Embed Size (px)
Citation preview
UNIVERSITÄT DES SAARLANDES
Naturwissenschaftlich-Technische Fakultät II
Grundgebiete der Elektrotechnik Prof. Dr.-Ing. habil. Herbert Kliem
Elektrotechnisches Grundlagenpraktikum
INHALT
Versuch 1: Das elektrische Feld
Versuch 2: Das elektrische Strömungsfeld
Versuch 3: Das Magnetfeld
Versuch 4: Parallelresonanzkreis und Messungen an
Zweipolen
Versuch 5: Elektrische Maschinen
Versuch 6: Transiente Vorgänge

Versuch 1
Das elektrische Feld
1 GRUNDLAGEN ....................................................................................................................................... 2
1.1 DEFINITION DES ELEKTRISCHEN FELDES .............................................................................................. 2
1.2 DAS POTENTIAL, DIE SPANNUNG ......................................................................................................... 3
1.3 DAS ELEKTROSTATISCHE FELD DES PLATTENKONDENSATORS ............................................................ 6
1.3.1 Die Verschiebungsflußdichte ...................................................................................................... 7
1.3.2 Die elektrische Polarisation ....................................................................................................... 8
1.3.3 Die Kapazität eines Plattenkondensator .................................................................................. 12
1.3.4 Parallel- und Reihenschaltung von Kondensatoren ................................................................. 12
1.4 DER IDEALE KONDENSATOR IM WECHSELSTROMKREIS .................................................................... 13
1.4.1 Phasenlage zwischen Strom und Spannung ............................................................................. 13
1.4.2 Leistung und Energieumsetzung ............................................................................................... 15
1.5 DER VERLUSTBEHAFTETE KONDENSATOR ........................................................................................ 16
1.5.1 Ersatzschaltbild ........................................................................................................................ 16
1.5.2 Der Verlustfaktor ...................................................................................................................... 17
1.5.3 Die spezifische Wärmekapazität ............................................................................................... 19
1.5.4 Einteilung technischer Kondensatoren .................................................................................... 19
1.5.5 Elektrolytkondensatoren ........................................................................................................... 20
1.6 DIE BESTIMMUNG DER AUSTRITTSARBEIT MIT HILFE DES KONTAKTPOTENTIALS .............................. 21
1.6.1 Das Potentialtopfmodell ........................................................................................................... 21
1.6.2 Die Berührungsspannung ......................................................................................................... 22
1.6.3 Das Kelvin/Zisman-Verfahren .................................................................................................. 24
2 VORBEREITENDE AUFGABEN ....................................................................................................... 28
3 MESSAUFBAU UND MESSAUFGABEN .......................................................................................... 30
3.1 VERSUCH PLATTENKONDENSATOR ................................................................................................... 30
3.1.1 Meßaufbau zum Plattenkondensator ........................................................................................ 30
3.1.2 Meßaufgaben zum Plattenkondensator .................................................................................... 31
3.2 VERSUCH ELEKTROLYTKONDENSATOR ............................................................................................. 32
3.2.1 Meßaufbau zum Elektrolytkondensator .................................................................................... 32
3.2.2 Meßaufgaben zum Elektrolytkondensator ................................................................................ 33
3.3 VERSUCH KELVIN/ZISMAN-METHODE .............................................................................................. 35
3.3.1 Meßaufbau zur Kelvin/Zisman-Methode .................................................................................. 35
3.3.2 Meßaufgaben zur Kelvin/Zisman-Methode .............................................................................. 35
2 1 Grundlagen
1 Grundlagen
Viele technische Anwendungen der heutigen Zeit beruhen auf dem Vorhandensein
elektrischer, bzw. elektrostatischer Felder. Die beiden wohl bekanntesten Anwendungen
sind die Xerographie (Fotokopieren) und der elektrostatische Filter. Der elektrostatische
Filter wird vor allem in Kohlekraftwerken eingesetzt. Mit ihm können 99,9% der Asche
und des Staubes aus der Abluft gefiltert werden.
1.1 Definition des elektrischen Feldes
Es gibt eine Vielzahl elektrischer Erscheinungen. Diese werden zurückgeführt auf die
Wirkung von ruhenden oder bewegten elektrischen Ladungen.
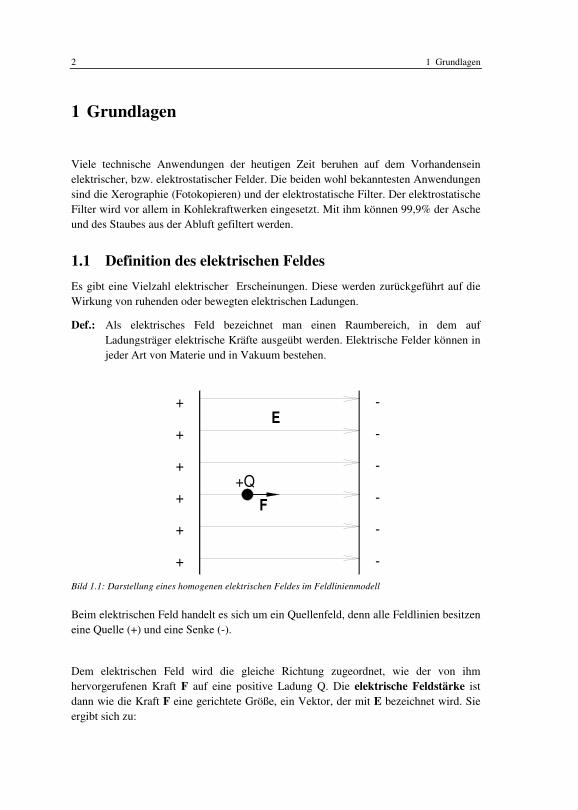
Def.: Als elektrisches Feld bezeichnet man einen Raumbereich, in dem auf
Ladungsträger elektrische Kräfte ausgeübt werden. Elektrische Felder können in
jeder Art von Materie und in Vakuum bestehen.
E
+Q
+
+
+F
+
+
+
-
-
-
-
-
-
Bild 1.1: Darstellung eines homogenen elektrischen Feldes im Feldlinienmodell
Beim elektrischen Feld handelt es sich um ein Quellenfeld, denn alle Feldlinien besitzen
eine Quelle (+) und eine Senke (-).
Dem elektrischen Feld wird die gleiche Richtung zugeordnet, wie der von ihm
hervorgerufenen Kraft F auf eine positive Ladung Q. Die elektrische Feldstärke ist
dann wie die Kraft F eine gerichtete Größe, ein Vektor, der mit E bezeichnet wird. Sie
ergibt sich zu:
1.2 Das Potential, die Spannung 3
EF
= lim QQ 0→
Der Proportionalitätsfaktor Q bezeichnet die elektrische Eigenschaft des geladenen
Körpers, seine Ladung. Es gibt positive und negative Ladungen. Ladungen mit gleichem
Vorzeichen stoßen sich ab, ungleiche ziehen sich an. Im Gegensatz zur elektrischen
Feldstärke ist die Ladung eine physikalische Größe, die keine Richtung hat, also ein
Skalar. Eine beliebige elektrische Ladung Q setzt sich aus dem Vielfachen N der
kleinstmöglichen Ladung, der sogenannten Elementarladung e, zusammen. Für die
Größe des Betrages der Elementarladung, gemessen in Coulomb, ergibt sich:
e 1,602 10 C-19= ⋅
Die Ladung des Elektrons ist negativ. Auf ein Elektron wirkt also im elektrischen Feld
eine Kraft entgegengesetzt zur Feldrichtung.
1.2 Das Potential, die Spannung
Bewegt sich eine Probeladung Q in Richtung des elektrischen Feldes, so führt das Feld
ihm Energie hinzu. Umgekehrt muß Arbeit aufgewendet werden, wenn der Körper
gegen die Kraftwirkung bewegt werden soll. Diese Arbeit W (eine skalare Größe) wird
als positiv angesehen, wenn sich die Ladung in der Richtung der auf ihn ausgeübten
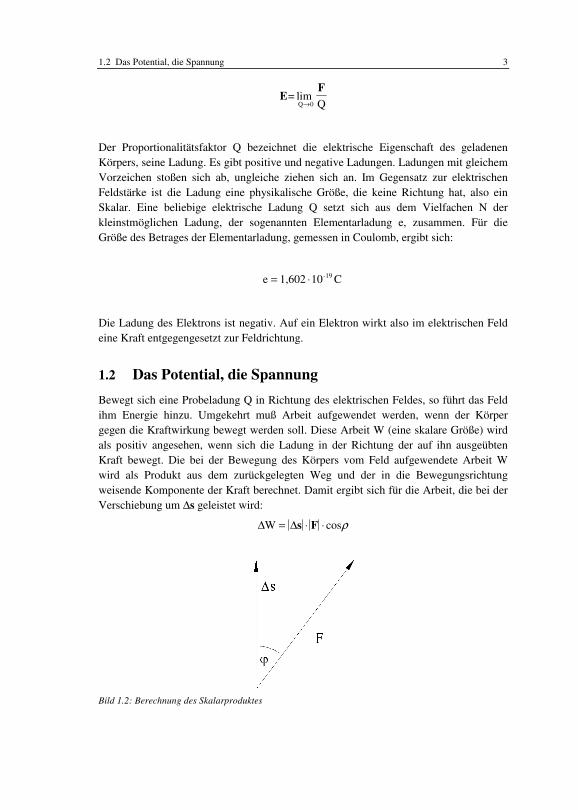
Kraft bewegt. Die bei der Bewegung des Körpers vom Feld aufgewendete Arbeit W
wird als Produkt aus dem zurückgelegten Weg und der in die Bewegungsrichtung
weisende Komponente der Kraft berechnet. Damit ergibt sich für die Arbeit, die bei der
Verschiebung um ∆s geleistet wird:
∆ ∆W cos= ⋅ ⋅s F ρ
Bild 1.2: Berechnung des Skalarproduktes
4 1 Grundlagen
Und als Skalarprodukt geschrieben:
∆ ∆W = •F s
Einsetzen von F E= ⋅Q liefert:
∆ ∆W Q = ⋅ •E s
Oder in Komponentenschreibweise:
( )∆ ∆ ∆ ∆W Q E x E y E z x y z= ⋅ ⋅ ⋅ ⋅+ +
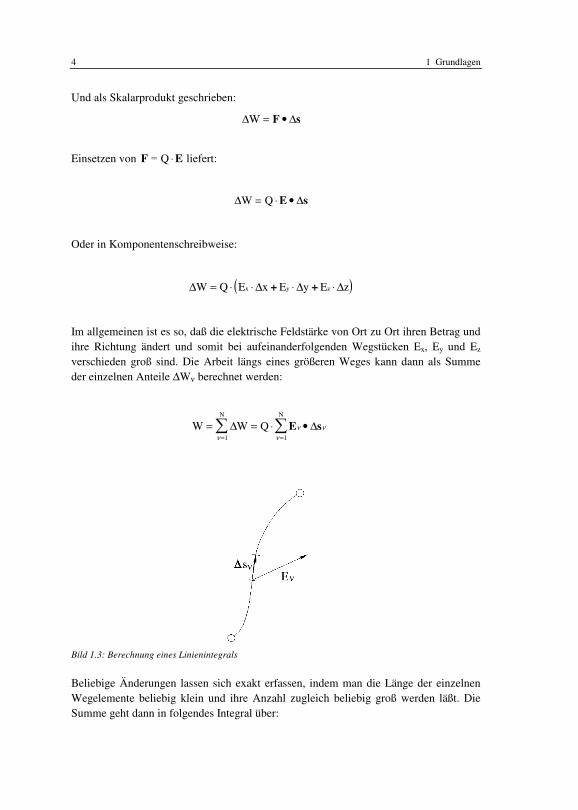
Im allgemeinen ist es so, daß die elektrische Feldstärke von Ort zu Ort ihren Betrag und
ihre Richtung ändert und somit bei aufeinanderfolgenden Wegstücken Ex, Ey und Ez
verschieden groß sind. Die Arbeit längs eines größeren Weges kann dann als Summe
der einzelnen Anteile ∆Wν berechnet werden:
W W Q1
N
1
N
= = ⋅ •= =
∑ ∑∆ ∆ν
ν ν
ν
E s
Bild 1.3: Berechnung eines Linienintegrals
Beliebige Änderungen lassen sich exakt erfassen, indem man die Länge der einzelnen
Wegelemente beliebig klein und ihre Anzahl zugleich beliebig groß werden läßt. Die
Summe geht dann in folgendes Integral über:
1.2 Das Potential, die Spannung 5
W Q da
b
= ⋅ •∫E s
Dieses Integral wird Linienintegral genannt, wobei die Integration über einen vorher
festgelegten Weg von a nach b geht. In der praktischen Ausführung der Integration in
kartesischen Koordinaten muß das Linienintegral in drei einfache Integrale zerlegt
werden:
W Q E (x, y, z)dx + E (x, y, z)dy + E (x, y, z)dz x
x
x
y z
x
x
x
x
a
b
a
b
a
b
= ⋅
∫ ∫∫
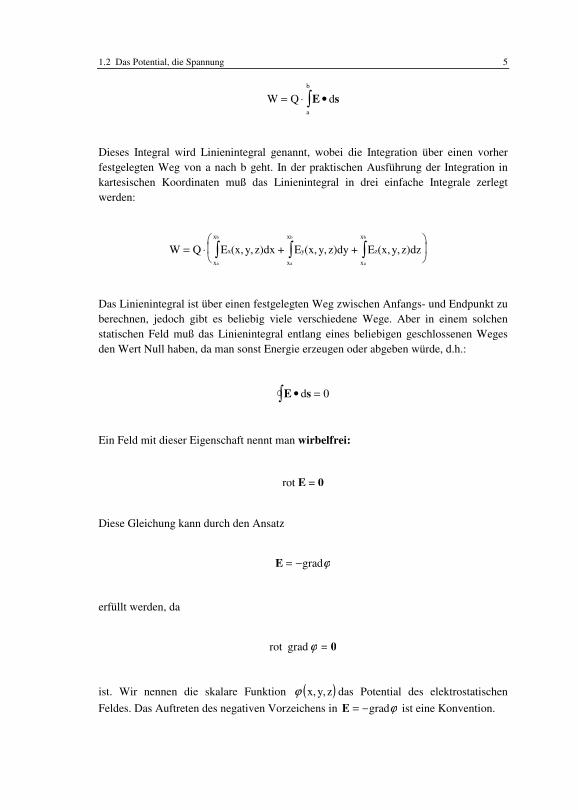
Das Linienintegral ist über einen festgelegten Weg zwischen Anfangs- und Endpunkt zu
berechnen, jedoch gibt es beliebig viele verschiedene Wege. Aber in einem solchen
statischen Feld muß das Linienintegral entlang eines beliebigen geschlossenen Weges
den Wert Null haben, da man sonst Energie erzeugen oder abgeben würde, d.h.:
E s• =∫ d 0
Ein Feld mit dieser Eigenschaft nennt man wirbelfrei:
rot =E 0
Diese Gleichung kann durch den Ansatz
E = −gradϕ
erfüllt werden, da
rot grad ϕ = 0
ist. Wir nennen die skalare Funktion ( )ϕ x, y, z das Potential des elektrostatischen
Feldes. Das Auftreten des negativen Vorzeichens in E = −gradϕ ist eine Konvention.
6 1 Grundlagen
Das Linienintegral
U : d ab
a
b
= •∫E s
wird als Spannung bezeichnet. Wegen
U : d grad d d (a) (b)ab
a
b
a
b
a
b
= • = − • = − = −∫∫∫E s sϕ ϕ ϕ ϕ
ist das Linienintegral vom Weg zwischen den Punkten a und b unabhängig.
Somit ist auch die bei einer Verschiebung einer Ladung aufgewandte Arbeit W allein
eine Funktion der beiden Endpunkte a und b:
[ ]W Q d Q (a) (b) Q Uab
a
b
ab= ⋅ • = ⋅ − = ⋅∫E s ϕ ϕ
Weiterhin sei bemerkt, daß Flächen mit gleichem Potential Äquipotentialflächen heißen.
Das elektrische Feld steht senkrecht auf den Äquipotentialflächen.
1.3 Das elektrostatische Feld des Plattenkondensators
Das elektrostatische Feld ist ein Sonderfall des elektrischen Feldes. Kennzeichen dieses
Sonderfalls sind ruhende elektrische Ladungen.
Die einfachste Form eines elektrostatischen Feldes bildet sich zwischen zwei
planparallelen Metallplatten aus, welche an einer Gleichspannungsquelle angeschlossen
sind. Der Aufbau des elektrischen Feldes erfolgt durch die Gleichspannungsquelle. Ihre
Quellenspannung verschiebt die in der Leitung und in den Platten befindlichen
Elektronen. Somit hat man auf der einen Platte einen Elektronenüberschuß, also eine
Elektrizitätsmenge -Q, entsprechend auf der anderen Platte eine Fehlmenge gleichen
Wertes +Q. Das elektrostatische Feld bleibt auch nach Abtrennen der Gleichspannung
1.3 Das elektrostatische Feld des Plattenkondensators 7
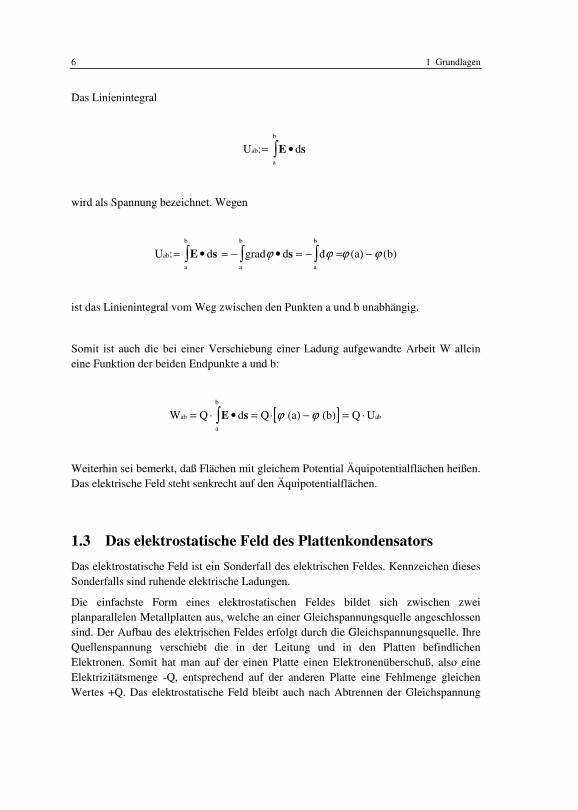
erhalten. Bauelemente, mit der speziellen Aufgabe, einen Ladungszustand zu speichern,
heißen Kondensatoren.
Bild 1.4: Elektrischen Feld eines Plattenkondensators
Bringt man einen Isolierwerkstoff zwischen die Platten des Kondensators, um z.B. eine
bestimmte Kapazität bei möglichst geringen Abmessungen zu erzielen, so nennt man
den vom elektrischen Feld erfüllten Raum Dielektrikum.
1.3.1 Die Verschiebungsflußdichte
Das Feldstärkefeld E allein ist nicht ausreichend, die Erscheinungen im
elektrostatischen Feld zu beschreiben. Wir benötigen noch eine Feldgröße, die
unabhängig von der Art des Dielektrikums nur durch die Elektrodenladung festgelegt
ist. Man führt also eine für viele symmetrische Leiteranordnungen recht einfach
berechenbare Feldgröße ein, die Verschiebungsflußdichte D, wobei A die durchsetzte
Fläche ist:
D AA
d = Q∫ •
Dies bedeutet, daß das Hüllenintegral der Verschiebungsflußdichte gleich dem von der
Hülle eingeschlossenen Ladungen ist.
8 1 Grundlagen
1.3.2 Die elektrische Polarisation
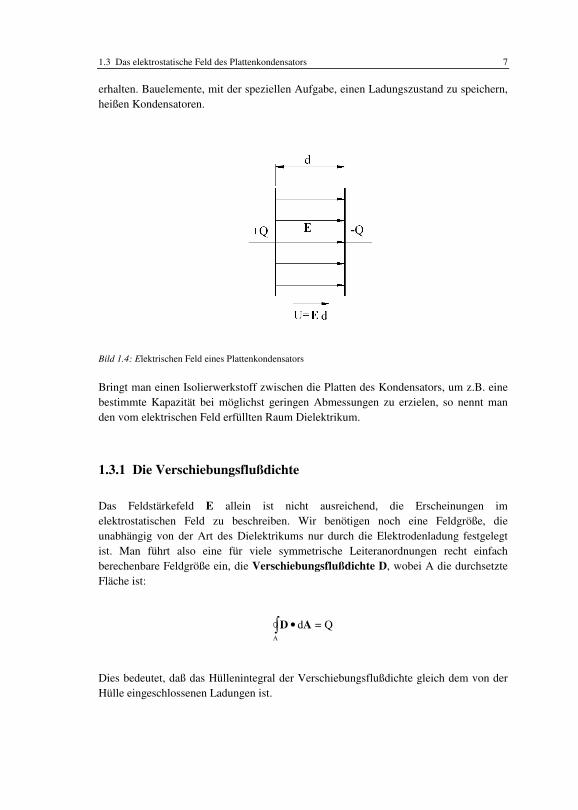
Um eine allgemeine Materialgleichung für Dielektrika zu erhalten, macht man folgendes
Gedankenexperiment:
Eine Ladung -q wird aus der Elektrode eines Plattenkondensators gelöst. +q bleibt auf
der Platte zurück.
Bild 1.5: Gedankenexperiment
Für Ladungsneutralität gilt:
+ q - q = 0
Man untersucht nun drei Positionen in denen sich die Ladung befindet. In Position 1 gilt
für die Ladung auf der linken Platte ql und auf der rechten Platte qr:
q = +q , q = 0l r
Für Position 3 gilt:
q = 0 , q = +ql r

1.3 Das elektrostatische Feld des Plattenkondensators 9
und für Position 2 (Mitte):
q =1
2q , q =
1
2ql r⋅ ⋅
Damit ergibt sich allgemein für den Ladungstransport im Außenkreis ( a + b = d ) :
q =b
a + bq , q =
a
a + bql r
Nun führt man eine zusätzliche Ladung +q in Position a+∆z ein:
( ) ( )q '=b - z
a + b- q , q '=
a + z
a + b- ql r
∆ ∆⋅ ⋅
( )q '+q '=b - z + a + z
a + b- q ql r
∆ ∆⋅ = −
Für die gesuchte Ladungen ergibt sich:
Q = q + q '=b
a + bq -
b - z
a + bq
z q
a bl l l ⋅ ⋅ =
⋅
+
∆ ∆
Q = q + q '=a
a + bq -
a + z
a + bq
z q
a br r r ⋅ ⋅ =
− ⋅
+
∆ ∆
-q und +q bilden einen Dipol.
pz = q z⋅ ∆
nennt man das Dipolmoment in z-Richtung. Für ∆z = 0 gilt:
Q = Q = 0l r

10 1 Grundlagen
Weiterhin ergibt sich für die linke Flächenladung:
( )Q
A
q z
A a b
1
V=
⋅
⋅ += ⋅
∆pz
und somit für N Dipole:
Q
A
N
V= n == ⋅ ⋅p p Pz z , mit n =
N
V : Dipoldichte (Materie, die Dipole enthält)
P ist die durch die Dipole hervorgerufene Flächenladung, die Polarisation. Für die
allgemeine Materialgleichung erhält man bei zusätzlicher Feldstärke E:
D E P= ⋅ε 0 +
Dabei ist ε 0 = 8,854 10-12 As
Vm⋅ die Feldkonstante des elektrischen Vakuum. Im
Material ist P von den negativen zu den positiven Polarisationsladungen gerichtet. Im
allgemeinen kann jedoch P eine andere Richtung wie D und/oder E haben!
Ist das elektrische Feld E klein, so hat man einen linearen Zusammenhang zwischen E
und P:
P E= ⋅ ⋅ε 0 Χ
Die Zahl Χ (CHI, griechischer Buchstabe) heißt elektrische Suszeptibilität und ist ein
Maß für die Polarisierbarkeit eines Stoffes. Mit dem linearen Zusammenhang ergibt sich
für D:
D E E E E= ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ε ε ε ε ε0 0 0 0 r+ = =Χ Χ( )1
Wenn also bei unverändertem Plattenabstand d an Stelle von Luft ein geeigneter
Isolierstoff als Dielektrikum verwendet wird, so vergrößert sich der Verschiebungsfluß.
1.3 Das elektrostatische Feld des Plattenkondensators 11
Der Proportionalitätsfaktor wird Dielektrizitätszahl ε r (ε r = 1+ Χ ) genannt und ist eine
dimensionslose Zahl.
Wichtige Größenordnungen sind z.B.:
Luft ε r 1≈
Öl ε r 2...3≈
PVC ε r 3,5≈
Glas ε r 4...8≈
Al2O3 ε r 8≈
Wasser ε r 80≈
Im einzelnen unterscheidet man drei Polarisationsmechanismen:
1. Die Elektronenpolarisation:
Das äußere elektrische Feld bewirkt eine Deformation der Elektronenhülle der Atome,
so daß pro Atom ein Dipolmoment auftritt. Dieser Polarisationsmechanismus ist bei
allen Polarisationsvorgängen beteiligt.
2. Ionenpolarisation:
Diese liegt vor, wenn unter dem Einfluß des äußeren elektrischen Feldes die positiven
und negativen Ionen eines Moleküls elastisch gegeneinander verschoben werden. Die
Schwerpunkte der Anionen- und Kationenladungen fallen nicht mehr zusammen, und es
entstehen Dipolmomente.
3. Orientierungspolarisation:
Einige Moleküle haben schon aufgrund ihrer Struktur ein permanentes Dipolmoment
(z.B. Wassermoleküle). Ohne äußeres Feld sind alle Richtungen statistisch gleich
verteilt. Erst unter dem Einfluß eines äußeren elektrischen Feldes richten sich die
Dipole aus und bewirken eine makroskopische Polarisation.
12 1 Grundlagen
1.3.3 Die Kapazität eines Plattenkondensators
Die Kapazität eines Kondensators ist allgemein wie folgt definiert:
C
d
d
A
a
b=
•
•
∫
∫
D A
E s
Damit ergibt sich für die Kapazität des Plattenkondensators:
C =Q
U
Q
E d
Q
Dd
Q
Q
Ad
A
d=
⋅=
⋅⋅
=
⋅ ⋅⋅
=⋅ ⋅
ε ε ε ε
ε ε
0 0
0
r r
r
Die Ladung Q kürzt sich heraus, so daß nur noch geometrische Größen und die
Dielektrizitätszahl in der Gleichung für die Kapazität übrig bleiben.
1.3.4 Parallel- und Reihenschaltung von Kondensatoren
Parallelschaltung:
C Ci==
∑i
n
1
Dies liegt bei einem geschichteten Dielektrikum senkrecht zu den Kondensatorplatten
vor
Reihenschaltung:
1
C
1
Ci
==
∑i
n
1
Dies liegt bei einem geschichteten Dielektrikum waagerecht zu den Kondensatorplatten
vor.

1.4 Der ideale Kondensator im Wechselstromkreis 13
1.4 Der ideale Kondensator im Wechselstromkreis
Der ideale Kondensator besitzt eine konstante Kapazität. Sein Wirkwiderstand ist
unendlich, die Wirkung seines Magnetfeldes ist Null.
1.4.1 Phasenlage zwischen Strom und Spannung
Eine Kapazität C liege an einer Wechselspannung
( )u u sin t +c c u= ⋅ ⋅ɵ ω ϕ
Der Kondensatorstrom ist bei konstanter Kapazität proportional der Änderungs-
geschwindigkeit der Kondensatorspannung. Dies folgt aus der Definition des Stromes:
idQ
dtc =
Einsetzen von Q C uc= ⋅ :
i Cdu
dtC u cos( t ) i sin( t )c
c
c u c i= ⋅ = ⋅ ⋅ ⋅ ⋅ + = ⋅ ⋅ +ɵ ɵω ω ϕ ω ϕ
Daraus folgt durch Koeffizientenvergleich:
ɵɵu
i C
c
c
=⋅
1
ω und ϕ ϕ
π
2i u= +
Der Strom zum Kondensator eilt der Spannung am Kondensator um 90° oder ¼
Periodendauer voraus.
14 1 Grundlagen
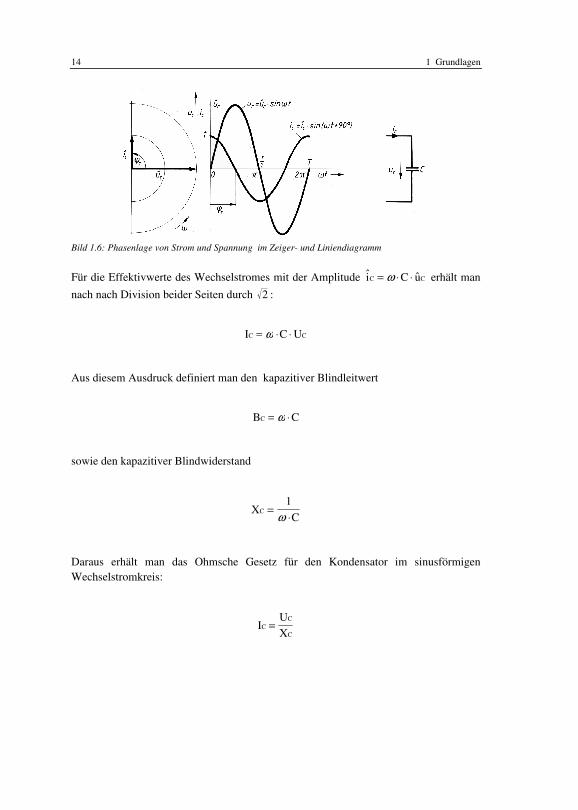
Bild 1.6: Phasenlage von Strom und Spannung im Zeiger- und Liniendiagramm
Für die Effektivwerte des Wechselstromes mit der Amplitude ɵ ɵi C uC C= ⋅ ⋅ω erhält man
nach nach Division beider Seiten durch 2 :
I C UC C= ⋅ ⋅ω
Aus diesem Ausdruck definiert man den kapazitiver Blindleitwert
B CC = ⋅ω
sowie den kapazitiver Blindwiderstand
X1
CC =
⋅ω
Daraus erhält man das Ohmsche Gesetz für den Kondensator im sinusförmigen
Wechselstromkreis:
IU
XC
C
C
=
1.4 Der ideale Kondensator im Wechselstromkreis 15
1.4.2 Leistung und Energieumsetzung
Die Momentanleistung zu einem Zeitpunkt t ist durch das Produkt der zu diesem
Zeitpunkt bestehenden Spannung uc und dem Strom ic bestimmt.
( )p t = u ic c⋅
( )p t = u sin t i cos tc c ɵ ( ) ɵ ( )⋅ ⋅ ⋅ ⋅ ⋅ω ω mit cos( t) sin 90ω ω⋅ = ⋅ + °( )t
Mit der trigonometrischen Umformung
2 sin( t) cos( t) sin(2 t)⋅ ⋅ ⋅ ⋅ = ⋅ ⋅ω ω ω
wird
( )p t =u i
2t
c cɵ ɵsin( )
⋅⋅ ⋅ ⋅2 ω
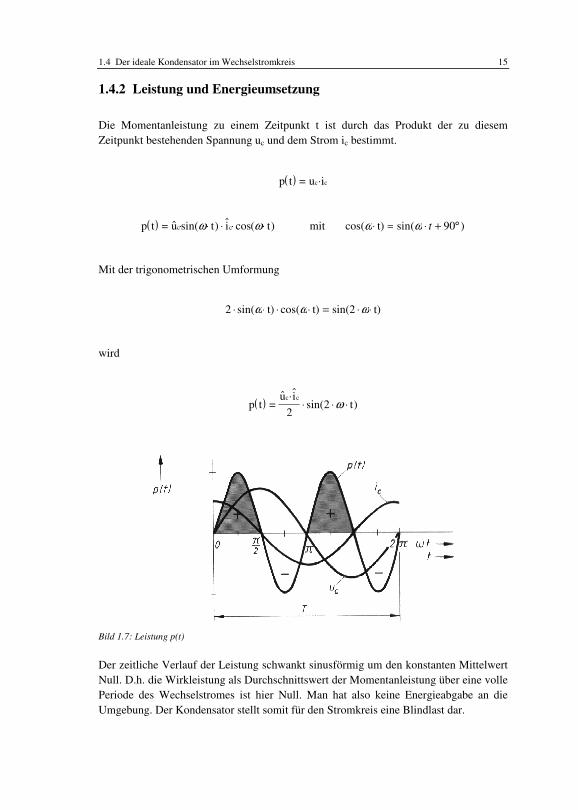
Bild 1.7: Leistung p(t)
Der zeitliche Verlauf der Leistung schwankt sinusförmig um den konstanten Mittelwert
Null. D.h. die Wirkleistung als Durchschnittswert der Momentanleistung über eine volle
Periode des Wechselstromes ist hier Null. Man hat also keine Energieabgabe an die
Umgebung. Der Kondensator stellt somit für den Stromkreis eine Blindlast dar.
16 1 Grundlagen
Die Blindleistung definiert man als Produkt der Effektivwerte von
Kondensatorspannung und Kondensatorstrom.
P U IB C C= ⋅ wenn ϕc = 90°
1.5 Der verlustbehaftete Kondensator
Der technische Kondensator ist nicht verlustfrei. Das Vorhandensein von Verlusten
( = thermische Verluste) bedeutet energiemäßig, daß im technischen Kondensator nicht
nur Blindarbeit, sondern auch Wirkarbeit verrichtet wird.
Die Kondensatorverluste beruhen besonders auf:
• einer geringen elektrischen Leitfähigkeit des Dielektrikums
• einem geringen Widerstand der Zuleitungen und der Kondensatorplatten
• der Umpolarisation der Moleküldipole des Dielektrikums
1.5.1 Ersatzschaltbild
Die einfachste Ersatzschaltung, welche die Verluste berücksichtigt, besteht aus der
Parallelschaltung eines idealen Kondensators und eines idealen Widerstandes.
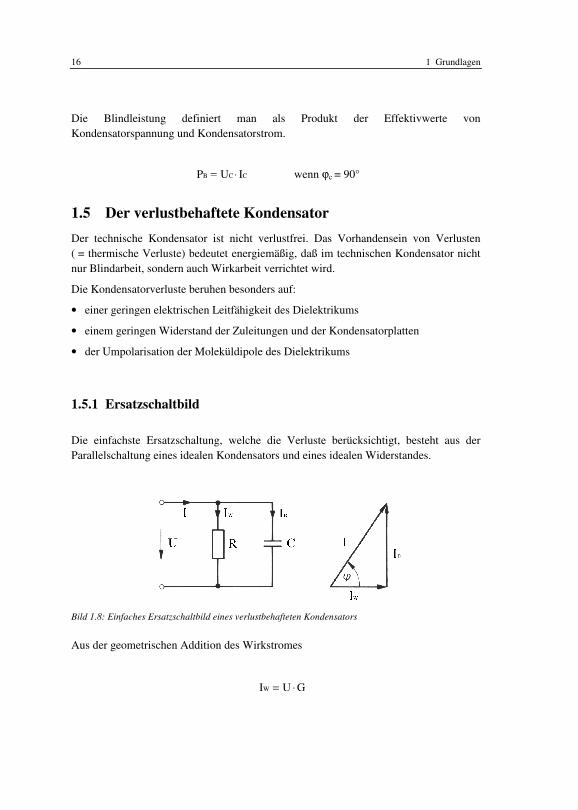
Bild 1.8: Einfaches Ersatzschaltbild eines verlustbehafteten Kondensators
Aus der geometrischen Addition des Wirkstromes
I U GW = ⋅

1.5 Der verlustbehaftete Kondensator 17
mit dem Blindstrom
I C U = U BB C= ⋅ ⋅ ⋅ω
ergibt sich der Gesamtstrom:
I U G B2C
2= ⋅ +
Der Scheinleitwert Y ergibt sich damit zu:
Y G B2C
2= +
und daraus das Ohmsche Gesetz:
I Y U= ⋅
Die Phasenverschiebung zwischen dem Gesamtstrom und der Spannung an der
Parallelschaltung ist:
tan =B
G
C
ϕ
1.5.2 Der Verlustfaktor
Der Verlustfaktor ergibt sich mit der Wirkleistung
PU
RW
0
2
=⋅
ɵ
2 (Scheitelwert der Augenblicksleistung an R)

18 1 Grundlagen
und der Blindleistung
PC U
B0
2
=⋅ ⋅ω ɵ
2 (Scheitelwert der Augenblicksleistung an C)
zu:
tanP
P
1
C R
I
I
X
R
W
B
W
B
δω
= =⋅ ⋅
= =
Die Verluste des Kondensators werden als Verhältnis von Blindleitwert Xc zu
Wirkwiderstand Rc angegeben. Im Leitwertdreieck entspricht dieses Seitenverhältnis
dem Tangens des Verlustwinkels δ.
Bild 1.9: Leitwertdreieck eines verlustbehafteten Kondensators
δ ist der Verlustwinkel des Kondensators, also die Abweichung von der
Phasenverschiebung 90° zwischen Strom und Spannung beim Kondensator. Der
Ausdruck
( )tanδ ϕ= °−tan 90
wird Verlustfaktor des Kondensators genannt.
1.5 Der verlustbehaftete Kondensator 19
1.5.3 Die spezifische Wärmekapazität
Beim verlustbehafteten Kondensator handelt es sich um thermische Verluste. Kennt
man die Zeit ∆t, in welcher die Wärme zu- oder abgeführt wurde, und die zugehörige
Wärmemenge, kann man daraus die Wirkleistung bestimmen.
P =Q
tw
∆
Die zu- oder abgeführte Wärmemenge eines Körpers bei Temperaturänderung beträgt:
( )Q c m T T2 1= ⋅ ⋅ −
Den Proportionalitätsfaktor c nennt man die spezifische Wärmekapazität. Sie ist
abhängig vom Material. Weiter taucht in der Gleichung die Masse m, die
Anfangstemperatur T1, sowie die Endtemperatur T2 auf.
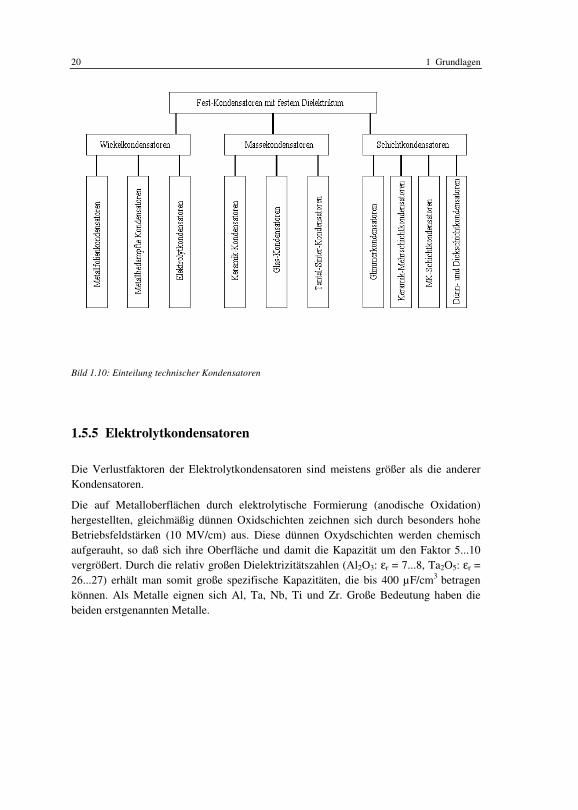
1.5.4 Einteilung technischer Kondensatoren
Aus den Forderungen der Anwender nach unterschiedlichen Werten und
Einsatzgebieten hat sich eine Vielzahl von Kondensatortypen entwickelt.
Die Anwendungen lassen sich grob in 3 Gruppen unterscheiden:
• Bauteilkondensatoren als Bauelemente der Elektronik und Nachrichtentechnik
• Leistungskondensatoren für Energietechnik, Leistungselektronik und Hochfrequenz -
Leistungsgeneratoren
• Schutzkondensatoren für Berührungs- und Störschutz
Die wichtigsten Auswahlkriterien sind neben dem Kapazitätswert, der Verlustfaktor, der
Isolationswiderstand (Selbstentladezeitkonstante), die Betriebstemperatur, der
Temperaturkoeffizient, die Frequenzabhängigkeit der Kapazität und die
Betriebsbrauchbarkeitsdauer.
20 1 Grundlagen
Bild 1.10: Einteilung technischer Kondensatoren
1.5.5 Elektrolytkondensatoren
Die Verlustfaktoren der Elektrolytkondensatoren sind meistens größer als die anderer
Kondensatoren.
Die auf Metalloberflächen durch elektrolytische Formierung (anodische Oxidation)
hergestellten, gleichmäßig dünnen Oxidschichten zeichnen sich durch besonders hohe
Betriebsfeldstärken (10 MV/cm) aus. Diese dünnen Oxydschichten werden chemisch
aufgerauht, so daß sich ihre Oberfläche und damit die Kapazität um den Faktor 5...10
vergrößert. Durch die relativ großen Dielektrizitätszahlen (Al2O3: εr = 7...8, Ta2O5: εr =
26...27) erhält man somit große spezifische Kapazitäten, die bis 400 µF/cm3
betragen
können. Als Metalle eignen sich Al, Ta, Nb, Ti und Zr. Große Bedeutung haben die
beiden erstgenannten Metalle.
1.6 Die Bestimmung der Austrittsarbeit mit Hilfe des Kontaktpotentials 21
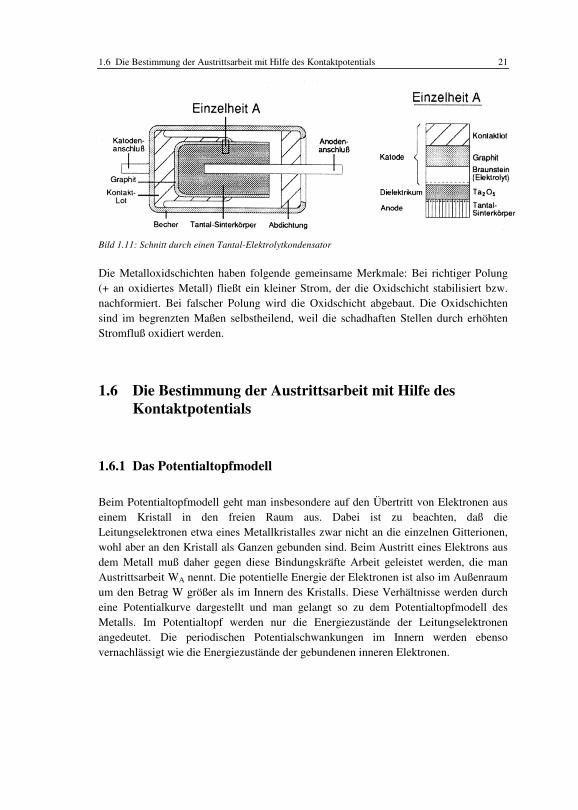
Bild 1.11: Schnitt durch einen Tantal-Elektrolytkondensator
Die Metalloxidschichten haben folgende gemeinsame Merkmale: Bei richtiger Polung
(+ an oxidiertes Metall) fließt ein kleiner Strom, der die Oxidschicht stabilisiert bzw.
nachformiert. Bei falscher Polung wird die Oxidschicht abgebaut. Die Oxidschichten
sind im begrenzten Maßen selbstheilend, weil die schadhaften Stellen durch erhöhten
Stromfluß oxidiert werden.
1.6 Die Bestimmung der Austrittsarbeit mit Hilfe des
Kontaktpotentials
1.6.1 Das Potentialtopfmodell
Beim Potentialtopfmodell geht man insbesondere auf den Übertritt von Elektronen aus
einem Kristall in den freien Raum aus. Dabei ist zu beachten, daß die
Leitungselektronen etwa eines Metallkristalles zwar nicht an die einzelnen Gitterionen,
wohl aber an den Kristall als Ganzen gebunden sind. Beim Austritt eines Elektrons aus
dem Metall muß daher gegen diese Bindungskräfte Arbeit geleistet werden, die man
Austrittsarbeit WA nennt. Die potentielle Energie der Elektronen ist also im Außenraum
um den Betrag W größer als im Innern des Kristalls. Diese Verhältnisse werden durch
eine Potentialkurve dargestellt und man gelangt so zu dem Potentialtopfmodell des
Metalls. Im Potentialtopf werden nur die Energiezustände der Leitungselektronen
angedeutet. Die periodischen Potentialschwankungen im Innern werden ebenso
vernachlässigt wie die Energiezustände der gebundenen inneren Elektronen.
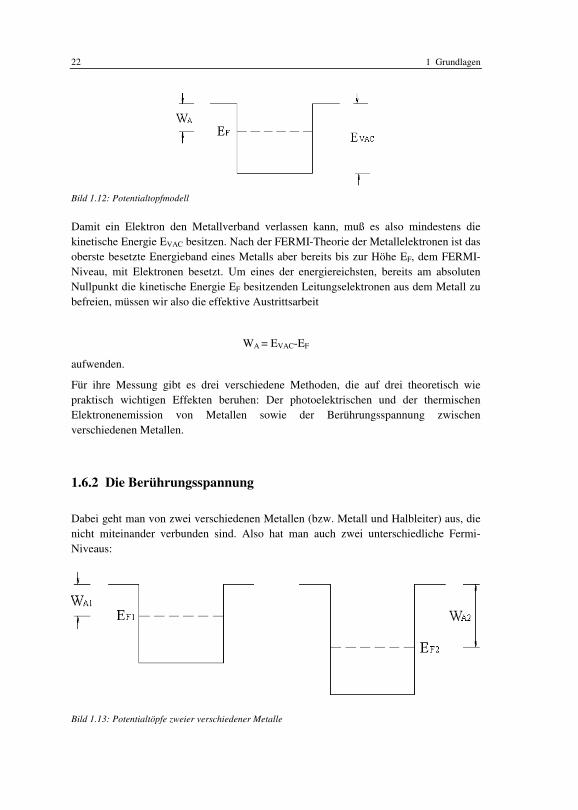
22 1 Grundlagen
Bild 1.12: Potentialtopfmodell
Damit ein Elektron den Metallverband verlassen kann, muß es also mindestens die
kinetische Energie EVAC besitzen. Nach der FERMI-Theorie der Metallelektronen ist das
oberste besetzte Energieband eines Metalls aber bereits bis zur Höhe EF, dem FERMI-
Niveau, mit Elektronen besetzt. Um eines der energiereichsten, bereits am absoluten
Nullpunkt die kinetische Energie EF besitzenden Leitungselektronen aus dem Metall zu
befreien, müssen wir also die effektive Austrittsarbeit
WA = EVAC-EF
aufwenden.
Für ihre Messung gibt es drei verschiedene Methoden, die auf drei theoretisch wie
praktisch wichtigen Effekten beruhen: Der photoelektrischen und der thermischen
Elektronenemission von Metallen sowie der Berührungsspannung zwischen
verschiedenen Metallen.
1.6.2 Die Berührungsspannung
Dabei geht man von zwei verschiedenen Metallen (bzw. Metall und Halbleiter) aus, die
nicht miteinander verbunden sind. Also hat man auch zwei unterschiedliche Fermi-
Niveaus:
Bild 1.13: Potentialtöpfe zweier verschiedener Metalle
1.6 Die Bestimmung der Austrittsarbeit mit Hilfe des Kontaktpotentials 23
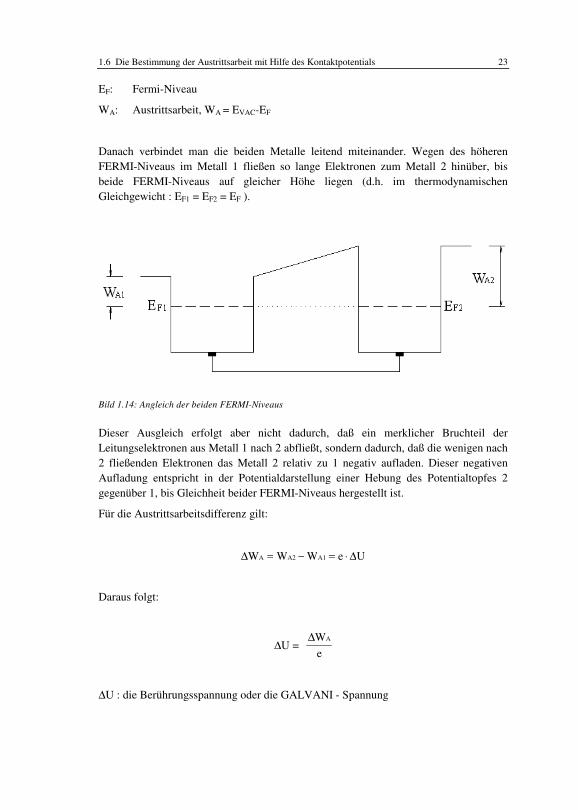
EF: Fermi-Niveau
WA: Austrittsarbeit, WA = EVAC-EF
Danach verbindet man die beiden Metalle leitend miteinander. Wegen des höheren
FERMI-Niveaus im Metall 1 fließen so lange Elektronen zum Metall 2 hinüber, bis
beide FERMI-Niveaus auf gleicher Höhe liegen (d.h. im thermodynamischen
Gleichgewicht : EF1 = EF2 = EF ).
Bild 1.14: Angleich der beiden FERMI-Niveaus
Dieser Ausgleich erfolgt aber nicht dadurch, daß ein merklicher Bruchteil der
Leitungselektronen aus Metall 1 nach 2 abfließt, sondern dadurch, daß die wenigen nach
2 fließenden Elektronen das Metall 2 relativ zu 1 negativ aufladen. Dieser negativen
Aufladung entspricht in der Potentialdarstellung einer Hebung des Potentialtopfes 2
gegenüber 1, bis Gleichheit beider FERMI-Niveaus hergestellt ist.
Für die Austrittsarbeitsdifferenz gilt:
∆ ∆W W W e UA A2 A1= − = ⋅
Daraus folgt:
∆∆
U = W
e
A
∆U : die Berührungsspannung oder die GALVANI - Spannung
24 1 Grundlagen
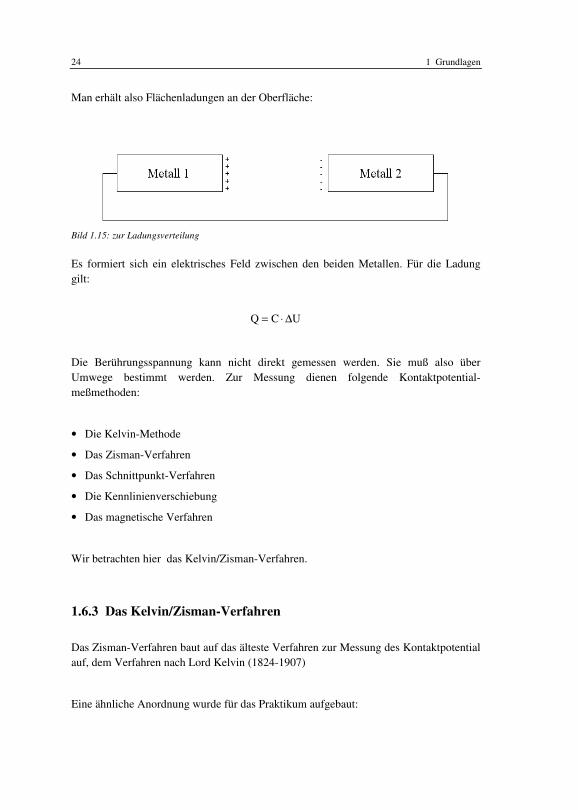
Man erhält also Flächenladungen an der Oberfläche:
Bild 1.15: zur Ladungsverteilung
Es formiert sich ein elektrisches Feld zwischen den beiden Metallen. Für die Ladung
gilt:
Q C U= ⋅ ∆
Die Berührungsspannung kann nicht direkt gemessen werden. Sie muß also über
Umwege bestimmt werden. Zur Messung dienen folgende Kontaktpotential-
meßmethoden:
• Die Kelvin-Methode
• Das Zisman-Verfahren
• Das Schnittpunkt-Verfahren
• Die Kennlinienverschiebung
• Das magnetische Verfahren
Wir betrachten hier das Kelvin/Zisman-Verfahren.
1.6.3 Das Kelvin/Zisman-Verfahren
Das Zisman-Verfahren baut auf das älteste Verfahren zur Messung des Kontaktpotential
auf, dem Verfahren nach Lord Kelvin (1824-1907)
Eine ähnliche Anordnung wurde für das Praktikum aufgebaut:

1.6 Die Bestimmung der Austrittsarbeit mit Hilfe des Kontaktpotentials 25
Bild 1.16: Prinzipschaltbild zur Kelvin/Zisman-Methode
Eine Elektrode 1 aus Kupfer schwingt mit einer Frequenz ω. Realisiert wurde diese
sinusförmige Schwingung mit einem Lautsprecher. Als Elektrode 2 kann ein beliebiges
Metall oder ein Halbleiter eingesetzt werden.
Diese Schwingung bewirkt eine Kapazitätsänderung zwischen den Elektroden:
CA
x= ⋅ε 0 mit ( )x x x sin t0 1= + ⋅ ⋅ω
Die Spannung U setzt sich zusammen aus einer äußeren Spannungsquelle Uo, die über
ein Potentiometer einstellbar ist, und der Berührungsspannung ∆U:
U U U UW
e0 0
A
= + = +∆∆
Für den Wechselstrom IW , der im Versuch nach einer Stromverstärkung mit dem
Ozilloskop gemessen wird, ergibt sich:
IdQ
dt
d
dt(U C)w = = ⋅
26 1 Grundlagen
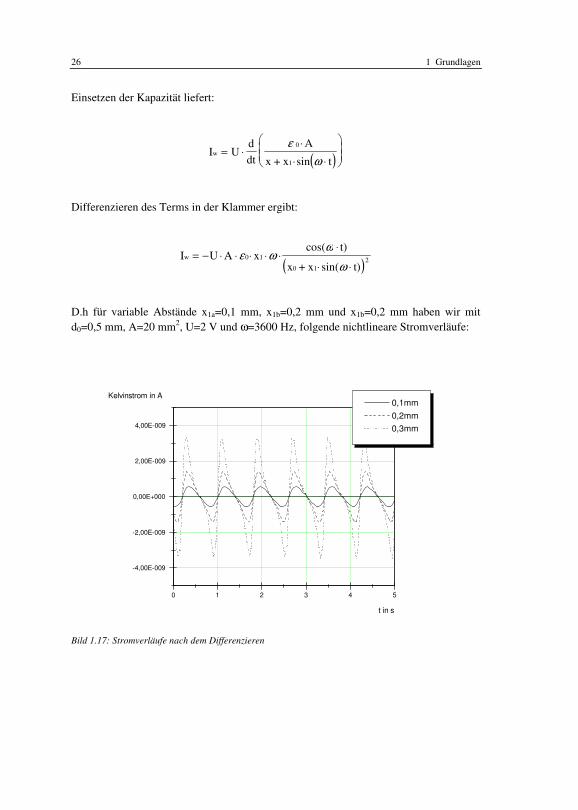
Einsetzen der Kapazität liefert:
( )I U
d
dt
A
x + x sin tw
0
1
= ⋅⋅
⋅ ⋅
ε
ω
Differenzieren des Terms in der Klammer ergibt:
( )I U A x
cos( t)
x + x sin( t)w 0 1
0 1
= − ⋅ ⋅ ⋅ ⋅ ⋅⋅
⋅ ⋅ε ω
ω
ω2
D.h für variable Abstände x1a=0,1 mm, x1b=0,2 mm und x1b=0,2 mm haben wir mit
d0=0,5 mm, A=20 mm2, U=2 V und ω=3600 Hz, folgende nichtlineare Stromverläufe:
0 1 2 3 4 5
-4,00E-009
-2,00E-009
0,00E+000
2,00E-009
4,00E-009
t in s
Kelvinstrom in A 0,1mm
0,2mm
0,3mm
Bild 1.17: Stromverläufe nach dem Differenzieren

1.6 Die Bestimmung der Austrittsarbeit mit Hilfe des Kontaktpotentials 27
Man kann nun U0 mit dem Potentiometer so variieren, daß IW = 0 ist. Dann gilt:
UW
e= - U0
A
= −∆
∆
Die Austrittsarbeitsdifferenz ist damit:
∆W = - e UA 0 ⋅
Durch die angelegte Spannung wird das elektrische Feld kompensiert. Somit ist dies
eine wechselwirkungsfreie Methode zur Charakterisierung eines Werstoffes.
Abschließend sei bemerkt, daß die Kontaktpotentialverfahren sich vor allem für die
Messungen von Austrittsarbeitsdifferenzen eignen. Soll jedoch die absolute
Austrittsarbeit von Metallen bestimmt werden, muß die Austrittsarbeit der
Bezugselektrode bekannt sein und als unveränderlich vorausgesetzt werden. Sie sollte
dann in jedem Fall aus einem hochschmelzenden Metall (am besten Wolfram) bestehen,
damit sie durch genügende Entgasung von den die Austrittsarbeit beeinflussenden
Fremdstoffschichten befreit werden kann. Die Austrittsarbeit der Bezugselektrode muß
dann nach einem anderen Verfahren (z.B. photoelektrischer Effekt oder Glühemission)
gesondert bestimmt werden.
28 2 Vorbereitende Aufgaben
2 Vorbereitende Aufgaben
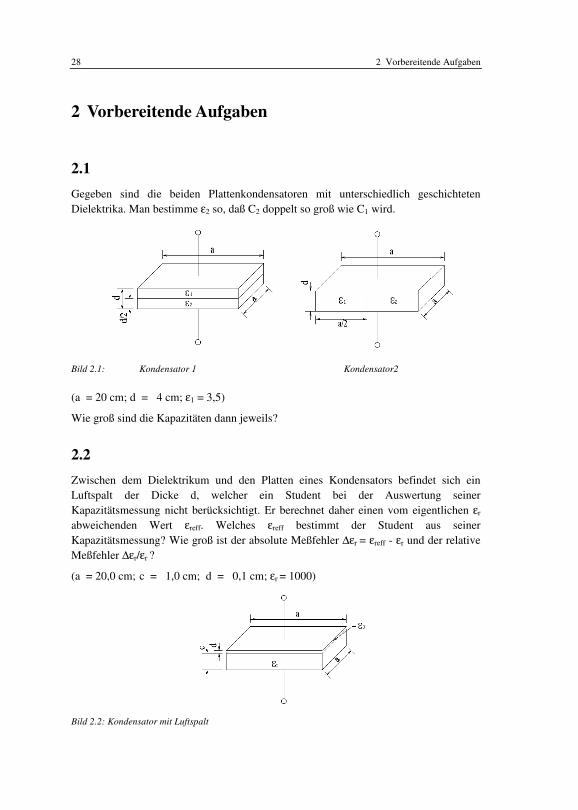
2.1
Gegeben sind die beiden Plattenkondensatoren mit unterschiedlich geschichteten
Dielektrika. Man bestimme ε2 so, daß C2 doppelt so groß wie C1 wird.
Bild 2.1: Kondensator 1 Kondensator2
(a = 20 cm; d = 4 cm; ε1 = 3,5)
Wie groß sind die Kapazitäten dann jeweils?
2.2
Zwischen dem Dielektrikum und den Platten eines Kondensators befindet sich ein
Luftspalt der Dicke d, welcher ein Student bei der Auswertung seiner
Kapazitätsmessung nicht berücksichtigt. Er berechnet daher einen vom eigentlichen εr
abweichenden Wert εreff. Welches εreff bestimmt der Student aus seiner
Kapazitätsmessung? Wie groß ist der absolute Meßfehler ∆εr = εreff - εr und der relative
Meßfehler ∆εr/εr ?
(a = 20,0 cm; c = 1,0 cm; d = 0,1 cm; εr = 1000)
Bild 2.2: Kondensator mit Luftspalt
2.3 29
2.3
Gegeben ist das Ersatzschaltbild eines verlustbehafteten Kondensators nach Kapitel
1.5.1. Nun soll der Verlustfaktor dieses Kondensators bestimmt werden.
Dafür wurde in einem Teilversuch 8 min lang einem Elektrolytkondensator über einen
Heizdraht eine Wirkleistung von 0,5 W zugeführt. Dabei erwärmte sich der Elko um
8 °C.
a.) Berechnen Sie daraus das Produkt aus spezifischer Wärmekapazität und Masse
( c m⋅ ).
Derselbe Elko wurde dann in einem zweiten Teilversuch an einen Trafo mit U = 4 V
und I = 2 A angeschlossen. Durch diese zugeführte Scheinleistung erwärmte sich der
Elko nach 10 min um 11 °C.
b.) Berechnen Sie aus der zugeführten Wärmemenge die Wirkleistung. Benutzen Sie
dabei das Produkt aus spezifischer Wärmekapazität und Masse ( c m⋅ ) aus
Aufgabenteil a.).
c.) Bestimmen Sie aus Aufgabenteil b.) den Verlustfaktor des Elkos.
Anmerkung: Diese Vorgehensweise zur Bestimmung des Verlustfaktors ist analog zur
Meßaufgabe 2 aus Kapitel 3.2.2.
2.4
Bei der Bestimmung der Austrittsarbeitsdifferenz mit Hilfe der Kelvin/Zisman-Methode
fließt ein Strom. Entsteht dieser Stromfluß durch eine Spannungsquelle oder eine
Stromquelle? Gehen Sie dabei von den Definitionen der Quellen aus!
2.5
Wieso besitzt der Kelvinstrom höhere Harmonische?
30 3 Meßaufbau und Meßaufgaben
3 Meßaufbau und Meßaufgaben
Der Versuch zum elektrischen Feld ist in drei Teilversuche gegliedert.
3.1 Versuch Plattenkondensator
Dieser Teilversuch dient zur Bestimmung verschiedener Dielektrizitätszahlen.
3.1.1 Meßaufbau zum Plattenkondensator
Im Versuch Plattenkondensator wird mit folgender Meßvorrichtung gearbeitet:
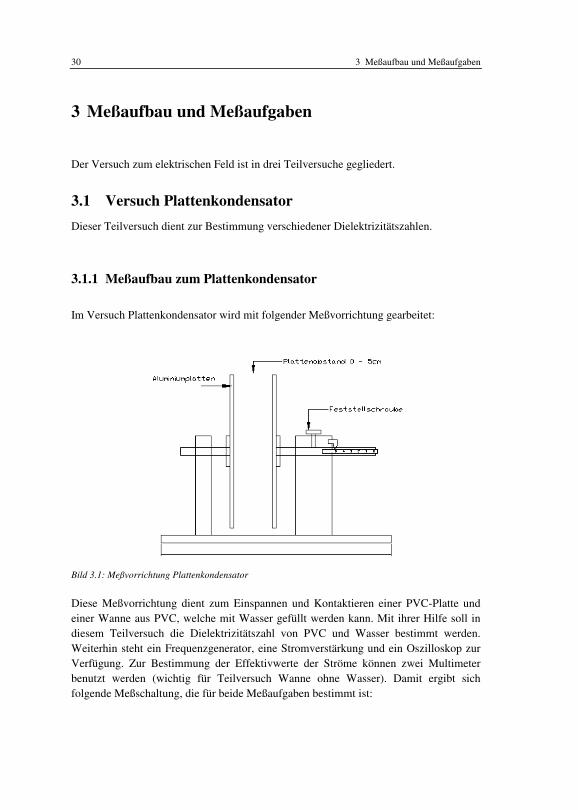
Bild 3.1: Meßvorrichtung Plattenkondensator
Diese Meßvorrichtung dient zum Einspannen und Kontaktieren einer PVC-Platte und
einer Wanne aus PVC, welche mit Wasser gefüllt werden kann. Mit ihrer Hilfe soll in
diesem Teilversuch die Dielektrizitätszahl von PVC und Wasser bestimmt werden.
Weiterhin steht ein Frequenzgenerator, eine Stromverstärkung und ein Oszilloskop zur
Verfügung. Zur Bestimmung der Effektivwerte der Ströme können zwei Multimeter
benutzt werden (wichtig für Teilversuch Wanne ohne Wasser). Damit ergibt sich
folgende Meßschaltung, die für beide Meßaufgaben bestimmt ist:
3.1 Versuch Plattenkondensator 31
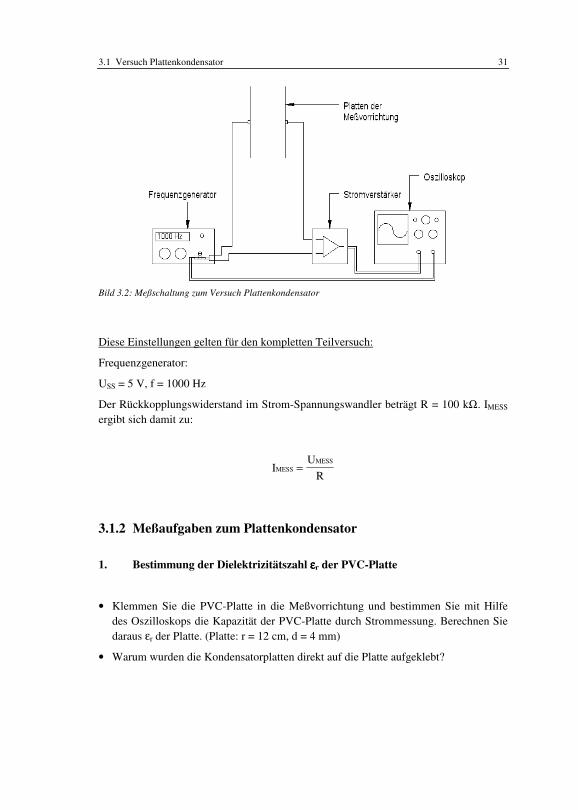
Bild 3.2: Meßschaltung zum Versuch Plattenkondensator
Diese Einstellungen gelten für den kompletten Teilversuch:
Frequenzgenerator:
USS = 5 V, f = 1000 Hz
Der Rückkopplungswiderstand im Strom-Spannungswandler beträgt R = 100 kΩ. IMESS
ergibt sich damit zu:
IU
RMESS
MESS
=
3.1.2 Meßaufgaben zum Plattenkondensator
1. Bestimmung der Dielektrizitätszahl εεεεr der PVC-Platte
• Klemmen Sie die PVC-Platte in die Meßvorrichtung und bestimmen Sie mit Hilfe
des Oszilloskops die Kapazität der PVC-Platte durch Strommessung. Berechnen Sie
daraus εr der Platte. (Platte: r = 12 cm, d = 4 mm)
• Warum wurden die Kondensatorplatten direkt auf die Platte aufgeklebt?
32 3 Meßaufbau und Meßaufgaben
2. Bestimmung der Dielektrizitätszahl εεεεr von Wasser
• Gehen Sie dabei wie folgt vor:
Bestimmen Sie die Kapazität der leeren Wanne durch Strommessung. Man kann
davon ausgehen, daß die bestimmte Kapazität größer als die eigentliche
Kapazität ist, da noch Streukapazitäten hinzukommen. Berechnen Sie deshalb
den Sollwert der Kapazität der leeren Wanne und daraus einen Korrekturfaktor
sC
C
IST
SOLL
= .
Die Breite des Leerraumes beträgt d = 32 mm.
Nun messen Sie die Kapazität der Wanne mit Wasser. Diese muß dann ebenfalls
durch den Korrekturfaktor korrigiert (dividiert) werden. Berechnen Sie daraus
den Kapazitätswert von Wasser und damit εr.
• Was sind die Gründe für das Abweichen vom eigentlichen Wert εr von Wasser?
3.2 Versuch Elektrolytkondensator
In diesem Teilversuch geht es um zwei verschiedene Verfahren zur Bestimmung des
Verlustfaktors. Als Kondensator eignet sich am Besten ein Elektrolytkondensator.
Grund dafür ist sein hoher Verlustfaktor.
3.2.1 Meßaufbau zum Elektrolytkondensator
Ein Elektrolytkondensator (C = 2,2 mF) wurde für diese Anwendung mit einem
Heizdraht umwickelt. Damit der Kondensator seine aufgenommene Wärme nicht an die
Umgebung abgibt, befindet er sich in einem isolierten Gehäuse. Ein Temperatur-
aufnehmer (PT100) sitzt direkt auf dem Aluminiumgehäuse des Kondensators. Die
Temperatur wird über einen Meßumformer direkt digital angezeigt.
3.2 Versuch Elektrolytkondensator 33
3.2.2 Meßaufgaben zum Elektrolytkondensator
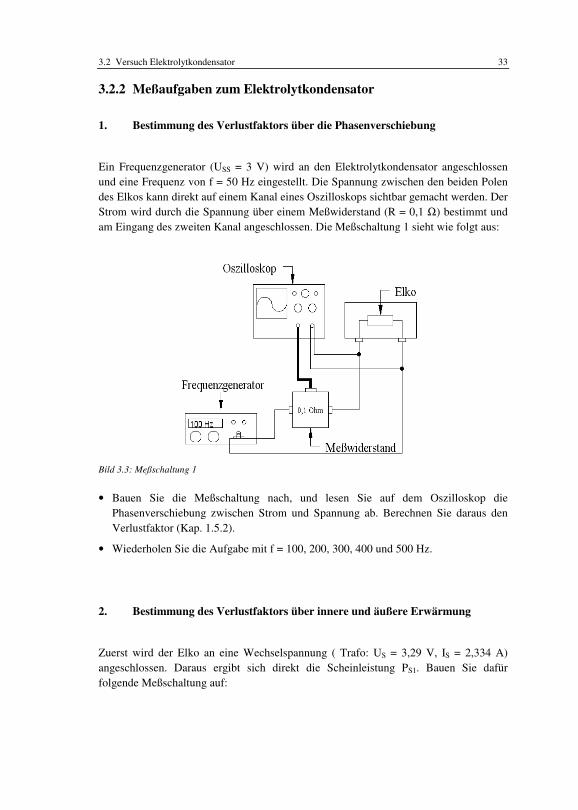
1. Bestimmung des Verlustfaktors über die Phasenverschiebung
Ein Frequenzgenerator (USS = 3 V) wird an den Elektrolytkondensator angeschlossen
und eine Frequenz von f = 50 Hz eingestellt. Die Spannung zwischen den beiden Polen
des Elkos kann direkt auf einem Kanal eines Oszilloskops sichtbar gemacht werden. Der
Strom wird durch die Spannung über einem Meßwiderstand (R = 0,1 Ω) bestimmt und
am Eingang des zweiten Kanal angeschlossen. Die Meßschaltung 1 sieht wie folgt aus:
Bild 3.3: Meßschaltung 1
• Bauen Sie die Meßschaltung nach, und lesen Sie auf dem Oszilloskop die
Phasenverschiebung zwischen Strom und Spannung ab. Berechnen Sie daraus den
Verlustfaktor (Kap. 1.5.2).
• Wiederholen Sie die Aufgabe mit f = 100, 200, 300, 400 und 500 Hz.
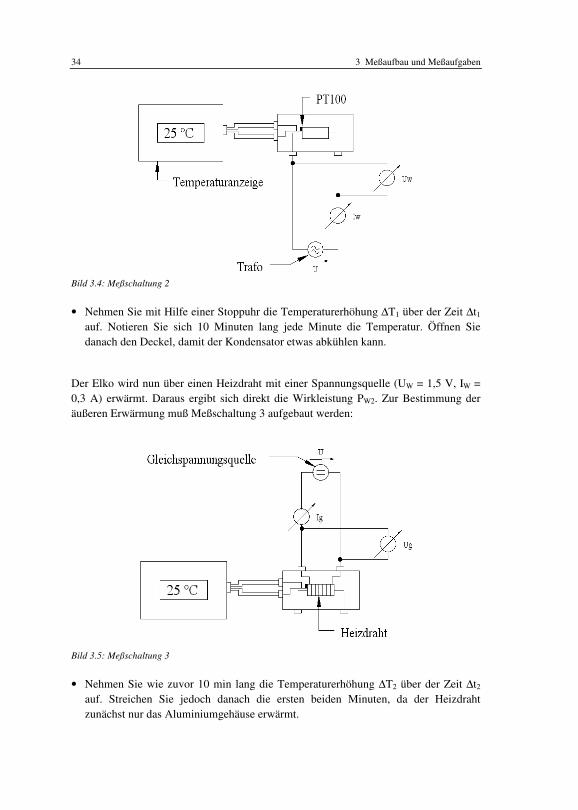
2. Bestimmung des Verlustfaktors über innere und äußere Erwärmung
Zuerst wird der Elko an eine Wechselspannung ( Trafo: US = 3,29 V, IS = 2,334 A)
angeschlossen. Daraus ergibt sich direkt die Scheinleistung PS1. Bauen Sie dafür
folgende Meßschaltung auf:
34 3 Meßaufbau und Meßaufgaben
Bild 3.4: Meßschaltung 2
• Nehmen Sie mit Hilfe einer Stoppuhr die Temperaturerhöhung ∆T1 über der Zeit ∆t1
auf. Notieren Sie sich 10 Minuten lang jede Minute die Temperatur. Öffnen Sie
danach den Deckel, damit der Kondensator etwas abkühlen kann.
Der Elko wird nun über einen Heizdraht mit einer Spannungsquelle (UW = 1,5 V, IW =
0,3 A) erwärmt. Daraus ergibt sich direkt die Wirkleistung PW2. Zur Bestimmung der
äußeren Erwärmung muß Meßschaltung 3 aufgebaut werden:
Bild 3.5: Meßschaltung 3
• Nehmen Sie wie zuvor 10 min lang die Temperaturerhöhung ∆T2 über der Zeit ∆t2
auf. Streichen Sie jedoch danach die ersten beiden Minuten, da der Heizdraht
zunächst nur das Aluminiumgehäuse erwärmt.
3.3 Versuch Kelvin/Zisman-Methode 35
• Berechnen Sie aus den gewonnenen Werten den Verlustfaktor.
[Vorgehensweise (Vergleiche „Vorbereitende Aufgaben Nr.3“):
Aus Messung 3 kann über die Wirkleistung PW3 das Produkt c m⋅ bestimmt
werden. Dieses setzt man in Wärmemenge aus Messung 2 und erhält daraus die
Wirkleistung PW1. Mit Hilfe der Scheinleistung PS2 und der Wirkleistung PW2
kann die Blindleistung PB2 berechnet werden.
P P PB2 S22
W22= −
Aus PW2 und PB2 bestimmt man den Verlustfaktor.]
• Vergleichen Sie das Ergebnis mit dem Verlustfaktor aus Messung 1.
3.3 Versuch Kelvin/Zisman-Methode
In diesem Versuch sollen Austrittsarbeitsdifferenzen bestimmt werden. Weiterhin wird
die Abhängigkeit der Kapazität von der Frequenz untersucht.
3.3.1 Meßaufbau zur Kelvin/Zisman-Methode
Der Meßaufbau richtet sich nach Kapitel 1.6.3. Die Elektrode 1 wird über einen
Lautsprecher zu einer sinusförmigen Schwingung angeregt. Mit dem Frequenzgenerator
wird die Amplitude des Lautsprechers festgelegt. Der Kelvinstrom wird über einem
Stromverstärker (Rückkopplungswiderstand R=10 MΩ) an ein Oszilloskop
angeschlossen. Die äußere Spannungsquelle kann über ein Potentiometer geregelt
werden.
3.3.2 Meßaufgaben zur Kelvin/Zisman-Methode
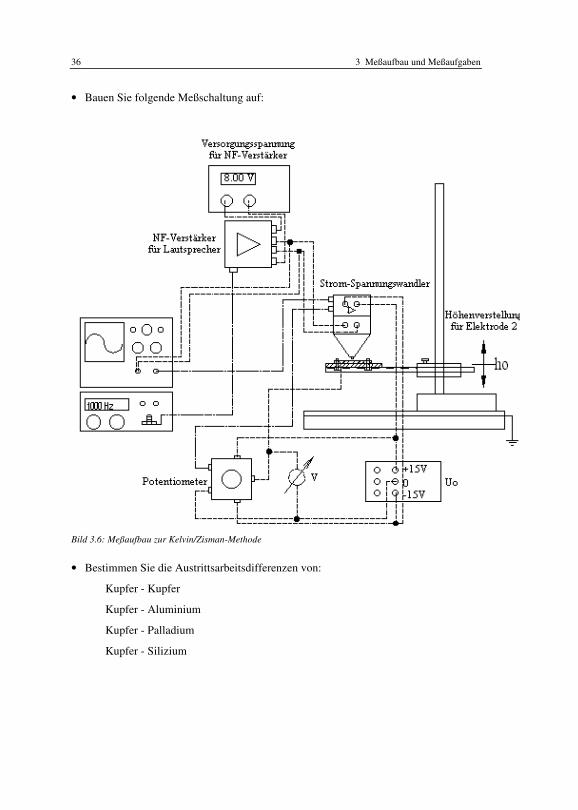
1. Bestimmung von Austrittsarbeitsdifferenzen
Für Aufgabe 1 sind folgende Einstellungen am Frequenzgenerator vorgesehen:
f = 500 Hz, Lautsprecheramplitude USS = 2 V
Versorgungsspannung NF-Verstärker: U=8 V
Referenz: Elektrode 1 aus Kupfer
36 3 Meßaufbau und Meßaufgaben
• Bauen Sie folgende Meßschaltung auf:
Bild 3.6: Meßaufbau zur Kelvin/Zisman-Methode
• Bestimmen Sie die Austrittsarbeitsdifferenzen von:
Kupfer - Kupfer
Kupfer - Aluminium
Kupfer - Palladium
Kupfer - Silizium
3.3 Versuch Kelvin/Zisman-Methode 37
[Vorgehensweise gemäß Kapitel 1.6.3:
Befestigen Sie die erste zu messende Elektrode. Stellen Sie die maximale Spannung am
Potentiometer ein. Nun fahren Sie jeweils die Elektrode 2 so dicht an die Elektrode 1,
daß sich die beiden Elektroden gerade nicht berühren. Drehen Sie nun am Potentiometer
bis der Strom auf dem Oszilloskop Null wird.]
2. Abhängigkeit des Kelvinstromes von der Frequenz bei konst. Amplitude
• Untersuchen Sie die Frequenzabhängigkeit des Kelvinstromes. Wählen Sie hierfür
folgende Frequenzen: 100 Hz, 150 Hz, 200 Hz, 250 Hz, ..., 800 Hz. Die Amplitude
muß hierbei konstant gehalten werden! (Elektrode 2 = Kupfer)
Vorgehensweise:
Zuerst legt man die Maximalspannung von U0= -2,91 V an. Dann beginnend bei
100 Hz:
1. Lautsprecheramplitude UL = 3 V wählen
2. Heranfahren von Elektrode 2 bis kurz vor Berührung der beiden
Elektroden
3. UL halbieren
4. Ausgangsspannung ablesen
5. Nächst höheren Frequenzwert wählen.
6. Erhöhen der Lautsprecheramplitude bis kurz vor Berührung der beiden
Elektroden
7. Weiter mit 3.
• Bestimmen Sie aus der Ausgangsspannung des Strom-Spannungs-Wandlers den
Kelvinstrom (Kelvinstrom IK = UA/10 MΩ) für alle Frequenzen.
• Stellen Sie die Messung für die Ausarbeitung graphisch dar.
• Vorführung durch den Praktikumsbetreuer:
Aufzeigen der höheren Harmonischen des Kelvinstromes am Digital-Spectrum-
Analyzer.
Versuch 2
Das elektrische
Stromungsfeld
INHALTSVERZEICHNIS
1 EINLEITUNG .................................................................................................................................. 2
2 DER SKINEFFEKT ......................................................................................................................... 4
2.1 STROMLEITUNG IM METALL ...................................................................................................... 4
2.2 DAS MAGNETFELD EINES STROMDURCHFLOSSENEN LEITERS .................................................... 5
2.3 PRINZIPIELLER AUFBAU DER MESSANORDNUNG ..................................................................... 10
3 ERMITTLUNG EBENER FELDBILDER .................................................................................. 14
3.1 ALLGEMEINE DEFINITIONEN UND BEGRIFFE ............................................................................ 14
3.2 VERHALTEN VON STROMDICHTE UND ELEKTRISCHER FELDSTÄRKE AN GRENZFLÄCHEN ........ 15
3.3 MESSSCHALTUNG UND MESSPRINZIP ....................................................................................... 16
4 MESSUNG VON KONTAKTWIDERSTAND UND SPEZIFISCHEM WIDERSTAND ....... 18
4.1 KONTAKTWIDERSTANDSMESSUNG........................................................................................... 18
4.2 VIERPUNKT MESSUNG ............................................................................................................. 20
5 LEITUNG IM ELEKTROLYTEN ............................................................................................... 23
5.1 IONEN ALS LADUNGSTRÄGER .................................................................................................. 23
5.2 VORGÄNGE IN DER ELEKTROCHEMISCHEN ZELLE UND ELEKTROLYSE .................................... 24
5.3 STROM-SPANNUNGS-ZUSAMMENHANG ................................................................................... 27
6 TEMPERATURABHÄNGIGKEIT DES WIDERSTANDES .................................................... 30
6.1 ALLGEMEINE DEFINITION DES WIDERSTANDES IM STRÖMUNGSFELD...................................... 30
6.2 ÜBERSICHT UND KENNZEICHNUNG VERSCHIEDENER WIDERSTÄNDE ...................................... 31
6.3 ALLGEMEINE TEMPERATURABHÄNGIGKEIT ............................................................................. 32
6.4 HERSTELLUNG UND TEMPERATURVERHALTEN ........................................................................ 34
7 VORBEREITENDE AUFGABEN ................................................................................................ 40
8 VERSUCHSDURCHFÜHRUNG .................................................................................................. 43
9 ANHANG ........................................................................................................................................ 48
9.1 WIDERSTANDS-TEMPERATUR-CHARAKTERISTIK DES TEMPERATURSENSORS KTY 10-6 ........ 48
2 Versuch 2: Das elektrische Strömungsfeld
1 Einleitung
Strömungsvorgänge von Ladungsträgern spielen in der Elektrotechnik eine große Rolle.
Dabei wird jeder Transportvorgang von Teilchen (z.B. quasifreie Ladungsträger im Leiter) in
eine bestimmte Richtung, ausgelöst durch die Wirkung einer Kraft, als Strömung bezeichnet.
Dargestellt wird diese Strömung durch ein mehr oder weniger kompliziertes Strömungsfeld.
An jeder Stelle des Feldes bewegen sich die Ladungsträger mit einer nach Betrag und
Richtung bestimmten Geschwindigkeit. Das Strömungsfeld ist also ein Vektorfeld, in dem die
antreibende Kraft der Ladungsträger eine eindeutige Richtung und einen eindeutigen Betrag
besitzt.
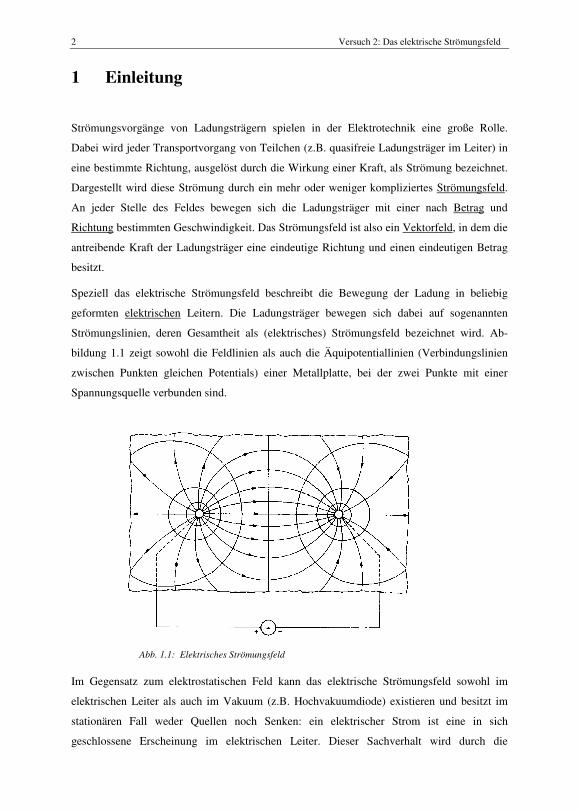
Speziell das elektrische Strömungsfeld beschreibt die Bewegung der Ladung in beliebig
geformten elektrischen Leitern. Die Ladungsträger bewegen sich dabei auf sogenannten
Strömungslinien, deren Gesamtheit als (elektrisches) Strömungsfeld bezeichnet wird. Ab-
bildung 1.1 zeigt sowohl die Feldlinien als auch die Äquipotentiallinien (Verbindungslinien
zwischen Punkten gleichen Potentials) einer Metallplatte, bei der zwei Punkte mit einer
Spannungsquelle verbunden sind.
Abb. 1.1: Elektrisches Strömungsfeld
Im Gegensatz zum elektrostatischen Feld kann das elektrische Strömungsfeld sowohl im
elektrischen Leiter als auch im Vakuum (z.B. Hochvakuumdiode) existieren und besitzt im
stationären Fall weder Quellen noch Senken: ein elektrischer Strom ist eine in sich
geschlossene Erscheinung im elektrischen Leiter. Dieser Sachverhalt wird durch die
1 Einleitung 3
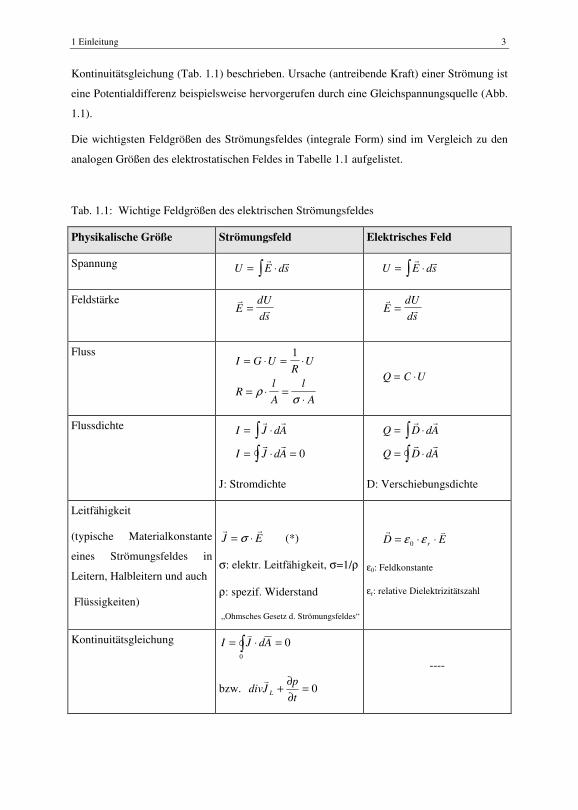
Kontinuitätsgleichung (Tab. 1.1) beschrieben. Ursache (antreibende Kraft) einer Strömung ist
eine Potentialdifferenz beispielsweise hervorgerufen durch eine Gleichspannungsquelle (Abb.
1.1).
Die wichtigsten Feldgrößen des Strömungsfeldes (integrale Form) sind im Vergleich zu den
analogen Größen des elektrostatischen Feldes in Tabelle 1.1 aufgelistet.
Tab. 1.1: Wichtige Feldgrößen des elektrischen Strömungsfeldes
Physikalische Größe Strömungsfeld Elektrisches Feld
Spannung U E ds= ⋅∫
U E ds= ⋅∫
Feldstärke
EdU
ds=
E
dU
ds=
Fluss
I G UR
U
Rl
A
l
A
= ⋅ = ⋅
= ⋅ =⋅
1
ρσ
Q C U= ⋅
Flussdichte
I J dA
I J dA
= ⋅
= ⋅ =
∫∫
0
J: Stromdichte
Q D dA
Q D dA
= ⋅
= ⋅
∫∫
D: Verschiebungsdichte
Leitfähigkeit
(typische Materialkonstante
eines Strömungsfeldes in
Leitern, Halbleitern und auch
Flüssigkeiten)
J E= ⋅σ (*)
σ: elektr. Leitfähigkeit, σ=1/ρ
ρ: spezif. Widerstand
„Ohmsches Gesetz d. Strömungsfeldes“
ED r
⋅⋅= εε 0
ε0: Feldkonstante
εr: relative Dielektrizitätszahl
Kontinuitätsgleichung ∫ =⋅=0
0AdJI
bzw. 0=∂
∂+
t
pJdiv L
----
4 Versuch 2: Das elektrische Strömungsfeld
Für die Beziehung zwischen den gerichteten Größen Stromdichte J und elektrischer
Feldstärke E (Gleichung * Tabelle 1.1), das ohmsche Gesetz des Strömungsfeldes, spielen die
möglichen Leitungsmechanismen eine große Rolle. Neben der Stromleitung in isolierenden
und leitenden Festkörpern (freie Elektronen) existieren auch Leitungsphänomene in Flüssig-
keiten (Ionen), ionisierten Gasen und im Vakuum.
Der Versuch „elektrisches Strömungsfeld“ teilt sich in vier Abschnitte:
♦ Stromfluss durch einen massiven Aluminiumzylinder und Nachweis des Skineffektes mit
Hilfe eines magnetoresistiven Sensors.
♦ Experimentelle Aufnahme eines Feldbildes mit Hilfe von Äquipotentiallinien.
♦ Stromleitung in Flüssigkeiten.
♦ Temperaturabhängigkeit des Widerstandes.
2 Der Skineffekt
2.1 Stromleitung im Metall
In diesem Versuch wird der Strömungsvorgang in Metallen (z.B. Aluminiumzylinder)
genauer betrachtet. In jedem Raumbereich der Materie sind die Ladungen der positiven und
negativen Ladungsträger gleich groß. Die Strömung im Metall kann als raumladungsfrei
angesehen werden. Wechselwirkungen zwischen den positiven und negativen Ladungen
heben sich gegenseitig auf, so dass der Körper nach außen hin unelektrisch erscheint. Die
positiven Ladungen im Metall (Kern der Atome) sind dabei unbeweglich. Sie bilden
zusammen mit den gebundenen Elektronen die Atomrümpfe. Nach der Theorie des freien
Elektronengases nach Drude kann nun ein Teil der negativen Ladung, die Valenzelektronen
(Elektronen der äußeren Schale des Atoms), sich leicht vom Atomrumpf lösen und sich frei
zwischen den Ionenrümpfen bewegen. Diese „freien“ Elektronen stehen dem Ladungstrans-
port zur Verfügung. Durch Anlegen eines äußeren elektrischen Feldes werden diese Elektro-
2 Der Skineffekt 5
nen entgegen dem Feld mit der mittleren Geschwindigkeit v bewegt. Es fließt also ein Strom
durch den metallischen Leiter.
2.2 Das Magnetfeld eines stromdurchflossenen Leiters
Eng verbunden mit der Strömung von Ladungsträgern ist die Ausbildung eines Magnetfeldes
B. Die Zusammenhänge zwischen diesen elektrischen und magnetischen Feldern sowie deren
Verknüpfung untereinander werden dabei allgemein durch die Maxwellschen Gleichungen
erfasst. Aus der ersten Maxwellschen Gleichung (Durchflutungsgesetz) beispielsweise
H ds J
D
tdAL
As
⋅ = + ⋅∫∫ ( )∂
∂
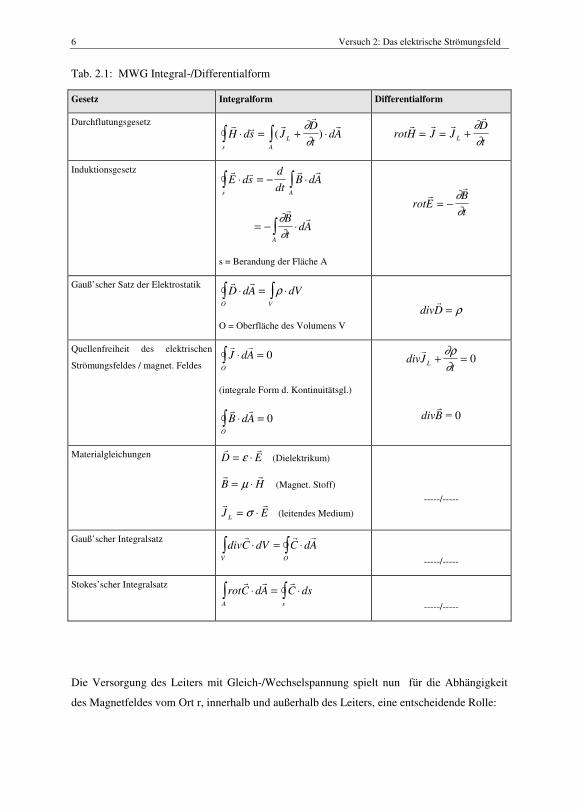
lässt sich die oben schon erwähnte Beziehung zwischen Strömung und Magnetfeld heraus-
lesen. Zur Erzeugung eines Magnetfeldes ist also ein Stromfluss notwendig. Tab. 2.1 zeigt zur
Vervollständigung eine Gegenüberstellung aller Maxwellschen Gleichungen in integraler und
differentieller Form. Die Überführung von der Integralform in die Differentialform gelingt
mit dem Gauß’schen und Stokes’schen Integralsatz. Auch die vollständige Theorie des
Skineffektes, der in diesem Versuch experimentell aufgezeigt werden soll, lässt sich unter
Zuhilfenahme dieses Gleichungssatzes einschließlich der Materialgleichungen beschreiben
bzw. herleiten. Diese Herleitung würde jedoch im Rahmen dieses Versuches zu weit führen,
so dass man sich hier auf die Betrachtung grundlegender Aspekte zur Stromverdrängung
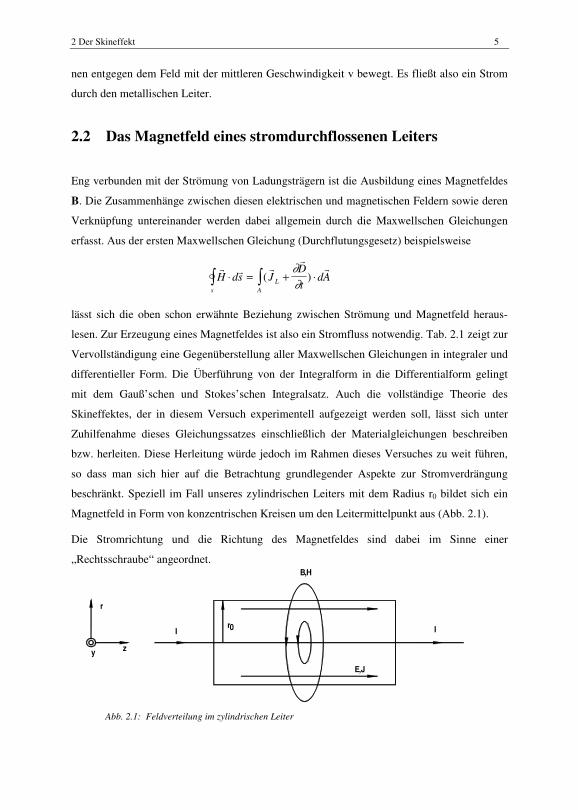
beschränkt. Speziell im Fall unseres zylindrischen Leiters mit dem Radius r0 bildet sich ein
Magnetfeld in Form von konzentrischen Kreisen um den Leitermittelpunkt aus (Abb. 2.1).
Die Stromrichtung und die Richtung des Magnetfeldes sind dabei im Sinne einer
„Rechtsschraube“ angeordnet.
Abb. 2.1: Feldverteilung im zylindrischen Leiter
r
yz
Ir0
E,J
B,H
I
6 Versuch 2: Das elektrische Strömungsfeld
Tab. 2.1: MWG Integral-/Differentialform
Gesetz Integralform Differentialform
Durchflutungsgesetz
H ds J
D
tdAL
As
⋅ = + ⋅∫∫ ( )∂
∂ rotH J J
D
tL
= = +∂
∂
Induktionsgesetz E ds
d
dtB dA
As
⋅ = − ⋅∫∫
= − ⋅∫∂
∂
B
tdA
A
s = Berandung der Fläche A
rotEB
t
= −∂
∂
Gauß’scher Satz der Elektrostatik D dA dV
VO
⋅ = ⋅∫∫ ρ
O = Oberfläche des Volumens V
divD
= ρ
Quellenfreiheit des elektrischen
Strömungsfeldes / magnet. Feldes
J dA
O
⋅ =∫ 0
(integrale Form d. Kontinuitätsgl.)
B dA
O
⋅ =∫ 0
divJt
L
+ =
∂ρ
∂0
divB
= 0
Materialgleichungen D E= ⋅ε (Dielektrikum)
B H= ⋅µ (Magnet. Stoff)
J EL = ⋅σ (leitendes Medium)
-----/-----
Gauß’scher Integralsatz divC dV C dA
OV
⋅ = ⋅∫∫
-----/-----
Stokes’scher Integralsatz rotC dA C ds
sA
⋅ = ⋅∫∫
-----/-----
Die Versorgung des Leiters mit Gleich-/Wechselspannung spielt nun für die Abhängigkeit
des Magnetfeldes vom Ort r, innerhalb und außerhalb des Leiters, eine entscheidende Rolle:

2 Der Skineffekt 7
a.) Feldverteilung bei Gleichspannung:
Legt man an einen zylindrischen Leiter eine Gleichspannung U= an, bildet sich ein
homogenes elektrisches Feld E aus (Abb. 2.1). Es fließt ein Gleichstrom I durch den Leiter.
Da die elektrische Feldstärke über das ohmsche Gesetz des Strömungsfeldes
J E= ⋅σ (1)
mit der Stromdichte J gekoppelt ist, stellt sich auch eine über den gesamten Querschnitt
konstante Stromdichte ein (Abb. 2.2).
Abb. 2.2: Stromdichteverteilung über Leiterquerschnitt (Gleichspg.)
Durch den Stromfluss bildet sich ein Magnetfeld innerhalb und außerhalb des Leiters in Form
von konzentrischen Kreisen um den Mittelpunkt aus (siehe vorne). Für die magnetische Feld-
stärke H im Inneren und Äußeren ergeben sich folgende Abhängigkeiten :
Leiterinneres (r<r0):
Im Leiterbereich gilt für die Stromdichte:
JI
r=
⋅π 0
2 (2)
Durch Anwendung des Durchflutungssatzes auf eine kreisförmige Feldlinie mit dem Radius r
ergibt sich dann mit (2)
∫ ⋅⋅⋅=⋅=⋅=⋅⋅
1
22
0
22
s
rHsdHr
rIrJ ππ
(3)
Daraus folgt für den Verlauf der magnetischen Feldstärke im Leiterinneren
H rI r
r( ) =
⋅
⋅ ⋅2 0
2π (4)
(r)
ro-
Jz
ror
8 Versuch 2: Das elektrische Strömungsfeld
bzw. B r H rI r
r( ) ( )= ⋅ =
⋅ ⋅
⋅ ⋅µ
µ
π2 0
(5) mit µ µ µ= ⋅0 r ; µr ≈ 1
Leiteräußeres (r>r0):
Durch erneute Anwendung des Durchflutungsgesetzes lässt sich die magnetische Feldstärke H
außerhalb des Leiters ermitteln.
∫ ⋅=
2s
sdHI
(6)
Der Betrag der magnetischen Erregung entlang einer Feldlinie ist dabei konstant. Der
Integrationsweg s soll sich entlang einer Feldlinie in Richtung der magnetischen Feldstärke
erstrecken.
⇒ ∫ ⋅=
2s
dsHI
= ⋅
= ⋅ ⋅ ⋅
∫H ds
H r
s2
2 π
⇒ H rI
r( ) =
⋅ ⋅2 π (7) bzw. B r
I
r( ) =
⋅
⋅ ⋅
µ
π2 (8)
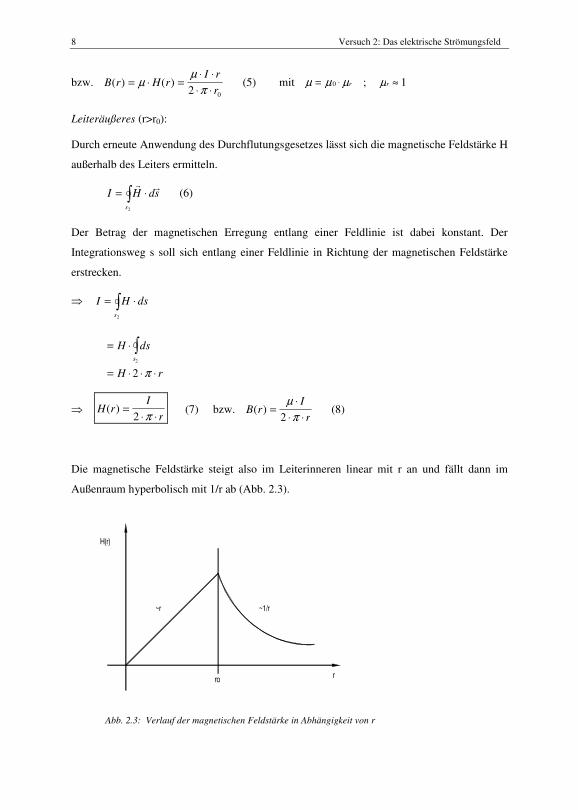
Die magnetische Feldstärke steigt also im Leiterinneren linear mit r an und fällt dann im
Außenraum hyperbolisch mit 1/r ab (Abb. 2.3).
Abb. 2.3: Verlauf der magnetischen Feldstärke in Abhängigkeit von r
H(r)
~r
ror
~1/r
2 Der Skineffekt 9
b.) Feldverteilung bei Wechselspannung:
Speist man den zylindrischen Leiter nun mit einer Wechselspannung der Frequenz ω, so ist
die Stromdichte über den gesamten Leiterquerschnitt nicht mehr konstant. Der Strom drängt
mit wachsender Frequenz ω mehr und mehr zur Leiteroberfläche. Diesen Vorgang bezeichnet
man als Skin- oder Hauteffekt. Die Ursache dieses Effektes ist in der inneren Selbstinduktion
zu suchen.
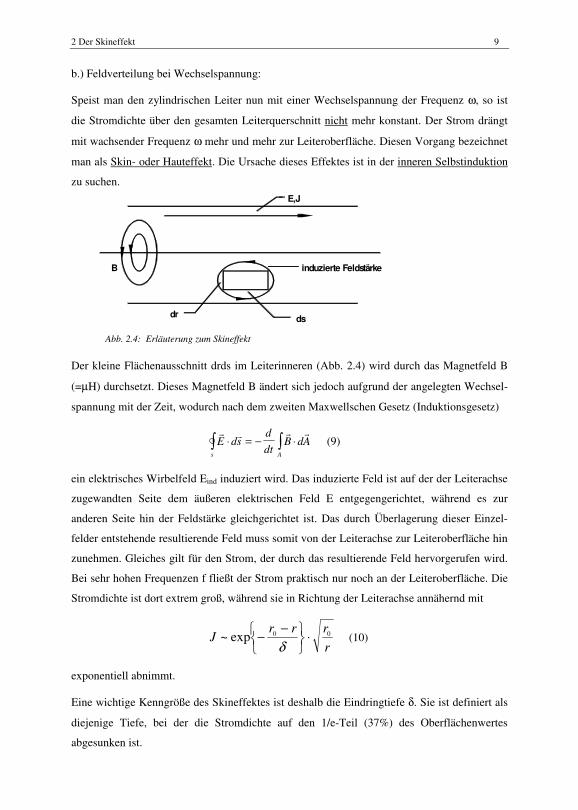
Abb. 2.4: Erläuterung zum Skineffekt
Der kleine Flächenausschnitt drds im Leiterinneren (Abb. 2.4) wird durch das Magnetfeld B
(=µH) durchsetzt. Dieses Magnetfeld B ändert sich jedoch aufgrund der angelegten Wechsel-
spannung mit der Zeit, wodurch nach dem zweiten Maxwellschen Gesetz (Induktionsgesetz)
E ds
d
dtB dA
As
⋅ = − ⋅∫∫ (9)
ein elektrisches Wirbelfeld Eind induziert wird. Das induzierte Feld ist auf der der Leiterachse
zugewandten Seite dem äußeren elektrischen Feld E entgegengerichtet, während es zur
anderen Seite hin der Feldstärke gleichgerichtet ist. Das durch Überlagerung dieser Einzel-
felder entstehende resultierende Feld muss somit von der Leiterachse zur Leiteroberfläche hin
zunehmen. Gleiches gilt für den Strom, der durch das resultierende Feld hervorgerufen wird.
Bei sehr hohen Frequenzen f fließt der Strom praktisch nur noch an der Leiteroberfläche. Die
Stromdichte ist dort extrem groß, während sie in Richtung der Leiterachse annähernd mit
r
rrrJ 00exp~ ⋅
−−
δ (10)
exponentiell abnimmt.
Eine wichtige Kenngröße des Skineffektes ist deshalb die Eindringtiefe δ. Sie ist definiert als
diejenige Tiefe, bei der die Stromdichte auf den 1/e-Teil (37%) des Oberflächenwertes
abgesunken ist.
induzierte Feldstärke
dr
B
ds
E,J
10 Versuch 2: Das elektrische Strömungsfeld
µσπωσµδ
⋅⋅⋅=
⋅⋅=
f
12 (11)
Bei einer Frequenz von f=50Hz gilt beispielsweise für Aluminium:
δAl = 0,1203 cm
mit σ = 35*106 1/Ωcm
µr ≈ 1
µ0 = 1,256*10-6
Vs/Am
Als eine Auswirkung des Skineffektes ist die Vergrößerung des Leiterwiderstandes bei
Wechselstromspeisung im Vergleich zum Gleichstromwiderstand zu nennen. Ist δ<<d
(d=Leiterdurchmesser) wird der Widerstand nämlich durch den Umfang und nicht mehr durch
den Querschnitt A des Leiters bestimmt. Deshalb können in der Hochfrequenztechnik
beispielsweise Hohlleiter verwendet werden.
2.3 Prinzipieller Aufbau der Messanordnung
a.) Spannungsversorgung des Messobjektes:
Als Messobjekt wird in unserem Versuch ein massiver Aluminiumzylinder mit einem Durch-
messer d=10cm verwendet. Die Versorgung des Zylinders erfolgt entweder über eine Gleich-
spannungsquelle(*) oder über einen Blocktransformator mit Halogenleuchten (**). Der
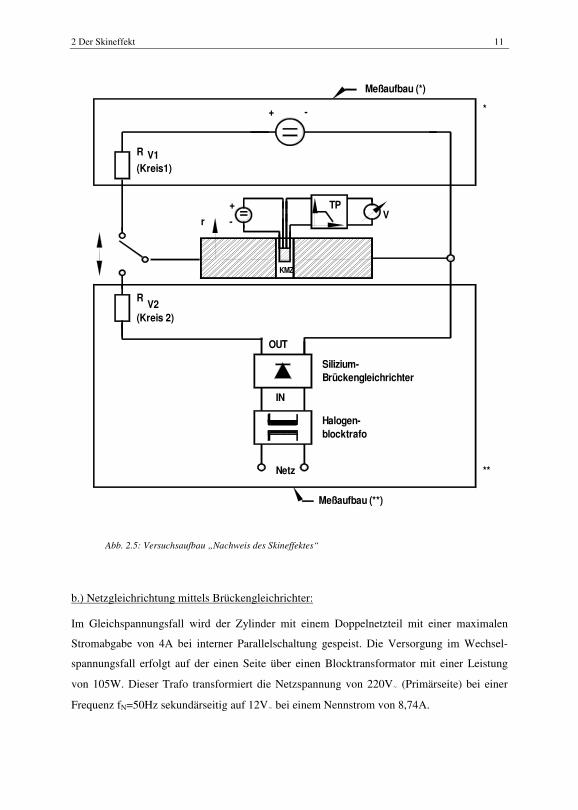
komplette Versuchsaufbau ist Abbildung 2.5 zu entnehmen.
Bei der Versorgung des Aluminiumzylinders mit Gleich- bzw. Wechselspannung ist zu
beachten, dass der Widerstand des Messobjektes lediglich im µΩ-Bereich liegt, was bei
direktem Anschluss einer Spannungsquelle einem Kurzschluss gleich käme. Zur Begrenzung
des Stromes ist es deshalb notwendig, dem Zylinder einen größeren Vorwiderstand RV in
Form von 12V,50W-Niedervolt-Halogenlampen in einem Aluminiumgehäuse vorzuschalten.
2 Der Skineffekt 11
Abb. 2.5: Versuchsaufbau „Nachweis des Skineffektes“
b.) Netzgleichrichtung mittels Brückengleichrichter:
Im Gleichspannungsfall wird der Zylinder mit einem Doppelnetzteil mit einer maximalen
Stromabgabe von 4A bei interner Parallelschaltung gespeist. Die Versorgung im Wechsel-
spannungsfall erfolgt auf der einen Seite über einen Blocktransformator mit einer Leistung
von 105W. Dieser Trafo transformiert die Netzspannung von 220V~ (Primärseite) bei einer
Frequenz fN=50Hz sekundärseitig auf 12V~ bei einem Nennstrom von 8,74A.
Meßaufbau (**)
blocktrafo
Halogen-
Brückengleichrichter
Silizium-
(Kreis 2)
V2R
Netz
IN
OUT
KMZ
V1R
(Kreis1)
+
-r
TP
-+
**
V
Meßaufbau (*)
*
12 Versuch 2: Das elektrische Strömungsfeld
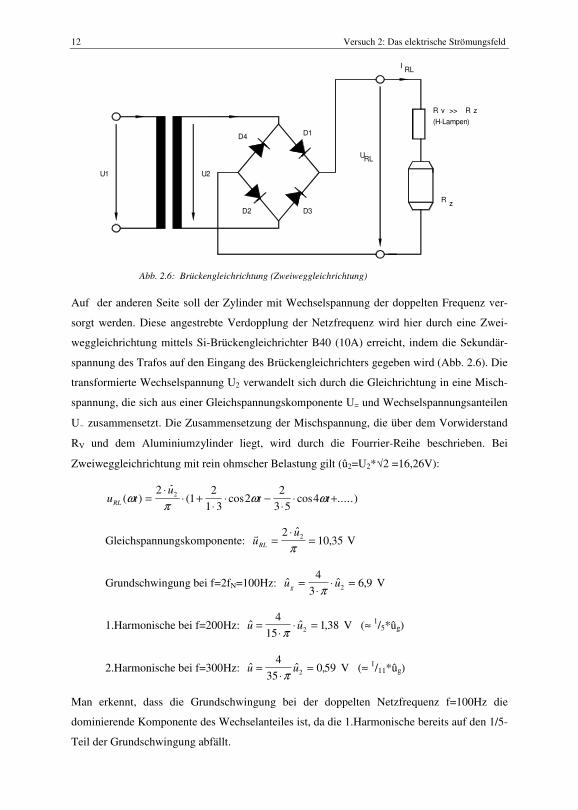
Abb. 2.6: Brückengleichrichtung (Zweiweggleichrichtung)
Auf der anderen Seite soll der Zylinder mit Wechselspannung der doppelten Frequenz ver-
sorgt werden. Diese angestrebte Verdopplung der Netzfrequenz wird hier durch eine Zwei-
weggleichrichtung mittels Si-Brückengleichrichter B40 (10A) erreicht, indem die Sekundär-
spannung des Trafos auf den Eingang des Brückengleichrichters gegeben wird (Abb. 2.6). Die
transformierte Wechselspannung U2 verwandelt sich durch die Gleichrichtung in eine Misch-
spannung, die sich aus einer Gleichspannungskomponente U= und Wechselspannungsanteilen
U~ zusammensetzt. Die Zusammensetzung der Mischspannung, die über dem Vorwiderstand
RV und dem Aluminiumzylinder liegt, wird durch die Fourrier-Reihe beschrieben. Bei
Zweiweggleichrichtung mit rein ohmscher Belastung gilt (û2=U2*√2 =16,26V):
u tu
t tRL ( )ɵ
( cos cos .....)ωπ
ω ω=⋅
⋅ +⋅
⋅ −⋅
⋅ +2
12
1 32
2
3 54
2
Gleichspannungskomponente: u
uRL =
⋅=
210 35
2ɵ
,π
V
Grundschwingung bei f=2fN=100Hz: ɵ ɵ ,u ug =⋅
⋅ =4
36 92π
V
1.Harmonische bei f=200Hz: ɵ ɵ ,u u=⋅
⋅ =4
151 382π
V (≈ 1/5*ûg)
2.Harmonische bei f=300Hz: ɵ ɵ ,u u=⋅
=4
350 592π
V (≈ 1/11*ûg)
Man erkennt, dass die Grundschwingung bei der doppelten Netzfrequenz f=100Hz die
dominierende Komponente des Wechselanteiles ist, da die 1.Harmonische bereits auf den 1/5-
Teil der Grundschwingung abfällt.
U1
D2
U2
D4
D3
URL
Rz
D1
(H-Lampen)
R v >> R z
IRL
2 Der Skineffekt 13
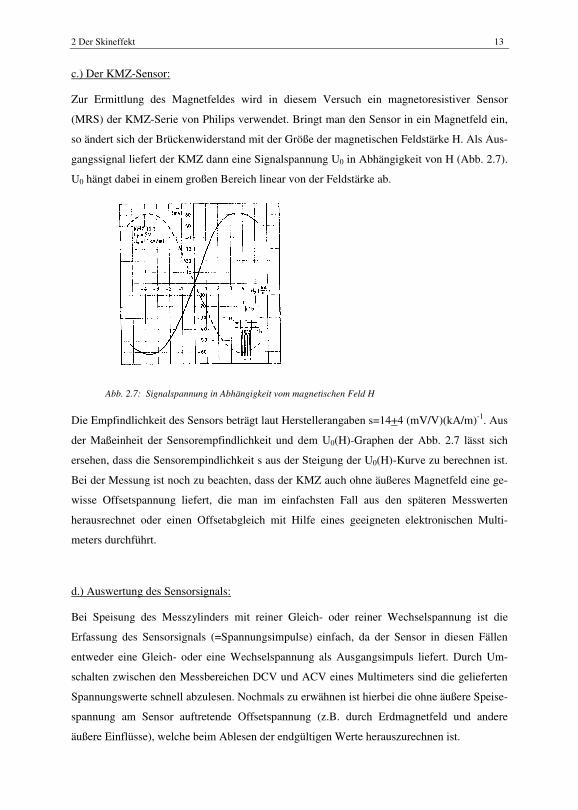
c.) Der KMZ-Sensor:
Zur Ermittlung des Magnetfeldes wird in diesem Versuch ein magnetoresistiver Sensor
(MRS) der KMZ-Serie von Philips verwendet. Bringt man den Sensor in ein Magnetfeld ein,
so ändert sich der Brückenwiderstand mit der Größe der magnetischen Feldstärke H. Als Aus-
gangssignal liefert der KMZ dann eine Signalspannung U0 in Abhängigkeit von H (Abb. 2.7).
U0 hängt dabei in einem großen Bereich linear von der Feldstärke ab.
Abb. 2.7: Signalspannung in Abhängigkeit vom magnetischen Feld H
Die Empfindlichkeit des Sensors beträgt laut Herstellerangaben s=14+4 (mV/V)(kA/m)-1
. Aus
der Maßeinheit der Sensorempfindlichkeit und dem U0(H)-Graphen der Abb. 2.7 lässt sich
ersehen, dass die Sensorempindlichkeit s aus der Steigung der U0(H)-Kurve zu berechnen ist.
Bei der Messung ist noch zu beachten, dass der KMZ auch ohne äußeres Magnetfeld eine ge-
wisse Offsetspannung liefert, die man im einfachsten Fall aus den späteren Messwerten
herausrechnet oder einen Offsetabgleich mit Hilfe eines geeigneten elektronischen Multi-
meters durchführt.
d.) Auswertung des Sensorsignals:
Bei Speisung des Messzylinders mit reiner Gleich- oder reiner Wechselspannung ist die
Erfassung des Sensorsignals (=Spannungsimpulse) einfach, da der Sensor in diesen Fällen
entweder eine Gleich- oder eine Wechselspannung als Ausgangsimpuls liefert. Durch Um-
schalten zwischen den Messbereichen DCV und ACV eines Multimeters sind die gelieferten
Spannungswerte schnell abzulesen. Nochmals zu erwähnen ist hierbei die ohne äußere Speise-
spannung am Sensor auftretende Offsetspannung (z.B. durch Erdmagnetfeld und andere
äußere Einflüsse), welche beim Ablesen der endgültigen Werte herauszurechnen ist.
14 Versuch 2: Das elektrische Strömungsfeld
Wird jedoch die Versorgungsvariante über den Brückengleichrichter gewählt, so wird der
Zylinder mit einer Mischspannung beaufschlagt und der Sensor liefert ebenfalls eine solche
Mischspannung als Ausgangssignal. Misst man dieses Signal mit einem Multimeter (ACV-
Einstellung), so unterdrückt das Multimeter in seiner Einstellung zwar den Gleichanteil,
ermittelt aber summarisch den Effektivwert des gesamten Wechselanteiles, der sich aus der
Grundschwingung und den höheren Harmonischen bei Frequenzen von f=200,300,400,... Hz
zusammensetzt.
3 Ermittlung ebener Feldbilder
3.1 Allgemeine Definitionen und Begriffe
Wie schon in Abb. 1.1 der Einleitung zu erkennen war, entsteht zwischen zwei mit einer
Spannungsquelle verbundenen Punktelektroden auf einer Metallplatte ein elektrisches
Strömungsfeld. Die Ebene zwischen den Elektroden ist dabei ausgefüllt durch unendlich viele
Punkte gleichen als auch ungleichen Potentials. Verbindet man nun die Punkte gleichen
Potentials, so erhält man Linien, die man als Äquipotentiallinien bezeichnet. Im dreidimen-
sionalen Fall, beispielsweise im elektrischen Feld um eine Punktelektrode, spricht man jedoch
von Äquipotentialflächen, die unter dieser Annahme das Aussehen von konzentrischen
Kugeln um die Punktelektrode haben. Bewegt man Ladungen auf diesen Äquipotentiallinien
bzw. innerhalb der Äquipotentialflächen, so ist aufgrund der fehlenden Potentialdifferenz kein
Arbeitsaufwand notwendig. Durch Hinzunahme der elektrischen Feldlinien und somit auch
aufgrund des Ohmschen Gesetzes des Strömungsfeldes der Strömungslinien
J E= ⋅σ (1)
gelingt eine sehr anschauliche Darstellung des elektrischen (Strömungs-)Feldes. Die Feld-
bzw. Strömungslinien schneiden die Äquipotentiallinien dabei stets senkrecht. Dieser
Sachverhalt macht es dann auch möglich, im Rahmen dieses Versuches über die Aufnahme
der Äquipotentiallinien auf das ungefähre Feldbild zu schließen.
3 Ermittlung ebener Feldbilder 15
3.2 Verhalten von Stromdichte und elektrischer Feldstärke an
Grenzflächen
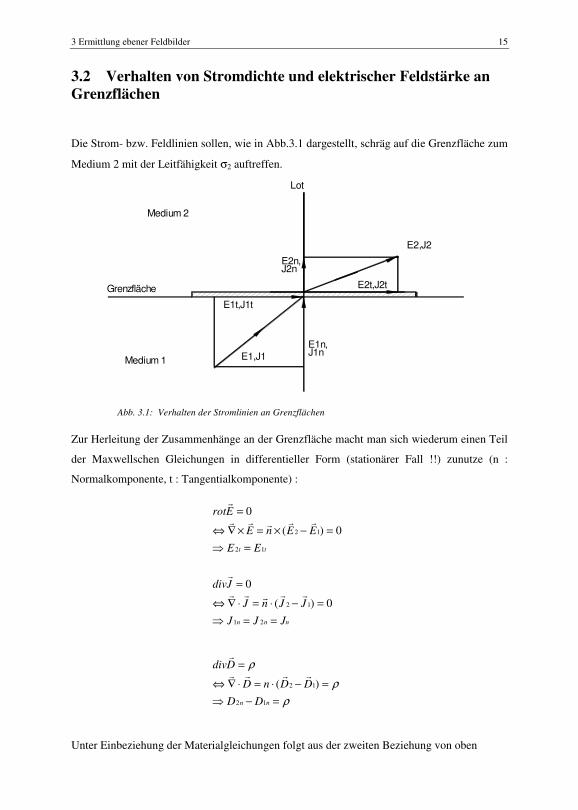
Die Strom- bzw. Feldlinien sollen, wie in Abb.3.1 dargestellt, schräg auf die Grenzfläche zum
Medium 2 mit der Leitfähigkeit σ2 auftreffen.
Abb. 3.1: Verhalten der Stromlinien an Grenzflächen
Zur Herleitung der Zusammenhänge an der Grenzfläche macht man sich wiederum einen Teil
der Maxwellschen Gleichungen in differentieller Form (stationärer Fall !!) zunutze (n :
Normalkomponente, t : Tangentialkomponente) :
Unter Einbeziehung der Materialgleichungen folgt aus der zweiten Beziehung von oben
tt EE
EEnE
Erot
12
12 0)(
0
=⇒=−×=×∇⇔
=
nnn JJJ
JJnJ
Jdiv
==⇒=−⋅=⋅∇⇔
=
21
12 0)(
0
ρ
ρ
ρ
=−⇒=−⋅=⋅∇⇔
=
nn DD
DDnD
Ddiv
12
12 )(
E1n,J1n
E1t,J1t
Medium 1 E1,J1
Medium 2
Grenzfläche
E2n,J2n
Lot
E2t,J2t
E2,J2
16 Versuch 2: Das elektrische Strömungsfeld
J Jn n1 2= (2) ⇒ σ σ1 1 2 2⋅ = ⋅E En n ⇒ E
E
n
n
1
2
2
1
=σ
σ (3)
Aus geometrischen Betrachtungen in Abb. 3.1 erhält man
Anschließende Quotientenbildung liefert dann das Brechungsgesetz für Stromlinien :
Brechungsgesetz: tan
tan
α
α
σ
σ1
2
1
2
1
2
2
1
= = =J
J
E
E
t
t
n
n
(4)
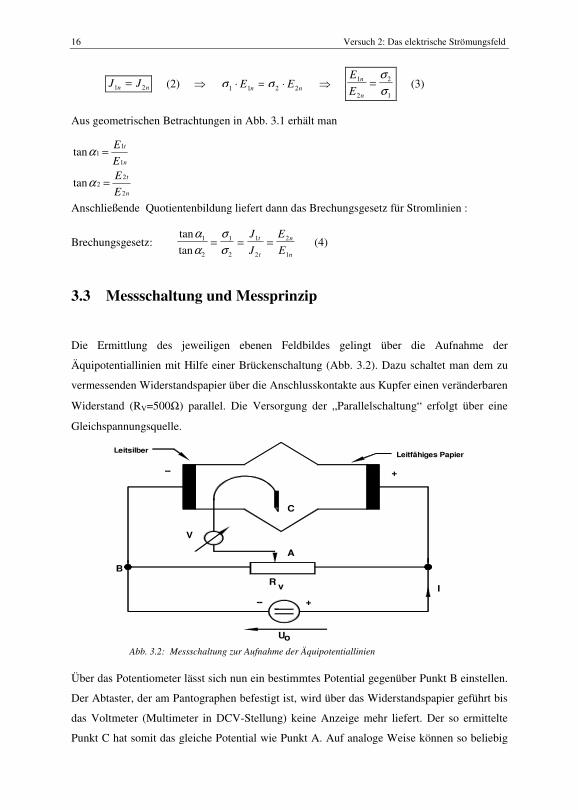
3.3 Messschaltung und Messprinzip
Die Ermittlung des jeweiligen ebenen Feldbildes gelingt über die Aufnahme der
Äquipotentiallinien mit Hilfe einer Brückenschaltung (Abb. 3.2). Dazu schaltet man dem zu
vermessenden Widerstandspapier über die Anschlusskontakte aus Kupfer einen veränderbaren
Widerstand (RV=500Ω) parallel. Die Versorgung der „Parallelschaltung“ erfolgt über eine
Gleichspannungsquelle.
Abb. 3.2: Messschaltung zur Aufnahme der Äquipotentiallinien
Über das Potentiometer lässt sich nun ein bestimmtes Potential gegenüber Punkt B einstellen.
Der Abtaster, der am Pantographen befestigt ist, wird über das Widerstandspapier geführt bis
das Voltmeter (Multimeter in DCV-Stellung) keine Anzeige mehr liefert. Der so ermittelte
Punkt C hat somit das gleiche Potential wie Punkt A. Auf analoge Weise können so beliebig
n
t
n
t
E
E
E
E
2
22
1
11
tan
tan
=
=
α
α
B
V
Leitsilber
--
A
Uo
Rv
+--
I
Leitfähiges Papier
+
C
3 Ermittlung ebener Feldbilder 17
viele Punkte aufgenommen und über den Zeichenstift, der ebenfalls am Pantographen
befestigt ist, auf dem separaten Zeichenblatt festgehalten werden. Durch Verbinden dieser
Punkte erhält man eine endgültige Äquipotentiallinie. Bei Einstellung eines neuen Potentiales
am veränderbaren Widerstand wiederholt sich dieser Messablauf von neuem. Durch diese
Methode kann die gewünschte Anzahl an Äquipotentiallinien auf dem Messobjekt Stück für
Stück aufgezeichnet werden.
18 Versuch 2: Das elektrische Strömungsfeld
1 2 3 4 5 6
0
SiO2
A
V
I
I II
7
8
N-Si
4,5 mm 4,5 mm 4,5 mm 4,5 mm 4,5 mm 4,5 mm
20 mm
0,55 mm
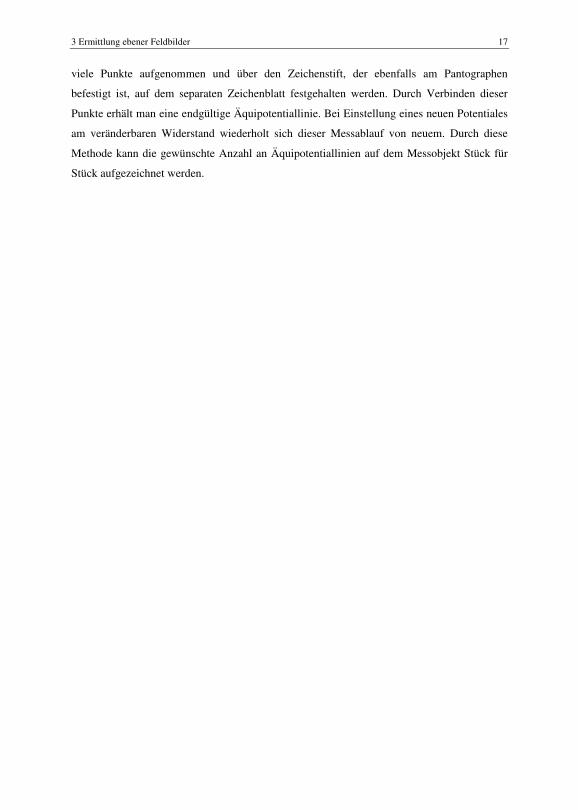
4 Messung von Kontaktwiderstand und spezifischem
Widerstand
Der Widerstand in Halbleitern ist in hohem Maße abhängig von der Dotierung und der
Temperatur. Die spezifische Leitfähigkeit ist gegeben als )( pn pne µµσ ⋅+⋅⋅= , wobei n und
p stark temperaturabhängig sein können.
Werden auf den Halbleiter Kontakte aufgebracht, so entsteht zusätzlich zu dem Volumen-
widerstand ein Kontaktwiderstand zwischen Halbleitermaterial und Kontaktwerkstoff.
In diesem Versuch sollen diese Widerstände für Silizium mit aufgedampften Goldkontakten
mit den beiden nachfolgend vorgestellten Verfahren bestimmt werden.
4.1 Kontaktwiderstandsmessung
Abb. 4.1: Messaufbau Kontaktwiderstandsmessung
4 Messung von Kontaktwiderstand und spezifischem Widerstand 19
∆ U 1
∆ U 2
∆ U 3
∆ U 4
∆ U 5
∆ U 6
I
I
RK
R1 R2 R3 R4 R5 R6
RK
Beschreibung:
Auf einen Siliziumwaver werden Goldkontakte aufgebracht, die zur Stromeinspeisung und
Potentialmessung dienen. Über die Kontaktflächen I und II wird ein Strom eingespeist und an
den Abgriffen 1 – 7 werden die Potentiale bestimmt.
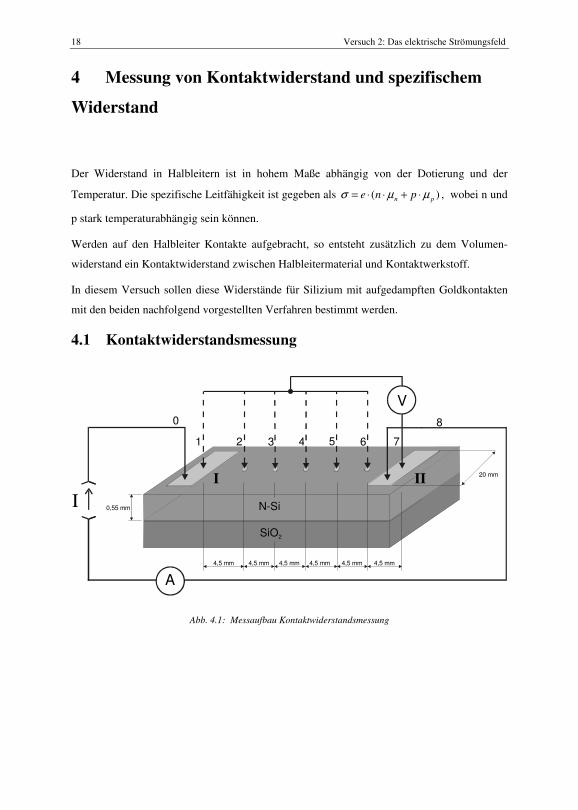
Es ergibt sich folgende Ersatzschaltung:
Mit Hilfe der Potentiale und der Kenntnis des eingestellten Stromes können der Kontakt-
widerstand am Gold – Silizium Übergang und der Volumenwiderstand bestimmt werden.
Für den spezifischen Volumenwiderstand gilt: σ
ρ1
=⋅
=l
AR
R= Widerstand zwischen den Messpunkten
A= Fläche, die zur Leitung beiträgt
l= Abstand zwischen den Kontakten
Abb. 4.2: Ersatzschaltbild der Probe zur Kontaktwiderstandsmessung
20 Versuch 2: Das elektrische Strömungsfeld
4.2 Vierpunkt Messung
0123
N-Si
SiO2
A
V
I
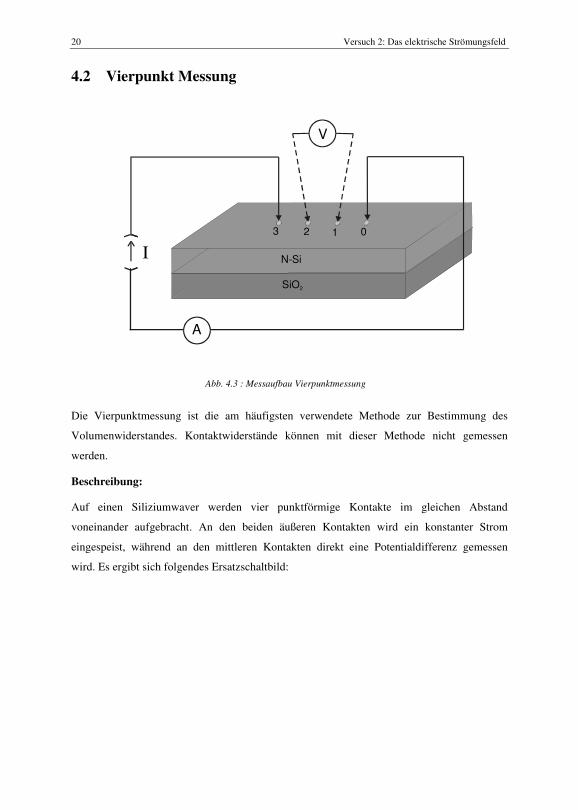
Die Vierpunktmessung ist die am häufigsten verwendete Methode zur Bestimmung des
Volumenwiderstandes. Kontaktwiderstände können mit dieser Methode nicht gemessen
werden.
Beschreibung:
Auf einen Siliziumwaver werden vier punktförmige Kontakte im gleichen Abstand
voneinander aufgebracht. An den beiden äußeren Kontakten wird ein konstanter Strom
eingespeist, während an den mittleren Kontakten direkt eine Potentialdifferenz gemessen
wird. Es ergibt sich folgendes Ersatzschaltbild:
Abb. 4.3 : Messaufbau Vierpunktmessung
4 Messung von Kontaktwiderstand und spezifischem Widerstand 21
∆ U
R1 R2 R3
I I
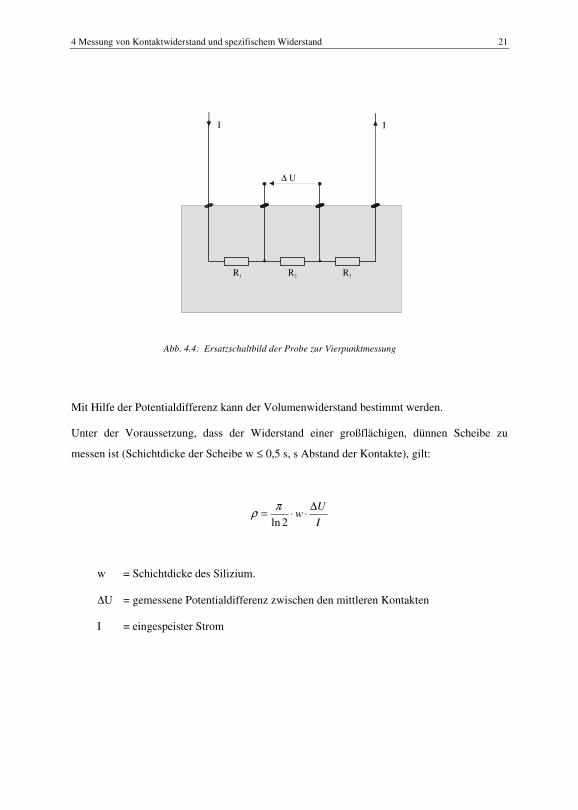
Mit Hilfe der Potentialdifferenz kann der Volumenwiderstand bestimmt werden.
Unter der Voraussetzung, dass der Widerstand einer großflächigen, dünnen Scheibe zu
messen ist (Schichtdicke der Scheibe w ≤ 0,5 s, s Abstand der Kontakte), gilt:
I
Uw
∆⋅⋅=
2ln
πρ
w = Schichtdicke des Silizium.
∆U = gemessene Potentialdifferenz zwischen den mittleren Kontakten
I = eingespeister Strom
Abb. 4.4: Ersatzschaltbild der Probe zur Vierpunktmessung
22 Versuch 2: Das elektrische Strömungsfeld
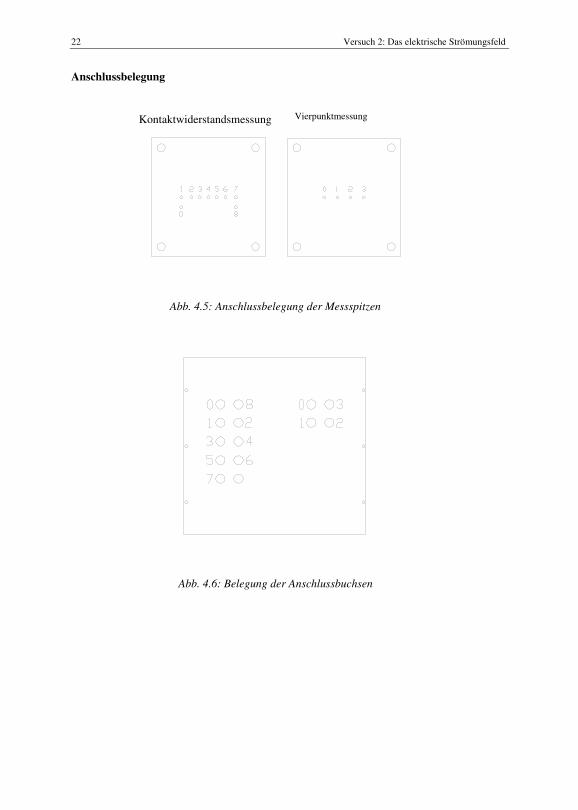
Anschlussbelegung
Kontaktwiderstandsmessung Vierpunktmessung
Abb. 4.5: Anschlussbelegung der Messspitzen
Abb. 4.6: Belegung der Anschlussbuchsen
5 Leitung im Elektrolyten 23
5 Leitung im Elektrolyten
5.1 Ionen als Ladungsträger
Neben der Möglichkeit des Ladungstransportes durch freie Elektronen, wie beispielsweise die
Strömung durch den Aluminiumzylinder, wird in Flüssigkeiten die Ladung durch Ionen
transportiert. Dies stellt einen weiteren Leitungsmechanismus im elektrischen Strömungsfeld
dar.
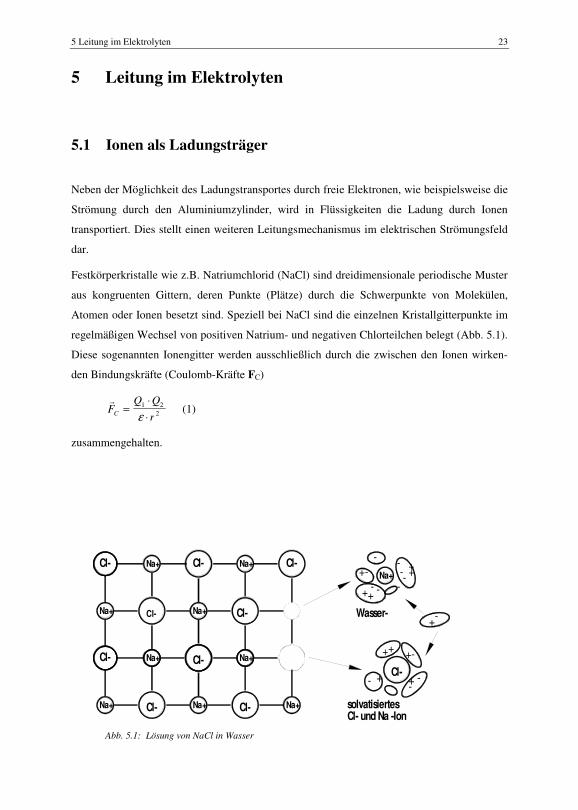
Festkörperkristalle wie z.B. Natriumchlorid (NaCl) sind dreidimensionale periodische Muster
aus kongruenten Gittern, deren Punkte (Plätze) durch die Schwerpunkte von Molekülen,
Atomen oder Ionen besetzt sind. Speziell bei NaCl sind die einzelnen Kristallgitterpunkte im
regelmäßigen Wechsel von positiven Natrium- und negativen Chlorteilchen belegt (Abb. 5.1).
Diese sogenannten Ionengitter werden ausschließlich durch die zwischen den Ionen wirken-
den Bindungskräfte (Coulomb-Kräfte FC)
F
Q Q
rC =
⋅
⋅1 2
2ε (1)
zusammengehalten.
Abb. 5.1: Lösung von NaCl in Wasser
Cl- und Na -IonsolvatisiertesNa+ Na+Cl- Cl- Na+
Cl-
Na+
Na+ Cl-
Na+Cl-
Cl- Na+ Cl-
Na+
Cl-
Na+ Cl-
-+Cl-
+-
-
--
+-+ Na+
+-++
--++
- -
Wasser-+--
- +-
24 Versuch 2: Das elektrische Strömungsfeld
In reinem bzw. destilliertem Wasser dagegen liegt bei 25°C lediglich der Bruchteil von 10-14
Wassermolekülen dissoziiert, d.h. als H+- und OH
--Ionen, vor, weshalb Wasser eine sehr
geringe Leitfähigkeit besitzt. Dafür hat es aber mit ε=80,18 eine der höchsten Dielektrizitäts-
konstanten in der Gruppe der Flüssigkeiten. Des weiteren sind die Elektronegativitäten von
Sauerstoff und Wasserstoff unterschiedlich, so dass die beiden entgegengesetzten Pole sich
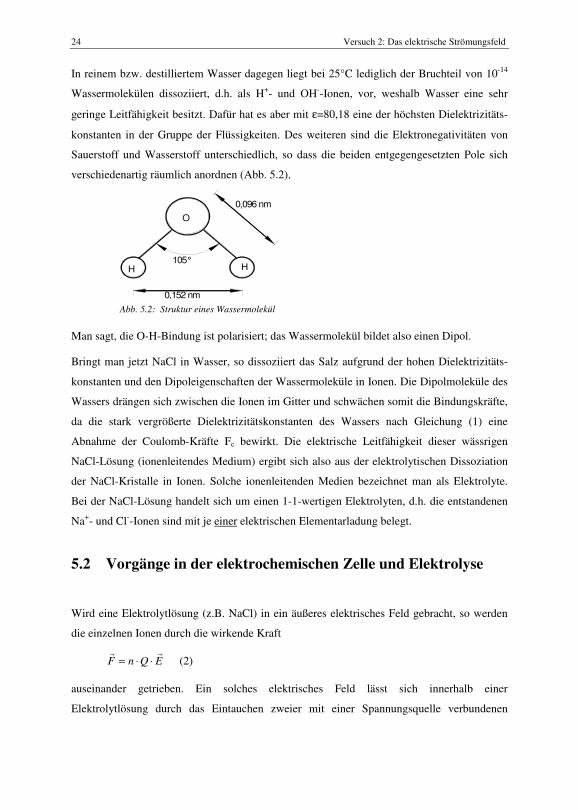
verschiedenartig räumlich anordnen (Abb. 5.2).
Abb. 5.2: Struktur eines Wassermolekül
Man sagt, die O-H-Bindung ist polarisiert; das Wassermolekül bildet also einen Dipol.
Bringt man jetzt NaCl in Wasser, so dissoziiert das Salz aufgrund der hohen Dielektrizitäts-
konstanten und den Dipoleigenschaften der Wassermoleküle in Ionen. Die Dipolmoleküle des
Wassers drängen sich zwischen die Ionen im Gitter und schwächen somit die Bindungskräfte,
da die stark vergrößerte Dielektrizitätskonstanten des Wassers nach Gleichung (1) eine
Abnahme der Coulomb-Kräfte Fc bewirkt. Die elektrische Leitfähigkeit dieser wässrigen
NaCl-Lösung (ionenleitendes Medium) ergibt sich also aus der elektrolytischen Dissoziation
der NaCl-Kristalle in Ionen. Solche ionenleitenden Medien bezeichnet man als Elektrolyte.
Bei der NaCl-Lösung handelt sich um einen 1-1-wertigen Elektrolyten, d.h. die entstandenen
Na+- und Cl
--Ionen sind mit je einer elektrischen Elementarladung belegt.
5.2 Vorgänge in der elektrochemischen Zelle und Elektrolyse
Wird eine Elektrolytlösung (z.B. NaCl) in ein äußeres elektrisches Feld gebracht, so werden
die einzelnen Ionen durch die wirkende Kraft
F n Q E= ⋅ ⋅ (2)
auseinander getrieben. Ein solches elektrisches Feld lässt sich innerhalb einer
Elektrolytlösung durch das Eintauchen zweier mit einer Spannungsquelle verbundenen
0,152 nm
105°H H
0,096 nm
O
5 Leitung im Elektrolyten 25
Elektroden erzeugen. Dabei muss zwischen polarisierbaren und unpolarisierbaren Elektroden
unterschieden werden:
-Polarisierbare Elektroden: Es entsteht beim Stromdurchgang an der Oberfläche infolge
chemischer Umsetzung eine dem Strom entgegengesetzte
EMK (Elektromotorische Kraft) oder Polarisation.
-Unpolarisierbare Elektroden: Selbst bei geringer angelegter Spannung setzt ein Stromfluss
ein und bleibt konstant.
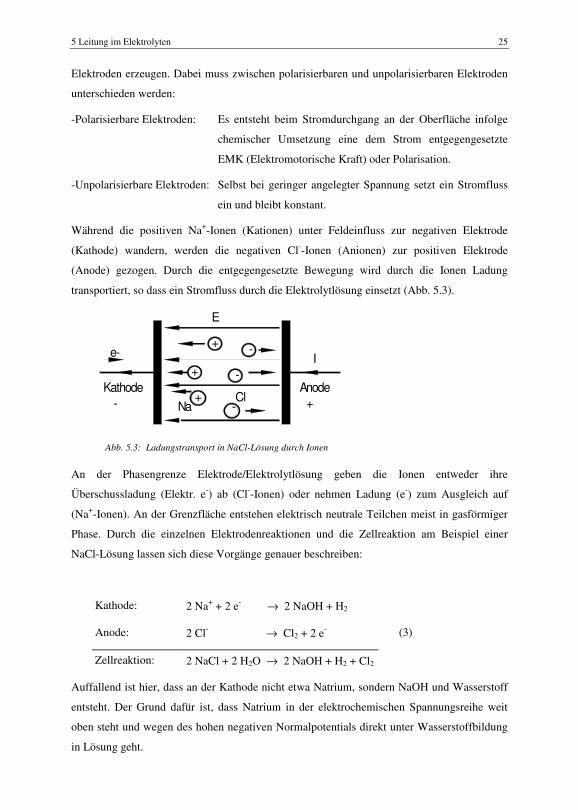
Während die positiven Na+-Ionen (Kationen) unter Feldeinfluss zur negativen Elektrode
(Kathode) wandern, werden die negativen Cl--Ionen (Anionen) zur positiven Elektrode
(Anode) gezogen. Durch die entgegengesetzte Bewegung wird durch die Ionen Ladung
transportiert, so dass ein Stromfluss durch die Elektrolytlösung einsetzt (Abb. 5.3).
Abb. 5.3: Ladungstransport in NaCl-Lösung durch Ionen
An der Phasengrenze Elektrode/Elektrolytlösung geben die Ionen entweder ihre
Überschussladung (Elektr. e-) ab (Cl
--Ionen) oder nehmen Ladung (e
-) zum Ausgleich auf
(Na+-Ionen). An der Grenzfläche entstehen elektrisch neutrale Teilchen meist in gasförmiger
Phase. Durch die einzelnen Elektrodenreaktionen und die Zellreaktion am Beispiel einer
NaCl-Lösung lassen sich diese Vorgänge genauer beschreiben:
Kathode: 2 Na+ + 2 e
- → 2 NaOH + H2
Anode: 2 Cl- → Cl2 + 2 e
- (3)
Zellreaktion: 2 NaCl + 2 H2O → 2 NaOH + H2 + Cl2
Auffallend ist hier, dass an der Kathode nicht etwa Natrium, sondern NaOH und Wasserstoff
entsteht. Der Grund dafür ist, dass Natrium in der elektrochemischen Spannungsreihe weit
oben steht und wegen des hohen negativen Normalpotentials direkt unter Wasserstoffbildung
in Lösung geht.
Na
Kathode
-
e-
E
+ -
+-Cl
-+
Anode
+
I
26 Versuch 2: Das elektrische Strömungsfeld
Die Phasengrenze Elektrode/Elektrolyt ist nicht nur der Ort, an dem eine chemische Reaktion
abläuft, sondern auch der Übergangspunkt zwischen zwei Leitungsmechanismen des
Strömungsfeldes:
• Elektronenleitung
• Ionenleitung.
Beim Transport von Elektronen durch metallische Leiter bauen sich im Gegensatz zum
Ionenleiter aber keine Konzentrationsdifferenzen auf. Eine Veränderung des Ionenleiters beim
Fließen eines Stromes ist also möglich. Des weiteren ist der Stromfluss im Elektrolyten mit
einem Stofftransport verbunden, was durch die Faradayschen Gesetze erfasst ist.
Die Aufspaltung des Elektrolyten in seine Bestandteile durch Stromfluss bezeichnet man als
Elektrolyse. Zur Beschreibung des elektrischen Verhaltens einer Elektrolytlösung bedient
man sich der elektrischen Leitfähigkeit bzw. des spezifischen Widerstandes:
Rl
A
l
A=
⋅= ⋅
σρ (4)
GA
l= ⋅σ (5)
ρσ
=1
(6)
Mit Hilfe der Elektrodengeometrie und einer Strom-Spannungsmessung zur Ermittlung des
Widerstandes lässt sich dann mit den Gleichungen (4), (5) und (6) die Leitfähigkeit und der
spezifische Widerstand berechnen. Tabelle 5.1 zeigt Leitfähigkeiten verschiedener Lösungs-
mittel und Elektrolytlösungen.
Tab. 5.1: Leitfähigkeiten verschiedener Lösungsmittel und Elektrolytlösungen aus Literatur
System T [°C] σ [1/Ωcm]
Destilliertes Wasser 20 10-7
...10-5
Reines Wasser 25 6,4*10-8
NaCl-Lösung (c=1mol/l) 18 0,744*10-1
Schwefelsäure H2SO4 (c=1mol/l) 18 0,366

5 Leitung im Elektrolyten 27
5.3 Strom-Spannungs-Zusammenhang
Der Strom durch den Elektrolyten bei angelegter Spannung U setzt sich aus der Summe der
positiven und negativen Ladungen zusammen, die in einer Zeit t eine gedachte Fläche A
(senkrecht zur Längsachse der Elektrolytzelle angeordnet) durchsetzen. Für den Gesamtstrom
einer 1-1-wertigen Elektrolytlösung ergibt sich somit folgender Zusammenhang:
IQ
tA e n v n v= = ⋅ ⋅ ⋅ + ⋅+ + − −
0 ( ) (7)
Mit c = n/NA [mol/cm3] , n
+=n
-=n (Äquivalentmenge)
⇒ = = ⋅ ⋅ ⋅ ⋅ ++ −IQ
tA e N c v vA0 ( )
= ⋅ ⋅ ⋅ ++ −A F c v v( ) (8)
Mit v E= ⋅µ
(8a) und EU
l= (8b)
⇒ =⋅ ⋅
⋅ + ⋅+ −I
c F A
lU
R
( )µ µ
1
(9)
F = Faraday-Konstante
c = Äquivalentkonzentration [mol/cm3]
µ = Beweglichkeit [cm2/Vs]
v = mittlere Geschwindigkeit
Für die Leitfähigkeit folgt dann:
σ µ µµ
= ⋅ = ⋅ ⋅ ++ −1
R
l
AF c ( ) (10)
Gleichung (9) beschreibt einen linearen I-U-Zusammenhang, der bei Anlegen einer
Gleichspannung an die Elektroden jedoch näherungsweise erst für die Spannung oberhalb der
Zersetzungsspannung EZ gültig ist (Abb. 5.4). Bei Spannungen unterhalb EZ ist der Zellen-
widerstand sehr groß und verhindert somit einen stärkeren Anstieg des Stromes von Beginn
an.
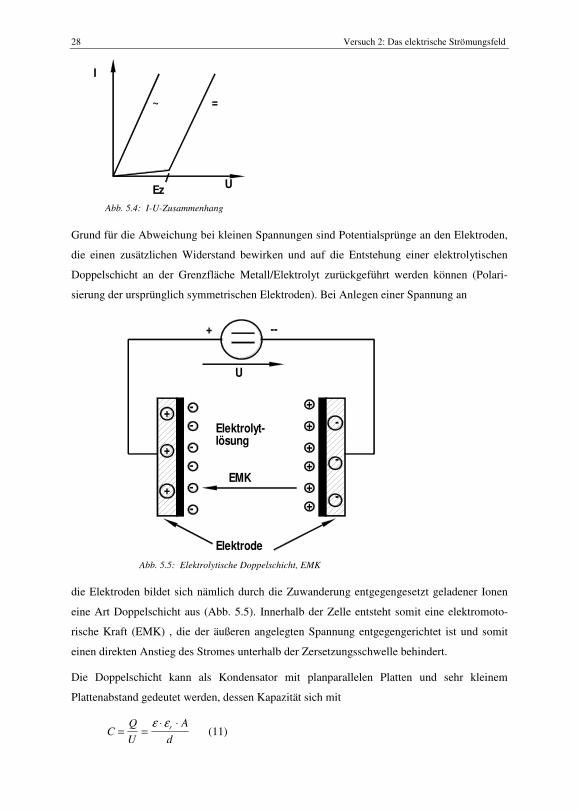
28 Versuch 2: Das elektrische Strömungsfeld
Abb. 5.4: I-U-Zusammenhang
Grund für die Abweichung bei kleinen Spannungen sind Potentialsprünge an den Elektroden,
die einen zusätzlichen Widerstand bewirken und auf die Entstehung einer elektrolytischen
Doppelschicht an der Grenzfläche Metall/Elektrolyt zurückgeführt werden können (Polari-
sierung der ursprünglich symmetrischen Elektroden). Bei Anlegen einer Spannung an
Abb. 5.5: Elektrolytische Doppelschicht, EMK
die Elektroden bildet sich nämlich durch die Zuwanderung entgegengesetzt geladener Ionen
eine Art Doppelschicht aus (Abb. 5.5). Innerhalb der Zelle entsteht somit eine elektromoto-
rische Kraft (EMK) , die der äußeren angelegten Spannung entgegengerichtet ist und somit
einen direkten Anstieg des Stromes unterhalb der Zersetzungsschwelle behindert.
Die Doppelschicht kann als Kondensator mit planparallelen Platten und sehr kleinem
Plattenabstand gedeutet werden, dessen Kapazität sich mit
CQ
U
A
d
r= =
⋅ ⋅ε ε (11)
+-
Elektrode
- +
+
+
-lösung
-
-EMK
-
Elektrolyt--
+-
+
+
+
-+
U
+ --
EzU
I
~ =
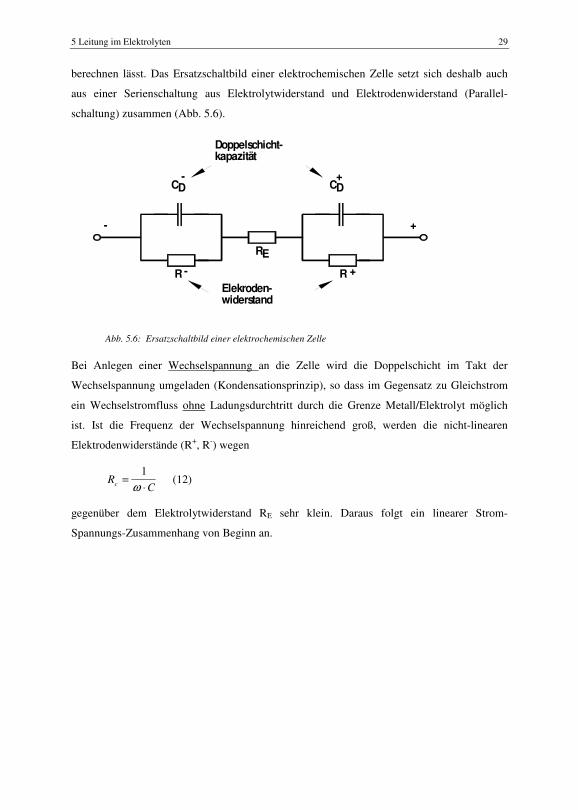
5 Leitung im Elektrolyten 29
berechnen lässt. Das Ersatzschaltbild einer elektrochemischen Zelle setzt sich deshalb auch
aus einer Serienschaltung aus Elektrolytwiderstand und Elektrodenwiderstand (Parallel-
schaltung) zusammen (Abb. 5.6).
Abb. 5.6: Ersatzschaltbild einer elektrochemischen Zelle
Bei Anlegen einer Wechselspannung an die Zelle wird die Doppelschicht im Takt der
Wechselspannung umgeladen (Kondensationsprinzip), so dass im Gegensatz zu Gleichstrom
ein Wechselstromfluss ohne Ladungsdurchtritt durch die Grenze Metall/Elektrolyt möglich
ist. Ist die Frequenz der Wechselspannung hinreichend groß, werden die nicht-linearen
Elektrodenwiderstände (R+, R
-) wegen
RCc =
⋅
1
ω (12)
gegenüber dem Elektrolytwiderstand RE sehr klein. Daraus folgt ein linearer Strom-
Spannungs-Zusammenhang von Beginn an.
-
Elekroden-widerstand
-R
ER
Doppelschicht-kapazität
-DC
+
+R
+DC

30 Versuch 2: Das elektrische Strömungsfeld
6 Temperaturabhängigkeit des Widerstandes
6.1 Allgemeine Definition des Widerstandes im Strömungsfeld
Der Widerstand R stellt neben dem Strom I und der Spannung U eine Integralgröße des
stationären Strömungsfeldes dar. So wie das Ohmsche Gesetz des Strömungsfeldes
J E E= ⋅ = ⋅σ
ρ
1 (1)
σ = elektr. Leitfähigkeit
ρ = spezif. Widerstand
eine Beziehung zwischen Stromdichte und Feldstärke in einem Punkt des Raumes darstellt, so
ist der Widerstand eine Verknüpfung zwischen Strom und Spannung einer beliebigen
Strömungsstrecke. Jede beliebige volumenhafte Strömungsform kann man sich deshalb durch
einen Widerstand ersetzt denken. Er ist damit gleichzeitig nichts anderes als ein Bau- oder
Schaltelement; das Aussehen des Strömungsfeldes, welches sich hinter R verbirgt, ist dabei
nicht mehr von Interesse. Für den Widerstand eines Strömungsfeldes gilt allgemein :
RU
I
E ds
J dA
J ds
J dAab
ab a
b
A
a
A
= =
⋅
⋅= ⋅
⋅
⋅
∫
∫
∫
∫
1
σ (2)
a,b: zwei verschiedene Potentialflächen mit ϕa=const. und ϕb=const
J ds
A
⋅∫ : Stromdichte durch Querschnitt der Fläche A
Speziell bei homogenem Strömungsfeld und Annahme eines linienhaften Leiters der Länge l
und konstantem Querschnitt A folgt:
J ds ,
J dA ,
J = const.
⇒ = ⋅
⋅
= ⋅ =⋅
=⋅
∫
∫
∫
∫R
J ds
dA
ds
dA
l
A
l
Aab
l
A
l
A
1 10 0
σ σ σ
ρ (3)
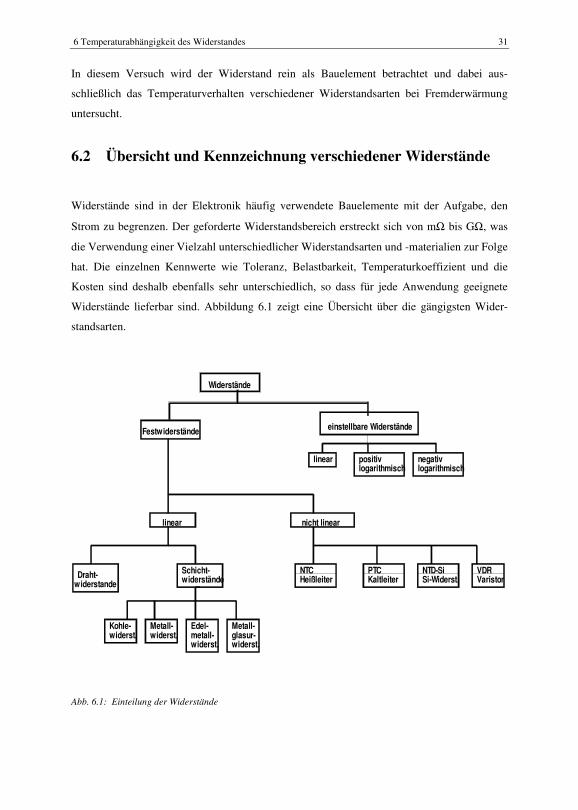
6 Temperaturabhängigkeit des Widerstandes 31
In diesem Versuch wird der Widerstand rein als Bauelement betrachtet und dabei aus-
schließlich das Temperaturverhalten verschiedener Widerstandsarten bei Fremderwärmung
untersucht.
6.2 Übersicht und Kennzeichnung verschiedener Widerstände
Widerstände sind in der Elektronik häufig verwendete Bauelemente mit der Aufgabe, den
Strom zu begrenzen. Der geforderte Widerstandsbereich erstreckt sich von mΩ bis GΩ, was
die Verwendung einer Vielzahl unterschiedlicher Widerstandsarten und -materialien zur Folge
hat. Die einzelnen Kennwerte wie Toleranz, Belastbarkeit, Temperaturkoeffizient und die
Kosten sind deshalb ebenfalls sehr unterschiedlich, so dass für jede Anwendung geeignete
Widerstände lieferbar sind. Abbildung 6.1 zeigt eine Übersicht über die gängigsten Wider-
standsarten.
Abb. 6.1: Einteilung der Widerstände
nicht linear
einstellbare Widerstände
widerst.
widerstandeDraht-
Kohle-widerst.
Metall-
widerst.widerst.
Edel-metall-
Metall-glasur-
Schicht-widerstände
NTCHeißleiter
linear
Festwiderstände
linear
Widerstände
VaristorPTCKaltleiter Si-Widerst.
NTD-Si VDR
positivlogarithmisch
negativlogarithmisch
32 Versuch 2: Das elektrische Strömungsfeld
Aus der Übersicht ist die Aufteilung in Festwiderstand (fester Widerstandswert) und einstell-
bare Widerstände (veränderbarer Widerstandswert) zu erkennen. Während bei den veränder-
lichen Widerständen lediglich noch die Art der möglichen Widerstandskurve (linear, positiv/
negativ logarithmisch) unterschieden sind, spalten sich die Festwiderstände weiter in lineare
bzw. nicht-lineare Widerstandselemente auf. Die Gruppe der linearen Widerstände zeichnet
sich dabei durch ein lineares Strom-Spannungsverhalten und geringe Temperaturabhängigkeit
aus; die nicht-linearen Bauelemente sind dagegen abhängig von einer physikalischen Größe
wie z.B. Temperatur oder Spannung.
Die Kennzeichnung der Widerstände wird mittels Farbcode oder Ziffernstempel vorgenom-
men. Beispielsweise werden Schichtwiderstände mit einer maximalen Belastbarkeit von
P=1W und einer Toleranz von 1% mit Farbringen versehen, währenddessen Widerstände mit
größerer Belastbarkeit (P≥2W) oder einer Widerstandstoleranz von 0,5% sowie nicht-lineare
Festwiderstände, wie der Heißleiter (NTC) und Kaltleiter (PTC), mit einer Ziffernfolge
bedruckt sind.
6.3 Allgemeine Temperaturabhängigkeit
Jeder Widerstand weist eine mehr oder weniger starke Abhängigkeit von der Temperatur auf.
Die Hauptursache für dieses Verhalten lässt sich aus dem Zusammenhang des Widerstandes R
zu den Größen Ladungsträgerdichte n, Feldstärke E sowie Geschwindigkeit v der Ladung
erklären.
Rl
A
l
n q A
l
n qv
EA
=⋅
=⋅ ⋅ ⋅
=
⋅ ⋅
⋅
σ µ (4a)
v = Ladungsgeschwindigkeit
µ = Beweglichkeit
n = Ladungsträgerdichte
Ändert sich der Widerstand um den Betrag ∆R, hervorgerufen durch eine Temperatur-
änderung ∆T, so kann dafür nach Gleichung (4a) lediglich eine temperaturabhängige
elektrische Leitfähigkeit σ verantwortlich sein:
σ µ( ) ( ) ( )T T n T q= ⋅ ⋅ (4b)
6 Temperaturabhängigkeit des Widerstandes 33
Als Faustregel kann gelten, dass die Ladungsträgerbeweglichkeit µ mit steigender Temperatur
abnimmt (Stichworte: Gitterschwingung, Streuung an Phononen) und die Ladungsträgerdichte
n zunimmt (Stichwort: thermische Generation von Ladungsträgern). Das Temperaturverhalten
metallischer Leiter wird beispielsweise unter der Voraussetzung nahezu konstanter
Ladungsträgerdichte n durch die Temperaturabhängigkeit der Beweglichkeit µ bestimmt.
Speziell in diesem Fall erfolgt bei steigender Temperatur eine sinkende Leitfähigkeit σ. Das
Widerstands-Temperatur-Verhalten lässt sich hier näherungsweise durch die lineare
Beziehung
R T R T T( ) ( ) ( )= ⋅ + ⋅0 1 α ∆ (4c)
beschreiben.
Der Temperaturkoeffizient α ist dabei nichts anderes als die Widerstandsänderung ∆R/R pro
Temperaturdifferenz ∆T:
α = =⋅
TR
R TKR
∆
∆ (5)
allg. Definition : α T
To Tx
dx
dT0
1
0
= ⋅ (5a)
Diese lineare Beziehung (4c) gilt jedoch in unserem Fall nur für die Gruppe der linearen
Festwiderstände bei nicht zu hohen Temperaturen, keinesfalls für die Heißleiter bzw.
Kaltleiter mit extrem ausgeprägtem Temperaturverhalten. Da der Temperaturkoeffizient
sowohl positive als auch negative Werte annehmen kann, ist auch ein Widerstandsanstieg
bzw. eine Widerstandsabnahme mit der Temperatur möglich. Diese Erscheinung ist jedoch
bei Betrieb von elektronischen Geräten und Schaltungen im allgemeinen unerwünscht, so dass
man bestrebt ist, diesen Temperaturkoeffizient α der Widerstände so klein wie möglich zu
halten, um eine geringe Temperaturabhängigkeit zu erreichen.
Beispiele: Metallschichtwiderstand α = + 50 ppm/K
Kohleschichtwiderstand α = - 200 ppm/K
ppm: parts per million = 10-6
In anderen Anwendungsbereichen dagegen ist eine extreme Temperaturabhängigkeit von
nichtmetallischen Leitern (HL-Materialien, Kohle, Glas) erwünscht. Bei diesen Materialien
dominiert entweder die temperaturabhängige Beweglichkeit oder die temperaturabhängige
Ladungsträgerdichte. Diese Eigenschaften macht man sich beispielsweise bei der Herstellung
34 Versuch 2: Das elektrische Strömungsfeld
der oben schon erwähnten PTC-/NTC-Widerstände mit stark positiven/negativen Temperatur-
koeffizienten zunutze.
In diesem Zusammenhang sind die Vorgänge der Eigenleitung von Halbleitern sowie die
Störstellenleitung eingehender zu betrachten. Beim Eigenhalbleiter kommt es bei Tempera-
turen T oberhalb des absoluten Temperaturnullpunktes zur Generation von Elektron-Loch-
Paaren (thermische Paarerzeugung) über das verbotene Band der Breite WB. Zwischen
Generation und Rekombination (Rückbildung der Ladungsträgerpaare) besteht in diesem Fall
bei jeder Temperatur ein Gleichgewichtszustand mit einer bestimmten Anzahl von Ladungs-
trägern, welche die Eigenleitung des reinen Kristalls bestimmt. Die Elektronendichte n ist
gleich der Löcherdichte p und damit gleich der Eigenleitungsdichte ni.
inpn == (I)
−⋅kT
WTn B
i2
exp~ 23
(II)
Aus Gleichung (II) erkennt man, dass die Konzentration der Ladungsträger mit zunehmender
Temperatur exponentiell anwächst und somit auch die Leitfähigkeit σ exponentiell zunimmt.
Das Temperaturverhalten der Beweglichkeit µ ist gegenüber der dominierenden Temperatur-
abhängigkeit von n, p zu vernachlässigen.
Im Störstellenhalbleiter dagegen ist bei Raumtemperatur (Bereich der Störstellenerschöpfung)
die Ladungsträgerdichte n, p und damit auch die Leitfähigkeit σ durch die Dotierungskonzen-
tration (Donatorenkonzentration: ND, Akzeptorenkonzentration: NA) bestimmt.
n = ND , p = NA (III)
Die Ladungsträgerdichte ist in diesem Bereich temperaturunabhängig; sie bleibt also konstant.
Im Gegensatz zum Eigenhalbleiter wird hier die Temperaturabhängigkeit der Leitfähigkeit σ
im wesentlichen von der Temperaturabhängigkeit der Beweglichkeit µ bestimmt.
6.4 Herstellung und Temperaturverhalten
In diesem Abschnitt wird nun speziell auf die in diesem Versuch verwendeten Widerstände
eingegangen. Dabei soll das Augenmerk auf der Herstellung und den Materialien der
einzelnen Widerstände liegen und vor allem das unterschiedliche Temperaturverhalten bei
den nicht-linearen Widerständen erläutert werden.
6 Temperaturabhängigkeit des Widerstandes 35
a) Lineare Festwiderstände
Kohleschichtwiderstand, Metallschichtwiderstand (Schichtwiderstände)
- Herstellung und Material:
Der Grundträger der Kohleschichtwiderstände ist meist eine isolierende Keramik z.B. ein
kleiner Stab aus Porzellan. Auf diesem Träger ist nun die eigentliche Widerstandsschicht als
kristalline Grauglanzkohle durch die Abspaltung von Kohlenwasserstoffen bei ca. 900-1100
°C aufgetragen. Die Dicke der aufgebrachten Schicht (nm-µm) ist dabei entscheidend für den
späteren Widerstandswert. Der von außen zugängliche Anschlussdraht (Zinn) wird nun an
zwei Metallkappen angeschweißt, die an den Enden des keramischen Trägers angebracht sind.
Zum Schutz des Widerstandes vor äußeren Einflüssen wird zum Schluss noch eine
Harzschicht aufgebracht, die gleichzeitig elektrisch isoliert.
Bei der Herstellung von Metallschichtwiderständen verwendet man ebenfalls eine Keramik
als Träger, der dann jedoch mit einer Metallschicht (Cr-Ni) überzogen wird. Diese wird
entweder galvanisch abgeschieden oder im Vakuum mit Hilfe eines Sputterverfahrens auf die
Keramik aufgedampft. Die Anschlussdrähte werden wie beim Kohleschichtwiderstand über
zwei Metallkappen rechts und links auf die Widerstände gepresst. Zum Schutz gegen äußere
Einflüsse dient auch hier ein mehrlagiger Schutzüberzug. Da das Aufbringen der Schichten
nicht beliebig genau erfolgen kann, kann der Widerstand durch Einbrennen einer Wendelung
mittels Laser auf einen bestimmten Widerstandswert angepasst werden. Die am häufigsten
verwendeten Widerstandsreihen sind dabei E6 (+ 20%), E12 (+ 10%), E24 (+ 5%), E48 (+
2,5%).
- Temperaturverhalten:
Beide Widerstandsarten weisen eine eher geringe Abhängigkeit von der Temperatur auf. Der
Kohleschichtwiderstand besitzt einen negativen Temperaturkoeffizienten (-1000ppm/K < α <
-200ppm/K); der Metallschichtwiderstand kann einen positiven als auch negativen
Temperaturkoeffizienten besitzen (+ 0-50 ppm/K) und weist somit die geringste Temperatur-
abhängigkeit dieser beiden Widerstandsarten auf. Die Widerstand-Temperatur-Charakteristik
R(T) ist näherungsweise durch die Gleichungen (4c) und (5) gegeben.
36 Versuch 2: Das elektrische Strömungsfeld
Drahtwiderstände
- Herstellung und Material:
Bei diesen Widerständen wird ein spezieller Widerstandsdraht aus Konstantan (Cu-Ni),
Manganin (Cu-Ni-Mn) oder Nickelin (Ni-Cr) auf einen Glasfiberkörper gewickelt. Im ein-
fachsten Fall bringt man nun eine Lackschicht zum Schutz auf; herrschen jedoch hohe
Temperaturen bis 450 °C glasiert oder zementiert man die Widerstände und umgibt sie mit
isolierender Keramik (bis 2kV spannungsfest).
- Temperaturverhalten:
Drahtwiderstände sind für den Einsatz bei hohen Belastungen (bis 200 W) und hohen
Temperaturen (-55 bis 450 °C) gefertigt. Folglich reagieren sie kaum auf Temperatur-
änderungen innerhalb des oben genannten Temperaturbereiches, was auch an den geringen
Temperaturkoeffizienten (α = + 1 ppm/K bis + 200 ppm/K) abzulesen ist. Analog zu den
Schichtwiderständen ist die Widerstand-Temperatur-Charakteristik näherungsweise durch die
Gleichungen (4c) und (5) beschrieben.
b) Nicht-lineare Widerstände
Heißleiter (NTC)
- Herstellung und Material:
Heißleiter setzen sich aus speziellen Halbleiterwerkstoffen mit einem spezifischen Widerstand
von ρ=5*10-9
bis 5*10-1
mΩ-1mm
-2 zusammen. Die wichtigsten Rohmaterialien sind dabei
Mischkristalle mit Fe3O4 (Spinelle) und Materialien mit analoger Struktur wie beispielsweise
Titanverbindungen (Zn2TiO4), Nickeloxid (NiO), Cobaltoxid (CoO) oder Eisenoxid (Fe2O3)
mit Titan(II)-oxid (TiO2) als Zusatz. Mischt man die entsprechenden Materialien, so entsteht
eine Masse, die unter Zugabe eines Bindemittels zu Scheiben bzw. Stäben gepresst wird. Bei
der anschließenden Sinterung, einer zur Verfestigung dienenden Wärmebehandlung unter
Vakuum bei 2/3 bis
3/4 der absoluten Schmelztemperatur, entsteht eine kristalline Keramik mit
ausgeprägtem negativem Temperaturkoeffizient.
- Temperaturverhalten:
Der Heißleiter zeichnet sich durch eine ausgeprägte Temperaturabhängigkeit aus. Bei einem
negativen Temperaturkoeffizienten von α = -3 bis -7 %/K nimmt der Widerstand mit
steigender Temperatur stark exponentiell ab (Abb. 6.2).
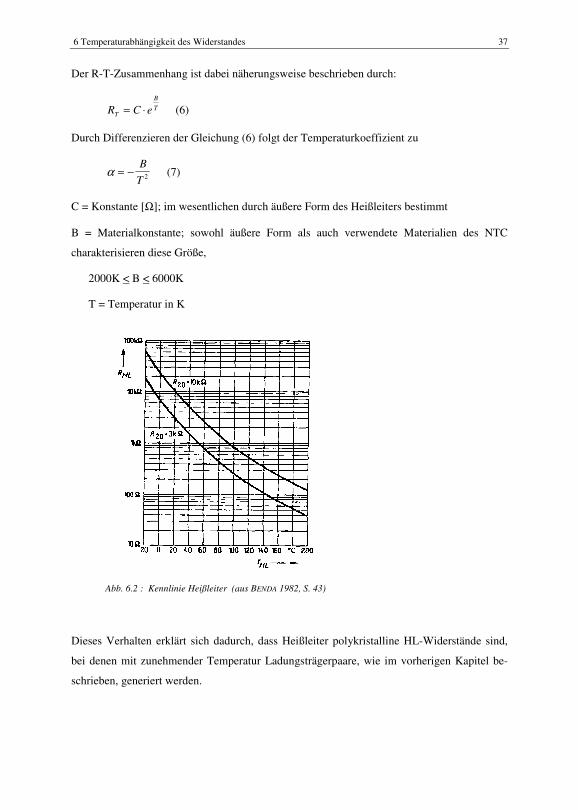
6 Temperaturabhängigkeit des Widerstandes 37
Der R-T-Zusammenhang ist dabei näherungsweise beschrieben durch:
R C eT
B
T= ⋅ (6)
Durch Differenzieren der Gleichung (6) folgt der Temperaturkoeffizient zu
α = −B
T2 (7)
C = Konstante [Ω]; im wesentlichen durch äußere Form des Heißleiters bestimmt
B = Materialkonstante; sowohl äußere Form als auch verwendete Materialien des NTC
charakterisieren diese Größe,
2000K < B < 6000K
T = Temperatur in K
Abb. 6.2 : Kennlinie Heißleiter (aus BENDA 1982, S. 43)
Dieses Verhalten erklärt sich dadurch, dass Heißleiter polykristalline HL-Widerstände sind,
bei denen mit zunehmender Temperatur Ladungsträgerpaare, wie im vorherigen Kapitel be-
schrieben, generiert werden.
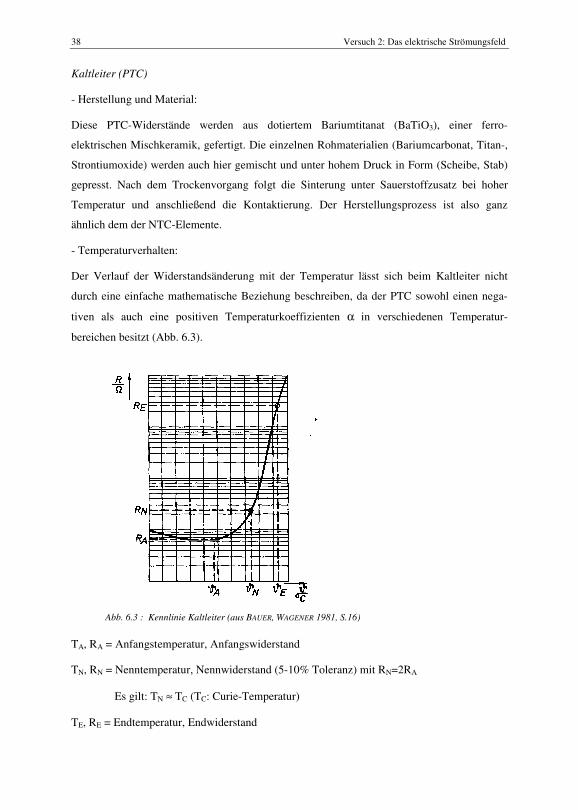
38 Versuch 2: Das elektrische Strömungsfeld
Kaltleiter (PTC)
- Herstellung und Material:
Diese PTC-Widerstände werden aus dotiertem Bariumtitanat (BaTiO3), einer ferro-
elektrischen Mischkeramik, gefertigt. Die einzelnen Rohmaterialien (Bariumcarbonat, Titan-,
Strontiumoxide) werden auch hier gemischt und unter hohem Druck in Form (Scheibe, Stab)
gepresst. Nach dem Trockenvorgang folgt die Sinterung unter Sauerstoffzusatz bei hoher
Temperatur und anschließend die Kontaktierung. Der Herstellungsprozess ist also ganz
ähnlich dem der NTC-Elemente.
- Temperaturverhalten:
Der Verlauf der Widerstandsänderung mit der Temperatur lässt sich beim Kaltleiter nicht
durch eine einfache mathematische Beziehung beschreiben, da der PTC sowohl einen nega-
tiven als auch eine positiven Temperaturkoeffizienten α in verschiedenen Temperatur-
bereichen besitzt (Abb. 6.3).
Abb. 6.3 : Kennlinie Kaltleiter (aus BAUER, WAGENER 1981, S.16)
TA, RA = Anfangstemperatur, Anfangswiderstand
TN, RN = Nenntemperatur, Nennwiderstand (5-10% Toleranz) mit RN=2RA
Es gilt: TN ≈ TC (TC: Curie-Temperatur)
TE, RE = Endtemperatur, Endwiderstand
6 Temperaturabhängigkeit des Widerstandes 39
Man kann vier Teilabschnitte erkennen:
T < TA : Negatives α, fallender Widerstandswert mit steigender Temperatur
TA < T < TN : Schwach positives α, Übergang zur langsamen Widerstandszunahme
TN < T < TE : Stark positives α, geringe Temperaturänderung bewirkt enormen Anstieg des
Widerstandswertes
TE << T : Allmählicher Übergang zu negativem α
Grund für dieses Temperaturverhalten ist zum einen die Sinterung unter Sauerstoffzusatz.
Diese Sauerstoffatome lagern sich innerhalb der polykristallinen Mischkeramik in Nähe der
Kristalloberflächen an. Der Sauerstoff ist dabei in der Lage, freie Elektronen des umliegenden
Kristalls zu binden, wodurch elektrische Potentialbarrieren an den Korngrenzen (negative
Oberflächenladungen) entstehen können. Um diese negativen Ladungspunkte bilden sich
dünne positive Raumladungen nicht abgesättigter Fremdatome, in denen die Ladungsträger-
dichte stark reduziert ist. Dies bewirkt einen zusätzlichen Widerstand ROL des Kaltleiters.
Rn
eOL
e
k T
OL
~1
⋅⋅
⋅
ϕ
(8)
ROL = Widerstand durch negative Oberflächenladung
T = Temperatur des Mischkristalls [K]
n = Zahl der negativen Oberflächenladung pro Länge
ϕOL = Höhe des Potentials der Oberflächenladung
e = 1,602*10-19
As
k = 1,37*10-23
Ws/K Boltzmann-Konstante
Zum anderen weisen die Dielektrizitätskonstanten εr von Mischkristallen wie BaTiO3
folgende Temperaturabhängigkeit auf:
εr
C
C
T T=
− (9)
C = Konstantte ≈ 105 K
TC ≈ TN = Curie-Temperatur

40 Versuch 2: Das elektrische Strömungsfeld
Da jetzt noch die Höhe der Potentialbarriere der Oberflächenladung umgekehrt proportional
dieser Dielektrizitätskonstanten εr ist,
ϕεOl
r
~1
(10)
lässt sich der Widerstandsanstieg des Kaltleiters für Temperaturen T > TN≈TC
zurückverfolgen. Unterhalb TC≈TN bzw. oberhalb TE sind diese negativen Oberflächen-
ladungen zu schwach bis gar nicht ausgebildet.
7 Vorbereitende Aufgaben
Aufgabe 1 :
Gegeben sei die Anordnung aus Abbildung 7.1.
Abb.7.1 : Kreisringausschnitt
Der Ausschnitt des Kreisringes besitze dabei die Radien r und R, die Leitfähigkeit σ und die
Dicke d.
Auf die geraden Stirnseiten sind zwei hochleitende Elektroden (σE >> σ) aufgebracht.
7 Vorbereitende Aufgaben 41
(a) Skizzieren Sie den Verlauf der Stromlinien und einiger Äquipotentiallinien auf den
Kreisringausschnitt.
(b) Begründen Sie exakt das Verhalten der Stromlinien an der Grenzfläche zwischen
hochleitender Elektrode und Kreisringausschnitt.
(c) Berechnen Sie den Widerstand R der Anordnung.
(d) Wie müsste man die Elektroden an den symmetrischen Kreisringausschnitt anbringen, um
einen radialen Stromlinienverlauf zu erhalten?
Aufgabe 2 :
Betrachtet wird ein Rundleiter von 120 km Länge aus Bronze. Der Durchmesser der Leitung
beträgt 3 mm.
Anhand der Eindringtiefe δ soll das Maß der Stromverdrängung für folgende Parameter
bestimmt werden:
σ = 4,76*105
1/Ωcm ; µr = 1 ; f = 8 kHz
(a) Wie groß ist die Eindringtiefe?
(b) Nimmt der Widerstand des Leiters im Vergleich zum Gleichstromwiderstand zu oder ab?
(c) Begründen Sie ihre Entscheidung!!
(d) Welche Möglichkeiten gibt es die Stromverdrängung „herabzusetzen“ ?
Aufgabe 3 :
Eine Stromlinie innerhalb eines Mediums 1 trifft unter einem Winkel von α1=40° auf die
Grenzfläche zu einem Medium 2 der Leitfähigkeit σ2=2 Sm/mm². Medium 1 besitzt die
Leitfähigkeit σ1=56 Sm/mm².
Die Stromdichte an der Grenzfläche soll J1=1 A/mm² betragen (siehe Abb. 3.1).
(a) Ist der Brechungswinkel α2 größer oder kleiner als der Einfallswinkel α1? Warum?
(b) Berechnen Sie den Winkel α2.
(c) Wie groß ist die Stromdichte im Medium 2?

42 Versuch 2: Das elektrische Strömungsfeld
Aufgabe 4 :
Zwei Elektroden tauchen im Abstand von 10cm in eine wässrige Lösung von Natriumchlorid.
(a) Mit welcher Geschwindigkeit bewegen sich die Kationen und Anionen, wenn eine
Gleichspannung von 30V angelegt wird?
(Hinweis : µ+ = 51,9*10
-5 cm²/Vs µ-
= 79*10-5
cm²/Vs)
(b) Berechnen Sie die elektrische Leitfähigkeit der Elektrolytlösung bei einer Konzentration
von c = 0,1 mol/l.
Aufgabe 5 :
1. Ein Platinwiderstand mit einem Temperaturkoeffizienten α0 = 3,9*10-3
1/K besitzt bei T0 =
0°C einen Widerstand von R0 = 100Ω.
(a) Welcher Widerstandswert ist bei T1 = 200°C zu erwarten?
(b) Wie groß ist der Temperaturkoeffizient α50 für T = 50°C?
2. Bei Heißleitern (NTC) dagegen nimmt der Widerstand gemäß Gleichung (6 ) der Theorie
exponentiell mit der Temperatur T ab.
(c) Ermitteln Sie mit Hilfe von Gleichung (6) allgemein den B-Kennwert eines Heißleiters für
die Bezugstemperaturen 25°C/85°C.
8 Versuchsdurchführung 43
8 Versuchsdurchführung
Aufgabe 1: „Nachweis des Skineffektes“
1.1 Versorgung des Zylinders mit Gleichspannung ( Messaufbau (*) Abb. 2.5 )
(a) Bestimmen Sie die Empfindlichkeit s [mVV-1
/kAm-1
] des MRS-Sensors bei einer
Sensorbetriebsspannung UB=5V, indem Sie die Ausgangsspannung U0 des Sensors in
Abhängigkeit vom Strom I durch den Zylinder aufnehmen ( Beachte: Offsetspannung des
Sensor !!!). Justieren Sie dazu die Sensorunterkante in Höhe der Zylinderoberfläche und
variieren dann den Strom in 0,25A-Schrittweite bis etwa 4A.
Wie hängt der Strom I in diesem speziellen Fall von der magnetischen Erregung H ab?
Skizzieren Sie aus den gewonnenen Messdaten den Verlauf der Sensorspannung U0 in
Abhängigkeit von der magnetischen Erregung H (Uo(H)-Diagramm) und ermitteln die
Sensorempfindlichkeit s.
(b) Nehmen Sie bei unverändertem Versuchsaufbau die Brückenspannung des Sensors und
damit die Erregung H in Abhängigkeit vom Ort r bei konstantem Strom I=3,5A durch
den Zylinder über eine Messstrecke von r=11cm auf (Schrittweite rs=1cm ;
Zylinderradius r=5cm).
Startpunkt des Sensors : 6cm über Zylindermantel (r=11cm) 30 auf Maßskala
Endpunkt des Sensor : Mittelpunkt des Zylinder (r=5cm) 19 auf Maßskala
(c) Bestimmen Sie mit Hilfe der Sensorempfindlichkeit s aus Aufgabe 1.1(a) den Verlauf der
magnetischen Erregung H(r).
1.2 Versorgung mit Wechselspannung (Messaufbau (**) mit HL-Trafo Abb. 2.5 )
(a) Schalten Sie an eine geeignete Stelle im Messaufbau ein Multimeter, um dem genauen
Strom durch den Zylinder zu bestimmen.
Welche Einstellung benötigt man am Multimeter?
Wie groß ist der Strom I durch den Zylinder?
44 Versuch 2: Das elektrische Strömungsfeld
(b) Analog zum Gleichspannungsfall erfolgt jetzt die Aufnahme der Sensorausgangs-
spannung U0 und damit der magnetischen Erregung H in Abhängigkeit vom Ort r.
Tragen Sie die Erregung H über den Ort r in einem Koordinatensystem auf.
(c) In den Messaufbau wird zusätzlich ein Si-Brückengleichrichter geschaltet.
Wie groß ist jetzt der (Wechsel)Strom durch den Zylinder?
Wie sieht jetzt der H(r)-Verlauf aus?
Worin äußert sich der Skineffekt im Kurvenverlauf?
Zeigen Sie den Unterschied zum H(r)-Verlauf aus Aufgabenteil (b) auf.
Begründen Sie ihre Antwort!!!
Aufgabe 2 : „Aussehen ebener Strömungsfelder“
(a) Tasten Sie die Umrisse der zu vermessenden Probe mit dem Abtaster ab und markieren
sie die Punkte mit Hilfe des Zeichenstiftes auf dem separaten Papier.
(b) Ermitteln Sie nun unter Verwendung der Brückenschaltung (Abb. 3.2) sowie des
Pantographen mit Abtaster und Zeichenstift den Verlauf der Äquipotentiallinien auf dem
leitfähigen Papier.
Parameter: Abstand der Äquipotentiallinien = 0,1V
Spannungsversorgung des Leitpapiers = 2V
Anzahl der Potentialpunkte pro Ä-Linie =25-30
(c) Verbinden Sie die ertasteten Potentialpunkte zu vollständigen Äquipotentiallinien.
(d) Skizzieren Sie exemplarisch in eine Kopie der aufgenommenen Äquipotentiallinien den
näherungsweisen Verlauf der Feldlinien sowie deren Richtung.
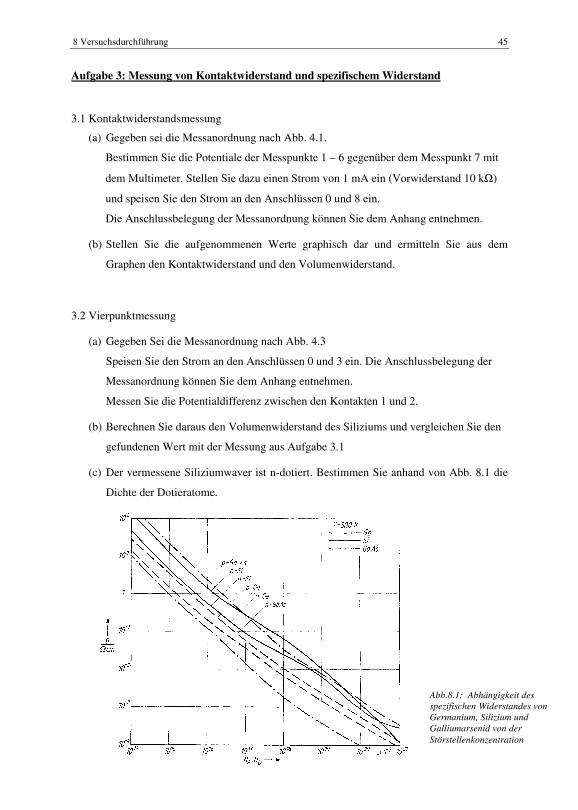
8 Versuchsdurchführung 45
Aufgabe 3: Messung von Kontaktwiderstand und spezifischem Widerstand
3.1 Kontaktwiderstandsmessung
(a) Gegeben sei die Messanordnung nach Abb. 4.1.
Bestimmen Sie die Potentiale der Messpunkte 1 – 6 gegenüber dem Messpunkt 7 mit
dem Multimeter. Stellen Sie dazu einen Strom von 1 mA ein (Vorwiderstand 10 kΩ)
und speisen Sie den Strom an den Anschlüssen 0 und 8 ein.
Die Anschlussbelegung der Messanordnung können Sie dem Anhang entnehmen.
(b) Stellen Sie die aufgenommenen Werte graphisch dar und ermitteln Sie aus dem
Graphen den Kontaktwiderstand und den Volumenwiderstand.
3.2 Vierpunktmessung
(a) Gegeben Sei die Messanordnung nach Abb. 4.3
Speisen Sie den Strom an den Anschlüssen 0 und 3 ein. Die Anschlussbelegung der
Messanordnung können Sie dem Anhang entnehmen.
Messen Sie die Potentialdifferenz zwischen den Kontakten 1 und 2.
(b) Berechnen Sie daraus den Volumenwiderstand des Siliziums und vergleichen Sie den
gefundenen Wert mit der Messung aus Aufgabe 3.1
(c) Der vermessene Siliziumwaver ist n-dotiert. Bestimmen Sie anhand von Abb. 8.1 die
Dichte der Dotieratome.
Abb.8.1: Abhängigkeit des
spezifischen Widerstandes von
Germanium, Silizium und
Galliumarsenid von der
Störstellenkonzentration
46 Versuch 2: Das elektrische Strömungsfeld
Aufgabe 4 : „Stromleitung in Flüssigkeiten“
4.1 Destilliertes Wasser:
(a) Ermitteln Sie den Strom I in Abhängigkeit von der angelegten Spannung für destilliertes
Wasser in einer elektrochemischen Zelle.
Parameter : - Eingetauchte Plattenfläche A=40cm²
- Plattenabstand L≈8cm
Für Gleichspannung 0-20V in Form einer Datentabelle (Schrittweite 1V).
Für Wechselspannung 0-20V in Form einer Datentabelle (Schrittweite 1V).
(b) Skizzieren Sie beide I(U)-Verläufe.
(c) Wo liegt der Unterschied? Begründung !!!
(d) Berechnen Sie in beiden Fällen an den Spannungspunkten 10V und 20V mit Hilfe der
Küvettengeometrie die Leitfähigkeit des destillierten Wassers und stellen Sie einen
Vergleich zu den Literaturwerten an.
4.2 1-molare Natriumchloridlösung:
Tauschen Sie das destillierte Wasser in der elektrochemischen Zelle gegen 1M NaCl.
(a) Ermitteln Sie den Strom I in Abhängigkeit von der angelegten Spannung für die Elek-
trolytlösung in einer elektrochemischen Zelle.
Parameter : - Eingetauchte Plattenfläche A=40cm²
- Plattenabstand L≈8cm
Für Wechselspannung 0-15V in Form einer Datentabelle (Schrittweite 1V).
(b) Skizzieren Sie den I(U)-Verlauf.
(c) Berechnen Sie an den Spannungspunkten 7V und 14V mit Hilfe der Küvettengeometrie
die Leitfähigkeit der Lösung und stellen Sie einen Vergleich zu den Literaturwerten an.
Wie lassen sich eventuelle Abweichungen der ermittelten Leitfähigkeiten erklären?
(d) Bestimmen Sie zusätzlich unter Zuhilfenahme der oben bestimmten Leitfähigkeit die
mittlere Geschwindigkeit/Beweglichkeit der Ladungsträger (Ionen).
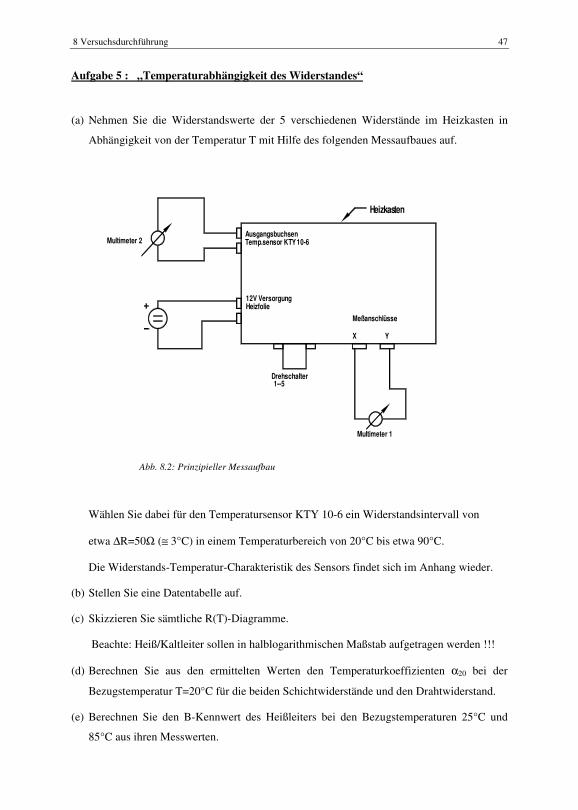
8 Versuchsdurchführung 47
Aufgabe 5 : „Temperaturabhängigkeit des Widerstandes“
(a) Nehmen Sie die Widerstandswerte der 5 verschiedenen Widerstände im Heizkasten in
Abhängigkeit von der Temperatur T mit Hilfe des folgenden Messaufbaues auf.
Abb. 8.2: Prinzipieller Messaufbau
Wählen Sie dabei für den Temperatursensor KTY 10-6 ein Widerstandsintervall von
etwa ∆R=50Ω (≅ 3°C) in einem Temperaturbereich von 20°C bis etwa 90°C.
Die Widerstands-Temperatur-Charakteristik des Sensors findet sich im Anhang wieder.
(b) Stellen Sie eine Datentabelle auf.
(c) Skizzieren Sie sämtliche R(T)-Diagramme.
Beachte: Heiß/Kaltleiter sollen in halblogarithmischen Maßstab aufgetragen werden !!!
(d) Berechnen Sie aus den ermittelten Werten den Temperaturkoeffizienten α20 bei der
Bezugstemperatur T=20°C für die beiden Schichtwiderstände und den Drahtwiderstand.
(e) Berechnen Sie den B-Kennwert des Heißleiters bei den Bezugstemperaturen 25°C und
85°C aus ihren Messwerten.
---
1--5Drehschalter
12V VersorgungHeizfolie
Multimeter 2 Temp.sensor KTY 10-6Ausgangsbuchsen
Multimeter 1
Meßanschlüsse
X Y
Heizkasten
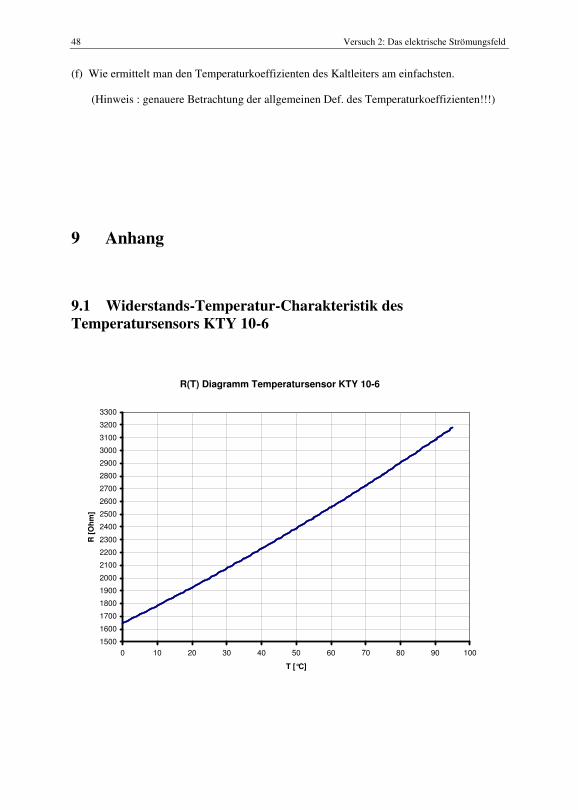
48 Versuch 2: Das elektrische Strömungsfeld
(f) Wie ermittelt man den Temperaturkoeffizienten des Kaltleiters am einfachsten.
(Hinweis : genauere Betrachtung der allgemeinen Def. des Temperaturkoeffizienten!!!)
9 Anhang
9.1 Widerstands-Temperatur-Charakteristik des
Temperatursensors KTY 10-6
R(T) Diagramm Temperatursensor KTY 10-6
1500
1600
1700
1800
1900
2000
2100
2200
2300
2400
2500
2600
2700
2800
2900
3000
3100
3200
3300
0 10 20 30 40 50 60 70 80 90 100
T [°C]
R [
Oh
m]
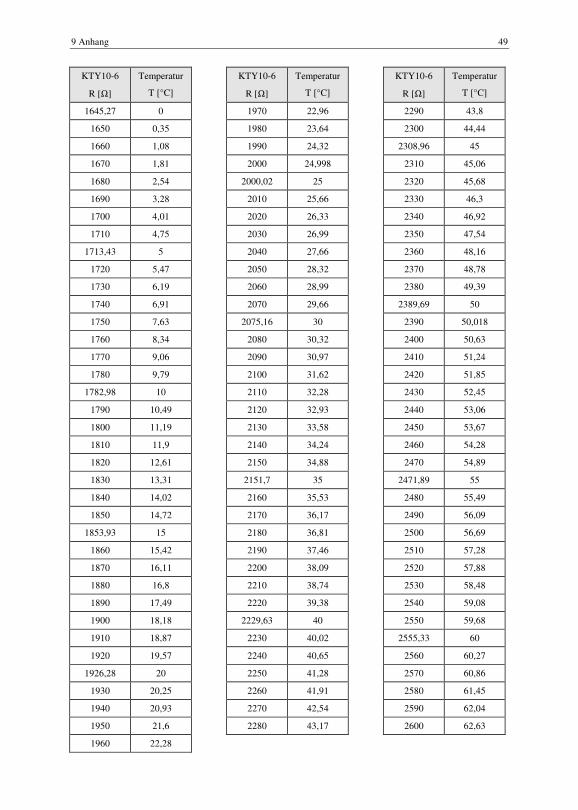
9 Anhang 49
KTY10-6
R [Ω]
Temperatur
T [°C]
1645,27 0
1650 0,35
1660 1,08
1670 1,81
1680 2,54
1690 3,28
1700 4,01
1710 4,75
1713,43 5
1720 5,47
1730 6,19
1740 6,91
1750 7,63
1760 8,34
1770 9,06
1780 9,79
1782,98 10
1790 10,49
1800 11,19
1810 11,9
1820 12,61
1830 13,31
1840 14,02
1850 14,72
1853,93 15
1860 15,42
1870 16,11
1880 16,8
1890 17,49
1900 18,18
1910 18,87
1920 19,57
1926,28 20
1930 20,25
1940 20,93
1950 21,6
1960 22,28
KTY10-6
R [Ω]
Temperatur
T [°C]
1970 22,96
1980 23,64
1990 24,32
2000 24,998
2000,02 25
2010 25,66
2020 26,33
2030 26,99
2040 27,66
2050 28,32
2060 28,99
2070 29,66
2075,16 30
2080 30,32
2090 30,97
2100 31,62
2110 32,28
2120 32,93
2130 33,58
2140 34,24
2150 34,88
2151,7 35
2160 35,53
2170 36,17
2180 36,81
2190 37,46
2200 38,09
2210 38,74
2220 39,38
2229,63 40
2230 40,02
2240 40,65
2250 41,28
2260 41,91
2270 42,54
2280 43,17
KTY10-6
R [Ω]
Temperatur
T [°C]
2290 43,8
2300 44,44
2308,96 45
2310 45,06
2320 45,68
2330 46,3
2340 46,92
2350 47,54
2360 48,16
2370 48,78
2380 49,39
2389,69 50
2390 50,018
2400 50,63
2410 51,24
2420 51,85
2430 52,45
2440 53,06
2450 53,67
2460 54,28
2470 54,89
2471,89 55
2480 55,49
2490 56,09
2500 56,69
2510 57,28
2520 57,88
2530 58,48
2540 59,08
2550 59,68
2555,33 60
2560 60,27
2570 60,86
2580 61,45
2590 62,04
2600 62,63
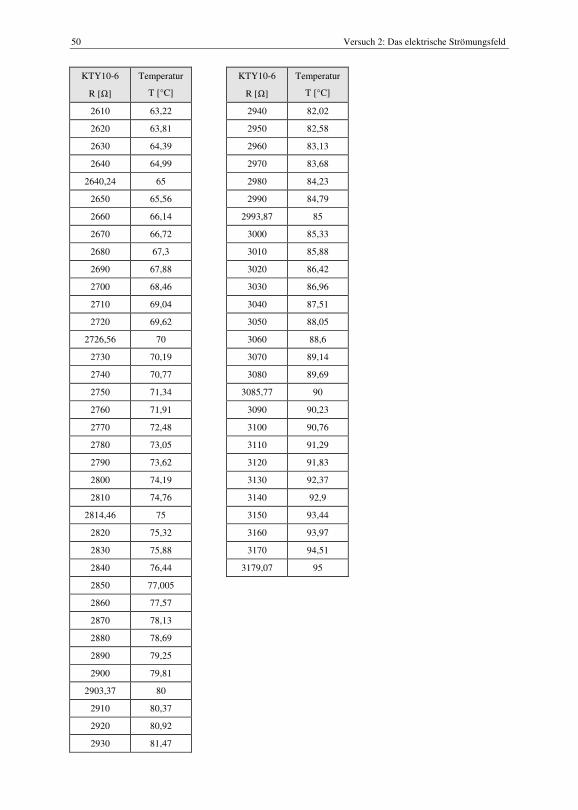
50 Versuch 2: Das elektrische Strömungsfeld
KTY10-6
R [Ω]
Temperatur
T [°C]
2610 63,22
2620 63,81
2630 64,39
2640 64,99
2640,24 65
2650 65,56
2660 66,14
2670 66,72
2680 67,3
2690 67,88
2700 68,46
2710 69,04
2720 69,62
2726,56 70
2730 70,19
2740 70,77
2750 71,34
2760 71,91
2770 72,48
2780 73,05
2790 73,62
2800 74,19
2810 74,76
2814,46 75
2820 75,32
2830 75,88
2840 76,44
2850 77,005
2860 77,57
2870 78,13
2880 78,69
2890 79,25
2900 79,81
2903,37 80
2910 80,37
2920 80,92
2930 81,47
KTY10-6
R [Ω]
Temperatur
T [°C]
2940 82,02
2950 82,58
2960 83,13
2970 83,68
2980 84,23
2990 84,79
2993,87 85
3000 85,33
3010 85,88
3020 86,42
3030 86,96
3040 87,51
3050 88,05
3060 88,6
3070 89,14
3080 89,69
3085,77 90
3090 90,23
3100 90,76
3110 91,29
3120 91,83
3130 92,37
3140 92,9
3150 93,44
3160 93,97
3170 94,51
3179,07 95

Versuch 3
Das Magnetfeld
1 DAS MAGNETFELD UND SEINE FELDGRÖßEN ........................................................................... 2
1.1 DEFINITION DER FLUßDICHTE B UND DER ERREGUNG H ..................................................................... 2
1.2 GRUNDBEGRIFFE ................................................................................................................................. 6
2 MATERIE IM MAGNETFELD ........................................................................................................... 10
2.1 MAGNETISIERUNG M......................................................................................................................... 10
2.2 DIAMAGNETISMUS ............................................................................................................................ 12
2.3 PARAMAGNETISMUS .......................................................................................................................... 12
2.4 WERKSTOFFE MIT MAGNETISCHER ORDNUNG ................................................................................... 13
2.5 ANTIFERROMAGNETISMUS ................................................................................................................ 16
2.6 FERRIMAGNETISMUS ......................................................................................................................... 16
3 MAGNETISCHER KREIS ................................................................................................................... 16
3.1 GRUNDLAGEN ................................................................................................................................... 16
3.2 SCHERUNG UND EFFEKTIVE PERMEABILITÄT ..................................................................................... 18
4 KRAFTWIRKUNG IM MAGNETFELD ........................................................................................... 19
4.1 KRAFT AUF STROMDURCHFLOSSENEN LEITER ................................................................................... 19
4.2 LORENTZKRAFT ................................................................................................................................ 20
4.3 DIE KRAFTWAAGE............................................................................................................................. 20
5 DER HALLEFFEKT ............................................................................................................................. 22
5.1 HERLEITUNG ..................................................................................................................................... 22
5.2 MEßMETHODEN.................................................................................................................................24
6 ELEKTROMAGNETISCHE INDUKTION ....................................................................................... 26
6.1 MAGNETISCHER FLUß ....................................................................................................................... 26
6.2 DER BEGRIFF INDUKTION .................................................................................................................. 26
7 WIRBELSTRÖME ................................................................................................................................ 28
7.1 GRUNDLAGEN ................................................................................................................................... 28
7.2 BESTIMMUNG DER BREMSKRAFT EINES WIRBELSTROMES ................................................................ 30
8 VORBEREITENDE AUFGABEN ....................................................................................................... 31
9 VERSUCHSDURCHFÜHRUNG ......................................................................................................... 33
9.1 ALLGEMEINE HINWEISE .................................................................................................................... 33
9.2 MESSUNG DES MAGNETFELDES ........................................................................................................ 33
9.3 KRAFT AUF EINEN STROMDURCHFLOSSENEN LEITER ......................................................................... 33
9.4 HALLEFFEKT ..................................................................................................................................... 33
9.5 BEWEGUNGSINDUKTION .................................................................................................................... 34
9.6 WIRBELSTROMEFFEKT ...................................................................................................................... 34
10 LITERATURVERZEICHNIS ............................................................................................................ 35
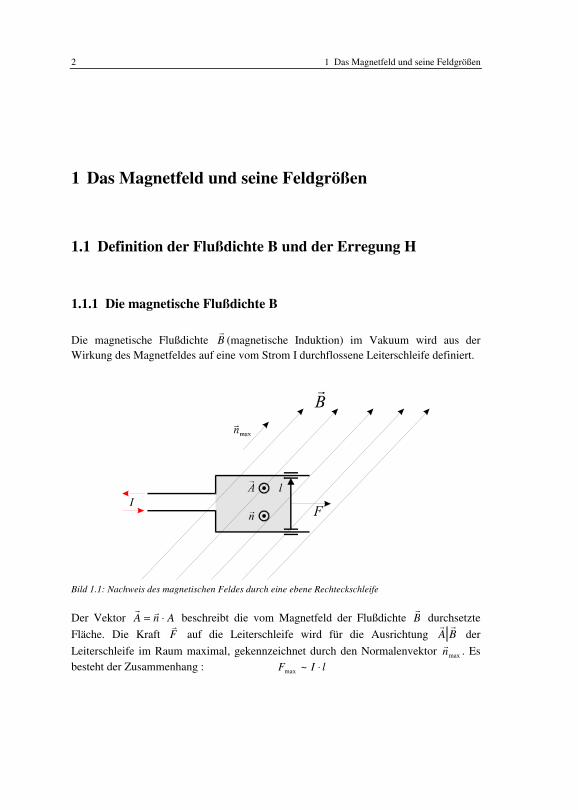
2 1 Das Magnetfeld und seine Feldgrößen
1 Das Magnetfeld und seine Feldgrößen
1.1 Definition der Flußdichte B und der Erregung H
1.1.1 Die magnetische Flußdichte B
Die magnetische Flußdichte B (magnetische Induktion) im Vakuum wird aus der
Wirkung des Magnetfeldes auf eine vom Strom I durchflossene Leiterschleife definiert.
Bild 1.1: Nachweis des magnetischen Feldes durch eine ebene Rechteckschleife
Der Vektor A n A= ⋅ beschreibt die vom Magnetfeld der Flußdichte
B durchsetzte
Fläche. Die Kraft F auf die Leiterschleife wird für die Ausrichtung
A B der
Leiterschleife im Raum maximal, gekennzeichnet durch den Normalenvektor nmax
. Es
besteht der Zusammenhang : F I lmax ~ ⋅
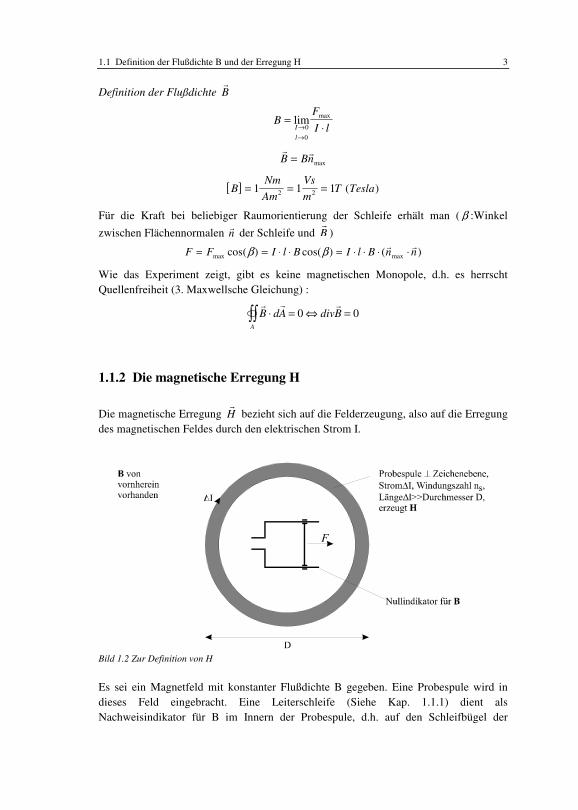
1.1 Definition der Flußdichte B und der Erregung H 3
Definition der Flußdichte B
BF
I lI
l
=⋅→
→
limmax
0
0
B Bn= max
[ ]BNm
Am
Vs
mT Tesla= = =1 1 12 2 ( )
Für die Kraft bei beliebiger Raumorientierung der Schleife erhält man ( β :Winkel
zwischen Flächennormalen n der Schleife und
B )
F F I l B I l B n n= = ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅max maxcos( ) cos( ) ( )β β
Wie das Experiment zeigt, gibt es keine magnetischen Monopole, d.h. es herrscht
Quellenfreiheit (3. Maxwellsche Gleichung) :
B dA divB
A
⋅ = ⇔ =∫∫ 0 0
1.1.2 Die magnetische Erregung H
Die magnetische Erregung
H bezieht sich auf die Felderzeugung, also auf die Erregung
des magnetischen Feldes durch den elektrischen Strom I.
Bild 1.2 Zur Definition von H
Es sei ein Magnetfeld mit konstanter Flußdichte B gegeben. Eine Probespule wird in
dieses Feld eingebracht. Eine Leiterschleife (Siehe Kap. 1.1.1) dient als
Nachweisindikator für B im Innern der Probespule, d.h. auf den Schleifbügel der
4 1 Das Magnetfeld und seine Feldgrößen
Leiterschleife wirkt eine Kraft. Zur Kompensation der Kraft muß ein Strom ΔI durch die
Spule fließen. Es zeigt sich, daß dieser Kompensationsstrom für eine Richtung der
Spulenachse ein Maximum hat. Im Innern der Spule ist dann B = 0 . Verschiedene
Spulenanordnungen ergeben, daß für die Kompensation das Produkt von ΔI mit der
Windungszahl ns pro Längeneinheit Δl maßgeblich ist.
Definition der magnetische Erregung
H
Hn I
ll
s=
→limΔ
Δ
Δ0
[ ]HA
m= 1
Durch Variation der Orientierung von Δl zeigt man, daß H ein Vektor ist.
Führt man eine Probespule längs eines geschlossenen Weges C, der eine Fläche A
begrenzt, so zeigt sich daß gilt
H ds J dA
AC
⋅ = ⋅∫∫∫ .
In diesem Experiment ist J zunächst nur die Leitungsstromdichte, die die Fläche
A
durchsetzt. Das folgende Gedankenexperiment zeigt, daß eine Ergänzung erforderlich
ist.
Bild 1.3 Mögliche Integrationsflächen bei der Anwendung des Durchflutungsgesetzes
1.1 Definition der Flußdichte B und der Erregung H 5
„Die außerhalb des Bildes geschlossene Leiterschleife ist durch zwei voneinander
isolierte Leiterplatten unterbrochen, die einen Kondensator bilden. Obwohl zwischen
den Kondensatorplatten immer J = 0 ist, kann in den Leitungsdrähten zeitweise ein
Strom fließen, beispielsweise ein Wechselstrom, der periodisch seine Richtung ändert
und dabei die Platten abwechselnd positiv und negativ auflädt. Wendet man zu einem
Zeitpunkt, zu dem ein Strom durch den Draht fließt, das Durchflutungsgesetz auf den
eingezeichneten Umlauf an und wählt die Fläche einmal so, daß der Strom I durch sie
hindurchtritt und einmal so, daß sie zwischen den Kondensatorplatten verläuft, also
keine Strombahnen schneidet, dann ergibt die rechte Seite der Gleichung einmal den
Wert I und einmal den Wert Null. Die Gleichung kann also in dieser Form keine
allgemeine Gültigkeit haben..... Da die Zunahme der Ladung auf der den Draht
abschließenden Kondensatorplatten dem zufließenden Strom
I J dA= ⋅∫
gleich sein muß,
IdQ
dt= ,
und für die Erregung im Raum zwischen den Platten gilt
Q D dA= ⋅∫
,
wenn man jeweils über die Plattenoberfläche integriert, muß zwischen dem Strom I und
der (elektrischen) Erregung der Zusammenhang
J dAdD
dtdA⋅ = ⋅∫∫
bestehen. (Die Differentiation braucht nur an D ausgeführt zu werden, da sich nur die
(elektrische) Erregung, nicht aber die Fläche zeitlich ändert.) Den Ausdruck auf der
rechten Seite der Gleichung bezeichnete Maxwell als Verschiebungstrom und
entsprechend dD
dt
als Verschiebungsstromdichte.“1
Das Durchflutungsgesetz lautet somit
H ds J dAges
AC
⋅ = ⋅∫∫∫ .
Die Gesamtstromdichte J ges setzt sich somit aus der Leitungsstromdichte
J L
und der
Verschiebungsstromdichte ∂
∂tD
zusammen.
1 [4] Georg Bosse, Grundlagen der Elektrotechnik II

6 1 Das Magnetfeld und seine Feldgrößen
Im Vakuum sind B und
H gleichgerichtet und ihr Quotient ist in allen Raumpunkten
gleich
B
H
B
Hconst
Vs
Am
n
n
1
1
0
74 10= = = = −µ π .
1.2 Grundbegriffe
1.2.1 Maxwellgleichungen
Die Maxwellschen Gleichungen in Integralform sind gegeben durch
Induktionsgesetz d
dtB dA E ds
A C
⋅ = − ⋅∫∫ ∫
Durchflutungsgesetz J dA H dsges
CA
⋅ = ⋅∫∫∫
Quellfreiheit des Magnetfeldes B dA
A
⋅ =∫∫ 0
Quellen des elektr. Feldes D dA dV
VA
⋅ = ∫∫∫∫∫ ρ
Dabei beschreibt E die elektrische Feldstärke D die elektrische Flächenladungsdichte und
ρ die elektrische Raumladungsdichte.
Setzt man eine zeitunabhängige Geometrie voraus, gilt
d
dtB dA
tB dA
⋅ = ⋅∫∫∫∫
∂
∂
Mit dem Satz von Gauß
divF dV F dAV A
∫∫∫ ∫∫= ⋅
und dem Satz von Stokes
rotF dA F dsCA
⋅ = ⋅∫∫∫
erhält man dann die Maxwellschen Gleichungen in Differentialform, wobei
Differenzierbarkeit ( keine Unstetigkeitsstellen ) vorausgesetzt sei.
1.2 Grundbegriffe 7
Induktionsgesetz ∂
∂tB rotE
= −
Durchflutungsgesetz J rotHges =
Quellfreiheit des Magnetfeldes divB
= 0
Quellen des elektr. Feldes divD
= ρ
1.2.2 Materialgleichungen
Zur Lösung der Maxwellschen Gleichungen sind Nebenbedingungen, wie die
Materialgleichungen, notwendig. Sie sind so gewählt, daß die Linearität der
Maxwellschen Gleichungen erhalten bleibt. Der einfachste und zugleich lineare Fall
sind die multiplikativen Relationen D E Er= =ε ε ε0
B H Hr= =µ µ µ0
J E= σ
mit µ π0
74 10= ⋅ − Vs
Am
ε0
128 854 10= ⋅ −,As
Vm.
Leitfähigkeit σ , Dielektrizitätskonstante ε und Permeabilität µ sind im allgemeinen
skalare Größen, die in inhomogenen Medien ortsabhängig sind. Bei ferromagnetischen
(bzw. ferroelektrischen) Stoffen tritt an die Stelle der linearen Beziehung ein
funktionaler Zusammenhang B B H T= ( , ) [bzw.
D D P T= ( , ) ], in dem sogar noch die
„Vorgeschichte“ des Materials berücksichtigt werden muß.
Daraus folgen die allgemeinen Materialgleichungen, die auch für hysteresebehaftete
Werkstoffe und für Nichtlinearitäten gelten. D E P= +ε0
B H M= +µ µ0 0
Elektrische Polarisation P
Magnetisierung M
:
:
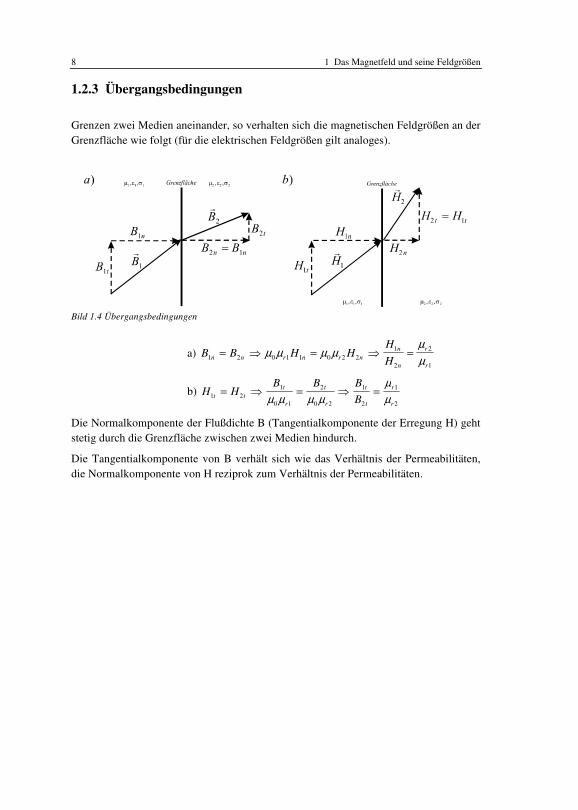
8 1 Das Magnetfeld und seine Feldgrößen
1.2.3 Übergangsbedingungen
Grenzen zwei Medien aneinander, so verhalten sich die magnetischen Feldgrößen an der
Grenzfläche wie folgt (für die elektrischen Feldgrößen gilt analoges).
Bild 1.4 Übergangsbedingungen
a) B B H HH
Hn n r n r n
n
n
r
r
1 2 0 1 1 0 2 2
1
2
2
1
= ⇒ = ⇒ =µ µ µ µµ
µ
b) H HB B B
Bt t
t
r
t
r
t
t
r
r
1 2
1
0 1
2
0 2
1
2
1
2
= ⇒ = ⇒ =µ µ µ µ
µ
µ
Die Normalkomponente der Flußdichte B (Tangentialkomponente der Erregung H) geht
stetig durch die Grenzfläche zwischen zwei Medien hindurch.
Die Tangentialkomponente von B verhält sich wie das Verhältnis der Permeabilitäten,
die Normalkomponente von H reziprok zum Verhältnis der Permeabilitäten.

1.2 Grundbegriffe 9
1.2.4 Anwendung der Maxwellgleichungen am Beispiel der langen
Spule
Bild 1.5 Lange Spule
Für die gegebene Spulengeometrie soll die magnetische Erregung H im Innern der Spule
berechnet werden. Mit der Annahme, daß sich die Erregungen der Einzelwindungen
addieren und dem Durchflutungsgesetz gilt
J dA J A n Ii i
iA
s⋅ = =∑∫∫ Δ
H ds H s H l H l H l H l
C
i ii
s s⋅ = = + + +∫ ∑ Δ 2 2 3 3 4 4 .
Der Integrationsweg werde so gewählt, daß sich die Teilstrecken aufsummieren. Da die
H li i für i=2..4 (Außenbereiche) vernachlässigbar klein sind, reduziert sich das
Durchflutungsgesetz zu
H l n Is s s= ⇒ Hn I
ls
s
s
= .
10 2 Materie im Magnetfeld
2 Materie im Magnetfeld
2.1 Magnetisierung M
Die Magnetisierung
M wird als Dipoldichte, ganz analog zum elektrischen Fall,
definiert.
Definition der Magnetisierung M
M
dm
dV:=
m beschreibt dabei das magnetische Dipolmoment. Zur Deutung der Magnetisierung M kann man sich folgender Hilfsvorstellung bedienen. Die Elektronen innerhalb der
Atome durchlaufen geschlossene Bahnen und rotieren dabei um ihre eigene Achse
(Spin). Diese Elektronenbewegung kann als ein elektrischer Ringstrom und damit als
magnetischer Dipol gedeutet werden. Die magnetischen Dipolmomente können
entweder durch Dipolmomente entgegengesetzter Richtung aufgehoben werden, oder es
kann ein Überschuß von Dipolmomenten einer Richtung vorhanden sein. Diese
magnetischen Dipole können auf nicht abgeschlossene Schalen zurückgeführt werden.
Ohne ein äußeres Feld sind ihre Orientierungen zufällig verteilt. Wird ihnen ein äußeres
Feld aufgeprägt, so richten sich die Momente parallel zum Feld aus. Dieser Orientierung
wirkt aber die thermische Bewegung entgegen. Man betrachtet einen homogenen
Zylinder, in dem Ringströme vorhanden sind, deren Momente parallel zur Zylinderachse
stehen. Im Innern des Zylinders kompensieren sich die Ströme, während an der
Oberfläche ein resultierender Strom, der Amperesche Strom, fließt. Er entspricht quasi
einem Strom, der eine den Zylinder umschließende Spule durchfließt. Das resultierende
magnetische Moment einer kleinen Kreisscheibe ergibt sich zu
dm Adi=

2.1 Magnetisierung M 11
Bild 2.1 Amperescher Strom in einer Kreisscheibe mit dem Volumen dV=Adl
Daraus folgt für die Magnetisierung Mdm
dV
Adi
Adl
di
dl= = = .
Nimmt man an, daß der Amperesche Strom des Zylinders und der Strom über eine
Spule einander entsprechen, kann bei gleichen geometrischen Verhältnissen die Spule
und der Zylinder nach außen hin, d.h. in ihrer Wirkung, als gleichwertig betrachtet
werden, wenn man voraussetzt, daß Mn I
dl
di
dl
s= = ist. Für eine lange Spule gilt
Bn I
dls
s= µ0
Geht man von einer homogenen Magnetisierung aus, kann das Feld im Innern des
Zylinders mit
B Mz = µ0
angegeben werden.
An dieser Stelle sei nochmals darauf hingewiesen, daß der Amperesche Strom nur eine
Hilfsvorstellung darstellt.
Liegt sowohl eine Felderzeugung durch eine Spule ( )Bs , als auch durch magnetisiertes
Material vor, überlagern sich die beiden Teilfelder zu B B Ms= + µ0 .
Verwendet man die magnetische Erregung
H ergibt sich folgender Zusammenhang
( ) B H Ms= +µ0 .
Die Magnetisierung hängt von der Erregung
H ab. Je größer die Erregung
H ist, desto
mehr Punktdipole werden ausgerichtet. Dies entspricht einer Vergrößerung der
Magnetisierung
M .

12 2 Materie im Magnetfeld
Bei linearer Abhängigkeit ist
M H= χ ,
wobei die magnetische Suszeptibilität χ wiederum eine materialspezifische Größe ist.
Es folgt
( ) B H H Hr= = = +µ µ µ µ χ0 0 1 .
Die Quantentheorie zeigt, daß die angenommenen Kreisströme zu gequantelten
magnetischen Momenten führen, deren kleinste Einheit als Bohrsches Magneton
µB
e
e
eh
mAcm
m
= = ⋅ −
29 27 10 20 2,
Elektronenmasse :
bezeichnet wird.
Man erhält für die Suszeptibilität
χ µ= −r 1 .
2.2 Diamagnetismus
Die magnetischen Eigenschaften eines Stoffes können auf seine atomare Struktur
zurückgeführt werden. Hat das Atom keinen Gesamtdrehimpuls und somit auch kein
magnetisches Moment, so liegen keine permanenten magnetischen Dipole vor. Dies ist
der Fall, wenn die Atome des Werkstoffes nur abgeschlossene Schalen besitzen.
Ein äußeres magnetisches Feld induziert bei seinem Einschaltvorgang einen
Induktionsstoß auf die Elektronenbahnen. Nach der Lenzschen Regel wirken diese
induzierten Ströme ihrer Ursache entgegen. Die entstehenden magnetischen, induzierten
Dipole sind dem äußeren Feld entgegengerichtet. Das angelegte Feld wird
abgeschwächt. Der Effekt ist temperaturunabhängig und existiert prinzipiell in allen
Stoffen, wird aber durch die Ausrichtungseffekte permanenter Dipole überdeckt.
Die Suszeptibilität nimmt für diamagnetische Werkstoffe sehr kleine negative Werte an.
χ χ< <<0 1,
2.3 Paramagnetismus
Die Atome paramagnetischer Stoffe besitzen permanente magnetische Momente, die
untereinander schwach wechselwirken. Ohne ein äußeres Magnetfeld sind ihre
Orientierungen zufällig verteilt. Wird ihnen ein äußeres Feld aufgeprägt, so richten sie
sich parallel zum Feld aus. Dieser Orientierung wirkt aber die thermische Bewegung
entgegen, so daß mit zunehmender Temperatur die Magnetisierung abnimmt. Es gilt

2.4 Werkstoffe mit magnetischer Ordnung 13
χ =C
T
Konstante C
.
χm selbst nimmt kleine positive Werte an.
χ χ> <<0 1,
2.4 Werkstoffe mit magnetischer Ordnung
2.4.1 Ferromagnetismus
Bei ferromagnetischen Materialien (für technische Anwendungen wichtig: Fe, Co, Ni,
SmCo5, Nd2Fe14B) kann die magnetische Suszeptibilität sehr hohe positive Werte
annehmen ( )χ >> 1 . Da die permanent vorhandenen Elementarmagnete sehr stark
miteinander wechselwirken, kommt es in kleinen Bereichen schon ohne äußeres Feld,
unterhalb der „Curie-Temperatur“ TC, zu einer spontanen Ausrichtung. Diese Bereiche
permanenter Magnetisierung , Domänen bzw. Weißsche Bezirke genannt, besitzen keine
Vorzugsrichtung, so daß die Probe nach außen hin unmagnetisiert erscheint. Steigt die
Temperatur über TC, so wird die magnetische Ordnung innerhalb der Domänen durch
die thermische Bewegung aufgehoben, der Stoff wird paramagnetisch. Es gilt die
Gesetzmäßigkeit
χ =−
C
T TC
.
Wird bei magnetischer Ordnung (T<TC) ein äußeres Magnetfeld dem Material
aufgeprägt, so richten sich die Domänen parallel zum Feld aus und/oder sie verändern
ihre Ausdehnung. Nach dem „Umklappen“ besitzt das Material eine größere
Magnetisierung in Feldrichtung, die das angelegte Feld überwiegt. Ab einer gewissen
Feldstärke des eingeprägten Feldes verläuft der Prozeß irreversibel, d.h. auch nach
Abschalten des äußeren Feldes verbleibt eine remanente Magnetisierung, die erst durch
ein Gegenfeld wieder aufgehoben wird. Es kommt zur Ausbildung einer
Hysteresekurve.
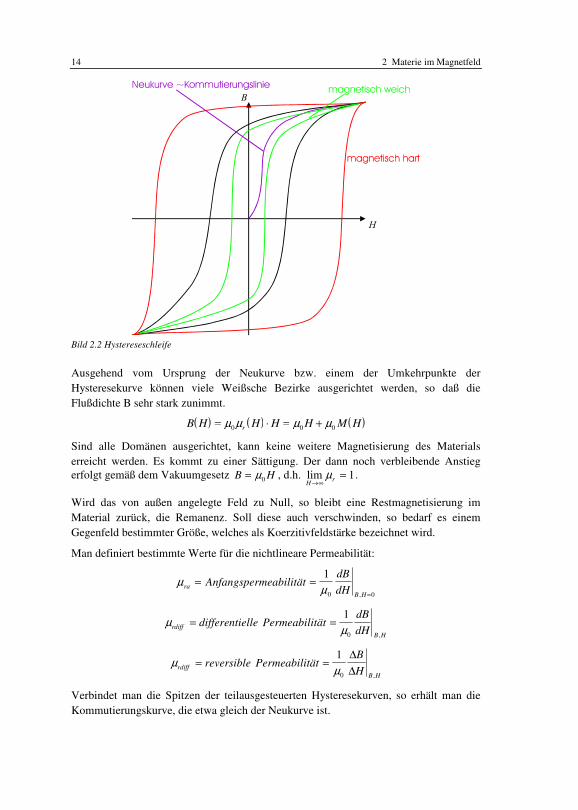
14 2 Materie im Magnetfeld
Bild 2.2 Hystereseschleife
Ausgehend vom Ursprung der Neukurve bzw. einem der Umkehrpunkte der
Hysteresekurve können viele Weißsche Bezirke ausgerichtet werden, so daß die
Flußdichte B sehr stark zunimmt.
( ) ( ) ( )B H H H H M Hr= ⋅ = +µ µ µ µ0 0 0
Sind alle Domänen ausgerichtet, kann keine weitere Magnetisierung des Materials
erreicht werden. Es kommt zu einer Sättigung. Der dann noch verbleibende Anstieg
erfolgt gemäß dem Vakuumgesetz B H= µ0 , d.h. limH
r→∞
=µ 1.
Wird das von außen angelegte Feld zu Null, so bleibt eine Restmagnetisierung im
Material zurück, die Remanenz. Soll diese auch verschwinden, so bedarf es einem
Gegenfeld bestimmter Größe, welches als Koerzitivfeldstärke bezeichnet wird.
Man definiert bestimmte Werte für die nichtlineare Permeabilität:
µµra
B H
AnfangspermeabilitätdB
dH= =
=
1
0 0,
µµrdiff
B H
differentielle PermeabilitätdB
dH= =
1
0 ,
µµrdiff
B H
reversible PermeabilitätB
H= =
1
0
Δ
Δ,
Verbindet man die Spitzen der teilausgesteuerten Hysteresekurven, so erhält man die
Kommutierungskurve, die etwa gleich der Neukurve ist.
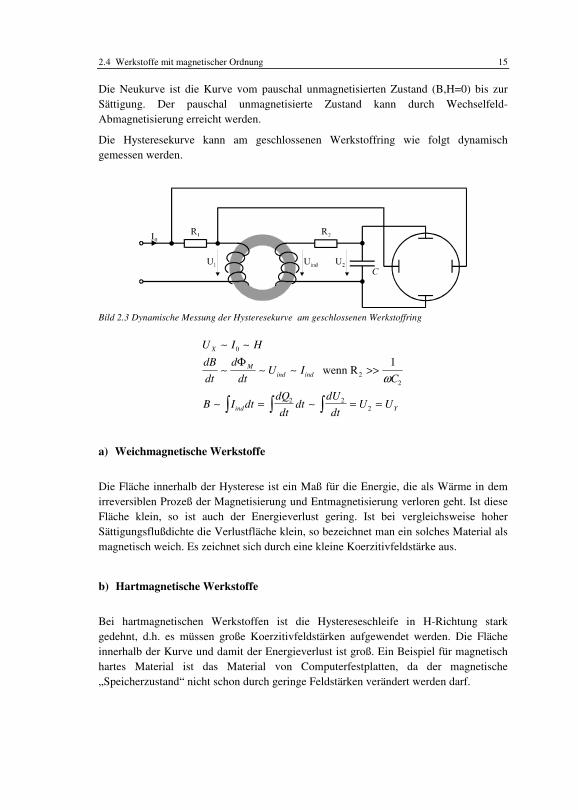
2.4 Werkstoffe mit magnetischer Ordnung 15
Die Neukurve ist die Kurve vom pauschal unmagnetisierten Zustand (B,H=0) bis zur
Sättigung. Der pauschal unmagnetisierte Zustand kann durch Wechselfeld-
Abmagnetisierung erreicht werden.
Die Hysteresekurve kann am geschlossenen Werkstoffring wie folgt dynamisch
gemessen werden.
Bild 2.3 Dynamische Messung der Hysteresekurve am geschlossenen Werkstoffring
U I H
dB
dt
d
dtU I
C
B I dtdQ
dtdt
dU
dtU U
X
M
ind ind
ind Y
∼ ∼
∼ ∼ ∼ >>
∼ = ∼ = =∫ ∫∫
0
2
2 2
2
1Φwenn R2 ω
a) Weichmagnetische Werkstoffe
Die Fläche innerhalb der Hysterese ist ein Maß für die Energie, die als Wärme in dem
irreversiblen Prozeß der Magnetisierung und Entmagnetisierung verloren geht. Ist diese
Fläche klein, so ist auch der Energieverlust gering. Ist bei vergleichsweise hoher
Sättigungsflußdichte die Verlustfläche klein, so bezeichnet man ein solches Material als
magnetisch weich. Es zeichnet sich durch eine kleine Koerzitivfeldstärke aus.
b) Hartmagnetische Werkstoffe
Bei hartmagnetischen Werkstoffen ist die Hystereseschleife in H-Richtung stark
gedehnt, d.h. es müssen große Koerzitivfeldstärken aufgewendet werden. Die Fläche
innerhalb der Kurve und damit der Energieverlust ist groß. Ein Beispiel für magnetisch
hartes Material ist das Material von Computerfestplatten, da der magnetische
„Speicherzustand“ nicht schon durch geringe Feldstärken verändert werden darf.
16 3 Magnetischer Kreis
2.5 Antiferromagnetismus
In antiferromagnetischen Stoffen richten sich die Momente parallel aus, jedoch
paarweise antiparallel, so daß sich kein resultierendes magnetisches Moment ergibt. Es
kommt zu keiner Hysteresebildung. Beispiele solcher Materialien sind MnO, MnS, NiO,
Md etc.
2.6 Ferrimagnetismus
Eine Sonderform des Antiferromagnetismus ist der Ferrimagnetismus. Die antiparallen
Momente innerhalb einer Gitterzelle kompensieren sich nicht vollständig, d.h. es bildet
sich ein äußeres magnetisches Moment. In der Technik gibt es zwei bedeutende
Werkstoffgruppen, die Ferrite und die Granate. Ferrimagnetische Materialien zeichnen
sich besonders durch ihren hohen elektrischen Widerstand aus, was eine Reduzierung
der Wirbelstromverluste zur Folge hat. Deshalb sind Ferrite für die HF-Technik von
Bedeutung (Übertrager).
3 Magnetischer Kreis
3.1 Grundlagen
Unter Verwendung der Materialgleichungen kann man die Übergangsbedingung für die
Tangentialkomponente der Flußdichte B berechnen.
B Ht r t1 2 0 1 2 1 2, , ,= µ µ ⇒ B
B
t
t
r
r
1
2
1
2
=µ
µ
Betrachtet sei eine Grenzfläche zwischen Luft mit µrL ≈ 1und Magnetwerkstoff mit
µrM ⟩⟩1. Daraus ergibt sich, daß B BLt Mt⟨⟨ ist. Der tangentiale Fluß wird im
hochpermeablen Werkstoff geführt, d.h. der Fluß kann gerichtet werden bzw. die
Induktion B kann analog zum elektrischen Strom in einem Leiter geführt werden. Wird
der magnetische Fluß zum Großteil in hochpermeablem Material geführt, bezeichnet
man die Anordnung gemäß angesprochener Analogie als magnetischen Kreis.
Ein magnetischer Kreis mit Luftspalt wird dazu herangezogen, ein definiertes,
annähernd homogenes Luftmagnetfeld zu erzeugen, wenn man von den Streufeldern an
den Luftspalträndern absieht. Die Streufelder nehmen mit der Luftspaltbreite zu.
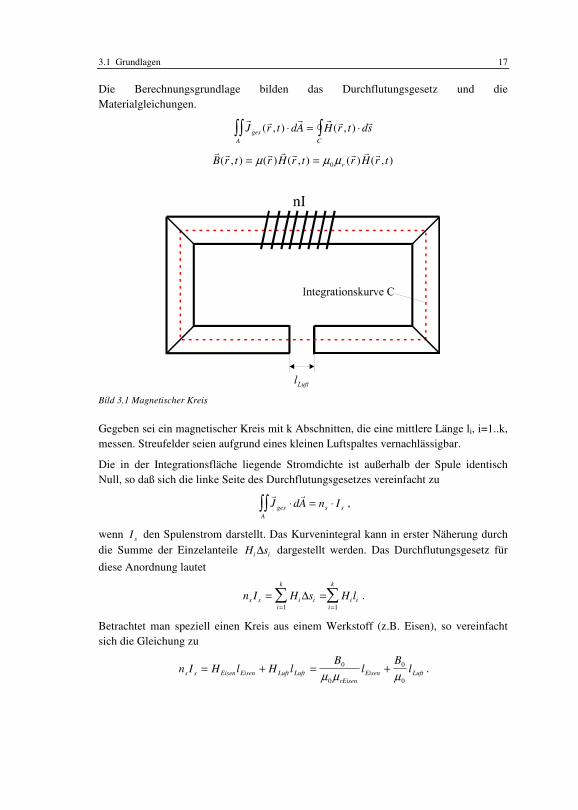
3.1 Grundlagen 17
Die Berechnungsgrundlage bilden das Durchflutungsgesetz und die
Materialgleichungen.
J r t dA H r t dsges
CA
( , ) ( , )⋅ = ⋅∫∫∫
B r t r H r t r H r tr( , ) ( ) ( , ) ( ) ( , )= =µ µ µ0
Bild 3.1 Magnetischer Kreis
Gegeben sei ein magnetischer Kreis mit k Abschnitten, die eine mittlere Länge li, i=1..k,
messen. Streufelder seien aufgrund eines kleinen Luftspaltes vernachlässigbar.
Die in der Integrationsfläche liegende Stromdichte ist außerhalb der Spule identisch
Null, so daß sich die linke Seite des Durchflutungsgesetzes vereinfacht zu
J dA n Iges s s
A
⋅ = ⋅∫∫ ,
wenn I s den Spulenstrom darstellt. Das Kurvenintegral kann in erster Näherung durch
die Summe der Einzelanteile H si iΔ dargestellt werden. Das Durchflutungsgesetz für
diese Anordnung lautet
n I H s H ls s i ii
k
i ii
k
= == =
∑ ∑Δ1 1
.
Betrachtet man speziell einen Kreis aus einem Werkstoff (z.B. Eisen), so vereinfacht
sich die Gleichung zu
n I H l H lB
lB
ls s Eisen Eisen Luft Luft
rEisen
Eisen Luft= + = +0
0
0
0µ µ µ.

18 3 Magnetischer Kreis
3.2 Scherung und effektive Permeabilität
Bisher wurde die Hysterese nur für Ringkerne ohne Luftspalt diskutiert.
n I H ls s Eisen Eisen= ' '
B HEisen rEisen Eisen' '= µ µ0
Bn I
lEisen rEisen
s s
Eisen
''
= µ µ0
Betrachtet man das Feld im Luftspalt in Abhängigkeit der Erregung, so wirkt sich der
Luftspalt auf die Hystereseform aus und zwar in der Art, daß die Hysterese um den
linearen Anteil des Luftspaltes „geschert“ wird.
Es gilt n I H l H ls s Eisen Eisen Luft Luft= +
Setzt man dies mit einem geschlossenen Magnetkreis der Länge l l lEisen Luft= + mit einer
relativen Permeabilität µreff gleich, so ergibt sich
( )n I H l l H l H ls s geschlossen Eisen Luft Eisen Eisen Luft Luft= + = + .
Wie oben erwähnt, ist B über den gesamten Integrationsweg konstant.
( )B l l B l B lEisen Luft
reff
Eisen
rEisen
Luft⋅ +
=⋅
+⋅
µ µ µ µ µ0 0 0
⇒ µ
µ
reff
Eisen Luft
Eisen
rEisen
Luft
l l
ll
=+
+
Der Magnetkreis mit dem Luftspalt wirkt wie ein geschlossener Kreis mit der
„effektiven Permeabilität“ µreff .
Für große relative Permeabilitäten nähert sich die effektive Permeabilität dem Wert
limµ
µrEisen
reff
Eisen Luft
Luft
l l
l→∞=
+,
der unabhängig von µrEisenist. Setzt man dieses Ergebnis wieder in die Gleichung des
Ersatzkreises ein, so ergibt sich
( ) ( )n I
B l l t B l l
l l
l
B l
s s
Eisen Luf
reff
Eisen Luft
Eisen Luft
Luft
Luft=
⋅ +=
⋅ +
+=
⋅
µ µµ
µ0
0
0
.
Das bestätigt die Vermutung, daß bei hoher Permeabilität die Länge des Luftspalts
ausschlaggebend ist.
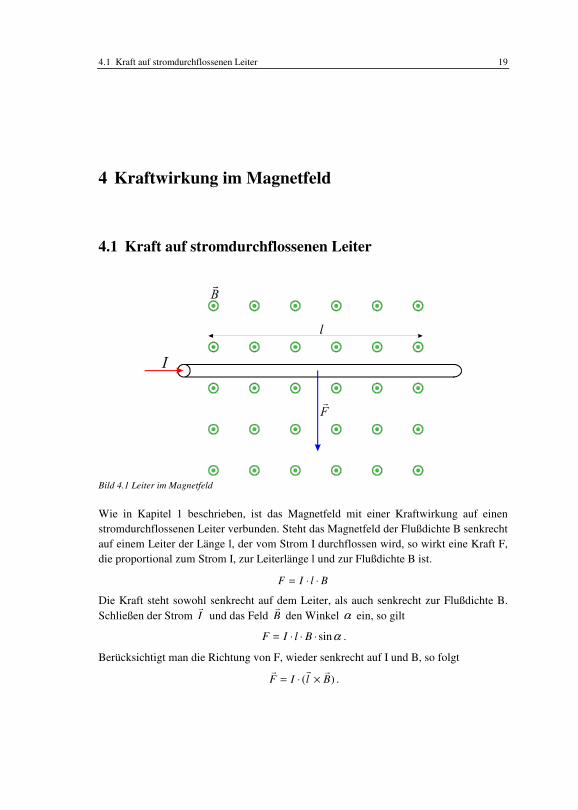
4.1 Kraft auf stromdurchflossenen Leiter 19
4 Kraftwirkung im Magnetfeld
4.1 Kraft auf stromdurchflossenen Leiter
Bild 4.1 Leiter im Magnetfeld
Wie in Kapitel 1 beschrieben, ist das Magnetfeld mit einer Kraftwirkung auf einen
stromdurchflossenen Leiter verbunden. Steht das Magnetfeld der Flußdichte B senkrecht
auf einem Leiter der Länge l, der vom Strom I durchflossen wird, so wirkt eine Kraft F,
die proportional zum Strom I, zur Leiterlänge l und zur Flußdichte B ist.
F I l B= ⋅ ⋅
Die Kraft steht sowohl senkrecht auf dem Leiter, als auch senkrecht zur Flußdichte B.
Schließen der Strom I und das Feld
B den Winkel α ein, so gilt
F I l B= ⋅ ⋅ ⋅ sinα .
Berücksichtigt man die Richtung von F, wieder senkrecht auf I und B, so folgt F I l B= ⋅ ×( ) .

20 4 Kraftwirkung im Magnetfeld
4.2 Lorentzkraft
Bild 4.2 Lorentzkraft
Die Kraft auf ein infinitesimal kleines Leiterstück ergibt sich zu
dF I ds B= ⋅ ⋅ .
Identifiziert man den Strom als zeitlich veränderliche Ladung dQ
dt, folgt
dFdQ
dtds B dQ
ds
dtB dQ v B= ⋅ = = ⋅ ⋅ ,
wenn v die Geschwindigkeit der Ladungsträger in Richtung ds ist.
Sei die Ladung dQ durch ein Elektron oder ein Ion mit der Ladung q repräsentiert, so ist
die im Magnetfeld wirkende Kraft, genannt Lorentzkraft, unter Berücksichtigung der
Richtung
( ) F q v BL = × .
Betrachtet man die Energie, stellt man fest, daß wegen F senkrecht
v ||ds
das Integral
W F dss
s
= ⋅∫
1
2
immer verschwindet. Es wird keine Energie durch das Magnetfeld auf die Ladungsträger
übertragen.
4.3 Die Kraftwaage
Da die zu erwartende Kraft (Strom I=2A, Flußdichte B<0,8T, Leiterlänge l=0,04m)
klein ist, wird das Prinzip der Balkenwaage zur Kraftmessung herangezogen, um
eventuelle Reibungseffekte gering zu halten.
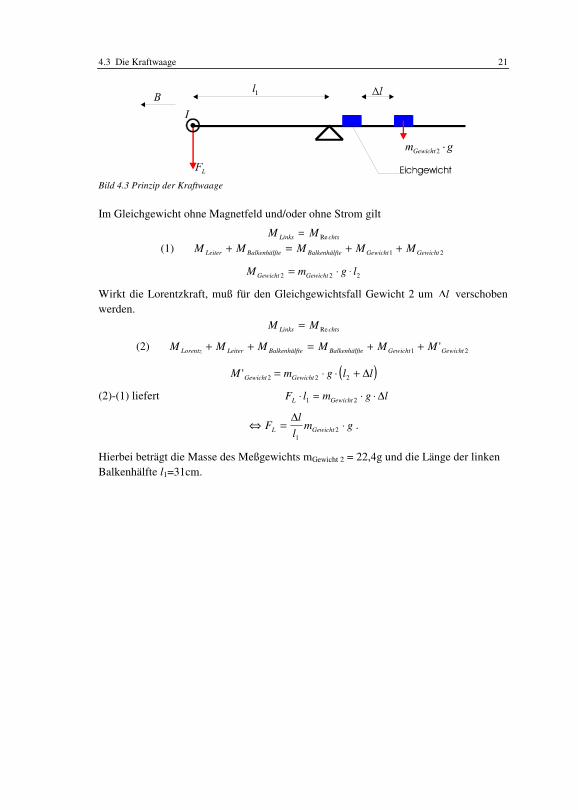
4.3 Die Kraftwaage 21
Bild 4.3 Prinzip der Kraftwaage
Im Gleichgewicht ohne Magnetfeld und/oder ohne Strom gilt
M MLinks chts= Re
(1) M M M M MLeiter Balkenhälfte Balkenhälfte Gewicht Gewicht+ = + +1 2
M m g lGewicht Gewicht2 2 2= ⋅ ⋅
Wirkt die Lorentzkraft, muß für den Gleichgewichtsfall Gewicht 2 um Δl verschoben
werden.
M MLinks chts= Re
(2) M M M M M MLorentz Leiter Balkenhälfte Balkenhälfte Gewicht Gewicht+ + = + +1 2'
( )M m g l lGewicht Gewicht' 2 2 2= ⋅ ⋅ + Δ
(2)-(1) liefert F l m g lL Gewicht⋅ = ⋅ ⋅1 2 Δ
⇔ Fl
lm gL Gewicht= ⋅
Δ
1
2 .
Hierbei beträgt die Masse des Meßgewichts mGewicht 2 = 22,4g und die Länge der linken
Balkenhälfte l1=31cm.
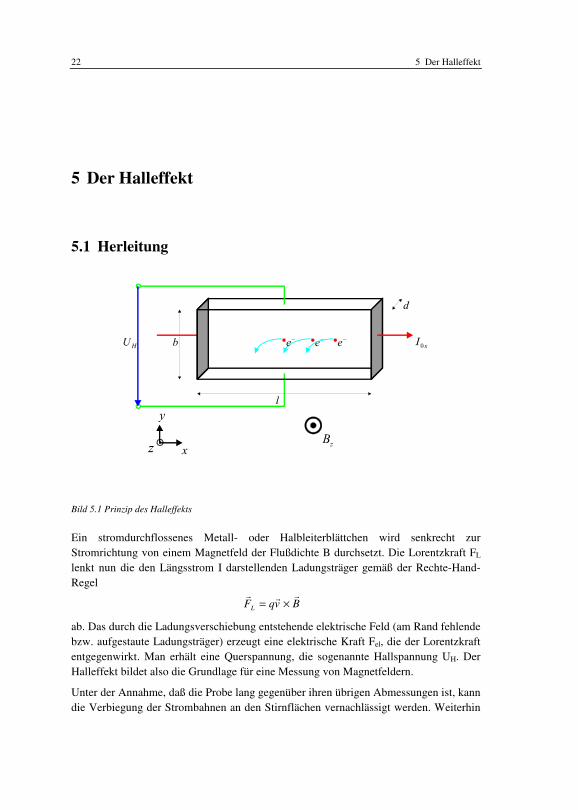
22 5 Der Halleffekt
5 Der Halleffekt
5.1 Herleitung
Bild 5.1 Prinzip des Halleffekts
Ein stromdurchflossenes Metall- oder Halbleiterblättchen wird senkrecht zur
Stromrichtung von einem Magnetfeld der Flußdichte B durchsetzt. Die Lorentzkraft FL
lenkt nun die den Längsstrom I darstellenden Ladungsträger gemäß der Rechte-Hand-
Regel F qv BL = ×
ab. Das durch die Ladungsverschiebung entstehende elektrische Feld (am Rand fehlende
bzw. aufgestaute Ladungsträger) erzeugt eine elektrische Kraft Fel, die der Lorentzkraft
entgegenwirkt. Man erhält eine Querspannung, die sogenannte Hallspannung UH. Der
Halleffekt bildet also die Grundlage für eine Messung von Magnetfeldern.
Unter der Annahme, daß die Probe lang gegenüber ihren übrigen Abmessungen ist, kann
die Verbiegung der Strombahnen an den Stirnflächen vernachlässigt werden. Weiterhin

5.1 Herleitung 23
sollen auch andere Randerscheinungen vernachlässigt werden, insbesondere die
Tatsache, daß die Ladungsträger einer Geschwindigkeitsverteilung unterliegen. Folglich
kann in der Mitte der Probe angesetzt werden, daß sich nach Abklingen der
Einschalteffekte die elektrische Kraft im Gleichgewicht mit der Lorentzkraft befindet. F FL el=
Für eine Ladungsträgerart (hier Elektronen) gilt mit der mittlerer Driftgeschwindigkeit F ev BL d= − ×
I bdJ bdnevx x dx= = −
⇒ =−
vI
bdnedx
x.
Mit B
Bz
=
0
0 ergibt sich F FLx Lz= = 0 und F ev BLy dx z= − .
Da F eE eU
bely y
H= − = − ist, kann die Hallspannung UH bestimmt werden.
U v bBne
I B
dR
I B
dH dx z
x z
H
x z= = − =
1
Die materialabhängigen Größen werden in dem Hallkoeffizienten RH zusammengefaßt.
RneH = −1
Auffällig und mit der Elektronengastheorie nicht vereinbar sind die positiven
Hallkoeffizienten für z.B. Zn, Cd, Mo etc. Sie konnten erst mittels der Wellentheorie als
Löcherleitung (Ladungsträgerart hier Defektelektronen) gedeutet werden. Bei Anhebung
eines Elektrons vom Valenzband ins Leitungsband (bzw. zu einem Akzeptor) bleibt im
Valenzband eine Lücke (Loch) zurück. In dieses Loch kann nun ein benachbartes
Elektron springen. Diese Bewegung kann als Bewegung einer positiven
Elementarladung gedeutet werden. Aus diesem Grund spricht man auch von einem
Defektelektron.
Somit gilt analog für den Fall der Defektelektronen bei p-dotiertem Halbleiter
RpeH =1
.
An RH für die Löcherleitung erkennt man, daß das Vorzeichen der Hallspannung
Auskunft über die Ladungsträgerart gibt.
Der Hallkoeffizient für gemischte Leitung ergibt sich zu
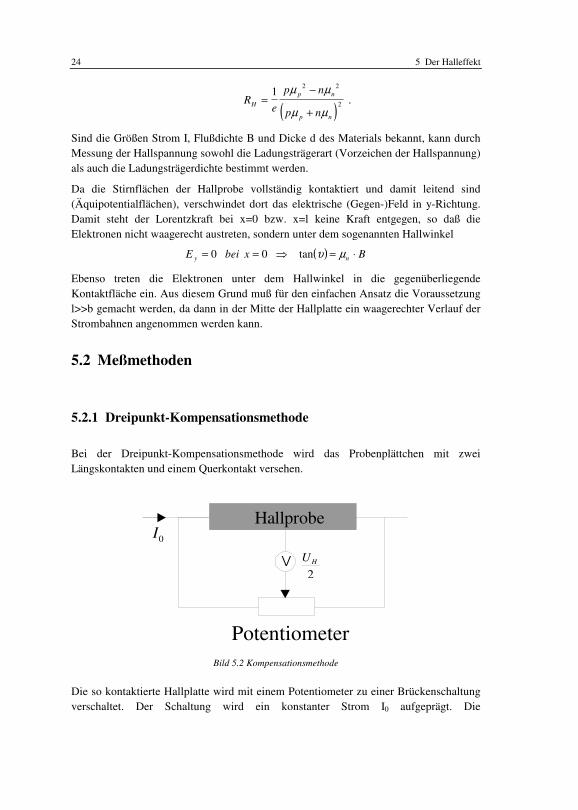
24 5 Der Halleffekt
( )R
e
p n
p nH
p n
p n
=−
+
12 2
2
µ µ
µ µ .
Sind die Größen Strom I, Flußdichte B und Dicke d des Materials bekannt, kann durch
Messung der Hallspannung sowohl die Ladungsträgerart (Vorzeichen der Hallspannung)
als auch die Ladungsträgerdichte bestimmt werden.
Da die Stirnflächen der Hallprobe vollständig kontaktiert und damit leitend sind
(Äquipotentialflächen), verschwindet dort das elektrische (Gegen-)Feld in y-Richtung.
Damit steht der Lorentzkraft bei x=0 bzw. x=l keine Kraft entgegen, so daß die
Elektronen nicht waagerecht austreten, sondern unter dem sogenannten Hallwinkel
( )E bei x By n= = ⇒ = ⋅0 0 tan υ µ
Ebenso treten die Elektronen unter dem Hallwinkel in die gegenüberliegende
Kontaktfläche ein. Aus diesem Grund muß für den einfachen Ansatz die Voraussetzung
l>>b gemacht werden, da dann in der Mitte der Hallplatte ein waagerechter Verlauf der
Strombahnen angenommen werden kann.
5.2 Meßmethoden
5.2.1 Dreipunkt-Kompensationsmethode
Bei der Dreipunkt-Kompensationsmethode wird das Probenplättchen mit zwei
Längskontakten und einem Querkontakt versehen.
Hallprobe
Potentiometer
VV UH
2
I0
Bild 5.2 Kompensationsmethode
Die so kontaktierte Hallplatte wird mit einem Potentiometer zu einer Brückenschaltung
verschaltet. Der Schaltung wird ein konstanter Strom I0 aufgeprägt. Die
5.2 Meßmethoden 25
Brückenspannung wird bei ausgeschaltetem Magnetfeld über das Potentiometer
(Spannungsteiler) zu Null abgeglichen. Wirkt nun ein Magnetfeld B ein, so entsteht eine
von Null verschiedene Brückenspannung, die aus Symmetriegründen gerade der halben
Hallspannung entspricht. Vorteil dieser Meßmethode ist, daß man einen Nullabgleich
durchführen kann. Der Metall-Halbleiter-Übergang (Halbleiter-Metall-Übergang) stellt
einen in Sperrichtung (Durchlaßrichtung) gepolten Schottky-Kontakt dar. Diese
Übergänge sind stark temperaturabhängig, so daß bei einer geringen
Temperaturveränderung das Widerstandsverhältnis der Probe (zwischen rechtem und
linken Längskontakt), nicht aber der Gesamtwiderstand verändert wird. Dies bewirkt
eine Verstimmung der Brücke und man erhält eine Brückenspannung.
5.2.2 Vierpunkt Meßmethode
Bei der Vierpunktmessung wird die Probe mittels der Längskontakte mit einem
Konstantstrom I0 beaufschlagt. Zwischen den gegenüberliegenden Querkontakten wird
dann einfach die Hallspannung gemessen (Siehe Bild 5.1). Vorteil dieser Methode ist
die geringere Temperaturabhängigkeit, da hier die Einflüsse der Schottkykontakte die
Messung nicht beeinflussen. Ein Nachteil besteht darin, daß die Querkontakte bei
manueller Herstellung nicht genau gegenüber liegen, und so eine zusätzliche Spannung
als Offset über den Querkontakten liegt.
26 6 Elektromagnetische Induktion
6 Elektromagnetische Induktion
6.1 Magnetischer Fluß
Der magnetische Fluß, analog zum elektrischen Fluß, ist ein Maß für die Anzahl
magnetischer Feldlinien , die eine Fläche durchsetzen ( ≠ Flußdichte).
Wird eine Fläche A homogen von einem Magnetfeld der Flußdichte
B durchsetzt und
schließen sie den Winkel α ein, so ist der magnetische Fluß definiert als
Φ M B A B A= ⋅ =
cosα .
Die Fläche sei inhomogen durchsetzt. In infinitesimalen Flächenstücken ΔAi
ist die
Flußdichte aber nahezu homogen, so daß obige Definitionsgleichung angewendet
werden kann. Eine entsprechende Summation der Einzelflüsse
ΔΦ ΔMi iB A= ⋅
ergibt den Gesamtfluß Φ M. Der Grenzübergang Δ
Ai → 0 führt zum Übergang von
Summation zu Integration.
Φ ΔΔ
MA
ii A
i
B A B dA= ⋅ = ⋅→∑ ∫lim
0
6.2 Der Begriff Induktion
Auf einen stromdurchflossenen Leiter wirkt im Magnetfeld eine Kraft. Analog fließt ein
Strom, wenn ein Leiter in einem Magnetfeld eine Kraft erfährt.
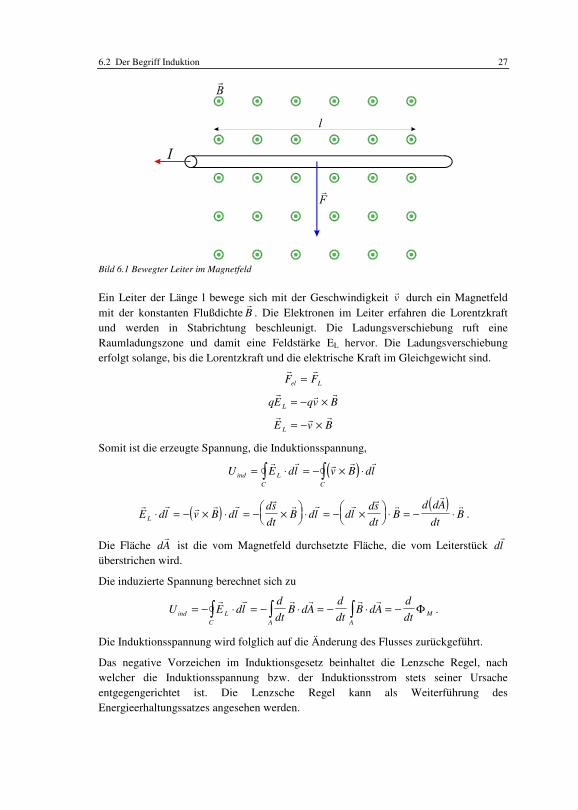
6.2 Der Begriff Induktion 27
Bild 6.1 Bewegter Leiter im Magnetfeld
Ein Leiter der Länge l bewege sich mit der Geschwindigkeit v durch ein Magnetfeld
mit der konstanten FlußdichteB . Die Elektronen im Leiter erfahren die Lorentzkraft
und werden in Stabrichtung beschleunigt. Die Ladungsverschiebung ruft eine
Raumladungszone und damit eine Feldstärke EL hervor. Die Ladungsverschiebung
erfolgt solange, bis die Lorentzkraft und die elektrische Kraft im Gleichgewicht sind. F Fel L=
qE qv BL
= − ×
E v BL = − ×
Somit ist die erzeugte Spannung, die Induktionsspannung,
( )U E dl v B dlind L
C C
= ⋅ = − × ⋅∫ ∫
( )( )
E dl v B dlds
dtB dl dl
ds
dtB
d dA
dtBL ⋅ = − × ⋅ = − ×
⋅ = − ×
⋅ = − ⋅ .
Die Fläche dA
ist die vom Magnetfeld durchsetzte Fläche, die vom Leiterstück dl
überstrichen wird.
Die induzierte Spannung berechnet sich zu
U E dld
dtB dA
d
dtB dA
d
dtind L
AC A
M= − ⋅ = − ⋅ = − ⋅ = −∫∫ ∫
Φ .
Die Induktionsspannung wird folglich auf die Änderung des Flusses zurückgeführt.
Das negative Vorzeichen im Induktionsgesetz beinhaltet die Lenzsche Regel, nach
welcher die Induktionsspannung bzw. der Induktionsstrom stets seiner Ursache
entgegengerichtet ist. Die Lenzsche Regel kann als Weiterführung des
Energieerhaltungssatzes angesehen werden.
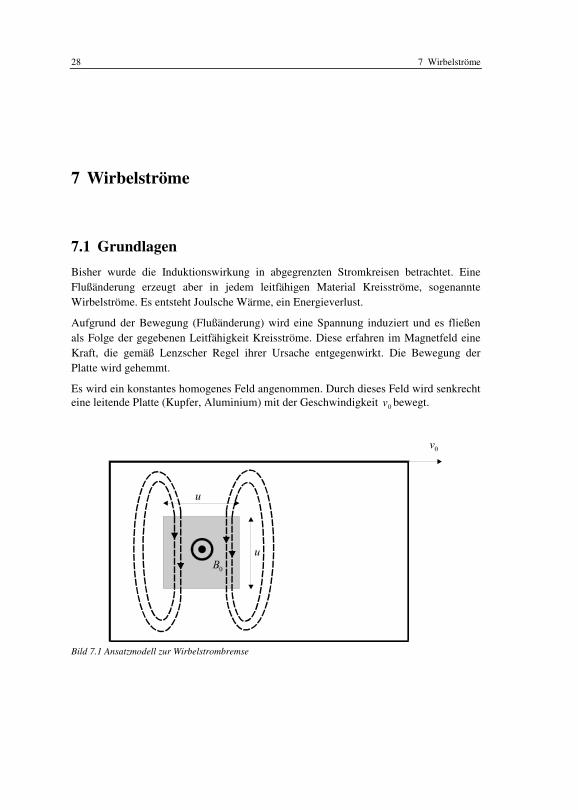
28 7 Wirbelströme
7 Wirbelströme
7.1 Grundlagen
Bisher wurde die Induktionswirkung in abgegrenzten Stromkreisen betrachtet. Eine
Flußänderung erzeugt aber in jedem leitfähigen Material Kreisströme, sogenannte
Wirbelströme. Es entsteht Joulsche Wärme, ein Energieverlust.
Aufgrund der Bewegung (Flußänderung) wird eine Spannung induziert und es fließen
als Folge der gegebenen Leitfähigkeit Kreisströme. Diese erfahren im Magnetfeld eine
Kraft, die gemäß Lenzscher Regel ihrer Ursache entgegenwirkt. Die Bewegung der
Platte wird gehemmt.
Es wird ein konstantes homogenes Feld angenommen. Durch dieses Feld wird senkrecht
eine leitende Platte (Kupfer, Aluminium) mit der Geschwindigkeit v0 bewegt.
Bild 7.1 Ansatzmodell zur Wirbelstrombremse

7.1 Grundlagen 29
Die zeitabhängig durchsetzte Fläche ist
( )A t u u x t u ux t
dA t
dt
dA
dx
dx
dt
dA
dxv uv
( ) ( ) ( )
( ).
= − = −
= = = −
2
0 0
Die induzierte Spannung ist
( )Ud t
dt
d
dtB A t B
dA t
dtuB vind
M
dB
dt
= − = − ⋅ = −
=
=
Φ ( )( )
( ) 0 0
0
0 0 .
Vereinfachend wird der Widerstand auf den doppelten Wert des im Feld liegenden
Anteils angesetzt, da die Verlängerung der Strombahnen um das betrachtete
Flächenelement von der größeren Querschnittsfläche kompensiert wird.
Bild 7.2 Materialgeometrie
R Ru
A
u
ud dges A s s
B
s
B
= = = =2 2 2 2ρ ρρ
Induzierter Strom IU
R
B uv dind
ind
ges
B
s
= =0 0
2ρ
Auf die bewegten Ladungsträger wirkt die Kraft
F uI Bu v d B
L ind
B
s
= =0
2
0 0
2
2ρ,
die für die Bremswirkung verantwortlich ist.
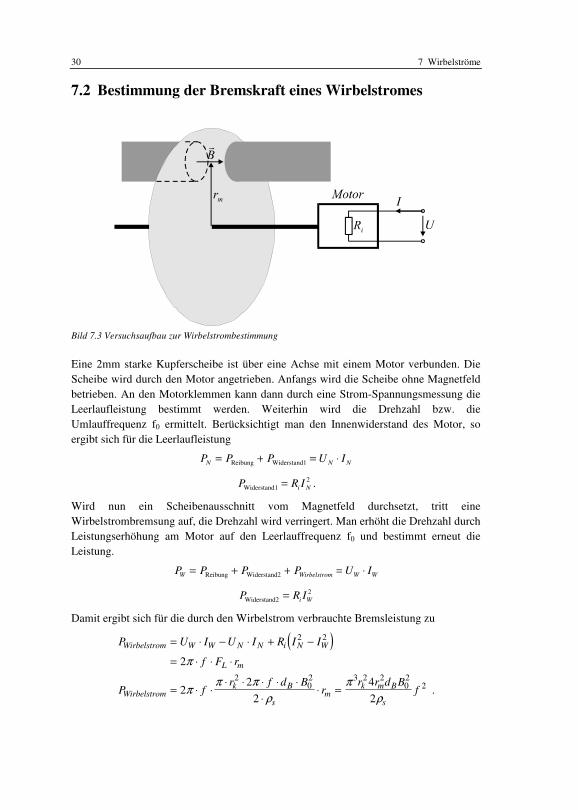
30 7 Wirbelströme
7.2 Bestimmung der Bremskraft eines Wirbelstromes
Bild 7.3 Versuchsaufbau zur Wirbelstrombestimmung
Eine 2mm starke Kupferscheibe ist über eine Achse mit einem Motor verbunden. Die
Scheibe wird durch den Motor angetrieben. Anfangs wird die Scheibe ohne Magnetfeld
betrieben. An den Motorklemmen kann dann durch eine Strom-Spannungsmessung die
Leerlaufleistung bestimmt werden. Weiterhin wird die Drehzahl bzw. die
Umlauffrequenz f0 ermittelt. Berücksichtigt man den Innenwiderstand des Motor, so
ergibt sich für die Leerlaufleistung
P P P U IN N N= + = ⋅Reibung Widerstand1
P R Ii NWiderstand1 = 2 .
Wird nun ein Scheibenausschnitt vom Magnetfeld durchsetzt, tritt eine
Wirbelstrombremsung auf, die Drehzahl wird verringert. Man erhöht die Drehzahl durch
Leistungserhöhung am Motor auf den Leerlauffrequenz f0 und bestimmt erneut die
Leistung.
P P P P U IW Wirbelstrom W W= + + = ⋅Reibung Widerstand2
P R Ii WWiderstand2 = 2
Damit ergibt sich für die durch den Wirbelstrom verbrauchte Bremsleistung zu
( )P U I U I R I I
f F r
P fr f d B
rr r d B
f
Wirbelstrom W W N N i N W
L m
Wirbelstromk B
sm
k m B
s
= ⋅ − ⋅ + −
= ⋅ ⋅ ⋅
= ⋅ ⋅⋅ ⋅ ⋅ ⋅ ⋅
⋅⋅ =
2 2
202 3 2 2
02
2
2
22
2
4
2
π
ππ π
ρ
π
ρ.

7.2 Bestimmung der Bremskraft eines Wirbelstromes 31
8 Vorbereitende Aufgaben
1. Warum ist ein Supraleiter 1. Art ein idealer Diamagnet ?
2. Wie ist das Ampere definiert ?
3. Magnetischer Kreis :
Berechnen Sie die Amperewindungszahl der Kreisspule, wenn folgende Vorgaben
gemacht werden.
Luftspaltbreite l mm mm mm mmLuft = 20 15 10 5, , ,
Durchmesser des Eisenkerns d mmKern = ∅60
Außenmaße des Eisenkerns l l mm mm1 2 440 220× = ×
Luftspaltflußdichte B T0 0 4= .
Permeabilität des Eisens µEisen = 3000
Bild 8.1 Magnetischer Kreis (Geometrie)
4. Halleffekt:
a) Erklären Sie Prinzip und Wirkung einer Hallsonde.
b) In welche Richtung werden Elektronen bzw. Defektelektronen abgelenkt ?
c) Skizzieren Sie die Stromlinien in einer Hallsonde ?
d) Warum muß l>>b sein ?
32 8 Vorbereitende Aufgaben
e) Dreipunktmethode: Was geschieht, wenn ein Nullabgleich der Brückenanordnung
durchgeführt wurde und dann der eingeprägte Strom I0 verändert wird.
5. Induktion:
Der bei einer Flußänderung in eine Spule induzierte Spannungsstoß ist ein Maß für
die Änderung des magnetischen Flusses. Wird die Spule aus einem homogenen
Magnetfeld in den feldfreien Raum gebracht, so kann man damit die magnetische
Induktion in dem Luftspalt messen.
a) Welcher Zusammenhang besteht dabei zwischen dem Integral des induzierten
Spannungsstoßes und den Spulendimensionen (Fläche, Windungszahl) ?
b) Wie sieht der Spannungsstoß in der Spule aus, wenn die Spule von einem
feldfreien Punkt A durch das homogene Magnetfeld zu einem gegenüberliegenden
feldfreien Punkt B bewegt wird? Skizzieren Sie den zeitlichen Verlauf der
induzierten Spannung und des magnetischen Flusses durch die Spule, wenn
Streufelder am Rand des Luftspaltes vernachlässigt werden.
6. Wirbelstrom:
Ein leitendes Blech wird als Pendelmasse durch ein Magnetfeld bewegt. Es sei
angenommen, daß die Fläche des Bleches größer als die Querschnittsfläche des
Magnetfeldes ist. Ohne Magnetfeld führe das Pendel schwachgedämpfte
Pendelschwingungen aus. Wird das Magnetfeld eingeschaltet, so wird das Blech
abgebremst, d.h. die Dämpfung wird wesentlich verstärkt.
a) In das Blech werden waagerechte (parallel zur Bewegungsrichtung) Schlitze
eingesägt. Wie verhält sich die Pendelbewegung nun in Anwesenheit des
Magnetfeldes ?
b) Das Blech werde wieder als massiv angenommen, aber die Fläche des Bleches ist
kleiner als die Querschnittsfläche des Magnetfeldes. Was ist in Bezug auf die
Pendelbewegung zu sagen, wenn das Magnetfeld eingeschaltet wird.
9.1 Allgemeine Hinweise 33
9 Versuchsdurchführung
9.1 Allgemeine Hinweise
Achtung: Vor dem Einschalten des Netzgerätes ist sicherzustellen, daß die
Spannungsregler auf NULL gestellt sind. Die Spannung ist im Versuch von NULL
Volt aus langsam zu erhöhen, bis der gewünschte Strom erreicht ist. Ebenso
„weich“ ist das Abschalten durchzuführen. Auf keinen Fall eine Spule unter Last
von der Versorgung trennen (warum?).
Alle Versuchsergebnisse sind zu dokumentieren (falls möglich auch graphisch) und
zu interpretieren.
9.2 Messung des Magnetfeldes
Man bestimme mit der B-Feld-Meßsonde im Luftspalt des magnetischen Kreises die
magnetische Induktion als Funktion des Stromes resp. des H-Feldes im Strombereich
1 0 1 0 1A A A A A→ → − → → (100mA-Schritte). !!! Vor dem Abschalten
Spulenspannung wieder auf Null stellen !!! Die Größe des Luftspaltes wird vom
Versuchsbetreuer am Versuchstag mitgeteilt. Stellen Sie Ihre Meßergebnisse graphisch
dar und interpretieren Sie kurz das Ergebnis.
9.3 Kraft auf einen stromdurchflossenen Leiter
Man bestimme die Kraft auf einen stromdurchflossenen Leiter in dem Feld des
magnetischen Kreises. Der Luftspalt wird auf 5mm eingestellt. Überprüfen Sie
qualitativ die Homogenität des Feldes über die Querschnittsfläche der Polschuhe und in
der Umgebung des Luftspalts. Skizzieren Sie qualitativ die magnetische Induktion B als
Funktion des Abstandes vom Luftspaltmittelpunkt. Bestimmen Sie anschließend die
ablenkende Kraft für verschiedene Stromstärken (0-2A, 100mA-Schritte) bei fester
Luftspaltinduktion B=700mT bzw. für verschiedene Werte von B (0-700mT, 100mT-
Schritte) bei festem Leiterstrom I=2A. Warum ist zur Vermeidung eines systematischen
Meßfehlers der Leiter immer an demselben Ort im Luftspalt zu halten ?
9.4 Halleffekt
Gehen Sie sorgsam mit der Hallsonde um!
Der Halleffekt wird mittels der Vierpunktmeßmethode untersucht. Das
Halbleitermaterial besitzt eine Dicke von 530µm . Verwenden Sie eine Luftspaltbreite
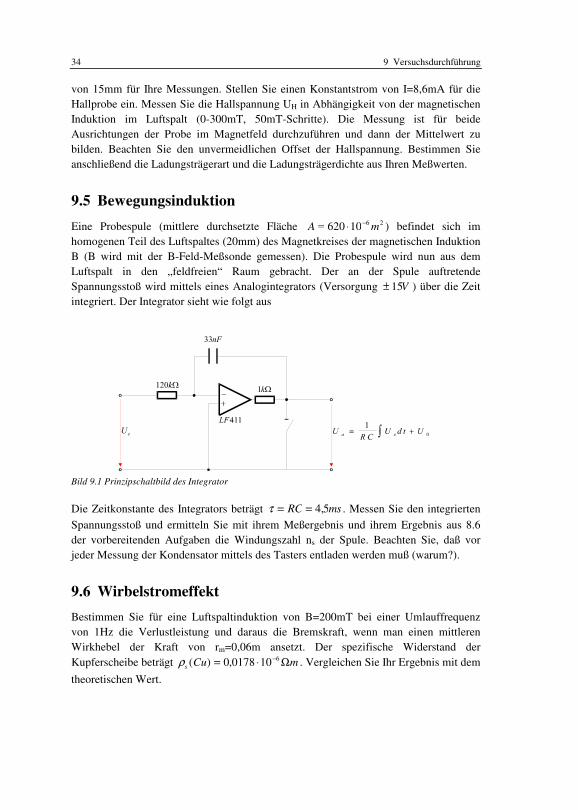
34 9 Versuchsdurchführung
von 15mm für Ihre Messungen. Stellen Sie einen Konstantstrom von I=8,6mA für die
Hallprobe ein. Messen Sie die Hallspannung UH in Abhängigkeit von der magnetischen
Induktion im Luftspalt (0-300mT, 50mT-Schritte). Die Messung ist für beide
Ausrichtungen der Probe im Magnetfeld durchzuführen und dann der Mittelwert zu
bilden. Beachten Sie den unvermeidlichen Offset der Hallspannung. Bestimmen Sie
anschließend die Ladungsträgerart und die Ladungsträgerdichte aus Ihren Meßwerten.
9.5 Bewegungsinduktion
Eine Probespule (mittlere durchsetzte Fläche A m= ⋅ −620 10 6 2 ) befindet sich im
homogenen Teil des Luftspaltes (20mm) des Magnetkreises der magnetischen Induktion
B (B wird mit der B-Feld-Meßsonde gemessen). Die Probespule wird nun aus dem
Luftspalt in den „feldfreien“ Raum gebracht. Der an der Spule auftretende
Spannungsstoß wird mittels eines Analogintegrators (Versorgung ± 15V ) über die Zeit
integriert. Der Integrator sieht wie folgt aus
Bild 9.1 Prinzipschaltbild des Integrator
Die Zeitkonstante des Integrators beträgt τ = =RC ms4 5, . Messen Sie den integrierten
Spannungsstoß und ermitteln Sie mit ihrem Meßergebnis und ihrem Ergebnis aus 8.6
der vorbereitenden Aufgaben die Windungszahl ns der Spule. Beachten Sie, daß vor
jeder Messung der Kondensator mittels des Tasters entladen werden muß (warum?).
9.6 Wirbelstromeffekt
Bestimmen Sie für eine Luftspaltinduktion von B=200mT bei einer Umlauffrequenz
von 1Hz die Verlustleistung und daraus die Bremskraft, wenn man einen mittleren
Wirkhebel der Kraft von rm=0,06m ansetzt. Der spezifische Widerstand der
Kupferscheibe beträgt ρs Cu m( ) ,= ⋅ −0 0178 10 6 Ω . Vergleichen Sie Ihr Ergebnis mit dem
theoretischen Wert.
9.6 Wirbelstromeffekt 35
10 Literaturverzeichnis
[1] Dr. rer. nat. K. A. Hempel, Hilfsblätter zur Vorlesung Werkstoffe der Elektrotechnik
[2] Prof. Dr. rer. nat. G. Arlt, Werkstoffe der Elektrotechnik
[3] AB Materialien der Mikroelektronik TU Hamburg-Harburg
[4] G.Bosse, Grundlagen der Elektrotechnik II
[5] Lidner, Brauer, Lehmann, Taschenbuch der Elektrotechnik
[6] M. Nalbach, Studienarbeit Das Magnetfeld

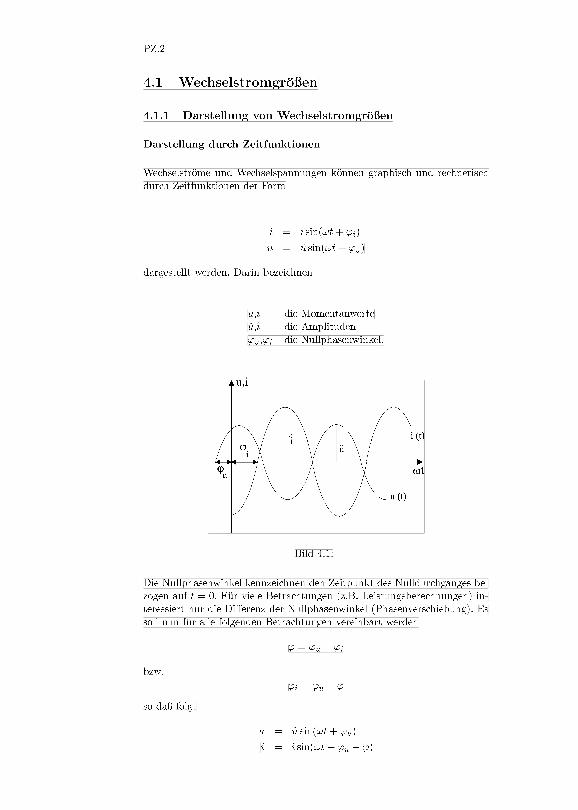
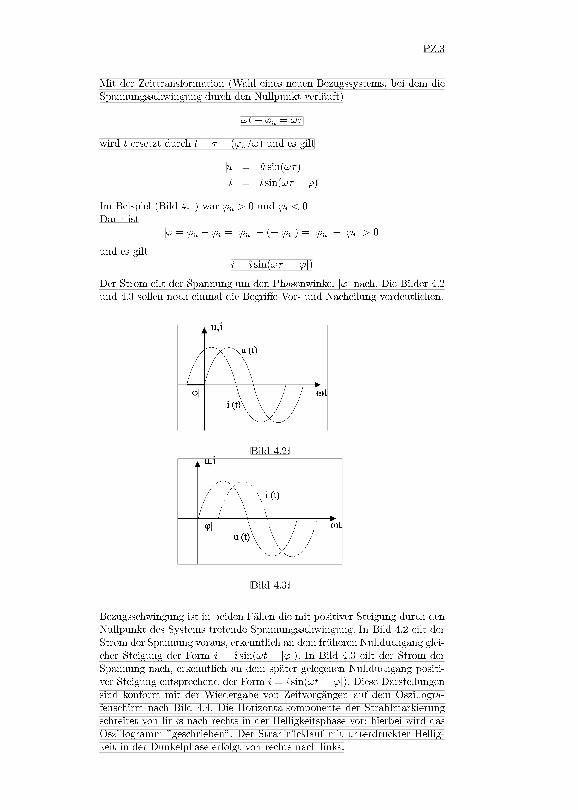
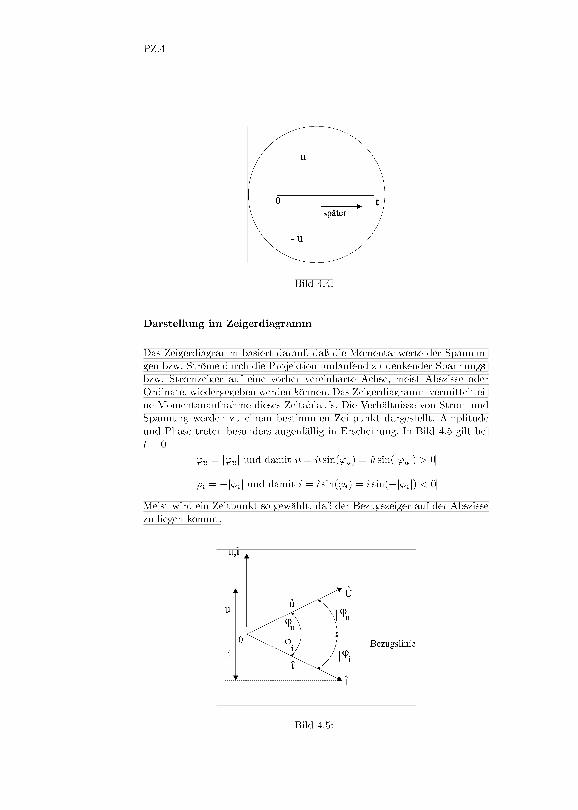

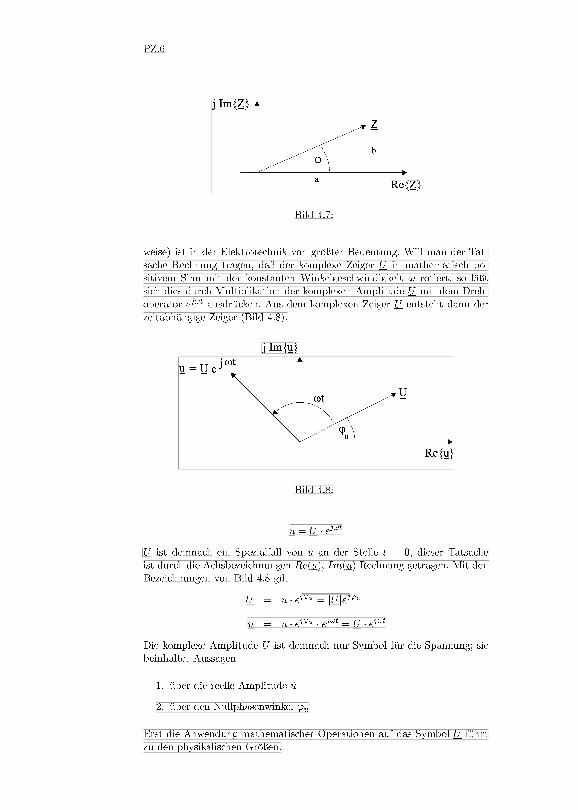

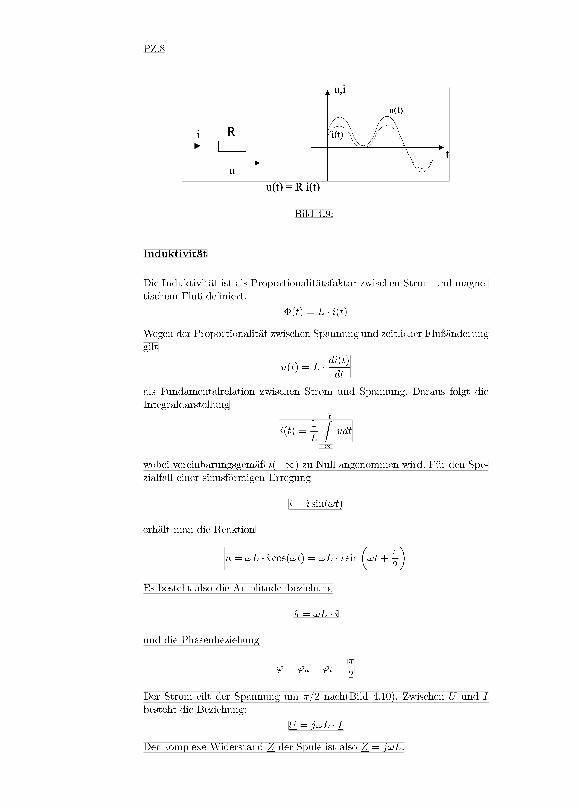

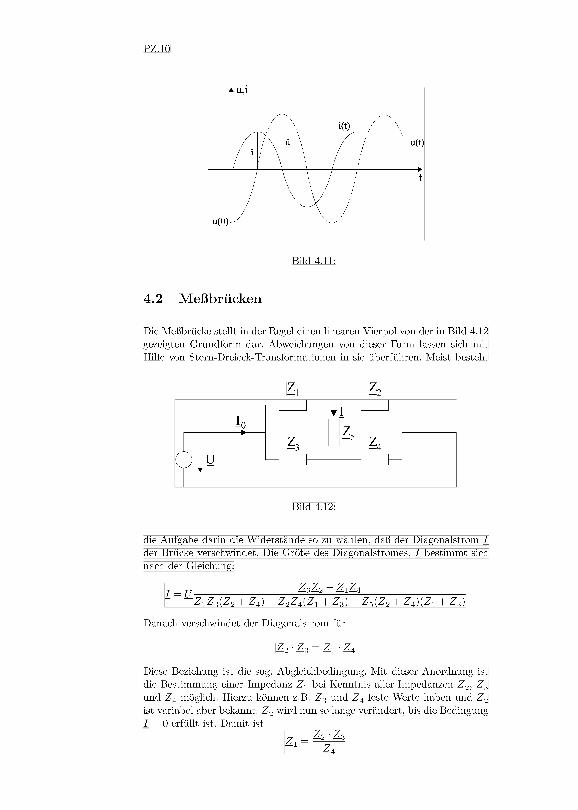
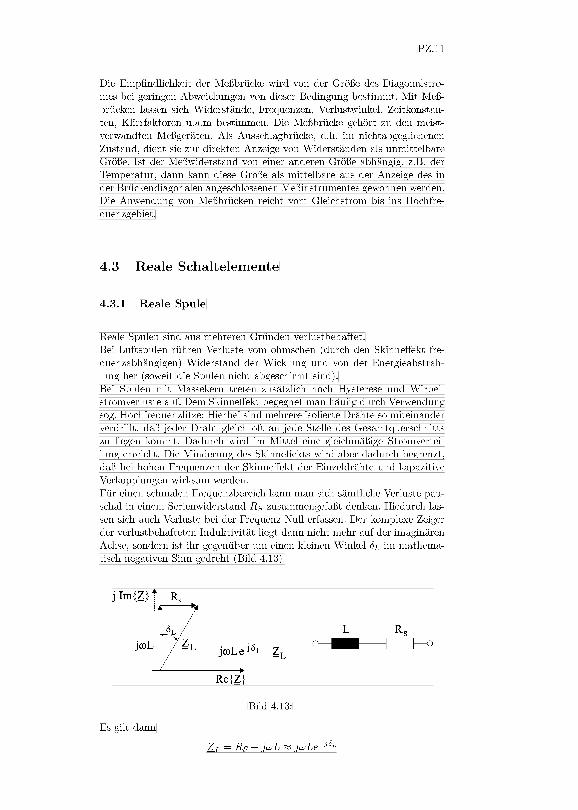
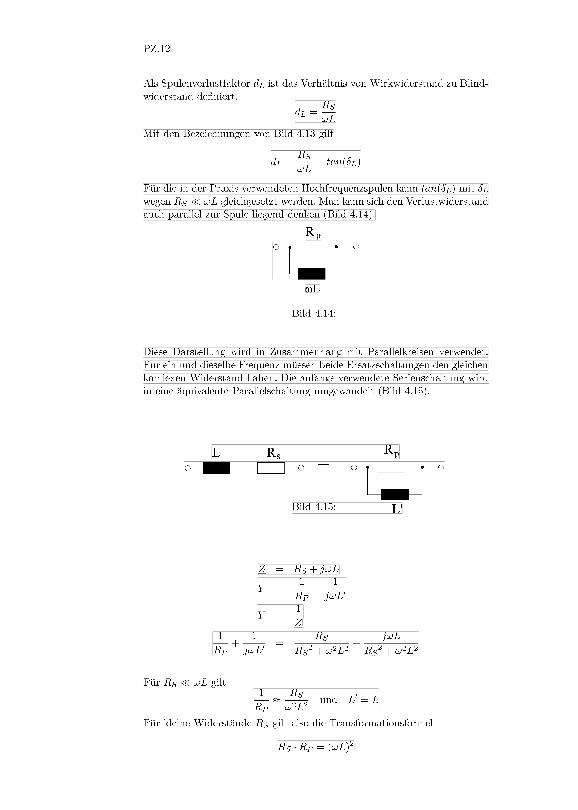

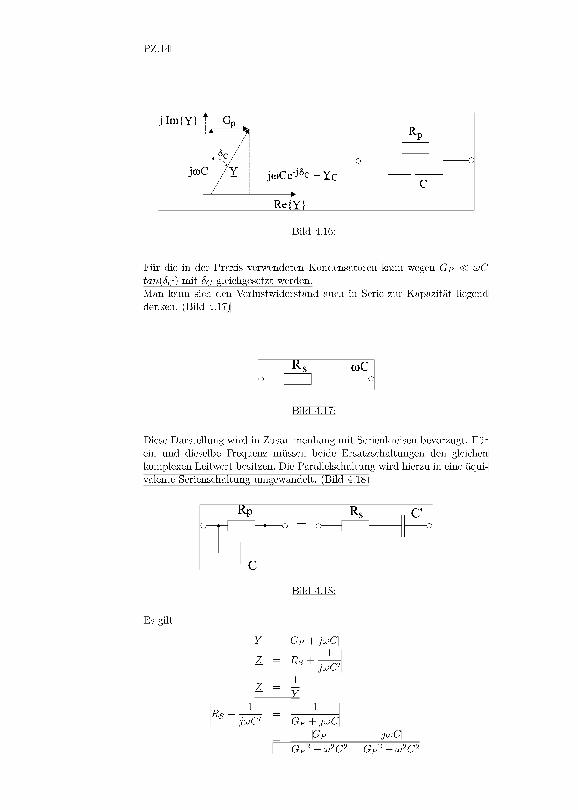

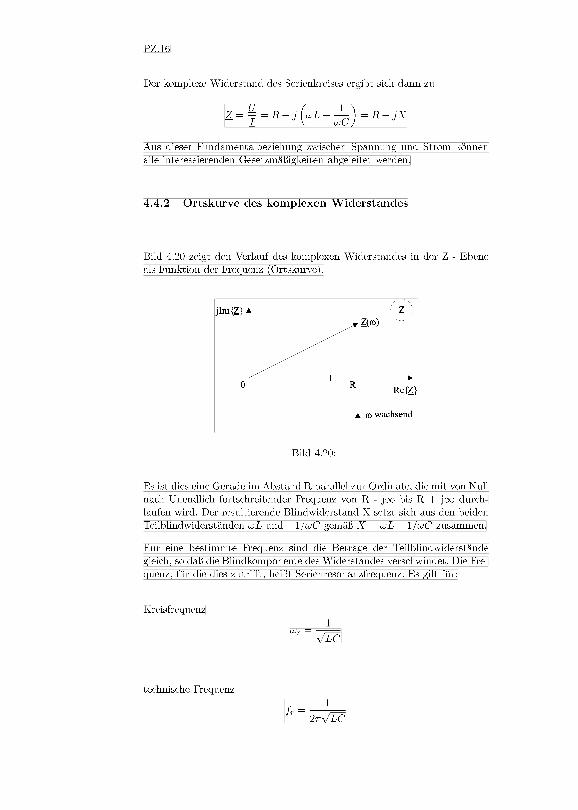
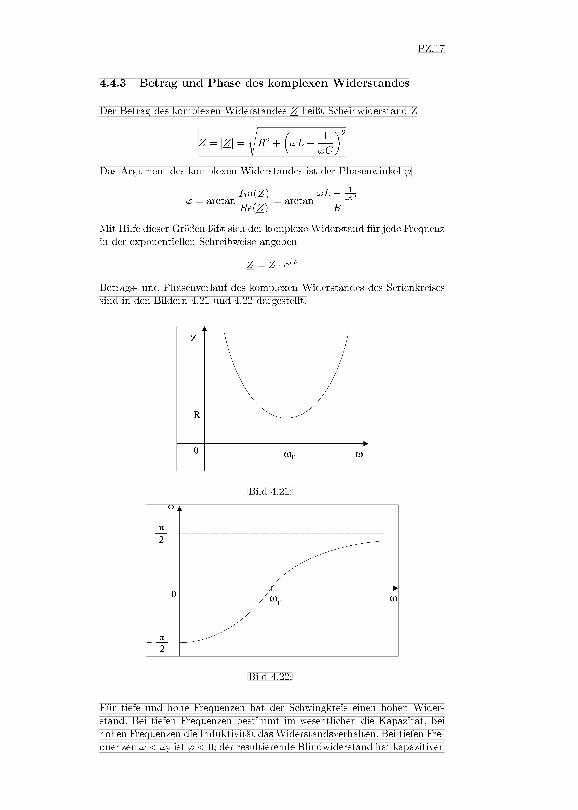
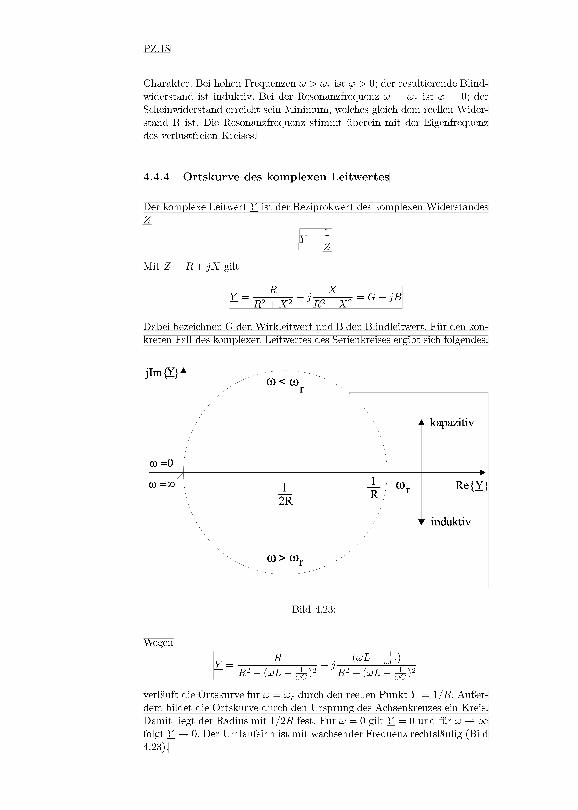
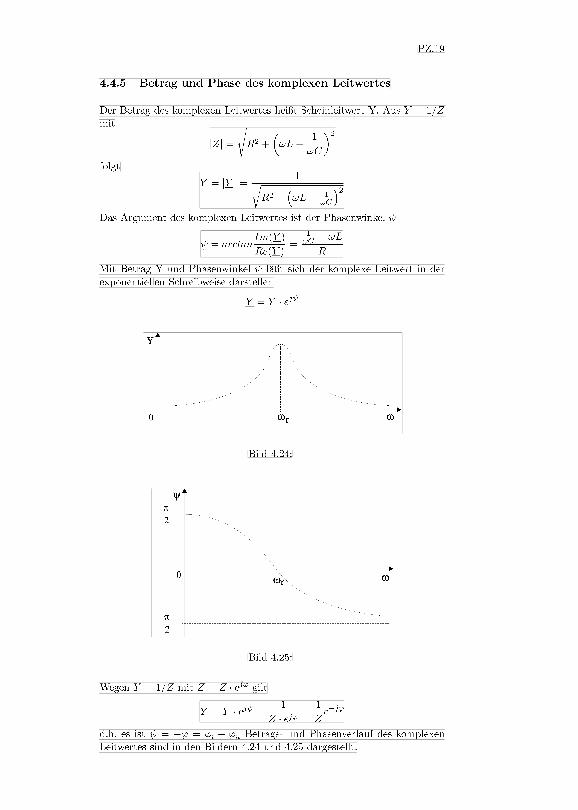

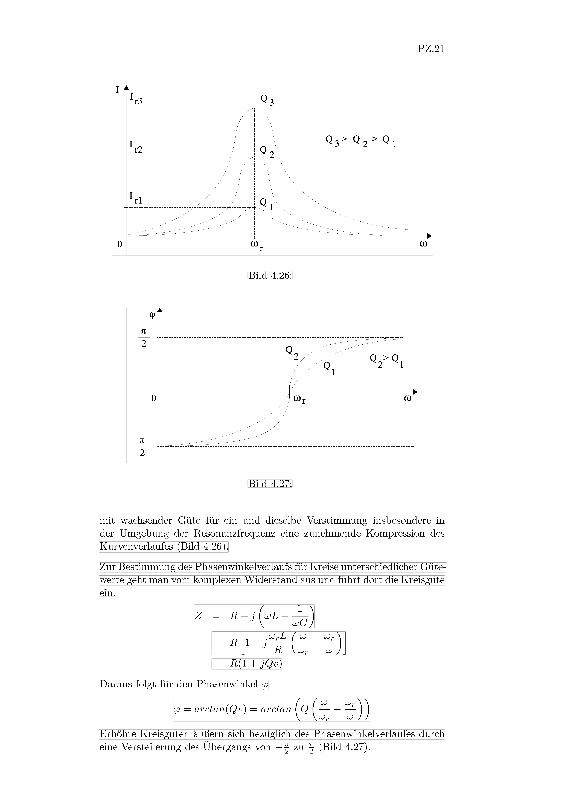

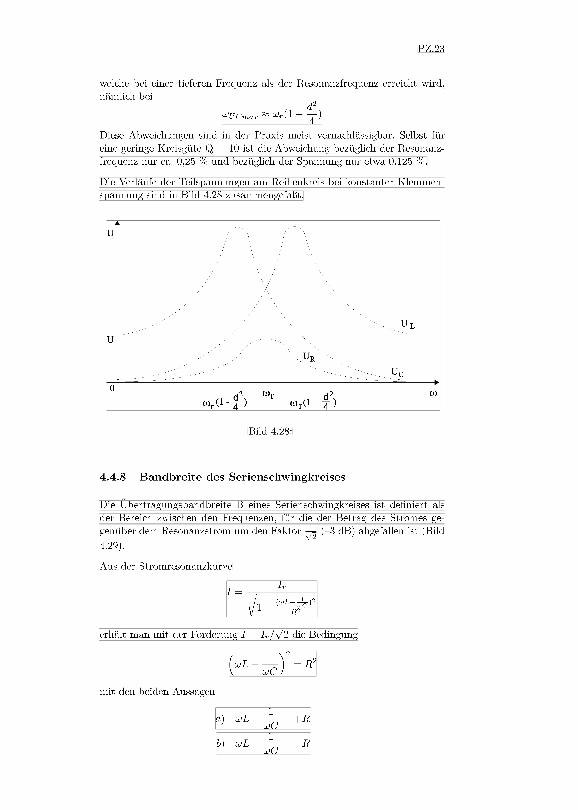
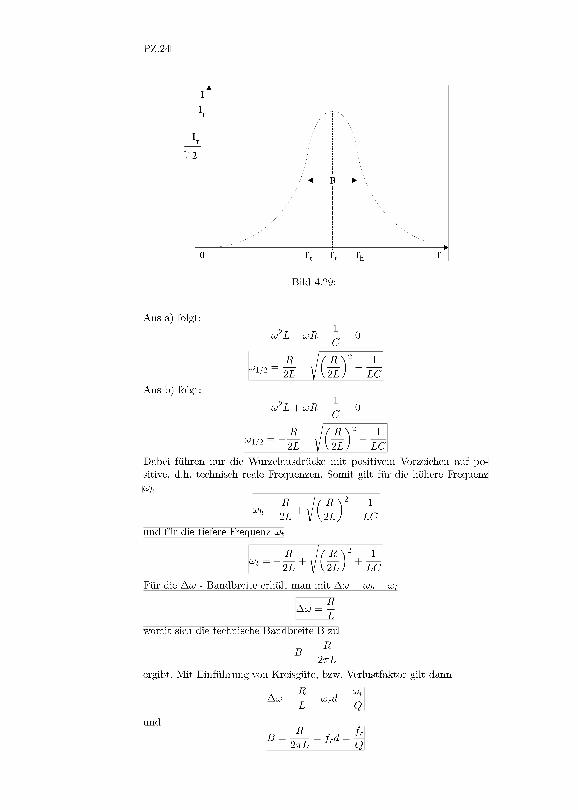
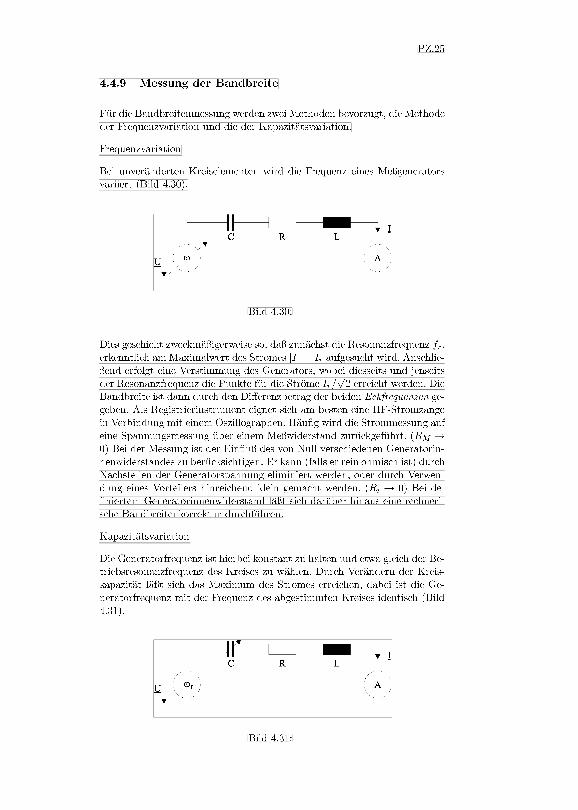
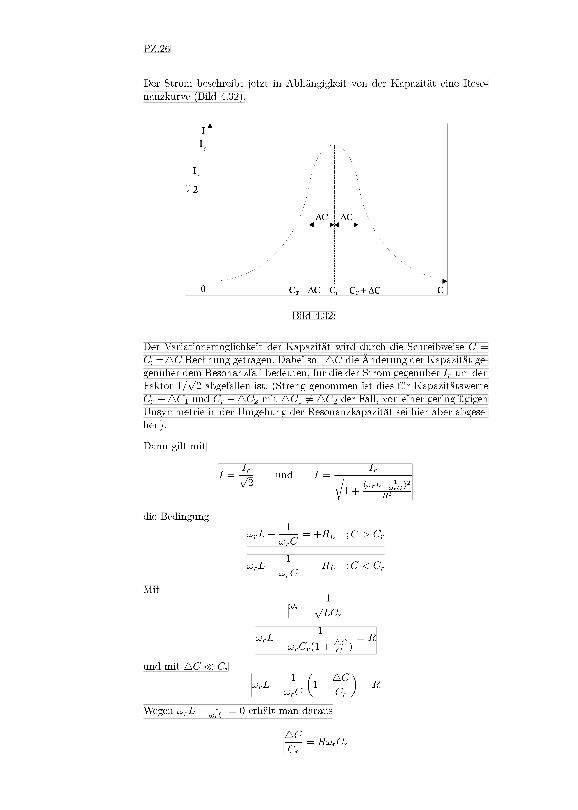
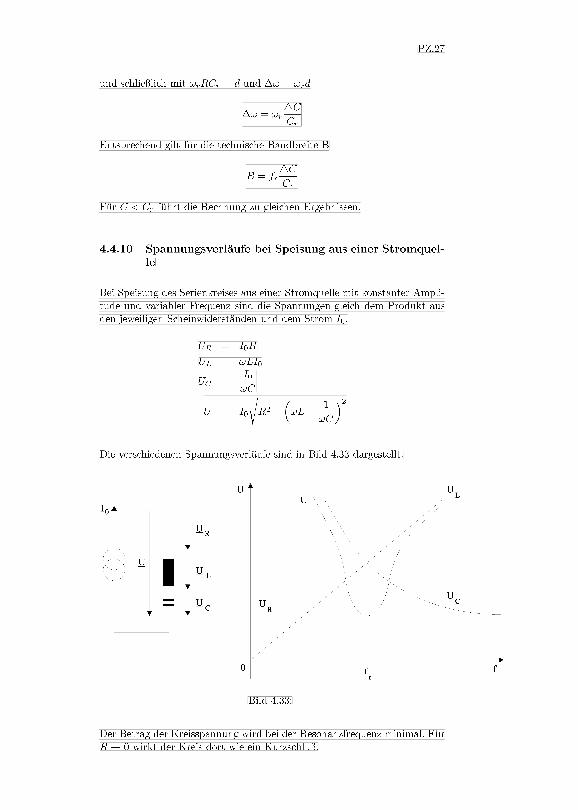
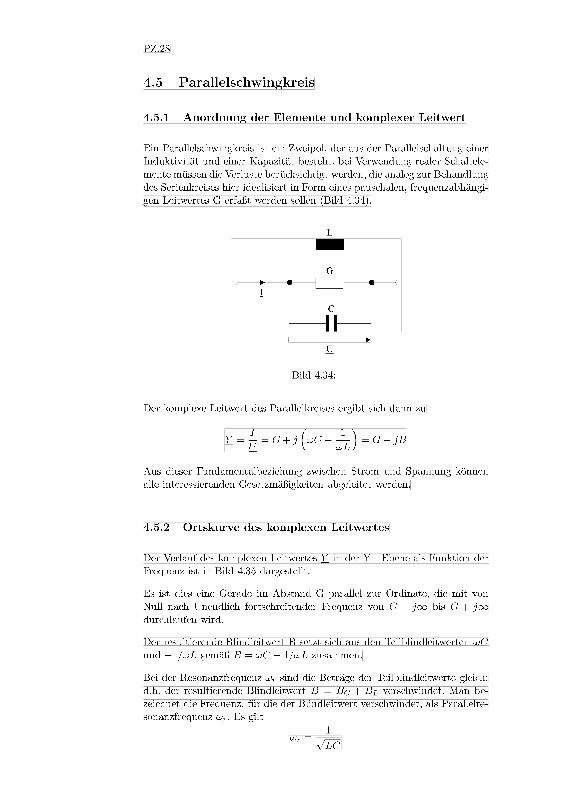
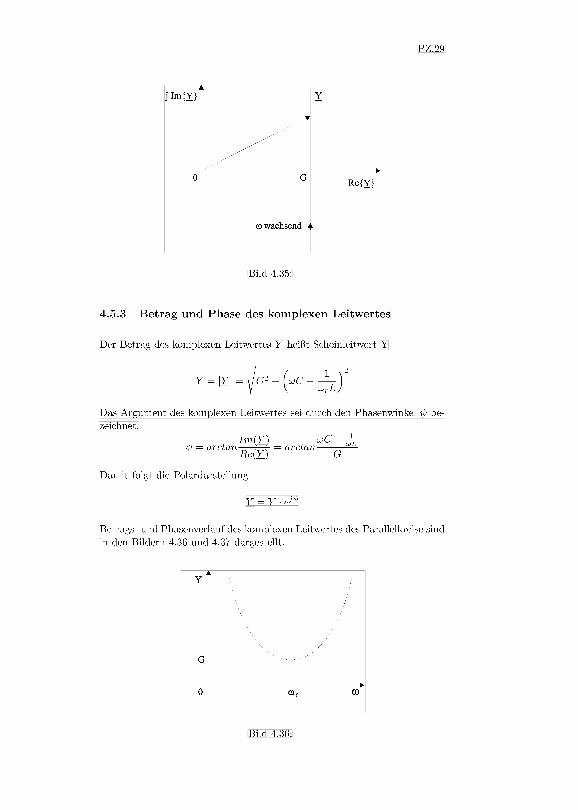
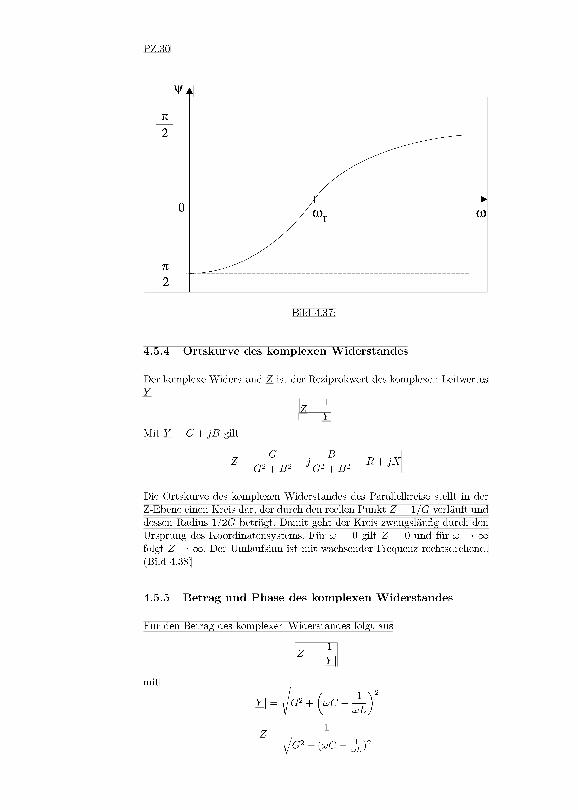
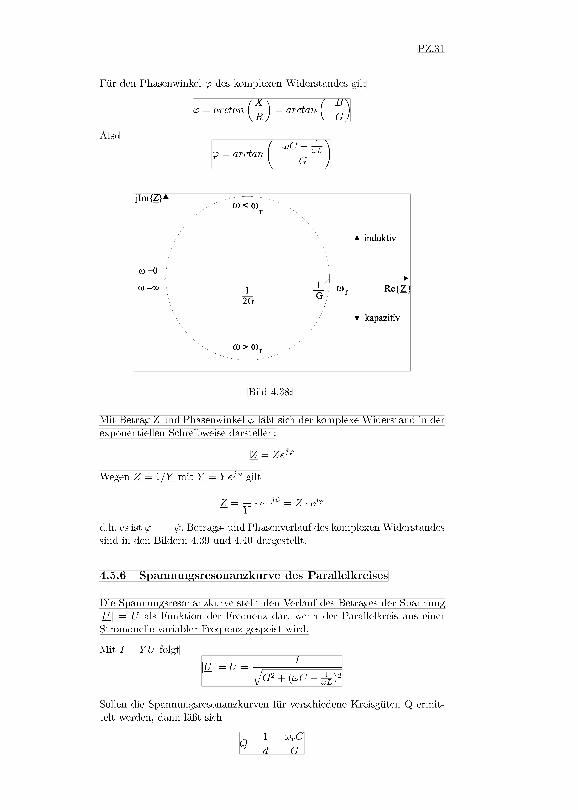
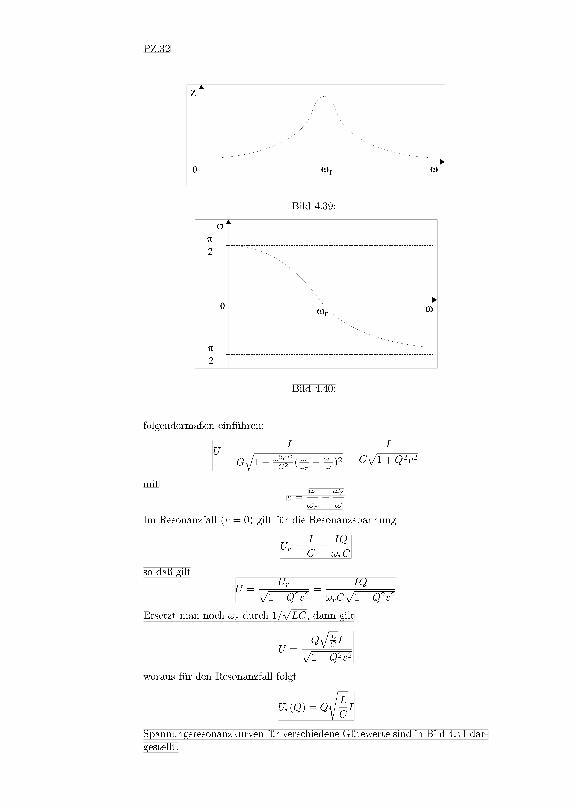
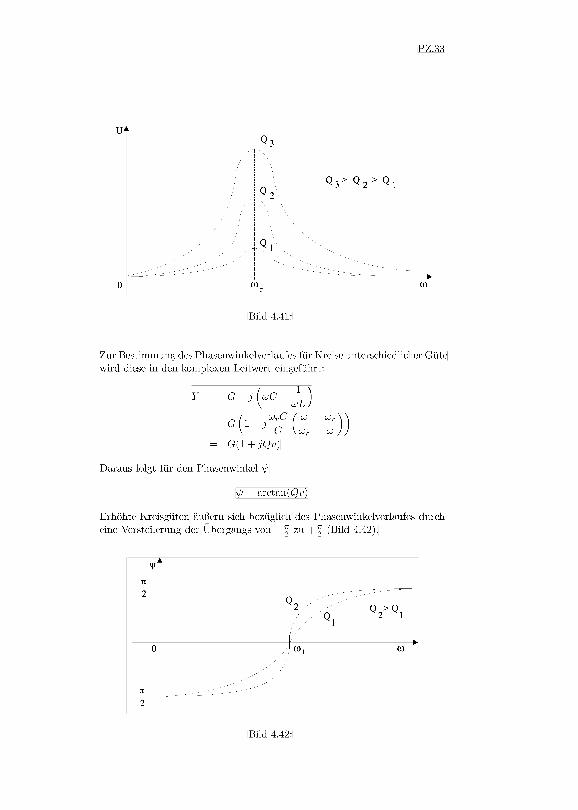
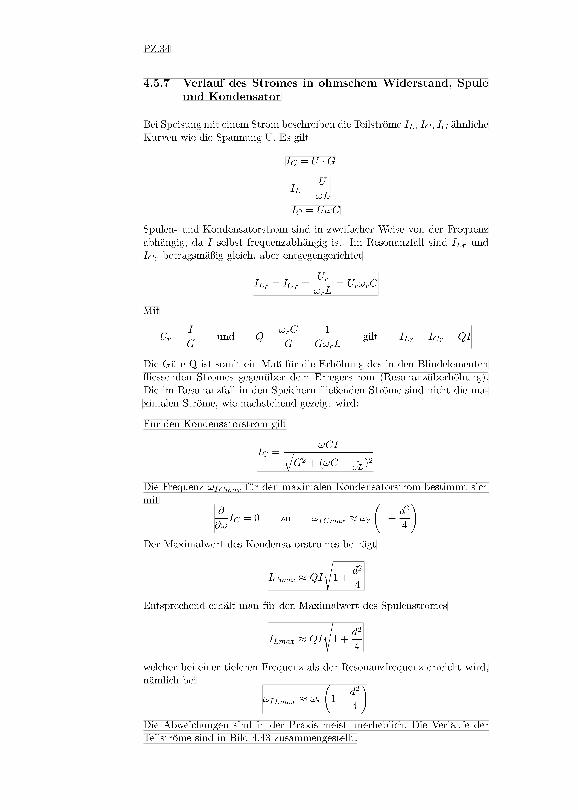
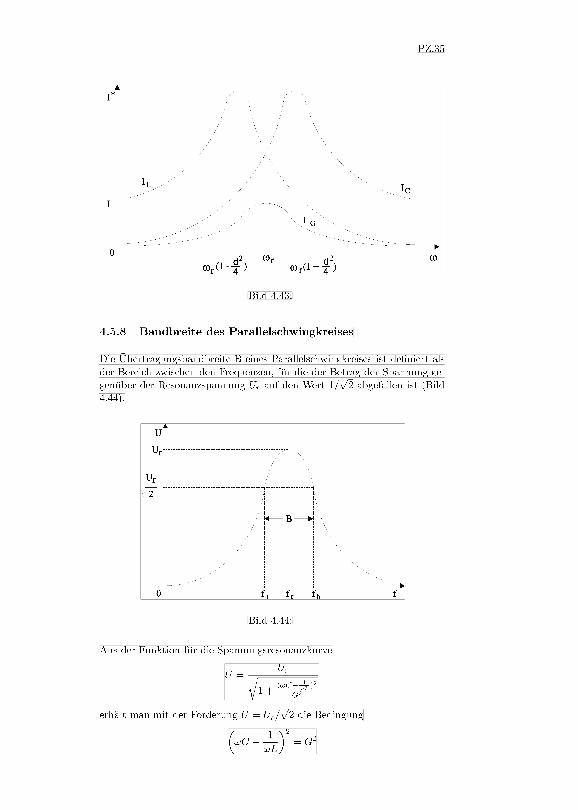
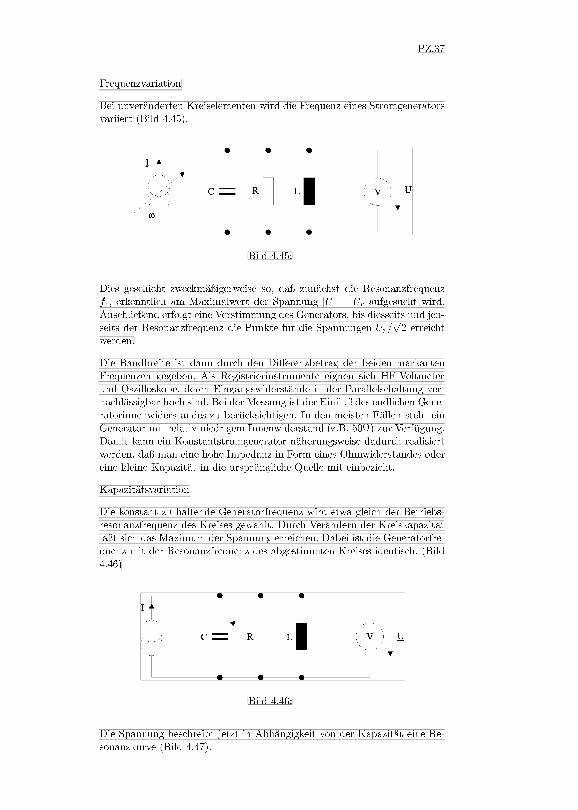
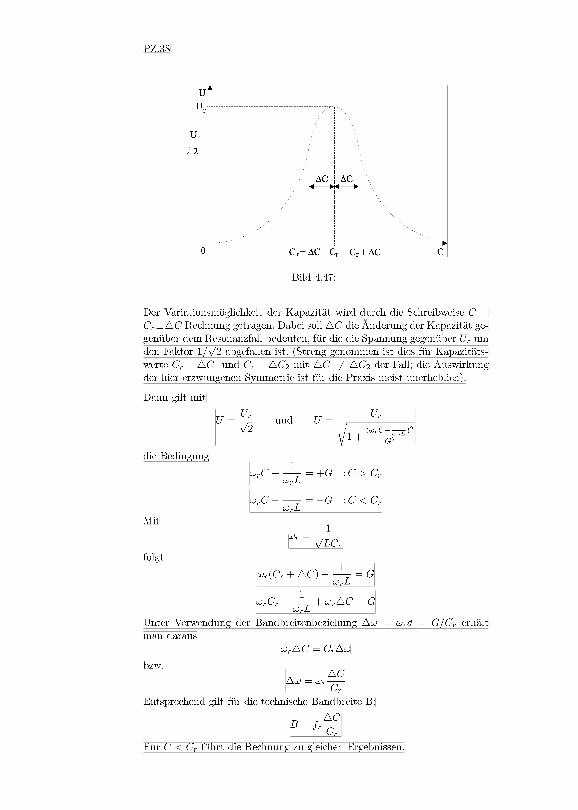
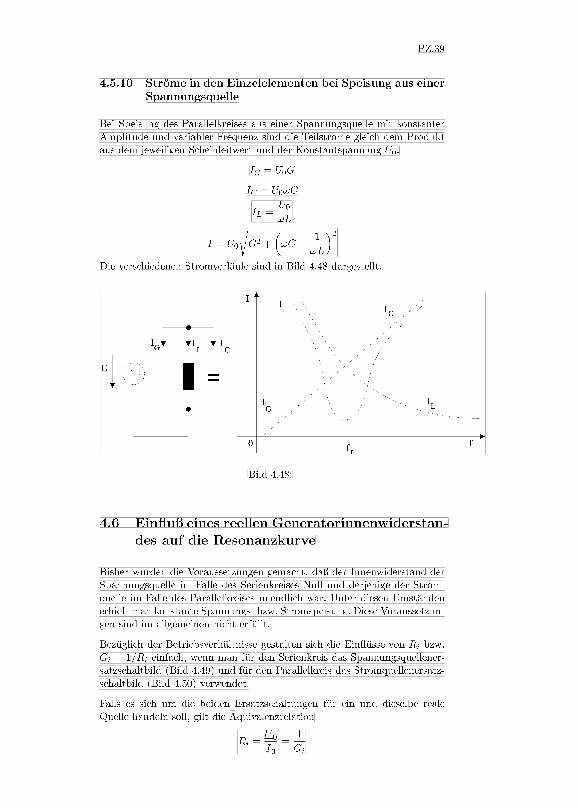
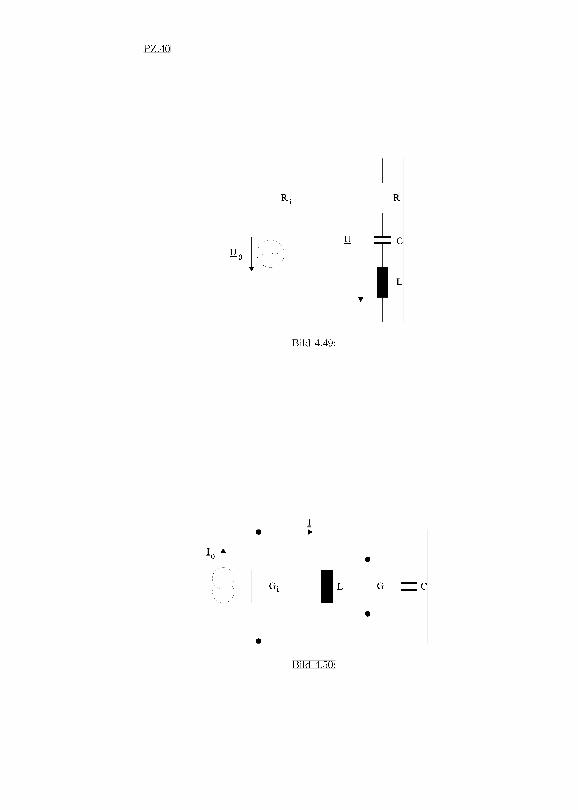
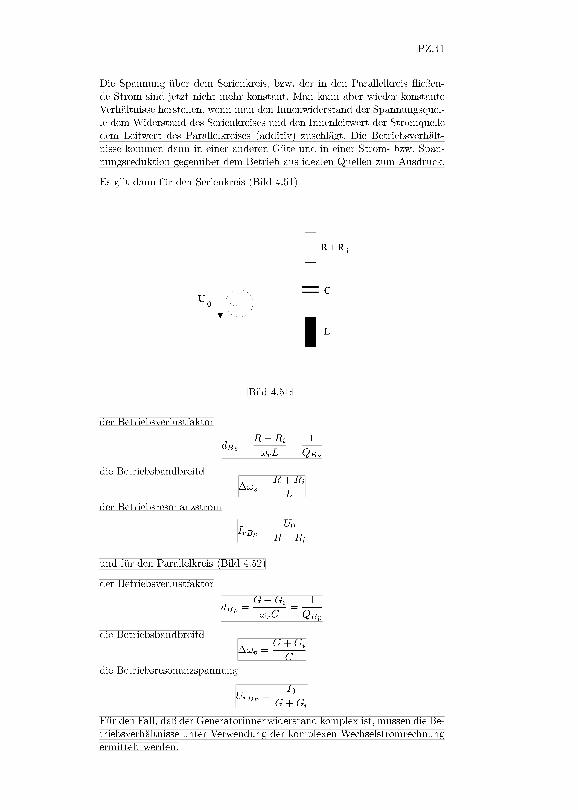
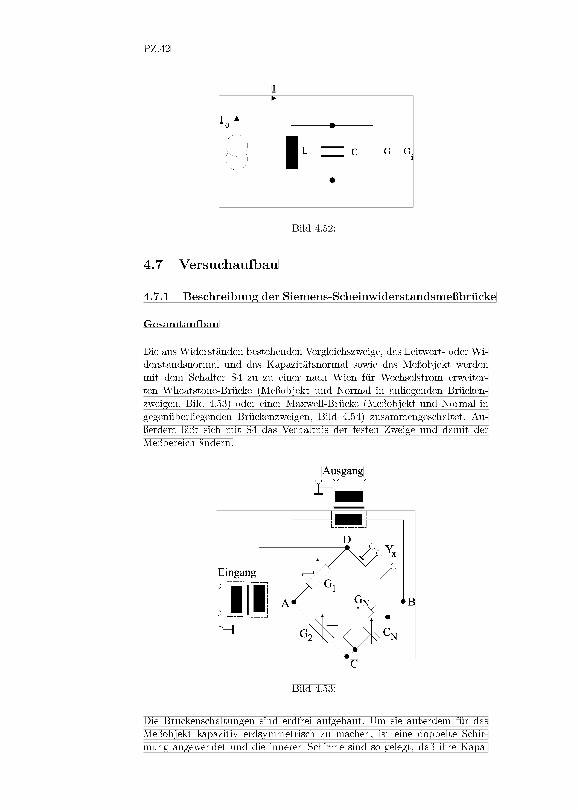
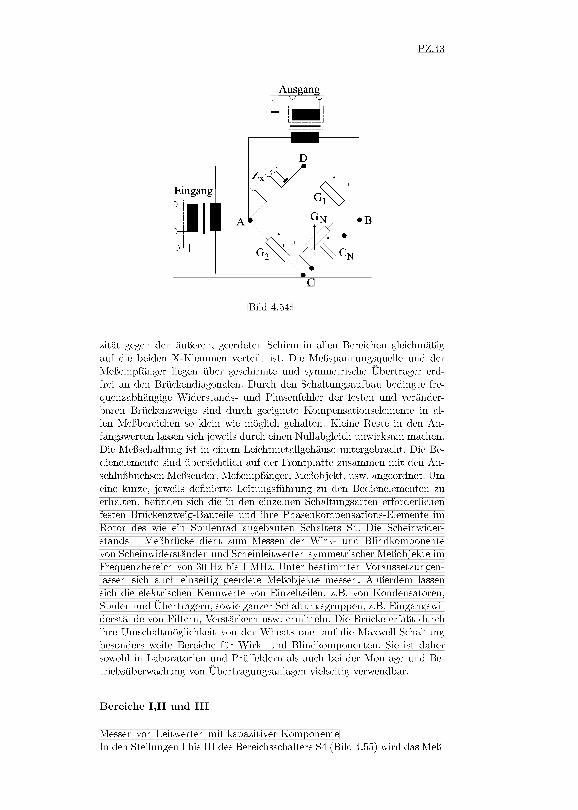
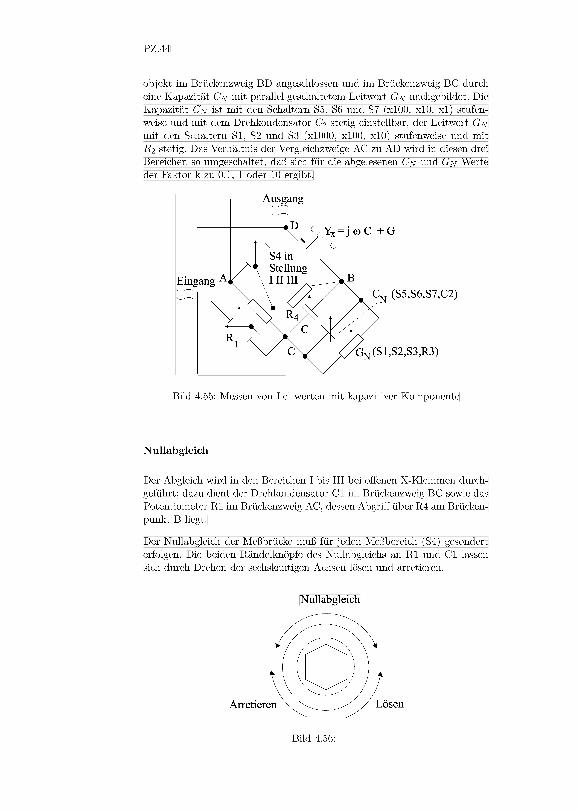
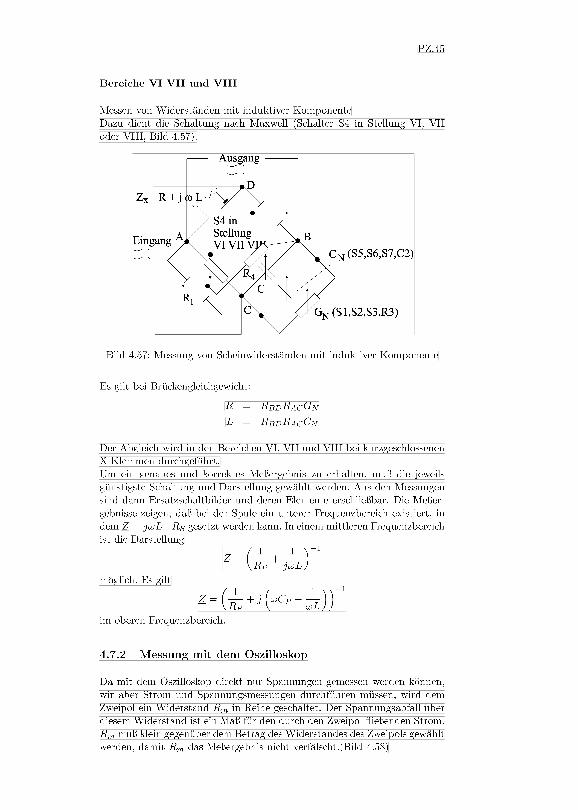
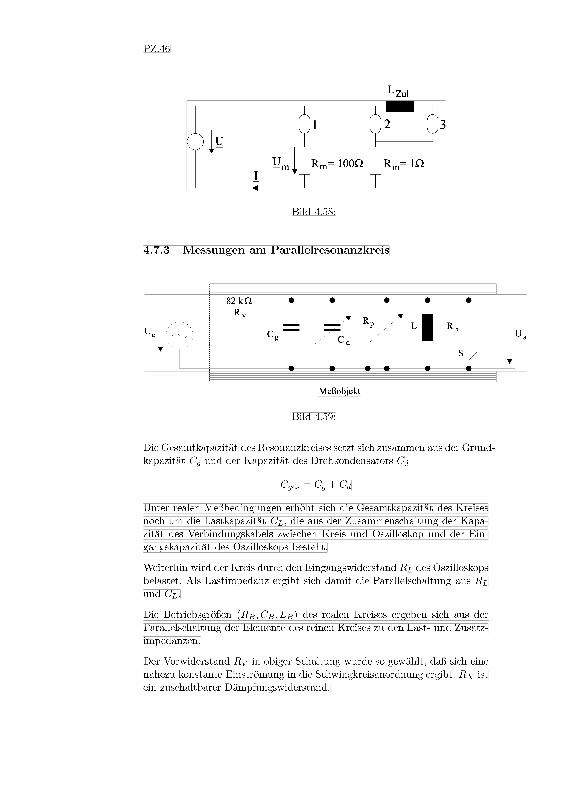
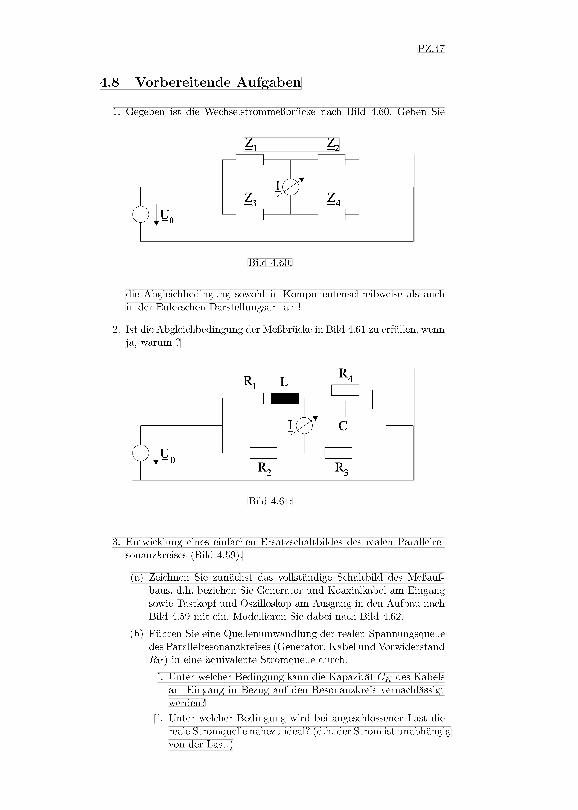
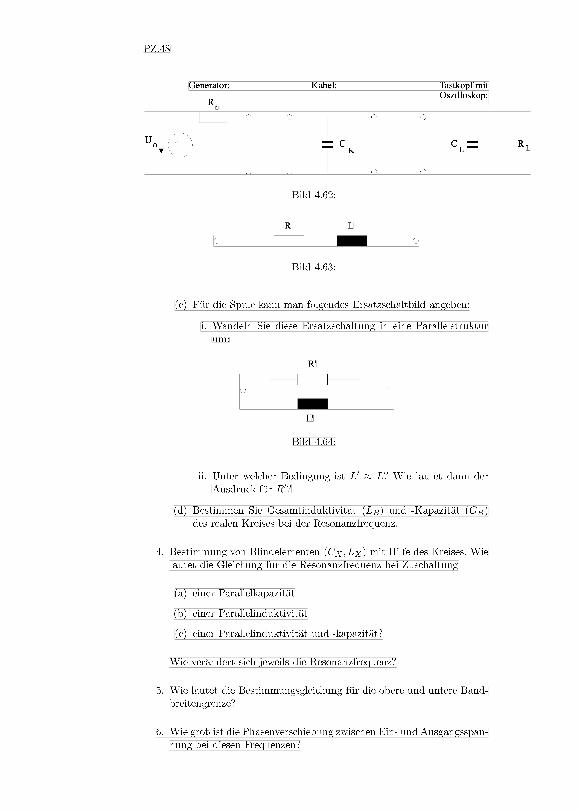

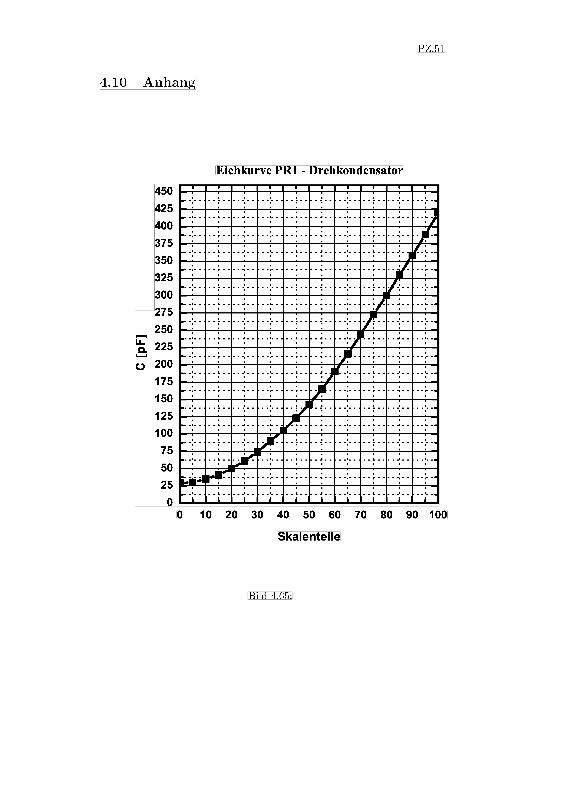
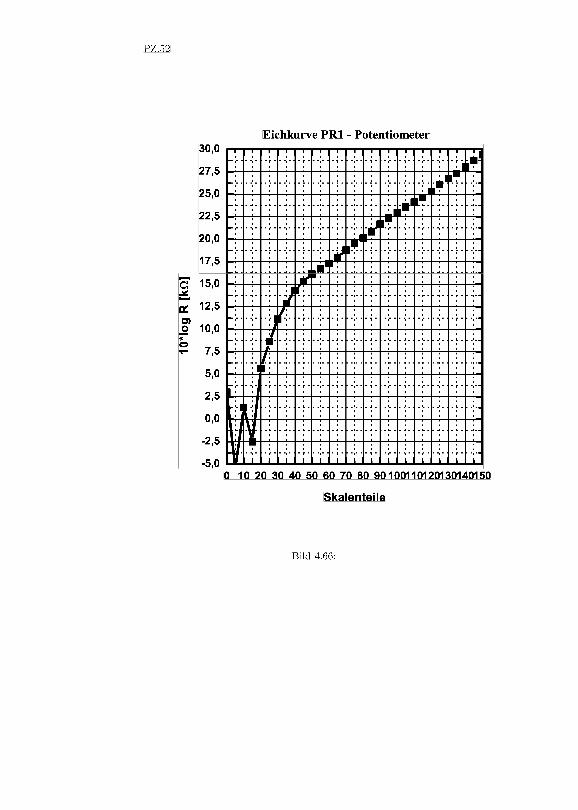

Inhaltsverzeichnis
0 Einleitung ........................................................................................................................................ 4
1 Grundlagen ..................................................................................................................................... 5
1.1 Induktionsgesetz ........................................................................................................... 5
2 Hauptgleichungen .......................................................................................................................... 7
3 Erregungsarten und Betriebsverhalten ..................................................................................... 10
3.1 Nebenschlussmaschine ............................................................................................... 10
3.2 Reihenschlussmaschine............................................................................................... 14
3.3 Fremderregung ............................................................................................................ 16
4 Literatur ....................................................................................................................................... 17
5 Vorbereitende Aufgaben ............................................................................................................. 18
6 Versuchsaufgaben ........................................................................................................................ 19
7 Anhang .......................................................................................................................................... 20
Einleitung
Die Grundlagen zum Verständnis der Funktionsweise elektrischer Maschinen wurden bereits in der
Vorlesung “Grundlagen der Elektrotechnik I” behandelt. Im Folgenden werden diese Grundgesetzte kurz
rekapituliert und zur Herleitung der Beziehungen, mit denen elektrische Maschinen zusammenfassend
beschrieben werden, genutzt. Die hier vorliegende Anleitung soll nur einen kurzen Überblick über die
Bauarten und das Verhalten dieser Maschinen in Abhängigkeit von der Beschaltungart oder der Last
vermitteln. Möglichkeiten zur Drehzahleinstellung werden ebenso behandelt und tragen zum Verständnis
der Regelung dieser Systeme bei.
In der Praxis ist das Verhalten dieser Maschinen durch viele Faktoren geprägt, deren Berücksichtigung
für eine genauere Auslegung öfters eine FEM-Simulation oder andere numerische Berechnungsverfahren
erfordert. Dabei löst man die Maxwellschen Gleichungen in einer begrenzten Anzahl von Punkten in
einem Bereich, in dem magnetische Felder vorhanden sind. Man spricht von Diskretisierung. Das
Ergebnis der Simulation sind typischerweise Näherungslösungen für die Flussdichten B und für die
Feldstärken H, aus denen man anschließend Magnetflüsse, Induktivitäten, Energien, Kräfte oder
Drehmomente ableiten kann. Wirbelstromverluste oder die Geräuschabstrahlung können aber auch
simuliert werden. Erwähnenswert ist die Tatsache, dass ruhende elektrische Maschinen wie z.B.
Transformatoren ebenso dem Begriff elektrische Maschinen zuzuordnen sind und als stationäre
Energiewandler bezeichnet werden. Im Folgenden werden wir uns allerdings mit rotierenden elektrischen
Maschinen, speziell der Gleichstrommaschine, befassen.
Die Basis der elektrischen Energieversorgung war zunächst der Gleichstrom. Mit der industriellen
Entwicklung entstand das Bedürfnis, die elektrische Energie zum Antrieb von Maschinen zu nutzen. Mit
dem Übergang zur Drehstromtechnik wurden die Gleichstrommaschinen aus manchen Gebieten verdrängt
und durch Drehfeldmaschinen wie Synchronmotoren und Induktionsmotoren ersetzt. Diese haben
allgemein einen einfacheren Aufbau sind günstiger herzustellen, haben aber den Nachteil einer starken
Abhängigkeit der Drehzahl von der Netzfrequenz. Der Bedarf nach drehzahlvariablen Antrieben machte
damals den Einsatz von Gleichstrommaschinen unentbehrlich. Heute wird durch die moderne
Leistungselektronik der Einsatz von robusten drehzahlvariablen Drehstrommotoren realisiert. Allerdings
gilt dieser Trend eher im Bereich großer Leistungen. Im Bereich der Kleinmaschinen z.B. in der
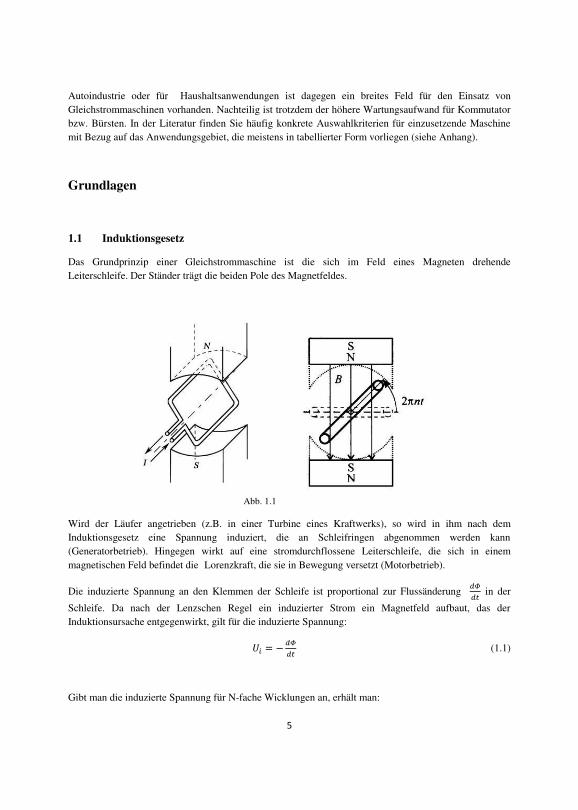
Autoindustrie oder für Haushaltsanwendungen ist dagegen ein breites Feld für den Einsatz von
Gleichstrommaschinen vorhanden. Nachteilig ist trotzdem der höhere Wartungsaufwand für Kommutator
bzw. Bürsten. In der Literatur finden Sie häufig konkrete Auswahlkriterien für einzusetzende Maschine
mit Bezug auf das Anwendungsgebiet, die meistens in tabellierter Form vorliegen (siehe Anhang).
Grundlagen
1.1 Induktionsgesetz
Das Grundprinzip einer Gleichstrommaschine ist die sich im Feld eines Magneten drehende
Leiterschleife.Der Ständer trägt die beiden Pole des Magnetfeldes.
Abb. 1.1
Wird der Läufer angetrieben (z.B. in einer Turbine eines Kraftwerks), so wird in ihm nach dem
Induktionsgesetz eine Spannung induziert, die an Schleifringen abgenommen werden kann
(Generatorbetrieb). Hingegen wirkt auf eine stromdurchflossene Leiterschleife, die sich in einem
magnetischen Feld befindet die Lorenzkraft, die sie in Bewegung versetzt (Motorbetrieb).
Die induzierte Spannung an den Klemmen der Schleife ist proportional zur Flussänderung in der
Schleife. Da nach der Lenzschen Regel ein induzierter Strom ein Magnetfeld aufbaut, das der
Induktionsursache entgegenwirkt, gilt für die induzierte Spannung:
(1.1)
Gibt man die induzierte Spannung für N-fache Wicklungen an, erhält man:
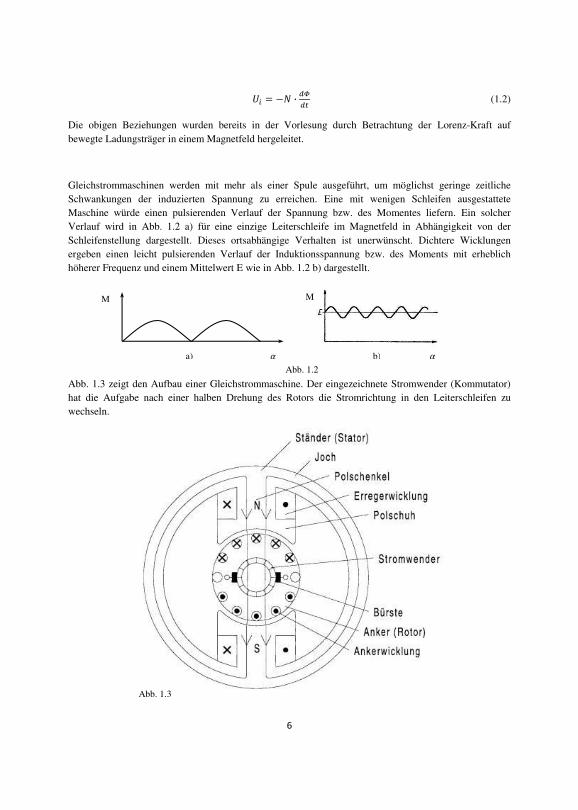
(1.2)
Die obigen Beziehungen wurden bereits in der Vorlesung durch Betrachtung der Lorenz-Kraft auf
bewegte Ladungsträger in einem Magnetfeld hergeleitet.
Gleichstrommaschinen werden mit mehr als einer Spule ausgeführt, um möglichst geringe zeitliche
Schwankungen der induzierten Spannung zu erreichen. Eine mit wenigen Schleifen ausgestattete
Maschine würde einen pulsierenden Verlauf der Spannung bzw. des Momentes liefern. Ein solcher
Verlauf wird in Abb. 1.2 a) für eine einzige Leiterschleife im Magnetfeld in Abhängigkeit von der
Schleifenstellung dargestellt. Dieses ortsabhängige Verhalten ist unerwünscht. Dichtere Wicklungen
ergeben einen leicht pulsierenden Verlauf der Induktionsspannung bzw. des Moments mit erheblich
höherer Frequenz und einem Mittelwert E wie in Abb. 1.2 b) dargestellt.
Abb. 1.3 zeigt den Aufbau einer Gleichstrommaschine. Der eingezeichnete Stromwender (Kommutator)
hat die Aufgabe nach einer halben Drehung des Rotors die Stromrichtung in den Leiterschleifen zu
wechseln.
M
M
a)
Abb. 1.2
b)
Abb. 1.3

Damit wirkt ein kontinuierliches Moment in gleicher Richtung und die Drehbewegung wird
aufrechterhalten.
Wenn sich eine Leiterschleife im „kritischen Punkt“ (Gleichgewichtslage) befindet, wirken trotzdem auf
alle anderen Leiterschleifen Momente, die zur Gesamtrotation beitragen. Die Enden der Leiterschleifen
sind an voneinander isolierte Lamellen des Kollektors geführt, auf denen die Bürsten gleiten und den
Strom zuführen.
Die stromführenden Leiterschleifen des Läufers bauen ein eigenes Magnetfeld auf, das sich dem im
Ständer realisierten Hauptfeld überlagert.Diese Ankerrückwirkung ist die Ursache für Verzerrungen des
Feldes und zusätzliche Induktionsspannungen, die von den auf dem Kollektor gleitenden Bürsten
kurzgeschlossen werden und das so genannte Bürstenfeuer nach sich ziehen. Dadurch werden aber
Kommutatorsegmente und Bürsten zerstört. Bürstenfeuer soll deshalb immer kleingehalten werden. Diese
Schwachstelle ist oft der Grund zum Ausfall der Maschinen mit Stromwender.
Hauptgleichungen
Die in den N Ankerleitern bei Drehung des Ankers im zeitlich konstanten Erregerfeld induzierte
Spannung ist nach Gl. (2.1) durch das Produkt der Anzahl der Ankerleiter N, der am Ort des Leiters
herrschenden Flussdichte B, der aktiven Leiterlänge l und der Leitergeschwindigkeit v gegeben.
(2.1)
Mit diesem Ansatz erhält man für die an den Bürsten abgenommene Spannung folgende Beziehung:
(2.2)
Abb. 2.1

z und 2a stellen jeweils die Zahl der Ankerleiter und Ankerzweigpaare dar. Die Ankerzweige treten
immer paarweise auf. p ist die Polpaarzahl und beträgt für eine vierpolige Gleichstrommaschine zwei und
für eine zweipolige eins. n ist die Ankerdrehzahl. Dies ist die erste Hauptgleichung der
Gleichstrommaschine.
Außerdem führen wir die sogenannte Polbedeckung als den Quotienten aus Polbreite und Polteilung
ein.
(2.3)
p = 2 p = 1
Bei gängigen Maschinen beträgt die Polbedeckung ca. = 0,7. Das heißt, 70 % der Ankerleiter befinden
sich unter einem Hauptpol. Siehe Abb. 2.2.
Über die Polbedeckung kann also der Fluss jedes Poles durch die Spulen berechnet werden:
(2.4)
In (2.4) ist die Polteilung:
(2.5)
r ist Radius des Ankers.
Somit kann die Beziehung (2.1) umformuliert werden:
(2.6)
Im Rahmen dieses Versuchs kann der Faktor in (2.2) als eine Maschinenkonstante angenommen
werden. Er gibt Aufschluss über die Anzahl der Ankerzweigpaare, Polpaarzahl und Anzahl der
Ankerleiter.
Abb. 2.2

Wenn wir den Ankerstrom mit bezeichnen, erhalten wir für die innere Leistung der Maschine:
p n (2.7)
Mit dem inneren Drehmoment, das den Wert:
(2.8)
annimmt. Dies ist die zweite Gleichung der Gleichstrommaschine. Sie besagt, dass das Drehmoment eines
Gleichstrommotors proportional zum Fluss pro Pol und zum Ankerstrom ist. Mit den Beziehungen (2.4)
und (2.5) kann man für das Nenndrehmoment* der Maschine in (2.8) schreiben:
(2.9)
Offensichtlich ist durch das Nennmoment die Baugröße (Volumen des Läufers) bestimmt. In (2.9) ist D
der Durchmesser von Anker. Siehe dazu [Böd./Seq.] Seite 289 bzw. [Kremser] Seite 15.
----------------------------------------------------------------------------------------------------
* Zur Überwindung von Luft- und Lagerreibung wird ein Drehmoment benötigt. Außerdem ist den Eisenverlusten im Anker auch
ein Drehmoment zuzuordnen. Diese werden vernachlässigt und es werden deshalb hier die Bezeichnungen bzw. für
Nenndrehmoment und Nennstrom benutzt.
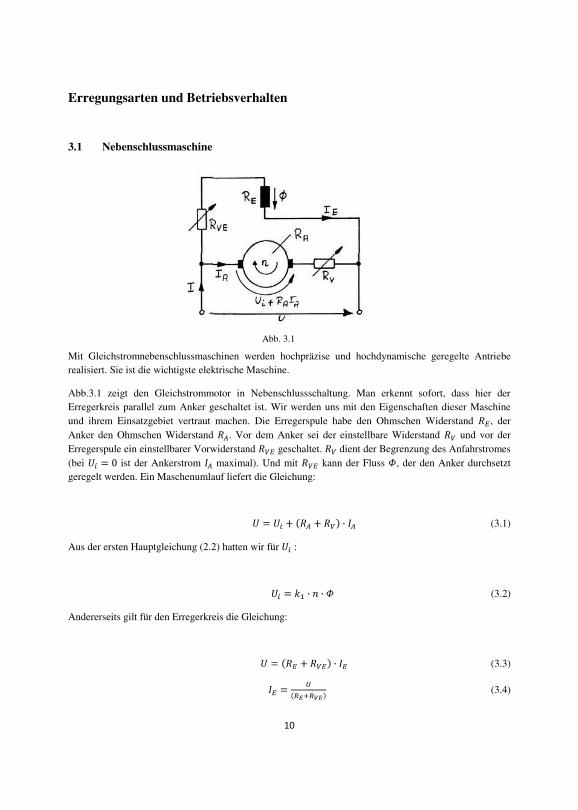
Erregungsarten und Betriebsverhalten
3.1 Nebenschlussmaschine
Mit Gleichstromnebenschlussmaschinen werden hochpräzise und hochdynamische geregelte Antriebe
realisiert. Sie ist die wichtigste elektrische Maschine.
Abb.3.1 zeigt den Gleichstrommotor in Nebenschlussschaltung. Man erkennt sofort, dass hier der
Erregerkreis parallel zum Anker geschaltet ist. Wir werden uns mit den Eigenschaften dieser Maschine
und ihrem Einsatzgebiet vertraut machen. Die Erregerspule habe den Ohmschen Widerstand , der
Anker den Ohmschen Widerstand . Vor dem Anker sei der einstellbare Widerstand und vor der
Erregerspule ein einstellbarer Vorwiderstand geschaltet. dient der Begrenzung des Anfahrstromes
(bei ist der Ankerstrom maximal). Und mit kann der Fluss , der den Anker durchsetzt
geregelt werden. Ein Maschenumlauf liefert die Gleichung:
(3.1)
Aus der ersten Hauptgleichung (2.2) hatten wir für :
(3.2)
Andererseits gilt für den Erregerkreis die Gleichung:
(3.3)
(3.4)
Abb. 3.1
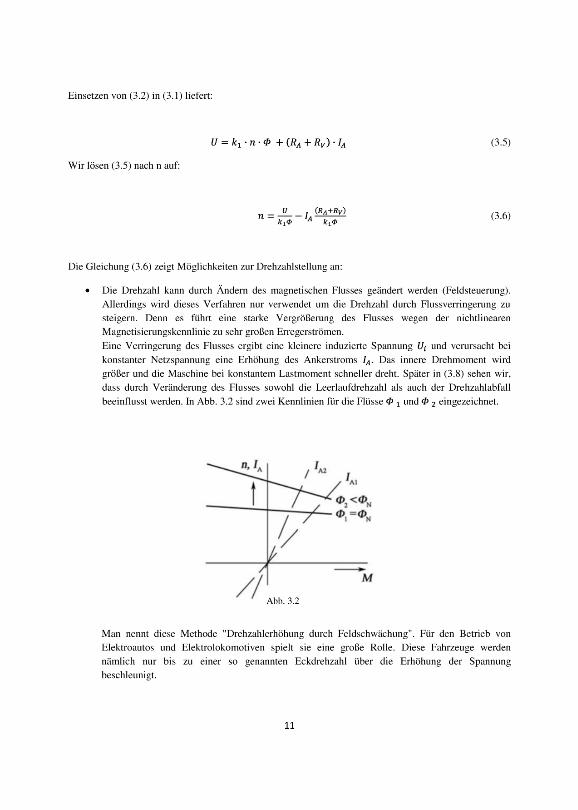

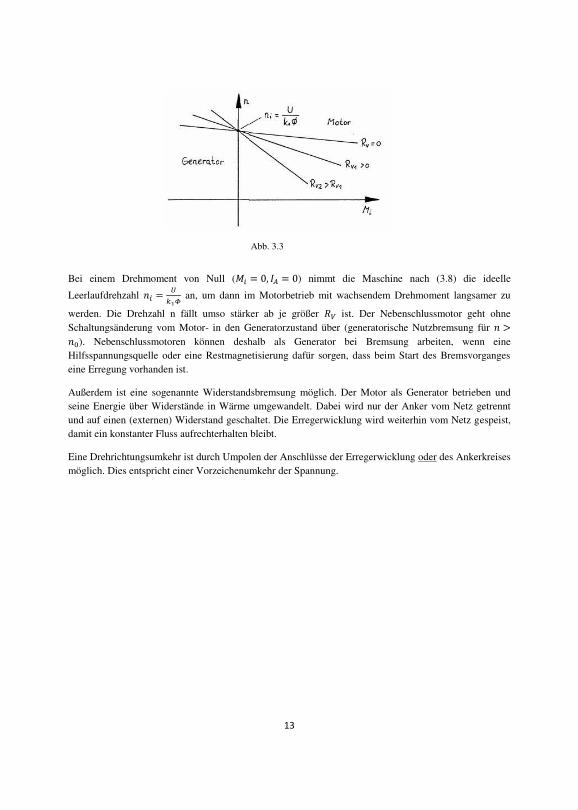
Bei einem Drehmoment von Null ( ) nimmt die Maschine nach (3.8) die ideelle
Leerlaufdrehzahl an, um dann im Motorbetrieb mit wachsendem Drehmoment langsamer zu
werden. Die Drehzahl n fällt umso stärker ab je größer ist. Der Nebenschlussmotor geht ohne
Schaltungsänderung vom Motor- in den Generatorzustand über (generatorische Nutzbremsung für
). Nebenschlussmotoren können deshalb als Generator bei Bremsung arbeiten, wenn eine
Hilfsspannungsquelle oder eine Restmagnetisierung dafür sorgen, dass beim Start des Bremsvorganges
eine Erregung vorhanden ist.
Außerdem ist eine sogenannte Widerstandsbremsung möglich.Der Motor als Generator betrieben und
seine Energie über Widerstände in Wärme umgewandelt. Dabei wird nur der Anker vom Netz getrennt
und auf einen (externen) Widerstand geschaltet. Die Erregerwicklung wird weiterhin vom Netz gespeist,
damit ein konstanter Fluss aufrechterhalten bleibt.
Eine Drehrichtungsumkehr ist durch Umpolen der Anschlüsse der Erregerwicklung oder des Ankerkreises
möglich. Dies entspricht einer Vorzeichenumkehr der Spannung.
Abb. 3.3
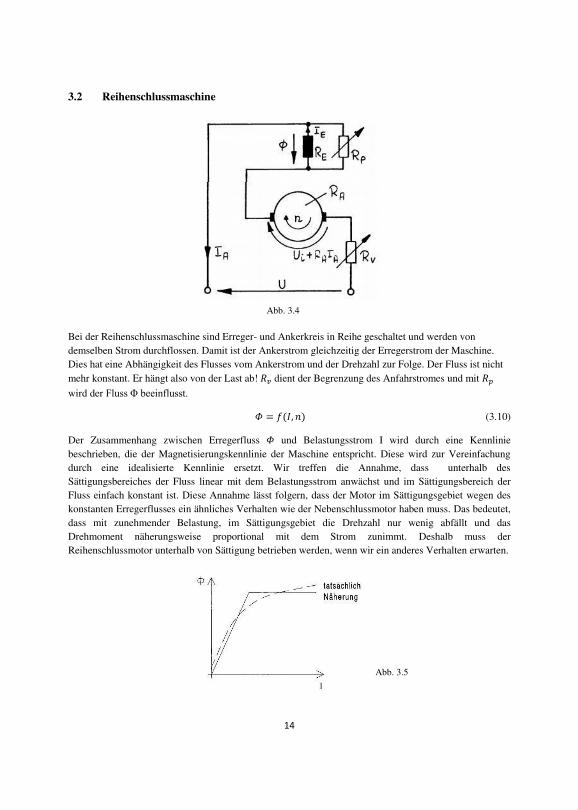
3.2 Reihenschlussmaschine
Bei der Reihenschlussmaschine sind Erreger- und Ankerkreis in Reihe geschaltet und werden von
demselben Strom durchflossen. Damit ist der Ankerstrom gleichzeitig der Erregerstrom der Maschine.
Dies hat eine Abhängigkeit des Flusses vom Ankerstrom und der Drehzahl zur Folge. Der Fluss ist nicht
mehr konstant. Er hängt also von der Last ab! dient der Begrenzung des Anfahrstromes und mit
wird der Fluss beeinflusst.
(3.10)
Der Zusammenhang zwischen Erregerfluss und Belastungsstrom I wird durch eine Kennlinie
beschrieben, die der Magnetisierungskennlinie der Maschine entspricht. Diese wird zur Vereinfachung
durch eine idealisierte Kennlinie ersetzt. Wir treffen die Annahme, dass unterhalb des
Sättigungsbereiches der Fluss linear mit dem Belastungsstrom anwächst und im Sättigungsbereich der
Fluss einfach konstant ist. Diese Annahme lässt folgern, dass der Motor im Sättigungsgebiet wegen des
konstanten Erregerflusses ein ähnliches Verhalten wie der Nebenschlussmotor haben muss. Das bedeutet,
dass mit zunehmender Belastung, im Sättigungsgebiet die Drehzahl nur wenig abfällt und das
Drehmoment näherungsweise proportional mit dem Strom zunimmt. Deshalb muss der
Reihenschlussmotor unterhalb von Sättigung betrieben werden, wenn wir ein anderes Verhalten erwarten.
Abb. 3.4
Abb. 3.5

Unterhalb des Sättigungsbereichs ist der Erregerfluss dem Belastungsstrom proportional.
(3.11)
ist eine Maschinenkonstante und wird ähnlich wie die Faktoren und aus Abschnitt 2 durch den
konstruktiven Aufbau und die magnetischen Eigenschaften des verwendeten Materials bestimmt.
(3.11) eingesetzt in (3.2) ergibt:
(3.12)
Hier ist I der Ankerstrom und eine neu eingeführte Maschinenkonstante.
Damit können wir eine Beziehung zwischen Drehmoment und Laststrom angeben.
(3.13)
In Abb. 3.6 ist auch eine Abhängigkeit der Drehzahl vom Strom eingezeichnet, was später in (3.16)
hergeleitet wird.
Wir betrachten außerdem das Drehmoment-Drehzahl-Verhalten:
(3.14)
Mit (3.12)
(3.15)
Wir Lösen (3.15) nach n auf:
(3.16)
Und durch Ersetzen des Stromes aus (3.13) folgt
Abb. 3.6
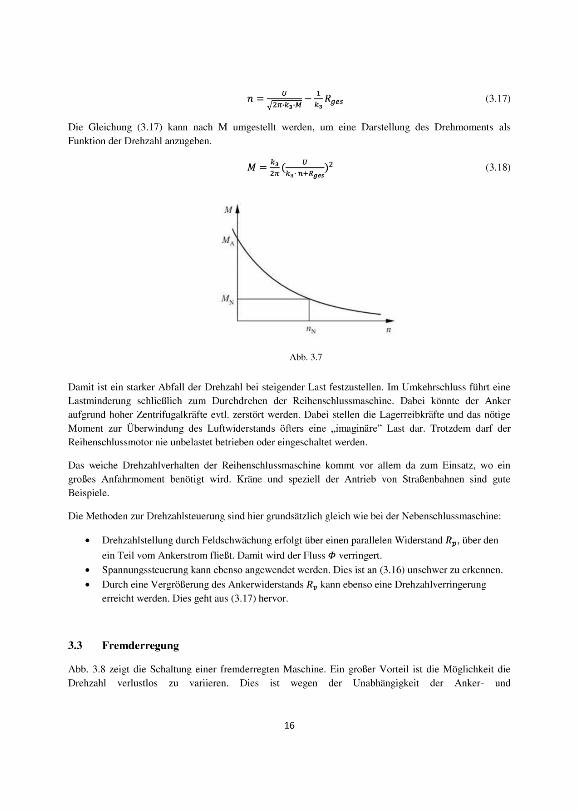
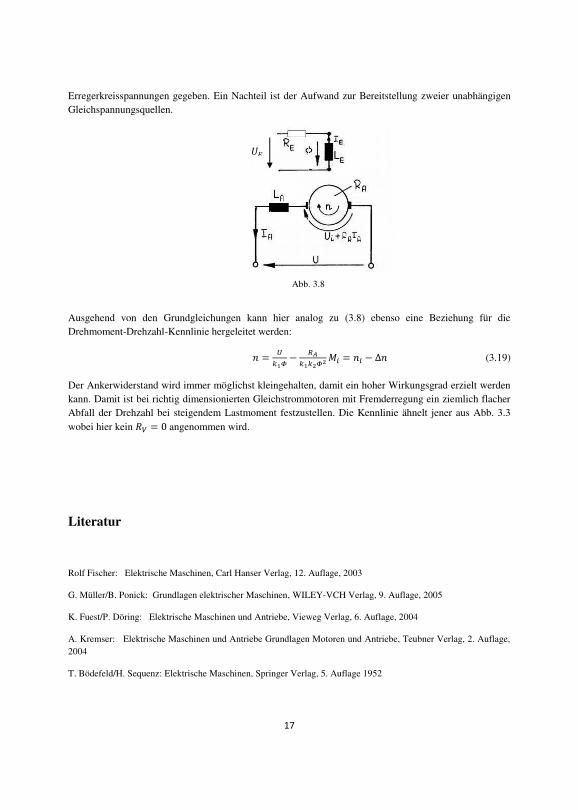
Erregerkreisspannungen gegeben. Ein Nachteil ist der Aufwand zur Bereitstellung zweier unabhängigen
Gleichspannungsquellen.
Ausgehend von den Grundgleichungen kann hier analog zu (3.8) ebenso eine Beziehung für die
Drehmoment-Drehzahl-Kennlinie hergeleitet werden:
(3.19)
Der Ankerwiderstand wird immer möglichst kleingehalten, damit ein hoher Wirkungsgrad erzielt werden
kann. Damit ist bei richtig dimensionierten Gleichstrommotoren mit Fremderregung ein ziemlich flacher
Abfall der Drehzahl bei steigendem Lastmoment festzustellen. Die Kennlinie ähnelt jener aus Abb. 3.3
wobei hier kein angenommen wird.
Literatur
Rolf Fischer: Elektrische Maschinen, Carl Hanser Verlag, 12. Auflage, 2003
G. Müller/B. Ponick: Grundlagen elektrischer Maschinen, WILEY-VCH Verlag, 9. Auflage, 2005
K. Fuest/P. Döring: Elektrische Maschinen und Antriebe, Vieweg Verlag, 6. Auflage, 2004
A. Kremser: Elektrische Maschinen und Antriebe Grundlagen Motoren und Antriebe, Teubner Verlag, 2. Auflage,
2004
T. Bödefeld/H. Sequenz: Elektrische Maschinen, Springer Verlag, 5. Auflage 1952
Abb. 3.8
Vorbereitende Aufgaben
1. Gegeben sei ein Nebenschlussmotor mit folgenden Daten:
Leistung = 3,2 kW
Drehzahl n = 1450
Ankerwicklungswiderstand: = 1,2 Ω
Erregerwicklungswiderstand: = 165 Ω
Nennstrom I = 17 A
Nennspannung U = 220 V
a) Der Motor wird mit einem Moment so belastet, dass der genannte Nennstrom fließt.
Dabei stellt sich die angegebene Drehzahl ein. Berechnen Sie die Anker- und
Erregerströme. In der Ankerwicklung wird eine Spannung induziert. Wie groß ist
diese? (es existieren hier keine Vorwiderstände in Erreger- oder Ankerkreis).
b) Nun wird der Motor derart belastet, dass nur der halbe Nennstrom fließt. Berechnen Sie
die Anker- und Erregerströme erneut. Bestimmen Sie die sich bei dieser Belastung
einstellende Drehzahl. Um wie viel Prozent ist hier die Drehzahl gestiegen?
Kommentieren Sie Ihr Ergebnis!
c) Berechnen Sie den Wirkungsgrad des Motors als Verhältnis der abgegebenen zur
aufgenommenen Leistung.
2. Gegeben sei ein Reihenschlussmotor mit folgenden Daten:
Leistung = 75 kW
Drehzahl n = 970
Ankerwicklungswiderstand: = 20 mΩ
Erregerwicklungswiderstand: = 8,6 mΩ
Nennstrom I = 380 A
Nennspannung U = 220 V
Wir nehmen an, dass der Motor bei Strömen kleiner als der Nennstrom unterhalb des
Sättigungsbereichs und bei größeren Strömen oberhalb davon arbeitet.
a) Bestimmen Sie Drehzahl und Drehmoment bei einer Belastung, die einen halben Fluss
des Nennstroms hervorruft.
b) Bei einer kurzzeitigen Überlastung des Motors soll der 1,5 fache Nennstrom fließen. Wie
groß sind Drehzahl und Drehmoment? Kommentieren Sie Ihre Ergebnisse!
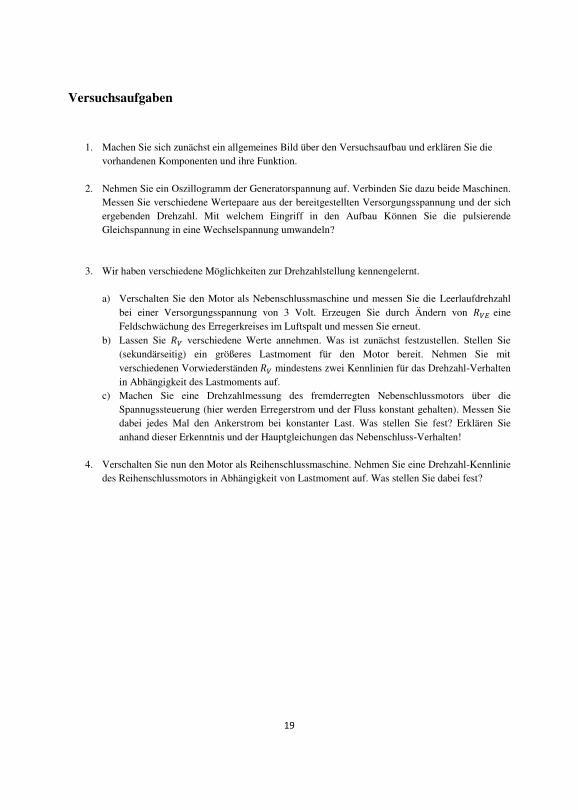
Versuchsaufgaben
1. Machen Sie sich zunächst ein allgemeines Bild über den Versuchsaufbau und erklären Sie die
vorhandenen Komponenten und ihre Funktion.
2. Nehmen Sie ein Oszillogramm der Generatorspannung auf. Verbinden Sie dazu beide Maschinen.
Messen Sie verschiedene Wertepaare aus der bereitgestellten Versorgungsspannung und der sich
ergebenden Drehzahl. Mit welchem Eingriff in den Aufbau Können Sie die pulsierende
Gleichspannung in eine Wechselspannung umwandeln?
3. Wir haben verschiedene Möglichkeiten zur Drehzahlstellung kennengelernt.
a) Verschalten Sie den Motor als Nebenschlussmaschine und messen Sie die Leerlaufdrehzahl
bei einer Versorgungsspannung von 3 Volt. Erzeugen Sie durch Ändern von eine
Feldschwächung des Erregerkreises im Luftspalt und messen Sie erneut.
b) Lassen Sie verschiedene Werte annehmen. Was ist zunächst festzustellen. Stellen Sie
(sekundärseitig) ein größeres Lastmoment für den Motor bereit. Nehmen Sie mit
verschiedenen Vorwiederständen mindestens zwei Kennlinien für das Drehzahl-Verhalten
in Abhängigkeit des Lastmoments auf.
c) Machen Sie eine Drehzahlmessung des fremderregten Nebenschlussmotors über die
Spannugssteuerung (hier werden Erregerstrom und der Fluss konstant gehalten). Messen Sie
dabei jedes Mal den Ankerstrom bei konstanter Last. Was stellen Sie fest? Erklären Sie
anhand dieser Erkenntnis und der Hauptgleichungen das Nebenschluss-Verhalten!
4. Verschalten Sie nun den Motor als Reihenschlussmaschine. Nehmen Sie eine Drehzahl-Kennlinie
des Reihenschlussmotors in Abhängigkeit von Lastmoment auf. Was stellen Sie dabei fest?
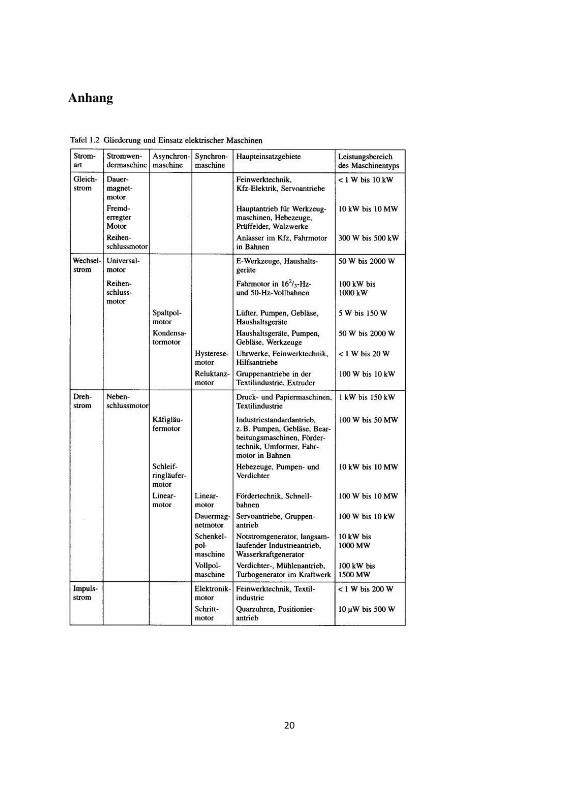
Anhang
Versuch 6
Transiente Vorgange
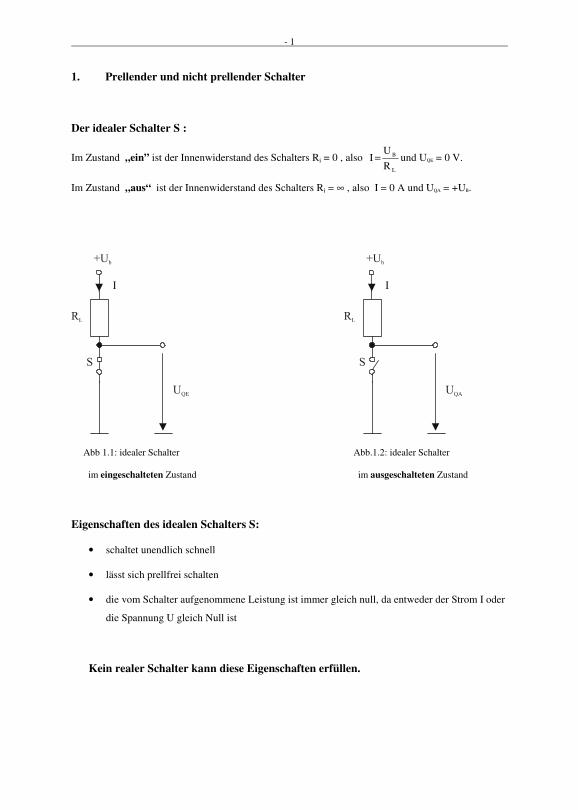
- 1
1. Prellender und nicht prellender Schalter
Der idealer Schalter S :
Im Zustand „ein” ist der Innenwiderstand des Schalters Ri = 0 , also L
B
R
UI = und UQE = 0 V.
Im Zustand „aus“ ist der Innenwiderstand des Schalters Ri = ∞ , also I = 0 A und UQA = +UB.
Abb 1.1: idealer Schalter Abb.1.2: idealer Schalter
im eingeschalteten Zustand im ausgeschalteten Zustand
Eigenschaften des idealen Schalters S:
• schaltet unendlich schnell
• lässt sich prellfrei schalten
• die vom Schalter aufgenommene Leistung ist immer gleich null, da entweder der Strom I oder
die Spannung U gleich Null ist
Kein realer Schalter kann diese Eigenschaften erfüllen.
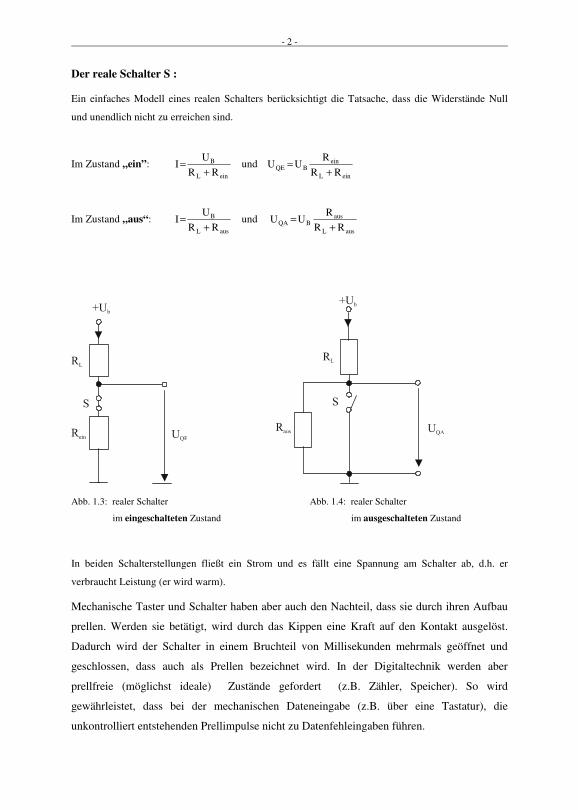
- 2 -
Der reale Schalter S :
Ein einfaches Modell eines realen Schalters berücksichtigt die Tatsache, dass die Widerstände Null
und unendlich nicht zu erreichen sind.
Im Zustand „ein”: einL
B
RR
UI
+= und
einL
einBQE
RR
RUU
+=
Im Zustand „aus“: ausL
B
RR
UI
+= und
ausL
ausBQA
RR
RUU
+=
Abb. 1.3: realer Schalter Abb. 1.4: realer Schalter
im eingeschalteten Zustand im ausgeschalteten Zustand
In beiden Schalterstellungen fließt ein Strom und es fällt eine Spannung am Schalter ab, d.h. er
verbraucht Leistung (er wird warm).
Mechanische Taster und Schalter haben aber auch den Nachteil, dass sie durch ihren Aufbau
prellen. Werden sie betätigt, wird durch das Kippen eine Kraft auf den Kontakt ausgelöst.
Dadurch wird der Schalter in einem Bruchteil von Millisekunden mehrmals geöffnet und
geschlossen, dass auch als Prellen bezeichnet wird. In der Digitaltechnik werden aber
prellfreie (möglichst ideale) Zustände gefordert (z.B. Zähler, Speicher). So wird
gewährleistet, dass bei der mechanischen Dateneingabe (z.B. über eine Tastatur), die
unkontrolliert entstehenden Prellimpulse nicht zu Datenfehleingaben führen.
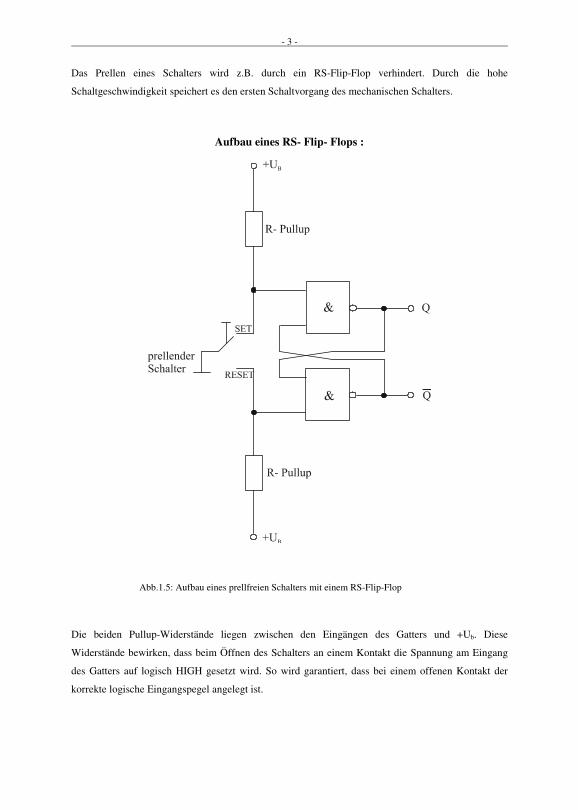
- 3 -
Das Prellen eines Schalters wird z.B. durch ein RS-Flip-Flop verhindert. Durch die hohe
Schaltgeschwindigkeit speichert es den ersten Schaltvorgang des mechanischen Schalters.
Aufbau eines RS- Flip- Flops :
Abb.1.5: Aufbau eines prellfreien Schalters mit einem RS-Flip-Flop
Die beiden Pullup-Widerstände liegen zwischen den Eingängen des Gatters und +Ub. Diese
Widerstände bewirken, dass beim Öffnen des Schalters an einem Kontakt die Spannung am Eingang
des Gatters auf logisch HIGH gesetzt wird. So wird garantiert, dass bei einem offenen Kontakt der
korrekte logische Eingangspegel angelegt ist.
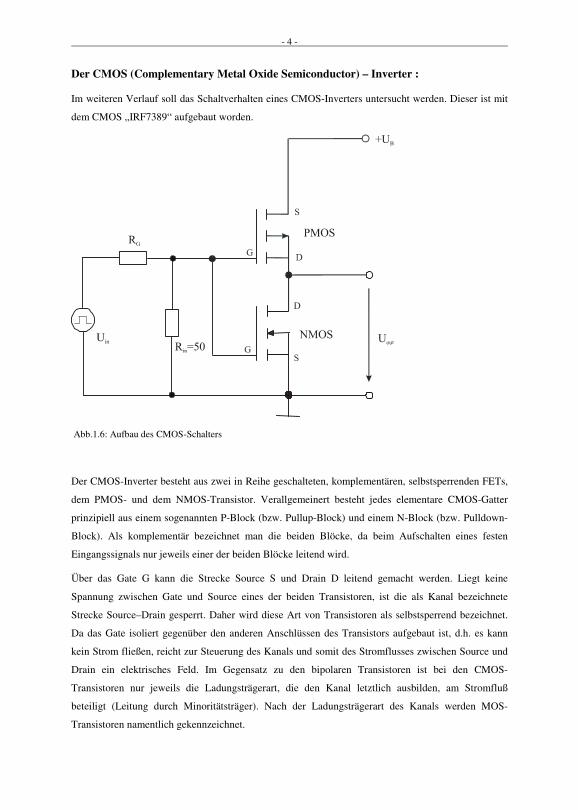
- 4 -
Der CMOS (Complementary Metal Oxide Semiconductor) – Inverter :
Im weiteren Verlauf soll das Schaltverhalten eines CMOS-Inverters untersucht werden. Dieser ist mit
dem CMOS „IRF7389“ aufgebaut worden.
Abb.1.6: Aufbau des CMOS-Schalters
Der CMOS-Inverter besteht aus zwei in Reihe geschalteten, komplementären, selbstsperrenden FETs,
dem PMOS- und dem NMOS-Transistor. Verallgemeinert besteht jedes elementare CMOS-Gatter
prinzipiell aus einem sogenannten P-Block (bzw. Pullup-Block) und einem N-Block (bzw. Pulldown-
Block). Als komplementär bezeichnet man die beiden Blöcke, da beim Aufschalten eines festen
Eingangssignals nur jeweils einer der beiden Blöcke leitend wird.
Über das Gate G kann die Strecke Source S und Drain D leitend gemacht werden. Liegt keine
Spannung zwischen Gate und Source eines der beiden Transistoren, ist die als Kanal bezeichnete
Strecke Source–Drain gesperrt. Daher wird diese Art von Transistoren als selbstsperrend bezeichnet.
Da das Gate isoliert gegenüber den anderen Anschlüssen des Transistors aufgebaut ist, d.h. es kann
kein Strom fließen, reicht zur Steuerung des Kanals und somit des Stromflusses zwischen Source und
Drain ein elektrisches Feld. Im Gegensatz zu den bipolaren Transistoren ist bei den CMOS-
Transistoren nur jeweils die Ladungsträgerart, die den Kanal letztlich ausbilden, am Stromfluß
beteiligt (Leitung durch Minoritätsträger). Nach der Ladungsträgerart des Kanals werden MOS-
Transistoren namentlich gekennzeichnet.

- 5 -
Wird an den Eingang des PMOS-Transistors logisch LOW gesetzt, so ist die Spannung Ugs negativ
und er wird leitend. Der NMOS-Transistor sperrt und daher wird der Ausgang auf logisch HIGH
gesetzt. Liegt am Eingang die volle Spannung Uin,, so wird der NMOS-Transistor leitend, und der
PMOS sperrt, daher wird der Ausgang auf logisch LOW gesetzt.
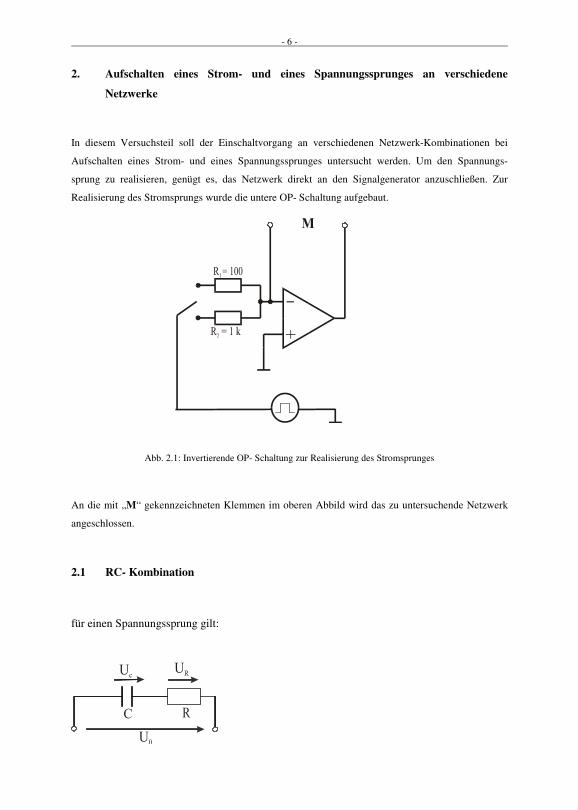
- 6 -
2. Aufschalten eines Strom- und eines Spannungssprunges an verschiedene
Netzwerke
In diesem Versuchsteil soll der Einschaltvorgang an verschiedenen Netzwerk-Kombinationen bei
Aufschalten eines Strom- und eines Spannungssprunges untersucht werden. Um den Spannungs-
sprung zu realisieren, genügt es, das Netzwerk direkt an den Signalgenerator anzuschließen. Zur
Realisierung des Stromsprungs wurde die untere OP- Schaltung aufgebaut.
Abb. 2.1: Invertierende OP- Schaltung zur Realisierung des Stromsprunges
An die mit „M“ gekennzeichneten Klemmen im oberen Abbild wird das zu untersuchende Netzwerk
angeschlossen.
2.1 RC- Kombination
für einen Spannungssprung gilt:

- 7 -
Für die Spannung über der Kapazität gilt :
∫⋅= dt)t(IC
1)t(UC
aus der Maschengleichung folgt :
0CR UUU =+
∫ =+⋅ 0Udt)t(IC
1)t(IR
Unter Anwendung der Laplace-Transformation :
s
U)]t(I[L
Cs
1)]t(I[LR 0=⋅
⋅+⋅
⋅+⋅
=
Cs
1Rs
U)]t(I[L 0
C
1Rs
U)]t(I[L 0
+⋅
=
ergibt sich für den Strom :
−
⋅=τ
texp
R
U)t(I 0
und für die Spannung :
R0C UU)t(U −=
)t(IRU)t(U 0C ⋅−=
−
⋅⋅−=τ
texp
R
URU)t(U 0
0C
−
−⋅=τ
texp1U)t(U 0C
−
τ
texp CR ⋅=τ
CR
1s
1
⋅+
mit
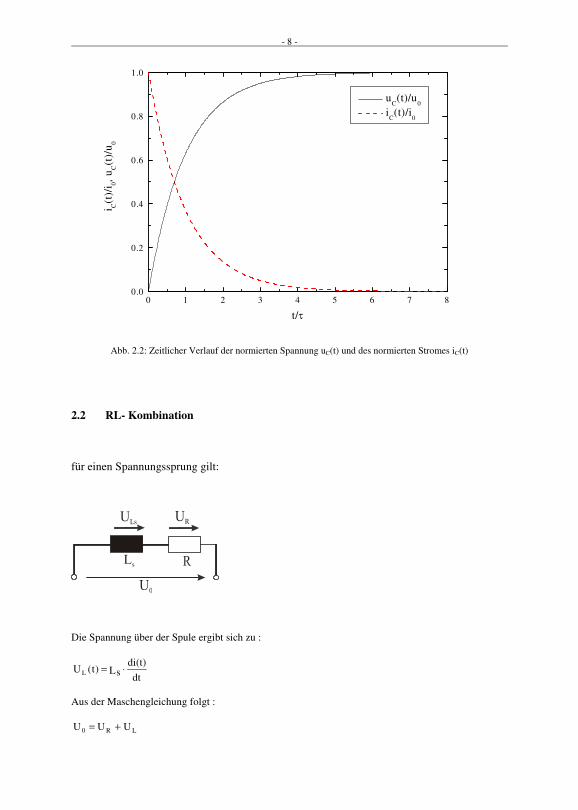
- 8 -
0 1 2 3 4 5 6 7 80.0
0.2
0.4
0.6
0.8
1.0
uC(t)/u
0
iC(t)/i
0
i C(t
)/i 0
, u
C(t
)/u
0
t/τ
Abb. 2.2: Zeitlicher Verlauf der normierten Spannung uC(t) und des normierten Stromes iC(t)
2.2 RL- Kombination
für einen Spannungssprung gilt:
Die Spannung über der Spule ergibt sich zu :
dt
di(t)Ls)t(U L ⋅=
Aus der Maschengleichung folgt :
LR0 UUU +=
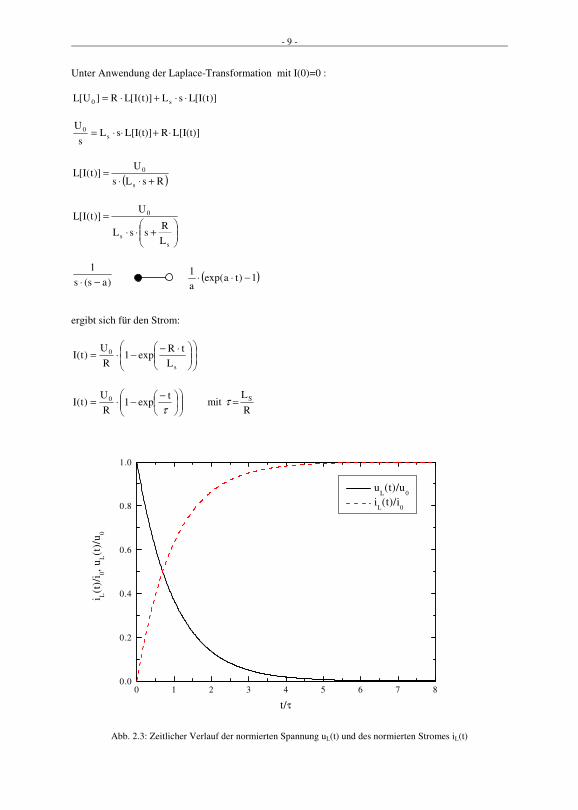
- 9 -
Unter Anwendung der Laplace-Transformation mit I(0)=0 :
)]t(I[LsL)]t(I[LR]U[L s0 ⋅⋅+⋅=
L[I(t)]RL[I(t)]sLs
Us
0 ⋅+⋅⋅=
( )RsLs
U)]t(I[L
s
0
+⋅⋅=
+⋅⋅
=
s
s
0
L
RssL
U)]t(I[L
ergibt sich für den Strom:
⋅−−⋅=
s
0
L
tRexp1
R
U)t(I
−
−⋅=τ
texp1
R
U)t(I 0 mit
R
LS=τ
0 1 2 3 4 5 6 7 80.0
0.2
0.4
0.6
0.8
1.0
uL(t)/u
0
iL(t)/i
0
i L(t
)/i 0
, u
L(t
)/u
0
t/τ
Abb. 2.3: Zeitlicher Verlauf der normierten Spannung uL(t) und des normierten Stromes iL(t)
( )1)taexp(a
1−⋅⋅)as(s
1
−⋅
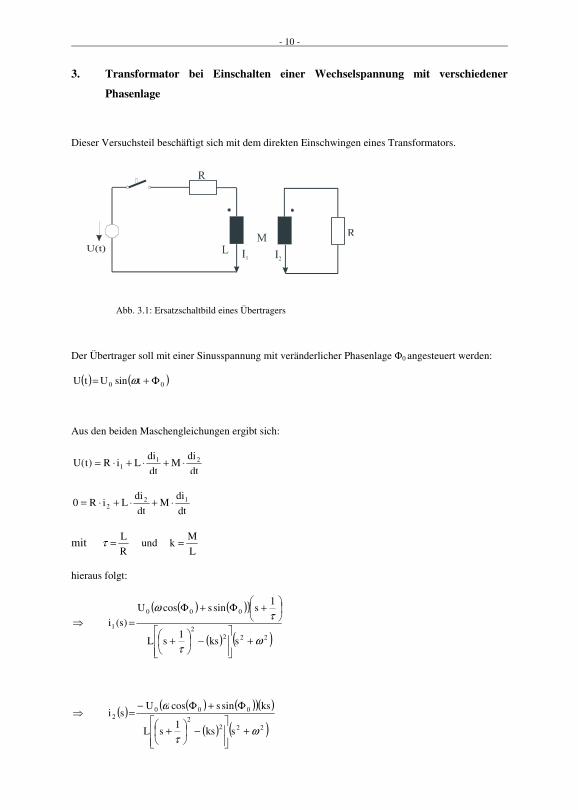
- 10 -
3. Transformator bei Einschalten einer Wechselspannung mit verschiedener
Phasenlage
Dieser Versuchsteil beschäftigt sich mit dem direkten Einschwingen eines Transformators.
Abb. 3.1: Ersatzschaltbild eines Übertragers
Der Übertrager soll mit einer Sinusspannung mit veränderlicher Phasenlage Φ0 angesteuert werden:
( ) ( )00 tsinUtU Φ+= ω
Aus den beiden Maschengleichungen ergibt sich:
dt
diM
dt
diLiR)t(U 21
1 ⋅+⋅+⋅=
dt
diM
dt
diLiR0 12
2 ⋅+⋅+⋅=
mit R
L=τ und
L
Mk =
hieraus folgt:
( ) ( )( )
( ) ( )2222
000
1
sks1
sL
1ssinscosU
)s(i
ωτ
τω
+
−
+
+Φ+Φ
=⇒
( )( ) ( )( )( )
( ) ( )2222
0002
sks1
sL
kssinscosUsi
ωτ
ω
+
−
+
Φ+Φ−=⇒
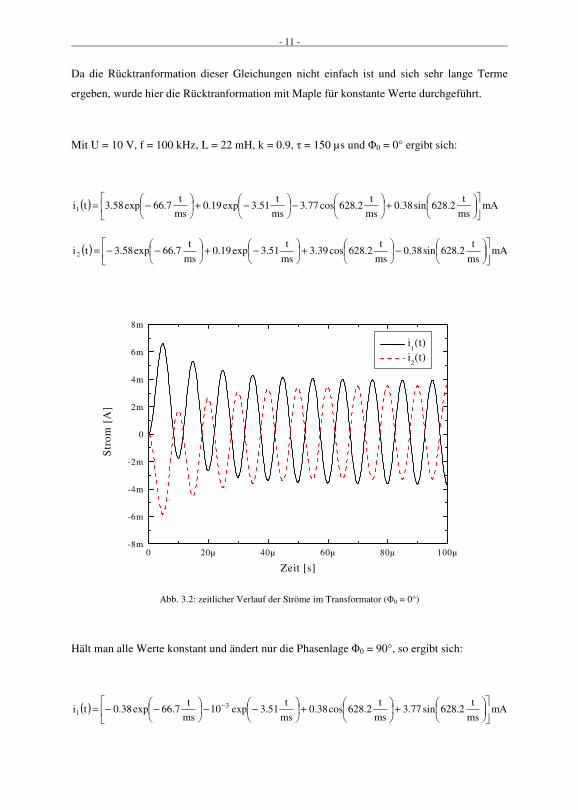
- 11 -
Da die Rücktranformation dieser Gleichungen nicht einfach ist und sich sehr lange Terme
ergeben, wurde hier die Rücktranformation mit Maple für konstante Werte durchgeführt.
Mit U = 10 V, f = 100 kHz, L = 22 mH, k = 0.9, τ = 150 µs und Φ0 = 0° ergibt sich:
( ) mAms
t2.628sin38.0
ms
t2.628cos77.3
ms
t51.3exp19.0
ms
t7.66exp58.3ti1
+
−
−+
−=
( ) mAms
t2.628sin38.0
ms
t2.628cos39.3
ms
t51.3exp19.0
ms
t7.66exp58.3ti2
−
+
−+
−−=
0 20µ 40µ 60µ 80µ 100µ-8m
-6m
-4m
-2m
0
2m
4m
6m
8m
Str
om
[A
]
Zeit [s]
i1(t)
i2(t)
Abb. 3.2: zeitlicher Verlauf der Ströme im Transformator (Φ0 = 0°)
Hält man alle Werte konstant und ändert nur die Phasenlage Φ0 = 90°, so ergibt sich:
( ) mAms
t2.628sin77.3
ms
t2.628cos38.0
ms
t51.3exp10
ms
t7.66exp38.0ti
31
+
+
−−
−−= −
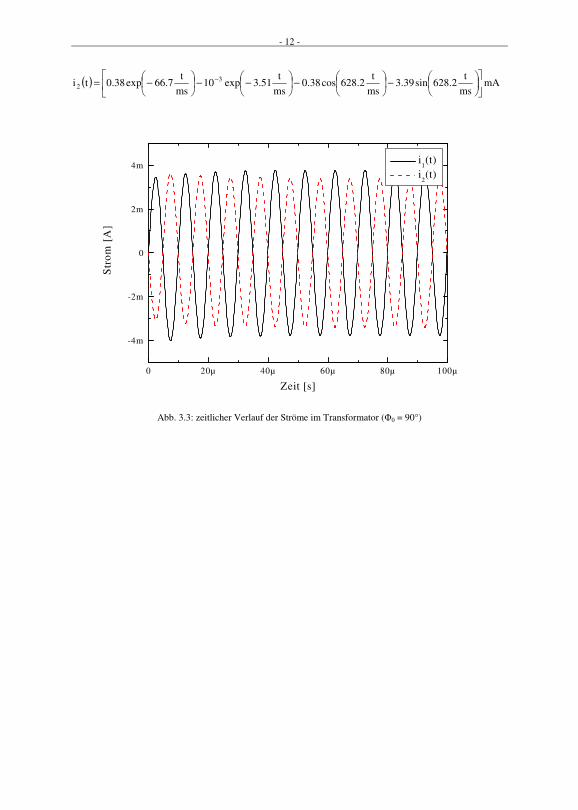
- 12 -
( ) mAms
t2.628sin39.3
ms
t2.628cos38.0
ms
t51.3exp10
ms
t7.66exp38.0ti
32
−
−
−−
−= −
0 20µ 40µ 60µ 80µ 100µ
-4m
-2m
0
2m
4m i
1(t)
i2(t)
Str
om
[A
]
Zeit [s]
Abb. 3.3: zeitlicher Verlauf der Ströme im Transformator (Φ0 = 90°)
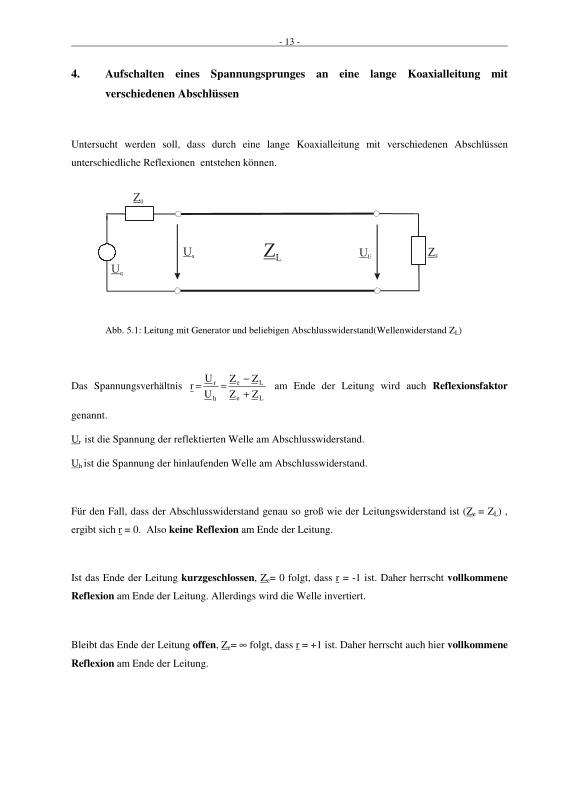
- 13 -
4. Aufschalten eines Spannungsprunges an eine lange Koaxialleitung mit
verschiedenen Abschlüssen
Untersucht werden soll, dass durch eine lange Koaxialleitung mit verschiedenen Abschlüssen
unterschiedliche Reflexionen entstehen können.
Abb. 5.1: Leitung mit Generator und beliebigen Abschlusswiderstand(Wellenwiderstand ZL)
Das Spannungsverhältnis Le
Le
h
r
ZZ
ZZ
U
Ur
+
−== am Ende der Leitung wird auch Reflexionsfaktor
genannt.
Ur ist die Spannung der reflektierten Welle am Abschlusswiderstand.
Uh ist die Spannung der hinlaufenden Welle am Abschlusswiderstand.
Für den Fall, dass der Abschlusswiderstand genau so groß wie der Leitungswiderstand ist (Ze = ZL) ,
ergibt sich r = 0. Also keine Reflexion am Ende der Leitung.
Ist das Ende der Leitung kurzgeschlossen, Ze= 0 folgt, dass r = -1 ist. Daher herrscht vollkommene
Reflexion am Ende der Leitung. Allerdings wird die Welle invertiert.
Bleibt das Ende der Leitung offen, Ze= ∞ folgt, dass r = +1 ist. Daher herrscht auch hier vollkommene
Reflexion am Ende der Leitung.
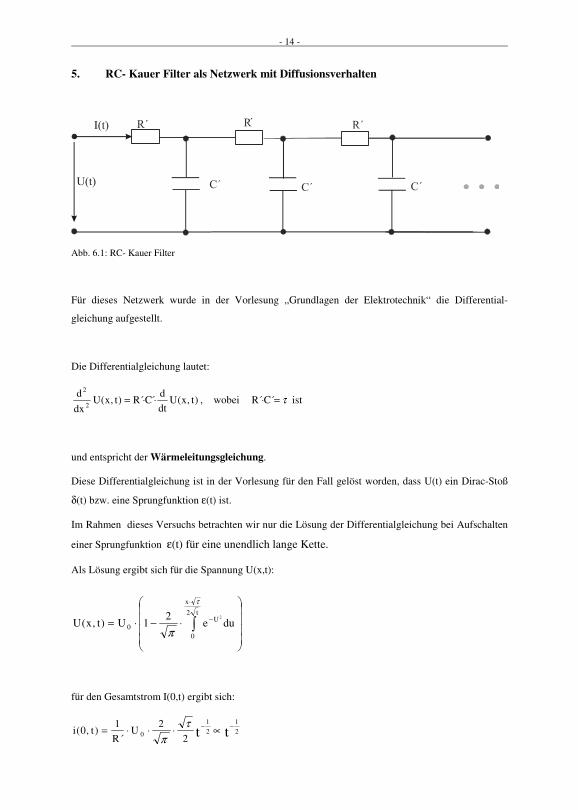
- 14 -
5. RC- Kauer Filter als Netzwerk mit Diffusionsverhalten
Abb. 6.1: RC- Kauer Filter
Für dieses Netzwerk wurde in der Vorlesung „Grundlagen der Elektrotechnik“ die Differential-
gleichung aufgestellt.
Die Differentialgleichung lautet:
)t,x(Udt
d´C´R)t,x(U
dx
d2
2
⋅⋅= , wobei τ=⋅C´R´ ist
und entspricht der Wärmeleitungsgleichung.
Diese Differentialgleichung ist in der Vorlesung für den Fall gelöst worden, dass U(t) ein Dirac-Stoß
δ(t) bzw. eine Sprungfunktion ε(t) ist.
Im Rahmen dieses Versuchs betrachten wir nur die Lösung der Differentialgleichung bei Aufschalten
einer Sprungfunktion ε(t) für eine unendlich lange Kette.
Als Lösung ergibt sich für die Spannung U(x,t):
für den Gesamtstrom I(0,t) ergibt sich:
tt 2
1
2
1
02
2U
´R
1)t,0(i
−−∝⋅⋅⋅=
τ
π
⋅−⋅= ∫
⋅
−t2
x
0
U0 due
21U)t,x(U
2
τ
π

- 15 -
für den Fall, dass diese RC- Kombination unendlich lang ist, ist der Gesamtstrom I(0,t) also
proportional zu t-0.5
.
In diesem Versuch sind zur Modellierung 7 diskrete RC-Glieder aufgebaut worden.
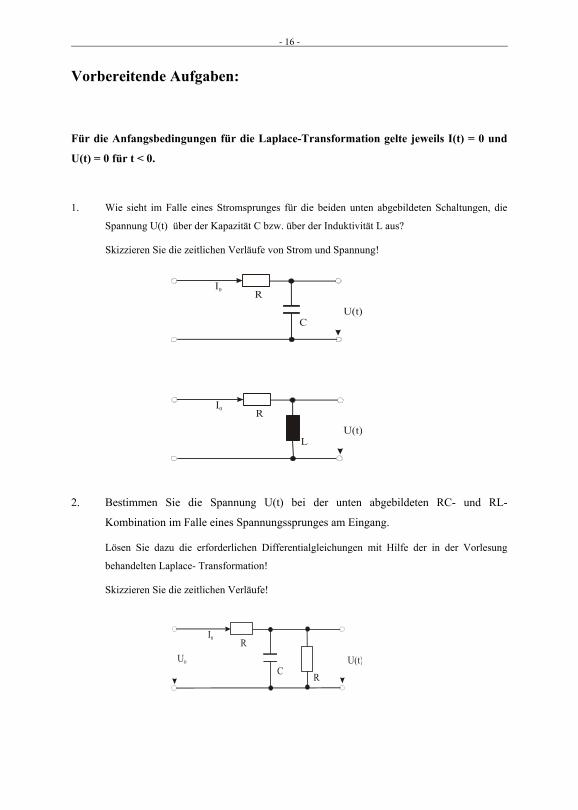
- 16 -
Vorbereitende Aufgaben:
Für die Anfangsbedingungen für die Laplace-Transformation gelte jeweils I(t) = 0 und
U(t) = 0 für t < 0.
1. Wie sieht im Falle eines Stromsprunges für die beiden unten abgebildeten Schaltungen, die
Spannung U(t) über der Kapazität C bzw. über der Induktivität L aus?
Skizzieren Sie die zeitlichen Verläufe von Strom und Spannung!
2. Bestimmen Sie die Spannung U(t) bei der unten abgebildeten RC- und RL-
Kombination im Falle eines Spannungssprunges am Eingang.
Lösen Sie dazu die erforderlichen Differentialgleichungen mit Hilfe der in der Vorlesung
behandelten Laplace- Transformation!
Skizzieren Sie die zeitlichen Verläufe!
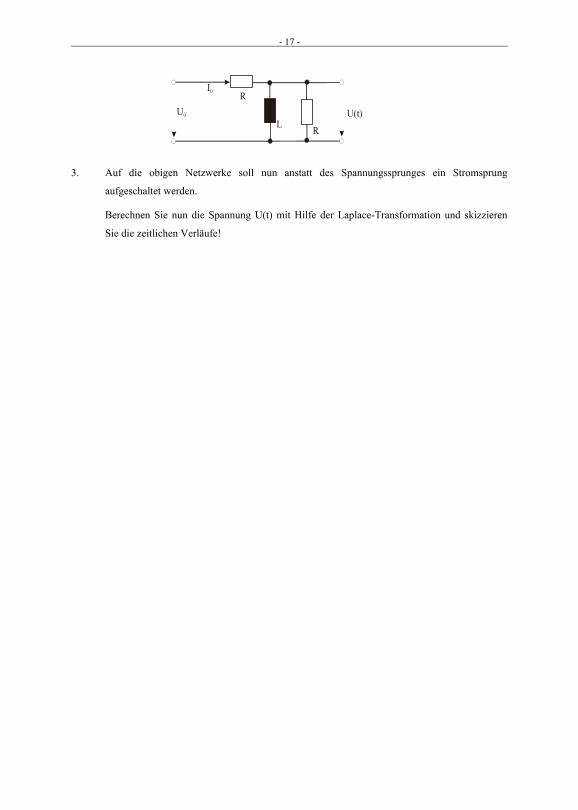
- 17 -
3. Auf die obigen Netzwerke soll nun anstatt des Spannungssprunges ein Stromsprung
aufgeschaltet werden.
Berechnen Sie nun die Spannung U(t) mit Hilfe der Laplace-Transformation und skizzieren
Sie die zeitlichen Verläufe!
- 18 -
Versuchsdurchführung :
1. Prellender und nicht prellender Schalter
Überprüfen Sie die am Messplatz befindlichen mechanischen Schalter, das RS-Flip-Flop und
den CMOS-Schalter auf ihr Prellverhalten. Stellen Sie hierzu das Oszilloskop auf einen
Zeitbereich von 50µs ein und nehmen Sie jeweils den Einschaltvorgang auf.
Was ist hierbei zu erkennen?
2. Aufschalten eines Strom- bzw. Spannungssprunges an verschiedene Netzwerke
Schalten Sie an verschiedene Netzwerke jeweils einen Spannung- und einen Stromsprung und
nehmen Sie den zeitlichen Verlauf der Spannung über der Kapazität bzw. der Induktivität auf.
Legen Sie hierzu ein Rechtecksignal mit 5V Amplitude und einer Frequenz von 2kHz an.
Beim Stromsprung ist die Stromquelle mit dem 1k Widerstand zu betreiben. Das
Oszilloskop ist auf einen Zeitbereich von 2ms einzustellen.
a) RC-Kombination
b) RC-Kombination mit Widerstand parallel zu C
c) RL-Kombination
d) RL-Kombination mit Widerstand parallel zu L
e) Transformator
Ergibt sich ein von Ihnen erwarteter Verlauf für die Spannung?
3. Einschwingverhalten eines Transformators bei Einschalten einer
Wechselspannung verschiedener Phasenlage
Überprüfen Sie den direkten Einschwingvorgang an einem Transformator bei der Ansteuerung
einer Wechselspannung mit verschiedenen Phasenlagen. Nehmen Sie hierzu den zeitlichen
Verlauf des Stromes auf der Sekundärseite bei Abschluss dieser mit einem Widerstand auf.
Als Signal ist das Arbiträrsignal des Generators zu wählen, welches mit dem PC programmiert
werden kann. Die Frequenz beträgt 30kHz und die Oszilloskopeinstellung 10µs. Der
Signalgenerator wird mit dem Flip-Flop getriggert. Die Phasenlage beträgt = 0°, = 45° und
= 90°
- 19 -
4. Zeitlicher Verlauf der magnetischen Feldstärke in einem leitenden Zylinder bei
Aufschalten eines Stromsprunges
Bei einem Aluminiumzylinder soll der zeitliche Verlauf der magnetischen Feldstärke H(r,t) in
Abhängigkeit des Abstandes vom Mittelpunkt des Zylinders aufgenommen werden. Hierzu
wird der Zylinder mittels einer Transistorschaltung von einem Rechteckstrom durchflossen.
Hierzu wird der Transistor vom Signalgenerator mit einem Rechtecksignal der Höhe 5V und
mit dem Offset 2,5V angesteuert. Die Frequenz beträgt 10Hz und das Oszilloskop wird auf
20ms eingestellt. Kanal 2, mit welchem das Ausgangssignal eine KMZ zur
Magnetfeldmessung ausgelesen wird, muss auf AC-Kopplung eingestellt werden.
Wie ändert sich der zeitliche Verlauf und wie ist dieser Verlauf zu erklären (Skineffekt)?
5. Aufschalten eines Spannungssprunges auf eine lange Koaxialleitung mit
verschiedenen Abschlüssen
Schalten Sie dazu auf die am Messplatz befindliche Koaxialleitung einen Spannungssprung.
Die Leitung soll hierzu am Ende unterschiedlich abgeschlossen werden (R = 0 , R = 50
und R = ). Ein Rechtecksignal mit 200kHz und 5V Amplitude wird verwendet. Das
Oszilloskop ist auf 500ns einzustellen.
Bei welchen Abschlüssen entsteht eine reflektierte Welle?
Berechnen Sie die Länge des Koaxialkabels, wenn die Ausbreitungsgeschwindigkeit der Welle
2/3 der Lichtgeschwindigkeit beträgt.
6. RC-Kauer Filter als Netzwerk mit Diffusionsverhalten
Messen Sie die einzelnen Ströme und Spannungen an einem diskret mit 7 Gliedern
aufgebauten Netzwerk. Ein Rechtecksignal der Frequenz 10Hz und der Amplitude 5V wird
verwendet. Das Oszilloskop wird auf 10ms eingestellt.
Wie ist der zeitliche Verlauf der Ströme und Spannungen zu erklären?

- 20 -
Originalfunktion f(t) Laplace-Transformation fb(s)
( )tδ 1
( )at −δ ase−
1 s
1
t 2s
1
2t2
1
3s
1
3t!3
1
4s
1
nt!n
1
1ns
1+
(n > 0, ganzzahlig)
ate as
1
−
a
t
ea
1 −
as1
1
+
( )1ea
1 at − ( )ass
1
−
a
t
e1−
− ( )as1s
1
+
atte ( )2
as
1
−
a
t
2te
a
1 −
( )2
as1
1
+
( )at
1n
e!1n
t
−
−
( )n
as
1
− (n > 0, ganzzahlig)
ba
ee btat
−
−
( )( )bsas
1
−−
ba
ee b
t
a
t
−
−−−
( )( )bs1as1
1
++