Embed Size (px)
Citation preview
Universitat Karlsruhe (TH)Fakultat fur Mathematik
Mathematisches Institut II
Prof. Dr. Enrico Leuzinger
Skript zur Vorlesung
DIFFERENTIAL-
GEOMETRIE
Sommersemester 2005

Inhaltsverzeichnis
I Kurven 1
1 Euklidische Geometrie 11.1 Der Rn als euklidischer Raum . . . . . . . . . . . . . . . . . . . . . . 11.2 Ableitung von Skalarprodukt und Vektorprodukt . . . . . . . . . . . 2
2 Parametrisierte Kurven in Rn 22.1 Ein Definitionsversuch . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2 Differenzierbare Kurven . . . . . . . . . . . . . . . . . . . . . . . . . 32.3 Tangentialvektoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3 Lange und Bogenlangeparameter 43.1 Die Lange einer Kurve . . . . . . . . . . . . . . . . . . . . . . . . . . 43.2 Parametertransformationen . . . . . . . . . . . . . . . . . . . . . . . 63.3 Regulare Kurven und Bogenlange . . . . . . . . . . . . . . . . . . . . 7
4 Krummung von Kurven 84.1 Motivation und Definition . . . . . . . . . . . . . . . . . . . . . . . . 84.2 Die orientierte Krummung fur ebene Kurven . . . . . . . . . . . . . 10
5 Frenet-Formeln und Hauptsatz 115.1 Frenet-Formeln fur ebene Kurven . . . . . . . . . . . . . . . . . . . . 115.2 Frenet-Formeln fur Raumkurven . . . . . . . . . . . . . . . . . . . . 14
6 Ausblick auf die globale Kurventheorie 186.1 Totalkrummung, Umlaufsatz von Hopf . . . . . . . . . . . . . . . . . 186.2 Konvexe Kurven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
II Flachen 23
7 Regulare Flachen im R3 237.1 Die Tangentialabbildung . . . . . . . . . . . . . . . . . . . . . . . . . 237.2 Regulare Flachen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247.3 Tangentialebenen einer Flache . . . . . . . . . . . . . . . . . . . . . . 26
8 Beispiele 288.1 Affine Ebenen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288.2 Graphen von Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . 298.3 Die 2-Sphare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308.4 Implizit definierte Flachen . . . . . . . . . . . . . . . . . . . . . . . . 318.5 Rotationsflachen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
i

9 Die 1. Fundamentalform 349.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349.2 Lange von Flachenkurven . . . . . . . . . . . . . . . . . . . . . . . . 359.3 Winkel zwischen Parameterlinien . . . . . . . . . . . . . . . . . . . . 369.4 Verhalten von I bei Koordinatenwechsel . . . . . . . . . . . . . . . . 36
III Krummung von Flachen 38
10 Gauß- und Weingarten-Abbildung 3810.1 Differenzierbare Abbildungen . . . . . . . . . . . . . . . . . . . . . . 3810.2 Das Tangentialbundel . . . . . . . . . . . . . . . . . . . . . . . . . . 3910.3 Normalenfelder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4010.4 Gauß- und Weingarten-Abbildung . . . . . . . . . . . . . . . . . . . 42
11 Gauß-Krummung und mittlere Krummung 4711.1 Die Normalschnittkrummung . . . . . . . . . . . . . . . . . . . . . . 4711.2 Hauptkrummungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5011.3 Die Gauß-Krummung . . . . . . . . . . . . . . . . . . . . . . . . . . 5011.4 Formeln fur K und H in lokalen Koordinaten . . . . . . . . . . . . . 51
12 Rotationsflachen mit konstanter Gauß-Krummung 55
13 Minimalflachen 56
IV Innere Geometrie von Flachen 61
14 Lokale Isometrien 6114.1 Ein Beispiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6114.2 Isometrien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
15 Christoffel-Symbole und Theorema egregium 64
16 Kovariante Ableitung und Geodatische 6716.1 Die kovariante Ableitung . . . . . . . . . . . . . . . . . . . . . . . . . 6716.2 Geodatische . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6916.3 Die Differentialgleichung fur Geodatische . . . . . . . . . . . . . . . . 71
17 Geodatische auf Rotationsflachen 72
18 Kurzeste Kurven sind Geodatische 74
19 Geodatische Parallelkoordinaten 77
ii
20 Parallelverschiebung und geodatischeKrummung 8320.1 Parallele Vektorfelder . . . . . . . . . . . . . . . . . . . . . . . . . . 8320.2 Parallelverschiebung . . . . . . . . . . . . . . . . . . . . . . . . . . . 8520.3 Parallelverschiebung und Krummung . . . . . . . . . . . . . . . . . . 86
V Der Satz von Gauß-Bonnet und Folgerungen 92
21 Umlaufsatz und Satz von Gauß-Bonnet 9221.1 Der Umlaufsatz fur Flachenkurven . . . . . . . . . . . . . . . . . . . 9221.2 Satz von Gauß-Bonnet (lokale Version) . . . . . . . . . . . . . . . . . 9521.3 Folgerungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
22 Mannigfaltigkeiten (light) 9822.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9822.2 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
23 Klassifikationssatz fur kompakte2-Mannigfaltigkeiten 10223.1 Chirurgie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10223.2 Der Klassifikationssatz . . . . . . . . . . . . . . . . . . . . . . . . . . 105
24 Satz von Gauß-Bonnet (Globale Version) 10624.1 Triangulierungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10624.2 Der Satz von Gauß-Bonnet . . . . . . . . . . . . . . . . . . . . . . . 107
Anhang 109
A Einige Grundbegriffe der Topologie 109
B Fragen zur Lernkontrolle 111
C Historische Anmerkungen 113
D Literaturauswahl 115
iii

Teil I
Kurven
1 Euklidische Geometrie
1.1 Der Rn als euklidischer Raum
Ein euklidischer Vektorraum ist ein reeller Vektorraum E versehen mit einem Ska-larprodukt. Wir betrachten den Spezialfall E = Rn mit dem Standard-Skalarprodukt〈·, ·〉 : Rn × Rn → R, gegeben durch
〈a, b〉 :=n∑i=1
aibi
fur a = (a1, . . . , an), b = (b1, . . . , bn) ∈ Rn. Mittels ‖a‖ :=√〈a, a〉 erhalt man eine
Norm auf Rn und durch d(a, b) := ‖a−b‖ eine Metrik. Der Winkel ∠(a, b) zwischenzwei vom Nullvektor verschiedenen Vektoren a und b wird durch
cos∠(a, b) :=〈a, b〉‖a‖ ‖b‖
definiert. Eine euklidische Isometrie oder eine Bewegung ist eine Abbildung φ :Rn → Rn mit der folgenden Eigenschaft: Fur alle x, y ∈ Rn gilt
d(φ(x), φ(y)) = d(x, y).
Nach Definition von d ist diese Bedingung aquivalent zu ‖φ(x) − φ(y)‖ = ‖x − y‖fur alle x, y ∈ Rn. Beispiele von Isometrien sind Translationen, Spiegelungen undRotationen. Ist a ∈ Rn, so bezeichnet Ta : Rn → Rn die Translation x 7→ x + a.Sei A eine orthogonale Abbildung, d. h. A ist linear und 〈Ax,Ay〉 = 〈x, y〉 furalle x, y ∈ Rn. Eine orthogonale Abbildung ist dadurch charakterisiert, dass ihreDarstellungsmatrix M bezuglich der Standardbasis orthogonal ist, also M ∈ O(n).Fur z ∈ Rn ist
RA,z := Tz A T−zeine Rotation (oder Drehung) um z. Der Punkt z ist ein Fixpunkt von R undjede Rotation um z ist von obiger Form (fur ein geeignetes A). Die Rotation heißteigentlich, falls detA > 0 (die entsprechende Abbildungsmatrix ist dann in derspeziellen orthogonalen Gruppe SO(n)).
Die Isometrien des Rn bilden bezuglich der Komposition von Abbildungen eineGruppe. Aus der linearen Algebra ist folgender Satz bekannt (vgl. E.G. Rees, Noteson Geometry, Part I, Thm. 5).
Satz 1. Jede euklidische Isometrie ist als Verknupfung einer Rotation mit einerTranslation darstellbar.
1

1.2 Ableitung von Skalarprodukt und Vektorprodukt
Wir wollen als Vorbereitung noch die ”Ableitung“ des Skalarprodukts und des Vek-torprodukts bestimmen. Dazu seien s 7→ a(s) und s 7→ b(s) zwei differenzierbareAbbildungen von einem offen Intervall I ⊆ R nach Rn. Dann ist
s 7→ 〈a(s), b(s)〉 =n∑i=1
ai(s)bi(s)
eine differenzierbare Funktion und es gilt die Produktregel
d
ds〈a(s), b(s)〉 =
d
ds
n∑i=1
ai(s)bi(s)
=n∑i=1
(a′i(s)bi(s) + ai(s)b′i(s))
= 〈a′(s), b(s)〉+ 〈a(s), b′(s)〉.
Als nachstes betrachten wir das Vektorprodukt ∧ : R3×R3 → R3. Definitionsgemaßgilt fur a = (a1, a2, a3) und b = (b1, b2, b3)
a ∧ b =(∣∣∣∣ a2 b2
a3 b3
∣∣∣∣ ,− ∣∣∣∣ a1 b1a3 b3
∣∣∣∣ , ∣∣∣∣ a1 b1a2 b2
∣∣∣∣)= (a2b3 − a3b2,−a1b3 + a3b1, a1b2 − a2b1).
Sind s 7→ a(s) und s 7→ b(s) differenzierbare Abbildungen von I ⊆ R nach R3, sorechnet man leicht nach, dass ebenfalls eine Produktregel gilt
d
ds(a(s) ∧ b(s)) = a′(s) ∧ b(s) + a(s) ∧ b′(s).
2 Parametrisierte Kurven in Rn
2.1 Ein Definitionsversuch
Die naheliegende Definition einer Kurve ist folgende: Es sei I ⊆ R ein Intervall.Eine ”Kurve“ in Rn ist eine stetige Abbildung f : I → Rn. Diese Defintion laßtdann aber Spezialfalle zu, die man nicht unbedingt als Kurven bezeichnen mochte.So gibt es zum Beispiel eine stetige, surjektive Abbildung f : [0, 1]→ [0, 1]× [0, 1].Gemaß obiger Definition ware also das Einheitsquadrat in R2 das Bild einer Kur-ve. Wir wollen das Konstruktionsprinzip einer solchen Peano-Kurve skizzieren, vgl.Abb. 2.1. Man betrachtet das Einheitsquadrat und die wie in (a) eingezeichneteKurve. Eine Skalierung mit dem Faktor 1/2, Drehung um 90 Grad im Uhrzeiger-sinn um den eingezeichneten Punkt und Verschiebung um den Vektor (0, 1/2) fuhrtauf die Abbildung (b). Wir spiegeln an der in (c) eingezeichneten Achse, verschie-ben um den Vektor (1/2, 0) und verbinden die Endpunkte der vier Kurven wie in
2

Abbildung 2.1: Konstruktion einer Peano-Kurve
(d). Ausgehend von (d) wiederholt man jetzt diese Schritte. Im Grenzfall erhaltman schließlich eine stetige Abbildung von [0, 1] auf das Einheitsquadrat (vgl. z.B.Konigsberger, Analysis 1, S. 282).
2.2 Differenzierbare Kurven
Um Phanomene wie im letzten Abschnitt, also z.B. raumfullende Kurven, auszu-schließen, muss die Definition entsprechend eingeschrankt werden. Zunachst nocheine technische Vorbemerkung: Ist I ⊆ R ein beliebiges Intervall und c : I → Rneine Abbildung, so heißt c differenzierbar, wenn es ein offenes Intervall I∗ ⊇ I undeine differenzierbare Abbildung c∗ gibt mit c∗|I = c.
Definition 1. Es sei I ⊆ R ein Intervall. Eine parametrisierte Kurve ist eineC∞-Abbildung c : I → Rn, t 7→ (x1(t), . . . , xn(t)), d.h. die Ableitungen
x(k)i (t) :=
dkxidtk
(t)
existieren fur alle k ∈ N und i = 1, . . . , n. Im Fall n = 2 (bzw. n = 3) nennt man cebene Kurve (bzw. Raumkurve).
Bemerkung (a) Oft fordert man nur, dass c eine Ck-Abbildung ist (also k malstetig differenzierbar fur ein festes k ∈ N).(b) Eine parametrisierte Kurve ist eine Abbildung und nicht mit der Bildmengec(I) ⊂ Rn zu verwechseln. Die Menge c(I) nennt man manchmal auch die Spur vonc. Da Intervalle zusammenhangend und differenzierbare Kurven insbesondere auchstetig sind, ist die Spur einer parametrisierten Kurve ebenfalls zusammenhangend.
2.3 Tangentialvektoren
Sei x = (x1, . . . , xn) ∈ Rn. Der Tangentialraum von Rn im Punkt x ist die Menge
TxRn := x × Rn = (x, a) | a ∈ Rn .
Mittels der Bijektion TxRn → Rn, (x, a) 7→ a versehen wir TxRn mit der Struk-tur eines reellen Vektorraums. Damit wird diese Bijektion zu einem Vektorraum-Isomorphismus. Die Elemente des Tangentialraums TxR heißen Tangentialvektoren.
3
Den Punkt x bezeichnet man als Fußpunkt von v = (x, a) ∈ TxR. Einen Tangenti-alvektor kann man sich als einen im Punkt x angehefteten Vektor a vorstellen. DenTangentialvektor an eine parametrisierten Kurve c im Punkt c(t) definieren wir als(c(t), c′(t)) ∈ Tc(t)Rn, wobei
c′(t) :=dc
dt(t) = (x′1(t), . . . , x′n(t)).
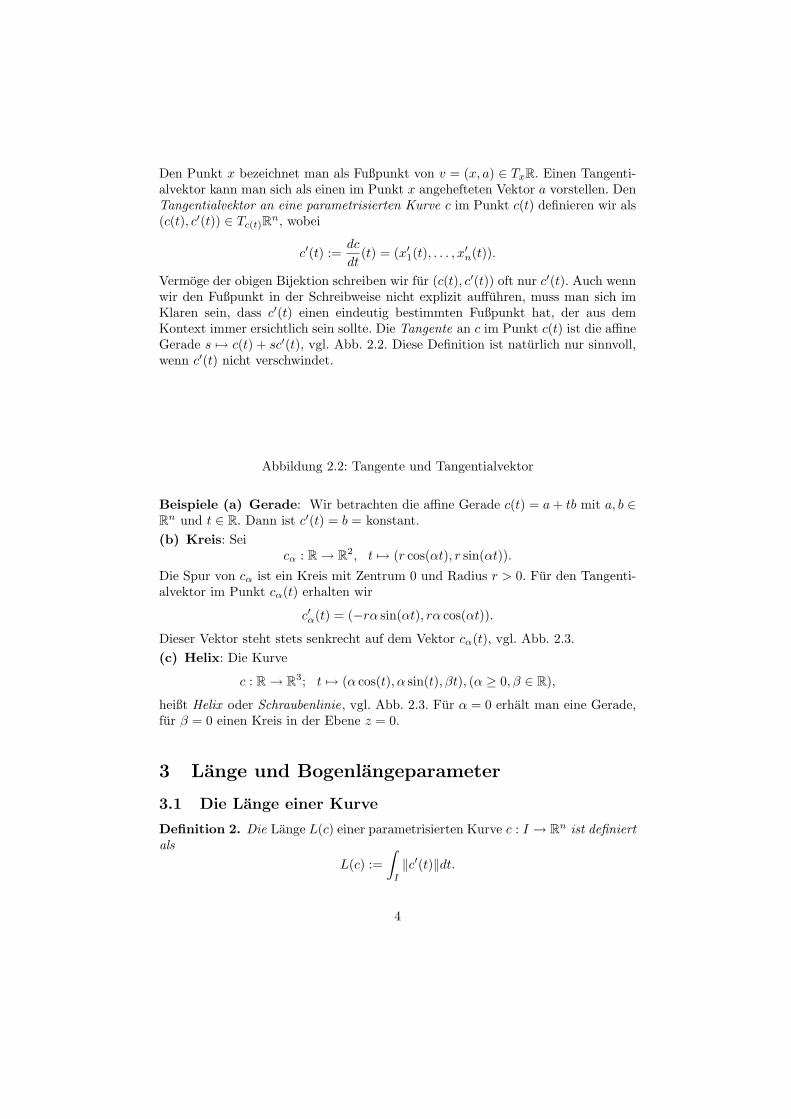
Vermoge der obigen Bijektion schreiben wir fur (c(t), c′(t)) oft nur c′(t). Auch wennwir den Fußpunkt in der Schreibweise nicht explizit auffuhren, muss man sich imKlaren sein, dass c′(t) einen eindeutig bestimmten Fußpunkt hat, der aus demKontext immer ersichtlich sein sollte. Die Tangente an c im Punkt c(t) ist die affineGerade s 7→ c(t) + sc′(t), vgl. Abb. 2.2. Diese Definition ist naturlich nur sinnvoll,wenn c′(t) nicht verschwindet.
Abbildung 2.2: Tangente und Tangentialvektor
Beispiele (a) Gerade: Wir betrachten die affine Gerade c(t) = a+ tb mit a, b ∈Rn und t ∈ R. Dann ist c′(t) = b = konstant.(b) Kreis: Sei
cα : R→ R2, t 7→ (r cos(αt), r sin(αt)).
Die Spur von cα ist ein Kreis mit Zentrum 0 und Radius r > 0. Fur den Tangenti-alvektor im Punkt cα(t) erhalten wir
c′α(t) = (−rα sin(αt), rα cos(αt)).
Dieser Vektor steht stets senkrecht auf dem Vektor cα(t), vgl. Abb. 2.3.(c) Helix: Die Kurve
c : R→ R3; t 7→ (α cos(t), α sin(t), βt), (α ≥ 0, β ∈ R),
heißt Helix oder Schraubenlinie, vgl. Abb. 2.3. Fur α = 0 erhalt man eine Gerade,fur β = 0 einen Kreis in der Ebene z = 0.
3 Lange und Bogenlangeparameter
3.1 Die Lange einer Kurve
Definition 2. Die Lange L(c) einer parametrisierten Kurve c : I → Rn ist definiertals
L(c) :=∫I
‖c′(t)‖dt.
4

Abbildung 2.3: Tangentialvektor an einen Kreis und eine Helix
Beispiele (a) Die Kurve c : I = [0,∞) → R2, t 7→ e−t(cos t, sin t) heißt Logarith-mische Spirale. Es ist
c′(t) = −e−t(cos t, sin t) + e−t(− sin t, cos t)
und ‖c′(t)‖2 = 2e−2t. Daraus folgt
L(c) =∫I
‖c′(t)‖dt =√
2∫ ∞
0
e−tdt =√
2.
(b) Die Spur der Kurve c : I = [0, 2π] → R2, t 7→ (α cos t, β sin t), α ≥ β > 0, isteine Ellipse. Wegen c′(t) = (−α sin t, β cos t) folgt
L(c) =∫I
‖c′(t)‖dt =∫ 2π
0
√α2 sin2 t+ β2 cos2 t dt.
Das ist ein sogenanntes elliptisches Integral; es ist nicht elementar darstellbar.
Satz 2. Die Lange von Kurven ist invariant unter Isometrien, d.h. ist c : I → Rneine parametrisierte Kurve und φ eine Isometrie, so gilt L(φ c) = L(c).
Beweis. Wegen Satz 1 genugt es die Behauptung fur Translationen und Rotationenzu zeigen. Da diese differenzierbar sind, ist φ c selbst wieder eine parametrisierteKurve. Sei also zunachst φ = Ta, a ∈ Rn, eine Translation. Dann ist
(φ c)(t) = c(t) + a und (φ c)′(t) = c′(t).
Damit folgt unmittelbar aus der Definition der Lange, daß L(φ c) = L(c). Seischliesslich φ = RA,z eine Rotation. Aus der Definition von RA,z folgt
(φ c)′(t) = Ac′(t).
Da A eine orthogonale Abbildung ist, gilt ‖Ac′‖ = ‖c′‖ und damit auch in diesemFall L(φ c) = L(c).
5

3.2 Parametertransformationen
Es sei c : I → Rn eine gegebene parametrisierte Kurve und I ein weiteres Intervall.Eine Parametertransformation ist ein Diffeomorphismus ϕ : I → I, d. h. ϕ istbijektiv, differenzierbar (d.h. hier also C∞) und die inverse Abbildung ϕ−1 : I → Iist ebenfalls differenzierbar. Man sagt, daß die Kurve c := c ϕ : I → Rn aus cdurch die Parametertransformation ϕ entsteht:
Ic // Rn
I
ϕ
OO
c
??~~~~~~~~
.
Satz 3. Die Lange von parametrisierten Kurven ist invariant unter Parameter-transformationen: Entsteht c aus c durch Parametertransformation, so gilt L(c) =L(c).
Beweis. Es sei c : I → Rn, r 7→ c(r), eine parametrisierte Kurve und ϕ : I → I,t 7→ r = ϕ(t) eine Parametertransformation. Fur c := c ϕ gilt dann
L(c) =∫I
∥∥∥dcdt
(t)∥∥∥dt =
∫I
∥∥∥d(c ϕ)dt
(t)∥∥∥dt.
Mit Kettenregel und Substitutionsregel folgt weiter∫I
∥∥∥d(c ϕ)dt
(t)∥∥∥dt =
∫I
∥∥∥dcdr
(ϕ(t))∥∥∥|ϕ′(t)|dt =
∫I
∥∥∥dcdr
(r)∥∥∥dr = L(c)
Damit ist der Satz bewiesen.
Bemerkung (a) Die Satze 2 und 3 lassen sich folgendermaßen zusammenfassen:Hat man ein kommutatives Diagramm der Form
Ic // Rn
φ
I
ϕ
OO
c// Rn
mit einem Diffeomorphismus ϕ : I → I und einer Isometrie φ, so gilt
L(c) = L(φ c ϕ) = L(c).
(b) Parametertransformationen definieren auf der Menge aller parametrisiertenKurven eine Aquivalenzrelation: zwei Kurven c1, c2 sind aquivalent, falls es eine Pa-rametertransformation ϕ gibt mit c2 = c1 ϕ. Eine entsprechende Aquivalenzklasseheißt auch unparametrisierte (oder geometrische) Kurve.
6
3.3 Regulare Kurven und Bogenlange
Es sei c : I → Rn eine parametrisierte Kurve. Die Tangente an c im Punkt c(t) istdie affine Gerade s 7→ c(t) + sc′(t). Fur gewisse geometrische Konzepte, die wir imFolgenden einfuhren werden, muss man voraussetzen, dass in jedem Kurvenpunktvon c die Tangente existiert (der entsprechende Tangentialvektor c′(t) also nichtder Nullvektor ist). Das fuhrt auf folgende
Definition 3. Die Kurve c : I → Rn heißt regular, wenn fur alle t ∈ I giltc′(t) 6= 0.
Beispiel. Wir betrachten die Kurven c : R → R2, t 7→ (t, t2) und c : R → R2,t 7→ (t3, t6). Es ist c′(t) = (1, 2t) und c ist regular. Wegen c′(t) = (3t2, 6t5) ist cnicht regular. Man beachte aber, dass c(R) = c(R) eine Parabel ist. Die Eigenschaft“regular” ist demnach keine Eigenschaft der Spur einer Kurve.
Es sei c : [α, β]→ Rn eine regulare Kurve. Setzt man
s(t) :=∫ t
α
‖c′(τ)‖dτ,
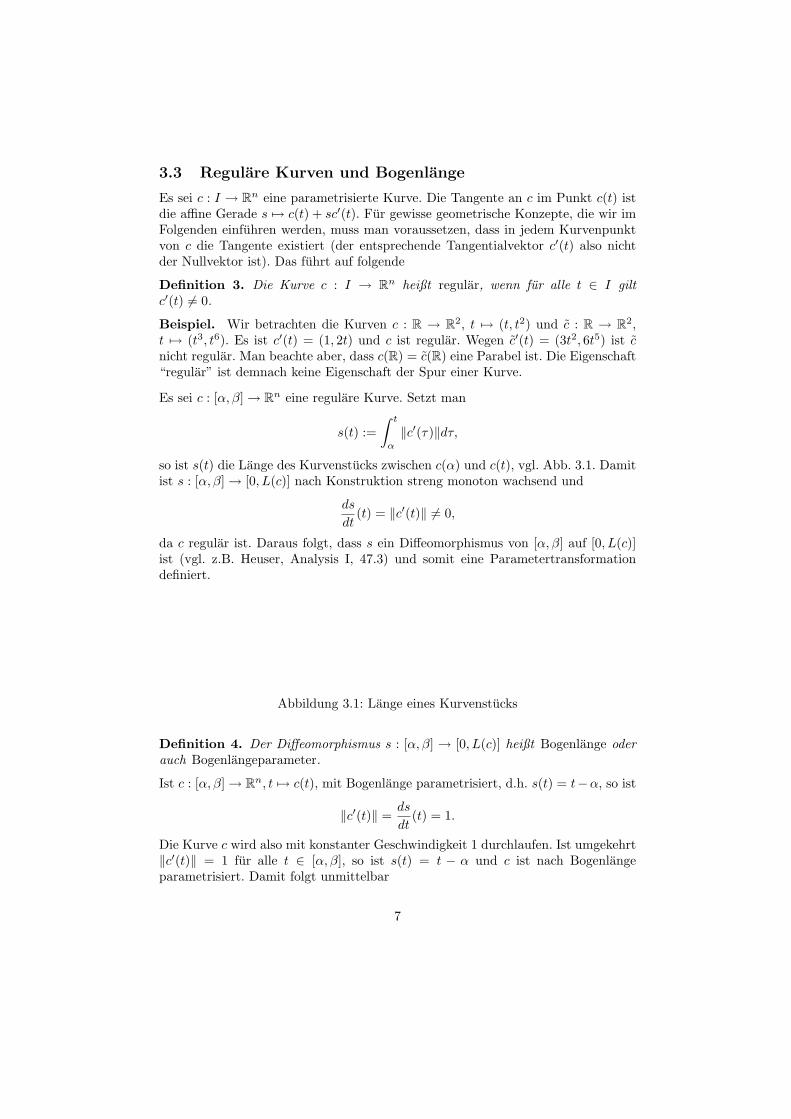
so ist s(t) die Lange des Kurvenstucks zwischen c(α) und c(t), vgl. Abb. 3.1. Damitist s : [α, β]→ [0, L(c)] nach Konstruktion streng monoton wachsend und
ds
dt(t) = ‖c′(t)‖ 6= 0,
da c regular ist. Daraus folgt, dass s ein Diffeomorphismus von [α, β] auf [0, L(c)]ist (vgl. z.B. Heuser, Analysis I, 47.3) und somit eine Parametertransformationdefiniert.
Abbildung 3.1: Lange eines Kurvenstucks
Definition 4. Der Diffeomorphismus s : [α, β] → [0, L(c)] heißt Bogenlange oderauch Bogenlangeparameter.
Ist c : [α, β]→ Rn, t 7→ c(t), mit Bogenlange parametrisiert, d.h. s(t) = t−α, so ist
‖c′(t)‖ =ds
dt(t) = 1.
Die Kurve c wird also mit konstanter Geschwindigkeit 1 durchlaufen. Ist umgekehrt‖c′(t)‖ = 1 fur alle t ∈ [α, β], so ist s(t) = t − α und c ist nach Bogenlangeparametrisiert. Damit folgt unmittelbar
7

Lemma 1. Eine Kurve c : I → Rn, t 7→ c(t) ist genau dann nach Bogenlangeparametrisiert, wenn ‖c′(t)‖ = 1 fur alle t ∈ I gilt.
Bemerkung (a) Die Parametrisierung nach Bogenlange ist bis auf Verschiebungs 7→ s+ s0 und Richtungsumkehr s 7→ −s eindeutig bestimmt.(b) Eine mit Bogenlange parmetrisierte Kurve ist insbesondere reguar.
Es gilt nun folgender, fur die Theorie wichtige, Satz:
Satz 4. Jede regulare, parametrisierte Kurve c : [α, β] → Rn, t 7→ c(t) mit Langel kann nach Bogenlange parametrisiert werden, d.h. es gibt eine nach Bogenlangeparametrisierte Kurve c : [0, l]→ Rn, s 7→ c(s), die aus c durch Parametertransfor-mation entsteht.
Beweis. Wir setzen
ϕ(t) :=∫ t
α
∥∥∥ dcdτ
(τ)∥∥∥dτ.
Damit ist ϕ : [α, β] → [0, l], t 7→ ϕ(t) =: s(t) eine streng monoton wachsende,differenzierbare Abbildung mit
dϕ
dt(t) ≡ ds
dt(t) =
∥∥∥dcdt
(t)∥∥∥ 6= 0.
Also hat ϕ eine differenzierbare Umkehrabbildung ϕ−1 : [0, l] → [α, β], s 7→ t. DieKurve c(s) := (c ϕ−1)(s) ist demnach ebenfalls differenzierbar und wegen∥∥∥dc
ds(s)∥∥∥ =
∥∥∥d(c ϕ−1)ds
(s)∥∥∥ =
∥∥∥dcdt
(ϕ−1(s))∥∥∥ · ∣∣∣dϕ−1
ds(s)∣∣∣ =
∥∥∥dcdt
(t)∥∥∥ · ∣∣∣ dt
ds
∣∣∣ = 1
ist sie nach Bogenlange parametrisiert.
Beispiel. Wir betrachten die Kurve c : I := [0, 2π] → R2, t 7→ (r cos t, r sin t).Die Spur von c ist ein Kreis vom Radius r. Es gilt c′(t) = (−r sin t, r cos t), also‖c′(t)‖ = r. Fur die Bogenlange s ergibt sich
s(t) =∫ t
0
rdτ = rt.
Damit erhalt man t = t(s) = sr . Weiter gilt L(c) = 2πr. Die Umparametrisierung
c : [0, 2πr]→ R2 von c nach Bogenlange hat demnach die Gestalt
c(s) := c(t(s)) =(r cos
s
r, r sin
s
r
).
4 Krummung von Kurven
4.1 Motivation und Definition
Wir wollen in diesem Abschnitt den zentralen Begriff der ”Krummung“ definieren.Anschaulich ist klar, dass eine Gerade oder ein Geradenstuck nicht ”gekrummt“
8

ist, also ”Krummung“ 0 haben sollte. Betrachtet man Kreise mit immer grosserwerdendem Radius, so nahern sich diese immer mehr einer Geraden an. Es istdeshalb plausibel, dass die ”Krummung“ eines Kreises vom Radius r proportionalzu 1/r sein sollte. Die folgende Definition misst die Anderung der Tangenten.
Definition 5. Es sei c : I → Rn, s 7→ c(s) eine mit Bogenlange parametrisierteKurve. Die Krummung von c im Punkt c(s) ist definiert als
κ(c(s)) ≡ κ(s) := ‖c′′(s)‖ =∥∥∥d2c
ds2(s)∥∥∥ ≥ 0.
Wir wollen nachprufen, ob diese Definition obiger Heuristik entspricht. Dazubetrachten wir zunachst eine Gerade c : s 7→ a + sb. Diese ist genau dann nachBogenlange parametrisiert, wenn ‖b‖ = 1 gilt. Da c′(s) = b konstant ist, hat diesauf die zweite Ableitung c′′(s) = 0 in diesem Fall keinen Einfluss. Nach obigerDefinition haben wir also jedenfalls κ(s) = 0 fur alle s.
Als zweiten Test betrachten wir einen mit Bogenlange parametrisierten Kreisvom Radius r, also
c(s) = (r coss
r, r sin
s
r).
Dann ist c′(s) = (− sin(s/r), cos(s/r)) und
c′′(s) =1r
(− coss
r,− sin
s
r) = − 1
r2c(s).
Es folgt also κ(s) = ‖c′′(s)‖ = 1/r.
Bemerkung (a) Falls κ identisch gleich Null ist, so ist c′′(s) = 0 fur alle s ∈ I.Durch Integration folgt, dass c′(s) = b =konstant und c(s) = a+sb gelten muss. Ei-ne mit Bogenlange parametrisierte Kurve mit verschwindender Krummung ist alsostets ein Geradenstuck. Da auch die Umkehrung hiervon gilt, sind Geraden(stucke)genau die mit Bogenlange parametrisierten Kurven mit konstanter Krummung 0.(b) Falls κ konstant ungleich Null ist, so erhalt man im Falle ebener KurvenKreisstucke. In hoheren Dimensionen gibt es noch andere Kurven mit konstan-ter Krummung (z.B. die Helix). Wir werden darauf spater eingehen (vgl. Satz 6und Abschnitt 5.2).
Da sich regulare Kurven stets nach Bogenlange parametrisieren lassen, liegt esnahe die Definition der Krummung folgendermaßen zu erweitern:
Definition 6. Es sei c : I → Rn, t 7→ c(t) eine regulare, parametrisierte Kurve.Wir definieren die Krummung κ(c(t)) ≡ κ(t) von c im Punkt c(t) durch
κ(c(t)) := κ((c ϕ−1)(s)) = κ(c(s)),
wobei c := c ϕ−1 die Umparametrisierung von c nach Bogenlange ist.
9

Damit ist per Definition die Krummung einer Kurve invariant unter Parameter-transformationen. Ist φ eine Bewegung des Rn, so ist
‖(φ c)′′(s)‖ = ‖c′′(s)‖.
Diese Formel gilt namlich fur Translationen und Rotationen und damit nach Satz1 fur beliebige Isometrien. Die Krummung einer Kurve ist damit - wie die Lange -invariant unter Isometrien.
Wir fugen noch eine wichtige Beobachtung an. Falls c : I → Rn, s 7→ c(s)mit Bogenlange parametrisiert ist, so gilt 〈c′(s), c′(s)〉 = ‖c′(s)‖2 = 1. Ableiten(vgl. Abschnitt 1.2) ergibt 2〈c′(s), c′′(s)〉 = 0, also ist c′(s) orthogonal zu c′′(s), inZeichen c′(s) ⊥ c′′(s).
4.2 Die orientierte Krummung fur ebene Kurven
Fur die im letzten Abschnitt definierte Krummung einer parametrisierten Kurvein Rn gilt κ ≥ 0. Fur ebene Kurven, d.h. fur n = 2, konnen wir die Krummungzusatzlich mit einem Vorzeichen versehen. Wir wahlen dazu eine Orientierung vonR2, d. h. wir betrachten die Menge B aller geordneten Bases von R2 und definierenauf B folgende Aquivalenzrelation: Zwei geordnete Basen B = (b1, b2) und B′ =(b′1, b
′2) sind aquivalent, wenn die Matrix MBB′ , die den Basiswechsel von B nach B′
beschreibt positive Determinante hat. Diese Aquivalenzrelation zerlegt die MengeB in zwei Klassen. Man wahlt eine dieser beiden Klassen aus und bezeichnet eineBasis als positiv orientiert, wenn sie dieser Klasse angehort. Wir wollen eine Basis alspositiv orientiert bezeichnen, wenn sie zur Klasse der Standard-Basis E = (e1, e2)gehort. Die Basiswechselmatrix MBE ist gerade
MBE = (b1|b2) ∈ R2×2,
wenn (b1|b2) die Matrix bezeichnet, die als Spalten die Vektoren b1, b2 hat. EineBasis B = (b1, b2) ist also genau dann positiv orientiert, wenn det(b1|b2) > 0 gilt.
Es sei c : I → R2, s 7→ c(s) eine nach Bogenlange parametrisierte ebene Kurve.Fur den Tangentialvektor an c im Punkt c(s) setzen wir T (s) := c′(s). Da c mit Bo-genlange parametrisiert ist, ist T (s) ein Einheitsvektor. Wir wahlen in jedem Punktc(s) einen Einheitsnormalenvektor N(s), so dass (T (s), N(s)) positiv orientiert ist,vgl. Abb. 4.1. Damit folgt insbesondere, dass N(s) parallel zu c′′(s) ist.
Definition 7. Der Vektor N(s) heißt Normalenvektor von c im Punkt c(s). DieAbbildung κ∗ : I → R definiert durch
c′′(s) = κ∗(s)N(s)
heißt orientierte Krummung von c.
Geometrisch laßt die orientierte Krummung folgende Deutung zu: Ist κ∗(s) < 0,so dreht die Tangente im Uhrzeigersinn; ist κ∗(s) > 0, so dreht die Tangente imGegenuhrzeigersinn, vgl. Abb. 4.2. Geht man zur anderen Orientierung von R2
uber, so sind die Folgerungen zu vertauschen.
10

Abbildung 4.1: Normalenvektor
Abbildung 4.2: Orientierte Krummung
Bemerkung (a) Da s 7→ T (s) differenzierbar ist, sind sowohl N : I → R2 als auchκ∗ : I → R differenzierbare Abbildungen.(b) Das Vorzeichen der orientierten Krummung andert sich, wenn man die Kurveruckwarts durchlauft, d. h. anstelle von c : [α, β]→ R2 betrachtet man c− : [α, β]→R2, s 7→ c(α+ β − s).(c) Es gilt stets κ(s) = |κ∗(s)|.(d) Die orientierte Krummung ist invariant unter eigentlichen Bewegungen des R2.Sei dazu c := A · c mit A ∈ SO(2). Dann gilt
c′(s) =d(A · c)ds
(s) = A · c′(s) und c′′(s) =d2(A · c)ds2
(s) = A · c′′(s).
Da A eine eigentliche Bewegung ist, gilt N(s) = AN(s). Nach Definition gilt
A · κ∗(s)N(s) = A · c′′(s) = c′′(s) = κ∗(s)N(s) = κ∗(s)AN(s) = A · κ∗(s)N(s).
Nach Multiplikation mit A−1 folgt κ∗(s) = κ∗(s). Man mache sich klar, dass dieseAussage fur beliebige Bewegungen im Allgemeinen falsch ist (z.B. Spiegelungen).
5 Frenet-Formeln und Hauptsatz
5.1 Frenet-Formeln fur ebene Kurven
Ist c : I → R2, s 7→ c(s) eine mit Bogenlange parametrisierte ebene Kurve, sohaben wir nach Abschnitt 4.2 fur jedes s ∈ I eine Orthonormalbasis (T (s), N(s))der Tangentialebene Tc(s)R2 ∼= R2. Diese nennt man auch ein begleitendes 2-Bein.
11

Nach Definition der Krummung gilt T ′(s) = κ∗(s)N(s). Wir wollen untersuchen,wie sich N ′(s) in der Basis (T (s), N(s)) darstellen lasst. Fur alle s ∈ I gilt
0 = 〈T (s), N(s)〉 (5.1)1 = 〈N(s), N(s)〉 (5.2)
Ableiten dieser Gleichungen fuhrt auf
0 = 〈T ′(s), N(s)〉+ 〈T (s), N ′(s)〉 (5.3)0 = 2〈N ′(s), N(s)〉 (5.4)
Da wir Vektoren in R2 betrachten, folgt aus (5.1) und (5.4), dass N ′(s) proportionalzu T (s) ist. Demnach gibt es zu jedem s ∈ I ein λ(s) mit N ′(s) = λ(s)T (s). Wirwollen λ(s) bestimmen. Wegen 〈T (s), T (s)〉 = ‖T (s)‖2 = 1 gilt
λ(s) = λ(s)〈T (s), T (s)〉 = 〈λ(s)T (s), T (s)〉 = 〈N ′(s), T (s)〉
und wegen (5.3) und ‖N(s)‖ = 1
λ(s) = −〈N(s), T ′(s)〉 = −〈N(s), κ∗(s)N(s)〉 = −κ∗(s).
Zusammfassend erhalten wir folgenden
Satz 5 (Frenet-Formeln fur ebene Kurven). Es sei c : I → R2, s 7→ c(s) eine mitBogenlange parametrisierte Kurve. Dann gelten fur s ∈ I die Ableitungsgleichungenvon Frenet:
T ′(s) = κ∗(s)N(s)N ′(s) = −κ∗(s)T (s)
bzw. in Matrixschreibweise(T ′(s)N ′(s)
)=(
0 κ∗(s)−κ∗(s) 0
)(T (s)N(s)
).
Wir wissen bereits, dass Kreisstucke konstante Krummung κ > 0 haben. Mithilfeder Frenet-Formeln lasst sich diese Aussage in der Ebene umkehren.
Satz 6. Es sei c : I → R2, c 7→ c(s) eine nach Bogenlange parametrisierte ebeneKurve mit konstanter Krummung κ∗ = κ > 0. Dann ist die Spur von c ein Segmenteines Kreises vom Radius 1/κ.
Beweis. Wir betrachten die parametrisierte Kurve γ(s) := c(s) + 1κN(s). Dann
gilt γ′(s) = c′(s) + 1κN′(s), und aus Satz 5 folgt
γ′(s) = T (s) +1κ
(−κT (s)) = 0,
12

d.h. γ(s) = konstant = a ∈ R2. Damit gilt
‖c(s)− a‖ = ‖ 1κN(s)‖ =
1κ,
d. h. c(I) liegt auf einem Kreis mit Zentrum a und Radius 1κ .
Satz 7 (Haupsatz uber ebene Kurven). Es sei κ∗ : I → R, s 7→ κ∗(s) eine diffe-renzierbare Funktion. Dann gilt(a) Es gibt eine nach Bogenlange parametrisierte Kurve c : I → R2, s 7→
c(s), so dass κ∗(s) die orientierte Krummung von c ist.(b) Jede andere ebene Kurve c, die den Bedingungen aus (a) genugt, unter-
scheidet sich von c nur durch eine eigentliche euklidische Bewegung derEbene. Genauer: Es gibt eine Matrix D ∈ SO(2) und einen Vektor a,so dass c(s) = Dc(s) + a gilt.
Beweis. Die gesuchte Kurve c soll nach Bogenlange parametrisiert sein, d.h.‖c′(s)‖ = ‖T (s)‖ = 1. Deshalb machen wir den Einheitsvektor-Ansatz T (s) :=(cosα(s), sinα(s)) fur eine zu bestimmende Funktion α : I → R. Es gilt dannnotwendigerweise
N(s) = (− sinα(s), cosα(s)).
Wegen den Frenet-Formeln gilt weiter κ∗(s)N(s) = T ′(s) = α′(s)N(s). Damit folgtα′(s) = κ∗(s). Wir wahlen jetzt Anfangsbedingungen, d.h. fur s0 ∈ I geben wirc(s0) und T (s0) vor. Es sei c(s0) = (0, 0) und T (s0) = (1, 0), insbesondere alsoα(s0) = 0. Aufgrund der obigen Uberlegungen setzen wir
α(s) :=∫ s
s0
κ∗(t)dt.
Fur die gesuchte Kurve c(s) = (x1(s), x2(s)) mit c′(s) = T (s) = (x′1(s), x′2(s)) ist
x1(s) =∫ s
s0
cosα(σ)dσ und x2(s) =∫ s
s0
sinα(σ)dσ.
Man rechnet leicht nach, dass c die Eigenschaften aus (a) hat. Es sei c eine weitereKurve, die den Bedingungen in (a) genugt. Da (T (s0), N(s0)) positiv orientiert ist,gibt es eine eigentliche Drehung φ, die das 2-Bein (T (s0), N(s0)) in c(s0) auf das2-Bein (T (s0), N(s0)) in c(s0) abbildet. Wir betrachten die Kurve c := φ c. Da dieorientierte Krummung unter eigentlichen Bewegungen invariant bleibt, gilt
T ′(s) = κ∗(s)N(s) und N ′(s) = −κ∗(s)T (s).
Wir betrachten die differenzierbare Funktion
f(s) := ‖T (s)− T (s)‖2 + ‖N(s)− N(s)‖2.
Mit den Frenet-Formeln aus Satz 5 folgt dfds (s) = 0, d.h f muss konstant sein.
Da weiter T (s0) = φ(T (s0)) = T (s0) und N(s0) = φ(N(s0)) = N(s0) ist, folgt
13
f(s0) = 0 und damit f = 0. Insbesondere ist also T (s) = T (s) fur alle s ∈ I. Damitfolgt
d(c− c)ds
(s) = T (s)− T (s) = 0
fur alle s ∈ I, d.h. c(s) − c(s) = k = konstant. Weil aber nach Definition c(s0) =c(s0) folgt schliesslich k = 0, d.h. c = c = φ c.
5.2 Frenet-Formeln fur Raumkurven
Am Ende von Abschnitt 4.1 hatten wir uberlegt, dass fur eine mit Bogenlangeparametrisierte Kurve c : I → Rn, s 7→ c(s) gilt c′(s) ⊥ c′′(s).
Falls nun κ(s) = ‖c′′(s)‖ 6= 0 fur alle s ∈ I gilt, so ist
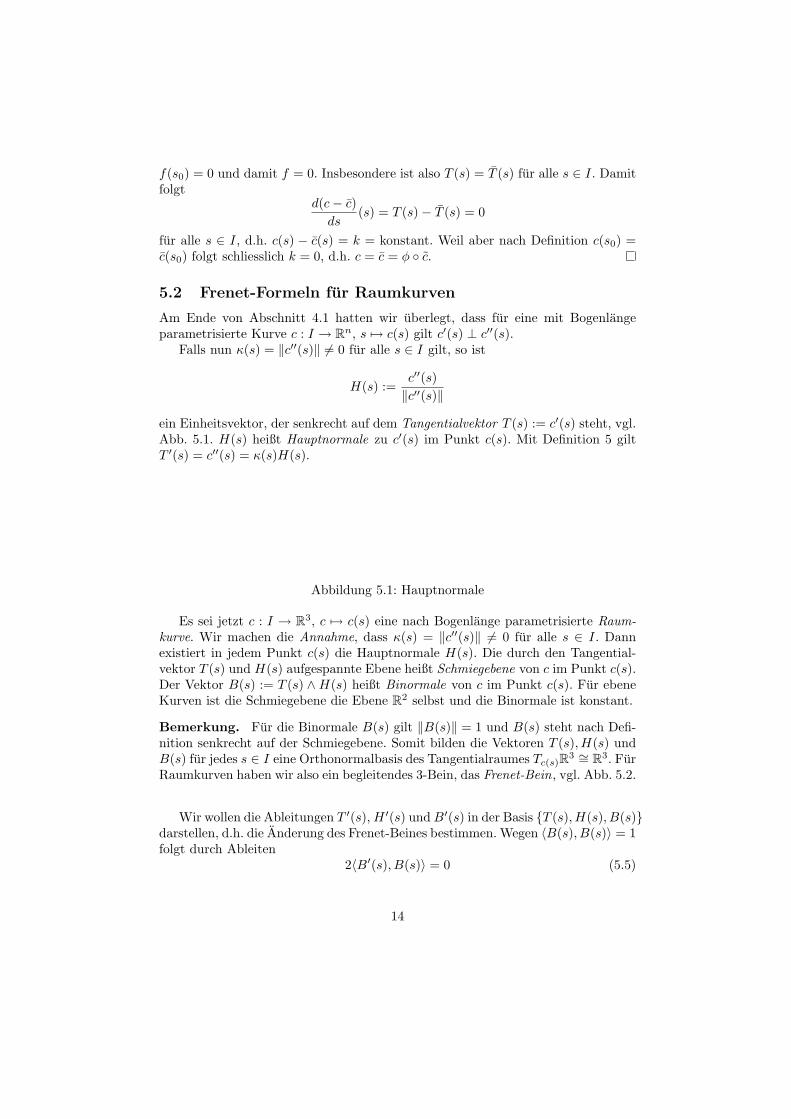
H(s) :=c′′(s)‖c′′(s)‖
ein Einheitsvektor, der senkrecht auf dem Tangentialvektor T (s) := c′(s) steht, vgl.Abb. 5.1. H(s) heißt Hauptnormale zu c′(s) im Punkt c(s). Mit Definition 5 giltT ′(s) = c′′(s) = κ(s)H(s).
Abbildung 5.1: Hauptnormale
Es sei jetzt c : I → R3, c 7→ c(s) eine nach Bogenlange parametrisierte Raum-kurve. Wir machen die Annahme, dass κ(s) = ‖c′′(s)‖ 6= 0 fur alle s ∈ I. Dannexistiert in jedem Punkt c(s) die Hauptnormale H(s). Die durch den Tangential-vektor T (s) und H(s) aufgespannte Ebene heißt Schmiegebene von c im Punkt c(s).Der Vektor B(s) := T (s) ∧H(s) heißt Binormale von c im Punkt c(s). Fur ebeneKurven ist die Schmiegebene die Ebene R2 selbst und die Binormale ist konstant.
Bemerkung. Fur die Binormale B(s) gilt ‖B(s)‖ = 1 und B(s) steht nach Defi-nition senkrecht auf der Schmiegebene. Somit bilden die Vektoren T (s), H(s) undB(s) fur jedes s ∈ I eine Orthonormalbasis des Tangentialraumes Tc(s)R3 ∼= R3. FurRaumkurven haben wir also ein begleitendes 3-Bein, das Frenet-Bein, vgl. Abb. 5.2.
Wir wollen die Ableitungen T ′(s),H ′(s) undB′(s) in der Basis T (s), H(s), B(s)darstellen, d.h. die Anderung des Frenet-Beines bestimmen. Wegen 〈B(s), B(s)〉 = 1folgt durch Ableiten
2〈B′(s), B(s)〉 = 0 (5.5)
14

Abbildung 5.2: Das begleitende 3-Bein
d.h. B′(s) steht senkrecht auf B(s). Nach Definition von B(s) ist
B′(s) =d
ds(c′(s) ∧H(s))
= c′′(s) ∧H(s) + c′(s) ∧H ′(s)= κ(s)H(s) ∧H(s) + T (s) ∧H ′(s) = T (s) ∧H ′(s),
also steht B′(s) senkrecht auf T (s). Zusammen mit (5.5) folgt, dass B′(s) propor-tional zu H(s) ist. Wir machen folgende
Definition 8. Die Abbildung τ : I → R, die fur jedes s ∈ I der Gleichung
B′(s) = −τ(s)H(s)
genugt, heißt Torsion (oder Windung) von c.
Geometrisch misst τ die Anderung der Schmiegebene, da B eine Normale derSchmiegebene ist. Fur ebene Kurven ist B = konstant und damit τ = 0.
Bemerkung. Ist c : I → R3, t 7→ c(t) eine (nicht unbedingt mit Bogenlangeparametrisierte) regulare Kurve mit κ(t) 6= 0, so definiert man die Torsion τ(t) vonc im Punkt c(t) durch
τ(t) := τ((c ϕ−1)(s)) ≡ τ(s),
wobei c := c ϕ−1 die Umparametrisierung von c nach Bogenlange ist.
Beispiel. Wir wollen Krummung und Torsion fur die Helix bestimmen. NachDefinition ist c : (−∞,∞) → R3, t 7→ (α cos t, α sin t, βt) mit α ≥ 0 und β ∈ R.Wegen c′(t) = (−α sin t, α cos t, β) folgt ‖c′(t)‖ =
√α2 + β2. Wir parametrisieren c
zunachst nach Bogenlange (von 0 aus), also s(t) = t√α2 + β2. Damit ist t = t(s) =
s/√α2 + β2 und mit γ :=
√α2 + β2 ist
c(s) := c(t(s)) =(α cos
s
γ, α sin
s
γ, βs
γ
)die Umparametrisierung von c nach Bogenlange. Weiter ist
T (s) = c′(s) =(−αγ
sins
γ,α
γcos
s
γ,β
γ
).
15

Setzt man e3 := (0, 0, 1), so folgt aus dieser Gleichung 〈T (s), e3〉 = β/γ. T (s)schliesst also mit der z-Achse einen konstanten Winkel ein. Fur die zweite Ableitungvon c erhalt man c′′(s) =
(−αγ−2 cos(sγ−1),−αγ−2 sin(sγ−1), 0
). Es folgt also
κ(s) = ‖c′′(s)‖ =α
γ2=
α
α2 + β2= konstant ≥ 0.
Damit ist
H(s) =c′′(s)‖c′′(s)‖
=(− cos
s
γ,− sin
s
γ, 0)
und nach Definition von B
B(s) = T (s) ∧H(s) =(β
γsin
s
γ,−β
γcos
s
γ,α
γ
).
Nach Definition erhalt man τ aus der Gleichung
B′(s) =(β
γ2cos
s
γ,β
γ2sin
s
γ, 0)
= −τ(s)H(s),
also istτ(s) =
β
γ2=
β
α2 + β2= konstant.
Wir wollen uns jetzt wieder der Darstellung von T ′(s), H ′(s) und B′(s) imbegleitenden Dreibein T (s), H(s), B(s) zuwenden. Wir wissen schon, dass
T ′(s) = κ(s)H(s) (5.6)B′(s) = −τ(s)H(s). (5.7)
Wir mussen also noch H ′(s) bestimmen. Nach allgemeinen Eigenschaften des Vek-torprodukts gilt mit B(s) = T (s)∧H(s) auch T (s) = H(s)∧B(s) = −B(s)∧H(s)und H(s) = B(s) ∧ T (s). Durch Ableiten ergibt sich dann
H ′(s) = B′(s) ∧ T (s) +B(s) ∧ T ′(s)
und wegen (5.6) und (5.7)
H ′(s) = −τ(s)H(s) ∧ T (s) + κ(s)B(s) ∧H(s)= τ(s)B(s)− κ(s)T (s).
Man erhalt also folgenden
Satz 8 (Frenet-Formeln fur Raumkurven). Es sei c : I → R3 eine nach Bogenlangeparametrisierte Kurve mit κ(s) 6= 0 fur alle s ∈ I. Dann gelten folgende Ableitungs-gleichungen: T ′(s)
H ′(s)B′(s)
=
0 κ(s) 0−κ(s) 0 τ(s)
0 −τ(s) 0
T (s)H(s)B(s)
.
16
Die Verteilung der Vorzeichen in dieser Matrix erklart die Wahl des Vorzeichensin der Definition von τ .
Mithilfe der Frenet-Formeln erhalt man einen zu Satz 7 analogen Hauptsatzfur Raumkurven: Eine mit Bogenlange parametrisierte Raumkurve ist durch ih-re Krummung und Torsion bis auf eine euklidische Bewegung von R3 eindeutigfestgelegt. Genauer gilt
Satz 9 (Hauptsatz uber Raumkurven). Es seien κ : I → R>0, s 7→ κ(s) undτ : I → R, s 7→ τ(s) differenzierbare Funktionen. Dann gilt(a) Es gibt eine mit Bogenlange parametrisierte Kurve c : I → R3, s 7→ c(s),
so dass κ die Krummung und τ die Torsion von c ist.(b) Jede andere mit Bogenlange parametrisierte Raumkurve c : I → R3
mit den Eigenschaften aus (a) unterscheidet sich von c nur durch eineeigentliche Bewegung des R3, d.h. es gibt eine orthogonale Abbildung Amit detA = 1 und einen Vektor a ∈ R3, so dass c(s) = (A c)(s) + agilt.
Beweis-Skizze. Die Frenet-Formeln beschreiben ein lineares Differentialgleichungs-system 1. Ordnung. Dazu setzen wir T =: (x1, x2, x3), H =: (x4, x5, x6) undB =: (x7, x8, x9). Die Formeln von Frenet liefern das System
x′1 = κx4
...x′9 = −τx6
Ein solches lineares System hat zu gegebenen Anfangsbedingungen T (s0)H(s0)B(s0)
=
x1(s0) x2(s0) x3(s0)x4(s0) x5(s0) x6(s0)x7(s0) x8(s0) x9(s0)
genau eine auf ganz I definierte Losung (vgl. z.B. W. Walter, Gewohnliche Diffe-rentialgleichungen, S. 132). Damit erhalt man T (s) = c′(s) und durch Integrationc(s). Beim Beweis der Eindeutigkeit geht man ahnlich vor wie im Hauptsatz uberebene Kurven (Ubung!).
Bemerkung. Fur die Dimensionen n ≥ 4 kann man analoge Betrachtungen an-stellen. Man geht aus von den hoheren Ableitungen c′(s), c′′(s), . . . , c(n−1)(s) undfordert, dass in jedem Punkt s ∈ I diese n − 1 Vektoren linear unabhangig sind.Kurven, die diese Bedingung erfullen nennt man Frenet-Kurven. Fur n = 2 sindFrenet-Kurven gerade regulare Kurven und fur n = 3 sind Frenet-Kurven regulareKurven mit nicht verschwindender Krummung. Man konstruiert aus diesen n − 1Vektoren mittels des Gram-Schmidt-Verfahrens fur jedes s ∈ I n − 1 orthonor-mierte Vektoren und erganzt diese dann zu einer Orthonormalbasis von Tc(s)Rn(ein begleitendes n-Bein). Damit beweist man dann analoge Frenet-Formeln undHauptsatze.
17

6 Ausblick auf die globale Kurventheorie
Nach dem Hauptsatz versteht man die lokale Gestalt einer Raumkurve vollstandig,sobald man ihre Krummung und Torsion kennt. Technisch kann man - mindestensim Prinzip - alles auf die Frenet-Formeln zuruckfuhren. Die Untersuchung von glo-balen Eigenschaften ist viel schwieriger, da man zusatzlich die topologische Gestaltder Kurve im Großen berucksichtigen muss. Im Folgenden diskutieren wir einigeSatze aus der globalen Kurventheorie. Fehlende Beweise findet man z.B. in denBuchern von Klingenberg und Spivak.
6.1 Totalkrummung, Umlaufsatz von Hopf
Eine regulare Kurve c : [a, b]→ Rn heißt (differenzierbar) geschlossen, wenn es eineregulare Kurve c : R→ Rn gibt mit c|[a,b] = c und c(t+(b−a)) = c(t). Insbesonderegilt also
c(b) = c(b) = c(a+ b− a) = c(a) = c(a) und c′(b) = c′(b) = c′(a) = c′(a).
Eine geschlossene Kurve c : [a, b] → Rn heißt einfach geschlossen, wenn die Ein-schrankung c|[a,b) von c auf [a, b) injektiv ist.
Satz 10 (Polarwinkel und Windungszahl). Es sei c : [a, b] → R2 \ 0, t 7→ c(t),eine parametrisierte Kurve. Dann gilt(a) Es gibt eine differenzierbare Funktion ϕ : [a, b]→ R, so dass
c(t) = ‖c(t)‖ (cos(ϕ(t)), sin(ϕ(t)))
fur alle t ∈ [a, b] ist.(b) Ist ψ : [a, b]→ R eine weitere Funktion mit den Eigenschaften von ϕ aus
(a), so ist ψ = ϕ+ 2πk mit einem k ∈ Z. Inbesondere ist die Differenzϕ(b) − ϕ(a) nicht von ϕ abhangig. Die Funktion ϕ heißt Polarwinkel-Funktion.
(c) Falls c geschlossen ist, so ist
W (c) :=1
2π(ϕ(b)− ϕ(a)) ∈ Z.
W (c) heißt Windungszahl von c.
Beweis. (a) Da die Abbildung [a, b]→ R2 \0, t 7→ c(t)/‖c(t)‖ wohldefiniert unddifferenzierbar ist, genugt es die Behauptung in (a) fur Kurven c mit c([a, b]) ⊆ S1
zu zeigen. Es sei t ∈ [a, b]. Dann gibt es wegen der Stetigkeit von c eine relativoffene, zusammenhangende Umgebung It von t (also ein Intervall der Form [a, ε),(δ, b] oder (ε, δ), das t enthalt und in [a, b] enthalten ist), so dass c(It) in einem derfolgenden offenen Halbkreise von S1 enthalten ist:
18

S1 =
(x, y) ∈ R2 | (x, y) ∈ S1, y > 0
S2 =
(x, y) ∈ R2 | (x, y) ∈ S1, x < 0
S3 =
(x, y) ∈ R2 | (x, y) ∈ S1, y < 0
S4 =
(x, y) ∈ R2 | (x, y) ∈ S1, x > 0
Die Abbildung h : [a, b]→ 1, 2, 3, 4 sei so gewahlt, dass c(It) ⊂ Sh(t) gilt. Weiterseien v1 := (1, 0), v2 := (0, 1), v3 := (−1, 0), v4 := (0,−1). Fur t ∈ [a, b] definierenwir θt : It → R durch
s 7→ arccos(〈c(s), vh(t)〉) +π
2(h(t)− 1).
Da 〈c(s), vh(t)〉 ∈ (−1, 1), ist θt : It → R differenzierbar. Nach Definition giltc(s) = (cos θt(s), sin θt(s)) fur s ∈ It. Da [a, b] kompakt und die It, t ∈ [a, b], ei-ne relativ offene Uberdeckung von [a, b] bilden, gibt es endlich viele t1, . . . , tn, sodass die Itj , j = 1, . . . , n, das Intervall [a, b] uberdecken. Ohne Einschrankung gelteItj ⊂ Itl nur fur j = l. Es bezeichne aj den Anfangs- und bj den Endpunkt desIntervalls Itj . Ohne Einschrankung seien die Itj nach aufsteigenden Anfangspunk-ten sortiert, also ai < aj fur i < j. Wir definieren jetzt ϕ : [a, b] → R. Es seiϕ|[a1,b1) := θt1 . Da die Itj eine Uberdeckung bilden, gilt [a1, b1)∩ (a2, b2) 6= ∅. NachKonstruktion mussen θt2 und θt1 = ϕ|[a1,b1) auf der offenen Menge [a1, b1)∩ (a2, b2)modulo 2π ubereinstimmen. Damit kann man ϕ|[a1,b1) eindeutig auf [a1, b2) fort-setzen. Nach endlich vielen Schritten erhalt man eine differenzierbare Abbildung ϕmit den geforderten Eigenschaften.(b) Ist ψ eine weitere solche Abbildung, so gilt notwendigerweise ψ(t) − ϕ(t) =2πk(t) fur jedes t ∈ [a, b] mit einer Funktion k : [a, b] → Z. Da k stetig und aufeiner zusammenhangenden Menge definiert ist, folgt k(t) = c ∈ Z fur alle t ∈ [a, b].(c) Fur geschlossene Kurven gilt nach Definition von ϕ stets ϕ(a) = ϕ(b) + 2πkmit einem k ∈ Z.
Definition 9. Es sei c : [a, b]→ R2 eine regulare geschlossene Kurve. Die Umlauf-zahl U(c) von c ist definiert als die Windungszahl von c′(t),
U(c) := W (c′) ∈ Z.
Dabei wird c′ : [a, b]→ R2 \ 0 als differenzierbare Kurve aufgefaßt.
Beispiele. In Abb. 6.1 sind die Bilder einiger geschlossener Kurven und ihre Um-laufzahlen angegeben. Alle Kurven werden einmal in Pfeilrichtung durchlaufen.
Der folgende Satz bestimmt globale topologische Informationen uber eine ebeneKurve (Umlaufzahl) aus lokalen Großen (Krummung).
19
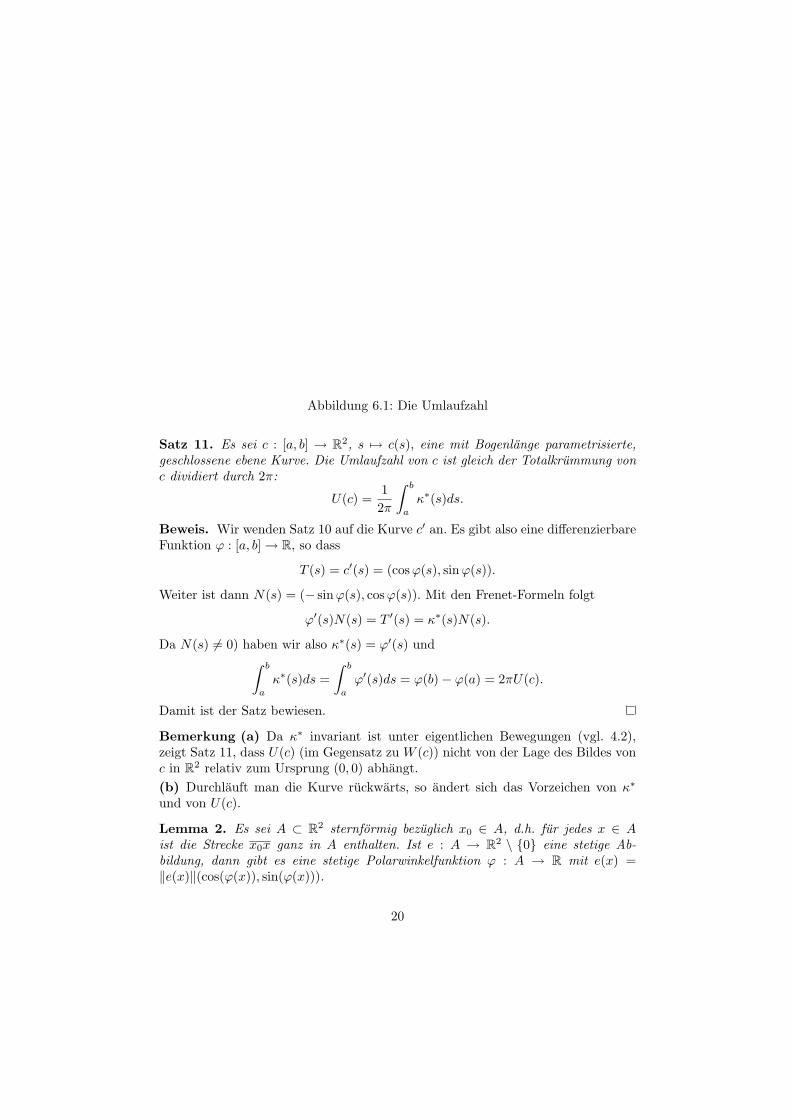
Abbildung 6.1: Die Umlaufzahl
Satz 11. Es sei c : [a, b] → R2, s 7→ c(s), eine mit Bogenlange parametrisierte,geschlossene ebene Kurve. Die Umlaufzahl von c ist gleich der Totalkrummung vonc dividiert durch 2π:
U(c) =1
2π
∫ b
a
κ∗(s)ds.
Beweis. Wir wenden Satz 10 auf die Kurve c′ an. Es gibt also eine differenzierbareFunktion ϕ : [a, b]→ R, so dass
T (s) = c′(s) = (cosϕ(s), sinϕ(s)).
Weiter ist dann N(s) = (− sinϕ(s), cosϕ(s)). Mit den Frenet-Formeln folgt
ϕ′(s)N(s) = T ′(s) = κ∗(s)N(s).
Da N(s) 6= 0) haben wir also κ∗(s) = ϕ′(s) und∫ b
a
κ∗(s)ds =∫ b
a
ϕ′(s)ds = ϕ(b)− ϕ(a) = 2πU(c).
Damit ist der Satz bewiesen.
Bemerkung (a) Da κ∗ invariant ist unter eigentlichen Bewegungen (vgl. 4.2),zeigt Satz 11, dass U(c) (im Gegensatz zu W (c)) nicht von der Lage des Bildes vonc in R2 relativ zum Ursprung (0, 0) abhangt.(b) Durchlauft man die Kurve ruckwarts, so andert sich das Vorzeichen von κ∗
und von U(c).
Lemma 2. Es sei A ⊂ R2 sternformig bezuglich x0 ∈ A, d.h. fur jedes x ∈ Aist die Strecke x0x ganz in A enthalten. Ist e : A → R2 \ 0 eine stetige Ab-bildung, dann gibt es eine stetige Polarwinkelfunktion ϕ : A → R mit e(x) =‖e(x)‖(cos(ϕ(x)), sin(ϕ(x))).
20
Beweis. Wir setzen ϕ(x0) = 0. Dann ist die Einschrankung von e auf die Streckex0 + t(x − x0) eine stetige Kurve mit Parameter t ∈ [0, 1]. Nach Satz 10 ist ϕdann eindeutig definiert langs der Strecke x0x. Da A sternformig ist , ist damit eineFunktion ϕ auf ganz A eindeutig definiert und ebenfalls stetig.
Satz 12 (Hopfscher Umlaufsatz). Fur eine einfach geschlossene, nach Bogenlangeparametrisierte ebene Kurve c : [a, b]→ R2 gilt
12π
∫ b
a
κ∗(s)ds = ±1.
Beweis. Nach Wahl geeigneter Koordinatenachsen konnen wir annehmen, dassc(t) = (x(t), y(t)) mit y(a) = y(b) = 0 und y(t) ≥ 0 fur alle t gilt. Wir betrachtendann die Menge
A := (s, t) ∈ R2 | a ≤ s ≤ t ≤ b
und die Abbildung e : A→ R2 \ 0 definiert durch
e(s, t) :=
c(t)−c(s)‖c(t)−c(s)‖ , falls s 6= t und (s, t) 6= (a, b);
c′(t), falls s = t;
−c′(a), falls (s, t) = (a, b).
Weil die Kurve c einfach geschlossen ist, gilt c(t) 6= c(s) fur alle t 6= s außer(s, t) = (a, b) und somit ist e wohldefiniert. Die Steitigkeit von e folgt durchUbergang von Sekanten zu Tangenten. Weiter ist e(t, t) = c′(t), die Tangente der(mit Bogenlange parametrisierten) Kurve c im Punkt c(t). Nach Lemma 2 existiertdann eine Polarwinkelfunktion ϕ : A → R mit e(s, t) = (cos(ϕ(x)), sin(ϕ(x)) undϕ(a, a) = 0. Die Funktion ϕ(t) := ϕ(t, t) ist dann die Poalarwinkelfunktion langsder Kurve c, und nach Satz 11 (und dessen Beweis) gilt
12π
∫ b
a
κ∗(t)dt =1
2π
∫ b
a
ϕ′(t)dt =1
2π(ϕ(b, b)− ϕ(a, a)).
Andererseits ist ϕ(a, b)− ϕ(a, a) = π, falls x′(a) > 0 (sonst = −π), sowie ϕ(b, b)−ϕ(a, b) = π, falls x′(a) > 0 (sonst −π). Insgesamt ist also ϕ(b, b)−ϕ(a, a) entwedergleich +2π oder −2π.
Der nachste Satz hat Beziehungen zur Knotentheorie.
Satz 13 (Fary-Milnor). Sei c : [0, L] → R3, s 7→ c(s) eine geschlossene, nachBogenlange parametrisierte Raumkurve. Ist c ein Knoten, so gilt∫ L
0
κ(s)ds ≥ 4π.
21
6.2 Konvexe Kurven
Definition 10. Eine regulare ebene Kurve c : I → R2, t 7→ c(t) heißt konvex, fallsfur alle t ∈ I das Bild c(I) der Kurve ganz in einer der durch die Tangente an c inc(t) definierten Halbebenen liegt, vgl. Abb. 6.2.
Abbildung 6.2: Konvexitat
Satz 14 (Charakterisierung konvexer Kurven). Eine einfach geschlossene, regulareebene Kurve c : I → R2, s 7→ c(s) ist genau dann konvex, falls entweder κ∗(s) ≥ 0fur alle s ∈ I oder κ∗(s) ≤ 0 fur alle s ∈ I gilt.
Satz 15 (4-Scheitelsatz). Eine einfach geschlossene, konvexe ebene Kurve hat min-destens 4 Scheitelpunkte, d.h. Punkte mit κ′(s) = 0.
Der nachste Satz liefert die Losung einer beliebten “Denksport-Aufgabe”: EinSeil wird am Aquator um die Erdkugel gespannt(!). Wieviel langer muß das Seilsein, wenn es uberall einen Meter Abstand vom Boden haben soll?
Satz 16 (Parallelkurve). Sei c : [0, l] → R2, s 7→ c(s) eine einfach geschlossene,konvexe, nach Bogenlange parametrisierte ebene Kurve mit κ∗(s) ≥ 0. Die Paral-lelkurve c von c im Abstand d > 0, d.h. also
c(s) := c(s)− dN(s),
hat die Lange L(c) = L(c) + 2πd.
Beweis. Nach Definition gilt c′(s) = c′(s) − dN ′(s) und mit den Frenet-Formelnist
c′(s) = c′(s) + dκ∗(s)T (s) = c′(s)(1 + dκ∗(s)).
Damit gilt
L(c) =∫ l
0
‖c′(s)‖ds =∫ l
0
|1 + dκ∗(s)|ds
und wegen κ∗(s) ≥ 0 und dem Hopfschen Umlaufsatz
L(c) = l + d
∫ l
0
κ∗(s)ds = L(c) + 2πd.
22
Teil II
Flachen
7 Regulare Flachen im R3
7.1 Die Tangentialabbildung
Es sei U ⊆ Rm eine offene Menge. Weiter sei f : U → Rn eine differenzierbareAbbildung1. Die Tangentialabbildung oder das Differential von f im Punkt a ∈ Uist die lineare Abbildung
dfa : TaRm → Tf(a)Rn; dfa(X) := limt→0
f(a+ tX)− f(a)t
=d
dt|t=0 f(a+ tX).
Andere gebrauchliche Schreibweisen fur dfa sind f∗a oder Taf . Aus der Analysissollten folgende Tatsachen bekannt sein: (i) Fur X = ei (= i-ter Standardbasis-vektor) ist dfa(ei) =: ∂f
∂xi(a) ≡ fxi(a) die i-te partielle Ableitung von f nach xi
im Punkt a, (ii) bezuglich der Standardbasen von TaRm und Tf(a)Rn hat dfa dieJacobi-Matrix Daf von f als Darstellungsmatrix:
Daf :=(∂fi∂xj
(a))i=1,...,nj=1,...,m
.
Fur eine geometrische Interpretation der Wirkungsweise von dfa betrachten wir denFall U = R2 mit Koordinaten (u, v), n = 3 und X = e1 (vgl. Abb. 7.1).
Abbildung 7.1: Die Tangentialabbildung
Die Tangentialabbildung dfa bildet den Tangentialvektor der Geraden t 7→ a+ te1
im Punkt a auf den Tangentialvektor der Raumkurve t 7→ f(a+ te1) im Punkt f(a)1Wenn nichts anderes vorausgesetzt wird, verstehen wir unter einer differenzierbaren Abbildung
immer eine C∞-Abbildung.
23
ab. Da dfa linear ist, wird der Tangentialraum TaR2 auf einen Untervektorraumvon Tf(a)R3 abgebildet, der von
dfa(e1), dfa(e2) = fu(a), fv(a)
aufgespannt wird.Die Kurven R → R2, t 7→ (u0, v0) + tei, i = 1, 2, nennt man Parameterlinien.
Die Parameterlinien t 7→ (u0 + t, v0) (bzw. t 7→ (u0, v0 + t)) nennt man u-Linien(bzw. v-Linien) und schreibt dafur oft nur v = v0 (bzw. u = u0).
Ein im Folgenden wichtiges Hilfsmittel ist der aus der Analysis bekannte Satzuber die Umkehrabbildung:
Satz 1 (Umkehrsatz). Es sei W ⊂ Rn offen, a ∈ W und f : W → Rn differen-zierbar. Ist dfa : TaRn → Tf(a)Rn ein Vektorraumisomorphismus, so gibt es eineoffene Umgebung U ⊂ W von a und eine offene Umgebung V von f(a), so dassf |U : U → V ein Diffeomorphismus ist.
7.2 Regulare Flachen
Eine Teilmenge S ⊂ R3 heißt regulare Flache, falls es zu jedem Punkt p ∈ Seine offene Umgebung V von p in R3, eine offene Teilmenge U ⊂ R2 und eineC∞-Abbildung x : U → R3, (u, v) 7→ x(u, v) gibt (vgl. Abb. 7.2) mit folgendenEigenschaften(a) x(U) = S ∩ V und x : U → S ∩ V ist ein Homoomorphismus.(b) Die Tangentialabbildung dx(u,v) : T(u,v)R2 → Tx(u,v)R3 ist injektiv fur
alle (u, v) ∈ U .
Abbildung 7.2: Regulare Flache
Bemerkung (a) Da x differenzierbar ist, ist x insbesondere stetig. Bedingung (a)besagt, dass es eine stetige Inverse x−1 : S ∩ V → U gibt. Dabei ist S ∩ V bzw. Umit der entsprechenden Teilraum-Topologie von R3 bzw. R2 versehen.
24

(b) Bedingung (b) bedeutet dass die Jabobi-Matrix
D(u,v)x =
∂x1
∂u(u, v)
∂x1
∂v(u, v)
∂x2
∂u(u, v)
∂x2
∂v(u, v)
∂x3
∂u(u, v)
∂x3
∂v(u, v)
=(xu(u, v), xv(u, v)
)
fur alle (u, v) ∈ U den Rang 2 hat. Aquivalent dazu sind: (i) die Spaltenvekto-ren xu(u, v) und xv(u, v) sind linear unabhangig, (ii) fur das Vektorprodukt giltxu(u, v) ∧ xv(u, v) 6= 0.(c) Die Abbildung x heißt Parametrisierung von S im Punkt p. Die Umkehr-Abbildung x−1 : S ∩ V → U heißt Karte oder lokales Koordinatensystem um pund die (u, v) nennt man Koordinaten von x(u, v).
Im gleichen Punkt einer Flache kann es verschiedene Parametrisierungen geben.Wir wollen zeigen,dass die entsprechenden Koordinatenwechsel differenzierbar sind.Dazu benotigen wir den etwas technischen
Satz 2. Es sei S ⊂ R3 eine regulare Flache. Weiter sei W ⊂ R2 offen und f : W →R3 eine differenzierbare Abbildung mit f(W ) ⊂ S. Ist p ∈ f(W ) und x : U → Seine Parametrisierung um p mit x(U) ⊂ f(W ), so ist fur W ′ := f−1(x(U)) dieAbbildung
x−1 f : W ′ → U
differenzierbar.
Beweis. Nach Voraussetzung gibt eine offene Umgebung V ⊂ R3 von p mit x(U) =S ∩ V . Da x(U) ⊂ f(W ) ⊂ S gilt
W ′ = f−1(x(U)) = f−1(S ∩ V ) = W ∩ f−1(V ) = f−1(V ).
Wegen der Stetigkeit von f und da V offen ist, ist W ′ offen in R2. Die Frage nachder Differenzierbarkeit von x−1 f ist also sinnvoll. Wir zeigen, dass x−1 f injedem Punkt a ∈ W ′ differenzierbar ist. Sei dazu q = f(a) und (u0, v0) ∈ U so,dass q = x(u0, v0) gilt. Wir definieren x : U × R→ R3 durch
x(u, v, t) := x(u, v) + (0, 0, t).
Dann gilt offenbar x = x auf U × 0. Es ist
D(u0,v0,0)x =
∂x1
∂u(u0, v0)
∂x1
∂v(u0, v0) 0
∂x2
∂u(u0, v0)
∂x2
∂v(u0, v0) 0
∂x3
∂u(u0, v0)
∂x3
∂v(u0, v0) 1
.
25
Wegen der Rangbedingung an x gibt es eine 2 × 2 Untermatrix der JacobimatrixD(u0,v0)x, die Rang 2 hat. Nach eventueller Vertauschung der Koordinaten xi kannman annehmen, dass diese Untermatrix die 2 × 2 Untermatrix von D(u0,v0,0)x ist,die links oben steht. Damit ist D(u0,v0,0)x regular und nach dem Umkehrsatz gibtes offene Umgebungen U ⊂ U × R von (u0, v0, 0) und V ⊂ R3 von x(u0, v0, 0) =x(u0, v0) = q = f(a), so dass x|U : U → V ein Diffeomorphismus ist. Dann ist
U ∩ (U × 0) = U ′ × 0
fur eine in R2 offenen Menge U ′ ⊂ U . Da x ein Homoomorphismus von U auf x(U) =S ∩ V ist, gibt es eine offene Menge V ′ ⊂ R3, so dass x|U ′ ein Homoomorphismusvon U ′ auf S∩V ′ ist. Wir bezeichnen mit π : R3 → R2 die Projektion (x1, x2, x3) 7→(x1, x2). Da x|U ′ = x|U ′×0, gilt x−1 = π (x|U )−1 auf S ∩ V ′.
Wegen der Stetigkeit von f ist W ′′ := f−1(S ∩ V ′) offen in R2 mit a ∈W ′′ undauf W ′′ gilt
x−1 f = π x−1 f.
Als Verkettung differenzierbarer Abbildungen ist π x−1 f und damit auch x−1 fin a differenzierbar. Da a beliebig war, folgt die Behauptung.
Korollar 1. Es sei S eine regulare Flache und x : U → S und x : U → S seienParametrisierungen von S um p. Sei D := x(U) ∩ x(U). Dann ist der Koordina-tenwechsel
x−1 x : x−1(D)→ x−1(D)
differenzierbar (mit differenzierbarer Inverser x−1 x).
7.3 Tangentialebenen einer Flache
Es sei S eine regulare Flache und p ∈ S. Weiter sei c : (−ε, ε) → S ⊂ R3 einedifferenzierbare Kurve mit c(0) = p. Der Vektor
c′(0) :=dc
dt(0) ∈ TpR3
heißt Tangentialvektor an die Flache S im Punkt p. Die Tangentialebene TpS einerregularen Flache S im Punkt p ist die Menge aller solchen Tangentialvektoren, also
TpS := c′(0) | c wie oben .
Die Elemente des Tangentialraumes nennt man Tangentialvektoren. Die lineareHulle einer Menge von Vektoren a1, . . . , am bezeichnen wir im Folgenden mit[a1, . . . , am].
Lemma 1. Ist x : U → S eine Parametrisierung von S um p mit x(u, v) = p, soist
TpS = dx(u,v)(T(u,v)R2) = p × [xu(u, v), xv(u, v)].
Insbesondere ist TpS ein zweidimensionaler Untervektorraum von TpR3.
26

Beweis. Wir zeigen zuerst, dass TpS ⊆ dx(u,v)(T(u,v)R2). Sei also c′(0) ∈ TpS fureine differenzierbare Kurve c : (−ε, ε)→ S ⊂ R3 mit c(0) = p. Weiter sei x : U → Seine Parametrisierung um p. Dann ist nach Satz 2 die Abbildung
ϕ := x−1 c : (−ε, ε)→ U
differenzierbar (ε sei dabei so klein gewahlt, dass diese Abbildung definiert ist;wegen der Stetigkeit von c ist das immer moglich), vgl. Abb. 7.3(a).
(a)
(b)
Abbildung 7.3: Tangentialvektoren
Es folgt
c′(0) =d
dt|0 (x ϕ)(t) = dx(u,v)(ϕ′(0)), d.h. c′(0) ∈ dx(u,v)(T(u,v)R2)
und somit gilt TpS ⊆ p × [xu(u, v), xv(u, v)].Sei jetzt umgekehrt
Y = αxu(u, v) + βxv(u, v) ∈ dx(u,v)(T(u,v)R2).
Wir setzen c(t) := x((u, v) + t(α, β)), vgl. Abb. 7.3(b). Dann ist c differenzierbar,
27

c(0) = p und es gilt
c′(0) = dx(u,v)(αe1 + βe2) = αdx(u,v)(e1) + βdx(u,v)(e2)= αxu(u, v) + βxv(u, v) = Y,
d.h. Y ∈ TpS. Also ist auch die Inklusion p×[xu(u, v), xv(u, v)] ⊆ TpS gezeigt.
Lemma 2. Die Tangentialebene in einem Punkt einer regularen Flache ist un-abhangig von der lokalen Parmetrisierung. Genauer seien x : U → S und x : U → SParametrisierungen von S um p. Fur xu := xu(x−1(p)), xv := xv(x−1(p)) undxu := xu(x−1(p)), xv := xv(x−1(p)) gilt dann
TpS = [xu, xv] = [xu, xv].
Beweis. Die erste Behauptung folgt unmittelbar aus der Definition von TpS, dieja gar keine Parametrisierungen verwendet. der zweite teil des Lemmas folgt dannaus Lemma 1.
Lemma 3. Es sei S eine regulare Flache und M eine offene Teilmenge von S,d. h. es gibt eine offen Menge W ⊂ R3 mit M = S ∩W . Dann ist M eine regulareFlache und TpM = TpS fur alle p ∈M .
Beweis. Ist p ∈ M und x : U → S eine Parametrisierung von S um p, so ist xeingeschrankt auf x−1(x(U) ∩M) eine Parametrisierung von M um p.
8 Beispiele
8.1 Affine Ebenen
Die affine Ebene durch p ∈ R3 aufgespannt durch die linear unabhangigen VektorenX,Y ∈ R3 ist
S := p+ uX + vY |u, v ∈ R ,
vergleiche Abb. 8.1. Wir wollen zeigen, dass S eine regulare Flache ist. Eine einzige
Abbildung 8.1: Eine affine Ebene
Parametrisierung reicht hier schon aus. Man wahlt dazu U := R2, V := R3 und
28

setzt x : U → R3, (u, v) 7→ p + uX + vY . Da xu = X, xv = Y , ist die Rang-Bedingung erfullt. Dass x ein Homoomorphismus ist, folgt aus der Definition derUnterraumtopologie.
8.2 Graphen von Funktionen
Es sei U ⊆ R2 offen und f : U → R eine C∞-Funktion. Der Graph von f ist dieMenge
S :=
(x1, x2, x3) ∈ R3 | (x1, x2) ∈ U, x3 = f(x1, x2).
Wir wollen uberlegen, dass S eine regulare Flache ist. Wie bei Ebenen genugt auchhier eine einzige Parametrisierung. Wir setzen V := R3 und definieren x : U → R3
Abbildung 8.2: Graph einer Funktion
durch (u, v) 7→ (u, v, f(u, v)), vgl. Abb. 8.2. Dann gilt
x(U) = S = S ∩ V.
Ferner ist die bijektive Abbildung x : U → S differenzierbar und somit auch stetig.Die Umkehrabbildung x−1 : S → U , (u, v, f(u, v)) 7→ (u, v) ist stetig, da x−1 = π|S ,wobei π : R3 → R2 die Projektion (x1, x2, x3) 7→ (x1, x2) bezeichnet. Insbesondereist x also ein Homoomorphismus von U auf S. Wegen
D(u,v)x =
1 00 1
∂f
∂u(u, v)
∂f
∂v(u, v)
ist die Rangbedingung ebenfalls erfullt.
Umgekehrt ist jede regulare Flache lokal als Graph einer Funktion darstellbar.Genauer gilt
Satz 3. Es sei S eine regulare Flache. Dann gibt es zu jedem p ∈ S eine offeneMenge O ⊂ R3, so dass S ∩O der Graph einer C∞-Funktion ist.
29

Beweis. Es sei x : U → S eine Parametrisierung um p = x(u0, v0). Da S regularist, konnen wir (nach eventueller Vertauschung der Koordinaten xi) annehmen,dass die Matrix
D :=
∂x1
∂u(u0, v0)
∂x1
∂v(u0, v0)
∂x2
∂u(u0, v0)
∂x2
∂v(u0, v0)
regular ist. Es sei π : R3 → R2 die Projektion (x1, x2, x3) 7→ (x1, x2). Dann ist
g := π x : U → R2, (u, v) 7→ (x1(u, v), x2(u, v))
differenzierbar. Wegen D(u0,v0)g = D gibt es nach dem Umkehrsatz offenene Umge-bungen W ⊂ U von (u0, v0) und V ⊂ R2 von (x1(u0, v0), x2(u0, v0)), so dass g|W :W → V ein Diffeomorphismus ist. Sei h := (g|W )−1 : V → W , (x1, x2) 7→ (u, v).Dann gilt
(x h)(x1, x2) = x(u, v)= (x1(u, v), x2(u, v), x3(u, v))= (x1, x2, x3(h(x1, x2)).
Da x ein Homoomorphismus ist, ist x(W ) = x(h(V )) offen in x(U). Es gibt alsoeine offene Menge O ⊂ R3, so dass x(W ) = S ∩ O gilt. Schließlich ist S ∩ O derGraph der Funktion f : V → R, (x1, x2) 7→ x3(h(x1, x2)).
8.3 Die 2-Sphare
Es sei S := S2 :=x = (x1, x2, x3) ∈ R3 | ‖x‖ = 1
. Die Menge S ist also gerade
die Einheitssphare, vgl. Abb. 8.3. Wir wollen zeigen, dass S eine regulare Flache
Abbildung 8.3: Die 2-Sphare
ist. Dazu betrachten wir zunachst die offene Menge
V +3 :=
(x1, x2, x3) ∈ R3 |x3 > 0
⊂ R3,
30

und die offene Menge
U3 :=
(x1, x2) ∈ R2 |x21 + x2
2 < 1.
Dann ist S2 ∩ V +3 der Graph der Funktion f : U3 → R,
(x1, x2) 7→√
1− (x21 + x2
2).
Nach Beispiel 8.2 ist x+3 : U3 → R3, (x1, x2) 7→ (x1, x2,
√1− (x2
1 + x22)) eine lokale
Parametrisierung von S2. Das Bild von x+3 ist die offene obere Hemisphare. Analog
parametrisiert man die untere offene Hemisphare durch
x−3 : U3 → R3, (x1, x2) 7→ (x1, x2,−√
1− (x21 + x2
2)).
Damit fehlen noch die Punkte auf S2 mit x3 = 0. Fur diese bekommt man Para-metrisierungen durch Vertauschen der Rollen von x3 mit x1 bzw. x2.
Wir haben also insgesamt 6 lokale Parametrisierungen gebraucht, um S2 zuuberdecken. Man kommt allerdings schon mit 2 Parametrisierungen aus. Es sollnur die Idee wiedergegeben werden, detailliertes Nachrechnen ist als Ubung empfoh-len. Wir konstruieren Koordinatenumgebungen durch stereographische Projektionπ (vgl. Abb 8.4). Bezeichnet N = (0, 0, 1) den ”Nordpol“ so ist π : S2 \ N → R2
gegeben durch
(x1, x2, x3) 7→ 11− x3
(x1, x2).
Eine analoge Formel erhalt man fur die stereographische Projektion vom ”Sudpol“S = (0, 0,−1) aus.
Abbildung 8.4: Stereographische Projektion
8.4 Implizit definierte Flachen
Oft ist eine Menge S implizit durch eine Gleichung definiert:
S :=
(x1, x2, x3) ∈ R3 | f(x1, x2, x3) = 0.
31

Die Sphare S2 fallt in diese Klasse von Flachen. Das folgende Kriterium gibt einehinreichende Bedingung dafur, dass S eine regulare Flache ist.
Satz 4. Sei V0 ⊂ R3 offen und f : V0 → R eine C∞-Funktion. Weiter sei
S :=
(x1, x2, x3) ∈ R3 | f(x1, x2, x3) = 0
= f−10.
Falls fur alle p ∈ S der Gradient
grad f(p) =( ∂f∂x1
,∂f
∂x2,∂f
∂x3
)(p) 6= (0, 0, 0)
ist, so ist S eine regulare Flache.
Beweis. Sei p ∈ S. Wegen grad f(p) 6= 0 konnen wir ohne Einschrankung anneh-men, dass ∂f/∂x3(p) 6= 0 ist. Wir definieren ϕ : V0 → R3 durch (x1, x2, x3) 7→(x1, x2, f(x1, x2, x3)). Dann gilt
Dpϕ =
1 0 00 1 0
∂f
∂x1(p)
∂f
∂x2(p)
∂f
∂x3(p)
,
also detDpϕ 6= 0. Nach dem Satz uber die Umkehrabbildung gibt es offene MengenV1 ⊂ V0, W1 := ϕ(V1) ⊂ R3 mit p ∈ V1, ϕ(p) ∈ W1, so dass ϕ|V1 : V1 → W1 einDiffeomorphismus ist. Es gilt dann
S ∩ V1 = (ϕ|V1)−1(W1 ∩ (R2 × 0)
).
Sei π : R3 → R2 die Projektion (x1, x2, x3) 7→ (x1, x2). Dann ist
U := π(W1 ∩ (R2 × 0))
offen in R2. Die Inklusion i : U → W1 ∩ (R2 × 0), (x1, x2) 7→ (x1, x2, 0), ist einHomoomorphismus. Somit ist x := (ϕ|V1)−1 i : U → R3 eine lokale Parametrisie-rung von S, die wegen dx = d(ϕ|V1)−1 di Rang 2 hat.
Beispiel (a) Es seien a, b, c ∈ R \ 0. Wir betrachten das Ellipsoid S definiertdurch
S :=
(x1, x2, x3) ∈ R3 | x21
a2+x2
2
b2+x2
3
c2= 1.
Mit den Bezeichnungen aus Satz 4 sei V0 := R3 und f : R3 → R,
f(x1, x2, x3) :=x2
1
a2+x2
2
b2+x2
3
c2− 1,
also S = f−10. Um den Satz anwenden zu konnen, mussen wir zeigen, dassgrad f(p) 6= 0 fur alle p ∈ S gilt. Es ist aber
grad f(x1, x2, x3) =(
2x1
a2,
2x2
b2,
2x3
c2
)= (0, 0, 0)
nur fur (x1, x2, x3) = (0, 0, 0) 6∈ S. Fur a = b = c = 1 erhalt man die EinheitssphareS2.
32

(b) Das nachste Beispiel ist etwas abstrakter. Fur d > 0 betrachten wir die Mengealler symmetrischen 2× 2 Matrizen mit Determinante d, also
S :=X =
(x1 x2
x2 x3
)|xi ∈ R, detX = x1x3 − x2
2 = d
.
Es sei f : R3 → R, f(x1, x2, x3) := x1x3 − x22 − d. Dann ist
grad f(x1, x2, x3) = (x3,−2x2, x1) 6= (0, 0, 0)
fur alle X ∈ S, da d > 0. Nach Satz 4 ist S eine regulare Flache (ein 2-schaligesHyperboloid).
Bemerkung. Die Bedingung grad f(p) 6= 0 fur alle p ∈ S ist hinreichend, abernicht notwendig dafur, dass S eine regulare Flache ist. Wir betrachten dazu dieSphare
S2 =
(x1, x2, x3) ∈ R3 |x21 + x2
2 + x23 = 1
und setzen f(x1, x2, x3) := (x2
1 + x22 + x2
3 − 1)2. Dann ist S2 = f−1(0),
grad f(x1, x2, x3) = 2(x21 + x2
2 + x23 − 1)(2x1, 2x2, 2x3)
und somit grad f(p) = 0 fur alle p ∈ S2. Trotzdem ist S2 - wie wir bereits wissen -eine regulare Flache (siehe Beispiel (a) und 7.3).
8.5 Rotationsflachen
Eine wichtige Klasse von Flachen sind Drehflachen oder Rotationsflachen. Dabeiwird eine ebene Kurve in der x1x3-Ebene um die x3-Achse gedreht, vgl. Abb. 8.5.Um eine regulare Flache zu erhalten, muss die zu rotierende Kurve gewisse Bedin-gungen erfullen, auf die wir hier aber nicht eingehen wollen.
Abbildung 8.5: Rotationsflache
33

9 Die 1. Fundamentalform
9.1 Definition
Wir wollen auf einer regularen Flache Geometrie betreiben, also z.B. Langen undWinkel messen. Der Tangentialraum TpR3 ∼= R3 ist mit dem Standardskalarprodukt〈·, ·〉 von R3 versehen. Ist S ⊂ R3 eine regulare Flache und p ∈ S, so ist dieTangentialebene TpS ein Untervektorraum von TpR3 (siehe Lemma II. 2). Es liegtalso nahe, das Standard-Skalarprodukt auf TpS einzuschranken.
Definition 1. Es sei S eine regulare Flache und p ∈ S. Dann definiert die bilineareAbbildung
〈·, ·〉p : TpS × TpS → R, 〈X,Y 〉p := 〈X,Y 〉
ein Skalarprodukt auf TpS. Die Zuordnung I : p 7→ Ip := 〈·, ·〉p heißt 1. Fundamen-talform von S.
Fur eine gegebene Parameterisierung x : U → S von S um p haben wir die Basis
xu := xu(x−1(p)) und xv := xv(x−1(p))
von TpS. Bezuglich dieser Basis konnen wir Ip, p ∈ x(U), durch eine positiv definite,symmetrische Matrix (gij(u, v)) ∈ R2×2 beschreiben. Die folgende Bezeichnungdieser Matrix geht auf Gauß zuruck:
(gij) =(g11 g12
g21 g22
)=(E FF G
),
mit
g11 ≡ E = E(u, v) = 〈xu, xv〉p,g12 = g21 ≡ F = F (u, v) = 〈xu, xv〉p = 〈xv, xu〉p,
g22 ≡ G = G(u, v) = 〈xv, xv〉p.
Zusammenfassend haben wir gezeigt: Auf einer regularen Flache S wird durch dasStandardskalarprodukt von R3 eine Familie von Skalarprodukten (Ip)p∈S induziert.Bezuglich einer Parametrisierung x : U → S von S ist diese Familie gegeben durcheine 2-parametrige Familie von Matrizen (gij(u, v))(u,v)∈U . Dabei sind die Eintragegij : U → R differenzierbare Funktionen.
Beispiel (a) Wir betrachten eine affine Ebene, die global durch x : R2 → R3,(u, v) 7→ x0 + uf1 + vf2 mit zwei orthonormierten Vektoren f1, f2 ∈ R3 parametri-siert ist. Dann ist xu = f1 und xv = f2, also(
E FF G
)=(
1 00 1
).
34
(b) Es sei S der Zylinder S =
(x1, x2, x3) ∈ R3 |x21 + x2
2 = r2
. Eine lokale Para-metrisierung von S ist x(u, v) = (r cosu, r sinu, v). Dann ist xu = r(− sinu, cosu, 0),xv = (0, 0, 1) und damit (
E FF G
)=(r2 00 1
).
Bemerkung. Die innere Geometrie einer Flache umfasst alle Eigenschaften oderGroßen, die nur von der 1. Fundamentalform abhangen (bzw. durch diese bestimmtsind).
Nach den obigen Beispielen stimmen fur r = 1 die 1. Fundamentalform von Zylinderund Ebene uberein. Der tiefere Grund dafur liegt darin, dass man den Zylinder unterErhaltung der 1. Fundamentalform in die Ebene ”abwickeln“ kann. Insbesondereenthalt die 1. Fundamentalform nicht die vollstandige Information daruber, wie dieFlache in den R3 eingebettet ist. Fur viele geometrische Fragestellungen genugt esaber oft, die 1. Fundamentalform zu kennen. In den nachsten beiden Abschnittengeben wir erste Beispiele dazu an. Wir werden spater in Teil IV noch ausfuhrlichauf Fragen der inneren Geometrie eingehen.
9.2 Lange von Flachenkurven
Es sei x : U → S eine Parametrisierung einer regulare Flache S. Weiter sei [α, β]→U , t 7→ (u(t), v(t)) eine differenzierbare Kurve. Dann ist c(t) = x(u(t), v(t)) einedifferenzierbare Flachenkurve, vgl. Abb. 9.1. Da x(U) ⊂ S ⊂ R3 kann man c
Abbildung 9.1: Eine Flachenkurve
naturlich auch als Raumkurve auffasssen. Die Lange von c ist dann
L(c) =∫ β
α
‖c′(t)‖dt.
35

Weiter ist nach der Kettenregel c′(t) = xu(u(t), v(t))u′(t) + xv(u(t), v(t))v′(t) ∈Tc(t)S und somit
‖c′(t)‖2 = 〈c′(t), c′(t)〉= (u′(t))2〈xu, xv〉+ 2u′(t)v′(t)〈xu, xv〉+ (v′(t))2〈xv, xv〉= (u′(t))2E + 2u′(t)v′(t)F + (v′(t))2G.
Zur Bestimmung von L(c) fur eine Flachenkurve genugt es also, die 1. Fundamental-form der Flache und die Kurve im Parametergebiet zu kennen. Mit andern Worten:die Lange einer F lachenkurve von S ist eine Große der inneren Geometrie von S.
9.3 Winkel zwischen Parameterlinien
Es sei S eine regulare Flache. Wir betrachten die Parameterlinien u = u0 undv = v0 bzw. deren Bilder x(u0, t) und x(t, v0) auf S, vgl. Abb. 9.2.
Abbildung 9.2: Parameterlinien
Der Winkel α, unter dem sich x(u0, t) und x(t, v0) im Punkt x(u0, v0) schneiden,ist gegeben durch
cosα =〈xu(u0, v0), xv(u0, v0)〉‖xu(u0, v0)‖ ‖xv(u0, v0)‖
=F (u0, v0)√
E(u0, v0) ·G(u0, v0).
Auch hier genugt die Kenntnis der 1. Fundamentalform, um den Winkel zu bestim-men.
9.4 Verhalten von I bei Koordinatenwechsel
Es sei S eine regulare Flache. Sind zwei Parametrisierungen x : U → S, x : U → Sum den Punkt p ∈ x(U)∩ x(U) gegeben, so stellt sich die Frage, wie die Darstellun-gen der 1. Fundamentalform Ip in den jeweiligen Koordinaten zusammenhangen.Wir betrachten dazu den Koordinatenwechsel
x−1 x : x−1(x(U) ∩ x(U)) → x−1(x(U) ∩ x(U))(u, v) 7→ (u, v).
36
Nach der Kettenregel gilt
∂x
∂u(u, v) =
∂x (x−1 x)∂u
(u, v) =∂x
∂u(u, v)
=∂x
∂u(u, v) · ∂u
∂u(u, v) +
∂x
∂v(u, v) · ∂v
∂u(u, v)
und
∂x
∂v(u, v) =
∂x (x−1 x)∂v
(u, v) =∂x
∂v(u, v)
=∂x
∂u(u, v) · ∂u
∂v(u, v) +
∂x
∂v(u, v) · ∂v
∂v(u, v).
Wir setzen
f1 := xu(u, v) f2 := xv(u, v)f1 := xu(u, v) f2 := xv(u, v)
Bezuglich dieser Standardbasen hat der Koordinatenwechsel gemass obiger Rech-nung die Darstellungmatrix
D(u, v) =(dij(u, v)
)=
∂u
∂u(u, v)
∂u
∂v(u, v)
∂v
∂u(u, v)
∂v
∂v(u, v)
Wir konnen also schreiben
fi =2∑k=1
dkifk
und
gij = 〈fi, fj〉p =2∑
k,l=1
dkidlj〈fk, fl〉p,
bzw. (gij(u, v)
)= DT (u, v)
(gij(u, v)
)D(u, v).
Fur jeden Punkt p = x(u, v) = x(u, v) gelten also die bekannten Transformations-formeln fur Skalarprodukte unter Basiswechsel.
Bemerkung. Wir haben in diesem Teil (2-dimensionale) regulare Flachen in R3
eingefuhrt und gewisse allgemeine Eigenschaften diskutiert. Die Dimensionen zweiund drei wurden aber nirgends wirklich benutzt. Tatsachlich kann man die bishe-rigen Konzepte genauso fur beliebige Dimensionen betrachten: man spricht dannvon ((n− 1)-dimensionalen) regularen Hyperflachen in Rn.
37
Teil III
Krummung von Flachen
10 Gauß- und Weingarten-Abbildung
10.1 Differenzierbare Abbildungen
Wir betrachten zwei regulare Flachen M und N und eine stetige Abbildung f :M → N . Es seien p ∈ M , x : U → M eine Parametrisierung um p und y : V → Neine Parametrisierung um f(p).
Definition 1. Die stetige Abbildung f : M → N heißt differenzierbar in p ∈ M ,wenn die Abbildung
y−1 f x : x−1(x(U) ∩ f−1(y(V ))
)→ y−1
(f(x(U)) ∩ y(V )
)differenzierbar in x−1(p) ist, vgl. Abb. 10.1. Sie heißt differenzierbar, wenn sie injedem Punkt q ∈M differenzierbar ist.
Abbildung 10.1: Darstellung in lokalen Koordinaten
Bemerkung (a) Da f stetig ist, ist die Menge x−1(x(U)∩ f−1(y(V ))
)offen in U
und damit offen in R2. Die Frage nach Differenzierbarkeit ist also sinnvoll.(b) Die Darstellung von f in Definition 1 bezeichnet man auch als Darstellung vonf in lokalen Koordinaten. Man kann sich also merken: f ist genau dann differen-zierbar, wenn f in lokalen Koordinaten differenzierbar ist.
38

(c) Die Differenzierbarkeitsaussage in lokalen Koordinaten hangt nicht von der Pa-rametrisierung um p und f(p) ab. Genauer: Ist x eine weitere Parametrisierung ump und y eine weitere Parametrisierung um f(p), so ist y−1 f x genau dann diffe-renzierbar in x−1(p), wenn y−1f x differenzierbar in x−1(p) ist (Ubungsaufgabe!).
Definition 2. Es sei n ∈ N. Ist f : M → Rn eine stetige Abbildung, so heißt fdifferenzierbar in p ∈M , wenn die Abbildung
f x : U → Rn
fur eine und damit jede Parametrisierung um p differenzierbar ist.
10.2 Das Tangentialbundel
Es sei f : M → N eine differenzierbare Abbildung zwischen regularen Flachen.Weiter sei v ∈ TpM ein Tangentialvektor, d. h. es gibt eine differenzierbare Kurve c :(−ε, ε)→ R3 mit c(0) = p, c
((−ε, ε)
)⊂M und c′(0) = v. Die Tangentialabbildung
dfp : TpM → Tf(p)N ist die lineare Abbildung gegeben durch
dfp(v) :=d(f c)dt
(0),
d. h. dfp bildet den Tangentialvektor c′(0) der Kurve c im Punkt p auf den Tangen-tialvektor der Kurve f c im Punkt f(p) ab, vgl. Abb. 10.2.
Abbildung 10.2: Die Tangentialabbildung
Wir mussen zeigen, dass dfp wohldefiniert ist, d. h. ist c : (−ε, ε)→M, eine weitereKurve mit c(0) = p und c′(0) = v, so ist zu zeigen, dass
d(f c)dt
(0) =d(f c)dt
(0)
gilt. Dazu sei x : U → M eine Parametrisierung um c(0) = c(0) = p. Wegen derStetigkeit von c und c kann man annehmen, dass die Abbildungen x−1c und x−1cdefiniert sind. Dann gilt nach Voraussetzung
dxx−1(p)
(d(x−1 c)dt
(0))
= c′(0) = c′(0) = dxx−1(p)
(d(x−1 c)dt
(0)).
39

Da dxx−1(p) injektiv ist, folgt
d(x−1 c)dt
(0) =d(x−1 c)
dt(0).
Somit gilt
d(f c)dt
(0) =d(f x x−1 c)
dt(0)
= d(f x)x−1(p)
(d(x−1 c)dt
(0))
= d(f x)x−1(p)
(d(x−1 c)dt
(0))
=d(f x x−1 c)
dt(0)
=d(f c)dt
(0)
Es kommt also nicht auf die Kurve c an, sondern nur auf den Tangentialvektor c′(0)dieser Kurve. Ist c′(0) = αxu + βxv, so kann man die spezielle Kurve
t 7→ x(x−1(p) + t(α, β))
benutzen. Rechnen Sie mithilfe solcher Kurven die Linearitat von dfp nach.
Definition 3. Die disjunkte Vereinigung
TM :=∐p∈M
TpM
heißt das Tangentialbundel von M . Eine differenzierbare Abbildung f : M → Ninduziert durch die Festsetzung
df(p, v) := (f(p), dfp(v)), (p, v) ∈ TpM
eine Abbildung df : TM → TN .
10.3 Normalenfelder
Die Krummung einer Kurve haben wir als Anderungsgeschwindigkeit der Tangentedefiniert. Die Krummung einer Flache wird nun analog als Anderungsgeschwindigkeitder Tangentialebene definiert. Dazu benotigen wir einige neue Begriffe.
Definition 4. Ein Einheitsnormalenvektorfeld auf einer offenen Teilmenge Weiner regularen Flache S ist eine differenzierbare Abbildung
N : W → TR3 = R3 × R3, q 7→ (q,N(q)),
die jedem Punkt q ∈W einen Einheitsnormalenvektor an S in q zuordnet, d. h.
‖N(q)‖ = 1 und 〈N(q), X〉 = 0
fur alle X ∈ TqS, vgl. Abb. 10.3.
40

Abbildung 10.3: Einheitsnormalenvektor
Eine regulare Flache S heißt orientierbar , wenn es auf S ein differenzierbares Ein-heitsnormalenvektorfeld N : S → TR3 gibt. Die Wahl eines solchen Vektorfeldesnennt man auch eine Orientierung von S. Auf einer orientierbaren Flache gibt esimmer genau zwei Orientierungen.
Definition 5. Es sei S eine regulare Flache und x : U → S eine Parametrisierungvon S um p = x(u, v). Der Vektor
N(p) :=xu(u, v) ∧ xv(u, v)‖xu(u, v) ∧ xv(u, v)‖
∈ TpR3
heißt Einheitsnormalenvektor von S im Punkt p ∈ S bezuglich x.
Die AbbildungN x : U → TR3 ∼= R3 × R3
ist per Definition differenzierbar und N ist ein Normalenfeld.Es sei x : U → S, (u, v) 7→ x(u, v) eine weitere Parametrisierung um p. Mit N(p)sei der Normalenvektor bezuglich x bezeichnet. Weiter sei
ϕ : x−1(x(U) ∩ x(U)) → x−1(x(U) ∩ x(U))(u, v) 7→ (u, v)
der Koordinatenwechsel. Es gilt also
x(u, v) = (x ϕ)(u, v) = x(u, v)
und damit
xu ∧ xv =(xu∂u
∂u+ xv
∂v
∂u
)∧(xu∂u
∂v+ xv
∂v
∂v
)=(∂u∂u
∂v
∂v− ∂u
∂v
∂v
∂u
)xu ∧ xv = det(dϕ) xu ∧ xv.
Schließlich erhalten wir
N(p) =det(dϕ)|det(dϕ)|
·N(p).
Ist det(dϕ) > 0 so heißt ϕ orientierungserhaltend. Bei einem orientierungserhalten-den Diffeomorphismus gilt also N(p) = N(p), sonst gilt N(p) = −N(p).
41
Bemerkung. Eine regulare Flache S ist genau dann orientierbar, wenn es eineUberdeckung (ϕi)i∈I von S durch Parametrisierungen ϕi : Ui → S gibt, so dassalle Koordinatenwechsel ϕi ϕ−1
j positive Funktionaldeterminate haben (Ubungs-aufgabe!).
Beispiele (a) Die 2-Sphare S2 und Graphen von Funktionen sind stets orientier-bar. Jede Flache, die durch eine Parametrisierung beschrieben werden kann, istorientierbar.(b) Das Mobiusband ist nicht orientierbar, vgl. Abb. 10.4.
Abbildung 10.4: Mobiusband
10.4 Gauß- und Weingarten-Abbildung
Es sei S eine orientierbare Flache mit Einheitsnormalenfeld N . Die Abbildung π :TR3 → R3, (p, v) 7→ v ist differenzierbar und damit auch die Abbildung π N . Furdiese Abbildung schreiben wir einfach N . Nach Definition ist also N(S) ⊂ S2, vgl.Abb. 10.5.
Abbildung 10.5: Gauß-Abbildung
Definition 6. Sei S eine orientierbare Flache. Die differenzierbare Abbildung
N : S → S2, p 7→ N(p)
heißt Gauß-Abbildung von S.
42

Da das Vektorfeld N bis auf ein Vorzeichen eindeutig bestimmt ist, gibt es zu jedemp ∈ N eine Parametrisierung x : U → S um p, so dass N auf x(U) die Gestalt ausDefinition 5 hat.
Wir betrachten die Tangentialabbildung
dNp : TpS → TN(p)S2.
Nach Konstruktion steht N(p) senkrecht auf TN(p)S2. Da aber per Definition N(p)
auch senkrecht auf TpS steht, konnen wir die Tangentialraume TpS und TN(p)S2
uber die Abbildung (p, v) 7→ (N(p), v) identifizieren: TpS ∼= TN(p)S2. Insbesondere
fassen wir nun dNp als Endomorphismus von TpS auf.
Definition 7. Die Tangentialabbildung der Gauß-Abbildung
dNp : TpS → TpS, p ∈ S,
heißt Weingarten-Abbildung (oder auch Form-Operator).
Es sei x : U → S eine Parametrisierung von S. Weiter sei p = x(u, v) ∈ x(U). Dannhaben wir die Basis
xu = xu(u, v), xv = xv(u, v)von TpS. Fur die Tangentialabbildung dNp gilt dann
dNp(xu) = dNp(dx(u,v)(e1)
)= d(N x)(u,v)(e1)
=∂(N x)
∂u(u, v) =: Nu(u, v)
und
dNp(xv) =∂(N x)
∂v(u, v) =: Nv(u, v).
Bemerkungen (a) Ist c : I → S, t 7→ c(t) = x(u(t), v(t)) eine differenzierbareFlachenkurve mit c(0) = p und N(t) := N(c(t)) die Einschrankung der Gauß-Abbildung auf diese Kurve, so gilt
N ′(0) =d(N c)
dt(0) = dNp(c′(0)) = dNp(u′(0)xu + v′(0)xv)
= u′(0)Nu(u(0), v(0)) + v′(0)Nv(u(0), v(0)).
(b) Da 〈N,N〉 = 1 folgt duch ableiten
〈Nu, N〉 = 〈Nv, N〉 = 0.
Das zeigt nochmals
dNp(TpS) = dNp([xu, xv]
)= [Nu, Nv] ⊂ N⊥ ∼= TpS,
d. h. dNp ist fur alle p ∈ S ein Endomorphismus von TpS.
43

Satz 1. Die Weingarten-Abbildung dNp : TpS → TpS einer regularen Flache S istfur jeden Punkt p ∈ S selbstadjungiert bezuglich der 1. Fundamentalform von S,d. h. es gilt
〈dNp(X), Y 〉p = 〈X, dNp(Y )〉pfur alle p ∈ S und alle X,Y ∈ TpS.
Beweis. Es genugt die Behauptung fur eine Basis von TpS zu zeigen. Dazu seix : U → S eine Parametrisierung von S. Dann haben wir die Basis xu, xv vonTpS. Wegen der Symmetrie des Skalarprodukts gilt
〈dNp(xu), xu〉 = 〈xu, dNp(xu)〉, 〈dNp(xv), xv〉 = 〈xv, dNp(xv)〉.
Es bleibt also〈dNp(xu), xv〉 = 〈xu, dNp(xv)〉
zu zeigen. Das ist aber aquivalent zu
〈Nu, xv〉 = 〈xu, Nv〉.
Um das zu zeigen, leiten wir 〈N, xu〉 = 0 = 〈N, xv〉 nach v bzw. nach u ab underhalten
〈Nv, xu〉+ 〈N, xuv〉 = 0〈Nu, xv〉+ 〈N, xvu〉 = 0.
Da x eine C∞-Abbildung, ist gilt xuv = xvu (x ∈ C2 hatte schon gereicht.). Damitfolgt die Behauptung.
Wir erinnnern an die folgenden Begriffe aus der Linearen Algebra. Sei E eineuklidischer Vektorraum, d. h. E ist ein reeller Vektorraum mit Skalarprodukt. Zueiner selbstadjungierten Abbildung φ : E → E gehort eine symmetrische Bilinear-form Bφ definiert durch
Bφ(X,Y ) := 〈φ(X), Y 〉
bzw. eine quadratische Form
Qφ(X) := Bφ(X,X) = 〈φ(X), X〉.
Wir betrachten jetzt diese Konzepte fur E = TpS and φ = −dNp.
Definition 8. Die quadratische Form IIp die zu −dNp, p ∈ S, gehort, heißt 2.Fundamentalform von S in p, also
IIp(X) := 〈−dNp(X), X〉p
fur alle p ∈ S und alle X ∈ TpS. Wir werden die Bezeichnung IIp auch fur dieentsprechende Bilinearform verwenden.
44

Beispiele (a) Es sei S die affine Ebene durch p ∈ R3 aufgespannt von den Vekto-ren f1 und f2. Ein Normalenfeld auf S ist dann offenbar konstant. Es sei
f =f1 ∧ f2
‖f1 ∧ f2‖.
Wir wahlen die Orientierung so, dass N(p) = (p, f) gilt. Die Gauß-Abbildung istalso konstant. Fur die Weingarten-Abbildung gilt folglich dNq ≡ 0, bzw. IIq ≡ 0fur alle q ∈ S.(b) Wir betrachten die Sphare S2
r vom Radius r (S2 = S21). Fur N ergeben sich
die zwei MoglichkeitenN(p) = ± p
‖p‖= ±p
r,
je nach Wahl der Orientierung. Positives Vorzeichen entspricht dem “außeren” Nor-malenfeld, negatives Vorzeichen dem “inneren”, vgl. Abb. 10.6. Damit ist
Abbildung 10.6: Außeres Normalenfeld auf S2r
N = ±1r
idS2r
und dNp = ±1r
idTpS2r.
Nach Definition erhalt man IIp(X) = ∓ 1r 〈X,X〉p.
(c) Als weiteres Beispiel betrachten wir den Zylinder S, vgl. Abb. 10.7,
S =
(x1, x2, x3) ∈ R3 |x21 + x2
2 = 1.
Die Gauß-Abbildung ist konstant langs Mantellinien und das Bild N(S) ist einGroßkreis auf S2, vgl. Abb. 10.7.Fur die Weingarten-Abbildung erhalt man
dNp(X) = 0, wenn X tangential an eine Mantellinie ist unddNp(Y ) = Y, wenn Y tangential an eine Kreislinie ist.
Die Vektoren X und Y sind orthogonal und bilden damit eine Basis von TpS.Bezuglich dieser Basis hat die zweite Fundamentalform also die Darstellung
IIp =(
0 00 ‖Y ‖2
).
45

Abbildung 10.7: Zylinder und entprechende Gauß-Abbildung
Zeigen Sie als , dass der Zylinder eine regulare Flache ist, und weisen Sie dannmithilfe einer Parametrisierung von S die obigen Behauptungen nach.(d) Wir betrachten das hyperbolische Paraboloid, das implizit durch
S =
(x1, x2, x3) ∈ R3 |x3 = x22 − x2
1
gegeben ist, vgl. Abb. 10.8. Eine globale Parametrisierung von S ist die Abbildung
x : R2 → R3, (u, v) 7→ (u, v, v2 − u2).
S ist insbesondere der Graph einer Funktion und damit orientierbar.Wir wahlen das Normalenfeld bzgl. x als Orientierung, vgl. Definition 5. Es gilt
Abbildung 10.8: Hyperbolisches Paraboloid
xu(u, v) = (1, 0,−2u) und xv(u, v) = (0, 1, 2v), sowie xu(u, v)∧xv(u, v) = (2u,−2v, 1).Fur den Normalenvektor in p = x(u, v) erhalten wir also
N(p) = N(x(u, v)) =xu ∧ xv‖xu ∧ xv‖
=(2u,−2v, 1)√4u2 + 4v2 + 1
.
46
Fur p = (0, 0, 0) = x(0, 0) gilt
xu := xu(0, 0) = (1, 0, 0) = e1,
xv := xv(0, 0) = (0, 1, 0) = e2.
Fur eine Flachenkurve cmit c(0) = p = (0, 0, 0) istN(t) := N(c(t)) = N(x(u(t), v(t)))die Einschrankung der Gauß-Abbildung auf diese Kurve. Dann ergibt sich
dNp(c′(0)) =dN
dt(0)
= (2u′(0),−2v′(0), 0)= 2u′(0)e1 − 2v′(0)e2.
Da aber
c′(0) = u′(0)xu(0, 0) + v′(0)xv(0, 0)= u′(0)e1 + v′(0)e2,
sehen wir durch Vergleich: e1 = xu(0, 0) ist Eigenvektor von dNp zum Eigenwert 2und e2 = xv(0, 0) ist Eigenvektor zum Eigenwert −2.
11 Gauß-Krummung und mittlere Krummung
11.1 Die Normalschnittkrummung
Wir gehen aus von einer Idee von Euler und betrachten sogenannte Normalschnitteeiner Flache. Dazu sei S eine orientierte regulare Flache und p ∈ S. Weiter seiX ∈ TpS mit ‖X‖ = 1. Es bezeichne
σX := [N(p), X]
die affine Ebene in R3 durch p, aufgespannt von X und N(p). Dann ist σX ∩ S ineiner Umgebung von p das Bild einer regularen, mit Bogenlange parametrisiertenKurve cX : I → S mit c′X(0) = X. Um das einzusehen, wahlen wir eine lokaleParametrisierung x : U → S von S um p, die mit der Orientierung von S vertraglichist. Dann bilden die Vektoren
xu, xv, xu ∧ xv
eine Basis von R3 (wobei als Argument uberall x−1(p) zu nehmen ist). Weiter sei Bdie Matrix deren Spalten gerade diese Vektoren sind. Wir fuhren einen Basiswechselim R3 durch, beziehen uns also jetzt auf die obige Basis, d. h. wir betrachten dieKoordinaten (y1, y2, y3) mit x1
x2
x3
= B
y1
y2
y3
.
47

Dieser Koordinatenwechsel ist ein Diffeomorphismus von R3 auf sich selbst. Bezuglichder Koordinaten y entpricht S der Menge
B−1S =B−1p | p ∈ S
.
Da x eine Parametrisierung von S ist, ist B−1 x eine Parametrisierung von B−1Sund es gilt
d(B−1 x)x−1(p) = dB−1p dxx−1(p)
= (xu xv xu ∧ xv)−1(xu xv)
=
1 00 10 0
Wir haben damit dieselbe Situation wie im Beweis von Satz 3 in Abschnitt 8.2.Die Orthogonalprojektion π auf die Ebene [xu, xv] ist in einer hinreichend klei-nen Umgebung von p ein Diffeomorphismus auf eine offene Umgebung von (0, 0) ∈R2 ∼= [xu, xv]. Der Schnitt von σX mit dieser Ebene ist eine Gerade durch 0. DerSchnitt von σX mit S ist das Bild dieser Geraden unter π−1 und damit eine regulareFlachenkurve.
Es sei κ : I → R die Krummung von cX , also
κ(s) = ‖c′′X(s)‖.
Da cX in der Ebene σX liegt ist c′′X(0) parallel zu N(p), d. h. H(0) = ±N(p) (sofernH(0) definiert ist). Das Vorzeichen ist durch die Orientierung von S bzw. durch dieWahl von N bestimmt.
Definition 9. Die Normalschnittkrummung κn(X) von S im Punkt p in RichtungX ∈ TpS, ‖X‖ = 1, ist definiert als
κn(X) := 〈c′′X(0), N(p)〉 = ±κ(0).
Das ist - bis auf ein durch N bestimmtes Vorzeichen - die Krummung der ebenenKurve S ∩ σX . Mit anderen Worten: N induziert eine Orientierung von σX . Wahltman diese Orientierung als die positive Orientierung von σX , so ist κn gerade dieorientierte Krummung von S ∩ σX .Wir stellen jetzt eine Beziehung zur 2. Fundamentalform bzw. zur Weingarten-Abbildung her. Dazu sei N(s) := N(cX(s)) der Normalenvektor von S im PunktcX(s), s ∈ I. Dann gilt
〈N(s), c′X(s)〉 = 0
fur alle s ∈ I. Ableiten nach s ergibt
〈N ′(s), c′X(s)〉+ 〈N(s), c′′X(s)〉 = 0 (∗)
48
fur alle s ∈ I. Es folgt
IIp(X) = IIp(c′X(0))
= Ip(− dNc(0)(c′X(0)), c′X(0)
)= 〈−(N cX)′(0), c′X(0)〉p
und mit (∗)
IIp(X) = 〈N(0), c′′X(0)〉 = κn(X)
Damit erhalt man eine geometrische Interpretation der 2. Fundamentalform IIp:
IIp(X) = κn(X)
fur alle X ∈ TpS mit ‖X‖ = 1.
Beispiele (a) Wir betrachten eine Ebene. Alle Schnitte sind Geraden und alleNormalkrummungen verschwinden. Es gilt also IIp ≡ 0.(b) Wir betrachten die Sphare S2. Alle Normalschnitte sind Großkreise, d. h. furdie Normalkrummung gilt stets κn(X) = ±1, bzw.
IIp(X) = ±1
fur alle p ∈ S2 und alle X ∈ TpS mit ‖X‖ = 1. Das Vorzeichen wird durch dieWahl der Orientierung bestimmt. Bei Wahl des außeren Normalenfeldes erhalt mannegative Vorzeichen, bei Wahl des inneren Normalenfeldes positives Vorzeichen, vgl.Abb. 11.1.
Abbildung 11.1: Normalschnittkrummung von S2
49

11.2 Hauptkrummungen
Aus der Linearen Algebra wissen wir: Da −dNp : TpS → TpS fur jedes p ∈ S selbst-adjungiert bezuglich der 1. Fundamentalform ist, gibt es eine Orthonormalbasis
E1(p), E2(p)
von TpS aus Eigenvektoren von −dNp,
−dNp(Ei(p)) = κi(p)Ei(p), i = 1, 2.
Der Endomorphismus−dNp ist damit diagonalisierbar und die Darstellungs-Matrizenvon Ip und IIp bezuglich obiger Basis aus Eigenvektoren haben die Gestalt
IIp =(κ1(p) 0
0 κ2(p)
)Ip =
(1 00 1
).
Ip und IIp sind also insbesondere simultan diagonalisierbar fur alle p ∈ S. OhneEinschrankung sei κ1(p) ≥ κ2(p). Dann gilt
κ1(p) = max IIp(X) | ‖X‖ = 1, X ∈ Tp(S)
undκ2(p) = min IIp(X) | ‖X‖ = 1, X ∈ Tp(S) .
Das bedeutet geometrisch: Die Eigenwerte κ1(p) und κ2(p) sind die Extrema derNormalschnittkrummung in orthogonalen Richtungen.
Definition 10. Die Eigenwerte κ1(p) und κ2(p) heißen Hauptkrummungen inp. Die zugehorigen Eigenvektoren E1(p), E2(p) ∈ TpS heißen Hauptkrummungs-richtungen von S in p ∈ S.
Aus den Hauptkrummungen κ1 und κ2 in einem Punkt p ∈ S kann man die Nor-malschnittkrummung in einer beliebigen Richtung X ∈ TpS, ‖X‖ = 1, berechnen.Dazu stellt man X in der Basis E1, E2 von TpS dar,
X = cos θ E1 + sin θ E2.
Dann erhalt man folgende Formel von Euler:
κn(X) = IIp(X)= 〈−dNp(X), X〉p= κ1 cos2 θ + κ2 sin2 θ.
11.3 Die Gauß-Krummung
Es sei S eine regulare Flache. Unter einer geometrischen Eigenschaft von S ver-steht man eine Eigenschaft, die unabhangig von der Wahl einer Parametrisierungvon S ist (fur ihre Bestimmung ist man naturlich trotzdem oft auf eine konkrete
50

Parametrisierung angewiesen). Fur Konstruktionen im Tangentialraum bedeutetUnabhangigkeit gerade Unabhangigkeit von der gewahlten Basis. Die Lineare Al-gebra liefert uns einige solche Invarianten. So sind etwa fur eine quadratische Formbzw. eine symmetrische Bilinearform die Spur und die Determinante einer Dar-stellungsmatrix unabhangig von der Wahl der Basis, bezuglich der die jeweiligeAbbildung dargestellt wird.
Definition 11. Wir betrachten den Endomorphismus −dNp : TpS → TpS undsetzen
K(p) := det(−dNp) = κ1(p)κ2(p),
H(p) :=12
Spur(−dNp) =12
(κ1(p) + κ2(p)).
Damit erhalten wir Funktionen K : S → R und H : S → R; K(p) heißt Gauß-Krummung von S in p, H(p) heißt mittlere Krummung von S in p.
Neben I und II sind das die wichtigsten (lokalen) geometrischen Invarianten einerFlache. Anhand der Gauß-Krummung klassifiziert man die Punkte einer Flachefolgendermaßen: Der Punkt p ∈ S heißt
elliptischer Punkt, wenn K(p) > 0 ⇐⇒ det(−dNp) > 0
parabolischer Punkt, wennK(p) = 0 und − dNp 6= 0 ⇐⇒det(−dNp) = 0 und − dNp 6= 0
hyperbolischer Punkt, wenn K(p) < 0 ⇐⇒ det(−dNp) < 0
Flachpunkt, wenn κ1 = κ2 = 0 ⇐⇒ −dNp = 0.
Bemerkung. Die Gauß-Krummung ist von der Wahl der Orientierung von Sbzw. von der Wahl des Normalenfelds N unabhangig. Hingegen andert die mittlereKrummung beim Wechsel der Orientierung ihr Vorzeichen.
11.4 Formeln fur K und H in lokalen Koordinaten
Es sei S eine orientierte regulare Flache und x : U → S eine mit der Orientierungvertragliche Parametrisierung von S. Wir wollen fur einen Punkt p ∈ x(U) mithilfevon x Formeln fur die 2. Fundamentalform, die Gauß-Krummung und die mittlereKrummung herleiten. Sei also p ∈ x(U) und
xu := xu(x−1(p)), xv := xv(x−1(p)).
Dann ist B := xu, xv eine Basis von TpS. Nach Voraussetzung gilt fur q ∈ x(U)
N(q) =xu(x−1(q)) ∧ xv(x−1(q))‖xu(x−1(q)) ∧ xv(x−1(q))‖
.
Es sei
A(p) =(a11 a12
a21 a22
)
51

die Abbildungsmatrix von dNp bezuglich B, d. h.
dNp(xu) = a11xu + a21xv
dNp(xv) = a12xu + a22xv
Die Matrix der 2. Fundamentialform IIp bezuglich B sei(e ff g
).
Durch ableiten von 〈N x, xu〉 = 〈N x, xv〉 = 0 erhalt man zunachst
〈(N x)u, xu〉+ 〈N x, xuu〉 = 0〈(N x)v, xv〉+ 〈N x, xvv〉 = 0〈(N x)v, xu〉+ 〈N x, xuv〉 = 0.
Also ist mit Nu := (N x)u = dNp(xu) und Nv := (N x)v = dNp(xv),
e = IIp(xu, xu) = −〈dNp(xu), xu〉 = −〈Nu, xu〉 = 〈N, xuu〉f = IIp(xu, xv) = −〈Nu, xv〉 = 〈N, xuv〉g = IIp(xv, xv) = −〈Nv, xv〉 = 〈N, xvv〉.
Nach Definition ist IIp(X,Y ) = Ip(−dNp(X), Y ) fur X,Y ∈ TpS. Wir wollenvorubergehend eine etwas allgemeinere Situation betrachten. Dazu sei Φ ein selbst-adjungierter Endomorphismus eines n-dimensionalen euklidischen Vektorraums Vmit Basis b1, . . . , bn. Es sei Q die durch
Q(x, y) := 〈Φ(x), y〉 (x, y ∈ V )
definierte symmetrische Bilinearform. Weiter seien
B := (bij) := (Q(bi, bj)), C := (cij) := (〈bi, bj〉)
die Darstellungsmatrix von Q bzw. die Matrix des Skalarprodukts und A die Matrixvon Φ in dieser Basis. Dann gilt
bij = Q(bi, bj) = 〈Φ(bi), bj〉
= 〈∑k
akibk, bj〉
=∑k
akickj ,
bzw. B = ATC.Wenden wir nun diese Uberlegungen auf obige Situation an, so haben wir(
e ff g
)= −
(a11 a21
a12 a22
)(E FF G
)
52

und damit
−AT = −(a11 a21
a12 a22
)=(e ff g
)(E FF G
)−1
.
Man beachte dabei, dass die Matrix eines Skalarprodukts stets regular ist, da dieseMatrix nur positive Eigenwerte und damit nicht verschwindende Determinante hat.In unserem Fall gilt speziell(
E FF G
)−1
=1
EG− F 2
(G −F−F E
).
Damit erhalten wir das
Lemma 1. Fur die Gauß-Krummung im Punkt p ∈ S gilt
K(p) = det(−dNp) = det(−A) = det(−AT ) =det(IIp)det(Ip)
=eg − f2
EG− F 2.
Fur die mittlere Krummung im Punkt p ∈ S gilt
H(p) =12
Spur(−A) =12eG− 2fF + gE
EG− F 2.
Bemerkung. Wird X ∈ TpS = [xu, xv] als Tangentialvektor an eine Kurve cgeschrieben, also c′(0) = X, so ist
c′(0) = u′(0)xu + v′(0)xv
und
IIp(c′(0)) = −〈dNp(c′(0), c′(0)〉= −〈u′(0)Nu + v′(0)Nv, u′(0)xu + v′(0)xv〉= (u′(0))2e+ 2u′(0)v′(0)f + (v′(0))2g
(man vgl. dazu auch Ip(c′(0)) = (u′(0))2E + 2u′(0)v′(0)F + (v′(0))2G).
Beispiele (a) Fur den Rotationstorus betrachten wir die lokale Parametrisierung
x(u, v) =
(a+ r cosu) cos v(a+ r cosu) sin v
r sinu
, (u, v) ∈ (0, 2π)× (0, 2π).
Mit den obigen Formeln erhalt man
E = r2, F = 0, G = (a+ r cosu)2
e = r, f = 0, g = (a+ r cosu) cosu
und damit
K(x(u, v)) =eg − f2
EG− F 2=
cosur(a+ r cosu)
.
Wir wollen die Punkte des Torus klassifizieren. Man erhalt
53

parabolische Punkte (K = 0) fur u = π/2 und u = 3π/2,
hyperbolische Punkte (K < 0) fur u ∈ (π/2, 3π/2),
elliptische Punkte (K > 0) fur u ∈ (0, π/2) ∪ (3π/2, 2π).
Man vergleiche zu dieser Klassifikation auch Abb. 11.2. Ahnlich berechnet manauch die mittlere Krummung (Ubungsaufgabe!).
Abbildung 11.2: Erzeugende Kurve des Rotationstorus
(b) Wir betrachten nun allgemeine Rotationsflachen (vgl. II. 8.5). Es sei v 7→(ϕ(v), 0, ψ(v)), v ∈ (a, b), die zu rotierende Kurve, ohne Einschrankung sei diesenach Bogenlange parametrisiert (d.h. (ϕ′)2 + (ψ′)2 = 1). Dann ist
x(u, v) := (ϕ(v) cosu, ϕ(v) sinu, ψ(v)), (u, v) ∈ (0, 2π)× (a, b)
eine lokale Parametrisierung. Damit folgt
E = ϕ2, F = 0, G = (ϕ′)2 + (ψ′)2 = 1e = −ϕψ′, f = 0, g = ψ′ϕ′′ − ψ′′ϕ′
und
K =eg − f2
EG− F 2= −ψ
′
ϕ(ψ′ϕ′′ − ψ′′ϕ′).
Ableiten von (ϕ′)2 + (ψ′)2 = 1 ergibt
2ϕ′ϕ′′ + 2ψ′ψ′′ = 0.
und damit
K = − 1ϕ
((ψ′)2ϕ′′ − ψ′ψ′′ϕ′)
= −ϕ′′
ϕ((ψ′)2 + (ϕ′)2) = −ϕ
′′
ϕ.
54

12 Rotationsflachen mit konstanter Gauß-Krummung
Wir betrachten eine Rotationsflache mit konstanter Krummung. Es gelten die Vor-aussetzungen und Bezeichnungen des letzten Beispiels. Die obige Formel fur Kliefert die Differentialgleichung
ϕ′′ +K0ϕ = 0
mit einer Konstanten K0. Die allgemeine Losung dieser Differentialgleichung hatfolgende Gestalt:
ϕ(v) =
a cos(√K0v) + b sin(
√K0v) falls K0 > 0
av + b falls K0 = 0a cosh(
√−K0v) + b sinh(
√−K0v) falls K0 < 0
mit beliebigen Konstanten a, b ∈ R. Wir betrachten die Falle K0 ∈ 1, 0,−1genauer.
1. Fall K = 0 : Es ist ϕ(v) = av + b. Wegen
(ϕ′)2 ≤ (ϕ′)2 + (ψ′)2 = 1
folgt a2 ≤ 1. Damit erhalt man einen
Kreiszylinder fur a = 0,
Kreiskegel fur 0 < |a| < 1,
Ebenenstuck fur a = 1.
2. Fall K = 1 : Nach geeigneter Wahl von v ist ϕ(v) = a cos v, a > 0. Weiterhinmuss gelten a2 sin2 v ≤ 1. Es folgt
ψ(v) =∫ v
0
√1− a2 sin2 t dt.
Man erhalt
2-Sphare fur a = 1
Spindelflache fur 0 < a < 1
Wulst-Flache fur a > 1
Diese Flachen haben typischerweise auch nicht-regulare Punkte.
3. Fall K = −1 : Es ist ϕ(v) = aev + be−v und (aev − be−v)2 ≤ 1. Sei zunachstab = 0, also etwa b = 0. Durch geeignete Wahl von v kann man a = 1erreichen. Dann ist
ϕ(v) = ev ψ(v) =∫ v
0
√1− e2t dt.
55
Die ebene Kurve v 7→ (ϕ(v), ψ(v)) heißt Traktrix oder Schleppkurve. DieLange der Tangentenstrecke von (ϕ(v), ψ(v)) bis zum Schnitt mit der x3-Achse ist konstant 1. Die durch Rotation dieser Kurve entstehende Flache(mit singularen Punkten) heißt Pseudo-Sphare. Sie spielte eine wichtige Rollein der Geschichte der nicht-euklidischen Geometrie.
Fur ab 6= 0 hat man etwa a = −b = c/2 bzw. a = b = c/2. Flachen dieder ersten Bedingung genugen sind vom Kegeltyp. Flachen die der zweitenBedingung genugen sind vom Kehltyp.
Abbildung 12.1: Ezeugende Kurven verschiedener Typen von Rotationsflachen
13 Minimalflachen
Es sei S eine regulare Flache und x : U → S eine Parametrisierung von S. Derhier verwendete Integralbegriff ist der des Lebesgue-Integrals, der aus der Analysisbekannt sein sollte (vgl. z.B. K. Konigsberger, Analysis II, Kap. 7).
Definition 12. Der Flacheninhalt von x(U) ist definiert als
A(x(U)) :=∫∫
U
dA =∫∫
U
√EG− F 2 du dv,
dabei heißt dA = ‖xu ∧ xv‖du dv das Flachenelement von x.
Wir haben hier die Gleichung 〈a∧b, c∧d〉 = 〈a, c〉〈b, d〉−〈a, d〉〈b, c〉 fur a, b, c, d ∈ R3
benutzt. Die Zahl A(x(U)) ist unabhangig von der Parametrisierung (Ubung!).
56

Definition 13. Es sei D ⊂ U ein beschranktes Gebiet mit Rand ∂D und a : D → Reine C∞-Funktion mit a|∂D = 0. Eine normale Variation von x ist eine Familie
xε : D → R3
von Flachenstucken xε(u, v) := x(u, v) + εa(u, v)N(u, v), ε ∈ (−δ, δ).
Wir wollen den Flacheninhalt von xε bestimmen. Es gilt
xεu = xu + εaNu + εauN
xεv = xv + εaNv + εavN.
Fur die erste Fundamentalform von xε erhalt man
Eε = E − 2aεe+O(ε2)
F ε = F − 2aεf +O(ε2)
Gε = G− 2aεg +O(ε2)
und damit
dAε =√EεGε − (F ε)2 du dv
=(EG− F 2 + 2aε(−gE − eG+ 2fF ) +O(ε2)
)1/2du dv
=(EG− F 2 + 2aε(−2H(EG− F 2)) +O(ε2)
)1/2du dv
Aus dieser letzten Formel erkennt man dass EεGε− (F ε)2 6= 0 fur genugend kleinesε gilt, d. h. xε ist eine regulare Parametrisierung. Wir erhalten
A(ε) := A(xε(D)) =∫∫
D
√EεGε − (F ε)2 du dv
=∫∫
D
((EG− F 2)(1− 4aεH) +O(ε2)
)1/2du dv
Daraus ergibt sich die erste Variation des Flachenfunktionals:
A′(0) =dA(xε(D))
dε(0) =
∫∫D
√EG− F 2(−2aH) du dv.
Wir haben hier benutzt, dass∫∫
und ddε vertauschbar sind (vgl. dazu K. Konigsberger,
Analysis 2, 4. Aufl., 8.4).
Satz 2. Sei x : U → R3 eine lokale Parametrisierung einer regularen Flache S.Die mittlere Krummung H von S verschwindet genau dann, wenn A′(0) = 0 furalle normalen Variationen von x gilt.
Beweis. Sei A′(0) = 0. Wir nehmen an, dass ein Punkt p ∈ x(U) ⊂ S existiertmit H(p) 6= 0. Aus Stetigkeitsgrunden existiert dann eine Umgebung x(W ) ⊂ x(U)von p, so dass H(q) 6= 0 fur alle q ∈ x(W ). Wir wahlen D ⊂W und eine Funktion
57

a : D → R so, dass a(u, v) = H(x(u, v)) gilt fur alle (u, v) ∈ D und a = 0 aufU \D. Aus obiger Formel folgt dann, dass A′(0) < 0 gilt. Das ist ein Widerspruchzur Voraussetzung.Sei umgekehrt H = 0. Dann folgt sofort A′(0) = 0 wegen obiger Formel.
Definition 14. Eine regulare Flache mit H = 0 heißt Minimalflache.
Bemerkungen (a) H = 0 ist notwendig fur A(x0) ≤ A(xε) fur alle normalenVariationen xε : D → R3 mit xε|∂D = x|∂D, aber nicht hinreichend: Ein kritischerPunkt des Flachenfunktionals braucht kein Minimum zu sein. Um das zu entschei-den, braucht man noch die 2. Variation. Der Name Minimalflache ist also etwasirrefuhrend.(b) Ist H 6= 0 so kann man mit der Variation a(u, v) := H(u, v) den Flacheninhaltverkleineren.(c) Minimalflachen haben keine elliptischen Punkte. Aus H = 1
2 (κ1 +κ2) = 0 folgtnamlich K = κ1κ2 = −κ2
1 ≤ 0. Also kann z.B. S2 oder ein Rotationstorus keineMinimalflache sein.(d) Minimalflachen ohne Rand konnen nicht kompakt sein. Beweisidee: Eine kom-pakte Flache im R3 hat Punkte mit K(p) > 0. Ist namlich Br die kleinste offeneKugel im R3 in der S enthalten ist, so sind in einem Beruhrpunkt p alle Normal-schnittkrummungen von S großer oder gleich 1/r.(e) Physikalisch werden Minimalflachen mit Rand durch Seifenhaute realisiert. Ex-perimente motivierten das Plateau-Problem: Gibt es zu jeder einfach geschlosse-nen Kurve c in R3 eine Flache mit kleinstem Flacheninhalt mit c als Rand? DieseFrage konnte um 1930 positiv beantwortet werden.(f) Es gibt enge Beziehungen zwischen Minimalflachen und der Funktionentheorie(Weierstraß-Darstellung).
Beispiele (a) Ebenen sind stets Minimalflachen, da H = 0 aus κ1 = κ2 folgt.(b) Das Katenoid ist die einzige Rotationsflache die auch Minimalflache ist. Sieentsteht durch Rotation der sogenannten Kettenlinie, die durch
t 7→ (a cosh(t/a), t)
gegeben ist.(c) Eine Regelflache ist eine Flache, die folgende Parametrisierung zulasst:
x : U → R3, (u, v) 7→ c(u) + vY (u),
mit einer differenzierbaren Kurve c in R3 und einem Vektorfeld Y langs c. DasHelikoid (oder Wendelflache) ist die durch
x(u, v) = (0, 0, au) + v(cosu, sinu, 0)
definierte Regelflache. Es ist die einzige Regelflache mit H = 0.
58

Abbildung 13.1: Katenoid
59
Abbildung 13.2: Helikoid aus verschiedenen Perspektiven. Das Helikoid wird schritt-weise “nach hinten” gekippt.
60

Teil IV
Innere Geometrie von Flachen
14 Lokale Isometrien
14.1 Ein Beispiel
Wir betrachten das Ebenenstuck parametrisiert durch
x : (0, 2π)× R→ R3, (u, v) 7→ (u, 0, v),
und das Zylinderstuck parametrisiert durch
y : (0, 2π)× R→ R3, (u, v) 7→ (cosu, sinu, v).
Als offene Teilmengen von Ebene und Zylinder sind es regulare Flachen. Die ange-gebenen Parametrisierungen sind per Definition Diffeomorphismen auf die entspre-chenden Flachen. Die Abbildung ϕ := y x−1 von der Ebene auf den Zylinder,
(u, 0, v) 7→ (cosu, sinu, v),
ist differenzierbar und kann als “Aufwickeln” des Ebenenstucks auf das Zylin-derstuck aufgefasst werden. Fur die obigen Parametrisierungen gilt
xu = (1, 0, 0), xv = (0, 0, 1), E = G = 1, F = 0,yu = (− sinu, cosu, 0), yv = (0, 0, 1), E = G = 1, F = 0.
Die ersten Fundamentalformen der Ebene und des Zylinders haben bezuglich derBasen xu, xv und yu, yv demnach dieselben Darstellungen. Hat man eine dif-ferenzierbare Kurve (u(t), v(t)) in U so folgt aus Abschnitt 9.2, dass sich entspre-chende Kurven x(u(t), v(t)) in der Ebene und y(u(t), v(t)) auf dem Zylinder dieselbeLange haben. Es gibt beim “Aufwickeln” der Ebene auf den Zylinder bzw. beim“Abwickeln” des Zylinders auf die Ebene also keine Langenverzerrung.
Abbildung 14.1: Auf- und Abwickeln eines Ebenenstucks auf einen Zylinder
Man kann sich nun fragen, ob es eine solche “langentreue” Abbildung auch zwi-schen anderen Flachen gibt, etwa zwischen Ebene und 2-Sphare. Im Folgendenwollen wir solche Fragen beantworten. Dazu werden wir zunachst den Begriff einerlangentreuen Abbildung definieren.
61

14.2 Isometrien
Wir erinnern daran, dass eine Abbildung f : S → S zwischen zwei regularen FlachenS und S differenzierbar in p ∈ S ist, wenn es Parametrisierungen x um p und x umf(p) gibt, so dass die Abbildung x−1 f x differenzierbar ist (vgl. Abschnitt 10.1).
Definition 1. Es seien S und S regulare Flachen.(a) Ein Diffeomorphismus ϕ : S → S heißt Isometrie, falls fur alle p ∈ S
und alle X1, X2 ∈ TpS
〈X1, X2〉p = 〈dϕp(X1), dϕp(X2)〉ϕ(p)
gilt, d. h. die lineare Abbildung dϕp : (TpS, 〈, 〉p) → (Tϕ(p)S, 〈, 〉ϕ(p)) isteine euklidische Isometrie fur alle p ∈ S. Die Flachen S und S heißendann isometrisch.
(b) Gibt es zu jedem p ∈ S eine Isometrie ϕ : U → U einer offenen Umge-bung U von p auf eine offene Umgebung U von ϕ(p), so heißt S lokalisometrisch zu S. Ist S lokal isometrisch zu S, so auch S zu S.
Beispiele (a) Die Abbildung ϕ aus Abschnitt 14.1 ist eine (lokale) Isometrie.(b) Es sei c eine auf einem offenen Intervall I = (−ε, ε) definierte, mit Bogenlangeparametrisierte, spharische Raumkurve, d. h. eine Kurve, deren Bild in S2 enthaltenist. Es gilt also ‖c(u)‖ = 1 und ‖c′(u)‖ = 1 fur u ∈ I. Die durch
x(u, v) := x0 + vc(u), (u, v) ∈ I × R>0
definierte Teilmenge von R3 heißt ein allgemeiner Kegel. Nach eventueller Verklei-nerung von ε ist S := x(I ×R>0) eine regulare Flache und x|I×R>0 ist eine globaleParametrisierung von S. Es gilt
xu = vc′, xv = c,
E = v2, F = 0, G = 1.
Wir definieren ϕ : S → R2 durch
p = x(u, v) 7→ (v cosu, v sinu, 0).
Dann ist ϕ ein lokaler Diffeomorphismus. Da fur die lokale Parametrisierung
x(u, v) = (v cosu, v sinu, 0)
der Ebene E = v2, F = 0, G = 1 gilt, ist ϕ eine lokale Isometrie.
Satz 1. Es seien S und S regulare Flachen. Weiter seien x : U → S und x : U → Szwei lokale Parametrisierungen mit gemeinsamem Parameterbereich U . Dann istE = E, F = F und G = G in U genau dann, wenn die Abbildung
ϕ := x x−1 : x(U)→ x(U)
eine (lokale) Isometrie ist.
62

Beweis. Es sei ϕ eine lokale Isometrie. Dann gilt
E = 〈xu, xu〉 = 〈dϕ(xu), dϕ(xu)〉 = 〈xu, xu〉 = E.
Analog folgen F = F und G = G.Wir kommen zur Umkehrung obiger Aussage. Es sei p ∈ x(U) und X ∈ TpS. Dannhat X eine Darstellung
X = c′(0) = u′xu + v′xv
fur eine differenzierbare Kurve c(t) = x(u(t), v(t)), c(0) = p. Weiter gilt
dϕp(X) =d
dt
∣∣∣∣0
(ϕ c)(t) =d
dt
∣∣∣∣0
(x x−1 x)(u(t), v(t))
=d
dt
∣∣∣∣0
x(u(t), v(t)) = u′xu + v′xv
Also gilt
〈dϕpX, dϕpX〉ϕ(p) = 〈u′xu + v′xv, u′xu + v′xv〉
= (u′)2E + 2u′v′F + (v′)2G
= (u′)2E + 2u′v′F + (v′)2G
= 〈X,X〉p
Mit der Polarisations-Identitat
〈X,Y 〉 =12(〈X + Y,X + Y 〉 − 〈X,X〉 − 〈Y, Y 〉
)fur alle X,Y ∈ TpS folgt die Behauptung.
Beispiel. Wir zeigen, dass das Katenoid lokal isometrisch zum Helikoid ist. Dazubetrachten wir die lokale Parametrisierung
x(u, v) = (cosh v cosu, cosh v sinu, v), (u, v) ∈ U := (0, 2π)× R.
des Katenoids. Dann gilt
E = cosh2v, F = 0, G = 1 + sinh2v = cosh2v.
Eine lokale Parametrisierung des Helikoids ist
x(u, v) = (v cos u, v sin u, u), (u, v) ∈ U := (0, 2π)× R.
Die Abbildung U → U , (u, v) 7→ (u, sinh v) = (u, v) ist ein Diffeomorphismus vonU auf U , da
∂(u, v)∂(u, v)
= det(
1 00 cosh v
)= cosh v 6= 0.
63

Damit erhalt man eine Parametrisierung des Helikoids mit Parameterbereich U :
x(u, v) = (sinh v cosu, sinh v sinu, u).
Bezuglich dieser Parametrisierung gilt
E = 〈xu, xu〉 = sinh2v + 1 = cosh2v, F = 0, G = cosh2v.
Damit folgt die Behauptung aus dem obigen Satz.
Bemerkungen (a) Lokale Isometrien sind langentreu und winkeltreu: Wir be-trachten ohne Einschrankung den Fall einer Isometrie. Ist c : I → S eine Flachen-kurve und ϕ : S → S eine Isometrie, so ist L(c) = L(ϕc). Schließen zwei Kurven c1und c2 im Punkt c1(0) = c2(0) den Winkel α ein, so schließen auch die Bildkurvenϕ c1 und ϕ c2 im Punkt (ϕ c1)(0) diesen Winkel ein.(b) Auch wenn man weiß, dass zwei Flachen lokal isometrisch sind, ist es oft schwie-rig eine lokale Isometrie explizit anzugeben.(c) Der Nachweis, dass zwei Flachen nicht lokal isometrisch sein konnen ist imallgemeinen einfacher. Es genugt, Isometrie-Invarianten zu finden, die verschiedensind. Wir werden sehen, dass die Gauß-Krummung eine solche Invariante ist. Damitfolgt beispielsweise sofort, dass die 2-Sphare und die Ebene nicht lokal isometrischsein konnen.
15 Christoffel-Symbole und Theorema egregium
Bei einer Raumkurve haben wir das Anderungsverhalten des begleitenden Dreibeinsbetrachtet, um die Formeln von Frenet zu erhalten. Wir betrachten nun eine lokaleParametrisierung x : U → S einer Flache S und das sogenannte Darboux-Beinxu, xv, N . Nach Voraussetzung sind diese drei Vektoren zwar linear unabhangig,bilden aber im allgemeinen keine Orthonormalbasis.
Wir wollen das Anderungsverhalten dieses Dreibeins beschreiben. Die Ableitungxuu von xu nach u ist eine Linearkombination von xu, xv und N . Analoges gilt furdie anderen Ableitungen und wir konnen schreiben:
xuu = Γ 111xu + Γ 2
11xv + L1N
xuv = Γ 112xu + Γ 2
12xv + L2N
xvu = Γ 121xu + Γ 2
21xv + L2N
xvv = Γ 122xu + Γ 2
22xv + L3N.
(15.1)
Fur die partiellen Ableitungen von N verwenden wir die Bezeichnungen
Nu = a11xu + a21xv,
Nv = a12xu + a22xv.
Vergleichen Sie dazu auch Abschnitt 11.4.
64

Definition 2. Die Funktionen Γ kij mit i, j, k ∈ 1, 2 nennt man Christoffel-
Symbole von S bezuglich der Parametrisierung x.
Wir wollen die Koeffizienten Li und Γ kij berechnen. Zunachst ist wegen xuv = xvu
Γ k12 = Γ k
21 , k = 1, 2
und L2 = L2. Bildet man mit den Gleichungen aus (15.1) das Skalarprodukt mitN so folgt
L1 = e, L2 = f, L3 = g,
wobei e, f, g die Koeffizienten der 2. Fundamentalform sind (vgl. 11.4). Wir bildennun das Skalarprodukt der Gleichungen in (15.1) mit xu und xv. Man erhalt
Γ 111E + Γ 2
11F = 〈xuu, xu〉 =12Eu
Γ 111F + Γ 2
11G = 〈xuu, xv〉 = Fu −12Ev
Γ 112E + Γ 2
12F = 〈xuv, xu〉 =12Ev
Γ 112F + Γ 2
12G = 〈xuv, xv〉 =12Gu
Γ 122E + Γ 2
22F = 〈xvv, xu〉 = Fv −12Gu
Γ 122F + Γ 2
22G = 〈xvv, xv〉 =12Gv
(15.2)
Jedes dieser drei linearen Gleichungssysteme ist wegen EG − F 2 6= 0 eindeutiglosbar. Die Christoffel-Symbole konnen also aus den Koeffizienten E,F,G der 1.Fundamentalform und deren Ableitungen berechnet werden. Beispielsweise gilt mitden ersten zwei Zeilen von (15.2)(
E FF G
) Γ 111
Γ 211
=
12Eu
Fu − 12Ev
und damit schliesslich Γ 1
11
Γ 211
=(E FF G
)−1 1
2Eu
Fu − 12Ev
.
Diese Uberlegung zeigt: Die Christoffel-Symbole Γ kij sind Großen der inneren Geo-
metrie einer Flache.
65

Das System (15.1) ist unterbestimmt, d. h. man hat mehr Unbekannte als Gleichun-gen. Um Beziehungen zwischen den Unbekannten in (15.1) zu finden, leiten wirnochmals ab. Die folgenden Rechnungen gehen im wesentlichen auf Gauß zuruck.Zunachst gilt allgemein
(xuu)v − (xuv)u = 0,(xvv)u − (xvu)v = 0,
Nuv −Nvu = 0.(15.3)
Setzt man (15.1) in (15.3) ein, so erhalt man Gleichungen der Form
Aixu +Bixv + CiN = 0, i = 1, 2, 3,
wobei Ai, Bi und Ci Funktionen von E, F , G, e, f , g und deren Ableitungen sind.Da xu, xv, N linear unabhangig sind, erhalt man 9 Relationen
Ai = 0, Bi = 0, Ci = 0 i = 1, 2, 3.
Wir betrachten jetzt die 1. Gleichung aus (15.3) im Detail:
Γ 111xuv + Γ 2
11xvv + eNv + (Γ 111)vxu + (Γ 2
11)vxv + evN =
Γ 112xuu + Γ 2
12xvu + fNu + (Γ 112)uxu + (Γ 2
12)uxv + fuN
Wir benutzen nochmals (15.1) und erhalten durch Vergleich der Koeffizienten vonxv
B1 = Γ 111Γ 2
12 + Γ 211Γ 2
22 + ea22 + (Γ 211)v − Γ 1
12Γ 211 − Γ 2
12Γ 212 − fa21 − (Γ 2
12)u = 0.
Setzt man noch die Werte fur aij ein, vgl. Abschnitt 11.4, so ergibt sich die Gauß-Formel
−EK = (Γ 212)u − (Γ 2
11)v + Γ 112Γ 2
11 + Γ 212Γ 2
12 − Γ 211Γ 2
22 − Γ 111Γ 2
12
Da die Christoffel-Symbole Großen der inneren Geometrie sind, folgt aus der Gauß-Formel der wichtige Satz
Satz 2 (Theorema egregium). Die Gauß-Krummung K einer regularen Flache istinvariant unter lokalen Isometrien.
Die Definition der Gauß-Krummung benutzte die Einbettung einer Flache in denumgebenden Raum R3. Obiger Satz besagt nun aber, dass die Gauß-Krummungeiner Flache nicht von dieser Einbettung abhangt. Sie ist also eine Große (oderInvariante) der inneren Geometrie einer Flache.
Beweis von Satz 2. Sei p ∈ S und x : U → S eine lokale Parametrisierung ump. Weiter sei V ⊂ x(U) eine Umgebung von p und ϕ : V → ϕ(V ) ⊂ S eine lokaleIsometrie. Dann ist
x := ϕ x : x−1(V )→ ϕ(V )
66

eine lokale Parametrisierung von S um ϕ(p). Ist nun q ∈ V beliebig, so stimmendie Koeffizienten der 1. Fundamentalform von S bei q (bez. x) und von S bei ϕ(q)(bez. x) uberein und damit auch die Christoffel-Symbole in q und ϕ(q). Nach derGauß-Formel gilt somit
K(q) = K(ϕ(q))
fur alle q ∈ V .
Aus dem Beispiel in 14.2 folgt demnach: Die Gauß-Krummung des Katenoids unddes Helikoids sind demnach in entsprechenden Punkten gleich. Das ist anschaulichnicht evident!
16 Kovariante Ableitung und Geodatische
Wir wollen in diesem Abschnitt Großen und Eigenschaften der inneren Geometrieeiner Flache herleiten. Das sind Konzepte, die insbesondere nicht von der Einbet-tung der Flache in einen umgebenden Raum abhangen.
16.1 Die kovariante Ableitung
Wir definieren zunachst die Richtungsableitung eines Vektorfeldes auf einer re-gularen Flache.
Definition 3. Ein differenzierbares Vektorfeld Y auf einer regularen Flache S isteine differenzierbare Abbildung
Y : S → TS =∐p∈S
TpS mit Y (p) ∈ TpS.
Dabei heißt Y differenzierbar, wenn fur jede lokale Parametrisierung x : U → S dieFunktionen a, b : U → R in der Darstellung
Y (x(u, v)) = a(u, v)xu(u, v) + b(u, v)xv(u, v),
kurz Y = axu + bxv, differenzierbar sind.
Es seien X ∈ TpS und c : (−ε, ε) → S eine differenzierbare Kurve mit c(0) = pund c′(0) = X. Ist Y ein differenzierbares Vektorfeld auf S, so bezeichne Y (t) dieEinschrankung von Y auf c, also
Y (t) := Y (c(t)).
Wir wollen das Vektorfeld Y “in Richtung X” ableiten. Nach Definition 3 ist dieAbbildung Y c : (−ε, ε)→ R3 differenzierbar. Mit
Y ′(t) :=d(Y c)dt
(t)
67

bezeichnen wir die gewohnliche Ableitung nach dem Parameter t. Zunachst ist Y ′(t)ein Element von Tc(t)R3. Wir konnen also schreiben
Y ′(t) = αxu + βxv + γN,
wenn N ein Normalenvektor von S im Punkt c(t) ist. Dabei bezeichnet man denTangentialvektor αxu+βxv ∈ Tc(t)S als Tangential- und γN als Normalkomponentevon Y ′(t).
Definition 4. Sei X ∈ TpS, c : (−ε, ε) → S differenzierbar mit c(0) = p undc′(0) = X. Die Tangentialkomponente DXY von Y ′(0), also die Orthogonalprojek-tion von Y ′(0) auf TpS, heißt kovariante Ableitung von Y in Richtung X.
Ausgehend von einem Vektorfeld Y und einem Vektor X ∈ TpS erhalten wir alsowieder einen Vektor DXY ∈ TpS. In der Definition dieser Zuordnung scheint derumgebende Raum und die Kurve c eine entscheidende Rolle zu spielen. Wir wollennun aber zeigen, dass dies nicht der Fall ist.
Lemma 1. Die kovariante Ableitung ist ein Begriff der inneren Geometrie einerFlache, insbesondere also vom umgebenden Raum unabhangig.
Beweis. Seien X ∈ TpS und x : U → S eine lokale Parametrisierung um p. Weitersei c : (−ε, ε)→ S eine differenzierbare Kurve mit c(0) = p und c′(0) = X, also
X = c′(0) = u′xu + v′xv
mit differenzierbaren Funktionen u, v : (−ε, ε)→ U . Ist nun Y ein differenziebaresVektorfeld auf S so gilt
Y (t) = a(u(t), v(t))xu(u(t), v(t)) + b(u(t), v(t))xv(u(t), v(t))=: a(t)xu(t) + b(t)xv(t).
Aus (xu)′ = u′xuu + v′xuv folgt (alles bei t = 0 ausgewertet)
Y ′ = a′xu + b′xv + a(u′xuu + v′xuv) + b(u′xvu + v′xvv).
Mit den Formeln (15.1) aus Abschnitt 15 findet man fur die Tangentialkomponentevon Y ′(0)
DXY =(a′ + Γ 1
11au′ + Γ 1
12av′ + Γ 1
12bu′ + Γ 1
22bv′)xu+(
b′ + Γ 211au
′ + Γ 212av
′ + Γ 212bu
′ + Γ 222bv
′)xv (16.1)
Dabei ist die rechte Seite bei p bzw. t = 0 auszuwerten. Man sieht, dass DXYnicht von der Kurve c, sondern nur von c′(0) = X bzw. von den Koordinaten(u′(0), v′(0)) von c′(0) in der Basis xu, xv von TpS abhangt. Da die Christoffel-Symbole Großen der inneren Geometrie sind, ist mit dieser Formel gezeigt, dassauch die kovariante Ableitung ein Begriff der inneren Geometrie ist (also nur vonder 1. Fundamentalform abhangt).
68

Bemerkung. Nach obigem Lemma 1 kann man also Dc′(0)Y berechnen, falls mandie Koeffizienten der 1. Fundamentalform kennt. Genauer gilt (Ubungsaufgabe!):Es seien S und S lokal isometrische regulare Flachen und Y ein differenzierbaresVektorfeld auf S. Weiter sei p ∈ S, X ∈ TpS und ϕ : W → W eine lokale Isometrieeiner offenen Umgebung von p auf eine offene Umgebung von ϕ(p) = p. Dann istY := dϕ(Y ) ein differenzierbares Vektorfeld auf W . Mit X := dϕp(X) gilt
DX Y = dϕp(DXY ),
d.h. man hat das folgende kommutative Diagramm:
Wϕ //
DX
W
DX
DXY
dϕ// DX Y
Beispiel. Fur die Ebene gilt E = G = 1, F = 0, Γ kij = 0 und damit ist
Dc′(0)Y = a′xu + b′xv
die gewohnliche Ableitung Y ′ von Y = axu + bxv. Das ist auch direkt aus dergeometrischen Konstruktion klar. Die kovariante Ableitung verallgemeinert alsodie gewohnliche Ableitung von Vektoren in der Ebene.
16.2 Geodatische
Es sei S eine regulare Flache und γ : I → S eine differenzierbare Kurve. DasVektorfeld γ′(t) : I → TS ist nur langs γ definiert. Trotzdem kann man ein solchesVektorfeld in Richtung X ∈ Tp(S) ableiten, wenn p ∈ γ(I) gilt, und wenn man Xals Tangentialvektor einer Kurve c darstellen kann, deren Bild in γ(I) enthalten ist(z.B. wenn X = γ′(t) wie in der folgenden Definition).
Definition 5. Eine nicht konstante, differenzierbare Kurve γ : I → S heißtGeodatische, falls
Dγ′(t)γ′(t) = 0
fur alle t ∈ I gilt.
Bemerkungen (a) Die Eigenschaft Geodatische zu sein ist eine innergeometrischeEigenschaft einer Kurve auf einer Flache. Insbesondere ist diese Eigenschaft nachder Bemerkung in 16.1 invariant unter lokalen Isometrien.(b) Damit man fur eine Kurve c : [0, l] → S keine Probleme mit der Ableitung inden Randpunkten bekommt verlangt man in diesem Fall, dass c die Einschrankungeiner differenzierbaren Kurve c : (0− ε, l + ε)→ S auf [0, l] ist.
69

Satz 3. Die Tangentialvektoren einer Geodatischen haben konstante Lange, d. h.ist γ : I → S eine Geodatische, so gibt es ein α 6= 0 mit ‖γ′(t)‖ = α fur allet ∈ I. Damit sind Geodatische stets proportional zur Bogenlange parametrisiert,d. h. s = αt, wenn s die Bogenlange ist.
Beweis. Es sei N(γ(t)) die Normale von S im Punkt γ(t). Dann gilt
d
dt‖γ′(t)‖2 =
d
dt〈γ′(t), γ′(t)〉 = 2〈γ′′(t), γ′(t)〉
= 2〈Dγ′(t)γ′ + β(t)N(γ(t)), γ′(t)〉 = 0,
da Dγ′(t)γ′ = 0 und N(γ(t)) orthogonal zu γ′(t) ist.
Beispiele (a) In der euklidischen Ebene R2 sind Geodatische genau die Geraden,da γ′′ = Dγ′(t)γ
′ = 0.(b) Jede Gerade auf einer Flache ist Geodatische: gleiches Argument wie in (a).
Ist γ eine Kurve auf der Flache S, so hat man das folgende geometrische Kriteri-um fur Geodatische. Es ergibt sich unmittelbar aus der Definition der kovariantenAbleitung.
Lemma 2. Eine Flachenkurve γ ist genau dann Geodatische, wenn die Hauptnor-male in jedem Punkt proportional zur Flachennormale ist, d.h. senkrecht auf derFlache steht.
Beweis. Die Tangentialkomponente von γ′′ ist Dγ′γ′. Ist also H(t) proportional
zu N(t), so folgt Dγ′γ′ = 0. Ist umgekehrt Dγ′γ
′ = 0, so hat γ′′ nur eine Normal-komponente, d.h. H(t) ist proportional zu N(t).Wenn wir im folgenden Punktmengen als Kurven bezeichnen, so sind naturlichimmer entsprechende Parametrisierungen dieser Punktmengen gemeint.
Beispiele (a) Die 2-Sphare. Nach obigem Kriterium sind Groß-Kreise Geodati-sche, da ein Gross-Kreis eine ebene Kurve mit H‖N ist. Wir werden spater sehen,dass es durch jeden Punkt in jeder Richtung lokal genau eine Geodatische gibt. Da-mit sind Groß-Kreise die einzigen (mit Bogenlange parametrisierten) Geodatischenauf S2.(b) Der Zylinder. Wir betrachten einen Zylinder vom Radius 1. Da Mantelli-nien Geraden sind, sind sie Geodatische. Ebenso sind Breitenkreise Geodatische,weil H||N gilt. Wie sehen die ubrigen Geodatischen aus? Da Geodatische Objekteder inneren Geometrie sind, ist die Eigenschaft Geodatische zu sein, invariant un-ter lokalen Isometrien. Folglich gehen beim Abwickeln des Zylinders auf die EbeneGeodatische in Geodatische uber. Die gleiche Aussage gilt naturlich auch fur dieandere Richtung. Es genugt also die Geodatischen der Ebene zu kennen und die-se auf den Zylinder aufzuwickeln, man vergleiche dazu Abb. 16.1. Demnach gibtes unendlich viele Geodatische zwischen zwei Punkten. Neben Mantellinien undBreitenkreisen sind also Schraubenlinien genau die Geodatischen auf dem Zylinder.
70

Abbildung 16.1: Geodatische auf dem Zylinder
16.3 Die Differentialgleichung fur Geodatische
Wir wollen die definierende Gleichung einer Geodatischen, also Dγ′γ′ = 0, in lokalen
Koordinaten genauer untersuchen. Dazu sei γ : I → S eine differenzierbare Kurveauf S und x : U → S eine lokale Parametrisierung, so dass
γ(t) = x(u(t), v(t)), t ∈ I
mit differenzierbaren Funktionen u und v gilt. Dann ist
γ′(t) = u′(t)xu(u(t), v(t)) + v′(t)xv(u(t), v(t)).
Benutzt man Gleichung (16.1) fur Y = γ′, also a = u′, b = v′, so ist γ genau dannGeodatische, wenn
0 = u′′ + Γ 111(u′)2 + 2Γ 1
12u′v′ + Γ 1
22(v′)2,
0 = v′′ + Γ 211(u′)2 + 2Γ 2
12u′v′ + Γ 2
22(v′)2,(16.2)
da xu und xv linear unabhangig sind. (16.2) ist ein Differentialgleichungssystem 2.Ordnung fur u und v. Ein solches System hat zu gegebenen Anfangsbedingungenlokal genau eine Losung (vgl. z.B. V.I. Arnol’d, Gewohnliche Differentialgleichun-gen, Kap. 4). Die Anfangsbedingungen entsprechen dabei einem Startpunkt γ(0),gegeben durch (u(0), v(0)) und einem Tangentialvektor gegeben durch seine Koor-dinaten (u′(0), v′(0)). Es ergibt sich also der folgende wichtige
Satz 4 (Lokale Existenz und Eindeutigkeit von Geodatischen). Seien S eine re-gulare Flache, p ∈ S und 0 6= X ∈ TpS ein Tangentialvektor.(a) (Existenz) Es gibt ein ε > 0 und eine Geodatische γ : (−ε, ε)→ S mit
γ(0) = p und γ′(0) = X.(b) (Eindeutigkeit) Ist γ : (−δ, δ) → S eine weitere Geodatische die die-
sen Bedingungen genugt, so ist γ = γ auf (−ε, ε) ∩ (−δ, δ).
71

17 Geodatische auf Rotationsflachen
Es sei c(v) = (ϕ(v), 0, ψ(v)) eine regulare, ebene Kurve mit ϕ > 0 definiert aufeinem offenen Intervall I. Wir betrachten die Rotationsflache S, gegeben durch
S = (x1, x2, x3) ∈ R3 |x3 = ψ(v), x21 + x2
2 = (ϕ(v))2, v ∈ I.
Eine lokale Parametrisierung von S ist gegeben durch
x(u, v) =(ϕ(v) cosu, ϕ(v) sinu, ψ(v)
), (u, v) ∈ (0, 2π)× I.
Die ebene Kurve c wird also um die x3-Achse rotiert. Ohne Einschrankung sei cmit Bogenlange parametrisiert, also∥∥∥ dc
dv
∥∥∥2
= 1 =(dϕdv
)2
+(dψdv
)2
Wir nehmen außerdem an, dass ϕ ein Homoomorphismus von I auf ϕ(I) ist, I ist mitder Teilraumtopologie versehen. Dann ist S eine regulare Flache (Ubungsaufgabe!).Fur eine Rotationsflache gilt E = ϕ2, F = 0, G = 1. Fur die Christoffel-Symboleerhalt man
Γ 111 = 0, Γ 1
22 = 0, Γ 112 =
1ϕ
dϕ
dv
Γ 212 = 0, Γ 2
11 = −ϕdϕdv, Γ 2
22 = 0.
Damit hat das Differentialgleichungssystem fur Geodatische folgende Gestalt
0 = u′′ +2ϕ
dϕ
dvu′v′,
0 = v′′ − ϕdϕdv
(u′)2.
(17.1)
Wir wissen bereits, dass Kurven mit H‖N Geodatische sind. Demnach sind alleMeridiane Geodatische, vgl. Abb. 17.1. Wir testen das nochmals mit unserer Diffe-rentialgleichung. Fur Meridiane ist u konstant, also u′ = 0. Ohne Einschrankung seis = v die Bogenlange, dann gilt v′ = 1 und v′′ = 0. Das Differentialgleichungssystem(17.1) ist also erfullt.
Abbildung 17.1: Meridiane auf einer Rotationsflache
72

Welche Breitenkreise sind Geodatische? Ein Breitenkreis γ ist genau dann Geodati-sche, wenn γ′′ parallel zu N ist, d. h. wenn N in der Schmiegebene von γ liegt.Anschaulich gilt das genau bei lokalen Extrema von ϕ, also wenn
dϕ
dv= 0.
Wir prufen das mit unserer Differentialgleichung. Fur einen Breitenkreis ist v = v0
konstant und damit v′ = 0. Aus der 1. Gleichung von (17.1) folgt dann u′′ = 0,also ist 0 6= u′ konstant, da Geodatische nicht konstant sind. Damit folgt aus der2. Gleichung
ϕdϕ
dv= 0
also dϕ/dv = 0, da ϕ > 0.
Wir wollen eine weitere wichtige Folgerung aus dem System (17.1) ableiten. Es ist
(ϕ2u′)′ = 2ϕdϕ
dvv′u′ + ϕ2u′′
= ϕ2(u′′ +2ϕ
dϕ
dvv′u′) = 0
wegen der 1. Gleichung von (17.1). Es gilt also ϕ2u′ = c mit einer Konstantenc ∈ R. Der Winkel θ ∈ [0, π/2], unter dem eine mit Bogenlange parametrisierteGeodatische γ einen Breitenkreis schneidet, ist gegeben durch
cos θ =|〈xu, γ′〉|‖xu‖‖γ′‖
=|〈xu, u′xu + v′xv〉|
‖xu‖ · 1=‖xu‖2|u′|‖xu‖
= |ϕu′|,
da bei Rotationsflachen stets xu⊥xv(⇐⇒ F = 0) und ‖xu‖ = ϕ(⇐⇒ E = ϕ2) gilt.Da weiter ϕ(v(s)) gerade der Radius r(s) des Breitenkreises ist, folgt die Relationvon Clairaut
r(s) cos θ(s) = c = konst.
Die Relation von Clairaut ermoglicht eine qualitative Diskussion des Verhaltens vonGeodatischen auf Rotationsflachen. Es gilt
• Nimmt der Radius ab, also r ↓ 0, so wachst cos θ bzw. θ ↓ 0.
• Wachst der Radius, also r ↑ ∞, so nimmt cos θ ab bzw. θ ↑ π/2.
• Ist c = 0 folgt cos θ = 0 bzw. θ = π/2.
Beispiele (a) Wir betrachten einen Zylinder. Dort ist der Radius r konstant unddamit auch θ. Wir bekommen unsere Ergebnisse nochmals bestatigt: Geodatischesind Schraubenlinien (θ ∈ (0, π/2)), Kreise (θ = 0) und Geraden (θ = π/2).
73
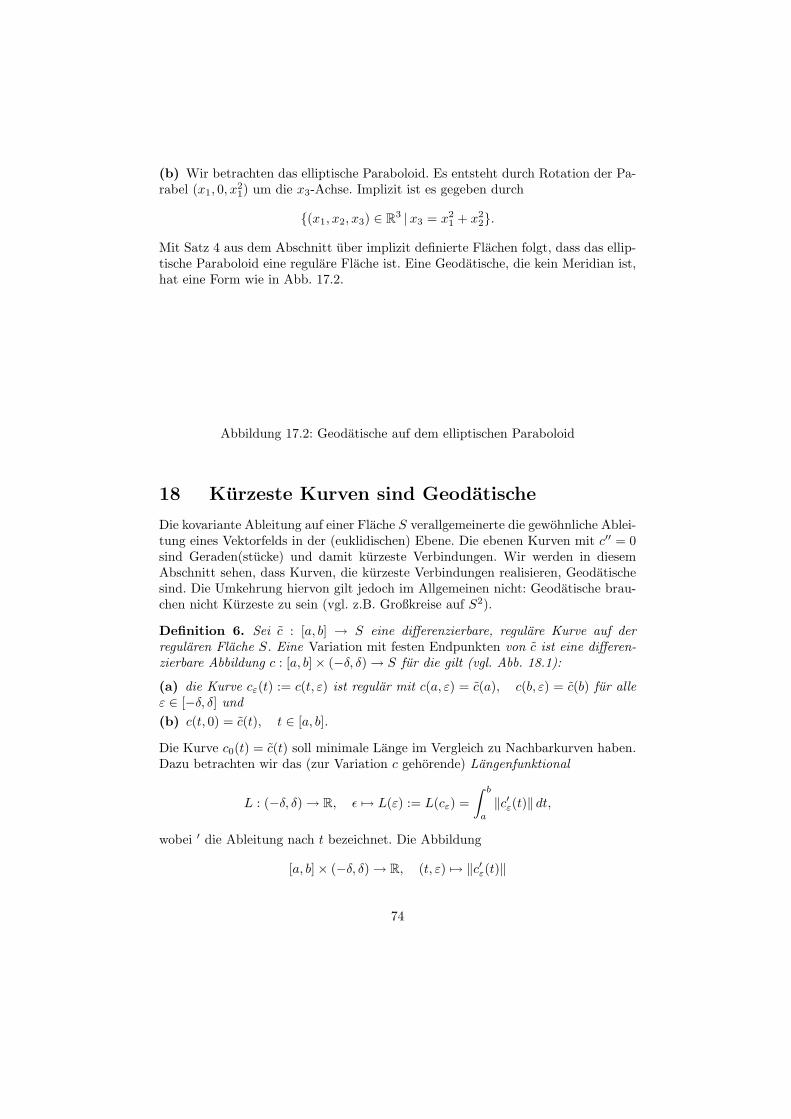
(b) Wir betrachten das elliptische Paraboloid. Es entsteht durch Rotation der Pa-rabel (x1, 0, x2
1) um die x3-Achse. Implizit ist es gegeben durch
(x1, x2, x3) ∈ R3 |x3 = x21 + x2
2.
Mit Satz 4 aus dem Abschnitt uber implizit definierte Flachen folgt, dass das ellip-tische Paraboloid eine regulare Flache ist. Eine Geodatische, die kein Meridian ist,hat eine Form wie in Abb. 17.2.
Abbildung 17.2: Geodatische auf dem elliptischen Paraboloid
18 Kurzeste Kurven sind Geodatische
Die kovariante Ableitung auf einer Flache S verallgemeinerte die gewohnliche Ablei-tung eines Vektorfelds in der (euklidischen) Ebene. Die ebenen Kurven mit c′′ = 0sind Geraden(stucke) und damit kurzeste Verbindungen. Wir werden in diesemAbschnitt sehen, dass Kurven, die kurzeste Verbindungen realisieren, Geodatischesind. Die Umkehrung hiervon gilt jedoch im Allgemeinen nicht: Geodatische brau-chen nicht Kurzeste zu sein (vgl. z.B. Großkreise auf S2).
Definition 6. Sei c : [a, b] → S eine differenzierbare, regulare Kurve auf derregularen Flache S. Eine Variation mit festen Endpunkten von c ist eine differen-zierbare Abbildung c : [a, b]× (−δ, δ)→ S fur die gilt (vgl. Abb. 18.1):
(a) die Kurve cε(t) := c(t, ε) ist regular mit c(a, ε) = c(a), c(b, ε) = c(b) fur alleε ∈ [−δ, δ] und(b) c(t, 0) = c(t), t ∈ [a, b].
Die Kurve c0(t) = c(t) soll minimale Lange im Vergleich zu Nachbarkurven haben.Dazu betrachten wir das (zur Variation c gehorende) Langenfunktional
L : (−δ, δ)→ R, ε 7→ L(ε) := L(cε) =∫ b
a
‖c′ε(t)‖ dt,
wobei ′ die Ableitung nach t bezeichnet. Die Abbildung
[a, b]× (−δ, δ)→ R, (t, ε) 7→ ‖c′ε(t)‖
74
Abbildung 18.1: Variation mit festen Endpunkten
ist wegen der Forderungen an c differenzierbar. Insbesondere existiert die partielleAbleitung nach ε. Auch L ist differenzierbar und wir haben
dL
dε=∫ b
a
∂
∂ε‖c′ε(t)‖ dt =
∫ b
a
⟨c′ε, ∂c
′ε/∂ε
⟩‖c′ε‖
dt,
(vgl. Konigsberger, Analysis 2, 2.6). Weiter gilt
∂c′ε∂ε
=∂
∂ε
(∂cε∂t
)=
∂
∂t
(∂cε∂ε
).
Eine notwendige Bedingung fur die Minimalitat von L(c0) im Vergleich zur Langevon Nachbarkurven ist dL/dε(0) = 0. Die Kurve c0 ist dann kritischer Punkt desLangenfunktionals. Fur festes t ist
(−δ, δ)→ S, ε 7→ c(t, ε)
eine differenzierbare, zu c transversale Kurve. Das differenzierbare Vektorfeld langsc = c0
V (t) =∂
∂εc(t, 0)
heißt Variationsfeld . Es ist V (a) = V (b) = 0. Wir nehmen jetzt an, dass c(t) = c0(t)mit Bogenlange parametrisiert ist, d. h. ‖c′0‖ = 1. Damit folgt
dL
dε(0) =
∫ b
a
〈c′0, V ′(t)〉 dt =∫ b
a
〈c′(t), V ′(t)〉 dt.
Es gilt 〈c′, V ′〉 = 〈c′, V 〉′ − 〈c′′, V 〉. Integration liefert
dL
dε(0) = 〈c′(t), V (t)〉
∣∣∣ba−∫ b
a
〈c′′, V 〉 dt
= −∫ b
a
〈c′′, V 〉 dt
= −∫ b
a
〈Dc′(t)c′ + β(t)N(c(t)), V (t)〉 dt
= −∫ b
a
〈Dc′(t)c′, V (t)〉 dt,
75
da V tangential an S, also N⊥V ist. Falls nun c eine Geodatische ist, so istdL/dε(0) = 0, d. h. Geodatische sind kritische Punkte des Langenfunktionals. Esgilt folgender
Satz 5 (Kurzeste sind Geodatische). Sei c : [a, b] → S eine mit Bogenlange pa-rametrisierte, differenzierbare Flachenkurve mit c(a) = p1 und c(b) = p2, so dassc([a, b]) ⊂ x(U) fur eine Parametrisierung x : U → S von S. Hat c unter allenVerbindungskurven von p1 und p2 kurzeste Lange, so ist c eine Geodatische.
Beweis. Sei c eine Variation von c mit festen Endpunkten und Variationsfeld V .Da c nach Voraussetzung eine kurzeste Verbindung zwischen p1 und p2 ist, gilt furjede solche Variationen
(∗) 0 =dL
dε(0) = −
∫ b
a
〈Dc′(t)c′, V 〉 dt.
Ist c keine Geodatische so gilt Dc′(t0)c′ 6= 0 fur ein t0 ∈ [a, b]. Wir leiten daraus
einen Widerspruch zu obiger Gleichung ab. Da Dc′(t)c′ stetig ist gibt es ein δ > 0
mitDc′(t)c
′ 6= 0, t ∈ [t0 − δ, t0 + δ].
Wir konstruieren nun eine Variation von c, die obiger Gleichung (∗) widerspricht.Sei dazu x : U → S eine Parametrisierung von S mit p1, p2 ∈ x(U) und u,vseien differenzierbare Funktion [a, b] → R mit c(t) = x(u(t), v(t)). Da Dc′(t)c
′ eindifferenzierbares Vektorfeld langs c(t) ist, gibt es differenzierbare Funktionen x1, x2 :[a, b]→ R mit
Dc′(t)c = x1(t)xu(u(t), v(t)) + x2(t)xv(u(t), v(t)).
Es sei α : [a, b]→ R eine differenzierbare Abschneidefunktion wie in Abb. 18.2.
Abbildung 18.2: Abschneidefunktion
Wir wahlen ein Intervall I := [−ε, ε] so klein, dass
c(t, ε) := x(u(t) + εα(t)x1(t), v(t) + εα(t)x2(t))
fur (t, ε) ∈ [a, b] × I definiert ist. Dann ist c eine Variation von c mit festen End-punkten. Fur das zugehorige Variationsvektorfeld V gilt
V (t) =∂
∂εc(t, 0) = αx1xu + αx2xv = α(t)Dc′(t)c
′.
76

Damit folgt
dL
dε(0) = −
∫ b
a
〈Dc′(t)c′, V (t)〉 dt = −
∫ b
a
α(t)‖Dc′(t)c′‖2 dt < 0.
Das ist ein Widerspruch z (∗).
Bemerkungen (a) Das Argument in obigem Beweis zeigt: Falls eine Kurve c zwi-schen zwei Punkten p und q keine Geodatische ist, so lasst sie sich verkurzen, d. h.es gibt eine Nachbarkurve c mit gleichen Endpunkten und L(c) < L(c).(b) Die Umkehrung von Satz 5 ist falsch. Geodatische sind nicht immer Kurzeste.Einfache Gegenbeispiele findet man auf der 2-Sphare und dem Zylinder.(c) Man kann zeigen: Sind p und q genugend nahe, so existiert genau eine kurzesteGeodatische zwischen p und q (vgl. Satz 8 im nachsten Abschnitt).
19 Geodatische Parallelkoordinaten
Durch die Wahl von speziellen, der jeweiligen Fragestellung angepassten Parametri-sierungen lassen sich Rechnungen oft vereinfachen. Wir wollen hier ein Beispiel einersolchen Parametrisierung angeben. Zuachst fuhren wir einige neue Bezeichnungenein. Es sei
(gij) =(g11 g12
g21 g22
):=(E FF G
)die Matrix der 1. Fundamentalform. Die dazu inverse Matrix bezeichnen wir mit
(gij) := (gij)−1.
Anstelle von (u, v) schreiben wir (u1, u2). Weiter sei
gij,k :=∂gij∂uk
.
Damit ergibt sich fur die Christoffel-Symbole aus den Gleichungen (15.2)
Γ kij =
12
2∑l=1
gkl(gil,j + gjl,i − gij,l)
(Ubungsaufgabe!). Ist Y = a1xu1 + a2xu2 ein differenzierbares Vektorfeld und c′ =u′1xu1 + u′2xu2 das Tangentenvektorfeld an eine differenzierbare Kurve, so erhaltenwir fur die kovariante Ableitung den Ausdruck
Dc′(t)Y =2∑k=1
((ak)′ +
2∑i,j=1
Γ kij a
i(uj)′)xuk .
Insbesondere konnen wir das Differentialgleichungssystem fur Geodatische (16.2)schreiben als
(uk)′′ +2∑
i,j=1
Γ kij (ui)′(uj)′ = 0, k = 1, 2.
77

Lemma 3 (Orthogonale Parameterlinien). Falls g12 = 0, so ist gii = 1/gii furi = 1, 2, und fur i 6= k
Γ kik =
gkk,i2gkk
= (log√gkk),i und Γ k
ii = − gii,k2gkk
.
Beweis. Offensichtlich gilt(g11 00 g22
)−1
=(
1/g11 00 1/g22
).
Setzt man dies in die Formel fur die Christoffel-Symbole ein, so ergibt sich fur i 6= k
Γ kik =
12gkkgkk,i
undΓ kii =
12gkk(−gii,k).
Satz 6 (Geodatische Parallelkoordinaten). Seien S eine regulare Flache und
x : V → S, (v1, v2) 7→ x(v1, v2)
eine lokale Parametrisierung von S. Weiter sei c(s) = x(v1(s), v2(s)), s ∈ [a, b]eine differenzierbare Flachenkurve. Es sei s0 ∈ (a, b) und c′(s0) 6= 0. Dann gibt eseinen Diffeomorphismus
ϕ : U → V ′, (u1, u2) 7→ (v1, v2)
Ux //
ϕ
x(U)
V
x
==zzzzzzzz
von einer offenen Menge U ⊂ R2 auf eine offene Umgebung V ′ ⊂ V von (v1(s0), v2(s0)),so dass fur die lokale Parametrisierung x := x ϕ gilt(a) Die Kurve c(s) = x(u1(s), u2(s)) = (x ϕ−1)(v1(s), v2(s)) ist in einer
genugend kleinen Umgebung von s0 gegeben durch u1(s) = 0 und u2(s) =s.
(b) Die Kurven u2 = konst. sind nach Bogenlange parametrisierte Geodati-sche, die jede der Kurven u1 = konst. orthogonal schneiden. Die Seg-mente α ≤ u1 ≤ β zwischen den Kurven u1 = α und u1 = β haben alledie gleiche Lange β − α (vgl. Abb. 19.1).
(c) Die Koeffizienten der 1. Fundamentalform bzgl. x haben die Form
g11 = 〈xu1 , xu1〉 = 1, g12 = 0, g22 > 0.
Haben umgekehrt die Koeffizienten der 1. Fundamentalform diese Ge-stalt, so gelten die Eigenschaften aus (b).
78

(d) Falls speziell c(s) Geodatische ist mit ‖c′(s)‖ = 1, so gilt zusatzlich
g22(0, u2) = 1, g22,1(0, u2) = 0, Γ kij (0, u2) = 0
fur alle i, j, k.
Abbildung 19.1: Geodatische Parallelkoordinaten. Die gestrichelten Linien sindnach Bogenlange parametrisierte Geodatische.
Definition 7. Koordinaten mit den Eigenschaften (a) und (b) aus Satz 6 heißenGeodatische Parallelkoordinaten (basierend auf einer Kurve u1 = konst.). Die Kur-ven u1 = konst. heißen Parallelkurven. Ist speziell u1 = 0 eine mit Bogenlange pa-rametrisierte Geodatische, so nennt man die Koordinaten auch Fermi-Koordinaten.
Beweis von Satz 6. (a),(b) Indem wir eventuell c auf eine kleine Umgebung vons0 ∈ (a, b) einschranken, konnen wir ohne Einschrankung annehmen, dass c′(s) 6= 0fur alle s ∈ (a, b) gilt. Es sei
T (s) :=c′(s)‖c′(s)‖
und T ∗(s) ∈ Tc(s)S so, dass T ∗⊥T , ‖T ∗‖ = 1 und (T, T ∗) die gleiche Orientierungwie (xv1 , xv2) hat. Sei s ∈ (a, b). Wir wissen, dass es zu c(s) und T ∗(s) ein ε(s)und eine nach Bogenlange parametrisierte Geodatische γ : (−ε(s), ε(s)) → S mitγ(0) = c(s) und γ′(0) = T ∗(s) gibt. Wir fassen alle diese Geodatischen in einer1-Parameterfamilie c zusammen: fur s ∈ (a, b), t ∈ (−ε(s), ε(s)) sei
t 7→ c(t, s) = x(v1(t, s), v2(t, s))
79

die nach Bogenlange parametrisierte Geodatische mit
c(0, s) = c(s),∂c
∂t(0, s) = T ∗(s).
Indem man (a, b) eventuell nochmals verkleinert, konnen wir annehmen, dass ε(s) =ε > 0 von s unabhangig ist. Die Abbildung
ϕ : (−ε, ε)× (a, b)→ V, (t, s) 7→ (v1(t, s), v2(t, s))
ist differenzierbar, da die vi(t, s) als Losungen der Differentialgleichungen fur Geodati-sche differenzierbar von den Anfangsbedingungen c(s), T ∗(s) abhangen. Die Jacobi-Matrix von ϕ im Punkt (0, s0) hat als Spalten die linear unabhangigen VektorenT ∗(s0) und T (s0). Somit ist ϕ nach dem Umkehrsatz ein Diffeomorphismus voneiner Umgebung U von (0, s0) in (−ε, ε) × (a, b) auf eine Umgebung V ′ ⊂ V von(v1(s0), v2(s0)). Damit ist (a) und der 2. Teil von (b) gezeigt.(c) Wir schreiben ab jetzt (u1, u2) fur (t, s). Da die Kurven u2 = konst. nachKonstruktion mit Bogenlange parametrisierte Geodatische sind, ist
g11 = ‖xu1‖ = 1.
Aus den Differentialgleichungen fur Geodatische (16.2) folgt fur u1 = s und u2 =konst.
Γ 111 = Γ 2
11 = 0.
Somit gilt
0 = Γ 111 =
12
∑l
g1l(g1l,1 + gl1,1 − g11,l) = g12g12,1.
Da g12 = −g12/ det(gik) ist, folgt aus dieser Gleichung g12g12,1 = 0 oder auch
12
(g212),1 =
∂
∂u1
12g2
12 = 0,
d. h. g12 ist als Funktion von u1 konstant. Da nach Konstruktion
g12(0, u2) = 〈T, T ∗〉 = 0
ist, folgt g12(u1, u2) = 0. Damit ist der 1. Teil von (b) gezeigt. Da (gik) als Matrixeines Skalarprodukts positiv definit ist gilt g22 = det(gik) > 0. Wir kommen nunzum 2. Teil von (c). Es gelte also
g11 = 1, g12 = 0, g22 > 0.
Daraus folgt Γ 111 = 0 und nach Lemma 3 ist Γ 2
11 = 0. Also
Dxu1xu1 =∑i
Γ i11xui = 0,
80

d. h. die Kurven u2 = konst. sind nach Bogenlange parametrisierte (da g11 = 1)Geodatische, welche (wegen g12 = 0) jede der Kurven u1 = konst. orthogonalschneiden. Jede dieser Kurven kann als Basiskurve gewahlt werden.(d) Fur s = u2 sei c(s) = x(0, u2) eine nach Bogenlange parametrisierte Geodatische.Dann gilt g22(0, u2) = 1. Da g12 = 0 und g11 = 1, folgt mit Lemma 3
Γ 111 = 0 = Γ 2
11.
Wir mussen noch die Behauptung fur die ubrigen Christoffel-Symbole zeigen. Langsder Kurve c gilt Dc′(s)T = Dc′(s)c
′ = 0, also
0 =d
ds〈T (s), T ∗(s)〉 = 〈T ′(s), T ∗(s)〉+ 〈T (s), T ∗′(s)〉
= 〈Dc′(s)T, T∗〉+ 〈T,Dc′(s)T
∗〉= 〈T,Dc′(s)T
∗〉.
Aus ‖T ∗(s)‖ = 1 folgt ahnlich wie oben
0 =d
ds〈T ∗(s), T ∗(s)〉 = 2〈T ∗(s), Dc′(s)T
∗〉.
Wir schließen daraus, dass Dc′(s)T∗ orthogonal zu [T (s), T ∗(s)] = Tc(s)S ist. Also
muss Dc′(s)T∗ = 0 sein. In geodatischen Parallelkoordinaten (u1, u2) ist T ∗(s) =
xu1(0, u2). Die Formel fur die kovariante Ableitung (16.1) liefert fur (a1, a2) = (1, 0)die Gleichung
Γ 112(0, u2) = 0 = Γ 2
12(0, u2).
Nach Lemma 3 ist
Γ 112 =
12g22,1
g22, also g22,1(0, u2) = 0.
Weiterhin folgt damit ebenfalls aus Lemma 3
Γ 122(0, u2) = −g22,1(0, u2)
2g11= 0.
Schließlich ist wegen g22(0, u2) = 1,
Γ 222(0, u2) =
g22,2(0, u2)2g22
= 0.
Damit ist der Satz vollstandig bewiesen.
Wir wollen zwei Anwendungen von geodatischen Parallelkoordinaten geben.Zunachst werden wir eine Formel fur die Gauß-Krummung in geodatischen Parallel-koordinaten herleiten und anschließend zeigen wir, dass Geodatische lokal Kurzestesind.
81

Satz 7. In geodatischen Parallelkoordinaten gilt fur die Gauß-Krummung
K(u1, u2) = −(√g22),11√g22
(u1, u2).
Beweis. Nach der Gauß-Formel (Theorema egregium) gilt
−g11K = Γ 212,1 − Γ 2
11,2 + Γ 112Γ 2
11 + Γ 212Γ 2
12 − Γ 211Γ 2
22 − Γ 111Γ 2
12.
Mit Lemma 3 und da in geodatischen Parallelkoordinaten g11 = 1, g12 = 0 gilt,folgt
−K = (log√g22),11 + ((log
√g22),1)2.
Wir setzen f :=√g22 und rechnen
(log f),11 + ((log f),1)2 = (f,1f
),1 + (f,1f
)2 =f,11
f=
(√g22),11√g22
.
Damit ist der Satz bewiesen.
Wir wissen bereits, dass kurzeste Verbindungen immer Geodatische sind. DieUmkehrung ist im Allgemeinen falsch, wie etwa das Beispiel des Zylinders zeigt.Der folgende Satz besagt jedoch, dass genugend kleine Segmente von Geodatischenauch Kurzeste sind.
Satz 8 (Geodatische sind lokal Kurzeste). Seien S eine regulare Flache und x :U → S, (u1, u2) 7→ x(u1, u2) geodatische Parallelkoordinaten. Dann ist eine mitBogenlange parametrisierte Geodatische der Form
γ(s) := x(s, u20), s0 ≤ s ≤ s1
kurzer als eine beliebige Kurve
c(t) := x(u1(t), u2(t)), t0 ≤ t ≤ t1
die p0 = γ(s0) = c(t0) und p1 = γ(s1) = c(t1) verbindet.
Beweis. Es ist c′ = (u1)′xu1 + (u2)′xu2 . Damit folgt
‖c′‖2 = ((u1)′)2g11 + 2(u1)′(u2)′g12 + g22((u2)′)2
= ((u1)′)2 + (u2)2g22(u1(t), u2(t))
≥ ((u1)′)2.
Es gilt also
L(c) ≥∫ t1
t0
|(u1)′| dt ≥ u1(t1)− u1(t0) = s1 − s0 = L(γ).
82
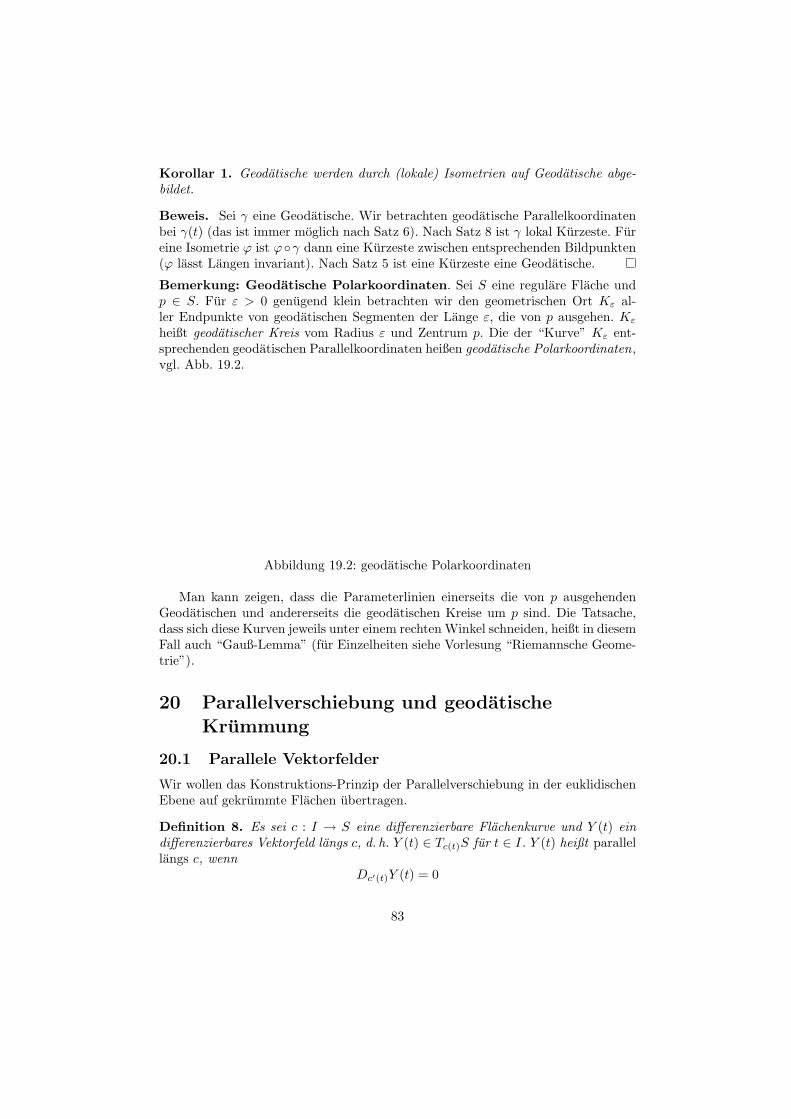
Korollar 1. Geodatische werden durch (lokale) Isometrien auf Geodatische abge-bildet.
Beweis. Sei γ eine Geodatische. Wir betrachten geodatische Parallelkoordinatenbei γ(t) (das ist immer moglich nach Satz 6). Nach Satz 8 ist γ lokal Kurzeste. Fureine Isometrie ϕ ist ϕγ dann eine Kurzeste zwischen entsprechenden Bildpunkten(ϕ lasst Langen invariant). Nach Satz 5 ist eine Kurzeste eine Geodatische.
Bemerkung: Geodatische Polarkoordinaten. Sei S eine regulare Flache undp ∈ S. Fur ε > 0 genugend klein betrachten wir den geometrischen Ort Kε al-ler Endpunkte von geodatischen Segmenten der Lange ε, die von p ausgehen. Kε
heißt geodatischer Kreis vom Radius ε und Zentrum p. Die der “Kurve” Kε ent-sprechenden geodatischen Parallelkoordinaten heißen geodatische Polarkoordinaten,vgl. Abb. 19.2.
Abbildung 19.2: geodatische Polarkoordinaten
Man kann zeigen, dass die Parameterlinien einerseits die von p ausgehendenGeodatischen und andererseits die geodatischen Kreise um p sind. Die Tatsache,dass sich diese Kurven jeweils unter einem rechten Winkel schneiden, heißt in diesemFall auch “Gauß-Lemma” (fur Einzelheiten siehe Vorlesung “Riemannsche Geome-trie”).
20 Parallelverschiebung und geodatischeKrummung
20.1 Parallele Vektorfelder
Wir wollen das Konstruktions-Prinzip der Parallelverschiebung in der euklidischenEbene auf gekrummte Flachen ubertragen.
Definition 8. Es sei c : I → S eine differenzierbare Flachenkurve und Y (t) eindifferenzierbares Vektorfeld langs c, d. h. Y (t) ∈ Tc(t)S fur t ∈ I. Y (t) heißt parallellangs c, wenn
Dc′(t)Y (t) = 0
83
fur alle t ∈ I gilt.
Bemerkungen (a) Wir betrachten den Spezialfall der euklidischen Ebene. Hierist
Dc′(t)Y (t) = Y ′(t) = 0 ⇐⇒ Y (t) = konst.
Die parallelen Vektorfelder sind hier also gerade die konstanten Vektorfelder.(b) Das Tangentenvektorfeld c′(t) einer Geodatischen c ist stets parallel.
Satz 9. Es seien Y und Z parallele Vektorfelder langs c : I → S. Dann ist
〈Y (t), Z(t)〉c(t) = konst.
Damit sind der Winkel ∠(Y (t), Z(t)) und die Langen ‖Y (t)‖, ‖Z(t)‖ konstant.
Beweis. Das Vektorfeld Y ist genau dann parallel, wenn die Tangentialkomponentevon Y ′ verschwindet, wenn also Y ′(t)⊥Tc(t)S gilt. Daraus folgt
d
dt〈Y (t), Z(t)〉 = 〈Y ′(t), Z(t)〉+ 〈Y (t), Z ′(t)〉 = 0.
Demnach ist 〈Y (t), Z(t)〉 konstant.
Beispiel (Parallelfelder langs Geodatischen). Wir betrachten eine Geodati-sche c : I → S. Wie sieht das Parallelfeld Y langs c mit Y (t0) = Y0 ∈ Tc(t0)Saus? Ist α der Winkel zwischen c′(t0) und Y0, so folgt aus obigem Satz, dass die-ser Winkel langs c erhalten bleibt. Man erhalt also Y (t), indem man c′(t) um denWinkel α dreht und eventuell noch mit einem konstanten Faktor multipliziert. Dasso erhaltene Vektorfeld Y ist differenzierbar und parallel.
Satz 10 (Existenz und Eindeutigkeit von Parallelfeldern). Es seien c : I → S einedifferenzierbare Kurve auf der regularen Flache S und Y0 ∈ Tc(t0)S, t0 ∈ I. Danngibt es ein eindeutig bestimmtes Parallelfeld Y (t) langs c mit Y (t0) = Y0.
Beweis. Wir konnen annehmen, dass I abgeschlossen ist. Damit ist c(I) ⊂ Skompakt und wird von endlich vielen Koordinatenumgebungen uberdeckt. Wegender Eindeutigkeit genugt es, die Behauptung fur Segmente von c zu beweisen, dieganz in einer Koordinatenumgebung liegen. Es sei also x : U → S eine lokaleParametrisierung um c(t0) und u,v seien differenzierbare Funktionen, so dass c(t) =x(u(t), v(t)) in dieser Koordinatenumgebung gilt. Wir machen fur Y den Ansatz
Y (t) = a(t)xu(u(t), v(t)) + b(t)xv(u(t), v(t))
mit zu bestimmenden differenzierbaren Funktionen a und b. Y ist genau dann par-allel, wenn
0 = Dc′Y = (a′ + Γ 111au
′ + Γ 112av
′ + Γ 112bu
′ + Γ 122bv
′)xu+
(b′ + Γ 211au
′ + Γ 212av
′ + Γ 212bu
′ + Γ 222bv
′)xv
84

gilt, also genau wenn
a′ + Γ 111au
′ + Γ 112av
′ + Γ 112bu
′ + Γ 122bv
′ = 0
b′ + Γ 211au
′ + Γ 212av
′ + Γ 212bu
′ + Γ 222bv
′ = 0.(20.1)
Das ist aber ein lineares Differentialgleichungssystem 1. Ordnung fur a und b. Eshat zu gegebenen Anfangsbedingungen (a(t0), b(t0)) genau eine Losung (a(t), b(t)).Zudem ist diese Losung auf dem ganzen Intervall I definiert.
20.2 Parallelverschiebung
Wir zeigen im Folgenden wie man mit Hilfe von Parallelfeldern Vektoren langsKurven “parallel verschieben” kann.
Definition 9. Sei c : I → S eine differenzierbare Kurve und Y0 ∈ Tc(t0)S. Weitersei Y (t) das parallele Vektorfeld langs c mit Y (t0) = Y0. Fur t1 ∈ I heißt dannY (t1) die Parallelverschiebung von Y0 langs c nach c(t1).
Bemerkungen (a) Aus Satz 9 folgt, dass die Parallelverschiebung langs einerKurve c : [a, b] → S eine lineare Isometrie der euklidischen Vektorraume TpS undTqS ist, wobei p = c(a) und q = c(b) ist. Die Parallelverschiebung ermoglicht somitden Vergleich “weit voneinander entfernter” Tangentialraume.(b) Ist die Kurve c nur stuckweise differenzierbar, so definiert man die Parallelver-schiebung segmentweise.(c) Die Parallelverschiebung ist als Begriff der inneren Geometrie einer Flacheinvariant unter lokalen Isometrien. Genauer: Hat man eine Kurve c : I → S mitc(I) ⊂ U , U offen, eine Isometrie ϕ : U → U ⊂ S und Y0 ∈ Tc(t0)S, so gilt daskommutative Diagramm:
Y0dϕ //
PV langs c
dϕ(Y0)
PV langs ϕ c
Y (t)dϕ
// dϕ(Y (t))
(d) Es seien S und S zwei regulare Flachen, die sich langs einer differenzierbarenKurve c : I → S ∩ S tangential beruhren, d. h. Tc(t)S = Tc(t)S fur alle t ∈ I. Ist Y0
ein Vektor aus Tc(t)S = Tc(t)S, so ist Y (t) genau dann die Parallelverschiebung vonY0 langs c bezuglich S, wenn Y (t) die Parallelverschiebung von Y0 langs c bezuglichS ist. Denn: die kovariante Ableitung Dc′(t)Y ist fur beide Flachen dieselbe (da dasentsprechende Differentialgleichungssystem (20.1) fur beide Flachen identisch ist).
Beispiel. Wir betrachten ein Beispiel zur letzten Bemerkung. Es sei c der Brei-tenkreis zum Winkel π/2 − ϕ auf einer orientierten Einheitssphare. Weiter sei Y0
tangential an c im Punkt p. Gesucht ist die Parallelverschiebung von Y0 langs c.Dazu betrachten wir den Kegel K, der die Sphare langs c tangential beruhrt, vgl.Abb. 20.1. Dieser hat gerade den Offnungswinkel ψ = π/2− ϕ.
85

Abbildung 20.1:
Die Kurve c liegt auf dem Kegel und Y0 ist tangential an K. Ohne Einschrankungsei c mit Bogenlange parametrisiert und p = c(0). Nach der obigen Bemerkunggenugt es, die Parallelverschiebung von Y0 langs c bezuglich K zu bestimmen.Da K lokal isometrisch zur Ebene ist, konnen wir die Parallelverschiebung in derEbene durchfuhren (vgl. Abb. 20.2) und dann wieder auf den Kegel bzw. die Sphareubertragen.
Abbildung 20.2: Parallelverschiebung von Y0 in der Ebene. Parallelverschiebungauf dem Zylinder erhalt man, indem man den erhaltenen Winkel zwischen Y (t)und c′(t) auf den Zylinder ubertragt.
20.3 Parallelverschiebung und Krummung
Wir wollen nun die Parallelverschiebung mit der Krummung in Verbindung bringen.Dazu betrachten wir eine orientierbare Flache S. Weiter sei c : I → S, t 7→ c(t)eine mit Bogenlange parametrisierte Flachenkurve. Wegen ‖c′(t)‖2 = 〈c′, c′〉 = 1 ist〈c′′(t), c′(t)〉 = 0. Damit ist die Tangentialkomponente Dc′(t)c
′ von c′′ proportionalzu N(t) ∧ c′(t). Das fuhrt auf folgende
Definition 10. Die Abbildung κg : I → R definiert durch
Dc′(t)c′(t) = κg(t)(N(t) ∧ c′(t))
86

heißt geodatische Krummung. Die Zahl κg(t) heißt geodatische Krummung von cim Punkt c(t).
Das Vorzeichen von κg hangt von der gewahlten Orientierung der Flache bzw. vomDurchlaufsinn der Kurve ab.
Lemma 4. Sei c : I → S eine nach Bogenlange parametrisierte Kurve undκ(t) = ‖c′′(t)‖ die Krummung von c. Weiter sei κn(t) = 〈c′′(t), N(t)〉 die Nor-malschnittkrummung von S im Punkt c(t) in Richtung c′(t). Dann gilt
κ2(t) = κ2n(t) + κ2
g(t).
Beweis. Zerlegung von c′′ in Normal- und Tangentialkomponente liefert
c′′ = 〈c′′, N〉N +Dc′(t)c′
= κnN + κg(N ∧ c′).
Da N und N ∧c′ orthogonale Einheitsvektoren sind folgt κ2 = ‖c′′‖2 = κ2n+κ2
g.
Bemerkungen (a) Mit Definition 10 gilt: Eine Kurve c ist genau dann Geodatische,wenn κg ≡ 0 gilt. Das erklart auch die Bezeichnung “geodatische Krummung”.(b) Falls T1(t) = c′(t) und T2(t) ein begleitendes 2-Bein von c ist, das gleich ori-entiert ist wie S, so ist
κg(t) = 〈Dc′(t)c′, T2(t)〉.
Die geodatische Krummung κg ist also eine Große der inneren Geometrie einerorientierten Flache.
Im folgenden sei Y ein paralleles Einheitsvektorfeld langs einer nach Bogenlangeparametrisierten Kurve c : I = [a, b]→ S.
Es sei V ein 2-dimensionaler orientierter Vektorraum. Weiter seien X und Yzwei linear unabhangige Vektoren. Es sei α ∈ (0, π) der Winkel zwischen X und Y ,also
cosα =〈X,Y 〉‖X‖‖Y ‖
∈ (−1, 1).
Der orientierte Winkel zwischen X und Y ist definiert als α, wenn (X,Y ) positivorientiert ist, und als −α, wenn (X,Y ) negativ orientiert ist. Man beachte, dass dieReihenfolge von X und Y entscheidend ist! Im Spezialfall einer orientierten Flacheist jede Tangentialebene orientiert und das Vorzeichen des orientierten Winkelszwischen X und Y ist gegeben durch das Vorzeichen von det(X,Y,N), wobei N dieFlachennormale ist.
Lemma 5. Es sei Y ein paralleles Einheitsvektorfeld langs der nach Bogenlangeparametrisierten Kurve c : I → S. Weiter sei θ(t) der orientierte Winkel zwischenY (t) und c′(t), also
Y (t) = cos θ(t) c′(t)− sin θ(t) (N(t) ∧ c′(t)),
mit cos θ(t) = 〈c′(t), Y (t)〉, |θ| ∈ (0, π). Dann ist κg(t) = θ′(t).
87
Beweis. Wir leiten die Gleichung cos θ(t) = 〈c′(t), Y (t)〉 nach t ab und erhaltenmit Dc′Y = Dc′c
′ = 0, dass
−θ′(t) sin θ(t) = 〈c′′(t), Y (t)〉+ 〈c′(t), Y ′(t)〉= 〈Dc′(t)c
′, Y (t)〉+ 〈c′(t), Dc′(t)Y 〉= 〈Dc′(t)c
′, cos θ(t) c′(t)− sin θ(t) (N(t) ∧ c′(t))〉= cos θ(t) 〈Dc′(t)c
′, c′(t)〉 − sin θ(t)κg(t)= − sin θ(t)κg(t)
Fur t0 ∈ I mit sin θ(t0) 6= 0 folgt die Behauptung. Ist sin θ(t) ungleich 0 in ei-ner Umgebung von t0, so folgt die Behauptung, da θ′(t) und κg(t) stetig sind. Istsin θ(t) ≡ 0 auf einem abgeschlossenen Intervall J ⊂ I, so ist c auf J Geodatische(da Y = c′ und Y parallel)und damit κg = 0 = θ′(t) auf J .
Bemerkung: Holonomie. Betrachtet man die Winkelanderung (bzgl. c′) bei Par-allelverschiebung langs c, so gilt nach obigem Lemma
θ(t1)− θ(t0) =∫ t1
t0
κg(t) dt.
Ist insbesondere c geschlossen, so ist θ(b)−θ(a) der Winkel zwischen Y (b) und Y (a).
Es sei nun T1(t), T2(t), T3(t) = N(t) eine begleitende Orthonormalbasis einerFlachenkurve c(t) (c muss nicht mit Bogenlange parametrisiert sein) mit T1(t) undT2(t) ∈ Tc(t)S. Weiter sei
Y (t) = cosϕ(t)T1(t) + sinϕ(t)T2(t)
ein Einheits-Vektorfeld langs c.Frage: Wie muss man ϕ wahlen, damit Y parallel ist?
Wir stellen zunachst fest, dass wegen 〈Ti, Tj〉 = δij
〈T ′i , Tj〉+ 〈Ti, T ′j〉 = 0
gilt. Setzt man aij := 〈T ′i , Tj〉, so folgt aij = −aji. Man erhalt damit eine schief-symmetrische Matrix (aij) die folgende Eigenschaft hat T ′1
T ′2T ′3
=
0 α β−α 0 γ−β −γ 0
T1
T2
T3
.
Weiter gilt
Y ′ = −ϕ′ sinϕT1 + ϕ′ cosϕT2 + cosϕ (αT2 + βT3) + sinϕ (−αT1 + γT3)= −(α+ ϕ′) sinϕT1 + (α+ ϕ′) cosϕT2 + (β cosϕ+ γ sinϕ)T3.
Das Vektorfeld Y ist genau dann parallel, wenn die Tangentialkomponente von Y ′
verschwindet, also genau dann, wenn α+ϕ′ = 0 gilt. Im nachsten Lemma bestimmenwir α(= −ϕ′) mittels geodatischer Parallelkoordinaten.
88

Lemma 6. Es sei S eine orientierte Flache, x : U → S, (u1, u2) 7→ x(u1, u2) seiengeodatische Parallelkoordinaten und c sei eine Kurve in x(U), also
c(t) = x(u1(t), u2(t)).
Weiter sei T1(t) = xu1(u1(t), u2(t)),
T2(t) =xu2(u1(t), u2(t))‖xu2(u1(t), u2(t))‖
und T3(t) = T1(t) ∧ T2(t) = N(t).
Fur α(t) = 〈T ′1(t), T2(t)〉 gilt α(t) = (√g22),1(u2)′(t).
Beweis. Zunachst ist
T ′1(t) =d
dtxu1(u1(t), u2(t))
= (u1)′(t)xu1u1(u1(t), u2(t)) + (u2)′(t)xu1u2(u1(t), u2(t)).
In geodatischen Parallelkoordinaten gilt aber g12 = 0 und g11 = 1 und damitΓ 1
11 = 0. Weiter ist nach Lemma 3 auch Γ 211 = − g11,2
g22= 0. Also ergibt sich
〈xu1u1 , xu2〉 = 〈Γ 111xu1 + Γ 2
11xu2 + lN, xu2〉 = Γ 111g12 + Γ 2
11g22 = 0.
Damit folgt
α = 〈xu1u2 , xu2〉(u2)′1‖xu2‖
=12∂
∂u1〈xu2 , xu2〉(u2)′
1‖xu2‖
=12g22,1
1√g22
(u2)′ = (√g22),1(u2)′
Damit ist das Lemma bewiesen.
Als Anwendung charakterisieren wir die Flachen mit Gauß-Krummung Null.
Satz 11 (Flachen mit K = 0). Sei S eine regulare Flache. Folgende Aussagen sindaquivalent:(a) Die Parallelverschiebung ist lokal wegunabhangig, d. h. zu jedem p ∈ S
gibt es eine (Koordinaten-)Umgebung in der die Parallelverschiebungnicht von der Kurve c abhangt.
(b) Zu jedem p ∈ S gibt es geodatische Parallelkoordinaten, so dass gij = δijgilt.
(c) S ist lokal isometrisch zur euklidischen Ebene.(d) Fur die Gauß-Krummung K von S gilt K ≡ 0.
Beweis. Der Beweis der Aquivalenzen (b)⇐⇒ (c)⇐⇒ (d) ist eine Ubungsaufgabe.Wir vervollstandigen nun noch den Ringschluß.(c) ⇒ (a): Parallelfelder in der euklidischen Ebene sind konstant, also ist dieParallelverschiebung wegunabhangig.
89

(a) ⇒ (b): In einer Umgebung von p wahlen wir Fermi-Koordinaten x : U → S(vgl. Satz 6) basierend auf der nach Bogenlange parametrisierten Geodatischenx(0, u2) mit p = x(0, 0). Nach Annahme ist die Parallelverschiebung in x(U) wegu-nabhangig. Wir zeigen: die Kurven x(a, u2) sind alle Geodatische. Dazu betrachtenwir den Einheitsvektor
A0 :=xu2
√g22
(a, 0).
Die Kurve u2 = 0 ist Geodatische, deren Tangentialvektor im Punkt x(a, 0) senk-recht zu A0 steht. Also ist die Parallelverschiebung A1 von A0 langs u2 = 0nach x(0, 0) ein Einheitsvektor, der orthogonal zum Tangentialvektor an x(u1, 0) inu1 = 0 steht.
Abbildung 20.3: Parallelverschiebung von A0
Damit folgtA1 =
xu2
√g22
(0, 0).
Die Parallelverschiebung A2 von A1 langs u1 = 0 nach x(0, b) ist der Tangential-vektor an die Geodatische u1 = 0, also
A2 =xu2
√g22
(0, b).
Nun verschieben wir A2 parallel langs der Geodatischen u2 = b nach x(a, b) underhalten wegen g12 = 0
A3 =xu2
√g22
(a, b).
Nach Voraussetzung ist die Parallelverschiebung wegunabhangig. Also ist die Par-allelverschiebung von A0 langs u1 = a ebenfalls A3. Da b beliebig war, ist
xu2
√g22
(a, u2)
90

ein paralleles Einheitsvektorfeld langs x(a, u2). Dann ist x(a, u2) aber eine Geodati-sche. Da Geodatische proportional zur Bogenlange parametrisiert sind, folgt, dass√g22(a, u2) als Funktion von u2 konstant ist. Aus der Differentialgleichung fur
Geodatische (16.2) folgt mit u = u1, dass Γ 122 = 0. Da nach Lemma 3
Γ 122 = −g22,1
2g11
gilt, ist g22 auch als Funktion von u1 konstant. Damit schließen wir, dass g22(u1, u2) =g22(0, 0) = 1 gilt. Da fur geodatische Parallelkoordinaten allgemein g11 ≡ 1 undg12 ≡ 0 gilt, folgt schließlich die Behauptung gij = δij .
91
Teil V
Der Satz von Gauß-Bonnet undFolgerungen
21 Umlaufsatz und Satz von Gauß-Bonnet
21.1 Der Umlaufsatz fur Flachenkurven
Wir beginnen mit einer Verallgemeinerung des Umlaufsatzes von Hopf (Satz 12 in6.1). Dazu benotigen wir noch einige zusatzliche Begriffe.
Definition 1. Sei S eine regulare Flache. Unter einer einfach geschlossenen, stuck-weise regularen Flachenkurve verstehen wir eine stetige Abbildung c : [0, l]→ S mitfolgenden Eigenschaften(a) Die Kurve ist geschlossen, d. h. c(0) = c(l).(b) Die Kurve c ist injektiv auf ]0, l[.(c) Es gibt eine Unterteilung 0 = t0 < t1 < · · · < tk < tk+1 = l von [0, l], so
dass c auf jedem Segment Ii := [ti−1, ti], i = 1, . . . , k+1, differenzierbarund regular ist.
Nach Definition gibt es fur jedes ti links- und rechtsseitige Ableitungen von c.Wir schreiben c′(t+i ) fur die rechtsseitige und c′(t−i ) fur die linksseitige Ableitung.Wir wollen weiter annehmen, dass S orientiert ist. Dann sei −π < δi < π derorientierte Winkel zwischen c′(t−i ) und c′(t+i ). (Den Fall |δi| = π, der anschaulicheiner “Spitze” entspricht, betrachten wir hier nicht.) Zudem nehmen wir an, dass cauf jedem regularen Segment mit Bogenlange parametrisiert ist.
Definition 2. Der mit Vorzeichen versehene Winkel −π < δi < π heißt Aussen-winkel im Punkt c(ti), vgl. Abb. 21.1. Falls δi 6= 0, so nennen wir c(ti) eine Eckevon c.
Abbildung 21.1: Aussenwinkel einer Kurve
92

Es sei jetzt x : U → S, (u, v) 7→ x(u, v) eine lokale Parametrisierung von S,die mit der Orientierung von S vertraglich ist. Weiter sei U homoomorph zu eineroffenen Kreisscheibe. Sei c : [0, l]→ S eine einfach geschlossene, stuckweise regulareKurve mit c([0, l]) ⊂ x(U), Ecken c(ti) und Aussenwinkeln δi fur i = 1, . . . , k. Manbeachte, dass mit dieser Konvention c(0) = c(l) keine Ecke ist! Schließlich sei furi = 1, . . . , k+1 und t ∈ Ii = [ti−1, ti], βi(t) der orientierte Winkel zwischen xu(c(t))und c′(t). Es gilt also insbesondere
(∗) δi = βi+1(ti)− βi(ti) (i = 1, . . . , k).
Der folgende Satz ist eine Verallgemeinerung des Satzes von Hopf (Satz 12 in 6.1)fur ebene Kurven.
Satz 1 (Umlaufsatz fur Flachenkurven). Mit obigen Bezeichnungen gilt
k+1∑i=1
(βi(ti)− βi(ti−1)) +k∑i=1
δi = ±2π.
In Worten: Die totale Variation des Winkels zwischen einem festen Richtungsfeldund dem Tangentialvektor von c ist zusammen mit den “Sprungen” an den Eckengleich ±2π (wobei das Vorzeichen von der Orientierung der Kurve abhangt).
Beweis. 1. Schritt: Wir nehmen an, dass c keine Ecken hat, also δi = 0 fur allei = 1, . . . , k. Dann ist nach (∗) βi+1(ti) = βi(ti) fur i = 1, . . . , k und die Behauptungdes ist Satzes somit aquivalent zu
βk+1(l)− β1(0) = ±2π.
Diese Gleichung ist nun aber eine Konsequenz aus den folgenden drei Bemerkungen:(1) Da sowohl βk+1(l) als auch β1(0) den Winkel zwischen xu und c′(0) = c′(l)
messen, ist βk+1(l)− β1(0) ein Vielfaches von 2π.(2) Sei I die erste Fundamentalform von S und I0 die erste Fundamentalform
der euklidischen Ebene R2. Fur λ ∈ [0, 1] ist dann Iλ := λI+(1−λ)I0 ebenfalls ein(positiv definites) Skalarprodukt auf TpS fur p ∈ S (genauer: Iλ ist eine sogenannteRiemannsche Metrik). Wir definieren den Winkel βλ zwischen xu und c′ bezuglichIλ durch
cosβλ :=Iλ(xu, c′)√
Iλ(xu, xu)Iλ(c′, c′)
Weil βλ stetig von λ abhangt, verandert sich βλ(l)− βλ(0) stetig mit λ. Da dieserWert aber immer ein Vielfaches von 2π ist, muss er konstant sein.
(3) Fur λ = 0 ist (S, I0) lokal isometrisch zu der euklidischen Ebene (vgl. Satz11 in 20.3). Wir konnen also S in diesem Fall als Stuck von R2 und c als ebeneKurve auffassen. Somit ist β0(l)− β0(0) gerade 2π mal die Umlaufzahl von c, alsonach dem Umlaufsatz von Hopf (Satz 12 in 6.1) gleich ±2π.
93

2. Schritt: Wir nehmen jetzt an, dass c insgesamt k Ecken hat, also δi 6= 0 furi = 1, . . . , k. Mit obiger Gleichung (∗) gilt allgemein
k+1∑i=1
(βi(ti)− βi(ti−1)) +k∑i=1
δi = βk+1(l)− β1(0).
Satz 1 ist somit wieder aquivalent zur Gleichung
βk+1(l)− β1(0) = ±2π.
Wir beweisen diese Gleichung, indem wir wie im ersten Schritt die folgenden Ei-genschaften (1), (2), (3) nachweisen. (1) und (2) sind klar:
(1) βk+1(l)− β1(0) = 2πn (n ∈ Z),(2) βλk+1(l)− βλ1 (0) = konstant = β0
k+1(l)− β01(0) = (βk+1(l)− β1(0)).
(3) Die zu beweisende Aussage von Satz 1 ist aquivalent zu der folgenden Verall-gemeinerung des Umlaufsatzes von Hopf fur ebene geschlossene Kurven mit Ecken:
βk+1(l)− β1(0) =k+1∑i=1
(βi(ti)− βi(ti−1)) +k∑i=1
δi = ±2π.
Um diese Gleichung zu beweisen, gehen wir wie folgt vor. Fur jede Ecke c(ti) wahlenwir einen kleinen Kreis K um c(ti). Sei P = c(ai) der letzte Punkt von c([ti−1, ti])auf K und Q = c(bi) der erste Punkt von c([ti, ti+1]) auf K. Wir wahlen dann eineglatte Kurve ci von P nach Q mit Anfangsrichtung c′(ai) und Endrichtung c′(bi),vgl. Abb. 21.2. Wenn der Radius von K gegen Null geht, so ist die totale Anderung
Abbildung 21.2: Glatten von Ecken
der Tangentenrichtung von ci beliebig nahe bei δi. Wahlt man also alle Kreisradiengenugend klein, so erhalt man mittels der Kurven ci eine einfach geschlossene glatteKurve c. Nach dem Umlaufsatz ist die totale Anderung des Tangentenvektors c′
gleich ±2π. Andererseits ist die totale Tangentenanderung langs der Teilkurven cinahe bei
∑ki=1 δi, wahrend die totale Anderung der ubrigen Segmente von c nahe
bei∑k+1i=1 (βi(ti)− βi(ti−1)) ist. Wir erhalten somit insgesamt, dass der Ausdruck
βk+1(l)− β1(0) =k+1∑i=1
(βi(ti)− βi(ti−1)) +k∑i=1
δi
94
nahe bei ±2π ist. Nach (1) und (2) muss er somit gleich ±2π sein.
21.2 Satz von Gauß-Bonnet (lokale Version)
Definition 3. Es sei S eine orientierte Flache. Ein einfaches Gebiet ist eine Teil-menge G von S, die homoomorph zu einer (abgeschlossenen) Kreisscheibe ist undfur deren Rand gilt ∂G = c([0, l]) fur eine stuckweise regulare, einfach geschlosseneKurve c : [0, l]→ S.
Wir nehmen ohne Einschrankung an, dass c auf jedem regularen Segment nachBogenlange parametrisiert ist. Dann kann man auf jedem solchen Segment von c denVektor c′(t) zu einer positiv orientierten Orthonormalbasis (c′(t), T2(t)) von Tc(t)Serganzen. Man sagt c ist bezuglich G positiv orientiert, falls auf jedem regularenSegment von c gilt: fur die positive Orthonormalbasis (c′(t), T2(t)) zeigt T2(t) nachG, genauer: Ist ε(t) eine in G verlaufende differenzierbare Kurve mit ε(0) = c(t)und ε′(0) 6= c′(t), so ist
〈ε′(0), T2(t)〉 > 0.
Anschaulich: Das Innere von G liegt “links” von c, vgl. Abb. 21.3.
Abbildung 21.3: Eine positiv orientierte Randkurve
Wir hatten gesehen, dass der Flacheninhalt von x(U) gegeben ist durch
A(x(U)) =∫∫
U
dA =∫∫
U
|xu ∧ xv| dudv
und dass diese Große unabhangig von der lokalen Parametrisierung x ist. Genauso zeigt man, dass fur eine differenzierbare Funktion f auf x(U) das Integral von fuber G, also die Große
I(f) :=∫∫
G
f dA :=∫∫
V
f(x(u, v)) dA
mit G = x(V ), unabhangig von der Parametrisierung ist.
Satz 2 (Gauß-Bonnet, lokale Version). Es sei x : U → S eine lokale Parame-trisierung einer regularen Flache S durch geodatische Parallelkoordinaten. Weitersei G ⊂ x(U) ein einfaches, abgeschlossenes Gebiet mit Rand ∂G = c(I) fur eine
95

positiv orientierte, einfach geschlossene, stuckweise regulare Kurve c. Die Kurve csei mit Bogenlange parametrisiert. Sind fur i = 1, . . . , k, c(ti) die Ecken von c undδi die Aussenwinkel, so gilt∫∫
G
K dA+k+1∑i=1
∫ ti
ti−1
κg(t) dt+k∑i=1
δi = 2π,
dabei ist κg die geodatische Krummung der regularen Segmente von c und K ist dieGauß-Krummung von S.
Bemerkung. Der Satz gilt auch ohne die Einschrankung, dass man geodatischeParallelkoordinaten als Parameter hat. Diese Voraussetzung erleichtert lediglich denBeweis.
Beweis von Satz 2. Da wir geodatische Parallelkoordinaten voraussetzen, giltnach Abschnitt 19, Satz 6,
(gij) =(
1 00 g22
).
Damit ist dA =√det(gij) du1du2 =
√g22 du
1du2. Weiter ist T1 := xu1 ein Ein-heitsvektorfeld auf G. Langs der Randkurve c betrachten wir ein Parallelfeld Y (t).Auf Ii := [ti−1, ti], i = 1, . . . , k + 1, sei θi(t) der orientierte Winkel zwischen Y (t)und c′(t), ϕi(t) der orientierte Winkel zwischen T1(t) und Y (t), vgl. Abb. 21.4.
Abbildung 21.4:
Dann istβi(t) = θi(t) + ϕi(t), t ∈ Ii
differenzierbar. Nach dem Umlaufsatz fur Flachenkurven (Satz 1) und unserer An-nahme uber Orientierung und Durchlaufsinn ist die gesamte Tangentendrehung vonc′ bezuglich T1 gegeben durch
k+1∑i=1
(βi(ti)− βi(ti−1)) +k∑i=1
δi = 2π. (21.1)
Das konnen wir auch schreiben als
2π =k+1∑i=1
∫Ii
β′i(t) dt+k∑i=1
δi =k+1∑i=1
∫Ii
(θ′i(t) + ϕ′i(t)) dt+k∑i=1
δi (21.2)
96

Nach Lemma 5 aus Abschnitt 20.3 ist
k+1∑i=1
∫Ii
θ′i(t) dt =k+1∑i=1
∫Ii
κg(t) dt. (21.3)
Weiter ist nach Lemma 6 aus Abschnitt 20.3
k+1∑i=1
∫Ii
ϕ′i(t) dt =k+1∑i=1
∫Ii
(−√g22),1 (u2)′dt =k+1∑i=1
∫u2(Ii)
(−∂√g22
∂u1
)du2
=∫x−1(∂G)
−(∂√g22
∂u1
)du2 ∗=
∫∫x−1(G)
−∂2(√g22)
(∂u1)2du1du2
=∫∫
x−1(G)
−(√g22),11√g22
√g22 du
1du2
∗∗=∫∫
x−1(G)
K x−1 dA =∫∫
G
K dA
(21.4)
In der Gleichung ∗ wurde der Satz von Gauß-Green fur Gebiete Ω der Ebene ver-wendet, ∫
∂Ω
P dx+Qdy =∫∫
Ω
(∂Q∂x− ∂P
∂y
)dxdy
mit P = 0 und Q = −(√g22),1. Gleichung ∗∗ gilt nach Satz 7 aus Abschnitt 19.
Setzt man nun (21.3) und (21.4) in (21.2) ein, so folgt die Behauptung.
21.3 Folgerungen
(a) Wenn die Kurve c keine Ecken hat, so gilt∫∫G
K dA+∫∂G
κg dt = 2π.
(b) Falls S die euklidische Ebene R2 ist, so ist K = 0 und κg = κ∗, die orientierteKrummung. Satz 2 ist dann gerade der Umlaufsatz von Hopf fur ebene Kurven (vgl.auch den Beweis von Satz 1).(c) Es sei c ein geodatisches Polygon, d. h. die regularen Segmente von c sindGeodatische. Dann ist κg = 0 und es gilt∫∫
G
K dA+k∑i=1
δi = 2π.
Definiert man die Innenwinkel αi an den Ecken c(ti) als αi := π− δi, so gilt fur eingeodatisches n-Eck∫∫
G
K dA = 2π −n∑i=1
(π − αi) = π(2− n) +n∑i=1
αi.
97
Insbesondere gilt fur ein geodatisches Dreieck ∆∫∫∆
K dA = α1 + α2 + α3 − π.
(d) Wir betrachten ein geodatisches Dreieck ∆ und spezialisieren die Gauß-Krummung.Dann gilt fur die Innenwinkelsumme von ∆
α+ β + γ
> π= π< π
, falls
K > 0K = 0K < 0
.
Beispielsweise ist K = 1 fur die Einheitssphare S2, K = 0 fur die Ebene undK = −1 fur die Pseudosphare.(e) Ist K ≤ 0 im Gebiet G, so schneiden sich zwei mit Bogenlange parametrisier-te, voneinander verschiedene Geodatische in G hochstens einmal. Das kann manwie folgt einsehen. Angenommen die Geodatischen schneiden sich mehr als einmal.Dann entsteht (insbesondere) ein geodatisches 2-Eck (vgl. Abb. 21.5) fur das giltα > 0 und β > 0 (wieso?).
Abbildung 21.5: Geodatisches 2-Eck
Nach obiger Folgerung (b) aus dem Satz von Gauß-Bonnet ist aber
0 ≥∫∫
K dA = α+ β > 0,
ein Widerspruch!
22 Mannigfaltigkeiten (light)
22.1 Definition
Wir wollen im Folgenden den Begriff der regularen Flache verallgemeinern. Bisherwaren unsere Flachen stets Teilmengen von R3. Das ist eine starke Einschrankung,denn geometrische Konfigurationen haben oft mehr als nur zwei Parameter. EinBeispiel ist die Position eines Pendels mit n > 2 Gelenken, vgl. Abb. 22.1. Die Lageist hier durch das n-Tupel (α1, . . . , αn) ∈ [0, 2π]n gegeben. Andere geometrischeObjekte wiederum sind gar nicht erst als Teilmengen eines Rn gegeben, so zumBeispiel der n-dimensionale projektive Raum, den wir in 22.2 genauer betrachten.Das folgende Konzept hat sich im Laufe der Zeit herausgebildet (siehe Anhang C).
98

Abbildung 22.1: Ebenes Pendel mit 3 Gelenken
Definition 4. Eine n-dimensionale topologische Mannigfaltigkeit ist ein topolo-gischer Raum M , der lokal euklidisch ist. Genauer: Es gibt eine Menge von PaarenA := (Mi, ϕi) | i ∈ I von offenen Teilmengen Mi ⊂ M und stetigen Abbildungenϕi : Mi → Rn mit den folgenden Eigenschaften:(a) Die Mengen Mi bilden eine Uberdeckung von M , d. h.
M =⋃i∈I
Mi.
(b) Fur alle i ∈ I ist ϕi : Mi → ϕi(Mi) ⊆ Rn ein Homoomorphismus.
Eine n-dimensionale, topologische Mannigfaltigkeit heißt differenzier-bar, falls zusatzlich gilt
(c) Falls Mi∩Mj 6= ∅, so ist ϕi(Mi∩Mj) offen in Rn und der Kartenwechsel
ϕj ϕ−1i : ϕi(Mi ∩Mj)→ ϕj(Mi ∩Mj)
ist differenzierbar, vgl. Abb. 22.2.
Abbildung 22.2: Kartenwechsel
99
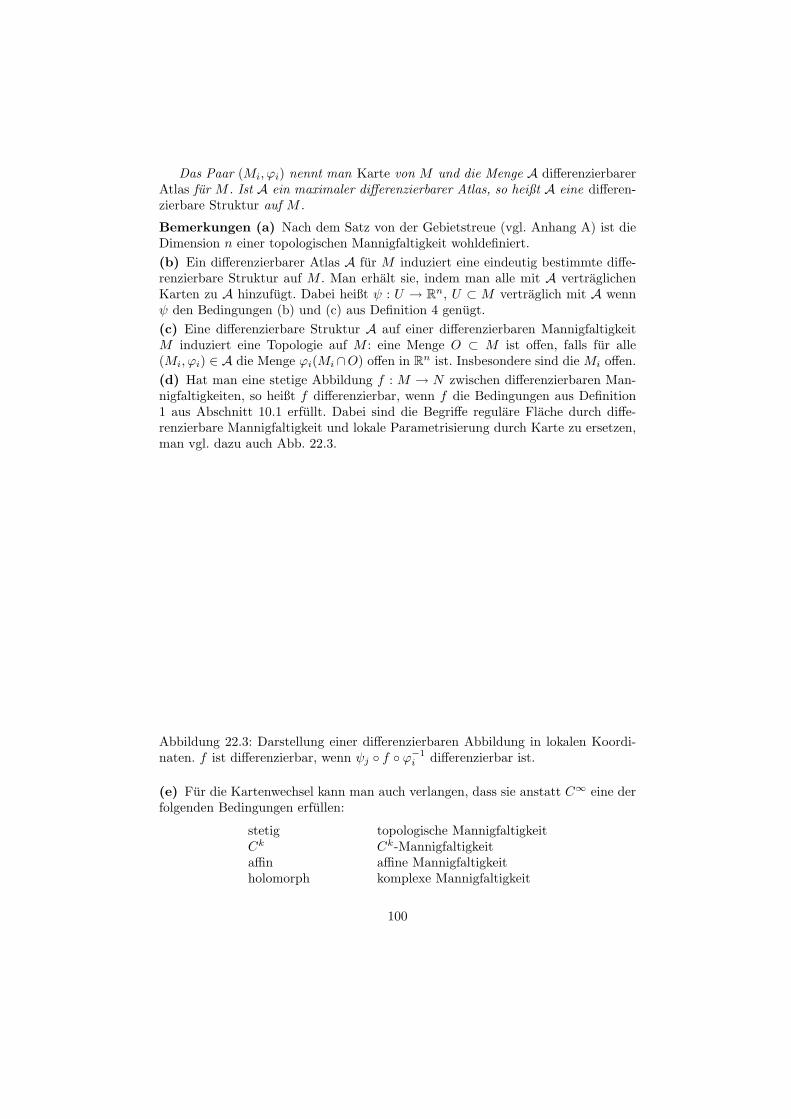
Das Paar (Mi, ϕi) nennt man Karte von M und die Menge A differenzierbarerAtlas fur M . Ist A ein maximaler differenzierbarer Atlas, so heißt A eine differen-zierbare Struktur auf M .
Bemerkungen (a) Nach dem Satz von der Gebietstreue (vgl. Anhang A) ist dieDimension n einer topologischen Mannigfaltigkeit wohldefiniert.(b) Ein differenzierbarer Atlas A fur M induziert eine eindeutig bestimmte diffe-renzierbare Struktur auf M . Man erhalt sie, indem man alle mit A vertraglichenKarten zu A hinzufugt. Dabei heißt ψ : U → Rn, U ⊂ M vertraglich mit A wennψ den Bedingungen (b) und (c) aus Definition 4 genugt.(c) Eine differenzierbare Struktur A auf einer differenzierbaren MannigfaltigkeitM induziert eine Topologie auf M : eine Menge O ⊂ M ist offen, falls fur alle(Mi, ϕi) ∈ A die Menge ϕi(Mi ∩O) offen in Rn ist. Insbesondere sind die Mi offen.(d) Hat man eine stetige Abbildung f : M → N zwischen differenzierbaren Man-nigfaltigkeiten, so heißt f differenzierbar, wenn f die Bedingungen aus Definition1 aus Abschnitt 10.1 erfullt. Dabei sind die Begriffe regulare Flache durch diffe-renzierbare Mannigfaltigkeit und lokale Parametrisierung durch Karte zu ersetzen,man vgl. dazu auch Abb. 22.3.
Abbildung 22.3: Darstellung einer differenzierbaren Abbildung in lokalen Koordi-naten. f ist differenzierbar, wenn ψj f ϕ−1
i differenzierbar ist.
(e) Fur die Kartenwechsel kann man auch verlangen, dass sie anstatt C∞ eine derfolgenden Bedingungen erfullen:
stetig topologische MannigfaltigkeitCk Ck-Mannigfaltigkeitaffin affine Mannigfaltigkeitholomorph komplexe Mannigfaltigkeit
100
Die entsprechenden Objekte erhalten dann die Bezeichnung aus der zweiten Spalte.
Definition 5. Sei (M,A) eine differenzierbare Mannigfaltigkeit. M heißt orien-tierbar, falls man aus A einen Atlas auswahlen kann, so dass die Funktionaldeter-minaten aller Kartenwechsel ϕi ϕ−1
j gleiches Vorzeichen haben.
Eine zweidimensionale Mannigfaltigkeit M in R3, versehen mit der Teilraumto-pologie ist genau dann orientierbar, wenn es ein differenzierbares Einheitsnorma-lenfeld auf M gibt. Denn eine solche Mannigfaltigkeit ist ja nichts anderes als eineregulare Flache.
22.2 Beispiele
(a) 1-dimensionale Mannigfaltigkeiten. Jede zusammenhangende 1-dimensi-onale topologische Mannigfaltigkeit ist homoomorph zu einem Intervall in R oderzur Kreislinie S1 (vgl. z.B. L. Fuhrer, Allgemeine Topologie, Vieweg, 1977, Kap.15.13).(b) Regulare Flachen. Wir betrachten eine regulare Flache S. Die Umkehrab-bildungen lokaler Parametrisierungen bilden einen differenzierbaren Atlas fur S.Die Karten sind hier so gewahlt, dass die von der entsprechenden differenzierbarenStruktur induzierte Topologie gerade die Teilraumtopologie ist.(c) Regulare Flachenstucke. Wir betrachten eine offene Menge U ⊂ R2 und eineinjektive Immersion f : U → R3, d. h. f ist differenzierbar und die Tangentialab-bildung dfp ist injektiv fur alle p ∈ U . Dann ist (f(U), f−1) ein differenzierbarerAtlas fur f(U). Der wesentliche Unterschied zwischen regularen Flachen und re-gularen Flachenstucken ist, dass regulare Flachenstucke im Allgemeinen nicht dieTeilraumtopologie tragen.(d) Die reell projektive Ebene. Wir betrachten die Menge P2 der 1-dimensionalenUntervektorraume von R3, also
P2 :=
[x] |x ∈ R3, x 6= 0.
Definiert man auf R3\0 die Aquivalenzrelation ∼ durch
x ∼ y :⇐⇒ x = λy
mit einem λ 6= 0, so hat man eine bijektive Abbildung zwischen (R3\0)/∼ und P2.Die entsprechende Quotienten-Topologie (siehe Anhang A) ist dann eine naturlicheTopologie auf P2. Schrankt man die obige Aquivalenzrelation auf S2 ein, so werdengenau die Antipodenpunkte identifiziert, d.h. ∼ auf S2 ist definiert durch
x ∼ y :⇐⇒ x = ±y.
Wir erhalten also P2 ∼= S2/∼. Es sei V3 die obere offene Hemisphare von S2. Wirdefinieren ρ3 : V3 → R2 durch (x1, x2, x3) 7→ (x1, x2). Dann ist ρ3 injektiv und
101
ρ3(V3) ist die offene Einheitskreisscheibe B1(0) in R2. Es sei nun π : S2 → P2
definiert durch x 7→ [x]. Weiter sei M3 := π(V3). Dann ist
ϕ3 : M3 → R2, [x] 7→ (ρ (π|V3)−1)([x])
injektiv und ϕ3(M3) = B1(0). Wir betrachten nun die offenen Hemispharen V1 :=x ∈ S2 |x1 > 0
und V2 :=
x ∈ S2 |x2 > 0
. Fur diese konstruieren wir analo-
ge Abbildungen ϕ1 : M1 → R2 und ϕ2 : M2 → R2, dabei ist Mi := π(Vi). DieDefinitionsbereiche dieser Abbildungen uberdecken P2 und die Bilder dieser Abbil-dungen sind offen. Weiter ist (Mi, ϕi) | i = 1, 2, 3 ein differenzierbarer Atlas vonP2 (Ubung!), der seinerseits eine differenzierbarer Struktur auf P2 induziert.Ubungsaufgabe: Ersetzt man die orthogonalen Projektionen durch passende stereo-graphische Projektionen, so ergibt sich ein differenzierbarer Atlas fur P2, der diegleiche differenzierbare Struktur induziert.
23 Klassifikationssatz fur kompakte2-Mannigfaltigkeiten
23.1 Chirurgie
Aus gegebenen topologischen Raumen kann man durch “verkleben” neue konstru-ieren. Der anschauliche Begriff des Verklebens wird dabei durch eine Aquivalenzre-lation prazisiert.
Wir wollen einen Spezialfall genauer beschreiben. Dazu sei X ein topologischerRaum und α : X → X ein Homoomorphismus. Die Menge X × [0, 1] sei mit derProdukt-Topologie versehen. Auf dieser Menge definieren wir eine Aquivalenzrela-tion∼ durch (x, 0) ∼ (α(x), 1) fur x ∈ X und (x, t) ∼ (x, t) fur x ∈ X und 0 < t < 1.Die Menge der Aquivalenzklassen (X× [0, 1])/α wird mit der Quotienten-Topologieversehen. Anschaulich werden gegenuberliegende Seiten des “Rechtecks” X × [0, 1]so verklebt, wie es der Homoomorphismus α angibt, vgl. Abb. 23.1.
Abbildung 23.1: Selbstverkleben von X × [0, 1]
Beispiele (a) (Zylinder) Wir betrachten X = [−1, 1] und α(x) = x. Wir ver-kleben also ein Paar sich gegenuberliegender Seiten. Genauer betrachten wir dieAquivalenzrelation ∼ mit den Klassen
(x, 0), (x, 1) |x ∈ [−1, 1] und (x, t) |x ∈ [−1, 1], t ∈ (0, 1) .
102
Dieser Quotientenraum wird schematisch wie in Abb. 23.2 dargestellt. Der entspre-
Abbildung 23.2: Die mit Pfeilen markierten Seiten werden verklebt.
chende Quotientenraum (X× [0, 1])/α ist homoomorph zu einem Rotationszylinder(Ubungsaufgabe!).(b) (Torus) Wir betrachten das Einheitsquadrat Q = [0, 1]2. Wir verkleben ge-genuberliegende Rander dieses Quadrats, vgl. Abb. 23.3, d.h. wir verkleben zuerst
Abbildung 23.3: Selbstverkleben des Einheitsquadrats zum Torus
etwa die obere und untere Kante (der Zylinder entsteht), und danach die vertikalenKanten, die jetzt Kreise sind. Ubung: Man zeige, dass Rotationstorus und das wieoben verklebte Einheitsquadrat homoomorph sind.(c) (Mobiusband) Das Mobiusband entsteht, indem man ein Rechteck wie inAbb. 23.4 verklebt. Die Pfeile in entgegengesetzter Richtung deuten dabei an, dass
Abbildung 23.4: Mobiusband
die Seiten so zu identifizieren sind, dass beim Verkleben die Pfeile wieder in diegleiche Richtung zeigen. Formal haben wir X = [−1, 1] und α(x) = −x.(d) Klein’sche Flasche. Die Klein’sche Flasche entsteht aus einem Rechteckdurch Verkleben wie in Abbildung 23.5.
103

Abbildung 23.5: Die Klein’sche Flasche
Es seien X und Y topologische Raume, X0 ⊂ X ein Teilraum und ϕ : X0 → Yeine stetige Abbildung. Es bezeichene Y ∪ϕX den Quotientenraum X+Y/ ∼ nachder von x ∼ ϕ(x) fur alle x ∈ X0 erzeugten Aquivalenzrelation auf der topologischenSumme X + Y . Man sagt dann, Y ∪ϕ X entstehe durch Anheften von X an Ymittels der Anheftungsabbildung ϕ (oder auch: Y ∪ϕ X entsteht aus X + Y durchIndentifizieren der Punkte x ∈ X0 mit ihren Bildpunkten ϕ(x) ∈ Y ).
Beispiele (a) Verkleben von 2 Henkeln. Wir betrachten zunachst einen Torusund stanzen eine offene Kreisscheibe aus. Wir erhalten einen topologischen Raum,der als Henkel bezeichnet wird. Haben wir nun zwei Kopien solcher Henkel, so ver-
Abbildung 23.6: Verkleben von zwei Henkeln
kleben wir entprechende Punkte der Randkreise (es ist also ϕ = id). Das Ergebnisist der in Abb. 23.6 dargestellte Raum.(b) Sphare mit Henkel. Stanzt man aus einer Sphare eine offene Kreisscheibeaus, so kann man langs des Randkreises einen Henkel anheften, vgl. Abb. 23.7.Eine Sphare mit einem Henkel ist homoomorph zu einem Torus. Diesen Prozesskann man wiederholen und so mehrere Henkel an eine Sphare anheften.(c) Die projektive Ebene. Wir betrachten nochmals die projektive Ebene P2.Wir wollen hier skizzieren, wie man P2 erhalt, wenn man ein Mobiusband und eineabgeschlossene Kreisscheibe auf bestimmte Art miteinander verklebt. Es sei S dieobere abgeschlossene Hemisphare von S2. Man erhalt daraus P2 als topologischenRaum, wenn man gegenuberliegende Punkte auf der Einheitskreislinie (Aquator)verklebt. Dieser Quotientenraum ist aber homoomorph zu einer abgeschlossenenEinheitskreisscheibe, auf der gegenuberliegende Randpunkte verklebt werden. Manmuss dazu die obere Hemisphare lediglich “flachdrucken”. Wir wollen diesen Fak-torraum (vgl. Abb. 23.8 links) auf eine andere Art konstruieren. Wir betrachten dieEinheitskreisscheibe D und zerschneiden/verkleben diese wie in Abb. 23.8 rechts.Die beiden Raume in Abb. 23.8 sind dann homoomorph. Wir deformieren nun die
104

Abbildung 23.7: Sphare mit Henkel
Abbildung 23.8: Verkleben der projektiven Ebene I
Abbildung 23.9: Verkleben der projektiven Ebene II
ausseren Teile der zerschnittenen Kreisscheibe wie in Abb. 23.9 links. Dann ver-kleben wir zuerst das Rechteck zum Mobiusband und die beiden ubrigen Teile zueiner Kreisscheibe. Schließlich erhalten wir P2, indem wir die Kreisscheibe an dasMobiusband anheften.(d) Die Klein’sche Flasche. Die Klein’sche Flasche entsteht durch Verklebenvon zwei Mobiusbandern (vgl. K. Janich, Topologie, S.60).
23.2 Der Klassifikationssatz
Unter einer 2-Mannigfaltigkeit verstehen wir hier eine 2-dimensionale, zusammenhan-gende topologische Mannigfaltigkeit. Die kompakten 2-Mannigfaltigkeiten kann manvollstandig auflisten. Einen Beweis des folgenden Satzes findet man z.B. im Buchvon Ossa, Kap. 3.8.
105
Satz 3 (Klassifikationssatz). Es sei M eine kompakte 2-Mannigfaltigkeit. Dann gilt(a) Ist M orientierbar, so gibt es ein g ∈ N ∪ 0, so dass M homoomorph
zu einer 2-Sphare mit g Henkeln ist.(b) Ist M nicht orientierbar, so gibt es ein g ∈ N, so dass M homoomorph
zu einer 2-Sphare mit g ≥ 1 aufgesetzten Mobiusbandern ist.Die Zahl g heißt Geschlecht von M . Zwei kompakte 2-Mannigfaltigkeiten sind genaudann homoomorph, wenn sie vom gleichen Geschlecht und beide orientierbar (bzw.nicht orientierbar) sind.
Beispiele (a) Die Sphare S2 ist orientierbar und hat Geschlecht g = 0. Der Torusist ebenfalls orientierbar und hat Geschlecht g = 1.(b) Die projektive Ebene ist nicht orientierbar und vom Geschlecht g = 1. DieKlein’sche Flasche ist nicht orientierbar und vom Geschlecht g = 2.
24 Satz von Gauß-Bonnet (Globale Version)
24.1 Triangulierungen
Wir benotigen hier einige Begriffe und Satze aus der algebraischen Topologie, diewir ohne Beweise angeben. Sei ∆ das Standard 2-Simplex, also ∆ := (x1, x2, x3) ∈R3 | x1 + x2 + x3 = 1 und 0 ≤ xi ≤ 1, i = 1, 2, 3.Definition 6. Es sei M eine kompakte, orientierbare 2-Mannigfaltigkeit. Eine Tri-angulierung von M ist eine endliche Familie
σk : ∆→ σk(∆) ⊂M (k = 1, . . . , n)
von orientierungserhaltenden Diffeomorphismen σk (d.h. σk hat positive Funktio-naldeterminante), fur die gilt:(a) Die Simplices (oder Dreiecke) σk(∆) bilden eine Uberdeckung von M ,
M =n⋃k=1
σk(∆).
(b) Ist σk(∆) ∩ σj(∆) 6= ∅, dann haben σk(∆) und σj(∆) entweder genaueine Kante oder genau eine Ecke gemeinsam.
Satz 4. Jede kompakte, orientierbare 2-Manngifaltigkeit M mit gegebenem AtlasA besitzt eine Triangulierung σk : ∆ → M (k = 1, . . . , n), so dass jedes simplexσk(∆) ganz im Definitionsbereich einer Karte von A enthalten ist.
Einen Beweis dieses Satzes findet man z.B. in J. Munkres, Elemenatry differen-tial topology, Princeton, 1966.
Definition 7. Die Euler-Poincare Charakteristik einer Triangulierung T von Mist definiert als
χ(M,T ) := #Ecken−#Kanten + #Flachen,
(dabei steht # fur “Anzahl”).
106
Satz 5. Die Euler-Poincare Charakteristik einer kompakten, orientierbaren 2-Man-nigfaltigkeit M ist unabhangig von der Triangulierung T , und es gilt
χ(M) = 2− 2g,
wobei g das Geschlecht von M ist.
Aus Satz 3 und Satz 5 folgt
Korollar 1. Die Euler Charakteristik χ(M) ist eine topologische Invariante undzwei kompakte, orientierbare 2-Mannigfaltigkeiten M1 und M2 sind genau dannhomoomorph, wenn χ(M1) = χ(M2) gilt.
Beispiele (a) Wir betrachten die Sphare S2. Der Sphare sei ein Tetraeder einbe-schrieben, vgl. Abb. 24.1. Man “projiziert” die Seiten dieses Tetraeders auf S2 und
Abbildung 24.1: Triangulierungen von S2 und T 2
erhalt dadurch eine Triangulierung. Es ergibt sich damit χ(S2) = 4− 6 + 4 = 2.(b) Es sei T 2 der Torus. Durch die wie in Abb. 24.1 angedeutete Triangulierungdes Rechtecks erhalt man eine Triangulierung von T 2. Es gilt also χ(T 2) = 9−27+18 = 0. Entfernt man aus dieser Triangulierung eine Flache, so erhalt man eineTriangulierung eines Henkels. Die Euler-Poincare Charakterisktik eines Henkels istalso χ(T 2)− 1 = −1.
24.2 Der Satz von Gauß-Bonnet
Wir konnen nun eine globale Version des Satzes von Gauß-Bonnet formulieren.
Satz 6 (Gauß-Bonnet, globale Version). Es sei M ⊂ R3 eine kompakte, orientier-bare 2-Mannigfaltigkeit. Dann gilt∫∫
M
K dA = 2πχ(M).
Bemerkungen (a) Der Satz gilt allgemeiner fur jede kompakte, orientierbare 2-Mannigfaltigkeit M mit einer Riemannschen Metrik (M braucht also nicht unbe-dingt als Teilmenge von R3 gegeben zu sein). Dazu muss man aber alle Begriffe wieKrummung, Parallelverschiebung, Flacheninhalt usw. zuerst entsprechen verallge-meinern (vgl. dazu die Vorlesung “Riemannschen Geometrie”).
107
(b) Ist M eine kompakte, orientierbare 2-Mannigfaltigkeit, die homoomorph zu S2
ist, so gilt stets ∫∫M
K dA = 4π.
(c) Ist M eine kompakte, orientierbare 2-Mannigfatigkeit mit K > 0, so ist Mhomoomorph zu S2. Aus dem Satz von Gauß-Bonnet und Satz 5 folgt namlich
2− 2g = χ(M) =1
2π
∫∫M
K dA > 0,
also g = 0. Nach dem Klassifikationssatz ist dann M homoomorph zu S2.
Beweisskizze zu Satz 6: Wir wahlen eine Triangulierung σj : ∆ → M, (j =1, . . . , f) von M , so dass jedes Dreieck σj(∆) ganz in einem Parallelkoordinaten-Gebiet liegt. Wir orientieren die Dreiecke so, dass ihre Orientierung mit derjenigender Mannigfaltigkeit M ubereinstimmt. Es bezeichne e die Anzahl der Ecken, k dieAnzahl der Kanten und f die Anzahl der Flachen dieser Triangulierung. Nach demlokalen Satz von Gauß-Bonnet gilt fur j = 1, . . . , f∫∫
σj(∆)
K dA = −∫∂(σj(∆))
κg dt+3∑i=1
α(j)i − π.
Wir summieren nun uber alle j und erhalten∫∫M
K dA =f∑j=1
∫∫σj(∆)
K dA = −f∑j=1
∫∂(fj(∆))
κg dt+ e2π − fπ.
Jede Kante erscheint in dieser Summe 2 mal, aber gegenlaufig orientiert (so dasssich das Vorzeichen der geodatischen Krummung jeweils umkehrt, vgl. Definition10 in 20.3). Damit ergibt sich∫∫
M
K dA = e2π − fπ.
Jede Dreiecksflache hat 3 Kanten und jede Kante berandet genau 2 Flachen, alsoist 3f = 2k. Somit folgt schließlich∫∫
M
K dA = 2πe− fπ = 2π(e− 32f + f) = 2π(e− k + f) = 2πχ(M).
108
Anhang
A Einige Grundbegriffe der Topologie
Ein topologischer Raum ist ein Paar (X, T ) bestehend aus einer Menge X undeinem System T von Teilmengen von X, so dass gilt:
(1) X und ∅ sind in T ,(2) der Durchschnitt von endlich vielen und die Vereinigung von beliebig vielen
Mengen aus T ist wieder in T .
Das Teilmengensystem T nennt man eine Topologie von X. Die Elemente vonT heißen offene Teilmengen von X. Eine Menge A ⊂ X ist abgeschlossen inX genau dann, wenn ihr Komplement offen ist.
Eine Basis von T ist eine Teilmenge B ⊂ T , so dass fur jede offene MengeV ∈ T gilt V =
⋃i∈I Vi mit Vi ∈ B.
Ubung: Rn und Cn haben eine abzahlbare Basis.
Sei x ∈ X. Eine Teilmenge U ⊂ X heißt Umgebung von x ∈ X, wenn eseine offene Menge V gibt mit x ∈ V ⊂ U . Ein topologischer Raum erfullt dasHausdorffsche Trennungsaxiom oder ist hausdorffsch, wenn zu je zwei ver-schiedenen Punkten disjunkte, offene Umgebungen existieren.
Eine Teilmenge Y ⊆ X eines topologischen Raumes ist selbst wieder ein topolo-gischer Raum versehen mit der Teilraum-Topologie: Eine Menge U ⊆ Y ist offengenau dann, wenn es eine offene Menge V von X gibt mit V ∩ Y = U .
Ubung: Sei X hausdorffsch mit abzahlbarer Basis. Dann ist jeder TeilraumY ⊂ X auch hausdorffsch mit abzahlbarer Basis.
Die topologische Summe von zwei topologischen Raumen X und Y ist diedisjunkte Vereinigung X + Y versehen mit der TopologieU + V | U offen in X,V offen in Y .Eine Abbildung zwischen topologischen Raumen, f : X −→ Y , heißt stetig,
falls die Urbilder von offenen Mengen in Y offen sind in X. Die Abbildung f :X −→ Y heißt offen, falls Bilder von offenen Mengen in X offen sind in Y . Einebijektive Abbildung f : X −→ Y , fur die sowohl f als auch ihre Umkehrabbildungf−1 : Y −→ X stetig sind, heißt Homoomorphismus.
Ein metrischer Raum ist ein Paar (X, d), bestehend aus einer Menge X undeiner Abbildung d : X ×X −→ R, so dass fur alle x, y, z ∈ X gilt:
(1) d(x, y) ≥ 0 und d(x, y) = 0⇐⇒ x = y.(2) d(x, y) = d(y, x),(3) d(x, z) ≤ d(x, y) + d(y, z).
Ein metrischer Raum (X, d) ist auch ein topologischer Raum. Die Topologiewird wie folgt konstruiert: eine Menge O ⊂ X ist offen, falls fur alle p ∈ O ein
109

ε = ε(p) > 0 existiert, so dass der Ball um p mit Radius ε ganz in O enthalten ist:Bε(p) := q ∈ X | d(p, q) < ε ⊂ O.
Eine Teilmenge Y ⊆ X eines topologischen Raumes heißt kompakt, wenn jedeUberdeckung von Y durch offene Mengen eine endliche Teiluberdeckung enthalt: IfY =
⋃i∈I Ui, then there are i1, . . . , in ∈ I such that Y =
⋃nk=1 Uik .
Ein topologischer Raum X heißt zusammenhangend, wenn er sich nicht inzwei nichtleere, disjunkte, offene Teilmengen zerlegen lasst (oder, aquivalent, wennX und ∅ die einzigen zugleich offenen und abgeschlossenen Teilmengen sind).
Ubung: Stetige Bilder von kompakten Mengen sind kompakt. Stetige Bildervon zusammenhangenden Mengen sind zusammenhangend.
Seien X und Y topologische Raume. Eine Teilmenge W ⊆ X × Y heißt offenin der Produkt-Topologie, wenn es zu jedem Punkt (x, y) ∈ W Umgebungen Uvon x in X und V von y in Y gibt, so dass U × V ⊆W .
Sei X ein topologischer Raum und ∼ eine Aquivalenzrelation auf X. Wir be-zeichnen mit [x] := y ∈ X| y ∼ x die Aquivalenzklasse von x. Weiter bezeichneX/ ∼ die Menge der Aquivalenzklassen und π : X −→ X/ ∼; x 7→ [x] die naturli-che Projektion. Die Quotienten-Topologie auf X/ ∼ ist so definiert: U ⊂ X/ ∼ist offen genau dann, wenn π−1(U) offen ist in X (π ist dann stetig).
Satz von der Gebietstreue: Ist U ⊆ Rn offen und f : U −→ Rn eine injektiveund stetige Abbildung, so ist f(U) ⊂ Rn auch offen.
Einen Beweis dieses Satzes findet man z.B. im Buch von Alexandroff und Hopf,Kap. X.2., oder im Buch von Ossa, Kap. 5.6.
Korollar Fur m 6= n ist Rm nicht homoomorph zu Rn.
Beweis-Skizze. Ist etwa m < n so ist (x1, . . . , xm) 7−→ (x1, . . . , xm, 0, . . . , 0) eineinjektive, stetige Abbildung von Rm auf eine nicht offene Teilmenge von Rn. Warenun Rn homoomorph zu Rm, so ergibt sich ein Widerspruch zum Satz von derGebietstreue.
Literaturhinweise
• P. Alexandroff, H. Hopf, Topologie I, Springer Verlag, 1935.
• K. Janich, Topologie, Springer, 1994.
• E. Ossa, Topologie, Vieweg, 1992.
• I.M. Singer, J. Thorpe, Lecture Notes on Elementary Topology and Geometry,Springer, 1967.
110
B Fragen zur Lernkontrolle
1. Kurven: Was ist eine parametrisierte Kurve? Wie ist ein Tangentialvektor aneine Kurve definiert? Beispiel? Gegenbeispiel? Was heißt und wozu braucht manden Begriff “regular” im Zusammenhang mit Kurven? Wieso ist die Lange einerKurve ein geometrischer Begriff? Was charakterisiert die Bogenlange als Parame-ter? Welche Kurven kann man immer mit Bogenlange parametrisieren? Welcheebenen Kurven haben konstante Krummung? Wie lauten die Ableitungsgleichun-gen von Frenet fur ebene Kurven bzw. fur Raumkurven? Was besagt der Hauptsatzder (lokalen) Kurventheorie fur Raumkurven? Was ist die zentrale Idee des Bewei-ses? Wieviel Differenzierbarkeit muss man voraussetzen? Was versteht man unterHauptnormale, Binormale und Schmiegebene? Wie ist die Torsion definiert? Gibtes Raumkurven mit konstanter Krummung und beliebig vorgegebener Torsion? Bei-spiel einer Kurve mit Krummung 4 und Torsion 10? Was besagt der Umlaufsatzvon Hopf?
2. Flachen: Was ist eine regulare Flache(=rF) in R3? Was versteht man untereiner lokalen Parametrisierung einer rF? Wie sind Tangentialebenen und Tangenti-alvektoren von rF definiert? Wann ist die Niveaumenge f−1(a) einer Funktion einerF? Beweis? Was ist die erste Fundamentalform einer rF? Wie verhalt sich die ersteFundamentalform unter Koordinatentransformationen?
3. Krummung: Was versteht man unter der Gauß- bzw. der Weingarten-Abbildung? Beispiele? Was fur eine wichtige (linear-algebraische) Eigenschaft hatdie Weingarten-Abbildung? Wie ist die 2. Fundamentalform definiert und wie kannman sie geometrisch interpretieren? Definition der Gauß-Krummung und der mitt-leren Krummung? Was ist der Zusammenhang dieser Großen mit der Normal-krummung und den Hauptkrummungen? Wie lauten die Formeln fur H und K?Wie nennt man rF mit H = 0 und was ist die geometrische Interpretation davon?
4. Innere Geometrie: Was ist eine Isometrie (lokal, global) von rF? Bei-spiele? Gegenbeispiele? Wie berechnet man den Flacheninhalt einer rF? Was sindChristoffel-Symbole? Was besagt das “theorema egregium”? Wie ist die kovarianteAbleitung eines Vektorfeldes auf einer rF in eine gegebene Richtung definiert? Bei-spiele fur Großen der inneren Geometrie? Ist die kovariante Ableitung eine solcheGroße? Wie findet man die Formel dafur? Was ist die kovariante Ableitung in dereuklidischen Ebene R2? Was ist eine Geodatische? Weitere Charakterisierungenvon Geos? Wie lauten die Differentialgleichungen fur Geodatische und wie leitetman sie her? Was besagt der Satz uber die lokale Existenz und Eindeutigkeit vonGeodatischen? Beispiele von Geos auf Rotationsflachen? Wie lautet der Satz vonClairaut? Was ist der Zusammenhang zwischen Geodatischen und kurzesten Verbin-dungskurven auf rF? Beweisidee? Was sind geodatische Parallelkoordinaten? Wassind Fermi-Koordinaten? Wie sieht die 1. Fundamentalform in solchen Koordinatenaus? Wie lautet die Formel fur die Gauß-Krummung in geodatischen Parallelkoor-
111
dinaten? Was ist ein paralleles Vektorfeld? Wie ist die Parallelverschiebung langseiner Kurve definiert und was hat sie fur eine wichtige Eigenschaft? Was verstehtman unter der geodatischen Krummung einer Flachenkurve? Besteht ein Zusam-menhang zwischen der geodatischen Krummung und der Parallelverschiebung? Washat die geodatische Krummung mit Geodatischen zu tun?
5. Satz von Gauß-Bonnet: Was versteht man unter der Orientierung ei-ner rF bzw. allgemeiner einer 2-Mannigfaltigkeit? Was ist eine differenzierbare 2-Mannigfaltigkeit? Was versteht man unter dem Geschlecht und der Euler-Charakte-ristik einer kompakten, orientierbaren 2-Mannigfaltigkeit? Klassifikationssatz? Wielautet die lokale und wie die globale Version des Satzes von Gauß-Bonnet und wassind die Beweisideen? Anwendungen (z.B. auf geodatische Dreiecke in Flachen mitkonstanter Gauß-Krummung)?
112

C Historische Anmerkungen
Kurven und Flachen im dreidimensionalen euklidischen Raum gehoren zu den klas-sischen Gegenstanden der Geometrie. Die Methoden der analytischen Geometrieund der Differentialrechnung wurden seit ihrer Erfindung systematisch auch zurUntersuchung von Kurven und Flachen eingesetzt (u.a. im 18. Jahrhundert vonL. Euler). Erst um 1827 jedoch hat Carl-Friedrich Gauß (1777-1855) die Diffe-rentialgeometrie grundlegend verandert und durch seine Entdeckungen den Wegzum abstrakten und fundamentalen Konzept einer differenzierbaren Mannigfaltig-keit aufgezeigt. In seinem beruhmten “theorema egregium” hat Gauß nachgewiesen,dass es ein Maß fur die Krummung einer Flache gibt (heute als Gauß-Krummungbezeichnet), das nur von der Moglichkeit einer Langenmessung von Kurven auf derFlache abhangig ist (1. Fundamentalform). Durch diese Entdeckung einer “intrin-sischen” oder “inneren” Geometrie (also unabhangig von der Gestalt der Flache imumgebenden Raum) wurde das abstrakte Konzept einer 2-Mannigfaltigkeit denk-bar, auf der eine beliebige Langenmessung vorgegeben ist.
Weiter gefordert wurden solche Vorstellungen durch die Entdeckung von nicht-euklidischen Geometrien durch Janos Bolyai (1802-1860) und unabhangig von Ni-kolai Iwanowitsch Lobachefskij (1793-1856) um 1830. In einer nicht-euklidischen(d.h. elliptischen oder hyperbolischen) Geometrie gelten alle “Postulate” von Eu-klid ausser dem Parallelenaxiom. Letzteres besagt, dass es durch einen Punkt p,welcher nicht auf einer Geraden L liegt, genau eine zu L parallele Gerade gibt. DieMoglichkeit von widerspruchsfreien Geometrien, in denen das Parallelenaxiom nichtgilt, war auch Gauß bekannt. Er hat seine Einsichten jedoch nicht veroffentlicht(wohl um Konflikte philosophischer Art zu vermeiden).
Der entscheidende Paradigmenwechsel gelang schließlich Berhard Riemann (1826-1866). In seinem Habilitationsvortrag in Gottingen im Jahre 1854 fuhrte er den Be-griff einer “Mannigfaltigkeit” ein als einer “mehrfach ausgedehnten Große”, die lokalso “aussieht” wie Rn. Er machte klar, wie in einem solchen Raum viele verschiedeneLangenmessungen definiert werden konnen (heute sogenannte Riemannsche Metri-ken). Damit hat er insbesondere topologische (d.h. nur von der gegebenen Man-nigfaltigkeit abhangige) und metrische (d.h. durch die gewahlte Langenmessungbestimmte) Eigenschaften klar unterschieden. Weiter zeigte er, dass sich sowohl dieeuklidische Geometrie als auch die nicht-euklidischen Geometrien als Spezialfallevon Riemannschen Geometrien auffassen lassen.
In der zweiten Halte des 19. Jahrhunderts haben zahlreiche weitere wichtigeEntwicklungen stattgefunden. Vom Standpunkt der modernen Differentialgeometrieund der Theorie der Mannigfaltigkeiten aus gesehen besonders bedeutend ist dasmonumentale Werk von Henri Poincare (1854-1912). Verschiedene Konzepte, die ereinfuhrte und Fragen, die er stellte, waren richtungsweisend fur die Weiterentwick-lung dieses Gebietes im 20. Jahrhundert. So benutzte er z.B. (Homotopie-)Gruppen,um topologische Invarianten von Mannigfaltigkeiten zu bestimmen und unterstrichdie Bedeutung von Mannigfaltigkeiten im Studium von dynamischen Systemen.Die beruhmte Poincare-Vermutung besagt, dass eine geschlossene, einfach zusam-menhangende 3-dimensionale Mannigfaltigkeit homoomorph zu einer 3-Sphare ist.
113
Fur die Losung dieses Problems wurde im Jahr 2000 ein Preisgeld von einer MillionDollar ausgesetzt (vgl. www.claymath.org/millennium). Momentan (Februar 2004)diskutieren Experten gerade uber die Vollstandigkeit eines schwierigen, von GrishaPerelman vorgelegten “Beweises”.
Von besonderer Bedeutung fur die weitere Entwicklung des Mannigfaltigkeitsbe-griffs und die Mathematik des 20. Jahrhunderts insgesamt war die Entstehung derTheorie der Lie-Gruppen (das sind Gruppen, die gleichzeitig auch Mannigfaltigkei-ten sind). Nach deren Einfuhrung durch Sophus Lie (1842-1899) gegen Ende des 19.Jahrhunderts haben vor allem Elie Cartan (1869-1951) und Hermann Weyl (1885-1955) wichtige Beitrage geleistet. Lie-Gruppen bilden heute einen zentralen Gegen-stand mathematischer Forschung. Schon in seinem Erlanger Programm von 1878hatte Felix Klein (1849-1925) den engen Zusammenhang zwischen Gruppentheorieund Geometrie betont (via Symmetrien). Alle diese Beitrage fuhrten zusammen mitdem Entstehen der Topologie zu einer zunehmenden Klarung der Begriffe, so dassdie Theorie der Mannigfaltigkeiten heute hochentwickelt und fur weite Bereiche derMathematik und der Physik fundamental ist (z.B. Differentialgeometrie, Riemann-sche Geometrie, Relativitatstheorie, Quanten(feld)theorie, Analysis, Lie-Gruppen,algebraische Geometrie).
Literaturauswahl:
• P. Dombrowski, 150 years after Gauß, Asterisque, 62, Soc. Math. de France,1979.
• H. Meschkowski, Mathematiker-Lexikon, Bibl. Inst. Mannheim, 1980.
• E. Scholz, Die Geschichte des Mannigfaltigkeitsbegriffs von Riemann bis Poin-care, Birkhauser, 1980.
• M. Spivak, How to read Gauß, Kapitel 3A in: A Comprehensive Introductionto Differential Geometry, Bd. II.
• M. Spivak, What did Riemann say?, Kapitel 4B in: A Comprehensive Intro-duction to Differential Geometry, Bd. II.
.
114

D Literaturauswahl
• M. Berger, B. Gostiaux, Differential Geometry: Manifolds, Curves andSurfaces, Graduate texts in Mathematics 115, Springer Verlag, 1978.
Die Vorlesungen “Differentialgeometrie” und “Riemannsche Geometrie” fuhren von
speziellen zu allgemeinen Konzepten. Das Buch von Berger beschreibt den umge-
kehrten Weg. Es beginnt mit Mannigfaltigkeiten und behandelt Kurven und Flachen
dann als spezielle Beispiele von solchen.
• W. Blaschke, K. Leichtweiß, Elementare Differentialgeometrie, SpringerVerlag, 1973
Enhalt viele Themen, die moderne Differentialgeometrie-Lehrbucher eher vernachlassigen
(z.B. isoperimetrische Ungleichungen). Eine Fundgrube fur viele Beispiele von spe-
ziellen Klassen von Kurven und Flachen. Trotz des Titels geht das Buch weit uber
den Stoff der Vorlesung hinaus.
• M. do Carmo, Differentialgeometrie von Kurven und Flachen, Vieweg Stu-dium, Aufbaukurs Mathematik, 3. Aufl. 1993.
Ebenfalls ein Buch, dessen Inhalt dem Stoff der Vorlesung entspricht. Wie auch in
der Vorlesung wird vor allem Wert auf die geometrischen Ideen und weniger auf den
Formalismus gelegt.
• J. Casey, Exploring curvature, Vieweg Verlag, 1996.
Ein sehr originelles Buch! Beschrieben sind u.a. einfache Experimente durch die
die intrinsische Geometrie von Flachen (Krummung, PV, Geos etc.) anhand von
physikalischen Gegenstanden (z.B. Kartoffeln oder Wassermelonen) erforscht werden
kann.
• A. Gray, Differentialgeometrie, Spektrum Verlag, 1994
Differentialgeometrie mit “Mathematica”.
• W. Kuhnel, Differentialgeometrie, Kurven - Flachen - Mannigfaltigkeiten,Vieweg Studium, Aufbaukurs Mathematik, 1999.
Eine Spezialitat dieses Textes:, neben Kurven und Flachen im Euklidischen Raum
werden auch solche im Minkowski-Raum (der grundlegend ist fur die spezielle Rela-
tivitatstheorie) behandelt. Außerdem hat das Buch zwei Teile: der 1. Teil entspricht
der Vorlesung Differentialgeometrie wahrend der 2. Teil die Riemannsche Geometrie
behandelt.
115

• W. Klingenberg, A Course in Differential Geometry, Graduate texts inMathematics 51, Springer Verlag, 1978.
Die Ubersetzung eines Klassikers! (in Deutsch wohl nur noch antiquarisch erhaltlich
als Heidelberger Taschenbuch). In relativ knapper, aber sehr praziser Form werden
neben dem Stoff der Vorlesung auch gleich noch Konzepte der Riemannsche Geo-
metrie behandelt. Besonders interessant sind die vielen Anmerkungen. Klingenberg
(geb. 1924) ist ebenso wie Berger (geb. 1927) ein einflussreicher Differentialgeometer
des 20. Jahrhunderts.
• H. Reckziegel, M. Kriener, K. Pawel, Elementare Differentialgeometriemit Maple, Vieweg Verlag, 1998.
Die Autoren entwickeln die Begriffe und Resultate der Differentialgeometrie im
Wechsel mit Maple-Programmpaketen. Die zahlreichen so erstellten Graphiken ver-
tiefen das Verstandnis der Theorie. Etwas weniger benutzerfreundlich als das Buch
von Gray.
• M. Spivak, A comprehensive introduction to differential geometry, vol. 2 undvol 3., Publish or perish, 1998.
Spivak wollte um 1970 “Das Große Buch der Differentialgeometrie” schreiben. Ob-
wohl es 5 dicke Bande umfasst, ist es unvollstandig geblieben. Der 1. Band be-
handelt Mannigfaltigkeiten. Der 2. Band enthalt (u.a.) historische Teile (z.B. ein
Kapitel “How to read Gauss”). Funf Bucher fur Leser mit viel Zeit (man wird aller-
dings auch belohnt). Das Besondere bei Spivak: es wird viel motiviert (was in der
mathematischen Literatur leider eher selten ist).
116
Index
Aussenwinkel, 92
begleitendes 2-Bein, 11Bewegung, 1Binormale, 14Bogenlange, 7Bogenlangeparameter, 7
Christoffel-Symbole, 65
Darboux-Bein, 64Differential, 23differenzierbare Struktur, 99differenzierbarer Atlas, 99differenzierbares Vektorfeld, 67Drehflachen, 33
Ecke, 92Einheitsnormalenvektor, 41erste Variation des Flachenfunktionals,
57erste Variation des Langenfunktionals, 74euklidische Isometrie, 1euklidischer Vektorraum, 1Euler-Poincare Charakteristik, 106
Fermi-Koordinaten, 79Flache
orientierbare, 41regulare, 24
Flachenelement, 56Flacheninhalt, 56Flachenkurve
einfach geschlossene, 92Frenet-Bein, 14Frenet-Kurven, 17Fundamentalform
erste, 34zweite, 44
Gauß-Abbildung, 42Gauß-Formel, 66Gauß-Krummung, 51
Gebieteinfaches, 95
Geodatische, 69geodatische Krummung, 87Geodatische Parallelkoordinaten, 79geodatische Polarkoordinaten, 83geodatisches Polygon, 97Geschlecht, 106Graph einer Funktion, 29
Hauptkrummungen, 50Hauptkrummungsrichtungen, 50Hauptnormale, 14Helikoid, 58Helix, 4
Immersion, 101Isometrie
euklidische, 1zwischen Fachen, 62
Karte, 25, 99Katenoid, 58Kegel
allgemeiner, 62Kettenlinie, 58Koordinaten, 25kovariante Ableitung, 68Krummung
einer Kurve, 9Gauß-, 51mittlere, 51orientierte, 10
Kurveebene, 3parametrisierte , 3regulare, 7
Lange einer Kurve, 4Langenfunktional, 74Logarithmische Spirale, 5lokal isometrisch, 62lokales Koordinatensystem, 25
117
Mannigfaltigkeitdifferenzierbare, 99n-dimensionale, 98orientierbare, 101topologische, 98
Minimalflache, 58mittlere Krummung, 51
normale Variation, 57Normalenvektor, 10Normalschnittkrummung, 48
orientierte Winkel, 87Orientierung einer Flache, 41
paralleles Vektorfeld, 83Parallelverschiebung, 85Parameterlinien, 24Parametertransformation, 6Parametrisierung, 25Peano-Kurve, 2Pseudo-Sphare, 56
Raumkurve, 3Regelflache, 58Relation von Clairaut, 73Rotationsflachen, 33
Satz von Gauß-Bonnetglobal, 107lokal, 96
Schleppkurve, 56Schmiegebene, 14Schraubenlinie, 4stereographische Projektion, 31
Tangente, 4Tangentialabbildung, 23Tangentialbundel, 40Tangentialebene
einer Flache, 26Tangentialraum, 3Tangentialvektor, 14
an eine Flache, 26an eine Kurve, 4
theorema egregium, 66
Torsion, 15Traktrix, 56Triangulierung, 106
Umlaufsatzfur Flachenkurven, 93von Hopf, 21
Variation mit festen Endpunkten, 74Variationsfeld, 75
Weingarten-Abbildung, 43Wendelflache, 58Windung, 15
118


![Topologische K-Theorie - math.kit.edu · klassischen“ K-Theorie- Buchern von Atiyah [Ati] und Karoubi [Ka] orientiert haben, ist das Skript im¨ Detailausf¨uhrlicher.InhaltlichwurdederSto](https://img.pdfslide.org/doc/110x75/5b9f331a09d3f2e02c8cc533/topologische-k-theorie-mathkit-klassischen-k-theorie-buchern-von-atiyah.jpg)


























