Embed Size (px)
Citation preview
SIRM 2013 – 10. Internationale Tagung Schwingungen in rotierenden Maschinen,Berlin, Deutschland, 25. – 27. Februar 2013
Einfluss der masseerhaltenden Kavitation auf gleitgelagerte Rotoren unterinstationärer Belastung
Steffen Nitzschke1, Elmar Woschke 2, Christian Daniel 3, Jens Strackeljan4
1 Institut für Mechanik, Otto-von-Guericke Universität, 39106, Magdeburg, Deutschland, [email protected] Institut für Mechanik, Otto-von-Guericke Universität, 39106, Magdeburg, Deutschland, [email protected] Institut für Mechanik, Otto-von-Guericke Universität, 39106, Magdeburg, Deutschland, [email protected] Institut für Mechanik, Otto-von-Guericke Universität, 39106, Magdeburg, Deutschland, [email protected]
KurzfassungFür die Simulation gleitgelagerter Systeme bietet sich die Verwendung von Mehrkörperprogrammen zur Be-
schreibung der Bewegung an, die Abbildung der Lagereigenschaften kann dabei in verschiedenen Detaillierungs-graden erfolgen. Der vorliegende Artikel beschreibt die Einbindung der Reynoldsgleichung unter Berücksichti-gung eines transienten masseerhaltenden Kavitationsalgorithmus nach Elrod, wobei ein Fokus auf der zeitlichenÄnderung des Spaltfüllungsgrads und deren Implementierung liegt.
Die Ergebnisse werden zunächst mit quasistationären Lösungen aus der Literatur verglichen. Anschließenderfolgt eine Bewertung der Systemeigenschaften im Vergleich zu einer numerisch effizienteren Lösung unter Ver-nachlässigung der masseerhaltenden Kavitation (Gümbel). Im Kontext kritischer Drehzahlen (Resonanz, Auftretenvon Oil-Whirl und Oil-Whip) wird der Einfluss instationärer Belastungen auf das rotordynamische Verhalten un-tersucht. Abschließend werden mit dem Hintergrund numerischer Effizienz die Auswirkung der Vernachlässigungdes zeitabhängigen Verhaltens des Spaltfüllungsgrads innerhalb des vorgestellten masseerhaltenden Kaviationsal-gorithmus diskutiert.
Symbolliste
Formelzeichen Beschreibung Index Beschreibung
x, y, z kartesische Koordinaten ()liq Flüssigkeitr, d Radius, Durchmesser ()gas Luftl, b Länge, Breite ()h hydrodynamischh Spaltfunktion ()pres Druckgebietψ relatives Lagerspiel ()cav Kavitationsgebietρ Dichte ()amb Umgebungη dynamische Viskosität ()zu Zuführungm Masse ()welle Welleneigenschaftt Zeit ()rotor Rotoreigenschaftf Frequenz ()lager Lagereigenschaftn Drehzahl ()min, ()max minimal, maximalu Umfangsgeschwindigkeit ()ges gesamtω Winkelgeschwindigkeit ()m gemitteltϑ Spaltfüllungsgrad ()k kritischp Druck
1 EinleitungBei der Entwicklung rotordynamischer Systeme können auch transiente Effekte für die Auslegung der Lage-
rung von Bedeutung sein. Im Fall gleitgelagerter Rotoren sind in der Vergangenheit für quasistatische Belastungen
1 Paper-ID 210

Programmsysteme mit hohem Detaillierungsgrad entwickelt worden. Das bezieht sich vor allem auf die Berück-sichtigung von Turbulenzeinflüssen, thermohydrodynamischen Effekten, Kavitationsmodellen und Modellen fürMischreibungsbeschreibungen. Für dynamische Fragestellungen wurden bisher, bedingt durch die Rechenzeitan-forderungen, weitgehend vereinfachte Algorithmen verwendet, die häufig auf Kennfeldern, der Kurzlagertheorieoder der Lösung der Reynoldsgleichung unter Vernachlässigung der Masseerhaltung basierten. Eine Erhöhung derModelltiefe für dynamische Untersuchungen ist, bedingt durch die steigenden Anforderungen an die Simulations-güte, unumgänglich.
Einen typischen Ausgangspunkt für rotordynamische Berechnungen stellen Mehrkörperprogramme dar. DieEinbindung der Routinen für die Beschreibung der Gleitlagerung wird durch nutzergeschriebene Kraftroutinenrealisiert. Dabei soll in diesem Beitrag die Lösung der Reynoldsgleichung in jedem Schritt der Zeitintegrationunter Einhaltung der Kontinuitätsgleichung innerhalb des Kavitationsmodells erfolgen. Hierzu findet der Elrod-Algorithmus [1] Verwendung, welcher eine Unterteilung des Lösungsgebiets sowie der Lösungsvariablen nachDruck- und Kavitation vornimmt. Zur Vermeidung von unphysikalischen zeitlosen Veränderungen des Spaltfül-lungsgrads muss bei Berücksichtigung transienter Effekte zusätzlich dessen zeitliche Abhängigkeit in die Simula-tion einbezogen werden.
Zur Untersuchung der Einflüsse des masseerhaltenden Kavitationsalgorithmus sowie speziell der transientenVeränderung des Spaltfüllungsgrads, wird ein Modell mit zeitabhängiger Belastung unter Verwendung verschiede-ner Varianten zur Abbildung der Kavitation in den Gleitlagern aufgebaut. Dabei soll der Einfluss der Modellierungauf die resultierenden Verlagerungsbahnen der Welle herausgestellt werden. Ziel ist es, ein besseres Verständnisder Rückwirkung auf die Rotordynamik zu erhalten.
2 Theoretische Grundlagen2.1 Hydrodynamik
Die Beschreibung der hydrodynamischen Eigenschaften von Radialgleitlagern basiert auf der Reynoldsglei-chung, welche eine vereinfachte Form der Navier-Stokes Gleichungen darstellt. Dabei erfolgt eine Bilanzierungder Flüssigkeitsbewegung im Lager und Beschreibung des dadurch entstehenden Tragdruckaufbausph in Ab-hängigkeit des Ortes (x, y) und der Zeitt. Die Reynoldsgleichung ist eine partielle, inhomogene elliptische Dif-ferentialgleichung zweiter Ordnung ohne geschlossenene analytische Lösung. Die einzelnen Terme lassen sichStrömungsanteilen zuordnen, die für quasistationäre Betrachtungen hinlänglich in der Literatur beschrieben sind[2].
∂
∂x
(ρ h3
12η
∂ph
∂x
)
+∂
∂y
(ρ h3
12η
∂ph
∂y
)
︸ ︷︷ ︸Poiseuille-Strömung1
= um∂(ρ h)
∂x︸ ︷︷ ︸
Couette-Strömung2
+∂(ρ h)
∂t︸ ︷︷ ︸
Verdrängungs-Strömung
(1)
Die Lösung der Reynoldsgleichung führt rein formal zu negativen Drücken, welche, aufgrund des begrenzten Ver-mögens von Fluiden, Zugspannungen zu übertragen, unphysikalsich sind. An dieser Stelle müssen entsprechendeNebenbedingungen formuliert werden, welche die Kavitation beschreiben. Aus numerischer Sicht bieten sich ein-fache Modelle z.B. nach Gümbel an, die den negativen Druckanteil zu Null fordern. Dieses Vorgehen verletzt dieMassenbilanz, was zur Entwicklung von masseerhaltenden Kaviationsmodellen führte [3], [4], [5]. Eine nume-risch effiziente Umsetzung stellt der Elrod-Algorithmus dar, welcher im kavitativen Bereich die Einführung eineslokalen Spaltfüllungsgradsϑ(x, y) als Lösungsvariable vorsieht [6]. Im Kavitationsgebiet, welches nur teilweisemit Schmierstoff gefüllt ist, wird eine homogene Mischdichte und Mischviskosität aus viskosem Schmierstoff undkompressiblem Gas definiert
ρ = ϑ ρliq + (1 − ϑ) ρgas∼= ϑ ρliq ,
η = ϑ ηliq + (1 − ϑ) ηgas∼= ϑ ηliq , (2)
1Druck-Strömung2Scher-Strömung
2 Paper-ID 210
wobei der Proportionalitätsfaktorϑ Werte zwischen 0 und 1 annehmen kann. Während im Druckgebiet konsequentVollfüllung vorliegt, wodurch sich ein Spaltfüllungsgradϑpres = 1 einstellt, wird im Kavitationsgebiet der Druckals Umgebungsdruckpcav = pamb angenommen und ist damit apriori bekannt3. Dementsprechend ist im Kavitati-onsgebiet die Ausprägung eines Druckgradienten und damit die Entstehung der Poiseuille-Strömung unmöglich.Resultierend ergibt sich ein Dualismus bzgl. der Lösungsgröße Druck bzw. Spaltfüllungsgrad der partiellen Diffe-rentialgleichung Gl. (3).
Unbekannte Differentialgleichung Bedingung
p∂
∂x
(h3
12 ηliq
∂ph
∂x
)
+∂
∂y
(h3
12 ηliq
∂ph
∂y
)
= um∂(ϑh)
∂x+
∂(ϑh)∂t
ph > pcav, ϑ = 1
ϑ 0 = um∂(ϑh)
∂x+
∂(ϑh)∂t
ph = pcav, ϑ < 1
(3)
Die Berücksichtigung dynamischer Aspekte bei der Lösung der Reynoldsgleichung (insbesondere aufgrund derVerdrängungsströmung) erfolgt, obgleich sie für viele Anwendungen in teilweise erheblichen Unterschieden resul-tiert, nur selten. Bei quasistationären Betrachtungen (z.B. [8], [9]) können im Gegensatz zu Umsetzungen innerhalbvon Mehrkörpersimulationen direkte Rückwirkungen der Kräfte auf die kinematischen Größen nicht berücksichtigtund damit die beschriebenen dynamischen Effekte nur genähert abgebildet werden. Die vollständige Beschreibungist nur unter Verwendung von rückkopplungsbehafteten Zeitintegration gegeben.
2.2 MehrkörpersimulationEine etablierte Methode zur Beschreibung komplexer dynamischer Systeme stellt die Mehrkörpersimulation
dar. Ausgehend von der Beschreibung der Masseeigenschaften und relativen Positionen der Körper zueinandersowie den zwischen den Körpern wirkenden Kraftelementen können automatisiert die Bewegungsdifferentialglei-chungen formuliert und mit geeigneten Integrationsverfahren als Anfangswertprobleme gelöst werden.
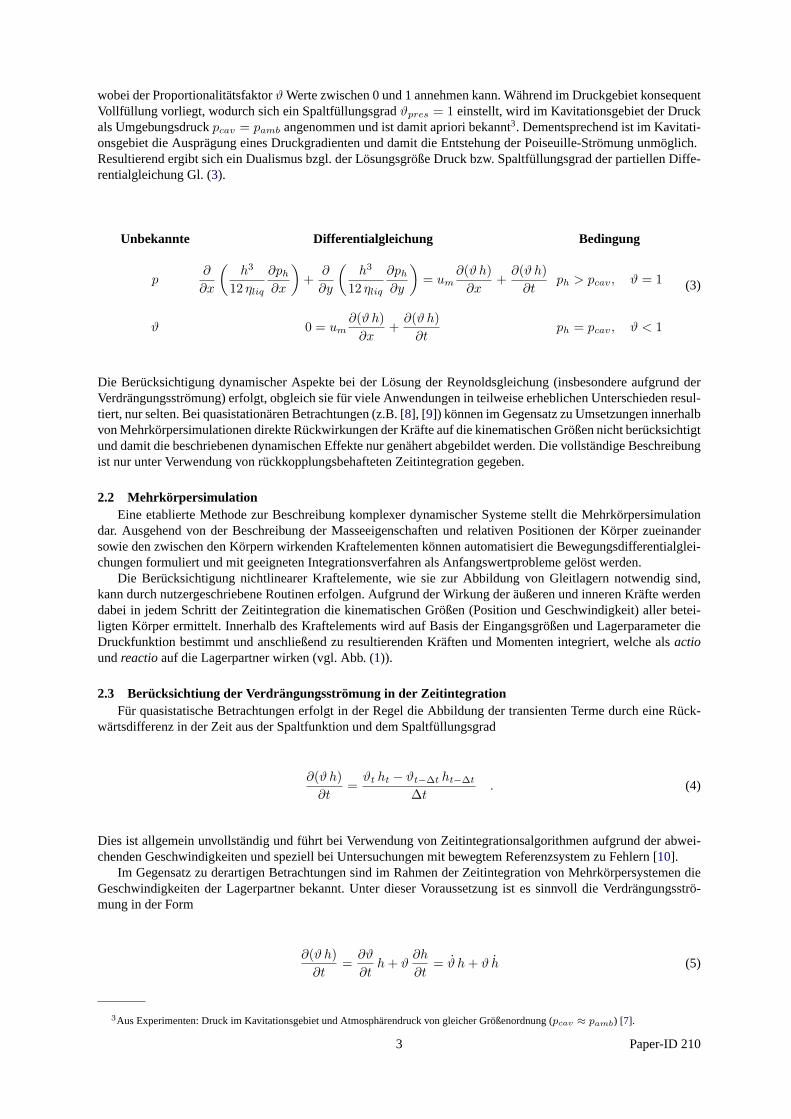
Die Berücksichtigung nichtlinearer Kraftelemente, wie sie zur Abbildung von Gleitlagern notwendig sind,kann durch nutzergeschriebene Routinen erfolgen. Aufgrund der Wirkung der äußeren und inneren Kräfte werdendabei in jedem Schritt der Zeitintegration die kinematischen Größen (Position und Geschwindigkeit) aller betei-ligten Körper ermittelt. Innerhalb des Kraftelements wird auf Basis der Eingangsgrößen und Lagerparameter dieDruckfunktion bestimmt und anschließend zu resultierenden Kräften und Momenten integriert, welche alsactioundreactioauf die Lagerpartner wirken (vgl. Abb. (1)).
2.3 Berücksichtiung der Verdrängungsströmung in der ZeitintegrationFür quasistatische Betrachtungen erfolgt in der Regel die Abbildung der transienten Terme durch eine Rück-
wärtsdifferenz in der Zeit aus der Spaltfunktion und dem Spaltfüllungsgrad
∂(ϑh)∂t
=ϑt ht − ϑt−Δt ht−Δt
Δt. (4)
Dies ist allgemein unvollständig und führt bei Verwendung von Zeitintegrationsalgorithmen aufgrund der abwei-chenden Geschwindigkeiten und speziell bei Untersuchungen mit bewegtem Referenzsystem zu Fehlern [10].
Im Gegensatz zu derartigen Betrachtungen sind im Rahmen der Zeitintegration von Mehrkörpersystemen dieGeschwindigkeiten der Lagerpartner bekannt. Unter dieser Voraussetzung ist es sinnvoll die Verdrängungsströ-mung in der Form
∂(ϑh)∂t
=∂ϑ
∂th + ϑ
∂h
∂t= ϑ h + ϑ h (5)
3Aus Experimenten: Druck im Kavitationsgebiet und Atmosphärendruck von gleicher Größenordnung (pcav ≈ pamb) [7].
3 Paper-ID 210
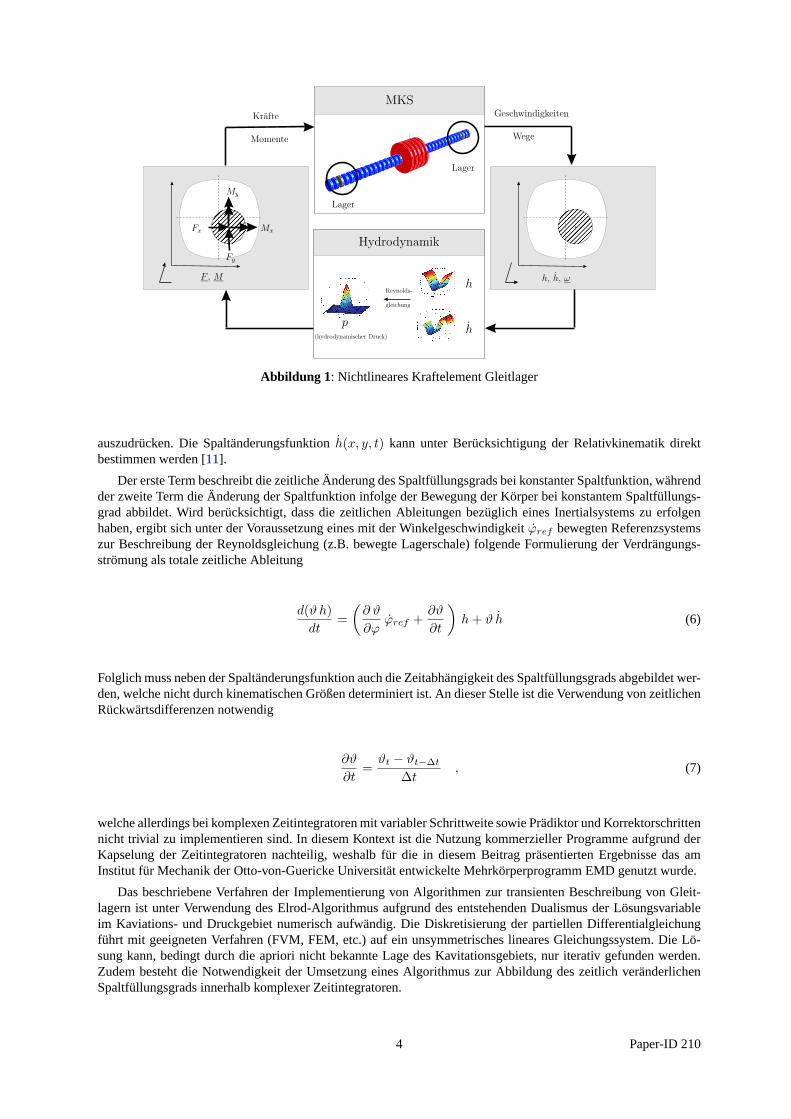
Abbildung 1: Nichtlineares Kraftelement Gleitlager
auszudrücken. Die Spaltänderungsfunktionh(x, y, t) kann unter Berücksichtigung der Relativkinematik direktbestimmen werden [11].
Der erste Term beschreibt die zeitliche Änderung des Spaltfüllungsgrads bei konstanter Spaltfunktion, währendder zweite Term die Änderung der Spaltfunktion infolge der Bewegung der Körper bei konstantem Spaltfüllungs-grad abbildet. Wird berücksichtigt, dass die zeitlichen Ableitungen bezüglich eines Inertialsystems zu erfolgenhaben, ergibt sich unter der Voraussetzung eines mit der Winkelgeschwindigkeitϕref bewegten Referenzsystemszur Beschreibung der Reynoldsgleichung (z.B. bewegte Lagerschale) folgende Formulierung der Verdrängungs-strömung als totale zeitliche Ableitung
d(ϑh)dt
=
(∂ ϑ
∂ϕϕref +
∂ϑ
∂t
)
h + ϑ h (6)
Folglich muss neben der Spaltänderungsfunktion auch die Zeitabhängigkeit des Spaltfüllungsgrads abgebildet wer-den, welche nicht durch kinematischen Größen determiniert ist. An dieser Stelle ist die Verwendung von zeitlichenRückwärtsdifferenzen notwendig
∂ϑ
∂t=
ϑt − ϑt−Δt
Δt, (7)
welche allerdings bei komplexen Zeitintegratoren mit variabler Schrittweite sowie Prädiktor und Korrektorschrittennicht trivial zu implementieren sind. In diesem Kontext ist die Nutzung kommerzieller Programme aufgrund derKapselung der Zeitintegratoren nachteilig, weshalb für die in diesem Beitrag präsentierten Ergebnisse das amInstitut für Mechanik der Otto-von-Guericke Universität entwickelte Mehrkörperprogramm EMD genutzt wurde.
Das beschriebene Verfahren der Implementierung von Algorithmen zur transienten Beschreibung von Gleit-lagern ist unter Verwendung des Elrod-Algorithmus aufgrund des entstehenden Dualismus der Lösungsvariableim Kaviations- und Druckgebiet numerisch aufwändig. Die Diskretisierung der partiellen Differentialgleichungführt mit geeigneten Verfahren (FVM, FEM, etc.) auf ein unsymmetrisches lineares Gleichungssystem. Die Lö-sung kann, bedingt durch die apriori nicht bekannte Lage des Kavitationsgebiets, nur iterativ gefunden werden.Zudem besteht die Notwendigkeit der Umsetzung eines Algorithmus zur Abbildung des zeitlich veränderlichenSpaltfüllungsgrads innerhalb komplexer Zeitintegratoren.
4 Paper-ID 210
3 MKS-ModellFür die Simulationen wird das Modell eines Laval-Rotors mit den in Tab. (1) bzw. Abb. (2) zusammengefassten
geometrischen Größen und Lagerparametern verwendet.
Tabelle 1: Geometrische Größen des Laval-Rotors und Lagerparameter MFL 4x60°
Bezeichnung Wert EinheitlLager 800 mmlWelle 900 mmlRotor 100 mmdWelle 50 mmdRotor 150 mmmges 26.5 kgωk
1 105 Hzmu ru 440 gmm
Bezeichnung Wert EinheitdLager 50 mmbLager 36 mmψmin 2.4 ‰ψmax 29.44 ‰
η 0.0084 Pa spzu 0.6 bar
nmax 13000 min−1
Welle und Rotor wurden in einem FE-System mit 36 Timoshenko-Balkenelementen abgebildet. Nach formalerSubstrukturierung und modaler Reduktion auf die ersten 20 Biegeeigenformen erfolgte der Import des FE-Modellsin das MKS-Programm. Dabei wurde eine Implemetierung unter Verwendung des von [12] vorgeschlagenen For-mats für die Beschreibung kleiner elastischer Deformationen und deren Überlagerung mit den großen Starrkörper-bewegungen nach der Methode des bewegten Bezugssystems umgesetzt.
Abbildung 2: Abmaße Laval-Rotor
4 ErgebnisseZunächst erfolgt eine Validierung des Kavitationsalgorithmus nach Elrod innerhalb einer MKS-Simulation
anhand einer in der Literatur gegebenen quasistationären Referenzlösung im Drehzahlbereich bisnmax. Nach Va-lidierung des Algorithmus wird der Einfluss der unterschiedlichen Kavitationsmodelle auf das quasistationäre Ver-halten bei Vorgabe verschiedener Lasten und Drehzahlen untersucht. Anschließend wird das dynamische Verhaltenvon Hochlaufsimulationen mit variierten Winkelbeschleunigungen simuliert. Abschließend wird der Einfluss derzeitlichen Änderung des Spaltfüllungsgrads analysiert.
4.1 ValidierungAls Referenzlösung werden die in [13] über diskreten Drehzahlen aufgetragenen quasistationären Rotorampli-
tuden des angegebenen Modells herangezogen. Zur Berechnung wurde dort das Rotordynamik-Programm MADYN/ NOLIN [14] mit einer auf Kennfeldern basierendem Gleitlagerformulierung verwendet. Die Kennfelder zur Ab-
1Erste Biegeeigenfrequenz bei Lagerung ”gelenkig-gelenkig”
5 Paper-ID 210
0 2000 4000 6000 8000 10000 120000
20
40
60
80
100
120
140
160
180
200
220
Drehzahl [min-1 ]
Rot
oram
plitu
de [μ
m]
ReferenzEMD-Alp3TEMD-ElrodEMD-Gümbel
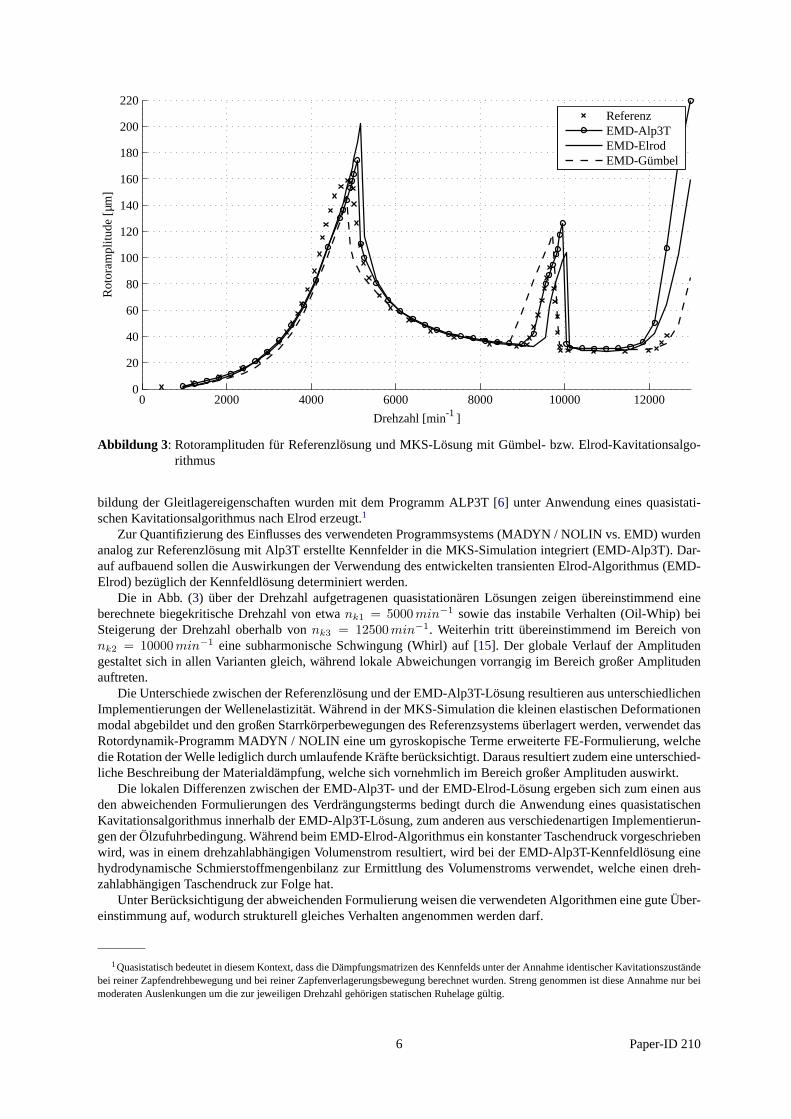
Abbildung 3: Rotoramplituden für Referenzlösung und MKS-Lösung mit Gümbel- bzw. Elrod-Kavitationsalgo-rithmus
bildung der Gleitlagereigenschaften wurden mit dem Programm ALP3T [6] unter Anwendung eines quasistati-schen Kavitationsalgorithmus nach Elrod erzeugt.1
Zur Quantifizierung des Einflusses des verwendeten Programmsystems (MADYN / NOLIN vs. EMD) wurdenanalog zur Referenzlösung mit Alp3T erstellte Kennfelder in die MKS-Simulation integriert (EMD-Alp3T). Dar-auf aufbauend sollen die Auswirkungen der Verwendung des entwickelten transienten Elrod-Algorithmus (EMD-Elrod) bezüglich der Kennfeldlösung determiniert werden.
Die in Abb. (3) über der Drehzahl aufgetragenen quasistationären Lösungen zeigen übereinstimmend eineberechnete biegekritische Drehzahl von etwank1 = 5000 min−1 sowie das instabile Verhalten (Oil-Whip) beiSteigerung der Drehzahl oberhalb vonnk3 = 12500 min−1. Weiterhin tritt übereinstimmend im Bereich vonnk2 = 10000 min−1 eine subharmonische Schwingung (Whirl) auf [15]. Der globale Verlauf der Amplitudengestaltet sich in allen Varianten gleich, während lokale Abweichungen vorrangig im Bereich großer Amplitudenauftreten.
Die Unterschiede zwischen der Referenzlösung und der EMD-Alp3T-Lösung resultieren aus unterschiedlichenImplementierungen der Wellenelastizität. Während in der MKS-Simulation die kleinen elastischen Deformationenmodal abgebildet und den großen Starrkörperbewegungen des Referenzsystems überlagert werden, verwendet dasRotordynamik-Programm MADYN / NOLIN eine um gyroskopische Terme erweiterte FE-Formulierung, welchedie Rotation der Welle lediglich durch umlaufende Kräfte berücksichtigt. Daraus resultiert zudem eine unterschied-liche Beschreibung der Materialdämpfung, welche sich vornehmlich im Bereich großer Amplituden auswirkt.
Die lokalen Differenzen zwischen der EMD-Alp3T- und der EMD-Elrod-Lösung ergeben sich zum einen ausden abweichenden Formulierungen des Verdrängungsterms bedingt durch die Anwendung eines quasistatischenKavitationsalgorithmus innerhalb der EMD-Alp3T-Lösung, zum anderen aus verschiedenartigen Implementierun-gen der Ölzufuhrbedingung. Während beim EMD-Elrod-Algorithmus ein konstanter Taschendruck vorgeschriebenwird, was in einem drehzahlabhängigen Volumenstrom resultiert, wird bei der EMD-Alp3T-Kennfeldlösung einehydrodynamische Schmierstoffmengenbilanz zur Ermittlung des Volumenstroms verwendet, welche einen dreh-zahlabhängigen Taschendruck zur Folge hat.
Unter Berücksichtigung der abweichenden Formulierung weisen die verwendeten Algorithmen eine gute Über-einstimmung auf, wodurch strukturell gleiches Verhalten angenommen werden darf.
1Quasistatisch bedeutet in diesem Kontext, dass die Dämpfungsmatrizen des Kennfelds unter der Annahme identischer Kavitationszuständebei reiner Zapfendrehbewegung und bei reiner Zapfenverlagerungsbewegung berechnet wurden. Streng genommen ist diese Annahme nur beimoderaten Auslenkungen um die zur jeweiligen Drehzahl gehörigen statischen Ruhelage gültig.
6 Paper-ID 210
4.2 Vergleich Elrod und Gümbel
Zur Bestimmung des Einflusses des masseerhaltenden Kavitationsmodells nach Elrod wird die für dynamischeUntersuchungen sonst übliche Vereinfachung des Kavitationsalgorithmus nach Gümbel als Vergleich verwendet.Nach Diskretisierung ergibt sich ebenfalls ein lineares Gleichungssystem, welches allerdings symmetrisch ist unddirekt gelöst werden kann. Im Gegensatz zum Elrod-Algorithmus gilt im gesamten Schmierspalt der Spaltfüllungs-gradϑ = 1, wodurch sämtliche zeitlichen Abhängigkeiten dieser Größe entfallen.
In Abb. (3) ist neben den Validierungsrechnungen zur Bestimmung des Einflusses der masseerhaltenden Kavi-tation auch der Amplitudengang bei Verwendung des Gümbel-Algorithmus dargestellt. Aus diesem Diagrammwurden exemplarisch vier charakteristische Drehzahlen (3000 min−1 - unterkritisch,5500 min−1- Resonanz,
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
vx [-]
vy [-
]
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
vx [-]
vy [-
]
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
vx [-]
vy [-
]
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
vx [-]
vy [-
]
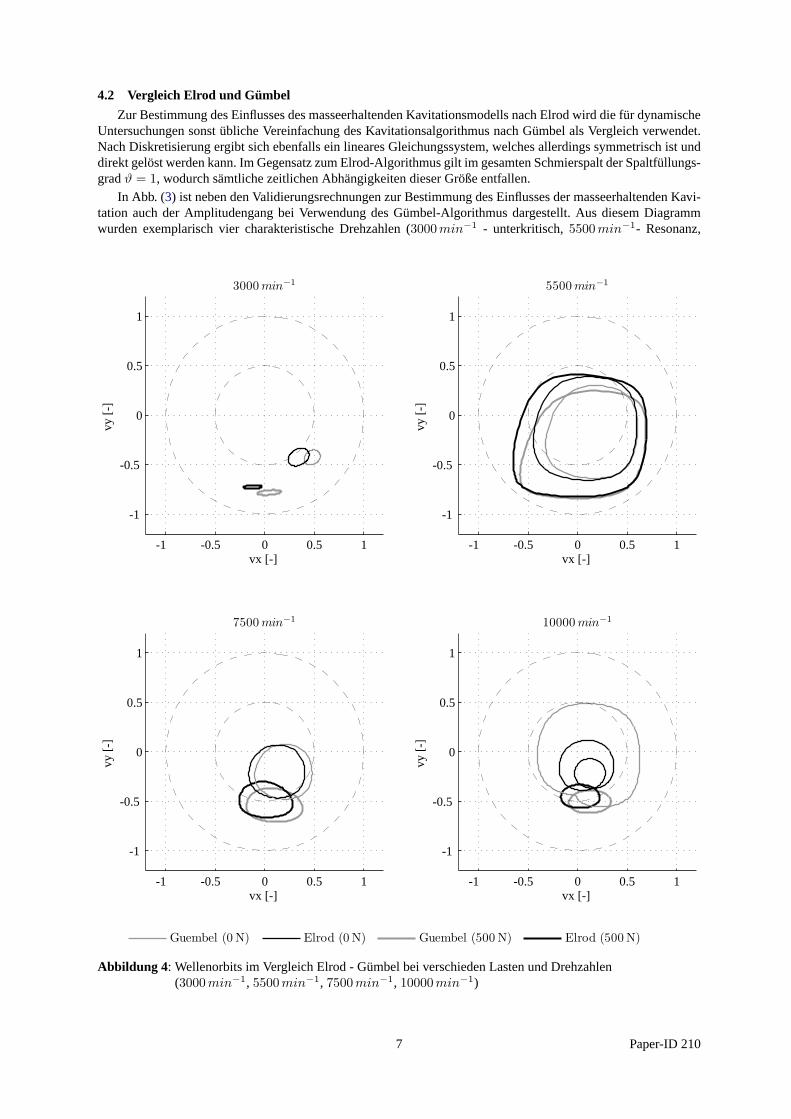
Abbildung 4: Wellenorbits im Vergleich Elrod - Gümbel bei verschieden Lasten und Drehzahlen(3000 min−1, 5500 min−1, 7500 min−1, 10000 min−1)
7 Paper-ID 210
0.2 0.205 0.21 0.215 0.220
20
40
60
t [s]
hmin
[μm
]
0.2 0.205 0.21 0.215 0.220
1
2
3
4
t [s]
pmax
[MP
a]
0.23 0.235 0.240
20
40
60
t [s]
hmin
[μm
]
0.23 0.235 0.240
1
2
3
4
t [s]
pmax
[MP
a]
0.215 0.22 0.225 0.23 0.2350
20
40
60
t [s]
hmin
[μm
]
0.215 0.22 0.225 0.23 0.2350
1
2
3
4
t [s]
pmax
[MP
a]
0.19 0.2 0.21 0.22 0.230
20
40
60
t [s]
hmin
[μm
]
0.19 0.2 0.21 0.22 0.230
1
2
3
4
t [s]
pmax
[MP
a]
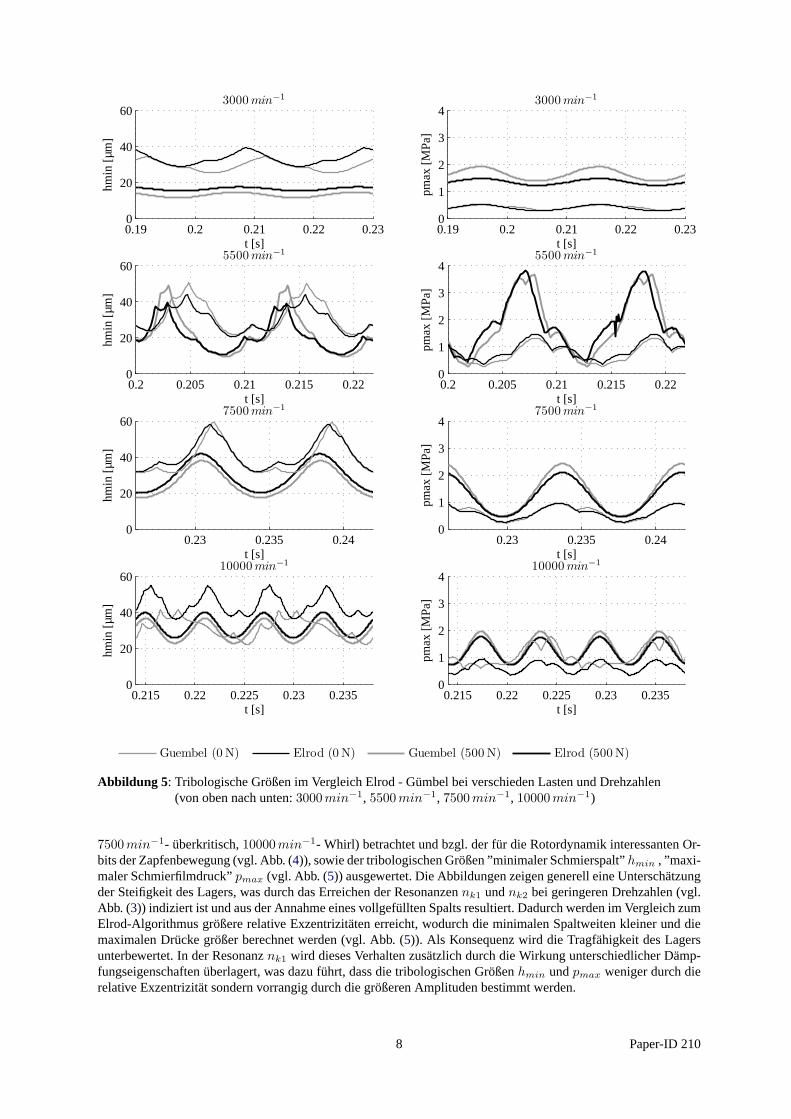
Abbildung 5: Tribologische Größen im Vergleich Elrod - Gümbel bei verschieden Lasten und Drehzahlen(von oben nach unten:3000 min−1, 5500 min−1, 7500 min−1, 10000 min−1)
7500 min−1- überkritisch,10000 min−1- Whirl) betrachtet und bzgl. der für die Rotordynamik interessanten Or-bits der Zapfenbewegung (vgl. Abb. (4)), sowie der tribologischen Größen ”minimaler Schmierspalt”hmin , ”maxi-maler Schmierfilmdruck”pmax (vgl. Abb. (5)) ausgewertet. Die Abbildungen zeigen generell eine Unterschätzungder Steifigkeit des Lagers, was durch das Erreichen der Resonanzennk1 undnk2 bei geringeren Drehzahlen (vgl.Abb. (3)) indiziert ist und aus der Annahme eines vollgefüllten Spalts resultiert. Dadurch werden im Vergleich zumElrod-Algorithmus größere relative Exzentrizitäten erreicht, wodurch die minimalen Spaltweiten kleiner und diemaximalen Drücke größer berechnet werden (vgl. Abb. (5)). Als Konsequenz wird die Tragfähigkeit des Lagersunterbewertet. In der Resonanznk1 wird dieses Verhalten zusätzlich durch die Wirkung unterschiedlicher Dämp-fungseigenschaften überlagert, was dazu führt, dass die tribologischen Größenhmin undpmax weniger durch dierelative Exzentrizität sondern vorrangig durch die größeren Amplituden bestimmt werden.
8 Paper-ID 210
4.3 Transiente SimulationenDie bisherigen Untersuchungen bezogen sich auf die Beschreibung quasistationärer Zustände, wird dagegen ein
Hochlauf mit konstanter Winkelbeschleunigung untersucht, treten Unterschiede auf. In Abhängigkeit der Winkel-beschleunigung verändern sich das Auftreten und die Amplitude der Resonanz, des Oil-Whirls und des Oil-Whips(vgl. Abb. (6) - oben).
0 2000 4000 6000 8000 10000 12000 14000 16000 180000
20
40
60
80
100
120
140
160
180
200
220
Drehzahl [min-1 ]
Rot
oram
plitu
de [μ
m]
5300 5350 5400 5450 5500 5550 5600180
185
190
195
200
205
Drehzahl [min-1 ]
Rot
oram
plitu
de [μ
m]
80 100 120 140 1600
5
10
15
Frequenz [Hz]
Rot
orau
slen
kung
x [μ
m]
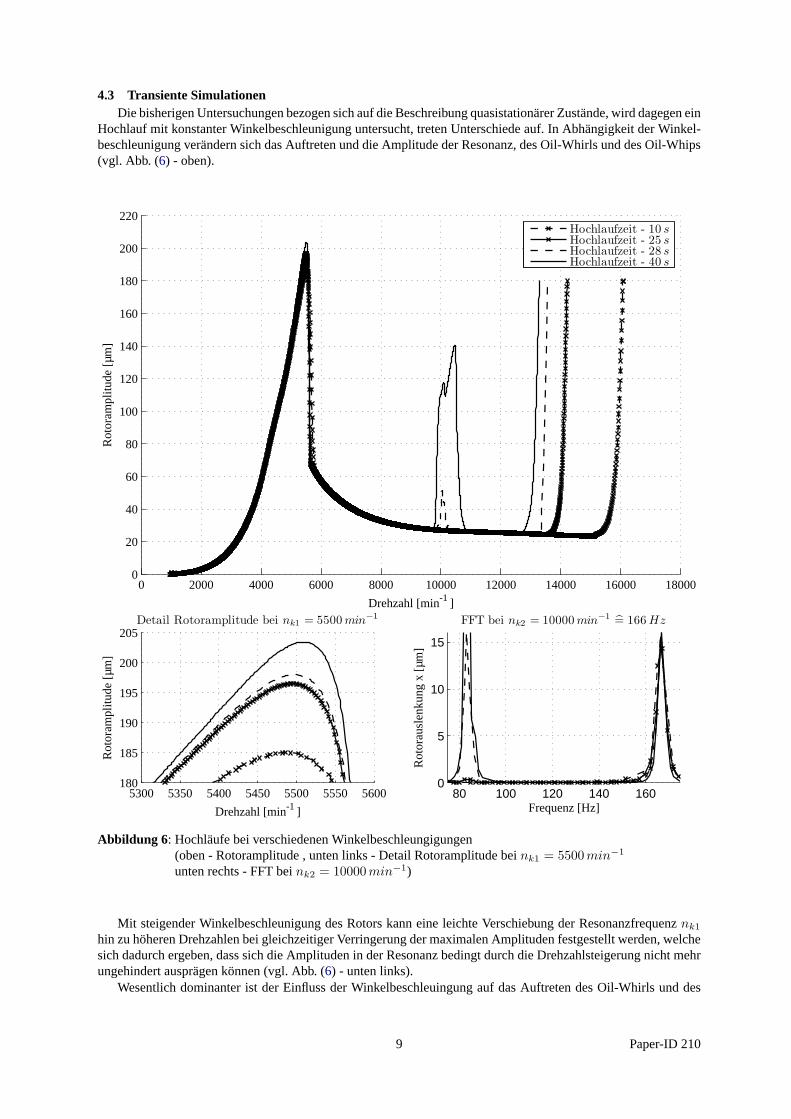
Abbildung 6: Hochläufe bei verschiedenen Winkelbeschleungigungen(oben - Rotoramplitude , unten links - Detail Rotoramplitude beink1 = 5500 min−1
unten rechts - FFT beink2 = 10000 min−1)
Mit steigender Winkelbeschleunigung des Rotors kann eine leichte Verschiebung der Resonanzfrequenznk1
hin zu höheren Drehzahlen bei gleichzeitiger Verringerung der maximalen Amplituden festgestellt werden, welchesich dadurch ergeben, dass sich die Amplituden in der Resonanz bedingt durch die Drehzahlsteigerung nicht mehrungehindert ausprägen können (vgl. Abb. (6) - unten links).
Wesentlich dominanter ist der Einfluss der Winkelbeschleuingung auf das Auftreten des Oil-Whirls und des
9 Paper-ID 210
Oil-Whips. Mit steigender Winkelbeschleunigung verringern sich die Amplitudenüberhöhungen beink2. Erfolgteine Fourier-Transformation an dieser Stelle, können die subharmonischen Anteile weiterhin identifiziert werden(vgl. Abb. (6) - unten rechts), bei höheren Winkelbeschleunigungen leisten sie jedoch bedingt durch die gerin-gere Zeit zur Ausbildung der Amplitude im Vergleich zur Unwuchtschwingung keinen dominanten Beitrag. Dasletztlich zum Systemversagen führende Auftreten des Oil-Whips erfolgt mit steigender Winkelbeschleunigung beisukzessiv höheren Drehzahlennk3. Die transienten Einflüsse der nichtlinearen Lagerungseigenschaften auf dasSystemverhalten sind vielfältig und können den sicheren Betrieb eines Rotorsystems maßgeblich beeinflussen.
4.4 Einfluss der zeitlichen Änderung des Spaltfüllungsgrads
Um den Einfluss der algorithmisch kompliziert im Integrator zu implementierenden Änderung des Spaltfül-lungsgrads Gl. (7) bewerten zu können, soll im Folgenden exemplarisch aus den in Abs. (4.2) definierten Variantendie Simulation bein = 5500 min−1 mit F = 500 N mit und ohne Berücksichtigung dieses Effekts untersuchtwerden. Das bisher verwendete Mehrflächenlager weist aufgrund der vier Zuführungstaschen in weiten Bereicheneinen vollgefüllten Schmierspalt auf, wodurch der hier zu quantifizierende Einfluss der zeitlichen Änderung desSpaltfüllungsgrads nur gering ausgeprägt ist. Aus diesem Grund werden zusätzliche Simulationsergebnisse unterVerwendung eines Kreislagers mit identischen Abmessungen und einer Zuführtasche als Vergleichsbeispiel mitgeringerem Spaltfüllungsgrad präsentiert.
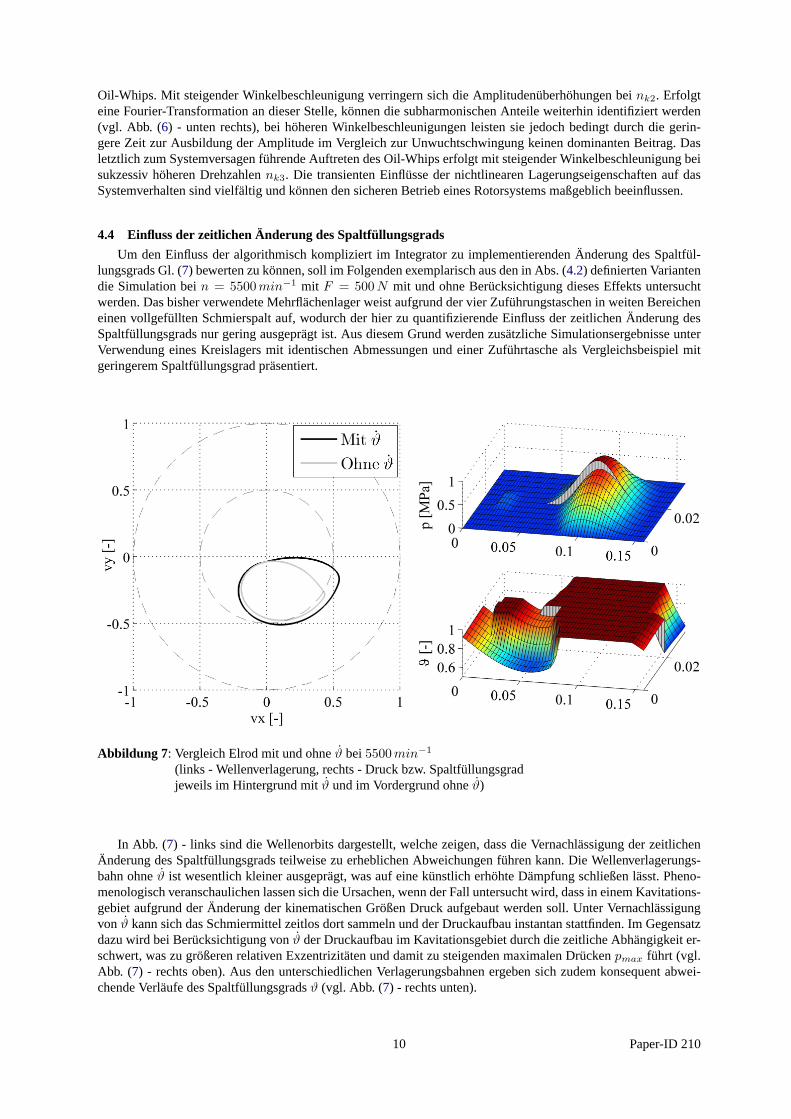
Abbildung 7: Vergleich Elrod mit und ohneϑ bei5500 min−1
(links - Wellenverlagerung, rechts - Druck bzw. Spaltfüllungsgradjeweils im Hintergrund mitϑ und im Vordergrund ohneϑ)
In Abb. (7) - links sind die Wellenorbits dargestellt, welche zeigen, dass die Vernachlässigung der zeitlichenÄnderung des Spaltfüllungsgrads teilweise zu erheblichen Abweichungen führen kann. Die Wellenverlagerungs-bahn ohneϑ ist wesentlich kleiner ausgeprägt, was auf eine künstlich erhöhte Dämpfung schließen lässt. Pheno-menologisch veranschaulichen lassen sich die Ursachen, wenn der Fall untersucht wird, dass in einem Kavitations-gebiet aufgrund der Änderung der kinematischen Größen Druck aufgebaut werden soll. Unter Vernachlässigungvon ϑ kann sich das Schmiermittel zeitlos dort sammeln und der Druckaufbau instantan stattfinden. Im Gegensatzdazu wird bei Berücksichtigung vonϑ der Druckaufbau im Kavitationsgebiet durch die zeitliche Abhängigkeit er-schwert, was zu größeren relativen Exzentrizitäten und damit zu steigenden maximalen Drückenpmax führt (vgl.Abb. (7) - rechts oben). Aus den unterschiedlichen Verlagerungsbahnen ergeben sich zudem konsequent abwei-chende Verläufe des Spaltfüllungsgradsϑ (vgl. Abb. (7) - rechts unten).
10 Paper-ID 210
5 ZusammenfassungIn dem vorliegenden Beitrag wurde die Einbindung eines volldynamsichen Algorithmus zur Lösung der Rey-
noldsgleichung in jedem Zeitschritt einer Mehrkörpersimulation unter Berücksichtigung masseerhaltender Kavi-tation vorgestellt. Besonderen Wert wurde auf die vollständige Abbildung des Verdrängungsterms und der damitverbundenen zeitlichen Änderung des Spaltfüllungsgrads gelegt.
Nach Validierung der Algorithmen an einem quasistationären Beispiel, wurden Unterschiede bzgl. Resonanzund weiterer subharmonischer Schwingungsphänomene (Whirl/Whip) analysiert und interpretiert. Der Einflussdes Kavitationsalgorithmus auf die Lösung im quasistationären Fall wurde bei verschiedenen Lasten und Drehzah-len untersucht. Es konnte gezeigt werden, dass unter Vernachlässigung der Masseerhaltung das System wenigersteif reagiert, was sich in einer Verringerung der kritischen Drehzahlennk äußert. Aufgrund der größeren Ex-zentrizitäten werden die minimalen Spaltweiten kleiner und die maximalen Drücke größer berechnet, was einerUnterbewertung der Tragfähigkeit entspricht. Unter Berücksichtigung transienter Effekte konnte gezeigt werden,dass die Amplitudenüberhöhungen bei den kritischen Drehzahlennk1 und nk2 mit steigender Winkelgeschwin-digkeit geringer ausfallen und das Systemversagen bei höheren Drehzahlennk3 auftritt. Abschließend wurde derEinfluss der Berücksichtigung der zeitlichen Änderung des Spaltfüllungsgrads am Beispiel eines Kreislagers dis-kutiert. Die Vernachlässigung des Terms führt zu einer generellen Überschätzung der Tragreserven des Lagers,was sich im Kontext der fortschreitenden Optimierung rotordynamischer Systeme als kritisch erweisen kann.
Literatur[1] Bobach, L. (2008):Simulation dynamisch belasteter Radialgleitlager unter Mischreibungsbedingungen. Dis-
sertation, Otto-von-Guericke Universität Magdeburg.
[2] Booker, J. F. und Boedo, S. (2001): Finite element analysis of elastic engine bearing lubrication: Theory.Traitement des problèmes de lubrification par la méthode des eléments finis, revue européenne des elémentsfinis, 10(6-7), pp. 705 – 724.
[3] Elrod, H. G. (1981): A Cavitation Algorithm.Journal of Lubrication Technology, 103, pp. 350 – 354.
[4] Floberg, L. (1957): The infinite journal bearing considering vaporization.Transactions of Chalmers Univer-sity of Technologie, 189.
[5] Glienicke, J. und Eilers, M. (1993): Nichtlineare Rotordynamik - Berechnungsverfahren zur Berücksich-tigung des nichtlinearen Verhaltens realer Turbinengleitlager und Quetschfilmdämpfer bei allgemeinen ro-tordynamischen Untersuchungen.Forsch.-Ber. der Forsch.-Vereinigung Antriebstechnik, Frankfurt/M., 473.
[6] Jakobsson, B. und Floberg, L. (1957): The finite journal bearing considering vaporization.Transactions ofChalmers University of Technologie, 190.
[7] Klement, H. D. (1993): Berechnung der Eigenfrequenz und Stabilität von Rotoren mit MADYN.VDI Bericht,1082.
[8] Lang, O. R. und Steinhilper, W. (1978):Gleitlager: Berechnung und Konstruktion von Gleitlagern mit kon-stanter und zeitlich veränderlicher Belastung. Springer, Berlin.
[9] Mermertas, Ü. (2007):Nichtlinearer Einfluss von Radialgleitlagern auf die Dynamik schnelllaufender Roto-ren. Dissertation, Technische Universität Clausthal.
[10] Mittwollen, N. (1990): Betriebsverhalten von Radialgleitlagern bei hohen Umfangsgeschwindigkeiten undhohen thermischen Belastungen.Fortschritt-Berichte VDI : Reihe 1, Düsseldorf, 187.
[11] Mittwollen, N., Rückert, A., Schmitz, A. und Reinhardt, W.-D. (1991): Verbesserung der Berechnungsgrund-lagen für schnelllaufende, hochbelastete Mehrgleitflächen- und Radialkippsegmentlager.Abschlussbericht -BMFT-Verbundprojekt 03T0012A, Technische Universität Braunschweig.
[12] Muszynska, A. (1986): Whirl and Whip - Rotor/Bearing Stability Problems.Journal of Sound and Vibration,110(3), pp. 443 – 462.
[13] Nitzschke, S., Woschke, E., Daniel, C. und Strackeljan, J. (2011): Simulation von Schwimmbuchsenlagerun-gen in Abgasturboladern.Journal of Mechanical Engineering of the National Technical University of UkraineKPI, 61(2), pp. 7 – 12.
[14] Olsson, K. O. (1965): Cavitation in dynamically loaded bearings.Transactions of Chalmers University ofTechnologie, 308.
[15] Schwertassek, R. und Wallrapp, O. (1999):Dynamik flexibler Mehrkörpersysteme. Vieweg.
11 Paper-ID 210






![5.1.3 Diskussion des Phasenumwandlungsverhaltens im ... · (111)-Reflexes nach der Methode von [Timoshenko 1970] Spannungen von 5 GPa berechnet. Die Bildung von Martensitphasen durch](https://img.pdfslide.org/doc/110x75/5e1befae7a7c4274645b8990/513-diskussion-des-phasenumwandlungsverhaltens-im-111-reflexes-nach-der.jpg)






















