Embed Size (px)
Citation preview

Fachgebiet FahrzeugtechnikTechnische Universität Darmstadt | Prof. Dr. rer. nat. Hermann Winner
Jahresbericht2009/2010
Vorwort
Sehr geehrte Leserinnen und Leser,
in diesem Jahresbericht berichten wir Ihnen über die Entwick-
lungen bei FZD und den aktuellen Stand von Forschung und
Lehre im Zeitraum 2009 bis Mai 2010. In diesem Zeitraum hat
sich die für die Automobilindustrie so einschneidende Wirtschaftskrise auch bis zu uns
durchgeschlagen. Die industrielle Drittmittelforschung erlitt einen erheblichen Rück-
schlag, was sich deutlich auf unsere Investitionskraft ausgewirkt hat. Dies war jedoch
kein Grund für einen Stillstand. Wie in diesem Bericht weiter hinten zu lesen ist,
haben wir einige neue Entwicklungen angestoßen oder auch andere erfolgreich abge-
schlossen. Zu letzteren zählt beispielsweise das Handbuch Fahrerassistenzsysteme (Hrsg.: Winner, Hakuli, Wolf), ein Referenzwerk für die umfangreiche Fahrerassis-
tenzsystem-Technik. FZD stellt dabei nicht nur das Herausgeberteam, sondern ist
auch mit insgesamt sieben Mitarbeitern als Beitragsautoren beteiligt.
Gerade unter den wirtschaftlich ungünstigen Bedingungen wird der Zusammenhalt
herausgefordert. Diese Bewährungsprobe haben wir bestens bestanden, weil sich jeder solidarisch um die Sicherung der wirtschaftlichen Zukunft verdient gemacht hat.
So konnten wir vieles abfedern. Auch deshalb gehen wir den nächsten Zeitraum op-
timistisch an.
Ich danke all unseren Projektpartnern für ihre großzügige Unterstützung und schließe
dieses Vorwort mit dem herzlichsten Dank an die Mitarbeiterinnen und Mitarbeiter
für die äußerst engagierte und professionelle Mitarbeit am Erfolgsmodell FZD.
Im Juli 2010
Prof. Dr. rer. nat. Hermann Winner
2
Inhaltsverzeichnis
Vorwort 1
Inhaltsverzeichnis 2
Mitarbeiter 3
Lehre 8
Exkursionen 10
FZD-Seminare 15
Promotionen 17
Veranstaltungen 19
Finanzen 23
Fördernde Institutionen und Kooperationspartner 27
Forschungsprojekte 28
Testfahrzeugprojekt 46
Automotive System Engineering Darmstadt 48
Uni-DAS e.V. 49
Internationale Austauschaktivitäten 50
Tagungsbesuche 53
Vorträge 55
Veröffentlichungen 58
Mitarbeit in Gremien 61
Auszeichnungen 62
Redaktion: Sebastian Geyer
3
Mitarbeiter
Das FZD-Team vor dem roten Zahnrad
Von links nach rechts:
Mathias Haag, Robert Korndörfer, Phil Adams, Alexander Stoff, Sven Müller, Fabian
Regh, Sebastian Geyer, Emir Kutluay, Prof. em. Bert Breuer, Harald Bathke, Prof. Hermann Winner, Florian Füllgrabe, Alexander Reul, Dr. Norbert Fecher, Kai Schrö-
ter, Benedikt Lattke, Rita Delp, Gunther Seipel, Stephan Hakuli, Michael Augustin.
Auf dem Foto sind nicht vertreten:
Nico Dziubek, Dr. Uwe Ernstberger, Stefan Habenicht, Anneliese Hüther, Stefan
Korndörfer, Benjamin Marx, Anke Mehm, Dr. Dietrich Overhoff, Christine Suszka,
Daniel Simmermacher, Anja Stretz, Timo Völkl, Dr. Alois Weidele, Alexander Weitzel.
4
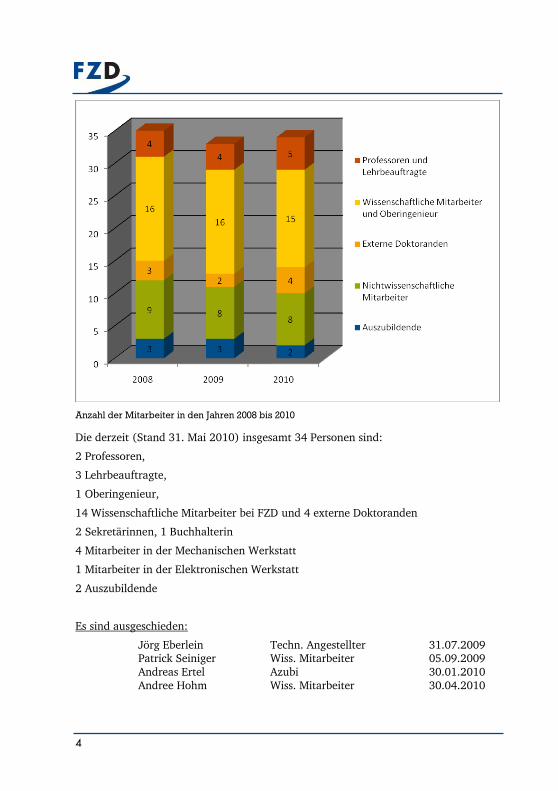
Anzahl der Mitarbeiter in den Jahren 2008 bis 2010
Die derzeit (Stand 31. Mai 2010) insgesamt 34 Personen sind:
2 Professoren,
3 Lehrbeauftragte,
1 Oberingenieur,
14 Wissenschaftliche Mitarbeiter bei FZD und 4 externe Doktoranden
2 Sekretärinnen, 1 Buchhalterin
4 Mitarbeiter in der Mechanischen Werkstatt
1 Mitarbeiter in der Elektronischen Werkstatt
2 Auszubildende
Es sind ausgeschieden:
Jörg Eberlein Techn. Angestellter 31.07.2009 Patrick Seiniger Wiss. Mitarbeiter 05.09.2009
Andreas Ertel Azubi 30.01.2010
Andree Hohm Wiss. Mitarbeiter 30.04.2010
5
Neu bei FZD
Benjamin Marx
Externer Doktorand seit 01.04.2009
2000 Abitur an der Heinrich-Emanuel-Merck-Schule, Darmstadt
2000-2001 Zivildienst bei der ev. Michaelsgemeinde in Darmstadt
2001-2009 Studium des Allgemeinen Maschinenbaus an der TU Darmstadt
Studienarbeit am Fachgebiet Fahrzeugtechnik zur Fahrdynamik
von Motorrädern
Externe Diplomarbeit bei der Daimler AG mit dem Titel „Optimie-
rung vorhandener Auffahrsimulationsziele im Hinblick auf Radar-
echoäquivalenz und Kameratauglichkeit im Vergleich zum Real-
fahrzeug“
Nico Dziubek
Wissenschaftlicher Mitarbeiter seit 01.10.2009
1999 Abitur an der Taunusschule Königstein
1999-2000 Zivildienst beim Amt für Umwelt- und Naturschutz in Kronberg im Taunus
2000-2007 Studium der Elektro- und Informationstechnik an der TU Darmstadt, Schwerpunkt Automatisierungstechnik
Studienarbeit am Institut für Regelungstechnik, Druckschwin-
gungsmodell Common-Rail-Einspritzung
Diplomarbeit am Fachgebiet Fahrzeugtechnik, Fahrzeug- und
Aktormodell für aktive Hinterachslenkung
2007-2009 Entwicklungsingenieur Hardware bei Peiker acustic, Friedrichsdorf,
mobile Kommunikation im Automotive-Bereich
6
Timo Völkl
Externer Doktorand seit 01.01.2010
2002 Abitur am Christoph-Probst-Gymnasium Gilching
2002-2003 Zivildienst beim Malteser Hilfsdienst in Gröbenzell
2003-2009 Studium des Allgemeinen Maschinenwesens an der TU München
Semesterarbeiten am Lehrstuhl für Ergonomie zur Untersuchung
des Fahrerverhaltens und am Lehrstuhl für Fahrzeugtechnik zur
Entwurfsmethodik von Doppelquerlenkerachsen
Diplomarbeit am Lehrstuhl für Fahrzeugtechnik der TU München
zur Vertikaldynamik
2009 MEGmbH, Ingolstadt
Dr. Uwe Ernstberger
Lehrbeauftragter seit 18.01.2010
1977-1982 Studium des Maschinenbaus an der Universität Karlsruhe
1982-1985 Promotion an der Fakultät für Maschinenwesen der Universität Karlsru-
he/Kernforschungszentrum Karlsruhe, Institut für Material- und Festkörper-
forschung
1985-1991 Projektleiter am Standort Stuttgart, McKinsey & Co. Inc.
1991-1992 Hauptabteilungsleiter Unternehmensplanung, Daimler-Benz AG
1993-1996 Bereichsleiter strategische Produktplanung, Daimler-Benz AG
1996-2002 Bereichsleiter Karosserieentwicklung, DaimlerChrysler AG
2002-2003 Direktor Entwicklung Baureihe A- und B-Klasse, DaimlerChrysler AG
seit 2003 Direktor Entwicklung und Programm-Management M-/R-/GL-/GLK-
Klasse, Daimler AG
7
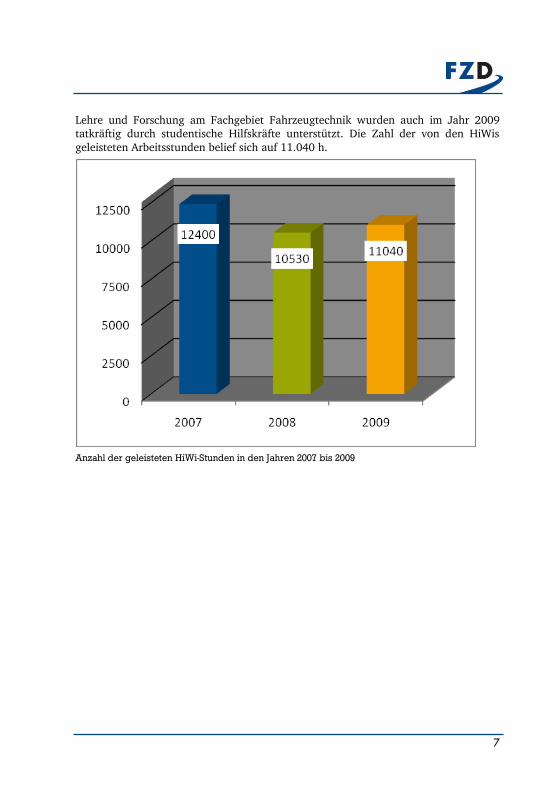
Lehre und Forschung am Fachgebiet Fahrzeugtechnik wurden auch im Jahr 2009
tatkräftig durch studentische Hilfskräfte unterstützt. Die Zahl der von den HiWis
geleisteten Arbeitsstunden belief sich auf 11.040 h.
Anzahl der geleisteten HiWi-Stunden in den Jahren 2007 bis 2009
8
Lehre
Wie schon im Vorjahr ist das studentische Interesse an den von FZD angebotenen
Lehrveranstaltungen ungebrochen, was sich auch in der hohen Zahl der am Fachge-
biet absolvierten Prüfungen widerspiegelt.
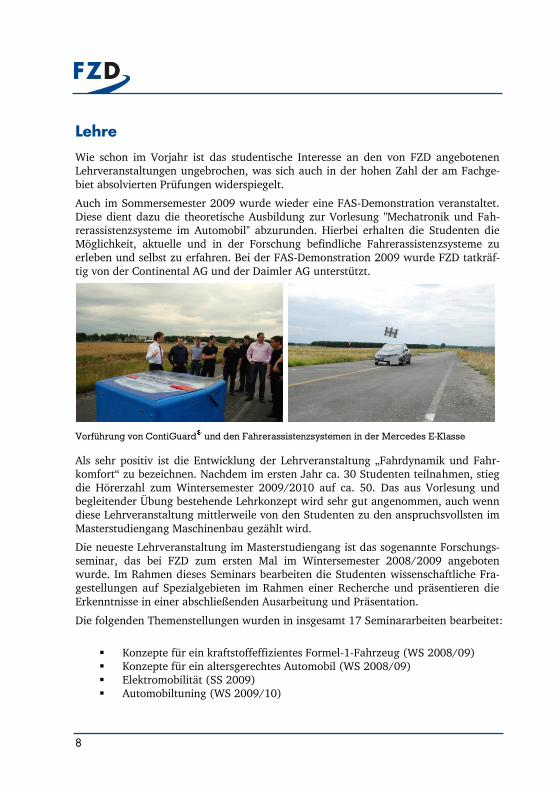
Auch im Sommersemester 2009 wurde wieder eine FAS-Demonstration veranstaltet.
Diese dient dazu die theoretische Ausbildung zur Vorlesung "Mechatronik und Fah-
rerassistenzsysteme im Automobil" abzurunden. Hierbei erhalten die Studenten die
Möglichkeit, aktuelle und in der Forschung befindliche Fahrerassistenzsysteme zu
erleben und selbst zu erfahren. Bei der FAS-Demonstration 2009 wurde FZD tatkräf-
tig von der Continental AG und der Daimler AG unterstützt.
Vorführung von ContiGuard und den Fahrerassistenzsystemen in der Mercedes E-Klasse
Als sehr positiv ist die Entwicklung der Lehrveranstaltung „Fahrdynamik und Fahr-
komfort“ zu bezeichnen. Nachdem im ersten Jahr ca. 30 Studenten teilnahmen, stieg
die Hörerzahl zum Wintersemester 2009/2010 auf ca. 50. Das aus Vorlesung und
begleitender Übung bestehende Lehrkonzept wird sehr gut angenommen, auch wenn
diese Lehrveranstaltung mittlerweile von den Studenten zu den anspruchsvollsten im
Masterstudiengang Maschinenbau gezählt wird.
Die neueste Lehrveranstaltung im Masterstudiengang ist das sogenannte Forschungs-
seminar, das bei FZD zum ersten Mal im Wintersemester 2008/2009 angeboten
wurde. Im Rahmen dieses Seminars bearbeiten die Studenten wissenschaftliche Fra-
gestellungen auf Spezialgebieten im Rahmen einer Recherche und präsentieren die
Erkenntnisse in einer abschließenden Ausarbeitung und Präsentation.
Die folgenden Themenstellungen wurden in insgesamt 17 Seminararbeiten bearbeitet:
Konzepte für ein kraftstoffeffizientes Formel-1-Fahrzeug (WS 2008/09)
Konzepte für ein altersgerechtes Automobil (WS 2008/09)
Elektromobilität (SS 2009)
Automobiltuning (WS 2009/10)
9
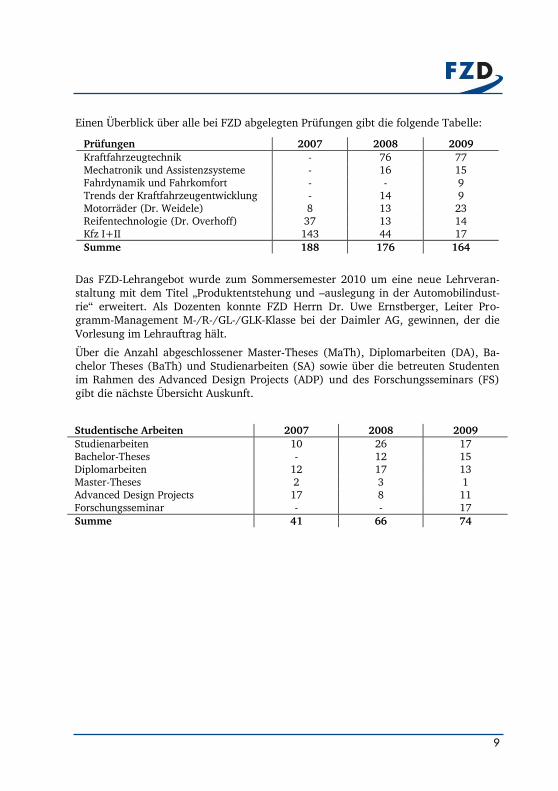
Einen Überblick über alle bei FZD abgelegten Prüfungen gibt die folgende Tabelle:
Prüfungen 2007 2008 2009
Kraftfahrzeugtechnik - 76 77
Mechatronik und Assistenzsysteme - 16 15
Fahrdynamik und Fahrkomfort - - 9
Trends der Kraftfahrzeugentwicklung - 14 9
Motorräder (Dr. Weidele) 8 13 23
Reifentechnologie (Dr. Overhoff) 37 13 14
Kfz I+II 143 44 17
Summe 188 176 164
Das FZD-Lehrangebot wurde zum Sommersemester 2010 um eine neue Lehrveran-
staltung mit dem Titel „Produktentstehung und –auslegung in der Automobilindust-
rie“ erweitert. Als Dozenten konnte FZD Herrn Dr. Uwe Ernstberger, Leiter Pro-
gramm-Management M-/R-/GL-/GLK-Klasse bei der Daimler AG, gewinnen, der die
Vorlesung im Lehrauftrag hält.
Über die Anzahl abgeschlossener Master-Theses (MaTh), Diplomarbeiten (DA), Ba-
chelor Theses (BaTh) und Studienarbeiten (SA) sowie über die betreuten Studenten
im Rahmen des Advanced Design Projects (ADP) und des Forschungsseminars (FS)
gibt die nächste Übersicht Auskunft.
Studentische Arbeiten 2007 2008 2009
Studienarbeiten 10 26 17
Bachelor-Theses - 12 15
Diplomarbeiten 12 17 13
Master-Theses 2 3 1
Advanced Design Projects 17 8 11
Forschungsseminar - - 17
Summe 41 66 74
10
Exkursionen
Exkursion der Mentorengruppenmitglieder
Im Fachbereich Maschinenbau erhält jeder Student einen Professor des Fachbereichs
als Mentor genannt. Dieser steht den Studenten mit Rat zur Verfügung und ist auch
beauftragt, am Anfang des dritten Semesters mit jedem seiner Mentierten ein Orien-
tierungsgespräch zu führen, um den Studienerfolg zu sichern. Über diesen Pflichtter-
min hinaus werden von Prof. Winner regelmäßige Treffen organsiert, die auch gut
besucht werden. Um das schon aus diesen Treffen entwickelte Gemeinschaftsgefühl
zu stärken und auch die Gruppen anderer Jahrgänge zu verbinden, hat sich die Idee
entwickelt, eine gemeinsame Exkursion durchzuführen. Die Förderung durch Studi-
engebühren und die später folgenden Ersatzmitteln ermöglichten auch mehrtägige
Fahrten. Die Mentorengruppe des zweiten Studienjahres organisiert diese im Som-mersemester stattfindenden Exkursionen. So konnten 32 Studenten zusammen mit
Prof. Winner im Mai 2009 beim Teilchenbeschleuniger des CERN bei Genf noch einen
Blick in den großen Detektor werfen, bevor er zwei Monate später für die Öffentlich-
keit geschlossen wurde. Die Fahrt 2010 führte 25 Studenten nach Tuttlingen zum
Bremsscheibenhersteller SHW und dem Werkzeugmaschinenproduzenten Chiron.
Nach einem gemeinsamen Abend in Stuttgart wurde das Motorenwerk von Mercedes-
Benz in Untertürkheim besichtigt und das Programm mit dem Besuch im Mercedes-
Benz-Museum abgeschlossen. Durch diese Aktivitäten und den sonstigen Kontakten
im MentorING-Programm entsteht ein lebendiges Netzwerk, das nun auch über das
Studium hinaus Bestand haben soll, hierzu mehr im nächsten Jahresbericht.

11
Exkursion „Motorräder“ 2009 nach Berlin
Vom 12. bis 13. Juni 2009 fand im Rahmen der Vorlesung „Motorräder“ eine Ex-
kursion nach Berlin statt. Unter der Leitung von Dr. Alois Weidele und Patrick Seini-
ger nahmen 12 Studenten an der Fahrt teil.
Neben der Anreise stand am ersten Tag ein Rundgang durch Berlin-Mitte sowie
Prenzlauer Berg auf dem Programm, dessen Höhepunkte die Besichtigung des Regie-
rungsviertels sowie ein gemütliches Abendprogramm bildeten.
Nach einer kurzen Nacht im Jugendgästehaus am Zoo ging es früh morgens weiter zum BMW Motorrad Werk in Berlin-Spandau. Dort erwartete die Gruppe nach einem
Begrüßungskaffee und dem obligatorischen Einführungsvortrag ein extra organisier-
ter Werksrundgang mit tiefen Einblicken in die Motoren- bzw. Motorradendmontage.
Im Anschluss stand der Produktionsleiter Herr Kemser den kniffligen Fragen des
Publikums viel detaillierter als allgemein üblich Rede und Antwort, bevor der Besuch
bei BMW mit einem Essen im Betriebsrestaurant seinen kulinarischen Abschluss fand.
Am Nachmittag stand ursprünglich der Besuch des Berliner DDR-Motorrad-Museums
auf der Agenda (www.erstesberliner-ddr-motorradmuseum.de). Dieser wurde
jedoch spontan zu Gunsten eines Geheimtipps von Herrn Kemser fallen gelassen, der
die Besichtigung des Reichstagsgebäudes unter Umgehung der langen Warteschlan-
gen ermöglichte. Bei herrlichem Sonnenwetter konnte so vor der Rückfahrt nach
Darmstadt noch ein grandioser Blick über Berlin genossen werden.
Die vollständige Kostenübernahme für Studenten gelang durch Studiengebührenge-
setzkompensationsmittel. Ein herzlicher Dank gilt den Ansprechpartnern vor Ort,
allen voran den Herren Kemser und Scheffel, die wesentlich zum Gelingen der Veran-
staltung beigetragen haben.
12
FFF-Herbstexkursion Norddeutschland September 2009
Die diesjährige „kleine“ Herbstexkursion führte die FFF-Mitglieder nach Norddeutsch-
land. Zunächst stand eine Werksbesichtigung bei Airbus in Bremen auf dem Pro-
gramm.
Im Rahmen des Fertigungsverbundes von Airbus ist Bremen das Zentrum für Flügel-
ausrüstung aller Großraumflugzeuge und das Zentrum für die Herstellung der Lan-
deklappen für alle Airbus-Programme. Beide Bereiche wurden unter der äußerst fachkundigen und interessanten Führung von Herrn Horst Becker, einem pensionier-
ten Airbus-Mitarbeiter, besichtigt. Es folgte die Weiterfahrt nach Hamburg. Dort
klang der erste Tag bei typisch norddeutschen Fischgerichten gemütlich aus.
Am nächsten Tag stand zunächst die Besichtigung des Deutschen Elektronen-
Synchrotrons DESY in Hamburg-Altona an. DESY ist eines der weltweit führenden Beschleunigerzentren zur Erforschung der Materie. Die Besichtigung erfolgte unter
fachkundiger Leitung von zwei bei DESY forschenden Doktoranden.
Weiterhin standen eine Hafenrundfahrt, einen Führung durch das größte fahrtüchtige,
zivile Museumsschiff der Welt, die San Diego, unter Leitung von Herrn Georg Kindler, einem ehemaligen Seemann, sowie eine Besichtigung des stillgelegten russischen U-
Boots U-434 auf dem Programm.

13
Exkursion in das Testzentrum IDIADA in Spanien
Im Rahmen der Lehrveranstaltung "Fahrdynamik und Fahrkomfort" und auf Einla-
dung der Adam Opel GmbH führte FZD vom 26.-27. Januar 2010 eine Exkursion nach Spanien in das Testzentrum IDIADA in der Nähe von Barcelona durch. Bei früh-
lingshaften Wetterbedingungen erhielten die Studenten interessante Einblicke in das
Tätigkeitsfeld der Mitarbeiter der Abteilung „Vehicle Dynamics" und in die Versuchs-
einrichtungen auf dem Testgelände. Diese Exkursion ist Teil des Lehrkonzepts, Wis-
sen aus dem komplexen Feld der Fahrdynamik nicht nur theoretisch, sondern auch in
der Praxis direkt erlebbar zu vermitteln.
Die Exkursionsteilnehmer unter Palmen
Eine vollständige Kostenübernahme für Studenten konnte durch Einsatz der Studien-
gebührengesetzkompensationsmittel realisiert werden.
14
TdK-Exkursion Bodensee März 2010
Vom 01. bis 02. März 2010 fand im Rahmen der Vorlesung „Trends der Kraftfahr-
zeugentwicklung“ eine Exkursion in den südwestdeutschen Raum statt. An der Fahrt
nahmen 24 Studenten sowie sechs Wissenschaftliche Mitarbeiter des Fachgebiets teil.
Am ersten Tag der Exkursion wurde die Porsche AG in Zuffenhausen besucht und den
Teilnehmern ein Einblick in die Antriebsentwicklung und Sportwagenproduktion
gegeben. Anschließend fuhr die Gruppe weiter nach Wasserburg/Bodensee, um dort
ihr Nachtquartier aufzuschlagen. Zuvor stand jedoch fangfrischer Fisch auf dem
Abendprogramm.
Am folgenden Morgen führte eine kurze Fahrt nach Lindau/Bodensee zur Continental
A.D.C. GmbH. Hier wurde den Teilnehmern ein spannender Einblick in die Entwick-
lung von Fahrerassistenzsystemen gegeben, deren Funktionalität während einer
Probefahrt mit drei Versuchsträgern demonstriert wurde.
Die Teilnahme an dieser Exkursion war für die Studenten aufgrund des Einsatzes der
Studiengebührengesetzkompensationsmittel kostenlos. Ein herzlicher Dank gilt den
besuchten Unternehmen, die durch Ihren Einsatz maßgeblich zum Erfolg der Veran-
staltung beigetragen haben.
15
FZD-Seminare
Fahrzeug- und Motortechnisches Seminar
Die zahlreichen interessanten Vorträge des Fahrzeug- und Motortechnischen Semi-
nars, das gemeinsam mit dem Fachgebiet Verbrennungskraftmaschinen (Professor
Beidl) organisiert wird, boten auch in den Jahren 2009 und 2010 eine öffentliche
Plattform für fachübergreifenden Austausch mit Industrie und Forschungseinrichtun-
gen. Nachfolgend sind die Vorträge des Sommersemesters 2010 und ein Rückblick
auf das Wintersemester 2009/2010 aufgeführt.
Sommersemester 2010:
26.04.2010 Prof. Dr. Uwe Grebe, General Motors
„Effiziente Antriebstechnologien für das Jahr 2020“
03.05.2010 Dr. Sven Christian Fritz, MTU Friedrichshafen GmbH
„Effiziente Anwendung von Optimierungs- und Automatisierungsme-
thoden bei der MTU Friedrichshafen GmbH / TOGNUM AG“
10.05.2010 Dr. Peter Waldmann, Dr. Dirk Wisselmann, BMW AG
„Hochautomatisiertes Fahren im fahrdynamischen Grenzbereich auf
der Nürburgring-Nordschleife“
17.05.2010 Prof. Dr. Thomas Kropf, Robert Bosch GmbH
„Von der Unfallforschung zu vernetzten Sicherheitssystemen – Wie
Technik Leben retten kann“
07.06.2010 Dr. Ralf Schwarz, Wolfgang Geißler, AUDI AG
„Fahrerassistenz- und Fahrwerkssysteme im neuen Audi A8“
21.06.2010 Dr. Paul Spurk, Umicore AG „Die Abgasnachbehandlung im Wandel der Zeit“
05.07.2010 Dr. Manfred Klell, HyCent Research GmbH
„Wasserstoff – Herstellung, Speicherung und Anwendung im Fahr-
zeug“

16
Wintersemester 2009/2010
02.11.2009 Flugkapitän Dipl.-Ing. Claus Cordes, Deutsche Lufthansa AG
„Bauart und Einsatzspektrum von Flugzeugkolbenmotoren“
16.11.2009 Prof. Rolf Isermann und Projektbearbeiter, TU Darmstadt „Elektronisches Fahrerassistenzsystem für Überholvorgänge –
PRORETA 2“
23.11.2009 Dr. Jürgen Präckel, Adam Opel GmbH
„Das Fahrwerk des neuen Opel Astra: Zielsetzung, Konzeptauswahl und
finale Auslegung“
30.11.2009 Dr. Günter Fraidl, AVL List GmbH
„Zukünftige ottomotorische Antriebe – Kostenoptimierung und/oder
Hybridisierung“
07.12.2009 Dr. Christian Landerl, BMW Motorrad
„Ein Hochleistungsmotor für Landstraße und Rennstrecke – der Antrieb
der neuen S1000RR von BMW Motorrad“
11.01.2010 Dipl.-Ing. Peter Ehinger, Dr. Ing. h. c. F. Porsche AG
„Porsche Panamera – Auflösung des Zielkonflikts zwischen Sportwa-
genanspruch und hohem Fahrkomfort“
25.01.2010 Dipl.-Ing. Ulrich Mellinghoff, Daimler AG
„Das Experimentier-Sicherheitsfahrzeug ESF 2009“
01.02.2010 Dipl.-Ing. Gerald Killmann, Toyota Motor Europe
„Die Hybridtechnologie in der dritten Generation des Toyota Prius“
Motorradtechnisches Seminar
Seit 2004 wird zusätzlich zum Fahrzeugtechnischen Seminar und besonders für die
Hörer der Vorlesung Motorräder und alle weiteren Motorradbegeisterten das Motor-
radtechnische Seminar angeboten.
Sommersemester 2010:
10.06.2010 Dipl.-Ing. Harald Fraueneder, Dipl.-Ing. (FH) Clemens Schelhaas, KTM Sportmotorcycle AG „Fahrwerk und E-Mobility“
01.07.2010 Hugo Binder, Fraunhofer-Institut für Graphische Datenverarbei-tung IGD „Fahrwerke und Antriebstechnik ferngelenkter Rennmotorräder“
08.07.2010 Dipl.-Ing. Christian Richter, BMW Motorrad GmbH „Motorrad Karosserie-Entwicklungsprozess“
17
Promotionen
Dr.-Ing. Patrick Seiniger Tag der mündlichen Prüfung: 10.09.2009
Erkennbarkeit und Vermeidbarkeit von ungebremsten Motorrad-Kurvenunfällen
Der Fragestellung, ob und wenn ja, wie Fahrdynamikregelsysteme auch für Motorrä-
der darstellbar sind und einen Effekt der Unfallzahlensenkung hervorrufen können,
wird in dieser Arbeit nachgegangen. Aus einer Analyse des Unfallgeschehens von
Motorrädern leiten sich ungebremste Kurvenunfälle als potentiell vermeidbar durch
zukünftige Fahrdynamikregelsysteme ab. Für diese Unfallklassen von Motorrädern
sind keine Methoden der Erkennung und Beeinflussung bekannt.
Die beiden denkbaren Grundszenarien ungebremster Kurvenunfälle – Erreichen der
Kraftschlussgrenze durch negativen Reibwertsprung und durch Erhöhen des Kraft-
schlussbedarfs – wurden mittels Fahrversuch hinsichtlich besonderer Erkennungs-
merkmale untersucht. Spätestens mit Beginn des Gleitens an beiden Rädern zeigt sich
in allen nachgestellten Unfällen eine kurveneindrehende Schwimmwinkelgeschwin-
digkeit (oder auch Gierratenüberhöhung). Zusätzlich rollt („kippt“) das Fahrzeug
zum Kurveninneren hin. Die Auswertung der Schwimmwinkelgeschwindigkeit erweist
sich als geeignetes Kriterium zur Erkennung dieser Fahrsituationen, das auch bei
hochdynamischen Fahrmanövern eine hinreichend hohe Erkennungsschwelle zur
Vermeidung von „false positive“-Fehlern besitzt.
Zur Stabilisierung der Rollbewegung ist eine Erhöhung von Seitenkraft oder Rollmo-
ment erforderlich. Letzteres ist physikalisch erreichbar durch Verwendung von Stabi-
lisierungskreiseln. Technisch anwendbar für typische Einspurfahrzeuge ist diese
Methode nicht, dazu sind die Energien und Massen zu groß. Das Erhöhen der Radlast
durch aktive Fahrwerke beansprucht mindestens in gleichem Maße den Querkraft-
schluss und kann daher auch nicht zur Stabilisierung verwendet werden. Da die Gierstabilisierung mit einer Beeinflussung der Seitenkraftdifferenz auskommt, ist eine
Beeinflussung der Gierdrehung durch Manipulation von Reifenlängsschlupf oder
Schräglauf mit dem Ziel einer Schwimmwinkelbegrenzung möglich. Mit dieser Me-
thode können High-sider-Unfälle, wie sie bei Reibwertsprüngen hoch-niedrig-hoch
entstehen, vermieden werden.

18
Dr.-Ing., Dipl.-Wirt.-Ing. Doris Schmidt Tag der mündlichen Prüfung: 09.02.2010
Fehleranalyse und Datenfusion von Satellitennavigations- und Fahrdynamiksen-
sorsignalen
Durch die Kostenreduktion und die technische Entwicklung von Globalen Satelliten-
navigationssystem(GNSS)-Empfängern ist deren Verkaufszahl in den letzten Jahren
deutlich gestiegen und GNSS-Empfänger sind auch im Automobilbereich nicht mehr
wegzudenken. Eine ähnlich starke technologische Progression und Wachstumsge-
schwindigkeit von Systemen ist auch im Bereich der Fahrerassistenzsysteme (FAS) zu beobachten. Die komplementären Eigenschaften der GNSS-Daten bezüglich Verfüg-
barkeit und Langzeitstabilität im Vergleich zu einigen Fahrdynamiksensordaten füh-
ren auf die Motivation, diese Charakteristiken zu nutzen und GNSS nicht nur zur
Routenführung im Automobilbereich einzusetzen. Dieser Gesichtspunkt wird in der
vorliegenden Arbeit mit dem Ziel, eine Verbesserung der Datenqualität für ausge-
wählte Fahrdynamiksensordaten durch Fusion mit GNSS-Daten und ohne Verwen-
dung der Digitalen Karte zu erreichen, aufgegriffen.
Ausgehend von der Vielzahl an Fahrerassistenzsystemen (FAS) und dem Aspekt, dass
sich nicht alle Systeme für das Vorhaben eignen, werden zunächst eine Auswahl und
eine Gruppierung der FAS vorgenommen. Aus dieser Einteilung kristallisieren sich die
zwei Betrachtungsgrößen Gierrate und Fahrzeuggeschwindigkeit als wichtige Größen
heraus, da sie die Basisgrößen für weitere Betrachtungsgrößen und somit für zahlrei-
che FAS darstellen. Daher sind diese beiden Größen Hauptgegenstand in der vorlie-
genden Arbeit. Für die Untersuchung werden drei GNSS-Empfangsgeräte betrachtet,
die sich hinsichtlich Empfängertechnologie und Algorithmen unterscheiden. Aus einer
Fehleranalyse der realen GNSS- und Fahrdynamikmessdaten ergibt sich die Notwen-
digkeit der Bestimmung der Verzugszeiten der GNSS-Daten im Vergleich zu den
entsprechenden Fahrdynamiksensordaten. Dies erfolgt durch die in dieser Arbeit neu
entwickelte sog. Schlupfmethode. Unter Berücksichtigung von weiteren Erkenntnis-sen aus der Fehleranalyse und der Ableitung der für alle verwendeten GNSS-
Empfänger einheitlichen Fusionsstrategie wird für jede Betrachtungsgröße ein Fusi-
onsansatz erarbeitet sowie implementiert. Anhand ausgewählter Bewertungskriterien
zeigt sich durch den in dieser Arbeit realisierten Fusionsansatz zum einen eine Ver-
besserung der beiden Betrachtungsgrößen durch GNSS-Daten-Stützung. Zum ande-
ren ist eine Rangfolge unter den GNSS-Geräten bzgl. Fehlerreduzierung feststellbar.
19
Veranstaltungen
L3-Kolleg
Im Frühjahr 2009 wurde im Rahmen der neuen Weiterbildungsreihe „L³-Kolleg“, die
FZD in Kooperation mit der Continental AG für Ingenieure mit Berufserfahrung an-
bietet, ein erstes Pilotseminar mit dem Titel „Mechatronik der Bremse“ entwickelt
und erstmals durchgeführt. FZD arbeitet hierzu mit der Didaktikerin Frau Dipl.-Psych.
Gerlinde Fritz aus Roßdorf und TU-intern mit wechselnden Partnern zusammen. Im
Rahmen des Pilotseminars waren dies die Institute für Automatisierungstechnik (IAT)
und Fluidsystemtechnik (FST).
Ziel des L³-Programms (Life-Long-Learning) ist es die Teilnehmer für die Interdiszip-
linarität im Unternehmen zu sensibilisieren und Ihnen ein gemeinsames breites Ba-
siswissen zu vermitteln. Das Lernen von hochspezialisiertem, punktuellem Experten-
wissen, wie dies beispielsweise Aufgabe eines typischen Fachseminars in der Fortbil-
dung sein könnte, wird bewusst ausgeklammert.
Während des zweitägigen Seminars mit jeweils etwa 16-20 Teilnehmern werden
gezielt die Wechselbeziehungen zwischen den einzelnen Disziplinen wie Mechanik,
Elektronik, Hydraulik oder Regelungstechnik adressiert. Erreicht wird dieses Ziel
durch einen hohen Anteil an praxisnahen Übungen mit Hilfe einer Simulationsumge-
bung im Verhältnis von etwa 50:50 zu den Theorieteilen sowie durch Übungen zu
Anwendungsbeispielen am Nachmittag des zweiten Seminartages. In allen Teilen
wird in besonderer Weise auf das Erleben von „Aha-Effekten“ Wert gelegt.
Die flankierenden Evaluierungen sowohl auf Seite des Industriepartners als auch auf
Seite der Anbieter bestätigen den Erfolg dieses Ansatzes in beeindruckender Weise.
20
Tagung Enhanced Vehicle Safety (ESV) 2009
Auf der ESV 2009 in Stuttgart war FZD durch Prof. Dr. Hermann Winner, Benedikt
Lattke, Marcus Reul, Patrick Seiniger und Kai Schröter vertreten. Patrick Seiniger und
Marcus Reul präsentierten in interessiert aufgenommenen Vorträgen ihre For-
schungsergebnisse.
FZD-Stand auf der ESV 2009
Weiterhin wurden auf einem Stand die Forschungsschwerpunkte von FZD auf Postern und durch ein Fachgebietsvideo dargestellt. Dies wurde durch verschiedene Ausstel-
lungstücke ergänzt (u.a. ein FZD-Versuchsmotorrad).
21
DFG-Expertengespräch „Kooperative Fahrzeugführung“
Die Arbeitsgruppe „Kooperative Fahrzeugführung“, bestehend aus den Bearbeitern
des Projekts Conduct-by-Wire bei FZD und am Institut für Arbeitswissenschaft der TU
Darmstadt (IAD) sowie den Bearbeitern des Projekts H-Mode am Institut für Ver-
kehrssystemtechnik des DLR in Braunschweig und dem Lehrstuhl für Ergonomie der
TU München (LfE), veranstaltete am 17. September 2009 ein gleichnamiges DFG-Ex-
pertengespräch in Griesheim.
Im Beisein von rund 20 namhaften Experten aus Industrie und Forschung wurden die
Forschungsvorhaben Conduct-by-Wire (siehe Projektbeschreibung auf Seite 30) und
H-Mode vorgestellt und zur kritischen Diskussion eingeladen. In Vorträgen, einer
Demonstrations-Session und in Kleingruppenarbeiten kommentierten die eingelade-
nen Experten die Forschungsvorhaben, gaben Anregungen für zukünftige Arbeiten
und trugen mit ihrer individuellen Erfahrung zur Ausrichtung der Folgeforschungs-
projekte bei.
Beide Forschungsansätze wurden von den anwesenden Experten sehr positiv bewer-
tet und ihr Potential für weitere Forschungstätigkeiten hervorgehoben.
Begrüßung der Teilnehmer durch Prof. Ralph Bruder und Prof. Heiner Bubb

22
Abschlussveranstaltung PRORETA II - Überholassistenz
Am 6. Oktober 2009 wurde auf dem August-Euler-Flugplatz der Prototyp eines Fah-
rerassistenzsystems für Überholsituationen einem Publikum von ca. 80 geladenen
Gästen aus der Automobilindustrie, Presse und Forschung demonstriert. Nach der
Vorstellung des Gesamtprojektes
durch die Vertreter des Projekt-
partners Continental, Dr. Rieth
und Dr. Lüke, informierten die
Projektbearbeiter Andree Hohm,
Roman Mannale, Ken Schmitt und
Christian Wojek im Towergebäu-de des Flugplatzes über die Er-
gebnisse ihrer Mitte 2006 begon-
nenen Forschungsarbeit. Der Hö-
hepunkt der Veranstaltung war
die anschließende Fahrdemonst-
ration auf der Rollbahn, bei der
verschiedene typische Überholszenarien und die entsprechenden Reaktionen des
aufgebauten Forschungsfahrzeugs vorgeführt wurden. So wurden etwa Szenarien
gezeigt, bei denen der Fahrer eine visuelle, haptische und auditive Warnung erhielt,
sobald er ein als gefährlich erkanntes Überholmanöver initiierte. Für den ebenso im
Rahmen eines sicheren Versuchsaufbaus gezeigten Fall, dass der Fahrer nicht auf
diese Warnung reagiert, bremste das Assistenzsystem das überholende Fahrzeug
automatisch soweit ab, dass dem Fahrer ein
sicheres Wiedereinscheren hinter dem zu überholenden Fahrzeug ermöglicht wurde. Die
gezeigten Situationen illustrierten dabei das
Spektrum der Möglichkeiten, ein als gefährlich
erkanntes Überholmanöver assistiert abzubre-
chen.
Ein weiteres Highlight war die Unterzeichnung
eines Kooperationsvertrages durch den Präsi-
denten der TU Darmstadt, Prof. Prömel, sowie
dem Mitglied des Vorstandes der Continental
AG Heinz-Gerhard Wente für zukünftige gemeinsame Projekte und Forschungsansät-
ze im Bereich der Fahrzeugsicherheit.
Bis zum Ende der Veranstaltung wurden noch zahlreiche Fachdiskussionen zwischen
den Gästen geführt. Ein häufig gezogenes Resümee der Veranstaltung war die
Musterhaftigkeit der Kooperation PRORETA und des Forschungsprojektes PRORETA
II – Überholassistenz für eine gelungene und zielorientierte Zusammenarbeit zwi-
schen Industrie und universitärer Forschung, die für beide Seiten bedeutenden Nut-
zen erzeugt.
Das Auditorium informiert sich über das Kooperationsprojekt PRORETA II
Die Szenarien wurden bis zum Einbruch der Dunkelheit gefahren, das System funktionierte dabei zuverlässig
23
Finanzen
Einnahmen
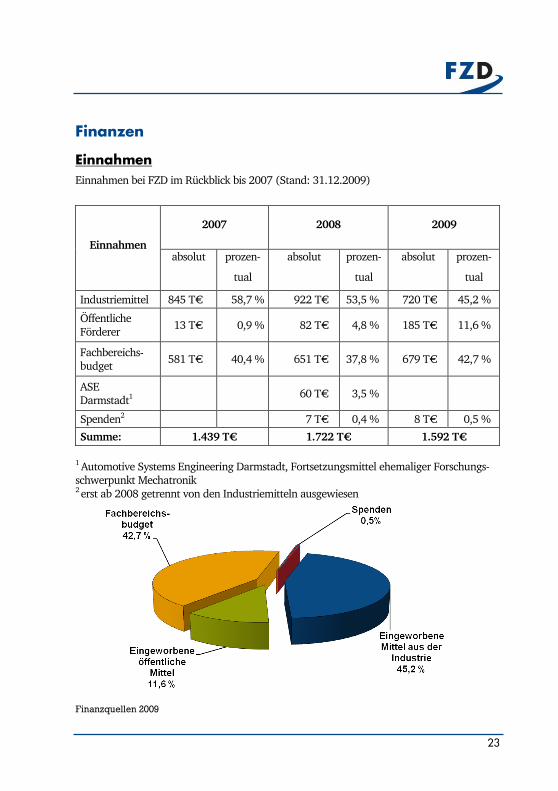
Einnahmen bei FZD im Rückblick bis 2007 (Stand: 31.12.2009)
Einnahmen
2007 2008 2009
absolut prozen-
tual
absolut prozen-
tual
absolut prozen-
tual
Industriemittel 845 T€ 58,7 % 922 T€ 53,5 % 720 T€ 45,2 %
Öffentliche
Förderer 13 T€ 0,9 % 82 T€ 4,8 % 185 T€ 11,6 %
Fachbereichs-
budget 581 T€ 40,4 % 651 T€ 37,8 % 679 T€ 42,7 %
ASE
Darmstadt1 60 T€ 3,5 %
Spenden2 7 T€ 0,4 % 8 T€ 0,5 %
Summe: 1.439 T€ 1.722 T€ 1.592 T€
1 Automotive Systems Engineering Darmstadt, Fortsetzungsmittel ehemaliger Forschungs-
schwerpunkt Mechatronik 2 erst ab 2008 getrennt von den Industriemitteln ausgewiesen
Finanzquellen 2009

24
Spenden
Das Fachgebiet Fahrzeugtechnik konnte sich im Jahr 2009 über eine Spende im Wert
von 8.448 € freuen. Mit der Spende vom Verein der Freunde des Fachgebiets Fahr-
zeugtechnik (FFF) wurde das Baumaterial für die Errichtung der Prüfstandskabine für
den Schwungmassenprüfstand finanziert. Für diese großzügige Zuwendung, die es
FZD erst ermöglichte, die Infrastruktur für den Prüfstand in Eigenleistung zu errich-
ten, herzlichen Dank.
Studienbeitrags-Kompensationsmittel
Im Wintersemester 2009/2010 stand dem Fachgebiet Fahrzeugtechnik ein Betrag von
11.200 € zur Verfügung. Davon wurden für 109,70 € Bücher gekauft. Für das jähr-
lich stattfindende Tutorium wurde der Opel Astra für 620 € neu bereift. Die studenti-schen Exkursionen kosteten insgesamt 7.901,20 €. Des Weiteren wurde für Gries-
heim ein neuer, voll bestückter Werkzeugwagen zu einem Preis von 1.923,87 € be-
schafft. Die Bibliothek wurde mit einem neuen Rechner für 528,36 € ausgestattet
und um verschiedene Skripte kostenlos anzubieten, wurden 111,74 € für Tonerkartu-
schen ausgegeben.

25
Infrastruktur: Schwungmassenprüfstand
Mit der Einweihung des Schwungmassenprüfstandes am 05.08.2010 geht für FZD ein
umfangreiches Projekt zu Ende und es beginnt eine neue Phase für die Bremsenfor-
schung bei FZD. Erstmals verfügt FZD nun über einen leistungsfähigen Schwungmas-
senprüfstand in den eigenen Räumen.
Prüfkabine (studentische Konstruktion + Realisierung)
Möglich wurde das Projekt durch die bemerkenswerte Zusammenarbeit zwischen der
mechanischen Werkstatt des Fachgebiets, industriellen Förderern, dem Verein der
Freunde des Fachgebiets (FFF) und dem FZD-Bremsencenter. Letzteres konnte von
Beginn an durch die Betreuung studentischer Arbeiten (ADP + HiWi) die grundsätz-
lichen Anforderungen klären und den Konstruktionsentwurf (Bild links) für die zum
Betrieb des Prüfstandes erforderliche Prüfkabine liefern. Dabei wurde das Baumateri-
al für die Prüfkabine (Bild rechts) vom FFF gespendet und vom Fachgebiet in beacht-
licher Eigenleistung errichtet. Einem Team um den Oberingenieur Dr. Fecher gelang
es, sukzessive die für den Prüfstand benötigten Baugruppen und Anbauteile zu akqui-
rieren und dem Fachgebiet zur Nutzung zu überstellen. Für den Aufbau- und Zu-sammenbau des Prüfstandes am Fachgebiet konnte FZD voll auf den Einsatz und die
Fähigkeiten aller Mitarbeiter der mechanischen Werkstatt um Meister Robert Korn-
dörfer zählen. Sowohl beim Aufbau als auch bei der Inbetriebnahme wurde das Fach-
gebiet in besonderer Weise von den Firmen Continental Teves (Frankfurt) und
HORIBA ATS (Darmstadt) unterstützt.
Allen Förderern und Mitwirkenden hiermit ein herzliches Dankeschön!

26
Schwungmassenprüfstand
Leistungsdaten des Schwungmassenprüfstandes:
Einsatzbereich: Pkw und leichte Nfz
Leistung: P = 131 kW
max. Bremsmoment: MB = 6.000 Nm
Dauerschleppmoment: MS = 800 Nm
max. Drehzahl: nmax = 3.000 min-1 (entspr. ca. 350km/h!)
max. Bremsdruck: pB = 250 bar
max. Druckaufbaugradient: dp/dt = 500 bar/s
max. Schwungmasse: ϑmax = 187,5 kgm²
Schwungmassenstufung: (10) | 2,5 | 5 | 10 | 20 | 20 | 40 | 80 kgm²
Zuluft: dV/dt = 3.500 m³/h
Abluft: dV/dt = 3.700 m³/h
27
Fördernde Institutionen und Kooperationspartner
Öffentliche Institutionen und Verbände
Arbeitsgemeinschaft industrieller Forschungsvereinigungen
Bundesanstalt für Straßenwesen
Bundesministerium für Wirtschaft und Technologie
Deutsche Forschungsgemeinschaft
Gesamtverband der Deutschen Versicherungsgesellschaft e.V.
Industrielle Partner und Förderer
Adam Opel GmbH, Rüsselsheim
BMW Motorrad GmbH, München
Buckle-Up Productions, Essen
Continental Teves, Frankfurt
Daimler AG. Sindelfingen
Honda R&D Co., Ltd., Saitama (Japan)
Honda R&D Europe (Deutschland) GmbH, Offenbach
KTM Sportmotorcycle AG, Mattighofen (Österreich)
Robert Bosch GmbH, Abstatt
SHW Automotive GmbH & Co. KG, Tuttlingen
Vieweg + Teubner Verlag, Wiesbaden
ZF Sachs AG, Schweinfurt
Forschungseinrichtungen
Institut für Arbeitswissenschaft (IAD), TU Darmstadt
Institut für Automatisierungstechnik (IAT), TU Darmstadt
Institut für Physikalische Geodäsie (IPGD), TU Darmstadt
Institut für Verkehrssystemtechnik des DLR, Braunschweig
Lehrstuhl für Ergonomie (LfE), TU München
28
Forschungsprojekte
Bei unserer Forschung steht die Betrachtung des Gesamtsystems Fahrer-Fahrzeug-
Umwelt im Vordergrund. Wir schaffen systematisch Konzepte und Methoden mit der
notwendigen Technologie, unabhängig von Disziplinengrenzen.
Mit unserer Kompetenz auf den Gebieten der Fahrzeugmechanik und der Mechatronik
lösen wir viele Aufgaben autark. Zusätzlich kooperieren wir mit anderen Disziplinen,
um eine breitere Expertise für unsere Projekte zu erreichen und den interdisziplinären
Austausch zu fördern. Die Forschung bei FZD umfasst dabei die sechs Bereiche Fah-
rerassistenz, Fahrdynamik, Motorrad, Sicherheit, Bremse und Testverfahren. FZD
steht für „Innovation durch Verständnis“.
29
FZD-Forschungsprojekte
Conduct-by-Wire: Serielle Assistenz im Automobil - Fahrzeugführung mit
einer Manöverschnittstelle
Seite 30
Fahrstreifenwechselassistenz
Seite 31
Fusion von GNSS- und Fahrdynamiksensorsignalen für eine genaue und
integere Positions- und Fahrzustandsschätzung
Seite 32
Optimierung der Fahrdynamik durch Koordination von ESP und Dämpfer-
regelung
Seite 33
Auswirkung von Fahrzeugtuning auf die Verkehrssicherheit
Seite 34
Analyse von Reifenspurmerkmalen unter kontrollierten Bedingungen
Seite 35
MoLife – Wissenschaftliche Grundlagen kommunikationsbasierter Fahreras-
sistenzsysteme für Motorräder
Seite 36
Bremslenkmomentoptimierte Kurvenbremsung von Motorrädern
Seite 37
Konzeptentwicklung einer kostengünstigen, funktionserweiterten Leicht-
bau-Bremsscheibe
Seite 38
Modellierungskonzept für die Auslegung von Bremssystemen
Seite 39
Standardtestverfahren für Frontalkollisionsschutzsysteme auf Basis von
EVITA
Seite 40
Forschungsprojekte externer Doktoranden
Darstellung von radaräquivalenten Fahrzeugen für Tests der radarbasierten
Fahrerassistenzsysteme durch Soft Crash Targets Seite 41
Erweiterte Ansätze zur objektiven Bewertung von Fahrsicherheit in Pro-
bandenkollektiven Seite 42
Wechselwirkung zwischen CDC-Dämpfern und deren Stützlagern hinsicht-
lich Fahrkomfort Seite 43
Analyse und Bewertung der Fahrzeugparameter zur Bestimmung des Run-
denzeitoptimums eines Rennsportfahrzeugs Seite 44
30
DFG-Projekt: Conduct-by-Wire
Bearbeiter: Dipl.-Ing. Stephan Hakuli
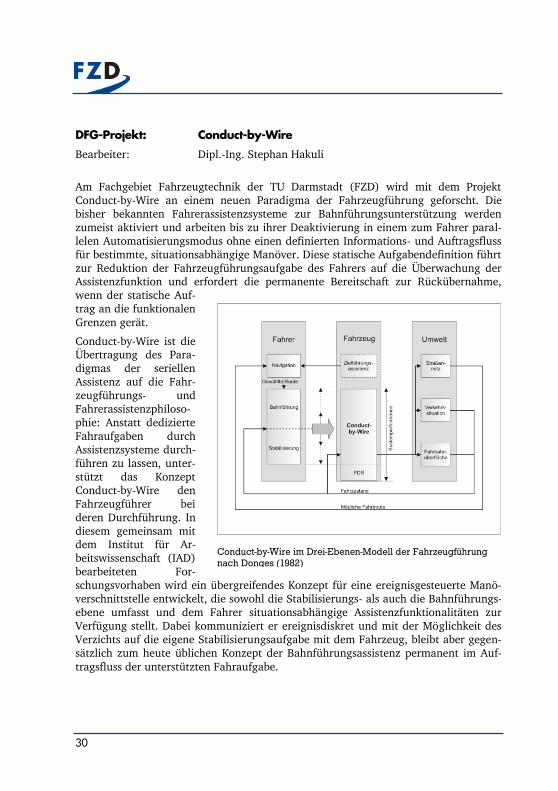
Am Fachgebiet Fahrzeugtechnik der TU Darmstadt (FZD) wird mit dem Projekt
Conduct-by-Wire an einem neuen Paradigma der Fahrzeugführung geforscht. Die
bisher bekannten Fahrerassistenzsysteme zur Bahnführungsunterstützung werden
zumeist aktiviert und arbeiten bis zu ihrer Deaktivierung in einem zum Fahrer paral-
lelen Automatisierungsmodus ohne einen definierten Informations- und Auftragsfluss
für bestimmte, situationsabhängige Manöver. Diese statische Aufgabendefinition führt
zur Reduktion der Fahrzeugführungsaufgabe des Fahrers auf die Überwachung der Assistenzfunktion und erfordert die permanente Bereitschaft zur Rückübernahme,
wenn der statische Auf-
trag an die funktionalen
Grenzen gerät.
Conduct-by-Wire ist die Übertragung des Para-
digmas der seriellen
Assistenz auf die Fahr-
zeugführungs- und
Fahrerassistenzphiloso-
phie: Anstatt dedizierte
Fahraufgaben durch
Assistenzsysteme durch-
führen zu lassen, unter-
stützt das Konzept
Conduct-by-Wire den
Fahrzeugführer bei
deren Durchführung. In
diesem gemeinsam mit dem Institut für Ar-
beitswissenschaft (IAD)
bearbeiteten For-
schungsvorhaben wird ein übergreifendes Konzept für eine ereignisgesteuerte Manö-
verschnittstelle entwickelt, die sowohl die Stabilisierungs- als auch die Bahnführungs-
ebene umfasst und dem Fahrer situationsabhängige Assistenzfunktionalitäten zur
Verfügung stellt. Dabei kommuniziert er ereignisdiskret und mit der Möglichkeit des
Verzichts auf die eigene Stabilisierungsaufgabe mit dem Fahrzeug, bleibt aber gegen-
sätzlich zum heute üblichen Konzept der Bahnführungsassistenz permanent im Auf-
tragsfluss der unterstützten Fahraufgabe.
Conduct-by-Wire im Drei-Ebenen-Modell der Fahrzeugführung nach Donges (1982)
31
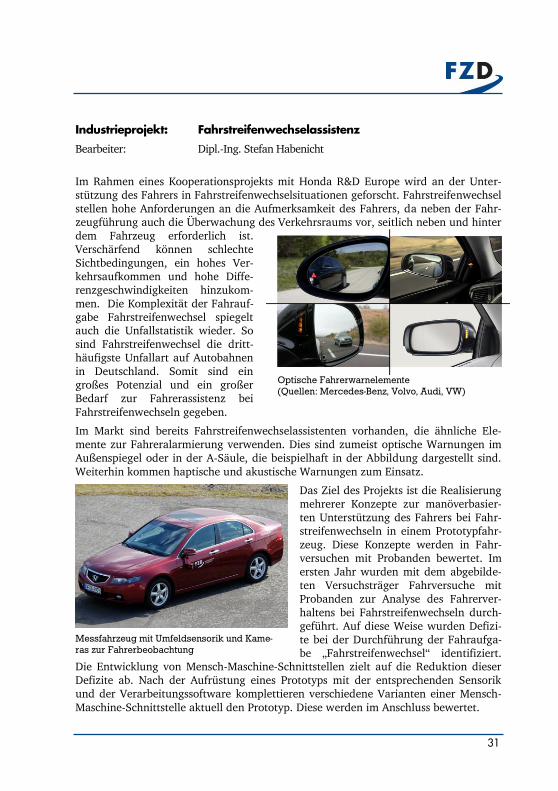
Optische Fahrerwarnelemente (Quellen: Mercedes-Benz, Volvo, Audi, VW)
Industrieprojekt: Fahrstreifenwechselassistenz
Bearbeiter: Dipl.-Ing. Stefan Habenicht
Im Rahmen eines Kooperationsprojekts mit Honda R&D Europe wird an der Unter-
stützung des Fahrers in Fahrstreifenwechselsituationen geforscht. Fahrstreifenwechsel
stellen hohe Anforderungen an die Aufmerksamkeit des Fahrers, da neben der Fahr-
zeugführung auch die Überwachung des Verkehrsraums vor, seitlich neben und hinter
dem Fahrzeug erforderlich ist.
Verschärfend können schlechte
Sichtbedingungen, ein hohes Ver-
kehrsaufkommen und hohe Diffe-
renzgeschwindigkeiten hinzukom-
men. Die Komplexität der Fahrauf-
gabe Fahrstreifenwechsel spiegelt auch die Unfallstatistik wieder. So
sind Fahrstreifenwechsel die dritt-
häufigste Unfallart auf Autobahnen
in Deutschland. Somit sind ein
großes Potenzial und ein großer
Bedarf zur Fahrerassistenz bei
Fahrstreifenwechseln gegeben.
Im Markt sind bereits Fahrstreifenwechselassistenten vorhanden, die ähnliche Ele-
mente zur Fahreralarmierung verwenden. Dies sind zumeist optische Warnungen im
Außenspiegel oder in der A-Säule, die beispielhaft in der Abbildung dargestellt sind.
Weiterhin kommen haptische und akustische Warnungen zum Einsatz.
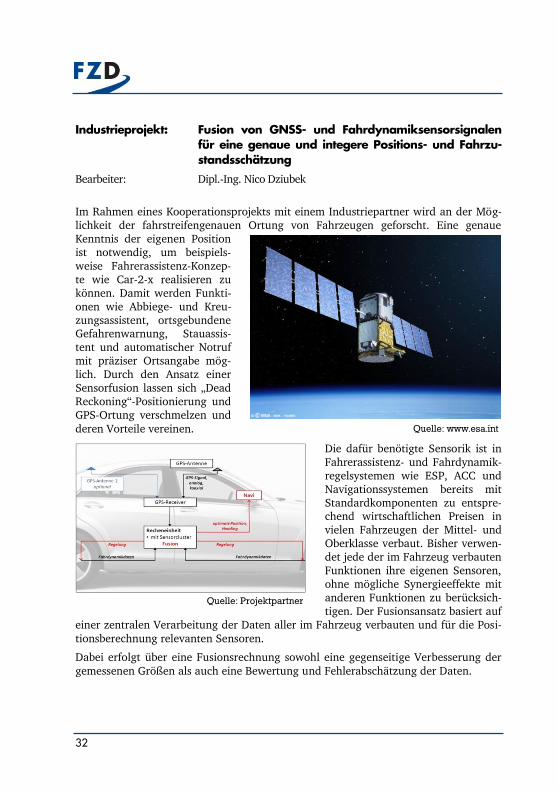
Das Ziel des Projekts ist die Realisierung
mehrerer Konzepte zur manöverbasier-
ten Unterstützung des Fahrers bei Fahr-
streifenwechseln in einem Prototypfahr-
zeug. Diese Konzepte werden in Fahr-
versuchen mit Probanden bewertet. Im
ersten Jahr wurden mit dem abgebilde-
ten Versuchsträger Fahrversuche mit
Probanden zur Analyse des Fahrerver-
haltens bei Fahrstreifenwechseln durch-
geführt. Auf diese Weise wurden Defizi-
te bei der Durchführung der Fahraufga-
be „Fahrstreifenwechsel“ identifiziert. Die Entwicklung von Mensch-Maschine-Schnittstellen zielt auf die Reduktion dieser
Defizite ab. Nach der Aufrüstung eines Prototyps mit der entsprechenden Sensorik
und der Verarbeitungssoftware komplettieren verschiedene Varianten einer Mensch-
Maschine-Schnittstelle aktuell den Prototyp. Diese werden im Anschluss bewertet.
Messfahrzeug mit Umfeldsensorik und Kame-ras zur Fahrerbeobachtung
32
Industrieprojekt: Fusion von GNSS- und Fahrdynamiksensorsignalen für eine genaue und integere Positions- und Fahrzu-standsschätzung
Bearbeiter: Dipl.-Ing. Nico Dziubek
Im Rahmen eines Kooperationsprojekts mit einem Industriepartner wird an der Mög-
lichkeit der fahrstreifengenauen Ortung von Fahrzeugen geforscht. Eine genaue
Kenntnis der eigenen Position
ist notwendig, um beispiels-
weise Fahrerassistenz-Konzep-
te wie Car-2-x realisieren zu
können. Damit werden Funkti-
onen wie Abbiege- und Kreu-
zungsassistent, ortsgebundene Gefahrenwarnung, Stauassis-
tent und automatischer Notruf
mit präziser Ortsangabe mög-
lich. Durch den Ansatz einer
Sensorfusion lassen sich „Dead
Reckoning“-Positionierung und
GPS-Ortung verschmelzen und
deren Vorteile vereinen.
Die dafür benötigte Sensorik ist in
Fahrerassistenz- und Fahrdynamik-
regelsystemen wie ESP, ACC und
Navigationssystemen bereits mit
Standardkomponenten zu entspre-chend wirtschaftlichen Preisen in
vielen Fahrzeugen der Mittel- und
Oberklasse verbaut. Bisher verwen-
det jede der im Fahrzeug verbauten
Funktionen ihre eigenen Sensoren,
ohne mögliche Synergieeffekte mit
anderen Funktionen zu berücksich-
tigen. Der Fusionsansatz basiert auf
einer zentralen Verarbeitung der Daten aller im Fahrzeug verbauten und für die Posi-
tionsberechnung relevanten Sensoren.
Dabei erfolgt über eine Fusionsrechnung sowohl eine gegenseitige Verbesserung der
gemessenen Größen als auch eine Bewertung und Fehlerabschätzung der Daten.
Quelle: www.esa.int
Quelle: Projektpartner
33
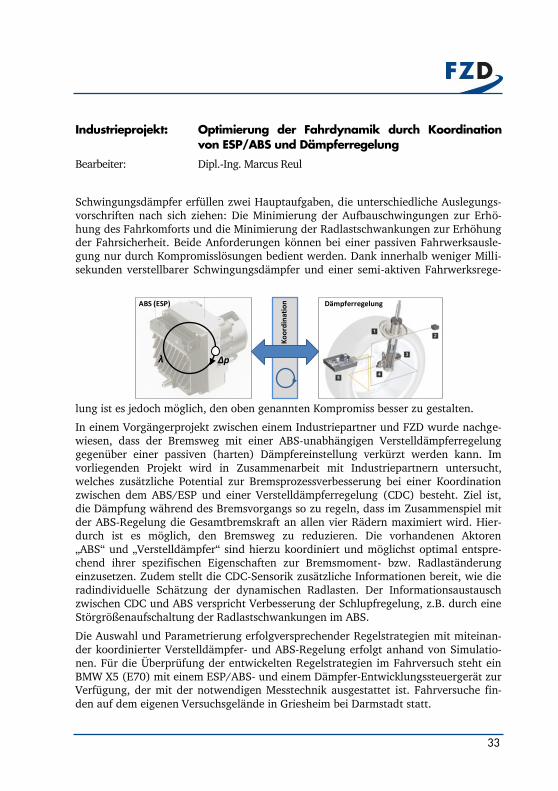
Industrieprojekt: Optimierung der Fahrdynamik durch Koordination von ESP/ABS und Dämpferregelung
Bearbeiter: Dipl.-Ing. Marcus Reul
Schwingungsdämpfer erfüllen zwei Hauptaufgaben, die unterschiedliche Auslegungs-
vorschriften nach sich ziehen: Die Minimierung der Aufbauschwingungen zur Erhö-
hung des Fahrkomforts und die Minimierung der Radlastschwankungen zur Erhöhung der Fahrsicherheit. Beide Anforderungen können bei einer passiven Fahrwerksausle-
gung nur durch Kompromisslösungen bedient werden. Dank innerhalb weniger Milli-
sekunden verstellbarer Schwingungsdämpfer und einer semi-aktiven Fahrwerksrege-
lung ist es jedoch möglich, den oben genannten Kompromiss besser zu gestalten.
In einem Vorgängerprojekt zwischen einem Industriepartner und FZD wurde nachge-
wiesen, dass der Bremsweg mit einer ABS-unabhängigen Verstelldämpferregelung
gegenüber einer passiven (harten) Dämpfereinstellung verkürzt werden kann. Im
vorliegenden Projekt wird in Zusammenarbeit mit Industriepartnern untersucht,
welches zusätzliche Potential zur Bremsprozessverbesserung bei einer Koordination
zwischen dem ABS/ESP und einer Verstelldämpferregelung (CDC) besteht. Ziel ist,
die Dämpfung während des Bremsvorgangs so zu regeln, dass im Zusammenspiel mit
der ABS-Regelung die Gesamtbremskraft an allen vier Rädern maximiert wird. Hier-
durch ist es möglich, den Bremsweg zu reduzieren. Die vorhandenen Aktoren
„ABS“ und „Verstelldämpfer“ sind hierzu koordiniert und möglichst optimal entspre-
chend ihrer spezifischen Eigenschaften zur Bremsmoment- bzw. Radlaständerung
einzusetzen. Zudem stellt die CDC-Sensorik zusätzliche Informationen bereit, wie die
radindividuelle Schätzung der dynamischen Radlasten. Der Informationsaustausch
zwischen CDC und ABS verspricht Verbesserung der Schlupfregelung, z.B. durch eine
Störgrößenaufschaltung der Radlastschwankungen im ABS.
Die Auswahl und Parametrierung erfolgversprechender Regelstrategien mit miteinan-
der koordinierter Verstelldämpfer- und ABS-Regelung erfolgt anhand von Simulatio-
nen. Für die Überprüfung der entwickelten Regelstrategien im Fahrversuch steht ein
BMW X5 (E70) mit einem ESP/ABS- und einem Dämpfer-Entwicklungssteuergerät zur Verfügung, der mit der notwendigen Messtechnik ausgestattet ist. Fahrversuche fin-
den auf dem eigenen Versuchsgelände in Griesheim bei Darmstadt statt.
Ko
ord
inat
ion
Δpλ
ABS (ESP) Dämpferregelung
34
BASt-Projekt: Auswirkung von Fahrzeugtuning auf die Verkehrs-sicherheit
Bearbeiter: Dipl.-Ing. Fabian Regh
Tuning erfreut sich in Deutschland großer Beliebtheit. Jedes achte bis zehnte Auto ist
nach Schätzungen des Verbands der Deutschen Automobil Tuner e.V. (VDAT) getunt.
Insbesondere junge Käufer planen Modifikationen am Fahrzeug, jedoch verfügen
diese oftmals nicht über die Kaufkraft um sich Markenprodukte zuzulegen. Neben der
optischen Aufwertung wird durch umfangreiche Umbaumaßnahmen eine bessere
fahrdynamische Performance angestrebt. Hierzu bieten etablierte Unternehmen auf-
einander abgestimmte Gesamtlösungen an, die, von Fachwerkstätten montiert, ledig-
lich Einschränkungen beim Komfort, nicht jedoch bei der Sicherheit aufweisen sollen. Demgegenüber stehen zum Teil um 90 % billigere Lösungen durch im Internet zu
bestellende Produkte mit anschließender Eigenmontage. Der sachgemäße Einbau und
die Einhaltung gesetzlicher Mindestanforderungen werden von Prüfstellen untersucht,
Aussagen über das tatsächliche Verhalten bei speziellen Fahrsituationen liegen jedoch
nicht vor. Eine Gefährdung der Verkehrssicherheit durch getunte Fahrzeuge ist somit
zurzeit nicht auszuschließen.
Im Rahmen des Projekts mit der Bundesanstalt für Straßenwesen (BASt) werden
hierzu die sicherheitskritischen Auswirkungen von Modifikationen am Fahrwerk
untersucht. Im Fokus des Projekts stehen sicherheitskritische Kombinationen ver-
schiedener Modifikationen. Diese Tuningmaßnahmen umfassen neben der Montage
von Bauteilen wie beispielsweise Federn, Dämpfer, Spurverbreiterungen und Gewin-
defahrwerken auch die Veränderung von Sturz und Spur. Daraus folgen geänderte
Fahrwerkparameter wie beispielsweise dem Lenkrollhalbmesser, die eine Beeinflus-
sung des Fahrverhaltens insbesondere im fahrdynamischen Grenzbereich bewirken.
Die Grenzkombinationen werden durch eine Feldstudie ermittelt und im Anschluss
systematisch untersucht.
Ziel der Untersuchung ist eine klare Abgrenzung sicherheitstechnisch akzeptabler
Modifikationen von den inakzeptablen. Abgeleitet aus der Untersuchung können
Prüfmethoden zur Gewährleistung von Sicherheitskriterien erstellt werden.

35
Industrieprojekt: Analyse von Reifenspurmerkmalen unter kontrollier-ten Bedingungen
Bearbeiter: Dipl.-Ing. Gunther Seipel
Im Rahmen eines Forschungsprojekts mit der Industrie werden Reifenspuren unter
kontrollierten Bedingungen erzeugt und hinsichtlich ihrer Merkmale untersucht.
Reifenspuren stellen bei der Unfallrekon-
struktion oftmals die einzigen Anknüp-
fungstatsachen für Sachverständige dar und
leisten somit einen entscheidenden Beitrag
zur Nachvollziehbarkeit des Unfallhergangs.
Mit dessen zunehmender Komplexität stoßen bisherige Rekonstruktionsverfahren
allerdings oftmals an ihre Grenzen, da
valide Aussagen zum Spurzeichnungsver-
halten beispielsweise bei kombinierten
Längs- und Quermanövern, fahrzeugbe-
dingten hohen dynamischen Radlast-
schwankungen, unterschiedlicher Reifen-
steifigkeit, verschiedenen Fahrbahnbelägen oder bei Eingriff von Fahrdynamikregel-
systemen fehlen.
Inhalt des Forschungsprojekts ist daher die systematische Untersuchung von Einfluss-
parametern auf das Spurzeichnungsverhalten von Pkw-Reifen. Die relevanten Größen
werden zunächst auf Grundlage bekannter Modellvorstellungen zur Entstehung von
Reifenspuren identifiziert und anschließend experimentell unter kontrollieren Bedin-
gungen überprüft.
Als Werkzeug kommt der fach-
gebietseigene Reifenmessanhä-
nger PETRA (Personenwagen-
Reifen-Traktions-Messanhänger)
zum Einsatz, welcher unter
anderem die stationäre Fahrt bei
konstanten Schräglauf- und
Längsschlupfwerten des Mess-
reifens ermöglicht. Mit diesem
werden zunächst Stichversuche zur Definition der Sichtbarkeits-
grenzen sowie zur Erarbeitung
einer Dokumentationsmethodik
durchgeführt.
Reifenmessanhänger PETRA
Reifenspuren am Unfallort
Que
lle:
http
://w
ww
.jpci
ty.d
e/R
eife
nspu
ren
36
Kooperationsprojekt: MoLife – Wissenschaftliche Grundlagen kommunika-tionsbasierter Fahrerassistenzsysteme für Motorräder
Bearbeiter: Dipl.-Ing. Benedikt Lattke
In dem öffentlich geförderten Kooperationsprojekt „MoLife“ entwickelt FZD zusam-
men mit der Firma carhs.communication GmbH ein integriertes Kommunikations-
und Warnsystem für Motorräder, das über drahtlose Kommunikation rechtzeitig vor Gefahrstellen warnt. Zur Erkennung von Gefahrstellen wird neben technischen Fahr-
dynamiksensoren der Fahrer als aktiver „Sensor“ eingebunden.
Während FZD grundlegende Untersuchungen zu Fahrdynamik, Gefahrenerkennung
und Sensorik sowie Arbeiten zur Bewertung von HMI-Konzepten durchführt, wird von
dem Industriepartner die reale Umsetzung des Systems in Form von Software- und Elektronikentwicklung sowie Prototypenaufbau übernommen. Testfahrten und Vali-
dierung werden von beiden Partnern gemeinsam durchgeführt.
Das Teilprojekt von FZD beinhaltet die
theoretisch-wissenschaftliche Entwick-
lung von Möglichkeiten zur Gefahren-erkennung basierend auf den Daten
von Mensch und Sensorik. Durch die
Untersuchung von fahrdynamischen
Zusammenhängen und Reaktionen des
Fahrers beim Passieren von Gefahr-
stellen werden neuartige Methoden
zur Erkennung dieser entwickelt, um
darauf basierend entsprechende Algo-
rithmen abzuleiten.
Da Motorradfahrer im Vergleich zu Pkw-Fahrern höheren Belastungen ausgesetzt sind
und schon kleine Fehler des Fahrers zu fatalen Folgen führen können, ist es erforder-
lich, Bedien- und Warnelemente so zu gestalten, dass der Fahrer weder erschreckt
noch abgelenkt wird. Daher
werden verschiedene Konzepte
von Mensch-Maschine-Schnitt-
stellen entsprechend den ge-
nannten Anforderungen bewer-
tet, um zu gewährleisten, dass
der Fahrer effektiv und ohne Beeinträchtigung der Fahr-
sicherheit gewarnt wird.
Gruppenfahrten: Neue Anwendungsmöglichkeiten für Fahrzeugkommunikation, Quelle: carhs
Beispiele für Warnelemente in Motorrädern, Quellen: Honda, SIM
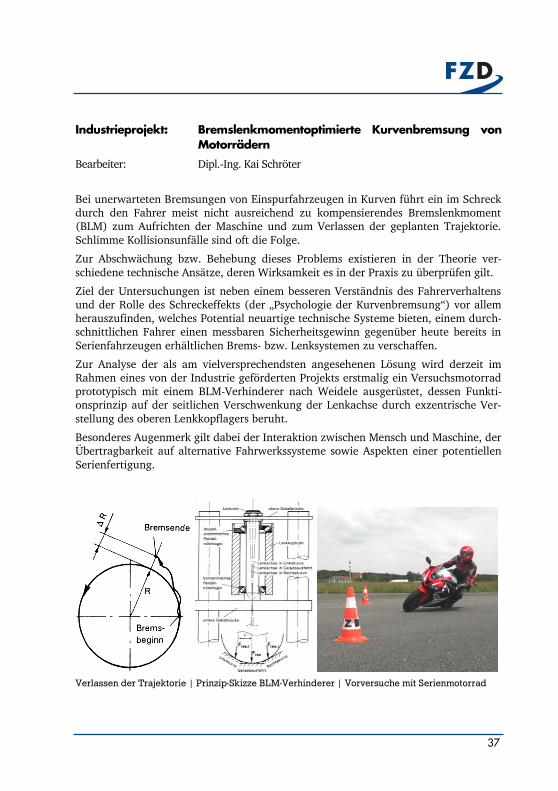
37
Industrieprojekt: Bremslenkmomentoptimierte Kurvenbremsung von Motorrädern
Bearbeiter: Dipl.-Ing. Kai Schröter
Bei unerwarteten Bremsungen von Einspurfahrzeugen in Kurven führt ein im Schreck
durch den Fahrer meist nicht ausreichend zu kompensierendes Bremslenkmoment
(BLM) zum Aufrichten der Maschine und zum Verlassen der geplanten Trajektorie.
Schlimme Kollisionsunfälle sind oft die Folge.
Zur Abschwächung bzw. Behebung dieses Problems existieren in der Theorie ver-
schiedene technische Ansätze, deren Wirksamkeit es in der Praxis zu überprüfen gilt.
Ziel der Untersuchungen ist neben einem besseren Verständnis des Fahrerverhaltens
und der Rolle des Schreckeffekts (der „Psychologie der Kurvenbremsung“) vor allem
herauszufinden, welches Potential neuartige technische Systeme bieten, einem durch-
schnittlichen Fahrer einen messbaren Sicherheitsgewinn gegenüber heute bereits in
Serienfahrzeugen erhältlichen Brems- bzw. Lenksystemen zu verschaffen.
Zur Analyse der als am vielversprechendsten angesehenen Lösung wird derzeit im
Rahmen eines von der Industrie geförderten Projekts erstmalig ein Versuchsmotorrad
prototypisch mit einem BLM-Verhinderer nach Weidele ausgerüstet, dessen Funkti-
onsprinzip auf der seitlichen Verschwenkung der Lenkachse durch exzentrische Ver-
stellung des oberen Lenkkopflagers beruht.
Besonderes Augenmerk gilt dabei der Interaktion zwischen Mensch und Maschine, der
Übertragbarkeit auf alternative Fahrwerkssysteme sowie Aspekten einer potentiellen
Serienfertigung.
Verlassen der Trajektorie | Prinzip-Skizze BLM-Verhinderer | Vorversuche mit Serienmotorrad

38
Industrieprojekt: Konzeptentwicklung einer kostengünstigen, funkti-onserweiterten Leichtbau-Bremsscheibe
Bearbeiter: Dipl.-Ing. Florian Füllgrabe
Vor dem aktuellen Hintergrund der Ressourcenschonung und fortwährend steigender
Energiepreise gewinnt das Thema Leichtbau bei der Entwicklung von Kraftfahrzeugen
und damit auch im Bereich der Radbremse zunehmend an Bedeutung. Bisher wurde
beim Bremsscheibenwerkstoff aufgrund ausgewogener Materialeigenschaften und
niedriger Kosten zumeist auf Grauguss zurückgegriffen, jedoch zu Lasten einer ver-
gleichsweise hohen Masse. Betrachtet man die gesamte Scheibenbremse, so beträgt
die anteilige Masse einer Guss-Bremsscheibe etwa 50 %. Dieser Aspekt veranschau-
licht das Leichtbaupotential, vor allem unter Berücksichtigung der reifengefederten Massen, zu denen die Bremsscheibe gehört. Darüber hinaus werden der Kraftstoffver-
brauch und damit die CO2-Emissionen durch eine geringere Masse des Gesamtfahr-
zeugs gesenkt, was hinsichtlich kommender
Emissionsrichtlinien von Bedeutung ist. Im
Rahmen des Industrieprojekts mit Schwäbi-
sche Hüttenwerke Automotive (SHW) wer-
den unter Berücksichtigung der Anforderun-
gen an eine moderne Radbremse verschiede-
ne Konzepte zur Realisierung einer Brems-
scheibe in Leichtbauweise evaluiert. Im
Fokus der Entwicklung stehen unter ande-
rem die Bereiche Werkstoff- und Verbund-
leichtbau, wobei die Anforderungen an einen
wirtschaftlichen Fertigungsprozess berück-
sichtigt werden. Nach Beendigung der Kon-zeptentwicklungsphase wurden im vergan-
genen Jahr zwei Leichtbau-Bremsscheiben in
Aluminium/Grauguss-Verbundbauweise erfolgreich prototypisch umgesetzt. Zur
Verbindung der Komponenten Topf und Reibring kommen die Prozesse Reibschwei-
ßen und eine Kombination aus den umformenden Fertigungsverfahren Drücken und
Drückwalzen zum Einsatz. Beide Bremsscheiben wurden mittels verschiedener Prüf-
verfahren auf einem Schwungmassenprüfstand validiert. Eine Optimierung der
Bremsscheiben hinsichtlich Geometrie und Thermomanagement unter Einbindung
analytischer und numerischer Simulationstools ergänzt die Untersuchungen.
Neben dem Entwicklungsziel „Leichtbau-Bremsscheibe“ wird im Projektrahmen nach
möglichen Funktionserweiterungen für eine Bremsscheibe geforscht. Bisher wird die
Scheibe als Reibpartner des Belags nur als passive Komponente innerhalb des Brems-
systems betrieben. Dort hat sie die primäre Funktion die kinetische Energie des Fahr-
zeugs in thermische Energie zu wandeln. Insbesondere die thermische Belastung der
Scheibe und sicherheitsrelevante Aspekte werden an dieser Stelle betrachtet.
Leichtbau-Bremsscheibe mit Aluminiumtopf und Reibring aus Grauguss [Quelle: SHW]
39
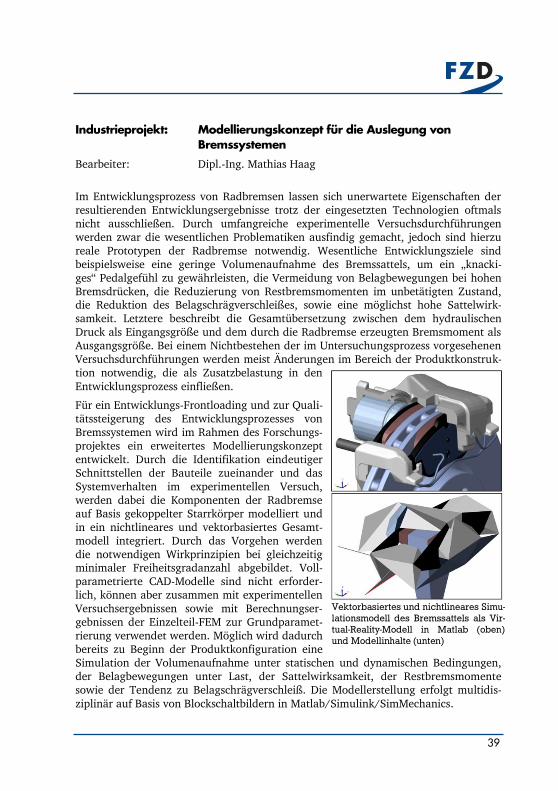
Industrieprojekt: Modellierungskonzept für die Auslegung von Bremssystemen
Bearbeiter: Dipl.-Ing. Mathias Haag
Im Entwicklungsprozess von Radbremsen lassen sich unerwartete Eigenschaften der
resultierenden Entwicklungsergebnisse trotz der eingesetzten Technologien oftmals
nicht ausschließen. Durch umfangreiche experimentelle Versuchsdurchführungen
werden zwar die wesentlichen Problematiken ausfindig gemacht, jedoch sind hierzu
reale Prototypen der Radbremse notwendig. Wesentliche Entwicklungsziele sind
beispielsweise eine geringe Volumenaufnahme des Bremssattels, um ein „knacki-
ges“ Pedalgefühl zu gewährleisten, die Vermeidung von Belagbewegungen bei hohen
Bremsdrücken, die Reduzierung von Restbremsmomenten im unbetätigten Zustand, die Reduktion des Belagschrägverschleißes, sowie eine möglichst hohe Sattelwirk-
samkeit. Letztere beschreibt die Gesamtübersetzung zwischen dem hydraulischen
Druck als Eingangsgröße und dem durch die Radbremse erzeugten Bremsmoment als
Ausgangsgröße. Bei einem Nichtbestehen der im Untersuchungsprozess vorgesehenen
Versuchsdurchführungen werden meist Änderungen im Bereich der Produktkonstruk-
tion notwendig, die als Zusatzbelastung in den
Entwicklungsprozess einfließen.
Für ein Entwicklungs-Frontloading und zur Quali-
tätssteigerung des Entwicklungsprozesses von
Bremssystemen wird im Rahmen des Forschungs-
projektes ein erweitertes Modellierungskonzept
entwickelt. Durch die Identifikation eindeutiger
Schnittstellen der Bauteile zueinander und das
Systemverhalten im experimentellen Versuch,
werden dabei die Komponenten der Radbremse
auf Basis gekoppelter Starrkörper modelliert und
in ein nichtlineares und vektorbasiertes Gesamt-
modell integriert. Durch das Vorgehen werden
die notwendigen Wirkprinzipien bei gleichzeitig minimaler Freiheitsgradanzahl abgebildet. Voll-
parametrierte CAD-Modelle sind nicht erforder-
lich, können aber zusammen mit experimentellen
Versuchsergebnissen sowie mit Berechnungser-
gebnissen der Einzelteil-FEM zur Grundparamet-
rierung verwendet werden. Möglich wird dadurch
bereits zu Beginn der Produktkonfiguration eine
Simulation der Volumenaufnahme unter statischen und dynamischen Bedingungen,
der Belagbewegungen unter Last, der Sattelwirksamkeit, der Restbremsmomente
sowie der Tendenz zu Belagschrägverschleiß. Die Modellerstellung erfolgt multidis-
ziplinär auf Basis von Blockschaltbildern in Matlab/Simulink/SimMechanics.
Vektorbasiertes und nichtlineares Simu-lationsmodell des Bremssattels als Vir-tual-Reality-Modell in Matlab (oben) und Modellinhalte (unten)
40
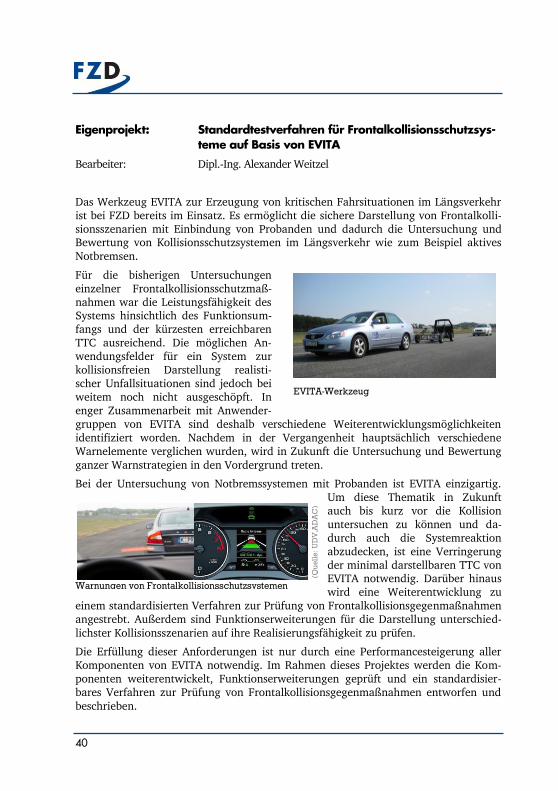
Eigenprojekt: Standardtestverfahren für Frontalkollisionsschutzsys-teme auf Basis von EVITA
Bearbeiter: Dipl.-Ing. Alexander Weitzel
Das Werkzeug EVITA zur Erzeugung von kritischen Fahrsituationen im Längsverkehr
ist bei FZD bereits im Einsatz. Es ermöglicht die sichere Darstellung von Frontalkolli-
sionsszenarien mit Einbindung von Probanden und dadurch die Untersuchung und Bewertung von Kollisionsschutzsystemen im Längsverkehr wie zum Beispiel aktives
Notbremsen.
Für die bisherigen Untersuchungen
einzelner Frontalkollisionsschutzmaß-
nahmen war die Leistungsfähigkeit des Systems hinsichtlich des Funktionsum-
fangs und der kürzesten erreichbaren
TTC ausreichend. Die möglichen An-
wendungsfelder für ein System zur
kollisionsfreien Darstellung realisti-
scher Unfallsituationen sind jedoch bei
weitem noch nicht ausgeschöpft. In
enger Zusammenarbeit mit Anwender-
gruppen von EVITA sind deshalb verschiedene Weiterentwicklungsmöglichkeiten
identifiziert worden. Nachdem in der Vergangenheit hauptsächlich verschiedene
Warnelemente verglichen wurden, wird in Zukunft die Untersuchung und Bewertung
ganzer Warnstrategien in den Vordergrund treten.
Bei der Untersuchung von Notbremssystemen mit Probanden ist EVITA einzigartig.
Um diese Thematik in Zukunft
auch bis kurz vor die Kollision
untersuchen zu können und da-
durch auch die Systemreaktion
abzudecken, ist eine Verringerung
der minimal darstellbaren TTC von EVITA notwendig. Darüber hinaus
wird eine Weiterentwicklung zu
einem standardisierten Verfahren zur Prüfung von Frontalkollisionsgegenmaßnahmen
angestrebt. Außerdem sind Funktionserweiterungen für die Darstellung unterschied-
lichster Kollisionsszenarien auf ihre Realisierungsfähigkeit zu prüfen.
Die Erfüllung dieser Anforderungen ist nur durch eine Performancesteigerung aller
Komponenten von EVITA notwendig. Im Rahmen dieses Projektes werden die Kom-
ponenten weiterentwickelt, Funktionserweiterungen geprüft und ein standardisier-
bares Verfahren zur Prüfung von Frontalkollisionsgegenmaßnahmen entworfen und
beschrieben.
EVITA-Werkzeug
Warnungen von Frontalkollisionsschutzsystemen
(Que
lle: U
DV
,AD
AC
)
41
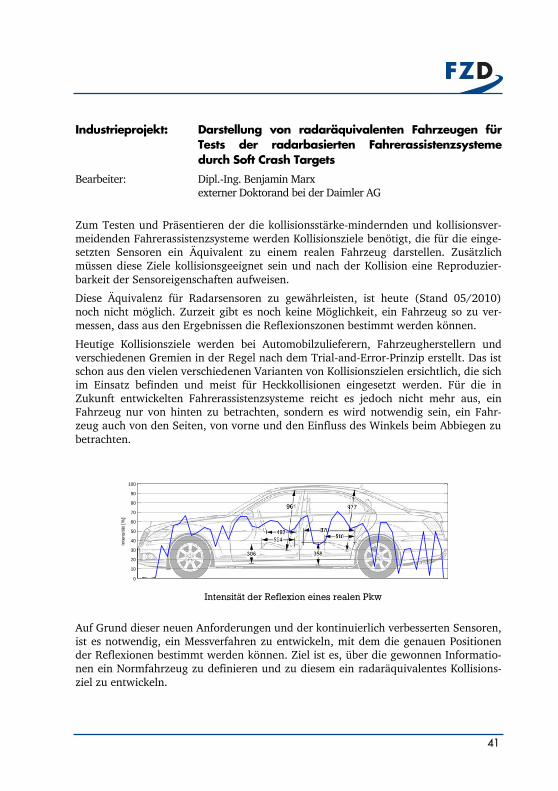
Industrieprojekt: Darstellung von radaräquivalenten Fahrzeugen für Tests der radarbasierten Fahrerassistenzsysteme durch Soft Crash Targets
Bearbeiter: Dipl.-Ing. Benjamin Marx
externer Doktorand bei der Daimler AG
Zum Testen und Präsentieren der die kollisionsstärke-mindernden und kollisionsver-
meidenden Fahrerassistenzsysteme werden Kollisionsziele benötigt, die für die einge-
setzten Sensoren ein Äquivalent zu einem realen Fahrzeug darstellen. Zusätzlich
müssen diese Ziele kollisionsgeeignet sein und nach der Kollision eine Reproduzier-
barkeit der Sensoreigenschaften aufweisen.
Diese Äquivalenz für Radarsensoren zu gewährleisten, ist heute (Stand 05/2010)
noch nicht möglich. Zurzeit gibt es noch keine Möglichkeit, ein Fahrzeug so zu ver-
messen, dass aus den Ergebnissen die Reflexionszonen bestimmt werden können.
Heutige Kollisionsziele werden bei Automobilzulieferern, Fahrzeugherstellern und
verschiedenen Gremien in der Regel nach dem Trial-and-Error-Prinzip erstellt. Das ist
schon aus den vielen verschiedenen Varianten von Kollisionszielen ersichtlich, die sich
im Einsatz befinden und meist für Heckkollisionen eingesetzt werden. Für die in
Zukunft entwickelten Fahrerassistenzsysteme reicht es jedoch nicht mehr aus, ein
Fahrzeug nur von hinten zu betrachten, sondern es wird notwendig sein, ein Fahr-
zeug auch von den Seiten, von vorne und den Einfluss des Winkels beim Abbiegen zu
betrachten.
Auf Grund dieser neuen Anforderungen und der kontinuierlich verbesserten Sensoren,
ist es notwendig, ein Messverfahren zu entwickeln, mit dem die genauen Positionen
der Reflexionen bestimmt werden können. Ziel ist es, über die gewonnen Informatio-
nen ein Normfahrzeug zu definieren und zu diesem ein radaräquivalentes Kollisions-
ziel zu entwickeln.
0
10
20
30
40
50
60
70
80
90
100
Inte
nsität
[%]
Intensität der Reflexion eines realen Pkw
42
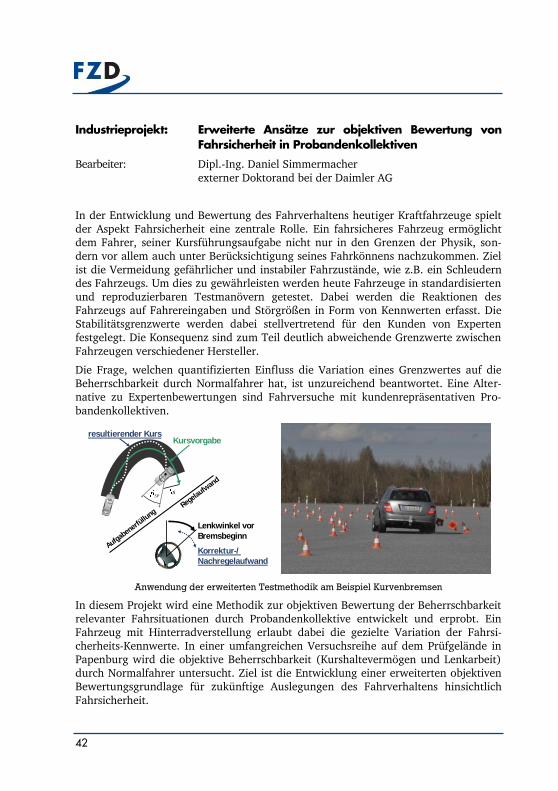
Industrieprojekt: Erweiterte Ansätze zur objektiven Bewertung von Fahrsicherheit in Probandenkollektiven
Bearbeiter: Dipl.-Ing. Daniel Simmermacher
externer Doktorand bei der Daimler AG
In der Entwicklung und Bewertung des Fahrverhaltens heutiger Kraftfahrzeuge spielt
der Aspekt Fahrsicherheit eine zentrale Rolle. Ein fahrsicheres Fahrzeug ermöglicht
dem Fahrer, seiner Kursführungsaufgabe nicht nur in den Grenzen der Physik, son-
dern vor allem auch unter Berücksichtigung seines Fahrkönnens nachzukommen. Ziel
ist die Vermeidung gefährlicher und instabiler Fahrzustände, wie z.B. ein Schleudern
des Fahrzeugs. Um dies zu gewährleisten werden heute Fahrzeuge in standardisierten
und reproduzierbaren Testmanövern getestet. Dabei werden die Reaktionen des
Fahrzeugs auf Fahrereingaben und Störgrößen in Form von Kennwerten erfasst. Die
Stabilitätsgrenzwerte werden dabei stellvertretend für den Kunden von Experten
festgelegt. Die Konsequenz sind zum Teil deutlich abweichende Grenzwerte zwischen
Fahrzeugen verschiedener Hersteller.
Die Frage, welchen quantifizierten Einfluss die Variation eines Grenzwertes auf die
Beherrschbarkeit durch Normalfahrer hat, ist unzureichend beantwortet. Eine Alter-
native zu Expertenbewertungen sind Fahrversuche mit kundenrepräsentativen Pro-
bandenkollektiven.
Anwendung der erweiterten Testmethodik am Beispiel Kurvenbremsen
In diesem Projekt wird eine Methodik zur objektiven Bewertung der Beherrschbarkeit
relevanter Fahrsituationen durch Probandenkollektive entwickelt und erprobt. Ein
Fahrzeug mit Hinterradverstellung erlaubt dabei die gezielte Variation der Fahrsi-
cherheits-Kennwerte. In einer umfangreichen Versuchsreihe auf dem Prüfgelände in
Papenburg wird die objektive Beherrschbarkeit (Kurshaltevermögen und Lenkarbeit)
durch Normalfahrer untersucht. Ziel ist die Entwicklung einer erweiterten objektiven
Bewertungsgrundlage für zukünftige Auslegungen des Fahrverhaltens hinsichtlich
Fahrsicherheit.
Aufgab
ener
füllu
ng
Lenkwinkel vor
Bremsbeginn
Korrektur-/
Nachregelaufwand
Regela
ufwan
d
Kursvorgaberesultierender Kurs
SPs
43
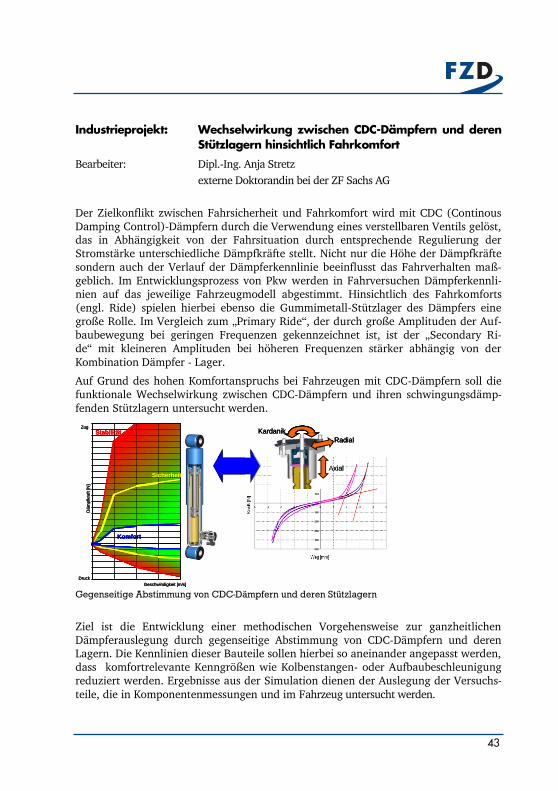
Industrieprojekt: Wechselwirkung zwischen CDC-Dämpfern und deren Stützlagern hinsichtlich Fahrkomfort
Bearbeiter: Dipl.-Ing. Anja Stretz
externe Doktorandin bei der ZF Sachs AG
Der Zielkonflikt zwischen Fahrsicherheit und Fahrkomfort wird mit CDC (Continous
Damping Control)-Dämpfern durch die Verwendung eines verstellbaren Ventils gelöst, das in Abhängigkeit von der Fahrsituation durch entsprechende Regulierung der
Stromstärke unterschiedliche Dämpfkräfte stellt. Nicht nur die Höhe der Dämpfkräfte
sondern auch der Verlauf der Dämpferkennlinie beeinflusst das Fahrverhalten maß-
geblich. Im Entwicklungsprozess von Pkw werden in Fahrversuchen Dämpferkennli-
nien auf das jeweilige Fahrzeugmodell abgestimmt. Hinsichtlich des Fahrkomforts
(engl. Ride) spielen hierbei ebenso die Gummimetall-Stützlager des Dämpfers eine
große Rolle. Im Vergleich zum „Primary Ride“, der durch große Amplituden der Auf-
baubewegung bei geringen Frequenzen gekennzeichnet ist, ist der „Secondary Ri-
de“ mit kleineren Amplituden bei höheren Frequenzen stärker abhängig von der
Kombination Dämpfer - Lager.
Auf Grund des hohen Komfortanspruchs bei Fahrzeugen mit CDC-Dämpfern soll die
funktionale Wechselwirkung zwischen CDC-Dämpfern und ihren schwingungsdämp-
fenden Stützlagern untersucht werden.
Axial
Radial
KardanikStabilität
Komfort
Geschwindigkeit [m/s]
Dä
mpfk
raft
[N
]
Druck
Zug
SicherheitAxial
Radial
Kardanik
Axial
Radial
KardanikStabilität
Komfort
Geschwindigkeit [m/s]
Dä
mpfk
raft
[N
]
Druck
Zug
Sicherheit
Stabilität
Komfort
Geschwindigkeit [m/s]
Dä
mpfk
raft
[N
]
Druck
Zug
Sicherheit
Gegenseitige Abstimmung von CDC-Dämpfern und deren Stützlagern
Ziel ist die Entwicklung einer methodischen Vorgehensweise zur ganzheitlichen
Dämpferauslegung durch gegenseitige Abstimmung von CDC-Dämpfern und deren Lagern. Die Kennlinien dieser Bauteile sollen hierbei so aneinander angepasst werden,
dass komfortrelevante Kenngrößen wie Kolbenstangen- oder Aufbaubeschleunigung
reduziert werden. Ergebnisse aus der Simulation dienen der Auslegung der Versuchs-
teile, die in Komponentenmessungen und im Fahrzeug untersucht werden.
44
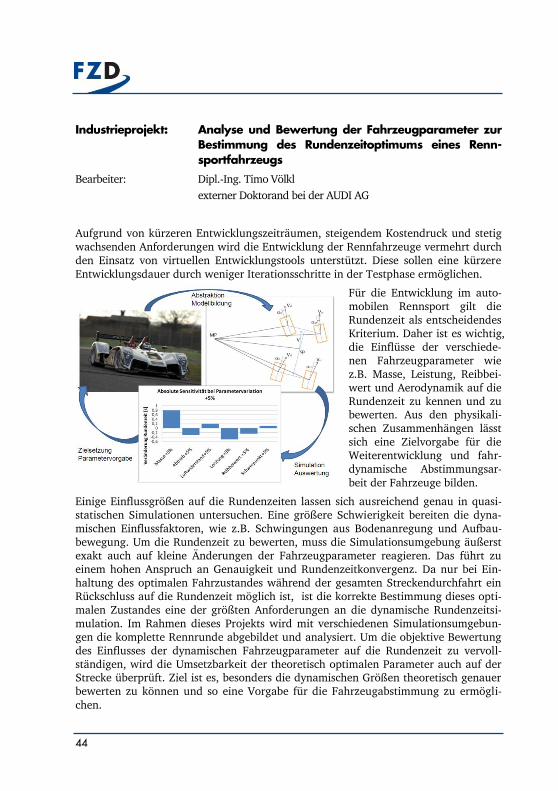
Industrieprojekt: Analyse und Bewertung der Fahrzeugparameter zur Bestimmung des Rundenzeitoptimums eines Renn-sportfahrzeugs
Bearbeiter: Dipl.-Ing. Timo Völkl
externer Doktorand bei der AUDI AG
Aufgrund von kürzeren Entwicklungszeiträumen, steigendem Kostendruck und stetig
wachsenden Anforderungen wird die Entwicklung der Rennfahrzeuge vermehrt durch
den Einsatz von virtuellen Entwicklungstools unterstützt. Diese sollen eine kürzere
Entwicklungsdauer durch weniger Iterationsschritte in der Testphase ermöglichen.
Für die Entwicklung im auto-
mobilen Rennsport gilt die
Rundenzeit als entscheidendes
Kriterium. Daher ist es wichtig,
die Einflüsse der verschiede-
nen Fahrzeugparameter wie
z.B. Masse, Leistung, Reibbei-
wert und Aerodynamik auf die
Rundenzeit zu kennen und zu bewerten. Aus den physikali-
schen Zusammenhängen lässt
sich eine Zielvorgabe für die
Weiterentwicklung und fahr-
dynamische Abstimmungsar-
beit der Fahrzeuge bilden.
Einige Einflussgrößen auf die Rundenzeiten lassen sich ausreichend genau in quasi-
statischen Simulationen untersuchen. Eine größere Schwierigkeit bereiten die dyna-
mischen Einflussfaktoren, wie z.B. Schwingungen aus Bodenanregung und Aufbau-
bewegung. Um die Rundenzeit zu bewerten, muss die Simulationsumgebung äußerst
exakt auch auf kleine Änderungen der Fahrzeugparameter reagieren. Das führt zu
einem hohen Anspruch an Genauigkeit und Rundenzeitkonvergenz. Da nur bei Ein-
haltung des optimalen Fahrzustandes während der gesamten Streckendurchfahrt ein
Rückschluss auf die Rundenzeit möglich ist, ist die korrekte Bestimmung dieses opti-
malen Zustandes eine der größten Anforderungen an die dynamische Rundenzeitsi-
mulation. Im Rahmen dieses Projekts wird mit verschiedenen Simulationsumgebun-
gen die komplette Rennrunde abgebildet und analysiert. Um die objektive Bewertung
des Einflusses der dynamischen Fahrzeugparameter auf die Rundenzeit zu vervoll-
ständigen, wird die Umsetzbarkeit der theoretisch optimalen Parameter auch auf der Strecke überprüft. Ziel ist es, besonders die dynamischen Größen theoretisch genauer
bewerten zu können und so eine Vorgabe für die Fahrzeugabstimmung zu ermögli-
chen.
45
Abgeschlossene Forschungsprojekte 2009
Kosten-Wirksamkeits- und Stakeholder-Analyse von Systemen zur Unfall-
vermeidung in Straßentunneln
PRORETA II - Überholassistenz
46
Testfahrzeugprojekt
Im Rahmen des Testfahrzeugprojekts führt das Fachgebiet Fahrzeugtechnik Subjek-
tivbeurteilungen an Serienfahrzeugen unterschiedlicher Hersteller und Importeure
durch. Das Projekt bietet unseren Mitarbeitern Zugriff auf aktuelle Fahrzeuge. Dies ist
im Hinblick auf die Kenntnis über den Stand der Technik sowohl für die Forschung als
auch für die Lehre unabdingbar. Die Ausbildung der Studierenden lebt von den Ein-
drücken der Ausbilder, welche durch deren „Erfahrungen“ im Umgang mit neuen
Fahrzeugen und Systemen zu Stande kommen. Darüber hinaus gibt das Projekt
Rückmeldung über die Umsetzung der laufenden Forschung in den Produkten und
ermöglicht, weitere Potenziale in der Fahrzeugentwicklung abzuschätzen. Die von den Mitarbeitern zu verfassenden Berichte trainieren die Fähigkeit zur sachlichen
Diskussion subjektiver Eindrücke und zwingen zur Definition von Beurteilungskriteri-
en. Nicht zuletzt bietet das Testfahrzeugprojekt eine hervorragende praktische Wei-
terbildung für junge Fahrzeugingenieure.
Unseren Partnern, die uns ihre Fahrzeuge zur Verfügung stellen, bieten wir eine fachlich kompetente Diskussion unserer Eindrücke in Form eines ausführlichen Sub-
jektivbeurteilungsberichtes als marktnahe Studie. Zu Gute kommt ihnen insbesondere
unsere Unabhängigkeit als Hochschulinstitut bei zugleich guter Kenntnis der Wettbe-
werber. Im Mittelpunkt jedes Berichtes steht vor allem die konstruktive Kritik.
Mit diesem Anspruch haben wir 1987 unser Testfahrzeugprojekt etabliert und blicken
damit bereits auf eine lange Tradition zurück. Nachdem inzwischen rund 32 Herstel-
ler und Importeure mit uns zusammenarbeiten, ist allein die Gesamtzahl an beurteil-
ten Testwagen bis zur Jahresmitte 2010 auf 429 gestiegen. Die Anzahl der dem Pro-
jekt erst 1994/95 formell zugeordneten Test-Motorräder beläuft sich auf 27. Diese
recht gering anmutende Zahl trügt, da in nunmehr über 30 Jahren aktiver Motorrad-
forschung unzählige Motorräder im Rahmen von Forschungsprojekten ausführlich
untersucht wurden, aber in der Testfahrzeugstatistik nicht auftauchen.
In den vergangenen 12 Monaten wurden drei Wagen sowie ein Motorrad verschiede-
ner Hersteller und Importeure über Zeiträume von zwei bis vier Wochen auf einer
Gesamtstrecke von ca. 15.900 km im Alltagseinsatz gefahren und subjektiv beurteilt.
Das Fahrerkollektiv der Testwagen umfasste durchschnittlich 14 Mitarbeiter des
Fachgebietes (Prof. Dr. rer. nat., Dr.-Ing., Dipl.-Ing., Dipl.-Wirtsch.-Ing. und M.Sc.).
Das Fahrerkollektiv für den Motorradtest setzte sich neben vier Mitarbeitern des FG
aus acht weiteren dem FG nahe stehenden Motorradenthusiasten, darunter Studenten
und Techniker, zusammen. Der Neuwert der Fahrzeuge lag in Summe bei über
226.000 €. Die Beurteilung findet im Alltagsbetrieb ausschließlich auf öffentlichen
Straßen statt. Unser Fahrerkollektiv legt während der Versuchsphase 2.400 bis 5.800
km mit den Testfahrzeugen zurück. Der von uns erstellte Beurteilungsbericht beinhal-
tet eine kritische Diskussion der positiven und negativen Eindrücke aus fahrzeugtech-
nischer Sicht. Zusätzlich werden freie Beschreibungen unserer Tester berücksichtigt.
47
Testfahrzeugstatistik
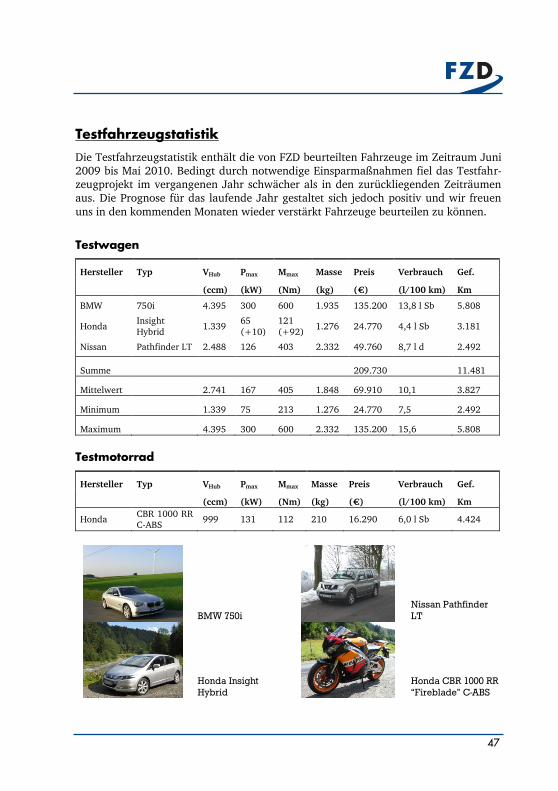
Die Testfahrzeugstatistik enthält die von FZD beurteilten Fahrzeuge im Zeitraum Juni
2009 bis Mai 2010. Bedingt durch notwendige Einsparmaßnahmen fiel das Testfahr-
zeugprojekt im vergangenen Jahr schwächer als in den zurückliegenden Zeiträumen
aus. Die Prognose für das laufende Jahr gestaltet sich jedoch positiv und wir freuen
uns in den kommenden Monaten wieder verstärkt Fahrzeuge beurteilen zu können.
Testwagen
Hersteller Typ VHub Pmax Mmax Masse Preis Verbrauch Gef.
(ccm) (kW) (Nm) (kg) (€) (l/100 km) Km
BMW 750i 4.395 300 600 1.935 135.200 13,8 l Sb 5.808
Honda Insight
Hybrid 1.339
65
(+10)
121
(+92) 1.276 24.770 4,4 l Sb 3.181
Nissan Pathfinder LT 2.488 126 403 2.332 49.760 8,7 l d 2.492
Summe 209.730 11.481
Mittelwert 2.741 167 405 1.848 69.910 10,1 3.827
Minimum 1.339 75 213 1.276 24.770 7,5 2.492
Maximum 4.395 300 600 2.332 135.200 15,6 5.808
Testmotorrad
Hersteller Typ VHub Pmax Mmax Masse Preis Verbrauch Gef.
(ccm) (kW) (Nm) (kg) (€) (l/100 km) Km
Honda CBR 1000 RR C-ABS
999 131 112 210 16.290 6,0 l Sb 4.424
BMW 750i Nissan Pathfinder LT
Honda Insight Hybrid
Honda CBR 1000 RR “Fireblade” C-ABS
48
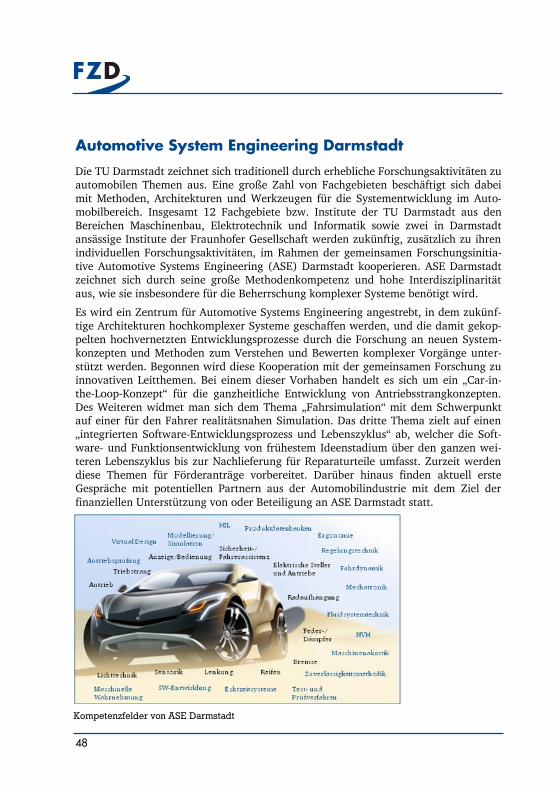
Automotive System Engineering Darmstadt
Die TU Darmstadt zeichnet sich traditionell durch erhebliche Forschungsaktivitäten zu
automobilen Themen aus. Eine große Zahl von Fachgebieten beschäftigt sich dabei
mit Methoden, Architekturen und Werkzeugen für die Systementwicklung im Auto-
mobilbereich. Insgesamt 12 Fachgebiete bzw. Institute der TU Darmstadt aus den
Bereichen Maschinenbau, Elektrotechnik und Informatik sowie zwei in Darmstadt
ansässige Institute der Fraunhofer Gesellschaft werden zukünftig, zusätzlich zu ihren
individuellen Forschungsaktivitäten, im Rahmen der gemeinsamen Forschungsinitia-
tive Automotive Systems Engineering (ASE) Darmstadt kooperieren. ASE Darmstadt
zeichnet sich durch seine große Methodenkompetenz und hohe Interdisziplinarität
aus, wie sie insbesondere für die Beherrschung komplexer Systeme benötigt wird.
Es wird ein Zentrum für Automotive Systems Engineering angestrebt, in dem zukünf-
tige Architekturen hochkomplexer Systeme geschaffen werden, und die damit gekop-
pelten hochvernetzten Entwicklungsprozesse durch die Forschung an neuen System-
konzepten und Methoden zum Verstehen und Bewerten komplexer Vorgänge unter-
stützt werden. Begonnen wird diese Kooperation mit der gemeinsamen Forschung zu
innovativen Leitthemen. Bei einem dieser Vorhaben handelt es sich um ein „Car-in-
the-Loop-Konzept“ für die ganzheitliche Entwicklung von Antriebsstrangkonzepten.
Des Weiteren widmet man sich dem Thema „Fahrsimulation“ mit dem Schwerpunkt auf einer für den Fahrer realitätsnahen Simulation. Das dritte Thema zielt auf einen
„integrierten Software-Entwicklungsprozess und Lebenszyklus“ ab, welcher die Soft-
ware- und Funktionsentwicklung von frühestem Ideenstadium über den ganzen wei-
teren Lebenszyklus bis zur Nachlieferung für Reparaturteile umfasst. Zurzeit werden
diese Themen für Förderanträge vorbereitet. Darüber hinaus finden aktuell erste
Gespräche mit potentiellen Partnern aus der Automobilindustrie mit dem Ziel der
finanziellen Unterstützung von oder Beteiligung an ASE Darmstadt statt.
Kompetenzfelder von ASE Darmstadt
49
Uni-DAS e.V.
Das hohe Niveau der deutschen Fahrerassistenzforschung
äußert sich auch in der Vertretung von in Industrie und
Wissenschaft ausgewiesenen Experten in den Universitä-
ten. Um dies auch nach außen zu repräsentieren, haben
sich fünf Lehrstühle zusammengetan:
Prof. Klaus Dietmayer, Universität Ulm, Prof. Berthold
Färber, Universität der Bundeswehr München, Prof. Mar-
kus Maurer, Technische Universität Braunschweig, Prof.
Christoph Stiller, Karlsruher Institut für Technologie und Prof. Hermann Winner, Technische Universität Darmstadt.
Der von ihnen gegründete gemeinnützige Verein Uni-DAS e.V. bildet die Basis für
eine gemeinschaftliche Organisation von Forschungsanträgen und Weiterbildungsan-
geboten, der Förderung des wissenschaftlichen Nachwuchses und des wissenschaftli-
chen Austauschs sowie dem gemeinschaftlichen Auftreten in Gremien.
Die in Uni-DAS vertretene Expertise umfasst das gesamte Gebiet der Fahrerassistenz
von der maschinellen Umfeld-Perzeption über die Assistenzfunktionen, die Mensch-
Maschine-Interaktion und -Systemarchitektur bis hin zu Test- und Bewertungsverfah-
ren.
Prof. Winner übernahm für die ersten 18 Monate den Vorsitz von Uni-DAS, sein Stell-
vertreter ist Prof. Maurer. Fabian Regh wurde als erster Geschäftsführer eingesetzt.
Weitere Informationen können der Homepage www.uni-das.de entnommen werden.
50
Internationale Austauschaktivitäten
Austauschprogramm Virginia-Tech
Im Jahr 2006 initiierte FZD ein studentisches Austauschprogramm und kooperiert
seitdem mit dem Advanced Vehicle Dynamics Laboratory der Virginia Tech unter der
Leitung von Frau Professor Sandu. Seit nunmehr vier Jahren entsendet FZD jährlich
drei Studierende nach Blacksburg an die Virginia Tech. Die Studenten können auf
Grund der jahrelangen Partnerschaft zwischen der TU Darmstadt und der Virginia
Tech ein Semester in den USA studieren und sind von den Studiengebühren in Höhe
von 9.000 US-$ pro Semester befreit. Zusätzlich unterstützt FZD die Studenten mit
einem Stipendium des DAAD in Höhe von 950 € monatlich und einer Reisepauschale
in Höhe von 800 €. Im WS 2009/10 besuchten die Studenten Christina Grotenhöfer,
Sebastian Scholz und Benjamin Siegl die Virginia Tech. Ihre Erfahrungsberichte sind
auf der FZD-Homepage nachzulesen.
Automotive Engineering Summer Germany
In der Zeit vom 24.5.2010 bis zum 30.7.2010 wird zum ersten Mal das Austauschpro-
gramm Automotive Engineering Summer Germany (AESG) für Studenten amerikani-
scher Partneruniversitäten (z.Z. Virginia Tech, University at Buffalo) durchgeführt. Im
Rahmen von AESG belegen die Austauschstudenten die drei von FZD angebotenen
Lehrveranstaltungen Trends der Kraftfahrzeugentwicklung, Advanced Design Project und
Tutorium Fahrzeugtechnik.
Bei der Gestaltung des Programms wurde großer Wert darauf gelegt, den Bedürfnis-
sen der amerikanischen Studenten entgegenzukommen. Beispielsweise findet das
Programm in den amerikanischen Sommersemesterferien statt und es können alle
Lehrveranstaltungen ohne Deutschkenntnisse belegt werden. Zusätzlich werden in Deutschland erworbene Leistungsnachweise vollständig von den Partneruniversitäten
anerkannt.
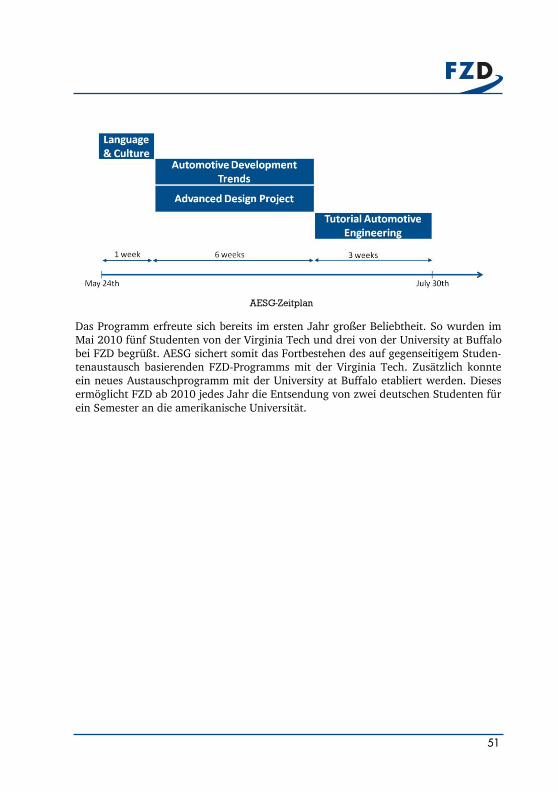
51
Das Programm erfreute sich bereits im ersten Jahr großer Beliebtheit. So wurden im
Mai 2010 fünf Studenten von der Virginia Tech und drei von der University at Buffalo
bei FZD begrüßt. AESG sichert somit das Fortbestehen des auf gegenseitigem Studen-
tenaustausch basierenden FZD-Programms mit der Virginia Tech. Zusätzlich konnte
ein neues Austauschprogramm mit der University at Buffalo etabliert werden. Dieses
ermöglicht FZD ab 2010 jedes Jahr die Entsendung von zwei deutschen Studenten für
ein Semester an die amerikanische Universität.
AESG-Zeitplan
52
Ausländische Gäste bei FZD
01.06.2009-
29.07.2009
Darcy Dwyer
Smith College, MA, USA
01.06.2009-
29.07.2009
Rachel Howell
Valparaiso University, IN, USA
01.06.2009-
29.07.2009
Amanda Scott
Michigan Technological University, MI, USA
01.06.2009-
29.07.2009
Ivan Stalev
Pennsylvania State University, PA, USA
24.05.2010-
30.07.2010
Rebecca Bandy
Virginia Polytechnic Institute and State University, VA, USA
24.05.2010-
30.07.2010
Devin Clancy
Virginia Polytechnic Institute and State University, VA, USA
24.05.2010-
30.07.2010
Sujay Kawale
Virginia Polytechnic Institute and State University, VA, USA
24.05.2010-
30.07.2010
Steven Mangone
University at Buffalo, NY, USA
24.05.2010-
30.07.2010
Scott Naranjo
Virginia Polytechnic Institute and State University, VA, USA
24.05.2010-
30.07.2010
Eduardo Pinto
Virginia Polytechnic Institute and State University, VA, USA
24.05.2010-
30.07.2010
Nicholas Rhode
University at Buffalo, NY, USA
24.05.2010-
30.07.2010
John Robinson
University at Buffalo, NY, USA
53
Tagungsbesuche
Tagungsbesuche 2010:
PISa - MYMOSA Workshop, Helmond - Eindhoven (NL), 03.-04. Februar 2010: Bene-
dikt Lattke, Kai Schröter
GfA Frühjahrskongress 2010, Darmstadt, 24.-26.März 2010: Andree Hohm, Hermann
Winner
Sicherheit durch Fahrerassistenz, 14.-15. April 2010: Norbert Fecher
Gesellschaft für Ursachenforschung bei Verkehrsunfällen (GUVU) Frühjahrsseminar,
Köln, 16. April 2010: Fabian Regh
Safety Week 2010, Aschaffenburg, 19.-20. Mai 2010: Benedikt Lattke
FISITA 2010 World Automotive Congress, Budapest, 30. Mai - 04. Juni 2010: Mathias
Haag, Stephan Hakuli
International Conference on Safety and Mobility of Vulnerable Road Users (VRU):
Pedestrians, Motorcyclists, and Bicyclists, Jerusalem (IL), 30. Mai - 02. Juni 2010: Kai
Schröter
Tagungsbesuche 2009:
AAET 2009, Braunschweig, 11.-12. Februar 2009: Fabian Regh
chassis.tech 2009, München, 2.-3. März 2009: Marcus Reul
Safety Update 2009, Aschaffenburg, 06.-07. Mai 2009: Fabian Regh
Wissenschaftlerseminar des Instituts für Zweiradsicherheit, Kreuzbergpass (I), 05.-09.
Juni 2009: Kai Schröter, Patrick Seiniger
ESV 2009, Stuttgart, 15.-18. Juni 2009: Benedikt Lattke, Fabian Regh, Marcus Reul,
Kai Schröter, Patrick Seiniger, Hermann Winner
1. Darmstädter Ingenieurkongress – Bau und Umwelt, Darmstadt, 14.-15. September
2009: Hermann Winner
7. Hessischer Mobilitätskongress, Frankfurt a.M., 18. September 2009: Sebastian
Geyer, Hermann Winner
14. Internationaler Kongress Elektronik im Kraftfahrzeug, Baden-Baden, 7.-8. Okto-
ber 2009: Hermann Winner, Andree Hohm
12. Internationale VDI-Tagung Reifen-Fahrwerk-Fahrbahn, Hannover, 20.-21. Okto-
ber 2009: Marcus Reul, Alexander Stoff, Hermann Winner
54
DGON-Symposium: POSNAV 2009, Dresden, 27.-28. Oktober 2009: Nico Dziubek
15. Esslinger Forum Kfz-Mechatronik, Esslingen, 11. November 2009: Hermann
Winner
5. Fahrer im 21. Jahrhundert, Braunschweig, 04.-05. November 2009: Stefan Habe-
nicht, Alexander Weitzel
Subjektive Fahreindrücke sichtbar machen IV, Essen, 12.-13. November 2009: Ale-
xander Stoff
Der FZD-Tagungskalender, ein Ergebnis der stetigen Prozessoptimierung
55
Vorträge
Vorträge 2010, Vortragende unterstrichen:
Schröter, K.; Weidele, A.: Fahrdynamik, Stabilität und Bremsverhalten von Motorrä-
dern, DEKRA Grundlehrgang Unfallanalyse, Altensteig, Januar 2010
Hohm, A.; Winner, H.: Probandenstudie zur Ermittlung der Adequate Overtaking
Margin (AOM) für die Fahrerassistenz in Überholsituationen. 56. Kongress der Ge-sellschaft für Arbeitswissenschaft, Darmstadt, März 2010
Lattke, B., Winner, H.; Entwicklung eines kommunikationsbasierten Fahrerassistenz-
und Komfortsystems für Motorräder, Safety Lecture, Safety Week 2010, Aschaffen-
burg, Mai 2010
Winner, H.; Fecher, N.: Forschung für mehr Fahrsicherheit, Kolloquium „Talk im
Tower“, Griesheim, Mai 2010
Haag, M., Winner, H., Ungethüm, U., Simon, D., Sykora, J.: Modeling Concept for
Dimensioning of Wheel Brake Systems, FISITA 2010 World Automotive Congress,
Budapest, Mai 2010
Hakuli, S.; Kluin, M.; Geyer, S.; Winner, H.: Development and Validation of Manoeu-
vre-Based Driver Assistance Functions for Conduct-by-Wire with IPG CarMaker,
FISITA 2010 World Automotive Congress, Budapest, Mai 2010
Seiniger, P.; Schröter, K.; Gail, J.: Perspectives for Motorcycle Stability Control Sys-
tems, International Conference on Safety and Mobility of Vulnerable Road Users
(VRU): Pedestrians, Motorcyclists, and Bicyclists, Jerusalem (IL), Mai 2010
Vorträge 2009, Vortragende unterstrichen:
Seiniger, P., Weidele, A.: Fahrdynamik, Stabilität und Bremsverhalten von Motorrä-
dern, DEKRA Grundlehrgang Unfallanalyse, Altensteig, Januar 2009
Reul, M.; Winner, H.; Schürr, H.; Laduron, P.: ABS-Control Using Dynamic Wheel
Load Information, chassis.tech 2009, München, März 2009
Winner, H.; Fecher, N.; Regh, F.; Hoffmann, J.: Fahrversuche zur Untersuchung von
Frontalkollisionsgegenmaßnahmen, 4. Darmstädter Kolloquium Mensch & Fahrzeug,
Darmstadt, März 2009
Reul, M.; Winner, H.: Enhanced Braking Performance by Integrated ABS and Semi-
Active Damping Control, ESV 2009, Stuttgart, Juni 2009
56
Gail, J.; Funke, J.; Seiniger, P.; Westerkamp, U.; Anti Lock Braking and Vehicle Sta-
bility Control for Motorcycles – Why or Why not?, ESV 2009, Stuttgart, Juni 2009
Winner, H.; Fecher, N.; Geyer, S.: Ansätze der Fahrzeugtechnik zur Reduzierung der
Umweltbelastungen im Straßenverkehr. 1. Darmstädter Ingenieurkongress - Bau und
Umwelt, Darmstadt, September 2009
Winner, H.; Fecher, N.; Geyer, S.: Umwelt- und ressourcenschonende Fahrzeugtech-
nik im Überblick, 7. Hessischer Mobilitätskongress, Frankfurt a.M., September 2009
Reul, M.; Betz, A.; Winner, H.: Optimierung des Anbremsvorgangs durch Koordinati-
on semi-aktiver Dämpfer mit ABS, 12. Internationale VDI-Tagung Reifen-Fahrwerk-
Fahrbahn, Hannover, Oktober 2009
Wesp, A.; Stoff, A.; Winner, H.: Der Einfluss der Systemauslegung hinterachsgelenk-
ter Fahrzeuge auf die Bewertung von Fahrern im Makrosinusversuch. 12. Internatio-
nale VDI-Tagung Reifen-Fahrwerk-Fahrbahn, Hannover, Oktober 2009
Isermann, R.; Schiele, B.; Winner, H.; Hohm, A.; Mannale, R.; Schmitt, K.; Wojek, C.;
Lüke, S.: Elektronische Fahrerassistenz zur Vermeidung von Überholunfällen, 14.
Internationaler Kongress Elektronik im Kraftfahrzeug, Baden-Baden, Oktober 2009
Wesp, A.; Stoff, A.; Winner, H.: Die Systemauslegung von hinterachsgelenkten Fahr-
zeugen als Einflussgröße auf die Fahrerbewertung im Makrosinusversuch und Spur-
wechsel. Subjektive Fahreindrücke sichtbar machen IV, Essen, November 2009
Winner, H.: Die Evolution der Fahrer-Assistenzsysteme. 15. Esslinger Forum Kfz-
Mechatronik, Esslingen, November 2009
57
Handbuch Fahrerassistenzsysteme
Am 20. Juli 2009 erschien im Verlag Vie-
weg+Teubner das von Hermann Winner, Stephan
Hakuli und Gabriele Wolf herausgegebene Hand-
buch Fahrerassistenzsysteme. Dieses Buch ist in
seiner Ausführlichkeit einzigartig im deutschspra-chigen Raum, denn es werden nicht nur die im Pkw-
Bereich bereits am Markt verfügbaren Systeme für
aktive Sicherheit und Fahrerentlastung detailliert
beschrieben, sondern auch Funktionen, die sich
derzeit noch im Forschungsstadium befinden. Ihre
Komponenten, das heißt die erforderlichen Sensoren,
Aktoren, mechatronischen Subsysteme und Betäti-
gungselemente werden ebenso erläutert wie die
nutzergerechte Gestaltung der Mensch-Maschine-
Schnittstelle zwischen Assistenzsystem und Fahrer.
Zwei Kapitel über die Besonderheiten von Fahreras-
sistenzsystemen bei Nutzfahrzeugen und Motorrä-
dern runden den umfassenden Ansatz ab.
Das Handbuch Fahrerassistenzsysteme ist damit ein Grundlagenwerk, das sich an
Entwicklungs- und Applikationsingenieure der Automobilindustrie richtet und auch
für Studenten vieler Fachrichtungen, z. B. Kraftfahrzeugtechnik, Mechatronik und
technische Informatik, von großem Nutzen sein wird.
Insgesamt haben über 90 Autoren am Handbuch Fahrerassistenzsysteme mitgewirkt,
wobei FZD, den eigenen Forschungskompetenzen entsprechend, mit einem hohen
Eigenanteil vertreten ist. Von FZD-Autoren wurden, teilweise in Zusammenarbeit mit
Co-Autoren aus Forschung und Industrie, die Kapitel Radar, Fahrdynamikregelsysteme
und Betätigungsunterstützung für Motorräder, Adaptive Cruise Control, Frontalkolli-
sionsschutzsysteme, Fahrerwarnelemente, Kreuzungsassistenz, Bewertungskonzept EVITA,
Kooperative Automation und der Ausblick auf zukünftige Assistenzsysteme Quo Vadis,
FAS? geschrieben.
Bibliographische Daten:
Hermann Winner, Stephan Hakuli, Gabriele Wolf: Handbuch Fahrerassistenzsysteme. ATZ-MTZ-Fachbuch, Vieweg+Teubner, 2009, ISBN 978-3-8348-0287-3
58
Veröffentlichungen
Veröffentlichungen 2010:
Haag, M., Winner, H., Ungethüm, U., Simon, D., Sykora, J.: Modeling Concept for
Dimensioning of Wheel Brake Systems, FISITA 2010 World Automotive Congress. 30.
Mai - 04. Juni 2010 in Budapest, 2010
Hakuli, S.; Kluin, M.; Geyer, S.; Winner, H.: Development and Validation of Manoeu-
vre-Based Driver Assistance Functions for Conduct-by-Wire with IPG CarMaker,
FISITA 2010 World Automotive Congress. 30. Mai - 04. Juni 2010 in Budapest, 2010
Hohm, A., Winner, H.: Probandenstudie zur Ermittlung der Adequate Overtaking
Margin (AOM) für die Fahrerassistenz in Überholsituationen. In: Gesellschaft für
Arbeitswissenschaft e. V. (Hrsg.): Neue Arbeits- und Lebenswelten gestalten. 56.
Kongress der Gesellschaft für Arbeitswissenschaft vom 24.-26. März 2010 in Dar-
mstadt, 2010
Schmidt, D.: Fehleranalyse und Datenfusion von Satellitennavigations- und Fahrdy-
namiksensorsignalen. Fortschritt-Berichte VDI Reihe 12 Nr. 719, ISBN 978-3-18-
371912-9, Düsseldorf, 2010
Seiniger, P.; Schröter, K.; Gail, J.: Perspectives for Motorcycle Stability Control Sys-
tems, International Conference on Safety and Mobility of Vulnerable Road Users (VRU): Pedestrians, Motorcyclists, and Bicyclists. 30. Mai - 02. Juni 2010 in Jerusa-
lem (IL), 2010
Veröffentlichungen 2009:
Bruder, R.; Winner, H. (Hrsg.): Darmstädter Kolloquium Mensch & Fahrzeug. Wie
realitätsnah lässt sich Fahrerverhalten messen? 18.-19. März 2009 in Darmstadt.
Ergonomia Verlag, Stuttgart, 2009
Fecher, N.; Fuchs, K.; Hoffmann, J.; Abendroth, B.; Bruder, R.; Winner, H.: Aktive
Gefahrenbremsungen - Wie reagiert das Fahrer-Fahrzeug-System? In: ATZ Automo-
biltechnische Zeitschrift 02/2009
Fecher, N.; Winner, H.: Fachgebiet Fahrzeugtechnik. In: Young Professionals Technik
Sommersemester 2009, ALPHA, April 2009, S. 282-288, ISSN 1862-9253
Gail, J.; Funke, J.; Seiniger, P.; Westerkamp, U.; Anti Lock Braking and Vehicle Sta-
bility Control for Motorcycles – Why or Why not? ESV 2009. 15.-18. Juni 2009 in Stuttgart, 2009
59
Hakuli, S.; Schreiber, M.; Winner, H.: Entwicklung eines Methodenkatalogs für ma-
növerbasiertes Fahren nach dem Conduct-by-Wire-Prinzip. 1. Automobiltechnisches
Kolloquium. 16.-17. April 2009 in München, 2009
Hakuli, S. et al.: Kooperative Automation. In: Winner, H.; Hakuli, S.; Wolf, G.
(Hrsg.): Handbuch Fahrerassistenzsysteme. Vieweg+Teubner Verlag, Wiesbaden,
2009
Hoffmann, J.; Winner, H.: EVITA - Das Prüfverfahren zur Beurteilung von Antikollisi-onssystemen. In: Winner, H.; Hakuli, S.; Wolf, G. (Hrsg.): Handbuch Fahrerassistenz-
systeme. Vieweg+Teubner Verlag, Wiesbaden, 2009
Isermann, R.; Schiele, B.; Winner, H.; Hohm, A.; Mannale, R.; Schmitt, K.; Wojek, C.;
Lüke, S.: Elektronische Fahrerassistenz zur Vermeidung von Überholunfällen, 14.
Internationaler Kongress Elektronik im Kraftfahrzeug, 10/2009, Band 2075, Baden-
Baden, 2009
Mages, M.: Top-Down-Funktionsentwicklung eines Einbiege- und Kreuzenassistenten.
Forstschritt-Berichte VDI Reihe 12 Nr. 694, ISBN 978-3-18-369412-9, Düsseldorf,
2009.
Reul, M.; Winner, H.; Schürr, H.; Laduron, P.: ABS-Control Using Dynamic Wheel
Load Information. chassis.tech 2009. 2.-3. März 2009 in München, 2009
Reul, M.; Winner, H.: Enhanced Braking Performance by Integrated ABS and Semi-
Active Damping Control. ESV 2009. 15.-18. Juni 2009 in Stuttgart, 2009
Reul, M.; Betz, A.; Winner, H.: Optimierung des Anbremsvorgangs durch Koordinati-
on semi-aktiver Dämpfer mit ABS. 12. Internationale VDI-Tagung Reifen-Fahrwerk-Fahrbahn. 20.-21. Oktober 2009 in Hannover, 2009
Sardá, A.: Wirkungskette der Entstehung von Hotspots und Heißrubbeln in Pkw-
Scheibenbremsen. Fortschritt-Berichte VDI Reihe 12 Nr. 704, ISBN 978-3-18-370412-
5, Düsseldorf, 2009
Seiniger, P. et al.: Fahrdynamikregelsysteme für Motorräder. In: Winner, H.; Hakuli,
S.; Wolf, G. (Hrsg.): Handbuch Fahrerassistenzsysteme. Vieweg+Teubner Verlag,
Wiesbaden, 2009
Seiniger, P.: Erkennbarkeit und Vermeidbarkeit von ungebremsten Motorrad-
Kurvenunfällen. Fortschritt-Berichte VDI Reihe 12 Nr. 707, ISBN 978-3-18-370712-9,
Düsseldorf, 2009
Wesp, A.; Stoff, A.; Winner, H.: Der Einfluss der Systemauslegung hinterachsgelenk-
ter Fahrzeuge auf die Bewertung von Fahrern im Makrosinusversuch. 12. Internatio-
nale VDI-Tagung Reifen-Fahrwerk-Fahrbahn. 20.-21. Oktober 2009 in Hannover, 2009
60
Wesp, A.; Stoff, A.; Winner, H.: Die Systemauslegung von hinterachsgelenkten Fahr-
zeugen als Einflussgröße auf die Fahrerbewertung im Makrosinusversuch und Spur-
wechsel. Subjektive Fahreindrücke sichtbar machen IV. 12./13. November 2009 in
Essen, 2009
Winner, H.; Fecher, N.; Regh, F.; Hoffmann, J.: Fahrversuche zur Untersuchung von
Frontalkollisionsgegenmaßnahmen. In: Bruder, R.; Winner, H. (Hrsg.): Darmstädter
Kolloquium Mensch & Fahrzeug - Wie realitätsnah lässt sich Fahrerverhalten messen? Ergonomia Verlag, Stuttgart, 2009
Winner, H.; Regh, F.: Aktive Sicherheit – Effektivität aktiver Sicherheitssysteme, Der
Weg zum autonomen Fahrzeug. Safety Update 2009. 06./07. Mai 2009 in Aschaffen-
burg, 2009
Winner, H.: Die Evolution der Fahrer-Assistenzsysteme. 15. Esslinger Forum Kfz-Me-
chatronik. 11. November 2009 in Esslingen, 2009
Winner, H.; Hakuli, S.; Wolf, G. (Hrsg.): Handbuch Fahrerassistenzsysteme. Vie-
weg+Teubner Verlag, Wiesbaden, 2009
Winner, H.: Radarsensorik. In: Winner, H.; Hakuli, S.; Wolf, G. (Hrsg.): Handbuch
Fahrerassistenzsysteme. Vieweg+Teubner Verlag, Wiesbaden, 2009
Winner, H.; Danner, B.; Steinle, J.: Adaptive Cruise Control. In: Winner, H.; Hakuli,
S.; Wolf, G. (Hrsg.): Handbuch Fahrerassistenzsysteme. Vieweg+Teubner Verlag,
Wiesbaden, 2009
Winner, H.: Frontalkollisionsschutzsysteme. In: Winner, H.; Hakuli, S.; Wolf, G.
(Hrsg.): Handbuch Fahrerassistenzsysteme. Vieweg+Teubner Verlag, Wiesbaden, 2009
Winner, H.; Wolf, G.: Quo vadis, FAS? In: Winner, H.; Hakuli, S.; Wolf, G. (Hrsg.):
Handbuch Fahrerassistenzsysteme. Vieweg+Teubner Verlag, Wiesbaden, 2009
Winner, H.; Fecher, N.; Geyer, S.: Ansätze der Fahrzeugtechnik zur Reduzierung der
Umweltbelastungen im Straßenverkehr. 1. Darmstädter Ingenieurkongress - Bau und
Umwelt. 14./15. September 2009 in Darmstadt, 2009
Winner, H.; Fecher, N.; Geyer, S.: Umwelt- und ressourcenschonende Fahrzeugtech-
nik im Überblick. 7. Hessischer Mobilitätskongress. 18. September 2009 in Frankfurt
a.M., 2009
Wolf, G.; Winner, H.: Driving in Road Tunnels - Socio-Economic Assessment of Acci-
dent Prevention Systems. 5. Internationaler Fachkongress Verkehr und Sicherheit in
Straßentunneln. 6.-8. Mai 2009 in Hamburg, 2009

61
Mitarbeit in Gremien
Kai Schröter:
Fachausschuss Kraftfahrzeugtechnik des Kraftfahrtbundesamtes, Sonderaus-
schuss Zweiradfahrzeuge
Hermann Winner:
Uni-DAS e.V. zur Förderung der universitären Fahrerassistenzforschung, Grün-
der und erster Vorsitzende
Wissenschaftliche Gesellschaft für Kraftfahrzeug- und Motorentechnik e.V.
Programmausschuss VDI-Tagungsreihe Erprobung und Simulation
Programmausschuss VDI/VW-Gemeinschaftstagung Integrierte Sicherheit und
Fahrerassistenz
Programmausschuss VDI-Tagungsreihe Reifen, Fahrwerk, Fahrbahn
Vertreter des Fachbereichs Maschinenbau in der Prüfungskommission Master of
Traffic and Transport, TU Darmstadt
Forschungsschwerpunkt Integrierte Verkehrssysteme, TU Darmstadt
Forschungsschwerpunkt Mechatronik, TU Darmstadt
Externes Mitglied der Berufungskommission „Autonome Fahrzeugsysteme und
mobile Roboter“ der Otto-von-Guericke-Universität Magdeburg
Mitglied des AK I.14, Normungsausschuss Automobiltechnik
Akkreditierungsgutachter für verschiedene Akkreditierungsagenturen (ZEvA,
AIISIN, AQIN)
62
Auszeichnungen
Herr Nico Cianciaruso wurde mit dem FFF-Jahrespreis ausgezeichnet. Zu seinen
besonderen Verdiensten zählen beispielsweise der Aufbau einer neuen FZD-
Datenbank und die große Unterstützung bei der Serverumstellung.
KONTAKT
Prof. Dr. rer. nat. Hermann Winner
Technische Universität Darmstadt
Fachgebiet Fahrzeugtechnik
Petersenstraße 30
64287 Darmstadt
Telefon +49 6151 164372
Fax +49 6151 165192
www.fahrzeugtechnik-darmstadt.de


Fachgebiet FahrzeugtechnikTechnische Universität DarmstadtPetersenstraße 3064287 DarmstadtTelefon 06151/16-4372Fax 06151/16-5192Email [email protected] www.fahrzeugtechnik-darmstadt.de