Embed Size (px)
Citation preview
Analysis II*
Humboldt-Universitat zu Berlin
Caren Tischendorf
Skript zur Vorlesung im SS 2015

Inhaltsverzeichnis
1 Einleitung und Wiederholung 41.1 Konvergenzkriterien von Folgen . . . . . . . . . . . . . . . . . 4
1.1.1 Satz von Bolzano-Weierstraß . . . . . . . . . . . . . . . 51.1.2 Cauchy-Folgen . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Konvergenzkriterien von Reihen . . . . . . . . . . . . . . . . . 61.2.1 Leibniz-Kriterium . . . . . . . . . . . . . . . . . . . . . 61.2.2 Majoranten- und Minoranten-Kriterium . . . . . . . . 71.2.3 Quotienten-Kriterium . . . . . . . . . . . . . . . . . . . 71.2.4 Wurzel-Kriterium . . . . . . . . . . . . . . . . . . . . . 81.2.5 Konvergenz von Potenzreihen . . . . . . . . . . . . . . 8
1.3 Stetigkeit von Funktionen in metrischen Raumen . . . . . . . 91.4 Kompakte Mengen in metrischen Raumen . . . . . . . . . . . 9
1.4.1 Satz von Heine-Borel . . . . . . . . . . . . . . . . . . . 91.4.2 Satz vom Minimum und Maximum . . . . . . . . . . . 10
1.5 Gleichmaßige Stetigkeit . . . . . . . . . . . . . . . . . . . . . . 101.6 Zwischenwertsatz . . . . . . . . . . . . . . . . . . . . . . . . . 101.7 Umkehrsatz fur stetige, monotone Funktionen . . . . . . . . . 111.8 Differenzierbarkeit von Funktionen einer Variablen . . . . . . . 11
1.8.1 Differenzierbarkeit verknupfter Abbildungen (Ketten-regel) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.8.2 Differenzierbarkeit der inversen Abbildung . . . . . . . 111.8.3 Mittelwertsatz . . . . . . . . . . . . . . . . . . . . . . . 121.8.4 Notwendige Bedingung fur lokale Extrema . . . . . . . 121.8.5 Taylorformel und Taylorreihe . . . . . . . . . . . . . . 13
2 Differentialrechnung fur Funktionen mit mehreren Variablen 152.1 Stetige lineare Abbildungen . . . . . . . . . . . . . . . . . . . 15
2.1.1 Beschrankte lineare Abbildungen . . . . . . . . . . . . 152.1.2 Operatornorm . . . . . . . . . . . . . . . . . . . . . . . 172.1.3 Stetigkeitseigenschaften . . . . . . . . . . . . . . . . . . 192.1.4 Vollstandigkeit von L(E,F ) . . . . . . . . . . . . . . . 202.1.5 Endlich-dimensionale Banachraume . . . . . . . . . . . 232.1.6 Matrixdarstellungen . . . . . . . . . . . . . . . . . . . 27
2.2 Differenzierbarkeit . . . . . . . . . . . . . . . . . . . . . . . . 292.2.1 Totale Differenzierbarkeit . . . . . . . . . . . . . . . . 302.2.2 Richtungsableitungen . . . . . . . . . . . . . . . . . . . 36
2

2.2.3 Partielle Ableitungen . . . . . . . . . . . . . . . . . . . 392.2.4 Jacobi-Matrix . . . . . . . . . . . . . . . . . . . . . . . 422.2.5 Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . 472.2.6 Rechenregeln . . . . . . . . . . . . . . . . . . . . . . . 502.2.7 Mittelwertsatz . . . . . . . . . . . . . . . . . . . . . . . 522.2.8 Notwendige Bedingungen fur Extrema . . . . . . . . . 54
2.3 Hohere Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . 552.3.1 Multilineare Abbildungen . . . . . . . . . . . . . . . . 552.3.2 Differenzierbarkeit hoherer Ordnung . . . . . . . . . . 602.3.3 Partielle Ableitungen hoherer Ordnung . . . . . . . . . 652.3.4 Taylorsche Formeln . . . . . . . . . . . . . . . . . . . . 672.3.5 Extrema fur Funktionen mehrerer Variablen . . . . . . 71
2.4 Eigenschaften impliziter Funktionen . . . . . . . . . . . . . . . 742.4.1 Satz uber die Umkehrabbildung . . . . . . . . . . . . . 752.4.2 Satz uber implizite Funktionen . . . . . . . . . . . . . 80
3 Integration von Funktionen mit einer Variablen 853.1 Das Cauchy-Riemann-Integral . . . . . . . . . . . . . . . . . . 893.2 Eigenschaften des Integrals . . . . . . . . . . . . . . . . . . . . 953.3 Der Hauptsatz der Differential- und Integralrechnung . . . . . 993.4 Das unbestimmte Integral . . . . . . . . . . . . . . . . . . . . 1013.5 Der Mittelwertsatz der Integralrechnung . . . . . . . . . . . . 1033.6 Integrationstechniken . . . . . . . . . . . . . . . . . . . . . . . 1053.7 Uneigentliche Integrale . . . . . . . . . . . . . . . . . . . . . . 107
4 Grundlagen gewohnlicher Differentialgleichungen 1094.1 Losung linearer Anfangswertprobleme . . . . . . . . . . . . . . 1104.2 Separation der Variablen . . . . . . . . . . . . . . . . . . . . . 1144.3 Existenz einer Losung . . . . . . . . . . . . . . . . . . . . . . 1174.4 Eindeutigkeit einer Losung . . . . . . . . . . . . . . . . . . . . 117
A Anhang 119A.1 Banachscher Fixpunktsatz . . . . . . . . . . . . . . . . . . . . 119A.2 Erweiterungssatz fur gleichmaßig stetige Funktionen . . . . . . 120A.3 Satz von Arzela-Ascoli . . . . . . . . . . . . . . . . . . . . . . 123
3
1 Einleitung und Wiederholung
Die Schwerpunkte der Vorlesung Analysis II* sind
• Differentialrechnung fur Funktionen mit mehreren Variablen
• Integralrechnung fur Funktionen einer Variablen
• Grundlagen zu gewohnlichen Differentialgleichungen
Als begleitende und weiterfuhrende Literatur zur Vorlesung wird folgendeLiteratur empfohlen:
[1] H. Amann, J. Escher: Analysis I, II, und III, Birkhauser
[2] M. Barner, F. Flohr: Analysis I und II, de Gruyter
[3] J. Dieudonne: Grundzuge der modernen Analysis, Deutscher Verlag derWissenschaften
[4] O. Forster: Analysis 1, 2 und 3, Springer-Spektrum und Springer-Vieweg
[5] E. Hairer, G. Wanner: Analysis by its history, Springer
[6] H. Heuser: Lehrbuch der Analysis, Teil 1 und 2, Springer-Vieweg
Zu Beginn der Vorlesung wollen wir an einige wichtige Satze aus der Vorle-sung Analysis I* erinnern.
1.1 Konvergenzkriterien von Folgen
Satz 1.1. Jede wachsende (bzw. fallende), beschrankte reelle Folge (xn) kon-vergiert und es gilt:
xn ↑ supn∈N
xn ( bzw. xn ↓ infn∈N
xn ).
Beispiel 1.2. Wir betrachten die Folge
1
2,
2
3,
3
4,
4
5,
5
6,
6
7,
7
8,
8
9, ..., d.h. xn =
n
n+ 1.
4
Die Folge konvergiert gegen 1: Die Folge ist monoton wachsend, da
xn−1 =n− 1
n<
n
n+ 1= xn.
Offenbar ist 1 eine obere Schranke. Sie ist zudem die kleinste obere Schranke,da es fur alle s < 1 eine naturliche Zahl n mit n+ 1 > 1
1−s gibt und somit
xn =n
n+ 1= 1− 1
n+ 1> 1− (1− s) = s.
Satz 1.3. Eine reelle Folge (xn) konvergiert genau dann, wenn
lim infn→∞
xn = lim supn→∞
xn.
Falls die reelle Folge(xn) konvergiert, dann gilt
lim infn→∞
xn = limn→∞
xn = lim supn→∞
xn.
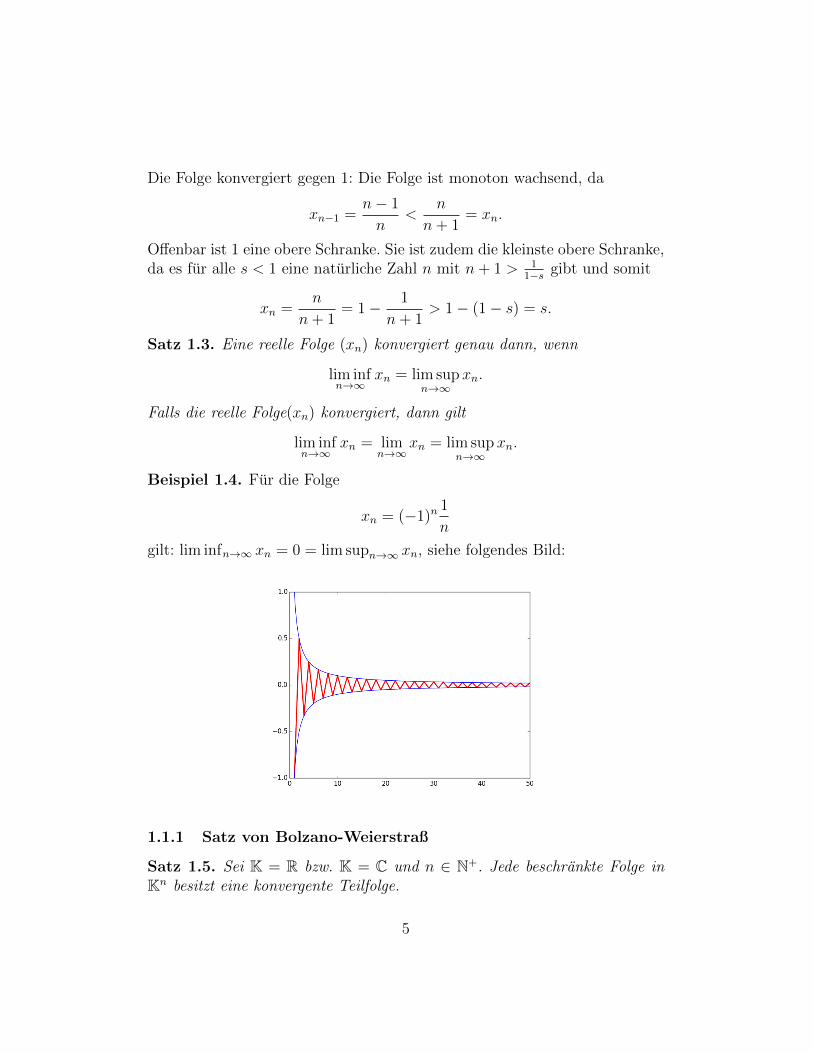
Beispiel 1.4. Fur die Folge
xn = (−1)n1
n
gilt: lim infn→∞ xn = 0 = lim supn→∞ xn, siehe folgendes Bild:
1.1.1 Satz von Bolzano-Weierstraß
Satz 1.5. Sei K = R bzw. K = C und n ∈ N+. Jede beschrankte Folge inKn besitzt eine konvergente Teilfolge.
5

1.1.2 Cauchy-Folgen
Satz 1.6. Sei X ein metrischer Raum und (xn) Folge in X. Dann gilt:
1. Falls (xn) konvergent, dann ist (xn) eine Cauchy-Folge.
2. Falls (xn) eine Cauchy-Folge ist, dann ist (xn) beschrankt.
3. Falls (xn) eine Cauchy-Folge ist und eine konvergente Teilfolge besitzt,dann ist (xn) konvergent.
Beispiel 1.7. Die Folge
x0 = 2, xn+1 =1
2(xn +
2
xn)
ist eine Cauchy-Folge in Q und in R, aber konvergiert nur in R. Ihr Grenzwertist√
2,
1.2 Konvergenzkriterien von Reihen
Satz 1.8. Seien E ein Banachraum, (xk) eine Folge in E und sn :=n∑k=0
xk.
1. Falls∞∑k=0
xk konvergent ist, dann ist (xk) eine Null-Folge.
2. Falls E = R, dann ist die Reihe∞∑k=0
xk ist genau dann konvergent, wenn
die Folge (sn) beschrankt ist.
1.2.1 Leibniz-Kriterium
Satz 1.9. Sei (xk) eine fallende Null-Folge in R mit xk ≥ 0 fur alle k ∈ N.
Dann konvergiert die alternierende Reihe∞∑k=0
(−1)kxk.
Beispiel 1.10. Nach dem Leibnizkriterium konvergiert die alternierende Rei-he
∞∑k=0
(−1)k1
k.
6

1.2.2 Majoranten- und Minoranten-Kriterium
Satz 1.11. Seien E ein Banachraum und (xk) eine Folge in E. Besitzt die
Reihe∞∑k=0
xk eine konvergente Majorante, so ist sie (absolut) konvergent. Be-
sitzt die Reihe∞∑k=0
xk eine divergente Minorante, so ist sie divergent.
Beispiel 1.12. Die harmonische Reihe
1 +1
2+ (
1
3+
1
4) + (
1
5+
1
6+
1
7+
1
8) + (
1
9+
1
10+
1
11+ . . .
besitzt die divergente Minorante
1 +1
2+ (
1
4+
1
4) + (
1
8+
1
8+
1
8+
1
8) + (
1
16+
1
16+ . . .
= 1 +1
2+
1
2+
1
2+ ...
und ist daher selbst divergent.
1.2.3 Quotienten-Kriterium
Satz 1.13. Seien E ein Banachraum und (xk) eine Folge in E. Es existiereein k0 ∈ N, so dass xk 6= 0 fur alle k ≥ k0.
1. Falls ein q ∈ (0, 1) und ein k1 ∈ N mit k1 ≥ k0 existieren, so dass
‖xk+1‖‖xk‖
≤ q ∀k ≥ k1,
dann konvergiert die Reihe∞∑k=0
xk (absolut).
2. Falls ein k1 ∈ N mit k1 ≥ k0 existiert, so dass
‖xk+1‖‖xk‖
≥ 1 ∀k ≥ k1,
dann divergiert die Reihe∞∑k=0
xk.
7

Beispiel 1.14. Die Reihe
∞∑k=0
1
k!
konvergiert absolut, da
|xk+1||xk|
=1
(k + 1)!
k!
1=
1
k + 1≤ 1
2∀k ≥ 1.
1.2.4 Wurzel-Kriterium
Satz 1.15. Seien E ein Banachraum und (xk) eine Folge in E. Sei zudemα := lim supk→∞ k
√xk. Dann gelten:
1. Falls α < 1, so konvergiert die Reihe∞∑k=0
xk (absolut).
2. Falls α > 1, so divergiert die Reihe∞∑k=0
xk.
Beispiel 1.16. Die geometrische Reihe
∞∑k=0
1
2k
konvergiert absolut, da
α := lim supk→∞
k√xk = lim sup
k→∞
k
√1
2k= lim sup
k→∞
1
2=
1
2< 1.
1.2.5 Konvergenz von Potenzreihen
Satz 1.17. Sei∞∑k=0
akxk eine Potenzreihe in K. Dann existiert genau ein
ρ ∈ [0,∞], mit folgenden Eigenschaften:
1. Die Reihe∞∑k=0
akxk konvergiert absolut fur |x| < ρ und divergiert fur
|x| > ρ.
8

2. Es gilt die Hadamard-Formel:
ρ =1
lim supk→∞
k√|ak|
.
3. Falls limk→∞
|ak||ak+1|
∈ R, so gilt
ρ = limk→∞
|ak||ak+1|
.
1.3 Stetigkeit von Funktionen in metrischen Raumen
Satz 1.18. Es seien X und Y metrische Raume. Dann ist die Funktionf : X → Y genau dann stetig in x, wenn sie in x folgenstetig ist.
Satz 1.19. Es sei Y ein metrischer Raum. Dann ist die Funktion f : R→ Ygenau dann stetig in x, wenn sie in x links- und rechtsseitig stetig ist.
1.4 Kompakte Mengen in metrischen Raumen
Satz 1.20. Sei X ein metrischer Raum. Dann gelten:
1. Falls K ⊂ X kompakt, dann ist K abgeschlossen und beschrankt.
2. K ⊂ X ist genau dann kompakt, wenn jede Folge in K eine konvergenteTeilfolge besitzt.
Beispiel 1.21. Jedes endliche, abgeschlossene Intervall in R ist kompakt,aber N ist nicht kompakt in R.
1.4.1 Satz von Heine-Borel
Satz 1.22. Sei K ein Korper und n ∈ N+. Eine Teilmenge von Kn ist genaudann kompakt, wenn sie abgeschlossen und beschrankt ist.
Beispiel 1.23. Mengen im Rn und Cn sind genau dann kompakt, wenn sieabgeschlossen und beschrankt sind.
9

1.4.2 Satz vom Minimum und Maximum
Satz 1.24. Sei X ein kompakter metrischer Raum und f : X → R stetig.Dann existieren x ∈ X und x ∈ X, so dass
f(x) = minx∈X
f(x) und f(x) = maxx∈X
f(x).
Beispiel 1.25. Stetige Funktionen nehmen auf einem endlichen, abgeschlos-senen Intervall in R ihr Maximum und ihr Minimum an.
1.5 Gleichmaßige Stetigkeit
Satz 1.26. Seien X, Y metrische Raume. Dann gelten:
1. Falls f : X → Y Lipschitz-stetig ist, dann ist f auch gleichmaßig stetig.
2. Falls f : X → Y stetig ist und X kompakt ist, dann ist f auchgleichmaßig stetig.
Beispiel 1.27. Die Funktion f : [0, b] → R mit f(x) =√x ist gleichmaßig
stetig, aber nicht Lipschitz-stetig. Die gleichmaßige Stetigkeit ist klar, da fstetig ist und [0, b] kompakt. Fur die Lipschitz-Stetigkeit musste es ein L > 0geben, so dass
|√x−√y| ≤ L|x− y| ∀x, y ∈ [0, b].
Dann musste auch insbesondere gelten, dass
|√x| ≤ L|x| ∀x ∈ [0, b]
d.h.
1
L2≤ x ∀x ∈ [0, b],
was offenbar nicht stimmt.
1.6 Zwischenwertsatz
Satz 1.28. Sei X ein zusammenhangender metrischer Raum und f : X → Reine stetige Abbildung. Dann ist f(X) ein Intervall, d.h. f nimmt jeden Wertan, der zwischen zwei Funktionswerten von f liegt.
Als Spezialfall ergibt sich der Zwischenwertsatz von Bolzano, wenn X einIntervall in R ist.
10
1.7 Umkehrsatz fur stetige, monotone Funktionen
Satz 1.29. Sei I ⊂ R ein nicht leeres Intervall. Falls f : I → R stetigund streng monoton wachsend (bzw. streng monoton fallend) ist, dann istJ := f(I) ein Intervall und f : I → J ist bijektiv. Zudem ist dann auchdie inverse Funktion f−1 : J → I stetig und streng monoton wachsend (bzw.streng monoton fallend).
Beispiel 1.30. Die Funktion f : R → R mit f(x) = exp(x) ist stetig undstreng monoton wachsend. Somit ist auch ihre Umkehrfunktion f−1 : R+ →R mit f−1(x) = log(x) stetig und streng monoton wachsend.
1.8 Differenzierbarkeit von Funktionen einer Variablen
Satz 1.31. Sei X ⊂ R perfekt und E ein normierter Vektorraum uber R.Dann ist eine Funktion f : X → E genau dann differenzierbar in a ∈ X,wenn sie in a links- und rechtsseitig differenzierbar mit ∂+f(a) = ∂−f(a) ist.
1.8.1 Differenzierbarkeit verknupfter Abbildungen (Kettenregel)
Satz 1.32. Sei K ein Korper, X ⊂ K eine Menge, a ∈ X ein Haufungspunktund E ein normierter Vektorraum uber K. Sei f : X → K in a differenzier-bar, f(X) ⊂ Y ⊂ K und f(a) ein Haufungspunkt in Y . Sei g : Y → E inf(a) differenzierbar. Dann ist auch g ◦ f in a differenzierbar und es gilt
(g ◦ f)′(a) = g′(f(a))f ′(a).
Beispiel 1.33. Die Ableitung der Funktion f : R→ R mit f(x) := exp(x3)ist gegeben durch
f ′(x) = exp(x3)3x2 = 3x2 exp(x3).
1.8.2 Differenzierbarkeit der inversen Abbildung
Satz 1.34. Sei K ein Korper, X ⊂ K eine Menge, a ∈ X ein Haufungspunktund E ein normierter Vektorraum uber K. Sei f : X → E injektiv und in adifferenzierbar mit f ′(a) 6= 0. Sei zudem die inverse Abbildung f−1 in f(a)stetig. Dann ist f−1 in f(a) differenzierbar mit
(f−1)′(f(a)) =1
f ′(a).
11

Beispiel 1.35. Fur die Ableitung der Umkehrfunktion f−1(y) = log(y) derFunktion f(x) = exp(x) gilt
(f−1)′(exp(x)) =1
exp(x),
d.h.
(f−1)′(y) =1
y.
1.8.3 Mittelwertsatz
Satz 1.36. Sei E ein normierter Vektorraum und f ∈ C([a, b], E) in (a, b)differenzierbar.
1. Dann gilt
‖f(b)− f(a)‖ ≤ supt∈(a,b)
‖f ′(t)‖(b− a).
2. Falls E = R, dann existiert ein ξ ∈ (a, b) mit
f(b)− f(a) = f ′(ξ)(b− a).
Beispiel 1.37. Mit dem Mittelwertsatz lassen sich leicht Nachweise zurgleichmaßigen Stetigkeit fuhren. Wir betrachten die Funktion f : R → Rmit f(x) := sin(x). Dann gilt fur alle x ≤ y ∈ R, dass
| sin(y)− sin(x)| ≤ supt∈(x,y)
| cos(t)| (y − x) ≤ y − x.
Damit folgt aus |y − x| < δ mit δ := ε stets | sin(y) − sin(x)| ≤ ε. Also istsin(x) gleichmaßig stetig auf R.
1.8.4 Notwendige Bedingung fur lokale Extrema
Satz 1.38. Sei X ⊂ R, f : X → R besitze in a ∈ X ein lokales Extremumund sei in a differenzierbar. Dann gilt f ′(a) = 0.
12

1.8.5 Taylorformel und Taylorreihe
Satz 1.39. Es seien K ein Korper, E ein Banachraum, D ⊆ K konvex mitmindestens zwei Punkten und n ∈ N+. Sei a ∈ D gegeben.
1. Fur alle f ∈ Cn(D,E) und x ∈ D gilt:
f(x) =n∑k=0
f (k)(a)
k!(x− a)k +Rn(f, a)(x) ∀k ∈ N+
mit
Rn(f, a)(x) = o(‖x− a‖n) (x→ a)
Falls K = R und E = R, dann existiert ein s ∈ (0, 1), so dass
Rn(f, a)(x) =f (n+1)(a+ s(x− a))
(n+ 1)!(x− a)n+1.
2. Falls f ∈ C∞(D,E) und limn→∞ ‖Rn(f, a)(x)‖E = 0 fur alle x ∈ D,dann gilt
f(x) = T (f, a)(x) =∞∑k=0
f (k)(a)
k!(x− a)k.
Beispiel 1.40. Wir betrachten K := R, D := (0, 2], f(x) := log(x). Danngilt fur k ∈ N+ und a ∈ (0, 2], dass
f (k)(a) = (−1)k−1(k − 1)!1
ak.
Die Taylorreihe hat daher fur x ∈ (0, 2] die Form
T (log, a)(x) = log(a) +∞∑k=1
(−1)k−1 1
k
(x− a)k
ak.
Fur a = 1 und x = 2 ergibt sich gerade die alternierende harmonische Reihe
T (log, 1)(2) =∞∑k=1
(−1)k−1 1
k.
13

Fur das Restglied wissen wir, dass ein s ∈ (0, 1) existiert, so dass
|Rn(log, 1)(x)| =∣∣∣∣f (n+1)(1 + s)
(n+ 1)!
∣∣∣∣=
1
n+ 1
∣∣∣∣ x− 1
1 + s(x− 1)
∣∣∣∣n+1
≤ 1
n+ 11n+1 → 0 (n→∞) ∀x ∈ (0, 2].
Daher erhalten wir
log(2) = T (log, 1)(2) =∞∑k=1
(−1)k−1 1
k.
14

2 Differentialrechnung fur Funktionen mit meh-
reren Variablen
Wir haben gesehen, dass die Ableitung einer Funktion f(x) ein nutzlichesHilfsmittel fur eine Reihe von Problemstellungen sein kann, so beispielsweise
• zur (lokalen) linearen Approximation von Kurven
• zur Bestimmung von Extremwerten (Minima und Maxima) einer Funk-tion
• zur Reihendarstellung von Funktionen
• zur Berechnung von Grenzwerten von Reihen
• zum Test auf Monotonie von Funktionen.
In diesem Kapitel werden wir sehen, dass sich vieles auch auf Funktionenf(x1, x2, . . . , xn) von mehreren Variablen erweitern lasst. Dazu benotigen wiranfangs ein paar grundlegende Kenntnisse uber stetige lineare Abbildungen,die im folgenden Abschnitt dargestellt sind.
2.1 Stetige lineare Abbildungen
Seien E = (E, ‖ · ‖E) und F = (F, ‖ · ‖F ) zwei normierte Vektorraume ubereinem Korper K, wobei K = R oder K = C. Wenn aus dem Kontext klar ist,welche Norm gemeint ist, dann schreiben wir einfach ‖ · ‖ anstelle von ‖ · ‖Ebzw. ‖ · ‖F .
2.1.1 Beschrankte lineare Abbildungen
Definition 2.1. Eine lineare Abbildung A von E nach F heißt beschrankt,falls es eine Konstante c > 0 gibt, so dass
‖Ax‖F ≤ c‖x‖E ∀x ∈ E.
Bemerkung 2.2. (i) Lineare Abbildungen zwischen zwei Vektorraumen wer-den auch lineare Operatoren genannt. Man verwendet den Begriff Ope-rator in der Regel fur Abbildungen zwischen unendlich dimensionalenVektorraumen.
15

(ii) Die Definition 2.1 ist nicht konsistent mit der Definition 9.33 beschrank-ter Funktionen. Eine lineare Abbildung f(x) ist im Sinne von Definition9.33 aus der Vorlesung Analysis I* nur dann beschrankt, wenn f(x) = 0fur alle x ∈ E. Diese Inkonsistenz ist historisch bedingt und hat sichin der Literatur zur Analysis leider etabliert. Beschrankte Funktionenim Sinne der Definition 9.33 entsprechen der (intuitiven) Vorstellungbeschrankter Funktionen, die auf einer Menge X ⊂ R definiert sind. ImZuge der Formalisierung der Analysis hat sich allerdings herausgestellt,dass es hilfreicher ist, eine Funktion genau dann beschrankt zu nennen,wenn sie beschrankte Mengen in beschrankte Mengen abbildet. Dementspricht die Definition 2.1, wie Lemma 2.3 zeigt.
Lemma 2.3. Eine lineare Abbildung A von E nach F ist im Sinne derDefinition 2.1 genau dann beschrankt, wenn sie beschrankte Mengen aus Ein beschrankte Mengen in F abbildet.
Beweis:
(i) Sei A beschrankt und X ⊂ E beschrankt, d.h. ∃M ∈ R : ‖x‖E ≤ M∀x ∈ X. Dann gilt
‖Ax‖F ≤ c‖x‖E ≤ c ·M ∀x ∈ X,
d.h. {y = Ax : x ∈ X} ist beschrankt in F .
(ii) Sei A eine lineare Abbildung, die beschrankte Mengen aus E in be-schrankte Mengen in F abbildet. Dann ist die Menge
{y = Ax : x ∈ E, ‖x‖E = 1}
beschrankt, d.h. es existiert ein M ∈ R, so dass ‖Ax‖F ≤ M fur allex ∈ E mit ‖x‖E = 1. Daraus folgt fur jedes x ∈ E mit x 6= 0 bei Wahlvon x := 1
‖x‖Ex, dass ‖x‖E = 1 und
‖Ax‖F =‖Ax‖F‖x‖E
‖x‖E = ‖ 1‖x‖E
Ax‖F‖x‖E = ‖Ax‖F‖x‖E ≤M‖x‖E.
Offenbar gilt die Ungleichung
‖Ax‖F ≤M‖x‖E.
auch fur x = 0, d.h. A ist beschrankt im Sinne der Definition 2.1.
16

�
Im Folgenden meinen wir mit beschrankten linearen Abbildungen stets be-schrankte lineare Abbildungen im Sinne der Definition 2.1.
2.1.2 Operatornorm
Lemma 2.4. Sei L(E,F ) die Menge aller beschrankten, linearen Abbildun-gen von E nach F . Dann gelten:
(i) L(E,F ) bildet einen K-Vektorraum mit der Addition A + B zweierAbbildungen A und B sowie der Multiplikation λ ·A einer Abbildung Amit einem Skalar λ ∈ K, die wie folgt definiert sind:
(A+B)(x) := A(x) +B(x), (λ · A)(x) := λ · A(x) ∀x ∈ E.
(ii) Die Abbildung ‖ · ‖ mit
‖A‖ = supx∈E, x 6=0
‖Ax‖F‖x‖E
ist eine Norm auf L(E,F ). Wir nennen ‖A‖ die Operatornorm von A.
Beweis:
(i) Dies ist eine leichte Ubungsaufgabe.
(ii) Wir zeigen die drei Normeigenschaften. Sei A ∈ L(E,F ).
(a) ‖A‖ = 0 genau dann, wenn ‖Ax‖F = 0 ∀x ∈ E. Dies bedeutet,dass Ax = 0 ∀x ∈ E, d.h. A = 0.
(b) Sei λ ∈ K. Dann gilt
‖λA‖ = supx∈E, x 6=0
‖λAx‖F‖x‖E
= supx∈E, x 6=0
|λ| · ‖Ax‖F‖x‖E
= |λ| supx∈E, x 6=0
‖Ax‖F‖x‖E
= |λ| · ‖A‖.
17

(c) Sei auch B Element von L(E,F ). Dann gilt
‖A+B‖ = supx∈E, x 6=0
‖Ax+Bx‖F‖x‖E
≤ supx∈E, x 6=0
‖Ax‖F + ‖Bx‖F‖x‖E
≤ supx∈E, x 6=0
‖Ax‖F‖x‖E
+ supx∈E, x 6=0
‖Bx‖F‖x‖E
= ‖A‖+ ‖B‖.
�
Lemma 2.5. Sei ‖ · ‖ die Operatornorm linearer, beschrankter Operatorenvon E nach F . Dann gelten:
(i) ‖A‖ = inf {c ∈ R : ‖Ax‖F ≤ c‖x‖E ∀x ∈ E}.
(ii) ∀x ∈ E: ‖Ax‖F ≤ ‖A‖ ‖x‖E.
(iii) ‖A‖ = sup‖x‖E=1
‖Ax‖F = sup‖x‖E≤1
‖Ax‖F .
Beweis:
(i) Da das Supremum per Definition die kleinste obere Schranke ist, sohaben wir
‖A‖ = supx∈E, x 6=0
‖Ax‖F‖x‖E
= inf {c ∈ R :‖Ax‖F‖x‖E
≤ c ∀x ∈ E mit x 6= 0}
= inf {c ∈ R : ‖Ax‖F ≤ c‖x‖E ∀x ∈ E}.
(ii) Sei x ∈ E mit x 6= 0. Dann gilt
‖Ax‖F =‖Ax‖F‖x‖E
‖x‖E ≤ supx∈E, x 6=0
‖Ax‖F‖x‖E
‖x‖E = ‖A‖ ‖x‖E.
Offenbar gilt die Ungleichung auch fur x = 0.
(iii) Dies ist eine Ubungsaufgabe. Hinweis: Man nutze, dass ‖x‖E = 1 fur
x :=1
‖x‖Ex mit x ∈ E und x 6= 0.
18

�
Beispiel 2.6. Sei A : R3 → R2 definiert durch
A(x) = (2x1 + 3x2, x1 + x2 + x3).
Wir betrachten R3 und R2 jeweils mit der Maximumsnorm ‖ · ‖∞. Dann gilt
‖A‖ = sup‖x‖∞≤1
‖A(x)‖∞
= supmax{|x1|,|x2|,|x3|}≤1
max{|2x1 + 3x2|, |x1 + x2 + x3|}
≤ supmax{|x1|,|x2|,|x3|}≤1
max{2|x1|+ 3|x2|, |x1|+ |x2|+ |x3|}
≤ max{5, 3} = 5.
Außerdem gilt fur das spezielle x∗ := (1, 1, 1) ∈ R3, dass
A(x∗) = (2 · 1 + 3 · 1, 1 + 1 + 1) = (5, 3)
und somit ‖A(x∗)‖∞ = max{5, 3} = 5 sowie ‖x∗‖∞ = max{1, 1, 1} = 1, d.h.
‖A‖ ≥ ‖A(x∗)‖∞‖x∗‖∞
= 5.
Damit haben wir gezeigt, dass ‖A‖ = 5.
2.1.3 Stetigkeitseigenschaften
Lemma 2.7. Jede Abbildung A ∈ L(E,F ) ist Lipschitz-stetig, also insbeson-dere auch stetig und gleichmaßig stetig.
Beweis: Seien x, y ∈ E beliebig. Dann gilt
‖Ax− Ay‖F = ‖A(x− y)‖F ≤ ‖A‖ ‖x− y‖E,
d.h. A ist Lipschitz-stetig mit der Lipschitz-Konstanten L := ‖A‖. �
Satz 2.8. Sei A eine lineare Abbildung von E nach F . Dann sind folgendeBedingungen aquivalent:
19

(i) A ∈ L(E,F )
(ii) A ist stetig.
(iii) A ist stetig in x0 = 0.
Beweis: (i)⇒ (ii): Dies gilt wegen Lemma 2.7.(ii)⇒ (iii): trivial nach Definition der Stetigkeit(iii)⇒ (i): Sei A stetig in x0 = 0. Dann existiert ein δ > 0 mit
‖Ax− Ax0‖F < 1 ∀x ∈ B(x0, δ)
d.h. ‖Ax‖F < 1 fur alle x ∈ E mit ‖x‖E ≤ δ und somit
‖A‖ = sup‖x‖E≤1
‖Ax‖F =1
δsup‖x‖E≤1
‖A(δx)‖F =1
δsup‖x‖E≤δ
‖Ax‖F <1
δ,
d.h. A ist beschrankt. �
2.1.4 Vollstandigkeit von L(E,F )
Satz 2.9. Sei F ein Banachraum. Dann ist der Vektorraum L(E,F ) allerbeschrankten, linearen Abbildungen von E nach F ein Banachraum mit derOperatornorm ‖ · ‖.
Beweis: Es bleibt zu zeigen, dass L(E,F ) vollstandig ist. Sei (An) eineCauchy-Folge in L(E,F ). Dann existiert zu jedem ε > 0 ein N(ε) ∈ N, sodass
‖An − Am‖ ≤ ε ∀m,n ≥ N(ε).
Fur jedes x ∈ E gilt somit
‖Anx− Amx‖F = ‖(An − Am)x‖F≤ ‖An − Am‖ ‖x‖E ≤ ε‖x‖E ∀m,n ≥ N(ε), (2.1)
d.h. (Anx) ist eine Cauchy-Folge in F . Da F ein Banachraum ist, so exi-stiert limn→∞Anx ∈ F . Wir definieren nun eine Abbildung A von E nachF durch A(x) := limn→∞Anx. Es bleibt zu zeigen, dass A ∈ L(E,F ) undlimn→∞An = A, d.h. limn→∞ ‖An − A‖ = 0.
20

(i) A ist linear, denn fur x, y ∈ E und α, β ∈ K gilt wegen der Linearitataller An, dass
A(αx+ βy) = limn→∞
An(αx+ βy) = limn→∞
(αAnx+ βAny)
= α limn→∞
Anx+ β limn→∞
Any = αA(x) + βA(y).
(ii) A ist beschrankt: Da (An) eine Cauchy-Folge ist, so ist die Folge (An)beschrankt in L(E,F ) und somit existiert ein M ∈ R, so dass ‖An‖ ≤M fur alle n ∈ N. Da zudem alle An als Abbildungen von E nach Fbeschrankt sind, so ergibt sich fur alle x ∈ E, dass
‖Anx‖F ≤ ‖An‖ ‖x‖E ≤M ‖x‖E
und daher
‖Ax‖F = ‖ limn→∞
Anx‖F = limn→∞
‖Anx‖F ≤M ‖x‖E.
(iii) limn→∞An = A: Sei ε > 0. Wegen (2.1) gilt fur alle x ∈ E mit ‖x‖E ≤1, dass
‖Anx− Amx‖F ≤ ε ∀m,n ≥ N(ε).
Fur m→∞ ergibt sich
‖Anx− Ax‖ = ‖Anx− limm→∞
Amx‖F
= limm→∞
‖Anx− Amx‖F ≤ ε ∀n ≥ N(ε).
Daraus folgt
‖An − A‖ = sup‖x‖E≤1
‖Anx− Ax‖F ≤ ε ∀n ≥ N(ε),
d.h. limn→∞An = A.
�
21

Bemerkung 2.10. Zum Beweis der Vollstandigkeit von L(E,F ) haben wirunter Ausnutzung der Vollstandigkeit von F gezeigt, dass die punktweisedefinierte Abbildung
A(x) := limn→∞
An(x) ∀x ∈ E
einer konvergenten Folge linearer, beschrankter Abbildungen An auch linearund beschrankt ist. Dies bedeutet, dass eine solche punktweise definierteAbbildung A einer konvergenten Folge linearer, stetiger Abbildungen An auchlinear und stetig ist. Dies ist fur nichtlineare Abbildungen nicht automatischgegeben, wie folgendes Beispiel zeigt. Sei E := [0, 1] und F := R sowie
fn : [0, 1]→ R mit fn(x) = xn ∀n ∈ N
gegeben. Dann ist die punktweise definierte Funktion
f : [0, 1]→ R mit f(x) = limn→∞
fn(x) ∀x ∈ [0, 1]
im Punkt x = 1 offenbar nicht stetig, da
f(x) = limn→∞
xn =
{0 fur x ∈ [0, 1)
1 fur x = 1.
Aus Satz 2.9 konnen wir unmittelbar auf die Vollstandigkeit spezieller Funk-tionenraume schließen:
Folgerung 2.11. (i) L(E,K) ist ein Banachraum.
(ii) Falls E ein Banachraum ist, dann ist L(E) := L(E,E) mit der Ver-knufung ◦ von Funktionen eine Banach-Algebra.
Hierbei ist die Definition einer Banach-Algebra wie folgt gegeben:
Definition 2.12. Eine assoziative Algebra (A,+, ◦) heißt Banach-Algebra,wenn A ein Banachraum ist und die Ungleichung
‖a ◦ b‖ ≤ ‖a‖ · ‖b‖ ∀a, b ∈ A
erfullt ist. Besitzt A ein Einselement e, so wird außerdem ‖e‖ = 1 gefordert.
Beweis. (von Folgerung 2.11)
22

(i) Da K vollstandig ist, so ist dies eine unmittelbare Folgerung aus Satz2.9.
(ii) Zunachst ist L(E) nach Satz 2.9 ein Banachraum. Der Nachweis, dassL(E) eine assoziative K-Algebra ist, ist leicht nachzurechnen. Wir zei-gen nur noch die Submultiplikativitat der Norm. Seien A,B ∈ L(E)und x ∈ E beliebig. Dann gilt
‖(B ◦ A)(x)‖ = ‖B(A(x))‖ ≤ ‖B‖ · ‖A(x)‖ ≤ ‖B‖ · ‖A‖ · ‖x‖,
d.h.
‖B ◦ A‖ ≤ ‖B‖ · ‖A‖.
Die identische Abbildung id : E → E mit id(x) = x fur alle x ∈ E istdas Einselement in L(E). Offenbar ist
‖id‖ = supx∈E, x6=0
‖x‖E‖x‖E
= 1.
2.1.5 Endlich-dimensionale Banachraume
Endlich-dimensionale Vektorraume haben viele schone Eigenschaften, diewir bereits von Kn kennen. Dies beruht auf dem Fakt, dass jeder endlich-dimensionale K-Vektorraum der Dimension n topologisch isomorph zu Kn
ist, wie wir im Folgenden sehen werden.
Definition 2.13. Zwei normierte Vektorraume E und F heißen topologischisomorph, wenn es einen stetigen, linearen Isomorphismus T von E auf Fderart gibt, dass T−1 auch stetig ist, d.h. zu L(F,E) gehort. Dann heißt Tein topologischer Isomorphismus von E auf F .Die Menge aller topologischen Isomorphismen von E auf F bezeichnen wirmit Lis(E,F ), und wir schreiben E ∼= F , wenn Lis(E,F ) nicht leer ist.Zudem definieren wir
Laut(E) := Lis(E,E).
Damit ist Laut(E) die Menge aller topologischen Automorphismen von E.
23

Bemerkung 2.14. Wenn man von zwei normierten Vektorraumen sagt, dasssie isomorph zueinander sind, so meint man damit, dass sie topologisch iso-morph zueinander sind.
Satz 2.15. Seien die normierten Vektorraume E und F (topologisch) iso-morph. Dann ist E ein Banachraum genau dann, wenn F ein Banachraumist.
Beweis: Sei T ein stetiger linearer Isomorphismus von E auf F . Da sowohl Tals auch T−1 stetig sind, so genugt es offenbar zu zeigen, dass F vollstandigist, falls E vollstandig ist. Sei (yn) eine Cauchy-Folge in F . Dann ist wegender Stetigkeit von T−1 die Folge (xn) in E mit xn = T−1(yn) eine Cauchy-Folge in E. Da E vollstandig ist, so konvergiert die Folge (xn) gegen einElement x ∈ E. Aufgrund der Stetigkeit von T gilt nun fur die Folge (yn),dass
limn→∞
yn = limn→∞
T (xn) = T ( limn→∞
xn) = T (x) ∈ F,
d.h. F ist vollstandig. �
Satz 2.16. (Banachscher Homomorphiesatz)Es seien E und F Banachraume, und T ∈ L(E,F ) sei bijektiv. Dann ist Tein topologischer Isomorphismus, d.h. T ∈ Lis(E,F ).
Dieser Satz wird in Vorlesungen zur Funktionalanalysis an spaterer Stelle imStudium bewiesen. Lineare, stetige Isomorphismen zwischen Banachraumensind daher automatisch auch topologische Isomorphismen.
Satz 2.17. Es sei {b1, . . . , bn} eine Basis von E. Dann ist T : E → Kn mit
x =n∑j=1
yjbj 7→ y := (y1, . . . , yn)
ein topologischer Isomorphismus.
Beweis. Offenbar ist T linear und bijektiv mit der Inversen T−1 : Kn → Emit
(y1, . . . , yn) 7→ x :=n∑j=1
yjbj
Es bleibt zu zeigen, dass T und T−1 stetig sind. Wir zeigen die Beschranktheitder Abbildungen.
24

(i) Sei y = (y1, . . . , yn) ∈ Kn. Dann haben wir mit der Cauchy-SchwarzschenUngleichung
‖T−1(y)‖E = ‖n∑j=1
yjbj‖ ≤n∑j=1
|yj| · ‖bj‖E
≤
(n∑j=1
|yj|
) 12
·
(n∑j=1
‖bj‖
) 12
= β‖y‖2 fur β :=
(n∑j=1
‖bj‖
) 12
,
d.h. T−1 ∈ L(Kn, E).
(ii) Da T−1 linear ist und ‖ · ‖E eine Norm in E ist, so ist ‖ · ‖∗ mit
‖(y1, . . . , yn)‖∗ := ‖T−1(y)‖E
eine Norm auf Kn. Da alle Normen auf Kn aquivalent sind, so existiertein α > 0, so dass
‖y‖2 ≤ α‖y‖∗ ∀y ∈ Kn.
Sei x =∑n
j=1 yjbj ∈ E beliebig. Dann gilt
‖T (x)‖2 ≤ α‖T (x)‖∗ ≤ α‖T−1(T (x))‖E = α‖x‖E.
d.h. T ∈ L(E,Kn).
Satz 2.18. Sei E endlich-dimensional. Dann gelten folgende Aussagen:
(i) Alle Normen auf E sind aquivalent.
(ii) E ist vollstandig, also ein Banachraum.
Beweis. (i) Dies folgt aus Satz 2.17, da alle Normen auf Kn aquivalentsind. Sei T : E → Kn ein topologischer Isomorphismus, wobei n dieDimension von E ist. Seien ‖ · ‖E,1 und ‖ · ‖E,2 Normen auf E. Dannsind die Abbildungen ‖ · ‖K,1 und ‖ · ‖K,2 mit
‖y‖K,1 := ‖T−1(y)‖E,1 und ‖y‖K,2 := ‖T−1(y)‖E,2 ∀y ∈ Kn
25

Normen auf Kn. Aufgrund der Aquivalenz aller Normen auf Kn existiertein M > 0, so dass
M−1‖y‖K,1 ≤ ‖y‖K,2 ≤M‖y‖K,1.Damit gilt fur alle x ∈ E, dass
M−1‖x‖E,1 = M−1‖T (x)‖K,1 ≤ ‖T (x)‖K,2 = ‖x‖E,2und
‖x‖E,2 = ‖T (x)‖K,2 ≤M‖T (x)‖K,1 = M‖x‖E,1.
(ii) Dies folgt direkt aus den Satzen 2.15 und 2.17, da Kn vollstandig ist(siehe Analysis-I-Vorlesung).
Satz 2.19. Sei E endlichdimensional. Dann gilt Hom(E,F ) = L(E,F ). Mitanderen Worten: Jeder lineare Operator auf einem endlich-dimensionalennormierten Vektorraum ist stetig.
Beweis. Wir definieren T ∈ Lis(E,Kn) wieder (siehe Satz 2.17) durch
x =n∑j=1
yjbj 7→ (y1, . . . , yn)
Dann existiert ein M > 0 mit
‖T (x)‖Kn ≤M‖x‖E ∀x ∈ E.Sei nun A ∈ Hom(E,F ) und x =
∑nj=1 yjbj ∈ E beliebig. Da A linear ist, so
gilt mit der Cauchy-Schwarzschen Ungleichung, dass
‖A(x)‖F = ‖n∑j=1
yjA(bj)‖F ≤n∑j=1
|yj| · ‖A(bj)‖F
≤
(n∑j=1
|yj|
) 12
·
(n∑j=1
‖A(bj)‖
) 12
= α‖y‖2 = α‖T (x)‖2 ≤ αM‖x‖E
fur α :=(∑n
j=1 ‖A(bj)‖) 1
2. Damit haben wir gezeigt, dass A beschrankt und
somit stetig ist.
Bemerkung 2.20. Man beachte, dass die Aussagen der Satze 2.18 und 2.19i.a. nicht mehr gelten, wenn E ein unendlich dimensionaler normierter Raumist.
26

2.1.6 Matrixdarstellungen
Es seien m,n ∈ N. Wir bezeichnen mit Km×n die Menge aller (m × n)-Matrizen
A = (aij) = (aij)1 ≤ i ≤ m1 ≤ j ≤ n
=
a11 a12 . . . a1n
a21 a22 . . . a2n...
.... . .
...am1 am2 . . . amn
mit Elementen aij aus K. Aus der Vorlesung Lineare Algebra wissen wir, dassKm×n mit der Addition von Matrizen und der skalaren Multiplikation vonMatrizen ein K-Vektorraum der Dimension m · n ist.
Bemerkung 2.21. 1. Der Raum Km×n ist mit der Frobenius- bzw. Hilbert-Schmidt-Norm
‖A‖F :=
√√√√ m∑i=1
n∑j=1
|aij|2
ein Banachraum. (Ubungsaufgabe)
2. Die Abbildung T : Km×n → Km·n
(aij) 7→ (a11, . . . , a1n, a21, . . . , a2n, . . . , am1, . . . , amn)
ist ein isometrischer Isomorphismus fur die Frobeniusnorm ‖ · ‖F aufKm×n und die euklidische Norm ‖ · ‖2 auf Km·n.
Definition 2.22. Seien E und F endlich-dimensionale Vektorraume mit denBasen
E = {e1, . . . , en}, F = {f1, . . . , fm}.
Dann bezeichnen wir fur jede Abbildung A ∈ Hom(E,F ) die Matrix
AFE := (aij),
als Darstellunsgmatrix der linearen Abbildung A bezuglich der Basen Eund F , wenn die Elemente aij die eindeutig bestimmten Koeffizienten fol-gender Basisdarstellungen sind:
A(ej) =m∑i=1
aijfi ∀j = 1, . . . , n.
27

Satz 2.23. Seien E und F endlich-dimensionale normierte Vektorraume mitden Basen
E = {e1, . . . , en}, F = {f1, . . . , fm}.
(i) Dann ist die Abbildung T : L(E,F )→ Km×n mit
A 7→ AFE
ein topologischer Isomorphismus.
(ii) Es sei G ein weiterer endlich-dimensionaler normierter Vektorraumund G sei eine Basis von G. Dann gilt
(B ◦ A)GE = BGF · AFE
fur alle A ∈ Hom(E,F ) und B ∈ Hom(F,G).
Beweis:
(i) Die Linearitat von T sieht man leicht wie folgt. Seien A,B ∈ L(E,F )und α, β ∈ K. Seien AFE = (aij) und BFE = (bij) die Darstellungsmatri-zen von A und B. Dann gilt
A(ej) =m∑i=1
aijfi und B(ej) =m∑i=1
bijfi ∀j = 1, . . . , n
und daher
(αA+ βB)(ej) = αA(ej) + βB(ej)
= α
m∑i=1
aijfi + βB(ej) =m∑i=1
bijfi
=m∑i=1
(αaij + βbij)fi ∀j = 1, . . . , n,
d.h.
T (αA+ βB) = (αaij + βbij) = α(aij) + β(bij) = αT (A) + βT (B).
28

Die Abbildung T ist bijektiv, denn ihre Inverse T−1 : Km×n → L(E,F )kann man leicht angeben. Fur gegebene (aij) ∈ Km×n ist die AbbildungA : E → F mit
A(x) :=m∑i=1
(n∑j=1
aijxj
)fi,
wobei x =∑n
j=1 xjej die Basisdarstellung von x in der Basis E ist,linear und somit nach Satz 2.19 ein Element von L(E,F ). Zudem giltT−1(aij) = A, denn
A(ej) =m∑i=1
aijfi ∀ j = 1, . . . , n
und somit
T (A) = (aij).
Der Raum Km×n ist isomorph zu Km·n und hat daher eine endlicheDimension, namlich m · n. Da T : L(E,F )→ Km×n bijektiv ist, so istauch L(E,F ) endlich-dimensional mit der Dimension m · n. Nach Satz2.19 sind T und T−1 als lineare Abbildungen auch stetig, d.h. T ist eintopologischer Isomorphismus.
(ii) Dies sollte aus der Vorlesung Lineare Algebra bekannt sein, lasst sichaber auch durch konsequentes Nachvollziehen der Definition von Dar-stellungsmatrizen und der Matrizenmultiplikation leicht nachrechnen.
�
2.2 Differenzierbarkeit
In diesem Kapitel erweitern wir das Konzept der Differenzierbarkeit aufFunktionen f : X ⊂ E → F , wobei E und F Banachraume sind. Insbe-sondere widmen wir uns dem Fall E = Rn, d.h. der Differenzierbarkeit vonFunktionen mit mehreren reellen Variablen. Dazu seien im Folgenden E undF Banachraume (also nicht mehr nur normierte Raume).
29
2.2.1 Totale Differenzierbarkeit
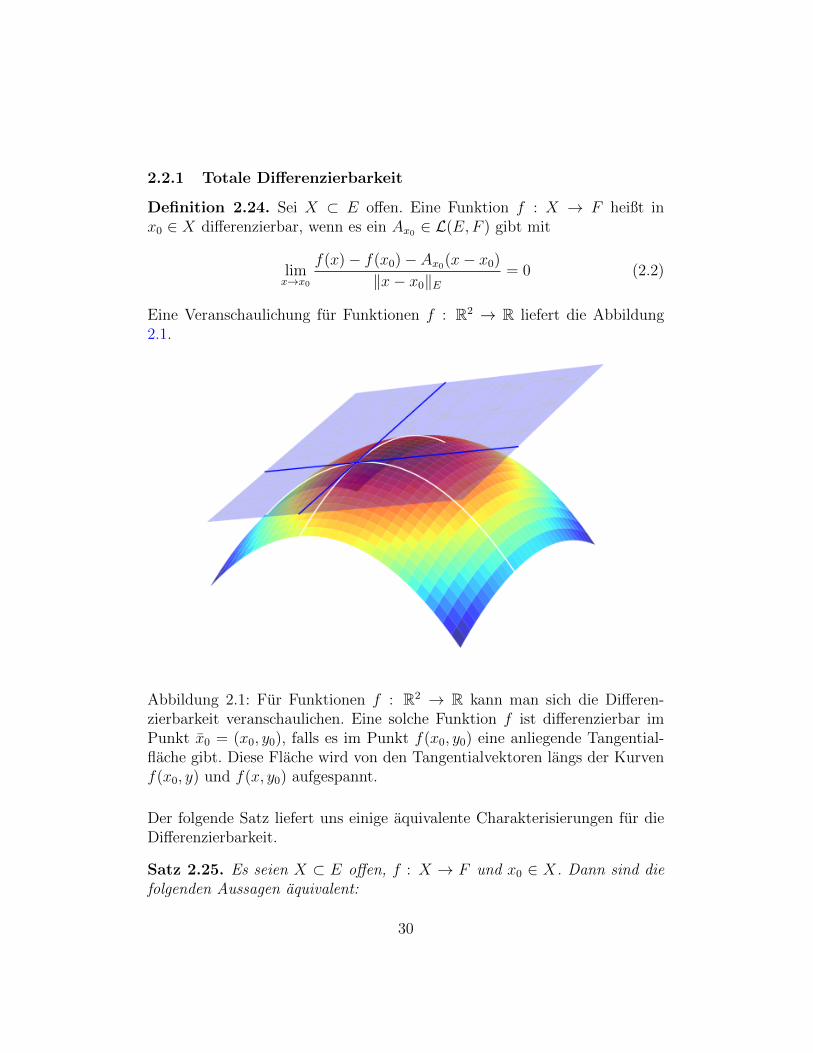
Definition 2.24. Sei X ⊂ E offen. Eine Funktion f : X → F heißt inx0 ∈ X differenzierbar, wenn es ein Ax0 ∈ L(E,F ) gibt mit
limx→x0
f(x)− f(x0)− Ax0(x− x0)
‖x− x0‖E= 0 (2.2)
Eine Veranschaulichung fur Funktionen f : R2 → R liefert die Abbildung2.1.
Abbildung 2.1: Fur Funktionen f : R2 → R kann man sich die Differen-zierbarkeit veranschaulichen. Eine solche Funktion f ist differenzierbar imPunkt x0 = (x0, y0), falls es im Punkt f(x0, y0) eine anliegende Tangential-flache gibt. Diese Flache wird von den Tangentialvektoren langs der Kurvenf(x0, y) und f(x, y0) aufgespannt.
Der folgende Satz liefert uns einige aquivalente Charakterisierungen fur dieDifferenzierbarkeit.
Satz 2.25. Es seien X ⊂ E offen, f : X → F und x0 ∈ X. Dann sind diefolgenden Aussagen aquivalent:
30

(i) f ist in x0 differenzierbar.
(ii) Es existieren ein Ax0 ∈ L(E,F ) und eine in x0 stetige Funktion rx0 :X → F mit rx0(x0) = 0, so dass
f(x) = f(x0) + Ax0(x− x0) + ‖x− x0‖rx0(x) ∀x ∈ X.
(iii) Es existiert ein Ax0 ∈ L(E,F ) mit
f(x) = f(x0) + Ax0(x− x0) + o(‖x− x0‖) fur x→ x0.
Beweis: Wir fuhren einen Ringschluss.
(i)⇒ (ii): Da f in x0 differenzierbar ist, so existiert ein Ax0 ∈ L(E,F ) mit
limx→x0
f(x)− f(x0)− Ax0(x− x0)
‖x− x0‖E= 0. (2.3)
Nun definieren wir eine Funktion rx0 : X → F als
rx0(x) :=
{0, falls x = x0f(x)−f(x0)−Ax0 (x−x0)
‖x−x0‖E, sonst.
Wegen (2.3) gilt limx→x0 rx0(x) = 0, d.h. rx0 ist in x0 stetig und die Behaup-tung ist erfullt.
(ii)⇒ (iii): Da rx0 in x0 stetig ist, so gilt limx→x0 rx0(x) = 0, d.h.
‖x− x0‖rx0(x) = o(‖x− x0‖) fur x→ x0.
(iii)⇒ (i): Dies gilt offensichtlich nach Definition von o(‖x− x0‖). �
Im folgenden Satz sind einige Eigenschaften differenzierbarer Funktionen zu-sammengefasst.
Satz 2.26. Es seien X ⊂ E offen, f : X → F und x0 ∈ X. Dann sind diefolgenden Aussagen aquivalent:
(i) Ist f in x0 differenzierbar, so ist f in x0 stetig.
(ii) Es sei f in x0 differenzierbar. Dann ist der lineare Operator Ax0 ∈L(E,F ) in (2.2) eindeutig bestimmt.
31

Beweis:
(i) Sei f in x0 differenzierbar. Dann folgt aus Satz 2.25(ii), dass ein Ax0 ∈L(E,F ) und eine in x0 stetige Funktion rx0 : X → F mit rx0(x0) = 0existieren, so dass
f(x) = f(x0) + Ax0(x− x0) + ‖x− x0‖rx0(x) ∀x ∈ X.
Fur x→ x0 ergibt sich
limx→x0
f(x) = f(x0),
d.h. f ist stetig in x0.
(ii) Sei B ∈ L(E,F ) eine weitere Abbildung mit der Eigenschaft
limx→x0
f(x)− f(x0)−Bx0(x− x0)
‖x− x0‖E= 0. (2.4)
Die Differenz von (2.2) und (2.4) ergibt
limx→x0
(Ax0 −Bx0)(x− x0)
‖x− x0‖E= 0.
Sei y ∈ E beliebig mit ‖y‖E = 1. Wir wahlen nun die Folge (xn) mit
xn := x0 +1
ny. (2.5)
Offenbar gilt limn→∞ xn = x0 und somit
limn→∞
(Ax0 −Bx0)(xn − x0)
‖xn − x0‖E= 0.
Setzen wir nun (2.5) ein, dann erhalten wir
limn→∞
(Ax0 −Bx0)(y)
‖y‖E= 0, (2.6)
d.h. (Ax0 − Bx0)(y) = 0 fur alle y ∈ E mit ‖y‖E = 1. Sei nun x ∈ Xbeliebig. Dann haben wir
(Ax0 −Bx0)(x) = ‖x‖E(Ax0 −Bx0)
(x
‖x‖E
)= 0
wegen (2.6) und∥∥∥ x‖x‖E
∥∥∥E
= 1, d.h.
Ax0(x) = Bx0(x) ∀x ∈ X.
32

�
Definition 2.27. Wir bezeichnen den (nach Satz 2.25) eindeutigen OperatorAx0 ∈ L(E,F ) einer in x0 differenzierbaren Funktion f : X ⊂ E → F(siehe Definition 2.24) als Ableitung von f in x0. Als Symbol verwendenwir Df(x0).
Wir nennen die Funktion f : X ⊂ E → F differenzierbar, wenn f injedem Punkt x ∈ X differenzierbar ist. In diesem Fall heißt die FunktionDf : X ⊂ E → L(E,F ) mit
Df(x) := Ax
die Ableitung von f , wobei fur jedes x ∈ X die Abbildung Ax die Ableitungvon f(x) ist.
Bemerkung 2.28. In der Literatur wird die hier angegebene Ableitung auchtotale Ableitung oder Frechet-Ableitung genannt. Der Begriff totale Ab-leitung dient der Abgrenzung von der Richtungsableitung und der partiel-len Ableitung, die wir im Anschluss kennenlernen werden. Mit dem BegriffFrechet-Ableitung betont man die Verallgemeinerung des Ableitungsbegriffsfur Funktionen, die auf einem Korper K definiert sind, auf Funktionen, dieauf einem Banachraum definiert sind.
Daruberhinaus werden in der Literatur auch die Symbole f ′(x0) und ∂f(x0)anstelle von Df(x0) verwendet.
Definition 2.29. Sei X ⊂ E offen. Eine Funktion f : X → F heißt stetigdifferenzierbar, falls die Ableitung Df : X → L(E,F ) existiert und stetigist. Wir setzen
C1(X,F ) := {f : X → F | f ist stetig differenzierbar}.
Bemerkung 2.30. Unter Beachtung von Satz 2.26 wissen wir, dass jede diffe-renzierbare Funktion f auch stetig ist und somit gilt, dass
C1(X,F ) ⊂ C(X,F ).
Beispiel 2.31. (i) Sei f : E → F konstant, d.h. f(x) = y0 fur ein festesy0 ∈ F und alle x ∈ E. Dann ist f stetig differenzierbar und es gilt
33

Df(x) = 0 fur alle x ∈ E:
Sei x0 ∈ E beliebig, aber fest. Offenbar gilt fur alle x ∈ E, dass
f(x) = y0 = f(x0) + 0 · (x− x0).
Mit Satz 2.25 sehen wir, dass f in x0 differenzierbar ist und Df(x0) = 0.Offenbar ist Df stetig.
(ii) Sei f : E → F affin linear, d.h. f(x) = Ax + b fur alle x ∈ E, mitA ∈ L(E,F ) und b ∈ F . Dann ist f stetig differenzierbar und es giltDf(x) = A fur alle x ∈ E:
Sei x0 ∈ E beliebig, aber fest. Offenbar gilt fur alle x ∈ E, dass
f(x) = Ax+ b = Ax0 + b+ A(x− x0) = f(x0) + A(x− x0).
Mit Satz 2.25 sehen wir, dass f in x0 differenzierbar und Df(x0) = Aist. Die Stetigkeit von Df ist trivial, da
‖Df(x)−Df(x0)‖ = ‖A− A‖ = 0 ∀x ∈ E.
(iii) Sei H ein Hilbertraum mit dem Skalarprodukt (·, ·) und f : H → Kdefiniert als f(x) := (x, x). Dann ist f differenzierbar und es gilt
Df(x0) : H → Kx 7→ 2Re(x0, x).
Seien x0 ∈ H und x ∈ H. Dann gilt
(x− x0, x− x0) = (x, x)− (x, x0)− (x0, x) + (x0, x0)
= (x, x)− (x− x0, x0)− (x0, x− x0)− (x0, x0)
= (x, x)− (x0, x− x0)− (x0, x− x0)− (x0, x0)
= (x, x)− 2Re(x0, x− x0)− (x0, x0),
d.h.
f(x− x0) = f(x)− 2Re(x0, x− x0)− f(x0).
Dies bedeutet
f(x) = f(x0) + 2Re(x0, x− x0) + f(x− x0)
= f(x0) + 2Re(x0, x− x0) + ‖x− x0‖2
34

Offenbar ist die Abbildung x 7→ 2Re(x0, x) linear und
‖x− x0‖2 = o(‖x− x0‖) fur x→ x0,
womit die Differenzierbarkeit aus Satz 2.25 folgt.
Satz 2.32. Sei F = Km, X ⊂ E offen und f = (f 1, . . . , fm) : X → F . Dannist f in x0 ∈ X genau dann (stetig) differenzierbar, wenn jede Komponentef j fur 1 ≤ j ≤ m in x0 (stetig) differenzierbar ist.
Beweis: Man kann sich durch komponentenweise Betrachtungen leicht uber-zeugen, dass fur Abbildungen A = (A1, ..., Am) ∈ Hom(E,Km) gilt:
A ∈ L(E,Km) ⇔ Aj ∈ L(E,K) ∀j = 1, . . . ,m.
(⇒) Sei f in x0 ∈ X (stetig) differenzierbar. Dann gilt
limx→x0
f(x)− f(x0)−Df(x0)(x− x0)
‖x− x0‖E= 0,
wobei Df ∈ L(E,Km). Dann gilt Df j ∈ L(E,K) fur alle j = 1, . . . ,m. Inder Vorlesung Analysis I* wurde gezeigt, dass eine Folge (yn) in Km genaudann konvergiert, wenn jede sie in jeder Komponente (yjn) fur 1 ≤ j ≤ m inK konvergiert. Daraus folgt, dass
limx→x0
f j(x)− f j(x0)−Df j(x0)(x− x0)
‖x− x0‖E= 0 ∀j = 1, . . . ,m.
Falls Df stetig ist, so sind offenbar auch alle Komponenten Df j stetig.
(⇐) Sei f j fur alle j = 1, . . . ,m in x0 ∈ X (stetig) differenzierbar. Dann gilt
limx→x0
f j(x)− f j(x0)−Df j(x0)(x− x0)
‖x− x0‖E= 0 j = 1, . . . ,m,
wobei Df j ∈ L(E,K). Dann gilt Df := (Df 1, ..., Dfm) ∈ L(E,Km). Ausder komponentenweise Konvergenz folgt
limx→x0
f(x)− f(x0)−Df(x0)(x− x0)
‖x− x0‖E= 0.
Falls alle Komponenten Df j stetig sind, so ist Df offenbar auch stetig. �
35

2.2.2 Richtungsableitungen
Es seien X ⊂ E offen, f : X → F , x0 ∈ X und v ∈ E\{0}. Da X offen ist,so gibt es ein ε > 0 mit
x0 + tv ∈ X fur t ∈ R, |t| < ε.
Dann beschreibt die Funktion
(−ε, ε)→ F (2.7)
t 7→ f(x0 + tv)
Kurve in Im(f) ⊂ F .
Definition 2.33. Ist die in (2.7) definiert Funktion im Punkt 0 differenzier-bar, dann heißt ihre Ableitung Richtungsableitung von f an der Stelle x0
in Richtung v und wird mit Dvf(x0) bezeichnet.
Nach Definition der Ableitung fur Funktionen auf R (siehe Analysis I) gilt:
Dvf(x0) = limt→0
f(x0 + tv)− f(x0)
t. (2.8)
Eine Veranschaulichung fur Funktionen f : R2 → R ist in Abbildung 2.2 zusehen.
Beispiel 2.34. Wir betrachten die Funktion f : R3 → R2 mit
f(x1, x2, x3) = (x31 + x2
2, x1 · x3).
Dann lautet die Richtungsableitung von f im Punkt x0 = (4, 5, 6) in Richtungv = (1, 2, 3):
Dvf(x1, x2, x3) = limt→0
f(4 + t, 5 + 2t, 6 + 3t)− f(4, 5, 6)
t
= limt→0
((4 + t)3 + (5 + 2t)2 − 89, (4 + t)(6 + 3t)− 24)
t= lim
t→0(3 · 42 + 2 · 5, 4 · 3 + 6) = (58, 18).
Satz 2.35. Es sei X ⊂ E offen, f : X → F differenzierbar in x0 ∈ X. Dannexistiert Dvf(x0) fur jedes v ∈ E\{0} und es gilt Dvf(x0) = Df(x0)v.
36
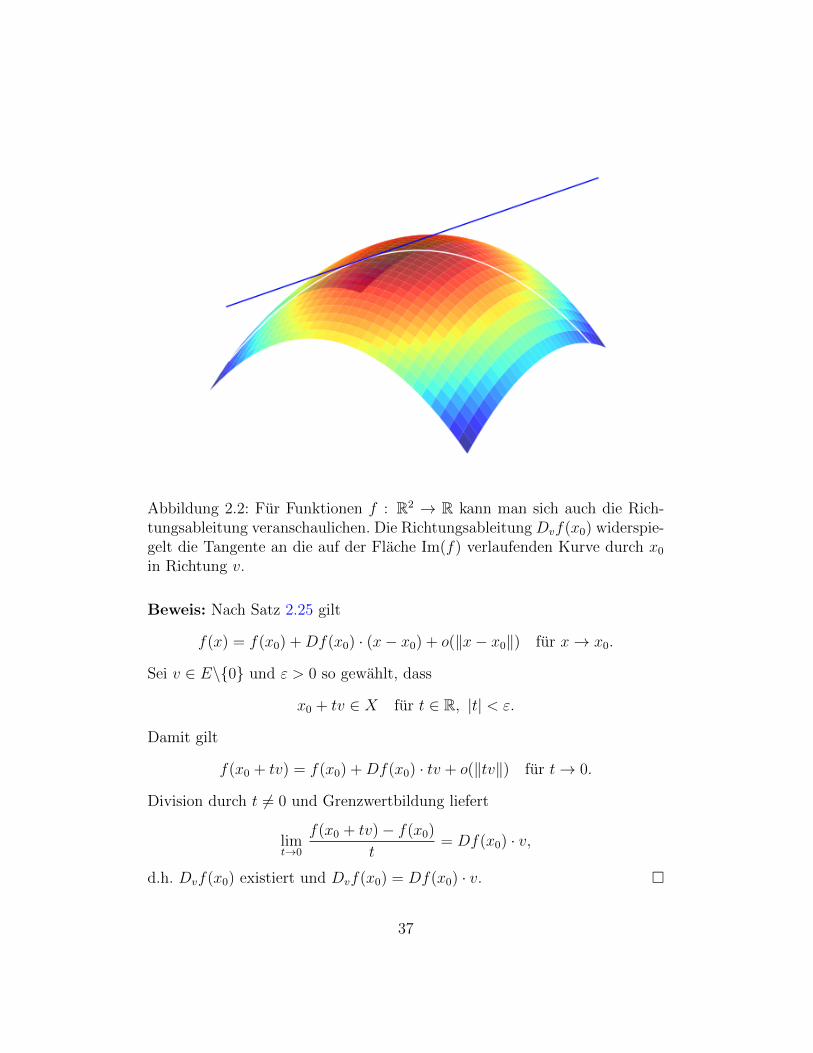
Abbildung 2.2: Fur Funktionen f : R2 → R kann man sich auch die Rich-tungsableitung veranschaulichen. Die Richtungsableitung Dvf(x0) widerspie-gelt die Tangente an die auf der Flache Im(f) verlaufenden Kurve durch x0
in Richtung v.
Beweis: Nach Satz 2.25 gilt
f(x) = f(x0) +Df(x0) · (x− x0) + o(‖x− x0‖) fur x→ x0.
Sei v ∈ E\{0} und ε > 0 so gewahlt, dass
x0 + tv ∈ X fur t ∈ R, |t| < ε.
Damit gilt
f(x0 + tv) = f(x0) +Df(x0) · tv + o(‖tv‖) fur t→ 0.
Division durch t 6= 0 und Grenzwertbildung liefert
limt→0
f(x0 + tv)− f(x0)
t= Df(x0) · v,
d.h. Dvf(x0) existiert und Dvf(x0) = Df(x0) · v. �
37

Bemerkung 2.36. Die Umkehrung des Satzes 2.35 ist nicht gewahrleistet, wiefolgendes Beispiel zeigt.
Beispiel 2.37. Wir betrachten die Funktion f : R2 → R mit
f(x1, x2) :=
{x21x2x21+x22
fur (x1, x2) 6= 0
0 fur (x1, x2) = 0.
Zunachst gilt fur jedes t 6= 0 und v 6= 0, dass
f(tv) =t3v2
1v2
t2(v21 + v2
2)= tf(v).
Somit existieren alle Richtungsableitungen im Punkt x = 0 und sind gleich
Dvf(0) = limt→0
f(tv)
t= f(v).
Ware f im Punkt 0 differenzierbar, so wurde nach Satz 2.35 gelten:
Df(0) · v = f(v).
Da f nichtlinear ist, so kann dies nicht stimmen. Anschaulich gesprochen: DieRichtungsableitungen existieren alle, liegen jedoch nicht alle in einer Ebene.Daher ist f im Punkt 0 nicht (total) differenzierbar.
Falls alle Richtungsableitungen einer Funktion in einem Punkt existieren, sobraucht die Funktion noch nicht einmal stetig zu sein, wie folgendes Beispielzeigt. Sei f : R2 → R mit
f(x1, x2) :=
{x1x22x21+x42
fur (x1, x2) 6= 0
0 fur (x1, x2) = 0.(2.9)
Im Nullpunkt existieren alle Richtungsableitungen, denn
Dvf(0) = limt→0
f(tv)− f(0)
t= lim
t→0
t3v1v22
t3v21 + t5v4
2
= limt→0
v1v22
v21 + t2v4
2
=
{v22v1, falls v1 6= 0
0, falls v1 = 0.
Doch die Funktion f ist ist nicht stetig im Nullpunkt, denn
limh→0+
f(0, h) = limh→0+
0
h4= 0 und lim
h→0+f(h2, h) = lim
h→0+
h4
h4 + h4=
1
2.
Die Funktion ist in Abbildung 2.3 zu sehen.
38

Abbildung 2.3: Die Funktion f aus (2.9) ist in (0, 0) in alle Richtungendifferenzierbar, aber nicht stetig.
2.2.3 Partielle Ableitungen
Im Fall E = Rn sind die Koordinatenachsen gewisse ausgezeichnete Rich-tungen. Fur Ableitungen in diese Richtungen verwendet man den Begriff derpartiellen Ableitung.
Definition 2.38. Sei X ⊂ Rn offen und k ∈ N mit 1 ≤ k ≤ n. Dann heißt
∂kf(x0) :=∂f
∂xk(x0) := Dekf(x0) = lim
t→0
f(x0 + tek)− f(x0)
t
die partielle Ableitung von f : X → F bezuglich der Komponente xk,wobei ek = (0, ...0, 1, 0, ..., 0) mit der Eins an der k-ten Stelle.
Die Funktion f heißt partiell differenzierbar, falls die partiellen Ableitun-gen von f bezuglich aller Komponenten x1,..., xn existieren.
Die Funktion f heißt stetig partiell differenzierbar, falls die partiellenAbleitungen von f bezuglich aller Komponenten x1,..., xn existieren und ste-tig sind.
Beispiel 2.39. Wir betrachten wieder die Funktion f : R3 → R2 mit
f(x1, x2, x3) = (x31 + x2
2, x1 · x3).
39

Dann lautet die erste partielle Ableitung von f im Punkt x0 = (4, 5, 6):
∂1f(4, 5, 6) = limt→0
f(4 + t, 5, 6)− f(4, 5, 6)
t
=
(limt→0
(4 + t)3 − 64
t, limt→0
6(4 + t)− 24
t
)= (48, 6).
Hinweis: Bei der Berechnung der partiellen Ableitung ∂kf genugt es, dieFunktion f nur als Funktion von xk zu betrachten, bei der die anderen Kom-ponenten x1, . . . , xk−1, xk+1, . . . , xn feste Parameter sind. Auf diese Weiseerhalt man sofort
∂1f(x) = (3x21, x3), ∂2f(x) = (2x2, 0), ∂3f(x) = (0, x1).
Bemerkung 2.40. Die eben im Beispiel angestellte Uberlegung zur Berech-nung der partiellen Ableitung ∂kf ergibt sich aus folgender Uberlegung:
Fur die Funktion g : R→ F definiert durch
g(z) := f(x1, ..., xk−1, z, xk+1, ..., xn)
gilt im Punkt xk
g′(xk) = limt→0
g(xk + t)− g(xk)
t
= limt→0
f(x1, ..., xk−1, xk + t, xk+1, ..., xn)− f(x1, ..., xk−1, xk, xk+1, ..., xn)
t
= limt→0
f(x+ tek)− f(x)
t= ∂kf(x).
Folgerung 2.41. Sei f : Rn → F im Punkt x0 differenzierbar. Dann istf : Rn → F im Punkt x0 partiell differenzierbar.
Dies ist eine unmittelbare Folgerung aus Satz 2.35, da die partiellen Ablei-tungen spezielle Richtungsableitungen sind.
Bemerkung 2.42. Ist eine Funktion f in x0 partiell differenzierbar, so brauchtf in x0 nicht stetig zu sein.
40

Abbildung 2.4: Dies ist der Graph der Funktion f aus Bemerkung 2.42.Die beiden partiellen Ableitungen (blaue Linien) existieren in Null, aber dieFunktion ist in Null nicht stetig.
Wir betrachten dazu die Funktion f : R2 → R mit
f(x1, x2) =
{x1x2
(x21+x22)2, fur x 6= 0
0 fur x = 0.
Dann gilt fur alle t ∈ R, dass
f(t, 0) = 0 = f(0, t).
Somit haben wir ∂1f(0, 0) = 0 und ∂2f(0, 0) = 0, d.h. f ist in (0, 0) partielldifferenzierbar. Aber f ist in (0, 0) nicht stetig, da
limn→∞
f(1
n,
1
n) = lim
n→∞
n2
46= 0 = f(0, 0).
Man sieht dies auch in Abbildung 2.4.
Satz 2.43. Sei E = Rn, X ⊂ E offen und f : X → F in x0 ∈ X differen-zierbar. Dann gilt
Df(x0)v =n∑k=1
vk∂kf(x0) ∀v = (v1, . . . , vn) ∈ Rn.
41

Beweis: Da v =∑n
k=1 vkek, so folgt aus der Linearitat von Df(x0) und Satz
2.35, dass
Df(x0)v = Df(x0)
(n∑k=1
vkek
)=
n∑k=1
vkDf(x0) · ek
=n∑k=1
vkDekf(x0) =n∑k=1
vk∂kf(x0).
�
2.2.4 Jacobi-Matrix
Definition 2.44. Sei x ⊂ Rn offen und f = (f 1, . . . , fm) : X → Rm in x0
partiell differenzierbar. Dann heißt die Matrix
Jf (x0) :=
∂1f1(x0) . . . ∂nf
1(x0)...
. . ....
∂1fm(x0) . . . ∂nf
m(x0)
Jacobi-Matrix von f im Punkt x0.
Beispiel 2.45. Sei f : R3 → R2 mit
f(x1, x2, x3) = (x1 + x2x3, x21 − x2).
Dann gilt
Jf (x) =
(1 x3 x2
2x1 −1 0
).
Folgerung 2.46. Sei X ⊂ Rn offen und f = (f 1, . . . , fm) : X → Rm in x0
differenzierbar. Dann ist jede Komponente f j in x0 partiell differenzierbarund es gilt
Jf (x0) = (Df(x0))FE
mit der Standardbasis E = (e1, . . . , en) in Rn und der Standardbasis F =(e1, . . . , em) in Rm, d.h. die Jacobi-Matrix Jf (x0) ist die Darstellungsmatrixvon Df(x0) bezuglich der Standardbasen.
42

Beweis: Aus Satz 2.43 folgt mit v := ek fur jedes k = 1, . . . , n, dass
Df(x0)ek = ∂kf(x0) =m∑j=1
∂kfj(x0)ej
Daher haben wir
(Df(x0))FE =
∂1f1(x0) . . . ∂nf
1(x0)...
. . ....
∂1fm(x0) . . . ∂nf
m(x0)
= Jf (x0).
�
Bemerkung. Bei der Darstellung von Df fur Funktionen f : Rn → Rm in denStandardbasen lasst man die Angabe der Basen oftmals weg und schreibteinfach Df(x0) = Jf (x0), falls f in x0 differenzierbar ist.
Satz 2.47. (Differenzierbarkeitskriterium)Sei X ⊂ Rn offen. Dann ist f : X → F genau dann stetig differenzierbar,wenn f stetig partiell differenzierbar ist.
Beweis: (⇒): Die partielle Differenzierbarkeit kennen wir schon aus Folge-rung 2.41. Mit Satz 2.43 folgt fur jedes k = 1, . . . , n, dass fur alle x ∈ X:
∂kf(x) = Df(x)ek.
DaDf nach Voraussetzung stetig ist, ist somit auch ∂kf fur jedes k = 1, . . . , nstetig.
(⇐): Sei x0 ∈ X und eine lineare Abbildung A(x0) : Rn → F definiert durch
A(x0)v :=n∑k=1
vk∂kf(x0).
Da Rn endlich-dimensional ist, so folgt aus Satz 2.19, dass A(x0) ∈ L(Rn, F ).Wir zeigen nun, dass A(x0) = Df(x0), d.h.
limv→0
f(x0 + v)− f(x0)− A(x0)v
‖v‖∞= 0.
43

Sei ε > 0 so gewahlt, dass B(x0, ε) ⊂ X. Sei v = (v1, ..., vn) ∈ B(x0, ε). Dannerhalten wir fur
xk := x0 +k∑j=1
vjej, 1 ≤ k ≤ n,
dass
f(x0 + v)− f(x0) =n∑k=1
(f(xk)− f(xk−1)).
Wegen xk − xk−1 = vkek ergibt der Fundamentalsatz der Differential- undIntegralrechnung, dass
f(x0 + v)− f(x0) =n∑k=1
vk∫ 1
0
∂kf(xk−1 + tvkek) dt.
Somit haben wir
f(x0 + v)− f(x)− A(x0)v =n∑k=1
vk∫ 1
0
(∂kf(xk−1 + tvkek)− ∂kf(x0)
)dt.
(2.10)
Fur v → 0 gilt auch fur jedes t ∈ [0, 1], dass
w(t) := xk−1 + tvkek − x0 =k−1∑j=1
vjej + tvkek → 0.
Da ∂kf stetig ist, so gilt fur jedes t ∈ [0, 1], dass
limv→0‖∂kf(x0 + w(t))− ∂kf(x0)‖F = 0. (2.11)
44

Aus (2.10) folgt, dass
‖f(x0 + v)− f(x0)− A(x0)v‖F‖v‖∞
≤n∑k=1
|vk|‖v‖∞
∫ 1
0
‖∂kf(x0 + w(t))− ∂kf(x0)‖F dt
≤n∑k=1
∫ 1
0
‖∂kf(x0 + w(t))− ∂kf(x0)‖F dt
≤n∑k=1
supt∈[0,1]
∥∥∂kf(x0 + w(t))− ∂kf(x0)∥∥F
∫ 1
0
1 dt
=n∑k=1
supt∈[0,1]
∥∥∂kf(x0 + w(t))− ∂kf(x0)∥∥F.
Unter Berucksichtigung von (2.11) erhalten wir
limv→0
‖f(x0 + v)− f(x0)− A(x0)v‖F‖v‖∞
= 0.
Es bleibt zu zeigen, dass die Abbildung x 7→ A(x) stetig ist. Sei x0 ∈ Xwieder beliebig, aber fest. Dann gilt fur alle x ∈ X und alle v ∈ Rn, dass
‖A(x)v − A(x0)v‖F =
∥∥∥∥∥n∑k=1
vk∂kf(x)−n∑k=1
vk∂kf(x0)
∥∥∥∥∥F
≤n∑k=1
|vk| ‖∂kf(x)− ∂kf(x0)‖F
≤
(n∑k=1
‖∂kf(x)− ∂kf(x0)‖F
)‖v‖∞,
also
‖A(x)− A(x0)‖ ≤n∑k=1
‖∂kf(x)− ∂kf(x0)‖F ∀x ∈ X.
Aufgrund der Stetigkeit der partiellen Ableitungen ∂kf erhalten wir
limx→x0
‖A(x)− A(x0)‖ = 0.
�
45

Bemerkung. Hier ist eine Modifikation des soeben gegebenen Beweises vonSatz 2.47 ohne Benutzung des Hauptsatzes der Differential- und Integralrech-nung, der erst an spaterer Stelle der Vorlesung behandelt wird. Anstelle des-sen benutzen wir den Mittelwertsatz 1.36 fur Funktionen in einer Variablen.Fur die im Beweis gewahlten Vektoren xk und v = (v1, ..., vn) betrachten wirdie Funktionen gk : [0, 1]→ F definiert durch
gk(t) := f(xk−1 + tvkek)− tvk∂kf(x0).
Aufgrund der Definition der Funktionen gk und der Abbildung A(x0) gilt,dass
n∑k=1
(gk(1)− gk(0)) =n∑k=1
(f(xk)− vk∂kf(x0)− f(xk−1))
=n∑k=1
(f(xk)− f(xk−1))−n∑k=1
vk∂kf(x0)
= f(xn)− f(x0)− A(x0)v,
d.h. anstelle von (2.10) haben wir
f(xn)− f(x0)− A(x0)v =n∑k=1
(gk(1)− gk(0)). (2.10*)
Die Funktionen gk sind differenzierbar auf [0, 1], da die partiellen Ableitungen∂kf in B(x0, ε) ⊂ X existieren und xk−1 + tvkek ∈ B(x0, ε) fur alle t ∈ [0, 1].Dann wissen wir aufgrund des Mittelwertsatzes 1.36, dass
‖gk(1)− gk(0)‖F ≤ supt∈[0,1]
‖g′(t)‖F
= supt∈[0,1]
‖vk∂kf(xk−1 + tvkek)− vk∂kf(x0)‖F
46

Mit (2.10*) erhalten wir
‖f(x0 + v)− f(x0)− A(x0)v‖F‖v‖∞
≤n∑k=1
|vk|‖v‖∞
supt∈[0,1]
‖∂kf(xk−1 + tvkek)− ∂kf(x0)‖F
≤n∑k=1
supt∈[0,1]
‖∂kf(xk−1 + tvkek)− ∂kf(x0)‖F
=n∑k=1
supt∈[0,1]
‖∂kf(x0 + w(t))− ∂kf(x0)‖F .
Ab hier erfolgt der Rest des Beweises genauso wie zuvor.
Folgerung 2.48. Sei X ⊂ Rn offen. Dann ist f = (f 1, . . . , fm) : X → Rm
genau dann stetig differenzierbar, wenn alle Komponenten f j stetig partielldifferenzierbar sind.
Dies folgt unmittelbar aus den Satzen 2.47 und 2.32.
Beispiel 2.49. Die Funktion f : R3 → R2 mit
f(x1, x2, x3) = (x2 sin(x1), x1 + cos(2x3))
ist stetig differenzierbar und es gilt
Df(x1, x2, x3) =
(x2 cos(x1) sin(x1) 0
1 0 − 2 sin(2x3)
).
2.2.5 Gradient
Satz 2.50. (Rieszscher Darstellungssatz fur endlich-dimensionale Hilbert-raume)Sei (E, (·, ·)) ein endlich-dimensionaler Hilbertraum. Dann gibt es zu jedemf ∈ L(E,K) ein eindeutig bestimmtes y ∈ E, so dass
f(x) = (x, y) ∀x ∈ E.
47

Beweis: Sei T : E → L(E,K) die lineare Abbildung mit
(Ty)(x) := (x, y) ∀x, y ∈ E.
Dann ist T injektiv, denn aus Ty1 = Ty2 fur y1, y2 ∈ E folgt
(x, y1) = (x, y2) ∀x ∈ E
und somit
‖y1 − y2‖2 = (y1 − y2, y1 − y2) = (y1 − y2, y1)− (y1 − y2, y2) = 0,
d.h. y1 = y2. Damit haben wir dim(kerT ) = 0. Sei n die Dimension von E.Dann ist L(E,K) nach Satz 2.23 topologisch isomorph zu K1×n und besitztsomit auch die Dimension n. Aus der Linearen Algebra wissen wir zudem,dass
n = dim(E) = dim(kerT ) + dim(im T ) = dim(im T ).
Damit ist T surjektiv und die Behauptung bewiesen. �
Bemerkung. Der Satz 2.50 gilt auch fur unendlich-dimensionale Hilbertraumeund wird in Vorlesungen zur Funktionalanalysis bewiesen.
Definition 2.51. SeiX ⊂ Rn offen und f : X → R in x0 ∈ X differenzierbar.Dann heißt ∇f(x0) ∈ Rn der Gradient von f in x0, falls
(∇f(x0), x) = Df(x0)x ∀x ∈ Rn,
wobei (·, ·) das Euklidische Skalarprodukt ist.
Bemerkung 2.52. Da Df(x0) ∈ L(Rn,R), so existiert aufgrund des Riesz-schen Darstellungssatzes genau ein y ∈ Rn mit
Df(x0)v = (v, y) = (y, v) ∀v ∈ Rn.
Damit existiert der Gradient ∇f(x0) von f in x0 und ist eindeutig bestimmt.
Satz 2.53. Sei X ⊂ Rn offen und f : X → R in x0 ∈ X differenzierbar.Dann gilt
∇f(x0) = (∂1f(x0), . . . , ∂nf(x0)).
48
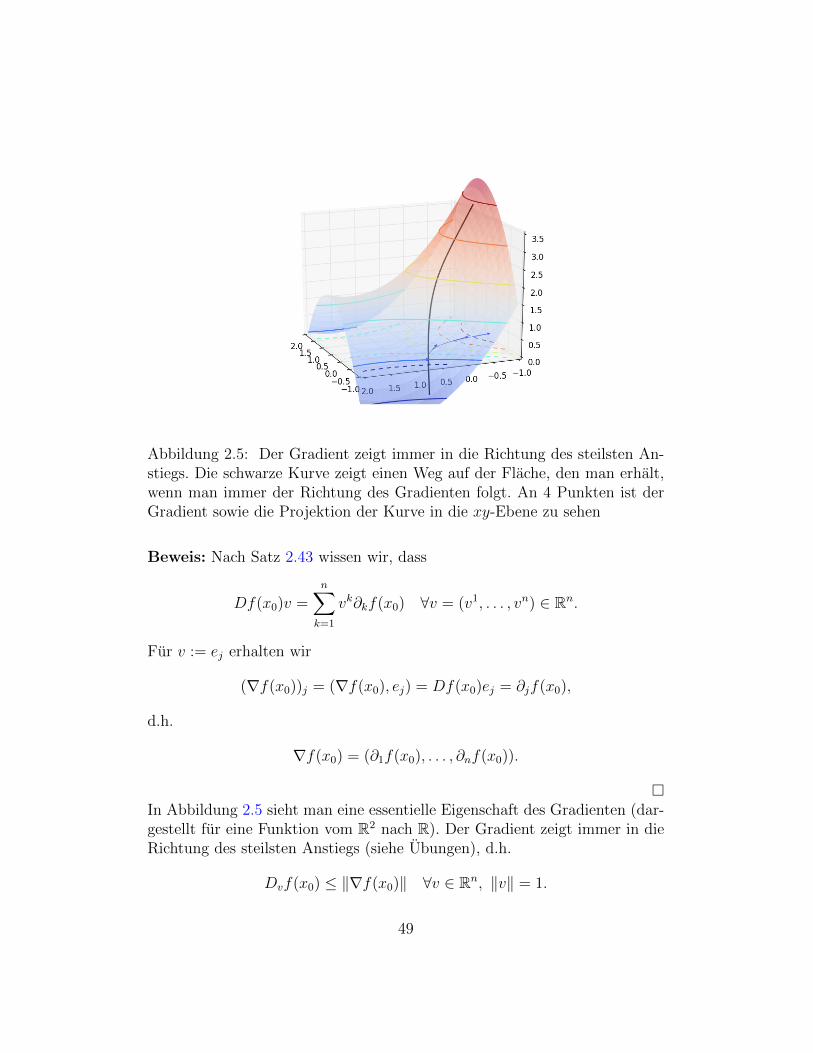
Abbildung 2.5: Der Gradient zeigt immer in die Richtung des steilsten An-stiegs. Die schwarze Kurve zeigt einen Weg auf der Flache, den man erhalt,wenn man immer der Richtung des Gradienten folgt. An 4 Punkten ist derGradient sowie die Projektion der Kurve in die xy-Ebene zu sehen
Beweis: Nach Satz 2.43 wissen wir, dass
Df(x0)v =n∑k=1
vk∂kf(x0) ∀v = (v1, . . . , vn) ∈ Rn.
Fur v := ej erhalten wir
(∇f(x0))j = (∇f(x0), ej) = Df(x0)ej = ∂jf(x0),
d.h.
∇f(x0) = (∂1f(x0), . . . , ∂nf(x0)).
�In Abbildung 2.5 sieht man eine essentielle Eigenschaft des Gradienten (dar-gestellt fur eine Funktion vom R2 nach R). Der Gradient zeigt immer in dieRichtung des steilsten Anstiegs (siehe Ubungen), d.h.
Dvf(x0) ≤ ‖∇f(x0)‖ ∀v ∈ Rn, ‖v‖ = 1.
49

2.2.6 Rechenregeln
Satz 2.54. (Linearitat) Sei X ⊂ E offen, f, g : X → F in x0 ∈ X differen-zierbar und α, β ∈ K. Dann ist auch h := αf + βg in x0 differenzierbar undes gilt
Dh(x0) = αDf(x0) + βDg(x0).
Beweis: Da f und g in x0 differenzierbar sind, so gilt fur x ∈ B(x0, ε) ⊂ X,dass
f(x) = f(x0) +Df(x0)(x− x0) + rfx0(x)‖x− x0‖,g(x) = g(x0) +Dg(x0)(x− x0) + rgx0(x)‖x− x0‖
mit stetigen Funktionen rfx0 , rgx0
: X → F , fur die rfx0(x0) = 0 = rgx0(x0).Daraus folgt
h(x) = αf(x) + βg(x)
= αf(x0) + βg(x0) + αDf(x0)(x− x0) + βDg(x0)(x− x0)
+ αrfx0(x)‖x− x0‖+ βrgx0(x)‖x− x0‖= h(x0) + αDf(x0)(x− x0) + βDg(x0)(x− x0) + rhx0(x)‖x− x0‖
sowie rhx0(x0) = 0 fur die stetige Funktion rhx0 mit
rhx0(x) := αrfx0(x) + βrgx0(x).
�
Satz 2.55. (Kettenregel) Seien X ⊂ E und Y ⊂ F offen, G ein weitererBanachraum sowie f : X → Y ⊂ F in x0 ∈ X und g : Y → G in y0 :=f(x0) ∈ Y differenzierbar. Dann ist g ◦ f : X → G in x0 differenzierbar undes gilt
D(g ◦ f)(x0) = Dg(y0) ·Df(x0).
Beweis: Da f in x0 differenzierbar ist und g in y0 differenzierbar ist, so giltfur x ∈ B(x0, ε1) ⊂ X und y ∈ B(y0, ε2) mit f(B(x0, ε1)) ⊂ B(y0, ε2) ⊂ Y ,dass
f(x) = f(x0) +Df(x0)(x− x0) + rfx0(x)‖x− x0‖,g(y) = g(y0) +Dg(y0)(y − y0) + rgy0(y)‖y − y0‖
50

mit stetigen Funktionen rfx0 : X → F und rgy0 : Y → G, fur die rfx0(x0) = 0und rgy0(y0) = 0 und somit fur hinreichend kleine ε1 > 0 und ε2 > 0:
(g ◦ f)(x) = g(f(x))
= g(f(x0) +Df(x0)(x− x0) + rfx0(x)‖x− x0‖)= g(f(x0)) +Dg(y0)Df(x0)(x− x0)
+Dg(y0)rfx0(x)‖x− x0‖+ rgy0(y0 + sx0(x))‖sx0(x)‖
fur
sx0(x) := Df(x0)(x− x0) + rfx0(x)‖x− x0‖.
Also haben wir
(g ◦ f)(x) = (g ◦ f)(x0) +Dg(y0)Df(x0)(x− x0) + rx0(x)‖x− x0‖
fur
rx0(x) :=
{Dg(y0)rfx0(x) + rgy0(y0 + sx0(x))
‖sx0 (x)‖‖x−x0‖ fur x 6= x0,
0 fur x = x0.
Da rfx0 und rgx0 stetig sind, so ist auch rx0 stetig. Die Stetigkeit in x 6= x0 istklar nach Definition von rx0 . Die Stetigkeit in x0 folgt aus
limx→x0
rx0(x) = limx→x0
(Dg(y0)rfx0(x) + rgy0(y0 + sx0(x))
‖sx0(x)‖‖x− x0‖
)= lim
x→x0rgy0(y0)
‖Df(x0)(x− x0)‖‖x− x0‖
= 0.
�
Satz 2.56. (Produktregel) Sei X ⊂ E offen und f, g : X → R in x0 ∈ X dif-ferenzierbar. Dann ist h : X → R mit h(x) = f(x) ·g(x) in x0 differenzierbarund es gilt
Dh(x0) = g(x0) ·Df(x0) + f(x0) ·Dg(x0).
51

Beweis: Wir betrachten ϕ : R2 → R mit ϕ(y1, y2) := y1 · y2. Dann gilth = ϕ(f, g) und mit Hilfe der Kettenregel erhalten wir
Dh(x0) = Dϕ(f(x0), g(x0))
(Df(x0)Dg(x0)
)= (g(x0), f(x0))
(Df(x0)Dg(x0)
)= g(x0) ·Df(x0) + f(x0) ·Dg(x0).
�
Bemerkung 2.57. Die Kettenregel zeigt noch eine weitere geometrische Ei-genschaft des Gradienten. Sei X ⊂ E offen und c ∈ im (f). Dann heißt
Mc := {x ∈ X : f(x) = c} ⊂ X
Niveauflache von f zum Niveau c. Sei I ⊂ R ein offenes Intervall, ϕ : I →Mc
differenzierbar und f : X → R differenzierbar. Dann gilt
(∇f(ϕ(t)), ϕ′(t)) = 0 ∀t ∈ I,
d.h. der Gradient steht senkrecht auf den Tangentialvektoren einer beliebigenKurve einer Niveauflache, siehe auch Abbildung 2.6. Dies ergibt sich aus derKettenregel und der Definition des Gradienten wie folgt:
(∇f(ϕ(t)), ϕ′(t)) = Df(ϕ(t))ϕ′(t) = D(f ◦ ϕ)(t) = 0,
denn (f ◦ ϕ)(t) = c fur alle t ∈ I.
2.2.7 Mittelwertsatz
Der Mittelwertsatz 1.36 fur Funktionen von einer Variablen lasst sich auchauf Funktionen mehrerer Variablen verallgemeinern.
Satz 2.58. (Mittelwertsatz fur Funktionen mehrerer Veranderlicher)Sei X ⊂ E offen und f : X → F differenzierbar. Dann gilt
‖f(y)− f(x)‖F ≤ sup0≤t≤1
‖Df(x+ t(y − x))‖ ‖y − x‖E
fur alle x, y ∈ X mit {x+ t(y − x) : t ∈ [0, 1]} ⊂ X.
52
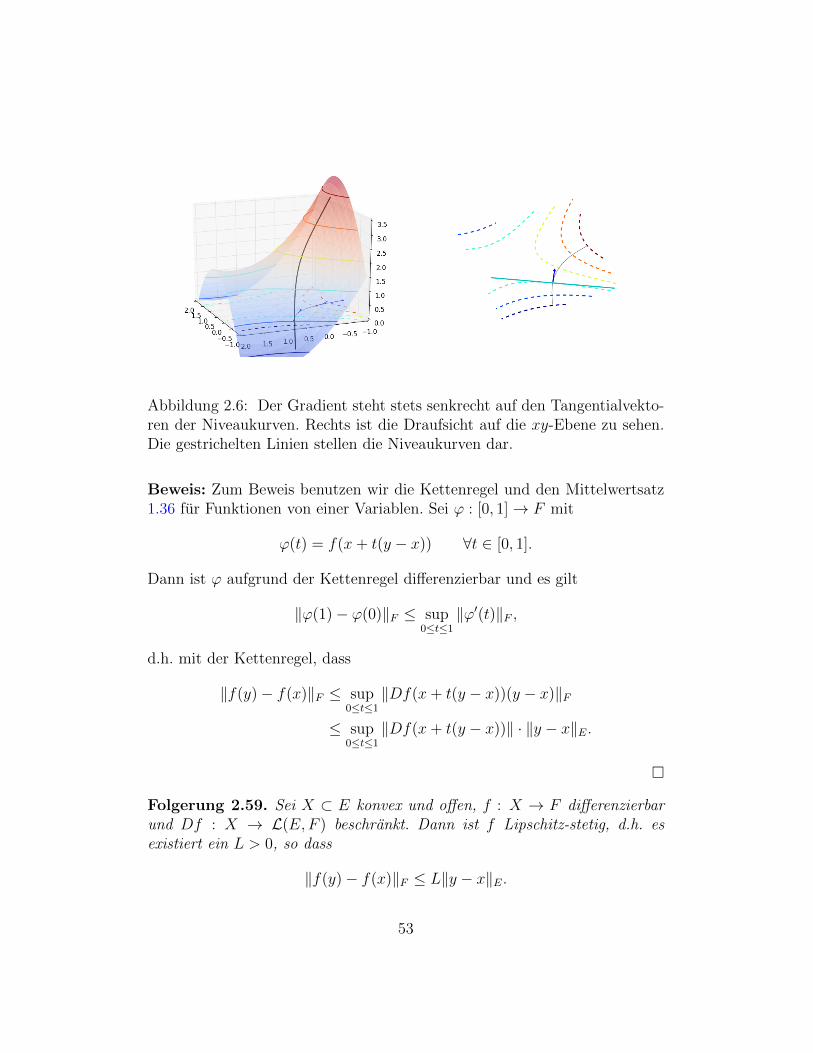
Abbildung 2.6: Der Gradient steht stets senkrecht auf den Tangentialvekto-ren der Niveaukurven. Rechts ist die Draufsicht auf die xy-Ebene zu sehen.Die gestrichelten Linien stellen die Niveaukurven dar.
Beweis: Zum Beweis benutzen wir die Kettenregel und den Mittelwertsatz1.36 fur Funktionen von einer Variablen. Sei ϕ : [0, 1]→ F mit
ϕ(t) = f(x+ t(y − x)) ∀t ∈ [0, 1].
Dann ist ϕ aufgrund der Kettenregel differenzierbar und es gilt
‖ϕ(1)− ϕ(0)‖F ≤ sup0≤t≤1
‖ϕ′(t)‖F ,
d.h. mit der Kettenregel, dass
‖f(y)− f(x)‖F ≤ sup0≤t≤1
‖Df(x+ t(y − x))(y − x)‖F
≤ sup0≤t≤1
‖Df(x+ t(y − x))‖ · ‖y − x‖E.
�
Folgerung 2.59. Sei X ⊂ E konvex und offen, f : X → F differenzierbarund Df : X → L(E,F ) beschrankt. Dann ist f Lipschitz-stetig, d.h. esexistiert ein L > 0, so dass
‖f(y)− f(x)‖F ≤ L‖y − x‖E.
53

Beweis: Da Df beschrankt ist, so existiert ein L > 0, so dass ‖Df(z)‖ ≤ Lfur alle z ∈ X. Da X konvex ist, so gilt {x + t(y − x) : t ∈ [0, 1]} ⊂ X furalle x, y ∈ X. Mit dem Mittelwertsatz 2.58 erhalten wir
‖f(y)− f(x)‖F ≤ sup0≤t≤1
‖Df(x+ t(y − x))‖ ‖y − x‖E ≤ L‖y − x‖E.
�
Folgerung 2.60. Sei X ⊂ E zusammenhangend und offen, f : X → Fdifferenzierbar mit Df = 0. Dann ist f konstant.
Beweis: UbungsaufgabeHinweis: Man wahle ein x0 ∈ X und zeige, dass die Menge f−1({y0}) fury0 := f(x0) sowohl offen als auch abgeschlossen in X und damit nach Satz12.21 der Vorlesung Analysis I* gleich X ist. �
2.2.8 Notwendige Bedingungen fur Extrema
Der Satz 1.38 fur Funktionen von einer Variablen lasst sich auch auf Funk-tionen mehrerer Variablen verallgemeinern.
Satz 2.61. Sei X ⊂ E offen und f : X → R habe in x0 ∈ X ein lokalesExtremum. Falls alle Richtungsableitungen Dvf in x0 existieren, dann gilt
Dvf(x0) = 0 ∀v ∈ E\{0}.Beweis: Sei v ∈ E\{0} und ε > 0 so gewahlt, dass x0+tv ∈ X fur t ∈ (−ε, ε).Dann ist die Funktion ϕ : (−ε, ε)→ R mit
ϕ(t) = f(x0 + tv)
in 0 differenzierbar und hat in 0 ein lokales Extremum. Aus Satz 1.38 folgt,dass ϕ′(0) = 0, d.h. mit der Kettenregel, dass Dvf(x0) = Df(x0)v = ϕ′(0) =0. �
Definition 2.62. Sei X ⊂ E offen und f : X → F in x0 differenzierbar mitDf(x0) = 0. Dann heißt x0 kritischer Punkt von f .
Bemerkung. Falls X ⊂ E und f : X → R differenzierbar ist, dann istjeder Extremwert x∗ ∈ int(X) ein kritischer Punkt von f . Man beachte, dassExtremwerte von f ansonsten aber auch auf dem Rand ∂X angenommenwerden konnen.
Um hinreichende Kriterien fur die Existenz eines lokalen oder globalen Extre-mums angeben zu konnen, brauchen wir zweite Ableitungen fur Funktionenmehrerer Veranderlicher. Diese behandeln wir im nachsten Abschnitt.
54

2.3 Hohere Ableitungen
Es seien E und F auch in diesem Abschnitt wieder Banachraume. Sei weiterX ⊂ E eine offene Teilmenge und f : X → F (total) differenzierbar. Fallsdie Ableitung g := Df : X → L(E,F ) auch (total) differenzierbar ist, dannheißt f zweimal (total) differenzierbar und man schreibt D2f := Dg. Manbeachte, dass D2f die Menge X in den Banachraum L(E,L(E,F )) abbildet.
Die Darstellung von Objekten aus dem Raum L(E,L(E,F )) ist allerdingsziemlich unbequem. Noch unangenehmer wird es, wenn man noch hohereAbleitungen bestimmen will. Diese sind dann Objekte in Raumen der Form
L(E,L(E, . . .L(E,F ) . . .)).
Fur eine leichtere Darstellung solcher Objekte betrachtet man dazu isomor-phe Raume, welche Bildraume sogenannter multilinearer Abbildungen sind.
2.3.1 Multilineare Abbildungen
Definition 2.63. Seien E1, . . . , Em mit m ≥ 2 und F Banachraume. EineAbbildung
ϕ : E1 × · · · × Em → F
heißt multilinear, falls ϕ in jedem Argument linear ist, d.h. wenn fur allexj ∈ Ej mit 1 ≤ j ≤ m die Abbildungen
fk : Ek → F
t 7→ ϕ(x1, ..., xk−1, t, xk+1, ..., xm)
fur k = 1, . . . ,m linear sind.
Fur multilineare Abbildungen haben wir die gleichen Stetigkeitseigenschaftenwie fur lineare Abbildungen (siehe Satz 2.8).
Satz 2.64. Sei ϕ eine multilineare Abbildung von E1 × · · · × Em nach F .Dann sind folgende Bedingungen aquivalent:
(i) ϕ ist stetig.
(ii) ϕ ist stetig in x0 = 0.
55

(iii) ϕ ist beschrankt, d.h. ϕ bildet beschrankte Mengen in beschrankte Men-gen ab.
(iv) Es existiert ein c ≥ 0 mit
‖ϕ(x1, . . . , xm)‖F ≤ c‖x1‖E1 · . . . · ‖xm‖Em
fur alle xj ∈ Ej mit 1 ≤ j ≤ m.
Beweis: (i)⇒ (ii): Dies trivial nach Definition der Stetigkeit.
(ii)⇒ (iii): Sei B ⊂ E1× · · · ×Em beschrankt. Dann existiert ein C > 0, sodass
‖xj‖Ej≤ C ∀ j = 1, . . . ,m ∀x ∈ B.
Da ϕ in 0 stetig ist, so existiert ein δ > 0, so dass
‖ϕ(z1, ..., zm)‖F ≤ 1 ∀z ∈ E1 × · · · × Em mit ‖zj‖Ej≤ δ, j = 1, . . . ,m.
Sei x ∈ B beliebig. Dann gilt fur yj := δcxj, j = 1, . . . ,m, dass
‖yj‖Ej=δ
c‖xj‖Ej
≤ δ
cc = δ
und somit
‖ϕ(y1, ..., ym)‖F ≤ 1.
Da ϕ multilinear ist, so erhalten wir
‖ϕ(x1, ..., xm)‖F =cm
δm‖ϕ(y1, ..., ym)‖F ≤
cm
δm,
d.h. ϕ(B) ist beschrankt.
(iii)⇒ (iv): Nach Voraussetzung ist ϕ(B(0, 1)) beschrankt, d.h. es existierteine Konstante c > 0, so dass
‖ϕ(z1, ..., zm)‖F ≤ c ∀ z ∈ E1 × · · · × Em mit ‖zj‖Ej≤ 1, j = 1, . . . ,m.
Da ϕ multilinear ist, so gilt fur alle x ∈ E1 × · · · × Em, dass
‖ϕ(x1, ..., xm)‖F = ‖x1‖E1 · . . . · ‖xm‖Em
∥∥∥∥ϕ( 1
‖x1‖E1
x1, ...,1
‖xm‖Em
xm
)∥∥∥∥F
≤ ‖x1‖E1 · . . . · ‖xm‖Em · c.
56

(iv) ⇒ (i): Sei x = (x1, . . . , xm) ∈ E1 × · · · × Em und (xn) eine Folge inE1 × · · · × Em mit limn→∞ xn = x. Wir zeigen, dass limn→∞ ϕ(xn) = ϕ(x).Dazu folgern wir mit der Multilinearitat von ϕ, dass
‖ϕ(x)− ϕ(xn)‖F = ‖ϕ(x1, . . . , xm)− ϕ(xn1 , . . . , xnm)‖F
≤m∑j=1
‖ϕ(x1, . . . , xj, xnj+1, ..., x
nm)− ϕ(x1, . . . , xj−1, x
nj , ..., x
nm)‖F
=m∑j=1
‖ϕ(x1, . . . , xj−1, xj − xnj , xnj+1, ..., xnm)‖F .
Nach Voraussetzung gilt damit
‖ϕ(x)− ϕ(xn)‖F
≤ cm∑j=1
‖x1‖E1 . . . ‖xj−1‖Ej−1‖xj − xnj ‖Ej
‖xnj+1‖Ej+1. . . ‖xnm‖Em
fur eine Konstante c > 0, d.h.
limn→∞
‖ϕ(x)− ϕ(xn)‖F = 0
wegen limn→∞ ‖xj − xnj ‖Ej= 0 fur alle j = 1, . . . ,m. �
Folgerung 2.65. Sei dimEk < ∞ fur k = 1, . . . ,m. Dann ist jede multili-neare Abbildung von E1 × · · · × Em nach F stetig.
Den Beweis kann man ganz analog zum Beweis von Satz 2.19 fuhren.
Definition 2.66. Die Menge aller stetigen, multilinearen Abbildungen vonE1 × · · · × Em nach F bezeichnen wir mit
L(E1, . . . , Em;F ).
Weiter definieren wir Lm(E,F ) := L(E, . . . , E︸ ︷︷ ︸m−mal
;F ), L1(E,F ) := L(E,F ) und
L0(E,F ) := F .
Bemerkung. Offensichtlich ist L(E1, . . . , Em;F ) ein Untervektorraum vonC(E1 × · · · × Em, F ).
57

Satz 2.67. Fur ϕ ∈ L(E1, . . . , Em;F ) sei
‖ϕ‖ := inf{α ≥ 0 : ‖ϕ(x1, . . . , xm)‖F ≤ α‖x1‖E1 · . . . · ‖xm‖Em , xj ∈ Ej}.
Dann gilt
(i) L(E1, . . . , Em;F ) ist ein Banachraum mit der Norm ‖ · ‖.
(ii) Fur die Norm ‖ · ‖ auf L(E1, . . . , Em;F ) gilt:
‖ϕ‖ = sup{‖ϕ(x1, . . . , xm)‖ : ‖xj‖Ej≤ 1, 1 ≤ j ≤ m}
und
‖ϕ(x1, . . . , xm)‖ ≤ ‖ϕ‖ · ‖x1‖E1 · . . . · ‖xm‖Em
fur alle (x1, . . . , xm) ∈ E1 × · · · × Em.
Den Beweis von (i) kann man vollkommen analog zum Beweis von Satz 2.9fuhren. Die Normeigenschaft folgt analog Beweis von Lemma 2.4. Fur denBeweis von (ii) kann man die gleichen Uberlegungen wie die von Beweis vonLemma 2.5 nutzen.
Satz 2.68. Die Raume L(E1, . . . , Em;F ) und L(E1,L(E2, . . . ,L(Em, F ) . . . ))sind isometrisch isomorph.
Beweis: Wir zeigen, dass L(E1, E2;F ) und L(E1,L(E2, F )) isometrisch iso-morph sind. Fur m > 2 erhalt man dann die Behauptung per Induktion uberm.
Wir zeigen, dass die Abbildung T : L(E1,L(E2, F )) → L(E1, E2;F ) mitT (A) := ϕA und
ϕA(x1, x2) := (Ax1)x2 ∀(x1, x2) ∈ E1 × E2
ein topologischer Isomorphismus ist.
(i) Fur A ∈ L(E1,L(E2, F )) ist die Abbildung ϕA : E1 ×E2 → F bilinearund stetig, da
‖ϕA(x1, x2)‖F ≤ ‖Ax1‖L(E2,F )‖x2‖E2 ≤ ‖A‖‖x1‖E1‖x2‖E2 .
Somit gilt T (A) ∈ L(E1, E2;F ) und
‖T (A)‖ = ‖ϕA‖ ≤ ‖A‖
fur A ∈ L(E1,L(E2, F )).
58

(ii) Fur ϕ ∈ L(E1, E2;F ) sei Aϕ : E1 → L(E2, F ) definiert als
Aϕ(x1)x2 := ϕ(x1, x2) ∀(x1, x2) ∈ E1 × E2.
Da
‖Aϕ(x1)x2‖F = ‖ϕ(x1, x2)‖F≤ ‖ϕ‖ · ‖x1‖E1‖x2‖E2 ∀(x1, x2) ∈ E1 × E2,
so sehen wir, dass Aϕ(x1) ∈ L(E2, F ) und
‖Aϕ(x1)‖L(E2,F ) ≤ ‖ϕ‖ · ‖x1‖E1 ∀x1 ∈ E1.
Dies bedeutet wiederum, dass Aϕ ∈ L(E1,L(E2, F )) und
‖Aϕ‖ ≤ ‖ϕ‖.
(iii) Die Abbildung
S : L(E1, E2;F )→ L(E1,L(E2, F ))
ϕ 7→ Aϕ
ist die Umkehrabbildung von T : Fur A ∈ L(E1,L(E2, F )) haben wir
S(T (A)) = S(ϕA) = AϕA= A
denn fur alle (x1, x2) ∈ E1 × E2 gilt
(AϕAx1)x2 = ϕA(x1, x2) = (Ax1)x2.
Umgekehrt wissen wir fur ϕ ∈ L(E1, E2;F ), dass
T (S(ϕ)) = T (Aϕ) = ϕAϕ = ϕ
denn fur alle (x1, x2) ∈ E1 × E2 gilt
ϕAϕ(x1, x2) = (Aϕx1)x2 = ϕ(x1, x2).
Aus (i)−(iii) folgt, dass T linear, stetig und bijektiv ist, wobei auch T−1 = Sstetig ist. Zudem liefern die Abschatzungen von (i) und (ii), dass fur alleA ∈ L(E1,L(E2, F )) gilt:
‖A‖ = ‖S(T (A))‖ = ‖S(ϕA)‖ ≤ ‖ϕA‖ ≤ ‖A‖,
d.h. ‖A‖ = ‖ϕA‖, also ist T isometrisch. �
Folgerung 2.69. Fur m ∈ N ist Lm(E,F ) ein Banachraum und L(E,Lm(E,F ))ist isometrisch isomorph zu Lm+1(E,F ).
59

2.3.2 Differenzierbarkeit hoherer Ordnung
Definition 2.70. Sei X ⊂ E offen und f : X → F differenzierbar sowiex ∈ X. Dann setzen wir D0f(x0) := f(x0) und D1f(x) := Df(x). Nundefinieren wir rekursiv: Falls Dmf : X → Lm(E,F ) differenzierbar ist, dannsei
Dm+1f(x) := D(Dmf)(x) ∈ L(E,Lm(E, f)) ∼= Lm+1(E,F ).
Falls Dmf(x) existiert, so nennen wir Dmf(x) die m-te Ableitung von fim Punkt x. Wir sagen dann auch f ist in x m-mal differenzierbar.
Falls Dmf(x) fur jedes x ∈ X existiert, so nennen wir Dmf die m-te Ablei-tung von f und sagen, dass f m-mal differenzierbar ist. Falls Dmf nochstetig ist, dann nennen wir f m-mal stetig differenzierbar.
Zudem definieren wir
Cm(X,F ) := {f : X → F : f ist m-mal stetig differenzierbar}
sowie
C∞(X,F ) :=⋂m∈N
Cm(X,F ).
Falls f ∈ C∞(X,F ), dann heißt f unendlich oft stetig differenzierbarbzw. glatt.
Beispiel 2.71. Sei f : R× R→ R mit
f(x1, x2) := sin(x1) + cos(x2).
Dann gilt fur alle z[1], z[2] ∈ R2, dass
D1f(x)z[1] =(cos(x1) − sin(x2)
)z[1]
= cos(x1)z[1]1 − sin(x2)z
[1]2
und damit
(D2f(x))(z[1], z[2]) = D(Df(x)z[1])z[2]
=(− sin(x1)z
[1]1 − cos(x2)z
[1]2
)z[2]
= − sin(x1)z[1]1 z
[2]1 − cos(x2)z
[1]2 z
[2]2
60

Die zweite Ableitung lasst sich auch anders darstellen als
(D2f(x))(z[1], z[2]) = z[2]>(− sin(x1) 0
0 − cos(x2)
)z[1].
Bemerkung 2.72. Fur zweimal stetig differenzierbare Funktionen f : Rm → Rgilt
(D2f(x))(z[1], z[2]) = z[2]>
∂1∂1f(x) . . . ∂1∂mf(x)...
...∂m∂1f(x) . . . ∂m∂mf(x)
z[1],
denn
Df(x)z[1] = ∇f(x) · z[1] =m∑i=1
∂if(x)z[1]i
und daher
(D2f(x))(z[1], z[2]) =m∑j=1
m∑i=1
∂j∂if(x)z[1]i z
[2]j .
Die Matrix
Hf (x) :=
∂1∂1f(x) . . . ∂1∂mf(x)...
...∂m∂1f(x) . . . ∂m∂mf(x)
heißt Hessematrix von f im Punkt x.
Satz 2.73. Sei X ⊂ E offen und f ∈ C2(X,F ). Dann gilt fur alle x ∈ X,dass
D2f(x)(z[1], z[2]) = D2f(x)(z[2], z[1]) ∀z[1], z[2] ∈ E.
Beweis: Sei x ∈ X und ε > 0 so, dass B(x, 2ε) ⊂ X. Da D2f(x) bilinearist, so genugt es, die Behauptung fur alle z[1], z[2] ∈ E mit ‖z[1]‖E ≤ ε und‖z[2]‖E ≤ ε zu zeigen.
Wir betrachten die Funktionen ϕ1 : [0, 1]→ F and ϕ2 [0, 1]→ F mit
ϕ1(t) := f(x+ z[2] + tz[1])− f(x+ tz[1])− tDf(x+ z[2])z[1] + tDf(x)z[1]
ϕ2(t) := Df(x+ tz[2])z[1] − tD2f(x)(z[1], z[2])
61

Da f ∈ C2(X,F ), so sind ϕ1 und ϕ2 stetig differenzierbar und es gilt aufgrunddes Mittelwertsatzes 1.36, dass
‖ϕ1(1)− ϕ1(0)‖F ≤ supt∈[0,1]
‖ϕ′1(t)‖, ‖ϕ2(1)− ϕ2(0)‖F ≤ supt∈[0,1]
‖ϕ′2(t)‖
d.h.
‖f(x+ z[2] + z[1])− f(x+ z[1])−Df(x+ z[2])z[1] +Df(x)z[1] − f(x+ z[2]) + f(x)‖F≤ sup
t∈[0,1]
‖Df(x+ z[2] + tz[1])z[1] −Df(x+ tz[1])z[1] −Df(x+ z[2])z[1] +Df(x)z[1]‖F
und
‖Df(x+ z[2])z[1] −D2f(x)(z[1], z[2])−Df(x)z[1]‖F≤ sup
t∈[0,1]
‖D2f(x+ tz[2])(z[1], z[2])−D2f(x)(z[1], z[2])‖F .
Durch Addition beider Ungleichungen und Anwendung der Dreiecksunglei-chung erhalten wir
‖f(x+ z[2] + z[1])− f(x+ z[1])− f(x+ z[2]) + f(x)−D2f(x)(z[1], z[2])‖F≤ sup
t∈[0,1]
‖Df(x+ z[2] + tz[1])z[1] −Df(x+ tz[1])z[1] −Df(x+ z[2])z[1] +Df(x)z[1]‖F
+ supt∈[0,1]
‖D2f(x+ tz[2])(z[1], z[2])−D2f(x)(z[1], z[2])‖F (2.12)
Da f ∈ C2(X,F ), so ist fur jedes t ∈ [0, 1] die Funktion gt : X → F mit
gt(x) := Df(x+ tz[1])z[1] −Df(x)z[1]
differenzierbar. Nutzen wir nun den Mittelwertsatz 2.58, so erhalten wir
‖Df(x+ z[2] + tz[1])z[1] −Df(x+ z[2])z[1] −Df(x+ tz[1])z[1] +Df(x)z[1]‖F= ‖gt(x+ z[2])− gt(x)‖F≤ sup
τ∈[0,1]
‖Dgt(x+ τz[2])‖ · ‖z[2]‖E
≤ supτ∈[0,1]
‖D2f(x+ τz[2] + tz[1])−D2f(x+ τz[2])‖ · ‖z[1]‖E ‖z[2]‖E
62

Dies setzen wir in (2.12) ein und bekommen damit
‖f(x+ z[2] + z[1])− f(x+ z[1])− f(x+ z[2]) + f(x)−D2f(x)(z[1], z[2])‖F≤ sup
t∈[0,1]
supτ∈[0,1]
‖D2f(x+ τz[2] + tz[1])−D2f(x+ τz[2])‖ · ‖z[1]‖E ‖z[2]‖E
+ supt∈[0,1]
‖D2f(x+ tz[2])−D2f(x)‖ · ‖z[1]‖E ‖z[2]‖E. (2.13)
Durch Vertauschung von z[1] und z[2] ergibt sich
‖f(x+ z[1] + z[2])− f(x+ z[2])− f(x+ z[1]) + f(x)−D2f(x)(z[2], z[1])‖F≤ sup
t∈[0,1]
supτ∈[0,1]
‖D2f(x+ τz[1] + tz[2])−D2f(x+ τz[1])‖ · ‖z[2]‖E ‖z[1]‖E
+ supt∈[0,1]
‖D2f(x+ tz[1])−D2f(x)‖ · ‖z[2]‖E ‖z[1]‖E. (2.14)
Mit der Addition von (2.13) und (2.14) und Nutzung der Dreiecksungleichungerhalten wir
‖D2f(x)(z[2], z[1])−D2f(x)(z[1], z[2])‖F≤ sup
t∈[0,1]
supτ∈[0,1]
‖D2f(x+ τz[2] + tz[1])−D2f(x+ τz[2])‖ · ‖z[1]‖E ‖z[2]‖E
+ supt∈[0,1]
supτ∈[0,1]
‖D2f(x+ τz[1] + tz[2])−D2f(x+ τz[1])‖ · ‖z[2]‖E ‖z[1]‖E
+ supt∈[0,1]
‖D2f(x+ tz[2])−D2f(x)‖ · ‖z[1]‖E ‖z[2]‖E
+ supt∈[0,1]
‖D2f(x+ tz[1])−D2f(x)‖ · ‖z[2]‖E ‖z[1]‖E.
Sei s ∈ [0, 1]. Ersetzen wir nun z[1] und z[2] durch sz[1] und sz[2], dann ergibtsich
‖D2f(x)(sz[2], sz[1])−D2f(x)(sz[1], sz[2])‖F≤ sup
t∈[0,1]
supτ∈[0,1]
‖D2f(x+ τsz[2] + tsz[1])−D2f(x+ τsz[2])‖ · ‖sz[1]‖E ‖sz[2]‖E
+ supt∈[0,1]
supτ∈[0,1]
‖D2f(x+ τsz[1] + tsz[2])−D2f(x+ τsz[1])‖ · ‖sz[2]‖E ‖sz[1]‖E
+ supt∈[0,1]
‖D2f(x+ tsz[2])−D2f(x)‖ · ‖sz[1]‖E ‖sz[2]‖E
+ supt∈[0,1]
‖D2f(x+ tsz[1])−D2f(x)‖ · ‖sz[2]‖E ‖sz[1]‖E.
63

Da D2f(x) bilinear ist, so erhalten wir fur jedes s ∈ [0, 1], dass
‖D2f(x)(z[2], z[1])−D2f(x)(z[1], z[2])‖F≤ sup
t∈[0,1]
supτ∈[0,1]
‖D2f(x+ τsz[2] + tsz[1])−D2f(x+ τsz[2])‖ · ‖z[1]‖E ‖z[2]‖E
+ supt∈[0,1]
supτ∈[0,1]
‖D2f(x+ τsz[1] + tsz[2])−D2f(x+ τsz[1])‖ · ‖z[2]‖E ‖z[1]‖E
+ supt∈[0,1]
‖D2f(x+ tsz[2])−D2f(x)‖ · ‖z[1]‖E ‖z[2]‖E
+ supt∈[0,1]
‖D2f(x+ tsz[1])−D2f(x)‖ · ‖z[2]‖E ‖z[1]‖E.
Da D2f(·) stetig ist, so erhalten wir fur s→ 0, dass
‖D2f(x)(z[2], z[1])−D2f(x)(z[1], z[2])‖F ≤ 0,
d.h. D2f(x)(z[2], z[1]) = D2f(x)(z[1], z[2]). �
Satz 2.74. Sei X ⊂ E offen und f ∈ Cm(X,F ). Dann gilt fur alle x ∈ Xund jede Permutation σ ∈ Sm, dass
Dmf(x)(z[1], . . . , z[m]) = Dmf(x)(z[σ(1)], . . . , z[σ(m)]) ∀z[1], . . . , z[m] ∈ E.
Beweis: Der Beweis erfolgt per Induktion uber m. Fur m = 1 ist die Aussagetrivial und fur m = 2 gilt die Aussage nach Satz 2.73. Sei die Behauptungnun fur m − 1 mit m ≥ 2 erfullt. Dann gilt nach Induktionsvoraussetzungfur jede Permutation σ ∈ Sm mit σ(1) = 1, dass
Dmf(x)(z[σ(1)], . . . , z[σ(m)]) = Dm−1(Df(x)z[σ(1)])(z[σ(2)], . . . , z[σ(m)])
= Dm−1(Df(x)z[1])(z[2], . . . , z[m])
= Dmf(x)(z[1], . . . , z[m]) ∀z[1], . . . , z[m] ∈ E.
Somit genugt es zu zeigen, dass ∀z[1], . . . , z[m] ∈ E:
Dmf(x)(z[1], z[2], z[3], . . . , z[m]) = Dmf(x)(z[2], z[1], z[3], . . . , z[m]).
Satz 2.73 liefert uns, dass
Dmf(x)(z[1], z[2], z[3], . . . , z[m]) = Dm−2(D2f(x)(z[1], z[2]))(z[3], . . . , z[m])
= Dm−2(D2f(x)(z[2], z[1]))(z[3], . . . , z[m])
= Dmf(x)(z[2], z[1], z[3], . . . , z[m]).
�
64

2.3.3 Partielle Ableitungen hoherer Ordnung
Wir betrachten nun wieder den Spezialfall E = Rn.
Definition 2.75. Seien X ⊂ Rn offen, m ∈ N, f : X → F und j1, . . . , jm ∈{1, . . . , n}. Dann heißt
∂mf(x)
∂xj1 . . . ∂xjm:= ∂j1 . . . ∂jmf(x)
fur x ∈ X die partielle Ableitung der Ordnung m von f in x. DieAbbildung f heißt m-mal (stetig) partiell differenzierbar, falls alle Ab-leitungen bis einschließlich der Ordnung m existieren (und stetig sind).
Satz 2.76. Seien X ⊂ Rn offen, f : X → F und m ∈ N. Dann ist f ∈Cm(X,F ) genau dann, wenn f m-mal stetig partiell differenzierbar ist. Fallsf ∈ Cm(X,F ), dann gilt
Dmf(x)(z[1], ..., z[m]) =n∑
j1,...,jm=1
∂j1 . . . ∂jmf(x)z[1]j1. . . z
[m]jm. (2.15)
Beweis: (⇒): Sei f ∈ Cm(X,F ). Wir zeigen per Induktion uber m, dassf m-mal stetig partiell differenzierbar ist und die Gleichung (2.15) gilt. Furm = 1 ist dies aufgrund der Satze 2.47 (Differenzierbarkeitskriterium) und2.43 klar, denn
Df(x)z[1] =n∑k=1
z[1]k ∂kf(x) =
n∑j1=1
∂j1f(x)z[1]j1.
Sei nun die Behauptung fur m− 1 korrekt. Da Df ∈ Cm−1(X,F ), so ist Dfnach Induktionsvoraussetzung (m−1)-mal stetig partiell differenzierbar. MitSatz 2.43 folgt, dass f m-mal stetig partiell differenzierbar ist und es gilt
Dmf(x)(z[1], ..., z[m]) = Dm−1(Df(x)z[1])(z[2], . . . , z[m])
=n∑
j2,...,jm=1
∂j2 . . . ∂jm(Df(x)z[1])(z[2]j2. . . z
[m]jm
)
=n∑
j1,...,jm=1
∂j1 . . . ∂jmf(x)z[1]j1. . . z
[m]jm.
65

(⇐): Sei f m-mal stetig partiell differenzierbar ist. Wir zeigen per Induktionuber m, dass f ∈ Cm(X,F ). Fur m = 1 ist dies aufgrund des Differen-zierbarkeitskriteriums 2.47 klar. Sei nun die Behauptung fur m− 1 korrekt.Aufgrund der Induktionsvoraussetzung existieren die partiellen Ableitungenvon Dm−1f und sind stetig. Nach Satz 2.47 gilt nun
D(Dm−1f) : X → L(Rn,Lm−1(Rn, F )) = Lm(Rn, F )
existiert und ist stetig. Also gilt f ∈ Cm(X,F ). �
Satz 2.77. Seien X ⊂ Rn offen, m ∈ N und f ∈ Cm(X,F ). Dann gilt furjede Permutation σ ∈ Sm, dass
∂mf
∂xj1 . . . ∂xjm=
∂mf
∂xσ(j1) . . . ∂xσ(jm)
.
Beweis: Dies ergibt sich unmittelbar aus Satz 2.74 und der Gleichung (2.15).�
Folgerung 2.78. (Satz von Schwarz) Falls f ∈ C2(X,K), dann gilt fur allex ∈ X und k, j ∈ 1, . . . , n:
∂j∂kf(x) = ∂k∂jf(x).
Bemerkung 2.79. Der Satz von Schwarz gilt nicht, falls f nur zweimal partielldifferenzierbar ist. Dies kann man an der Funktion
f(x1, x2) :=
{x1x2(x21−x22)
x21+x22, falls (x1, x2) 6= (0, 0)
0, falls (x1, x2) = (0, 0).
sehen (Ubungsaufgabe).
Die Kettenregel gilt auch fur Funktionen hoherer Ableitungen, wie folgenderSatz zeigt.
Satz 2.80. Seien X ⊂ E und Y ⊂ F offen, G ein weiterer Banachraumsowie f ∈ Cm(X,F ) und g ∈ Cm(Y,G). Dann ist g ◦ f ∈ Cm(X,G).
Der Beweis ergibt sich auch wieder per Induktion uber m. Es gibt aber keineschone einfache Darstellung der hoheren Ableitung fur verknupfte Funktio-nen.
66

2.3.4 Taylorsche Formeln
Satz 2.81. Sei X ⊂ E offen, m ∈ N und f ∈ Cm(X,F ). Dann gilt
f(x+ h) =m∑k=0
1
k!Dkf(x)(h, ..., h︸ ︷︷ ︸
k−mal
) +Rm(f, x, h)
mit Rm(f, x, h) = o(‖h‖mE ) (h→ 0) bzw. etwas genauer:
‖Rm(f, x, h)‖F ≤1
(m− 1)!max0≤t≤1
‖Dmf(x+ th)−Dmf(x)‖ ‖h‖mE ,
falls {z ∈ E : z = x+ th, 0 ≤ t ≤ 1} ⊂ X.
Beispiel 2.82. Sei f(x1, x2) := x1x2 + sin(x1). Dann erhalten wir als erste3 Ableitungen:
Df(x)h = (x2 + cos(x1))h1 + x1h2
D2f(x)(h, h) = (− sin(x1)h1 + h2)h1 + h1h2 = − sin(x1)h21 + 2h1h2
D3f(x)(h, h, h) = − cos(x1)h31
Somit erhalten wir
f((π, 1) + h) = f(π, 1) +Df(π, 1)h+1
2D2f(π, 1)(h, h)
+1
6D3f(π, 1)(h, h, h) +R3(f, (π, 1), h)
mit R3(f, x, h) = o(‖h‖3E) (h→ 0), d.h.
(π + h1)(1 + h2) + sin(π + h1) = π + 2h1 + πh2 + h1h2
− 1
6h3
1 +R3(f, (π, 1), h).
Beweis: Wir beweisen den Satz 2.81 mit Hilfe der Taylorformel fur Funktio-nen von R nach F aus der Vorlesung Analysis I* (Satz 15.28). Seien x ∈ Xund h ∈ E so gewahlt, dass {z ∈ E : z = x + th, 0 ≤ t ≤ 1} ⊂ X. Nunbetrachten wir die Funktion
g : [0, 1]→ F
s 7→ f(x+ sh)
67

Die Funktion g ist als Komposition f ◦ r mit der linearen (unendlich oftdifferenzierbaren) Abbildung
r : [0, 1]→ E
s 7→ x+ sh
m-mal stetig differenzierbar und es gilt
g(m)(s) = Dmf(x+ sh)(h, . . . , h︸ ︷︷ ︸m−mal
),
denn mit Induktion uber m erhalten wir mit der Kettenregel
g′(s) = Df(x+ sh)h
g(m)(s) = Dg(m−1)(s) = D(Dm−1f(x+ sh)( h, . . . , h︸ ︷︷ ︸(m−1)−mal
))h
= Dmf(x+ sh)(h, . . . , h︸ ︷︷ ︸m−mal
).
Nach Satz 15.28 aus der Vorlesung Analysis I* wissen wir, dass
g(s) =m∑k=0
g(k)(0)
k!sk + Rm(g, 0)(s)
mit
‖Rm(g, 0)(s)‖F ≤1
(m− 1)!sup
0≤t≤1‖g(s)(ts)− g(m)(0)‖F |s|m.
Dies bedeutet
f(x+ h) = g(1) =m∑k=0
g(k)(0)
k!+Rm(g, 0)(1)
=m∑k=0
Dmf(x+ h)(h, . . . , h)
k!+ Rm(g, 0)(1)
mit Rm(f, x, h) := Rm(g, 0)(1) und
‖Rm(f, x, h)‖F ≤1
(m− 1)!sup
0<t<1‖g(m)(t)− g(m)(0)‖F
=1
(m− 1)!sup
0≤t≤1‖Dmf(x+ th)(h, . . . , h)−Dmf(x)(h, . . . , h)‖F
≤ 1
(m− 1)!sup
0≤t≤1‖Dmf(x+ th)−Dmf(x)‖ ‖h‖mE .
68

�
Bemerkung 2.83. Falls die Voraussetzungen von Satz 2.81 mit f ∈ Cm+1(X,F )erfullt sind, dann gilt
f(x+ h) =m∑k=0
1
k!Dkf(x)(h, ..., h) +O(‖h‖m+1).
Dies folgt unmittelbar aus Satz 2.81, denn
f(x+ h) =m+1∑k=0
1
k!Dkf(x)(h, ..., h) + o(‖h‖m+1)
=m∑k=0
1
k!Dkf(x)(h, ..., h) +R
mit
R− 1
(m+ 1)!Dm+1f(x)(h, ..., h) = o(‖h‖m+1)
und folglich existiert ein c > 0 mit
‖R‖F ≤1
(m+ 1)!‖Dm+1f(x)(h, ..., h)‖F + c‖h‖m+1
≤(
1
(m+ 1)!‖Dm+1f(x)‖F + c
)‖ ‖h‖m+1,
d.h. R = O(‖h‖m+1).
Im Falle E = Rn konnen wir die Taylorsche Formel (Satz 2.81) mit Hilfeder partiellen Ableitungen darstellen. Dazu definieren wir fur α ∈ Nn, |α| :=∑n
j=1 αj und f ∈ C |α|(X,F ) mit X ⊂ Rn offen:
∂αf := ∂α11 ∂α2
2 . . . ∂αnn f =
∂|α|f
∂xα11 ∂x
α22 . . . ∂xαn
n
fur α 6= 0
und ∂0f := f .
Folgerung 2.84. (Satz von Taylor)Seien X ⊂ Rn offen, f ∈ Cm(X,F ) und x ∈ X. Dann gilt
f(x+ h) =∑|α|≤m
∂αf(x)
α!hα + o(‖h‖m) (h→ 0)
mit α! := α1!α2! · · ·αn! und hα := hα11 h
α22 · · ·hαn
n .
69

Beweis: Da h =∑n
j=1 hjej, so gilt fur alle 1 ≤ k ≤ m:
Dkf(x)(h, . . . , h) = Dkf(x)
(n∑
j1=1
hj1ej1 , . . . ,
n∑jk=1
hjkejk
)
=n∑
j1=1
· · ·n∑
jk=1
Dkf(x) (ej1 , . . . , ejk)hj1 · · ·hjk
=n∑
j1=1
· · ·n∑
jk=1
∂j1 . . . ∂jkf(x)hj1 · · ·hjk
Mit Satz 2.77 konnen wir alle Tupel (j1, . . . , jk), bei denen fur α ∈ Nn mit|α| = k jedes ` ∈ {1, ..., n} genau α`-mal vorkommt, zusammenfassen underhalten
Dkf(x)(h, . . . , h) =∑|α|=k
k!
α1! · · ·αn!∂α1
1 . . . ∂αnn f(x)hα1
1 · · ·hαnn
=∑|α|=k
k!
α!∂αf(x)hα
Mit Satz 2.81 erhalten wir
f(x+ h) =m∑k=0
1
k!Dkf(x)(h, . . . , h) + o(‖h‖m) (h→ 0)
=∑|α|≤m
∂αf(x)
α!hα + o(‖h‖m) (h→ 0)
�
Folgerung 2.85. Seien X ⊂ Rn offen, f ∈ C2(X,F ) und x ∈ X. Dann gilt
f(x+ h) = f(x) +∇f(x) · h+1
2h>Hf (x)h+ o(‖h‖2) (h→ 0) (2.16)
mit der Hessematrix Hf (x).
Dies folgt unmittelbar aus dem Satz 2.81 , da
D0f(x) = f(x), D1f(x) = f(x)h = ∇f(x) · h, D2f(x)(h, h) = h>Hf (x)h.
70

2.3.5 Extrema fur Funktionen mehrerer Variablen
Aus der linearen Algebra benotigen wir folgenden Satz fur symmetrisch po-sitiv definite Matrizen.
Satz 2.86. Sei M ∈ Rn×n. Dann sind folgende Aussagen aquivalent:
(i) M ist symmetrisch und positiv definit, d.h.
M = M> und x>Mx > 0 ∀x ∈ Rn\{0}.
(ii) M = M> und es existiert ein c > 0 mit x>Mx ≥ c‖x‖22 ∀x ∈ Rn.
Beweis: Die Richtung (ii) → (i) ist trivial. Fur die Richtung (i) → (ii)benutzt man die Tatsache, dass fur symmetrisch, positiv definite Matrizeneine orthogonale Matrix S mit
M = S>DS
existiert, wobei D eine Diagonalmatrix ist, deren Diagonaleintrage djj dieEigenwerte von M sind. Fur ej ∈ Rn erhalten wir
djj = e>j Dej = e>j SMS>ej = (S>ej)>M(S>ej) > 0
und somit fur alle x ∈ Rn:
x>Mx = x>S>DSx = (Sx)>D(Sx) =n∑j=1
djj(Sx)2j ≥ c
n∑j=1
(Sx)2j
fur c := min1≤j≤n djj > 0 und somit
x>Mx ≥ c(Sx)>(Sx) = cx>S>Sx = cx>x = c‖x‖22.
�Nun konnen wir folgende hinreichende Kriterien fur lokale Extrema formu-lieren.
Satz 2.87. Sei x ⊂ Rn offen und x0 ∈ X ein kritischer Punkt von f ∈C2(X,R). Dann gilt:
(i) Falls Hf (x0) positiv definit ist, so hat f in x0 ein isoliertes lokalesMinimum.
71

(ii) Falls Hf (x0) negativ definit ist, so hat f in x0 ein isoliertes lokalesMaximum.
(iii) Falls Hf (x0) indefinit ist, so ist x0 kein isoliertes Extremum von f .
Beweis: Da x0 ein kritischer Punkt von f ist, so gilt Df(x0) = 0 und somiterhalten wir aus Folgerung 2.85, dass
f(x0 + h) = f(x0) +1
2h>Hf (x0)h+R(h) (2.17)
mit R(h) = o(‖h‖2) fur h→ 0.
(i) Da Hf (x0) symmetrisch und positiv definit ist, so existiert ein c > 0mit
z>Hf (x0)z ≥ c‖z‖22 ∀z ∈ Rm.
Dann gilt fur alle h mit ‖R(h)‖ ≤ c4‖h‖2
2, dass
f(x0 + h) ≥ f(x0) +c
2‖h‖2 − c
4‖h‖2
2 = f(x0) +c
4‖h‖2,
d.h. x0 ist ein lokales Minimum.
(ii) Dies folgt sofort aus (i), wenn man f durch −f ersetzt.
(iii) Falls Hf (x0) indefinit ist, so existieren z1, z2 ∈ Rn, so dass
z>1 Hf (x0)z1 > 0, z>2 Hf (x0)z2 < 0.
Wir wahlen nun s ∈ R+ so klein, dass fur alle 0 < t ≤ s und h1 := tz1
und h2 := tz2 gilt:
x0 + h1 ∈ X, x0 + h2 ∈ X
h>1 Hf (x0)h1 +R(h1) =1
2z>1 Hf (x0)z1 +
R(tz1)
‖tz1‖22
‖z1‖22 > 0
h>2 Hf (x0)h2 +R(h2) =1
2z>2 Hf (x0)z2 +
R(tz2)
‖tz2‖22
‖z2‖22 < 0.
Dann erhalten wir mit (2.17), dass
f(x0 + tz1) > f(x0) und f(x0 + tz2) < f(x0) ∀t ∈ (0, 1],
d.h. f hat in x0 kein lokales Extremum.
�
72
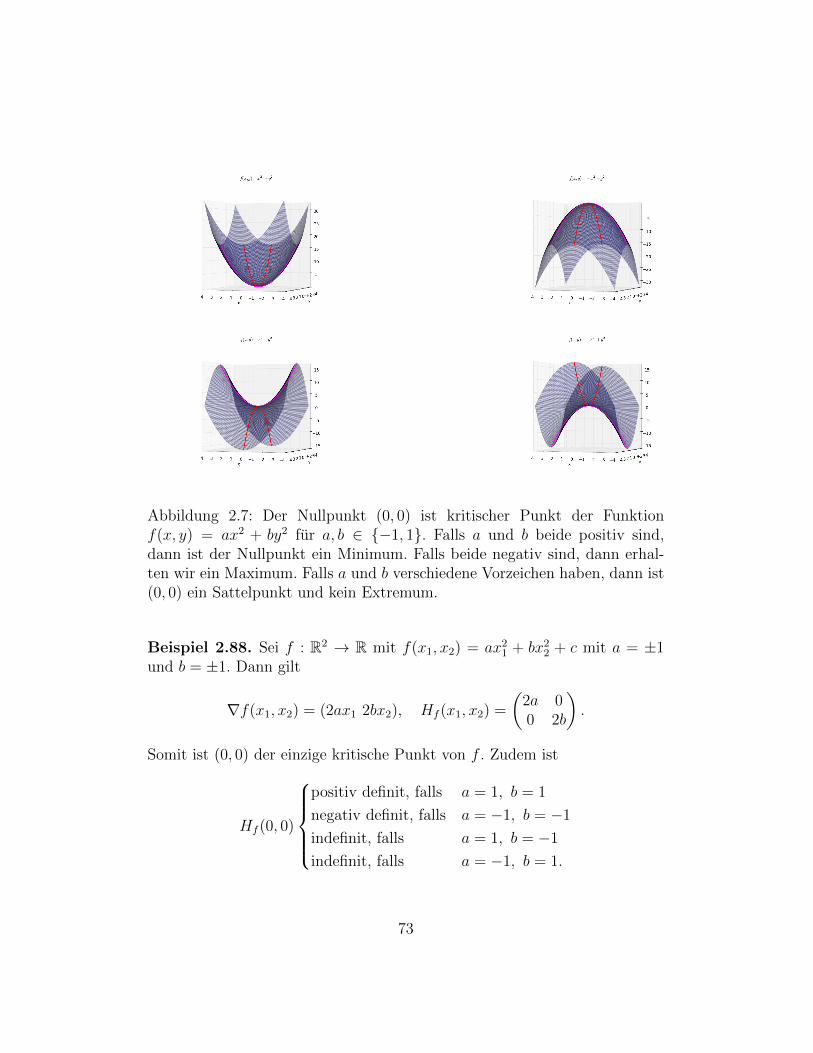
Abbildung 2.7: Der Nullpunkt (0, 0) ist kritischer Punkt der Funktionf(x, y) = ax2 + by2 fur a, b ∈ {−1, 1}. Falls a und b beide positiv sind,dann ist der Nullpunkt ein Minimum. Falls beide negativ sind, dann erhal-ten wir ein Maximum. Falls a und b verschiedene Vorzeichen haben, dann ist(0, 0) ein Sattelpunkt und kein Extremum.
Beispiel 2.88. Sei f : R2 → R mit f(x1, x2) = ax21 + bx2
2 + c mit a = ±1und b = ±1. Dann gilt
∇f(x1, x2) = (2ax1 2bx2), Hf (x1, x2) =
(2a 00 2b
).
Somit ist (0, 0) der einzige kritische Punkt von f . Zudem ist
Hf (0, 0)
positiv definit, falls a = 1, b = 1
negativ definit, falls a = −1, b = −1
indefinit, falls a = 1, b = −1
indefinit, falls a = −1, b = 1.
73
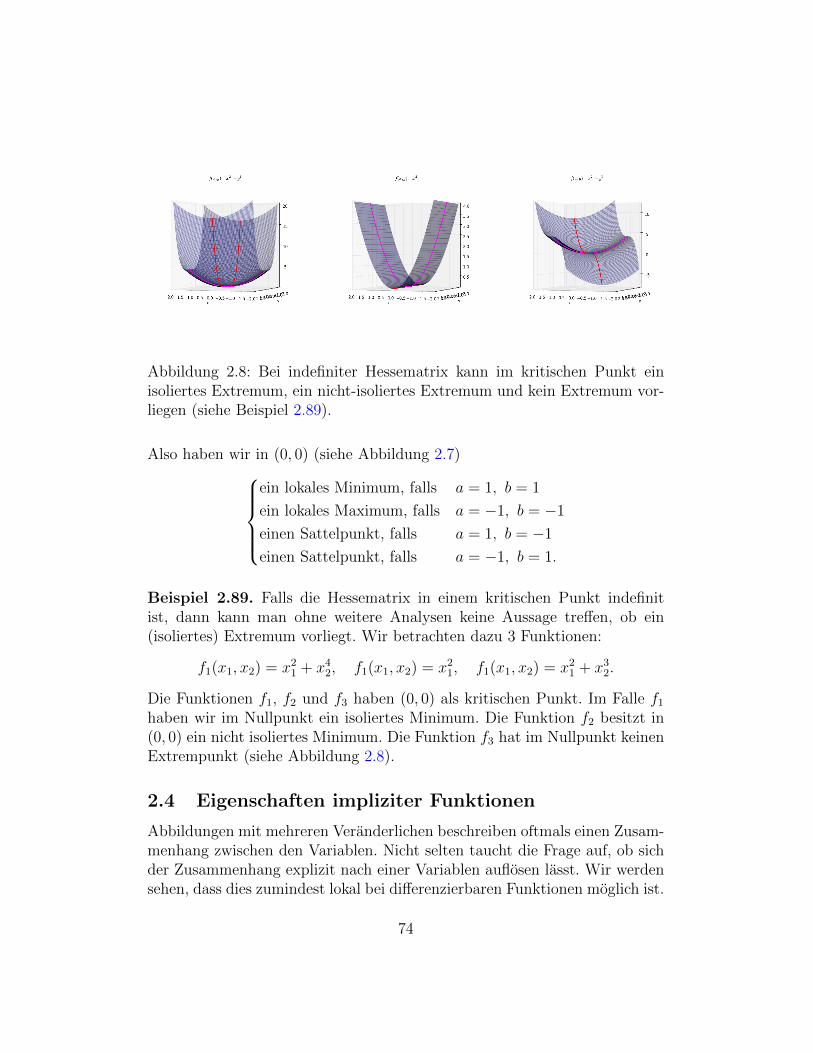
Abbildung 2.8: Bei indefiniter Hessematrix kann im kritischen Punkt einisoliertes Extremum, ein nicht-isoliertes Extremum und kein Extremum vor-liegen (siehe Beispiel 2.89).
Also haben wir in (0, 0) (siehe Abbildung 2.7)ein lokales Minimum, falls a = 1, b = 1
ein lokales Maximum, falls a = −1, b = −1
einen Sattelpunkt, falls a = 1, b = −1
einen Sattelpunkt, falls a = −1, b = 1.
Beispiel 2.89. Falls die Hessematrix in einem kritischen Punkt indefinitist, dann kann man ohne weitere Analysen keine Aussage treffen, ob ein(isoliertes) Extremum vorliegt. Wir betrachten dazu 3 Funktionen:
f1(x1, x2) = x21 + x4
2, f1(x1, x2) = x21, f1(x1, x2) = x2
1 + x32.
Die Funktionen f1, f2 und f3 haben (0, 0) als kritischen Punkt. Im Falle f1
haben wir im Nullpunkt ein isoliertes Minimum. Die Funktion f2 besitzt in(0, 0) ein nicht isoliertes Minimum. Die Funktion f3 hat im Nullpunkt keinenExtrempunkt (siehe Abbildung 2.8).
2.4 Eigenschaften impliziter Funktionen
Abbildungen mit mehreren Veranderlichen beschreiben oftmals einen Zusam-menhang zwischen den Variablen. Nicht selten taucht die Frage auf, ob sichder Zusammenhang explizit nach einer Variablen auflosen lasst. Wir werdensehen, dass dies zumindest lokal bei differenzierbaren Funktionen moglich ist.
74

2.4.1 Satz uber die Umkehrabbildung
Bevor wir uns der Frage der lokalen Umkehrbarkeit allgemeiner differen-zierbarer Funktionen widmen, beschaftigen wir uns mit der Umkehrbarkeitlinearer beschrankter Abbildungen.
Satz 2.90. Sei A ∈ L(E) mit ‖A‖ < 1. Dann ist I − A invertierbar und esgilt
‖(I − A)−1‖ ≤ 1
1− ‖A‖.
Beweis: Offenbar ist A : E → E eine kontraktive Abbildung. Nach demBanachschen Fixpunktsatz existiert genau ein x ∈ E mit x = Ax. Somitbesitzt die Abbildung I − A : E → E genau eine Nullstelle und diese istoffenbar x = 0. Daher wissen wir, dass I − A invertierbar ist.
Aufgrund der Konvergenz geometrischer Reihen wissen wir, dass
∞∑n=0
‖An‖ ≤∞∑n=0
‖A‖n =1
1− ‖A‖, (2.18)
d.h. die Abbildung B :=∑∞
n=0An ist unter Berucksichtigung des Majoran-
tenkriteriums absolut konvergent. Zudem gilt
B(I − A) =∞∑n=0
(An − An+1) = I
und analog (I−A)B = I, d.h. B ist die Inverse von I−A. Mit (2.18) erhaltenwir
‖(I − A)−1‖ = ‖B‖ ≤∞∑n=0
‖An‖ ≤ 1
1− ‖A‖.
�
Lemma 2.91. Fur alle A ∈ Lis(E,F ) gilt: A−1 ∈ L(F,E) und die Abbildung
finv : Lis(E,F )→ L(F,E)
A 7→ A−1
ist stetig differenzierbar, wobei
Dfinv(A)B = −A−1BA−1 ∀A ∈ Lis(E,F ) ∀B ∈ L(E,F ).
75

Beweis: Seien A ∈ Lis(E,F ) und B ∈ L(E,F ) mit
‖B‖ < 1
2‖A−1‖.
Da
A+B = A− AA−1(−B) = A(I − A−1(−B))
und
‖A−1(−B)‖ ≤ ‖A−1‖ ‖B‖ < ‖A−1‖ 1
2‖A−1‖=
1
2,
so folgt aus Satz 2.90, dass A+B invertierbar ist und mit
(A+B)−1 − A−1 = (A+B)−1[A− (A+B)]A−1 = −(A+B)−1BA−1
dass
‖(A+B)−1 − A−1 + A−1BA−1‖= ‖ − (A+B)−1BA−1 + A−1BA−1‖≤ ‖(A+B)−1 − A−1‖ ‖B‖ ‖A−1‖≤ ‖(A+B)−1‖ ‖B‖2 ‖A−1‖2 < 2‖B‖2 ‖A−1‖2
d.h.
‖(A+B)−1 − A−1 + A−1BA−1‖ = o(‖B‖) fur ‖B‖ → 0.
Somit ist finv differenzierbar und
Dfinv(A)B = −A−1BA−1 ∀A ∈ Lis(E,F )
fur alle B ∈ L(E,F ) mit
‖B‖ < 1
2‖A−1‖.
Aufgrund der Linearitat von Dfinv(A) gilt dann auch
Dfinv(A)B = −A−1BA−1 ∀A ∈ Lis(E,F ) ∀B ∈ L(E,F ).
76

Insbesondere ist finv daher auch stetig und somit
Dfinv(·)B = −finv(·)Bfinv(·) ∀B ∈ L(E,F )
stetig mit
‖Dfinv(·)‖ = sup‖B‖=1
‖Dfinv(·)B‖ ≤ sup‖B‖=1
‖finv(·)‖2‖B‖ = ‖finv(·)‖2.
�
Satz 2.92. (Satz uber die Umkehrabbildung)Sei X ⊂ E offen, x0 ∈ X, m ∈ N+ ∪ {∞} und f ∈ Cm(X,F ). Zudemsei Df(x0) ∈ L(E,F ) invertierbar. Dann existiert eine offene Umgebung Uvon x0 in X und eine offene Umgebung V von f(x0) in F mit folgendenEigenschaften:
(i) f : U → V ist bijektiv.
(ii) Fur jedes x ∈ U ist Df(x) invertierbar. Zudem gilt fur y := f(x), dassDf−1(y) existiert und
Df−1(y) = (Df(x))−1.
(iii) f−1 ∈ Cm(V,E).
Beweis:
(i) Sei X0 := {z = x− x0 : x ∈ X} und h : X0 → E definiert als
h(z) := (Df(x0))−1[f(z + x0)− f(x0)]. (2.19)
Dann ist 0 ∈ X0 und h(0) = 0. Zudem ist aufgrund der Kettenregelh ∈ Cm(X0, E) und es gilt
Dh(0) = (Df(x0))−1Df(x0) = I.
Wir zeigen zunachst, dass es Nullumgebungen U0 und V0 gibt, so dassh : U0 → V0 bijektiv ist. Sei g : X0 → E mit g(z) := z− h(z). Dann istg ∈ Cm(X0, E) und somit Dg(0) : X0 → E stetig. Damit existiert einr > 0, so dass
‖Dg(z)‖ ≤ 1
2∀ z ∈ B(0, 2r) ⊂ X0. (2.20)
77

Unter Ausnutzung des Mittelwertsatzes 2.58 erhalten wir fur alle z ∈B(0, 2r), dass
‖g(z)‖E = ‖g(z)− g(0)‖E ≤ sup0≤t≤1
‖Dg(tz)‖E‖z‖E ≤1
22r = r. (2.21)
Sei nun y ∈ B(0, r) fest gewahlt und gy : B(0, 2r) → E mit gy(z) :=g(z) + y. Dann ist gy ∈ Cm(X0, E) und wir sehen, dass
‖gy(z)‖E ≤ ‖g(z)‖E + ‖y‖E ≤ 2r ∀z ∈ B(0, 2r)
d.h. gy : B(0, 2r)→ B(0, 2r). Zudem ist gy kontraktiv, da wir aus demMittelwertsatz 2.58 folgern konnen, dass fur alle z1, z2 ∈ B(0, 2r) gilt:
‖gy(z2)− gy(z1)‖E ≤ sup0≤t≤1
‖Dgy(z1 + t(z2 − z1))‖E‖z2 − z1‖E
≤ 1
2‖z2 − z1‖E.
Nun konnen wir den Banachschen Fixpunktsatz A.4 anwenden. Es exi-stiert genau ein z ∈ B(0, 2r) mit gy(z) = z bzw. h(z) = y ∈ B(0, r).Somit ist die Abbildung h : B(0, 2r)→ B(0, r) bijektiv.
Da fur alle z ∈ B(0, 2r) gilt
z = z − h(z) + h(z) = g(z) + h(z),
so haben wir mit dem Mittelwertsatz 2.58 fur g wieder, dass
‖z1 − z2‖E ≤1
2‖z1 − z2‖E + ‖h(z1)− h(z2)‖E ∀ z1, z2 ∈ B(0, 2r),
d.h.
‖z1 − z2‖E ≤ 2‖h(z1)− h(z2)‖E ∀ z1, z2 ∈ B(0, 2r). (2.22)
Insbesondere gilt fur alle z ∈ B(0, 2r) mit h(z) ∈ B(0, r), dass
‖z‖E = ‖z − 0‖E ≤ 2‖h(z)− h(0)‖E = 2‖h(z)‖E < 2r.
Damit ist h|U0 : U0 → V0 fur V0 := B(0, r) und U0 := h−1(V0) ⊂B(0, 2r) bijektiv. Nach Definition von h gilt:
f(x) = f(x0) +Df(x0)h(x− x0) ∀x ∈ X (2.23)
und somit ist die Abbildung f : U → V mit U := {x = z+x0 : z ∈ U0}und V := f(U) bijektiv.
78

(ii) Unter Beachtung von (2.19) erhalten wir fur alle x1, x2 ∈ U ⊂ B(x0, 2r):
‖x1 − x2‖E = ‖(x1 − x0)− (x2 − x0)‖E≤ 2‖h(x1 − x0)− h(x2 − x0)‖E= 2‖(Df(x0))−1[f(x1)− f(x2)]‖E≤ 2‖(Df(x0))−1‖ ‖f(x1)− f(x2)‖F .
Dies bedeutet fur alle y1, y2 ∈ V , dass
‖f−1(y1)− f−1(y2)‖E ≤ 2‖(Df(x0))−1‖ ‖y1 − y2‖F . (2.24)
Somit wissen wir, dass f−1 auf V Lipschitz-stetig und insbesonderestetig ist. Jetzt zeigen wir, dass f−1 auf V differenzierbar ist. NachDefinition von g ist
Dh(z) = I −Dg(z) ∀ z ∈ U0 ⊂ B(0, 2r).
Wegen (2.20) folgt aus dem Satz 2.90, dass Dh(z) invertierbar ist unddaher
‖(Dh(z))−1‖ ≤ 2 ∀ z ∈ U0.
Beachten wir (2.23), so wissen wir, dass Df(x) fur x ∈ U invertierbarist und
‖(Df(x))−1‖ ≤ 2‖(Df(x0))−1‖ ∀x ∈ U.
Sei nun y ∈ V fest gewahlt und ε > 0 so klein, dass fur alle v ∈ B(0, ε)gilt: y + v ∈ V . Dann haben wir fur x := f−1(y) und xv := f−1(y + v),dass
‖f−1(y + v)− f−1(y)− (Df(x))−1(y + v − y)‖E= ‖xv − x− (Df(x))−1(f(xv)− f(x))‖E= ‖(Df(x))−1[f(xv)− f(x)−Df(x)(xv − x)]‖E= o(‖xv − x‖E) fur xv → x.
Aufgrund von (2.24) wissen wir noch, dass
‖xv − x‖E = ‖f−1(y + v)− f−1(y)‖E ≤ 2‖(Df(x0))−1‖ ‖v‖F .
Dies bedeutet, dass
‖f−1(y + v)− f−1(y)− (Df(x))−1v‖E = o(‖v‖F ) fur v → 0,
d.h. Df−1(y) existiert und es gilt Df−1(y) = (Df(x))−1.
79

(iii) Mit (ii), Lemma 2.91 und der Kettenregel wissen wir, dass Df−1(·)stetig ist und somit f−1 ∈ C1(V,E). Fur m > 1 folgt die Behauptungunter Beachtung von Lemma 2.91 per Induktion.
�
Definition 2.93. Sei X ⊂ E offen, Y ⊂ F , m ∈ N+∪{∞}. Eine Abbildungf : X → Y heißt Cm-Diffeomorphismus von X auf Y , falls f bijektiv istsowie f ∈ Cm(X, Y ) und f−1 ∈ Cm(Y,E). Fur den Fall m = 0 spricht manvon einem Homoomorphismus.
Diffm(X, Y ) := {f : X → Y : f ist ein Cm −Diffeomorphismus}.
Die Abbildung g : X → F heißt ein lokaler Cm-Diffeomorphismus, falls es zujedem x0 ∈ X offene umgebungen U ⊂ X von x0 und V ⊂ F von g(x0) gibt,so dass g|U ∈ Diffm(U, V ).
Diffmloc(X,F ) := {g : X → F : g ist ein lokaler Cm −Diffeomorphismus}.
Bemerkung 2.94. Seien X ⊂ E und Y ⊂ F offen. Dann gilt fur alle m ∈ N,dass
Diff∞(X, Y ) ⊂ Diffm+1(X, Y ) ⊂ Diffm(X, Y ) ⊂ Diffmloc(X,F )
Diff∞loc(X,F ) ⊂ Diffm+1loc (X,F ) ⊂ Diffmloc(X,F ).
2.4.2 Satz uber implizite Funktionen
In diesem Abschnitt interessieren wir uns fur die Auflosbarkeit von Gleichun-gen nach bestimmten Variablen.
Beispiel 2.95.
f(x1, x2) = x21 + x2
2 − r2
Kann man f(x1, x2) = 0 nach x1 oder x2 auflosen? Ja, aber nicht global,sondern nur lokal. Eine lokal eindeutige Auflosung nach x2 ist nur moglich,falls x∗2 6= 0. Fur x∗2 > 0 haben wir lokal um x∗2, dass
x2 =√r2 − x2
1.
80

Abbildung 2.9: Eine Antwort zur Funktionsbeschreibung der roten Kurve,d.h. der Menge aller Punkte mit x2 + y2 + z2 = 0 und (x − 1)2 + z2 = 0,liefert der Satz uber implizite Funktionen 2.99.
Fur x∗2 < 0 haben wir lokal um x∗2, dass
x2 = −√r2 − x2
1
Entsprechend ist eine lokal eindeutige Auflosung nach x1 nur moglich, fallsx∗1 6= 0.
Allgemein ist die Frage nach der Auflosbarkeit z.B. von Interesse, wenn manLosungen eines nichtlinearen Gleichungssystems darstellen will. Ein Beispielhierfur ist die Frage nach einer Funktionsbeschreibung fur die rote Kurve inAbbildung 2.9.
Definition 2.96. Seien E1, E2 und F Banachraume. Seien X1 ⊂ E1 undX2 ⊂ E2 offen. Sei f : X1 × X2 → F in (x∗1, x
∗2) ∈ X1 × X2 differenzierbar.
Dann bezeichnen wir mit D1f(x∗1, x∗2) bzw. D2f(x∗1, x
∗2) die Ableitungen der
Funktionen
f(·, x∗2) : X1 → F
x1 7→ f(x1, x∗2)
81

im Punkt x∗1 bzw.
f(x∗1, ·) : X2 → F
x2 7→ f(x∗1, x2)
im Punkt x∗2.
Beispiel 2.97. Fur
f(x1, x2) = x21 + x2
2 − r2
haben wir
D1f(x1, x2) = 2x1, D2f(x1, x2) = 2x2.
Lemma 2.98. Seien E1, E2 und F Banachraume. Seien X1 ⊂ E1 und X2 ⊂E2 offen. Sei f ∈ C1(X1 × X2, F ). Dann gilt fur alle x1 ∈ X1, x2 ∈ X2,h1 ∈ E1 und h2 ∈ E2, dass
Df(x1, x2)(h1, h2) = D1f(x1, x2)h1 +D2f(x1, x2)h2.
Der Beweis ist eine Ubungsaufgabe.
Satz 2.99. (Satz uber implizite Funktionen)Seien E1, E2 und F Banachraume. Seien X1 ⊂ E1 und X2 ⊂ E2 offen. Seif ∈ Cm(X1 ×X2, F ). Sei (x∗1, x
∗2) ∈ X1 ×X2 mit
f(x∗1, x∗2) = 0, D2(x∗1, x
∗2) ∈ Lis(E2, F ).
Dann existieren offene Umgebungen U ⊂ X1 ×X2 von (x∗1, x∗2) und V ⊂ E1
von x∗1 sowie eine eindeutig bestimmte Funktion g ∈ Cm(V,E2), so dass
((x1, x2) ∈ U und f(x1, x2) = 0)⇔ (x1 ∈ V und x2 = g(x1)) . (2.25)
Zudem gilt
Dg(x1) = −(D2f(x1, g(x1)))−1D1f(x1, g(x1)) ∀x1 ∈ V. (2.26)
Beweis: Wir betrachten die Funktion ϕ : X1 ×X2 → E1 × E2 mit
ϕ(x1, x2) := (x1, (B ◦ f)(x1, x2)),
82

wobei B := (D2f(x∗1, x∗2))−1 ∈ L(F,E2). Da f ∈ Cm(X1 × X2, F ), so ist
ϕ ∈ Cm(X1 ×X2, E1 × E2). Die Ableitung in (x∗1, x∗2) ist gegeben durch
Dϕ(x∗1, x∗2) =
(I 0
BD1f(x∗1, x∗2) I
)und somit invertierbar mit
(Dϕ(x∗1, x∗2))−1 =
(I 0
−BD1f(x∗1, x∗2) I
)Zudem gilt ϕ(x∗1, x
∗2) = (x∗1, 0), da f(x∗1, x
∗2) = 0. Jetzt konnen wir den Satz
2.92 anwenden. Es gibt also Umgebungen U ⊂ E1 × E2 von (x∗1, x∗2) und
W ⊂ E1 × E2 von (x∗1, 0), so dass ϕ : U → W bijektiv ist und
Dϕ−1(y1, y2) = (Dϕ(x1, x2))−1
fur alle (y1, y2) ∈ W mit (y1, y2) = ϕ(x1, x2). Sei
(ψ1, ψ2) := ψ := ϕ−1 : W → U.
Dann gilt fur alle (y1, y2) ∈ W , dass
(y1, y2) = ϕ(ψ1(y1, y2), ψ2(y1, y2))
= (ψ1(y1, y2), Bf(ψ1(y1, y2), ψ2(y1, y2))),
d.h.
y1 = ψ1(y1, y2) (2.27)
und
y2 = Bf(ψ1(y1, y2), ψ2(y1, y2)). (2.28)
Sei V := {x1 ∈ E1 : (x1, 0) ∈ W} und g : V → E2 definiert durch
g(x1) := ψ2(x1, 0).
Da W offen ist und (x∗1, 0) = ϕ(x∗1, x∗2) ∈ W , so ist V eine offene Umgebung
von x∗1 und g(x∗1) = ψ2(ϕ(x∗1, x∗2)) = x∗2. Zudem haben wir wegen (2.27) fur
alle x1 ∈ V , dass
f(x1, g(x1)) = f(ψ1(x1, 0), ψ2(x1, 0)) = f(ψ(x1, 0))
83

und weiter mit (2.28), dass fur alle x1 ∈ V :
(x1, Bf(x1, g(x1))) = (ψ(x1, 0), Bf(ψ(x1, 0)))
= ϕ(ψ(x1, 0)) = (x1, 0),
d.h., da B invertierbar ist, dass
f(x1, g(x1)) = 0 ∀x1 ∈ V. (2.29)
Nun erhalten wir die Aquivalenz (2.25) wie folgt.(⇐) Sei x2 = g(x1) und x1 ∈ V . Da (x1, g(x1)) = ψ(x1, 0) ∈ U , so gehort(x1, x2) zu U und aus (2.29) folgt f(x1, x2) = 0.(⇒) Sei (x1, x2) ∈ U und f(x1, x2) = 0. Dann haben wir
(x1, 0) = (x1, Bf(x1, x2)) = ϕ(x1, x2) ∈ W
und somit x1 ∈ V . Zudem gilt wegen (2.29), dass
ϕ(x1, x2) = (x1, 0) = (x1, Bf(x1, g(x1))) = ϕ(x1, g(x1)).
Da ϕ bijektiv von U nach W ist, so gilt x2 = g(x1). Damit ist auch klar, dasses nur eine Funktion g mit der Eigenschaft (2.25) geben kann.Zum Nachweis von (2.26) wenden wir die Kettenregel auf die Funktion h :V → F mit
h(x1) = f(x1, g(x1))
an. Wegen (2.29) wissen wir, dass h(x1) = 0 fur alle x1 ∈ V . Somit erhaltenwir fur alle x1 ∈ V , dass
0 = Dh(x1) = D1f(x1, g(x1)) +D2f(x1, g(x1)) ◦Dg(x1). (2.30)
Da D2f(x∗1, g(x∗1)) = D2f(x∗1, x∗2) ∈ Lis(E2, F ), D2f(x1, g(x1)) ∈ L(E2, F ),
Lis(E2, F ) eine offene Menge in L(E2, F ) ist (UA) sowie D2f und g stetigsind, so ist D2f(x1, g(x1)) ∈ Lis(E2, F ) fur alle x1 in einer hinreichend kleinenUmgebung von x∗1. Wenn wir nun V so weit verkleinern, dassD2f(x1, g(x1)) ∈Lis(E2, F ) fur alle x1 ∈ V , dann erhalten wir aus (2.30), dass
Dg(x1) = −(D1f(x1, g(x1)))−1D2f(x1, g(x1)).
�
84

3 Integration von Funktionen mit einer Va-
riablen
Fur die Betrachtungen in diesem Kapitel sei F ein Banachraum und I = [a, b]ein kompaktes, perfektes Intervall in R.
Definition 3.1. Wir nennen Z = (z0, z1, . . . , zn) eine Zerlegung von I, falls
a = z0 < z1 < · · · < zn = b.
Eine Zerlegung Z = (z0, z1, . . . , zn) von I heißt Verfeinerung der ZerlegungZ, falls {z0, z1, . . . , zn} ⊂ {z0, z1, . . . , zn}.
Definition 3.2. Eine Funktion f : I = [a, b]→ F heißt Treppenfunktion,wenn es eine Zerlegung Z = (z0, z1, . . . , zn) von I gibt, so dass f auf jedemIntervall (zi−1, zi) konstant ist. Die Menge aller Treppenfunktionen von Inach F bezeichnen wir mit T (I, F ).
Definition 3.3. Eine Funktion f : I = [a, b]→ F heißt sprungstetig, fallsdie einseitigen Grenzwerte
f(x+0) := limz→x+0z 6=x
f(z) und f(x−0) := limz→x−0z 6=x
f(z)
fur alle x ∈ (a, b) sowie die einseitigen Grenzwerte f(a+0) und f(b−0) exi-stieren. Die Menge aller sprungstetigen Funktionen von I nach F bezeichnenwir mit S(I, F ).
Definition 3.4. Eine Funktion f : I → F heißt stuckweise stetig, fallssie sprungstetig ist und nur endlich viele Unstetigkeitsstellen besitzt. DieMenge aller stuckweise stetigen Funktionen von I nach F bezeichnen wir mitSC(I, F ).
Bemerkung 3.5. Man kann leicht nachprufen, dass die Mengen T (I, F ), S(I, F )und SC(I, F ) Vektorraume sind. Zudem gilt offenbar, dass
T (I, F ) ⊂ SC(I, F ) ⊂ S(I, F ) sowie C(I, F ) ⊂ SC(I, F ).
Sprungstetige Funktionen lassen sich als Grenzwerte von Treppenfunktionencharakterisieren, wie folgender Satz zeigt.
85

Abbildung 3.10: Beispiele von Funktionen. Links: Treppenfunktion. Mitte:Stuckweise stetige Funktion. Rechts: Nicht sprungstetige Funktion.
Satz 3.6. Eine Funktion f : I → F ist genau dann sprungstetig, falls eseine Folge von Treppenfunktionen fn ∈ T (I, F ) gibt, die gleichmaßig gegen fkonvergiert.
Beweis: (⇒) Sei f : I = [a, b]→ F sprungstetig und n ∈ N+. Wir konstru-ieren nun eine Treppenfunktion fn, fur die
‖f(x)− fn(x)‖F <1
n∀x ∈ I (3.1)
gilt. Dann ist (fn) offenbar eine Folge von Treppenfunktionen, die gleichmaßiggegen f konvergiert.Nach Voraussetzung existieren f(a+0), f(b−0) sowie f(x+0) und f(x−0)fur alle x ∈ (a, b). Dies bedeutet, dass wir fur jedes x ∈ I reelle Zahlena(x) < x < b(x) finden, so dass
‖f(s)− f(t)‖F <1
n∀ s, t ∈ (a(x), x) ∩ I
und
‖f(s)− f(t)‖F <1
n∀ s, t ∈ (x, b(x)) ∩ I.
Da ⋃x∈I
(a(x), b(x)) ⊃ I
eine offene Uberdeckung des kompakten Intervalls I ist, so gibt es eine end-liche Teiluberdeckung
M⋃m=0
(a(xm), b(xm)) ⊃ I.
86

Seien nun die Werte a(xm), xm und b(xm) so sortiert, dass
M⋃m=0
{a(xm), xm, b(xm)} ⊂ {z0, z1, . . . , zN}
und
a =: z0 < z1 < · · · < zN := b.
Dann gilt fur alle i ∈ {1, ..., N}:
‖f(s)− f(t)‖F <1
n∀ s, t ∈ (zi−1, zi) ∩ I.
Nun definieren wir die Funktion fn : I → F als
fn(x) :=
{f(zi), falls x = zi fur ein i ∈ {0, 1, . . . , N}f((zi−1 + zi)/2), falls x ∈ (zi−1, zi) fur ein i ∈ {1, . . . , N}.
Offenbar gilt nun (3.1) nach Konstruktion von f .
(⇒) Sei (fn) eine Folge von Treppenfunktionen, die gleichmaßig gegen fkonvergiert. Sei x ∈ (a, b] fest gewahlt.
Wir zeigen, dass es ein y ∈ F gibt, so dass fur jede Folge (xm) in I, dievon links gegen x konvergiert, gilt: limm→∞ f(xm) = y. Dies bedeutet, dassf(x−0) existiert. Auf analoge Weise kann man zeigen, dass f(x+0) fur allex ∈ [a, b) existiert.
Sei ε > 0. Dann existiert ein n = n(ε) ∈ N, so dass
‖f(z)− fn(z)‖F ≤ε
2∀z ∈ I.
Da fn eine Treppenfunktion ist, so existiert ein an(x) < x mit
fn(s) = fn(t) ∀s, t ∈ (an(x), x).
Somit haben wir fur alle s, t ∈ (an(x), x), dass
‖f(s)− f(t)‖F ≤ ‖f(s)− fn(s)‖F + ‖fn(t)− f(t)‖F < ε. (3.2)
Sei nun (xm) eine Folge in I, die von links gegen x konvergiert. Dann existiertein M = M(ε) > 0, so dass
xm ∈ (an(x), x) ∀m ≥M.
87

Nun konnen wir aus (3.2) schließen, dass
‖f(xm)− f(xk)‖F < ε ∀m, k ≥M,
d.h. (f(xm)) ist eine Cauchyfolge in F . Da F ein Banachraum ist, so konver-giert (f(xm)) gegen ein y ∈ F . Es bleibt zu zeigen, dass jede beliebige Folge(f(xk)) gegen y konvergiert, falls (xk) eine Folge in I ist, die von links gegenx konvergiert.
Sei K(ε) > 0 so groß gewahlt, dass xk ∈ (an(x), x) fur alle k ≥ K(ε). Seiweiter m∗ ≥M(ε) so groß gewahlt, dass
‖f(xm∗)− y‖F ≤ ε.
Mit Hilfe von (3.2) erhalten wir fur alle k ≥ K(ε), dass
‖f(xk)− y‖F ≤ ‖f(xk)− f(xm∗)‖F + ‖f(xm∗)− y‖F ≤ 2ε,
d.h. (f(xk)) konvergiert gegen y . �
Satz 3.7. Der Raum S(I, F ) ist ein abgeschlossener Unterraum von B(I, F )mit der Norm
‖f‖∞ := supx∈I‖f(x)‖F
und damit ein Banachraum. Es gilt
S(I, F ) = (T (I, F )).
Beweis: Aus Satz 3.6 folgt unmittelbar, dass
S(I, F ) = (T (I, F )). (3.3)
In der Vorlesung Analysis I* wurde gezeigt, dass der Raum B(I, F ) allerbeschrankten Abbildungen von I nach F ein Banach-Raum mit der Norm
‖f‖∞ = supx∈I‖f(x)‖F <∞
ist. Wir zeigen, dass ‖f‖∞ < ∞ fur alle f ∈ S(I, F ). Sei f ∈ S(I, F ). Wirnehmen an, dass f unbeschrankt ist, d.h. dass es fur jedes n ∈ N ein xn ∈ Imit
‖f(xn)‖F ≥ n (3.4)
88
gibt. Da I kompakt ist, so existiert eine konvergente Teilfolge (xnk) von (xn)
und ein x ∈ I mit limk→∞ xnk= x. O.B.d.A. konnen wir annehmen, dass
(xnk) von links oder von rechts gegen x konvergiert (immer moglich durch
Entfernung aller Folgenglieder links bzw. rechts von x aus der Teilfolge). Daf sprungstetig ist, so existieren f(x−0) und f(x+0), d.h. wir finden einy ∈ F , so dass
limk→∞
f(xnk) = y.
Dies ist aber ein Widerspruch zu (3.4).
Unter Beachtung von (3.3) ist somit S(I, F ) ein abgeschlossener Unterraumvon B(I, F ). �
3.1 Das Cauchy-Riemann-Integral
Definition 3.8. Sei f ∈ T (I, F ) und Z = (z0, z1, . . . , zm) eine Zerlegung so,dass f auf (zi−1, zi) konstant gleich yi ∈ F fur alle i ∈ {1, . . . ,m}. Danndefinieren wir das Cauchy-Riemann-Integral von f als∫
I
f(x) dx :=
∫ b
a
f(x) dx :=m∑i=1
(zi − zi−1)yi.
Zur Rechtfertigung der Definition 3.8 muss man zeigen, dass das Integralunabhangig von der Wahl der Zerlegung Z ist.
Lemma 3.9. Seien f ∈ T (I, F ) und Z = (z0, . . . , zm) sowie Z = (z0, . . . , zm)zwei Zerlegungen von I mit
f(x) =: yi ∈ F ∀x ∈ (zi−1, zi) und f(x) =: yi ∈ F ∀x ∈ (zi−1, zi).
Dann gilt
m∑i=1
(zi − zi−1)yi =m∑i=1
(zi − zi−1)yi.
Der Beweis ist eine Ubungsaufgabe. Hinweis: Man zeige zunachst, dass dieAussage gilt, wenn Z eine Verfeinerung von Z ist und argumentiere dann furbeliebige Z mit der Verfeinerung Z = (z0, . . . , zm), die sich aus
{z0, . . . , zm} := {z0, . . . , zm} ∪ {z0, . . . , zm}.
89
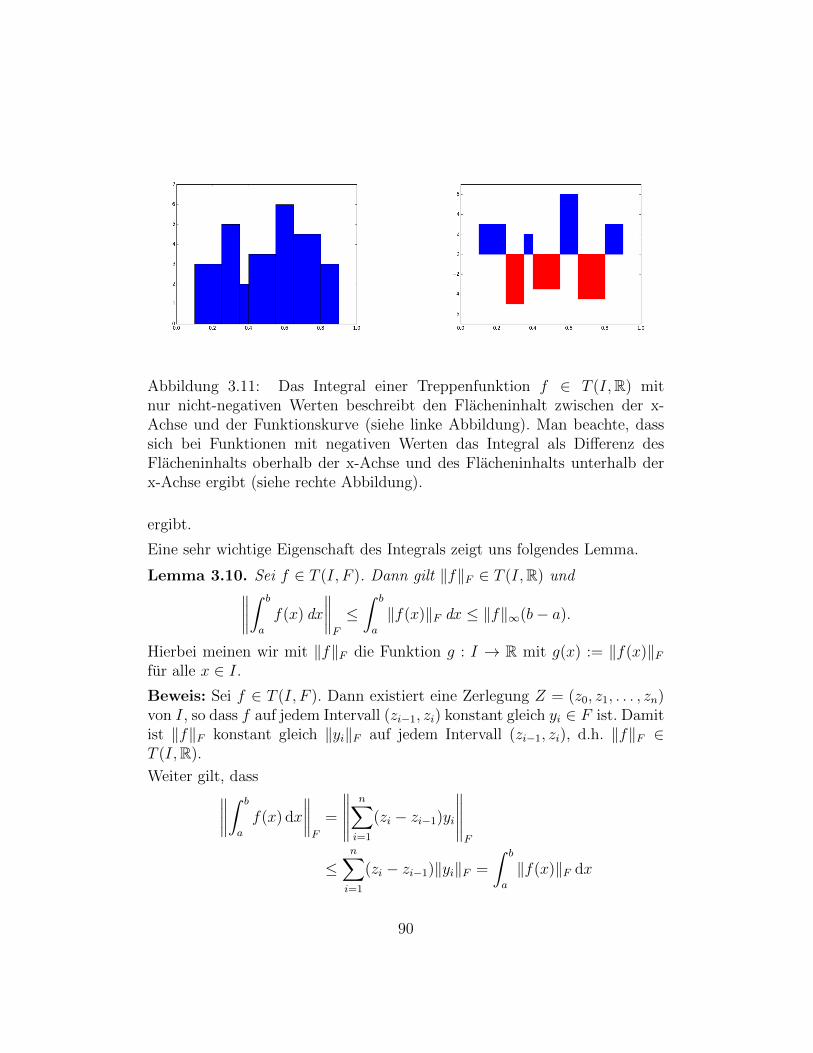
Abbildung 3.11: Das Integral einer Treppenfunktion f ∈ T (I,R) mitnur nicht-negativen Werten beschreibt den Flacheninhalt zwischen der x-Achse und der Funktionskurve (siehe linke Abbildung). Man beachte, dasssich bei Funktionen mit negativen Werten das Integral als Differenz desFlacheninhalts oberhalb der x-Achse und des Flacheninhalts unterhalb derx-Achse ergibt (siehe rechte Abbildung).
ergibt.
Eine sehr wichtige Eigenschaft des Integrals zeigt uns folgendes Lemma.
Lemma 3.10. Sei f ∈ T (I, F ). Dann gilt ‖f‖F ∈ T (I,R) und∥∥∥∥∫ b
a
f(x) dx
∥∥∥∥F
≤∫ b
a
‖f(x)‖F dx ≤ ‖f‖∞(b− a).
Hierbei meinen wir mit ‖f‖F die Funktion g : I → R mit g(x) := ‖f(x)‖Ffur alle x ∈ I.
Beweis: Sei f ∈ T (I, F ). Dann existiert eine Zerlegung Z = (z0, z1, . . . , zn)von I, so dass f auf jedem Intervall (zi−1, zi) konstant gleich yi ∈ F ist. Damitist ‖f‖F konstant gleich ‖yi‖F auf jedem Intervall (zi−1, zi), d.h. ‖f‖F ∈T (I,R).
Weiter gilt, dass∥∥∥∥∫ b
a
f(x) dx
∥∥∥∥F
=
∥∥∥∥∥n∑i=1
(zi − zi−1)yi
∥∥∥∥∥F
≤n∑i=1
(zi − zi−1)‖yi‖F =
∫ b
a
‖f(x)‖F dx
90

und ∫ b
a
‖f(x)‖F dx =n∑i=1
(zi − zi−1)‖yi‖F
≤n∑i=1
(zi − zi−1)‖f‖∞ = ‖f‖∞(b− a).
�
Folgerung 3.11. Die Abbildung
A : T (I, F )→ F
f 7→∫I
f(x) dx
ist linear und beschrankt, d.h. A ∈ L(T (I, F ), F ).1 Zudem gilt ‖A‖ = (b−a).
Beweis: Die Linearitat ist leicht zu zeigen (UA). Aus Lemma 3.10 folgt, dass
‖A‖ = supf∈T (I,F )
‖Af‖F‖f‖T (I,F )
= supf∈T (I,F )
‖Af‖F‖f‖∞
≤ b− a.
�
Definition 3.12. Sei f ∈ S(I, F ). Dann definieren wir das Cauchy-Riemann-Integral von f als∫
I
f(x) dx :=
∫ b
a
f(x) dx := limn→∞
∫ b
a
fn(x) dx, (3.5)
wobei (fn) eine Folge von Treppenfunktionen fn ∈ T (I, F ) mit limn→∞ fn =f ist.
Die Existenz einer solchen Folge (fn) ist aufgrund von Satz 3.6 stets gesichert.Zur Rechtfertigung der Definition 3.12 mussen wir aber noch zeigen, dass derGrenzwert
limn→∞
∫ b
a
fn(x) dx, (3.6)
stets existiert und dass das Integral unabhangig von der Wahl der Folge (fn)ist. Dazu benutzen wir folgenden Satz uber stetige Erweiterungen linearerund beschrankter Abbildungen.
1Hierbei meinen wir den Raum T (I, F ) mit der Norm ‖f‖∞ = supx∈I ‖f(x)‖F .
91

Satz 3.13. Sei E ein normierter Raum, X ⊂ E ein in E dichter Unter-vektorraum und F ein Banachraum. Sei A ∈ L(X,F ). Dann existiert eineeindeutig bestimmte Erweiterung A ∈ L(E,F ) von A mit
Ax = limn→∞
Axn ∀x ∈ E ∀xn ∈ X mit x = limn→∞
xn.
Zudem gilt ‖A‖L(E,F ) = ‖A‖L(X,F ).
Beweis: DaA linear und beschrankt ist, so istA nach Lemma 2.7 gleichmaßigstetig. Die Existenz einer eindeutig bestimmten, stetigen Erweiterung A vonA mit
Ax = limn→∞
Axn ∀x ∈ E ∀xn ∈ X mit x = limn→∞
xn.
folgt aus dem Erweiterungssatz fur gleichmaßig stetige Funktionen A.5. Furdie Linearitat von A betrachten wir
x = limn→∞
xn mit xn ∈ X und y = limn→∞
yn mit yn ∈ X
sowie α, β ∈ K. Dann gilt
αAx+ βAy = α limn→∞
Axn + β limn→∞
Ayn
= limn→∞
A(αxn + βyn) = A(αx+ βy).
Da A stetig ist, so gilt A ∈ L(E,F ). Die Stetigkeit der Norm liefert uns furjedes x = limn→∞ xn ∈ E mit xn ∈ X, dass
‖Ax‖F = ‖ limn→∞
Axn‖F = limn→∞
‖Axn‖F
≤ limn→∞
‖A‖L(X,F )‖xn‖E = ‖A‖L(X,F ) limn→∞
‖xn‖E = ‖A‖L(X,F )‖x‖E,
d.h. ‖A‖L(E,F ) ≤ ‖A‖L(X,F ). Außerdem wissen wir, dass
‖A‖L(X,F ) = sup‖x‖E≤1, x∈X
‖Ax‖ ≤ sup‖x‖E≤1
‖Ax‖ = ‖A‖L(E,F ).
�Mit der Folgerung 3.11 und dem Satz 3.13 ist nun klar, dass die Definition3.12 des Integrals wohldefiniert ist.
92

Satz 3.14. Sei F ein Banachraum und f ∈ S(I, F ). Dann existiert zu jedemε > 0 ein δ > 0 mit∥∥∥∥∥
∫ b
a
f(x)dx−n∑j=1
f(ξj)(zj − zj−1)
∥∥∥∥∥F
< ε
fur alle Zerlegungen Z = (z0, . . . , zn) von I mit
max1≤j≤n
(zj − zj−1) < δ
und beliebigen Zwischenpunkten ξj ∈ [zj−1, zj] fur j = 1, . . . , n.
Beweis: Wir zeigen dies zunachst fur Treppenfunktionen f ∈ T (I, E). Seiε > 0 gegeben und Z∗ = (z∗0 , . . . , z
∗n∗) eine Zerlegung fur f . Wir setzen
δ :=ε
4n∗‖f‖∞.
Seien nun Z = (z0, . . . , zn) eine beliebige Zerlegung von I mit
max1≤j≤n
(zj − zj−1) < δ
und ξj ∈ [zj−1, zj] beliebige Zwischenpunkte fur j = 1, . . . , n. Da f eineTreppenfunktion ist, so ist f konstant auf (z∗j−1, z
∗j ) fur alle j = 1, . . . , n. Wir
bezeichnen den Funktionswert von f auf (z∗j−1, z∗j ) mit f ∗j . Sei Z = (y0, ..., ym)
die Zerlegung von I, fur die
{y0, . . . , ym} = {z0, . . . , zn} ∪ {z∗0 , . . . , z∗n∗}
gilt. Dann erhalten wir∫ b
a
f(x) dx−n∑j=1
f(ξj)(zj − zj−1)
=n∗∑j=1
f ∗j (z∗j − z∗j−1)−n∑j=1
f(ξj)(zj − zj−1)
=m∑k=1
(g∗k − gk)(yk − yk−1),
93

wobei
g∗k := f ∗j , falls [yk−1, yk] ⊂ [z∗j−1, z∗j ],
gk := f(ξj), falls [yk−1, yk] ⊂ [zj−1, zj].
Dann kann g∗k 6= gk nur fur maximal 2n∗ Werte k der Menge {0, . . . ,m}gelten. Zudem wissen wir, dass fur alle k ∈ {0, . . . ,m} gilt:
‖(g∗k − gk)(yk − yk−1)‖F < (‖g∗k‖F + ‖gk‖F )|yk − yk−1| ≤ 2‖f‖∞δ.
Damit ergibt sich∥∥∥∥∥∫ b
a
f(x) dx−n∑j=1
f(ξj)(zj − zj−1)
∥∥∥∥∥F
< 4n∗‖f‖∞δ = ε.
Wir zeigen nun die Behauptung fur f ∈ S(I, F ). sei ε > 0 gegeben. DaT (I, F ) dicht in S(I, F ) ist, so existiert ein g ∈ T (I, F ) mit
‖f − g‖∞ <ε
3(b− a).
Aus Lemma 3.10 folgt nun
‖∫ b
a
(f − g)(x) dx‖∞ ≤ ‖f − g‖∞(b− a) <ε
3. (3.7)
Da g ∈ T (I, F ), so existiert ein δ > 0, so dass∥∥∥∥∥∫ b
a
f(x)dx−n∑j=1
f(ξj)(zj − zj−1)
∥∥∥∥∥F
<ε
3(3.8)
fur alle Zerlegungen Z = (z0, . . . , zn) von I mit
max1≤j≤n
(zj − zj−1) < δ
und beliebigen Zwischenpunkten ξj ∈ [zj−1, zj] fur j = 1, . . . , n. Zudem wis-sen wir, dass∥∥∥∥∥
n∑j=1
(f(ξj)− g(ξj))(zj − zj−1)
∥∥∥∥∥F
≤ ‖f − g‖∞(b− a) <ε
3(3.9)
Dann ergibt die Addition von (3.7)-(3.9) mit der Dreiecksungleichung dieBehauptung. �
94

Definition 3.15. Eine Funktion f : I → F heißt Riemann integrierbar,falls ein y ∈ F mit folgender Eigenschaft existiert: Zu jedem ε > 0 existiertein δ > 0, so dass ∥∥∥∥∥y −
n∑j=1
f(ξj)(zj − zj−1)
∥∥∥∥∥F
< ε
fur alle Zerlegungen Z = (z0, . . . , zn) von I mit
max1≤j≤n
(zj − zj−1) < δ
und beliebige Zwischenpunkte ξj ∈ [zj−1, zj] fur j = 1, . . . , n. Dann ist yeindeutig bestimmt und heißt Riemannsches Integral von f uber I. Manschreibt ∫ b
a
f(x) dx
fur y. Man nennt∑n
j=1 f(ξj)(zj − zj−1) die Riemannschen Summen.
Folgerung 3.16. Jede sprungstetige Funktion ist Riemann integrierbar. DasCauchy-Riemannsche Integral stimmt fur sprungstetige Funktionen mit demRiemannschen Integral uberein.
Dies folgt direkt aus Satz 3.14.
3.2 Eigenschaften des Integrals
Bemerkung 3.17. Man kann sich leicht davon uberzeugen, dass die Abbildung
A : S(I, F )→ F
f 7→∫I
f(x) dx
linear ist.
Der folgende Satz liefert uns eine Auskunft daruber, wann man Grenzwert-bildung und Integration sowie Summenbildung und Integration vertauschenkann.
Satz 3.18. Sei (fn) eine Folge mit fn ∈ S(I, E).
95

(i) Wenn (fn) gleichmaßig gegen f konvergiert, dann ist f ∈ S(I, E) undes gilt
limn→∞
∫ b
a
fn(x) dx =
∫ b
a
limn→∞
fn(x) dx =
∫ b
a
f(x) dx.
(ii) Wenn∑∞
n=0 fn gleichmaßig konvergiert, dann ist∑∞
n=0 fn ∈ S(I, E)und es gilt ∫ b
a
∞∑n=0
fn(x) dx =∞∑n=0
∫ b
a
fn(x) dx.
Beweis: Die gleichmaßige Konvergenz von (fn) ist gleichbedeutend mit derKonvergenz von (fn) in S(I, E) mit der Norm ‖f‖∞ = supx∈I ‖f(x)‖E. So-mit ist (i) eine direkte Folgerung aus Satz 3.7, wenn man die Definition desCauchy-Riemann-Integrals beachtet. Berucksichtigt man noch die Linearitatdes Integrals, dann folgt auch (ii). �
Beispiel 3.19. Bei nur punktweise konvergierenden Funktionenfolgen giltSatz 3.18 i.a. nicht. Wir betrachten dazu die Funktionen fn : [0, 1]→ R mit
fn(x) :=
0, falls x = 0
n, falls x ∈ (0, 1n)
0, falls x ∈ [ 1n, 1].
Offenbar ist fn ∈ T ([0, 1],R) und (fn) konvergiert punktweise gegen f := 0.Es gilt ∫ 1
0
fn(x) dx = 1, aber
∫ 1
0
f(x) dx = 0.
Der nachste Satz liefert uns Auskunft uber die Vertauschbarkeit von Normund Integral.
Satz 3.20. Sei f ∈ S(I, F ). Dann gilt ‖f‖F ∈ S(I,R) und∥∥∥∥∫ b
a
f(x) dx
∥∥∥∥F
≤∫ b
a
‖f(x)‖F dx ≤ ‖f‖∞(b− a).
96

Beweis: Sei f ∈ S(I, F ). Dann existiert nach Satz 3.7 eine Folge (fn) inT (I, F ), die gleichmaßig gegen f konvergiert. Ferner liefert uns die Dreiecks-ungleichung, dass
| ‖fn(x)‖F − ‖f(x)‖F | ≤ ‖fn(x)− f(x)‖F ≤ ‖fn − f‖∞ ∀x ∈ I.
Somit konvergiert (fn) gleichmaßig gegen ‖f‖F . Da ‖fn‖F ∈ T (I,R), so folgtaus Satz 3.7, dass ‖f‖F ∈ S(I,R). Aufgrund von Lemma 3.10 wissen wir,dass ∥∥∥∥∫ b
a
fn(x) dx
∥∥∥∥F
≤∫ b
a
‖fn(x)‖F dx ≤ ‖fn‖∞(b− a).
Nun konnen wir mit Satz 3.18 den Grenzwert auf beiden Seiten bilden underhalten die Behauptung. �
Definition 3.21. Sei f ∈ S(I, F ). Seien α, β ∈ I beliebig. Dann definierenwir
∫ β
α
f(x) dx =
∫ βαf(x) dx , falls α < β
0 , falls α = β
−∫ αβf(x) dx , falls α > β.
Die Definition ist wohldefiniert, da mit f ∈ S(I, F ) auch f ∈ S([α, β], F ) furalle α < β ∈ I.
Das Integral ist additiv im Sinne des folgenden Satzes.
Satz 3.22. (Additivitat des Integrals). Sei f ∈ S(I, F ). Dann gilt fur alleα, β, γ ∈ I, dass ∫ β
α
f(x) dx =
∫ γ
α
f(x) dx+
∫ β
γ
f(x) dx.
Beweis: Aufgrund der Definition 3.21 ist schnell klar, dass es genugt, dieBehauptung nur fur den Fall α < γ < β zu zeigen. Sei (fn) eine Folge vonTreppenfunktionen fn ∈ T (I, F ), die gleichmaßig gegen f konvergiert. Dannkonvergieren auch die Folgen (gn) mit gn := fn|[α,γ] ∈ T ([α, γ], F ) und (hn)mit hn := fn|[γ,β] ∈ T ([γ, β], F ) gleichmaßig gegen g := f |[α,γ] ∈ T ([α, γ], F )
97
bzw. h := f |[γ,β] ∈ T ([γ, β], F ). Aufgrund der Definition des Integrals furTreppenfunktionen ergibt sich fur alle n ∈ N, dass∫ β
α
fn(x) dx =
∫ γ
α
fn(x) dx+
∫ β
γ
fn(x) dx.
Mit Satz 3.18 erhalten wir∫ β
α
f(x) dx =
∫ β
α
limn→∞
fn(x) dx
= limn→∞
∫ β
α
fn(x) dx
= limn→∞
∫ γ
α
fn(x) dx+ limn→∞
∫ β
γ
fn(x) dx
=
∫ γ
α
limn→∞
fn(x) dx+
∫ β
γ
limn→∞
fn(x) dx
=
∫ γ
α
f(x) dx+
∫ β
γ
f(x) dx.
�Fur den Fall, dass F = R haben wir eine Ordnungsrelation in F und konnendamit auch Aussagen zur Positivitat und Monotonie des Integrals treffen.
Satz 3.23. (Positivitat des Integrals). Sei f ∈ S(I,R) mit f(x) ≥ 0 fur alle
x ∈ I. Dann gilt auch∫ baf(x) dx ≥ 0.
Beweis: Folgt man dem Beweis von Satz 3.6, dann sieht man, dass es furjedes f ∈ S(I,R) mit f(x) ≥ 0 fur alle x ∈ I eine Folge (fn) von Treppen-funktionen fn ∈ T (I, F ) mit fn(x) ≥ 0 fur alle x ∈ I und alle n ∈ N gibt,die gleichmaßig gegen f konvergiert. Aufgrund der Definition des Integralsfur Treppenfunktionen ergibt sich fur alle n ∈ N, dass∫ b
a
fn(x) dx ≥ 0.
Mit Satz 3.18 erhalten wir∫ b
a
f(x) dx =
∫ b
a
limn→∞
fn(x) dx = limn→∞
∫ b
a
fn(x) dx ≥ 0.
�
98
Folgerung 3.24. (Monotonie des Integrals). Seien f, g ∈ S(I,R) mit f(x) ≤g(x) fur alle x ∈ I. Dann gilt
∫ baf(x) dx ≤
∫ bag(x) dx.
Beweis: Offenbar gilt fur die Funktion h(x) := g(x)−f(x), dass h ∈ S(I,R)und h(x) ≥ 0 fur alle x ∈ I. Mit Satz 3.23 folgt
0 ≤∫ b
a
h(x) dx =
∫ b
a
g(x)− f(x) dx.
Da das Integral linear ist, so folgt∫ baf(x) dx ≤
∫ bag(x) dx. �
3.3 Der Hauptsatz der Differential- und Integralrech-nung
Sei wieder I = [a, b] ⊂ R und F ein Banachraum. Sei f ∈ S(I, F ) gegeben.Wir betrachten die Abbildung
F : I → F
x 7→∫ x
a
f(s) ds.(3.10)
Lemma 3.25. Sei f ∈ S(I, F ). Dann gilt fur die Abbildung F aus (3.10),dass
‖F(x)−F(y)‖F ≤ ‖f‖∞|x− y| ∀x, y ∈ I.
Beweis: Aus der Additivitat des Integrals (Satz 3.22) folgt
F (x)− F (y) =
∫ x
a
f(s) ds−∫ y
a
f(s) ds
=
∫ x
a
f(s) ds+
∫ a
y
f(s) ds =
∫ x
y
f(s) ds.
Mit Satz 3.20 erhalten wir fur x > y, dass
‖F(x)−F(y)‖F =
∥∥∥∥∫ x
y
f(x) ds
∥∥∥∥F
≤ ‖f‖∞(x− y)
und fur x < y, dass
‖F(x)−F(y)‖F =
∥∥∥∥∫ y
x
f(x) ds
∥∥∥∥F
≤ ‖f‖∞(y − x),
woraus die Behauptung folgt. �
99

Satz 3.26. Sei f ∈ S(I, F ) und sei f stetig in x ∈ I. Dann ist die AbbildungF aus (3.10) differenzierbar in x und es gilt F ′(x) = f(x).
Beweis: Sei h ∈ R mit a+ h ∈ I und h 6= 0. Dann gilt
F(x+ h)−F(x)
h=
1
h
(∫ x+h
a
f(s) ds−∫ x
a
f(s) ds
)=
1
h
∫ x+h
x
f(s) ds.
Da
f(x)h = f(x)
∫ x+h
x
1 ds =
∫ x+h
x
f(x) ds,
so folgt
F(x+ h)−F(x)− f(x)h
h=
1
h
∫ x+h
x
(f(s)− f(x)) ds. (3.11)
Da f in x stetig ist, so existiert zu jedem ε > 0 ein δ > 0, so dass
‖f(s)− f(x)‖F < ε ∀s ∈ (x− δ, x+ δ) ∩ I.
Mit Hilfe von Satz 3.20 und Folgerung 3.24 erhalten wir fur alle h mit 0 <h < δ, dass
‖∫ x+h
x
(f(s)− f(x)) ds‖F ≤∫ x+h
x
‖f(s)− f(x)‖F ds ≤∫ x+h
x
ε ds = hε
und fur h mit −δ < h < 0, dass
‖∫ x+h
x
(f(s)− f(x)) ds‖F ≤∫ x
x+h
‖f(s)− f(x)‖F ds ≤∫ x
x+h
ε ds = −hε.
Unter Beachtung von (3.11) wissen wir nun, dass∥∥∥∥F(x+ h)−F(x)− f(x)h
h
∥∥∥∥F
≤ 1
|h||h|ε = ε.
Dies bedeutet, dass F in x differenzierbar ist und es gilt F ′(x) = f(x). �
Definition 3.27. Sei f : I → F eine beliebige Funktion. Dann heißt F :I → F eine Stammfunktion von f , falls F differenzierbar ist und es giltF ′(x) = f(x) fur alle x ∈ I.
100

Satz 3.28. (Hauptsatz der Differential- und Integralrechnung). Sei f ∈ C(I, F ).Dann besitzt f eine Stammfunktion. Fur jede Stammfunktion F von f gilt,dass
F(x)−F(a) =
∫ x
a
f(s) ds ∀x ∈ I.
Beweis: Mit Satz 3.26 wissen wir, dass die Abbildung F aus (3.10) eineStammfunktion von f ist. Sei G eine beliebige weitere Stammfunktion vonf . Dann ist die Funktion H : I → F mit H(x) := F(x)−G(x) fur alle x ∈ Idifferenzierbar und es gilt
H′(x) = F ′(x)− G ′(x) = f(x)− f(x) = 0 ∀x ∈ I.
Aufgrund von Folgerung 2.60 wissen wir, dass H konstant auf I ist. Sei dieseKonstante gleich c ∈ F . Dann erhalten wir
G(x)− G(a) = (F(x)− c)− (F(a)− c) =
∫ x
a
f(s) ds ∀x ∈ I.
�
3.4 Das unbestimmte Integral
Definition 3.29. Sei f ∈ C(I, F ). Dann bezeichnet man mit∫f(x) dx+ c
die Menge aller Stammfunktionen von f , wobei c ∈ F eine Konstante ist.Dabei heißt
∫f(x) dx das unbestimmte Integral von f . Das unbestimmte
Integral ist ein Reprasentant aller Stammfunktionen von f .
Im folgenden sind ein paar Beispiele aufgelistet. Die Gultigkeit folgt aus derKenntnis der Ableitung der entsprechenden Stammfunktion. Fruher konn-te man diese und weitere Beispiele in zahlreichen Tafelwerken finden. Heu-te findet man diese einfach mit Softwareprogrammen, die symbolisch in-tegrieren konnen, z.B. Mathematica, Maple oder SymPy. Sehr bequem istauch die Nutzung des Links http://www.wolframalpha.com/. Mit dem Be-fehl integral f(x) kann man sich die Stammfunktionen von f(x) anzeigenlassen.
101

f(x) = xa, a 6= −1 ⇒∫f(x) dx =
1
a+ 1xa+1
f(x) =1
x⇒
∫f(x) dx = log |x|
f(x) = ax, a > 0, a 6= 1 ⇒∫f(x) dx =
ax
log a
f(x) = ex ⇒∫f(x) dx = ex
f(x) = sin(x) ⇒∫f(x) dx = − cos(x)
f(x) = cos(x) ⇒∫f(x) dx = sin(x)
f(x) =1
cos2(x)⇒
∫f(x) dx = tan(x)
f(x) =1
sin2(x)⇒
∫f(x) dx = − cot(x)
f(x) =1√
1− x2⇒
∫f(x) dx = arcsin(x)
f(x) =1
1 + x2⇒
∫f(x) dx = − arctan(x)
Fur Potenzreihen gilt:
f(x) =∞∑k=0
akxk ⇒
∫f(x) dx =
∞∑k=0
akk + 1
xk+1
Fur g ∈ C1(I,R) mit g(x) 6= 0 ∀x 6= 0 gilt:
f(x) =g′(x)
g(x)⇒
∫f(x) dx = log |g(x)|
102
3.5 Der Mittelwertsatz der Integralrechnung
Satz 3.30. Seien f, g ∈ C(I,R) und g(x) ≥ 0 fur alle x ∈ I. Dann existiertein ξ ∈ I mit ∫ b
a
f(x)g(x) dx = f(ξ)
∫ b
a
g(x) dx.
Beweis: Fur den Fall, dass g(x) = 0 fur alle x ∈ I, gilt die Behauptung furjedes ξ ∈ I. Sei nun g eine Funktion, fur die es ein x∗ ∈ I mit g(x∗) > 0gibt. Sei ε := 1
2g(x∗). Da g stetig ist, so existiert ein δ > 0, so dass g(x) ∈
(g(x∗)−ε, g(x∗)+ε) fur alle x ∈ (x∗−δ, x∗+δ). Daraus konnen wir schließen,dass
g(x) ≥ 1
2g(x∗) ∀x ∈ (x∗ − δ, x∗ + δ).
Nun folgt aus den Satzen 3.22 und 3.23, dass∫ b
a
g(x) dx =
∫ x∗−δ
a
g(x) dx+
∫ x∗+δ
x∗−δg(x) dx+
∫ b
x∗+δ
g(x) dx
≥∫ x∗+δ
x∗−δg(x) dx ≥
∫ x∗+δ
x∗−δ
1
2g(x∗) dx
=1
2g(x∗)
∫ x∗+δ
x∗−δ1 dx =
1
2g(x∗)2δ > 0.
Sei
m := minx∈I
f(x), M := maxx∈I
f(x).
Da g(x) ≥ 0 fur alle x ∈ I, so gilt
mg(x) ≤ f(x)g(x) ≤Mg(x) ∀x ∈ I.
Aufgrund der Linearitat des Integrals und der Monotonie des Integrals (Satz3.24) erhalten wir
m
∫ b
a
g(x) dx ≤∫ b
a
f(x)g(x) dx ≤M
∫ b
a
g(x) dx,
103

d.h.
m ≤∫ baf(x)g(x) dx∫ bag(x) dx
≤M.
Mit dem Zwischenwertsatz aus der Vorlesung Analysis I* (siehe auch Satz1.28) finden wir nun ein ξ ∈ I mit
f(ξ) =
∫ baf(x)g(x) dx∫ bag(x) dx
,
woraus die Behauptung folgt. �
Folgerung 3.31. Sei f ∈ C(I,R). Dann gibt es ein ξ ∈ I mit∫ b
a
f(x) dx = f(ξ)(b− a).
Die Abbildung 3.12 zeigt eine graphische Interpretation des Mittelwertsatzes.
Bemerkung 3.32. Fur sprungstetige Funktionen gelten die Holdersche Un-gleichung und die Minkowski-Ungleichung in Integralform. Sei f ∈ S(I,R)und p ∈ [1,∞) sowie q := p
p−1mit q :=∞ fur p = 1. Dann definieren wir
‖f‖p :=
(∫ b
a
|f(x)|p dx
) 1p
.
Fur f, g ∈ S(I,R) gelten die Holdersche Ungleichung∣∣∣∣∫ b
a
f(x)g(x) dx
∣∣∣∣ ≤ ∫ b
a
|f(x)g(x)| dx ≤ ‖f‖p‖g‖q
sowie die Minkowski-Ungleichung
‖f + g‖p ≤ ‖f‖p + ‖g‖p.
Der Beweis ist eine Ubungsaufgabe. Hinweis: Die Beweise fur die HolderscheUngleichung und die Minkowski-Ungleichung in Summenform lassen sich voll-kommen analog auch auf Integrale ubertragen.
104
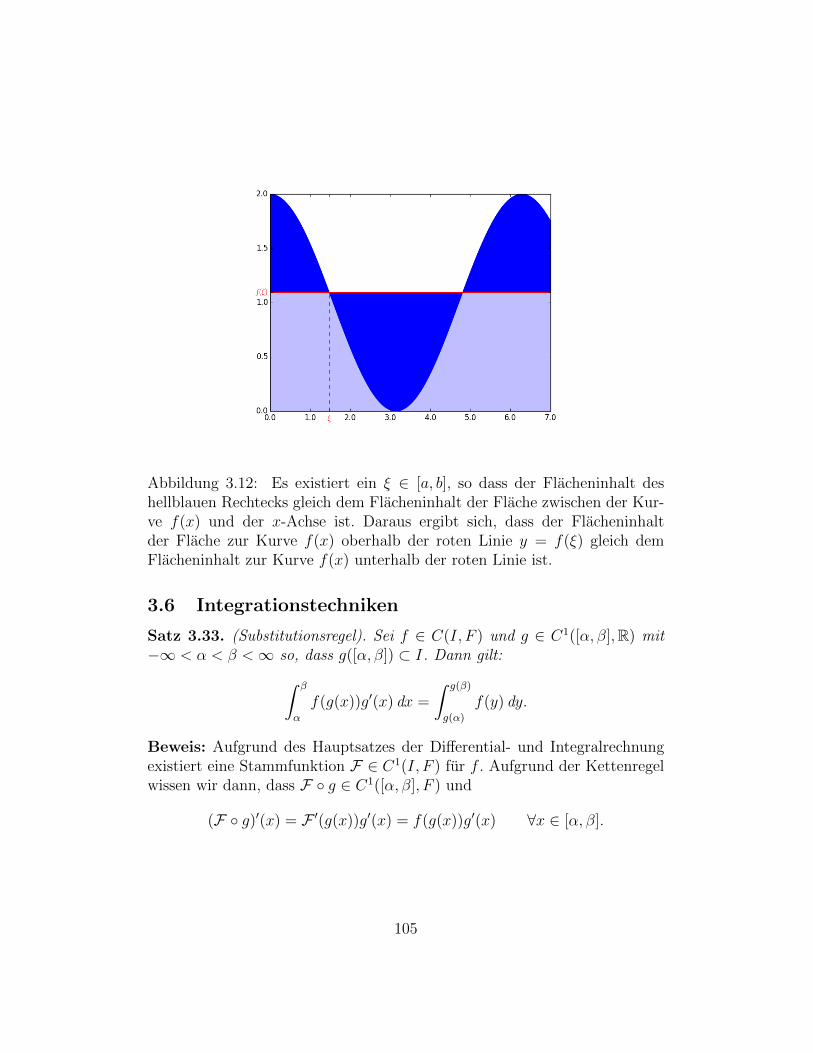
Abbildung 3.12: Es existiert ein ξ ∈ [a, b], so dass der Flacheninhalt deshellblauen Rechtecks gleich dem Flacheninhalt der Flache zwischen der Kur-ve f(x) und der x-Achse ist. Daraus ergibt sich, dass der Flacheninhaltder Flache zur Kurve f(x) oberhalb der roten Linie y = f(ξ) gleich demFlacheninhalt zur Kurve f(x) unterhalb der roten Linie ist.
3.6 Integrationstechniken
Satz 3.33. (Substitutionsregel). Sei f ∈ C(I, F ) und g ∈ C1([α, β],R) mit−∞ < α < β <∞ so, dass g([α, β]) ⊂ I. Dann gilt:∫ β
α
f(g(x))g′(x) dx =
∫ g(β)
g(α)
f(y) dy.
Beweis: Aufgrund des Hauptsatzes der Differential- und Integralrechnungexistiert eine Stammfunktion F ∈ C1(I, F ) fur f . Aufgrund der Kettenregelwissen wir dann, dass F ◦ g ∈ C1([α, β], F ) und
(F ◦ g)′(x) = F ′(g(x))g′(x) = f(g(x))g′(x) ∀x ∈ [α, β].
105

Mit dem Hauptsatz der Differential- und Integralrechnung erhalten wir∫ β
α
f(g(x))g′(x) dx = (F ◦ g)(β)− (F ◦ g)(α)
= F(g(β))−F(g(α)) =
∫ g(β)
g(α)
f(y) dy.
�
Beispiel 3.34.∫ 2
0
2x cos(x2) dxg(x)=x2
=
∫ 4
0
cos(y) dy = [− sin(y)]40 = − sin(4).
Satz 3.35. (Partielle Integration). Seien f, g ∈ C1(I,R). Dann gilt:∫ b
a
f(x)g′(x) dx = [fg]ba −∫ b
a
f ′(x)g(x) dx,
wobei [fg]ba := (fg)(b)− (fg)(a).
Beweis: Aufgrund der Produktregel wissen wir, dass
(fg)′(x) = f ′(x)g(x) + f(x)g′(x) ∀x ∈ I.
Mit dem Hauptsatz der Differential- und Integralrechnung erhalten wir
(fg)(b)− (fg)(a) =
∫ b
a
(fg)′(x) dx =
∫ b
a
f ′(x)g(x) + f(x)g′(x) dx,
woraus die Behauptung folgt. �
Beispiel 3.36.∫ 1
0
xex dx = [xex]10 −∫ 1
0
ex dx = e− [ex]10 = e− (e− 1) = 1.
106
3.7 Uneigentliche Integrale
Sei F ein Banachraum und J ⊂ R ein Intervall mit den Grenzen a und b. Hierlassen wir auch offene und halboffene Intervalle sowie a = −∞ und b = ∞zu.
Definition 3.37. Eine Abbildung f : J → F heißt zulassig, falls ihreEinschrankung auf jedes kompakte Teilintervall von J sprungstetig ist.
Definition 3.38. Eine zulassige Funktion f : J → F heißt (uneigentlich)integrierber, falls es ein c ∈ (a, b) gibt, so dass die Grenzwerte
limα→a+0
∫ c
α
f(x) dx und limβ→b−0
∫ β
c
f(x) dx
in F existieren.
Lemma 3.39. Sei f : J → F uneigentlich integrierbar. Dann existieren dieGrenzwerte
limα→a+0
∫ c
α
f(x) dx und limβ→b−0
∫ β
c
f(x) dx
fur jedes c ∈ (a, b). Zudem gilt
limα→a+0
∫ c
α
f(x) dx+ limβ→b−0
∫ β
c
f(x) dx = limα→a+0
∫ c
α
f(x) dx+ limβ→b−0
∫ β
c
f(x) dx
fur alle c, c ∈ (a, b).
Beweis: Nach Voraussetzung existiert ein c∗ ∈ (a, b), so dass die Grenzwerte
limα→a+0
∫ c∗
α
f(x) dx und limβ→b−0
∫ β
c∗
f(x) dx
in F existieren. Sei jetzt c ∈ (a, b) beliebig. Aufgrund der Additivitat derIntegrale gilt ∫ c
α
f(x) dx =
∫ c∗
α
f(x) dx+
∫ c
c∗
f(x) dx∫ β
c
f(x) dx =
∫ c∗
c
f(x) dx+
∫ β
c∗
f(x) dx
107

Somit existieren offenbar auch limα→a+0
∫ cαf(x) dx und limβ→b−0
∫ βcf(x) dx.
Zudem erhalten wir
limα→a+0
∫ c
α
f(x) dx+ limβ→b−0
∫ β
c
f(x) dx
= limα→a+0
∫ c∗
α
f(x) dx+
∫ c
c∗
f(x) dx+
∫ c∗
c
f(x) dx+ limβ→b−0
∫ β
c∗
f(x) dx
= limα→a+0
∫ c∗
α
f(x) dx+ limβ→b−0
∫ β
c∗
f(x) dx
Da c beliebig war, so folgt daraus die Behauptung. �
Definition 3.40. Sei f : J → F uneigentlich integrierbar und sei c ∈ (a, b).Dann heißt ∫ b
a
f(x) dx := limα→a+0
∫ c
α
f(x) dx+ limβ→b−0
∫ β
c
f(x) dx
(uneigentliches) Integral von f uber J .
Aufgrund von Lemma 3.39 ist das uneigentliche Integral wohldefiniert, d.h.unabhangig von der Wahl von c.
Beispiel 3.41. Sei a > 0. Dann gilt∫ ∞a
1
x2dx = lim
β→∞
∫ β
a
1
x2dx = lim
β→∞[−1
x]βa = lim
β→∞(1
a− 1
β) =
1
a.
Beispiel 3.42. Sei a ∈ R. Dann existiert∫∞ax dx nicht, denn∫ β
a
x dx = [1
2x2]βa =
1
2β2 − 1
2a2
konvergiert nicht fur β →∞.
Bemerkung 3.43. Fur −∞ < a < b < ∞ und f ∈ S([a, b], F ) stimmt dasuneigentliche Integral mit dem Cauchy-Riemannschen Integral uberein.
Definition 3.44. Sei f : J → F zulassig. Dann heißt f absolut integrier-bar, falls das Integral ∫ b
a
‖f(x)‖F dx
in R existiert.
108

4 Grundlagen gewohnlicher Differentialglei-
chungen
Sei I ∈ R ein offenes Intervall, E ein Banachraum und D ⊂ E offen. Seiweiter f : I × D → E stetig.
Definition 4.1. Eine Funktion x∗ : I∗ → D heißt Losung der gewohnlichenDifferentialgleichung
x′ = f(t, x), (4.1)
falls I∗ ⊂ I ein perfektes Intervall ist und x∗ ∈ C1(I∗,D) die Gleichung
x′∗(t) = f(t, x∗(t)) ∀t ∈ I∗
erfullt. Fur gegebene (t0, x0) ∈ I × D nennt man
x′ = f(t, x) mit x(t0) = x0 (4.2)
ein Anfangswertproblem. Entsprechend heißt x∗ : I∗ → D Losung desAnfangswertproblems (4.2), falls x∗ : I∗ → D eine Losung der gewohnlichenDifferentialgleichung (4.1) ist, fur die x∗(t0) = x0 gilt.
Definition 4.2. Eine Losung x∗ ∈ C1(I∗,D) des Anfangswertproblems (4.2)heißt globale Losung, falls I∗ = I.
Definition 4.3. Eine Losung x∗ ∈ C1(I∗,D) des Anfangswertproblems (4.2)heißt maximal bzw. nicht fortsetzbar, falls es keine Losung x∗∗ ∈ C1(I∗∗,D)des Anfangswertproblems (4.2) gibt, fur die I∗ ⊂ I∗∗ und I∗ 6= I∗∗.
Satz 4.4. Sei I∗ ⊂ I ein perfektes Intervall. Dann ist x ∈ C1(I∗,D) genaudann eine Losung des Anfangswertproblems (4.2), falls
x(t) = x0 +
∫ t
t0
f(s, x(s)) ∀t ∈ I∗. (4.3)
Beweis: (⇒). Nach dem Hauptsatz der Differential- und Integralrechnunggilt
x(t)− x(t0) =
∫ t
t0
x′(s) ds =
∫ t
t0
f(s, x(s)) ds ∀t ∈ I∗.
109

Berucksichtigen wir noch die Anfangsbedingung, so erhalten wir (4.3).
(⇐). Da f ∈ C(I × D, E), so ist auch die Funktion
g : I → E
s 7→ f(s, x(s))
stetig. Mit Satz 3.26 ergibt die Differentiation von (4.3), dass
x′(t) = g(t) = f(t, x(t)) ∀t ∈ I∗.
Zudem erhalten wir aus (4.3), dass
x(t0) = x0 +
∫ t0
t0
f(s, x(s)) ds = x0.
�
4.1 Losung linearer Anfangswertprobleme
Satz 4.5. Seien A ∈ L(E) und g ∈ C(R, E). Dann besitzt das lineare An-fangswertproblem
x′ = Ax+ g(t), x(t0) = x0
die eindeutig bestimmte globale Losung
x∗(t) = e(t−t0)Ax0 +
∫ t
t0
e(t−s)Ag(s) ds.
Bemerkung 4.6. Die Exponentialfunktion
e : L(E)→ L(E)
M 7→ eM
ist definiert als
eM :=∞∑k=0
1
k!Mk,
wobei M0 := I mit der Einheitsmatrix I ∈ L(E). Die Reihe konvergiert (d.h.eM ist wohldefiniert), da
∞∑k=0
1
k!‖M‖kE = e‖M‖E
eine konvergente Majorante ist.
110

Zum Beweis des Satzes (4.5) benotigen wir noch folgende drei Lemmata.
Lemma 4.7. Sei E ein Banachraum und seien A,B ∈ L(E). Dann gelten:
(i) Fur A = 0 haben wir eA = I.
(ii) Falls A und B kommutieren, d.h. AB = BA, dann gilt
eA+B = eAeB = eBeA.
(iii) e−A = (eA)−1
Beweis:
(i) Fur A = 0 ergibt die Definition
eA :=∞∑k=0
1
k!Ak = A0 = I.
(ii) Da A und B kommutieren, so erhalten wir
eA+B =∞∑n=0
1
n!(A+B)n
AB=BA=
∞∑n=0
1
n!
n∑k=0
(n
k
)AkBn−k
=∞∑n=0
n∑k=0
Ak
k!
Bn−k
(n− k)!=
∞∑i=0
Ai
i!
∞∑j=0
Bj
j!= eAeB.
Da A+B = B +A, so ergibt sich der zweite Teil der Gleichung durchVertauschung von A und B.
(iii) Dies folgt unmittelbar aus (i) und (ii).
�
Lemma 4.8. Sei A ∈ L(E). Dann ist die Abbildung
f : R→ L(E)
t 7→ etA
differenzierbar und es gilt
f ′(t) = AetA = etAA ∀ t ∈ R.
Zudem gilt
‖etA‖E ≤ e|t|·‖A‖E .
111

Beweis: Seien t, h ∈ R gegeben. Da tA und hA kommutieren, so gilt
f(t+ h)− f(t) = etA+hA − etA = etA(ehA − I) = (ehA − I)etA.
Somit bleibt fur die Ableitung von f zu zeigen, dass
limh→0
1
h(ehA − I) = A.
Nach Definition der Exponentialabbildung erhalten wir
limh→0
1
h(ehA − I) = lim
h→0
1
h
∞∑k=1
1
k!hkAk = lim
h→0
∞∑k=1
1
k!hk−1Ak = A1 = A.
Die Abschatzung der Norm ergibt sich aus der Dreiecksungleichung, denn
‖etA‖E =
∥∥∥∥∥∞∑k=0
1
k!tkAk
∥∥∥∥∥E
≤∞∑k=0
1
k!|t|k‖A‖kE = e|t|·‖A‖E .
�
Lemma 4.9. (Lemma von Gronwall). Sei J ⊂ R ein Intervall, t0 ∈ J undα, β ∈ [0,∞). Sei y : J → [0,∞) stetig mit
y(t) ≤ α + β
∣∣∣∣∫ t
t0
y(s) ds
∣∣∣∣ ∀t ∈ J. (4.4)
Dann gilt:
y(t) ≤ αeβ|t−t0| ∀t ∈ J. (4.5)
Beweis: Sei zunachst t ∈ J mit t ≥ t0. Wir betrachten die Funktion
h : [t0, t]→ [0,∞)
r 7→ βeβ(t0−r)∫ r
t0
y(s) ds
Aufgrund der Kettenregel und Satz 3.26 ergibt sich
h′(r) = −β2eβ(t0−r)∫ r
t0
y(s) ds+ βeβ(t0−r)y(r)
= βeβ(t0−r)(y(r)− β
∫ r
t0
y(s) ds
)= βeβ(t0−r)
(y(r)− β
∣∣∣∣∫ r
t0
y(s) ds
∣∣∣∣)
112

und weiter mit (4.4) erhalten wir s ∈ [t0, r])
h′(r) ≤ αβeβ(t0−r).
Aufgrund der Monotonie des Integrals konnen wir schlussfolgern, dass∫ t
t0
h′(r) dr ≤∫ t
t0
αβeβ(t0−r) dr
Nach dem Hauptsatz der Differential- und Integralrechnung bedeutet dies
h(t)− h(t0) ≤ α− αeβ(t0−t),
d.h.
βeβ(t0−t)∫ r
t0
y(s) ds ≤ α− αeβ(t0−t),
und mit (4.4) folgt
eβ(t0−t)y(t) ≤ αeβ(t0−t) + βeβ(t0−t)∫ r
t0
y(s) ds ≤ α,
woraus sich die Behauptung fur t ≥ t0 ergibt. Fur den Fall t ∈ J mit t ≤ t0erhalt man die Behauptung auf analoge Weise, wenn man anstelle von h dieFunktion
h : [t, t0]→ (−∞, t0]
r 7→ −βeβ(r−t0)
∫ t0
r
y(s) ds
benutzt. �
Nun konnen wir den Satz 4.5 zur eindeutigen Losbarkeit linearer Anfangs-wertprobleme beweisen.
Beweis des Satzes 4.5: Wir zeigen zunachst, dass
x∗(t) = e(t−t0)Ax0 +
∫ t
t0
e(t−s)Ag(s) ds = e(t−t0)Ax0 + etA∫ t
t0
e−sAg(s) ds
113

mit t ∈ R eine globale Losung des Anfangswertproblems ist. Mit Hilfe derKettenregel, Satz 3.26, Lemma 4.7 sowie Lemma 4.8 erhalten wir
x′∗(t) = Ae(t−t0)Ax0 + AetA∫ t
t0
e−sAg(s) ds+ etAe−tAg(t)
= A
(e(t−t0)Ax0 + etA
∫ t
t0
e−sAg(s) ds
)+ g(t) = Ax∗(t) + g(t)
fur alle t ∈ R.
Es bleibt die Eindeutigkeit der Losung zu zeigen. Wir nehmen an, dass eszwei globale Losungen x1 und x2 des Anfangswertproblems gibt. Dann giltnach Satz 4.4, dass
x1(t)− x2(t) = x0 +
∫ t
t0
(Ax1(s) + g(s)) ds− (x0 +
∫ t
t0
(Ax2(s) + g(s)) ds)
=
∫ t
t0
A(x1(s)− x2(s)) ds
und somit unter Berucksichtigung von Satz 3.20 fur
y(t) := ‖x1(t)− x2(t)‖E, t ∈ R,
dass
y(t) ≤∫ t
t0
‖A‖ ‖x1(s)− x2(s)‖E ds = ‖A‖∫ t
t0
y(s) ds.
Fur α := 0 und β := ‖A‖ erhalten wir mit dem Lemma 4.9 von Gronwall,dass
y(t) ≤ 0 ∀t ∈ R, (4.6)
d.h. ‖x1(t) − x2(t)‖E = 0 fur alle t ∈ R. Daher gilt x1(t) = x2(t) fur allet ∈ R, d.h. es gibt nur eine Losung des Anfangswertproblems. �
4.2 Separation der Variablen
Satz 4.10. (Separation der Variablen)Seien g ∈ C(I,R) und h ∈ C(D,R) mit h(x) 6= 0 fur x ∈ D. Dann besitzt
das Anfangswertproblem
x′ =g(t)
h(x), x(t0) = x0
114

fur jedes (t0, x0) ∈ I×D eine eindeutig bestimmte lokale Losung, die aus derGleichung ∫ x(t)
x0
h(ξ) dξ =
∫ t
t0
g(s) ds (4.7)
gewonnen werden kann.
Bemerkung 4.11. Unter einer lokalen Losung eines Anfangswertproblemes(4.2) fur (t0, x0) ∈ I × D verstehen wir eine Funktion x∗ ∈ C1(I0,U0), diedie Gleichung
x′∗(t) = f(t, x∗(t)) ∀t ∈ I0
erfullt, wobei I0 ein offenes Intervall mit t0 ∈ I0 ist und U0 ⊂ D eine (offene)Umgebung von x0 ist.
Beweis: Sei (t0, x0) ∈ I × D. Sei G eine Stammfunktion von g und H eineStammfunktion von h. Dann gilt fur die Abbildung
Φ : I × D → R(t, x) 7→ H(x)−H(x0)− (G(t)−G(t0)),
dass Φ(t0, x0) = 0 und DxΦ(t0, x0) = H ′(x0) = h(x0) 6= 0. Aufgrund desSatzes uber implizite Funktionen existieren eine Umgebung U0 ⊂ D von x0
und ein offenes Intervall I0 ⊂ I mit t0 ∈ I0, so dass die Gleichung
Φ(t, x) = 0
fur alle t ∈ I0 eine eindeutige Losung x∗(t) ∈ U0 besitzt. Die so gewonneneFunktion x∗ : I0 → U0 ist nach dem Satz uber implizite Funktionen stetigdifferenzierbar und es gilt
H(x∗(t))−H(x0) = G(t)−G(t0) ∀t ∈ I0
mit x∗(t0) = x0. Differenzieren wir die Gleichung nach t, dann erhalten wiraufgrund der Kettenregel, dass
h(x∗(t))x′∗(t) = g(t) ∀t ∈ I0,
115

d.h. x∗ ist eine lokale Losung des Anfangswertproblems fur (t0, x0). Aufgrunddes Hauptsatzes der Differential- und Integralrechnung gilt fur diese Losung,dass ∫ x∗(t)
x0
h(ξ) dξ = H(x∗(t))−H(x0) = G(t)−G(t0) =
∫ t
t0
g(s) ds.
Es bleibt die Eindeutigkeit der Losung zu zeigen. Wir nehmen an, dass x ∈C1(I0,U0) irgendeine weitere Losung ist. Dann ist die Funktion
ψ : I0 → Rt 7→ Φ(t, x(t)),
stetig differenzierbar und es gilt aufgrund der Kettenregel, dass
ψ′(t) = DtΦ(t, x(t)) +DxΦ(t, x(t))x′(t)
= −G′(t) +H ′(x(t))x′(t) = −g(t) + h(x(t))g(t)
h(x(t))= 0 ∀t ∈ I0.
Somit ist ψ konstant und wir sehen, dass
Φ(t, x(t)) = ψ(t) = ψ(t0) = Φ(t0, x0) = 0 ∀t ∈ I0.
Aufgrund der Eindeutigkeit der Funktion x∗ mit dieser Eigenschaft ist nunx = x∗. �
Beispiel 4.12. Sei I = R und D = R. Wir betrachten das Anfangswertpro-blem
x′ = t(x2 + 1), x(t0) = x0.
Mit dem Satz 4.10 gilt bei Wahl von h(x) = 11+x2
und g(t) = t fur die Losunglokal um (t0, x0), dass ∫ x(t)
x0
1
1 + ξ2dξ =
∫ t
t0
s ds,
d.h.
arctan(x(t))− arctan(x0) =1
2(t2 − t20),
also
x(t) = tan
(1
2(t2 − t20) + arctan(x0)
).
116

In weitergehenden Vorlesungen zu gewohnlichen Differentialgleichungen oderdynamischen Systemen werden allgemeine Existenz- und Losbarkeitssatze furgewohnliche Differentialgleichungen bewiesen. Hier geben wir nur die Satzeund eine Beweisidee an.
4.3 Existenz einer Losung
Satz 4.13. (Satz von Cauchy-Peano)Sei I ⊂ R ein offenes Intervall, E ein endlich-dimensionaler Banachraumund D ⊂ E offen. Sei f ∈ C(I × D, E). Dann existiert ein α > 0, so dassdas Anfangswertproblem
x′ = f(t, x), x(t0) = x0
auf [t0 − α, t0 + α] mindestens eine Losung besitzt.
Den Beweis findet man u.a. in [Amann: Gewohnliche Differentialgleichungen]auf den Seiten 109-110. Er beruht auf der Konstruktion von stuckweise linea-ren Naherungslosungen mit Hilfe des Eulerschen Polygonzugsverfahrens unddem Nachweis der Konvergenz der Naherungslosungen gegen eine Losung desAnfangswertproblems mit Hilfe des Satzes von Arzela-Ascoli (siehe Anhang).
4.4 Eindeutigkeit einer Losung
Definition 4.14. Sei I ⊂ R, E ein Banachraum und D ⊂ E. Dann heißtf ∈ C(I×D, E) lokal Lipschitz-stetig bezuglich x, falls es zu jedem (t0, x0) ∈I × D eine Umgebung I0 ×D0 von (t0, x0) und ein L > 0 gibt, so dass
‖f(t, x1)− f(t, x2)‖ ≤ L‖x1 − x2‖ ∀t ∈ I0 ∀x1, x2 ∈ D0.
Satz 4.15. (Satz von Picard-Lindelof)Sei I ⊂ R ein offenes Intervall, E ein endlich-dimensionaler Banachraumund D ⊂ E offen. Sei f ∈ C(I × D, E) lokal Lipschitz-stetig bezuglich x.Dann existiert ein α > 0, so dass das Anfangswertproblem
x′ = f(t, x), x(t0) = x0
auf [t0 − α, t0 + α] eine eindeutig bestimmte Losung besitzt.
117
Den Beweis findet man u.a. in [Amann, Escher: Anaysis II] auf den Seiten 244-245. Die Idee des Beweises besteht darin, dass man mit Hilfe des BanachschenFixpunktsatzes zeigt, dass es ein Intervall I0 = [t0 − α, t0 + α] mit α > 0gibt, so dass die Abbildung T : C(I0,D)→ C(I0, E) mit
T (x)(t) := x0 +
∫ t
t0
f(s, x(s)) ds ∀x ∈ C(I,D)∀t ∈ I0
genau einen Fixpunkt besitzt.
118

A Anhang
A.1 Banachscher Fixpunktsatz
Definition A.1. Seien X und Y Mengen mit X ⊂ Y . Sei weiter f : X → Yeine Abbildung. Dann heißt x ein Fixpunkt von F , falls f(x) = x.
Definition A.2. Seien X und Y metrische Raume. Dann heißt eine Abbil-dung f : X → Y kontraktiv bzw. eine Kontraktion, falls es ein c ∈ [0, 1)gibt, so dass
d(f(x1), f(x2) ≤ c d(x1, x2) ∀x1, x2 ∈ X.
Bemerkung A.3. Eine Abbildung f ist genau dann kontraktiv, falls f Lipschitz-stetig mit einer Lipschitz-Konstanten L < 1 ist.
Satz A.4. (Banachscher Fixpunktsatz)Es sei E ein vollstandiger metrischer Raum und X ⊂ E abgeschlossen. Seiweiter f : X → X eine kontraktive Abbildung. Dann gelten folgende Aussa-gen.
(i) f hat genau einen Fixpunkt x∗.
(ii) Die Folge xn := f(xn−1) konvergiert fur jeden Startwert x0 gegen x∗.
(iii) Wenn c eine Kontraktionskonstante von f ist, dann gilt
d(x∗, xn) ≤ cn
1− cd(x1, x0) ∀n ∈ N.
Beweis: Wir zeigen zunachst, dass f hochstens einen Fixpunkt haben kann.Angenommen, wir haben x, y ∈ X mit f(x) = x und f(y) = y. Dann gilt
‖x− y‖ = ‖f(x)− f(y)‖ ≤ c‖x− y‖,
d.h. (1− c)‖x− y| ≤ 0. Da c < 1, so bedeutet dies ‖x− y| = 0, also x = y.
Wir zeigen nun, dass die Folge xn := f(xn−1) fur jeden Startwert x0 konver-giert. Zunachst gilt
d(xm+1, xm) = d(f(xm), f(xm−1) ≤ c d(xm, xm−1) ∀m ∈ N+. (A.1)
119

Induktiv erhalten wir fur alle 0 ≤ k ≤ m, dass
d(xm+1, xm) ≤ cm−k d(xk+1, xk).
Dies ermoglicht uns fur n > k ≥ 0 die Abschatzung
d(xn, xk) ≤n−1∑m=k
d(xm+1, xm) ≤n−1∑m=k
cm−k d(xk+1, xk)
=n−1−k∑l=0
cl d(xk+1, xk) =1− cn−k
1− cd(xk+1, xk).
Aus (A.1) konnen wir noch folgern, dass
d(xk+1, xk) ≤ ck d(x1, x0)
und somit
d(xn, xk) ≤ck − cn
1− cd(x1, x0) ∀ 0 ≤ k < n. (A.2)
Da 0 ≤ c < 1, so ist (xn) eine Cauchy-Folge in X ⊂ E. Da E vollstandig ist,so konvergiert (xn) gegen ein x∗ ∈ E. Da X abgeschlossen ist, so gilt x∗ ∈ X.Mit der Stetigkeit von f erhalten wir
x∗ = limn→∞
xn = limn→∞
f(xn−1) = f( limn→∞
xn−1) = f(x∗),
d.h. f besitzt x∗ als Fixpunkt. Damit sind (i) und (ii) bewiesen. Fur (iii)folgern wir aus (A.2) und der Stetigkeit der Metrik, dass
d(x∗, xk) = d( limn→∞
xn, xk) = limn→∞
d(xn, xk)
≤ limn→∞
ck − cn
1− cd(x1, x0) ≤ ck
1− cd(x1, x0).
�
A.2 Erweiterungssatz fur gleichmaßig stetige Funktio-nen
Satz A.5. (Erweiterungssatz fur gleichmaßig stetige Funktionen)Seien Y und Z metrische Raume und Z zudem vollstandig. Sei X ⊂ Y eine
120

dichte Teilmenge von Y und f : X → Z gleichmaßig stetig. Dann existierteine eindeutig bestimmte, stetige Erweiterung f ∈ C(Y, Z) von f , d.h. f(x) =f(x) fur alle x ∈ X. Die stetige Erweiterung f ist eine gleichmaßig stetigeFunktion, fur die gilt:
f(y) = limn→∞
f(xn) ∀xn ∈ X mit y = limn→∞
xn ∈ Y. (A.3)
Beweis: (i) Wir zeigen zuerst die Eindeutigkeit. Wir nehmen an, dass eszwei stetige Erweiterungen g, h ∈ C(Y, Z) von f gibt. Sei y ∈ Y gegeben. DaX dicht in Y ist, so existiert eine Folge (xn) in X mit limn→∞ xn = y. Da gund h stetig sind, so erhalten wir
g(y) = limn→∞
g(xn) = limn→∞
f(xn) = limn→∞
f(xn) = h(y),
d.h. f = g.
(ii) Wir zeigen nun, dass sich mittels der Gleichung (A.3) eine Funktionf : Y → Z ergibt, d.h. dass sich unabhangig von der Wahl der Folge (xn)mit limn→∞ xn = y immer der gleiche Funktionswert f(y) = limn→∞ f(xn)ergibt. Sei y ∈ Y gegeben und seien (xn) und (x′n) zwei Folgen in X mit
limn→∞
xn = y = limn→∞
x′n.
Wir zeigen zunachst, dass z, z′ ∈ Z existieren mit
limn→∞
f(xn) = z, limn→∞
f(x′n) = z′.
Sei ε > 0 gegeben. Da f gleichmaßig stetig ist, so existiert ein δ > 0 mit
d(f(x), f(x)) < ε ∀x, x mit d(x, x) < δ.
Da (xn) und (x′n) gegen y konvergieren, so existiert ein N ∈ N mit
d(xj, y) <δ
2, d(x′j, y) <
δ
2, ∀j ≥ N.
Daraus folgt, dass
d(xj, xk) ≤ d(xj, y) + d(y, xk) < δ ∀j, k ≥ N
d(x′j, x′k) ≤ d(x′j, y) + d(y, x′k) < δ ∀j, k ≥ N
d(xj, x′k) ≤ d(xj, y) + d(y, x′k) < δ ∀j, k ≥ N
121

und somit haben wir
d(f(xj), f(xk)) < ε ∀j, k ≥ N
d(f(x′j), f(x′k)) < ε ∀j, k ≥ N
d(f(xj), f(x′k)) < ε ∀j, k ≥ N. (A.4)
Dies bedeutet, dass (f(xn)) und (f(x′n)) Cauchy-Folgen in Z sind und auf-grund der Vollstandigkeit von Z gegen ein z ∈ Z bzw. z′ ∈ Z konvergieren.Die Ungleichung (A.4) liefert uns zudem
limj→∞
limk→∞
d(f(xj), f(x′k)) ≤ ε.
d.h. d(z, z′) ≤ ε. Da dies fur alle ε > 0 gilt, so folgt z = z′.
(iii) Die Funktion f ist offenbar eine Erweiterung von f , da fur alle x ∈ Xgilt:
f(x) = limn→∞
f(xn) = f(x), wobei xn := x ∀n ∈ N.
(iv) Wir zeigen schließlich, dass f gleichmaßig stetig und damit insbesondereauch stetig ist. Sei ε > 0. Sei δ > 0 so gewahlt, dass
d(f(x), f(x)) <ε
3∀x, x mit d(x, x) < δ.
Seien y, y′ ∈ Y mit d(y, y′) < δ3. Dann existieren Folgen (xn) und (x′n) in X
mit xn → y und x′n → y′. Daher finden wir ein N > 0, so dass
d(yn, y) <δ
3, d(y′n, y
′) <δ
3∀n ≥ N.
Somit haben wir
d(yN , y′N) ≤ d(yN , y) + d(y, y′) + d(y′, y′N) < δ
d(yn, yN) ≤ d(yn, y) + d(y, yN) < δ
d(y′n, y′N) ≤ d(y′n, y
′) + d(y′, y′N) < δ
fur alle n ≥ N und weiter
d(f(y), f(y′))
≤ d(f(y), f(yN)) + d(f(yN), f(y′N)) + d(f(y′N), f(y′))
≤ limn→∞
d(f(yn), f(yN)) + d(f(yN), f(y′N)) + limn→∞
d(f(y′N), f(y′n))
<ε
3+ε
3+ε
3= ε.
�
122

A.3 Satz von Arzela-Ascoli
Satz A.6. (Satz von Arzela-Ascoli)Sei K ein kompakter metrischer Raum und F ein Banachraum. Sei M ⊂C(K,F ). Dann ist M genau dann relativ kompakt (d.h. M ist kompakt),wenn gilt:
(i) M ist gleichgradig stetig, d.h. zu jedem y ∈ K und jedem ε > 0 existierteine Umgebung V von y ∈ K, so dass
‖f(x)− f(y)‖F < ε ∀x ∈ V ∀f ∈M.
(ii) M(y) := {f(y) | f ∈M} ist fur jedes y ∈ K relativ kompakt in F .
Falls F endlich dimensional ist, so ist M genau dann relativ kompakt, wennM gleichgardig stetig und beschrankt ist.
Einen Beweis findet man u.a. in [Werner: Funktionalanalysis], Seiten 68-70.
123





























