Embed Size (px)
Citation preview
Anhang A 235
werte direkt geliefert werden und somit nicht mehr einer Stellenauslöschung unterliegen. Aus diesem Grund ist die simultane inverse Vektoriteration trotz des komplizierteren Aufbaus und des bedeutend größeren Rechenaufwandes pro Iterationsschritt zu empfehlen, da die raschere Konvergenz den Gesamtrechenaufwand doch nicht zu sehr anwachsen läßt.
AnhangA
Die Methode der konjugierten Gradienten in der Ausgleichsrechnung
A. 1. Vermittelnde Ausgleichung nach der Methode der konjugierten Gradienten. Sowohl im Zusammenhang mit den Relaxationsverfahren als auch mit den Fehlergleichungen wurde der Begriff der Residuen verwendet. Um in der momentanen Verknüpfung der beiden Sachgebiete den Namenkonflikt zu vermeiden, wird folgende Bezeichnung benutzt werden: Es sei V(k) ein Näherungsvektor der gesuchten Lösung x. Unter!(k) verstehen wir den zugehörigen Fehlervektor bezüglich der Fehlergleichungen
CV(k) + d = !(k),
während r(k) den Residuenvektor bezüglich der Normalgleichungen
CT CV(k) + CT d = r(k)
(A.l)
(A. 2)
im üblichen Sinn der Relaxationsrechnung bedeutet. Dann gilt offenbar die Beziehung
(A.3)
Die Elimination der Normalgleichungsmatrix A = CT C im Nenner von qk der Rechenvorschrift (2.96) erfolgt durch die Umformung
(A. 4)
Aus der Rekursionsformel für die Residuenvektoren r(k) in (2.96) wird A eliminiert, indem man zu den Fehlervektoren übergeht. Zu diesem Zweck wird die Rekursionsformel für die Näherungsvektoren in (2.96), das ist V(k) = V(k - 1) + q k p(k),
mit C multipliziert. (A. 5)
Addiert man in (A. 5) auf beiden Seiten den Konstantenvektor d, ergibt sich unter Beachtung von (A. 1) die Rekursionsformel für die Fehlervektoren
(A. 6)
Die Beziehung (A. 3) stellt schließlich den Zusammenhang zwischen den Fehlervektoren und den Residuenvektoren her. Die Residuenvektoren sind ebenfalls mitzuführen, da sie zur Berechnung von ek-l, p(k) und qk benötigt werden.
236 Anhang A
Aus (2.95) und (2.96) resultiert damit der folgende Algorithmus zur Auflösung der Fehlergleichungen Cx + d = fmit Hilfe der Methode der konjugierten Gradienten.
Start: I Wahl von v(o); f(O) = Cv(O) + d
Relaxionsschritt (k = 1,2, ... ):
,(le-l) = C T f(k-l)
(,(k-1), ,(k-l»)
ek-l = (,(k-2), ,(k-2»)
{ _,(k-l)
p(k) _ - _,(k-1) + ek-l p(k-1)
(r(k-1), ,(k-1))
qk = (Cp(k), Cp(k»)
V(k) = V(k-l) + qkP(k)
f(k) =j<k-l) + qk(Cp(k»)
(k ~ 2)
(k = 1)
(k ~ 2)
(A. 7)
(A.8)
In der Rechenvorschrift (A. 7) und (A. 8) sind j<k), d und C p(k) je n-dimensionale Vektoren, ,(k - 1), p(k) und V(k) sind je rn-dimensional.
Man stellt fest, daß pro Relaxationsschritt zwei Operationen Matrix mal Vektor erforderlich sind. Die in der Methode der konjugierten Gradienten benötigte Multiplikation mit A wird jetzt in zwei Teilschritten ausgeführt. Dadurch wird der Rechenaufwand pro Iterationsschritt sogar erhöht, doch muß die Matrix Ader Normalgleichungen nicht explizit berechnet werden. Von Bedeutung sind die Eigenschaften des Rechenprozesses, die sich aus denjenigen der Methode der konjugierten Gradienten ergeben. Eine unmittelbare Folge von Satz 2.13 ist
Satz A. 1. Der Algorithmus (A. 7) und (A. 8) liefert die Lösung der Fehlergleichungen nach höchstens m Schritten.
Ferner gilt
Satz A. 2. Bei Auflösung der Fehlergleichungen der vermittelnden Ausgleichung nach der Methode der konjugierten Gradienten nimmt der Betrag der Fehlervektoren f(k) im strengen Sinn monoton ab.
Beweis: Löst man die Rekursionsformel für die Fehlervektoren j<k) in (A. 8) nachj<k - 1) auf, folgt für das Skalarprodukt
(j(k-1),/(k-ll) = (j(k),j(k») _ 2qk (j(k), Cp(k») + q~ (Cp(k), Cp(k»). (A.9)
Die Methode der konjugierten Gradienten in der Ausgleichsrechnung 237
Da aber nach (A. 3) und weiter nach (2.87)
(f(k), Cp(k») = (cT /(k), p(k») = (,(k), p(k») = 0
ist, verschwindet in (A. 9) das mittlere Glied, und es folgt aus (A. 9)
(f(k),j(k») = (f(k-l),j(k-l)) - tll(Cp(k), Cp(k»). (A. 10)
Solange der Näherungsvektor V(k - 1) =F x ist, ist auch der Residuenvektor ,(k - 1) =F o. Damit ist auch der Relaxationsvektor p(k) =F O. Folglich ist wegen des Maximalrangs von C der Vektor C p(k) =F 0, und da auch qk =F 0 ist, ergibt sich aus (A. 10) die strenge Monotonie von (f(k),j(k») mit zunehmendem k. Die Bedeutung des Satzes A.2 besteht darin, daß der iterative Prozeß auf Grund des Fehlerquadrates (f(k),/(k») eventuell schon vor Ausführung von m Schritten abgebrochen werden kann. Dies ist dann angezeigt, wenn man nur verlangt, daß der Wert von (f(k),j(k») eine gegebene Schranke unterschreitet und man sich mit einer entsprechenden Näherung V(k) für die gesuchte Lösung x zufrieden gibt. Bei der Lösung von größeren Fehlergleichungssystemen der Geodäsie konnte beobachtet werden, daß der minimal mögliche Wert von (/(k), j<k») oft schon nach verhältnismäßig wenig Schritten erreicht wurde, und daß die zugehörige Näherung V(k) die Lösung auch mit hinreichender Genauigkeit darstellte. Diese Tatsache reduziert den totalen Rechenaufwand. Abschließend soll noch auf die praktische Durchführung und die sich daraus ergebenden Konsequenzen eingegangen werden. Es ist nur sinnvoll, die Methode der konjugierten Gradienten zur Lösung der Fehlergleichungen anzuwenden, falls die Matrix C sehr schwach besetzt ist. Dies trifft in den meisten Anwendungen der Geodäsie zu, indem jede Fehlergleichung nur eine sehr beschränkte Anzahl von Unbekannten verknüpft. Um die vielen Nullelemente bei der Berechnung von C p(k) berücksichtigen zu können, ist es vorteilhaft, anstelle der Matrix C beispielsweise zwei Referenzmatrizen zu verwenden, die die Information enthalten, welche Elemente von Null verschieden sind und ihre tatsächlichen Werte. Analog kann man verfahren zur ökonomischen Berechnung von CT j<k - 1). Sind beispielsweise nur 2 % der Elemente von C von Null verschieden, so benötigt die skizzierte kompakte Darstellung von C und CT nur rund 10% des Speicherbedarfs im Vergleich zur vollständigen Matrix C. Durch weitergehende computerorientierte Verfeinerungen läßt sich der Speicherbedarf noch stärker herabsetzen. Unter der Annahme, daß die Anzahl der Fehlergleichungen ungefähr doppelt so groß ist wie die Zahl der Unbekannten, ergibt die Auszählung der multiplikativen Rechenoperationen unter Berücksichtigung der schwachen Besetzung von C einen totalen Aufwand, der nur proportional zu m2 ist. Im Vergleich dazu sind die Methode der Normalgleichungen und die Methode der Orthogonalisierung je m3-Prozesse.
Numerisch vorteilhaft ist zudem die Tatsache, daß die Methode stets mit den gegebenen Zahlwerten der Fehlergleichungen arbeitet. Dadurch werden Rundungsfehler, wie sie bei der Bildung der Normalgleichungen oder im Verlauf der Orthogonalisierung entstehen, vermieden.
238 Anhang A
Schlußfolgerung: Zur Lösung von Fehlergleichungssystemen mit vielen Unbekannten und mit schwach besetzter Matrix C ist die Methode der konjugierten Gradienten den andern Verfahren vorzuziehen.
A. 2. Bedingte Ausgleichung nach der Methode der konjugierten Gradienten. Es ist zweckmäßig, zur Behandlung der bedingten Ausgleichung anstelle des Lösungsvektors x den Korrekturvektor oder Verbesserungsvektor v = x-I als unbekannt zu betrachten. Für diesen Vektor v lauten die Bedingungsgleichungen (3.25)
Pv+w=O, mit w=Pl+q.
Die Korrelatengleichungen (3.27) werden damit
v = pT t,
und die Normalgleichungen für den Korrelatenvektor t lauten
ppT t + w = 0.
(A. 11)
(A. 12)
(A. 13)
Die Methode der konjugierten Gradienten zur Lösung der Normalgleichungen (A. 13) liefert einen Prozeß zur iterativen Berechnung von Näherungen t(k) des Korrelatenvektors t und über die Korrelatengleichungen (A. 12) zur Berechnung von Näherungen V(k) des Korrekturvektors v. Man beachte, daß jetzt V(k) eine Näherung für v bedeutet! Der Residuenvektor ,(k) ist gegeben durch
,(k) = P pT t(k) + w.
Mit Hilfe des Zusammenhangs
ergibt sich aus (A. 14) und (A. 15) die Relation
,(k) = PV(k) + w
zwischen der Näherung V(k) und dem Residuenvektor ,(k).
(A. 14)
(A. 15)
(A. 16)
Die Elimination der Normalgleichungsmatrix A = P pT aus dem Nenner von qk der Rechenvorschrift (2.96) erfolgt analog wie oben. Weiter folgt aus der jetzt für t(k) zu formulierenden Rekursionsformel
(A. 17)
nach Multiplikation mit pT gemäß (A. 15) die zugehörige Rekursionsformel für die Näherungen V(k)
(A. 18)
Zusammenfassend ergibt sich zur Lösung der bedingten Ausgleichung P v + w = 0, (v, v) = Minimum nach der Methode der konjugierten Gradienten der nachfolgende Algorithmus.
Die Methode der konjugierten Gradienten in der Ausgleichsrechnung 239
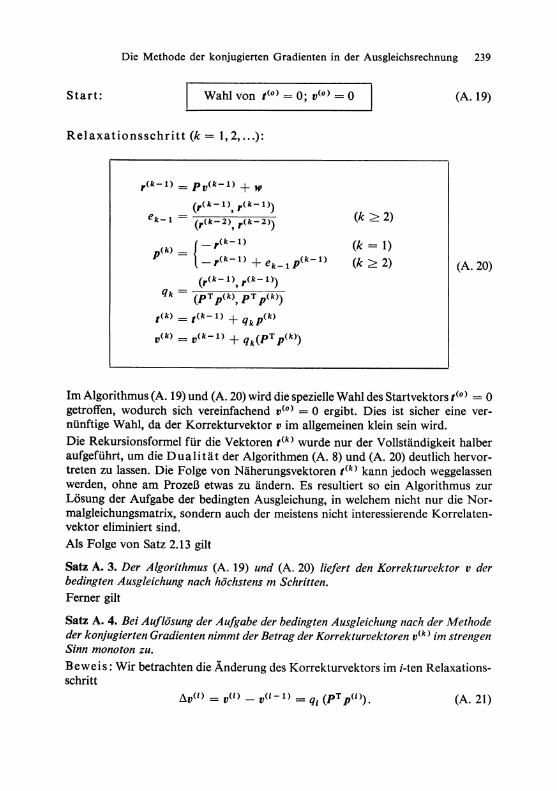
Start: Wahl von t(o) = 0; 1)(0) = 0
Relaxationsschritt (k = 1,2, ... ):
,(k-l) = PV(k-l) + W
(,("-0, ,(k-O)
ek-l = (,(k-2), ,(1' 2»
{ _ ,(k-O
p(k) _ - _,(k-O + e,,_IP(k-O
(,(1<-0, ,(1<-1»
qk = (pT p(k), pT p(k»
t(k) = t(k-l) + qkP(k)
V(k) = V(k-O + qk(pT p(k»
(k ~ 2)
(k = 1)
(k ~ 2)
(A.19)
(A.20)
Im Algorithmus (A. 19) und (A. 20) wird die spezielle Wahl des Startvektors t(o) = 0 getroffen, wodurch sich vereinfachend 1)(0) = 0 ergibt. Dies ist sicher eine vernünftige Wahl, da der Korrekturvektor I) im allgemeinen klein sein wird. Die Rekursionsformel für die Vektoren t(k) wurde nur der Vollständigkeit halber aufgeführt, um die Dualität der Algorithmen (A. 8) und (A. 20) deutlich hervortreten zu lassen. Die Folge von Näherungsvektoren t(k) kann jedoch weggelassen werden, ohne am Prozeß etwas zu ändern. Es resultiert so ein Algorithmus zur Lösung der Aufgabe der bedingten Ausgleichung, in welchem nicht nur die Normalgleichungsmatrix, sondern auch der meistens nicht interessierende Korrelatenvektor eliminiert sind. Als Folge von Satz 2.13 gilt
Satz A. 3. De, Algorithmus (A. 19) und (A. 20) liefert den Korrekturvektor v der bedingten Ausgleichung nach höchstens m Schritten. Ferner gilt
Satz A. 4. Bei Auflösung der Aufgabe der bedingten Ausgleichung nach der Methode der konjugierten Gradienten nimmt der Betrag der Korrekturvektoren V(k) im strengen Sinn monoton zu.
Beweis: Wir betrachten die Änderung des Korrekturvektors im i-ten Relaxationsschritt
(A. 21)

240 Anhang B
Da die Relaxations vektoren p(i) paarweise konjugiert sind, sind also die Änderungen ßv(i) gemäß
(ßv(i), ßv(j») = q! qj (pT p(i), pT p(j») = qi qj (p(i), ppT p(j)) = 0 (A. 22)
für i =1= j
paarweise orthogonal. Die k-te Näherung V(k) läßt sich aber formal als endliche Summe aus v(o) = 0 und den k Änderungsvektoren ßv(l), ßV(2), •.. , ßV(k)
darstellen als k k
V(k) = v(o) + L ßv(i) = L ßv(i). (A. 23) ;=1 ;=1
Infolge der paarweisen Orthogonalität (A. 22) ist deshalb
(V(k), V(k») = (tl ßv(i), ;tl ßV(i))
k k (A. 24) = L (ßv(i), ßv(i)) = L q~ (pT pm, pT p(i)).
;=1 ;=1
Der Wert von (V(kl, V(k») ist in der Tat mit wachsendem k streng zunehmend, da die Summanden in (A. 24) nach analoger Schlußweise wie oben wesentlich positive Größen sind, solange die Lösung v noch nicht erreicht ist. Die in A. 1 gemachten Feststellungen und Bemerkungen zum Verfahren übertragen sich sinngemäß.
Anhang B
Aufgaben
Aufgabe 1.1. [zu 1.1] Sind die drei Vektoren des vierdimensionalen Vektorraums linear unabhängig?
Aufgabe 1.2. [zu 1.1] Welches sind die Winkel 'P zwischen den Vektoren von Aufgabe 1.1?
Aufgabe 1.3. [zu 1.1] Es seien b l , b2 , ... , b. orthonormierte Vektoren in Vn . Man zeige, daß die Koordinaten eines beliebigen Vektors x aus Vn bezüglich der Basis der bi gegeben sind durch
Ci = (bi' x).
Aufgaben 241
Aufgabe 1.4. [zu 1.1] Wie lautet die Matrix der linearen Transformation, die der Drehung des V3 um die y-Achse um den Winkel !p entspricht?
Aufgabe 1.5. [zu 1.1] Man beweise die Invarianz der Eigenwerte einer Matrix bei einer Ähnlichkeitstransformation. Wie transformieren sich die Eigenvektoren ?
Aufgabe 1.6. [zu 1.2] Man zeige, daß die Matrixnormen (1.43) und (1.44) die Eigenschaft (1.41) besitzen.
Aufgabe 1.7. [zu 1.2] Welches sind die den Vektornormen (1.34) und (1.35) untergeordneten Matrixnormen ?
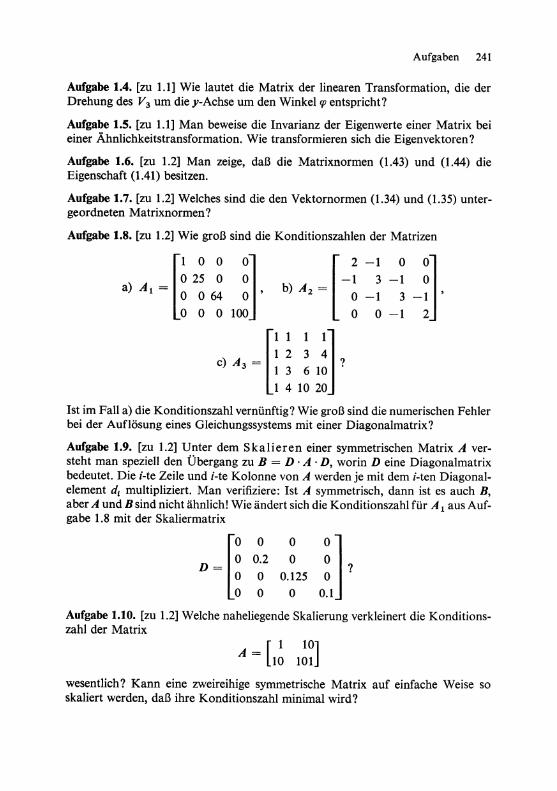
Aufgabe 1.8. [zu 1.2] Wie groß sind die Konditionszahlen der Matrizen
[
1 0 0
) A=0250 a 1 0 0 64
000
~] , 100
[ 2 -1 0 0] -1 3 -1 0
b) A 2 = 0 -1 3 -1 '
o 0 -1 2
_1234? [1 1 1 1]
c) A 3 - 1 3 6 10 .
1 4 10 20
Ist im Fall a) die Konditionszahl vernünftig? Wie groß sind die numerischen Fehler bei der Auflösung eines Gleichungssystems mit einer Diagonalmatrix?
Aufgabe 1.9. [zu 1.2] Unter dem Skalieren einer symmetrischen Matrix A versteht man speziell den Übergang zu B = D . A . D, worin Deine Diagonalmatrix bedeutet. Die i-te Zeile und i-te Kolonne von A werden je mit dem i-ten Diagonalelement d, multipliziert. Man verifiziere: Ist A symmetrisch, dann ist es auch B, aber A und B sind nicht ähnlich! Wie ändert sich die Konditionszahl für Al aus Aufgabe 1.8 mit der Skaliermatrix
[0 0 0 0]
D = 0 0.2 0 O? o 0 0.125 0 .
o 0 0 0.1
Aufgabe 1.10. [zu 1.2] Welche naheliegende Skalierung verkleinert die Konditionszahl der Matrix
[ 1 10] A = 10 101
wesentlich? Kann eine zweireihige symmetrische Matrix auf einfache Weise so skaliert werden, daß ihre Konditionszahl minimal wird?
242 Anhang B
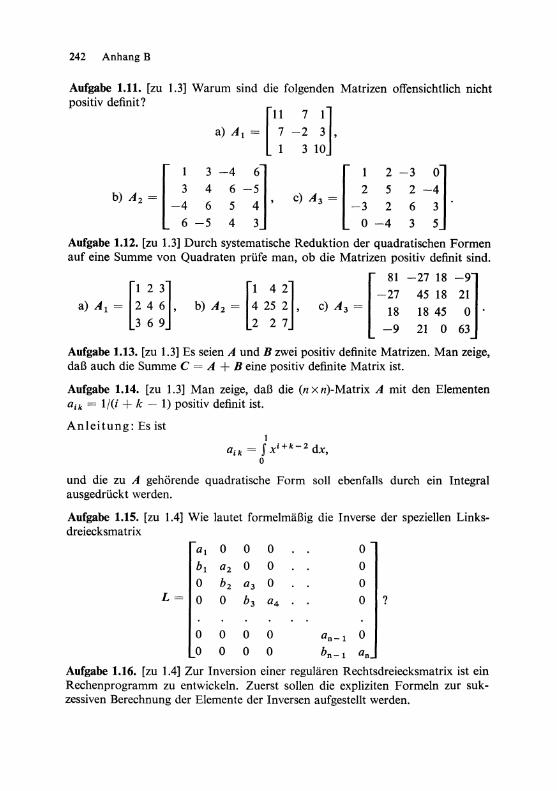
Aufgabe 1.11. [zu 1.3] Warum sind die folgenden Matrizen offensichtlich nicht positiv definit?
[11
a) Al = ; 7 1]
-2 3 ,
3 10
b) A 2 = [_! : -; -11, c) A, - [_~ ~ -~ -:].
6 -5 4 3J 0 -4 3 5
Aufgabe 1.12. [zu 1.3] Durch systematische Reduktion der quadratischen Formen auf eine Summe von Quadraten prüfe man, ob die Matrizen positiv definit sind.
[1 2 3] a) Al = 2 4 6 ,
369
[1 4 2] b) A 2 = 4 25 2 ,
2 2 7
[
81 -27 18 -9
J -27 45 18 21 c) A 3 = 18 18 45 0 .
-9 21 0 63
Aufgabe 1.13. [zu 1.3] Es seien A und B zwei positiv definite Matrizen. Man zeige, daß auch die Summe C = A + B eine positiv definite Matrix ist.
Aufgabe 1.14. [zu 1.3] Man zeige, daß die (n x n)-Matrix A mit den Elementen aik = 1/(i + k - 1) positiv definit ist.
Anleitung: Es ist 1
aik = S X i + k - 2 dx, o
und die zu A gehörende quadratische Form soll ebenfalls durch ein Integral ausgedrückt werden.
Aufgabe 1.15. [zu 1.4] Wie lautet formelmäßig die Inverse der speziellen Linksdreiecksmatrix
al 0 0 0 0
bl a2 0 0 0
0 b2 a3 0 0 L= 0 0 b3 a4 0 ?
o 0 0 0 an-l 0 o 0 0 0 bn - l an
Aufgabe 1.16. [zu 1.4] Zur Inversion einer regulären Rechtsdreiecksmatrix ist ein Rechenprogramm zu entwickeln. Zuerst sollen die expliziten Formeln zur sukzessiven Berechnung der Elemente der Inversen aufgestellt werden.
Aufgabe 1.17. [zu 1.4] Man löse das System Ax + b = 0
4Xl - 2X2 + 6X3 - 10 = 0
-2Xl + 17x2 + X3 - 39 = 0
6Xl + X2 + 19x3 - 53 = 0
Aufgaben 243
nach der Methode von Cholesky. Anschließend berechne man die Diagonalelemente der Inversen A - 1.
Aufgabe 1.18. [zu 1.4] Lösung der Bandgleichungen nach Cholesky:
Xl + 2x2 - X3 + 2=0
2xl + 8X2 + 4X3 - 2X4 + 10 = 0
-Xl + 4x2 + 19x3 + 9X4 - 3xs - 35 = 0
- 2X2 + 9X3 + 26x4 + 5xs - 3X6 - 47 = 0
- 3X3 + 5X4 + 14xs + X6 + 34 = 0
- 3X4 + Xs + 6X6 + 3 = 0
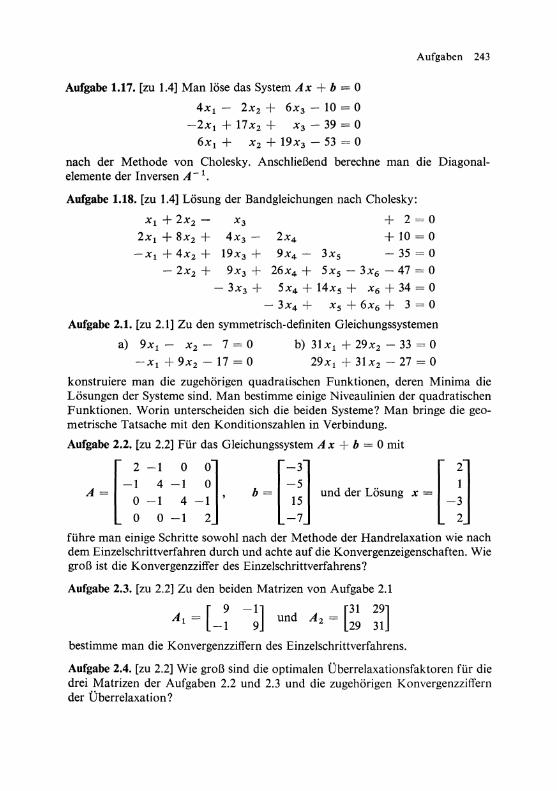
Aufgabe 2.1. [zu 2.1] Zu den symmetrisch-definiten Gleichungssystemen
a) 9Xl - X2 - 7 = 0 b) 31xl + 29x2 - 33 = 0
-Xl + 9X2 - 17 = 0 29x l + 31x2 - 27 = 0
konstruiere man die zugehörigen quadratischen Funktionen, deren Minima die Lösungen der Systeme sind. Man bestimme einige Niveaulinien der quadratischen Funktionen. Worin unterscheiden sich die bei den Systeme? Man bringe die geometrische Tatsache mit den Konditionszah1en in Verbindung.
Aufgabe 2.2. [zu 2.2] Für das Gleichungssystem A x + b = 0 mit
A = -1 4 -1 0 r 2 -1 0 01 o -1 4 -1 ' o 0 -1 2
führe man einige Schritte sowohl nach der Methode der Handrelaxation wie nach dem Einzelschrittverfahren durch und achte auf die Konvergenzeigenschaften. Wie groß ist die Konvergenzziffer des Einzelschrittverfahrens?
Aufgabe 2.3. [zu 2.2] Zu den beiden Matrizen von Aufgabe 2.1
Al = [_~ -~] und A 2 = [~~ ~~] bestimme man die Konvergenzziffern des Einzelschrittverfahrens.
Aufgabe 2.4. [zu 2.2] Wie groß sind die optimalen Überrelaxationsfaktoren für die drei Matrizen der Aufgaben 2.2 und 2.3 und die zugehörigen Konvergenzziffern der Überrelaxation ?
244 Anhang B
Aufgabe 2.5. [zu 2.2] Für das Gleichungssystem
31 Xl + 29x2 - 33 = 0
29xI + 31x2 - 27 = 0
studiere man numerisch das Konvergenzverhalten für verschiedene Überrelaxationsfaktoren in der Nähe des optimalen Wertes, und man berechne die zugehörigen Konvergenzradien. Vergleich der numerisch festgestellten Konvergenzgeschwindigkeit mit den theoretisch erwarteten Werten.
Aufgabe 2.6. [zu 2.3] Die beiden symmetrisch-definiten Gleichungssysteme von Aufgabe 2.1 löse man sowohl nach der Methode des stärksten Abstiegs als auch nach dem Gesamtschrittverfahren. Durch graphische Darstellung der Näherungspunkte und der Relaxationsrichtungen mache man sich ein anschauliches Bild vom Konvergenzverhalten der beiden Verfahren.
Aufgabe 2.7. [zu 2.3] Man beweise auf Grund des Spektralradius, daß das Gesamtschrittverfahren für ein symmetrisch-definites Gleichungssystem in zwei Unbekannten immer konvergiert. Diese Aussage gilt für Systeme in mehr Variablen nicht!
Aufgabe 2.8. [zu 2.3] Man zeige, daß das Gesamtschrittverfahren für alle Werte von a, für welche die Matrix
../2 2
a
A= ../2
1 ../2
2 2 ../2
a 2
positiv definit ist, divergiert.
Aufgabe 2.9. [zu 2.4] Die Gleichungssysteme der Aufgaben 2.2 und 2.5 sind nach der Methode der konjugierten Gradienten zu lösen. Man prüfe die Orthogonalitätseigenschaften der Residuenvektoren (Rechenkontrolle!).
Aufgabe 2.10. [zu 2.4] Im Fall des Systems der Aufgabe 2.5 führe man die Rechnung konsequent mit vier wesentlichen Dezimalstellen durch. Welches ist die Näherung nach zwei Schritten, falls man vom Nullpunkt ausgeht? Wie groß ist die Abweichung von der exakten Lösung und wie groß ist der Residuenvektor?
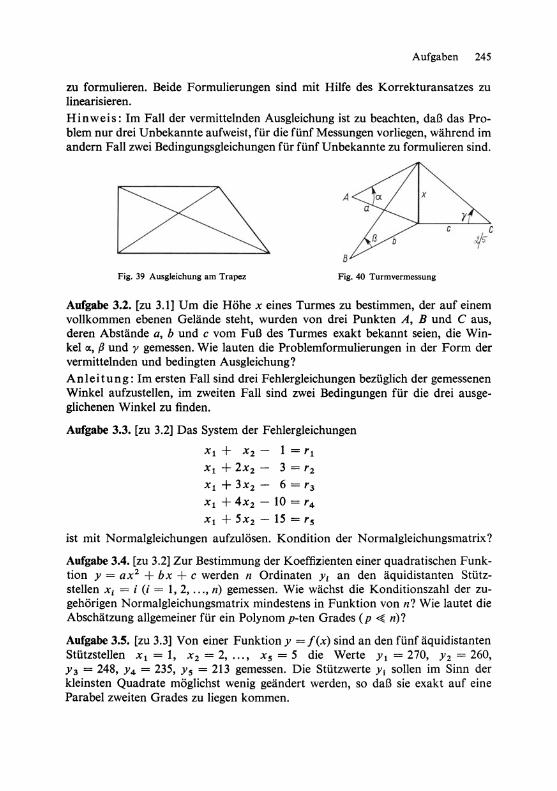
Aufgabe 3.1. [zu 3.1] In einem rechtwinkligen Trapez wurden folgende Elemente gemessen: Längere parallele Seite 6 cm, kürzere parallele Seite 4 cm, dazu senkrechte Seite 2.5 cm, längere Diagonale 6.5 cm und kürzere Diagonale 4.7 cm. Die Aufgabe ist sowohl in der Form der vermittelnden wie der bedingten Ausgleichung
Aufgaben 245
zu formulieren. Beide Formulierungen sind mit Hilfe des Korrekturansatzes zu linearisieren. Hinweis: Im Fall der vermittelnden Ausgleichung ist zu beachten, daß das Problem nur drei Unbekannte aufweist, für die fünf Messungen vorliegen, während im andern Fall zwei Bedingungsgleichungen für fünf Unbekannte zu formulieren sind.
A
B
Fig. 39 Ausgleichung am Trapez Fig. 40 Turmvermessung
Aufgabe 3.2. [zu 3.1] Um die Höhe x eines Turmes zu bestimmen, der auf einem vollkommen ebenen Gelände steht, wurden von drei Punkten A, Bund C aus, deren Abstände a, bund c vom Fuß des Turmes exakt bekannt seien, die Winkel oe, ß und y gemessen. Wie lauten die Problemformulierungen in der Form der vermittelnden und bedingten Ausgleichung? Anleitung: Im ersten Fall sind drei Fehlergleichungen bezüglich der gemessenen Winkel aufzustellen, im zweiten Fall sind zwei Bedingungen für die drei ausgeglichenen Winkel zu finden.
Aufgabe 3.3. [zu 3.2] Das System der Fehlergleichungen
Xl + X2 - 1 = rl
Xl + 2X2 - 3 = r2
Xl + 3X2 - 6 = r3
Xl+ 4x2- 10 =r4
Xl + 5X2 - 15 = rs
ist mit Normalgleichungen aufzulösen. Kondition der Normalgleichungsmatrix?
Aufgabe 3.4. [zu 3.2] Zur Bestimmung der Koeffizienten einer quadratischen Funktion Y = ax2 + bx + ewerden n Ordinaten YI an den äquidistanten StützsteIlen XI = i (i = 1,2, ... , n) gemessen. Wie wächst die Konditionszahl der zugehörigen Normalgleichungsmatrix mindestens in Funktion von n? Wie lautet die Abschätzung allgemeiner für ein Polynom p-ten Grades (p ~ n)?
Aufgabe 3.5. [zu 3.3] Von einer Funktion Y = f(x) sind an den fünf äquidistanten Stützstellen Xl = 1, X2 = 2, ... , X5 = 5 die Werte Yl = 270, Y2 = 260, Y3 = 248, Y4 = 235, Y5 = 213 gemessen. Die Stützwerte Yi sollen im Sinn der kleinsten Quadrate möglichst wenig geändert werden, so daß sie exakt auf eine Parabel zweiten Grades zu liegen kommen.

246 Anhang B
Anleitung: Für je vier aufeinanderfolgende Stützwerte muß die dritte Differenz Yi - 3 Y t - 1 + 3 Yi - 2 - Yi _ 3 = 0 sein. Dies liefert zwei Bedingungsgleichungen.
Wie lautet das dazu duale Problem?
Aufgabe 3.6. [zu 3.4] Das Fehlergleichungssystem von Aufgabe 3.3 ist nach der Methode der Orthogonalisierung zu lösen.
Aufgabe 3.7. [zu 3.4] Das Problem der bedingten Ausgleichung von Aufgabe 3.5 ist mit der Orthogonalisierungsmethode zu behandeln.
Aufgabe 3.8. [zu 3.4] Das Fehlergleichungssystem
1.07Xl + 1.10X2 - 2.80 = rl
1.07x1 + 1.11x2 - 2.70 = r2
1.07x1 + 1.15X2 - 2.50 = r3
ist unter Verwendung einer dreisteIligen Genauigkeit sowohl nach der Methode der Normalgleichungen als auch nach der Orthogonalisierung zu lösen. Alle auftretenden Zahl werte sind auf drei wesentliche Ziffern zu runden.
Beispiel: 1.072 + 1.072 + 1.072 = 1.14 + 1.14 + 1.14 = 3.42. Man zeige, daß die so entstehende Normalgleichungsmatrix numerisch indefinit ist! Die Orthogonalisierung liefert dagegen ein brauchbares Resultat.
Aufgabe 3.9. [zu 3.4] Die Lösung x der Fehlergleichungen Cx + d = r kann auf Grund der Methode der Orthogonalisierung nach (3.51) und (3.48) direkt durch den Konstantenvektor d ausgedrückt werden als
x = _R- 1 -/= _R- 1 'ST ·d.
Die Matrix C+ = R- 1 • ST heißt Pseudoin verse von C, indem sie ja formal die Lösung der Fehlergleichungen liefert. Man verifiziere, daß C+ C = I (Einheitsmatrix der Ordnung m) ist. Wie lautet die Pseudoinverse C+ für das Fehlergleichungssystem von Aufgabe 3.3? Mit ihr ist die Lösung x zu berechnen.
Aufgabe 3.10. [zu 3.5] Das System von Fehlergleichungen, das typisch ist für eine Ausgleichung der Geodäsie, ist nach der Methode der konjugierten Gradienten zu behandeln.
Xl - 0.1 =/1 Xl - X 2 + 0.2 = 12
X2 - X3 - 0.3 = 13
X3 - X4 + 0.4 = 14
X3 + 0.1 =/5 X4 - 0.2 =/6
+ X4 - 0.3 =/7

Aufgaben 247
Man achte auf die Monotonieeigenschaft des Betrages der Fehlervektoren. Was für eine Beobachtung in Bezug auf die Residuenvektoren kann dabei gemacht werden? Wieviele Schritte führen praktisch zum Resultat?
Aufgabe 3.11. [zu 3.5] Die Ausgleichung des Gravitationsfeldes der Erde in seiner einfachsten Form führt auf das folgende Problem: Um die Gravitation an einer Reihe von m Punkten zu bestimmen, werden n Dif-ferenzen der Erdanziehung zwischen je zwei Punktepaaren gemessen. In einem Punkt A des Netzes ist die Erdanziehung als bekannt vorauszusetzen. Für die gemessenen Differenzwerte soHen zufäHig gewählte Zahlen zwischen -1 und + 1 verwendet werden. Für das Netz der Figur 41 sind die Fehlergleichungen (29 Gleichungen in 15 Unbekannten) aufzusteHen und dieselben sollen mit Hilfe eines Computers nach der Methode der konjugierten Gradienten gelöst werden, wobei die vielen NuHe1emente mit Referenzmatrizen berücksichtigt werden soHen. Die Iteration ist abzubrechen, sobald der Wert von (fk,j~) über drei Iterationen nicht mehr abnimmt. Zahl der benötigten Iterationen?
8 13
14
Fig.41 Netz des Gravitationsfeldes
Aufgabe 4.1. [zu 4.1] Wie lautet das Eigenwertproblem eines Systems mit drei Freiheitsgraden, dessen potentieHe und kinetische Energie durch folgende Ausdrücke der Lagekoordinaten qk gegeben sind:
U = 9qr + 6q1 q2 + 6q1 q3 + 17q~ + lOq2 q3 + 27qL
T = 4q1 + 9q~ + 16qi.
Aufgabe 4.2. [zu 4.1] Desgleichen für
U = 8qr + 2q1 q2 - 4q1 q3 + 20q~ + 6q2 q3 + 15qi,
T = 4qr + 2q1 q2 + lOq~ + 4q2 q3 + 15qi·
Aufgabe 4.3. [zu 4.2] Man bestimme in erster Näherung die Änderung der Nu IIstellen des Polynoms Z4 - 130z3 + 3129z2 - 13100z + 10000 (NuHstellen z 1 = 1, z 2 = 4, z 3 = 25, Z4 = 100), falls ein einziger Koeffizient eine relative Änderung um 10- 5 erfährt. WeIche Nullstelle ist am empfindlichsten?
Aufgabe 4.4. [zu 4.2] Gleiches Problem wie in Aufgabe 4.3 für das Polynom Z8 - 130z6 + 3129z4 - 13100z2 + 10000, falls einer der von Null verschiedenen Koeffizienten relativ um 10- 5 geändert wird.
Aufgabe 4.5. [zu 4.4] Wie lautet die zu
[-; -2 1 -:] 10 -3 A=
1 -3 20 -1 4 9 30

248 Anhang B
ähnliche Matrix, falls A einer (2, 4)-Drehung mit dem Winkel Cf! = rr/2 unterworfen wird? Wirkung dieser Transformation?
Aufgabe 4.6. [zu 4.4] Die Matrizen
sind nach der Methode von Jacobi auf Diagonalform zu transformieren. Wie lauten die Transformationsmatrizen und welches sind die Eigenwerte und Eigenvektoren?
Aufgabe 4.7. [zu 4.4] Um den Suchprozeß des klassischen Jacobi-Verfahrens abzukürzen, kann die Methode wie folgt modifiziert werden: Man bildet die Summen Si der Quadrate der Elemente jeder Zeile je ohne das Diagonalelement
n
Si = L a'b, (i = 1,2, ... , n). j~l
Hi n
Offenbar gilt S(A) = L SI' Auf welche einfache Art transformieren sich die i~l
Zeilensummen Si bei einer (p, q)-Rotation? Zur Bestimmung des Pivotelementes der Rotation wird nun das absolut größte Außendiagonalelement apq (= aqp !) aus jener Zeile p mit dem größten Wert sp bestimmt, wozu nur etwa 2n Vergleiche nötig sind. Man verzichtet also darauf, in jedem Schritt das wirklich absolut größte Außendiagonalelement zu ermitteln. Man beweise die Konvergenz dieses modifizierten Jacobi-Verfahrens. Zu diesem Verfahren soll ein Rechenprogramm erstellt werden.
Aufgabe 4.8. [zu 4.4] Mit weIcher Genauigkeit stellen die Diagonalelemente von
[
5 10- 4
A-- 2.10- 4
2.10- 4
10- 4 2.10- 4 2.10- 4 ]
-9 10- 5 10- 5
10- 5 10 10- 6
10- 5 10- 6 8
die Eigenwerte dar? Welches sind die Abschätzungen mit Hilfe des Gerschgorinsehen Kreisesatzes (siehe 4.5.4)?
Aufgabe 4.9. [zu 4.5] Die Matrix
A~n 4 3] 15 10 10 20
ist sowohl nach der Methode von Givens als auch von Householder auf tridiagonale Form zu transformieren. Wie lauten die Transformationsmatrizen U und die
Aufgaben 249
tridiagonalen Matrizen? Man verifiziere an diesem Beispiel, daß die resultierenden Matrizen im wesentlichen übereinstimmen.
Aufgabe 4.10. [zu 4.5] Man zeige, daß jede tridiagonale Matrix der Ordnung n
J=
al b1
Cl a2 b2
C2 a3 b3
Cn - 2 an - 1 bn - 1
Cn -1 an
mit der Eigenschaft bl • CI > 0 (i = 1,2, '" ,n - 1) reelle Eigenwerte besitzt. Hinweis: J ist ähnlich zu einer symmetrischen tridiagonalen Matrix, d. h. J ist symmetrisierbar.
Aufgabe 4.11. [zu 4.5] Im Zusammenhang mit der Latteninterpolation treten tridiagonale Matrizen der Form
J=
2 1 4 1
4
4 2
von hoher Ordnung n auf. Welches sind die unteren und oberen Schranken der Eigenwerte auf Grund des Gerschgorinschen Kreisesatzes ? Wie groß ist demnach unabhängig von der Ordnung n die Konditionszahl der Matrix J höchstens? Im Fall n = 4 führe man nach dem Verfahren der Bisection fünf Schritte zur Eingrenzung des kleinsten Eigenwertes durch.
Aufgabe 4.12. [zu 4.5] Sollen alle Eigenwerte einer tridiagonalen Matrix nach der Methode der Bisection berechnet werden, kann die totale Zahl der Intervallhalbierungen verkleinert werden, indem die Information über die Lage der noch nicht bestimmten Eigenwerte auf Grund der Zahl der Vorzeichenwechsel laufend verarbeitet wird, so daß als Startwerte für die Eigenwerte bei fortschreitender Rechnung engere Grenzen verwendet werden können. Man entwickle ein Rechenprogramm, welches die laufend anfallende Information zur Eingrenzung der Eigenwerte auswertet und die Schranken ständig verbessert. Die Intervallhalbierungen sind zu stoppen, sobald die Schranken absolut genommen eng genug sind.
Aufgabe 4.13. [zu 4.5] Für tridiagonale Matrizen sehr hoher Ordnung können die Werte der Rekursionspolynome fk (A) entweder sehr groß oder auch sehr klein
250 Anhang B
werden, so daß im Rechenautomaten Überfluß oder Unterfluß möglich ist. Um dies einzusehen studiere man das Verhalten der Reursionspolynome für eine Matrix J der Ordnung n = 50 aus Aufgabe 4.11 für A = 1 und A = 6. Durch welche Modifikation des Verfahrens kann diese Schwierigkeit behoben werden (vgI. dazu [88])?
Aufgabe 4.14. [zu 4.6] Für die Matrix
A~H führe man mindestens zwei Schritte des LR-Cholesky-Verfahrens durch.
Aufgabe 4.15. [zu 4.6] Der kleinste Eigenwert der Matrix A von Aufgabe 4.14 ist A3 (A) = 1.5762. Was passiert, falls vor der ersten Zerlegung eine Koordinatenverschiebung um y = 1.55, resp. um y = 1.60 ausgeführt wird? Im ersten Fall führe man zwei bis drei LR-Cholesky-Schritte durch. Man vergleiche mit den entsprechenden Resultaten von Aufgabe 4.14 und man achte insbesondere auf das Element aW (Rechenschiebergenauigkeit genügt). Welches ist der Konvergenzquotient, mit welchem das Element aW gegen Null konvergiert (A 2 (A) ~ 17.30)?
Aufgabe 4.16. [zu 4.6] Zur Bestimmung des kleinsten Eigenwertes von
führe man einige QD-Schritte a) ohne Koordinatenverschiebung, b) mit einer einzigen ersten Koordinatenverschiebung mit der in Aufgabe 4.11 gefundenen unteren Schranke y = 1.3125, c) mit versuchsweisen Koordinatenverschiebungen auf Grund von q"4) nach einem selbst gewählten Schema durch. Wie ist das Konvergenzverhalten in den drei Fällen?
Aufgabe 4.17. [zu 4.6] Die Nullstellen des Polynoms P4(X) = x4 - 12x3 + 49x2
- 80x + 45 sind mit Hilfe des QD-Algorithmus zu berechnen.
Aufgabe 4.18. [zu 4.6] Auf Grund der in Aufgabe 2.9 erhaltenen Zahlwerte der qk
und ek bei der Auflösung des linearen Gleichungssystems von Aufgabe 2.2 bestimme man den kleinsten Eigenwert der Koeffizientenmatrix A der Aufgabe 4.16. Wie gut ist die Übereinstimmung mit dem in Aufgabe 4.16 gefundenen Wert, falls die Methode der konjugierten Gradienten mit einer kleinen Stellenzahl (z. B. 5 bis 6 wesentlichen Ziffern) durchgeführt wird?
Aufgaben 251
Aufgabe 4.19. [zu 4.7] Zur Matrix J von Aufgabe 4.16 bestimme man
a) den größten Eigenwert und den zugehörigen Eigenvektor durch klassische Vektoriteration ; b) den kleinsten Eigenwert und den zugehörigen Eigenvektor einmal durch eine Spektraltransformation und nachfolgende klassische Vektoriteration und einmal durch inverse Vektoriteration. Vergleich der Konvergenzgeschwindigkeit.
Aufgabe 4.20. [zu 4.8] Im allgemeinen Eigenwertproblem (A - Ä B) x = 0 seien A und B symmetrische und positive definite Bandmatrizen hoher Ordnung n und von relativ kleiner Bandbreite m. Bei Rückführung auf das spezielle Eigenwertproblem (C - Ä I) y = 0 mit symmetrischer Matrix C geht die Bandgestalt verloren! Auf das spezielle Eigenwertproblem (C - Ä I) y = 0 soll die inverse Vektoriteration zur Bestimmung der kleinsten Eigenwerte und der zugehörigen Eigenvektoren so angewendet werden, daß von der BandgestaIt der Matrizen A und B wesentlichen Gebrauch gemacht wird.
Hinweis: Die Matrix C darf nur formal verwendet werden, jedoch sollen die Cholesky-Zerlegungen von A und B geeignet benützt werden.
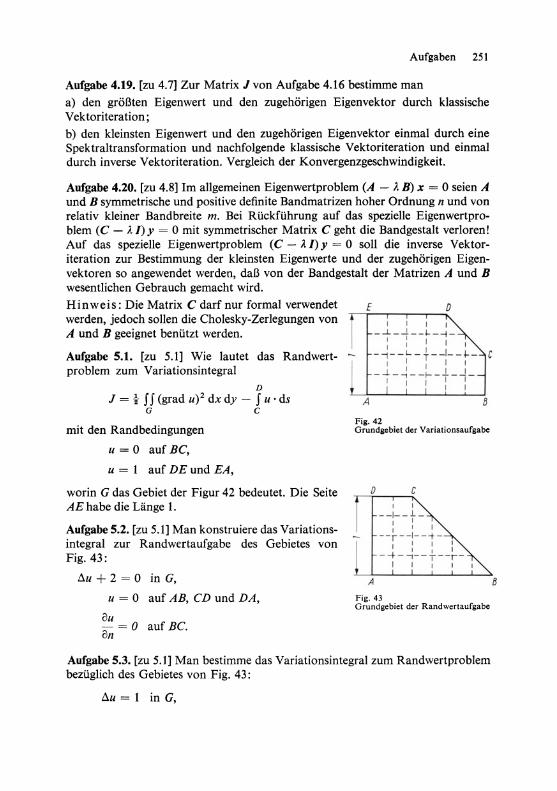
Aufgabe 5.1. [zu 5.1] Wie lautet das Randwertproblem zum Variationsintegral
D
J = t H (grad U)2 dx dy - S U· ds G C
mit den Randbedingungen
U = 0 auf BC,
U = 1 auf DEund EA,
worin G das Gebiet der Figur 42 bedeutet. Die Seite AE habe die Länge 1.
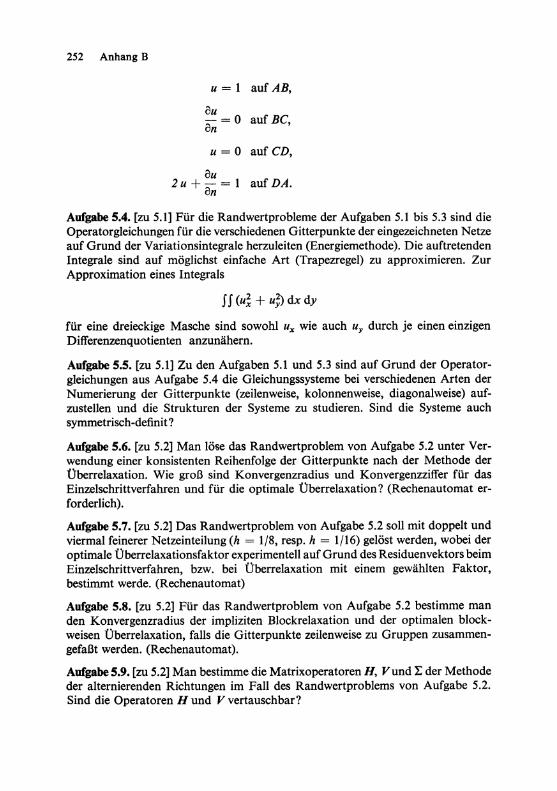
Aufgabe 5.2. [zu 5.1] Man konstruiere das Variationsintegral zur Randwertaufgabe des Gebietes von Fig.43:
llu + 2 = 0 in G,
u = 0 auf AB, CD und DA,
OU - = 0 auf Be. an
E D I I I I
_...L_...! __ I-_-j_
: : I I I
- ,- - L- + - -1- - +- - C I I I I I
_..L_~_+_.l_.J_ I I I : :
ß
Fig.42 Grundgebiet der Variationsaufgabe
Fig.43 Grundgebiet der Randwertaufgabe
Aufgabe 5.3. [zu 5.1] Man bestimme das Variationsintegral zum Randwertproblem bezüglich des Gebietes von Fig. 43:
llu = 1 in G,
B
252 Anhang B
U = 1 auf AB,
ou - = 0 auf BC, on u = 0 auf CD,
ou 2 u + - = 1 auf DA. on
Aufgabe 5.4. [zu 5.1] Für die Randwertprobleme der Aufgaben 5.1 bis 5.3 sind die Operatorgleichungen für die verschiedenen Gitterpunkte der eingezeichneten Netze auf Grund der Variationsintegrale herzuleiten (Energiemethode). Die auftretenden Integrale sind auf möglichst einfache Art (Trapezregel) zu approximieren. Zur Approximation eines Integrals
für eine dreieckige Masche sind sowohl u" wie auch uy durch je einen einzigen Differenzenquotienten anzunähern.
Aufgabe 5.5. [zu 5.1] Zu den Aufgaben 5.1 und 5.3 sind auf Grund der Operatorgleichungen aus Aufgabe 5.4 die Gleichungssysteme bei verschiedenen Arten der Numerierung der Gitterpunkte (zeilenweise, kolonnenweise, diagonalweise) aufzustellen und die Strukturen der Systeme zu studieren. Sind die Systeme auch symmetrisch-definit?
Aufgabe 5.6. [zu 5.2] Man löse das Randwertproblem von Aufgabe 5.2 unter Verwendung einer konsistenten Reihenfolge der Gitterpunkte nach der Methode der Überrelaxation. Wie groß sind Konvergenzradius und Konvergenzziffer für das Einzelschrittverfahren und für die optimale Überrelaxation? (Rechenautomat erforderlich).
Aufgabe 5.7. [zu 5.2] Das Randwertproblem von Aufgabe 5.2 soll mit doppelt und viermal feinerer Netzeinteilung (h = 1/8, resp. h = 1/16) gelöst werden, wobei der optimale Überrelaxationsfaktor experimentell auf Grund des Residuenvektors beim Einzelschrittverfahren, bzw. bei Überrelaxation mit einem gewählten Faktor, bestimmt werde. (Rechenautomat)
Aufgabe 5.8. [zu 5.2] Für das Randwertproblem von Aufgabe 5.2 bestimme man den Konvergenzradius der impliziten Blockrelaxation und der optimalen blockweisen Überrelaxation, falls die Gitterpunkte zeilenweise zu Gruppen zusammengefaßt werden. (Rechenautomat).
Aufgabe 5.9. [zu 5.2] Man bestimme die Matrixoperatoren H, Vund I: der Methode der alternierenden Richtungen im Fall des Randwertproblems von Aufgabe 5.2. Sind die Operatoren H und V vertauschbar?
Literatur 253
Literatur
[I] Ai t k e n, A.: Studies in practical mathematics 11. The evaluation of the latent roots and vectors of a matrix. Proc. Roy. Soc. Edinburgh, A 57 (1937) 269-304.
[2] Bauer, F. L.; Heinhold, J.; Samelson, K.; Sauer, R.: Moderne Rechenanlagen. Stuttgart 1965.
[3] Baumann, R.; Feliciano, M.; Bauer, F. L.; Samelson, K.: Introduction to ALGOL. Englewood Cliffs, N. J. 1964.
[4] Bau man n, R.: ALGOL-Manual der ALCOR-Gruppe. Elektronische Rechenanlagen 5/6 (1961) und 2 (1962), sowie München 1967.
[5] Ben 0 i t: Note sur une methode de resolution des equations normales etc. (Procede du commandant C hol e s k y). BuH. geodesique 3 (1924) 67-77.
[6] Bi r k hof f, G.; Va r g a, R. S.: Implicit alternating direction methods. Trans. Amer. Math. Soc. 92 (1959) 13-24.
[7] Bi r k hof f, G.; Va r g a, R. S.; Y 0 u n g, D.: Alternating direction implicit methods. Advances in computers, 3 (1962) 189-273.
x-rj [8] d e B 0 0 r, C. M.; R i c e, J. R.: Chebyshev approximation by a TI -
x+Sj and application to ADI iteration. J. Soc. Industr. Appl. Math. 11 (1963) 159-169.
[9] Co ll atz, L.: Über die Konvergenzkriterien bei Iterationsverfahren für lineare Gleichungssysteme. Math. Z. 53 (1950) 149-161.
[10] Co ll atz, L.: Numerische Behandlung von Differentialgleichungen. 2. Auf!. Berlin 1955; 3. Auf!. in englischer Sprache. Berlin·Göttingen·Heidelberg 1959.
[lI] Co u r a n t, R.; H i I b e r t, D.: Methoden der mathematischen Physik. Berlin 1931.
[12] D ij k s t r a, E. W.: A primer to ALGOL 60 programming. London-New York 1962.
[13] Engeli, M.; Ginsburg, Th.; Rutishauser, H.; Stiefel, E.: Refined iterative methods for the computation of the solution and the eigenvalues of selfadjoint boundary value problems. Basel·Stuttgart 1959. Mitt. lost. f. angew. Math. ETH Zürich, Nr. 8.
[14] Eng e I i, M.: Automatisierte Behandlung elliptischer Randwertprobleme. Dissertation. Zürich 1962.
[15] Fad d e eva, V. N.: Computational methods of linear algebra. New York 1959.
[16] Faddejew, D. K.; Faddejewa, W. N.: Numerische Methoden der linearen Algebra, München-Wien 1964.
[17] Forsythe, G. E.; Wasow, W. R: Finite·difference methods for partial differential equations. New York 1960.
[18] F 0 r s y t h e, G. E.; He n r i c i, P.: The cyclic Jacobi method for computing the principal values of a complex matrix. Trans. Amer. Math. Soc. 94 (1960) 1-23.
[19] Fox, L.: Numerical methods in linear algebra. Oxford 1964. [20] Fra n cis, J. F. G.: The QR transformation. A unitary analogue to the LR
transformation, Parts land 11. Computer J. 4 (1961/62) 265-271; 332-345. [21] Ger s c h gor i n, S.: Abgrenzung der Eigenwerte einer Matrix. Bul. Acad. Sci.
USSR, Leningrad, classe math. 7 (1931) 749-754. [22] Gin s bur g, T h.: The conjugate gradient method, Numer. Math. 5 (1963)
191-200.
254 Literatur
[23] Gi v e n s, W.: Numerical computation of the characteristic values of areal symmetric matrix. Oak Ridge Nat. Lab. Report ORNL-1574 (1954).
[24] G 0 0 d w i n, E. T.: Modern computing methods, London 1961. [25] G r ö b n e r, W.: Matrizenrechnung. München 1956. [26] G r 0 s s man n, W.: Grundzüge der Ausgleichsrechnung. Berlin 1961. [27] Ha n sen, E. R.: On cyclic Jacobi methods. J. Soc. Industr. Appl. Math. 11
(1963) 448-459. [28] He n r i c i, P.: The quotient-difference algorithm. Nat. Bur. Standards Appl.
Math. Sero 49, 1958,23-46. [29] He n r i c i, P.: On the speed of convergence of cyclic and quasicyclic Jacobi
methods for computing eigenvalues of Hermitian matrices. J. Soc. Industr. Appl. Math. 6 (1958) 144-162.
[30] H e n r i c i, P.: So me applications of the quotient-difference algorithm. Proc. Symposia in Appl. Math., 1S (1963) 159-183.
[31] H e s t e n e s, M.; S t i e fe I, E.: Methods of conjugate gradients for solving linear systems. J. Res. Nat. Bur. Standards 49 (1952) 409-436.
[32] Ho u s e hol der, A. S.: Principles of numerical analysis. New York 1953. [33] Ho u s e hol der, A. S.: The theory of matrices in numerical analysis. New
York-Toronto-London 1964. [34] Ja co b i, C. G. J.: Über ein leichtes Verfahren, die in der Theorie der Säkular
störungen vorkommenden Gleichungen numerisch aufzulösen. Crelle's J. 30 (1846) 51-94.
{35] K aha n, W.: Gauß-Seidel methods for solving large systems of linear equations. Dissertation. Toronto 1958.
{36] L ä u chI i, P.: Iterative Lösung und Fehlerabschätzung in der Ausgleichsrechnung. Z. f. angew. Math. u. Phys. 10 (1959) 245-280.
[37] Müll e r, D.: Programmierung elektronischer Rechenanlagen. 2. Aufl., Mannheim 1965.
{38] Mur d 0 c h, D. C.: Linear algebra for undergraduates. New York-London 1957.
[39] Na u r, P.: ed., Revised report on the algorithmic language ALGOL 60. Numer. Math. 4 (1963) 420-453; Commun. Ass. Comp. Mach. 6 (1963) 1-17.
[40] 0 s t r 0 w ski, A.: Über das Nichtverschwinden einer Klasse von Determinanten und die Lokalisierung der charakteristischen Wurzeln von Matrizen. Co mpositio Math. 9 (1951) 209-226.
[41] Pe ace man, D. W.; R ach f 0 r d, H. H.: The numerical solution of parabolic and elliptic differential equations. J. Soc. Industr. Appl. Math. 3 (1955) 28-41.
[42] Ru t i s hau s e r, H.: Der Quotienten-Differenzen-Algorithmus. Z. f. angew. Math. u. Phys. S (1954) 233-25l.
[43] Ru t i s hau s e r, H.: Der Quotienten-Differenzen-Algorithmus. Basel-Stuttgart 1957. Mitt. Inst. f. angew. Math. ETH Zürich, Nr. 7.
[44] Ru t i s hau s e r, H.: Solution of eigenvalue problems with the LR-transformation. Nat. Bur. Standards Appl. Math. Sero 49, 1958,47-81.
[45] Ru t i s hau s e r, H.: Über eine kubisch konvergente Variante der LR-Transformation. Z. f. angew. Math. u. Mech. 40 (1960) 49-54.
[46] Ru t i s hau s e r, H.: Stabile Sonderfälle des Quotienten-Differenzen-Algorith· mus. Numer. Math. S (1963) 95-112.
Literatur 255
[47] Ru t i s hau s e r, H.: On Jacobi rotation patterns. Proc. Symposia in Appl. Math. 15 (1963) 219-239.
[48] Ru t i s hau s e r, H.; Sc h war z, H. R.: The LR-transformation method for symmetric matrices. Numer. Math. 5 (1963) 273-289.
[49] Ru t i s hau s e r, H.: The Jacobi method for real symmetric matrices. Numer. Math. 9 (1966) 1-10.
[50] Sc h 1 end e r, B.: Grundzüge der algorithmischen Formelsprache ALGOL. Der math. u. naturwiss. Unterricht 13 (1961) 451-458.
[51] Sc h m eid 1 e r, W.: Vorträge über Determinanten und Matrizen. Berlin 1949. [52] Schönhage, A.: Zur Konvergenz des Jacobi-Verfahrens. Numer. Math. 3
(1961) 374-380. [53] Sc h r öde r, G.: Über die Konvergenz einiger Jacobi-Verfahren zur Bestim
mung der Eigenwerte symmetrischer Matrizen. Schriften d. Rheinisch-Westfälischen Inst. f. instr. Math. Universität Bonn. Sero A. Nr. 5 (1964).
[54] Sc h war z, H. A.: Gesammelte mathematische Abhandlungen. Bd. 1. Berlin 1890,241-265.
[55] Sc h war z, H. R.: An introduction to ALGOL. Comm. Ass. Comp. Mach. 5, 1962, S. 82-95.
[56] Sc h war z, H. R.: Die Reduktion einer symmetrischen Bandmatrix auf tridiagonale Form. Z. f. angew. Math. U. Mech. (Sonderheft) 45 (1965) T76-T77.
[57] S ha w, F. S.: Relaxation methods. New York 1953. [58] S hel don, J. W.: On the numerical solution of eIIiptic difference equations.
Math. Tables and Other Aids to Comp. 9 (1955) 101-112. [59] Sou t h weil, R. V.: Relaxation methods in engineering science. London 1940. [60] Sou t h weil, R. V.: Relaxation methods in theoretical Physics. Oxford 1956. [61] S t i e fe I, E.: Über einige Methoden der Relaxationsrechnung. Z. f. angew.
Math. U. Phys. 3 (1952) 1-33. [62] S t i e f e 1, E.: Ausgleichung ohne Aufstellung der Gaußschen Normalgleichun
gen. Wiss. Z. Technische Hochschule Dresden 2 (1952/53) 441-442. [63] S t i e fe I, E.: Relaxationsmethoden bester Strategie zur Lösung linearer Glei
chungssysteme. Comment. Math. Helv. 29 (1955) 157-179. [64] Stiefel, E.: Einführung in die numerische Mathematik. 4. Auflage. Stuttgart
1969. [65] S y n g e, J. L.: The hypercirc1e in mathematical physics, Cambridge 1957. [66] Tod d, J.: A survey of numerical analysis. New York-Toronto-London 1962. [67] U n ger, H.: Nichtlineare Behandlung von Eigenwertaufgaben, Z. f. angew.
Math. U. Mech. 30 (1950) 281-282. (68) Varga, R. S.: Matrix iterative analysis. Englewood Cliffs, N. J. 1962. (69) W ach s p r e ß, E. L.: CURE: A generalized two-space-dimension multigroup
coding for the IBM-704, Report KAPL-I724 (Knolls Atomic Power Laboratory) Schenectady, New York 1957.
[70] W ach s p r e ß, E. L.: Optimum alternating-direction implicit iteration parameters for a model problem, J. SOC. Industr. Appl. Math. 10 (1962) 339-350.
[71] W ach s p re ß, E. L.: Iterative solution of elliptic systems and applications to the neutron diffusion equations of reactor physics. Englewood Cliffs 1966.
[72J Wie I a n d t, H.: Bestimmung höherer Eigenwerte durch gebrochene Iteration. Bericht der aerodynamischen Versuchsanstalt Göttingen. 44/J /37 (1944).
[73J W i I kin s 0 n, J. H.: Note on the quadratic convergence of the cyclic Jacobi process. Numer. Math. 4 (1962) 296-300.
256 Literatur
[74] W i I kin s 0 n, J. H.: Rounding errors in algebraic processes. London 1963. [75] W i I kin so n, J. H.: The algebraic eigenvalue problem. Oxford 1965. [76] W i I kin s 0 n, J. H.: Convergence of the LR, QR, and related algorithms.
Computer J. 8 (1965) 77-84. [77] W i I kin s 0 n, J. H.: The QR algorithm for real symmetrie matrices with
multiple eigenvalues. Computer J. 8 (1965) 85-87. [78] W y n n, P.: Acceleration techniques for iterated vectors and matrix problems.
Math. Comput. 16 (1962) 301-322. [79] Y 0 u n g, D.: Iterative methods for solving partial differential equations of
elliptic type. Trans. Amer. Math. Soc. 76 (1954) 92-111. [80] Zur m ü h I, R.: Matrizen. 4. Auflage. Berlin 1964. [81] Bayer, G.: Einführung in das Programmieren. 1. Programmieren in ALGOL.
Berlin 1969. [82] Forsythe, G.; Moler, C. B.: Computer solution of linear algebraic systems.
Englewood Cliffs, N. J. 1967. [83] Heinrich, W.; Stucky, W.: Programmierung mit ALGOL 60. Stuttgart 1971. [84] Rutishauser, H.: Description of ALGOL 60. Handbook for automatie computa
tion, vol. 1. Part a. Berlin-Heidelberg-New York 1967. [85] Schwarz, H. R.: Die Methode der konjugierten Gradienten in der Ausgleichs
rechnung. Z. für Vermessungswesen 95 (1970) 130-140. [86] Schwarz, H. R.; Rutishauser, H.; Stiefel, E.: Numerical analysis ofsymmetric
matrices. Englewood Cliffs, N. J. 1972. [87] Stummel, F.; Hainer, K.: Praktische Mathematik. Stuttgart 1971. [88] Wilkinson, J. H.; Reinsch, C.: Handbook for automatie computation, vol. II,
Linear algebra. Berlin-Heidelberg-New York 1971.
Namen- und Sachverzeichnis
Abbrechkriterium 76, 120, 158 adjungierter Operator 16 adjungierte Transformation 16 ähnliche Matrizen 15 f., 148 ff. Ähnlichkeitstransformation 15 f., 112 f.,
126, 131 -, orthogonale 113, 126 Aitken, /52-Prozeß 178 ALGOL-Prozeduren
bisection 141 cg76 cholesky 36 choleskyband 43 choleskysol 38 fehlerorth 98 givens 129 householder 133 jacobi 1 121 jacobi 2 125 /inverse 34 lrcholband 162 op 231 orth 96 rotation 115 ueberrelax 213
allgemeines Eigenwertproblem 106, 187 ff. - Iterationsverfahren 52 ff. Ausgleichsrechnung 78 ff. - vermittelnder Beobachtungen 41 Ausgleichung, bedingte 81 f., 87 ff. -, direkter Beobachtungen 81 -, Dualität der 90 ff., 103 -, vermittelnde 41,79 f., 82 ff.
Balkenschwingung 41 Bandbreite 41 ff., 204 Bandmatrix 41 ff., 129, 191, 204 f. -, symmetrisch-definite 41,160 ff., 204 f -, Cholesky-Zerlegung einer 42 Basis 12 ff. bedingte Ausgleichung 81 f., 87 ff.
bedingte Ausgleichung, Methode der konjugierten Gradienten 103
- -, - der Orthogonalisierung 99 f. Bedingungsgleichungen 81 Betrag eines Vektors 12 Bisection 141, 191,229 Blockrelaxation 216 ff., 224 -, 'symmetrische 222 blockweise tridiagonal 60, 208, 219
charakteristisches Polynom 106 ff., 137 Cholesky, Methode von 34 ff., 84, 90,
100 ff., 146, 181, 188, 204, 217 Cholesky-Zerlegung 37, 42, 70, 147, 149,
187
Darstellung eines Operators 14 f. Definitheit, positive 23 ff. diagonal block weise tridiagonal 60, 70,
208 ff. - dominante Matrix 25 ff., 49, 55, 69,
224,229 Diagonalmatrix 41, 116, 120, 150, 188 f.,
205 Differentialgleichung, elliptische 193 ff. -, Eulersche 194 -, parabolische 223 Differentialoperator 196 Dirichlet-Problem 192 ff. Diskretisation 28, 41, 44, 192, 197 ff.,
216 dominanter Eigenwert 53 Drehung, zweidimensionale, orthogonale
113 Dreiecksmatrix 31 -, Inverse einer 33 Dreieckslungleichung 17 f. - zerlegung von Matrizen 31, 146 ff. Dualität der Ausgleichung 90 ff., 103 - der Rhombenregeln 166 dyadisches Produkt 130
258 Namen- und Sachverzeichnis
Eigenlfrequenz 106 - schwingungsform 106 - vektor 15 f., 106, 120, 144 ff., 175 ff.,
191 f., 233 f. - vektoren von tridiagonalen Matrizen
144 ff. - wert 15 f., 21 ff. 53, 60 ff., 106 ff. - -, dominanter 53 - -, mehrfacher 112 - -problem 103 ff., 191,232 ff. - - -, allgemeines 106, 187 ff. - -probleme der Physik 103 ff. - -problem, spezielles 106, 187 ff. - - -, symmetrisches 103 ff. Einheits I matrix 16
- vektor 12 Einschneideverfahren 80 Einzelschrittverfahren 48 ff., 214 Elastizitätstheorie 211 Eliminationspunkt 203 elliptische Differentialgleichung 193 ff. Energiemethode 44, 187, 192 ff. Epsilon-Algorithmus von Wynn 178 euklidische Norm 18 euklidischer Algorithmus 172 - Vektorraum 13 euklidisches inneres Produkt 13, 16 euklidische Vektornorm 18 Euler, Differentialgleichung von 194 Extremallaufgabe 82, 87, 109 -prinzip 198
Fehlerlgleichungen 80 ff. -vektor 52 ff., 214, 225 Fermatsches Prinzip 197 Frobeniussche Norm 18
Gauß 79, 103 Gaußsche Normalgleichungen 82 ff.
- Transformierte 186 Gaußscher Algorithmus 37 Gaußsches Prinzip 78 f., 85 Gauß-Seidel, Methode von 50 ff., 208 gebrochene Iteration 144 ff., 181 Geodäsie 80, 82 Gerschgorin, Kreisesatz von 140 f., 229 Gesamtschrittverfahren 68 ff. Gewichtsmatrix 101 Gitterpunkt 197
Givens, Methode von 127 ff., 134, 160, 191
Gleichungssystem, symmetrisch-definites 36, 44 ff., 84, 200, 203 ff.
Gradient 48, 66, 72 Gradientenmethode 66 ff. Greensche Formel 193, 196 f.
Hamiltonsches Prinzip 105, 196 Handrelaxation 48 ff., 207 Hauptachsentheorem 109 ff. Hauptminor 24, 137, 147, 149, 152, 157,
167 Hestenes-Stiefel, Methode von 71 ff. Hilfspunkt 203 Höldersche Norm 17 Householder, Methode von 129 ff., 160,
191 Hyperkreis 92
inneres Produkt 12 f. - -, euklidisches 13, 16 invariant 15 f., 111, 180 Invariante 151, 167 inverse Matrix 14 - Transformation 14 - Vektoriteration 180 f., 234 - -, simultane 187 Inversion einer Dreiecksmatrix 33 - - positiv definiten Matrix 40 f. involutorische Matrix 130 irreduzible Matrix 26 ff., 163 Iterationslmatrix 52 ff., 218 ff. - parameter 225 ff. - - von Wachspreß 227 ff. - verfahren, allgemeines 52 ff. - zyklus 50, 212, 215
Jacobi 69, 114 -, klassische Methode von 116 ff. -, Methode von 116 ff., 186, 188, 191 - -Rotation 114 ff., 127, 190 -, zyklische Methode von 123 ff. Iacobisches Iterationsverfahren 69
Kette, Sturmsehe 126, 134 ff. klassische Vektoriteration 176 ff. kompatible Normen 19 ff. Komponenten eines Vektors 11 f.
Kondition einer Matrix 21 f., 46 - von Normalgleichungen 84 ff. Konditionszahl 22 f., 40, 84 ff., 102 konjugierte Richtungen 71 ff. konsistent 211 Konvergenz - der Handrelaxation 49 - - LR-Transformation 148 f. - - Methode von Peaceman-Rachford
225 f. - - Potenzmethode 178 - - simultanen Vektoriteration 182 ff. - - überrelaxation 56 ff. - - Vektoriteration 178 - des Einzelschrittverfahrens 50 ff. - - Gauß-Seidelschen Verfahrens 50 ff. - - Gesamtschrittverfahrens 69 f. - - klassischen Jacobi-Verfahrens 117 ff. - - LR-Cholesky-Verfahrens 150 ff. - - QD-Algorithmus 167 ff. - - zyklischen Jacobi-Verfahrens 124 - einer Matrixfolge 19, 120 - - Vektorfolge 18 - eines Iterationsverfahrens 52 ff. -, lineare 119, 153 f., 168, 178, 214 -, quadratische 119, 123 ff. -radius 54, 211 f., 225 ff. -ziffer 54, 69 f., 211 f. Koordinaten!verschiebung 149, 152 ff.,
168 - eines Vektors 12, 14 f. Korrektur 79, 82, 87, 207 Korrelaten 87 - gleichungen 87 ff. - vektor 87 ff. Kreisesatz von Gerschgorin 140 f., 229
Länge eines Vektors 12, 17 Laplace-Gleichung 192, 195 Laplacescher Differentialoperator 194 f. lineare Gleichungen 36 - Transformation 13 linearer Operator 14 ff. Linearisierung 79 ff. Linearkombination 11 Linksdreiecksmatrix 31 ff., 147 ff. LR-Cholesky 150 ff. LR-Transformation 146 ff., 176, 191,233
Namen- und Sachverzeichnis 259
Matrix 14 ff. -, ähnlich 15 f. 148 ff. -, blockweise tridiagonale 60, 208 -, diagonal blockweise tridiagonale 60,
70,208 ff. -, - dominante 25 ff., 49, 55, 69, 224,
229 -, inverse 14 -, involutorische 130 -, irreduzible 26 ff., 163 -folge 19 - -, konvergente 19 -norm 18 ff. - -, kompatible 19 ff. - -, multiplikative 18 - -, untergeordnete 20 f. -operator 197, 223 -, orthogonale 95, 112 f., 120, 130, 188 f. -, Pascalsche 24 -, positiv definite 17, 21 ff., 104 ff., 149,
182, 187, 224 ff. -, quadratische 14 -, reduzible 25 ff., 152 -, reguläre 14 -, symmetrische 16, 104 ff. -, transponierte 16 -, tridiagonale 41, 127 ff., 137 ff., 163 ff.
175, 205, 217 -, vertauschbare 187, 226 Maximum-Minimum-Prinzip 119 mehrfacher Eigenwert 112 Mehrstellenoperator 202, 216 Methode der alternierenden Richtungen
224 ff. - - Blockrelaxation 216 ff. - - blockweisen überrelaxation 218ff. - - fortgesetzten Intervallhalbierung 139
ff., 192 - - kleinsten Quadrate 79, 83 - - konjugierten Gradienten 71 ff., 103,
173 ff., 231 ff. - - Orthogonalisierung 93 ff., 182, 185 - - punktweisen überrelaxation 218 ff.,
227 - - Relaxation 44 ff., 84, 192, 205 ff.,
234 - - symmetrischen Blockrelaxation
222 f. - - überrelaxation 55 ff., 208
260 Namen- und Sachverzeichnis
Methode der Vektoriteration 175 ff., 190 - des stärksten Abstiegs 67 f. - von Cholesky 34 ff., 84, 90, 100 ff.,
146, 181, 187,204 f., 217 - - Gauß-Seidel 50, 56, 208 - - Givens 127 ff., 134, 160, 191 - - Hestenes-Stiefel 71 ff. - - Householder 129 ff., 160, 191 - - Jacobi 116 ff., 186, 188, 191 - - -, klassische 116 ff. - - -, zyklische 123 ff. - - Rachford und Peaceman 223 ff. - - Peaceman-Rachford 223 ff. Minimalpunkt 47 ff., 71 f. Minimumpunkt 45
Nachiteration einer Lösung 39 f. natürliche Randbedingung 194 ff., 202 Norm einer Matrix 18 ff. - eines Vektors 12, 17 ff. -, euklidische 18 -, Frobeniussche 18 -, Höldersche 17 -, Schursche 18 -, spektrale 21 -, untergeordnete 20 Normallfall 152 ff. -gleichungen 41,83 ff. - -, Kondition von 84 ff. -schwingungen 105 normiert 12 -er Vektorraum 12, 17 Nullmatrix 16 Nullvektor 11
Operator 13 !f., 173, 200 ff., 223, 234 -, adjungierter 16 -, linearer 14 ff. -, selbstadjungierter 16 f. -gleichung 75, 200 ff., 233 optimaler Überrelaxationsfaktor 59 ff.,
208 ff. orthogonale Ähnlichkeitstransformation
113, 126 - Drehung 113 - Matrix 95, 112 f., 120, 130, 188 f. orthogonales System 13, 73 orthogonale Vektoren 13
Orthogonalisierungsverfahren 93 ff. orthonormiert 13, 93 ff., 109 ff. Orthonormierungsverfahren 95 ff. Ostrowski 28
parabolische Differentialgleichung 223 Pascalsche Matrix 24 Peaceman-Rachford,
223 ff. Pivotelement 114, 124
Methode von
Poisson, Differentialgleichung von 193 ff., 216
positiv definite Matrix 17, 21 ff., 104 ff., 149, 182, 187,224 ff.
- - quadratische Form 17, 23 ff., 44 ff., 104 ff., 192 ff.
positives.QD-Schema 167 ff.,175 positiv semidefinite Matrix 21, 222 Potenzmethode 176, 182, 190 Prinzip der Korrektur 79, 82 - des direkten Angriffs 192, 198 - - stärksten Abstiegs 67 Property A 208 ff.
QD-Algorithmus 163 ff., 176, 191, 229, 233
QR-Transformation 160 quadratische Form 16 f., 23 !f., 192, 199 - -, positiv definite 17, 23 !f., 44 ff.,
104 ff., 192 ff. - -, Reduktion auf eine Summe von
Quadraten 28 !f. - -, semidefinite 24 Quotienten-Differenzen-Algorithmus
163 ff., 176, 191, 229, 233
Rachford und Peaceman, Methode von 223 !f.
Randbedingungen 193 !f. Randwertproblem 44, 192 ff. -, selbstadjungiertes 196 f. Rayleighscher Quotient 68, 84, 112, 178 Rayleighsches Prinzip 197 Rechtsdreiecksmatrix 31 ff., 94, 147 ff.,
183 Reduktion einer quadratischen Form 28 ff. reduzible Matrix 25 ff., 152 reguläre Transformation 14 Rekursionspolynome 137 !f.
Relaxationslmethode 44 ff., 84, 192,205 ff. - -, blockweise 217 ff. - -, explizite 217 - -, implizite 217,224 -prinzip 46 ff. -richtung 47 ff., 66, 71 Residuenloperator 207 - vektor 39, 45 ff" 66 ff., 83, 214 Residuum 48, 79 ff. Rhombenregel166 ff. Rotation, Jacobi- 114, ff., 127, 190 Rotationsindexpaar 113, 127 Rückwärtseinsetzen 37 f., 97, 181
Schmidtsches Orthogonalisierungsverfah-ren 93 ff., 182, 185
Schursche Norm 18 Schwarzsehe Konstanten 177 ff. - Ungleichung 13 Schwingungen 103 ff. Schwingungsgleichung 195 Seidel 50 selbstadjungiert 16 f., 192, 195 ff. selbstadjungierter Operator 16 f. semidefinite quadratische Form 24 simultane Vektoriteration 182 ff. Southwellsche Relaxationsmethode 207 Spektral!norm 21 f. -radius 53 ff., 64 ff., 215 ff., 222, 225 ff. -transformation 149, 159, 234 Spurenabschnitt 150 f. Stiefel-Hestenes, Methode von 71 ff. Sturmsche Kette 126, 134 ff. symmetrisch-definite Bandmatrix 41 ff.,
160 ff. - Gleichungen 36, 44 ff., 84, 200, 203 ff. symmetrische Blockrelaxation 222 - Matrix 16, IM ff.
Transformation, adjungierte 16 - auf Diagonalform 113 ff. - - tridiagonale Form 126 ff. - des Vektorraums 13 -, lineare 13 transponierte Matrix 16 tridiagonale Matrix 41, 127 ff., 137 ff.,
163 ff., 175,205,217
Namen- und Sachverzeichnis 261
Tschebyscheffsche Methode 222 Tschebyscheffsches Approximationsprob
lern 227 - - Prinzip 78
überrelaxation 55 ff., 208 -, blockweise 218 - .. punktweise 218, 227 Überrelaxationsfaktor 56, 208 ff. -, optimale Wahl des 59 ff., 208 ff. untergeordnete Matrixnorm 20 f. - - zur euklidischen Vektornorm 20 f.
Variation 105 Variations I integral 192 ff. - problem 44, 192 Vektor 11 -folge 18, 176, 180 -iteration 175 ff., 190,234 - -, gebrochene 144 ff., 181 - -, inverse 180, 234 - -, klassische 176 - -, simultane 182 ff., 192 - -, -inverse 187 -komponenten 11 -koordinaten 12 -norm 17 ff. -raum 11 ff. - -, euklidiscAer 13 - -, normierter 12, 17 Verfahren, s. Methode vermittelnde Ausgleichung 41,79 f., 82 If. - -, Methode der konjugierten Gradien-
ten 103 - -, Methode der Orthogonalisierung
96 ff. Versuchsvektor 45 ff., 71 ff. vertauschbare Matrizen 187, 226 ff. Vorwärtseinsetzen 35 f., 181
Wachspreß, Iterationsparameter von 227 Wielandt, Vektoriteration von 144, 181
234 • Wynn, Epsilon-Algorithmus von 178, 214
Zwangsbedingung 194 ff. zyklisches Iterationsverfahren 50, 123
Leitfäden der angewandten Mathematik und Mechanik Herausgegeben von Prof. Dr. Dr. h. c. H. GörtIer, Freiburg i. Br.
Bauer /Heinhold/Samelson/Sauer Modeme RechenanIagen 357 Seiten mit 193 Bildern. Ln. DM 49,-
Becker Gasdynamik 248 Seiten mit 117 Bildern. Ln. DM 43,-
Collatz Differentialgleichungen 4. Auflage. 226 Seiten mit 136 Bildern. Kart. DM 16,80 (Teubner Studienbücher)
Hotz Informatik: Rechenanlagen 136 Seiten, 55 Bilder, 56 Aufgaben. Kart. DM 12,80 (Teubner Studienbücher)
Jaeger/Wenke Lineare WirtschaftsaIgebra Band 1: XVI, 174 S. Kart. DM 14,- Band 2: IV, 160 S. Kart. DM 14,-Mit insgesamt 45 Bildern, 136 Aufgaben, 32 Tabellen und zahlreichen Beispielen (Teubner Studienbücher)
Künzi/Tzschach/Zehnder Numerische Methoden der mathematischen Optimierung mit ALGOL- und FORTRAN-Programmen 151 Seiten mit 16 Bildern und 15 Beispielen. Ln. DM 33,-
Leipholz Stabilitätstheorie 245 Seiten mit 87 Bildern, 63 Beispielen und 1 Tafel. Ln. DM 44,-
Magnus Schwingungen 2. Auflage. 251 Seiten mit 197 Bildern. Kart. DM 16,80 (Teubner Studienbücher)
Martensen Potentialtheorie 266 Seiten mit 57 Bildern, 89 Aufgaben und zahlreichen Beispielen. Ln. DM 37,-
Rotta Turbulente Strömungen. 267 Seiten mit 104 Bildern. Ln. DM 68,-
Schwarz/Rutishauser/Stiefel Numerik symmetrischer Matrizen 2. Auflage, 261 Seiten, 43 Bilder, 49 Beispiele, 68 Aufgaben. Ln. DM 36,-
Stiefel Einführung in die numerische Mathematik 4. Auflage. 257 Seiten mit 44 Bildern, 9 Tabellen, 36 Aufgaben und zahlreichen Beispielen. Kart. DM 16,80 (Teubner Studienbücher)
Uhlmann
Statistische QualitätskontroUe 220 Seiten mit 31 Bildern, 8 Tabellen und 91 Aufgaben. Ln. DM 39,-
Wieghardt
Theoretische Strömungslehre 226 Seiten mit 98 Bildern. Ln. DM 39,-
Wirth Systematisches Programmieren 160 Seiten, 60 Bilder, 64 Übungen und zahlreiche Beispiele. Kart. DM 14,80 (Teubner Studienbücher)
Witting
Mathematische Statistik 223 Seiten mit 7 Bildern, 82 Beispielen und 126 Aufgaben sowie einem Tabellenanhang. Ln. DM 46,-
Witting/Nölle
Angewandte Mathematische Statistik 194 Seiten mit 97 Beispielen und 123 Aufgaben sowie einem Anhang "Grundlagen und Hilfsmittel". Ln. DM 68,-
Preisänderungen vorbehalten
B. G. Teubner Stuttgart



















