Embed Size (px)
Citation preview

Fachgebiet Datenverarbeitung in der KonstruktionFachbereich MaschinenbauTechnische Universität Darmstadt
Leitung: Prof. Dr.-Ing. R. Anderl
Petersenstraße 30D-64287 Darmstadt
Einführung in das rechnergestützte KonstruierenComputer Aided Design (CAD)
Sommersemester 2007
© 2007 – DiK, Technische Universität DarmstadtFolie 2
Gliederung der 4. Vorlesung
1. Produktdatentechnologie
2. Ideenfindung und Skizziertechniken
3. Geometrische Modellierung
4. Geometriemodelle
5. Einzelteilmodellierung
6. Baugruppenmodellierung
7. Toleranzen, Passungen und Oberflächenangaben
8. Ableitung Technischer Zeichnungen
9. Fortgeschrittene Methoden des rechnerunterstützten Konstruierens
© 2007 – DiK, Technische Universität DarmstadtFolie 3
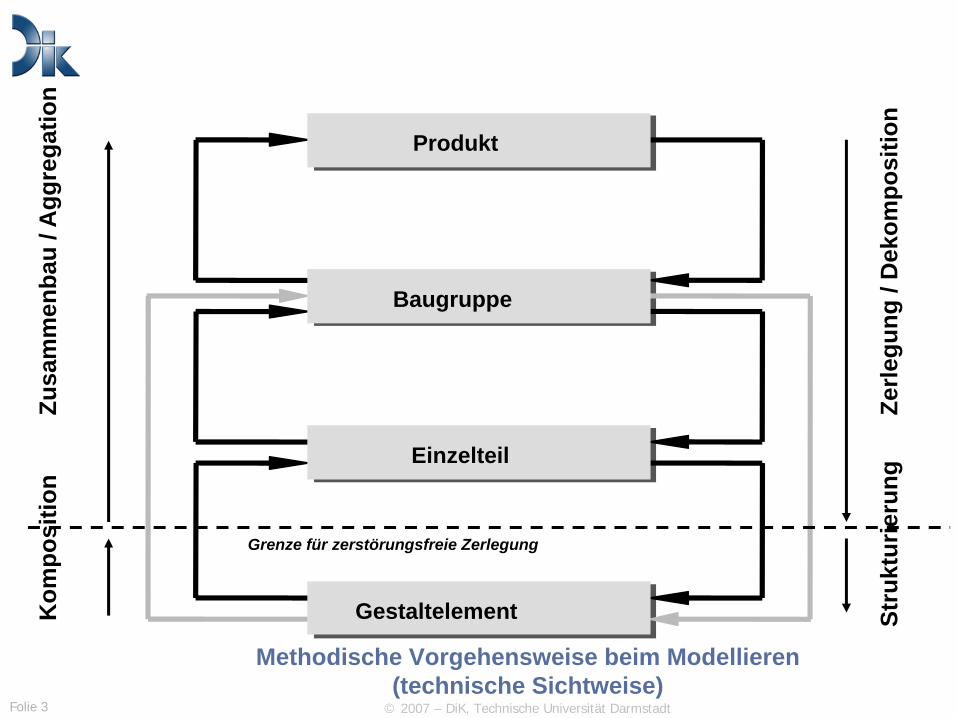
Methodische Vorgehensweise beim Modellieren(technische Sichtweise)
Produkt
Baugruppe
Einzelteil
GestaltelementKom
posi
tion
Zusa
mm
enba
u / A
ggre
gatio
n
Zerle
gung
/ D
ekom
posi
tion
Stru
ktur
ieru
ng
Grenze für zerstörungsfreie Zerlegung
© 2007 – DiK, Technische Universität DarmstadtFolie 4
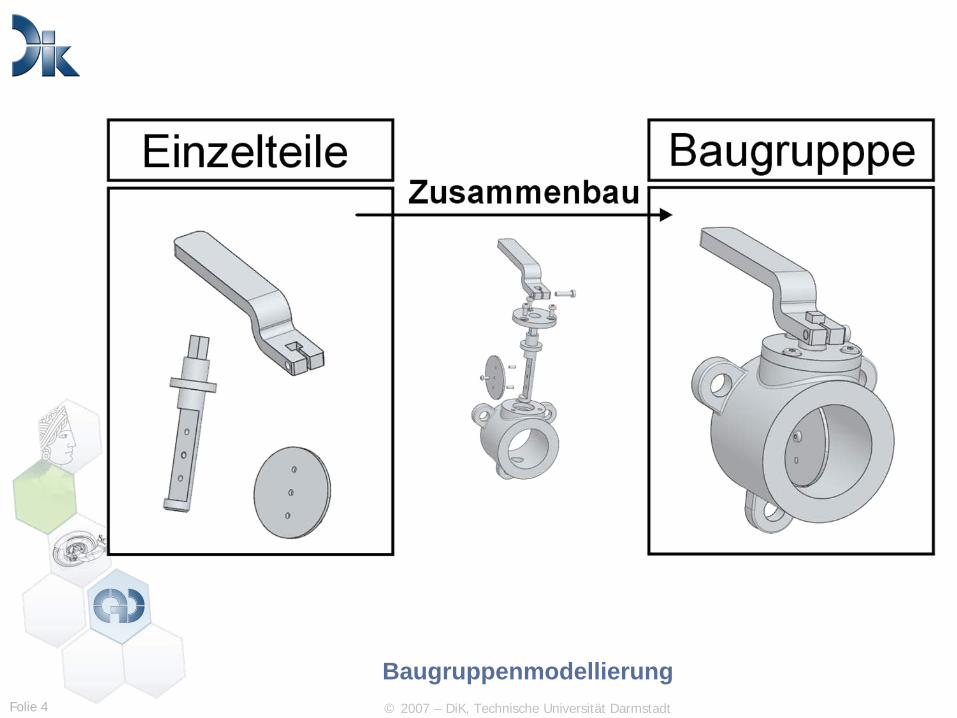
Baugruppenmodellierung
© 2007 – DiK, Technische Universität DarmstadtFolie 5
Prinzipien der Baugruppenbildung
© 2007 – DiK, Technische Universität DarmstadtFolie 6
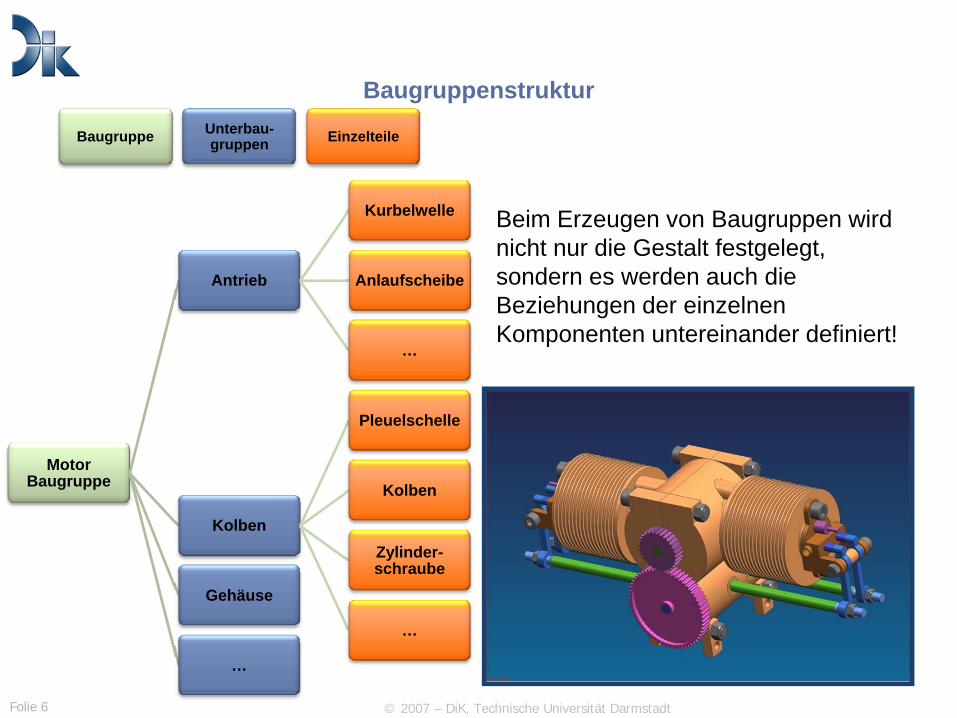
Baugruppenstruktur
Motor Baugruppe
Antrieb
Kurbelwelle
Anlaufscheibe
…
Kolben
Pleuelschelle
Kolben
Zylinder-schraube
…
Gehäuse
…
Beim Erzeugen von Baugruppen wird nicht nur die Gestalt festgelegt, sondern es werden auch die Beziehungen der einzelnen Komponenten untereinander definiert!
Unterbau-gruppenBaugruppe Einzelteile
© 2007 – DiK, Technische Universität DarmstadtFolie 7
Unterscheidung von Baugruppenstrukturennach Verwendungszweck (Teil 1)
Die Strukturierung von Produkten aus Baugruppen (Oberbaugruppenund Unterbaugruppen) und Einzelteilen kann nach unterschiedlichemVerwendungszweck erfolgen.• Funktionsbaugruppen:
Funktionsbaugruppen bestehen aus Bauteilen, die einer gemeinsamen Funktion dienen.Bsp.: Alle Komponenten einer Bremsanlage
• Montagebaugruppen:Eine Montagebaugruppe besteht aus Bauteilen, die komplett gefügt in die nächsthöherer Struktureinheit montiert werden können.Bsp.: Motoren
• Ersatzteil/Verkaufsbaugruppen:Eine Ersatzteil- oder Verkaufsbaugruppe besteht aus Bauteilen, die zusammen, z.B. als Ersatzteile, verkauft werden.Bsp.: Kompletter Satz Dichtungen einer Maschine
© 2007 – DiK, Technische Universität DarmstadtFolie 8
Unterscheidung von Baugruppenstrukturennach Verwendungszweck (Teil 2)
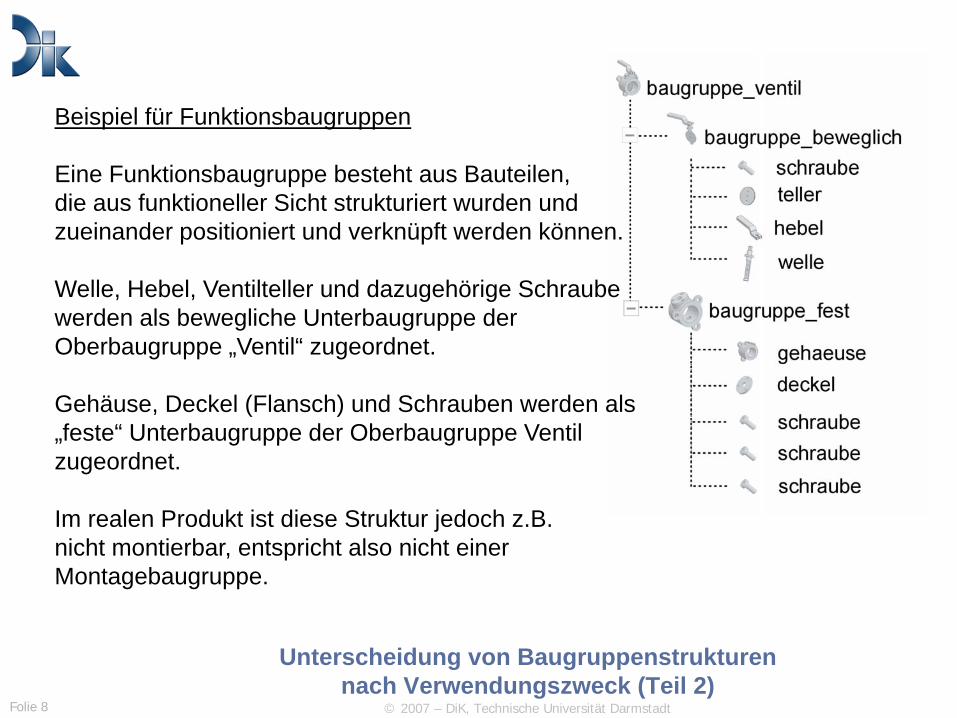
Beispiel für Funktionsbaugruppen
Eine Funktionsbaugruppe besteht aus Bauteilen,die aus funktioneller Sicht strukturiert wurden undzueinander positioniert und verknüpft werden können.
Welle, Hebel, Ventilteller und dazugehörige Schraube werden als bewegliche Unterbaugruppe derOberbaugruppe „Ventil“ zugeordnet.
Gehäuse, Deckel (Flansch) und Schrauben werden als„feste“ Unterbaugruppe der Oberbaugruppe Ventilzugeordnet.
Im realen Produkt ist diese Struktur jedoch z.B. nicht montierbar, entspricht also nicht einerMontagebaugruppe.
© 2007 – DiK, Technische Universität DarmstadtFolie 9
Vorgehensweisen zur Baugruppenmodellierung: BOTTOM UP und TOP DOWN
topdown
bottomup
© 2007 – DiK, Technische Universität DarmstadtFolie 10
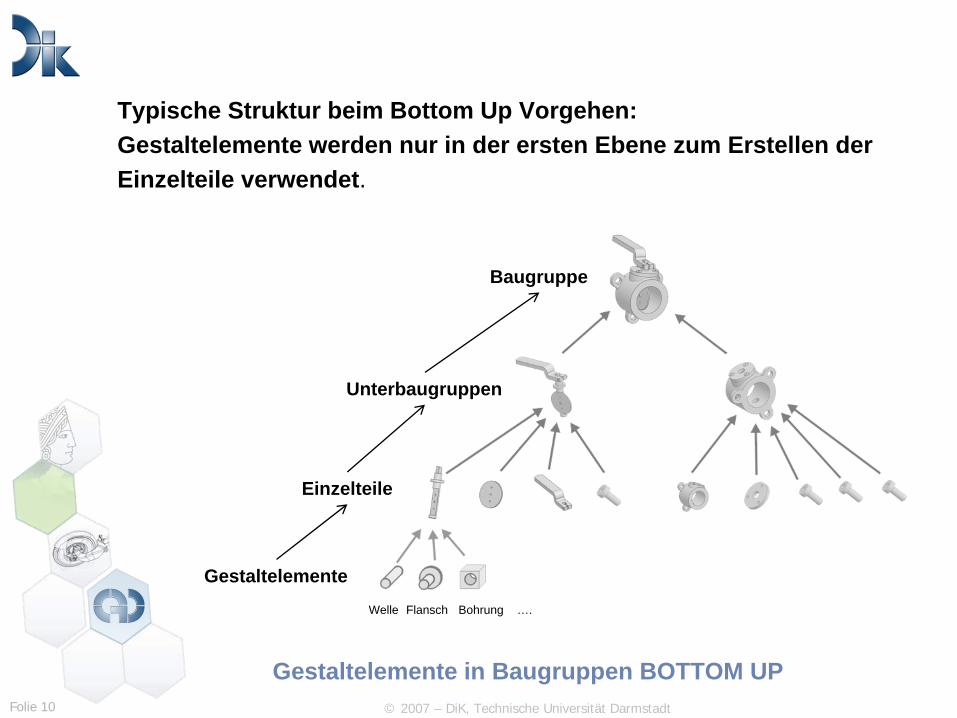
Gestaltelemente in Baugruppen BOTTOM UP
Typische Struktur beim Bottom Up Vorgehen:Gestaltelemente werden nur in der ersten Ebene zum Erstellen derEinzelteile verwendet.
Gestaltelemente
Einzelteile
Unterbaugruppen
Baugruppe
Welle Flansch Bohrung ….
© 2007 – DiK, Technische Universität DarmstadtFolie 11
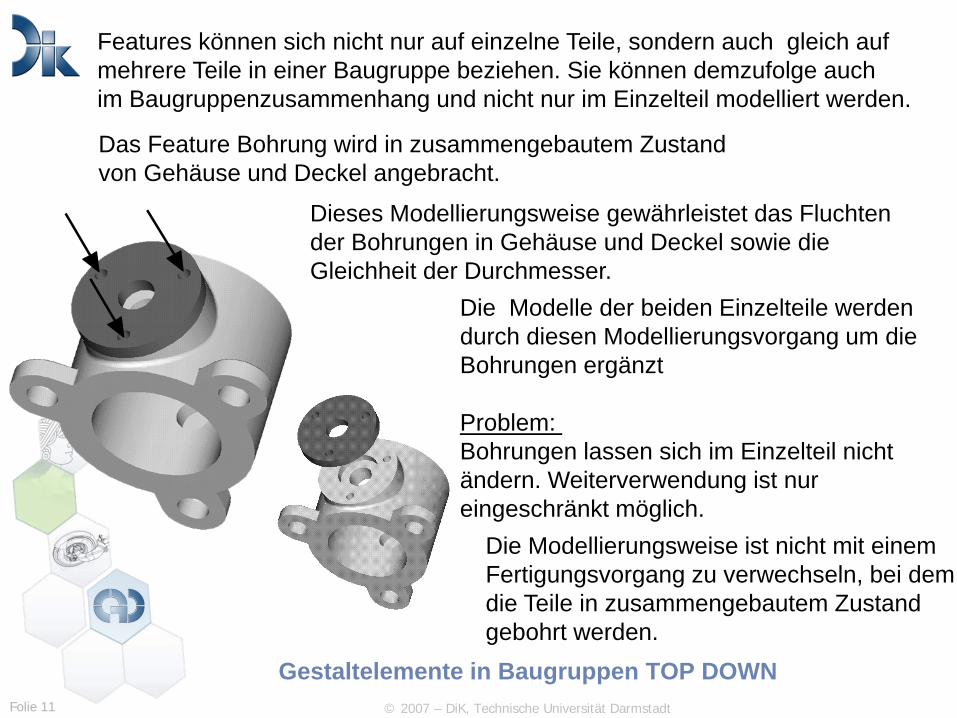
Gestaltelemente in Baugruppen TOP DOWN
Die Modelle der beiden Einzelteile werden durch diesen Modellierungsvorgang um die Bohrungen ergänzt
Problem: Bohrungen lassen sich im Einzelteil nichtändern. Weiterverwendung ist nur eingeschränkt möglich.
Features können sich nicht nur auf einzelne Teile, sondern auch gleich aufmehrere Teile in einer Baugruppe beziehen. Sie können demzufolge auchim Baugruppenzusammenhang und nicht nur im Einzelteil modelliert werden.
Das Feature Bohrung wird in zusammengebautem Zustand von Gehäuse und Deckel angebracht.
Dieses Modellierungsweise gewährleistet das Fluchten der Bohrungen in Gehäuse und Deckel sowie die Gleichheit der Durchmesser.
Die Modellierungsweise ist nicht mit einemFertigungsvorgang zu verwechseln, bei demdie Teile in zusammengebautem Zustandgebohrt werden.
© 2007 – DiK, Technische Universität DarmstadtFolie 12
Möglichkeiten zur Positionierung von Einzelteilen in Baugruppen
Positionierung von Bauteilen und –gruppen:
• Absolute Positionierung• Relative Positionierung von Körpern bzw. Elementen über
› Bemaßungen› Anordnungsbedingungen› Hilfsgeometrien
• Platzierungsbedingungen• Methodisches Vorgehen und Nutzung von Hilfsgeometrien
© 2007 – DiK, Technische Universität DarmstadtFolie 13
Absolute Positionierung von Elementen
Koordinatensystem, raumfest, Ursprung
X1,Y1,Z1
X2,Y2,Z2
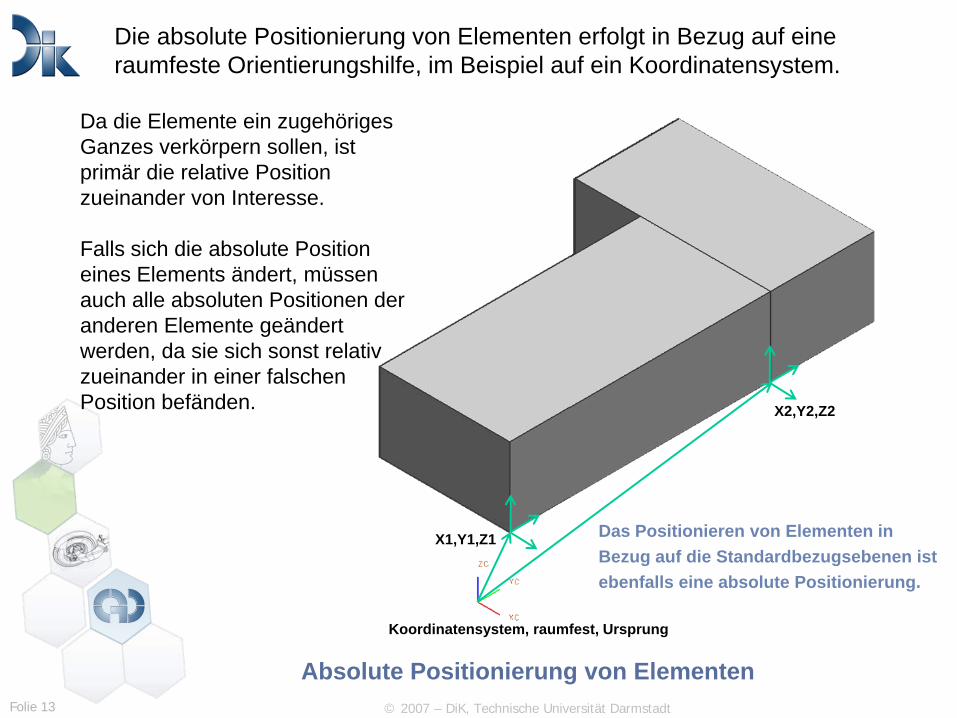
Die absolute Positionierung von Elementen erfolgt in Bezug auf eine raumfeste Orientierungshilfe, im Beispiel auf ein Koordinatensystem.
Da die Elemente ein zugehöriges Ganzes verkörpern sollen, ist primär die relative Position zueinander von Interesse.
Falls sich die absolute Position eines Elements ändert, müssen auch alle absoluten Positionen der anderen Elemente geändert werden, da sie sich sonst relativ zueinander in einer falschen Position befänden.
Das Positionieren von Elementen inBezug auf die Standardbezugsebenen istebenfalls eine absolute Positionierung.
© 2007 – DiK, Technische Universität DarmstadtFolie 14
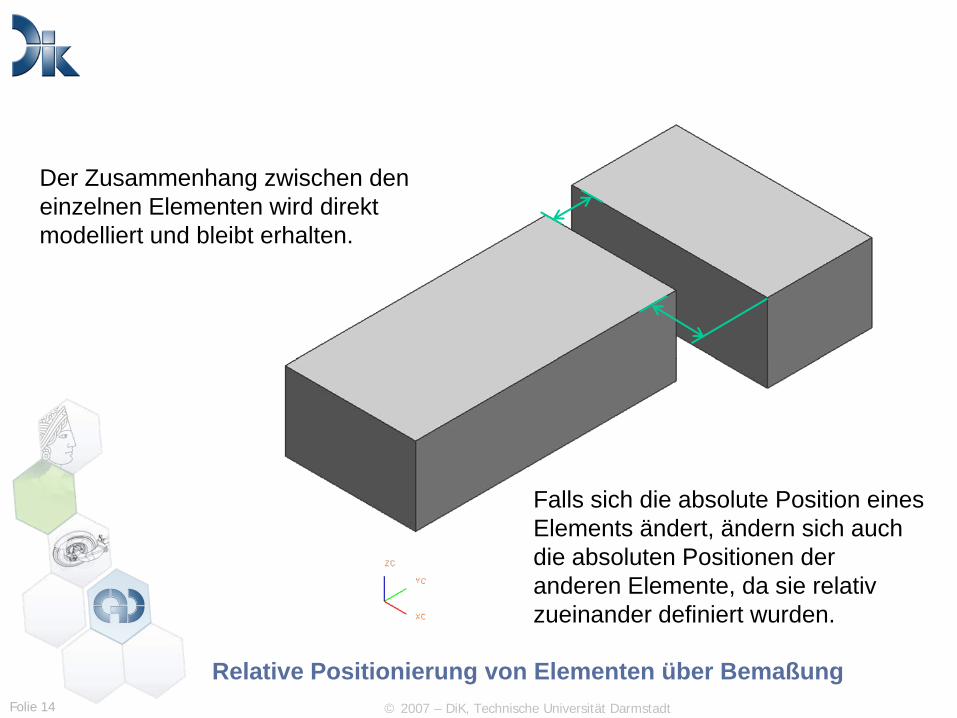
Relative Positionierung von Elementen über Bemaßung
Der Zusammenhang zwischen den einzelnen Elementen wird direkt modelliert und bleibt erhalten.
Falls sich die absolute Position eines Elements ändert, ändern sich auch die absoluten Positionen der anderen Elemente, da sie relativ zueinander definiert wurden.
© 2007 – DiK, Technische Universität DarmstadtFolie 15
Relative Positionierung über Anordnungsbedingungen
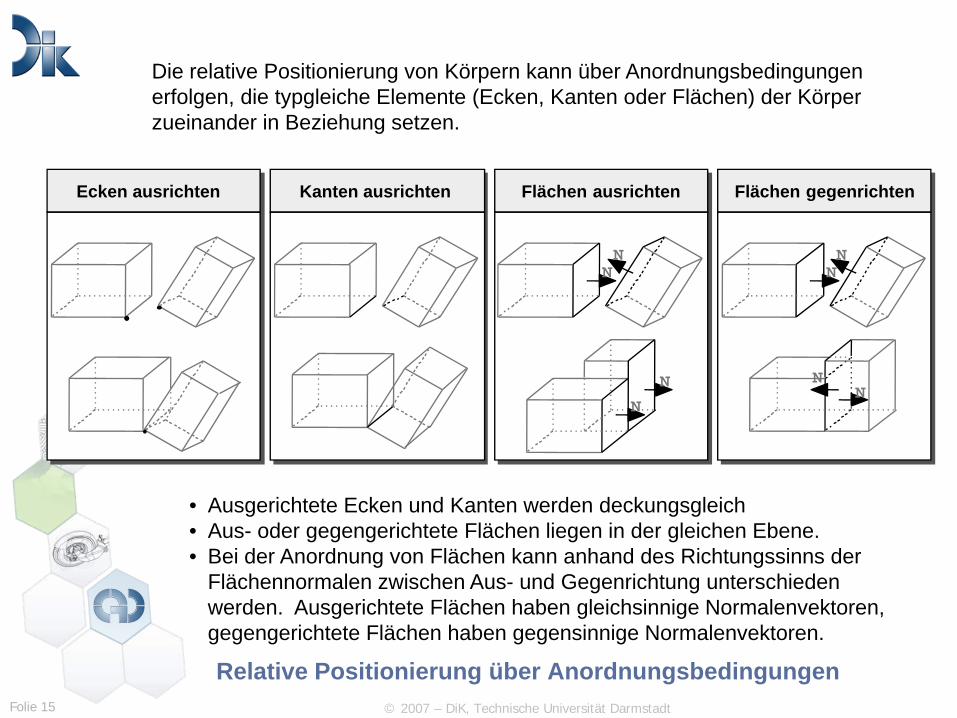
Ecken ausrichten Kanten ausrichten Flächen ausrichten Flächen gegenrichten
NN
N
N
NN
NN
Die relative Positionierung von Körpern kann über Anordnungsbedingungen erfolgen, die typgleiche Elemente (Ecken, Kanten oder Flächen) der Körper zueinander in Beziehung setzen.
• Ausgerichtete Ecken und Kanten werden deckungsgleich• Aus- oder gegengerichtete Flächen liegen in der gleichen Ebene. • Bei der Anordnung von Flächen kann anhand des Richtungssinns der
Flächennormalen zwischen Aus- und Gegenrichtung unterschieden werden. Ausgerichtete Flächen haben gleichsinnige Normalenvektoren, gegengerichtete Flächen haben gegensinnige Normalenvektoren.
© 2007 – DiK, Technische Universität DarmstadtFolie 16
Relative Positionierung von Elementen über Hilfsgeometrie
Hilfspunkte Hilfslinien Hilfsebenen
(-)
D1 D1
Achsabstand
Koaxialität
Punktabstand
Durch Punkt
Ebenenabstand
D1
D2
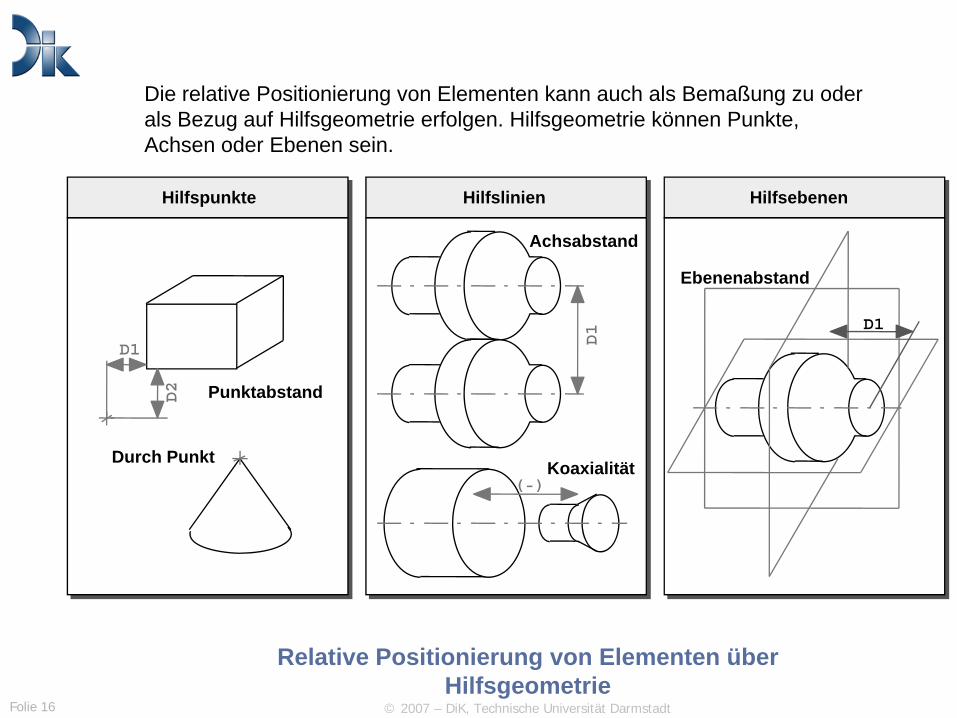
Die relative Positionierung von Elementen kann auch als Bemaßung zu oder als Bezug auf Hilfsgeometrie erfolgen. Hilfsgeometrie können Punkte, Achsen oder Ebenen sein.
© 2007 – DiK, Technische Universität DarmstadtFolie 17
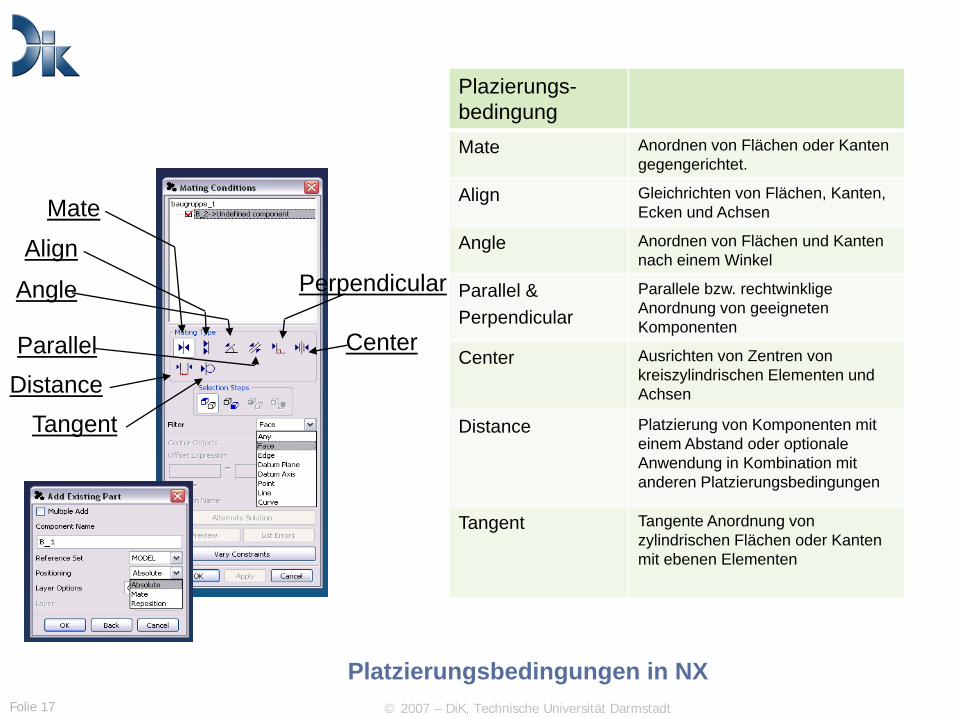
Platzierungsbedingungen in NX
Plazierungs-bedingungMate Anordnen von Flächen oder Kanten
gegengerichtet.
Align Gleichrichten von Flächen, Kanten, Ecken und Achsen
Angle Anordnen von Flächen und Kanten nach einem Winkel
Parallel &Perpendicular
Parallele bzw. rechtwinklige Anordnung von geeigneten Komponenten
Center Ausrichten von Zentren von kreiszylindrischen Elementen und Achsen
Distance Platzierung von Komponenten mit einem Abstand oder optionale Anwendung in Kombination mit anderen Platzierungsbedingungen
Tangent Tangente Anordnung von zylindrischen Flächen oder Kanten mit ebenen Elementen
Align
Mate
Angle
Parallel
Perpendicular
Center
DistanceTangent
© 2007 – DiK, Technische Universität DarmstadtFolie 18
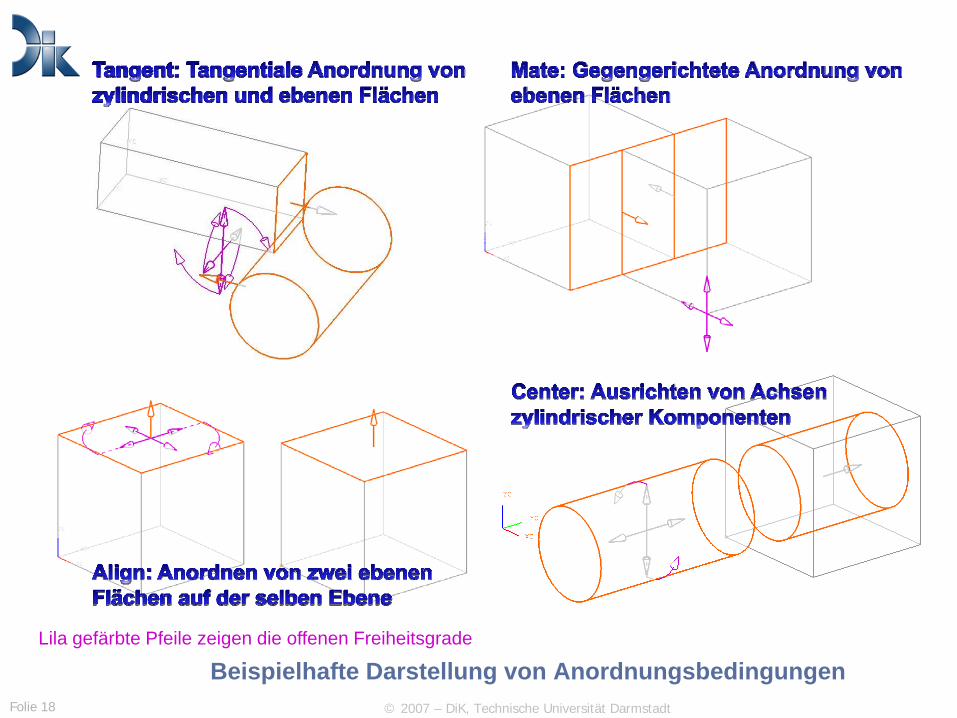
Beispielhafte Darstellung von AnordnungsbedingungenLila gefärbte Pfeile zeigen die offenen Freiheitsgrade
© 2007 – DiK, Technische Universität DarmstadtFolie 19
UG-DEMOAnordnungsbedingungen
© 2007 – DiK, Technische Universität DarmstadtFolie 20
Methodisches Vorgehen und Nutzung von Hilfsfunktionen
Methodisches Vorgehen und Nutzung von Hilfsgeometrie bei der Modellierung von Baugruppen: (Nach der BOTTOM UP - Methode)
• Zuordnung der Einzelteile in eine hierarchische Struktur mit Unterbaugruppen:
- Zusammensetzen der Einzelteile zu Unterbaugruppen
- Zusammensetzen von Unterbaugruppen und Einzelteilen zum Produkt
• Verwendung von Hilfsgeometrie: (sofern erforderlich)
- zum „schrägen“ Einbau oder für
- Bewegungssimulationen
• Einbaukontrolle durch:
- Messen der Durchdringung von Bauteilen
- Erzeugen eines Schnittes durch die Baugruppe
• Definieren einer Explosionsdarstellung
• Erzeugen von Stücklisten
© 2007 – DiK, Technische Universität DarmstadtFolie 21
Grundlagen der Baugruppenbildungüber Verbindungen
© 2007 – DiK, Technische Universität DarmstadtFolie 22
Grundlagen der Schraubenverbindungen
© 2007 – DiK, Technische Universität DarmstadtFolie 23
Repräsentation von Gewinden
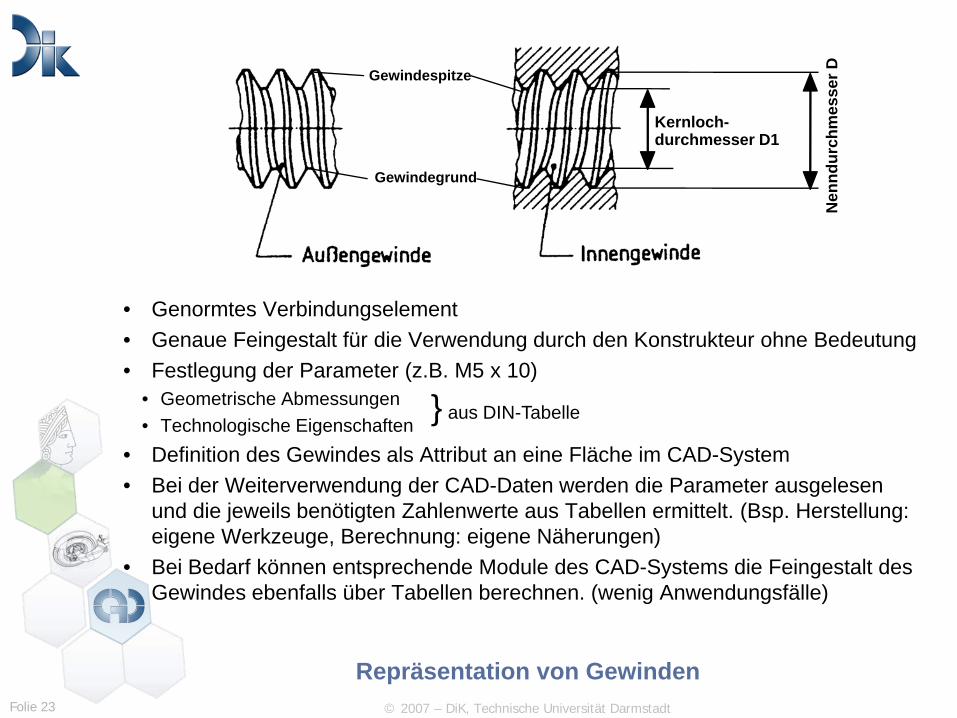
• Genormtes Verbindungselement• Genaue Feingestalt für die Verwendung durch den Konstrukteur ohne Bedeutung• Festlegung der Parameter (z.B. M5 x 10)
• Geometrische Abmessungen• Technologische Eigenschaften
• Definition des Gewindes als Attribut an eine Fläche im CAD-System• Bei der Weiterverwendung der CAD-Daten werden die Parameter ausgelesen
und die jeweils benötigten Zahlenwerte aus Tabellen ermittelt. (Bsp. Herstellung: eigene Werkzeuge, Berechnung: eigene Näherungen)
• Bei Bedarf können entsprechende Module des CAD-Systems die Feingestalt desGewindes ebenfalls über Tabellen berechnen. (wenig Anwendungsfälle)
Gewindespitze
Gewindegrund
Nen
ndur
chm
esse
r D
Kernloch-durchmesser D1
} aus DIN-Tabelle
© 2007 – DiK, Technische Universität DarmstadtFolie 24
Schema zur Konstruktion von Gewinden
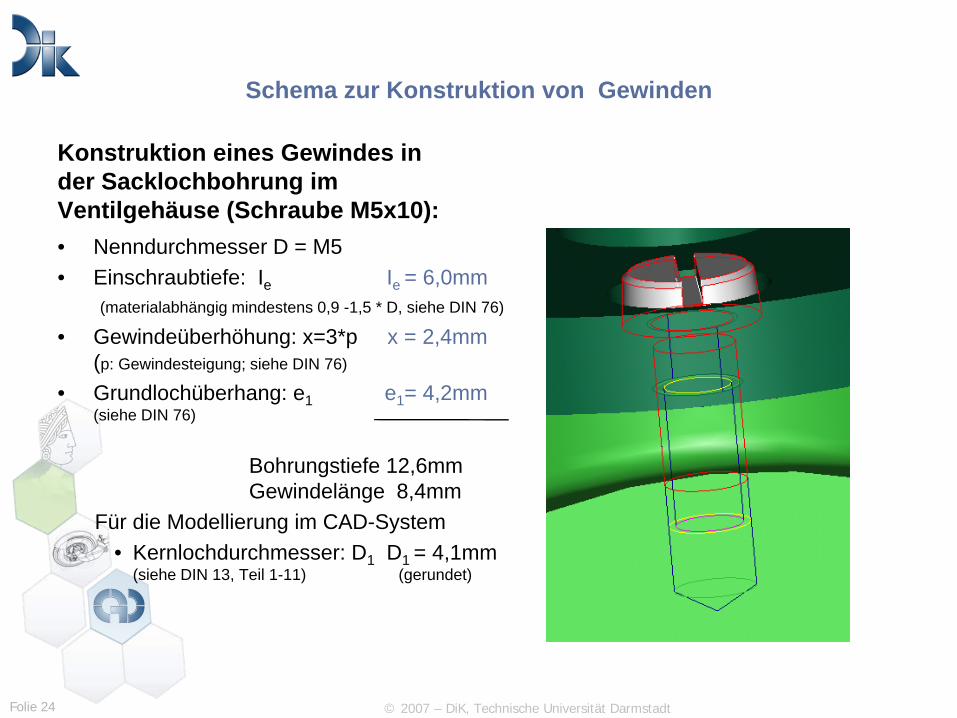
Konstruktion eines Gewindes in der Sacklochbohrung im Ventilgehäuse (Schraube M5x10): • Nenndurchmesser D = M5• Einschraubtiefe: Ie Ie = 6,0mm
(materialabhängig mindestens 0,9 -1,5 * D, siehe DIN 76)
• Gewindeüberhöhung: x=3*p x = 2,4mm(p: Gewindesteigung; siehe DIN 76)
• Grundlochüberhang: e1 e1= 4,2mm(siehe DIN 76)
Bohrungstiefe 12,6mmGewindelänge 8,4mm
Für die Modellierung im CAD-System• Kernlochdurchmesser: D1 D1 = 4,1mm
(siehe DIN 13, Teil 1-11) (gerundet)
© 2007 – DiK, Technische Universität DarmstadtFolie 25
UG DEMOGewinde im CAD-System
© 2007 – DiK, Technische Universität DarmstadtFolie 26
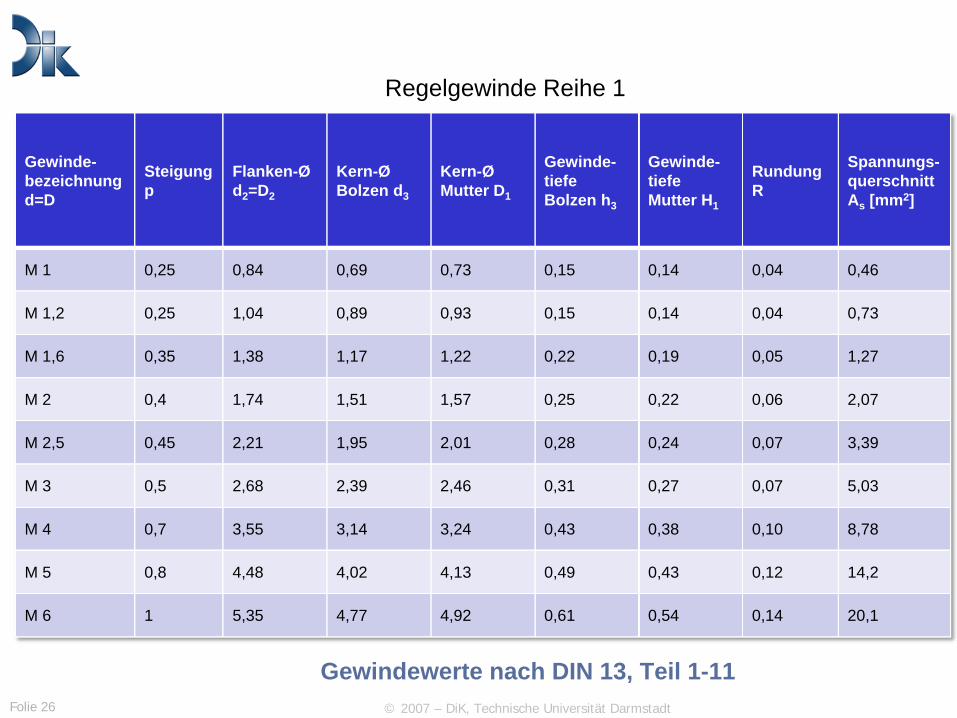
Gewindewerte nach DIN 13, Teil 1-11
Gewinde-bezeichnungd=D
Steigung p
Flanken-Ø d2=D2
Kern-Ø Bolzen d3
Kern-Ø Mutter D1
Gewinde-tiefe Bolzen h3
Gewinde-tiefe Mutter H1
Rundung R
Spannungs-querschnittAs [mm2]
M 1 0,25 0,84 0,69 0,73 0,15 0,14 0,04 0,46
M 1,2 0,25 1,04 0,89 0,93 0,15 0,14 0,04 0,73
M 1,6 0,35 1,38 1,17 1,22 0,22 0,19 0,05 1,27
M 2 0,4 1,74 1,51 1,57 0,25 0,22 0,06 2,07
M 2,5 0,45 2,21 1,95 2,01 0,28 0,24 0,07 3,39
M 3 0,5 2,68 2,39 2,46 0,31 0,27 0,07 5,03
M 4 0,7 3,55 3,14 3,24 0,43 0,38 0,10 8,78
M 5 0,8 4,48 4,02 4,13 0,49 0,43 0,12 14,2
M 6 1 5,35 4,77 4,92 0,61 0,54 0,14 20,1
Regelgewinde Reihe 1
© 2007 – DiK, Technische Universität DarmstadtFolie 27
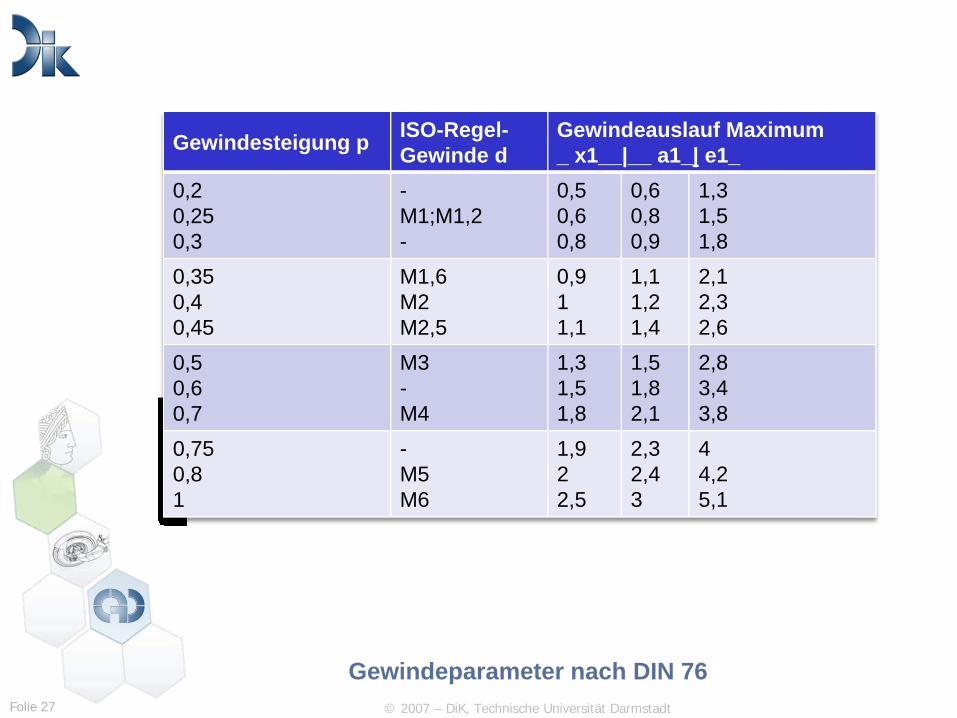
Gewindeparameter nach DIN 76
Gewindesteigung p ISO-Regel-Gewinde d
Gewindeauslauf Maximum_ x1__|__ a1_| e1_
0,20,250,3
-M1;M1,2-
0,50,60,8
0,60,80,9
1,31,51,8
0,350,40,45
M1,6M2M2,5
0,911,1
1,11,21,4
2,12,32,6
0,50,60,7
M3-M4
1,31,51,8
1,51,82,1
2,83,43,8
0,750,81
-M5M6
1,922,5
2,32,43
44,25,1