Embed Size (px)
Citation preview
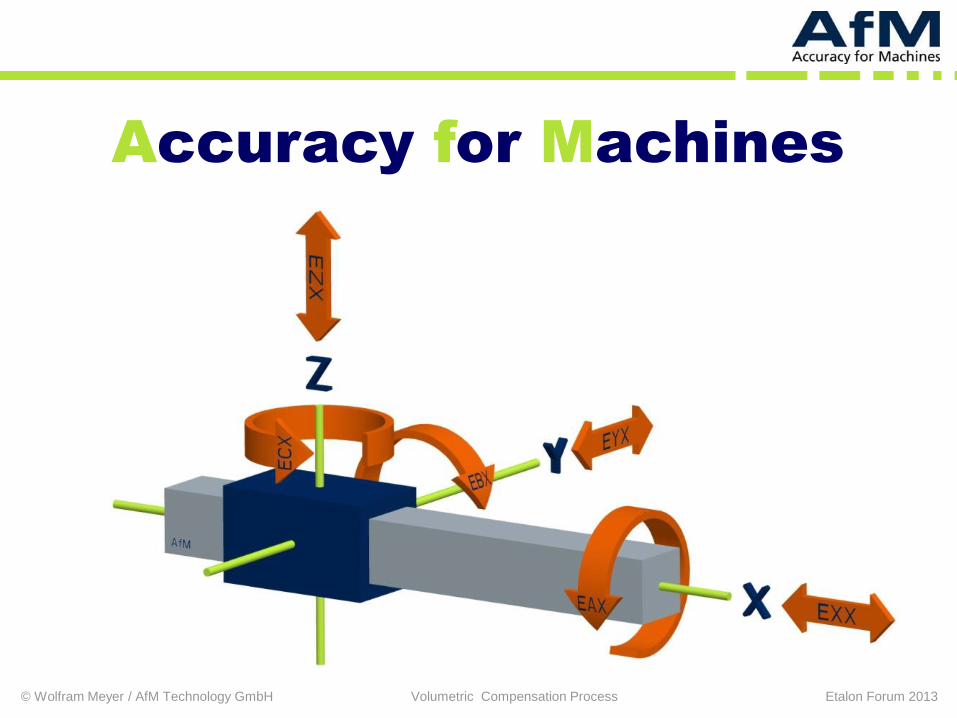
Accuracy for Machines
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
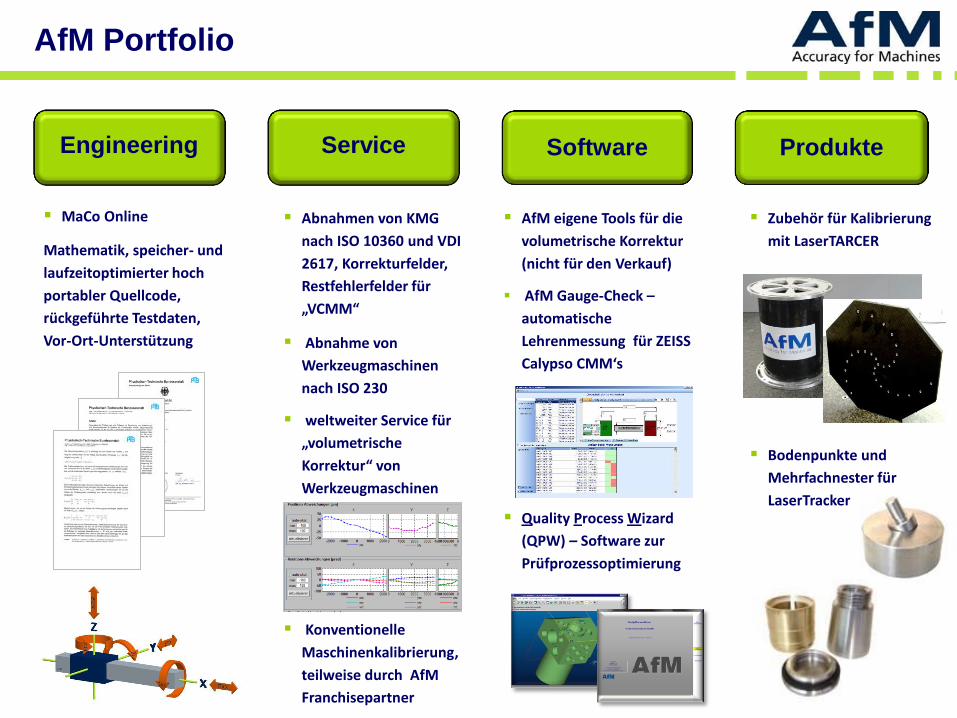
AfM Portfolio
Service
Engineering
Software
Produkte
MaCo Online
Mathematik speicher- und
laufzeitoptimierter hoch
portabler Quellcode
ruumlckgefuumlhrte Testdaten
Vor-Ort-Unterstuumltzung
Abnahmen von KMG
nach ISO 10360 und VDI
2617 Korrekturfelder
Restfehlerfelder fuumlr
bdquoVCMMldquo
Abnahme von
Werkzeugmaschinen
nach ISO 230
weltweiter Service fuumlr
bdquovolumetrische
Korrekturldquo von
Werkzeugmaschinen
Konventionelle
Maschinenkalibrierung
teilweise durch AfM
Franchisepartner
AfM eigene Tools fuumlr die
volumetrische Korrektur
(nicht fuumlr den Verkauf)
AfM Gauge-Check ndash
automatische
Lehrenmessung fuumlr ZEISS
Calypso CMMlsquos
Quality Process Wizard
(QPW) ndash Software zur
Pruumlfprozessoptimierung
Zubehoumlr fuumlr Kalibrierung
mit LaserTARCER
Bodenpunkte und
Mehrfachnester fuumlr
LaserTracker
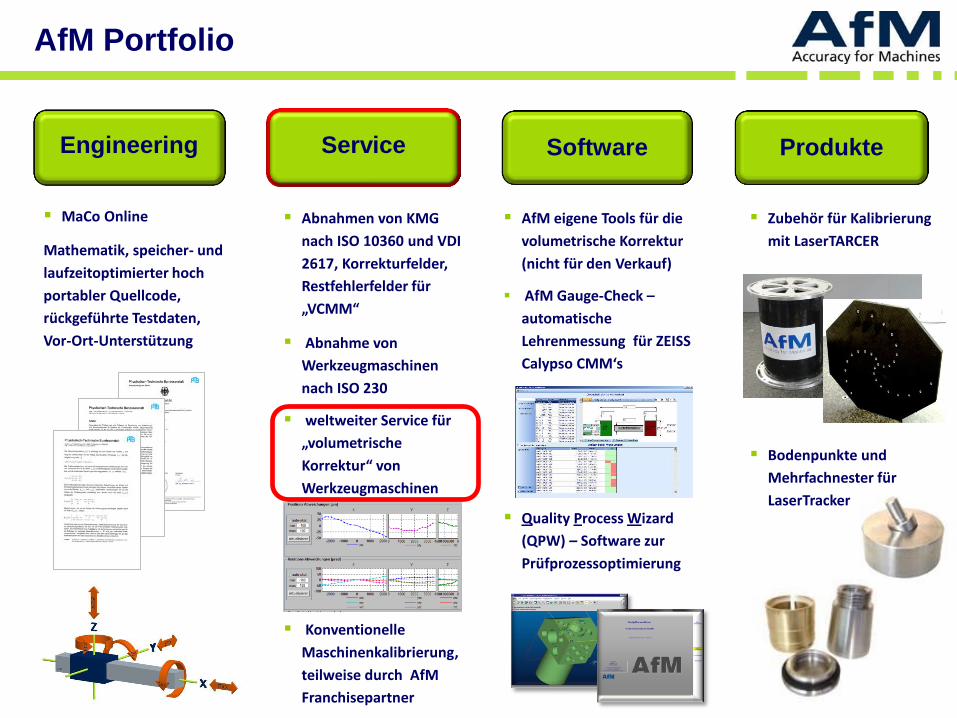
AfM Portfolio
Engineering
Software
Produkte
Abnahmen von KMG
nach ISO 10360 und VDI
2617 Korrekturfelder
Restfehlerfelder fuumlr
bdquoVCMMldquo
Abnahme von
Werkzeugmaschinen
nach ISO 230
weltweiter Service fuumlr
bdquovolumetrische
Korrekturldquo von
Werkzeugmaschinen
Konventionelle
Maschinenkalibrierung
teilweise durch AfM
Franchisepartner
AfM eigene Tools fuumlr die
volumetrische Korrektur
(nicht fuumlr den Verkauf)
AfM Gauge-Check ndash
automatische
Lehrenmessung fuumlr ZEISS
Calypso CMMlsquos
Quality Process Wizard
(QPW) ndash Software zur
Pruumlfprozessoptimierung
Zubehoumlr fuumlr Kalibrierung
mit LaserTARCER
Bodenpunkte und
Mehrfachnester fuumlr
LaserTracker
Service
MaCo Online
Mathematik speicher- und
laufzeitoptimierter hoch
portabler Quellcode
ruumlckgefuumlhrte Testdaten
Vor-Ort-Unterstuumltzung
Thema
Volumetrische Korrektur ndash Erfahrungen eines
internationalen Dienstleisters
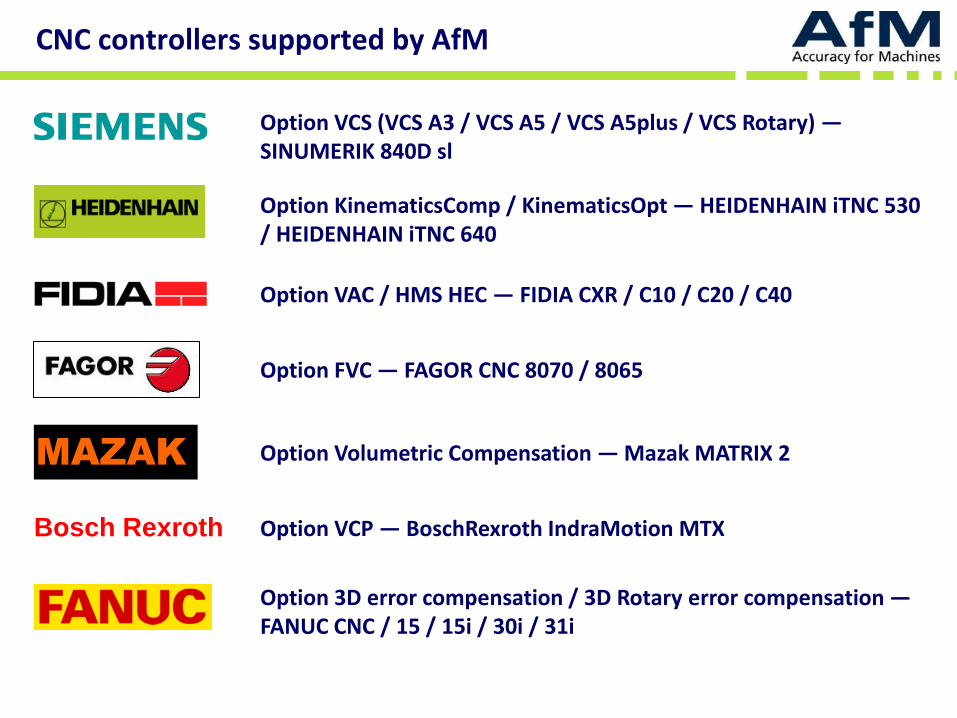
CNC controllers supported by AfM
Option VCS (VCS A3 VCS A5 VCS A5plus VCS Rotary) ― SINUMERIK 840D sl
Option VAC HMS HEC ― FIDIA CXR C10 C20 C40
Option FVC ― FAGOR CNC 8070 8065
Option 3D error compensation 3D Rotary error compensation ― FANUC CNC 15 15i 30i 31i
Option KinematicsComp KinematicsOpt ― HEIDENHAIN iTNC 530 HEIDENHAIN iTNC 640
Option Volumetric Compensation ― Mazak MATRIX 2
Option VCP ― BoschRexroth IndraMotion MTX
MAZAK
Bosch Rexroth
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
AfM Portfolio
Service
Engineering
Software
Produkte
MaCo Online
Mathematik speicher- und
laufzeitoptimierter hoch
portabler Quellcode
ruumlckgefuumlhrte Testdaten
Vor-Ort-Unterstuumltzung
Abnahmen von KMG
nach ISO 10360 und VDI
2617 Korrekturfelder
Restfehlerfelder fuumlr
bdquoVCMMldquo
Abnahme von
Werkzeugmaschinen
nach ISO 230
weltweiter Service fuumlr
bdquovolumetrische
Korrekturldquo von
Werkzeugmaschinen
Konventionelle
Maschinenkalibrierung
teilweise durch AfM
Franchisepartner
AfM eigene Tools fuumlr die
volumetrische Korrektur
(nicht fuumlr den Verkauf)
AfM Gauge-Check ndash
automatische
Lehrenmessung fuumlr ZEISS
Calypso CMMlsquos
Quality Process Wizard
(QPW) ndash Software zur
Pruumlfprozessoptimierung
Zubehoumlr fuumlr Kalibrierung
mit LaserTARCER
Bodenpunkte und
Mehrfachnester fuumlr
LaserTracker
AfM Portfolio
Engineering
Software
Produkte
Abnahmen von KMG
nach ISO 10360 und VDI
2617 Korrekturfelder
Restfehlerfelder fuumlr
bdquoVCMMldquo
Abnahme von
Werkzeugmaschinen
nach ISO 230
weltweiter Service fuumlr
bdquovolumetrische
Korrekturldquo von
Werkzeugmaschinen
Konventionelle
Maschinenkalibrierung
teilweise durch AfM
Franchisepartner
AfM eigene Tools fuumlr die
volumetrische Korrektur
(nicht fuumlr den Verkauf)
AfM Gauge-Check ndash
automatische
Lehrenmessung fuumlr ZEISS
Calypso CMMlsquos
Quality Process Wizard
(QPW) ndash Software zur
Pruumlfprozessoptimierung
Zubehoumlr fuumlr Kalibrierung
mit LaserTARCER
Bodenpunkte und
Mehrfachnester fuumlr
LaserTracker
Service
MaCo Online
Mathematik speicher- und
laufzeitoptimierter hoch
portabler Quellcode
ruumlckgefuumlhrte Testdaten
Vor-Ort-Unterstuumltzung
Thema
Volumetrische Korrektur ndash Erfahrungen eines
internationalen Dienstleisters
CNC controllers supported by AfM
Option VCS (VCS A3 VCS A5 VCS A5plus VCS Rotary) ― SINUMERIK 840D sl
Option VAC HMS HEC ― FIDIA CXR C10 C20 C40
Option FVC ― FAGOR CNC 8070 8065
Option 3D error compensation 3D Rotary error compensation ― FANUC CNC 15 15i 30i 31i
Option KinematicsComp KinematicsOpt ― HEIDENHAIN iTNC 530 HEIDENHAIN iTNC 640
Option Volumetric Compensation ― Mazak MATRIX 2
Option VCP ― BoschRexroth IndraMotion MTX
MAZAK
Bosch Rexroth
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
AfM Portfolio
Engineering
Software
Produkte
Abnahmen von KMG
nach ISO 10360 und VDI
2617 Korrekturfelder
Restfehlerfelder fuumlr
bdquoVCMMldquo
Abnahme von
Werkzeugmaschinen
nach ISO 230
weltweiter Service fuumlr
bdquovolumetrische
Korrekturldquo von
Werkzeugmaschinen
Konventionelle
Maschinenkalibrierung
teilweise durch AfM
Franchisepartner
AfM eigene Tools fuumlr die
volumetrische Korrektur
(nicht fuumlr den Verkauf)
AfM Gauge-Check ndash
automatische
Lehrenmessung fuumlr ZEISS
Calypso CMMlsquos
Quality Process Wizard
(QPW) ndash Software zur
Pruumlfprozessoptimierung
Zubehoumlr fuumlr Kalibrierung
mit LaserTARCER
Bodenpunkte und
Mehrfachnester fuumlr
LaserTracker
Service
MaCo Online
Mathematik speicher- und
laufzeitoptimierter hoch
portabler Quellcode
ruumlckgefuumlhrte Testdaten
Vor-Ort-Unterstuumltzung
Thema
Volumetrische Korrektur ndash Erfahrungen eines
internationalen Dienstleisters
CNC controllers supported by AfM
Option VCS (VCS A3 VCS A5 VCS A5plus VCS Rotary) ― SINUMERIK 840D sl
Option VAC HMS HEC ― FIDIA CXR C10 C20 C40
Option FVC ― FAGOR CNC 8070 8065
Option 3D error compensation 3D Rotary error compensation ― FANUC CNC 15 15i 30i 31i
Option KinematicsComp KinematicsOpt ― HEIDENHAIN iTNC 530 HEIDENHAIN iTNC 640
Option Volumetric Compensation ― Mazak MATRIX 2
Option VCP ― BoschRexroth IndraMotion MTX
MAZAK
Bosch Rexroth
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Thema
Volumetrische Korrektur ndash Erfahrungen eines
internationalen Dienstleisters
CNC controllers supported by AfM
Option VCS (VCS A3 VCS A5 VCS A5plus VCS Rotary) ― SINUMERIK 840D sl
Option VAC HMS HEC ― FIDIA CXR C10 C20 C40
Option FVC ― FAGOR CNC 8070 8065
Option 3D error compensation 3D Rotary error compensation ― FANUC CNC 15 15i 30i 31i
Option KinematicsComp KinematicsOpt ― HEIDENHAIN iTNC 530 HEIDENHAIN iTNC 640
Option Volumetric Compensation ― Mazak MATRIX 2
Option VCP ― BoschRexroth IndraMotion MTX
MAZAK
Bosch Rexroth
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
CNC controllers supported by AfM
Option VCS (VCS A3 VCS A5 VCS A5plus VCS Rotary) ― SINUMERIK 840D sl
Option VAC HMS HEC ― FIDIA CXR C10 C20 C40
Option FVC ― FAGOR CNC 8070 8065
Option 3D error compensation 3D Rotary error compensation ― FANUC CNC 15 15i 30i 31i
Option KinematicsComp KinematicsOpt ― HEIDENHAIN iTNC 530 HEIDENHAIN iTNC 640
Option Volumetric Compensation ― Mazak MATRIX 2
Option VCP ― BoschRexroth IndraMotion MTX
MAZAK
Bosch Rexroth
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Vision
Was wir alle gern haumltten hellip
Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Vision
Was wir alle gern haumltten hellip
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Unsere Erfahrung
volumetrische
Kompensation hellip
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
Hat viele technische
Details
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherschbar
Ist leistungsfaumlhig
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
Hat viele technische
Details
Ist kein Buch mit
sieben Siegeln
Ist beherrschbar
Ist leistungsfaumlhig
Zahlt sich aus
Unsere Erfahrung
Fragen
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
ist komplex
Unsere Erfahrung
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
Unsere Erfahrung
Einfacher als dieser
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
Unsere Erfahrung
Einfacher als dieser Der falsche Weg
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
volumetrische
Kompensation hellip
ist komplex
ist ein Prozess
ist kein Allheilmittel
ist nicht fuumlr nebenbei
ist nicht standardisiert
ist nicht eine Frage
des Messgeraumltes
Unsere Erfahrung
Einfacher als dieser Der falsche Weg Vielfalt
Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Der Prozess
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
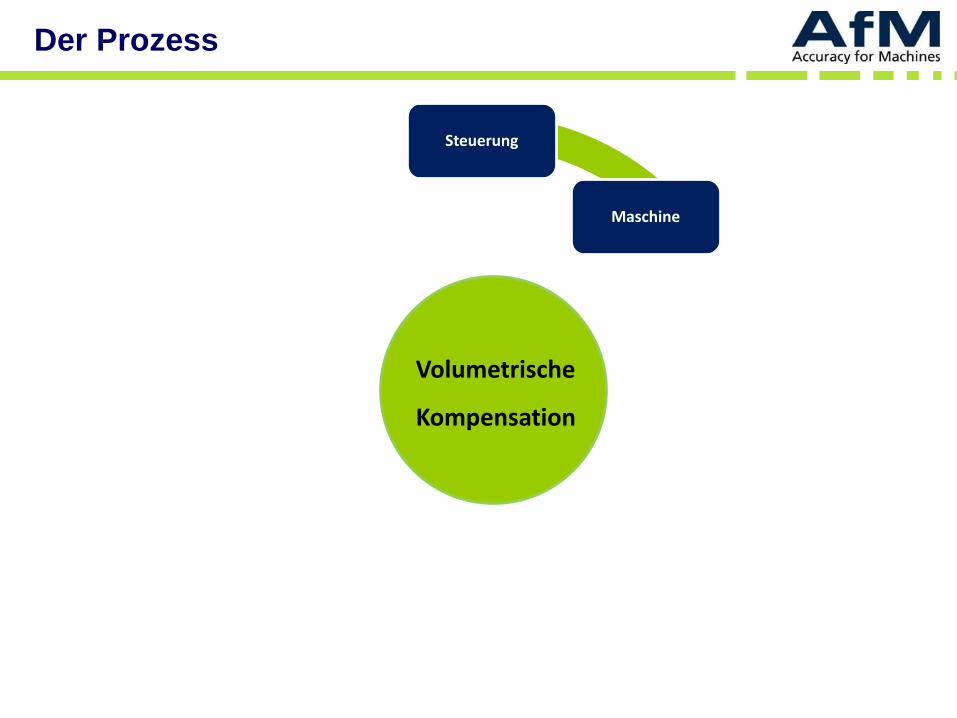
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
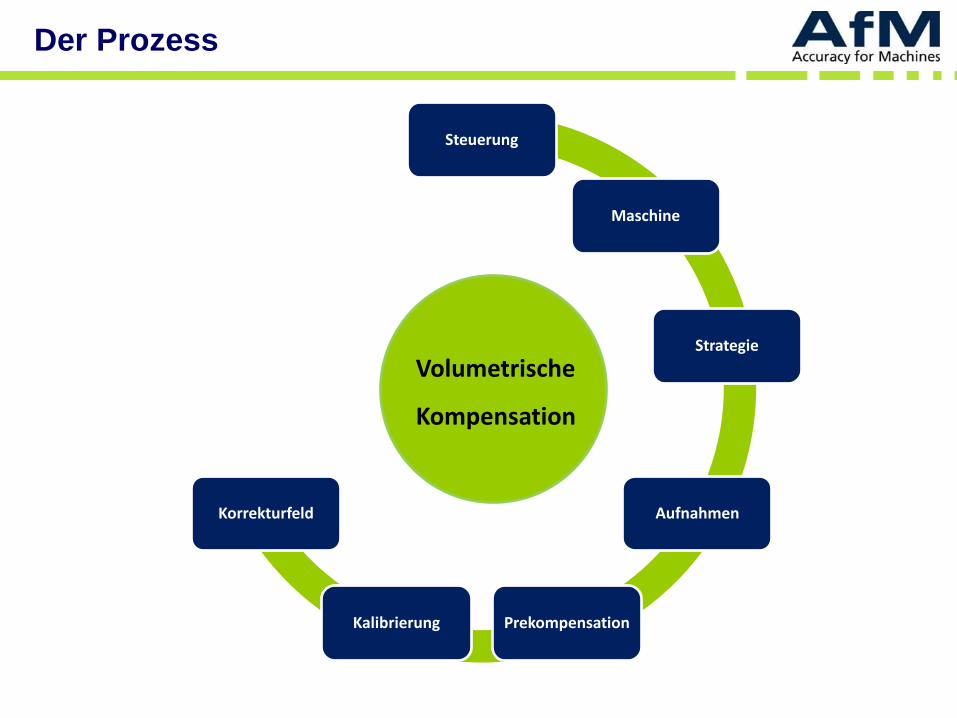
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Der Prozess
Steuerung
Maschine
Strategie
Aufnahmen
Prekompensation Kalibrierung
Korrekturfeld
Verifizierung
Bewertung
Volumetrische
Kompensation
Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Der Kunde steht im Mittelpunkt
Steuerungs-
hersteller
Maschinen-
bauer
Endkunden Maschinennutzer
Meszliggeraumlte-
hersteller
Engineering Test amp Ruumlckmeldung
Beratung Training Analyse amp Bewertung
Komplettservice Maschineabnahmen
Produktdemo Service Kundenschulung
MAZAK
Bosch Rexroth
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
Retrofit Projekt
Entwicklung Kompensationsstartegie
Gantry Achsen amp Umkehrspiel Kalibrierung Linearachsen
Volumetrische Kalibrierung amp Verifizierung Linearachsen
Umkehrspiel amp Positionsfehler Kalibrierung Drehachsen
Auswertung Analyse amp Bewertung
Kompaktschulung zur volumetrischen Korrektur
Praxisbeispiel Luftfahrt
Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Maschine
Kompensationsvolumen 139msup3
X-Achse 12000mm
Y-Achse 1625mm
Z-Achse 712mm
Maschine mit aktiver Positions- und
Umkehrspielkompensation
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
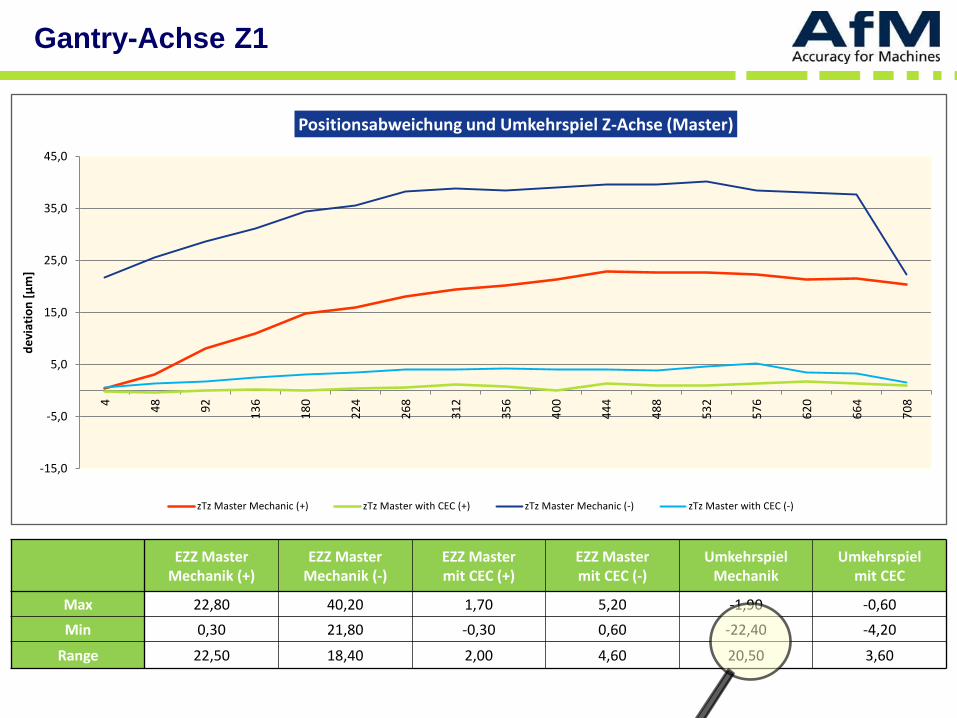
Gantry-Achse Z1
-150
-50
50
150
250
350
450
4
48
92
13
6
18
0
22
4
26
8
31
2
35
6
40
0
44
4
48
8
53
2
57
6
62
0
66
4
70
8
de
viat
ion
[micro
m]
Positionsabweichung und Umkehrspiel Z-Achse (Master)
zTz Master Mechanic (+) zTz Master with CEC (+) zTz Master Mechanic (-) zTz Master with CEC (-)
EZZ Master
Mechanik (+) EZZ Master
Mechanik (-) EZZ Master mit CEC (+)
EZZ Master mit CEC (-)
Umkehrspiel Mechanik
Umkehrspiel mit CEC
Max 2280 4020 170 520 -190 -060
Min 030 2180 -030 060 -2240 -420
Range 2250 1840 200 460 2050 360
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
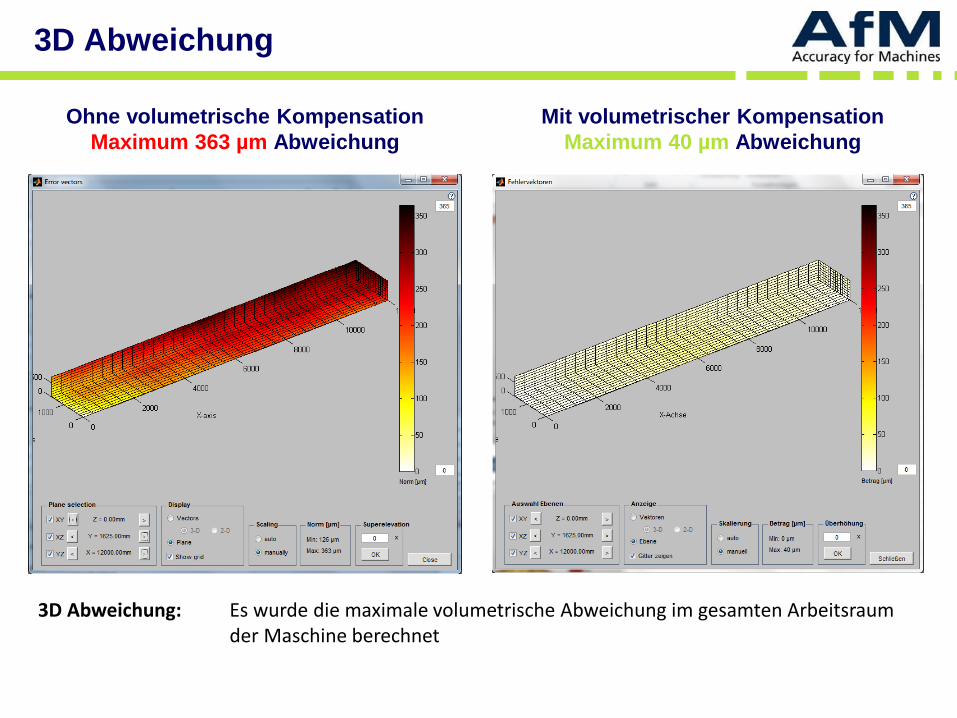
3D Abweichung
Ohne volumetrische Kompensation
Maximum 363 microm Abweichung
Mit volumetrischer Kompensation
Maximum 40 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
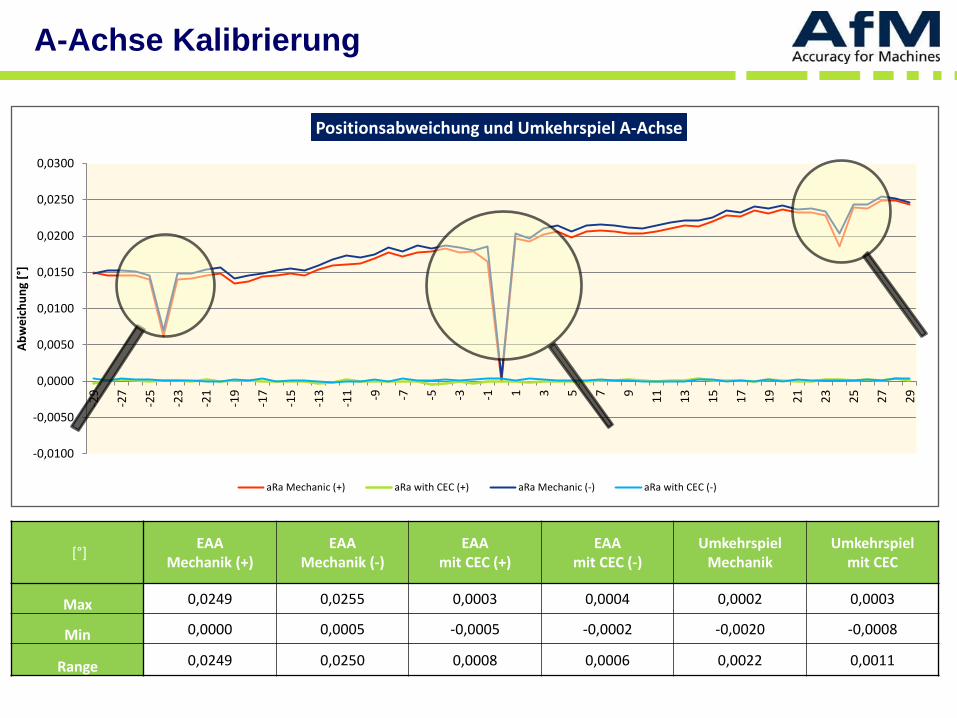
-00100
-00050
00000
00050
00100
00150
00200
00250
00300
-29
-27
-25
-23
-21
-19
-17
-15
-13
-11 -9 -7 -5 -3 -1 1 3 5 7 9
11
13
15
17
19
21
23
25
27
29
Ab
we
ich
un
g [deg
]
Positionsabweichung und Umkehrspiel A-Achse
aRa Mechanic (+) aRa with CEC (+) aRa Mechanic (-) aRa with CEC (-)
A-Achse Kalibrierung
[deg] EAA
Mechanik (+) EAA
Mechanik (-) EAA
mit CEC (+) EAA
mit CEC (-) Umkehrspiel
Mechanik Umkehrspiel
mit CEC
Max 00249 00255 00003 00004 00002 00003
Min 00000 00005 -00005 -00002 -00020 -00008
Range 00249 00250 00008 00006 00022 00011
Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Praxisbeispiel Formenbau
Projekt vollstaumlndige Kompensation
aller Abweichungen an einer
Neumaschine
Entwicklung Kompensationsstrategie fuumlr 43
Abweichungsparameter (21 fuumlr XYZ und 22 fuumlr AC)
Volumetrische Kalibrierung amp Verifizierung der
Linearachsen XYZ
Kompensation der Komponentenabweichungen A amp C-Achse
Kompensation der Lageabweichungen A amp C-Achse
Auswertung Analyse Bewertung und Praumlsentation
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
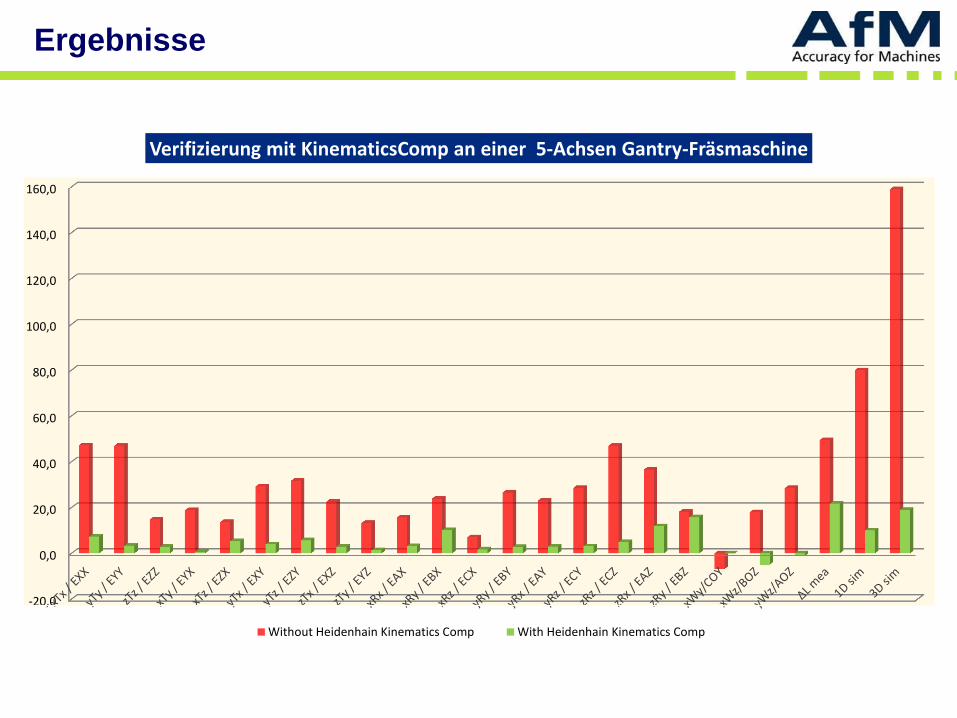
Ergebnisse
-200
00
200
400
600
800
1000
1200
1400
1600
Verifizierung mit KinematicsComp an einer 5-Achsen Gantry-Fraumlsmaschine
Without Heidenhain Kinematics Comp With Heidenhain Kinematics Comp
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
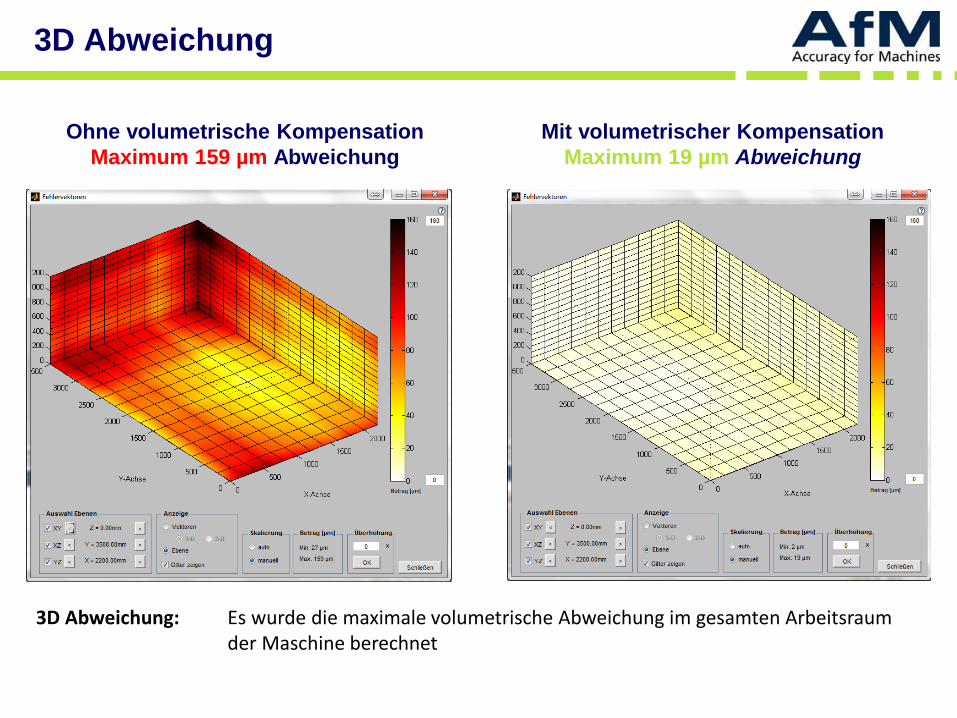
3D Abweichung
Ohne volumetrische Kompensation
Maximum 159 microm Abweichung
Mit volumetrischer Kompensation
Maximum 19 microm Abweichung
3D Abweichung Es wurde die maximale volumetrische Abweichung im gesamten Arbeitsraum der Maschine berechnet
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
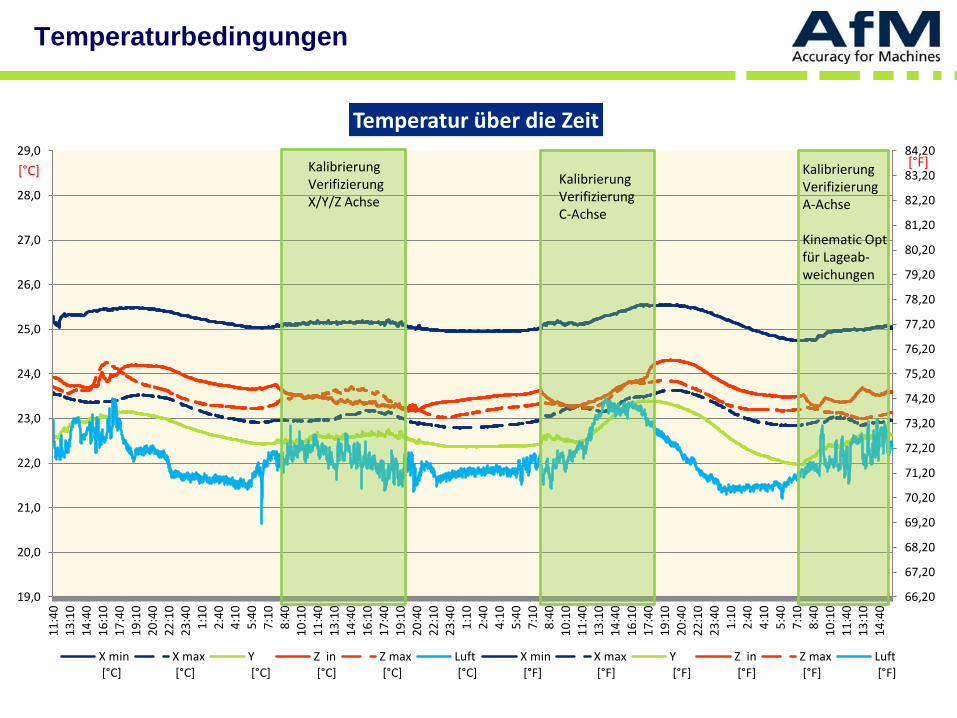
Temperaturbedingungen
6620
6720
6820
6920
7020
7120
7220
7320
7420
7520
7620
7720
7820
7920
8020
8120
8220
8320
8420
190
200
210
220
230
240
250
260
270
280
290
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
16
10
17
40
19
10
20
40
22
10
23
40
11
02
40
41
05
40
71
08
40
10
10
11
40
13
10
14
40
Temperatur uumlber die Zeit
X min [degC]
X max [degC]
Y [degC]
Z in [degC]
Z max [degC]
Luft [degC]
X min [degF]
X max [degF]
Y [degF]
Z in [degF]
Z max [degF]
Luft [degF]
Kalibrierung Verifizierung XYZ Achse
[degC] [degF]
Kalibrierung Verifizierung C-Achse
Kalibrierung Verifizierung A-Achse Kinematic Opt fuumlr Lageab- weichungen
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
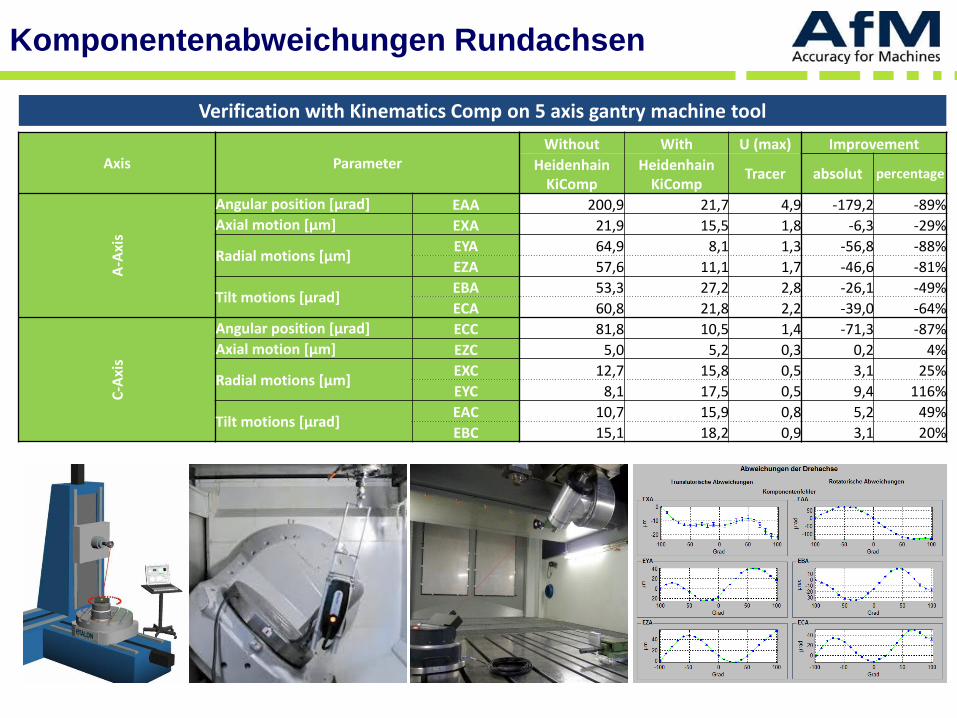
Komponentenabweichungen Rundachsen
Verification with Kinematics Comp on 5 axis gantry machine tool
Axis Parameter Without With U (max) Improvement
Heidenhain KiComp
Heidenhain KiComp
Tracer absolut percentage
A-A
xis
Angular position [microrad] EAA 2009 217 49 -1792 -89 Axial motion [microm] EXA 219 155 18 -63 -29
Radial motions [microm] EYA 649 81 13 -568 -88
EZA 576 111 17 -466 -81
Tilt motions [microrad] EBA 533 272 28 -261 -49
ECA 608 218 22 -390 -64
C-A
xis
Angular position [microrad] ECC 818 105 14 -713 -87 Axial motion [microm] EZC 50 52 03 02 4
Radial motions [microm] EXC 127 158 05 31 25
EYC 81 175 05 94 116
Tilt motions [microrad] EAC 107 159 08 52 49
EBC 151 182 09 31 20
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013
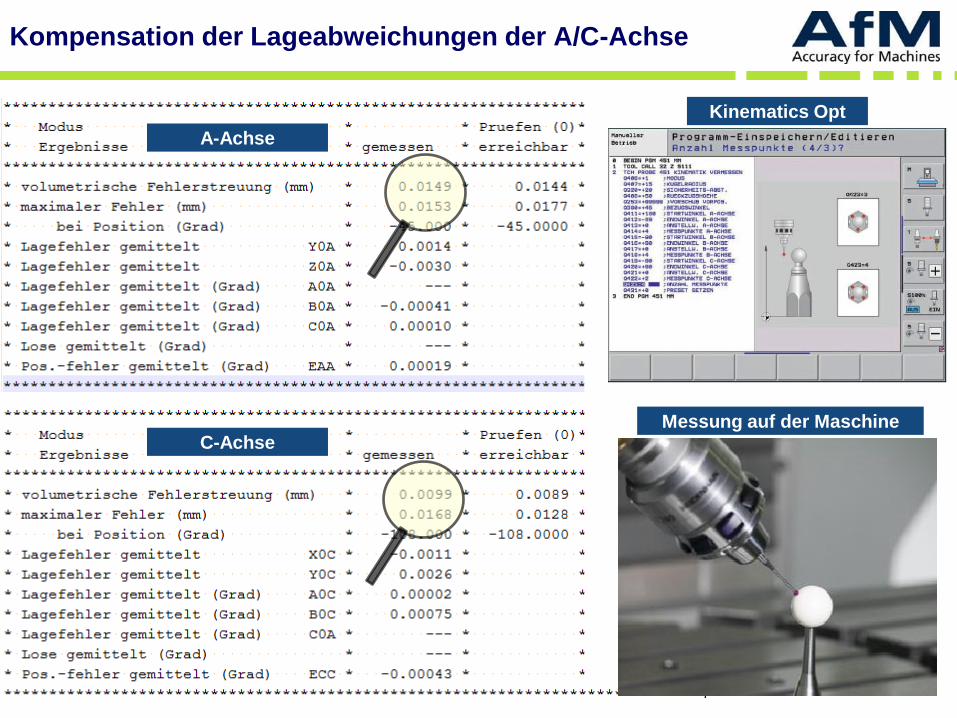
Kompensation der Lageabweichungen der AC-Achse
C-Achse
A-Achse
Kinematics Opt
Messung auf der Maschine
Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013

Vielen Dank fuumlr Ihre
Aufmerksamkeit
AfM Technology GmbH bull Gartenstraszlige 133 bull 73430 Aalen
Tel +49 (0)7361 889608-0 bull Fax +49 (0)7361 889608-99
wwwafm-tecde bull infoafm-tecde
Der Vortrag steht fuumlr Sie auf unseren Webseiten in deutsch und englisch unter
httpwwwafm-tecinfoafm-technology-vortraegehtml zum Download bereit
copy Wolfram Meyer AfM Technology GmbH Volumetric Compensation Process Etalon Forum 2013





























