Embed Size (px)
Citation preview
คู่มอืปฏบัิตกิารระบบสารสนเทศภมูศิาสตรส์ าหรับวศิวกรเหมอืงแร ่ 5-1
การวเิคราะหล์กัษณะพืน้ผวิ Surface Analyst
ข้อมูลพื้นผิว (Surface) มีความหมายในทางระบบสารสนเทศภูมิศาสตร์ คือ ข้อมูลที่มีความต่อเนือ่งของจุดที่มีค่าที่แตกต่างกนัในแต่ละจุด โดยสามารถแสดงได้ด้วยแกน Z (Z-axis) ซ่ึงก็คือข้อมูลที่อยู่ในระบบพิกัดแบบสามมิติ X, Y, Z ส่วนการวิเคราะห์พื้นผิว (Surface analysis) หมายถึง การวิเคราะห์การกระจายของค่าตวัแปร Z (Z-value) ในรูปแบบต่างๆ ดงัทีจ่ะกล่าวถึงต่อไปนี ้
5.1 แบบจ ำลองภมูิประเทศ
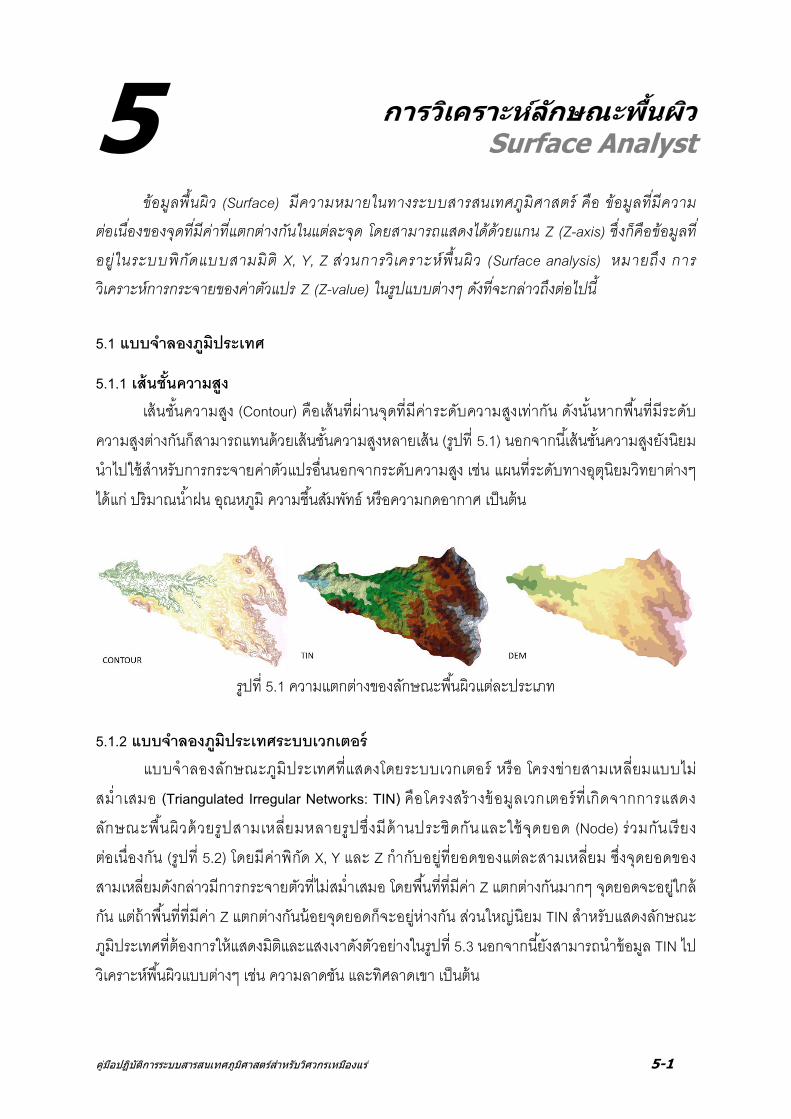
5.1.1 เส้นชัน้ควำมสูง เส้นชัน้ความสงู (Contour) คือเส้นท่ีผ่านจุดท่ีมีค่าระดับความสงูเท่ากัน ดังนัน้หากพืน้ท่ีมีระดับ
ความสงูต่างกันก็สามารถแทนด้วยเส้นชัน้ความสงูหลายเส้น (รูปท่ี 5.1) นอกจากนีเ้ส้นชัน้ความสงูยงันิยมน าไปใช้ส าหรับการกระจายค่าตวัแปรอ่ืนนอกจากระดบัความสงู เช่น แผนท่ีระดบัทางอุตุนิยมวิทยาตา่งๆ ได้แก่ ปริมาณน า้ฝน อุณหภมิู ความชืน้สมัพทัธ์ หรือความกดอากาศ เป็นต้น
รูปท่ี 5.1 ความแตกตา่งของลกัษณะพืน้ผิวแตล่ะประเภท
5.1.2 แบบจ ำลองภมูิประเทศระบบเวกเตอร์
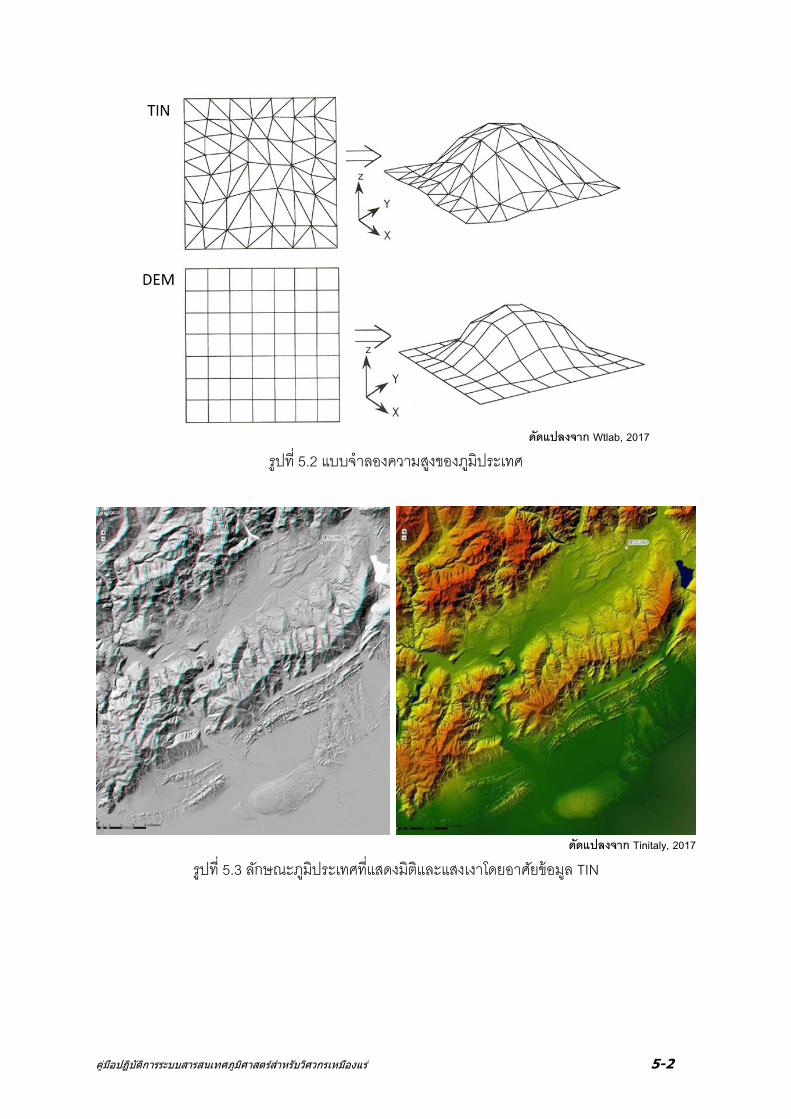
แบบจ าลองลักษณะภูมิประเทศท่ีแสดงโดยระบบเวกเตอร์ หรือ โครงข่ายสามเหลี่ยมแบบไม่สม ่าเสมอ (Triangulated Irregular Networks: TIN) คือโครงสร้างข้อมูลเวกเตอร์ท่ีเกิดจากการแสดงลักษณะพืน้ผิวด้วยรูปสามเหลี่ยมหลายรูปซึ่งมีด้านประชิดกันและใช้จุดยอด (Node) ร่วมกันเรียงต่อเน่ืองกัน (รูปท่ี 5.2) โดยมีค่าพิกัด X, Y และ Z ก ากับอยู่ท่ียอดของแต่ละสามเหลี่ยม ซึ่งจุดยอดของสามเหลี่ยมดงักลา่วมีการกระจายตวัท่ีไม่สม ่าเสมอ โดยพืน้ท่ีท่ีมีคา่ Z แตกต่างกันมากๆ จุดยอดจะอยูใ่กล้กนั แต่ถ้าพืน้ท่ีท่ีมีค่า Z แตกต่างกันน้อยจุดยอดก็จะอยู่ห่างกัน สว่นใหญ่นิยม TIN ส าหรับแสดงลกัษณะภมิูประเทศท่ีต้องการให้แสดงมิติและแสงเงาดงัตวัอยา่งในรูปท่ี 5.3 นอกจากนีย้งัสามารถน าข้อมลู TIN ไปวิเคราะห์พืน้ผิวแบบตา่งๆ เช่น ความลาดชนั และทิศลาดเขา เป็นต้น
5
คู่มอืปฏบัิตกิารระบบสารสนเทศภมูศิาสตรส์ าหรับวศิวกรเหมอืงแร ่ 5-2
ดดัแปลงจำก Wtlab, 2017
รูปท่ี 5.2 แบบจ าลองความสงูของภมิูประเทศ
ดดัแปลงจำก Tinitaly, 2017
รูปท่ี 5.3 ลกัษณะภมิูประเทศท่ีแสดงมิติและแสงเงาโดยอาศยัข้อมลู TIN
คู่มอืปฏบัิตกิารระบบสารสนเทศภมูศิาสตรส์ าหรับวศิวกรเหมอืงแร ่ 5-3
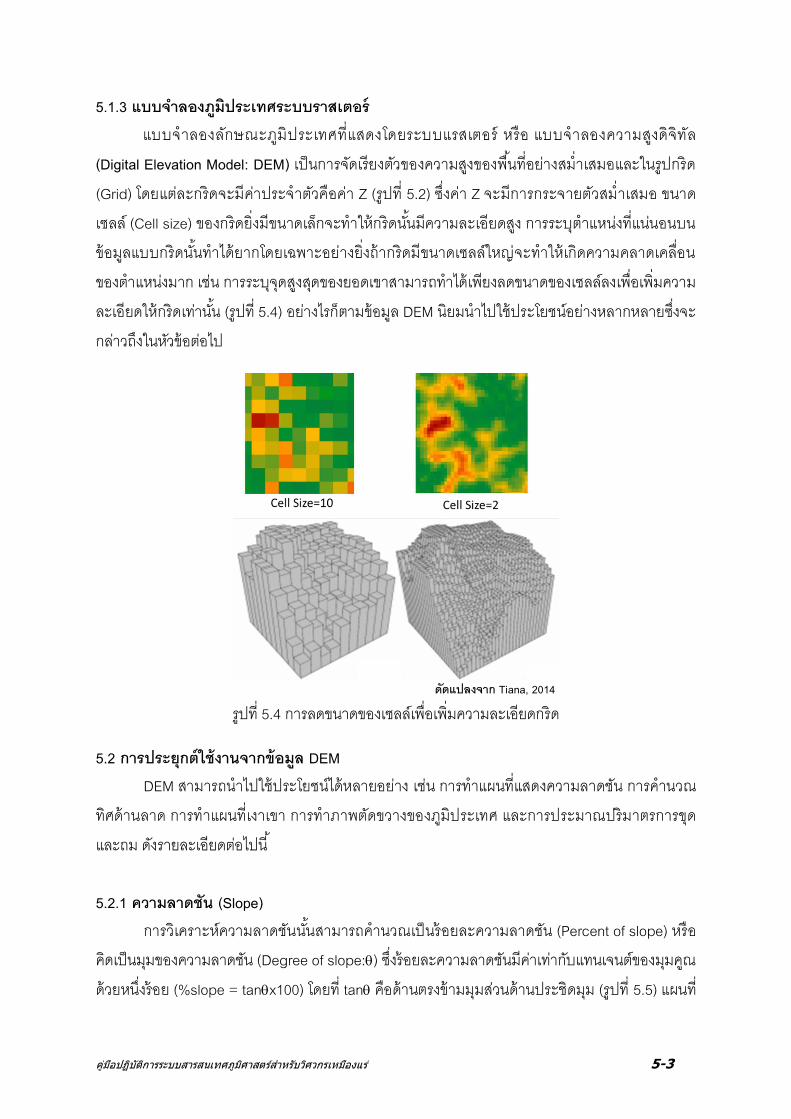
5.1.3 แบบจ ำลองภมูิประเทศระบบรำสเตอร์ แบบจ าลองลักษณะภูมิประเทศท่ีแสดงโดยระบบแรสเตอร์ หรือ แบบจ าลองความสูงดิจิทัล
(Digital Elevation Model: DEM) เป็นการจดัเรียงตวัของความสงูของพืน้ท่ีอย่างสม ่าเสมอและในรูปกริด (Grid) โดยแต่ละกริดจะมีค่าประจ าตวัคือค่า Z (รูปท่ี 5.2) ซึ่งค่า Z จะมีการกระจายตัวสม ่าเสมอ ขนาดเซลล์ (Cell size) ของกริดยิ่งมีขนาดเล็กจะท าให้กริดนัน้มีความละเอียดสงู การระบุต าแหน่งท่ีแนน่อนบนข้อมูลแบบกริดนัน้ท าได้ยากโดยเฉพาะอย่างยิ่งถ้ากริดมีขนาดเซลล์ใหญ่จะท าให้เกิดความคลาดเคลื่อนของต าแหนง่มาก เช่น การระบุจุดสงูสดุของยอดเขาสามารถท าได้เพียงลดขนาดของเซลล์ลงเพื่อเพิ่มความละเอียดให้กริดเทา่นัน้ (รูปท่ี 5.4) อยา่งไรก็ตามข้อมูล DEM นิยมน าไปใช้ประโยชน์อย่างหลากหลายซึง่จะกลา่วถึงในหวัข้อตอ่ไป
ดดัแปลงจำก Tiana, 2014
รูปท่ี 5.4 การลดขนาดของเซลล์เพื่อเพิ่มความละเอียดกริด
5.2 กำรประยุกต์ใช้งำนจำกข้อมูล DEM DEM สามารถน าไปใช้ประโยชน์ได้หลายอย่าง เช่น การท าแผนท่ีแสดงความลาดชัน การค านวณ
ทิศด้านลาด การท าแผนท่ีเงาเขา การท าภาพตัดขวางของภูมิประเทศ และการประมาณปริมาตรการขุดและถม ดงัรายละเอียดตอ่ไปนี ้
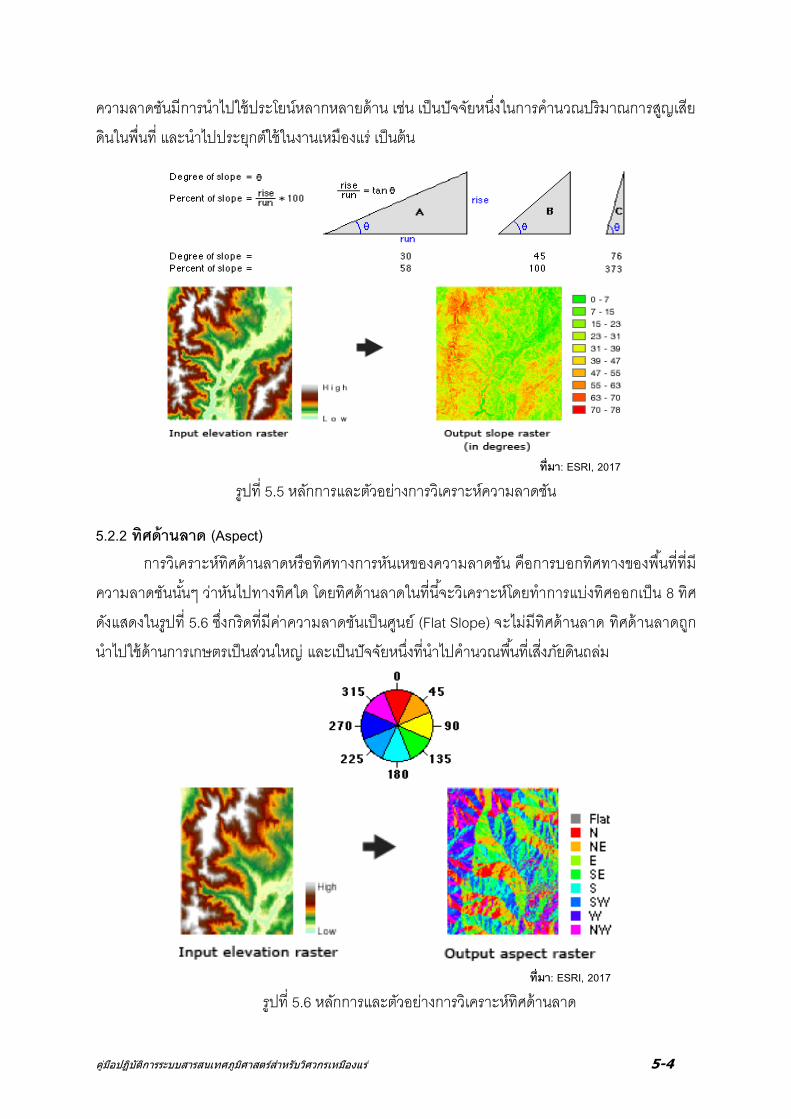
5.2.1 ควำมลำดชัน (Slope)
การวิเคราะห์ความลาดชันนัน้สามารถค านวณเป็นร้อยละความลาดชัน (Percent of slope) หรือคิดเป็นมมุของความลาดชนั (Degree of slope:) ซึง่ร้อยละความลาดชนัมีคา่เทา่กบัแทนเจนต์ของมมุคูณด้วยหนึ่งร้อย (%slope = tanx100) โดยท่ี tan คือด้านตรงข้ามมุมสว่นด้านประชิดมมุ (รูปท่ี 5.5) แผนท่ี
คู่มอืปฏบัิตกิารระบบสารสนเทศภมูศิาสตรส์ าหรับวศิวกรเหมอืงแร ่ 5-4
ความลาดชนัมีการน าไปใช้ประโยน์หลากหลายด้าน เช่น เป็นปัจจยัหนึง่ในการค านวณปริมาณการสญูเสียดินในพื่นท่ี และน าไปประยกุต์ใช้ในงานเหมืองแร่ เป็นต้น
ที่มำ: ESRI, 2017
รูปท่ี 5.5 หลกัการและตวัอยา่งการวิเคราะห์ความลาดชนั
5.2.2 ทิศด้ำนลำด (Aspect) การวิเคราะห์ทิศด้านลาดหรือทิศทางการหนัเหของความลาดชัน คือการบอกทิศทางของพืน้ท่ีท่ีมี
ความลาดชันนัน้ๆ ว่าหนัไปทางทิศใด โดยทิศด้านลาดในท่ีนีจ้ะวิเคราะห์โดยท าการแบ่งทิศออกเป็น 8 ทิศ ดงัแสดงในรูปท่ี 5.6 ซึง่กริดท่ีมีคา่ความลาดชันเป็นศูนย์ (Flat Slope) จะไม่มีทิศด้านลาด ทิศด้านลาดถูกน าไปใช้ด้านการเกษตรเป็นสว่นใหญ่ และเป็นปัจจยัหนึง่ท่ีน าไปค านวณพืน้ท่ีเสีง่ภยัดินถลม่
ที่มำ: ESRI, 2017
รูปท่ี 5.6 หลกัการและตวัอยา่งการวิเคราะห์ทิศด้านลาด
คู่มอืปฏบัิตกิารระบบสารสนเทศภมูศิาสตรส์ าหรับวศิวกรเหมอืงแร ่ 5-5
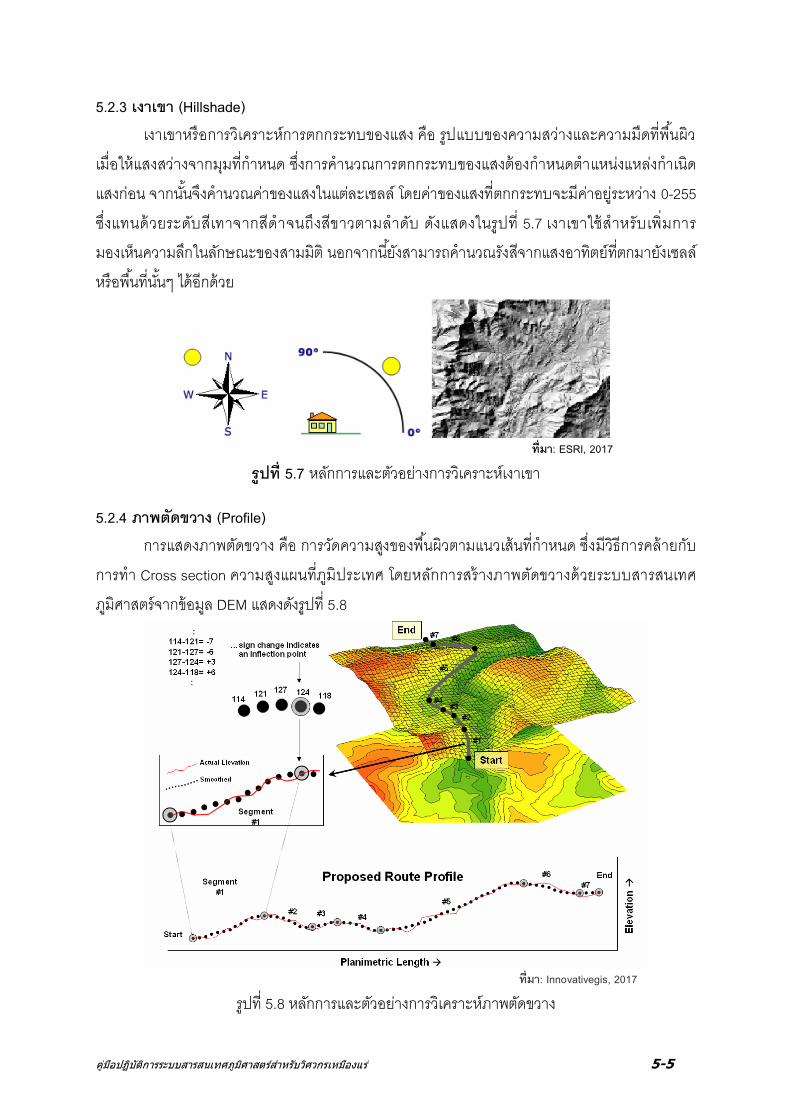
5.2.3 เงำเขำ (Hillshade) เงาเขาหรือการวิเคราะห์การตกกระทบของแสง คือ รูปแบบของความสว่างและความมืดท่ีพืน้ผิว
เม่ือให้แสงสว่างจากมุมท่ีก าหนด ซึง่การค านวณการตกกระทบของแสงต้องก าหนดต าแหน่งแหลง่ก าเนิดแสงก่อน จากนัน้จึงค านวณคา่ของแสงในแตล่ะเซลล์ โดยคา่ของแสงท่ีตกกระทบจะมีคา่อยู่ระหวา่ง 0-255 ซึ่งแทนด้วยระดับสีเทาจากสีด าจนถึงสีขาวตามล าดับ ดังแสดงในรูปท่ี 5.7 เงาเขาใช้ส าหรับเพิ่มการมองเห็นความลกึในลกัษณะของสามมิติ นอกจากนีย้งัสามารถค านวณรังสจีากแสงอาทิตย์ท่ีตกมายงัเซลล์หรือพืน้ท่ีนัน้ๆ ได้อีกด้วย
ที่มำ: ESRI, 2017
รูปที่ 5.7 หลกัการและตวัอยา่งการวิเคราะห์เงาเขา
5.2.4 ภำพตัดขวำง (Profile) การแสดงภาพตดัขวาง คือ การวดัความสงูของพืน้ผิวตามแนวเส้นท่ีก าหนด ซึ่งมีวิธีการคล้ายกับ
การท า Cross section ความสูงแผนท่ีภูมิประเทศ โดยหลกัการสร้างภาพตัดขวางด้วยระบบสารสนเทศภมิูศาสตร์จากข้อมลู DEM แสดงดงัรูปท่ี 5.8
ที่มำ: Innovativegis, 2017
รูปท่ี 5.8 หลกัการและตวัอยา่งการวิเคราะห์ภาพตดัขวาง
คู่มอืปฏบัิตกิารระบบสารสนเทศภมูศิาสตรส์ าหรับวศิวกรเหมอืงแร ่ 5-6
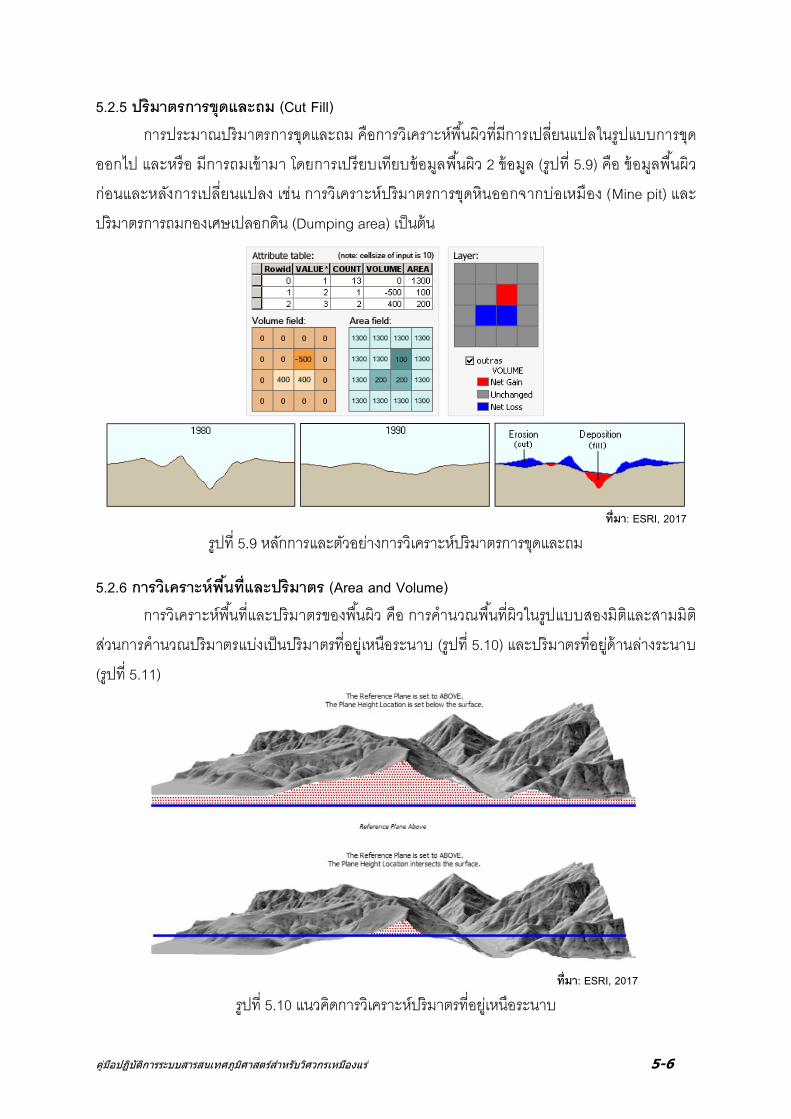
5.2.5 ปริมำตรกำรขุดและถม (Cut Fill) การประมาณปริมาตรการขุดและถม คือการวิเคราะห์พืน้ผิวท่ีมีการเปลี่ยนแปลในรูปแบบการขุด
ออกไป และหรือ มีการถมเข้ามา โดยการเปรียบเทียบข้อมูลพืน้ผิว 2 ข้อมูล (รูปท่ี 5.9) คือ ข้อมูลพืน้ผิวก่อนและหลงัการเปลี่ยนแปลง เช่น การวิเคราะห์ปริมาตรการขุดหินออกจากบ่อเหมือง (Mine pit) และปริมาตรการถมกองเศษเปลอกดิน (Dumping area) เป็นต้น
ที่มำ: ESRI, 2017
รูปท่ี 5.9 หลกัการและตวัอยา่งการวิเคราะห์ปริมาตรการขดุและถม
5.2.6 กำรวิเครำะห์พืน้ที่และปริมำตร (Area and Volume) การวิเคราะห์พืน้ท่ีและปริมาตรของพืน้ผิว คือ การค านวณพืน้ท่ีผิวในรูปแบบสองมิติและสามมิติ
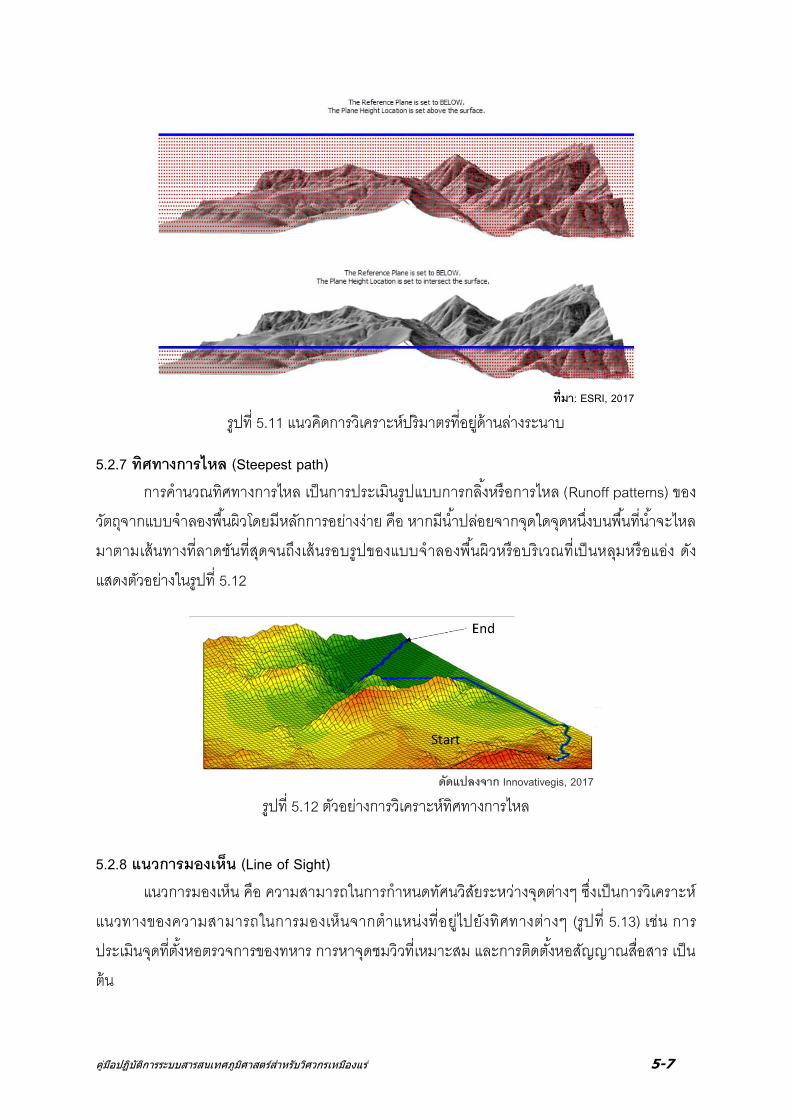
สว่นการค านวณปริมาตรแบง่เป็นปริมาตรท่ีอยู่เหนือระนาบ (รูปท่ี 5.10) และปริมาตรท่ีอยูด้่านลา่งระนาบ (รูปท่ี 5.11)
ที่มำ: ESRI, 2017
รูปท่ี 5.10 แนวคิดการวิเคราะห์ปริมาตรท่ีอยูเ่หนือระนาบ
คู่มอืปฏบัิตกิารระบบสารสนเทศภมูศิาสตรส์ าหรับวศิวกรเหมอืงแร ่ 5-7
ที่มำ: ESRI, 2017
รูปท่ี 5.11 แนวคิดการวิเคราะห์ปริมาตรท่ีอยูด้่านลา่งระนาบ
5.2.7 ทิศทำงกำรไหล (Steepest path) การค านวณทิศทางการไหล เป็นการประเมินรูปแบบการกลิง้หรือการไหล (Runoff patterns) ของวตัถจุากแบบจ าลองพืน้ผิวโดยมีหลกัการอยา่งง่าย คือ หากมีน า้ปลอ่ยจากจุดใดจุดหนึง่บนพืน้ท่ีน า้จะไหลมาตามเส้นทางท่ีลาดชันท่ีสุดจนถึงเส้นรอบรูปของแบบจ าลองพืน้ผิวหรือบริเวณท่ีเป็นหลมุหรือแอ่ง ดังแสดงตวัอยา่งในรูปท่ี 5.12
ดดัแปลงจำก Innovativegis, 2017
รูปท่ี 5.12 ตวัอยา่งการวิเคราะห์ทิศทางการไหล
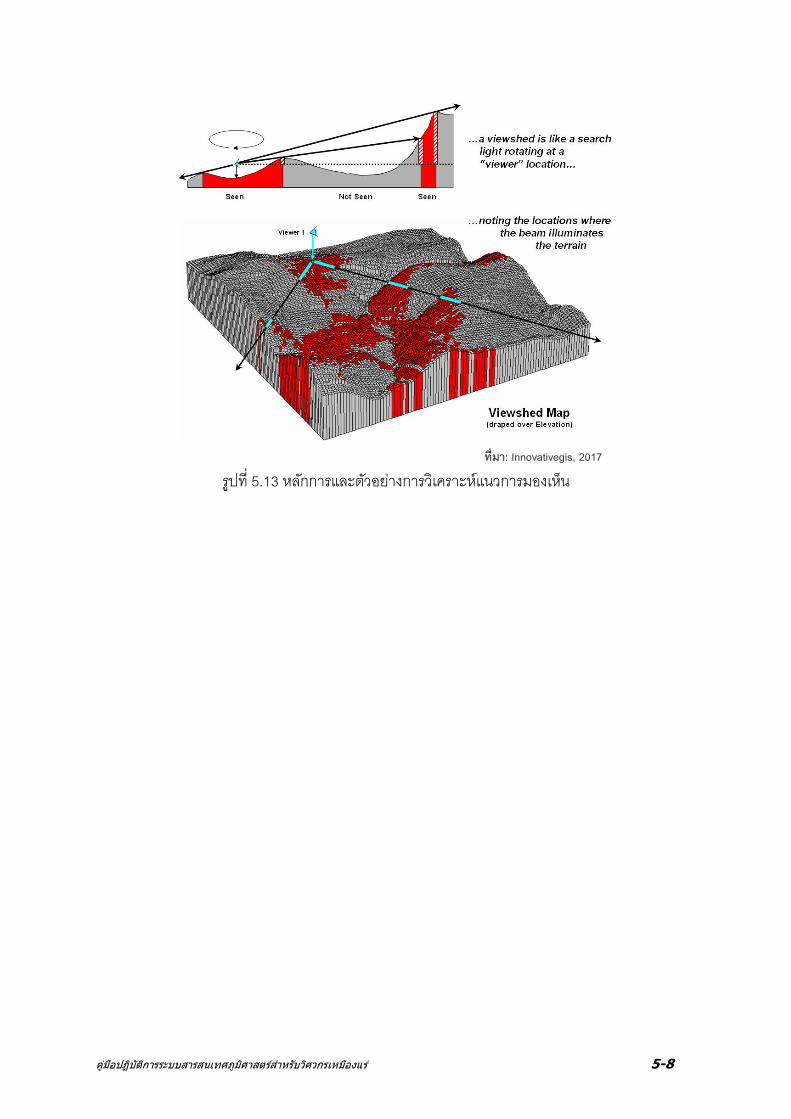
5.2.8 แนวกำรมองเห็น (Line of Sight) แนวการมองเห็น คือ ความสามารถในการก าหนดทศันวิสยัระหว่างจุดต่างๆ ซึ่งเป็นการวิเคราะห์แนวทางของความสามารถในการมองเห็นจากต าแหน่งท่ีอยู่ไปยังทิศทางต่างๆ (รูปท่ี 5.13) เช่น การประเมินจุดท่ีตัง้หอตรวจการของทหาร การหาจุดชมวิวท่ีเหมาะสม และการติดตัง้หอสญัญาณสือ่สาร เป็นต้น
คู่มอืปฏบัิตกิารระบบสารสนเทศภมูศิาสตรส์ าหรับวศิวกรเหมอืงแร ่ 5-8
ที่มำ: Innovativegis, 2017
รูปท่ี 5.13 หลกัการและตวัอยา่งการวิเคราะห์แนวการมองเห็น