Embed Size (px)
Citation preview
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
6 Fahrsicherheitssysteme
� 6.1 Gliederung von Fahrsicherheitssystemen
� 6.2 Radschlupf-Regelsysteme
� 6.3 Fahrdynamik-Regelung
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
6.1 Gliederung von Fahrsicherheits-Systemen
� Aktive Sicherheitssysteme– Antiblockiersysteme– Antriebsschlupfregelungen– Fahrdynamikregelungen– Fahrerassistenzsysteme– …
� Passive Sicherheitssysteme– Sicherheitsfahrgastzelle– Airbags– Sicherheitsgurte– Gurtstraffer– …
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
6.2 Radschlupf-Regelsysteme
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
Aufgabe eines Radschlupf-Regelsystems
� Die Lenkbarkeit des Fahrzeugs soll bei allen Fahrbahnbeschaffenheiten sichergestellt sein.
� Die Haftreibungszahl zwischen den Rädern und der Fahrbahn soll maximal ausgenutzt werden, wobei Lenkbarkeit und Fahrstabilität Vorrang haben.
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
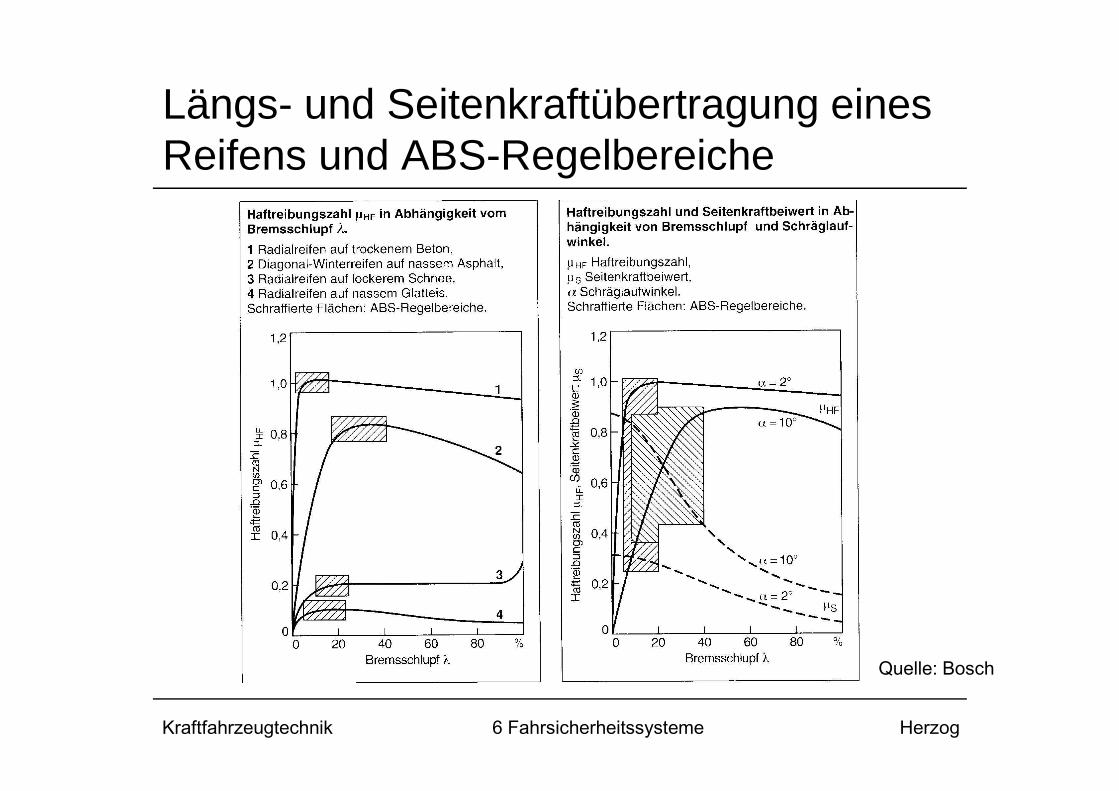
Längs- und Seitenkraftübertragung eines Reifens und ABS-Regelbereiche
Quelle: Bosch
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
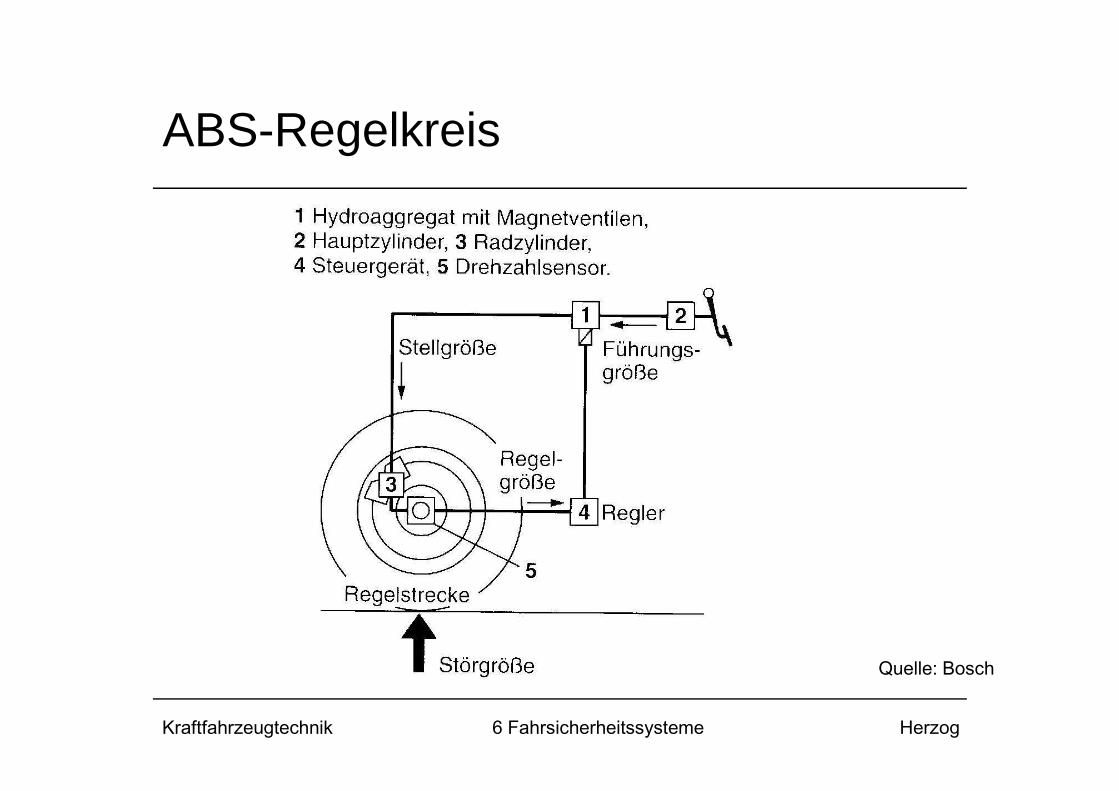
ABS-Regelkreis
Quelle: Bosch
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
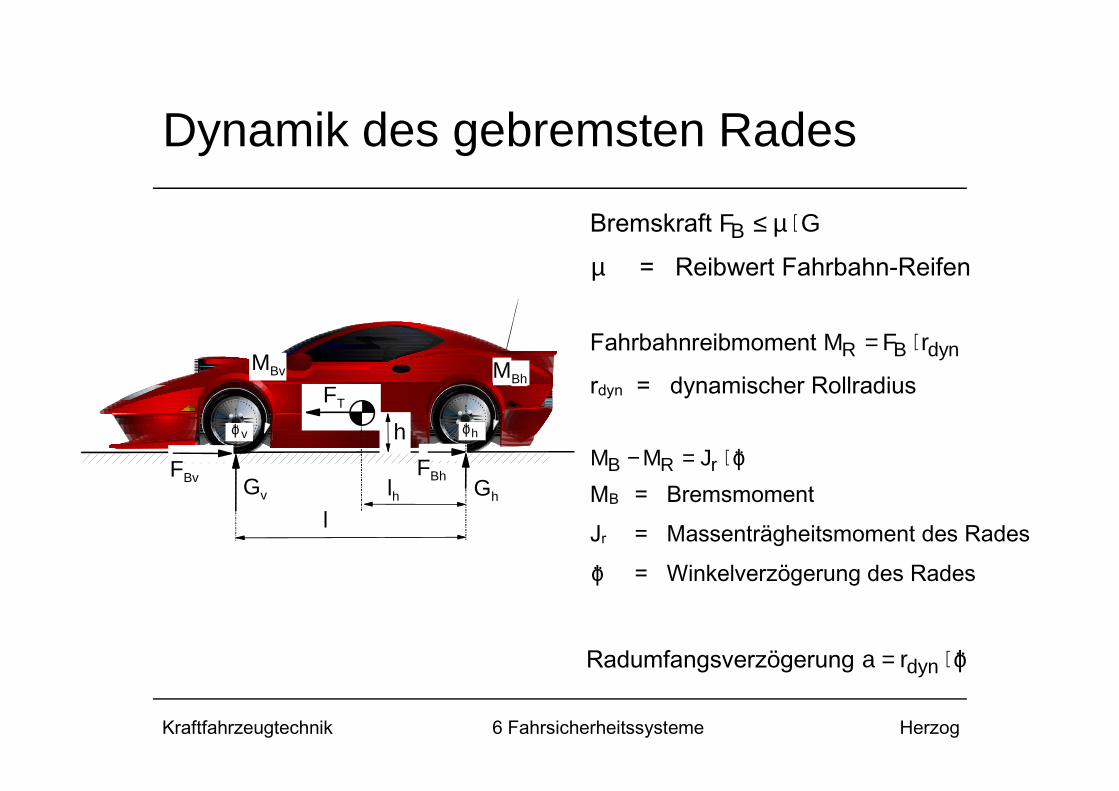
Dynamik des gebremsten Rades
FT
FBhFBv
h
l
Gv Ghlh
MBv
vϕ&&
MBh
hϕ&&
Bremskraft GFB ⋅µ≤ µ = Reibwert Fahrbahn-Reifen
Fahrbahnreibmoment dynBR rFM ⋅=
rdyn = dynamischer Rollradius
ϕ⋅=− &&rRB JMM MB = Bremsmoment Jr = Massenträgheitsmoment des Rades ϕ&& = Winkelverzögerung des Rades
Radumfangsverzögerung ϕ⋅= &&dynra
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
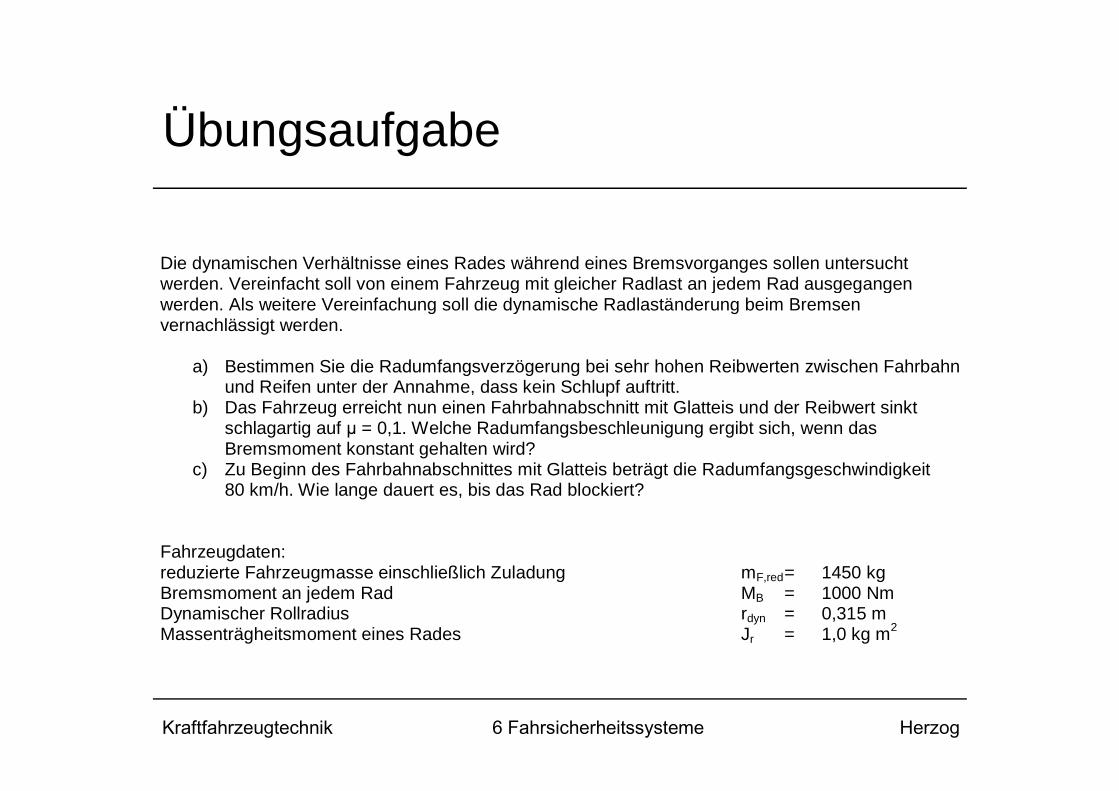
Übungsaufgabe
Die dynamischen Verhältnisse eines Rades während eines Bremsvorganges sollen untersucht werden. Vereinfacht soll von einem Fahrzeug mit gleicher Radlast an jedem Rad ausgegangen werden. Als weitere Vereinfachung soll die dynamische Radlaständerung beim Bremsen vernachlässigt werden.
a) Bestimmen Sie die Radumfangsverzögerung bei sehr hohen Reibwerten zwischen Fahrbahn und Reifen unter der Annahme, dass kein Schlupf auftritt.
b) Das Fahrzeug erreicht nun einen Fahrbahnabschnitt mit Glatteis und der Reibwert sinkt schlagartig auf µ = 0,1. Welche Radumfangsbeschleunigung ergibt sich, wenn das Bremsmoment konstant gehalten wird?
c) Zu Beginn des Fahrbahnabschnittes mit Glatteis beträgt die Radumfangsgeschwindigkeit 80 km/h. Wie lange dauert es, bis das Rad blockiert?
Fahrzeugdaten: reduzierte Fahrzeugmasse einschließlich Zuladung mF,red = 1450 kg Bremsmoment an jedem Rad MB = 1000 Nm Dynamischer Rollradius rdyn = 0,315 m Massenträgheitsmoment eines Rades Jr = 1,0 kg m2
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
Regelgrößen von Radschlupf-Regelsystemen
� Grundlage von Radschlupf-Regelsystemen sind die Signale der Raddrehzahlsensoren.
� Da der Schlupf nicht direkt gemessen werden kann, wird im Steuergerät eine ihm ähnliche Größe berechnet, und zusätzlich werden weitere Regelgrößen verwendet.
� Die Radumfangsbeschleunigung bzw. –verzögerung ist eine wichtige Regelgröße, aber aufgrund verän-derlicher Massenträgheiten an den angetriebenen Rädern alleine nicht aussagekräftig genug.
� Da bei Schlupf an den Rädern die Fahrzeuggesch-windigkeit nicht gemessen werden kann, wird eine Referenzgeschwindigkeit berechnet.
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
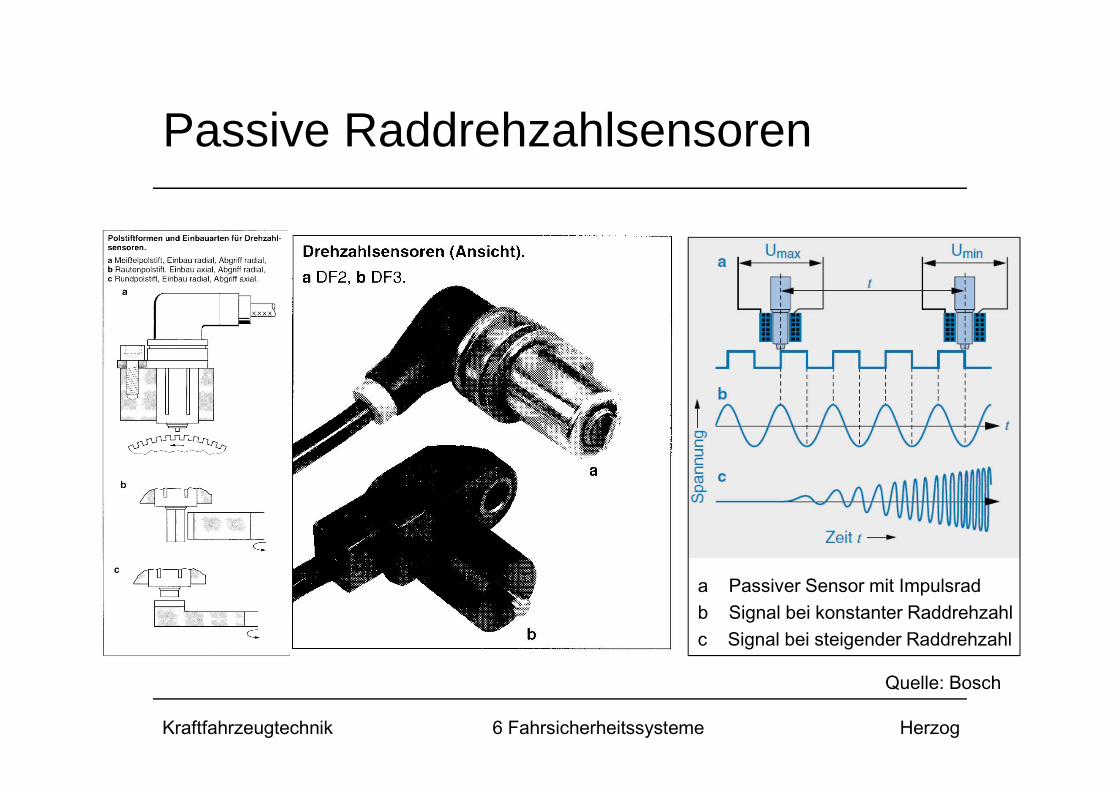
Passive Raddrehzahlsensoren
Quelle: Bosch
a Passiver Sensor mit Impulsradb Signal bei konstanter Raddrehzahlc Signal bei steigender Raddrehzahl
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
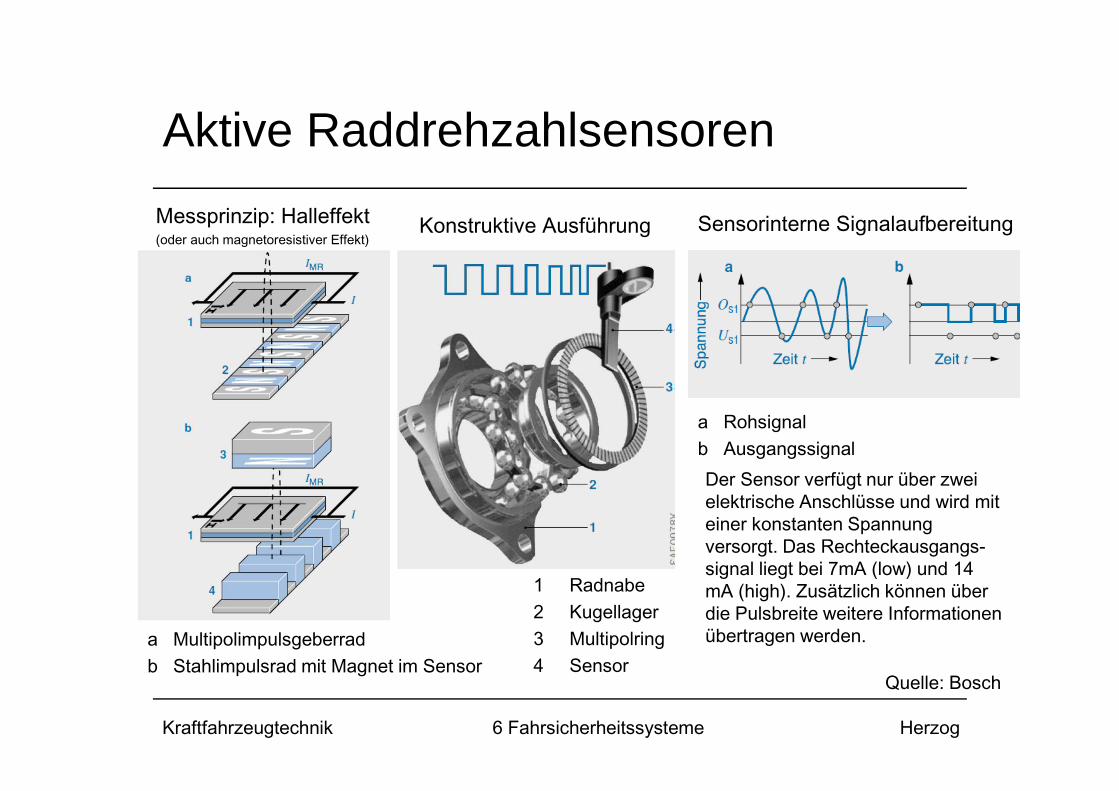
Aktive Raddrehzahlsensoren
Quelle: Bosch
Messprinzip: Halleffekt(oder auch magnetoresistiver Effekt)
a Multipolimpulsgeberradb Stahlimpulsrad mit Magnet im Sensor
Konstruktive Ausführung Sensorinterne Signalaufbereitung
a Rohsignalb AusgangssignalDer Sensor verfügt nur über zwei elektrische Anschlüsse und wird mit einer konstanten Spannung versorgt. Das Rechteckausgangs-signal liegt bei 7mA (low) und 14 mA (high). Zusätzlich können über die Pulsbreite weitere Informationen übertragen werden.
1 Radnabe2 Kugellager3 Multipolring4 Sensor
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
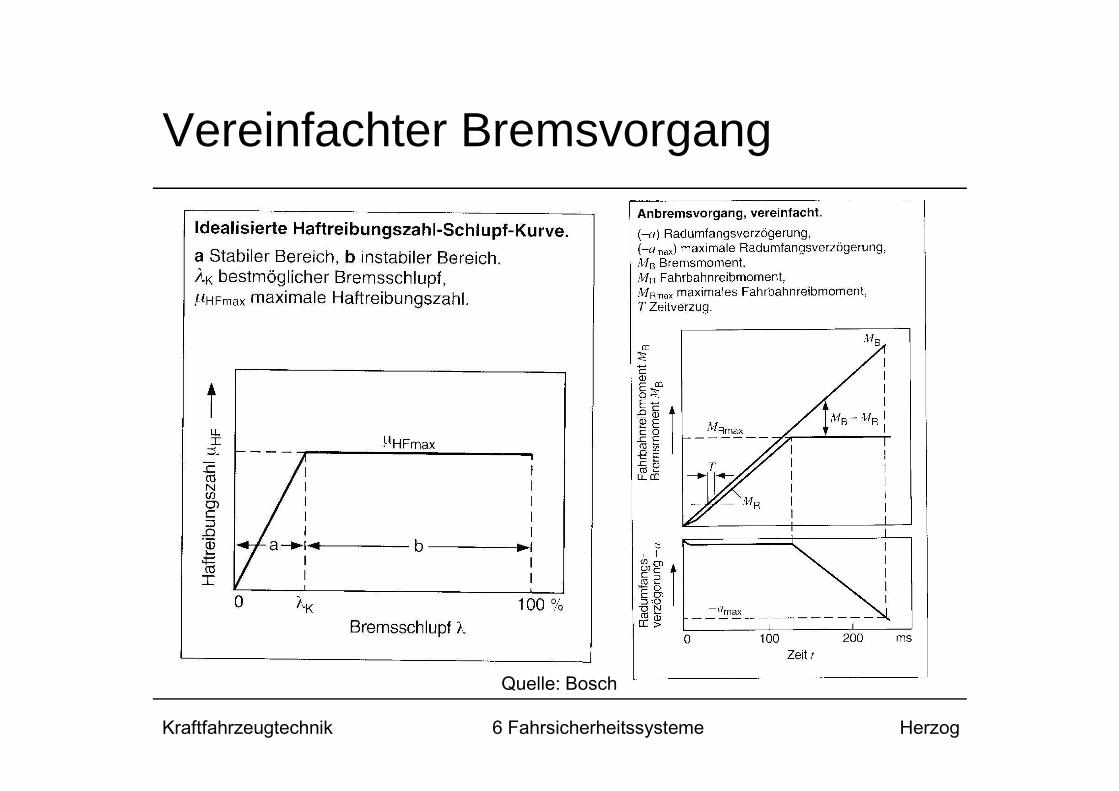
Vereinfachter Bremsvorgang
Quelle: Bosch
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
Bestimmung der Referenzgeschwindigkeit
� Die Referenzgeschwindigkeit bei Teilbremsungen bestimmt das schneller laufende Rad einer „Diagonalen“ (z.B. rechtes Vorderrad und linkes Hinterrad).
� Während einer ABS-Regelung bestimmt das Steuergerät die Referenzgeschwindigkeit aus der Fahrzeuggeschwindigkeit bei Regelbeginn und lässt diese rampenförmig abnehmen.
� Die Steilheit der Rampe wird durch weitere logische Verknüpfungen im Steuergerät berechnet.
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
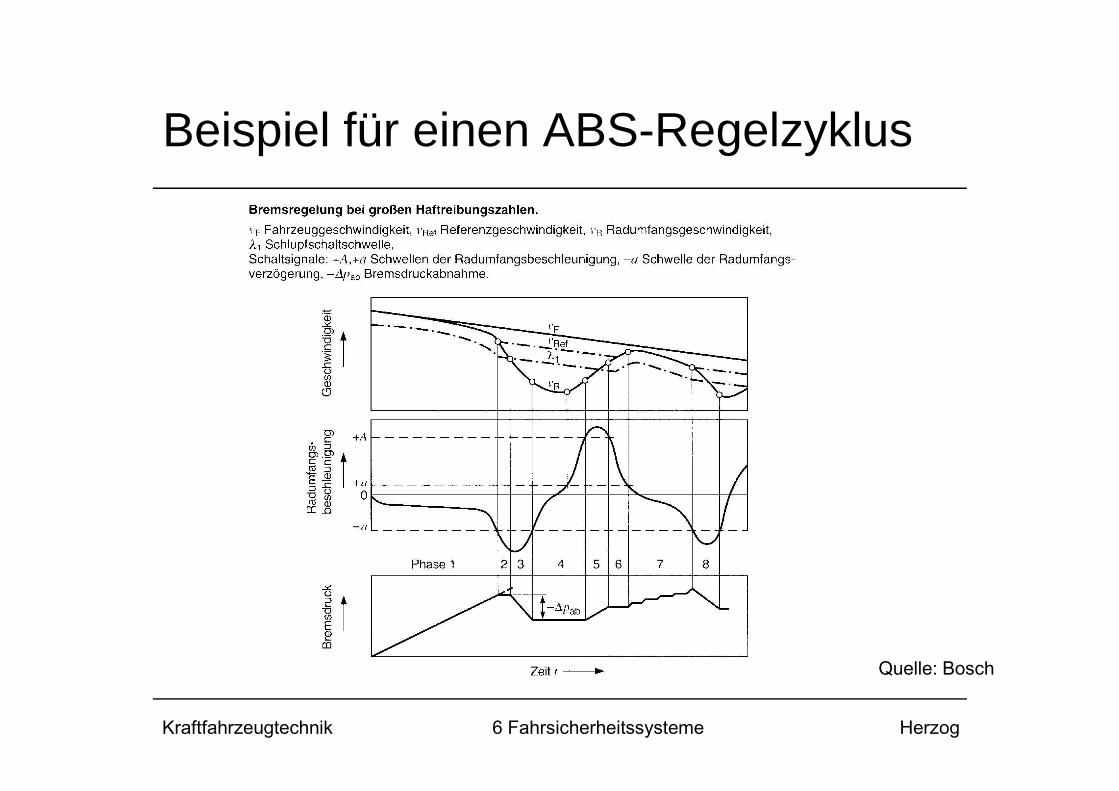
Beispiel für einen ABS-Regelzyklus
Quelle: Bosch
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
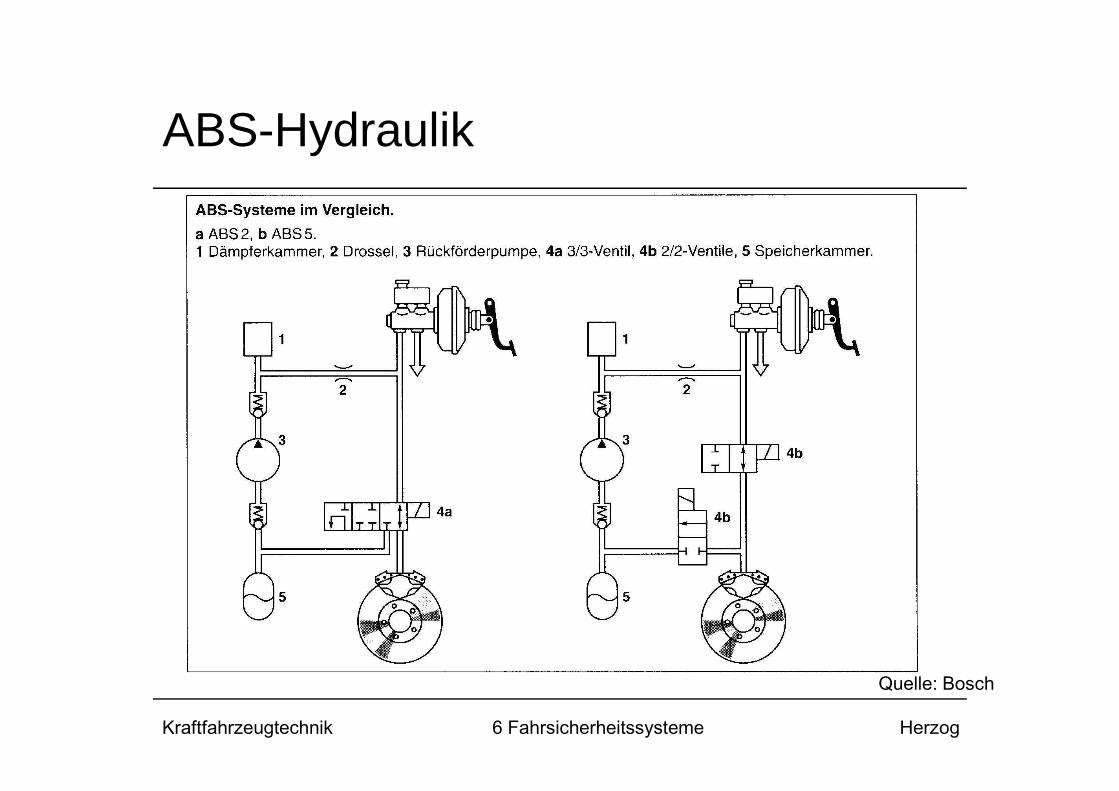
ABS-Hydraulik
Quelle: Bosch
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
6.3 Fahrdynamikregelung
� Eine Fahrdynamikregelung soll kritische Fahrzustände (z.B. Schleudern) erkennen und das Fahrzeug dann wieder stabilisieren.
� Die Eingriffe einer Fahrdynamikregelung erfolgen durch Schlupfregelung an den einzelnen Rädern mit Hilfe von Bremsen- und Motoreingriffen.
� Im normalen Fahrbetrieb greift die Fahrdynamikregelung nicht ein.
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
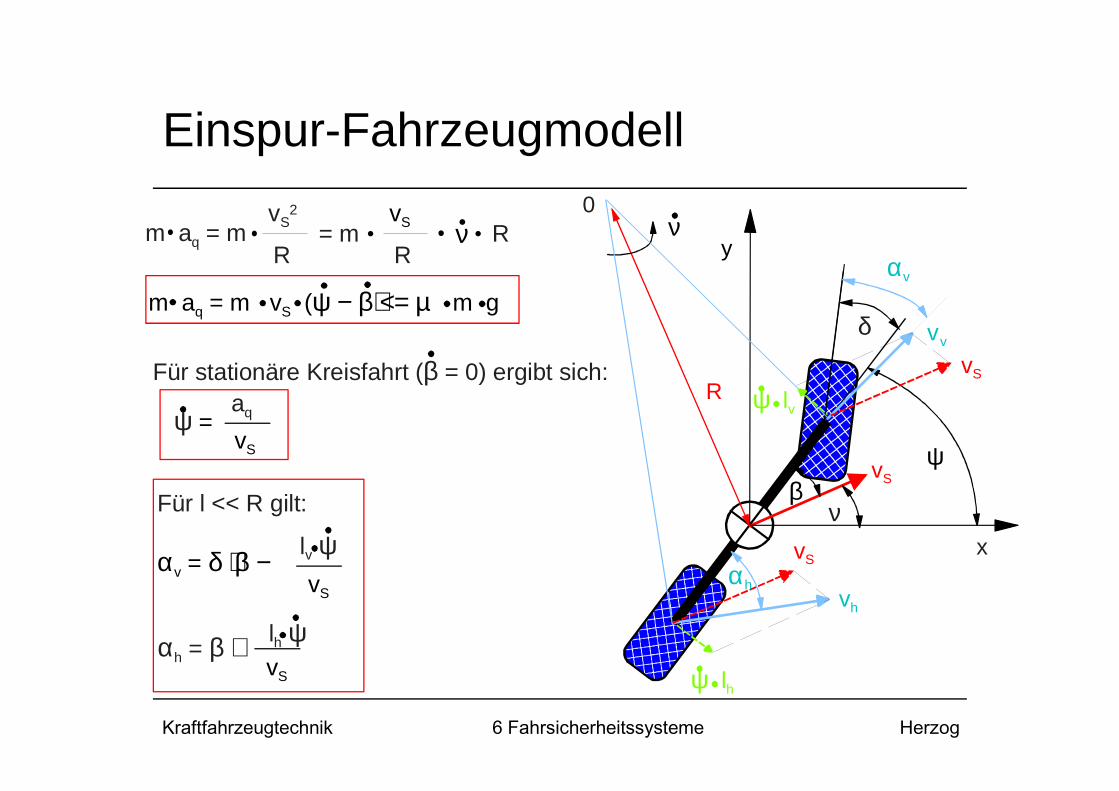
Einspur-Fahrzeugmodell
x
y
βν
ψvS
δ
ν
R
0m aq = m
vS2
R
vS
R= m ν R
m aq = m vS (ψ − β) <= µ m g
Für stationäre Kreisfahrt (β = 0) ergibt sich:aq
vS
ψ =
Für l << R gilt:
αv = δ + β − lv ψ
vS
αh = β + lh ψ vS ψ lh
ψ lv
vS
vS
vh
vv
αh
αv
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
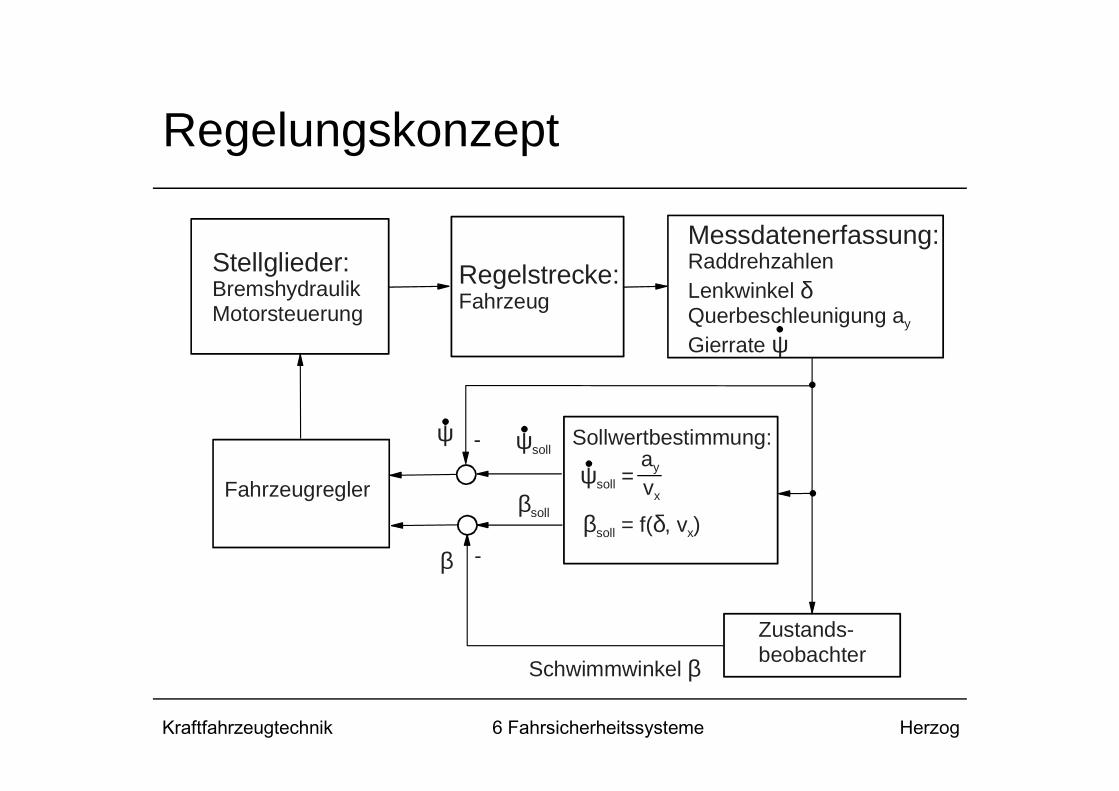
Regelungskonzept
Regelstrecke:Fahrzeug
Zustands-beobachter
Sollwertbestimmung:
Fahrzeugregler
Stellglieder:BremshydraulikMotorsteuerung
Messdatenerfassung:RaddrehzahlenLenkwinkel δQuerbeschleunigung ay
Gierrate ψ
Schwimmwinkel β
βsoll
ψsoll
-
-
β
ψ
ψsoll =ay
vx
βsoll = f(δ, vx)
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
Übungsaufgabe
Gegeben ist eine Auswahl von Messwerten eines Fahrzeugs mit Fahrdynamikregelung. Stellen Sie anhand der gegeben Werte fest, ob ein Eingriff der Fahrdynamikregelung erforderlich ist. Bestimmen Sie die Soll-Winkelgeschwindigkeit und den Soll-Schwimmwinkel. Daten: Fahrzeuggeschwindigkeit v = 80 km/h Querbeschleunigung aq = 2 m/s2
Gierwinkelgeschwindigkeit ψ& = 0,15 rad/s Fahrzeugmasse mF = 1340 kg Schwerpunktabstand vorne lv = 1,25 m Schwerpunktabstand hinten lh = 1,35 m Schräglaufsteifigkeit an der Vorderachse cαv = 50 000 N/rad Schräglaufsteifigkeit an der Hinterachse cαh = 50 000 N/rad
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
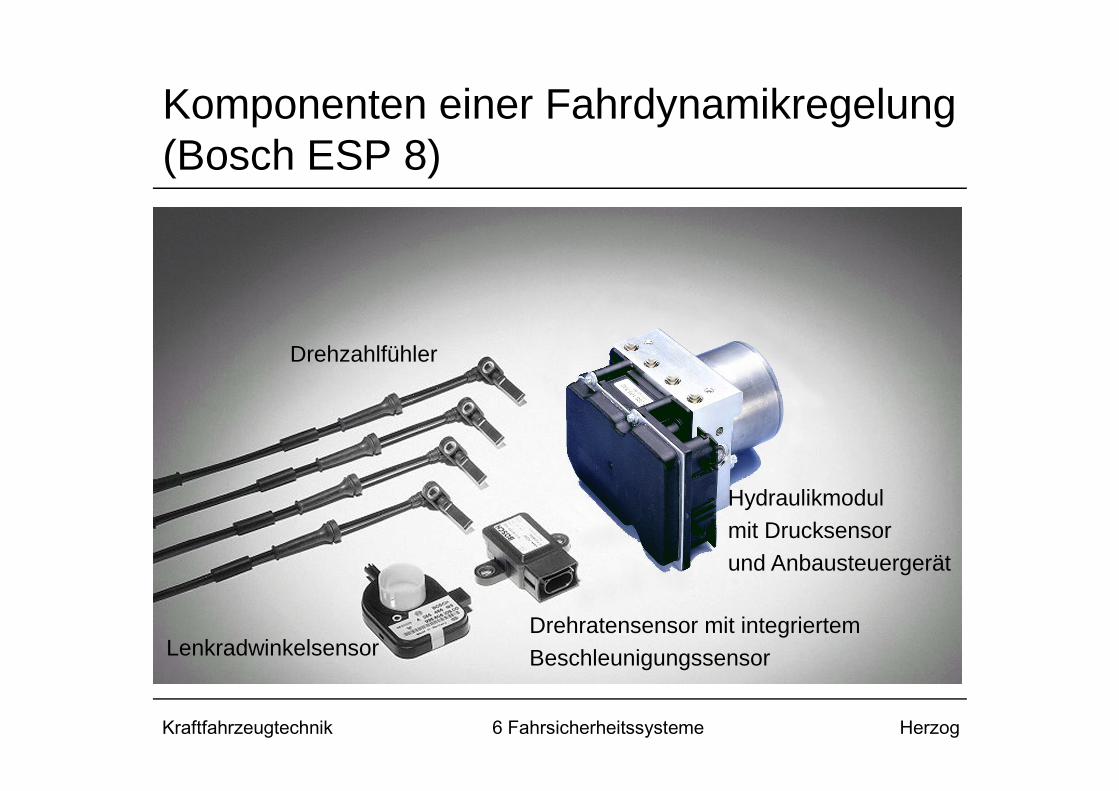
Komponenten einer Fahrdynamikregelung (Bosch ESP 8)
Drehzahlfühler
Hydraulikmodulmit Drucksensorund Anbausteuergerät
Drehratensensor mit integriertemBeschleunigungssensorLenkradwinkelsensor
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
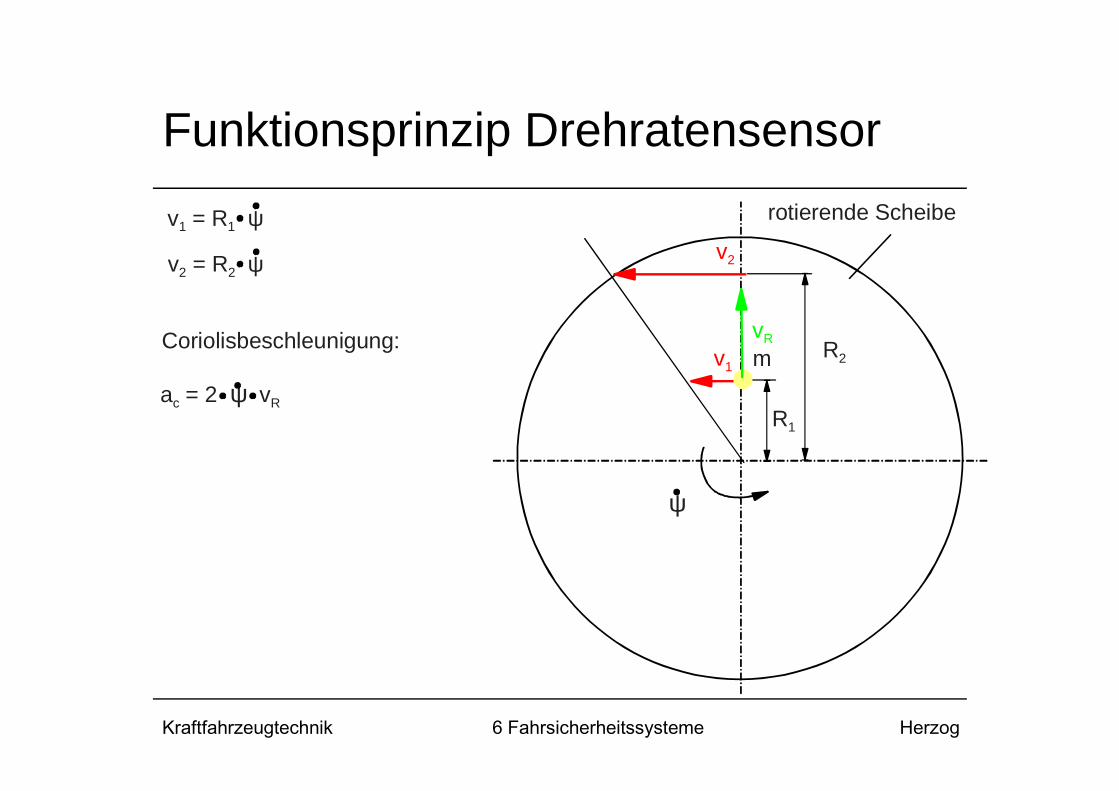
Funktionsprinzip Drehratensensor
v1
v2
R1
R2mvR
ψ
v1 = R1 ψ
v2 = R2 ψ
Coriolisbeschleunigung:
ac = 2 ψ vR
rotierende Scheibe
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
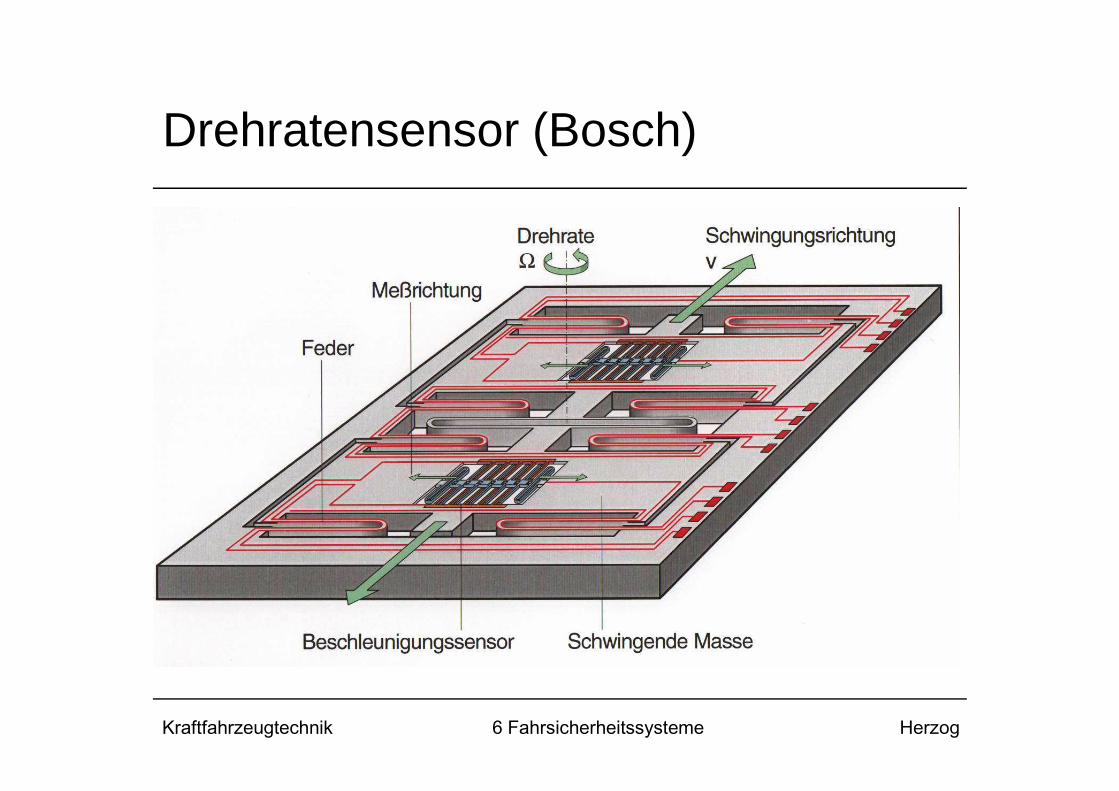
Drehratensensor (Bosch)
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
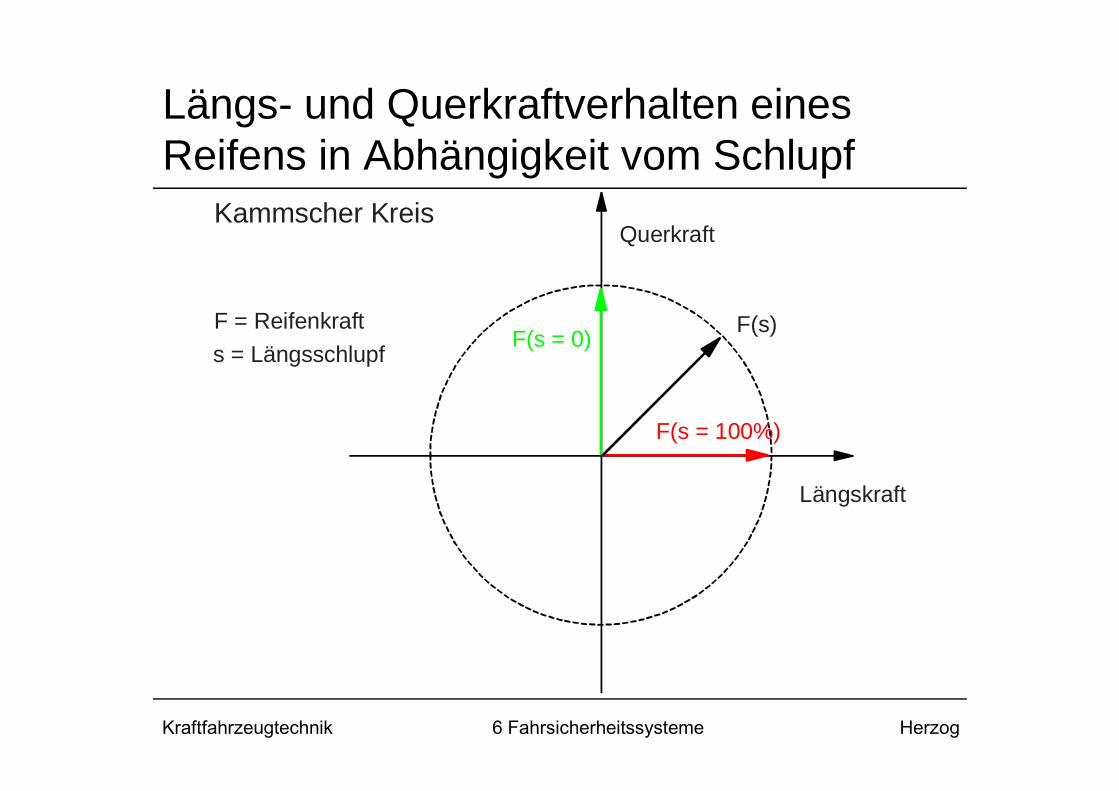
Längs- und Querkraftverhalten eines Reifens in Abhängigkeit vom Schlupf
Längskraft
Querkraft
F = Reifenkraft
s = LängsschlupfF(s)
F(s = 100%)
F(s = 0)
Kammscher Kreis
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
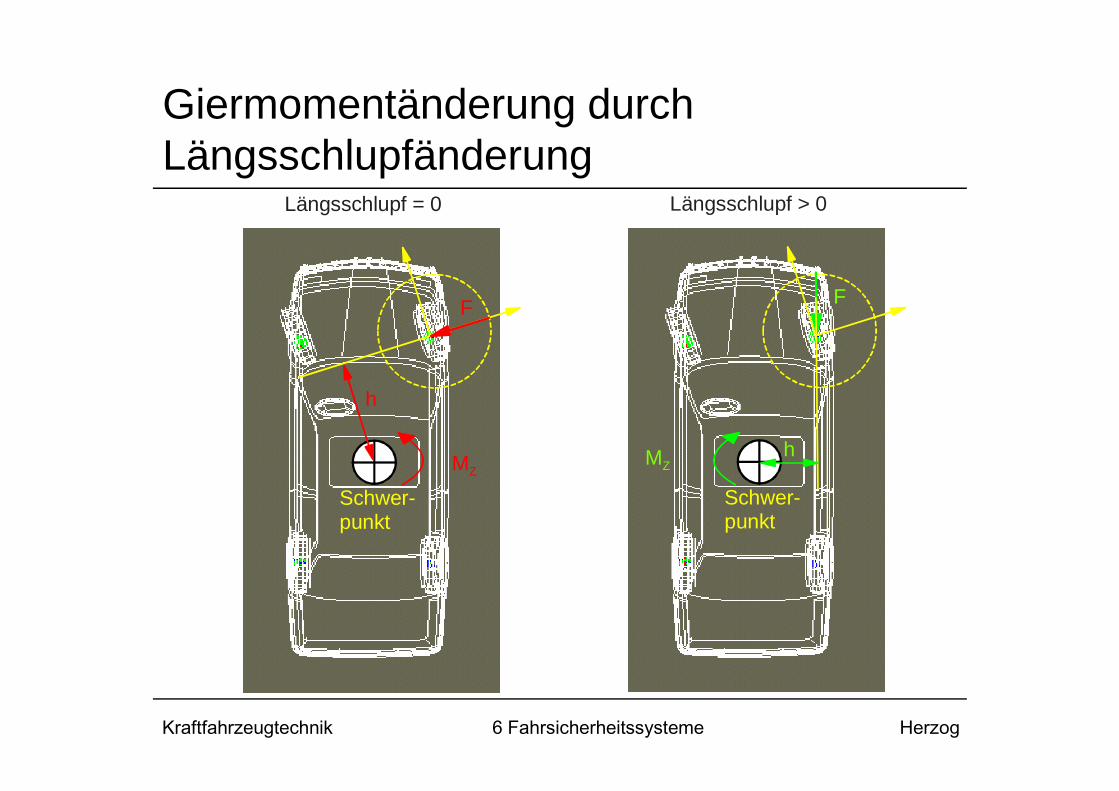
Giermomentänderung durch Längsschlupfänderung
F
Schwer-punkt
h
MZ
Längsschlupf = 0
F
Schwer-punkt
hMZ
Längsschlupf > 0
Kraftfahrzeugtechnik 6 Fahrsicherheitssysteme Herzog
Zusammenfassung
� Hauptaufgabe einer Fahrdynamikregelung ist die Begrenzung des Schwimmwinkels.
� Der Schwimmwinkel wird mit Hilfe eines Zustandsbeobachters (Einspurmodell) geschätzt.
� Die Querbeschleunigung wird durch den Reibwert begrenzt. Aus Querbeschleunigung und Fahrzeug-geschwindigkeit ergibt sich die Sollgierrate.
� Der Reglereingriff erfolgt durch Giermoment-änderung. Diese wird durch Schlupfveränderung an den einzelnen Rädern erzeugt. Hierbei kann nicht die Größe der Reifenkräfte sondern nur deren Richtung beeinflusst werden.