Embed Size (px)
Citation preview
Fachhochschule Braunschweig/Wolfenbüttel
Studiengang Elektrotechnik
Fachrichtung Anlagen- und Automatisierungstechnik
Diplomarbeit Messdatenerfassung und –auswertung an Modell-LKWs
Bearbeitet von Michael Brosig
Erstprüfer: Prof. Dr.-Ing. D. Meyer
Zweitprüfer: Prof. Dr. rer. nat. H.-J. Wagner
Wolfenbüttel, April 2005
Erklärung
Hiermit versichere ich, dass ich die vorliegende Arbeit selbstständig
angefertigt und alle benutzten Quellen und Hilfsmittel angegeben
habe.
Wolfenbüttel, April 2005
Inhaltsverzeichnis
i
Inhaltsverzeichnis
Einführung ........................................................................................................................ 1
1 Grundlagen................................................................................................................ 2 1.1 Sensoren zur Abstands- und Geschwindigkeitsmessung.................................. 2
1.1.1 Ultraschallsensoren................................................................................... 2 1.1.2 Optische Sensoren..................................................................................... 4 1.1.3 Mikrowellensensoren................................................................................ 5
1.2 LabView............................................................................................................ 6 1.3 LabJack UE9 Messkarte ................................................................................... 9
1.3.1 Bedienung unter Windows...................................................................... 10 1.3.2 Bedienung mit LabView......................................................................... 12
2 Eigenschaften der Sensoren .................................................................................... 14 2.1 Ultraschallsensoren......................................................................................... 15
2.1.1 Welotec UWOA...................................................................................... 16 2.1.2 PIL P43 ................................................................................................... 17
2.2 Lasersensor, Balluff BOD63M....................................................................... 18 2.3 Infrarot Sensor, Sharp GP2Y0A02YK ........................................................... 19 2.4 Lichtschranke mit Strichscheibe, Sharp GP1A70R........................................ 20 2.5 Mikrowellensensor, Siemens KMY24............................................................ 21
3 Spannungsversorgung der Modell-LKWs .............................................................. 26
4 Anbau der Peripherie an die LKWs........................................................................ 28
5 Anbau der Sensoren an die LKWs.......................................................................... 30 5.1 Sensoren für die Abtastung in Fahrtrichtung.................................................. 30
5.1.1 Montage von Sensoren auf dem Dach .................................................... 31 5.1.2 Montage von Sensoren am Kühlergrill ................................................... 31
5.2 Abtastung des seitlichen Abstands ................................................................. 33 5.3 Abtastung nach hinten .................................................................................... 33 5.4 Geschwindigkeitssensor.................................................................................. 34 5.5 Eingangsbelegung der UE9 ............................................................................ 35
6 Auswertung mit LabView....................................................................................... 36 6.1 Runden der Werte ........................................................................................... 37 6.2 Ultraschallsensor Welotec UWOA................................................................. 37 6.3 Ultraschallsensor PIL...................................................................................... 38 6.4 Lasersensor Balluff BOD63M........................................................................ 38 6.5 Optischer Distanzsensor Sharp GP2 ............................................................... 39
Inhaltsverzeichnis
ii
6.5.1 Auswertung der vorderen Sensoren........................................................ 39 6.5.2 Auswertung des hinteren Sensors ........................................................... 40
6.6 Lichtschranke mit Strichscheibe..................................................................... 40 6.6.1 Geschwindigkeit ..................................................................................... 40 6.6.2 Fahrtrichtungsauswertung....................................................................... 42
6.7 Mikrowellensensor Siemens KMY24............................................................. 43
7 Fahren und Lenken der LKWs über LabJack UE9................................................. 45 7.1 Signale zum Steuern der Fahrzeuge................................................................ 45 7.2 Nachbilden der Signale mit der UE9 .............................................................. 46 7.3 Umschalten der Steuerungsart ........................................................................ 49
8 Zusammenfassung .................................................................................................. 50
9 Ausblick .................................................................................................................. 50
10 Literatur .................................................................................................................. 51
11 Anhang.................................................................................................................... 51 11.1 Datenblätter..................................................................................................... 52
11.1.1 Welotec UWOA...................................................................................... 52 11.1.2 PIL P43-F4Y-2D-1C0-330E................................................................... 54 11.1.3 Balluff BOD 63M ................................................................................... 56 11.1.4 Sharp GP2Y0A02YK ............................................................................. 58 11.1.5 Sharp GP1A70R ..................................................................................... 60 11.1.6 Siemens KMY24..................................................................................... 62 11.1.7 Panasonik Bleiakkumulator .................................................................... 66 11.1.8 Astec DC-DC-Wandler APC05A08 ....................................................... 67 11.1.9 Astec DC-DC-Wandler AEE00C12-49 .................................................. 69
11.2 CD-Rom.......................................................................................................... 71
Einführung
1
Einführung
In der Automobilindustrie werden vermehrt Sensoren zur Abstandserkennung
eingesetzt, z.B. bei Einparkhilfen, Airbagsteuerungen oder bei Fahrhilfen zur
Vermeidung von Auffahrunfällen. Das Institut für Anlagen und Automatisie-
rungstechnik der Fachhochschule Braunschweig/Wolfenbüttel bearbeitet ein
Projekt, in dessen Verlauf zwei Modell-LKWs mit Sensoren ausgestattet werden
sollen. Es soll mit diesen Sensoren erreicht werden, dass die LKWs in der Lage
sind selbstständig zu fahren, Hindernissen auszuweichen oder anzuhalten,
wenn dies nicht mehr möglich ist.
Mit dieser Arbeit sollen die Voraussetzungen für ein erfolgreiches Gelingen die-
ses Projekts geschaffen werden.
Die vorliegende Arbeit beschäftigt sich im ersten Kapitel mit den Grundlagen
verschiedener Sensoren zur Abstandsmessung. Zusätzlich werden die Mess-
karte LabJack UE9 und das Programm LabView vorgestellt. Im zweiten Kapitel
werden Kennlinien der vorhandenen Sensoren ermittelt. Aus den daraus ge-
wonnenen Erkenntnissen werden Schlussfolgerungen für ihren Einsatz an den
LKWs gezogen. In den Kapiteln drei bis fünf wird der Anbau der Sensoren und
aller anderen erforderlichen Geräte dokumentiert. In Kapitel sechs dieser Arbeit
werden dann Vorschläge zur Auswertung der Sensoren aufgezeigt. Diese Aus-
wertung erfolgt mit LabView. Die erarbeiteten Rechenvorschriften sind allge-
mein gehalten, so dass sie auch mit anderen Programmen verwirklicht werden
können. Im letzten Hauptabschnitt wird dann gezeigt wie die Modell-LKWs mit
der LabJack UE9 gesteuert werden können.
Grundlagen
2
1 Grundlagen
In diesem Kapitel wird kurz auf die Grundlagen der verschiedenen Sensoren
eingegangen, die in diesem Projekt verwendet werden. Weiterhin werden das
Programm LabView und die Messkarte LabJack UE9 vorgestellt.
1.1 Sensoren zur Abstands- und Geschwindigkeitsmessung
Zur Abstandsmessung von Objekten können verschiedene Verfahren ange-
wendet werden. Dieser Abschnitt soll einen kurzen Überblick über die techni-
schen Hintergründe dieser Verfahren geben. Es werden absichtlich nur die
Grundlagen und nicht die physikalischen Herleitungen aufgezeigt, da keine
neuen Sensoren entwickelt werden sollen. Zum Einsatz kommen hauptsächlich
herkömmliche Sensoren aus der Automatisierungstechnik. Ihre Technik wird in
den folgenden Kapiteln beschrieben.
1.1.1 Ultraschallsensoren
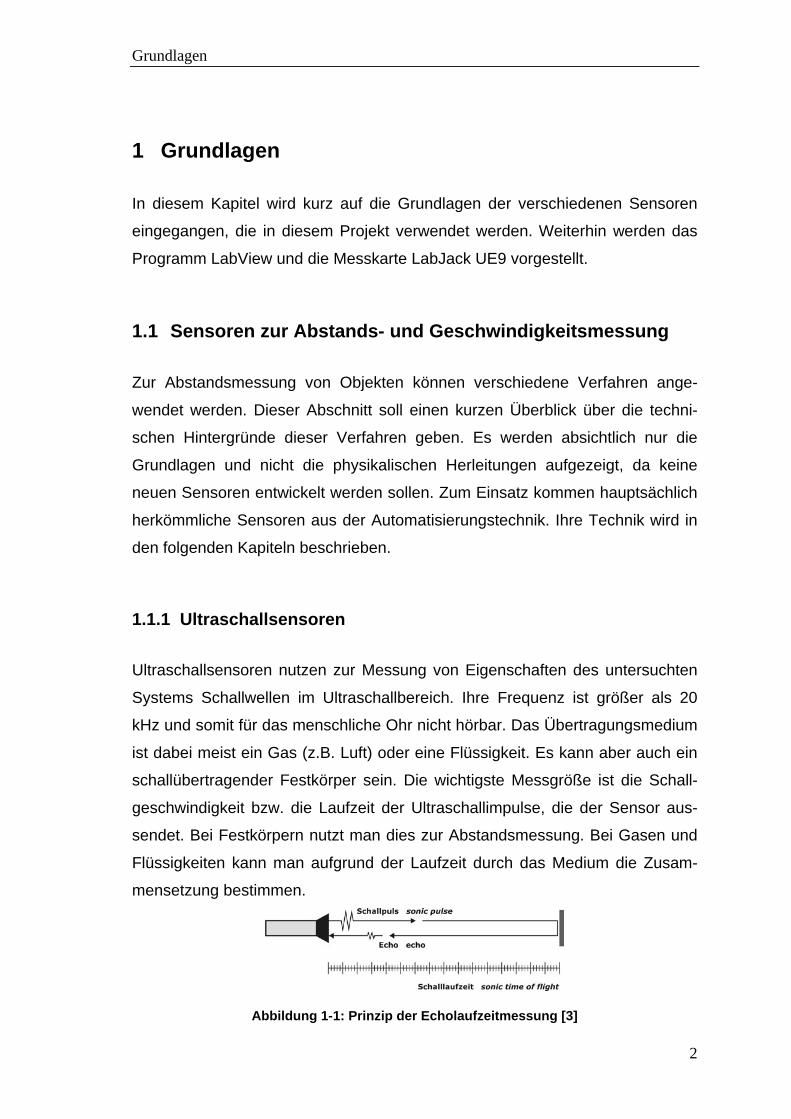
Ultraschallsensoren nutzen zur Messung von Eigenschaften des untersuchten
Systems Schallwellen im Ultraschallbereich. Ihre Frequenz ist größer als 20
kHz und somit für das menschliche Ohr nicht hörbar. Das Übertragungsmedium
ist dabei meist ein Gas (z.B. Luft) oder eine Flüssigkeit. Es kann aber auch ein
schallübertragender Festkörper sein. Die wichtigste Messgröße ist die Schall-
geschwindigkeit bzw. die Laufzeit der Ultraschallimpulse, die der Sensor aus-
sendet. Bei Festkörpern nutzt man dies zur Abstandsmessung. Bei Gasen und
Flüssigkeiten kann man aufgrund der Laufzeit durch das Medium die Zusam-
mensetzung bestimmen.
Abbildung 1-1: Prinzip der Echolaufzeitmessung [3]
Grundlagen
3
Ultraschallsensoren zur Abstandsmessung bestehen meist aus einem Einkopf-
system. Sie vereinen Sender und Empfänger in einem Gehäuse. Um den Ab-
stand zu ermitteln, werden die vom Messobjekt reflektierten Ultraschallimpulse
gemessen. Es können somit nur Abstände zu Objekten gemessen werden, die
den Schall zum Empfänger reflektieren. In Abbildung 1-2 ist die Umlenkung von
Ultraschallwellen gezeigt. Der Abstand dieses schräg stehenden Objekts kann
nicht ermittelt werden.
Abbildung 1-2: Reflektion von Ultraschallwellen [3]
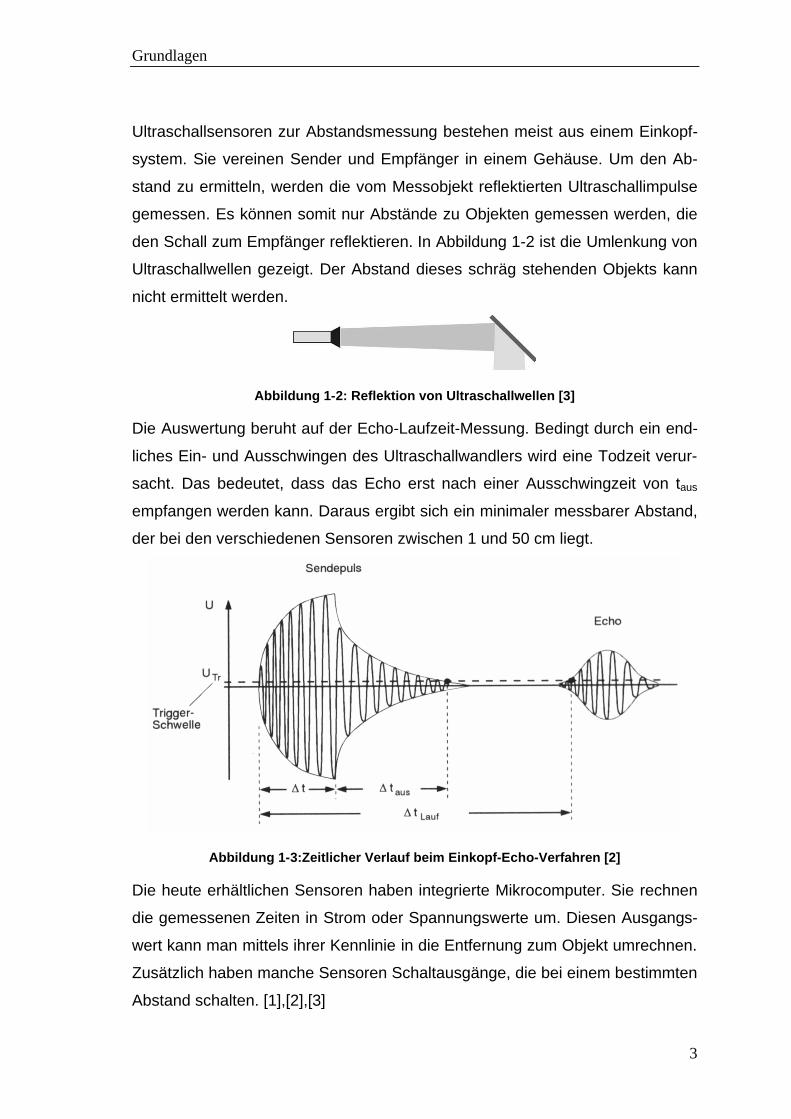
Die Auswertung beruht auf der Echo-Laufzeit-Messung. Bedingt durch ein end-
liches Ein- und Ausschwingen des Ultraschallwandlers wird eine Todzeit verur-
sacht. Das bedeutet, dass das Echo erst nach einer Ausschwingzeit von taus
empfangen werden kann. Daraus ergibt sich ein minimaler messbarer Abstand,
der bei den verschiedenen Sensoren zwischen 1 und 50 cm liegt.
Abbildung 1-3:Zeitlicher Verlauf beim Einkopf-Echo-Verfahren [2]
Die heute erhältlichen Sensoren haben integrierte Mikrocomputer. Sie rechnen
die gemessenen Zeiten in Strom oder Spannungswerte um. Diesen Ausgangs-
wert kann man mittels ihrer Kennlinie in die Entfernung zum Objekt umrechnen.
Zusätzlich haben manche Sensoren Schaltausgänge, die bei einem bestimmten
Abstand schalten. [1],[2],[3]
Grundlagen
4
1.1.2 Optische Sensoren
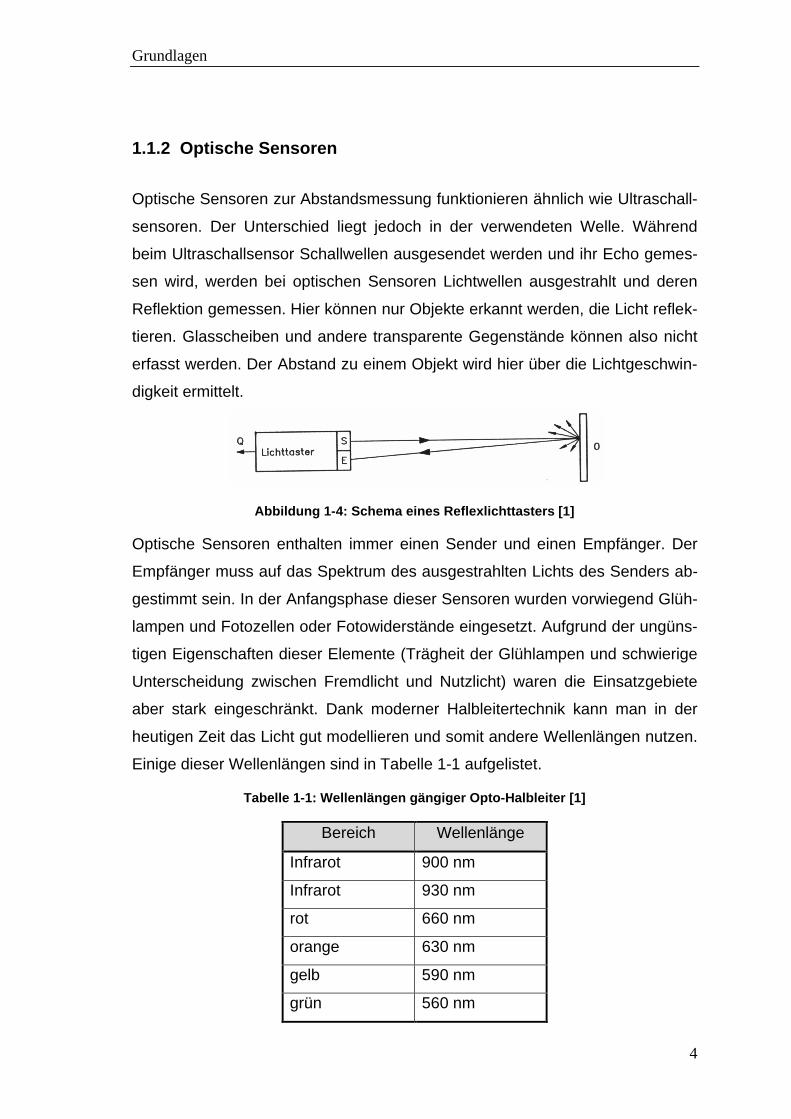
Optische Sensoren zur Abstandsmessung funktionieren ähnlich wie Ultraschall-
sensoren. Der Unterschied liegt jedoch in der verwendeten Welle. Während
beim Ultraschallsensor Schallwellen ausgesendet werden und ihr Echo gemes-
sen wird, werden bei optischen Sensoren Lichtwellen ausgestrahlt und deren
Reflektion gemessen. Hier können nur Objekte erkannt werden, die Licht reflek-
tieren. Glasscheiben und andere transparente Gegenstände können also nicht
erfasst werden. Der Abstand zu einem Objekt wird hier über die Lichtgeschwin-
digkeit ermittelt.
Abbildung 1-4: Schema eines Reflexlichttasters [1]
Optische Sensoren enthalten immer einen Sender und einen Empfänger. Der
Empfänger muss auf das Spektrum des ausgestrahlten Lichts des Senders ab-
gestimmt sein. In der Anfangsphase dieser Sensoren wurden vorwiegend Glüh-
lampen und Fotozellen oder Fotowiderstände eingesetzt. Aufgrund der ungüns-
tigen Eigenschaften dieser Elemente (Trägheit der Glühlampen und schwierige
Unterscheidung zwischen Fremdlicht und Nutzlicht) waren die Einsatzgebiete
aber stark eingeschränkt. Dank moderner Halbleitertechnik kann man in der
heutigen Zeit das Licht gut modellieren und somit andere Wellenlängen nutzen.
Einige dieser Wellenlängen sind in Tabelle 1-1 aufgelistet.
Tabelle 1-1: Wellenlängen gängiger Opto-Halbleiter [1]
Bereich Wellenlänge
Infrarot 900 nm
Infrarot 930 nm
rot 660 nm
orange 630 nm
gelb 590 nm
grün 560 nm
Grundlagen
5
Hierbei werden Fotodioden oder Fototransistoren als Empfänger eingesetzt. Bei
dieser Methode kann es beispielsweise zu Störungen durch Verschmutzung der
Optik kommen. Wie bei den Ultraschallsensoren haben auch diese Sensoren
normalerweise Analogausgänge und/oder Schaltausgänge.
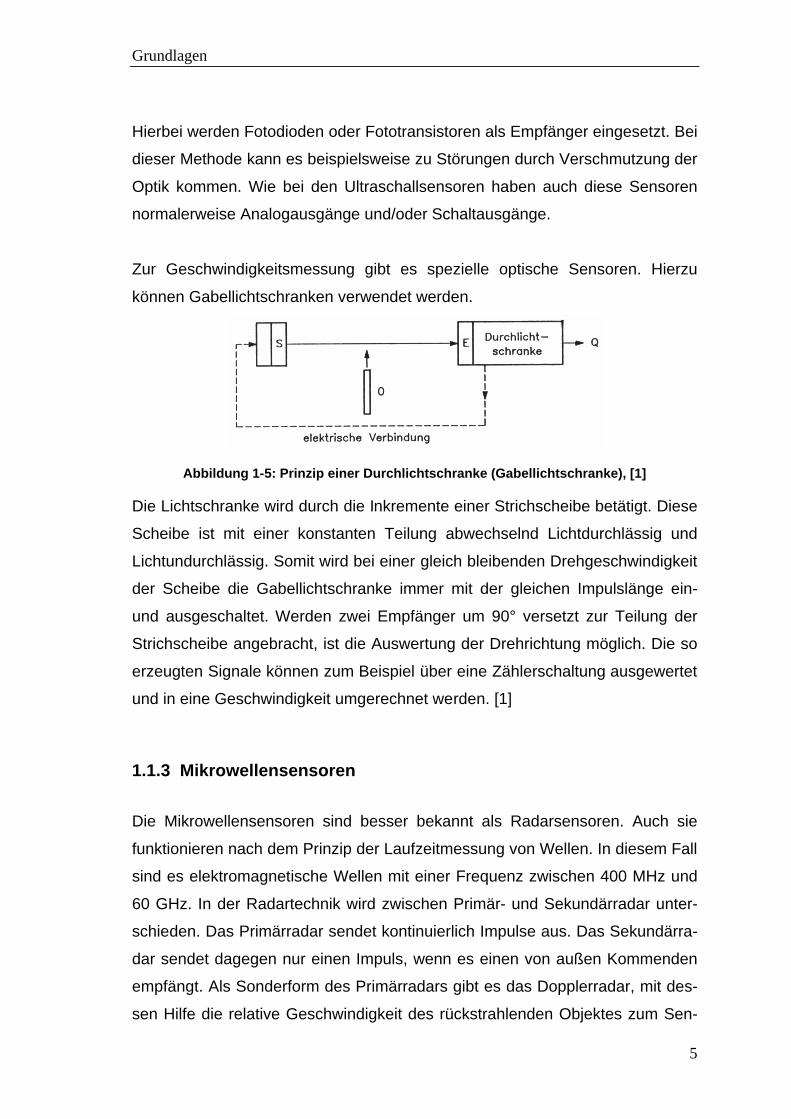
Zur Geschwindigkeitsmessung gibt es spezielle optische Sensoren. Hierzu
können Gabellichtschranken verwendet werden.
Abbildung 1-5: Prinzip einer Durchlichtschranke (Gabellichtschranke), [1]
Die Lichtschranke wird durch die Inkremente einer Strichscheibe betätigt. Diese
Scheibe ist mit einer konstanten Teilung abwechselnd Lichtdurchlässig und
Lichtundurchlässig. Somit wird bei einer gleich bleibenden Drehgeschwindigkeit
der Scheibe die Gabellichtschranke immer mit der gleichen Impulslänge ein-
und ausgeschaltet. Werden zwei Empfänger um 90° versetzt zur Teilung der
Strichscheibe angebracht, ist die Auswertung der Drehrichtung möglich. Die so
erzeugten Signale können zum Beispiel über eine Zählerschaltung ausgewertet
und in eine Geschwindigkeit umgerechnet werden. [1]
1.1.3 Mikrowellensensoren
Die Mikrowellensensoren sind besser bekannt als Radarsensoren. Auch sie
funktionieren nach dem Prinzip der Laufzeitmessung von Wellen. In diesem Fall
sind es elektromagnetische Wellen mit einer Frequenz zwischen 400 MHz und
60 GHz. In der Radartechnik wird zwischen Primär- und Sekundärradar unter-
schieden. Das Primärradar sendet kontinuierlich Impulse aus. Das Sekundärra-
dar sendet dagegen nur einen Impuls, wenn es einen von außen Kommenden
empfängt. Als Sonderform des Primärradars gibt es das Dopplerradar, mit des-
sen Hilfe die relative Geschwindigkeit des rückstrahlenden Objektes zum Sen-
Grundlagen
6
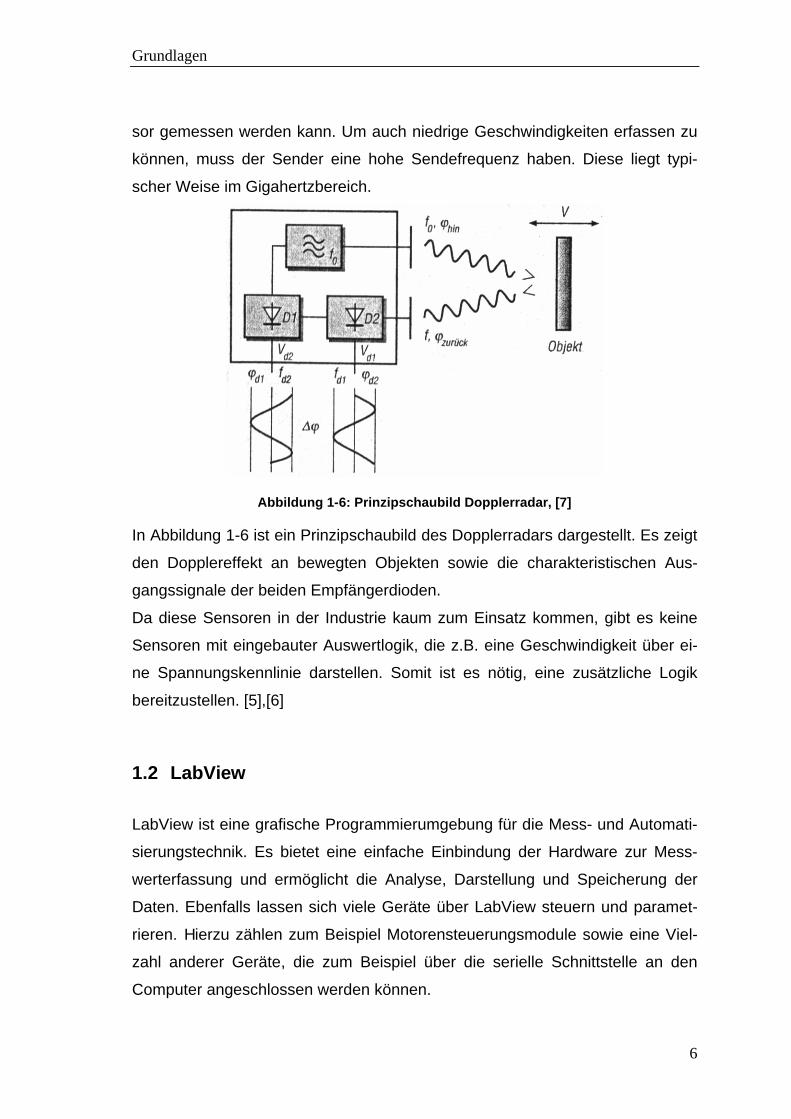
sor gemessen werden kann. Um auch niedrige Geschwindigkeiten erfassen zu
können, muss der Sender eine hohe Sendefrequenz haben. Diese liegt typi-
scher Weise im Gigahertzbereich.
Abbildung 1-6: Prinzipschaubild Dopplerradar, [7]
In Abbildung 1-6 ist ein Prinzipschaubild des Dopplerradars dargestellt. Es zeigt
den Dopplereffekt an bewegten Objekten sowie die charakteristischen Aus-
gangssignale der beiden Empfängerdioden.
Da diese Sensoren in der Industrie kaum zum Einsatz kommen, gibt es keine
Sensoren mit eingebauter Auswertlogik, die z.B. eine Geschwindigkeit über ei-
ne Spannungskennlinie darstellen. Somit ist es nötig, eine zusätzliche Logik
bereitzustellen. [5],[6]
1.2 LabView
LabView ist eine grafische Programmierumgebung für die Mess- und Automati-
sierungstechnik. Es bietet eine einfache Einbindung der Hardware zur Mess-
werterfassung und ermöglicht die Analyse, Darstellung und Speicherung der
Daten. Ebenfalls lassen sich viele Geräte über LabView steuern und paramet-
rieren. Hierzu zählen zum Beispiel Motorensteuerungsmodule sowie eine Viel-
zahl anderer Geräte, die zum Beispiel über die serielle Schnittstelle an den
Computer angeschlossen werden können.
Grundlagen
7
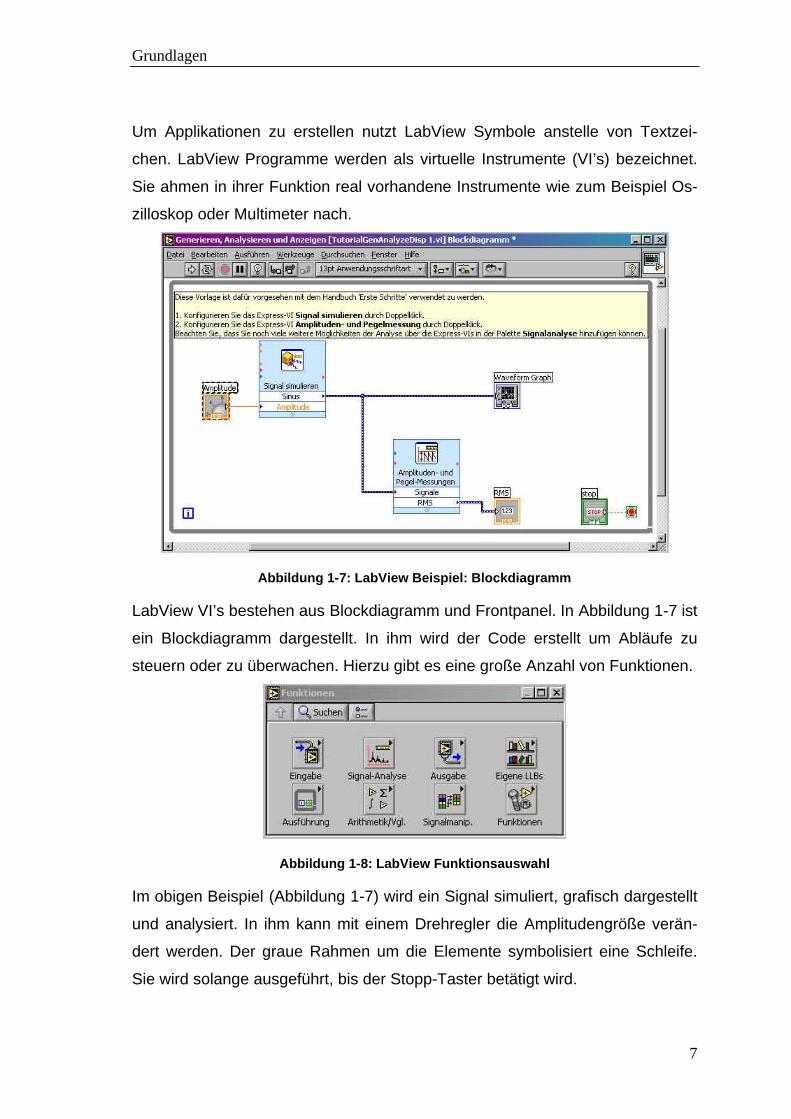
Um Applikationen zu erstellen nutzt LabView Symbole anstelle von Textzei-
chen. LabView Programme werden als virtuelle Instrumente (VI’s) bezeichnet.
Sie ahmen in ihrer Funktion real vorhandene Instrumente wie zum Beispiel Os-
zilloskop oder Multimeter nach.
Abbildung 1-7: LabView Beispiel: Blockdiagramm
LabView VI’s bestehen aus Blockdiagramm und Frontpanel. In Abbildung 1-7 ist
ein Blockdiagramm dargestellt. In ihm wird der Code erstellt um Abläufe zu
steuern oder zu überwachen. Hierzu gibt es eine große Anzahl von Funktionen.
Abbildung 1-8: LabView Funktionsauswahl
Im obigen Beispiel (Abbildung 1-7) wird ein Signal simuliert, grafisch dargestellt
und analysiert. In ihm kann mit einem Drehregler die Amplitudengröße verän-
dert werden. Der graue Rahmen um die Elemente symbolisiert eine Schleife.
Sie wird solange ausgeführt, bis der Stopp-Taster betätigt wird.
Grundlagen
8
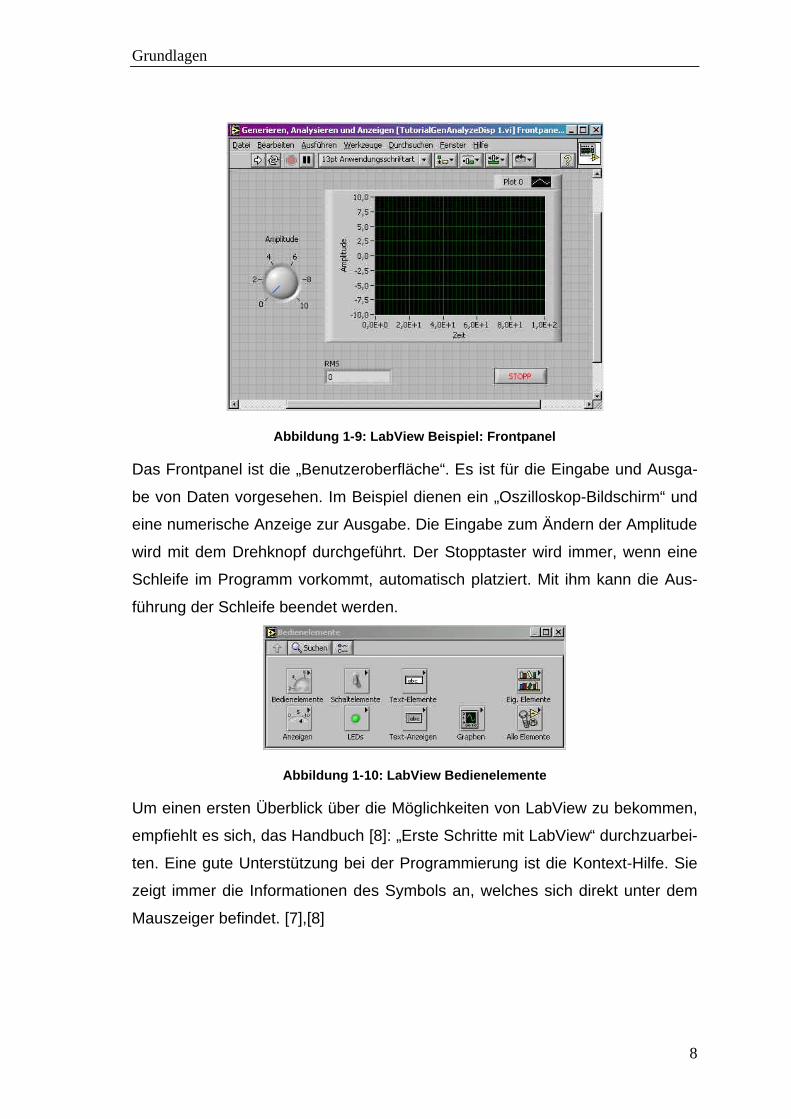
Abbildung 1-9: LabView Beispiel: Frontpanel
Das Frontpanel ist die „Benutzeroberfläche“. Es ist für die Eingabe und Ausga-
be von Daten vorgesehen. Im Beispiel dienen ein „Oszilloskop-Bildschirm“ und
eine numerische Anzeige zur Ausgabe. Die Eingabe zum Ändern der Amplitude
wird mit dem Drehknopf durchgeführt. Der Stopptaster wird immer, wenn eine
Schleife im Programm vorkommt, automatisch platziert. Mit ihm kann die Aus-
führung der Schleife beendet werden.
Abbildung 1-10: LabView Bedienelemente
Um einen ersten Überblick über die Möglichkeiten von LabView zu bekommen,
empfiehlt es sich, das Handbuch [8]: „Erste Schritte mit LabView“ durchzuarbei-
ten. Eine gute Unterstützung bei der Programmierung ist die Kontext-Hilfe. Sie
zeigt immer die Informationen des Symbols an, welches sich direkt unter dem
Mauszeiger befindet. [7],[8]

Grundlagen
9
1.3 LabJack UE9 Messkarte
Die Messkarte UE9 der Firma LabJack Corporation ist eine analoge/digitale
Ein- und Ausgangskarte. Man kann sie über USB oder Ethernet an den Compu-
ter anschließen.
Abbildung 1-11: LabJack UE9 [8]
Sie besitzt 14 freie Analogeingänge (AIN0 bis AIN13) und zwei intern beschalte-
te Analogeingänge (AIN14 und AIN15). Mit den internen Eingängen können
Größen wie Temperatur, Betriebsspannung und andere interne Parameter ge-
messen werden. Über einen Adressmultiplexer (MIO0 bis MIO2) kann die Karte
bis zu 112 externe Analogeingänge verwalten. Dabei ist zu beachten, dass die
beiden internen AIN auch mit gemultiplext werden. Alle Eingänge können unipo-
lar oder bipolar betrieben werden. Ihr Messbereich reicht je nach Betriebsart
von 0 bis 5 Volt bzw. von -5 bis 5 Volt. Die Karte bietet zwei Analogausgänge,
die in einem Bereich von 0,01 bis 4,86 Volt eingestellt werden können. Inklusive
des Adressmultiplexers hat die Karte 23 digitale Ein- und Ausgänge, davon acht
so genannte „flexible digital I/O“ (FIO0 bis FIO7), acht „digital I/O“ (EIO0 bis
EIO7) und vier „control lines“ (CIO0 bis CIO3). Alle digitalen I/O haben drei
mögliche Zustände: Eingang, Ausgang-low (0V) und Ausgang-high (3,3V). FIO0
bis FIO7 können zusätzlich als Timer und Zähler betrieben werden. Dabei wer-
den die I/O’s aufsteigend beschaltet. Zuerst kommen die Timer, danach die
Zähler. Bei zwei Timern und einem Zähler sind FIO0 und FIO1 als Timer konfi-
guriert und FIO2 als Zähler. Kommt ein dritter Timer hinzu, wird der Zählerein-
gang verschoben. Er liegt dann auf FIO3.

Grundlagen
10
1.3.1 Bedienung unter Windows
Die Karte stellt Treiber für Windows, eine Oberfläche zum Updaten der Firmwa-
re und eine Test- und Konfigurationsumgebung zur Verfügung. Da die Karte
noch nicht lange auf dm Markt ist und ständig weiterentwickelt wird, empfiehlt
der Hersteller nach der Installation der Treiber ein Firmwareupdate durchzufüh-
ren. Dabei ist zu beachten, dass die neue Firmware auch eine aktuelle Version
ist. Bei einem ersten Updateversuch im Rahmen dieser Arbeit, ist eine alte
Firmwareversion, welche von LabJack fälschlicher Weise ins Netz gestellt wur-
de, herunter geladen worden. Dieses Update machte die Messkarte unbrauch-
bar. Deshalb muss unbedingt auf das Datum der Updates geachtet werden,
wenn eine neue Version installiert wird. Im Rahmen dieser Arbeit wurde die
Control-Firmware auf Version 1,25 und die Comm-Firmware auf Version 1,29
aktualisiert.
Beim Starten des „Control Panels“ werden alle an den Computer angeschlos-
senen UE9 aufgelistet.
Abbildung 1-12: LabJack Control Panel
Nach der Auswahl einer Karte kann man diese testen oder konfigurieren. Wenn
man das Test Panel öffnet (siehe Abbildung 1-13), werden alle Ein- und Aus-
gänge der Karte angezeigt. Dieses Programm greift kontinuierlich auf die Karte
zu, um Werte zu lesen oder zu schreiben.
Grundlagen
11
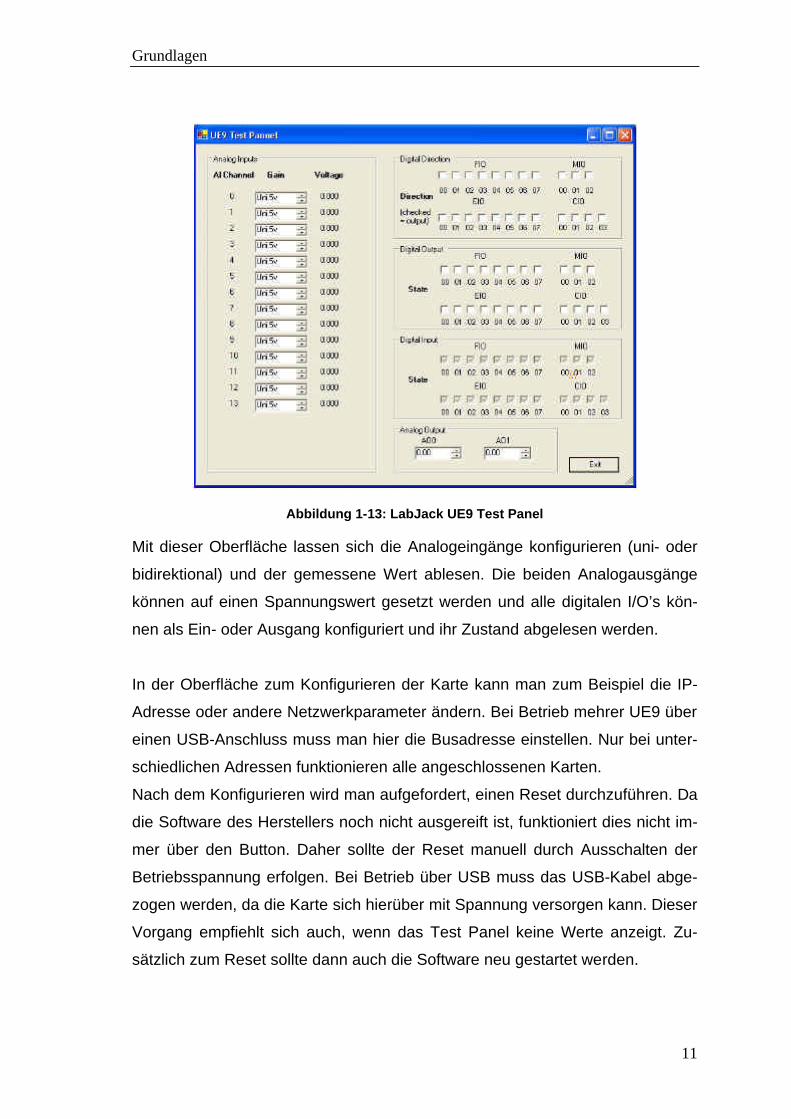
Abbildung 1-13: LabJack UE9 Test Panel
Mit dieser Oberfläche lassen sich die Analogeingänge konfigurieren (uni- oder
bidirektional) und der gemessene Wert ablesen. Die beiden Analogausgänge
können auf einen Spannungswert gesetzt werden und alle digitalen I/O’s kön-
nen als Ein- oder Ausgang konfiguriert und ihr Zustand abgelesen werden.
In der Oberfläche zum Konfigurieren der Karte kann man zum Beispiel die IP-
Adresse oder andere Netzwerkparameter ändern. Bei Betrieb mehrer UE9 über
einen USB-Anschluss muss man hier die Busadresse einstellen. Nur bei unter-
schiedlichen Adressen funktionieren alle angeschlossenen Karten.
Nach dem Konfigurieren wird man aufgefordert, einen Reset durchzuführen. Da
die Software des Herstellers noch nicht ausgereift ist, funktioniert dies nicht im-
mer über den Button. Daher sollte der Reset manuell durch Ausschalten der
Betriebsspannung erfolgen. Bei Betrieb über USB muss das USB-Kabel abge-
zogen werden, da die Karte sich hierüber mit Spannung versorgen kann. Dieser
Vorgang empfiehlt sich auch, wenn das Test Panel keine Werte anzeigt. Zu-
sätzlich zum Reset sollte dann auch die Software neu gestartet werden.
Grundlagen
12
1.3.2 Bedienung mit LabView
Die Karte LabJack UE9 wird von LabView nur indirekt unterstütz. Sie wird nicht
erkannt, so dass ein direktes Zugreifen auf die Karte nicht möglich ist, wie es
beispielsweise mit Messgeräten der Firma National Instruments geht. Die Firma
LabJack Corporation liefert aber fertige VI’s, die anhand von Beispielen die
Funktionen der Karte zeigen. In diesen Beispielen sind alle zur Kommunikation
und Parametrierung benötigten Elemente vorhanden. Nach einer kurzen Einar-
beitungszeit zeigt sich ein klares Schema, welches angewendet werden muss,
um Ein- und Ausgänge zu konfigurieren, Eingänge auszulesen oder Ausgänge
zusetzen. Dabei wird die Karte im ersten Schritt konfiguriert und danach in einer
Schleife ausgelesen.
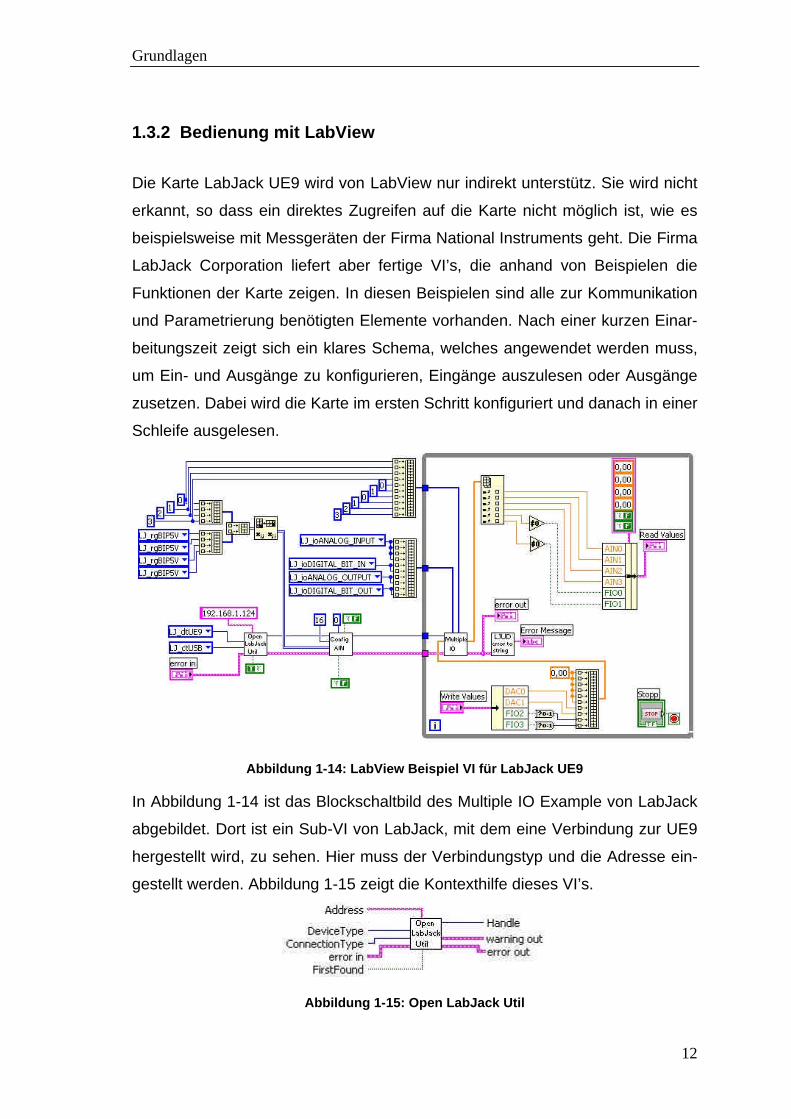
Abbildung 1-14: LabView Beispiel VI für LabJack UE9
In Abbildung 1-14 ist das Blockschaltbild des Multiple IO Example von LabJack
abgebildet. Dort ist ein Sub-VI von LabJack, mit dem eine Verbindung zur UE9
hergestellt wird, zu sehen. Hier muss der Verbindungstyp und die Adresse ein-
gestellt werden. Abbildung 1-15 zeigt die Kontexthilfe dieses VI’s.
Abbildung 1-15: Open LabJack Util
Grundlagen
13
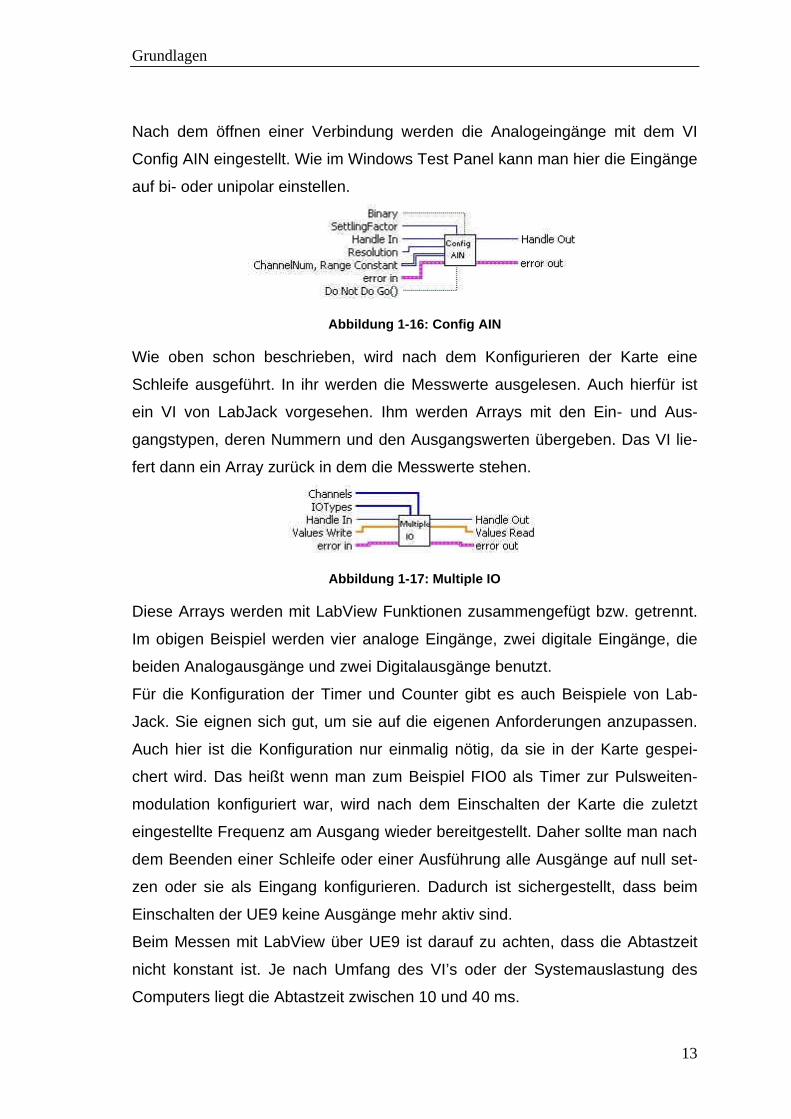
Nach dem öffnen einer Verbindung werden die Analogeingänge mit dem VI
Config AIN eingestellt. Wie im Windows Test Panel kann man hier die Eingänge
auf bi- oder unipolar einstellen.
Abbildung 1-16: Config AIN
Wie oben schon beschrieben, wird nach dem Konfigurieren der Karte eine
Schleife ausgeführt. In ihr werden die Messwerte ausgelesen. Auch hierfür ist
ein VI von LabJack vorgesehen. Ihm werden Arrays mit den Ein- und Aus-
gangstypen, deren Nummern und den Ausgangswerten übergeben. Das VI lie-
fert dann ein Array zurück in dem die Messwerte stehen.
Abbildung 1-17: Multiple IO
Diese Arrays werden mit LabView Funktionen zusammengefügt bzw. getrennt.
Im obigen Beispiel werden vier analoge Eingänge, zwei digitale Eingänge, die
beiden Analogausgänge und zwei Digitalausgänge benutzt.
Für die Konfiguration der Timer und Counter gibt es auch Beispiele von Lab-
Jack. Sie eignen sich gut, um sie auf die eigenen Anforderungen anzupassen.
Auch hier ist die Konfiguration nur einmalig nötig, da sie in der Karte gespei-
chert wird. Das heißt wenn man zum Beispiel FIO0 als Timer zur Pulsweiten-
modulation konfiguriert war, wird nach dem Einschalten der Karte die zuletzt
eingestellte Frequenz am Ausgang wieder bereitgestellt. Daher sollte man nach
dem Beenden einer Schleife oder einer Ausführung alle Ausgänge auf null set-
zen oder sie als Eingang konfigurieren. Dadurch ist sichergestellt, dass beim
Einschalten der UE9 keine Ausgänge mehr aktiv sind.
Beim Messen mit LabView über UE9 ist darauf zu achten, dass die Abtastzeit
nicht konstant ist. Je nach Umfang des VI’s oder der Systemauslastung des
Computers liegt die Abtastzeit zwischen 10 und 40 ms.
Eigenschaften der Sensoren
14
2 Eigenschaften der Sensoren
Um die späteren Einsatzmöglichkeiten der vorhandenen Sensoren zu bestim-
men, wurden ihre Eigenschaften verglichen und anschließend Kennlinien auf-
genommen. In der folgenden Tabelle werden die Eigenschaften der Sensoren
laut den Datenblättern der Hersteller dargestellt.
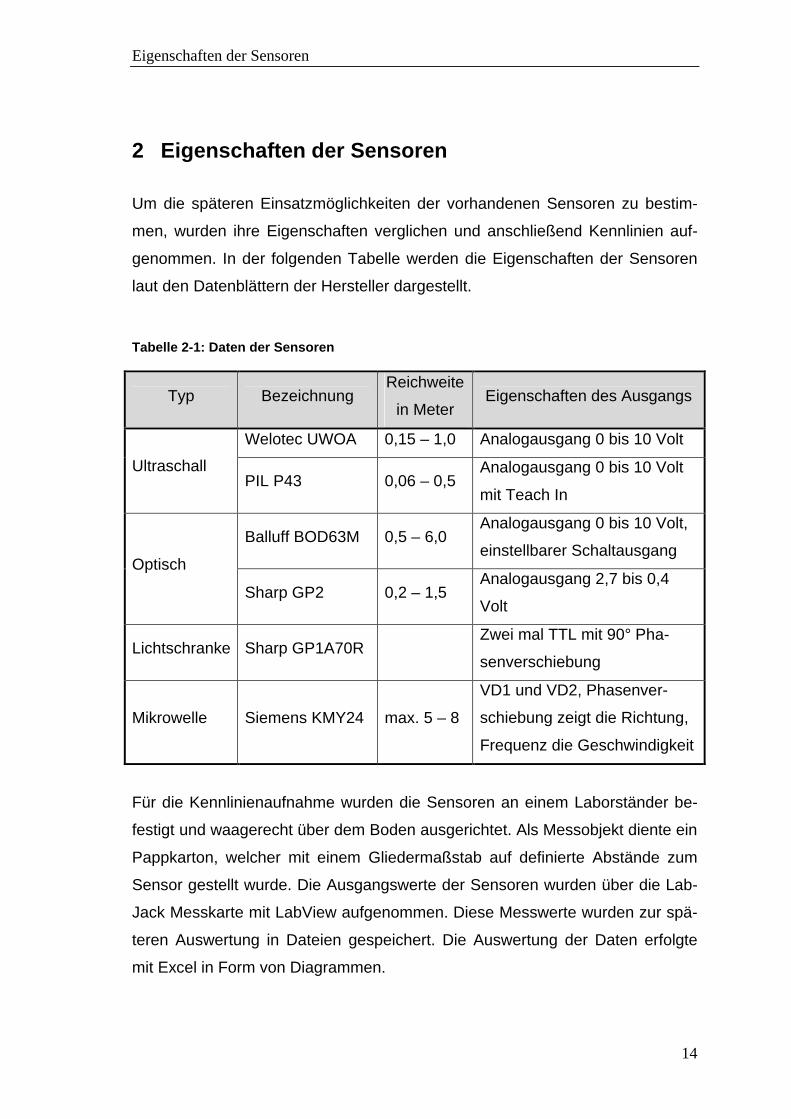
Tabelle 2-1: Daten der Sensoren
Typ Bezeichnung Reichweite
in Meter Eigenschaften des Ausgangs
Welotec UWOA 0,15 – 1,0 Analogausgang 0 bis 10 Volt
Ultraschall PIL P43 0,06 – 0,5
Analogausgang 0 bis 10 Volt
mit Teach In
Balluff BOD63M 0,5 – 6,0 Analogausgang 0 bis 10 Volt,
einstellbarer Schaltausgang Optisch
Sharp GP2 0,2 – 1,5 Analogausgang 2,7 bis 0,4
Volt
Lichtschranke Sharp GP1A70R Zwei mal TTL mit 90° Pha-
senverschiebung
Mikrowelle Siemens KMY24 max. 5 – 8
VD1 und VD2, Phasenver-
schiebung zeigt die Richtung,
Frequenz die Geschwindigkeit
Für die Kennlinienaufnahme wurden die Sensoren an einem Laborständer be-
festigt und waagerecht über dem Boden ausgerichtet. Als Messobjekt diente ein
Pappkarton, welcher mit einem Gliedermaßstab auf definierte Abstände zum
Sensor gestellt wurde. Die Ausgangswerte der Sensoren wurden über die Lab-
Jack Messkarte mit LabView aufgenommen. Diese Messwerte wurden zur spä-
teren Auswertung in Dateien gespeichert. Die Auswertung der Daten erfolgte
mit Excel in Form von Diagrammen.
Eigenschaften der Sensoren
15
Zur Aufnahme der Kennlinien mit LabJack UE9 war es nötig, Spannungsteiler
an den Sensoren mit 10 Volt Analogausgang zu benutzen. Da man mit der UE9
nur bis 5 Volt messen kann, und somit die Spannung halbiert werden muss,
wurde ein symmetrischer Spannungsteiler aus zwei 10 kO Widerständen ge-
wählt. Dieses war bei beiden Ultraschallsensoren und beim Analogausgang des
Lasers nötig. Die Spannungsteiler wurden direkt mit den Anschlussleitungen
der Sensoren verlötet, da sie für den späteren Einsatz auch benötigt werden.
2.1 Ultraschallsensoren
Bei beiden Ultraschallsensoren zeigte sich, dass eine zu starke Objektneigung
dazu führt, dass nicht mehr genügend Signale in Empfängerrichtung reflektiert
wurden. Daher lassen sich nur Objekte mit einer Maximalneigung von 10° bis
30° zum Sensor detektieren. Diese Werte sind oberflächenabhängig. Je glatter
die Oberfläche ist, desto geringer darf der Winkel sein. Die Ultraschallwellen
werden bei zu großem Winkel umgelenkt und gelangen nicht zum Sensor zu-
rück. Das bedeutet für den späteren Einsatz am Modell-LKW, dass keine hin-
reichende Sicherheit gegeben ist, im Fahrtbetrieb alle Gegenstände zu erken-
nen. Da sich nicht ausschließen lässt, dass die beiden Sensoren sich gegensei-
tig stören, dürfen sie nicht in gleicher Richtung betrieben werden.
Der Sensor von PIL eignet sich aufgrund seiner Reichweite (6 bis 50 cm) gut
zur seitlichen Abstandserkennung. Dies kann zum Beispiel eine Wand sein an
der der LKW entlang fährt.
Der Sensor der Firma Welotec ist nur einmal vorhanden und soll auf einem
LKW in Fahrtrichtung abtasten. Seine Abstandswerte sollen genutzt werden,
wenn später dieser LKW automatisch hinter dem anderen herfährt.
Um die Umrechnungsfaktoren von Ausgangsspannung in Abstand zu ermitteln,
wurden von den Sensoren Kennlinien aufgenommen. Diese werden in den fol-
genden zwei Unterabschnitten gezeigt.
Eigenschaften der Sensoren
16
2.1.1 Welotec UWOA
Der Sensor der Firma Welotec hat eine sehr hohe Empfindlichkeit, welche eine
gute Erkennung von kleinen Objekten zulässt. Um eine Kennlinie des Analog-
ausgangs zu erstellen, wurden alle 5 cm ein Messwert aufgenommen.
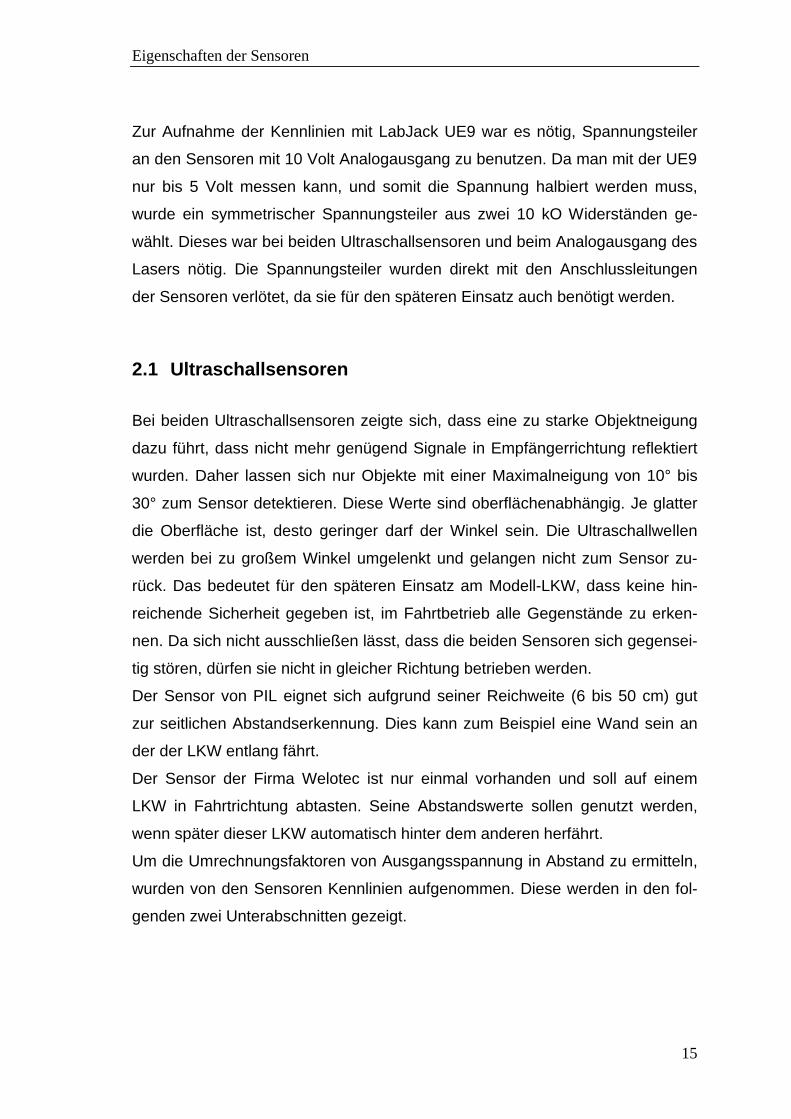
Aus Abbildung 2-1 kann man erkennen, dass der Sensor eine lineare Kennlinie
vorweist. Wenn man den toten Bereich des Sensors (0 bis 15 cm) vernachläs-
sigt, kann man die Steigung auf 5 V/m festlegen. Die Nullpunktverschiebung
von ungefähr -0,06 kann man vernachlässigen, da später am LKW eventuell
eine Verschiebung der x-Achse durchgeführt werden muss, um ihn mit anderen
Sensoren abzugleichen. Somit muss in der späteren Auswertung des Sensors
die gemessene Spannung durch die Steigung geteilt werden, um den Abstand
zu erhalten.
Welotec Ultraschallsensor
y = 5,0427x - 0,0576
0
1
2
3
4
5
6
0 0,2 0,4 0,6 0,8 1 1,2
Abstand in m
Mes
swer
t in
V
Abbildung 2-1: Kennlinie des Ultraschallsensors Welotec UWOA
Im toten Bereich kann es vorkommen, dass die Kennlinie einen Sprung auf 5 V
macht. Dieses kann zu Verwechslungen bei der Auswertung führen.
Eigenschaften der Sensoren
17
2.1.2 PIL P43
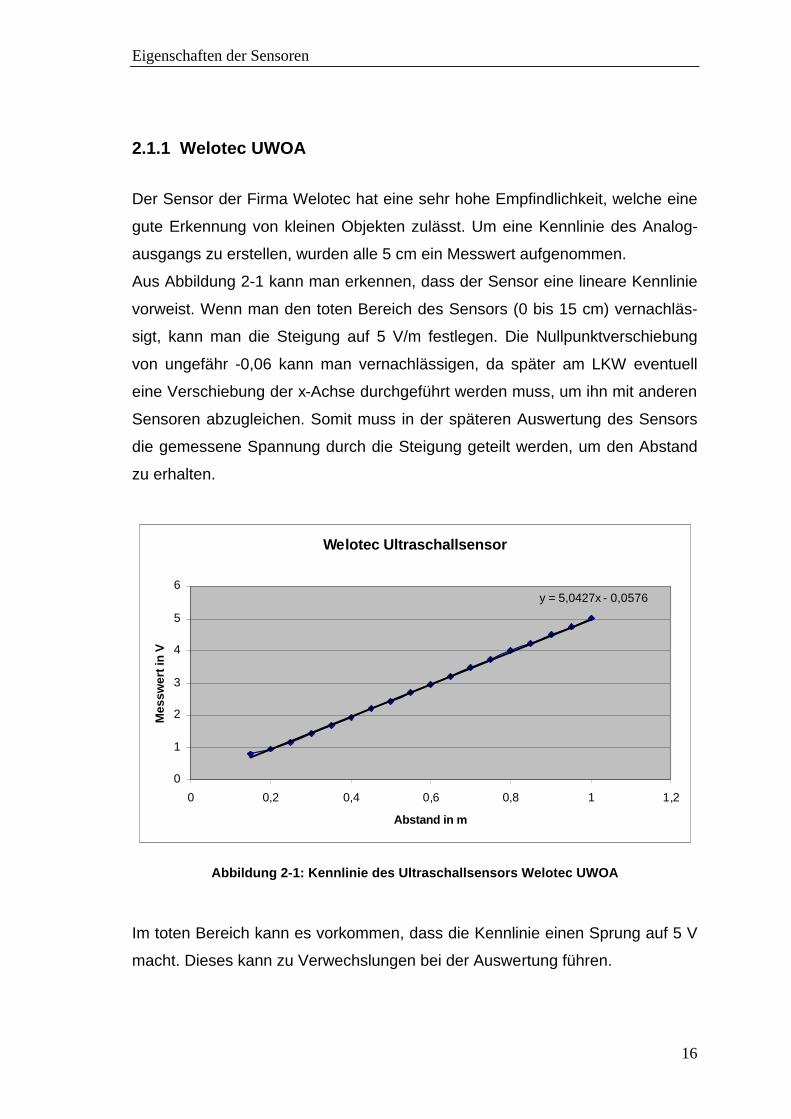
Dieser Sensor verfügt über einen Analogausgang mit Teach In Funktion. Damit
kann man die Steigung der Kennlinie verändern oder umkehren. In diesem Fall
ist eine Kennlinie mit negativer Steigung eingestellt worden. Sie wurde auf den
Höchstwert bei geringstem Abstand (6 cm), und auf den Wert 0 V bei größtem
messbarem Abstand (50 cm) eingestellt. Daraus ergibt sich die Kennlinie nach
Abbildung 2-2, aus der man wieder mittels der Trendlinienfunktion von Excel die
Steigung ablesen kann. Ab einem Abstand von 6 cm fällt die Kennlinie von 5 V
bis auf 0 V bei 50 cm.
PIL Ultraschallsensor
y = -11,401x + 5,7063
0
1
2
3
4
5
6
0 0,1 0,2 0,3 0,4 0,5 0,6
Abstand in m
Mes
swer
t in
V
Abbildung 2-2: Kennlinie des Ultraschallsensors PIL P43
Auch bei diesem Sensor gibt es den toten Bereich. Er liegt im Abstand von 0
cm bis 6 cm vom Sensorkopf. Kommt ein Objekt in diesen Bereich treten Aus-
gangswerte von 0 V oder 5 V auf. In diesem Fall gibt es keinen Zusammenhang
zwischen Ausgangsspannung und Abstand zum Sensor.
Eigenschaften der Sensoren
18
2.2 Lasersensor, Balluff BOD63M
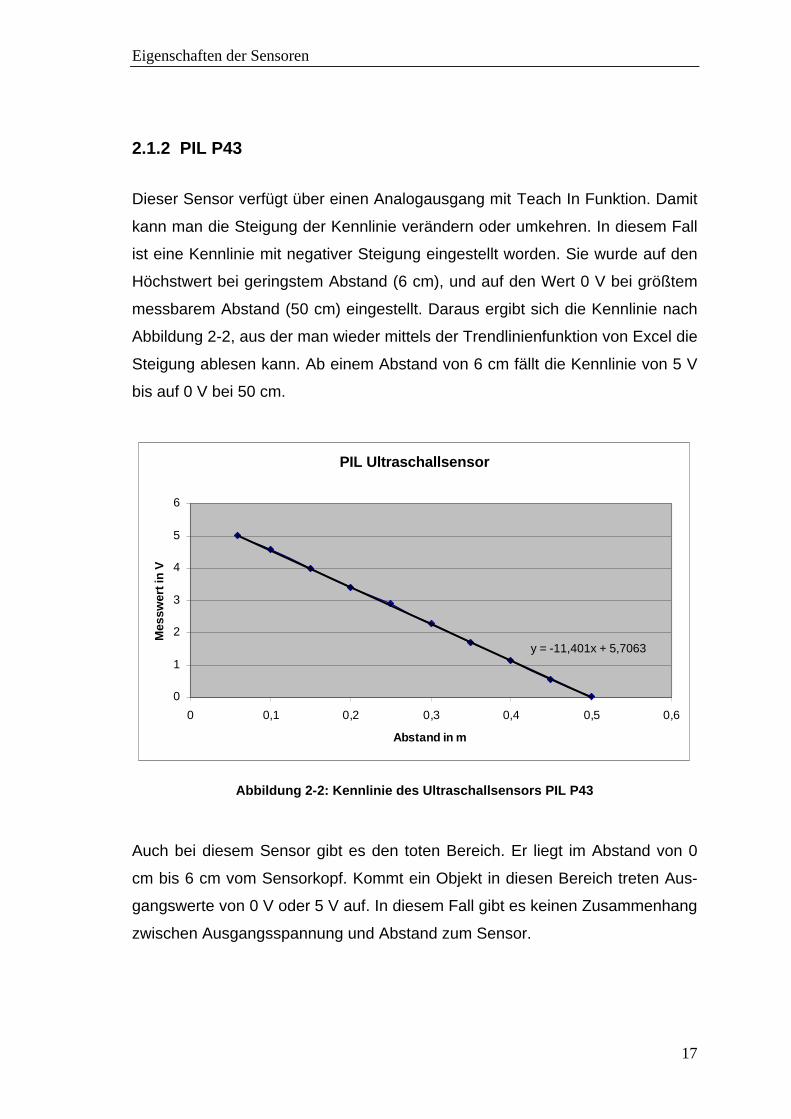
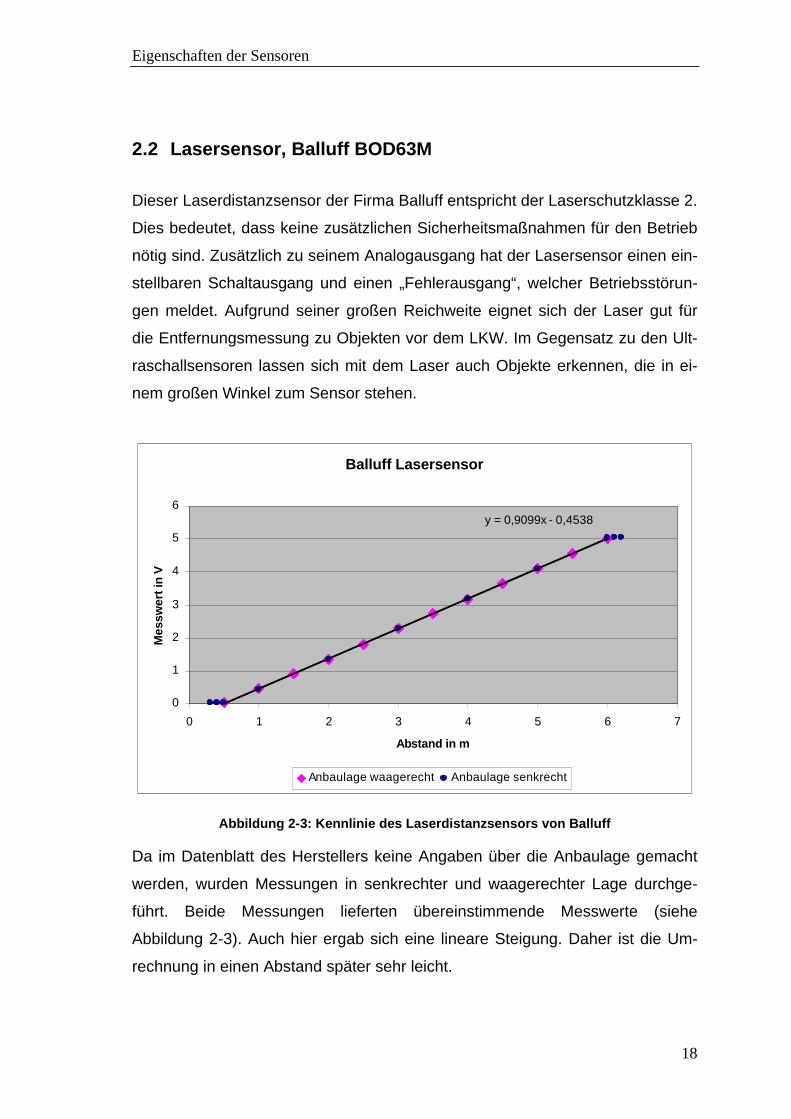
Dieser Laserdistanzsensor der Firma Balluff entspricht der Laserschutzklasse 2.
Dies bedeutet, dass keine zusätzlichen Sicherheitsmaßnahmen für den Betrieb
nötig sind. Zusätzlich zu seinem Analogausgang hat der Lasersensor einen ein-
stellbaren Schaltausgang und einen „Fehlerausgang“, welcher Betriebsstörun-
gen meldet. Aufgrund seiner großen Reichweite eignet sich der Laser gut für
die Entfernungsmessung zu Objekten vor dem LKW. Im Gegensatz zu den Ult-
raschallsensoren lassen sich mit dem Laser auch Objekte erkennen, die in ei-
nem großen Winkel zum Sensor stehen.
Balluff Lasersensor
y = 0,9099x - 0,4538
0
1
2
3
4
5
6
0 1 2 3 4 5 6 7
Abstand in m
Mes
swer
t in
V
Anbaulage waagerecht Anbaulage senkrecht
Abbildung 2-3: Kennlinie des Laserdistanzsensors von Balluff
Da im Datenblatt des Herstellers keine Angaben über die Anbaulage gemacht
werden, wurden Messungen in senkrechter und waagerechter Lage durchge-
führt. Beide Messungen lieferten übereinstimmende Messwerte (siehe
Abbildung 2-3). Auch hier ergab sich eine lineare Steigung. Daher ist die Um-
rechnung in einen Abstand später sehr leicht.
Eigenschaften der Sensoren
19
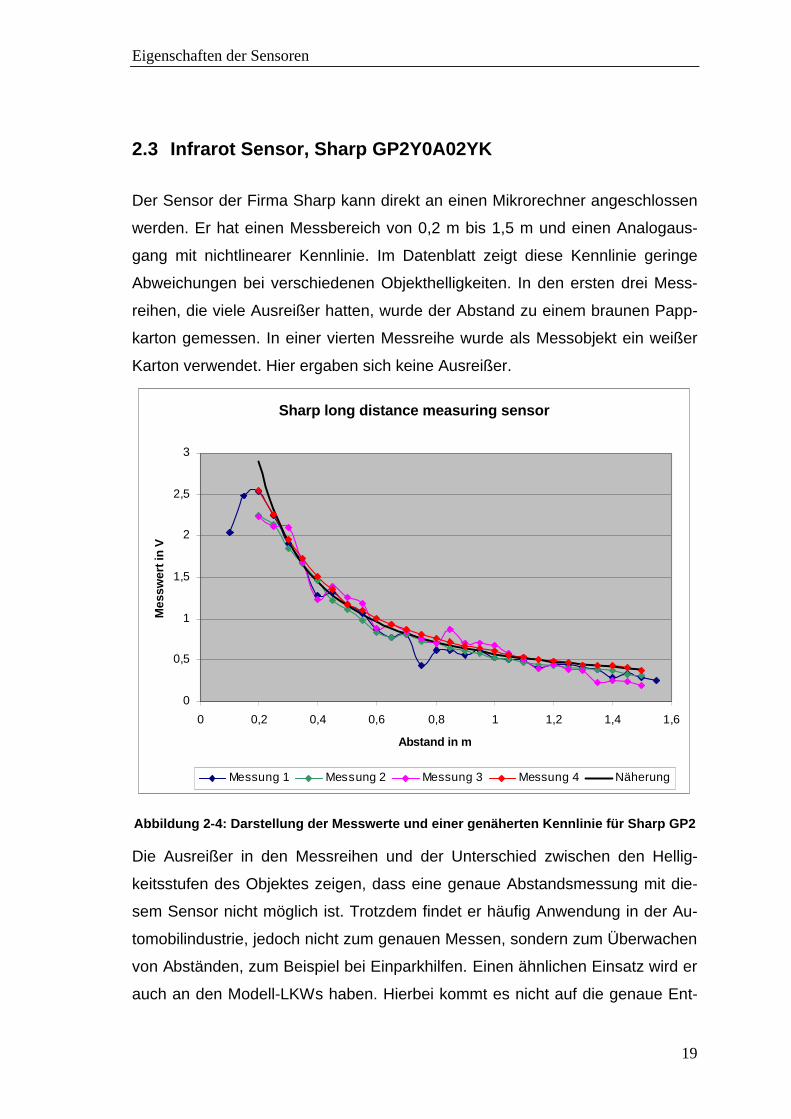
2.3 Infrarot Sensor, Sharp GP2Y0A02YK
Der Sensor der Firma Sharp kann direkt an einen Mikrorechner angeschlossen
werden. Er hat einen Messbereich von 0,2 m bis 1,5 m und einen Analogaus-
gang mit nichtlinearer Kennlinie. Im Datenblatt zeigt diese Kennlinie geringe
Abweichungen bei verschiedenen Objekthelligkeiten. In den ersten drei Mess-
reihen, die viele Ausreißer hatten, wurde der Abstand zu einem braunen Papp-
karton gemessen. In einer vierten Messreihe wurde als Messobjekt ein weißer
Karton verwendet. Hier ergaben sich keine Ausreißer.
Sharp long distance measuring sensor
0
0,5
1
1,5
2
2,5
3
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6
Abstand in m
Mes
swer
t in
V
Messung 1 Messung 2 Messung 3 Messung 4 Näherung
Abbildung 2-4: Darstellung der Messwerte und einer genäherten Kennlinie für Sharp GP2
Die Ausreißer in den Messreihen und der Unterschied zwischen den Hellig-
keitsstufen des Objektes zeigen, dass eine genaue Abstandsmessung mit die-
sem Sensor nicht möglich ist. Trotzdem findet er häufig Anwendung in der Au-
tomobilindustrie, jedoch nicht zum genauen Messen, sondern zum Überwachen
von Abständen, zum Beispiel bei Einparkhilfen. Einen ähnlichen Einsatz wird er
auch an den Modell-LKWs haben. Hierbei kommt es nicht auf die genaue Ent-
Eigenschaften der Sensoren
20
fernung zu einem Objekt an. Aus den Messwerten (siehe Abbildung 2-4) kann
man entnehmen, dass im Nahbereich bis ungefähr 0,8 m die Kennlinie recht
steil ist. Somit ist hier eine Zuordnung zu einem Abstand genauer als in dem
recht flachen Bereich dahinter. Um dennoch den Spannungswert des Ausgangs
in einen Abstand umzurechnen, wurde mittels der Trendlinienfunktion für die
zweite und die vierte Messung eine potenzielle Trendlinie erstellt. Diese Trend-
linien entsprechen dem Verlauf ab 25 cm recht gut. Die Formeln der beiden
Trendlinien unterschieden sich nur geringfügig. Aus ihnen wurde die Annähe-
rung, die auch im Diagramm mit dargestellt ist, hergeleitet. Der Abstand in Me-
tern ergibt sich somit aus 0,58 Vm dividiert durch den gemessenen Span-
nungswert am Ausgang des Sensors.
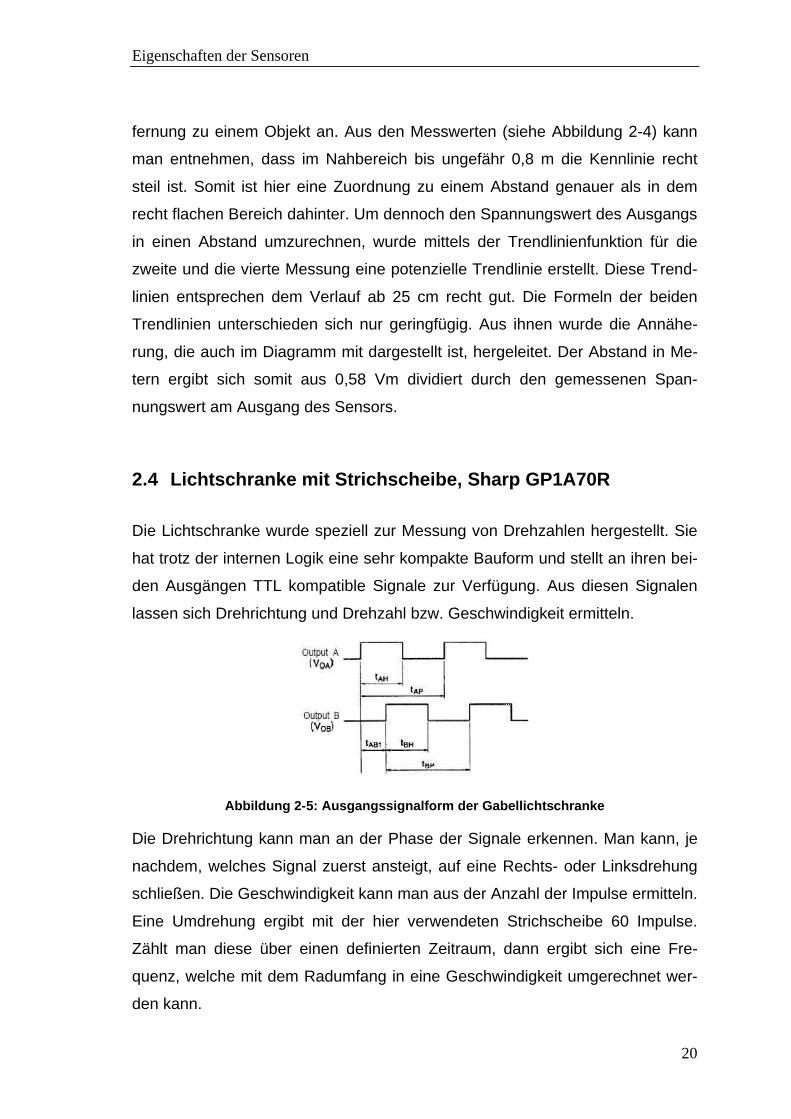
2.4 Lichtschranke mit Strichscheibe, Sharp GP1A70R
Die Lichtschranke wurde speziell zur Messung von Drehzahlen hergestellt. Sie
hat trotz der internen Logik eine sehr kompakte Bauform und stellt an ihren bei-
den Ausgängen TTL kompatible Signale zur Verfügung. Aus diesen Signalen
lassen sich Drehrichtung und Drehzahl bzw. Geschwindigkeit ermitteln.
Abbildung 2-5: Ausgangssignalform der Gabellichtschranke
Die Drehrichtung kann man an der Phase der Signale erkennen. Man kann, je
nachdem, welches Signal zuerst ansteigt, auf eine Rechts- oder Linksdrehung
schließen. Die Geschwindigkeit kann man aus der Anzahl der Impulse ermitteln.
Eine Umdrehung ergibt mit der hier verwendeten Strichscheibe 60 Impulse.
Zählt man diese über einen definierten Zeitraum, dann ergibt sich eine Fre-
quenz, welche mit dem Radumfang in eine Geschwindigkeit umgerechnet wer-
den kann.
Eigenschaften der Sensoren
21
2.5 Mikrowellensensor, Siemens KMY24
Dieser Sensor wurde ursprünglich von der Firma Siemens entwickelt und unter
dem Namen KMY24 vertrieben. Heute wird er bei Conrad unter dem Namen
HFMD24 ohne Angabe eines Herstellers verkauft. Die Datenblätter, die man
zusätzlich unter www.conrad.de herunterladen kann, beziehen sich aber auf
den Sensor von Siemens. Dieses Dopplermodul arbeitet mit einer Frequenz von
2,45GHz und ist hauptsächlich zur Bewegungserfassung gedacht. Es kann aber
auch zur Geschwindigkeitsmessung mit Richtungserkennung sowie zur Identifi-
kation von Objekten genutzt werden.
Aus dem mitgelieferten Datenblatt ließ sich entnehmen, dass an den Ausgän-
gen maximal eine Spannung von 0,32 V anliegt und der Sensor eine Reichweite
von 5 bis 8 m hat. In einem ersten Versuch wurden die Ausgänge direkt an ein
Oszilloskop angeschlossen. Hier zeigte sich, dass die Ausgangssignale sehr
viel kleiner sind und von einem starken Rauschen überlagert werden.
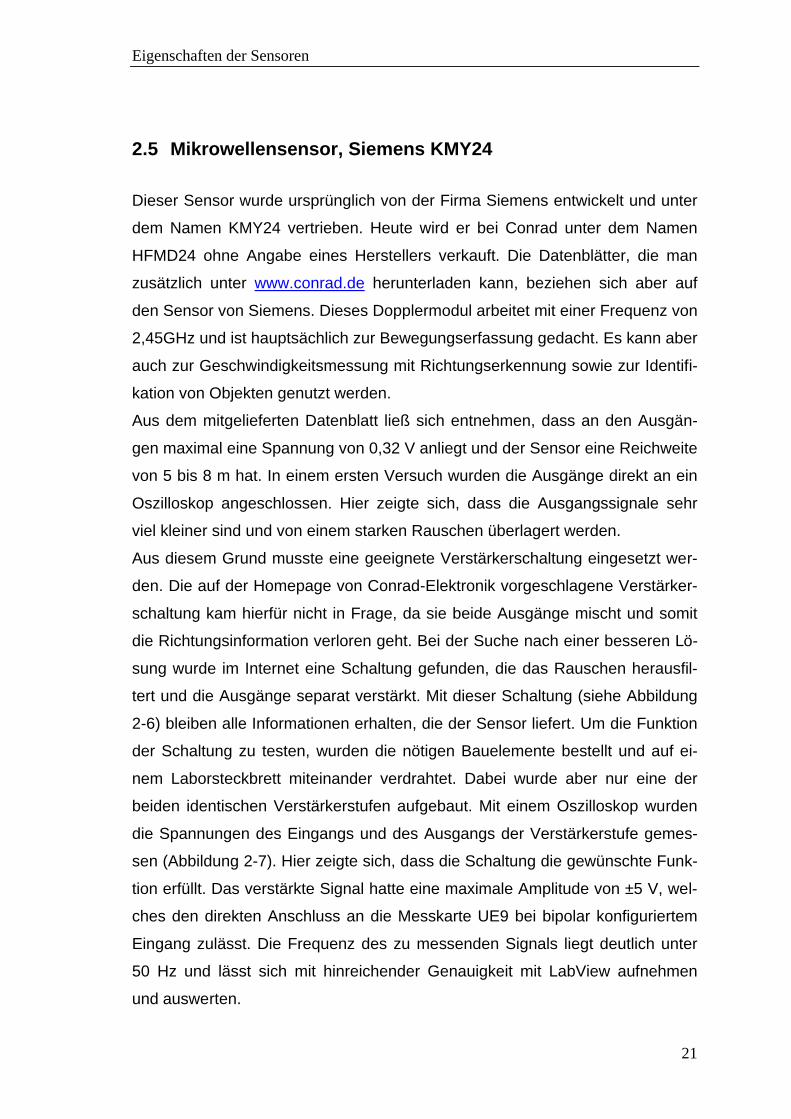
Aus diesem Grund musste eine geeignete Verstärkerschaltung eingesetzt wer-
den. Die auf der Homepage von Conrad-Elektronik vorgeschlagene Verstärker-
schaltung kam hierfür nicht in Frage, da sie beide Ausgänge mischt und somit
die Richtungsinformation verloren geht. Bei der Suche nach einer besseren Lö-
sung wurde im Internet eine Schaltung gefunden, die das Rauschen herausfil-
tert und die Ausgänge separat verstärkt. Mit dieser Schaltung (siehe Abbildung
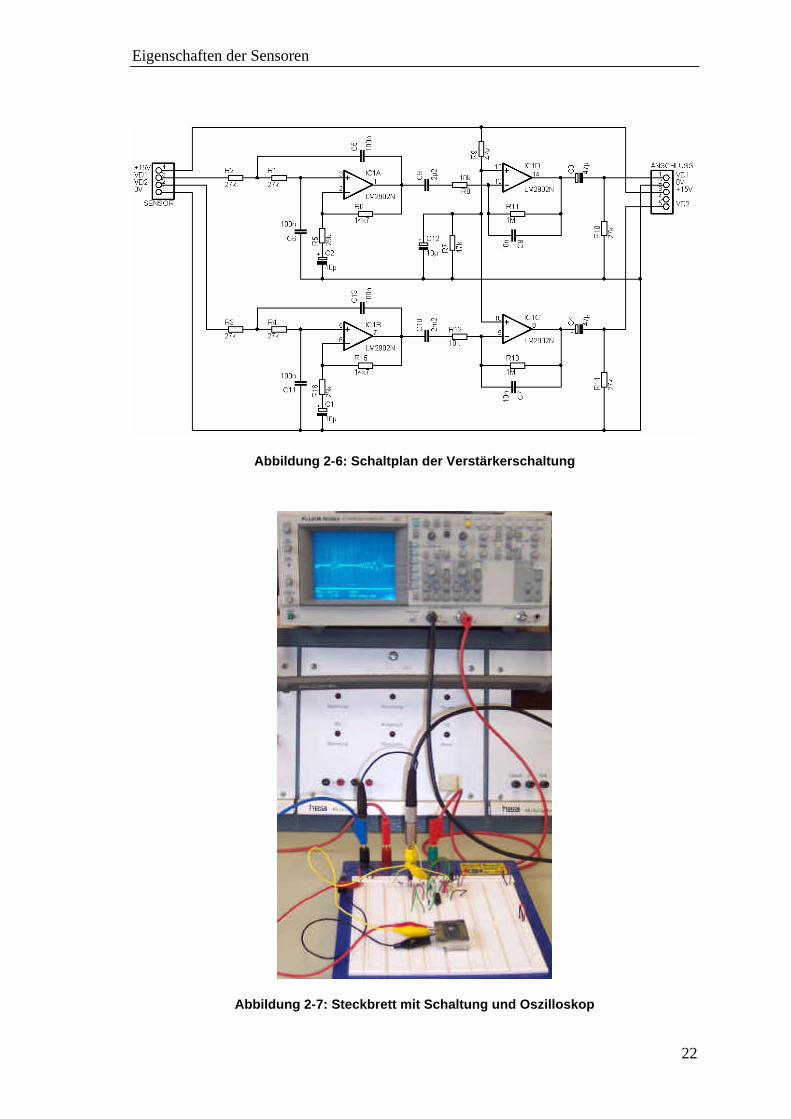
2-6) bleiben alle Informationen erhalten, die der Sensor liefert. Um die Funktion
der Schaltung zu testen, wurden die nötigen Bauelemente bestellt und auf ei-
nem Laborsteckbrett miteinander verdrahtet. Dabei wurde aber nur eine der
beiden identischen Verstärkerstufen aufgebaut. Mit einem Oszilloskop wurden
die Spannungen des Eingangs und des Ausgangs der Verstärkerstufe gemes-
sen (Abbildung 2-7). Hier zeigte sich, dass die Schaltung die gewünschte Funk-
tion erfüllt. Das verstärkte Signal hatte eine maximale Amplitude von ±5 V, wel-
ches den direkten Anschluss an die Messkarte UE9 bei bipolar konfiguriertem
Eingang zulässt. Die Frequenz des zu messenden Signals liegt deutlich unter
50 Hz und lässt sich mit hinreichender Genauigkeit mit LabView aufnehmen
und auswerten.
Eigenschaften der Sensoren
22
Abbildung 2-6: Schaltplan der Verstärkerschaltung
Abbildung 2-7: Steckbrett mit Schaltung und Oszilloskop
Eigenschaften der Sensoren
23
Aufgrund dieser Erfahrungen mit dem Sensor wurde mit Eagle ein Layout für
eine Platine entworfen. Dieses wurde geätzt und bestückt. Der fertige Aufbau ist
in Abbildung 2-8 zu sehen. Für die weiteren Messungen wurde ein LabView VI
entworfen, welches die Messwerte grafisch darstellt und sie zusätzlich zur wei-
teren Auswertung in eine Datei speichert.
Abbildung 2-8: Platine mit Sensor
Da der Sensor nur bewegte Objekte wahrnehmen kann und die Frequenz des
Ausgangssignals geschwindigkeitsabhängig ist, wurde der Versuchsaufbau in
das Labor für elektrische Antriebe verlegt. Hier wurden mittels eines Linearmo-
tors und eines darauf montierten Pappkartons die Eigenschaften des Mikrowel-
lensensors untersucht. Bei diesen Untersuchungen wurde der Karton in unter-
schiedlichen Geschwindigkeiten vor dem Sensor bewegt. Außerdem wurden
der Winkel zum Sensor (seitliche Annäherung) und das Material des zu erken-
nenden Objektes (Karton in Aluminiumfolie eingewickelt) verändert.
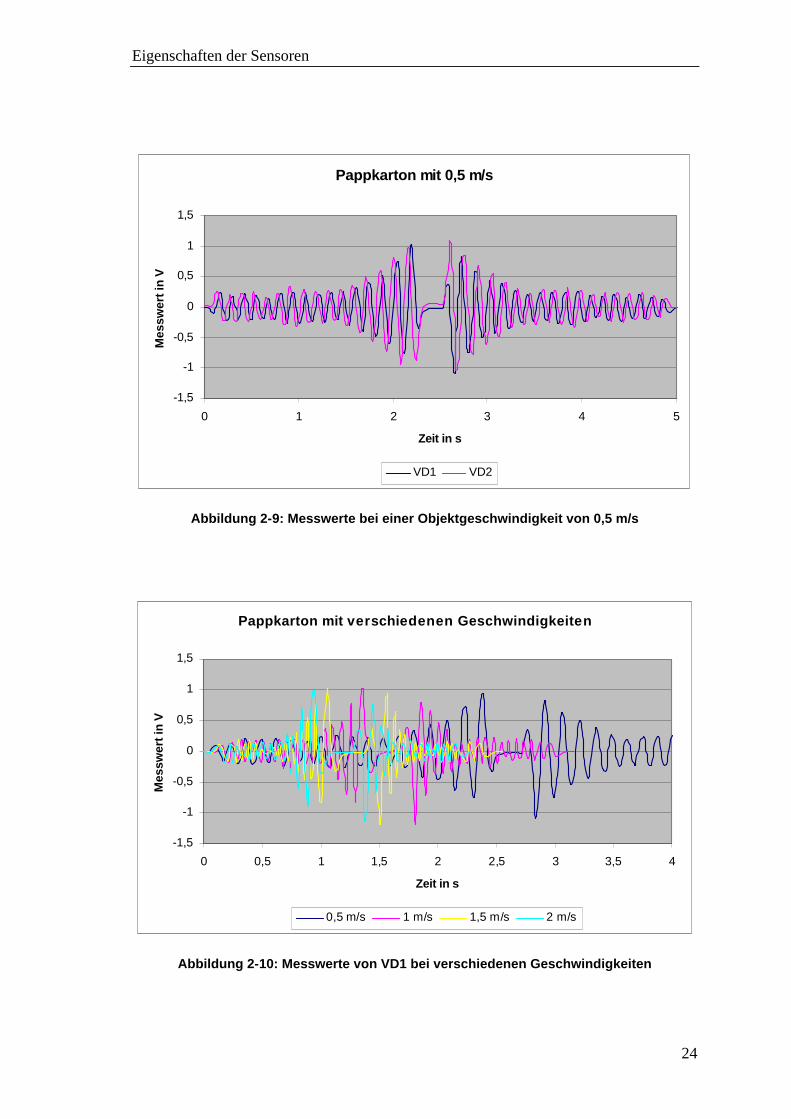
Bei allen Messungen wurde das gleiche Fahrprogramm verwendet. Der Fahr-
weg betrug 117,5 cm und die Beschleunigung in beide Richtungen 5 m/s2. In
der ersten Messung, die mit einer Geschwindigkeit von 0,5 m/s durchgeführt
wurde, näherte sich der Karton dem Sensor auf 28 cm. In Abbildung 2-9 kann
man sehr gut die Phasenverschiebung zwischen den Ausgangsspannungen
des Sensors sehen. Wenn sich ein Objekt zum Sensor hin bewegt, eilt VD2 vor.
Bewegt sich das Objekt vom Sensor weg, eilt VD2 nach. Um die weiteren Dar-
stellungen der Messwerte übersichtlicher zu gestalten, wird in den folgenden
Abbildungen nur noch VD1 dargestellt. In Abbildung 2-10 ist die Abhängigkeit
des Ausgangssignals zur Geschwindigkeit des Kartons dargestellt. Man sieht,
dass die Anzahl der Perioden und die Amplitude immer gleich bleiben. Es än-
dert sich also nur die Frequenz des Signals.
Eigenschaften der Sensoren
24
Pappkarton mit 0,5 m/s
-1,5
-1
-0,5
0
0,5
1
1,5
0 1 2 3 4 5
Zeit in s
Mes
swer
t in
V
VD1 VD2
Abbildung 2-9: Messwerte bei einer Objektgeschwindigkeit von 0,5 m/s
Pappkarton mit verschiedenen Geschwindigkeiten
-1,5
-1
-0,5
0
0,5
1
1,5
0 0,5 1 1,5 2 2,5 3 3,5 4
Zeit in s
Mes
swer
t in
V
0,5 m/s 1 m/s 1,5 m/s 2 m/s
Abbildung 2-10: Messwerte von VD1 bei verschiedenen Geschwindigkeiten
Eigenschaften der Sensoren
25
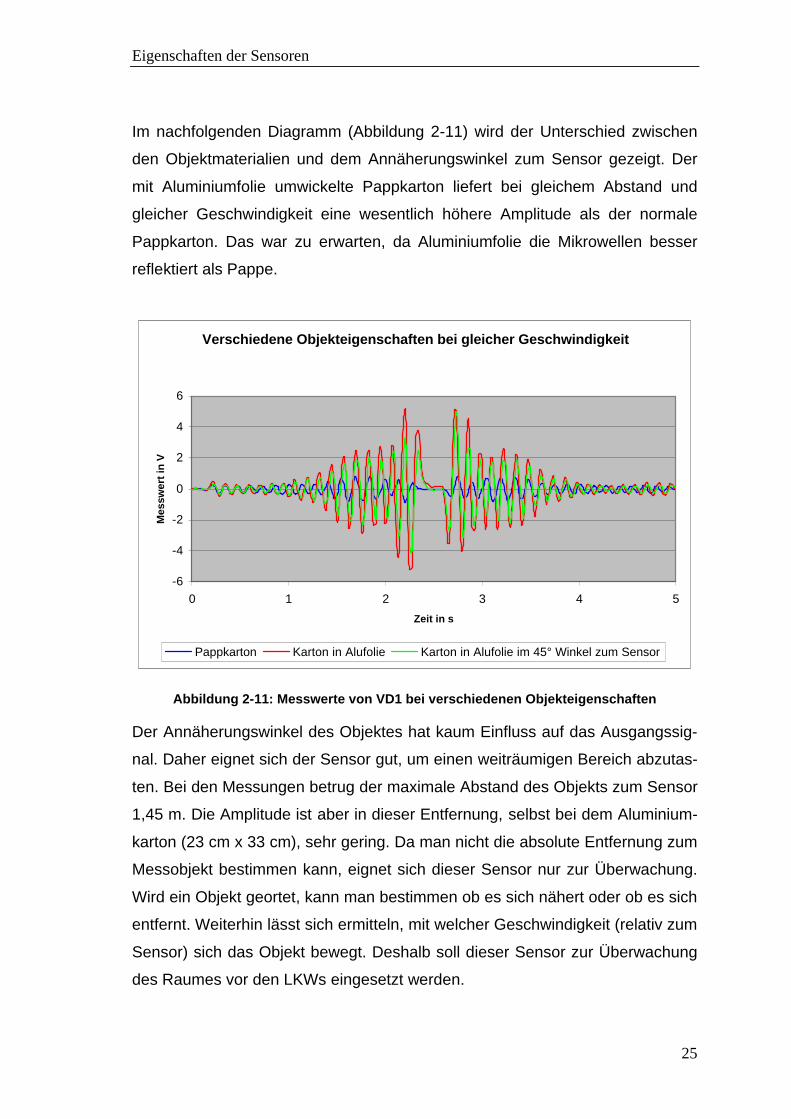
Im nachfolgenden Diagramm (Abbildung 2-11) wird der Unterschied zwischen
den Objektmaterialien und dem Annäherungswinkel zum Sensor gezeigt. Der
mit Aluminiumfolie umwickelte Pappkarton liefert bei gleichem Abstand und
gleicher Geschwindigkeit eine wesentlich höhere Amplitude als der normale
Pappkarton. Das war zu erwarten, da Aluminiumfolie die Mikrowellen besser
reflektiert als Pappe.
Verschiedene Objekteigenschaften bei gleicher Geschwindigkeit
-6
-4
-2
0
2
4
6
0 1 2 3 4 5
Zeit in s
Mes
swer
t in
V
Pappkarton Karton in Alufolie Karton in Alufolie im 45° Winkel zum Sensor
Abbildung 2-11: Messwerte von VD1 bei verschiedenen Objekteigenschaften
Der Annäherungswinkel des Objektes hat kaum Einfluss auf das Ausgangssig-
nal. Daher eignet sich der Sensor gut, um einen weiträumigen Bereich abzutas-
ten. Bei den Messungen betrug der maximale Abstand des Objekts zum Sensor
1,45 m. Die Amplitude ist aber in dieser Entfernung, selbst bei dem Aluminium-
karton (23 cm x 33 cm), sehr gering. Da man nicht die absolute Entfernung zum
Messobjekt bestimmen kann, eignet sich dieser Sensor nur zur Überwachung.
Wird ein Objekt geortet, kann man bestimmen ob es sich nähert oder ob es sich
entfernt. Weiterhin lässt sich ermitteln, mit welcher Geschwindigkeit (relativ zum
Sensor) sich das Objekt bewegt. Deshalb soll dieser Sensor zur Überwachung
des Raumes vor den LKWs eingesetzt werden.
Spannungsversorgung der Modell-LKWs
26
3 Spannungsversorgung der Modell-LKWs
Um den mobilen Einsatz der Modell-LKWs zu gewährleisten, muss eine eigene
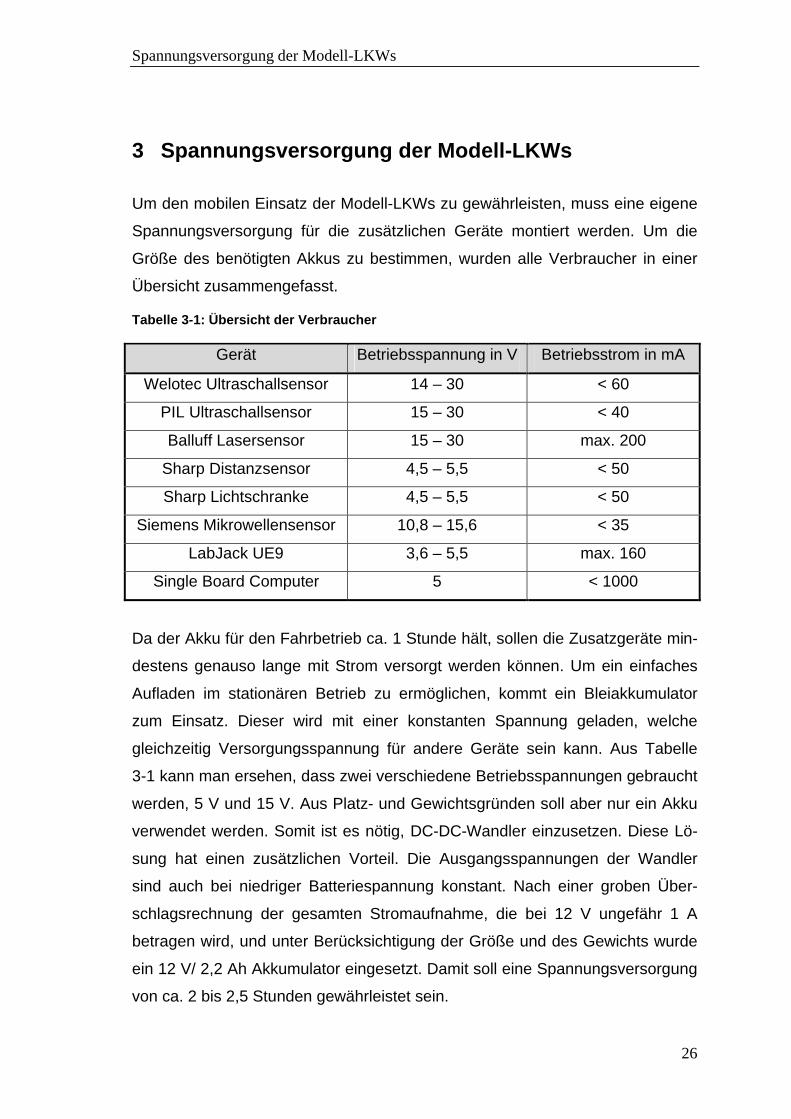
Spannungsversorgung für die zusätzlichen Geräte montiert werden. Um die
Größe des benötigten Akkus zu bestimmen, wurden alle Verbraucher in einer
Übersicht zusammengefasst.
Tabelle 3-1: Übersicht der Verbraucher
Gerät Betriebsspannung in V Betriebsstrom in mA
Welotec Ultraschallsensor 14 – 30 < 60
PIL Ultraschallsensor 15 – 30 < 40
Balluff Lasersensor 15 – 30 max. 200
Sharp Distanzsensor 4,5 – 5,5 < 50
Sharp Lichtschranke 4,5 – 5,5 < 50
Siemens Mikrowellensensor 10,8 – 15,6 < 35
LabJack UE9 3,6 – 5,5 max. 160
Single Board Computer 5 < 1000
Da der Akku für den Fahrbetrieb ca. 1 Stunde hält, sollen die Zusatzgeräte min-
destens genauso lange mit Strom versorgt werden können. Um ein einfaches
Aufladen im stationären Betrieb zu ermöglichen, kommt ein Bleiakkumulator
zum Einsatz. Dieser wird mit einer konstanten Spannung geladen, welche
gleichzeitig Versorgungsspannung für andere Geräte sein kann. Aus Tabelle
3-1 kann man ersehen, dass zwei verschiedene Betriebsspannungen gebraucht
werden, 5 V und 15 V. Aus Platz- und Gewichtsgründen soll aber nur ein Akku
verwendet werden. Somit ist es nötig, DC-DC-Wandler einzusetzen. Diese Lö-
sung hat einen zusätzlichen Vorteil. Die Ausgangsspannungen der Wandler
sind auch bei niedriger Batteriespannung konstant. Nach einer groben Über-
schlagsrechnung der gesamten Stromaufnahme, die bei 12 V ungefähr 1 A
betragen wird, und unter Berücksichtigung der Größe und des Gewichts wurde
ein 12 V/ 2,2 Ah Akkumulator eingesetzt. Damit soll eine Spannungsversorgung
von ca. 2 bis 2,5 Stunden gewährleistet sein.
Spannungsversorgung der Modell-LKWs
27
Bei DC-DC-Wandlern gibt es eine große Auswahl an verschiedenen Ein- und
Ausgangsspannungen. Ebenfalls gibt es viele verschiede Leistungsbereiche.
Die Firma Astec hat sich auf ihre Herstellung spezialisiert und bietet leistungs-
starke, baulich sehr kompakte Wandler mit einem hohen Wirkungsgrad an. Da
diese auch im Vergleich zu anderen Herstellern preislich recht günstig sind,
werden aus der Modellpalette von Astec die Wandler für die beiden benötigten
Spannungen ausgewählt. Die 5 V Spannungsversorgung muss einen hohen
Strom liefern können, da sie das Prozessor Board, die LabJack-Karte und die
Sensoren der Firma Sharp versorgen muss. Aufgrund dieser Anforderungen
kommt hier der Wandler APC05A08 zum Einsatz. Er hat eine Ausgangsspan-
nung von 5 V bei einer Eingangsspannung von 7,5 V bis 13 V. Seine Leistung
beträgt 30 W, welche einen Ausgangsstrom von 5 A zulässt. Der Wirkungsgrad
des Wandlers beträgt laut Datenblatt 94%. Er hat keinen von der Eingangs-
spannung getrennten Masseanschluss. Dieser ist aber auch nicht erforderlich,
da zur Messung mit der UE9 alle Sensoren auf das gleiche Potential gelegt
werden müssen und somit nur ein Masseanschluss vorgesehen ist.
Abbildung 3-1: APC05A08 Abbildung 3-2: AEE00C12-49
Der DC-DC-Wandler AEE00C12-49 für die 15 V Betriebsspannung arbeitet mit
einer Eingangsspannung von 9 V bis 18 V. Er hat eine Leistung von 10 W, was
für einen Ausgangsstrom von 0,68 A reicht. Im Gegensatz zu dem Wandler für
die 5 V ist dieser vergossen und zwischen Ein- und Ausgang isoliert. Das führt
zu einem schlechteren Wirkungsgrad. Dieser ist angegeben mit 84%.

Anbau der Peripherie an die LKWs
28
4 Anbau der Peripherie an die LKWs
Um spätere Arbeiten an den LKWs vorzubereiten und eine optimale Platzaus-
nutzung auf der Ladefläche zu erzielen, wurde auch das noch nicht genutzte
Prozessor Board montiert. Es wurde auf einer Kunststoffplatte befestigt und
hochkant im vorderen linken Bereich der Ladefläche befestigt. Dem Board ge-
genüber wurde der Bleiakku positioniert. Die Messkarte LabJack UE9 fand im
hinteren Teil der Ladefläche ihren Platz. Neben der UE9 sind Löcher für die
Durchführung der Leitungen und Platz für die Verstärkerschaltung des Mikro-
wellensensors vorgesehen.
Abbildung 4-1: Ladefläche eines Modell-LKWs mit den angeordneten Geräten
In Abbildung 4-1 sieht man den fertigen Aufbau der Geräte auf der Ladefläche.
Im vorderen Bereich ist noch Platz, um in weiteren Projekten zum Beispiel ein
Wireless-Lan-Modul positionieren zu können. Der 15V DC-DC-Wandler ist links
neben der UE9 untergebracht. Der 5 V DC-DC-Wandler ist auf diesem LKW
noch nicht angebaut, da bis heute nur ein Exemplar von Conrad-Elektronik ge-
liefert wurde.
Er soll später in dem transparenten Kunststoffschälchen auf der UE9 unterge-
bracht werden.
Anbau der Peripherie an die LKWs
29
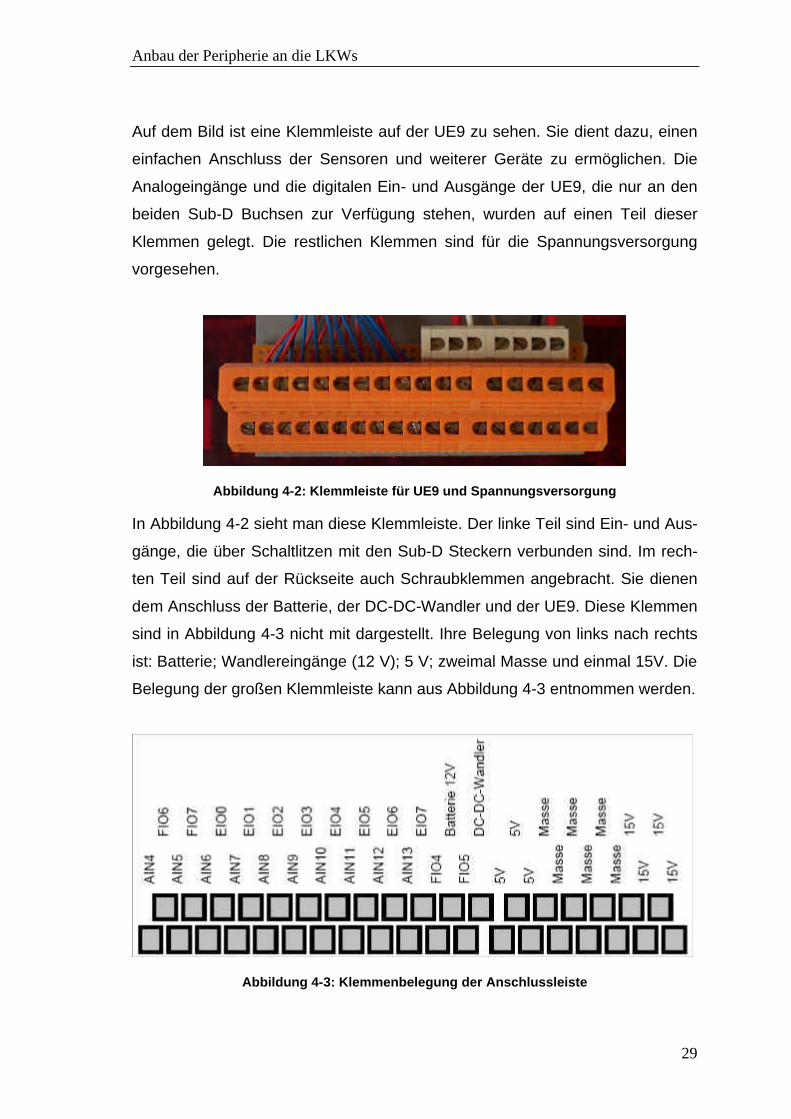
Auf dem Bild ist eine Klemmleiste auf der UE9 zu sehen. Sie dient dazu, einen
einfachen Anschluss der Sensoren und weiterer Geräte zu ermöglichen. Die
Analogeingänge und die digitalen Ein- und Ausgänge der UE9, die nur an den
beiden Sub-D Buchsen zur Verfügung stehen, wurden auf einen Teil dieser
Klemmen gelegt. Die restlichen Klemmen sind für die Spannungsversorgung
vorgesehen.
Abbildung 4-2: Klemmleiste für UE9 und Spannungsversorgung
In Abbildung 4-2 sieht man diese Klemmleiste. Der linke Teil sind Ein- und Aus-
gänge, die über Schaltlitzen mit den Sub-D Steckern verbunden sind. Im rech-
ten Teil sind auf der Rückseite auch Schraubklemmen angebracht. Sie dienen
dem Anschluss der Batterie, der DC-DC-Wandler und der UE9. Diese Klemmen
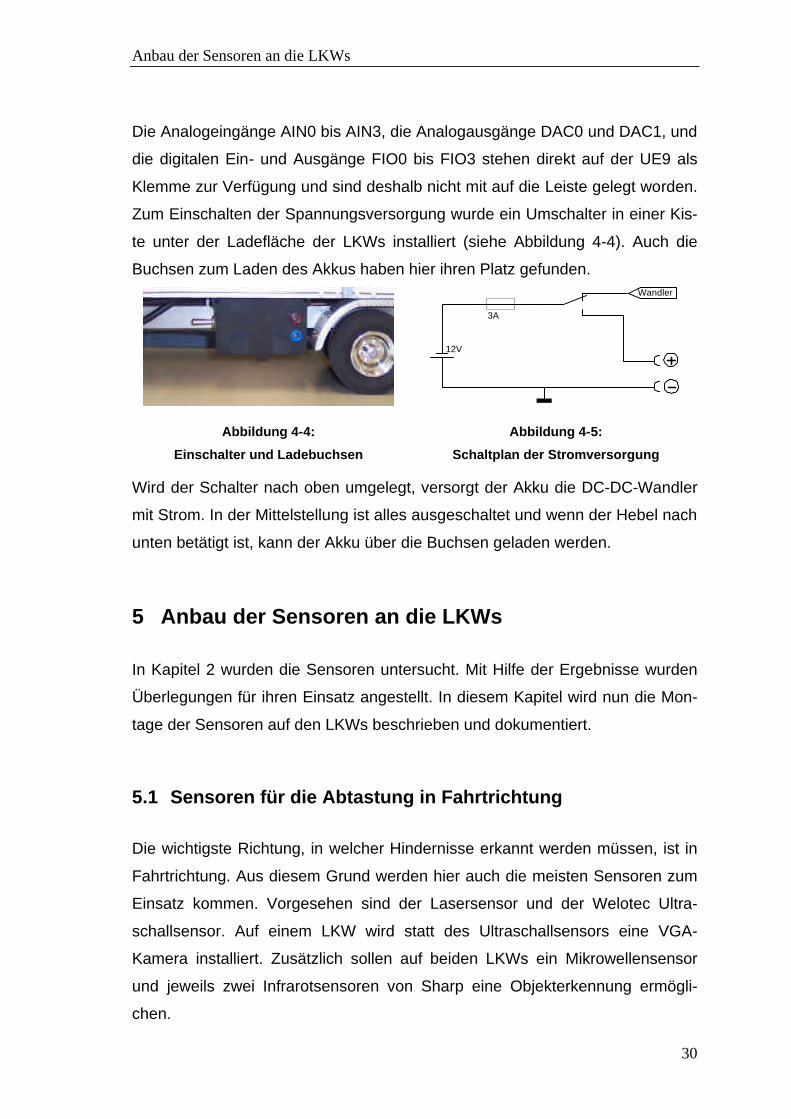
sind in Abbildung 4-3 nicht mit dargestellt. Ihre Belegung von links nach rechts
ist: Batterie; Wandlereingänge (12 V); 5 V; zweimal Masse und einmal 15V. Die
Belegung der großen Klemmleiste kann aus Abbildung 4-3 entnommen werden.
Abbildung 4-3: Klemmenbelegung der Anschlussleiste
Anbau der Sensoren an die LKWs
30
Die Analogeingänge AIN0 bis AIN3, die Analogausgänge DAC0 und DAC1, und
die digitalen Ein- und Ausgänge FIO0 bis FIO3 stehen direkt auf der UE9 als
Klemme zur Verfügung und sind deshalb nicht mit auf die Leiste gelegt worden.
Zum Einschalten der Spannungsversorgung wurde ein Umschalter in einer Kis-
te unter der Ladefläche der LKWs installiert (siehe Abbildung 4-4). Auch die
Buchsen zum Laden des Akkus haben hier ihren Platz gefunden.
12V
3A Wandler
Abbildung 4-4:
Einschalter und Ladebuchsen
Abbildung 4-5:
Schaltplan der Stromversorgung
Wird der Schalter nach oben umgelegt, versorgt der Akku die DC-DC-Wandler
mit Strom. In der Mittelstellung ist alles ausgeschaltet und wenn der Hebel nach
unten betätigt ist, kann der Akku über die Buchsen geladen werden.
5 Anbau der Sensoren an die LKWs
In Kapitel 2 wurden die Sensoren untersucht. Mit Hilfe der Ergebnisse wurden
Überlegungen für ihren Einsatz angestellt. In diesem Kapitel wird nun die Mon-
tage der Sensoren auf den LKWs beschrieben und dokumentiert.
5.1 Sensoren für die Abtastung in Fahrtrichtung
Die wichtigste Richtung, in welcher Hindernisse erkannt werden müssen, ist in
Fahrtrichtung. Aus diesem Grund werden hier auch die meisten Sensoren zum
Einsatz kommen. Vorgesehen sind der Lasersensor und der Welotec Ultra-
schallsensor. Auf einem LKW wird statt des Ultraschallsensors eine VGA-
Kamera installiert. Zusätzlich sollen auf beiden LKWs ein Mikrowellensensor
und jeweils zwei Infrarotsensoren von Sharp eine Objekterkennung ermögli-
chen.

Anbau der Sensoren an die LKWs
31
5.1.1 Montage von Sensoren auf dem Dach
Um den Lasersensor und den Ultraschallsensor auf dem Dach des Führerhau-
ses zu befestigen, wurde eine Kunststoffplatte angefertigt. Auf ihr wurden der
Laser mit doppelseitigem Klebeband und die Muttern des Ultraschallsensors mit
Kunststoffkleber befestigt. Auf dem Dach wurde die Platte mit Heißkleber ange-
klebt. Solange der Kleber weich war, konnte man den Laser so über dem Bo-
den auszurichten, dass er die Plane des anderen LKWs im kompletten Messbe-
reich erfasst. Die Anschlusskabel der Sensoren wurden direkt hinter dem Füh-
rerhaus auf die Ladefläche geführt.
Abbildung 5-1: Sensorplatte zur Dachmontage, Seitenansicht und Draufsicht
Die Platte ist so ausgeführt, dass sie über den Lampen und den Hupen des
LKWs angebracht ist. Dadurch mussten diese nicht abmontieren werden (siehe
Abbildung 5-1). Die Platte des anderen LKWs ist identisch, jedoch wird sie nicht
mit einem Ultraschallsensor sondern mit einer VGA-Kamera ausgerüstet.
5.1.2 Montage von Sensoren am Kühlergrill
Zur weiteren Abtastung der Fahrstrecke soll der Mikrowellensensor und zwei
Infrarotsensoren vorn am LKW platziert werden. Die beiden Sensoren von
Sharp sollen erkennen, ob der vorausfahrende LKW eine Richtungsänderung
vornimmt. Dies ist notwendig, um später ein selbständiges hintereinander Her-
fahren zu ermöglichen. Dazu wird jeweils ein Sensor an den äußeren Ecken
des LKWs angebracht. Steht ein Objekt parallel vor dem LKW zeigen beide
Sensoren denselben Wert an. Steht das Objekt jedoch schräg, sind die Werte
unterschiedlich. Dieses lässt sich auf die LKWs übertragen. Fährt der voraus-

Anbau der Sensoren an die LKWs
32
fahrende LKW geradeaus ist seine Plane parallel zu dem anderen. Fährt er eine
Kurve, ist die Plane nicht mehr parallel. Je nach Kurvenradius und Richtung
wird einer der Sensoren den vorfahrenden LKW nicht mehr orten. Das macht
die Auswertung einfacher, da die angezeigten Entfernungen stark voneinander
abweichen.
Der Anbau dieser Sensoren erfolgt ebenfalls mit Hilfe einer Kunststoffplatte.
Diese gewährleistet eine glatte, ebene Fläche für die Sensoren. Somit ist si-
chergestellt, dass die Infrarotsensoren parallel zueinander und parallel mit der
LKW-Längsachse ausgerichtet sind. Zusätzlich wird in der Mitte der Platte der
Mikrowellensensor befestigt.
Abbildung 5-2: Sensorplatte vorn am LKW montiert
Die Sensorplatte ist als Einheit zu sehen. Deshalb wurde nur eine Anschlusslei-
tung für alle Sensoren verwendet. Diese Leitung (siehe Tabelle 5-1) führt unter
der Ladefläche nach hinten und wird durch eine Bohrung auf sie geführt.
Tabelle 5-1: Aderbelegung des Anschlusskabels der Sensorplatte
Aderfarbe Belegung
blau Masse
grau Masse
rot 15 V (Mikrowellensensor)
grün 5 V (Infrarotsensoren)
weiß IR-Sensor links
gelb IR-Sensor rechts
rosa Mikrowellensensor VD1
braun Mikrowellensensor VD2
Anbau der Sensoren an die LKWs
33
5.2 Abtastung des seitlichen Abstands
Wie schon in Kapitel 2.1.2 beschrieben, eignet sich der Ultraschallsensor von
PIL gut für die Messung des seitlichen Abstands. Da er eine kleine Baugröße
hat, lässt er sich gut unter der Ladefläche montieren. Er ist dort leicht einge-
klemmt und mit den Muttern an der unteren Kannte der Seitenwand ver-
schraubt. Auch seine Anschlussleitung wird unter der Ladefläche verlegt.
Abbildung 5-3: LKW-Seite mit PIL Ultraschallsensor
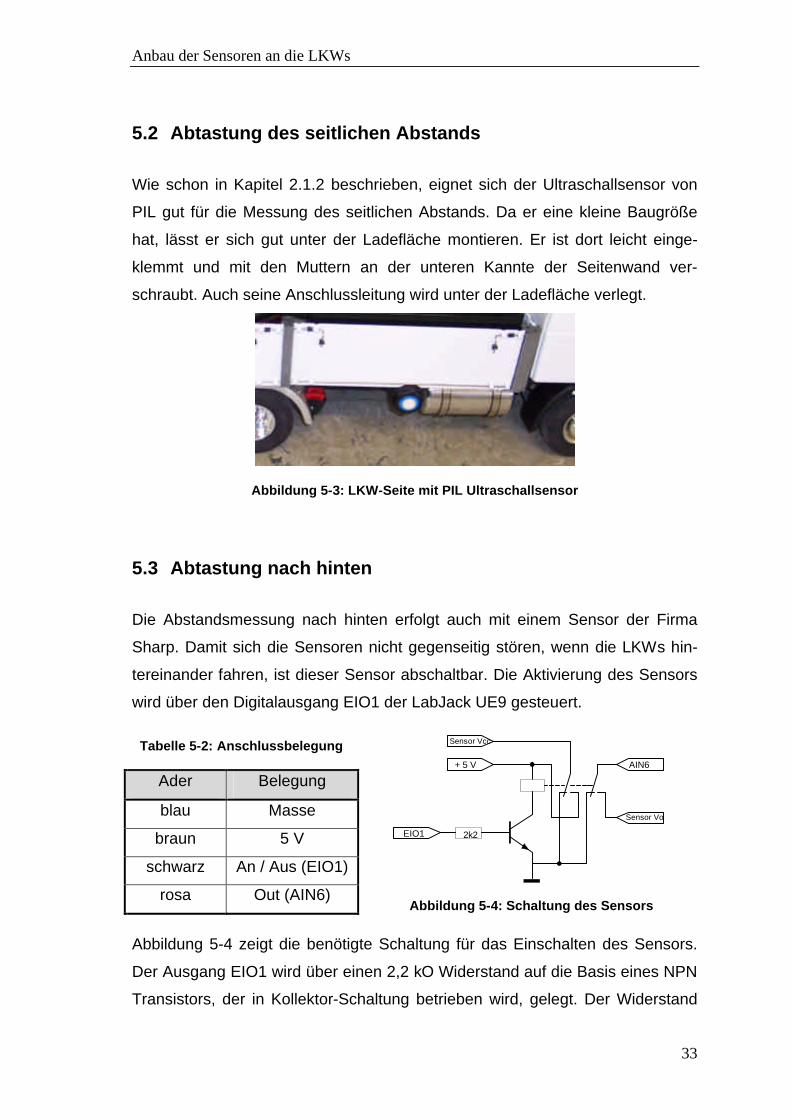
5.3 Abtastung nach hinten
Die Abstandsmessung nach hinten erfolgt auch mit einem Sensor der Firma
Sharp. Damit sich die Sensoren nicht gegenseitig stören, wenn die LKWs hin-
tereinander fahren, ist dieser Sensor abschaltbar. Die Aktivierung des Sensors
wird über den Digitalausgang EIO1 der LabJack UE9 gesteuert.
Tabelle 5-2: Anschlussbelegung
Ader Belegung
blau Masse
braun 5 V
schwarz An / Aus (EIO1)
2k2
+ 5 V
Sensor Vcc
AIN6
EIO1 Sensor Vo
rosa Out (AIN6)
Abbildung 5-4: Schaltung des Sensors
Abbildung 5-4 zeigt die benötigte Schaltung für das Einschalten des Sensors.
Der Ausgang EIO1 wird über einen 2,2 kO Widerstand auf die Basis eines NPN
Transistors, der in Kollektor-Schaltung betrieben wird, gelegt. Der Widerstand
Anbau der Sensoren an die LKWs
34
begrenzt den Stromfluss über die Basis auf 1 mA. Wird EIO1 aktiviert, schaltet
der Transistor auf Durchgang und lässt dadurch das Relais anziehen. Das Re-
lais hat zwei Wechslerkontakte. Mit ihnen wird die Spannungsversorgung des
Sensors geschaltet. Ist es angezogen, wird er mit 5 V versorgt. Ist es abgefal-
len, wird der Spannungseingang des Sensors auf Masse gelegt. Der Analog-
ausgang wird ebenfalls geschaltet. Bei Aktivierung ist er auf AIN6 gelegt, an-
sonsten wird AIN6 mit Masse belegt.
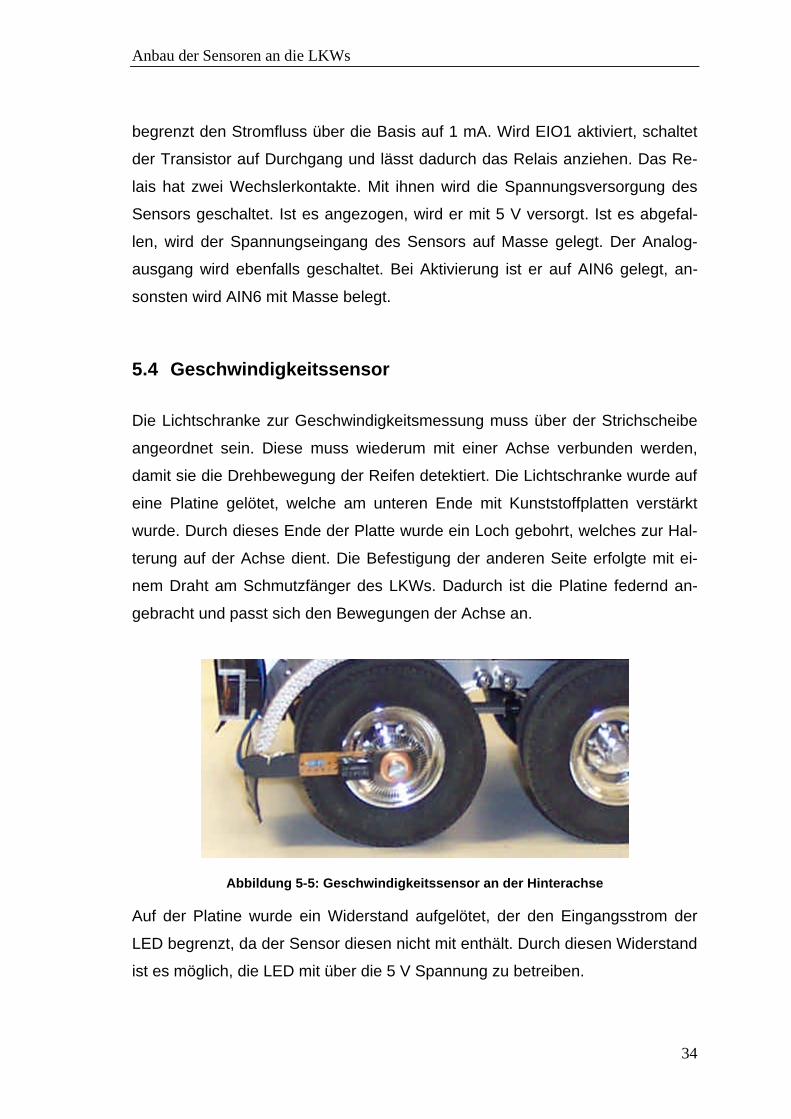
5.4 Geschwindigkeitssensor
Die Lichtschranke zur Geschwindigkeitsmessung muss über der Strichscheibe
angeordnet sein. Diese muss wiederum mit einer Achse verbunden werden,
damit sie die Drehbewegung der Reifen detektiert. Die Lichtschranke wurde auf
eine Platine gelötet, welche am unteren Ende mit Kunststoffplatten verstärkt
wurde. Durch dieses Ende der Platte wurde ein Loch gebohrt, welches zur Hal-
terung auf der Achse dient. Die Befestigung der anderen Seite erfolgte mit ei-
nem Draht am Schmutzfänger des LKWs. Dadurch ist die Platine federnd an-
gebracht und passt sich den Bewegungen der Achse an.
Abbildung 5-5: Geschwindigkeitssensor an der Hinterachse
Auf der Platine wurde ein Widerstand aufgelötet, der den Eingangsstrom der
LED begrenzt, da der Sensor diesen nicht mit enthält. Durch diesen Widerstand
ist es möglich, die LED mit über die 5 V Spannung zu betreiben.
Anbau der Sensoren an die LKWs
35
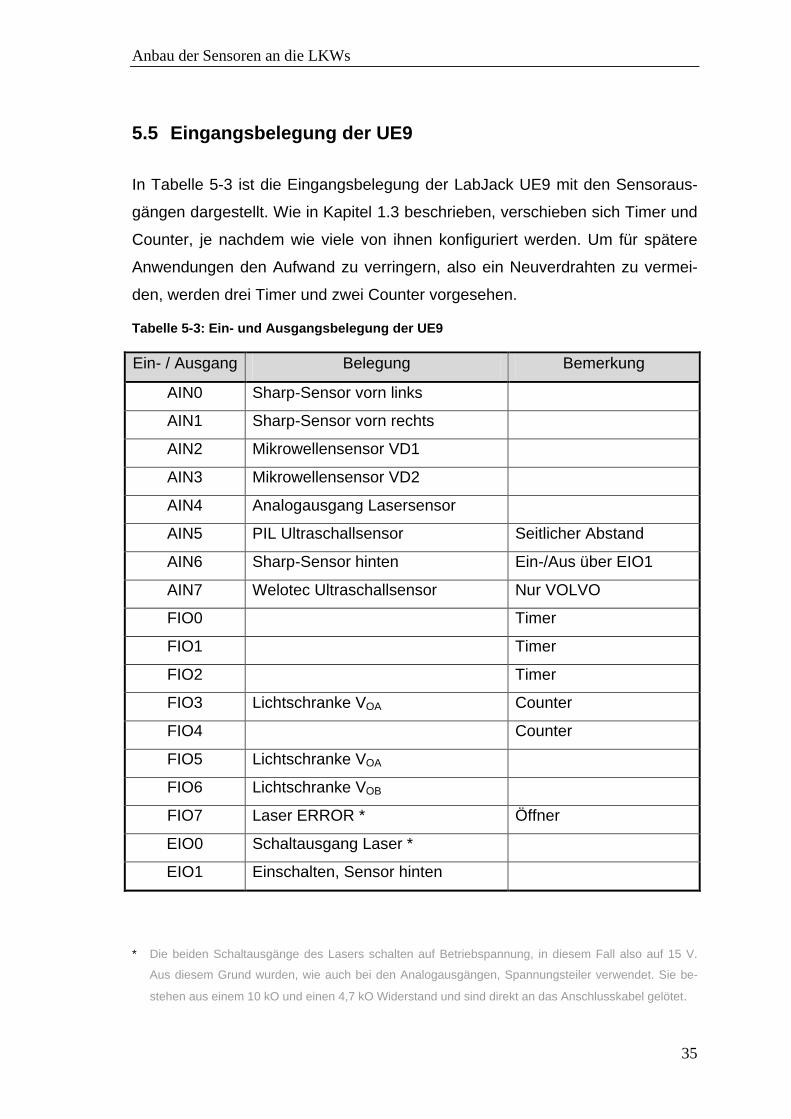
5.5 Eingangsbelegung der UE9
In Tabelle 5-3 ist die Eingangsbelegung der LabJack UE9 mit den Sensoraus-
gängen dargestellt. Wie in Kapitel 1.3 beschrieben, verschieben sich Timer und
Counter, je nachdem wie viele von ihnen konfiguriert werden. Um für spätere
Anwendungen den Aufwand zu verringern, also ein Neuverdrahten zu vermei-
den, werden drei Timer und zwei Counter vorgesehen.
Tabelle 5-3: Ein- und Ausgangsbelegung der UE9
Ein- / Ausgang Belegung Bemerkung
AIN0 Sharp-Sensor vorn links
AIN1 Sharp-Sensor vorn rechts
AIN2 Mikrowellensensor VD1
AIN3 Mikrowellensensor VD2
AIN4 Analogausgang Lasersensor
AIN5 PIL Ultraschallsensor Seitlicher Abstand
AIN6 Sharp-Sensor hinten Ein-/Aus über EIO1
AIN7 Welotec Ultraschallsensor Nur VOLVO
FIO0 Timer
FIO1 Timer
FIO2 Timer
FIO3 Lichtschranke VOA Counter
FIO4 Counter
FIO5 Lichtschranke VOA
FIO6 Lichtschranke VOB
FIO7 Laser ERROR * Öffner
EIO0 Schaltausgang Laser *
EIO1 Einschalten, Sensor hinten
* Die beiden Schaltausgänge des Lasers schalten auf Betriebspannung, in diesem Fall also auf 15 V.
Aus diesem Grund wurden, wie auch bei den Analogausgängen, Spannungsteiler verwendet. Sie be-
stehen aus einem 10 kO und einen 4,7 kO Widerstand und sind direkt an das Anschlusskabel gelötet.
Auswertung mit LabView
36
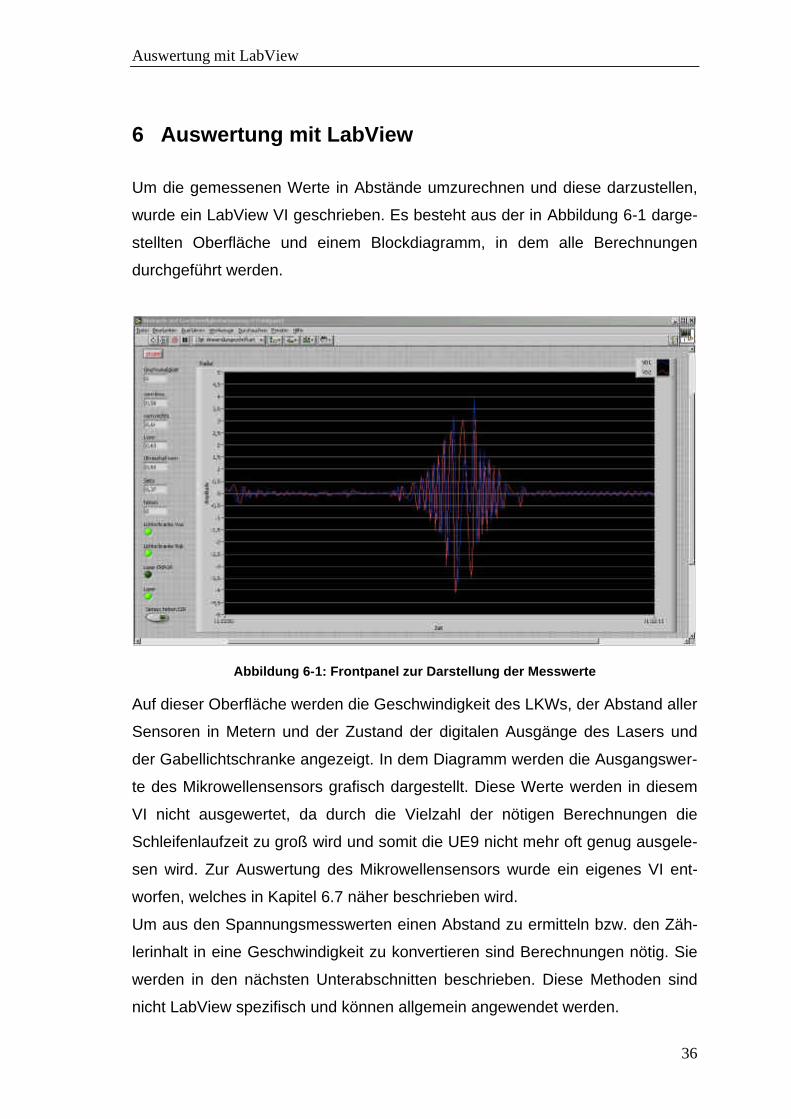
6 Auswertung mit LabView
Um die gemessenen Werte in Abstände umzurechnen und diese darzustellen,
wurde ein LabView VI geschrieben. Es besteht aus der in Abbildung 6-1 darge-
stellten Oberfläche und einem Blockdiagramm, in dem alle Berechnungen
durchgeführt werden.
Abbildung 6-1: Frontpanel zur Darstellung der Messwerte
Auf dieser Oberfläche werden die Geschwindigkeit des LKWs, der Abstand aller
Sensoren in Metern und der Zustand der digitalen Ausgänge des Lasers und
der Gabellichtschranke angezeigt. In dem Diagramm werden die Ausgangswer-
te des Mikrowellensensors grafisch dargestellt. Diese Werte werden in diesem
VI nicht ausgewertet, da durch die Vielzahl der nötigen Berechnungen die
Schleifenlaufzeit zu groß wird und somit die UE9 nicht mehr oft genug ausgele-
sen wird. Zur Auswertung des Mikrowellensensors wurde ein eigenes VI ent-
worfen, welches in Kapitel 6.7 näher beschrieben wird.
Um aus den Spannungsmesswerten einen Abstand zu ermitteln bzw. den Zäh-
lerinhalt in eine Geschwindigkeit zu konvertieren sind Berechnungen nötig. Sie
werden in den nächsten Unterabschnitten beschrieben. Diese Methoden sind
nicht LabView spezifisch und können allgemein angewendet werden.
Auswertung mit LabView
37
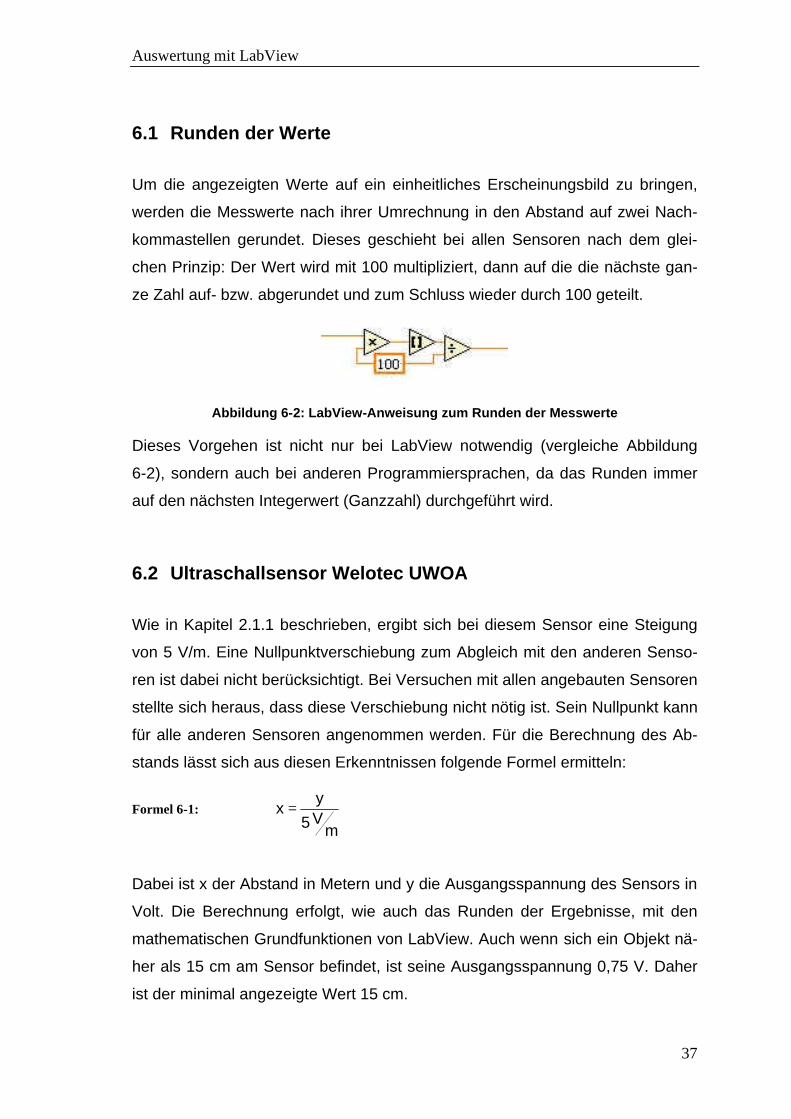
6.1 Runden der Werte
Um die angezeigten Werte auf ein einheitliches Erscheinungsbild zu bringen,
werden die Messwerte nach ihrer Umrechnung in den Abstand auf zwei Nach-
kommastellen gerundet. Dieses geschieht bei allen Sensoren nach dem glei-
chen Prinzip: Der Wert wird mit 100 multipliziert, dann auf die die nächste gan-
ze Zahl auf- bzw. abgerundet und zum Schluss wieder durch 100 geteilt.
Abbildung 6-2: LabView-Anweisung zum Runden der Messwerte
Dieses Vorgehen ist nicht nur bei LabView notwendig (vergleiche Abbildung
6-2), sondern auch bei anderen Programmiersprachen, da das Runden immer
auf den nächsten Integerwert (Ganzzahl) durchgeführt wird.
6.2 Ultraschallsensor Welotec UWOA
Wie in Kapitel 2.1.1 beschrieben, ergibt sich bei diesem Sensor eine Steigung
von 5 V/m. Eine Nullpunktverschiebung zum Abgleich mit den anderen Senso-
ren ist dabei nicht berücksichtigt. Bei Versuchen mit allen angebauten Sensoren
stellte sich heraus, dass diese Verschiebung nicht nötig ist. Sein Nullpunkt kann
für alle anderen Sensoren angenommen werden. Für die Berechnung des Ab-
stands lässt sich aus diesen Erkenntnissen folgende Formel ermitteln:
Formel 6-1:
mV5
yx =
Dabei ist x der Abstand in Metern und y die Ausgangsspannung des Sensors in
Volt. Die Berechnung erfolgt, wie auch das Runden der Ergebnisse, mit den
mathematischen Grundfunktionen von LabView. Auch wenn sich ein Objekt nä-
her als 15 cm am Sensor befindet, ist seine Ausgangsspannung 0,75 V. Daher
ist der minimal angezeigte Wert 15 cm.
Auswertung mit LabView
38
6.3 Ultraschallsensor PIL
Aufgrund der Anbaulage an der Seite des LKWs muss dieser Sensor nicht mit
anderen Abstandssensoren abgestimmt werden. Sein Nullpunkt ist bündig mit
der Außenkante. Deshalb muss die Formel, die in 2.1.2 mit der Trendlinienfunk-
tion von Excel ermittelt wurde, nur nach x aufgelöst werden, um den Abstand zu
erhalten.
Formel 6-2:
mV11,4
5,7Vyx
−−
=
6.4 Lasersensor Balluff BOD63M
Der Lasersensor ist auf dem LKW neben dem Welotec Ultraschallsensor ange-
bracht. Es wurde überprüft, ob der Lasersensor und der Ultraschallsensor die
gleichen Werte anzeigen. Da Bei einem der LKWs nur der Lasersensor auf dem
Dach angebracht wurde, können die Berechnungen für ihn direkt übernommen
werden, ohne ihn auf andere Sensoren abzustimmen.
Im ersten Schritt wurde die Trendlinie des Lasersensors nach x aufgelöst:
Formel 6-3:
mV0,91
0,45Vyx
+=
Danach wurden beide Sensoren betrieben und die errechneten Werte vergli-
chen. Es zeigten sich Abweichungen im Bereich von einem Zentimeter. Um
diesen auszugleichen, ohne einen weiteren Rechenschritt im Programm
einzuführen, wurde dieser mit in die Formel eingerechnet:
Formel 6-4:
mV0,91
0,44Vy
mV0,91
mV0,910,01m
mV0,91
0,45Vyx
+≈
⋅−
+=
Mit dieser Rechenvorschrift ist die Übereinstimmung der beiden Sensoren bes-
ser. Es treten noch minimale Abweichungen auf, die aber zu vernachlässigen
sind. Während der Fahrt der LKWs ist es ausreichend, den Abstand zu Objek-
ten auf einige cm genau zu messen.
Auswertung mit LabView
39
6.5 Optischer Distanzsensor Sharp GP2
Die Umrechnung der Spannungswerte von den optischen Distanzsensoren er-
folgt wie in Kapitel 2.3 beschrieben nach folgender Formel:
Formel 6-5: y
0,58Vmx =
Diese Werte sind aufgrund der Annäherung der Kennlinie und der Eigenschaf-
ten des Sensors nur grobe Richtwerte. Sie werden deshalb nicht mit den
Messwerten des Lasersensors oder des Ultraschallsensors verglichen. Für die
Funktionen, die diese Sensoren erfüllen sollen, ist das nicht nötig. In den beiden
folgenden Abschnitten werden Vorschläge für die Auswertung dieser Sensoren
gemacht.
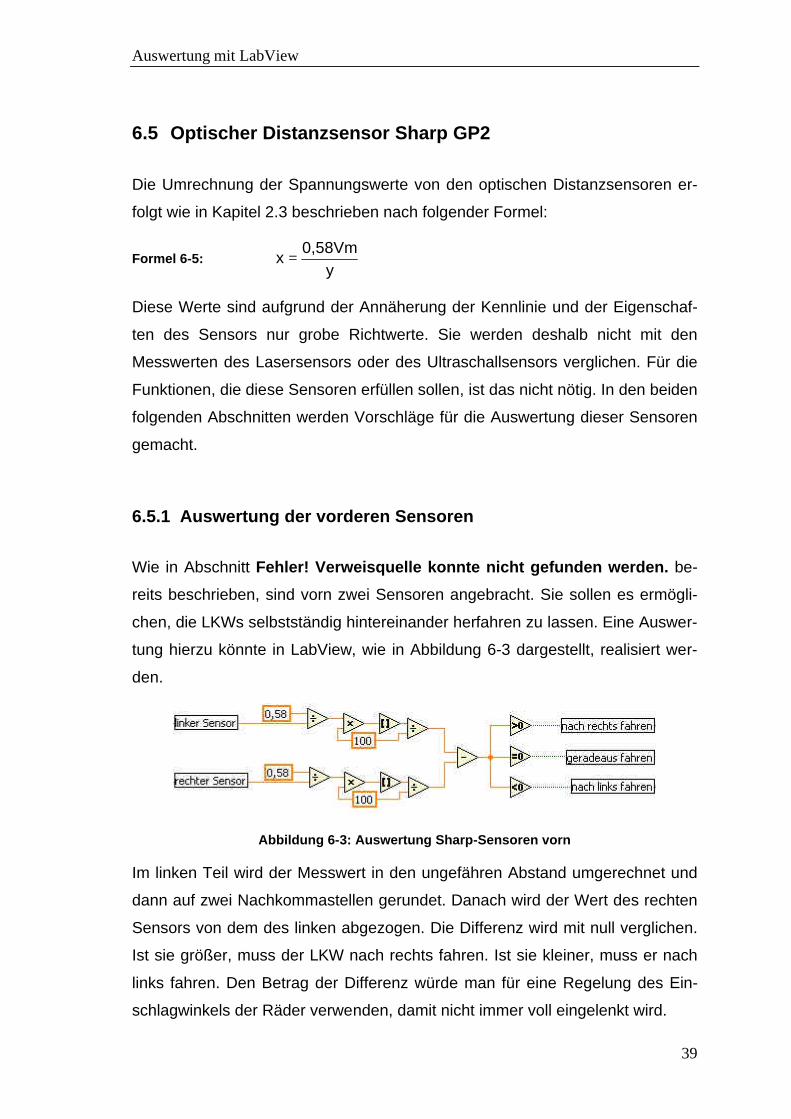
6.5.1 Auswertung der vorderen Sensoren
Wie in Abschnitt Fehler! Verweisquelle konnte nicht gefunden werden. be-
reits beschrieben, sind vorn zwei Sensoren angebracht. Sie sollen es ermögli-
chen, die LKWs selbstständig hintereinander herfahren zu lassen. Eine Auswer-
tung hierzu könnte in LabView, wie in Abbildung 6-3 dargestellt, realisiert wer-
den.
Abbildung 6-3: Auswertung Sharp-Sensoren vorn
Im linken Teil wird der Messwert in den ungefähren Abstand umgerechnet und
dann auf zwei Nachkommastellen gerundet. Danach wird der Wert des rechten
Sensors von dem des linken abgezogen. Die Differenz wird mit null verglichen.
Ist sie größer, muss der LKW nach rechts fahren. Ist sie kleiner, muss er nach
links fahren. Den Betrag der Differenz würde man für eine Regelung des Ein-
schlagwinkels der Räder verwenden, damit nicht immer voll eingelenkt wird.
Auswertung mit LabView
40
6.5.2 Auswertung des hinteren Sensors
Für die Abstandsüberwachung nach hinten ist nur ein Sensor vorgesehen. Die-
ser ist, wie in Abschnitt 5.3 erläutert, ein- bzw. ausschaltbar. Seine Auswertung
erfolgt nach Formel 6-5. Er soll beim Rückwärtsfahren dazu dienen, große Ge-
genstände oder Wände zu erkennen und eine Kollision mit diesen verhindern.
6.6 Lichtschranke mit Strichscheibe
Bei der Auswertung der Geschwindigkeit und der Fahrtrichtung ergaben sich
anfangs einige Probleme, welche aber zum größten Teil behoben wurden. Im
Folgenden werden diese Probleme und ihre Lösungen vorgestellt.
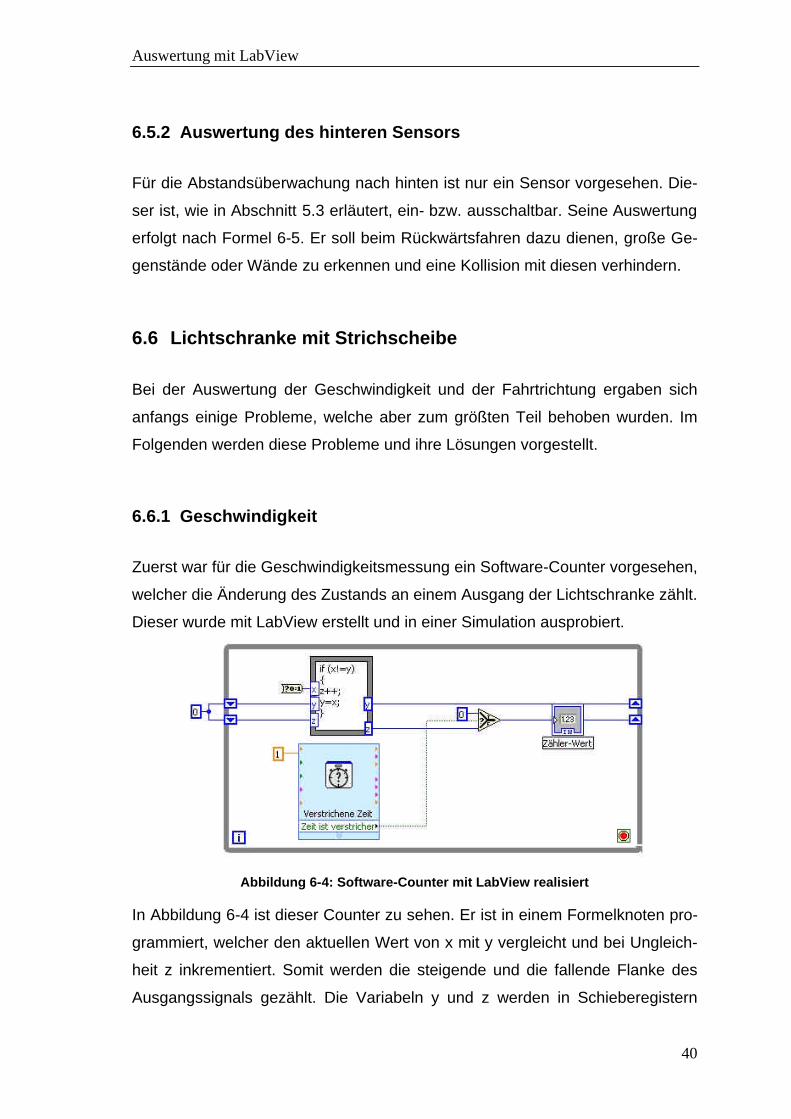
6.6.1 Geschwindigkeit
Zuerst war für die Geschwindigkeitsmessung ein Software-Counter vorgesehen,
welcher die Änderung des Zustands an einem Ausgang der Lichtschranke zählt.
Dieser wurde mit LabView erstellt und in einer Simulation ausprobiert.
Abbildung 6-4: Software-Counter mit LabView realisiert
In Abbildung 6-4 ist dieser Counter zu sehen. Er ist in einem Formelknoten pro-
grammiert, welcher den aktuellen Wert von x mit y vergleicht und bei Ungleich-
heit z inkrementiert. Somit werden die steigende und die fallende Flanke des
Ausgangssignals gezählt. Die Variabeln y und z werden in Schieberegistern
Auswertung mit LabView
41
gespeichert, damit ihr Wert im nächsten Schleifendurchlauf weiterhin zur Verfü-
gung steht. Der Zähler wird nach einer Sekunde wieder auf null gesetzt. Sein
Endwert kann in eine Drehzahl, und diese über den Reifenumfang in eine Ge-
schwindigkeit umgerechnet werden. In der Simulation, die mit einem Rechteck-
Signal mit einer Frequenz von 10 Hz durchgeführt wurde, funktionierte dieser
Zähler. Der anschließende Versuch mit der Lichtschranke war jedoch nicht er-
folgreich. Es stellte sich heraus, dass die LabJack UE9 nicht oft genug abgetas-
tet wird, um alle Impulse der Lichtschranke zu erkennen (siehe Abschnitt 1.3.2).
Um die Geschwindigkeitsmessung dennoch mit der Gabellichtschranke zu rea-
lisieren, musste vom Entwurf eines Software-Counters abgesehen und ein
Hardware-Counter eingesetzt werde. Dieser wird von der UE9 bereitgestellt, ist
aber nicht näher spezifiziert. Im Forum der Firma LabJack wird seine obere
Grenzfrequenz auf ungefähr 10 kHz geschätzt. Auch die Lichtschranke hat die-
se Frequenz als Grenze. Im Betrieb an den LKWs wird diese aber nie erreicht.
Da die LKWs höchsten 10 km/h schnell fahren, ist die maximal mögliche Fre-
quenz 750 HZ. Diese wurde mittels des Reifendurchmessers von 7,2 cm und
der 60er Teilung der Taktscheibe ermittelt.
Mittels eines von LabJack bereitgestellten Beispiels gelang es, den Timer mit
LabView zu konfigurieren, auszulesen und zurückzusetzen. Dieses Beispiel
wurde so geändert, dass der Timer nach 0,1 s ausgelesen und danach zurück-
gesetzt wird. Um den ausgelesenen Wert in eine Geschwindigkeit umzurech-
nen, muss eine Konstante ermittelt werden. Sie ergibt sich aus dem Radum-
fang, der Taktzahl der Strichscheibe je Umdrehung, der Abtastzeit und einem
Faktor, um in km/h umzurechnen. Der Umfang von 22,62 cm entspricht einer
Umdrehung des Reifens. Diese Umdrehung ergibt 60 Impulse an der Licht-
schranke. Legt das Fahrzeug eine Strecke von einem Meter zurück, lassen sich
somit 265 Impulse zählen. Die Geschwindigkeit soll in km/h dargestellt werden.
Dazu benötigt man einen Umrechnungsfaktor, welcher die Abtastzeit berück-
sichtigen muss:
0,1sImpulse
7,36h
km1
sImpulse
265sm
1 =⇒=
In einem Formelknoten in LabView wird der Zählerwert durch diese Konstante
geteilt und nach dem Prinzip aus Abschnitt 6.1 gerundet.
Auswertung mit LabView
42
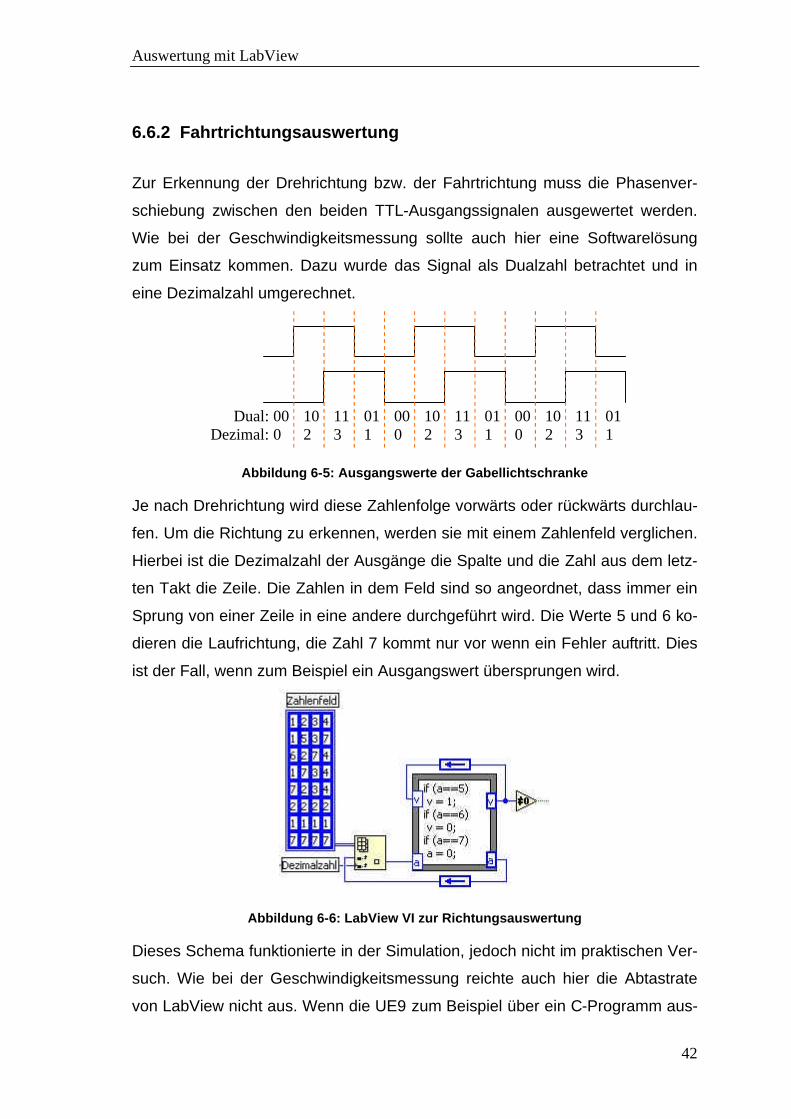
6.6.2 Fahrtrichtungsauswertung
Zur Erkennung der Drehrichtung bzw. der Fahrtrichtung muss die Phasenver-
schiebung zwischen den beiden TTL-Ausgangssignalen ausgewertet werden.
Wie bei der Geschwindigkeitsmessung sollte auch hier eine Softwarelösung
zum Einsatz kommen. Dazu wurde das Signal als Dualzahl betrachtet und in
eine Dezimalzahl umgerechnet.
Abbildung 6-5: Ausgangswerte der Gabellichtschranke
Je nach Drehrichtung wird diese Zahlenfolge vorwärts oder rückwärts durchlau-
fen. Um die Richtung zu erkennen, werden sie mit einem Zahlenfeld verglichen.
Hierbei ist die Dezimalzahl der Ausgänge die Spalte und die Zahl aus dem letz-
ten Takt die Zeile. Die Zahlen in dem Feld sind so angeordnet, dass immer ein
Sprung von einer Zeile in eine andere durchgeführt wird. Die Werte 5 und 6 ko-
dieren die Laufrichtung, die Zahl 7 kommt nur vor wenn ein Fehler auftritt. Dies
ist der Fall, wenn zum Beispiel ein Ausgangswert übersprungen wird.
Abbildung 6-6: LabView VI zur Richtungsauswertung
Dieses Schema funktionierte in der Simulation, jedoch nicht im praktischen Ver-
such. Wie bei der Geschwindigkeitsmessung reichte auch hier die Abtastrate
von LabView nicht aus. Wenn die UE9 zum Beispiel über ein C-Programm aus-
00 0
00 0
00 0
10 2
10 2
10 2
11 3
11 3
11 3
01 1
01 1
01 1
Dual: Dezimal:
Auswertung mit LabView
43
gelesen wird, sollte dieser Algorithmus aber funktionieren. Laut Hersteller kann
die Karte bis zu 50000 Abtastungen pro Sekunde durchführen. Diese Abtastrate
ist auf jeden Fall ausreichend, um alle Impulse der Gabellichtschranke zu er-
kennen. Dann würde auch die Geschwindigkeitsmessung mit der Softwarelö-
sung funktionieren.
Sollte die Abtastrate dennoch zu langsam sein, ist auch hier eine Hardwarelö-
sung nötig. Diese könnte mit einem Taktflanken gesteuertem D-Flipflop reali-
siert werden. Dazu legt man einen Ausgang an den D-Eingang und den ande-
ren an den Clock-Eingang. Bei voreilender Phase hat der Ausgang des Flipflops
high-Pegel, bei nacheilender Phase hat er low-Pegel.
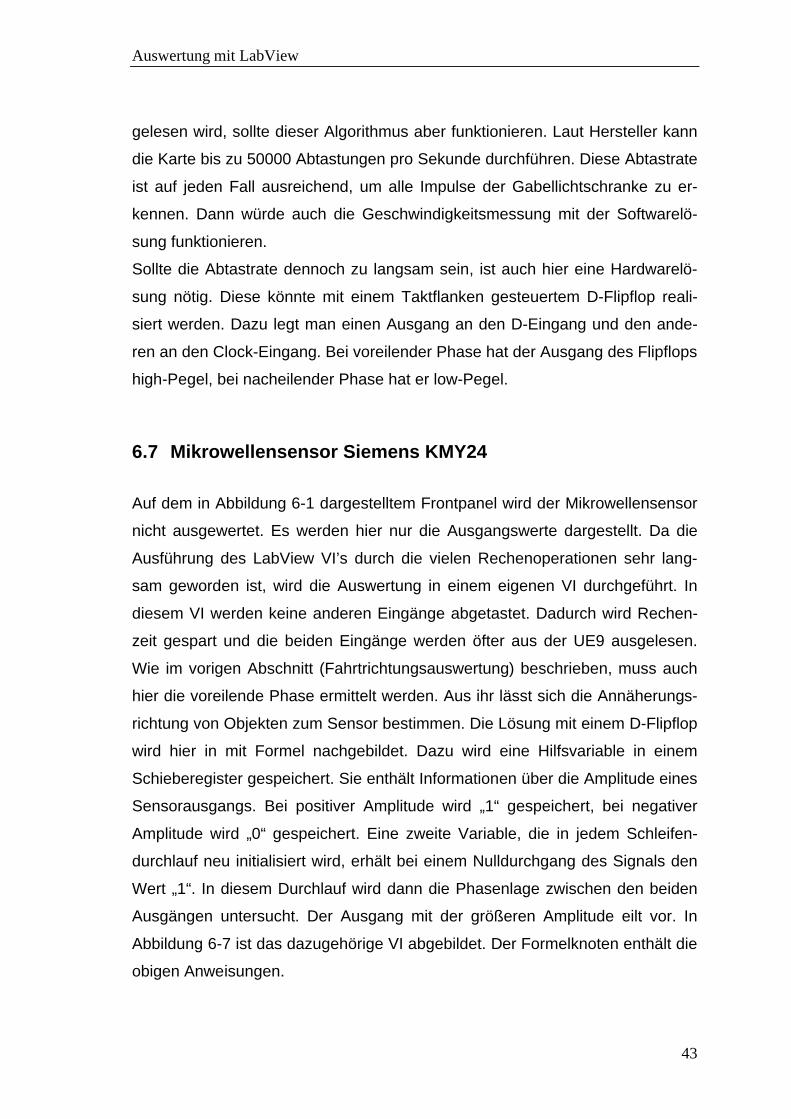
6.7 Mikrowellensensor Siemens KMY24
Auf dem in Abbildung 6-1 dargestelltem Frontpanel wird der Mikrowellensensor
nicht ausgewertet. Es werden hier nur die Ausgangswerte dargestellt. Da die
Ausführung des LabView VI’s durch die vielen Rechenoperationen sehr lang-
sam geworden ist, wird die Auswertung in einem eigenen VI durchgeführt. In
diesem VI werden keine anderen Eingänge abgetastet. Dadurch wird Rechen-
zeit gespart und die beiden Eingänge werden öfter aus der UE9 ausgelesen.
Wie im vorigen Abschnitt (Fahrtrichtungsauswertung) beschrieben, muss auch
hier die voreilende Phase ermittelt werden. Aus ihr lässt sich die Annäherungs-
richtung von Objekten zum Sensor bestimmen. Die Lösung mit einem D-Flipflop
wird hier in mit Formel nachgebildet. Dazu wird eine Hilfsvariable in einem
Schieberegister gespeichert. Sie enthält Informationen über die Amplitude eines
Sensorausgangs. Bei positiver Amplitude wird „1“ gespeichert, bei negativer
Amplitude wird „0“ gespeichert. Eine zweite Variable, die in jedem Schleifen-
durchlauf neu initialisiert wird, erhält bei einem Nulldurchgang des Signals den
Wert „1“. In diesem Durchlauf wird dann die Phasenlage zwischen den beiden
Ausgängen untersucht. Der Ausgang mit der größeren Amplitude eilt vor. In
Abbildung 6-7 ist das dazugehörige VI abgebildet. Der Formelknoten enthält die
obigen Anweisungen.
Auswertung mit LabView
44
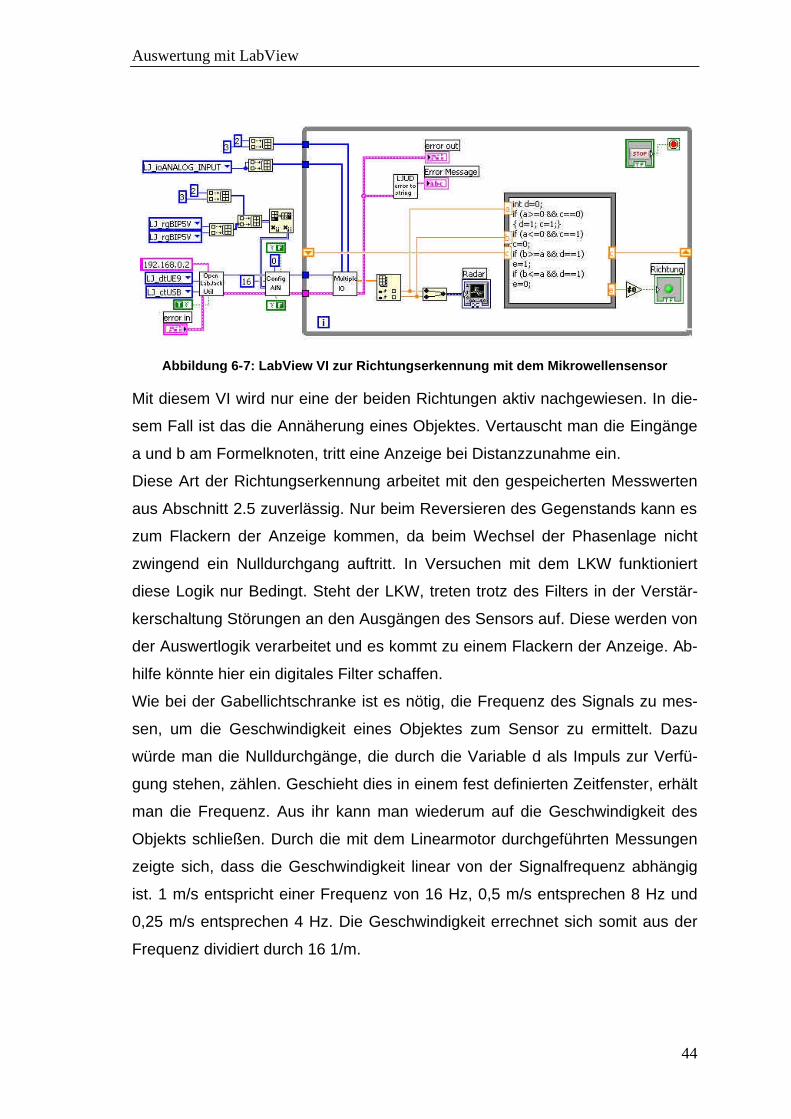
Abbildung 6-7: LabView VI zur Richtungserkennung mit dem Mikrowellensensor
Mit diesem VI wird nur eine der beiden Richtungen aktiv nachgewiesen. In die-
sem Fall ist das die Annäherung eines Objektes. Vertauscht man die Eingänge
a und b am Formelknoten, tritt eine Anzeige bei Distanzzunahme ein.
Diese Art der Richtungserkennung arbeitet mit den gespeicherten Messwerten
aus Abschnitt 2.5 zuverlässig. Nur beim Reversieren des Gegenstands kann es
zum Flackern der Anzeige kommen, da beim Wechsel der Phasenlage nicht
zwingend ein Nulldurchgang auftritt. In Versuchen mit dem LKW funktioniert
diese Logik nur Bedingt. Steht der LKW, treten trotz des Filters in der Verstär-
kerschaltung Störungen an den Ausgängen des Sensors auf. Diese werden von
der Auswertlogik verarbeitet und es kommt zu einem Flackern der Anzeige. Ab-
hilfe könnte hier ein digitales Filter schaffen.
Wie bei der Gabellichtschranke ist es nötig, die Frequenz des Signals zu mes-
sen, um die Geschwindigkeit eines Objektes zum Sensor zu ermittelt. Dazu
würde man die Nulldurchgänge, die durch die Variable d als Impuls zur Verfü-
gung stehen, zählen. Geschieht dies in einem fest definierten Zeitfenster, erhält
man die Frequenz. Aus ihr kann man wiederum auf die Geschwindigkeit des
Objekts schließen. Durch die mit dem Linearmotor durchgeführten Messungen
zeigte sich, dass die Geschwindigkeit linear von der Signalfrequenz abhängig
ist. 1 m/s entspricht einer Frequenz von 16 Hz, 0,5 m/s entsprechen 8 Hz und
0,25 m/s entsprechen 4 Hz. Die Geschwindigkeit errechnet sich somit aus der
Frequenz dividiert durch 16 1/m.
Fahren und Lenken der LKWs über LabJack UE9
45
7 Fahren und Lenken der LKWs über LabJack UE9
Damit die LKWs später selbstständig Hindernissen ausweichen können oder
selbstständig hintereinander herfahren können, ist es nötig, in die Fernsteue-
rung einzugreifen. Zuerst wurde untersucht, auf welche Art die Steuerung der
LKWs funktioniert. Danach wurden ein VI entwickelt, mit dem man die Signale
über die UE9 nachbilden kann. Zum Schluss musste eine Schaltung zum Um-
schalten der Steuerung von Fernbedienung auf UE9 entwickelt werden.
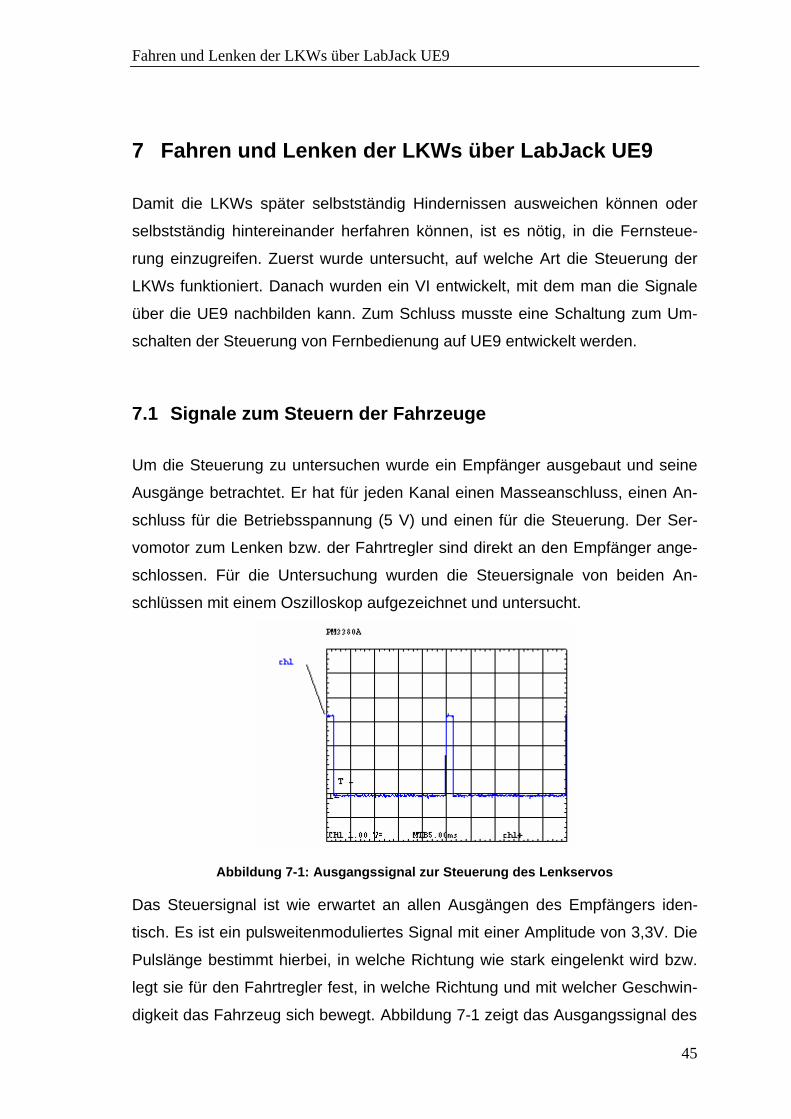
7.1 Signale zum Steuern der Fahrzeuge
Um die Steuerung zu untersuchen wurde ein Empfänger ausgebaut und seine
Ausgänge betrachtet. Er hat für jeden Kanal einen Masseanschluss, einen An-
schluss für die Betriebsspannung (5 V) und einen für die Steuerung. Der Ser-
vomotor zum Lenken bzw. der Fahrtregler sind direkt an den Empfänger ange-
schlossen. Für die Untersuchung wurden die Steuersignale von beiden An-
schlüssen mit einem Oszilloskop aufgezeichnet und untersucht.
Abbildung 7-1: Ausgangssignal zur Steuerung des Lenkservos
Das Steuersignal ist wie erwartet an allen Ausgängen des Empfängers iden-
tisch. Es ist ein pulsweitenmoduliertes Signal mit einer Amplitude von 3,3V. Die
Pulslänge bestimmt hierbei, in welche Richtung wie stark eingelenkt wird bzw.
legt sie für den Fahrtregler fest, in welche Richtung und mit welcher Geschwin-
digkeit das Fahrzeug sich bewegt. Abbildung 7-1 zeigt das Ausgangssignal des
Fahren und Lenken der LKWs über LabJack UE9
46
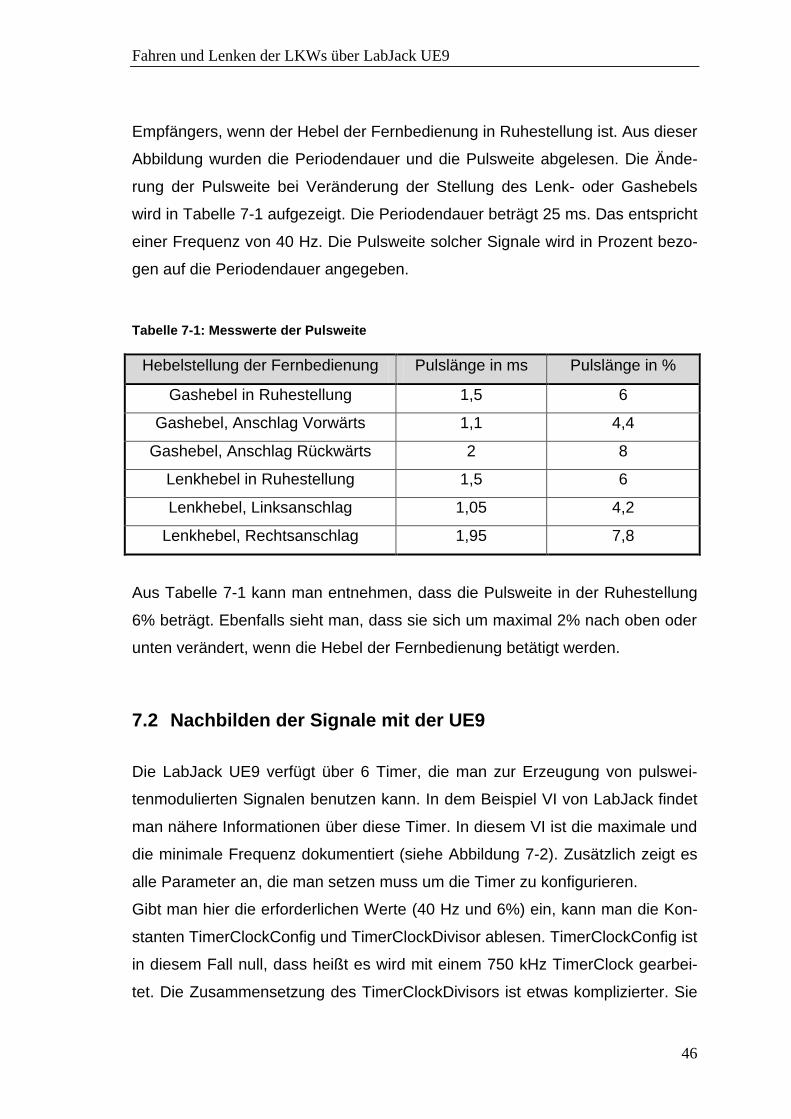
Empfängers, wenn der Hebel der Fernbedienung in Ruhestellung ist. Aus dieser
Abbildung wurden die Periodendauer und die Pulsweite abgelesen. Die Ände-
rung der Pulsweite bei Veränderung der Stellung des Lenk- oder Gashebels
wird in Tabelle 7-1 aufgezeigt. Die Periodendauer beträgt 25 ms. Das entspricht
einer Frequenz von 40 Hz. Die Pulsweite solcher Signale wird in Prozent bezo-
gen auf die Periodendauer angegeben.
Tabelle 7-1: Messwerte der Pulsweite
Hebelstellung der Fernbedienung Pulslänge in ms Pulslänge in %
Gashebel in Ruhestellung 1,5 6
Gashebel, Anschlag Vorwärts 1,1 4,4
Gashebel, Anschlag Rückwärts 2 8
Lenkhebel in Ruhestellung 1,5 6
Lenkhebel, Linksanschlag 1,05 4,2
Lenkhebel, Rechtsanschlag 1,95 7,8
Aus Tabelle 7-1 kann man entnehmen, dass die Pulsweite in der Ruhestellung
6% beträgt. Ebenfalls sieht man, dass sie sich um maximal 2% nach oben oder
unten verändert, wenn die Hebel der Fernbedienung betätigt werden.
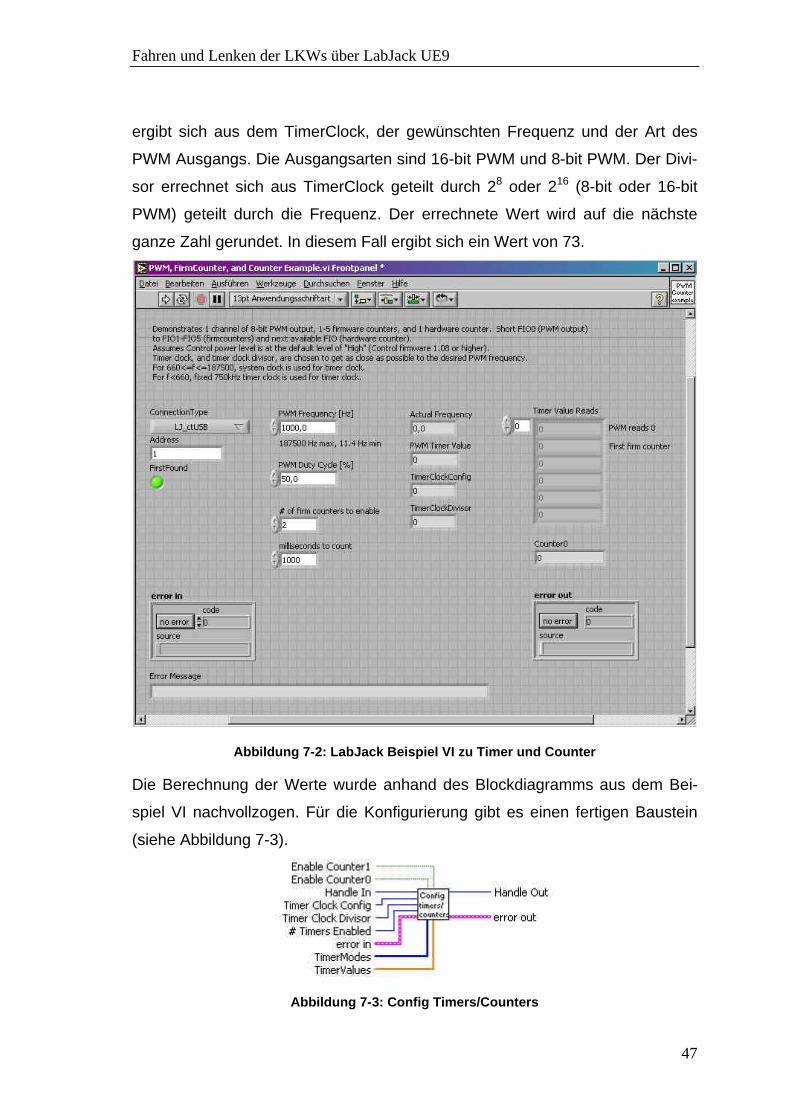
7.2 Nachbilden der Signale mit der UE9
Die LabJack UE9 verfügt über 6 Timer, die man zur Erzeugung von pulswei-
tenmodulierten Signalen benutzen kann. In dem Beispiel VI von LabJack findet
man nähere Informationen über diese Timer. In diesem VI ist die maximale und
die minimale Frequenz dokumentiert (siehe Abbildung 7-2). Zusätzlich zeigt es
alle Parameter an, die man setzen muss um die Timer zu konfigurieren.
Gibt man hier die erforderlichen Werte (40 Hz und 6%) ein, kann man die Kon-
stanten TimerClockConfig und TimerClockDivisor ablesen. TimerClockConfig ist
in diesem Fall null, dass heißt es wird mit einem 750 kHz TimerClock gearbei-
tet. Die Zusammensetzung des TimerClockDivisors ist etwas komplizierter. Sie
Fahren und Lenken der LKWs über LabJack UE9
47
ergibt sich aus dem TimerClock, der gewünschten Frequenz und der Art des
PWM Ausgangs. Die Ausgangsarten sind 16-bit PWM und 8-bit PWM. Der Divi-
sor errechnet sich aus TimerClock geteilt durch 28 oder 216 (8-bit oder 16-bit
PWM) geteilt durch die Frequenz. Der errechnete Wert wird auf die nächste
ganze Zahl gerundet. In diesem Fall ergibt sich ein Wert von 73.
Abbildung 7-2: LabJack Beispiel VI zu Timer und Counter
Die Berechnung der Werte wurde anhand des Blockdiagramms aus dem Bei-
spiel VI nachvollzogen. Für die Konfigurierung gibt es einen fertigen Baustein
(siehe Abbildung 7-3).
Abbildung 7-3: Config Timers/Counters
Fahren und Lenken der LKWs über LabJack UE9
48
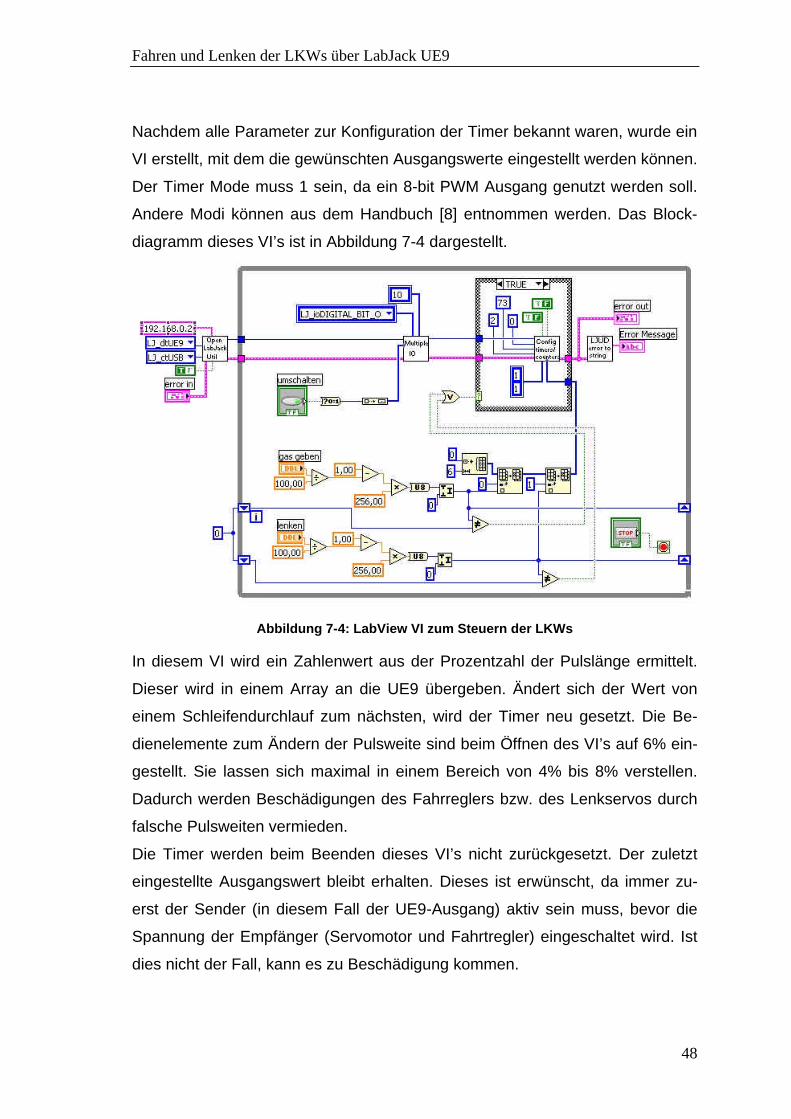
Nachdem alle Parameter zur Konfiguration der Timer bekannt waren, wurde ein
VI erstellt, mit dem die gewünschten Ausgangswerte eingestellt werden können.
Der Timer Mode muss 1 sein, da ein 8-bit PWM Ausgang genutzt werden soll.
Andere Modi können aus dem Handbuch [8] entnommen werden. Das Block-
diagramm dieses VI’s ist in Abbildung 7-4 dargestellt.
Abbildung 7-4: LabView VI zum Steuern der LKWs
In diesem VI wird ein Zahlenwert aus der Prozentzahl der Pulslänge ermittelt.
Dieser wird in einem Array an die UE9 übergeben. Ändert sich der Wert von
einem Schleifendurchlauf zum nächsten, wird der Timer neu gesetzt. Die Be-
dienelemente zum Ändern der Pulsweite sind beim Öffnen des VI’s auf 6% ein-
gestellt. Sie lassen sich maximal in einem Bereich von 4% bis 8% verstellen.
Dadurch werden Beschädigungen des Fahrreglers bzw. des Lenkservos durch
falsche Pulsweiten vermieden.
Die Timer werden beim Beenden dieses VI’s nicht zurückgesetzt. Der zuletzt
eingestellte Ausgangswert bleibt erhalten. Dieses ist erwünscht, da immer zu-
erst der Sender (in diesem Fall der UE9-Ausgang) aktiv sein muss, bevor die
Spannung der Empfänger (Servomotor und Fahrtregler) eingeschaltet wird. Ist
dies nicht der Fall, kann es zu Beschädigung kommen.
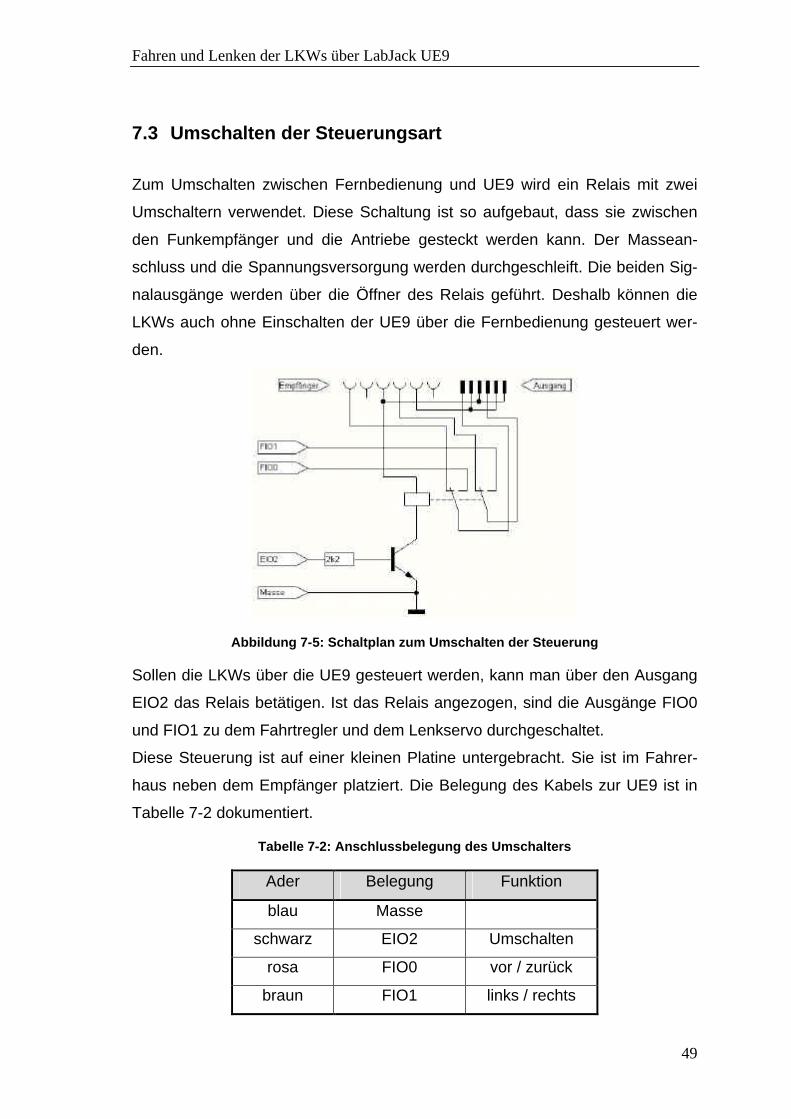
Fahren und Lenken der LKWs über LabJack UE9
49
7.3 Umschalten der Steuerungsart
Zum Umschalten zwischen Fernbedienung und UE9 wird ein Relais mit zwei
Umschaltern verwendet. Diese Schaltung ist so aufgebaut, dass sie zwischen
den Funkempfänger und die Antriebe gesteckt werden kann. Der Massean-
schluss und die Spannungsversorgung werden durchgeschleift. Die beiden Sig-
nalausgänge werden über die Öffner des Relais geführt. Deshalb können die
LKWs auch ohne Einschalten der UE9 über die Fernbedienung gesteuert wer-
den.
Abbildung 7-5: Schaltplan zum Umschalten der Steuerung
Sollen die LKWs über die UE9 gesteuert werden, kann man über den Ausgang
EIO2 das Relais betätigen. Ist das Relais angezogen, sind die Ausgänge FIO0
und FIO1 zu dem Fahrtregler und dem Lenkservo durchgeschaltet.
Diese Steuerung ist auf einer kleinen Platine untergebracht. Sie ist im Fahrer-
haus neben dem Empfänger platziert. Die Belegung des Kabels zur UE9 ist in
Tabelle 7-2 dokumentiert.
Tabelle 7-2: Anschlussbelegung des Umschalters
Ader Belegung Funktion
blau Masse
schwarz EIO2 Umschalten
rosa FIO0 vor / zurück
braun FIO1 links / rechts
Zusammenfassung
50
8 Zusammenfassung
In dieser Arbeit wurden Sensoren für die Abstandsmessung untersucht. Dazu
wurden die technischen Grundlagen der Sensoren kurz erläutet. Danach wur-
den ihre Kennlinien ermittelt und Vorschläge für den Einsatz am LKW gemacht.
Es wurde der Anbau der Sensoren an die LKWs und ihr Anschluss an die
Messkarte dokumentiert. Diese Karte ist in der Arbeit ebenfalls vorgestellt wor-
den. Es wird gezeigt, wie man mit LabView auf sie zugreift. Im nächsten Schritt
wurden Algorithmen zur Auswertung der Sensoren vorgestellt. Sie sind mit
LabView realisiert worden. Die Algorithmen sind allgemein formuliert. Dadurch
kann man sie in anderen Programmiersprachen genauso einfach implementie-
ren.
Im letzten Kapitel der Arbeit wird eine Lösung erarbeitet, um die LKWs über die
LabJack UE9 zu steuern. Dazu wurde eine Schaltung zum Umschalten entwi-
ckelt und die nötige Timerkonfiguration der UE9 erarbeitet und vorgestellt.
9 Ausblick
Auf den LKWs wurden Prozessor Boards montiert. Mit diesen ist es möglich, die
LabJack UE9 zu betreiben. Wenn auf den Boards ein Echtzeitbetriebssystem
läuft, können die Sensoren öfter abgetastet werden als mit der LabView-Lösung
unter Windows. Damit wird die Ausführung komplexer Schritte ermöglicht. So
könnte man in die Fernsteuerung eingreifen, um Kollisionen zu vermeiden. Die-
se Eingriffe können zum Beispiel Ausweichen oder Bremsen sein. Außerdem
kann Programm entwickelt werden, welches anhand der Daten der Sensoren
einen LKW selbstständig hinter dem Anderen herfahren lässt.
Literatur
51
10 Literatur
[1] Schnell (Hrsg.): Sensoren in der Automatisierungstechnik. Vieweg Verlag,
Braunschweig, 1991
[2] Niebuhr / Lindner: Physikalische Messtechnik mit Sensoren. R. Olden-
bourg Verlag, München Wien, 1996
[3] Welotec: Ultraschallsensoren. www.welotec.de
[4] Dr. Godfried-Willem Raes: http://logosfundation.org/ii/quadradar.html
[5] Helmut Israel: Bewegungsmelder per Privat-Radar. Funk Amateur 01/99
[6] Fachkurs „Contactless“: Radar als Sensor in interaktiven Umgebungen.
Bauhaus Universität Weimar, 2004
[7] National Instruments: LabView Benutzerhandbuch. www.ni.com
[8] National Instruments: Erste Schritte mit LabView. www.ni.com
[9] LabJack Corporation: LabJack UE9 User’s Guide. www.labjack.com
11 Anhang
Im Anhang sind die Datenblätter der Sensoren und der Spannungswandler auf-
geführt. Zusätzlich sind sie auf der CD-Rom gespeichert. Auf ihr sind alle ver-
wendeten LabView VI’s und die Software für die LabJack UE9 abgelegt. Eben-
falls sind auf ihr diese Arbeit, die Schaltpläne und Fotos des Projekts als Datei
gesichert.
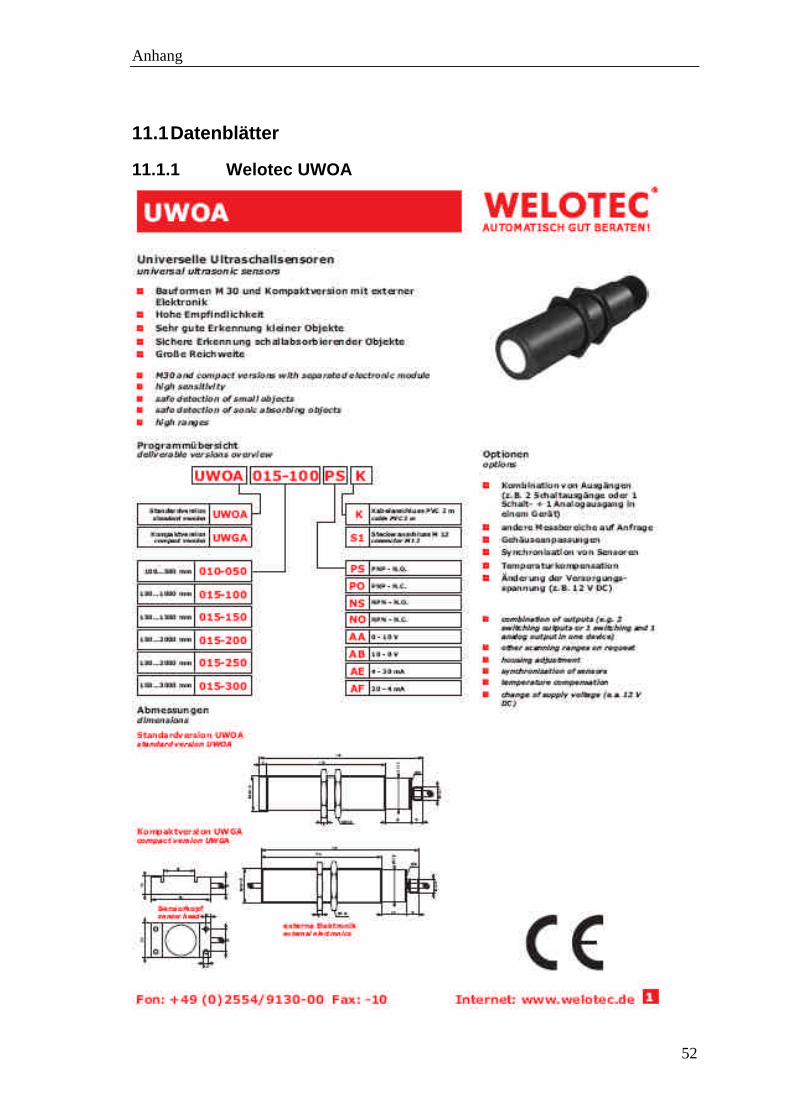
Anhang
52
11.1 Datenblätter
11.1.1 Welotec UWOA
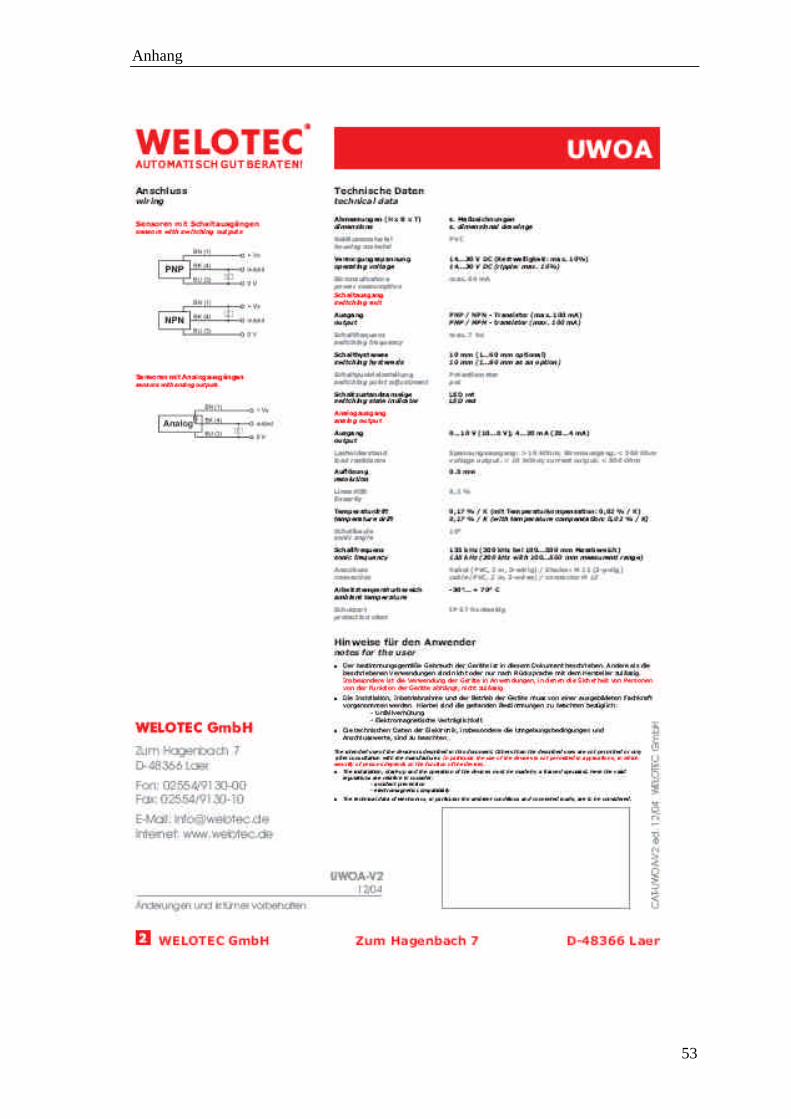
Anhang
53
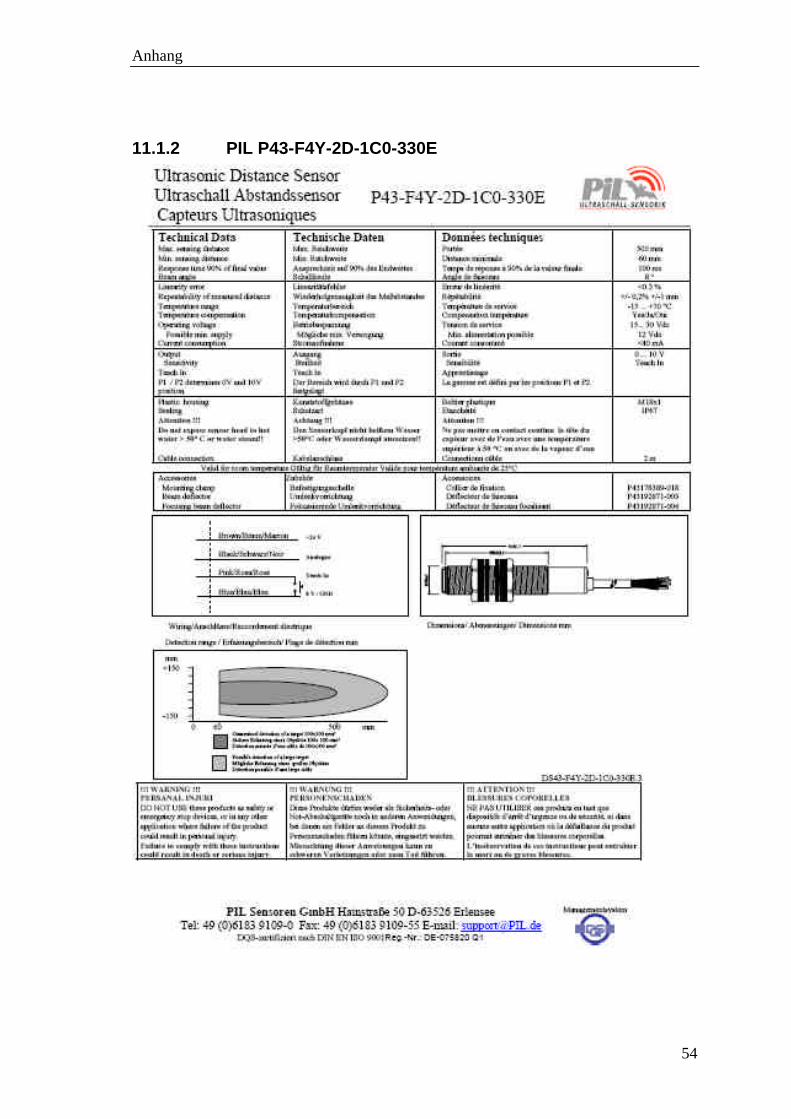
Anhang
54
11.1.2 PIL P43-F4Y-2D-1C0-330E
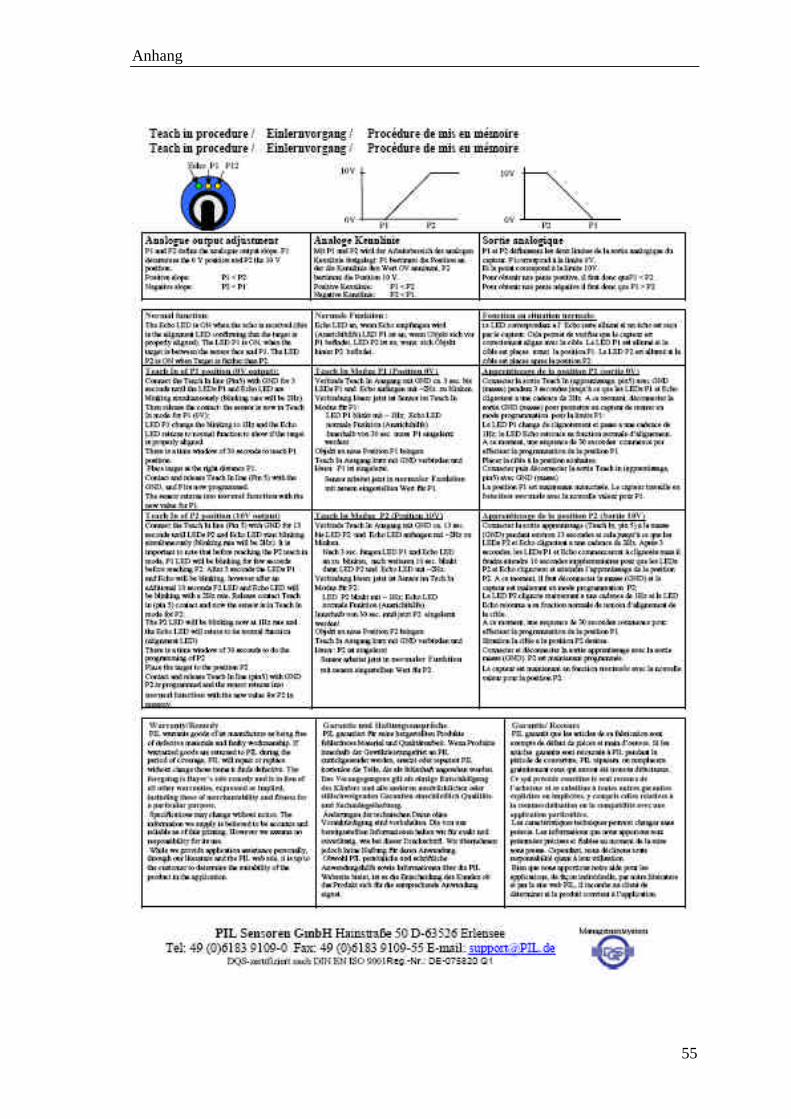
Anhang
55
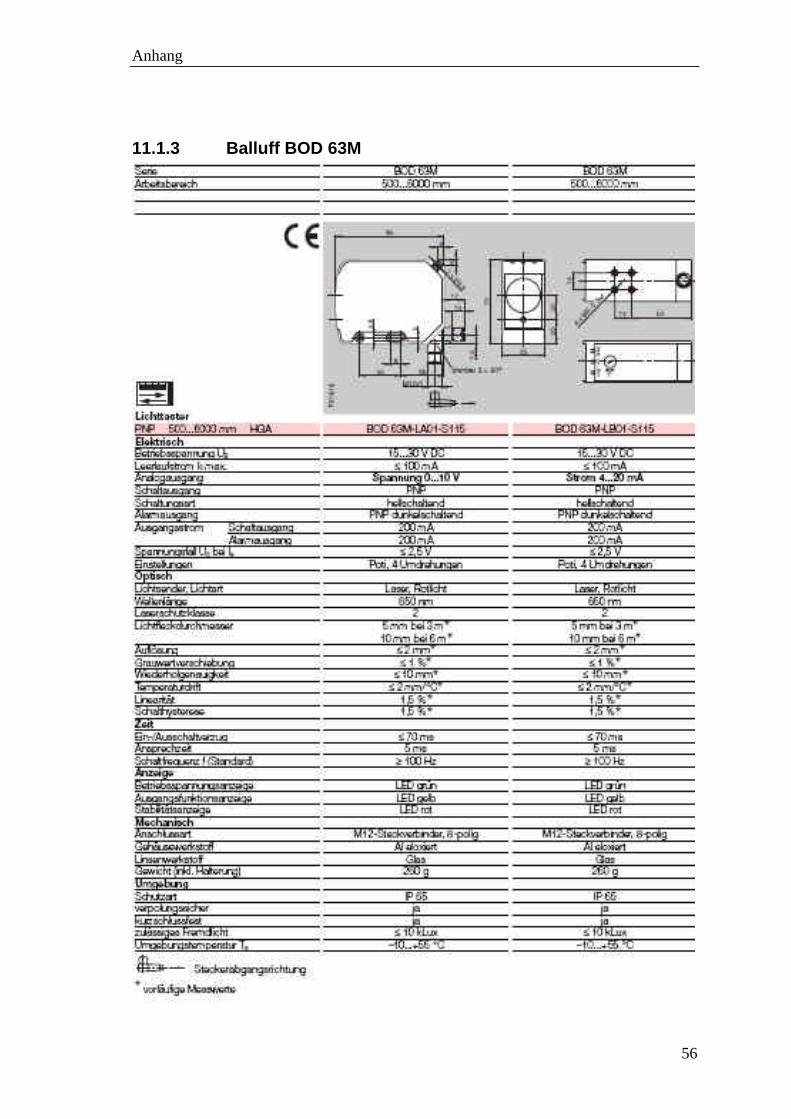
Anhang
56
11.1.3 Balluff BOD 63M
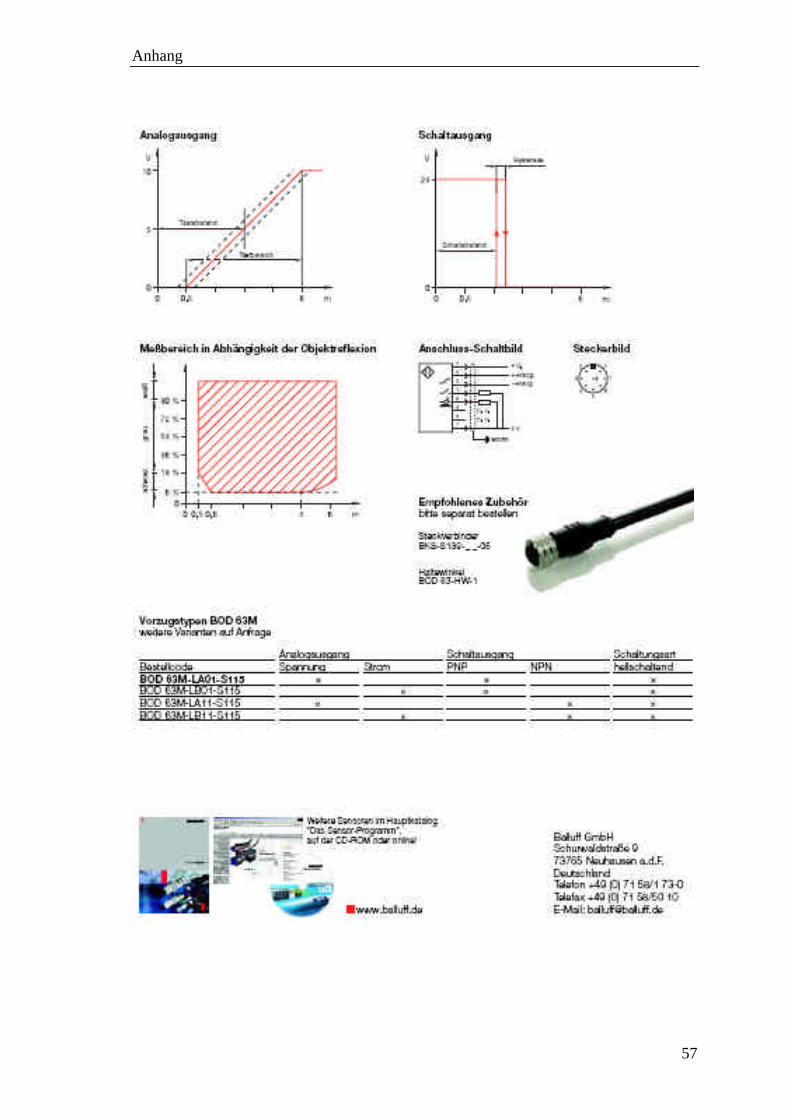
Anhang
57
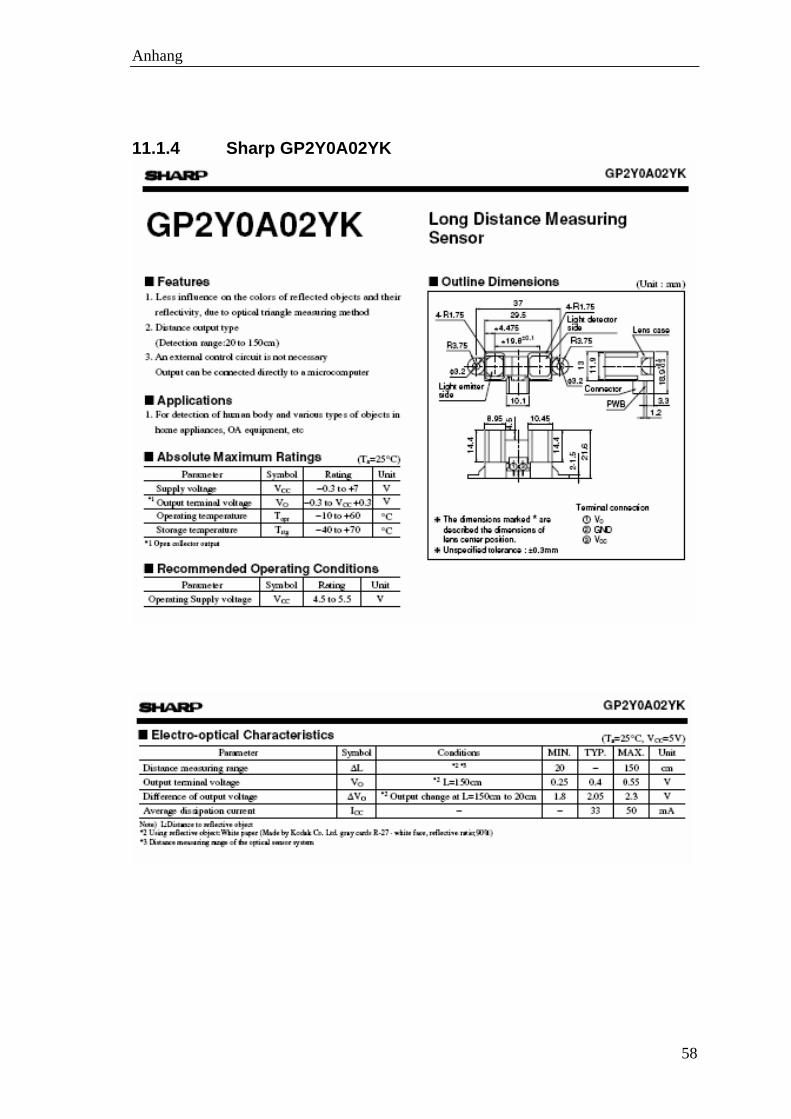
Anhang
58
11.1.4 Sharp GP2Y0A02YK
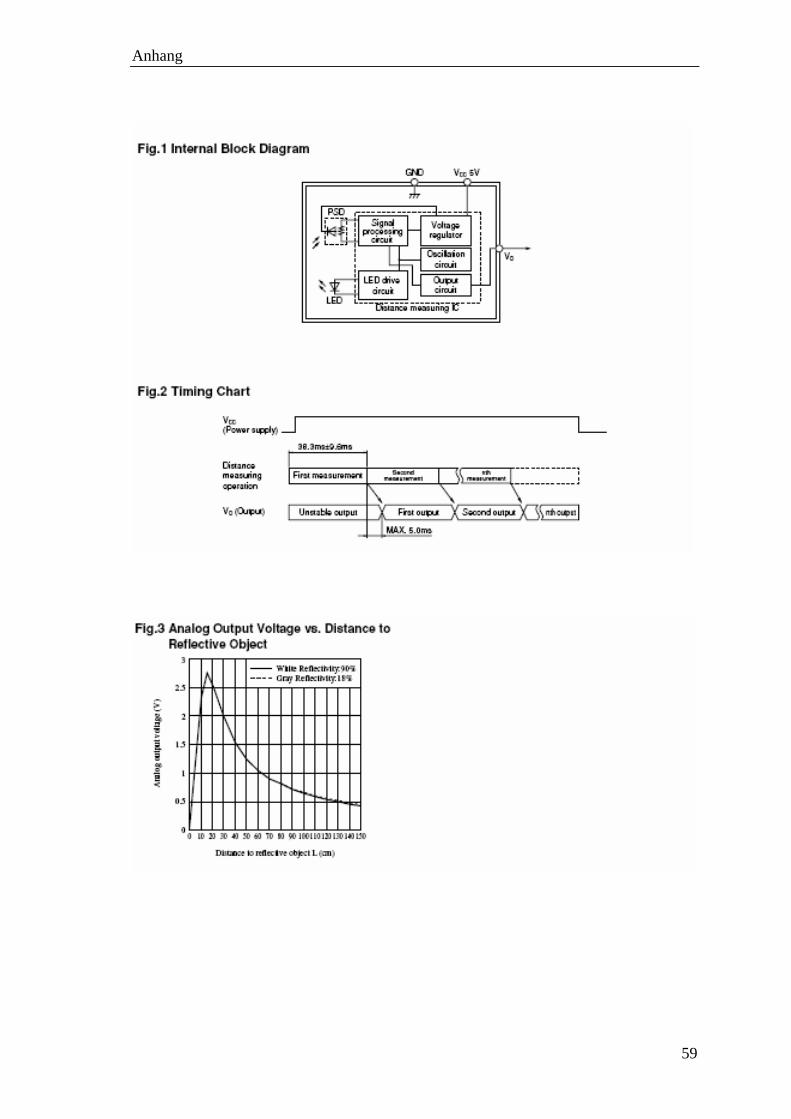
Anhang
59
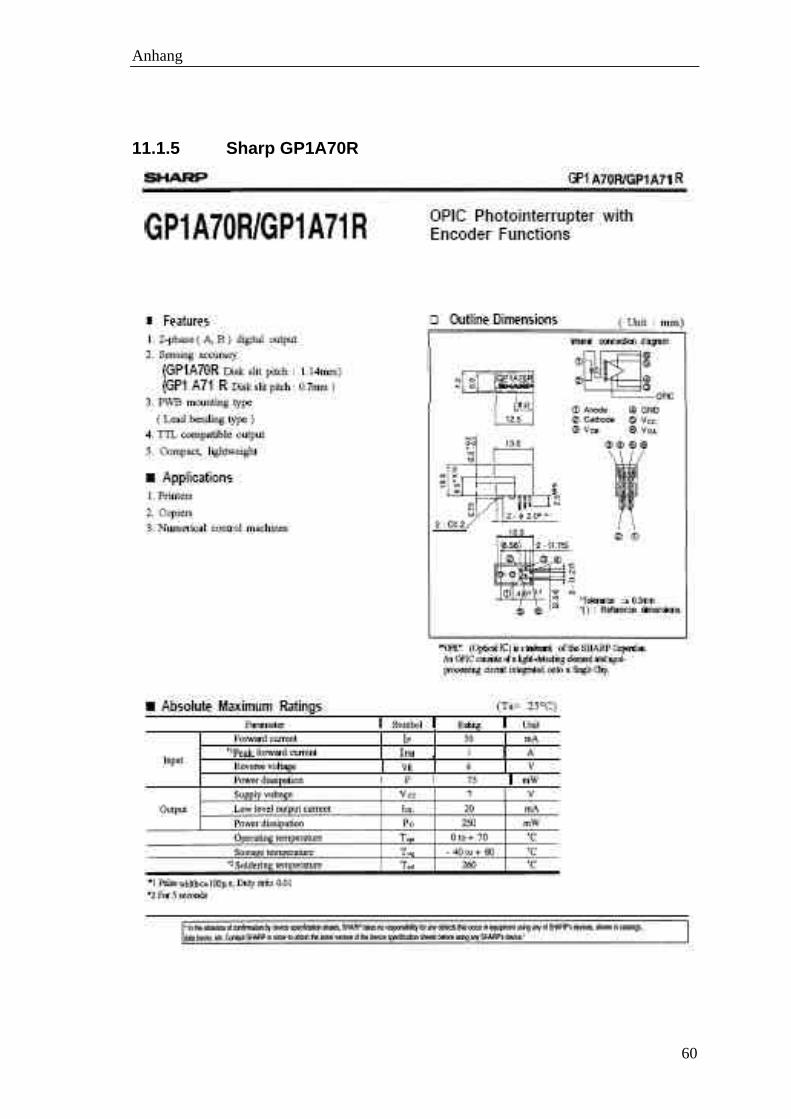
Anhang
60
11.1.5 Sharp GP1A70R
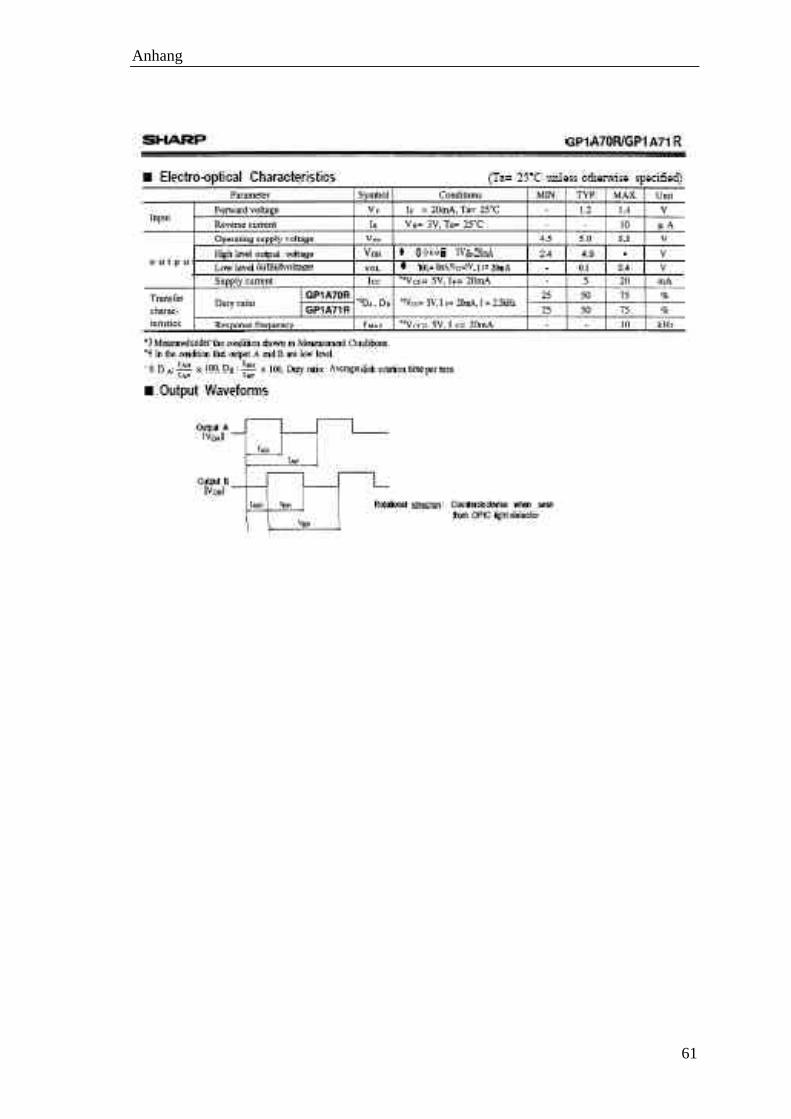
Anhang
61
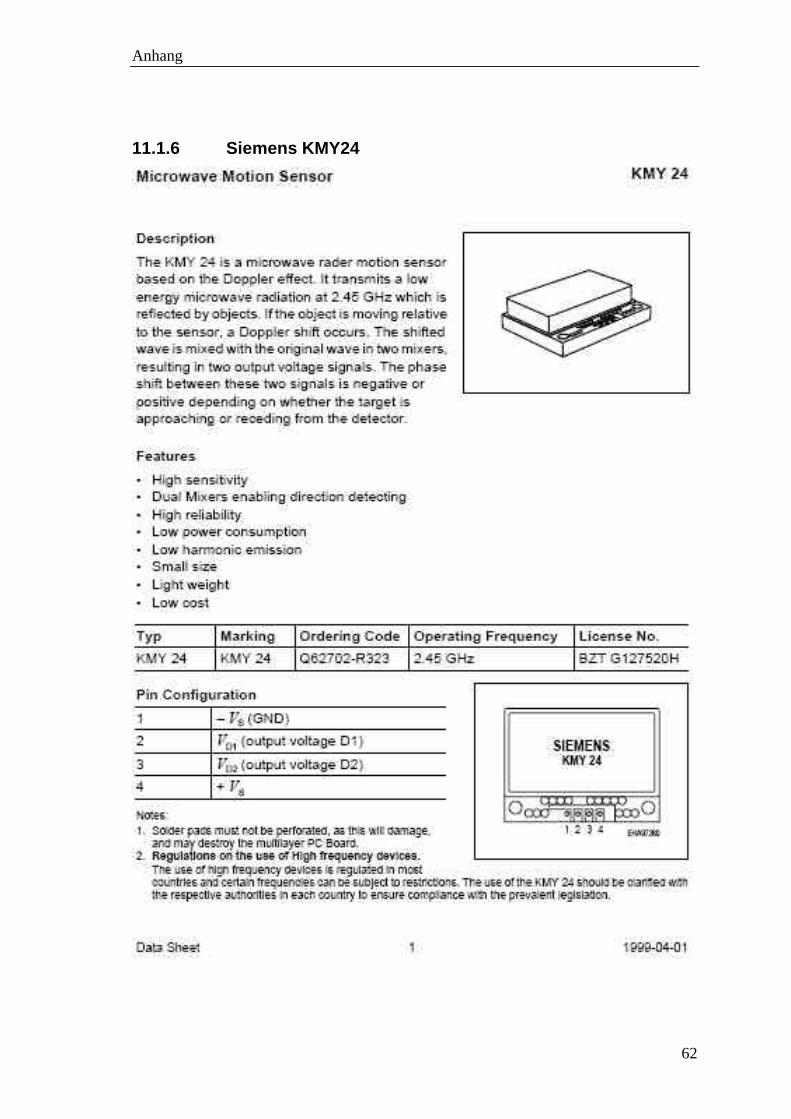
Anhang
62
11.1.6 Siemens KMY24
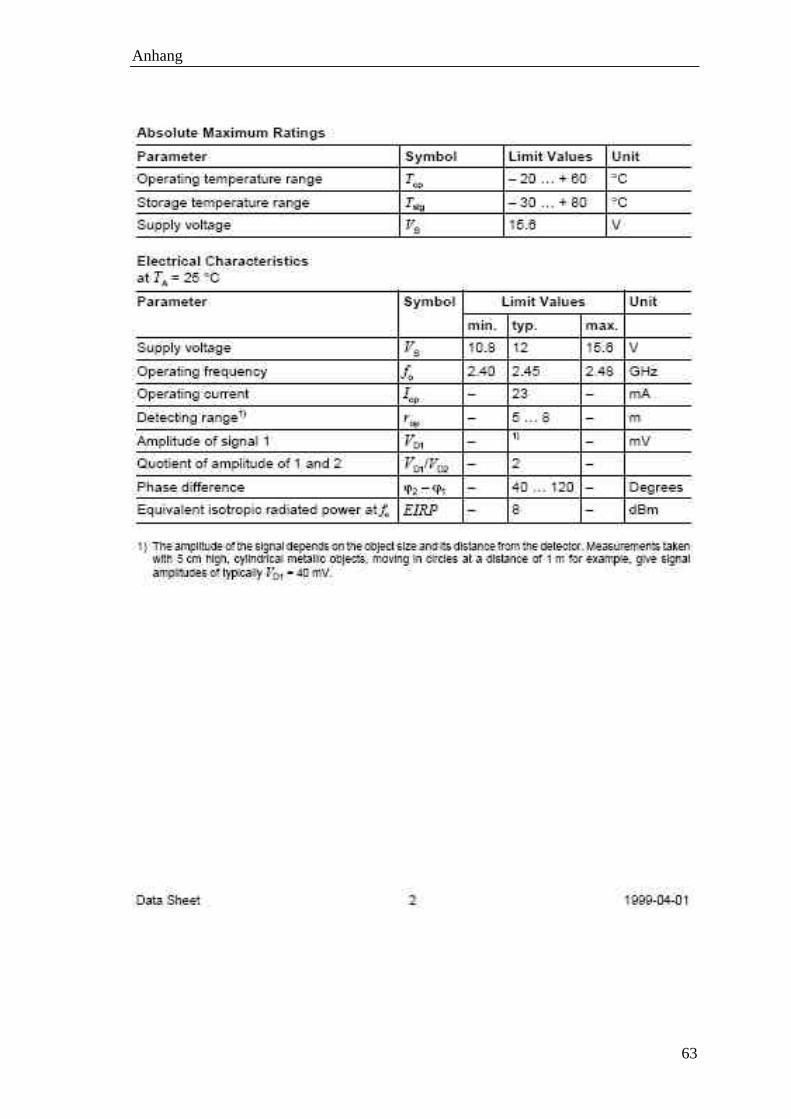
Anhang
63
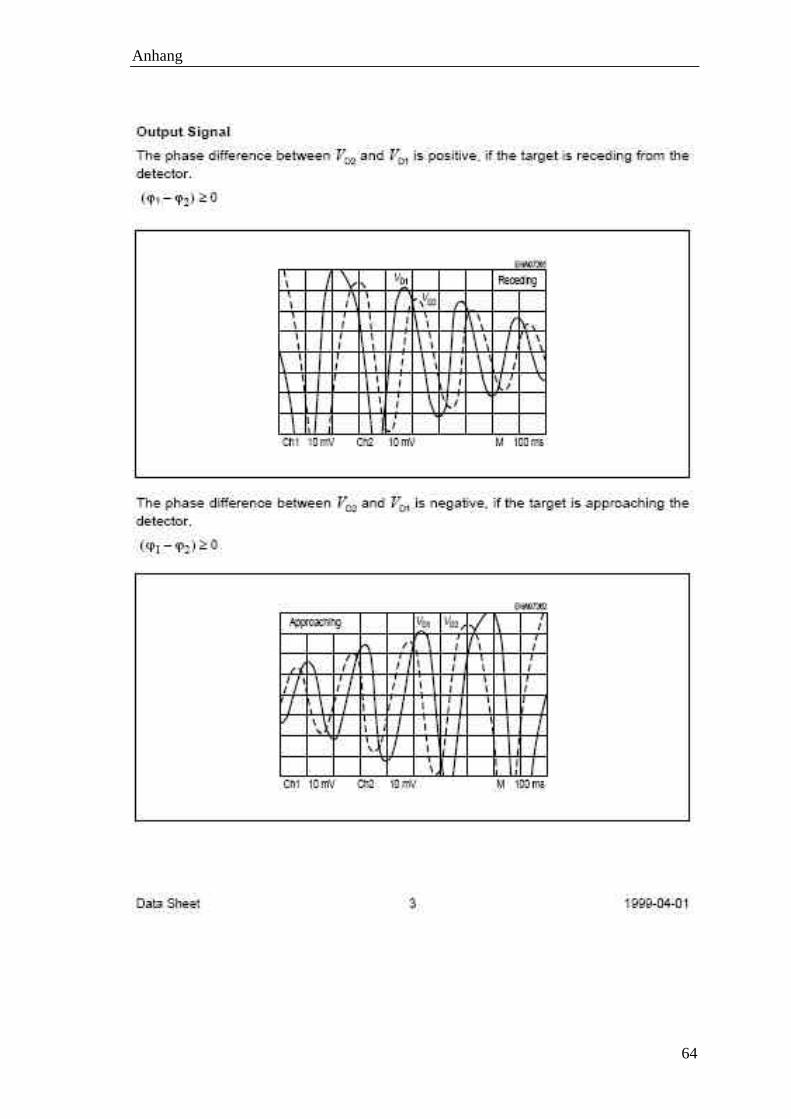
Anhang
64
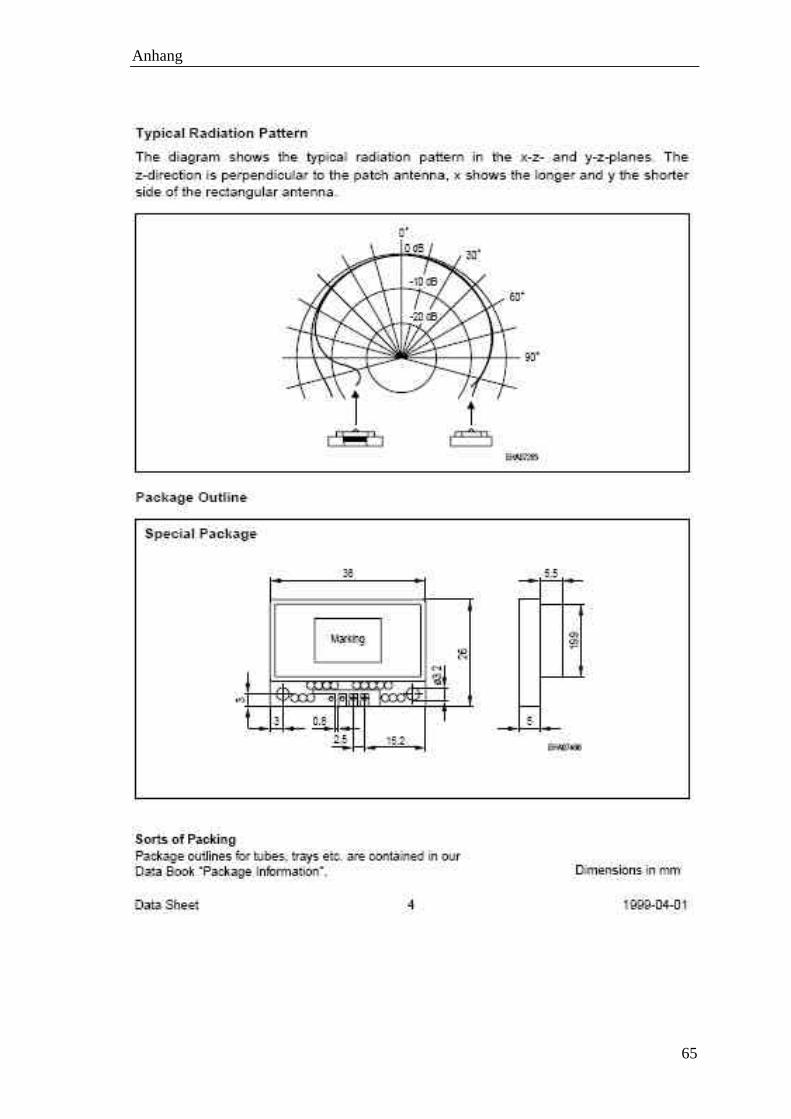
Anhang
65
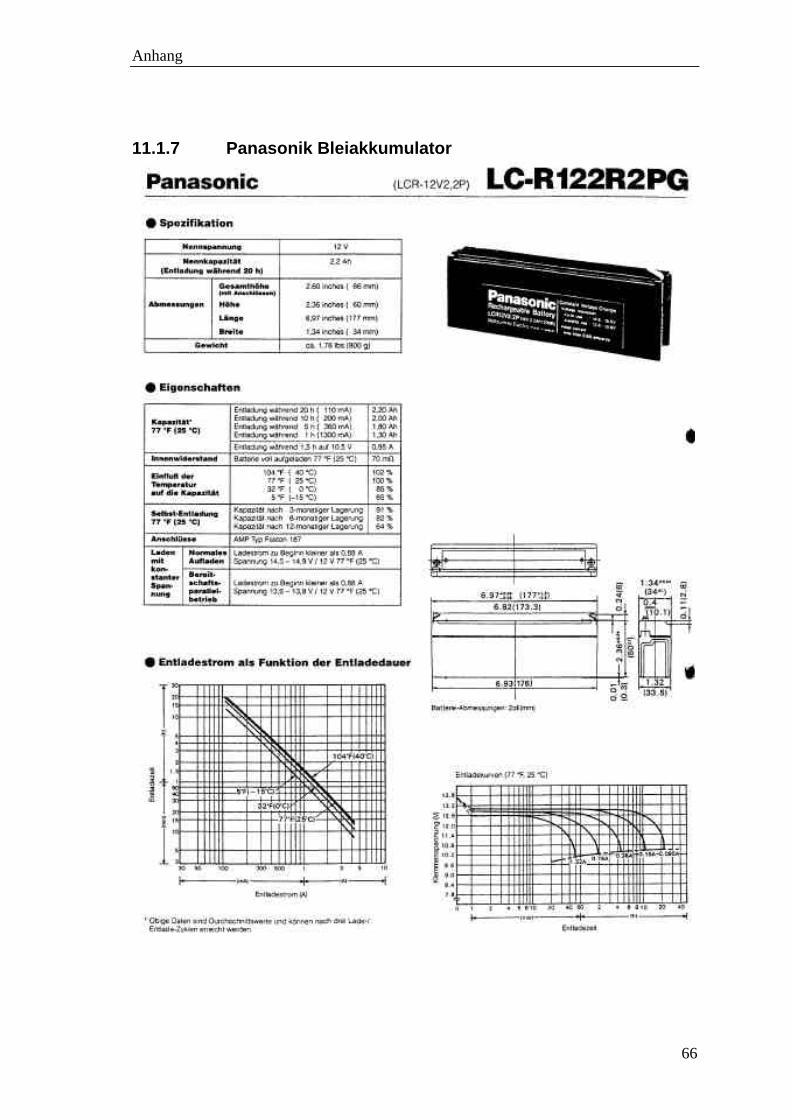
Anhang
66
11.1.7 Panasonik Bleiakkumulator
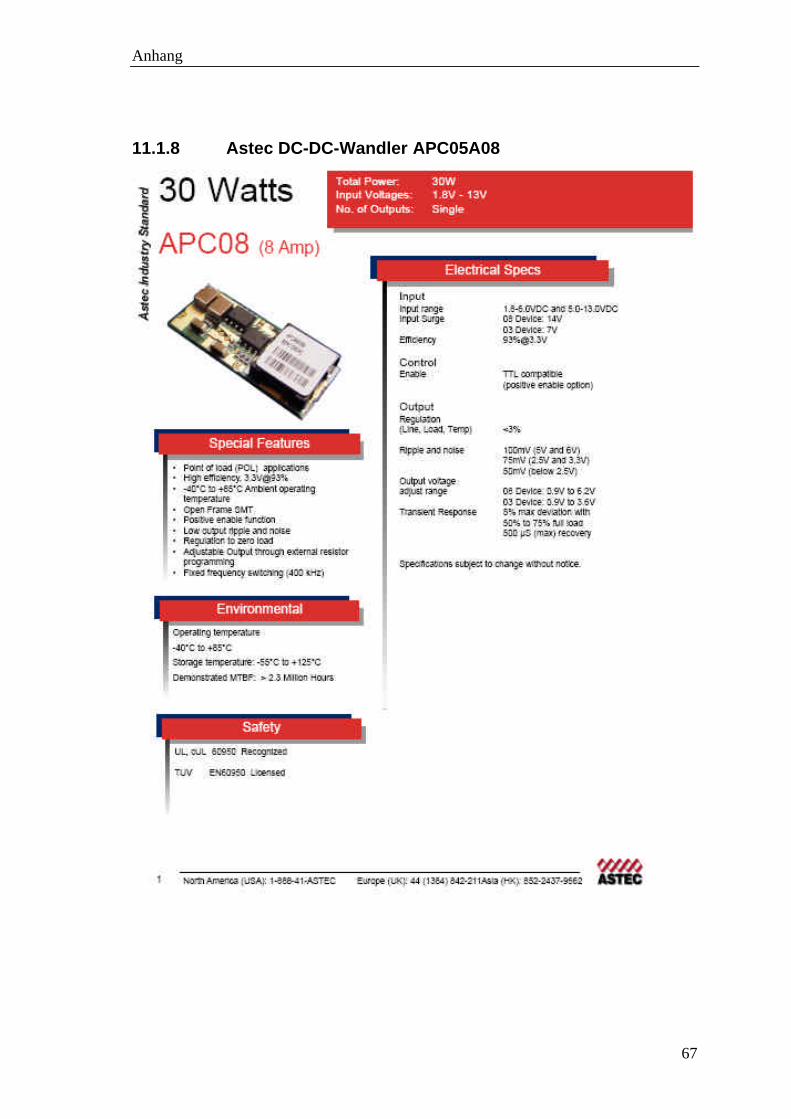
Anhang
67
11.1.8 Astec DC-DC-Wandler APC05A08
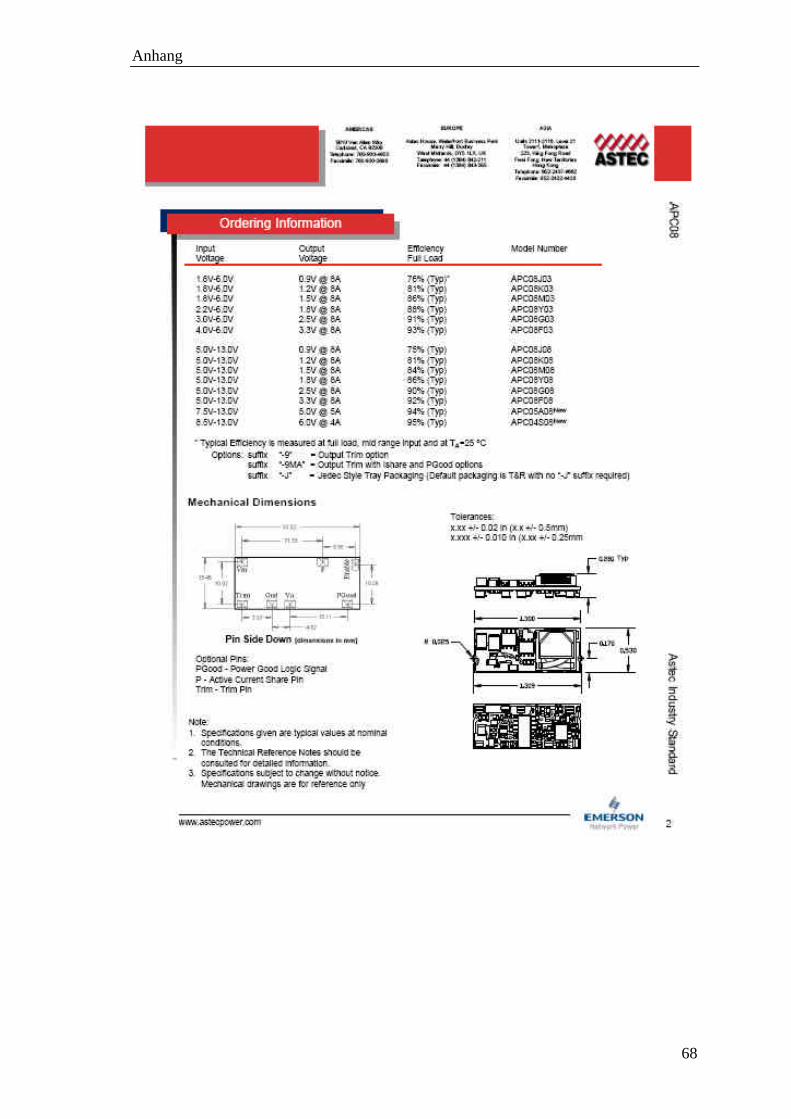
Anhang
68
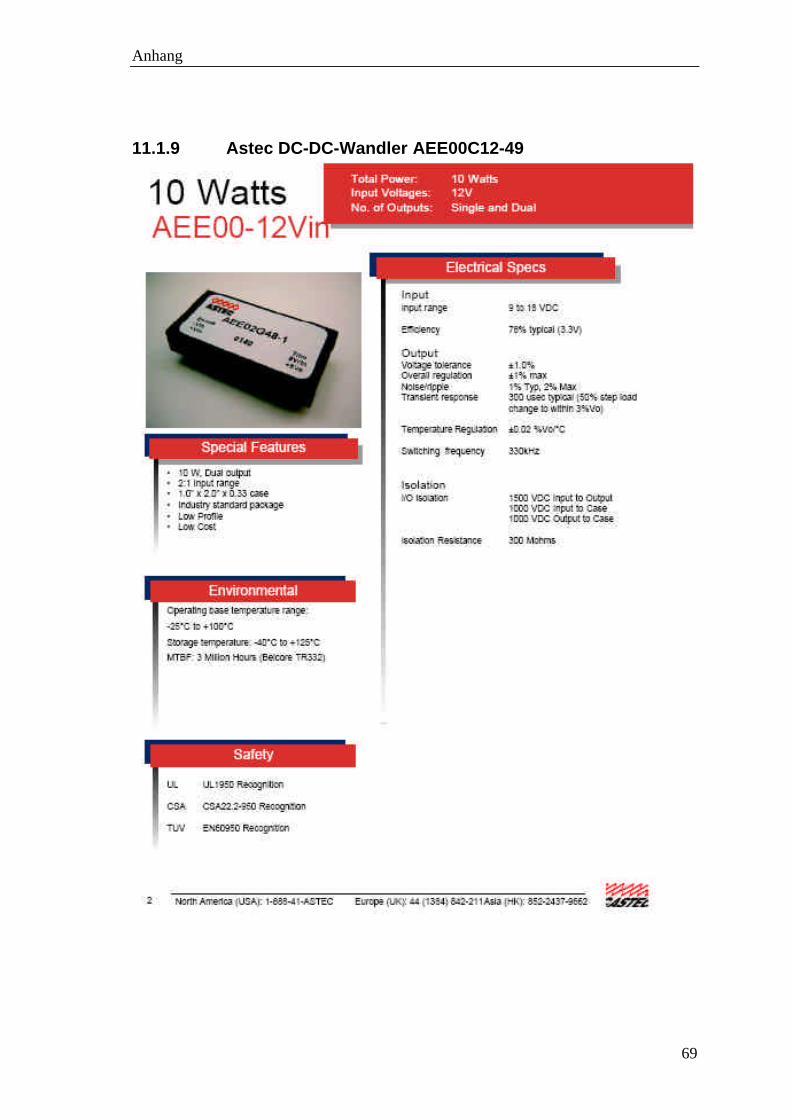
Anhang
69
11.1.9 Astec DC-DC-Wandler AEE00C12-49
Anhang
70

Anhang
71
11.2 CD-Rom





























