Embed Size (px)
Citation preview
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Automobilelektronik: Quo Vadis?
Prof. Dr.-Ing. Hans-Christian Reuss
Zulieferertag Baden-Württemberg 12. November 2013
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Verbesserung von
• Wirtschaftlichkeit/Leistungsfähigkeit
• Komfort
• Sicherheit
• Umweltverträglichkeit
Warum Elektronik im Automobil?
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Explosion der Funktionen bewirkt Zunahme der
Komplexität
Zunahme der Steuer- und Regelfunktionen
Zunahme der Rechenleistung
Zunahme der Kommunikation
Zunahme der Diagnose- und Testfunktionen
Zunahme der in Software realisierten
Funktionen
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
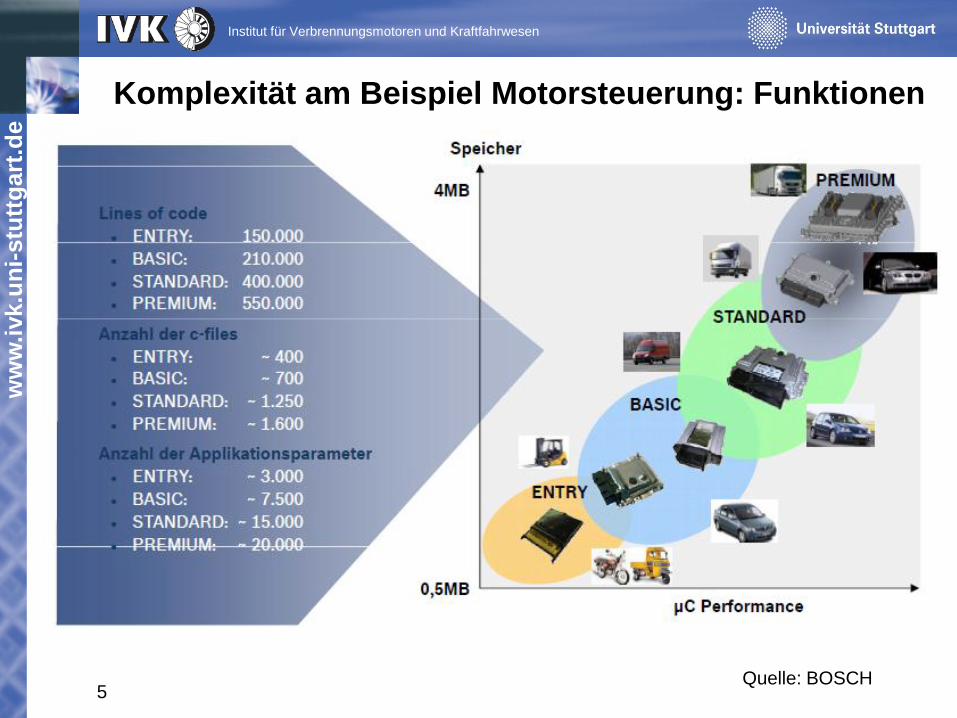
5
Quelle: BOSCH
Komplexität am Beispiel Motorsteuerung: Funktionen
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
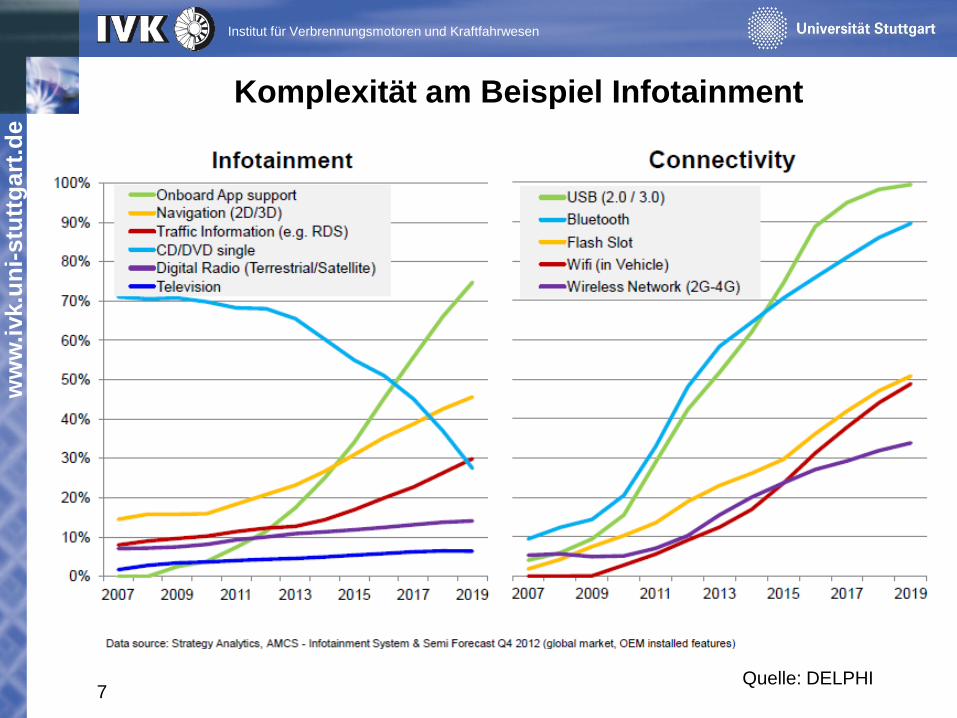
7
Komplexität am Beispiel Infotainment
Quelle: DELPHI
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Ziel
Dieses komplexe Gesamtsystem gilt es nach
Kriterien wie Kosten, Zuverlässigkeit,
Verfügbarkeit, Sicherheit, Kundennutzen,
Umweltfreundlichkeit, Bauraum, Gewicht
sowie Entwicklungszeit und Manpower zu
optimieren.
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
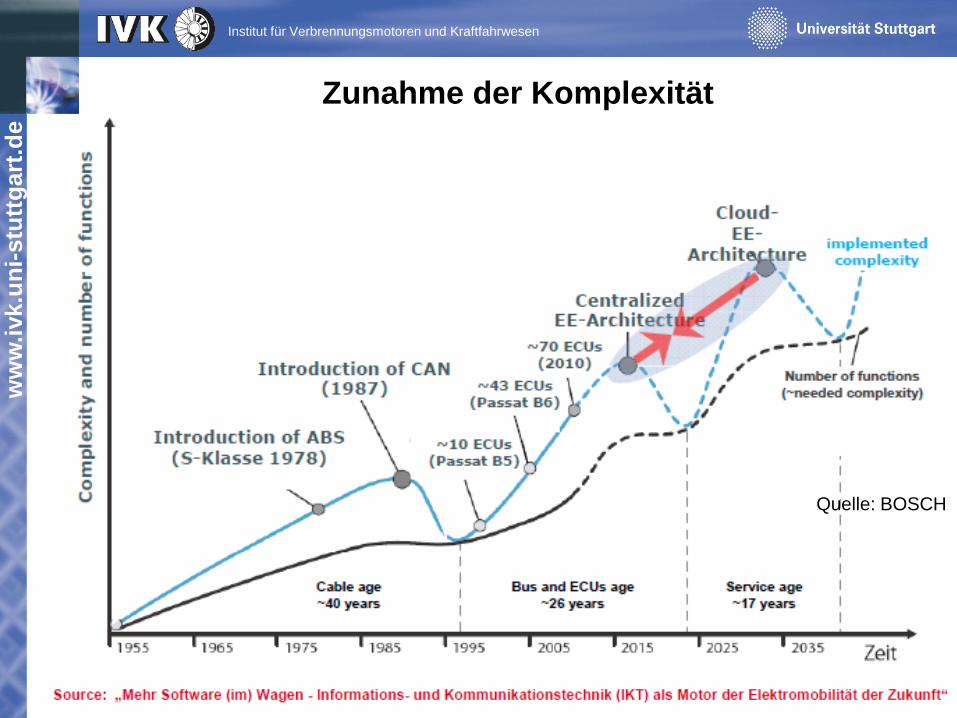
9
Quelle: BOSCH
Zunahme der Komplexität
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
10
Maßnahmen zur Beherrschung der Komplexität
1. Modularisierung und Standardisierung der Architektur
- Autosar, zentral. Architektur, Cloud
2. Strukturierter Entwicklungsprozess
- V-Modell
- Funktionsorientierter Entwurf
3. Modellbasierter Softwareentwurf
- Durchgängige Modellierung
- Modellgetriebene Entwicklung
4. Test & Integration
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
12
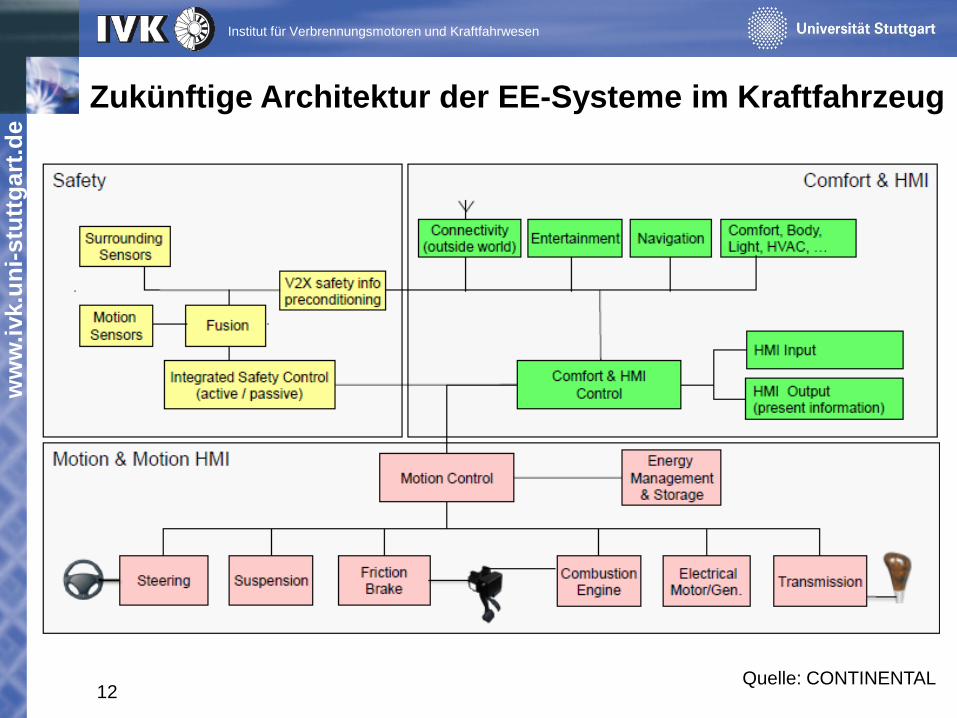
Zukünftige Architektur der EE-Systeme im Kraftfahrzeug
Quelle: CONTINENTAL
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
13
• Elektromobilität
• Connected
• Fahrerassistenzsysteme
Aktuelle Schwerpunktthemen der Automobilelektronik
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Elektromobilität

ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Inverter
(DC/AC)
BMS
Klimatisierung
Elektromotor(en) Ladeeinrichtung
Vakuumpumpe
Elektrische Lenkung Energiewandler
(DC/DC)
Ladeinfrastruktur
Instrumente
Traktionsbatterie
Bildquellen: Internet
Neue Fahrzeugkomponenten
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
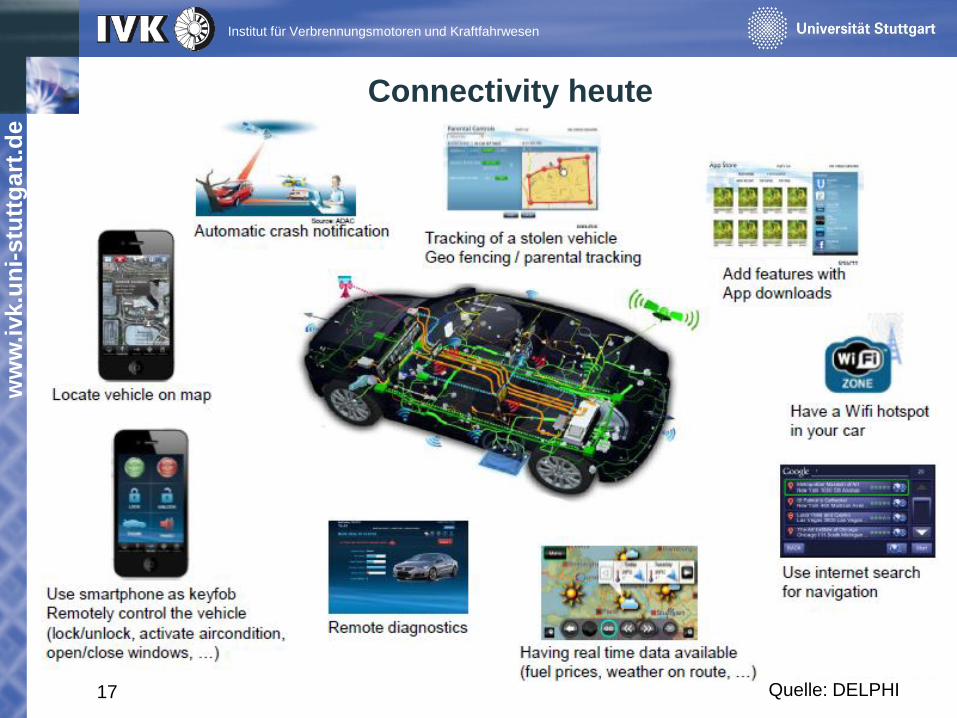
17
Quelle: DELPHI
Connectivity heute
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
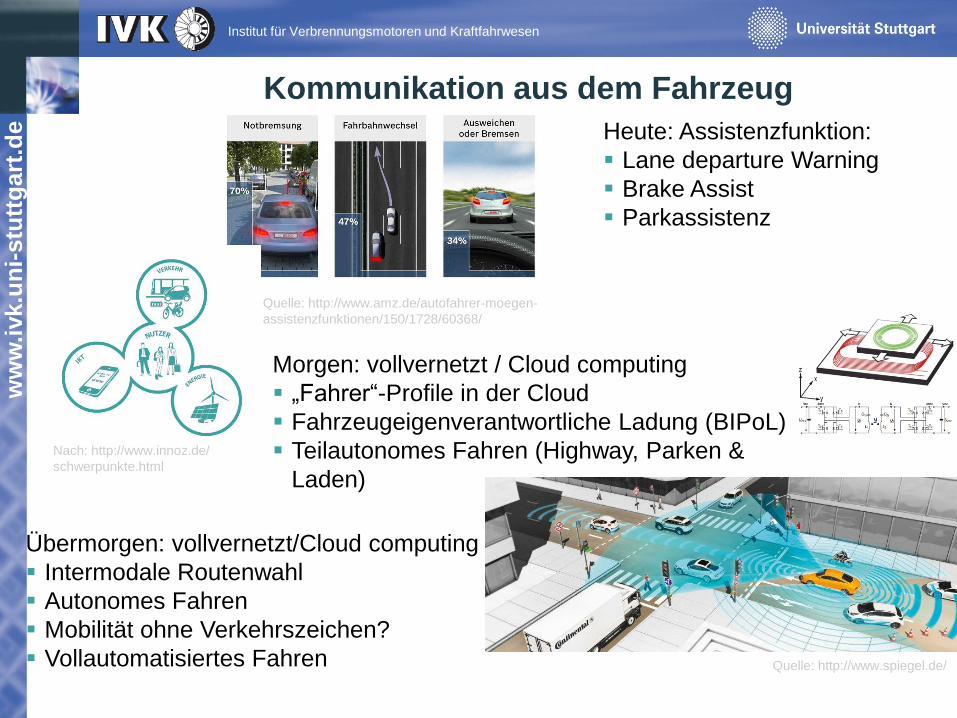
Kommunikation aus dem Fahrzeug
Heute: Assistenzfunktion:
Lane departure Warning
Brake Assist
Parkassistenz
Quelle: http://www.spiegel.de/
Quelle: http://www.amz.de/autofahrer-moegen-
assistenzfunktionen/150/1728/60368/
Übermorgen: vollvernetzt/Cloud computing
Intermodale Routenwahl
Autonomes Fahren
Mobilität ohne Verkehrszeichen?
Vollautomatisiertes Fahren
Morgen: vollvernetzt / Cloud computing
„Fahrer“-Profile in der Cloud
Fahrzeugeigenverantwortliche Ladung (BIPoL)
Teilautonomes Fahren (Highway, Parken &
Laden)
Nach: http://www.innoz.de/
schwerpunkte.html
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Herausforderungen bei der Ladekommunikation
Viele Beteiligte
(Zulieferer und Hersteller von
Ladesäule, Fahrzeugen,
Buchungsstellen,
Energieversorger, …)
Domänenübergreifend
(Energieversorger,
Abrechnungswesen - IKT,
Fahrzeughersteller, …)
Viele Schnittstellen
(elektrischer Anschluss, Protokoll,
Übertragungsschicht, …)
Elektrische Sicherheit
Datensensitivität
(Abrechnungsdaten, …)

ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Projekt Ladekommunikation
Projektzeitraum (1.1.2012 - 31.12.2014)
Entwicklung eines Conformance-Tests
für die ISO15118
Testfälle gemäß ISO 15118 zu:
Struktur
Logische Abläufe
Timing
Datenkonsistenz
…
Mitarbeit im ISO Gremium betreffend des
Conformance-Tests der ISO 15118
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
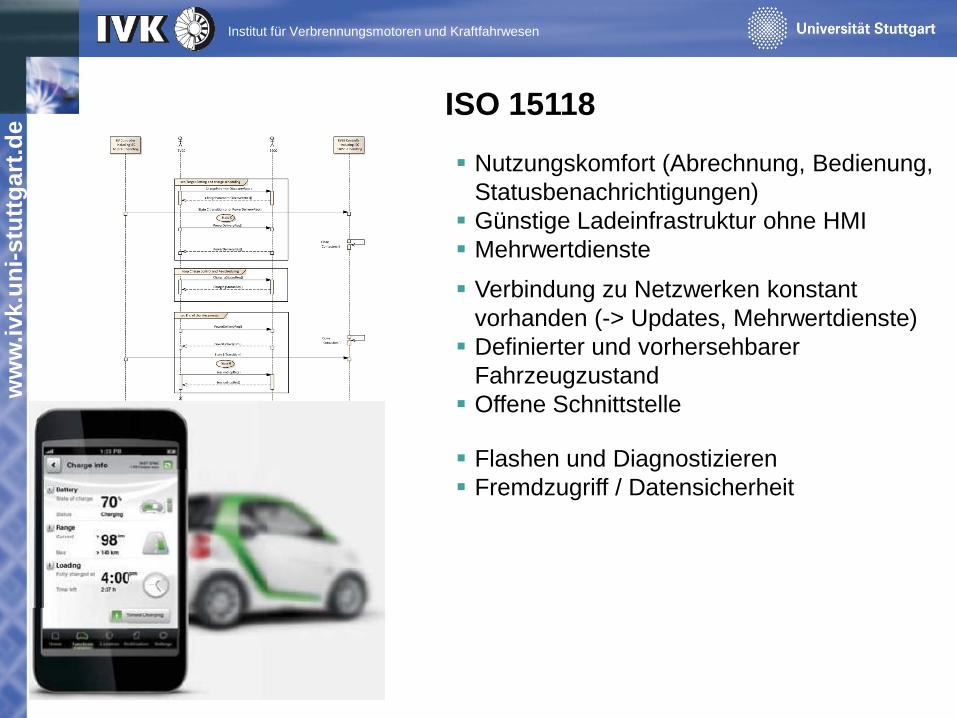
ISO 15118
Nutzungskomfort (Abrechnung, Bedienung,
Statusbenachrichtigungen)
Günstige Ladeinfrastruktur ohne HMI
Mehrwertdienste
Verbindung zu Netzwerken konstant
vorhanden (-> Updates, Mehrwertdienste)
Definierter und vorhersehbarer
Fahrzeugzustand
Offene Schnittstelle
Flashen und Diagnostizieren
Fremdzugriff / Datensicherheit
Quelle: http://www.smartcenter.de/
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Aktuelle Fahrerassistenzsysteme
Abstandsautomat
ACC Systeme radarbasiert, neu: Kamera-Bildverarbeitung
und Verwendung von Navigationsdaten
Spurverlassenswarner
Kamerabasiert, neu: Eingriff in die eletrische Lenkung
Parksysteme
Autark, neu: Verwendung von Lenkung und Bremse,
connected
Quelle: AUDI
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Automatisiertes Fahren
teilautomatisiert – hochautomatisiert - vollautomatisiert
Langsam:
Parken
Stau
Schnell:
Autobahn
Stadtverkehr
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Potenziale des automatisierten Fahrens
Verkehrsunfälle reduzieren
Komfortables Fahren Entlastung des Fahrers
Energieeffizientes Fahren
Wie können diese Potenziale genutzt werden, um
eine zentrale Herausforderung in der
Elektromobilität anzugehen?
http://www.zukunft-mobilitaet.net
http://www.daimler.com
http://www.bosch.de
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Folie 29
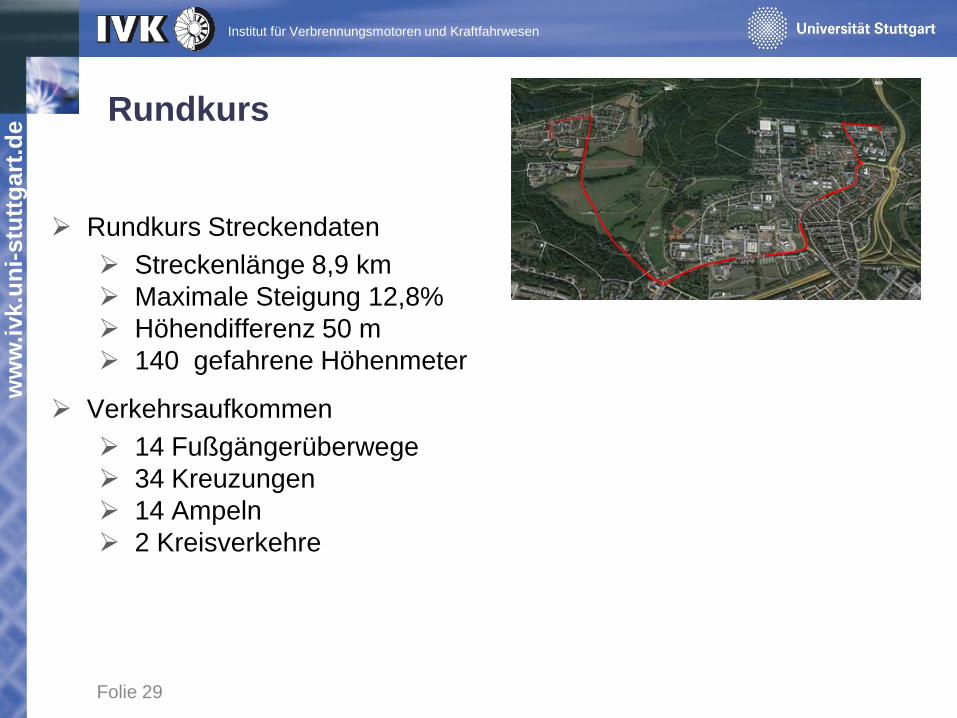
Rundkurs
Rundkurs Streckendaten
Streckenlänge 8,9 km
Maximale Steigung 12,8%
Höhendifferenz 50 m
140 gefahrene Höhenmeter
Verkehrsaufkommen
14 Fußgängerüberwege
34 Kreuzungen
14 Ampeln
2 Kreisverkehre
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Folie 30
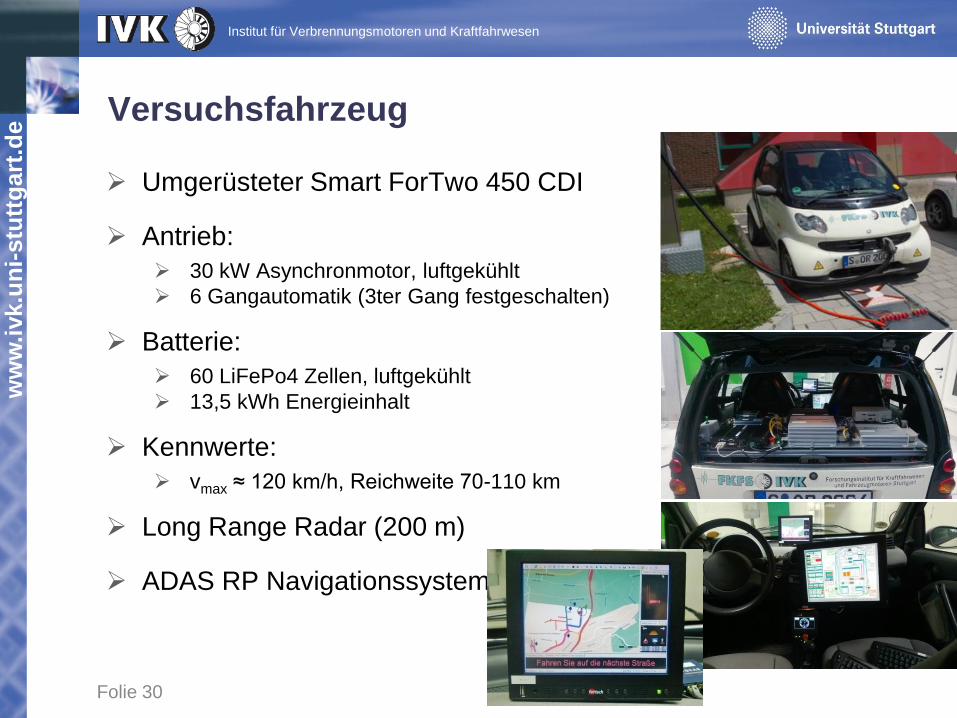
Versuchsfahrzeug
Umgerüsteter Smart ForTwo 450 CDI
Antrieb:
30 kW Asynchronmotor, luftgekühlt
6 Gangautomatik (3ter Gang festgeschalten)
Batterie:
60 LiFePo4 Zellen, luftgekühlt
13,5 kWh Energieinhalt
Kennwerte:
vmax ≈ 120 km/h, Reichweite 70-110 km
Long Range Radar (200 m)
ADAS RP Navigationssystem
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Folie 31
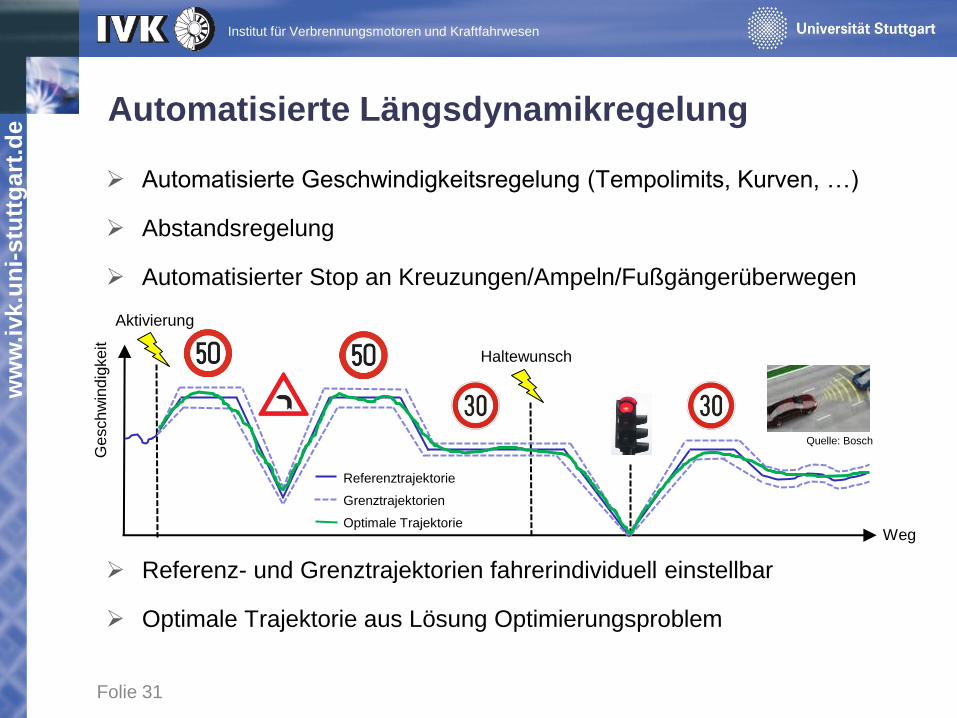
Automatisierte Längsdynamikregelung
Automatisierte Geschwindigkeitsregelung (Tempolimits, Kurven, …)
Abstandsregelung
Automatisierter Stop an Kreuzungen/Ampeln/Fußgängerüberwegen
Referenz- und Grenztrajektorien fahrerindividuell einstellbar
Optimale Trajektorie aus Lösung Optimierungsproblem
Ge
sch
win
dig
ke
it
Weg
Haltewunsch
Aktivierung
Referenztrajektorie
Grenztrajektorien
Optimale Trajektorie
Quelle: Bosch
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Folie 32
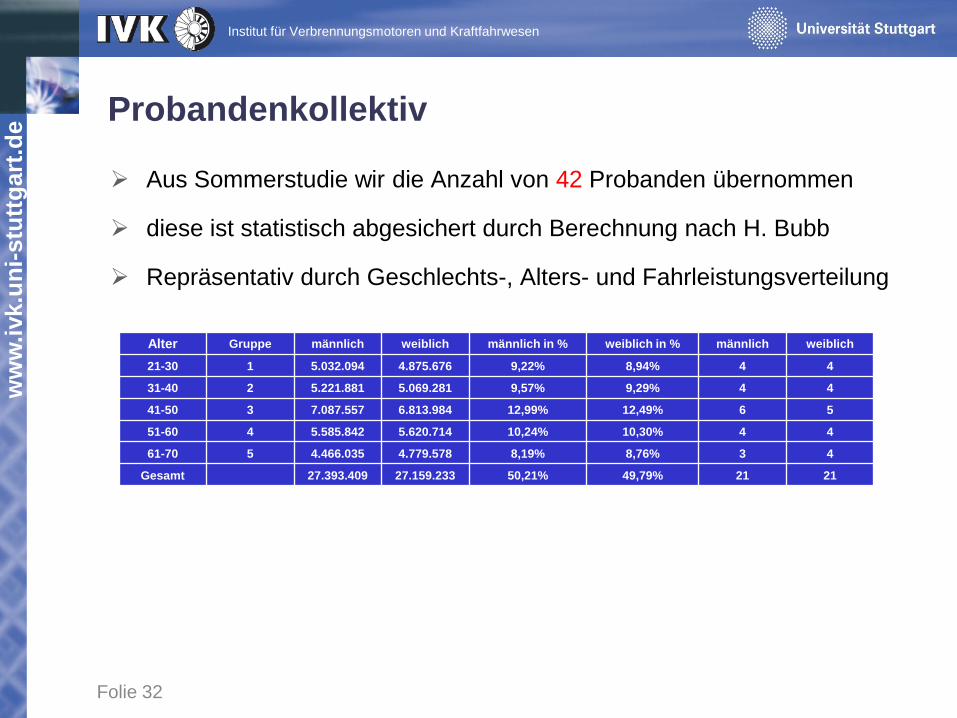
Probandenkollektiv
Aus Sommerstudie wir die Anzahl von 42 Probanden übernommen
diese ist statistisch abgesichert durch Berechnung nach H. Bubb
Repräsentativ durch Geschlechts-, Alters- und Fahrleistungsverteilung
Alter Gruppe männlich weiblich männlich in % weiblich in % männlich weiblich
21-30 1 5.032.094 4.875.676 9,22% 8,94% 4 4
31-40 2 5.221.881 5.069.281 9,57% 9,29% 4 4
41-50 3 7.087.557 6.813.984 12,99% 12,49% 6 5
51-60 4 5.585.842 5.620.714 10,24% 10,30% 4 4
61-70 5 4.466.035 4.779.578 8,19% 8,76% 3 4
Gesamt 27.393.409 27.159.233 50,21% 49,79% 21 21
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Folie 33
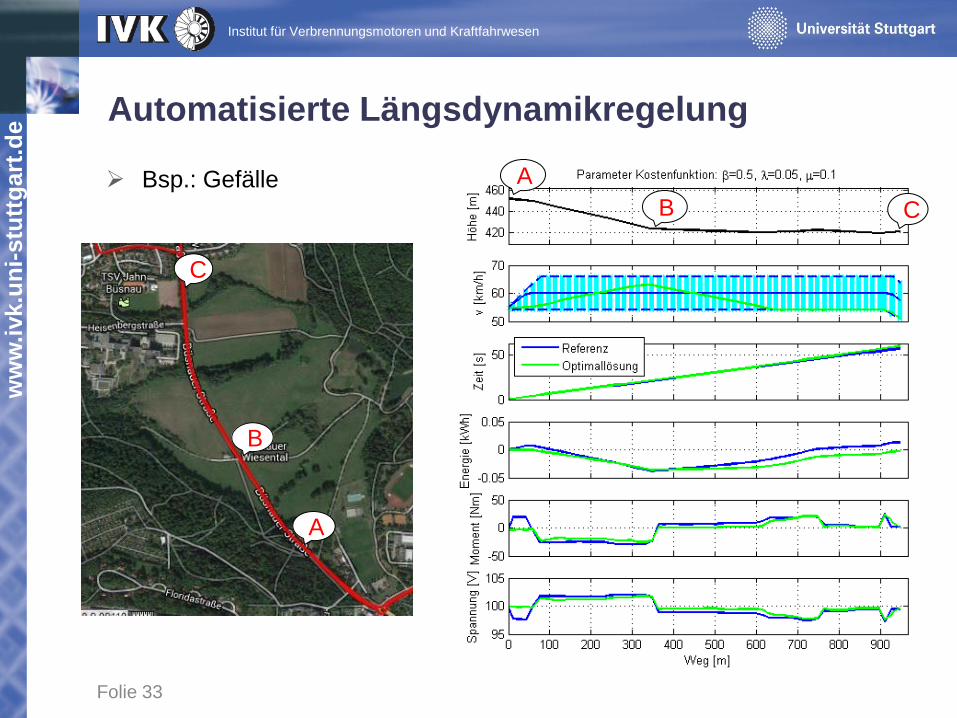
Automatisierte Längsdynamikregelung
A
C
B
A
B C
Bsp.: Gefälle
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
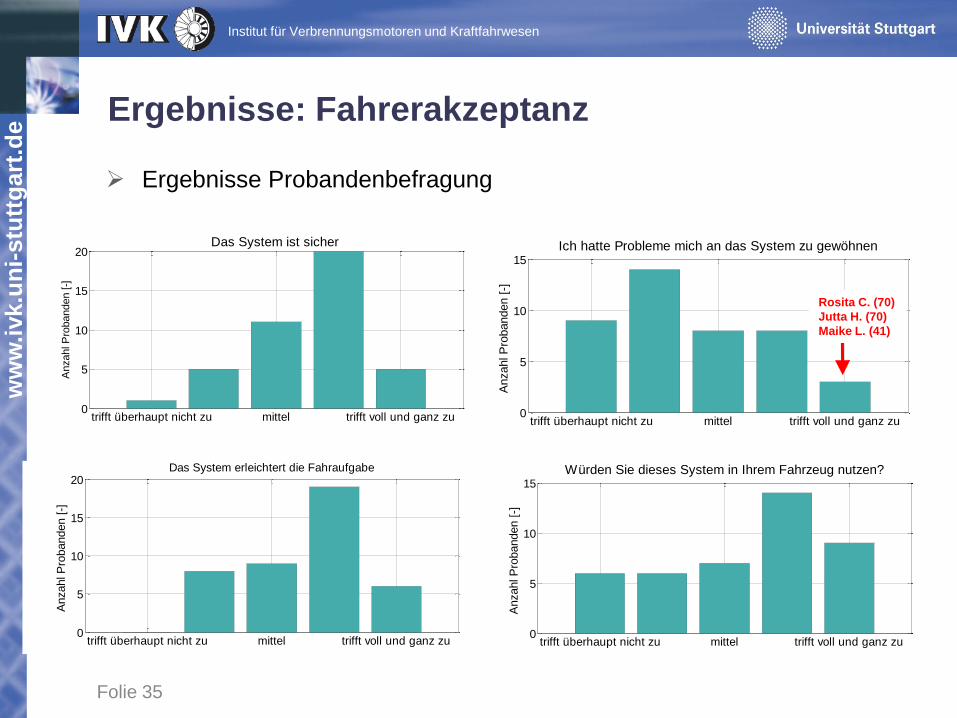
trifft überhaupt nicht zu mittel trifft voll und ganz zu0
5
10
15
20
Anzahl P
robanden [-]
Das System ist sicher
Folie 35
Ergebnisse: Fahrerakzeptanz
Ergebnisse Probandenbefragung
trifft überhaupt nicht zu mittel trifft voll und ganz zu0
5
10
15
Anzahl P
robanden [
-]
Würden Sie dieses System in Ihrem Fahrzeug nutzen?
trifft überhaupt nicht zu mittel trifft voll und ganz zu0
5
10
15
20
Anzahl P
robanden [
-]
Das System erleichtert die Fahraufgabe
trifft überhaupt nicht zu mittel trifft voll und ganz zu0
5
10
15
Anzahl P
robanden [
-]
Ich hatte Probleme mich an das System zu gewöhnen
Rosita C. (70)
Jutta H. (70)
Maike L. (41)
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Folie 36
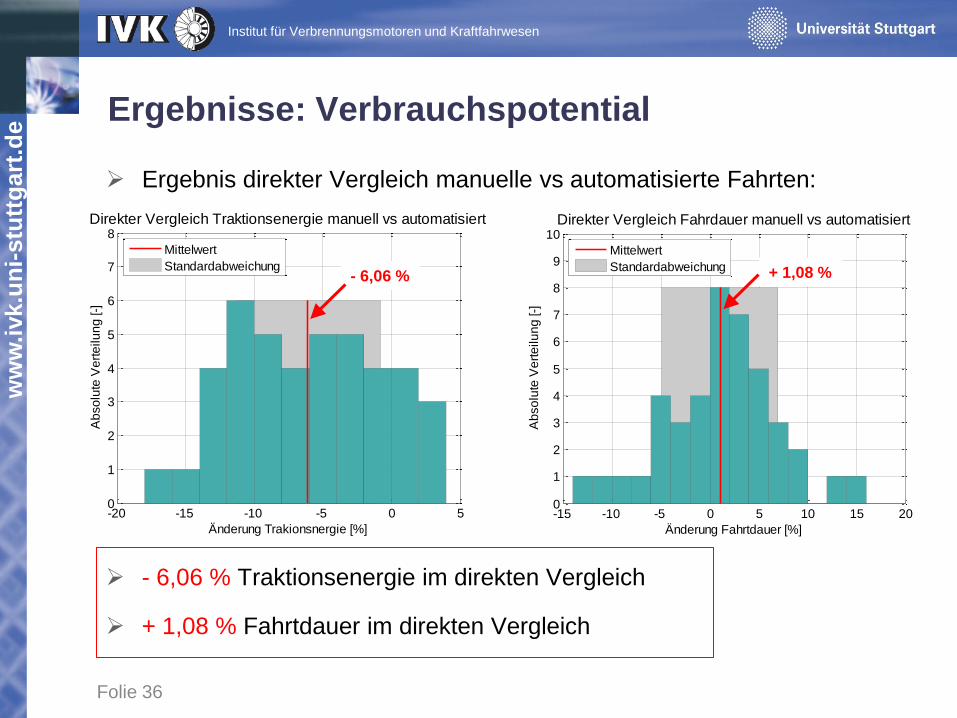
Ergebnisse: Verbrauchspotential
Ergebnis direkter Vergleich manuelle vs automatisierte Fahrten:
-20 -15 -10 -5 0 50
1
2
3
4
5
6
7
8
Änderung Trakionsnergie [%]
Ab
so
lute
Ve
rte
ilu
ng
[-]
Direkter Vergleich Traktionsenergie manuell vs automatisiert
Mittelwert
Standardabweichung
-15 -10 -5 0 5 10 15 200
1
2
3
4
5
6
7
8
9
10
Änderung Fahrtdauer [%]A
bso
lute
Ve
rte
ilu
ng
[-]
Direkter Vergleich Fahrdauer manuell vs automatisiert
Mittelwert
Standardabweichung + 1,08 % - 6,06 %
- 6,06 % Traktionsenergie im direkten Vergleich
+ 1,08 % Fahrtdauer im direkten Vergleich
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
EFA 2014/2
EFA 2014/2: „Verbundprojekt: Energieeffizientes Fahren 2014 – 2.
Projektphase“ gefördert vom Bundesministerium für Bildung und Forschung
(BMBF)
Ziel: Verlängerung der Reichweite von Elektrofahrzeugen um 15%
Methode: energieeffizientes Fahren
Zwei Ansätze: a) energetisch optimierte Fahrzeugsysteme
b) Verwendung von Informationen über
Verkehrssituationen und die Route
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
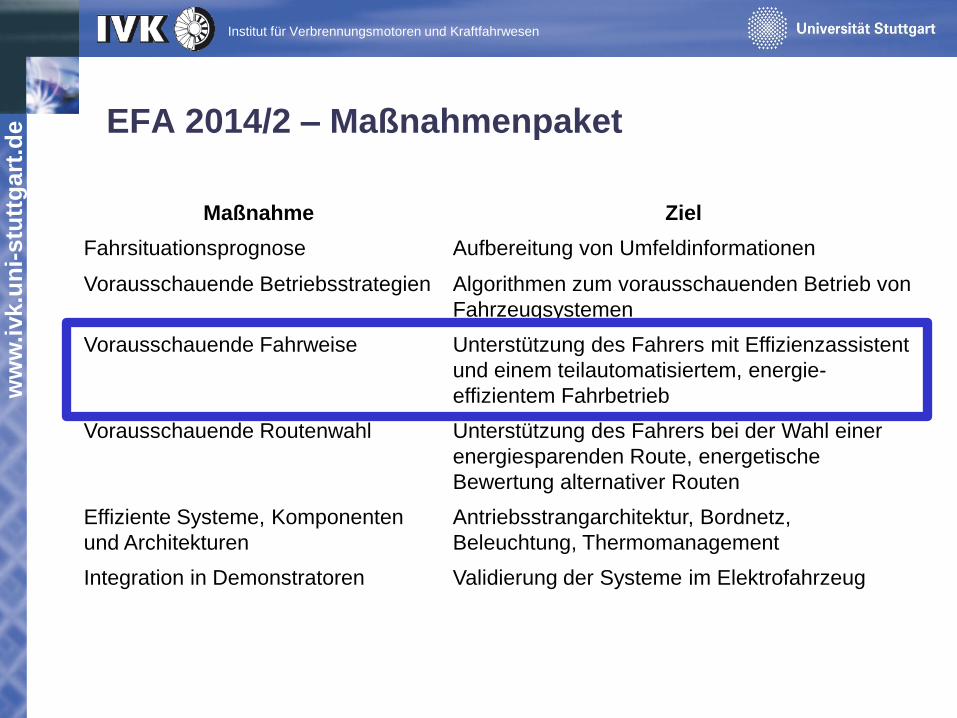
EFA 2014/2 – Maßnahmenpaket
Maßnahme Ziel
Fahrsituationsprognose Aufbereitung von Umfeldinformationen
Vorausschauende Betriebsstrategien Algorithmen zum vorausschauenden Betrieb von
Fahrzeugsystemen
Vorausschauende Fahrweise Unterstützung des Fahrers mit Effizienzassistent
und einem teilautomatisiertem, energie-
effizientem Fahrbetrieb
Vorausschauende Routenwahl Unterstützung des Fahrers bei der Wahl einer
energiesparenden Route, energetische
Bewertung alternativer Routen
Effiziente Systeme, Komponenten
und Architekturen
Antriebsstrangarchitektur, Bordnetz,
Beleuchtung, Thermomanagement
Integration in Demonstratoren Validierung der Systeme im Elektrofahrzeug
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
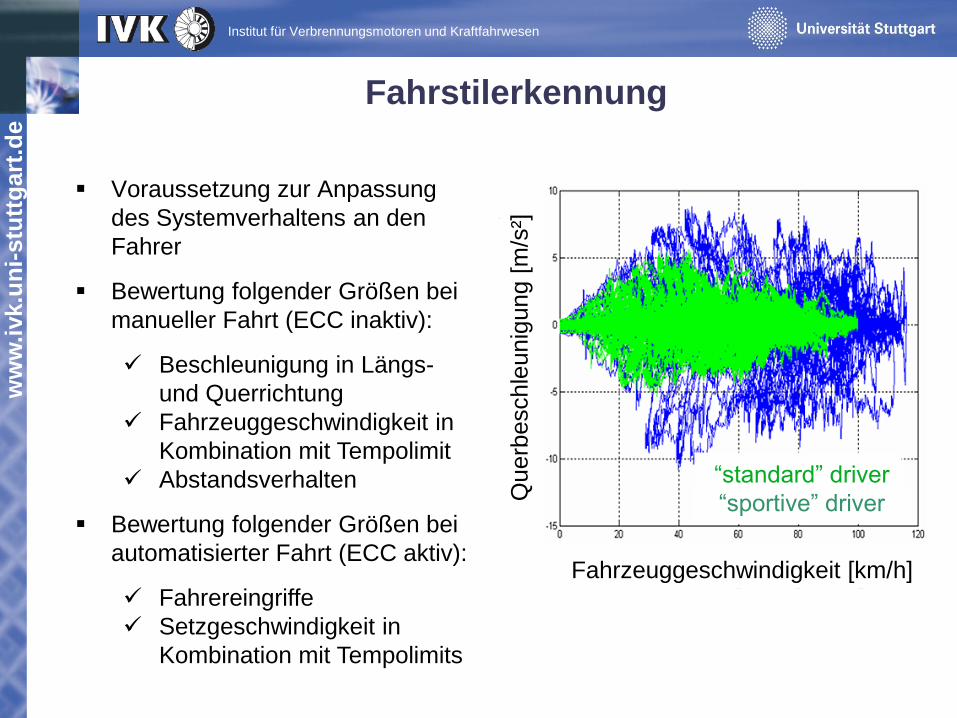
Fahrstilerkennung
Voraussetzung zur Anpassung
des Systemverhaltens an den
Fahrer
Bewertung folgender Größen bei
manueller Fahrt (ECC inaktiv):
Beschleunigung in Längs-
und Querrichtung
Fahrzeuggeschwindigkeit in
Kombination mit Tempolimit
Abstandsverhalten
Bewertung folgender Größen bei
automatisierter Fahrt (ECC aktiv):
Fahrereingriffe
Setzgeschwindigkeit in
Kombination mit Tempolimits
Querb
eschle
unig
ung [
m/s
²]
Fahrzeuggeschwindigkeit [km/h]
“standard” driver
“sportive” driver

ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Hardware im Versuchsfahrzeug
1. Basisfahrzeug
Elektrofahrzeug, dass:
die benötigten Anpassungen
erlaubt und
die erforderlichen technischen
Möglichkeiten bietet
2. Zusätzliche Komponenten für
Efficient Cruise Control
Radar: BOSCH LRR3
Rapid Prototyping Plattform:
dSPACE MicroAutoBox
CarPC: ADAS RP (elektronischer
Horizont)
Source: dSPACE Source: BOSCH
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
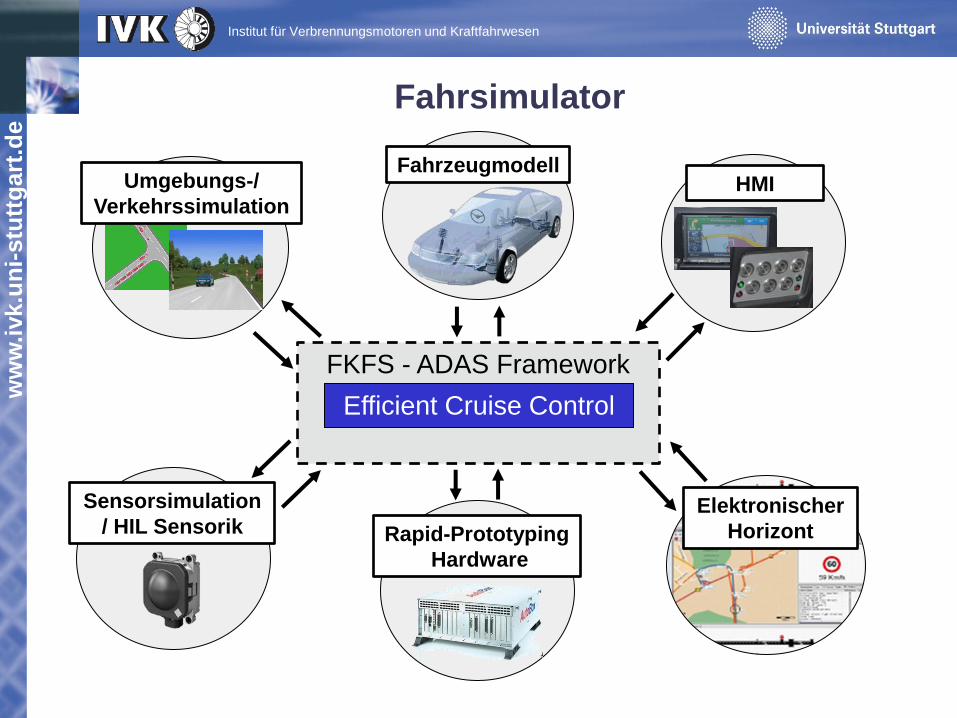
FKFS - ADAS Framework
Fahrsimulator
Efficient Cruise Control
Elektronischer
Horizont Rapid-Prototyping
Hardware
Sensorsimulation
/ HIL Sensorik
Umgebungs-/
Verkehrssimulation
Fahrzeugmodell HMI
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
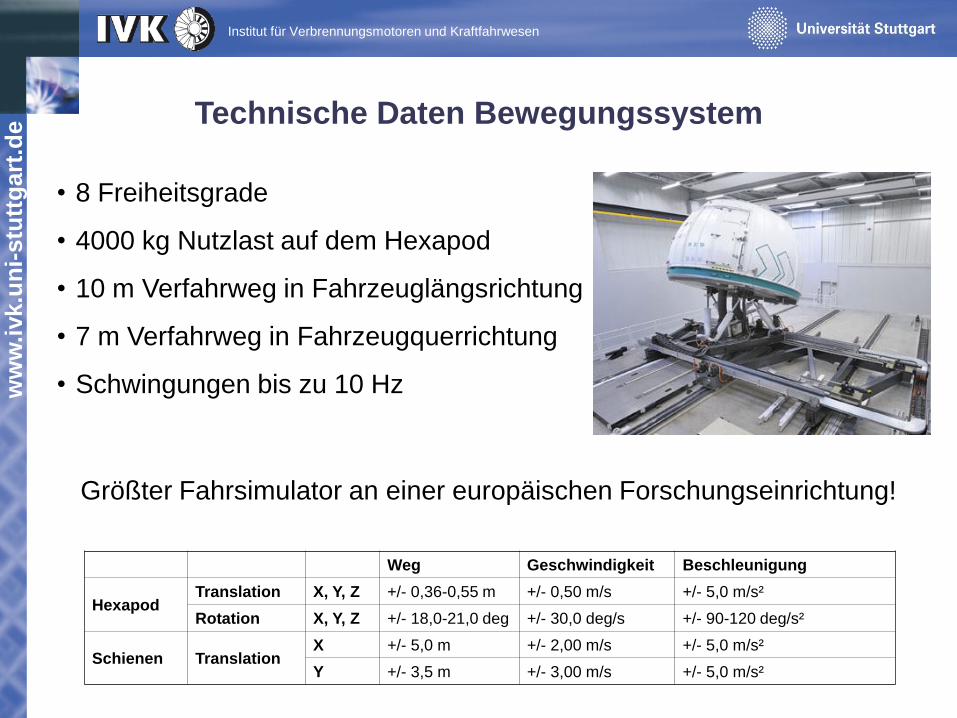
Weg Geschwindigkeit Beschleunigung
Hexapod Translation X, Y, Z +/- 0,36-0,55 m +/- 0,50 m/s +/- 5,0 m/s²
Rotation X, Y, Z +/- 18,0-21,0 deg +/- 30,0 deg/s +/- 90-120 deg/s²
Schienen Translation X +/- 5,0 m +/- 2,00 m/s +/- 5,0 m/s²
Y +/- 3,5 m +/- 3,00 m/s +/- 5,0 m/s²
• 8 Freiheitsgrade
• 4000 kg Nutzlast auf dem Hexapod
• 10 m Verfahrweg in Fahrzeuglängsrichtung
• 7 m Verfahrweg in Fahrzeugquerrichtung
• Schwingungen bis zu 10 Hz
Größter Fahrsimulator an einer europäischen Forschungseinrichtung!
Technische Daten Bewegungssystem

ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
• Innendurchmesser 5,6m, somit groß genug für komplette Fahrzeuge
• Innenwand der Kabine dient als Projektionsfläche für die Grafikanlage
• Demontierbares Torelement ermöglicht Wechsel des
Simulatorfahrzeugs
Simulatorkabine
ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
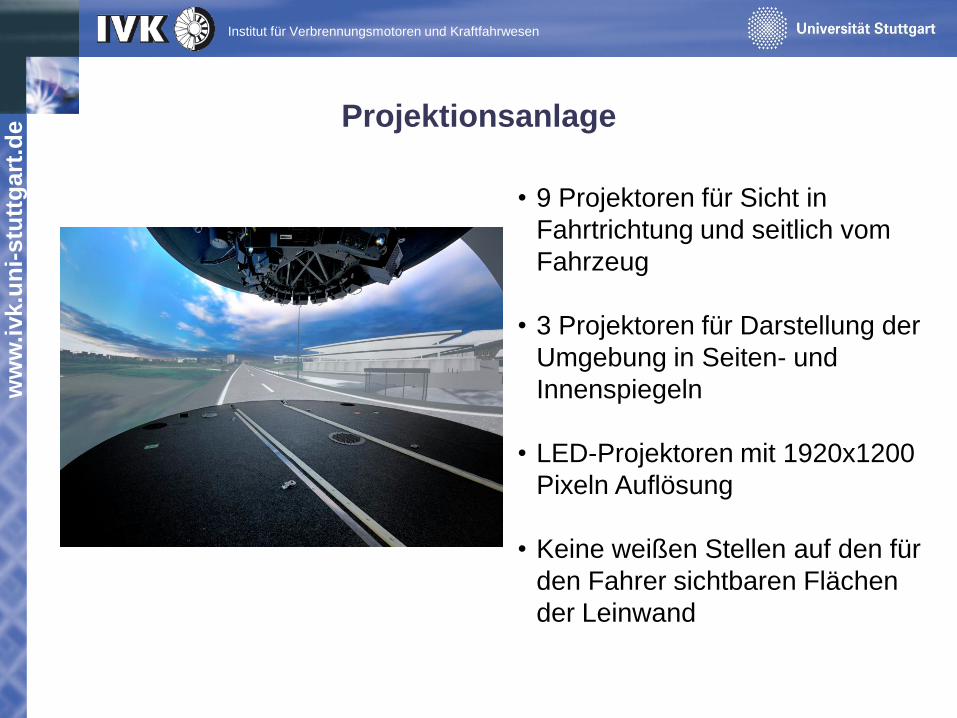
• 9 Projektoren für Sicht in
Fahrtrichtung und seitlich vom
Fahrzeug
• 3 Projektoren für Darstellung der
Umgebung in Seiten- und
Innenspiegeln
• LED-Projektoren mit 1920x1200
Pixeln Auflösung
• Keine weißen Stellen auf den für
den Fahrer sichtbaren Flächen
der Leinwand
Projektionsanlage

ww
w.i
vk.u
ni-
stu
ttg
art
.de
Institut für Verbrennungsmotoren und Kraftfahrwesen
Vielen Dank für Ihre Aufmerksamkeit