Embed Size (px)
Citation preview

Funktionalanalysis II.
Flavius GuiasEmail: [email protected]
Technische Universitat Dortmund, Sommersemester 2010http://www.mathematik.tu-dortmund.de/lsi/fguias/fa2.html

2
Empfohlene Literatur:
D. Werner: Funktionalanalysis, 6.Aufl., Springer, 2007
M. Dobrowolski: Angewandte Funktionalanalysis, Springer, 2006
Inhaltsverzeichnis
1 Einfuhrung in die Operatorentheorie 51.1 Kompakte Operatoren . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Adjungierte Operatoren, Annihilatoren, Gelfandscher Dreier . . . 6
1.2.1 Quotientenraume. Annihilatoren . . . . . . . . . . . . . . 61.2.2 Adjungierte Operatoren . . . . . . . . . . . . . . . . . . . 71.2.3 Hilbert-Adjungierte . . . . . . . . . . . . . . . . . . . . . 81.2.4 Gelfandscher Dreier . . . . . . . . . . . . . . . . . . . . . 9
1.3 Operatoren mit abgeschlossenem Bild . . . . . . . . . . . . . . . 12
2 Spektraltheorie 132.1 Spektrum und Resolventenmenge . . . . . . . . . . . . . . . . . . 132.2 Fredholm-Operatoren und Spektraltheorie kompakter Operatoren 162.3 Kompakte Operatoren auf Hilbert-Raumen . . . . . . . . . . . . 17
2.3.1 Selbstadjungierte Operatoren . . . . . . . . . . . . . . . . 172.3.2 Spektralsatz fur kompakte normale Operatoren . . . . . . 172.3.3 Das abstrakte Eigenwertproblem. Satz von Courant-Hilbert 192.3.4 Das Eigenwertproblem fur den Laplace-Operator . . . . . 21
3 Distributionen und Fourier-Transformation 253.1 Distributionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 Die Fourier-Transformation in S . . . . . . . . . . . . . . . . . . 293.3 Die Fourier-Transformation in S ′ und in L2 . . . . . . . . . . . . 303.4 Sobolev-Raume und Fourier-Transformation . . . . . . . . . . . . 32
4 Operatorhalbgruppen 354.1 Operatorhalbgruppen und infinitesimale Generatoren . . . . . . . 35
3

4 INHALTSVERZEICHNIS
Kapitel 1
Einfuhrung in dieOperatorentheorie
L(X,Y ) bezeichne den Raum der stetigen linearen Operatoren zwischen denBanach-Raumen X und Y . Fur T ∈ L(X,Y ) bezeichnet man mit N (T ) undR(T ) den Nullraum bzw. den Bildraum von T .
1.1 Kompakte Operatoren
Definition 1.1 Seien X,Y Banach-Raume. Eine lineare Abbildung T : X → Yheißt kompakt, wenn sie beschrankte Mengen in X auf relativ kompakte Mengenin Y abbildet. Die Menge dieser kompakten linearen Abbildungen wird mitK(X,Y ) bezeichnet.
Bemerkung: Eine kompakte lineare Abbildung ist stetig, denn das Bild der ab-geschlossenen Einheitskugel ist beschrankt, so dass ‖T‖X→Y = sup‖x‖X=1 ‖Tx‖Yexistiert. Aquivalent kann man kompakte Abbildungen dadurch charakterisie-ren, dass sie beschrankte Folgen auf Folgen abbilden, die eine konvergente Teil-folge besitzen.
Satz 1.2 (i) Seien X und Y Banach-Raume. Dann ist K(X,Y ) ein abge-schlossener Unterraum von L(X,Y ), bzw. selbst ein Banachraum. Insbe-sodere folgt aus Tk → T in L(X,Y ) mit Tk kompakt, dass auch T kompaktist.
(ii) Sei Z ein weiterer Banach-Raum und T ∈ L(X,Y ), S ∈ L(Y, Z). Ist Toder S kompakt, so ist ST ∈ L(X,Z) ebenfalls kompakt.
Beispiele:
(i) Falls X endlichdimensional ist, so ist die abgeschlossene EinheitskugelB1(0) kompakt. Fur T : X → Y linear und stetig folgt also dass T (B1(0))ebenfalls kompakt ist. In diesem Fall gilt daher K(X,Y ) = L(X,Y ).
5

6 KAPITEL 1. EINFUHRUNG IN DIE OPERATORENTHEORIE
(ii) Ist T ∈ L(X,Y ) mit endlichdimensionalem Bild, so ist T kompakt, dennT (B1(0)) ist beschrankte Teilmenge in R(T ), also auch relativ kompakt(aufgrund der endlichen Dimension des Bildraums).
(iii) Sei X = L2(R) oder C[a, b] und k ∈ L2(R2) bzw. C([a, b]2). Der Fredholm-sche Integraloperator mit Kern k
Tk : X → X, (Tkf)(s) :=∫k(s, t)f(t)dt
ist kompakt. (Das Integral wird uber R bzw, uber [a, b] berechnet).
Definition 1.3 Mit F(X,Y ) bezeichnet man die Menge der stetigen linearenOperatoren von X nach Y mit endlichdimensionalem Bild. Falls X = Y benut-zen wir die ubliche Bezeichnung F(X) := F(X,X).
Satz 1.4 Seien X,Y Banach-Raume.
(i) Es gilt F(X,Y ) ⊂ K(X,Y ). Genauer, wenn Tn ∈ F(X,Y ) mit‖Tn − T‖X→Y → 0, so ist T kompakt.
(ii) Falls eine Folge (Sn) in F(Y ) mitlimn→∞ Sny = y, ∀y ∈ Y existiert (und Y somit separabel ist), so giltF(X,Y ) = K(X,Y ).
Korollar 1.5 Sei X ein beliebiger Banach-Raum und Y einer der separablenBanach-Raume c0, lp, Lp(1 ≤ p < ∞), C(K) mit K ⊂ Rn kompakt. Dann giltF(X,Y ) = K(X,Y ).
Bemerkung: Die Aussage (ii) des Satzes ist i.A. fur nichtseparable Y nichtrichtig. Allerdings, fur die Raume l∞, L∞ stimmt sie ebenfalls.
1.2 Adjungierte Operatoren, Annihilatoren undGelfandscher Dreier
1.2.1 Quotientenraume. Annihilatoren
Sei U ein Unterraum eines Banach-RaumsX. Fur x ∈ X bezeichne [x] = x+Udessen Aquivalenzklasse (x ∼ y ⇔ x− y ∈ U). Der Quotientenraum X/U bildetmit den Operationen [x] + [y] = [x + y] und α[x] = [αx] bekanntlich einenlinearen Raum. Auf X/U defineren wir
‖[x]‖X/U := dist(x,U) = infy∈U
‖x− y‖X .
Satz 1.6 Sei U ein Unterraum eines Banach-Raums X. Dann ist ‖[x]‖X/U eineHalbnorm auf X/U . Ist U abgeschlossen, so ist ‖[x]‖X/U eine Norm, genanntQuotientennorm, und (X/U, ‖[·]‖X/U ) ist ein Banach-Raum.

1.2. ADJUNGIERTE OPERATOREN, ANNIHILATOREN, GELFANDSCHER DREIER7
Lemma 1.7 Seien X und Y Banach-Raume und T ∈ L(X,Y ). Dann ist derOperator T : X/N (T ) → R(T ), T : [x] 7→ Tx stetig und bijektiv.
Sei X ein Banach-Raum und X ′ der Dualraum. Fur x ∈ X und x′ ∈ X ′
bezeichne 〈x, x′〉 := x′(x).
Definition 1.8 Sei X ein Banach-Raum und U ⊂ X, V ⊂ X ′ gegebene Teil-mengen. Die Annihilatoren von U bzw. V werden durch
U⊥ := x′ ∈ X ′ : 〈x, x′〉 = 0 fur alle x ∈ U (1.1)V⊥ := x ∈ X : 〈x, x′〉 = 0 fur alle x′ ∈ V (1.2)
definiert.
Die Annihilatoren U⊥, V⊥ sind offenbar Unterraume von X ′ bzw. X.V⊥ ist als Durchschnitt von Nullraumen stetiger Funktionale abgeschlossen inX. U⊥ laßt sich als Durchschnitt der Nullraume der Funktionale i(x) ∈ X ′′ mitx ∈ U schreiben. Da diese Funktionale stetig bezuglich der schwach* Topologievon X ′ sind, ist U⊥ schwach* abgeschlossen in X ′.
Satz 1.9 Sei X ein Banach-Raum und U ein Unterraum.
(i) Es gilt (U⊥)⊥ = U .
(ii) Falls U abgeschlossen ist, dann existieren die kanonischen isometrischenIsomorphismen (X/U)′ ' U⊥ und U ′ ' X ′/U⊥.
1.2.2 Adjungierte Operatoren
Definition 1.10 SeienX,Y Banach-Raume und T ∈ L(X,Y ). Dann heißt T ′ ∈L(Y ′, X ′) mit
〈Tx, y′〉 = 〈x, T ′y′〉 ∀x ∈ X, y′ ∈ Y ′ (1.3)
der adjungierte Operator zu T .
Satz 1.11 Durch (1.3) wird ein eindeutiger Operator T ′ ∈ L(Y ′, X ′) bestimmt.Weiterhin gilt:
(i) Die Abbildung T 7→ T ′ von L(X,Y ) nach L(Y ′, X ′) ist linear und isome-trisch, d.h. es gilt ‖T‖ = ‖T ′‖. Sie ist i.A. nicht surjektiv.
(ii) SindX,Y, Z Banach-Raume und T ∈ L(X,Y ), S ∈ L(Y, Z), so gilt (ST )′ =T ′S′.
(iii) T ′′ iX = iY T wobei iX , iY die kanonischen Inklusionen im Bidual sind.
(iv) Ist T ∈ L(X,Y ) invertierbar, so ist auch T ′ ∈ L(Y ′, X ′) und es gilt(T ′)−1 = (T−1)′.

8 KAPITEL 1. EINFUHRUNG IN DIE OPERATORENTHEORIE
Beispiele:
(i) Sei X = Y = lp fur 1 ≤ p < ∞ und T der Linksshift (x1, x2, x3, . . . ) 7→(x2, x3, . . . ). Dann ist T ′ der Rechtsshift (y1, y2, . . . ) 7→ (0, y1, y2, . . . ).
(ii) Sei X = Y = Lp([0, 1]) fur 1 ≤ p < ∞ und h ∈ L∞([0, 1]) gegeben.Definiere den Operator T(p) ∈ L(X) durch f 7→ hf . Dann gilt T ′(p) = T(q)
fur 1/p+ 1/q = 1.
(iii) Sei X = Y = L2([0, 1]) und T der Integraloperator mit L2-Kern k gegebendurch (Tf)(s) =
∫k(s, t)f(t)dt. Dann ist T ′ der Integraloperator mit Kern
k′(s, t) = k(t, s).
Satz 1.12 (Schauder)Seien X und Y Banach-Raume und T ∈ L(X,Y ). Dann ist T genau dann
kompakt, wenn T ′ kompakt ist.
Satz 1.13 Seien X, Y Banach-Raume und T ∈ L(X,Y ). Dann gilt:
(i) N (T ′) = R(T )⊥ und N (T ) = R(T ′)⊥.
(ii) Es gilt R(T ) = N (T ′)⊥, insbesondere ist T ′ injektiv, wenn das Bild R(T )dicht in Y ist.
Korollar 1.14 Seien X, Y Banach-Raume und T ∈ L(X,Y ) ein Operatormit abgeschlossenem Bild. Dann ist die Operatorgleichung Tx = y genau dannlosbar, wenn y ∈ N (T ′)⊥ gilt, d.h. wenn fur alle y′ ∈ Y ′ mit T ′y′ = 0 dieEigenschaft y′(y) = 0 gilt. Dies stimmt insbesonders dann, wenn T ′ injektiv ist.
1.2.3 Hilbert-Adjungierte
Definition 1.15 Seien H1,H2 Hilbert-Raume und T ∈ L(H1,H2). Dann heißtT ∗ ∈ L(H2,H1) mit
(Tx, y) = (x, T ∗y) ∀x ∈ H1, y ∈ H2 (1.4)
die Hilbert-Adjungierte zu T . Falls beide Raume ubereinstimmen (= H), so heißtein Operator T ∈ L(H) mit T = T ∗ selbstadjungiert.
Bemerkung: Im Folgenden wird der Zusammenhang zum bisher definiertenadjungierten Operator festgehalten.
Bezeichne mit jH1 : H1 → H ′1 die Abbildung x 7→ jH1(x) wobei jH1(x)(y) :=
(y, x), ∀y ∈ H1. Nach dem Rieszschen Darstellungssatz ist jH1 eine antilineareIsometrie. Die Gleichung (1.4) ist aquivalent zu jH2(y)(Tx) = jH1(T
∗y)(x),∀x ∈ H1, y ∈ H2 und somit zu jH2(y) T = jH1 T ∗y, ∀y ∈ H2.
Ausgehend von Gleichung (1.3) erhalt man analog jH2(y)(Tx) = T ′jH2(y)(x),∀x ∈ H1, y ∈ H2 und damit jH2(y) T = T ′ jH2(y), ∀y ∈ H2.
Damit ergibt sich T ∗ = j−1H1T ′jH2 . Die Hilbert-Adjungierte und der adjun-
gierte Operator unterscheiden sich also nur in der Darstellung des Dualraums.

1.2. ADJUNGIERTE OPERATOREN, ANNIHILATOREN, GELFANDSCHER DREIER9
Satz 1.16 Durch (1.4) ist ein eindeutiger Operator T ∗ ∈ L(H2,H1) bestimmt.Weiterhin gilt:
(i) Der Operator ∗ : L(H1,H2) → L(H2,H1) ist eine antilineare Isometrie,d.h. es gilt ‖T‖ = ‖T ∗‖ ∀T ∈ L(H1,H2) und (λ1T1+λ2T2)∗ = λ1T
∗1 +λ2T
∗2
fur alle T1, T2 ∈ L(H1,H2) und λ1, λ2 ∈ K.
(ii) Sind H1,H2,H3 Hilbert-Raume und T ∈ L(H1,H2), S ∈ L(H2,H3), sogilt (ST )∗ = T ∗S∗ und T ∗∗ = T .
(iii) Es gilt ‖TT ∗‖ = ‖T ∗T‖ = ‖T‖2.
(iv) Wenn T ∈ L(H1,H2) invertierbar ist, so ist (T ∗)−1 ∈ L(H1,H2) mit(T ∗)−1 = (T−1)∗.
(v) T ist genau dann kompakt, wenn T ∗ kompakt ist.
Satz 1.17 (i) Fur T ∈ L(H1,H2) giltN (T ∗) = R(T )⊥ undN (T ) = R(T ∗)⊥.
(ii) Es gilt R(T ) = N (T ∗)⊥, insbesondere ist der adjungierte Operator injek-tiv, wenn das Bild von T dicht in H2 ist.
Beispiele:
(i) Sei H = Kn. Dann wird T ∈ L(H) durch eine Matrix (aij)i,j dargestellt,wahrend T ∗ durch die Matrix (aji)i,j dargestellt ist.
(ii) Sei H = L2([0, 1]) und Tk ∈ L(H) der Fredholmsche Integraloperatormit L2-Kern k, also (Tkf)(s) =
∫ 1
0k(s, t)f(t)dt. Dann ist T ∗k = Tk∗ mit
k∗(s, t) = k(t, s).
(iii) Sei T : l2 → l2 der Linksshift: (x1, x2, x3, . . . ) 7→ (x2, x3, . . . ). Dann ist T ∗
der Rechtsshift, d.h. es gilt T ∗((y1, y2, . . . )) = (0, y1, y2, . . . ).
1.2.4 Gelfandscher Dreier
Definition 1.18 Fur Hilbert-Raume H1,H2 heißt das Schema
H1 → H2 → H ′1, (1.5)
wobei beide Einbettungen dicht sind, Gelfandscher Dreier.
Bemerkung: Fur einen Gelfandschen Dreier reicht schon die dichte EinbettungH1
Id→ H2 aus. Aufgrund der Reflexivitat der Hilbert-Raume gilt Id′′ = Id undsomit, nach Satz 1.13 (ii), R(Id′) = N (Id)⊥ = 0⊥ = H ′
1, also die EinbettungH ′
2 → H ′1 ist ebenfalls dicht. Durch Identifizierung von H2 mit H ′
2 erhalt mandie gewunschte Eigenschaft.
10 KAPITEL 1. EINFUHRUNG IN DIE OPERATORENTHEORIE
Ein Gelfandscher Dreier erlaubt die Konstruktion einer sogenannnten nega-tiven Norm auf H2. Die Identifizierung von H2 mit H ′
2 ergibt folgendes Schema:
H1Id→ H2 ↔ H ′
2Id′→ H ′
1
x 7→ x (·, y)H2 7→ (·, y)H2 |H1 .
Die negative Norm eines Elementes y ∈ H2 wird durch
‖y‖−1 := ‖(·, y)‖H′1
= supx∈H1
|(x, y)H2 |‖x‖H1
(1.6)
definiert.Aufgrund der Einbettung H1 → H2 gilt ‖x‖H2 ≤ K‖x‖H1 und somit
‖y‖−1 ≤ supx∈H1
‖x‖H2 · ‖y‖H2
‖x‖H1
≤ K‖y‖H2 .
Nach dem Rieszschen Darstellungssatz gibt es zu jedem y ∈ H2 ein xy ∈ H1
mit (·, y)H2 |H1 = (·, xy)H1 . Fur x ∈ H1, y ∈ H2 gilt dann:
|(x, y)H2 |‖x‖H1
=|(x, xy)H1 |‖x‖H1
≤ ‖x‖H1 · ‖xy‖H1
‖x‖H1
= ‖xy‖H1 .
Fur x = xy gilt Gleichheit und nach (1.6) ist ‖y‖−1 = ‖xy‖H1 .Falls man die Identifizierung H2 ↔ H ′
2 vornimmt, so kann man nicht mehrH1 mit dessen Dualraum H ′
1 identifizieren (s. nachstes Beispiel (ii))!
Beispiel: Sei Ω ⊂ Rn ein beschranktes Gebiet.
(i) Der Dualraum von Hm,20 (Ω).
Durch den Skalarprodukt
(u, v)m :=∑|α|≤m
∫Ω
DαuDαvdx
wird der RaumHm,2(Ω) ein Hilbert-Raum. Wir betrachten nun den Unter-raum Hm,2
0 (Ω). Durch wiederholte Anwendung der Poincare-Ungleichung:‖u‖2;Ω ≤ c‖Du‖2;Ω fur u ∈ H1,2
0 (Ω) auf die Ableitungen Dαu erhalt man,dass
(u, v)m,0 :=∑|α|=m
∫Ω
DαuDαvdx
ein zu (·, ·)m aquivalentes Skalarprodukt auf Hm,20 (Ω) ist.
Mit H−m,2(Ω) bezeichne man den Dualraum von Hm,20 (Ω). Der Rieszsche
Darstellungssatz ergibt dann, dass zu jedem L ∈ H−m,2(Ω) es genau einu ∈ Hm,2
0 (Ω) gibt, mit
L(v) =∑|α|=m
∫Ω
DαuDαvdx
fur alle v ∈ Hm,20 (Ω).

1.2. ADJUNGIERTE OPERATOREN, ANNIHILATOREN, GELFANDSCHER DREIER11
(ii) Die negative Norm auf L2(Ω).
Setze H1 = (H1,20 (Ω), (·, ·)1,0) und H2 = (L2(Ω), (·, ·)). Da die Einbettung
H1,20 (Ω) → L2(Ω) dicht (und kompakt) ist, so ist auch die Einbettung
L2(Ω)′ → H1,20 (Ω)′ = H−1,2
0 (Ω) dicht (und kompakt). Durch die Identifi-kation L2 ↔ (L2)′ definiert man auf L2(Ω) die negative Norm durch
‖u‖−1,2;Ω = supv∈H1,2
0 (Ω)
|∫Ωuvdx|
‖Dv‖2;Ω, ∀u ∈ L2(Ω).
Dies entspricht der Norm von u in dem Raum (H1,20 )′ = H−1,2. In der
Tat, durch die Identifizierung L2 ↔ (L2)′ definiert u ∈ L2 ein stetigeslineares Funktional Lu ∈ (L2)′ ⊂ (H1,2
0 )′ durch Lu(·) = (·, u). Nach demRieszschen Darstellungssatz kann dieses Funktional durch ein w ∈ H1,2
0
bezuglich des Skalarporduktes (·, ·)1,0 dargestellt werden: (v, u) = Lu(v) =(v, w)1,0 = (Dv,Dw) ∀v ∈ H1,2
0 . Dann gilt: ‖u‖−1 = ‖Lu‖(H1,20 )′ =
‖w‖H1,20
= ‖Dw‖2;Ω. Die negative Norm ist also die Norm der Funktiona-
le auf H1,20 welche sich im obigen Sinne durch L2-Funktionen darstellen
lassen.
Man beachte: Im Kontext dieses Gelfandschen Dreiers darf man nicht mehrden Hilbert-Raum H1,2
0 (Ω) mit dessen Dualraum H−1,2(Ω) identifizieren!
Generell wird jedes Funktional L ∈ H−1,2(Ω) als L(v) = (Dv,Dw) =:−(v,∆w) ∀v ∈ H1,2
0 (Ω) fur ein w ∈ H1,20 (Ω) dargestellt. Die letzte Gleich-
heit ergibt sich zunachst durch partielle Integration fur hinreichend re-gulare w (z.B. im dichten Unterraum C∞0 (Ω)). Man kann in diesem Fall∆w ∈ H−1,2
0 betrachten. Aufgrund von |(Dv,Dw)| ≤ ‖Dv‖2‖Dw‖2 furalle v ∈ H1,2
0 und w ∈ H1,20 fest, kann der Laplace-Operator −∆ durch
ein Standardargument auf ganz H1,20 (Ω) fortgesetzt werden. Somit ist
−∆ : H1,20 (Ω) → H−1,2(Ω) ein isometrischer Isomorphismus, falls man
auf H1,20 den Skalarprodukt (·, ·)1,0 betrachtet.
Im Gelfandschen Dreier ist eine solche Identifikation jedoch nicht moglich.
Nach dem Schema (L2)′ ↔ L2 Id′→ (H1,20 )′, u 7→ w ∈ H1,2
0 mit (·, u) =(D·, Dw) = −(·,∆w) erhalt man nur diejenigen Funktionale auf H1,2
0 , diedurch ein w ∈ H1,2
0 mit −∆w = u ∈ L2(Ω) dargestellt werden. R(Id′)ist also ein echter Unterraum von (H1,2
0 )′, dessen Identifikation mit H1,20
nicht moglich ist.
12 KAPITEL 1. EINFUHRUNG IN DIE OPERATORENTHEORIE
1.3 Operatoren mit abgeschlossenem Bild
Fur ein Operator T ∈ L(X,Y ) mit abgeschlossenem Bild ist nach Korollar1.14 ist die Gleichung Tx = y genau dann losbar, wenn y ∈ N (T ′)⊥ gilt. ImFolgenden werden Bedingungen angegeben, welche die Abgeschlossenheit desBildes gewahrleisten.
Satz 1.19 Sei X ein Banach-Raum und X0 ⊂ X ein endlichdimensionaler Un-terraum. Dann existiert eine stetige lineare Projektion P : X → X0 mit abge-schlossenen Nullraum N (P ) =: X1. Dann gilt X = X0 ⊕ X1 algebraisch undtopologisch, d.h. fur jedes x ∈ X gibt es eine eindeutige Zerlegung x = x0 + x1
mit xi ∈ Xi und ‖xi‖X ≤ K‖x‖X fur i = 0, 1.
Bemerkung: Im Unterschied zu den Projektionssatz fur Hilbert-Raume musshier vorausgesetzt werden, dass der Unterraum X0 endlichdimensional ist. DieNorm von P ist von der Dimension von X0 abhangig, wahrend X1 von Pabhangt.
Lemma 1.20 SeienX,Y Banach-Raume und T ∈ L(X,Y ). Dann sind aquivalent:
(i) R(T ) ist abgeschlossen in Y .
(ii) Zu jedem y ∈ R(T ), gibt es ein x mit Tx = y und ‖x‖X ≤ K‖y‖Y mit Kunabhangig von y.
Satz 1.21 Seien X,Y, Z Banach-Raume mit X → Y kompakt und sei T ∈L(X,Z). Dann sind aquivalent:
(i) R(T ) ist abgeschlossen in Z und der Nullraum N (T ) ist endlichdimensio-nal.
(ii) Es existiert eine Konstante K mit
‖x‖X ≤ K(‖Tx‖Z + ‖x‖Y ), ∀x ∈ X. (1.7)
Lemma 1.22 Sei T ∈ L(X,Y ). Falls ein m > 0 existiert, mit m‖y′‖Y ′ ≤‖T ′y′‖X′ fur alle y′ ∈ Y ′, dann ist T offen.
Satz 1.23 (Satz vom abgeschlossenen Bild, Closed Range Theorem)Seien X,Y Banach-Raume und T ∈ L(X,Y ). Dann sind aquivalent:
(i) R(T ) ist abgeschlossen in Y .
(ii) R(T ) = N (T ′)⊥.
(iii) R(T ′) ist abgeschlossen in X ′.
(iv) R(T ′) = N (T )⊥.
Kapitel 2
Spektraltheorie
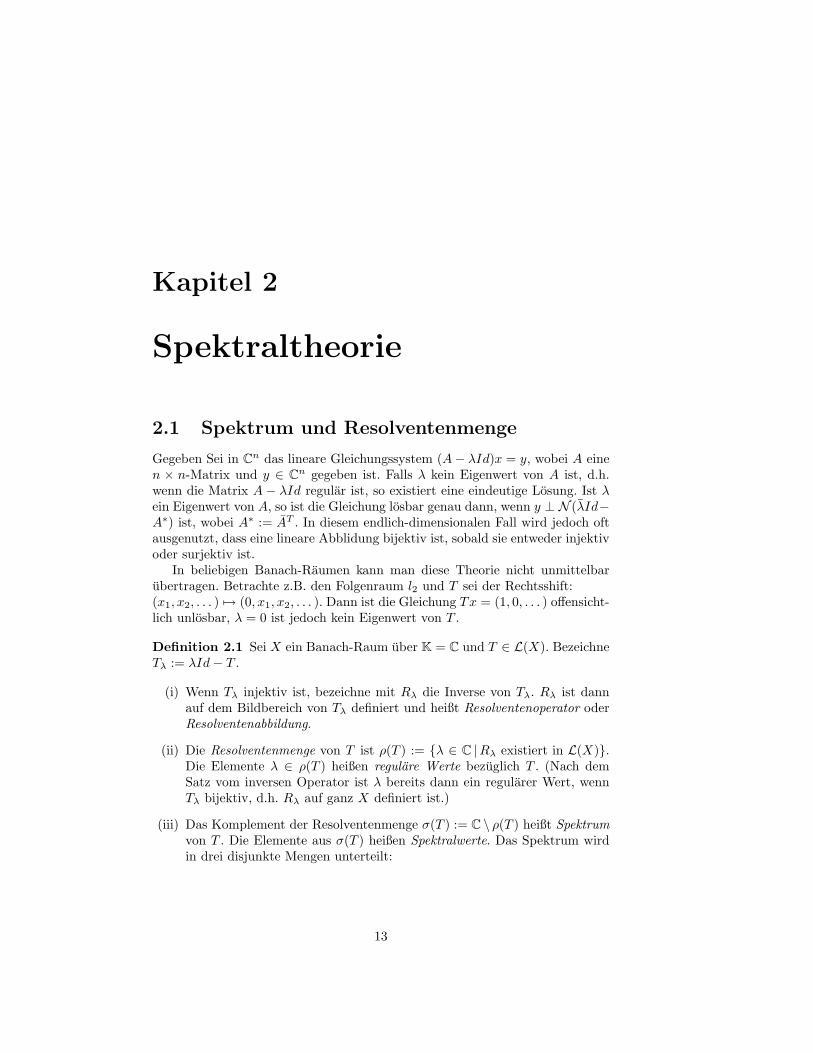
2.1 Spektrum und Resolventenmenge
Gegeben Sei in Cn das lineare Gleichungssystem (A− λId)x = y, wobei A einen × n-Matrix und y ∈ Cn gegeben ist. Falls λ kein Eigenwert von A ist, d.h.wenn die Matrix A − λId regular ist, so existiert eine eindeutige Losung. Ist λein Eigenwert von A, so ist die Gleichung losbar genau dann, wenn y ⊥ N (λId−A∗) ist, wobei A∗ := AT . In diesem endlich-dimensionalen Fall wird jedoch oftausgenutzt, dass eine lineare Abblidung bijektiv ist, sobald sie entweder injektivoder surjektiv ist.
In beliebigen Banach-Raumen kann man diese Theorie nicht unmittelbarubertragen. Betrachte z.B. den Folgenraum l2 und T sei der Rechtsshift:(x1, x2, . . . ) 7→ (0, x1, x2, . . . ). Dann ist die Gleichung Tx = (1, 0, . . . ) offensicht-lich unlosbar, λ = 0 ist jedoch kein Eigenwert von T .
Definition 2.1 Sei X ein Banach-Raum uber K = C und T ∈ L(X). BezeichneTλ := λId− T .
(i) Wenn Tλ injektiv ist, bezeichne mit Rλ die Inverse von Tλ. Rλ ist dannauf dem Bildbereich von Tλ definiert und heißt Resolventenoperator oderResolventenabbildung.
(ii) Die Resolventenmenge von T ist ρ(T ) := λ ∈ C |Rλ existiert in L(X).Die Elemente λ ∈ ρ(T ) heißen regulare Werte bezuglich T . (Nach demSatz vom inversen Operator ist λ bereits dann ein regularer Wert, wennTλ bijektiv, d.h. Rλ auf ganz X definiert ist.)
(iii) Das Komplement der Resolventenmenge σ(T ) := C \ ρ(T ) heißt Spektrumvon T . Die Elemente aus σ(T ) heißen Spektralwerte. Das Spektrum wirdin drei disjunkte Mengen unterteilt:
13

14 KAPITEL 2. SPEKTRALTHEORIE
– Punktspektrum:
σp(T ) = λ ∈ σ(T ) : Rλ existiert nicht, d.h. Rλ ist nicht injektiv
In diesem Fall gilt fur den linearen Operator Tλ dass N (Tλ) 6= 0.λ ∈ C heißt daher Eigenwert von T , N (Tλ) ist der Eigenraum zu λund dimN (Tλ) heißt Vielfachheit von λ.
– Kontinuierliches Spektrum:
σc(T ) = λ ∈ σ(T ) : Rλ existiert, ist auf einer dichten Teilmenge von X definiert und dort unstetig
(In diesem Fall kann Rλ nicht auf ganz X definiert sein.)– Residuenspektrum (Restspektrum):
σr(T ) = λ ∈ σ(T ) : Rλ existiert, ist aber nicht auf einer dichten Teilmenge von X definiert
Bemerkung:
• Jeder Eigenwert ist ein Spektralwert, die Umkehrung ist jedoch falsch(s.obiges Beispiel).
• Es gilt σ(T ) = σp(T ) ∪ σc(T ) ∪ σr(T ). Der Fall einer dicht definierten(jedoch nicht auf ganzX), stetigen Resolvente kann also nicht vorkommen.
• Beim Residuenspektrum wird keine Aussage gemacht, ob der Resolven-tenoperator Rλ stetig ist oder nicht. Die Bezeichnung “kontinuierlichesSpektrum” ruhrt daher, dass solche Spektralwerte meist kontinuierlichvorkommen, z.B. uber ein ganzes reelles Intervall.
Beispiele:
(i) Sei X = l2 und T sei der Rechtsshift: (x1, x2, . . . ) 7→ (0, x1, x2, . . . ). T istinjektiv, nicht surjektiv und es gilt ‖T‖ = 1. Die Inverse T−1 ist auf derMenge x ∈ l2 |x1 = 0 definiert und ist stetig. Dieser Definitionsbereichliegt offenbar nicht dicht in l2, daher gehort λ = 0 zum Residuenspektrumvon T .
(ii) Sei Ω ⊂ Rn ein beschranktes Gebiet und sei X = C0(Ω). Sei v ∈ Xgegeben und T : X → X, Tu = uv fur alle u ∈ X. Es gilt ‖Tu‖∞ =‖uv‖∞ ≤ ‖v‖∞‖u‖∞. Damit ist T ∈ L(X) mit ‖T‖ ≤ ‖v‖∞. Sei A ⊂ Cder Wertebereich von v (kompakte Menge). Die Gleichung (λId − T )u =w ist also aquivalent zu (λ − v)u = w und besitzt die formale Losungu = w/(λ− v). Damit ist σ(T ) = A und ρ(T ) = C \ A. Wenn das Urbildv−1(λ) ein nichtleeres Inneres besitzt, so gilt fur alle Funktionen u ausXmit Trager in diesem Inneren: Tλu = (λ−v)u = 0. Somit ist N (Tλ) 6= 0und diese Funktionen u sind Eigenvektoren von T zum Eigenwert λ .Falls das Innere von v−1(λ) leer ist, ist die Gleichung (λ − v)u = whochstens fur diejenigen w ∈ X losbar, mit w(x) = 0 fur x ∈ v−1(λ).Die Menge dieser w’s liegt aber nicht dicht in X. Diese λ gehoren daherzum Residuenspektrum von T .

2.1. SPEKTRUM UND RESOLVENTENMENGE 15
Satz 2.2 Es gilt σ(T ) = σ(T ′). Ist X ein Hilbert-Raum, so istσ(T ∗) = λ : λ ∈ σ(T ).
Lemma 2.3 Sei A ∈ L(X,Y ) bijektiv. Wenn fur B ∈ L(X,Y ) gilt
‖A−B‖X→Y <1
‖A−1‖Y→X,
so ist auch B bijektiv und
B−1 =∞∑k=0
(A−1(A−B))kA−1.
Die Menge der bijektiven Operatoren ist somit offen in L(X,Y ).
Definition 2.4 Sei D ⊂ C eine offene Menge und sei Aλλ∈D eine Menge vonOperatoren in L(X). Aλ hangt analytisch von λ ab, wenn es fur jedes λ0 ∈ Deine Umgebung U = U(λ0) und Operatoren Ak ∈ L(X) gibt, mitAλ =
∑∞k=0(λ− λ0)kAk fur alle λ ∈ U .
Satz 2.5 Sei T ∈ L(X) dann gilt:
(i) ρ(T ) ist offen und nichtleer.
(ii) σ(T ) ist nichtleer, kompakt und in der Menge λ ∈ C : |λ| ≤ ‖T‖enthalten.
(iii) Der Resolventenoperator Rλ = Rλ(T ) hangt auf der Menge ρ(T ) ⊂ Canalytisch von λ ab mit Rλ =
∑∞k=0(λ − λ0)kRk+1
λ0. Die Reihe ist Norm-
konvergent mindestens im Kreis λ ∈ C : |λ− λ0| < ‖Rλ0‖−1.
Lemma 2.6 Die reelle Zahlenfolge (an) erfulle 0 ≤ an+m ≤ anam fur allem,n ∈ N. Dann konvergiert ( n
√an) gegen a := infn n
√an.
Fur T ∈ L(X) und an := ‖Tn‖ ergibt sich daraus:
Definition 2.7 r(T ) := infn ‖Tn‖1/n = limn→∞ ‖Tn‖1/n wird der Spektralra-dius von T ∈ L(X) genannt.
Satz 2.8 Es gelten folgende Aussagen:
(i) σ(T ) ⊂ λ ∈ C : |λ| ≤ r(T ).
(ii) Falls K = C, so existiert λ ∈ σ(T ) mit |λ| = r(T ), also es gilt r(T ) =max|λ| : λ ∈ σ(T ) (daher die Bezeichnung Spektralradius).
Satz 2.9 Ist H ein Hilbert-Raum und T ∈ L(H) normal, d.h. es erfullt TT ∗ =T ∗T , so ist r(T ) = ‖T‖.

16 KAPITEL 2. SPEKTRALTHEORIE
2.2 Fredholm-Operatoren und die Spektraltheo-rie kompakter Operatoren auf Banach-Raumen
Definition 2.10 Seien X,Y Banach-Raume. T ∈ L(X,Y ) heißt Fredholm-Operator, wenn N (T ) endlichdimensional und die Kodimension von R(T ):codim R(T ) :=dim Y/R(T ) ebenfalls endlich ist. Die ganze Zahlind T :=dim N (T )−codim R(T ) heißt Index des Fredholm-Operators.
Aufgrund der endlichen Kodimension besitzen Fredholm-Operatoren ein ab-geschlossenes Bild:
Satz 2.11 Seien X,Y Banach-Raume und T ∈ L(X,Y ) mit codim R(T ) <∞.Dann besitzt T ein abgeschlossenes Bild.
Bemerkungen:
(i) (Fredholmsche Alternative)
Sei T ein Fredholm-Operator vom Index 0, d.h. dim N (T ) =codim R(T ).Dann ist T injektiv, genau dann wenn T surjektiv ist: T injektiv ⇔dim N (T ) = 0 = codim R(T ) ⇔ T surjektiv.
D.h.: entweder die Operatorgleichung Tx = y besitzt fur alle y eine eindeu-tige Losung, falls die homogene Gleichung Tx = 0 nur die triviale Losungx = 0 besitzt, oder die Gleichung Tx = y ist nicht fur alle y losbar. Dannund nur dann gibt es genau einen endlichdimensionalen Eigenraum von T(1 ≤ dim N (T ) <∞).
(ii) Aus N (T ′) = R(T )⊥ und N (T ) = R(T ′)⊥ folgt dim N (T ′) = codimR(T )bzw. codim R(T ′) = dim N (T ). Der adjungierte Operator T ′ : Y ′ → X ′
ist daher ebenfalls Fredholmsch mit ind T ′ = −ind T .
Die Eigenschaften des Spektrums kompakter Operatoren werden im folgen-den Satz festgehalten:
Satz 2.12 (Riesz-Schauder)Sei X ein unendlichdimensionaler Banach-Raum und T ∈ K(X). Dann gilt:
(i) 0 ist Spektralwert von T .
(ii) Tλ = λId − T ist fur λ 6= 0 ein Fredholm-Operator vom Index 0, insbe-sondere ist jeder Spektralwert Eigenwert.
(iii) Es gibt hochstens abzahlbar viele Eigenwerte, die keinen Haufungspunkthaben, außer eventuell 0.
Der Beweis basiert auf folgende Lemmata. Sei S = Id− T fur T ∈ K(X).
Lemma 2.13 Der Nullraum von Sn ist endlichdimensional und das Bild vonSn ist abgeschlossen, fur alle n ∈ N.

2.3. KOMPAKTE OPERATOREN AUF HILBERT-RAUMEN 17
Lemma 2.14 Wenn N (S) = 0, so ist R(S) = X.
Lemma 2.15 Es gilt codimR(S) = dimN (S), also S ist ein Fredholm-Operatorvom Index 0.
Der Beweis von Teil (i) des Satzes von Riesz-Schauder folgt mithilfe der Kom-paktheit von T : Wenn 0 ∈ ρ(T ), so sind T, T−1 stetig, bijektiv. Eine beliebigebeschrankte Folge in X kann also als Bild durch T einer anderen beschrankterFolge dargestellt werden. Die Kompaktheit von T impliziert die Konvergenz ei-ner Teilfolge der ursprunglich gewahlten beschrankten Folge. Dies steht aber imWiderspruch zur Annahme, dass X unendlichdimensional ist.
Teil (ii) des Satzes folgt aus Lemma 2.14 und Lemma 2.15 fur Tλ = λId−T =λ(Id− λ−1T ).
Teil (iii) folgt aus dem nachsten Lemma:
Lemma 2.16 Ein kompakter Operator hat hochstens abzahlbar viele Eigen-werte, die keinen Haufungspunkt in C besitzen, außer eventuell 0. Jeder Eigen-wert 6= 0 hat endliche Vielfachheit.
2.3 Kompakte Operatoren auf Hilbert-Raumen
2.3.1 Selbstadjungierte Operatoren
Sei H ein Hilbert-Raum. Nach Definition 1.15 heißt ein Operator T ∈ L(H)mit T = T ∗ selbstadjungiert. Selbstadjungierte Operatoren besitzen folgendewichtige Eigenschaften:
Satz 2.17 (Hellinger-Toeplitz)Erfullt eine lineare Abbildung T : H → H die Symmetriebedingung
(Tx, y) = (x, Ty) ∀x, y ∈ H, so ist T stetig und folglich selbstadjungiert.
Satz 2.18 Sei K = C. Dann sind fur T ∈ L(H) aquivalent:
(i) T ist selbstadjungiert.
(ii) Es gilt (Tx, x) ∈ R ∀x ∈ H.
Satz 2.19 Fur selbstadjungiertes T ∈ L(H) gilt ‖T‖ = sup‖x‖≤1 |(Tx, x)|.
2.3.2 Spektralsatz fur kompakte normale Operatoren
Ein Operator T ∈ L(H) ist nach Satz 1.16 genau dann kompakt, wenn T ∗
kompakt ist. Falls TT ∗ = T ∗T gilt, so heißt der Operator T normal.
Lemma 2.20 Sei T ∈ L(H). Dann gilt:
(i) λ ∈ σ(T ) genau dann, wenn λ ∈ σ(T ∗).

18 KAPITEL 2. SPEKTRALTHEORIE
(ii) Ist T selbstadjungiert und kompakt, so ist σ(T ) ⊂ R. (Die Aussage giltauch generell, ohne die Kompaktheitsvoraussetzung).
(iii) Ist T normal und x Eigenvektor von T zum Eigenwert λ, so ist x auchEigenvektor von T ∗ zum Eigenwert λ.
(iv) Ist T normal, so haben verschiedene Eigenwerte orthogonale Eigenvekto-ren.
(v) Ist K = C und T normal, so existiert λ ∈ σ(T ) mit |λ| = ‖T‖.
(vi) Ist K = R und T selbstadjungiert und kompakt, so ist ‖T‖ oder −‖T‖Eigenwert von T .
Satz 2.21 (Spektralsatz fur kompakte normale Operatoren)Sei T ∈ K(H) normal (falls K = C) bzw. selbstadjungiert (falls K = R).
Dann existieren ein (eventuell endliches) Orthonormalsystem e1, e2, . . . sowieeine (eventuell abbrechende) Nullfolge λ1, λ2, . . . in K \ 0, so dass
H = N (T )⊕ spane1, e2, . . .
sowie Tx =∑k λk(x, ek)ek fur alle x ∈ H, wobei λk die von 0 verschiedene
Eigenwerte und ek entsprechende Eigenvektoren sind. Weiterhin gilt ‖T‖ =supk |λk|.
Bemerkung: Im obigen Satz ist (λk) die Folge aller Eigenwerte 6= 0, zu ver-schiedenen Eigenvektoren (ek). Bezeichne mit (µk) die Folge der paarweise ver-schiedenen Eigenwerte von T die 6= 0 sind (deren Vielfachheit durch die An-zahl der λ’s welche = µk sind gegeben ist. Sei Ek die orthogonale Projektionauf dem entsprechenden Eigenraum N (Tµk
) = N (µkId − T ), gegeben durchEkx =
∑dk
i=1(x, eki )e
ki , wobei (eki )
dki=1 eine ONB von N (Tµk
) ist. Dann besagtder Spektralsatz, dass Tx =
∑∞k=1 µkEkx ∀x ∈ H gilt. Das nachste Resultat
zeigt jedoch, dass diese Konvergenz sogar in der Operatornorm stattfindet:
Korollar 2.22 (Spektralsatz, Projektionsversion)Unter den Voraussetzungen von Satz 2.21 und mit den obigen Bezeichnun-
gen, konvergiert T =∑∞k=1 µkEk in der Operatornorm.
Definition 2.23 Ein Operator T ∈ L(H) heißt positiv (T ≥ 0), wenn(Tx, x) ≥ 0 ∀x ∈ H. (Falls K = C folgt aus Satz 2.18 dass T selbstadjungiertist).
Satz 2.24 (Quadratwurzel aus positive kompakte Operatoren)Sei T ∈ K(H) positiv (und selbstadjungiert falls K = R). Dann existiert
genau ein positiver (und selbstadjungierter) Operator S ∈ K(H) mit S2 = T .Man schreibt S := T 1/2.

2.3. KOMPAKTE OPERATOREN AUF HILBERT-RAUMEN 19
Bemerkung: Fur T ∈ L(H) seien die Voraussetzungen aus Satz 2.21 erfullt.Fur die Gleichung Tλx = y fur λ 6= 0 gilt die Fredholmsche Alternative: entwederist λ ∈ ρ(T ), d.h. die homogene Gleichung Tλx = 0 besitzt nur die trivialeLosung und somit hat die Gleichung Tλx = y eine eindeutige Losung fur alley ∈ H, oder es ist λ ∈ σ(T ), nach Satz 2.12 hat also die homogene Gleichungnichttriviale Losungen. In diesem Fall ist die Operatorgleichung Tλx = y nichtfur alle y ∈ H losbar.
Falls λ ∈ ρ(T ) kann man die Losung dieser Gleichung (nach Satz 2.21 als
x =∑k
1λ− λk
(y, ek)ek +1λ
∑e∈S
(y, e)e
ausdrucken, wobei S eine Orthonormalbasis von N (T ) ist.
Beispiel: Sei H = L2([0, 1]) und T = Tk der Fredholmsche Integraloperatormit L2-Kern k:
Tx(s) =∫ 1
0
k(s, t)x(t)dt.
T ist somit kompakt und, falls k(s, t) = k(t, s), auch selbstadjungiert. Die obigenBetrachtungen sind also in diesem Fall anwendbar. Weiterhin laßt sich zeigen,dass die Entwicklung
k =∑n
λnen ⊗ en
in L2 gilt, wobei (g ⊗ h)(t, s) := g(t)h(s) und dass
‖k‖L2([0,1]2) =
(∑n
λ2n
)1/2
= ‖(λn)‖l2
gilt.
2.3.3 Das abstrakte Eigenwertproblem. Satz von Courant-Hilbert
Seien (X, a(·, ·)) und (Y, (·, ·)) Hilbert-Raume uber K = R mit kompakter unddichter Einbettung X → Y . Die Normen bezeichnet man mit ‖ · ‖X bzw. ‖ · ‖.Betrachte das Eigenwertproblem:
a(u, v) = λ(u, v) ∀v ∈ X (2.1)
mit dem Eigenvektor u ∈ X zum Eigenwert λ.Beispiel: X = H1,2
0 (Ω), a(u, v) = (Du.Dv) =∫ΩDuDvdx und Y = L2(Ω),
(u, v) =∫Ωuvdx. Das Eigenwertproblem lautet in diesem Fall:
(Du,Dv) = (u, v) ∀v ∈ X,
welche die schwache Formulierung des Eigenwertproblems −∆u = λu, u ∈H1,2
0 (Ω) ist.

20 KAPITEL 2. SPEKTRALTHEORIE
Bemerkung: Das abstrakte Eigenwertproblem kann man auf die Spektraltheo-rie eines kompakten, selbstadjungierten Operators zuruckfuhren.
Sei R : X → X ′ gegeben durch a(Rg, v) = g(v) ∀v ∈ X undJ : X → X ′, u 7→ (u, ·).
Fur g = J(u) gilt dann: a(RJ(u), v) = J(u)(v) ∀v ∈ X ⇔ a(RJ(u), v) =
(u, v) ∀v ∈ X ⇔ a(λRJ(u), v) = λ(u, v) ∀v ∈ X(λ 6= 0)(2.1)= a(u, v). Damit ist
(2.1) aquivalent zu u = λRJ(u) ⇔ (Id− λRJ)u = 0.Aufgrund des Gelfandschen DreiersX → Y ' Y ′ → X ′ ist J kompakt, daher
ist auch RJ : X → X kompakt. Eine direkte Rechnung zeigt, dass RJ auchselbstadjungiert ist. Somit ist das abstrakte Eigenwertproblem (2.1) aquivalentzur Spektraltheorie des kompakten, selbstadjungierten Operators RJ .
Satz 2.25 (Courant-Hilbert)Sei X unendlichdimensional und seien die angegebenen Voraussetzungen
an X und Y erfullt. Dann besitzt (2.1) abzahlbar unendlich viele Eigenwer-te λk, k ∈ N mit Eigenvektoren uk ∈ X, ‖uk‖ = 1, wobei die Eigenwerte zumehrfachen Eigenvektoren auch mehrfach gezahlt werden. Es gelten weiterhindie Eigenschaften:
(i) 0 < λ1 ≤ λ2 ≤ · · · → ∞, die Eigenwerte besitzen endliche Vielfachheitenund es gibt keine Haufungspunkte von Eigenwerten.
(ii) Die Eigenvektoren sind sowohl a(·, ·) als auch (·, ·) -orthogonal; a(uk, ul) =λkδkl, (uk, ul) = δkl. Sie bilden ein vollstandiges System in X und Y : Zu v ∈ Ysetze ci = (v, ui) (i-ter Fourier-Koeffizient), vk =
∑ki=1 ciui (k-ter Fourier-
Abschnitt). Dann gilt vk → v in Y sowie vk → v in X, falls v ∈ X und‖v‖ = (
∑∞i=1 c
2i )
1/2, ‖v‖X = (∑∞i=1 λic
2i )
1/2 falls v ∈ X.(iii) Die Eigenwerte lassen sich variationell charakterisieren durch
λk = minv⊥Y Ek−1
R(v)
mit dem Rayleighquotienten
R(v) =a(v, v)(v, v)
=‖v‖2X‖v‖2
und Ek−1 = spanu1, . . . uk−1, wobei das Minimum fur v = uk angenommenwird (Rayleighsches Minimumprinzip).
(iv) Es gilt das Courantsche Minmax-Prinzip:
λk = minmaxv∈Mk
R(v) : Mk ⊂ X, dim Mk = k,
wobei das Minimum fur Mk = Ek angenommen wird.
Bemerkungen:(i) Der Satz gilt auch fur endlichdimensionale Raume X = Y ' Rn. In
diesem Fall gibt es allerdings nur n Eigenwerte. Da jedes Skalarprodukt aufRn durch eine symmetrische, positiv definite Matrix erzeugt werden kann, ist

2.3. KOMPAKTE OPERATOREN AUF HILBERT-RAUMEN 21
das Eigenwertproblem (2.1) aquivalent zu Ax = λBx mit positiv definiten,symmetrischen Matrizen A und B.
(ii) Im Courantschen Minmax-Prinzip kommen die ersten k − 1 Eigenvek-toren nicht vor (im Unterschied zum Rayleighschen Minimumprinzip). Falls furzwei Bilinearformen a1(·, ·) und a2(·, ·) die Beziehung zwischen den Rayleighko-effizienten: R1(v) ≤ R2(v) ∀v ∈ X gilt, so impliziert das Courantsche Minmax-Prinzip λk(a1) ≤ λk(a2) ∀k. Mit dem Rayleighschen Minimumprinzip kann mandies nur fur k = 1 folgern.
Beispiele:(i) Berechnung der negativen NormSei X → Y → X ′ ein Gelfandscher Dreier. Nach den Ausfuhrungen im
Abschnitt 1.2.4 definiert man die negative Norm fur Elemente u ∈ Y durch‖u‖−1 = supv∈X
|(u,v)|‖v‖X
. Das Supremum wir fur ein w ∈ X erreicht, welchesa(w, v) = (u, v) ∀v ∈ X lost. Damit gilt ‖u‖−1 = ‖w‖X . Mithilfe des Ortho-gonalsystems (ui) ergeben sich die Fourier-Entwicklungen: u =
∑i ciui bzw.
w =∑i λ
−1i ciui und somit, unter Anwendung von Satz 2.25, dass ‖u‖−1 =
‖w‖X = (∑i λ
−1i c2i )
1/2.(ii) Das Ritzsche VerfahrenDabei approximiert man die Losung des Problems in X:
a(u, v) = (f, v) ∀v ∈ X, f ∈ Y gegeben
durch die Losung des folgenden Problems in einem Unterraum Xk ⊂ X mitdim Xk = k:
a(Pku, vk) = (f, vk) ∀vk ∈ Xk
dessen Losung Pku die orthogonale Projektion von u auf Xk ist. Man zeigt,dass die Abschatzung ‖u−Pku‖X ≤ ck‖f‖ ∀f ∈ Y gilt, wobei die Konstante ckvom Raum Xk abhangt. Folgendes Resultat liefert eine Aussage uber die Großedieser Konstante im Falle des optimalen Raumes Xk:
Satz 2.26 Die kleinste Konstante ck in der Ungleichung ‖u− Pku‖X ≤ ck‖f‖∀f ∈ Y wird fur die Wahl Xk = Ek = spanu1, . . . , uk angenommen, mitck = λ
−1/2k+1 .
2.3.4 Das Eigenwertproblem fur den Laplace-Operator
Sei Ω ⊂ Rn ein beschranktes Gebiet und K = R. Betrachte das Dirichlet-Problem:
−∆uk = λkuk in Ωuk = 0 auf ∂Ω
oder, in schwacher Formulierung: Gesucht sind Eigenvektoren uk ∈ H1,20 (Ω) und
Eigenwerte λk ∈ R mit
a(uk, v) = λk(uk, v) ∀v ∈ H1,20 (Ω),

22 KAPITEL 2. SPEKTRALTHEORIE
wobeia(u, v) = (Du,Dv) =
∫Ω
DuDvdx.
Die Poincare-Ungleichung impliziert, dass a(·, ·)1/2 eine Norm auf X = H1,20 (Ω)
ist. Mit Y = L2(Ω) betrachte den Gelfandschen Dreier X → Y → X ′. NachSatz 2.25 existieren abzahlbar viele Eigenwerte 0 < λ1 ≤ λ2 ≤ · · · → ∞ und dieentsprechenden Eigenvektoren bilden ein vollstandiges Orthogonalsystem in Xund in Y .
Man kann zeigen, dass die schwachen Losungen des Eigenwertproblems re-gular und somit klassische Losungen des ursprunglichen Dirichlet-Problems sind:
Satz 2.27 (Innere Regularitat)Falls u ∈ H1,2
0 (Ω) eine Losung von a(u, v) = λ(u, v) ∀v ∈ H1,20 (Ω) ist, so gilt
u ∈ H2,2(Ω0), ∀Ω0 ⊂⊂ Ω und ‖u‖2,2;Ω0 ≤ c‖u‖1,2;Ω.
Bemerkung: Die Eigenschaft der inneren Regularitat gilt auch allgemeiner, furelliptische Differentialoperatoren.
Lemma 2.28 Die Eigenvektoren uk liegen in C∞(Ω).
Bemerkung: Seien Ω1,Ω2 Gebiete mit Ω1 ⊂ Ω2. Setze die Funktionen, dieauf Ω1 definiert sind, durch 0 auf Ω2 fort. Damit folgt C∞0 (Ω1) ⊂ C∞0 (Ω2) undH1,2
0 (Ω1) ⊂ H1,20 (Ω2). Nach dem Courantschen Minmax-Prinzip folgt λk(Ω1) ≥
λk(Ω2), die Eigenwerte sind also gebietsmonoton.Beispiel: Sei Ω = (0, 1)2. Die Eigenwerte des Laplace-Operators sind gegebendurch λij = π2(i2 + j2) mit den Eigenvektoren uij = sin(iπx) sin(jπy). FurK ∈ N liegt im Intervall [K2/4,K2] eine Anzahl O(K2) Eigenwerte. Damitexistieren Konstanten m,M > 0 mit mk ≤ λk ≤Mk. Fur Quadrate (0, a)2 gilteine ahnliche Ungleichung, mit m = m(a),M = M(a).
Diese Eigenschaft kann man benutzen, um eine Abschatzung dieser Art furallgemeine Gebiete zu zeigen:
Satz 2.29 Sei Ω ⊂ Rn ein beschranktes Gebiet. Dann gibt es Konstanten m =m(Ω),M = M(Ω) > 0, so dass fur den k-ten Eigenwert λk(Ω) gilt: mk ≤λk(Ω) ≤Mk.
Als nachstes betrachten wir eine Anwendung des Eigenwertproblems desLaplace-Operators unter anderen Randbedingungen.
Beispiel: Losung der Warmeleitungsgleichung mit Neumannschen Randbedin-gungen vt −∆v = 0 in Ω× R+
Dνv = 0 auf ∂Ωv(x, 0 = v0(x) in Ω
wobei v(t, x) die Temperatur zur Zeitpunkt t im Punkt x des Gebietes darstellt.Die betrachtete Randbedingung besagt, dass kein Warmefluß durch den Randstattfindet.

2.3. KOMPAKTE OPERATOREN AUF HILBERT-RAUMEN 23
Eine erste Losung des Eigenwertproblems fur den Laplace-Operator mit dengegebenen Randbedingungen ist λ1 = 0 mit dem Eigenvektor u1 = konstant.Die Neumannsche (“naturliche”) Randbedingung liefert die schwache Formu-lierung (Du,Dv) = λ(u, v) fur alle v ∈ H1,2(Ω). Im Unterschied zur “erzwun-genen” (Dirichlet-) Randbedingung ist diese nicht in dem zugrunde liegendenHilbertraum eingebaut, we z.B. im Falle des Raumes H1,2
0 .Die bisherige Theorie lieferte aber nur strikt positive Eigenwerte. Um es
fur die Bestimmung der restlichen Eigenwerte λ > 0 anwenden zu konnen,benotigt man die Angabe eines passenden Unterraumes X ⊂ H1,2(Ω), in wel-chem die nichtkonstanten Eigenfunktionen liegen. Durch Einsetzen von v ≡ 1in die schwache Formulierung des Eigenwertproblems, erhalt man dass fur dieLosung u die Eigenschaft
∫Ωudx = 0 gelten muss.
Die anderen Eigenwerte und Eigenvektoren erhalt man also durch Anwen-dung des Satzes 2.25 fur die Raume X = v ∈ H1,2(Ω) :
∫Ωvdx = 0 und
Y = L2(Ω). Dies ist moglich, da auf X (Funktionen mit verschwindendem Mit-telwert) ebenfalls eine Poincare-Ungleichung gilt. Die Folge der Eigenwerte desLaplace-Operators in diesem Fall ist also 0 = λ1 < λ2 ≤ · · · → ∞ mit denentsprechenden Eigenvektoren ui zu λi.
Der Ansatz vi(t, x) = ki(t)ui(x) fur partikulare Losungen liefert ki(t) =cie
−λit und die Losung de urspunglichen partiellen Differentialgleichung ist da-mit gegeben durch
v(x, t) =∞∑i=1
v0,ie−λitui(x),
wobei v0(x) =∑∞i=1 v0,iui(x), v0,i = (v0, ui).
Dies impliziert folgende Eigenschaften der Losung:a) Glattung der Anfangsdaten: Fur beliebige k ∈ N gilt: ‖D(k)
t v(t, ·)‖22 =∑∞i=1 v
20,iλ
2ki e
−2λit ≤ c(t, k)‖v0‖22, da λ2ki e
−2λit → 0 fur λi →∞.b) Asymptotisches Verhalten: v(x, t) → v0,1 fur t → ∞, wegen λ1 = 0.
Da fur t → ∞ die Approximation v(t, x) ≈ v0,1u1 + v0,2e−λ2tu2(x) (mit u1 =
konst) gilt, ist das Langzeitverhalten der Losung v hauptsahlich von der zweitenEigenfunktion u2(x) beeinflusst.

24 KAPITEL 2. SPEKTRALTHEORIE

Kapitel 3
Distributionen undFourier-Transformation
In diesem Kapitel wird stets K = C angenommen.
3.1 Distributionen
Definition 3.1 Sei Ω ⊂ Rn ein Gebiet und (φk) eine Folge in C∞0 (Ω). Wirsagen, (φk) konvergiert gegen φ ∈ C∞0 (Ω) (Bezeichnung φk
D→ φ), wenn es einekompakte Menge K ⊂⊂ Ω gibt mit supp(φk), supp(φ) ⊂ K und wenn Dαφk →Dαφ gleichmaßig in Ω fur alle Multiindizes α gilt. Der Raum C∞0 (Ω) mit diesemKonvergenzbegriff wird mit D(Ω) bezeichnet. Die Elemente φ ∈ D(Ω) werdenauch Testfunktionen genannt.
Bemerkung: Man kann zeigen, dass dieser Konvergenzbegriff auf einer lokal-konvexen Topologie auf D(Ω) basiert.
Definition 3.2 Eine lineare Abbildung T : D(Ω) → C heißt Distribution, wennT sie folgenstetig bezuglich des Konvergenzbegriffs “D→” ist, d.h. wenn fur alleFolgen (φk) in D(Ω) gilt
φkD→ φ⇒ T (φk) → T (φ).
Die Menge der Distributionen wird mit D′(Ω) bezeichnet.
Bemerkung: Die Menge der Distributionen D′(Ω) bildet ein Vektorraum.
Satz 3.3 Ein lineares Funktional T : D(Ω) → C ist genau dann eine Distribu-tion, wenn es zu jeder Menge K ⊂⊂ Ω Konstanten c ∈ R+ und N ∈ N gibtmit
|T (φ)| ≤ c‖φ‖N,∞;K = c max|α|≤N
supx∈K
|Dαφ(x)| ∀φ ∈ D(K)
wobei D(K) aus allen Funktionen in C∞ mit Trager in K besteht.
25

26 KAPITEL 3. DISTRIBUTIONEN UND FOURIER-TRANSFORMATION
Definition 3.4 Distributionen T = Tf ∈ D′(Ω) fur welche
Tf (φ) =∫
Ω
fφdx ∀φ ∈ D(Ω)
fur ein f ∈ L1loc(Ω) gilt, heißen regulare Distributionen.
Bemerkung: Der Begriff ist wohldefiniert. Wenn φkD→ φ, so gilt supp(φk), supp(φ) ⊂
K ⊂⊂ Ω und wegen f ∈ L1(K),∣∣∣∣∫Ω
f(φk − φ)dx∣∣∣∣ ≤ max
K|φk − φ|
∫K
|f |dx→ 0.
Damit ist Tf eine Distribution. Falls Tf = Tg fur f, g ∈ L1loc(Ω), so folgt aus∫
Ωfφdx =
∫Ωgφdx ∀φ ∈ D(Ω) (mit dem Fundamentallemma der Variations-
rechnung) dass f = g f.u. Somit ist die Zuordnung f → Tf injektiv.Regulare Distributionen Tf werden in der Regel mit ihrer Darstellung f
identifiziert.
Definition 3.5 Eine Distribution T ∈ D′(Ω) heißt von endlicher Ordnung,wenn es Konstanten c ∈ R+ und N ∈ N0 gibt mit
|T (φ)| ≤ c‖φ‖N,∞;Ω ∀φ ∈ D(Ω).
Das minimale N heißt die Ordnung von T .
Bemerkung: Regulare Distributionen und Distributionen von endlicher Ord-nung bilden Unterraume von D′(Ω). Ein Funktional, welches die Bedingung inder obigen Definition erfullt, ist nach Satz 3.3 bereits eine Distribution.
Beispiel: Die Dirac-Distribution δa fur a ∈ Ω definiert durch δa(φ) = φ(a) ∀φ ∈D(Ω) ist nicht regular, aber von endlicher Ordnung mit der Ordnung 0.
Definition 3.6 Sei T ∈ D′(Ω). Fur eine Funktion p ∈ C∞(Ω) definiert mandie Multiplikation pT durch
pT (φ) = T (pφ) ∀φ ∈ D(Ω)
und fur einen Multiindex α die Differentiation durch
DαT (φ) = (−1)|α|T (Dαφ) ∀φ ∈ D(Ω).
Bemerkung: Man verifiziert leicht, dass pT und DαT in der obigen Definitionebenfalls Distributionen sind. Fur regulare Distributionen gilt sogar noch mehr,wie das folgende Resultat zeigt:
Lemma 3.7 Sei Tf eine regulare Distribution. Dann gilt pTf = Tpf fur allep ∈ C∞(Ω). Falls die schwache Ableitung Dαf ∈ L1
loc existiert, so gilt DαTf =TDαf .
3.1. DISTRIBUTIONEN 27
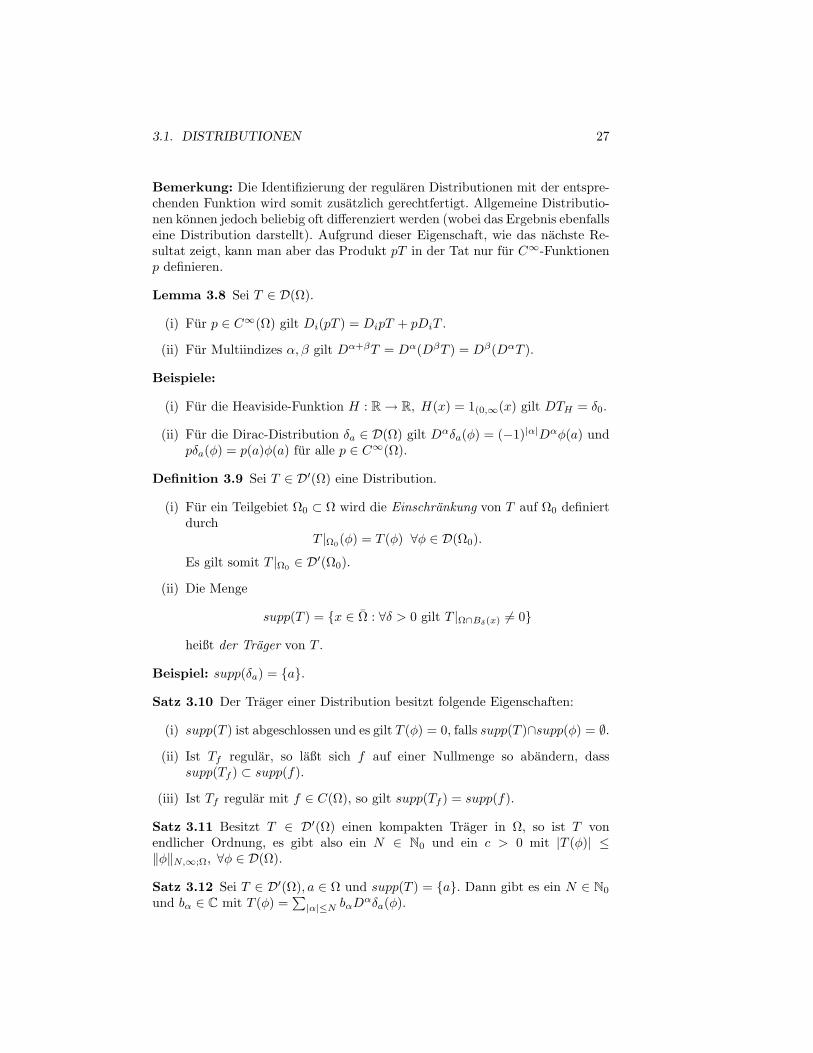
Bemerkung: Die Identifizierung der regularen Distributionen mit der entspre-chenden Funktion wird somit zusatzlich gerechtfertigt. Allgemeine Distributio-nen konnen jedoch beliebig oft differenziert werden (wobei das Ergebnis ebenfallseine Distribution darstellt). Aufgrund dieser Eigenschaft, wie das nachste Re-sultat zeigt, kann man aber das Produkt pT in der Tat nur fur C∞-Funktionenp definieren.
Lemma 3.8 Sei T ∈ D(Ω).
(i) Fur p ∈ C∞(Ω) gilt Di(pT ) = DipT + pDiT .
(ii) Fur Multiindizes α, β gilt Dα+βT = Dα(DβT ) = Dβ(DαT ).
Beispiele:
(i) Fur die Heaviside-Funktion H : R → R, H(x) = 1(0,∞(x) gilt DTH = δ0.
(ii) Fur die Dirac-Distribution δa ∈ D(Ω) gilt Dαδa(φ) = (−1)|α|Dαφ(a) undpδa(φ) = p(a)φ(a) fur alle p ∈ C∞(Ω).
Definition 3.9 Sei T ∈ D′(Ω) eine Distribution.
(i) Fur ein Teilgebiet Ω0 ⊂ Ω wird die Einschrankung von T auf Ω0 definiertdurch
T |Ω0(φ) = T (φ) ∀φ ∈ D(Ω0).
Es gilt somit T |Ω0 ∈ D′(Ω0).
(ii) Die Menge
supp(T ) = x ∈ Ω : ∀δ > 0 gilt T |Ω∩Bδ(x) 6= 0
heißt der Trager von T .
Beispiel: supp(δa) = a.
Satz 3.10 Der Trager einer Distribution besitzt folgende Eigenschaften:
(i) supp(T ) ist abgeschlossen und es gilt T (φ) = 0, falls supp(T )∩supp(φ) = ∅.
(ii) Ist Tf regular, so laßt sich f auf einer Nullmenge so abandern, dasssupp(Tf ) ⊂ supp(f).
(iii) Ist Tf regular mit f ∈ C(Ω), so gilt supp(Tf ) = supp(f).
Satz 3.11 Besitzt T ∈ D′(Ω) einen kompakten Trager in Ω, so ist T vonendlicher Ordnung, es gibt also ein N ∈ N0 und ein c > 0 mit |T (φ)| ≤‖φ‖N,∞;Ω, ∀φ ∈ D(Ω).
Satz 3.12 Sei T ∈ D′(Ω), a ∈ Ω und supp(T ) = a. Dann gibt es ein N ∈ N0
und bα ∈ C mit T (φ) =∑
|α|≤N bαDαδa(φ).

28 KAPITEL 3. DISTRIBUTIONEN UND FOURIER-TRANSFORMATION
Definition 3.13 Eine Folge (Tk) konvergiert in D′(Ω) gegen T ∈ D′(Ω) (Be-
zeichnung: TkD′
→ T ), wenn Tk(φ) → T (φ) fur alle φ ∈ D(Ω).
Satz 3.14 Sei (Tk) eine Folge in D′(Ω), so dass (Tk(φ)) fur alle φ ∈ D(Ω)
konvergiert. Dann gibt es eine Distribution T ∈ D′(Ω) mit TkD′
→ T .
Satz 3.15 Ist TkD′
→ T und φkD→ φ, so gilt Tk(φk) → T (φ).
Sei nun Ω = Rn.Da wir eine regulare Distribution Tf mit der Funktion f ∈ L1
loc identifizieren,fur welche das Faltungsprodukt f ∗ ψ fur ψ ∈ D definiert ist, setzt man
(Tf ∗ ψ)(x) = (f ∗ ψ)(x) =∫f(y)ψ(x− y)dy = Tf (ψ(x− ·)).
Dies motiviert die allgemeine Definition:
Definition 3.16 Fur T ∈ D′ und ψ ∈ D ist die Faltung T ∗ ψ die Funktiondefiniert durch
(T ∗ ψ)(x) = T (ψ(x− ·)),
wobei der Punkt die Variable bezeichnet, auf die T wirkt.
Beispiel: Fur T =∑i αiδai gilt (T ∗ ψ)(x) =
∑i αiψ(x− ai).
Die Differenzierbarkeitseigenschaften des Faltungsproduktes von Funktionenubertragen sich auch in diesem Fall:
Satz 3.17 Sei T ∈ D′ und ψ ∈ D. Dann ist T ∗ ψ in Rn unendlich oft differen-zierbar mit supp(T ∗ ψ) ⊂ supp(T ) + supp(ψ) und
Dα(T ∗ ψ) = (DαT ) ∗ ψ = T ∗ (Dαψ).
Lemma 3.18 Fur T ∈ D′ und ψ, φ ∈ D gilt (T ∗ φ) ∗ ψ = T ∗ (φ ∗ ψ).
Satz 3.19 Fur alle Distributionen T gilt mit den skalierten glattenden Kernen
Jε die Konvergenz: T ∗ JεD′
→ T , insbesondere ist C∞ dicht in D′ und C∞0 istdicht im Raum der Distributionen mit kompaktem Trager.
Definition 3.20 Eine Distribution T ∈ D′(Rn) heißt Fundamentallosung desDifferentialoperators P (D) =
∑|α|≤m aαD
α, wenn P (D)T = δ0 gilt.
Beispiele:
(i) Die Distribution TH fur die Heavisidefunktion H(x) = 1(0,∞)(x) ist eineFundamentalllosung des Operators D = d
dx .

3.2. DIE FOURIER-TRANSFORMATION IN S 29
(ii) Die Fundamentallosung des Laplace-Operators ∆ ist gegeben durch Tu,wobei
u(x) =− 1n(n−2)ωn
|x|−n+2 , n ≥ 312π log |x| , n = 2
wobei ωn das Volumen der n-dimensionalen Einheitskugel in Rn bezeich-net.
Satz 3.21 Sei T eine Fundamentallosung von P (D) und f ∈ D(Rn). Dann istdie Losung der Differentialgleichung P (D)u = f in Rn gegeben durch u(x) =(T ∗ f)(x).
Bemerkung: Das Resultat gilt auch fur allgemeinere rechte Seiten f . In dieserVorlesung haben wir das Faltungsprodukt T ∗ f jedoch nur fur f ∈ D definiert,wobei das Ergebnis wiederum eine Funktion in D ist. Eine Erweiterung des Fal-tungsproduktes fur allgemeinere f liefert als Ergebnis die Distribution T ∗ f ,welche die betrachtete Partielle Differentialgleichung (im Distributionssinn) lost.Zusatzliche Regularitatseigenschaften dieser Distributionslosung mussen aller-dings noch nachgewiesen werden. Auf weitere Details wird an dieser Stelle jedochverzichtet.
3.2 Die Fourier-Transformation in SSei weiterhin Ω = Rn.
Definition 3.22 Setze fur k, l ∈ N0
pk,l(φ) = supx∈Rn
(|x|k + 1)∑|α|≤l
|Dαφ(x)|.
Eine Funktion φ ∈ C∞(Rn) heißt schnell fallend, wenn pk.l <∞ ∀k, l ∈ N0. MitS = S(Rn) wird die Menge der schnell fallenden Funktionen bezeichnet. Wirsagen, (φj) konvergiert gegen φ in S (Schreibweise φj
S→ φ), wenn pk,l(φj−φ) →0 ∀k, l ∈ N0.
Bemerkung: Die Funktionen in S samt deren Ableitungen fallen fur große|x| schneller als jedes |x|−k ab. Die Funktion φ(x) = e−|x|
2liegt in S, jedoch
nicht in D, da sie kein kompakter Trager besitzt. Die Konvergenz in S ist diepolynomial gewichtete Konvergenz aller partiellen Ableitungen. D ist dicht inS, denn es gilt τRφ
S→ φ fur R → ∞, wobei τR eine Abschneidefunktion gleich1 fur |x| ≤ R und gleich 0 fur |x| > 2R ist.
Definition 3.23 Sei φ ∈ S. Dann heißt
Fφ(ξ) = (2π)−n/2∫
Rn
e−ix·ξφ(x)dx, ξ ∈ Rn
die Fourier-Transformierte von φ. Der auf S definierte Operator heißt Fourier-Transformation.

30 KAPITEL 3. DISTRIBUTIONEN UND FOURIER-TRANSFORMATION
Bemerkung: Der Begriff ist wohldefiniert, denn fur φ ∈ S gilt |φ(x)| ≤ c(1 +|x|)−n−1 und somit |Fφ(ξ)| ≤ c
∫Rn |e−ix·ξ|(1 + |x|)−n−1dx ≤ c.
Satz 3.24 Fur φ ∈ S und ein Multiindex α sind auch xαφ,Dαφ,Fφ,DαFφ,F(Dαφ) ∈S und es gilt DαFφ = (−i)|α|F(xαφ) und ξαFφ = (−i)|α|F(Dαφ).
Satz 3.25 Die Fouriertransformation F : S → S ist stetig, d.h. φkS→ φ ⇒
FφkS→ Fφ.
Korollar 3.26 Die Fouriertransformation ist stetig zwischen den Raumen L1(Rn)und C0(Rn) mit ‖Fu‖∞ ≤ (2π)−n/2‖u‖1. Fur u ∈ L1(Rn) gilt weiterhin, dasslim|ξ|→∞ |Fu(ξ)| = 0.
Bemerkung: Im Fourier-Raum wird die partielle Ableitung zu einer Multi-plikation mit einem Monom und daher transformiert sich eine lineare partielleDifferentialgleichung mit konstanten Koeffizienten in eine Multiplikation mit ei-nem Polynom. Damit man aus den Eigenschaften im Fourier-Raum wieder aufden Eigenschaften im ursprunglichen Raum schließen kann, ist die eine Um-kehrtransformation notwendig.
Lemma 3.27 Es giltF(e−|x|
2/2)(ξ) = e−|ξ|2/2.
Satz 3.28 Die Fourier-Transformation F : S → S ist bijektiv, stetig mit steti-ger Inverse gegeben durch
(F−1φ)(x) = (2π)−n/2∫
Rn
eix·ξφ(ξ)dξ, ∀φ ∈ S.
3.3 Die Fourier-Transformation in S ′ und in L2
Definition 3.29 Mit S ′ (Raum der langsam wachsenden oder temperiertenDistributionen) bezeichnet man den Raum der linearen Funktionale T : S → Cdie folgenstetig bezuglich der Konvergenz in S sind, also φk
S→ φ⇒ Tφk → Tφ.
Bemerkung: Es gilt S ′ ⊂ D′, denn φkD→ φ⇒ φk
S→ φ⇒ Tφk → Tφ.
Beispiele:
(i) Jede Distribution mit kompaktem Trager kann zu einem Element in S ′fortgesetzt werden.
(ii) Fur f ∈ Lp(Rn) ⊂ L1loc(Rn) laßt sich die Distribution Tf auf S fortsetzen.
(iii) Fur ein Polynom q(x) mit Grad ≤ k ist Tq ∈ S ′.
(iv) Fur f(x) = e|x|2
laßt sich die Distribution Tf nicht auf S forsetzen.

3.3. DIE FOURIER-TRANSFORMATION IN S ′ UND IN L2 31
Definition 3.30 Fur T ∈ S ′ heißt
FT (φ) = T (Fφ)
die Fourier-Transformierte von T . Weiterhin definiert man
F−1T (φ) = T (F−1φ).
Satz 3.31 (i) Ist Tψ ∈ S ′ regular mit ψ ∈ S, so gilt FTψ = TFψ.
(ii) Fur T ∈ S ′ ist FT ∈ S ′.
Satz 3.32 Die Transformationen F ,F−1 : S ′ → S ′ sind bijektiv mit FF−1T =F−1FT = T .
Satz 3.33 Fur T ∈ S ′ gilt F−1T (φ(ξ)) = FT (φ(−ξ)) und
T FT F−1TDαδ0 (2π)−n/2i|α|xα (2π)−n/2(−i)|α|xαxα (2π)n/2i|α|Dαδ0 (2π)n/2(−i)|α|Dαδ0DαT i|α|xαFT (−i)|α|xαF−1TxαT i|α|DαFT (−i)|α|Dα(F−1T ).
Satz 3.34 Fur φ, ψ ∈ S gilt die Parsevalsche Gleichung
(φ, ψ) = (Fφ,Fψ) = (F−1φ,F−1ψ),
insbesondere ‖φ‖2 = ‖Fφ‖2, d.h. die Fourier-Transformation und deren Inversesind Isometrien bezuglich der L2-Norm.
Bemerkung: Da S dicht in L2 ist, konnen die isometrischen AbbildungenF ,F−1 : S ⊂ L2 → S ⊂ L2 eindeutig zu auf L2 stetigen Abbildungen for-gesetzt werden.
Definition 3.35 Die eindeutige Fortsetzung von F auf L2 heißt Fourier-Plancherel-Transformation und wird auch mit F bezeichnet.
Satz 3.36 Fur die Fourier-Plancherel-Transformation gilt fur alle φ, ψ ∈ L2:
(φ, ψ) = (Fφ,Fψ) = (F−1φ,F−1ψ),
insbesondere ‖φ‖2 = ‖Fφ‖2. Weiterhin stimmt die Fourier-Plancherel-Transformation(durch die Identifizierung Tf ↔ f) mit der Fourier-Transformation in S ′ ubereinund es gilt FTf = TFf fur alle f ∈ L2.
32 KAPITEL 3. DISTRIBUTIONEN UND FOURIER-TRANSFORMATION
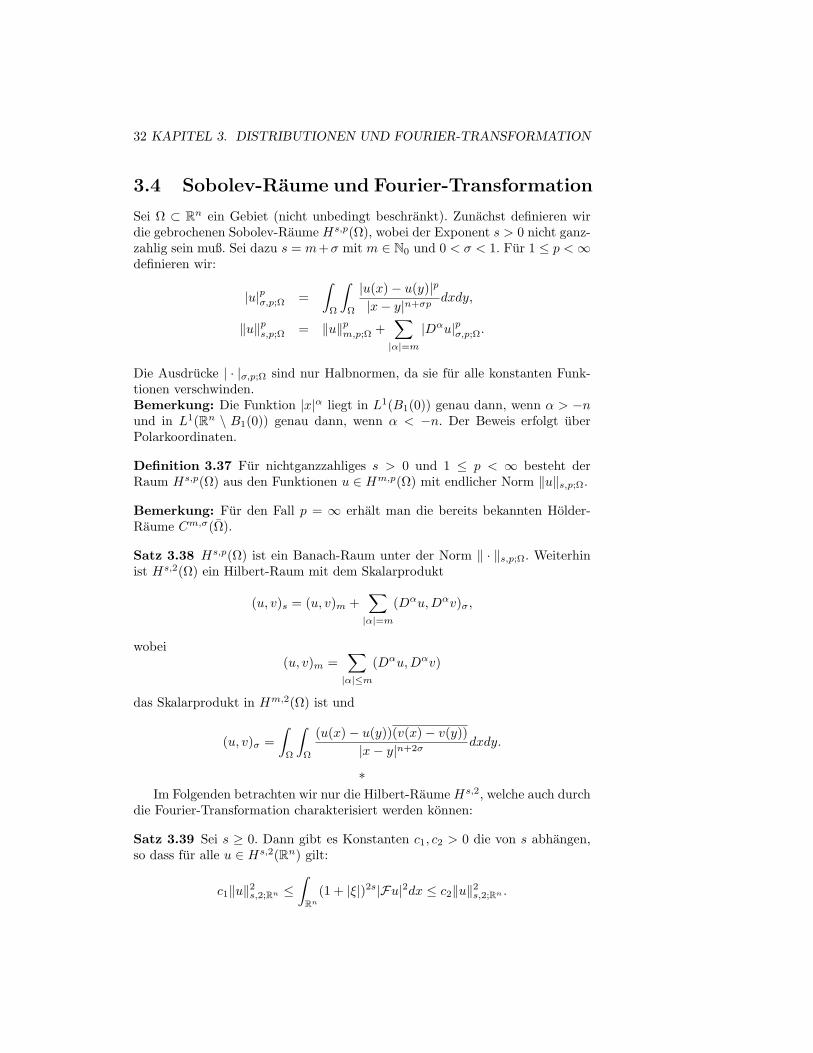
3.4 Sobolev-Raume und Fourier-Transformation
Sei Ω ⊂ Rn ein Gebiet (nicht unbedingt beschrankt). Zunachst definieren wirdie gebrochenen Sobolev-Raume Hs,p(Ω), wobei der Exponent s > 0 nicht ganz-zahlig sein muß. Sei dazu s = m+σ mit m ∈ N0 und 0 < σ < 1. Fur 1 ≤ p <∞definieren wir:
|u|pσ,p;Ω =∫
Ω
∫Ω
|u(x)− u(y)|p
|x− y|n+σpdxdy,
‖u‖ps,p;Ω = ‖u‖pm,p;Ω +∑|α|=m
|Dαu|pσ,p;Ω.
Die Ausdrucke | · |σ,p;Ω sind nur Halbnormen, da sie fur alle konstanten Funk-tionen verschwinden.Bemerkung: Die Funktion |x|α liegt in L1(B1(0)) genau dann, wenn α > −nund in L1(Rn \ B1(0)) genau dann, wenn α < −n. Der Beweis erfolgt uberPolarkoordinaten.
Definition 3.37 Fur nichtganzzahliges s > 0 und 1 ≤ p < ∞ besteht derRaum Hs,p(Ω) aus den Funktionen u ∈ Hm,p(Ω) mit endlicher Norm ‖u‖s,p;Ω.
Bemerkung: Fur den Fall p = ∞ erhalt man die bereits bekannten Holder-Raume Cm,σ(Ω).
Satz 3.38 Hs,p(Ω) ist ein Banach-Raum unter der Norm ‖ · ‖s,p;Ω. Weiterhinist Hs,2(Ω) ein Hilbert-Raum mit dem Skalarprodukt
(u, v)s = (u, v)m +∑|α|=m
(Dαu,Dαv)σ,
wobei(u, v)m =
∑|α|≤m
(Dαu,Dαv)
das Skalarprodukt in Hm,2(Ω) ist und
(u, v)σ =∫
Ω
∫Ω
(u(x)− u(y))(v(x)− v(y))|x− y|n+2σ
dxdy.
*Im Folgenden betrachten wir nur die Hilbert-Raume Hs,2, welche auch durch
die Fourier-Transformation charakterisiert werden konnen:
Satz 3.39 Sei s ≥ 0. Dann gibt es Konstanten c1, c2 > 0 die von s abhangen,so dass fur alle u ∈ Hs,2(Rn) gilt:
c1‖u‖2s,2;Rn ≤∫
Rn
(1 + |ξ|)2s|Fu|2dx ≤ c2‖u‖2s,2;Rn .
3.4. SOBOLEV-RAUME UND FOURIER-TRANSFORMATION 33
Satz 3.40 Sei s ≥ 0. Auf Ω ⊂ Rn gebe es einen stetigen ForsetzungsoperatorE : Hs,2(Ω) → Hs,2(Rn) mit Eu|Ω = u. Dann stimmt der Raum Hs,2(Ω) mitder Einschrankung der Funktionen in Hs,2(Rn) auf Ω uberein und die Norm
‖u‖′s,2;Ω = inf‖(1 + | · |)sF u‖2;Rn : u ∈ Hs,2(Rn) mit u|Ω = u
ist zur Norm in Hs,2(Ω) aquivalent.
Bemerkung: Man zeigt, dass ein solcher Fortsetzungsoperator E z.B. fur be-schrankte Gebiete der Klasse Cm,1 existiert.
Mithilfe der Fourier-Transformation lassen sich z.B. Einbettungssatze fur dieRaume Hs,2 zeigen:
Satz 3.41 Sei s−n/2 = l+α mit l ∈ N0 und 0 < α < 1. Gibt es fur das GebietΩ ⊂ Rn einen stetigen Fortsetzungsoperator E : Hs,2(Ω) → Hs,2(Rn), so giltdie Einbettung Hs,2(Ω) → Cl,α(Ω).
An dieser Stelle wird an die bisher bekannten Spursatzen aus der Theorieder ganzzahligen Sobolev-Raume erinnert. Hier kann man einen stetigen Spur-operator S : H1,p(Ω) → Lq(∂Ω) definieren (1/p + 1/q = 1), wobei Su mit derklassischen Fortsetzung auf ∂Ω ubereinstimmt, falls u ∈ C0(Ω). Im Allgemei-nen gilt die Umkehrung nicht: Zu Elementen u ∈ Lq(∂Ω) gibt es kein stetigerFortstzungsoperator F mit Fu ∈ H1,p(Ω). Dafur benotigt man eine zusatzlicheRegularitat, welche in geeigneter Weise durch gebrochene Sobolov-Raume cha-rakterisiert werden kann.
Definition 3.42 Sei m ∈ N0, s = m + σ mit 0 < σ < 1. Sei Ω ein be-schranktes Gebiet der Klasse Cm,1 mit entsprechender Lokalisierung (Uj , φj)(mit Zerlegung der Eins φj), j = 1, . . . , J . Nach Drehung und Verschiebungdes Koordinatensystems ist der Rand ∂Ω lokal darstellbar als (y′, hj(y′) mity′ ∈ U ′j ⊂ Rn−1 und hj ∈ Cm,1.
Eine Funktion u : ∂Ω → K liegt im Raum Hs,2(∂Ω), wenn die Funktionenuj(y′) = (φju)(y′, hj(y′)) im Raum Hs,2(U ′j) liegen.
Mit Dαuj = Dαy′uj ist Hs,2(∂Ω) normiert durch:
‖u‖2m,2;∂Ω =J∑j=1
∑|α|≤m
∫∂Ω
|Dαuj |2dσ fur σ = 0,
|u|2σ,2;∂Ω =J∑j=1
∫∂Ω
∫∂Ω
|uj(x)− uj(y)|2
|x− y|m−1+2σdσxdσy
‖u‖2s,2;∂Ω = ‖u‖2m,2;∂Ω +∑|α|=m
|Dαu|2σ,2;∂Ω fur 0 < σ < 1
Bemerkung: Die Normen hangen von der Lokalisierung ab, sind aber aquivalentfur unterschiedliche Lokalisierungen.
34 KAPITEL 3. DISTRIBUTIONEN UND FOURIER-TRANSFORMATION
Satz 3.43 Sei Ω ein beschranktes Gebiet der Klasse Cm,1. Sei s = m+σ > 1/2mit 0 ≤ σ < 1.
(i) Der Spuroperator S ist stetig zwischen den RaumenHs,2(Ω) undHs−1/2,2(∂Ω).
(ii) Es existiert ein stetiger Fortsetzungsoperator F : Hs−1/2,2(∂Ω) → Hs,2(Ω)mit SF = Id.
Kapitel 4
Operatorhalbgruppen
Die Losung der linearen homogenen gewohnlichen DGL u′ = Au, u(0) = x0 inRn is bekanntlich gegeben durch u(t) = etAx0, wobei die Exponentialfunktionfur Matrizen uber die entsprechende Potenzreihe definiert wird. Dabei gilt dieHalbgruppeneigenschaft esAetA = e(s+t)A, s, t ≥ 0 und e0A = Id. Ziel diesesKapitels ist, diese Fragestellung im Kontext von linearen (nicht notwendig be-schrankten) Operatoren A auf einem Banach- (Hilbert-) Raum zu untersuchen.A kann oft ein linearer Differentialoperator sein und die entsprechende linearegewohnliche DGL im Banachraum ist somit eine partielle Differentialgleichung.
4.1 Operatorhalbgruppen und infinitesimale Ge-neratoren
Sei X ein Banach-Raum.
Definition 4.1 Eine stark stetige Operatorhalbgruppe (oder C0-Halbgruppe) isteine Familie Tt : X → X, t ≥ 0 von stetigen linearen Operatoren mit folgendenEigenschaften:
(i) T0 = Id,
(ii) Ts+t = TsTt fur alle s, t ≥ 0,
(iii) limt→0 Ttx = x fur alle x ∈ X.
Bemerkung: Die Bedingung (iii) bedeutet Stetigkeit der Halbgruppe in derstarken Operatortopologie. Diese lokalkonvexe Topologie wird auf dem RaumL(X,Y ) durch die Halbnormen px(T ) = ‖Tx‖Y , x ∈ X erzeugt. Bedingung (iii)bedeutet also, dass Tt gegen Id in dieser Topologie konvergiert. Gilt stattdessendie starkere Forderung (iii)’ limt→0 ‖Tt − Id‖ = 0, so spricht man von einernormstetigen Halbgruppe.
35

36 KAPITEL 4. OPERATORHALBGRUPPEN
Beispiele:
(i) Sei A ∈ L(X) Dann definiert
Tt = etA :=∞∑n=0
tnAn
n!
eine normstetige Halbgruppe.
(ii) Die Translationshalbgruppe (Ttf)(x) = f(x+ t) fur f ∈ Lp(R), Lp([0,∞)),1 ≤ p <∞, oder in C0(R), C0((0,∞)).
(iii) Die Warmeleitungshalbgruppe definiert auf Lp(Rd) durch T0 = Id und
(Ttf)(x) =1
(4πt)d/2
∫Rd
exp(−|x− y|2
4t
)f(y)dy = γt ∗ f fur t > 0,
wobei γt(x) = (4πt)−d/2 exp(−|x|2/4t).
Lemma 4.2 Ist (Tt)t≥0 eine C0-Halbgruppe auf einem Banach-Raum X, soexistieren Konstanten M ≥ 1, ω ∈ R mit ‖Tt‖ ≤Meωt fur alle t ≥ 0.
Bemerkung: Die Zahl ω0 = infω : ∃M = M(ω) mit ‖Tt‖ ≤Meωt heißt derTyp oder die Wachstumsschranke der Halbgruppe. Falls man M = 1 und ω = 0wahlen kann, d.h. wenn ‖Tt‖ ≤ 1, so spricht man von einer Kontraktionshalb-gruppe.
Lemma 4.3 Ist (Tt) eine C0-Halbgruppe auf einem Banach-Raum X, so ist dieAbbildung (t, x) 7→ Tt(x) stetig von [0,∞) ×X nach X und zwar gleichmaßigstetig in t auf kompakten Teilmengen von [0,∞). Insbesondere ist fur jedesx ∈ X die vektorwertige Funktion u : t 7→ Ttx stetig. Bezeichnung: u ∈C([0,∞), X).
Definition 4.4 Sei (Tt)t≥0 eine C0-Halbgruppe auf einem Banach-Raum X.Der infinitesimale Generator von (Tt) ist der Operator
Ax = limh→0
Thx− x
h
auf dem Definitionsbereich
dom(A) =x ∈ X : lim
h→0
Thx− x
hexistiert
.
Beispiele:
(i) Der Generator der Halbgruppe (etA) ist A selbst.
(ii) Fur die Translationshalbgruppe (Tt) gilt Af = f ′, wobei auf C0 dom(A) =f ∈ C0 : f ′ ∈ C0 ist, wahrend auf Lp dom(A) = f ∈ Lp : f ist absolutstetig mitf ′ ∈ Lp gilt.
4.1. OPERATORHALBGRUPPEN UND INFINITESIMALE GENERATOREN37
(iii) Der Generator der Warmeleitungshalbgruppe auf L2(Rd)ist der Laplace-Operator ∆ mit dom(∆) = H2,2(Rd). Im Fall p 6= 2 gilt dom(∆) = f ∈Lp : ∆f ∈ Lp = H2,p(Rd) fur 1 < p <∞.
*
Im Folgenden wird das Riemann-Integral∫ b
a
u(s)ds fur stetige, Banachraum-
wertige Funktionen u : [0,∞) → X benotigt. Deren Konstruktion und Eigen-schaften sind ahnlich wie bei reellwertige (stetige) Funktionen. Fur T ∈ L(X)
gilt dazu T
(∫ b
a
u(s)ds
)=∫ b
a
T (u(s))ds.
Lemma 4.5 Sei A der infinitesimale Generator der C0-Halbgruppe (Tt) aufdem Banach-Raum X und sei t ≥ 0. Dann gilt:
(i)∫ t
0
Tsxds ∈ dom(A) fur alle x ∈ X und A(∫ t
0
Tsxds
)= Ttx− x.
(ii) Tt( dom(A)) ⊂ dom(A).
(iii) TtAx = ATtx fur alle x ∈ dom(A).
(iv) Ttx− x =∫ t
0
TsAxds fur alle x ∈ dom(A).
Satz 4.6 Der infinitesimale Generator einer C0-Halbgruppe ist dicht definiertund abgeschlossen (der Graph G(A) ist abgeschlossen in dom(A)×X).
Satz 4.7 Sei (Tt) eine C0-Halbgruppe auf dem Banach-Raum X mit GeneratorA und sei x0 ∈ dom(A). Dann ist die Funktion u : [0,∞) → X, u(t) = Ttx0
stetig differenzierbar, mit Werten in dom(A) und eine Losung des abstraktenCauchy-Problems
u′ = Au, u(0) = x0. (4.1)
Die Losung von (4.1) mit diesen Eigenschaften ist eindeutig und hangt stetigvom Anfangswert x0 ab.
Korollar 4.8 Zwei C0-Halbgruppen mit demselben Generator stimmen uberein.
Satz 4.9 Fur eine C0-Halbgruppe (Tt) mit Generator A sind folgende Aussagenaquivalent:
(i) (Tt) ist normstetig.
(ii) A ist stetig.
(iii) dom(A) = X.
Falls diese Bedingungen erfullt sind, so gilt Tt = etA fur alle t ≥ 0.

38 KAPITEL 4. OPERATORHALBGRUPPEN
*Das obige Resultat charakterisiert also die normstetigen Halbgruppen. Als
nachstes werden notwendige und hinreichende Bedingungen angegeben, unterwelchen ein Operator A eine C0-Halbgruppe erzeugt. Nach Satz 4.6 muss Adicht definiert sein. Fur dicht definierte Operatoren definiert man die BegriffeResolventenmenge, Spektrum, Resolventenabbildung analog wie im Abschnitt2.1. Es gilt ebenfalls, dass ρ(A) offen und Rλ analytisch ist, wahrend das Spek-trum σ(A) abgeschlossen ist, i.A. aber fur unbeschrankte Operatoren A nichtkompakt ist (vgl. Abschnitt 2.1).
Satz 4.10 Sei A der infinitesimale Generator einer Kontraktionshalbgruppe(Tt). Dann gilt:
(i) λ ∈ C : Reλ > 0 ⊂ ρ(A).
(ii) Rλx = (λId−A)−1x =∫∞0e−λsTsxds fur alle λ mit Reλ > 0 (die Resol-
vente ist also die Laplace-Transformierte der Halbgruppe).
(iii) ‖Rλ‖ ≤ 1/(Reλ) fur alle λ mit Reλ > 0.
Satz 4.11 (Satz von Hille-Yosida fur Kontraktionshalbgruppen)Ein Operator A ist genau dann ein Generator einer Kontraktionshalbgruppe,
wenn A dicht definiert und abgeschlossen ist, (0,∞) ⊂ ρ(A) gilt und ‖Rλ‖ ≤ 1/λfur alle λ > 0.
Satz 4.12 Sei A der infinitesimale Generator einer C0-Halbgruppe (Tt) mit‖Tt‖ ≤Meωt fur alle t ≥ 0. Dann gilt:
(i) λ ∈ C : Reλ > ω ⊂ ρ(A).
(ii) Rλx = (λId−A)−1x =∫∞0e−λsTsxds fur alle λ mit Reλ > ω.
(iii) ‖Rnλ‖ ≤M/(Reλ− ω)n fur alle λ mit Reλ > ω, n ∈ N.
Satz 4.13 (Satz von Hille-Yosida im allgemeinen Fall)Ein Operator A ist genau dann ein Generator einer C0-Halbgruppe, wenn
A dicht definiert und abgeschlossen ist, und wenn Konstanten ω ∈ R,M ≥ 1existieren mit (ω,∞) ⊂ ρ(A) und ‖Rnλ‖ ≤M/(λ− ω)n fur alle λ > ω, n ∈ N. Indiesem Fall gilt die Abschatzung ‖Tt‖ ≤Meωt fur alle t ≥ 0.
*Im Folgenden werden weitere Kriterien an einem Operator betrachtet, welche
ihn als Generator einer Halbgruppe charakterisieren. Im Unterschied zum Satzvon Hille-Yosida, werden die Bedingungen nur von dem Operator selbst undnicht von dessen Resolvente abhangen.
Definition 4.14 (i) Die Dualitatsabbildung auf einem Banach-Raum X istdie mengenwertige Abbildung J : X → P(X ′) mitJ(x) = x′ ∈ X ′ : ‖x′‖ = ‖x‖ und 〈x, x′〉 = ‖x‖2.

4.1. OPERATORHALBGRUPPEN UND INFINITESIMALE GENERATOREN39
(ii) Ein linearer Operator A auf X heißt dissipativ, falls ∀x ∈ dom(A),∃x′ ∈J(x) mit Re〈Ax, x′〉 ≤ 0.
(iii) Ein linearer Operator A auf X heißt akkretiv, falls −A dissipativ ist.
Bemerkungen: Nach dem Satz von Hahn-Banach gilt immer J(x) 6= ∅. FallsX = H ein Hilbert-Raum ist (mit der Identifikation H ′ = H) ist J(x) = xund der Operator A ist genau dann dissipativ, wenn Re(Ax, x) ≤ 0 auf dom(A)gilt.Beispiele:
• Fur X = Lp mit 1 < p < ∞ gilt fur f 6= 0: J(f) = g mit g(x) =‖f‖2−pp f(x)|f(x)|p−2 ∈ Lq mit 1/p+ 1/q = 1. Weiterhin ist J(0) = 0.
• Fur X = C[0, 1] ist J(1[0,1](x)) die Menge aller W’Maße auf [0, 1].
• Sei X = C0(Rd) und A = ∆ mit dom(∆) = S(Rd). Dann ist ∆ dissipativ:Zu φ ∈ S(Rd) existiert ein x0 mit ‖φ‖∞ = |φ(x0)|. Setze α = φ(x0) unddefiniere das Funktional x′ = αδx0 . Dann gilt x′ ∈ J(φ) und Re〈∆φ, x′〉 =Reα∆φ(x0) ≤ 0, denn die reellwertige Funktion ψ = Reαφ nimmt bei x0
ihr Maximum an und somit mussen bei x0 alle ∂ψ/∂x2j ≤ 0 sein.
Satz 4.15 Ein linearer Operator A ist genau dann dissipativ, wenn‖Tλx‖ ≥ λ‖x‖ ∀λ > 0, x ∈ dom(A).
Satz 4.16 (Lumer-Phillips)Sei A ein dicht definierter linearer Operator in einem Banach-RaumX. Dann
ist A genau dann der infinitesimale Generator einer Kontraktionshalbgruppe,wenn A dissipativ ist und Tλ0 = λ0Id−A fur ein λ0 > 0 surjektiv ist.
Beispiel: Sei X = f ∈ C[0, 1] : f(0) = f(1) = 0 mit der Supremumsnormund Af = f ′′ mit dom(A) = f ∈ C2[0, 1] ∩X : f ′′ ∈ X. Dann erzeugt A eineKontraktionshalbgruppe (Tt) auf X und fur f0 ∈ dom(A) ist v(t, x) := Ttf0 eineLosung des Anfangswertproblems
vt = vxx fur t ≥ 0, x ∈ (0, 1)v(0, x) = f0(x) fur x ∈ (0, 1)
v(t, 0) = v(t, 1) = 0 fur t ≥ 0.











![Almost transitive and almost homogeneous Separable Banach ... · in some separable almost transitive Banach space ([9]). A classical example of an almost homogeneous separable Banach](https://img.pdfslide.org/doc/110x75/60213e540d9f2439067866c2/almost-transitive-and-almost-homogeneous-separable-banach-in-some-separable.jpg)
















