Embed Size (px)
Citation preview
232
7 Regelung Closed loop control
Regelungen kommen an vie len Stellen in mechatronischen Systemen vor. In der Forderanlage aus Kapitell muss z. B. die Geschwindigkeit des Bandes geregelt werden. Die Kemaufgabe in der Regelungstechnik besteht darin, fUr eine bestimmte Regelungsaufgabe den geeigneten Regier auszuwahlen und die Parameter anzupassen.
In diesem Kapitel werden zunachst Begriffe im Zusammenhang mit Regelkreisen erlautert. Danach werden Regier und Strecken getrennt betrachtet, urn im dritten Teil in ihrem Zusammenwirken untersucht zu werden.
7.1 Grundbegriffe Fundamentals
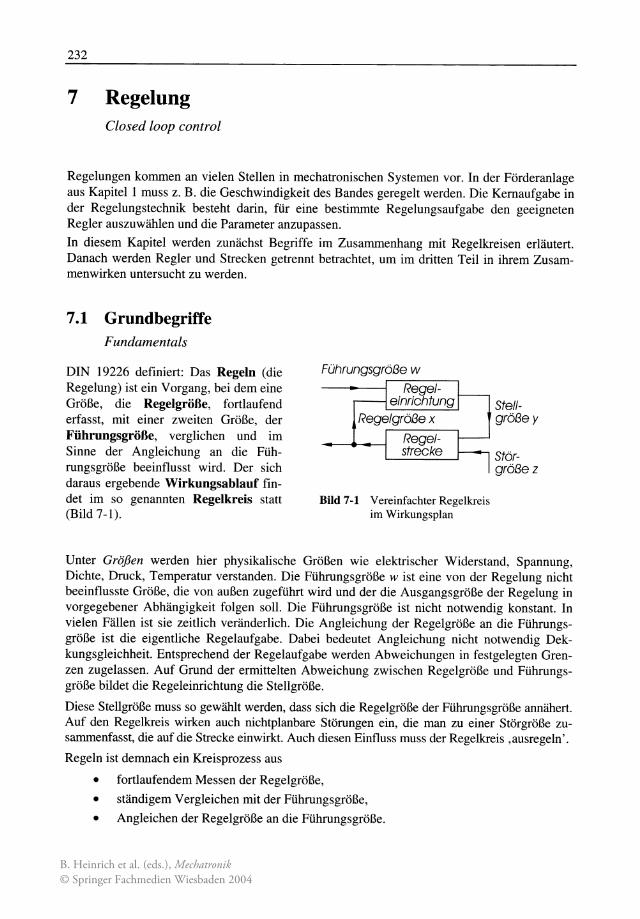
DIN 19226 definiert: Das Regeln (die Regelung) ist ein Vorgang, bei dem eine GroBe, die Regelgro6e, fortlaufend erfasst, mit einer zweiten GroBe, der Fiihrungsgro6e, verglichen und im Sinne der Angleichung an die FtihrungsgroBe beeinflusst wird. Der sich daraus ergebende Wirkungsablauf findet im so genannten Regelkreis statt (Bild 7-1).
Bild 7-1 Vereinfachter Regelkreis im Wirkungsplan
Stellgr6Be y
St6rgr6Bez
Unter GrofJen werden hier physikalische GroBen wie elektrischer Widerstand, Spannung, Dichte, Druck, Temperatur verstanden. Die FtihrungsgroBe wist eine von der Regelung nicht beeinflusste GroBe, die von auBen zugefUhrt wird und der die AusgangsgroBe der Regelung in vorgegebener Abhangigkeit folgen solI. Die FtihrungsgroBe ist nicht notwendig konstant. In vielen Fallen ist sie zeitlich veranderlich. Die Angleichung der RegelgroBe an die FtihrungsgroBe ist die eigentliche Regelaufgabe. Dabei bedeutet Angleichung nicht notwendig Dekkungsgleichheit. Entsprechend der Regelaufgabe werden Abweichungen in festgelegten Grenzen zugelassen. Auf Grund der ermittelten Abweichung zwischen RegelgroBe und FtihrungsgroBe bildet die Regeleinrichtung die StellgroBe.
Diese StellgroBe muss so gewahlt werden, dass sich die RegelgroBe der FtihrungsgroBe annahert. Auf den Regelkreis wirken auch nichtplanbare StOrungen ein, die man zu einer StorgroBe zusarnmenfasst, die auf die Strecke einwirkt. Auch diesen Einfluss muss der Regelkreis ,ausregeln'.
Regeln ist demnach ein Kreisprozess aus
• fortlaufendem Messen der RegelgroBe,
• standigem Vergleichen mit der FtihrungsgroBe,
• Angleichen der RegelgroBe an die FtihrungsgroBe.
B. Heinrich et al. (eds.), Mechatronik© Springer Fachmedien Wiesbaden 2004
7.2 Beschreibung des Verhaltens von Regelkreisgliedem 233
7.2 Beschreibung des Verhaltens von Regelkreisgliedern Description of the behaviour of elements used in closed loop control circuits
Ein Regelkreis setzt sich aus vielen Komponenten zusammen, deren Zusammenwirken die Eigenschaften und die Wirkung des Regelkreises ausmachen. Unabhangig vom Detail ist es wichtig zu wissen, wie der Regelkreis als Gesamtheit auf veranderte EingangsgroBen reagiert, urn ggf. ungewollte Effekte beseitigen zu konnen oder auch nur, urn sein Verhalten beschreiben zu konnen. Meist ist der Regelkreis zu komplex, urn sein Gesamtverhalten geeignet vorhersagen und einstellen zu konnen. Deshalb wird methodisch so vorgegangen, dass zunachst das Verhalten der Komponenten untersucht und beschrieben wird. Aus deren Kenntnis lasst sich dann vieles tiber das Zusammenwirken in einem Kreisprozess aussagen. Es ist sinnvoll, bei diesen Untersuchungen nicht von Regel-, Stell-, Ftihrungs- und StOrgroBen zu sprechen, sondem allgemein von Eingangs- und AusgangsgroBen. Diese werden mit u und v bezeichnet.
Statisches Verhalten
Das statische Verhalten von Regelkreisgliedem wird durch Kennlinien beschrieben. Eine Kennlinie beschreibt im Beharrungszustand die Abhangigkeit der AusgangsgroBe v von der EingangsgroBe u.
Ais Beharrungszustand eines Gliedes gilt derjenige beliebig lange aufrechtzuerhaltende Zustand, der sichbei zeitlicher Konstanz der Eingangssignale nach Ablauf aller Einschwingungsvorgange ergibt.
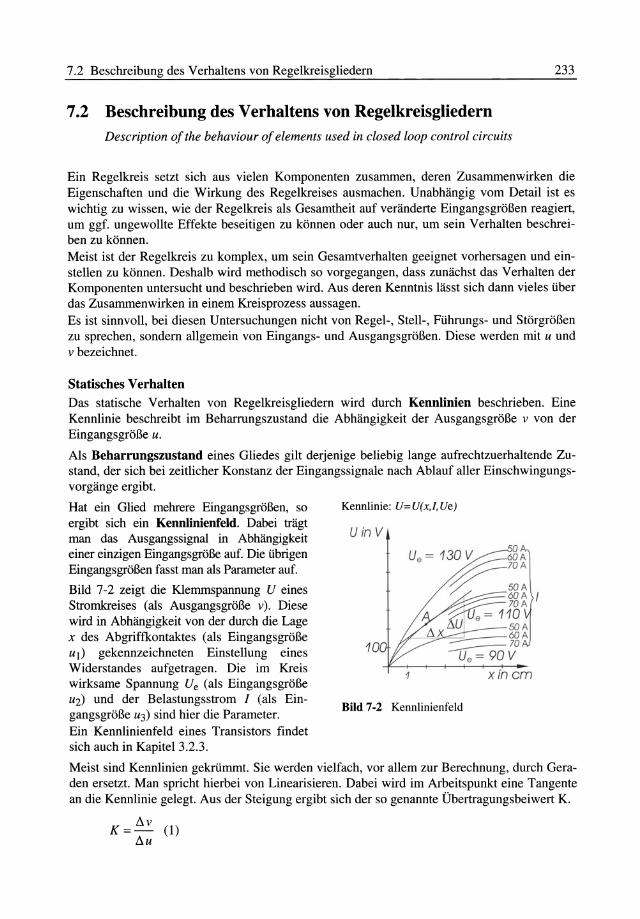
Hat ein Glied mehrere EingangsgroBen, so ergibt sich ein Kennlinienfeld. Dabei tragt man das Ausgangssignal in Abhangigkeit einer einzigen EingangsgroBe auf. Die tibrigen EingangsgroBen fasst man als Parameter auf.
Bild 7-2 zeigt die K1emmspannung V eines Stromkreises (als AusgangsgroBe v) . Diese wird in Abhangigkeit von der durch die Lage x des Abgriffkontaktes (als EingangsgroBe u I) gekennzeichneten Einstellung eines Widerstandes aufgetragen. Die im Kreis wirksame Spannung Ve (als EingangsgroBe U2) und der Belastungsstrom I (als EingangsgroBe U3) sind hier die Parameter. Ein Kennlinienfeld eines Transistors findet sich auch in Kapitel 3.2.3.
Kennlinie: U=U(x,/,Ue)
U in V
1 xincm
BUd 7-2 Kennlinienfeld
Meist sind Kennlinien gekriimmt. Sie werden vielfach, vor allem zur Berechnung, durch Geraden ersetzt. Man spricht hierbei von Linearisieren. Dabei wird im Arbeitspunkt eine Tangente an die Kennlinie gelegt. Aus der Steigung ergibt sich der so genannte Ubertragungsbeiwert K.
K=~ (1) flu
234 7 Regelung
In Bild 7-2 wurde der Arbeitspunkt bei x = 2 cm, Ue = 110 V und 1= 50 A gewahlt. An der Geraden liest man ab:
K = fl v = fl U e = 200 V = 66, 7 ~. flu flx 3cm cm
Zeitverhalten
Das Zeitverhalten der Regelkreisglieder wird dadurch untersucht, dass man die jeweiligen EingangsgroBen typisch iindert und zwar
• sprunghaft,
• ansteigend,
• impulsformig oder
• sinusfOrmig. Das Ubergangsverhalten beschreibt dann den zeitlichen Verlauf des Ausgangssignals bei Aufschaltung charakteristischer zeitlicher Verliiufe des Eingangssignals.
Sprungantwort
Viele Regelvorgiinge verhalten sich so, dass die EingangsgroBe u sich sprunghaft iindert von einem Anfangswert Uo auf einen festen Endwert u I. Die Reaktion der AusgangsgroBe darauf wird hier Sprungantwort genannt. Diese kann sehr unterschiedlich ausfallen. Die Sprungantwort kann schlagartig erfolgen, sie kann sich langsam und gleichmiiBig ihrem Endwert nahem, oder sie kann erst tiber den Endwert hinauswandem, urn sich ihm dann schwingend zu nahem.
Die Aufschaltung eines Sprunges ist - zumindest bei theoretischen Betrachtungen - eine hiiufig angewandte Testmethode bei der Untersuchung von Regelkreisgliedem. Urn aus der Funktionsgleichung den Einfluss der konstanten Eingangssprunghohe u zu eliminieren, fiihrt die DIN eine neue Funktion h(t) ein, die Ubergangsfunktion genannt wird.
h(t) = v(t) u(t)
(2)
Ftir gro8e t und stabiles Verhalten gilt h(t) = K (3),
wobei K der Dbertragungsbeiwert aus (1) ist.
u v mogliche
Sprungantwort ul-----
Eingangssprung
o Bild 7-3 Sprungantwort
Beispiel fiir die Berechnung eines Ubertragungsbeiwertes
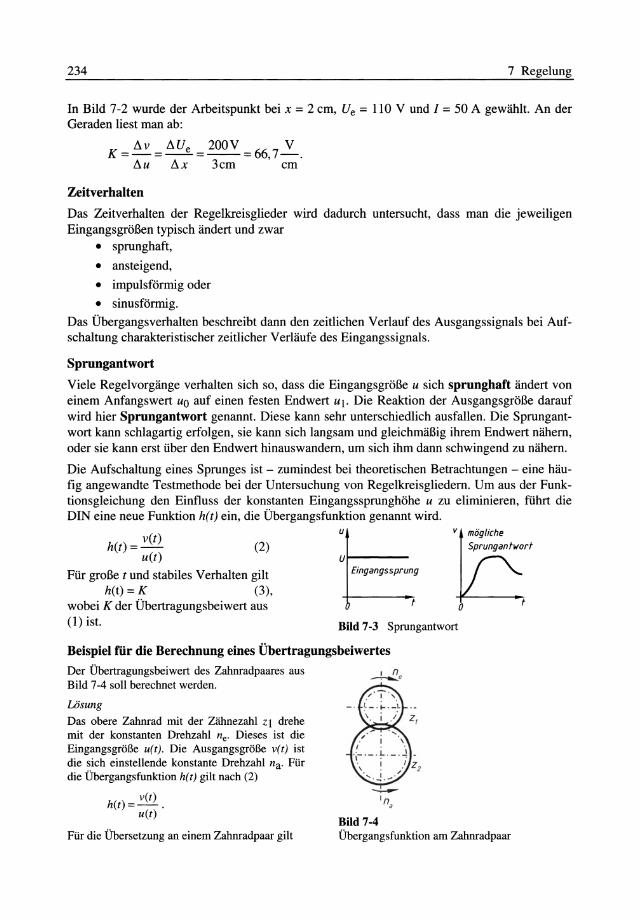
Der Ubertragungsbeiwert des Zahnradpaares aus Bild 7-4 soli berechnet werden.
wsung Das obere Zahnrad mit der Zahnezahl Zl drehe mit der konstanten Drehzahl ne. Dieses ist die EingangsgroBe u(t). Die AusgangsgroBe vet) ist die sich einstellende konstante Drehzahl na. Flir die Ubergangsfunktion h(t) gilt nach (2)
h(t) = vet) . u(t)
Flir die Ubersetzung an einem Zahnradpaar gilt Bild 7-4 Ubergangsfunktion am Zahnradpaar
7.2 Beschreibung des Verhaltens von Regelkreisgliedem 235
~=~ (4). lie ZZ
Also ist die Ubergangsfunktion h(t) = ~ . Zz
Laut (3) ist h(t) = K, also ist der Ubertragungsbeiwert hier das umgekehrte Ubersetzungsverhliltnis.
Anstiegsantwort
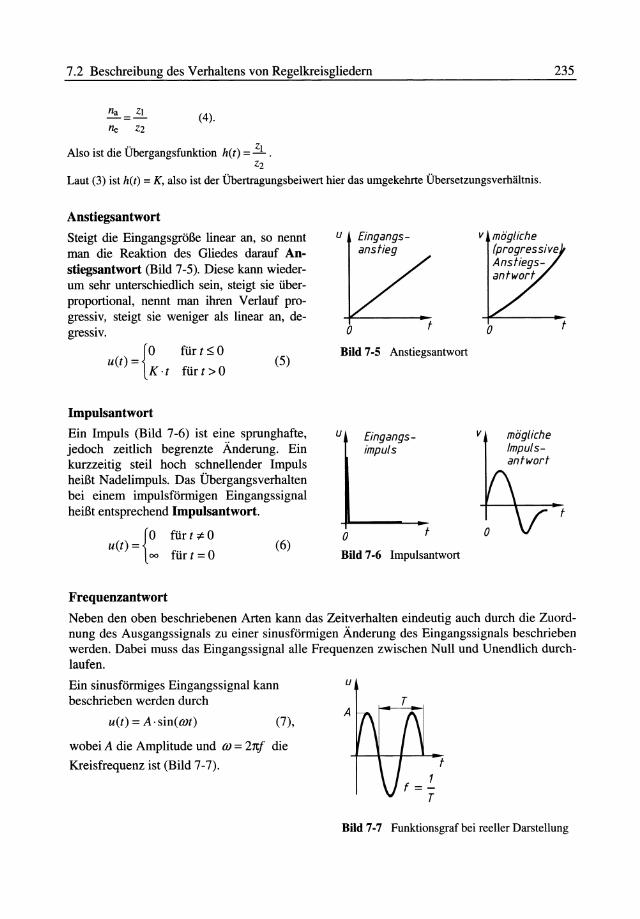
Steigt die EingangsgroBe linear an, so nennt man die Reaktion des Gliedes darauf Anstiegsantwort (Bild 7-5). Diese kann wiederurn sehr unterschiedlich sein, steigt sie iiberproportional, nennt man ihren Verlauf progressiv, steigt sie weniger als linear an, degressiv.
u(t) = {O K·t
Impulsantwort
fUr t S; ° fUr t > ° (5)
Ein Impuls (Bild 7-6) ist eine sprunghafte, jedoch zeitlich begrenzte Anderung. Ein kurzzeitig steil hoch schnellender Impuls heiBt Nadelimpuls. Das Ubergangsverhalten bei einem impulsfOrmigen Eingangssignal heiBt entsprechend Impulsantwort.
{o fUr t:;t: ° u(t) =
00 fUr t = ° Frequenzantwort
(6)
u
o
Eingangsanstieg
t
Bild 7-5 Anstiegsantwort
u
o
Eingangsimpuls
t
Bild 7-6 Impulsantwort
v mogliche (progressive Anstiegsantwort
o
v mogliche Impulsantwort
t
t
Neben den oben beschriebenen Arten kann das Zeitverhalten eindeutig auch durch die Zuordnung des Ausgangssignals zu einer sinusfOrmigen Anderung des Eingangssignals beschrieben werden. Dabei muss das Eingangssignal aIle Frequenzen zwischen Null und Unendlich durchlaufen.
Ein sinusfOrmiges Eingangssignal kann beschrieben werden durch
u(t) = A·sin(wt) (7),
wobei A die Amplitude und w = 21tf die
Kreisfrequenz ist (Bild 7-7).
u
A
t
Bild 7-7 Funktionsgraf bei reeller Darstellung
236
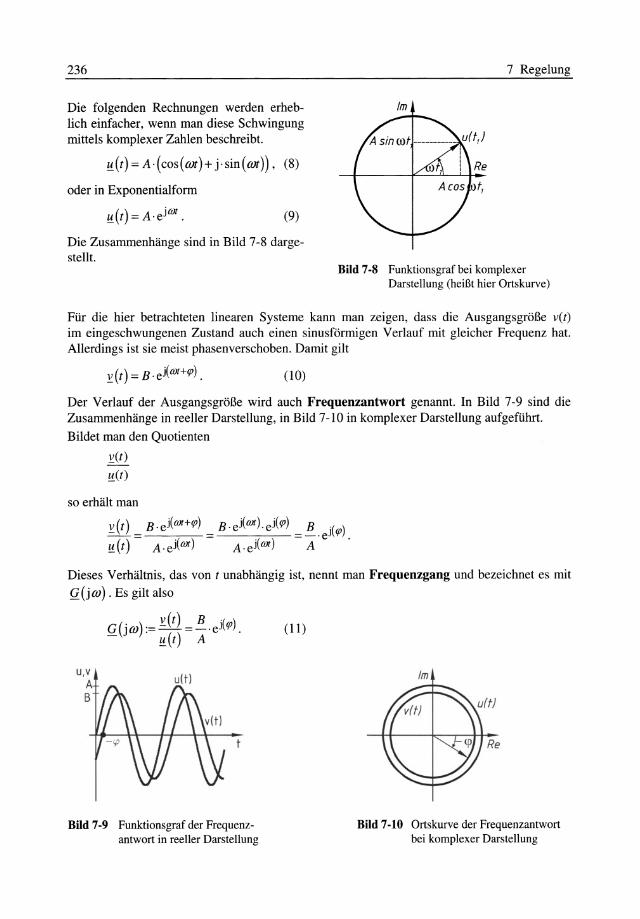
Die folgenden Rechnungen werden erheblich einfacher, wenn man diese Schwingung mittels komplexer Zahlen beschreibt.
!{(t) = k(cos(tm)+ j.sin(tm)), (8)
oder in Exponentialform
!{(t)=ke jliJl . (9)
Die Zusammenhange sind in Bild 7-8 dargestellt.
7 Regelung
1m
Bild 7-8 Funktionsgraf bei komplexer Darstellung (heiEt hier Ortskurve)
Fur die hier betrachteten linearen Systeme kann man zeigen, dass die AusgangsgroBe vet) im eingeschwungenen Zustand auch einen sinusfOrrnigen Verlauf mit gleicher Frequenz hat. Allerdings ist sie meist phasenverschoben. Damit gilt
(10)
Der Verlauf der AusgangsgroBe wird auch Frequeuzantwort genannt. In Bild 7-9 sind die Zusammenhange in reeller Darstellung, in Bild 7-10 in komplexer Darstellung aufgefiihrt.
Bildet man den Quotienten
.!;(t)
!{(t)
so erhalt man
.!;(t) = B·ej(liJI+tp) = B·ej(liJI)·ej(tp) = B .ej(tp)
!{(t) kej(liJI) A-ej(liJI) A
Dieses VerhaItnis, das von t unabhangig ist, nennt man Frequenzgang und bezeichnet es mit
Q(jOJ) . Es gilt also
G(jOJ):= ~(t) = B .ej(tp). - !{(t) A
Bild 7-9 Funktionsgraf der Frequenzantwort in reeller Darstellung
(11 )
1m
Bild 7-10 Ortskurve der Frequenzantwort bei komplexer Darstellung
7.3 Regelstrecken
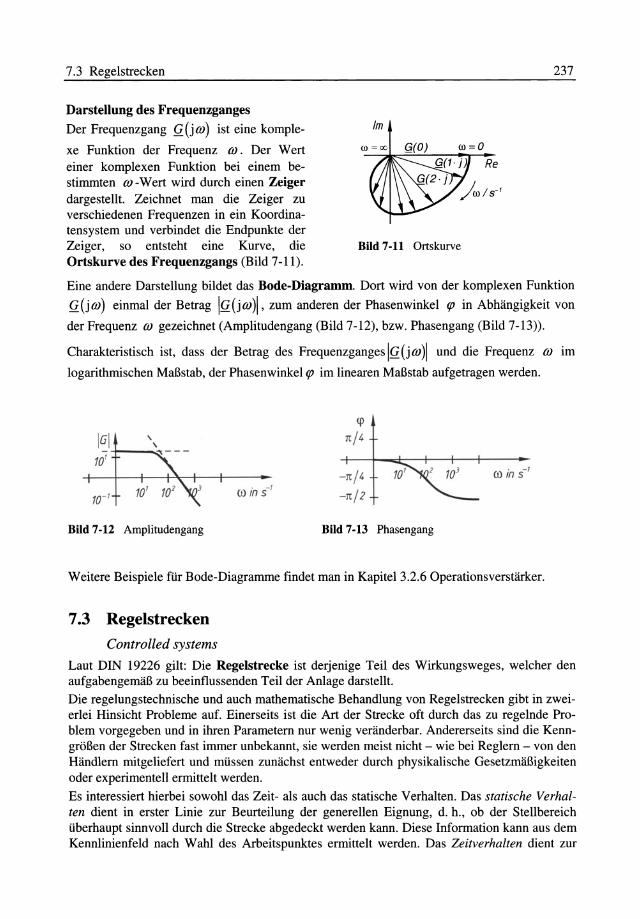
Darstellung des Frequenzganges
Der Frequenzgang Q (j OJ) ist eine komple
xe Funktion der Frequenz OJ. Der Wert einer komplexen Funktion bei einem bestimmten OJ -Wert wird durch einen Zeiger dargestellt. Zeichnet man die Zeiger zu verschiedenen Frequenzen in ein Koordinatensystem und verbindet die Endpunkte der Zeiger, so entsteht eine Kurve, die Ortskurve des Frequenzgangs (Bild 7-11).
237
1m
Bild 7-11 Ortskurve
Eine andere Darstellung bildet das Bode-Diagramm. Dort wird von der komplexen Funktion
Q(jOJ) einmal der Betrag IQ(jOJ)I, zum anderen der Phasenwinkel rp in Abhangigkeit von
der Frequenz OJ gezeichnet (Amplitudengang (Bild 7-12), bzw. Phasengang (Bild 7-13)).
Charakteristisch ist, dass der Betrag des Frequenzganges IQ (j OJ)I und die Frequenz OJ im
logarithrnischen MaBstab, der Phasenwinkel rp im linearen MaBstab aufgetragen werden.
q>
161 , re /4 ,
10' ..... ---
-re/4 . -I wms
10- 1 ro in s-' -re/2
Bild 7-12 Amplitudengang Bild 7-13 Phasengang
Weitere Beispiele ftir Bode-Diagramme findet man in Kapitel 3.2.6 Operationsverstarker.
7.3 Regelstrecken Controlled systems
Laut DIN 19226 gilt: Die Regelstrecke ist derjenige Teil des Wirkungsweges, welcher den aufgabengemaB zu beeinflussenden Teil der Anlage darstellt. Die regelungstechnische und auch mathematische Behandlung von Regelstrecken gibt in zweierlei Hinsicht Probleme auf. Einerseits ist die Art der Strecke oft durch das zu regelnde Problem vorgegeben und in ihren Parametem nur wenig veranderbar. Andererseits sind die KenngroBen der Strecken fast immer unbekannt, sie werden meist nicht - wie bei Reglem - von den Handlem rnitgeliefert und miissen zunachst entweder durch physikalische GesetzmaBigkeiten oder experimentell errnittelt werden.
Es interessiert hierbei sowohl das Zeit- als auch das statische Verhalten. Das statische Verhalten dient in erster Linie zur Beurteilung der generellen Eignung, d. h., ob der Stellbereich tiberhaupt sinnvoll durch die Strecke abgedeckt werden kann. Diese Information kann aus dem Kennlinienfeld nach Wahl des Arbeitspunktes errnittelt werden. Das Zeitverhalten dient zur
238 7 Regelung
Beurteilung der Frage, ob eine gegebene Strecke im Zusammenwirken mit den anderen Teilen des Regelkreises sinnvolle Ergebnisse liefert. Notwendig dafiir ist stets eine mathematische Beschreibung des dynamischen Verhaltens der Strecke.
Das unterschiedliche dynamische Verhalten bildet auch die Grundlage fUr eine Systematisierung der unterschiedlichen Streckentypen. Diese erfolgt nicht nach der zu regelnden physikalischen GroBe, sondem nach dem Zeitverhalten der Strecke.
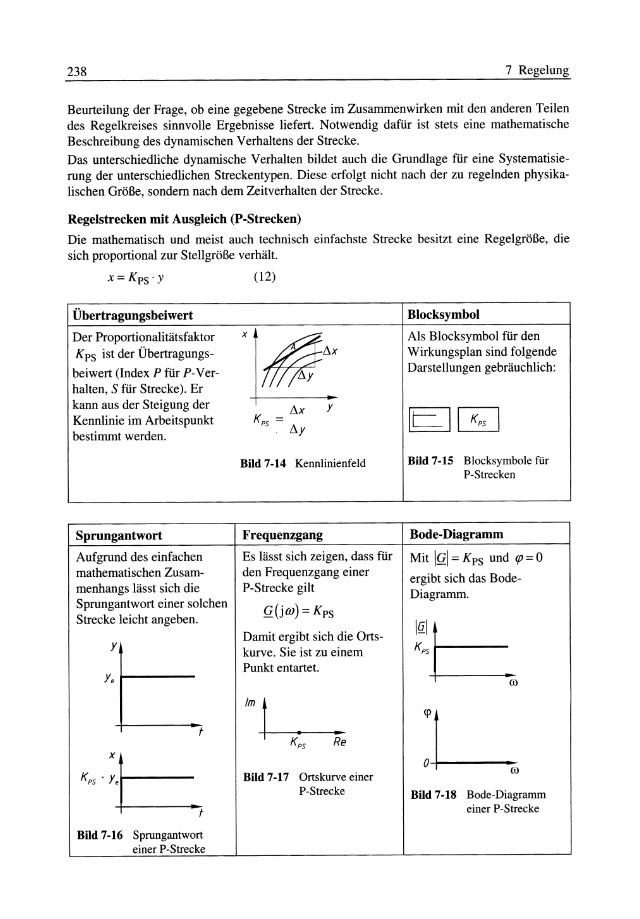
Regelstrecken mit Ausgleicb (P-Strecken)
Die mathematisch und meist auch technisch einfachste Strecke besitzt eine RegelgroBe, die sich proportional zur StellgroBe verhalt.
x=Kps'Y (12)
Ubertragungsbeiwert
Der Proportionalitatsfaktor K ps ist der Ubertragungs-
beiwert (Index P fiir P-Ver-halten, S fUr Strecke). Er kann aus der Steigung der Kennlinie im Arbeitspunkt bestimmt werden.
Sprungantwort
Aufgrund des einfachen mathematischen Zusammenhangs liisst sich die Sprungantwort einer solchen Strecke leicht angeben.
y
Ye 1-----
t
Bild 7-16 Sprungantwort einer P-Strecke
'l~d' I ~Y ~
L1x y Kps =
. L1y
Bild 7-14 Kennlinienfeld
Frequenzgang
Es lasst sich zeigen, dass fUr den Frequenzgang einer P-Strecke gilt
Q(jw)= Kps
Damit ergibt sich die Ortskurve. Sie ist zu einem Punkt entartet.
1m -+1--.----. .. -Kps Re
Bild 7-17 Ortskurve einer P-Strecke
Blocksymbol
Ais Blocksymbol fUr den Wirkungsplan sind folgende Darstellungen gebrauchlich:
~~ BUd 7-15 BlocksymboJe fur
P-Strecken
Bode-Diagramm
Mit IQI = Kps und tp= 0
ergibt sich das BodeDiagramm.
BUd 7·18 Bode-Diagramm einer P-Strecke
7.3 Regelstrecken 239
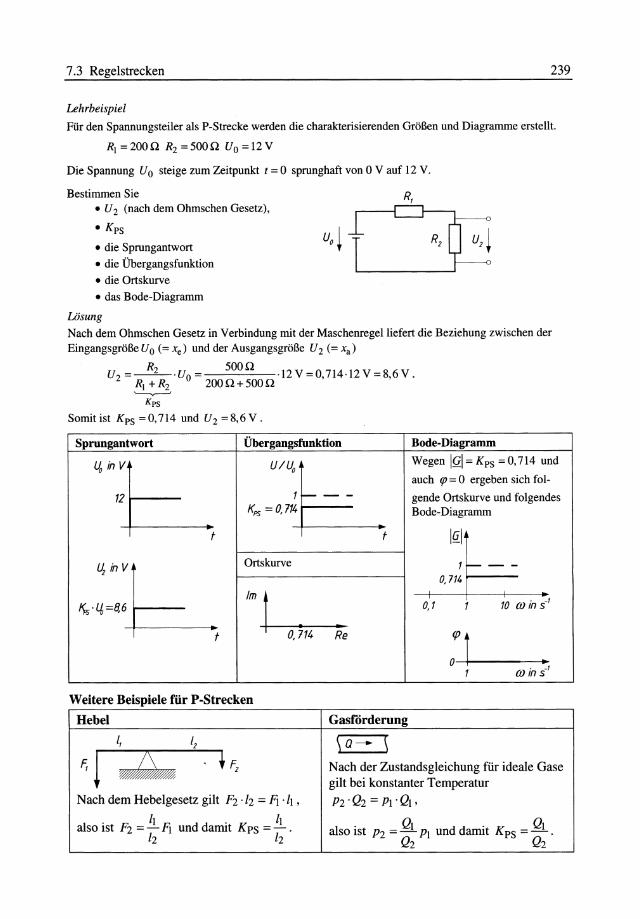
Lehrbeispiel
Fur den Spannungsteiler als P-Strecke werden die charakterisierenden GroBen und Diagramme erstellt.
Rj = 200 n R2 = 500 n U 0 = 12 V
Die Spannung Uo steige zum Zeitpunkt t = 0 sprunghaft von 0 V auf 12 V.
Bestimmen Sie • U 2 (nach dem Ohmschen Gesetz),
• Kps • die Sprungantwort • die Ubergangsfunktion
R, U,Ir:-3R • die Ortskurve • das Bode-Diagramm
LOsung
Nach dem Ohmschen Gesetz in Verbindung mit der Maschenregelliefert die Beziehung zwischen der EingangsgroBe U 0 (= xe) und der AusgangsgroBe U 2 (= Xa)
R2 500n U 2 == Rj + R2 . U 0 = 200 n + 500 n ·12 V = 0,714 ·12 V = 8,6 V .
'------.r---' Kps
Somit ist Kps = 0,714 und U2 = 8,6 V .
Sprungantwort Ubergangsfunktion Bode.Diagramm
llo in V VIVo Wegen IQI==Kps =0,714 und
auch rp = 0 ergeben sich fol-
12 Tf--- - gende Ortskurve und folgendes Kps == 0,714 Bode-Diagramm
t t \Q\
liz in V Ortskurve tf--- -0,714
~·4==~6 1m 1 0,1 1 10 OJ in S-'
• .. t 0,714 Re :1 •
1 OJ in S-'
Weitere Beispiele fUr P·Strecken
Hebel Gasrorderung
(, (2 )Q- \ ~ ! ~ t F2 Nach der Zustandsgleichung fiir ideale Gase
gilt bei konstanter Temperatur Nach dem Hebelgesetz gilt F2· h = Fi . It , P2·Q2==PI·QI,
also ist F2 = il Fi und damit Kps = il. I· QI dd· K QI 12 h a so 1St P2 == - PI un awt PS = - .
Q2 Q2
240 7 Regelung
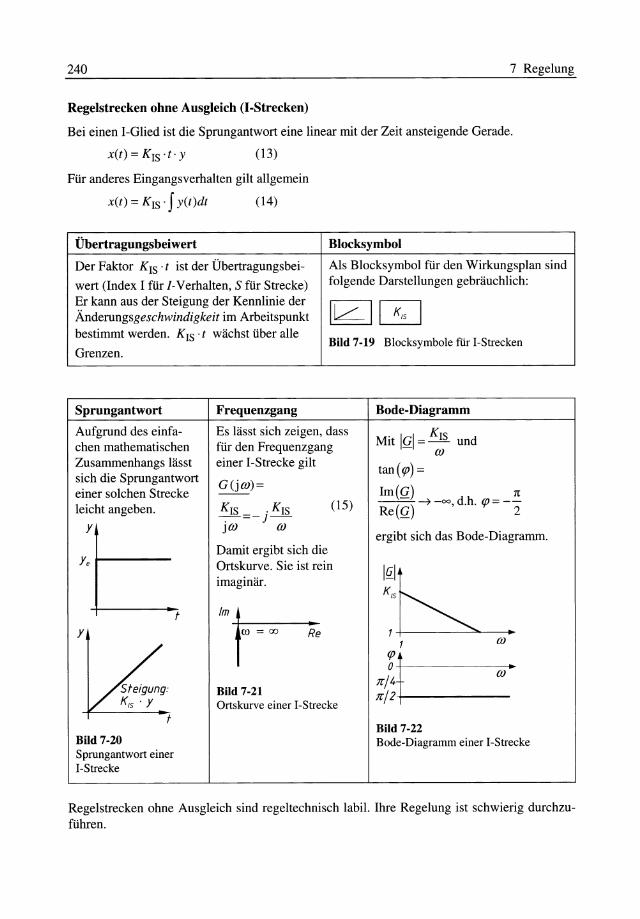
Regelstrecken ohne Ausgleich (I-Strecken)
Bei einen I-Glied ist die Sprungantwort eine linear mit der Zeit ansteigende Gerade.
x(t) = K IS ·t· y (13)
Ftir anderes Eingangsverhalten gilt allgemein
x(t) = K IS ' f y(t)dt (14)
Ubertragungsbeiwert Blocksymbol
Der Faktor KIS ' t ist der Ubertragungsbei- Ais Blocksymbol fUr den Wirkungsplan sind
wert (Index I fUr /-Verhalten, S ftir Strecke) folgende Darstellungen gebrauchlich:
Er kann aus der Steigung der Kennlinie der ~[g Anderungsgeschwindigkeit im Arbeitspunkt
bestimmt werden. KIS ' t wachst tiber alle Bild 7-19
Grenzen.
Sprungantwort
Aufgrund des einfachen mathematischen Zusammenhangs lasst sich die Sprungantwort einer so1chen Strecke leicht angeben.
Y
Ye 1-----
Y
I ~. V1:e~g~n~
t
Bild 7-20 Sprungantwort einer I-Strecke
t
Frequenzgang
Es lasst sich zeigen, dass fUr den Frequenzgang einer I-Strecke gilt
G(jOJ)=
K IS . K IS (15) -.-=-j-]OJ OJ
Damit ergibt sich die Ortskurve. Sie ist rein imaginar.
/m~ () = 00 Re
Bild 7-21 Ortskurve einer I-Strecke
Blocksymbole fUr I-Strecken
Bode-Diagramm
Mit IQI = K IS und OJ
tan(lp) =
Im(Q) n --~ -00 d.h. lp = -Re(Q)' 2
ergibt sich das Bode-Diagramm.
1 OJ
ff/:t 1[/2++------
OJ
Bild 7-22 Bode-Diagramm einer I-Strecke
Regelstrecken ohne Ausgleich sind regeltechnisch labil. Ihre Regelung ist schwierig durchzufUhren.
7.3 Regelstrecken 241
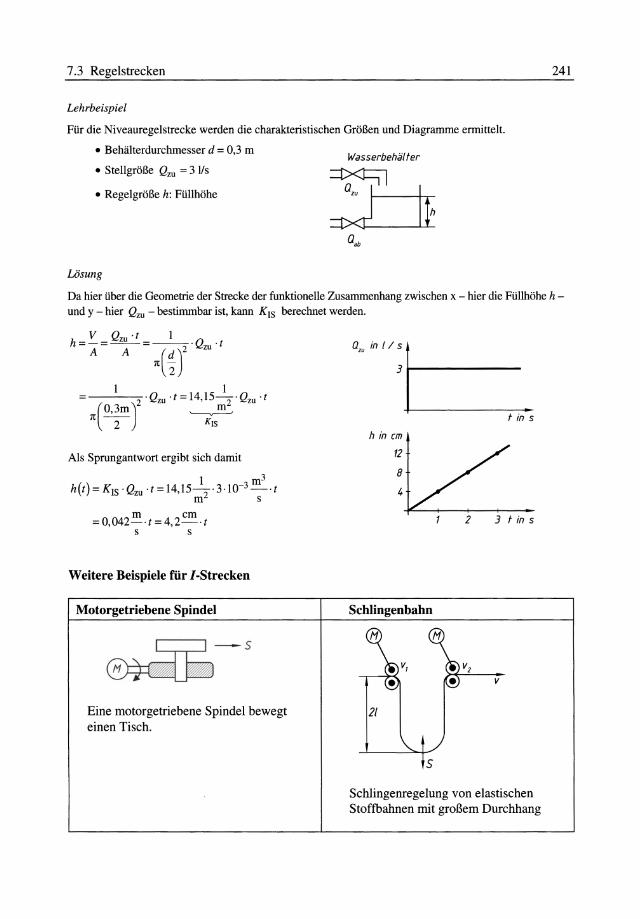
Lehrbeispiel
Fiir die Niveauregelstrecke werden die charakteristischen GroBen und Diagramme ermittelt.
• Behalterdurchmesser d = 0,3 m Wasserbehalter
• StellgroBe Qzu = 3 Us
• RegelgroBe h: Fiillhohe
LOsung
Da hier iiber die Geometrie der Strecke der funktionelle Zusarnmenhang zwischen x - hier die Fiillhohe h -und y - hier Qzu - bestimmbar ist, kann K1S berechnet werden.
h=~= Qzu . ( =_I_. Q . (
A A n(%Y zu
1 1 ----=-2 · Qzu .(=14,15-2 ·Qzu·( n(O,3m) ~
2 K1S
Als Sprungantwort ergibt sich damit
1 m3 h(t) = K1S · Qzu . t = 14,15-2 .3.10-3 _ . (
m s m cm = 0,042- · t = 4,2- · t s s
Weitere Beispiele fUr I-Strecken
Motorgetriebene Spindel
Eine motorgetriebene Spindel bewegt einen Tisch.
0Z" in 1/ s
31--------
h in em
12
8
4
Schlingenbahn
tin s
2 3 tin s
v
Schlingenregelung von elastischen Stoffbahnen mit groBem Durchhang
242 7 Regelung
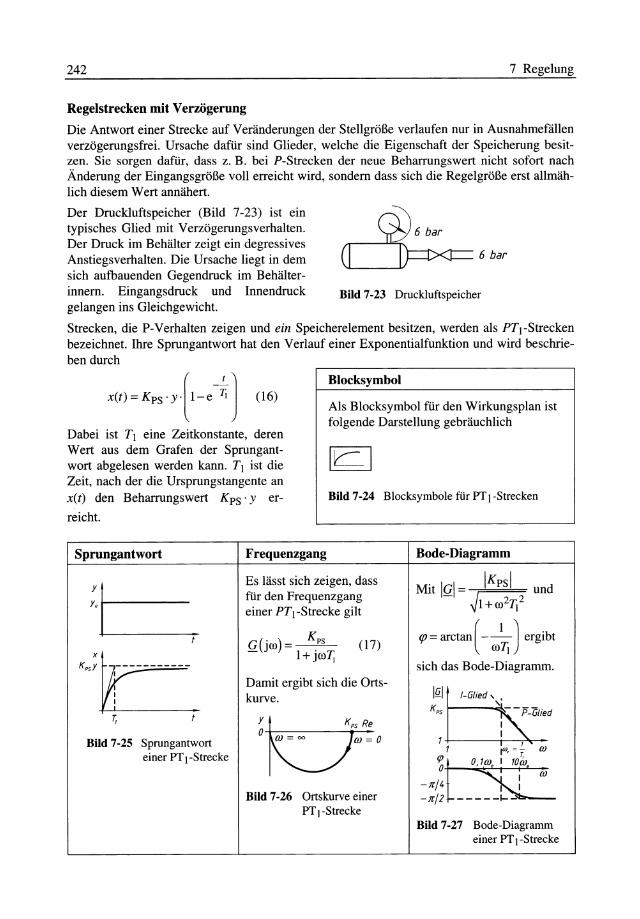
Regelstrecken mit Verzogerung
Die Antwort einer Strecke auf Veranderungen der StellgroBe verlaufen nur in Ausnahmefiillen verzogerungsfrei. Ursache dafUr sind Glieder, welche die Eigenschaft der Speicherung be sitzen. Sie sorgen dafiir, dass z. B. bei P-Strecken der neue Beharrungswert nicht sofort nach Anderung der EingangsgroBe voll erreicht wird, sondern dass sich die RegelgroBe erst allmahlich diesem Wert annahert.
Der Druckluftspeicher (Bild 7-23) ist ein typisches Glied mit Verzogerungsverhalten. Der Druck im Behiilter zeigt ein degressives Anstiegsverhalten. Die Ursache liegt in dem sich aufbauenden Gegendruck im Behalterinnern. Eingangsdruck und Innendruck gelangen ins Gleichgewicht.
".----u=r,® 6 bar
(I :J)==txl== 6 bar
Bild 7-23 Druckluftspeicher
Strecken, die P-Verhalten zeigen und ein Speicherelement besitzen, werden als PT1-Strecken bezeichnet. Ihre Sprungantwort hat den Verlauf einer Exponentialfunktion und wird beschrieben durch
Blocksymbol X(t)~KPS.Y{I-,i) (16)
Dabei ist Tl eine Zeitkonstante, deren Wert aus dem Grafen der Sprungantwort abgelesen werden kann. Tl ist die Zeit, nach der die Ursprungstangente an x(t) den Beharrungswert K PS . Y er-
Als Blocksymbol fUr den Wirkungsplan ist folgende Darstellung gebrauchlich
reicht.
Sprungantwort
Bild 7-25 Sprungantwort einer PT l-Strecke
Bild 7-24 Blocksymbole flir PTl-Strecken
Frequenzgang
Es lasst sich zeigen, dass fUr den Frequenzgang einer PTI-Strecke gilt
Q(jm) = ~ps (17) 1+JmI;
Damit ergibt sich die Ortskurve.
y~ °1~W=O
Bild 7-26 Ortskurve einer PT I-Strecke
Bode-Diagramm
Mit IGI = IKpsl und - ~1+m2T?
rp = arctan ( __ 1_) ergibt m1j
sich das Bode-Diagramm.
IQJ I-Glied ',:
Kps ~Glied
1 1 1 1""=-;: 0)
~ 0,10), 110m
-7[/4 ~ 0)
-7[/2 ------1--
Bild 7-27 Bode-Diagramm einer PT l-Strecke
7.3 Regelstrecken
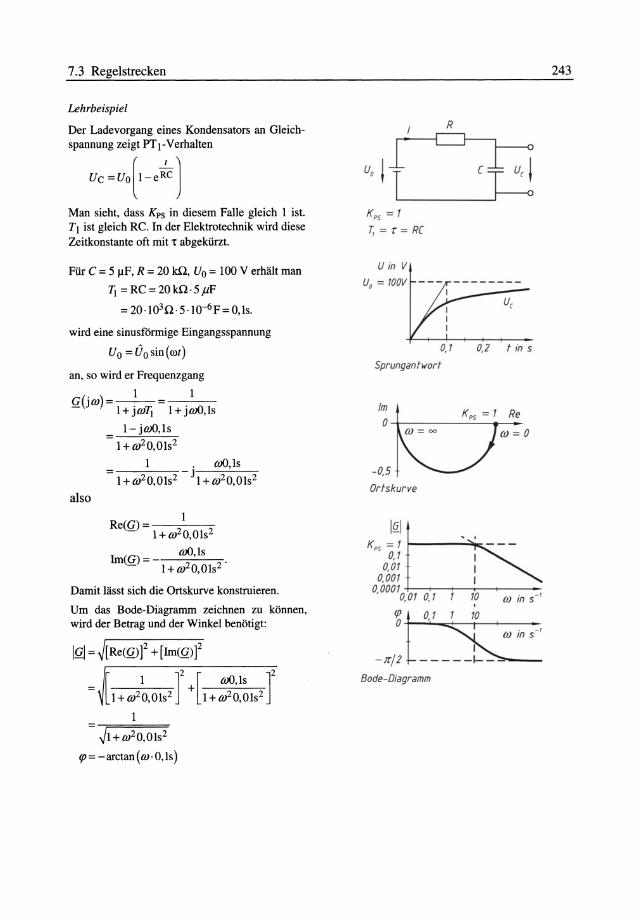
Lehrbeispiel
Der Ladevorgang eines Kondensators an Gleichspannung zeigt PT 1-Verhalten
Man sieht, dass Kps in diesem Falle gleich 1 ist. Tl ist gleich RC. In der Elektrotechnik wird diese Zeitkonstante oft mit 't abgekurzt.
Fur C = 5 flF, R = 20 kQ, Uo = 100 V erhlilt man
1j =RC=20kQ ·5,uF
= 20·103Q ,5,l0-6P= O,ls.
wird eine sinusfOrmige Eingangsspannung
Uo = Uo sin (wt)
an, so wird er Prequenzgang
G(jO)) =_1_= 1 - 1 + jO)1j 1 + jwO,ls
1- jwO,ls
1+ o?O,01s2
1 , wO,ls -J
1 + 0)20,01s2 1 + 0)20,01s2
also
Re(G) = 1 - 1 + 0)20,01s2
Im(G) _ wO,ls - - 1+0)20,Ols2 '
Damit !asst sich die Ortskurve konstruieren.
Urn das Bode-Diagramm zeichnen zu konnen, wird der Betrag und der Winkel benotigt:
[ 1 ]2 [ wO,ls ]2 = 1+0)20,Ols2 + 1+0)20,Ols2
1
~1+0)20,Ols2 rp= -arctan (0), O,ls)
U in V
U. = 100V
0.1 Sprungantworf
0,2 tins
1m Kp5 = 1 Re
0 ~--------~-1---
-0,5
Ortskurve
W:I K P5 = 1 f------.;::.,...,
0,1 0,01
0.001
0) = a
0, 000 1 +:------<:---.-------0,01 0,1 10
~ 0,1 10
-n/2 Bode- Diagramm
243
244
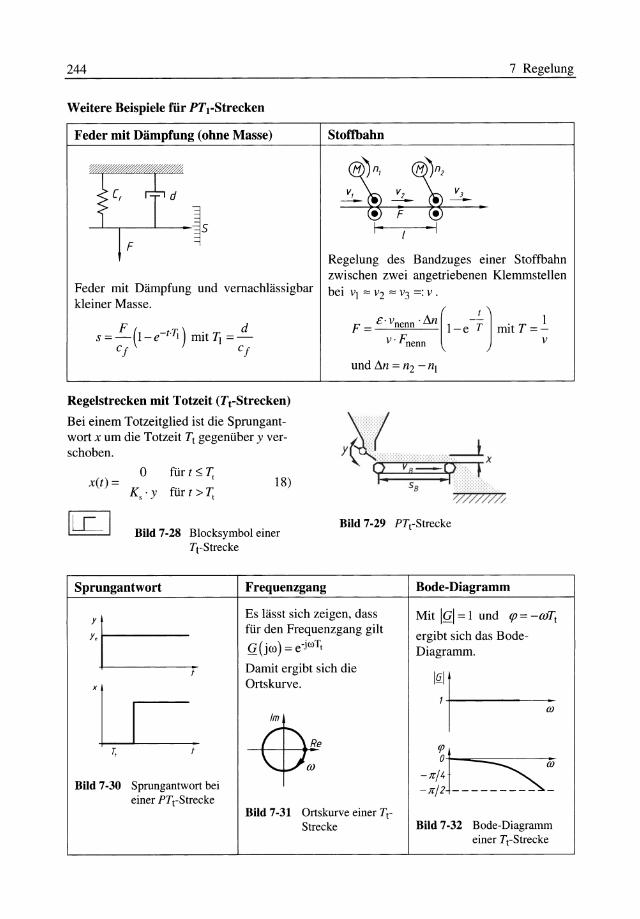
Weitere Beispiele fur PT1-Strecken
Feder mit Dampfung (ohne Masse)
Feder mit Dampfung und vemachlassigbar kleiner Masse.
Regelstrecken mit Totzeit (Tt-Strecken)
Bei einem Totzeitglied ist die Sprungantwort x urn die Totzeit Tt gegeniiber y verschoben.
x(t) = o fUr t ::; T,
18) K, . y fUr t > T,
Bild 7-28 B1ocksymbol einer Tt-Strecke
Sprungantwort Frequenzgang
7 Regelung
Stoflbahn
Regelung des Bandzuges einer Stoffbahn zwischen zwei angetriebenen Klemmstellen bei vI '" v2 '" v3 =: v .
F c·vnenn . I'1n (1 --Tt 1 . T 1 = -e rrnt =-V· Fnenn v
und I'1n = n2 - nl
Bild 7-29 PTcStrecke
Bode-Diagramm
:'C Es Iasst sich zeigen, dass fUr den Frequenzgang gilt
Mit IQI = 1 und ffJ = -OJ'rt ergibt sich das BodeDiagramm. Q (j0)) = e-jOlTt
t Darnit ergibt sich die XLc Ortskurve.
-$;m
Re T, t
Bild 7-30 Sprungantwort bei OJ
einer PT("Strecke Bild 7-31 Ortskurve einer T("
Strecke Bild 7-32 Bode-Diagramrn einer Tt-Strecke
7.4 RegIer
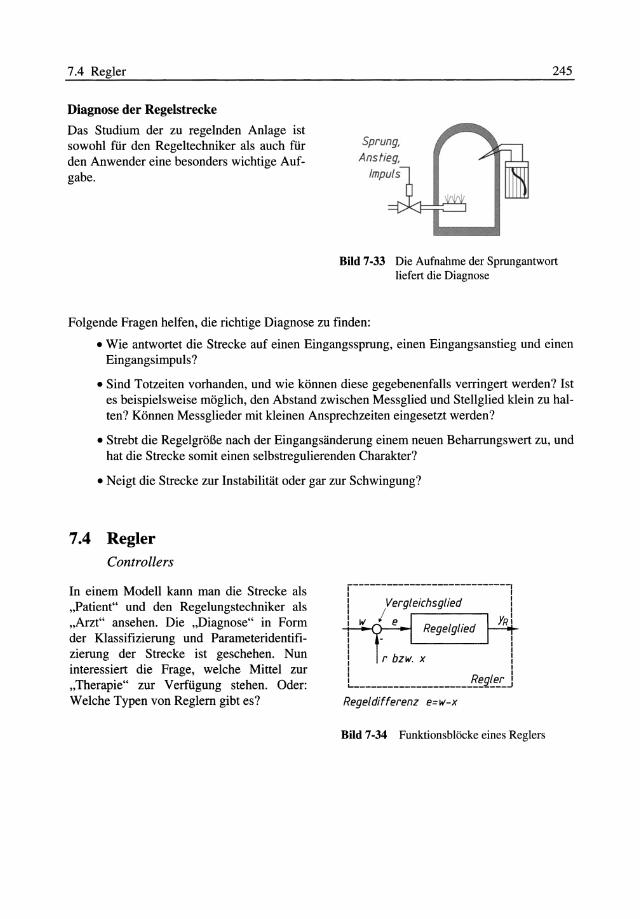
Diagnose der Regelstrecke
Das Studium der zu regelnden Anlage ist sowohl ftir den Regeltechniker ais auch ftir den Anwender eine besonders wichtige Aufgabe.
Sprung,
Ansfieg,
Impuls
245
Bild 7-33 Die Aufnahme der Sprungantwort liefert die Diagnose
Folgende Fragen helfen, die richtige Diagnose zu finden:
• Wie antwortet die Strecke auf einen Eingangssprung, einen Eingangsanstieg und einen Eingangsimpuls?
• Sind Totzeiten vorhanden, und wie konnen diese gegebenenfalls verringert werden? 1st es beispielsweise moglich, den Abstand zwischen Messglied und Stellglied klein zu halten? Konnen Messglieder mit kleinen Ansprechzeiten eingesetzt werden?
• Strebt die RegelgroBe nach der Eingangsanderung einem neuen Beharrungswert zu, und hat die Strecke somit einen selbstregulierenden Charakter?
• Neigt die Strecke zur Instabilitat oder gar zur Schwingung?
7.4 Regier Controllers
In einem Modell kann man die Strecke als "Patient" und den Regelungstechniker als "Arzt" ansehen. Die "Diagnose" in Form der Klassifizierung und Parameteridentifizierung der Strecke ist geschehen. Nun interessiert die Frage, welche Mittel zur "Therapie" zur Verfiigung stehen. Oder: Welche Typen von Reglem gibt es?
-----------------------------1 Vergleichsg/ied
I e Regelglied
I I 1
I YRI
I 1 I
r bzw. x I 1 1 _____________________ ~~~~~J
Regeldifferenz e=w-x
Bild 7-34 FunktionsblOcke eines Reglers
246
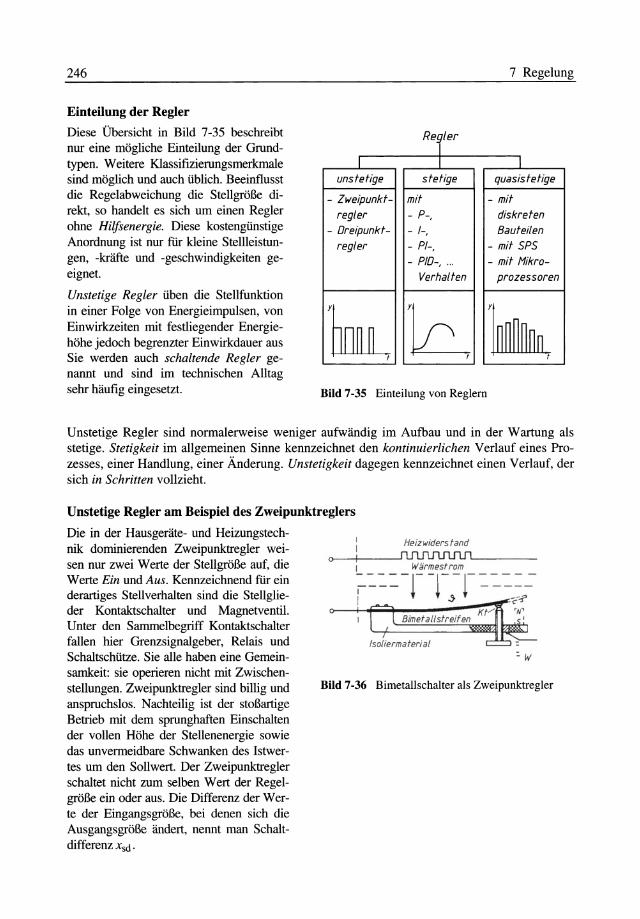
Einteilung der Regier
Diese Ubersicht in Bild 7-35 beschreibt nur eine mogliche Einteilung der Grundtypen. Weitere Klassifizierungsmerkmale sind moglich und auch ublich. Beeinflusst die Regelabweichung die StellgroBe direkt, so handelt es sich urn einen Regier ohne Hilfsenergie. Diese kostengtinstige Anordnung ist nur fur kleine Stellleistungen, -kriifte und -geschwindigkeiten geeignet.
Unstetige RegIer iiben die Stellfunktion in einer Foige von Energieimpulsen, von Einwirkzeiten mit festliegender EnergiehOhe jedoch begrenzter Einwirkdauer aus Sie werden auch schaltende Regier genannt und sind im technischen Alltag sehr haufig eingesetzt.
RegIer 1
I I unstetige stetige
- Zweipunkt- mit reg/er - P-,
- Dreipunkt- - 1-, reg/er - PI-,
- PID-, ... Verhalten
'DoL t
'~ t
Bild 7-35 Einteilung von Reglem
7 Regelung
I quasistetige
- mit diskreten Bauteilen
- mit SPS - mit t1ikro-
prozessoren
'. t
Unstetige Regier sind normalerweise weniger aufwandig im Aufbau und in der Wartung als stetige. Stetigkeit im allgemeinen Sinne kennzeichnet den kontinuierlichen Verlauf eines Prozesses, einer Handlung, einer Anderung. Unstetigkeit dagegen kennzeichnet einen Verlauf, der sich in Schritten vollzieht.
Unstetige Regier am Beispiel des Zweipunktreglers
Die in der Hausgerate- und Heizungstech-nik dominierenden Zweipunktregler wei-sen nur zwei Werte der StellgroBe auf, die Werte Ein und Aus. Kennzeichnend fur ein derartiges Stellverhalten sind die Stellglie-der Kontaktschalter und Magnetventil. Unter den Sanunelbegriff Kontaktschalter fallen hier Grenzsignalgeber, Relais und Schaltschiitze. Sie aIle haben eine Gemein-
Heiz widers f ilnd
I Wiirmestrom -----!--!------------ - ----I 1 .} c-'"-?
Bimefilllsfreifen
Isoliermilteriill
samkeit: sie operieren nicht mit Zwischenstellungen. Zweipunktregler sind billig und anspruchslos. Nachteilig ist der stoBartige
Bild 7-36 Bimetallschalter als Zweipunktregler
Betrieb mit dem sprunghaften Einschalten der vollen Hohe der Stellenenergie sowie das unvermeidbare Schwanken des Istwer-tes urn den Sollwert. Der Zweipunktregler schaltet nicht zum selben Wert der Regel-groBe ein oder aus. Die Differenz der Wer-te der EingangsgroBe, bei denen sich die AusgangsgroBe andert, neont man Schalt-differenz Xsd .
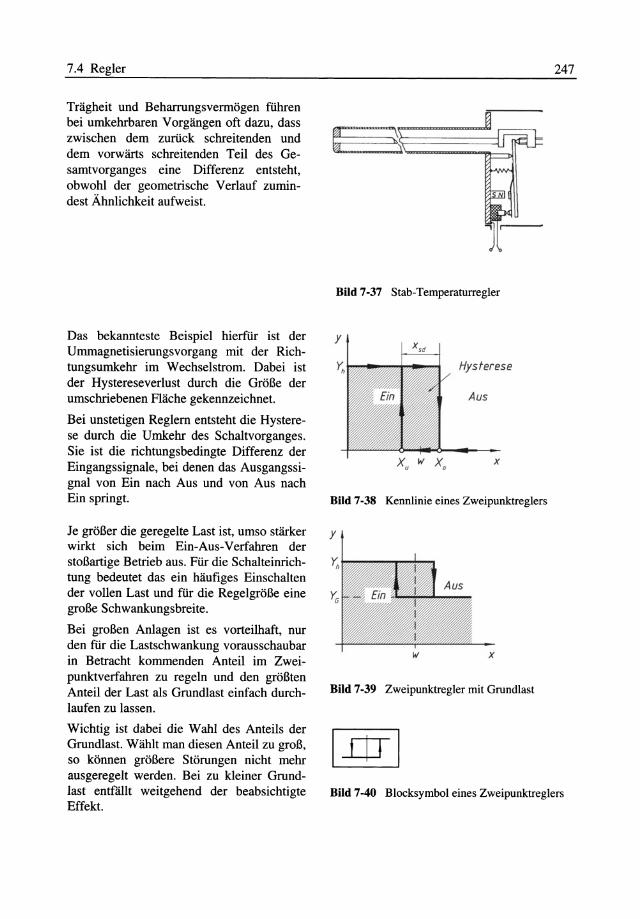
7.4 RegIer
Tdigheit und Beharrungsverrnogen fUhren bei umkehrbaren Vorgangen oft dazu, dass zwischen dem zuruck schreitenden und dem vorwarts schreitenden Teil des Gesamtvorganges eine Differenz entsteht, obwohl der geometrische Verlauf zumindest Ahnlichkeit aufweist.
Das bekannteste Beispiel hierfur ist der Ummagnetisierungsvorgang mit der Richtungsumkehr im Wechselstrom. Dabei ist der Hystereseverlust durch die GroBe der umschriebenen Flache gekennzeichnet.
Bei unstetigen Reglem entsteht die Hysterese durch die Umkehr des Schaltvorganges. Sie ist die richtungsbedingte Differenz der Eingangssignale, bei denen das Ausgangssignal von Ein nach Aus und von Aus nach Ein springt.
Je groBer die geregelte Last ist, umso starker wirkt sich beim Ein-Aus-Verfahren der stoBartige Betrieb aus. Fur die Schalteinrichtung bedeutet das ein haufiges Einschalten der vollen Last und fur die RegelgroBe eine groBe Schwankungsbreite.
Bei groBen Anlagen ist es vorteilhaft, nur den fur die Lastschwankung vorausschaubar in Betracht kommenden Anteil im Zweipunktverfahren zu regeln und den groBten Anteil der Last als Grundlast einfach durchlaufen zu lassen.
Wichtig ist dabei die Wahl des Anteils der Grundlast. Wiihlt man diesen Anteil zu groB, so konnen groBere StOrungen nicht mehr ausgeregelt werden. Bei zu kleiner Grundlast entrallt weitgehend der beabsichtigte Effekt.
247
)
Bild 7-37 Stab-Temperaturregler
Hysterese
Aus
x
Bild 7·38 Kennlinie eines Zweipunktreglers
w x
Bild 7·39 Zweipunktregler mit Grundlast
Bild 7·40 Blocksymbol eines Zweipunktreglers
248 7 Regelung
Stetige Regier
Praktische Technik ist stets ein Kompromiss zwischen der Forderung nach hOchster Prazision in der Erfiillung der gegebenen Aufgabe und dem wirtschaftlich vertretbaren MaB des Aufwands. Die Anwendung einer unstetigen Regelung ist immer eine derartige Kompromisslosung. Die Schwankungsbreite wird innerhalb der vertretbaren Grenzen hingenommen.
Nach der Art des regelnden Eingreifens unterscheiden sich die stetigen RegIer in grundlegender Weise. Da gibt es zum Beispiel eine Gruppe, die sehr schnell auf jede Anderung in der Strecke reagiert, dabei jedoch keine hOchste Prazision in der Erreichung des Sollwertes erzielt. Eine andere Gruppe benotigt eine verhaltnismiillig gro8e Operationszeit, urn dann aber auch ein sehr genaues Resultat zu bringen. Optimale Ergebnisse lassen sich oft nur durch die Kombination der Arten unter Inkaufnahme eines betrachtlichen geratetechnischen Aufwandes erzielen.
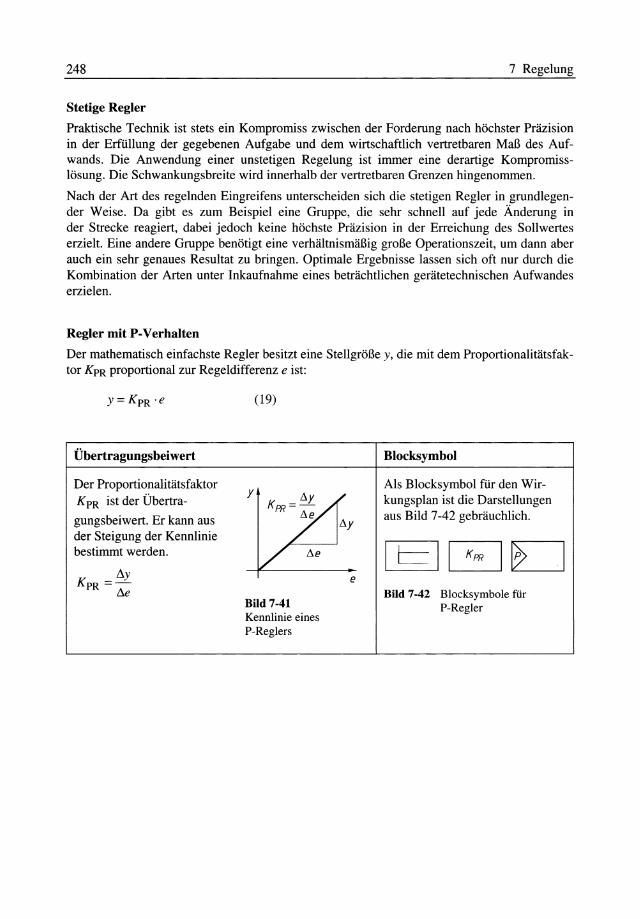
Regier mit P-Verhalten
Der mathematisch einfachste RegIer besitzt eine StellgroBe y, die mit dem Proportionalitatsfaktor KpR proportional zur Regeldifferenz e ist:
(19)
Ubertragungsbeiwert Blocksymbol
Der Proportionalitatsfaktor y Ais Blocksymbol fUr den Wir-K PR ist der Ubertra- K ~y ~ kungsplan ist die Darstellungen
gungsbeiwert. Er kann aus PRY·y aus Bild 7-42 gebrauchlich.
der Steigung der Kennlinie
~GD bestimmt werden. / ~e
Ay K pR =- e
Ae Bild 7-42 Blocksymbole fur Bild 7-41 P-Regler Kennlinie eines P-Reglers
7.4 RegIer
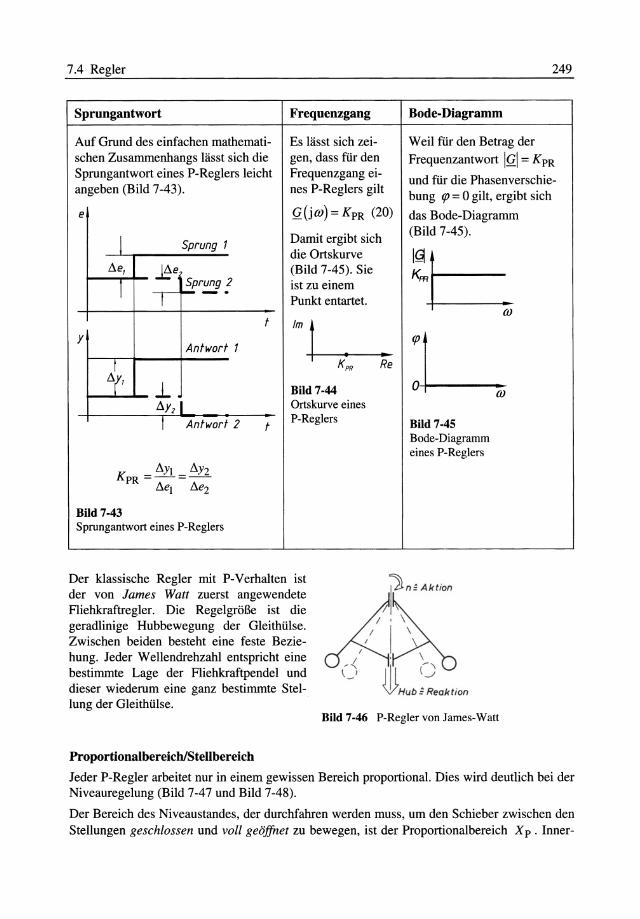
Sprungantwort Frequenzgang
Auf Grund des einfachen mathemati- Es lasst sich zei-schen Zusammenhangs lasst sich die gen, dass fiir den Sprungantwort eines P-Reglers leicht Frequenzgang ei-angeben (Bild 7-43). nes P-Reglers gilt
e Q(jeo) = KpR (20)
J Sprung 1 Damit ergibt sich die Ortskurve
!leI ~e2 (Bild 7-45). Sie
I Sprung 2 ist zu einem - -I Punktentartet.
t 1m 1 y
Antwort 1 •
~(1 KpR
1- Bild 7-44
!lY2 I Ortskurve eines
! Antwort 2 t P-Reglers
KpR = !lYI = !lY2 !leI !le2
Bild 7-43 Sprungantwort eines P-Reglers
Der klassische RegIer mit P-Verhalten ist der von James Watt zuerst angewendete Fliehkraftregler. Die RegeigroBe ist die geradlinige Hubbewegung der Gleithiilse. Zwischen beiden besteht eine feste Beziehung. Jeder Wellendrehzahl entspricht eine bestimmte Lage der Fliehkraftpendel und dieser wiederum eine ganz bestimmte Stel-. lung der Gleithiilse.
• Re
249
Bode-Diagramm
Wei I fiir den Betrag der
Frequenzantwort IQI = K PR
und fur die Phasenverschie-bung rp = 0 gilt, ergibt sich
das Bode-Diagramm (Bild 7-45).
~t=. eo
L Bild 7-45 Bode-Diagramrn eines P-Reglers
Bild 7-46 P-Regler von James-Watt
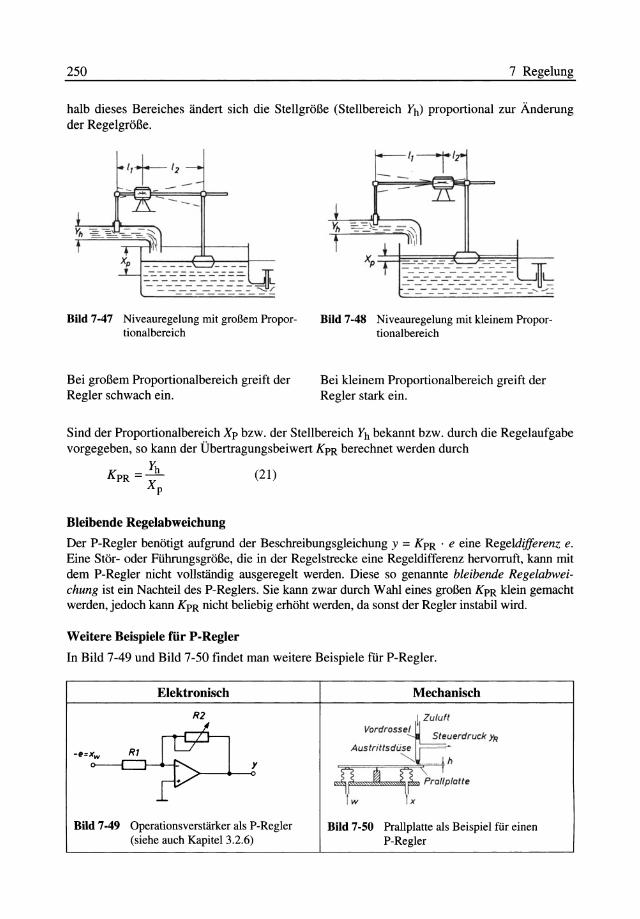
Proportionalbereich/Stellbereich
Jeder P-Regler arbeitet nur in einem gewissen Bereich proportional. Dies wird deutlich bei der Niveauregelung (Bild 7-47 und Bild 7-48).
Der Bereich des Niveaustandes, der durchfahren werden muss, urn den Schieber zwischen den Stellungen geschlossen und voll geoffnet zu bewegen, ist der Proportionalbereich X P . Inner-
250 7 Regelung
halb dieses Bereiches lindert sich die StellgroBe (Stellbereich Yh) proportional zur Anderung der RegelgroBe.
Bild 7·47 Niveauregelung mit groBem Propor. tionalbereich
Bei groBem Proportional bereich greift der RegIer schwach ein.
I'i' --
Bild 7·48 Niveauregelung mit kleinem Proportionalbereich
Bei kleinem Proportionalbereich greift der RegIer stark ein.
Sind der Proportionalbereich Xp bzw. der Stellbereich Yh bekannt bzw. durch die Regelaufgabe vorgegeben, so kann der Ubertragungsbeiwert KpR berechnet werden durch
Yh KpR =- (21)
Xp
Bleibende Regelabweichung
Der P-Regler benotigt aufgrund der Beschreibungsgleichung y = KpR . e eine Regeldifferenz e. Eine StOr- oder FuhrungsgroBe, die in der Regelstrecke eine Regeldifferenz hervorruft, kann mit dem P-Regler nicht vollstlindig ausgeregelt werden. Diese so genannte bleibende Regelabweichung ist ein Nachteil des P-Reglers. Sie kann zwar durch Wahl eines groBen KpR klein gemacht werden, jedoch kann K PR nicht beliebig erhoht werden, da sonst der Regier instabil wird.
Weitere Beispiele fur P·Regler
In Bild 7-49 und Bild 7-50 findet man weitere Beispiele fur P-Regler.
Elektronisch
R2
Y
Bild 7·49 Operationsverstlirker als P-Regler (siehe auch Kapitel 3.2.6)
Mechanisch
I Zulu'l Vordr ossel
Sleuerdruck YR Auslrittsdiise
""- h
Bild 7·50 Prallplatte als Beispiel ftir einen P-Regler
7.4 RegIer
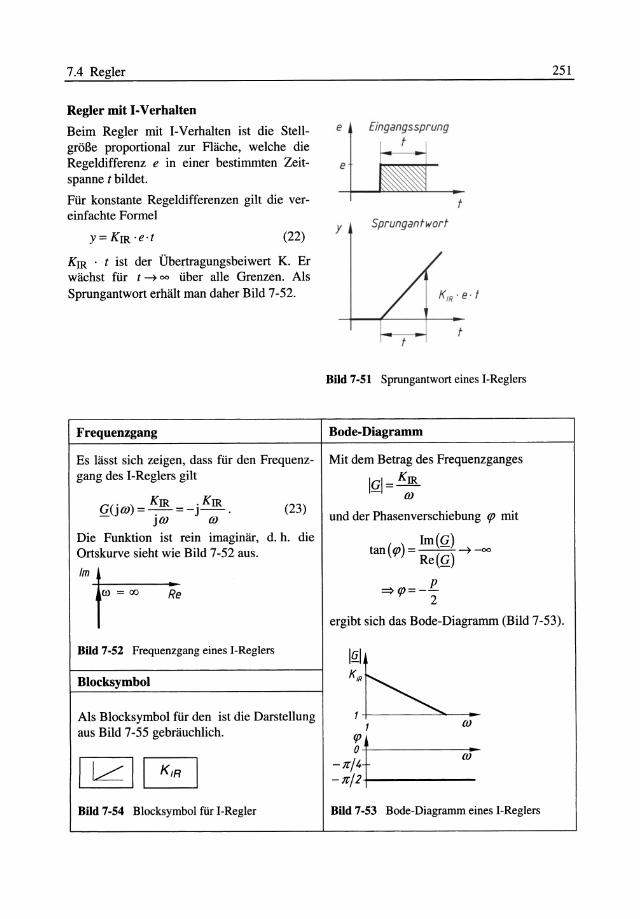
RegIer mit I-Verhalten
Beim RegIer mit I-Verhalten ist die StellgroBe proportional zur Flliche, welche die Regeldifferenz e in einer bestimmten Zeitspanne t bildet.
Ffir konstante Regeldifferenzen gilt die vereinfachte Formel
y = KIR ·e·t (22)
KIR . t ist der Ubertragungsbeiwert K. Er wlichst ffir t ~ 00 fiber alle Grenzen. Als Sprungantwort erhlilt man daher Bild 7-52.
Frequenzgang
Es llisst sich zeigen, dass ffir den Frequenzgang des I-Reglers gilt
Q(jlU) = ~IR = _j KIR . (23) JlU lU
Die Funktion ist rein imaginlir, d. h. die Ortskurve sieht wie Bild 7-52 aus.
Im~ f(O = 00 Re
BUd 7-52 Frequenzgang eines I-RegJers
Blocksymbol
Als Blocksymbol fUr den ist die Darstellung aus Bild 7-55 gebrliuchlich.
Bild 7-54 Blocksymbol fUr I-Regier
e
e
y
Eingangs sprung f
Sprungantwort
t
t
Bild 7-51 Sprungantwort eines I-Reglers
Bode-Diagramm
Mit dem Betrag des Frequenzganges
IQI = KIR lU
und der Phasenverschiebung cp mit
tan ( cp) = 1m (Q) ~ -00
Re(Q) p
=> cp=--2
251
ergibt sich das Bode-Diagramm (Bild 7-53).
I~I
K.~ 1+---------~----
1 lU
-x/~~ - n-/2++-~ -----
.. lU
Bild 7-53 Bode-Diagramm eines I-Reglers
252 7 Regelung
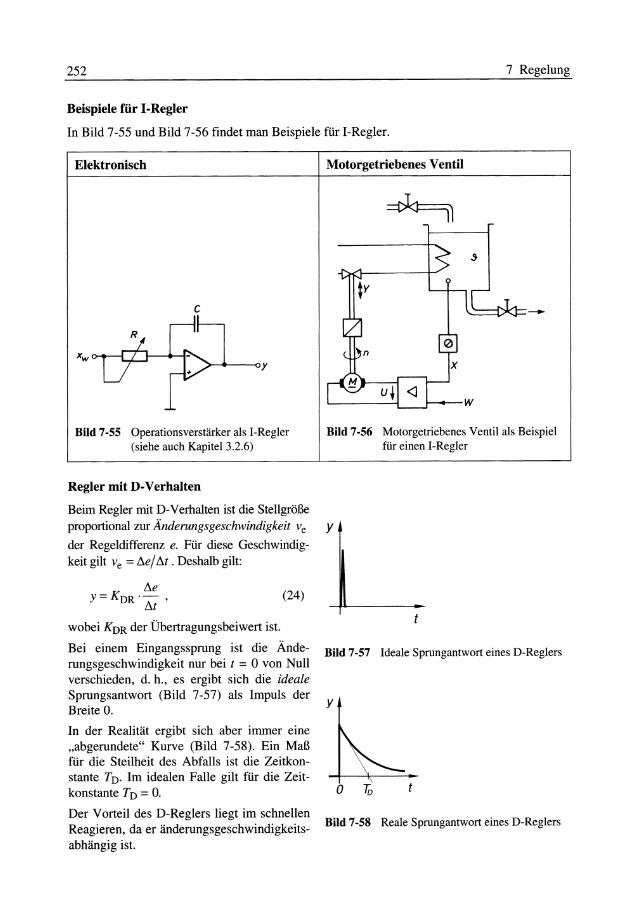
Beispiele fUr I-Regier
In Bild 7-55 und Bild 7-56 findet man Beispiele fUr I-RegIer.
Elektronisch
c
>-----oy
Bild 7-55 Operationsverstiirker ais I-RegIer (siehe auch Kapitel 3.2.6)
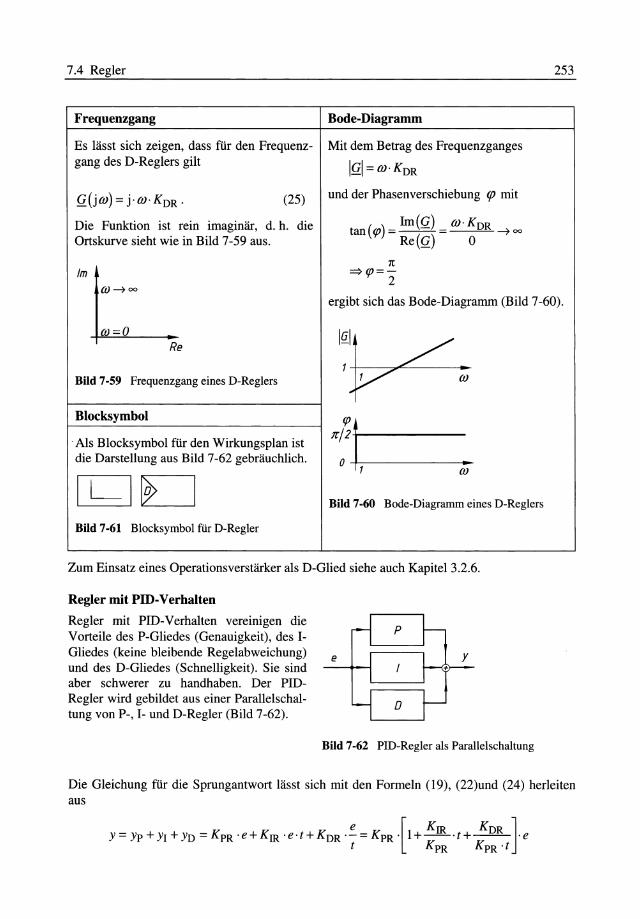
Regier mit D-Verhalten
Beim RegIer mit D-V erhalten ist die StellgroBe
Motorgetriebenes Ventil
Bild 7-56 Motorgetriebenes Ventil ais Beispiel flir einen I-RegIer
proportional zur Anderungsgeschwindigkeit Ve Y
der Regeldifferenz e. Fiir diese Geschwindig-keit gilt ve = /::"ej /::"t • Deshalb gilt:
/::"e y= K OR · /::"t '
wobei KOR der Ubertragungsbeiwert ist.
(24)
Bei einem Eingangssprung ist die Anderungsgeschwindigkeit nur bei t = 0 von Null verschieden, d. h., es ergibt sich die idea Ie Sprungsantwort (Bild 7-57) als Impuls der Breite o. In der Realitiit ergibt sich aber immer eine "abgerundete" Kurve (Bild 7-58). Ein MaS fUr die Steilheit des Abfalls ist die Zeitkonstante To. 1m idealen Falle gilt fUr die Zeitkonstante To = O.
Der Vorteil des D-Reglers liegt im schnellen Reagieren, da er anderungsgeschwindigkeitsabhangig ist.
Bild 7-57 Ideale Sprungantwort eines D-Reglers
y
o
Bild 7-58 Reale Sprungantwort eines D-Reglers
7.4 RegIer
Frequenzgang
Es lasst sich zeigen, dass fUr den Frequenzgang des D-Reglers gilt
Q(jw) = j·w·KOR . (25)
Die Funktion ist rein imaginiir, d. h. die Ortskurve sieht wie in Bild 7-59 aus.
1m w~oo
Bode-Diagramm
Mit dem Betrag des Frequenzganges
IQI=w.KoR
und der Phasenverschiebung rp mit
Im(G) w·KOR tan(~)=-=-= ~oo
Re(Q) 0
11:
=>~=2
253
ergibt sich das Bode-Diagramm (Bild 7-60).
0)=0 Re
Bild 7-59 Frequenzgang eines D-Reglers
Blocksymbol
. Ais Blocksymbol flir den Wirkungsplan ist die Darstellung aus Bild 7-62 gebrauchlich.
Bild 7-61 Blocksymbol flir D-Regler
I§:I ./
11---~~~~----~-,V
7r/~1 o -t--:-1-------------<;-
Bild 7-60 Bode-Diagramm eines D-Reglers
Zum Einsatz eines Operationsverstiirker als D-Glied siehe auch Kapitel 3.2.6.
Regier mit PID-Verhalten
RegIer mit PID-Verhalten veremlgen die Vorteile des P-Gliedes (Genauigkeit), des 1-Gliedes (keine bleibende Regelabweichung) und des D-Gliedes (Schnelligkeit). Sie sind aber schwerer zu handhaben. Der PIDRegIer wird gebildet aus einer Parallelschaltung von po, 1- und D-Regler (Bild 7-62).
e y
Bild 7-62 Pill-RegIer als Parallelschaltung
Die Gleichung flir die Sprungantwort lasst sich mit den Formeln (19), (22)und (24) herleiten aus
e [KIR KOR ] Y = YP + YI + Yo = K PR . e + K IR . e· t + K OR . - = K PR· 1 + --. t + -- . e t KpR KpR·t
254 7 Regelung
mit den Abkiirzungen
KpR = Tn und KDR = Tv KIR KpR
(26) und (27)
gilt
[ lTV] y = K pR ' 1+-·(+- ·e. Tn t
(28)
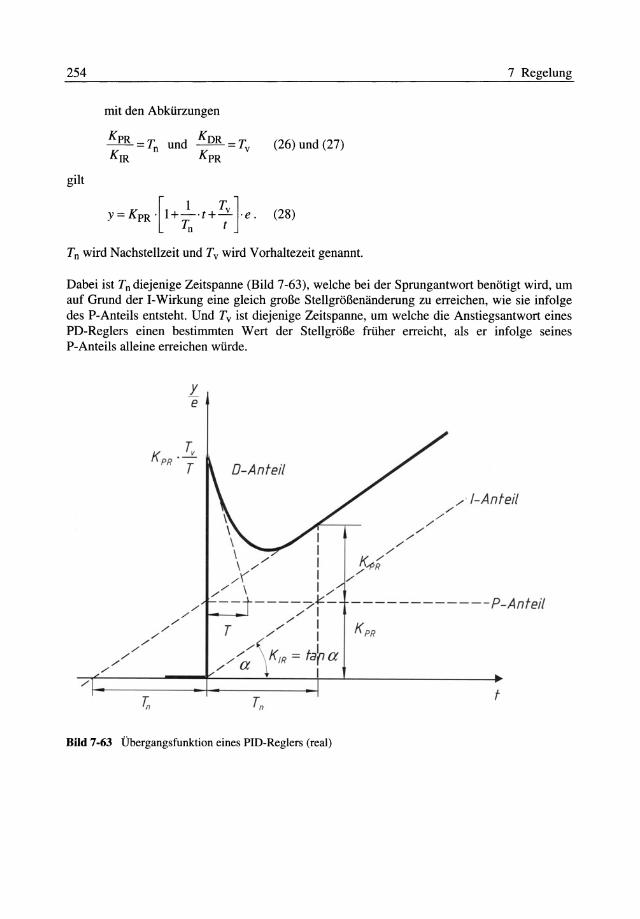
Tn wird Nachstellzeit und Tv wird Vorhaltezeit genannt.
Dabei ist Tn diejenige Zeitspanne (Bild 7-63), welche bei der Sprungantwort ben6tigt wird, urn auf Grund der I-Wirkung eine gleich groBe Stellgr6Benlinderung zu erreichen, wie sie infolge des P-Anteils entsteht. Und Tv ist diejenige Zeitspanne, urn welche die Anstiegsantwort eines PD-Reglers einen bestimmten Wert der Stellgr6Be friiher erreicht, als er infolge seines P-Anteils alleine erreichen wiirde.
L e
D-AnteJ1 K .~
PR T
./r---------+-------~
Bild 7-63 Ubergangsfunktion eines PID-Reg1ers (real)
K~: ./
./
./ ./
./ ./
./ ./
./
,,/ I- Anteil
------------P-Anteil
KpR
t
7.4 RegIer
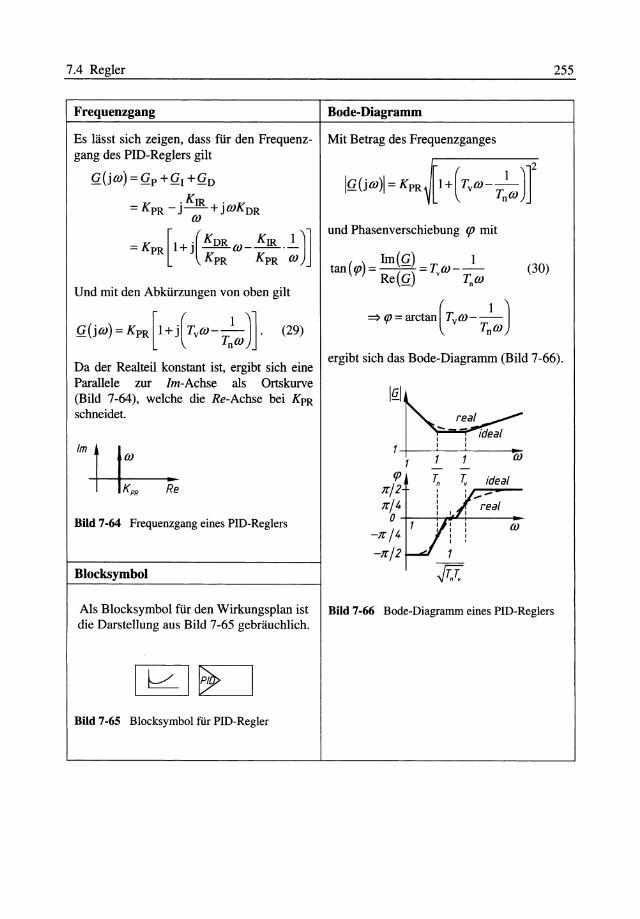
Frequenzgang
Es lasst sich zeigen, dass fiir den Frequenzgang des PID-Reglers gilt
Q(jw) = Qp +QI +QD .KIR .
= KpR - J--+ JwKDR w
= KpR [1 + j(KDR w- KIR . ..!..)] KpR KpR w
Und mit den Abkiirzungen von oben gilt
Q(jw) = KpR [1+ {TvW- T:W)]. (29)
Da der Realteil konstant ist, ergibt sich eine Parallele zur Im-Achse als Ortskurve (Bild 7-64), welche die Re-Achse bei KpR schneidet.
Bild 7-64 Frequenzgang eines PID-Reglers
Blocksymbol
Bode-Diagramm
Mit Betrag des Frequenzganges
und Phasenverschiebung ffJ mit
Im(G) 1 tan(qJ)=---=-=TW-- (30) Re(Q) v Tow
~ qJ= arctan (TvW __ l_) Tow
255
ergibt sich das Bode-Diagramm (Bild 7-66).
IQ:I I'... real I "~-"""""""'--ideal
I I
1-+--~'--'~----....,~ W
w
Ais Blocksymbol fiir den Wirkungsplan ist Bild 7-66 Bode-Diagramm eines PID-Reglers die Darstellung aus Bild 7-65 gebrauchlich.
BUd 7-65 Blocksymbol fiir PID-Regler
256
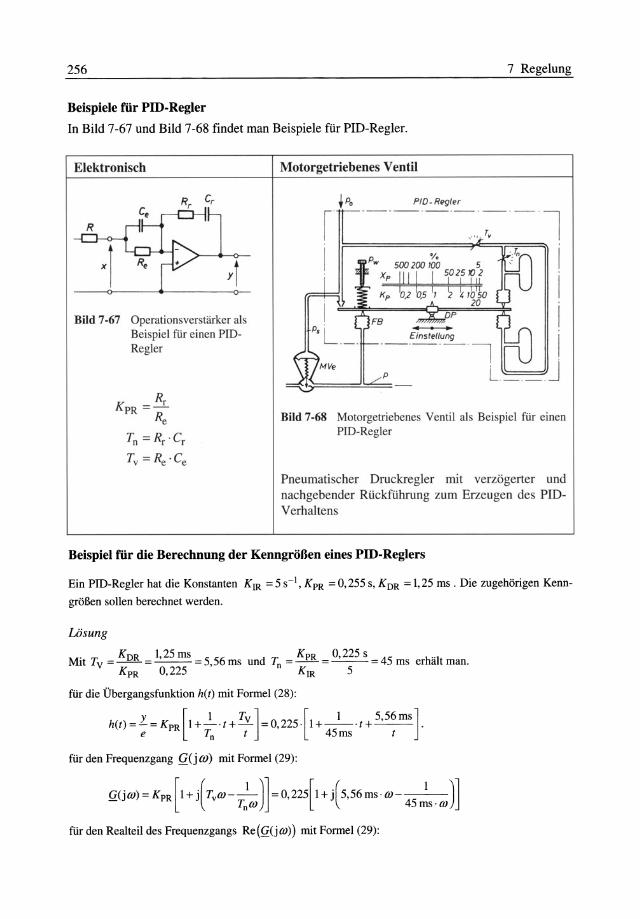
Beispiele filr PID-Regler
In Bild 7-67 und Bild 7-68 findet man Beispiele flir PID-Regler.
Elektronisch
R cr r
Motorgetriebenes Venti!
PID - Regler
7 Regelung
---- ·- ·-, .. ,·,-;:-·- l I 1
I Bild 7-67 Operationsverstiirker als Bei pie\ fiir einen PIDRegIer
£insfellung I' ._._._., .
Rr KpR =-
Re Tn = Rr ,Cr
Tv = Re .Ce
~~~p L._ ._ .J
Bild 7-68 Motorgetriebene Venti I als Beispiel fUr einen PID-Regler
Pneumatischer Druclaegler mit verzogerter und nachgebender Riickfiihrung zum Erzeugen des PIDVerhaltens
Beispiel filr die Berechnung der Kenngro8en eines PID-Reglers
Ein PID-Regler hat die Konstanten KJR = 5 s-l, KpR = 0,255 s, KOR = 1,25 ms . Die zugehorigen Kenn
groBen sollen berechnet werden.
LOsung
. KOR 1,25 ms KpR 0,225 s . MIt Tv = --= ---= 5,56 ms und Tn = --= ---= 45 ms erhalt man.
KpR 0,225 KJR 5
flir die Ubergangsfunktion h(t) mit Formel (28):
h(t) = l.. = KpR [1 +..!....t + Tv] = 0,225 .[1 +_I_. t + 5,56ms]. e Tn t 45ms t
fUr den Frequenzgang Q(j (0) mit Formel (29):
Q(jm) = KpR [1 + j(Tvm--1-)] = 0,225[1 + j(5,56 ms. m- 1 )] Tnm 45 ms· m
fiir den Realteil des Frequenzgangs Re (Q(j m) ) mit Formel (29):
7.4 RegIer
Re(Q(jw»)= KpR 01=0,225
flir den Imagin1irteil Im(Q(jw) des Frequenzgangs mit Formel (29):
Im(Q(jw)=KpR 0(TvW--l-)=0,2250(5,56msow- 1 ) Tnw 45ms ow
flir die Phasenverschiebung qJnach Formel (30):
0,2250 (5,56 ms 0 W ___ 1_) an(qJ) = Im(Q) = 45ms ow =5,56msow----
~0 ~m ~~ow
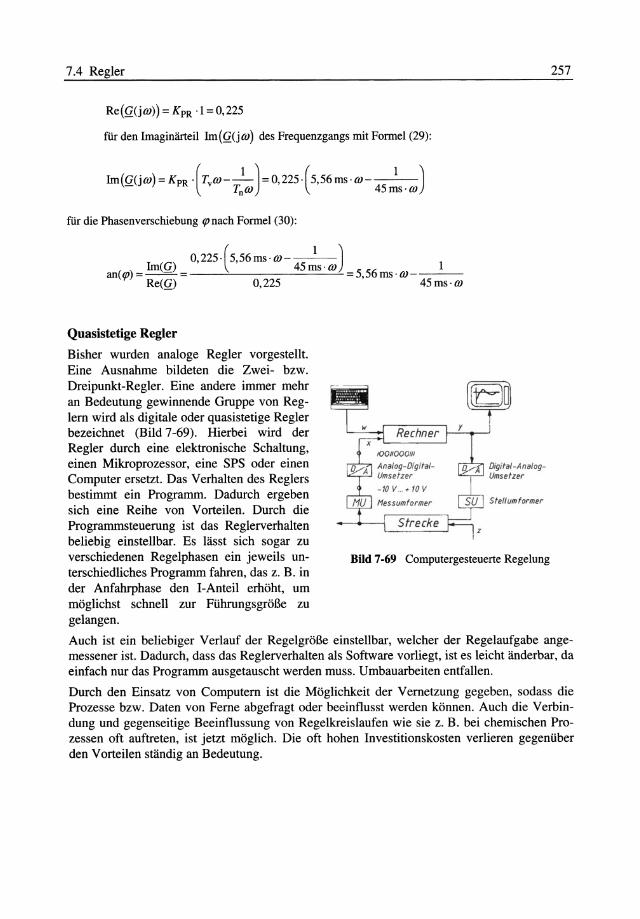
Quasistetige Regier
Bisher wurden analoge RegIer vorgestellt. Eine Ausnahme biideten die Zwei- bzwo Dreipunkt-Regiero Eine andere imrner mehr an Bedeutung gewinnende Gruppe von Reglern wird als digitale oder quasistetige RegIer bezeichnet (Bild 7-69). Hierbei wird der RegIer durch eine elektronische Schaltung, einen Mikroprozessor, eine SPS oder einen Computer ersetzt. Das Verhalten des Regiers bestimrnt ein Programrn. Dadurch ergeben sich eine Reihe von Vorteilen. Durch die Programrnsteuerung ist das Regierverhalten beliebig einstellbar. Es Hisst sich sogar zu verschiedenen Regeiphasen ein jeweils unterschiedliches Programrn fahren, das z. B. in der Anfahrphase den I-Anteil erhOht, urn moglichst schnell zur FiihrungsgroBe zu gelangen.
Bild 7-69 Computergesteuerte Regelung
257
Auch ist ein beliebiger Verlauf der RegelgroBe einstellbar, welcher der Regelaufgabe angemessener ist. Dadurch, dass das Regierverhalten ais Software vorliegt, ist es Ieicht linderbar, da einfach nur das Programrn ausgetauscht werden muss. Umbauarbeiten entfallen.
Durch den Einsatz von Computern ist die Moglichkeit der Vernetzung gegeben, sodass die Prozesse bzw. Daten von Feme abgefragt oder beeinflusst werden konnen. Auch die Verbindung und gegenseitige Beeinflussung von Regelkreislaufen wie sie z. B. bei chemischen Prozessen oft auftreten, ist jetzt moglich. Die oft hohen Investitionskosten verlieren gegeniiber den Vorteilen stlindig an Bedeutung.
258
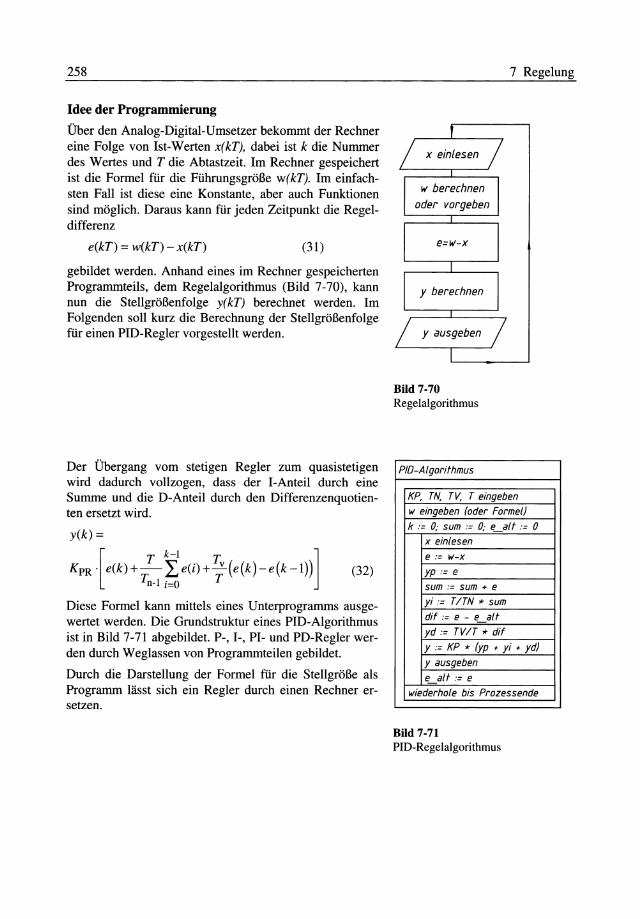
Idee der Programmierung Uber den Analog-Digital-Umsetzer bekommt der Rechner eine Folge von Ist-Werten x(kT), dabei ist k die Nummer des Wertes und T die Abtastzeit. 1m Rechner gespeichert ist die Formel fUr die FiihrnngsgroBe w(kT). 1m einfachsten Fall ist diese eine Konstante, aber auch Funktionen sind moglich. Daraus kann fiir jeden Zeitpunkt die Regeldifferenz
e(kT) = w(kT) - x(kT) (31)
gebildet werden. Anhand eines im Rechner gespeicherten Prograrnmteils, dem Regelalgorithmus (Bild 7-70), kann nun die StellgroBenfolge y(kT) berechnet werden. 1m Folgenden solI kurz die Berechnung der StellgroBenfolge fiir einen PID-Regler vorgestellt werden.
Der Ubergang vom stetigen RegIer zum quasistetigen wird dadurch vollzogen, dass der I-Anteil durch eine Summe und die D-Anteil durch den Differenzenquotienten ersetzt wird.
y(k) =
KpR .[e(k)+~ re(i)+ Tv (e{k)-e{k -1))] Tn-l i=O T
(32)
Diese Formel kann mittels eines Unterprograrnms ausgewertet werden. Die Grundstruktur eines PID-Algorithmus ist in Bild 7-71 abgebildet. P-, 1-, PI- und PD-Regler werden durch Weglassen von Prograrnmteilen gebildet.
Durch die Darstellung der Formel fiir die StellgroBe als Prograrnm liisst sich ein RegIer durch einen Rechner ersetzen.
, / x einlesen /
hi berechnen oder vorgeben
e=hI-x
~
y berechnen
L y ausgeben
I
BUd 7-70 Regelalgorithmus
PID-Algorithmus
J J
7 Regelung
KP, TN, TV, T eingeben
w eingeben (oder Forme/)
k := 0; sum := 0; e a/t := 0
x einlesen
e := w-x
yp:= e
sum := sum + e
yi := TITN * sum
dif := e - e a/t
yd := TVIT * dif
Y := KP * (yp + yi + yd)
Y ausgeben
e alt := e
wiederhole bis Prozessende
BUd 7-71 PID-Regelalgorithmus
7.5 Zusammenwirken zwischen RegIer und Strecke
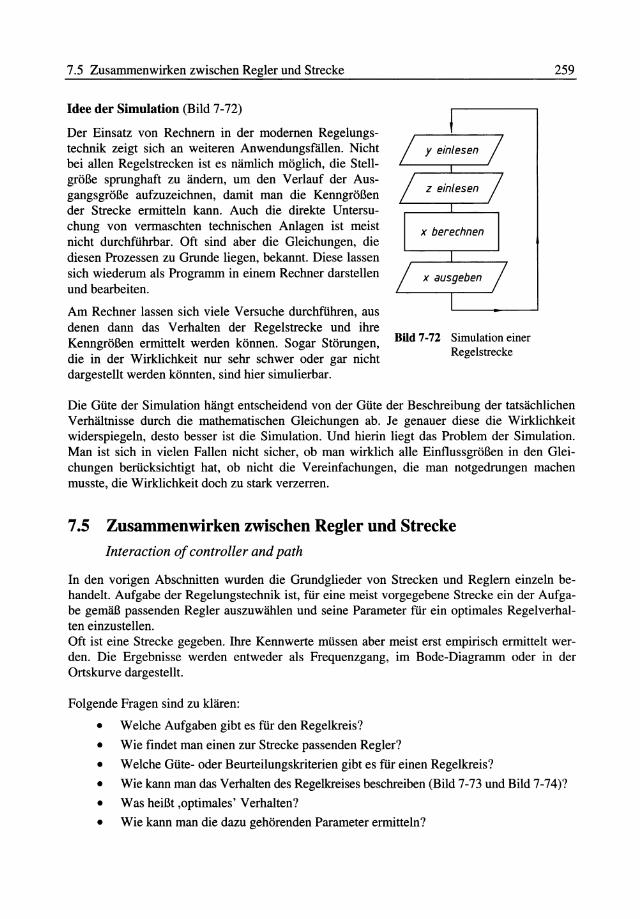
Idee der Simulation (Bild 7-72)
Der Einsatz von Rechnem in der modemen Regelungstechnik zeigt sich an weiteren Anwendungsfallen. Nicht bei allen Regelstrecken ist es nlimlich moglich, die StellgroBe sprunghaft zu iindem, urn den Verlauf der AusgangsgroBe aufzuzeichnen, damit man die KenngroBen der Strecke ermitteln kann. Auch die direkte Untersuchung von vermaschten technischen Anlagen ist meist nicht durchfiihrbar. Oft sind aber die Gleichungen, die diesen Prozessen zu Grunde liegen, bekannt. Diese lassen sich wiederum als Programm in einem Rechner darstellen und bearbeiten.
Am Rechner lassen sich viele Versuche durchfiihren, aus denen dann das Verhalten der Regelstrecke und ihre KenngroBen ermittelt werden konnen. Sogar StOrungen, die in der Wirklichkeit nur sehr schwer oder gar nicht dargestellt werden konnten, sind hier simulierbar.
Bild 7-72 Simulation einer Regelstrecke
259
Die Giite der Simulation hiingt entscheidend von der Giite der Beschreibung der tatsachlichen Verhaltnisse durch die rnathematischen Gleichungen abo Je genauer diese die Wirklichkeit widerspiegeln, desto besser ist die Simulation. Und hierin liegt das Problem der Simulation. Man ist sich in vielen Fallen nicht sicher, ob man wirklich aile EinflussgroBen in den Gleichungen beriicksichtigt hat, ob nicht die Vereinfachungen, die man notgedrungen machen musste, die Wirklichkeit doch zu stark verzerren.
7.5 Zusammenwirken zwischen Regier und Strecke Interaction of controller and path
In den vorigen Abschnitten wurden die Grundglieder von Strecken und Reglem einzeln behandelt. Aufgabe der Regelungstechnik ist, fiir eine meist vorgegebene Strecke ein der Aufgabe gemaB passenden RegIer auszuwahlen und seine Parameter fUr ein optimales Regelverhalten einzustellen. Oft ist eine Strecke gegeben. Ihre Kennwerte miissen aber meist erst empirisch ermittelt werden. Die Ergebnisse werden entweder als Frequenzgang, im Bode-Diagramm oder in der Ortskurve dargestellt.
Folgende Fragen sind zu kliiren:
• Welche Aufgaben gibt es ffir den Regelkreis?
• Wie findet man einen zur Strecke passenden RegIer?
• Welche Giite- oder Beurteilungskriterien gibt es fUr einen Regelkreis?
• Wie kann man das Verhalten des Regelkreises beschreiben (Bild 7-73 und Bild 7-74)?
• Was heiBt ,optimales' Verhalten?
• Wie kann man die dazu gehorenden Parameter ermitteln?
260
x
hi
t
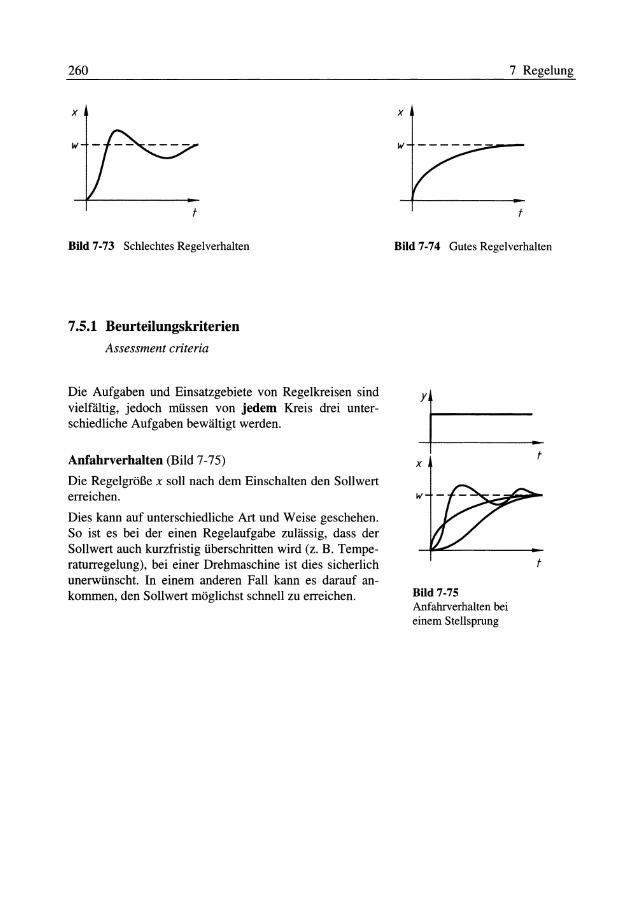
Bild 7-73 Schlechtes Regelverhalten
7.5.1 Beurteilungskriterien Assessment criteria
Die Aufgaben und Einsatzgebiete von Regelkreisen sind vielfaltig, jedoch miissen von jedem Kreis drei unterschiedliche Aufgaben bewaltigt werden.
Anfahrverhalten (Bild 7-75)
Die Regelgro8e x solI nach dem Einschalten den Sollwert erreichen.
Dies kann auf unterschiedliche Art und Weise geschehen. So ist es bei der einen Regelaufgabe zuliissig, dass der Sol1wert auch kurzfristig iiberschritten wird (z. B. Temperaturregelung), bei einer Drehmaschine ist dies sicherlich unerwiinscht. In einem anderen Fall kann es daraufankommen, den Sollwert moglichst schnell zu erreichen.
7 Regelung
x
hi - - - - - ::-;.,;-a---
t
Bild 7-74 Gutes Regelverhalten
y
x
Bild 7-75 Anfahrverhalten bei einem Stellsprung
t
t
7.5 Zusammenwirken zwischen Regier und Strecke
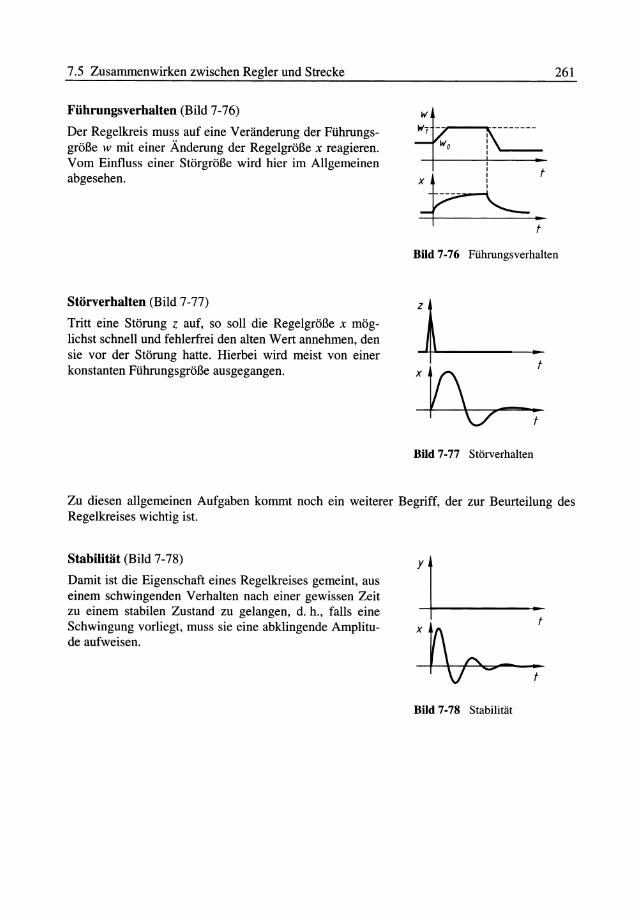
Fiihrungsverhalten (Bild 7-76)
Der Regelkreis muss auf eine Veranderung der FiihrungsgroBe w mit einer Anderung der RegelgroBe x reagieren. Vom Einfluss einer StorgroBe wird hier im Allgemeinen abgesehen.
StOrverhalten (Bild 7-77)
Tritt eine Storung z auf, so soli die RegelgroBe x moglichst schnell und fehlerfrei den alten Wert annehmen, den sie vor der Storung hatte. Hierbei wird meist von einer konstanten FiihrungsgroBe ausgegangen.
261
w
I I t
K. t
Bild 7-76 Fiihrungsverhalten
z
t
.. t
Bild 7-77 StOrverhalten
Zu diesen allgemeinen Aufgaben kommt noch ein weiterer Begriff, der zur Beurteilung des Regelkreises wichtig ist.
Stabilitiit (Bild 7-78)
Damit ist die Eigenschaft eines Regelkreises gemeint, aus einem schwingenden Verhalten nach einer gewissen Zeit zu einem stabilen Zustand zu gelangen, d. h., falls eine Schwingung vorliegt, muss sie eine abklingende Amplitude aufweisen.
y
Bild 7-78 Stabilitat
t
.. t
262
7.5.2 Regelung mit stetigen Reglem
Closed loop control with continuously variable action controllers
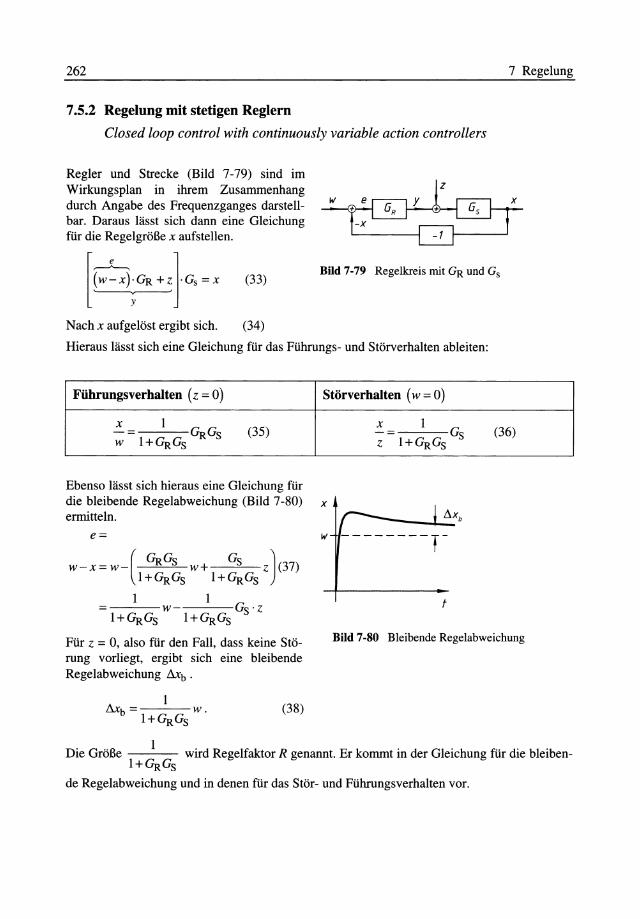
RegIer und Strecke (Bild 7-79) sind im Wirkungsplan in ihrem Zusammenhang durch Angabe des Frequenzganges darstellbar. Daraus Hisst sich dann eine Gleichung filr die RegelgroBe x aufstellen.
7 Regelung
(33) Bild 7-79 Regelkreis mit ~ und Gs
Nach x aufgelOst ergibt sich. (34)
Hieraus lasst sich eine Gleichung filr das Fiihrungs- und StOrverhalten ableiten:
Fiihrungsverhalten (z = 0) Storverhalten (w = 0)
x 1 ~G (35) - = w l+~Gs s
Ebenso lasst sich hieraus eine Gleichung fOr die bleibende Regelabweichung (Bild 7-80) x ermitteln.
e=
w-x=w-( ~Gs w+ Gs Z)(37) l+~Gs l+~Gs
1 1 = w- Gs·z l+~Gs l+~Gs
x 1 G - = z l+~Gs s
t
(36)
FOr z = 0, also filr den Fall, dass keine Storung vorliegt, ergibt sich eine bleibende Regelabweichung Lllb .
Bild 7-80 Bleibende Regelabweichung
1 Lll = w.
b l+~Gs (38)
1 Die GroBe wird Regelfaktor R genannt. Er kommt in der Gleichung filr die bleiben-
l+~Gs
de Regelabweichung und in denen filr das Stor- und Fiihrungsverhalten VOT.
7.5 Zusammenwirken zwischen RegIer und Strecke
Stabilitiitsuntersuchungen
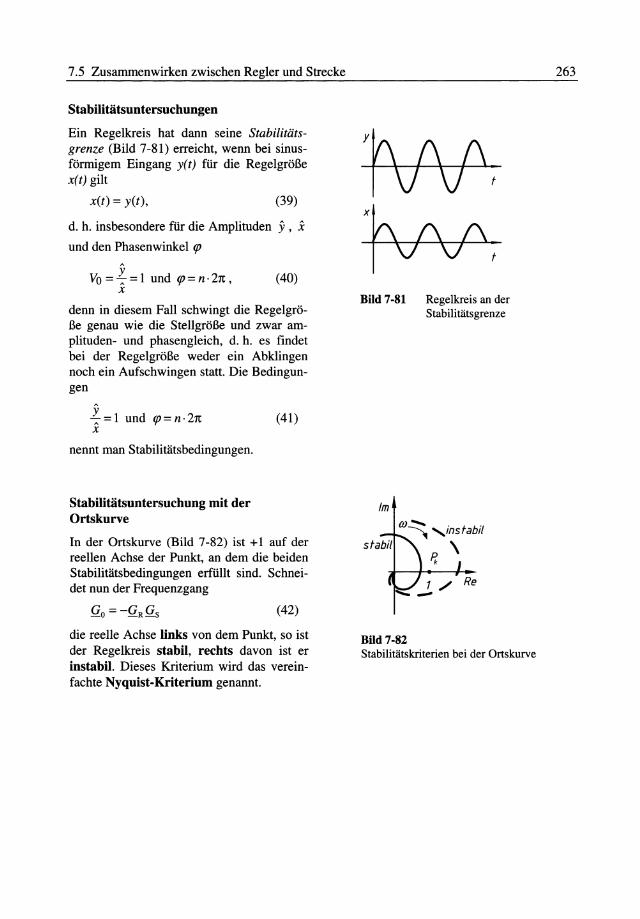
Ein Regelkreis hat dann seine Stabilitiitsgrenze (Bild 7-81) erreicht, wenn bei sinusfOrmigem Eingang y( t) fiir die RegelgroBe x(t) gilt
x(t) = y(t), (39)
d. h. insbesondere fUr die Amplituden y, x und den Phasenwinkel rp
Vo = :' = 1 und rp = n· 21t , (40) x
denn in diesem Fall schwingt die RegelgroBe genau wie die StellgroBe und zwar amplituden- und phasengleich, d. h. es findet bei der RegelgroBe weder ein Abklingen noch ein Aufschwingen statt. Die Bedingungen
:' = 1 und rp = n· 21t x
nennt man Stabilitatsbedingungen.
Stabilitiitsuntersuchung mit der Ortskurve
(41)
In der Ortskurve (Bild 7-82) ist +1 auf der reellen Achse der Punkt, an dem die beiden Stabilitatsbedingungen erfUllt sind. Schneidet nun der Frequenzgang
(42)
die reelle Achse links von dem Punkt, so ist der Regelkreis stabil, rechts davon ist er instabil. Dieses Kriterium wird das vereinfachte Nyquist.Kriterium genannt.
x
t
Bild 7·81 Regelkreis an der Stabilitatsgrenze
1m
Bild 7·82 Stabilitiitskriterien bei der Ortskurve
263
264
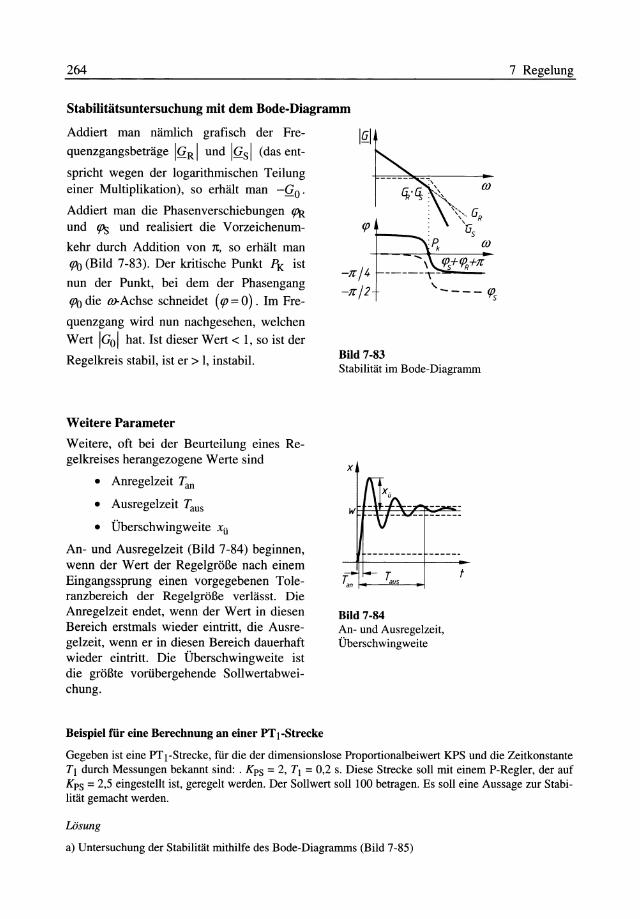
Stabilitiitsuntersuchung mit dem Bode-Diagramm
Addiert man namlich grafisch der Fre- IQ:I quenzgangsbetriige IQRI und 10;1 (das ent-
spricht wegen der logarithrnischen Teilung einer Multiplikation), so erhiilt man -Qo.
Addiert man die Phasenverschiebungen q:R
und IPs und realisiert die V orzeichenum-
kehr durch Addition von n, so erhiilt man lPo (Bild 7-83). Der kritische Punkt PK ist
nun der Punkt, bei dem der Phasengang lPo die w-Achse schneidet (rp = 0). 1m Fre
quenzgang wird nun nachgesehen, welchen Wert IGo I hat. 1st dieser Wert < 1, so ist der
Regelkreis stabil, ist er > 1, instabil.
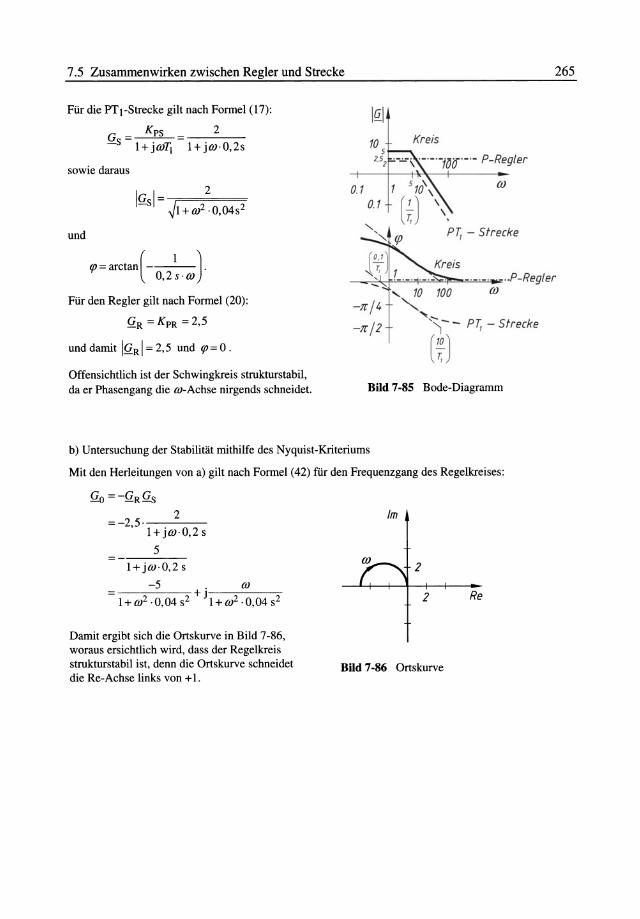
Weitere Parameter
Weitere, oft bei der Beurteilung eines Regelkreises herangezogene Werte sind
• Anregelzeit Tan
• Ausregelzeit Taus
• Uberschwingweite xii
An- und Ausregelzeit (Bild 7-84) beginnen, wenn der Wert der RegelgroBe nach einem Eingangssprung einen vorgegebenen Toleranzbereich der RegelgroBe verliisst. Die Anregelzeit endet, wenn der Wert in diesen Bereich erstrnals wieder eintritt, die Ausregelzeit, wenn er in diesen Bereich dauerhaft wieder eintritt. Die Uberschwingweite ist die groBte voriibergehende Sollwertabweichung.
Beispiel ffir eine Berechnung an einer PT l-Strecke
OJ
rp r--_ -1! /4
"\ 'Ps+f/{+1! -----,--1!/2
, ---- 'Ps
Bild 7-83 Stabilitiit im Bode-Diagramm
x
Bild 7-84 An- und Ausregelzeit, Uberschwingweite
7 Regelung
Gegeben ist eine PTI-Strecke, fiir die der dimensionslose Proportionalbeiwert KPS und die Zeitkonstante Tl durch Messungen bekannt sind: . Kps = 2, Tl = 0,2 s. Diese Strecke solI mit einem P-Regler, der auf Kps = 2,5 eingestellt ist, geregelt werden. Der Sol1wert so111oo betragen. Es solI eine Aussage zur Stabilitiit gemacht werden.
LOsung
a) Untersuchung der Stabilitiit mithilfe des Bode-Diagramms (Bild 7-85)
7.5 Zusammenwirken zwischen RegIer und Strecke 265
Flir die PT l-Strecke gilt nach Formel (17): IQ:I G =~= 2 -"!.S 1+ jliili 1+ jW·0,2s
Kreis 10 5
sowie daraus 1.52 '-=, '-'- '-mO'-'- P-Regler
0.1 1 5 10\ OJ
0.1 (!...) \ T, •
"-',,- P T, - Strecke und
rp = arctan ( 1 J 0,2s·w . _.-2'-F'=,*~"l!!"",,== ...... - . .P-Regler
Flir den Regier gilt nach Formel (20):
QR =KpR =2,5
und damit IQR 1= 2,5 und rp= O.
Offensichtlich ist der Schwingkreis strukturstabil, da er Phasengang die w-Achse nirgends schneidet.
" 10 OJ
""-,-''I- - PT, - Sfrecke
(*J
-n/4 - n12
Bild 7-85 Bode-Diagramm
b) Untersuchung der Stabilitat rnithilfe des Nyquist-Kriteriums
Mit den Herleitungen von a) gilt nach Formel (42) flir den Frequenzgang des Regelkreises:
Qo =-QRQS
= -25. 2 , l+jw·0,2s
5 1+jw·0,2s
-5 . w --~----~+J--~----~ 1+W2 ·0,04 s2 1+W2 ·0,04 s2
Damit ergibt sich die Ortskurve in Bild 7-86, woraus ersichtlich wird, dass der Regelkreis strukturstabil ist, denn die Ortskurve schneidet die Re-Achse links von +1.
1m
2
2 Re
Bild 7-86 Ortskurve
266
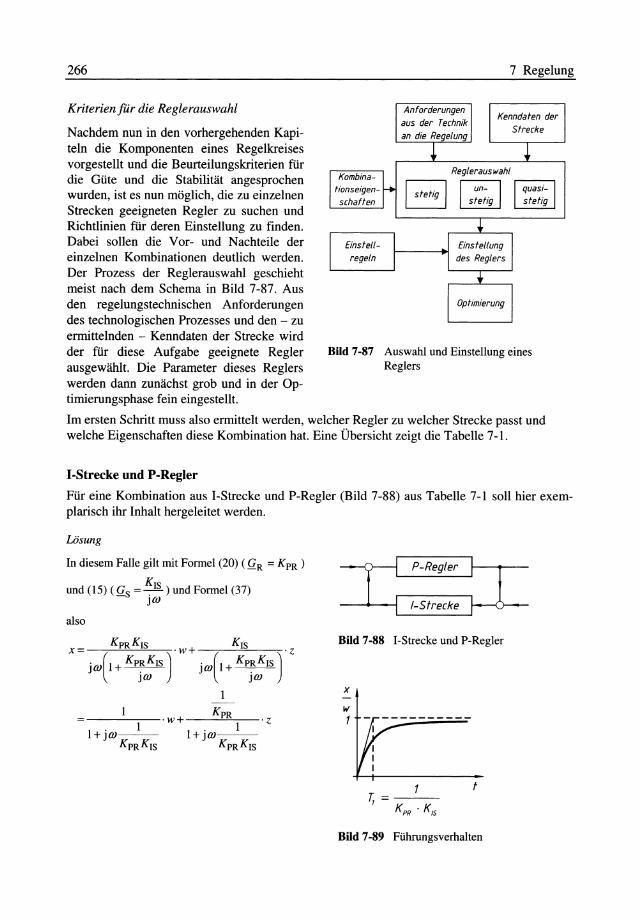
Kriterien fUr die Reglerauswahl
Nachdem nun in den vorhergehenden Kapiteln die Komponenten eines Regelkreises vorgestellt und die Beurteilungskriterien fiir die Giite und die Stabilitat angesprochen wurden, ist es nun moglich, die zu einzelnen Strecken geeigneten RegIer zu suchen und Richtlinien fiir deren Einstellung zu finden. Dabei sol1en die Vor- und Nachteile der einzelnen Kombinationen deutlich werden_ Der Prozess der Reglerauswahl geschieht meist nach dem Schema in Bild 7-87. Aus den regelungstechnischen Anforderungen des technologischen Prozesses und den - zu ermittelnden - Kenndaten der Strecke wird der fUr diese Aufgabe geeignete RegIer ausgewahlt. Die Parameter dieses Reglers werden dann zunachst grob und in der Optimierungsphase fein eingestellt.
7 Regelung
Anforderungen Kenndaten der
aus der Technik 5trecke
an die Regelung
+ 1 Reglerauswahl
~ KOmbina-_r tionseigen- I stetig I c;J l quasi-J schaften stetig stetig
.. ~
Einstell- Einstellung regeln des Reglers
+ Optimierung
BUd 7-87 Auswahl und Einstellung eines Reglers
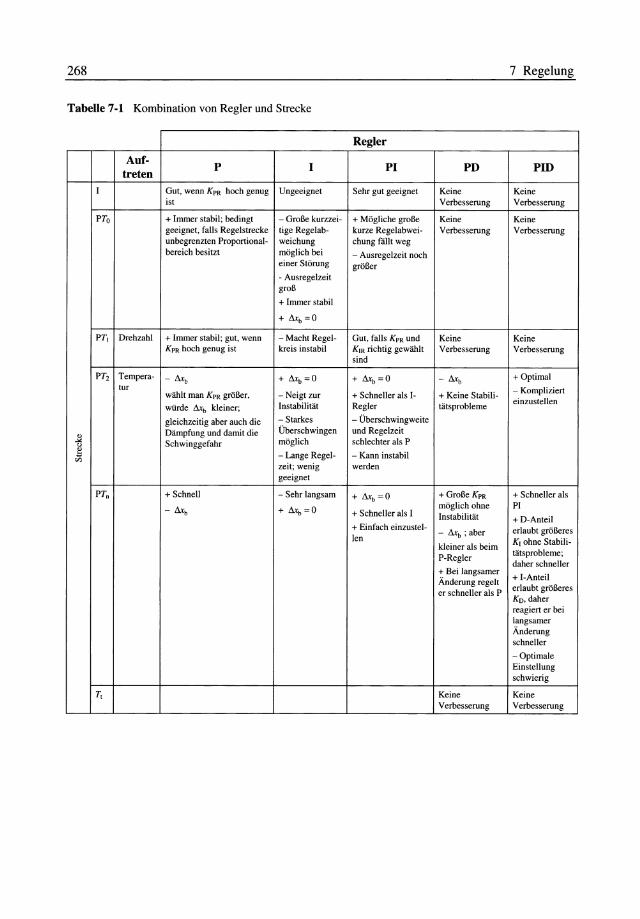
1m ersten Schritt muss also ermittelt werden, welcher RegIer zu welcher Strecke passt und welche Eigenschaften diese Kombination hat. Eine Ubersicht zeigt die Tabelle 7-1.
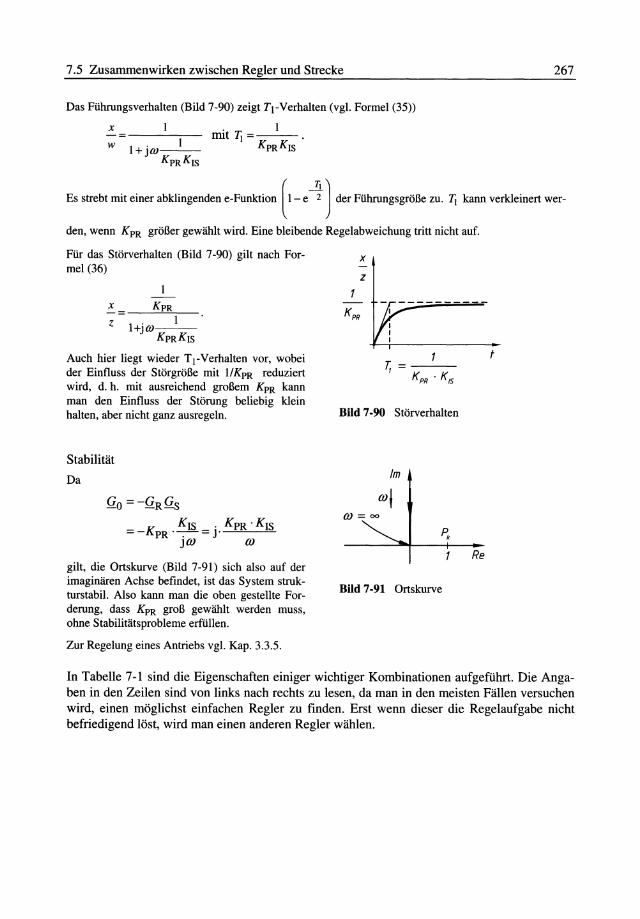
I-Strecke und P-Regler
Fiir eine Kombination aus I-Strecke und P-Regler (Bild 7-88) aus Tabelle 7-1 solI hier exemplarisch ihr Inhalt hergeleitet werden.
LOsung
In diesem Falle gilt mit Formel (20) (QR = K PR )
K und (15) (Qs = ~ ) und Formel (37)
jliJ
also
X KpRK1S ·w+ K1S -z
jliJ(l+ Kpr: IS ) jliJ(l+ Kpr: IS )
1
-----:---w+ KpR .z 1 . __ 1_ 1 - 1 +jliJ +jliJ----
KpRK1S KpRK1S
P-Regler
/-Sfrecke
BUd 7-88 I-Strecke und P-Regler
x IV 1
f
BUd 7-89 Fiihrungsverhalten
7.5 Zusammenwirken zwischen Regier und Strecke 267
Das FUhrungsverhalten (Bild 7-90) zeigt TI-Verhalten (vgl. Formel (35»
x
1 . 1 +]aJ---
KpRKrs w
Es strebt mit einer abklingenden e-Funktion [1- e -% 1 der FUhrungsgroBe zu. 1] kann verkleinert wer
den, wenn K PR groBer gewiihlt wird. Eine bleibende Regelabweiehung tritt nieht auf.
FUr das StOrverhalten (Bild 7-90) gilt naeh Formel (36)
x
1 . 1 +]aJ---
KpRKrs z
Aueh hier liegt wieder T\-Verhalten vor, wobei der Einfluss der StorgroBe mit lIKpR reduziert wird, d. h. mit ausreiehend groBem KpR kann man den Einfluss der StOrung beliebig klein halten, aber nieht ganz ausregeln.
Stabilitat
Da
QO=-QRQS
=-KpR ' ~IS =j' KpR ·K1S J{O {O
gilt, die Ortskurve (Bild 7-91) sich also auf der imaginaren Aehse befindet, ist das System strukturstabil. Also kann man die oben gestellte Forderung, dass KpR groB gewiih1t werden muss, ohne Stabilitlitsprobleme erfUllen.
Zur Regelung eines Antriebs vgl. Kap. 3.3.5.
x
z
t
Bild 7-90 StOrverhalten
1m
{O=oo
Re
Bild 7-91 Ortskurve
In Tabelle 7-1 sind die Eigenschaften einiger wichtiger Kombinationen aufgefiihrt. Die Angaben in den Zeilen sind von links nach rechts zu lesen, da man in den meisten Fallen versuchen wird, einen moglichst einfachen Regier zu finden. Erst wenn dieser die Regelaufgabe nicht befriedigend lost, wird man einen anderen Regier wahlen.
268 7 Regelung
Tabelle 7-1 Kombination von RegIer und Strecke
Regier
Auf-P I PI PD PID treten
I Gut, wenn KpR hoch genug Ungeeignet Sehr gut geeignet Keine Keine ist Verbesserung Verbesserung
PTo + Immer stabil; bedingt - GroBe kurzzei- + Mogliche groBe Keine Keine geeignet, falls Regelstrecke tige Regelab- kurze Regelabwei- Verbesserung Verbesserung unbegrenzten Proportional- weichung chung Hillt weg bereich besitzt moglich bei - Ausregelzeit noch
einer StOrung groBer - Ausregelzeit groB
+ Immer stabil
+ dxb=O
PT, Drehzahl + bruner stabil; gut, wenn - Macht Regel- Gut, falls KpR und Keine Keine KpR hoch genug ist kreis instabil K'R richtig gewahlt Verbesserung Verbesserung
sind
PT2 Tempera- - dxb + dxb=O + dxb =0 - dxb + Optimal tur - Kompliziert wahlt man KPR groBer, -Neigtzur + Schneller als 1- + Keine Stabili-
einzustellen wiirde dxb k1einer; Instabilitiit RegIer tiitsprobleme
gleichzeitig aber auch die - Starkes - Uberschwingweite
J;l Diimpfung und damit die Uberschwingen und Regelzeit
0 Schwinggefahr moglich schlechter als P ~ - Lange Regel- - Kann instabil '" zeit; wenig werden
geeignet
PT. + Schnell - Sehr langsam + dxb =0 + GroBe KpR + Schneller als
-~ + dxb=O moglichohne PI
+ Schneller als I Instabilitiit +D-Anteil + Einfach einzustel-
- dxb ; aber erlaubt groBeres len K, ohne Stabili-
k1einer als beim P-Regler
tiitsprobleme; daher schneller
+ Bei langsamer +I-Anteil Anderung regelt erlaubt groBeres er schneller als P KD,daher reagiert er bei langsamer Anderung schneller
-Optimale Einstellung schwierig
T, Keine Keine Verbesserung Verbesserung
7.5 Zusammenwirken zwischen Regier und Strecke 269
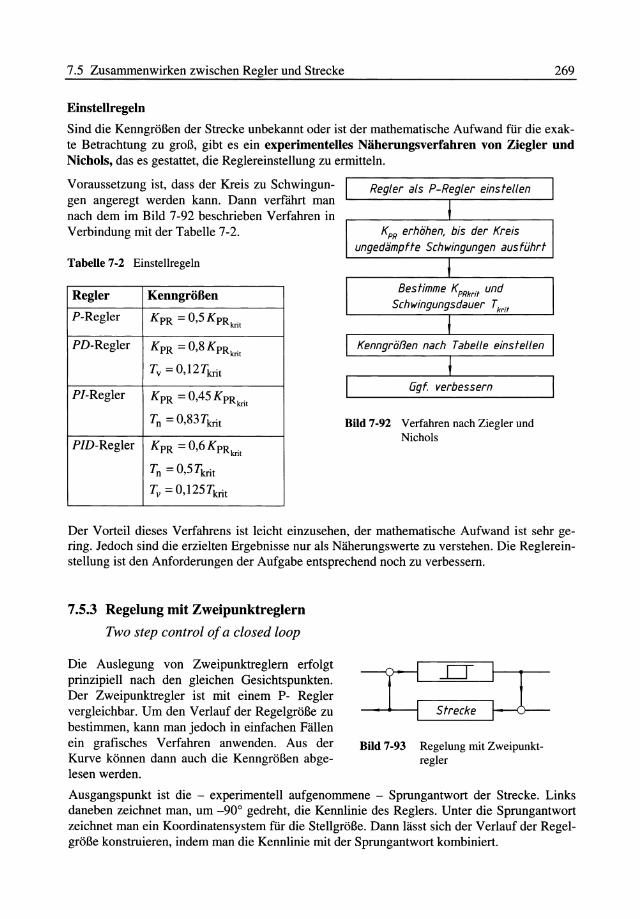
EinsteUregeln
Sind die KenngroBen der Strecke unbekannt oder ist der mathematische Aufwand flir die exakte Betrachtung zu groB, gibt es ein experimentelles Niiherungsverfahren von Ziegler und Nichols, das es gestattet, die Reglereinstellung zu ermitteln.
Voraussetzung ist, dass der Kreis zu Schwingungen angeregt werden kann. Dann verfahrt man nach dem im Bild 7-92 beschrieben Verfahren in Verbindung mit der Tabelle 7-2.
Tabelle 7-2 Einstellregeln
Regier Kenngro8en
P-Regler KpR = 0,5 K pRkrit
PD-Regler KpR = 0,8 K pRkrit
Tv = 0,12Tkrit
PI-Regier K PR = 0,45 K PRkrit
Tn = 0,83Tkrit
PID-Regler KpR = 0,6 K PRkrit
Tn = 0,5Tkrit
Tv = 0,125Tkrit
Regier als P-Regler einstellen
KpR erhOhen, bis der Kreis ungedampfte Schwingungen ausfUhrt
Bestimme KPRkrit und Schwingungsdauer Tkrit
KenngriifJen nach Tabelle einstellen
Ggf. verbessern
Bild 7-92 Verfahren nach Ziegler und Nichols
Der V orteil dieses Verfahrens ist leicht einzusehen, der mathematische Aufwand ist sehr gering. Iedoch sind die erzielten Ergebnisse nur als Naherungswerte zu verstehen. Die Reglereinstellung ist den Anforderungen der Aufgabe entsprechend noch zu verbessem.
7.5.3 Regelung mit Zweipunktreglern
Two step control of a closed loop
Die Auslegung von Zweipunktreglem erfolgt prinzipiell nach den gleichen Gesichtspunkten. Der Zweipunktregler ist mit einem P- RegIer vergleichbar. Urn den Verlauf der RegelgroBe zu bestimmen, kann man jedoch in einfachen Hillen ein grafisches Verfahren anwenden. Aus der Kurve konnen dann auch die KenngroBen abgelesen werden.
=tr---~-reC-ke-~ Bild 7-93 Regelung mit Zweipunkt
regler
Ausgangspunkt ist die - experimentell aufgenommene - Sprungantwort der Strecke. Links daneben zeichnet man, urn -900 gedreht, die Kennlinie des Reglers. Unter die Sprungantwort zeichnet man ein Koordinatensystem flir die StellgroBe. Dann Hisst sich der Verlauf der RegelgroBe konstruieren, indem man die Kennlinie mit der Sprungantwort kombiniert.
270 7 Regelung
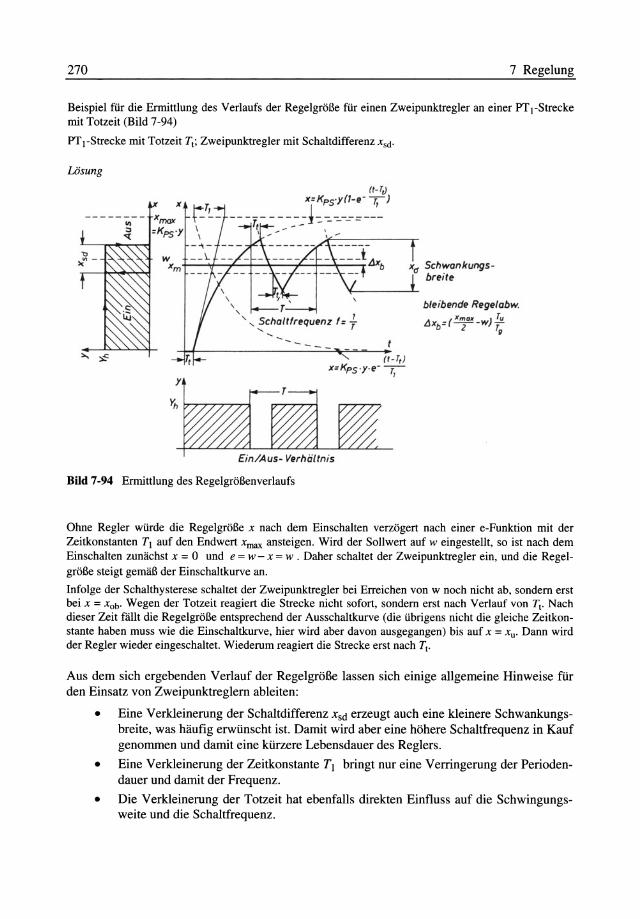
Beispiel flir die Ennittlung des Verlaufs der RegelgroBe flir einen Zweipunktregler an einer PT I-Strecke mit Totzeit (Bild 7-94)
PT I-Strecke mit Totzeit Tt ; Zweipunktregler mit Schaltdifferenz x sd.
LOsung (t- T,)
X= Kps·y (T-fr T) -- --To - - - ---i-:. ~ ~---=---
t ,,-. " ..;"r-~-----r
\ , " T
" " Schallfrequenz f = f '-
---
Bild 7-94 Ennittlung des RegelgroBenverlaufs
XcJ Schwankungsbreile
bleibende Regelobw. Kmo, ) Tu
tJxb=( -Z--W T g
Ohne Regier wiirde die RegelgroBe x nach dem Einschalten verzogert nach einer e-Funktion mit der Zeitkonstanten TI auf den Endwert Xmax ansteigen. Wird der Sollwert auf w eingestellt, so ist nach dem Einschalten zunachst x = 0 und e = w - x = w . Daher schaltet der Zweipunktregler ein, und die RegelgroBe steigt gemaB der Einschaltkurve an.
Infolge der Schalthysterese schaltet der Zweipunktregler bei Erreiehen von w noch nieht ab, sondem erst bei x = xob. Wegen der Totzeit reagiert die Strecke nicht sofort, sondem erst nach Verlauf von Tt. Nach dieser Zeit flillt die RegelgroBe entsprechend der Ausschaltkurve (die iibrigens nieht die gleiehe Zeitkonstante haben muss wie die Einschaltkurve, hier wird aber davon ausgegangen) bis auf x = xu. Dann wird der Regier wieder eingeschaltet. Wiederum reagiert die Strecke erst nach Tt.
Aus dem sich ergebenden Verlauf der Regelgro8e lassen sich einige allgemeine Hinweise fUr den Einsatz von Zweipunktreglem ableiten:
• Eine Verkleinerung der Schaltdifferenz Xsd erzeugt auch eine kleinere Schwankungsbreite, was hliufig erwiinscht ist. Darnit wird aber eine hohere Schaltfrequenz in Kauf genommen und darnit eine kiirzere Lebensdauer des Reglers.
• Eine Verkleinerung der Zeitkonstante TJ bringt nur eine Verringerung der Periodendauer und darnit der Frequenz.
• Die Verkleinerung der Totzeit hat ebenfalls direkten Einfluss auf die Schwingungsweite und die Schaltfrequenz.
7.5 Zusammenwirken zwischen Regier und Strecke
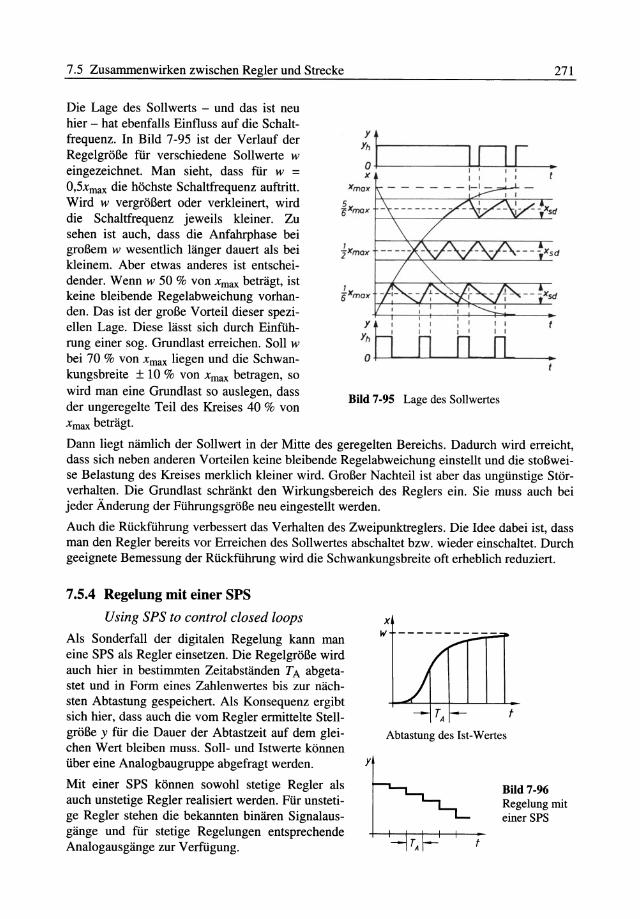
Die Lage des Sollwerts - und das ist neu hier - hat ebenfalls Einfluss auf die Schaltfrequenz. In Bild 7-95 ist der Verlauf der RegelgroBe fUr verschiedene Sollwerte w
eingezeichnet. Man sieht, dass fUr w = 0,5xmax die hochste Schaltfrequenz auftritt. Wird w vergroBert oder verkleinert, wird die Schaltfrequenz jeweils kleiner. Zu sehen ist auch, dass die Anfahrphase bei groBem w wesentlich Hinger dauert als bei kleinem. Aber etwas anderes ist entscheidender. Wenn w 50 % von xmax betragt, ist keine bleibende Regelabweichung vorhanden. Das ist der groBe Vorteil dieser speziellen Lage. Diese Iasst sich durch EinfUhrung einer sog. Grundlast erreichen. SolI w bei 70 % von Xmax Iiegen und die Schwankungsbreite ± 10 % von Xmax betragen, so wird man eine Grundlast so auslegen, dass der ungeregelte Teil des Kreises 40 % von Xmax betragt.
271
:~l _ ---!-I D~[_ I I I I x
Xmox 1 I I
- - - -1-1-
, I 1
o I I
H I I
n BUd 7-95 Lage des Sollwertes
• t
Dann liegt narnlich der Sollwert in der Mitte des geregelten Bereichs. Dadurch wird erreicht, dass sich neben anderen Vorteilen keine bleibende Regelabweichung einstellt und die stoBweise Belastung des Kreises merklich kleiner wird. GroBer Nachteil ist aber das ungiinstige Storverhalten. Die Grundlast schrankt den Wirkungsbereich des Reglers ein. Sie muss auch bei jeder Anderung der FiihrungsgroBe neu eingestellt werden.
Auch die Riickfiihrung verbessert das Verhalten des Zweipunktreglers. Die Idee dabei ist, dass man den RegIer bereits vor Erreichen des Sollwertes abschaltet bzw. wieder einschaltet. Durch geeignete Bemessung der Riickfiihrung wird die Schwankungsbreite oft erheblich reduziert.
7.5.4 Regelung mit einer SPS
Using SPS to control closed loops
Ais Sonderfall der digitalen Regelung kann man eine SPS ais RegIer einsetzen. Die RegeigroBe wird auch hier in bestimmten Zeitabstanden T A abgetastet und in Form eines Zahlenwertes bis zur nachsten Abtastung gespeichert. Ais Konsequenz ergibt sich hier, dass auch die yom Regier errnittelte StellgroBe y fUr die Dauer der Abtastzeit auf dem gIeichen Wert bleiben muss. Soll- und Istwerte konnen iiber eine Analogbaugruppe abgefragt werden.
Mit einer SPS konnen sowohl stetige RegIer ais auch unstetige RegIer realisiert werden. Fiir unstetige RegIer stehen die bekannten binliren Signalausgange und fiir stetige Regelungen entsprechende Analogausgange zur Verfiigung.
y
x
t
Abtastung des Ist-Wertes
t
BUd 7-96 RegeJung mit einer SPS





























