Embed Size (px)
Citation preview
2 Mechanik
2.5 Mechanik in bewegtenBezugssystemen
2.5.1 Galilei’sche Relativität
Die Beschreibung einer Bewegung hängt ab vomverwendeten Bezugssystem: Wenn jemand in einemEisenbahnwagen einen Ball aufwirft so hängt dieForm der Bahnkurve davon ab ob der Betrachterebenfalls in der Eisenbahn sitzt oder auf dem Bahn-steig steht.
Man ist grundsätzlich frei in der Wahl des Bezugssy-stems, d.h. man kann auswählen welches Bezugssy-stem man verwendet um die beobachteten Phänome-ne zu beschreiben. Im oben genannten Beispiel un-terscheiden sich die beiden Bezugssysteme lediglichum die Anfangsgeschwindigkeit in der Bewegungs-richtung der Eisenbahn. Es gibt meist ein Bezugssy-stem, welches eine besonders einfache Beschreibungermöglicht. Vor allem aber ist nicht garantiert, dassin jedem Bezugssystem die Newton’schen Axiomeerfüllt sind. Ist dies der Fall, so bezeichnet man dasSystem als Inertialsystem. Es gibt beliebig viele un-terschiedliche Inertialsysteme.
Zunächst kann man jedes Inertialsystem in ein an-deres transformieren, wenn man eine Translationoder Rotation vornimmt. Außerdem kann man dasBezugssystem immer mit konstanter Geschwindig-keit gegenüber einem Inertialsystem verschiebenund erhält ein weiteres Inertialsystem. Die Tatsache,dass alle diese Systeme gleichwertige Möglichkei-ten für die Beschreibung der beobachteten Phänome-ne darstellen bedeutet, dass absolute Geschwindig-keit keine Bedeutung hat. Ähnlich bedeutet die Tat-sache, dass der Ursprung des Koordinatensystemsfrei wählbar ist, dass absolute Position keine Bedeu-tung hat. Aus der (experimentell verifizierten) Tatsa-che, dass die physikalischen Gesetze gültig bleibenbei einer beliebigen (konstanten) Bewegung des Be-zugssystems kann man u. a. die Erhaltung des linea-ren Impulses herleiten.
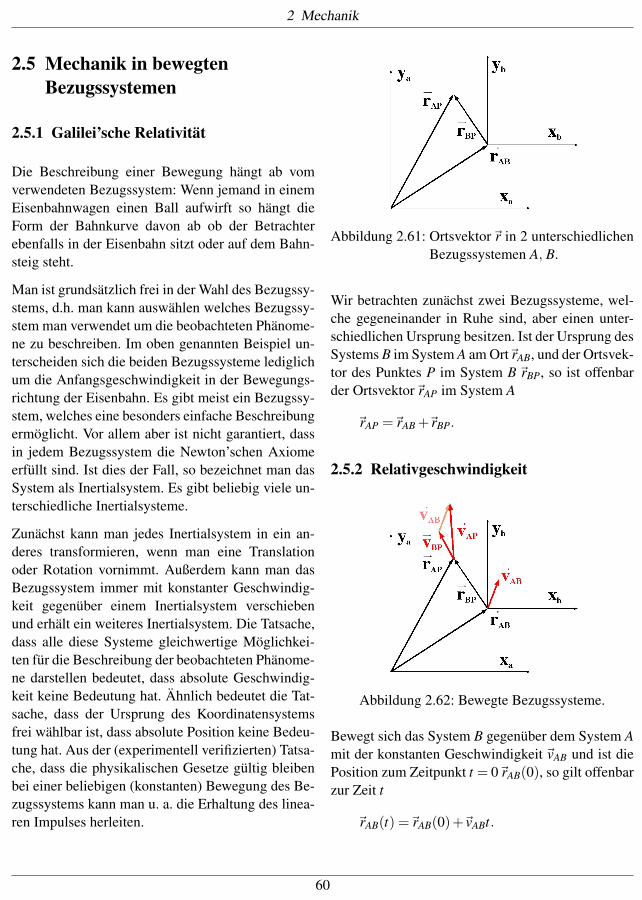
Abbildung 2.61: Ortsvektor~r in 2 unterschiedlichenBezugssystemen A, B.
Wir betrachten zunächst zwei Bezugssysteme, wel-che gegeneinander in Ruhe sind, aber einen unter-schiedlichen Ursprung besitzen. Ist der Ursprung desSystems B im System A am Ort~rAB, und der Ortsvek-tor des Punktes P im System B ~rBP, so ist offenbarder Ortsvektor~rAP im System A
~rAP =~rAB +~rBP.
2.5.2 Relativgeschwindigkeit
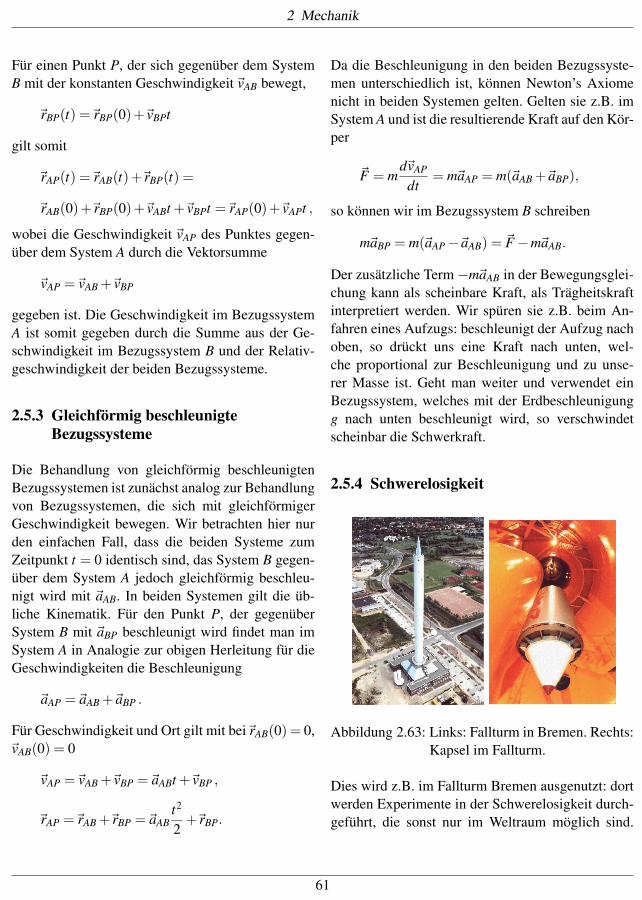
Abbildung 2.62: Bewegte Bezugssysteme.
Bewegt sich das System B gegenüber dem System Amit der konstanten Geschwindigkeit ~vAB und ist diePosition zum Zeitpunkt t = 0~rAB(0), so gilt offenbarzur Zeit t
~rAB(t) =~rAB(0)+~vABt.
60
2 Mechanik
Für einen Punkt P, der sich gegenüber dem SystemB mit der konstanten Geschwindigkeit~vAB bewegt,
~rBP(t) =~rBP(0)+~vBPt
gilt somit
~rAP(t) =~rAB(t)+~rBP(t) =
~rAB(0)+~rBP(0)+~vABt +~vBPt =~rAP(0)+~vAPt ,
wobei die Geschwindigkeit ~vAP des Punktes gegen-über dem System A durch die Vektorsumme
~vAP =~vAB +~vBP
gegeben ist. Die Geschwindigkeit im BezugssystemA ist somit gegeben durch die Summe aus der Ge-schwindigkeit im Bezugssystem B und der Relativ-geschwindigkeit der beiden Bezugssysteme.
2.5.3 Gleichförmig beschleunigteBezugssysteme
Die Behandlung von gleichförmig beschleunigtenBezugssystemen ist zunächst analog zur Behandlungvon Bezugssystemen, die sich mit gleichförmigerGeschwindigkeit bewegen. Wir betrachten hier nurden einfachen Fall, dass die beiden Systeme zumZeitpunkt t = 0 identisch sind, das System B gegen-über dem System A jedoch gleichförmig beschleu-nigt wird mit ~aAB. In beiden Systemen gilt die üb-liche Kinematik. Für den Punkt P, der gegenüberSystem B mit ~aBP beschleunigt wird findet man imSystem A in Analogie zur obigen Herleitung für dieGeschwindigkeiten die Beschleunigung
~aAP =~aAB +~aBP .
Für Geschwindigkeit und Ort gilt mit bei~rAB(0) = 0,~vAB(0) = 0
~vAP =~vAB +~vBP =~aABt +~vBP ,
~rAP =~rAB +~rBP =~aABt2
2+~rBP.
Da die Beschleunigung in den beiden Bezugssyste-men unterschiedlich ist, können Newton’s Axiomenicht in beiden Systemen gelten. Gelten sie z.B. imSystem A und ist die resultierende Kraft auf den Kör-per
~F = md~vAP
dt= m~aAP = m(~aAB +~aBP),
so können wir im Bezugssystem B schreiben
m~aBP = m(~aAP �~aAB) = ~F �m~aAB.
Der zusätzliche Term �m~aAB in der Bewegungsglei-chung kann als scheinbare Kraft, als Trägheitskraftinterpretiert werden. Wir spüren sie z.B. beim An-fahren eines Aufzugs: beschleunigt der Aufzug nachoben, so drückt uns eine Kraft nach unten, wel-che proportional zur Beschleunigung und zu unse-rer Masse ist. Geht man weiter und verwendet einBezugssystem, welches mit der Erdbeschleunigungg nach unten beschleunigt wird, so verschwindetscheinbar die Schwerkraft.
2.5.4 Schwerelosigkeit
Abbildung 2.63: Links: Fallturm in Bremen. Rechts:Kapsel im Fallturm.
Dies wird z.B. im Fallturm Bremen ausgenutzt: dortwerden Experimente in der Schwerelosigkeit durch-geführt, die sonst nur im Weltraum möglich sind.
61
2 Mechanik
So können für Kurzzeitexperimente die hohen Ko-sten einer Weltraumexpedition eingespart werden. Indem 110 m hohen Rohr des Turms wird eine Fallkap-sel hochgezogen und losgelassen.
Während des freien Falls von knapp fünf Sekun-den herrscht in der Kapsel Schwerelosigkeit. DasFallrohr wird luftleer gepumpt, um Störungen durchLuftreibung zu vermeiden.
Zeit [s]0 20 45 65
8
45o aufwärts 45o abwärts
1.8 g 0g 1.8 g
10
9
Höh
e [k
m]
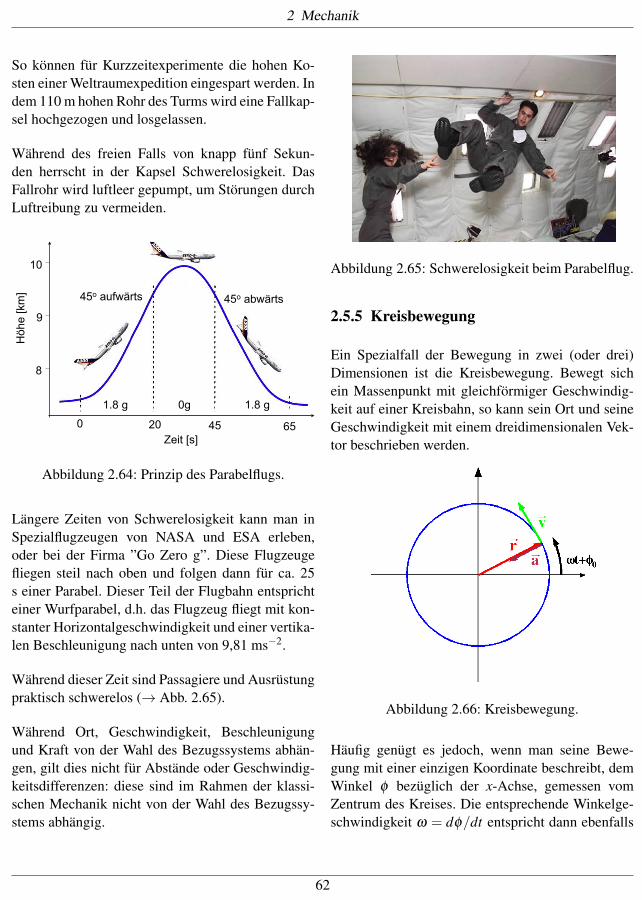
Abbildung 2.64: Prinzip des Parabelflugs.
Längere Zeiten von Schwerelosigkeit kann man inSpezialflugzeugen von NASA und ESA erleben,oder bei der Firma ”Go Zero g”. Diese Flugzeugefliegen steil nach oben und folgen dann für ca. 25s einer Parabel. Dieser Teil der Flugbahn entsprichteiner Wurfparabel, d.h. das Flugzeug fliegt mit kon-stanter Horizontalgeschwindigkeit und einer vertika-len Beschleunigung nach unten von 9,81 ms�2.
Während dieser Zeit sind Passagiere und Ausrüstungpraktisch schwerelos (! Abb. 2.65).
Während Ort, Geschwindigkeit, Beschleunigungund Kraft von der Wahl des Bezugssystems abhän-gen, gilt dies nicht für Abstände oder Geschwindig-keitsdifferenzen: diese sind im Rahmen der klassi-schen Mechanik nicht von der Wahl des Bezugssy-stems abhängig.
Abbildung 2.65: Schwerelosigkeit beim Parabelflug.
2.5.5 Kreisbewegung
Ein Spezialfall der Bewegung in zwei (oder drei)Dimensionen ist die Kreisbewegung. Bewegt sichein Massenpunkt mit gleichförmiger Geschwindig-keit auf einer Kreisbahn, so kann sein Ort und seineGeschwindigkeit mit einem dreidimensionalen Vek-tor beschrieben werden.
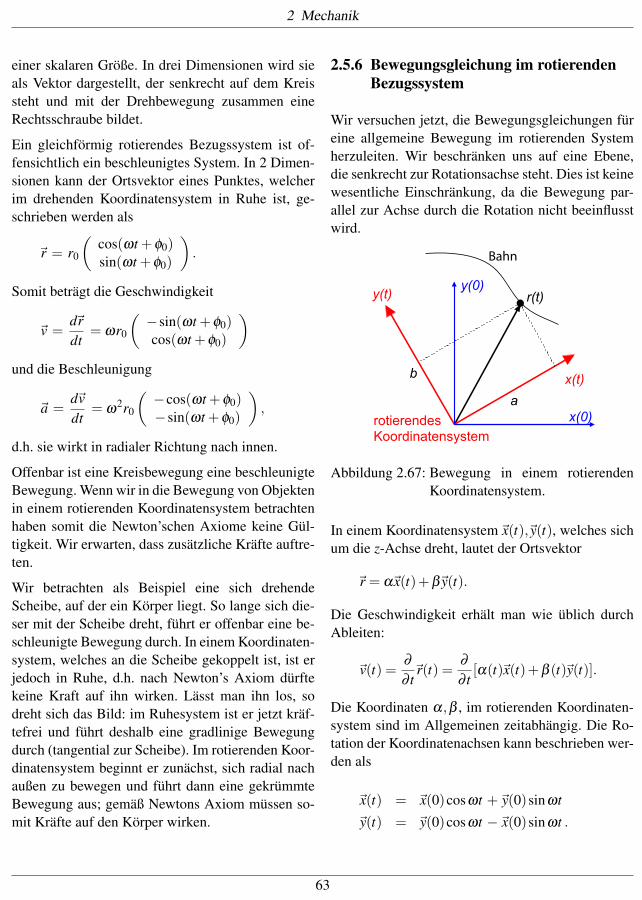
Abbildung 2.66: Kreisbewegung.
Häufig genügt es jedoch, wenn man seine Bewe-gung mit einer einzigen Koordinate beschreibt, demWinkel f bezüglich der x-Achse, gemessen vomZentrum des Kreises. Die entsprechende Winkelge-schwindigkeit w = df/dt entspricht dann ebenfalls
62
2 Mechanik
einer skalaren Größe. In drei Dimensionen wird sieals Vektor dargestellt, der senkrecht auf dem Kreissteht und mit der Drehbewegung zusammen eineRechtsschraube bildet.
Ein gleichförmig rotierendes Bezugssystem ist of-fensichtlich ein beschleunigtes System. In 2 Dimen-sionen kann der Ortsvektor eines Punktes, welcherim drehenden Koordinatensystem in Ruhe ist, ge-schrieben werden als
~r = r0
✓
cos(wt +f0)sin(wt +f0)
◆
.
Somit beträgt die Geschwindigkeit
~v =d~rdt
= wr0
✓
�sin(wt +f0)cos(wt +f0)
◆
und die Beschleunigung
~a =d~vdt
= w
2r0
✓
�cos(wt +f0)�sin(wt +f0)
◆
,
d.h. sie wirkt in radialer Richtung nach innen.
Offenbar ist eine Kreisbewegung eine beschleunigteBewegung. Wenn wir in die Bewegung von Objektenin einem rotierenden Koordinatensystem betrachtenhaben somit die Newton’schen Axiome keine Gül-tigkeit. Wir erwarten, dass zusätzliche Kräfte auftre-ten.
Wir betrachten als Beispiel eine sich drehendeScheibe, auf der ein Körper liegt. So lange sich die-ser mit der Scheibe dreht, führt er offenbar eine be-schleunigte Bewegung durch. In einem Koordinaten-system, welches an die Scheibe gekoppelt ist, ist erjedoch in Ruhe, d.h. nach Newton’s Axiom dürftekeine Kraft auf ihn wirken. Lässt man ihn los, sodreht sich das Bild: im Ruhesystem ist er jetzt kräf-tefrei und führt deshalb eine gradlinige Bewegungdurch (tangential zur Scheibe). Im rotierenden Koor-dinatensystem beginnt er zunächst, sich radial nachaußen zu bewegen und führt dann eine gekrümmteBewegung aus; gemäß Newtons Axiom müssen so-mit Kräfte auf den Körper wirken.
2.5.6 Bewegungsgleichung im rotierendenBezugssystem
Wir versuchen jetzt, die Bewegungsgleichungen füreine allgemeine Bewegung im rotierenden Systemherzuleiten. Wir beschränken uns auf eine Ebene,die senkrecht zur Rotationsachse steht. Dies ist keinewesentliche Einschränkung, da die Bewegung par-allel zur Achse durch die Rotation nicht beeinflusstwird.
r(t)
a
y(t)
x(t)
x(0)
y(0)
rotierendes Koordinatensystem
Bahn
b
Abbildung 2.67: Bewegung in einem rotierendenKoordinatensystem.
In einem Koordinatensystem~x(t),~y(t), welches sichum die z-Achse dreht, lautet der Ortsvektor
~r = a~x(t)+b~y(t).
Die Geschwindigkeit erhält man wie üblich durchAbleiten:
~v(t) =∂
∂ t~r(t) =
∂
∂ t[a(t)~x(t)+b (t)~y(t)].
Die Koordinaten a,b , im rotierenden Koordinaten-system sind im Allgemeinen zeitabhängig. Die Ro-tation der Koordinatenachsen kann beschrieben wer-den als
~x(t) = ~x(0)coswt +~y(0)sinwt~y(t) = ~y(0)coswt �~x(0)sinwt .
63

2 Mechanik
Die Geschwindigkeit des Ortsvektors ist demnach
~v(t) = a(t)~x(t)+ b (t)~y(t)+a(t)~x(t)+b (t)~y(t).
Die zeitlichen Ableitungen der Koordinatenachsensind
~x(t) = �~x(0)w sin(wt)+~y(0)w cos(wt)= w~y(t).
~y(t) = �~y(0)w sin(wt)�~x(0)w cos(wt)= �w~x(t).
Demnach ist
~v(t) = a(t)~x(t)+ b (t)~y(t)+w[a(t)~y(t)�b (t)~x(t)].
Der erste Term besitzt die gleiche Form wie in einemInertialsystem. Der zusätzliche zweite Term berück-sichtigt die Zeitabhängigkeit der Basisvektoren. Ertritt auch dann auf wenn a(t) = a(0) und b (t) =b (0), d.h. wenn sich der Punkt gegenüber dem rotie-renden Koordinatensystem nicht bewegt.
2.5.7 Scheinkräfte im rotierendenKoordinatensystem
Nach dem gleichen Verfahren können wir die Be-schleunigung berechnen:
~a(t) =∂
∂ t~v(t) =
∂
∂ t
n
a(t)~x(t)+ b (t)~y(t)+w[a(t)~y(t)�b (t)~x(t)]o
= a(t)~x(t)+wa(t)~y(t)+ b (t)~y(t)�wb (t)~x(t)
+w[a(t)~y(t)� b (t)~x(t)]+w
2[�a(t)~x(t)�b (t)~y(t)] .
= a(t)~x(t)+ b (t)~y(t)+2w[a(t)~y(t)� b (t)~x(t)]
+w
2[�a(t)~x(t)�b (t)~y(t)].
Der gleiche Sachverhalt kann auch etwas kompaktergeschrieben werden wenn wir die Vektoren
~rr = (a,b ,0) ,
~vr = (a, b ,0) ,
~ar = (a, b ,0) ,
einführen, d.h. Position, Geschwindigkeit und Be-schleunigung im rotierenden Koordinatensystem,sowie den Winkelgeschwindigkeitsvektor
~w = (0,0,w) .
Damit wird
~a = ~ar +2~w ⇥~vr �w
2~rr .
Wir können diese Gleichung natürlich auch nach derBeschleunigung im rotierenden Koordinatensystemauflösen:
~ar =~a�2~w ⇥~vr +w
2~rr .
Der erste Term entspricht der Beschleunigung im In-ertialsystem. Für ein kräftefreies System verschwin-det er nach dem Grundgesetz der Mechanik. Die bei-den anderen Terme erzeugen eine Beschleunigungim rotierenden Koordinatensystem, welche nicht vonäußeren Kräften bestimmt wird; sie werden deshalbals Scheinkräfte bezeichnet. Der mittlere Term istproportional zur Geschwindigkeit des Massenpunk-tes im rotierenden Koordinatensystem und zur Rota-tionsgeschwindigkeit des Systems. Der dritte Termist proportional zum Quadrat der Winkelgeschwin-digkeit, und zum Abstand von der Drehachse.
2.5.8 Zentrifugalkraft
Der letzte Term entspricht der Zentrifugalbeschleu-nigung (resp. Zentrifugalkraft). Sie muss durch ei-ne gleich große Zentripetalkraft kompensiert werdenwenn der Massenpunkt im rotierenden Koordinaten-system am Ort bleiben soll. Der Betrag ist
|F | = m|a| = mw
2r = mv2/r.
Die Zentrifugalkraft kann auch experimentell ge-messen werden. Man lässt dazu ein Gewicht um
64
2 Mechanik
Angelschnurm = 150 g
Kraftmesser
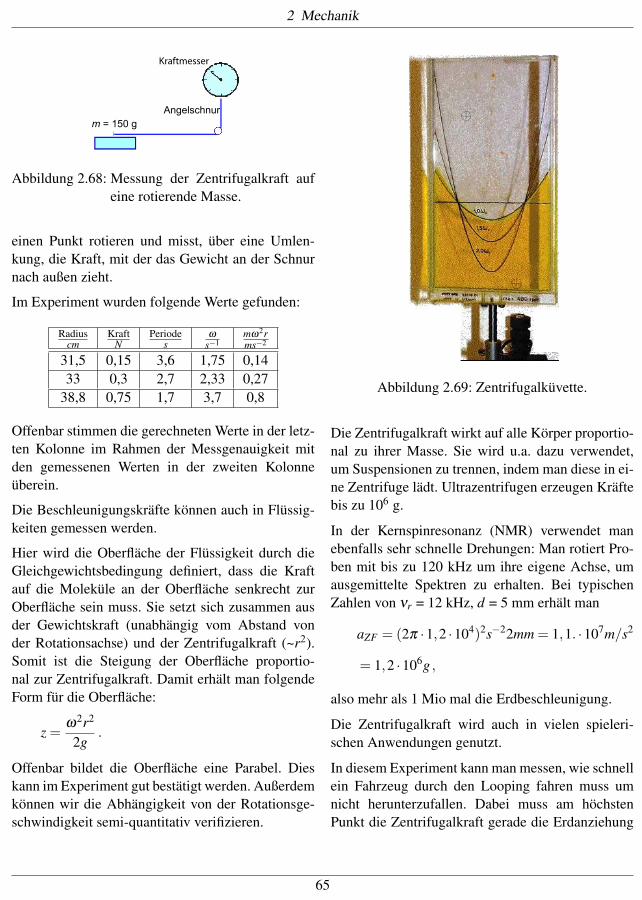
Abbildung 2.68: Messung der Zentrifugalkraft aufeine rotierende Masse.
einen Punkt rotieren und misst, über eine Umlen-kung, die Kraft, mit der das Gewicht an der Schnurnach außen zieht.
Im Experiment wurden folgende Werte gefunden:
Radiuscm
KraftN
Periodes
w
s�1mw
2rms�2
31,5 0,15 3,6 1,75 0,1433 0,3 2,7 2,33 0,27
38,8 0,75 1,7 3,7 0,8
Offenbar stimmen die gerechneten Werte in der letz-ten Kolonne im Rahmen der Messgenauigkeit mitden gemessenen Werten in der zweiten Kolonneüberein.
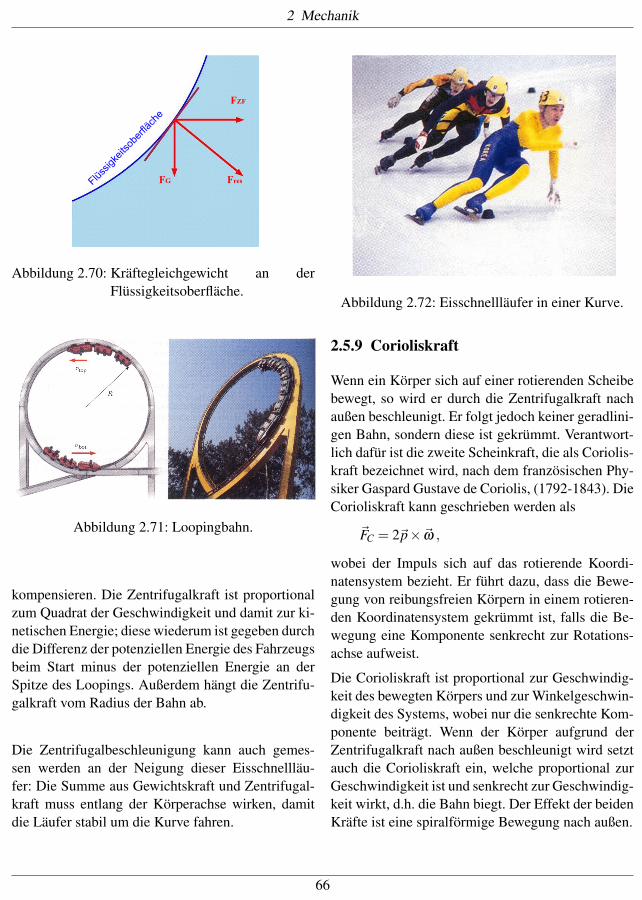
Die Beschleunigungskräfte können auch in Flüssig-keiten gemessen werden.
Hier wird die Oberfläche der Flüssigkeit durch dieGleichgewichtsbedingung definiert, dass die Kraftauf die Moleküle an der Oberfläche senkrecht zurOberfläche sein muss. Sie setzt sich zusammen ausder Gewichtskraft (unabhängig vom Abstand vonder Rotationsachse) und der Zentrifugalkraft (~r2).Somit ist die Steigung der Oberfläche proportio-nal zur Zentrifugalkraft. Damit erhält man folgendeForm für die Oberfläche:
z =w
2r2
2g.
Offenbar bildet die Oberfläche eine Parabel. Dieskann im Experiment gut bestätigt werden. Außerdemkönnen wir die Abhängigkeit von der Rotationsge-schwindigkeit semi-quantitativ verifizieren.
Abbildung 2.69: Zentrifugalküvette.
Die Zentrifugalkraft wirkt auf alle Körper proportio-nal zu ihrer Masse. Sie wird u.a. dazu verwendet,um Suspensionen zu trennen, indem man diese in ei-ne Zentrifuge lädt. Ultrazentrifugen erzeugen Kräftebis zu 106 g.
In der Kernspinresonanz (NMR) verwendet manebenfalls sehr schnelle Drehungen: Man rotiert Pro-ben mit bis zu 120 kHz um ihre eigene Achse, umausgemittelte Spektren zu erhalten. Bei typischenZahlen von nr = 12 kHz, d = 5 mm erhält man
aZF = (2p ·1,2 ·104)2s�22mm = 1,1. ·107m/s2
= 1,2 ·106g ,
also mehr als 1 Mio mal die Erdbeschleunigung.
Die Zentrifugalkraft wird auch in vielen spieleri-schen Anwendungen genutzt.
In diesem Experiment kann man messen, wie schnellein Fahrzeug durch den Looping fahren muss umnicht herunterzufallen. Dabei muss am höchstenPunkt die Zentrifugalkraft gerade die Erdanziehung
65
2 Mechanik
Fres
FZF
FGFlüssigkeitsoberfläche
Abbildung 2.70: Kräftegleichgewicht an derFlüssigkeitsoberfläche.
Abbildung 2.71: Loopingbahn.
kompensieren. Die Zentrifugalkraft ist proportionalzum Quadrat der Geschwindigkeit und damit zur ki-netischen Energie; diese wiederum ist gegeben durchdie Differenz der potenziellen Energie des Fahrzeugsbeim Start minus der potenziellen Energie an derSpitze des Loopings. Außerdem hängt die Zentrifu-galkraft vom Radius der Bahn ab.
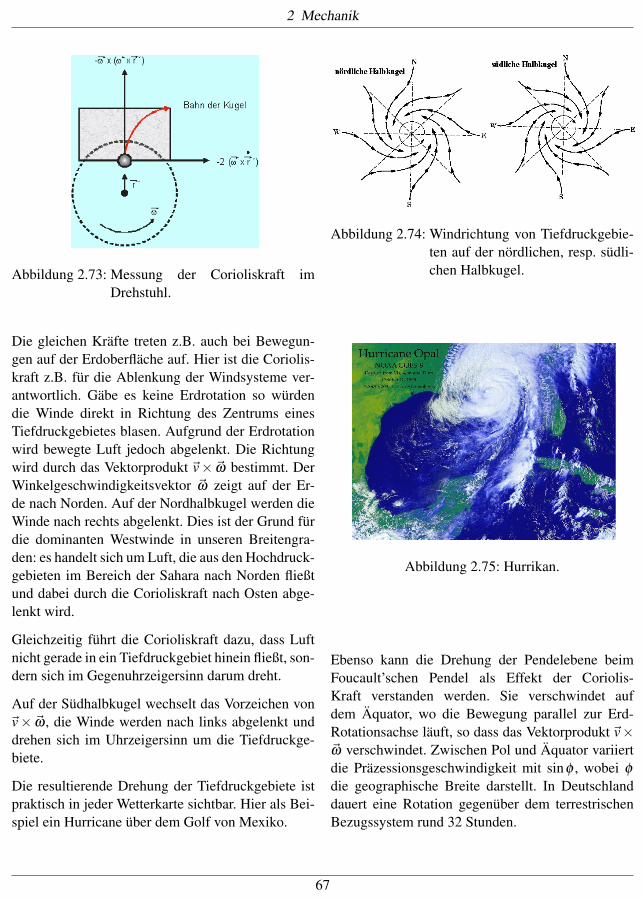
Die Zentrifugalbeschleunigung kann auch gemes-sen werden an der Neigung dieser Eisschnellläu-fer: Die Summe aus Gewichtskraft und Zentrifugal-kraft muss entlang der Körperachse wirken, damitdie Läufer stabil um die Kurve fahren.
Abbildung 2.72: Eisschnellläufer in einer Kurve.
2.5.9 Corioliskraft
Wenn ein Körper sich auf einer rotierenden Scheibebewegt, so wird er durch die Zentrifugalkraft nachaußen beschleunigt. Er folgt jedoch keiner geradlini-gen Bahn, sondern diese ist gekrümmt. Verantwort-lich dafür ist die zweite Scheinkraft, die als Coriolis-kraft bezeichnet wird, nach dem französischen Phy-siker Gaspard Gustave de Coriolis, (1792-1843). DieCorioliskraft kann geschrieben werden als
~FC = 2~p⇥~w ,
wobei der Impuls sich auf das rotierende Koordi-natensystem bezieht. Er führt dazu, dass die Bewe-gung von reibungsfreien Körpern in einem rotieren-den Koordinatensystem gekrümmt ist, falls die Be-wegung eine Komponente senkrecht zur Rotations-achse aufweist.
Die Corioliskraft ist proportional zur Geschwindig-keit des bewegten Körpers und zur Winkelgeschwin-digkeit des Systems, wobei nur die senkrechte Kom-ponente beiträgt. Wenn der Körper aufgrund derZentrifugalkraft nach außen beschleunigt wird setztauch die Corioliskraft ein, welche proportional zurGeschwindigkeit ist und senkrecht zur Geschwindig-keit wirkt, d.h. die Bahn biegt. Der Effekt der beidenKräfte ist eine spiralförmige Bewegung nach außen.
66
2 Mechanik
Abbildung 2.73: Messung der Corioliskraft imDrehstuhl.
Die gleichen Kräfte treten z.B. auch bei Bewegun-gen auf der Erdoberfläche auf. Hier ist die Coriolis-kraft z.B. für die Ablenkung der Windsysteme ver-antwortlich. Gäbe es keine Erdrotation so würdendie Winde direkt in Richtung des Zentrums einesTiefdruckgebietes blasen. Aufgrund der Erdrotationwird bewegte Luft jedoch abgelenkt. Die Richtungwird durch das Vektorprodukt ~v ⇥ ~
w bestimmt. DerWinkelgeschwindigkeitsvektor ~
w zeigt auf der Er-de nach Norden. Auf der Nordhalbkugel werden dieWinde nach rechts abgelenkt. Dies ist der Grund fürdie dominanten Westwinde in unseren Breitengra-den: es handelt sich um Luft, die aus den Hochdruck-gebieten im Bereich der Sahara nach Norden fließtund dabei durch die Corioliskraft nach Osten abge-lenkt wird.
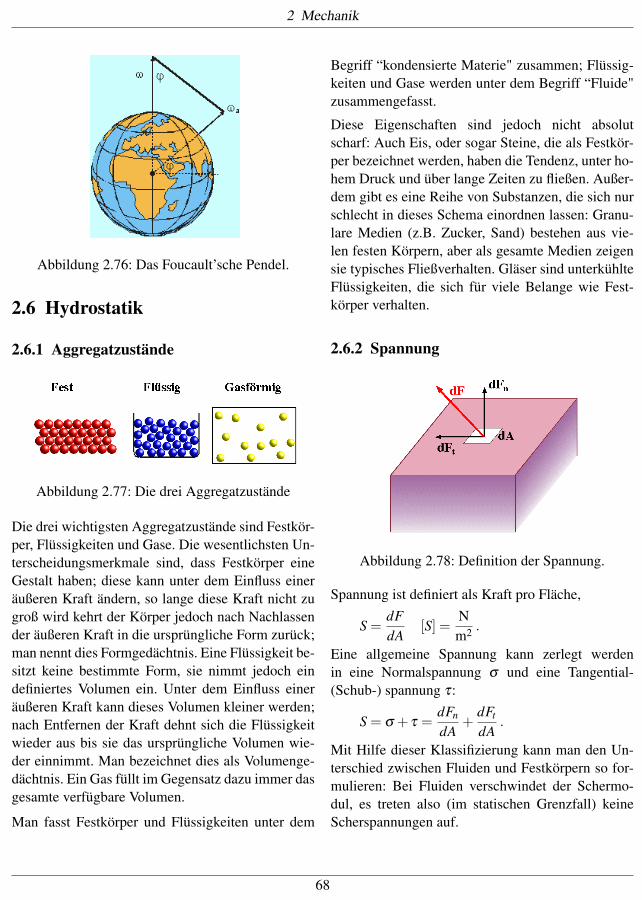
Gleichzeitig führt die Corioliskraft dazu, dass Luftnicht gerade in ein Tiefdruckgebiet hinein fließt, son-dern sich im Gegenuhrzeigersinn darum dreht.
Auf der Südhalbkugel wechselt das Vorzeichen von~v ⇥ ~
w , die Winde werden nach links abgelenkt unddrehen sich im Uhrzeigersinn um die Tiefdruckge-biete.
Die resultierende Drehung der Tiefdruckgebiete istpraktisch in jeder Wetterkarte sichtbar. Hier als Bei-spiel ein Hurricane über dem Golf von Mexiko.
Abbildung 2.74: Windrichtung von Tiefdruckgebie-ten auf der nördlichen, resp. südli-chen Halbkugel.
Abbildung 2.75: Hurrikan.
Ebenso kann die Drehung der Pendelebene beimFoucault’schen Pendel als Effekt der Coriolis-Kraft verstanden werden. Sie verschwindet aufdem Äquator, wo die Bewegung parallel zur Erd-Rotationsachse läuft, so dass das Vektorprodukt ~v ⇥~w verschwindet. Zwischen Pol und Äquator variiertdie Präzessionsgeschwindigkeit mit sinf , wobei f
die geographische Breite darstellt. In Deutschlanddauert eine Rotation gegenüber dem terrestrischenBezugssystem rund 32 Stunden.
67
2 Mechanik
Abbildung 2.76: Das Foucault’sche Pendel.
2.6 Hydrostatik
2.6.1 Aggregatzustände
Abbildung 2.77: Die drei Aggregatzustände
Die drei wichtigsten Aggregatzustände sind Festkör-per, Flüssigkeiten und Gase. Die wesentlichsten Un-terscheidungsmerkmale sind, dass Festkörper eineGestalt haben; diese kann unter dem Einfluss eineräußeren Kraft ändern, so lange diese Kraft nicht zugroß wird kehrt der Körper jedoch nach Nachlassender äußeren Kraft in die ursprüngliche Form zurück;man nennt dies Formgedächtnis. Eine Flüssigkeit be-sitzt keine bestimmte Form, sie nimmt jedoch eindefiniertes Volumen ein. Unter dem Einfluss eineräußeren Kraft kann dieses Volumen kleiner werden;nach Entfernen der Kraft dehnt sich die Flüssigkeitwieder aus bis sie das ursprüngliche Volumen wie-der einnimmt. Man bezeichnet dies als Volumenge-dächtnis. Ein Gas füllt im Gegensatz dazu immer dasgesamte verfügbare Volumen.
Man fasst Festkörper und Flüssigkeiten unter dem
Begriff “kondensierte Materie" zusammen; Flüssig-keiten und Gase werden unter dem Begriff “Fluide"zusammengefasst.
Diese Eigenschaften sind jedoch nicht absolutscharf: Auch Eis, oder sogar Steine, die als Festkör-per bezeichnet werden, haben die Tendenz, unter ho-hem Druck und über lange Zeiten zu fließen. Außer-dem gibt es eine Reihe von Substanzen, die sich nurschlecht in dieses Schema einordnen lassen: Granu-lare Medien (z.B. Zucker, Sand) bestehen aus vie-len festen Körpern, aber als gesamte Medien zeigensie typisches Fließverhalten. Gläser sind unterkühlteFlüssigkeiten, die sich für viele Belange wie Fest-körper verhalten.
2.6.2 Spannung
Abbildung 2.78: Definition der Spannung.
Spannung ist definiert als Kraft pro Fläche,
S =dFdA
[S] =Nm2 .
Eine allgemeine Spannung kann zerlegt werdenin eine Normalspannung s und eine Tangential-(Schub-) spannung t:
S = s + t =dFn
dA+
dFt
dA.
Mit Hilfe dieser Klassifizierung kann man den Un-terschied zwischen Fluiden und Festkörpern so for-mulieren: Bei Fluiden verschwindet der Schermo-dul, es treten also (im statischen Grenzfall) keineScherspannungen auf.
68
2 Mechanik
2.6.3 Hydrostatischer Druck undKomressibilität
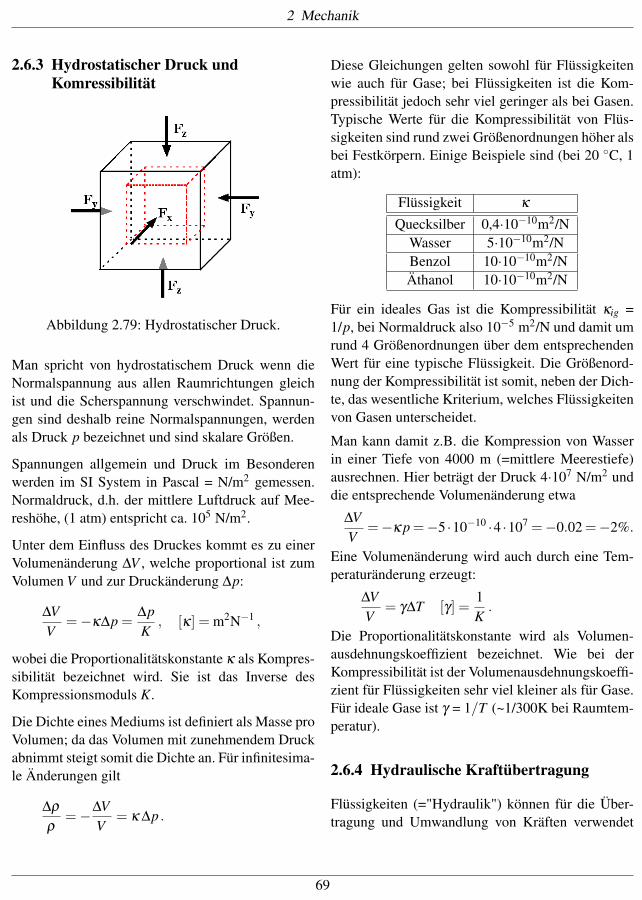
Abbildung 2.79: Hydrostatischer Druck.
Man spricht von hydrostatischem Druck wenn dieNormalspannung aus allen Raumrichtungen gleichist und die Scherspannung verschwindet. Spannun-gen sind deshalb reine Normalspannungen, werdenals Druck p bezeichnet und sind skalare Größen.
Spannungen allgemein und Druck im Besonderenwerden im SI System in Pascal = N/m2 gemessen.Normaldruck, d.h. der mittlere Luftdruck auf Mee-reshöhe, (1 atm) entspricht ca. 105 N/m2.
Unter dem Einfluss des Druckes kommt es zu einerVolumenänderung DV , welche proportional ist zumVolumen V und zur Druckänderung Dp:
DVV
= �kDp =DpK
, [k] = m2N�1 ,
wobei die Proportionalitätskonstante k als Kompres-sibilität bezeichnet wird. Sie ist das Inverse desKompressionsmoduls K.
Die Dichte eines Mediums ist definiert als Masse proVolumen; da das Volumen mit zunehmendem Druckabnimmt steigt somit die Dichte an. Für infinitesima-le Änderungen gilt
Dr
r
= �DVV
= k Dp .
Diese Gleichungen gelten sowohl für Flüssigkeitenwie auch für Gase; bei Flüssigkeiten ist die Kom-pressibilität jedoch sehr viel geringer als bei Gasen.Typische Werte für die Kompressibilität von Flüs-sigkeiten sind rund zwei Größenordnungen höher alsbei Festkörpern. Einige Beispiele sind (bei 20 �C, 1atm):
Flüssigkeit k
Quecksilber 0,4·10�10m2/NWasser 5·10�10m2/NBenzol 10·10�10m2/NÄthanol 10·10�10m2/N
Für ein ideales Gas ist die Kompressibilität kig =1/p, bei Normaldruck also 10�5 m2/N und damit umrund 4 Größenordnungen über dem entsprechendenWert für eine typische Flüssigkeit. Die Größenord-nung der Kompressibilität ist somit, neben der Dich-te, das wesentliche Kriterium, welches Flüssigkeitenvon Gasen unterscheidet.
Man kann damit z.B. die Kompression von Wasserin einer Tiefe von 4000 m (=mittlere Meerestiefe)ausrechnen. Hier beträgt der Druck 4·107 N/m2 unddie entsprechende Volumenänderung etwa
DVV
= �k p = �5 ·10�10 ·4 ·107 = �0.02 = �2%.
Eine Volumenänderung wird auch durch eine Tem-peraturänderung erzeugt:
DVV
= gDT [g] =1K
.
Die Proportionalitätskonstante wird als Volumen-ausdehnungskoeffizient bezeichnet. Wie bei derKompressibilität ist der Volumenausdehnungskoeffi-zient für Flüssigkeiten sehr viel kleiner als für Gase.Für ideale Gase ist g = 1/T (~1/300K bei Raumtem-peratur).
2.6.4 Hydraulische Kraftübertragung
Flüssigkeiten (="Hydraulik") können für die Über-tragung und Umwandlung von Kräften verwendet
69
2 Mechanik
werden. Ist die vertikale Ausdehnung eines Systemsvon Rohren klein so herrscht innerhalb im Gleichge-wicht überall derselbe Druck.
kleiner Kolben
großer Kolben A2A1
F1
Abbildung 2.80: Hydraulische Presse.
Damit gilt für die beiden KolbenF1
A1= p =
F2
A2
oder
F2 = F1A2
A1.
Somit lassen sich auch kleine Kräfte F1 in sehr großeKräfte F2 umwandeln, sofern die Flächenverhältnis-se entsprechend gewählt werden. Die Wege, die da-bei zurückgelegt werden, verhalten sich genau ent-gegengesetzt.
Abbildung 2.81: Hydraulischer Lift.
Auf diese Weise werden z.B. mit hydraulischenPressen große Kräfte erzeugt.
2.6.5 Schweredruck
Bei tiefen Flüssigkeiten und Gasen tritt ein Schwe-redruck auf: zusätzlich zum Außendruck wirkt an
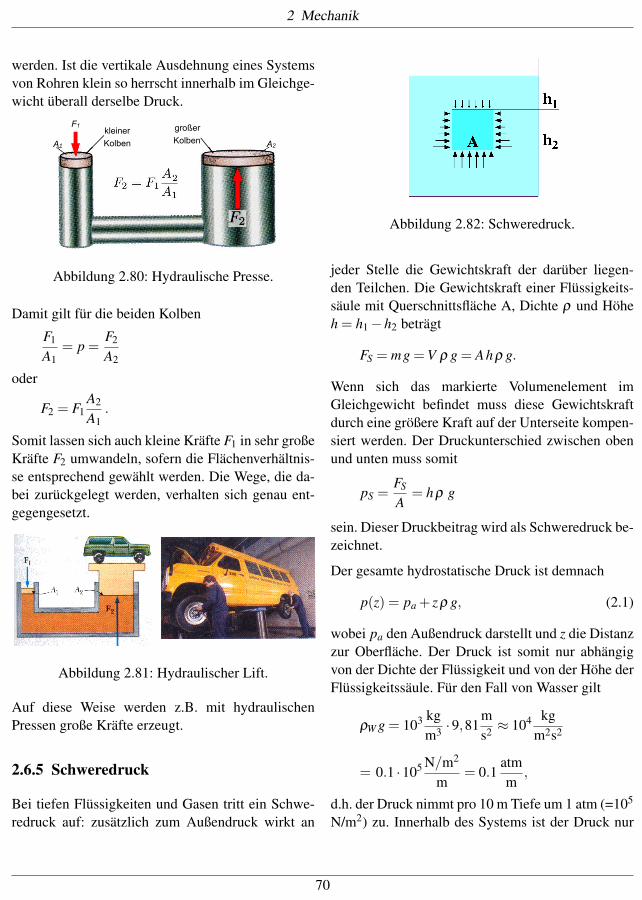
Abbildung 2.82: Schweredruck.
jeder Stelle die Gewichtskraft der darüber liegen-den Teilchen. Die Gewichtskraft einer Flüssigkeits-säule mit Querschnittsfläche A, Dichte r und Höheh = h1 �h2 beträgt
FS = mg = V r g = Ahr g.
Wenn sich das markierte Volumenelement imGleichgewicht befindet muss diese Gewichtskraftdurch eine größere Kraft auf der Unterseite kompen-siert werden. Der Druckunterschied zwischen obenund unten muss somit
pS =FS
A= hr g
sein. Dieser Druckbeitrag wird als Schweredruck be-zeichnet.
Der gesamte hydrostatische Druck ist demnach
p(z) = pa + zr g, (2.1)
wobei pa den Außendruck darstellt und z die Distanzzur Oberfläche. Der Druck ist somit nur abhängigvon der Dichte der Flüssigkeit und von der Höhe derFlüssigkeitssäule. Für den Fall von Wasser gilt
rW g = 103 kgm3 ·9,81
ms2 ⇡ 104 kg
m2s2
= 0.1 ·105 N/m2
m= 0.1
atmm
,
d.h. der Druck nimmt pro 10 m Tiefe um 1 atm (=105
N/m2) zu. Innerhalb des Systems ist der Druck nur
70
2 Mechanik
Abbildung 2.83: Kommunizierende Röhren.
von der Höhe abhängig, nicht vom (horizontalen)Ort. Dieses Prinzip gilt für alle unbewegten Fluide.
Eine Konsequenz davon ist, dass die Flüssigkeit ineinem System von verbundenen (="kommunizieren-den") Röhren überall bis zur gleichen Höhe auf-steigt, unabhängig vom Querschnitt und Form derRohre.
Abbildung 2.84: Druckverteilung im Wasserrohr-Netz.
Die gleichmäßige Verteilung des Drucks in einemSystem von Röhren wird verwendet um den Wasser-druck in der städtischen Wasserversorgung sicherzu-stellen: Das Reservoir muss mindestens so hoch lie-gen wie das höchste Haus. Eine Erweiterung diesesPrinzip ist, dass man - in einer gewissen Näherung- die Rohre auch weglassen darf: Eine Fontäne er-reicht die Höhe des Wasserspiegels im Reservoir.
2.6.6 Hydrostatischer Druck in Gasen
Im Falle von Gasen ist die Dichte abhängig vomDruck. Die Druckzunahme ist deshalb nicht mehr
proportional zur Höhe. Für eine dünne Schicht kanndie Dichte als konstant angenommen werden, dochbei Druckänderungen in der Atmosphäre müssen dieDichteänderungen berücksichtigt werden.
Für die Berechnung der Höhenabhängigkeit desDruckes in der Atmosphäre betrachten wir zunächsteine Schicht, welche so dünn ist, dass die Dich-te noch als konstant betrachtet werden kann. DieDruckänderung durch diese Schicht ist dann wie beieiner Flüssigkeit
d p = �r gdh,
wobei h nach oben zunimmt und somit der Druck ab-nimmt. Für ein ideales Gas gilt bei konstanter Tem-peratur (Boyle-Mariott Gesetz): r = r0 p/p0. Damitwird
d p = �r0pp0
gdh.
Trennung der Variablen und Integration ergibt
pZ
p0
d pp
= �r0
p0g
hZ
0
dh = lnpp0
= �r0
p0gh
oder
p = p0 exp(�r0ghp0
),
d.h. der Druck nimmt mit zunehmender Höhe expo-nentiell ab.
Numerische Werte für diese Parameter sind für Nor-malatmosphäre (T = 0�C, p0 = 1,013·105 Pa) r0 =1,293 kg/m3. Damit hat das Produkt r0g/p0 den nu-merischen Wert 1,254·10�4 m�1 oder
p = p0 e�h/8km.
Der Druck fällt pro 8 km Höhe auf 1/e oder pro 5,5km auf die Hälfte ab. In Wirklichkeit variieren so-wohl die Temperatur wie auch die Zusammenset-zung der Erdatmosphäre mit der Höhe. Die obigeFormel gibt aber eine gute Näherung für das tatsäch-liche Verhalten ab.
71
2 Mechanik
0 10 20
Höhe ü. M. / km
1
0.8
0.6
0.4
0.2
0
Dru
ck p
[atm
]
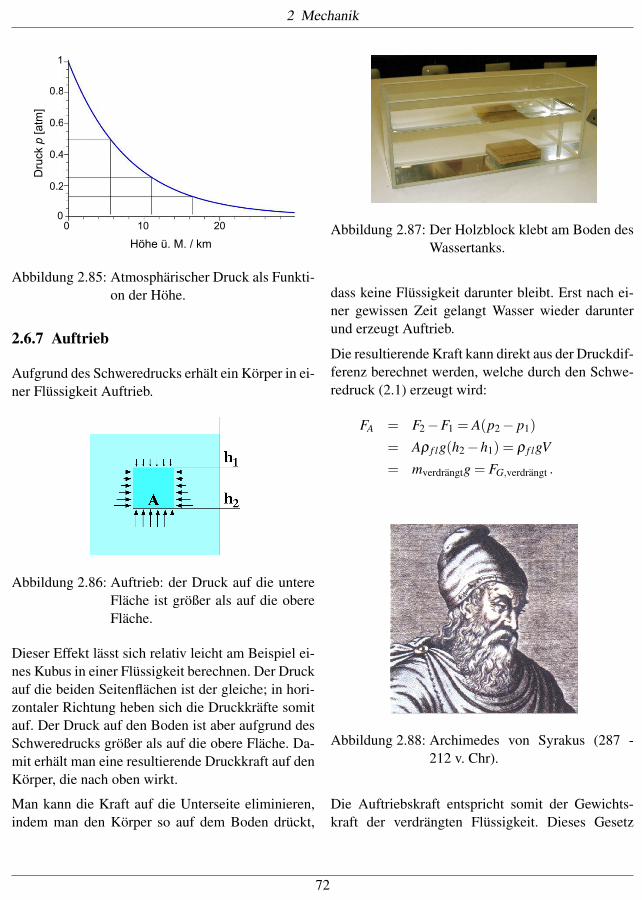
Abbildung 2.85: Atmosphärischer Druck als Funkti-on der Höhe.
2.6.7 Auftrieb
Aufgrund des Schweredrucks erhält ein Körper in ei-ner Flüssigkeit Auftrieb.
Abbildung 2.86: Auftrieb: der Druck auf die untereFläche ist größer als auf die obereFläche.
Dieser Effekt lässt sich relativ leicht am Beispiel ei-nes Kubus in einer Flüssigkeit berechnen. Der Druckauf die beiden Seitenflächen ist der gleiche; in hori-zontaler Richtung heben sich die Druckkräfte somitauf. Der Druck auf den Boden ist aber aufgrund desSchweredrucks größer als auf die obere Fläche. Da-mit erhält man eine resultierende Druckkraft auf denKörper, die nach oben wirkt.
Man kann die Kraft auf die Unterseite eliminieren,indem man den Körper so auf dem Boden drückt,
Abbildung 2.87: Der Holzblock klebt am Boden desWassertanks.
dass keine Flüssigkeit darunter bleibt. Erst nach ei-ner gewissen Zeit gelangt Wasser wieder darunterund erzeugt Auftrieb.
Die resultierende Kraft kann direkt aus der Druckdif-ferenz berechnet werden, welche durch den Schwe-redruck (2.1) erzeugt wird:
FA = F2 �F1 = A(p2 � p1)
= Ar f lg(h2 �h1) = r f lgV= mverdrangtg = FG,verdrangt .
Abbildung 2.88: Archimedes von Syrakus (287 -212 v. Chr).
Die Auftriebskraft entspricht somit der Gewichts-kraft der verdrängten Flüssigkeit. Dieses Gesetz
72
2 Mechanik
wurde zuerst von Archimedes formuliert und wirddeshalb als Prinzip von Archimedes bezeichnet. Esist eines der ältesten immer noch gültigen physikali-schen Gesetze.
Für den Spezialfall, dass der Körper die gleicheDichte besitzt wie die Flüssigkeit könnte man diesesResultat noch einfacher erhalten: Ein Flüssigkeits-volumen ist dann im Gleichgewicht, wenn die Auf-triebskraft gerade die Gewichtskraft kompensiert.Dieses Resultat wurde hier für einen Kubus herge-leitet, ist aber unabhängig von der Form gültig.
Abbildung 2.89: Messung des Auftriebs.
Der Auftrieb kann experimentell gemessen werden,indem man die Reduktion der Gewichtskraft misst,wenn der Körper in eine Flüssigkeit eingetauchtwird. Die verdrängte Flüssigkeitsmenge wird da-durch gemessen, dass sie in einem Becherglas auf-gefangen wird. Wird sie anschließend in den Behäl-ter gegossen, welche am gleichen Federkraftmesserhängt wie der Aluminiumblock so misst man wiederdie gleiche Kraft wie zu Beginn.
2.6.8 Auftrieb in Luft
Nicht nur in Flüssigkeiten, sondern auch in Luft undanderen Gasen existiert dieser Auftrieb. Dies ist z.B.die Grundlage für den Ballonflug (! Abb. 2.90),
Abbildung 2.90: Ballonflug.
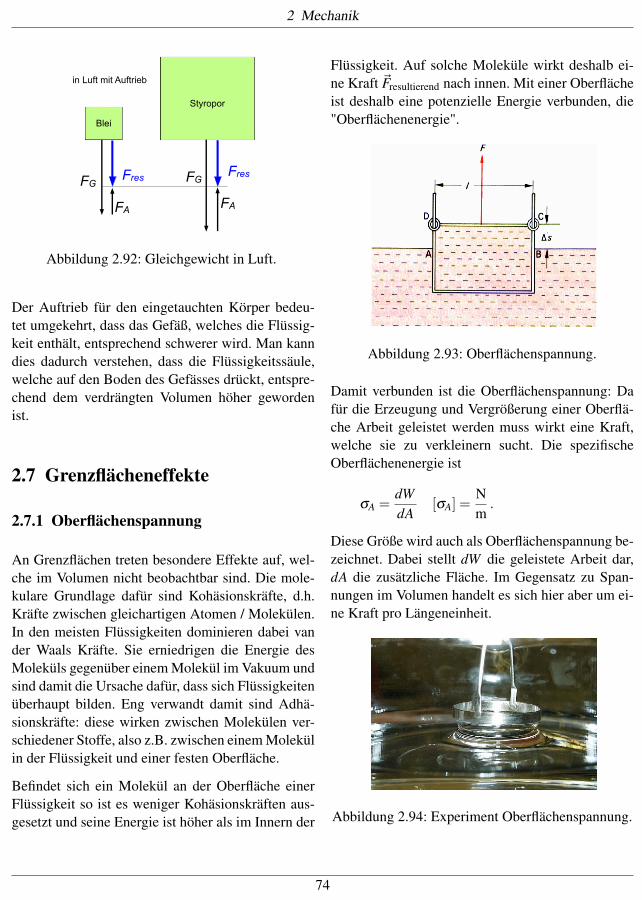
kann aber auch anhand eines einfachen Laborexpe-rimentes nachgewiesen werden.
Abbildung 2.91: Auftriebswaage.
Man kann den Effekt u.a. nachweisen indem man dieLuft entfernt (siehe Abb. 2.91). Im Experiment wirdder Auftrieb für 2 gleich schwere Körper gemessen,von denen der eine aus Blei besteh, der andere ausStyropor.
In Luft sind die beiden Körper im Gleichgewicht.Wie in Abb 2.92 gezeigt, ist die Summe Fres ausSchwerkraft FG und Auftrieb FA ist für beide gleich.Wird die Luft abgepumpt, so verschwindet der Auf-trieb. Da dieser für den größeren Körper erheblichgrößer ist, als für den kleinen Körper sinkt er ab.
73
2 Mechanik
FG
Styropor
in Luft mit Auftrieb
Blei
FA
Fres FG
FA
Fres
Abbildung 2.92: Gleichgewicht in Luft.
Der Auftrieb für den eingetauchten Körper bedeu-tet umgekehrt, dass das Gefäß, welches die Flüssig-keit enthält, entsprechend schwerer wird. Man kanndies dadurch verstehen, dass die Flüssigkeitssäule,welche auf den Boden des Gefässes drückt, entspre-chend dem verdrängten Volumen höher gewordenist.
2.7 Grenzflächeneffekte
2.7.1 Oberflächenspannung
An Grenzflächen treten besondere Effekte auf, wel-che im Volumen nicht beobachtbar sind. Die mole-kulare Grundlage dafür sind Kohäsionskräfte, d.h.Kräfte zwischen gleichartigen Atomen / Molekülen.In den meisten Flüssigkeiten dominieren dabei vander Waals Kräfte. Sie erniedrigen die Energie desMoleküls gegenüber einem Molekül im Vakuum undsind damit die Ursache dafür, dass sich Flüssigkeitenüberhaupt bilden. Eng verwandt damit sind Adhä-sionskräfte: diese wirken zwischen Molekülen ver-schiedener Stoffe, also z.B. zwischen einem Molekülin der Flüssigkeit und einer festen Oberfläche.
Befindet sich ein Molekül an der Oberfläche einerFlüssigkeit so ist es weniger Kohäsionskräften aus-gesetzt und seine Energie ist höher als im Innern der
Flüssigkeit. Auf solche Moleküle wirkt deshalb ei-ne Kraft ~Fresultierend nach innen. Mit einer Oberflächeist deshalb eine potenzielle Energie verbunden, die"Oberflächenenergie".
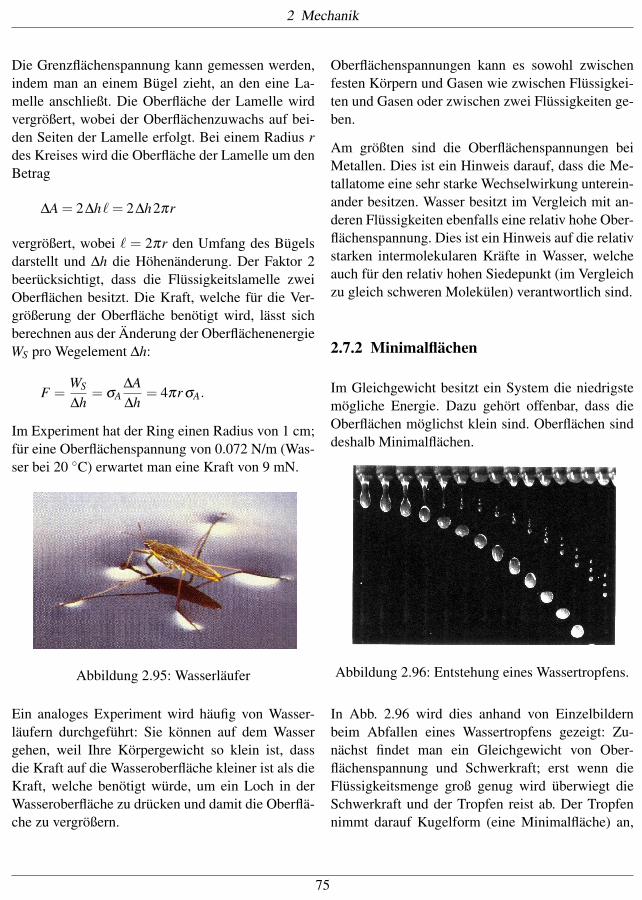
Abbildung 2.93: Oberflächenspannung.
Damit verbunden ist die Oberflächenspannung: Dafür die Erzeugung und Vergrößerung einer Oberflä-che Arbeit geleistet werden muss wirkt eine Kraft,welche sie zu verkleinern sucht. Die spezifischeOberflächenenergie ist
sA =dWdA
[sA] =Nm
.
Diese Größe wird auch als Oberflächenspannung be-zeichnet. Dabei stellt dW die geleistete Arbeit dar,dA die zusätzliche Fläche. Im Gegensatz zu Span-nungen im Volumen handelt es sich hier aber um ei-ne Kraft pro Längeneinheit.
Abbildung 2.94: Experiment Oberflächenspannung.
74
2 Mechanik
Die Grenzflächenspannung kann gemessen werden,indem man an einem Bügel zieht, an den eine La-melle anschließt. Die Oberfläche der Lamelle wirdvergrößert, wobei der Oberflächenzuwachs auf bei-den Seiten der Lamelle erfolgt. Bei einem Radius rdes Kreises wird die Oberfläche der Lamelle um denBetrag
DA = 2Dh` = 2Dh2pr
vergrößert, wobei ` = 2pr den Umfang des Bügelsdarstellt und Dh die Höhenänderung. Der Faktor 2beerücksichtigt, dass die Flüssigkeitslamelle zweiOberflächen besitzt. Die Kraft, welche für die Ver-größerung der Oberfläche benötigt wird, lässt sichberechnen aus der Änderung der OberflächenenergieWS pro Wegelement Dh:
F =WS
Dh= sA
DADh
= 4pr sA.
Im Experiment hat der Ring einen Radius von 1 cm;für eine Oberflächenspannung von 0.072 N/m (Was-ser bei 20 �C) erwartet man eine Kraft von 9 mN.
Abbildung 2.95: Wasserläufer
Ein analoges Experiment wird häufig von Wasser-läufern durchgeführt: Sie können auf dem Wassergehen, weil Ihre Körpergewicht so klein ist, dassdie Kraft auf die Wasseroberfläche kleiner ist als dieKraft, welche benötigt würde, um ein Loch in derWasseroberfläche zu drücken und damit die Oberflä-che zu vergrößern.
Oberflächenspannungen kann es sowohl zwischenfesten Körpern und Gasen wie zwischen Flüssigkei-ten und Gasen oder zwischen zwei Flüssigkeiten ge-ben.
Am größten sind die Oberflächenspannungen beiMetallen. Dies ist ein Hinweis darauf, dass die Me-tallatome eine sehr starke Wechselwirkung unterein-ander besitzen. Wasser besitzt im Vergleich mit an-deren Flüssigkeiten ebenfalls eine relativ hohe Ober-flächenspannung. Dies ist ein Hinweis auf die relativstarken intermolekularen Kräfte in Wasser, welcheauch für den relativ hohen Siedepunkt (im Vergleichzu gleich schweren Molekülen) verantwortlich sind.
2.7.2 Minimalflächen
Im Gleichgewicht besitzt ein System die niedrigstemögliche Energie. Dazu gehört offenbar, dass dieOberflächen möglichst klein sind. Oberflächen sinddeshalb Minimalflächen.
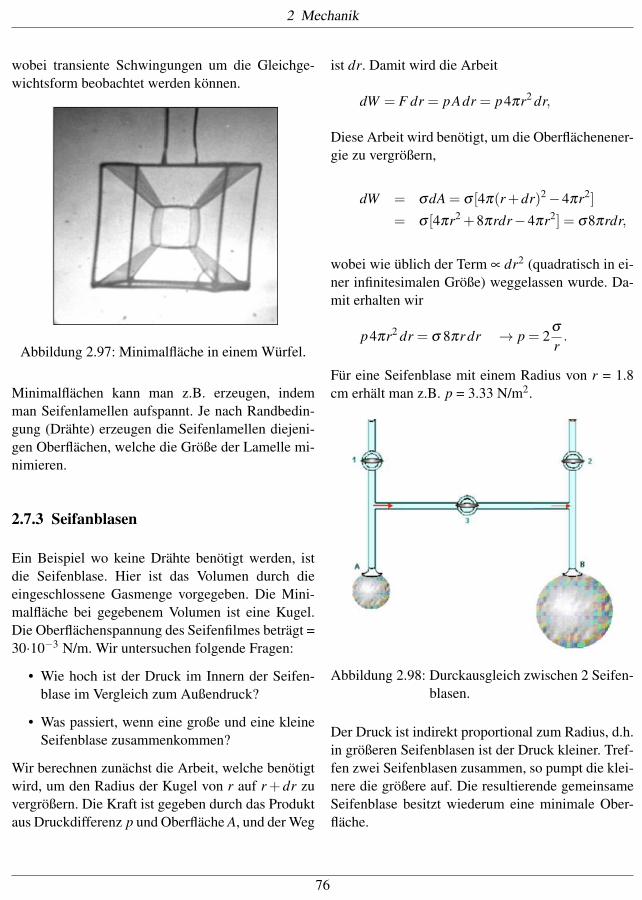
Abbildung 2.96: Entstehung eines Wassertropfens.
In Abb. 2.96 wird dies anhand von Einzelbildernbeim Abfallen eines Wassertropfens gezeigt: Zu-nächst findet man ein Gleichgewicht von Ober-flächenspannung und Schwerkraft; erst wenn dieFlüssigkeitsmenge groß genug wird überwiegt dieSchwerkraft und der Tropfen reist ab. Der Tropfennimmt darauf Kugelform (eine Minimalfläche) an,
75
2 Mechanik
wobei transiente Schwingungen um die Gleichge-wichtsform beobachtet werden können.
Abbildung 2.97: Minimalfläche in einem Würfel.
Minimalflächen kann man z.B. erzeugen, indemman Seifenlamellen aufspannt. Je nach Randbedin-gung (Drähte) erzeugen die Seifenlamellen diejeni-gen Oberflächen, welche die Größe der Lamelle mi-nimieren.
2.7.3 Seifanblasen
Ein Beispiel wo keine Drähte benötigt werden, istdie Seifenblase. Hier ist das Volumen durch dieeingeschlossene Gasmenge vorgegeben. Die Mini-malfläche bei gegebenem Volumen ist eine Kugel.Die Oberflächenspannung des Seifenfilmes beträgt =30·10�3 N/m. Wir untersuchen folgende Fragen:
• Wie hoch ist der Druck im Innern der Seifen-blase im Vergleich zum Außendruck?
• Was passiert, wenn eine große und eine kleineSeifenblase zusammenkommen?
Wir berechnen zunächst die Arbeit, welche benötigtwird, um den Radius der Kugel von r auf r + dr zuvergrößern. Die Kraft ist gegeben durch das Produktaus Druckdifferenz p und Oberfläche A, und der Weg
ist dr. Damit wird die Arbeit
dW = F dr = pAdr = p4pr2 dr,
Diese Arbeit wird benötigt, um die Oberflächenener-gie zu vergrößern,
dW = sdA = s [4p(r +dr)2 �4pr2]
= s [4pr2 +8prdr �4pr2] = s8prdr,
wobei wie üblich der Term µ dr2 (quadratisch in ei-ner infinitesimalen Größe) weggelassen wurde. Da-mit erhalten wir
p4pr2 dr = s 8pr dr ! p = 2s
r.
Für eine Seifenblase mit einem Radius von r = 1.8cm erhält man z.B. p = 3.33 N/m2.
Abbildung 2.98: Durckausgleich zwischen 2 Seifen-blasen.
Der Druck ist indirekt proportional zum Radius, d.h.in größeren Seifenblasen ist der Druck kleiner. Tref-fen zwei Seifenblasen zusammen, so pumpt die klei-nere die größere auf. Die resultierende gemeinsameSeifenblase besitzt wiederum eine minimale Ober-fläche.
76
2 Mechanik
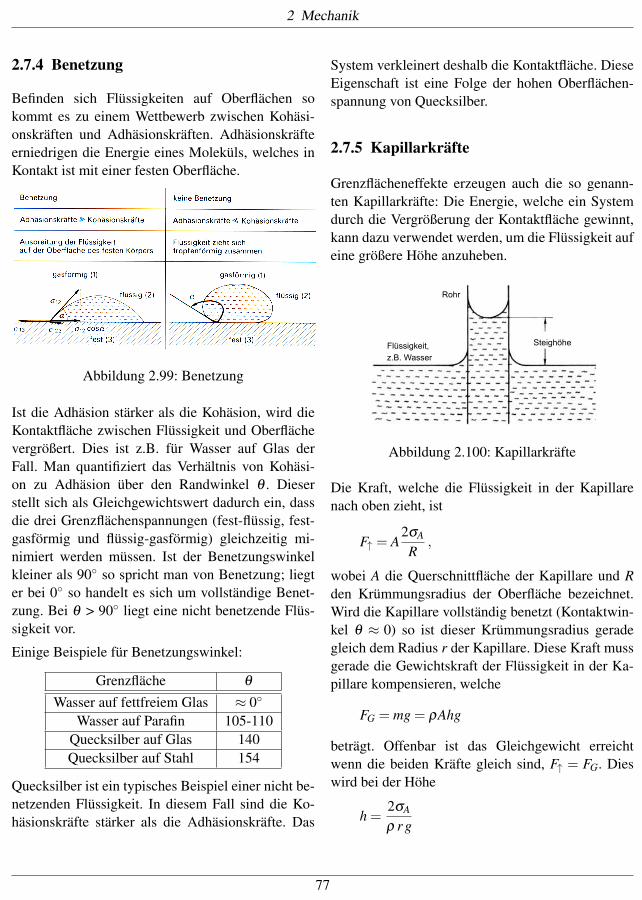
2.7.4 Benetzung
Befinden sich Flüssigkeiten auf Oberflächen sokommt es zu einem Wettbewerb zwischen Kohäsi-onskräften und Adhäsionskräften. Adhäsionskräfteerniedrigen die Energie eines Moleküls, welches inKontakt ist mit einer festen Oberfläche.
Abbildung 2.99: Benetzung
Ist die Adhäsion stärker als die Kohäsion, wird dieKontaktfläche zwischen Flüssigkeit und Oberflächevergrößert. Dies ist z.B. für Wasser auf Glas derFall. Man quantifiziert das Verhältnis von Kohäsi-on zu Adhäsion über den Randwinkel q . Dieserstellt sich als Gleichgewichtswert dadurch ein, dassdie drei Grenzflächenspannungen (fest-flüssig, fest-gasförmig und flüssig-gasförmig) gleichzeitig mi-nimiert werden müssen. Ist der Benetzungswinkelkleiner als 90� so spricht man von Benetzung; liegter bei 0� so handelt es sich um vollständige Benet-zung. Bei q > 90� liegt eine nicht benetzende Flüs-sigkeit vor.
Einige Beispiele für Benetzungswinkel:
Grenzfläche q
Wasser auf fettfreiem Glas ⇡ 0�
Wasser auf Parafin 105-110Quecksilber auf Glas 140Quecksilber auf Stahl 154
Quecksilber ist ein typisches Beispiel einer nicht be-netzenden Flüssigkeit. In diesem Fall sind die Ko-häsionskräfte stärker als die Adhäsionskräfte. Das
System verkleinert deshalb die Kontaktfläche. DieseEigenschaft ist eine Folge der hohen Oberflächen-spannung von Quecksilber.
2.7.5 Kapillarkräfte
Grenzflächeneffekte erzeugen auch die so genann-ten Kapillarkräfte: Die Energie, welche ein Systemdurch die Vergrößerung der Kontaktfläche gewinnt,kann dazu verwendet werden, um die Flüssigkeit aufeine größere Höhe anzuheben.
Flüssigkeit, z.B. Wasser
Rohr
Steighöhe
Abbildung 2.100: Kapillarkräfte
Die Kraft, welche die Flüssigkeit in der Kapillarenach oben zieht, ist
F" = A2sA
R,
wobei A die Querschnittfläche der Kapillare und Rden Krümmungsradius der Oberfläche bezeichnet.Wird die Kapillare vollständig benetzt (Kontaktwin-kel q ⇡ 0) so ist dieser Krümmungsradius geradegleich dem Radius r der Kapillare. Diese Kraft mussgerade die Gewichtskraft der Flüssigkeit in der Ka-pillare kompensieren, welche
FG = mg = rAhg
beträgt. Offenbar ist das Gleichgewicht erreichtwenn die beiden Kräfte gleich sind, F" = FG. Dieswird bei der Höhe
h =2sA
r r g
77
2 Mechanik
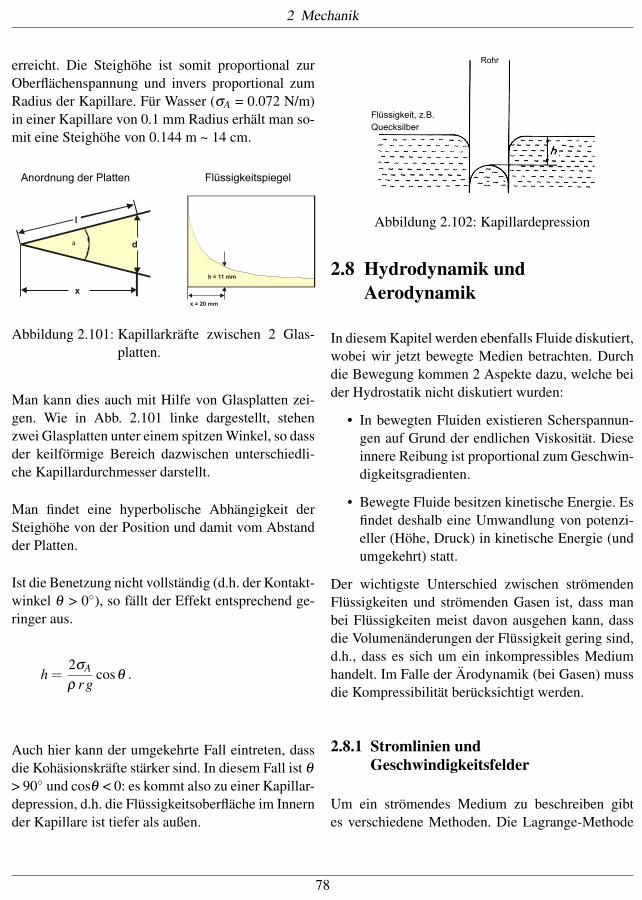
erreicht. Die Steighöhe ist somit proportional zurOberflächenspannung und invers proportional zumRadius der Kapillare. Für Wasser (sA = 0.072 N/m)in einer Kapillare von 0.1 mm Radius erhält man so-mit eine Steighöhe von 0.144 m ~ 14 cm.
l
a d
x
h = 11 mm
x = 20 mm
Anordnung der Platten Flüssigkeitspiegel
Abbildung 2.101: Kapillarkräfte zwischen 2 Glas-platten.
Man kann dies auch mit Hilfe von Glasplatten zei-gen. Wie in Abb. 2.101 linke dargestellt, stehenzwei Glasplatten unter einem spitzen Winkel, so dassder keilförmige Bereich dazwischen unterschiedli-che Kapillardurchmesser darstellt.
Man findet eine hyperbolische Abhängigkeit derSteighöhe von der Position und damit vom Abstandder Platten.
Ist die Benetzung nicht vollständig (d.h. der Kontakt-winkel q > 0�), so fällt der Effekt entsprechend ge-ringer aus.
h =2sA
r r gcosq .
Auch hier kann der umgekehrte Fall eintreten, dassdie Kohäsionskräfte stärker sind. In diesem Fall ist q
> 90� und cosq < 0: es kommt also zu einer Kapillar-depression, d.h. die Flüssigkeitsoberfläche im Innernder Kapillare ist tiefer als außen.
Flüssigkeit, z.B. Quecksilber
Rohr
Abbildung 2.102: Kapillardepression
2.8 Hydrodynamik undAerodynamik
In diesem Kapitel werden ebenfalls Fluide diskutiert,wobei wir jetzt bewegte Medien betrachten. Durchdie Bewegung kommen 2 Aspekte dazu, welche beider Hydrostatik nicht diskutiert wurden:
• In bewegten Fluiden existieren Scherspannun-gen auf Grund der endlichen Viskosität. Dieseinnere Reibung ist proportional zum Geschwin-digkeitsgradienten.
• Bewegte Fluide besitzen kinetische Energie. Esfindet deshalb eine Umwandlung von potenzi-eller (Höhe, Druck) in kinetische Energie (undumgekehrt) statt.
Der wichtigste Unterschied zwischen strömendenFlüssigkeiten und strömenden Gasen ist, dass manbei Flüssigkeiten meist davon ausgehen kann, dassdie Volumenänderungen der Flüssigkeit gering sind,d.h., dass es sich um ein inkompressibles Mediumhandelt. Im Falle der Ärodynamik (bei Gasen) mussdie Kompressibilität berücksichtigt werden.
2.8.1 Stromlinien undGeschwindigkeitsfelder
Um ein strömendes Medium zu beschreiben gibtes verschiedene Methoden. Die Lagrange-Methode
78
2 Mechanik
entspricht einer zeitlichen Verfolgung der Masse-elemente dm. Einfacher ist die Euler-Methode beider zu einem beliebigen Zeitpunkt die Geschwindig-keitsvektoren der einzelnen Masseelemente betrach-tet werden.
vFlüssigkeits-
element
Stromlinie
Abbildung 2.103: Flusslinien
Die Gesamtheit dieser Geschwindigkeitsvektorenwird als Geschwindigkeitsfeld bezeichnet. Zur Dar-stellung verwendet man meist Stromlinien. Dabeihandelt es sich um orientierte Kurven, welche denWeg der Flüssigkeitselemente verfolgen. Die mo-mentane Tangente an diese Kurven ergibt jeweils dielokale Richtung der Strömungsgeschwindigkeit.
v
Gebiet hoher Geschwindigkeit
Gebiet niedriger Geschwindigkeit
Abbildung 2.104: Stromliniendichte als Maß für dielokale Geschwindigkeit.
Die Dichte der Stromlinien ist ein Mass für den Be-trag der Geschwindigkeit: Je größer die Anzahl derStromlinien durch eine Fläche sind, desto größer istdie Stromdichte und damit die lokale Geschwindig-keit.
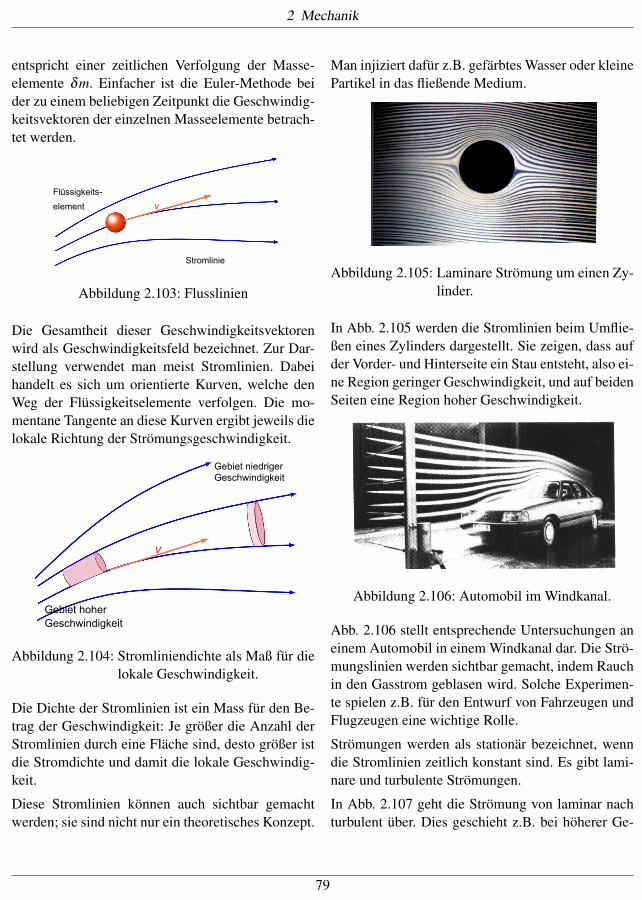
Diese Stromlinien können auch sichtbar gemachtwerden; sie sind nicht nur ein theoretisches Konzept.
Man injiziert dafür z.B. gefärbtes Wasser oder kleinePartikel in das fließende Medium.
Abbildung 2.105: Laminare Strömung um einen Zy-linder.
In Abb. 2.105 werden die Stromlinien beim Umflie-ßen eines Zylinders dargestellt. Sie zeigen, dass aufder Vorder- und Hinterseite ein Stau entsteht, also ei-ne Region geringer Geschwindigkeit, und auf beidenSeiten eine Region hoher Geschwindigkeit.
Abbildung 2.106: Automobil im Windkanal.
Abb. 2.106 stellt entsprechende Untersuchungen aneinem Automobil in einem Windkanal dar. Die Strö-mungslinien werden sichtbar gemacht, indem Rauchin den Gasstrom geblasen wird. Solche Experimen-te spielen z.B. für den Entwurf von Fahrzeugen undFlugzeugen eine wichtige Rolle.
Strömungen werden als stationär bezeichnet, wenndie Stromlinien zeitlich konstant sind. Es gibt lami-nare und turbulente Strömungen.
In Abb. 2.107 geht die Strömung von laminar nachturbulent über. Dies geschieht z.B. bei höherer Ge-
79
2 Mechanik
Abbildung 2.107: Laminare und turbulente Strö-mungen.
schwindigkeit. Die Charakterisierung von turbulen-ten Strömungen gehört ins Gebiet der nichtlinearenDynamik und kann in diesem Zusammenhang nichtdiskutiert werden.
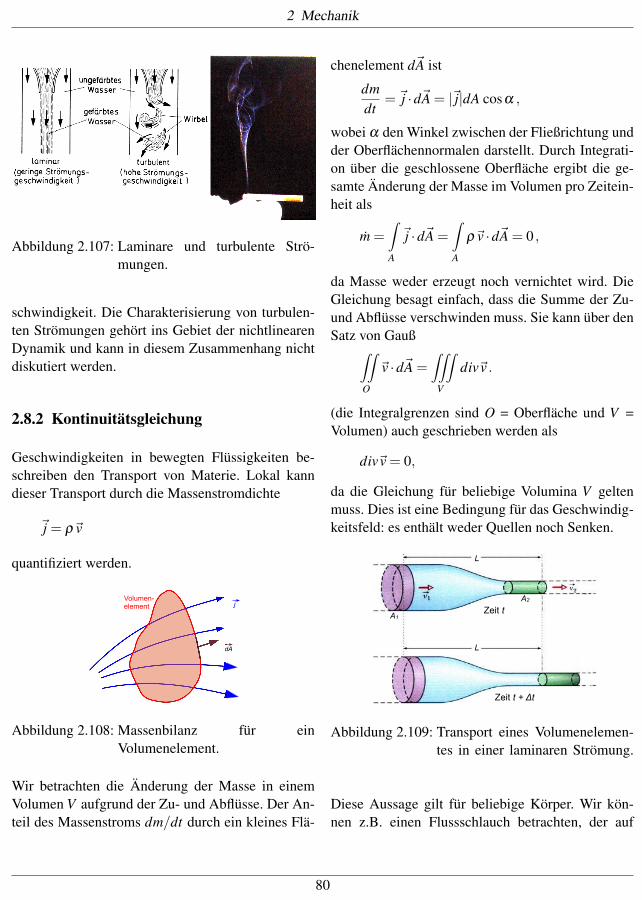
2.8.2 Kontinuitätsgleichung
Geschwindigkeiten in bewegten Flüssigkeiten be-schreiben den Transport von Materie. Lokal kanndieser Transport durch die Massenstromdichte
~j = r~v
quantifiziert werden.
Volumen- element j
dA
Abbildung 2.108: Massenbilanz für einVolumenelement.
Wir betrachten die Änderung der Masse in einemVolumen V aufgrund der Zu- und Abflüsse. Der An-teil des Massenstroms dm/dt durch ein kleines Flä-
chenelement d~A ist
dmdt
= ~j ·d~A = |~j|dA cosa ,
wobei a den Winkel zwischen der Fließrichtung undder Oberflächennormalen darstellt. Durch Integrati-on über die geschlossene Oberfläche ergibt die ge-samte Änderung der Masse im Volumen pro Zeitein-heit als
m =Z
A
~j ·d~A =Z
A
r~v ·d~A = 0 ,
da Masse weder erzeugt noch vernichtet wird. DieGleichung besagt einfach, dass die Summe der Zu-und Abflüsse verschwinden muss. Sie kann über denSatz von Gauß
ZZ
O
~v ·d~A =ZZZ
V
div~v .
(die Integralgrenzen sind O = Oberfläche und V =Volumen) auch geschrieben werden als
div~v = 0,
da die Gleichung für beliebige Volumina V geltenmuss. Dies ist eine Bedingung für das Geschwindig-keitsfeld: es enthält weder Quellen noch Senken.
Zeit t
L
L
A1
Zeit t + Δt
A2
Abbildung 2.109: Transport eines Volumenelemen-tes in einer laminaren Strömung.
Diese Aussage gilt für beliebige Körper. Wir kön-nen z.B. einen Flussschlauch betrachten, der auf
80
2 Mechanik
der Außenseite von Flusslinien begrenzt wird (~v ·~dA = 0) und an den Stirnflächen von zwei Schei-ben mit Flächen A1 und A2 (siehe Abb. 2.109). Dadie Seitenwände durch Flusslinien gebildet werden,fließt kein Material durch diesen Teil der Oberflä-che. Damit sind Ein- und Ausfluss gegeben durchdie Durchflussmenge durch die beiden Flächen linksund rechts.
Die Flüssigkeitsmenge, welche pro Zeiteinheit durcheine Stirnfläche fließt, ist proportional zum Pro-dukt aus Querschnittsfläche und Fließgeschwindig-keit vdm = r Av, da die Geschwindigkeit senkrechtauf der Fläche steht. Bei konstanter Dichte kann dieMassenbilanz somit geschrieben werden als
v1A1 = v2A2 (2.2)
oder
v2 = v1A1
A2.
Dies entspricht der Quantifizierung der oben ge-machten Aussage, dass nahe beieinander liegen-de Stromlinien hohe Geschwindigkeiten markierenund geringe Stromliniendichte einer langsamen Ge-schwindigkeit entspricht.
Für kompressible Flüssigkeiten muss die Gleichungum die Dichte erweitert werden:
v1r1A1 = v2r2A2 .
Für wirbelfreie Strömungen kann man das Ge-schwindigkeitsfeld ~v(~r) als Gradient eines Ge-schwindigkeitspotenzials f(~r) schreiben:
~v(~r) = grad f(~r) = ~—f(~r) .
Solche Strömungen werden deshalb auch als Poten-zialströmungen bezeichnet.
2.8.3 Bernoullische Gleichung
Wir betrachten eine Strömung in einem Rohr, dassich verengt. Die Zunahme der Geschwindigkeit auf-grund der Verengung bedeutet laut Gleichung (2.2)
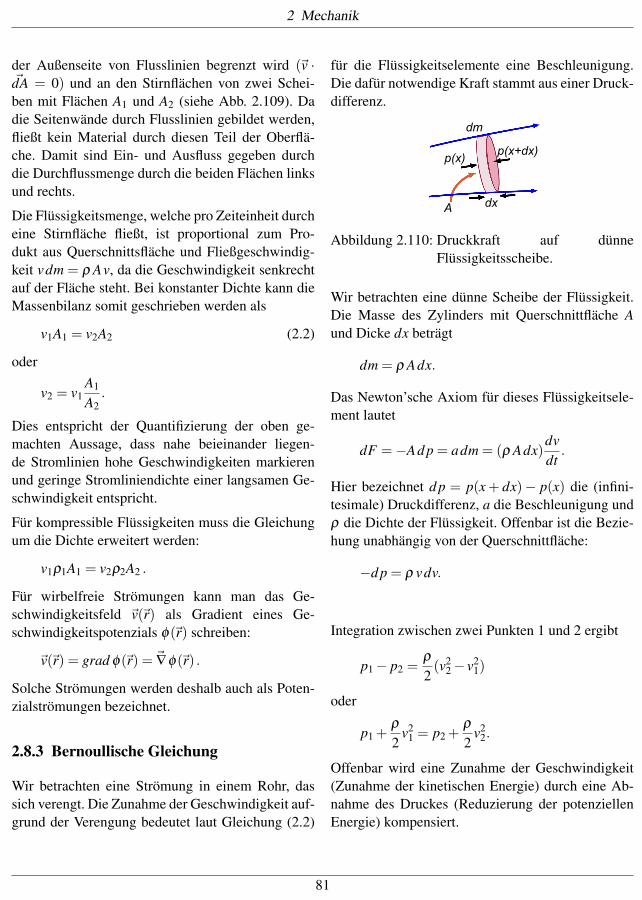
für die Flüssigkeitselemente eine Beschleunigung.Die dafür notwendige Kraft stammt aus einer Druck-differenz.
dm
p(x)
A
p(x+dx)
dx
Abbildung 2.110: Druckkraft auf dünneFlüssigkeitsscheibe.
Wir betrachten eine dünne Scheibe der Flüssigkeit.Die Masse des Zylinders mit Querschnittfläche Aund Dicke dx beträgt
dm = r Adx.
Das Newton’sche Axiom für dieses Flüssigkeitsele-ment lautet
dF = �Ad p = adm = (r Adx)dvdt
.
Hier bezeichnet d p = p(x + dx) � p(x) die (infini-tesimale) Druckdifferenz, a die Beschleunigung undr die Dichte der Flüssigkeit. Offenbar ist die Bezie-hung unabhängig von der Querschnittfläche:
�d p = r vdv.
Integration zwischen zwei Punkten 1 und 2 ergibt
p1 � p2 =r
2(v2
2 � v21)
oder
p1 +r
2v2
1 = p2 +r
2v2
2.
Offenbar wird eine Zunahme der Geschwindigkeit(Zunahme der kinetischen Energie) durch eine Ab-nahme des Druckes (Reduzierung der potenziellenEnergie) kompensiert.
81
2 Mechanik
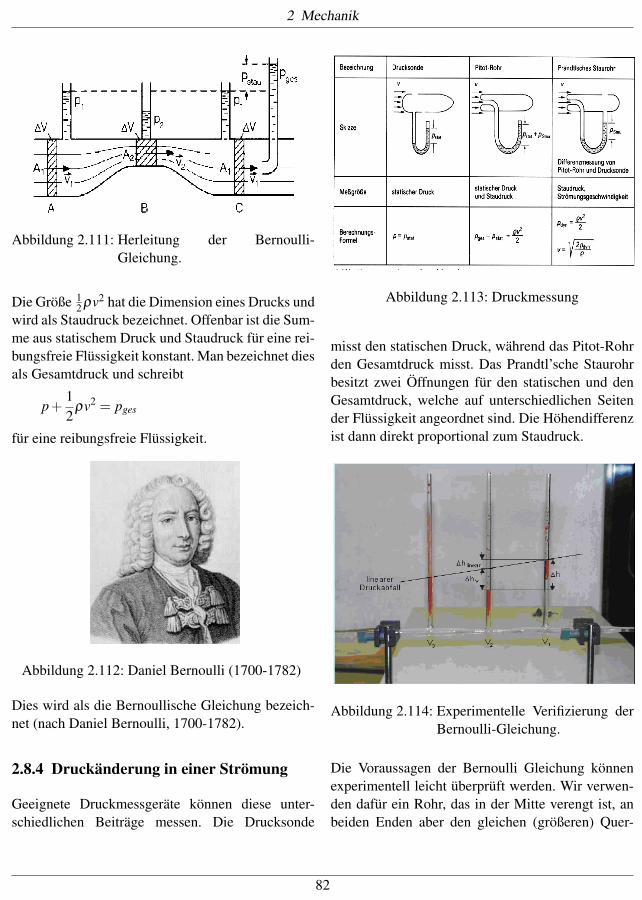
Abbildung 2.111: Herleitung der Bernoulli-Gleichung.
Die Größe 12 rv2 hat die Dimension eines Drucks und
wird als Staudruck bezeichnet. Offenbar ist die Sum-me aus statischem Druck und Staudruck für eine rei-bungsfreie Flüssigkeit konstant. Man bezeichnet diesals Gesamtdruck und schreibt
p+12
rv2 = pges
für eine reibungsfreie Flüssigkeit.
Abbildung 2.112: Daniel Bernoulli (1700-1782)
Dies wird als die Bernoullische Gleichung bezeich-net (nach Daniel Bernoulli, 1700-1782).
2.8.4 Druckänderung in einer Strömung
Geeignete Druckmessgeräte können diese unter-schiedlichen Beiträge messen. Die Drucksonde
Abbildung 2.113: Druckmessung
misst den statischen Druck, während das Pitot-Rohrden Gesamtdruck misst. Das Prandtl’sche Staurohrbesitzt zwei Öffnungen für den statischen und denGesamtdruck, welche auf unterschiedlichen Seitender Flüssigkeit angeordnet sind. Die Höhendifferenzist dann direkt proportional zum Staudruck.
Abbildung 2.114: Experimentelle Verifizierung derBernoulli-Gleichung.
Die Voraussagen der Bernoulli Gleichung könnenexperimentell leicht überprüft werden. Wir verwen-den dafür ein Rohr, das in der Mitte verengt ist, anbeiden Enden aber den gleichen (größeren) Quer-
82
2 Mechanik
schnitt zeigt. In den beiden äußeren Rohren steigtdas Wasser höher; an dieser Stelle ist offenbar derstatische Druck höher als in der Mitte, wo das Was-ser schneller fließt. Da die Strömung im Experi-ment nicht reibungsfrei ist findet man zusätzlich zumStaudruck auch einen linearen Druckabfall, welcherdie Reibungsverluste enthält.
v1 , p1 , h1
v2 , p2 , h2
Abbildung 2.115: Beitrag des Schweredrucks zurBernoulli-Gleichung.
Eine etwas allgemeinere Form erhält man, wenn manzusätzlich den Schweredruck berücksichtigt. Dannist der Gesamtdruck zusätzlich von der Höhe abhän-gig; er beträgt dann
p0 +r gh+12
r v2 = pges.
Insgesamt sind beide Formen der Bernoulli-Gleichung Ausdrücke der Energieerhaltung: jederTerm stellt eine Energiedichte, d.h. Energie pro Vo-lumen dar; der erste enthält die elastische Energie,der zweite die potenzielle Energie der Gravitation,der dritte die kinetische Energiedichte.
2.8.5 Demonstrationen zurBernoulli-Gleichung
Einige interessante Konseqünzen können leicht de-monstriert werden.
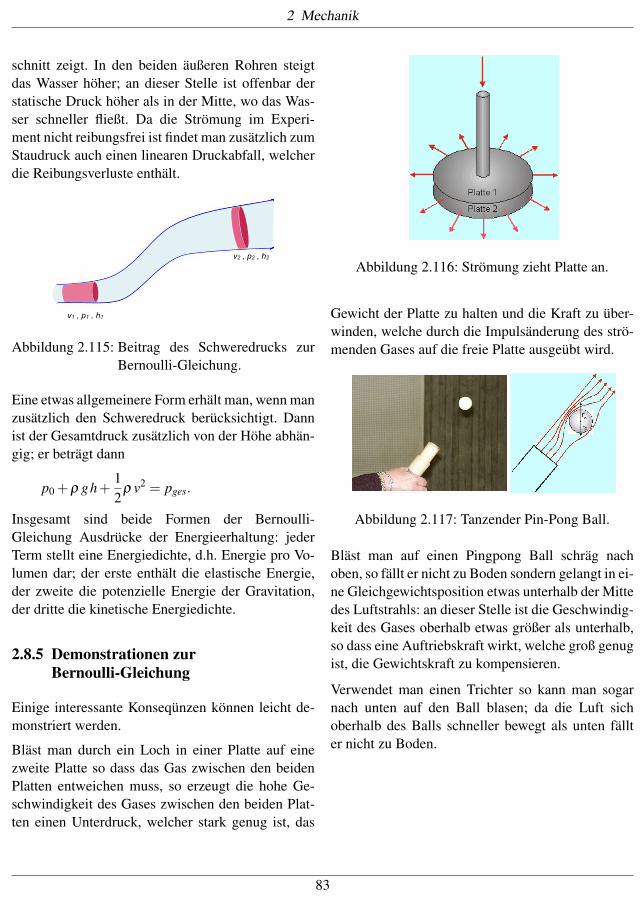
Bläst man durch ein Loch in einer Platte auf einezweite Platte so dass das Gas zwischen den beidenPlatten entweichen muss, so erzeugt die hohe Ge-schwindigkeit des Gases zwischen den beiden Plat-ten einen Unterdruck, welcher stark genug ist, das
Abbildung 2.116: Strömung zieht Platte an.
Gewicht der Platte zu halten und die Kraft zu über-winden, welche durch die Impulsänderung des strö-menden Gases auf die freie Platte ausgeübt wird.
Abbildung 2.117: Tanzender Pin-Pong Ball.
Bläst man auf einen Pingpong Ball schräg nachoben, so fällt er nicht zu Boden sondern gelangt in ei-ne Gleichgewichtsposition etwas unterhalb der Mittedes Luftstrahls: an dieser Stelle ist die Geschwindig-keit des Gases oberhalb etwas größer als unterhalb,so dass eine Auftriebskraft wirkt, welche groß genugist, die Gewichtskraft zu kompensieren.
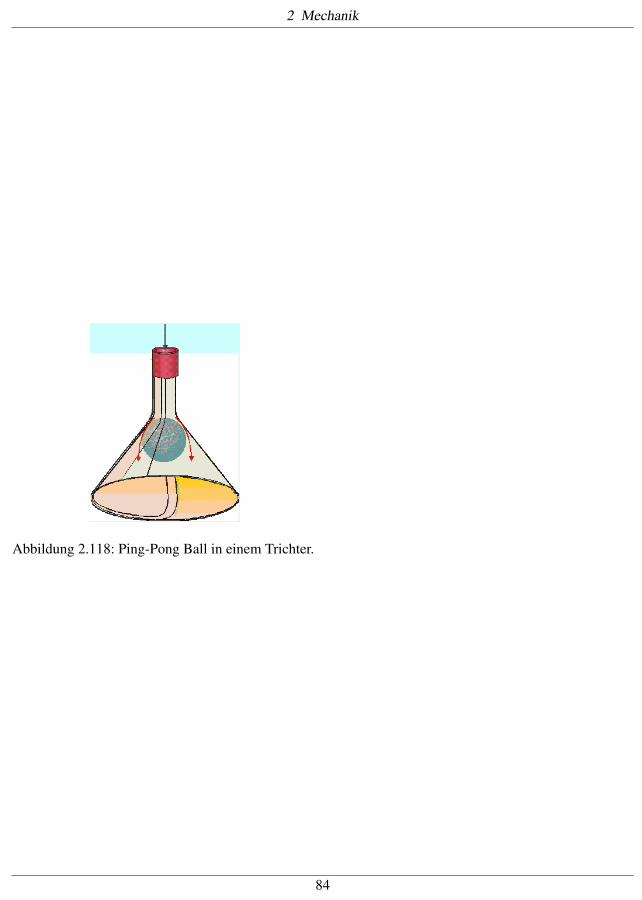
Verwendet man einen Trichter so kann man sogarnach unten auf den Ball blasen; da die Luft sichoberhalb des Balls schneller bewegt als unten fällter nicht zu Boden.
83
2 Mechanik
Abbildung 2.118: Ping-Pong Ball in einem Trichter.
84

















![AUFBAUKURS MECHANIK - uibk.ac.at · Grundgrößen der Mechanik SI Einheiten Länge (Meter [m]) Zeit (Sekunde [s]) Masse (Kilogramm [kg]) Abgeleitete Einheiten ... In der Mechanik](https://img.pdfslide.org/doc/110x75/5b9f5a7a09d3f25b318cf5ea/aufbaukurs-mechanik-uibkacat-grundgroessen-der-mechanik-si-einheiten-laenge.jpg)











