Embed Size (px)
Citation preview
AutomationMLDr. Rainer Drath
© ABB Group April 13, 2010 | Slide 1
AutomationMLArchitekturüberblick
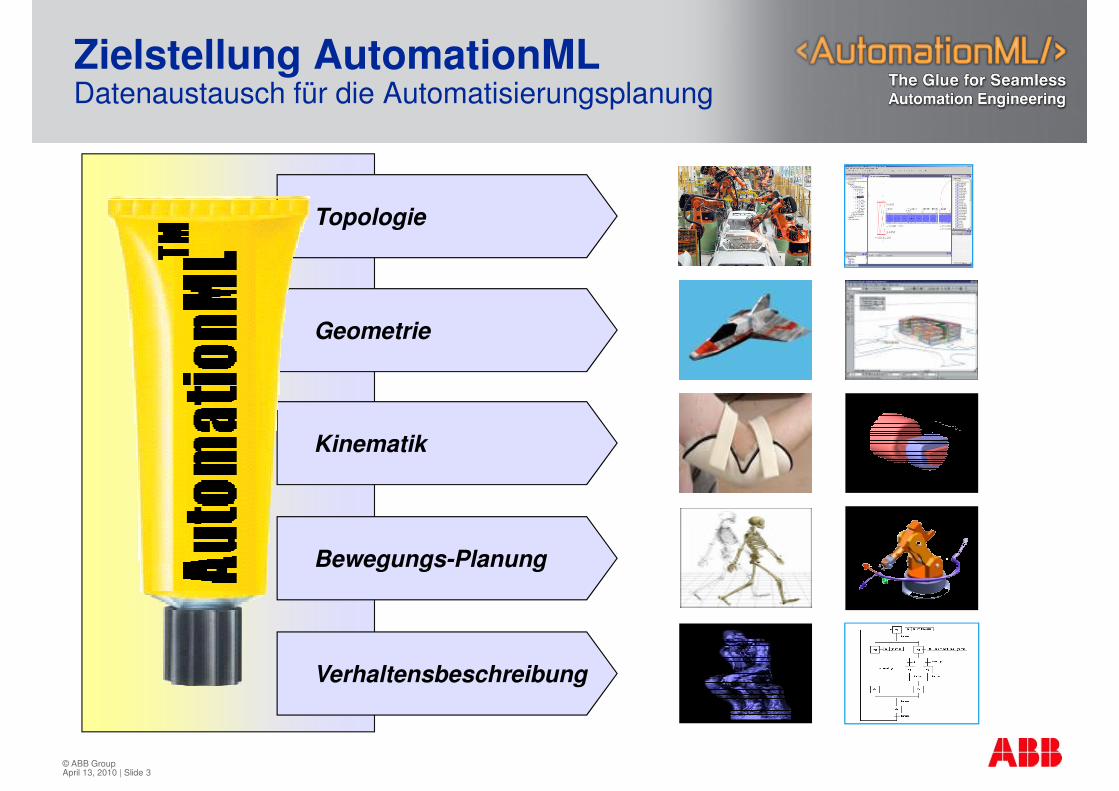
Zielstellung AutomationMLDatenaustausch für die Automatisierungsplanung
Topologie
Kinematik
Geometrie
© ABB Group April 13, 2010 | Slide 3
Bewegungs-Planung
Verhaltensbeschreibung
Anforderungen an AutomationMLEine Wunschliste
� Möglichst vollständige Beschreibung kompletter Anlagen
� Unterstützung wesentlicher Anwendungsfälle� Unterstützung wesentlicher Anwendungsfälle
� Möglichst frühzeitige Anwendbarkeit
� Kombination von „Best of Class“ Datenformaten
� Vernetzungsmöglichkeit von Sub-Datenformaten
� Hoher Durchdringungsgrad im Markt
� Verteilte Dateistruktur für die Handhabung von Massendaten� Verteilte Dateistruktur für die Handhabung von Massendaten
� Abbildung von Relationen zwischen Objekten
� Erweiterbarkeit und Flexibilität durch Meta-Konzepte
© ABB Group April 13, 2010 | Slide 4
Was AutomationML nicht istdamit keine Missverständnisse aufkommen
� keine Datenbank� keine Datenbank
� keine Datenzentrale
� kein Versionierungswerkzeug
� keine Software mit Funktionen
� keine Integrationsplattform� keine Integrationsplattform
� kein Allheilmittel
© ABB Group April 13, 2010 | Slide 5
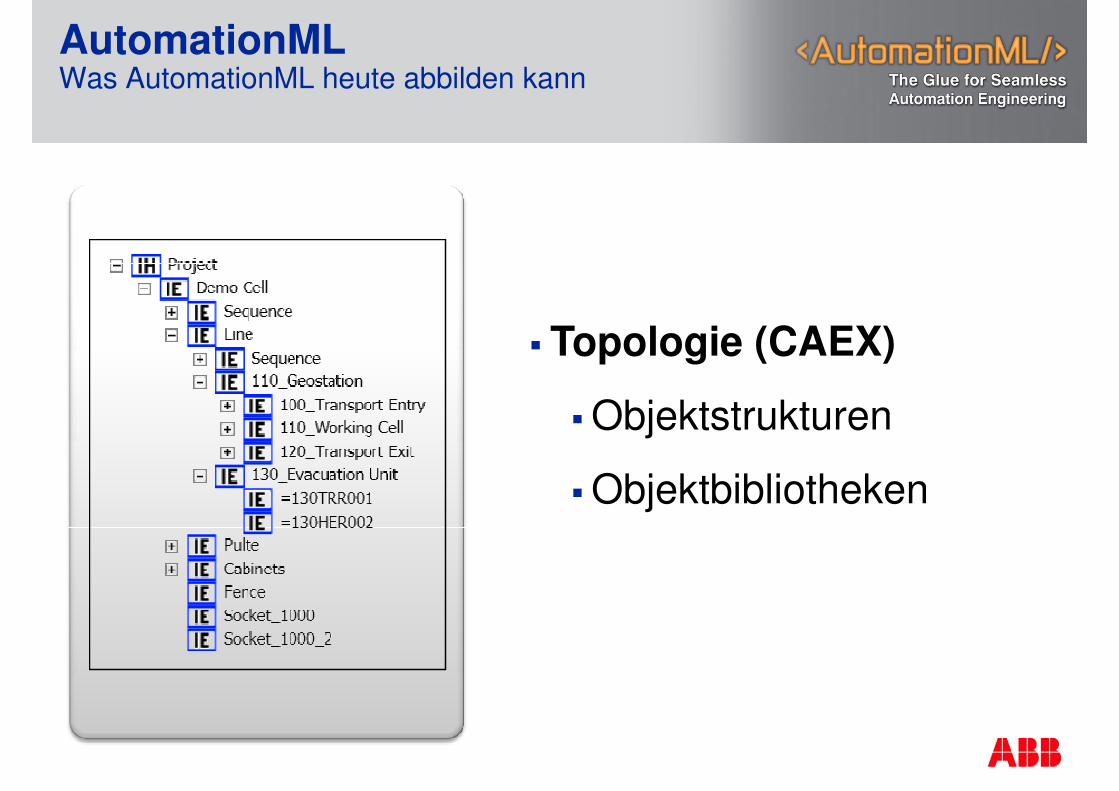
AutomationMLWas AutomationML heute abbilden kann
� Topologie (CAEX)
� Objektstrukturen
� Objektbibliotheken
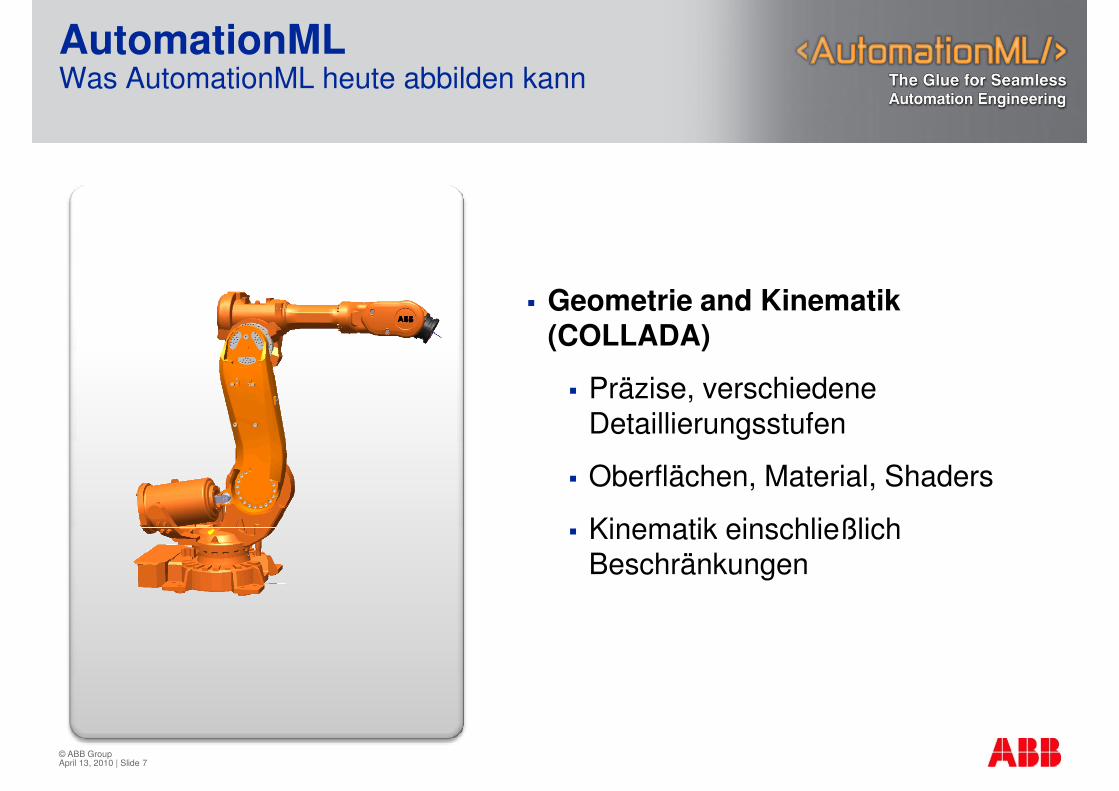
AutomationMLWas AutomationML heute abbilden kann
� Geometrie and Kinematik(COLLADA)
� Präzise, verschiedeneDetaillierungsstufen
� Oberflächen, Material, Shaders
� Kinematik einschließlich
© ABB Group April 13, 2010 | Slide 7
� Kinematik einschließlichBeschränkungen
OPERATION Seconds
Description
<Nr.> <Action>
End Time
Sequence diagram - Transport 2Start Time
Systempart
Prede-cessor
Dura-tion
0 5 10 15 20 25 30 35 40 45
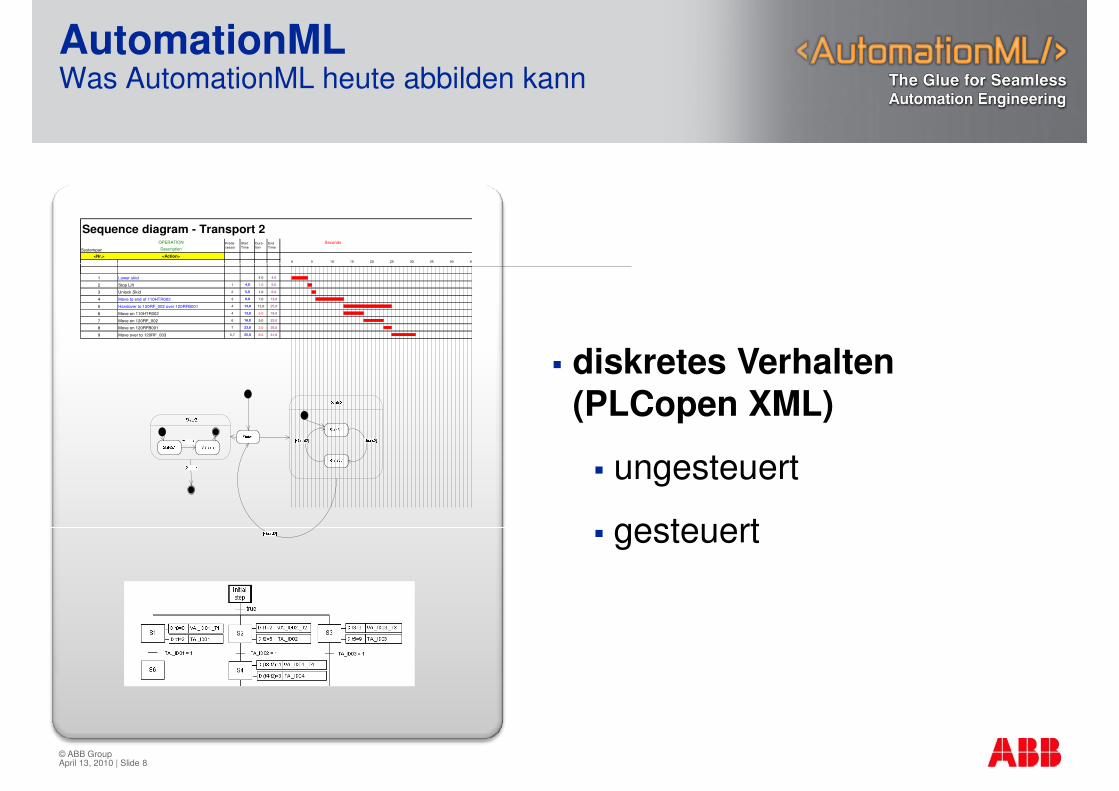
AutomationMLWas AutomationML heute abbilden kann
� diskretes Verhalten (PLCopen XML)
� ungesteuert
� gesteuert
1 Lower skid 4,0 4,0
2 Stop Lift 1 4,0 1,0 5,0
3 Unlock Skid 2 5,0 1,0 6,0
4 Move to end of 110HTR002 3 6,0 7,0 13,0
5 Handover to 120RF_002 over 120RFB001 4 13,0 12,0 25,0
6 Move on 110HTR002 4 13,0 5,0 18,0
7 Move on 120RF_002 6 18,0 5,0 23,0
8 Move on 120RFB001 7 23,0 2,0 25,0
9 Move over to 120RF_003 5,7 25,0 6,0 31,0
© ABB Group April 13, 2010 | Slide 8
� gesteuert
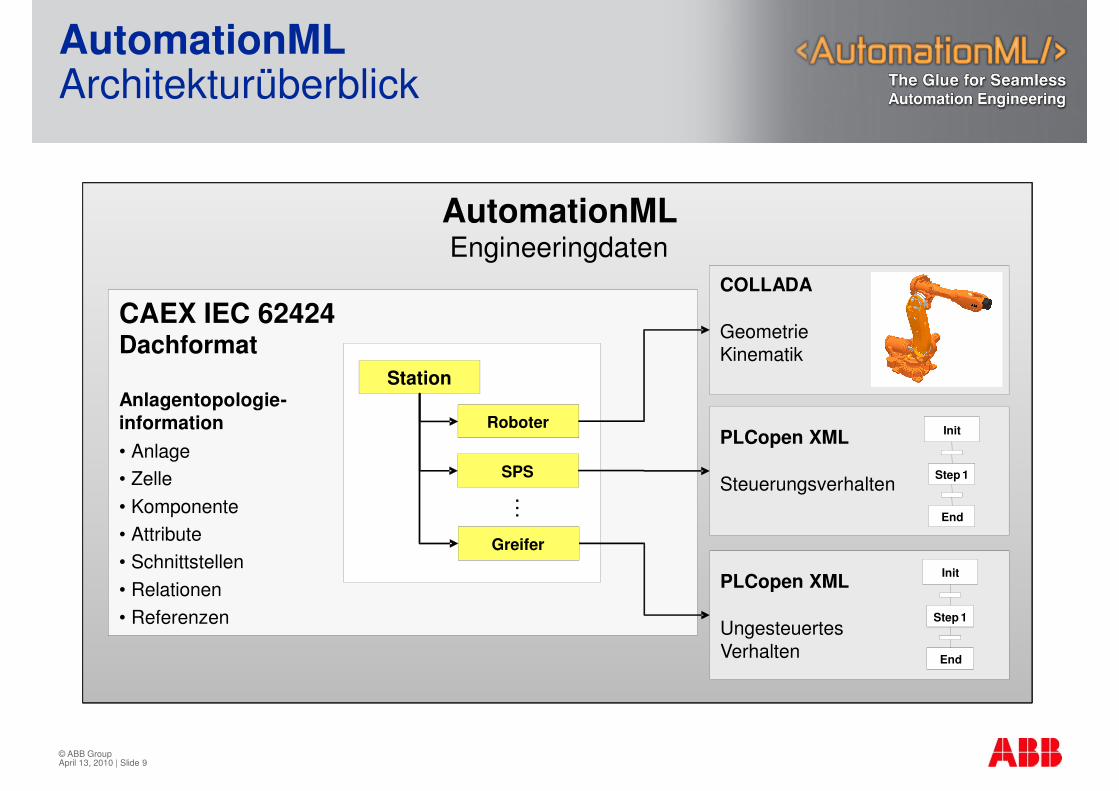
AutomationML Architekturüberblick
AutomationMLEngineeringdaten
CAEX IEC 62424 Dachformat
Anlagentopologie-information• Anlage• Zelle• Komponente• Attribute
COLLADA
GeometrieKinematik
PLCopen XML
Steuerungsverhalten
Station
Roboter
SPS
InitInit
Step 1
End
…
© ABB Group April 13, 2010 | Slide 9
• Attribute• Schnittstellen• Relationen• Referenzen
PLCopen XML
UngesteuertesVerhalten
Greifer
InitInit
Step 1
End
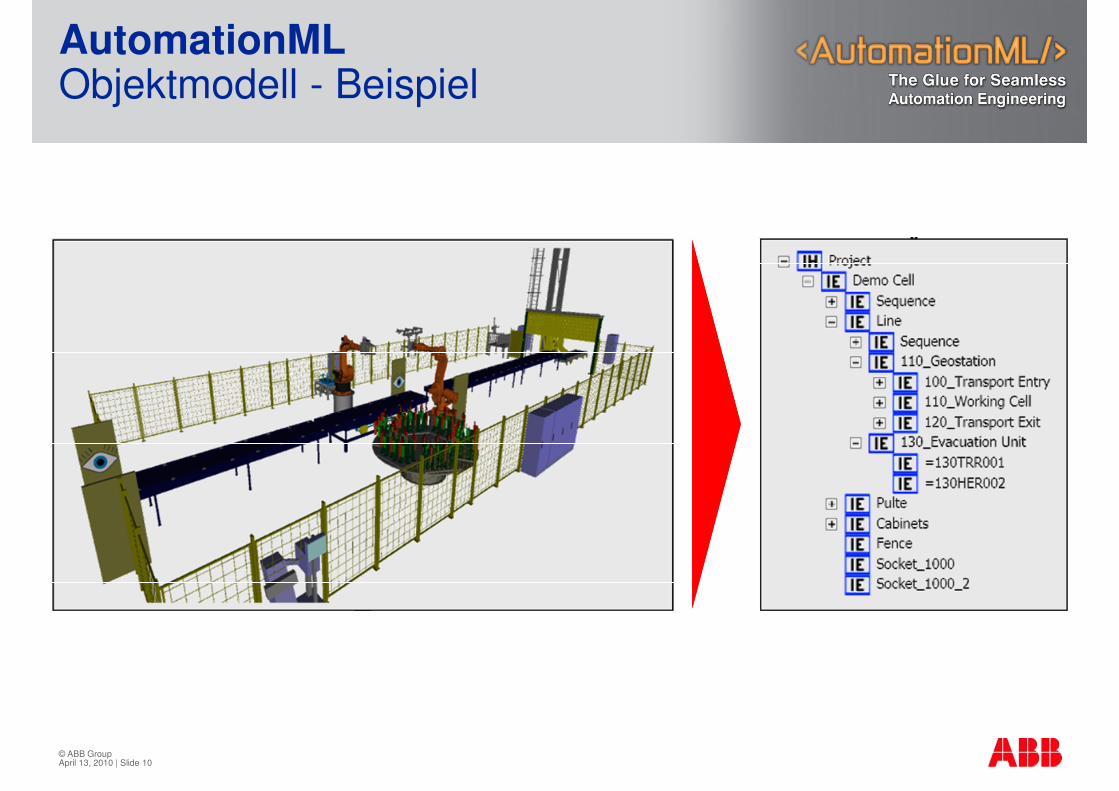
AutomationML Objektmodell - Beispiel
© ABB Group April 13, 2010 | Slide 10
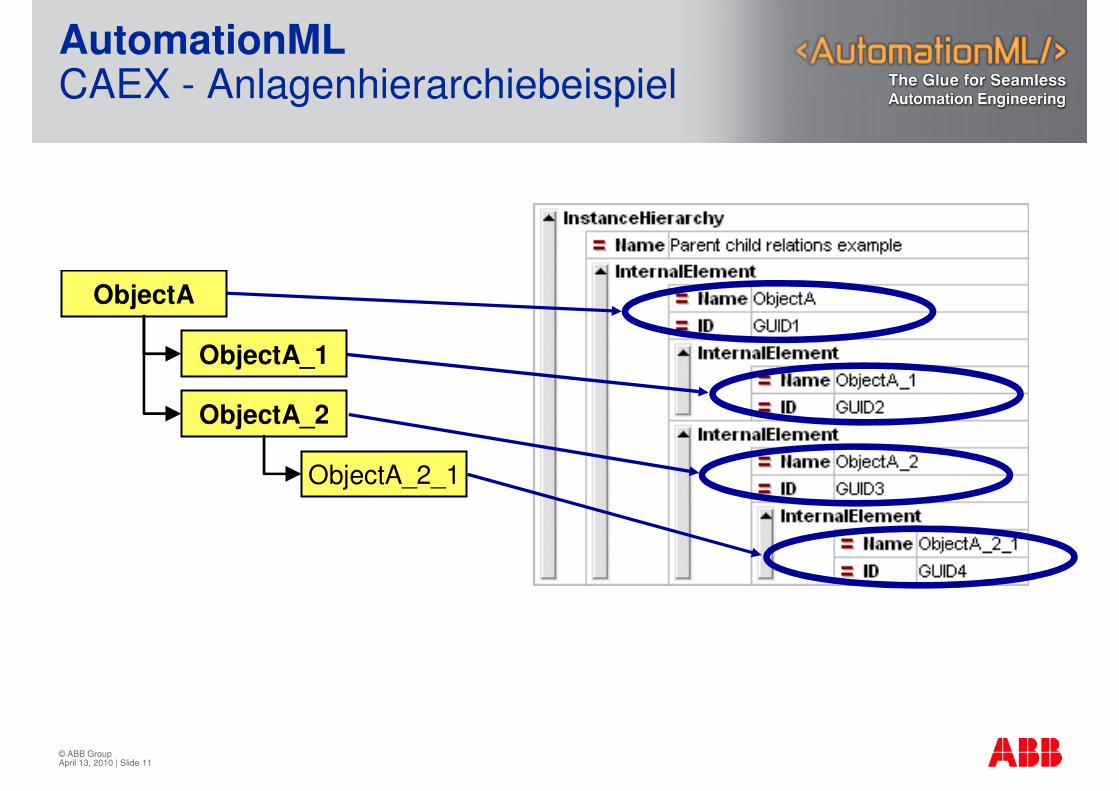
AutomationML CAEX - Anlagenhierarchiebeispiel
ObjectA_1
ObjectA
ObjectA_2
ObjectA_2_1
© ABB Group April 13, 2010 | Slide 11
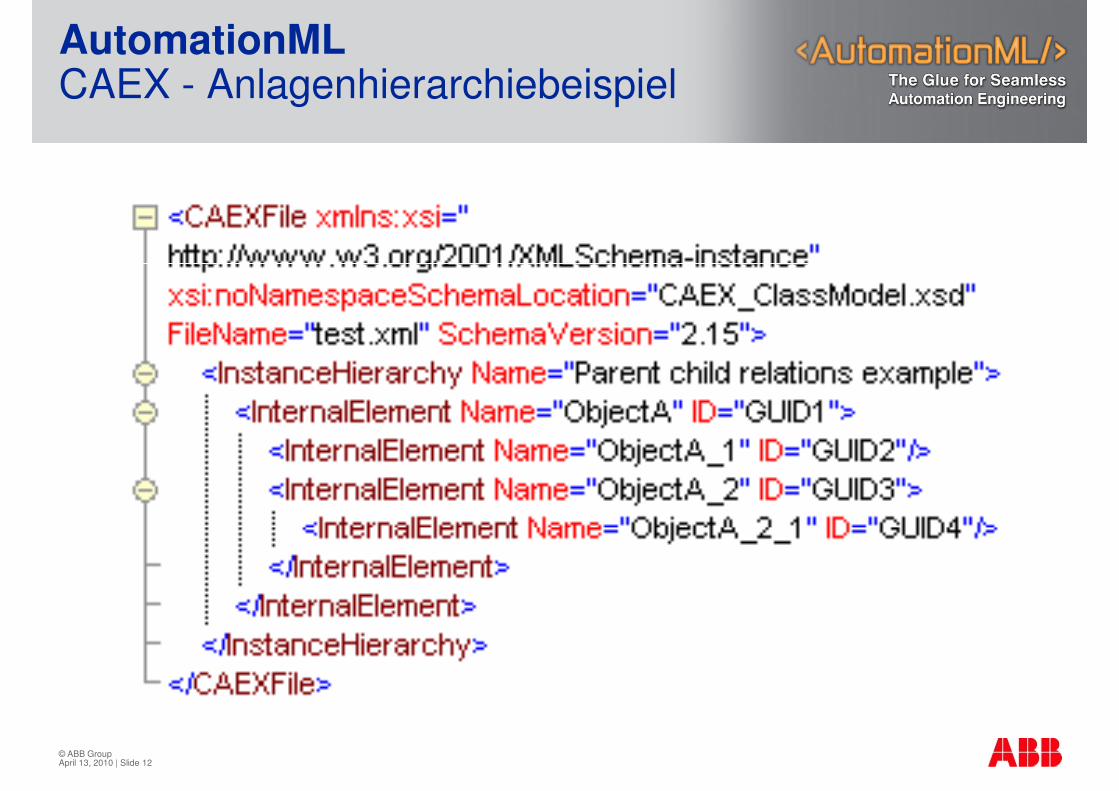
AutomationML CAEX - Anlagenhierarchiebeispiel
© ABB Group April 13, 2010 | Slide 12
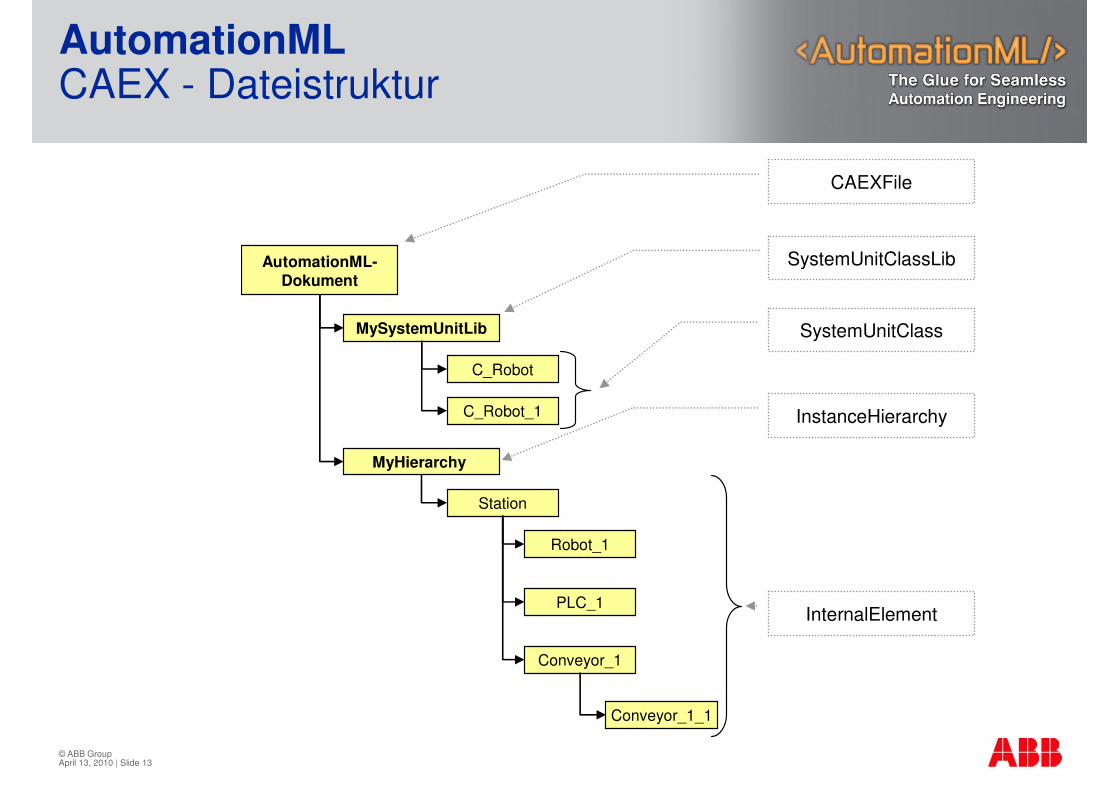
AutomationML-
CAEXFile
SystemUnitClassLib
AutomationML CAEX - Dateistruktur
MySystemUnitLib
C_Robot
AutomationML-Dokument
MyHierarchy
Station
C_Robot_1
SystemUnitClassLib
SystemUnitClass
InstanceHierarchy
Robot_1
PLC_1
Conveyor_1
Conveyor_1_1
InternalElement
© ABB Group April 13, 2010 | Slide 13
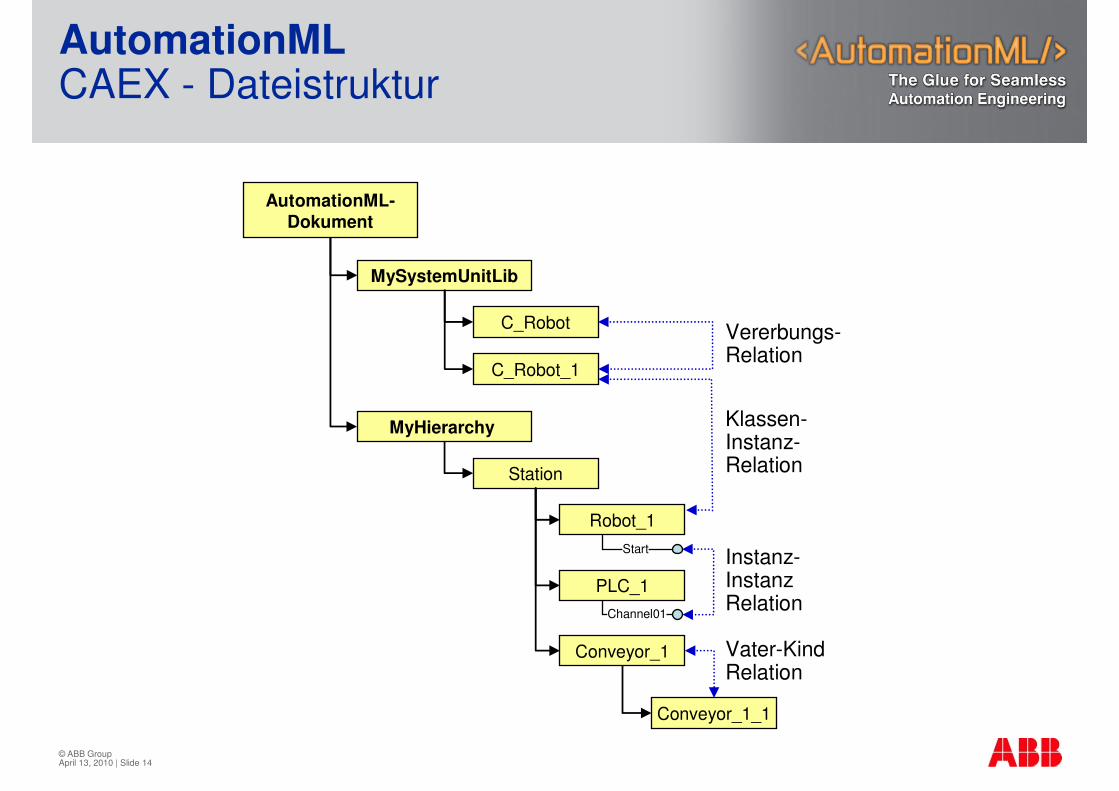
AutomationML CAEX - Dateistruktur
AutomationML-Dokument
MySystemUnitLib
C_Robot
MyHierarchy
Station
Robot_1
C_Robot_1
Vererbungs-Relation
Klassen-Instanz-Relation
© ABB Group April 13, 2010 | Slide 14
Robot_1
PLC_1
Conveyor_1
Conveyor_1_1
Instanz-Instanz Relation
Vater-Kind Relation
Start
Channel01
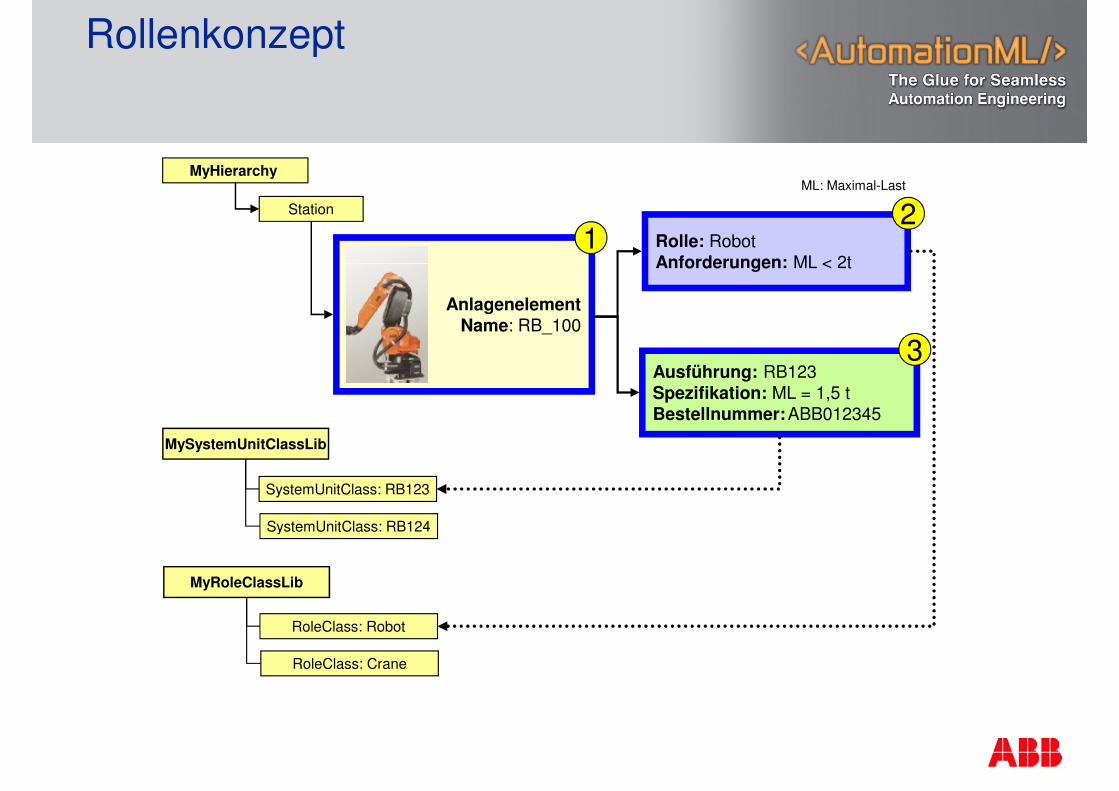
ML: Maximal-LastMyHierarchy
Station
1 Rolle: RobotAnforderungen: ML < 2t
2
Rollenkonzept
AnlagenelementName: RB_100
MySystemUnitClassLib
Anforderungen: ML < 2t
Ausführung: RB123Spezifikation: ML = 1,5 tBestellnummer:ABB012345
3
SystemUnitClass: RB123
SystemUnitClass: RB124SystemUnitClass: RB124
MyRoleClassLib
RoleClass: Robot
RoleClass: Crane
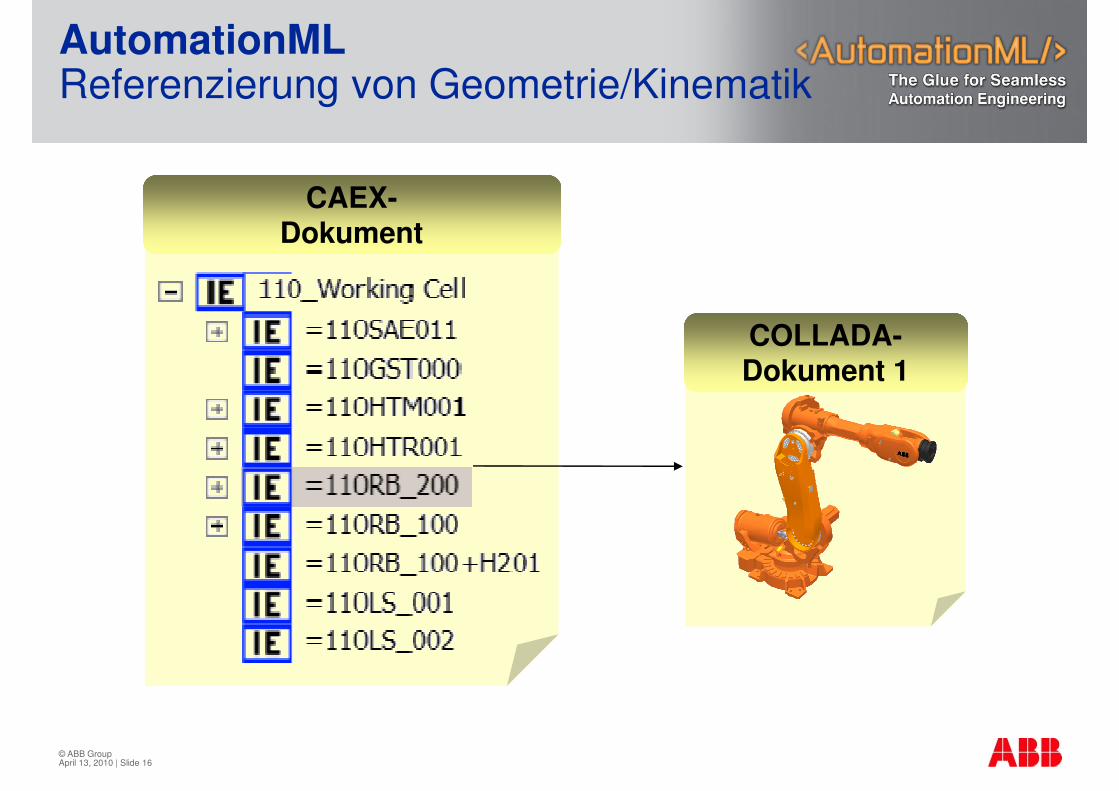
AutomationML Referenzierung von Geometrie/Kinematik
CAEX file
CAEX-Dokument
COLLADA-Dokument 1
© ABB Group April 13, 2010 | Slide 16
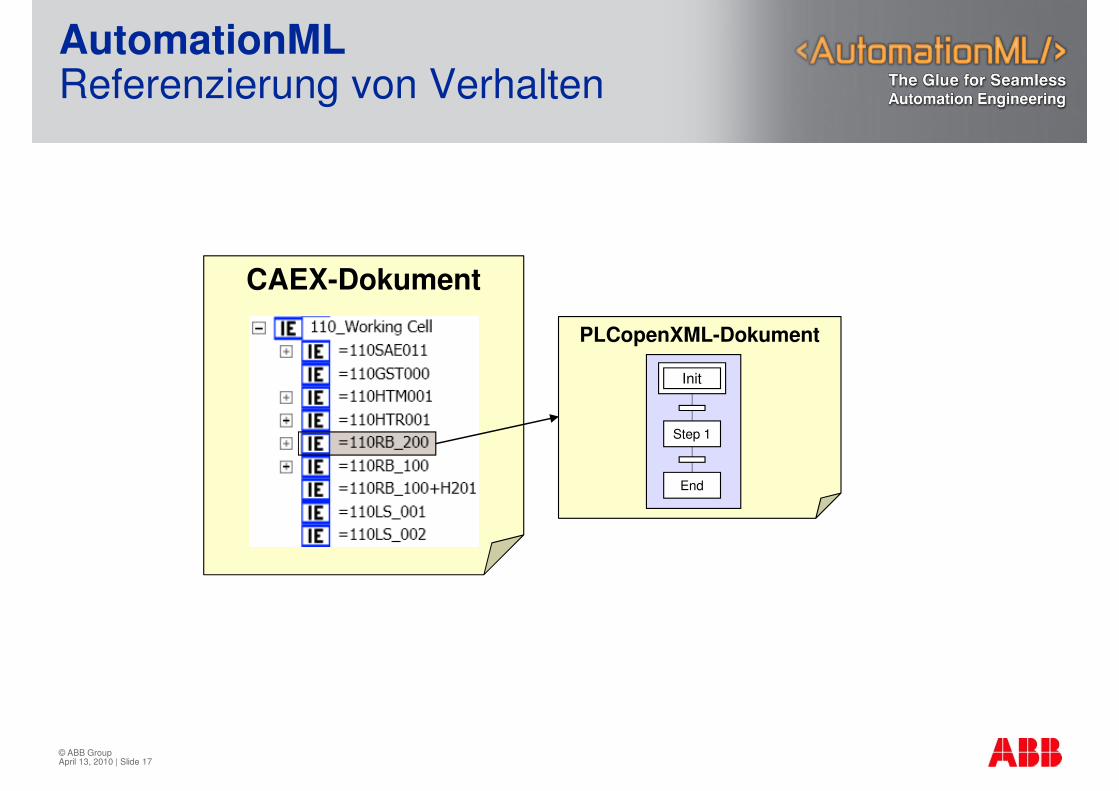
AutomationML Referenzierung von Verhalten
CAEX-DokumentCAEX-Dokument
PLCopenXML-Dokument
Init
Step 1
End
© ABB Group April 13, 2010 | Slide 17
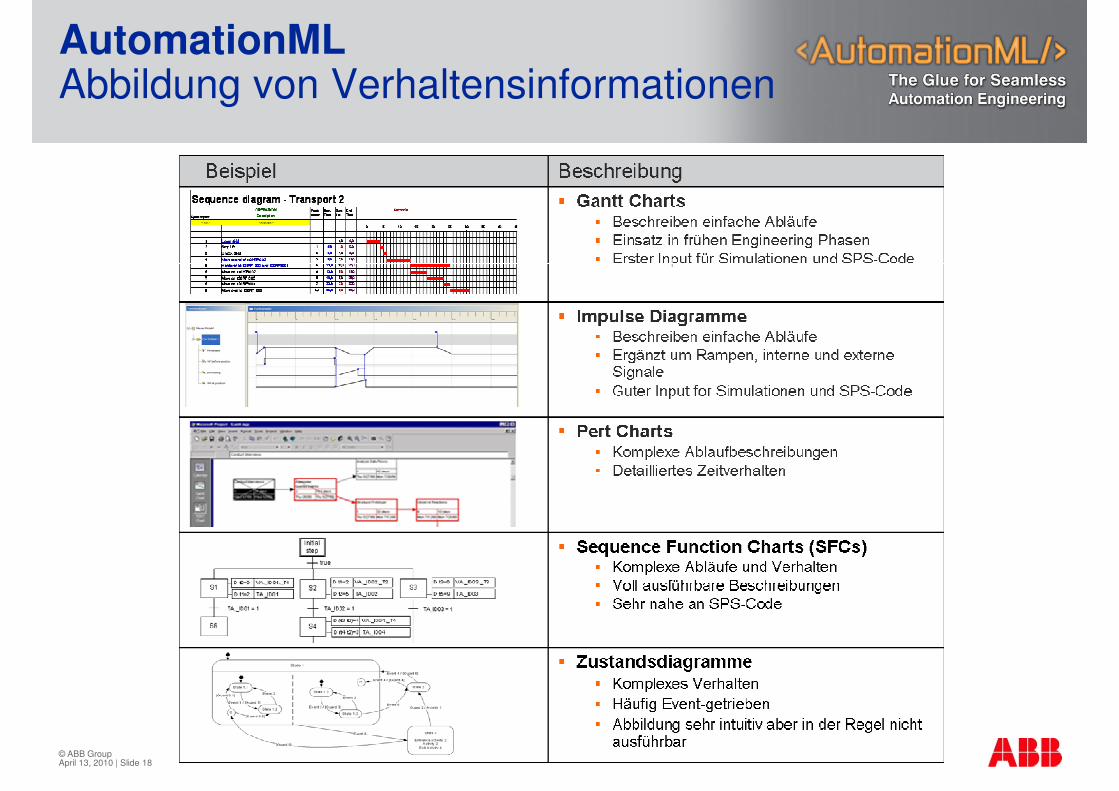
AutomationML Abbildung von Verhaltensinformationen
© ABB Group April 13, 2010 | Slide 18
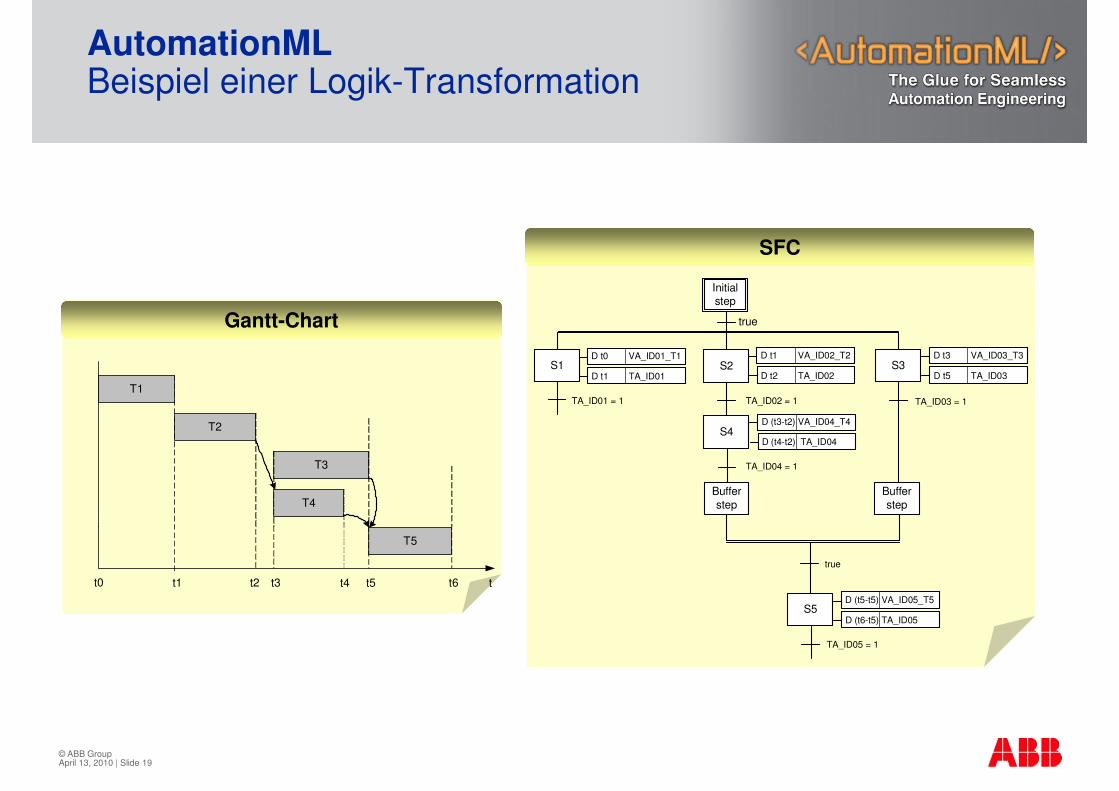
AutomationML Beispiel einer Logik-Transformation
SFC
CAEX fileGantt-Chart
T2
T1
T3
T4
Initialstep
S1 S3S2D t0 VA_ID01_T1
D t1 TA_ID01
true
D t1 VA_ID02_T2
D t2 TA_ID02
D t3 VA_ID03_T3
D t5 TA_ID03
S4D (t3-t2) VA_ID04_T4
D (t4-t2) TA_ID04
TA_ID01 = 1 TA_ID02 = 1
TA_ID04 = 1
TA_ID03 = 1
Bufferstep
Bufferstep
© ABB Group April 13, 2010 | Slide 19
t0 t1 tt2
T5
t3 t4 t6t5
S5D (t5-t5) VA_ID05_T5
D (t6-t5) TA_ID05
TA_ID05 = 1
true
AutomationML Beispiel einer Logik-Transformation
© ABB Group April 13, 2010 | Slide 20
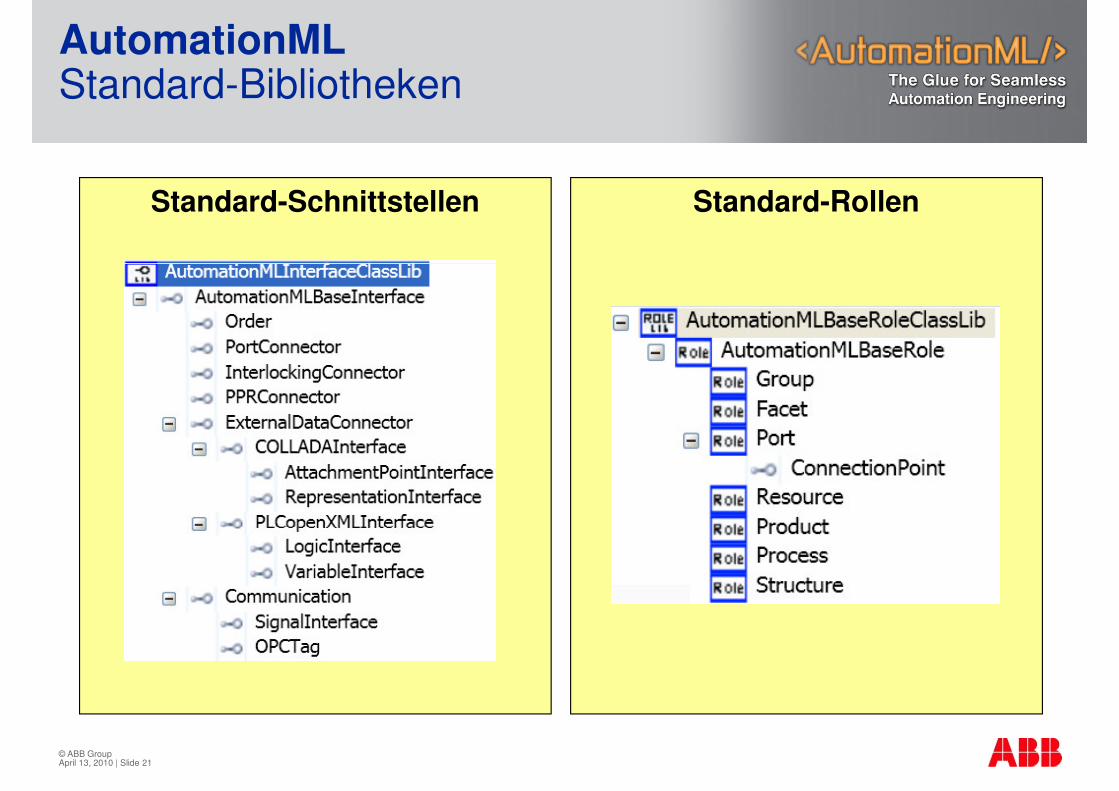
Standard-RollenStandard-Schnittstellen
AutomationML Standard-Bibliotheken
© ABB Group April 13, 2010 | Slide 21
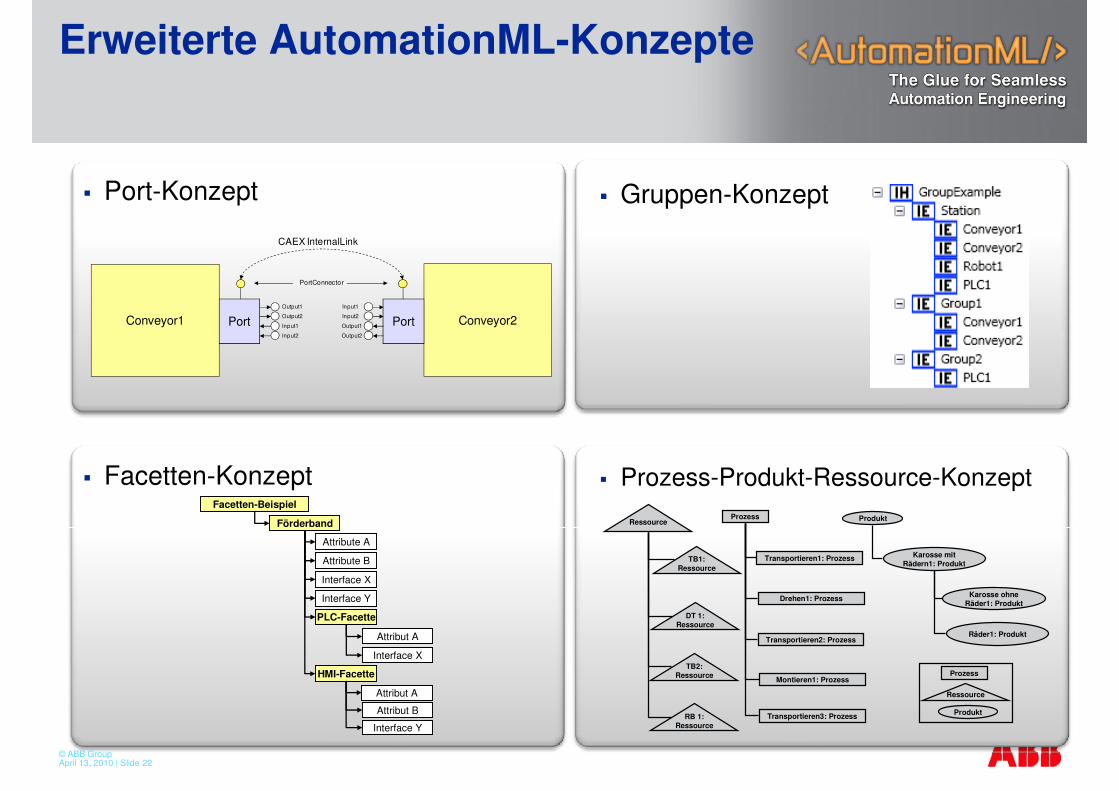
� Gruppen-Konzept
Erweiterte AutomationML-Konzepte
� Port-Konzept
CAEX InternalLink
� Prozess-Produkt-Ressource-Konzept� Facetten-Konzept
Conveyor1 PortOutput1
Output2
Input1
Input2
Conveyor2PortInput1
Input2
Output1
Output2
PortConnector
RessourceProzess Produkt
Facetten-Beispiel
Förderband
© ABB Group April 13, 2010 | Slide 22
Ressource
Prozess
Produkt
TB2: Ressource
TB1: Ressource
RB 1: Ressource
DT 1: Ressource
Montieren1: Prozess
Drehen1: Prozess
Transportieren1: Prozess
Transportieren2: Prozess
Transportieren3: Prozess
Räder1: Produkt
Karosse mit Rädern1: Produkt
Karosse ohneRäder1: Produkt
PLC-Facette
Förderband
Attribute A
Attribute B
Interface X
Interface Y
Attribut A
Interface X
HMI-Facette
Attribut B
Interface Y
Attribut A
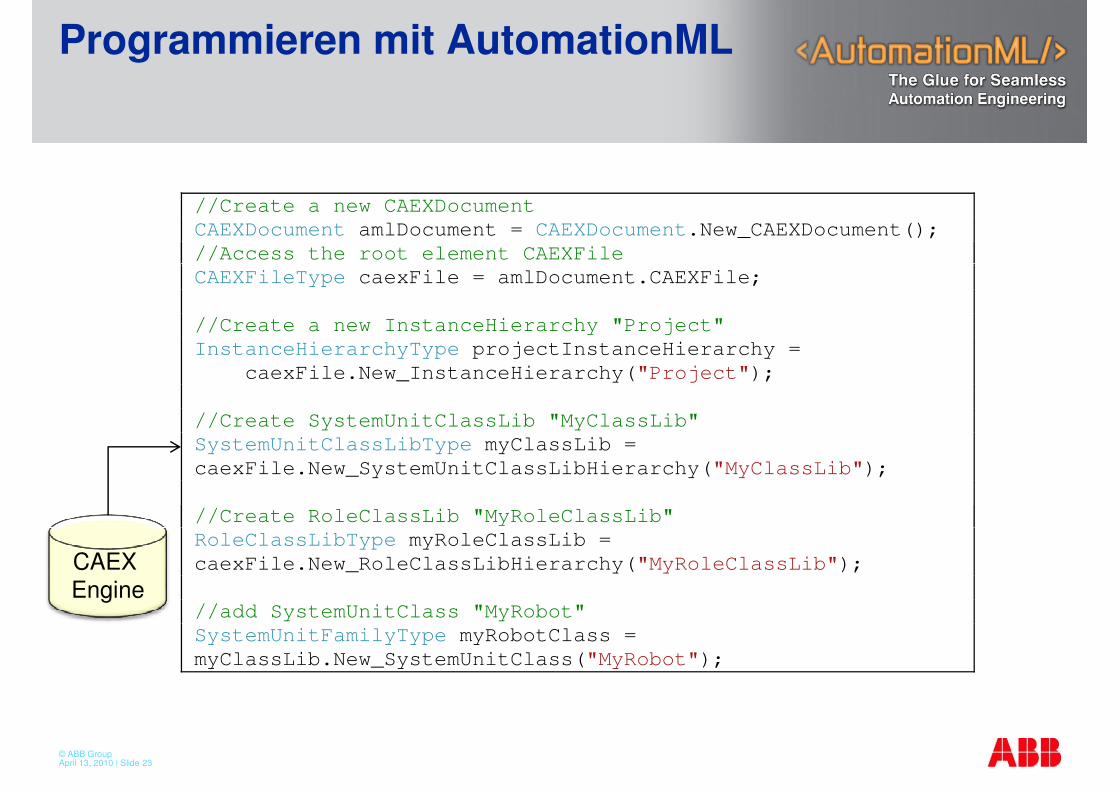
Programmieren mit AutomationML
//Create a new CAEXDocument CAEXDocument amlDocument = CAEXDocument.New_CAEXDocument(); //Access the root element CAEXFile //Access the root element CAEXFile CAEXFileType caexFile = amlDocument.CAEXFile; //Create a new InstanceHierarchy "Project" InstanceHierarchyType projectInstanceHierarchy = caexFile.New_InstanceHierarchy("Project"); //Create SystemUnitClassLib "MyClassLib" SystemUnitClassLibType myClassLib = caexFile.New_SystemUnitClassLibHierarchy("MyClassLib"); //Create RoleClassLib "MyRoleClassLib"
© ABB Group April 13, 2010 | Slide 23
//Create RoleClassLib "MyRoleClassLib" RoleClassLibType myRoleClassLib = caexFile.New_RoleClassLibHierarchy("MyRoleClassLib"); //add SystemUnitClass "MyRobot" SystemUnitFamilyType myRobotClass = myClassLib.New_SystemUnitClass("MyRobot");
CAEX Engine
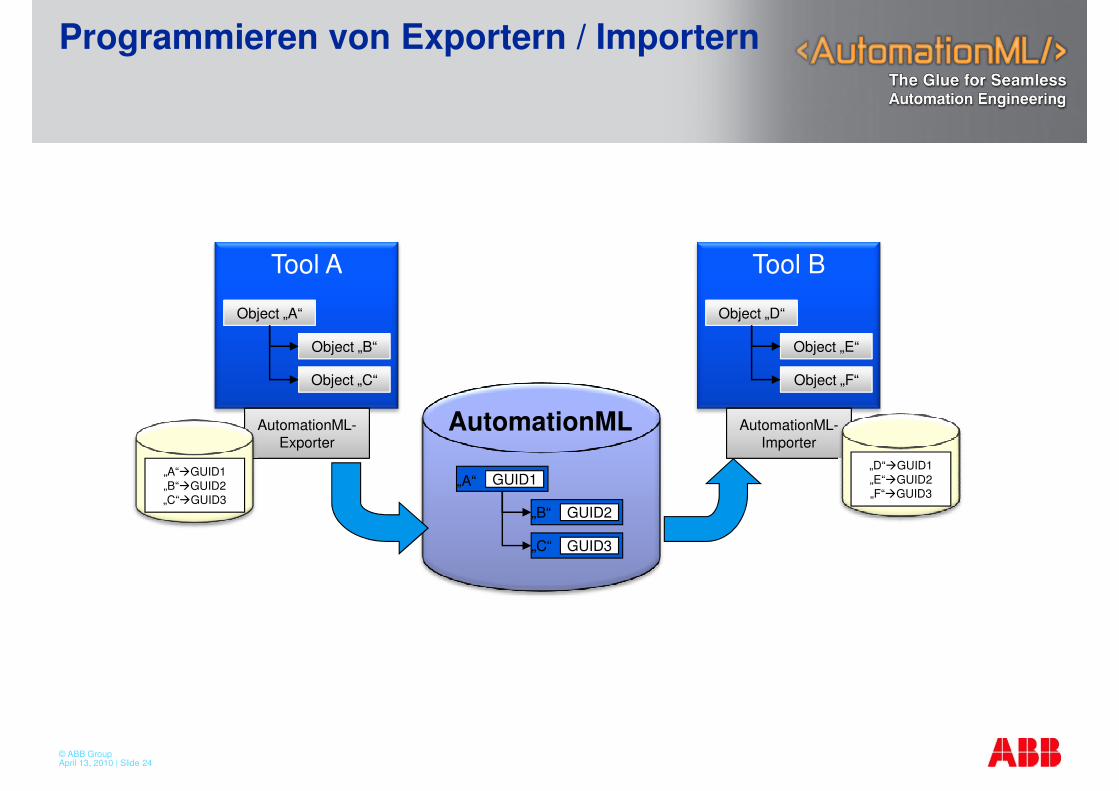
Programmieren von Exportern / Importern
Tool A Tool BTool A Tool B
Object „A“
Object „B“
Object „C“
„A“
„B“
GUID1
GUID2
AutomationML-Exporter
AutomationML-Importer
Object „D“
Object „E“
Object „F“
„D“�GUID1„E“�GUID2„F“�GUID3
„A“�GUID1„B“�GUID2„C“�GUID3
AutomationML
© ABB Group April 13, 2010 | Slide 24
„C“ GUID3
Zusammenfassung
� Erweiterbare Repräsentation� standardisierte Datenrepräsentation mittels XML
AutomationML ist kostenlos und offen zur Stimulierung einer innovativen Community
� standardisierte Datenrepräsentation mittels XML
� Schlank durch Kombination verfügbarer Standards
� Nutzbar von einfachen Automatisierungskomponenten bis zu aggregierten Anlagensystemen
� Offen für künftige Erweiterungen
� Offener Standard� Offene Datenrepräsentation
� Neutral, werkzeugunabhängige Datenspeicherung
© ABB Group April 13, 2010 | Slide 25
� Unterstützung im Engineering-Prozess� Unterstützung einer Multi-Dokumenten-Architektur
� Unterstützung für Änderungs- und Versionsprozesse
� Aber: AutomationML bietet keine Toolfunktionalität, sondern kann nur statische Planungsdaten abbilden (“Garbage in –Garbage out”)
…and others
Was es schon gibt Ein Fahrplan durch diese Konferenz
Beispiele zur Anwendung von AutomationML (im Anschluß)
Referenzwerkzeuge (heute 13:30 Uhr)Referenzwerkzeuge (heute 13:30 Uhr)
Modellierung von Geometrie und Kinematik (14:00 Uhr)
Modellierung von Verhalten (heute 14:30)
Anwendung in der Prozesstechnik (heute 16:00 Uhr)
Semantische MES-Interoperabilität (heute 16:30)
Tools von ABB, Siemens, Kuka (morgen, 9:00 Uhr)
Workshops (morgen 11:30-12:30)
Wohin geht die Reise (morgen 13:30)
Podiumsdiskussion (morgen 15:00 Uhr)
© ABB Group April 13, 2010 | Slide 27