Embed Size (px)
Citation preview

http://support.automation.siemens.com/WW/view/de/88970247
Applikationsbeschreibung 02/2014
Drehzahlsteuern eines SINAMICS S120 über CANopen SINAMICS S
Gewährleistung und Haftung
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 2
Sie
men
s A
G 2
014
All
right
s re
serv
ed
Gewährleistung und Haftung
Hinweis Die Applikationsbeispiele sind unverbindlich und erheben keinen Anspruch auf Vollständigkeit hinsichtlich Konfiguration und Ausstattung sowie jeglicher Eventualitäten. Die Applikationsbeispiele stellen keine kundenspezifischen Lösungen dar, sondern sollen lediglich Hilfestellung bieten bei typischen Aufgabenstellungen. Sie sind für den sachgemäßen Betrieb der beschriebenen Produkte selbst verantwortlich. Diese Applikationsbeispiele entheben Sie nicht der Verpflichtung zu sicherem Umgang bei Anwendung, Installation, Betrieb und Wartung. Durch Nutzung dieser Applikationsbeispiele erkennen Sie an, dass wir über die beschriebene Haftungsregelung hinaus nicht für etwaige Schäden haftbar gemacht werden können. Wir behalten uns das Recht vor, Änderungen an diesen Applikationsbeispielen jederzeit ohne Ankündigung durchzuführen. Bei Abweichungen zwischen den Vorschlägen in diesem Applikationsbeispiel und anderen Siemens Publikationen, wie z.B. Katalogen, hat der Inhalt der anderen Dokumentation Vorrang.
Für die in diesem Dokument enthaltenen Informationen übernehmen wir keine Gewähr. Unsere Haftung, gleich aus welchem Rechtsgrund, für durch die Verwendung der in diesem Applikationsbeispiel beschriebenen Beispiele, Hinweise, Programme, Projektierungs- und Leistungsdaten usw. verursachte Schäden ist ausgeschlossen, soweit nicht z.B. nach dem Produkthaftungsgesetz in Fällen des Vorsatzes, der groben Fahrlässigkeit, wegen der Verletzung des Lebens, des Körpers oder der Gesundheit, wegen einer Übernahme der Garantie für die Beschaffenheit einer Sache, wegen des arglistigen Verschweigens eines Mangels oder wegen Verletzung wesentlicher Vertragspflichten zwingend gehaftet wird. Der Schadens-ersatz wegen Verletzung wesentlicher Vertragspflichten ist jedoch auf den vertragstypischen, vorhersehbaren Schaden begrenzt, soweit nicht Vorsatz oder grobe Fahrlässigkeit vorliegt oder wegen der Verletzung des Lebens, des Körpers oder der Gesundheit zwingend gehaftet wird. Eine Änderung der Beweislast zu Ihrem Nachteil ist hiermit nicht verbunden. Weitergabe oder Vervielfältigung dieser Applikationsbeispiele oder Auszüge daraus sind nicht gestattet, soweit nicht ausdrücklich von Siemens Industry Sector zugestanden.
Security-hinweise
Siemens bietet Produkte und Lösungen mit Industrial Security-Funktionen an, die den sicheren Betrieb von Anlagen, Lösungen, Maschinen, Geräten und/oder Netzwerken unterstützen. Sie sind wichtige Komponenten in einem ganzheitlichen Industrial Security-Konzept. Die Produkte und Lösungen von Siemens werden unter diesem Gesichtspunkt ständig weiterentwickelt. Siemens empfiehlt, sich unbedingt regelmäßig über Produkt-Updates zu informieren.
Für den sicheren Betrieb von Produkten und Lösungen von Siemens ist es erforderlich, geeignete Schutzmaßnahmen (z. B. Zellenschutzkonzept) zu ergreifen und jede Komponente in ein ganzheitliches Industrial Security-Konzept zu integrieren, das dem aktuellen Stand der Technik entspricht. Dabei sind auch eingesetzte Produkte von anderen Herstellern zu berücksichtigen. Weitergehende Informationen über Industrial Security finden Sie unter http://www.siemens.com/industrialsecurity.
Um stets über Produkt-Updates informiert zu sein, melden Sie sich für unseren produktspezifischen Newsletter an. Weitere Informationen hierzu finden Sie unter http://support.automation.siemens.com.
Inhaltsverzeichnis
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 3
Sie
men
s A
G 2
014
All
right
s re
serv
ed
Inhaltsverzeichnis Gewährleistung und Haftung ................................................................................... 2 1 Aufgabe........................................................................................................... 4
1.1 Übersicht ........................................................................................... 4 2 Lösung ............................................................................................................ 5
2.1 Übersicht ........................................................................................... 5 2.2 Verwendete Hard- und Software-Komponenten ................................. 6
3 Konfiguration und Projektierung ................................................................... 7
3.1 Konfiguration des SINAMICS ............................................................. 7 3.1.1 Das CBC Konfigurationsmenü ........................................................... 7
4 Inbetriebnahme des Beispielprojekts .......................................................... 10
4.1 Übersicht ......................................................................................... 10 4.2 CAN-Parameter ............................................................................... 11 4.2.1 CU320 ............................................................................................. 11 4.2.2 SERVO ........................................................................................... 13 4.3 Berechnungsregeln.......................................................................... 18
5 Literaturhinweise .......................................................................................... 19 6 Ansprechpartner .......................................................................................... 19 7 Historie.......................................................................................................... 19
1 Aufgabe
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 4
Sie
men
s A
G 2
014
All
right
s re
serv
ed
1 Aufgabe 1.1 Übersicht
Ein Antrieb soll drehzahlgesteuert verfahren werden. Hierfür wird dieser über ein CAN-Interface angesteuert, das die Drehzahlsollwert-schnittstelle des Antriebs mit Daten versorgt.
2 Lösung
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 5
Sie
men
s A
G 2
014
All
right
s re
serv
ed
2 Lösung 2.1 Übersicht
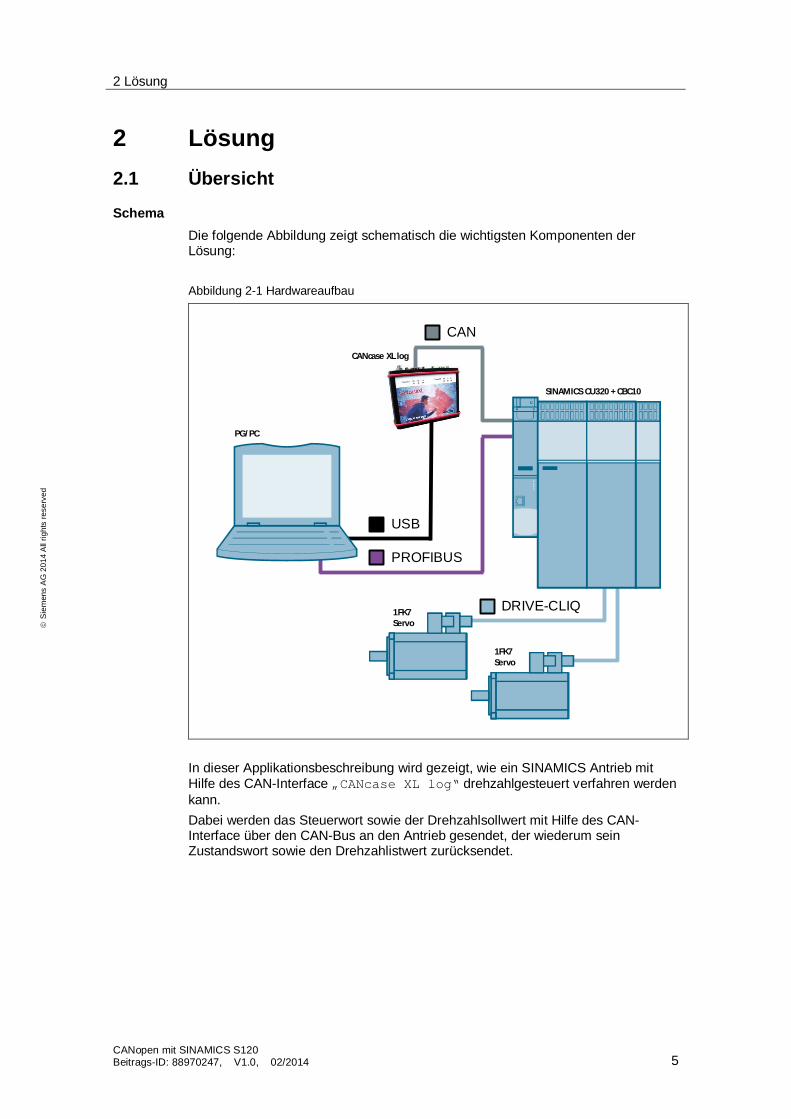
Schema Die folgende Abbildung zeigt schematisch die wichtigsten Komponenten der Lösung: Abbildung 2-1 Hardwareaufbau
PROFIBUS
DRIVE-CLIQ
USB
CAN
PG/PC
CANcase XL log
SINAMICS CU320 + CBC10
1FK7Servo
1FK7Servo
In dieser Applikationsbeschreibung wird gezeigt, wie ein SINAMICS Antrieb mit Hilfe des CAN-Interface „CANcase XL log“ drehzahlgesteuert verfahren werden kann. Dabei werden das Steuerwort sowie der Drehzahlsollwert mit Hilfe des CAN-Interface über den CAN-Bus an den Antrieb gesendet, der wiederum sein Zustandswort sowie den Drehzahlistwert zurücksendet.
2 Lösung
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 6
Sie
men
s A
G 2
014
All
right
s re
serv
ed
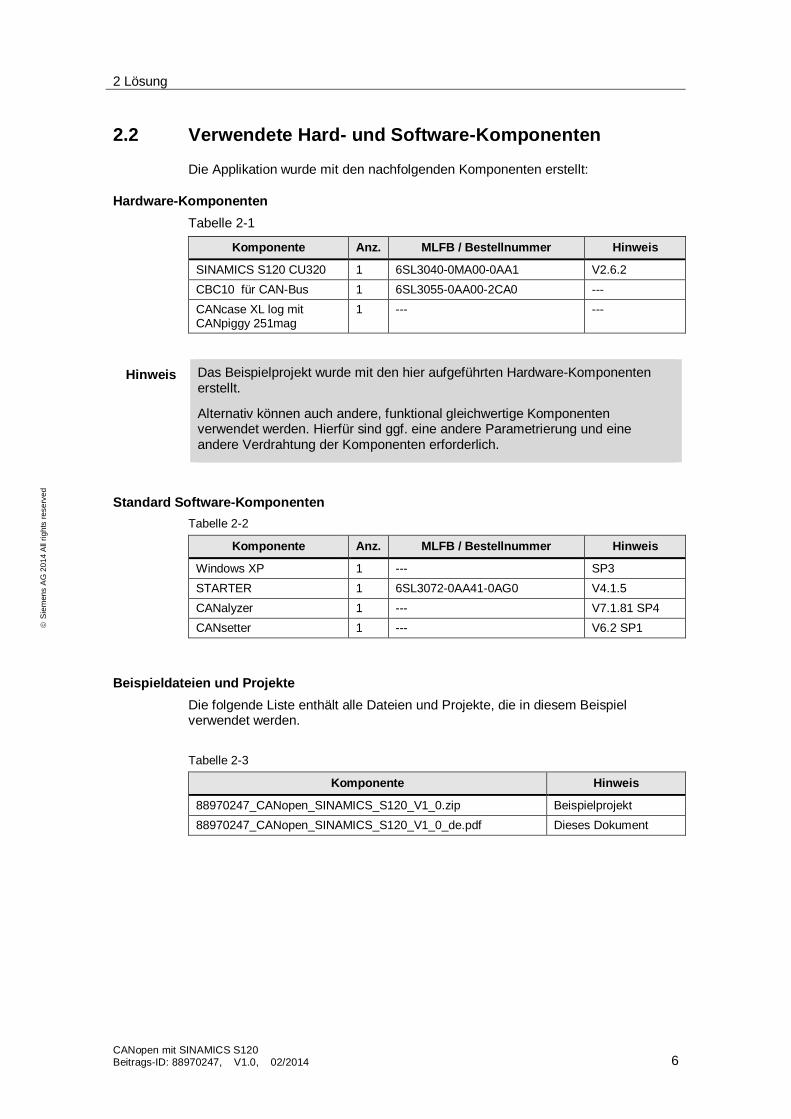
2.2 Verwendete Hard- und Software-Komponenten
Die Applikation wurde mit den nachfolgenden Komponenten erstellt:
Hardware-Komponenten Tabelle 2-1
Komponente Anz. MLFB / Bestellnummer Hinweis
SINAMICS S120 CU320 1 6SL3040-0MA00-0AA1 V2.6.2 CBC10 für CAN-Bus 1 6SL3055-0AA00-2CA0 --- CANcase XL log mit CANpiggy 251mag
1 --- ---
Hinweis Das Beispielprojekt wurde mit den hier aufgeführten Hardware-Komponenten erstellt.
Alternativ können auch andere, funktional gleichwertige Komponenten verwendet werden. Hierfür sind ggf. eine andere Parametrierung und eine andere Verdrahtung der Komponenten erforderlich.
Standard Software-Komponenten Tabelle 2-2
Komponente Anz. MLFB / Bestellnummer Hinweis
Windows XP 1 --- SP3 STARTER 1 6SL3072-0AA41-0AG0 V4.1.5 CANalyzer 1 --- V7.1.81 SP4 CANsetter 1 --- V6.2 SP1
Beispieldateien und Projekte Die folgende Liste enthält alle Dateien und Projekte, die in diesem Beispiel verwendet werden. Tabelle 2-3
Komponente Hinweis
88970247_CANopen_SINAMICS_S120_V1_0.zip Beispielprojekt 88970247_CANopen_SINAMICS_S120_V1_0_de.pdf Dieses Dokument
3 Konfiguration und Projektierung
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 7
Sie
men
s A
G 2
014
All
right
s re
serv
ed
3 Konfiguration und Projektierung 3.1 Konfiguration des SINAMICS
Im STARTER wird ein „Einzelantriebsgerät“ eingefügt. Die Schnittstelle für die Onlineverbindung wird auf „PROFIBUS DP“ gestellt und als Adresse die 126, da dass der Auslieferungszustand ist. Im Anschluss kann eine Onlineverbindung über PROFIBUS DP hergestellt werden. Wird nun die automatische Konfiguration gewählt, so werden alle vorhandenen Komponenten initialisiert und in das Projekt übernommen. Als Antriebsgerät wurde der Typ „SERVO“ gewählt. Wird ein SIEMENS Vorführkoffer genutzt, werden die Daten des „SERVO_02“ automatisch ermittelt. Die Daten des „SERVO_03“ können von dem Aufkleber auf dem Berührungsschutz abgelesen werden und über die DDS Konfiguration offline eingegeben werden. Während der Konfiguration wird die Verschaltung des „Betriebsbereitsignal“ gefordert. Mit dem Button „Schließen“ kann in der folgenden Maske fest eine „1“ verdrahtet werden. Dies kann an gleicher Stelle für den „SERVO_02“ übernommen werden. Ohne diese Einstellung sind die Antriebe nicht betriebsfähig.
Hinweis Weitere Informationen können dem Inbetriebnahmehandbuch entnommen werden.
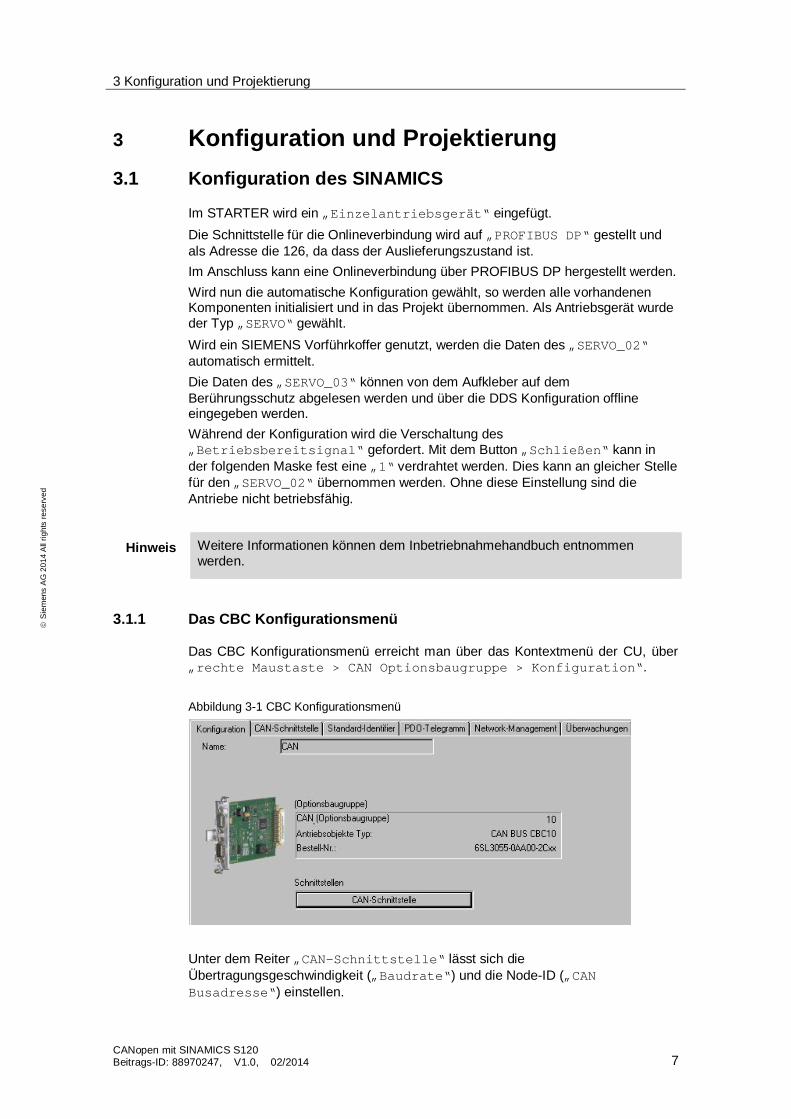
3.1.1 Das CBC Konfigurationsmenü
Das CBC Konfigurationsmenü erreicht man über das Kontextmenü der CU, über „rechte Maustaste > CAN Optionsbaugruppe > Konfiguration“.
Abbildung 3-1 CBC Konfigurationsmenü
Unter dem Reiter „CAN-Schnittstelle“ lässt sich die Übertragungsgeschwindigkeit („Baudrate“) und die Node-ID („CAN Busadresse“) einstellen.
3 Konfiguration und Projektierung
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 8
Sie
men
s A
G 2
014
All
right
s re
serv
ed
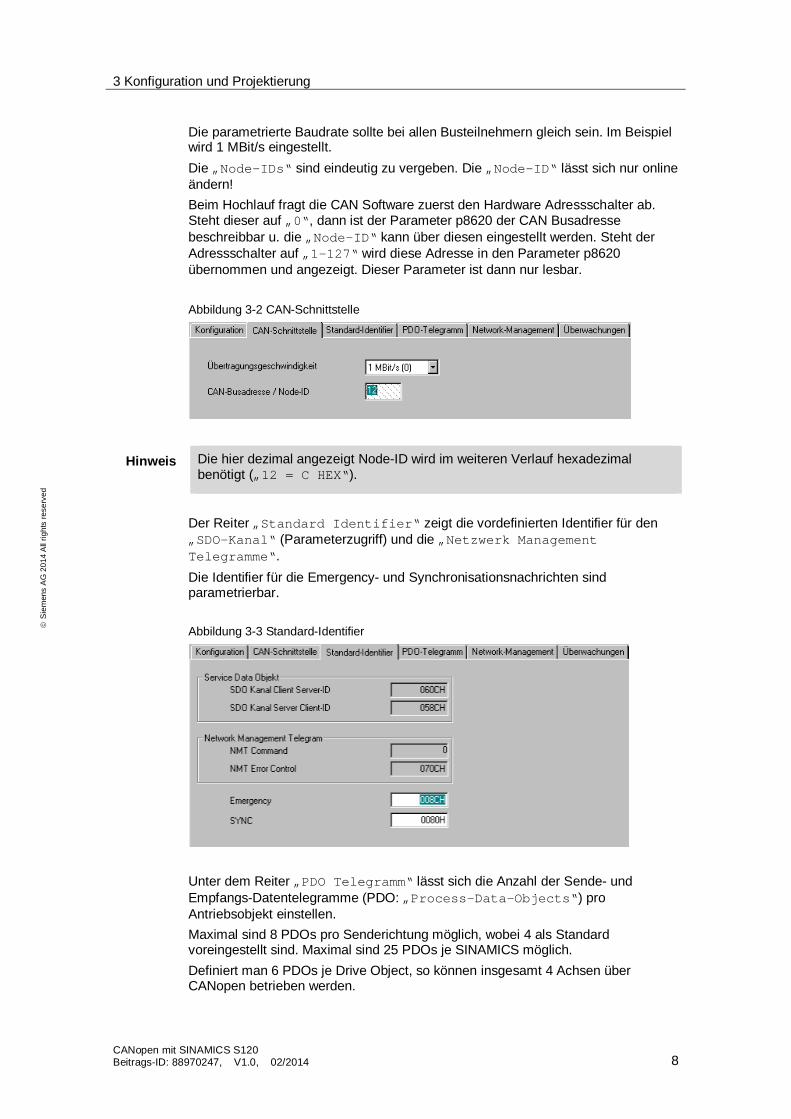
Die parametrierte Baudrate sollte bei allen Busteilnehmern gleich sein. Im Beispiel wird 1 MBit/s eingestellt. Die „Node-IDs“ sind eindeutig zu vergeben. Die „Node-ID“ lässt sich nur online ändern! Beim Hochlauf fragt die CAN Software zuerst den Hardware Adressschalter ab. Steht dieser auf „0“, dann ist der Parameter p8620 der CAN Busadresse beschreibbar u. die „Node-ID“ kann über diesen eingestellt werden. Steht der Adressschalter auf „1-127“ wird diese Adresse in den Parameter p8620 übernommen und angezeigt. Dieser Parameter ist dann nur lesbar. Abbildung 3-2 CAN-Schnittstelle
Hinweis Die hier dezimal angezeigt Node-ID wird im weiteren Verlauf hexadezimal benötigt („12 = C HEX“).
Der Reiter „Standard Identifier“ zeigt die vordefinierten Identifier für den „SDO-Kanal“ (Parameterzugriff) und die „Netzwerk Management Telegramme“. Die Identifier für die Emergency- und Synchronisationsnachrichten sind parametrierbar.
Abbildung 3-3 Standard-Identifier
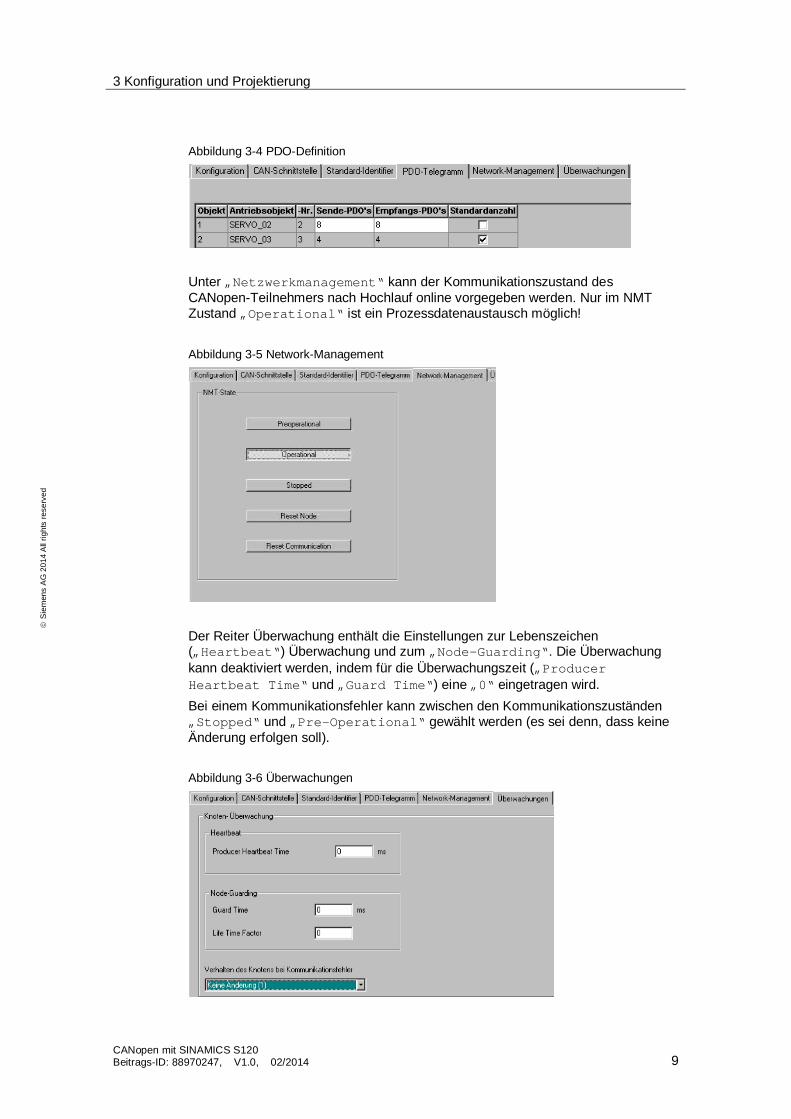
Unter dem Reiter „PDO Telegramm“ lässt sich die Anzahl der Sende- und Empfangs-Datentelegramme (PDO: „Process-Data-Objects“) pro Antriebsobjekt einstellen. Maximal sind 8 PDOs pro Senderichtung möglich, wobei 4 als Standard voreingestellt sind. Maximal sind 25 PDOs je SINAMICS möglich. Definiert man 6 PDOs je Drive Object, so können insgesamt 4 Achsen über CANopen betrieben werden.
3 Konfiguration und Projektierung
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 9
Sie
men
s A
G 2
014
All
right
s re
serv
ed
Abbildung 3-4 PDO-Definition
Unter „Netzwerkmanagement“ kann der Kommunikationszustand des CANopen-Teilnehmers nach Hochlauf online vorgegeben werden. Nur im NMT Zustand „Operational“ ist ein Prozessdatenaustausch möglich! Abbildung 3-5 Network-Management
Der Reiter Überwachung enthält die Einstellungen zur Lebenszeichen („Heartbeat“) Überwachung und zum „Node-Guarding“. Die Überwachung kann deaktiviert werden, indem für die Überwachungszeit („Producer Heartbeat Time“ und „Guard Time“) eine „0“ eingetragen wird. Bei einem Kommunikationsfehler kann zwischen den Kommunikationszuständen „Stopped“ und „Pre-Operational“ gewählt werden (es sei denn, dass keine Änderung erfolgen soll). Abbildung 3-6 Überwachungen
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 10
Sie
men
s A
G 2
014
All
right
s re
serv
ed
4 Inbetriebnahme des Beispielprojekts 4.1 Übersicht
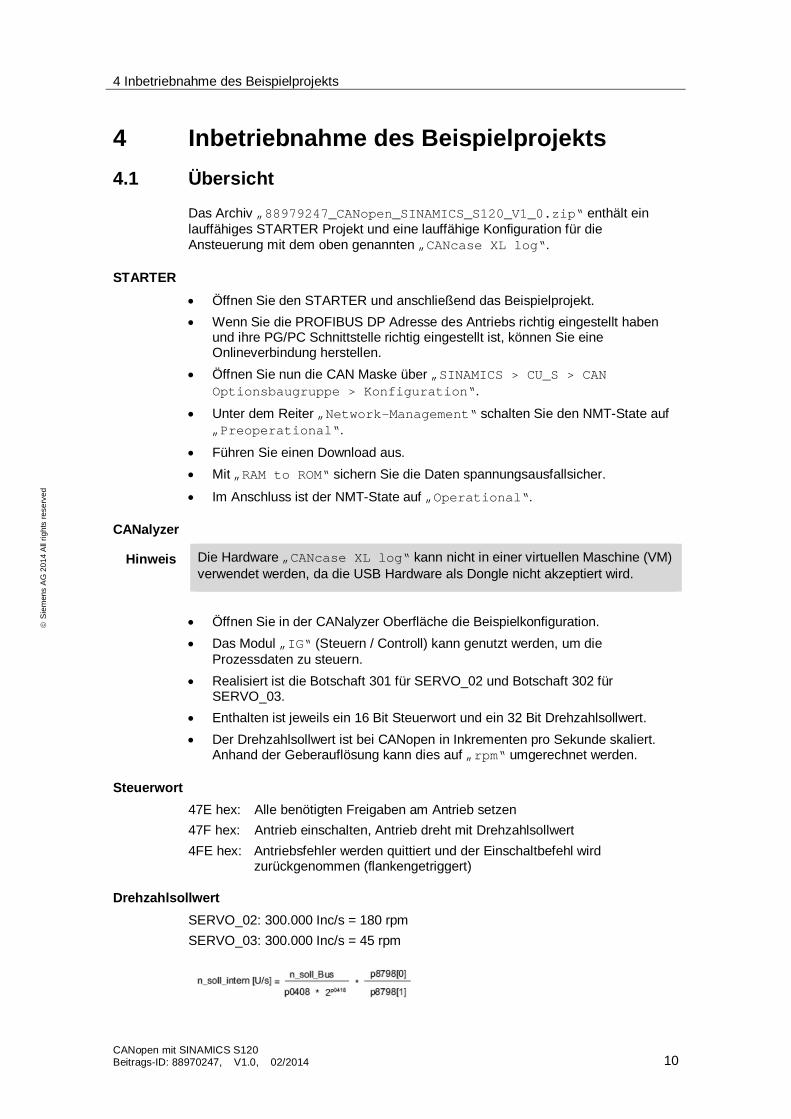
Das Archiv „88979247_CANopen_SINAMICS_S120_V1_0.zip“ enthält ein lauffähiges STARTER Projekt und eine lauffähige Konfiguration für die Ansteuerung mit dem oben genannten „CANcase XL log“.
STARTER Öffnen Sie den STARTER und anschließend das Beispielprojekt. Wenn Sie die PROFIBUS DP Adresse des Antriebs richtig eingestellt haben
und ihre PG/PC Schnittstelle richtig eingestellt ist, können Sie eine Onlineverbindung herstellen.
Öffnen Sie nun die CAN Maske über „SINAMICS > CU_S > CAN Optionsbaugruppe > Konfiguration“.
Unter dem Reiter „Network-Management“ schalten Sie den NMT-State auf „Preoperational“.
Führen Sie einen Download aus. Mit „RAM to ROM“ sichern Sie die Daten spannungsausfallsicher.
Im Anschluss ist der NMT-State auf „Operational“.
CANalyzer
Hinweis Die Hardware „CANcase XL log“ kann nicht in einer virtuellen Maschine (VM) verwendet werden, da die USB Hardware als Dongle nicht akzeptiert wird.
Öffnen Sie in der CANalyzer Oberfläche die Beispielkonfiguration. Das Modul „IG“ (Steuern / Controll) kann genutzt werden, um die
Prozessdaten zu steuern. Realisiert ist die Botschaft 301 für SERVO_02 und Botschaft 302 für
SERVO_03. Enthalten ist jeweils ein 16 Bit Steuerwort und ein 32 Bit Drehzahlsollwert. Der Drehzahlsollwert ist bei CANopen in Inkrementen pro Sekunde skaliert.
Anhand der Geberauflösung kann dies auf „rpm“ umgerechnet werden.
Steuerwort 47E hex: Alle benötigten Freigaben am Antrieb setzen 47F hex: Antrieb einschalten, Antrieb dreht mit Drehzahlsollwert 4FE hex: Antriebsfehler werden quittiert und der Einschaltbefehl wird
zurückgenommen (flankengetriggert)
Drehzahlsollwert SERVO_02: 300.000 Inc/s = 180 rpm SERVO_03: 300.000 Inc/s = 45 rpm
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 11
Sie
men
s A
G 2
014
All
right
s re
serv
ed
4.2 CAN-Parameter
4.2.1 CU320
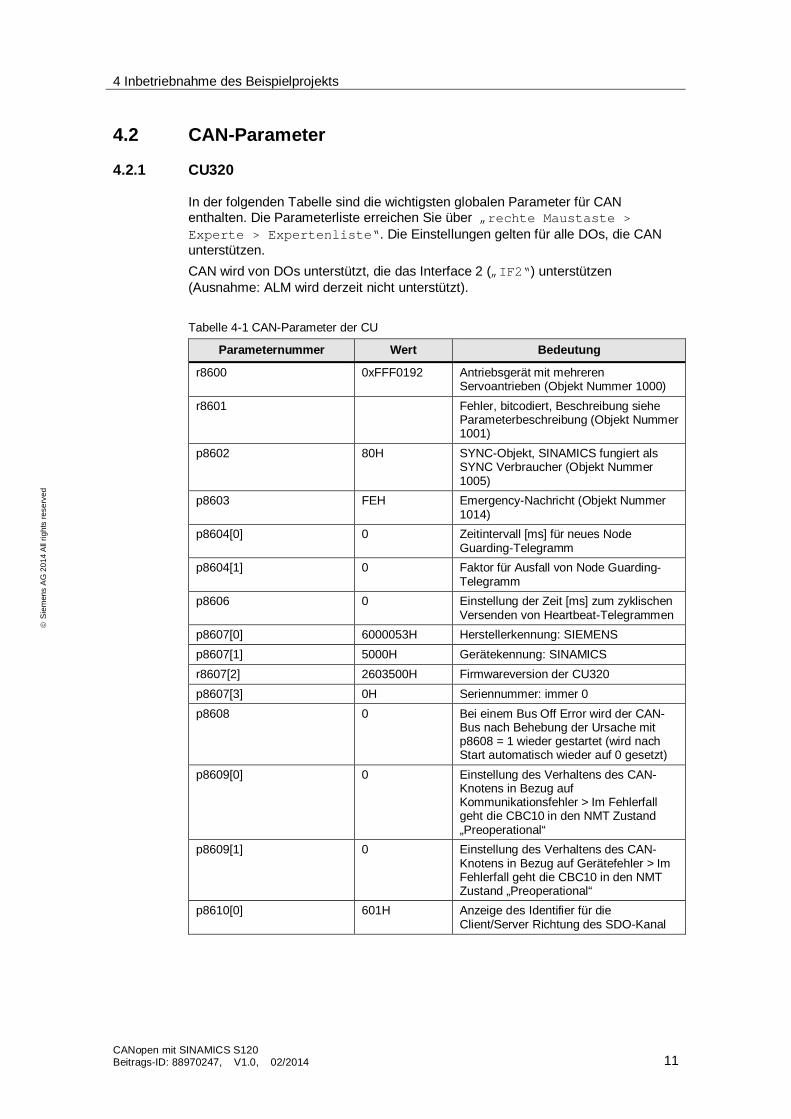
In der folgenden Tabelle sind die wichtigsten globalen Parameter für CAN enthalten. Die Parameterliste erreichen Sie über „rechte Maustaste > Experte > Expertenliste“. Die Einstellungen gelten für alle DOs, die CAN unterstützen. CAN wird von DOs unterstützt, die das Interface 2 („IF2“) unterstützen (Ausnahme: ALM wird derzeit nicht unterstützt). Tabelle 4-1 CAN-Parameter der CU
Parameternummer Wert Bedeutung
r8600 0xFFF0192 Antriebsgerät mit mehreren Servoantrieben (Objekt Nummer 1000)
r8601 Fehler, bitcodiert, Beschreibung siehe Parameterbeschreibung (Objekt Nummer 1001)
p8602 80H SYNC-Objekt, SINAMICS fungiert als SYNC Verbraucher (Objekt Nummer 1005)
p8603 FEH Emergency-Nachricht (Objekt Nummer 1014)
p8604[0] 0 Zeitintervall [ms] für neues Node Guarding-Telegramm
p8604[1] 0 Faktor für Ausfall von Node Guarding-Telegramm
p8606 0 Einstellung der Zeit [ms] zum zyklischen Versenden von Heartbeat-Telegrammen
p8607[0] 6000053H Herstellerkennung: SIEMENS p8607[1] 5000H Gerätekennung: SINAMICS r8607[2] 2603500H Firmwareversion der CU320 p8607[3] 0H Seriennummer: immer 0 p8608 0 Bei einem Bus Off Error wird der CAN-
Bus nach Behebung der Ursache mit p8608 = 1 wieder gestartet (wird nach Start automatisch wieder auf 0 gesetzt)
p8609[0] 0 Einstellung des Verhaltens des CAN-Knotens in Bezug auf Kommunikationsfehler > Im Fehlerfall geht die CBC10 in den NMT Zustand „Preoperational“
p8609[1] 0 Einstellung des Verhaltens des CAN-Knotens in Bezug auf Gerätefehler > Im Fehlerfall geht die CBC10 in den NMT Zustand „Preoperational“
p8610[0] 601H Anzeige des Identifier für die Client/Server Richtung des SDO-Kanal
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 12
Sie
men
s A
G 2
014
All
right
s re
serv
ed
Parameternummer Wert Bedeutung
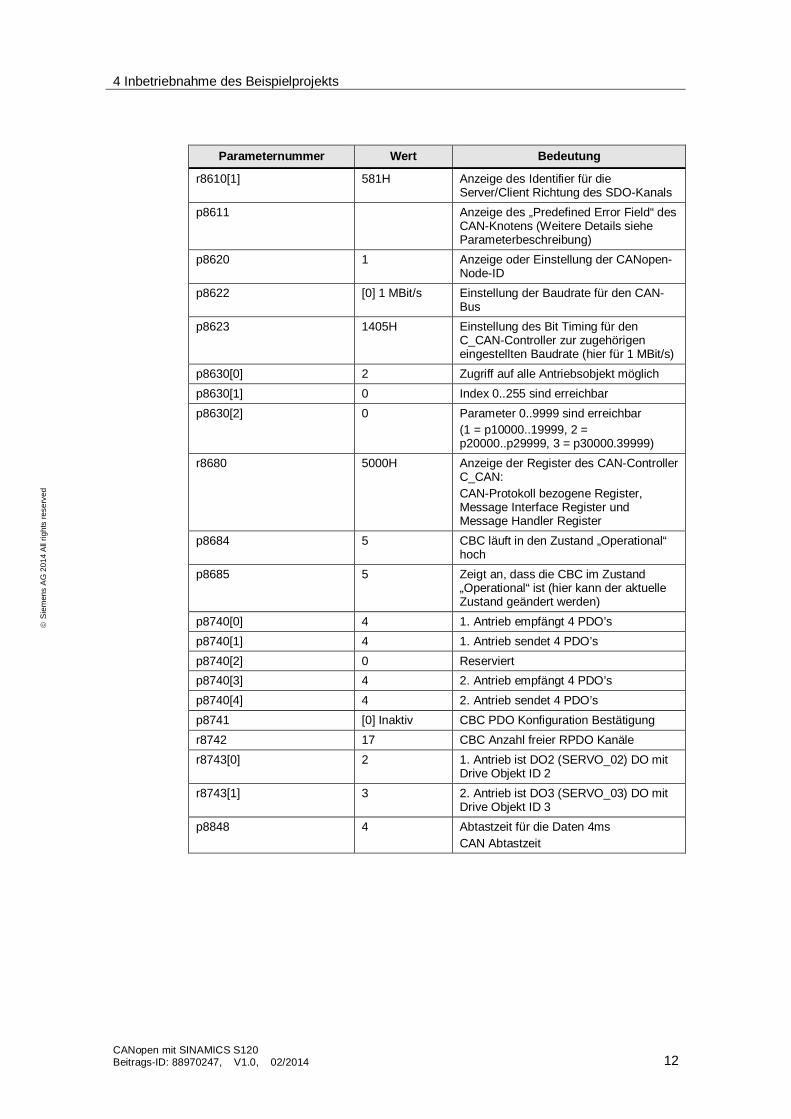
r8610[1] 581H Anzeige des Identifier für die Server/Client Richtung des SDO-Kanals
p8611 Anzeige des „Predefined Error Field“ des CAN-Knotens (Weitere Details siehe Parameterbeschreibung)
p8620 1 Anzeige oder Einstellung der CANopen-Node-ID
p8622 [0] 1 MBit/s Einstellung der Baudrate für den CAN-Bus
p8623 1405H Einstellung des Bit Timing für den C_CAN-Controller zur zugehörigen eingestellten Baudrate (hier für 1 MBit/s)
p8630[0] 2 Zugriff auf alle Antriebsobjekt möglich p8630[1] 0 Index 0..255 sind erreichbar p8630[2] 0 Parameter 0..9999 sind erreichbar
(1 = p10000..19999, 2 = p20000..p29999, 3 = p30000.39999)
r8680 5000H Anzeige der Register des CAN-Controller C_CAN: CAN-Protokoll bezogene Register, Message Interface Register und Message Handler Register
p8684 5 CBC läuft in den Zustand „Operational“ hoch
p8685 5 Zeigt an, dass die CBC im Zustand „Operational“ ist (hier kann der aktuelle Zustand geändert werden)
p8740[0] 4 1. Antrieb empfängt 4 PDO’s p8740[1] 4 1. Antrieb sendet 4 PDO’s p8740[2] 0 Reserviert p8740[3] 4 2. Antrieb empfängt 4 PDO’s p8740[4] 4 2. Antrieb sendet 4 PDO’s p8741 [0] Inaktiv CBC PDO Konfiguration Bestätigung r8742 17 CBC Anzahl freier RPDO Kanäle r8743[0] 2 1. Antrieb ist DO2 (SERVO_02) DO mit
Drive Objekt ID 2 r8743[1] 3 2. Antrieb ist DO3 (SERVO_03) DO mit
Drive Objekt ID 3 p8848 4 Abtastzeit für die Daten 4ms
CAN Abtastzeit
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 13
Sie
men
s A
G 2
014
All
right
s re
serv
ed
4.2.2 SERVO
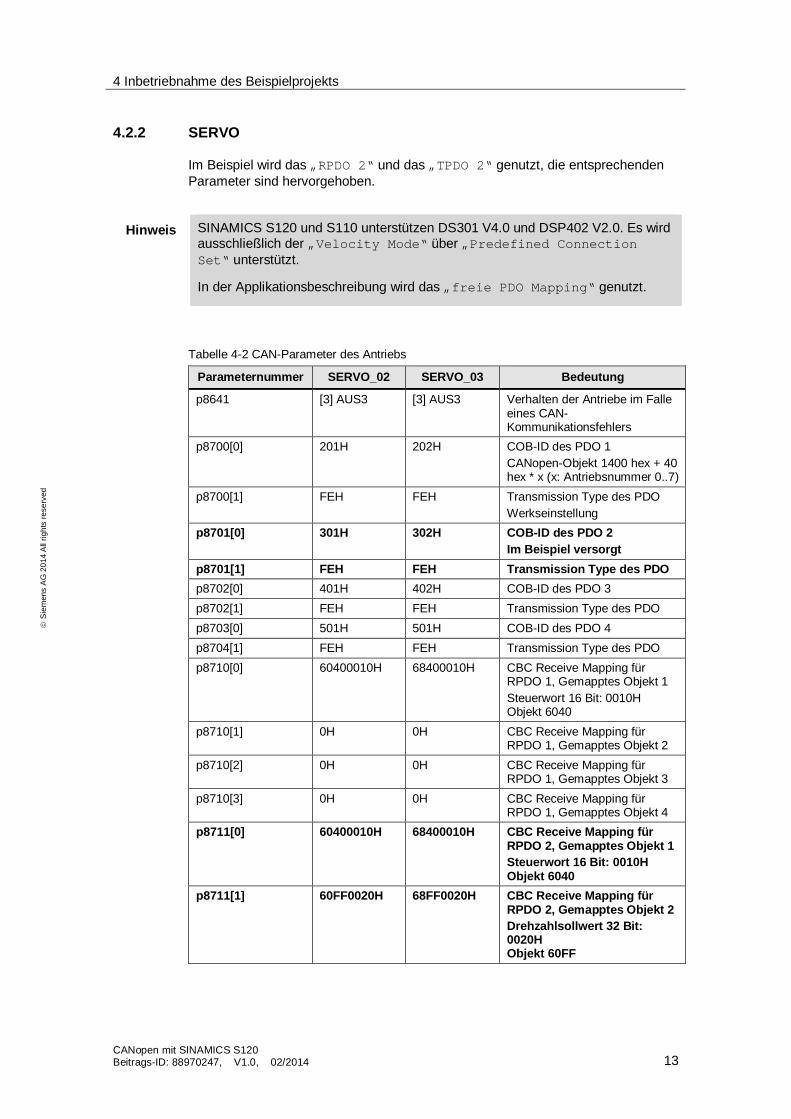
Im Beispiel wird das „RPDO 2“ und das „TPDO 2“ genutzt, die entsprechenden Parameter sind hervorgehoben.
Hinweis SINAMICS S120 und S110 unterstützen DS301 V4.0 und DSP402 V2.0. Es wird ausschließlich der „Velocity Mode“ über „Predefined Connection Set“ unterstützt.
In der Applikationsbeschreibung wird das „freie PDO Mapping“ genutzt.
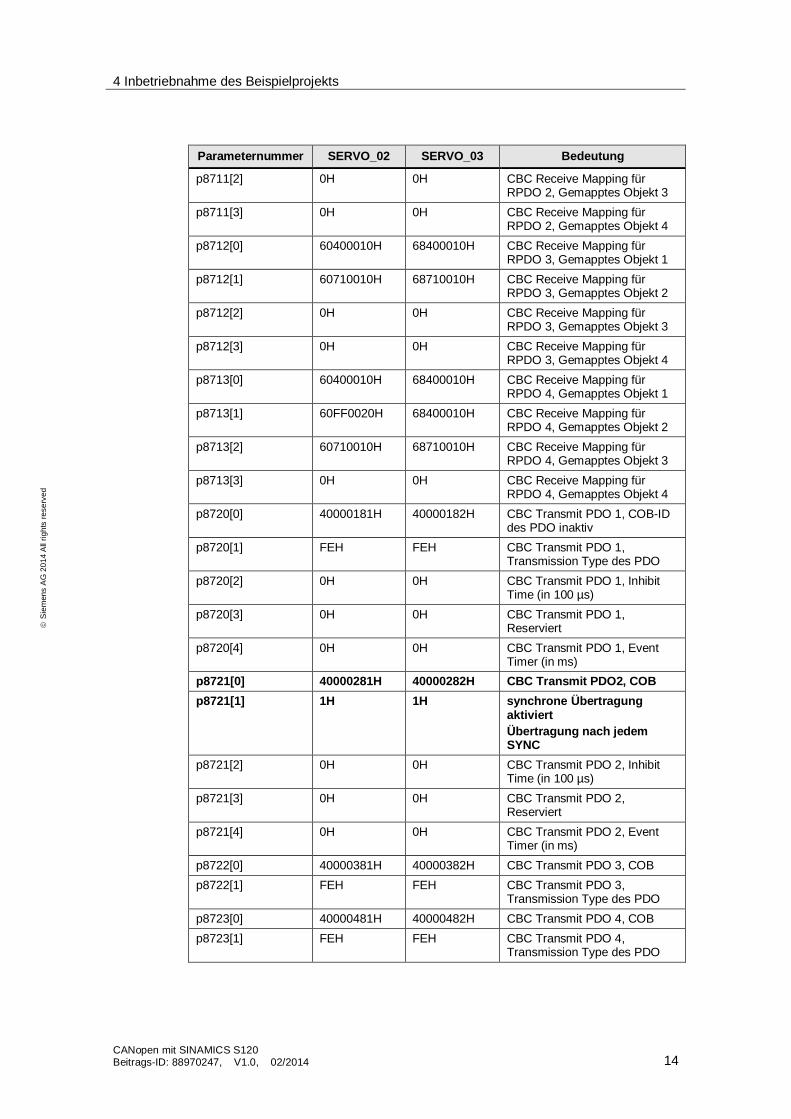
Tabelle 4-2 CAN-Parameter des Antriebs
Parameternummer SERVO_02 SERVO_03 Bedeutung
p8641 [3] AUS3 [3] AUS3 Verhalten der Antriebe im Falle eines CAN-Kommunikationsfehlers
p8700[0] 201H 202H COB-ID des PDO 1 CANopen-Objekt 1400 hex + 40 hex * x (x: Antriebsnummer 0..7)
p8700[1] FEH FEH Transmission Type des PDO Werkseinstellung
p8701[0] 301H 302H COB-ID des PDO 2 Im Beispiel versorgt
p8701[1] FEH FEH Transmission Type des PDO p8702[0] 401H 402H COB-ID des PDO 3 p8702[1] FEH FEH Transmission Type des PDO p8703[0] 501H 501H COB-ID des PDO 4 p8704[1] FEH FEH Transmission Type des PDO p8710[0] 60400010H 68400010H CBC Receive Mapping für
RPDO 1, Gemapptes Objekt 1 Steuerwort 16 Bit: 0010H Objekt 6040
p8710[1] 0H 0H CBC Receive Mapping für RPDO 1, Gemapptes Objekt 2
p8710[2] 0H 0H CBC Receive Mapping für RPDO 1, Gemapptes Objekt 3
p8710[3] 0H 0H CBC Receive Mapping für RPDO 1, Gemapptes Objekt 4
p8711[0] 60400010H 68400010H CBC Receive Mapping für RPDO 2, Gemapptes Objekt 1 Steuerwort 16 Bit: 0010H Objekt 6040
p8711[1] 60FF0020H 68FF0020H CBC Receive Mapping für RPDO 2, Gemapptes Objekt 2 Drehzahlsollwert 32 Bit: 0020H Objekt 60FF
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 14
Sie
men
s A
G 2
014
All
right
s re
serv
ed
Parameternummer SERVO_02 SERVO_03 Bedeutung
p8711[2] 0H 0H CBC Receive Mapping für RPDO 2, Gemapptes Objekt 3
p8711[3] 0H 0H CBC Receive Mapping für RPDO 2, Gemapptes Objekt 4
p8712[0] 60400010H 68400010H CBC Receive Mapping für RPDO 3, Gemapptes Objekt 1
p8712[1] 60710010H 68710010H CBC Receive Mapping für RPDO 3, Gemapptes Objekt 2
p8712[2] 0H 0H CBC Receive Mapping für RPDO 3, Gemapptes Objekt 3
p8712[3] 0H 0H CBC Receive Mapping für RPDO 3, Gemapptes Objekt 4
p8713[0] 60400010H 68400010H CBC Receive Mapping für RPDO 4, Gemapptes Objekt 1
p8713[1] 60FF0020H 68400010H CBC Receive Mapping für RPDO 4, Gemapptes Objekt 2
p8713[2] 60710010H 68710010H CBC Receive Mapping für RPDO 4, Gemapptes Objekt 3
p8713[3] 0H 0H CBC Receive Mapping für RPDO 4, Gemapptes Objekt 4
p8720[0] 40000181H 40000182H CBC Transmit PDO 1, COB-ID des PDO inaktiv
p8720[1] FEH FEH CBC Transmit PDO 1, Transmission Type des PDO
p8720[2] 0H 0H CBC Transmit PDO 1, Inhibit Time (in 100 µs)
p8720[3] 0H 0H CBC Transmit PDO 1, Reserviert
p8720[4] 0H 0H CBC Transmit PDO 1, Event Timer (in ms)
p8721[0] 40000281H 40000282H CBC Transmit PDO2, COB p8721[1] 1H 1H synchrone Übertragung
aktiviert Übertragung nach jedem SYNC
p8721[2] 0H 0H CBC Transmit PDO 2, Inhibit Time (in 100 µs)
p8721[3] 0H 0H CBC Transmit PDO 2, Reserviert
p8721[4] 0H 0H CBC Transmit PDO 2, Event Timer (in ms)
p8722[0] 40000381H 40000382H CBC Transmit PDO 3, COB p8722[1] FEH FEH CBC Transmit PDO 3,
Transmission Type des PDO p8723[0] 40000481H 40000482H CBC Transmit PDO 4, COB p8723[1] FEH FEH CBC Transmit PDO 4,
Transmission Type des PDO
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 15
Sie
men
s A
G 2
014
All
right
s re
serv
ed
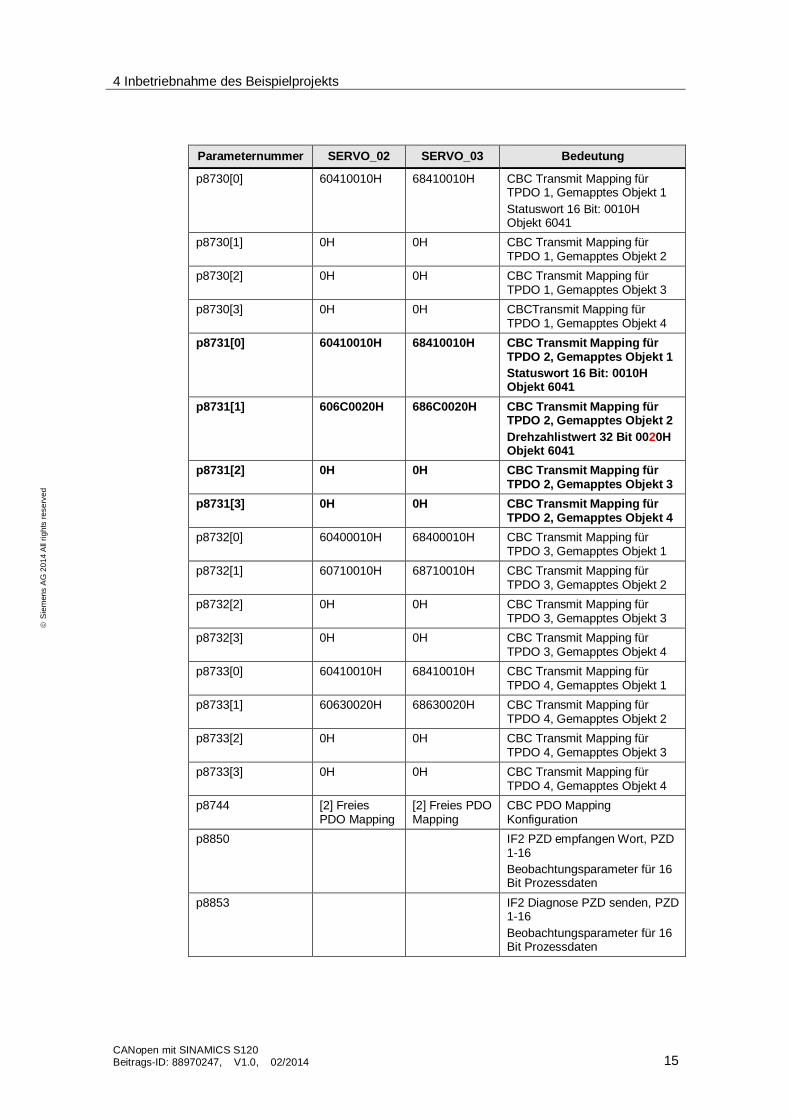
Parameternummer SERVO_02 SERVO_03 Bedeutung
p8730[0] 60410010H 68410010H CBC Transmit Mapping für TPDO 1, Gemapptes Objekt 1 Statuswort 16 Bit: 0010H Objekt 6041
p8730[1] 0H 0H CBC Transmit Mapping für TPDO 1, Gemapptes Objekt 2
p8730[2] 0H 0H CBC Transmit Mapping für TPDO 1, Gemapptes Objekt 3
p8730[3] 0H 0H CBCTransmit Mapping für TPDO 1, Gemapptes Objekt 4
p8731[0] 60410010H 68410010H CBC Transmit Mapping für TPDO 2, Gemapptes Objekt 1 Statuswort 16 Bit: 0010H Objekt 6041
p8731[1] 606C0020H 686C0020H CBC Transmit Mapping für TPDO 2, Gemapptes Objekt 2 Drehzahlistwert 32 Bit 0020H Objekt 6041
p8731[2] 0H 0H CBC Transmit Mapping für TPDO 2, Gemapptes Objekt 3
p8731[3] 0H 0H CBC Transmit Mapping für TPDO 2, Gemapptes Objekt 4
p8732[0] 60400010H 68400010H CBC Transmit Mapping für TPDO 3, Gemapptes Objekt 1
p8732[1] 60710010H 68710010H CBC Transmit Mapping für TPDO 3, Gemapptes Objekt 2
p8732[2] 0H 0H CBC Transmit Mapping für TPDO 3, Gemapptes Objekt 3
p8732[3] 0H 0H CBC Transmit Mapping für TPDO 3, Gemapptes Objekt 4
p8733[0] 60410010H 68410010H CBC Transmit Mapping für TPDO 4, Gemapptes Objekt 1
p8733[1] 60630020H 68630020H CBC Transmit Mapping für TPDO 4, Gemapptes Objekt 2
p8733[2] 0H 0H CBC Transmit Mapping für TPDO 4, Gemapptes Objekt 3
p8733[3] 0H 0H CBC Transmit Mapping für TPDO 4, Gemapptes Objekt 4
p8744 [2] Freies PDO Mapping
[2] Freies PDO Mapping
CBC PDO Mapping Konfiguration
p8850 IF2 PZD empfangen Wort, PZD 1-16 Beobachtungsparameter für 16 Bit Prozessdaten
p8853 IF2 Diagnose PZD senden, PZD 1-16 Beobachtungsparameter für 16 Bit Prozessdaten
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 16
Sie
men
s A
G 2
014
All
right
s re
serv
ed
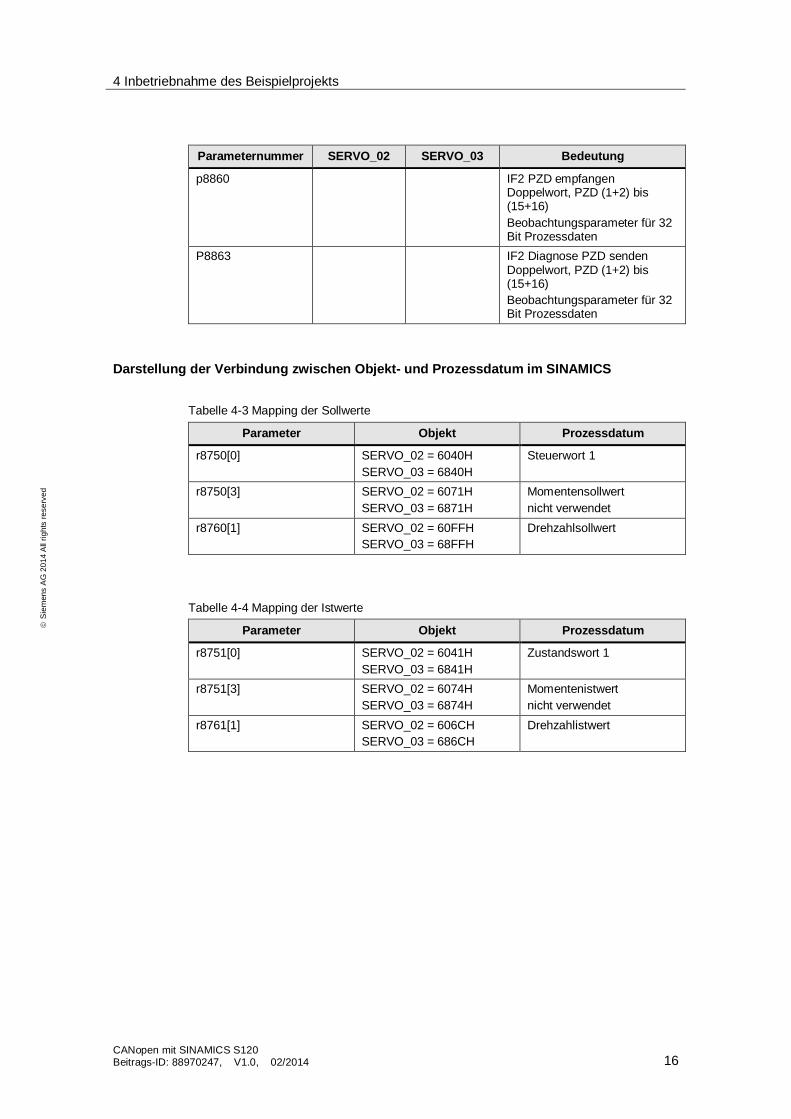
Parameternummer SERVO_02 SERVO_03 Bedeutung
p8860 IF2 PZD empfangen Doppelwort, PZD (1+2) bis (15+16) Beobachtungsparameter für 32 Bit Prozessdaten
P8863 IF2 Diagnose PZD senden Doppelwort, PZD (1+2) bis (15+16) Beobachtungsparameter für 32 Bit Prozessdaten
Darstellung der Verbindung zwischen Objekt- und Prozessdatum im SINAMICS Tabelle 4-3 Mapping der Sollwerte
Parameter Objekt Prozessdatum
r8750[0] SERVO_02 = 6040H SERVO_03 = 6840H
Steuerwort 1
r8750[3] SERVO_02 = 6071H SERVO_03 = 6871H
Momentensollwert nicht verwendet
r8760[1] SERVO_02 = 60FFH SERVO_03 = 68FFH
Drehzahlsollwert
Tabelle 4-4 Mapping der Istwerte
Parameter Objekt Prozessdatum
r8751[0] SERVO_02 = 6041H SERVO_03 = 6841H
Zustandswort 1
r8751[3] SERVO_02 = 6074H SERVO_03 = 6874H
Momentenistwert nicht verwendet
r8761[1] SERVO_02 = 606CH SERVO_03 = 686CH
Drehzahlistwert
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 17
Sie
men
s A
G 2
014
All
right
s re
serv
ed
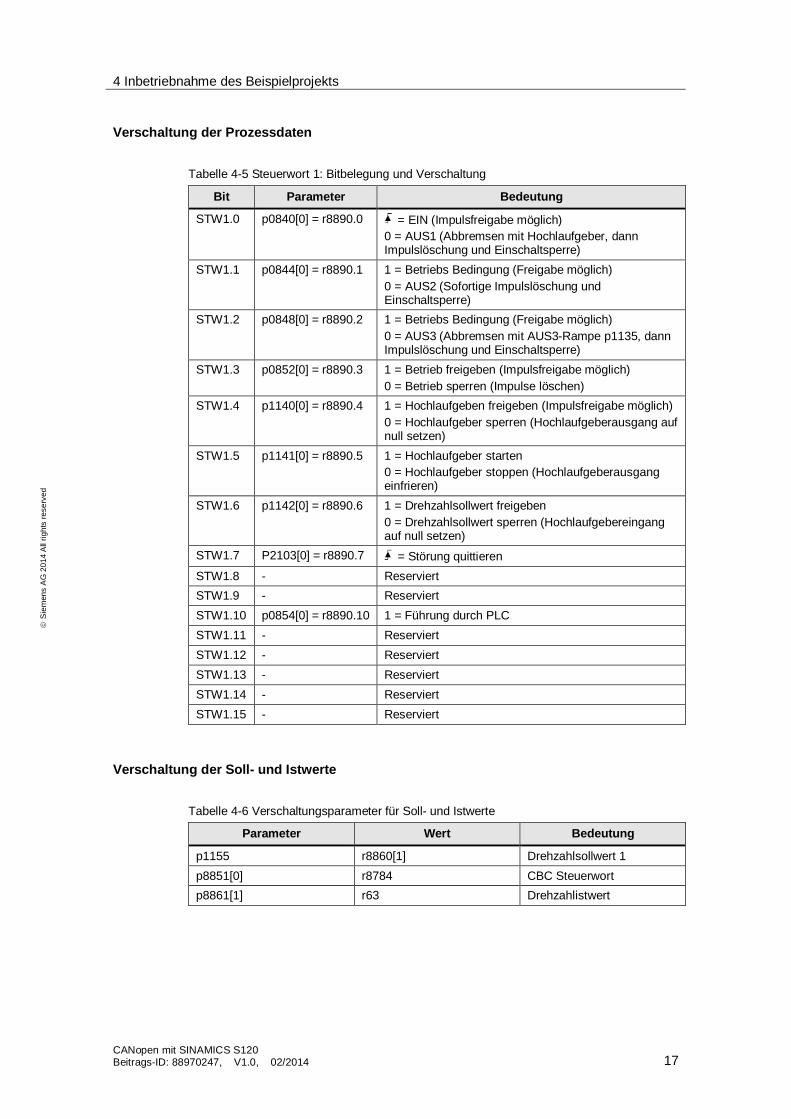
Verschaltung der Prozessdaten Tabelle 4-5 Steuerwort 1: Bitbelegung und Verschaltung
Bit Parameter Bedeutung
STW1.0 p0840[0] = r8890.0 = EIN (Impulsfreigabe möglich) 0 = AUS1 (Abbremsen mit Hochlaufgeber, dann Impulslöschung und Einschaltsperre)
STW1.1 p0844[0] = r8890.1 1 = Betriebs Bedingung (Freigabe möglich) 0 = AUS2 (Sofortige Impulslöschung und Einschaltsperre)
STW1.2 p0848[0] = r8890.2 1 = Betriebs Bedingung (Freigabe möglich) 0 = AUS3 (Abbremsen mit AUS3-Rampe p1135, dann Impulslöschung und Einschaltsperre)
STW1.3 p0852[0] = r8890.3 1 = Betrieb freigeben (Impulsfreigabe möglich) 0 = Betrieb sperren (Impulse löschen)
STW1.4 p1140[0] = r8890.4 1 = Hochlaufgeben freigeben (Impulsfreigabe möglich) 0 = Hochlaufgeber sperren (Hochlaufgeberausgang auf null setzen)
STW1.5 p1141[0] = r8890.5 1 = Hochlaufgeber starten 0 = Hochlaufgeber stoppen (Hochlaufgeberausgang einfrieren)
STW1.6 p1142[0] = r8890.6 1 = Drehzahlsollwert freigeben 0 = Drehzahlsollwert sperren (Hochlaufgebereingang auf null setzen)
STW1.7 P2103[0] = r8890.7 = Störung quittieren STW1.8 - Reserviert STW1.9 - Reserviert STW1.10 p0854[0] = r8890.10 1 = Führung durch PLC STW1.11 - Reserviert STW1.12 - Reserviert STW1.13 - Reserviert STW1.14 - Reserviert STW1.15 - Reserviert
Verschaltung der Soll- und Istwerte Tabelle 4-6 Verschaltungsparameter für Soll- und Istwerte
Parameter Wert Bedeutung
p1155 r8860[1] Drehzahlsollwert 1 p8851[0] r8784 CBC Steuerwort p8861[1] r63 Drehzahlistwert
4 Inbetriebnahme des Beispielprojekts
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 18
Sie
men
s A
G 2
014
All
right
s re
serv
ed
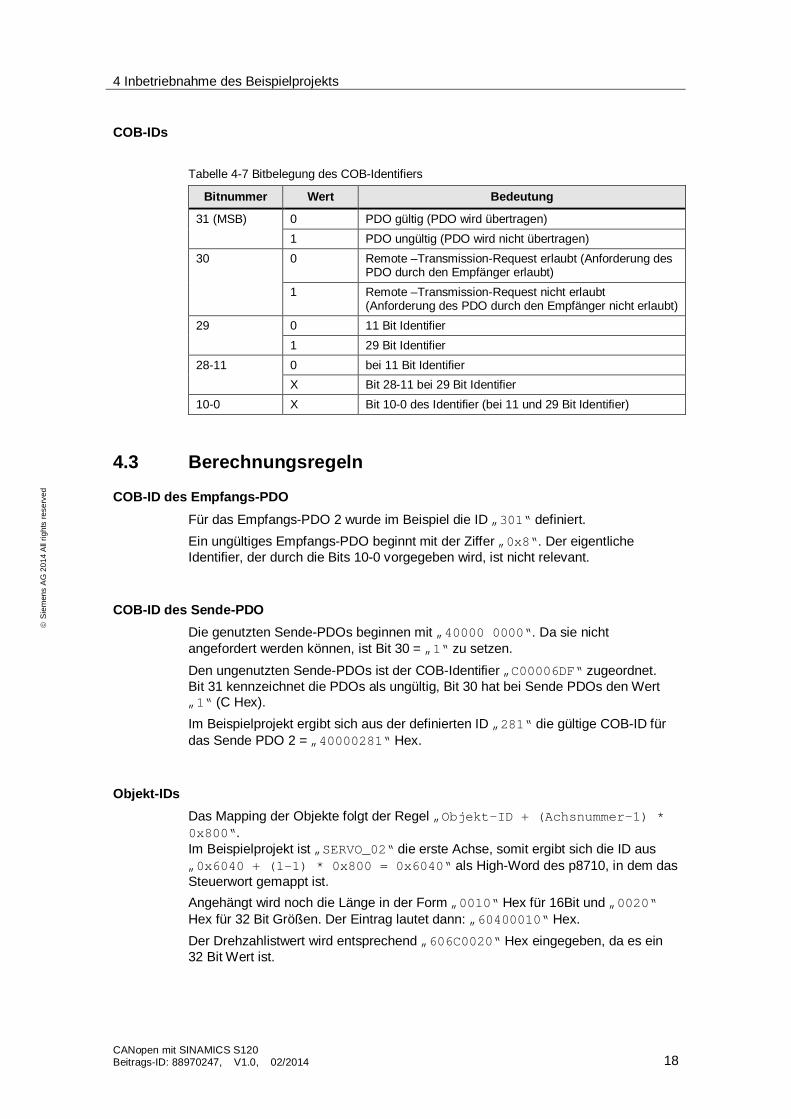
COB-IDs Tabelle 4-7 Bitbelegung des COB-Identifiers
Bitnummer Wert Bedeutung
31 (MSB) 0 PDO gültig (PDO wird übertragen) 1 PDO ungültig (PDO wird nicht übertragen)
30 0 Remote –Transmission-Request erlaubt (Anforderung des PDO durch den Empfänger erlaubt)
1 Remote –Transmission-Request nicht erlaubt (Anforderung des PDO durch den Empfänger nicht erlaubt)
29 0 11 Bit Identifier 1 29 Bit Identifier
28-11 0 bei 11 Bit Identifier X Bit 28-11 bei 29 Bit Identifier
10-0 X Bit 10-0 des Identifier (bei 11 und 29 Bit Identifier)
4.3 Berechnungsregeln
COB-ID des Empfangs-PDO Für das Empfangs-PDO 2 wurde im Beispiel die ID „301“ definiert. Ein ungültiges Empfangs-PDO beginnt mit der Ziffer „0x8“. Der eigentliche Identifier, der durch die Bits 10-0 vorgegeben wird, ist nicht relevant.
COB-ID des Sende-PDO Die genutzten Sende-PDOs beginnen mit „40000 0000“. Da sie nicht angefordert werden können, ist Bit 30 = „1“ zu setzen. Den ungenutzten Sende-PDOs ist der COB-Identifier „C00006DF“ zugeordnet. Bit 31 kennzeichnet die PDOs als ungültig, Bit 30 hat bei Sende PDOs den Wert „1“ (C Hex). Im Beispielprojekt ergibt sich aus der definierten ID „281“ die gültige COB-ID für das Sende PDO 2 = „40000281“ Hex.
Objekt-IDs Das Mapping der Objekte folgt der Regel „Objekt-ID + (Achsnummer-1) * 0x800“. Im Beispielprojekt ist „SERVO_02“ die erste Achse, somit ergibt sich die ID aus „0x6040 + (1-1) * 0x800 = 0x6040“ als High-Word des p8710, in dem das Steuerwort gemappt ist. Angehängt wird noch die Länge in der Form „0010“ Hex für 16Bit und „0020“ Hex für 32 Bit Größen. Der Eintrag lautet dann: „60400010“ Hex. Der Drehzahlistwert wird entsprechend „606C0020“ Hex eingegeben, da es ein 32 Bit Wert ist.
5 Literaturhinweise
CANopen mit SINAMICS S120 Beitrags-ID: 88970247, V1.0, 02/2014 19
Sie
men
s A
G 2
014
All
right
s re
serv
ed
5 Literaturhinweise Tabelle 5-1
Themengebiet Titel
\1\ Siemens Industry Online Support
http://support.automation.siemens.com
\2\ Downloadseite des Beitrages
http://support.automation.siemens.com/WW/view/de/88970247
\3\
6 Ansprechpartner Siemens AG Industry Sector I DT MC PMA APC Frauenauracher Straße 80 D - 91056 Erlangen mailto: [email protected]
7 Historie Tabelle 7-1
Version Datum Änderung
V1.0 02/2014 Erste Ausgabe





























