure 4.30 - Geometry B1 with down face geometry velocity profile 50 mm of the testing duct (On the
left); Incident velocity magnitude at the intercooler’s upstream face (on the right).

52
It is not possible to see the similarities between the pressure field presented (Figure 4.28) and the ve-
locity field distribution presented in Figure 4.30 as stated already this is due to selected scale for this
figure, an additional velocity plot was made on Figure 4.31 where this similarity can be find.
Figure 4.31 - Geometry B1 with down face geometry incident velocity magnitude at the intercooler’s
upstream face.
It was expected to have better results in the down face geometry given the aspect ratio of this configu-
ration.
4.8.4 Conclusions
From the results presented in this chapter it is possible to conclude that the air flow in the settling cham-
ber has smaller fluctuations due to the absence of deflectors and the heat exchangers (coolers) than in
previous geometries and the increase in volume, the outlet duct flow is now more homogeneous due
the presence of filter 1, the air flow is now more symmetric although such advantages are still difficult to
see on the test section.
Having that said one can confirm that geometry changes represent already a major improvement in the
air flow across the wind tunnel. Results presented in this chapter for down face geometry already present
a homogeneous flow, as for the rest aspect ratios, there is still room for improvement, this subject is
addressed in the next chapter.
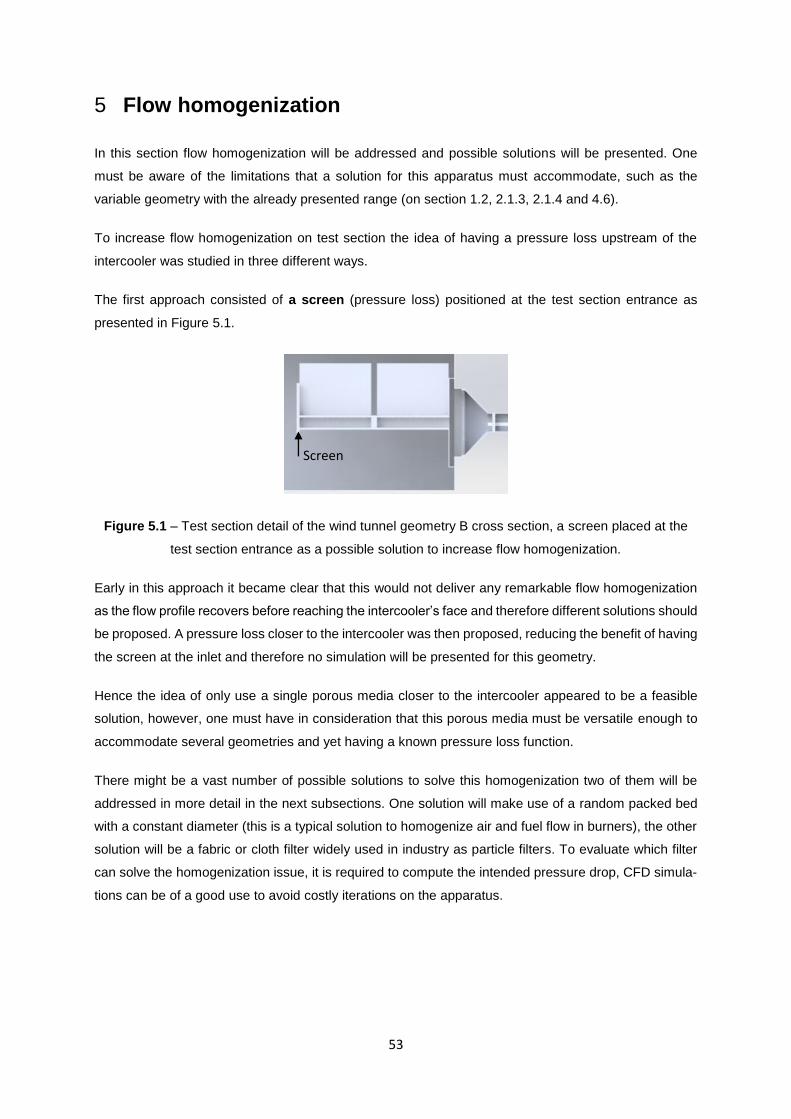
53
5 Flow homogenization
In this section flow homogenization will be addressed and possible solutions will be presented. One
must be aware of the limitations that a solution for this apparatus must accommodate, such as the
variable geometry with the already presented range (on section 1.2, 2.1.3, 2.1.4 and 4.6).
To increase flow homogenization on test section the idea of having a pressure loss upstream of the
intercooler was studied in three different ways.
The first approach consisted of a screen (pressure loss) positioned at the test section entrance as
presented in Figure 5.1.
Figure 5.1 – Test section detail of the wind tunnel geometry B cross section, a screen placed at the
test section entrance as a possible solution to increase flow homogenization.
Early in this approach it became clear that this would not deliver any remarkable flow homogenization
as the flow profile recovers before reaching the intercooler’s face and therefore different solutions should
be proposed. A pressure loss closer to the intercooler was then proposed, reducing the benefit of having
the screen at the inlet and therefore no simulation will be presented for this geometry.
Hence the idea of only use a single porous media closer to the intercooler appeared to be a feasible
solution, however, one must have in consideration that this porous media must be versatile enough to
accommodate several geometries and yet having a known pressure loss function.
There might be a vast number of possible solutions to solve this homogenization two of them will be
addressed in more detail in the next subsections. One solution will make use of a random packed bed
with a constant diameter (this is a typical solution to homogenize air and fuel flow in burners), the other
solution will be a fabric or cloth filter widely used in industry as particle filters. To evaluate which filter
can solve the homogenization issue, it is required to compute the intended pressure drop, CFD simula-
tions can be of a good use to avoid costly iterations on the apparatus.
Screen
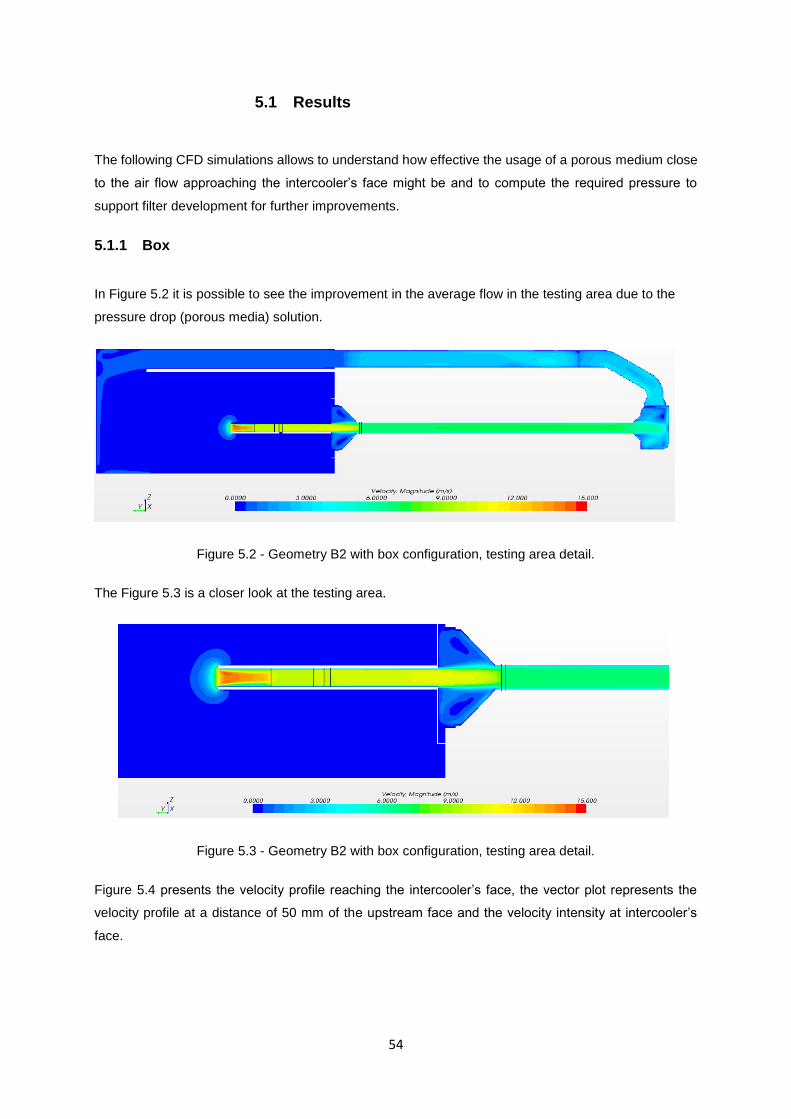
54
5.1 Results
The following CFD simulations allows to understand how effective the usage of a porous medium close
to the air flow approaching the intercooler’s face might be and to compute the required pressure to
support filter development for further improvements.
5.1.1 Box
In Figure 5.2 it is possible to see the improvement in the average flow in the testing area due to the
pressure drop (porous media) solution.
Figure 5.2 - Geometry B2 with box configuration, testing area detail.
The Figure 5.3 is a closer look at the testing area.
Figure 5.3 - Geometry B2 with box configuration, testing area detail.
Figure 5.4 presents the velocity profile reaching the intercooler’s face, the vector plot represents the
velocity profile at a distance of 50 mm of the upstream face and the velocity intensity at intercooler’s
face.
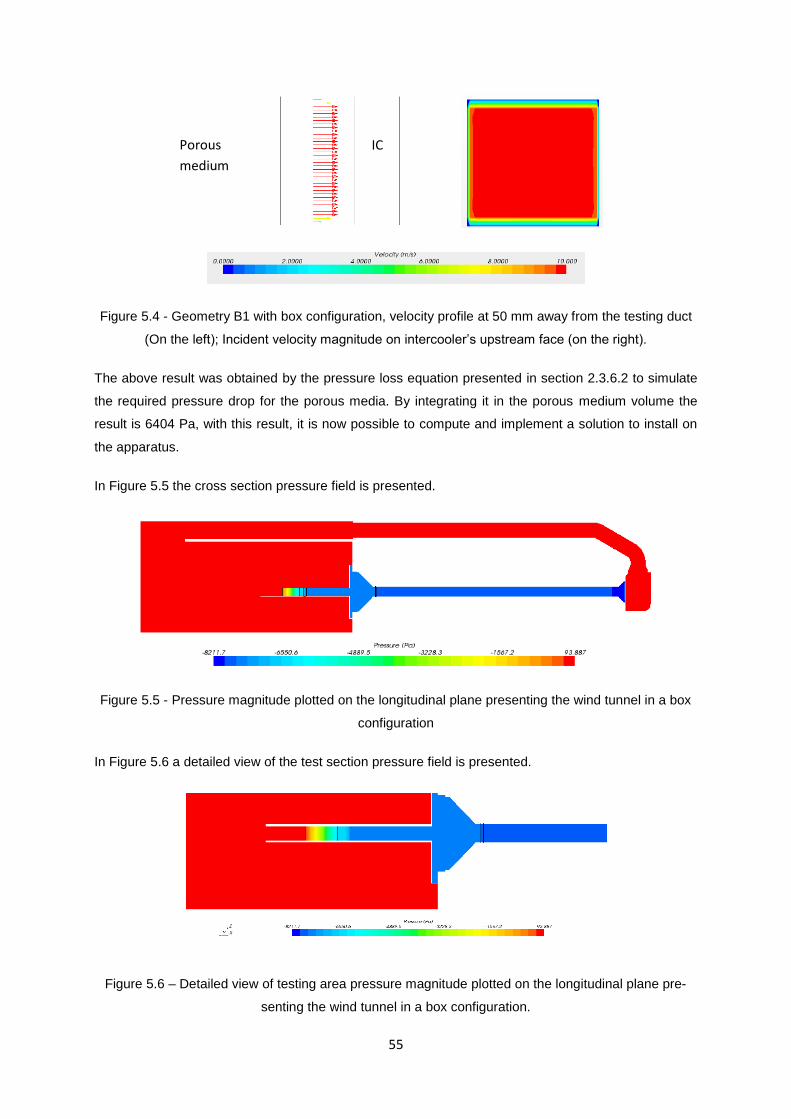
55
Figure 5.4 - Geometry B1 with box configuration, velocity profile at 50 mm away from the testing duct
(On the left); Incident velocity magnitude on intercooler’s upstream face (on the right).
The above result was obtained by the pressure loss equation presented in section 2.3.6.2 to simulate
the required pressure drop for the porous media. By integrating it in the porous medium volume the
result is 6404 Pa, with this result, it is now possible to compute and implement a solution to install on
the apparatus.
In Figure 5.5 the cross section pressure field is presented.
Figure 5.5 - Pressure magnitude plotted on the longitudinal plane presenting the wind tunnel in a box
configuration
In Figure 5.6 a detailed view of the test section pressure field is presented.
Figure 5.6 – Detailed view of testing area pressure magnitude plotted on the longitudinal plane pre-
senting the wind tunnel in a box configuration.
Porous
medium
IC
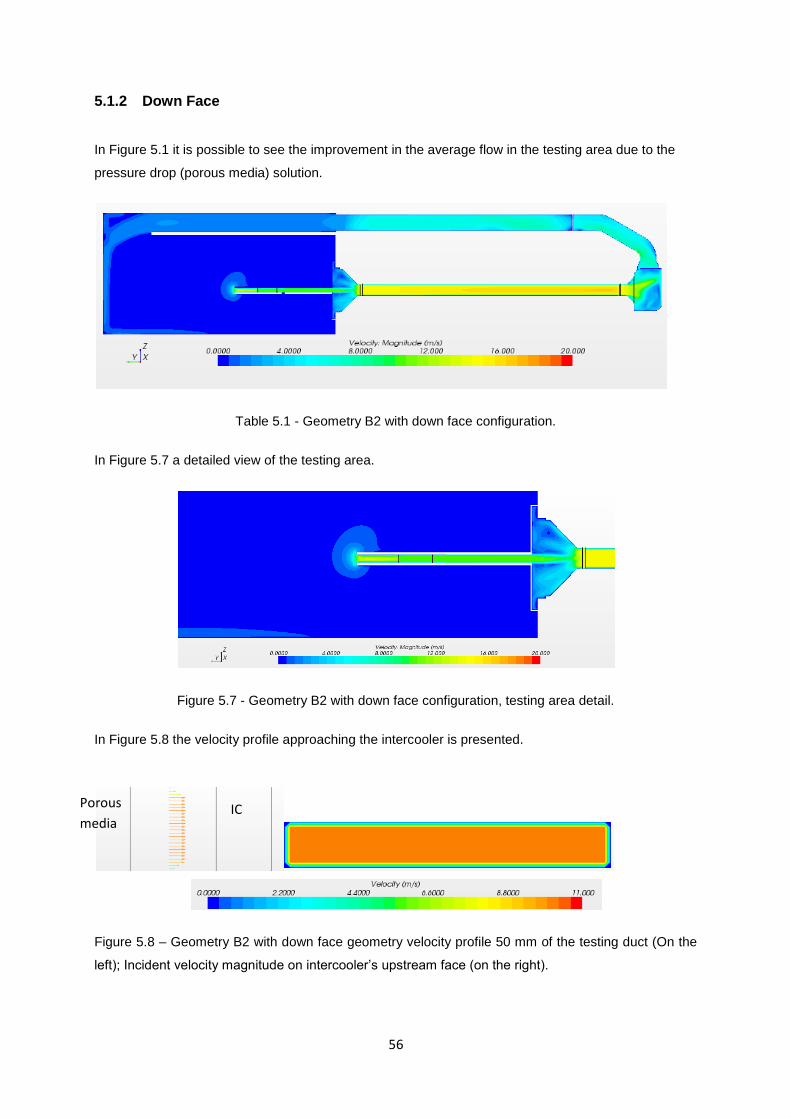
56
5.1.2 Down Face
In Figure 5.1 it is possible to see the improvement in the average flow in the testing area due to the
pressure drop (porous media) solution.
Table 5.1 - Geometry B2 with down face configuration.
In Figure 5.7 a detailed view of the testing area.
Figure 5.7 - Geometry B2 with down face configuration, testing area detail.
In Figure 5.8 the velocity profile approaching the intercooler is presented.
Figure 5.8 – Geometry B2 with down face geometry velocity profile 50 mm of the testing duct (On the
left); Incident velocity magnitude on intercooler’s upstream face (on the right).
Porous
media IC
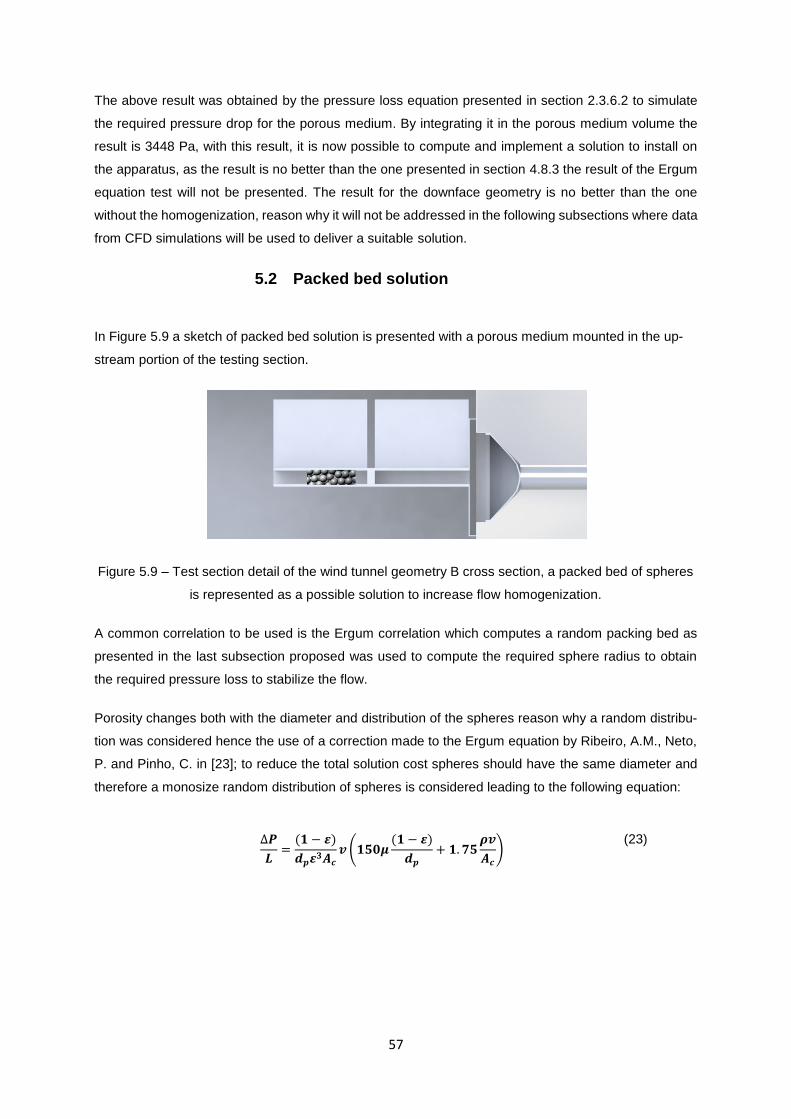
57
The above result was obtained by the pressure loss equation presented in section 2.3.6.2 to simulate
the required pressure drop for the porous medium. By integrating it in the porous medium volume the
result is 3448 Pa, with this result, it is now possible to compute and implement a solution to install on
the apparatus, as the result is no better than the one presented in section 4.8.3 the result of the Ergum
equation test will not be presented. The result for the downface geometry is no better than the one
without the homogenization, reason why it will not be addressed in the following subsections where data
from CFD simulations will be used to deliver a suitable solution.
5.2 Packed bed solution
In Figure 5.9 a sketch of packed bed solution is presented with a porous medium mounted in the up-
stream portion of the testing section.
Figure 5.9 – Test section detail of the wind tunnel geometry B cross section, a packed bed of spheres
is represented as a possible solution to increase flow homogenization.
A common correlation to be used is the Ergum correlation which computes a random packing bed as
presented in the last subsection proposed was used to compute the required sphere radius to obtain
the required pressure loss to stabilize the flow.
Porosity changes both with the diameter and distribution of the spheres reason why a random distribu-
tion was considered hence the use of a correction made to the Ergum equation by Ribeiro, A.M., Neto,
P. and Pinho, C. in [23]; to reduce the total solution cost spheres should have the same diameter and
therefore a monosize random distribution of spheres is considered leading to the following equation:
∆𝑷
𝑳=
(𝟏 − 𝜺)
𝒅𝒑𝜺𝟑𝑨𝒄
𝒗(𝟏𝟓𝟎𝝁(𝟏 − 𝜺)
𝒅𝒑
+ 𝟏. 𝟕𝟓𝝆𝒗
𝑨𝒄
) (23)
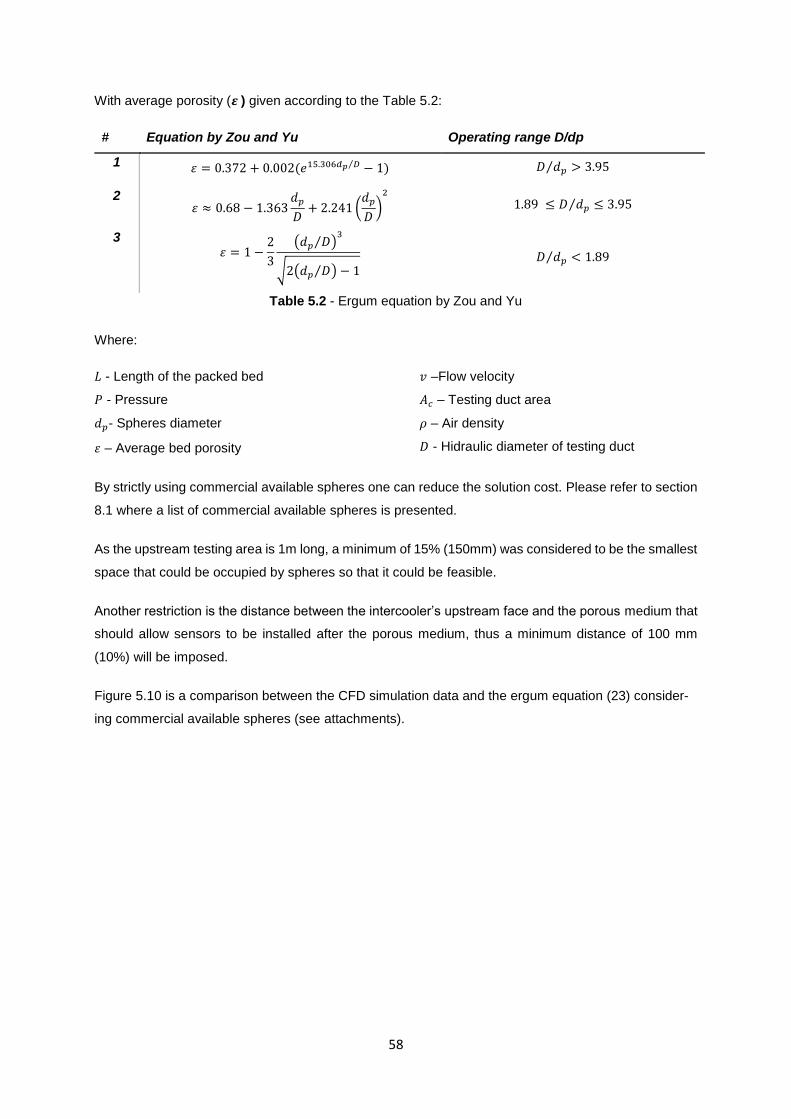
58
With average porosity (𝜺 ) given according to the Table 5.2:
# Equation by Zou and Yu Operating range D/dp
1 𝜀 = 0.372 + 0.002(𝑒15.306𝑑𝑝 𝐷⁄ − 1) 𝐷 𝑑𝑝⁄ > 3.95
2 𝜀 ≈ 0.68 − 1.363
𝑑𝑝
𝐷+ 2.241 (
𝑑𝑝
𝐷)
2
1.89 ≤ 𝐷 𝑑𝑝⁄ ≤ 3.95
3 𝜀 = 1 −
2
3
(𝑑𝑝 𝐷⁄ )3
√2(𝑑𝑝 𝐷⁄ ) − 1
𝐷 𝑑𝑝⁄ < 1.89
Table 5.2 - Ergum equation by Zou and Yu
Where:
𝐿 - Length of the packed bed
𝑃 - Pressure
𝑑𝑝- Spheres diameter
𝜀 – Average bed porosity
𝑣 –Flow velocity
𝐴𝑐 – Testing duct area
𝜌 – Air density
𝐷 - Hidraulic diameter of testing duct
By strictly using commercial available spheres one can reduce the solution cost. Please refer to section
8.1 where a list of commercial available spheres is presented.
As the upstream testing area is 1m long, a minimum of 15% (150mm) was considered to be the smallest
space that could be occupied by spheres so that it could be feasible.
Another restriction is the distance between the intercooler’s upstream face and the porous medium that
should allow sensors to be installed after the porous medium, thus a minimum distance of 100 mm
(10%) will be imposed.
Figure 5.10 is a comparison between the CFD simulation data and the ergum equation (23) consider-
ing commercial available spheres (see attachments).
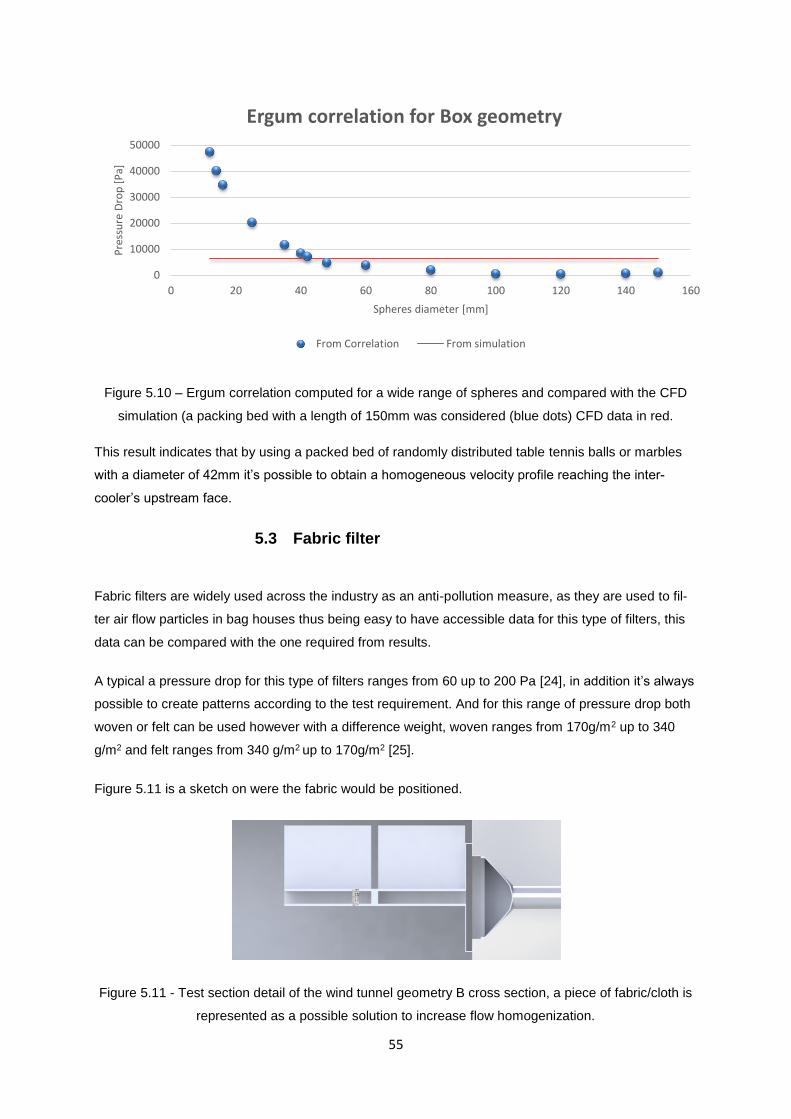
55
Figure 5.10 – Ergum correlation computed for a wide range of spheres and compared with the CFD
simulation (a packing bed with a length of 150mm was considered (blue dots) CFD data in red.
This result indicates that by using a packed bed of randomly distributed table tennis balls or marbles
with a diameter of 42mm it’s possible to obtain a homogeneous velocity profile reaching the inter-
cooler’s upstream face.
5.3 Fabric filter
Fabric filters are widely used across the industry as an anti-pollution measure, as they are used to fil-
ter air flow particles in bag houses thus being easy to have accessible data for this type of filters, this
data can be compared with the one required from results.
A typical a pressure drop for this type of filters ranges from 60 up to 200 Pa [24], in addition it’s always
possible to create patterns according to the test requirement. And for this range of pressure drop both
woven or felt can be used however with a difference weight, woven ranges from 170g/m2 up to 340
g/m2 and felt ranges from 340 g/m2 up to 170g/m2 [25].
Figure 5.11 is a sketch on were the fabric would be positioned.
Figure 5.11 - Test section detail of the wind tunnel geometry B cross section, a piece of fabric/cloth is
represented as a possible solution to increase flow homogenization.
0
10000
20000
30000
40000
50000
0 20 40 60 80 100 120 140 160
Pre
ssu
re D
rop
[P
a]
Spheres diameter [mm]
Ergum correlation for Box geometry
From Correlation From simulation
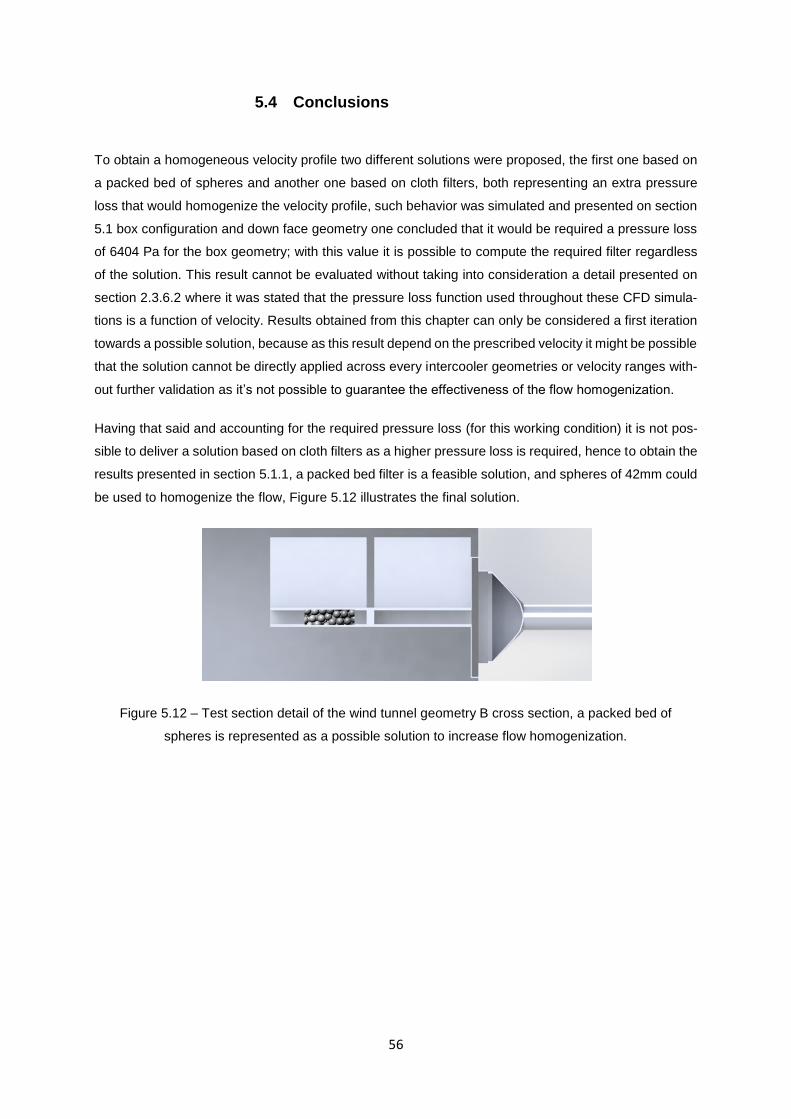
56
5.4 Conclusions
To obtain a homogeneous velocity profile two different solutions were proposed, the first one based on
a packed bed of spheres and another one based on cloth filters, both representing an extra pressure
loss that would homogenize the velocity profile, such behavior was simulated and presented on section
5.1 box configuration and down face geometry one concluded that it would be required a pressure loss
of 6404 Pa for the box geometry; with this value it is possible to compute the required filter regardless
of the solution. This result cannot be evaluated without taking into consideration a detail presented on
section 2.3.6.2 where it was stated that the pressure loss function used throughout these CFD simula-
tions is a function of velocity. Results obtained from this chapter can only be considered a first iteration
towards a possible solution, because as this result depend on the prescribed velocity it might be possible
that the solution cannot be directly applied across every intercooler geometries or velocity ranges with-
out further validation as it’s not possible to guarantee the effectiveness of the flow homogenization.
Having that said and accounting for the required pressure loss (for this working condition) it is not pos-
sible to deliver a solution based on cloth filters as a higher pressure loss is required, hence to obtain the
results presented in section 5.1.1, a packed bed filter is a feasible solution, and spheres of 42mm could
be used to homogenize the flow, Figure 5.12 illustrates the final solution.
Figure 5.12 – Test section detail of the wind tunnel geometry B cross section, a packed bed of
spheres is represented as a possible solution to increase flow homogenization.
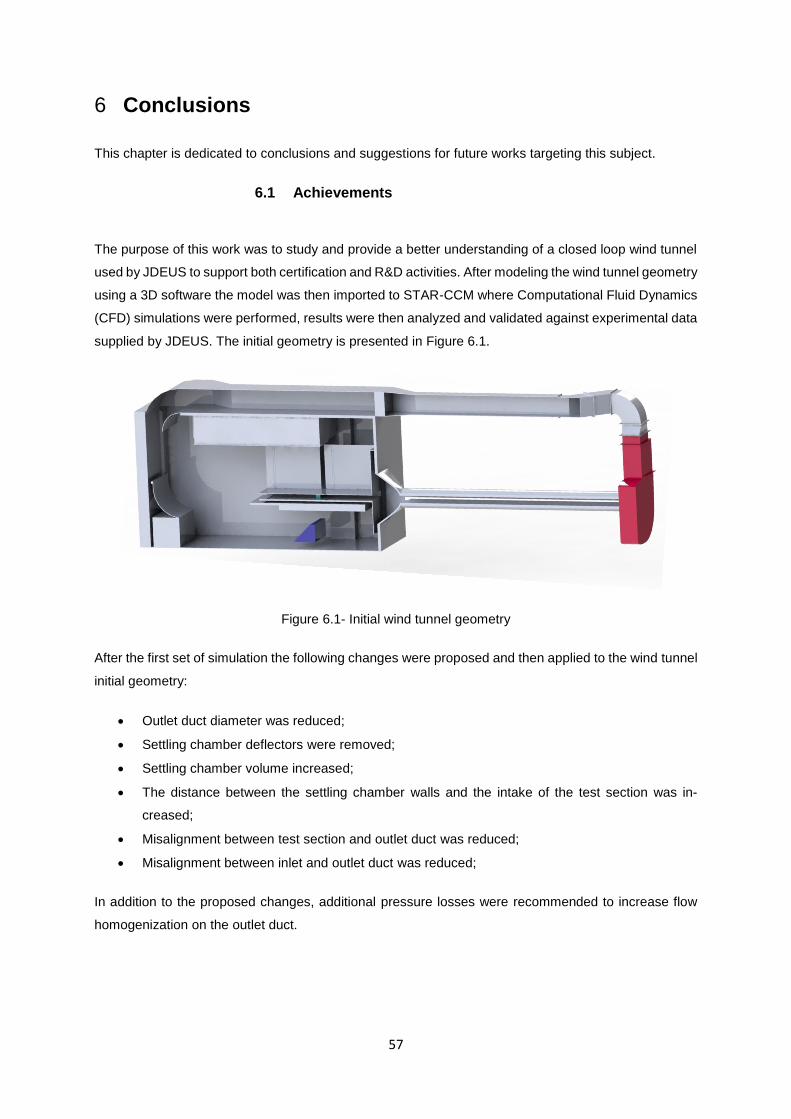
57
6 Conclusions
This chapter is dedicated to conclusions and suggestions for future works targeting this subject.
6.1 Achievements
The purpose of this work was to study and provide a better understanding of a closed loop wind tunnel
used by JDEUS to support both certification and R&D activities. After modeling the wind tunnel geometry
using a 3D software the model was then imported to STAR-CCM where Computational Fluid Dynamics
(CFD) simulations were performed, results were then analyzed and validated against experimental data
supplied by JDEUS. The initial geometry is presented in Figure 6.1.
Figure 6.1- Initial wind tunnel geometry
After the first set of simulation the following changes were proposed and then applied to the wind tunnel
initial geometry:
Outlet duct diameter was reduced;
Settling chamber deflectors were removed;
Settling chamber volume increased;
The distance between the settling chamber walls and the intake of the test section was in-
creased;
Misalignment between test section and outlet duct was reduced;
Misalignment between inlet and outlet duct was reduced;
In addition to the proposed changes, additional pressure losses were recommended to increase flow
homogenization on the outlet duct.
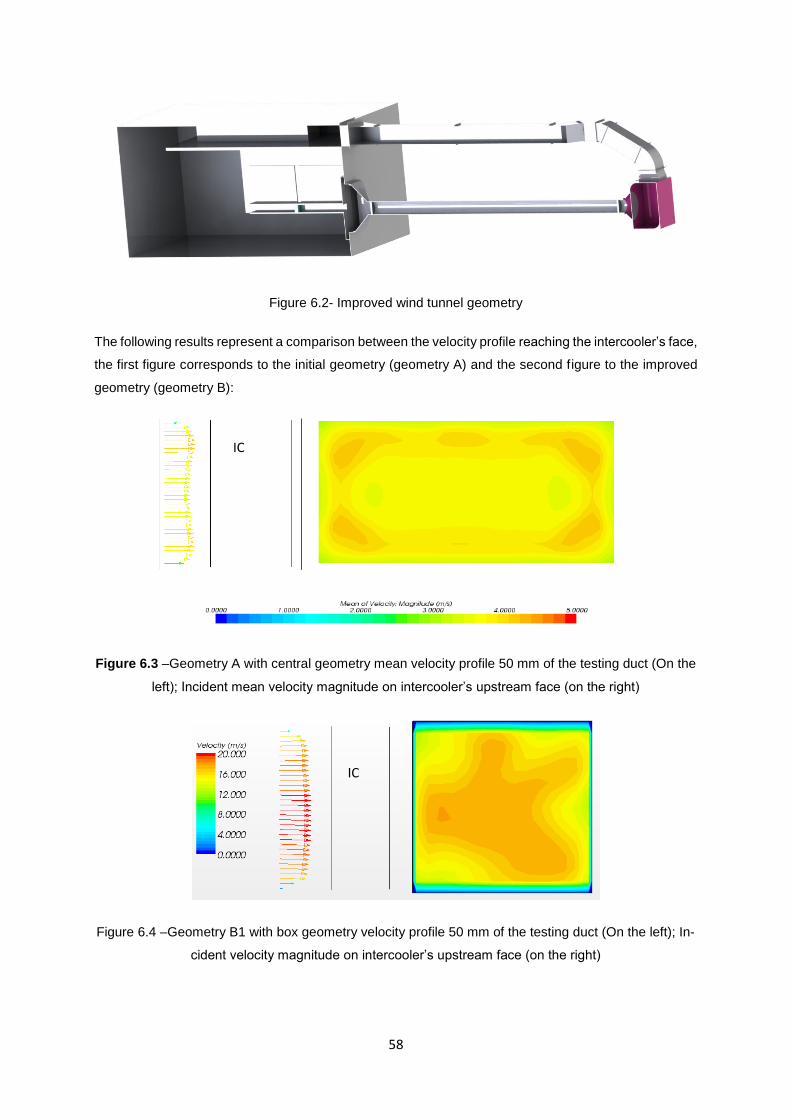
58
Figure 6.2- Improved wind tunnel geometry
The following results represent a comparison between the velocity profile reaching the intercooler’s face,
the first figure corresponds to the initial geometry (geometry A) and the second figure to the improved
geometry (geometry B):
Figure 6.3 –Geometry A with central geometry mean velocity profile 50 mm of the testing duct (On the
left); Incident mean velocity magnitude on intercooler’s upstream face (on the right)
Figure 6.4 –Geometry B1 with box geometry velocity profile 50 mm of the testing duct (On the left); In-
cident velocity magnitude on intercooler’s upstream face (on the right)
IC
IC
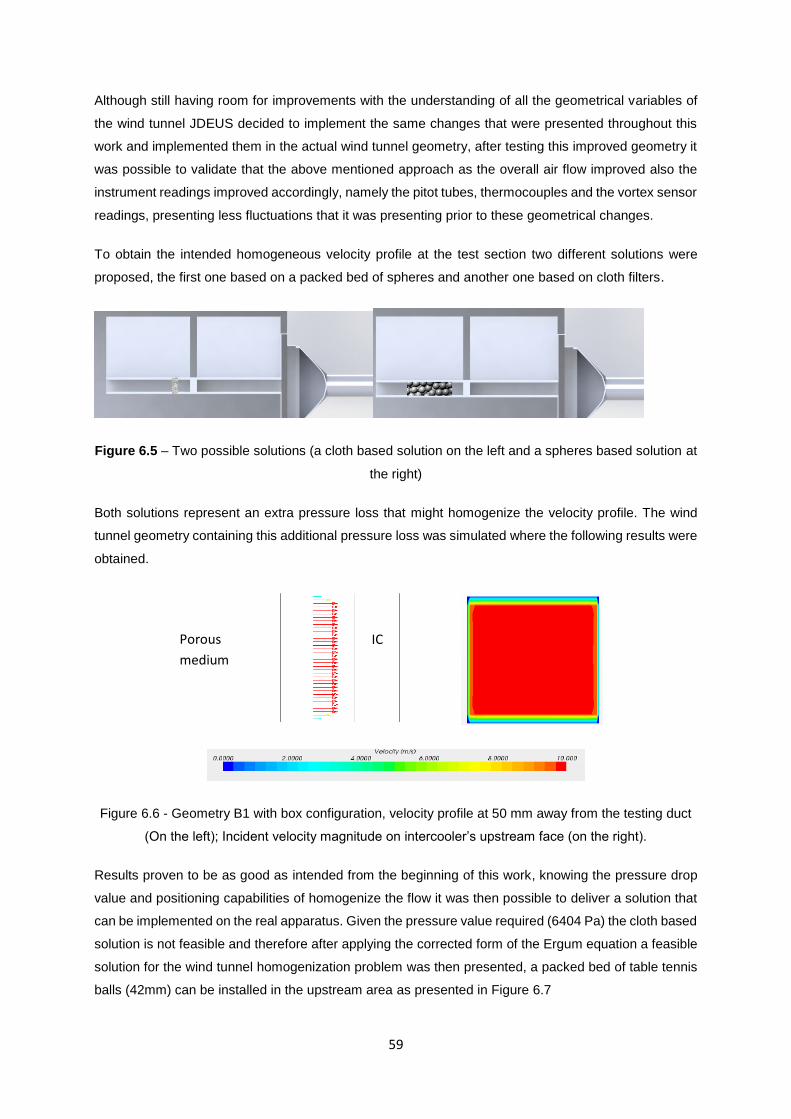
59
Although still having room for improvements with the understanding of all the geometrical variables of
the wind tunnel JDEUS decided to implement the same changes that were presented throughout this
work and implemented them in the actual wind tunnel geometry, after testing this improved geometry it
was possible to validate that the above mentioned approach as the overall air flow improved also the
instrument readings improved accordingly, namely the pitot tubes, thermocouples and the vortex sensor
readings, presenting less fluctuations that it was presenting prior to these geometrical changes.
To obtain the intended homogeneous velocity profile at the test section two different solutions were
proposed, the first one based on a packed bed of spheres and another one based on cloth filters.
Figure 6.5 – Two possible solutions (a cloth based solution on the left and a spheres based solution at
the right)
Both solutions represent an extra pressure loss that might homogenize the velocity profile. The wind
tunnel geometry containing this additional pressure loss was simulated where the following results were
obtained.
Figure 6.6 - Geometry B1 with box configuration, velocity profile at 50 mm away from the testing duct
(On the left); Incident velocity magnitude on intercooler’s upstream face (on the right).
Results proven to be as good as intended from the beginning of this work, knowing the pressure drop
value and positioning capabilities of homogenize the flow it was then possible to deliver a solution that
can be implemented on the real apparatus. Given the pressure value required (6404 Pa) the cloth based
solution is not feasible and therefore after applying the corrected form of the Ergum equation a feasible
solution for the wind tunnel homogenization problem was then presented, a packed bed of table tennis
balls (42mm) can be installed in the upstream area as presented in Figure 6.7
Porous
medium
IC

60
Figure 6.7 – Test section detail of the wind tunnel geometry B cross section, a packed bed of spheres
is represented as a possible solution to increase flow homogenization.
This result was obtained for a given wind tunnel working condition (configuration and velocity) and might
not be possible to transpose this result to be a solution for the entire range of velocities and geometry
configurations used by JDEUS, it points out a possible solution that after validated in the real apparatus
will prove the usability of such CFD simulations to improve other working conditions.
That said the objectives for this work were achieved as during this work a better understanding of the
wind tunnel was delivered to JDEUS improving the insight on how the wind tunnel behaves in certain
areas that were not being monitored during tests.
Geometry changes were proposed during the course of this work and by implementing wind tunnel
results improved, being the velocity profile homogenization the main focus of this work, it also delivered
a possible solution to be used as a versatile pressure drop fulfilling all the requirements in terms of costs
and flexibility.
6.2 Further work
Current work focused on the air flow arriving to the test section, for future simulations accounting for
thermal influence on the fluid might allow a better understanding of the flow arriving the drive section
and therefore understand even better how the flow behaves on the outlet duct.
In terms of geometry this work focused on a selection of geometries which should represent the wide
range of geometries required to be tested at JDEUS facilities, in order to have a better understanding
on how pressure losses can help on improving wind tunnel results it might sound reasonable to simulate
a wider range of geometries The full-face geometry represented a challenge and therefore was not
possible to include in this study, geometrical issues and convergence difficulties can be pointed out as
major difficulties to obtain valuable results from the CFD simulations, being an intercooler type with the
higher aspect ratio it would be interesting to study this geometry even further and to be able to obtain
suitable results that after validation could be used to improve the wind tunnel even more.
The velocities used for CFD simulations in this work were limited, a prescribed value for each geometry
was used and the subsequent simulations would use this value as a reference, as it was possible to see

61
during this work, the results are affected by the prescribed velocity and therefore it would be interesting
to iterate for a wider range of velocities.
The pressure drop equation was assumed to be the same for every geometry introducing another error
to the CFD simulations, this could be reduced by using more data and by computing a tailored equation
for each geometry, as for the filter pressure drop, depending on the solution adopted by the company it
might sound reasonable to review the pressure drop function for filters so that future work.
The test section is a complex apparatus that allows the wind tunnel to accommodate a wide range of
geometries, it’s composed out of 8 metal plates and it can be divided into two similar sets of 4 metal
plates each, one set lays upstream and the other one downstream of the test section. It would be inter-
esting for a future study to approach the need of the upstream component of the test section, allowing
the air to approach the intercooler coming directly from the settling chamber.
The cooler used to control the air flow temperature is a complex set of fans that forces the air passing
through heat exchangers while it cools, given the complexity of this secondary flows this impact on the
air flow was not accounted in this work, it would be interesting already to understand the impact of such
flows.
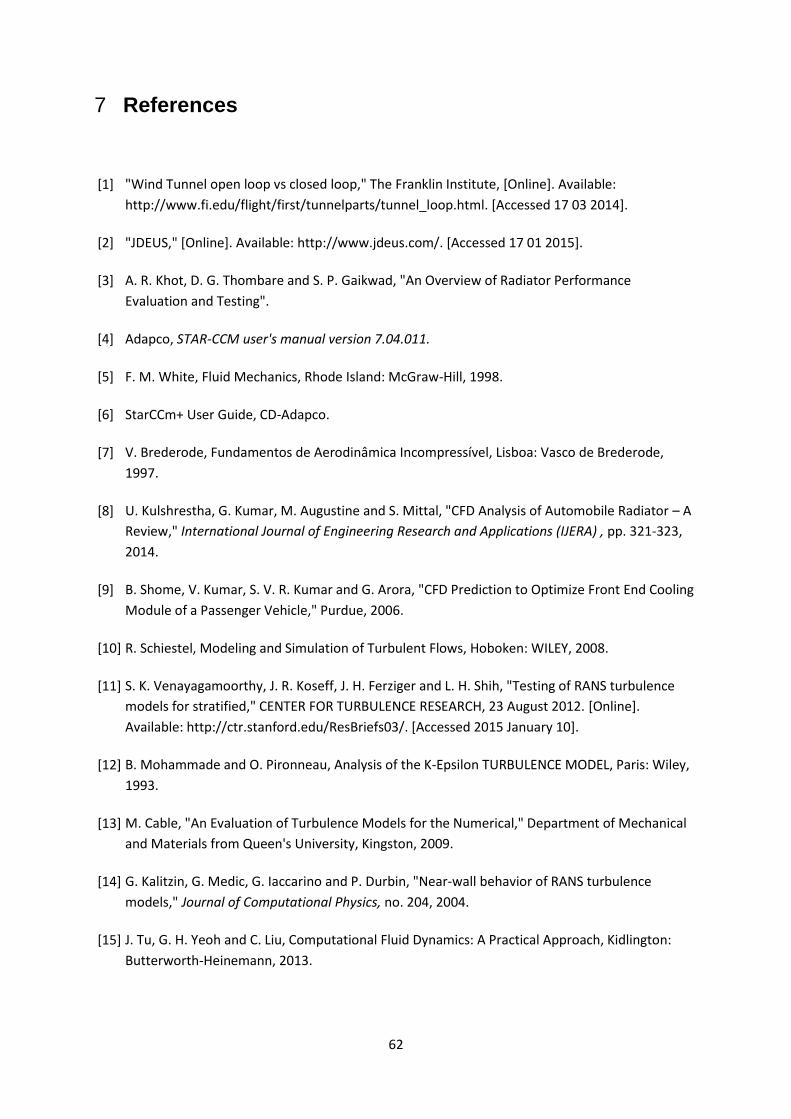
62
7 References
[1] "Wind Tunnel open loop vs closed loop," The Franklin Institute, [Online]. Available:
http://www.fi.edu/flight/first/tunnelparts/tunnel_loop.html. [Accessed 17 03 2014].
[2] "JDEUS," [Online]. Available: http://www.jdeus.com/. [Accessed 17 01 2015].
[3] A. R. Khot, D. G. Thombare and S. P. Gaikwad, "An Overview of Radiator Performance
Evaluation and Testing".
[4] Adapco, STAR-CCM user's manual version 7.04.011.
[5] F. M. White, Fluid Mechanics, Rhode Island: McGraw-Hill, 1998.
[6] StarCCm+ User Guide, CD-Adapco.
[7] V. Brederode, Fundamentos de Aerodinâmica Incompressível, Lisboa: Vasco de Brederode,
1997.
[8] U. Kulshrestha, G. Kumar, M. Augustine and S. Mittal, "CFD Analysis of Automobile Radiator – A
Review," International Journal of Engineering Research and Applications (IJERA) , pp. 321-323,
2014.
[9] B. Shome, V. Kumar, S. V. R. Kumar and G. Arora, "CFD Prediction to Optimize Front End Cooling
Module of a Passenger Vehicle," Purdue, 2006.
[10] R. Schiestel, Modeling and Simulation of Turbulent Flows, Hoboken: WILEY, 2008.
[11] S. K. Venayagamoorthy, J. R. Koseff, J. H. Ferziger and L. H. Shih, "Testing of RANS turbulence
models for stratified," CENTER FOR TURBULENCE RESEARCH, 23 August 2012. [Online].
Available: http://ctr.stanford.edu/ResBriefs03/. [Accessed 2015 January 10].
[12] B. Mohammade and O. Pironneau, Analysis of the K-Epsilon TURBULENCE MODEL, Paris: Wiley,
1993.
[13] M. Cable, "An Evaluation of Turbulence Models for the Numerical," Department of Mechanical
and Materials from Queen's University, Kingston, 2009.
[14] G. Kalitzin, G. Medic, G. Iaccarino and P. Durbin, "Near-wall behavior of RANS turbulence
models," Journal of Computational Physics, no. 204, 2004.
[15] J. Tu, G. H. Yeoh and C. Liu, Computational Fluid Dynamics: A Practical Approach, Kidlington:
Butterworth-Heinemann, 2013.
63
[16] E. Audusse, F. Benkhaldoun, S. Sari, M. Seaid and P. Tassi, "A fast finite volume solver for multi-
layered shallow water flows," Journal of Computational Physics, vol. 272, p. 23–45, 2014.
[17] V. V. Ranade, Computational Flow Modeling for Chemical Reactor Engineering, vol. IV, London:
Academic Press, 2002.
[18] M. Peric and S. Ferguson, "The advantage of polyhedral meshes," CD-Adapco, [Online].
Available: http://www.plmmarketplace.com/upload/Temp/The_Advantage_of_polyhedral.pdf.
[Accessed 30 01 01].
[19] J. F. Shepherd and C. R. Johnson, "Hexahedral Mesh Generation Constraints," Sandia National
Laboratories, [Online]. Available: https://cfwebprod.sandia.gov/cfdocs/CompResearch/.
[Accessed 5 January 2015].
[20] NPARC, "NPARC Alliance & Wind-US CFD Code," NASA, [Online]. Available:
http://www.grc.nasa.gov/WWW/wind/. [Accessed 11 06 2014].
[21] D.-W. Sun, Computational Fluid Dynamics in Food Processing, CRC Press, 2007.
[22] S. Gorlin and I. Slezinger, Wind Tunnels and their instrumentation, Jerusalem: Israel Program
for Scientific Translations, 1966.
[23] A.M.Ribeiro, P. Neto and C. Pinho, "Mean porosity and pressure drop measurements in packed
beds of monosized spheres: Side wall effects," International Review of Chemical Engineering,
vol. 2, pp. 40-46.
[24] A. S. Mujumdar, Handbook of Industrial Drying, Fourth Edition, Boca Raton: CRC Press, 2014.
[25] L. K. Wang, N. C. Pereira and Y.-T. Hung, Air Pollution Control Engineering, vol. I, Totowa: The
Humana Press, Inc., 2004.
[26] [Online]. Available:
http://web.mit.edu/16.unified/www/SPRING/propulsion/notes/node25.html. [Accessed
January 2014].
[27] J. H. Ferziger and M. PeriC, Computacional Methods for Fluid Dynamics, Springer, 2002, p. 3.
[28] D. P. DeWitt, T. L. Bergman, F. P. Incropera and A. S. Lavine, Fundamentals ofHeat and Mass
Transfer, John Wiley & Sons, 2006.
[29] "Power for Land, Sea and Air," 2009.
[30] "Uses of intercooler," [Online]. Available:
http://www.mechanicalengineeringblog.com/tag/uses-of-intercooler/. [Accessed December
2013].
64
[31] P. Steinberg, N. Deussen, W. Sebbesse, Schlenz and Dieter, "Engine cooling," vol. Aerodynamics
of Road Vehicles, p. 533–576, 1998.
[32] "Concentration variations within pipe cross-sections in a dilute phase pneumatic conveying
system".
[33] A. K. Oppenheim, Combustion in Piston Engines: Technology, Evolution, Diagnosis and Control,
2004.
[34] [Online]. Available: http://auto.howstuffworks.com/engine1.htm. [Accessed January 2014].
[35] [Online]. Available: http://inventors.about.com/library/inventors/blotto.htm. [Accessed
January 2014].
[36] "Mechanical Engineering Blog," Janeiro 2014. [Online]. Available:
http://www.mechanicalengineeringblog.com/tag/uses-of-intercooler/.
[37] "http://gearheadbanger.wordpress.com/2012/02/17/como-funciona-oturbo/," [Online].
[Accessed September 2013].
[38] "http://www.autospeed.com/cms/article.html?&A=112608," [Online]. [Accessed 23 February
2014].
[39] P. Patel and P. P. Rathod, "International Journal of Emerging Technology and Advanced
Engineering," vol. 3, no. Performance Analysis Of Four Stroke Internal Combustion Engine With
Supercharger - Review Study , 2013.
[40] T. V. K. Institute, "LOW SPEED WIND TUNNELS," [Online]. Available:
https://www.vki.ac.be//index.php?option=com_content&view=category&id=48:low-speed-
wind-tunnels&layout=blog&Itemid=151&layout=default. [Accessed 17 03 2014].
[41] F. Steinle and E. Stanewsky, "Wind Tunnel Flow Quality and Data Accuracy Requirements,"
R.O.Dietz, Manchester, Tennessee 37355 - USA, 1982.
[42] S. Okamoto, Wind Tunnels, Rijeka: Intech, 2011.
[43] C. Matsubara, T. Kuo and H. Wu, "Comparison of the Effects of k-ϵ, k-ω, and Zero Equation
Models on Characterization of Turbulent Permeability of Porous Medi," Journal of Water
Resource and Hydraulic Engineering, vol. 2, no. CFD, 2013.
[44] N. Magalhães, "CFD Fire Simulation in Enclosures," Instituto Superior Técnico, Lisboa, 2007.
[45] A. d. Souza, How to – Understand Computational Fluid Dynamics, NAFEMS Ltd , 2005.
[46] M. d. M. Torrecilla, Introduction to numerical simulation of fluid flow, St. Petersburg: Technical
University of Munich, 2004.

65
[47] F. Juretic, "Error Analysis in Finite Volume CFD," Department of Mechanical Engineering,
Imperial College London, 2004.
[48] H. F. Schiefer and A. S. Best, "A PORTABLE INSTRUMENT FOR MEASURING AIR," Bureau of
Standards Journal Research, vol. VI, no. RP261, pp. 51-61, 1930.
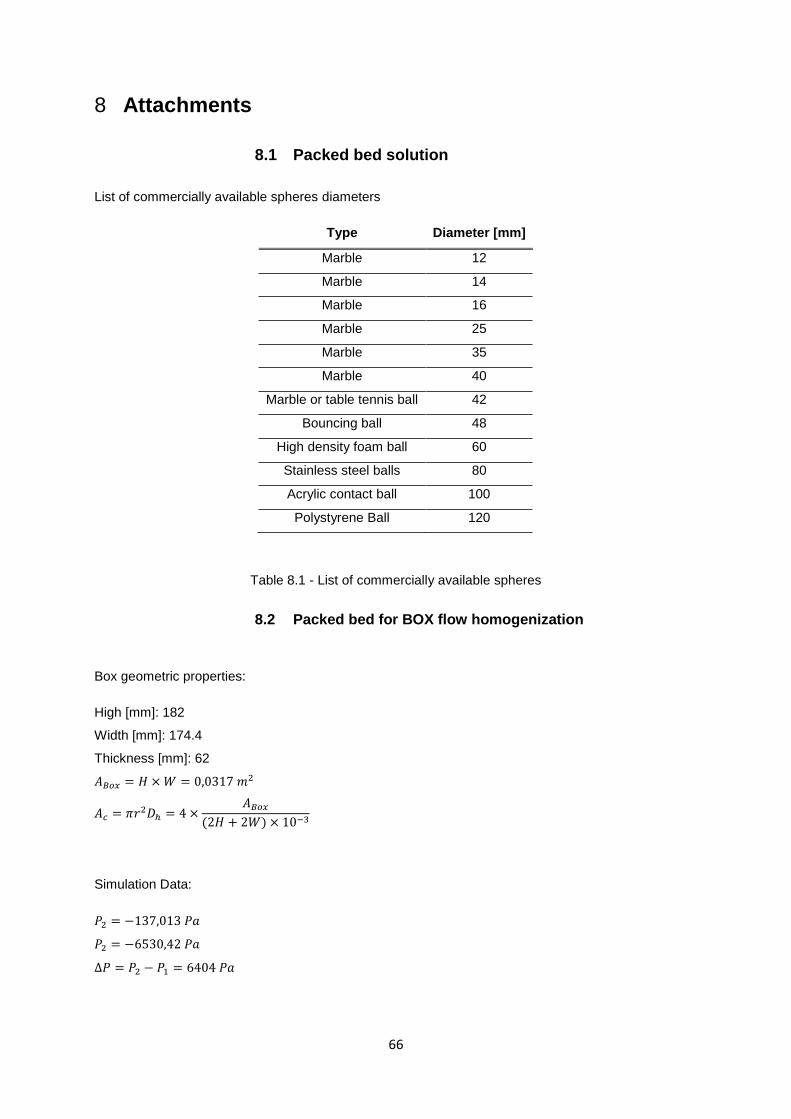
66
8 Attachments
8.1 Packed bed solution
List of commercially available spheres diameters
Type Diameter [mm]
Marble 12
Marble 14
Marble 16
Marble 25
Marble 35
Marble 40
Marble or table tennis ball 42
Bouncing ball 48
High density foam ball 60
Stainless steel balls 80
Acrylic contact ball 100
Polystyrene Ball 120
Table 8.1 - List of commercially available spheres
8.2 Packed bed for BOX flow homogenization
Box geometric properties:
High [mm]: 182
Width [mm]: 174.4
Thickness [mm]: 62
𝐴𝐵𝑜𝑥 = 𝐻 × 𝑊 = 0,0317 𝑚2
𝐴𝑐 = 𝜋𝑟2𝐷ℎ = 4 ×𝐴𝐵𝑜𝑥
(2𝐻 + 2𝑊) × 10−3
Simulation Data:
𝑃2 = −137,013 𝑃𝑎
𝑃2 = −6530,42 𝑃𝑎
∆𝑃 = 𝑃2 − 𝑃1 = 6404 𝑃𝑎
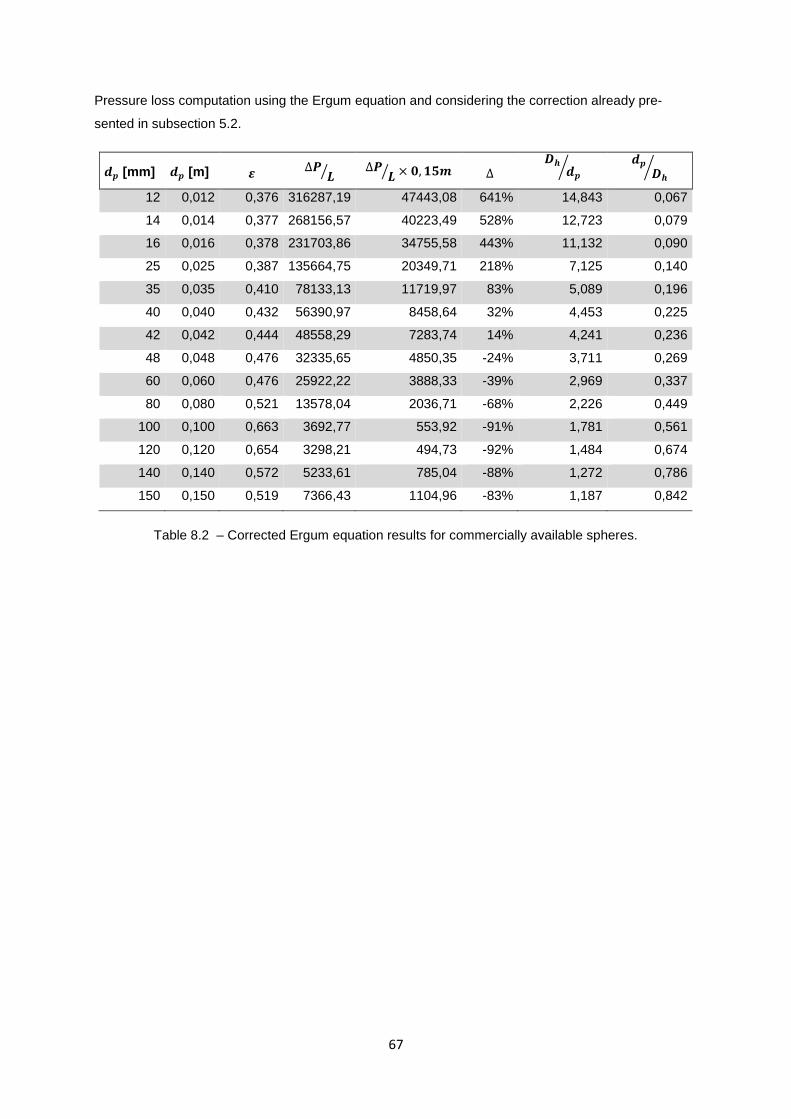
67
Pressure loss computation using the Ergum equation and considering the correction already pre-
sented in subsection 5.2.
𝒅𝒑 [mm] 𝒅𝒑 [m] 𝜺 ∆𝑷
𝑳⁄ ∆𝑷𝑳⁄ × 𝟎, 𝟏𝟓𝒎 ∆
𝑫𝒉𝒅𝒑
⁄ 𝒅𝒑
𝑫𝒉⁄
12 0,012 0,376 316287,19 47443,08 641% 14,843 0,067
14 0,014 0,377 268156,57 40223,49 528% 12,723 0,079
16 0,016 0,378 231703,86 34755,58 443% 11,132 0,090
25 0,025 0,387 135664,75 20349,71 218% 7,125 0,140
35 0,035 0,410 78133,13 11719,97 83% 5,089 0,196
40 0,040 0,432 56390,97 8458,64 32% 4,453 0,225
42 0,042 0,444 48558,29 7283,74 14% 4,241 0,236
48 0,048 0,476 32335,65 4850,35 -24% 3,711 0,269
60 0,060 0,476 25922,22 3888,33 -39% 2,969 0,337
80 0,080 0,521 13578,04 2036,71 -68% 2,226 0,449
100 0,100 0,663 3692,77 553,92 -91% 1,781 0,561
120 0,120 0,654 3298,21 494,73 -92% 1,484 0,674
140 0,140 0,572 5233,61 785,04 -88% 1,272 0,786
150 0,150 0,519 7366,43 1104,96 -83% 1,187 0,842
Table 8.2 – Corrected Ergum equation results for commercially available spheres.
Recommended