Embed Size (px)
Citation preview

ABB Drives Installations- undInbetriebnahmehandbuch
DeviceNet AdaptermodulNDNA-02


© 2001 ABB Industry O
DeviceNet AdaptermodulNDNA-02
Installations- undInbetriebnahmehandbuch
y. Alle Rechte vorbehalten.
3AFY 64484141 R0303 REV BGÜLTIG AB: 1.10.2001

Sicherheitsanweisungen
Übersicht Dieses Kapitel enthält die Sicherheitsvorschriften, die bei Installation und Betrieb des DeviceNet-Adaptermoduls NDNA-02 befolgt werden müssen. Vor Ausführung jeglicher Arbeiten am oder mit dem Gerät müssen die in diesem Kapitel enthaltenen Informationen aufmerksam gelesen werden.
Warnungen und Hinweise
In diesem Handbuch wird zwischen zwei Arten von Sicherheitsvor-schriften unterschieden. Warnungen sollen über Zustände informieren, die bei Nichteinhaltung der vorgeschriebenen Vorgehensweise zu einer folgenschweren Betriebsstörung, Sachschäden und zu Verletzungen auch mit Todesfolge führen können. Hinweise sollen den Leser zu besonderer Aufmerksamkeit veranlassen oder zusätzliche Informatio-nen zu dem betreffenden Thema liefern. Hinweise sind weniger wichtig als Warnungen, dürfen aber nicht missachtet werden.
Warnungen Durch sie wird der Leser über Situationen informiert, die zu ernsthaften Verletzungen von Personen und/oder schweren Schäden an Geräten führen können, und zwar mit den folgenden Symbolen:
Hochspannungsgefahr: Dieses Symbol warnt vor Hochspannungen, die zu Verletzungen von Perso-nen und/oder Schäden an Geräten führen können. Der Text neben diesem Symbol beschreibt Mög-lichkeiten zur Vermeidung dieser Gefahr.
Allgemeine Warnung: Dieses Symbol warnt vor nichtelektrischen Gefahren, die zu Verletzungen von Personen und/oder Schäden an Geräten füh-ren können. Der Text neben diesem Symbol beschreibt Möglichkeiten zur Vermeidung dieser Gefahr.
Elektrostatische Warnung: Dieses Symbol warnt vor elektrostatischer Entladung, die zu einer Beschädigung der Einrichtung führen kann. Der Text neben diesem Symbol beschreibt Möglichkei-ten zur Vermeidung dieser Gefahr.
NDNA-02 Installations- und Inbetriebnahmehandbuch iii
Sicherheitsanweisungen
Hinweise Der Leser wird durch Hinweise darauf hingewiesen, dass besondere Aufmerksamkeit erforderlich ist, oder dass es zu einem Thema Zusatz-informationen gibt, und zwar mit den folgenden Symbolen:
Allgemeine Sicher-heitsanweisungen
WARNUNG! Alle elektrischen Installations- und Wartungsarbeiten am Antrieb sind von qualifiziertem, elektrotechnisch geschultem Personal durchzuführen.
Der Antrieb und die benachbarten Geräte müssen vorschriftsmäßig geerdet werden.
Auf keinen Fall dürfen Arbeiten an einem eingeschalteten Antrieb durchgeführt werden. Nach dem Abschalten des Gerätes ist stets fünf Minuten zu warten, damit sich die Kondensatoren im Zwischenkreis entladen können, bevor am Antrieb, am Motor oder am Motorkabel gearbeitet wird. Es ist ratsam, vor Beginn der Arbeiten mit einem Span-nungsprüfer zu prüfen, ob der Antrieb tatsächlich spannungsfrei ist.
An den Motorkabel-Anschlussklemmen liegen bei eingeschalteter Netzspannung gefährlich hohe Spannungen an, auch wenn der Motor nicht dreht.
Im Antrieb können selbst bei abgeschalteter Netzspannung aufgrund externer Steuerkreise gefährlich hohe Spannungen vorhanden sein. Deshalb ist beim Arbeiten am Gerät entsprechende Vorsicht geboten. Bei Nichtbeachtung dieser Vorschriften kann es zu Verletzungen, auch mit tödlichen Folgen, kommen.
WARNUNG! Der Antrieb besitzt mehrere automatische Reset-Funktio-nen. Wenn diese Funktionen eingestellt und aktiv sind, läuft der Antrieb nach einem Fehler-Reset sofort wieder an. Diese Funktionen dürfen nicht eingestellt werden, wenn die gekoppelten Maschinen oder der Prozess für einen solchen Betrieb nicht geeignet sind oder gefährliche Situationen entstehen können.
Weitere Warnungen und Hinweise sind in den folgenden Kapiteln in den jeweiligen Abschnitten enthalten und müssen beachtet werden.
VORSICHT! Vorsicht soll besondere Aufmerksamkeit auf einen bestimmten Sachverhalt lenken.
Hinweis: Hinweis bietet zusätzliche Informationen oder verweist auf weitere verfügbare Informationen über das Thema.
iv NDNA-02 Installations- und Inbetriebnahmehandbuch

Inhaltsverzeichnis
Sicherheitsanweisungen
Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iiiWarnungen und Hinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iiiAllgemeine Sicherheitsanweisungen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Inhaltsverzeichnis
Kapitel 1 – Einführung in dieses Handbuch
Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1Zielgruppe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1Inhalt dieses Handbuchs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1In diesem Handbuch verwendete Konventionen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Kapitel 2 – Übersicht
Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1Topologie des DeviceNet-Busses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1NDNA-02 DeviceNet-Adaptermodul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Kompatibilität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3Prüfung auf Vollständigkeit bei Anlieferung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3Gewährleistungs- und Haftungsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Kapitel 3 – Mechanische Installation
Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1Montage außerhalb des Antriebs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1Montage innerhalb des Antriebs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Kapitel 4 – Elektrische Installation
Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1Allgemeine Verkabelungsanweisungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1Erdung des Moduls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1Einstellung der DIP-Schalter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2Anschlüsse des NDNA-02. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
Anschluss des Antriebs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5DeviceNet-Anschluss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
NDNA-02 Installations- und Inbetriebnahmehandbuch v
Inhaltsverzeichnis
Kapitel 5 – Programmierung
Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1Konfigurierung des Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
DeviceNet-Anschlusskonfiguration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1Steuerplätze. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
Kapitel 6 – Kommunikation
Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1Einführung in DeviceNet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1Objektmodellierung und Funktionsprofile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1Einheit Objekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1Parameterbearbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-6EDS-Dateien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-6
Bearbeitung der EDS-Dateien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-7
Kapitel 7 – Fehlersuche
Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1NDNA-02 Statuscodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1LED-Statusanzeigen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2Probleme bei der Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3Setup des Antriebs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3SPS-Programmierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3Scanner Fehlermeldungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3
Anhang A – Technische Daten
DDCS-Verbindung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1Feldbus-Verbindung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2NDNA-02 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3
Anhang B – Umgebungsbedingungen
Umgebungsbedingungen, Betrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1Umgebungsbedingungen, Lagerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1Umgebungsbedingungen, Transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1
Anhang C – Konformitätserklärung
vi NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 1 – Einführung in dieses Handbuch
Übersicht Dieses Kapitel enthält eine Beschreibung des Installations- und Inbe-triebnahmehandbuchs für das DeviceNet- Adaptermodul NDNA-02.
Zielgruppe Das Handbuch richtet sich an das Personal für die Montage, Inbetrieb-nahme und Bedienung des DeviceNet-Adaptermoduls, das zusammen mit einem ABB-Antrieb verwendet wird. Der Leser benötigt Grund-kenntnisse der Elektrotechnik, der Verdrahtungspraktiken, der Antriebstechnik, der Verwendung der Steuertafel des Antriebs und des DeviceNet-Protokolls.
Inhalt dieses Handbuchs
Die Installation und Inbetriebnahme des DeviceNet Adaptermoduls NDNA-02 werden in diesem Handbuch beschrieben.
Vorausgesetzt wird, dass vor Beginn der Installation des Adaptermoduls der Antrieb installiert und betriebsbereit ist. Weitere Informationen über Installation und Inbetriebnahme des Antriebs siehe Benutzerdokumentation.
Sicherheitsanweisungen werden auf den ersten Seiten dieses Handbuchs erläutert. Die Sicherheitsanweisungen beschreiben die Formate der verschiedenen in diesem Handbuch verwendeten Warnungen und Hinweise. In diesem Kapitel sind außerdem die Sicherheitsanweisungen angegeben, die für die Installation und den Betrieb des NDNA-02 Moduls gelten.
Kapitel 1 – Einführung in dieses Handbuch enthält eine kurze Beschreibung dieses Handbuchs.
Kapitel 2 – Übersicht enthält eine kurze Beschreibung des DeviceNet-Protokolls und des DeviceNet-Adaptermoduls NDNA-02, eine Checkli-ste zur Überprüfung auf Vollständigkeit bei Lieferung und Informatio-nen zu den Gewährleistungsbedingungen.
Kapitel 3 – Mechanische Installation enthält die Aufstellungs- und Montageanweisung zu diesem Modul.
Kapitel 4 – Elektrische Installation enthält die Anweisungen zur Verdrahtung, dem Busabschluss, der Einstellung der DIP-Schalter und der Erdung.
Kapitel 5 – Programmierung erläutert die Programmierung des Antriebs, bevor die Kommunikation mit dem Adaptermodul aufgenom-men werden kann.
Kapitel 6 – Kommunikation enthält eine Beschreibung der von NDNA-02 unterstützten DeviceNet-Funktionalität. In diesem Kapitel wird außerdem die Konfiguration des Scanners beschrieben.
NDNA-02 Installations- und Inbetriebnahmehandbuch 1-1
Kapitel 1 – Einführung in dieses Handbuch
Kapitel 7 – Fehlersuche beschreibt die Diagnose von Fehlern in der DeviceNet-Verbindung während der Installation, Inbetriebnahme und dem Betrieb.
Anhang A enthält die technischen Daten.
Anhang B enthält eine Spezifikation der während des Transports, der Lagerung und der Verwendung des NDNA-02 Moduls zulässigen Umgebungsbedingungen.
Anhang D enthält eine Konformitätserklärung.
In diesem Handbuch verwendete Konventionen
Bit-Strobe-Telegramm Der Bit-Strobe-Befehl ist ein vom Master gesendetes E/A-Telegramm. Ein Bit-Strobe-Befehlstelegramm besitzt die Fähigkeit für Multi-Cast. Mehrere Slaves können denselben Bit-Strobe-Befehl empfangen und darauf reagieren (Multi-Cast). Die Bit-Strobe-Antwort ist ein E/A-Telegramm, das ein Slave zurück an den Master sendet, wenn der Bit-Strobe-Befehl empfangen wurde.
Statusänderung/zyklisches Telegramm
Die Statusänderung/das zyklische Telegramm wird entweder vom Master oder vom Slave übertragen. Ein(e) Statusänderung/zyklisches Telegramm wird an einen einzelnen, spezifischen Knoten gesendet (Punkt-zu-Punkt-Verbindung). Ein Quittungstelegramm kann als Ant-wort auf dieses Telegramm gesendet werden.
Kommunikationsmodul Kommunikationsmodul ist ein Name für ein Gerät (z.B. einen Feldbus-adapter), über das der Antrieb mit einem externen seriellen Kommuni-kationsnetzwerk (z.B. einem Feldbus) verbunden ist. Die Kommunikation mit dem Kommunikationsmodul wird über einen Antriebsparameter aktiviert.
Datensätze undDatenworte
Datensätze sind Cluster von Daten, die über die DDCS-Verbindung zwischen dem NDNA-02 Adaptermodul und dem Antrieb übertragen werden. Jeder Datensatz besteht aus drei 16-Bit-Worten, d.h. Daten-worten. Das Steuerwort (manchmal auch Befehlswort genannt) und das Statuswort, Sollwerte und Istwerte (siehe Kapitel 6) sind Daten-worttypen; der Inhalt mancher Datenworte ist benutzerdefiniert. Siehe hierzu die Dokumentation des Antriebs.
EDS-Datei Mit der Electronic Data Sheet (EDS)-Datei werden die Eigenschaften des Gerätes dem DeviceNet-Scanner mitgeteilt. Jeder Antriebstyp und jedes Anwendungsprogramm benötigen eine eigene EDS-Datei.
Eingang In der ODVA DeviceNet-Spezifikation bezeichnet das Wort ‘Eingang’ den Datenfluss von einem Gerät in das Netz. In diesem Handbuch jedoch bezeichnet das Wort ‘Eingang’ den Datenfluss in ein Gerät wie z.B. NDNA-02.
1-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 1 – Einführung in dieses Handbuch
NDNA-02 Installations- und Inbetriebnahmehandbuch 1-3
Auswahl der E/A-Einheit Vernetzte Gerät (wie das NDNA-02) können mehrere E/A-Werte erzeu-gen bzw. verwerten. Typischerweise erzeugen bzw. verwerten sie einen oder mehrere E/A-Werte sowie Status- und Diagnoseinformatio-nen. Alle von einem Gerät übermittelte Daten werden durch ein Attribut eines der geräteinternen Objekte dargestellt.
Die Übertragung einer Vielzahl von Daten (Attributen) über eine ein-zelne E/A-Verbindung erfordert, die Gruppierung oder Zusammenfas-sung in einem Block.
MAC ID Jeder Knoten in einem DeviceNet-Netz besitzt eine eindeutige Bezeichnung. Diese Knotennummer wird MAC ID genannt (Media Access Control ID).
NDNA-02 DeviceNet-Adaptermodul
Das NDNA-02 Adaptermodul ist eines der optionalen Feldbusadapter-module, die es für Antriebe von ABB gibt. Das NDNA-02 ist ein Gerät, durch das ein ABB-Antrieb an den seriellen DeviceNet-Kommunikati-onsbus angeschlossen wird.
ODVA ODVA bedeutet Open DeviceNet Vendor Association. ODVA ist eine unabhängige Organisation zur Förderung der Interoperabilität zwischen den DeviceNet-Produkten verschiedener Hersteller. ABB ist Mitglied der ODVA.
Ausgang In der DeviceNet-Spezifikation der ODVA bezeichnet das Wort ‘Ausgang’ den Datenfluss aus dem Netzwerk in ein Gerät. In diesem Handbuch jedoch bezeichnet das Wort ’Ausgang’ den Datenfluss aus einem Gerät wie z.B. dem NDNA-02.
Parameter Ein Parameter ist eine Betriebsanweisung für einen Antrieb. Parameter können mit der Steuertafel des Antriebs oder über das NDNA-02 Modul gelesen und programmiert werden.
Abfragetelegramm Die meisten DeviceNet-Scanner und NDNA-02 V2.x unterstützen 3 verschiedene Datendienste. Diese sind Abfrage, Bit-Strobe und Statusänderung/zyklisches Telegramm.
Der Abfragebefehl ist ein vom Master gesendetes E/A-Telegramm. Ein Abfragebefehl richtet sich an einen bestimmten Slave (Punkt-zu-Punkt-Verbindung, NDNA-02 arbeitet immer als Slave). Ein Master muss zur Abfrage an jeden Slave eine Abfragetelegramm senden. Die Antwort auf die Abfrage ist ein E/A-Telegramm, das ein Slave nach Empfang des Abfragebefehls an den Master zurücksendet.
Abfrageliste (Scanliste) Der DeviceNet-Scanner kommuniziert mit den DeviceNet-Slaves in einer vom Benutzer festgelegten Reihenfolge. Diese Reihenfolge ist in der Abfrageliste festgelegt. Die Abfrageliste enthält alle Slave-Knoten und die Reihenfolge, in der die Slaves angesprochen werden.

Kapitel 1 – Einführung in dieses Handbuch
1-4 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 2 – Übersicht
Übersicht Dieses Kapitel enthält eine kurze Beschreibung der Bustopologie von DeviceNet, des NDNA-02 Adaptermoduls, eine Checkliste zur Überprüfung der Lieferung auf Vollständigkeit und Informationen zu den Gewährleistungsbedingungen.
Weitere Informationen finden Sie unter www.odva.org.
Topologie des DeviceNet-Busses
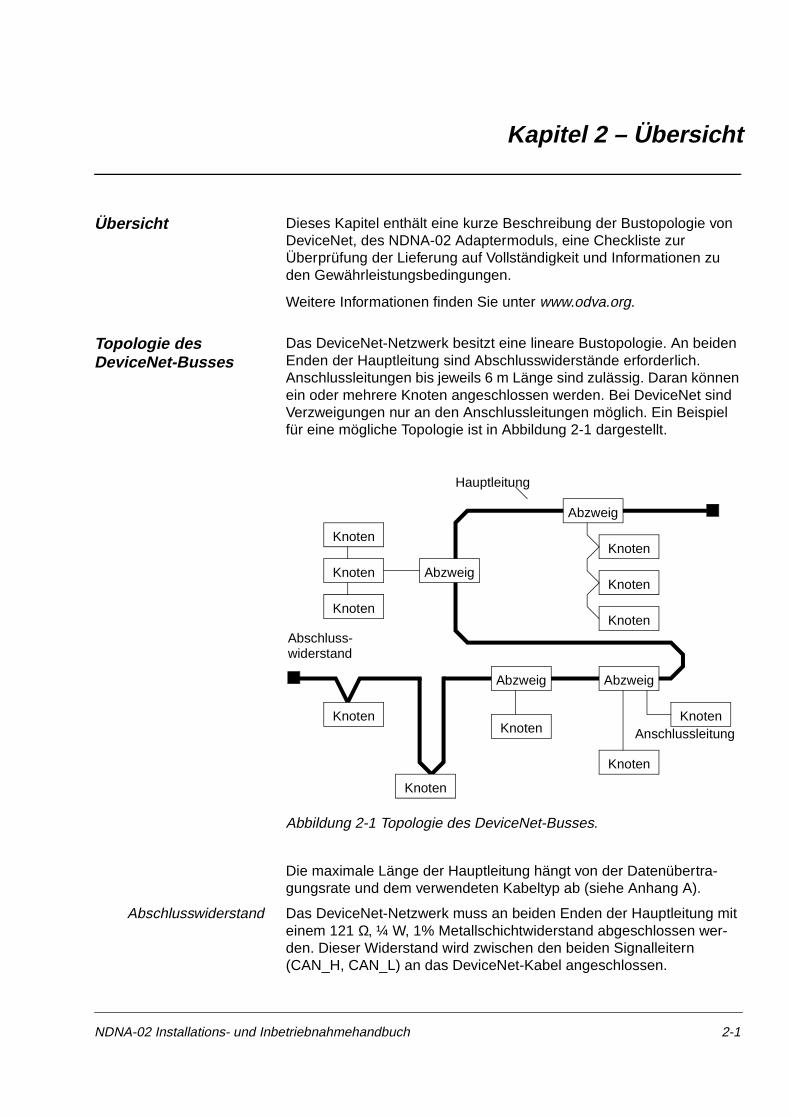
Das DeviceNet-Netzwerk besitzt eine lineare Bustopologie. An beiden Enden der Hauptleitung sind Abschlusswiderstände erforderlich. Anschlussleitungen bis jeweils 6 m Länge sind zulässig. Daran können ein oder mehrere Knoten angeschlossen werden. Bei DeviceNet sind Verzweigungen nur an den Anschlussleitungen möglich. Ein Beispiel für eine mögliche Topologie ist in Abbildung 2-1 dargestellt.
Abbildung 2-1 Topologie des DeviceNet-Busses.
Die maximale Länge der Hauptleitung hängt von der Datenübertra-gungsrate und dem verwendeten Kabeltyp ab (siehe Anhang A).
Abschlusswiderstand Das DeviceNet-Netzwerk muss an beiden Enden der Hauptleitung mit einem 121 Ω, ¼ W, 1% Metallschichtwiderstand abgeschlossen wer-den. Dieser Widerstand wird zwischen den beiden Signalleitern (CAN_H, CAN_L) an das DeviceNet-Kabel angeschlossen.
Knoten
Knoten
Knoten
Knoten
Knoten
Abzweig
Abzweig
AbzweigAbzweig
Knoten
Knoten
Knoten
Abschluss-widerstand
Knoten
Knoten
Knoten
Hauptleitung
Anschlussleitung
NDNA-02 Installations- und Inbetriebnahmehandbuch 2-1
Kapitel 2 – Übersicht
NDNA-02 DeviceNet-Adaptermodul
Das DeviceNet-Adaptermodul NDNA-02 ist ein optionales Gerät fürABB-Antriebe, mit dem der Antrieb an ein DeviceNet-System ange-schlossen wird. Der Antrieb wird im DeviceNet-System als Slave-Sta-tion behandelt. Das DeviceNet-Adaptermodul NDNA-02 ermöglicht:
• die Übertragung von Steuerbefehlen an den Antrieb(Start, Stop, Freigabe usw.)
• die Vorgabe eines Sollwertes für Motordrehzahl oder -drehmoment an den Antrieb
• die Übertragung eines Prozess-Istwertes oder -Sollwertes an den PID-Regler des Antriebs
• das Auslesen von Statusdaten oder Istwerten aus dem Antrieb
• Lesen und Schreiben der Antriebsparameterwerte
• das Rücksetzen von Antriebsfehlern.
Das NDNA-02 entspricht einem Slave der Klasse 2 nur mit vordefinier-ten Master-Slave-Verbindungsdiensten. Hierzu gehören explizite Mel-dung (Explicit Messaging), der Abfrageantwortdienst, der Bit-Strobe-Dienst und der Dienst Zustandsänderung/zyklisch. Die vom DeviceNet-Adaptermodul NDNA-02 unterstützten DeviceNet-Befehle und Service-funktionen werden in Kapitel 6 ausführlicher behandelt. Der Benutzer-dokumentation des Antriebs ist zu entnehmen, welche Befehle vom Antrieb unterstützt werden.
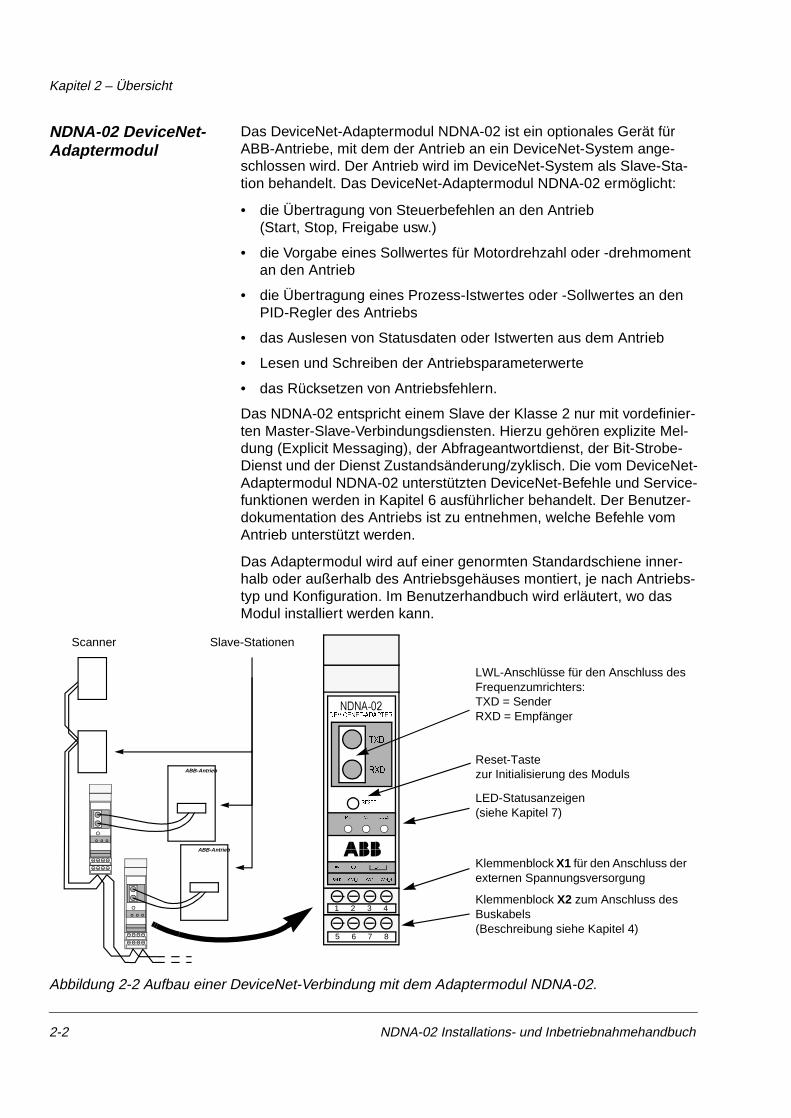
Das Adaptermodul wird auf einer genormten Standardschiene inner-halb oder außerhalb des Antriebsgehäuses montiert, je nach Antriebs-typ und Konfiguration. Im Benutzerhandbuch wird erläutert, wo das Modul installiert werden kann.
Abbildung 2-2 Aufbau einer DeviceNet-Verbindung mit dem Adaptermodul NDNA-02.
Scanner Slave-Stationen
Klemmenblock X1 für den Anschluss der externen Spannungsversorgung
LWL-Anschlüsse für den Anschluss des Frequenzumrichters:TXD = SenderRXD = Empfänger
LED-Statusanzeigen(siehe Kapitel 7)
1'1$'(9,&(1(7$'$37(5
06
9 8& (;7
6+/' &$1B/ *1' &$1B+
5(6(7
7;'
5;'
5 6 7 8
1 2 3 4
Reset-Tastezur Initialisierung des Moduls
Klemmenblock X2 zum Anschluss des Buskabels (Beschreibung siehe Kapitel 4)
16 ''&6
ABB-Antrieb
ABB-Antrieb
2-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 2 – Übersicht
Kompatibilität NDNA-02 ist mit folgenden Antrieben kompatibel:
• ACS 400
• ACS 600 SingleDrive
• ACS 600 MultiDrive
• ACS 600 MotionControl (ACP 600)
• ACS 600 CraneDrive (ACC 600)
• ACS 600 programmierbar
• ACS 6000
• DCS 400
• DCS 500
• DCS 600
• ACS 1000
• Alle Scanner, die nach der DeviceNet-Spezifikation der ODVA arbeiten. (NDNA-02 wurde mit dem Allen-Bradley 1747-SDN Scannermodul getestet.)
Prüfung aufVollständigkeit bei
Anlieferung
Das Optionspaket für das DeviceNet-Adaptermodul NDNA-02 enthält:
• DeviceNet-Adaptermodul NDNA-02
• Zwei Paar (vier Stück) LWL-Kabel für den Anschluss des Adaptermoduls an den Antrieb
• Montageschiene
• Dieses Handbuch, das Installations- und Inbetriebnahmehandbuch für NDNA-02.
Gewährleistungs- undHaftungsbedingungen
Die Gewährleistung für Ihren ABB-Antrieb und die Zusatzgeräte erstreckt sich auf Fertigungsfehler. Der Hersteller haftet nicht für Schä-den, die bei Transport oder Auspacken entstanden sind.
Bei und aus welchen Gründen auch immer haftet der Hersteller für Schäden und Betriebsstörungen aufgrund falschen Gebrauchs, fehler-hafter Installation, anormaler Temperaturen, der Einwirkung von Staub oder ätzenden Stoffen oder des Betriebs oberhalb der angegebenen Grenzwerte. Ebensowenig haftet der Hersteller für nachfolgende oder zufällige Schäden.
Die Herstellergewährleistung beträgt 12 Monate, längstens jedoch 18 Monate nach Versand ab Werk. Bei nachgewiesenem Inbetriebnahme-datum kann die Garantiezeit verlängert werden. Bitte wenden Sie sich an Ihren Händler.
Ihr ABB-Händler oder Vertrieb kann eine andere Garantiezeit gewäh-ren, was in den jeweiligen Verkaufs- und Gewährleistungsbedingungen festgehalten wird.
Im Falle von Fragen bezüglich des ABB-Antriebs wenden Sie sich bitte
NDNA-02 Installations- und Inbetriebnahmehandbuch 2-3
Kapitel 2 – Übersicht
an das zuständige Vertriebsbüro oder Ihre ABB-Niederlassung.
Die technischen Daten und Spezifikationen entsprechen den zum Zeit-punkt des Druckes gültigen Angaben. Der Hersteller behält sich Ände-rungen vor, ohne dies vorher mitzuteilen.
2-4 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 3 – Mechanische Installation
Übersicht Dieses Kapitel enthält die Montageanweisungen für das Adaptermo-dul. Das Adaptermodul wird je nach Antrieb innerhalb oder außerhalb des Antriebsgehäuses montiert. Im Benutzerhandbuch des Antriebs wird beschrieben, wo das Modul installiert werden kann.
Montage außerhalb des Antriebs
Wählen Sie den Einbauort des Moduls. Folgendes ist zu beachten:
• Die Anweisungen zur Verkabelung sind zu beachten (siehe Kapitel 4).
• Die Umgebungsbedingungen sind zu beachten (siehe Anhang B). Die Schutzklasse des Moduls ist IP 20.
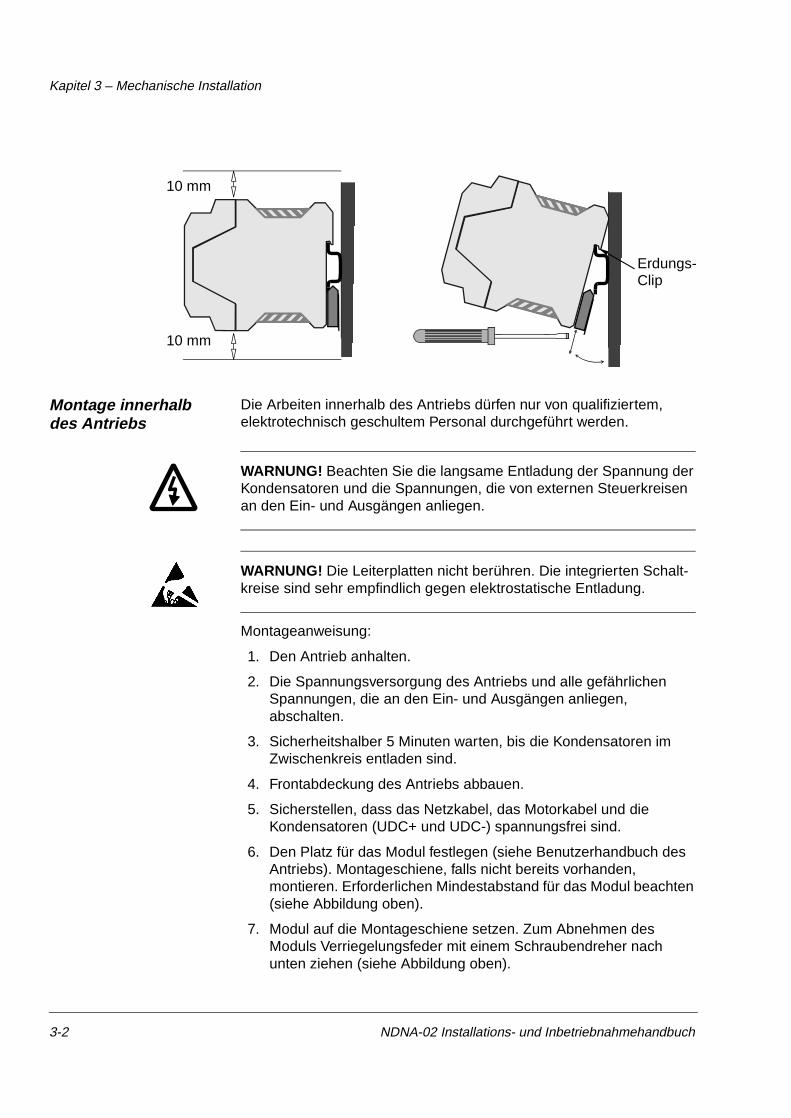
• Erforderlichen Platzbedarf des Moduls (mindestens 10 mm von angrenzenden Geräten oder der Wand) und des Antriebs einhalten (siehe Dokumentation des Antriebs).
• Das Modul wird mit Hilfe eines Erdungsclips geerdet (siehe nachfol-gende Abbildung). Die Montageschiene, an der das Adaptermodul installiert wird, muss über eine fremdspannungsfreie Erdung verfü-gen. Falls die Montageschiene nicht an einem ordnungsgemäß geerdeten Untergrund befestigt ist, muss ein Erdungsleiter verwen-det werden. Dieser ist möglichst kurz zu halten und muss einen Lei-terquerschnitt von mindestens 6 mm2 aufweisen. Hinweis: Die Verwendung eines massiven Kupferleiters ist nicht erlaubt (nur Drahtlitzenleiter sind hierfür zulässig).
Montageanweisung:
1. Zunächst im Schrank, in dem das Modul installiert werden soll, alle gefährlichen Spannungen abschalten.
2. Montageschiene montieren und ordnungsgemäße Erdung sicher-stellen (siehe oben).
3. Modul auf die Montageschiene setzen. Zum Abnehmen des Moduls Verriegelungsfeder mit einem Schraubendreher nach unten ziehen (siehe nachfolgende Abbildung).
NDNA-02 Installations- und Inbetriebnahmehandbuch 3-1
Kapitel 3 – Mechanische Installation
Montage innerhalb des Antriebs
Die Arbeiten innerhalb des Antriebs dürfen nur von qualifiziertem, elektrotechnisch geschultem Personal durchgeführt werden.
WARNUNG! Beachten Sie die langsame Entladung der Spannung der Kondensatoren und die Spannungen, die von externen Steuerkreisen an den Ein- und Ausgängen anliegen.
WARNUNG! Die Leiterplatten nicht berühren. Die integrierten Schalt-kreise sind sehr empfindlich gegen elektrostatische Entladung.
Montageanweisung:
1. Den Antrieb anhalten.
2. Die Spannungsversorgung des Antriebs und alle gefährlichen Spannungen, die an den Ein- und Ausgängen anliegen, abschalten.
3. Sicherheitshalber 5 Minuten warten, bis die Kondensatoren im Zwischenkreis entladen sind.
4. Frontabdeckung des Antriebs abbauen.
5. Sicherstellen, dass das Netzkabel, das Motorkabel und die Kondensatoren (UDC+ und UDC-) spannungsfrei sind.
6. Den Platz für das Modul festlegen (siehe Benutzerhandbuch des Antriebs). Montageschiene, falls nicht bereits vorhanden, montieren. Erforderlichen Mindestabstand für das Modul beachten (siehe Abbildung oben).
7. Modul auf die Montageschiene setzen. Zum Abnehmen des Moduls Verriegelungsfeder mit einem Schraubendreher nach unten ziehen (siehe Abbildung oben).
Erdungs-Clip
10 mm
10 mm
3-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 4 – Elektrische Installation
Übersicht Dieses Kapitel enthält:
• Allgemeine Verkabelungsanweisungen
• Anweisungen zur Erdung des Moduls
• Anweisungen zur Einstellung der Knotennummer des Moduls und der Datenübertragungsgeschwindigkeit (Baudrate)
• Anweisungen zum Anschluss des Moduls an den Antrieb und den DeviceNet-Bus.
WARNUNG! Vor Beginn der Montagearbeiten die Spannungsversor-gung des Antriebs abschalten. Sicherheitshalber 5 Minuten warten, bis der Zwischenkreis entladen ist. Alle gefährlichen Spannungen, die von externen Steuerkreisen an den Ein- und Ausgängen des Antriebs anliegen, sind ebenfalls abzuschalten.
Allgemeine Verkabe-lungsanweisungen
Spezifikation der Buskabel siehe Anhang A – Technische Daten.
Die Buskabel sind in einem möglichst großen Abstand zu den Motorka-beln zu verlegen. Parallele Verlegung von Motor- und Buskabeln ver-meiden. An den Kabeleinführungen sind geeignete Kabel-Durchführungen vorzusehen.
Bei der Verlegung der LWL-Kabel vorsichtig vorgehen. LWL-Kabel beim Abziehen am Steckverbinder greifen und nicht am Kabel selbst ziehen. Die Enden der Lichtwellenleiter dürfen nicht mit bloßen Händen berührt werden, da sie sehr schmutzempfindlich sind.
Die maximale langfristige Zugbelastung der LWL-Kabel beträgt 1 N.Der minimale kurzzeitige Biegeradius beträgt 25 mm.
Erdung des Moduls Die Modulerde des Moduls NDNA-02 ist mit der Montageschiene ver-bunden, auf der das Modul montiert ist. Falls diese Montageschiene ihrerseits an einer metallischen Grundplatte befestigt ist, so ist dadurch bereits eine ausreichende Erdung sichergestellt, und eine externe Erdung ist nicht erforderlich. Ist die Montageschiene an einem nicht geerdeten Untergrund befestigt, muss sie über eine Erdungsleitung mit der nächstliegenden Erdungsklemme verbunden werden. Hierbei ist jedoch zu beachten, dass die Erdungsleitung des Moduls und die Schirme der Leistungskabel nicht an dieselbe Klemme angeschlossen werden dürfen. (Siehe Montageanweisung in Kapitel 3.)
NDNA-02 Installations- und Inbetriebnahmehandbuch 4-1

Kapitel 4 – Elektrische Installation
Einstellung der DIP-Schalter
Mit den sich auf der Leiterplatte des NDNA befindenden DIP-Schaltern SW1 und SW2 können die Knotennummer, der Ruhemodus des Scan-ners (Scanner Idle Mode) und die Baudrate des Moduls eingestellt wer-den.
Wenn Schalter SW1:8 auf ON gestellt wird, wird die DIP-Schalter Ein-stellung wirksam. In diesem Fall agieren die entsprechenden Konfigu-rationsparameter (in der Feldbusparametergruppe; siehe Kapitel 5) lediglich als Nur-Lese-Anzeigen. Wenn SW1:8 auf OFF (Standardein-stellung) gestellt wird, werden die Knotennummer und die Baudrate über die Modul-Konfigurationsparameter eingestellt (siehe Kapitel 5).
Wenn der Schalter SW2:3 auf ON (NDNA-01) gestellt wird, kann das NDNA-02 Modul als Ersatz für die NDNA-01 Module mit Softwarever-sion V2.0 verwendet werden. In diesem Fall muss die originale NDNA-01 EDS-Datei verwendet werden.
Wenn Schalter SW2:4 auf ON (FREEZE) gestellt wird, kann der Antrieb den Betrieb gemäß dem/den letzten empfangenen, gültigen Steuerwort und Sollwerten fortsetzen, sofern sich der DeviceNet Scan-ner im Ruhemodus (z.B. offline) befindet. Wenn SW2:4 auf OFF (STOP) gesetzt ist, stoppt der Antrieb, wenn der Scanner auf den Ruhemodus geschaltet wird. Siehe hierzu die Antriebsdokumentation (Fehlerfunktionen bei Kommunikationsausfall).
Hinweise
• Die Ruhefunktion des Scanners wird ab Version V2.2 unterstützt.
• Die Modulmodus-Funktion wird ab Version V2.3 unterstützt.
• Die Schalter SW2:3 und SW2:4 sind unabhängig von der Einstellung von SW1:8 immer wirksam.
4-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 4 – Elektrische Installation
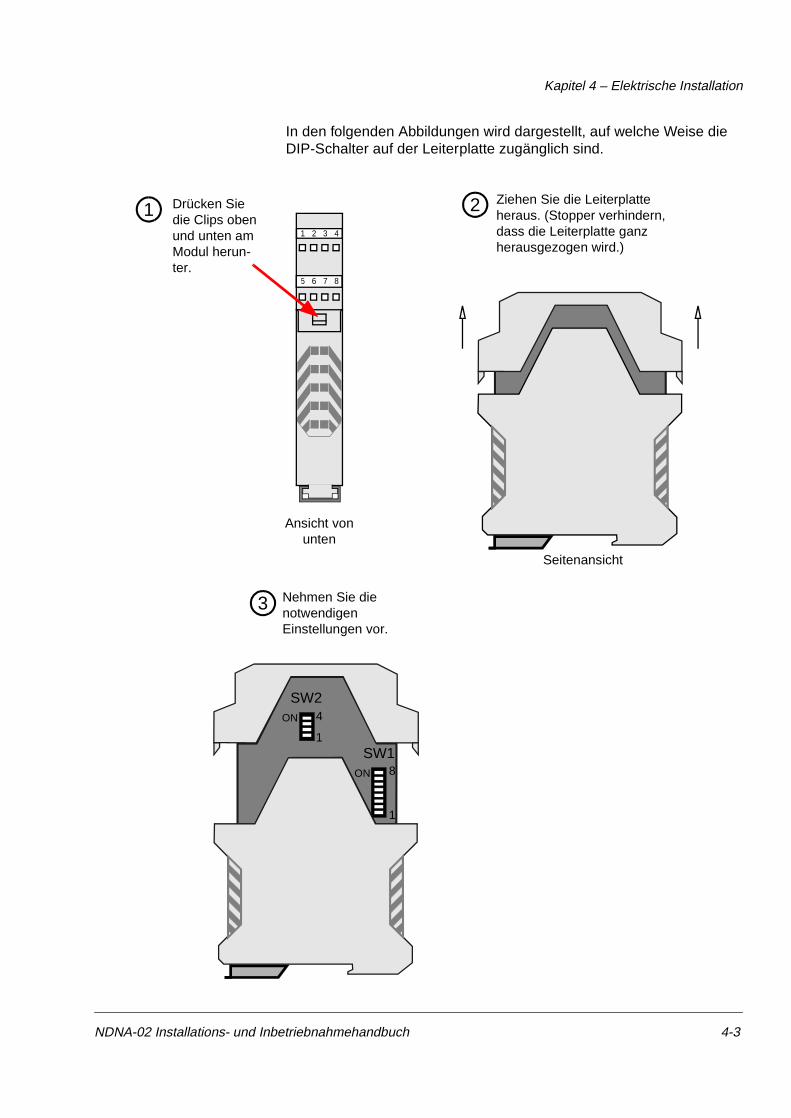
In den folgenden Abbildungen wird dargestellt, auf welche Weise die DIP-Schalter auf der Leiterplatte zugänglich sind.
1 2 3 4
5 6 7 8
Drücken Sie die Clips oben und unten am Modul herun-ter.
Ziehen Sie die Leiterplatte heraus. (Stopper verhindern, dass die Leiterplatte ganz herausgezogen wird.)
1 2
Ansicht von unten
Seitenansicht
Nehmen Sie die notwendigen Einstellungen vor.
3
SW1
SW2
1
ON
ON 8
1
4
NDNA-02 Installations- und Inbetriebnahmehandbuch 4-3

Kapitel 4 – Elektrische Installation
Knoten-Nr. Binär SW1
1 000001
2 000010
• • • • • • • • •
63(Standard-einstellung)
111111
ON DIP
1 2 3 4 5 6 7 8
ON DIP
1 2 3 4 5 6 7 8
ON DIP
1 2 3 4 5 6 7 8
Funktion SW1
SW1 und SW2 freigege-ben – Einstellung von Kno-tennummer und Baudrate
über die DIP-Schalter.
*SW1 und SW2 gesperrt – Knotennummer und Baudrate
über Parameter gewählt (Standardeinstellung).
ON DIP
1 2 3 4 5 6 7 8
ON DIP
1 2 3 4 5 6 7 8
Baud Rate
Binär SW2
125 kbit/s(Standard-einstellung)
xx00
250 kbit/s xx01
500 kbit/s xx10
ON DIP
1 2 3 4
ON DIP
1 2 3 4
ON DIP
1 2 3 4
Scanner-Ruhe-modus
Binär SW2
STOP(Standard-einstellung)
0xxx
FREEZE 1xxx
ON DIP
1 2 3 4
ON DIP
1 2 3 4
Modul-Modus
Binär SW2
NDNA-02(Standard-einstellung)
0xxx
NDNA-01 1xxx
ON DIP
1 2 3 4
ON DIP
1 2 3 4
4-4 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 4 – Elektrische Installation
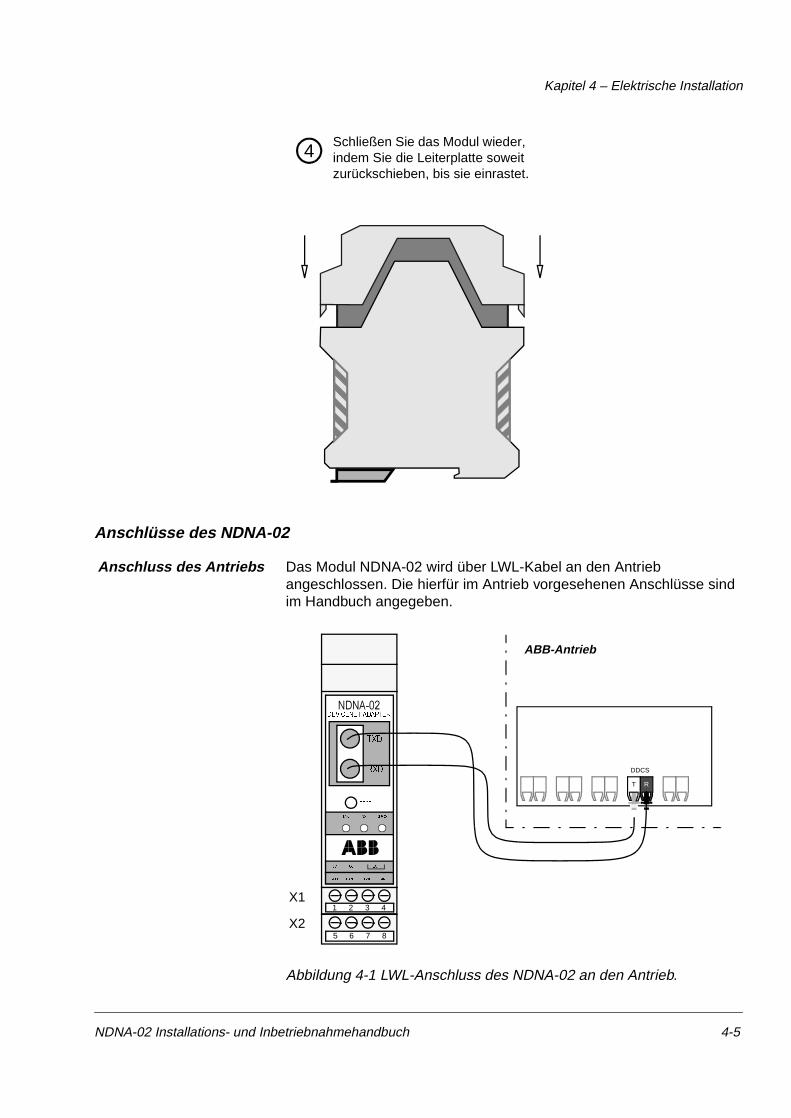
Anschlüsse des NDNA-02
Anschluss des Antriebs Das Modul NDNA-02 wird über LWL-Kabel an den Antrieb angeschlossen. Die hierfür im Antrieb vorgesehenen Anschlüsse sind im Handbuch angegeben.
Abbildung 4-1 LWL-Anschluss des NDNA-02 an den Antrieb.
Schließen Sie das Modul wieder, indem Sie die Leiterplatte soweit zurückschieben, bis sie einrastet.
4
1'1$'(9,&(1(7$'$37(5
06
9 8& (;7
6+/' &$1B/ *1' &$1B+
5(6(7
7;'
5;'
5 6 7 8
1 2 3 4
16 ''&6
ABB-Antrieb
RTT
DDCS
X1
X2
NDNA-02 Installations- und Inbetriebnahmehandbuch 4-5
Kapitel 4 – Elektrische Installation
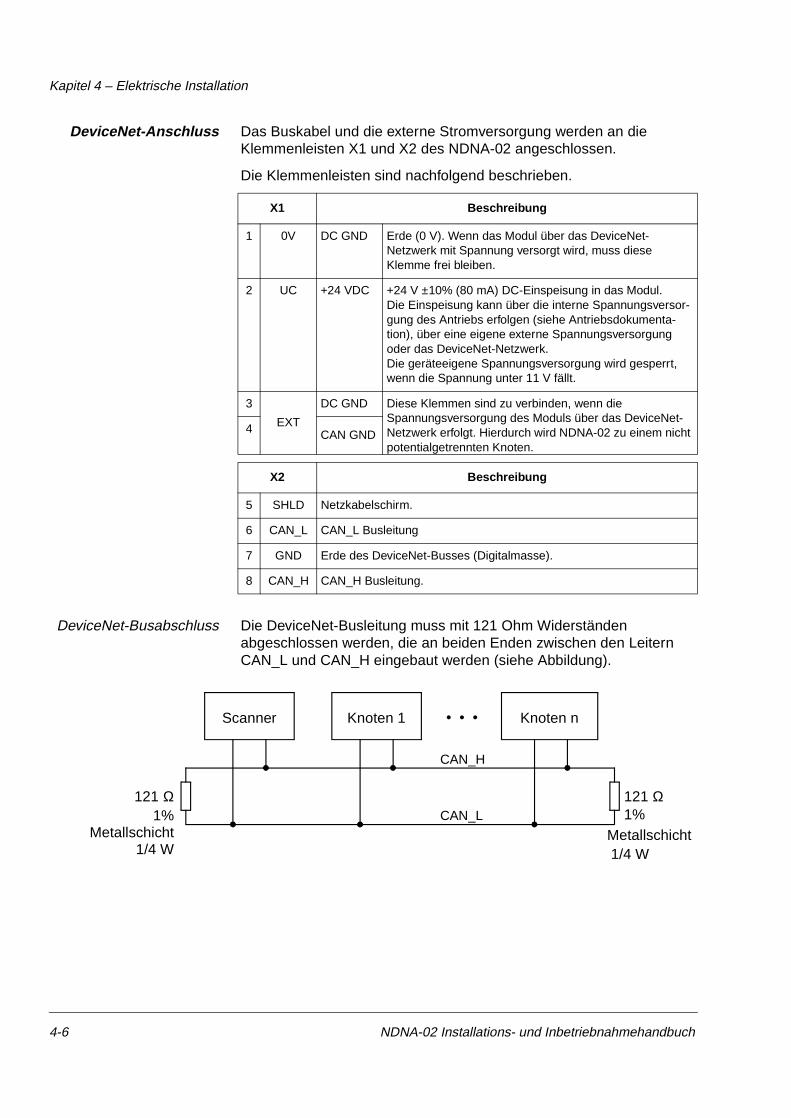
DeviceNet-Anschluss Das Buskabel und die externe Stromversorgung werden an die Klemmenleisten X1 und X2 des NDNA-02 angeschlossen.
Die Klemmenleisten sind nachfolgend beschrieben.
DeviceNet-Busabschluss Die DeviceNet-Busleitung muss mit 121 Ohm Widerständen abgeschlossen werden, die an beiden Enden zwischen den Leitern CAN_L und CAN_H eingebaut werden (siehe Abbildung).
X1 Beschreibung
1 0V DC GND Erde (0 V). Wenn das Modul über das DeviceNet-Netzwerk mit Spannung versorgt wird, muss diese Klemme frei bleiben.
2 UC +24 VDC +24 V ±10% (80 mA) DC-Einspeisung in das Modul.Die Einspeisung kann über die interne Spannungsversor-gung des Antriebs erfolgen (siehe Antriebsdokumenta-tion), über eine eigene externe Spannungsversorgung oder das DeviceNet-Netzwerk.Die geräteeigene Spannungsversorgung wird gesperrt, wenn die Spannung unter 11 V fällt.
3
EXT
DC GND Diese Klemmen sind zu verbinden, wenn die Spannungsversorgung des Moduls über das DeviceNet-Netzwerk erfolgt. Hierdurch wird NDNA-02 zu einem nicht potentialgetrennten Knoten.
4 CAN GND
X2 Beschreibung
5 SHLD Netzkabelschirm.
6 CAN_L CAN_L Busleitung
7 GND Erde des DeviceNet-Busses (Digitalmasse).
8 CAN_H CAN_H Busleitung.
• • •Knoten 1 Knoten n
121 Ω
CAN_H
CAN_L
Scanner
121 Ω1%
Metallschicht1/4 W
1%Metallschicht
1/4 W
4-6 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 4 – Elektrische Installation
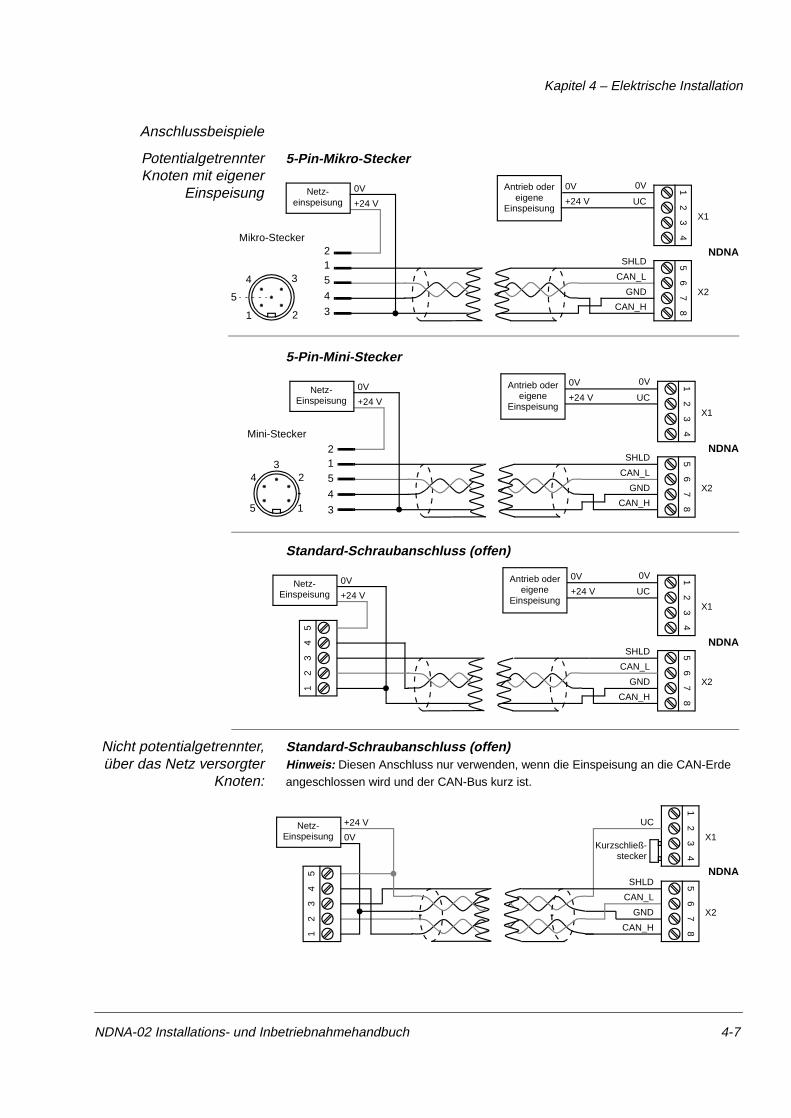
Anschlussbeispiele
PotentialgetrennterKnoten mit eigener
Einspeisung
5-Pin-Mikro-Stecker
5-Pin-Mini-Stecker
Standard-Schraubanschluss (offen)
Nicht potentialgetrennter,über das Netz versorgter
Knoten:
Standard-Schraubanschluss (offen)Hinweis: Diesen Anschluss nur verwenden, wenn die Einspeisung an die CAN-Erde angeschlossen wird und der CAN-Bus kurz ist.
5
3
Mikro-Stecker
GND
CAN_L
CAN_H
SHLD 56
78
UC
0V 12
34
4
1 2
X1
X2
0V
+24 VNetz-
einspeisung
4
5
3
12
+24 V
0VAntrieb odereigene
Einspeisung
NDNA
32
Mini-Stecker
GND
CAN_L
4
5
3
1
CAN_H
SHLD 56
78
UC
0V 12
34
2
4
5 1
X1
X2
+24 V
0VAntrieb odereigene
Einspeisung
0V
+24 VNetz-
Einspeisung
NDNA
GND
CAN_L
CAN_H
SHLD 56
78
UC
0V 12
34
43
21
5
X1
X2
0V
+24 VNetz-
Einspeisung +24 V
0VAntrieb odereigene
Einspeisung
NDNA
GND
CAN_L
CAN_H
SHLD 56
78
UC
12
34
43
21
5
+24 V
0VKurzschließ-
stecker
X1
X2
Netz-Einspeisung
NDNA
NDNA-02 Installations- und Inbetriebnahmehandbuch 4-7
Kapitel 4 – Elektrische Installation
4-8 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 5 – Programmierung
Übersicht Dieses Kapitel enthält Informationen über die Konfigurierung des DeviceNet-Adaptermoduls NDNA-02.
Konfigurierung des Systems
Nachdem das DeviceNet-Adaptermodul NDNA-02 mechanisch und elektrisch entsprechend den Anweisungen in den Kapiteln 3 und 4 installiert ist, müssen die Master-Station und der Antrieb für die Kommunikation mit dem Modul und dem Scanner vorbereitet werden.
Näheres zur Konfigurierung des Systems für die Kommunikation mit dem NDNA-02 können Sie der Dokumentation des Scanners entneh-men. Konfigurationsdateien (EDS-Dateien) für das NDNA-02 sind bei Ihrer ABB-Vertretung erhältlich.
DeviceNet-Anschlusskonfiguration
Das genaue Verfahren zur Aktivierung des Moduls für die Kommunika-tion mit dem Antrieb hängt vom Antriebstyp ab. (Normalerweise muss hierfür eine Parametereinstellung vorgenommen werden. Näheres siehe Dokumentation des Antriebs.)
Wenn die Kommunikation zwischen dem Antrieb und dem NDNA-02 hergestellt ist, werden verschiedene Konfigurationsparameter in den Antrieb geladen. Diese Parameter, die in Tabelle 5-1 aufgeführt sind, müssen zuerst überprüft und gegebenenfalls geändert werden. Die alternativen Einstellungen für diese Parameter werden im Anschluss an die Tabelle im Einzelnen erläutert.
Hinweis: Die neuen Einstellungen werden erst nach Wiedereinschal-tung des Moduls oder nach dem Drücken der RESET-Taste wirksam.
Hinweis: Die Gruppierung, Nummerierung und Einstellung der Para-meter sind von Antrieb zu Antrieb unterschiedlich. Näheres hierzu siehe Dokumentation des Antriebs.
Steuerplätze ABB-Antriebe können ihre Steuerdaten von verschiedenen Quellen erhalten, einschließlich Digitaleingängen, Analogeingängen, Steuertafel und Kommunikationsmodul (z.B. NDNA-02). Bei ABB-Antrieben kann der Benutzer die Quelle für jeden Steuerdatentyp (Start, Stop, Drehrichtung, Sollwert, Fehlerrücksetzung usw.) einzeln festlegen. Um eine umfassende Steuerung des Antriebs durch den Feldbus-Scanner zu gewährleisten, muss das Kommunikationsmodul als Quelle für diese Daten ausgewählt werden. Weitere Informationen zu den Auswahlparametern siehe Benutzerdokumentation.
NDNA-02 Installations- und Inbetriebnahmehandbuch 5-1
Kapitel 5 – Programmierung
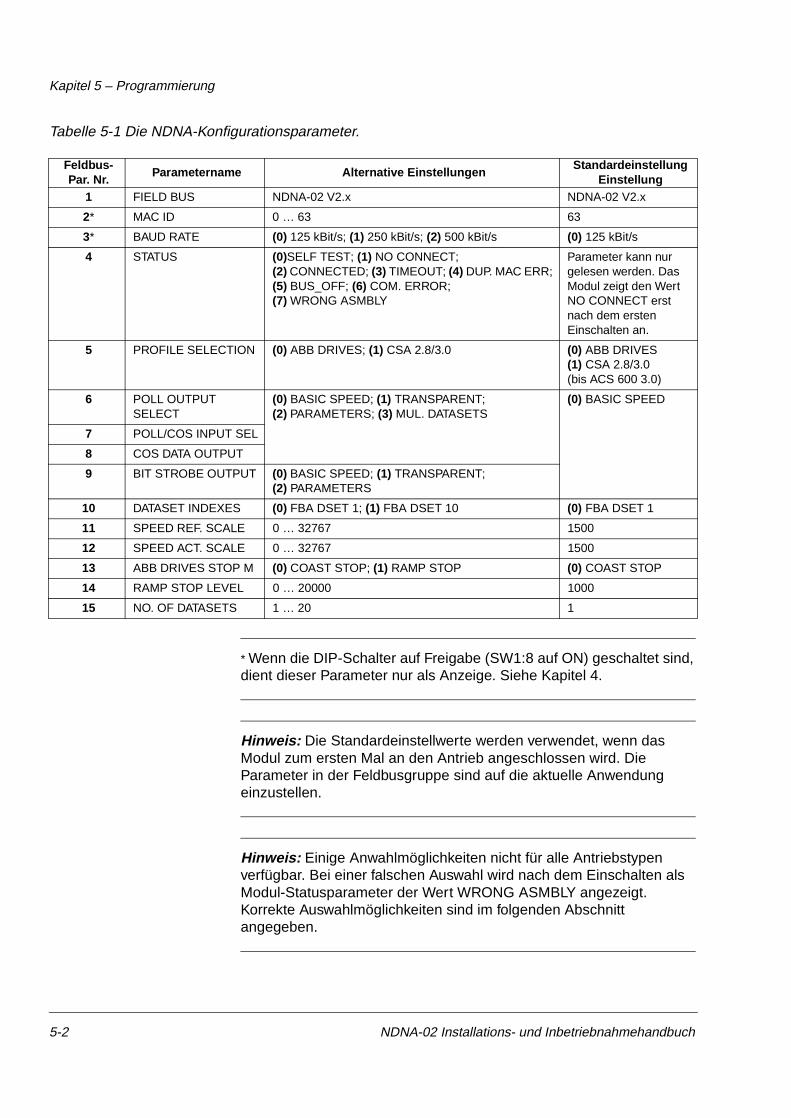
Tabelle 5-1 Die NDNA-Konfigurationsparameter.
* Wenn die DIP-Schalter auf Freigabe (SW1:8 auf ON) geschaltet sind, dient dieser Parameter nur als Anzeige. Siehe Kapitel 4.
Hinweis: Die Standardeinstellwerte werden verwendet, wenn das Modul zum ersten Mal an den Antrieb angeschlossen wird. Die Parameter in der Feldbusgruppe sind auf die aktuelle Anwendung einzustellen.
Hinweis: Einige Anwahlmöglichkeiten nicht für alle Antriebstypen verfügbar. Bei einer falschen Auswahl wird nach dem Einschalten als Modul-Statusparameter der Wert WRONG ASMBLY angezeigt. Korrekte Auswahlmöglichkeiten sind im folgenden Abschnitt angegeben.
Feldbus-Par. Nr.
Parametername Alternative EinstellungenStandardeinstellung
Einstellung1 FIELD BUS NDNA-02 V2.x NDNA-02 V2.x
2* MAC ID 0 … 63 63
3* BAUD RATE (0) 125 kBit/s; (1) 250 kBit/s; (2) 500 kBit/s (0) 125 kBit/s
4 STATUS (0)SELF TEST; (1) NO CONNECT; (2) CONNECTED; (3) TIMEOUT; (4) DUP. MAC ERR; (5) BUS_OFF; (6) COM. ERROR; (7) WRONG ASMBLY
Parameter kann nur gelesen werden. Das Modul zeigt den Wert NO CONNECT erst nach dem ersten Einschalten an.
5 PROFILE SELECTION (0) ABB DRIVES; (1) CSA 2.8/3.0 (0) ABB DRIVES (1) CSA 2.8/3.0 (bis ACS 600 3.0)
6 POLL OUTPUT SELECT
(0) BASIC SPEED; (1) TRANSPARENT; (2) PARAMETERS; (3) MUL. DATASETS
(0) BASIC SPEED
7 POLL/COS INPUT SEL
8 COS DATA OUTPUT
9 BIT STROBE OUTPUT (0) BASIC SPEED; (1) TRANSPARENT; (2) PARAMETERS
10 DATASET INDEXES (0) FBA DSET 1; (1) FBA DSET 10 (0) FBA DSET 1
11 SPEED REF. SCALE 0 … 32767 1500
12 SPEED ACT. SCALE 0 … 32767 1500
13 ABB DRIVES STOP M (0) COAST STOP; (1) RAMP STOP (0) COAST STOP
14 RAMP STOP LEVEL 0 … 20000 1000
15 NO. OF DATASETS 1 … 20 1
5-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 5 – Programmierung
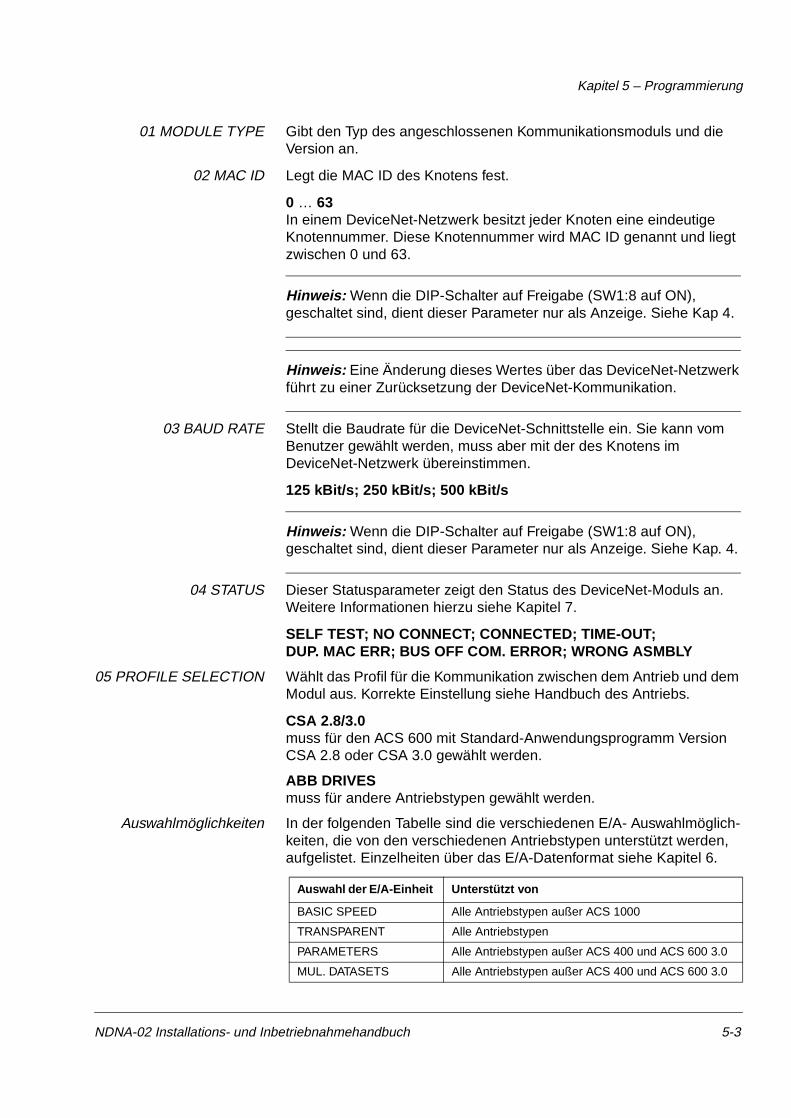
01 MODULE TYPE Gibt den Typ des angeschlossenen Kommunikationsmoduls und die Version an.
02 MAC ID Legt die MAC ID des Knotens fest.
0 … 63 In einem DeviceNet-Netzwerk besitzt jeder Knoten eine eindeutige Knotennummer. Diese Knotennummer wird MAC ID genannt und liegt zwischen 0 und 63.
Hinweis: Wenn die DIP-Schalter auf Freigabe (SW1:8 auf ON), geschaltet sind, dient dieser Parameter nur als Anzeige. Siehe Kap 4.
Hinweis: Eine Änderung dieses Wertes über das DeviceNet-Netzwerk führt zu einer Zurücksetzung der DeviceNet-Kommunikation.
03 BAUD RATE Stellt die Baudrate für die DeviceNet-Schnittstelle ein. Sie kann vom Benutzer gewählt werden, muss aber mit der des Knotens im DeviceNet-Netzwerk übereinstimmen.
125 kBit/s; 250 kBit/s; 500 kBit/s
Hinweis: Wenn die DIP-Schalter auf Freigabe (SW1:8 auf ON), geschaltet sind, dient dieser Parameter nur als Anzeige. Siehe Kap. 4.
04 STATUS Dieser Statusparameter zeigt den Status des DeviceNet-Moduls an. Weitere Informationen hierzu siehe Kapitel 7.
SELF TEST; NO CONNECT; CONNECTED; TIME-OUT; DUP. MAC ERR; BUS OFF COM. ERROR; WRONG ASMBLY
05 PROFILE SELECTION Wählt das Profil für die Kommunikation zwischen dem Antrieb und dem Modul aus. Korrekte Einstellung siehe Handbuch des Antriebs.
CSA 2.8/3.0muss für den ACS 600 mit Standard-Anwendungsprogramm Version CSA 2.8 oder CSA 3.0 gewählt werden.
ABB DRIVES muss für andere Antriebstypen gewählt werden.
Auswahlmöglichkeiten In der folgenden Tabelle sind die verschiedenen E/A- Auswahlmöglich-keiten, die von den verschiedenen Antriebstypen unterstützt werden, aufgelistet. Einzelheiten über das E/A-Datenformat siehe Kapitel 6.
Auswahl der E/A-Einheit Unterstützt von
BASIC SPEED Alle Antriebstypen außer ACS 1000
TRANSPARENT Alle Antriebstypen
PARAMETERS Alle Antriebstypen außer ACS 400 und ACS 600 3.0
MUL. DATASETS Alle Antriebstypen außer ACS 400 und ACS 600 3.0
NDNA-02 Installations- und Inbetriebnahmehandbuch 5-3
Kapitel 5 – Programmierung
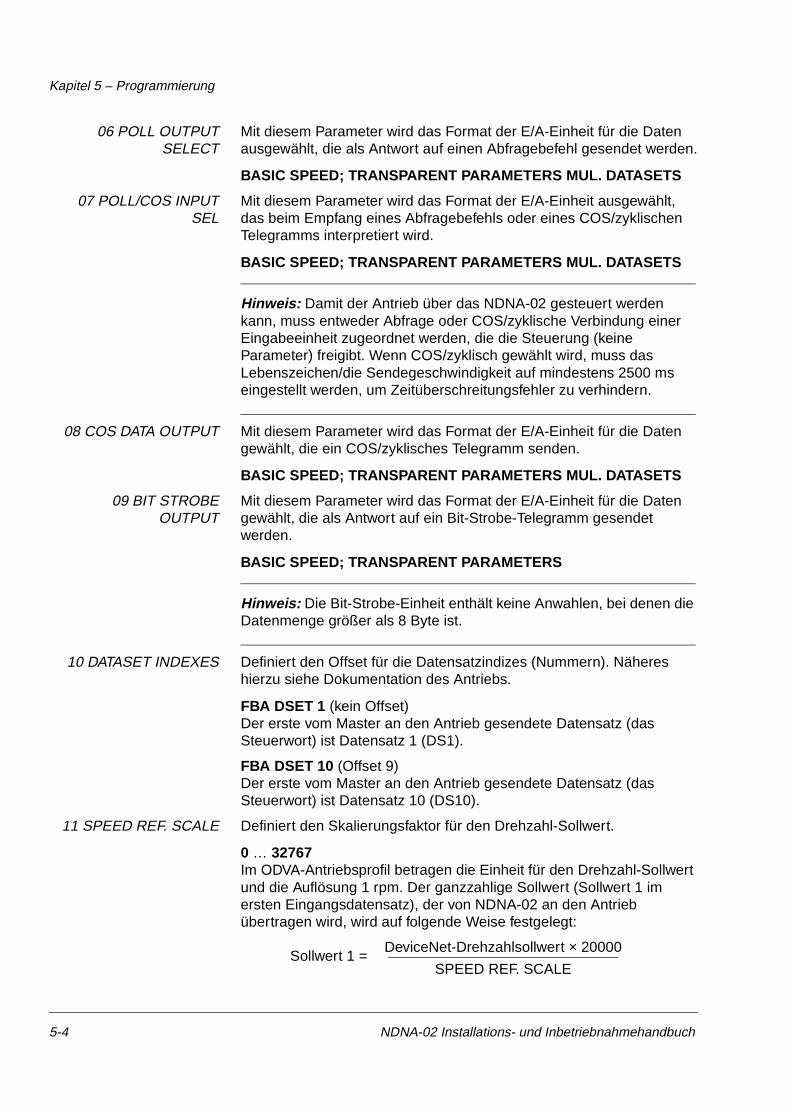
06 POLL OUTPUTSELECT
Mit diesem Parameter wird das Format der E/A-Einheit für die Daten ausgewählt, die als Antwort auf einen Abfragebefehl gesendet werden.
BASIC SPEED; TRANSPARENT PARAMETERS MUL. DATASETS
07 POLL/COS INPUTSEL
Mit diesem Parameter wird das Format der E/A-Einheit ausgewählt, das beim Empfang eines Abfragebefehls oder eines COS/zyklischen Telegramms interpretiert wird.
BASIC SPEED; TRANSPARENT PARAMETERS MUL. DATASETS
Hinweis: Damit der Antrieb über das NDNA-02 gesteuert werden kann, muss entweder Abfrage oder COS/zyklische Verbindung einer Eingabeeinheit zugeordnet werden, die die Steuerung (keine Parameter) freigibt. Wenn COS/zyklisch gewählt wird, muss das Lebenszeichen/die Sendegeschwindigkeit auf mindestens 2500 ms eingestellt werden, um Zeitüberschreitungsfehler zu verhindern.
08 COS DATA OUTPUT Mit diesem Parameter wird das Format der E/A-Einheit für die Daten gewählt, die ein COS/zyklisches Telegramm senden.
BASIC SPEED; TRANSPARENT PARAMETERS MUL. DATASETS
09 BIT STROBEOUTPUT
Mit diesem Parameter wird das Format der E/A-Einheit für die Daten gewählt, die als Antwort auf ein Bit-Strobe-Telegramm gesendet werden.
BASIC SPEED; TRANSPARENT PARAMETERS
Hinweis: Die Bit-Strobe-Einheit enthält keine Anwahlen, bei denen die Datenmenge größer als 8 Byte ist.
10 DATASET INDEXES Definiert den Offset für die Datensatzindizes (Nummern). Näheres hierzu siehe Dokumentation des Antriebs.
FBA DSET 1 (kein Offset) Der erste vom Master an den Antrieb gesendete Datensatz (das Steuerwort) ist Datensatz 1 (DS1).
FBA DSET 10 (Offset 9)Der erste vom Master an den Antrieb gesendete Datensatz (das Steuerwort) ist Datensatz 10 (DS10).
11 SPEED REF. SCALE Definiert den Skalierungsfaktor für den Drehzahl-Sollwert.
0 … 32767Im ODVA-Antriebsprofil betragen die Einheit für den Drehzahl-Sollwert und die Auflösung 1 rpm. Der ganzzahlige Sollwert (Sollwert 1 im ersten Eingangsdatensatz), der von NDNA-02 an den Antrieb übertragen wird, wird auf folgende Weise festgelegt:
Sollwert 1 = DeviceNet-Drehzahlsollwert × 20000
SPEED REF. SCALE
5-4 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 5 – Programmierung
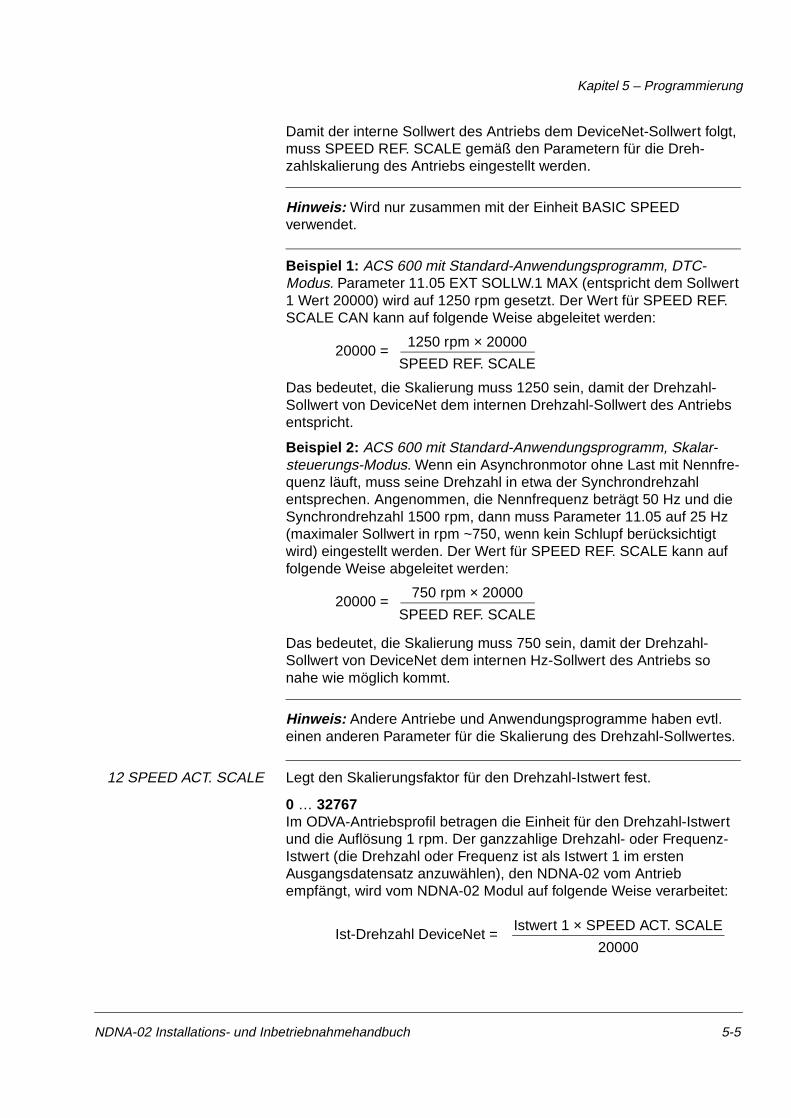
Damit der interne Sollwert des Antriebs dem DeviceNet-Sollwert folgt, muss SPEED REF. SCALE gemäß den Parametern für die Dreh-zahlskalierung des Antriebs eingestellt werden.
Hinweis: Wird nur zusammen mit der Einheit BASIC SPEED verwendet.
Beispiel 1: ACS 600 mit Standard-Anwendungsprogramm, DTC-Modus. Parameter 11.05 EXT SOLLW.1 MAX (entspricht dem Sollwert 1 Wert 20000) wird auf 1250 rpm gesetzt. Der Wert für SPEED REF. SCALE CAN kann auf folgende Weise abgeleitet werden:
Das bedeutet, die Skalierung muss 1250 sein, damit der Drehzahl-Sollwert von DeviceNet dem internen Drehzahl-Sollwert des Antriebs entspricht.
Beispiel 2: ACS 600 mit Standard-Anwendungsprogramm, Skalar-steuerungs-Modus. Wenn ein Asynchronmotor ohne Last mit Nennfre-quenz läuft, muss seine Drehzahl in etwa der Synchrondrehzahl entsprechen. Angenommen, die Nennfrequenz beträgt 50 Hz und die Synchrondrehzahl 1500 rpm, dann muss Parameter 11.05 auf 25 Hz (maximaler Sollwert in rpm ~750, wenn kein Schlupf berücksichtigt wird) eingestellt werden. Der Wert für SPEED REF. SCALE kann auf folgende Weise abgeleitet werden:
Das bedeutet, die Skalierung muss 750 sein, damit der Drehzahl-Sollwert von DeviceNet dem internen Hz-Sollwert des Antriebs so nahe wie möglich kommt.
Hinweis: Andere Antriebe und Anwendungsprogramme haben evtl. einen anderen Parameter für die Skalierung des Drehzahl-Sollwertes.
12 SPEED ACT. SCALE Legt den Skalierungsfaktor für den Drehzahl-Istwert fest.
0 … 32767Im ODVA-Antriebsprofil betragen die Einheit für den Drehzahl-Istwert und die Auflösung 1 rpm. Der ganzzahlige Drehzahl- oder Frequenz-Istwert (die Drehzahl oder Frequenz ist als Istwert 1 im ersten Ausgangsdatensatz anzuwählen), den NDNA-02 vom Antrieb empfängt, wird vom NDNA-02 Modul auf folgende Weise verarbeitet:
20000 = 1250 rpm × 20000
SPEED REF. SCALE
20000 = 750 rpm × 20000
SPEED REF. SCALE
Ist-Drehzahl DeviceNet = Istwert 1 × SPEED ACT. SCALE
20000
NDNA-02 Installations- und Inbetriebnahmehandbuch 5-5
Kapitel 5 – Programmierung
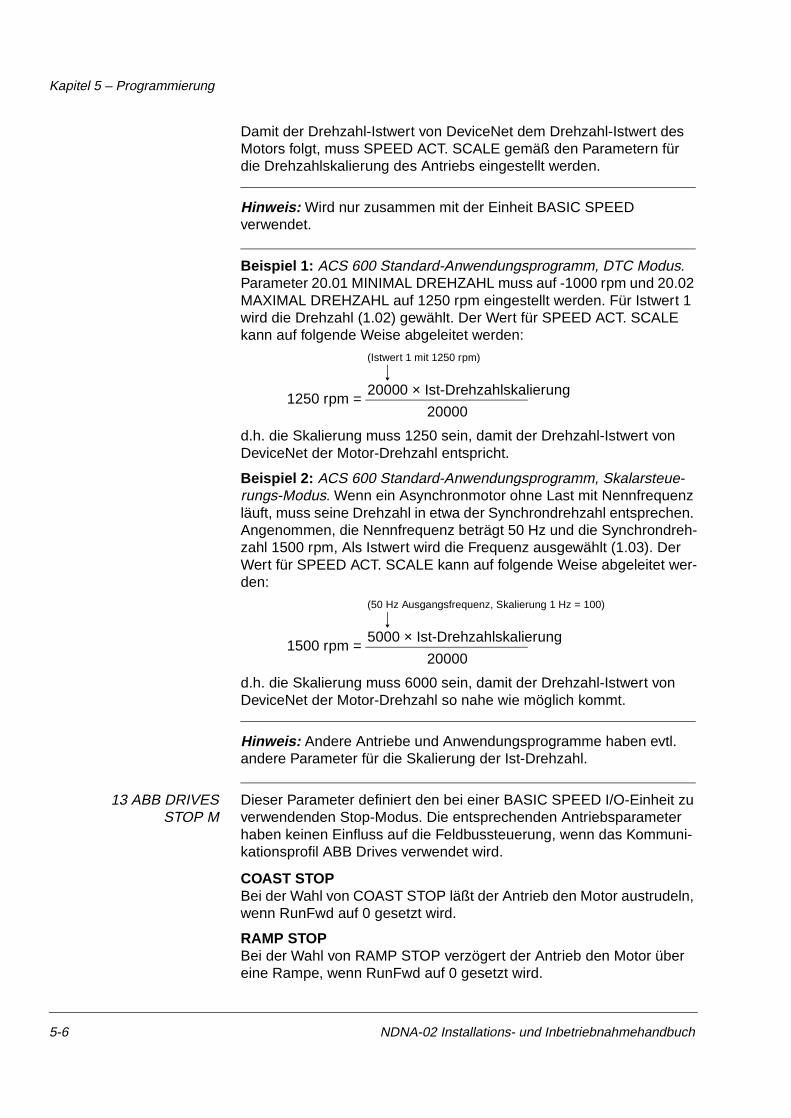
Damit der Drehzahl-Istwert von DeviceNet dem Drehzahl-Istwert des Motors folgt, muss SPEED ACT. SCALE gemäß den Parametern für die Drehzahlskalierung des Antriebs eingestellt werden.
Hinweis: Wird nur zusammen mit der Einheit BASIC SPEED verwendet.
Beispiel 1: ACS 600 Standard-Anwendungsprogramm, DTC Modus.Parameter 20.01 MINIMAL DREHZAHL muss auf -1000 rpm und 20.02 MAXIMAL DREHZAHL auf 1250 rpm eingestellt werden. Für Istwert 1 wird die Drehzahl (1.02) gewählt. Der Wert für SPEED ACT. SCALE kann auf folgende Weise abgeleitet werden:
d.h. die Skalierung muss 1250 sein, damit der Drehzahl-Istwert von DeviceNet der Motor-Drehzahl entspricht.
Beispiel 2: ACS 600 Standard-Anwendungsprogramm, Skalarsteue-rungs-Modus. Wenn ein Asynchronmotor ohne Last mit Nennfrequenz läuft, muss seine Drehzahl in etwa der Synchrondrehzahl entsprechen. Angenommen, die Nennfrequenz beträgt 50 Hz und die Synchrondreh-zahl 1500 rpm, Als Istwert wird die Frequenz ausgewählt (1.03). Der Wert für SPEED ACT. SCALE kann auf folgende Weise abgeleitet wer-den:
d.h. die Skalierung muss 6000 sein, damit der Drehzahl-Istwert von DeviceNet der Motor-Drehzahl so nahe wie möglich kommt.
Hinweis: Andere Antriebe und Anwendungsprogramme haben evtl. andere Parameter für die Skalierung der Ist-Drehzahl.
13 ABB DRIVES STOP M
Dieser Parameter definiert den bei einer BASIC SPEED I/O-Einheit zu verwendenden Stop-Modus. Die entsprechenden Antriebsparameter haben keinen Einfluss auf die Feldbussteuerung, wenn das Kommuni-kationsprofil ABB Drives verwendet wird.
COAST STOP Bei der Wahl von COAST STOP läßt der Antrieb den Motor austrudeln, wenn RunFwd auf 0 gesetzt wird.
RAMP STOPBei der Wahl von RAMP STOP verzögert der Antrieb den Motor über eine Rampe, wenn RunFwd auf 0 gesetzt wird.
1250 rpm = 20000 × Ist-Drehzahlskalierung
20000
(Istwert 1 mit 1250 rpm)
1500 rpm = 5000 × Ist-Drehzahlskalierung
20000
(50 Hz Ausgangsfrequenz, Skalierung 1 Hz = 100)
5-6 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 5 – Programmierung
Hinweis: Wird nur bei einer BASIC SPEED-Einheit und dem Kommunikationsprofil ABB Drives verwendet.
Bei RAMP STOP aktiviert NDNA-02 das Bit RAMP_OUT_ZERO im Profil-Steuerwort von ABB DRIVES und überwacht den Istwert 1 (Drehzahl oder Frequenz muss gewählt werden). Unterschreitet Istwert 1 den mit Feldbus-Parameter 14 RAMP STOP LEVEL festgelegten Wert, bewirkt NDNA-02, dass der Motor austrudelt.
14 RAMP STOP LEVEL Definiert den Wert, bei dem das Bit RAMP_OUT_ZERO auf "1" gesetzt wird und Stop mit Austrudeln aktiviert wird.
0 … 20000Der Wert von RAMP STOP LEVEL entspricht Istwert 1 und seiner Skalierung.
Hinweis: Wird nur bei der BASIC SPEED-Einheit und dem Kommunikationsprofil ABB DRIVES verwendet.
Wenn z.B. Frequenz als Datensatz 2 Wert 1 im ACS 600 Antrieb gewählt ist, entspricht Wert 250 in RAMP STOP LEVEL 2,5 Hz. Dem-entsprechend gilt, wenn Drehzahl als Datensatz 2 Wert 1 gewählt ist und die Ist-Drehzahl im Antrieb so skaliert ist, dass der Wert 20000 1500 rpm entspricht, dann entspricht der Wert 1000 in RAMP STOP LEVEL 75 rpm.
15 NO. OF DATASETS Dieser Parameter definiert die Anzahl der zu sendenden und zu emp-fangenden Datensätze (jeder besteht aus drei oder sechs Worten). Bitte beachten Sie, dass unterschiedliche Antriebe eine unterschiedli-che Anzahl von Datensätzen unterstützen; Näheres siehe Dokumenta-tion des Antriebs.
1 … 20
Hinweis: Die Einstellung dieses Parameters kann nur geändert wer-den, wenn die Einheit MUL. DATASETS bei einem der Konfigurations-parameter 6, 7 oder 8 gewählt ist. Dann ist der Mindestwert 2 (d.h. 2 Datensätze pro Richtung). Ansonsten dient dieser Parameter nur zur Anzeige und gibt die Anzahl der verwendeten Datensätze an. Die Anzahl der verwendeten Datensätze hängt vom Antriebstyp (Wert 1 beim ACS 400 und ACS 600 mit Anwendungsprogramm Version CSA 2.8/3.0) oder der gewählten Einheit (Wert 1 bei BASIC SPEED und TRANSPARENT, Wert 2 bei der Einheit PARAMETER) ab.
NDNA-02 Installations- und Inbetriebnahmehandbuch 5-7

Kapitel 5 – Programmierung
5-8 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 6 – Kommunikation
Übersicht In diesem Kapitel werden das DeviceNet-Kommunikationsprotokoll für den NDNA-02 und die Konfiguration des Scanners beschrieben. Ein-zelheiten über die DeviceNet-Kommunikation siehe ODVA DeviceNet Spezifikationen Release 2.0.
Einführung in DeviceNet
DeviceNet ist ein auf der CAN-Technologie basierendes Protokoll. CAN spezifiziert die physikalische Schnittstelle. DeviceNet spezifiziert die Verdrahtung und die Datenübertragung durch CAN.
NDNA-02 ist ein Gerät, das ausschließlich als Server der Gruppe 2 dient und die Funktionalität Vordefinierter Master-Slave-Verbindungs-satz realisiert. Die Funktionalität Offline-Verbindungssatz und UCMM werden nicht unterstützt.
Objektmodellierung und Funktionsprofile
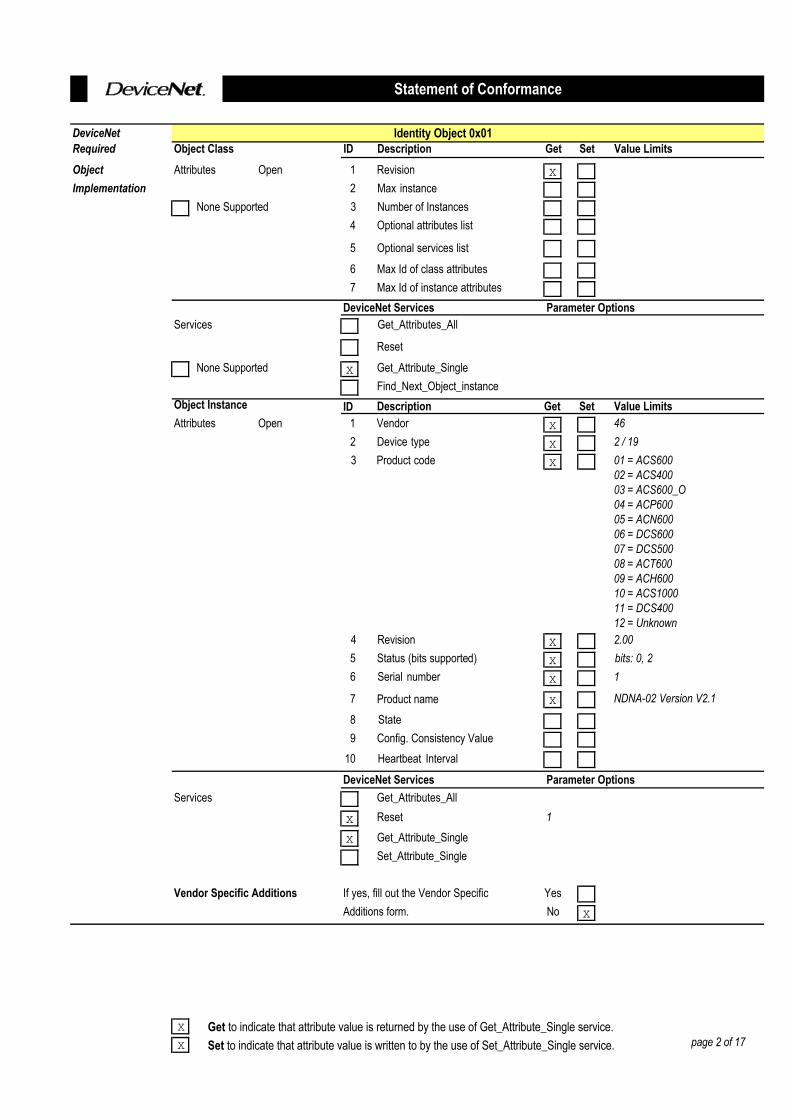
Eines der Hauptmerkmale von DeviceNet ist die Objektmodellierung. Eine Gruppe von Objekten kann mit einem Funktionsprofil beschrieben werden. NDNA-02 realisiert das ODVA AC/DC- Antriebsfunktionsprofil mit Zusatzmerkmalen. Die unterstützten Objekte und ihre Dienste und Attribute sind in Anhang C im Einzelnen beschrieben.
Einheit Objekt E/A-Einheiteninstanzen (Instanzen der E/A-Einheit) werden auch als blockweise Datenübertragung bezeichnet. Intelligente Geräte wie das NDNA-02, die ein Funktionsprofil realisieren, besitzen mehrere Objekte. Da immer nur die Daten eines Objektes über eine Einzelver-bindung übertragen werden können, ist es praktischer und effizienter mit Hilfe der Einheit Objekt, die Attribute verschiedener Objekte zu einer E/A-Verbindung zusammenzufassen (z.B. eine Abfrageverbin-dung). Die Einheit Objekt dient als Werkzeug für die Zusammenfas-sung dieser Attribute.
Die oben beschriebenen Auswahlmöglichkeiten sind eigentlich Instanzen der Einheit Objektklasse. NDNA-02 verwendet statische Einheiten (d.h. ausschließlich feste Gruppierungen verschiedener Objektdaten). Diese sind voreingestellt und können nicht geändert werden.
Die NDNA-02 kommuniziert mit dem Antrieb hauptsächlich über die schnelle zyklische Übertragung von Datensätzen. Die Größe und Bedeutung der in den Datensätzen übertragenen Daten ist festgelegt. Erläuterungen zu den Inhalten der Datensätze siehe Handbuch der Antriebsprogrammierung.
In den folgenden Tabellen werden die von NDNA-02 unterstützten, voreingestellten Instanzen der Einheiten beschrieben.
NDNA-02 Installations- und Inbetriebnahmehandbuch 6-1
Kapitel 6 – Kommunikation
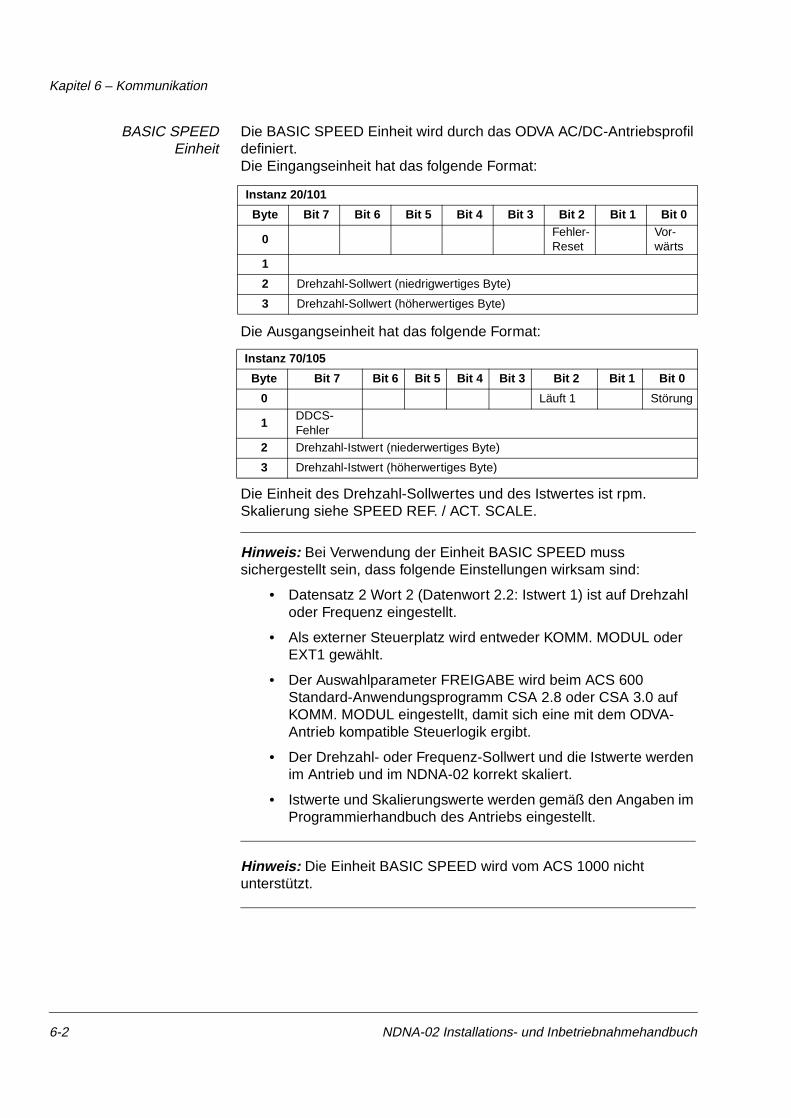
BASIC SPEED Einheit
Die BASIC SPEED Einheit wird durch das ODVA AC/DC-Antriebsprofil definiert. Die Eingangseinheit hat das folgende Format:
Die Ausgangseinheit hat das folgende Format:
Die Einheit des Drehzahl-Sollwertes und des Istwertes ist rpm. Skalierung siehe SPEED REF. / ACT. SCALE.
Hinweis: Bei Verwendung der Einheit BASIC SPEED muss sichergestellt sein, dass folgende Einstellungen wirksam sind:
• Datensatz 2 Wort 2 (Datenwort 2.2: Istwert 1) ist auf Drehzahl oder Frequenz eingestellt.
• Als externer Steuerplatz wird entweder KOMM. MODUL oder EXT1 gewählt.
• Der Auswahlparameter FREIGABE wird beim ACS 600 Standard-Anwendungsprogramm CSA 2.8 oder CSA 3.0 auf KOMM. MODUL eingestellt, damit sich eine mit dem ODVA-Antrieb kompatible Steuerlogik ergibt.
• Der Drehzahl- oder Frequenz-Sollwert und die Istwerte werden im Antrieb und im NDNA-02 korrekt skaliert.
• Istwerte und Skalierungswerte werden gemäß den Angaben im Programmierhandbuch des Antriebs eingestellt.
Hinweis: Die Einheit BASIC SPEED wird vom ACS 1000 nicht unterstützt.
Instanz 20/101
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0Fehler-Reset
Vor-wärts
1
2 Drehzahl-Sollwert (niedrigwertiges Byte)
3 Drehzahl-Sollwert (höherwertiges Byte)
Instanz 70/105
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Läuft 1 Störung
1DDCS-Fehler
2 Drehzahl-Istwert (niederwertiges Byte)
3 Drehzahl-Istwert (höherwertiges Byte)
6-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 6 – Kommunikation
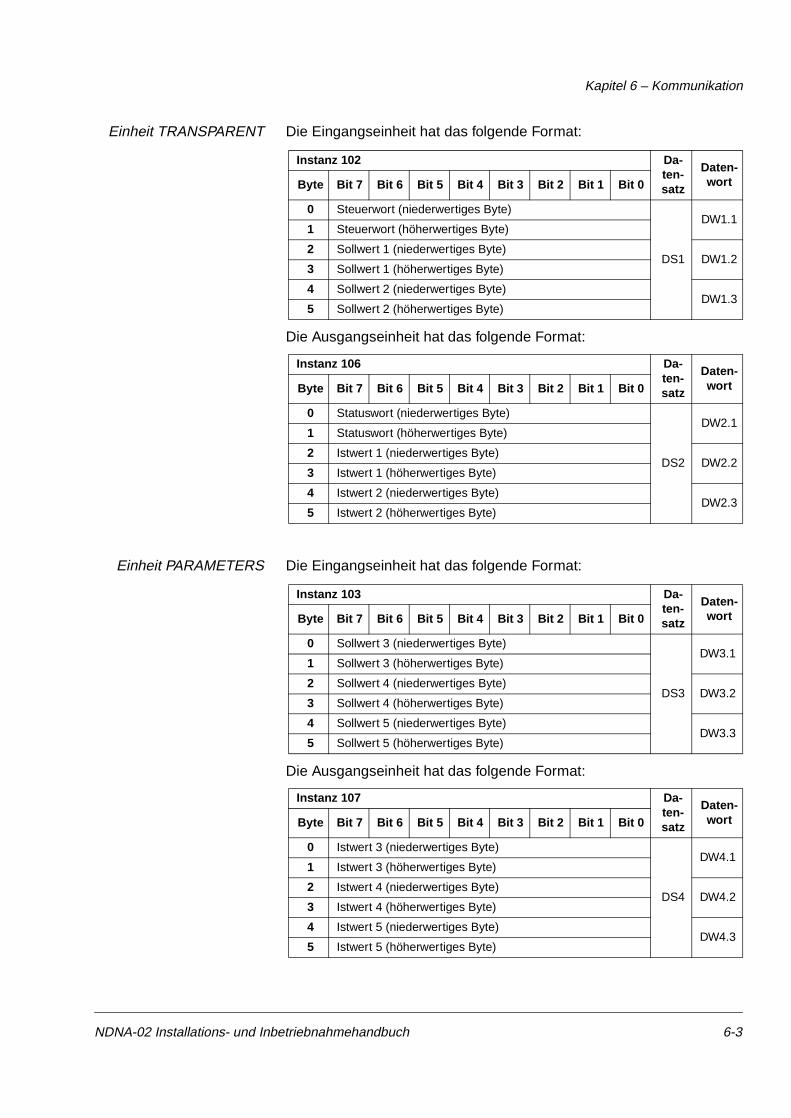
Einheit TRANSPARENT Die Eingangseinheit hat das folgende Format:
Die Ausgangseinheit hat das folgende Format:
Einheit PARAMETERS Die Eingangseinheit hat das folgende Format:
Die Ausgangseinheit hat das folgende Format:
Instanz 102 Da-ten-satz
Daten-wortByte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Steuerwort (niederwertiges Byte)
DS1
DW1.11 Steuerwort (höherwertiges Byte)
2 Sollwert 1 (niederwertiges Byte)DW1.2
3 Sollwert 1 (höherwertiges Byte)
4 Sollwert 2 (niederwertiges Byte)DW1.3
5 Sollwert 2 (höherwertiges Byte)
Instanz 106 Da-ten-satz
Daten-wortByte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Statuswort (niederwertiges Byte)
DS2
DW2.11 Statuswort (höherwertiges Byte)
2 Istwert 1 (niederwertiges Byte)DW2.2
3 Istwert 1 (höherwertiges Byte)
4 Istwert 2 (niederwertiges Byte)DW2.3
5 Istwert 2 (höherwertiges Byte)
Instanz 103 Da-ten-satz
Daten-wortByte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Sollwert 3 (niederwertiges Byte)
DS3
DW3.11 Sollwert 3 (höherwertiges Byte)
2 Sollwert 4 (niederwertiges Byte)DW3.2
3 Sollwert 4 (höherwertiges Byte)
4 Sollwert 5 (niederwertiges Byte)DW3.3
5 Sollwert 5 (höherwertiges Byte)
Instanz 107 Da-ten-satz
Daten-wortByte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Istwert 3 (niederwertiges Byte)
DS4
DW4.11 Istwert 3 (höherwertiges Byte)
2 Istwert 4 (niederwertiges Byte)DW4.2
3 Istwert 4 (höherwertiges Byte)
4 Istwert 5 (niederwertiges Byte)DW4.3
5 Istwert 5 (höherwertiges Byte)
NDNA-02 Installations- und Inbetriebnahmehandbuch 6-3
Kapitel 6 – Kommunikation
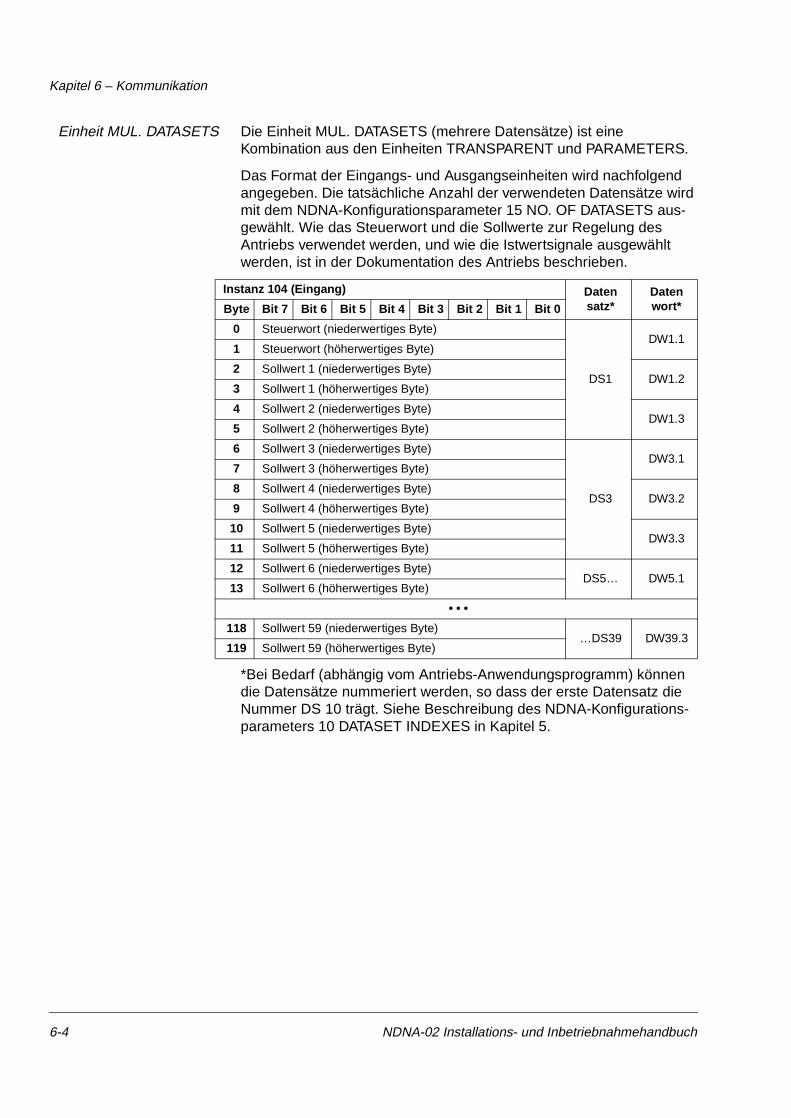
Einheit MUL. DATASETS Die Einheit MUL. DATASETS (mehrere Datensätze) ist eine Kombination aus den Einheiten TRANSPARENT und PARAMETERS.
Das Format der Eingangs- und Ausgangseinheiten wird nachfolgend angegeben. Die tatsächliche Anzahl der verwendeten Datensätze wird mit dem NDNA-Konfigurationsparameter 15 NO. OF DATASETS aus-gewählt. Wie das Steuerwort und die Sollwerte zur Regelung des Antriebs verwendet werden, und wie die Istwertsignale ausgewählt werden, ist in der Dokumentation des Antriebs beschrieben.
*Bei Bedarf (abhängig vom Antriebs-Anwendungsprogramm) können die Datensätze nummeriert werden, so dass der erste Datensatz die Nummer DS 10 trägt. Siehe Beschreibung des NDNA-Konfigurations-parameters 10 DATASET INDEXES in Kapitel 5.
Instanz 104 (Eingang) Datensatz*
Datenwort*Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Steuerwort (niederwertiges Byte)
DS1
DW1.11 Steuerwort (höherwertiges Byte)
2 Sollwert 1 (niederwertiges Byte)DW1.2
3 Sollwert 1 (höherwertiges Byte)
4 Sollwert 2 (niederwertiges Byte)DW1.3
5 Sollwert 2 (höherwertiges Byte)
6 Sollwert 3 (niederwertiges Byte)
DS3
DW3.17 Sollwert 3 (höherwertiges Byte)
8 Sollwert 4 (niederwertiges Byte)DW3.2
9 Sollwert 4 (höherwertiges Byte)
10 Sollwert 5 (niederwertiges Byte)DW3.3
11 Sollwert 5 (höherwertiges Byte)
12 Sollwert 6 (niederwertiges Byte)DS5… DW5.1
13 Sollwert 6 (höherwertiges Byte)
• • •
118 Sollwert 59 (niederwertiges Byte)…DS39 DW39.3
119 Sollwert 59 (höherwertiges Byte)
6-4 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 6 – Kommunikation
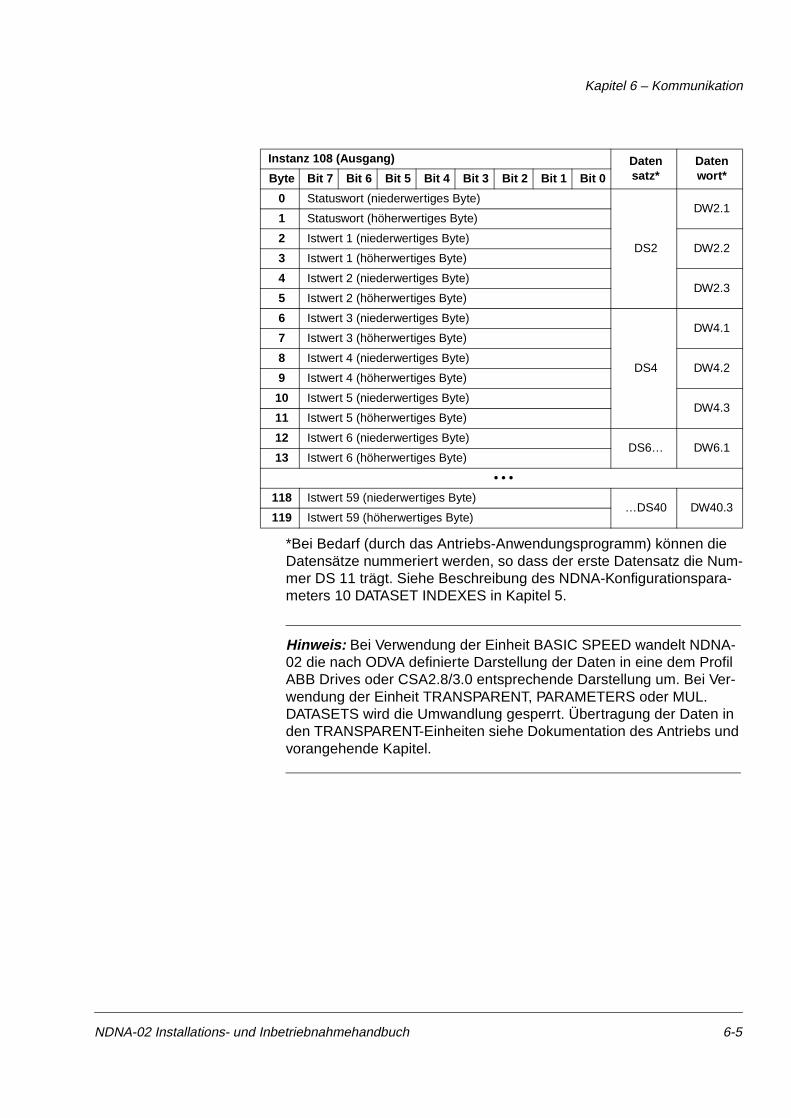
*Bei Bedarf (durch das Antriebs-Anwendungsprogramm) können die Datensätze nummeriert werden, so dass der erste Datensatz die Num-mer DS 11 trägt. Siehe Beschreibung des NDNA-Konfigurationspara-meters 10 DATASET INDEXES in Kapitel 5.
Hinweis: Bei Verwendung der Einheit BASIC SPEED wandelt NDNA-02 die nach ODVA definierte Darstellung der Daten in eine dem Profil ABB Drives oder CSA2.8/3.0 entsprechende Darstellung um. Bei Ver-wendung der Einheit TRANSPARENT, PARAMETERS oder MUL. DATASETS wird die Umwandlung gesperrt. Übertragung der Daten in den TRANSPARENT-Einheiten siehe Dokumentation des Antriebs und vorangehende Kapitel.
Instanz 108 (Ausgang) Datensatz*
Datenwort*Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Statuswort (niederwertiges Byte)
DS2
DW2.11 Statuswort (höherwertiges Byte)
2 Istwert 1 (niederwertiges Byte)DW2.2
3 Istwert 1 (höherwertiges Byte)
4 Istwert 2 (niederwertiges Byte)DW2.3
5 Istwert 2 (höherwertiges Byte)
6 Istwert 3 (niederwertiges Byte)
DS4
DW4.17 Istwert 3 (höherwertiges Byte)
8 Istwert 4 (niederwertiges Byte)DW4.2
9 Istwert 4 (höherwertiges Byte)
10 Istwert 5 (niederwertiges Byte)DW4.3
11 Istwert 5 (höherwertiges Byte)
12 Istwert 6 (niederwertiges Byte)DS6… DW6.1
13 Istwert 6 (höherwertiges Byte)
• • •
118 Istwert 59 (niederwertiges Byte)…DS40 DW40.3
119 Istwert 59 (höherwertiges Byte)
NDNA-02 Installations- und Inbetriebnahmehandbuch 6-5
Kapitel 6 – Kommunikation
Parameterbearbeitung Mit dem NDNA-02 kann auch auf die Antriebsparameter zugegriffen werden. (Für den Zugriff auf die Antriebsparameter ist die komplette EDS-Datei erforderlich - siehe unten.) Die Funktion wird durch das sogenannte Explicit Messaging des DeviceNet-Protokolls realisiert. Explicit Messaging nutzt Objekte, die aus drei Teilen bestehen, Klasse, Instanz, und Attribut.
Klasse ist immer 101 (65h). Instanz und Attribut entsprechen den Antriebsparametern Gruppe und Index auf folgende Weise:
• Instanz = Parametergruppe (0…99)• Attribut = Parameterindex + 100 (101…199)
Auf Parameter 99.01 wird beispielsweise, wie folgt, zugegriffen:
• Klasse = 101 = 0x65• Instanz = 99 = 0x63• Attribut = 101 = 0x66.
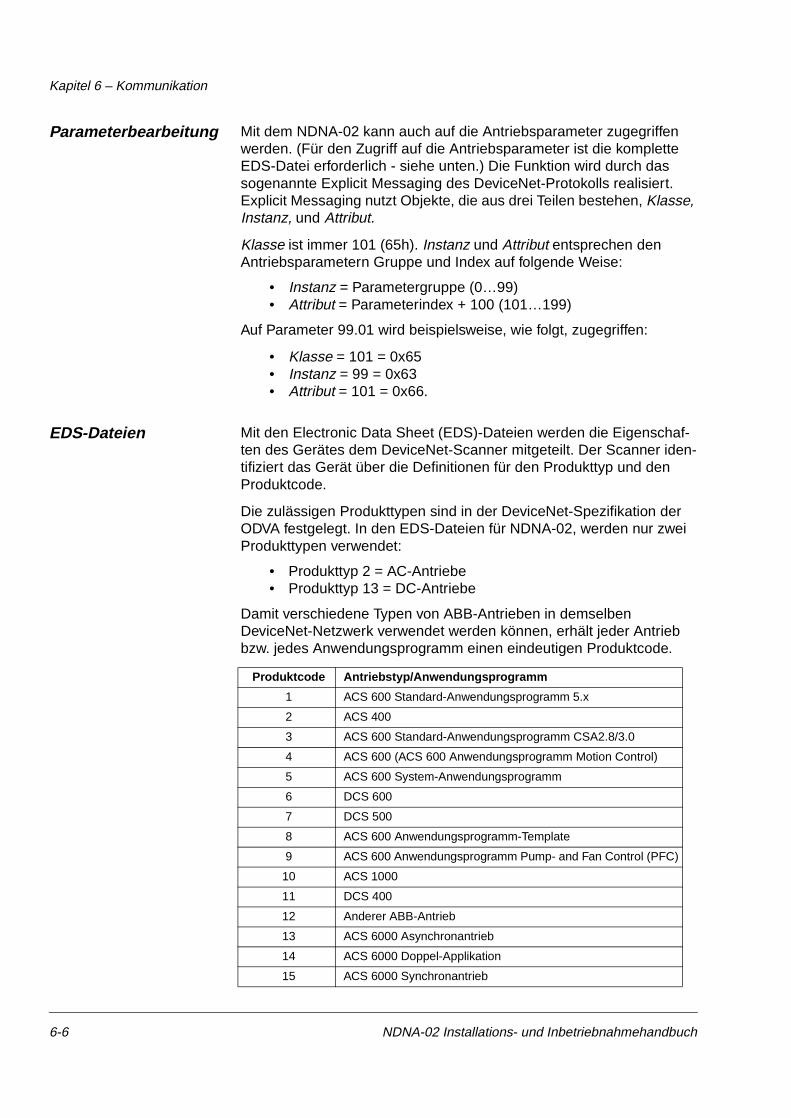
EDS-Dateien Mit den Electronic Data Sheet (EDS)-Dateien werden die Eigenschaf-ten des Gerätes dem DeviceNet-Scanner mitgeteilt. Der Scanner iden-tifiziert das Gerät über die Definitionen für den Produkttyp und den Produktcode.
Die zulässigen Produkttypen sind in der DeviceNet-Spezifikation der ODVA festgelegt. In den EDS-Dateien für NDNA-02, werden nur zwei Produkttypen verwendet:
• Produkttyp 2 = AC-Antriebe• Produkttyp 13 = DC-Antriebe
Damit verschiedene Typen von ABB-Antrieben in demselben DeviceNet-Netzwerk verwendet werden können, erhält jeder Antrieb bzw. jedes Anwendungsprogramm einen eindeutigen Produktcode.
Produktcode Antriebstyp/Anwendungsprogramm
1 ACS 600 Standard-Anwendungsprogramm 5.x
2 ACS 400
3 ACS 600 Standard-Anwendungsprogramm CSA2.8/3.0
4 ACS 600 (ACS 600 Anwendungsprogramm Motion Control)
5 ACS 600 System-Anwendungsprogramm
6 DCS 600
7 DCS 500
8 ACS 600 Anwendungsprogramm-Template
9 ACS 600 Anwendungsprogramm Pump- and Fan Control (PFC)
10 ACS 1000
11 DCS 400
12 Anderer ABB-Antrieb
13 ACS 6000 Asynchronantrieb
14 ACS 6000 Doppel-Applikation
15 ACS 6000 Synchronantrieb
6-6 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 6 – Kommunikation
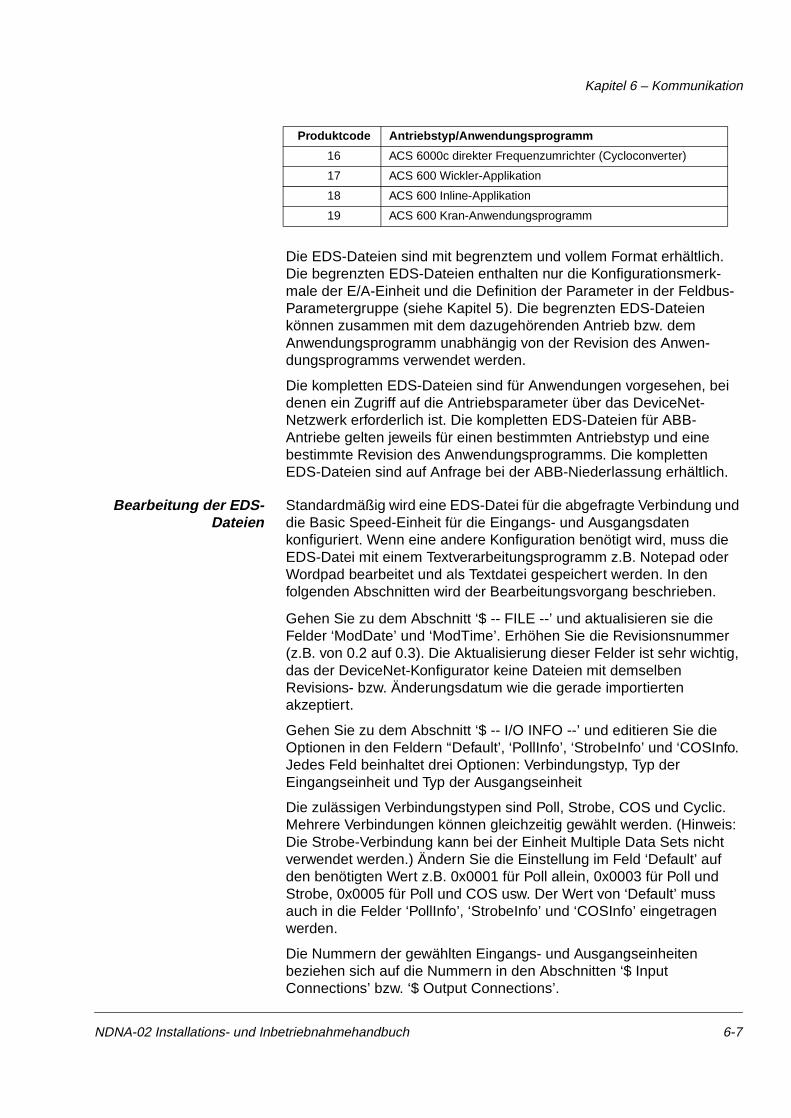
Die EDS-Dateien sind mit begrenztem und vollem Format erhältlich. Die begrenzten EDS-Dateien enthalten nur die Konfigurationsmerk-male der E/A-Einheit und die Definition der Parameter in der Feldbus-Parametergruppe (siehe Kapitel 5). Die begrenzten EDS-Dateien können zusammen mit dem dazugehörenden Antrieb bzw. dem Anwendungsprogramm unabhängig von der Revision des Anwen-dungsprogramms verwendet werden.
Die kompletten EDS-Dateien sind für Anwendungen vorgesehen, bei denen ein Zugriff auf die Antriebsparameter über das DeviceNet-Netzwerk erforderlich ist. Die kompletten EDS-Dateien für ABB-Antriebe gelten jeweils für einen bestimmten Antriebstyp und eine bestimmte Revision des Anwendungsprogramms. Die kompletten EDS-Dateien sind auf Anfrage bei der ABB-Niederlassung erhältlich.
Bearbeitung der EDS-Dateien
Standardmäßig wird eine EDS-Datei für die abgefragte Verbindung und die Basic Speed-Einheit für die Eingangs- und Ausgangsdaten konfiguriert. Wenn eine andere Konfiguration benötigt wird, muss die EDS-Datei mit einem Textverarbeitungsprogramm z.B. Notepad oder Wordpad bearbeitet und als Textdatei gespeichert werden. In den folgenden Abschnitten wird der Bearbeitungsvorgang beschrieben.
Gehen Sie zu dem Abschnitt ‘$ -- FILE --’ und aktualisieren sie die Felder ‘ModDate’ und ‘ModTime’. Erhöhen Sie die Revisionsnummer (z.B. von 0.2 auf 0.3). Die Aktualisierung dieser Felder ist sehr wichtig, das der DeviceNet-Konfigurator keine Dateien mit demselben Revisions- bzw. Änderungsdatum wie die gerade importierten akzeptiert.
Gehen Sie zu dem Abschnitt ‘$ -- I/O INFO --’ und editieren Sie die Optionen in den Feldern ‘‘Default’, ‘PollInfo’, ‘StrobeInfo’ und ‘COSInfo. Jedes Feld beinhaltet drei Optionen: Verbindungstyp, Typ der Eingangseinheit und Typ der Ausgangseinheit
Die zulässigen Verbindungstypen sind Poll, Strobe, COS und Cyclic. Mehrere Verbindungen können gleichzeitig gewählt werden. (Hinweis: Die Strobe-Verbindung kann bei der Einheit Multiple Data Sets nicht verwendet werden.) Ändern Sie die Einstellung im Feld ‘Default’ auf den benötigten Wert z.B. 0x0001 für Poll allein, 0x0003 für Poll und Strobe, 0x0005 für Poll und COS usw. Der Wert von ‘Default’ muss auch in die Felder ‘PollInfo’, ‘StrobeInfo’ und ‘COSInfo’ eingetragen werden.
Die Nummern der gewählten Eingangs- und Ausgangseinheiten beziehen sich auf die Nummern in den Abschnitten ‘$ Input Connections’ bzw. ‘$ Output Connections’.
16 ACS 6000c direkter Frequenzumrichter (Cycloconverter)
17 ACS 600 Wickler-Applikation
18 ACS 600 Inline-Applikation
19 ACS 600 Kran-Anwendungsprogramm
Produktcode Antriebstyp/Anwendungsprogramm
NDNA-02 Installations- und Inbetriebnahmehandbuch 6-7

Kapitel 6 – Kommunikation
Die Definitionen der Eingangs- und Ausgangsverbindungen sind vorgegeben und brauchen nicht editiert zu werden außer bei der Ausgangsverbindung 2. Wenn Ausgangverbindung 2 im Zusammenhang mit der Strobe-Verbindung verwendet werden soll, muss in das Feld ‘$ Size in Bytes’ 6 eingetragen werden. Wenn Eingangs- oder Ausgangsverbindung 4 (“Multiple Data Sets”) gewählt wurde, muss ‘$ Size in Bytes’ so geändert werden, dass der Eintrag in dem Feld dem Wert des Feldbus-Konfigurationsparameters 15 NO. OF DATASETS multipliziert mit 6 (da jeder Datensatz 6 Bytes enthält) entspricht.
Der Parameterabschnitt unter ‘-- Parameter Class’ darf nicht bearbeitet werden. -- Die Bearbeitung der Parameter ist kompliziert und kann leicht die Ursache für Syntaxfehler sein, die dazu führen, dass der Scanner die Datei zurückweist.
6-8 NDNA-02 Installations- und Inbetriebnahmehandbuch

Kapitel 7 – Fehlersuche
Übersicht Dieses Kapitel enthält Informationen zur Feststellung der Ursache von Fehlern und beschreibt Maßnahmen zur Beseitigung der häufigsten Probleme beim Einsatz des NDNA-02 Adaptermoduls.
NDNA-02 Statuscodes Dieser Statusparameter zeigt den Status des DeviceNet-Moduls an.
SELF TESTDas Modul initialisiert sich und führt einen Selbsttest durch.
NO CONNECTDas Modul hat den Einschaltvorgang beendet und wartet darauf, dass ein DeviceNet-Scanner oder die Busverwaltersoftware eine Verbindung aufbauen.
CONNECTEDDas DeviceNet-Modul ist angeschlossen und kommuniziert mit einem DeviceNet-Scanner oder der Busverwaltersoftware.
TIME-OUTDer DeviceNet-Scanner hat die Kommunikation mit dem NDNA-02 Modul gestoppt. Der Scanner wurde evtl. abgeschaltet.
Hinweis: Zeitüberschreitung wird nur bei E/A-Verbindungen (Abfrage, Bit-Strobe, COS/Zyklisch) und nicht bei der Explicit Messaging-Verbindung überwacht.
DUP. MAC ERRDas Modul hat ein anderes Gerät mit derselben MAC ID im Netzwerk erkannt. Den Wert der MAC ID ändern und die Spannungsversorgung des Moduls aus- und wieder einschalten.
BUS OFFDas Modul hat einen Fehler in der DeviceNet-Leitung erkannt und wird abgeschaltet. Um diesen Zustand zurückzusetzen, das Modul aus- und wieder einschalten.
COM. ERRORDas Modul hat einen anderen Kommunikationsfehler (z.B. Empfangs-pufferüberlauf) erkannt. Versuchen Sie, die Spannungsversorgung des Moduls aus- und wieder einzuschalten. Prüfen Sie auch die Anschlüsse und verlängern Sie den Abfragezyklus des Scanners.
WRONG ASMBLYDer Antrieb unterstützt die gewählte E/A-Einheit nicht. Siehe Einstellungen der Parameter zur Auswahl der E/A-Einheit.
NDNA-02 Installations- und Inbetriebnahmehandbuch 7-1
Kapitel 7 – Fehlersuche
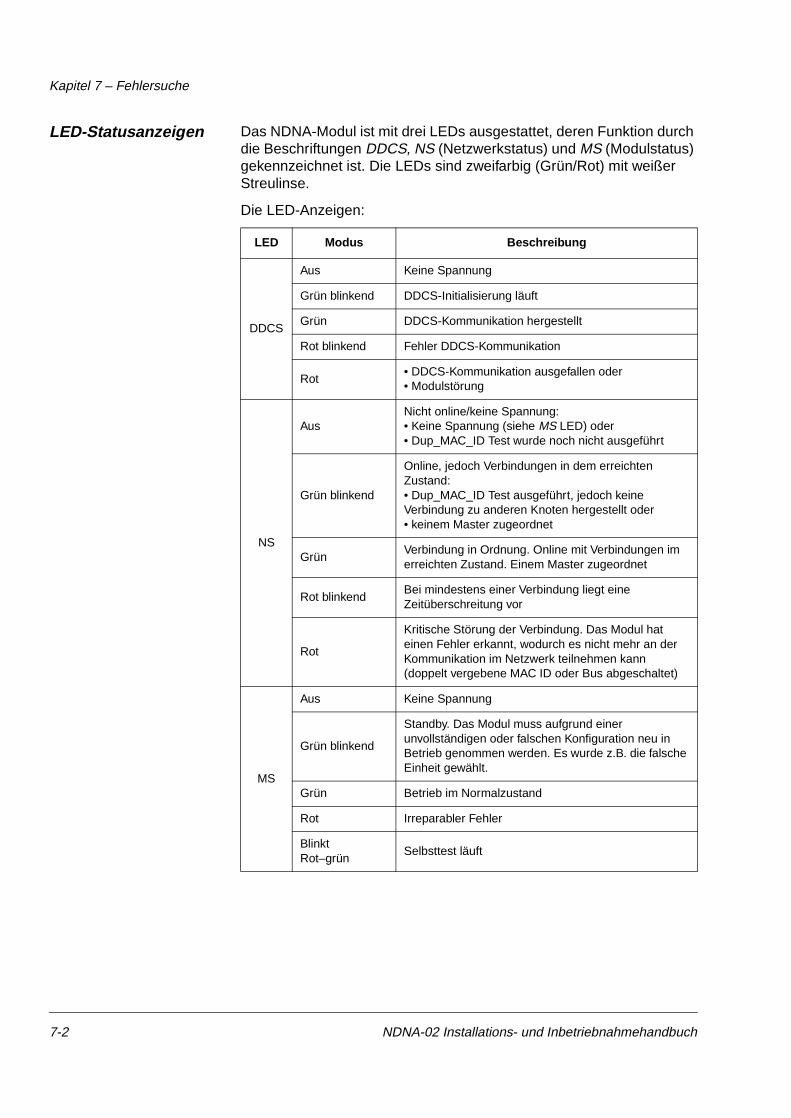
LED-Statusanzeigen Das NDNA-Modul ist mit drei LEDs ausgestattet, deren Funktion durch die Beschriftungen DDCS, NS (Netzwerkstatus) und MS (Modulstatus) gekennzeichnet ist. Die LEDs sind zweifarbig (Grün/Rot) mit weißer Streulinse.
Die LED-Anzeigen:
LED Modus Beschreibung
DDCS
Aus Keine Spannung
Grün blinkend DDCS-Initialisierung läuft
Grün DDCS-Kommunikation hergestellt
Rot blinkend Fehler DDCS-Kommunikation
Rot• DDCS-Kommunikation ausgefallen oder• Modulstörung
NS
AusNicht online/keine Spannung:• Keine Spannung (siehe MS LED) oder• Dup_MAC_ID Test wurde noch nicht ausgeführt
Grün blinkend
Online, jedoch Verbindungen in dem erreichten Zustand:• Dup_MAC_ID Test ausgeführt, jedoch keine Verbindung zu anderen Knoten hergestellt oder• keinem Master zugeordnet
GrünVerbindung in Ordnung. Online mit Verbindungen im erreichten Zustand. Einem Master zugeordnet
Rot blinkend Bei mindestens einer Verbindung liegt eine Zeitüberschreitung vor
Rot
Kritische Störung der Verbindung. Das Modul hat einen Fehler erkannt, wodurch es nicht mehr an der Kommunikation im Netzwerk teilnehmen kann (doppelt vergebene MAC ID oder Bus abgeschaltet)
MS
Aus Keine Spannung
Grün blinkend
Standby. Das Modul muss aufgrund einer unvollständigen oder falschen Konfiguration neu in Betrieb genommen werden. Es wurde z.B. die falsche Einheit gewählt.
Grün Betrieb im Normalzustand
Rot Irreparabler Fehler
Blinkt Rot–grün
Selbsttest läuft
7-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Kapitel 7 – Fehlersuche
Probleme bei der Installation
Alle Anschlüsse des Moduls überprüfen:
• DeviceNet-und Einspeisekabel sind an die Klemmenblöcke X1 und X2, wie in Kapitel 4 beschrieben, angeschlossen.
• Das DeviceNet-Einspeisekabel (falls verwendet) verfügt über eine ausreichende geregelte 24 V DC-Spannung.
• LWL-Kabel werden an den korrekten Kanal des Antriebs und des NDNA-02 Moduls angeschlossen.
• Prüfen Sie, dass die Farben der Stecker des LWL-Kabels zu den Farbmarkierungen des Steckers des Antriebs und des NDNA-02 Modulsteckers passen.
Setup des Antriebs Die Feldbus-Parametergruppe wird auf der Steuertafel nicht angezeigt:
• Geben Sie das NDNA-02 durch einstellen der entsprechenden Antriebsparameter frei.
Das NDNA-02 verwendet die Standardwerte:
• Prüfen Sie, dass die Feldbus-Parametergruppe korrekt eingerichtet ist. Ist dies der Fall, schalten Sie die Spannungsversorgung des NDNA-Moduls aus und wieder ein. Hierdurch wird das Modul veranlasst, die Einstellparameter erneut zu lesen.
Die Istwerte des Antriebs können gelesen werden, die Steuerbefehle (Start/Stop/Sollwert) werden jedoch nicht weitergegeben:
• Prüfen, dass die Steuerplatz-Parameter des Antriebs so eingestellt sind, dass das NDNA-02 Adaptermodul als Quelle für den benötig-ten Befehl verwendet wird.
• Prüfen, dass der Antrieb auf Fernsteuerung (REMOTE)eingestellt ist.
SPS-Programmierung Der Kundendienst von ABB Drives schließt das SPS-Programm nicht ein. Wenden Sie sich diesbezüglich an den Hersteller.
Scanner Fehlermeldungen
Siehe die Dokumentation des Scanners. Die neueste Version steht auf der Internetseite von Allen-Bradley http://www.ab.com zur Verfügung.
NDNA-02 Installations- und Inbetriebnahmehandbuch 7-3

Kapitel 7 – Fehlersuche
7-4 NDNA-02 Installations- und Inbetriebnahmehandbuch
Anhang A – Technische Daten
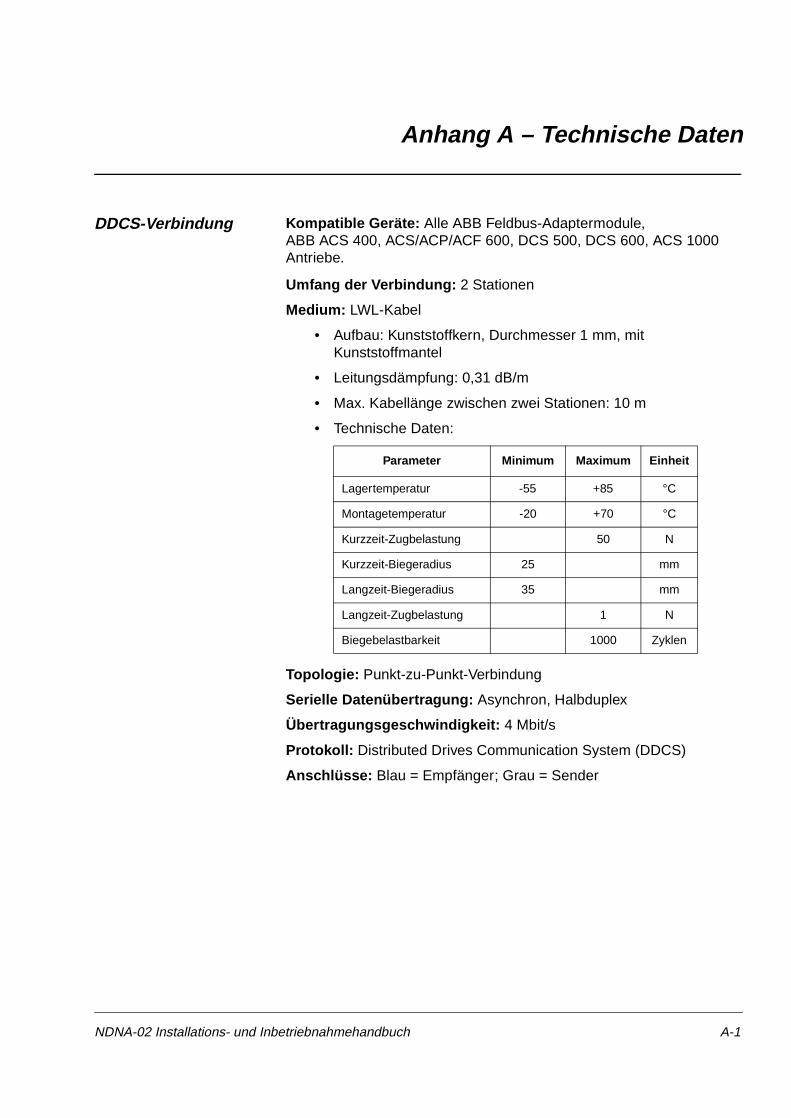
DDCS-Verbindung Kompatible Geräte: Alle ABB Feldbus-Adaptermodule,ABB ACS 400, ACS/ACP/ACF 600, DCS 500, DCS 600, ACS 1000 Antriebe.
Umfang der Verbindung: 2 Stationen
Medium: LWL-Kabel
• Aufbau: Kunststoffkern, Durchmesser 1 mm, mit Kunststoffmantel
• Leitungsdämpfung: 0,31 dB/m
• Max. Kabellänge zwischen zwei Stationen: 10 m
• Technische Daten:
Topologie: Punkt-zu-Punkt-Verbindung
Serielle Datenübertragung: Asynchron, Halbduplex
Übertragungsgeschwindigkeit: 4 Mbit/s
Protokoll: Distributed Drives Communication System (DDCS)
Anschlüsse: Blau = Empfänger; Grau = Sender
Parameter Minimum Maximum Einheit
Lagertemperatur -55 +85 °C
Montagetemperatur -20 +70 °C
Kurzzeit-Zugbelastung 50 N
Kurzzeit-Biegeradius 25 mm
Langzeit-Biegeradius 35 mm
Langzeit-Zugbelastung 1 N
Biegebelastbarkeit 1000 Zyklen
NDNA-02 Installations- und Inbetriebnahmehandbuch A-1
Anhang A – Technische Daten
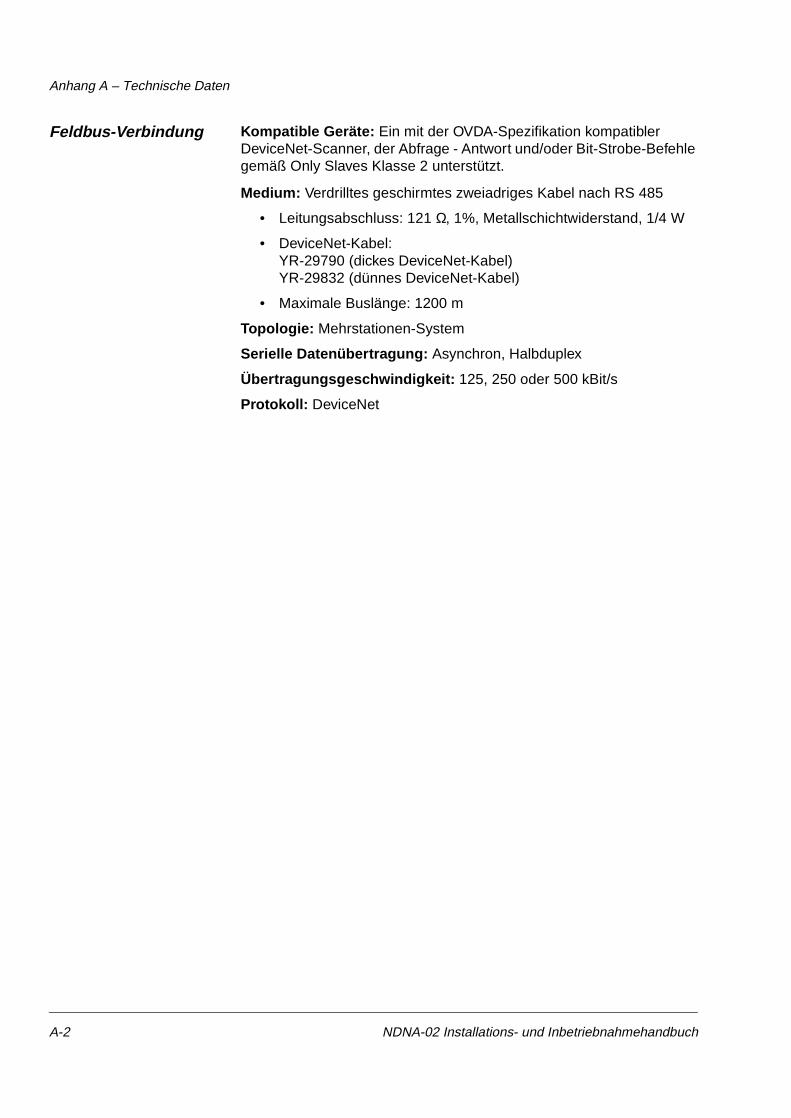
Feldbus-Verbindung Kompatible Geräte: Ein mit der OVDA-Spezifikation kompatibler DeviceNet-Scanner, der Abfrage - Antwort und/oder Bit-Strobe-Befehle gemäß Only Slaves Klasse 2 unterstützt.
Medium: Verdrilltes geschirmtes zweiadriges Kabel nach RS 485
• Leitungsabschluss: 121 Ω, 1%, Metallschichtwiderstand, 1/4 W
• DeviceNet-Kabel: YR-29790 (dickes DeviceNet-Kabel) YR-29832 (dünnes DeviceNet-Kabel)
• Maximale Buslänge: 1200 m
Topologie: Mehrstationen-System
Serielle Datenübertragung: Asynchron, Halbduplex
Übertragungsgeschwindigkeit: 125, 250 oder 500 kBit/s
Protokoll: DeviceNet
A-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Anhang A – Technische Daten
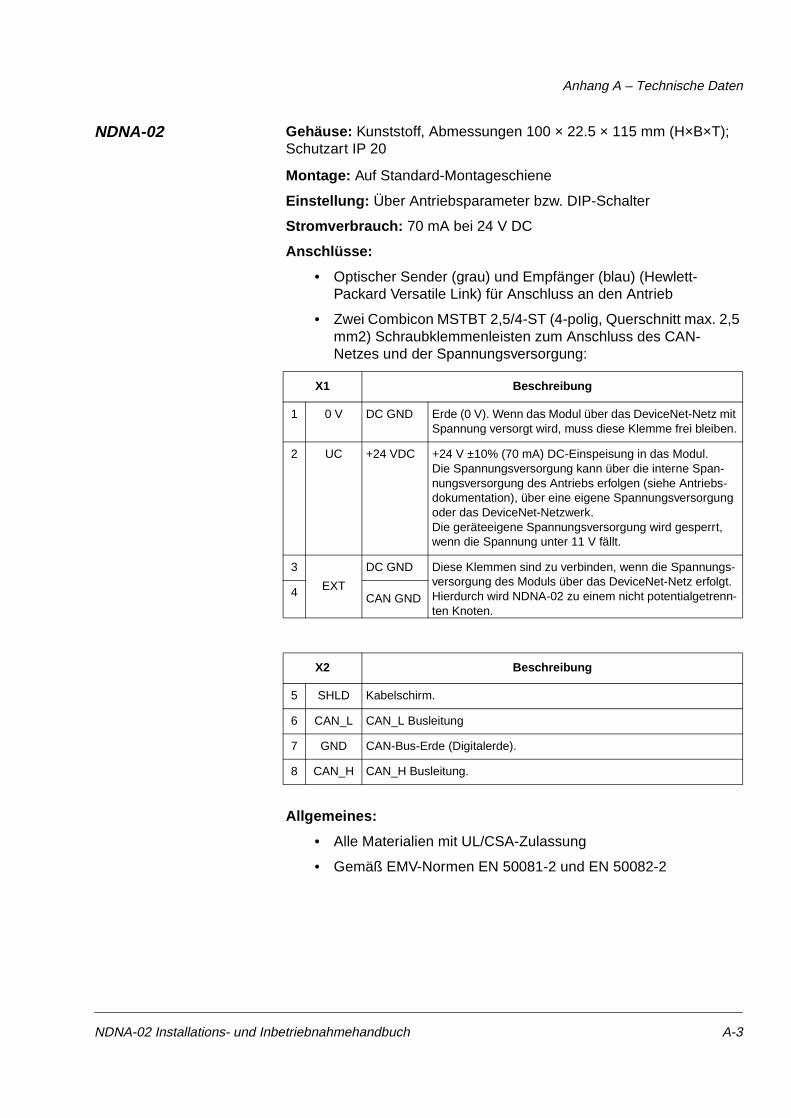
NDNA-02 Gehäuse: Kunststoff, Abmessungen 100 × 22.5 × 115 mm (H×B×T); Schutzart IP 20
Montage: Auf Standard-Montageschiene
Einstellung: Über Antriebsparameter bzw. DIP-Schalter
Stromverbrauch: 70 mA bei 24 V DC
Anschlüsse:
• Optischer Sender (grau) und Empfänger (blau) (Hewlett-Packard Versatile Link) für Anschluss an den Antrieb
• Zwei Combicon MSTBT 2,5/4-ST (4-polig, Querschnitt max. 2,5 mm2) Schraubklemmenleisten zum Anschluss des CAN-Netzes und der Spannungsversorgung:
Allgemeines:
• Alle Materialien mit UL/CSA-Zulassung
• Gemäß EMV-Normen EN 50081-2 und EN 50082-2
X1 Beschreibung
1 0 V DC GND Erde (0 V). Wenn das Modul über das DeviceNet-Netz mit Spannung versorgt wird, muss diese Klemme frei bleiben.
2 UC +24 VDC +24 V ±10% (70 mA) DC-Einspeisung in das Modul.Die Spannungsversorgung kann über die interne Span-nungsversorgung des Antriebs erfolgen (siehe Antriebs-dokumentation), über eine eigene Spannungsversorgung oder das DeviceNet-Netzwerk.Die geräteeigene Spannungsversorgung wird gesperrt, wenn die Spannung unter 11 V fällt.
3
EXT
DC GND Diese Klemmen sind zu verbinden, wenn die Spannungs-versorgung des Moduls über das DeviceNet-Netz erfolgt. Hierdurch wird NDNA-02 zu einem nicht potentialgetrenn-ten Knoten.
4 CAN GND
X2 Beschreibung
5 SHLD Kabelschirm.
6 CAN_L CAN_L Busleitung
7 GND CAN-Bus-Erde (Digitalerde).
8 CAN_H CAN_H Busleitung.
NDNA-02 Installations- und Inbetriebnahmehandbuch A-3

Anhang A – Technische Daten
A-4 NDNA-02 Installations- und Inbetriebnahmehandbuch
Anhang B – Umgebungsbedingungen
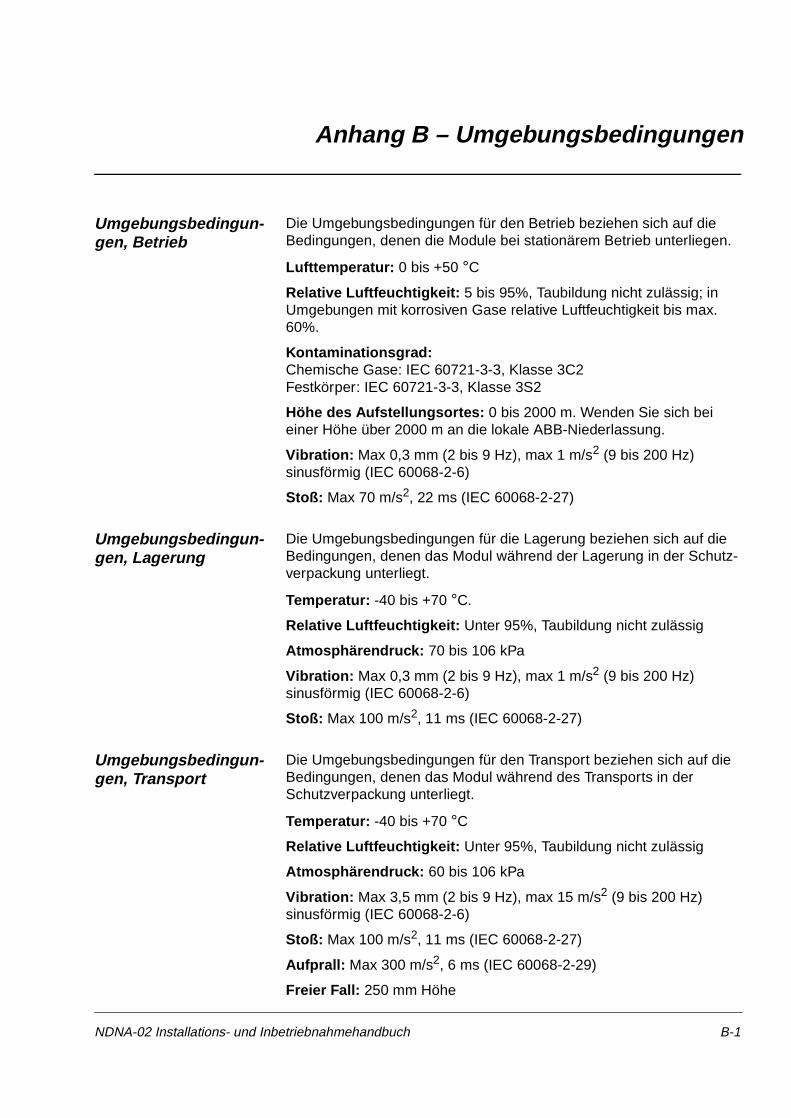
Umgebungsbedingun-gen, Betrieb
Die Umgebungsbedingungen für den Betrieb beziehen sich auf die Bedingungen, denen die Module bei stationärem Betrieb unterliegen.
Lufttemperatur: 0 bis +50 °C
Relative Luftfeuchtigkeit: 5 bis 95%, Taubildung nicht zulässig; in Umgebungen mit korrosiven Gase relative Luftfeuchtigkeit bis max. 60%.
Kontaminationsgrad: Chemische Gase: IEC 60721-3-3, Klasse 3C2Festkörper: IEC 60721-3-3, Klasse 3S2
Höhe des Aufstellungsortes: 0 bis 2000 m. Wenden Sie sich bei einer Höhe über 2000 m an die lokale ABB-Niederlassung.
Vibration: Max 0,3 mm (2 bis 9 Hz), max 1 m/s2 (9 bis 200 Hz) sinusförmig (IEC 60068-2-6)
Stoß: Max 70 m/s2, 22 ms (IEC 60068-2-27)
Umgebungsbedingun-gen, Lagerung
Die Umgebungsbedingungen für die Lagerung beziehen sich auf die Bedingungen, denen das Modul während der Lagerung in der Schutz-verpackung unterliegt.
Temperatur: -40 bis +70 °C.
Relative Luftfeuchtigkeit: Unter 95%, Taubildung nicht zulässig
Atmosphärendruck: 70 bis 106 kPa
Vibration: Max 0,3 mm (2 bis 9 Hz), max 1 m/s2 (9 bis 200 Hz) sinusförmig (IEC 60068-2-6)
Stoß: Max 100 m/s2, 11 ms (IEC 60068-2-27)
Umgebungsbedingun-gen, Transport
Die Umgebungsbedingungen für den Transport beziehen sich auf die Bedingungen, denen das Modul während des Transports in der Schutzverpackung unterliegt.
Temperatur: -40 bis +70 °C
Relative Luftfeuchtigkeit: Unter 95%, Taubildung nicht zulässig
Atmosphärendruck: 60 bis 106 kPa
Vibration: Max 3,5 mm (2 bis 9 Hz), max 15 m/s2 (9 bis 200 Hz) sinusförmig (IEC 60068-2-6)
Stoß: Max 100 m/s2, 11 ms (IEC 60068-2-27)
Aufprall: Max 300 m/s2, 6 ms (IEC 60068-2-29)
Freier Fall: 250 mm Höhe
NDNA-02 Installations- und Inbetriebnahmehandbuch B-1

Anhang B – Umgebungsbedingungen
B-2 NDNA-02 Installations- und Inbetriebnahmehandbuch
Anhang C – Konformitätserklärung
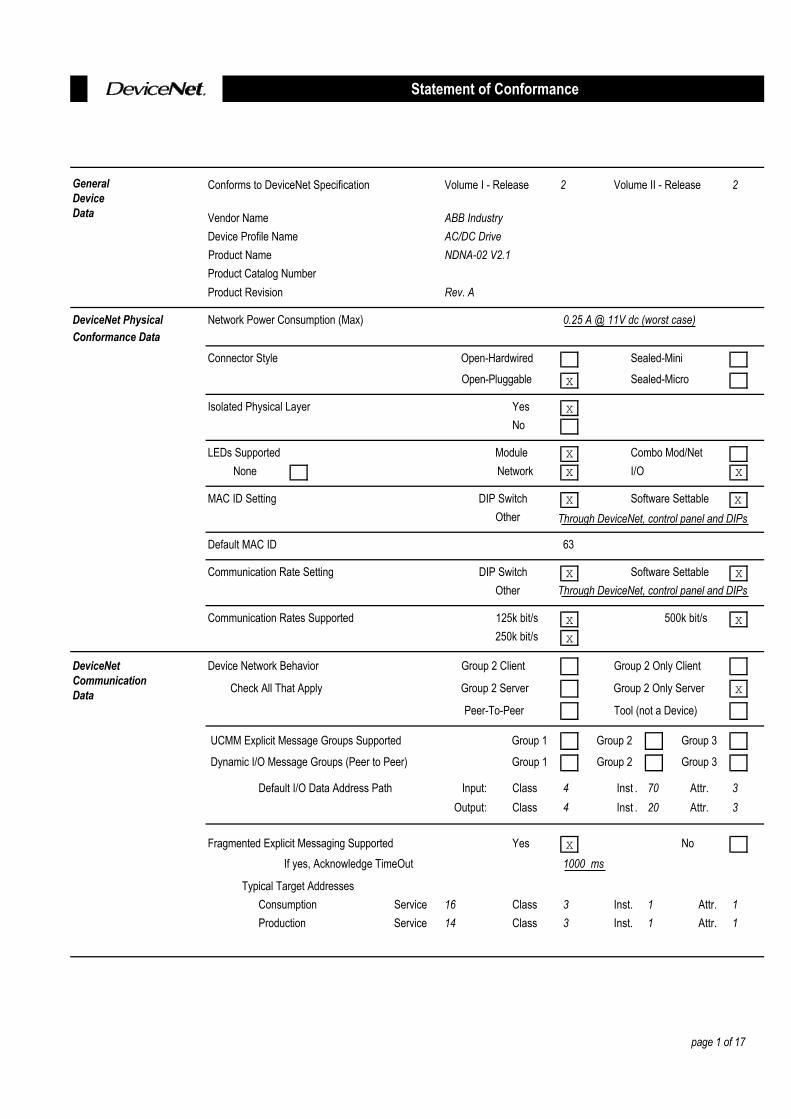
Statement of Conformance
GeneralDeviceData
Conforms to DeviceNet Specification Volume I - Release Volume II - Release 2
Vendor Name ABB IndustryDevice Profile Name AC/DC DriveProduct Name NDNA-02 V2.1Product Catalog Number Product Revision Rev. A
DeviceNet Physical Network Power Consumption (Max) 0.25 A @ 11V dc (worst case)Conformance Data
Connector Style Open-Hardwired Sealed-Mini Open-Pluggable X Sealed-Micro
Isolated Physical Layer Yes X
No
LEDs Supported Module Combo Mod/Net None Network I/O
MAC ID Setting DIP Switch Software SettableOther
Default MAC ID 63
Communication Rate Setting DIP Switch Software SettableOther Through DeviceNet, control panel and DIPs
Through DeviceNet, control panel and DIPs
Communication Rates Supported 125k bit/s X 500k bit/s X
250k bit/s X
DeviceNetCommunicationData
Device Network Behavior Group 2 Client Group 2 Only Client
Check All That Apply Group 2 Server Group 2 Only Server X
Peer-To-Peer Tool (not a Device)
UCMM Explicit Message Groups Supported Group 1 Group 2 Group 3
Dynamic I/O Message Groups (Peer to Peer) Group 1 Group 2 Group 3
Default I/O Data Address Path Input: Class 4 Inst . 70 Attr. 3
Output: Class 4 Inst . 20 Attr. 3
Fragmented Explicit Messaging Supported Yes X No If yes, Acknowledge TimeOut 1000 ms
Typical Target AddressesConsumption Service 16 Class 3 Inst. 1 Attr. 1Production Service 14 Class 3 Inst. 1 Attr. 1
page 1 of 17
2
X
X X
X
X
X
X
Statement of Conformance
DeviceNet Identity Object 0x01Required Object Class ID Description Get Set Value LimitsObject Attributes Open 1 Revision X
Implementation 2 Max instance None Supported 3 Number of Instances
4 Optional attributes list
5 Optional services list6 Max Id of class attributes7 Max Id of instance attributes
DeviceNet Services Parameter OptionsServices Get_Attributes_All
Reset None Supported X Get_Attribute_Single
Find_Next_Object_instanceObject Instance ID Description Get Set Value LimitsAttributes Open 1 Vendor X 46
2 Device type X 2 / 193 codeProduct X 01 = ACS600
02 = ACS40003 = ACS600_O04 = ACP60005 = ACN60006 = DCS60007 = DCS50008 = ACT60009 = ACH60010 = ACS100011 = DCS40012 = Unknown
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 2 of 17
4 Revision X 2.005 Status (bits supported) bits: 0, 2X
6 numberSerial X 1
7 Product name X NDNA-02 Version V2.1
8 State9 Config. Consistency Value
10 IntervalHeartbeat DeviceNet Services Parameter Options
Services Get_Attributes_All
X Reset 1
X Get_Attribute_Single Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific YesAdditions form. No X
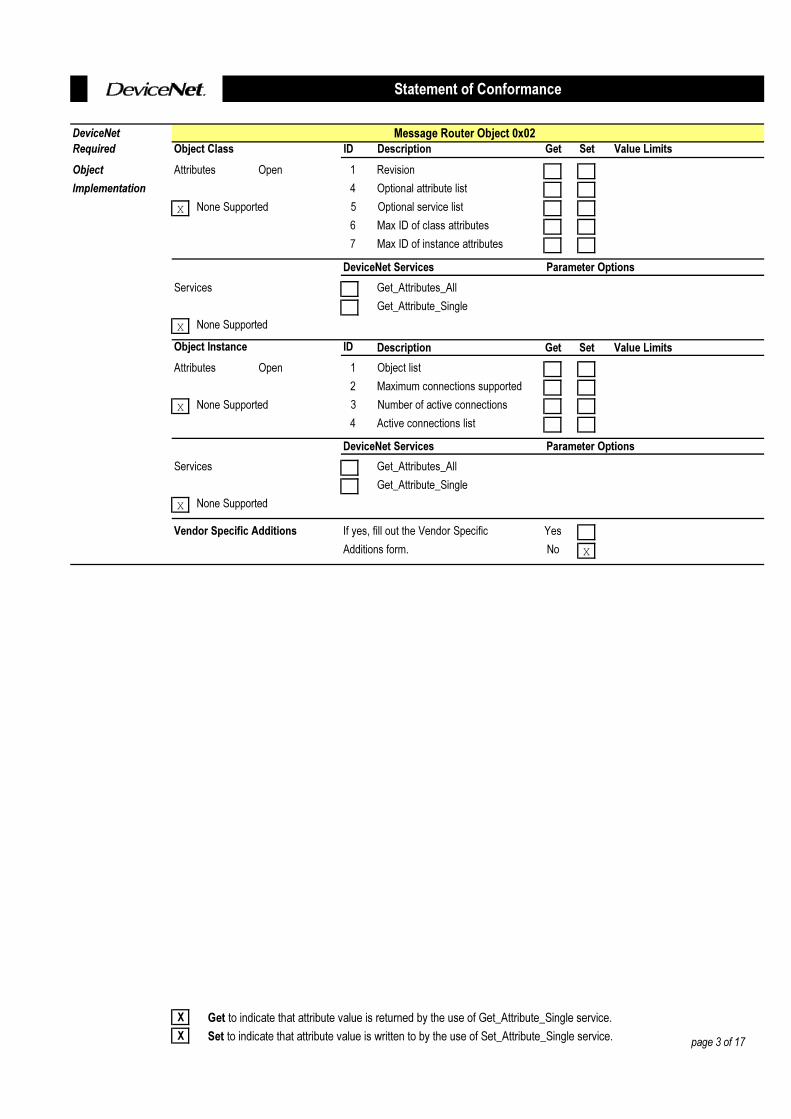
Statement of Conformance
DeviceNet Message Router Object 0x02
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision
Implementation 4 Optional attribute list
X None Supported 5 Optional service list
6 Max ID of class attributes
7 Max ID of instance attributes
DeviceNet Services Parameter Options
Services Get_Attributes_All
Get_Attribute_Single
X None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 Object list
2 Maximum connections supported
X None Supported 3 Number of active connections
4 Active connections list
DeviceNet Services Parameter Options
Services Get_Attributes_All
Get_Attribute_Single
X None Supported
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 3 of 17
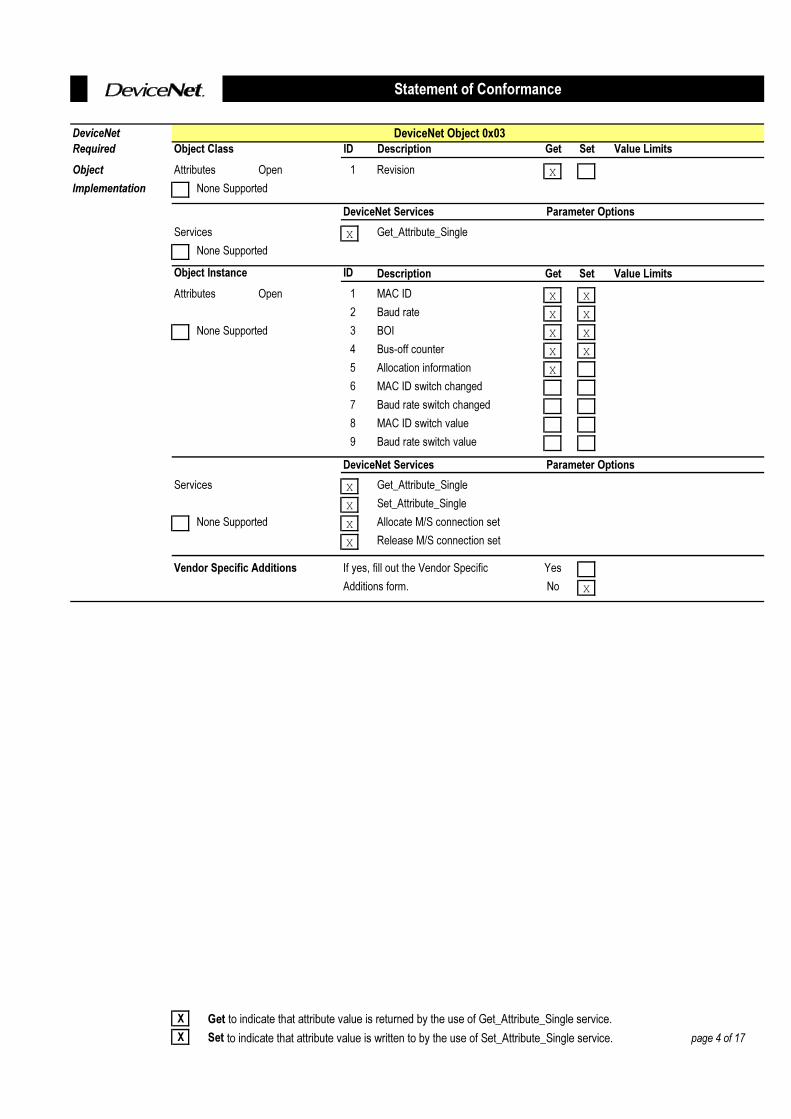
Statement of Conformance
DeviceNet DeviceNet Object 0x03
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported
DeviceNet Services Parameter Options
Services X Get_Attribute_Single
None Supported
Object Instance ID Description Get Set Value Limits
Attributes Open 1 MAC ID X X
2 Baud rate X X
None Supported 3 BOI X X
4 Bus-off counter X X
5 Allocation information X
6 MAC ID switch changed
7 Baud rate switch changed
8 MAC ID switch value
9 Baud rate switch value
DeviceNet Services Parameter Options
Services X Get_Attribute_Single
X Set_Attribute_Single
None Supported X Allocate M/S connection set
X Release M/S connection set
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 4 of 17
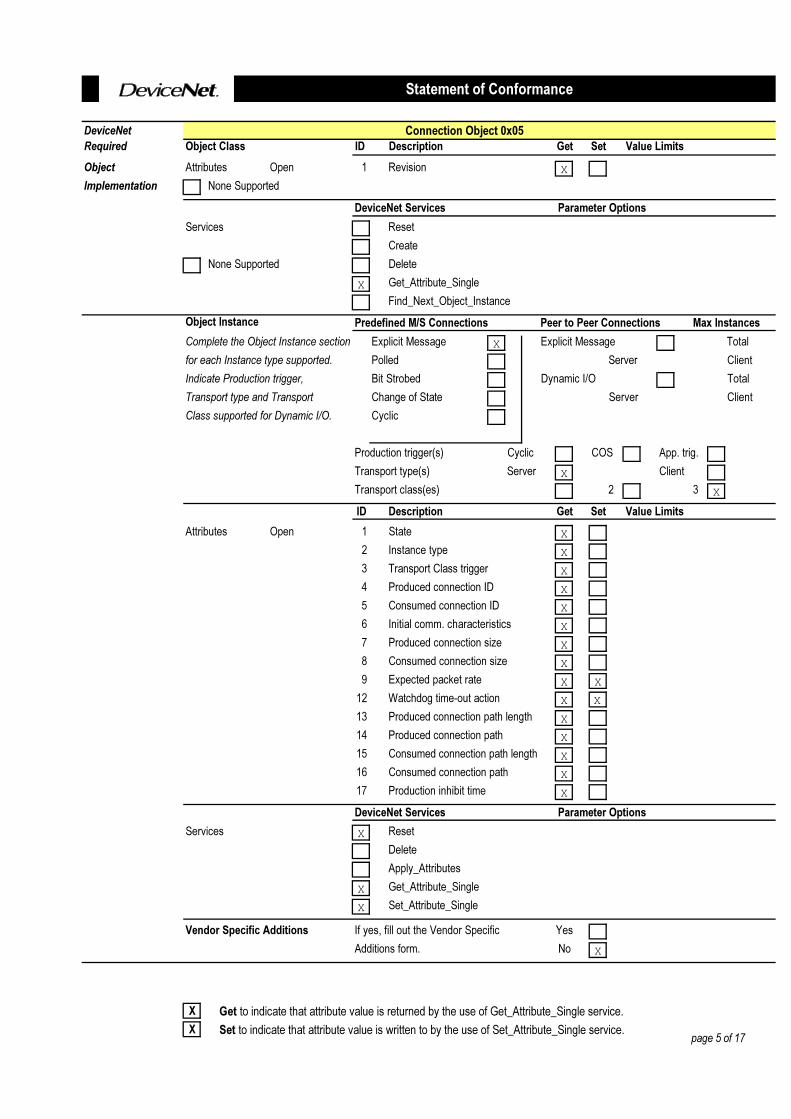
Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported
DeviceNet Services Parameter Options
Services Reset
Create
None Supported Delete
X Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message X Explicit Message Total
for each Instance type supported. Polled Server Client
Indicate Production trigger, Bit Strobed Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server X Client
Transport class(es) 2 3 X
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 5 of 17
X
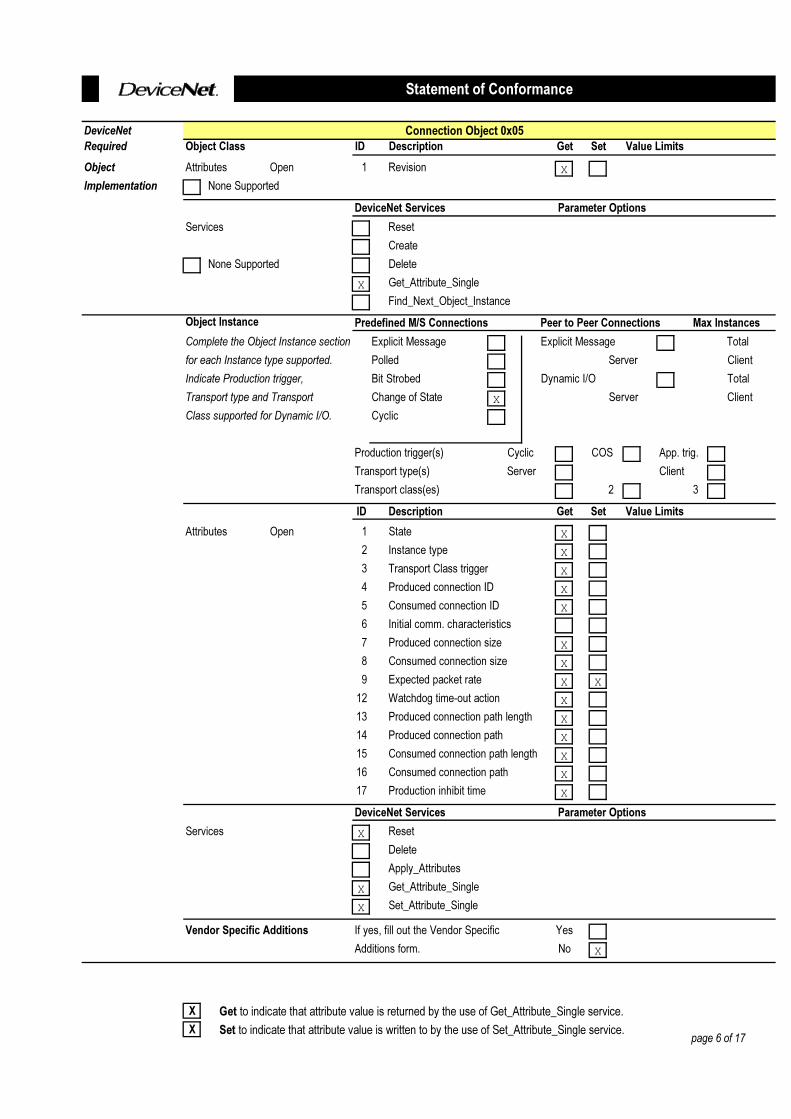
Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported
DeviceNet Services Parameter Options
Services Reset
Create
None Supported Delete
X Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message Explicit Message Total
for each Instance type supported. Polled Server Client
Indicate Production trigger, Bit Strobed Dynamic I/O Total
Transport type and Transport Change of State X Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server Client
Transport class(es) 2 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 6 of 17
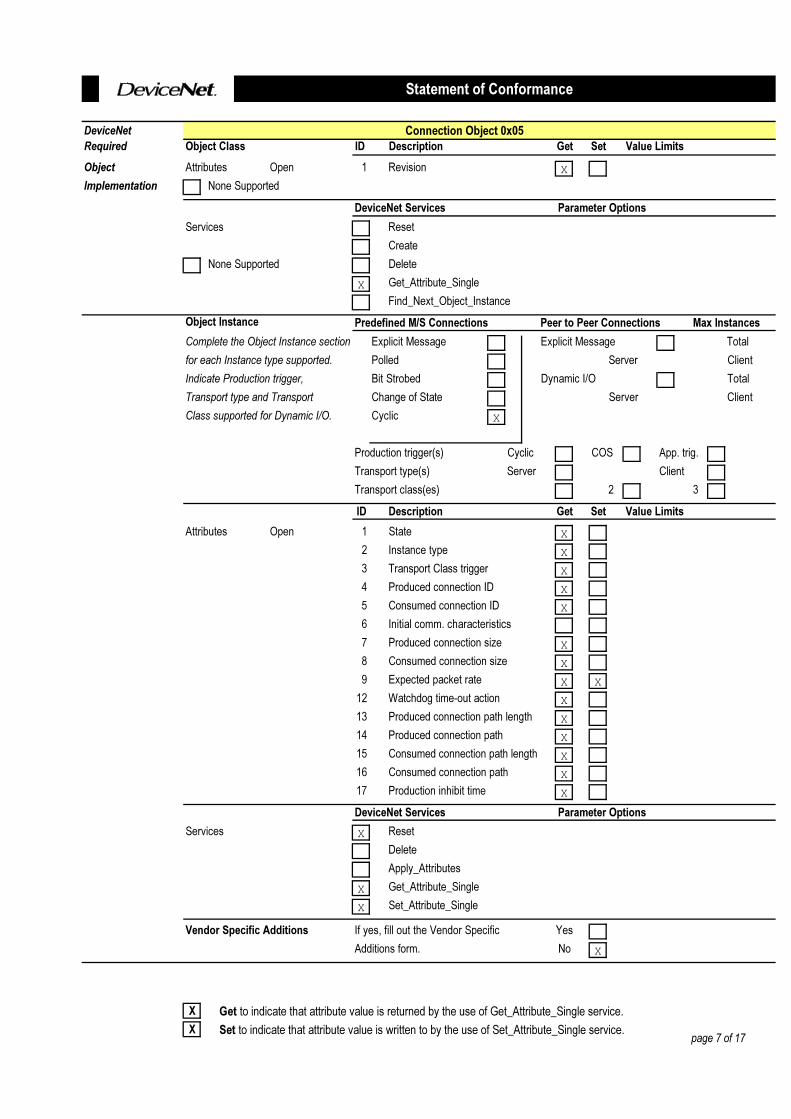
Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported
DeviceNet Services Parameter Options
Services Reset
Create
None Supported Delete
X Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message Explicit Message Total
for each Instance type supported. Polled Server Client
Indicate Production trigger, Bit Strobed Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic X
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server Client
Transport class(es) 2 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 7 of 17
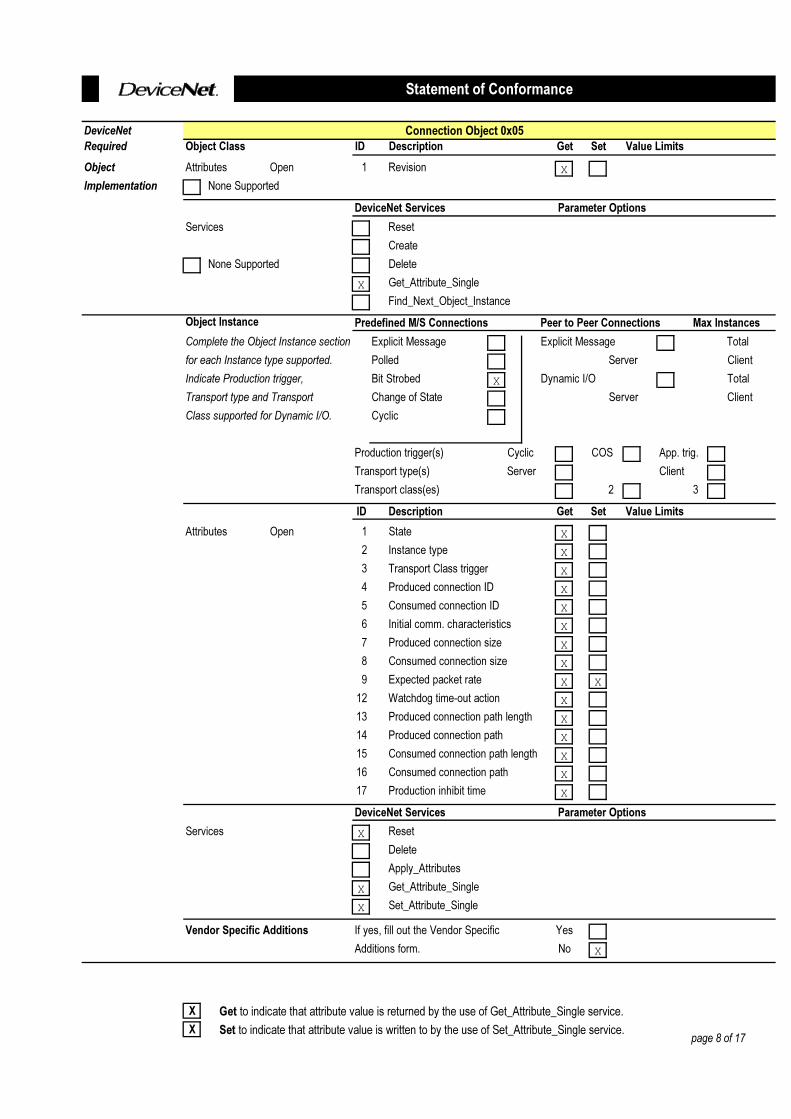
Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported
DeviceNet Services Parameter Options
Services Reset
Create
None Supported Delete
X Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message Explicit Message Total
for each Instance type supported. Polled Server Client
Indicate Production trigger, Bit Strobed X Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server Client
Transport class(es) 2 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics X
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 8 of 17
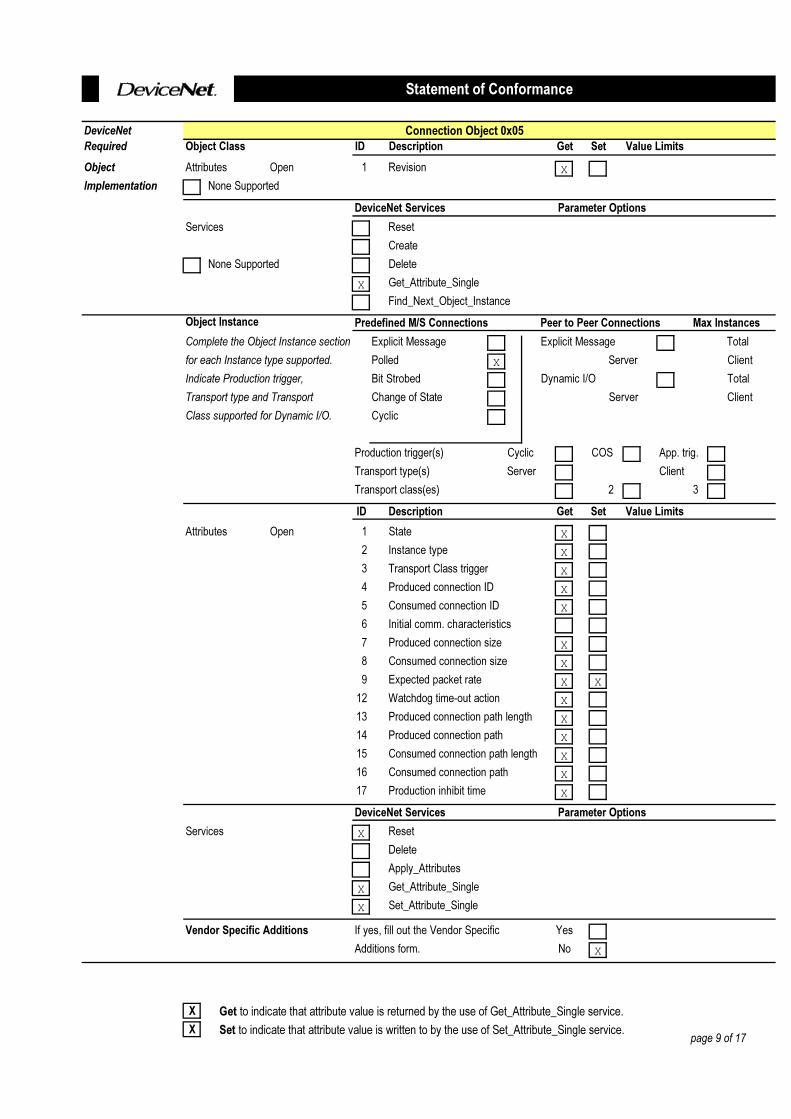
Statement of Conformance
DeviceNet Connection Object 0x05
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported
DeviceNet Services Parameter Options
Services Reset
Create
None Supported Delete
X Get_Attribute_Single
Find_Next_Object_Instance
Object Instance Predefined M/S Connections Peer to Peer Connections Max Instances
Complete the Object Instance section Explicit Message Explicit Message Total
for each Instance type supported. Polled X Server Client
Indicate Production trigger, Bit Strobed Dynamic I/O Total
Transport type and Transport Change of State Server Client
Class supported for Dynamic I/O. Cyclic
Production trigger(s) Cyclic COS App. trig.
Transport type(s) Server Client
Transport class(es) 2 3
ID Description Get Set Value Limits
Attributes Open 1 State X
2 Instance type X
3 Transport Class trigger X
4 Produced connection ID X
5 Consumed connection ID X
6 Initial comm. characteristics
7 Produced connection size X
8 Consumed connection size X
9 Expected packet rate X X
12 Watchdog time-out action X
13 Produced connection path length X
14 Produced connection path X
15 Consumed connection path length X
16 Consumed connection path X
17 Production inhibit time X
DeviceNet Services Parameter Options
Services X Reset
Delete
Apply_Attributes
X Get_Attribute_Single
X Set_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 9 of 17

Statement of Conformance
DeviceNet Assembly Object 0x04
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported 2 Max instance X
DeviceNet Services Parameter Options
Services Create
Delete
None Supported X Get_Attribute_Single
Object Instance Instance Type Instance Id(s)
The Object Instance section Static Input X 70, 105, 106, 107, 108
must be completed for each Static Output
instance type implemented.
ID Description Get Set Value Limits
Attributes Open 1 Number of members in list
2 Member list
None Supported 3 Data X
DeviceNet Services Parameter Options
Services Delete
X Get_Attribute_Single
None Supported Set_Attribute_Single
Get_Member
Insert_Member
Remove_Member
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 10 of 17
20 108
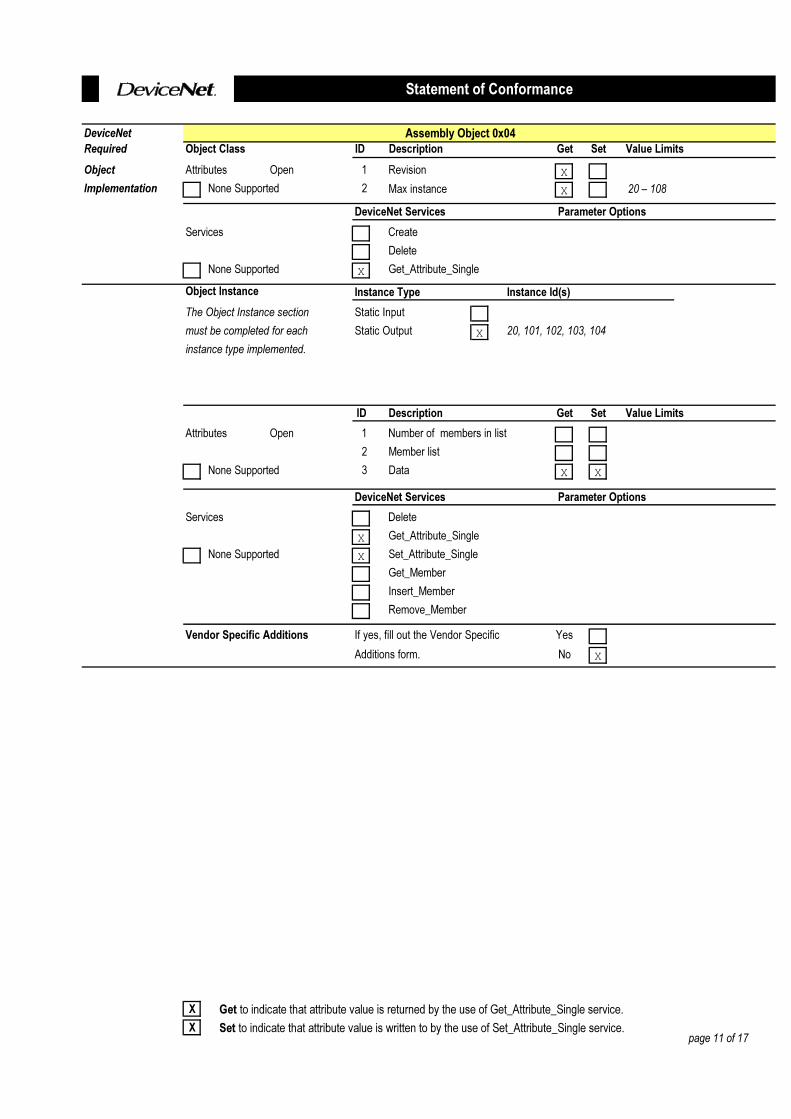
Statement of Conformance
DeviceNet Assembly Object 0x04
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported 2 Max instance X
DeviceNet Services Parameter Options
Services Create
Delete
None Supported X Get_Attribute_Single
Object Instance Instance Type Instance Id(s)
The Object Instance section Static Input
must be completed for each Static Output X 20, 101, 102, 103, 104
instance type implemented.
ID Description Get Set Value Limits
Attributes Open 1 Number of members in list
2 Member list
None Supported 3 Data X X
DeviceNet Services Parameter Options
Services Delete
X Get_Attribute_Single
None Supported X Set_Attribute_Single
Get_Member
Insert_Member
Remove_Member
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 11 of 17
20 108
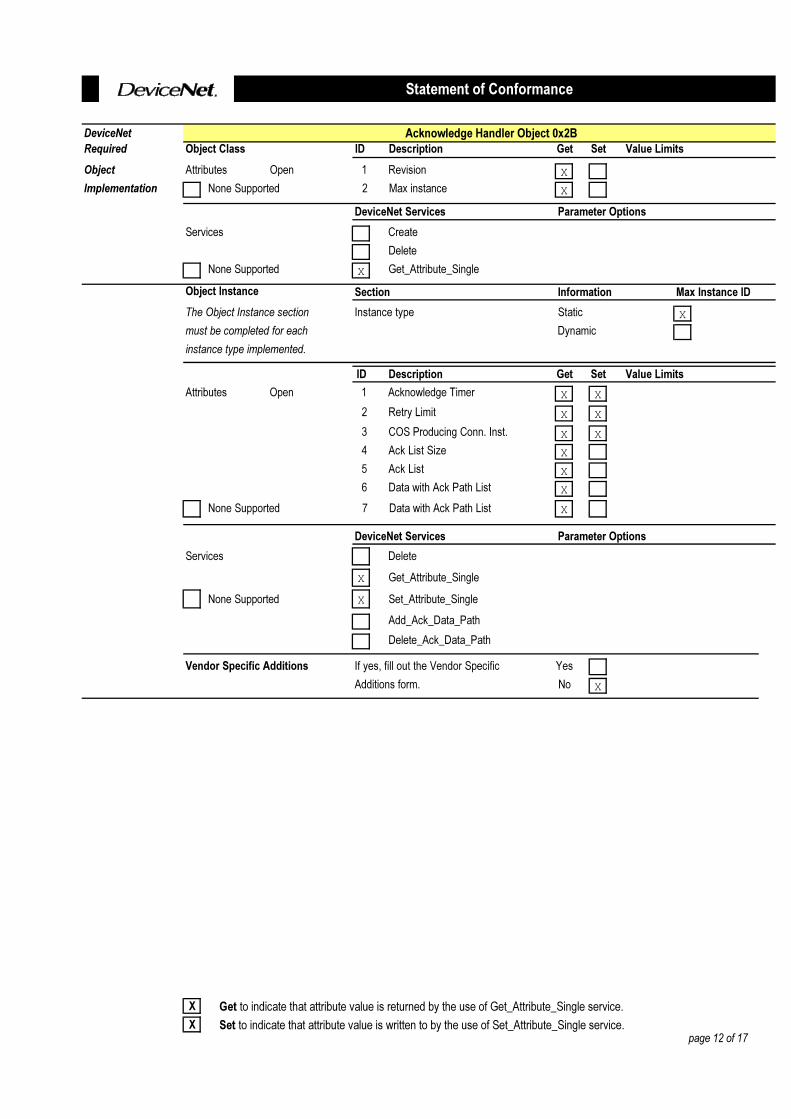
Statement of Conformance
DeviceNet Acknowledge Handler Object 0x2B
Required Object Class ID Description Get Set Value Limits
Object Attributes Open 1 Revision X
Implementation None Supported 2 Max instance X
DeviceNet Services Parameter Options
Services Create
Delete
None Supported X Get_Attribute_Single
Object Instance Section Information Max Instance ID
The Object Instance section Instance type Static X
must be completed for each Dynamic
instance type implemented.
ID Description Get Set Value Limits
Attributes Open 1 Acknowledge Timer X X
2 Retry Limit X X
3 COS Producing Conn. Inst. X X
4 Ack List Size X
5 Ack List X
6 Data with Ack Path List X
None Supported 7 Data with Ack Path List X
DeviceNet Services Parameter Options
Services Delete
X Get_Attribute_Single
None Supported X Set_Attribute_Single
Add_Ack_Data_Path
Delete_Ack_Data_Path
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service.page 12 of 17
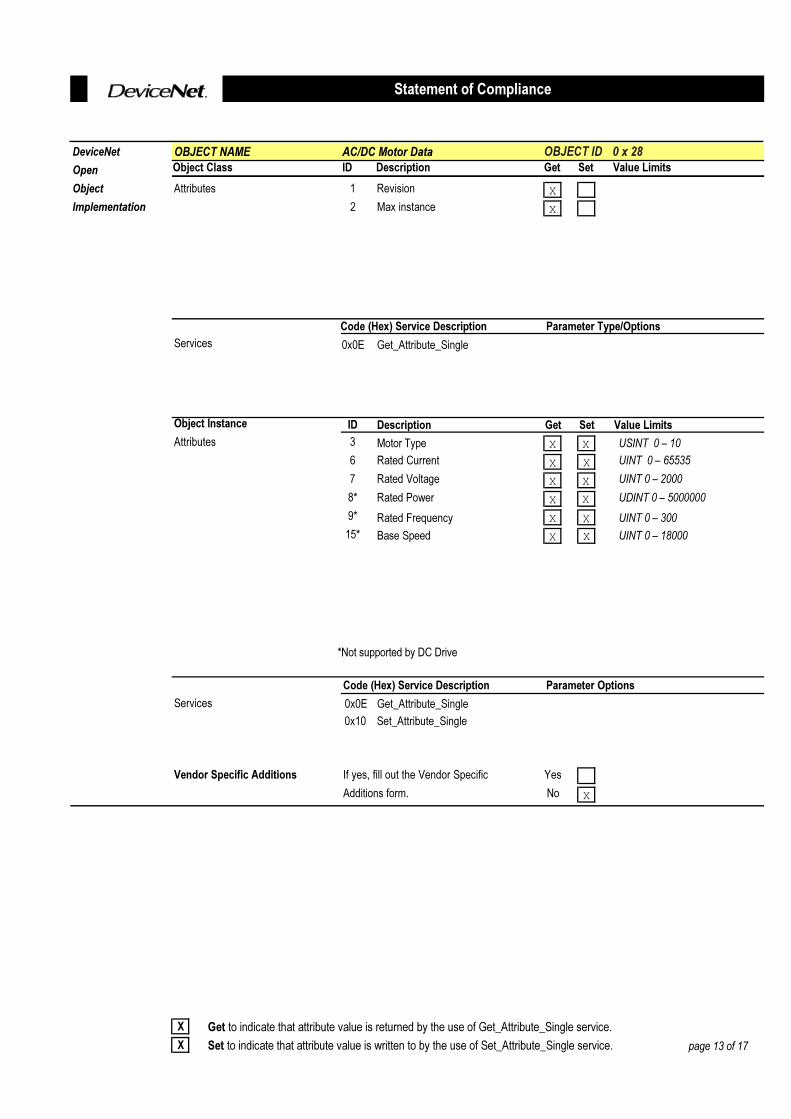
Set_Attribute_Single0x10
Statement of Compliance
DeviceNet OBJECT NAME AC/DC Motor Data
Open Object Class ID Description Get Set Value Limits
Object Attributes 1 Revision X
Implementation 2 Max instance X
Code (Hex) Service Description Parameter Type/Options
Services Get_Attribute_Single
Object Instance ID Description Get Set Value Limits
Attributes 3 Motor Type X USINT 0 10
6 Rated Current X UINT 0 65535
7 Rated Voltage X UINT 0 2000
8* Rated Power X
9* Rated Frequency X
15* Base Speed X
Code (Hex) Service Description Parameter Options
Services Get_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service.
OBJECT ID 0 x 28
0x0E
X
X
X
UDINT 0 5000000
0x0E
page 13 of 17
UINT 0 300
UINT 0 18000
*Not supported by DC Drive
X
X
X
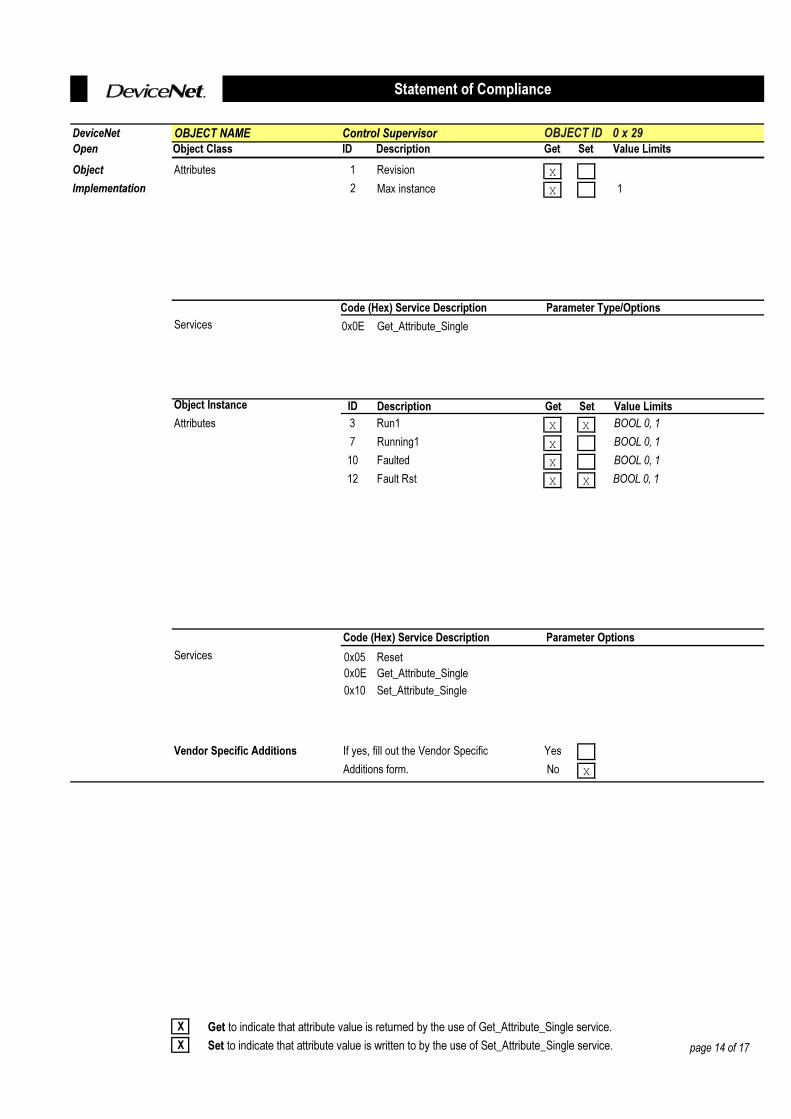
Set_Attribute_Single0x10
Statement of Compliance
DeviceNet OBJECT NAME Control Supervisor
Open Object Class ID Description Get Set Value Limits
Object Attributes 1 Revision X
Implementation 2 Max instance X
Code (Hex) Service Description Parameter Type/Options
Services Get_Attribute_Single
Object Instance ID Description Get Set Value Limits
Attributes 3 Run1 X BOOL 0, 1
7 Running1 X BOOL 0, 1
10 Faulted X BOOL 0, 1
12 Fault Rst X BOOL 0, 1
Code (Hex) Service Description Parameter Options
Services
Get_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service.
OBJECT ID 0 x 29
0x0E
X
X
0x0E
1
Reset0x05
page 14 of 17
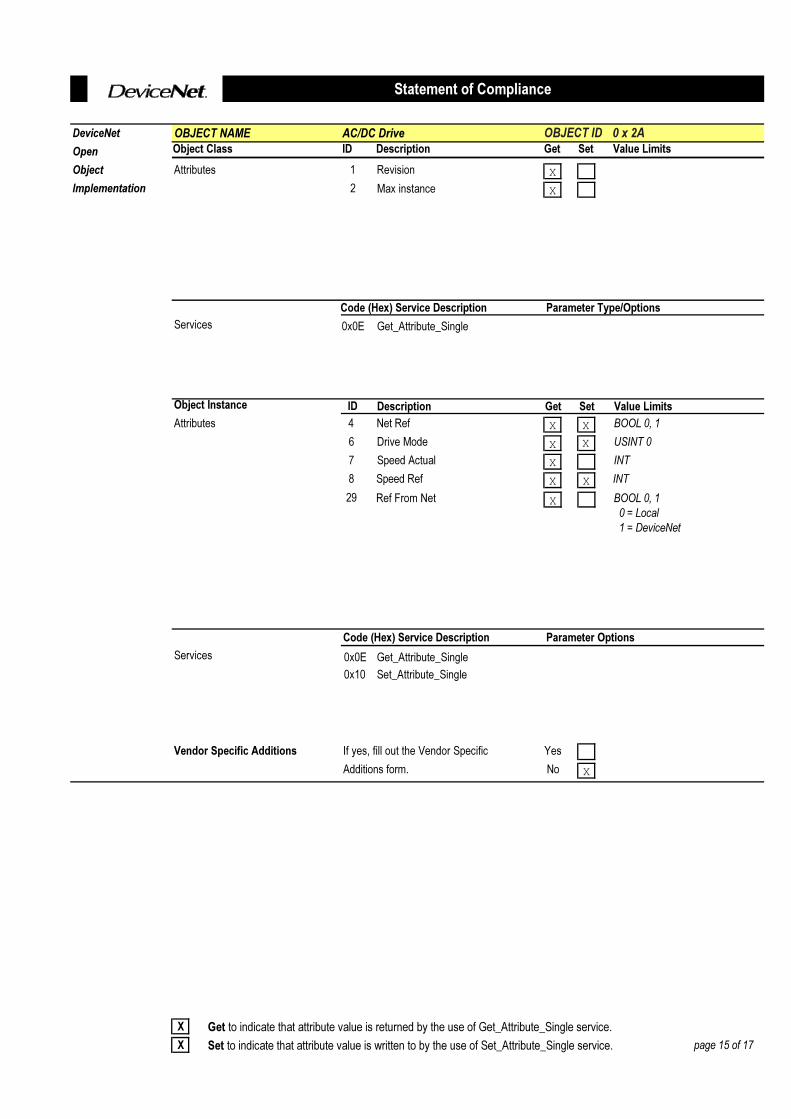
Set_Attribute_Single0x10
Statement of Compliance
DeviceNet OBJECT NAME AC/DC Drive
Open Object Class ID Description Get Set Value Limits
Object Attributes 1 Revision X
Implementation 2 Max instance X
Code (Hex) Service Description Parameter Type/Options
Services Get_Attribute_Single
Object Instance ID Description Get Set Value Limits
Attributes 4 Net Ref X BOOL 0, 1
6 Drive Mode X USINT 0
7 Speed Actual X INT
8 Speed Ref X INT
Code (Hex) Service Description Parameter Options
Services Get_Attribute_Single
Vendor Specific Additions If yes, fill out the Vendor Specific Yes
Additions form. No X
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service. page 15 of 17
OBJECT ID 0 x 2A
0x0E
X
X
0x0E
Ref From Net29 X BOOL 0, 1
0 = Local
1 = DeviceNet
X
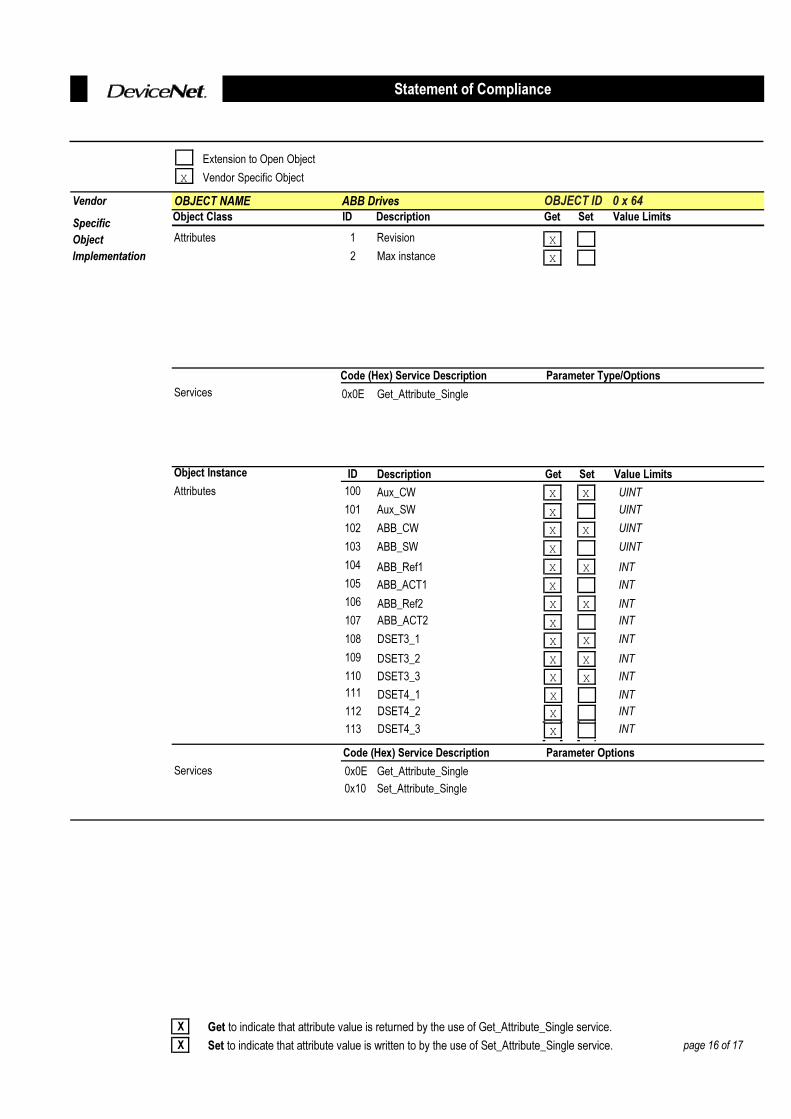
Set_Attribute_Single0x10
Statement of Compliance
Vendor OBJECT NAME ABB Drives
Specific Object Class ID Description Get Set Value Limits
Object Attributes 1 Revision X
Implementation 2 Max instance X
Code (Hex) Service Description Parameter Type/Options
Services Get_Attribute_Single
Object Instance ID Description Get Set Value Limits
Attributes 100 Aux_CW X UINT
101 Aux_SW X UINT
102 ABB_CW X UINT
103 ABB_SW X
INT
104 ABB_Ref1 X
105 ABB_ACT1 X
INT
Code (Hex) Service Description Parameter Options
Services Get_Attribute_Single
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service.
OBJECT ID 0 x 64
0x0E
X
X
X
UINT
0x0E
page 16 of 17
106 ABB_Ref2 X
INT
107 ABB_ACT2 X
INT
108 DSET3_1 X
INT
109 DSET3_2 X
INT
110 DSET3_3
X
X INT
111 DSET4_1
INT
112 DSET4_2 X INT 113 DSET4_3 X INT
X
X
X
X
Extension to Open Object
Vendor Specific ObjectX
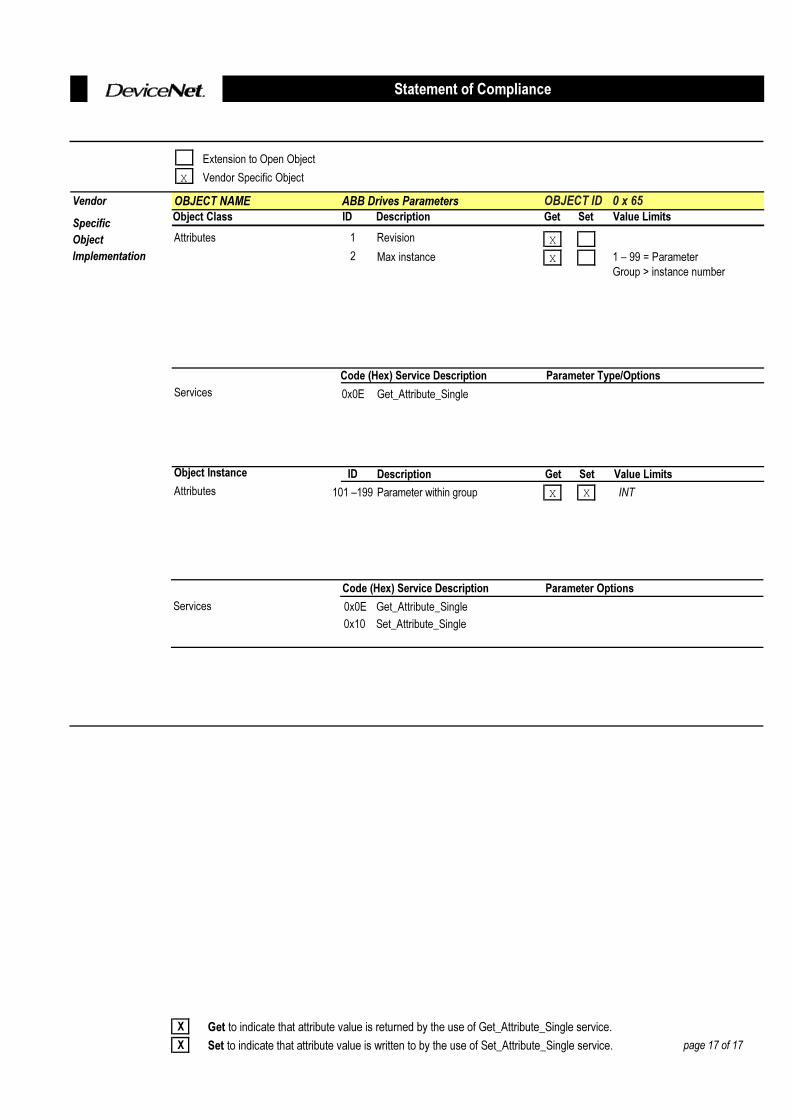
Set_Attribute_Single0x10
Statement of Compliance
Vendor OBJECT NAME ABB Drives Parameters
Specific Object Class ID Description Get Set Value Limits
Object Attributes 1 Revision X
Implementation 2 Max instance X
Code (Hex) Service Description Parameter Type/Options
Services Get_Attribute_Single
Object Instance ID Description Get Set Value Limits
Attributes 101 199 Parameter within group X INT
Code (Hex) Service Description Parameter Options
Services Get_Attribute_Single
X Get to indicate that attribute value is returned by the use of Get_Attribute_Single service.
X Set to indicate that attribute value is written to by the use of Set_Attribute_Single service.
OBJECT ID 0 x 65
0x0E
0x0E
page 17 of 17
Extension to Open Object
Vendor Specific ObjectX
1 99 = Parameter
Group > instance number
X


ND
NA
-02
/ DE
3AF
Y 6
4484
141
R03
03 R
EV
BG
ültig
ab:
01.
10.2
001
ABB Normelec AGBadener Straße 790CH-8048 ZürichSCHWEIZTelefon +41-(0)1-4356666Telefax +41-(0)1-4356605
ABB Industrie & Gebäudesysteme GmbH Wienerbergstraße 11 BA-1810 WienÖSTERREICHTelefon +43-(0)1-60109-0Telefax +43-(0)1-60109-8305
ABB Automation Products GmbHStandard DrivesDudenstraße 44 - 46D-68167 MannheimDEUTSCHLANDSupportLine 01805-78 73 44
Hotline Vertrieb 0180-33 22 400Telefax 0621-381 1777Internet http://www.abb.de/automation




























