Embed Size (px)
Citation preview
MAKING MODERN LIVING POSSIBLE
BedienungsanleitungVLT® Midi Drive FC 280
www.danfoss.de/vlt

Inhaltsverzeichnis
1 Einführung 4
1.1 Zielsetzung des Handbuchs 4
1.2 Zusätzliche Materialien 4
1.3 Dokument- und Softwareversion 4
1.4 Produktübersicht 4
1.5 Zulassungen und Zertifizierungen 5
1.6 Entsorgung 6
2 Sicherheit 7
2.1 Sicherheitssymbole 7
2.2 Qualifiziertes Personal 7
2.3 Sicherheitsmaßnahmen 7
3 Mechanische Installation 9
3.1 Auspacken 9
3.2 Installationsumgebung 10
3.3 Montage 10
4 Elektrische Installation 13
4.1 Sicherheitshinweise 13
4.2 EMV-gerechte Installation 13
4.3 Erdung 13
4.4 Anschlussdiagramm 15
4.5 Zugriff 17
4.6 Motoranschluss 17
4.7 Netzanschluss 18
4.8 Steuerkabel 19
4.8.1 Steuerklemmentypen 19
4.8.2 Verdrahtung der Steuerklemmen 20
4.8.3 Aktivierung des Motorbetriebs (Klemme 27) 20
4.8.4 Mechanische Bremssteuerung 21
4.8.5 USB-Datenschnittstelle 21
4.9 Checkliste vor der Installation 23
5 Inbetriebnahme 25
5.1 Sicherheitshinweise 25
5.2 Anlegen der Netzversorgung 25
5.3 Betrieb des Local Control Panels (LCP) 25
5.4 Grundlegende Programmierung 34
5.5 Überprüfung der Motordrehung 36
Inhaltsverzeichnis Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 1
5.6 Überprüfung der Drehrichtung des Drehgebers 37
5.7 Prüfung der Ort-Steuerung 37
5.8 Systemstart 37
5.9 Inbetriebnahme der Funktion „Safe Torque Off“ 37
6 Safe Torque Off (STO) 38
6.1 Sicherheitsmaßnahmen für STO 39
6.2 Installation der Funktion „Safe Torque Off“ 39
6.3 Inbetriebnahme der Funktion „Safe Torque Off“ 40
6.3.1 Aktivierung der Funktion „Safe Torque Off“ 40
6.3.2 Deaktivierung der Funktion „Safe Torque Off“ 40
6.3.3 Inbetriebnahmeprüfung der Funktion „Safe Torque Off“ 41
6.3.4 Prüfen auf STO-Anwendungen im manuellen Wiederanlaufmodus 41
6.3.5 Prüfen auf STO-Anwendungen im automatischen Wiederanlaufmodus 41
6.4 Wartung und Service der STO-Funktion 42
6.5 STO Technische Daten 43
7 Anwendungsbeispiele 44
7.1 Einführung 44
7.2 Anwendungsbeispiele 44
7.2.1 AMA 44
7.2.2 Drehzahl 44
7.2.3 Start/Stopp 45
7.2.4 Externe Alarmquittierung 46
7.2.5 Motorthermistor 46
7.2.6 SLC 46
8 Wartung, Diagnose und Fehlersuche 48
8.1 Wartung und Service 48
8.2 Warnungs- und Alarmtypen 48
8.3 Anzeige von Warn- und Alarmmeldungen 49
8.4 Warnungen und Alarmmeldungen 50
8.5 Fehlersuche und -behebung 52
9 Technische Daten 55
9.1 Elektrische Daten 55
9.2 Netzversorgung (3 Phasen) 56
9.3 Motorausgang und Motordaten 56
9.4 Umgebungsbedingungen 56
9.5 Kabelspezifikationen 57
9.6 Steuereingang/-ausgang und Steuerdaten 57
9.7 Anzugsdrehmomente für Anschlüsse 60
Inhaltsverzeichnis VLT® Midi Drive FC 280
2 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203

9.8 Sicherungen und Trennschalter 60
9.9 Baugrößen, Nennleistungen und Abmessungen 62
10 Anhang 65
10.1 Symbole, Abkürzungen und Konventionen 65
10.2 Aufbau der Parametermenüs 65
Index 69
Inhaltsverzeichnis Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 3
1 Einführung
1.1 Zielsetzung des Handbuchs
Diese Bedienungsanleitung enthält Informationen zursicheren Installation und Inbetriebnahme des VLT® MidiDriveFC 280 Frequenzumrichters.
Die Bedienungsanleitung richtet sich ausschließlich qualifi-ziertes Personal.
Lesen Sie die Bedienungsanleitung vollständig durch, umsicher und professionell mit dem Frequenzumrichter zuarbeiten. Beachten Sie besonders die Sicherheitshinweiseund allgemeinen Warnungen. Bewahren Sie dieseBedienungsanleitung immer zusammen mit dem Frequen-zumrichter auf.
VLT® ist eine eingetragene Marke.
1.2 Zusätzliche Materialien
Es stehen zusätzliche Handbücher zur Verfügung, die Ihnenhelfen, erweiterte Funktionen, die Programmierung und dieWartung von Frequenzumrichtern zu verstehen:
• Das VLT® Midi Drive FC 280 Projektierungs-handbuch, für Informationen zu Konstruktion undtypischen Anwendungen des Frequenzumrichters.
• Das VLT® Midi Drive FC 280 Programmierhandbuchenthält Informationen über die Programmierungund vollständige Parameterbeschreibungen.
Zusätzliche Veröffentlichungen und Handbücher sindverfügbar auf Danfoss. Siehe drives.danfoss.com/knowledge-center/technical-documentation/ für Auflistungen.
1.3 Dokument- und Softwareversion
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.Alle Verbesserungsvorschläge sind willkommen. Tabelle 1.1zeigt die Dokumentenversion und die entsprechendeSoftwareversion an.
Ausgabe Anmerkungen Softwareversion
MG07A2 Baugrößen K4 und K5 eingeführt. 1,1x
Tabelle 1.1 Dokument- und Softwareversion
1.4 Produktübersicht
1.4.1 Bestimmungsgemäße Verwendung
Der Frequenzumrichter ist ein elektronischer Motorreglerzur
• Regelung der Motordrehzahl als Reaktion auf dieSystemrückführung oder auf Remote-Befehle vonexternen Reglern. Ein Antriebssystem besteht ausFrequenzumrichter, Motor und vom Motorangetriebenen Geräten.
• Überwachung von System- und Motorzustand.
Sie können den Frequenzumrichter auch zum Motorüber-lastschutz verwenden.
Je nach Konfiguration lässt sich der Frequenzumrichter alsStand-alone-Anwendung oder als Teil einer größerenAnlage oder Installation einsetzen.
Der Frequenzumrichter ist für die Verwendung in in Wohn-,Geschäfts- und Gewerbebereichen unter Berücksichtigungörtlich geltender Gesetze und Standards zugelassen.
HINWEISIn einer häuslichen Umgebung kann dieses ProduktFunkstörungen verursachen. In diesem Fall müssen Siezusätzliche Maßnahmen zur Minderung dieser Störungenergreifen.
Vorhersehbarer MissbrauchVerwenden Sie den Frequenzumrichter nicht inAnwendungen, die nicht mit den angegebenen Betriebsbe-dingungen und -umgebungen konform sind. Achten Siedarauf, dass Ihre Anwendung die unter Kapitel 9 TechnischeDaten angegebenen Bedingungen erfüllt.
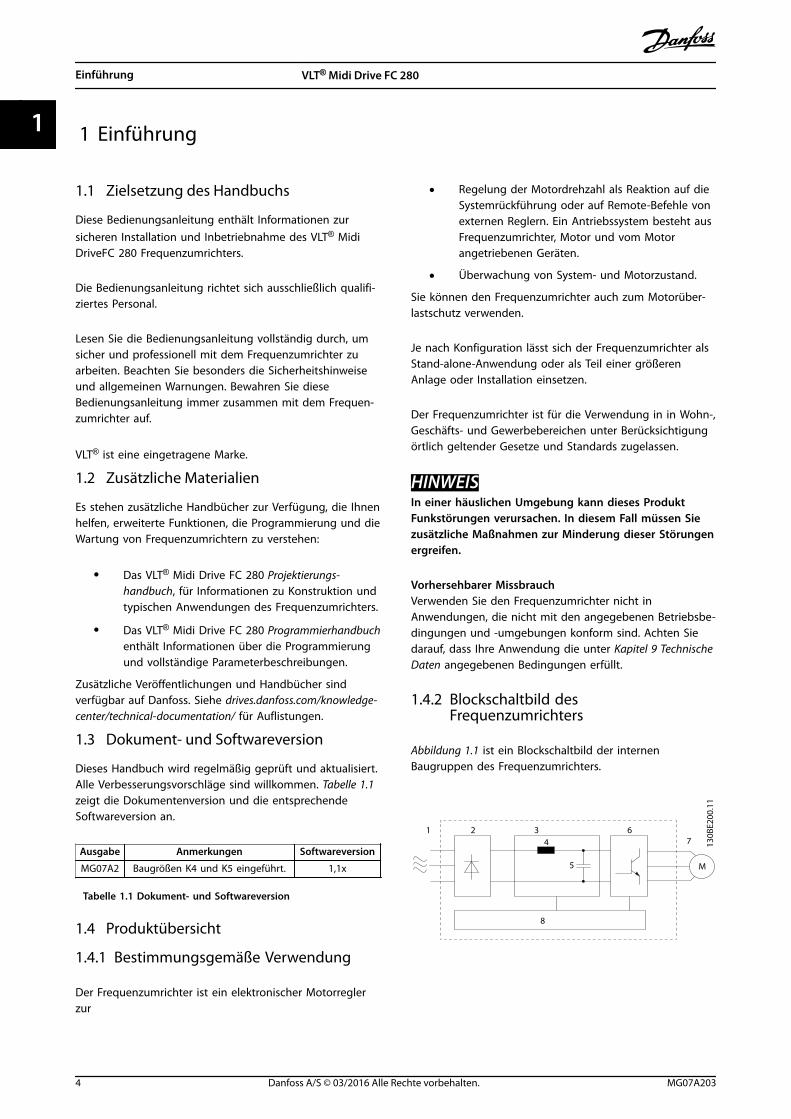
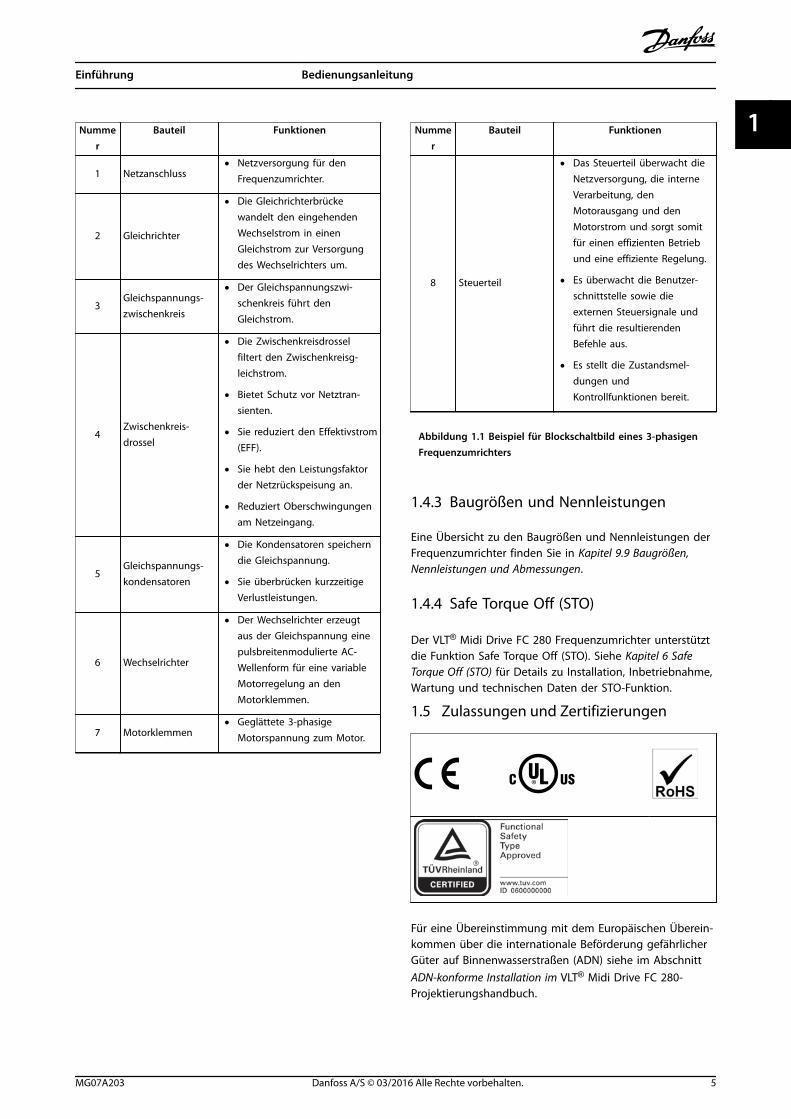
1.4.2 Blockschaltbild desFrequenzumrichters
Abbildung 1.1 ist ein Blockschaltbild der internenBaugruppen des Frequenzumrichters.
M
763
4
5
21
8
130B
E200
.11
Einführung VLT® Midi Drive FC 280
4 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
11
Nummer
Bauteil Funktionen
1 Netzanschluss• Netzversorgung für den
Frequenzumrichter.
2 Gleichrichter
• Die Gleichrichterbrückewandelt den eingehendenWechselstrom in einenGleichstrom zur Versorgungdes Wechselrichters um.
3Gleichspannungs-zwischenkreis
• Der Gleichspannungszwi-schenkreis führt denGleichstrom.
4Zwischenkreis-drossel
• Die Zwischenkreisdrosselfiltert den Zwischenkreisg-leichstrom.
• Bietet Schutz vor Netztran-sienten.
• Sie reduziert den Effektivstrom(EFF).
• Sie hebt den Leistungsfaktorder Netzrückspeisung an.
• Reduziert Oberschwingungenam Netzeingang.
5Gleichspannungs-kondensatoren
• Die Kondensatoren speicherndie Gleichspannung.
• Sie überbrücken kurzzeitigeVerlustleistungen.
6 Wechselrichter
• Der Wechselrichter erzeugtaus der Gleichspannung einepulsbreitenmodulierte AC-Wellenform für eine variableMotorregelung an denMotorklemmen.
7 Motorklemmen• Geglättete 3-phasige
Motorspannung zum Motor.
Nummer
Bauteil Funktionen
8 Steuerteil
• Das Steuerteil überwacht dieNetzversorgung, die interneVerarbeitung, denMotorausgang und denMotorstrom und sorgt somitfür einen effizienten Betriebund eine effiziente Regelung.
• Es überwacht die Benutzer-schnittstelle sowie dieexternen Steuersignale undführt die resultierendenBefehle aus.
• Es stellt die Zustandsmel-dungen undKontrollfunktionen bereit.
Abbildung 1.1 Beispiel für Blockschaltbild eines 3-phasigenFrequenzumrichters
1.4.3 Baugrößen und Nennleistungen
Eine Übersicht zu den Baugrößen und Nennleistungen derFrequenzumrichter finden Sie in Kapitel 9.9 Baugrößen,Nennleistungen und Abmessungen.
1.4.4 Safe Torque Off (STO)
Der VLT® Midi Drive FC 280 Frequenzumrichter unterstütztdie Funktion Safe Torque Off (STO). Siehe Kapitel 6 SafeTorque Off (STO) für Details zu Installation, Inbetriebnahme,Wartung und technischen Daten der STO-Funktion.
1.5 Zulassungen und Zertifizierungen
Für eine Übereinstimmung mit dem Europäischen Überein-kommen über die internationale Beförderung gefährlicherGüter auf Binnenwasserstraßen (ADN) siehe im AbschnittADN-konforme Installation im VLT® Midi Drive FC 280-Projektierungshandbuch.
Einführung Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 5
1 1

Der Frequenzumrichter erfüllt die Anforderungen derUL508C bezüglich der thermischen Sicherung. WeitereInformationen können Sie dem Abschnitt ThermischerMotorschutz im Projektierungshandbuch entnehmen.
Angewendete Normen und Konformität für STOZur Verwendung der Funktion „Safe Torque Off“ an denKlemmen 37 und 38 müssen Sie alle Sicherheitsbestim-mungen in einschlägigen Gesetzen, Vorschriften undRichtlinien erfüllen.
Die integrierte STO-Funktion erfüllt folgende Normen:• IEC/EN 61508: 2010 SIL2
• IEC/EN 61800-5-2: 2007 SIL2
• IEC/EN 62061: 2012 SILCL von SIL2
• IEC/EN 61326-3-1: 2008
• EN ISO 13849-1: 2008 Kategorie 3 PL d
1.6 Entsorgung
Sie dürfen elektrische Geräte und Gerätemit elektrischen Komponenten nichtzusammen mit normalem Hausmüllentsorgen.Sammeln Sie diese separat gemäß denlokalen Bestimmungen und den aktuellgültigen Gesetzen und führen Sie sie demRecycling zu.
Einführung VLT® Midi Drive FC 280
6 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
11
2 Sicherheit
2.1 Sicherheitssymbole
Folgende Symbole kommen in diesem Dokument zumEinsatz:
WARNUNGWeist auf eine potenziell gefährliche Situation hin, die zuschweren oder tödlichen Verletzungen führen kann.
VORSICHTWeist auf eine potenziell gefährliche Situation hin, die zuleichten oder mittleren Verletzungen führen kann. DieKennzeichnung kann ebenfalls als Warnung vorunsicheren Verfahren dienen.
HINWEISWeist auf eine wichtige Information hin, z. B. eineSituation, die zu Geräte- oder sonstigen Sachschädenführen kann.
2.2 Qualifiziertes Personal
Der einwandfreie und sichere Betrieb des Frequenzum-richters setzt fachgerechten und zuverlässigen Transportvoraus. Lagerung, Installation, Bedienung und Instand-haltung müssen diese Anforderungen ebenfalls erfüllen.Nur qualifiziertes Personal darf dieses Gerät installierenoder bedienen.
Qualifiziertes Fachpersonal wird als geschulte Mitarbeiterdefiniert, die gemäß den einschlägigen Gesetzen undVorschriften zur Installation, Inbetriebnahme und Instand-haltung von Betriebsmitteln, Systemen und Schaltungenberechtigt ist. Ferner muss das Personal mit den in dieserAnleitung enthaltenen Anweisungen und Sicherheitsmaß-nahmen vertraut sein.
2.3 Sicherheitsmaßnahmen
WARNUNGHOCHSPANNUNGBei Anschluss an Versorgungsnetzeingang, DC-Versorgung oder Zwischenkreiskopplung führenFrequenzumrichter Hochspannung. Erfolgen Installation,Inbetriebnahme und Wartung nicht durch qualifiziertesPersonal, kann dies zum Tod oder zu schweren Verlet-zungen führen.
• Installation, Inbetriebnahme und Wartungdürfen ausschließlich von qualifiziertemPersonal durchgeführt werden.
WARNUNGUNERWARTETER ANLAUFBei Anschluss des Frequenzumrichters an Versor-gungsnetz, DC-Versorgung oder Zwischenkreiskopplungkann der angeschlossene Motor jederzeit unerwartetanlaufen. Ein unerwarteter Anlauf im Rahmen vonProgrammierungs-, Service- oder Reparaturarbeiten kannzu schweren bzw. tödlichen Verletzungen oder zuSachschäden führen. Der Motor kann über einenexternen Schalter, einen Feldbus-Befehl, ein Sollwertein-gangssignal, über ein LCP oder LOP, eine Fernbedienungper MCT 10 Konfigurationssoftware oder nach einemquittierten Fehlerzustand anlaufen.So verhindern Sie ein unerwartetes Starten des Motors:
• Trennen Sie den Frequenzumrichter vom Netz.
• Drücken Sie [Off/Reset] am LCP, bevor SieParameter programmieren.
• Verkabeln und montieren Sie Frequenzum-richter, Motor und alle angetriebenen Gerätevollständig, bevor Sie den Frequenzumrichter anNetzversorgung, DC-Versorgung oder Zwischen-kreiskopplung anschließen.
Sicherheit Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 7
2 2
WARNUNGENTLADEZEITDer Frequenzumrichter enthält Zwischenkreiskonden-satoren, die auch bei abgeschaltetem Frequenzumrichtergeladen sein können. Auch wenn die Warn-LED nichtleuchten, kann Hochspannung anliegen. Das Nichtein-halten der angegebenen Wartezeit nach dem Trennender Stromversorgung vor Wartungs- oder Reparaturar-beiten kann zum Tod oder zu schweren Verletzungenführen.
• Stoppen Sie den Motor.
• Trennen Sie die Netzversorgung und alleexternen DC-Zwischenkreisversorgungen,einschließlich externer Batterie-, USV- und DC-Zwischenkreisverbindungen mit anderenFrequenzumrichtern.
• Trennen oder verriegeln Sie den PM-Motor.
• Warten Sie, damit die Kondensatorenvollständig entladen können. Die entsprechendeminimale Wartezeit finden Sie in Tabelle 2.1.
• Verwenden Sie vor der Durchführung vonWartungs- oder Reparaturarbeiten eingeeignetes Spannungsmessgerät, um sicherzu-stellen, dass die Kondensatoren vollständigentladen sind.
Spannung[V]
Leistungsbereich[kW (HP)]
Mindestwartezeit(Minuten)
200–240 0.37–3.7 (0.5–5) 4
380–480 0.37–7.5 (0.5–10) 4
11–22 (15–30) 15
Tabelle 2.1 Entladezeit
WARNUNGGEFAHR DURCH ABLEITSTRÖMEDie Ableitströme überschreiten 3,5 mA. Eine nichtvorschriftsmäßige Erdung des Frequenzumrichters kannzum Tod oder zu schweren Verletzungen führen.
• Lassen Sie die ordnungsgemäße Erdung derGeräte durch einen zertifizierten Elektroinstal-lateur überprüfen.
WARNUNGGEFAHR DURCH ANLAGENKOMPONENTEN!Ein Kontakt mit drehenden Wellen und elektrischenBetriebsmitteln kann zu schweren Personenschäden odersogar tödlichen Verletzungen führen.
• Stellen Sie sicher, dass Installations-,Inbetriebnahme- und Wartungsarbeitenausschließlich von geschultem und qualifi-ziertem Personal durchgeführt werden.
• Alle Elektroarbeiten müssen den VDE-Vorschriften und anderen lokal geltendenElektroinstallationsvorschriften entsprechen.
• Befolgen Sie die Verfahren in dieser Anleitung.
VORSICHTGEFAHR BEI EINEM INTERNEN FEHLEREin interner Fehler im Frequenzumrichter kann zuschweren Verletzungen führen, wenn der Frequenzum-richter nicht ordnungsgemäß geschlossen wird.
• Stellen Sie vor dem Anlegen von Netzspannungsicher, dass alle Sicherheitsabdeckungenangebracht und ordnungsgemäß befestigt sind.
Sicherheit VLT® Midi Drive FC 280
8 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
22
3 Mechanische Installation
3.1 Auspacken
3.1.1 Gelieferte Teile
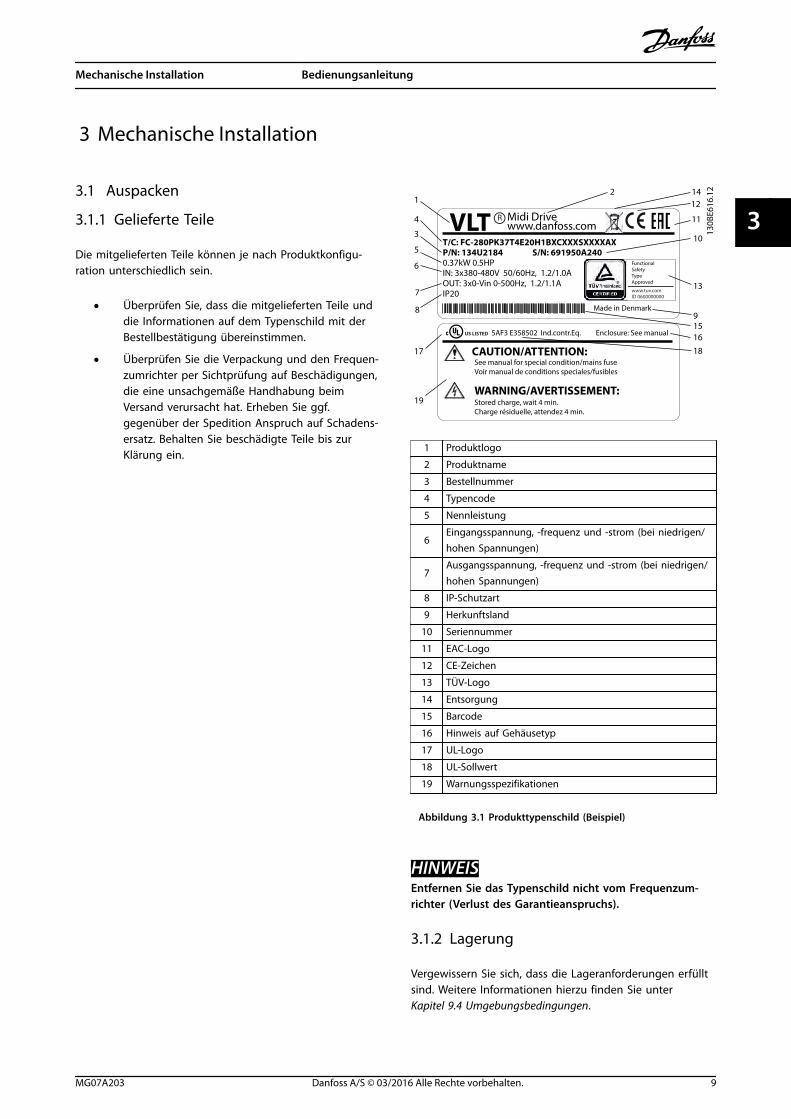
Die mitgelieferten Teile können je nach Produktkonfigu-ration unterschiedlich sein.
• Überprüfen Sie, dass die mitgelieferten Teile unddie Informationen auf dem Typenschild mit derBestellbestätigung übereinstimmen.
• Überprüfen Sie die Verpackung und den Frequen-zumrichter per Sichtprüfung auf Beschädigungen,die eine unsachgemäße Handhabung beimVersand verursacht hat. Erheben Sie ggf.gegenüber der Spedition Anspruch auf Schadens-ersatz. Behalten Sie beschädigte Teile bis zurKlärung ein.
130B
E616
.12
VLT
Made in Denmark
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HPIN: 3x380-480V 50/60Hz, 1.2/1.0AOUT: 3x0-Vin 0-500Hz, 1.2/1.1AIP20
P/N: 134U2184 S/N: 691950A240
Midi Drivewww.danfoss.com
CAUTION/ATTENTION:
WARNING/AVERTISSEMENT:
See manual for special condition/mains fuseVoir manual de conditions speciales/fusibles
5AF3 E358502 Ind.contr.Eq. Enclosure: See manual
Stored charge, wait 4 min. Charge résiduelle, attendez 4 min.
4
12
1214
10
11
3
5
6
8
17
19
1816159
137
R US LISTED
FunctionalSafetyTypeApproved
www.tuv.comID 0600000000
1 Produktlogo
2 Produktname
3 Bestellnummer
4 Typencode
5 Nennleistung
6Eingangsspannung, -frequenz und -strom (bei niedrigen/hohen Spannungen)
7Ausgangsspannung, -frequenz und -strom (bei niedrigen/hohen Spannungen)
8 IP-Schutzart
9 Herkunftsland
10 Seriennummer
11 EAC-Logo
12 CE-Zeichen
13 TÜV-Logo
14 Entsorgung
15 Barcode
16 Hinweis auf Gehäusetyp
17 UL-Logo
18 UL-Sollwert
19 Warnungsspezifikationen
Abbildung 3.1 Produkttypenschild (Beispiel)
HINWEISEntfernen Sie das Typenschild nicht vom Frequenzum-richter (Verlust des Garantieanspruchs).
3.1.2 Lagerung
Vergewissern Sie sich, dass die Lageranforderungen erfülltsind. Weitere Informationen hierzu finden Sie unterKapitel 9.4 Umgebungsbedingungen.
Mechanische Installation Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 9
3 3
3.2 Installationsumgebung
HINWEISStellen Sie in Umgebungen mit Aerosol-Flüssigkeiten,Partikeln oder korrosionsfördernden Gasen sicher, dassdie Schutzart der Geräte der Installationsumgebungentspricht. Eine Nichterfüllung der Anforderungen vonbestimmten Umgebungsbedingungen kann zu einerReduzierung der Lebensdauer des Frequenzumrichtersführen. Stellen Sie sicher, dass alle Anforderungenhinsichtlich Luftfeuchtigkeit, Temperatur und Höhenlageerfüllt werden.
Vibrationen und ErschütterungenDer Frequenzumrichter entspricht den Anforderungen fürGeräte zur Wandmontage sowie bei Montage an Maschi-nengestellen oder in Schaltschränken.
Detaillierte Spezifikationen zu Umgebungsbedingungenfinden Sie unter Kapitel 9.4 Umgebungsbedingungen.
3.3 Montage
HINWEISEine unsachgemäße Montage kann zu Überhitzung undeiner reduzierten Leistung führen.
Kühlung
• Stellen Sie sicher, dass über und unter demFrequenzumrichter zur Luftzirkulation ein Abstandvon mindestens 100 mm vorhanden ist.
Heben
• Prüfen Sie das Gewicht des Frequenzumrichters,um ein sicheres Heben zu gewährleisten, sieheKapitel 9.9 Baugrößen, Nennleistungen undAbmessungen.
• Vergewissern Sie sich, dass die Hebevorrichtungfür die Aufgabe geeignet ist.
• Planen Sie ggf. zum Transportieren des Geräts einHebezeug, einen Kran oder einen Gabelstaplermit der entsprechenden Tragfähigkeit ein.
• Verwenden Sie zum Heben die Transportösen amFrequenzumrichter (sofern vorhanden).
MontageWenden Sie sich für die Anpassung der Bohrungen desVLT® Midi Drive FC 280 zur Bestellung der separatenRückwand an Ihren örtlichen Danfoss-Händler.
Zur Montage des Frequenzumrichters:1. Achten Sie darauf, dass der Montageort stabil
genug ist, um das Gewicht des Geräts zu tragen.
Sie können mehrere Frequenzumrichter Seite-an-Seite ohne Zwischenraum aufstellen.
2. Stellen Sie die Einheit so nah wie möglich amMotor auf. Halten Sie die Motorkabel so kurz wiemöglich.
3. Sorgen Sie durch Montage des Geräts auf einerebenen, stabilen Oberfläche oder an deroptionalen Rückwand für eine ausreichendeLuftzirkulation zur Kühlung.
4. Verwenden Sie die vorgesehenen Bohrungen amFrequenzumrichter zur Wandmontage, sofernvorhanden.
HINWEISHinweise zu den Abmessungen der Bohrungen finden Sieunter Kapitel 9.9 Baugrößen, Nennleistungen undAbmessungen.
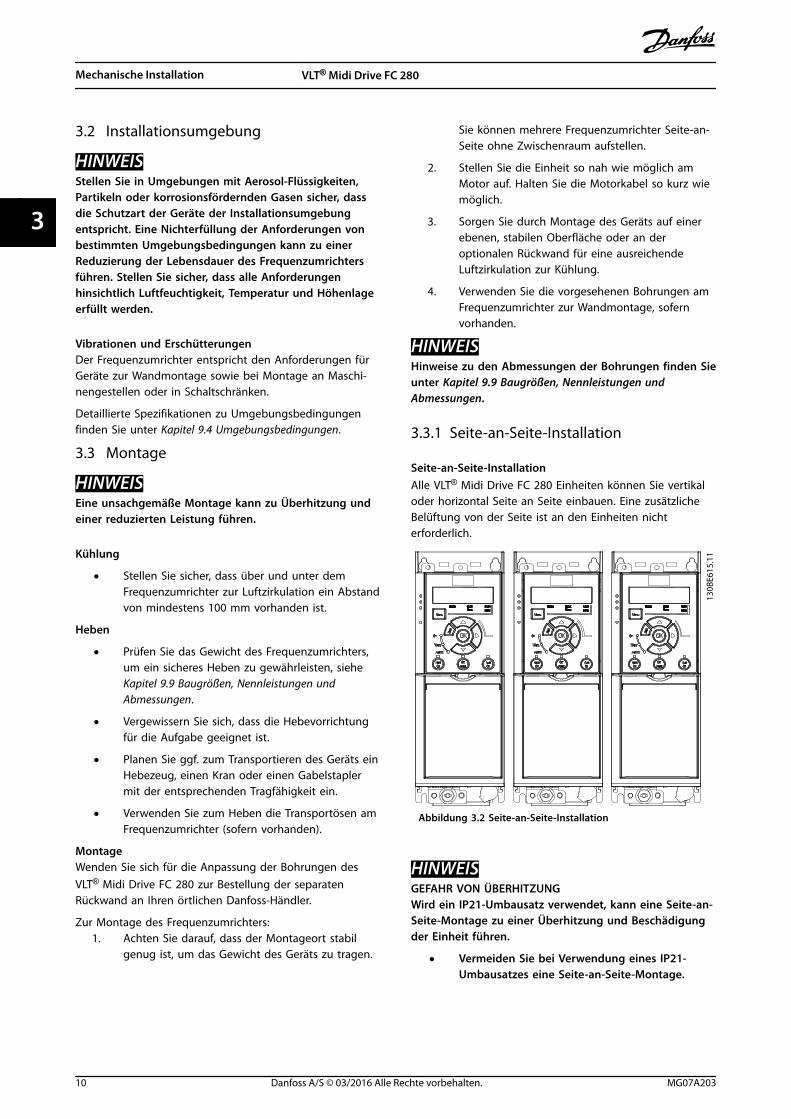
3.3.1 Seite-an-Seite-Installation
Seite-an-Seite-InstallationAlle VLT® Midi Drive FC 280 Einheiten können Sie vertikaloder horizontal Seite an Seite einbauen. Eine zusätzlicheBelüftung von der Seite ist an den Einheiten nichterforderlich.
130B
E615
.11
Abbildung 3.2 Seite-an-Seite-Installation
HINWEISGEFAHR VON ÜBERHITZUNGWird ein IP21-Umbausatz verwendet, kann eine Seite-an-Seite-Montage zu einer Überhitzung und Beschädigungder Einheit führen.
• Vermeiden Sie bei Verwendung eines IP21-Umbausatzes eine Seite-an-Seite-Montage.
Mechanische Installation VLT® Midi Drive FC 280
10 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
33
3.3.2 Bus-Abschirmset
Das Bus-Abschirmset gewährleistet die mechanischeBefestigung und die elektrische Abschirmung von Kabelnfür die folgenden Steuerkassettenvarianten:
• Steuerkassette mit PROFIBUS.
• Steuerkassette mit PROFINET.
• Steuerkassette mit CANopen.
• Steuerkassette mit Ethernet
Jedes Bus-Abschirmset enthält 1 waagerechtesAbschirmblech und 1 senkrechtes Abschirmblech. DieMontage des senkrechten Abschirmblechs ist optional.Dass senkrechte Abschirmblech bietet eine besseremechanischen Unterstützung für PROFINET- und Ethernet-Stopfbuchsen und -Kabel.
3.3.3 Montage
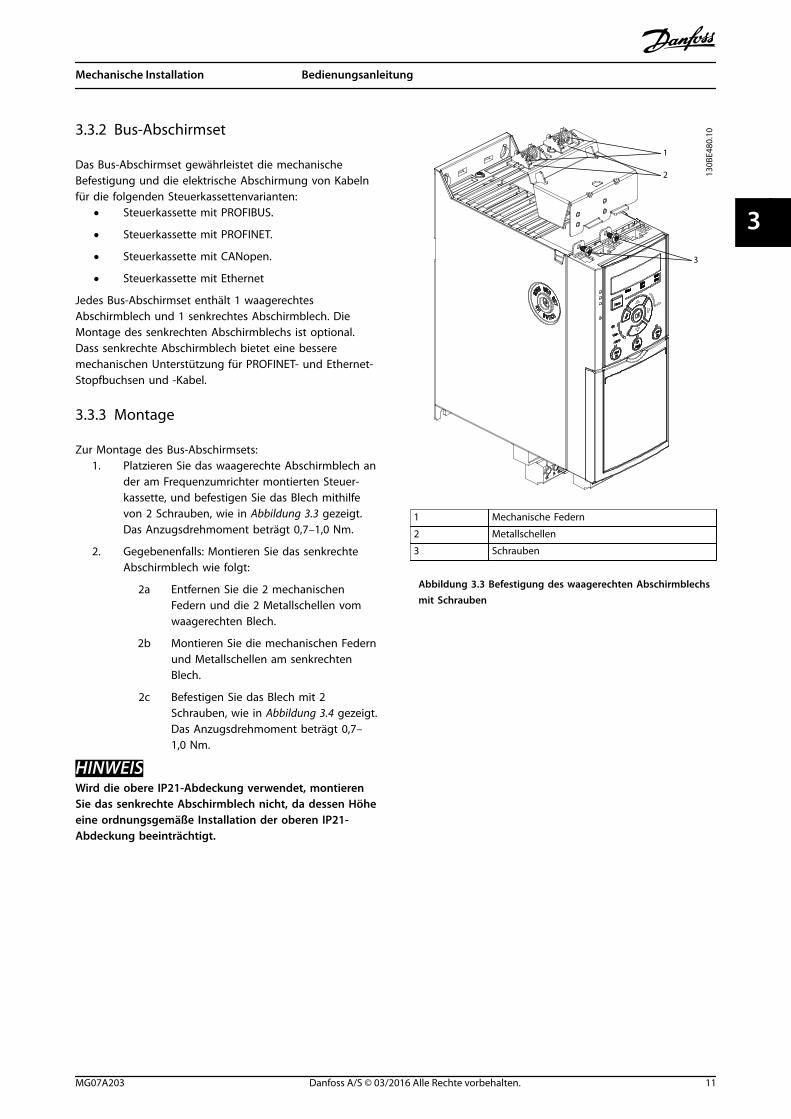
Zur Montage des Bus-Abschirmsets:1. Platzieren Sie das waagerechte Abschirmblech an
der am Frequenzumrichter montierten Steuer-kassette, und befestigen Sie das Blech mithilfevon 2 Schrauben, wie in Abbildung 3.3 gezeigt.Das Anzugsdrehmoment beträgt 0,7–1,0 Nm.
2. Gegebenenfalls: Montieren Sie das senkrechteAbschirmblech wie folgt:
2a Entfernen Sie die 2 mechanischenFedern und die 2 Metallschellen vomwaagerechten Blech.
2b Montieren Sie die mechanischen Federnund Metallschellen am senkrechtenBlech.
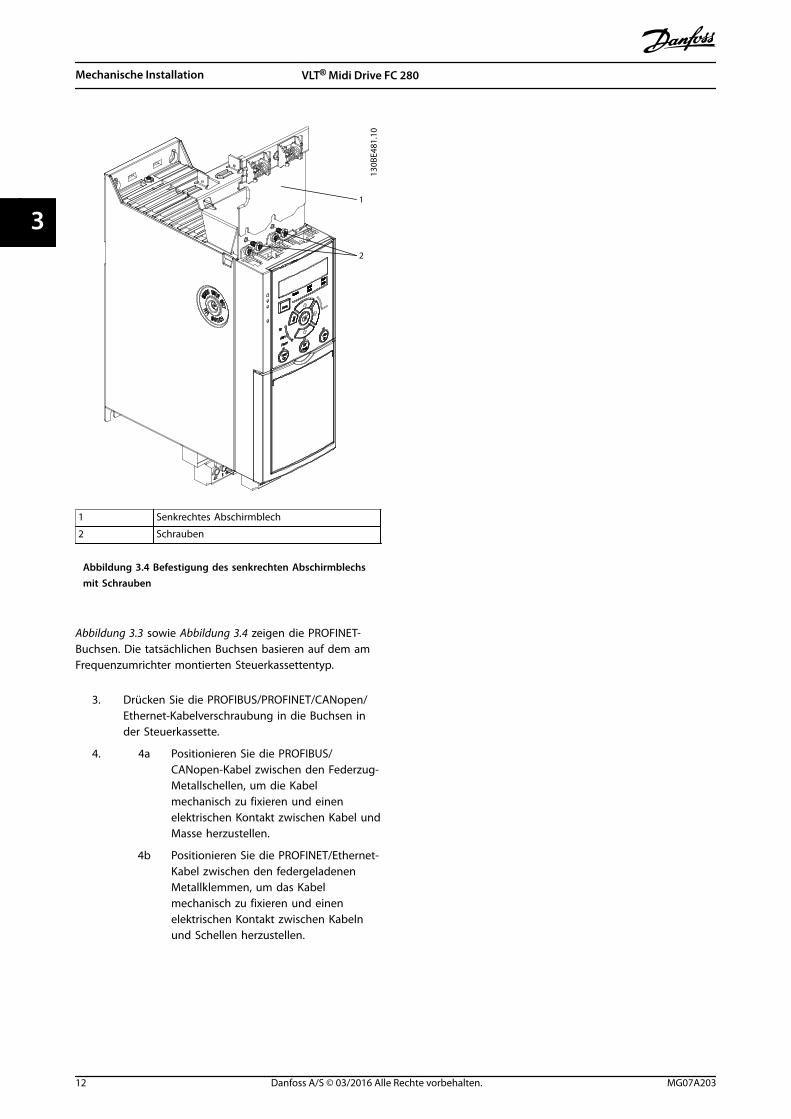
2c Befestigen Sie das Blech mit 2Schrauben, wie in Abbildung 3.4 gezeigt.Das Anzugsdrehmoment beträgt 0,7–1,0 Nm.
HINWEISWird die obere IP21-Abdeckung verwendet, montierenSie das senkrechte Abschirmblech nicht, da dessen Höheeine ordnungsgemäße Installation der oberen IP21-Abdeckung beeinträchtigt.
1
2
3
130B
E480
.10
1 Mechanische Federn
2 Metallschellen
3 Schrauben
Abbildung 3.3 Befestigung des waagerechten Abschirmblechsmit Schrauben
Mechanische Installation Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 11
3 3
130B
E481
.10
1
2
1 Senkrechtes Abschirmblech
2 Schrauben
Abbildung 3.4 Befestigung des senkrechten Abschirmblechsmit Schrauben
Abbildung 3.3 sowie Abbildung 3.4 zeigen die PROFINET-Buchsen. Die tatsächlichen Buchsen basieren auf dem amFrequenzumrichter montierten Steuerkassettentyp.
3. Drücken Sie die PROFIBUS/PROFINET/CANopen/Ethernet-Kabelverschraubung in die Buchsen inder Steuerkassette.
4. 4a Positionieren Sie die PROFIBUS/CANopen-Kabel zwischen den Federzug-Metallschellen, um die Kabelmechanisch zu fixieren und einenelektrischen Kontakt zwischen Kabel undMasse herzustellen.
4b Positionieren Sie die PROFINET/Ethernet-Kabel zwischen den federgeladenenMetallklemmen, um das Kabelmechanisch zu fixieren und einenelektrischen Kontakt zwischen Kabelnund Schellen herzustellen.
Mechanische Installation VLT® Midi Drive FC 280
12 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
33
4 Elektrische Installation
4.1 Sicherheitshinweise
Siehe Kapitel 2 Sicherheit für allgemeine Sicherheits-hinweise.
WARNUNGINDUZIERTE SPANNUNG!Induzierte Spannung von Motorkabeln vonverschiedenen Frequenzumrichtern, die nebeneinanderverlegt sind, können Gerätekondensatoren auch dannaufladen, wenn die Geräte abgeschaltet und verriegeltsind. Die Nichtbeachtung der Empfehlung zum separatenVerlegen von Motorkabeln oder zur Verwendung vonabgeschirmten Kabeln kann schwere Personenschädenoder sogar tödliche Verletzungen zur Folge haben!
• Verlegen Sie Motorkabel getrennt.
• verwenden Sie abgeschirmte Kabel.
• Verriegeln Sie alle Frequenzumrichter gleich-zeitig.
WARNUNGSTROMSCHLAGGEFAHRDer Frequenzumrichter kann einen Gleichstrom imSchutzleiter verursachen, der zum Tod oder zu schwerenVerletzungen führen kann!
• Wenn Sie zum Schutz vor elektrischem Schlageinen Fehlerstromschutzschalter (ResidualCurrent Device, RCD) verwenden, muss dieseran der Versorgungsseite vom Typ B sein.
Eine Nichtbeachtung dieser Empfehlung kann dazuführen, dass der Fehlerstromschutzschalter nicht dengewünschten Schutz bietet.
Überspannungsschutz• Für Anwendungen mit mehreren Motoren
benötigen Sie zusätzliche Schutzvorrichtungenwie einen Kurzschlussschutz oder einenthermischen Motorschutz zwischen Frequenzum-richter und Motor.
• Der Kurzschluss- und Überspannungsschutz wirddurch Sicherungen am Eingang gewährleistet.Wenn die Sicherungen nicht Bestandteil derLieferung ab Werk sind, muss sie der Installateurals Teil der Installation bereitstellen. Diemaximalen Nennwerte der Sicherungen finden Sieunter Kapitel 9.8 Sicherungen und Trennschalter.
Leitungstyp und Nennwerte• Die Querschnitte und Hitzebeständigkeit aller
verwendeten Kabel sollten den örtlichen undnationalen Vorschriften entsprechen.
• Empfehlung für die Verdrahtung des Stroman-schlusses: Kupferdraht, bemessen für mindestens75 °C (167 °F).
Siehe Kapitel 9.5 Kabelspezifikationen zu empfohlenenKabelquerschnitten und -typen.
4.2 EMV-gerechte Installation
Befolgen Sie die Anweisungen in Kapitel 4.3 Erdung,Kapitel 4.4 Anschlussdiagramm, Kapitel 4.6 Motoranschlussund Kapitel 4.8 Steuerkabel, um eine EMV-gerechte Instal-lation durchzuführen.
4.3 Erdung
WARNUNGGEFAHR DURCH ABLEITSTRÖMEDie Ableitströme überschreiten 3,5 mA. Eine nichtvorschriftsmäßige Erdung des Frequenzumrichters kannzum Tod oder zu schweren Verletzungen führen.
• Lassen Sie die ordnungsgemäße Erdung derGeräte durch einen zertifizierten Elektroinstal-lateur überprüfen.
Für elektrische Sicherheit• Erden Sie den Frequenzumrichter gemäß den
geltenden Normen und Richtlinien.
• Verwenden Sie für Netzversorgung,Motorleistungs- und Steuerleitungen einenspeziellen Schutzleiter.
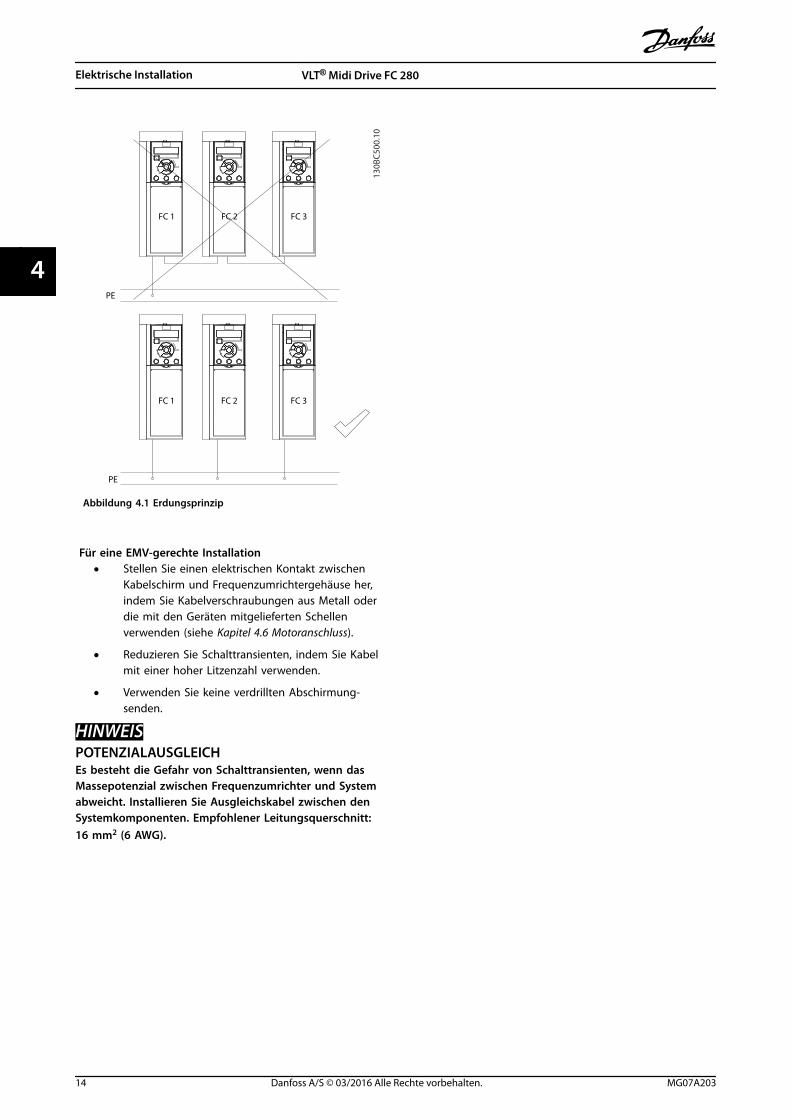
• Erden Sie Frequenzumrichter nicht in Reihehintereinander (siehe Abbildung 4.1).
• Halten Sie die Erdungskabel so kurz wie möglich.
• Befolgen Sie die Anforderungen des Motorhers-tellers an die Motorkabel.
• Mindestleitungsquerschnitt: 10 mm2 (2Erdungskabel, die beide den Bemaßungsvorgabenentsprechen, separat abschließen).
Elektrische Installation Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 13
4 4
130B
C500
.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Abbildung 4.1 Erdungsprinzip
Für eine EMV-gerechte Installation• Stellen Sie einen elektrischen Kontakt zwischen
Kabelschirm und Frequenzumrichtergehäuse her,indem Sie Kabelverschraubungen aus Metall oderdie mit den Geräten mitgelieferten Schellenverwenden (siehe Kapitel 4.6 Motoranschluss).
• Reduzieren Sie Schalttransienten, indem Sie Kabelmit einer hoher Litzenzahl verwenden.
• Verwenden Sie keine verdrillten Abschirmung-senden.
HINWEISPOTENZIALAUSGLEICHEs besteht die Gefahr von Schalttransienten, wenn dasMassepotenzial zwischen Frequenzumrichter und Systemabweicht. Installieren Sie Ausgleichskabel zwischen denSystemkomponenten. Empfohlener Leitungsquerschnitt:16 mm2 (6 AWG).
Elektrische Installation VLT® Midi Drive FC 280
14 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
44
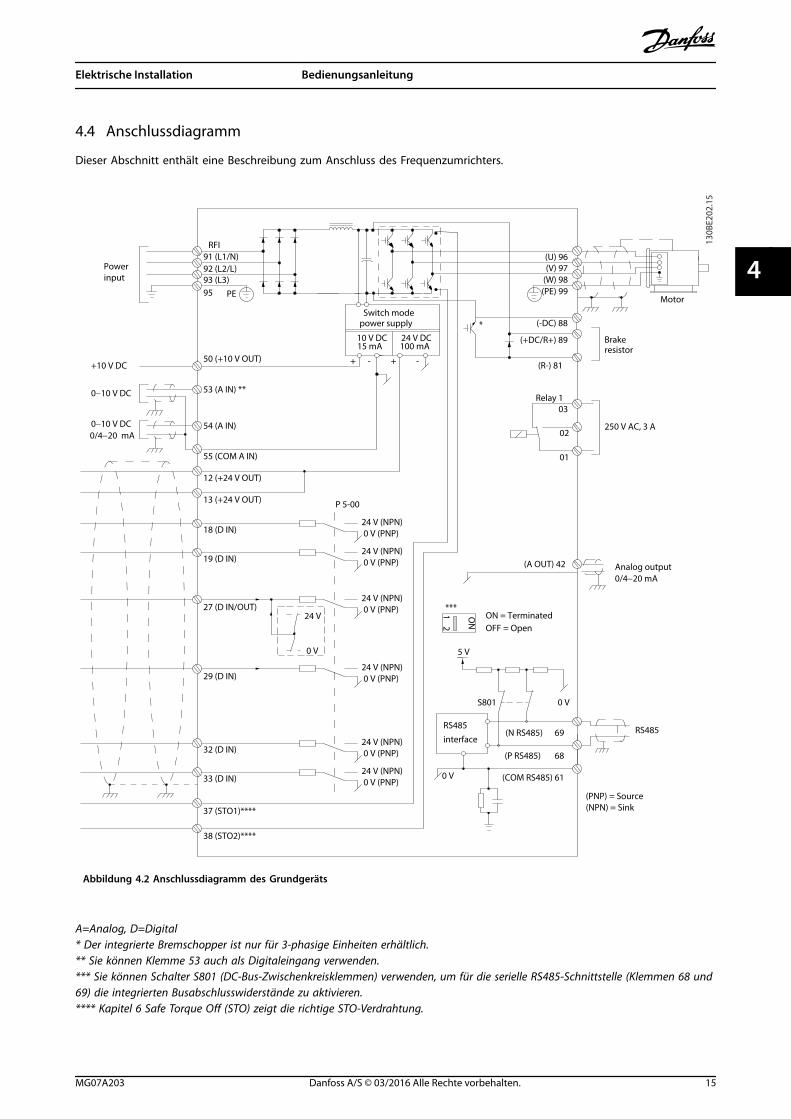
4.4 Anschlussdiagramm
Dieser Abschnitt enthält eine Beschreibung zum Anschluss des Frequenzumrichters.
130B
E202
.15
Powerinput
Switch modepower supply
Motor
Analog output
interface
(PNP) = Source (NPN) = Sink
ON = TerminatedOFF = Open
Brakeresistor
91 (L1/N)92 (L2/L)93 (L3)
PE
50 (+10 V OUT)
53 (A IN) **
54 (A IN)
55 (COM A IN)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC15 mA 100 mA
+ - + -
(U) 96(V) 97
(W) 98(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN) 0 V (PNP)
0 V (PNP)24 V (NPN)
19 (D IN)
24 V (NPN) 0 V (PNP)27 (D IN/OUT)
24 V
0 V
0 V (PNP)24 V (NPN)
29 (D IN)
24 V (NPN) 0 V (PNP)
0 V (PNP)24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)****
37 (STO1)****
95
P 5-00
21 O
N
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
*
***
Abbildung 4.2 Anschlussdiagramm des Grundgeräts
A=Analog, D=Digital* Der integrierte Bremschopper ist nur für 3-phasige Einheiten erhältlich.** Sie können Klemme 53 auch als Digitaleingang verwenden.*** Sie können Schalter S801 (DC-Bus-Zwischenkreisklemmen) verwenden, um für die serielle RS485-Schnittstelle (Klemmen 68 und69) die integrierten Busabschlusswiderstände zu aktivieren.**** Kapitel 6 Safe Torque Off (STO) zeigt die richtige STO-Verdrahtung.
Elektrische Installation Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 15
4 4
130B
D39
1.11
1
23
4
5
6
78
9 10
ResetAuto
OnHand
On
OK
Back
Menu
Status QuickMenu
MainMenu
PE
UVW
L1L2L3PE
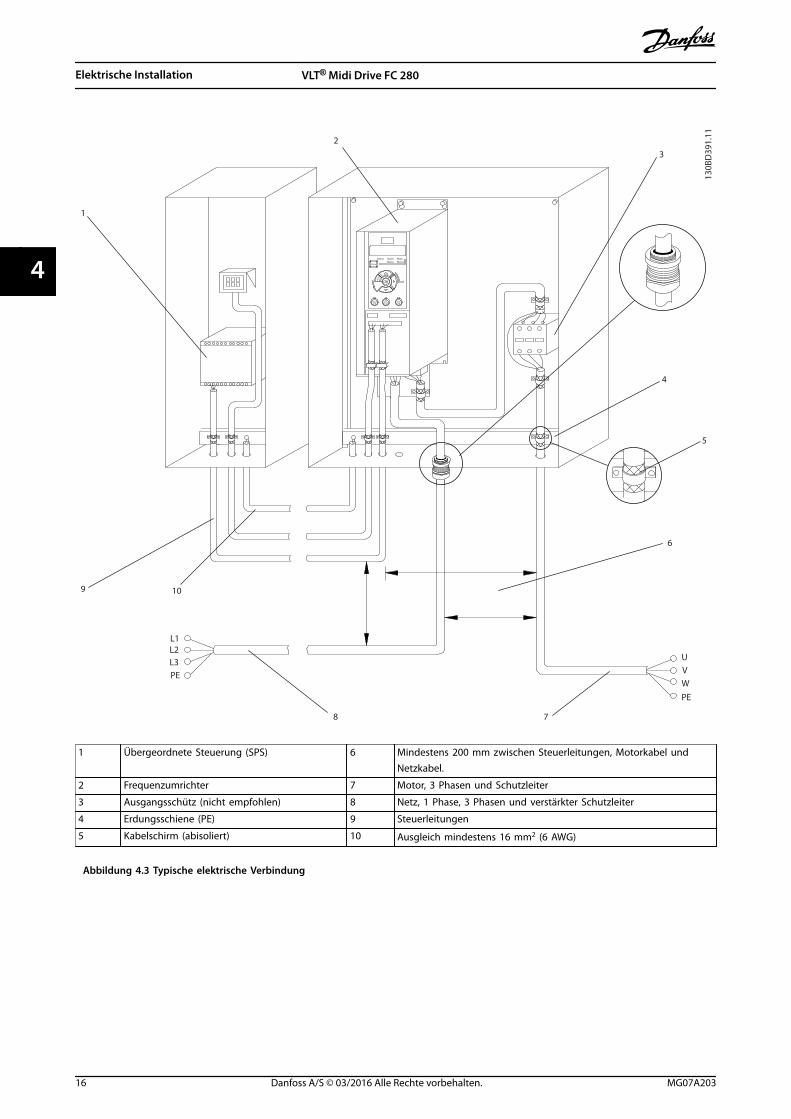
1 Übergeordnete Steuerung (SPS) 6 Mindestens 200 mm zwischen Steuerleitungen, Motorkabel undNetzkabel.
2 Frequenzumrichter 7 Motor, 3 Phasen und Schutzleiter
3 Ausgangsschütz (nicht empfohlen) 8 Netz, 1 Phase, 3 Phasen und verstärkter Schutzleiter
4 Erdungsschiene (PE) 9 Steuerleitungen
5 Kabelschirm (abisoliert) 10 Ausgleich mindestens 16 mm2 (6 AWG)
Abbildung 4.3 Typische elektrische Verbindung
Elektrische Installation VLT® Midi Drive FC 280
16 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
44
4.5 Zugriff
• Entfernen Sie die Abdeckplatte mit Hilfe einesSchraubendrehers. Siehe Abbildung 4.4.
130B
C504
.11
Abbildung 4.4 Steuerkabeldurchführung
4.6 Motoranschluss
WARNUNGINDUZIERTE SPANNUNG!Induzierte Spannung durch nebeneinander verlegteMotorkabel kann Gerätekondensatoren auch dannaufladen, wenn die Geräte freigeschaltet sind. DieNichtbeachtung der Empfehlung zum separaten Verlegenvon Motorkabeln oder zur Verwendung vonabgeschirmten Kabeln kann schwere Personenschädenoder sogar tödliche Verletzungen zur Folge haben!
• Verlegen Sie Motorkabel getrennt.
• verwenden Sie abgeschirmte Kabel.
• Befolgen Sie bezüglich der Kabelquerschnitteörtliche und nationale Vorschriften. MaximaleKabelquerschnitte siehe Kapitel 9.1 ElektrischeDaten.
• Befolgen Sie die Anforderungen des Motorhers-tellers an die Motorkabel.
• Kabeleinführungen für Motorkabel oderBodenplatten mit Durchführungen sind amUnterteil von Frequenzumrichtern mit SchutzartIP21 (NEMA 1/12) vorgesehen.
• Schließen Sie kein Anlass- oder Polwechselgerät(z. B. Dahlander-Motor oder Asynchron-Schleif-ringläufermotor) zwischen Frequenzumrichter undMotor an.
Vorgehensweise1. Isolieren Sie einen Abschnitt der äußeren
Kabelisolierung ab.
2. Positionieren Sie das abisolierte Kabel unter derKabelschelle, um eine mechanische Befestigung
und elektrischen Kontakt zwischen Kabelschirmund Erde herzustellen.
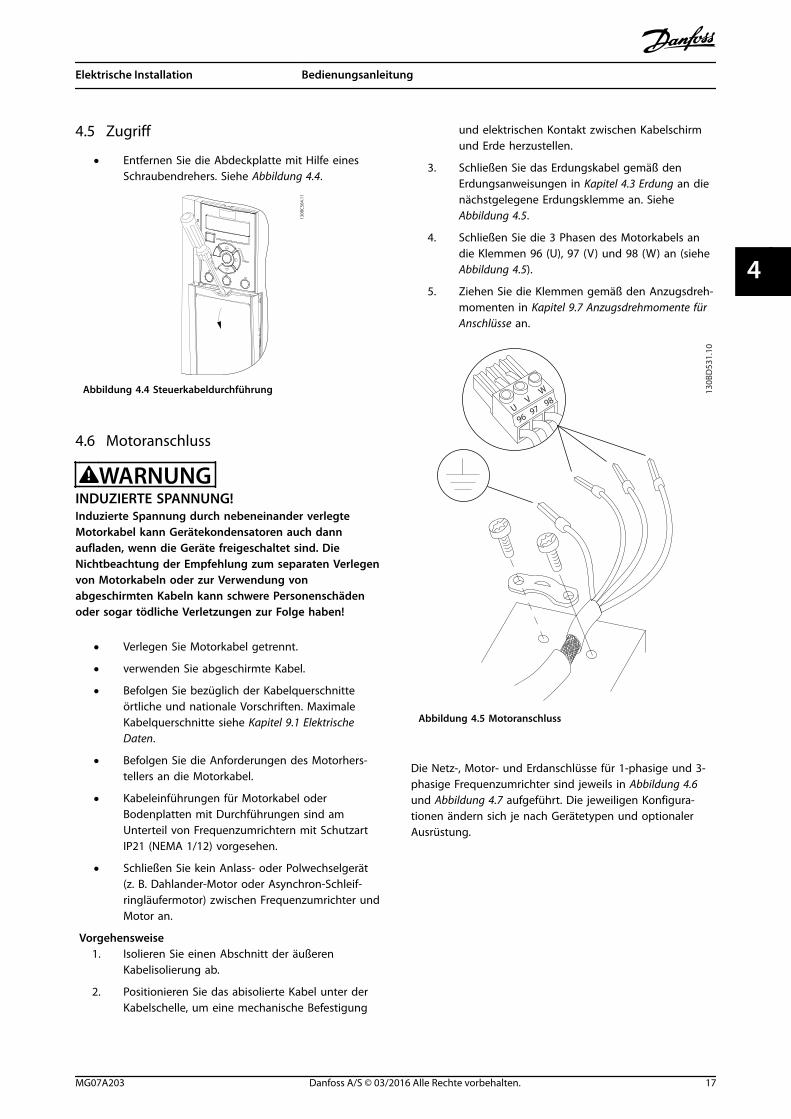
3. Schließen Sie das Erdungskabel gemäß denErdungsanweisungen in Kapitel 4.3 Erdung an dienächstgelegene Erdungsklemme an. SieheAbbildung 4.5.
4. Schließen Sie die 3 Phasen des Motorkabels andie Klemmen 96 (U), 97 (V) und 98 (W) an (sieheAbbildung 4.5).
5. Ziehen Sie die Klemmen gemäß den Anzugsdreh-momenten in Kapitel 9.7 Anzugsdrehmomente fürAnschlüsse an.
130B
D53
1.10
UV
W
9697
98
Abbildung 4.5 Motoranschluss
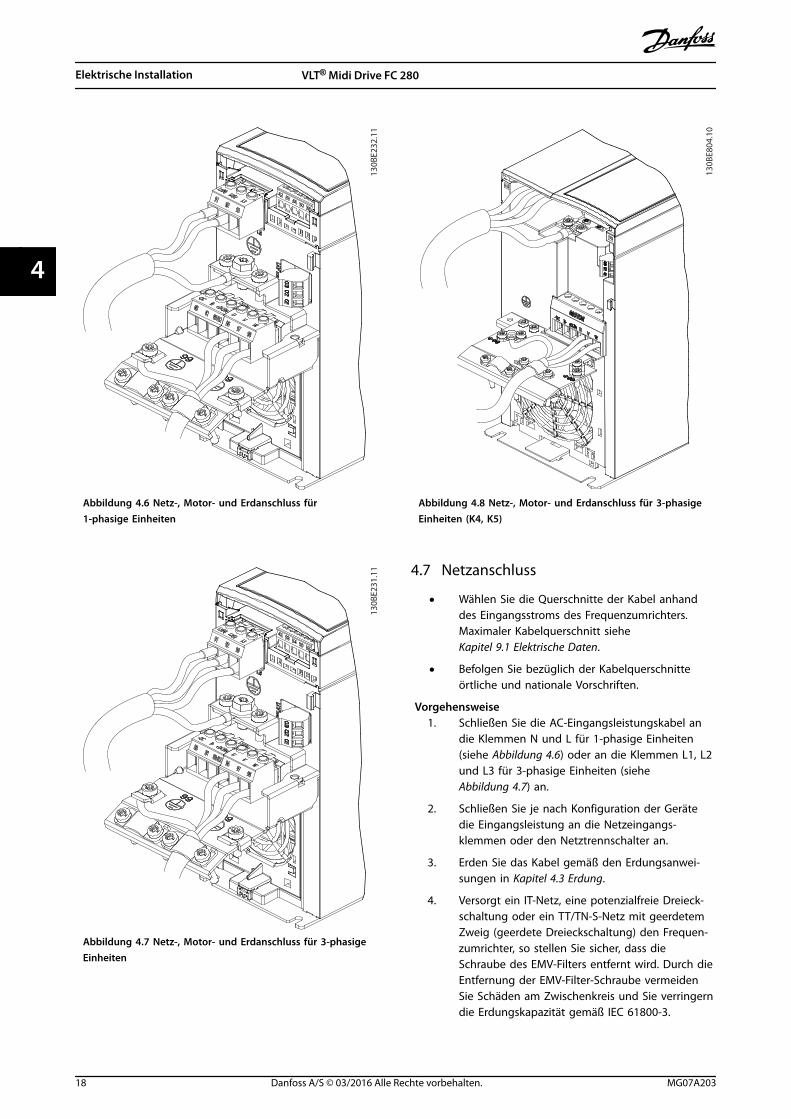
Die Netz-, Motor- und Erdanschlüsse für 1-phasige und 3-phasige Frequenzumrichter sind jeweils in Abbildung 4.6und Abbildung 4.7 aufgeführt. Die jeweiligen Konfigura-tionen ändern sich je nach Gerätetypen und optionalerAusrüstung.
Elektrische Installation Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 17
4 4
130B
E232
.11
Abbildung 4.6 Netz-, Motor- und Erdanschluss für1-phasige Einheiten
130B
E231
.11
Abbildung 4.7 Netz-, Motor- und Erdanschluss für 3-phasigeEinheiten
130B
E804
.10
Abbildung 4.8 Netz-, Motor- und Erdanschluss für 3-phasigeEinheiten (K4, K5)
4.7 Netzanschluss
• Wählen Sie die Querschnitte der Kabel anhanddes Eingangsstroms des Frequenzumrichters.Maximaler Kabelquerschnitt sieheKapitel 9.1 Elektrische Daten.
• Befolgen Sie bezüglich der Kabelquerschnitteörtliche und nationale Vorschriften.
Vorgehensweise1. Schließen Sie die AC-Eingangsleistungskabel an
die Klemmen N und L für 1-phasige Einheiten(siehe Abbildung 4.6) oder an die Klemmen L1, L2und L3 für 3-phasige Einheiten (sieheAbbildung 4.7) an.
2. Schließen Sie je nach Konfiguration der Gerätedie Eingangsleistung an die Netzeingangs-klemmen oder den Netztrennschalter an.
3. Erden Sie das Kabel gemäß den Erdungsanwei-sungen in Kapitel 4.3 Erdung.
4. Versorgt ein IT-Netz, eine potenzialfreie Dreieck-schaltung oder ein TT/TN-S-Netz mit geerdetemZweig (geerdete Dreieckschaltung) den Frequen-zumrichter, so stellen Sie sicher, dass dieSchraube des EMV-Filters entfernt wird. Durch dieEntfernung der EMV-Filter-Schraube vermeidenSie Schäden am Zwischenkreis und Sie verringerndie Erdungskapazität gemäß IEC 61800-3.
Elektrische Installation VLT® Midi Drive FC 280
18 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
44
4.8 Steuerkabel
4.8.1 Steuerklemmentypen
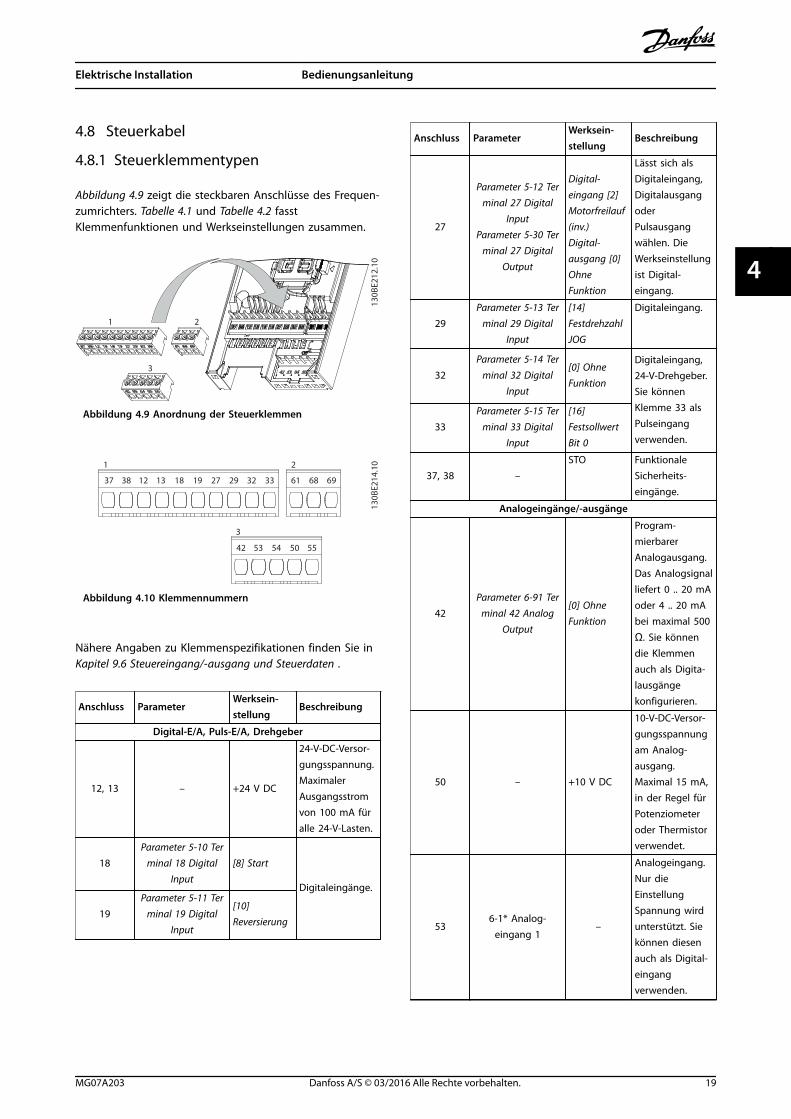
Abbildung 4.9 zeigt die steckbaren Anschlüsse des Frequen-zumrichters. Tabelle 4.1 und Tabelle 4.2 fasstKlemmenfunktionen und Werkseinstellungen zusammen.
130B
E212
.10
1 2
3
Abbildung 4.9 Anordnung der Steuerklemmen
130B
E214
.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Abbildung 4.10 Klemmennummern
Nähere Angaben zu Klemmenspezifikationen finden Sie inKapitel 9.6 Steuereingang/-ausgang und Steuerdaten .
Anschluss ParameterWerksein-stellung
Beschreibung
Digital-E/A, Puls-E/A, Drehgeber
12, 13 – +24 V DC
24-V-DC-Versor-gungsspannung.MaximalerAusgangsstromvon 100 mA füralle 24-V-Lasten.
18Parameter 5-10 Ter
minal 18 DigitalInput
[8] Start
Digitaleingänge.
19Parameter 5-11 Ter
minal 19 DigitalInput
[10]Reversierung
Anschluss ParameterWerksein-stellung
Beschreibung
27
Parameter 5-12 Terminal 27 Digital
InputParameter 5-30 Ter
minal 27 DigitalOutput
Digital-eingang [2]Motorfreilauf(inv.)Digital-ausgang [0]OhneFunktion
Lässt sich alsDigitaleingang,DigitalausgangoderPulsausgangwählen. DieWerkseinstellungist Digital-eingang.
29Parameter 5-13 Ter
minal 29 DigitalInput
[14]FestdrehzahlJOG
Digitaleingang.
32Parameter 5-14 Ter
minal 32 DigitalInput
[0] OhneFunktion
Digitaleingang,24-V-Drehgeber.Sie könnenKlemme 33 alsPulseingangverwenden.
33Parameter 5-15 Ter
minal 33 DigitalInput
[16]FestsollwertBit 0
37, 38 –STO Funktionale
Sicherheits-eingänge.
Analogeingänge/-ausgänge
42Parameter 6-91 Ter
minal 42 AnalogOutput
[0] OhneFunktion
Program-mierbarerAnalogausgang.Das Analogsignalliefert 0 .. 20 mAoder 4 .. 20 mAbei maximal 500
Ω. Sie könnendie Klemmenauch als Digita-lausgängekonfigurieren.
50 – +10 V DC
10-V-DC-Versor-gungsspannungam Analog-ausgang.Maximal 15 mA,in der Regel fürPotenziometeroder Thermistorverwendet.
536-1* Analog-
eingang 1–
Analogeingang.Nur dieEinstellungSpannung wirdunterstützt. Siekönnen diesenauch als Digital-eingangverwenden.
Elektrische Installation Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 19
4 4
Anschluss ParameterWerksein-stellung
Beschreibung
546-2* Analog-
eingang 2–
Analogeingang.Programmierbarfür Spannungoder Strom.
55 –
–
Bezugspotentialfür Digital- undAnalogeingänge.
Tabelle 4.1 Klemmenbeschreibung – Digitaleingänge/-ausgänge, Analogeingänge/-ausgänge
Anschluss ParameterWerksein-stellung
Beschreibung
Serielle Kommunikation
61 – –
Integriertes RC-Filter fürKabelab-schirmung. DientNUR zumAnschluss derAbschirmung beiEMV-Problemen.
68 (+)8-3* Ser. FC-
Schnittst.–
RS485-Schnitt-stelle. EinSchalter auf derSteuerkarte dientzum Zuschaltendes Abschlusswi-derstands.
69 (-)8-3* Ser. FC-
Schnittst.–
Relais
01, 02, 03 5-40 [9] Alarm
Wechselkontakt-Relaisausgang.Diese Relaisbefinden sich jenach Konfigu-ration und Größedes Frequenzum-richters anverschiedenenPositionen.Verwendbar fürWechsel- oderGleichspannungsowie ohmscheoder induktiveLasten.
Tabelle 4.2 Klemmenbeschreibungen – Serielle Schnittstelle
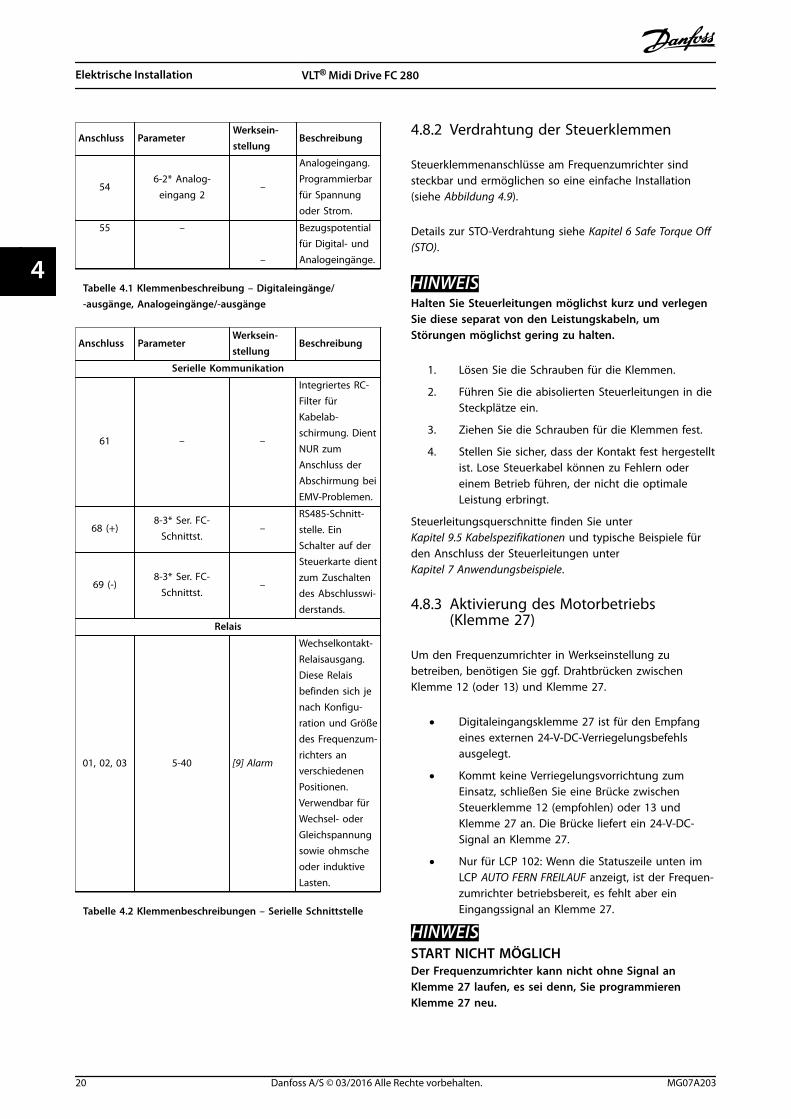
4.8.2 Verdrahtung der Steuerklemmen
Steuerklemmenanschlüsse am Frequenzumrichter sindsteckbar und ermöglichen so eine einfache Installation(siehe Abbildung 4.9).
Details zur STO-Verdrahtung siehe Kapitel 6 Safe Torque Off(STO).
HINWEISHalten Sie Steuerleitungen möglichst kurz und verlegenSie diese separat von den Leistungskabeln, umStörungen möglichst gering zu halten.
1. Lösen Sie die Schrauben für die Klemmen.
2. Führen Sie die abisolierten Steuerleitungen in dieSteckplätze ein.
3. Ziehen Sie die Schrauben für die Klemmen fest.
4. Stellen Sie sicher, dass der Kontakt fest hergestelltist. Lose Steuerkabel können zu Fehlern odereinem Betrieb führen, der nicht die optimaleLeistung erbringt.
Steuerleitungsquerschnitte finden Sie unterKapitel 9.5 Kabelspezifikationen und typische Beispiele fürden Anschluss der Steuerleitungen unterKapitel 7 Anwendungsbeispiele.
4.8.3 Aktivierung des Motorbetriebs(Klemme 27)
Um den Frequenzumrichter in Werkseinstellung zubetreiben, benötigen Sie ggf. Drahtbrücken zwischenKlemme 12 (oder 13) und Klemme 27.
• Digitaleingangsklemme 27 ist für den Empfangeines externen 24-V-DC-Verriegelungsbefehlsausgelegt.
• Kommt keine Verriegelungsvorrichtung zumEinsatz, schließen Sie eine Brücke zwischenSteuerklemme 12 (empfohlen) oder 13 undKlemme 27 an. Die Brücke liefert ein 24-V-DC-Signal an Klemme 27.
• Nur für LCP 102: Wenn die Statuszeile unten imLCP AUTO FERN FREILAUF anzeigt, ist der Frequen-zumrichter betriebsbereit, es fehlt aber einEingangssignal an Klemme 27.
HINWEISSTART NICHT MÖGLICHDer Frequenzumrichter kann nicht ohne Signal anKlemme 27 laufen, es sei denn, Sie programmierenKlemme 27 neu.
Elektrische Installation VLT® Midi Drive FC 280
20 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
44
4.8.4 Mechanische Bremssteuerung
In Hub-/Senkanwendungen muss eine elektromecha-nische Bremse gesteuert werden können:
• Steuern Sie die Bremse mit einem Relaisausgangoder Digitalausgang (Klemme 27).
• Halten Sie den Ausgang geschlossen(spannungsfrei), so lange der Frequenzumrichterden Motor nicht im Stillstand halten kann, z. B.,weil die Last zu schwer ist.
• Wählen Sie für Anwendungen mit einer elektro-mechanischen Bremse [32] MechanischeBremssteuerung in der Parametergruppe 5-4* Relaisaus.
• Die Bremse wird gelöst, wenn der Motorstromden eingestellten Wert in Parameter 2-20 Bremseöffnen bei Motorstrom überschreitet.
• Die Bremse wird aktiviert, wenn die Ausgangs-frequenz geringer als die inParameter 2-22 Bremse schließen bei Motorfrequenzeingestellte Frequenz ist und der Frequenzum-richter einen Stoppbefehl ausgibt.
Befindet sich der Frequenzumrichter im Alarmmodus oderbesteht eine Überspannungssituation, schließt diemechanische Bremse sofort.
Der Frequenzumrichter ist keine Sicherheitsvorrichtung. Esobliegt dem Systemplaner Sicherheitsvorrichtungen gemäßentsprechender nationaler Kran-/Hebevorschriften zuintegrieren.
130B
E201
.11
L1(N) L2(L) L3
U V W02 01
A1
A2
Frequency converterOutput
relay
Command circuit220 V AC
Mechanicalbrake
ShaftMotor
Freewheelingdiode
Brake power circuit380 V AC
Outputcontactorinput
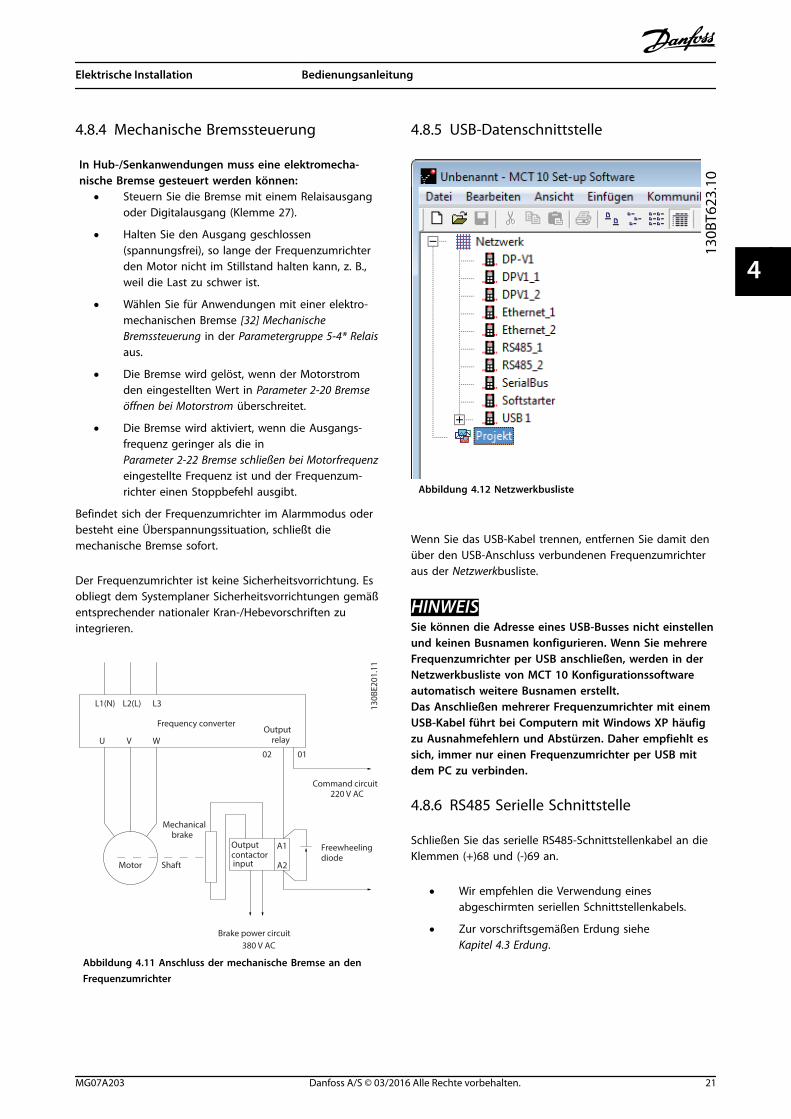
Abbildung 4.11 Anschluss der mechanische Bremse an denFrequenzumrichter
4.8.5 USB-Datenschnittstelle
Abbildung 4.12 Netzwerkbusliste
Wenn Sie das USB-Kabel trennen, entfernen Sie damit denüber den USB-Anschluss verbundenen Frequenzumrichteraus der Netzwerkbusliste.
HINWEISSie können die Adresse eines USB-Busses nicht einstellenund keinen Busnamen konfigurieren. Wenn Sie mehrereFrequenzumrichter per USB anschließen, werden in derNetzwerkbusliste von MCT 10 Konfigurationssoftwareautomatisch weitere Busnamen erstellt.Das Anschließen mehrerer Frequenzumrichter mit einemUSB-Kabel führt bei Computern mit Windows XP häufigzu Ausnahmefehlern und Abstürzen. Daher empfiehlt essich, immer nur einen Frequenzumrichter per USB mitdem PC zu verbinden.
4.8.6 RS485 Serielle Schnittstelle
Schließen Sie das serielle RS485-Schnittstellenkabel an dieKlemmen (+)68 und (-)69 an.
• Wir empfehlen die Verwendung einesabgeschirmten seriellen Schnittstellenkabels.
• Zur vorschriftsgemäßen Erdung siehe Kapitel 4.3 Erdung.
Elektrische Installation Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 21
4 4
61
68
69
+
130B
B489
.10
RS485
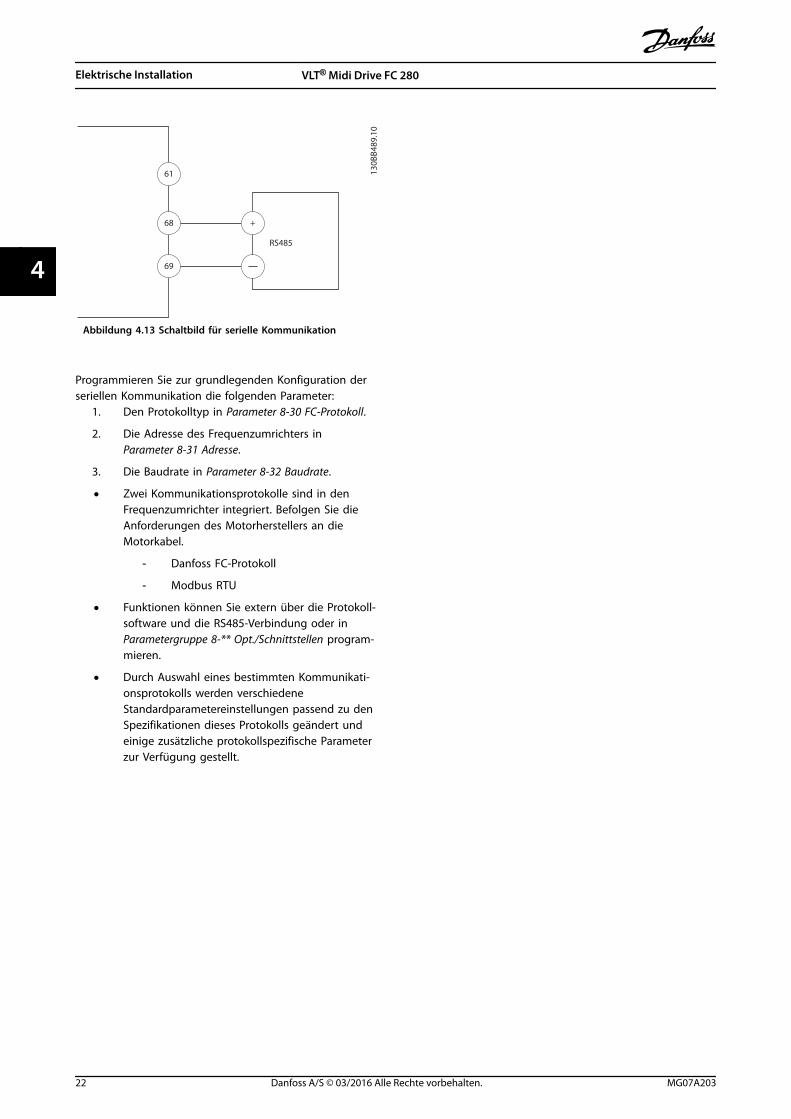
Abbildung 4.13 Schaltbild für serielle Kommunikation
Programmieren Sie zur grundlegenden Konfiguration derseriellen Kommunikation die folgenden Parameter:
1. Den Protokolltyp in Parameter 8-30 FC-Protokoll.
2. Die Adresse des Frequenzumrichters inParameter 8-31 Adresse.
3. Die Baudrate in Parameter 8-32 Baudrate.
• Zwei Kommunikationsprotokolle sind in denFrequenzumrichter integriert. Befolgen Sie dieAnforderungen des Motorherstellers an dieMotorkabel.
- Danfoss FC-Protokoll
- Modbus RTU
• Funktionen können Sie extern über die Protokoll-software und die RS485-Verbindung oder inParametergruppe 8-** Opt./Schnittstellen program-mieren.
• Durch Auswahl eines bestimmten Kommunikati-onsprotokolls werden verschiedeneStandardparametereinstellungen passend zu denSpezifikationen dieses Protokolls geändert undeinige zusätzliche protokollspezifische Parameterzur Verfügung gestellt.
Elektrische Installation VLT® Midi Drive FC 280
22 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
44
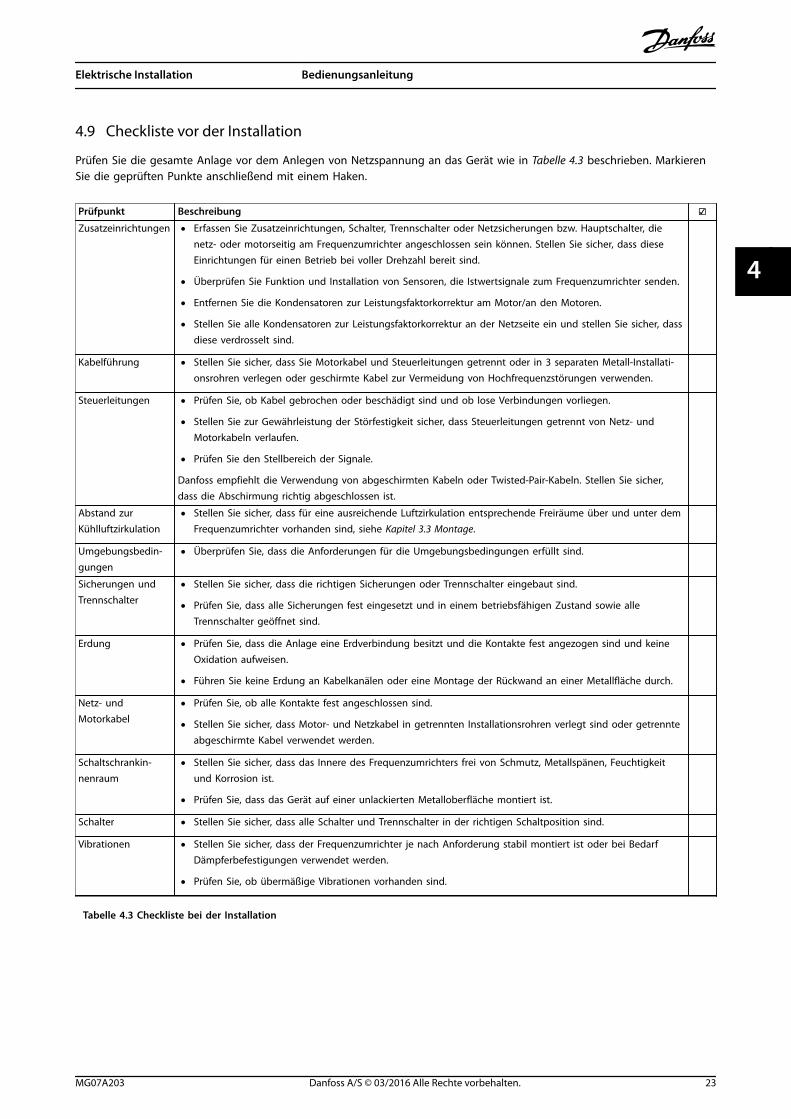
4.9 Checkliste vor der Installation
Prüfen Sie die gesamte Anlage vor dem Anlegen von Netzspannung an das Gerät wie in Tabelle 4.3 beschrieben. MarkierenSie die geprüften Punkte anschließend mit einem Haken.
Prüfpunkt Beschreibung Zusatzeinrichtungen • Erfassen Sie Zusatzeinrichtungen, Schalter, Trennschalter oder Netzsicherungen bzw. Hauptschalter, die
netz- oder motorseitig am Frequenzumrichter angeschlossen sein können. Stellen Sie sicher, dass dieseEinrichtungen für einen Betrieb bei voller Drehzahl bereit sind.
• Überprüfen Sie Funktion und Installation von Sensoren, die Istwertsignale zum Frequenzumrichter senden.
• Entfernen Sie die Kondensatoren zur Leistungsfaktorkorrektur am Motor/an den Motoren.
• Stellen Sie alle Kondensatoren zur Leistungsfaktorkorrektur an der Netzseite ein und stellen Sie sicher, dassdiese verdrosselt sind.
Kabelführung • Stellen Sie sicher, dass Sie Motorkabel und Steuerleitungen getrennt oder in 3 separaten Metall-Installati-onsrohren verlegen oder geschirmte Kabel zur Vermeidung von Hochfrequenzstörungen verwenden.
Steuerleitungen • Prüfen Sie, ob Kabel gebrochen oder beschädigt sind und ob lose Verbindungen vorliegen.
• Stellen Sie zur Gewährleistung der Störfestigkeit sicher, dass Steuerleitungen getrennt von Netz- undMotorkabeln verlaufen.
• Prüfen Sie den Stellbereich der Signale.
Danfoss empfiehlt die Verwendung von abgeschirmten Kabeln oder Twisted-Pair-Kabeln. Stellen Sie sicher,dass die Abschirmung richtig abgeschlossen ist.
Abstand zurKühlluftzirkulation
• Stellen Sie sicher, dass für eine ausreichende Luftzirkulation entsprechende Freiräume über und unter demFrequenzumrichter vorhanden sind, siehe Kapitel 3.3 Montage.
Umgebungsbedin-gungen
• Überprüfen Sie, dass die Anforderungen für die Umgebungsbedingungen erfüllt sind.
Sicherungen undTrennschalter
• Stellen Sie sicher, dass die richtigen Sicherungen oder Trennschalter eingebaut sind.
• Prüfen Sie, dass alle Sicherungen fest eingesetzt und in einem betriebsfähigen Zustand sowie alleTrennschalter geöffnet sind.
Erdung • Prüfen Sie, dass die Anlage eine Erdverbindung besitzt und die Kontakte fest angezogen sind und keineOxidation aufweisen.
• Führen Sie keine Erdung an Kabelkanälen oder eine Montage der Rückwand an einer Metallfläche durch.
Netz- undMotorkabel
• Prüfen Sie, ob alle Kontakte fest angeschlossen sind.
• Stellen Sie sicher, dass Motor- und Netzkabel in getrennten Installationsrohren verlegt sind oder getrennteabgeschirmte Kabel verwendet werden.
Schaltschrankin-nenraum
• Stellen Sie sicher, dass das Innere des Frequenzumrichters frei von Schmutz, Metallspänen, Feuchtigkeitund Korrosion ist.
• Prüfen Sie, dass das Gerät auf einer unlackierten Metalloberfläche montiert ist.
Schalter • Stellen Sie sicher, dass alle Schalter und Trennschalter in der richtigen Schaltposition sind.
Vibrationen • Stellen Sie sicher, dass der Frequenzumrichter je nach Anforderung stabil montiert ist oder bei BedarfDämpferbefestigungen verwendet werden.
• Prüfen Sie, ob übermäßige Vibrationen vorhanden sind.
Tabelle 4.3 Checkliste bei der Installation
Elektrische Installation Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 23
4 4
VORSICHTPOTENZIELLE GEFAHR IM FALLE EINES INTERNEN FEHLERSEs besteht Verletzungsgefahr, wenn Sie den Frequenzumrichter nicht ordnungsgemäß schließen.
• Vor dem Einschalten des Stroms müssen Sie sicherstellen, dass alle Sicherheitsabdeckungen eingesetzt undsicher befestigt sind.
Elektrische Installation VLT® Midi Drive FC 280
24 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
44
5 Inbetriebnahme
5.1 Sicherheitshinweise
Allgemeine Sicherheitshinweise finden Sie inKapitel 2 Sicherheit.
WARNUNGHOCHSPANNUNGBei Anschluss an das Versorgungsnetz führen Frequen-zumrichter Hochspannung. Erfolgen Installation,Inbetriebnahme und Wartung nicht durch qualifiziertesPersonal, kann dies Tod oder schwere Verletzungen zurFolge haben.
• Ausschließlich qualifiziertes Personal darf Instal-lation, Inbetriebnahme und Wartungvornehmen.
Vor dem Anlegen der Netzversorgung:1. Schließen Sie die Abdeckung ordnungsgemäß.
2. Überprüfen Sie, dass alle Kabelverschraubungenfestgezogen sind.
3. Die Netzspannung zum Frequenzumrichter mussAUS und freigeschaltet sein. Über dieTrennschalter am Frequenzumrichter können Siedie Eingangsspannung NICHT trennen.
4. Stellen Sie sicher, dass an den EingangsklemmenL1 (91), L2 (92) und L3 (93) keine Spannungzwischen zwei Phasen sowie zwischen denPhasen und Masse vorliegt.
5. Stellen Sie sicher, dass an den Ausgangsklemmen96 (U), 97(V) und 98 (W) keine Spannungzwischen zwei Phasen sowie zwischen denPhasen und Masse vorliegt. Ausgangsklemme
6. Prüfen Sie den korrekten Motoranschluss durchMessen der Ω-Werte an U-V (96-97), V-W (97-98)und W-U (98-96).
7. Prüfen Sie die ordnungsgemäße Erdung vonFrequenzumrichter und Motor.
8. Prüfen Sie die Klemmen des Frequenzumrichtersauf lose Anschlüsse.
9. Prüfen Sie, ob die Versorgungsspannung mit derNennspannung von Frequenzumrichter undMotor übereinstimmt.
5.2 Anlegen der Netzversorgung
Legen Sie unter Verwendung der folgenden SchritteSpannung an den Frequenzumrichter an:
1. Stellen Sie sicher, dass die Abweichung in derEingangsspannungssymmetrie höchstens ±3 %beträgt. Ist dies nicht der Fall, so korrigieren Siedie Asymmetrie der Eingangsspannung, bevor Siefortfahren. Wiederholen Sie dieses Verfahren nachder Spannungskorrektur.
2. Stellen Sie sicher, dass die Verkabelung optionalerGeräte dem Zweck der Anlage entspricht.
3. Stellen Sie sicher, dass alle Bedienvorrichtungenauf AUS stehen. Die Gehäusetüren müssengeschlossen und die Abdeckungen sicherbefestigt sein.
4. Legen Sie die Netzversorgung an den Frequen-zumrichter an. Starten Sie den Frequenzumrichternoch nicht. Stellen Sie bei Frequenzumrichternmit Trennschaltern diese auf EIN, um die Netzver-sorgung am Frequenzumrichter anzulegen.
5.3 Betrieb des Local Control Panels (LCP)
Der Frequenzumrichter unterstützt das numerische LCP(LCP 101), das grafische LCP (LCP 102) und Blindabde-ckungen. Dieser Abschnitt enthält eine Beschreibung desBetriebs mit LCP 101 und LCP 102.
HINWEISSie können den Frequenzumrichter auch mit dem PCüber eine RS485-Kommunikationsschnittstelle oder einenUSB-Anschluss programmieren. Dazu müssen Sie die MCT10 Konfigurationssoftware installieren. Diese Softwarekönnen Sie über die Artikelnummer 130B1000 bestellenoder von der Danfoss-Website herunterladen:www.danfoss.com/BusinessAreas/DrivesSolutions/software-download.
5.3.1 Numerische Bedieneinheit (LCP 101)
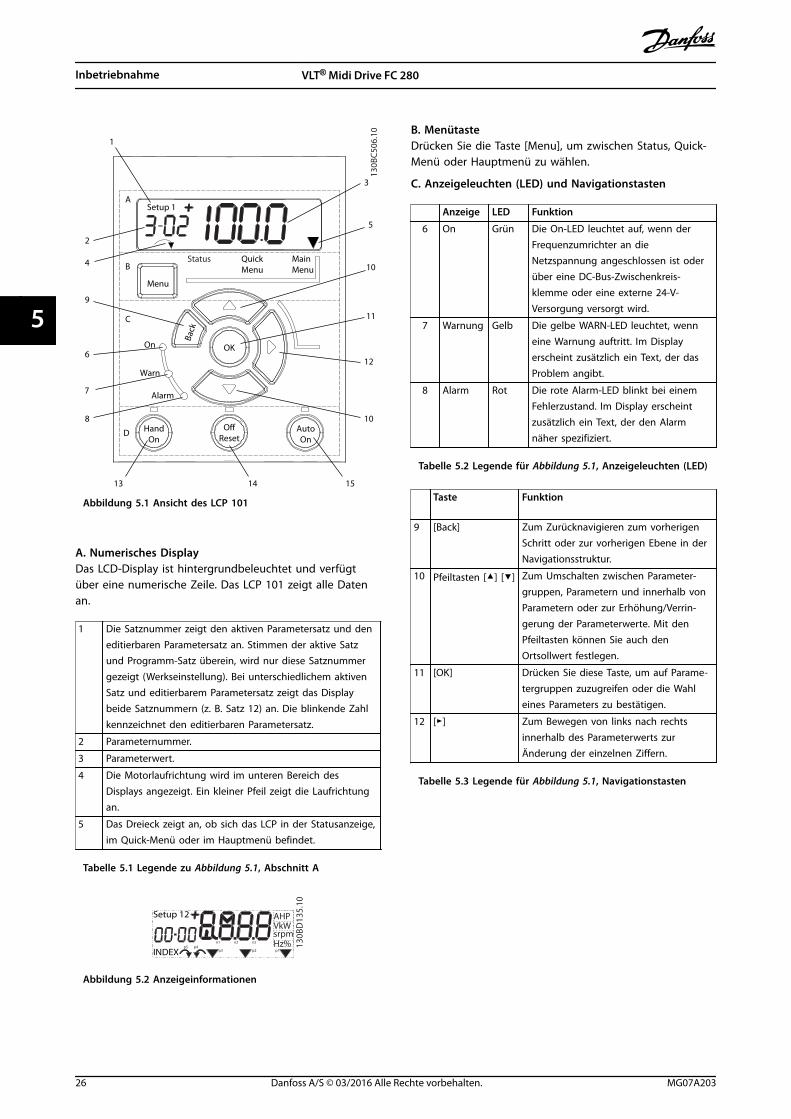
Die numerische Bedieneinheit (LCP 101) ist in diefolgenden 4 Funktionsbereiche unterteilt.
A. Numerisches Display
B. Menütaste.
C. Navigationstasten und Anzeigeleuchten (LED).
D. Bedientasten mit Kontroll-Anzeigen (LED).
Inbetriebnahme Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 25
5 5
130B
C506
.10
Setup 1A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status QuickMenu
MainMenu
HandOn
OReset
AutoOn
Back
OKOn
Warn
Alarm
Abbildung 5.1 Ansicht des LCP 101
A. Numerisches DisplayDas LCD-Display ist hintergrundbeleuchtet und verfügtüber eine numerische Zeile. Das LCP 101 zeigt alle Datenan.
1 Die Satznummer zeigt den aktiven Parametersatz und deneditierbaren Parametersatz an. Stimmen der aktive Satzund Programm-Satz überein, wird nur diese Satznummergezeigt (Werkseinstellung). Bei unterschiedlichem aktivenSatz und editierbarem Parametersatz zeigt das Displaybeide Satznummern (z. B. Satz 12) an. Die blinkende Zahlkennzeichnet den editierbaren Parametersatz.
2 Parameternummer.
3 Parameterwert.
4 Die Motorlaufrichtung wird im unteren Bereich desDisplays angezeigt. Ein kleiner Pfeil zeigt die Laufrichtungan.
5 Das Dreieck zeigt an, ob sich das LCP in der Statusanzeige,im Quick-Menü oder im Hauptmenü befindet.
Tabelle 5.1 Legende zu Abbildung 5.1, Abschnitt A
130B
D13
5.10
Setup 12
INDEX
AHPVkWsrpmHz%n2n1 n3
p5 p4p3 p2 p1
Abbildung 5.2 Anzeigeinformationen
B. MenütasteDrücken Sie die Taste [Menu], um zwischen Status, Quick-Menü oder Hauptmenü zu wählen.
C. Anzeigeleuchten (LED) und Navigationstasten
Anzeige LED Funktion
6 On Grün Die On-LED leuchtet auf, wenn derFrequenzumrichter an dieNetzspannung angeschlossen ist oderüber eine DC-Bus-Zwischenkreis-klemme oder eine externe 24-V-Versorgung versorgt wird.
7 Warnung Gelb Die gelbe WARN-LED leuchtet, wenneine Warnung auftritt. Im Displayerscheint zusätzlich ein Text, der dasProblem angibt.
8 Alarm Rot Die rote Alarm-LED blinkt bei einemFehlerzustand. Im Display erscheintzusätzlich ein Text, der den Alarmnäher spezifiziert.
Tabelle 5.2 Legende für Abbildung 5.1, Anzeigeleuchten (LED)
Taste Funktion
9 [Back] Zum Zurücknavigieren zum vorherigenSchritt oder zur vorherigen Ebene in derNavigationsstruktur.
10 Pfeiltasten [] [] Zum Umschalten zwischen Parameter-gruppen, Parametern und innerhalb vonParametern oder zur Erhöhung/Verrin-gerung der Parameterwerte. Mit denPfeiltasten können Sie auch denOrtsollwert festlegen.
11 [OK] Drücken Sie diese Taste, um auf Parame-tergruppen zuzugreifen oder die Wahleines Parameters zu bestätigen.
12 [] Zum Bewegen von links nach rechtsinnerhalb des Parameterwerts zurÄnderung der einzelnen Ziffern.
Tabelle 5.3 Legende für Abbildung 5.1, Navigationstasten
Inbetriebnahme VLT® Midi Drive FC 280
26 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
55
D. Bedientasten mit Kontroll-Anzeigen (LED)
Taste Funktion
13 [Hand On] Drücken Sie diese Taste, um den Frequenzum-richter im Handbetrieb (Ort-Steuerung) zustarten.
• Ein externes Stoppsignal über Steuersignaleoder serielle Kommunikation hebt denHandbetrieb auf.
14 Off/Reset Diese Taste dient dazu, den Motor zu stoppen,jedoch ohne Unterbrechung der Stromver-sorgung zum Frequenzumrichter, oder dazu,den Frequenzumrichter nach Behebung einesFehlers manuell zurückzusetzen.
15 Auto on Diese Taste versetzt das System in denFernbetrieb (Autobetrieb).
• Sie reagiert auf einen externen Startbefehlüber Steuerklemmen oder serielleKommunikation.
Tabelle 5.4 Legende zu Abbildung 5.1, Abschnitt D
WARNUNGELEKTRISCHE GEFAHRAuch nach dem Drücken der [Off/Reset]-Taste liegtweiterhin Spannung an den Klemmen des Frequenzum-richters an. Durch Drücken der Taste [Off/Reset] wird derFrequenzumrichter nicht von der Netzversorgunggetrennt. Ein Berühren spannungsführender Teile kannzu schweren Verletzungen oder zum Tod führen!
• Berühren Sie keine spannungsführenden Teile!
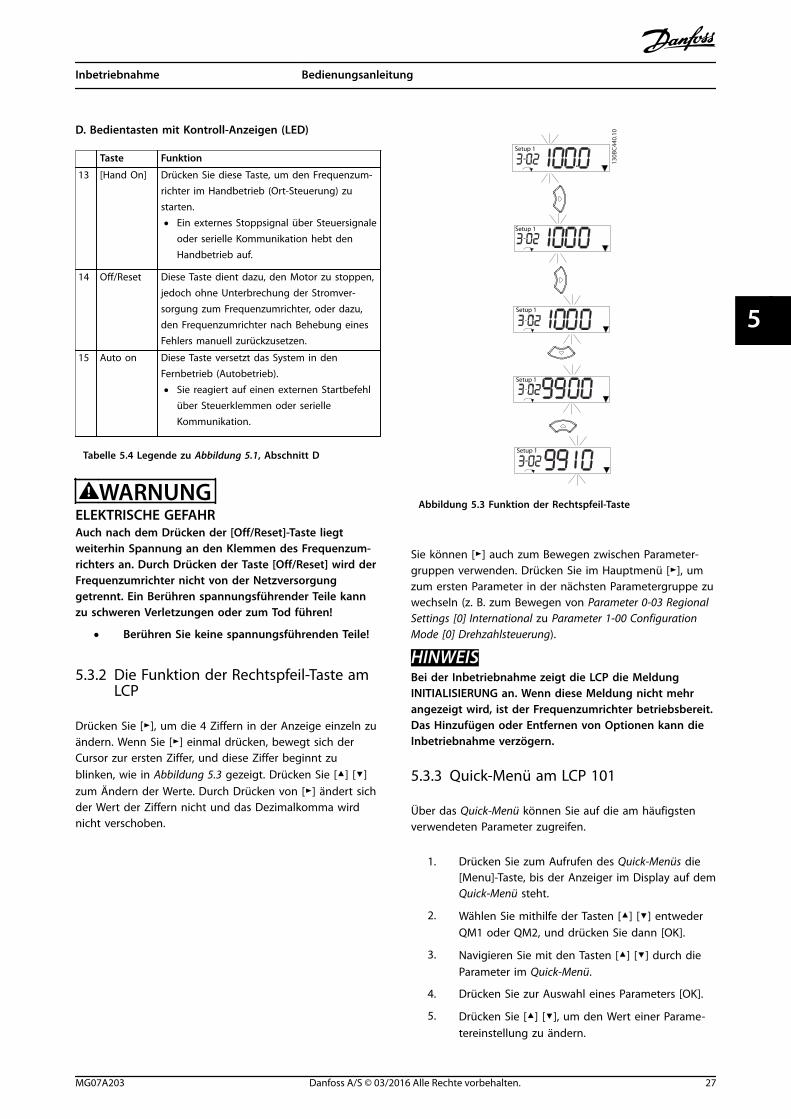
5.3.2 Die Funktion der Rechtspfeil-Taste amLCP
Drücken Sie [], um die 4 Ziffern in der Anzeige einzeln zuändern. Wenn Sie [] einmal drücken, bewegt sich derCursor zur ersten Ziffer, und diese Ziffer beginnt zublinken, wie in Abbildung 5.3 gezeigt. Drücken Sie [] []zum Ändern der Werte. Durch Drücken von [] ändert sichder Wert der Ziffern nicht und das Dezimalkomma wirdnicht verschoben.
130B
C440
.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Abbildung 5.3 Funktion der Rechtspfeil-Taste
Sie können [] auch zum Bewegen zwischen Parameter-gruppen verwenden. Drücken Sie im Hauptmenü [], umzum ersten Parameter in der nächsten Parametergruppe zuwechseln (z. B. zum Bewegen von Parameter 0-03 RegionalSettings [0] International zu Parameter 1-00 ConfigurationMode [0] Drehzahlsteuerung).
HINWEISBei der Inbetriebnahme zeigt die LCP die MeldungINITIALISIERUNG an. Wenn diese Meldung nicht mehrangezeigt wird, ist der Frequenzumrichter betriebsbereit.Das Hinzufügen oder Entfernen von Optionen kann dieInbetriebnahme verzögern.
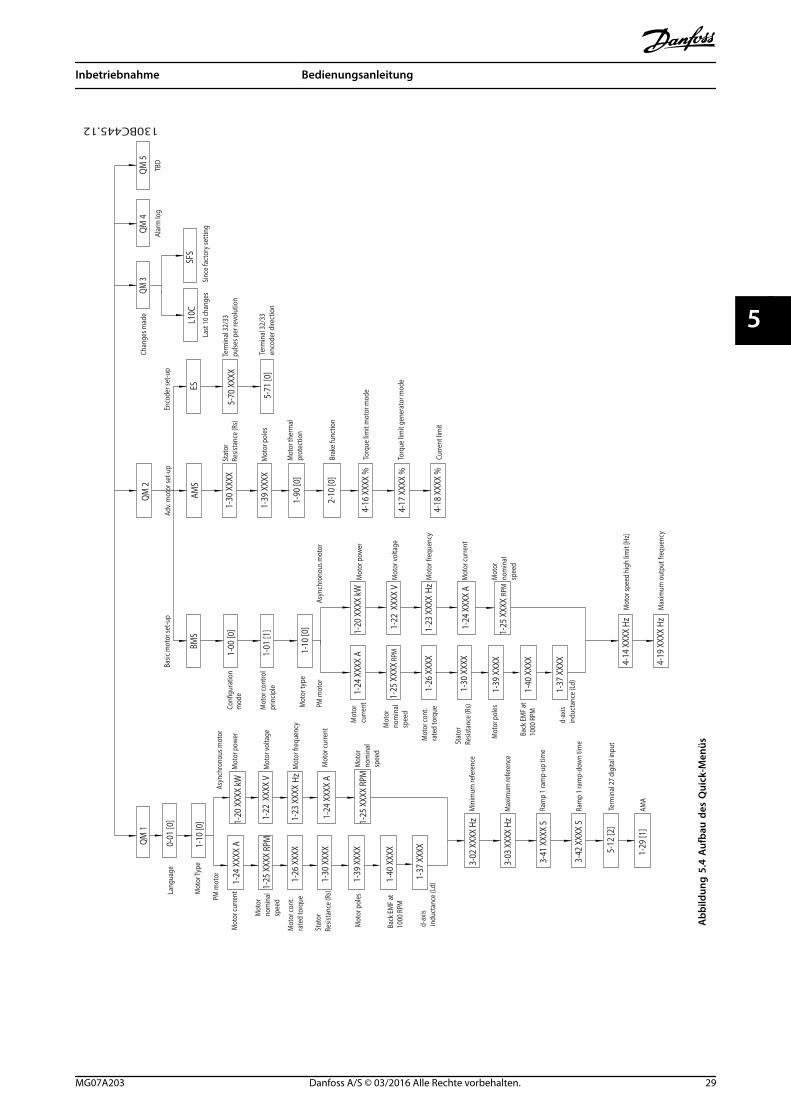
5.3.3 Quick-Menü am LCP 101
Über das Quick-Menü können Sie auf die am häufigstenverwendeten Parameter zugreifen.
1. Drücken Sie zum Aufrufen des Quick-Menüs die[Menu]-Taste, bis der Anzeiger im Display auf demQuick-Menü steht.
2. Wählen Sie mithilfe der Tasten [] [] entwederQM1 oder QM2, und drücken Sie dann [OK].
3. Navigieren Sie mit den Tasten [] [] durch dieParameter im Quick-Menü.
4. Drücken Sie zur Auswahl eines Parameters [OK].
5. Drücken Sie [] [], um den Wert einer Parame-tereinstellung zu ändern.
Inbetriebnahme Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 27
5 5
6. Drücken Sie [OK], um die Änderung zuakzeptieren.
7. Drücken Sie zum Verlassen zweimal [Back] (oderdreimal, wenn in QM2 und QM3) zum Aufrufendes Status, oder drücken Sie einmal [Menu] zumAufrufen des Hauptmenüs.
Inbetriebnahme VLT® Midi Drive FC 280
28 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
55
130BC445.12
1-22
XXX
X V
Mot
or
nom
inal
sp
eed
QM 1
0-01
[0]
1-10
[0]
1-24
XXX
X A
Lang
uage
Mot
or Ty
pe
1-20
XXX
X kW
Mot
or p
ower
Mot
or vo
ltage
1-26
XXX
X1-
23 X
XXX
Stat
or
Mot
or fr
eque
ncy
1-25
XXX
X
1-30
XXX
X
1-39
XXX
X
1-40
XXX
X
1-37
XXX
X
1-25
XXX
X
1-24
XXX
X A
3-02
XXX
X
3-03
XXX
X
3-41
XXX
X S
3-42
XXX
X S
5-12
[2]
1-29
[1]
AMA
Back
EMF a
t 10
00 R
PM
d-ax
is
QM 2
BMS
AMS
ES
5-70
XXX
X
5-71
[0]
1-30
XXX
X
1-39
XXX
X
1-90
[0]
2-10
[0]
4-16
XXX
X %
4-17
XXX
X %
4-18
XXX
X %
1-00
[0]
1-01
[1]
1-10
[0]
1-24
XXX
X A
1-20
XXX
X kW
1-22
XXX
X V
Mot
or
nom
inal
sp
eed
Mot
or p
ower
Mot
or vo
ltage
1-26
XXX
X1-
23 X
XXX
Mot
or fr
eque
ncy
1-25
XXX
X
1-30
XXX
X
1-40
XXX
X
1-37
XXX
X
1-25
XXX
X
1-24
XXX
X A
Back
EMF a
t 10
00 R
PM
d-ax
is
1-39
XXX
X 4-19
XXX
X
4-14
XXX
X
Stat
or
QM 3
QM 4
QM 5
L10C
SFS
TBD
Mot
or
nom
inal
sp
eed
Mot
or
nom
inal
sp
eed
Mot
or cu
rrent
Mot
or co
nt.
rate
d to
rque
Resis
tanc
e (R
s)
Mot
or p
oles
indu
ctan
ce (L
d)
Asyn
chro
nous
mot
or
Mot
or cu
rrent
Min
imum
refe
renc
e
Max
imum
refe
renc
e
Ram
p 1
ram
p-up
tim
e
Ram
p 1
ram
p-do
wn
time
Term
inal
27
digi
tal in
put
Basic
mot
or se
t-up
mod
e
Mot
or co
ntro
lpr
incip
le
Mot
or ty
pe
PM m
otor
PM m
otor
Mot
orcu
rrent
Mot
or co
nt.
rate
d to
rque
Stat
or
Resis
tanc
e (R
s)
Mot
or p
oles
indu
ctan
ce (L
d)
Mot
or sp
eed
high
limit
[Hz]
Max
imum
out
put f
requ
ency
Asyn
chro
nous
mot
or
Mot
or cu
rrent
RPM
RPM
RPM
Hz
RPM
Hz Hz
Hz Hz
Hz
Adv.
mot
or se
t-up
Resis
tanc
e (R
s)
Mot
or p
oles
Mot
or th
erm
alpr
otec
tion
Brak
e fu
nctio
n
Torq
ue lim
it m
otor
mod
e
Torq
ue lim
it ge
nera
tor m
ode
Curre
nt lim
it
Enco
der s
et-u
p
Term
inal
32/
33pu
lses p
er re
volu
tion
Term
inal
32/
33en
code
r dire
ctio
n
Chan
ges m
ade
Last
10
chan
ges
Sinc
e fa
ctor
y set
ting
Alar
m lo
g
Abb
ildun
g 5
.4 A
ufba
u d
es Q
uick
-Men
üs
Inbetriebnahme Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 29
5 5
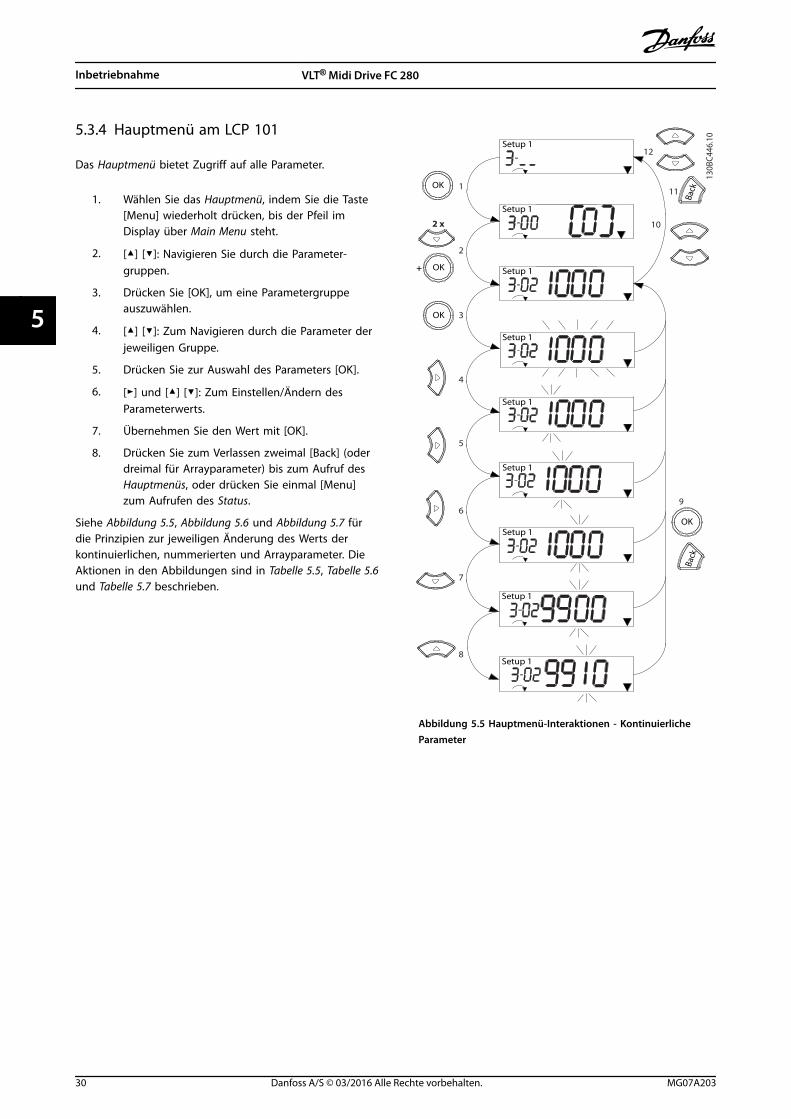
5.3.4 Hauptmenü am LCP 101
Das Hauptmenü bietet Zugriff auf alle Parameter.
1. Wählen Sie das Hauptmenü, indem Sie die Taste[Menu] wiederholt drücken, bis der Pfeil imDisplay über Main Menu steht.
2. [] []: Navigieren Sie durch die Parameter-gruppen.
3. Drücken Sie [OK], um eine Parametergruppeauszuwählen.
4. [] []: Zum Navigieren durch die Parameter derjeweiligen Gruppe.
5. Drücken Sie zur Auswahl des Parameters [OK].
6. [] und [] []: Zum Einstellen/Ändern desParameterwerts.
7. Übernehmen Sie den Wert mit [OK].
8. Drücken Sie zum Verlassen zweimal [Back] (oderdreimal für Arrayparameter) bis zum Aufruf desHauptmenüs, oder drücken Sie einmal [Menu]zum Aufrufen des Status.
Siehe Abbildung 5.5, Abbildung 5.6 und Abbildung 5.7 fürdie Prinzipien zur jeweiligen Änderung des Werts derkontinuierlichen, nummerierten und Arrayparameter. DieAktionen in den Abbildungen sind in Tabelle 5.5, Tabelle 5.6und Tabelle 5.7 beschrieben.
130B
C446
.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+ OK
9
OK
Abbildung 5.5 Hauptmenü-Interaktionen - KontinuierlicheParameter
Inbetriebnahme VLT® Midi Drive FC 280
30 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
55
1 [OK]: Der erste Parameter in der Gruppe wird angezeigt.
2 Drücken Sie mehrfach [], um zum gewünschten Parameter
nach unten zu navigieren.
3 Drücken Sie [OK], um mit der Bearbeitung zu beginnen.
4 []: Erste Stelle blinkt (kann geändert werden).
5 []: Zweite Stelle blinkt (kann geändert werden).
6 []: Dritte Stelle blinkt (kann geändert werden).
7 []: Bei einer Reduzierung des Parameterwerts ändert sich
das Dezimalkomma automatisch.
8 []: Erhöht den Parameterwert.
9 [Back]: Zum Verwerfen der Änderungen, zurück zu 2.[OK]: Zum Bestätigen der Änderungen, zurück zu 2.
10 [][]: Zur Auswahl eines Parameters innerhalb der Gruppe.
11 [Back]: Zum Entfernen des Werts und zur Anzeige derParametergruppe.
12 [][]: Zur Auswahl der Gruppe.
Tabelle 5.5 Ändern von Werten in kontinuierlichen Parametern
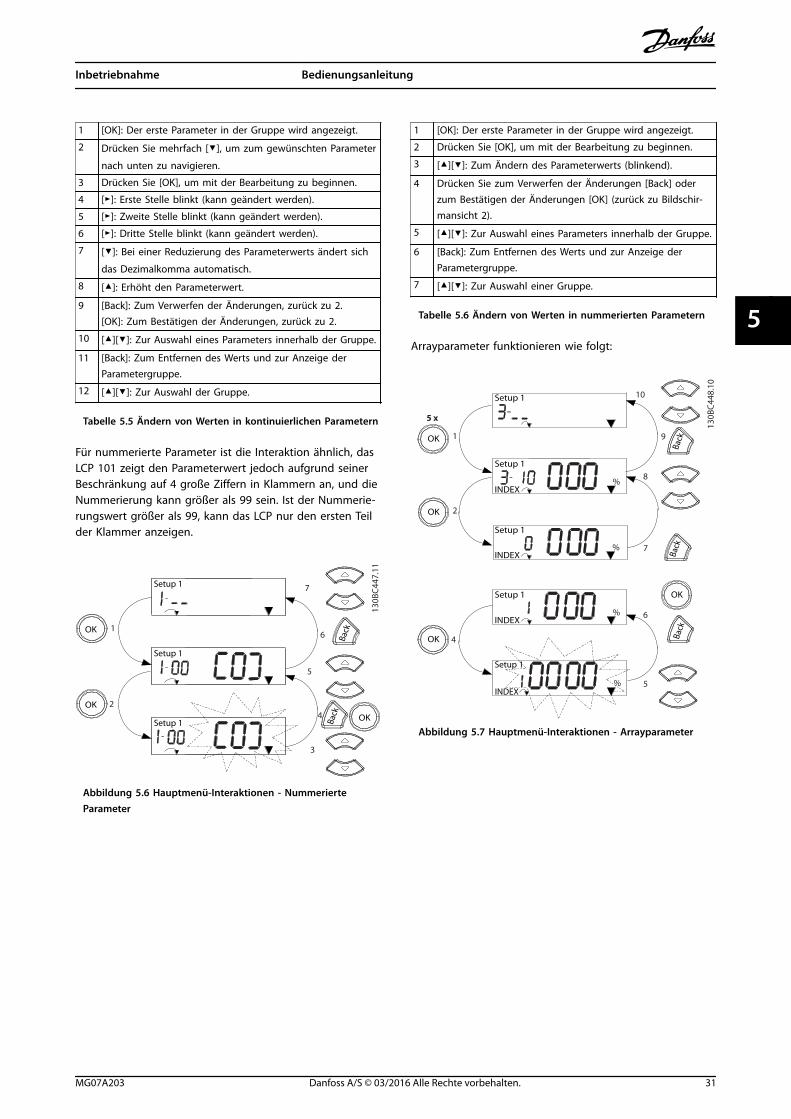
Für nummerierte Parameter ist die Interaktion ähnlich, dasLCP 101 zeigt den Parameterwert jedoch aufgrund seinerBeschränkung auf 4 große Ziffern in Klammern an, und dieNummerierung kann größer als 99 sein. Ist der Nummerie-rungswert größer als 99, kann das LCP nur den ersten Teilder Klammer anzeigen.
130B
C447
.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6OK
OK
Back
7
OKBack
Abbildung 5.6 Hauptmenü-Interaktionen - NummerierteParameter
1 [OK]: Der erste Parameter in der Gruppe wird angezeigt.
2 Drücken Sie [OK], um mit der Bearbeitung zu beginnen.
3 [][]: Zum Ändern des Parameterwerts (blinkend).
4 Drücken Sie zum Verwerfen der Änderungen [Back] oderzum Bestätigen der Änderungen [OK] (zurück zu Bildschir-mansicht 2).
5 [][]: Zur Auswahl eines Parameters innerhalb der Gruppe.
6 [Back]: Zum Entfernen des Werts und zur Anzeige derParametergruppe.
7 [][]: Zur Auswahl einer Gruppe.
Tabelle 5.6 Ändern von Werten in nummerierten Parametern
Arrayparameter funktionieren wie folgt:
130B
C448
.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%INDEX
%INDEX
%INDEX
Setup 1
INDEX%
OK
OK
OK
Abbildung 5.7 Hauptmenü-Interaktionen - Arrayparameter
Inbetriebnahme Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 31
5 5
1 [OK]: Zur Anzeige der Parameternummern und des Werts imersten Index.
2 [OK]: Der Index kann ausgewählt werden.
3 [][]: Zur Auswahl des Index.
4 [OK]: Wert kann geändert werden.
5 [][]: Zum Ändern des Parameterwerts (blinkend).
6 [Back]: Zum Verwerfen der Änderungen.[OK]: Zum Bestätigen der Änderungen.
7 [Back]: Zum Abbrechen der Bearbeitung des Indexes undzur Auswahl eines neuen Parameters.
8 [][]: Zur Auswahl eines Parameters innerhalb der Gruppe.
9 [Back]: Zum Entfernen des Indexwerts und zur Anzeige derParametergruppe.
10 [][]: Zur Auswahl der Gruppe.
Tabelle 5.7 Ändern von Werten in Arrayparametern
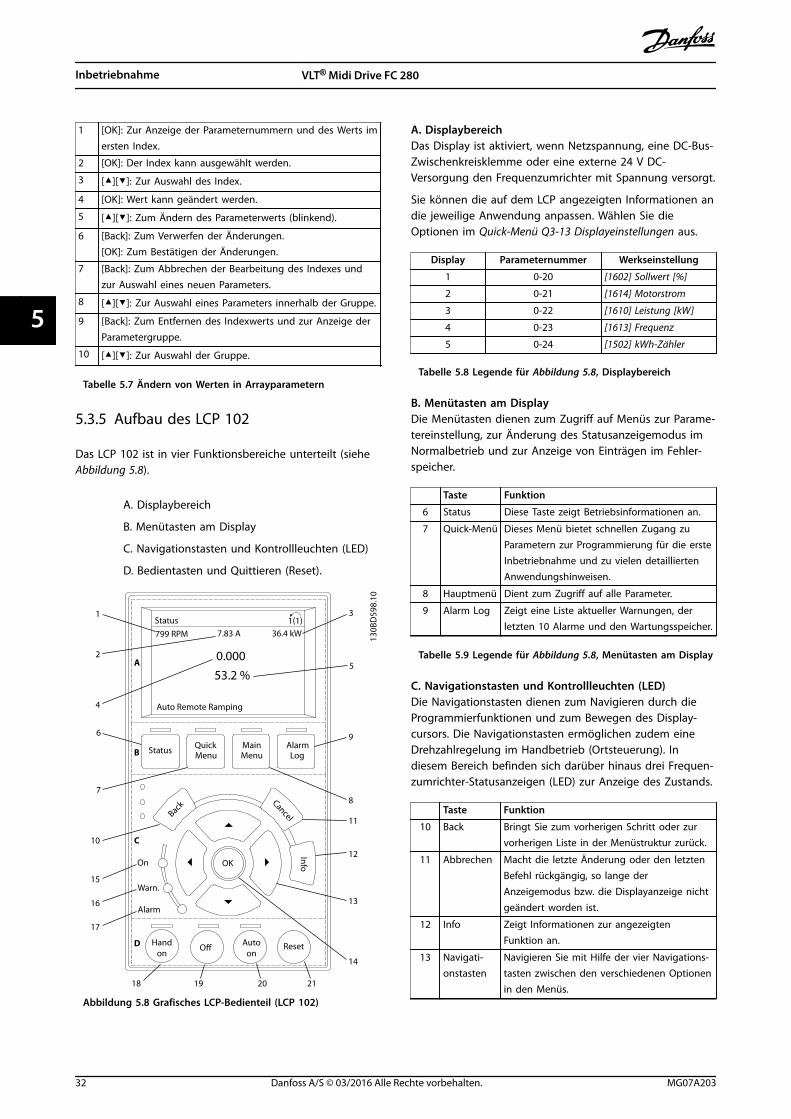
5.3.5 Aufbau des LCP 102
Das LCP 102 ist in vier Funktionsbereiche unterteilt (sieheAbbildung 5.8).
A. Displaybereich
B. Menütasten am Display
C. Navigationstasten und Kontrollleuchten (LED)
D. Bedientasten und Quittieren (Reset).
130B
D59
8.10
Autoon
ResetHandon
Off
StatusQuickMenu
MainMenu
AlarmLog
Back
CancelInfoOK
Status 1(1)36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
78
9
10
11
12
13
14
15
16
17
18 19 20 21
Abbildung 5.8 Grafisches LCP-Bedienteil (LCP 102)
A. DisplaybereichDas Display ist aktiviert, wenn Netzspannung, eine DC-Bus-Zwischenkreisklemme oder eine externe 24 V DC-Versorgung den Frequenzumrichter mit Spannung versorgt.
Sie können die auf dem LCP angezeigten Informationen andie jeweilige Anwendung anpassen. Wählen Sie dieOptionen im Quick-Menü Q3-13 Displayeinstellungen aus.
Display Parameternummer Werkseinstellung
1 0-20 [1602] Sollwert [%]
2 0-21 [1614] Motorstrom
3 0-22 [1610] Leistung [kW]
4 0-23 [1613] Frequenz
5 0-24 [1502] kWh-Zähler
Tabelle 5.8 Legende für Abbildung 5.8, Displaybereich
B. Menütasten am DisplayDie Menütasten dienen zum Zugriff auf Menüs zur Parame-tereinstellung, zur Änderung des Statusanzeigemodus imNormalbetrieb und zur Anzeige von Einträgen im Fehler-speicher.
Taste Funktion
6 Status Diese Taste zeigt Betriebsinformationen an.
7 Quick-Menü Dieses Menü bietet schnellen Zugang zuParametern zur Programmierung für die ersteInbetriebnahme und zu vielen detailliertenAnwendungshinweisen.
8 Hauptmenü Dient zum Zugriff auf alle Parameter.
9 Alarm Log Zeigt eine Liste aktueller Warnungen, derletzten 10 Alarme und den Wartungsspeicher.
Tabelle 5.9 Legende für Abbildung 5.8, Menütasten am Display
C. Navigationstasten und Kontrollleuchten (LED)Die Navigationstasten dienen zum Navigieren durch dieProgrammierfunktionen und zum Bewegen des Display-cursors. Die Navigationstasten ermöglichen zudem eineDrehzahlregelung im Handbetrieb (Ortsteuerung). Indiesem Bereich befinden sich darüber hinaus drei Frequen-zumrichter-Statusanzeigen (LED) zur Anzeige des Zustands.
Taste Funktion
10 Back Bringt Sie zum vorherigen Schritt oder zurvorherigen Liste in der Menüstruktur zurück.
11 Abbrechen Macht die letzte Änderung oder den letztenBefehl rückgängig, so lange derAnzeigemodus bzw. die Displayanzeige nichtgeändert worden ist.
12 Info Zeigt Informationen zur angezeigtenFunktion an.
13 Navigati-onstasten
Navigieren Sie mit Hilfe der vier Navigations-tasten zwischen den verschiedenen Optionenin den Menüs.
Inbetriebnahme VLT® Midi Drive FC 280
32 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
55
Taste Funktion
14 OK Drücken Sie diese Taste, um auf Parameter-gruppen zuzugreifen oder die Wahl einesParameters zu bestätigen.
Tabelle 5.10 Legende für Abbildung 5.8, Navigationstasten
Anzeige LED Funktion
15 On Grün Die On-LED leuchtet auf, wenn derFrequenzumrichter an dieNetzspannung angeschlossen istoder über eine DC-Bus-Zwischen-kreisklemme oder eine externe 24-V-Versorgung versorgt wird.
16 Warnung Gelb Die gelbe WARN-LED leuchtet,wenn eine Warnung auftritt. ImDisplay erscheint zusätzlich einText, der das Problem angibt.
17 Alarm Rot Die rote Alarm-LED blinkt beieinem Fehlerzustand. Im Displayerscheint zusätzlich ein Text, derden Alarm näher spezifiziert.
Tabelle 5.11 Legende für Abbildung 5.8, Anzeigeleuchten (LED)
D. Bedientasten und Quittieren (Reset).Die Bedientasten befinden sich unten am LCP.
Taste Funktion
18 [Hand On] Startet den Frequenzumrichter im Hand-Betrieb.
• Ein externes Stoppsignal überSteuersignale oder serielleKommunikation hebt denHandbetrieb auf.
19 Off Stoppt den angeschlossenen Motor, schaltetjedoch nicht die Spannungsversorgung zumFrequenzumrichter ab.
20 Auto on Diese Taste versetzt das System in denFernbetrieb (Autobetrieb).
• Sie reagiert auf einen externenStartbefehl über Steuerklemmen oderserielle Kommunikation.
21 Reset Diese Taste dient dazu, den Frequenzum-richter nach Behebung eines Fehlers manuellzurückzusetzen.
Tabelle 5.12 Legende für Abbildung 5.8, Bedientasten undQuittieren (Reset)
HINWEISDrücken Sie zur Einstellung des Display-Kontrasts[Status] und []/[].
5.3.6 Parametereinstellungen
Um die richtige Programmierung für Anwendungen zuerhalten, müssen Sie häufig Funktionen in mehrerenverwandten Parametern einstellen. Weitere Informationenzu den Parametern finden Sie unter Kapitel 10.2 Aufbau derParametermenüs.
Programmierdaten speichert der Frequenzumrichter iminternen Speicher.
• Laden Sie die Daten zur Sicherung in den LCP-Speicher.
• Schließen Sie das LCP zum Laden von Daten aufeinen anderen Frequenzumrichter an dieses Gerätan und laden Sie die gespeicherten Einstellungenherunter.
• Bei der Wiederherstellung von Werkseinstellungenwerden die im Speicher des LCP gespeichertenDaten nicht geändert.
5.3.7 Ändern von Parametereinstellungenmit LCP 102
Aufrufen und ändern von Parametereinstellungen durchDrücken von Quick Menu oder Main Menu. Über die TasteQuick Menu erhalten Sie nur Zugriff auf eine begrenzteAnzahl von Parametern.
1. Drücken Sie die Taste [Quick Menu] oder [MainMenu] am LCP.
2. Drücken Sie die Tasten [] [], um durch dieParametergruppen zu navigieren, drücken Sie aufdie [OK]-Taste, um eine Parametergruppeauszuwählen.
3. Drücken Sie die Tasten [] [], um durch dieParameter zu navigieren, drücken Sie auf dieTasten [OK], um ein Parameter auszuwählen.
4. Drücken Sie [] [], um den Wert einer Parame-tereinstellung zu ändern.
5. Drücken Sie auf die Tasten [] [], um die Stellebei der Eingabe eines dezimalen Parameters zuwechseln.
6. Drücken Sie [OK], um die Änderung zuakzeptieren.
7. Drücken Sie zweimal [Back], um zum Statusmenüzu wechseln, oder drücken Sie [Main Menu], umdas Hauptmenü zu öffnen.
Inbetriebnahme Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 33
5 5
Änderungen anzeigenQuick Menu Q5 - Liste geänd. Param. listet alle Parameterauf, die von der Werkseinstellung abweichen.
• Die Liste zeigt nur Parameter, die im aktuellenProgramm-Satz geändert wurden.
• Parameter, die auf die Werkseinstellung zurück-gesetzt wurden, werden nicht aufgelistet.
• Die Meldung Empty zeigt an, dass keineParameter geändert wurden.
5.3.8 Daten auf das/vom LCP 102hochladen/herunterladen
1. Drücken Sie die [Off ]-Taste, um den Motor zustoppen, bevor Sie Daten laden oder speichern.
2. Drücken Sie auf [Main Menu] Parameter 0-50 LCP-Kopie und anschließend auf [OK].
3. Wählen Sie [1] Speichern in LCP zum Hochladender Daten auf das LCP oder [2] Alle von LCP zumHerunterladen der Daten vom LCP.
4. Drücken Sie [OK]. Sie können den Upload- oderDownload-Vorgang an einem Statusbalkenverfolgen.
5. Drücken Sie auf [Hand on] oder [Auto on], umzum Normalbetrieb zurückzukehren.
5.3.9 Wiederherstellen derWerkseinstellungen mit dem LCP 102
HINWEISBei der Wiederherstellung der Werkseinstellungenbesteht die Gefahr eines Datenverlustes von Program-mierung, Motordaten, Lokalisierung und Überwachung.Speichern Sie die Daten für eine Datensicherung vor derInitialisierung im LCP.
Die Initialisierung des Frequenzumrichters stellt dieStandard-Parametereinstellungen wieder her. Eine Initiali-sierung ist über Parameter 14-22 Betriebsart (empfohlen)oder manuell möglich. Die Initialisierung setzt die Einstel-lungen für Parameter 1-06 Clockwise Direction nicht zurück.
• Die Initialisierung über Parameter 14-22 Betriebsartändert keine Einstellungen des Frequenzum-richters wie Betriebsstunden, über die serielleSchnittstelle gewählte Optionen, Fehlerspeicher,Alarm Log und weitere Überwachungsfunktionen.
• Eine manuelle Initialisierung löscht alle Daten zuMotor, Programmierung, Lokalisierung undÜberwachung und stellt die Werkseinstellungenwieder her.
Empfohlene Initialisierung, überParameter 14-22 Betriebsart
1. Drücken Sie zweimal auf [Main Menu], um aufParameter zuzugreifen.
2. Navigieren Sie zu Parameter 14-22 Betriebsart unddrücken Sie auf [OK].
3. Wählen Sie [2] Initialisierung aus und drücken Sieauf [OK].
4. Schalten Sie den Frequenzumrichterspannungslos und warten Sie, bis das Displayerlischt.
5. Legen Sie die Netzversorgung an den Frequen-zumrichter an.
Die Werkseinstellungen der Parameter werden während derInbetriebnahme wiederhergestellt. Dies kann etwas längerdauern als normal.
6. Alarm 80 wird angezeigt.
7. Mit [Reset] kehren Sie zum normalen Betriebzurück.
Manuelles Initialisierungsverfahren1. Schalten Sie den Frequenzumrichter
spannungslos und warten Sie, bis das Displayerlischt.
2. Halten Sie [Status], [Main Menu] und [OK] gleich-zeitig gedrückt und legen Sie Strom an das Gerätan (ca. 5 Sek. oder bis zu einem hörbaren Klickenund dem Starten des Lüfters).
Die Initialisierung stellt die Werkseinstellungen derParameter während der Inbetriebnahme wieder her. Dieskann etwas länger dauern als normal.
Die manuelle Initialisierung setzt die folgenden Frequen-zumrichterinformationen nicht zurück:
• Parameter 15-00 Betriebsstunden
• Parameter 15-03 Anzahl Netz-Ein
• Parameter 15-04 Anzahl Übertemperaturen
• Parameter 15-05 Anzahl Überspannungen
5.4 Grundlegende Programmierung
5.4.1 Einstellung von Asynchronmotoren
Geben Sie die folgenden Motordaten ein. Dieentsprechenden Angaben finden Sie auf dem Motor-Typenschild.
1. Parameter 1-20 Motornennleistung [kW].
2. Parameter 1-22 Motornennspannung.
3. Parameter 1-23 Motornennfrequenz.
4. Parameter 1-24 Motornennstrom.
Inbetriebnahme VLT® Midi Drive FC 280
34 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
55
5. Parameter 1-25 Motornenndrehzahl.
Für optimale Leistung im VVC+-Modus sind zusätzlicheMotordaten zur Konfiguration der folgenden Parametererforderlich. Die Daten finden Sie im Motordatenblatt(diese Daten sind in der Regel nicht auf dem Motor-Typenschild zu finden). Führen Sie überParameter 1-29 Autom. Motoranpassung [1] Komplette AMAoder durch manuelle Eingabe der folgenden Parametereine komplette AMA durch:
1. Parameter 1-30 Statorwiderstand (Rs).
2. Parameter 1-31 Rotorwiderstand (Rr).
3. Parameter 1-33 Statorstreureaktanz (X1).
4. Parameter 1-35 Hauptreaktanz (Xh).
Anwendungsspezifische Anpassung bei derDurchführung von VVC+
VVC+ ist der robusteste Steuermodus. In den meistenSituationen bietet dieser ohne weitere Anpassungenoptimale Leistung. Führen Sie für eine Leistungsopti-mierung eine komplette AMA durch.
5.4.2 PM-Motoreinstell. in VVC+
Erste Programmierschritte1. Stellen Sie Parameter 1-10 Motorart auf die
folgenden Optionen ein, um den PM-Motorbetrieb zu aktivieren:
- [1] PM, Vollpol
- [2] PM (Vergr. Magnete), keine Sat
- [3]PM, PM (Vergr. Magnete), Sat
2. Wählen Sie [0] Regelung ohne Rückführung inParameter 1-00 Configuration Mode.
HINWEISDie Geberrückführung wird bei PM-Motoren nichtunterstützt.
Programmierung von MotordatenNach Auswahl eines PM-Motors in Parameter 1-10 Motorartsind die Parameter für PM-Motoren in Parametergruppen1-2* Motordaten, 1-3* Erw. Motordaten und 1-4* Erw.Motordaten II aktiv.Die entsprechenden Angaben finden Sie auf dem Motor-Typenschild und im Datenblatt des Motors.
Programmieren Sie die folgenden Parameter in derangegebenen Reihenfolge:
1. Parameter 1-24 Motornennstrom.
2. Parameter 1-26 Dauer-Nenndrehmoment.
3. Parameter 1-25 Motornenndrehzahl.
4. Parameter 1-39 Motorpolzahl.
5. Parameter 1-30 Statorwiderstand (Rs).Geben Sie den Widerstand der Statorwicklung(Rs) zwischen Leiter und Sternpunkt an. Wenn nurLeiter-Leiter-Daten bereitstehen, teilen Sie denWert durch 2, um den Wert zwischen Leiter undSternpunkt zu erhalten.Sie können den Wert auch mit einem Ohmmetermessen, das den Kabelwiderstand berücksichtigt.Teilen Sie den gemessenen Wert durch 2 undgeben Sie das Ergebnis ein.
6. Parameter 1-37 Indukt. D-Achse (Ld).Geben Sie die direkte Achseninduktivität des PM-Motors zwischen Leiter und Sternpunkt an.Wenn nur Leiter-Leiter-Daten verfügbar sind,teilen Sie den Wert durch 2, um den Wertzwischen Leiter und Sternpunkt zu erhalten.Sie können den Wert auch mit einem Induktivi-tätsmessgerät messen, das die Induktivität desKabels berücksichtigt. Teilen Sie den gemessenenWert durch 2 und geben Sie das Ergebnis ein.
7. Parameter 1-40 Gegen-EMK bei 1000 UPM.Geben Sie die Gegen-EMK des PM-Motorszwischen zwei Außenleitern bei 1000 UPMmechanischer Drehzahl (Effektivwert) ein. DieGegen-EMK ist die Spannung, die von einem PM-Motor erzeugt wird, wenn kein Frequenzumrichterangeschlossen ist und die Welle extern gedrehtwird. Die Gegen-EMK wird normalerweise beiMotornenndrehzahl oder bei 1000 UPM gemessenzwischen zwei Außenleitern angegeben. Wennder Wert nicht für eine Motordrehzahl von 1000UPM verfügbar ist, berechnen Sie den korrektenWert wie folgt: Wenn die Gegen-EMK z. B. 320 Vbei 1800 UPM beträgt, können Sie diese wie folgtbei 1000 UPM berechnen:Gegen-EMK= (Spannung/UPM)x1000 =(320/1800)*1000 = 178.Programmieren Sie diesen Wert fürParameter 1-40 Gegen-EMK bei 1000 UPM.
Testmotorbetrieb1. Starten Sie den Motor mit niedriger Drehzahl (100
bis 200 UPM). Wenn sich der Motor nicht dreht,überprüfen Sie die Installation, die allgemeineProgrammierung und die Motordaten.
ParkenDiese Funktion wird für Anwendungen empfohlen, indenen sich der Motor mit niedriger Drehzahl dreht, z. B.bei Auftreten eines Windmühlen-Effekts (Motor wird durchLast gedreht) in Lüfteranwendungen. Sie könnenParameter 2-06 Parking Strom und Parameter 2-07 ParkingZeit anpassen. Erhöhen Sie bei Anwendungen mit hohemTrägheitsmoment die Werkseinstellung dieser Parameter.
Starten Sie den Motor mit Nenndrehzahl. Falls dieAnwendung nicht einwandfrei funktioniert, prüfen Sie die
Inbetriebnahme Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 35
5 5
VVC+ PM-Einstellungen. Tabelle 5.13 enthält Empfehlungenfür verschiedene Anwendungen.
Anwendung Einstellungen
Anwendungen mitniedrigem Trägheits-momentILast/IMotor <5
• Erhöhen Sie den Wert fürParameter 1-17 Filterzeitkonst.Spannung um den Faktor 5 bis10.
• Reduzieren Sie den Wert fürParameter 1-14 Dämpfungsver-stärkung.
• Reduzieren Sie den Wert(<100 %) für Parameter 1-66 Min.Strom bei niedr. Drz..
Anwendungen mitmittlerem Trägheits-moment50>ILast/IMotor >5
Behalten Sie berechnete Werte bei.
Anwendungen mit hohemTrägheitsmomentILast/IMotor > 50
Erhöhen Sie die Werte fürParameter 1-14 Dämpfungsver-stärkung, Parameter 1-15 Filterniedrige Drehzahl undParameter 1-16 Filter hohe Drehzahl
Hohe Last bei niedrigerDrehzahl<30 % (Nenndrehzahl)
Erhöhen Sie den Wert fürParameter 1-17 Filterzeitkonst.SpannungErhöhen Sie den Wert fürParameter 1-66 Min. Strom bei niedr.Drz. (>100 % über längere Zeit kannden Motor überhitzen).
Tabelle 5.13 Empfehlungen für verschiedene Anwendungen
Wenn der Motor bei einer bestimmten Drehzahl zuschwingen beginnt, erhöhen SieParameter 1-14 Dämpfungsverstärkung. Erhöhen Sie denWert in kleinen Schritten.
Sie können das Startmoment in Parameter 1-66 Min. Strombei niedr. Drz. einstellen. 100 % ist Nenndrehmoment alsStartmoment.
5.4.3 Automatische Motoranpassung (AMA)
Automatische Motoranpassung (AMA)Die Durchführung der AMA wird ausdrücklich empfohlen,da hierdurch die elektrischen Motorparameter gemessenwerden können, um die Kompatibilität zwischen demFrequenzumrichter und dem Motor im VVC+-Betrieb zuoptimieren.
• Der Frequenzumrichter erstellt zur Regelung deserzeugten Motorstroms ein mathematischesMotormodell, mit dem die Motorleistungverbessert werden kann.
• Einige Motoren sind möglicherweise nicht dazu inder Lage, den Test vollständig durchzuführen.Wählen Sie in diesem Fall [2] Reduz. Anpassung inParameter 1-29 Automatic Motor Adaption (AMA).
• Informationen zu Warn- oder Alarmmeldungenfinden Sie unter Kapitel 8.4 Warnungen undAlarmmeldungen.
• Führen Sie dieses Verfahren bei kaltem Motordurch, um das beste Ergebnis zu erzielen.
Ausführen einer AMA mit Hilfe des LCP1. Schließen Sie bei Verwendung der werkseitigen
Parametereinstellung vor dem Durchführen derAMA die Klemmen 12 und 27 an.
2. Öffnen Sie das Hauptmenü.
3. Navigieren Sie zu Parametergruppe 1-** Motor/Last.
4. Drücken Sie [OK].
5. Stellen Sie die Motorparameter in der Parameter-gruppe 1-2* Motordaten mit Hilfe derTypenschilddaten ein.
6. Legen Sie die Motorkabellänge inParameter 1-42 Motor Cable Length fest.
7. Gehen Sie zu Parameter 1-29 Autom. Motoran-passung.
8. Drücken Sie [OK].
9. Wählen Sie [1] Komplette Anpassung.
10. Drücken Sie [OK].
11. Der Test wird automatisch durchgeführt und zeigtan, wann er beendet ist.
Je nach Leistungsgröße nimmt die Durchführung der AMA3 bis 10 Minuten in Anspruch.
HINWEISDie AMA-Funktion verursacht kein Starten und keineBeschädigung des Motors.
5.5 Überprüfung der Motordrehung
Prüfen Sie vor dem Betrieb des Frequenzumrichters dieMotordrehung.
1. Drücken Sie [Hand On].
2. Lassen Sie den positiven Drehzahl-Sollwert durchDrücken von [] anzeigen.
3. Überprüfen Sie, ob die angezeigte Drehzahlpositiv ist.
Inbetriebnahme VLT® Midi Drive FC 280
36 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
55
4. Überprüfen Sie, ob die Verdrahtung zwischendem Frequenzumrichter und dem Motor korrektist.
5. Überprüfen Sie, dass die Drehrichtung des Motorsmit der Einstellung in Parameter 1-06 Drehrichtungrechts übereinstimmt.
5a Wenn Parameter 1-06 Drehrichtung rechtsauf [0] Normal eingestellt ist (Werksein-stellung: Rechtslauf ):
a. Vergewissern Sie sich, dass sichder Motor im Rechtslauf dreht.
b. Vergewissern Sie sich, dass derRichtungspfeil des LCPRechtslauf anzeigt.
5b Wenn Parameter 1-06 Drehrichtung rechtsauf [1] Invers eingestellt ist (Linkslauf ):
a. Vergewissern Sie sich, dass sichder Motor im Linkslauf dreht.
b. Vergewissern Sie sich, dass derRichtungspfeil des LCPLinkslauf anzeigt.
5.6 Überprüfung der Drehrichtung desDrehgebers
Überprüfen Sie die Drehrichtung des Drehgebers nur, wennGeberrückführung verwendet wird.
1. Wählen Sie [0] Regelung ohne Rückführung inParameter 1-00 Regelverfahren.
2. Wählen Sie [1] 24V/HTL-Drehgeber inParameter 7-00 Speed PID Feedback Source.
3. Drücken Sie [Hand On].
4. Drücken Sie [] zur Anzeige des positivenDrehzahl-Sollwerts (Parameter 1-06 Drehrichtungrechts auf [0] Normal).
5. Überprüfen Sie in Parameter 16-57 Feedback[RPM], ob die Rückführung positiv ist.
HINWEISNEGATIVER ISTWERTWenn der Istwert negativ ist, ist der Drehgeber falschangeschlossen. Verwenden Sie Parameter 5-71 Kl. 32/33Drehgeber Richtung zum Umkehren der Richtung odervertauschen Sie die Kabel des Drehgebers.
5.7 Prüfung der Ort-Steuerung
1. Drücken Sie die [Hand On]-Taste, um einenHandstart-Befehl am Frequenzumrichter durchzu-führen.
2. Beschleunigen Sie den Frequenzumrichter durchDrücken von [] auf volle Drehzahl. EineBewegung des Cursors links vom Dezimalpunktführt zu schnelleren Änderungen des Eingangs.
3. Achten Sie darauf, ob Beschleunigungsproblemeauftreten.
4. Drücken Sie auf [Off ]. Achten Sie darauf, obVerzögerungsprobleme auftreten.
Bei Beschleunigungs- oder Verzögerungsproblemen sieheKapitel 8.5 Fehlersuche und -behebung. Informationen zumZurücksetzen des Frequenzumrichters nach einerAbschaltung finden Sie unter Kapitel 8.2 Warnungs- undAlarmtypen.
5.8 Systemstart
Vor der Durchführung der in diesem Abschnittbeschriebenen Inbetriebnahme müssen Verdrahtung derAnwendung und Anwendungsprogrammierungabgeschlossen sein. Das folgende Verfahren wird nacherfolgter Anwendungskonfiguration empfohlen.
1. Drücken Sie auf [Auto on].
2. Legen Sie einen externen Startbefehl an.
3. Stellen Sie den Drehzahlsollwert über denDrehzahlbereich ein.
4. Entfernen Sie den externen Startbefehl.
5. Überprüfen Sie die Geräusch- und Vibrationspegeldes Motors, um zu gewährleisten, dass dasSystem wie vorgesehen arbeitet.
Wenn Warnungen oder Alarme auftreten, finden SieInformationen zum Zurücksetzen des Frequenzumrichtersnach einer Abschaltung unter Kapitel 8.2 Warnungs- undAlarmtypen.
5.9 Inbetriebnahme der Funktion „SafeTorque Off“
Weitere Informationen zur korrekten Installation undInbetriebnahme der STO-Funktion finden Sie unterKapitel 6 Safe Torque Off (STO).
Inbetriebnahme Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 37
5 5
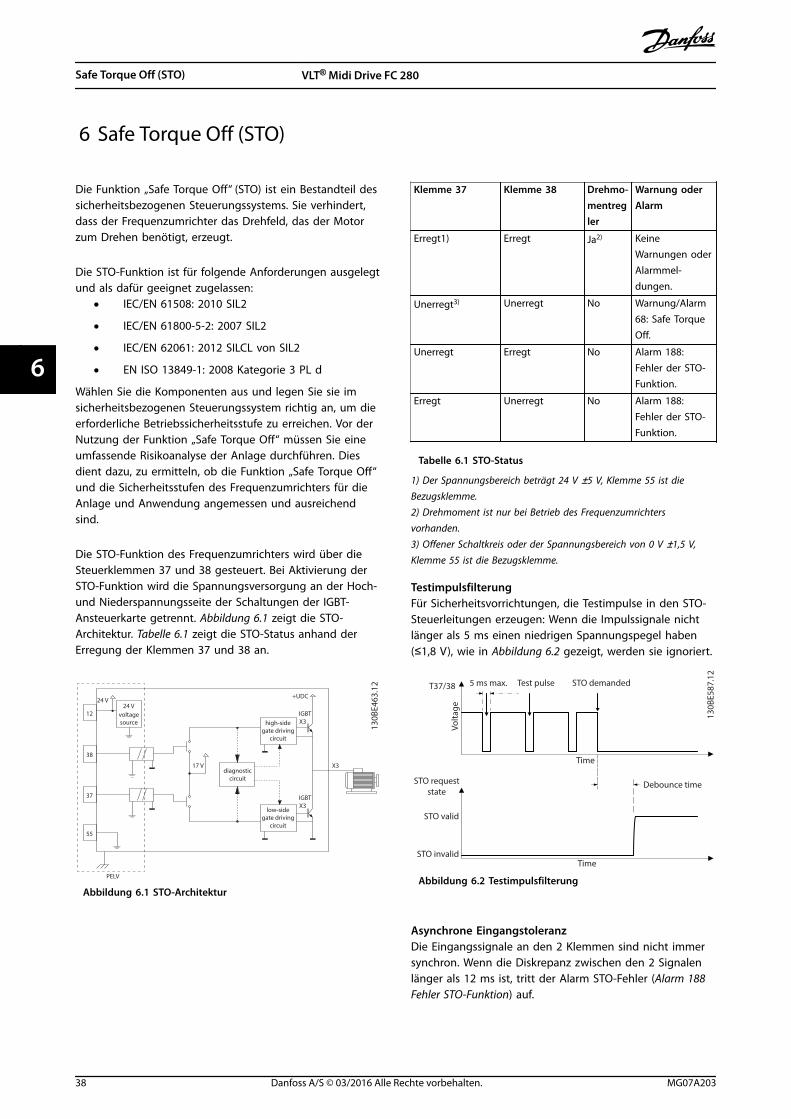
6 Safe Torque Off (STO)
Die Funktion „Safe Torque Off“ (STO) ist ein Bestandteil dessicherheitsbezogenen Steuerungssystems. Sie verhindert,dass der Frequenzumrichter das Drehfeld, das der Motorzum Drehen benötigt, erzeugt.
Die STO-Funktion ist für folgende Anforderungen ausgelegtund als dafür geeignet zugelassen:
• IEC/EN 61508: 2010 SIL2
• IEC/EN 61800-5-2: 2007 SIL2
• IEC/EN 62061: 2012 SILCL von SIL2
• EN ISO 13849-1: 2008 Kategorie 3 PL d
Wählen Sie die Komponenten aus und legen Sie sie imsicherheitsbezogenen Steuerungssystem richtig an, um dieerforderliche Betriebssicherheitsstufe zu erreichen. Vor derNutzung der Funktion „Safe Torque Off“ müssen Sie eineumfassende Risikoanalyse der Anlage durchführen. Diesdient dazu, zu ermitteln, ob die Funktion „Safe Torque Off“und die Sicherheitsstufen des Frequenzumrichters für dieAnlage und Anwendung angemessen und ausreichendsind.
Die STO-Funktion des Frequenzumrichters wird über dieSteuerklemmen 37 und 38 gesteuert. Bei Aktivierung derSTO-Funktion wird die Spannungsversorgung an der Hoch-und Niederspannungsseite der Schaltungen der IGBT-Ansteuerkarte getrennt. Abbildung 6.1 zeigt die STO-Architektur. Tabelle 6.1 zeigt die STO-Status anhand derErregung der Klemmen 37 und 38 an.
24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 Vvoltagesource high-side
gate drivingcircuit
diagnosticcircuit
low-sidegate driving
circuit
12
38
37
55
130B
E463
.12
Abbildung 6.1 STO-Architektur
Klemme 37 Klemme 38 Drehmo-mentregler
Warnung oderAlarm
Erregt1) Erregt Ja2) KeineWarnungen oderAlarmmel-dungen.
Unerregt3) Unerregt No Warnung/Alarm68: Safe TorqueOff.
Unerregt Erregt No Alarm 188:Fehler der STO-Funktion.
Erregt Unerregt No Alarm 188:Fehler der STO-Funktion.
Tabelle 6.1 STO-Status
1) Der Spannungsbereich beträgt 24 V ±5 V, Klemme 55 ist dieBezugsklemme.2) Drehmoment ist nur bei Betrieb des Frequenzumrichtersvorhanden.
3) Offener Schaltkreis oder der Spannungsbereich von 0 V ±1,5 V,Klemme 55 ist die Bezugsklemme.
TestimpulsfilterungFür Sicherheitsvorrichtungen, die Testimpulse in den STO-Steuerleitungen erzeugen: Wenn die Impulssignale nichtlänger als 5 ms einen niedrigen Spannungspegel haben(≤1,8 V), wie in Abbildung 6.2 gezeigt, werden sie ignoriert.
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Volta
ge
T37/38 Test pulse STO demanded
STO requeststate
130B
E587
.12
Abbildung 6.2 Testimpulsfilterung
Asynchrone EingangstoleranzDie Eingangssignale an den 2 Klemmen sind nicht immersynchron. Wenn die Diskrepanz zwischen den 2 Signalenlänger als 12 ms ist, tritt der Alarm STO-Fehler (Alarm 188Fehler STO-Funktion) auf.
Safe Torque Off (STO) VLT® Midi Drive FC 280
38 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
66
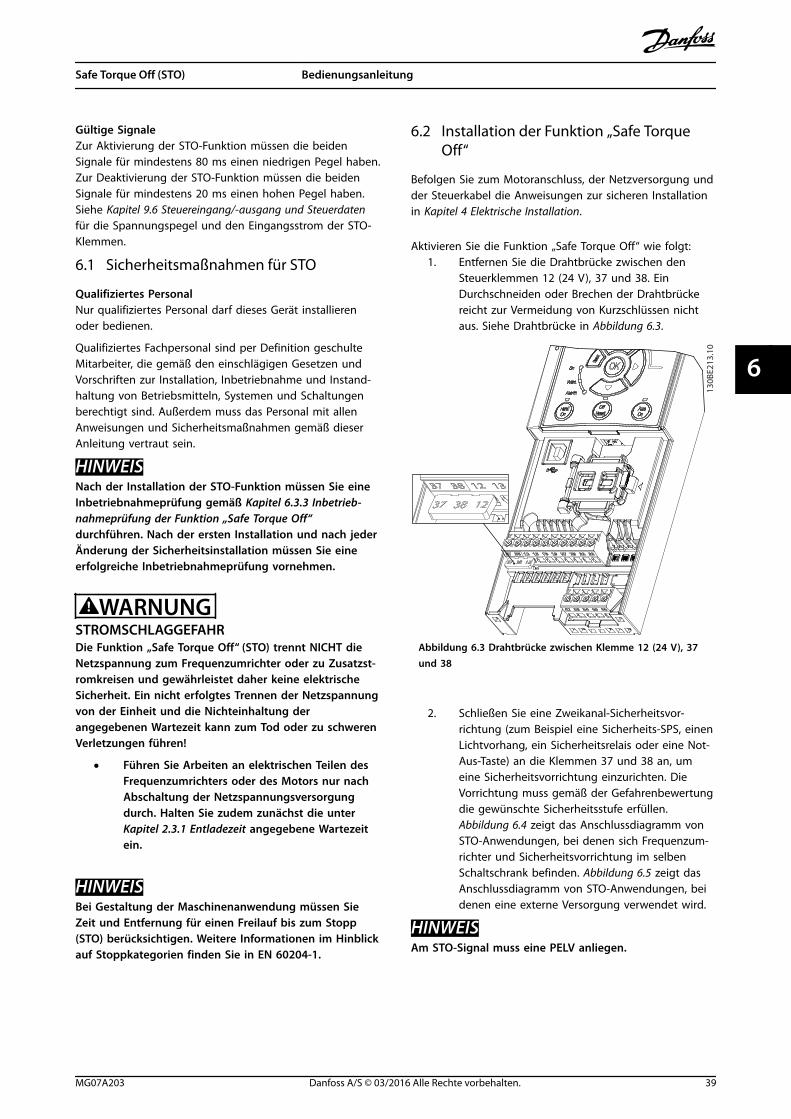
Gültige SignaleZur Aktivierung der STO-Funktion müssen die beidenSignale für mindestens 80 ms einen niedrigen Pegel haben.Zur Deaktivierung der STO-Funktion müssen die beidenSignale für mindestens 20 ms einen hohen Pegel haben.Siehe Kapitel 9.6 Steuereingang/-ausgang und Steuerdaten für die Spannungspegel und den Eingangsstrom der STO-Klemmen.
6.1 Sicherheitsmaßnahmen für STO
Qualifiziertes PersonalNur qualifiziertes Personal darf dieses Gerät installierenoder bedienen.
Qualifiziertes Fachpersonal sind per Definition geschulteMitarbeiter, die gemäß den einschlägigen Gesetzen undVorschriften zur Installation, Inbetriebnahme und Instand-haltung von Betriebsmitteln, Systemen und Schaltungenberechtigt sind. Außerdem muss das Personal mit allenAnweisungen und Sicherheitsmaßnahmen gemäß dieserAnleitung vertraut sein.
HINWEISNach der Installation der STO-Funktion müssen Sie eineInbetriebnahmeprüfung gemäß Kapitel 6.3.3 Inbetrieb-nahmeprüfung der Funktion „Safe Torque Off“durchführen. Nach der ersten Installation und nach jederÄnderung der Sicherheitsinstallation müssen Sie eineerfolgreiche Inbetriebnahmeprüfung vornehmen.
WARNUNGSTROMSCHLAGGEFAHRDie Funktion „Safe Torque Off“ (STO) trennt NICHT dieNetzspannung zum Frequenzumrichter oder zu Zusatzst-romkreisen und gewährleistet daher keine elektrischeSicherheit. Ein nicht erfolgtes Trennen der Netzspannungvon der Einheit und die Nichteinhaltung derangegebenen Wartezeit kann zum Tod oder zu schwerenVerletzungen führen!
• Führen Sie Arbeiten an elektrischen Teilen desFrequenzumrichters oder des Motors nur nachAbschaltung der Netzspannungsversorgungdurch. Halten Sie zudem zunächst die unterKapitel 2.3.1 Entladezeit angegebene Wartezeitein.
HINWEISBei Gestaltung der Maschinenanwendung müssen SieZeit und Entfernung für einen Freilauf bis zum Stopp(STO) berücksichtigen. Weitere Informationen im Hinblickauf Stoppkategorien finden Sie in EN 60204-1.
6.2 Installation der Funktion „Safe TorqueOff“
Befolgen Sie zum Motoranschluss, der Netzversorgung undder Steuerkabel die Anweisungen zur sicheren Installationin Kapitel 4 Elektrische Installation.
Aktivieren Sie die Funktion „Safe Torque Off“ wie folgt:1. Entfernen Sie die Drahtbrücke zwischen den
Steuerklemmen 12 (24 V), 37 und 38. EinDurchschneiden oder Brechen der Drahtbrückereicht zur Vermeidung von Kurzschlüssen nichtaus. Siehe Drahtbrücke in Abbildung 6.3.
130B
E213
.10
Abbildung 6.3 Drahtbrücke zwischen Klemme 12 (24 V), 37und 38
2. Schließen Sie eine Zweikanal-Sicherheitsvor-richtung (zum Beispiel eine Sicherheits-SPS, einenLichtvorhang, ein Sicherheitsrelais oder eine Not-Aus-Taste) an die Klemmen 37 und 38 an, umeine Sicherheitsvorrichtung einzurichten. DieVorrichtung muss gemäß der Gefahrenbewertungdie gewünschte Sicherheitsstufe erfüllen.Abbildung 6.4 zeigt das Anschlussdiagramm vonSTO-Anwendungen, bei denen sich Frequenzum-richter und Sicherheitsvorrichtung im selbenSchaltschrank befinden. Abbildung 6.5 zeigt dasAnschlussdiagramm von STO-Anwendungen, beidenen eine externe Versorgung verwendet wird.
HINWEISAm STO-Signal muss eine PELV anliegen.
Safe Torque Off (STO) Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 39
6 6
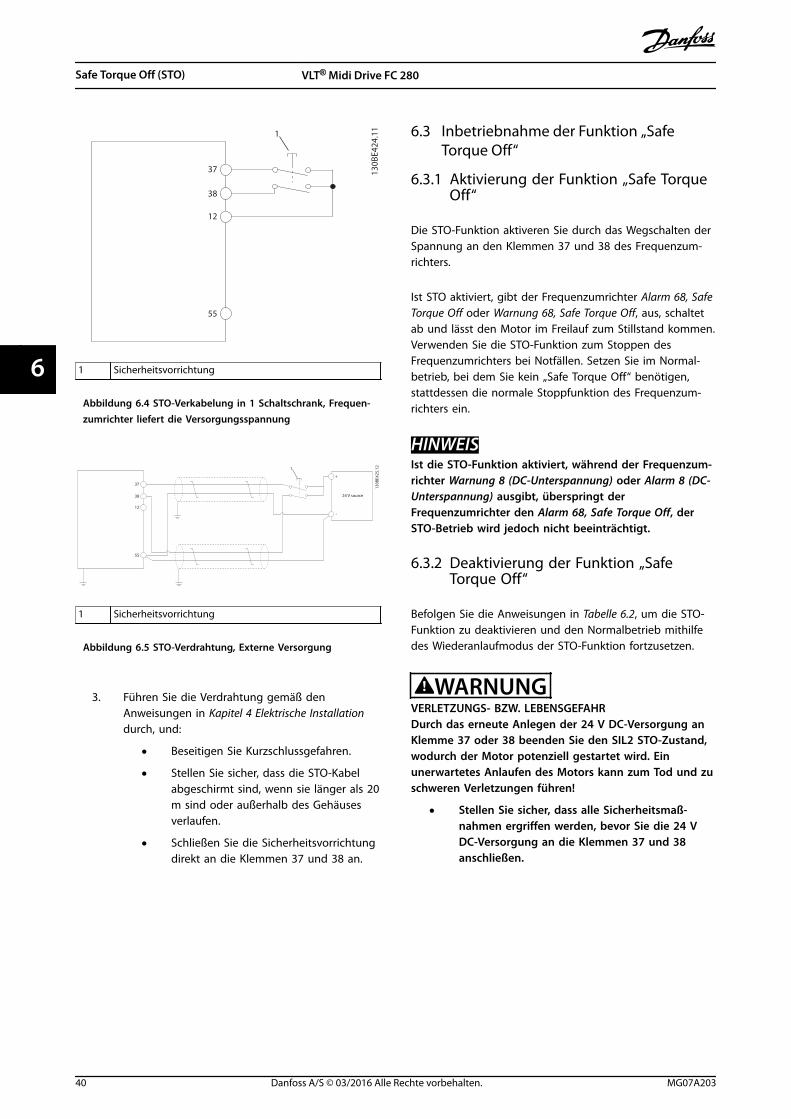
130B
E424
.11
37
38
12
55
1
1 Sicherheitsvorrichtung
Abbildung 6.4 STO-Verkabelung in 1 Schaltschrank, Frequen-zumrichter liefert die Versorgungsspannung
130B
E425
.12
24 V source
37
38
+
-12
55
1
1 Sicherheitsvorrichtung
Abbildung 6.5 STO-Verdrahtung, Externe Versorgung
3. Führen Sie die Verdrahtung gemäß denAnweisungen in Kapitel 4 Elektrische Installationdurch, und:
• Beseitigen Sie Kurzschlussgefahren.
• Stellen Sie sicher, dass die STO-Kabelabgeschirmt sind, wenn sie länger als 20m sind oder außerhalb des Gehäusesverlaufen.
• Schließen Sie die Sicherheitsvorrichtungdirekt an die Klemmen 37 und 38 an.
6.3 Inbetriebnahme der Funktion „SafeTorque Off“
6.3.1 Aktivierung der Funktion „Safe TorqueOff“
Die STO-Funktion aktiveren Sie durch das Wegschalten derSpannung an den Klemmen 37 und 38 des Frequenzum-richters.
Ist STO aktiviert, gibt der Frequenzumrichter Alarm 68, SafeTorque Off oder Warnung 68, Safe Torque Off, aus, schaltetab und lässt den Motor im Freilauf zum Stillstand kommen.Verwenden Sie die STO-Funktion zum Stoppen desFrequenzumrichters bei Notfällen. Setzen Sie im Normal-betrieb, bei dem Sie kein „Safe Torque Off“ benötigen,stattdessen die normale Stoppfunktion des Frequenzum-richters ein.
HINWEISIst die STO-Funktion aktiviert, während der Frequenzum-richter Warnung 8 (DC-Unterspannung) oder Alarm 8 (DC-Unterspannung) ausgibt, überspringt derFrequenzumrichter den Alarm 68, Safe Torque Off, derSTO-Betrieb wird jedoch nicht beeinträchtigt.
6.3.2 Deaktivierung der Funktion „SafeTorque Off“
Befolgen Sie die Anweisungen in Tabelle 6.2, um die STO-Funktion zu deaktivieren und den Normalbetrieb mithilfedes Wiederanlaufmodus der STO-Funktion fortzusetzen.
WARNUNGVERLETZUNGS- BZW. LEBENSGEFAHRDurch das erneute Anlegen der 24 V DC-Versorgung anKlemme 37 oder 38 beenden Sie den SIL2 STO-Zustand,wodurch der Motor potenziell gestartet wird. Einunerwartetes Anlaufen des Motors kann zum Tod und zuschweren Verletzungen führen!
• Stellen Sie sicher, dass alle Sicherheitsmaß-nahmen ergriffen werden, bevor Sie die 24 VDC-Versorgung an die Klemmen 37 und 38anschließen.
Safe Torque Off (STO) VLT® Midi Drive FC 280
40 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
66
Wiederan-laufmodus
Schritte zur Deakti-vierung der STO-Funktion und derUmstellung auf denNormalbetrieb
Konfiguration desWiederanlaufmodus
ManuellerWieder-anlauf
1. Legen Sie die 24 VDC-Versorgung wiederan den Klemmen 37und 38 an.
2. Initiieren Sie einQuittiersignal (überFeldbus, Klemme oderdurch Drücken derTaste [Reset]/[OffReset] am LCP).
Werkseinstellung.Parameter 5-19 Klemme37 Sicherer Stopp=[1] SafeTorque Off Alarm
Automa-tischerWieder-anlauf
Legen Sie die 24 V DC-Versorgung wieder anden Klemmen 37 und 38an.
Parameter 5-19 Klemme37 Sicherer Stopp= [3]Warnung Safe Torque Off.
Tabelle 6.2 STO-Deaktivierung
6.3.3 Inbetriebnahmeprüfung der Funktion„Safe Torque Off“
Führen Sie nach der Installation und vor erstmaligemBetrieb eine Inbetriebnahmeprüfung der Anlage oderAnwendung, die die STO-Funktion einsetzt, durch.Nach jeder Änderung der Anlage oder Anwendung, zu derdie Funktion „Safe Torque Off“ gehört, müssen Sie diesePrüfung wiederholen.
HINWEISNach der ersten Installation und nach jeder Änderungder Installation müssen Sie eine erfolgreiche Inbetrieb-nahmeprüfung der STO-Funktion vornehmen.
So führen Sie eine Inbetriebnahmeprüfung durch:• Befolgen Sie die Anweisungen in
Kapitel 6.3.4 Prüfen auf STO-Anwendungen immanuellen Wiederanlaufmodus, wenn die STO-Funktion auf den manuellen Wiederanlaufmoduseingestellt ist.
• Befolgen Sie die Anweisungen inKapitel 6.3.5 Prüfen auf STO-Anwendungen imautomatischen Wiederanlaufmodus, wenn die STO-Funktion auf den automatischenWiederanlaufmodus eingestellt ist.
6.3.4 Prüfen auf STO-Anwendungen immanuellen Wiederanlaufmodus
Führen Sie für Anwendungen, bei denenParameter 5-19 Klemme 37 Sicherer Stopp auf die Werksein-stellung [1] Safe Torque Off Alarm eingestellt ist, dieInbetriebnahmeprüfung wie folgt durch.
1. Stellen Sie Parameter 5-40 Relaisfunktion auf [190]Safe Function active (Sicherheitsfunktion aktiv) ein.
2. Trennen Sie die 24 V DC-Spannungsversorgungan den Klemmen 37 und 38 über die Sicherheits-vorrichtung, während der Frequenzumrichter denMotor antreibt (d. h. Netzversorgung bleibtbestehen).
3. Überprüfen Sie Folgendes:
3a Der Motor geht in den Freilauf. Esdauert ggf. lange, bis der Motor stoppt.
3b Ist das LCP montiert, wird Alarm 68, SafeTorque Off auf dem LCP angezeigt. Istdas LCP nicht montiert, wird Alarm 68,Safe Torque Off inParameter 15-30 Fehlerspeicher:Fehlercode protokolliert.
4. Legen Sie die 24 V DC-Spannung wieder an denKlemmen 37 und 38 an.
5. Stellen Sie sicher, dass der Motor im Freilauf unddas bedarfsgerechte Relais (falls angeschlossen)aktiviert bleibt.
6. Senden Sie ein Quittiersignal (über Feldbus,Klemme oder durch Drücken der Taste [Reset]/[Off Reset] am LCP).
7. Stellen Sie sicher, dass der Motor betriebsbereitist und innerhalb des ursprünglichen Drehzahlbe-reichs läuft.
Sie haben die Inbetriebnahmeprüfung erfolgreichabgeschlossen, wenn Sie alle oben beschriebenen Schritteerfolgreich durchführen konnten.
6.3.5 Prüfen auf STO-Anwendungen imautomatischen Wiederanlaufmodus
Führen Sie für Anwendungen, bei denenParameter 5-19 Klemme 37 Sicherer Stopp auf [3] Safe TorqueOff Warnung eingestellt ist, die Inbetriebnahmeprüfung wiefolgt durch:
1. Trennen Sie die 24 V DC-Spannungsversorgungan den Klemmen 37 und 38 über die Sicherheits-vorrichtung, während der Frequenzumrichter denMotor antreibt (d. h. Netzversorgung bleibtbestehen).
2. Überprüfen Sie Folgendes:
Safe Torque Off (STO) Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 41
6 6
2a Der Motor geht in den Freilauf. Esdauert ggf. lange, bis der Motor stoppt.
2b Ist das LCP montiert, wird Warnung 68,Safe Torque Off W68, auf dem LCPangezeigt. Ist das LCP nicht montiert,wird Warnung 68, Safe Torque Off W68 inBit 30 von Parameter 16-92 Warnwortprotokolliert.
3. Legen Sie die 24 V DC-Spannung wieder an denKlemmen 37 und 38 an.
4. Stellen Sie sicher, dass der Motor betriebsbereitist und innerhalb des ursprünglichen Drehzahlbe-reichs läuft.
Sie haben die Inbetriebnahmeprüfung erfolgreichabgeschlossen, wenn Sie alle oben beschriebenen Schritteerfolgreich durchführen konnten.
HINWEISSiehe Warnung zum Wiederanlaufverhalten inKapitel 6.1 Sicherheitsmaßnahmen für STO.
6.4 Wartung und Service der STO-Funktion
• Der Benutzer ist verantwortlich für Sicherheits-maßnahmen.
• Sie können die Frequenzumrichterparameter miteinem Passwort schützen.
Die Funktionsprüfung besteht aus 2 Teilen:
• Grundlegende Funktionsprüfung.
• Diagnosefunktionsprüfung.
Wenn Sie alle Schritte erfolgreich abschließen, ist dieFunktionsprüfung erfolgreich.
Grundlegende FunktionsprüfungWenn die STO-Funktion 1 Jahr lang nicht verwendetwurde, führen Sie eine grundlegende Funktionsprüfungdurch, um einen Fehler oder eine Fehlfunktion der STO-Funktion durchzuführen.
1. Stellen Sie sicher, dass Parameter 5-19 Klemme 37Sicherer Stopp auf *[1] Safe Torque Off Alarmeingestellt ist.
2. Trennen Sie die 24 V DC-Spannungsversorgungan den Klemmen 37 und 38.
3. Prüfen Sie, ob das LCP den Alarm 68, Safe TorqueOff anzeigt.
4. Vergewissern Sie sich, dass der Frequenzumrichterdie Anlage abschaltet.
5. Vergewissern Sie sich, dass der Motor in denFreilauf schaltet und zum Stillstand kommt.
6. Leiten Sie ein Startsignal ein (über Feldbus,Klemme oder LCP), und stellen Sie sicher, dassder Motor nicht startet.
7. Legen Sie die 24 V DC-Spannungsversorgungerneut an die Klemmen 37 und 38 an.
8. Vergewissern Sie sich, dass der Motor nichtautomatisch gestartet wird und nur durch einQuittiersignal (über Feldbus, Klemme oder durchDrücken der Taste [Reset]/[Off Reset]) wiederanläuft.
Diagnosefunktionsprüfung1. Überprüfen Sie, ob Warnung 68, Safe Torque Off
und Alarm 68, Safe Torque Off nicht auftreten,wenn keine 24 V-Spannungsversorgung an denKlemmen 37 und 38 angeschlossen ist.
2. Trennen Sie die 24 V-Spannungsversorgung vonKlemme 37 und überprüfen Sie, ob das LCP Alarm188, STO Function Fault (STO-Funktionsstörung)anzeigt, wenn das LCP montiert ist. Ist das LCPnicht montiert, überprüfen Sie, dass Alarm 188,STO Function Fault (STO-Funktionsstörung) inParameter 15-30 Fehlerspeicher: Fehlercodeprotokolliert wird.
3. Legen Sie die 24 V-Spannungsversorgung anKlemme 37 an, und überprüfen Sie, dass dasZurücksetzen des Alarms erfolgreich ist.
4. Trennen Sie die 24 V-Spannungsversorgung vonKlemme 38 und überprüfen Sie, ob das LCP Alarm188, STO Function Fault (STO-Funktionsstörung)anzeigt, wenn das LCP montiert ist. Ist das LCPnicht montiert, überprüfen Sie, dass Alarm 188,STO Function Fault (STO-Funktionsstörung) inParameter 15-30 Fehlerspeicher: Fehlercodeprotokolliert wird.
5. Legen Sie die 24 V-Spannungsversorgung anKlemme 38 an, und überprüfen Sie, dass dasZurücksetzen des Alarms erfolgreich ist.
Safe Torque Off (STO) VLT® Midi Drive FC 280
42 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
66
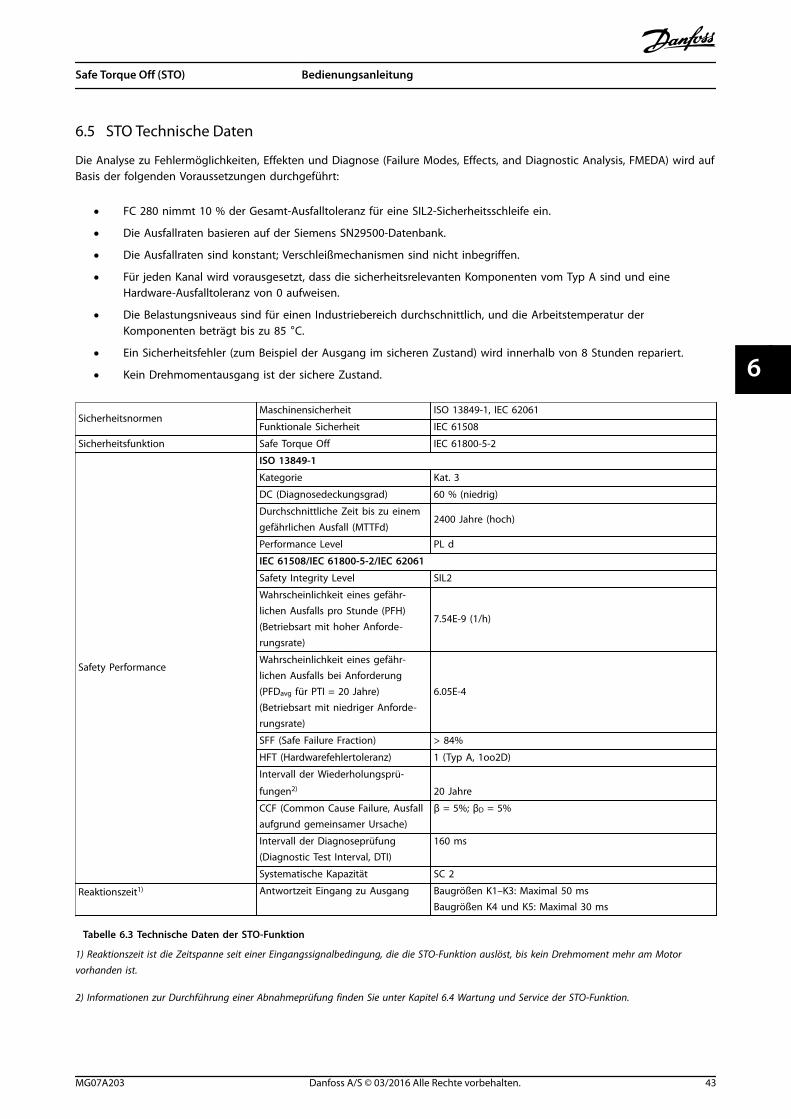
6.5 STO Technische Daten
Die Analyse zu Fehlermöglichkeiten, Effekten und Diagnose (Failure Modes, Effects, and Diagnostic Analysis, FMEDA) wird aufBasis der folgenden Voraussetzungen durchgeführt:
• FC 280 nimmt 10 % der Gesamt-Ausfalltoleranz für eine SIL2-Sicherheitsschleife ein.
• Die Ausfallraten basieren auf der Siemens SN29500-Datenbank.
• Die Ausfallraten sind konstant; Verschleißmechanismen sind nicht inbegriffen.
• Für jeden Kanal wird vorausgesetzt, dass die sicherheitsrelevanten Komponenten vom Typ A sind und eineHardware-Ausfalltoleranz von 0 aufweisen.
• Die Belastungsniveaus sind für einen Industriebereich durchschnittlich, und die Arbeitstemperatur derKomponenten beträgt bis zu 85 °C.
• Ein Sicherheitsfehler (zum Beispiel der Ausgang im sicheren Zustand) wird innerhalb von 8 Stunden repariert.
• Kein Drehmomentausgang ist der sichere Zustand.
SicherheitsnormenMaschinensicherheit ISO 13849-1, IEC 62061
Funktionale Sicherheit IEC 61508
Sicherheitsfunktion Safe Torque Off IEC 61800-5-2
Safety Performance
ISO 13849-1
Kategorie Kat. 3
DC (Diagnosedeckungsgrad) 60 % (niedrig)
Durchschnittliche Zeit bis zu einemgefährlichen Ausfall (MTTFd)
2400 Jahre (hoch)
Performance Level PL d
IEC 61508/IEC 61800-5-2/IEC 62061
Safety Integrity Level SIL2
Wahrscheinlichkeit eines gefähr-lichen Ausfalls pro Stunde (PFH)(Betriebsart mit hoher Anforde-rungsrate)
7.54E-9 (1/h)
Wahrscheinlichkeit eines gefähr-lichen Ausfalls bei Anforderung(PFDavg für PTI = 20 Jahre)(Betriebsart mit niedriger Anforde-rungsrate)
6.05E-4
SFF (Safe Failure Fraction) > 84%
HFT (Hardwarefehlertoleranz) 1 (Typ A, 1oo2D)
Intervall der Wiederholungsprü-
fungen2) 20 Jahre
CCF (Common Cause Failure, Ausfallaufgrund gemeinsamer Ursache)
β = 5%; βD = 5%
Intervall der Diagnoseprüfung(Diagnostic Test Interval, DTI)
160 ms
Systematische Kapazität SC 2
Reaktionszeit1) Antwortzeit Eingang zu Ausgang Baugrößen K1–K3: Maximal 50 msBaugrößen K4 und K5: Maximal 30 ms
Tabelle 6.3 Technische Daten der STO-Funktion
1) Reaktionszeit ist die Zeitspanne seit einer Eingangssignalbedingung, die die STO-Funktion auslöst, bis kein Drehmoment mehr am Motorvorhanden ist.
2) Informationen zur Durchführung einer Abnahmeprüfung finden Sie unter Kapitel 6.4 Wartung und Service der STO-Funktion.
Safe Torque Off (STO) Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 43
6 6
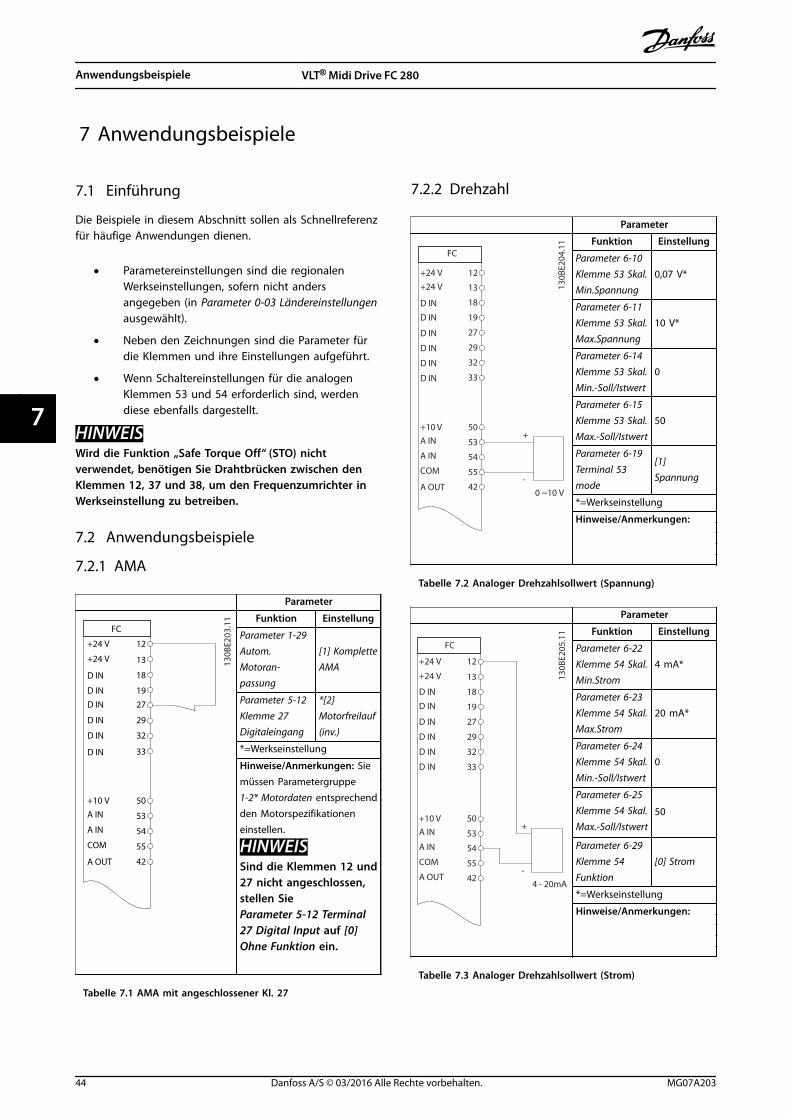
7 Anwendungsbeispiele
7.1 Einführung
Die Beispiele in diesem Abschnitt sollen als Schnellreferenzfür häufige Anwendungen dienen.
• Parametereinstellungen sind die regionalenWerkseinstellungen, sofern nicht andersangegeben (in Parameter 0-03 Ländereinstellungenausgewählt).
• Neben den Zeichnungen sind die Parameter fürdie Klemmen und ihre Einstellungen aufgeführt.
• Wenn Schaltereinstellungen für die analogenKlemmen 53 und 54 erforderlich sind, werdendiese ebenfalls dargestellt.
HINWEISWird die Funktion „Safe Torque Off“ (STO) nichtverwendet, benötigen Sie Drahtbrücken zwischen denKlemmen 12, 37 und 38, um den Frequenzumrichter inWerkseinstellung zu betreiben.
7.2 Anwendungsbeispiele
7.2.1 AMA
Parameter
130B
E203
.11
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42A OUT
D IN
+24 V
Funktion Einstellung
Parameter 1-29 Autom.Motoran-passung
[1] KompletteAMA
Parameter 5-12 Klemme 27Digitaleingang
*[2]Motorfreilauf(inv.)
*=Werkseinstellung
Hinweise/Anmerkungen: Siemüssen Parametergruppe1-2* Motordaten entsprechendden Motorspezifikationeneinstellen.
HINWEISSind die Klemmen 12 und27 nicht angeschlossen,stellen SieParameter 5-12 Terminal27 Digital Input auf [0]Ohne Funktion ein.
Tabelle 7.1 AMA mit angeschlossener Kl. 27
7.2.2 Drehzahl
Parameter
130B
E204
.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
420 ~10 V
+
-
FC
+24 V
Funktion Einstellung
Parameter 6-10 Klemme 53 Skal.Min.Spannung
0,07 V*
Parameter 6-11 Klemme 53 Skal.Max.Spannung
10 V*
Parameter 6-14 Klemme 53 Skal.Min.-Soll/Istwert
0
Parameter 6-15 Klemme 53 Skal.Max.-Soll/Istwert
50
Parameter 6-19 Terminal 53mode
[1]Spannung
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 7.2 Analoger Drehzahlsollwert (Spannung)
Parameter
130B
E205
.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
424 - 20mA
+
-
FC
+24 V
Funktion Einstellung
Parameter 6-22 Klemme 54 Skal.Min.Strom
4 mA*
Parameter 6-23 Klemme 54 Skal.Max.Strom
20 mA*
Parameter 6-24 Klemme 54 Skal.Min.-Soll/Istwert
0
Parameter 6-25 Klemme 54 Skal.Max.-Soll/Istwert
50
Parameter 6-29 Klemme 54Funktion
[0] Strom
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 7.3 Analoger Drehzahlsollwert (Strom)
Anwendungsbeispiele VLT® Midi Drive FC 280
44 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
77
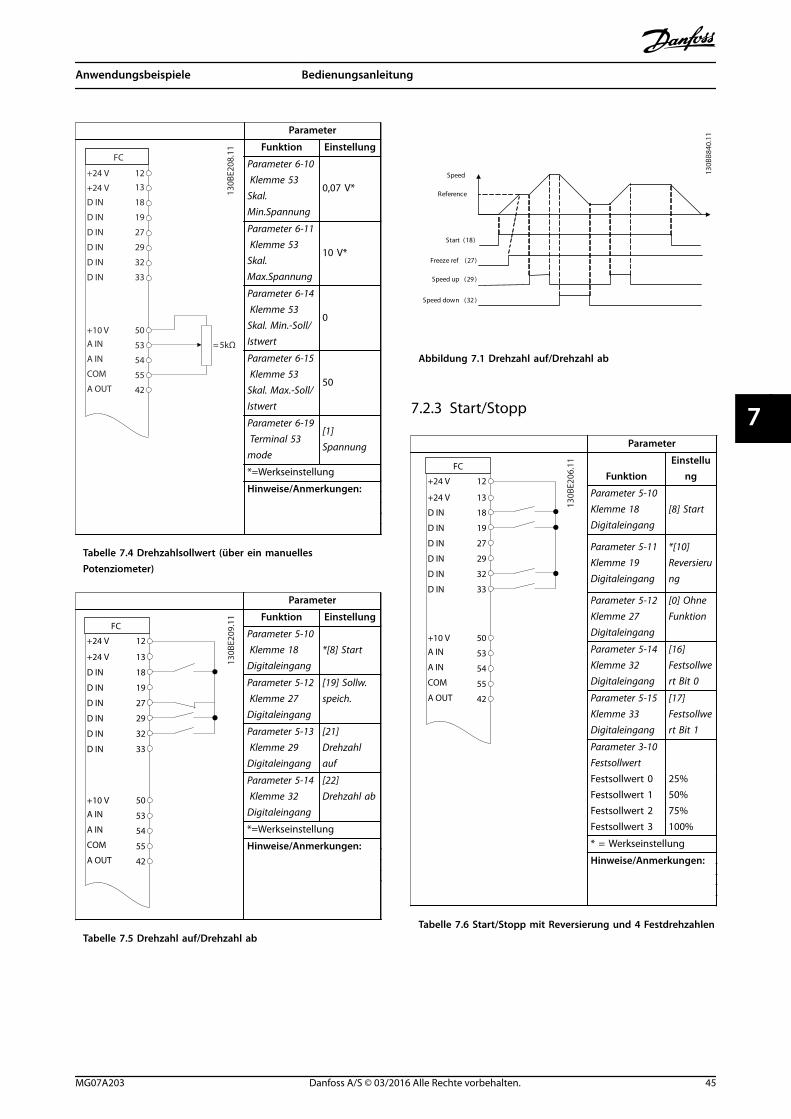
Parameter
130B
E208
.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
Funktion Einstellung
Parameter 6-10 Klemme 53Skal.Min.Spannung
0,07 V*
Parameter 6-11 Klemme 53Skal.Max.Spannung
10 V*
Parameter 6-14 Klemme 53Skal. Min.-Soll/Istwert
0
Parameter 6-15 Klemme 53Skal. Max.-Soll/Istwert
50
Parameter 6-19 Terminal 53mode
[1]Spannung
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 7.4 Drehzahlsollwert (über ein manuellesPotenziometer)
Parameter
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130B
E209
.11
+24 V
Funktion Einstellung
Parameter 5-10 Klemme 18Digitaleingang
*[8] Start
Parameter 5-12 Klemme 27Digitaleingang
[19] Sollw.speich.
Parameter 5-13 Klemme 29Digitaleingang
[21]Drehzahlauf
Parameter 5-14 Klemme 32Digitaleingang
[22]Drehzahl ab
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 7.5 Drehzahl auf/Drehzahl ab
Start (18)
Freeze ref (27)
Speed up (29 )
Speed down (32 )
Speed
Reference
130B
B840
.11
Abbildung 7.1 Drehzahl auf/Drehzahl ab
7.2.3 Start/Stopp
Parameter
130B
E206
.11
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
FunktionEinstellu
ng
Parameter 5-10 Klemme 18Digitaleingang
[8] Start
Parameter 5-11 Klemme 19Digitaleingang
*[10]Reversierung
Parameter 5-12 Klemme 27Digitaleingang
[0] OhneFunktion
Parameter 5-14 Klemme 32Digitaleingang
[16]Festsollwert Bit 0
Parameter 5-15 Klemme 33Digitaleingang
[17]Festsollwert Bit 1
Parameter 3-10 Festsollwert
Festsollwert 0Festsollwert 1Festsollwert 2Festsollwert 3
25%50%75%100%
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 7.6 Start/Stopp mit Reversierung und 4 Festdrehzahlen
Anwendungsbeispiele Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 45
7 7
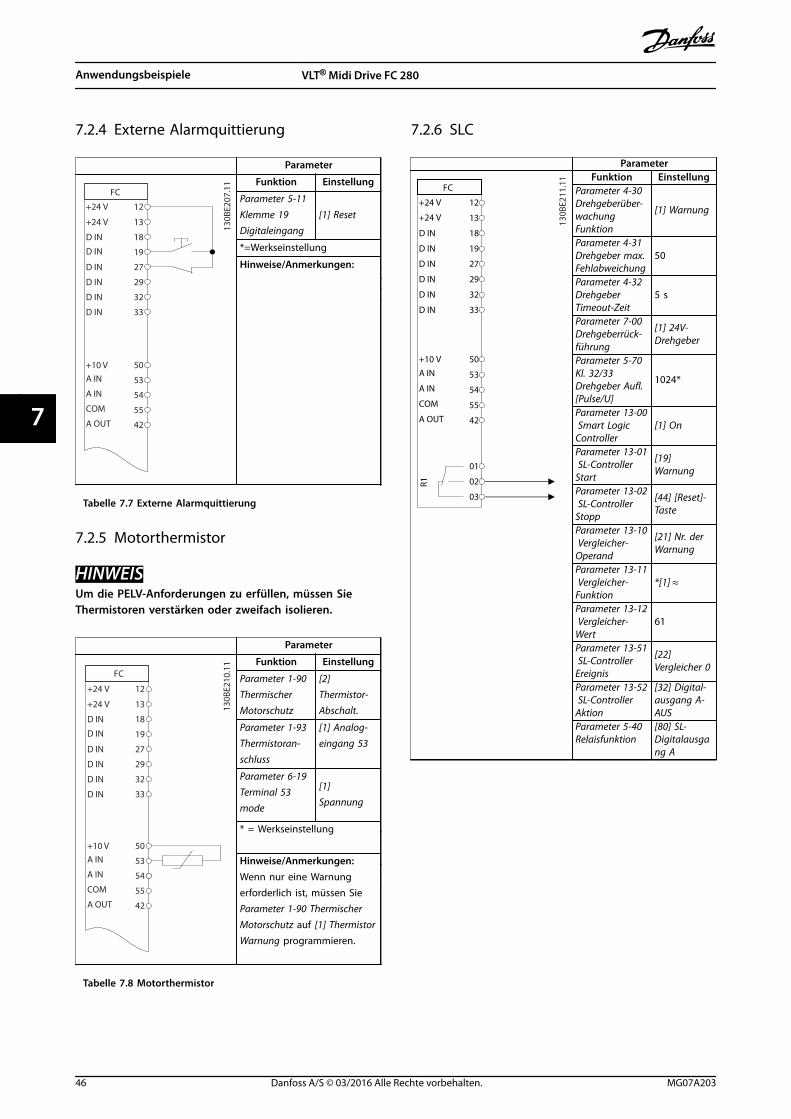
7.2.4 Externe Alarmquittierung
Parameter
130B
E207
.11
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
Funktion Einstellung
Parameter 5-11 Klemme 19Digitaleingang
[1] Reset
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 7.7 Externe Alarmquittierung
7.2.5 Motorthermistor
HINWEISUm die PELV-Anforderungen zu erfüllen, müssen SieThermistoren verstärken oder zweifach isolieren.
Parameter
130B
E210
.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
Funktion Einstellung
Parameter 1-90 ThermischerMotorschutz
[2]Thermistor-Abschalt.
Parameter 1-93 Thermistoran-schluss
[1] Analog-eingang 53
Parameter 6-19 Terminal 53mode
[1]Spannung
* = Werkseinstellung
Hinweise/Anmerkungen:Wenn nur eine Warnungerforderlich ist, müssen SieParameter 1-90 ThermischerMotorschutz auf [1] ThermistorWarnung programmieren.
Tabelle 7.8 Motorthermistor
7.2.6 SLC
Parameter
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUTR1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130B
E211
.11
+24 V
Funktion EinstellungParameter 4-30 Drehgeberüber-wachungFunktion
[1] Warnung
Parameter 4-31 Drehgeber max.Fehlabweichung
50
Parameter 4-32 DrehgeberTimeout-Zeit
5 s
Parameter 7-00 Drehgeberrück-führung
[1] 24V-Drehgeber
Parameter 5-70 Kl. 32/33Drehgeber Aufl.[Pulse/U]
1024*
Parameter 13-00 Smart LogicController
[1] On
Parameter 13-01 SL-ControllerStart
[19]Warnung
Parameter 13-02 SL-ControllerStopp
[44] [Reset]-Taste
Parameter 13-10 Vergleicher-Operand
[21] Nr. derWarnung
Parameter 13-11 Vergleicher-Funktion
*[1] ≈
Parameter 13-12 Vergleicher-Wert
61
Parameter 13-51 SL-ControllerEreignis
[22]Vergleicher 0
Parameter 13-52 SL-ControllerAktion
[32] Digital-ausgang A-AUS
Parameter 5-40 Relaisfunktion
[80] SL-Digitalausgang A
Anwendungsbeispiele VLT® Midi Drive FC 280
46 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
77

Parameter Funktion Einstellung
* = WerkseinstellungHinweise/Anmerkungen:Wenn der Grenzwert derDrehgeberüberwachungüberschritten wird, gibt derFrequenzumrichter Warnung 61,Istwertüberwachung aus. DerSLC überwacht Warnung 61,Istwertüberwachung. WirdWarnung 61, Istwertüber-wachung wahr, wird Relais 1ausgelöst.Externe Geräte könnenanzeigen, dass eine Wartungerforderlich ist. Wenn derIstwertfehler innerhalb von 5 swieder unter diese Grenze fällt,läuft der Frequenzumrichterweiter, und die Warnung wirdausgeblendet. Relais 1 bleibthingegen ausgelöst, bis Sie[Off/Reset] drücken.
Tabelle 7.9 Verwendung von SLC zur Einstellung eines Relais
Anwendungsbeispiele Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 47
7 7
8 Wartung, Diagnose und Fehlersuche
8.1 Wartung und Service
Unter normalen Betriebsbedingungen und Lastprofilen istder Frequenzumrichter über die gesamte Lebensdauerwartungsfrei. Zur Vermeidung von Betriebsstörungen,Gefahren und Beschädigungen müssen Sie die Frequen-zumrichter je nach Betriebsbedingungen in regelmäßigenAbständen inspizieren. Ersetzen Sie verschlissene oderbeschädigte Teile durch Originalersatzteile oderStandardteile. Wenden Sie sich für Service und Support anIhren örtlichen Danfoss-Händler.
WARNUNGUNERWARTETER ANLAUFBei Anschluss des Frequenzumrichters an Versor-gungsnetz, DC-Versorgung oder Zwischenkreiskopplungkann der angeschlossene Motor jederzeit unerwartetanlaufen. Ein unerwarteter Anlauf im Rahmen vonProgrammierungs-, Service- oder Reparaturarbeiten kannzu schweren bzw. tödlichen Verletzungen oder zuSachschäden führen. Der Motor kann über einenexternen Schalter, einen Feldbus-Befehl, ein Sollwertein-gangssignal, über ein LCP oder LOP, eine Fernbedienungper MCT 10 Konfigurationssoftware oder nach einemquittierten Fehlerzustand anlaufen.So verhindern Sie ein unerwartetes Starten des Motors:
• Trennen Sie den Frequenzumrichter vom Netz.
• Drücken Sie [Off/Reset] am LCP, bevor SieParameter programmieren.
• Verkabeln und montieren Sie Frequenzum-richter, Motor und alle angetriebenen Gerätevollständig, bevor Sie den Frequenzumrichter anNetzversorgung, DC-Versorgung oder Zwischen-kreiskopplung anschließen.
8.2 Warnungs- und Alarmtypen
Warnungs-/Alarmtyp
Beschreibung
Warnung Eine Warnung weist auf einen abnormalenBetriebszustand hin, der zu einem Alarm führt.Eine Warnung wird quittiert, wenn Sie dieabnorme Bedingung beseitigen.
Alarm Ein Alarm weist auf eine Störung hin, diesofortige Aufmerksamkeit erfordert. Die Störungführt immer zu einer Abschaltung oder einerAbschaltblockierung. Quittieren Sie den Frequen-zumrichter nach einem Alarm.Setzen Sie den Frequenzumrichter zurück; hierbeihaben Sie 4 Möglichkeiten:
• Drücken Sie die Taste [Reset]/[Off/Reset].
• Über einen Digitaleingang mit der Funktion„Reset“.
• Über serielle Schnittstelle.
• Automatisches Quittieren.
AbschaltungBei einer Abschaltung setzt der Frequenzumrichter seinenBetrieb aus, um Schäden an sich selbst oder an anderenGeräten zu verhindern. Falls eine Abschaltung auftritt, läuftder Motor bis zum Stillstand aus. Die Steuerung desFrequenzumrichters ist weiter funktionsfähig undüberwacht den Zustand des Frequenzumrichters. NachBehebung des Fehlerzustands können Sie dieAlarmmeldung des Frequenzumrichters quittieren.
AbschaltblockierungBei einer Abschaltblockierung setzt der Frequenzumrichterseinen Betrieb aus, um Schäden an sich selbst oder ananderen Geräten zu verhindern. Falls eine Abschaltblo-ckierung auftritt, läuft der Motor bis zum Stillstand aus. DieSteuerung des Frequenzumrichters ist weiter funktionsfähigund überwacht den Zustand des Frequenzumrichters. DerFrequenzumrichter löst nur dann eine Abschaltblockierungaus, wenn schwerwiegende Störungen auftreten, die denFrequenzumrichter oder sonstige Geräte beschädigenkönnen. Nachdem die Störungen behoben wurden,müssen Sie die Netzversorgung aus- und wiedereinschalten, bevor Sie den Frequenzumrichter zurücksetzenkönnen.
Wartung, Diagnose und Fehle... VLT® Midi Drive FC 280
48 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
88
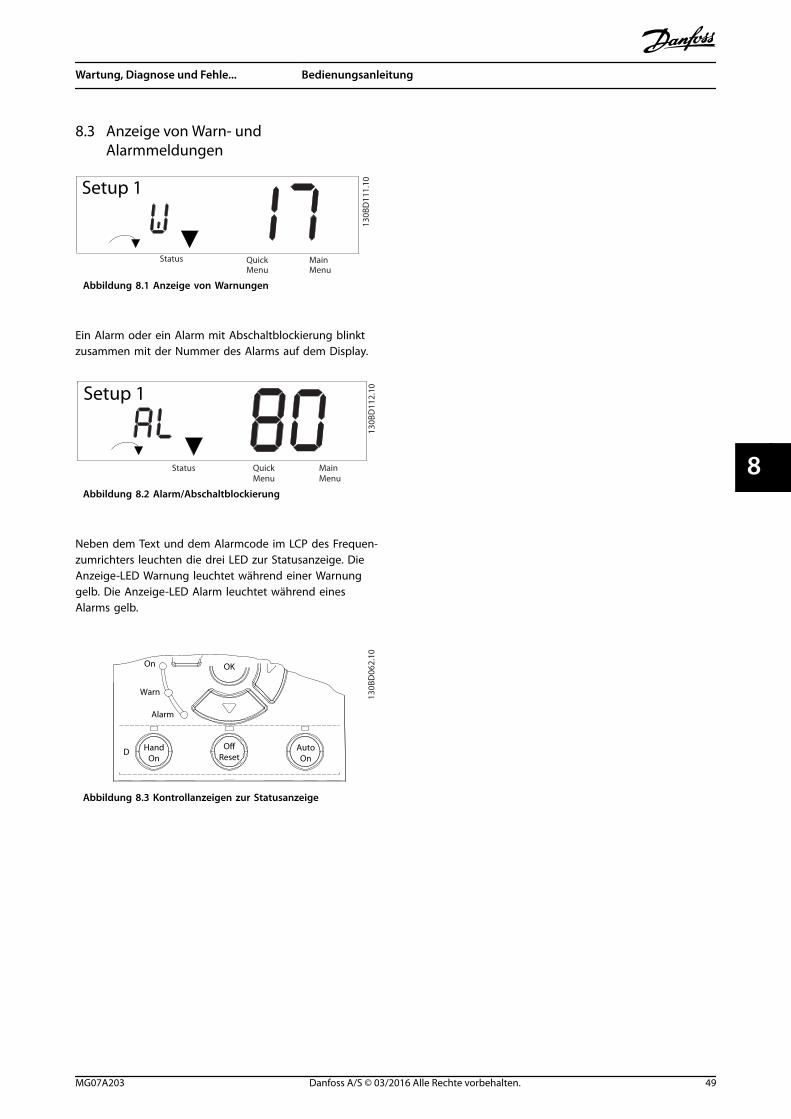
8.3 Anzeige von Warn- undAlarmmeldungen
Setup 1
Status Quick Menu
MainMenu
130B
D11
1.10
Abbildung 8.1 Anzeige von Warnungen
Ein Alarm oder ein Alarm mit Abschaltblockierung blinktzusammen mit der Nummer des Alarms auf dem Display.
Setup 1
Status Quick Menu
MainMenu
130B
D11
2.10
Abbildung 8.2 Alarm/Abschaltblockierung
Neben dem Text und dem Alarmcode im LCP des Frequen-zumrichters leuchten die drei LED zur Statusanzeige. DieAnzeige-LED Warnung leuchtet während einer Warnunggelb. Die Anzeige-LED Alarm leuchtet während einesAlarms gelb.
130B
D06
2.10
D HandOn Reset
AutoOn
OKOn
Warn
Alarm
Abbildung 8.3 Kontrollanzeigen zur Statusanzeige
Wartung, Diagnose und Fehle... Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 49
8 8
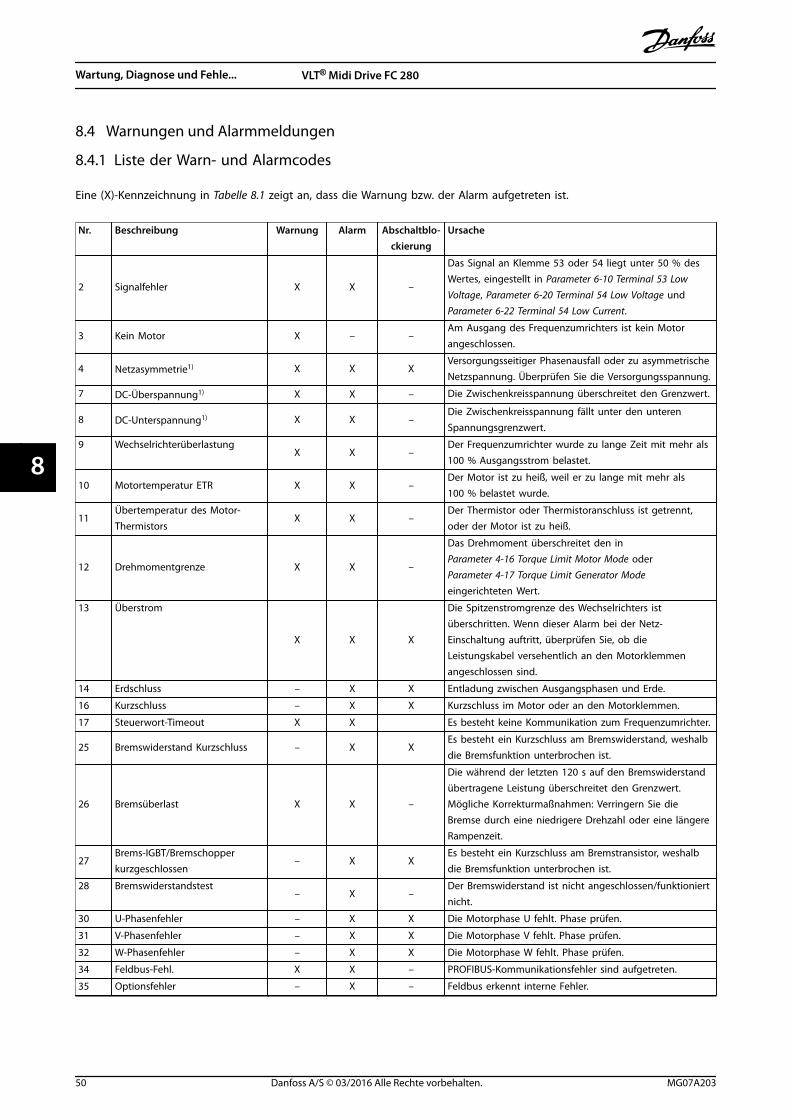
8.4 Warnungen und Alarmmeldungen
8.4.1 Liste der Warn- und Alarmcodes
Eine (X)-Kennzeichnung in Tabelle 8.1 zeigt an, dass die Warnung bzw. der Alarm aufgetreten ist.
Nr. Beschreibung Warnung Alarm Abschaltblo-ckierung
Ursache
2 Signalfehler X X –
Das Signal an Klemme 53 oder 54 liegt unter 50 % desWertes, eingestellt in Parameter 6-10 Terminal 53 LowVoltage, Parameter 6-20 Terminal 54 Low Voltage undParameter 6-22 Terminal 54 Low Current.
3 Kein Motor X – –Am Ausgang des Frequenzumrichters ist kein Motorangeschlossen.
4 Netzasymmetrie1) X X XVersorgungsseitiger Phasenausfall oder zu asymmetrischeNetzspannung. Überprüfen Sie die Versorgungsspannung.
7 DC-Überspannung1) X X – Die Zwischenkreisspannung überschreitet den Grenzwert.
8 DC-Unterspannung1) X X –Die Zwischenkreisspannung fällt unter den unterenSpannungsgrenzwert.
9 WechselrichterüberlastungX X –
Der Frequenzumrichter wurde zu lange Zeit mit mehr als100 % Ausgangsstrom belastet.
10 Motortemperatur ETR X X –Der Motor ist zu heiß, weil er zu lange mit mehr als100 % belastet wurde.
11Übertemperatur des Motor-Thermistors
X X –Der Thermistor oder Thermistoranschluss ist getrennt,oder der Motor ist zu heiß.
12 Drehmomentgrenze X X –
Das Drehmoment überschreitet den inParameter 4-16 Torque Limit Motor Mode oderParameter 4-17 Torque Limit Generator Modeeingerichteten Wert.
13 Überstrom
X X X
Die Spitzenstromgrenze des Wechselrichters istüberschritten. Wenn dieser Alarm bei der Netz-Einschaltung auftritt, überprüfen Sie, ob dieLeistungskabel versehentlich an den Motorklemmenangeschlossen sind.
14 Erdschluss – X X Entladung zwischen Ausgangsphasen und Erde.
16 Kurzschluss – X X Kurzschluss im Motor oder an den Motorklemmen.
17 Steuerwort-Timeout X X Es besteht keine Kommunikation zum Frequenzumrichter.
25 Bremswiderstand Kurzschluss – X XEs besteht ein Kurzschluss am Bremswiderstand, weshalbdie Bremsfunktion unterbrochen ist.
26 Bremsüberlast X X –
Die während der letzten 120 s auf den Bremswiderstandübertragene Leistung überschreitet den Grenzwert.Mögliche Korrekturmaßnahmen: Verringern Sie dieBremse durch eine niedrigere Drehzahl oder eine längereRampenzeit.
27Brems-IGBT/Bremschopperkurzgeschlossen
– X XEs besteht ein Kurzschluss am Bremstransistor, weshalbdie Bremsfunktion unterbrochen ist.
28 Bremswiderstandstest– X –
Der Bremswiderstand ist nicht angeschlossen/funktioniertnicht.
30 U-Phasenfehler – X X Die Motorphase U fehlt. Phase prüfen.
31 V-Phasenfehler – X X Die Motorphase V fehlt. Phase prüfen.
32 W-Phasenfehler – X X Die Motorphase W fehlt. Phase prüfen.
34 Feldbus-Fehl. X X – PROFIBUS-Kommunikationsfehler sind aufgetreten.
35 Optionsfehler – X – Feldbus erkennt interne Fehler.
Wartung, Diagnose und Fehle... VLT® Midi Drive FC 280
50 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
88
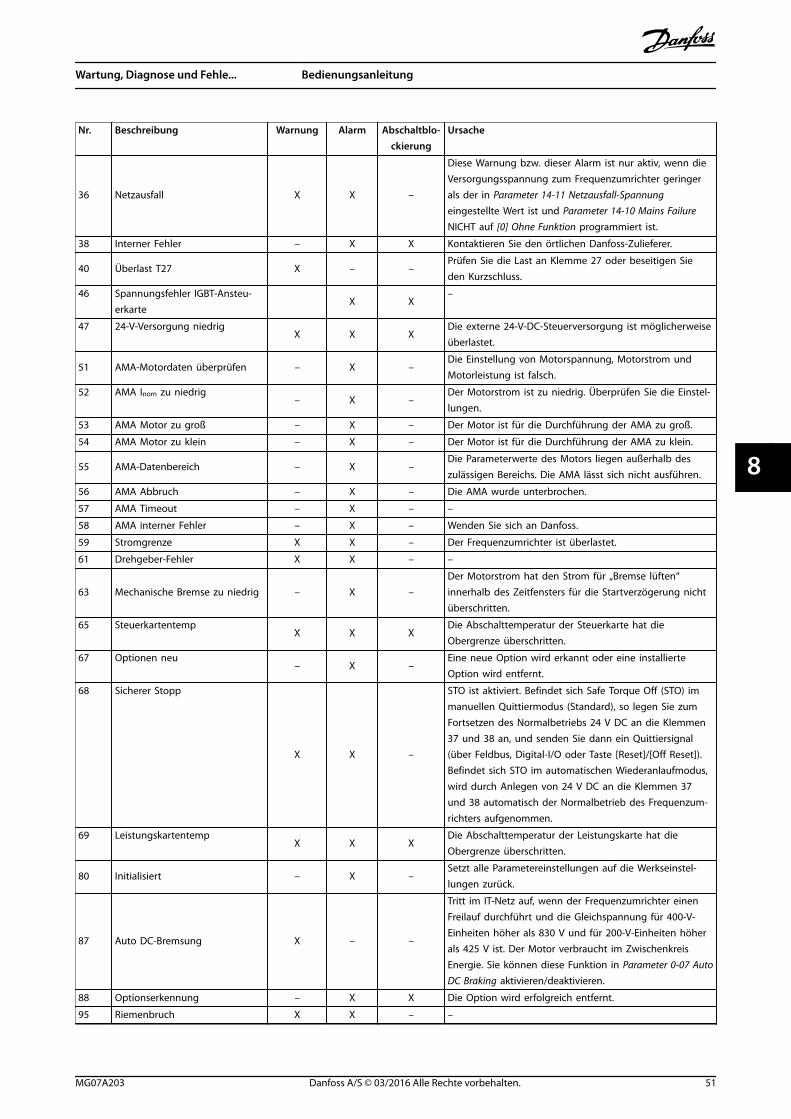
Nr. Beschreibung Warnung Alarm Abschaltblo-ckierung
Ursache
36 Netzausfall X X –
Diese Warnung bzw. dieser Alarm ist nur aktiv, wenn dieVersorgungsspannung zum Frequenzumrichter geringerals der in Parameter 14-11 Netzausfall-Spannungeingestellte Wert ist und Parameter 14-10 Mains FailureNICHT auf [0] Ohne Funktion programmiert ist.
38 Interner Fehler – X X Kontaktieren Sie den örtlichen Danfoss-Zulieferer.
40 Überlast T27 X – –Prüfen Sie die Last an Klemme 27 oder beseitigen Sieden Kurzschluss.
46 Spannungsfehler IGBT-Ansteu-erkarte
X X–
47 24-V-Versorgung niedrigX X X
Die externe 24-V-DC-Steuerversorgung ist möglicherweiseüberlastet.
51 AMA-Motordaten überprüfen – X –Die Einstellung von Motorspannung, Motorstrom undMotorleistung ist falsch.
52 AMA Inom zu niedrig– X –
Der Motorstrom ist zu niedrig. Überprüfen Sie die Einstel-lungen.
53 AMA Motor zu groß – X – Der Motor ist für die Durchführung der AMA zu groß.
54 AMA Motor zu klein – X – Der Motor ist für die Durchführung der AMA zu klein.
55 AMA-Datenbereich – X –Die Parameterwerte des Motors liegen außerhalb deszulässigen Bereichs. Die AMA lässt sich nicht ausführen.
56 AMA Abbruch – X – Die AMA wurde unterbrochen.
57 AMA Timeout – X – –
58 AMA interner Fehler – X – Wenden Sie sich an Danfoss.
59 Stromgrenze X X – Der Frequenzumrichter ist überlastet.
61 Drehgeber-Fehler X X – –
63 Mechanische Bremse zu niedrig – X –Der Motorstrom hat den Strom für „Bremse lüften“innerhalb des Zeitfensters für die Startverzögerung nichtüberschritten.
65 SteuerkartentempX X X
Die Abschalttemperatur der Steuerkarte hat dieObergrenze überschritten.
67 Optionen neu– X –
Eine neue Option wird erkannt oder eine installierteOption wird entfernt.
68 Sicherer Stopp
X X –
STO ist aktiviert. Befindet sich Safe Torque Off (STO) immanuellen Quittiermodus (Standard), so legen Sie zumFortsetzen des Normalbetriebs 24 V DC an die Klemmen37 und 38 an, und senden Sie dann ein Quittiersignal(über Feldbus, Digital-I/O oder Taste [Reset]/[Off Reset]).Befindet sich STO im automatischen Wiederanlaufmodus,wird durch Anlegen von 24 V DC an die Klemmen 37und 38 automatisch der Normalbetrieb des Frequenzum-richters aufgenommen.
69 LeistungskartentempX X X
Die Abschalttemperatur der Leistungskarte hat dieObergrenze überschritten.
80 Initialisiert – X –Setzt alle Parametereinstellungen auf die Werkseinstel-lungen zurück.
87 Auto DC-Bremsung X – –
Tritt im IT-Netz auf, wenn der Frequenzumrichter einenFreilauf durchführt und die Gleichspannung für 400-V-Einheiten höher als 830 V und für 200-V-Einheiten höherals 425 V ist. Der Motor verbraucht im ZwischenkreisEnergie. Sie können diese Funktion in Parameter 0-07 AutoDC Braking aktivieren/deaktivieren.
88 Optionserkennung – X X Die Option wird erfolgreich entfernt.
95 Riemenbruch X X – –
Wartung, Diagnose und Fehle... Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 51
8 8
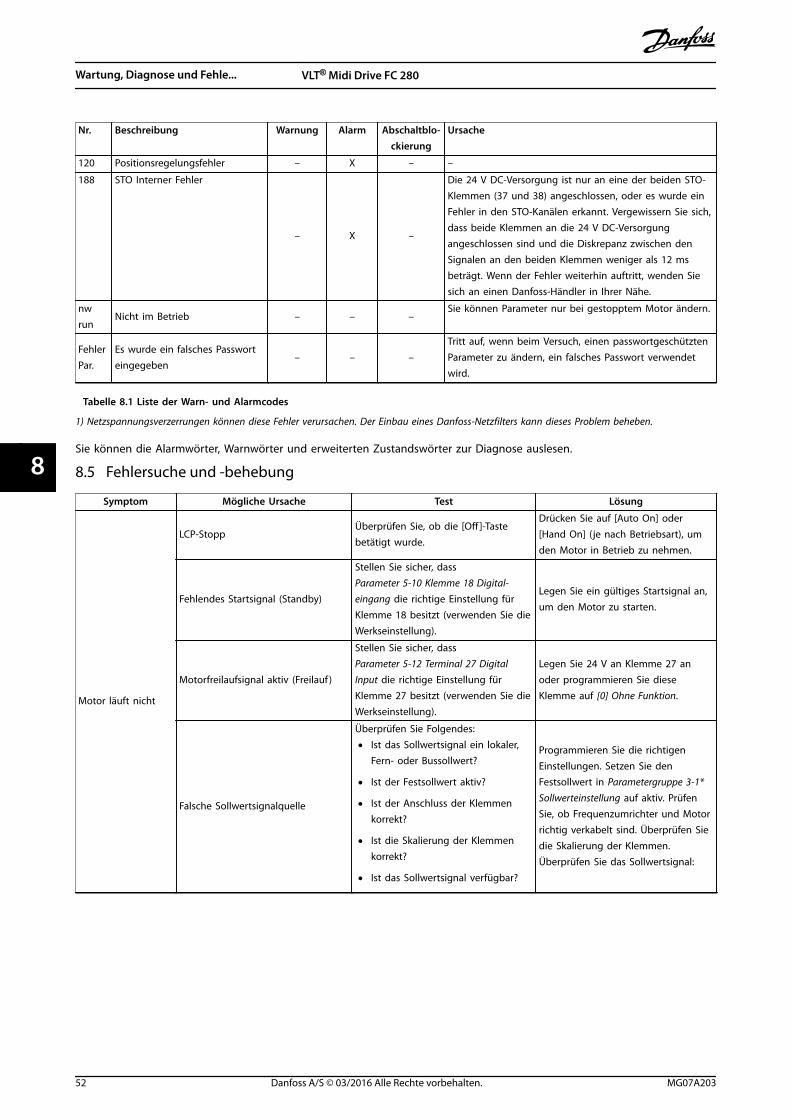
Nr. Beschreibung Warnung Alarm Abschaltblo-ckierung
Ursache
120 Positionsregelungsfehler – X – –
188 STO Interner Fehler
– X –
Die 24 V DC-Versorgung ist nur an eine der beiden STO-Klemmen (37 und 38) angeschlossen, oder es wurde einFehler in den STO-Kanälen erkannt. Vergewissern Sie sich,dass beide Klemmen an die 24 V DC-Versorgungangeschlossen sind und die Diskrepanz zwischen denSignalen an den beiden Klemmen weniger als 12 msbeträgt. Wenn der Fehler weiterhin auftritt, wenden Siesich an einen Danfoss-Händler in Ihrer Nähe.
nwrun
Nicht im Betrieb – – –Sie können Parameter nur bei gestopptem Motor ändern.
FehlerPar.
Es wurde ein falsches Passworteingegeben
– – –Tritt auf, wenn beim Versuch, einen passwortgeschütztenParameter zu ändern, ein falsches Passwort verwendetwird.
Tabelle 8.1 Liste der Warn- und Alarmcodes
1) Netzspannungsverzerrungen können diese Fehler verursachen. Der Einbau eines Danfoss-Netzfilters kann dieses Problem beheben.
Sie können die Alarmwörter, Warnwörter und erweiterten Zustandswörter zur Diagnose auslesen.
8.5 Fehlersuche und -behebung
Symptom Mögliche Ursache Test Lösung
Motor läuft nicht
LCP-StoppÜberprüfen Sie, ob die [Off ]-Tastebetätigt wurde.
Drücken Sie auf [Auto On] oder[Hand On] (je nach Betriebsart), umden Motor in Betrieb zu nehmen.
Fehlendes Startsignal (Standby)
Stellen Sie sicher, dassParameter 5-10 Klemme 18 Digital-eingang die richtige Einstellung fürKlemme 18 besitzt (verwenden Sie dieWerkseinstellung).
Legen Sie ein gültiges Startsignal an,um den Motor zu starten.
Motorfreilaufsignal aktiv (Freilauf )
Stellen Sie sicher, dassParameter 5-12 Terminal 27 DigitalInput die richtige Einstellung fürKlemme 27 besitzt (verwenden Sie dieWerkseinstellung).
Legen Sie 24 V an Klemme 27 anoder programmieren Sie dieseKlemme auf [0] Ohne Funktion.
Falsche Sollwertsignalquelle
Überprüfen Sie Folgendes:
• Ist das Sollwertsignal ein lokaler,Fern- oder Bussollwert?
• Ist der Festsollwert aktiv?
• Ist der Anschluss der Klemmenkorrekt?
• Ist die Skalierung der Klemmenkorrekt?
• Ist das Sollwertsignal verfügbar?
Programmieren Sie die richtigenEinstellungen. Setzen Sie denFestsollwert in Parametergruppe 3-1*Sollwerteinstellung auf aktiv. PrüfenSie, ob Frequenzumrichter und Motorrichtig verkabelt sind. Überprüfen Siedie Skalierung der Klemmen.Überprüfen Sie das Sollwertsignal:
Wartung, Diagnose und Fehle... VLT® Midi Drive FC 280
52 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
88
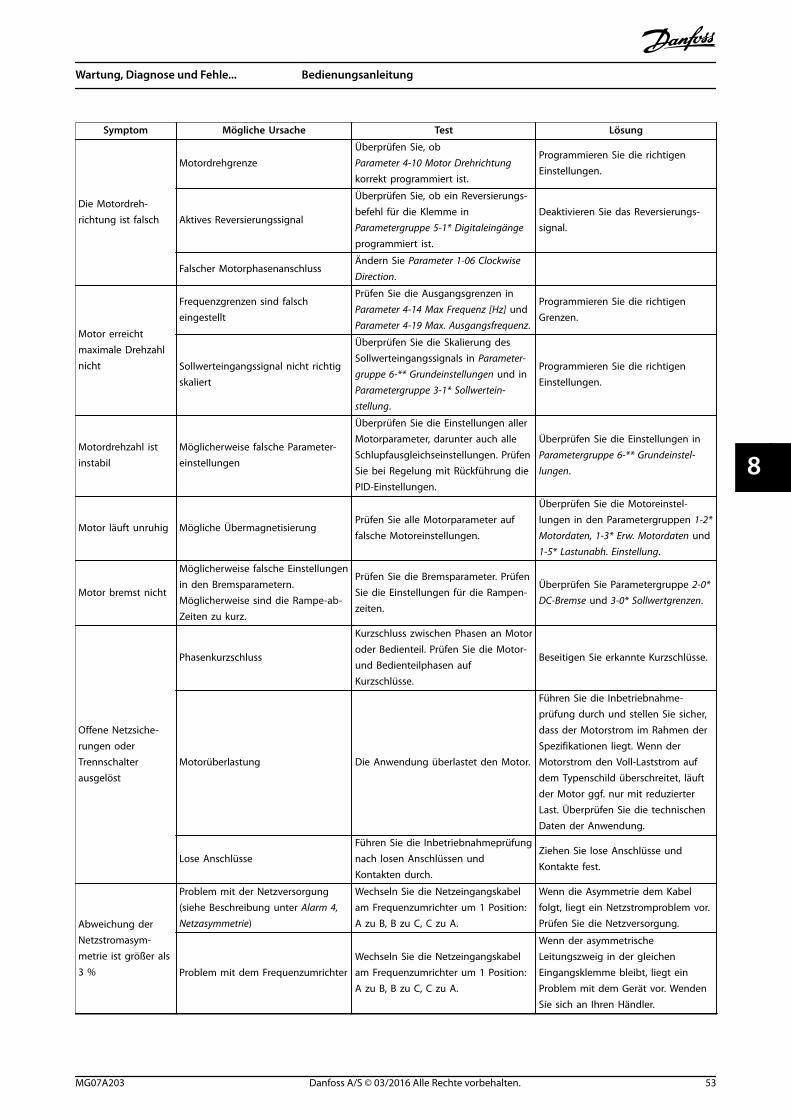
Symptom Mögliche Ursache Test Lösung
Die Motordreh-richtung ist falsch
MotordrehgrenzeÜberprüfen Sie, obParameter 4-10 Motor Drehrichtungkorrekt programmiert ist.
Programmieren Sie die richtigenEinstellungen.
Aktives Reversierungssignal
Überprüfen Sie, ob ein Reversierungs-befehl für die Klemme inParametergruppe 5-1* Digitaleingängeprogrammiert ist.
Deaktivieren Sie das Reversierungs-signal.
Falscher MotorphasenanschlussÄndern Sie Parameter 1-06 ClockwiseDirection.
Motor erreichtmaximale Drehzahlnicht
Frequenzgrenzen sind falscheingestellt
Prüfen Sie die Ausgangsgrenzen inParameter 4-14 Max Frequenz [Hz] undParameter 4-19 Max. Ausgangsfrequenz.
Programmieren Sie die richtigenGrenzen.
Sollwerteingangssignal nicht richtigskaliert
Überprüfen Sie die Skalierung desSollwerteingangssignals in Parameter-gruppe 6-** Grundeinstellungen und inParametergruppe 3-1* Sollwertein-stellung.
Programmieren Sie die richtigenEinstellungen.
Motordrehzahl istinstabil
Möglicherweise falsche Parameter-einstellungen
Überprüfen Sie die Einstellungen allerMotorparameter, darunter auch alleSchlupfausgleichseinstellungen. PrüfenSie bei Regelung mit Rückführung diePID-Einstellungen.
Überprüfen Sie die Einstellungen inParametergruppe 6-** Grundeinstel-lungen.
Motor läuft unruhig Mögliche ÜbermagnetisierungPrüfen Sie alle Motorparameter auffalsche Motoreinstellungen.
Überprüfen Sie die Motoreinstel-lungen in den Parametergruppen 1-2*Motordaten, 1-3* Erw. Motordaten und1-5* Lastunabh. Einstellung.
Motor bremst nicht
Möglicherweise falsche Einstellungenin den Bremsparametern.Möglicherweise sind die Rampe-ab-Zeiten zu kurz.
Prüfen Sie die Bremsparameter. PrüfenSie die Einstellungen für die Rampen-zeiten.
Überprüfen Sie Parametergruppe 2-0*DC-Bremse und 3-0* Sollwertgrenzen.
Offene Netzsiche-rungen oderTrennschalterausgelöst
Phasenkurzschluss
Kurzschluss zwischen Phasen an Motoroder Bedienteil. Prüfen Sie die Motor-und Bedienteilphasen aufKurzschlüsse.
Beseitigen Sie erkannte Kurzschlüsse.
Motorüberlastung Die Anwendung überlastet den Motor.
Führen Sie die Inbetriebnahme-prüfung durch und stellen Sie sicher,dass der Motorstrom im Rahmen derSpezifikationen liegt. Wenn derMotorstrom den Voll-Laststrom aufdem Typenschild überschreitet, läuftder Motor ggf. nur mit reduzierterLast. Überprüfen Sie die technischenDaten der Anwendung.
Lose AnschlüsseFühren Sie die Inbetriebnahmeprüfungnach losen Anschlüssen undKontakten durch.
Ziehen Sie lose Anschlüsse undKontakte fest.
Abweichung derNetzstromasym-metrie ist größer als3 %
Problem mit der Netzversorgung(siehe Beschreibung unter Alarm 4,Netzasymmetrie)
Wechseln Sie die Netzeingangskabelam Frequenzumrichter um 1 Position:A zu B, B zu C, C zu A.
Wenn die Asymmetrie dem Kabelfolgt, liegt ein Netzstromproblem vor.Prüfen Sie die Netzversorgung.
Problem mit dem FrequenzumrichterWechseln Sie die Netzeingangskabelam Frequenzumrichter um 1 Position:A zu B, B zu C, C zu A.
Wenn der asymmetrischeLeitungszweig in der gleichenEingangsklemme bleibt, liegt einProblem mit dem Gerät vor. WendenSie sich an Ihren Händler.
Wartung, Diagnose und Fehle... Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 53
8 8
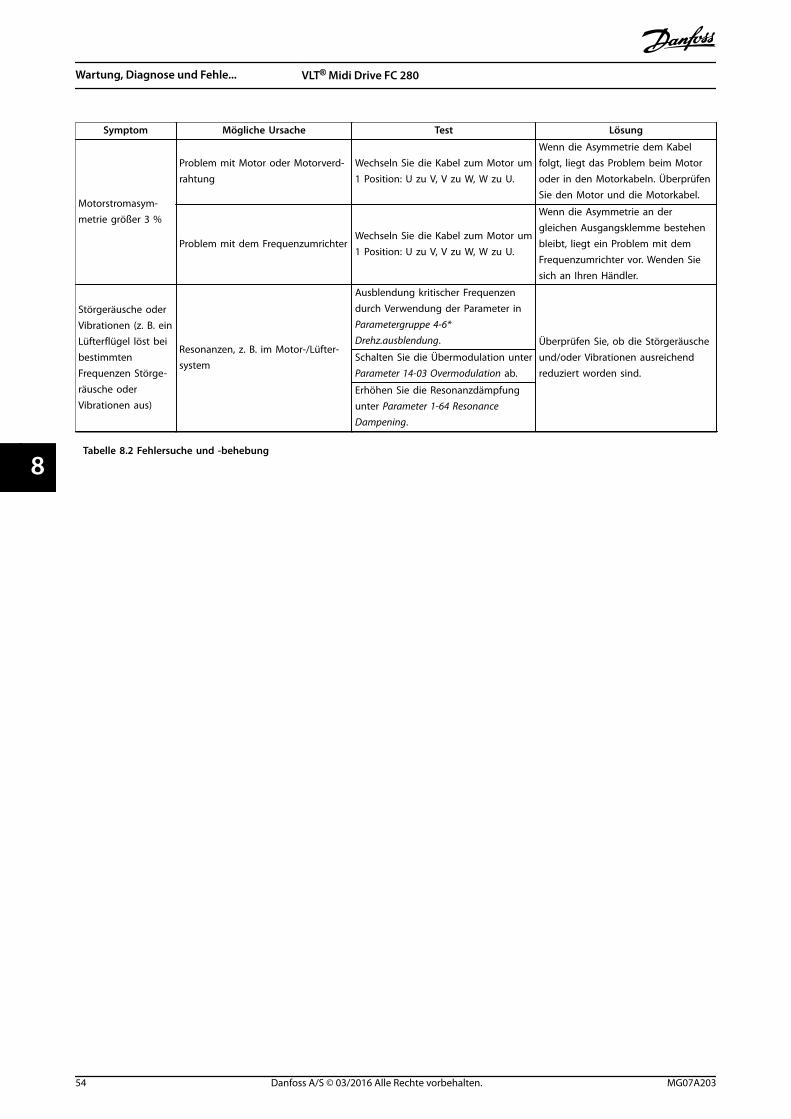
Symptom Mögliche Ursache Test Lösung
Motorstromasym-metrie größer 3 %
Problem mit Motor oder Motorverd-rahtung
Wechseln Sie die Kabel zum Motor um1 Position: U zu V, V zu W, W zu U.
Wenn die Asymmetrie dem Kabelfolgt, liegt das Problem beim Motoroder in den Motorkabeln. ÜberprüfenSie den Motor und die Motorkabel.
Problem mit dem FrequenzumrichterWechseln Sie die Kabel zum Motor um1 Position: U zu V, V zu W, W zu U.
Wenn die Asymmetrie an dergleichen Ausgangsklemme bestehenbleibt, liegt ein Problem mit demFrequenzumrichter vor. Wenden Siesich an Ihren Händler.
Störgeräusche oderVibrationen (z. B. einLüfterflügel löst beibestimmtenFrequenzen Störge-räusche oderVibrationen aus)
Resonanzen, z. B. im Motor-/Lüfter-system
Ausblendung kritischer Frequenzendurch Verwendung der Parameter inParametergruppe 4-6*Drehz.ausblendung. Überprüfen Sie, ob die Störgeräusche
und/oder Vibrationen ausreichendreduziert worden sind.
Schalten Sie die Übermodulation unterParameter 14-03 Overmodulation ab.
Erhöhen Sie die Resonanzdämpfungunter Parameter 1-64 ResonanceDampening.
Tabelle 8.2 Fehlersuche und -behebung
Wartung, Diagnose und Fehle... VLT® Midi Drive FC 280
54 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
88
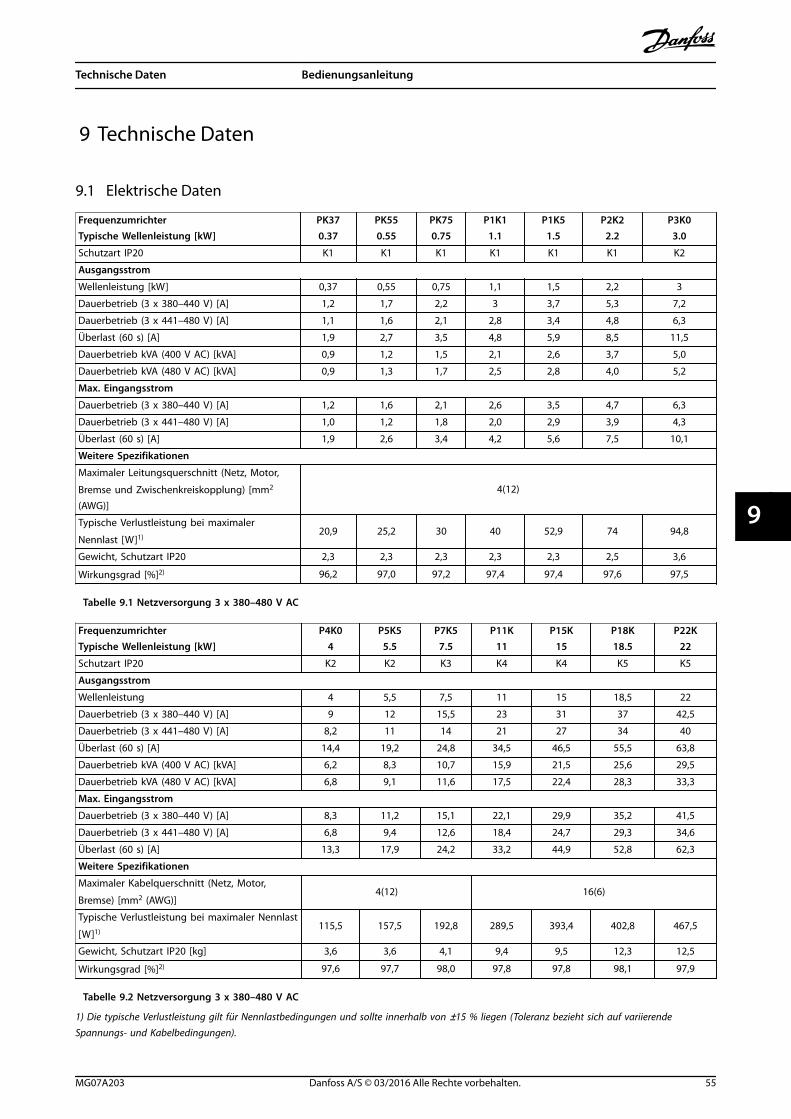
9 Technische Daten
9.1 Elektrische Daten
FrequenzumrichterTypische Wellenleistung [kW]
PK370.37
PK550.55
PK750.75
P1K11.1
P1K51.5
P2K22.2
P3K03.0
Schutzart IP20 K1 K1 K1 K1 K1 K1 K2
Ausgangsstrom
Wellenleistung [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Dauerbetrieb (3 x 380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Dauerbetrieb (3 x 441–480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Überlast (60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Dauerbetrieb kVA (400 V AC) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Dauerbetrieb kVA (480 V AC) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Dauerbetrieb (3 x 441–480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Überlast (60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz, Motor,
Bremse und Zwischenkreiskopplung) [mm2
(AWG)]
4(12)
Typische Verlustleistung bei maximaler
Nennlast [W]1)20,9 25,2 30 40 52,9 74 94,8
Gewicht, Schutzart IP20 2,3 2,3 2,3 2,3 2,3 2,5 3,6
Wirkungsgrad [%]2) 96,2 97,0 97,2 97,4 97,4 97,6 97,5
Tabelle 9.1 Netzversorgung 3 x 380–480 V AC
FrequenzumrichterTypische Wellenleistung [kW]
P4K04
P5K55.5
P7K57.5
P11K11
P15K15
P18K18.5
P22K22
Schutzart IP20 K2 K2 K3 K4 K4 K5 K5
Ausgangsstrom
Wellenleistung 4 5,5 7,5 11 15 18,5 22
Dauerbetrieb (3 x 380–440 V) [A] 9 12 15,5 23 31 37 42,5
Dauerbetrieb (3 x 441–480 V) [A] 8,2 11 14 21 27 34 40
Überlast (60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Dauerbetrieb kVA (400 V AC) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Dauerbetrieb kVA (480 V AC) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Dauerbetrieb (3 x 441–480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Überlast (60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Weitere Spezifikationen
Maximaler Kabelquerschnitt (Netz, Motor,
Bremse) [mm2 (AWG)]4(12) 16(6)
Typische Verlustleistung bei maximaler Nennlast
[W]1)115,5 157,5 192,8 289,5 393,4 402,8 467,5
Gewicht, Schutzart IP20 [kg] 3,6 3,6 4,1 9,4 9,5 12,3 12,5
Wirkungsgrad [%]2) 97,6 97,7 98,0 97,8 97,8 98,1 97,9
Tabelle 9.2 Netzversorgung 3 x 380–480 V AC
1) Die typische Verlustleistung gilt für Nennlastbedingungen und sollte innerhalb von ±15 % liegen (Toleranz bezieht sich auf variierendeSpannungs- und Kabelbedingungen).
Technische Daten Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 55
9 9
Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE2/IE3). Motoren mit niedrigerem Wirkungsgrad tragen ebenfalls zur Verlust-leistung im Frequenzumrichter bei, und Motoren mit hohem Wirkungsgrad reduzieren die Verlustleistung.Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Taktfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann dieVerlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer Steuerkarten sind eingeschlossen. Weitere Optionen undAnschlusslasten können die Verluste um bis zu 30 W erhöhen (typisch sind allerdings nur 4 W zusätzlich, bei einer vollständig belastetenSteuerkarte bzw. einem vollständig belasteten Feldbus).Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter www.danfoss.com/vltenergyefficiency.
2) Gemessen mit 50 m abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Die Energieeffizienzklasse finden Sie unter Kapitel 9.4 Umgebungsbedingungen. Für Teillastverluste siehe www.danfoss.com/vltenergyefficiency.
9.2 Netzversorgung (3 Phasen)
Netzversorgung (L1, L2, L3)Versorgungsklemmen L1, L2, L3Versorgungsspannung 380–480 V: -15% (-25%)1) bis +10%
1) Der Frequenzumrichter kann bei einer Eingangsspannung von -25 % mit reduzierter Leistung laufen. Die maximale Ausgangs-leistung des Frequenzumrichters beträgt 75 % bei einer Eingangsspannung von -25 % bzw. 85 % bei einer Eingangsspannungvon -15 %.Bei einer Netzspannung von weniger als 10 % unterhalb der niedrigsten Versorgungsnennspannung des Frequenzumrichters wirdkein volles Drehmoment erreicht.
Netzfrequenz 50/60 Hz ±5 %Maximale kurzzeitige Asymmetrie zwischen Netzphasen 3,0 % der VersorgungsnennspannungWirkleistungsfaktor (λ) ≥0,9 bei NennlastVerschiebungs-Leistungsfaktor (cos ϕ) Nahe 1 (>0,98)Schalten am Netzeingang L1, L2, L3 (Anzahl der Netz-Einschaltungen) ≤ 7,5 kW max. 2 x/Min.Schalten am Netzeingang L1, L2, L3 (Anzahl der Netz-Einschaltungen) 11-22 kW max. 1 x/Min.
Das Gerät eignet sich für Netzversorgungen, die maximal 5.000 Aeff (symmetrisch) bei maximal je 480 V liefern können.
9.3 Motorausgang und Motordaten
Motorausgang (U, V, W)Ausgangsspannung 0–100 % der VersorgungsspannungAusgangsfrequenz 0–500 HzAusgangsfrequenz bei VVC+-Betrieb 0–200 HzSchalten am Ausgang UnbegrenztRampenzeit 0,01–3600 s
DrehmomentkennlinieStartmoment (konstantes Drehmoment) maximal 160 %/60 s1)
Überlastmoment (konstantes Drehmoment) maximal 160 %/60 s1)
Anlaufstrom maximal 200 %/1 sDrehmomentanstiegzeit in VVC+-Modus (unabhängig von fsw) Maximal 50 ms
1) Prozentwert bezieht sich auf das Nenndrehmoment.
9.4 Umgebungsbedingungen
UmgebungsbedingungenSchutzart, Frequenzumrichter IP20/ChassisSchutzart, Umbausatz IP21Vibrationstest, alle Baugrößen 1,0 gLuftfeuchtigkeit 5–95 % (IEC 721-3-3; Klasse 3K3 (nicht kondensierend) bei Betrieb)Umgebungstemperatur (bei Schaltmodus DPWM)- mit Leistungsreduzierung Maximal 55 °C (131 °F)1)2)
- bei vollem konstanten Ausgangsstrom bei einigen Leistungsgrößen Maximal 50 °C (122 °F)
Technische Daten VLT® Midi Drive FC 280
56 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
99
- bei vollem konstanten Ausgangsstrom Maximal 45 °C (113 °F)Min. Umgebungstemperatur bei Volllast 0 °C (32 °F)Min. Umgebungstemperatur bei reduzierter Leistung -10 °C (14 °F)Temperatur bei Lagerung/Transport -25 bis +65/70 °C (-13 bis +149/158 °F)Max. Höhe über dem Meeresspiegel ohne Leistungsreduzierung 1000 m (3280 ft)Max. Höhe über dem Meeresspiegel mit Leistungsreduzierung 3000 m (9243 ft)
EMV-Normen, StöraussendungEN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EMV-Normen, StörfestigkeitEN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
Energieeffizienzklasse3) IE2
1) Siehe Abschnitt „Besondere Betriebsbedingungen“ im Projektierungshandbuch zur:
• Leistungsreduzierung aufgrund von hoher Umgebungstemperatur
• Leistungsreduzierung aufgrund von niedrigem Luftdruck
2) Für PROFIBUS-, PROFINET- und EtherNet/IP-Variante von VLT® Midi Drive FC 280, um eine Überhitzung der Steuerkarte zuverhindern, um eine volle Digital/Analog-I/O-Last bei einer Umgebungstemperatur von mehr als 45 °C zu vermeiden.3) Bestimmt gemäß EN 50598-2 bei:
• Nennlast
• 90 % der Nennfrequenz
• Schaltfrequenz-Werkseinstellung.
• Schaltmodus-Werkseinstellung
• Offener Typ: Umgebungslufttemperatur von 45 °C.
• Typ 1 (NEMA-Satz): Umgebungstemperatur von 45 °C.
9.5 Kabelspezifikationen
Kabellängen und Querschnitte1)
Maximale Motorkabellänge, mit Abschirmung 50 m (164 ft)Maximale Motorkabellänge, ohne Abschirmung 75 m (246 ft)Maximaler Querschnitt für Steuerklemmen, flexibler/starrer Draht 2,5 mm2/14 AWGMindestquerschnitt für Steuerklemmen 0,55 mm2/30 AWGMaximale STO-Eingangskabellänge, ungeschirmt 20 m
1) Leistungskabel, siehe Tabelle 9.1 und Tabelle 9.2.
9.6 Steuereingang/-ausgang und Steuerdaten
DigitaleingängeKlemme Nr. 18, 19, 271), 29, 32, 33Logik PNP oder NPNSpannungsniveau 0–24 V DCSpannungsniveau, logisch 0 PNP <5 V DCSpannungsniveau, logisch 1 PNP >10 V DCSpannungsniveau, logisch 0 NPN >19 V DCSpannungsniveau, logisch 1 NPN <14 V DCMaximale Spannung am Eingang 28 V DCPulsfrequenzbereich 4–32 kHz(Arbeitszyklus) minimale Pulsbreite 4,5 msEingangswiderstand, Ri Ca. 4 kΩ
1) Sie können die Klemme 27 auch als Ausgang programmieren.
Technische Daten Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 57
9 9
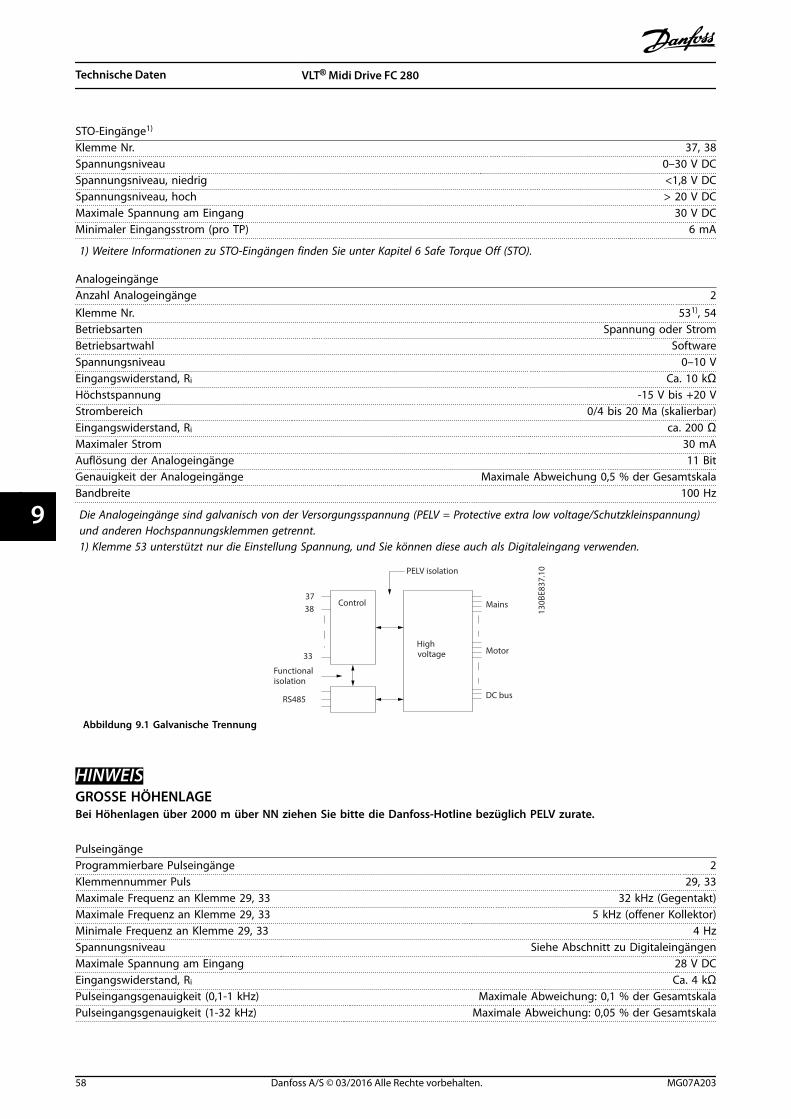
STO-Eingänge1)
Klemme Nr. 37, 38Spannungsniveau 0–30 V DCSpannungsniveau, niedrig <1,8 V DCSpannungsniveau, hoch > 20 V DCMaximale Spannung am Eingang 30 V DCMinimaler Eingangsstrom (pro TP) 6 mA
1) Weitere Informationen zu STO-Eingängen finden Sie unter Kapitel 6 Safe Torque Off (STO).
AnalogeingängeAnzahl Analogeingänge 2Klemme Nr. 531), 54Betriebsarten Spannung oder StromBetriebsartwahl SoftwareSpannungsniveau 0–10 VEingangswiderstand, Ri Ca. 10 kΩHöchstspannung -15 V bis +20 VStrombereich 0/4 bis 20 Ma (skalierbar)Eingangswiderstand, Ri ca. 200 ΩMaximaler Strom 30 mAAuflösung der Analogeingänge 11 BitGenauigkeit der Analogeingänge Maximale Abweichung 0,5 % der GesamtskalaBandbreite 100 Hz
Die Analogeingänge sind galvanisch von der Versorgungsspannung (PELV = Protective extra low voltage/Schutzkleinspannung)und anderen Hochspannungsklemmen getrennt.1) Klemme 53 unterstützt nur die Einstellung Spannung, und Sie können diese auch als Digitaleingang verwenden.
Mains
Functionalisolation
PELV isolation
Motor
DC bus
Highvoltage
Control37
RS485
38
33
130B
E837
.10
Abbildung 9.1 Galvanische Trennung
HINWEISGROSSE HÖHENLAGEBei Höhenlagen über 2000 m über NN ziehen Sie bitte die Danfoss-Hotline bezüglich PELV zurate.
PulseingängeProgrammierbare Pulseingänge 2Klemmennummer Puls 29, 33Maximale Frequenz an Klemme 29, 33 32 kHz (Gegentakt)Maximale Frequenz an Klemme 29, 33 5 kHz (offener Kollektor)Minimale Frequenz an Klemme 29, 33 4 HzSpannungsniveau Siehe Abschnitt zu DigitaleingängenMaximale Spannung am Eingang 28 V DCEingangswiderstand, Ri Ca. 4 kΩPulseingangsgenauigkeit (0,1-1 kHz) Maximale Abweichung: 0,1 % der GesamtskalaPulseingangsgenauigkeit (1-32 kHz) Maximale Abweichung: 0,05 % der Gesamtskala
Technische Daten VLT® Midi Drive FC 280
58 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
99
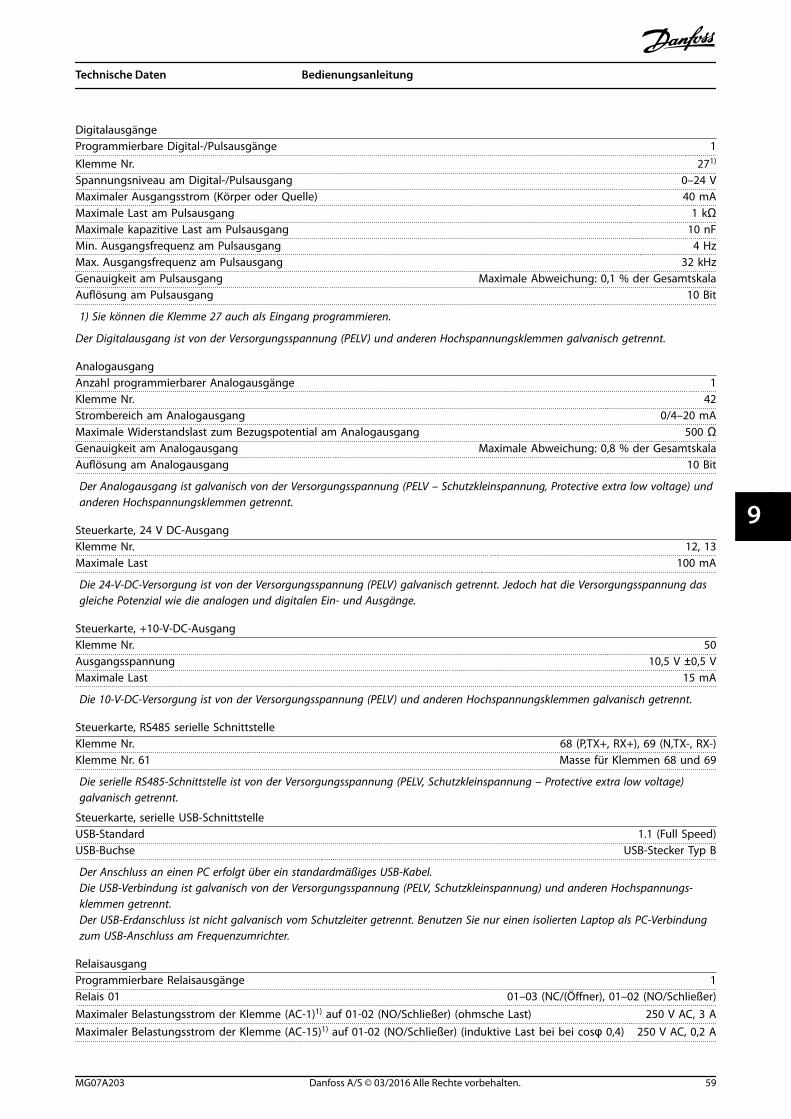
DigitalausgängeProgrammierbare Digital-/Pulsausgänge 1Klemme Nr. 271)
Spannungsniveau am Digital-/Pulsausgang 0–24 VMaximaler Ausgangsstrom (Körper oder Quelle) 40 mAMaximale Last am Pulsausgang 1 kΩMaximale kapazitive Last am Pulsausgang 10 nFMin. Ausgangsfrequenz am Pulsausgang 4 HzMax. Ausgangsfrequenz am Pulsausgang 32 kHzGenauigkeit am Pulsausgang Maximale Abweichung: 0,1 % der GesamtskalaAuflösung am Pulsausgang 10 Bit
1) Sie können die Klemme 27 auch als Eingang programmieren.
Der Digitalausgang ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
AnalogausgangAnzahl programmierbarer Analogausgänge 1Klemme Nr. 42Strombereich am Analogausgang 0/4–20 mAMaximale Widerstandslast zum Bezugspotential am Analogausgang 500 ΩGenauigkeit am Analogausgang Maximale Abweichung: 0,8 % der GesamtskalaAuflösung am Analogausgang 10 Bit
Der Analogausgang ist galvanisch von der Versorgungsspannung (PELV – Schutzkleinspannung, Protective extra low voltage) undanderen Hochspannungsklemmen getrennt.
Steuerkarte, 24 V DC-AusgangKlemme Nr. 12, 13Maximale Last 100 mA
Die 24-V-DC-Versorgung ist von der Versorgungsspannung (PELV) galvanisch getrennt. Jedoch hat die Versorgungsspannung dasgleiche Potenzial wie die analogen und digitalen Ein- und Ausgänge.
Steuerkarte, +10-V-DC-AusgangKlemme Nr. 50Ausgangsspannung 10,5 V ±0,5 VMaximale Last 15 mA
Die 10-V-DC-Versorgung ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
Steuerkarte, RS485 serielle SchnittstelleKlemme Nr. 68 (P,TX+, RX+), 69 (N,TX-, RX-)Klemme Nr. 61 Masse für Klemmen 68 und 69
Die serielle RS485-Schnittstelle ist von der Versorgungsspannung (PELV, Schutzkleinspannung – Protective extra low voltage)galvanisch getrennt.
Steuerkarte, serielle USB-Schnittstelle USB-Standard 1.1 (Full Speed)USB-Buchse USB-Stecker Typ B
Der Anschluss an einen PC erfolgt über ein standardmäßiges USB-Kabel.Die USB-Verbindung ist galvanisch von der Versorgungsspannung (PELV, Schutzkleinspannung) und anderen Hochspannungs-klemmen getrennt.Der USB-Erdanschluss ist nicht galvanisch vom Schutzleiter getrennt. Benutzen Sie nur einen isolierten Laptop als PC-Verbindungzum USB-Anschluss am Frequenzumrichter.
RelaisausgangProgrammierbare Relaisausgänge 1Relais 01 01–03 (NC/(Öffner), 01–02 (NO/Schließer)Maximaler Belastungsstrom der Klemme (AC-1)1) auf 01-02 (NO/Schließer) (ohmsche Last) 250 V AC, 3 AMaximaler Belastungsstrom der Klemme (AC-15)1) auf 01-02 (NO/Schließer) (induktive Last bei bei cosφ 0,4) 250 V AC, 0,2 A
Technische Daten Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 59
9 9
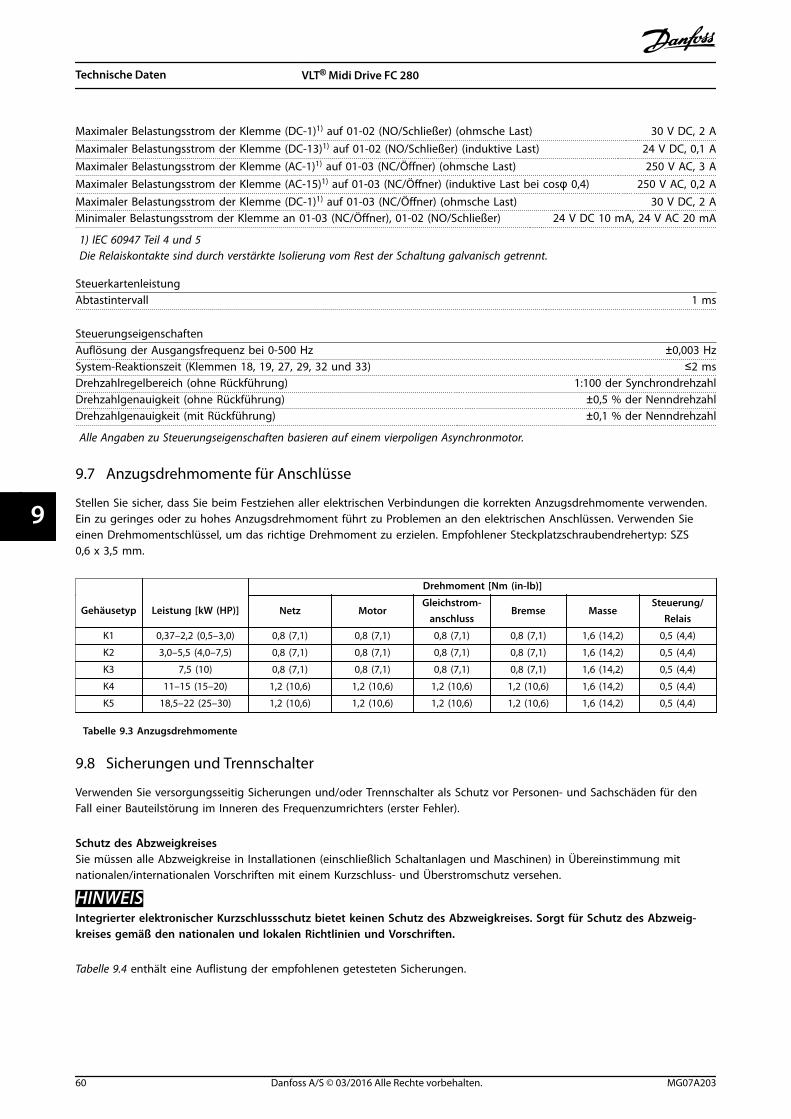
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 01-02 (NO/Schließer) (ohmsche Last) 30 V DC, 2 AMaximaler Belastungsstrom der Klemme (DC-13)1) auf 01-02 (NO/Schließer) (induktive Last) 24 V DC, 0,1 AMaximaler Belastungsstrom der Klemme (AC-1)1) auf 01-03 (NC/Öffner) (ohmsche Last) 250 V AC, 3 AMaximaler Belastungsstrom der Klemme (AC-15)1) auf 01-03 (NC/Öffner) (induktive Last bei cosφ 0,4) 250 V AC, 0,2 AMaximaler Belastungsstrom der Klemme (DC-1)1) auf 01-03 (NC/Öffner) (ohmsche Last) 30 V DC, 2 AMinimaler Belastungsstrom der Klemme an 01-03 (NC/Öffner), 01-02 (NO/Schließer) 24 V DC 10 mA, 24 V AC 20 mA
1) IEC 60947 Teil 4 und 5Die Relaiskontakte sind durch verstärkte Isolierung vom Rest der Schaltung galvanisch getrennt.
SteuerkartenleistungAbtastintervall 1 ms
SteuerungseigenschaftenAuflösung der Ausgangsfrequenz bei 0-500 Hz ±0,003 HzSystem-Reaktionszeit (Klemmen 18, 19, 27, 29, 32 und 33) ≤2 msDrehzahlregelbereich (ohne Rückführung) 1:100 der SynchrondrehzahlDrehzahlgenauigkeit (ohne Rückführung) ±0,5 % der NenndrehzahlDrehzahlgenauigkeit (mit Rückführung) ±0,1 % der Nenndrehzahl
Alle Angaben zu Steuerungseigenschaften basieren auf einem vierpoligen Asynchronmotor.
9.7 Anzugsdrehmomente für Anschlüsse
Stellen Sie sicher, dass Sie beim Festziehen aller elektrischen Verbindungen die korrekten Anzugsdrehmomente verwenden.Ein zu geringes oder zu hohes Anzugsdrehmoment führt zu Problemen an den elektrischen Anschlüssen. Verwenden Sieeinen Drehmomentschlüssel, um das richtige Drehmoment zu erzielen. Empfohlener Steckplatzschraubendrehertyp: SZS0,6 x 3,5 mm.
Drehmoment [Nm (in-lb)]
Gehäusetyp Leistung [kW (HP)] Netz MotorGleichstrom-
anschlussBremse Masse
Steuerung/Relais
K1 0,37–2,2 (0,5–3,0) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,5 (4,4)
K2 3,0–5,5 (4,0–7,5) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,5 (4,4)
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,5 (4,4)
K4 11–15 (15–20) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,5 (4,4)
K5 18,5–22 (25–30) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,5 (4,4)
Tabelle 9.3 Anzugsdrehmomente
9.8 Sicherungen und Trennschalter
Verwenden Sie versorgungsseitig Sicherungen und/oder Trennschalter als Schutz vor Personen- und Sachschäden für denFall einer Bauteilstörung im Inneren des Frequenzumrichters (erster Fehler).
Schutz des AbzweigkreisesSie müssen alle Abzweigkreise in Installationen (einschließlich Schaltanlagen und Maschinen) in Übereinstimmung mitnationalen/internationalen Vorschriften mit einem Kurzschluss- und Überstromschutz versehen.
HINWEISIntegrierter elektronischer Kurzschlussschutz bietet keinen Schutz des Abzweigkreises. Sorgt für Schutz des Abzweig-kreises gemäß den nationalen und lokalen Richtlinien und Vorschriften.
Tabelle 9.4 enthält eine Auflistung der empfohlenen getesteten Sicherungen.
Technische Daten VLT® Midi Drive FC 280
60 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
99
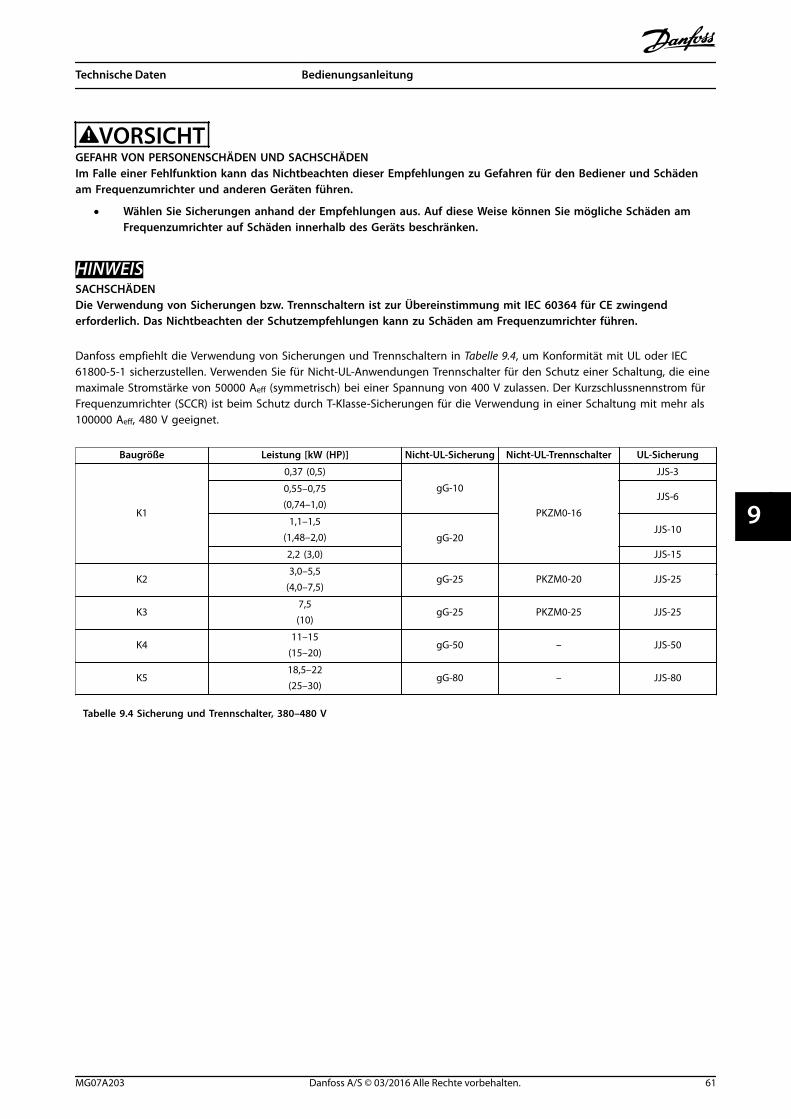
VORSICHTGEFAHR VON PERSONENSCHÄDEN UND SACHSCHÄDENIm Falle einer Fehlfunktion kann das Nichtbeachten dieser Empfehlungen zu Gefahren für den Bediener und Schädenam Frequenzumrichter und anderen Geräten führen.
• Wählen Sie Sicherungen anhand der Empfehlungen aus. Auf diese Weise können Sie mögliche Schäden amFrequenzumrichter auf Schäden innerhalb des Geräts beschränken.
HINWEISSACHSCHÄDENDie Verwendung von Sicherungen bzw. Trennschaltern ist zur Übereinstimmung mit IEC 60364 für CE zwingenderforderlich. Das Nichtbeachten der Schutzempfehlungen kann zu Schäden am Frequenzumrichter führen.
Danfoss empfiehlt die Verwendung von Sicherungen und Trennschaltern in Tabelle 9.4, um Konformität mit UL oder IEC61800-5-1 sicherzustellen. Verwenden Sie für Nicht-UL-Anwendungen Trennschalter für den Schutz einer Schaltung, die einemaximale Stromstärke von 50000 Aeff (symmetrisch) bei einer Spannung von 400 V zulassen. Der Kurzschlussnennstrom fürFrequenzumrichter (SCCR) ist beim Schutz durch T-Klasse-Sicherungen für die Verwendung in einer Schaltung mit mehr als100000 Aeff, 480 V geeignet.
Baugröße Leistung [kW (HP)] Nicht-UL-Sicherung Nicht-UL-Trennschalter UL-Sicherung
K1
0,37 (0,5)
gG-10
PKZM0-16
JJS-3
0,55–0,75(0,74–1,0)
JJS-6
1,1–1,5(1,48–2,0) gG-20
JJS-10
2,2 (3,0) JJS-15
K23,0–5,5
(4,0–7,5)gG-25 PKZM0-20 JJS-25
K37,5(10)
gG-25 PKZM0-25 JJS-25
K411–15
(15–20)gG-50 – JJS-50
K518,5–22(25–30)
gG-80 – JJS-80
Tabelle 9.4 Sicherung und Trennschalter, 380–480 V
Technische Daten Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 61
9 9
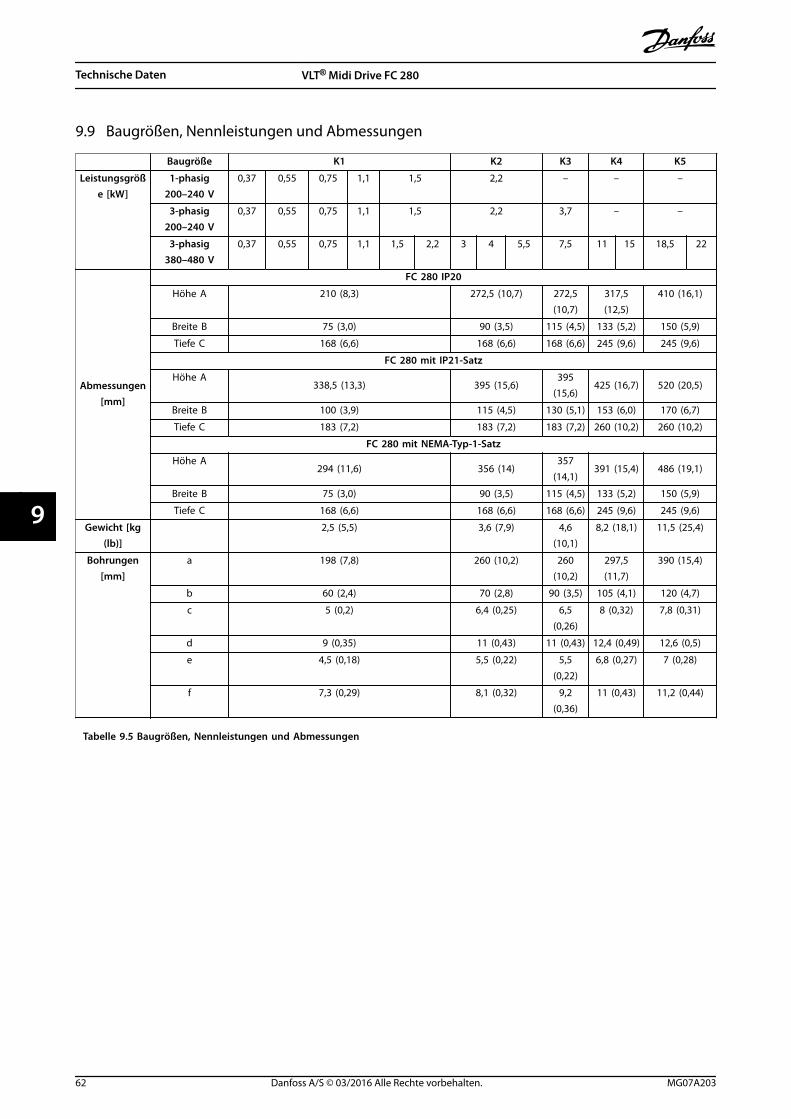
9.9 Baugrößen, Nennleistungen und Abmessungen
Baugröße K1 K2 K3 K4 K5
Leistungsgröße [kW]
1-phasig200–240 V
0,37 0,55 0,75 1,1 1,5 2,2 – – –
3-phasig200–240 V
0,37 0,55 0,75 1,1 1,5 2,2 3,7 – –
3-phasig380–480 V
0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5 11 15 18,5 22
Abmessungen[mm]
FC 280 IP20
Höhe A 210 (8,3) 272,5 (10,7) 272,5(10,7)
317,5(12,5)
410 (16,1)
Breite B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Tiefe C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
FC 280 mit IP21-Satz
Höhe A338,5 (13,3) 395 (15,6)
395(15,6)
425 (16,7) 520 (20,5)
Breite B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Tiefe C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
FC 280 mit NEMA-Typ-1-Satz
Höhe A294 (11,6) 356 (14)
357(14,1)
391 (15,4) 486 (19,1)
Breite B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Tiefe C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Gewicht [kg(lb)]
2,5 (5,5) 3,6 (7,9) 4,6(10,1)
8,2 (18,1) 11,5 (25,4)
Bohrungen[mm]
a 198 (7,8) 260 (10,2) 260(10,2)
297,5(11,7)
390 (15,4)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25) 6,5(0,26)
8 (0,32) 7,8 (0,31)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22) 5,5(0,22)
6,8 (0,27) 7 (0,28)
f 7,3 (0,29) 8,1 (0,32) 9,2(0,36)
11 (0,43) 11,2 (0,44)
Tabelle 9.5 Baugrößen, Nennleistungen und Abmessungen
Technische Daten VLT® Midi Drive FC 280
62 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
99
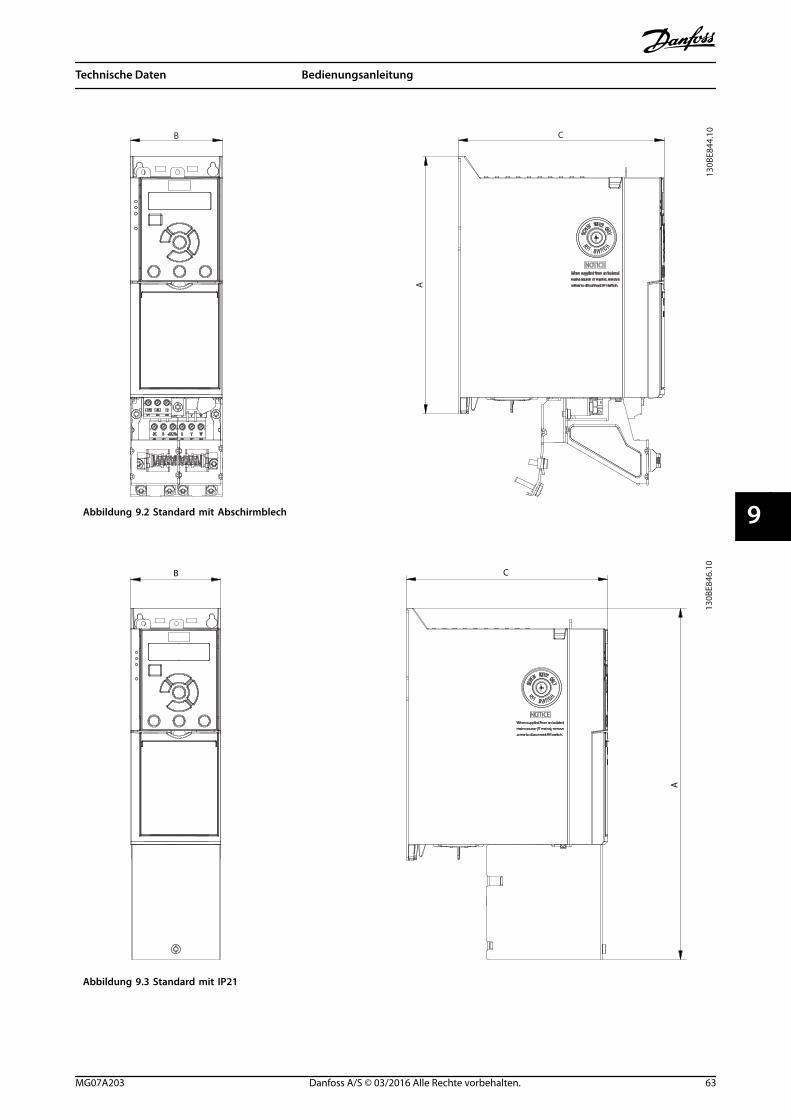
130B
E844
.10
B C
A
Abbildung 9.2 Standard mit Abschirmblech
130B
E846
.10
B
A
C
Abbildung 9.3 Standard mit IP21
Technische Daten Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 63
9 9
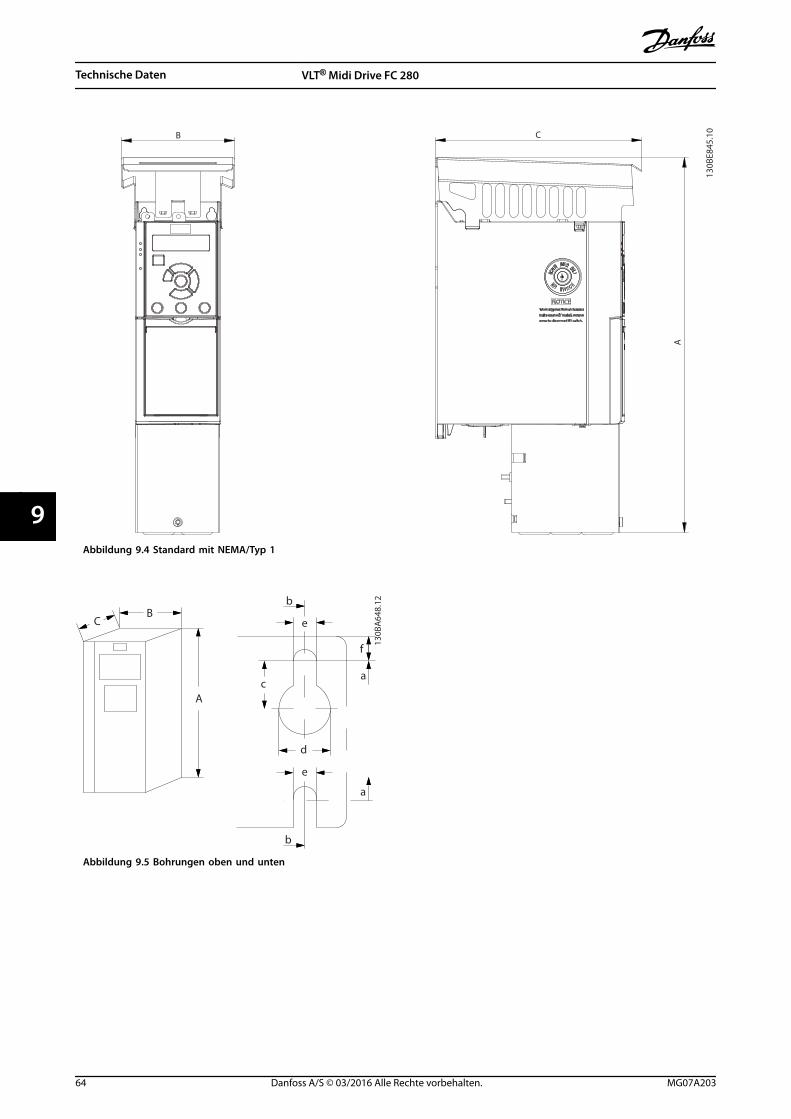
B C
A
130B
E845
.10
Abbildung 9.4 Standard mit NEMA/Typ 1
C
a
b
130B
A64
8.12
f
e
B
A
a
d
e
b
c
Abbildung 9.5 Bohrungen oben und unten
Technische Daten VLT® Midi Drive FC 280
64 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
99
10 Anhang
10.1 Symbole, Abkürzungen und Konventionen
°C Grad Celsius
AC Wechselstrom
AEO Automatische Energieoptimierung
AWG American Wire Gauge = Amerikanisches Drahtmaß
AMA Automatische Motoranpassung
DC Gleichstrom
EMV Elektromagnetische Verträglichkeit
ETR Elektronisches Thermorelais
fM,N Motornennfrequenz
FC Frequenzumrichter
IINV Wechselrichter-Nennausgangsstrom
ILIM Stromgrenze
IM,N Motornennstrom
IVLT,MAX Maximaler Ausgangsstrom
IVLT,N Vom Frequenzumrichter gelieferter Ausgangsnennstrom
IP Schutzart
LCP Local Control Panel (LCP Bedieneinheit)
MCT Motion Control Tool
ns Synchrone Motordrehzahl
PM,N Motornennleistung
PELV PELV (Schutzkleinspannung - Protective Extra Low Voltage)
PCB Leiterplatte
PM-Motor Permanentmagnetmotor
PWM Pulsbreitenmodulation (Pulse Width Modulation)
U/min Umdrehungen pro Minute
STO Safe Torque Off
TLIM Drehmomentgrenze
UM,N Motornennspannung
Tabelle 10.1 Symbole und Abkürzungen
Konventionen
• Für Abbildungen sind alle Abmessungen in [mm] angegeben.
• Ein Sternchen (*) kennzeichnet die Werkseinstellung eines Parameters.
• Nummerierte Listen zeigen Vorgehensweisen.
• Aufzählungslisten enthalten andere Informationen.
• Kursivschrift bedeutet:
- Querverweise.
- Link.
- Parametername
10.2 Aufbau der Parametermenüs
Anhang Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 65
10 10
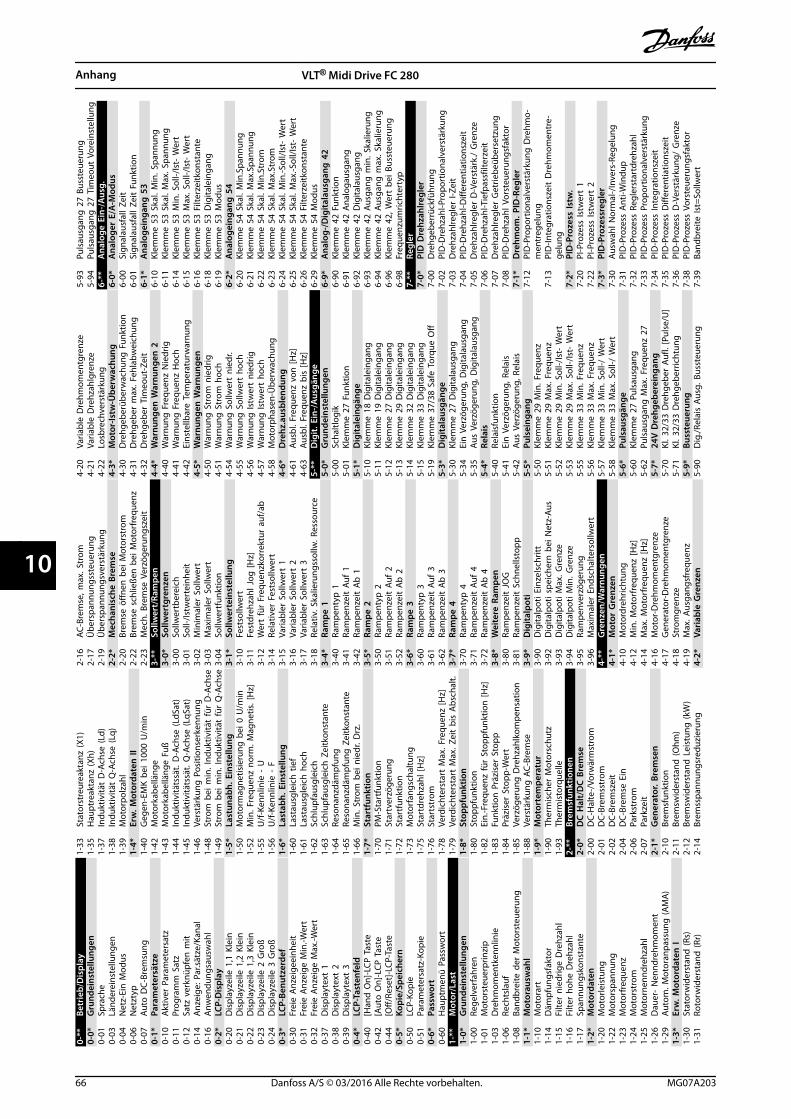
0-**
Betr
ieb/
Dis
play
0-0*
Gru
ndei
nste
llung
en0-
01Sp
rach
e0-
03Lä
nder
eins
tellu
ngen
0-04
Net
z-Ei
n M
odus
0-06
Net
ztyp
0-07
Auto
DC-
Brem
sung
0-1*
Para
met
ersä
tze
0-10
Akt
iver
Par
amet
ersa
tz0-
11Pr
ogra
mm
Sat
z0-
12Sa
tz v
erkn
üpfe
n m
it0-
14A
nzei
ge: P
ar.s
ätze
/Kan
al0-
16A
nwen
dung
saus
wah
l0-
2*LC
P-D
ispl
ay0-
20D
ispl
ayze
ile 1
,1 K
lein
0-21
Dis
play
zeile
1,2
Kle
in0-
22D
ispl
ayze
ile 1
,3 K
lein
0-23
Dis
play
zeile
2 G
roß
0-24
Dis
play
zeile
3 G
roß
0-3*
LCP-
Benu
tzer
def
0-30
Frei
e A
nzei
geei
nhei
t0-
31Fr
eie
Anz
eige
Min
.-Wer
t0-
32Fr
eie
Anz
eige
Max
.-Wer
t0-
37D
ispl
ayte
xt 1
0-38
Dis
play
text
20-
39D
ispl
ayte
xt 3
0-4*
LCP-
Tast
enfe
ld0-
40[H
and
On]
-LCP
Tas
te0-
42[A
uto
On]
-LCP
Tas
te0-
44[O
ff/Re
set]
-LCP
-Tas
te0-
5*Ko
pie/
Spei
cher
n0-
50LC
P-Ko
pie
0-51
Para
met
ersa
tz-K
opie
0-6*
Pass
wor
t0-
60H
aupt
men
ü P
assw
ort
1-**
Mot
or/L
ast
1-0*
Gru
ndei
nste
llung
en1-
00Re
gelv
erfa
hren
1-01
Mot
orst
euer
prin
zip
1-03
Dre
hmom
entk
ennl
inie
1-06
Rech
tsla
uf1-
08Ba
ndbr
eite
der
Mot
orst
euer
ung
1-1*
Mot
orau
swah
l1-
10M
otor
art
1-14
Däm
pfun
gsfa
ktor
1-15
Filte
r ni
edrig
e D
rehz
ahl
1-16
Filte
r ho
he D
rehz
ahl
1-17
Span
nung
skon
stan
te1-
2*M
otor
date
n1-
20M
otor
leis
tung
1-22
Mot
orsp
annu
ng1-
23M
otor
freq
uenz
1-24
Mot
orst
rom
1-25
Mot
orne
nndr
ehza
hl1-
26D
auer
- N
ennd
rehm
omen
t1-
29Au
tom
. Mot
oran
pass
ung
(AM
A)
1-3*
Erw
. Mot
orda
ten
I1-
30St
ator
wid
erst
and
(Rs)
1-31
Roto
rwid
erst
and
(Rr)
1-33
Stat
orst
reur
eakt
anz
(X1)
1-35
Hau
ptre
akta
nz (X
h)1-
37In
dukt
ivitä
t D
-Ach
se (L
d)1-
38In
dukt
ivitä
t Q
-Ach
se (L
q)1-
39M
otor
polz
ahl
1-4*
Erw
. Mot
orda
ten
II1-
40G
egen
-EM
K b
ei 1
000
U/m
in1-
42M
otor
kabe
lläng
e1-
43M
otor
kabe
lläng
e Fu
ß1-
44In
dukt
ivitä
tssä
t. D
-Ach
se (L
dSat
)1-
45In
dukt
ivitä
tssä
t. Q
-Ach
se (L
qSat
)1-
46Ve
rstä
rkun
g P
ositi
onse
rken
nung
1-48
Stro
m b
ei m
in. I
nduk
tivitä
t fü
r D
-Ach
se1-
49St
rom
bei
min
. Ind
uktiv
ität
für
Q-A
chse
1-5*
Last
unab
h. E
inst
ellu
ng1-
50M
otor
mag
netis
ieru
ng b
ei 0
U/m
in1-
52M
in. F
requ
enz
norm
. Mag
netis
. [H
z]1-
55U
/f-K
ennl
inie
- U
1-56
U/f
-Ken
nlin
ie -
F1-
6*La
stab
h. E
inst
ellu
ng1-
60La
stau
sgle
ich
tie
f1-
61La
stau
sgle
ich
hoc
h1-
62Sc
hlup
faus
glei
ch1-
63Sc
hlup
faus
glei
ch Z
eitk
onst
ante
1-64
Reso
nanz
däm
pfun
g1-
65Re
sona
nzdä
mpf
ung
Zei
tkon
stan
te1-
66M
in. S
trom
bei
nie
dr. D
rz.
1-7*
Star
tfun
ktio
n1-
70PM
-Sta
rtfu
nktio
n1-
71St
artv
erzö
geru
ng1-
72St
artf
unkt
ion
1-73
Mot
orfa
ngsc
haltu
ng1-
75St
artd
rehz
ahl [
Hz]
1-76
Star
tstr
om1-
78Ve
rdic
hter
star
t M
ax. F
requ
enz
[Hz]
1-79
Verd
icht
erst
art
Max
. Zei
t bi
s A
bsch
alt.
1-8*
Stop
pfun
ktio
n1-
80St
oppf
unkt
ion
1-82
Ein.
-Fre
quen
z fü
r St
oppf
unkt
ion
[Hz]
1-83
Funk
tion
Prä
zise
r St
opp
1-84
Präz
iser
Sto
pp-W
ert
1-85
Verz
öger
ung
Dre
hzah
lkom
pens
atio
n1-
88Ve
rstä
rkun
g A
C-Br
emse
1-9*
Mot
orte
mpe
ratu
r1-
90Th
erm
isch
er M
otor
schu
tz1-
93Th
erm
isto
rque
lle2-
**Br
emsf
unkt
ione
n2-
0*D
C H
alt/
DC
Bre
mse
2-00
DC-
Hal
te-/
Vorw
ärm
stro
m2-
01D
C-Br
emss
trom
2-02
DC-
Brem
szei
t2-
04D
C-Br
emse
Ein
2-06
Park
stro
m2-
07Pa
rkze
it2-
1*G
ener
ator
. Bre
mse
n2-
10Br
emsf
unkt
ion
2-11
Brem
swid
erst
and
(Ohm
)2-
12Br
emsw
ider
stan
d L
eist
ung
(kW
)2-
14Br
emss
pann
ungs
redu
zier
ung
2-16
AC-B
rem
se, m
ax. S
trom
2-17
Übe
rspa
nnun
gsst
euer
ung
2-19
Übe
rspa
nnun
gsve
rstä
rkun
g2-
2*M
echa
nisc
he B
rem
se2-
20Br
emse
öffn
en b
ei M
otor
stro
m2-
22Br
emse
sch
ließe
n b
ei M
otor
freq
uenz
2-23
Mec
h. B
rem
se V
erzö
geru
ngsz
eit
3-**
Sollw
ert/
Ram
pen
3-0*
Sollw
ertg
renz
en3-
00So
llwer
tber
eich
3-01
Soll-
/Istw
erte
inhe
it3-
02M
inim
aler
Sol
lwer
t3-
03M
axim
aler
Sol
lwer
t3-
04So
llwer
tfun
ktio
n3-
1*So
llwer
tein
stel
lung
3-10
Fest
sollw
ert
3-11
Fest
dreh
zahl
Jog
[Hz]
3-12
Wer
t fü
r Fr
eque
nzko
rrek
tur
auf/
ab3-
14Re
lativ
er F
ests
ollw
ert
3-15
Varia
bler
Sol
lwer
t 1
3-16
Varia
bler
Sol
lwer
t 2
3-17
Varia
bler
Sol
lwer
t 3
3-18
Rela
tiv. S
kalie
rung
ssol
lw. R
esso
urce
3-4*
Ram
pe 1
3-40
Ram
pent
yp 1
3-41
Ram
penz
eit
Auf
13-
42Ra
mpe
nzei
t A
b 1
3-5*
Ram
pe 2
3-50
Ram
pent
yp 2
3-51
Ram
penz
eit
Auf
23-
52Ra
mpe
nzei
t A
b 2
3-6*
Ram
pe 3
3-60
Ram
pent
yp 3
3-61
Ram
penz
eit
Auf
33-
62Ra
mpe
nzei
t A
b 3
3-7*
Ram
pe 4
3-70
Ram
pent
yp 4
3-71
Ram
penz
eit
Auf
43-
72Ra
mpe
nzei
t A
b 4
3-8*
Wei
tere
Ram
pen
3-80
Ram
penz
eit
JOG
3-81
Ram
penz
eit
Schn
ells
topp
3-9*
Dig
italp
oti
3-90
Dig
italp
oti E
inze
lsch
ritt
3-92
Dig
italp
oti s
peic
hern
bei
Net
z-Au
s3-
93D
igita
lpot
i Max
. Gre
nze
3-94
Dig
italp
oti M
in. G
renz
e3-
95Ra
mpe
nver
zöge
rung
3-96
Max
imal
er E
ndsc
halte
rsol
lwer
t4-
**G
renz
en/W
arnu
ngen
4-1*
Mot
or G
renz
en4-
10M
otor
dreh
richt
ung
4-12
Min
. Mot
orfr
eque
nz [H
z]4-
14M
ax. M
otor
freq
uenz
[Hz]
4-16
Mot
or-D
rehm
omen
tgre
nze
4-17
Gen
erat
or-D
rehm
omen
tgre
nze
4-18
Stro
mgr
enze
4-19
Max
. Aus
gang
sfre
quen
z4-
2*Va
riab
le G
renz
en
4-20
Varia
ble
Dre
hmom
entg
renz
e4-
21Va
riabl
e D
rehz
ahlg
renz
e4-
22Lo
sbre
chve
rstä
rkun
g4-
3*M
otor
-Istw
-Übe
rwac
hung
4-30
Dre
hgeb
erüb
erw
achu
ng F
unkt
ion
4-31
Dre
hgeb
er m
ax. F
ehla
bwei
chun
g4-
32D
rehg
eber
Tim
eout
-Zei
t4-
4*W
arnu
ngen
War
nung
en 2
4-40
War
nung
Fre
quen
z N
iedr
ig4-
41W
arnu
ng F
requ
enz
Hoc
h4-
42Ei
nste
llbar
e Te
mpe
ratu
rwar
nung
4-5*
War
nung
en W
arnu
ngen
4-50
War
nung
Str
om n
iedr
ig4-
51W
arnu
ng S
trom
hoc
h4-
54W
arnu
ng S
ollw
ert
nied
r.4-
55W
arnu
ng S
ollw
ert
hoch
4-56
War
nung
Istw
ert
nied
rig4-
57W
arnu
ng Is
twer
t ho
ch4-
58M
otor
phas
en-Ü
berw
achu
ng4-
6*D
rehz
.aus
blen
dung
4-61
Ausb
l. Fr
eque
nz v
on [H
z]4-
63Au
sbl.
Freq
uenz
bis
[Hz]
5-**
Dig
it. E
in-/
Aus
gäng
e5-
0*G
rund
eins
tellu
ngen
5-00
Scha
ltlog
ik5-
01Kl
emm
e 27
Fun
ktio
n5-
1*D
igita
lein
gäng
e5-
10Kl
emm
e 18
Dig
itale
inga
ng5-
11Kl
emm
e 19
Dig
itale
inga
ng5-
12Kl
emm
e 27
Dig
itale
inga
ng5-
13Kl
emm
e 29
Dig
itale
inga
ng5-
14Kl
emm
e 32
Dig
itale
inga
ng5-
15Kl
emm
e 33
Dig
itale
inga
ng5-
19Kl
emm
e 37
/38
Safe
Tor
que
Off
5-3*
Dig
itala
usgä
nge
5-30
Klem
me
27 D
igita
laus
gang
5-34
Ein
Ver
zöge
rung
, Dig
itala
usga
ng5-
35Au
s Ve
rzög
erun
g, D
igita
laus
gang
5-4*
Rela
is5-
40Re
lais
funk
tion
5-41
Ein
Ver
zöge
rung
, Rel
ais
5-42
Aus
Verz
öger
ung,
Rel
ais
5-5*
Puls
eing
ang
5-50
Klem
me
29 M
in. F
requ
enz
5-51
Klem
me
29 M
ax. F
requ
enz
5-52
Klem
me
29 M
in. S
oll-/
Ist-
Wer
t5-
53Kl
emm
e 29
Max
. Sol
l-/Is
t- W
ert
5-55
Klem
me
33 M
in. F
requ
enz
5-56
Klem
me
33 M
ax. F
requ
enz
5-57
Klem
me
33 M
in. S
oll-/
Wer
t5-
58Kl
emm
e 33
Max
. Sol
l-/ W
ert
5-6*
Puls
ausg
änge
5-60
Klem
me
27 P
ulsa
usga
ng5-
62Pu
lsau
sgan
g M
ax. F
requ
enz
275-
7*24
V D
rehg
eber
eing
ang
5-70
Kl. 3
2/33
Dre
hgeb
er A
ufl.
[Pul
se/U
]5-
71Kl
. 32/
33 D
rehg
eber
richt
ung
5-9*
Buss
teue
rung
5-90
Dig
./Rel
ais
Ausg
. Bus
steu
erun
g
5-93
Puls
ausg
ang
27
Buss
teue
rung
5-94
Puls
ausg
ang
27
Tim
eout
Vor
eins
tellu
ng6-
**A
nalo
ge E
in-/
Aus
g.6-
0*A
nalo
ger
E/A
-Mod
us6-
00Si
gnal
ausf
all Z
eit
6-01
Sign
alau
sfal
l Zei
t Fu
nktio
n6-
1*A
nalo
gein
gang
53
6-10
Klem
me
53 S
kal.
Min
. Spa
nnun
g6-
11Kl
emm
e 53
Ska
l. M
ax. S
pann
ung
6-14
Klem
me
53 M
in. S
oll-/
Ist-
Wer
t6-
15Kl
emm
e 53
Max
. Sol
l-/Is
t- W
ert
6-16
Klem
me
53 F
ilter
zeitk
onst
ante
6-18
Klem
me
53 D
igita
lein
gang
6-19
Klem
me
53 M
odus
6-2*
Ana
loge
inga
ng 5
46-
20Kl
emm
e 54
Ska
l. M
in.S
pann
ung
6-21
Klem
me
54 S
kal.
Max
.Spa
nnun
g6-
22Kl
emm
e 54
Ska
l. M
in.S
trom
6-23
Klem
me
54 S
kal.
Max
.Str
om6-
24Kl
emm
e 54
Ska
l. M
in.-S
oll/I
st-
Wer
t6-
25Kl
emm
e 54
Ska
l. M
ax.-S
oll/I
st-
Wer
t6-
26Kl
emm
e 54
Filt
erze
itkon
stan
te6-
29Kl
emm
e 54
Mod
us6-
9*A
nalo
g-/D
igita
laus
gang
42
6-90
Klem
me
42 F
unkt
ion
6-91
Klem
me
42 A
nalo
gaus
gang
6-92
Klem
me
42 D
igita
laus
gang
6-93
Klem
me
42 A
usga
ng m
in. S
kalie
rung
6-94
Klem
me
42 A
usga
ng m
ax. S
kalie
rung
6-96
Klem
me
42, W
ert
bei B
usst
euer
ung
6-98
Freq
uenz
umric
hter
typ
7-**
Regl
er7-
0*PI
D D
rehz
ahlre
gler
7-00
Dre
hgeb
errü
ckfü
hrun
g7-
02PI
D-D
rehz
ahl-P
ropo
rtio
nalv
erst
ärku
ng7-
03D
rehz
ahlre
gler
I-Ze
it7-
04PI
D-D
rehz
ahl-D
iffer
entia
tions
zeit
7-05
Dre
hzah
lregl
er D
-Ver
stär
k./
Gre
nze
7-06
PID
-Dre
hzah
l-Tie
fpas
sfilt
erze
it7-
07D
rehz
ahlre
gler
Get
riebe
über
setz
ung
7-08
PID
-Dre
hzah
l Vor
steu
erun
gsfa
ktor
7-1*
Dre
hmom
. PID
-Reg
ler
7-12
PID
-Pro
port
iona
lver
stär
kung
Dre
hmo-
men
treg
elun
g7-
13PI
D-In
tegr
atio
nsze
it D
rehm
omen
tre-
gelu
ng7-
2*PI
D-P
roze
ss Is
tw.
7-20
PI-P
roze
ss Is
twer
t 1
7-22
PI-P
roze
ss Is
twer
t 2
7-3*
PID
-Pro
zess
regl
er7-
30Au
swah
l Nor
mal
-/In
vers
-Reg
elun
g7-
31PI
D-P
roze
ss A
nti-W
indu
p7-
32PI
D-P
roze
ss R
egle
rsta
rtdr
ehza
hl7-
33PI
D-P
roze
ss P
ropo
rtio
nalv
erst
ärku
ng7-
34PI
D-P
roze
ss In
tegr
atio
nsze
it7-
35PI
D-P
roze
ss D
iffer
entia
tions
zeit
7-36
PID
-Pro
zess
D-V
erst
ärku
ng/
Gre
nze
7-38
PID
-Pro
zess
Vor
steu
erun
gsfa
ktor
7-39
Band
brei
te Is
t=So
llwer
t
Anhang VLT® Midi Drive FC 280
66 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
1010
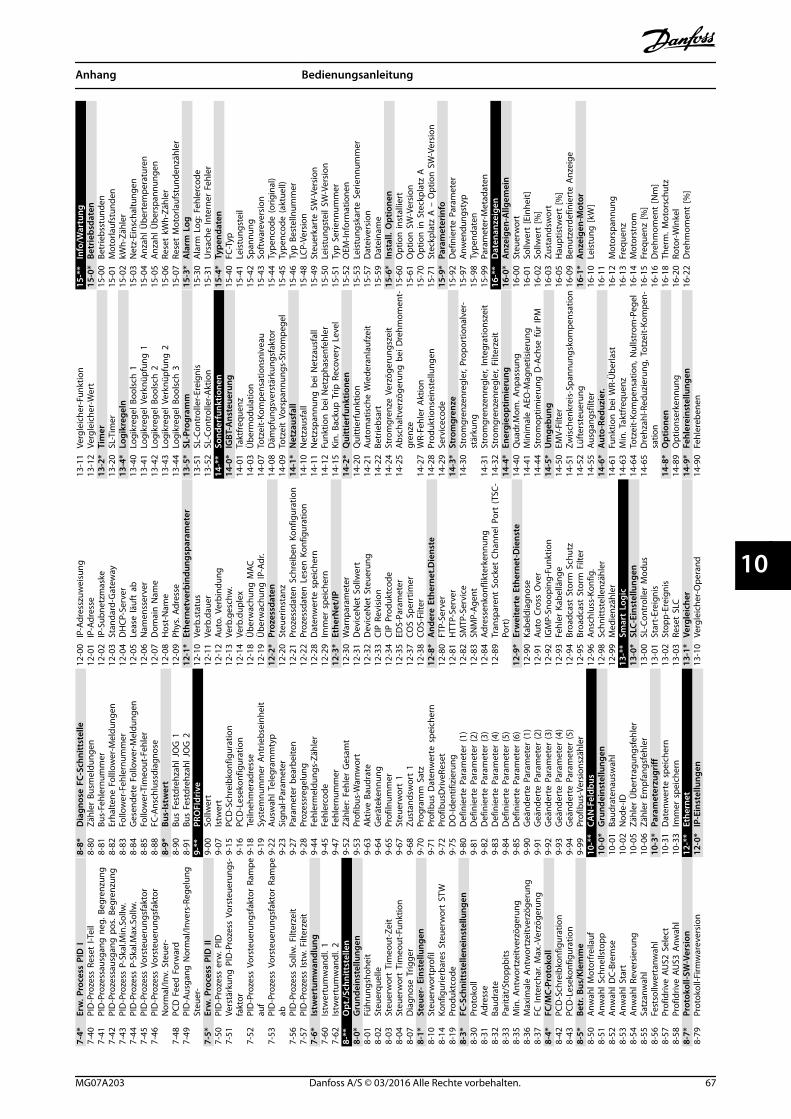
7-4*
Erw
. Pro
cess
PID
I7-
40PI
D-P
roze
ss R
eset
I-Te
il7-
41PI
D-P
roze
ssau
sgan
g n
eg. B
egre
nzun
g7-
42PI
D-P
roze
ssau
sgan
g p
os. B
egre
nzun
g7-
43PI
D-P
roze
ss P
-Ska
l.Min
.Sol
lw.
7-44
PID
-Pro
zess
P-S
kal.M
ax.S
ollw
.7-
45PI
D-P
roze
ss V
orst
euer
ungs
fakt
or7-
46PI
D-P
roze
ss V
orst
euer
ungs
fakt
orN
orm
al/In
v. S
teue
r-7-
48PC
D F
eed
For
war
d7-
49PI
D-A
usga
ng N
orm
al/In
vers
-Reg
elun
gSt
euer
-7-
5*Er
w. P
roce
ss P
ID II
7-50
PID
-Pro
zess
erw
. PID
7-51
Vers
tärk
ung
PID
-Pro
zess
Vor
steu
erun
gs-
fakt
or7-
52PI
D-P
roze
ss V
orst
euer
ungs
fakt
or R
ampe
auf
7-53
PID
-Pro
zess
Vor
steu
erun
gsfa
ktor
Ram
peab
7-56
PID
-Pro
zess
Sol
lw. F
ilter
zeit
7-57
PID
-Pro
zess
Istw
. Filt
erze
it7-
6*Is
twer
tum
wan
dlun
g7-
60Is
twer
tum
wan
dl. 1
7-62
Istw
ertu
mw
andl
. 28-
**O
pt./S
chni
ttst
elle
n8-
0*G
rund
eins
tellu
ngen
8-01
Führ
ungs
hohe
it8-
02St
euer
quel
le8-
03St
euer
wor
t Ti
meo
ut-Z
eit
8-04
Steu
erw
ort
Tim
eout
-Fun
ktio
n8-
07D
iagn
ose
Trig
ger
8-1*
Steu
er-
Eins
tellu
ngen
8-10
Steu
erw
ortp
rofil
8-14
Konf
igur
ierb
ares
Ste
uerw
ort
STW
8-19
Prod
uktc
ode
8-3*
FC-S
chni
ttst
elle
nein
stel
lung
en8-
30Pr
otok
oll
8-31
Adre
sse
8-32
Baud
rate
8-33
Parit
ät/S
topp
bits
8-35
Min
. Ant
wor
tzei
tver
zöge
rung
8-36
Max
imal
e A
ntw
ortz
eitv
erzö
geru
ng8-
37FC
Inte
rcha
r. M
ax.-V
erzö
geru
ng8-
4*FC
/MC-
Prot
okol
l8-
42PC
D-S
chre
ibko
nfig
urat
ion
8-43
PCD
-Les
ekon
figur
atio
n8-
5*Be
tr. B
us/K
lem
me
8-50
Anw
ahl M
otor
frei
lauf
8-51
Anw
ahl S
chne
llsto
pp8-
52A
nwah
l DC-
Brem
se8-
53A
nwah
l Sta
rt8-
54A
nwah
l Rev
ersi
erun
g8-
55Sa
tzan
wah
l8-
56Fe
stso
llwer
tanw
ahl
8-57
Prof
idriv
e AU
S2 S
elec
t8-
58Pr
ofid
rive
AUS3
Anw
ahl
8-7*
Prot
okol
l-SW
-Ver
sion
8-79
Prot
okol
l-Firm
war
ever
sion
8-8*
Dia
gnos
e FC
-Sch
nitt
stel
le8-
80Zä
hler
Bus
mel
dung
en8-
81Bu
s-Fe
hler
num
mer
8-82
Erha
ltene
Fol
llow
er-M
eldu
ngen
8-83
Follo
wer
-Feh
lern
umm
er8-
84G
esen
dete
Fol
low
er-M
eldu
ngen
8-85
Follo
wer
-Tim
eout
-Feh
ler
8-88
FC-A
nsch
luss
diag
nose
8-9*
Bus-
Istw
ert
8-90
Bus
Fest
dreh
zahl
JO
G 1
8-91
Bus
Fest
dreh
zahl
JO
G 2
9-**
PRO
FIdr
ive
9-00
Sollw
ert
9-07
Istw
ert
9-15
PCD
-Sch
reib
konf
igur
atio
n9-
16PC
D-L
esek
onfig
urat
ion
9-18
Teiln
ehm
erad
ress
e9-
19Sy
stem
num
mer
Ant
riebs
einh
eit
9-22
Ausw
ahl T
eleg
ram
mty
p9-
23Si
gnal
-Par
amet
er9-
27Pa
ram
eter
bea
rbei
ten
9-28
Proz
essr
egel
ung
9-44
Fehl
erm
eldu
ngs-
Zähl
er9-
45Fe
hler
code
9-47
Fehl
ernu
mm
er9-
52Zä
hler
: Feh
ler
Ges
amt
9-53
Prof
ibus
-War
nwor
t9-
63A
ktiv
e Ba
udra
te9-
64G
erät
eken
nung
9-65
Prof
ilnum
mer
9-67
Steu
erw
ort
19-
68Zu
stan
dsw
ort
19-
70Pr
ogra
mm
Sat
z9-
71Pr
ofib
us D
aten
wer
te s
peic
hern
9-72
Prof
ibus
Driv
eRes
et9-
75D
O-Id
entif
izie
rung
9-80
Def
inie
rte
Para
met
er (1
)9-
81D
efin
iert
e Pa
ram
eter
(2)
9-82
Def
inie
rte
Para
met
er (3
)9-
83D
efin
iert
e Pa
ram
eter
(4)
9-84
Def
inie
rte
Para
met
er (5
)9-
85D
efin
iert
e Pa
ram
eter
(6)
9-90
Geä
nder
te P
aram
eter
(1)
9-91
Geä
nder
te P
aram
eter
(2)
9-92
Geä
nder
te P
aram
eter
(3)
9-93
Geä
nder
te P
aram
eter
(4)
9-94
Geä
nder
te P
aram
eter
(5)
9-99
Prof
ibus
-Ver
sion
szäh
ler
10-*
*CA
N-F
eldb
us10
-0*
Gru
ndei
nste
llung
en10
-01
Baud
rate
naus
wah
l10
-02
Nod
e-ID
10-0
5Zä
hler
Übe
rtra
gung
sfeh
ler
10-0
6Zä
hler
Em
pfan
gsfe
hler
10-3
*Pa
ram
eter
zugr
iff10
-31
Dat
enw
erte
spe
iche
rn10
-33
Imm
er s
peic
hern
12-*
*Et
hern
et12
-0*
IP-E
inst
ellu
ngen
12-0
0IP
-Adr
essz
uwei
sung
12-0
1IP
-Adr
esse
12-0
2IP
-Sub
netz
mas
ke12
-03
Stan
dard
-Gat
eway
12-0
4D
HCP
-Ser
ver
12-0
5Le
ase
läuf
t ab
12-0
6N
amen
sser
ver
12-0
7D
omai
n N
ame
12-0
8H
ost-
Nam
e12
-09
Phys
. Adr
esse
12-1
*Et
hern
etve
rbin
dung
spar
amet
er12
-10
Verb
.sta
tus
12-1
1Ve
rb.d
auer
12-1
2Au
to. V
erbi
ndun
g12
-13
Verb
.ges
chw
.12
-14
Verb
.dup
lex
12-1
8Ü
berw
achu
ng M
AC12
-19
Übe
rwac
hung
IP-A
dr.
12-2
*Pr
ozes
sdat
en12
-20
Steu
erin
stan
z12
-21
Proz
essd
aten
Sch
reib
en K
onfig
urat
ion
12-2
2Pr
ozes
sdat
en L
esen
Kon
figur
atio
n12
-28
Dat
enw
erte
spe
iche
rn12
-29
Imm
er s
peic
hern
12-3
*Et
herN
et/IP
12-3
0W
arnp
aram
eter
12-3
1D
evic
eNet
Sol
lwer
t12
-32
Dev
iceN
et S
teue
rung
12-3
3CI
P R
evis
ion
12-3
4CI
P P
rodu
ktco
de12
-35
EDS-
Para
met
er12
-37
COS
Sper
rtim
er12
-38
COS-
Filte
r12
-8*
And
ere
Ethe
rnet
.Die
nste
12-8
0FT
P-Se
rver
12-8
1H
TTP-
Serv
er12
-82
SMTP
-Ser
vice
12-8
3SN
MP-
Agen
t12
-84
Adre
ssen
konf
likte
rken
nung
12-8
9Tr
ansp
aren
t So
cket
Cha
nnel
Por
t (T
SC-
Port
)12
-9*
Erw
eite
rte
Ethe
rnet
-Die
nste
12-9
0Ka
beld
iagn
ose
12-9
1Au
to C
ross
Ove
r12
-92
IGM
P-Sn
oopi
ng-F
unkt
ion
12-9
3Fe
hler
Kab
ellä
nge
12-9
4Br
oadc
ast
Stor
m S
chut
z12
-95
Broa
dcas
t St
orm
Filt
er12
-96
Ans
chlu
ss-K
onfig
.12
-98
Schn
ittst
elle
nzäh
ler
12-9
9M
edie
nzäh
ler
13-*
*Sm
art
Logi
c13
-0*
SLC-
Eins
tellu
ngen
13-0
0SL
-Con
trol
ler
Mod
us13
-01
Star
t-Er
eign
is13
-02
Stop
p-Er
eign
is13
-03
Rese
t SL
C13
-1*
Verg
leic
her
13-1
0Ve
rgle
iche
r-O
pera
nd
13-1
1Ve
rgle
iche
r-Fu
nktio
n13
-12
Verg
leic
her-
Wer
t13
-2*
Tim
er13
-20
SL-T
imer
13-4
*Lo
gikr
egel
n13
-40
Logi
kreg
el B
ools
ch 1
13-4
1Lo
gikr
egel
Ver
knüp
fung
113
-42
Logi
kreg
el B
ools
ch 2
13-4
3Lo
gikr
egel
Ver
knüp
fung
213
-44
Logi
kreg
el B
ools
ch 3
13-5
*SL
-Pro
gram
m13
-51
SL-C
ontr
olle
r-Er
eign
is13
-52
SL-C
ontr
olle
r-A
ktio
n14
-**
Sond
erfu
nktio
nen
14-0
*IG
BT-A
nste
ueru
ng14
-01
Takt
freq
uenz
14-0
3Ü
berm
odul
atio
n14
-07
Totz
eit-
Kom
pens
atio
nsni
veau
14-0
8D
ämpf
ungs
vers
tärk
ungs
fakt
or14
-09
Totz
eit
Vors
pann
ungs
-Str
ompe
gel
14-1
*N
etza
usfa
ll14
-10
Net
zaus
fall
14-1
1N
etzs
pann
ung
bei
Net
zaus
fall
14-1
2Fu
nktio
n b
ei N
etzp
hase
nfeh
ler
14-1
5Ki
n. B
acku
p T
rip R
ecov
ery
Leve
l14
-2*
Qui
ttie
rfun
ktio
nen
14-2
0Q
uitt
ierf
unkt
ion
14-2
1Au
tom
atis
che
Wie
dera
nlau
fzei
t14
-22
Betr
iebs
art
14-2
4St
rom
gren
ze V
erzö
geru
ngsz
eit
14-2
5A
bsch
altv
erzö
geru
ng b
ei D
rehm
omen
t-gr
enze
14-2
7W
R-Fe
hler
Akt
ion
14-2
8Pr
oduk
tions
eins
tellu
ngen
14-2
9Se
rvic
ecod
e14
-3*
Stro
mgr
enze
14-3
0St
rom
gren
zenr
egle
r, Pr
opor
tiona
lver
-st
ärku
ng14
-31
Stro
mgr
enze
nreg
ler,
Inte
grat
ions
zeit
14-3
2St
rom
gren
zenr
egle
r, Fi
lterz
eit
14-4
*En
ergi
eopt
imie
rung
14-4
0Q
uadr
.Mom
. Anp
assu
ng14
-41
Min
imal
e A
EO-M
agne
tisie
rung
14-4
4St
rom
optim
ieru
ng D
-Ach
se fü
r IP
M14
-5*
Um
gebu
ng14
-50
EMV-
Filte
r14
-51
Zwis
chen
krei
s-Sp
annu
ngsk
ompe
nsat
ion
14-5
2Lü
fter
steu
erun
g14
-55
Ausg
angs
filte
r14
-6*
Aut
o-Re
duzi
er.
14-6
1Fu
nktio
n b
ei W
R-Ü
berla
st14
-63
Min
. Tak
tfre
quen
z14
-64
Totz
eit-
Kom
pens
atio
n, N
ulls
trom
-Peg
el14
-65
Dre
hzah
l-Red
uzie
rung
, Tot
zeit-
Kom
pen-
satio
n14
-8*
Opt
ione
n14
-89
Opt
ions
erke
nnun
g14
-9*
Fehl
erei
nste
llung
en14
-90
Fehl
ereb
enen
15-*
*In
fo/W
artu
ng15
-0*
Betr
iebs
date
n15
-00
Betr
iebs
stun
den
15-0
1M
otor
lauf
stun
den
15-0
2kW
h-Zä
hler
15-0
3N
etz-
Eins
chal
tung
en15
-04
Anz
ahl Ü
bert
empe
ratu
ren
15-0
5A
nzah
l Übe
rspa
nnun
gen
15-0
6Re
set
kWh-
Zähl
er15
-07
Rese
t M
otor
lauf
stun
denz
ähle
r15
-3*
Ala
rm L
og15
-30
Ala
rm L
og: F
ehle
rcod
e15
-31
Urs
ache
Inte
rner
Feh
ler
15-4
*Ty
pend
aten
15-4
0FC
-Typ
15-4
1Le
istu
ngst
eil
15-4
2Sp
annu
ng15
-43
Soft
war
ever
sion
15-4
4Ty
penc
ode
(orig
inal
)15
-45
Type
ncod
e (a
ktue
ll)15
-46
Typ
Bes
telln
umm
er15
-48
LCP-
Vers
ion
15-4
9St
euer
kart
e SW
-Ver
sion
15-5
0Le
istu
ngst
eil S
W-V
ersi
on15
-51
Typ
Ser
ienn
umm
er15
-52
OEM
-Info
rmat
ione
n15
-53
Leis
tung
skar
te S
erie
nnum
mer
15-5
7D
atei
vers
ion
15-5
9D
atei
nam
e15
-6*
Inst
all.
Opt
ione
n15
-60
Opt
ion
inst
allie
rt15
-61
Opt
ion
SW
-Ver
sion
15-7
0O
ptio
n in
Ste
ckpl
atz
A15
-71
Stec
kpla
tz A
– O
ptio
n S
W-V
ersi
on15
-9*
Para
met
erin
fo15
-92
Def
inie
rte
Para
met
er15
-97
Anw
endu
ngst
yp15
-98
Type
ndat
en15
-99
Para
met
er-M
etad
aten
16-*
*D
aten
anze
igen
16-0
*A
nzei
gen-
Allg
emei
n16
-00
Steu
erw
ort
16-0
1So
llwer
t [E
inhe
it]16
-02
Sollw
ert
[%]
16-0
3Zu
stan
dsw
ort
16-0
5H
aupt
istw
ert
[%]
16-0
9Be
nutz
erde
finie
rte
Anz
eige
16-1
*A
nzei
gen-
Mot
or16
-10
Leis
tung
[kW
]16
-11
16-1
2M
otor
span
nung
16-1
3Fr
eque
nz16
-14
Mot
orst
rom
16-1
5Fr
eque
nz [%
]16
-16
Dre
hmom
ent
[Nm
]16
-18
Ther
m. M
otor
schu
tz16
-20
Roto
r-W
inke
l16
-22
Dre
hmom
ent
[%]
Anhang Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 67
10 10
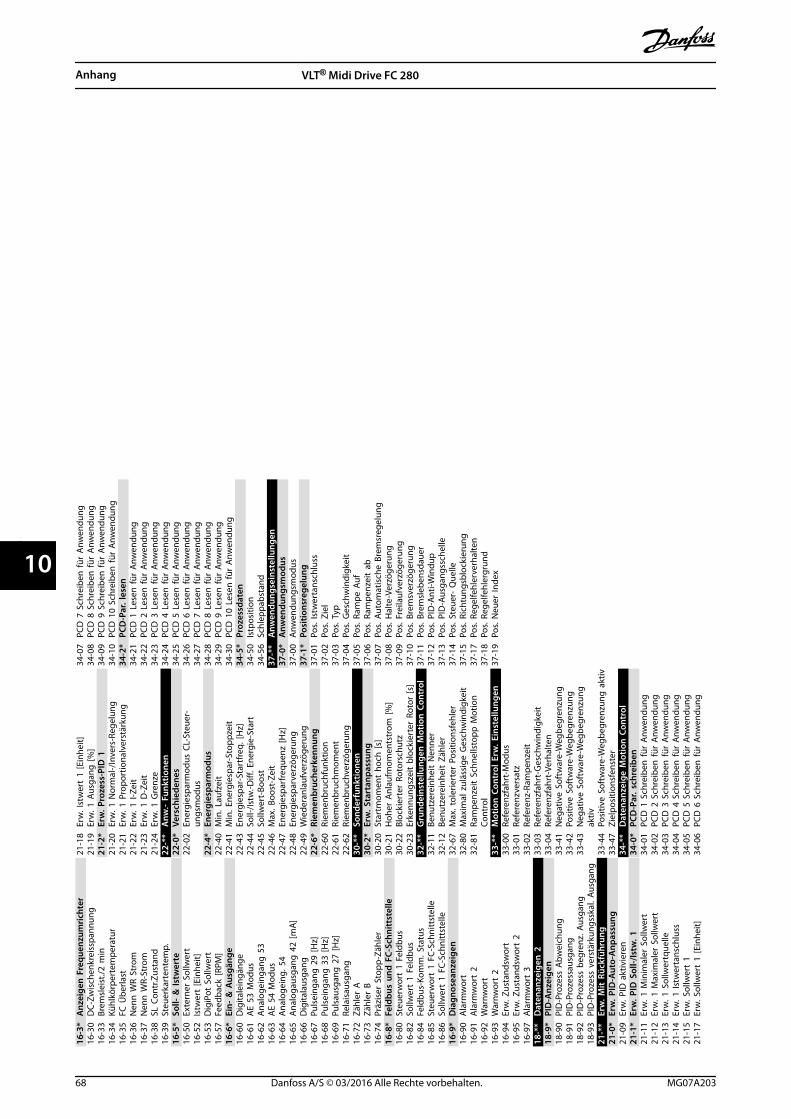
16-3
*A
nzei
gen
Fre
quen
zum
rich
ter
16-3
0D
C-Zw
isch
enkr
eiss
pann
ung
16-3
3Br
emsl
eist
./2 m
in16
-34
Kühl
körp
erte
mpe
ratu
r16
-35
FC Ü
berla
st16
-36
Nen
n W
R S
trom
16-3
7N
enn
WR-
Stro
m16
-38
SL C
ontr
.Zus
tand
16-3
9St
euer
kart
ente
mp.
16-5
*So
ll- &
Istw
erte
16-5
0Ex
tern
er S
ollw
ert
16-5
2Is
twer
t [E
inhe
it]16
-53
Dig
iPot
Sol
lwer
t16
-57
Feed
back
[RPM
]16
-6*
Ein-
& A
usgä
nge
16-6
0D
igita
lein
gäng
e16
-61
AE
53 M
odus
16-6
2A
nalo
gein
gang
53
16-6
3A
E 54
Mod
us16
-64
Ana
loge
ing.
54
16-6
5A
nalo
gaus
gang
42
[mA
]16
-66
Dig
itala
usga
ng16
-67
Puls
eing
ang
29
[Hz]
16-6
8Pu
lsei
ngan
g 3
3 [H
z]16
-69
Puls
ausg
ang
27
[Hz]
16-7
1Re
lais
ausg
ang
16-7
2Zä
hler
A16
-73
Zähl
er B
16-7
4Pr
äzis
er S
topp
-Zäh
ler
16-8
*Fe
ldbu
s un
d F
C-Sc
hnitt
stel
le16
-80
Steu
erw
ort
1 Fe
ldbu
s16
-82
Sollw
ert
1 Fe
ldbu
s16
-84
Feld
bus-
Kom
m. S
tatu
s16
-85
Steu
erw
ort
1 FC
-Sch
nitt
stel
le16
-86
Sollw
ert
1 FC
-Sch
nitt
stel
le16
-9*
Dia
gnos
eanz
eige
n16
-90
Ala
rmw
ort
16-9
1A
larm
wor
t 2
16-9
2W
arnw
ort
16-9
3W
arnw
ort
216
-94
Erw
. Zus
tand
swor
t16
-95
Erw
. Zus
tand
swor
t 2
16-9
7A
larm
wor
t 3
18-*
*D
aten
anze
igen
218
-9*
PID
-Anz
eige
n18
-90
PID
-Pro
zess
Abw
eich
ung
18-9
1PI
D-P
roze
ssau
sgan
g18
-92
PID
-Pro
zess
beg
renz
. Aus
gang
18-9
3PI
D-P
roze
ss v
erst
ärku
ngss
kal.
Ausg
ang
21-*
*Er
w. M
it R
ückf
ühru
ng21
-0*
Erw
. PID
-Aut
o-A
npas
sung
21-0
9Er
w. P
ID a
ktiv
iere
n21
-1*
Erw
. PID
Sol
l-/Is
tw. 1
21-1
1Er
w. 1
Min
imal
er S
ollw
ert
21-1
2Er
w. 1
Max
imal
er S
ollw
ert
21-1
3Er
w. 1
Sol
lwer
tque
lle21
-14
Erw
. 1 Is
twer
tans
chlu
ss21
-15
Erw
. Sol
lwer
t 1
21-1
7Er
w. S
ollw
ert
1 [E
inhe
it]
21-1
8Er
w. I
stw
ert
1 [E
inhe
it]21
-19
Erw
. 1 A
usga
ng [%
]21
-2*
Erw
. Pro
zess
-PID
121
-20
Erw
. 1 N
orm
al-/
Inve
rs-R
egel
ung
21-2
1Er
w. 1
Pro
port
iona
lver
stär
kung
21-2
2Er
w. 1
I-Ze
it21
-23
Erw
. 1 D
-Zei
t21
-24
Erw
. 1 G
renz
e22
-**
Anw
.- F
unkt
ione
n22
-0*
Vers
chie
dene
s22
-02
Ener
gies
parm
odus
CL-
Steu
er-
ungs
mod
us22
-4*
Ener
gies
parm
odus
22-4
0M
in. L
aufz
eit
22-4
1M
in. E
nerg
iesp
ar-S
topp
zeit
22-4
3En
ergi
espa
r-St
artf
req.
[Hz]
22-4
4So
ll-/Is
tw.-D
iff. E
nerg
ie-S
tart
22-4
5So
llwer
t-Bo
ost
22-4
6M
ax. B
oost
-Zei
t22
-47
Ener
gies
parf
requ
enz
[Hz]
22-4
8En
ergi
espa
rver
zöge
rung
22-4
9W
iede
ranl
aufv
erzö
geru
ng22
-6*
Riem
enbr
uche
rken
nung
22-6
0Ri
emen
bruc
hfun
ktio
n22
-61
Riem
enbr
uchm
omen
t22
-62
Riem
enbr
uchv
erzö
geru
ng30
-**
Sond
erfu
nktio
nen
30-2
*Er
w. S
tart
anpa
ssun
g30
-20
Star
tmom
ent
hoch
[s]
30-2
1H
oher
Anl
aufm
omen
tstr
om [%
]30
-22
Bloc
kier
ter
Roto
rsch
utz
30-2
3Er
kenn
ungs
zeit
blo
ckie
rter
Rot
or [s
]32
-**
Gru
ndei
nste
llung
en M
otio
n C
ontr
ol32
-11
Benu
tzer
einh
eit
Nen
ner
32-1
2Be
nutz
erei
nhei
t Zä
hler
32-6
7M
ax. t
oler
iert
er P
ositi
onsf
ehle
r32
-80
Max
imal
zul
ässi
ge G
esch
win
digk
eit
32-8
1Ra
mpe
nzei
t Sc
hnel
lsto
pp M
otio
nCo
ntro
l33
-**
Mot
ion
Con
trol
Erw
. Ein
stel
lung
en33
-00
Refe
renz
fahr
t-M
odus
33-0
1Re
fere
nzve
rsat
z33
-02
Refe
renz
-Ram
penz
eit
33-0
3Re
fere
nzfa
hrt-
Ges
chw
indi
gkei
t33
-04
Refe
renz
fahr
t-Ve
rhal
ten
33-4
1N
egat
ive
Soft
war
e-W
egbe
gren
zung
33-4
2Po
sitiv
e So
ftw
are-
Weg
begr
enzu
ng33
-43
Neg
ativ
e So
ftw
are-
Weg
begr
enzu
ngak
tiv33
-44
Posi
tive
Soft
war
e-W
egbe
gren
zung
akt
iv33
-47
Ziel
posi
tions
fens
ter
34-*
*D
aten
anze
ige
Mot
ion
Con
trol
34-0
*PC
D-P
ar. s
chre
iben
34-0
1PC
D 1
Sch
reib
en fü
r A
nwen
dung
34-0
2PC
D 2
Sch
reib
en fü
r A
nwen
dung
34-0
3PC
D 3
Sch
reib
en fü
r A
nwen
dung
34-0
4PC
D 4
Sch
reib
en fü
r A
nwen
dung
34-0
5PC
D 5
Sch
reib
en fü
r A
nwen
dung
34-0
6PC
D 6
Sch
reib
en fü
r A
nwen
dung
34-0
7PC
D 7
Sch
reib
en fü
r A
nwen
dung
34-0
8PC
D 8
Sch
reib
en fü
r A
nwen
dung
34-0
9PC
D 9
Sch
reib
en fü
r A
nwen
dung
34-1
0PC
D 1
0 Sc
hrei
ben
für
Anw
endu
ng34
-2*
PCD
-Par
. les
en34
-21
PCD
1 L
esen
für
Anw
endu
ng34
-22
PCD
2 L
esen
für
Anw
endu
ng34
-23
PCD
3 L
esen
für
Anw
endu
ng34
-24
PCD
4 L
esen
für
Anw
endu
ng34
-25
PCD
5 L
esen
für
Anw
endu
ng34
-26
PCD
6 L
esen
für
Anw
endu
ng34
-27
PCD
7 L
esen
für
Anw
endu
ng34
-28
PCD
8 L
esen
für
Anw
endu
ng34
-29
PCD
9 L
esen
für
Anw
endu
ng34
-30
PCD
10
Lese
n fü
r A
nwen
dung
34-5
*Pr
ozes
sdat
en34
-50
Istp
ositi
on34
-56
Schl
eppa
bsta
nd37
-**
Anw
endu
ngse
inst
ellu
ngen
37-0
*A
nwen
dung
smod
us37
-00
Anw
endu
ngsm
odus
37-1
*Po
sitio
nsre
gelu
ng37
-01
Pos.
Istw
erta
nsch
luss
37-0
2Po
s. Z
iel
37-0
3Po
s. T
yp37
-04
Pos.
Ges
chw
indi
gkei
t37
-05
Pos.
Ram
pe A
uf37
-06
Pos.
Ram
penz
eit
ab37
-07
Pos.
Aut
omat
isch
e Br
emsr
egel
ung
37-0
8Po
s. H
alte
-Ver
zöge
rung
37-0
9Po
s. F
reila
ufve
rzög
erun
g37
-10
Pos.
Bre
msv
erzö
geru
ng37
-11
Pos.
Bre
msl
eben
sdau
er37
-12
Pos.
PID
-Ant
i-Win
dup
37-1
3Po
s. P
ID-A
usga
ngss
chel
le37
-14
Pos.
Ste
uer-
Que
lle37
-15
Pos.
Ric
htun
gsbl
ocki
erun
g37
-17
Pos.
Reg
elfe
hler
verh
alte
n37
-18
Pos.
Reg
elfe
hler
grun
d37
-19
Pos.
Neu
er In
dex
Anhang VLT® Midi Drive FC 280
68 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
1010
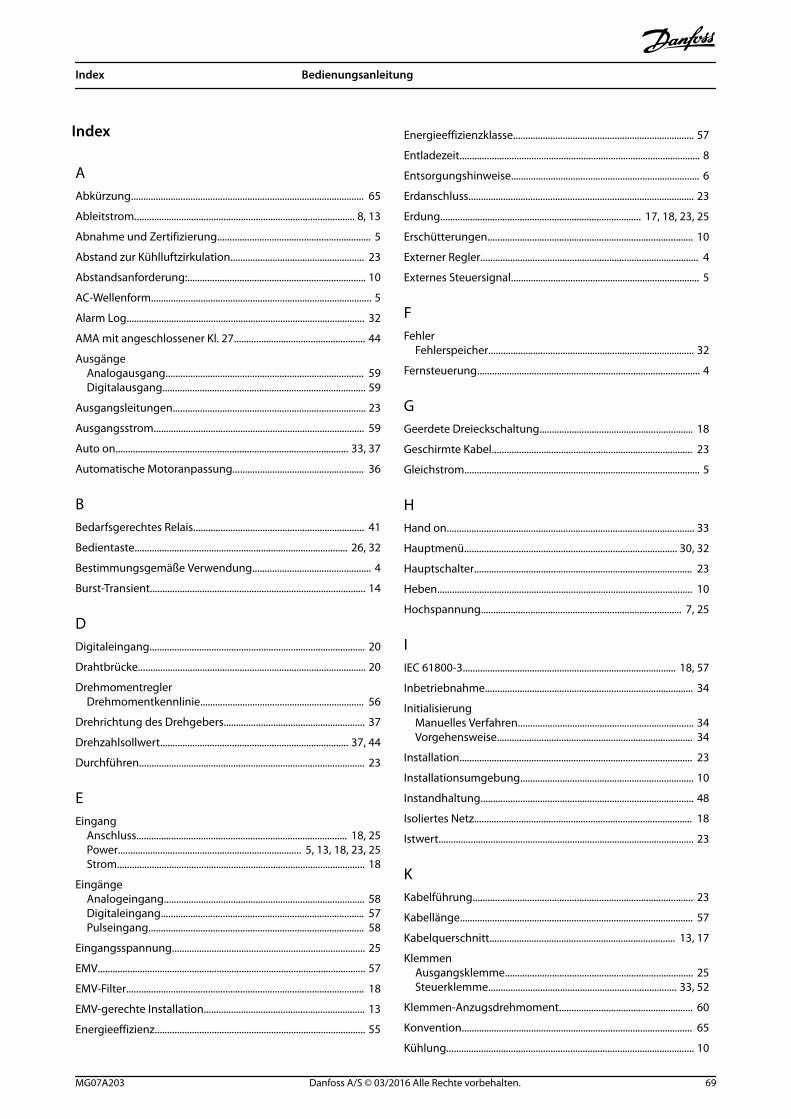
Index
AAbkürzung.............................................................................................. 65
Ableitstrom......................................................................................... 8, 13
Abnahme und Zertifizierung.............................................................. 5
Abstand zur Kühlluftzirkulation...................................................... 23
Abstandsanforderung:........................................................................ 10
AC-Wellenform......................................................................................... 5
Alarm Log................................................................................................ 32
AMA mit angeschlossener Kl. 27..................................................... 44
AusgängeAnalogausgang................................................................................ 59Digitalausgang.................................................................................. 59
Ausgangsleitungen.............................................................................. 23
Ausgangsstrom..................................................................................... 59
Auto on.............................................................................................. 33, 37
Automatische Motoranpassung..................................................... 36
BBedarfsgerechtes Relais..................................................................... 41
Bedientaste...................................................................................... 26, 32
Bestimmungsgemäße Verwendung................................................ 4
Burst-Transient....................................................................................... 14
DDigitaleingang....................................................................................... 20
Drahtbrücke............................................................................................ 20
DrehmomentreglerDrehmomentkennlinie.................................................................. 56
Drehrichtung des Drehgebers......................................................... 37
Drehzahlsollwert............................................................................ 37, 44
Durchführen........................................................................................... 23
EEingang
Anschluss..................................................................................... 18, 25Power.......................................................................... 5, 13, 18, 23, 25Strom.................................................................................................... 18
EingängeAnalogeingang................................................................................. 58Digitaleingang.................................................................................. 57Pulseingang....................................................................................... 58
Eingangsspannung.............................................................................. 25
EMV............................................................................................................ 57
EMV-Filter................................................................................................ 18
EMV-gerechte Installation................................................................. 13
Energieeffizienz..................................................................................... 55
Energieeffizienzklasse......................................................................... 57
Entladezeit................................................................................................. 8
Entsorgungshinweise............................................................................ 6
Erdanschluss........................................................................................... 23
Erdung................................................................................. 17, 18, 23, 25
Erschütterungen................................................................................... 10
Externer Regler........................................................................................ 4
Externes Steuersignal............................................................................ 5
FFehler
Fehlerspeicher................................................................................... 32
Fernsteuerung.......................................................................................... 4
GGeerdete Dreieckschaltung.............................................................. 18
Geschirmte Kabel................................................................................. 23
Gleichstrom............................................................................................... 5
HHand on.................................................................................................... 33
Hauptmenü...................................................................................... 30, 32
Hauptschalter........................................................................................ 23
Heben....................................................................................................... 10
Hochspannung................................................................................. 7, 25
IIEC 61800-3...................................................................................... 18, 57
Inbetriebnahme.................................................................................... 34
InitialisierungManuelles Verfahren....................................................................... 34Vorgehensweise............................................................................... 34
Installation.............................................................................................. 23
Installationsumgebung...................................................................... 10
Instandhaltung...................................................................................... 48
Isoliertes Netz........................................................................................ 18
Istwert....................................................................................................... 23
KKabelführung......................................................................................... 23
Kabellänge.............................................................................................. 57
Kabelquerschnitt........................................................................... 13, 17
KlemmenAusgangsklemme............................................................................ 25Steuerklemme............................................................................ 33, 52
Klemmen-Anzugsdrehmoment...................................................... 60
Konvention............................................................................................. 65
Kühlung.................................................................................................... 10
Index Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 69
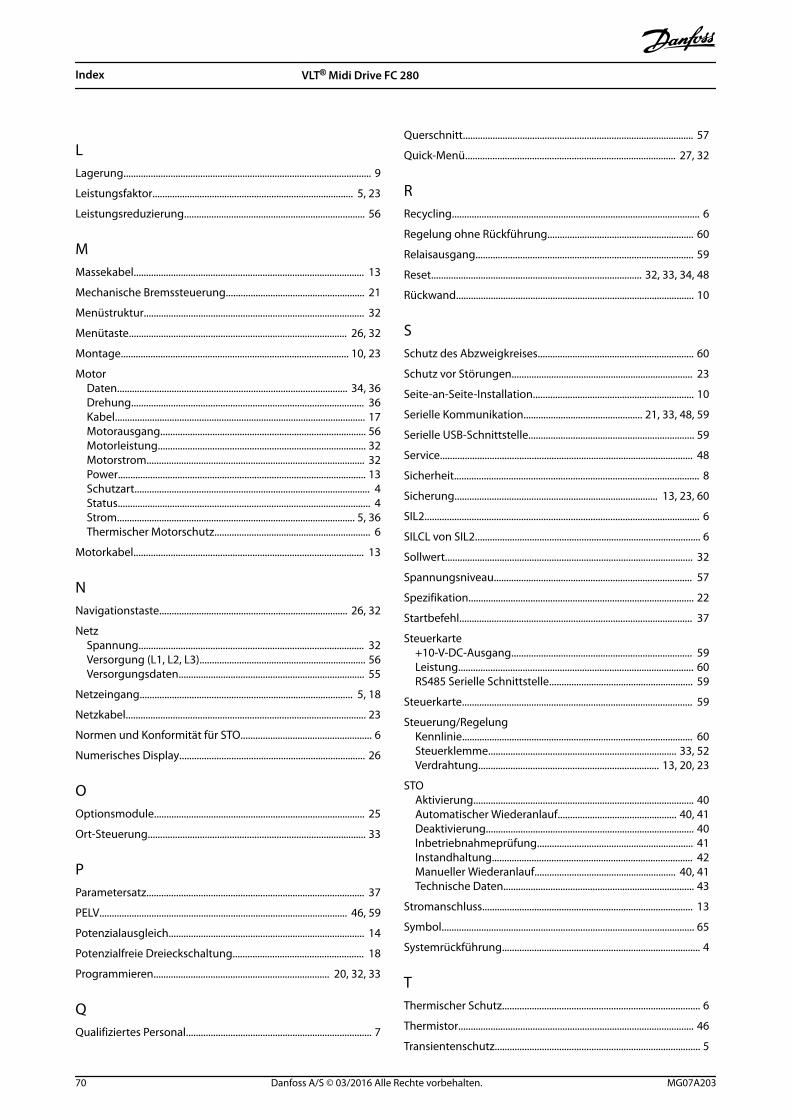
LLagerung.................................................................................................... 9
Leistungsfaktor................................................................................. 5, 23
Leistungsreduzierung......................................................................... 56
MMassekabel............................................................................................. 13
Mechanische Bremssteuerung........................................................ 21
Menüstruktur......................................................................................... 32
Menütaste........................................................................................ 26, 32
Montage............................................................................................ 10, 23
MotorDaten............................................................................................. 34, 36Drehung.............................................................................................. 36Kabel..................................................................................................... 17Motorausgang................................................................................... 56Motorleistung.................................................................................... 32Motorstrom........................................................................................ 32Power.................................................................................................... 13Schutzart............................................................................................... 4Status...................................................................................................... 4Strom................................................................................................ 5, 36Thermischer Motorschutz............................................................... 6
Motorkabel............................................................................................. 13
NNavigationstaste............................................................................ 26, 32
NetzSpannung........................................................................................... 32Versorgung (L1, L2, L3)................................................................... 56Versorgungsdaten........................................................................... 55
Netzeingang...................................................................................... 5, 18
Netzkabel................................................................................................. 23
Normen und Konformität für STO..................................................... 6
Numerisches Display........................................................................... 26
OOptionsmodule..................................................................................... 25
Ort-Steuerung........................................................................................ 33
PParametersatz........................................................................................ 37
PELV.................................................................................................... 46, 59
Potenzialausgleich............................................................................... 14
Potenzialfreie Dreieckschaltung..................................................... 18
Programmieren....................................................................... 20, 32, 33
QQualifiziertes Personal........................................................................... 7
Querschnitt............................................................................................. 57
Quick-Menü..................................................................................... 27, 32
RRecycling.................................................................................................... 6
Regelung ohne Rückführung........................................................... 60
Relaisausgang........................................................................................ 59
Reset..................................................................................... 32, 33, 34, 48
Rückwand................................................................................................ 10
SSchutz des Abzweigkreises............................................................... 60
Schutz vor Störungen......................................................................... 23
Seite-an-Seite-Installation................................................................. 10
Serielle Kommunikation................................................ 21, 33, 48, 59
Serielle USB-Schnittstelle................................................................... 59
Service...................................................................................................... 48
Sicherheit................................................................................................... 8
Sicherung.................................................................................. 13, 23, 60
SIL2............................................................................................................... 6
SILCL von SIL2........................................................................................... 6
Sollwert.................................................................................................... 32
Spannungsniveau................................................................................ 57
Spezifikation........................................................................................... 22
Startbefehl.............................................................................................. 37
Steuerkarte+10-V-DC-Ausgang......................................................................... 59Leistung............................................................................................... 60RS485 Serielle Schnittstelle.......................................................... 59
Steuerkarte............................................................................................. 59
Steuerung/RegelungKennlinie............................................................................................. 60Steuerklemme............................................................................ 33, 52Verdrahtung......................................................................... 13, 20, 23
STOAktivierung......................................................................................... 40Automatischer Wiederanlauf................................................ 40, 41Deaktivierung.................................................................................... 40Inbetriebnahmeprüfung............................................................... 41Instandhaltung................................................................................. 42Manueller Wiederanlauf......................................................... 40, 41Technische Daten............................................................................. 43
Stromanschluss..................................................................................... 13
Symbol...................................................................................................... 65
Systemrückführung................................................................................ 4
TThermischer Schutz................................................................................ 6
Thermistor............................................................................................... 46
Transientenschutz................................................................................... 5
Index VLT® Midi Drive FC 280
70 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. MG07A203
Trennschalter......................................................................................... 25
Typenschild............................................................................................... 9
ÜÜberspannungsschutz....................................................................... 13
UUmgebungsbedingung..................................................................... 56
Unerwarteter Anlauf....................................................................... 7, 48
VVersorgungsnetz.............................................................................. 5, 18
Versorgungsspannung................................................................ 25, 59
Vibrationen............................................................................................. 10
WWarnungs- und Alarmliste................................................................ 52
Werkseinstellung.................................................................................. 34
ZZusatzeinrichtungen........................................................................... 23
Zusätzliche Ressource........................................................................... 4
Zwischenkreiskopplung....................................................................... 7
Index Bedienungsanleitung
MG07A203 Danfoss A/S © 03/2016 Alle Rechte vorbehalten. 71
Die in Katalogen, Prospekten und anderen schriftlichen Unterlagen, wie z.B. Zeichnungen und Vorschlägen enthaltenen Angaben und technischen Daten sind vom Käufer vor Übernahme undAnwendung zu prüfen. Der Käufer kann aus diesen Unterlagen und zusätzlichen Diensten keinerlei Ansprüche gegenüber Danfoss oder Danfoss-Mitarbeitern ableiten, es sei denn, dass diesevorsätzlich oder grob fahrlässig gehandelt haben. Danfoss behält sich das Recht vor, ohne vorherige Bekanntmachung im Rahmen der angemessenen und zumutbaren Änderungen an seinenProdukten – auch an bereits in Auftrag genommenen – vorzunehmen. Alle in dieser Publikation enthaltenen Warenzeichen sind Eigentum der jeweiligen Firmen. Danfoss und das Danfoss-Logo sindWarenzeichen der Danfoss A/S. Alle Rechte vorbehalten.
Danfoss A/SUlsnaes 1DK-6300 Graastenvlt-drives.danfoss.com
*MG07A203*132R0153 MG07A203 03/2016





























