Embed Size (px)
Citation preview

Design und Implementierung der Fahrdynamik eines kettengetriebenen Roboters
Vortrag zur Diplomarbeit
Franz [email protected]
Ziele der Diplomarbeit
� Simulation der Fahrdynamik des Bombenentschärfungsroboters tEODorunter Zuhilfenahme der Physiksimulationssoftware VORTEX
� Entwicklung neuer Fahrmodellansätze� Beispielhafte Implementierung eines
Fahrmodellansatzes� Entwicklung einfacher
Bewertungsschemata und Vergleichdes beispielhaft Implementierten Modells und des in der Simulation existierenden Modells
Präsentationsüberblick
� Der tEODor Roboter� Grundlagen der Fahrmechanik von
Kettenfahrzeugen� Grundlagen von Physiksimulationen� Entwickelte Fahrmodellansätze� Bewertungsschemata für Fahrmodelle� Softwaretechnische Realisierung

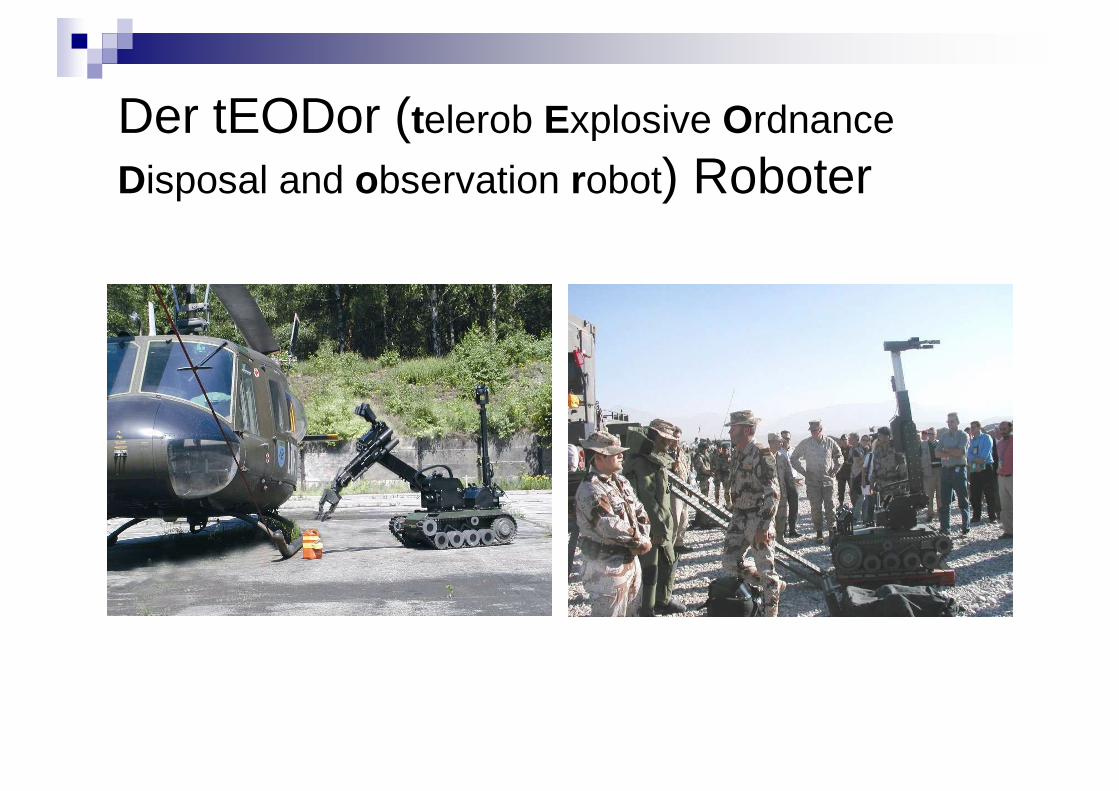
Der tEODor (telerob Explosive Ordnance
Disposal and observation robot) Roboter
� Gewicht: 360 kg� Länge: 130 cm� Breite: 68 cm� Höhe: 110 cm� Maximale
Geschwindigkeit: 50 Meter/Minute (= 3 km/h)
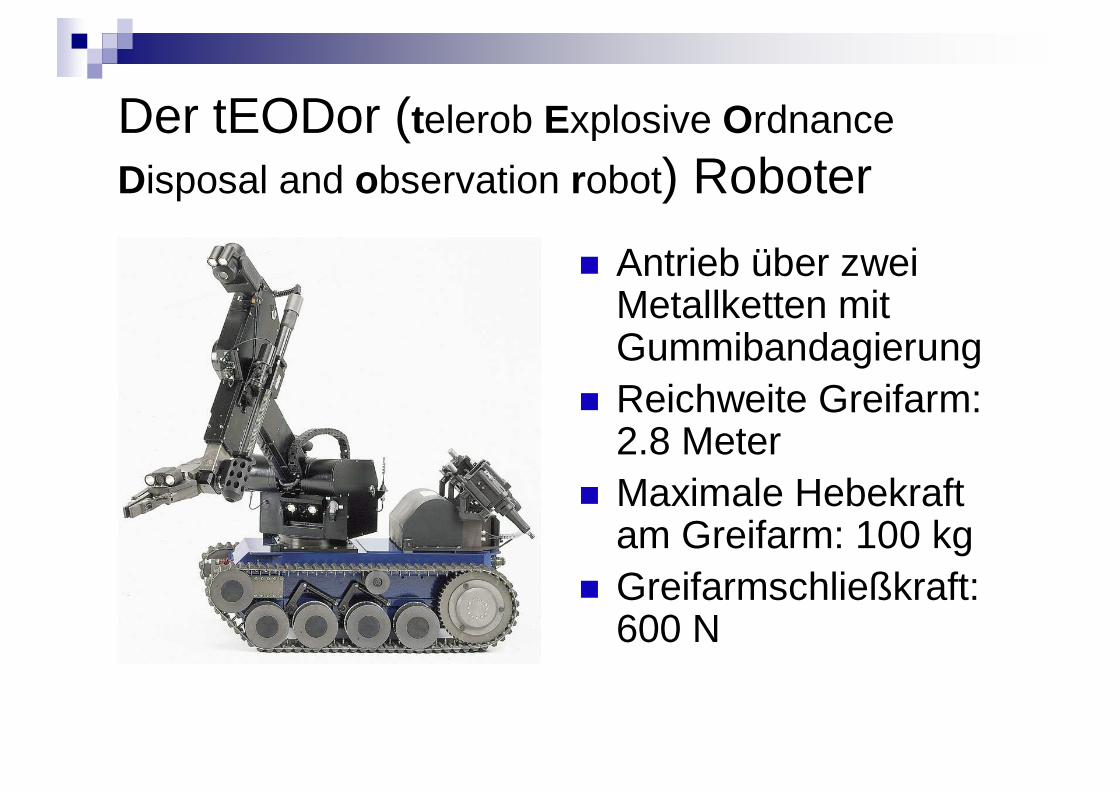
Der tEODor (telerob Explosive Ordnance
Disposal and observation robot) Roboter
Der tEODor (telerob Explosive Ordnance
Disposal and observation robot) Roboter
� Antrieb über zwei Metallketten mit Gummibandagierung
� Reichweite Greifarm: 2.8 Meter
� Maximale Hebekraft am Greifarm: 100 kg
� Greifarmschließkraft: 600 N
Der tEODor (telerob Explosive Ordnance
Disposal and observation robot) Roboter
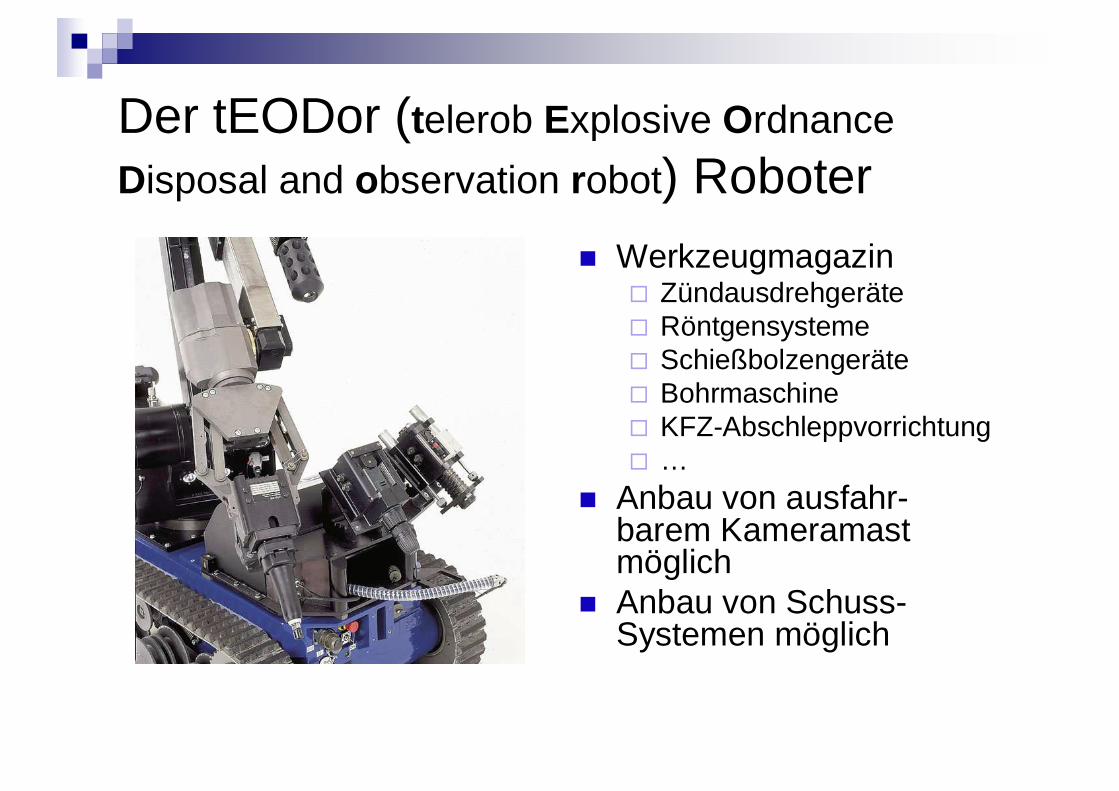
� Werkzeugmagazin� Zündausdrehgeräte� Röntgensysteme� Schießbolzengeräte� Bohrmaschine� KFZ-Abschleppvorrichtung� …
� Anbau von ausfahr-barem Kameramast möglich
� Anbau von Schuss-Systemen möglich
Der tEODor (telerob Explosive Ordnance
Disposal and observation robot) Roboter
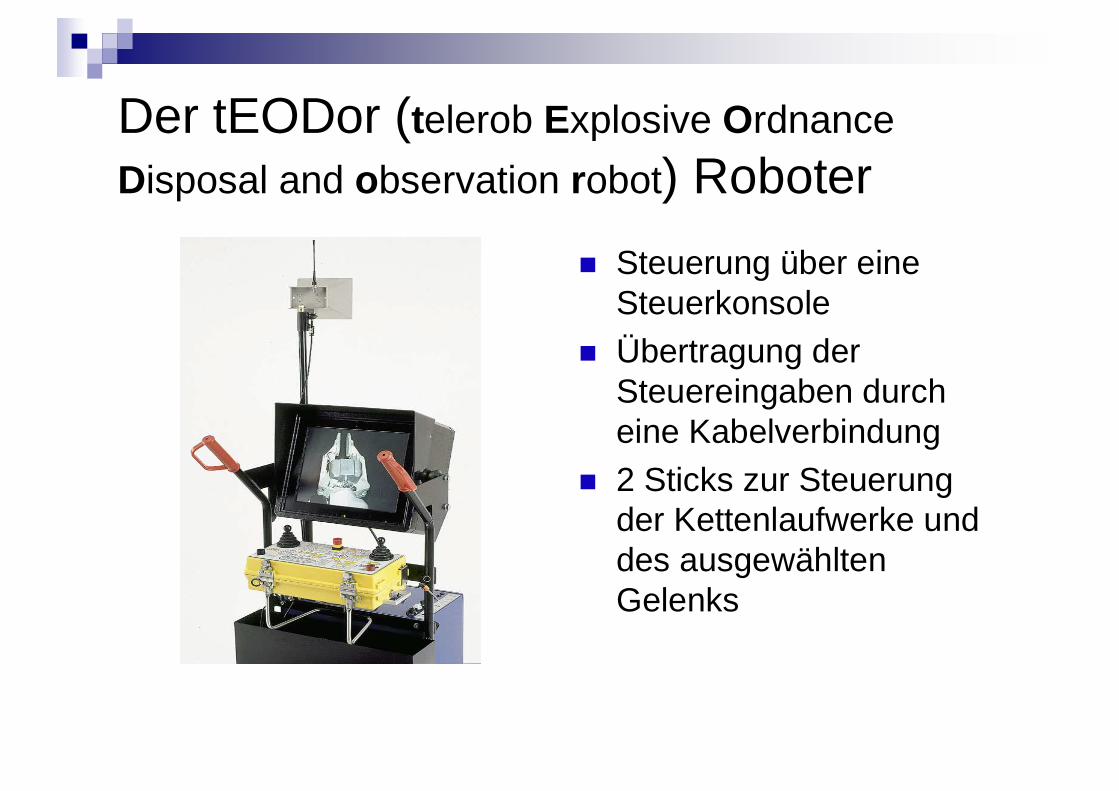
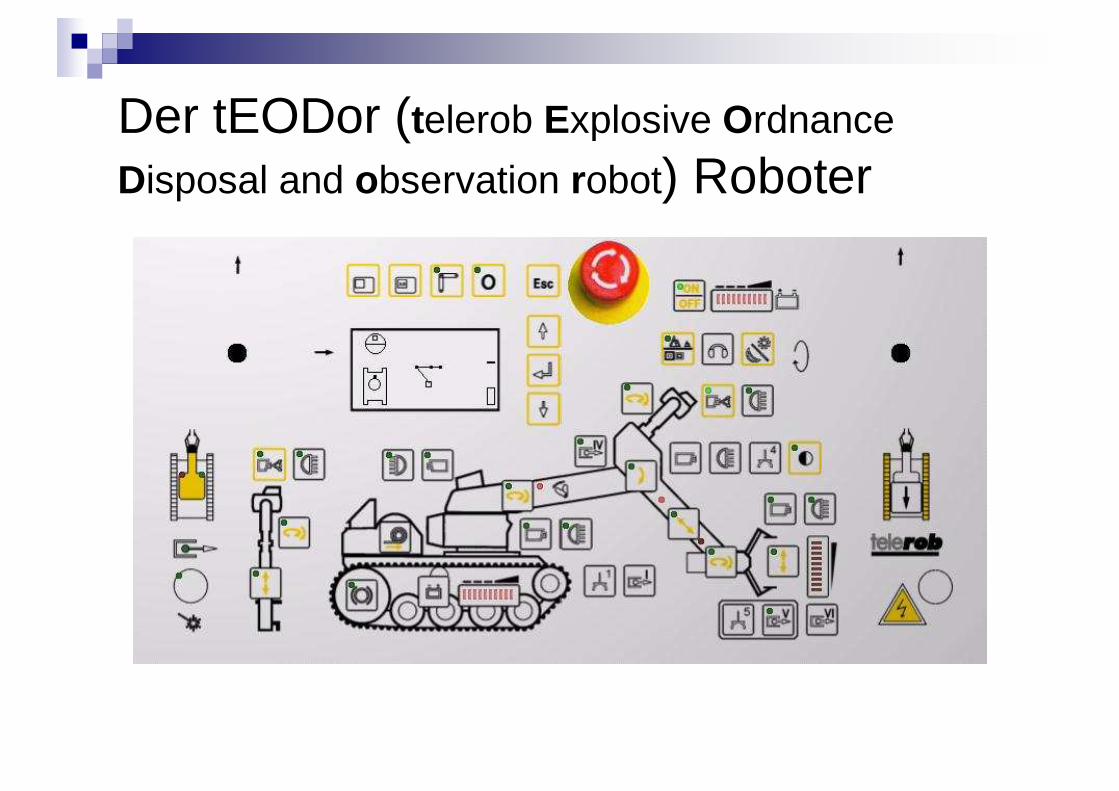
� Steuerung über eine Steuerkonsole
� Übertragung der Steuereingaben durch eine Kabelverbindung
� 2 Sticks zur Steuerung der Kettenlaufwerke und des ausgewählten Gelenks
Der tEODor (telerob Explosive Ordnance
Disposal and observation robot) Roboter
Grundlagen der Fahrmechanik von Kettenfahrzeugen
Als Laufwerk werden diejenigen Bauteile eines Kettenfahrzeugs bezeichnet, welche für die Übertragung
der Motorkraft und die Federung bzw. Dämpfung des Fahrzeugs verantwortlich sind.
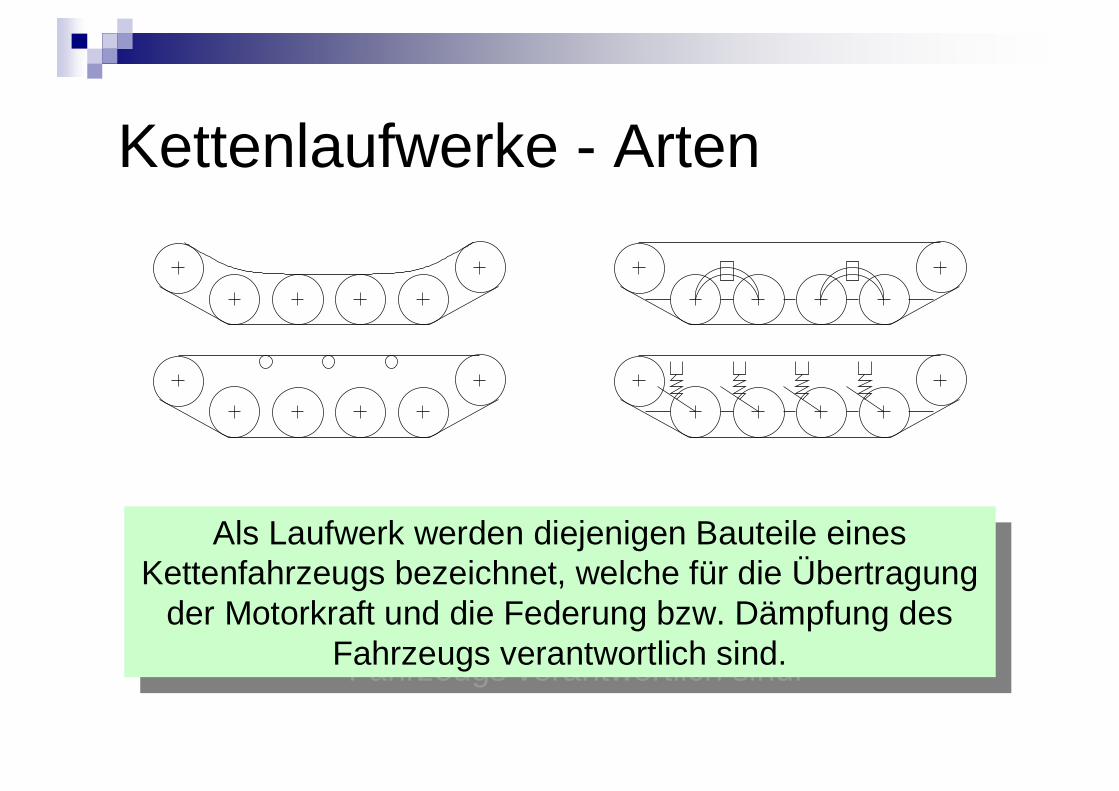
Kettenlaufwerke - Arten
Als Laufwerk werden diejenigen Bauteile eines Kettenfahrzeugs bezeichnet, welche für die Übertragung
der Motorkraft und die Federung bzw. Dämpfung des Fahrzeugs verantwortlich sind.
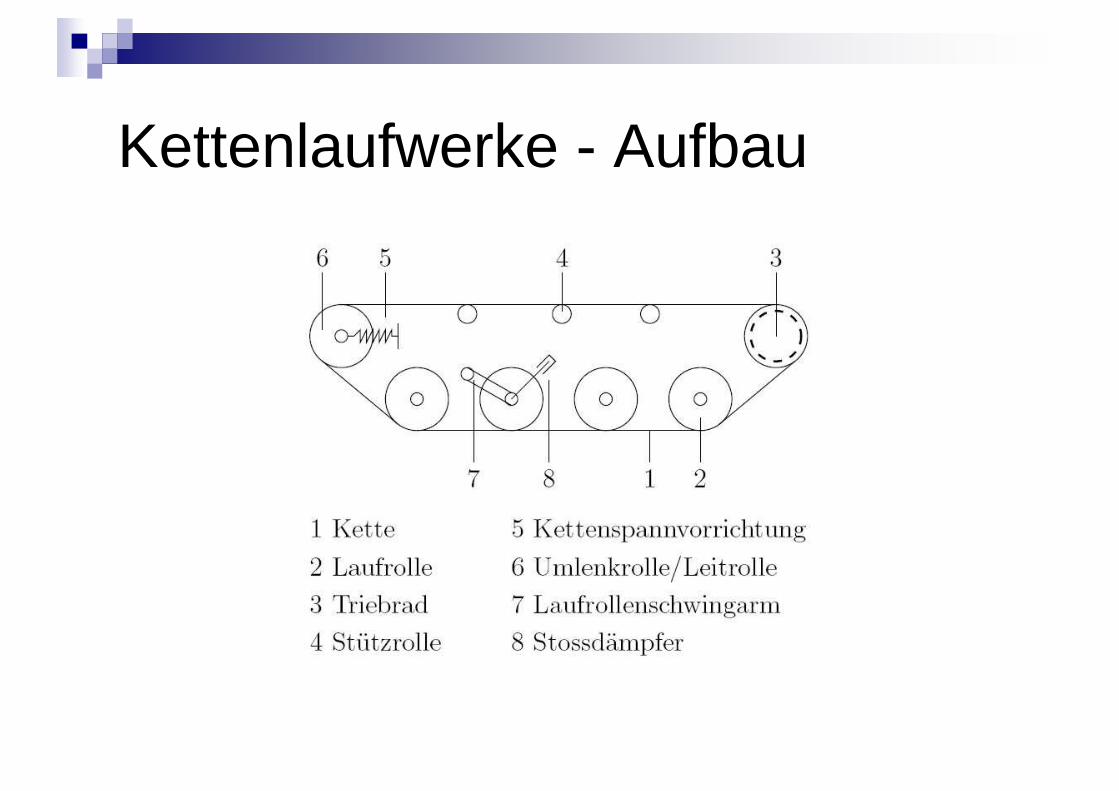
Kettenlaufwerke - Aufbau
Kettenlaufwerke - Aufgaben
� Übertragung von Längskräften auf den Boden� Antriebs- und Bremskräfte� Widerstände wirken diesen Kräften entgegen
� Übertragung von Seitenkräften� Seitenführungskraft bei der Kurvenfahrt (zu große
Rutschbewegungen sollen vermieden werden)� Beispiel Quergeneigte Fahrbahn: Seitliches
Abrutschen soll durch die Konstruktion der Kette vermieden werden
Kettenlaufwerke - Aufgaben
� Aufnahme von Hochkräften�Abfederung und Dämpfung des Aufbaus
aufgrund von Fahrbahnunebenheiten
� Aufnahme von Drehkräften�Mechanisches Problem hauptsächlich bei der
Kurvenfahrt (Entgleisen, Materialbruch)�Wird hier nicht weiter behandelt, kann jedoch
für eine Trainigssimulation verwendet werden
Kettenlaufwerke – Widerstände
� Innere Laufwerkswiderstände�Triebradreibung�Gelenkreibungswiderstand� Innerer Rollwiderstand
� Äußere Widerstände�Bugwiderstand�Steigungswiderstand�Luftwiderstand
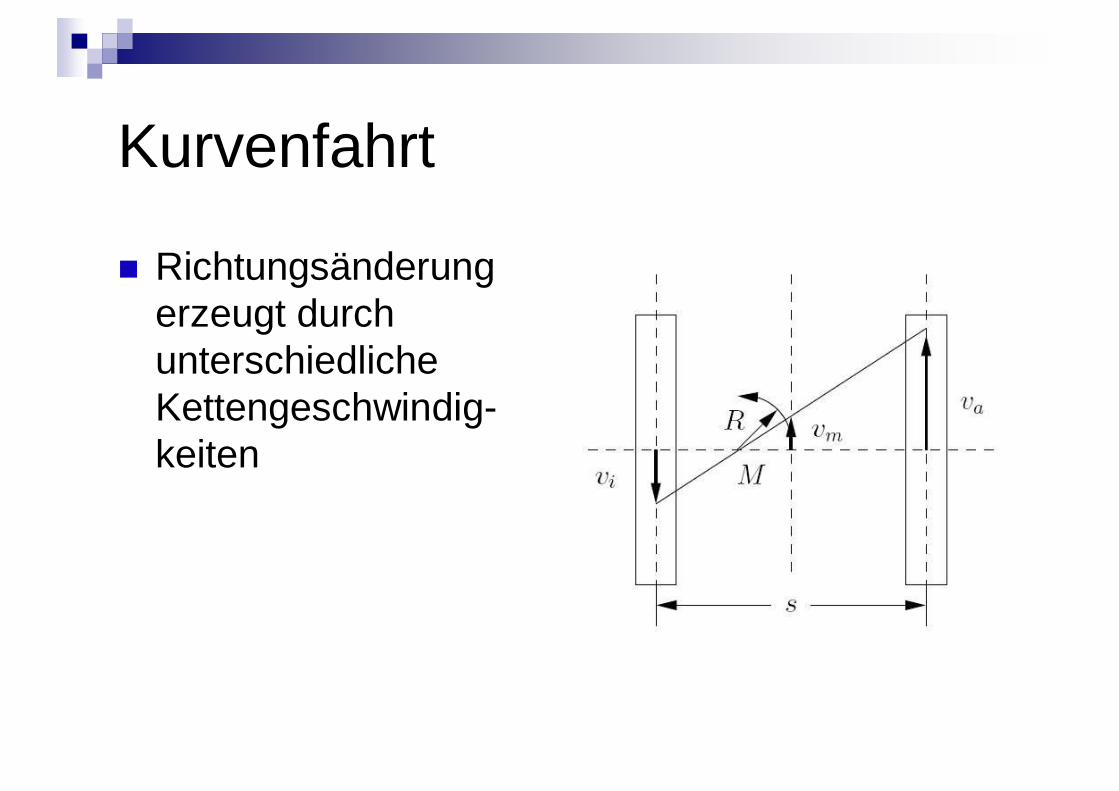
Kurvenfahrt
� Richtungsänderung erzeugt durch unterschiedliche Kettengeschwindig-keiten
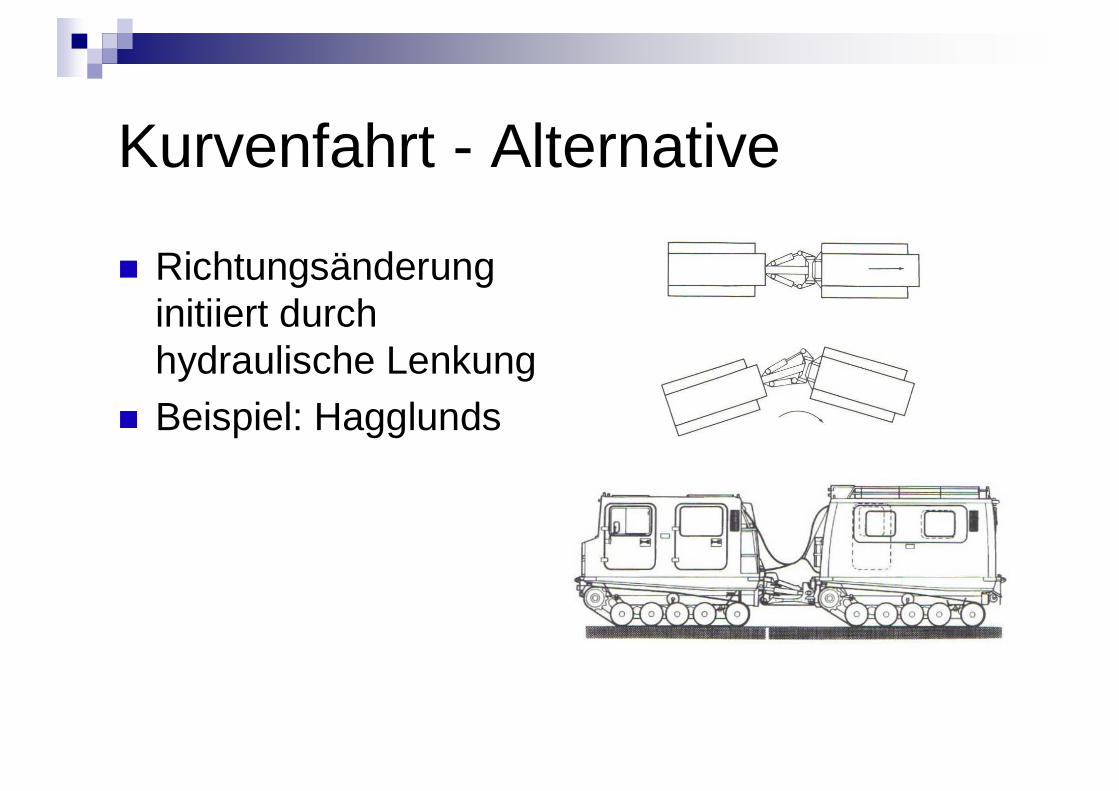
Kurvenfahrt - Alternative
� Richtungsänderung initiiert durch hydraulische Lenkung
� Beispiel: Hagglunds
Grundlagen von Physiksimulationen
Begriffsdefinitionen - Simulation
� Offline Simulation� Berechnung von Vorgängen mit möglichst aufwendigen
Rechenmodellen� Sehr komplexe Simulation bzgl. Rechenzeit und
Rechenkapazität� Interaktive Simulation
� Möglichst schnelle Berechnungszeit von Interesse� Somit: geringere Komplexität der Rechenmodelle� Mensch als interaktive Komponente im Vordergrund
� Echtzeitsimulation� Ähnlich der interaktiven Simulation jedoch mit garantierten
Rechenzeiten
Physik SDK‘s (Software Development Kits) sind Vertreter der interaktiven Simulation und nicht
der Echtzeitsimulation!
Begriffsdefinitionen - Simulation
Physik SDK‘s (Software Development Kits) sind Vertreter der interaktiven Simulation und nicht
der Echtzeitsimulation!
Eigenschaften von Physik SDK‘s
� Simulation einfacher Festkörper� Simulation komplexer mechanischer
Systeme (Fahrzeuge, Hydraulik, etc.)� Simulation von Reibung (meist Coulomb)� Baukastenprinzip (Plug-and-Play)� Integrierte Kollisionserkennung� Meist Singlethreading-Architektur
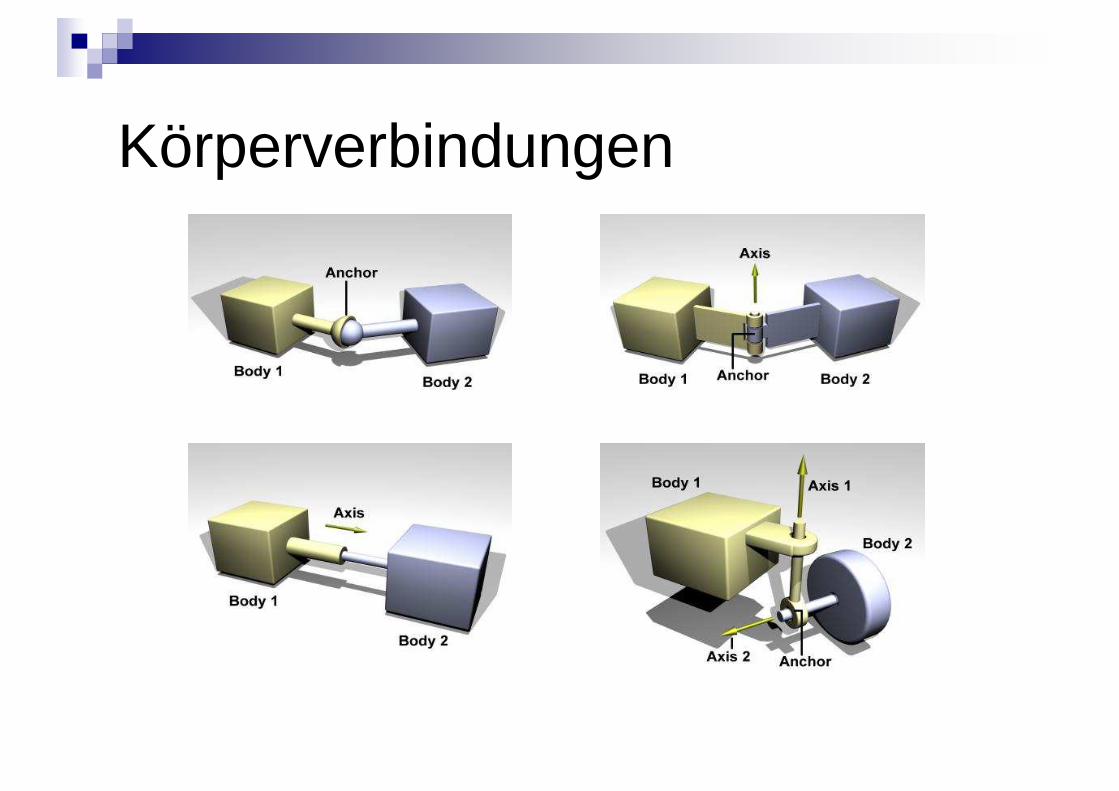
Körperverbindungen

Beispiele komplexer Systeme
Bewegungssimulation
Beschleunigung =Kraft
Masse
Gesetz von Newton wird nur bei der kontaktlosen Bewegung von einzelnen Körpern verwendet.
Bewegungssimulation
Beschleunigung =Kraft
Masse
Gesetz von Newton wird nur bei der kontaktlosen Bewegung von einzelnen Körpern verwendet.
Bewegungssimulation
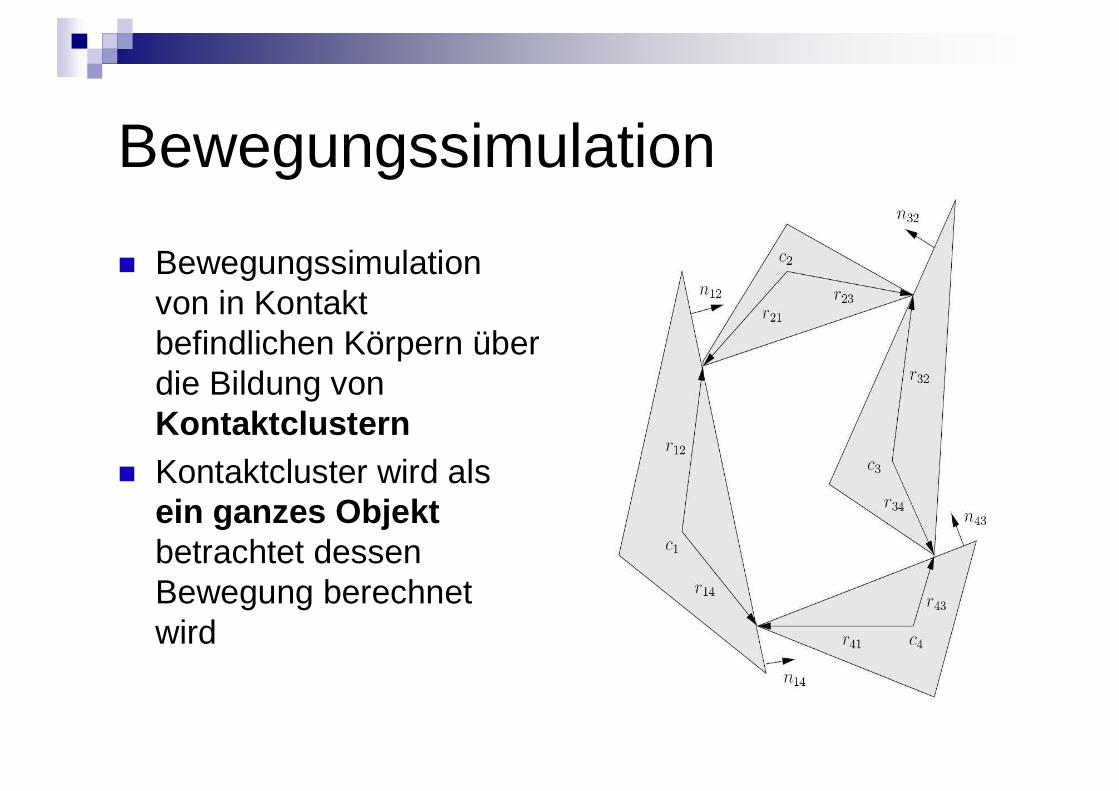
� Bewegungssimulation von in Kontakt befindlichen Körpern über die Bildung von Kontaktclustern
� Kontaktcluster wird als ein ganzes Objektbetrachtet dessen Bewegung berechnet wird
Bewegungssimulation
Problemsituationen
� Ursachen� Zu große Zeitschritte durch zu aufwendige
Berechnungen oder eine zu aufwendige Modellierung� Einwirkung von großen Kräften auf Körpern� Modellierung von Objekten mit sehr schweren und
sehr leichten Körpern� Hohe Reibung zwischen Körpern
� Auswirkungen� Instabiles System („Explosion“ oder
„Zusammenfallen“ des modellierten Systems)

Problemsituationen
Explosion Zusammenfallen
EntwickelteFahrmodellansätze
(Auszug)
Fahrmodellansätze unter ausschließlicher Verwendung geometrischer Primitive
Sämtliche Rollen werden durch Verbindungen, ähnlich wie Stoßdämpfer
beim PKW, an den Rumpf arretiert.
Ein Modell definiert ein physikalisches oder formales System, welches das betrachtete System mit mehr oder minder großem Abstraktionsgraddarstellt und dessen charakteristisches Verhalten
zu studieren gestattet.
Vorbemerkungen
Sämtliche Rollen werden durch Verbindungen, ähnlich wie Stoßdämpfer
beim PKW, an den Rumpf arretiert.
Ein Modell definiert ein physikalisches oder formales System, welches das betrachtete System mit mehr oder minder großem Abstraktionsgraddarstellt und dessen charakteristisches Verhalten
zu studieren gestattet.
Dynamikberechnung ausschlaggebenderFaktor für den Berechnungsaufwand !
Kollisionserkennung beansprucht relativ wenig Rechenzeit
Vorbemerkungen
Kollisionserkennung beansprucht relativ wenig Rechenzeit
Dynamikberechnung ausschlaggebenderFaktor für den Berechnungsaufwand !
Vorhandenes Fahrmodell
� Komplettes Kettenlaufwerk nachgebildet durch einen starren Körper
� Antrieb durch Kräfteer-zeugung an den Kontakt-stellen zur Umgebung
� Vorteil:� Geringer Rechenaufwand
� Nachteil:� kein charakteristisches
Federungsverhalten
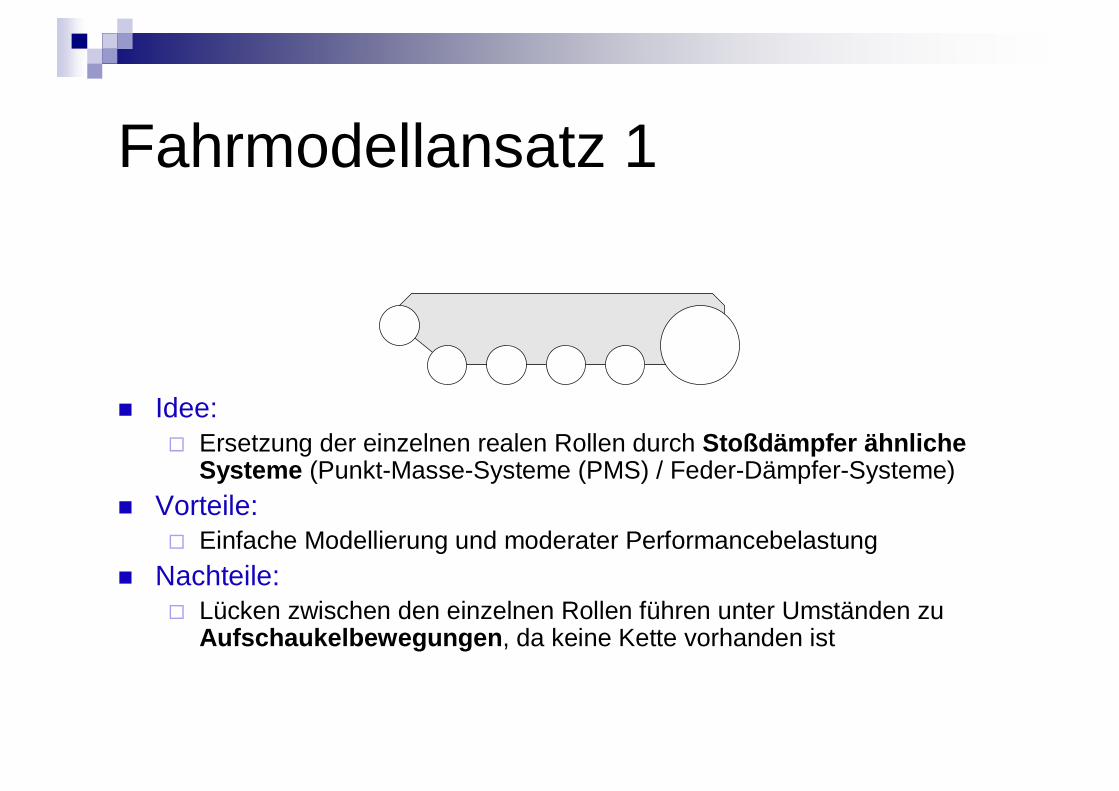
Fahrmodellansatz 1
� Idee:� Ersetzung der einzelnen realen Rollen durch Stoßdämpfer ähnliche
Systeme (Punkt-Masse-Systeme (PMS) / Feder-Dämpfer-Systeme)� Vorteile:
� Einfache Modellierung und moderater Performancebelastung� Nachteile:
� Lücken zwischen den einzelnen Rollen führen unter Umständen zu Aufschaukelbewegungen, da keine Kette vorhanden ist
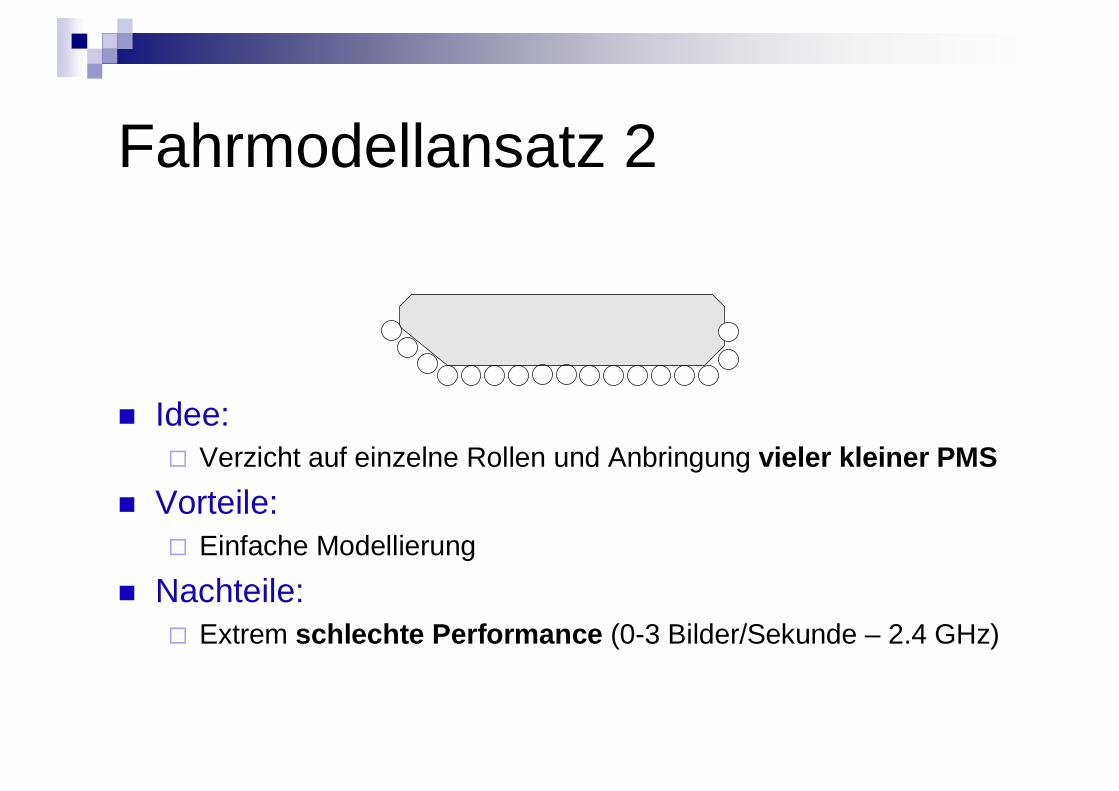
Fahrmodellansatz 2
� Idee:� Verzicht auf einzelne Rollen und Anbringung vieler kleiner PMS
� Vorteile:� Einfache Modellierung
� Nachteile:� Extrem schlechte Performance (0-3 Bilder/Sekunde – 2.4 GHz)
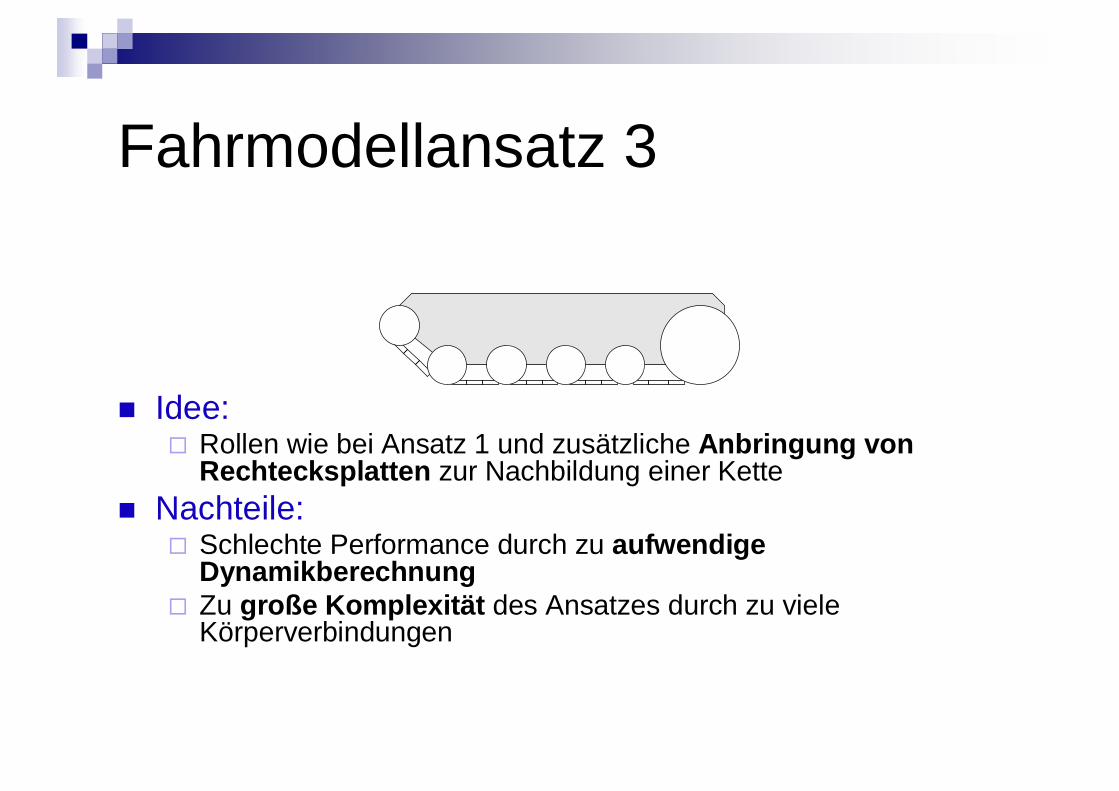
Fahrmodellansatz 3
� Idee:� Rollen wie bei Ansatz 1 und zusätzliche Anbringung von
Rechtecksplatten zur Nachbildung einer Kette� Nachteile:
� Schlechte Performance durch zu aufwendige Dynamikberechnung
� Zu große Komplexität des Ansatzes durch zu viele Körperverbindungen
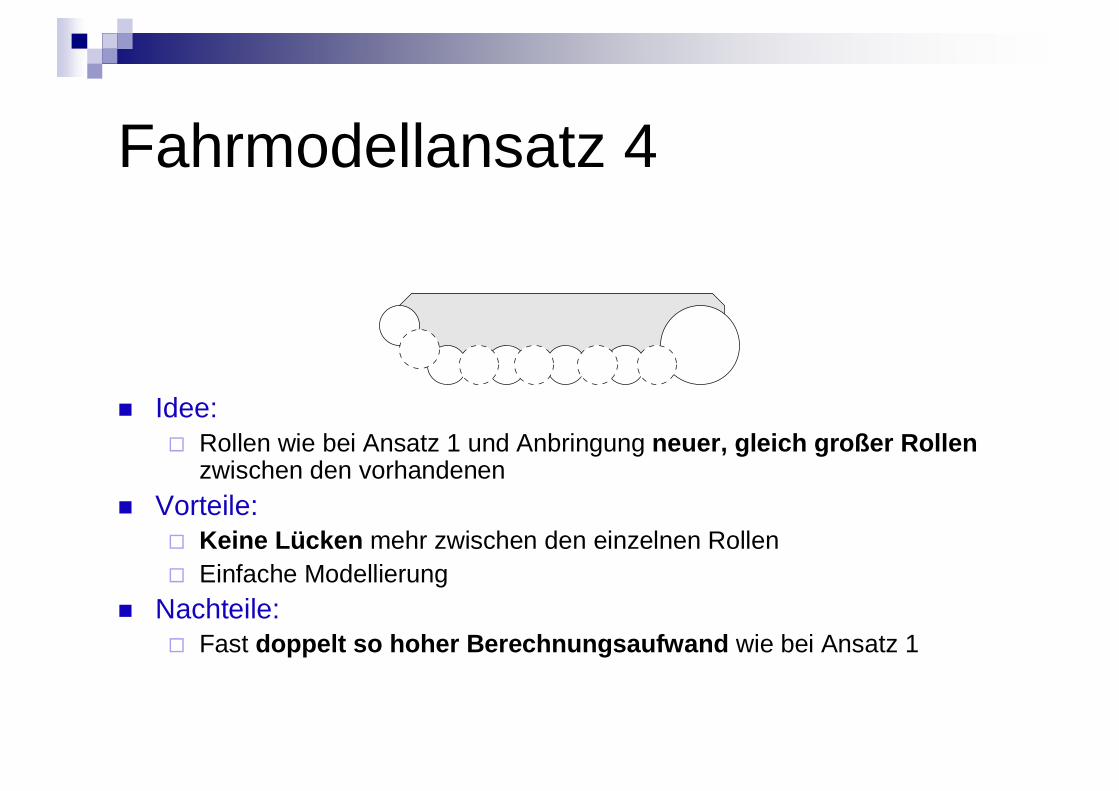
Fahrmodellansatz 4
� Idee:� Rollen wie bei Ansatz 1 und Anbringung neuer, gleich großer Rollen
zwischen den vorhandenen� Vorteile:
� Keine Lücken mehr zwischen den einzelnen Rollen� Einfache Modellierung
� Nachteile:� Fast doppelt so hoher Berechnungsaufwand wie bei Ansatz 1
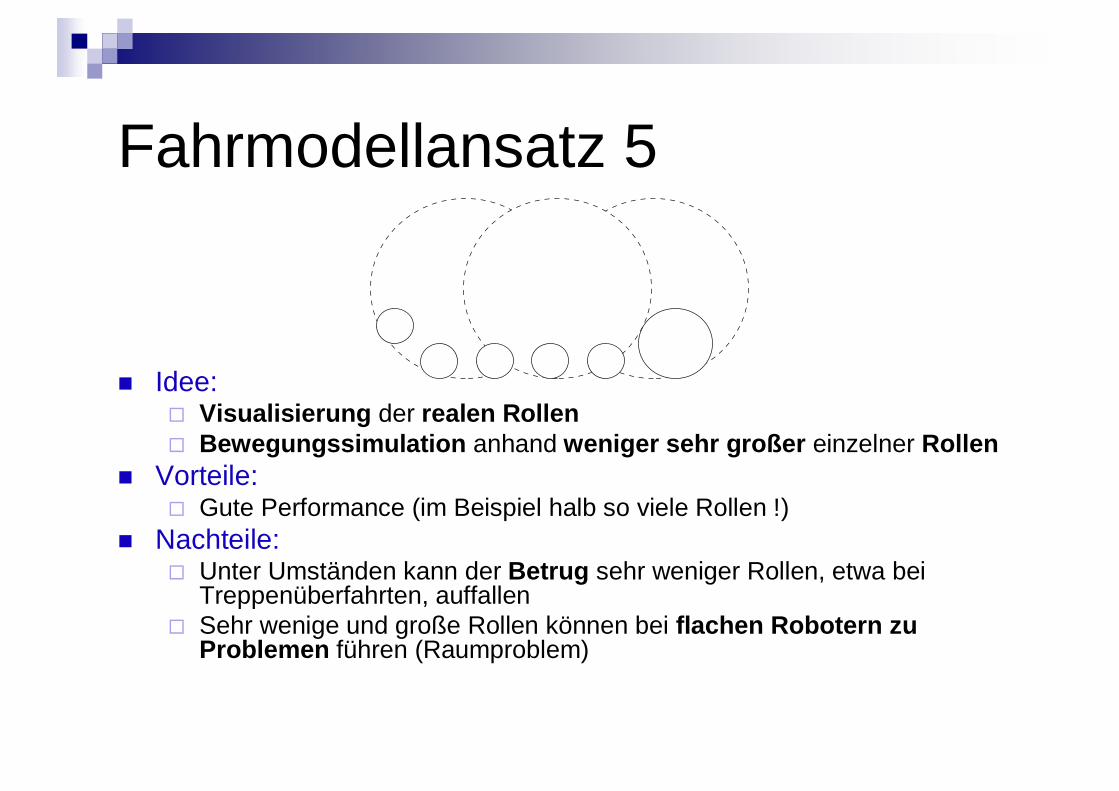
Fahrmodellansatz 5
� Idee:� Visualisierung der realen Rollen� Bewegungssimulation anhand weniger sehr großer einzelner Rollen
� Vorteile:� Gute Performance (im Beispiel halb so viele Rollen !)
� Nachteile:� Unter Umständen kann der Betrug sehr weniger Rollen, etwa bei
Treppenüberfahrten, auffallen� Sehr wenige und große Rollen können bei flachen Robotern zu
Problemen führen (Raumproblem)
� � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � �
EntwickelteFahrmodellansätze
(Auszug)
Fahrmodellansatz unter Berücksichtigungeines Kettenmodells
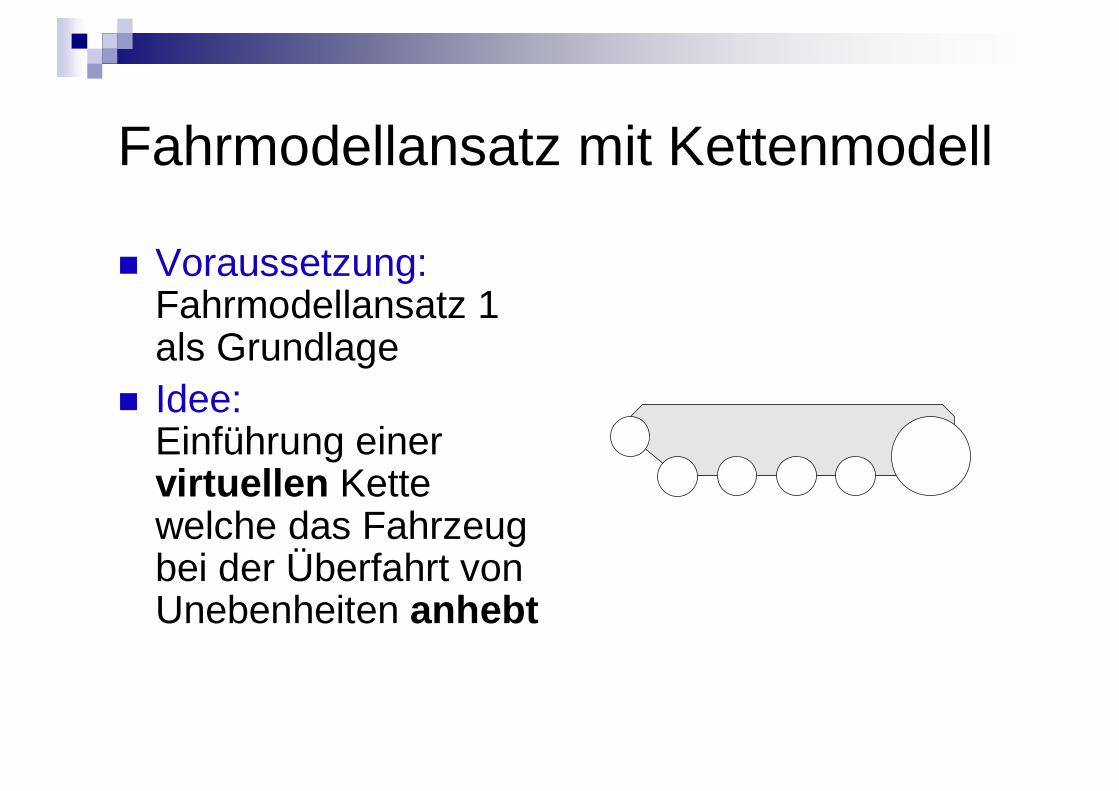
Fahrmodellansatz mit Kettenmodell
� Voraussetzung: Fahrmodellansatz 1 als Grundlage
� Idee: Einführung einer virtuellen Kette welche das Fahrzeug bei der Überfahrt von Unebenheiten anhebt
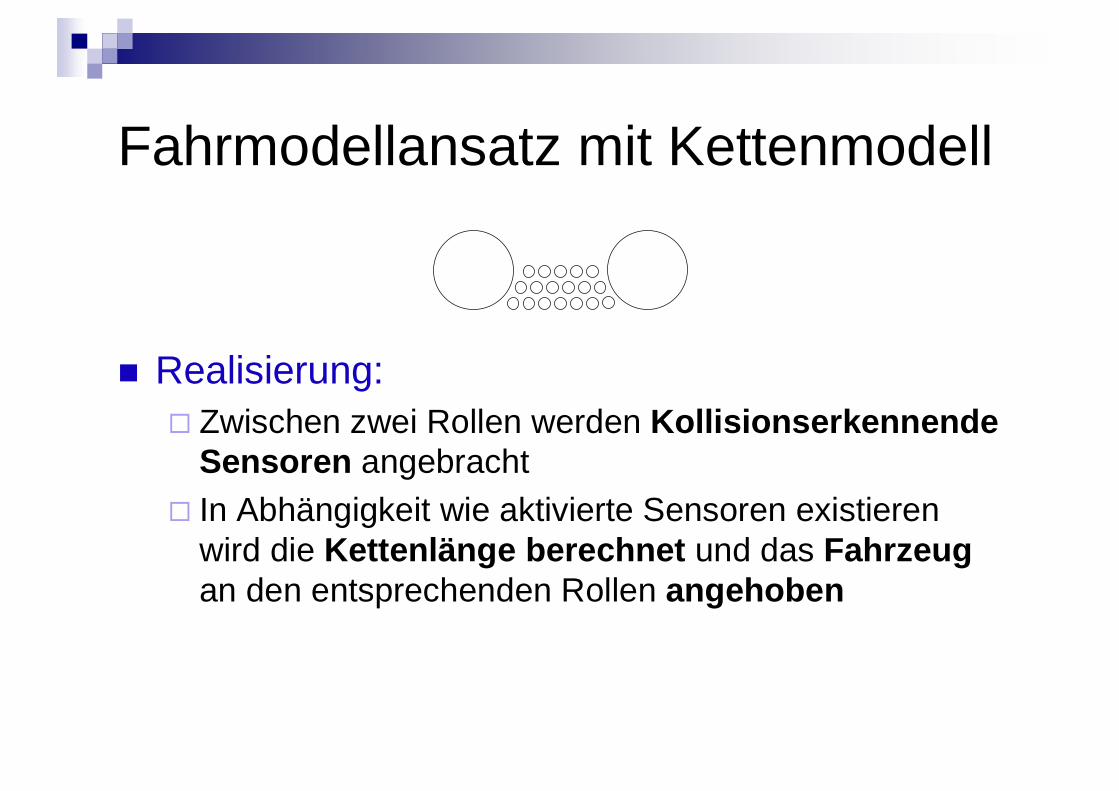
Fahrmodellansatz mit Kettenmodell
� Realisierung:� Zwischen zwei Rollen werden Kollisionserkennende
Sensoren angebracht� In Abhängigkeit wie aktivierte Sensoren existieren
wird die Kettenlänge berechnet und das Fahrzeugan den entsprechenden Rollen angehoben
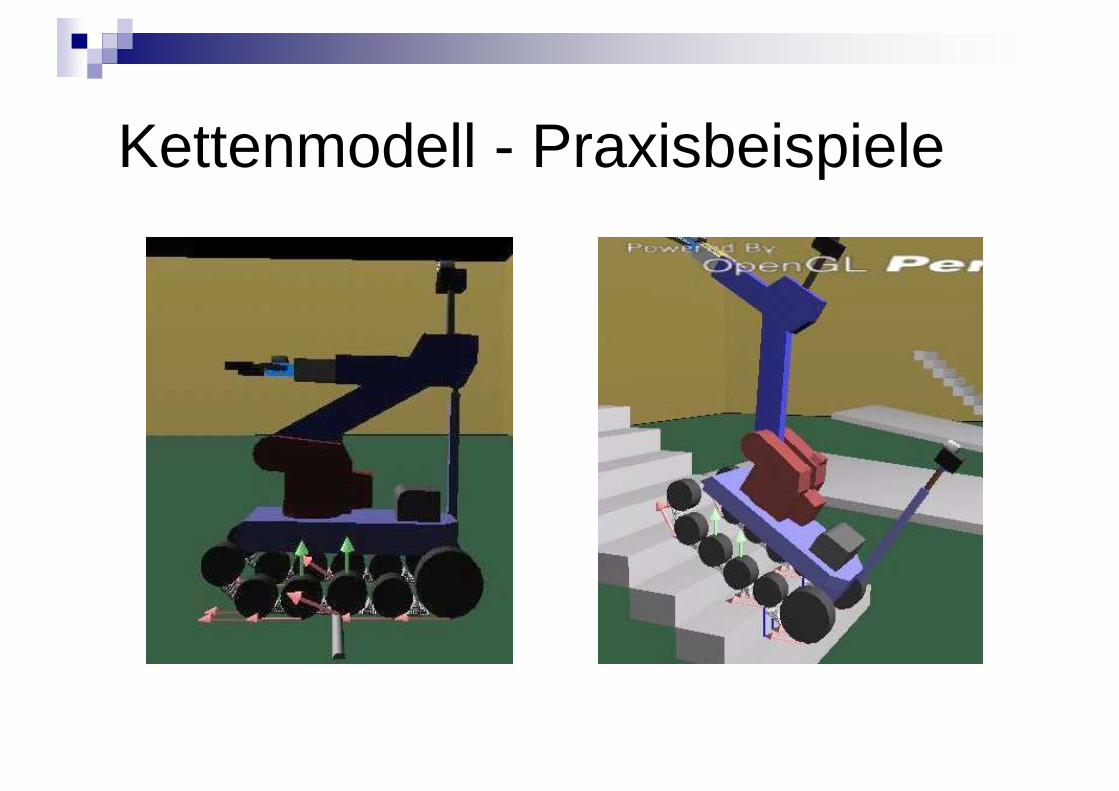
Kettenmodell - Praxisbeispiele
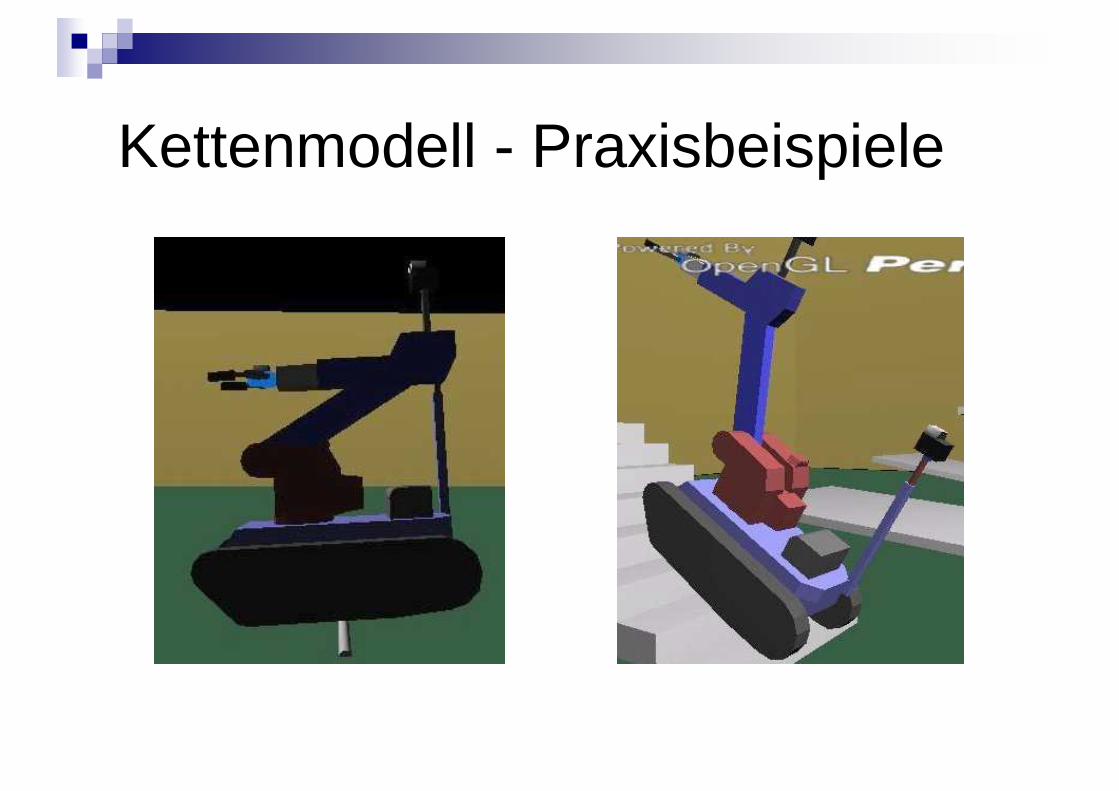
Kettenmodell - Praxisbeispiele
Bewertungsschematazum Vergleich von
Fahrmodellen
Bewertungsschemata
� Typische Fahrzustände des tEODor Roboters� Fahrt auf ebener Fläche mit festem Untergrund� Fahrt auf einer Rampe� Fahrt auf einer Treppe
� Durchgeführte Analysen� Rechenzeitvergleich� Treuetests� Rutschtests� Überfahrttests
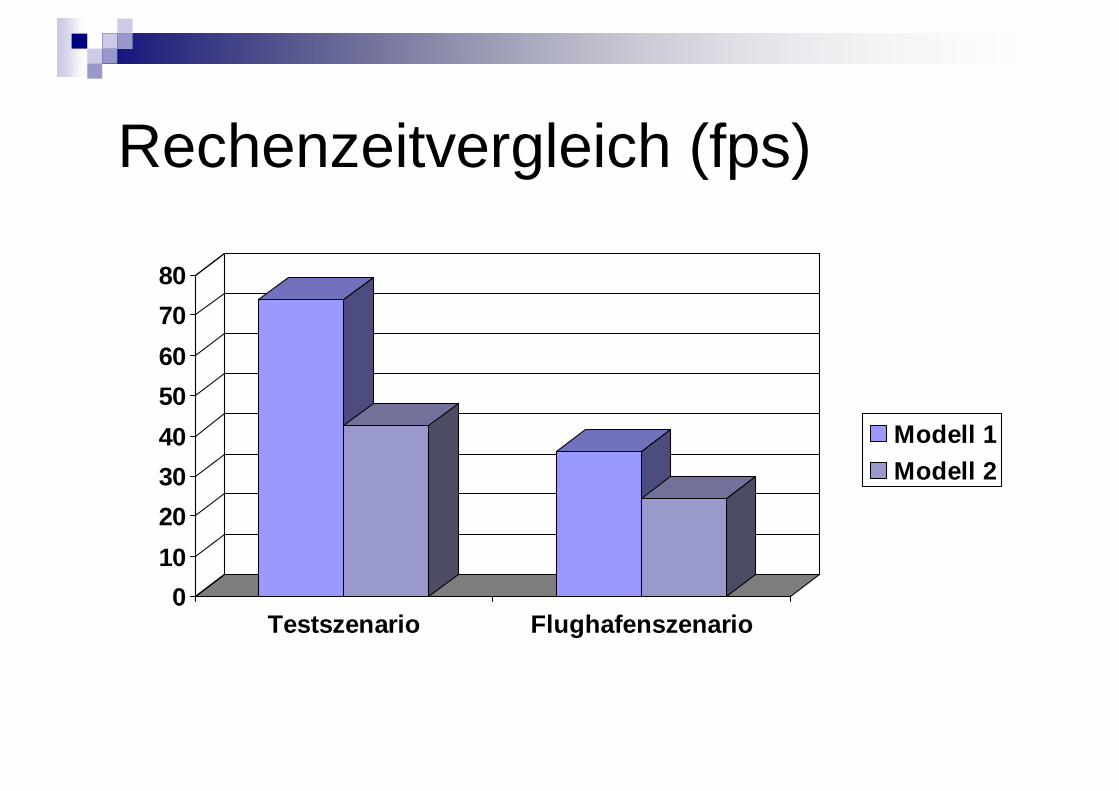
Rechenzeitvergleich (fps)
0
10
20
30
40
50
60
70
80
Testszenario Flughafenszenario
Modell 1Modell 2
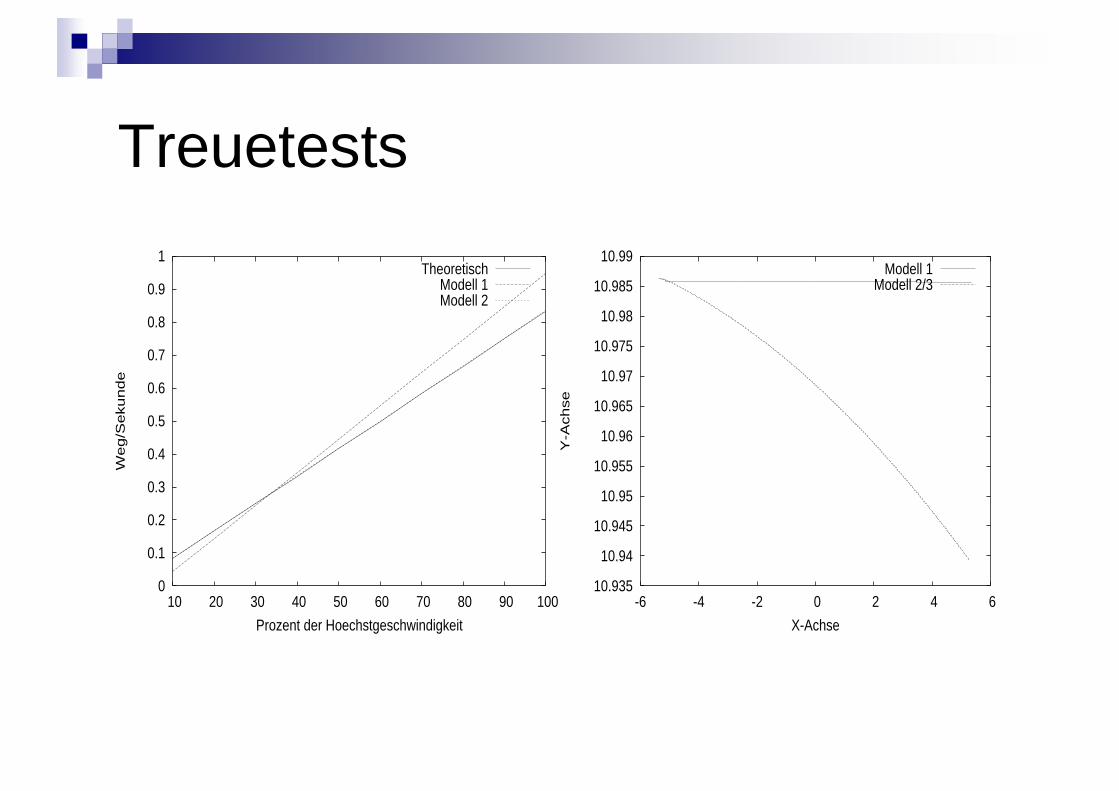
Treuetests
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
10 20 30 40 50 60 70 80 90 100
We
g/S
eku
nd
e
Prozent der Hoechstgeschwindigkeit
TheoretischModell 1Modell 2
10.935
10.94
10.945
10.95
10.955
10.96
10.965
10.97
10.975
10.98
10.985
10.99
-6 -4 -2 0 2 4 6
Y-A
ch
se
X-Achse
Modell 1Modell 2/3
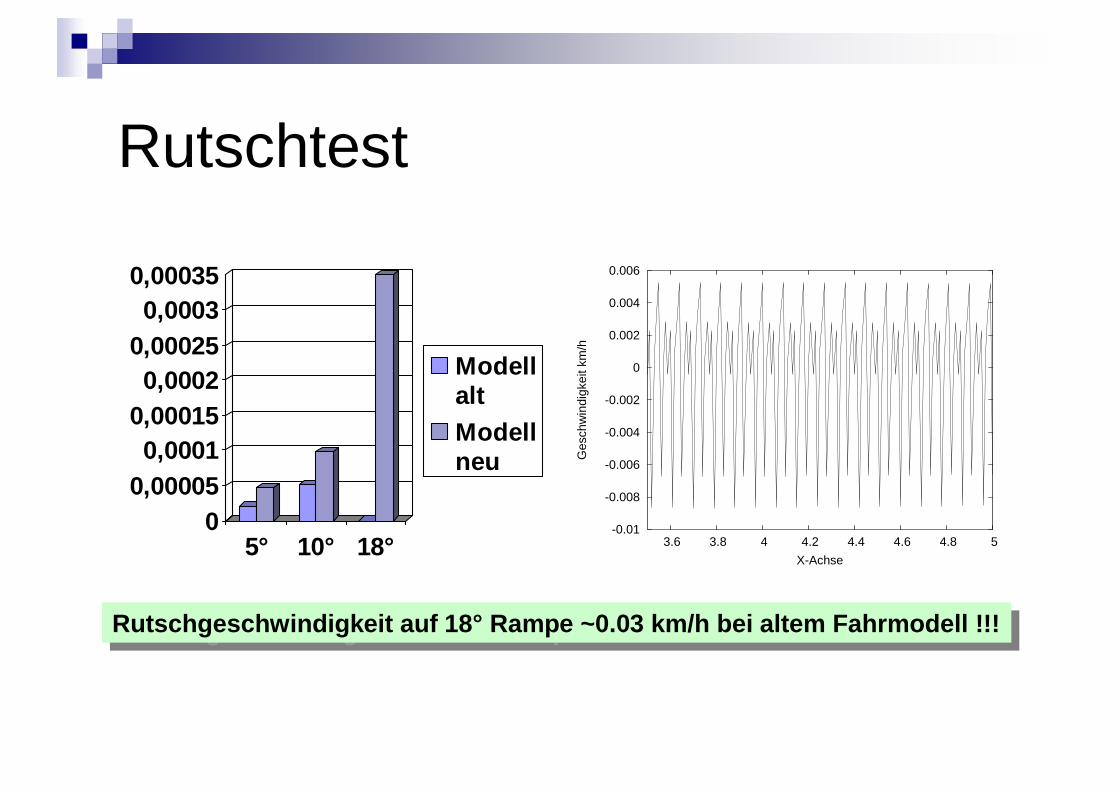
Rutschgeschwindigkeit auf 18° Rampe ~0.03 km/h bei altem Fahrmodell !!!
Rutschtest
00,000050,0001
0,000150,0002
0,000250,0003
0,00035
5° 10° 18°
ModellaltModellneu
-0.01
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
3.6 3.8 4 4.2 4.4 4.6 4.8 5
Ges
chw
indi
gkei
t km
/h
X-Achse
Rutschgeschwindigkeit auf 18° Rampe ~0.03 km/h bei altem Fahrmodell !!!
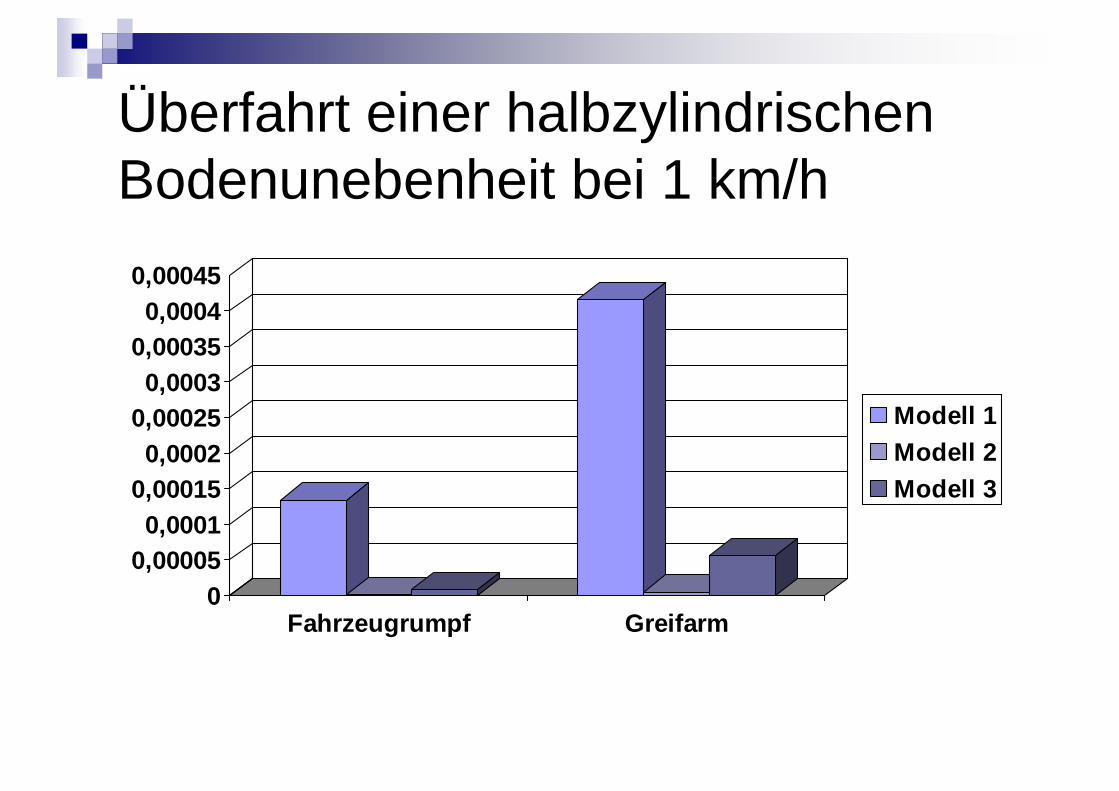
Überfahrt einer halbzylindrischen Bodenunebenheit bei 1 km/h
00,000050,0001
0,000150,0002
0,000250,0003
0,000350,0004
0,00045
Fahrzeugrumpf Greifarm
Modell 1Modell 2Modell 3
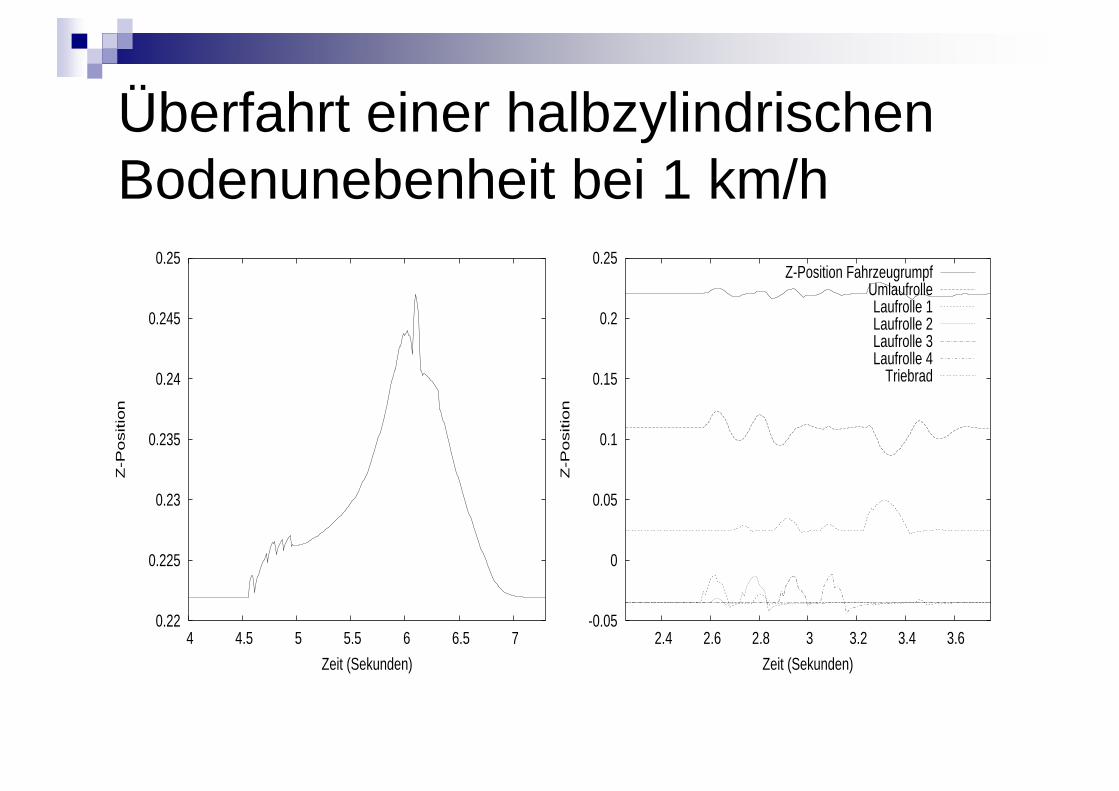
Überfahrt einer halbzylindrischen Bodenunebenheit bei 1 km/h
0.22
0.225
0.23
0.235
0.24
0.245
0.25
4 4.5 5 5.5 6 6.5 7
Z-P
ositio
n
Zeit (Sekunden)
-0.05
0
0.05
0.1
0.15
0.2
0.25
2.4 2.6 2.8 3 3.2 3.4 3.6
Z-P
ositio
n
Zeit (Sekunden)
Z-Position FahrzeugrumpfUmlaufrolleLaufrolle 1Laufrolle 2Laufrolle 3Laufrolle 4
Triebrad
Softwaretechnische Realisierung
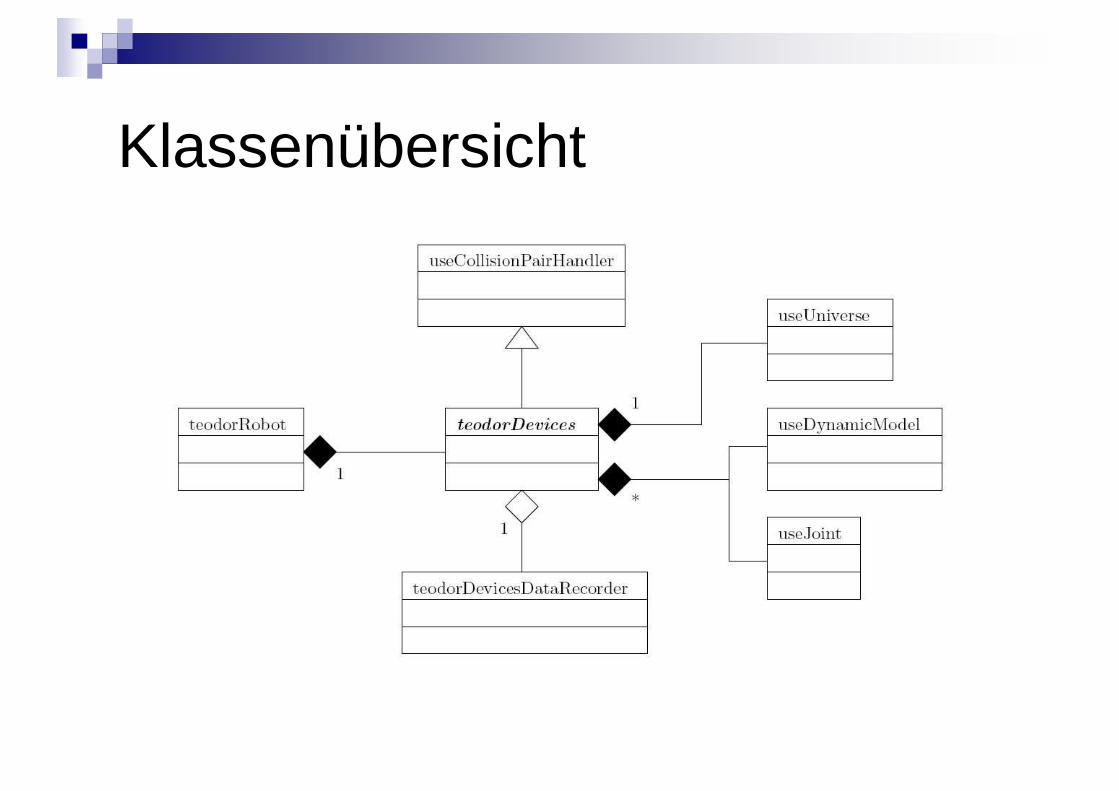
Klassenübersicht
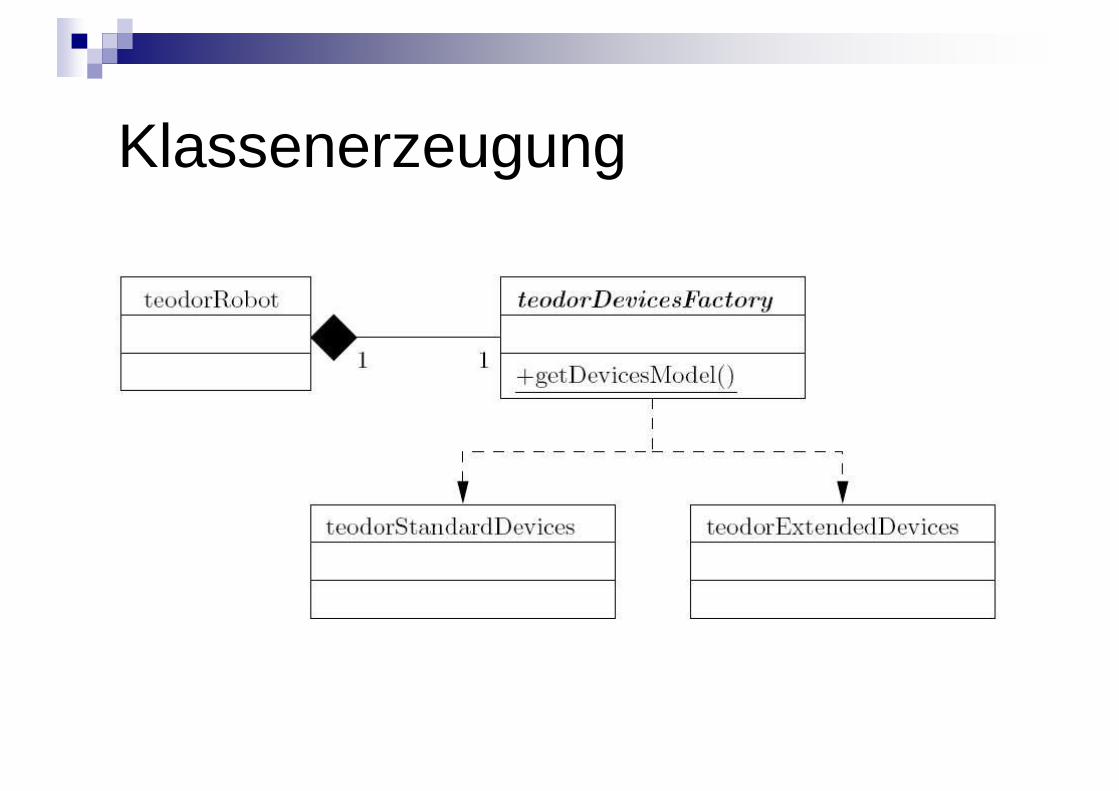
Klassenerzeugung
Zusammenfassung
� Physik SDK‘s unterstützen eine schnelleund realitätsnahe Modellierung bzw. Simulation technischer Systeme
� Aufwendigere Fahrmodelle durch hardwareunterstützte Physikberechnung zu realisieren (Grafikkarte, PhysX) oder eigene CPU für Berechnungen
PhysX Prozessor (Ageia)
� Etwa 25% der Rechenleistung wird bei modernen Computerspielen für sämtliche Physikberechnungen verwendet
� Physics Processing Unit (PPU) speziell entwickelt um hochparallele Berechnung physikalischer Effekte möglich in Echtzeit zu rechnen� Festkörperdynamik / Weichkörperdynamik� Finite Elemente Analyse� Flüssigkeitsdynamik� …
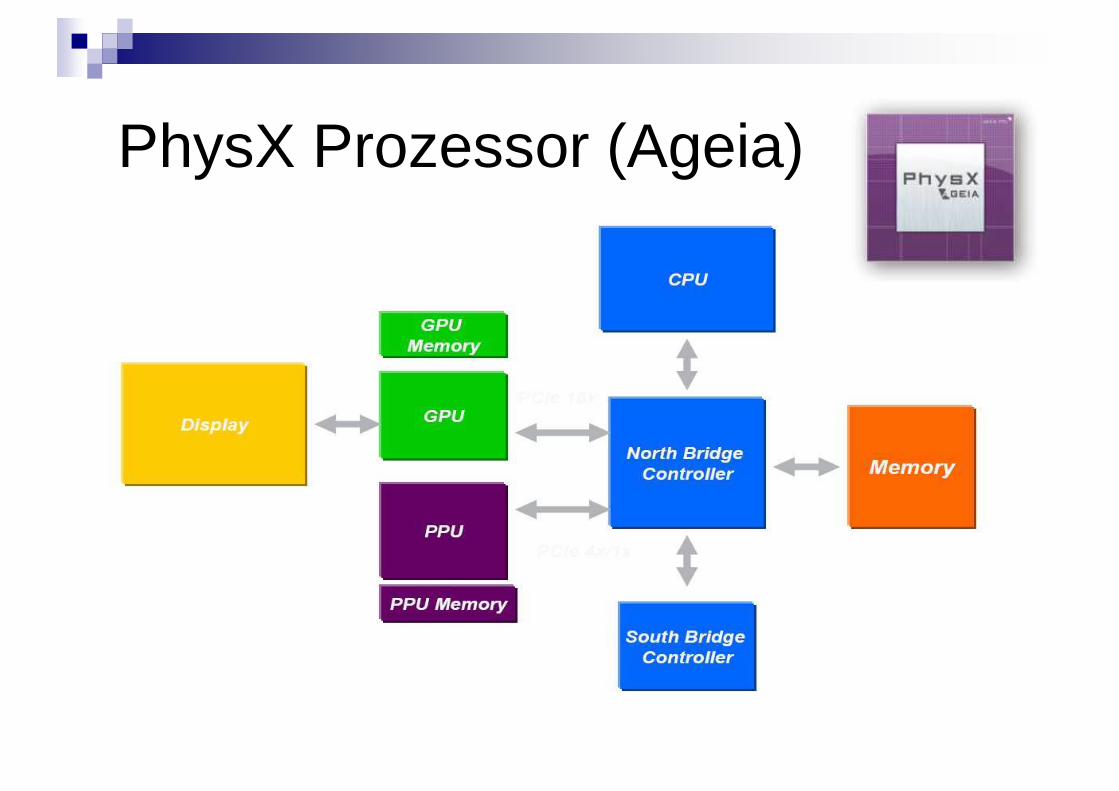
PhysX Prozessor (Ageia)
Noch Fragen ?
?
??
?
?
??
??
??
????
?
??
Backup-Folien
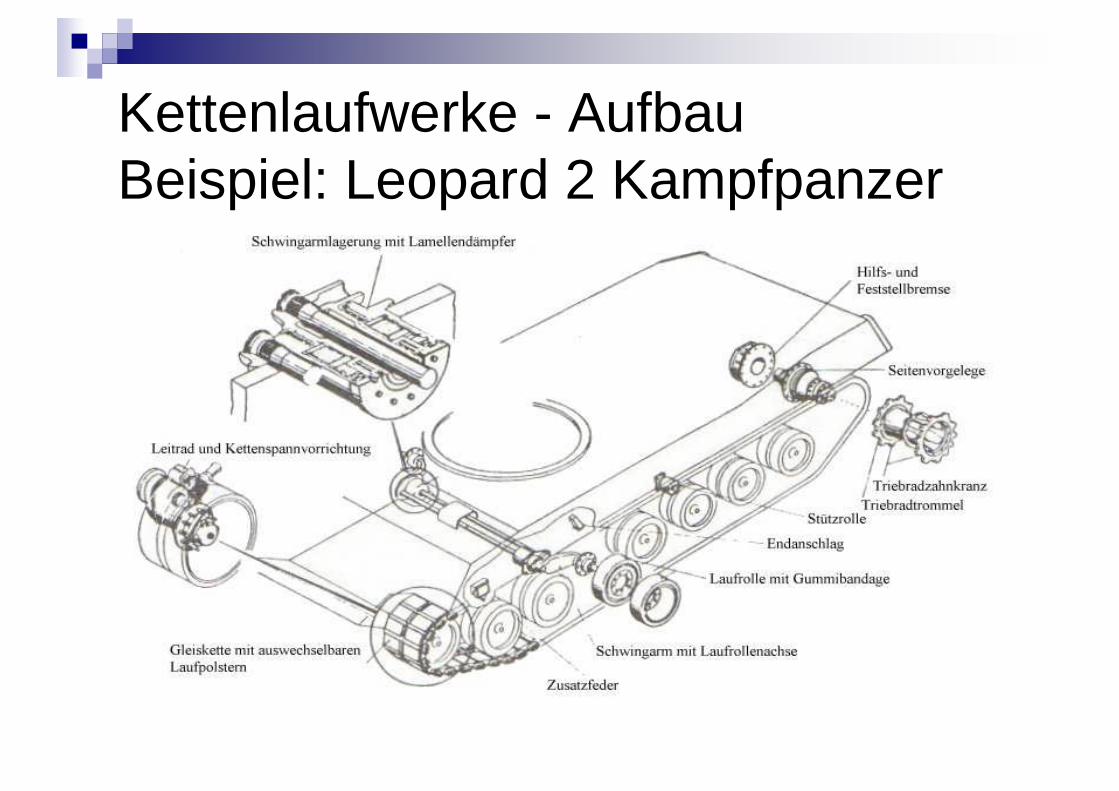
Kettenlaufwerke - Aufbau Beispiel: Leopard 2 Kampfpanzer
Kettenlaufwerke – Innere Laufwerkswiderstände� Arten von Widerständen:
� Triebradreibung� Reibung hervorgerufen durch Eingreifen der Kette am Triebrad und
der dadurch erzeugten Kräfte� Spurreibungswiderstand
� Reibung zwischen den Kettenführungsteilen (Laufrolle, Stützrollen, Umlenkrolle, Triebrädern) sowohl bei Geradeausfahrt als auch beider Kurvenfahrt
� Gelenkreibungswiderstand� Widerstand hervorgerufen durch Abwinkeln der Kettenglieder
gegeneinander an hinteren und vorderen Laufrollen, Umlenkrollen und Triebrädern bei überfahrt von Bodenunebenheiten
Kettenlaufwerke – Innere Laufwerkswiderstände
� Arten von Widerständen (Fortsetzung):�Stoßwiderstand
� Entsteht beim Überrollen der Kettengelenke durch Lauf-, Stütz- und Umlenkrollen abhängig von der Gummibandagierung der Rollen und der Kette
� Innerer Rollwiderstand� Widerstand durch Reibung innerhalb der Radlage
Kettenlaufwerke – Widerstände
� Berechnung innere Laufwerkswiderstände�Nach W. Merhof
� Widerstand in einer Größenordnung von 3 bis 8% vom Fahrzeuggewicht
�Nach J.Y. Wong / M.F. Bekker� Schwere Fahrzeuge:
� Fahrzeuggewicht * (222 + 3 * Geschwindigkeit)
� Leichte Fahrzeuge:� Fahrzeuggewicht * (133 + 2.5 * Geschwindigkeit)
Kettenlaufwerke – Innere Laufwerkswiderstände
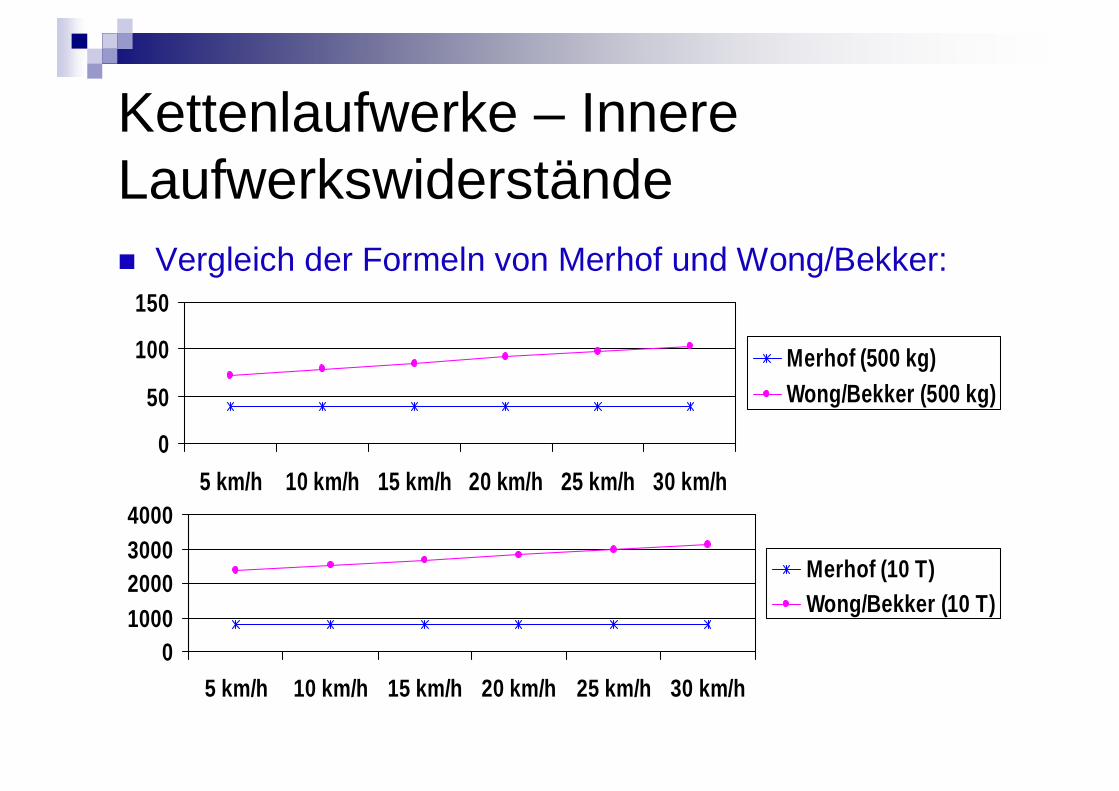
01000200030004000
5 km/h 10 km/h 15 km/h 20 km/h 25 km/h 30 km/h
Merhof (10 T)Wong/Bekker (10 T)
0
50
100
150
5 km/h 10 km/h 15 km/h 20 km/h 25 km/h 30 km/h
Merhof (500 kg)Wong/Bekker (500 kg)
� Vergleich der Formeln von Merhof und Wong/Bekker:
Kettenlaufwerke – Äußere Fahrwiderstände� Arten von Widerständen:
� Bugwiderstand� Entsteht an der Vorderseite des Fahrzeugs beim Einsinken� Größter Einzelfahrwiderstand
� Steigungswiderstand� Luftwiderstand
� Zu vernachlässigen bei Geländefahrt (v < 30 km/h)� Anhängerwiderstand� Beschleunigungswiderstand� Rollwiderstand
� Summe der Fahrwiderstände in der Ebene� Nach Mehrhof auf festem Untergrund 3 – 6% vom Fahrzeuggewicht
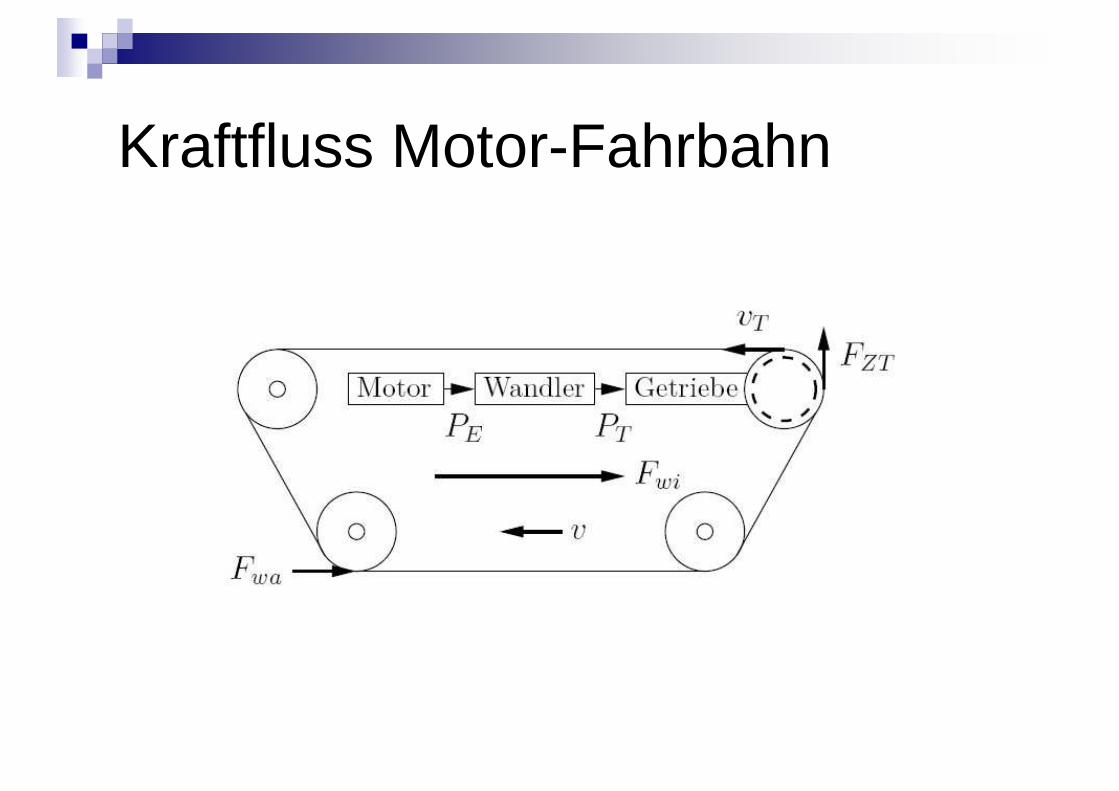
Kraftfluss Motor-Fahrbahn
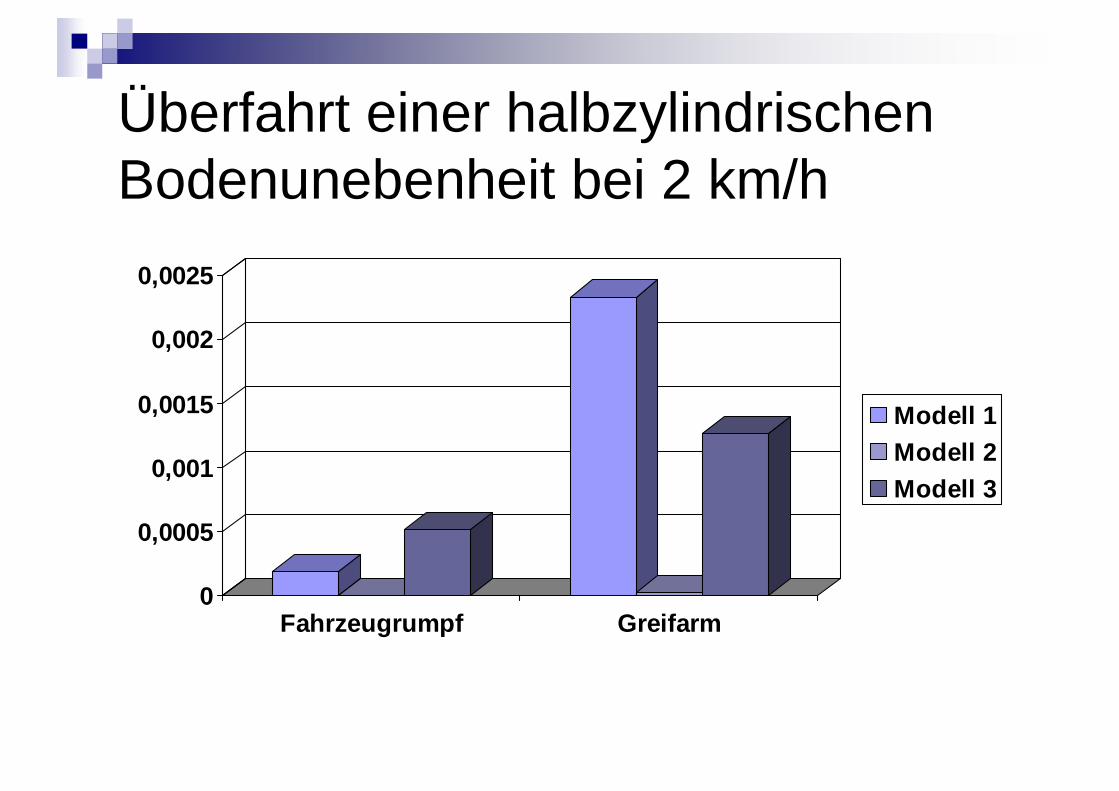
Überfahrt einer halbzylindrischen Bodenunebenheit bei 2 km/h
0
0,0005
0,001
0,0015
0,002
0,0025
Fahrzeugrumpf Greifarm
Modell 1Modell 2Modell 3
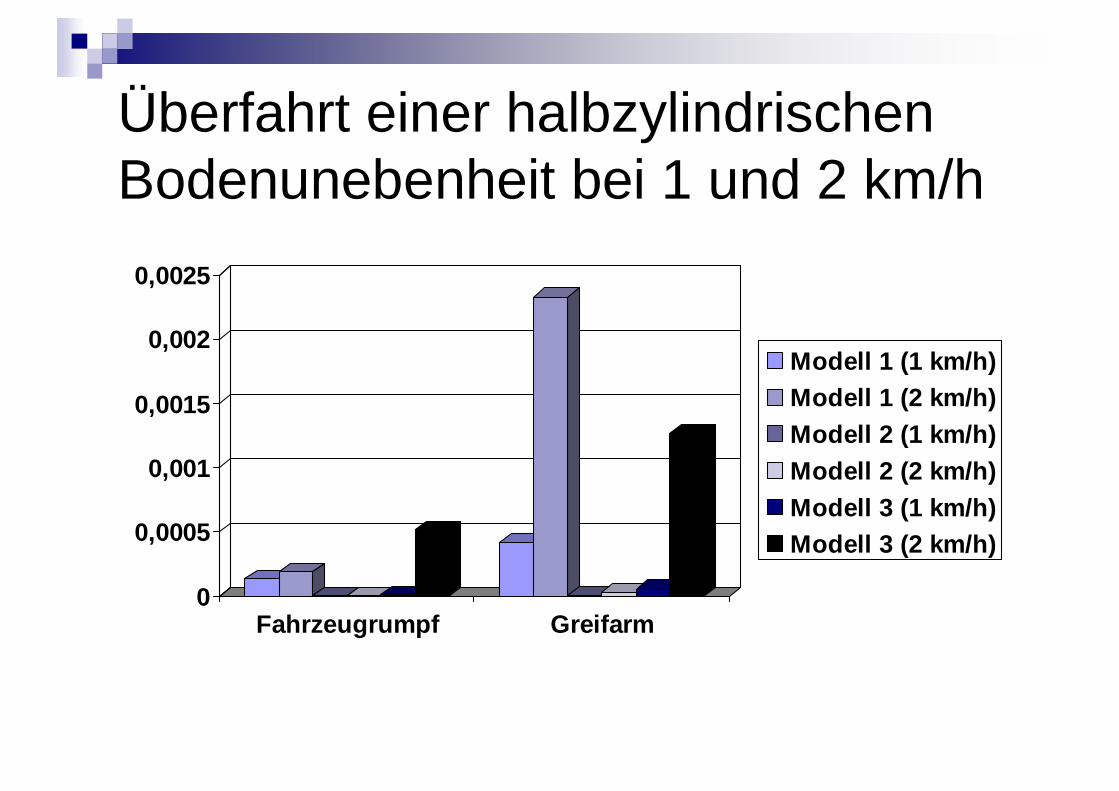
Überfahrt einer halbzylindrischen Bodenunebenheit bei 1 und 2 km/h
0
0,0005
0,001
0,0015
0,002
0,0025
Fahrzeugrumpf Greifarm
Modell 1 (1 km/h)Modell 1 (2 km/h)Modell 2 (1 km/h)Modell 2 (2 km/h)Modell 3 (1 km/h)Modell 3 (2 km/h)




























