Embed Size (px)
Citation preview

Ztschr. f. angew. 274 Winte r , GeschwindigkeitspllIne rsumlicher Getriebe Math. nnd Mech.
Wird dieser Druck beim Belasten iiberschritten, so tritt beim Entlasten aberrnals eine plastische, entgegengesetzt gerichtete Formandernng ein.
Wird der KSrper abwechselnd mit dem ursprunglichen Druck belastet und wieder entlastet, so wird das Material von innen nach auswarts zu ermiidet und zerstort.
1st rl/rs nicht geniigend klein, so kann es vorkornmen, dai3 ehe der Wert po in (52) erreicht wiirde, der ganze KBrper in den plastischen Zustand ubergegangen ist. Die Bedingung hierfur berechnet man aus
- I
zu q/rS = 0,5879.
Abb. 3.
Die Werte von 6, und bt sind in Abb. 3 fur die Werte von
p , = z k [ l - (:)*I, p a = ? k [ l -($)"I 3 3
ferner nach der Entlastung daigestellt. Es wurde gewtihlt r1 = 5 cm, rg = 10 cm, m = 4, E = 2000 000 kglcm', G = 800 000 kg/cm5, k = 3000 kg/cma. 9
Geschwindigkeifspliine riiumlicher Gehiebe. '1 Von HANS WINTER in Grer.
iner Anreguug Herrn F e d e r h o f e r s foIgend wird im nachstehenden - gestutzt auf verwendeten Methoden der kinernatischen E Behandlung des rLumlichen Systems sowie auf die von G r i i b l e r , Miil ler und Al t
stammenden Arbeiten iiber den Zwauglauf raumlicher Getriebc - das Entwerfen VOII Geschwindigkeitsplanen dieser Oetriebe an einigen Beispielen geteigt.
die in seinen bisherigen Verdffentlichungen
l ) Auszug aus dem kfnematIschen Teile der von der Technischen Hochschule Uraz genehmigten Dissertation des Verfassers Uber: *Beitrage zur Klnematik und Kinetoatstik dcr Getriebe.a - Hewn Prof. Dr.-Ing. F e d e r h o f e r , dem ich die weitgehendste F'iirderung der vorliegendeu Arbeit verdanke, sei snch an dieser Stelle der herzlichste Dank hierfUr ausgesprochen.
' J K. F e d e r h o f e r : Ueber die Beschleunlgung be1 der rLumlichen Bewegnng des starren KOrpera. Diem Zeitschr. Bd. 7 (1927), S. 2 9 0 bls 298. - Qraph. Kinematik und Rinetostatik des starren riiurnlicben Systems. Verlag J. Springer, Wien 1928. - Graph. Kinernalik der riiumlichen schwingenden Knrbelsbhleife. Sitzungsbericht der Akademie der Wissenschaften in Wien. Mathem.-naturw. KlasRe Abtlg. 119, 138. Bd., 1. uud 2. Heft 1929. - Graph. Kinernatik des Taumelecheibentriebes. DIese Zeltschr. Bd. 9 (1929 ' , 8. 312 bis 318.
a) M. G r U b l e r : Kriterium der Zwanglilufigkeit der Schraubenketten. Festschrift zu 0. M o h r s 80. Geburtstage. Berlin 1916, 8. 124. - R. MUller : Die Zwangliiufigkeit kinem. Retten. Von der Techniachen Eochschule Dresden genehmigte Dissertation. (tm Druck nicht erschlenen.) - H. A1 t : Die prnktische Bedeutung der Raumgetriebe. Z. d. VDI 1929, Heft 6, S. 188.

Band 10, Heft 3 Juni 1930 W i n t er . GeschwindiekeitsDlKne rllumlicher Getriebe 215
1. Einteilung der Raumgetriebe und deren Zwanglauf. J e nach der Art der die einzelnen Qlieder eines Raumgetriebes verbindenden Elementenpaare unter- scheidet man :
a) G e t r i e b e m i t n u r e i n f a c h e n E l c m e n t e n p a a r e n , d. s. Elementenpaare von einem Freiheitsgrad (Drehpaar, Schraubenpaar, Schiebepaar);
b) Ge t r i ebe , i n w e l c h e n a u c h E l e m e n t e n p a a r e von m d b r e r e n F r e i h e i t s - g r a d en v o r k o m m en . (Kreuzgelenk, Dreh-Schiebepaar, Kardangelenk, Kugelgelenk usw.).
Weiters teilt man die den Ausgangspunkt der Raumgetriebe bildenden rtiumlichen kinematischen Ketten in einfache und zusammengesetzte. Einfache kinematische Ketten werden ausschliefilich von binlren Gliedern gebildet, wBhrend in zusammengesetzten auch ternare nnd hohere Glieder auftreten. Auf diese letzteren sol1 hier nicht naher eingegangen werden.
Bei vsllig willkiirlicher Lage der Dreh- baw. Schraubenachsen betragt die zur Bildung einer einfachen zwangllufigen Kette notwendige Gliederanzabl bekanntlich n = 7. In Sonderfallen, wie sie durch spezielle Werte des Schraubenparameters (z. B. a = QJ
bei reinen Sehiebepaaren) oder durch besondere Lagen der Achsen gegeben sind, ver- mindert sich die Anzahl der notwendigen Glieder. Sind z B. alle Schraubenpaare durch SchiebepaTre ersetzt, so ist eine solche Kette mit n = 4 Glieder zwanglaufig beweglich. (Raumliche Schiebepaarkette.) Sol1 ein ranmliches Getriebe mit n = 6 Gliedern zwang- laufig beweglich sein, so mussen je drei Dreh- bzw. Schraubenachsen daucrnd einer Richtung parallel sein. Der Gescbwindigkeitszustand dieser beiden Sonderfalle ist in (3) und (4) behandelt.
Eine andere MGglichkeit, die Gliederanzahl in einem Raumgetriebe herabzumindern, besteht darin, dai3 man die GrSde einzelner Glieder zu Null werden laflt, wobei allerdings an die Stelle zweier Elementenpaare von einem Freiheitsgrade ein Elementenpaar mit zwei Freiheitsgraden treten mu& Auf diese Weise entstehen die unter b) genannten Getriebe, die Untersuchung ihres Geschwindigkeitszustandes erfolgt an Hand einiger Beispiele in (5), (6) und (7).
Zur Darstellung der Raumvektoren wurde ebenso wie in den genannten grund- legenden Arbeiten durchwegs das Abbildungsverfahren von Mayor und v. Mises heran- gezogen.
2. LzTrung zweier Grundaufgaben der dadellenden Geometric im Abbil- dungsverfahren von Mayor und v. Mise s. Die nachstehenden kinematischen Unter- suchungen erfordern mehrmals die Losung folgender Grundaufgaben im genannten Ab- bildungsverfahren :
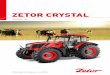
a) B e s t i m m u n g d e r S c h n i t t - l i n i e z w e i e r Ebenen . Jede der Ebenen sei durch einen in ihr liegenden Punkt und durch den fur die Ebene charakteristischen Abbilduugspunkt gegeben. Es seien dies die Punkte A, B und e l , eB, g QL.
,j. entsprechend den Ebenen EA uud e4 EB. (Abb. I). 93
ed
s Da die SchnittJinie der Ebenen EA und EB eine den beiden Ebenen gemeinsame Gerade ist, liefert die Verbindung der Abbildungspunkte
Schnittlinie. Urn ihren Spurpunkt anzugeben, werden zunachst die Spurpuokte 94 und g B der
zur Schnittlinie Parallelen durch A uud B bestimmt, die jedenfalls den Grundriflspuren der Ebenen El und EB angehoren. Die Richtung der GrundriDspur einer Ebene ist durch die Verbindung ihres Abbildungspunktes mit dem Ursprung 0 gegeben, da diese Gerade das Bild einer zur GrundriDebene parallelen Geraden der Ebene, somit einer ersteu Spurparallelea darstellt. Es sind daher die Parallelen durch 9.1 und gB zu Oel bzw. Oes die Grundridspuren der Ebenen, ihr Schnittpunkt g, ist der Spurpunkt der Schnittlinie S, wodurch deren Lage festgelegt ist.
gA A'
e l und eB bereits das Bild der Abb. 1.
(8'' 1 1 f 7'). 1 a*

Ztscbr f an ew. 276 Winte r , Geschwindigkeitsplltne rhmlicher Ctetriebe Math. ;ddlfech.
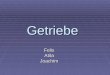
b) B e s t i m m u n g des Durchs toBpunk tes e i n e r G e r a d e n mi t e i n e r Ebene. Diese Aufgabe llif3t sich, wenn die Gerade L durch Grund- und AufriB, die Ebene E durch einen in ihr liegenden Punkt A und ihren Abbildungspunkt e gegeben ist, ohne Auffindung der Spuren der Ebene einfach losen. 1st D der gesuchte Durchstofipunkt, 2 ein beliebiger Punkt auf L, so bilden die Punkte A D s ein Dreieck, dessen Seite A D in der Ebene E liegen mufi.
Der Durchstedpunkt D kann daher gewonnen werden, wenn man auf L einen beliebigen Punkt s annimmt, mit d verbindet und das Bild A x bestimmt. Dieses schneidet das Bild der Geraden L in s, dem Abbildungspunkte der Ebene AZD, der mit e verbunden, das Bild der Geraden A D liefert. Die Parallele hierza durch A’ schneidet L’ im gesuchten Punkte D’. (Abb. 2).
Abb. 2. Abb. 3.
3. Die rElumliche SchSebepaarkeite. Die rLlumliche Schiebepaarkette ist zwang- lsufig, wenn sie aus 4 Gliedern besteht und die Aohsen der Sohiebepaare beliebige Lagen und Richtungen haben.
Die die Glieder 0, 1, 2, 3 ver- bindenden Schiebepaare seien rnit 810, ill, saa,Sao bezeichnet. Weiters sind die Bilder der Schnbrichtungen bezogen auf den Abbildungskreis (7. = c) bekannt und gleich bezeichnet.
Bei festgehaltenem Gliede 0 sind die Geschwindigkeitszust5nde aller Glieder durch die Annahme der GriSBe einer Geschwindigkeit, z. B. der des Gliedes 1, bestimmt und k6nnen daraus ermittelt werden.
Zwischen den absoluten und relativen Geschwindigkeiten DIO, Dao, Dso und v 2 1 , Ugs
der Glieder 0,1, 2, 3 bestehen folgende Beziehungen:
Abb. 3 zeigt eine derartige Kette, im Grundrisse.
Dao == Dio + !.)a1 Dao = Dao + 1328
Die Bilder der absoluten und relativen Gesohwindigkeiten decken sich mit den Bildern der zugehorigen Schubrichtungen; das Bild der Gesohwindigkeit b l o filllt in das Bud S ~ O , das Bild Ua1 in 821 usw. Nach G1. (1) bilden die Geschwhdigkeiten b10, 8 2 0 , V a l ein ebenes Dreieck, das Bild 2190 mu13 daher den Schnittpunkt m der Bilder u10 und u21
enthalten. Ebenso ergibt sich aus G1. (Z), da% das Bild wlo durch den Schnittpunkt n der Bilder Vao und vlP fiihren mu%. Die Verbindung der Punkte m,n gibt daher das Bild der Geschwindigkeit 090. Die GrSfie dieser Geschwindigkeit kann mit Hilfe eines Geschwindigkeitsplanes gewonnen werden (Abb. 3b). Ee stellt die Strecke 0 1’ die gege- bene Bildgr613e der Geschwindigkeit blo dar ; die BildgroDe Vao der Geschwindigkeit vso kann nach G1. (1) konstruiert werden, indem man 0 2’ parallel dem Bilde und 1’ 2’ parallel dem Bilde vai zieht. Die Zerlegung der Bildlkngc Vao nach den Richtungen der Bilder
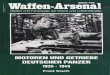
4. Abb. 4 stellt das bereits in (1) beschriebene sechsaliedrige RaumgeMebe dar. Die Achsen I, 11, 111 der als reine Drehpaare gedaohten Elementenpaare seien der Richtung !I?, die Achsen IV, V, VI der Richtung 9 parallel. Glied I mit den Achsen I und VI werde im Raume festgehalten; IUai sei der Winkelgeschwindigkeitsvektor des Gliedes 2 gegen dae feste Glied 1, die Winkelgeschwindigkeitsvektoren der Bewegungen
bezeichnet werden. Duroh Angabe per GrSBe von m,l oder der absoluten Geschwindigkeit eines
. . . . . . . . . . . (11, (2). . . . . . . . . . . .
und val liefert die Bildllingen dieser Geschwindigkeiten.
der Glieder 3 gegen 2, 4 gegen 3 . . . 6 gegen 1 mijgen rnit ma%, tU13, . . .

Band 10, Heft Juni 1930 W i n t e r , GeschwindigkeitsplLne r¨icher aetrjebe 277
Punktes auf dem Gliede 2, z. B. der des Punktes C, ist der Geschwindigkeitszustand des ganzen Getriebes festgelegt. Da die bekannte Bewegung des Gliedes 2 anch als resul- tierende Bewegung um die Achsen VI, V . . . 11 aufgefadt werden kann, liefert die Zerlegung ii von ma1 in die Wirkungslinien der iibrigen Winkelgeschwindigkeitrrvektoren deren Groi3en. Dies entspricht in der Statik der Zerlegung einer Kraft in 5 Wirkungs- linien, deren Richtungen die oben angefiihrten Bedingungen ertiillen.
Es ist demnach: mll = m23 f mJ4 + m4S + 1056 + m S l
oder, da allgemein m(k=- m k z
(ma, + 1032 + ~ 4 3 ) + (ms. + m S 5 + $16) = o . . . . . . (3). Daraus folgt unmittelbar : mil + mas + m 4 3 = O . . . . . . . . . . (4),
da die in den Klammern der GI. (3) stehenden Summenvektoren zwei verschiedenen Richtungen parallel sind; G1. (3) kann daher nur erfullt sein, wenn beide Klammeraus- driicke, gleich 0 sind. und (tua3 + mci) =(- m i l ) ein Rotationspaar bilden; die resultirrende Bewegung des Gliedes 4 ist daher ejne Translation, deren Gr65e und Richtung durch das Moment des genannten Rotations- paares gegeben ist. Dieser Momentenvektor t, der somit die allen Punkten des Gliedes 4 gemeinsame Translationsgesohwindigkeit darstcllt, steht jedenfalls senkrecht auf der Kichtung der Vektoren 1011, mas und ma,, sein Bild mub daher den in Abb. 4 einge- trageiien Antipol ex der Richtung 3 enthalten. Anderseits mu5 das Bild des gesuchten Translationsvektors auch durch den Antipol eL der Richtung e fuhren, da nach G1 ( 5 ) auch die Vektoren t&1 und (mr5 + m56) ein Rotationspaar bilden. Es ist daher durch die Ver- bindring e K e L das Bild 1 der allen Punkten des Gliedes 4 gemeinsamen Qeschwindigkeit festgelegt.
Abb. 4b zeigt den Oeschwin- digkeitsplan des Getriebes unter der Voraussetzung, dai3 die Gesohwindig- keit des Punktes C durch die Bild- lange O C gegeben ist; das Rild vc ist durch eg zu legen, da U, 111)21. Die graphische Auswertung der Gleichung I r l = UC + ~ J A C liefert die Grode der Qeschwiudigkeit des Punktes A; UAC EGZ! bedeutet hierbei die Relativgeschwin- digkeit des Punktes A gegen C, deren Bild zufolge der obigen Beziehung Abb. 4. den Schnittpunkt eK der Bilder v, und v1 enthalten mu& wobei sich die Bilder U A und t deoken; anderseits muB auf dem Bilde vAC auch der Antipol e i c liegen, denn es ist U ~ C 1 A C.
Durch Ziehen der entsprechenden Parallelen im Geschwindigkeilsplane gawinnt man die Geschwindigkeiten Dl = o a und blc = c a . Da weiter Dg 3 bl, kann der Qe-
sehwindigkeitsplan durch Eintragen der Geschwindigkeit UO = od leicht vervollstiindigt werden, wobei das Bild von bD durch die Antipole eL und e D E von und D E , das BiId
von uDB = bd durch den Punkt eL und den Antipol e B D von BD zu legen ist. 5. Ein dreigliedriges rhmlichec Geiriebe mit Elementenpaaren von mehreren
Freiheitsgraden ist in Abb. 5 wiedergegeben; die Glieder 3 und 2 sind ebenso wie Glied 2 und das feste Glied 1 duroh j e ein Elementenpaar von 2 Freiheitsgraden ver- bunden. Jedes dieser Elementenpaare gestattet eine Drehung um eine Achse (A1 bzw. Azz) und eine Schiebung langs dieser Achse. Qlied 3 verbindet ein Kardangelenk mit 1 I).
m54 + m65 + m 1 6 = o . . I . . . . . . . (5) ,
Aus G1. (4) ist ersichtlich, dab die Vektoren
-+ +
+
I ) Ein Modell dieses Getriebes wurde auf der Getriebelehre-Tagung 1928 in Dresden von A l t vorgeftlhrt.

Ztschr. f. anaew. 278 W i n t e r , Geschwindigkeitspliine rgumlicher Getriebe Math. uud Mech.
D a das Getriebe nur einen Freiheitsgrad besitzt, darf von der Schraubenbewrgung des Gliedes 2 um die A c h e Ax, deren Parametar nicht bekanut ist, nur eine Kompo- nente, z. B. die Schiebungsgeschwindigkeit b g l angenommen werden. Sol1 daraus der Geschwindigkeitszustand des Gliedes 3, welches eine sphlrische Bewegung urn D aus- 5iihrt, ermittelt werden, so erfordert dies die Kenntnis der Geschwindigkeiten zweier Punkte dieses Gliedes'). Wir wlhlcn hierfiir den Punkt C und den Spurpunkt G der Achse Air. Die absolute Geschwindigkeit boa1 dieses letzteren (in Abb. 5 c der Einfach- heit halber ra bezeichnet) fassen wir ala Summe der Geschwindigkeit seines Deckpunktes auf dem Gliede 2 und seiner Relativgeschwindigkeit gegen diesen Deckpunkt auf, so dal.3
An dieser Stelle sei auf die auch im folgenden beibehaltene Geschwindigkrits- bezeichnung hingewiesen. Gehiirt allgemein ein Punkt A einem Gliede i einer kine- matischen Kette an, so bedeutet D l C k die Relativgesohwindigkeit des Punktes A gegen seinen Deckpunkt auf dem Gliede k der Kette. 1st 1 das festgehaltene Glied, so be- zeichnet nach obigem b l r l die absolute Geschwindigkeit des Punktes A.
Die Relativge- schwindigkeit P ~ a l ist, da der Punkt G der Achse AII angehort, gleich der Schiebungs- geschwindigkeit der Relativbewegung vnn 3 gegen 2 und fallt daher in die Achse Am. Es decken sich dem- nach auch die Bilder vota und AII (Abb. 5 ~ ) . Die Geschwindigkeit b5z l entsteht, durch Summierung der allen Punkten des Gliedes 2 gleichen Schiebungs- gesch windigkeit D21 in der Richtung der Achse A1 und einer Drehgeschwindigkeit
I I Q ~ ~ um diese Achse. Die erstere ist der CroBe nach gegeben, sie besitzt im Ge- schwindigkeitsplane
(Abb. - 5b) die Lange oa , wlhrend ihr Bild mit dem Bilde d I zu- sammenfallt. Das Bild U G ~ I riihrt durch den Antipol eI von AI und ist senkrecht auf der Verbindung von G mit 91, dem Spur- punkte von A I , denn
Abb. 5. es ist I I O P I gleich dem Momente des nach Ar
fallenden Winkelgeschwindigkeitsvektors mat urn G, dessen Bild die angegebene Richtung besitzt. Endlich ist uns eine Ebene bekannt, in welcher der Geschwindigkeitsvektor koal liegen mui3; dies ist die Normalebene auf G D in G zufolge der sphgrischen Be- wegung des Gliedes 3 urn D. D a der Punkt D der Grundriaebene angehort, ist der
p G 3 1 = P G ) l + b G 3 1 . . . . . . . . . . (6).
-
') Die Drehachse steht drnn senkrecht auP den Richtungeu dieser Geschwlndigkelten.

Band 10, Heft 3 Juni 1930 Winte r , Geschwindigkeitsplhe rgumlicher Getriebe 279
Grundrid und daher auch das Bild VG yon )?a31 senkrecht auf GD' anzunehmen, die Lage dieses Bildes ist aber noch unbestimmt.
Fuhrcn wir die Groden ba1 und U c a l in GI. (6) ein, SO geht diese iiber in: b ~ 3 1 = bai + 1 1 G a i + Faaa
oder
Die durch diese Gleichung angedeutete Zerlegung der gegebenen Geschwindigkeit ba1 kann durchgefiihrt werden, wenn man die Lage des Bildes von p G 3 1 willkiirlich wiihlt. Der Schnittpunkt der Fehlannahme (2.11) 1 D'G mit dem nach AI fallenden Bilde 2'11 sei rnit XI bpzeichnet (Abb. 50).
Die Auflosung von bal nach G1. (7) erfordert folgende Liuien im Geschwindigkeits- plane: /I(va), aglI/ azl (s Schnittpunkt der Bilder 2'632 und uoal), o y l # u g l , ~ I U I ) / V O ~ ) ,
O U ~ l / u G a i .
Die Strecke & bedeutet nach vorstehendem die der Annahme ( v ~ ) entsprechende Drebgeschwindigkeit (uGsl) = (m2l) x gI G. Die Relativgeschwindigkeit des Punktes C der
Achse ArI gegen den Punkt G besitzt die Grode ma1 X GC, was aus folgender Ueber- legung hervorgeht: Die Relativgeschwindigkeit zweier beliebiger Punkte C und G des
Gliedes 3 ware durch den Ausdruck x G C gegeben, worin ma1 den absoluten Winkel- geschwindigkeitsvektor dieses Gliedes angibt. Lelzterer setzt sich entsprechend der resultierenden Drehung von 3 um die Achsen A1 und Arr aus den Teilkomponenten mll und tll39 zusammen, es ist daher
091 = b ~ 3 1 - (Uoai + U G S ~ ) . . . . . . . . (7).
--t
-+
--t
-+ ~ C B = ( m t l + 1031) X G C
und im vorliegenden Falle + bca = ma1 x G C ,
-+ da die Richtungen tu3* und G C zusammenfallen.
Aus der bekannten Bildlange (UGa1) = 0; wird nun ( V C G ) , wenn der Durchstod- punkt 9.1, der zu AI Parallelen durch C eingetragen ist, aus der Aehnlichkeit der Drei- ecke 91 GgeI und oe1 z1 einfach bestimmt.
Es ist -+ + 0 ~ 1 1 g 1 g , r , UI ~ i l G g . 1 , ~ i ~ i = ( m s i ) X G C = ( b c o ) .
Die absolute Geschwindigkeit des Punktes C setzt sich nach der Grnndgleichung der Zweipunktfiihrung aus der Geschwindigkeit des Punktes G und der Relativgeschwindig- keit bCG, somit fur die erste Fehlannahme aus den Strecken GI und GI zusammen. Die Strecke bildet nun die dieser Fehlannahme zugeordnete Bildlange der Geschwin- digkeit b ~ ~ ~ . Fur weitere Fehlannahmen von 3c auf V a l wurden sich die Punktreihen g1 g~ . . ., yl ya . . ., u1 U3.. ., ZI 2 3 . . . auf den entsprechenden, durch o gehenden Tragern ergeben. Die Reihen y, u, z entstehen durch Parallelprojektion der Reihe g, sind daher dieser ahnlich. Ebenso ist ohne weiteres a m der Abbildung ersichtlich, dad dann auch die Punkte c1 ca . . . eine der Reihe der Punkte 9192 . . . Lhnliche Punktreihe erfiillen. Dies bedingt gleichzeitig, dad alle mijglichen Geschwindigkeiten b C 3 l eioer Ebene E an- gehoren. Der Abbildungspunkt dieser Ebene bestimmt sich am einfachsten als Schnitt- punkt der Bilder zweier durch Fehlannahmen gewonnener Geschwindigkeiten bC31. Da die Vektoren t ) 0 3 ~ , bcG, bC31 in einer Ebene liegen, ist das Bild (vC) / / O C I durch den Schnittpunkt s1 der Bilder (VQ) und VCG zu legen; letzteres ist die Normale auf GgCI durch el. Als zweite Fehlannahme [WG] wurde jene gewahlt, bei welcher der Schnitt- punkt xa der Bilder vG und vll rnit dem Schnittpunkte der Bilder V ~ I und Air zusammen- fallt. Bei sinngemai3er Anwendung der Konstruktion, welche den Punkt cl lieferte, er- gibt sich der Punkt c2, wenn man im Geschwindigkeitsplane die Gerade ogl mjt der durch a gelegten Parallelen zu 2'GIa zum Schnitt bringt. Das Bild [UC] deckt sich dann mit dem Bilde [ f f Q ] . Der Schnittpunkt e der Bilder (VC) und [VC] ist der gesuchte Ab- bildungspunkt der Ebene E. Da die Gesohwindigkeit U C ~ I anderseits normal auf D C sein mud, ist das Bild vc der richtigen Geschwindigkeit bC31 die Verbindung von e mit dem Antipole D C . Die Parallele zu WC durch o schneidet die Gerade der Punkte
c1 c a . . . im richtigen Endpunkte c, so dad o c die Bildlange der Geschwindigkeit bell ist. Aus boll l%Dt sich die wahre Bildlange V(ta1 riiokkonstruieren, wenn cg (1 V C B gezogen
-+

ZtSchr.f.m ew. 280 Win te r , Geschwindigkeitsplhe rhumlicher Gettiebe Math. und &ch.
wird, wabrend das richtige Bild Z'Q durch den Schnittpunkt e,, der Bilder BC und VCG fiihrt. Da das Glied 3 eine spharische Bewegung ausfubrt, stehen die Gesohwindigkeits- vektoren aller Systempunkte senkrecht auf der Drehachse dieses Gliedes. Der eben ge- wonnene Schnittpunkt em der Geschwindigkeitsbilder zweier Systempunkte ist daher der Antipol der gesuchten Drehachse, das Bild der Drehachse selbst die Antipolare dieses Punktes. Durch die Bichtung der Achse und die Grade der Geschwindigkeit eines Punktes, z. B. der des Punktes C, ist aber der Geschwindigkeitszustand des Gliedes 3 vollkommen festgelegt.
6. Abb. 6 zeigt ein vfer&liedrf&es Gehiebe. Glied 1 wird feslgehalten, Glied 2 ist durch ein Zylinderpaar (I) an 1 aegeschlossen, ebenso 2 an 3 (11). Glied 4 steht mit 3 durch ein Krenzgelenk (Achsen I11 und IV), mit 1 durch ein Kugelgelenk oder Kardangelenk in Verbindung. Der Geschwindigkeitszustand des Gliedes 2 ist bekannt. Es sol1 die Geschwindigkeit eines dem Gliede 4 angehijrigen Punktes E ermittelt werden.
Die absolute Qeschwindigkeit bes1 des Punktes C ist unter Beibehaltnng der Be- zeichnungsweise in ( 5 ) gegeben durch:
bc31 = b e l l -k bc3¶ . . . . . - (8 ) .
In dieser Gleichung ist bc21 als bekannt anzusehen, da der Geschwindigkeitszustand des Gliedes 2 gegeben ist. Die Richtung der relativen Geschwindigkeit ist die Normale ouf die Ebene der Verbindung BC und der Achse 11, wZihrend b , ~ ~ jedenfalls in einer Normalebene auf D C liegen mnD, entsprechend der sphirischen Bewegung des Gliedes 4 um D.
A 'C32
Abb. 6.
Zur konstruktiren Ermitttlnng von b,al wurden in Abb. 6b die Antipole eI und err der Achsen I und 11, sowie der Antipol der Strecke CD eingetragen. Weiters wurden in Abb. 6 a zunichst der Spurpunkt 9x1 der AchFe I1 und die Spurpunkte 9.1 und geIr der durch C gelegten Parallelen zu den Achsen I und I1 bestimmt; der Spurpunkt g I fillt nach A . Das Bild m l der Geschwindigkeit bcz1 ist nun durch eI I gxg,r zu legen, denn es ist U e t l gleich dem Momente des Drehvektors mal in I um c, ebenso v,Ja I gc lxgIr durch ezx, Da diese beiden Vektoren und der Geschwindigkeitsvektor D,ai nach G1. (8) einer Ebene angehiiren, fiihrt das Bild von durch den Schnittpunkt s der Bilder veal
und Oeas; da anderseits beai normal auf C D steht, ihr Bild daher den Antipol C!? ent- halten mu3, ist letzteres durch die Verbindung der Pnnkte s und % gegeben. Die Ermittlung der BildgroDen der Geschwindigkeiten be$, und 0031 aus der gegebenen Bild- lange von & 2 1 eriolgt im Geschwindigkeitsplane, Abb. 6 c, durch Ziehen der entsprechen- den Bildparallelen.
Fiir die Ermittlung der Geschwindigkeit des Punktes C waren die Richtungen der Acheen III und IV vollkommen gleichgiiltig, wohl aber sind diese von EinfluB auf den Geschwindigkeitszustand der Bewegung des Gliedes 4 urn die Gerade DC. Diese Be-

Rand 10, Heft 3 Juni 1930 Winter . aeschwindi~keitsD11ne raumlicher Getriebe 281
wegung ware beispielsweise bei Vorhandensein eines Kugelgelenkes in C keine zwang- laufige mehr, da sich das Glied 4 dann unabhangig von der iibrigen Getriebebeweguug urn CD drehen konnte. Um nun bei gegebener Richtung der Achsen I11 und IV und fur den angenommeneq Geschwindigkeitszustand des Getriebes die Geschwindigkeit einrs Punktes E des Gliedes 4 zu bestimmen, suchen wir zunachst den Durchstobpunkt F der Verbindung E D mit der Ebene I der Achsen I11 nnd IV und bestimmen Torerst die Geschwindigkeit b~~~ dieses Punktes I). Die Resultierende der Winkelgeschwindigkeits- vektoren ~ I J I und tuIT in 111 und IV liegt jedenfalls in der von den beiden Achsen ge- gildeten Ebene 1. Der Punkt F, der auch der Ebene 1 angehort, erhlllt durch die Drehung um diesen resultierendm Winkelgeschwindigkeitsvektor, gleichgiiltig welche Richtung dieser besitzt, eine Geschwindigkeit, die senkrecht auf der Ebene I steht. Wir sind daber in der Lage, die Richtung der Gesnhwindigkeit bF4a des Punktes F pegen seinen Deckpunkt auf dem Gliede 3 anzugeben, wLbrend wir von seiner absoluten Ge- schwindigkeit wissen, dab sie in einer Normalebene auf D F liegen mub. Zur Bestimmung der GeschFindigkeit des Punktes F kBnnen folgende Beziehnngen herangezogen werden:
Die Graden der Geschwindigkeit BF21 des Deckpunktes yon F auf dem Gliede 2 und der relativen Geschwindigkeit bF33 konnen von Pcll und be31 auf Grund des Aehnlich- keitssatzes einer raumlichen Bewegung einfach abgeleitet werden ”.
Dieser Aehnlichkeitssatz sagt aus, dad die Fignr der Geschwindigkeitspunkte der Systempunkte eines Kiirpers, welcher eine Schrauben- oder Drehbewegung ausfuhrt, ahnlich ist der Figur der Spurpunkte der durch die Systempunkte gelegten Parallelen zur Schrauben- bzw. Drehachse und gegen diese um 90° gedreht ist. Somit ergibt sich z. B. die Geschwindigkeit P s i 1 aus bell durch folgende Konstruktion: man bestimmt zu- nachst den Spurpunkt gFI der durch F gelegtcn Parallelen zur Achse I und macht das Dreieck o vesl V F Y ~ (Abb. 6c) ahnlich dem Dreiecke g z g c I g F I . Ebenso ergibt sich bra2 a m der Aehnlichkeit der Dreiecke gII g e I I g F I I und o oF3? ~ u g a a , wobei gFI1 den Durchstob- punkt der durch F fuhrenden Parallelen zur Achse I1 bedeutet. Die Summierung der auf diese Weise gewonnenen Vektoren bpZl und bF3) zu OF31 erfolgt ebenfalls irn Ge- schwindigkeitsplane; andererseits sind die Bilder dieser Geschwindigkeitskomponenten, da es sich um reine Drehbewegungen handelt, die Geschwindigkeiten daher senkrecht auf den entsprechenden Drehachsen stehen miissen, durch deren Antipole zu legen ; 8 ~ ~ 1
fiihrt demnach durch e l , rpaa durch eII . Das Bild upal ist dann durch ihren Schnitt- punkt s1 zu legen. Die relative Geschwindigkeit p F 4 3 steht senkrecht auf der Ebene I, deren Abbildnngspunkt e der Schnittpunkt der Bilder der Achsen 111 und IV ist: ihr Bild VF43 ist daher die Antipolare des Punktes e. Das Bild der absoluten Geschwindig- keit bF41 ist die Verbindung des Schnittpunktes s1 der Bilder 2)p31 und 2)F43 und des Antipoles des Bildes der Geraden DEF. Die GroOenbestimmung von bra1 erfolgt wieder im Geschwindigkeitsplane durch Ziehen der Parallelon zu den zugehorigen Bildern. Die Geschwindigkeit des Punktes E kann nun einfach dadurch gewonnen werden, dab man die Bildlange up41 im Geschwiiidigkeitsplane lhnlich der Punktreihe D’E’F’ teilt; ihr Bild deckt sich mit z)p(1.
Sol1 die Groi3e der Winkelgeschwindigkeiten in den einzelnen Drehachsen angegeben werden, wie dies bei Beschleunigungskonstruktionen erforderlich ist, so kann dies durch Umkehrung der Momentenkonstruktion geschehen. Es ist z. €3. be3a das Moment der Winkelgeschwindigkeit m3s in IL um C. Von diesem Momente kennt man Bildlange und Bild, wahrend das Bild von Diese Angaben wiirden aber zur Bestimmung der BildlLnge 0 ) 3 9 geniigen.
1. Geschwindigkeitsplan eines fiinfgliedrigen Getriebes mit 2 Kreuzgelenken. Ein solches ist in Abb. 7 dargestellt. In den Punkten A , B, C sind die Glieder 2 - 1, 3 - 2, 4 - 3 durch Drehpaare (Achsen I, 11, III), die Glieder 4-5, 5 - 1 in D und E durch Kreuzgelenke, deren Achsen ebenfalls eingetragen sind, verbunden. Der Ge- schwindigkeitszustand des Gliedes 2 gegen l ist angenommen, es ist daraus der des
Die hierzu erforderlichen Bilder der Geraden D c und D E sind in Abb. 6 b eingetrapen, ibr Schnittpuukt n wird mit dern Sehnittpunkte e der Bilder I11 nud I V verbunden und die Gerade D’E’ mit der Parallelen zu n e irn Punkte F’ zum Schnitt gebracht.
bB41 = OF31 + PF43 bF3I = bPZl + pX39.
in das Bild der Achse I1 fallt.
I ) Zur Bestimmnng des DurchstoBpunktes F wnrde die in (1) gezeigte Konstruktion bentltzt
a) VgL F e d e r h o f e r , BGraph. Klnematik etc.* S. 13.

Zfschr. f. anzew. 282 W i n t e r . Gaschwincligkeitsplane rflumlicher Getriebe Math und Muclt.
Gliedes 4 zu bestimmen. Dic \-on den Achsen der Gelenke in D und E gebildeten Ebenen P D und F E bilden sich in den Punkten e D und eE a b (Abb. 7c). Die Punkte der Schnittlinie S dieser beiden Ebenen besitzen die Eigenschaft, dab die Geschaindigkeiten ihrer Punkte als Systempunkte des Gliedes 4 senkrecht auf X sein miissen. Dies geht aus folgendem hervor : es bedeutet 1&1 den resultierenden Winkelgeschwindigkeitsvektor des Gliedes 5 gegen 1, ebenso 1 ~ 4 5 den Drehvektor von 4 gegen 5 ; die Gerade S schneidet nun jedenfalls dic genannten Vektoren. Die Geschwindigkeit irgendeincs Punktes auf S ist durch die Summe der LuOeren Produktc der Vektorcn und mas um diesen Punkt gegeben und steht daher senkrecht auf S. Wir bestimmen zunachst den Spurpunkt K der Sehnittlinie, d e r m Bild die Verbindung der Abbildungspunkte eD nnd eE ist. D a der Punkt E in der GrundriDebene liegt, geniigt es, den Spurpunkt gOs der durch D gelegten I’arallelen zu S aufzusuchen; K liegt dann i m Schnittpunkte dcr durch E bzw. ~ D S gelegten Parallelen zii den Geraden O e E bzw. O e D ,
.Die absolute Geschwin4igltcit dcs Punktes K folgt aus der Gleichung: UK4l = UK21 + t’K34 + UK43 . . . . . . . . (9).
Hierin ist nur von DKai GroSe und Rich- tung bekannt, wgh- rend wir von !?K3a
und U ~ 4 3 nur dic Richtungen angeben konnen. Es Eteht D ~ 3 a bzw. U ~ 4 3 auf der von K und der Achse I1 bzw. 111
gebildeten Ebene senkrecht; die ent- sprechenden Bilder fiihren durch die An-
‘\G tipole e n nnd ellr.
D a K selbst in der GrundriDebene liegt, werden zunachst nur die Spurpunkte gII und glIr der Achsen II und I11 benotigt; das Bild yg32 steht dann senkrecht auf der Geraden K g r I durch eIl, das Bild vK43 senkrecht auf 9111 K durch err[; ibr Schnittpunkt ist mit s bezeichnet. Das Bild
Abb. 7 . VK der Geschwindig- keit bK4l fiihrt, da
UK4l I S , durch den Antipol der Geraden S. Wir nehmen zunachst die Richtung dieses Bildes willkurlich a n und bringen die mit ( v ~ ) bezeichnete Gerade mit dam Bilde der Geschwindigkeit ~ K Z I im Punkte z zum Schnitt, wobei das Bild rKal I K g r durch eI zu legen ist. Die Verbindung zs gibt die Richtung der Resultierenden aus den Ge- schwindigkeiten bKaa und D ~ a a . Die Zerlegnng des der Grade nach gegebenen Vektors UKa1 nach den ubrigen in GI. (9) vorkommenden Vektoren wurde im Geschwindigkeits- plane (Abb. 7 b) durchgeliihrt; es lassen sich hier ails e K l l = die Bildlangen ( r ~ ) = o(z>, (0x11) und (VK4a) bestimmen’). Wir sind nun aber auch i n dor Lage, die der Fehl- annahme ( V K ) zugeordnete Geschwindigkeit des Getriebepunktes D auf Grund der Gleichung:
(%
D D l l = UnZl + D o 3 2 + U D t 3
I) Die Bildlkngen der abeoluten Geschwindigkeiten b g l l , b~ 11 , . . sind der Einfachheit halber mit OH, vo . , . beeeichaet.

Band 10, Heft 3 . lnri i 1930 Winter . GeschwindiekeitsDlane riiumlicher Getriebe 253
zu bestimmen. Die auf der rechten Gleichungsseite stehcnden Vektorcn sind aus den bereits bekannten Vektoren mit Hilfe des Aehnlichlreitssatzes bestimmbar. Es orfordert dies znnachst das Eintragen der Spurpunkte gD1, gull , gDrr . I , der durch D gelegten Parallelen zu den Achsen I, 11, 111. Nun labt sich beispielsweise die Bildlange ( ~ ~ 3 2 ) aus ( U K 3 2 )
einfach konstruieren, denn es muO ( 0 ~ 3 2 ) senkrecht sein zu grrgnrr, wahrend die Verbin- dung der Spitzen dieser Vektoren die Relativgeschwindigkeit der Punkte K und D darstellt und als solche auf der Verbindung der Spurpunkte Kgnlr normal steht. Auf glciche Weise wird ( 0 ~ ~ 3 ) aus ( O K 4 3 ) gewonnen und endlich durch Zusammensetzung der einzelnen Komponenten die Bildlange o (d) von (rnrl).
Dreht sich nun die willkurlich angenommene Richtung (UK) um den Punkt 2, d. h. wandert der Schnittpunkt Z auf dem Bilde ~ ' ~ 2 1 , so andert sicli auch die Bildgrobe v K ; die Endpunkte allcr Vektorcn B K ~ , = o z miissen, da cs sich urn die Zerlegung einer gegebenen Bildlange nach z wei Wirkungslinien handclt, von denen die eine stets durch den Punkt 2, die andere immer durch s fuhrt. eine Gerade H parallel s s erfullen'). Denken wir uns z auf H fortschreiten, so erfullen die Endpunktc y, von 2)1<32 auf der durch den Endpunkt yo von O K O I gelegten Richtung ~ ' ~ 3 1 eine der I'unktreihe z Lhnliche Punktreibe; denn es entsteht die Reihe der Punkte yl durch Parallelprojektion der Punkt- reihe Z, wobei die Projektionsrichtung parallel der Richtung ~ ~ 4 3 ist. Es wurden somit auch die Bildlangen FZ dieser Geschwindigkeit von einem festen Punkt aus aufgetragen, eino der Reihe z ahnliche ergeben. Nun werden aber die Bildlgngen u~~~ und vOd3 ails den Langen V K ~ und v K 4 3 durch Zerlegung in je zwei vorgegebenc llichtungen gewonnen. Es bilden daher auch die Endpunkte dieser Vektoren Punktreihen, die beide ahnlich der Reihe x und daher auch untereinander ahnlich sind. Die Bildllnge ?'D = o d entsteht durch Addition der Bildlangen C D Z ~ , cD32 und vD43 ; da erstere durch den Geschwindigkcits- zustand des Gliedes 2 gegeben ist, die beiden letztercn aber bei Richtungsandcrungen von OK ahnliche Punktreihen erfullen, so wandert der Geschwindigkeitspunkt d in diesem Falle auf einer durch den bereits bekannten Punkt (d) fiihrenden Geraden G. Znr Fcst- legung dieser Geraden wurde die Geschwindigkcit OD fur eine zweite Fehlannahme be- stimmt und zwar wurde hierfiir jene gewahlt, bei welcher die Geschwindiglieit P~~~ ver- schwindet; der Endpunkt [ x ] fallt dann in den Schnittpunkt der Geraden N und I;, anf der die Punkte yo (y,) . . . liegen. Wird die oben beschriebene Konstruktion analog durchgefuhrt, so folgt daraus der Geschwindigkeitspunkt [d] als Endpunkt dcr Bildlange [ u ~ ] . Die Verbindung (d) [d] ist die Gerade G, auf welchcr die Endpunkte allcr Geschwindig- keiten Boll liegen mussen. Andersrits ist dadurch auch jene Ebene festgelcgt, welcher alle Geschwindigkeitsvektoren vD4l parallel sind; es ist dies die Ebene, welche sich durch den Punkt o und die Gerade G legen lafit,. Den Abbildungspunkt e dicser Ebene be- stimmen wir als Schnittpunkt der Bilder (vD) und [vD].
Das Aufsuchen der Bilder (UD) und [VO] geschieht wie in ( 5 ) niit Hilfe der Relativ- geschwindigkeit des Punktes D gegen K. Man legt, um z. B. das Bild [ u ~ ] zu konstruieren, durch den Antipol das Bild der Relativgeschwindigkeit b o x parallel zur Verbindung [ z ] [d] im Geschwindigkeitsplane; es trifft das durch X fiihrende Bild [ rg] im Punkte [el, durch welchen auch das Bild [UD] gehen mub. Auf gleiche Weise erhalt man das Bild (vD), welches [UD] im gesuchten Punkte e schneidet. Das Bild UD der wirklichen Gesehwindig- keit OD41 ist endlich die Verbindung des Punktes e mit dem Antipole zz der Geraden ED, auf welcher k'D41 senkrecht stehen muO. Die Parallele hiezu durch o schneidet die Gerade G im Punkte d und es ist die Bildlange z : ~ = o d.
Aus der Geschwindigkeit 13041 konnen die richtige Geschwindigkeit t ' ~ ~ ~ sowic deren Komponenten ruckkonstruiert werden. Die Konstruktion der Geschwindigkcit eines be- liebigen Getriebepunktes aus den nun bekannten Geschwindigkeiten rDrl oder rK41 bietet dann keine Schwierigkeiten mehr; sie kann auf gleiche Weise erfolgen wie z. B. die Bestimmung der Geschwindigkeit (bDal) aus (b~~,).
Die eben besprochene Konstruktion beruht darauf, dab man von zwei Punkten des Gliedes 4, welche nicht der Achse 111 angehoren, Ebenen angcben kann, in denen die Ge- schwindigkeitsvektoren dieser Punkte liegen mussen. Es sind dies die Normalebenen auf S im Punkte K , bzw. auf D E in D . Dieselben Voraussetzungen tref3cn auch in ahnlich auf- gebauten Getrieben zu, worauf im nachsten Abschnitte noch nahcr hingewiesen wird.
--t
__
__
') Vergl. K. F e d e r h o f s r : rGr. Rinematik. usw., S 42.

Ztsclu.f.an ew. &&,th.md&c:eeh.
8. Allgemeine Bemerkungen. Die in ( 5 ) , (6) und (7) durchgefiihrten Kon- struktionen konnen auch fur eine Reihe von Getrieben mit ahnlichern Aufbaue heran- gezogen werden. So sind z. B. bei dem Getriebe in Abb. 8 a (Drehachsen I, 11, Dreh- schiebepaare in C und Kardangelenk in D) dieselben Vorbedingungen gegeben wie bei dem viergliedrigen Getriebe in Abb. 6 (Abschnitt 6). Zur Festlegung des Geschwindig- keitszustandes der Glieder 3 und 4 ist an Stelle des in (6) verwendeten Punktes C der Punkt E einzufuhren, in .crelchem das Lot von D auf die Drehachse I11 diese trifft. Dieser Punkt des Gliedes 3 besitzt eine Geschwindigkeit, die senkrecht auf seiner Ver- bindung mit dem Punkte D steht, was hier fur den Punkt C nicht zutrifft.
Der Geschwindigkeitsplau des fiinfgliedrigen Getriebes in Abb. 8b (Drehachsen in A, B, C. D, Kardangelenk in
E 6 5 7 E ) i a t nach der in (7) be- 5 schriebenen Methode zu ent-
werfen, da hier die Geschwin- , / I I 7 ~ F J digkeiten aller Punkte des
Gliedes 4 auf der Achse IV Abb. 8. bestimmten Ebenen angeho-
ren; es sind dies die Normal- ebenen ihrer von E aus gemessenen Ortsvektoren. Es kann daher an Stelle des Spur- punktes K der Schnittlinie S i n Abb. 7 mit Vorteil der Spurpunkt der Achse IV verwendet werden, wiihrend die ubrige Konstruktion unverlndert bleibt. Dasselbe gilt fur das sechs- gliedrige Getriebe mit 5 Drehachsen nnd einem Kreuzgelenk nach Abb. 8 c; bedeuten hier K und J die Schnittpunkte der Achsen IV und V mit der Ebene E der Achsen des Kreuzgelenkes, t~ die Flachennormale dieser Ebene, so kann sich der Punkt K nur in einer Ebene bewegen, die durch die Gerade n und durch die Flachenoormale der Ebene (V K) bestimmt ist, wahrend der Geschwindigkeitsvektor des Punktes J einer Ebene, ge- bildet von der Normalen n und der Flachennormalen der Ebene (IV J), angehoren mud. Somit liegt wieder der in (7) behandelte Fall vor.
Zum Schlusse sei noch crwlhnt, da0 auch das Entwerfen von Beschleunigungs- planen einfacher Raumgetriebe auf ahnliche Weise erfolgen kann wie das Zeichnen yon Geschwindigkeitspliinen dieser Gttriebe, was in der eingangs erwtihnten Arbeit des Ver- fassers an einem Beispiel gezeigt wurde I).
284 U11 e r , Die einfach geflihrten Kapillar- und Schwere-Wellen
‘.E 2 2 I X \ A
J
24
Die einfach gefuhrten Kapillar- und Schwere-Wellen in fliehenden Mitteln. 11.
Von KARL ULLER in Gfeben.
1. Einleitung. Im ersten Teila) haben wir die gefuhrten Wellen behandelt, die an der Qrenze zweier flieaender Mittel moglich sind, falls gar keine Buderen Krtifte und falls nur Qrenzfltichenspannungen existieren. Es gibt in beiden Fallen keine FlnBge- schwindigkeiten, bei denen sie nicht moglich waren. Nach dem Standwechsel-Verfahren dagegen wltren sie im ersteren Falle uberhaupt unmoglicb, jm letzteren Falle mtiglicb, doch sind die Formeln in Wahrheit falsch, wcnn die beiden FluBgeschwindigkeiten ver- schieden siud. I m vorliegenden zweiten Teil wenden wir uns den reinen Schwere-Wellel: zu. Die beigegebenen Schankurven sind nicht maastablich gezeichnet, sind daher auch nicht nntereinander den Abmessungen nach vergleichbar ; sie geben nur den allgemeineii Charakter der Besiehungen wieder. I3a die Wellengeschwindigkeiten v’lm: proportional siud den Wellenltlngen 2 n/mi, gemessen lllngs U, so stellen die Wellengeschwindigkeits- Kiirven zngleich auch die Wellenliingen-Knrven in einem anderen Maastab dar. Sind die Wellengesohwindigkeiten sehr klein, so sprechen wir passend von K r i e c h - Wel l en . M a n hat bei ihnen den Eindruck, als ob die gefiihrte Welle an ihrem Orte verharre wie z. B. bei der Rippel-Wolken in der AtmosphBre. Den Auedruck: stationare Wellen ver- meiden wir; er ist ein Widerspruch in adjecto, denn eine Welle ohne Fortpflanzungs- geschwindigkeit gibt es nicht.
’ ) Verpl. FuDnote I) S 3 7 4 . *) K. U l l e r : Die einfach gefllhrten Kapillar und Schwere Wellen in flieflenden Mitteln. I. Diese
Zeitschr., Bd. 9 (19!29), 8. 305.