Embed Size (px)
Citation preview

Funktionalanalysis
Heinz Grundemann
12. Februar 2011


Einfuhrung
In der klassischen Analysis untersucht man Zahlenfolgen, Zahlenreihen Funktionen,... und fuhrt zu deren Beschreibung die Begriffe Abbildung, Grenzwert, Konvergenz,Stetigkeit, Differenzierbarkeit, ... ein. Im Mittelpunkt steht immer die Analyse der Ei-genschaften des einzelnen mathematischen Objektes (Folge, Reihe, Funktion,...). MitBezug auf eine Funktion f : (a, b) ⊂ R → R geht man wie folgt vor: Zunachst wirdfestgelegt, was unter der Stetigkeit oder Differenzierbarkeit von f in einem Punktx ∈ (a, b) zu verstehen ist. Kann man weiter zeigen, dass dies fur jedes x ∈ (a, b)der Fall ist, so wird die jeweilige Eigenschaft auf ganz f ubertragen, also f z.B. stetigoder differenzierbar auf (a, b) genannt. Weiter kann man fragen ob f in (a, b) einenmaximalen oder minimalen Wert annimmt, Nullstellen und Pole besitzt oder wie ihrasymptotisches Verhalten ist. Die Antworten darauf fuhren zur Analyse der lokalenEigenschaften von f , beziehen sich also auf bestimmte Punkte des Definitionsberei-ches einer vorgegebenen Funktion oder allgemeiner eines bestimmten mathematischenObjektes.
In der Funktionalanalysis geht man einen Schritt weiter und untersucht Mengen ma-thematischer Objekte, z.B. Mengen von Zahlenfolgen, Funktionen, Abbildungen, Ma-trizen, ... Nicht das einzelne Mengenelement (Folge, Funktion,...) steht im Mittelpunktdes Interesses, sondern gefragt wird nach den kollektiven Eigenschaften dieser Ge-samtheiten. Indem zwischen den Elementen (mathematischen Objekten) dieser Men-gen Relationen oder arithmetische Operationen eingefuhrt werden, entstehen topolo-gische oder algebraische Strukturen, die man im allgemeinen Raume nennt. Es zeigtsich, dass aus dieser Sicht unterschiedliche Gesamtheiten mathematischer Objekte zugleichen Raumtypen (metrische Raume, lineare Raume,...) fuhren und damit gewissegemeinsame Eigenschaften besitzen oder gleichen Prinzipien unterliegen. Auf dieserBetrachtungsebene kommen ubergreifend topologische, algebraische und geometrischeAspekte bei der Untersuchung von Eigenschaften einer Gesamtheit mathematischerObjekte (Funktionen, Folgen,...) mit ins Spiel. Man spricht in diesem Zusammenhangauch von einer globalen Charakterisierung der Objekte. Der potentielle Gewinn,der mit dieser Herangehensweise verbunden ist, liegt in einer ubergreifenden einheitli-chen Beurteilung oder Bewertung oft unterschiedlichster mathematischer Sachverhalteoder Prinzipien und der Interpretation dieser aus algebraischer oder geometrischerSicht.
Die Ziele und Aufgabe, der in diesem Grundkurs prasentierten anwendungsorientier-ten Funktionalanalysis, konnen im Uberblick in folgenden Aussagen zusammengefasstwerden:

iv
1. In der Funktionalanalysis werden die Grundprinzipien aus Algebra, Ana-lysis und Geometrie verallgemeinert und zu einer einheitlichen Theoriezusammengefuhrt.
2. Die Basis der Funktionalanalysis bilden Mengen aus allgemeinen Objek-ten (z. B. Punkte, Vektoren, Funktionen, Gleichungen, Abbildungen, Transfor-mationen), zwischen denen Beziehungen definiert sind. Diese Mengen heißenRaume.
3. Haufig auftretende Raume sind:Metrische Raume (Abstand ist definiert → Messen ist moglich)Lineare Raume (Addition und Multiplikation mit Zahlen ist definiert → Rech-nen ist moglich)Lineare normierte Raume (Rechnen und Messen ist moglich)
Die wichtigsten linearen und normierten Raume sind der BANACH-Raum undder HILBERT-Raum. Der HILBERT-Raum ist die direkte Verallgemeinerungeines linearen endlichdimensionalen Vektorraumes.
4. In Raumen konnen analytische und geometrische Grundaufgaben gelostwerden, z. B.:Konvergenz von Folgen und Reihen von Objekten→ NaherungsverfahrenMinimaler Abstand zwischen Teilmengen→ Approximationstheorie.
5. Zwischen Paaren gleicher oder verschiedener Raume werden Abbildungen defi-niert. Diese Abbildungen heißen Operatoren. Durch Operatoren sind allgemei-ne Zusammenhange der Objekte von Raumen in Form von Operatorgleichun-gen beschreibbar (z. B. algebraische Gleichungen, Anfangswert- und Randwert-Aufgaben zu gewohnlichen oder partiellen Differentialgleichungen, Integralglei-chungen). Die Funktionalanalysis stellt allgemeine Losbarkeitsbedingungen(Existenz und Eindeutigkeit) fur diese Operatorgleichungen bereit.
6. Die Losung von Operatorgleichungen kann in aquivalenter Form durch Extrem-wertaufgaben formuliert werden. Die Grundlage dafur bilden die Variations-prinzipien. Diese bilden gleichzeitig die Basis zur numerischen Losung vonOperatorgleichungen
Inhaltlich ist dieser einfuhrende Kurs zur Funktionalanalysis in folgende Schwerpunktegegliedert:
1. Metrische Raume (Abstandsfunktion, Topologische Grundbegriffe, Konver-genz und Vollstandigkeit, Operatoren, Kompaktheit, kontrahierende Abbildung,Fixpunktsatz, Methode der sukzessiven Approximation)
2. Lineare normierte Raume (Lineare Raume, BANACH-Raum, metrische Ei-genschaften von BANACH-Raumen, Lineare Operatoren)

v
3. Hilbert-Raume (Definitionen, Inneres Produkt, Beispiele, Orthogonalitat undUnterraume, Bestapproximation, FOURIER-Reihen, Orthonormalsysteme,SCHMIDTsches Orthonormierungsverfahren)
4. Quadratische Variationsprobleme (Funktionenraume, Verallgemeinerte Ab-leitung und SOBOLEW-Raume, Lineare Funktionale, Bilinearformen, DualerRaum, Numerische Losung quadr. Variationsprobleme, Variationsprobleme furlineare Dgln. 2. Ordnung)
5. Lineare Operatorgleichungen (Adjungierte, symmetrische und monotone Ope-ratoren, Energetischer Raum und FRIEDRICHSsche Erweiterung, Eigenwertpro-bleme, Numerische Losung von EW-Problemen, Dynamische Systeme

vi
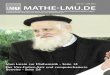
M e t r i s c h e r R a u mk o n t r a h i e r e n d e A b b i l d u n gF i x p u n k t g l e i c h u n g x = T x
H I L B E R T - R a u mb e s t a p p r . E l e m e n tF O U R I E R - R e i h e
q u a d r . V a r i a t i o n p r o b l e m el i n e a r e O p e r a t o r g l e i c h u n g e ne r z e u g t d u r c h l i n e a r e R A W A
F R E C H E T - A b l e i t u n ga l l g e m . V a r i a t i o n s p r o b l e m eL ö s u n g n i c h t l i n e a r e r R A W A
I n t e g r a l - u n d I n t e g r o - D i f f e r e n t i a l g l e i c h u n g e n
s u k z e s s i v eA p p r o x i m a t i o n
n u m e r i s c h eL ö s u n g
( F E M , F D M )
( B E M )n u m e r i s c h eL ö s u n g
A p p r o x i m a t i o n s -t h e o r i e
P o t e n t i a l -t h e o r i e
Ü b e r b l i c k z u r F u n k t i o n a l a n a l y s i s

vii
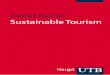
Ü b e r b l i c k z u d e n R ä u m e n
M e t r i s c h e rR a u m l i n e a r e r
R a u m
l i n e a r e rn o r m i e r t e r
R a u mR a u m m i ts k a l a r e mP r o d u k t
B A N A C H -R a u m
H I L B E R T -R a u mV e r v o l l -
s t ä n d i g u n g
M e n g e v o n O b j e k t e nA b s t a n d s -f u n k t i o n
a l g e b r a i s c h eS t r u k t u r


Inhaltsverzeichnis
1. Metrische Raume 11.1. Metrischer Raum und Abstandsfunktion . . . . . . . . . . . . . . . . . 21.2. Topologische Grundbegriffe . . . . . . . . . . . . . . . . . . . . . . . . 81.3. Konvergenz und Vollstandigkeit . . . . . . . . . . . . . . . . . . . . . . 121.4. Operatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.5. Kontrahierende Abbildung . . . . . . . . . . . . . . . . . . . . . . . . . 201.6. Kompaktheit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2. Lineare normierte Raume 372.1. Lineare Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.2. BANACH - Raum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.3. Metrische Eigenschaften von B-Raumen . . . . . . . . . . . . . . . . . . 442.4. Separable lineare Raume . . . . . . . . . . . . . . . . . . . . . . . . . . 482.5. Fixpunktsatze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3. HILBERT-Raume 513.1. Definitionen, Eigenschaften, Beispiele . . . . . . . . . . . . . . . . . . . 523.2. Orthogonalitat und Unterraume . . . . . . . . . . . . . . . . . . . . . . 573.3. FOURIER-Reihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4. Quadratische Variationsprobleme 694.1. Funktionenraume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.2. Verallgemeinerte Ableitung und SOBLEW-Raum . . . . . . . . . . . . 724.3. Lineare Funktionale und Bilinearformen . . . . . . . . . . . . . . . . . 79
4.3.1. Lineare Funktionale und dualer Raum . . . . . . . . . . . . . . 794.3.2. Bilinearformen . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.4. Quadratische Variationsprobleme . . . . . . . . . . . . . . . . . . . . . 834.5. Numerische Losung quadr. Variationsprobleme . . . . . . . . . . . . . . 91
4.5.1. Beispiel: Auslenkung einer Saite . . . . . . . . . . . . . . . . . . 944.6. Variationsprobleme fur lineare Dgl. 2. Ordnung . . . . . . . . . . . . . 98
4.6.1. Numerische Losung der Variationsgleichung (V G) . . . . . . . . 1004.6.2. Beispiel: Auslenkung einer Saite ( Sehne ) . . . . . . . . . . . . 101
5. Symmetrische Operatoren 1075.1. Spektrum symmetrischer Operatoren . . . . . . . . . . . . . . . . . . . 1105.2. FREDHOLMsche Alternative . . . . . . . . . . . . . . . . . . . . . . . 115
6. Lineare Operatorgleichungen 1196.1. Eigenwertprobleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125

x Inhaltsverzeichnis
6.2. Dynamische Systeme und Prozesse . . . . . . . . . . . . . . . . . . . . 1316.2.1. Diffusionsgleichung . . . . . . . . . . . . . . . . . . . . . . . . . 1316.2.2. Wellengleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . 1376.2.3. Schrodinger Gleichung . . . . . . . . . . . . . . . . . . . . . . . 141
6.3. Spektraldarstellung selbstadj. Operatoren . . . . . . . . . . . . . . . . . 1456.4. Energetischer Raum und FRIEDRICHSsche Erweiterung . . . . . . . . 1476.5. Funktionen selbstadjungierter Operatoren . . . . . . . . . . . . . . . . 149
7. Variationsprinzipien 1517.1. Variation, Ableitung, Extremum . . . . . . . . . . . . . . . . . . . . . . 1527.2. Klassische Variationsrechnung . . . . . . . . . . . . . . . . . . . . . . . 156
7.2.1. Variationsrechnung mit einfachen Funktionalen . . . . . . . . . 1567.2.2. Variationsrechnung mit allgemeinen Funktionalen . . . . . . . . 1627.2.3. Das HAMILTON Prinzip . . . . . . . . . . . . . . . . . . . . . . 1657.2.4. Variationsrechnung mit Funktionen mehrerer Variabler . . . . . 167
7.3. Numerische Losung von Variationsaufgaben . . . . . . . . . . . . . . . 1717.3.1. Methode von RITZ . . . . . . . . . . . . . . . . . . . . . . . . . 1717.3.2. Methode von GALERKIN . . . . . . . . . . . . . . . . . . . . . 173
7.4. Existenz und Eindeutigkeit der Losung von Variationsproblemen . . . . 176
A. Anhang 179A.1. Konvexe Mengen und konvexe Funktionen . . . . . . . . . . . . . . . . 179A.2. Messbare Mengen und messbare Funktionen . . . . . . . . . . . . . . . 181A.3. LEBESGUEsches Integral . . . . . . . . . . . . . . . . . . . . . . . . . 183A.4. Geordnete Mengen und ZORNsches Lemma . . . . . . . . . . . . . . . 188A.5. BANACH - Algebren . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189A.6. Operatorgruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
Literaturverzeichnis 199
Stichwortverzeichnis 201

1. Metrische Raume
Der dreidimensionale Raum unserer Anschauung wird durch diePunktmenge
R3 = ~x = (x1, x2, x3) | xi ∈ R i = 1, 2, 3reprasentiert. In ihm ist der Abstand d = d (~x, ~y) der Punkte ~x = (x1, x2, x3) und~y = (y1, y2, y3) durch die Formel
d (~x, ~y) =
√
(x1 − y1)2 + (x2 − y2)
2 + (x3 − y3)2
berechenbar. Mit den ublichen Langenmeßgeraten ( Zollstock, Meßschieber, Band-maß,... ) sind genau diese Abstande von Punkten an realen Objekten meßbar. Aus-gehend von dieser Abstandsdefinition sind Begriffe ableitbar, die die Form und gegen-seitige Lage von Gegenstanden im Raum beschreiben: Umgebung, Abmessung (Lange,Breite, Hohe, Radius,...), Entfernung (Nahe, Weite, Sprunge,...), Korperform (Zylin-der, Kugel,...). Deshalb folgt:DieAbstandsfunktion d (~x, ~y) legt eine Topologie im Raum fest, d.h. eine Mengemit Abstandsfunktion ist ein topologischer Raum.
Bemerkung: In der allgemeinen Topologie geht man den umgekehrten Weg: Ausge-hend von Punktmengen (Umgebungen) werden Abstande definiert.
Weiter: Aufbauend auf der Abstandsdefinition und der damit verbundenen Topo-logie konnen im R3 eine Analysis entwickelt, die Begriffe Grenzwert und Stetig-keit definiert und schließlich die Differential- und Integralrechnung eingefuhrtwerden.
Die Abstandsfunktion d (~x, ~y) fur die Punkte des R3 hat folgende Eigenschaften:1. d (~x, ~y) ist eine nicht negative reellwertige Zahl und d (~x, ~y) = 0 genau dann, wenn~x = ~y.2. d (~x, ~y) = d (~y, ~x) fur beliebige ~x, ~y ∈ R3.3. Es gilt die Dreiecksungleichung:
d (~x, ~z) ≤ d (~x, ~y) + d (~y, ~z)
fur bel. ~x, ~y, ~z ∈ R3
x
y
z
d ( x , y )d ( y , z )
d ( x , z )

2 1. Metrische Raume
Ziel dieses Kapitels ist es, in Mengen uber allgemeinen Objekten ( Funktionen,Folgen, Gleichungen, geometrischen Korpern,...) eine Abstandsfunktion d einzufuhren,die genau diese Eigenschaften besitzt. Die entstehende Struktur (Menge + Abstands-funktion) heißt dann metrischer Raum. In einem metrischen Raum konnen eineTopologie eingefuhrt und weiter eine Analysis (Grenzwerte, Stetigkeit,...) definiert wer-den.
1.1. Metrischer Raum und Abstandsfunktion
Definition 1.1 Eine nichtleere Menge X heißt metrischer Raum, wenn jedem Ele-mentepaar x,y ∈ X eine reelle Zahl d (x,y) so zugeordnet wird, dass gilt:
(M1) d (x,y) ≥ 0 und d (x,y) = 0 ⇔ x = y(M2) d (x,y) = d (y,x)(M3) d (x,y) ≤ d (x, z) + d (z,y) fur ∀ x,y, z ∈ X ( Dreiecksungleichung )
d (x,y) heißt Abstandsfunktion oder Metrik in X.
Folgerung 1.1
1. Verallgemeinerte Dreiecksungleichung:
d (x1,xn) ≤ d (x1,x2) + d (x2,x3) + ...+ d (xn−1,xn)
fur beliebige x1, ...,xn aus X
2.|d (x, z)− d (y, z)| ≤ d (x,y) fur beliebige x,y, z aus X
Folgt sofort aus:
d (x, z) ≤ d (x,y) + d (y, z) ⇒ d (x, z)− d (y, z) ≤ d (x,y)
d (y, z) ≤ d (y,x) + d (x, z) ⇒ d (x, z)− d (y, z) ≥ −d (x,y) .
3. “Stetigkeit” der Abstandsfunktion:
|d (x,y)− d (x′,y′)| ≤ d (x,x′) + d (y,y′) fur beliebige ∀ x,x′,y,y′ aus X
Folgt sofort aus:
d (x,y) ≤ d (x,x′) + d (x′,y′) + d (y′,y)
d (x′,y′) ≤ d (x′,x) + d (x,y) + d (y,y′) .

1.1. Metrischer Raum und Abstandsfunktion 3
UNGLEICHUNGEN
1. Folgen: f = xini=1 g = yini=1 ; xi, yi ∈ R bzw. C 1 ≤ n ≤ ∞
‖f‖p =
(n∑
i=1
| xi |p)1/p
1 ≤ p <∞ ‖f‖∞ = supi
| xi |
‖f · g‖1 =n∑
i=1
| xi · yi | ‖f + g‖p =(
n∑
i=1
| xi + yi |p)1/p
2. Funktionen: f : Ω → R g : Ω → R ( bzw. C )
‖f‖p =
∫
Ω
| f (t) |p dΩ
1/p
1 ≤ p <∞ ‖f‖∞ = supt∈Ω
| f (t) |
‖f · g‖1 =
∫
Ω
| f (t) · g (t) | dΩ; ‖f + g‖p =
∫
Ω
| f (t) + g (t) |p dΩ
1/p
Parameter p und q:1 ≤ p ≤ ∞ und
1
p+1
q= 1 ⇒ q =
p
p− 1p = 1 → q = ∞ ; p = ∞ → q = 1
HOLDERsche Ungleichung:
‖f · g‖1 ≤ ‖f‖p ‖g‖q (p > 1)
speziell fur p = 2 :
n∑
i=1
| xi · yi |≤(
n∑
i=1
| xi |2)1/2( n∑
i=1
| yi |2)1/2
∫
Ω
| f (t) · g (t) | dΩ ≤(∫
Ω
| f (t) |2 dΩ)1/2(
∫
Ω
| g (t) |2 dΩ)1/2
MINKOWSKIsche Ungleichung:
‖f + g‖p ≤ ‖f‖p + ‖g‖p (1 ≤ p ≤ ∞)
speziell fur p = 2 :
(n∑
i=1
| xi + yi |2)1/2
≤(
n∑
i=1
| xi |2)1/2
+
(n∑
i=1
| yi |2)1/2
(∫
Ω
| f (t) + g (t) |2 dΩ)1/2
≤(∫
Ω
| f (t) |2 dΩ)1/2
+
(∫
Ω
| g (t) |2 dΩ)1/2

4 1. Metrische Raume
Beweise zu den Ungleichungen
Lemma 1.1 Es seien a ≥ 0, b ≥ 0 und p > 1 reelle Zahlen, dann gilt:
ab ≤ ap
p+aq
qmit q =
p
p− 1. (1)
Beweis. Wegen1
p− 1=
1− p
p− 1+
p
p− 1= q − 1 folgt aus τ = tp−1 sofort t = τ q−1.
1)
Es sei ap−1 ≤ b,dann gilt : ab ≤ A1 + A2 mit
A1 =a∫
0
tp−1dt =ap
pund
A2 =b∫
0
τ q−1dτ =bq
q. ⇒ (1)
at
b A
Aa p - 1
t p - 1
1
2
tt =
2) Es sei ap−1 > b, dann gilt: bq−1 < a. Wegen der Symmetrie von a und bfolgt aus 1) sofort (1) .
Spezialfall: p = 2 ⇒ q = 2 und aus (a− b)2 ≥ 0 folgt sofort ab ≤ a2
2+b2
2.
HOLDERsche Ungleichung:
‖f · g‖1 ≤ ‖f‖p ‖g‖q (p > 1) (2)
Beweis.1) Aus f = 0 oder g = 0 folgt sofort (2) .2) Mit A = ‖f‖p > 0 und B = ‖g‖q > 0 und
a =| f (t) |A
, b =| g (t) |B
folgt aus dem Lemma:
| ab |= | f (t) g (t) |AB
≤ | f (t) |ppAp
+| g (t) |qqBq
Damit ist:
1
AB
∫
Ω
| f (t) g (t) | dt ≤ 1
p
(‖f‖pA
)p
+1
q
(‖g‖qB
)q
=1
p+
1
q= 1
⇒∫
Ω
| f (t) g (t) | dt ≤ AB = ‖f‖p ‖g‖q .

1.1. Metrischer Raum und Abstandsfunktion 5
MINKOWSKIsche Ungleichung:
‖f + g‖p ≤ ‖f‖p + ‖g‖p (1 ≤ p ≤ ∞) (3)
Beweis.1) Fur p = 1 und p = ∞ ist die Ungleichung offensichtlich.2) 1 < p < ∞ : Mit der Hilfsgroße h (t) = sgn (f (t) + g (t)) (f (t) + g (t))p−1, wo-bei
sgn (z) =
z
|z| fur z 6= 0
0 fur z = 0fur z ∈ C. ⇒
h (t) (f (t) + g (t)) = | f (t) + g (t) |p
Nach 1) und der HOLDER-Ungleichung ist:
‖f + g‖pp =
∫
Ω
| f (t) + g (t) |p dt = ‖h · f + h · g‖1
≤ ‖h · f‖1 + ‖h · g‖1 ≤(
‖f‖p + ‖g‖p)
‖h‖q .
Mit p = (p− 1) q und p−pq= p−p
p(p− 1) = 1 folgt weiter:
‖h‖q =
∫
Ω
| f (t) + g (t) |(p−1)q dt
pqp
= ‖f + g‖pqp
und schließlich
‖f + g‖p−pq
p = ‖f + g‖p ≤ ‖f‖p + ‖g‖p .
Beispiele fur Metrische Raume
1. X = M sei eine beliebige nichtleere Menge. Fur ∀ x,y ∈ M sei
d(x,y) =
0 fur x = y1 fur x 6= y
.
Dann sind die Axiome (M1)− (M3) erfullt und X ist ein metrischer Raum.Diese Metrik heißt diskrete Metrik. Dieses Beispiel zeigt, dass uber einer be-liebigen Menge ein metrischer Raum errichtet werden kann.
2. X = R (Menge der reellen Zahlen) mit der Abstandsfunktiond(x,y) =| x− y | bildet einen metrischen Raum.
3. X = R2 (Menge aller 2-Tupel) x =(x1, x2), y =(y1, y2).Fur ∀ x,y ∈ R2 erfullt die Abstandsfunktion d(x,y) =| x1 − y1| + | x2 − y2|die Axiome (M1)− (M3) und X ist damit ein metrischer Raum.

6 1. Metrische Raume
4. X = Rn (oder X = Cn) (Menge aller n−Tupel)x =(x1, ..., xn) , y =(y1, ..., yn) . Fur ∀ x,y ∈ Rn sei
a) d(x,y) =
(n∑
i=1
| xi − yi|p)1/p
fur 1 ≤ p <∞b) d(x,y) = max
1≤i≤n| xi − yi|
Das (M3)−Axiom kann mit der MINKOWSKIschen Ungleichung nachgewiesenwerden:
(n∑
i=1
| xi − yi|p)1/p
≤(
n∑
i=1
| xi − zi|p)1/p
+
(n∑
i=1
| zi − yi|p)1/p
.
In beiden Fallen sind die Axiome (M1)− (M3) erfullt und X ist ein metrischerRaum.
5. X− sei die Menge aller reell- oder komplexwertigen Zahlenfolgenx = xi∞i=1 , y = yi∞i=1 .
a) d(x,y) =
( ∞∑
i=1
| xi − yi|p)1/p
fur 1 ≤ p <∞
fur ∀ x,y ∈ X mit∞∑
i=1
| xi|p <∞ und∞∑
i=1
| yi|p <∞b) d(x,y) = sup
i| xi − yi|
fur ∀ x,y ∈ X mit supi
| xi|<∞ und supi
| yi|<∞In beiden Fallen sind die Axiome (M1)− (M3) erfullt und X ist ein metrischerRaum.
6. X = C [a, b]− Menge aller auf [a, b] stetigen reell- oder komplexwertigen Funk-tionen. In C [a, b] wird die Abstandsfunktion
d(f ,g) = maxa≤t≤b
| f (t)− g (t) |
fur bel. f ,g ∈ C [a, b]
ta b
d ( f , g )f ( t )
g ( t )
eingefuhrt. Wegen
|f (t)− g (t)| = |f (t)− h (t) + h (t)− g (t)|≤ |f (t)− h (t)|+ |h (t)− g (t)|≤ max
a ≤ t ≤ b|f (t)− h (t)| + max
a ≤ t ≤ b|h (t)− g (t)|
ist das Axiom (M3) erfullt und X ist mit der eingefuhrten Abstandsfunktion einmetrischer Raum.

1.1. Metrischer Raum und Abstandsfunktion 7
7. X−Menge aller reell- oder komplexwertigen Funktionen f (t), die auf einem (nicht
notwendig beschrankten) Intervall (a, b) definiert sind, wobeib∫
a
| f (t) |pdt < ∞.
In X wird die Abstandsfunktion
d(f ,g) =
(b∫
a
| f (t)− g (t) |pdt)1/p
fur bel. f ,g ∈ X
1 ≤ p <∞ ta b
f ( t )
g ( t )
d ( f , g )
p = 1 :
eingefuhrt. Mit der Ungleichung von MINKOWSKI kann die Gultigkeit des (M3)Axioms gezeigt werden:
b∫
a
| f (t)− g (t) |pdt
1/p
≤
b∫
a
| f (t)− h (t) |pdt
1/p
+
b∫
a
| h (t)− g (t) |pdt
1/p
Damit ist X ein metrischer Raum.

8 1. Metrische Raume
1.2. Topologische Grundbegriffe
X−metrischer Raum d (x,y)−Abstandsfunktion x,y ∈ X
1. x0 ∈ X. Die Menge
Kε (x0) = x ∈ X | d (x,x0) < ε
heißt offene Kugel in X oder ε−Umgebung von x0
(x0 −Mittelpunkt, ε− Radius) .Abgeschlossene Kugel: Kε (x0) = x ∈ X | d (x,x0) ≤ ε .
2. Die Menge U ⊂ X heißt Umgebung von x0, wenn sie eine ε−Umgebung vonx0 enthalt.
3. Die Menge A ⊂ X heißt beschrankt, falls A ganz in einer Kugel KR (y) mity ∈ X und 0 < R <∞ enthalten ist.
4. Die Menge A ⊂ X heißt offen, wenn zu jedem x ∈ A ein r > 0 existiert, sodass Kr (x) j A.
5. x0 ∈ A heißt innerer Punkt von A, wenn es ein ε > 0 gibt, so dassKε (x0) ⊂ A.
6. x0 ∈ A heißt Haufungspunkt von A ⊂ X, wenn jede Umgebung von x0 min-destens ein x ∈ A (x 6= x0) enthalt.
7. Die Menge aller Haufungspunkte einer Menge A heißt derivierte Menge A+.
8. Die Menge A = A ∪A+heißt Abschließung (abgeschlossene Hulle) von A.
9. Die Menge A heißt abgeschlossen, wenn A+ j A.
10. Ist B ⊂ A und B = A, so heißt B dicht in A.
11. Die Menge A aller inneren Punkte einer Menge A heißt Inneres von A.Die Differenzmenge ∂A = A−A, bestehend aus den Elementen der AbschließungA, die nicht zu A gehoren, heißt Rand der Menge A.

1.2. Topologische Grundbegriffe 9
Beispiele und Satze zu den topologischen Grundbegriffen
1. Offene Kugel und Umgebung von x0 ∈ X
U
x K ( x )00 e
e
Beispiele:a) X = R mit d (x,y) = |x− y|offene Kugeln = offene Intervalle Kε (x0) = (x0 − ε,x0 + ε) .b) X = R2 mit d (x,y) = |x1−y1|+ |x2−y2|
offene ”Kugel” im R2:
Kε (x0) =
x ∈ R2 | |x − x0|+ |y − y0| < εex
y
y 0
x 0 +
e+y 0
ey 0 - e-x 0 x 0
Im Falle X = R2 mit d (x,y) =√
(x1−y1)2 + (x2−y2)2 erhalt man jedoch
Kε (x0) =
x ∈ R2 |√
(x − x0)2 + (y − y0)
2 < ε
e
x
yy 0
x 0
c) X = C [a, b] mit d (f ,g) = maxa ≤ t ≤ b
|f (t)−g (t)|
offene Kugeln:
Kε (f0) =
f ∈ C [a, b]
∣∣∣∣max
a ≤ t ≤ b|f (t)−f0 (t)| < ε
e
a b
f ( t )0
f ( t )0
f ( t )0
+
- e
t
f ( t )

10 1. Metrische Raume
2. Beschrankte Mengen
y
RK ( y )
AR
Satz 1.2 Die Vereinigung endlich vieler beschrankter Mengen ist beschrankt.
Beweis. Die Mengen A und B seien beschrankt. Dann existieren Elementey1 ∈ X, y2 ∈ X und offene Kugel KR1 (y1) und KR2 (y2) mit A ⊂ KR1 (y1)und B ⊂ KR2 (y2) . Weiterhin sei d (y1,y2) = a. Fur ∀ x ∈ A ist d (x,y1) < R1und fur ∀ x ∈ B ist d (x,y1) < d (x,y2) + d (y2,y1) < R2 + a. Setzt man y = y1
und R = max R1, R2 + a , so ist A ∪B ⊂ KR (y) .Fur eine beliebige Anzahl endlich vieler Mengen erhalt man den Beweis mittelsvollstandiger Induktion.
Bemerkung 1.1 Die Vereinigung beliebig vieler beschrankter Mengen ist i. A.nicht beschrankt.
Bsp.: X = R mit d (x, y) =| x−y |; Ai = [i, i+ 1) i = 0, 1, ...⇒∞⋃
i=1
Ai = [0,∞) .
3. Offene Mengen und innere Punkte
Satz 1.3 Die Vereinigung beliebig vieler offener Mengen Aλ (λ ∈ L) ist eineoffene Menge.
Beweis. Es sei x ∈ A =⋃
λ ∈ L
Aλ , dann ist x ∈ Aλ0 fur wenigstens eine Menge
Aλ0 . Da Aλ0 offen ist, existiert ein offene Kugel Kr (x) mit Kr (x) ⊂ Aλ0 ⊂ A.Folglich ist A offen.
Satz 1.4 Der Durchschnitt endlich vieler offener Mengen ist eine offene Menge.
Beweis. Die Mengen Ai (i = 1, ..., n) seien offen und A =n⋂
i = 1
Ai. Ist x ∈ A,
so ist x ∈ Ai fur alle i = 1, ..., n. Folglich existieren offene Kugeln Kri (x) mitri > 0 und Kri (x) ⊂ Ai. Es sei r = min
1 ≤ i ≤ nri > 0 , dann gilt fur die offene Kugel

1.2. Topologische Grundbegriffe 11
Kr (x) : Kr (x) ⊂ Ai fur ∀ i = 1, ..., n und damit Kr (x) ⊂ A. Folglich ist Aeine offene Menge.
Bemerkung 1.2 Der Durchschnitt beliebig vieler offener Mengen ist i. A. keineoffene Menge.Bsp.:X = R mit d (x, y) = |x− y| ; An =
(− 1
n, 1 + 1
n
)n = 1, 2, ... ⇒
A =∞⋂
n = 1
An = [0, 1] ist eine abgeschlossene Menge in X. Die Punkte 0 und 1
sind keine inneren Punkte von A.
Bemerkung 1.3 Eine MengeA ist genau dann offen, wenn jedes Element x ∈ Ainnerer Punkt von A ist.
Bemerkung 1.4 Der metrische Raum X selbst sowie die leere Menge ∅ sindstets offen und abgeschlossen.
4. Abgeschlossene Mengen, Abschließung, Haufungspunkt
Beispiel 1.1 X = R mit d (x, y) =| x− y |;
• A = [0, 1] ⇒ A = A+= A . Ein beliebiges x ∈ A ist Haufungspunkt von Afolglich ist A abgeschlossen in R.
• B =(0, 1) ⇒ B+= B = [0, 1] . B enthalt die Haufungspunkte 0 und 1 nicht.
• C =
1n| n ∈ N
besitzt x0 = 0 als einzigen Haufungspunkt, d. h.
C+ = x0 und C = C ∪C+. C ist damit nicht abgeschlossen.
5. Beispiele fur eine dichte Menge
Beispiel 1.2 Die Menge der rationalen Zahlen Q ist in der Menge der reellenZahlen R dicht. Q ⊂ R und Q = R.
Beispiel 1.3 Im Raum C [a, b] aller auf [a, b] stetigen Funktionen mit der Ab-standsfunktion d (x,y) = max
a≤t≤b|x (t)− y (t)| ist die Menge
PR [a, b] =
PnR (t) =n∑
i=0
riti | ri ∈ Q ; a ≤ t ≤ b ; n ∈ N
aller Polynome PnR (t) auf [a, b] mit rationalen Koeffizienten ri und beliebigenGrades n dicht, d.h. es gilt PR [a, b] = C [a, b].
Beweis. Wesentlicher Bestandteil des Beweises dieser Aussage ist der WEIER-STRASSsche Approximationssatz (siehe z.B. ZEIDLER, [2] Bd. 1, S.84-86): Jedestetige Funktion x (t) kann beliebig genau durch ein Polynom Pn (t) approximiert
werden, d.h. fur beliebiges ε > 0 existiert ein Polynom Pn (t) =n∑
i=0
aiti mit reellen
Koeffizienten ai, so dass gilt
d (x,Pn) = maxa≤t≤b
|x (t)−Pn (t)| < ε.

12 1. Metrische Raume
Da jede reelle Zahl ai aber beliebig genau durch eine rationale Zahl ri naherungs-weise darstellbar ist, kann jedes Polynom Pn (t) mit reellen Koeffizienten beliebiggenau durch ein Polynom PnR (t) mit rationalen Koeffizienten approximiert wer-den:
d (Pn,PnR) = maxa≤t≤b
|Pn (t)−PnR (t)| < ε.
Damit ist d (x,PnR) ≤ d (x,Pn) + d (Pn,PnR) < 2ε und folglich PR [a, b] dichtin C [a, b].Aus der Abzahlbarkeit der rationalen Zahlen und zusammen mit der Tatsache,dass die Vereinigung abzahlbar vieler abzahlbarer Mengen wieder abzahlbar ist,folgt die Abzahlbarkeit der Menge PR [a, b]. Daraus kann nun geschlußfolgert wer-den, dass in C [a, b] mit PR [a, b] eine abzahlbare dichte Menge existiert.
1.3. Konvergenz und Vollstandigkeit
X−metrischer Raum d (x,y)−Abstandsfunktion x,y ∈ X
Definition 1.2 Eine Folge xn ⊂ X heißt konvergent, wenn ein x0 ∈ X mit
d (xn,x0) → 0 (n→ ∞)
existiert. In diesem Fall gibt es zu beliebigem ε > 0 ein n0 = n0 (ε) ∈ N, so dass
d (xn,x0) < ε fur beliebige n ≥ n0.
x0 ∈ X heißt Grenzwert der Folge xn .
Bezeichnung: xn → x0 (n→ ∞) oder limn→∞
xn = x0.
Bemerkung 1.5 Der Grenzwert einer Folge ist eindeutig bestimmt.
Beweis. Annahme: Die Elemente x und y mit x 6= y seien Grenzwerte der Folge xn .Dann gilt 0 < d (x,y) ≤ d (x,xn) + d (xn,y) → 0 und folglich ist d (x,y) = 0 unddamit x = y. Dieser Widerspruch zur Annahme beweist die Aussage der Bemerkung.
Bemerkung 1.6 Eine konvergente Folge xn ⊂ X mit xn → x0 ist beschramkt, d.h.es existiert eine offene Kugel KR (x0) mit xn ⊂ KR (x0).

1.3. Konvergenz und Vollstandigkeit 13
Beweis. Fur beliebiges ε > 0 existiert ein n0 (ε), so dass fur alle n = n0 giltd (xn,x0) < ε. Setzt man R0 = max d (x1,x0) , ..., d (xn0 ,x0) , ε+ 1,so ist xn ⊂ KR (x0).
Definition 1.3 Eine Folge xn ⊂ X heißt CAUCHY-Folge, wenn
limm,n→∞
d (xn,xm) = 0
gilt, d. h. fur belieges ε > 0 existiert ein n0 = n0 (ε) ∈ N, so daß
d (xn,xm) < ε fur beliebige n,m ≥ n0.
Satz 1.5 Jede in X konvergente Folge ist eine CAUCHY-Folge.
Beweis. xn sei eine konvergente Folge und xn → x0. Dann existiert fur bel. ε > 0ein n0 (ε) ∈ N mit d (xn,x0) <
ε2und d (xm,x0) <
ε2fur bel. m,n ≥ n0. Damit gilt
d (xm,xn) ≤ d (xm,x0) + d (x0,xn) < ε und folglich ist xn eine CAUCHY-Folge.
Bemerkung 1.7 Die Umkehrung des Satzes gilt i. A. nicht, d. h. nicht jede CAUCHY-Folge muß in einem beliebigen metrischen Raum gegen ein Element dieses Raumeskonvergieren.Bsp.: X =(0, 1) mit d (x, y) = |x− y| ist ein metrischer Raum. Die Folge xn = 1
n
(n = 1, 2, ...) ist in X eine CAUCHY-Folge, denn sei ε > 0 und n0 (ε) =[2ε
]+1, dann
folgt d (xm, xn) ≤ 1n+ 1
m≤ 2
n0< ε fur m,n = n0. Aber es gibt kein x0 ∈ X mit xn → x0
(da 0 /∈ X), d. h. xn ist keine konvergente Folge in X.
Definition 1.4 Ein metrischer Raum, in dem jede CAUCHY-Folge gegen ein Elementdieses Raumes konvergiert, heißt vollstandiger metrischer Raum.

14 1. Metrische Raume
Beispiele zum Konvergenzbegriff und zu
vollstandigen metrischen Raumen
1. X = Rn mit d (x,y) =
(n∑
i=1
(xi − yi)2
)1/2
Die Folgex(k)mit x(k) =
(
x(k)1 , ..., x
(k)n
)
konvergiert gegen
x(0) =(
x(0)1 , ..., x
(0)n
)
, wenn gilt:
d(x(k),x(0)
)=
(n∑
i=1
(
x(k)i − x
(0)i
)2)1/2
→ 0 fur k → ∞. Dies ist nur moglich,
wenn gilt: x(k)i → x
(0)i fur i = 1, ..., n.
Damit ist die Konvergenz im Raum Rn aquivalent zur koordinatenweisenKonvergenz.x(k)
⊂ Rn sei eine CAUCHY-Folge, dann existiert fur bel. ε > 0 ein n0 (ε)
mit d(x(k),x(m)
)=
(n∑
i=1
(
x(k)i − x
(m)i
)2)1/2
< ε fur bel. k,m ≥ n0. Folglich
ist auch∣∣∣x
(k)i − x
(m)i
∣∣∣ < ε fur bel. k,m ≥ n0 und jedes i = 1, ..., n. Damit ist
jede der Zahlenfolgen
x(k)i
(i = 1, ..., n) eine CAUCHY-Folge in R. Nach dem
CAUCHYschen Konvergenzkriterium fur reelle Zahlenfolgen existieren x(0)i mit
x(k)i → x
(0)i (k → ∞) . Folglich gilt auch x(k) → x(0) =
(
x(0)1 , ..., x
(0)n
)
∈ Rn und
damit ist der Raum Rn ein vollstandiger metrischer Raum.
2. X = C [a, b] mit d (x,y) = maxa ≤ t ≤ b
|x (t)− y (t)|Die Folge xn (t) konvergiert
gegen x0 (t) , wennd (xn,x0) = max
a ≤ t ≤ b|xn (t)− x0 (t)| → 0 fur n → ∞. Folglich existiert fur bel.
ε > 0 ein n0 (ε) ∈ N mit |xn (t)− x0 (t)| < ε fur bel. n ≥ n0 und bel. t ∈ [a, b] .( n0 (ε) ist unabhangig von t ∈ [a, b] ! )DieKonvergenz einer Funktionenfolge in C [a, b] ist aquivalent zur gleich-maßigen Konvergenz ( bzg. t ).a) xn (t) sei eine CAUCHY-Folge in C [a, b] folglich existiert fur bel. ε > 0 einn0 (ε) mit |xm (t)− xn (t)| < ε fur bel. n,m ≥ n0 und bel. t ∈ [a, b] . Wahlt mant fest (aber beliebig), so ist xn (t) eine Zahlenfolge. Nach dem CAUCHYschenKonvergenzkriterium fur Zahlenfolgen existiert ein x0 (t) mit xn (t) → x0 (t) .Damit wird jedem t ∈ [a, b] der Wert x0 (t) zugeordnet, d. h. x0 (t) ist eine auf[a, b] definierte Funktion.b) Aus a) folgt |xn (t)− xn+k (t)| < ε fur bel. n ≥ n0 und bel. t ∈ [a, b] (k ∈ N).Fur k → ∞ folgt |xn (t)− x0 (t)| ≤ ε, wenn n ≥ n0 und bel. t ∈ [a, b]. D. h. dieFolge xn (t) konvergiert gleichmaßig gegen x0 (t) auf dem Intervall [a, b] .c) Es bleibt zu zeigen, dass x0 (t) eine stetige Funktion auf [a, b] ist, d. h. x0 (t) ∈C [a, b] . Da xn (t) eine Folge stetiger Funktionen ist, existiert zu bel. ε > 0 einδ = δ (ε) > 0, so dass gilt |xn (t)− xn (t0)| < ε fur bel. t ∈ [a, b] mit |t− t0| < δ.Weiterhin ist
|x0 (t)− x0 (t0)| ≤ |x0 (t)− xn (t)|+ |xn (t)− xn (t0)|+ |xn (t0)− x0 (t0)| ≤ 3ε

1.3. Konvergenz und Vollstandigkeit 15
fur bel. t mit |t− t0| < δ und damit x0 (t) ∈ C [a, b] .
x ( t )
x ( t )n
0
x ( t )n
x ( t )0
x ( t )0 0
x ( t )n 0
ta t 0 b
Damit ist C [a, b] ein vollstandiger metrischer Raum.
3. X sei der metrische Raum aller auf dem Intervall [a, b] stetigen Funktionen x (t) ,
y (t) ,... mit d (x,y) =
(b∫
a
| x (t)− y (t) | pdt
)1/p
fur p fest und 1 ≤ p <∞. Die
Folge xn (t) konvergiert gegen x0 (t), wenn
d (xn,x0) =
(b∫
a
| xn (t)− x0 (t) | pdt
)1/p
→ 0 fur n→ ∞.
Diese Konvergenz heißt Konvergenz im p−ten Mittel auf [a, b] .Im Falle p = 2 ist dies die Konvergenz im quadratischen Mittel.Im Falle p = 1 kann die Konvergenz xn (t) → x0 (t) so gedeutet werden, dass die”Flache zwischen den Funktionen” gegen Null strebt.Bemerkung: X ist, wie das folgende Beispiel zeigt, i.A. aber kein vollstandigermetrischer Raum.

16 1. Metrische Raume
Beispiel 1.4 ( Beispiel fur einen nicht vollstandigen metrischen Raum )X sei der metrische Raum aller auf dem Intervall [0, 1] stetigen Funktionen x (t) , y (t)
mit d (x,y) =
(1∫
0
|x (t)− y (t)|2 dt)1/2
.
In X wird die Funktionenfolge
xn (t) =
n1/3 fur t ≤ 1n
t−1/3 fur t > 1n
definiert.Daneben fuhren wir die Funktionx (t) = t−1/3 ein.
x ( t )nn
t1n 1
t
1 3
1 3-
Die Funktionen xn (t) sind fur jedes n stetig auf [0, 1] . Außerdem ist:
(d (x,xn))2 =
1∫
0
|x (t)− xn (t)|2 dt =1/n∫
0
(t−1/3 − n1/3
)2dt
≤1/n∫
0
t−2/3dt = 33
√
1
n→ 0 fur n→ ∞
Folglich gilt xn (t) → x (t) , aber x (t) ist auf dem Intervall [0, 1] keine stetige Funktion.D.h., die Folge xn (t) ist damit zwar in X eine CAUCHY-Folge, aber es kann in Xkeine stetige Grenzfunktion fur diese Folge existieren. Damit ist X kein vollstandigermetrischer Raum.
Beispiel 1.5 ( Beispiel fur einen nicht vollstandigen metrischen Raum )
Es sei X = Q die Menge der rationalen Zahlen mit d (x, y) = |x− y| und xn =n∑
k=0
1k!
eine Zahlenfolge. Jedes xn ist Element aus Q und xn konvergiert in sich. Folglich
ist diese Folge eine CAUCHY-Folge. Aber xn → e =∞∑
k=0
1k!/∈ Q. Deshalb ist Q kein
vollstandiger metrischer Raum. Die Vervollstandigung von Q in dieser Metrik ist aberR.

1.4. Operatoren 17
1.4. Operatoren
X−metrischer Raummit dX (x,y) Y−metrischer Raummit dY (x,y)
A ⊆ X und B ⊆ Y seien Teilmengen.
Definition 1.5 Eine Abbildung T : A → B, die jedem x ∈ A eindeutig ein y ∈ B zu-geordnet, heißt Operator (oder Transformation)Schreibweise: Tx = y oder T (x) = yDefinitionsbereich von T : ABildbereich von T : T (A) = y ∈ B | ∃ x ∈ A mit T (x) = y
Der Operator T : A → B heißtsurjektiv ⇔ T (A) = Binjektiv ⇔ aus T (x) = T (y) ⇒ x = ybijektiv, wenn er surjektiv und injektiv ist.
Definition 1.6 Ist der Operator T : A → B bijektiv, so existiert der inverse Ope-rator T−1: B → A, der durch T−1 (y) = x ⇔ T (x) = y definiert ist.
Definition 1.7 Der Operator T : A → B heißt stetig im Punkt x0 ∈ A, wenn zubeliebigem ε > 0 ein δ (ε,x0) > 0 existiert, so dass gilt
dY (T (x) ,T (x0)) < ε fur bel. x ∈ A mit dX (x,x0) < δ.
Ist T in allen Punkten x0 ∈ A stetig, so heißt T stetig auf A.Kann außerdem δ (ε,x0) so gewahlt werden, dass es fur bel. x0 ∈ A nicht von x0
abhangt, so heißt T gleichmaßig stetig auf A, d. h. fur bel. x ∈ A und ε > 0existiert ein δ (ε) > 0, so dass gilt
dY (T (x) ,T (y)) < ε fur bel. y ∈ A mit dX (x,y) < δ.

18 1. Metrische Raume
Beispiele zu injektiven, surjektiven und bijektiven Abbildungen
X = Y = R, A = [a, b] , B = [c, d] , T : A ⊆ X → B
a bc
d
a bc
d
a bc
d
i n j e k t i v s u r j e k t i v b i j e k t i v
Beispiel 1.61. Integraloperatoren:X = Y = C [a, b] ; mit d (x,y) = max
a ≤ t ≤ b|x (t)− y (t)|
Mit der stetigen reellwertigen Funktion F (t, s,x (s)) , wobei F : [a, b]× [a, b]×R → R,sind
(Sx) (t) =
t∫
a
F (t, s,x (s)) ds t ∈ [a, b]VOLTERRAscherIntegraloperator
(Rx) (t) =
b∫
a
F (t, s,x (s)) ds t ∈ [a, b]FREDHOLMscherIntegraloperator
stetige Operatoren S : C [a, b] → C [a, b] und R : C [a, b] → C [a, b] .2. Differentialoperatoren:Gegeben sei die folgende RWA fur eine gewohnliche Differentialgleichung
md2x (t)
dt2+ µ
dx (t)
dt+ kx (t) = f (t) a ≤ t ≤ b
mit x (a) = xa x (b) = xb
Definiert man den Operator
(Ax) (t) = md2x (t)
dt2+ µ
dx (t)
dt+ kx (t) mit
D (A) =x ∈ C2 (a, b) | x (a) = xa ; x (b) = xb
,
dann gilt. A : D (A) → C [a, b] mit (Ax) (t) = f (t) .Der Operator A ist ein Differentialoperator.
Definition 1.8 Eine Abbildung T : A → B, die bijektiv und stetig ist und deren inver-se Abbildung T−1: B → A ebenfalls stetig ist, heißt homoomorph oder Homoomor-phismus.

1.4. Operatoren 19
Zwei Mengen A und B werden genau dann homoomorph genannt, wenn einHomoomorphismus T : A → B existiert.
A Bxy
T ( x )T ( y )
T
Td ( x , y ) d ( T ( x ) , T ( y ) )X Y
Beispiel 1.7 Im R2 seien die folgenden Mengen gegeben:
A =
(r, ϕ) ∈ R2∣∣∣0 < r1 < r < r2 und 0 < ϕ1 < ϕ < ϕ2 <
π
2
B =
(x, y) ∈ R2∣∣∣r21 < x2 + y2 < r22 und 0 < ϕ1 < arctan
(y
x
)
< ϕ2 <π
2
Die beiden Mengen A und B sind homoomorph zueinander.Ein Homoomorphismus T : A → B ist durch
T (r, ϕ) =
(xy
)
=
(r cos (ϕ)r sin (ϕ)
)
bzw. T−1 (x, y) =
(rϕ
)
=
( √
x2 + y2
arctan(yx
)
)
gegeben.
rr
r1
2
j
j
j
12
B
x
y
r 2r 1
j 2
j 1
A T ( A ) = B

20 1. Metrische Raume
1.5. Kontrahierende Abbildung
X− metrischer Raum d (x,y)−Abstandsfunktion x,y ∈ X
A ⊆ X− abgeschlossene Teilmenge in X
Definition 1.9 Eine Abbildung T : A → A heißt auf A kontrahierend, wenn gilt
d (T (x) ,T (y)) ≤ qd (x,y) mit q < 1 fur ∀ x,y ∈ A
D.h., der Abstand der Bilder ist stets kleiner als der Abstand der Urbilder.
Satz 1.6 (BANACHscher Fixpunktsatz)X− vollstandiger metrischer Raum, A ⊆ X− abgeschlossenT : A → A kontrahierende Abbildung auf ADann besitzt die Fixpunktgleichung
x = T (x)
genau eine Losung x∗ ∈ A, genannt Fixpunkt von T.
Satz 1.7 (Sukzessive Approximation)X− vollstandiger metrischer Raum, A ⊆ X− abgeschlossenT : A → A kontrahierende Abbildung auf ADann konvergiert die Folge
xn+1 = T (xn) n = 0, 1, 2, ...
fur beliebiges x0 ∈ A gegen den Fixpunkt x∗ ∈ A von T :
limn→∞
xn = x∗ = T (x∗)
a priori - Abschatzung:
d (xn,x∗) ≤ qn
1− qd (x0,T (x0))
a posteriori - Abschatzung:
d (xn,x∗) ≤ q
1− qd(xn,xn−1
)

1.5. Kontrahierende Abbildung 21
Beweis.x0 sei ein bel. Element aus der Menge A. Beginnend mit diesem Element wird die Folgexn+1 = T (xn) gebildet. Dann gilt:
d (xn+1,xn) = d (T (xn) ,T (xn−1)) ≤ qd(xn,xn−1
)
= qd (T (xn−1) ,T (xn−2)) ≤ q2d(xn−1,xn−2
)= ...
⇒ d (xn+1,xn) ≤ qn−kd (xk+1,xk) fur 0 ≤ k ≤ n
Weiterhin ist:
d (xn+m,xn) ≤n+m−1∑
i=n
d (xi+1,xi) (1)
≤(qm−1 + qm−2 + ...+ q + 1
)qn−kd (xk+1,xk)
=1− qm
1− qqn−kd (xk+1,xk) fur 0 ≤ k ≤ n und m ≥ 1
1) Existenz von x∗ : Aus der Beziehung (1) folgt: limn→∞
d (xn+m,xn) = 0. Folglich ist
die Folge xn eine CAUCHY-Folge . Da der metrische Raum X vollstandig ist, exis-tiert ein x∗ ∈ X mit x∗ = lim
n→∞xn. Da A abgeschlossen ist, gilt auch x∗ ∈ A. We-
gen
d (x∗,T (x∗)) ≤ d (x∗,xn) + d (xn,T (x∗))
= d (x∗,xn) + d (T (xn−1) ,T (x∗))
≤ d (x∗,xn)→0
+ qd (xn−1,x∗)
→0
→ 0 fur n→ ∞
ist T (x∗) = x∗, d. h. x∗ ist Fixpunkt von T.2) Eindeutigkeit von x∗ : Annahme: Es seien x∗ und y∗ mit x∗ 6= y∗ Fixpunkte von T.Dann ist
d (x∗,y∗) = d (T (x∗) ,T (y∗)) ≤ qd (x∗,y∗)
und damit q ≥ 1, im Widerspruch zur Vorraussetzung. Folglich kann nur x∗ = y∗ sein.3) A posteriori Abschatzung: Folgt sofort aus (1) mit k = n− 1 und m→ ∞.4) A priori Abschatzung: Folgt sofort aus (1) mit k = 0 undm→ ∞.
Anwendungen auf Integralgleichungen
Gegeben ist die Integralgleichung:
x (t) = λ
b∫
a
F (t, s,x (s)) ds+ f (t) fur a ≤ t ≤ b λ ∈ C (1)
Mit dem Integraloperator Tλ : C [a, b] → C [a, b] gemaß
(Tλx) (t) = λ
b∫
a
F (t, s,x (s)) ds+ f (t)

22 1. Metrische Raume
erhalt (1) die Form einer Fixpunktgleichung
x (t) = (Tλx) (t) fur a ≤ t ≤ b.
Bedingungen:
1. Die Funktion f : [a, b] → R sei stetig.
2. Die Funktion F : [a, b]× [a, b]× R → R und deren partielle Ableitung
Fx =∂F
∂x(t, s,x) mit Fx: [a, b]× [a, b]× R → R seien stetig.
3. Fx sei beschrankt: | Fx (t, s,x) |≤M1 <∞ fur bel. t, s ∈ [a, b] und x ∈ R.
4. Fur den Parameter λ gelte: (b− a) | λ | M1 = q < 1.
Satz 1.8 Unter den Bedingungen 1. - 4. besitzt die Integralgleichung (1) eine eindeutigbestimmte Losung x∗ (t) ∈ C [a, b]. Die Folge xn (t) gemaß der sukzessiven Approxi-mation
xn+1 (t) = λ
b∫
a
F (t, s,xn (s)) ds+ f (t) n = 0, 1, 2, ...
bzw. xn+1 (t) = (Tλxn) (t)
konvergiert fur bel. x0 (t) ∈ C [a, b] gegen x∗ (t), d. h. xn (t) → x∗ (t) (n→ ∞) .Als Startfunktion kann z. B. x0 (t) ≡ 1 auf [a, b] genommen werden.
Beweis. Es ist zu zeigen, dass der Operator Tλ auf dem vollstandigen metrischenRaum C [a, b] unter den Bedingungen 1.- 4. ein kontrahierender Operator ist.a) Setzt man A = X = C [a, b], dann ist Tλ : A → A und damit die erste Forderungan einen kontrahierenden Operator erfullt.b) Nach dem Mittelwertsatz der Differentialrechnung existiert fur ∀ t, s ∈ [a, b] und∀ x1,x2 ∈ R ein ξ ∈ R mit
|F (t, s,x1)− F (t, s,x2)| ≤ |Fx (t, s, ξ)| |x1 − x2| ≤nach 3)
M1 |x1 − x2| .
Damit erhalt man weiter:
dx (Tλx1,Tλx2) = maxa ≤ t ≤ b
|Tλx1 (t)−Tλx2 (t)|
≤ |b− a| |λ|M1 maxa ≤ t ≤ b
|x1 (t)− x2 (t)|
≤ qdx (x1,x2) mit q < 1 (nach 4))
Aus a) und b) folgt die Kontraktionseigenschaft des Operators Tλ. Die Aussagen desSatzes folgen nun direkt aus dem BANACHschen Fixpunktsatz.

1.5. Kontrahierende Abbildung 23
Bemerkung 1.8 Die a priori - und a posteriori - Abschatzungen des BANACHschenFixpunktsatzes sind mit q = (b− a) |λ|M1 gultig.
Bemerkung 1.9 Man spricht von einer linearen Integralgleichung, wenn gilt:
F (t, s,x (t)) = K (t, s)x (s)
Ist der Kern K (t, s) gemaß K : [a, b] × [a, b] → R stetig, so sind die Bedingungen 2.und 3. des Satzes mit M1 = max
a ≤ t,s ≤ b|K (t, s)| erfullt.
Bemerkung 1.10 Die Folge xn (t) konvergiert auf [a, b] gleichmaßig gegen x∗ (t).
Beispiel 1.8 Gegeben ist die lineare Integralgleichung
x (t) = λ
1∫
0
tsx (s) ds+ 1 fur 0 ≤ t ≤ 1 (2)
F (t, s,x (s)) = tsx (s) und Fx (t, s) = ts sind auf [0, 1]× [0, 1]×R stetige Funktionen.
max0 ≤ t,s ≤ 1
| Fx (t, s) |= 1 =M1
Gilt fur den Parameter λ: (b− a) |λ|M1 = |λ| < 1, so sind die Bedingungen des Satzesfur die Integralgleichung (2) mit q = |λ| erfullt. D. h. im Falle |λ| < 1 besitzt (2) eineeindeutig bestimmte Losung x∗ (t) ∈ C (0, 1) .Fur die Folge der Naherungslosungen xn (t) gemaß der sukzessiven Approximation gilt:
xn+1 (t) = λ
1∫
0
tsxn (s) ds+ 1 fur 0 ≤ t ≤ 1 und n = 0, 1, 2, ... .
Mit x0 (t) ≡ 1 auf [0, 1] erhalt man:
x1 (t) = λ t
1∫
0
s ds+ 1 =λ
2t+ 1
x2 (t) = λ t
1∫
0
(λ
2s2 + s
)
ds+ 1 =λ t
2
(λ
3+ 1
)
+ 1
x3 (t) = λ t
1∫
0
[λ
2
(λ
3+ 1
)
s2 + s
]
ds+ 1 =λ t
2
(λ2
32+λ
3+ 1
)
+ 1
−−−−−−−−−−−−−−−−−−−−−−−−−
xn+1 (t) = λ t
1∫
0
s xn (s) ds+ 1 =λ t
2
n∑
k=0
(λ
3
)k
+ 1
→ 3
2
(λ
3− λ
)
t+ 1 = x∗ (t) fur n→ ∞.
Man beachte, dass x∗ (t) fur bel. λ 6= 3 eine Losung von (2) ist.

24 1. Metrische Raume
Anwendungen auf Anfangswertprobleme
Gegeben ist das Anfangswertproblem (AWP):
x′ (t) = f (t,x (t)) |t− t0| ≤ h (1)
x (t0) = x0
Gesucht ist x (t) ∈ AA ⊂ X = C (t0 − h, t0 + h)und x (t) differenzierbar. Dabei ist:
A =
x (t) ∈ X
∣∣∣∣
max|t−t0|≤ h
|x (t)− x0| ≤ r
x ( t ) AS
t
xx + r
x - r
x
t + htt - h
0
0
0
000
Uberfuhrung der AWA in eine aquivalente Integralgleichung:
x (t) = x0 +
t∫
t0
f (s,x (s)) ds |t− t0| ≤ h x ∈ A
mit dem Integraloperator T : A → X gemaß
(Tx) (t) = x0 +
t∫
t0
f (s,x (s)) ds |t− t0| ≤ h
erhalt man die Fixpunktgleichung x (t) = (Tx) (t) .
Bedingungen:
1. Auf der Menge
S =(t,x) ∈ R2 | |t− t0| ≤ h; |x− x0| ≤ r
seien die Funktionen f : S → R und deren partielle Ableitung
fx =∂f
∂x(t,x) : S → R stetig.
2. Die Funktionen f und fx seien auf S beschrankt
max(t,x) ∈ S
|f (t,x)| =M max(t,x) ∈ S
|fx (t,x)| =M1
und h erfulle die Bedingungen
hM ≤ r und hM1 = q < 1.

1.5. Kontrahierende Abbildung 25
Satz 1.9 ( Satz von PICARD-LINDELOF ) Unter den Bedingungen 1. und 2.besitzt die AWA (1) eine eindeutig bestimmte Losung
x∗ (t) ∈ A ⊂ C (t0 − h, t0 + h)
Die Folge der Naherungslosungen xn (t) gemaß der sukzessiven Approximation
xn+1 (t) = x0 +
t∫
t0
f (s,xn (s)) ds |t− t0| ≤ h
bzw. xn+1 (t) = (Txn) (t) n = 0, 1, 2, ...
konvergiert fur bel. x0 (t) ∈ A gegen x∗ (t) , d. h. xn (t) → x∗ (t) (n→ ∞) .Als Startfunktion kann z. B. x0 (t) ≡ x0 fur |t− t0| ≤ h genommen werden.
Beweis. Es ist zu zeigen, dass der Operator T auf dem vollstandigen metrischen RaumX = C (h− t0, h+ t0) unter den Bedingungen 1. und 2. ein kontrahierender Operatorist. Die Aussagen des Satz folgen dann aus dem BANACHschen Fixpunktsatz.a) zu zeigen: T : A → A. Fur bel x (t) ∈ A gilt:
∣∣∣∣∣∣
t∫
t0
f (s,x (s)) ds
∣∣∣∣∣∣
≤ |t− t0| max(t,x) ∈ S
|f (t,x)| ≤ hM ≤ r
mit |t− t0| ≤ h
Folglich ist (BeachteTx ist fur x ∈ A eine stetige Funktion.)
dx (Tx,x0) = max|t−t0|≤ h
∣∣∣∣∣∣
t∫
t0
f (s,x (s)) ds
∣∣∣∣∣∣
≤ r
und damit (Tx) (t) ∈ A.b) Aus dem Mittelwertsatz der Diff.-Rechnung folgt fur bel. (t,x1) ∈ S und(t,x2) ∈S
|f (t,x1)− f (t,x2)| = |fx (t, ξ)| |x1 − x2| ≤M1 |x1 − x2|und damit
dx (Tx1,Tx2) = max|t−t0|≤ h
∣∣∣∣∣∣
t∫
t0
[f (s,x1 (s))− f (s,x2 (s))] ds
∣∣∣∣∣∣
≤ hM1 max|t−t0|≤ h
|x1 (t)− x2 (t)|
= qdx (x1,x2)
Aus a) und b) folgt, dassT ein kontrahierender Operator ist.

26 1. Metrische Raume
Beispiel 1.9 Gegeben sei die Anfangswertaufgabe:
x′ (t) = t x (t) mit x (0) = x0 = 1 (2)
Die zu (2) aquivalente Integralgleichung lautet:
x (t) = 1 +
t∫
0
s x (s) ds.
Mit t0 = 0 und x0 = 1 ist S = (t,x) ∈ R2 | |t| ≤ h; |x−1| ≤ r und man erhalt weitermit f (t,x) = tx , fx (t) = t:
max(t,x) ∈ S
|f (t,x)| ≤ h (r + 1) =M max(t,x) ∈ S
|fx (t,x)| = h =M1.
Die Bedingungen des Satzes sind deshalb erfullt, wenn
hM = h2 (r + 1) ≤ r und hM1 = h2 = q < 1.
(Dabei wurde |x| ≤ r + 1 benutzt.) D. h. im Falle h < 1 besitzt die AWA (2) eineeindeutig bestimmte Losung x∗ (t) ∈ C (−h, h) . Mit festem h muß r die Bedingungr ≥ h2/ (1− h2) erfullen.Fur die Folge der Naherungen xn (t) nach der sukzessiven Approximation gilt mitx0 (t) ≡ 1 auf [−h, h] :
x1 (t) = 1 +
t∫
0
s ds = 1 +t2
2
x2 (t) = 1 +
t∫
0
s
(
1 +s2
2
)
ds = 1 +t2
2+
1
2
(t2
2
)2
x3 (t) = 1 +
t∫
0
s x2 (s) ds = 1 +t2
2+
1
2!
(t2
2
)2
+1
3!
(t2
2
)3
−−−−−−−−−−−−−−−−−−−−−−−−−
xn+1 (t) = 1 +
t∫
0
s xn (s) ds =n+1∑
k=0
1
k!
(t2
2
)k
→ exp
(t2
2
)
= x∗ (t) fur (n→ ∞) .
Man beachte, daß x∗ (t) fur alle t ∈ R eine Losung von (2) ist.

1.5. Kontrahierende Abbildung 27
Iterierte Funktionensysteme
(Bezuglich der originalen und wesentlich umfassenderen Darstellung wird auf H.-O.PEITGEN, H. JURGENS, D. SAUPE: Bausteine des Chaos - Fraktale; Rowohlt, 1998verwiesen.)Gegeben: R2− Menge aller Punkte in der Ebene mit der Abstandsfunktion d (x,y) .Es wird die Menge X gebildet, die als Elemente alle nicht leeren beschrankten abge-schlossenen Mengen aus R2 enthalt:
X =A ⊂ R2 | A beschrankt und A = A; A 6= ∅
Definition einer Abstandsfunktion in X :Fur ∀A ∈ X und ∀ ε > 0 wird der ε−Kragen von A gebildet:
Aε =x ∈ R2 | d (x,y) ≤ ε fur ∀ y ∈ A
=⋃
y∈AKε (y)
AA
y Ae
e
e
y e
HAUSDORFF - Abstand in X :
h (A,B) = inf ε | A ⊂ Bε und B ⊂ Aε
Bemerkungen:1. h (A,B) = 0 ⇔ A = B2. Sind A = x und B = y gewohnliche Punkte aus R2, so isth (A,B) = d (x,y) der EUKLIDische Abstand in R2
A
B
a
b
e
e
e
e
A
B
h (A,B) = inf ε | A ⊂ Bε und B ⊂ Aε= max aε, bε
Xmit h (A,B) ist ein vollstandiger metrischer Raum
Definition eines kontrahierenden Operators in X :Mit der affinen Transformation im R2 :(x′1x′2
)
=
(a bc d
)(x1x2
)
+
(ef
)
x =
(x1x2
)
; x′ =
(x′1x′2
)
∈ R2
x′ = w (x) = Cx+ p

28 1. Metrische Raume
erhalt man inX die Transformation: w (A) = x′ ∈ R2 | x′ = w (x) fur ∀ x ∈ A .Beispiel:
C =
(0.5 00 0.5
)
; p =
(00
) Aw ( A )
x
x
10 . 5
1
0 . 5
1
2
R2 mit d2 (x,y) =√
(x1 − y1)2 + (x2 − y2)
2 = ‖x− y‖ ,wobei x = (x1, x2) ; y = (y1, y2) aus A. Dann ist:
d2 (w (x) , w (y)) = ‖C (x− y)‖ = q ‖x− y‖ = qd2 (x,y) mit q = 0.5 < 1
Allgemein: Ist ‖C‖ ≤ q so erhalt man
d2 (w (x) , w (y)) = ‖C (x− y)‖ ≤ ‖C‖ ‖x− y‖ ≤ qd2 (x,y)
Fur den HAUSDORFF-Abstand gilt dann auch
h (w (A) , w (B)) ≤ qh (A,B) .
Damit ist w auf X ein kontrahierender Operator, wenn ‖C‖ ≤ q < 1.
A
ee A eq
w ( A )eAw ( )
e ( q )e - K r a g e n v o n w ( A )w ( A ) =

1.5. Kontrahierende Abbildung 29
HUTCHINSON - Operator
w (A) = w1 (A) ∪ w2 (A) ∪ ... ∪ wN (A)
Dabei sind die wi kontrahierende Operatoren mit den Kontraktionsfaktoren qi < 1.Dann ist w inX auch ein kontrahierender Operator mit dem Kontraktionsfaktor
q = max1 ≤ i ≤ N
qi < 1.
Beispiel: Sei C =
(0.5 00 0.5
)
und
w1 mit C und p1 = (0, 0)T
w2 mit C und p2 = (0.5, 0)T
w3 mit C und p3 = (0, 0.5)T
w (A) = w1 (A) ∪ w2 (A) ∪ w3 (A)
A
x
x
1
2
0
21
3
R
R Rw ( A ) w ( A )
w ( A )
w (A) ist dann ein kontrahierender Operator in X mit dem Kontraktionsfaktor q = 0.5.Die Iteration
Ak+1 = w (Ak) mit A0 =x ∈ R2 | 0 ≤ x1 ≤ 1, 0 ≤ x2 ≤ 1
besitzt als Fixpunkt A∞ die Punktmenge des SIERPINSKI-Dreiecks. Anstelle der an-gegebenen Menge A0, kann die Iteration aber auch mit jeder anderen nicht leeren ab-geschlossenen beschrankten Menge des R2 gestartet werden (z.B. nur mit einem PunktA = (0, 0) .).

30 1. Metrische Raume
1.6. Kompaktheit
a) Aus der Analysis reeller Funktionen einer reellen Variablen ist bekannt:Ist f (x) auf dem endlichen abgeschlossenen Intervall [a, b] eine stetige Funktion, sogilt:- f (x) nimmt auf [a, b] ihr Minimum bzw. Maximum an.- f (x) ist auf [a, b] gleichmaßig stetig.b) Ist A ⊂ R3 eine abgeschlossene beschrankte Menge, so existiert zu jedem y ∈ R3
ein bestapproximierendes Element x0 ∈ A.
Diese Aussagen sind inhaltlich auf metrische Raume ubertragbar. Dazu ist (in Ver-allgemeinerung der Begriffe abgeschlossenes Intervall bzw. beschrankte abgeschlosseneMenge) der Begriff der kompakten Menge notwendig.
X−metrischer Raum d (x,y)−Abstandsfunktion x,y ∈ X
Definition 1.10 Die Menge A ⊂ X heißt relativ kompakt, wenn jede Folgexn ⊂ A eine konvergente Teilfolge x′
n enthalt, die gegen ein x ∈ X kon-vergiert:
x′n → x ∈ X (n→ ∞) .
Die Menge A ⊂ X heißt kompakt, wenn jede Folge xn ⊂ A eine konvergenteTeilfolge x′
n enthalt, die gegen ein x ∈ A konvergiert:
x′n → x ∈ A (n→ ∞) .
Folgerung 1.2 Eine Menge A ist genau dann kompakt, wenn sie relativ kompaktund abgeschlossen ist.
Folgerung 1.3 Jede relativ kompakte Menge A ist beschrankt.
Beweis. Annahme: A sei unbeschrankt. Dann existiert ein x0 ∈ X und eine Folgexn ⊂ A mit d (x0,xn) ≥ n. Da A relativ kompakt ist, mußte eine konvergente(und folglich beschrankte) Teilfolge von xn existieren, was aber unter dieser Be-dingung nicht der Fall ist. Damit ist die Annahme falsch und somit A beschrankt.
Folgerung 1.4 Jede kompakte Menge A ⊂ X ist abgeschlossen und beschrankt.Die Umkehrung gilt im Allgemeinen nicht, d. h. nicht jede abgeschlossene und be-schrankte Menge ist kompakt.

1.6. Kompaktheit 31
Beispiel 1.10 (Gegenbeispiel) X sei die Menge aller Zahlenfolgen xi mit∞∑
i=1
|xi|2 <
∞ und d (x,y) =
( ∞∑
i=1
(xi − yi)2
)1/2
. A sei die Einheitskugel in X:
A =
x ∈ X |∞∑
i=1
|xi|2 ≤ 1
. A ist abgeschlossen und beschrankt. Fur die Elemente
der Folgey(i)⊂ A mit y(i) =
(
0, ..., 0, 1i, 0, ...
)
gilt: d(y(i),y(j)
)=
√2 fur bel. i 6= j.
Folglich existiert keine konvergente Teilfolge vony(i)und damit ist A nicht kompakt.
Beispiele fur kompakte Mengen
1. Es sei X = R mit d (x,y) = |x− y| .Jede beschrankte Menge A ⊂ X ist relativ kompakt.
Beweis. A ⊂ X sei eine beschrankte Menge, folglich existiert ein Intervall [a, b]mit A ⊂ [a, b] . Weiterhin sei xn∞n=1 ⊂ A eine beliebige unendliche Zahlenfol-ge. Durch sukzessive Intervallhalbierungen von [a, b] wahlt man eine Teilfolgex′
n∞n=1, wobei im n− ten Halbierungsschritt x′n aus dem Teilintervall genom-
men wird, in dem unendlich viele Elemente der Folge xn liegen. Dann gilt:d (x′
n,x′m) ≤ b−a
2nfur alle m > n. Damit ist x′
n eine CAUCHY-Folge. Aus derVollstandigkeit von X folgt die Existenz eines Elementes x ∈ X mit x′
n → x.Damit ist A eine relativ kompakte Menge.
Bemerkung 1.11 Ist A ⊂ X abgeschlossen und beschrankt, dann ist x ∈ A unddamit A kompakt.
Beispiel 1.11 A = (0, 1) - relativ kompakte Menge; A = [0, 1] - kompakte Men-ge.
2. Es sei X = Rn mit d (x,y) =
(n∑
i=1
|xi − yi|2)1/2
.
Jede beschrankte Menge A ⊂ X ist relativ kompakt.
Beweis. a) n = 1 : siehe Bsp. 1.b) n = 2 : Da A beschrankt ist, existiert fur jede Folge xn∞n=1 ⊂ A mit xn =(ξn, ηn) ein x0 = (ξ0, η0) sowie eine Konstante M , so dass d (x0,xn) ≤ M < ∞fur ∀n. Damit gilt aber auch |ξ0 − ξn| ≤M und |η0 − ηn| ≤M , d. h. die Mengenξn und ηn sind in R beschrankte Mengen. Nach Teil a) des Beweises gilt:Es existiert eine Teilfolge x′
n ⊂ xn mit ξ′n → ξ undes existiert eine Teilfolge x′′
n ⊂ x′n mit η′′n → η damit konvergiert die Teilfolge
x′′n gegen ein x =(ξ, η) ∈ X und folglich ist A relativ kompakt.
c) Der Fall n ≥ 3 kann mittels vollstandiger Induktion bewiesen werden.
Bemerkung 1.12 Eine Menge A ⊂ X = Rn ist genau dann kompakt, wenn sieabgeschlossen und beschrankt ist.

32 1. Metrische Raume
3. Es sei X = C [a, b] mit d (x,y) = maxa ≤ t ≤ b
|x (t)− y (t)|Die Menge A ⊂ X habe folgende Eigenschaften:a) A ist beschrankt, d. h. max
a ≤ t ≤ b|x (t)| ≤M <∞ fur ∀ x (t) ∈ A.
b) A ist ”gleichmaßig stetig”, d. h. fur bel. ε > 0 existiert ein δ = δ (ε) > 0, sodass fur alle x ∈ A gilt |x (t)− x (s)| < ε, wenn nur |t− s| < δ.Dann gilt:
Satz 1.10 (Satz von ARZELA-ASCOLI) A ist in C [a, b] relativ kompakt.
Beweis. xn (t) ⊂ A sei eine Folge stetiger Funktionen xn : [a.b] → R.Mit Rab = ri ; i = 1, 2, ... wird die (abzahlbare) Menge aller rationalen Zahlenaus dem Intervall [a, b] bezeichnet. Aus der Bedingung a) folgt, dass die Folge
xn (r1) beschrankt ist und deshalb eine Teilfolge
x(1)n (r1)
existiert, die gegen
ein u1 ∈ R konvergiert, d.h. x(1)n (r1) → u1 fur n→ ∞.
Da die Folge
x(1)n (r2)
auch beschrankt ist, gibt es eine Teilfolge
x(2)n (r2)
mit x(2)n (r2) → u2. Die Konstruktion von ineinander enthaltenen Teilfolgen kann
fur beliebiges k = 1, 2, ... fortgesetzt werden. Damit entstehen die Zahlenfolgen:
x(1)1 (r1) , x
(1)2 (r1) , x
(1)3 (r1) , ... → u1
x(2)1 (r2) , x
(2)2 (r2) , x
(2)3 (r2) , ... → u2
............................
x(k)1 (rk) , x
(k)2 (rk) , ..., x
(k)k (rk) , ... → uk
............................ ,
wobei
x(k+1)n
eine Teilfolge von
x(k)n
ist. Es wird nun die Diagonalfolge ykmit yk = x
(k)k gebildet, dann gilt yk (ri) → ui fur i = 1, 2, ....
Es bleibt zu zeigen, dass yk eine CAUCHY-Folge ist. Dazu seien ε > 0 undδ > 0 so wie in Bedingung b) gewahlt. Dann gibt es endlich viele rationale Zahlens1, ..., sp aus Rab, so dass fur jedes t ∈ [a, b] ein sj mit |t− sj| < δ existiert.Wegen yk (ri) → ui fur alle i gilt auch yk (sj) konvergiert und ist folglich eineCAUCHY-Folge. Dann gibt es weiter ein n0 (ε), so dass
|yk (sj)− yl (sj)| < ε fur alle k, l = n0 (ε) und j = 1, ..., p.
Zusammen mit Bedingung b) gilt deshalb fur jedes t ∈ [a, b]:
|yk (t)− yl (t)| ≤ |yk (t)− yk (sj)|+ |yk (sj)− yl (sj)|+ |yl (sj)− yl (t)| < 3ε
fur alle k, l = n0 (ε) .
Folglich ist d (yk,yl) = maxa≤t≤b
|yk (t)− yl (t)| ≤ 3ε fur alle k, l = n0 (ε) . ⇒ xnenthalt die Teilfolge yn, die eine CAUCHY-Folge ist. Aus der Vollstandigkeitvon C [a, b] folgt, dass yn (t) gegen eine Funktion y (t) ∈ C [a, b] konvergiert.⇒ A ist relativ kompakt.

1.6. Kompaktheit 33
Beispiel 1.12 A =
x (t)
∣∣∣∣|x (t)| ≤M1 und
∣∣∣∣
dx (t)
dt
∣∣∣∣≤M2 fur a ≤ t ≤ b
A ist relativ kompakt in C [a, b] , denn:· A ist beschrankt und· aus dem Mittelwertsatz folgt: |x (t)− x (s)| ≤M2 |t− s|. Folglich ist A ”gleich-maßig stetig”.Ist insbesondere X = C (0, π) und A = sin (αt+ β) | |α| ≤M <∞, so ist Arelativ kompakt.
Satz 1.11 (Satz von WEIERSTRASS): Es sei f : A → R eine stetige Funk-tion auf der kompakten Menge A ⊂ X, dann nimmt f ihr Maximum undMinimum auf A an. D. h. es existieren
x ∈ A mit f (x) = minx∈A
f (x) und x ∈ A mit f (x) = maxx∈A
f (x) .
Beweis. a) Fur Minimum. Es sei α = infx ∈ A
f (x) , dann ist zu zeigen, dass ein x ∈ A
mit f (x) = α existiert. Es existiert eine Folge xn ⊂ A mit f (xn) < α + 1n. Da A
kompakt ist, existiert eine konvergente Teilfoge x′n mit x′
n → x ∈ A. Da f stetig aufA ist, gilt auch f (x′
n) → f (x) = α.b) Die entsprechende Aussage fur das Maximum von f (x) beweist man analog zu Teila) indem f durch −f ersetzt wird.
Satz 1.12 (X mit dX (x,y)) und (Y mit dY (x,y)) seien metrische Raume undT : A ⊂ X → Y sei ein stetiger Operator auf der kompakten Menge A, dannist T auf A gleichmaßig stetig, d. h. fur bel. ε > 0 existiert ein δ = δ (ε) > 0, sodass
dY (T (x) ,T (y)) < ε fur ∀ x, y ∈ A mit dX (x,y) < δ.
Beweis. Annahme: T sei nicht gleichmaßig stetig. Dann existieren ein ε0 > 0 undFolgen xn ⊂ A und yn ⊂ A, so dass gilt:
dX (xn,yn) ≤1
nund dY (T (xn) ,T (yn)) ≥ ε0 fur jedes n (1)
Da A kompakt ist, existiert aber eine Teilfolge x′n ⊂ xn mit x′
n → x ∈ A unddX (yn,x) ≤ dX (yn,x
′n) + dX (x′
n,x) → 0, folglich gilt yn → x. Da T stetig ist, giltauch dY (T (xn) ,T (yn)) → 0, was imWiderspruch zu (1) steht. Damit ist die Annahmefalsch und T somit gleichmaßig stetig auf A.

34 1. Metrische Raume
Satz 1.13 A ⊂ X sei eine kompakte Teilmenge. Dann existiert zu jedem fest gewahlteny ∈ X ein Punkt x0 ∈ A, der zu y den geringsten Abstand besitzt.x0 ∈ A heißt Bestapproximation von y in A.
Beweis. Es sei µ = infx ∈ A
d (x,y) . Dann existiert eine Folge xn ⊂ A mit
d (y,xn) < µ+ 1n(n = 1, 2, ...). Da A kompakt ist, existiert eine Teilfolge x′
n ⊂ xnmit x′
n → x0 ∈ A. x0 ist bestapproximierendes Element fur y inA, denn
d (y,x0) ≤ d (y,x′n)
→µ
+ d (x′n,x0)→0
→ µ fur n→ ∞
Folglich ist d (y,x0) ≤ µ, da x0 ∈ A (als kompakte Menge ist A auch abgeschlossen).Andererseits ist aber d (y,x0) ≥ µ und damit schließlich d (y,x0) = µ.
A
y
x 0m
Bemerkung 1.13 x0 ∈ A muß nicht eindeutig bestimmt sein.
Definition 1.11 X und Y seien metrische Raume, dann heißt der OperatorT : A ⊂ X → Y kompakt, wenn folgendes gilt:a) T ist stetig auf A undb) T bildet beschrankte Mengen in X in relativ kompakte Mengen in Y ab.
Bemerkung 1.14 Die Forderung b) ist aquivalent zu: Jede beschrankte Folge xn ⊂A enthalt eine Teilfolge x′
n, so dass die Folge Tx′n in Y konvergiert.

1.6. Kompaktheit 35
Beispiel 1.13 Gegeben sei der Integraloperator R : A ⊂ X → X mit X = C [a, b] und
(Rx) (t) =
b∫
a
F (t, s,x (s)) ds fur alle t ∈ [a, b]
A =
x (t) ∈ C [a, b]
∣∣∣∣maxa≤t≤b
|x (t)| ≤ r <∞, r − fest
.
Unter der Voraussetzung der Stetigkeit von F : D → R mit
D =(t, s,x) ∈ R3 | t, s ∈ [a, b] , − r ≤ x ≤ r
ist R : A → X ein kompakter Operator.
Beweis. Da D ⊂ R3 abgeschlossen und beschrankt und damit kompakt im R3 ist, folgtaus Satz 1.11 das F : D → R auf D gleichmaßig stetig ist. D.h. fur beliebiges ε > 0gibt es ein δ > 0, so dass
|F (t, s,x)− F (τ, s,y)| < ε fur alle (t, s,x) , (τ, s,y) ∈ D
mit |t− τ |+ |x− y| < δ
Wie durch R : A → C [a, b] schon ausgewiesen, ist (Rx) (t) fur eine stetige Funktionx (t) wieder eine stetige Funktion. Dies erkennt man mittels der gleichmaßigen Stetig-keit von F wie folgt: Sei d (x,y) = max
a≤s≤b|x (s)− y (s)| < δ so folgt
d (Rx,Ry) = maxa≤t≤b
∣∣∣∣∣∣
b∫
a
[F (t, s,x (s))− F (t, s,y (s))] ds
∣∣∣∣∣∣
≤ (b− a) ε
und damit die Stetigkeit von R.Da A ⊂ X beschrankt ist, genugt es nur noch zu zeigen, dass R (A) relativ kompaktist. Unter Nutzung des Satzes von ARZELA-ASCOLI ist dazu aber nur erforderlichzu zeigen, dass R (A) beschrankt ist und die Funktionen aus R (A) gleichmaßig stetigsind.R (A) beschrankt: Da F auf der abgeschlossenen beschrankten Menge D beschranktist, gilt fur alle x (s) ∈ A:
|(Rx) (t)| ≤ maxa≤t≤b
∣∣∣∣∣∣
b∫
a
F (t, s,x (s)) ds
∣∣∣∣∣∣
≤ (b− a) max(t,s,x)∈D
|F (t, s,x)|︸ ︷︷ ︸
=MF
= (b− a)MF
R (A) “gleichmaßig stetig”: Fur t, τ ∈ [a, b] mit |t− τ | < δ ist
|(Rx) (t)− (Rx) (τ)| ≤b∫
a
|F (t, s,x (s))− F (τ, s,x (s))| ds
≤ (b− a) ε fur alle x (s) ∈ A.


2. Lineare normierte Raume
Aus der linearen Algebra ist der dreidimensionale Vektorraum V3 bekannt. ZwischenV3 und demmetrischen Punktraum R3 besteht die Abbildung
−→ϕ (x,y) = −→v =
v1v2v3
=
y1y2y3
−
x1x2x3
,
die jedem Paar x =(x1 x2 x3
)T; y =
(y1 y2 y3
)Taus R3 eindeutig einen Vek-
tor −→v ∈ V3 zuordnet. Das Paar der Raume(R3,V3
)zusammen mit der Abbildung −→ϕ
heißt affiner Raum(R3,V3,−→ϕ
).
Hat außerdem jeder Vektor−→v ∈ V3eine Lange
∥∥−→v∥∥ ( seine Norm ), fur die gilt
∥∥−→v∥∥ = d (x,y) =
√
(x1 − y1)2 + (x2 − y2)
2 + (x3 − y3)2,
so heißt der affine Raum EUKLIDischer Raum E3.
E3 besitzt folgende Eigenschaften:
a) E3 ist ein metrischer Raum, d.h. in ihm kann man Messen und ”Analysis betreiben”( metrische Struktur ).b) E3 ist ein Vektorraum, d.h. in ihm kann man Rechnen und ”Arithmetik betreiben”( algebraische Struktur ).
Ziel dieses Kapitels ist die Einfuhrung von Vektorraumen uber allgemeinenObjekten (Funktionen, Abbildungen,...) und deren Verknupfung mit den Eigen-schaften metrischer Raume. Im Ergebniss dessen entstehen lineare normierteRaume.In linearen normierten Raumen kann man Messen und Rechnen.

38 2. Lineare normierte Raume
2.1. Lineare Raume
Definition 2.1 Ein linearer Raum uber einem Korper K ( K = R oder K = C )ist eine nichtleere Menge X mit
A) ( Addition ) einer Vorschrift, die jedem Paar x, y ( x ∈ X, y ∈ X ) genauein Element x+ y ∈ X zuordnet und
S) ( Multiplikation mit Elementen aus K ) einer Vorschrift, die jedemPaar λ, x ( λ∈K, x ∈ X ) genau ein Element λx ∈ X zuordnet.
Dabei gelten folgende Regeln ( x,y, z ∈ X; λ, µ ∈ K ):
(A1) x+(y + z) = (x+ y)+z ( Assoziativgesetz)
(A2) x+ y = y + x ( Kommutativgesetz )
(A3) Es existiert genau ein Element 0 ∈ X mit x+ 0 = x fur ∀ x ∈ X ( Existenz
des Nullelementes in X )
(A4) Fur ∀ x ∈ X existiert genau ein (−x)∈ X mit x+(−x)= 0.
( Existenz inverser Elemente in X )
(S1) (λ+ µ)x =λx+µx ( Distributivgesetze der
(S2) λ (x+ y) = λx+λy Multiplikation )
(S3) (λµ)x =λ (µx) ( Assoziativgesetz der Multiplikation)
(S4) 1x = x ( 1 ∈ K )
Bemerkung 2.1 Im Falle K = R ( K = C ) spricht man von einem reellen (kom-
plexen) linearen Raum.

2.1. Lineare Raume 39
Beispiele fur lineare Raume
1. Vektorraum Rn. Multiplikation und Addition werden komponentenweise erklart.
2. Menge lp aller reellwertigen oder komplexwertigen Zahlenfolgen
x = xi∞i=1 mit∞∑
i=1
|xi|p <∞ (1 ≤ p <∞)
”Addition in lp”: x+ y = xi + yi∞i=1
”Multiplikation in lp”: αx = αxi∞i=1 α ∈ R ( bzw. C )Diese Operationen fuhren wegen∞∑
i=1
|αxi|p = |α|p∞∑
i=1
|xi|p und( ∞∑
i=1
|xi + yi|p)1/p
≤( ∞∑
i=1
|xi|p)1/p
+
( ∞∑
i=1
|yi|p)1/p
( Ungleichung von MINKOWSKI )
wieder zu Zahlenfolgen aus lp. Folglich ist lp ein linearer Raum.
3. Metrischer Raum C [a, b] mit
(x+ y) (t) = x (t) + y (t) x (t) , y (t) ∈ C [a, b]
(αx) (t) = αx (t) α ∈ R (bzw. C) t ∈ [a, b]
C [a, b] wird damit zum linearen Raum, wobei 0 (t) ≡ 0 das Nullelement und−x (t) das zu x (t) inverse Element sind.
4. Die Menge aller Polynome der FormP (x) = a0 + a1x+ ...+ anx
n
mit ai (i = 0, 1, ..., n) und x aus R (bzw. C) ist mit der
Operationen ”+” : normale Polynomaddition undOperation ” · ” : Multiplikation mit reeller (bzw. kompl. Zahl)ein linearer Raum.
5. Die Menge X = R+ = x ∈ R | x > 0 mit dem Korper K = R und derOperationen ”+” : Multiplikation in R : x+ y ≡ x · yOperation ” · ” : Potenzieren in R : αx = xα
bildet einen linearen Raum.Nullelement in X :1 ∈ R;Inverses Element zu x : x−1 = 1
x(denn: x · x−1 = x0 = 1)
(x · y)α = xαyα x1 = x
(α + β) x = xα+β = xαxβ xαβ = (xα)β =(xβ)α

40 2. Lineare normierte Raume
Definitionen zum linearen Vektorraum X uber dem Korper K
1. U ⊂ X heißt Unterraum von X, wenn fur ∀ x,y ∈ U; λ ∈ K gilt:x+ y ∈ U und λx ∈ U. U ist dann selbst linearer Raum uber K.
2. U sei ein Unterraum von X und x0 ∈ X, dann heißt
M = x0 + y | y ∈ U ≡ x0 + U
lineare Mannigfaltigkeit in X.
3. A ⊂ X. Die Menge
spanA =
m∑
k=1
λkxk | xk ∈ A, λk ∈ K, m ∈ N
heißt lineare Hulle von A .
4. U und V seien Unterraume von X, dann heißt
U+V = span (U ∪V)
Summe von U und V. Gilt außerdem U ∩V = 0, so spricht man von derdirekten Summe U⊕V.Jedes z ∈ U⊕V ist eindeutig in der Form z = x+ y mit x ∈ U und y ∈ Vdarstellbar.
5. Die Unterraume U ⊂ X und V ⊂ X heißen komplementar zueinander, wenngilt X = U⊕V.
6. Die Menge B ⊂ X heißt linear unabhangig, wenn jede endliche Teilmenge ausB linear unabhangig ist.
7. Eine linear unabhangige Teilmenge B ⊂ X mit X = spanB heißt Basis in X.
8. Existiert eine Basis von X mit | B | = n, so besitzt jede Basis von X n Elemente:dim X = n. Existiert kein solches n, so heißt X unendlich-dimensional.
9. X und Y seien lineare Raume uber K. X und Y heißen linear isomorph zu-einander, wenn eine Bijektion f : X → Y mit der Eigenschaft
f (αx+βy) = αf (x) + βf (y) ∀ x,y ∈ X; α, β ∈ K
existiert. f heißt Isomorphismus von X auf Y.

2.1. Lineare Raume 41
Beispiele zur Dimension linearer Raume
1. Linearer Raum Pn der Polynome bis hochstens n− ten Grades: Es sei
B =1, t, t2, ..., tn
.
Die Gleichung Pn (t) = α0 + α1t + ... + αntn ≡ 0 ist fur alle t ∈ R nur im Falle
α0 = α1 = ... = αn = 0 erfullt, da nach dem Fundamentalsatz der Algebra einPolynom n− ten Grades genau n Nullstellen besitzt. Verschwindet ein PolynomPn aber fur alle t ∈ R, so kann es nur das Nullpolynom sein. Folglich bildet Beine Basis in Pn und dim(Pn) = n+ 1.
2. Linearer Raum aller stetigen Funktionen C [a, b] . Es sei:
B =1, t, t2, ..., tn, ...
⊂ C [a, b]
Jede Linearkombination von Elementen aus B fuhrt zu einem Polynom. FolglichbestehtB fur ein beliebiges n aus linear unabhangigen Elementen, d.h.B ist linearunabhangig. Nach dem Approximationssatz von WEIERSTRASS (siehe Beispiel1.3) kann jede stetige Funktion beliebig genau durch Polynome approximiertwerden. Folglich ist spanB = C [a, b] und damit B eine Basis in C [a, b] . DerRaum C [a, b] ist unendlich dimensional.
3. Linearer Raum aller Zahlenfolgen lp:
lp =
x = xi∞i=1
∣∣∣∣∣
∞∑
i=1
|xi|p <∞
.
In lp ist
B =
x(k)∣∣∣ x(k) =
(
0, ..., 0, 1k, 0, ...
)
k = 1, 2, ...
eine Basis. Folglich ist lp unendlich dimensional.

42 2. Lineare normierte Raume
2.2. BANACH - Raum
Definition 2.2 ( linearer normierter Raum ) Ein linearer Raum X uber demKorper K, in dem jedem x ∈ X eine reelle Zahl ‖ x ‖ zugeordnet ist, heißt linearernormierter Raum X, wenn gilt:
(N1) ‖x‖ = 0 und ‖x‖ = 0 ⇐⇒ x = 0
(N2) ‖αx‖ = |α| ‖x‖
(N3) ‖x+ y‖ ≤ ‖x‖+ ‖y‖
‖x‖ heißt Norm des Elementes x.
Bemerkung 2.2 In einem linearen normierten Raum X kann die kanonische Me-trik gemaß
d (x,y) = ‖x− y‖ ∀ x,y ∈ X
eingefuhrt werden.
Definition 2.3 Ein linearer normierter Raum, der bezuglich seiner kanonischenMetrik vollstandig ist, heißt
BANACH−Raum (oder B−Raum).
Bemerkung 2.31. Die Norm ist eine stetige Funktion und es gilt:
|‖x‖ − ‖y‖| ≤ ‖x− y‖ ∀ x,y ∈ X.
Dies ist ersichtlich aus den folgenden Ungleichungen:
‖x‖ = ‖x− y + y‖ ≤ ‖x− y‖+ ‖y‖ ⇒ ‖x‖ − ‖y‖ ≤ ‖x− y‖‖y‖ = ‖y − x+ x‖ ≤ ‖x− y‖+ ‖x‖ ⇒ ‖y‖ − ‖x‖ ≤ ‖x− y‖ .
2. Ein BANACH-Raum ist ein vollstandiger metrischer Raum mit der Abstandsfunktion
d (x,y) = ‖ x− y ‖ .Alle Definitionen, Satze und Aussagen uber vollstandige metrische Raume sind aufBANACH-Raume ubertragbar.

2.2. BANACH - Raum 43
Beispiele fur BANACH - Raume
1. Rn mit
‖x‖p =
(n∑
k=1
|xk|p)1/p
1 ≤ p <∞
max1≤ k ≤ n
|xk| p = ∞
2. lp− Raum aller Zahlenfolgen x = xk∞k=1 mit der Norm
‖x‖p =( ∞∑
k=1
|xk|p)1/p
1 ≤ p <∞
l∞− Raum aller beschrankten Zahlenfolgen mit der Norm
‖x‖∞ = supk
|xk| .
3. C [a, b]− Raum aller stetigen Funktionen f : [a, b] → C mit der Norm
‖f‖ = maxa ≤ t ≤ b
| f (t)|
4. Cm [a, b]− Raum aller auf [a, b] m− mal stetig differenzierbaren Funktionenf : [a, b] → C mit der Norm
‖f‖ =m∑
k=0
maxa ≤ t ≤ b
∣∣ f (k) (t)
∣∣
5. Lp [a, b]− Raum aller Funktionen f : [a, b] → C mit
(L)
b∫
a
| f (t)|p dt <∞ und der Norm ‖f‖ =
(L)
b∫
a
| f (t)|p dt
1/p
.
Mit dem Prafix (L) wird darauf hingewiesen, das diese Integrale im LEBES-GUEschen Sinne definiert sind (siehe Anhang A3). Im Folgenden wird jedochim Zusammenhang mit den Raumen Lp der Vorsatz (L) zu den Integralen meistnicht angegeben, da sich die auftretenden Integrale stets auf ein LEBESGUEschesMaß beziehen.

44 2. Lineare normierte Raume
Bemerkung 2.4 Wird in einem linearen Raum X eine Metrikfunktion d (x,y) ein-gefuhrt, die folgende Eigenschaften besitzt:a) Translationsinvarianz:
d (x+ z,y + z) = d (x,y) ∀ x,y, z ∈ X
b) Homogenitat:
d (αx,αy) = |α| d (x,y) ∀ x,y ∈ X und α ∈ K,
so gelten die zu den Normaxiomen aquivalenten Beziehungen
i) d (x,0) = 0 und d (x,0) = 0 ⇔ x = 0
ii) d (αx,0) = |α| d (x,0)
iii) d (x+ y,0) = d (x+ y,−y + y) = d (x,−y)≤ d (x,0) + d (0,−y) = d (x,0) + d (y,0)
Deshalb kann in X die Norm ‖x‖ = d (x,0) eingefuhrt werden. Ein metrischer Raummit einer translationsinvarianten homogenen Metrikfunktion ist damit auch ein norm-ierter Raum.
2.3. Metrische Eigenschaften von B-Raumen
1. Offene Kugel im BANACH-Raum X um den Punkt x0 mit dem Radius r :
Kr (x0) = x ∈ X | ‖x− x0‖ < r
2. Konvergenz im BANACH-Raum X :xn sei eine Folge in X, dann gilt xn→x0 ∈ X fur n→ ∞ genau dann, wenn
fur ∀ ε > 0 ∃ n0 (ε) mit ‖xn − x0‖ < ε ∀ n ≥ n0.
xn ist eine CAUCHY-Folge in X, wenn
fur ∀ ε > 0 ∃ n0 (ε) mit ‖xn − xm‖ < ε ∀ n,m ≥ n0.
Im B-Raum X besitzt jede CAUCHY-Folge einen Grenzwert. Die Konvergenz innormierten Raumen heißt Normkonvergenz.
3. Die Menge aller normkonvergenten Folgen ist linear:xn → x und yn→ y, dann gilt: xn ± yn → x ± y.xn → x und αn → α, dann gilt: αnxn → αx.xn → x dann gilt ‖xn‖ → ‖x‖ .

2.3. Metrische Eigenschaften von B-Raumen 45
Definition 2.4 ( Aquivalente Normen ):In einem normierten Raum X heißen die Normen ‖·‖1 und ‖·‖2 aquivalent, wennZahlen m > 0 und M > 0 existieren, so dass gilt:
m ‖x‖1 ≤ ‖x‖2 ≤M ‖x‖1 ∀ x ∈ X.
Bemerkung 2.5 In einem endlichdim. Raum X sind alle Normen aquivalent.
Beweis. Es sei e1, e2, ..., en eine Basis in Xn, dann hat jedes x ∈ Xn die Darstellung
x =n∑
k=1
αkek. In Xn wird die (spezielle) Norm ‖x‖∞ = maxk
|αk| eingefuhrt. Ist ‖x‖eine beliebige andere Norm in Xn, so gilt zunachst:
‖x‖ =
∥∥∥∥∥
n∑
k=1
αkek
∥∥∥∥∥≤
n∑
k=1
|αk| ‖ek‖ ≤M ‖x‖∞ (1)
mit M =n∑
k=1
‖ek‖
Weiterhin nimmt die (stetige) Normfunktion f (α1, ..., αn) =
∥∥∥∥
n∑
k=1
αkek
∥∥∥∥= ‖x‖ auf der
abgeschlossenen und beschrankten (d.h. kompakten) Einheitskugel
En =
(α1, ..., αn) ∈ Kn∣∣∣ max
k|αk| = 1
nach dem Satz von WEIERSTRASS (siehe Satz 1.11) ihr Minimum an und fur beliebige
Elemente y =n∑
k=1
βkek mit ‖y‖∞ = maxk
|βk| = 1 gilt:
f (β1, ..., βn) = ‖y‖ = m.
Wegen ‖y‖∞ = 1 ist stets fur irgendein j der Koeffizient βj 6= 0 und damit auch y 6= 0,folglich muß m > 0 sein.
Ist x 6= 0 ein beliebiges Element ausXn, so gilt mit y =x
‖x‖∞:
‖x‖ = ‖y‖ ‖x‖∞ = m ‖x‖∞ . (2)
Aus (1) und (2) folgt1
M‖x‖ ≤ ‖x‖∞ ≤ 1
m‖x‖ fur ∀ x ∈ Xn.
Ist ‖x‖1 eine weitere beliebige Norm fur Xn, so gilt auch
a ‖x‖1 ≤ ‖x‖∞ ≤ b ‖x‖1 fur gewisse a, b > 0

46 2. Lineare normierte Raume
und zusammen mit (2) folgt:
am ‖x‖1 ≤ m ‖x‖∞ ≤ ‖x‖ ≤M ‖x‖∞ ≤ bM ‖x‖1 .
Mit m = am > 0 und M = bM > 0 ergibt sich schließlich fur beliebige Normen ‖x‖und ‖x‖1 fur Xn: m ‖x‖1 ≤ ‖x‖ ≤M ‖x‖1 .
Bemerkung 2.6 Jeder endlichdim. normierte Raum Xn ist ein B-Raum.
Beweis. Sei e1, e2, ..., en eine Basis in Xn, dann gilt: ∀ x ∈ Xn hat die Darstellung
x =n∑
k=1
αkek. In Xn wird die Norm ‖x‖∞ = maxk
|αk| eingefuhrt. Jede andere Norm
‖·‖ ist dann aquivalent zu ‖·‖∞ .
Sei xk ⊂ Xn mit xk =n∑
i=1
αkiei eine CAUCHY-Folge, dann ist:
|αmi − αki| ≤ ‖xm − xk‖∞ ≤M ‖xm − xk‖ < ε
fur i = 1, ..., n; m, k = n0 (ε)
Damit ist auch αki eine CAUCHY-Folge in R und es existiert der Grenzwert α0i,d.h. αki → α0i ∈ R. Dann gilt aber auch
xk → x0 =n∑
i=1
α0iei ∈ Xn.
und der RaumXn ist vollstandig, d.h. ein BANACH-Raum.
Beispiele zu aquivalenten Normen
1. X = C [a, b] :
‖x‖1 = maxa ≤ t ≤ b
|x (t)| ‖x‖2 = maxa ≤ t ≤ b
∣∣e−rtx (t)
∣∣ (r > 0)
Dann ist:
‖x‖2 ≤ maxa ≤ t ≤ b
∣∣e−rt
∣∣ maxa ≤ t ≤ b
|x (t)| = e−ra ‖x‖1‖x‖2 = min
a ≤ t ≤ b
∣∣e−rt
∣∣ maxa ≤ t ≤ b
|x (t)| = e−rb ‖x‖1
und folglich
e−rb ‖x‖1 ≤ ‖x‖2 ≤ e−ra ‖x‖1

2.3. Metrische Eigenschaften von B-Raumen 47
2. X = Rn (bzw. Cn) x = (x1, ..., xn) ; xk ∈ R (bzw. C)
‖x‖1 =n∑
k=1
|xk| ; ‖x‖2 =
√√√√
n∑
k=1
|xk|2; ‖x‖∞ = maxk
|xk|
Dann ist:
‖x‖∞ = maxk
|xk| ≤n∑
k=1
|xk| = ‖x‖1 ≤ nmaxk
|xk| = n ‖x‖∞
‖x‖∞ = maxk
|xk| ≤
√√√√
n∑
k=1
|xk|2 = ‖x‖2 ≤√
nmaxk
|xk|2 =√n ‖x‖∞
‖x‖1 ≤ n ‖x‖∞ ≤ n ‖x‖2 ≤ n√n ‖x‖∞ ≤ n
√n ‖x‖1
und folglich1
n‖x‖1 ≤ ‖x‖2 ≤
√n ‖x‖1
Reihen in normierten Raumen
X sei ein normierter Raum und x1, ...,xn, ... ∈ X. Bilden die Partialsumme
sn =n∑
k=1
xk ∈ X. Existiert ein s ∈ X mit sn → s, so heißt s =∞∑
k=1
xk Summe der
unendlichen Reihe∞∑
k=1
xk in X. Die Reihe∞∑
k=1
xk heißt absolut konvergent, wenn die
Zahlenreihe∞∑
k=1
‖xk‖ konvergiert.
Bemerkung 2.7 In einem BANACH-Raum X ist jede absolut konvergente Reihe kon-vergent und es gilt ∥
∥∥∥∥
∞∑
k=1
xk
∥∥∥∥∥≤
∞∑
k=1
‖xk‖ .
Beweis.Die Partialsummen bilden eine CAUCHY-Folge, denn
‖sm − sn‖ ≤m∑
k=n+1
‖xk‖ < ε wenn n,m = n0 (ε)
⇒ ∃ s ∈ X mit sn → s.

48 2. Lineare normierte Raume
2.4. Separable lineare Raume
Definition 2.5 Der lineare normierte Raum X heißt separabel, wenn in diesemeine abzahlbare dichte Teilmenge B existiert, d.h. wenn B ⊂ X abzahlbar und B = X.
Beispiel 2.1 Jeder endlichdimensionale normierte Raum Xn ist separabel.
Beweis. Jedes x ∈ Xn ist in einer Basis e1, ..., en in der Form x =n∑
k=1
akek mit
ak ∈ R darstellbar. Da jede reelle Zahl ak beliebig genau durch eine rationale Zahlrk approximiert werden kann, existiert zu beliebigem ε > 0 und jedem x ∈ Xn ein
xr =n∑
k=1
rkek (rk ∈ Q) mit
‖x− xr‖ ≤n∑
k=1
|ak − rk| ‖ek‖ < ε.
Damit ist die Menge B =
xr ∈ Xn
∣∣∣∣xr =
n∑
k=1
rkek ; rk ∈ Q
dicht in Xn und aus
der Abzahlbarkeit der rationalen Zahlen folgt sofort die Abzahlbarkeit von B. Damitist Xn separabel.Ist Xn ein Raum uber dem Korper K = C, d.h. ist ak ∈ C, so kann ak ebenfallsbeliebig genau durch eine “rational komplexe” Zahl rk = r1k + ir2k mit r1k, r2k ∈ Q
angenahert werden. Der weitere Beweis folgt dann den gleichen Schritten wie im Fallreeller Koeffizienten.
Beispiel 2.2 Der lineare Raum aller stetigen Funktionen X = C [a, b] mit‖x‖ = max
a≤t≤b|x (t)| fur x (t) ∈ C [a, b] ist separabel, denn nach Beispiel 1.3 existiert mit
der Menge PR [a, b] aller Polynome mit rationalen Koeffizienten und beliebigen Gradeseine abzahlbare dichte Menge in C [a, b].
Satz 2.1 X sei eine separabler linearer normierter Raum, dann gibt es eine FolgeXn endlichdimensionaler Unterraume Xn ⊂ X, so dass gilt:
X1 ⊆ X1 ⊆ ... ⊆ Xn ⊆ ... ⊂ X und∞⋃
n=1
Xn = X.

2.5. Fixpunktsatze 49
Beweis. Da X separabel ist, existiert eine abzahlbare dichte TeilmengeB = x1,x2, ...,xn, ... ⊂ X. Definiert man Xn = span (x1, ...,xn), so ist
dim (Xn) ≤ n, Xn ⊆ Xn+1 und X =∞⋃
n=1
Xn.
Bemerkung 2.8 Dieser Satz sagt aus, dass ein separabler Raum X beliebig genaudurch endlichdimensionale Unterraume Xn ⊂ X approximiert werden kann. Diese Ei-genschaft separabler Raume hat große Bedeutung fur die Konstruktion von Naherungs-methoden zur Losung von Operatorgleichungen.
2.5. Fixpunktsatze
Die Beweise der folgenden Satze findet man in ZEIDLER [2], Bd.I, S. 53-66.
Satz 2.2 ( BROUWERscher Fixpunktsatz )A sei eine kompakte, konvexe, nicht leere Menge eines endlichdimensionalennormierten Raumes Xn und T : A −→ A ein stetiger Operator. Dann besitztT einen Fixpunkt x ∈ A, d.h. Tx = x.
Bemerkung 2.9 Der BROUWERsche Fixpunktsatz verallgemeinert den bekanntenZwischenwertsatz der klassischen Analysis:Ist [a, b] ⊂ R ≡ X1 und f : [a, b] → [a, b] eine stetige Funktion, so besitzt die Glei-chung f (t) = t bzw. f (t) − t = 0 wenigstens eine Losung, d.h. f hat wenigstens einenFixpunkt.
at
ba
b
tt t1 2 3
f ( t )
Folgerung 2.1 Ist S : B −→ B ein stetiger Operator auf einer Teilmenge B einesnormierten Raumes, die homoomorph zu einer Teilmenge A ist, die den Bedingungendes BROUWERschen Fixpunktsatzes entspricht, so besitzt S auf B einen Fixpunkt.
Beweis. Da A und B homoomorph sind, existiert ein Homoomorphismus Φ : A −→ Bbzw. Φ−1 : B −→ A. Mit dem stetigen Operator S ist der Operator T = Φ−1 ·

50 2. Lineare normierte Raume
S·Φ dann ebenfalls stetig und eine Abbildung T : A −→ A. Nach dem BROU-WERschen Fixpunktsatz besitzt T einen Fixpunkt x ∈ A, wobei x = Tx = Φ−1 ·S·Φ (x) und damit S·Φ (x) = Φ (x). y = Φ(x) ∈ B ist folglich ein Fixpunkt von S.
Satz 2.3 ( SCHAUDERscher Fixpunktsatz )Ist T : A −→ A ein kompakter Operator auf der beschrankten, abgeschlossenen,konvexen, nicht leeren Teilmenge A des BANACH-Raumes X, so besitzt T einen Fix-punkt x, d.h. es gilt Tx = x.
Beispiel 2.3 Fur welches λ ∈ R besitzt die Integralgleichung
x (t) = λ
b∫
a
F (t, s,x (s)) ds a ≤ t ≤ b ; λ ∈ R (1)
eine Losung?
Mit Rλx =λb∫
a
F (t, s,x (s)) ds kann (1) in der Form Rλx = x geschrieben werden. Im
Beispiel 1.37 wurde gezeigt, dass der Operator R = R1 auf der Menge
A =
x (t) ∈ C [a, b]
∣∣∣∣maxa≤t≤b
|x (t)| ≤ r <∞, r − fest
und unter den dort angegebenen Bedingungen an die Funktion F (t, s,x (s)) ein kom-pakter Operator ist. Ubernimmt man diese Bedingungen, so ist auch Rλ = λR furbeliebiges λ ∈ R ein kompakter Operator.Außerdem ist A ⊂ C [a, b] abgeschlossen und beschrankt. Mit beliebigen Funktionenx (t) ,y (t) ∈ A ist auch die konvexe Linearkombination (siehe Anhang A1)µx (t) + (1− µ)y (t) ∈ A (0 < µ < 1) und folglich A eine konvexe Menge.Nach dem SCHAUDERschen Fixpunktsatz genugt es zum Nachweis der Losbarkeit von(1) deshalb nur noch zu zeigen, dass Rλ : A −→ A. Wegen
‖(Rλx) (t)‖ ≤ |λ| maxa≤t≤b
∣∣∣∣∣∣
b∫
a
F (t, s,x (s)) ds
∣∣∣∣∣∣
≤ |λ| (b− a)MF
ist dies der Fall, wenn |λ| (b− a)MF ≤ r und damit |λ| ≤ r
(b− a)MF
. Unter dieser
Bedingung ist (1) losbar.

3. HILBERT-Raume
1. Im EUKLIDischen Raum E3 ist ein skalares Produkt
−→u ·−→v =(−→u ,−→v
)= u1v1 + u2v2 + u3v3
fur beliebige Paare von Vektoren −→u = (u1, u2, u3)T und −→v = (v1, v2, v3)
T defi-
niert. Außerdem gilt∥∥−→u∥∥ =
√(−→u ,−→u
).
Die Vektoren −→u und −→v heißen orthogonal zueinander (stehen senkrecht aufein-ander), wenn gilt
(−→u ,−→v)= 0.
Der Begriff der Orthogonalitat bildet die Grundlage zur Losung des fol-genden Approximationsproblems:
Gegeben:
−→u ∈ E3 und Unterraum U ⊂ E
3
Gesucht:
−→u 0 ∈ U mit∥∥−→u−−→u 0
∥∥ = min−→w ∈ U
∥∥−→u−−→w
∥∥
0u
0 u
u 0u-
U
−→u 0 heißt bestapproximierendes Element fur −→u bzg. des Unterraumes U. −→u 0
erfullt die Bedingung
(−→u−−→u 0,−→w)= 0 fur bel. −→w ∈ U.
Probleme dieser Art konnen in vollstandigen normierten Raumen mit inneremProdukt (HILBERT-Raumen) gelost werden.
2. Im Raum E3 existiert ein orthonormiertes Basissystem −→e 1,
−→e 2,−→e 3
(d.h.(−→e i,
−→e j
)= δij ) und jeder Vektor −→u ∈ E
3 hat die Darstellung
−→u =3∑
k=1
(−→u ,−→e k
)−→e k.
Unter eingeschrankten Bedingungen ist diese Darstellung auf ”unendlich dimen-sionale” HILBERT-Raume ubertragbar, d.h. die Elemente eines HILBERT-Rau-mes sind in FOURIER-Reihen nach einem orthonormalen Basissystem entwickel-bar.

52 3. HILBERT-Raume
3.1. Definitionen, Eigenschaften, Beispiele
Definition 3.1 ( Inneres Produkt ):H sei ein linearer Raum uber dem Korper K. Jedem Paar u,v ∈ H wird eine Zahl(u,v) ∈ K zugeordnet. (u,v) heißt inneres Produkt von u und v, wenn gilt:
(P1) (u,u) = 0 und (u,u) = 0 ⇔ u = 0
(P2) (u,v) = (v,u)(P3) (αu+βv,w) = α (u,w) + β (v,w) fur ∀ u,v,w ∈ H; α, β ∈ K.
Beispiele zum inneren Produkt
1. H = l2 x =(x1, x2, ..., xn, ...) ; y =(y1, y2, ..., yn, ...) ∈ H
(x,y) =∞∑
k=1
xkyk und ‖x‖ =
( ∞∑
k=1
|xk|2)1/2
2. H = C [a, b] f ,g ∈ H
(f ,g) =
b∫
a
f (t) · g (t)dt und ‖f‖ =
b∫
a
| f (t)|2 dt
1/2
.
Eigenschaften des inneren Produktes
1. (u,αv) = (αv,u) = α(v,u) = α (u,v)
2. (u,v +w) = (v +w,u) = (v,u) + (w,u) = (u,v) + (u,w)
3. SCHWARZsche Ungleichung:
|(u,v)|2 ≤ (u,u) (v,v) fur bel. u,v ∈ H
Beweis. Fur bel. u,v ∈ H und λ ∈ K gilt:
0 ≤ (u−λv,u−λv) = (u,u)− λ (v,u)− λ (u,v) + |λ|2 (v,v)
Setzen λ =(u,v)
(v,v)dann folgt: (u,u)− |(u,v)|2
(v,v)= 0
Das Gleichheitszeichen gilt genau dann, wenn u = αv (α ∈ K) .

3.1. Definitionen, Eigenschaften, Beispiele 53
4. Durch ‖u‖ =√
(u,u) fur bel. u ∈ H wird in H eine Norm definiert.
Beweis. (Es genugt das (N3)− Axiom zu beweisen )
‖u+ v‖2 = ‖u‖2 + ‖v‖2 + (u,v) + (v,u)
Wegen (u,v) + (v,u) = 2Re (u,v) ≤ 2 |(u,v)| ≤ 2 ‖u‖ ‖v‖ (dabei wurde dieSCHWARZsche Ungleichung benutzt) folgt
‖u+ v‖2 ≤ ‖u‖2 + ‖v‖2 + 2 ‖u‖ ‖v‖ = (‖u‖+ ‖v‖)2
5. Das innere Produkt im Raum H ist stetig, d.h. gilt un → u und vn → v , sofolgt (un,vn) → (u,v) (n→ ∞) .
Beweis. Mit der SCHWARZschen Ungleichung erhalt man:
|(un,vn)− (u,v)| = |(un − u,vn) + (u,vn − v)|≤ ‖un − u‖ ‖vn‖+ ‖u‖ ‖vn − v‖ → 0 fur n→ ∞.
6. Parallelogramm-Identitat:
2 ‖u‖2 + 2 ‖v‖2 = ‖u+ v‖2 + ‖u− v‖2
fur bel. u,v ∈ H u
v v - uu + v
7. Satz von APOLLONIUS:
‖w − u‖2 + ‖w − v‖2 = 1
2‖u− v‖2 + 2
∥∥∥∥w−u+ v
2
∥∥∥∥
2
fur bel. u,v,w ∈ H
Die Beziehung aus 6. und 7. werden durch einfaches Ausrechnen der Ausdruckeauf beiden Seiten bewiesen.
Definition 3.2 Ein linearer Raum H uber dem Korper K mit innerem Produkt heißtPre-HILBERT-Raum.
Satz 3.1 Jeder Pre-HILBERT-Raum H ist bezuglich der Norm
‖u‖ =√
(u,u) ∀ u ∈ H (NH)
ein normierter Raum. Es gilt die SCHWARZsche Ungleichung:
|(u,v)| ≤ ‖u‖ ‖v‖ ∀ u,v ∈ H.

54 3. HILBERT-Raume
Definition 3.3 Der lineare Raum H uber K heißt
HILBERT−Raum (oder H−Raum) ,
wenn H bezuglich der Norm (NH) ein vollstandiger Pre-HILBERT-Raum ist.
Bemerkung 3.11. Alle Definitionen, Satze und Aussagen uber lineare normierte Raume bleiben furPre-HILBERT-Raume und HILBERT-Raume gultig.2. Jeder HILBERT-Raum (H-Raum) ist ein BANACH-Raum (B-Raum).
Beispiele zum HILBERT-Raum
1. H = K ist mit dem inneren Produkt (x, y) = xy x, y ∈ K ein reeller (bzw.komplexwertiger) HILBERT-Raum ( ‖x‖ = |x| ).
2. H = Kn ( d.h. Rn oder Cn ) ist mit dem inneren Produkt
(x,y) =n∑
k=1
xkyk mitx =(x1, ..., xn) ∈ Kn
y =(y1, ..., yn) ∈ Kn
‖x‖ =
(n∑
k=1
|xk|2)1/2
ein HILBERT-Raum.Bei n→ ∞ folgt H = l2 ist HILBERT-Raum mit
(x,y) =∞∑
k=1
xkyk ‖x‖ =
( ∞∑
k=1
|xk|2)1/2
Dieser Raum heißt auch Raum der quadratisch summierbaren Zahlenfol-gen. Es ist dim (l2) = ∞.
3. Der Raum L2 (a, b) :Es sei −∞ ≤ a < b ≤ ∞ und L2 (a, b) die Menge aller meßbaren Funktionenf : (a, b) → K (siehe Anhang A2), wobei
(L)
b∫
a
| f (t)|2 dt <∞

3.1. Definitionen, Eigenschaften, Beispiele 55
( | f (t)|2 ist im LEBESGUEschen Sinne integrierbar; siehe Anhang A3). Danngilt:a) L2 (a, b) ist mit dem inneren Produkt
(f ,g) =
b∫
a
f (t) · g (t)dt fur bel. f ,g ∈ L2 (a, b)
ein HILBERT-Raum. Dieser Raum heißt auch Raum der auf (a, b) quadra-tisch summierbaren Funktionen.b) Es ist dim (L2 (a, b)) = ∞.
Bemerkung 3.2 Die Elemente aus L2 (a, b) sind Funktionenklassen. Zwei Funk-tionen f1 (t) und f2 (t) gehoren zum selben Element (zur selben Funktionenklasse)aus L2 (a, b), wenn gilt f1 (t) = f2 (t) fast uberall auf (a, b) . D.h., wenn gilt
f1 (t) 6= f2 (t) auf einer Menge vom Maße Null (bzw.b∫
a
|f (t)− g (t)|2 dt = 0 ;
siehe Anhang A2).
Bemerkung 3.3 Es sei [c, d] ⊂ (a, b) mit −∞ < c < d <∞ und
fm (t) =
tm fur t ∈ [c, d]0 sonst
.
Dann ist fm ∈ L2 (a, b) und das System f0 (t) , ..., fm (t) ist fur bel. m ∈ N inL2 (a, b) linear unabhangig. Damit ist dim (L2 (a, b)) = ∞.
Bemerkung 3.4 Die Menge C∗ [a, b] aller stetigen Funktionen auf [a, b] mit deminneren Produkt
(f ,g) =
b∫
a
f (t) · g (t)dt fur bel. f ,g ∈ C [a, b]
ist ein Pre-HILBERT-Raum, aber kein HILBERT-Raum. Es gilt jedoch: C∗ [a, b]mit diesem inneren Produkt ist in L2 (a, b) ein dichter Unterraum.
Bemerkung 3.5 Der Grund fur die Definition des Integrals im inneren Produktdes Raumes L2 (a, b) im LEBESGUEschen Sinne hangt damit zusammen, dassdieser Integralbegriff gegenuber der Konstruktion von Integralen nach RIEMANN(wie in der klassischen Analysis praktiziert) wesentlich allgemeiner ist. Z.B. sindVertauschungen von Integral und Grenzprozess gemaß
limn→∞
b∫
a
fn (t) dt =
b∫
a
limn→∞
fn (t) dt
bei Definition der Integrale im RIEMANNschen Sinne gegenuber der Definiti-on nach LEBESGUE an wesentlich einschneidendere Voraussetzungen gebunden.Die Berechnung der inneren Produkte in der Menge der Funktionen des L2 (a, b)uber RIEMANN-Integrale wurde deshalb zu einem Pre-HILBERT-Raum fuhren.

56 3. HILBERT-Raume
4. Der Raum L2 (G)Es sei G ⊂ Rn eine (nichtleere) meßbare Menge und L2 (G) die Menge allermeßbaren Funktionen
f : G → K, wobei
∫
G
|f (x)|2 dG <∞.
Dann gilt: L2 (G) ist mit dem inneren Produkt
(f ,g) =
∫
G
f (x) · g (x) dG fur bel. f ,g ∈ L2 (G)
ein HILBERT-Raum.
Bemerkung 3.6 Die Elemente aus L2 (G) sind wie im Falle des L2 (a, b) Funk-tionenklassen.
Bemerkung 3.7 Die SCHWARZsche Ungleichung nimmt in L2 (G) folgendeForm an:
∣∣∣∣∣∣
∫
G
f (x) · g (x)dG
∣∣∣∣∣∣
≤
∫
G
|f (x)|2 dG
1/2
∫
G
|g (x)|2 dG
1/2
Bemerkung 3.8 Ist G ⊂ Rn offen, so gilt dim (L2 (G)) = ∞.
Beweis. Ist G offen, so existiert ein Kubus
C = x = (ξ1, ..., ξn) ∈ Rn | −∞ < ak < ξk < bk <∞
mit C ⊂ G. Wir definieren
fm (x) =
ξm1 fur x = (ξ1, ξ2, ..., ξn) ∈ C0 fur x ∈ Rn −G.
.
Dann folgt fm (x) ∈ L2 (G) und das System f0 (x) , ..., fm (x) ist fur bel. m ∈ N
in L2 (G) linear unabhangig ⇒ dim (L2 (G)) = ∞.

3.2. Orthogonalitat und Unterraume 57
3.2. Orthogonalitat und Unterraume
Definition 3.4 H sei ein HILBERT-Raum.a) Die Elemente u,v ∈ H heißen orthogonal zueinander (u ⊥ v),wenn gilt (u,v) = 0.b) Die Teilmengen M1 ⊂ H und M2 ⊂ H heißen orthogonal zueinander(M1⊥ M2), wenn gilt (u,v) = 0 fur ∀ u ∈ M1 und ∀ v ∈ M2.c) Ist M eine beliebige Teilmenge von H, dann heißt die Menge
M⊥ = v ∈ H | (u,v) = 0 fur ∀ u ∈ M
Orthogonalraum zu M.
Satz 3.2 Fur jede Teilmenge M eines HILBERT-Raumes H ist M⊥ ein abgeschlos-sener Unterraum von H.
Beweis.a) M⊥ ist ein linearer Raum: Aus (u1,v) = 0 und (u2,v) = 0 folgt (αu1 + βu2,v) = 0.b) M⊥ ist abgeschlossen: Sei u ∈ M⊥, dann folgt, dass eine Folge un mit un ∈ M⊥
und limn→∞
un = u existiert. Aus der Stetigkeit des inneren Produktes folgt dann
(un,v) → (u,v) = 0.
Satz 3.3 ( Satz des PYTHAGORAS ):Die Elemente u1,u2, ...,un des HILBERT-Raumes H seien paarweise orthogonal, d. h.(ui,uj) = 0 fur i 6= j. Dann gilt:
‖u1 + u2 + ...+ un‖2 = ‖u1‖2 + ‖u2‖2 + ...+ ‖un‖2 .
Definition 3.5 V und W seien abgeschlossene Unterraume des HILBERT-RaumesH. Ist jedes u ∈ H eindeutig als Summe u = v +w mit v ∈ V und w ∈ W darstell-bar, so heißt H direkte Summe der Unterraume V und W (H = V ⊕W) .Die Menge W ⊂ H heißt orthogonales Komplement zum abgeschlossenen Unter-raum V ⊂ H wenn gilt
W ⊥ V und H = V ⊕W.

58 3. HILBERT-Raume
Satz 3.4 Jeder abgeschlossene Unterraum V eines HILBERT-Raumes H besitzt eineindeutig bestimmtes orthogonales Komplement W.
Satz 3.5 V , W seien zueinander orthogonale Komplemente des HILBERT-RaumesH (d. h. W ⊥ V und H = V ⊕W ), dann ist jedes u ∈ H eindeutig als Summeu = v +w mit v ∈ V und w ∈ W darstellbar, wobei (v,w) = 0.
Definition 3.6 Es sei H = V ⊕W mit W ⊥ V und jedes u ∈ H habe die eindeutigeDarstellung u = v +w mit v ∈ V und w ∈ W.Dann heißt das Element v ∈ V (bzw. w ∈ W) orthogonale Projektion von u aufV (bzw. auf W).Die Abbildung P : H → V gemaß Pu = v (bzw. Q : H → W gemaß Qu = w) heißtorthogonaler Projektor (oder Orthoprojektor) auf U (bzw. auf W).
Bemerkung 3.9 Der Orthoprojektor P ist ein linearer beschrankter Operatormit ‖P‖ = 1 und es gilt Q = I−P ( I− Einheitsoperator ).
Beweis. Mit ui = vi +wi (i = 1, 2) ∀ ui ∈ H folgt
P (αu1 + βu2) = αv1 + βv2 = αP (u1) + βP (u2)
‖Pu‖2 = ‖v‖2 ≤ ‖v‖2 + ‖w‖2 = ‖u‖2 fur bel. u = v +w ∈ H
Fur bel. u = v ∈ U folgt ‖Pu‖ = ‖u‖ und damit ist ‖P‖ = 1.
wu
v = P ( u )
UH

3.2. Orthogonalitat und Unterraume 59
Folgerung 3.1
1. Ist M ein Unterraum von H so gilt M ∩M⊥ = 0 .2. Aus der Stetigkeit des inneren Produktes folgt:
un⊥v ∈ H und un → u ∈ H ⇒ u⊥v.
3. M ⊂ H sei eine beliebige Teilmenge.
Aus u ∈ H und u ⊥ M folgt u ⊥ spanM.
4. Ist M = H, so folgt M⊥ = 0 .

60 3. HILBERT-Raume
BESTAPPROXIMATION IN HILBERT-RAUMEN
Satz 3.6 U sei ein abgeschlossener Unterraum des HILBERT-Raumes H und u ∈ Hbeliebig. Dann gilt:a) Es existiert genau ein u0 ∈ U mit
‖u− u0‖ = minv ∈ U
‖u− v‖ .
b) u0 erfullt die Bedingung
(u− u0,v) = 0 fur ∀ v ∈ U, d.h. u− u0 ∈ U⊥
u0 heißt bestapproximierendes Element fur u ∈ H bezuglich des Unterraumes U.
Bemerkung 3.10 Die Minimumprobleme minv ∈ U
‖u− v‖ und minv ∈ U
F (v) mit dem
quadratischen Funktional
F (v) =1
2(v,v)− (u,v) (1)
besitzen ein und dieselbe Losung u0 ∈ U. Dies folgt sofort aus dem Zusammenhang:
‖u− v‖2 = (u,u)−2 (u,v)+(v,v) = 2
[1
2(v,v)− (u,v)
]
+ ‖ u ‖2= 2F (v)+ ‖ u ‖2 .
Minimumprobleme der Form (1) werden im folgenden Kapitel 4: “Quadratische Va-riationsprobleme” untersucht. Dort werden Bedingungen angegeben unter denen dieseeine eindeutig bestimmte Losung besitzen. Satz 3.6 ist deshalb als Spezialfall in dieseallgemeine Problematik einzuordnen. Der Beweis zu Satz 3.6 folgt aus dem Beweise zuSatz 4.7 (siehe dazu Bemerkung 4.15).
Satz 3.7 Es sei Un ein n−dimensionaler Unterraum des HILBERT-Raumes H undv1, ...,vn eine Basis in Un. Das bestapproximierende Element u0 ∈ Un fur ein beliebigesu ∈ H kann in der Form
u0 =n∑
k=1
αkvk
dargestellt werden, wobei die Koeffizienten αk aus dem linearen Gleichungssystem
(u− u0,vi) = (u,vi)−n∑
k=1
αk (vk,vi) = 0 i = 1, ..., n
eindeutig berechenbar sind.

3.2. Orthogonalitat und Unterraume 61
Beweis. Zusammen mit Satz 3.6 genugt zum Beweis die Bemerkung, dass die Bedin-gung (u− u0,v) = 0 fur alle v ∈ Un genau dann gilt, wenn diese lediglich fur dieBasiselemente vi (i = 1, ..., n) erfullt ist, d.h. wenn (u− u0,vi) = 0 (i = 1, ..., n). Daslineare Gleichungssystem entsteht dann nach Substitution des Ansatzes fur u0 in diesenBeziehungen.
Bemerkung 3.111. Der Satz bildet die Grundlage zur numerischen Losung von Extremalaufgaben.2. Ist v1, ...,vn eine orthogonale Basis in Un, d. h. gilt (vk,vi) = δki , so erhalt manαk = (u,vk) und damit
u0 =n∑
k=1
(u,vk)vk.
Beispiel 3.1 Es sei H = L2 (0, 1) und Un ⊂ H der Unterraum, der von den Basis-funktionen ϕk (t) = tk (k = 0, 1, ..., n) aufgespannt wird. Un hat damit die Dimensionn+ 1. f (t) sei eine beliebige Funktion aus L2 (0, 1).Ansatz fur bestapproximierendes Element:
fn (t) =n∑
k=0
αkϕk (t) .
Dann ist (α0, α1, ..., αn) Losung des linearen Gleichungssystems
(ϕ0, ϕ0) ... (ϕn, ϕ0)... ... ...
(ϕ0, ϕn) ... (ϕn, ϕn)
α0
...αn
=
(f , ϕ0)...
(f , ϕn)
mit
(ϕk, ϕi) =
1∫
0
ϕk (t)ϕi (t) dt =
1∫
0
tk+i dt =1
k + i+ 1
(f , ϕi) =
1∫
0
f (t)ϕi (t) dt =
1∫
0
tif (t) dt.
Damit erhalt man die kontinuierliche Approximation von f (t) im quadratischen Mittel(Methode der kleinsten Quadrate).

62 3. HILBERT-Raume
3.3. FOURIER-Reihen
Im n− dimensionalen Vektorraum Rn mit der orthonormalen Basis e1, ..., en ist jedesElement u eindeutig in der Form
u =n∑
k=1
αkek mit αk = (u, ek)
darstellbar. Die Ubertragung dieser Darstellung auf die Elemente (unendlichdim.)HILBERT-Raume ist Gegenstand dieses Abschnittes.
Definition 3.7 Es sei u ein beliebiges Element des HILBERT-Raumes H unde1, e2, ...,en, ... ein orthonormales System (ONS) aus H, d. h. es gilt (ei, ek) = δik.Die Großen αk = (u, ek) k = 1, 2, ... heißen FOURIER-Koeffizienten.
Die formale Reihe∞∑
k=1
αkek heißt FOURIER-Reihe fur u bzg. ek .
Satz 3.8 Es sei u ∈ H beliebig und ek ⊂ H ein ONS. Dann konvergiert die Folgeder Partialsummen
vn =n∑
k=1
αkek → v ∈ H (n→ ∞) und es gilt:
BESSELsche Ungleichung:∞∑
k=1
|αk|2 ≤ ‖u‖2
PARSEVALsche Gleichung:∞∑
k=1
|αk|2 = ‖v‖2 .
Beweis.
0 ≤ ‖u− vn‖2 = (u− vn,u− vn)
= (u,u)−(
u,n∑
k=1
αkek
)
−(
n∑
k=1
αkek,u
)
+
(n∑
k=1
αkek,n∑
i=1
αiei
)
= ‖u‖2 −n∑
k=1
αkαk = ‖u‖2 −n∑
k=1
|αk|2 ⇒n∑
k=1
|αk|2 ≤ ‖u‖2

3.3. FOURIER-Reihen 63
Damit ist
n∑
k=1
|αk|2
eine CAUCHY-Folge, d.h. fur bel. ε > 0 ∃ N (ε) , so dass
∣∣∣∣∣
n∑
k=1
|αk|2 −m∑
k=1
|αk|2∣∣∣∣∣< ε fur bel. n,m = N (ε)
Im Falle n > m ist weiter
‖vn−vm‖2 =∥∥∥∥∥
n∑
k=m+1
αkek
∥∥∥∥∥
2
=n∑
k=m+1
|αk|2 < ε
Folglich ist auch vn eine CAUCHY-Folge in H. Da H ein vollstandiger Raum ist,existiert ein v ∈ H mit v = lim
n→∞vn. Weiter ist:
∣∣∣∣∣
n∑
k=0
|αk|2 − ‖v‖2∣∣∣∣∣
=∣∣‖vn‖2 − ‖v‖2
∣∣ = |‖vn‖ − ‖v‖| |‖vn‖+ ‖v‖|
≤ ‖vn−v‖ (‖vn‖+ ‖v‖) → 0 fur n→ ∞
Bemerkung 3.12 Das Element v ist die orthogonale Projektion von u auf den vone1, ..., ek, ... aufgespannten Unterraum U = span (ek), d.h. es gilt
(u− v, ek) = 0 fur k = 1, 2, ... und ‖u− v‖2 = ‖u‖2 −∞∑
k=1
|αk|2 .
Definition 3.8 Das ONS ek ⊂ H heißt vollstandig in H, wenn gilt
span (ek) = H.
Bemerkung 3.13 Das ONS ek ist genau dann vollstandig in H, wenn jedes u ∈ Heindeutig als Linearkombination der Elemente ek (k = 1, 2, ...) darstellbar ist.
Satz 3.9 ek sei ein vollstandiges ONS im HILBERT-Raum H, dann gilt:
a) Jedes u ∈ H ist in der Form u =∞∑
k=1
αkek mit den FOURIER-Koeffizienten
αk = (u, ek) darstellbar und es gilt die
PARSEVALsche Gleichung : ‖u‖2 =∞∑
k=1
|αk|2

64 3. HILBERT-Raume
b) Zu jeder Zahlenfolge αk mit αk ∈ C und∞∑
k=1
|αk|2 < ∞, gibt es genau ein u ∈ H
mit u =∞∑
k=1
αkek.
Satz 3.10 In einem separablen HILBERT-Raum H existiert wenigstens einvollstandiges ONS.
Beweis. H ist separabel, d.h. in H existiert eine abzahlbare dichte MengeB = u1, ..., un, ... mit B = H. Aus B konnen alle linear unabhangigen Elementeu1, ...,un, ... ausgewahlt werden. Damit ist auch span (un) = B = H. Die Elementeu1, ...,un, ... werden nach dem SCHMIDTschen Orthonormierungsverfahren orthonor-miert.⇒en. Es gilt dann span (en) = span (un) = H.
Bemerkung 3.14 Es gilt auch die Umkehrung des Satzes 3.11:Jeder H− Raum mit einem vollstandigen Orthonormalsystem ist separabel.
Beispiele fur separable H− Raume
1. Der Raum l2 ist separabel
B = x =(r1, r2, ...rn, ...) | ∀ n ∈ N, ∀ rk ∈ Q
2. Der Raum L2 (a, b) ist separabel
B = PR [a, b] =
PnR (t) =n∑
k=0
rktk | ∀ n ∈ N, ∀ rk ∈ Q
Beispiele fur vollstandige Orthonormalsysteme (ONS)
1. H = l2 x,y ∈ H mit x = ξk∞k=1 y = ηk∞k=1 :
(x,y) =∞∑
k=1
ξkηk ‖x‖ =
( ∞∑
k=1
|ξk|2)1/2
vollstandiges Orthonormalsystem in l2 : ek =(
0, ..., 0, 1k, 0, ...
)
⇒ ∀ x ∈ l2 : x =∞∑
k=1
(x, ek) ek =∞∑
k=1
ξkek

3.3. FOURIER-Reihen 65
2. H = L2 (−π, π) ; f ∈ L2 (−π, π) mit f : (−π, π) → R
vollstandiges Orthonormalsystem in L2 (−π, π) :
ϕ0 (t) =1√π
, ϕ2k−1 (t) =1√πcos (kt) , ϕ2k (t) =
1√πsin (kt) k = 1, 2, ...
Damit ist:
f (t) =a02
+∞∑
k=1
[ak cos (kt) + bk sin (kt)] ,
wobei ak =1
π
π∫
−π
f (t) cos (kt) dt bk =1
π
π∫
−π
f (t) sin (kt) dt
3. H = Lc2 (0, T ) ; f ∈ Lc
2 (0, T ) mit f : (0, T ) → C
vollstandiges Orthonormalsystem in Lc2 (0, T ) :
ϕk (t) =1√Texp (ikωt) k = 0,±1,±2, ... ω =
2π
T
Damit ist
f (t) =∞∑
k=−∞ck exp (ikωt) , wobei ck =
1
T
T∫
0
f (t) exp (−ikωt) dt
Allgemeine Konstruktion eines ONS
- Wahl eines linear unabhangigen Systems un ⊂ H mit span (un) = H.
- Orthonormieren von un nach SCHMIDT.
SCHMIDTsches Orthonormierungsverfahren
H sei ein HILBERT-Raum und un∞n=1 ⊂ H eine Folge linear unabhangiger Elemente.Dann existiert in H ein ONS en∞n=1 , wobei gilt:
en = αn1u1 + αn2u2 + ...+ αnnun αij ∈ K
D.h., es gilt span u1, ...un = span e1, ...en n = 1, 2, ...
Beweis. (mittels vollstandiger Induktion)
a) e1 = α11u1 Wegen ‖e1‖ = 1 folgt α11 =1
√
(u1,u1).
Induktionsannahme:
ek = αk1u1 + αk2u2 + ...+ αkkuk k = 1, ....n mit (ek, ej) = δkj

66 3. HILBERT-Raume
b) Ansatz:vn+1 = βn+1,1e1 + ...+ βn+1,nen + un+1
Bedingung zur Berechnung der Koeffizienten βi,j :
(vn+1, ek) =n∑
i=1
βn+1,i (ei, ek) + (un+1, ek)!= 0 k = 1, ..., n
⇒ βn+1,k = − (un+1, ek)
Normierung von vn+1 :
en+1 =1
√
(vn+1,vn+1)vn+1
Substitution von e1, ..., en in en+1 liefert en+1 =n+1∑
k=1
αn+1,k uk.
Beispiele zur Orthonormierung
1. H = L2 (−1, 1) ; fn (t) = tn n = 0, 1, 2, ... fn ist linear unabhangig und vollstandig in L2 (−1, 1) .SCHMIDTsche Orthonormierung liefert:
ϕn (t) =
(2n+ 1
2
)1/2
Ln (t) n = 0, 1, 2, ...
mit den LEGENDREschen Polynomen
Ln (t) =1
n!2ndn
dtn(t2 − 1
)n
insbesondere ist:
L0 (t) = 1, L1 (t) = t, L2 (t) =1
2
(3t2 − 1
)
L3 (t) =1
2
(5t3 − 3t
), L4 (t) =
1
8
(35t4 − 30t2 + 3
)
Es gilt dann1∫
−1
ϕn (t)ϕm (t) dt = δnm.
2. H = L2 (−∞,∞) ; fn (t) = tn exp(−1
2t2)
n = 0, 1, 2, ... fn ist linear unabhangig und vollstandig in L2 (−∞,∞) .SCHMIDTsche Orthonormierung liefert:
ϕn (t) =1
αn
exp
(
−1
2t2)
Hn (t) n = 0, 1, 2, ...
mit αn =
√
2nn!√π

3.3. FOURIER-Reihen 67
und den HERMITEschen Polynomen
Hn (t) = (−1)n exp(t2) dn
dtn(exp
(−t2))
Insbesondere ist:
H0 (t) = 1, H1 (t) = 2t, H3 (t) = 4t2 − 2
Es gilt dann∞∫
−∞
ϕn (t)ϕm (t) dt = δnm.
Definition 3.9 Die HILBERT-Raume H1 und H2 heißen normisomorph zueinan-der, wenn eine Bijektion f : H1 → H2 existiert mita) f (u+ v) = f (u) + f (v)b) f (αu) = αf (u) fur bel. u,v ∈ H1 und α ∈ K
c) (u,v) = (f (u) , f (v))
Bemerkung 3.15 Bei einer Normisomorphie bleiben alle fur einen normierten Raumtypischen Eigenschaften erhalten. Deshalb konnen normisomorphe Raume miteinanderidentifiziert werden.
Satz 3.11 Jeder unendlich dimensionale separable HILBERT-Raum ist normisomorphzum HILBERT-Raum l2.
Beweis. H separabler HILBERT-Raum und u ∈ H beliebig. ek ⊂ H sei ein vollstan-
diges ONS und αk = (u, ek) FOURIER-Koeffizienten. Dann ist u =∞∑
k=1
αkek.
Es wird die Abbildung f : H → l2 gemaß u ∈ H → (α1, ..., αn, ...) ∈ l2 definiert. Dannist f ein Normisomorphismus.Denn: a) und b) sind offensichtlich erfullt.
Zum Nachweis der Eigenschaft c) sei v =∞∑
i=1
βiei mit βi = (v, ei) .Dann ist
(u,v) =∞∑
k=1
∞∑
i=1
αkβi (ek, ei) =∞∑
k=1
αkβk = (f (u) , f (v))
Bemerkung 3.16 Zwei beliebige unendlich dimensionale separable HILBERT-Raumesind normisomorph zueinander.


4. QuadratischeVariationsprobleme
In diesem Abschnitt werden Methoden zur Losung von RWA fur lineare elliptischeDifferentialgleichungen behandelt.Im Mittelpunkt steht als Standardbeispiel die Differentialgleichung ( POISSON-Gleichung ):
−n∑
k=1
∂2u (x)
∂x2k= −div (grad u (x)) = −4 u (x) = f (x)
und die zugehorige DIRICHLETsche RWA:
Gesucht ist u (x) ∈ C2 (Ω) mit
−4 u (x) = f (x) x ∈ Ω ⊆ Rn
u (x) = 0 x ∈ ∂Ω = Γ
(DP ) W W = G
Diese RWA besitzt nur fur hinreichend glatte Funktionen f (x) und einenglatten Rand Γ eine (klassische) Losung u (x) ∈ C2 (Ω) .⇒ Erweiterung der Aufgabenstellung durch:
1. Verallgemeinerung des Losungsbegriffes→ Einfuhrung verallgemeinerter Ableitungen und SOBOLEW-Raume.
2. Aquivalente Formulierung zu (DP ) als Grundlage fur deren numerischeLosung → Quadratische Variationsprobleme

70 4. Quadratische Variationsprobleme
Das folgende einfache Beispiel soll die vorliegende Problematik und deren geplanteLosung verdeutlichen:
Gesucht ist u ∈ Q ( Raum der rationalen Zahlen ) mit
Au− α = 0 (α ∈ R) (A > 0)(1)
1. Diese Aufgabenstellung besitzt nur im Falle αA∈ Q eine Losung. Verallgemeinert
man die Aufgabenstellung durch Hinzunahme aller ”Grenzelemente” rationalerZahlen, so wird (1) losbar.⇒ Losungsraum ist R.Dies entspricht der Verallgemeinerung der RWA (DP ) durch Hinzunahme aller”Grenzelemente” klassischer Ableitungen der Funktionen u (x) .⇒ verallgemeinerte Ableitung und Losungsraum: SOBOLEW-Raum H1
2 (Ω) .
2. Folgende Aufgabenstellungen sind (in Verallgemeinerung) aquivalent zu (1) :
QuadratischesVariationsproblem
Gesucht ist u ∈ R mit
F (u) = minw∈R
F (w)
wobei F (w) = A2w2 − αw
(2)
Variations-gleichung
Gesucht ist u ∈ R mit
Auv − αv = 0 fur bel. v ∈ R
(3)
- Jede Losung von (1) ist auch eine Losung von (2) und (3) .- (2) und (3) besitzen ein und dieselbe eindeutig bestimmte Losung.- Die Losung von (2) und (3) heißt verallgemeinerte Losung von (1) .Diese Aussagen lassen sich sinngemaß auf die Losung der RWA (DP ) ubertragen.Mit der Einfuhrung des linearen Funktionals b : R → R mit b (u) = αu und derBilinearform a : R × R → R mit a (u, v) = Auv erhalt man die allgemeineVariationsgleichung a (u, v)− b (v) = 0 und das quadratische FunktionalF (w) = 1
2a (w,w)− b (w) .

4.1. Funktionenraume 71
4.1. Funktionenraume
Ω ⊆ Rn sei eine nicht leere, meßbare Teilmenge.F (Ω) sei die Menge aller auf Ω definierten, meßbaren, reell- bzw. komplexwertigenFunktionen f : Ω → R (bzw. C) (siehe Anhang A2).Fur ∀ f ,g ∈ F (Ω) und ∀ α, β ∈ R (bzw. C) ist
αf+βg ∈ F (Ω) gemaß (αf+βg) (x) = αf (x)+βg (x) x ∈ Ω
Mit diesen Operationen ”+” und ”·” ist F (Ω) ein linearer Raum.
1. L2 (Ω)−Raum aller auf Ω (im Sinne von LEBESGUE) quadratisch summierba-ren Funktionen:
L2 (Ω) =
f ∈ F (Ω)
∣∣∣∣∣∣
(L)
∫
Ω
|f (x)|2 dΩ <∞
Mit dem skalaren Produkt und der Norm
(f ,g)L2=
∫
Ω
f (x) g (x) dΩ ‖ f ‖L2=
∫
Ω
|f (x)|2 dΩ
1/2
ist L2 (Ω) ein separabler HILBERT-Raum.
2. C (Ω)− Raum aller auf Ω definierten stetigen Funktionen.Es gilt: C (Ω) ⊂ L2 (Ω) ⊂ F (Ω) .
3. Cm (Ω)− Raum aller auf Ω definierten Funktionen, die stetige partielle Ablei-tungen der Ordnung k = 0, 1, ...,m besitzen.
4. C0 (Ω)− Raum aller im Rn definierten stetigen Funktionen ϕmit kompaktemTrager in Ω:
C0 (Ω) = ϕ ∈ C (Ω) | ϕ (x) = 0 fur ∀ x /∈ Ω .
5. Cm0 (Ω)− Raum aller der Funktionen ausC0 (Ω), die stetige partielle Ableitungen
der Ordnung k = 0, 1, ...,m besitzen.
Cm0 (Ω) =
ϕ ∈ C0 (Ω)
∣∣∣∣∣∣
∂α1+...+αnϕ (x)
∂xα11 ...∂x
αnn
∈ C0 (Ω)
n∑
k=1
αk ≤ m
x = (x1, ..., xn)
6. C∞0 (Ω)− Raum aller Funktionen ϕ ∈ C0 (Ω), die beliebig oft stetig differenzier-
bar sind, d.h. ϕ ∈ C∞0 (Ω), wenn ϕ ∈ Cm
0 (Ω) fur m = 0, 1, ....

72 4. Quadratische Variationsprobleme
Definition 4.1 Es sei ϕ (x) ∈ C (Rn) , dann heißt die Menge
Tr (ϕ) = x ∈ Rn | ϕ (x) 6= 0Trager oder Support von ϕ.Ist Tr (ϕ) ⊆ Ω eine kompakteMenge, so heißt ϕ Funktion mitkompakten Trager in Ω.
W
j
R
T r ( )
n
Bemerkung 4.1 Der Raum C0 (Ω) wird mit der Norm und dem Skalarprodukt desL2 (Ω) zu einem PreHILBERT-Raum. Dieser Raum ist jedoch nicht vollstandig unddamit kein HILBERT-Raum (siehe Beispiel 1.4 ).
Bemerkung 4.2 Es gelten die Mengenrelationen
C∞0 (Ω) ⊂ Cm
0 (Ω) ⊂ C0 (Ω) ⊂ C (Ω) ⊂ L2 (Ω)
und die Mengen C∞0 (Ω) , Cm
0 (Ω) , C0 (Ω) und C (Ω) sind bezuglich der Metrik desL2 (Ω) in L2 (Ω) dicht.
Bemerkung 4.3 Es sei f ∈ L2 (Ω) und∫
Ω
ϕ (x) f (x)dΩ = 0 fur bel. ϕ ∈ C∞0 (Ω) ,
dann ist f (x) = 0 fur fast alle x ∈ Ω (d.h. f = 0 in L2 (Ω) ).Der Beweis folgt direkt aus der Dichtheit von C∞
0 (Ω) in L2 (Ω) .
4.2. Verallgemeinerte Ableitung und
SOBLEW-Raum
Nicht jede Funktion aus L2 (Ω) besitzt eine Ableitung im klassischen Sinne. DieseTatsache ist ein Haupthindernis bei der Losung von Differentialgleichungen. Deshalbwird der Begriff der Verallgemeinerten Ableitung eingefuhrt.Ausgangspunkt: Formel der partiellen Integrationa) n = 1 : Ω =(a, b) ⊂ R f , ϕ ∈ C1 (a, b)
b∫
a
f (x)dϕ (x)
dxdx = f (x)ϕ (x)|ba −
b∫
a
df (x)
dxϕ (x) dx

4.2. Verallgemeinerte Ableitung und SOBLEW-Raum 73
Ist ϕ ∈ C∞0 (a, b) , d.h. ϕ (a) = ϕ (b) = 0, so erhalt man:
b∫
a
f (x)dϕ (x)
dxdx =−
b∫
a
df (x)
dxϕ (x) dx. (∗)
b) n ∈ N : Ω ⊂ Rn sei eine offene Menge und x =(x1, ..., xn) ∈ Ω, f , ϕ ∈ C1 (Ω),dann gilt die Erste GREENsche Formel (Formel der mehrdimensionalen partiellenIntegration):
∫
Ω
f (x)∂ϕ (x)
∂xidΩ =
∫
Γ
f (x)ϕ (x)nidΓ−∫
Ω
∂f (x)
∂xiϕ (x) dΩ
dΓ− Oberflachenelementdes Randes Γ = ∂Ω
d GW
G
n = ( n , . . . , n )1 n
Ist ϕ ∈ C∞0 (Ω) , so erhalt man:
∫
Ω
f (x)∂ϕ (x)
∂xidΩ =−
∫
Ω
∂f (x)
∂xiϕ (x) dΩ (∗)
Die Beziehung (∗) bildet die Grundlage zur Definition der verallgemeinerten Ablei-tung und spielt eine bedeutende Rolle in der Variationsrechnung zur Theorie partiellerDifferentialgleichungen.
Definition 4.2 (Verallgemeinerte Ableitung)f (x) sei eine Funktion aus L2 (Ω) . Die Funktion g (x) ∈ L2 (Ω) heißt schwache oderverallgemeinerte Ableitung von f (x) bezuglich xi, wenn folgende Gleichung gilt:
∫
Ω
f (x)∂ϕ (x)
∂xidΩ = −
∫
Ω
g (x) ϕ (x) dΩ fur ∀ϕ ∈ C∞0 (Ω) .
Bezeichnung: g (x) =∂
∂xif (x)
Bemerkung 4.4
1.∂
∂xif (x) ist im Sinne des L2 (Ω) eindeutig bestimmt.

74 4. Quadratische Variationsprobleme
2. Es gelten die ublichen Rechenregeln:
∂
∂xi(αf1 + βf2) = α
∂f1∂xi
+ β∂f2∂xi
α, β ∈ R
∂
∂xi(ϕ · f) =
∂ϕ
∂xi·f + ϕ· ∂f
∂xi∀ ϕ ∈ C∞
0 (Ω)
3. Besitzt f ∈ L2 (Ω) in Ω eine Ableitung im klassischen Sinne, so stimmt diese (imSinne des L2 (Ω) ) mit der verallgemeinerten Ableitung zu f uberein.
Beispiel 4.1 (verallgemeinerte Ableitung):Ω =(a, b) ; f (x) : [a, b] → R sei eine stetige stuckweise differenzierbare Funktion. Ge-nauer: Es gibt endlich viele Punkte a = a0 < a1 < a2 < ... < ap = b, so dass auf jedemIntervall (aj−1, aj) j = 1, ..., p die Funktion f (x) stetig differenzierbar ist.
f ( x )
a = a b = a10 a a 2 a 3 4a 5 a = a 0 1a a 2 a 3 b = a 4x x
f ( x )
d fd x
d fd x
Dann gilt:a) f (x) ∈ L2 (Ω) , denn |f (x)|2 ist stetig auf [a, b] und damit integrierbar.b) f besitzt auf Ω = (a, b) die verallgemeinerte Ableitung
g (x) =df
dx=
f ′ (x) fur aj−1 < x < aj j = 1, ..., pbeliebig sonst
Denn:
b∫
a
fdϕ
dxdx =
p∑
j=1
aj∫
aj−1
fdϕ
dxdx = −
p∑
j=1
aj∫
aj−1
df
dxϕdx = −
b∫
a
df
dxϕdx
fur ∀ ϕ ∈ C∞0 (a, b)
Bemerkung 4.5 Das folgende Beispiel zeigt, dass nicht jedes f ∈ L2 (Ω) eine verall-
gemeinerte Ableitungdf
dxi∈ L2 (Ω) besitzt.

4.2. Verallgemeinerte Ableitung und SOBLEW-Raum 75
Beispiel: Es sei f (x) =1
xα(0 < α < 1
2
), dann ist wegen
1∫
0
|f (x)|2 dx =
1∫
0
dx
x2α=
[x1−2α
1− 2α
]1
0
=1
1− 2α<∞
f (x) ∈ L2 (0, 1) . Mit bel. ϕ (x) ∈ C∞0 (0, 1) und partieller Integration folgt
1∫
0
f (x)dϕ
dxdx =
1∫
0
1
xαdϕ
dxdx = α
1∫
0
1
xα+1ϕ (x) dx.
Aber1
xα+1/∈ L2 (0, 1) und damit besitzt f (x) keine verallgemeinerte Ableitung in
L2 (0, 1) .Es gilt jedoch: Die Menge aller f ∈ L2 (Ω), die eine verallgemeinerte Ableitung besit-zen, bildet einen Unterraum des L2 (Ω) . Dieser Unterraum wird SOBOLEW-Raumgenannt.
Definition 4.3 Der lineare normierte Raum
H12 (Ω) =
f ∈ L2 (Ω)
∣∣∣∣
∂
∂xif (x) ∈ L2 (Ω) ; i = 1, ..., n
mit dem inneren Produkt
(f ,g)H12=
n∑
i=1
∫
Ω
∂f
∂xi
∂g
∂xidΩ+
∫
Ω
f g dΩ fur f ,g ∈ H12 (Ω)
und der dadurch induzierten Norm
‖f‖H12=
n∑
i=1
∫
Ω
∣∣∣∣
∂f
∂xi
∣∣∣∣
2
dΩ+
∫
Ω
|f |2 dΩ
1/2
(1)
heißt SOBOLEW-Raum H12 (Ω) .
Definition 4.4 Die Vervollstandigung von C∞0 (Ω) bezuglich der Norm (1) ist
ebenfalls ein SOBOLEW-Raum. Dieser wird mit H12 (Ω) bezeichnet.

76 4. Quadratische Variationsprobleme
Satz 4.1 Die Raume H12 (Ω) und H1
2 (Ω) sind separable HILBERT-Raume. Esgilt:
C∞0 (Ω) ⊂ C1
0 (Ω) ⊂ H12 (Ω) ⊂ H1
2 (Ω) ⊂ L2 (Ω) .
Beweis. Es genugt die Vollstandigkeit des Raumes H12 (Ω) zu zeigen.
fp ⊂ H12 (Ω) sei eine CAUCHY-Folge, dann gilt fur beliebiges ε > 0:
‖fp − fq‖H12
=
n∑
i=1
∫
Ω
∣∣∣∣
∂fp∂xi
− ∂fq∂xi
∣∣∣∣
2
dΩ+
∫
Ω
|fp − fq|2 dΩ
1/2
< ε fur alle p, q = N0 (ε) .
Daraus ist erkennbar, dass auch die Folgen fp ⊂ L2 (Ω) und
∂fp∂xi
⊂ L2 (Ω)
(j = 1, ..., n) CAUCHY-Folgen sind. Wegen der Vollstandigkeit von L2 (Ω) existieren
f ∈ L2 (Ω) und gj ∈ L2 (Ω) mit ‖fp − f‖ → 0 und
∥∥∥∥
∂fp∂xi
− gj
∥∥∥∥→ 0 fur p → ∞. Laßt
man in der Integralbeziehung (∗)∫
Ω
fp∂ϕ
∂xjdΩ = −
∫
Ω
∂fp∂xj
ϕdΩ fur alle ϕ ∈ C∞0 (Ω)
p → ∞ laufen, so entsteht (unter Benutzung der Stetigkeit des inneren Produktes inL2 (Ω))
∫
Ω
f∂ϕ
∂xjdΩ = −
∫
Ω
gjϕdΩ fur alle ϕ ∈ C∞0 (Ω) .
Aus dieser Gleichung folgt, dass gj =∂f
∂xj(j = 1, ..., n) die verallgemeinerten Ablei-
tungen von f sind. Außerdem ist gj ∈ L2 (Ω), f ∈ H12 (Ω) und fp → f in H1
2 (Ω). Damitfolgt die Vollstandigkeit von H1
2 (Ω).
Satz 4.2 Es seien f und∂f
∂xiaus L2 (Ω) und g ∈ H1
2 (Ω), dann gilt:
∫
Ω
∂f
∂xig dΩ = −
∫
Ω
f∂g
∂xidΩ.

4.2. Verallgemeinerte Ableitung und SOBLEW-Raum 77
Bemerkung 4.6
1. Jedes f ∈ H12 (Ω) erfullt die Bedingung:
f (x) = 0 fur fast alle x ∈ Γ = ∂Ω.
2. Unter den Bedingungen des Satzes 4.2 konnen Ableitungen von f auf g ”ubergewalzt”werden. Dies findet bei der Herleitung von Variationsgleichungen fur RWA partiellerDifferentialgleichungen haufig Anwendung.
VERALLGEMEINERTE ABLEITUNGEN UND
SOBOLEW-RAUME HOHERER ORDNUNG
Multiindex α = (α1, α2, ..., αn) ; αi ∈ N mit |α| = α1 + α2 + ...+ αn
Bezeichnung fur das Ableitungssymbol der α1−fachen Ableitung nach x1, ..., αn−fachenAbleitung nach xn:
Dα =∂α1+α2+...+αn
∂xα11 ∂x
α22 ...∂x
αnn
.
Definition 4.5 Es sei f ∈ L2 (Ω) . Ein g ∈ L2 (Ω) heißt schwache oder verallge-meinerte Ableitung von f bezuglich des Multiindex α, wenn gilt:
∫
Ω
f (x) Dαϕ (x) dΩ = (−1)|α|∫
Ω
g (x) ϕ (x) dΩ fur ∀ ϕ ∈ C∞0 (Ω) .
Bezeichnung: g (x) = Dαf (x)
Definition 4.6 Der lineare normierte Raum
Hm2 (Ω) = f ∈ L2 (Ω) | Dα f (x) ∈ L2 (Ω) ; |α| ≤ m
mit dem skalaren Produkt
(f ,g)Hm2=
∑
0≤|α|≤m
∫
Ω
(Dαf) (Dαg) dΩ fur f ,g ∈ Hm2 (Ω)
und der dadurch induzierten Norm
‖f‖Hm2=
∑
0≤|α|≤m
∫
Ω
|Dαf |2 dΩ
1/2
(1)
heißt SOBOLEW-Raum Hm2 (Ω) .

78 4. Quadratische Variationsprobleme
Definition 4.7 Die Vervollstandigung von C∞0 (Ω) bezuglich der Norm (1) heißt
SOBOLEW-Raum Hm2 (Ω) .
Satz 4.3 Es seien f und Dαf aus L2 (Ω) und g ∈ H|α|2 (Ω), dann gilt:
∫
Ω
(Dαf) g dΩ = (−1)|α|∫
Ω
f (Dαg) dΩ.
Beispiel 4.2∫
Ω
∂2f
∂x2ig dΩ =
∫
Ω
f∂2g
∂x2idΩ fur ∀ f ,g ∈ H2
2 (Ω).

4.3. Lineare Funktionale und Bilinearformen 79
4.3. Lineare Funktionale und Bilinearformen
4.3.1. Lineare Funktionale und dualer Raum
Definition 4.8 X sei ein linearer normierter Raum uber dem Korper K. Untereinem linearen stetigen (beschrankten) Funktional auf X versteht man einenlinearen stetigen Operator b
b : X → K ,
mit folgenden Eigenschaften:(a) Linearitat: Fur alle u,v ∈ X und α, β ∈ K gilt:
b (αu+ βv) = αb (u) + βb (v) .
(b) Beschranktheit: Es existiert eine Konstante C = ‖b‖ = sup‖u‖≤1
|b (u)|, so dass gilt:
|b (u)| ≤ C ‖u‖ fur alle u ∈ X.
Bemerkung 4.7 Die Menge aller linearen beschrankten Funktionale bildet mit derublichen Addition (und der multiplikativen Verknupfung mit Elementen aus K ) furFunktionen selbst einen linearen normierten Raum, den dualen Raum X∗ = L (X,K)zu X. Ist K gemaß ‖α‖ = |α| fur alle α ∈ K normiert, so ist X∗ = L (X,K) einBANACH-Raum (siehe Satz 2.5 und Abschnitt 2.9).
Satz 4.4 (Darstellungssatz von RIESZ)X = H sei ein HILBERT-Raum mit dem inneren Produkt (·, ·). Ein lineares Funktionalb : H → K ist genau dann aus H∗ = L (H,K) (d.h. linear und beschrankt) wenn einw0 ∈ H existiert, so dass b die Darstellung
b (u) = (w0,u) ∀ u ∈ H und ‖b‖ = ‖w0‖
mit dem eindeutig bestimmten Element w0 ∈ H besitzt. D.h. jedes lineare beschrankteFunktional im HILBERT-Raum H kann als inneres Produkt mit einem Elementw0 ∈ H dargestellt werden.
Beweis. a) Existenz von w0 mit b (u) = (w0,u) .1. Fall: b (u) ≡ 0; setzen w0 = 0.

80 4. Quadratische Variationsprobleme
2. Fall: b ∈ H∗ mit b verschwindet aufH nicht identisch. Der Nullraum
N (b) = v ∈ H | b (v) = 0von b ist auf Grund der Stetigkeit von b (folgt aus der Beschranktheit von b!) einabgeschlossener Unterraum von H. Dann laßt sich jedes u ∈ H in der Form u = v+u0
mit v ∈ N (b) und u0 ∈ N⊥ (b) darstellen (denn, wegen b 6= 0 ist N (b) 6= H undH = N (b)⊕N⊥ (b) ).Wir nehmen nun ein u0 ∈ N⊥ (b) mit b (u0) = 1 (dies ist immer moglich!). Dannist
b (u− b (u)u0) = 0 fur alle u ∈ H
und folglich u− b (u)u0 = v ∈ N (b). Man erhalt durch Umstellen dieser Beziehungdie orthogonale Zerlegung
u = v + b (u)u0 mit v ∈ N (b) , b (u)u0 ∈ N⊥ (b) fur alle u ∈ H.
Wird das innere Produkt dieser Beziehung mit u0 gebildet, so folgt (wegen (u0,v) =0)
(u0,u) = b (u) (u0,u0) fur alle u ∈ H.
Setzt man nun w0 =u0
(u0,u0), so ist b (u) = (w0,u), fur alle u ∈ H.
b) Eindeutigkeit: Angenommen es sei b (u) = (w0,u) = (w1,u) fur alle u ∈ H ⇒(w0 −w1,u) = 0 fur alle u ∈ H ⇒ w0 −w1 = 0 ⇒ w0 = w1.c) Es sei b (u) = (w0,u) fur alle u ∈ H.Dann folgt aus den Eigenschaften des inneren Produktes, dass b (u) linear ist und mitder SCHWARZschen Ungleichung ist
|b (u)| = |(w0,u)| ≤ ‖w0‖ ‖u‖ ,d.h. b (u) ist beschrankt ⇒ (w0,u) ∈ H∗.d) Wegen |b (u)| = |(w0,u)| ≤ ‖w0‖ ‖u‖ ⇒ ‖b‖ ≤ ‖w0‖ . Andererseits istb (w0) = (w0,w0) = ‖w0‖2 und damit ‖b‖ = sup
‖u‖≤1
|b (u)| = ‖w0‖.
Bemerkung 4.8 Aus dem Teil a) des Beweises zu Satz 4.4 geht hervor, dass sichjedes Element u ∈ H in der Form
u = v + b (u)u0 mit v ∈ N (b) , b (u)u0 ∈ N⊥ (b)
darstellen laßt. N⊥ (b) besteht also nur aus Vielfachen des Elementes u0, d.h.dim
(N⊥ (b)
)= 1.
Definition 4.9 Die Abbildung
J : H → H∗ gemaß w ∈ H → b ∈ H∗ mit b (u) = (w,u) fur alle u ∈ H,
heißt Dualitatsabbildung. Unter Verwendung des Dualitatsproduktes 〈·, ·〉 ist dann:
b (u) = 〈b,u〉 = 〈J (w) ,u〉 = (w,u) .

4.3. Lineare Funktionale und Bilinearformen 81
Bemerkung 4.9 Die Dualitatsabbildung ist bijektiv, linear, stetig und es gilt
‖J (w)‖H∗ = ‖w‖H fur alle w ∈ H.
Beispiel 4.3 H = Rn mit (u,v) =n∑
i=1
uivi.
Jedes lineare beschrankte Funktional b : Rn → R hat dann die Form
b (u) = (u, a) =n∑
i=1
uiai mit festem a = (a1, ..., an) ∈ Rn.
Beispiel 4.4 H = Lc2 (Ω) mit (f ,g) =
∫
Ω
f (x)g (x)dΩ.
Jedes linear beschrankte Funktional b : Lc2 (Ω) → C hat dann die Form
b (f) =
∫
Ω
f (x)g0 (x)dΩ mit festem g0 (x) ∈ Lc2 (Ω) .
4.3.2. Bilinearformen
Definition 4.10 X sei ein linearer normierter Raum uber dem Korper K. Einebeschrankte bilineare Form auf X ist eine Abbildung (Funktion)
a : X×X → K ,
die folgende Eigenschaften besitzt:(a) Bilinearitat: Fur alle u,v,w ∈ X und α, β ∈ K gilt:
a (αu+ βv,w) = αa (u,w) + βa (v,w)
und a (w,αu+ βv) = αa (w,u) + βa (w,v) .
(b) Beschranktheit: Es existiert eine Konstante C > 0, so dass gilt:
|a (u,v)| ≤ C ‖u‖ ‖v‖ fur alle u,v ∈ X.
Definition 4.11 Die bilineare Form a (·, ·) heißt symmetrisch, wenn gilt:
a (u,v) = a (v,u) fur alle u,v ∈ X.

82 4. Quadratische Variationsprobleme
a (·, ·) heißt positiv, wenn gilt:
a (u,u) > 0 fur alle u ∈ X.
a (·, ·) heißt streng positiv ( bzw. positiv definit ), wenn eine Konstante c > 0existiert und gilt:
a (u,u) > c ‖u‖2 fur alle u ∈ X.
Satz 4.5 Eine auf dem normierten Raum X uber dem Korper K definierte be-schrankte bilineare Form a (·, ·) ist stetig.D. h., aus un → u und vn → v folgt a (un,vn) → a (u,v) (n→ ∞) .
Beweis. Mit der Beschranktheit von a (·, ·) ist:
|a (un,vn)− a (u,v)| = |a (un − u,vn) + a (u,vn−v)|≤ C ‖un − u‖ ‖vn‖+ C ‖u‖ ‖vn−v‖ → 0 fur n→ ∞.
Beispiel 4.5 H = Rn mit (u,v) =n∑
i=1
uivi ⇒ a (·, ·) : Rn × Rn → R mit
a (u,v) = (Au,v) =n∑
i,j=1
aijujvi und A = (aij)nij=1
a (·, ·) ist symmetrisch und positiv definit ⇔ Die Matrix A ist symmetrisch und positivdefinit.
Beispiel 4.6 H = H12 (Ω) mit
(f ,g) =
∫
Ω
n∑
i=1
∂f
∂xi
∂g
∂xidΩ+
∫
Ω
f ·gdΩ
⇒ a (·, ·) : H12 (Ω)× H1
2 (Ω) → C mit
a (f ,g) =
∫
Ω
n∑
i,j=1
aij (x)∂f (x)
∂xj
∂g (x)
∂xidΩ fur bel. f ,g ∈ H
1
2 (Ω)
a (·, ·) ist symmetrisch und positiv definit ⇔ Die Matrix A ist symmetrisch und positivdefinit.

4.4. Quadratische Variationsprobleme 83
4.4. Quadratische Variationsprobleme
Beispiel 4.7 Gelost werden soll das lineare Gleichungssystem
A−→u =−→b −→u ,−→b ∈ Rn,
wobei A : Rn → Rn eine symmetrische positiv definite Matrix ist.Definieren das lineare Funktional b : Rn → R mit
b(−→u)=(−→u ,−→b
)
=n∑
i=1
biui ,
die symmetrische positiv definite Bilinearform a : Rn × Rn → R mit
a(−→u ,−→v
)=(A−→u ,−→v
)=
n∑
i,j=1
aijujvi
und das quadratische Funktional
F(−→u)=
1
2a(−→u ,−→u
)− b
(−→u)=
1
2
n∑
i,j=1
aijujui −n∑
i=1
biui
Aufgabenstellungen:
linearesGleichungssystem:
Gesucht ist −→u ∈ Rn mit
A−→u =−→b
(GS)
quadratischesVariationsproblem:
Gesucht ist −→u ∈ Rn mitF(−→u)= min−→w ∈ Rn
F(−→w) (GV P )
Variationsgleichung:Gesucht ist −→u ∈ Rn mit
a(−→u ,−→v
)− b
(−→v)= 0 fur bel. −→v ∈ Rn (GV G)
Dann gilt: Die Aufgabenstellungen (GS) , (GV P ) und (GV G) haben ein und dieselbeeindeutig bestimmte Losung −→u ∈ Rn (siehe lineare Algebra und Numerik)−→u ist Losung von A−→u =
−→b ⇔
−→u ist Losung von∂F
∂−→u = A−→u −−→b = 0 ⇔
−→u ist Losung von(
A−→u −−→b ,−→v
)
= 0 fur bel. −→v ∈ Rn.

84 4. Quadratische Variationsprobleme
DIRICHLETsches Problem fur die LAPLACE-Gleichung
In der offenen beschrankten Menge Ω ⊂ Rn sei der LAPLACEsche Differentialaus-druck
4u (x) = div (grad u (x)) =n∑
i=1
∂2u (x)
∂xi
gegeben.
klassisches DIRICHLETsches Problem:
Gesucht ist u (x) ∈ C2 (Ω) mit
−4u (x) = f (x) x ∈ Ω
u (x) = 0 x ∈ Γ
(DP ) WG
Herleitung einer Variationsgleichung fur (DP ) :Bilden das gewichtete Residuum
∫
Ω
[4u (x) + f (x)] · v (x) dΩ = 0 fur bel. v ∈ H12 (Ω) .
Fuhren folgende partielle Integration aus
∫
Ω
4u · v dΩ =
∫
Γ
(n∑
i=1
∂u
∂xini
)
v |dΓ| −∫
Ω
n∑
i=1
∂u
∂xi
∂v
∂xidΩ
= −∫
Ω
n∑
i=1
∂u
∂xi
∂v
∂xidΩ ( wegen v (x) = 0 fur x ∈ Γ ).
Weiterhin istn∑
i=1
∂u
∂xini =
∂u
∂n( n - Normale an Γ ). Damit entsteht die Variations-
gleichunga (u,v)− b (v) = 0 fur bel. v ∈ H1
2 (Ω)
1. Symmetrische Bilinearform a : H12 (Ω)× H1
2 (Ω) → R mit
a (u,v) =
∫
Ω
n∑
i=1
∂u
∂xi
∂v
∂xidΩ
a (u,u) ist positiv definit, wenn die FRIEDRICHSsche Ungleichung gilt:
∫
Ω
n∑
i=1
∣∣∣∣
∂u
∂xi
∣∣∣∣
2
dΩ = c
∫
Ω
|u|2 dΩ fur bel. u ∈ H12 (Ω) c > 0.

4.4. Quadratische Variationsprobleme 85
2. Lineares beschranktes Funktional b : H12 (Ω) → R mit
b (v) =
∫
Ω
f (x)v (x) dΩ f (x) ∈ L2 (Ω)
3. Quadratisches Funktional F : H12 (Ω) → R mit
F (u) =1
2a (u,u)− b (u)
=1
2
∫
Ω
n∑
i=1
∣∣∣∣
∂u
∂xi
∣∣∣∣
2
dΩ−∫
Ω
f · u dΩ fur bel. u ∈ H12 (Ω)
DIRICHLETsches Variationsproblem:
Gesucht ist u (x) ∈ H12 (Ω) mit
F (u) = minw ∈ H1
2(Ω)
F (w)(DV P )
DIRICHLETsche Variationsgleichung:
( schwache Formulierung von (DP ) )
Gesucht ist u (x) ∈ H12 (Ω) mit
a (u,v)− b (v) = 0 fur bel. v ∈ H12 (Ω)
(DVG)
Satz 4.6 ( DIRICHLETsches Prinzip )1. Jede Losung u (x) ∈ C2 (Ω) des DIRICHLET-Problems (DP ) ist auch eine Losungvon (DV P ) und (DVG) .2. Die Probleme (DV P ) und (DVG) haben ein und dieselbe eindeutig bestimmte Losungu (x) ∈ H1
2 (Ω) .3. Die eindeutig bestimmte Losung u (x) ∈ H1
2 (Ω) von (DV P ) und (DVG) heißtverallgemeinerte ( oder schwache ) Losung von (DP ) .
Das DIRICHLETsche Prinzip ist ein Spezialfall des Hauptsatzes uber quadratische Va-riationsprobleme. Es wird deshalb zunachst dieser Hauptsatz formuliert und bewiesen.Daran anschließend folgen die Beweise zur FRIEDRICHSschen Ungleichung und zuSatz 4.7.

86 4. Quadratische Variationsprobleme
Satz 4.7 ( Satz von LAX-MILGRAM )(Hauptsatz uber quadratische Variationsprobleme)Voraussetzungen:a) Das Funktional b (·) : H → R sei im HILBERT-Raum H linear und be-schrankt. D. h. es gilt:
|b (v)| ≤ ‖b‖ ‖v‖ fur ∀ v ∈ H.
b) Die Bilinearform a (·, ·) : H×H → R sei beschrankt, symmetrisch und po-sitiv definit im HILBERT-Raum H. D. h. es existieren Konstanten c > 0 und Cmit
a (u,u) > c‖ u ‖2 ; |a (u,v)| ≤ C ‖u‖ ‖v‖ fur alle u,v ∈ H.
c) Quadratisches Funktional F : H → R mit
F (u) =1
2a (u,u)− b (u)
Dann gilt:
1. Das Variationsproblem:
Gesucht ist u∗ ∈ H mit
F (u∗) = minu∈H
F (u)
wobei F (u) = 12a (u,u)− b (u)
(V P )
hat eine eindeutig bestimmte Losung u∗ ∈ H.2. Die Variationsgleichung:
Gesucht ist u∗ ∈ H mit
a (u∗,v) = b (v) fur ∀ v ∈ H(V G)
hat eine eindeutig bestimmte Losung u∗ ∈ H.Unter den genannten Voraussetzungen besitzen die Aufgabenstellungen (VP) und(VG) ein und dieselbe eindeutig bestimmte Losung u∗ ∈ H. Außerdem gilt:
‖u∗‖ ≤ 1
c‖b‖ .

4.4. Quadratische Variationsprobleme 87
Beweis.a) Existenz einer Losung von (V P ) :Sei α = inf
u ∈ HF (u) . Wegen
F (u) =1
2a (u,u)− b (u) =
c
2‖u‖2 − ‖b‖ ‖u‖ = − 1
2c‖b‖2
(da die Fkt. f (x) = c2x2 − bx bei x = b
cein globales Minimum besitzt.) folgt α > −∞.
Dann existiert aber eine Folge un ⊂ H mit F (un) → α bei n→ ∞.Mit der Identitat (Parallelogrammgleichung; siehe nachfolgende Bemerkung zu diesemSatz)
2 [a (un,un) + a (um,um)] = a (un − um,un − um) + a (un + um,un + um)
folgt
F (un) + F (um) =1
4a (un − um,un − um) + 2F
(un + um
2
)
=1
4c ‖un − um‖2 + 2α.
Andererseits gilt aber auch F (un) + F (um) → 2α. Damit gilt:‖un − um‖ → 0. Folglich ist un eine CAUCHY-Folge in H. Da H vollstandig, exis-tiert ein u∗ ∈ Hmit un → u∗ und da F : H →R stetig, ist auch
F (un) → F (u∗) = infu ∈ H
F (u) .
b) Aquivalenz der Probleme (V P ) und (V G) :Fur bel. v ∈ H und mit der Losung u∗ von (V P ) ist
Φ (t) = F (u∗ + tv)
=t2
2a (v,v) + t [a (u∗,v)− b (v)] +
1
2a (u∗,u∗)− b (u∗) .
Wegen F (u∗) = minu ∈ H
F (u) ⇔ dΦ
dt(0) = 0 und mit
dΦ
dt= ta (v,v) + [a (u∗,v)− b (v)]
folgtdΦ
dt(0) = 0 ⇔ a (u∗,v)− b (v) = 0 fur alle v ∈ H.
Damit ist aber u∗ genau dann Losung von (V G), wenn u∗ Losung von (V P ) .c) Eindeutigkeit der Losung von (V P ) :u∗ und w∗ seien Losungen von (V P ), dann folgt nach Schritt b):a (u∗,v)− b (v) = 0a (w∗,v)− b (v) = 0
∀ v ∈ H ⇒ a (u∗ −w∗,v) = 0 ∀ v ∈ H.
Setzt man v = u∗ −w∗∈ H, so folgt
0 = a (u∗ −w∗,u∗ −w∗) = c ‖u∗ −w∗‖2

88 4. Quadratische Variationsprobleme
und damit u∗ = w∗.d) Setzt man in a (u∗,v)− b (v) = 0 (∀ v ∈ H) speziell v = u∗, so ista (u∗,u∗)− b (u∗) = 0 und wegen
c ‖u∗‖2 ≤ a (u∗,u∗) = b (u∗) ≤ ‖b‖ ‖u∗‖
folgt ‖u∗‖ ≤ 1c‖b‖ .
Satz 4.8 ( FRIEDRICHSschen Ungleichung )Ω sei eine offene beschrankte Menge aus dem Rn, dann existiert eine Konstante c > 0,so dass gilt
∫
Ω
n∑
i=1
∣∣∣∣
∂u
∂xi
∣∣∣∣
2
dΩ = c
∫
Ω
|u|2 dΩ fur bel. u ∈ H1
2 (Ω)
Beweis. 1. Es sei u ∈ C∞0 (Ω) . Da Ω beschrankt ist und u (x) = 0 auf ∂Ω, existiert
ein ”Quader” R = [a1, b1]× ...× [an, bn] mit Ω ⊂ R und u (x) = 0 auf R−Ω. Weiterist
u (x1, ..., xi, ..., xn) =
xi∫
ai
∂u
∂xi(x1, ..., y, ..., xn) dy
fur i = 1, ..., n; und bel. (x1, ..., xi, ..., xn) ∈ R
Mit der SCHWARZschen Ungleichung folgt
[u (x1, ..., xi, ..., xn)]2 =
xi∫
ai
1 · ∂u∂xi
(x1, ..., y, ..., xn) dy
2
≤xi∫
ai
12dy
xi∫
ai
∣∣∣∣
∂u
∂xi(x1, ..., y, ..., xn)
∣∣∣∣
2
dy
≤ (bi − ai)
bi∫
ai
∣∣∣∣
∂u
∂xi(x1, ..., y, ..., xn)
∣∣∣∣
2
dy

4.4. Quadratische Variationsprobleme 89
und damit
∫
Ω
|u|2 dΩ =
∫
R
|u|2 dΩ ≤∫
R
(bi − ai)
bi∫
ai
∣∣∣∣
∂u
∂xi
∣∣∣∣
2
dy
dΩ
= (bi − ai)2
∫
R
∣∣∣∣
∂u
∂xi
∣∣∣∣
2
dΩ
≤ c
∫
R
n∑
i=1
∣∣∣∣
∂u
∂xi
∣∣∣∣
2
dΩ = c
∫
Ω
n∑
i=1
∣∣∣∣
∂u
∂xi
∣∣∣∣
2
dΩ
Mit c = maxi
(bi − ai)2 und c = 1/c folgt fur u ∈ C∞
0 (Ω) die zu beweisende Unglei-
chung.
2. Es sei u ∈ H1
2 (Ω) .Dann existiert eine Folge um ⊂ C∞0 (Ω) mit
‖um − u‖H12→ 0 bei m→ ∞.
Folglich gilt auch
‖um − u‖L2→ 0 und
∥∥∥∥
∂um
∂xi− ∂u
∂xi
∥∥∥∥L2
→ 0 (i = 1, ..., n) .
Nach Teil 1. des Beweises gilt
∫
Ω
n∑
i=1
∣∣∣∣
∂um
∂xi
∣∣∣∣
2
dΩ = c
∫
Ω
|um|2 dΩ m = 1, 2, ...
Mitm→ ∞ folgt die zu beweisende Ungleichung fur bel. u ∈ H1
2 (Ω) .
Beweis. ( zu Satz 4.6 - DIRICHLETsches Prinzip )zu 1.: Aus der Konstruktion der Variationsaufgaben (DV P ) und (DVG) zu Beginndieses Abschnittes folgt, dass jede Losung u ∈ C2 (Ω) ⊂ H1
2 (Ω) der klassischen RWAauch eine Losung von (DV P ) und (DVG) ist.zu 2.: Die eindeutige Losbarkeit und die Gleichheit der Losungen von (DV P ) und(DVG) sind nach dem Satz von LAX-MILGRAM gezeigt, wenn nachgewiesen wird,dass in H1
2 (Ω)
a) a (u,v) =∫
Ω
n∑
i=1
∂u
∂xi
∂v
∂xidΩ beschrankt, symmetrisch und positiv definit
b) b (v) =∫
Ω
f (x)v (x) dΩ beschrankt.
Dabei ist
‖u‖L2=
∫
Ω
|u|2 dΩ
1/2
‖u‖H12=
∫
Ω
(
|u|2 +n∑
i=1
∣∣∣∣
∂u
∂xi
∣∣∣∣
2)
dΩ
1/2

90 4. Quadratische Variationsprobleme
zu a) Die Symmetrie von a (u,v) ist offensichtlich. Die Beschranktheit folgt sofort aus
der SCHWARZschen Ungleichung und mit∥∥∥
∂u∂xi
∥∥∥L2
≤ ‖u‖H12:
|a (u,v)| ≤∫
Ω
n∑
i=1
∣∣∣∣
∂u
∂xi
∂v
∂xi
∣∣∣∣dΩ ≤
n∑
i=1
∥∥∥∥
∂u
∂xi
∥∥∥∥L2
∥∥∥∥
∂v
∂xi
∥∥∥∥L2
≤ n ‖u‖H12‖v‖H1
2.
Aus der FRIEDRICHSschen Ungleichung folgt die positive Definitheit:
‖u‖2H12
=
∫
Ω
(
|u|2 +n∑
i=1
∣∣∣∣
∂u
∂xi
∣∣∣∣
2)
dΩ ≤(1
c+ 1
)∫
Ω
n∑
i=1
∣∣∣∣
∂u
∂xi
∣∣∣∣
2
dΩ
= 2
(1
c+ 1
)
a (u,u)
zu b) Unter Einbeziehung der SCHWARZschen Ungleichung und wegen ‖v‖2L2≤ ‖v‖2H1
2
folgt fur jedes f ∈ L2 (Ω) die Beschranktheit von b (v):
|b (v)| =
∣∣∣∣∣∣
∫
Ω
f · v dΩ
∣∣∣∣∣∣
= |(f ,v)| ≤ ‖f‖L2‖v‖L2
≤‖f‖L2‖v‖H1
2fur alle v ∈ H1
2.
Bemerkung 4.10 Verbindet man die Variationsprobleme (V P ) und (V G) mit Auf-gabenstellungen aus der Kontinuumsmechanik, insbesondere der Elastizitatstheorie, sokann u mit der Verschiebung der Punkte eines elastisch deformierbaren Korpers unterdem Einfluß einer außeren Kraft f identifiziert werden. In diesem Fall beschreibt dieBilinearform a (u,u) die Deformationsenergie des Korpers und b (u) = (f ,u) ist diedurch die Kraft f am Korper geleistete Deformationsarbeit. Die Aufgabenstellung (V P )bringt damit das Prinzip von der minimalen potentiellen Energie zum Ausdruck, d.h.das Funktional F (u) nimmt genau dann sein Minimum an, wenn sich das mechanischeSystem im Zustand minimaler potentieller Energie und damit im Gleichgewichtszustandbefindet. Das Prinzip von der virtuellen Arbeit bildet andererseits mit der Gleichunga (u∗,v) = b (v) fur ∀ v ∈ H die Grundlage der Aufgabenstellung (V G).

4.5. Numerische Losung quadr. Variationsprobleme 91
4.5. Numerische Losung quadr. Variationsprobleme
Im HILBERT-RaumH sind folgende Aufgabenstellungen gegeben:
Variationsproblem:
Gesucht ist u∗ ∈ H mitF (u∗) = min
u ∈ HF (u)
wobei F (u) = 12a (u,u)− b (u)
(V P )
Variationsgleichung:Gesucht ist u∗ ∈ H mit
a (u∗,v) = b (v) fur ∀ v ∈ H(V G)
Im endlich-dimensionalen Unterraum Hm ⊂ H sind folgende ”endlich-dimensionale”Aufgabenstellungen gegeben:
RITZschesVariationsproblem:
Gesucht ist u∗m ∈ Hm mit
F (u∗m) = min
u ∈ Hm
F (u) (V P )m
RITZscheVariationsgleichung:
Gesucht ist u∗m ∈ Hm mit
a (u∗m,v) = b (v) fur ∀ v ∈ Hm
(V G)m
Satz 4.9 (Konvergenzsatz zum Verfahren von RITZ)
a) Die Vereinigung aller Unterraume Hm sei dicht in H: H =∞⋃
m=1
Hm.
b) Das Funktional b (·) : H → R sei linear und beschrankt.Die Bilinearform a (·, ·) : H×H → R sei beschrankt, symmetrisch und positivdefinit. D. h. es existieren Konstanten c > 0 und d mita (u,u) > c ‖u‖2 ; |a (u,v)| ≤ C ‖u‖ ‖v‖ fur alle u,v ∈ V.Dann gilt:(VP) und (VG) besitzen ein und dieselbe eindeutig bestimmte Losung u∗ ∈H.(VP)m und (VG)m besitzen fur alle m = 1, 2, ... ein und dieselbe eindeutigbestimmte Losung u∗
m ∈ Hm und es gilt:
‖u∗ − u∗m‖ ≤ C
cminv∈Hm
‖u∗ − v‖ → 0 (m→ ∞) .
Beweis.Die eindeutige Losbarkeit von (V P ) , (V G) sowie von (V P )m , (V G)m folgt jeweils ausdem Satz von LAX-MILGRAM.

92 4. Quadratische Variationsprobleme
Konvergenzabschatzung: Bei Subtraktion von (V G)m und (V G) erhalt man die Ortho-Beziehung
a (u∗ − u∗m,v) = 0 fur bel. v ∈ Hm
Setzt man speziell v = u∗m, so folgt a (u
∗ − u∗m,u
∗m) = 0 und damit fur bel. v ∈ Hm :
a (u∗ − u∗m,u
∗) = a (u∗ − u∗m,u
∗ − u∗m) = a (u∗ − u∗
m,u∗ − v)
Weiter erhalt man
c ‖u∗ − u∗m‖2 ≤ a (u∗ − u∗
m,u∗ − u∗
m)
= a (u∗ − u∗m,u
∗ − v)
≤ C ‖u∗ − u∗m‖ ‖u∗ − v‖ fur bel. v ∈ Hm
und schließlich
‖u∗ − u∗m‖ ≤ C
c‖u∗ − v‖ fur bel. v ∈ Hm
⇒ ‖u∗ − u∗m‖ ≤ C
cminv∈Hm
‖u∗ − v‖ → 0 bei m→ ∞.
Numerische Bestimmung von u∗m :
ekmmk=1 sei eine Basis in Hm , dann ist Hm = span (e1m, ..., emm) und folglich hatjedes um ∈ Hm die Darstellung
um =m∑
k=1
αkmekm αkm ∈ R
Die RITZsche Variationsgleichung (V G)m ist damit aquivalent zu
m∑
k=1
αkma (ekm, ejm) = b (ejm) j = 1, ...,m.
Denn fur bel. ( aber fest gewahltes ) u ∈ Hm gilt:
(u,v) = 0 fur ∀ v ∈ Hm ⇔(u, ejm
)= 0 j = 1, ...,m
Man erhalt ausfuhrlich:
a (um,um) =m∑
k=1
m∑
j=1
αkmαjma (ekm, ejm) =−→a T ·A·−→a
b (um) =m∑
j=1
αjmb (ejm) =−→a T ·−→b
F (um) =1
2a (um,um)− b (um) =
1
2−→a T ·A · −→a −−→a T ·−→b ≡ F
(−→a),

4.5. Numerische Losung quadr. Variationsprobleme 93
wobei
A =
a (e1m, e1m) ... a (emm, e1m)... ... ...
a (e1m, emm) ... a (emm, emm)
; −→a =
α1m
...αmm
;−→b=
b (e1m)...
b (emm)
Damit entstehen folgende Aufgaben:
RITZschesVariationsproblem
im Rn:
Gesucht ist −→a ∗m ∈ Rn mit
F(−→a ∗
m
)= min−→a ∈ Rn
F(−→a) (AV P )m
RITZscheVariationsgleichung
im Rn:
Gesucht ist −→a ∗m ∈ Rn mit
A−→a ∗m =
−→b
(AV G)m
Bemerkung 4.11 u∗m =
m∑
k=1
α∗kmekm ist genau dann eine Losung von (V P )m bzw.
(V G)m , wenn −→a ∗m = (α∗
1m, ..., α∗mm)
T eine Losung von (AV P )m bzw. (AV G)m ist.
Bemerkung 4.12 Unter den Bedingungen des Satzes von LAX-MILGRAM ist A einesymmetrische positiv definite Matrix. Damit konnen folgende Verfahren zur Losung derdiskretisierten RITZschen Probleme verwendet werden:- (AV P )m ist mit einer Relaxationsmethode, z.B. mit dem CG-Verfahren losbar.- (AV G)m kann ebenfalls mittels des CG-Verfahrens oder dem CHOLESKY-Ver-fahren gelost werden.
Bemerkung 4.13 (zur Konvergenz des Naherungsverfahrens)Da sich die Ordnung der Approximation der Losung u∗ durch u∗
m gemaß der Ungleich-nung ‖u∗ − u∗
m‖ ≤ Ccminv∈Hm
‖u∗ − v‖ von der Ordnung der bestmaglichen Approximati-
on von u∗ durch Elemente v aus dem Unterraum Hm gemaß minv∈Hm
‖u∗ − v‖ nur durch
eine Konstante C = C/c unterscheidet, spricht man auch von der Quasioptimalitatdes Verfahrens von RITZ. Die Große min
v∈Hm
‖u∗ − v‖ kann mit Methoden der Approxi-
mationstheorie weiter abgeschatzt werden.Allgemein erhalt man die Aussage: Je glatter die Losung u∗ ∈ H und die Basis-funktionen ekm ∈ Hm sind, um so schneller ist die Konvergenz des Verfahrensvon RITZ.
Bemerkung 4.14 Eine allgemeine Strategie zur Bestimmung geeigneter Basisfunktio-nen kommt in der F
¯inite E
¯lement M
¯ethode ( FEM ) zur Anwendung.
Bemerkung 4.15 Das Problem der Bestapproximation eines Elementes u aus einemHILBERT-Raum durch ein Element u0 eines abgeschlossenen Unterraumes U diesesHILBERT-Raumes (siehe Abschnitt 3.2) und die Aussagen der Satze 3.6 und 3.7 dazu,konnen als Spezialfalle in die Problematik quadratischer Variationsprobleme eingeord-net werden. Dazu definiert man die Funktionale a (v,v) ≡ (v,v) und b (v) = (u,v).Mit diesen Funktionalen und Hm= U sind die Satze 3.6 und 3.7 Spezialfalle der Satze4.7 und 4.9.

94 4. Quadratische Variationsprobleme
4.5.1. Beispiel: Auslenkung einer Saite
Unter vereinfachten Bedingungen ist die Berechnung der Auslenkung u (x) einer beid-seitig fest eingespannten Saite infolge einer senkrecht einwirkenden Kraft f (x) auf dieLosung folgender RWA zuruckfuhrbar:
Gesucht ist u (x) ∈ C2 (a, b) mit
−u′′ (x) = f (x) fur a < x < b
u (a) = u (b) = 0
(DP )
f ( x )
u ( x )u a b
x
Herleitung einer Variationsgleichung fur (DP ) :(DP ) ist mit der Raumdimension n = 1 und damit Ω = (a, b) ⊂ R ein Spezi-alfall der allgemeinen klassischen RWA (DP ). Alle Herleitungen und Aussagen zurLosung dieser RWA konnen deshalb aus den vorstehenden Satzen ubernommen wer-den.
Gewichtetes Residuum:
b∫
a
[u′′ (x) + f (x)]v (x) dx!= 0 fur bel. v ∈ H
1
2 (a, b) .
Mittels partieller Integration erhalt man
b∫
a
u′′ (x)v (x) dx = [u′ (x)v (x)]ba −
b∫
a
u′ (x)v′ (x) dx = −b∫
a
u′ (x)v′ (x) dx
und damit die Variationsgleichung
b∫
a
u′ (x)v′ (x) dx−b∫
a
f (x)v (x) dx = 0 fur bel. v ∈ H1
2 (a, b) .
Beschrankte symmetrische positiv definite Bilinearform:
a : H1
2 (a, b)× H12 (a, b) → R mit a (u,v) =
b∫
a
u′ (x)v′ (x) dx
Lineares beschranktes Funktional
b : H1
2 (a, b) → R mit b (v) =
b∫
a
f (x)v (x) dx f (x) ∈ L2 (a, b)

4.5. Numerische Losung quadr. Variationsprobleme 95
Quadratisches Funktional F : H1
2 (a, b) → R mit
F (u) =1
2a (u,u)− b (u) =
1
2
b∫
a
u′ (x)u′ (x) dx−b∫
a
f (x)u (x) dx
Variationsproblem:Gesucht ist u (x) ∈ H1
2 (a, b) mitF (u) = min
w ∈ H12(a,b)
F (w) (V P )
Variationsgleichung(schwache Form zu (DP ) ):
Gesucht ist u (x) ∈ H12 (a, b) mit
a (u,v)− b (v) = 0 fur ∀ v ∈ H12 (a, b)
(V G)
Unter diesen Bedingungen gilt der Satz zum DIRICHLETschen Prinzip: (V P ) und(V G) besitzen ein und dieselbe eindeutig bestimmte Losung u (x) ∈ H1
2 (a, b) . u (x) istdie verallgemeinerte Losung fur (DP ) .
Numerische Losung von (V G)(Hm ⊂ H1
2 (a, b) sei ein m− dimensionaler Unterraum.)
RITZsche Variationsgleichung:Gesucht ist um ∈ Hm mit
a (um,v)− b (v) = 0 fur ∀ v ∈ Hm(V G)m
Konstruktion einer Basis in Hm :Das Intervall [a, b] wird in aquidistante Teilintervalle zerlegt
a a a a aa a0a = a 1 2 k - 1 k k + 1 m m + 1 = bx
h h h h h
. . . . . .
Dabei ist: ak = a+ kh k = 0, 1, ...,m+ 1 und h = b−am+1
.
Es werden folgeneBasisfunktionen (finite Elemente) ekm ∈ H12 (a, b) eingefuhrt:
ekm =
1h(x− ak−1) ak−1 ≤ x ≤ ak
1h(ak+1 − x) ak < x ≤ ak+1
0 sonst a a ak - 1 k k + 1
h h h
1 e k m
Ansatz fur um : um =m∑
k=1
αkmekm um ∈ Hm = span (e1m, ..., emm)
RITZsche Variationsgleichung im Rm :Gesucht ist −→a ∈ Rm mit
A−→a =−→b
(AV G)m

96 4. Quadratische Variationsprobleme
mit A = a (ekm, ejm) ; −→a = αkm ;−→b = b (ejm) .
Fur die verallgemeinerten Ableitungen der Basisfunktionen erhalt man:
e′km =
1h
ak−1 ≤ x ≤ ak− 1
hak < x ≤ ak+1
0 sonst
Damit ist a (ekm, ejm) =b∫
a
e′kme′jmdx =
2h
k = j = 1, ...,m− 1
h|k − j| = 1
0 |k − j| > 1
und b (ejm) =1h
[aj∫
aj−1
f (x) (x− aj−1) dx+aj+1∫
aj
f (x) (aj+1 − x) dx
]
≡ bj. Fur das linea-
re Gleichungssystem A−→a =−→b erhalt man:
A =1
h
2 −1 0 ... 0−1 2 −1 ... 0... ... ... ... ...0 ... −1 2 −10 ... 0 −1 2
; −→a =
α1m
...αmm
;−→b =
b1...bm
.
Zur Konvergenz der Naherungslosungen u∗m =
m∑
k=1
α∗kmekm mit der Losung
−→a ∗ = (α∗1m, ..., α
∗mm)
T des Gleichungssystems A−→a =−→b bleibt zu zeigen, dass
∞⋃
m=1
Hm
dicht in H12 (a, b) ist. Da H1
2 (a, b) durch Vervollstandigung des Raumes C∞0 (a, b) in der
Norm
‖u‖H12=
b∫
a
(
|u (x)|2 + |u′ (x)|2)
dx
1/2
fur alle u ∈ H12 (a, b)
entsteht, genugt es zu zeigen, dass sich in dieser Norm jede Funktion u (x) (u ∈ C∞0 (a, b))
durch eine stuckweise lineare Funktion um ∈ Hm mit wachsendem m beliebig genauapproximieren laßt. Es sei u (x)∈ C∞
0 (a, b) und
um (x) =m∑
k=1
u (ak) ekm (x) ∈ Hmmit um (a0) = u (a) = 0
und um (am+1) = u (b) = 0.
Setzt man vm = u− um, so ist ‖vm‖2H12=
m∑
k=0
ak+1∫
ak
(|vm (x)|2 + |v′
m (x)|2)dx. Wegen
vm (ak) = vm (ak+1) = 0 fur k = 0, 1, ...,m + 1 existieren nach dem Satz von ROLLEξk ∈ (ak, ak+1) mit v′
m (ξ) = 0. Folglich kann v′m (x) im Intervall [ak, ak+1] in der
Integralform v′m (x) =
x∫
ξ
v′′m (t) dt fur x ∈ [ak, ak+1] geschrieben werden.
Mit |v′m (x)| ≤
x∫
ξ
|v′′m (t)| dt ≤
ak+1∫
ak
1 · |v′′m (t)| dt und der Ungleichung von SCHWARZ

4.5. Numerische Losung quadr. Variationsprobleme 97
ergibt sich die Abschatzung
|v′m (x)|2 ≤ h
ak+1∫
ak
|v′′m (t)|2 dt und weiter
ak+1∫
ak
|v′m (x)|2 dx ≤ h2
ak+1∫
ak
|v′′m (t)|2 dt (Z1)
Uber den Mittelwertsatz der Differentialrechnung und mit vm (ak) = 0 folgt
vm (x) = vm (ak) + v′m (t) (t− ak) = v′
m (t) (t− ak) ; ak < t < x
und damit |vm (x)|2 ≤ h2M21 mit M1 = max
a≤t≤b|v′
m (t)| (Z2)
Die Zwischenresultaten (Z1) und (Z2) ergeben schließlich
‖vm‖2H12=
m∑
k=0
ak+1∫
ak
(
|vm (x)|2 + |v′m (x)|2
)
dx ≤ h2[
(b− a)M21 + ‖v′′
m‖2L2
]
und ‖vm‖H12= ‖u− um‖H1
2≤ hK → 0 fur h→ 0 und K = (b− a)M2
1 + ‖u′′m‖2L2
( Beachte: v′′m (x) = u′′
m (x) fur ak−1 < x < ak ; k=1,...,m ).

98 4. Quadratische Variationsprobleme
4.6. Variationsprobleme fur lineare Dgl. 2. Ordnung
Ω ⊂ Rn offene undbeschrankte MengeΓ = ∂Ω = Γu ∪ Γq
Γu ∩ Γq = ∅ ; Γu 6= ∅
uq
n nn = ( 1 , . . . , n )
WG
G
Lineare Differentialausdrucke:
L [u] (x) = −n∑
i=1
n∑
k=1
∂
∂xi
(
aik (x)∂u (x)
∂xk
)
+ c (x)u (x) x ∈ Ω
R [u] (x) =n∑
i=1
n∑
k=1
aik (x)∂u (x)
∂xkni
mit n = (n1, ..., nn)und x ∈ ∂Ω = Γ
Voraussetzungen: L [u] (x) sei ein streng elliptischer Differentialausdruck, d.h.:
1.
n∑
i=1
n∑
k=1
aik (x) ξiξk = γn∑
i=1
ξ2i (γ > 0)
fur bel. (ξ1, ..., ξn) ∈ Rn und ∀ x ∈ Ω
2. c (x) = 0 fur bel. x ∈ Ω
3. aik (x) = aki (x) fur bel. x ∈ Ω
RWA fur lineareDgl. 2. Ordnung:
Gesucht ist u (x) ∈ C2 (Ω) mitL [u] (x) = f (x) x ∈ Ωu (x) = g0 (x) x ∈ Γu
R [u] (x) + α (x)u (x) = q (x) x ∈ Γq
(DG)
Bemerkung 4.16u (x) = g0 (x) fur x ∈ Γu heißtwesentliche Randbedingung ( DIRICHLETsche RB )R [u] (x) + α (x)u (x) = q (x) fur x ∈ Γq heißtnaturliche Randbedingung (NEUMANNsche RB ).

4.6. Variationsprobleme fur lineare Dgl. 2. Ordnung 99
Herleitung einer Variationsgleichung fur (DG) :
HA =v (x) ∈ H1
2 (Ω) | v (x) = 0 fur fast alle x ∈ Γu
Durch partielle Integration erhalt man fur bel. v ∈ HA :
∫
Ω
L [u]v dΩ = −∫
Γq
R [u]v |dΓ|+∫
Ω
[n∑
i,k=1
aik∂u
∂xk
∂v
∂xk+ cuv
]
dΩ.
Damit folgt fur das gewichtete Residuum (fur bel.v ∈ HA )
0 =
∫
Ω
(L [u]− f)v dΩ+
∫
Γq
(R [u] + αu− q)v |dΓ|
=
∫
Ω
[n∑
i,k=1
aik∂u
∂xk
∂v
∂xk+ cuv
]
dΩ+
∫
Γq
αuv |dΓ|
−∫
Ω
fv dΩ−∫
Γq
qv |dΓ| .
Einfuhrung einerBilinearform und eines linearen Funktionals:
a (u,v) =n∑
i=1
n∑
k=1
∫
Ω
aik (x)∂u (x)
∂xi
∂v (x)
∂xkdΩ
+
∫
Ω
c (x)u (x)v (x) dΩ+
∫
Γq
α (x)u (x)v (x) dΓ
b (v) =
∫
Γq
q (x) · v (x) dΓ+
∫
Ω
f (x) · v (x) dΩf ∈ L2 (Ω)q ∈ L2 (Γq)
Bemerkung 4.17 Unter den Voraussetzungen 1. - 3. ist die Bilinearform a (u,v) alsAbbildung a : HA ×HA → R streng positiv definit und bildet im Raum
HA =v (x) ∈ H1
2 (Ω) | v (x) = 0 fur fast alle x ∈ Γu
ein inneres Produkt: (u,v)HA= a (u,v) fur bel. u,v ∈ HA. Mit der durch dieses
innere Produkt induzierten Norm
|u|HA≡√
a (u,u) fur bel. u ∈ HA
bildetHA einen separablen HILBERT-Raum. Dieser Raum heißt energetischer RaumHA zur RWA (DG) .Im Falle einer reinen DIRICHLETschen RWA (d.h. Γ = Γu, Γq = ∅) ist der entspre-
chende energetische Raum HA isomorph zu H12 (Ω) .

100 4. Quadratische Variationsprobleme
Bemerkung 4.18 Zur Erfullung der wesentlichen RB u (x) = g0 (x) (x ∈ Γu) wirddie Existenz einer Funktion
g (x) ∈ H12 (Ω) mit g0 (x) = g (x) fur fast alle x ∈ Γu.
vorausgesetzt. Damit ergibt sich fur die Losung der RWA (DG) folgende verallgemei-nerte Aufgabenstellung:
Variationsgleichung ( schwache Form zu (DG) ):
Gesucht ist u (x) = g (x) + u0 (x) mit u0 (x) ∈ HA
a (u0,v)− [b (v)− a (g,v)] = 0 ∀ v ∈ HA(V G)
Mit H = HA, den Voraussetzungen 1. - 3. und geeigneten Annahmen fur die Funktionenaik (x) , f (x) , c (x) , α (x) kann uber den Satz von LAX-MILGRAM fur (V G) dieExistenz und Eindeutigkeit einer Losung u (x) mit u (x) = g (x) = g0 (x) fur fast allex ∈ Γu gezeigt werden. Diese Losung heißt verallgemeinerte Losung der RWA (DG) .
Beispiel 4.8 Fur n = 1 und Ω = (a, b) ⊂ R seien die folgenden RB gegeben:a)
wesentliche RB: u (a) = ganaturliche RB: u′ (b) = q⇒ z.B.:
g (x) =
gaa−b
(2x− a− b) a ≤ x < a+b2
0 a+b2
≤ x ≤ b
u
xa ba + b
2
agg ( x )
b)
wesentliche RB:u (a) = gau (b) = gb
naturliche RB: nicht vorhanden⇒ z.B.:g (x) = ga +
gb−gab−a
(x− a)
u
xa b
ag
g ( x )g b
4.6.1. Numerische Losung der Variationsgleichung (V G)
Es sei HAm ⊂ HA ein m− dimensionaler Unterraum von HA und e1m, ..., emm eineBasis in HAm. Ansatz fur die Naherungslosung um :
um = g + u0m = g +m∑
k=1
αkmekm

4.6. Variationsprobleme fur lineare Dgl. 2. Ordnung 101
Mit diesem Ansatz entsteht aus (V G) die
RITZsche Variationsgleichung zu (V G)
Gesucht ist −→a = (α1m, ..., αmm) mitm∑
k=1
αkma(ekm, ejm
)= b (ejm)− a
(g, ejm
)
j = 1, ...,m
(V G)m
Dieses Problem fuhrt auf die Losung des linearen Gleichungssystems
A −→a =−→b
mit A =a(ekm, ejm
)m
k,j=1und
−→b=
b (ejm)− a
(g, ejm
)m
j=1.
Satz 4.10 Ist a (·, ·) : HA ×HA → R eine symmetrische, positiv definite, beschrankteBilinearform und b (·) : HA → R ein beschranktes lineares Funktional, so besitzt (V G)mfur beliebiges m = 1, 2, ... eine eindeutig bestimmte Losung u∗
m (x) ∈ HAm und es gilt( u∗ Losung von (V G)):
|u∗ − u∗m|HA
≤ C
cmin
v ∈ HAm
|u∗ − v|HA→ 0 fur m→ ∞.
4.6.2. Beispiel: Auslenkung einer Saite ( Sehne )
Die Berechnung der Auslenkung u (x) einer einseitig eingespannten und einseitig gefuhrtenSaite infolge einer senkrecht einwirkenden Kraft fuhrt auf folgende RWA:
Gesucht ist u (x) ∈ C2 (a, b) mit−u′′ (x) = f (x) a < x < b
u (a) = g0u′ (b) = q
(GP )
xa b
g 0
f ( x )
j
j = c o n s t
t a n= u ' ( b ) = q
u ( x )
Herleitung einer Variationsgleichung:
HA =u (x) ∈ H1
2 (a, b) | u (a) = 0

102 4. Quadratische Variationsprobleme
gewichtetes Residuum fur ∀ v ∈ HA :
0 =
b∫
a
[−u′′ (x) − f (x)]v (x) dx
= −u′ (x)v (x)|ba +b∫
a
u′ (x) v′ (x) dx−b∫
a
f (x)v (x) dx
=
b∫
a
u′ (x) v′ (x) dx−b∫
a
f (x)v (x) dx− qv (b) = a (u,v)− b (v)
mit der Bilinearform und dem linearen Funktional
a (u,v) =
b∫
a
u′ (x) v′ (x) dx ; b (v) =
b∫
a
f (x)v (x) dx+ qv (b)
Es sei g (x) ∈ H12 (a, b) so gewahlt, dass g (a) = g0. Zu losen ist dann die
Variationsgleichung
Gesucht ist u (x) = g (x) + u0 (x) mit u0 (x) ∈ HA und
a (u0,v)− [b (v)− a (g,v)] = 0 fur ∀ v ∈ HA
(V G)
Numerische Losung von (V G) :
HAm ⊂ HA sei ein m− dimensionaler Unterraum von HA.Man konstruiert eine Basis in HAm, indem das Intervall [a, b] in aquidistante Teilinter-valle zerlegt wird.
a a a a aa a0a = a 1 2 k - 1 k k + 1 m = bx
h h. . . . . . m - 1
1e e e0 m k m m m

4.6. Variationsprobleme fur lineare Dgl. 2. Ordnung 103
Dabei ist ak = a+ kh k = 0, 1, ...,m h =b− a
m.
ekm =
1h(x− ak−1) ak−1 ≤ x < ak
1h(ak+1 − x) ak ≤ x < ak+1 k = 1, ...,m− 1
0 sonst
e0m =
1h(a1 − x) a0 ≤ x < a1
0 sonstemm =
1h(x− am−1) am−1 ≤ x < am
0 sonst
Mit g (x) = g0e0m folgt g (a)− g0 = 0 und
u0m (x) =m∑
k=1
αkmekm und damit
um (x) = g (x) + u0m (x) = g0e0m +m∑
k=1
αkmekm
Es entsteht dieRITZsche Variationsgleichung im Rm :
Gesucht ist −→a = (α1m, ..., αmm) ∈ Rm mit
A−→a =−→b
mit A = a (ekm, ejm)mk,j=1 und−→b = b (ejm)− g0a (e0m, ejm)mj=1 .
Die verallgemeinerten Ableitungen der Basiselemente lauten:
e′km =
1h
ak−1 ≤ x < ak
− 1h
ak ≤ x < ak+1 k = 1, ...,m− 1
0 sonst
e′0m =
− 1h
a0 ≤ x < a1
0 sonste′mm =
1h
am−1 ≤ x < am
0 sonst

104 4. Quadratische Variationsprobleme
Damit erhalt man
a (ekm, ejm) =
b∫
a
e′kme′jm dx =
2h
k = j = 1, ...,m− 1
1h
k = j = m
− 1h
|k − j| = 1
0 |k − j| > 1
a (g, ejm) = g0
b∫
a
e′0me′jm dx =
−g0 1h
j = 1
0 j > 1
b (ejm) =1
h
aj∫
aj−1
f (x) (x− aj−1) dx+
aj+1∫
aj
f (x) (aj+1 − x) dx
+ qδjm
≡ bj + qδjm
und schließlich
A =
2 −1 0 ... 0−1 2 −1 ... 0... ... ... ... ...0 ... −1 2 −10 ... 0 −1 1
−→b =
b1 +1hg0
b2...bm−1
bm + q

4.6. Variationsprobleme fur lineare Dgl. 2. Ordnung 105
Schritte zur Entwicklung einer Variationsgleichung (VG) fur (DG)
Gesucht ist u (x) ∈ C2 (Ω) mitL [u] (x) = f (x) x ∈ Ωu (x) = g0 (x) x ∈ Γu
R [u] (x) + α (x) u (x) = q (x) x ∈ Γq
(DG)
1. Festlegung des energetischen Raumes:
HA =v ∈ H1
2 (Ω) | v (x) = 0 fur fast alle x ∈ Γu
2. Bildung des Residuums fur ∀ v (x) ∈ HA :
0 =
∫
Ω
[L [u] (x)− f (x)]v (x) dΩ
+
∫
Γq
[R [u] (x) + α (x) u (x)− q (x)]v (x) dΓ
Umformung des Integrals, bis nur noch verallgemeinerte Ableitungen ersten Gra-des auftreten (Durchfuhrung mittels partieller Integration).
3. Symmetrische positiv definite beschrankte Bilinearform:
a (u,v) =n∑
i,k=1
∫
Ω
aik (x)∂u (x)
∂xi
∂v (x)
∂xk
dΩ+
∫
Ω
c (x)u (x)v (x) dΩ
+
∫
Γq
α (x) u (x)v (x) dΓ
lineares beschranktes Funktional:
b (v) =
∫
Γq
q (x)v (x) dΓ+
∫
Ω
f (x)v (x) dΩ
4. Festlegung einer Funktion g (x) ∈ H12 (Ω) mit
g (x) = g0 (x) fur fast alle x ∈ Γu.
Variationsgleichung (schwache Form) zu (VG)
Gesucht ist u (x) = g (x) + u0 (x) mit u0 (x) ∈ HA und
a (u0,v)− [b (v)− a (g,v)] = 0 fur ∀ v ∈ HA
(V G)


5. Symmetrische Operatoren
Aus der linearen Algebra sind folgende Definitionen und Aussagen bekannt.
1. Die Matrix A (Abbildung A : Rn → Rn) heißt symmetrisch, wenn
(A−→u ,−→v
)=(−→u ,A−→v
)fur alle −→u ,−→v ∈ Rn.
2. Zu einer beliebigen Matrix B (Abbildung B : Rn → Rm) existiert stets dieadjungierte Matrix B∗ (Abbildung B∗ : Rm → Rn), die eindeutig durch dieForderung
(B−→u ,−→v
)
Rm =(−→u ,B∗−→v
)
Rn fur alle −→u ∈ Rn und alle −→v ∈ Rm.
definiert ist.
I.Die Eigenwerte (EW) und Eigenvektoren (EV) des Eigenwertproblems
A−→u − λ−→u =−→0 −→u ∈ Rn, λ ∈ C
mit der symmetrischen Matrix A besitzen folgende Eigenschaften:a) Alle EW λ sind reellwertig.b) Die EV −→u zum EW λ und −→v zum EW µ mit λ 6= µ sind orthogonal zueinander,d.h.
(−→u ,−→v)= 0.
c) Die algebraische Vielfachheit eines EW λ ist gleich der Dimension des Eigenunter-raumes zu λ. D.h. ist λ ein k−facher EW, so existieren zu λ genau k linear unabhangigeEV.d) Es existiert ein vollstandiges ONS aus EV −→u 1,
−→u 2, ...,−→u n zu den EW λ1, λ2, ..., λn(
A−→u k = λk−→u k, k = 1, ..., n
).D.h. jedes−→u ∈ Rn ist eindeutig in der Form
−→u =n∑
k=1
(−→u ,−→u k
)−→u k
darstellbar. Wegen(A−→u ,−→u k
)=(−→u ,A−→u k
)= λk
(−→u ,−→u k
)gilt fur das Bildelement
A−→u :
A−→u =n∑
k=1
(A−→u ,−→u k
)−→u k =n∑
k=1
λk(−→u ,−→u k
)−→u k.

108 5. Symmetrische Operatoren
II. Fur das Gleichungssystem B−→u =−→b mit −→u ∈ Rn und
−→b ∈ Rm gilt die Aussa-
ge:
B−→u =−→b ist genau dann losbar, wenn
(−→b ,−→v
)
Rm= 0 fur ∀ −→v mit B∗−→v =
−→0 (FA)
Beweis. a) B−→u =−→b sei losbar, d.h. es existiert ein −→u 0 ∈ Rn mit B−→u 0 =
−→b , dann
gilt fur jedes −→v ∈ Rm mit B∗−→v =−→0 :
(−→b ,−→v
)
Rm=(B−→u 0,
−→v)
Rm =(−→u 0,B
∗−→v)
Rn = 0.
b) Es ist zu zeigen:B−→u =−→b ist losbar, wenn
(−→b ,−→v
)
Rm= 0 fur alle−→v mitB∗−→v =
−→0 .
Zunachst ist(B−→u ,−→v
)
Rm =(−→u ,B∗−→v
)
Rn = 0 fur alle −→u ∈ Rn und alle −→v ∈ N (B∗)
und damit R (B)⊥N (B∗). Wegen r = rang (B) = dim (R (B)) unddim (N (B∗)) = m− r ist weiter Rm = R (B)⊕N (B∗) und R (B)⊥N (B∗). Gilt also(−→b ,−→v
)
Rm= 0 fur alle −→v ∈ N (B∗), so ist
−→b ∈ R (B) und folglich existiert ein
−→u 0 ∈ Rn mit B−→u 0 =−→b .
B 0 0 0 0B *
n
m
r n - r
m
n
r m - r
Wegen (B∗)∗ = B gilt die zu (FA) alternative Aussage:
B∗−→v = −→c ist genau dann losbar, wenn(−→c ,−→u
)
Rn = 0 fur ∀ −→u mit B−→u =−→0 (FA∗)
Die Aussagen (FA) und (FA∗) zur Losung linearer Gleichungssysteme sind unter derBezeichnung FREDHOLMsche Alternative bekannt. Kurzer konnen diese Zusam-menhange in folgender Form ausgedruckt werden:
Rm = R (B)⊕N (B∗) und R (B)⊥N (B∗) bzw. R (B) = (N (B∗))⊥ (FA)
Rn = R (B∗)⊕N (B) und R (B∗)⊥N (B) bzw. R (B∗) = (N (B))⊥ (FA∗)
Eine Matrix A (mit A : Rn → Rn) ist genau dann symmetrisch, wenn A = A∗.Fur eine symmetrische Matrix kann die FREDHOLMsche Alternative in der folgendenForm ausgesprochen werden (λ ∈ C):
λ−→u −A−→u =−→b ist genau dann losbar, wenn
(−→b ,−→v
)
= 0 fur alle Losungen −→v von A−→v − λ−→v =−→0 . (FAS)

109
Die EV der Matrix (λI−A)−1 (λ 6= λk; k = 1, ..., n) sind mit −→u k die gleichen wie jene
der Matrix A und zwar zu den entsprechenden EW µk =1
λ− λk(k = 1, ..., n). Dem-
zufolge ist im Falle λ 6= λk (k = 1, ..., n) die Losung −→u der Gleichung
λ−→u−A−→u =−→b (MitA ist auch (λI−A)−1 symmetrisch!):
−→u = (λI−A)−1 −→b =n∑
k=1
(
(λI−A)−1 −→b ,−→u k
)−→u k =n∑
k=1
1
λ− λk
(−→b ,−→u k
)−→u k
eindeutig bestimmt. Ist λ = λi = λi+1 = ... = λi+m−1 ein m−facher EW der Matrix
A, so ist die Gleichung λ−→u −A−→u =−→b nur dann losbar, wenn
(−→b ,−→u k
)
= 0 fur k =
i, ..., i+m−1. In diesem Fall erhalt man die Losungsmannigfaltigkeit:
−→u =n∑
k=1λk 6=λ
1
λ− λk
(−→b ,−→u k
)−→u k + span(−→u i,
−→u i+1, ...,−→u i+m−1
).
Die in I und II genannten Aussagen der linearen Algebra sind weitestgehend auf linea-re Operatoren und Operatorengleichungen in linearen Raumen ubertragbar. In diesemKapitel werden die Aussagen aus I und die FREDHOLMsche Alternative (FAS) auflineare symmetrische Operatoren in einem HILBERT-Raum verallgemeinert und ent-sprechend prazisiert. Die Verallgemeinerung der FREDHOLMschen Alternative (FA),(FA∗) auf lineare stetige Operatoren B : X → Y im HILBERT-Raumpaar X,Y ba-siert auf dem “Closed Rang Theorem” (siehe ZEIDLER; [2] Bd. 2, S. 210). DiesesTheorem sagt aus, dass
R (B) = (N (B∗))⊥ und R (B∗) = (N (B))⊥ ⇔ R (B) in Y abgeschlossen.

110 5. Symmetrische Operatoren
5.1. Spektrum symmetrischer Operatoren
Definition 5.1 Der lineare Operator A : D (A) ⊆ H → H auf dem HILBERT-Raum H uber dem Korper K (K = R oder C) wird symmetrisch genannt, wenn dasDefinitionsgebiet in H dicht ist und gilt
(Au,v) = (u,Av) fur alle u,v ∈ D (A) .
Satz 5.1 A : D (A) ⊆ H → H sei ein linearer symmetrischer Operator, dann gilt:a) (Au,u) ∈ R fur alle u ∈ D (A) und alle Eigenwerte von A sind reellwertig.b) Eigenvektoren zu verschiedenen Eigenwerten von A sind orthogonal zueinander.c) Ist u1, ...,uk, ... ein in H (hochstens abzahlbares) vollstandiges ONS von Ei-genvektoren des Operators A (Auk = λkuk; k = 1, 2, ...), dann enthalt die Mengeλ1, ..., λk, ... alle Eigenwerte von A.
Beweis. a) Die Reellwertigkeit von (Au,u) folgt mit u ∈ D (A) sofort aus
(Au,u) = (u,Au) = (Au,u).
Ist λ ein EW zum EV v, dann ist Av = λv und
λ (v,v) = (Av,v) = (v,Av) = λ (v,v) ⇒ λ = λ wegen (v,v) 6= 0.
b) Mit v EV zum EW λ und w EV zum EW µ 6= λ, d.h. Av = λv; Aw = µwfolgt
(λ− µ) (v,w) = (λv,w)− (v,µw) = (Av,w)− (v,Aw) = 0. ⇒ (v,w) = 0.
c) uk− vollstandiges ONS aus EV in H ⇒ ein beliebiges u ∈ H hat die Darstel-lung
u =∞∑
k=1
(u,uk)uk.
Annahme: Es existiert ein u 6= 0 und λ /∈ λk mit Au = λu. Dann gilt aber nachAussage b) (u,uk) = 0 fur k = 1, 2, ... . Da uk vollstandig in H folgt daraus nuru = 0 im Widerspruch zur Annahme. ⇒ Die Menge λk enthalt alle EW von A.

5.1. Spektrum symmetrischer Operatoren 111
Satz 5.2 ( Satz von HILBERT-SCHMIDT )A : H → H sei ein linearer kompakter symmetrischer Operator auf dem se-parablen HILBERT-Raum H uber K, dann gilt uber den Satz 5.1 hinaus:a) A besitzt ein vollstandiges ONS von Eigenwerten in H.b) Jeder Eigenwert λ 6= 0 von A hat endliche Vielfachheit.c) Besitzt A eine abzahlbar unendliche Menge von Eigenwerten (z.B. wenn λ 6= 0 keinEW von A ist und dim (H) = ∞), dann ist die Folge der EW λk eine Nullfolge, d.h.λk → 0 fur k → ∞.
Den Beweis zu Satz 5.2 findet man z.B. in ZEIDLER [2] , Bd. 1 S. 232.
Bemerkung 5.1 Aus den Aussagen des Satzes 5.2 folgt:1. Die EW λk konnen gemaß
|λ1| = |λ1| = ... = |λk| = ...0
geordnet werden und es gilt dann ‖A‖ = |λ1|.2. Jedes u ∈ H und sein Bildelement Au haben die Darstellung
u =∞∑
k=1
(u,uk)uk ; Au =∞∑
k=1
λk (u,uk)uk.
Beispiel 5.1 Gegeben ist die Integralgleichung
λu (t)−b∫
a
K (t, s)u (s) ds = 0 −∞ < a ≤ t ≤ b <∞ (I)
mit u ∈ L2 (a, b) und der stetigen symmetrischen Kernfunktion K : [a, b]× [a, b] → R,d.h.
K (t, s) = K (s, t) fur alle t, s ∈ [a, b] .
In H = L2 (a, b) wird der Integraloperator
(Au) (t) =
b∫
a
K (t, s)u (s) ds
definiert, womit die Integralgleichung (I) als Operatorgleichung in H gemaß
λu−Au = 0 fur alle u ∈ H
formuliert werden kann. Es gilt dann:a) Die Integralgleichung (I) hat in H = L2 (a, b) ein vollstandiges ONS von Eigenvek-toren uk des Operators A.

112 5. Symmetrische Operatoren
b) Eigenvektoren zu verschiedenen Eigenwerten sind orthogonal zueinander.c) Jeder EW λk 6= 0 hat endliche Vielfachheit.d) Hat die Integralgleichung (I) abzahlbar unendlich viele EW (z.B. wenn λ 6= 0 keinEW ist), dann gilt λk → 0 fur k → ∞.
Beweis. Die Aussagen folgen sofort aus dem Satz von HILBERT-SCHMIDT, wenngezeigt wird, dass A in L2 (a, b) ein linearer kompakter symmetrischer Operator ist.a) Die stetige Funktion K (t, s) ist auf der kompakten Menge [a, b] × [a, b] ⊂ R2
gleichmaßig stetig, d.h. fur jedes ε > 0 gibt es ein δ > 0, so dass fur beliebiget1, t2 ∈ [a, b]
maxa≤s≤b
|K (t1, s)−K (t2, s)| < ε , wenn nur |t1 − t2| < δ. (1)
Folglich ist mit diesem Ergebnis und der SCHWARZschen Ungleichung
|(Au) (t1)− (Au) (t2)| ≤ maxa≤s≤b
|K (t1, s)−K (t2, s)|b∫
a
1 · |u (s)| ds (1)
≤ ε
b∫
a
ds
1/2
b∫
a
|u (s)|2 ds
1/2
= ε√b− a ‖u‖ .
Damit ist die Stetigkeit von (Au) (t) bewiesen. Außerdem ist wegen
maxa≤t≤b
|(Au) (t)| ≤ maxa≤t,s≤b
|K (t, s)|b∫
a
1 · |u (s)| ds ≤√b− aM ‖u‖ (2)
mit M = maxa≤t,s≤b
|K (t, s)| der Operator A beschrankt:
‖Au‖2 =b∫
a
|(Au) (t)|2 dt ≤ (b− a)2M2 ‖u‖2 .
A : H → H ist folglich ein linearer beschrankter (d.h. stetiger) Operator.b) Ist M ⊂ H = L2 (a, b) eine beschrankte Menge, dann folgt mit (1) und (2)aus dem Satz von ARZELA-ASCOLI (Satz 1.10), dass die Bildmenge A (M) rela-tiv kompakt in C [a, b] ist. Jede relativ kompakte Menge in C [a, b] ist aber auch re-lativ kompakt in L2 (a, b), denn wenn gilt wn → w in C [a, b] fur n → ∞, so giltauch
‖wn −w‖2 =b∫
a
|wn (s)−w (s)|2 ds ≤ maxa≤s≤b
|wn (s)−w (s)|2 (b− a) → 0 fur n→ ∞.
Folglich ist A (M) auch relativ kompakt in L2 (a, b) und damit A : H → H ein kom-pakter Operator.

5.1. Spektrum symmetrischer Operatoren 113
c) Aus der Symmetrie der KernfunktionK (t, s) folgt fur beliebige u,v ∈ H:
(Au,v) =
b∫
a
b∫
a
K (t, s)u (s) ds
v (t) dt
=
b∫
a
b∫
a
K (t, s)v (t) dt
u (s) ds = (u,Av) .
Folglich ist der OperatorA : H → H auch symmetrisch.
Beispiel 5.2 Gegeben ist das Eigenwertproblem
−u′′ (t) = λu (t) 0 < t < π und u (0) = u (π) = 0; u ∈ C2 [0, π] (D)
Mit dem Operator A : D (A) ⊆ L2 (0, π) → L2 (0, π) gemaß
(Au) (t) = −u′′ (t) und D (A) =u ∈ C2 [0, π] | u (0) = u (π) = 0
kann das Problem (D) in der Form Au = λu geschrieben werden und es gilt:Der Operator A ist linear und symmetrisch aber nicht kompakt und besitzt in L2 (0, π)ein vollstandiges ONS von
(normierten) Eigenfunktionen uk (t) =1√πsin (kt) zu den Eigenwerten λk = k2,
d.h. jedes u ∈ L2 (0, π) ist in der Form
u (t) =∞∑
k=1
αk sin (kt) mit αk =1
π
π∫
0
u (t) sin (kt) dt
darstellbar.
Beweis.Mittels zweimaliger partieller Integration erhalt man fur u,v ∈ D (A):
(Au,v) =
π∫
0
(−u′′ (t))v (t) dt = (−u′ (t))v (t)|π0 +π∫
0
u′ (t)v′ (t) dt
= u (t)v′ (t)|π0 +π∫
0
u (t) (−v′′ (t)) dt = (u,Av) .
Damit ist die Symmetrie des offensichtlich linearen Operators A gezeigt.Wegen
(Auk) (t) = − d2
dt2
(1√πsin (kt)
)
= k21√πsin (kt) = λkuk (t)

114 5. Symmetrische Operatoren
sind uk (t) =1√πsin (kt) Eigenfunktionen und λk = k2 Eigenwerte von A. Außerdem
ist wegen
(uk,uj) =1
π
π∫
0
sin (kt) sin (jt) dt = δij
uk (t) ein ONS.Den Beweis der Vollstandigkeit des Systems uk (t) in L2 (0, π) findet man z.B. inZEIDLER [2] Bd. 1 S. 247.

5.2. FREDHOLMsche Alternative 115
5.2. FREDHOLMsche Alternative
Gegeben sei die inhomogene Operatorgleichung
λu−Au = b u,b ∈ H, λ ∈ K λ 6= 0 (IH)
und die zugeordnete homogene Gleichung
λv −Av = 0 v ∈ H, λ ∈ K λ 6= 0 (H)
Satz 5.3 Im separablen HILBERT-Raum H uber dem Korper K sei der Opera-tor A : H → H linear, kompakt und symmetrisch. Dann hat die Gleichung (IH)genau dann eine Losung, wenn (b,v) = 0 gilt fur alle Losungen v der homogenen Glei-chung (H).
Beweis siehe ZEIDLER [2] Bd. 1, S.237
Bemerkung 5.2 Unter den Bedingungen des Satzes 5.3 gilt:1. Hat Gleichung (H) nur die triviale Losung v = 0, so ist (IH) fur jedes b ∈ Heindeutig losbar und es gilt
u =∞∑
k=1
1
λ− λk(b,uk)uk,
wobei λk 6= 0 die EW und uk (k = 1, 2, ...) die entsprechenden EV des Operators A sind.Es existiert damit der inverse Operator (λI−A)−1 : H → H. Die homogene Gleichung(H) besitzt nur die triviale Losung v = 0, wenn λ 6= 0 und λ 6= λk (fur k = 1, 2, ...).2. Ist λ = λi = λi+1 = ... = λi+m−1 6= 0 ein m−facher EW von A, so sind dieentsprechenden EV ui,ui+1, ...,ui+m−1 Losungen von (H) und (IH) besitzt nur imFalle (b,uk) = 0 mit k = i, i+ 1, ..., i+m− 1 eine Losung:
u =∞∑
k=1λk 6=λ
1
λ− λk(b,uk)uk.
3. Im Falle dim (H) = ∞ gilt fur die EW λk → 0 (k → ∞), d.h. 0 ist ein Haufungspunktdes Spektrums σ (A) von Operator A. Da das Spektrum in C eine abgeschlossene Mengeist, besteht σ (A) aus allen EW von A und dem Punkt λ = 0.
Beispiel 5.3 Mit Bezug auf das Beispiel 5.1 wird die inhomogene Integralgleichung
λu (t)−b∫
a
K (t, s)u (s) ds = f (t) a ≤ t ≤ b (II)

116 5. Symmetrische Operatoren
zusammen mit der homogenen Gleichung
λv (t)−b∫
a
K (t, s)v (s) ds = 0 a ≤ t ≤ b (HI)
betrachtet. Gelten alle im Beispiel 5.1 genannten Bedingungen an die Kernfunktion
K (t, s), so wird (wie in Beispiel 5.1 gezeigt) durch (Au) (t) =b∫
a
K (t, s)u (s) ds ein
linearer kompakter symmetrischer Operator A : L2 (a, b) → L2 (a, b) definiert. Istf ∈ L2 (a, b), so ergeben sich aus Satz 5.3 fur die Losungen der Integralgleichungen(II) und (HI) folgende Aussagen:a) Ist λ 6= 0 kein EW von A (d.h. besitzt die homogene Integralgleichung (HI) nurdie triviale Losung v (t) = 0), so hat die inhomogene Integralgleichung (II) fur jedesf ∈ L2 (a, b) eine eindeutig bestimmte Losung u (t) ∈ L2 (a, b).b) Ist λ 6= 0 ein EW von A, dann ist (II) genau dann losbar, wenn
(f ,v) =
b∫
a
f (t)v (t) dt = 0
fur alle Losungen v der homogenen Integralgleichung (HI) (bzw. (f ,uk) = 0 fur alleEV uk zum EW λ).
Beispiel 5.4 Neben dem inhomogenen Randwertproblem (RWP)
−u′′ (t) = λu (t) + g (t) 0 < t < π
u (0) = u (π) = 0bzw.
Au = λu+ g , g ∈ C [a, b]
(Au) (t) = −u′′ (t)(ID)
wird das zugeordnete homogene RWP
−v′′ (t) = λv (t) 0 < t < π
v (0) = v (π) = 0bzw. Av = λv (HD)
betrachtet. Der Operator A : D (A) ⊆ L2 (a, b) → L2 (a, b) ist linear und symmetrisch,
jedoch nicht kompakt. Mit λk = k2 und uk (t) =1√πsin (kt) (k = 1, 2, ...) sind die EW
und Eigenfunktionen von A bekannt (siehe Beispiel 5.2).Ist g ∈ C [0, π], so konnen folgende Aussagen bewiesen werden (siehe ZEIDLER, [2],Bd.1, S. 249):a) Ist λ kein EW von A (d.h. hat das Eigenwertproblem (HD) nur die triviale Losungv (t) = 0), so besitzt das inhomogene RWP (ID) eine eindeutig bestimmte Losung u (t)b) Ist λ ein EW von A, so ist das RWP (ID) genau dann losbar, wenn
π∫
0
g (t)v (t) dt = 0

5.2. FREDHOLMsche Alternative 117
fur alle Losungen v des homogenen RWP (HD). Ist also λ = k2 EW zum EV
uk (t) =1√πsin (kt), so ist (ID) genau dann losbar, wenn gilt
π∫
0
g (t) sin (kt) dt = 0.


6. Lineare Operatorgleichungen
Aufgabenklassen, die auf lineare Operatorgleichungen fuhren:
1. Lineare zeitunabhangige (statische) Zusammenhangefuhren auf Operatorgleichungen der Form
Au = f
Beispiele:- lineare algebraische Gleichungssysteme- Berechnung statischer elektrischer Felder- statisches Kraftegleichgewicht mechanischer Systeme
2. Die analytische Beschreibung linearer dynamischer Vorgange fuhrt auf AWA(Evolutionsgleichungen), die als Operatorgleichungen der Form
du
dt+Au = f mit den Anfangsbedingungen (AB) u (0) = u0
darstellbar sind.Beispiele:- Wellenausbreitung- instationare Warmeleitung- Diffusionsvorgange (Migrationsprozesse)
Ist A : Rn → Rn eine symmetrische positiv definite Matrix, so besitzen diese bei-den Gleichungen eine eindeutig bestimmte Losung und es gibt ausgereifte numerischeAlgorithmen zu deren Bestimmung.
Durch Verallgemeinerung der Begriffe Symmetrie und positive Definitheitsind diese Aussagen auf lineare Operatorgleichungen ubertragbar.
Definition 6.1 H sei ein HILBERT-Raum und D (A) dicht in H. Der lineare Ope-rator A :D (A) ⊆ H → H heißt streng monoton, wenn
(Au,u) = c ‖u‖2 fur bel. u ∈ D (A) ( c > 0) .

120 6. Lineare Operatorgleichungen
Definition 6.2 ( adjungierter Operator )A :D (A) ⊆ H → H sei ein linearer Operator mit im HILBERT-Raum H dichtemDefinitionsgebiet D (A) . Auf der Menge
D (A∗) = v ∈ H | ∃ w ∈ H mit (Au,v) = (u,w) fur ∀ u ∈ D (A)
wird ein Operator A∗ : D (A∗) ⊆ H → H gemaß A∗v = w definiert. A∗ heißt adjun-gierter Operator zu A. Es gilt:
(Au,v) = (u,A∗v) fur ∀ u ∈ D (A) und ∀ v ∈ D (A∗) .
Definition 6.3 Der Definitionsbereich D (A) sei dicht in H.1. A heißt symmetrisch genau dann, wenn
(Au,v) = (u,Av) fur ∀ u,v ∈ D (A) .
2. A heißt selbstadjungiert genau dann, wenn A = A∗.3. A heißt schief-symmetrisch genau dann, wenn
(Au,v) = − (u,Av) fur ∀ u,v ∈ D (A) .
4. A heißt schief-adjungiert (skew-adjoint) genau dann, wenn A = −A∗.
Eigenschaften des adjungierten Operators A∗ :
a) A∗ ist ein linearer Operator.
b) (α A)∗ = α A∗ ( α beliebige komplexe Zahl ).
c) α sei eine reelle Zahl und i die imaginare Einheit, dann gilt:
A ist schief-symmetrisch genau dann, wenn αiA symmetrisch.
A ist schief-adjungiert genau dann, wenn αiA selbstadjungiert.

121
Beispiel zur Formulierung einer linearen OperatorgleichungIm folgenden sei Ω ⊂ Rn eine offene beschrankte Menge.
Klassisches DIRICHLET-Problem
Gesucht u ∈ C2 (Ω) mit−4u = f in Ωu = 0 auf Γ
(DP )
Definieren den Operator B mit
B : D (B) ⊂ C2 (Ω) → L2 (Ω)
D (B) =u ∈ C2 (Ω) | u = 0 auf Γ
Bu =−4u u ∈D (B)
(DP ) ist aquivalent zur
Operatorgleichung
Gesucht u ∈ D (Ω) mitBu = f
Variationsgleichung( schwache Form von (DP ) )
Gesucht u ∈ HA mita (u,v)− b (v) = 0fur bel. v ∈ HA
(V G)
mit dem energetischen Raum HA
HA v H1
2 (Ω)symm. pos. def. Bilinearform:a (u,v) =
∫
Ω
∇u·∇v dΩ
lineares Funktional:b (v) =
∫
Ω
f · v dΩ
(V G) ist fur bel. f ∈ L2 (Ω)eindeutig losbar ⇒ ∃ Operator AA : D (A) ⊆ HA → L2 (Ω)(V G) ist aquivalent zurOperatorgleichung:
Gesucht u ∈ D (A) mitAu = f
(OG)
Folgerungen:
1. Es gilt: Au = Bu fur bel. u ∈ D (B) ⇒ D (B) ⊂ D (A) .Denn: Jede Losung von (DP ) ist auch eine Losung von (V G) .A heißt FRIEDRICHSsche Erweiterung von B.
2. Fur bel. u,v ∈ D (B) gilt:
(Bu,v) =
∫
Ω
(−4u) · v dΩ =
∫
Ω
u· (−4v) dΩ = (u,Bv)
Damit ist B ein symmetrischer Operator.
3. Aus Au = f folgt die Variationsgleichung(Au− f ,v) = (Au,v) − (f ,v) = a (u,v) − b (v) = 0 fur bel. v ∈ D (A) Daa (u,v) symmetrisch und positiv definit, folgt(Au,v) = (u,Av) fur bel. u,v ∈ D (A) ⇒ A selbstadjungiert
(Au,u) = c ‖u‖2 fur bel. u ∈ D (A) (c > 0) ⇒ A streng monoton

122 6. Lineare Operatorgleichungen
Allgemeine Formulierung linearer Operatorgleichungen
Variationsgleichung zu einer RWA im HILBERT-RaumH :
Gesucht ist u ∈ HA mita (u,v)− b (v) = 0 fur bel. v ∈ HA
(V G)
HA ⊆ H sei der durch die RWA definierte energetische Raum. In HA sind durch diebeschrankte symmetrische positiv definite Bilinearform a (u,v) ein skalaresProdukt (u,v)HA
= a (u,v) und eine Norm |u|HA=√
a (u,u) definiert. HA sei einseparabler HILBERT-Raum. b (v) sei in HA ein beschranktes lineares Funk-tional.Nach dem Satz von LAX-MILGRAM hat (V G) eine eindeutig bestimmte Losungu ∈ HA, die auch Losung folgenderOperatorgleichung ist:
Gesucht ist u ∈ D (A) mitAu = f
(OG)
Dabei ist f ∈ H und A : D (A) ⊆ HA → H der durch (V G) definierte lineare selbst-adjungierte stark monotone Operator.Die Aufgaben (V G) und (OG) besitzen ein und dieselbe eindeutig bestimmte Losungu ∈ D (A) ⊆ HA.
1. Problem: Darstellung von Au und Losung von Au = f
Beispiel 6.1 A : Rn → Rn sei eine symmetrische positv definite Matrix
0 < λ1 < λ2 < ... < λn seien die Eigenwerte von A−→y 1 , −→y 2 , ..., −→y n vollst. ONS von Eigenvektoren von A
(−→y i,−→y j
)= δij
Ein bel. −→u ∈ Rn hat dann die Darstellung
−→u =n∑
k=1
(−→u , −→y k
)−→y k.
Wegen(A−→u ,−→y k
)=(−→u ,A−→y k
)= λk
(−→u ,−→y k
)folgt
A−→u =n∑
k=1
(A−→u , −→y k
)−→y k =n∑
k=1
λk(−→u ,−→y k
)−→y k fur bel. −→u ∈ Rn.
Weiterhin ist A−1−→y k = 1λk
−→y k und wegen(
A−1−→b ,−→y k
)
= 1λk
(−→b ,−→y k
)
folgt fur die
Losung des linearen Gleichungssystems A−→u =−→b :
−→u = A−1−→
b =n∑
k=1
(
A−1−→b ,−→y k
)−→y k =n∑
k=1
1
λk
(−→b ,−→y k
)−→y k fur bel.−→b ∈ Rn.

123
Bemerkung 6.1 Diese Darstellung fur symmetrische positiv definite Matrizen A
und fur die Losung linearer symmetrischer positiv definiter Gleichungssysteme A−→u =−→b
kann auf lineare selbstadjungierte stark monotone Operatoren A und Ope-ratorgleichungen Au = f ubertragen werden. Dazu mussen das Eigenwertpro-blem fur selbstadjungierte streng monotone Operatoren A formuliert und (i.R. numerische ) Losungsalgorithmen entwickelt werden.
2. Problem: Losung von Gleichungen der Form u′ (t) +Au (t) = f
Beispiel 6.2 A sei eine symmetrische positiv definite Matrix
0 < λ1 < λ2 < ... < λn seien die Eigenwerte von A−→y 1 , −→y 2 , ..., −→y n vollst. ONS von Eigenvektoren von A
Anfangswertaufgabe:
Gesucht ist −→u (t) mitd
dt−→u (t) +A−→u (t) =
−→b (t > 0)
−→u (0) = −→u 0
(AWA)
Ansatz fur −→u (t) :
−→u (t) =n∑
k=1
αk (t)−→y k αk (t) =
(−→u (t) ,−→y k
).
Dann ist:
d
dt−→u (t) =
n∑
k=1
dαk (t)
dt−→y k
A−→u (t) =n∑
k=1
λkαk (t)−→y k
−→b =
n∑
k=1
(−→b ,−→y k
)−→y k.
Diese Ausdrucke ind
dt−→u (t) +A−→u (t)−−→
b =−→0 eingesetzt liefert
n∑
k=1
[dαk (t)
dt+ λkαk (t)−
(−→b ,−→y k
)]−→y k =−→0 .
Damit erhalt man das folgende System gewohnlicher Differentialgleichungen
dαk (t)
dt+ λkαk (t) =
(−→b ,−→y k
)
k = 1, 2, ..., n

124 6. Lineare Operatorgleichungen
mit den Losungen
αk (t) = ck exp (−λkt) +1
λk
(−→b ,−→y k
)
ck ∈ R.
Mit den Koeffizienten αk (t) erhalt man weiter
−→u (t) =n∑
k=1
[
ck exp (−λkt) +1
λk
(−→b ,−→y k
)]−→y k.
Wegen −→u (0) = −→u 0 muß gelten
n∑
k=1
[
ck +1
λk
(−→b ,−→y k
)]−→y k!=
n∑
k=1
(−→u 0,−→y k
)−→y k.
⇒ ck =(−→u 0,
−→y k
)− 1
λk
(−→b ,−→y k
)
Damit erhalt man die Losung von (AWA) :
−→u (t) =n∑
k=1
[((−→u 0,
−→y k
)− 1
λk
(−→b ,−→y k
))
exp (−λkt) +1
λk
(−→b ,−→y k
)]−→y k
Bemerkung 6.2 Die Darstellung der Losung von (AWA) in der Form einerReihenentwicklung nach den Eigenvektoren der Matrix A ist auf die Losung zeitab-hangiger Operatorgleichungen mit selbstadjungierten streng monotonenOperatoren A ubertragbar ( z.B. auf (AWA) fur die Diffusionsgleichung, Wel-lengleichung oder SCHRODINGER-Gleichung ).

6.1. Eigenwertprobleme 125
6.1. Eigenwertprobleme
Im separablen HILBERT-RaumH sei dasEW - Variationsproblem gegeben:
Gesucht sind alle EW λk ∈ R undEV uk ∈ HA (uk 6= 0) mit
(u,v)HA= λ (u,v) fur bel. v ∈ HA
(EV G)
Dabei ist (u,v)HA= (Au,v) die durch den selbstadjungierten streng monotonen Ope-
rator A auf dessen energetischem Raum HA erzeugte symmetrische positiv definiteBilinearform.
Eigenwertproblem fur den Operator A :
Gesucht sind alle EW λk ∈ R undEV uk ∈ D (A) (uk 6= 0) der EW-Gleichung
Au =λu(EWP )
Satz 6.1 Ist jede beschrankte Menge aus HA in H relativ kompakt (d.h. ist die Ein-bettung von HA in H relativ kompakt), so gilt:a) A besitzt ein abzahlbares System von Eigenlosungen (EW und EV) λk, uk
(k = 1, 2, ...) mit Auk = λkuk.b) Das System der EV uk∞k=1 bildet in H ein vollstandiges ONS.c) Alle EW sind reellwertig und haben endliche Vielfachheit.
0 < c ≤ λ1 ≤ λ2 ≤ ... ≤ λk ≤ ... λk → ∞ bei k → ∞
Bemerkung 6.3 Die EW-Probleme (EV G) und (EV P ) haben ein und dieselben Losungen.
Satz 6.2 Der Operator A : D (A) ⊆ H → H sei selbstadjungiert stark monoton undbesitze ein abzahlbares System von Eigenlosungen (λk,uk) (k = 1, 2, ...) , wobei die EVuk∞k=1 in H ein vollstandiges ONS bilden. Dann gilt:1. Au hat die Darstellung
Au =∞∑
k=1
λk (u,uk)uk
fur bel. u ∈ D (A) =
u ∈ H
∣∣∣∣∣
∞∑
k=1
|λk (u,uk)|2 <∞

126 6. Lineare Operatorgleichungen
2. Es existiert der lineare beschrankte inverse Operator A−1 : H → H mit der Darstel-lung
A−1f =∞∑
k=1
1
λk(f ,uk)uk fur bel. f ∈ H
und es gilt∥∥A−1f
∥∥ ≤ 1
c‖f‖ wobei 0 < c ≤ λ1 ≤ λ2 ≤ ...
3. Die Losung der Operatorgleichung Au = f hat fur bel. f ∈ H die Form
u = A−1f =∞∑
k=1
1
λk(f ,uk)uk
Bemerkung 6.4 Folgende Bedingungen sind aquivalent:a) u ∈D (A)
b)∞∑
k=1
λk (u,uk)uk ist eine konvergente Reihe in H
c)∞∑
k=1
|λk (u,uk)|2 ist eine konvergente Zahlenreihe
Bemerkung 6.5 Fur den energetischen Raum HA des Operators A gilt
HA = u ∈ H | (Au,u) <∞ =
u ∈ H
∣∣∣∣∣
∞∑
k=1
λk |(u,uk)|2 <∞
Beispiel: EW-Problem fur die LAPLACE-Gleichung
Klassisches DIRICHLETsches EW-Problem
Gesucht sind (λk,uk) mit uk ∈ C2 (Ω) und−4u (x) = λu (x) x ∈ Ω
u (x) = 0 x ∈ Γ(EDP )
EW-Variationsgleichung
Gesucht sind (λk,uk) mit uk ∈ HA und(u,v)HA
= λ (u,v) fur bel. v ∈ HA(EV G)
Dabei ist:
1. HA =v ∈ H1
2 (Ω) | v (x) = 0 fur fast alle x ∈ Γv H
1
2 (Ω)
2. (u,v) =∫
Ω
u · v dΩ

6.1. Eigenwertprobleme 127
3. (u,v)HA=∫
Ω
∞∑
i=1
∂u
∂xi
∂v
∂xidΩ ≡ (Au,v) ist inHA eine beschrankte positiv definite
symmetrische Bilinearform.
4. Au =−4u (x) fur bel. u ∈ C2 (Ω) .A ist die FRIEDRICHSsche Erweiterung des durch (EDP ) definierten symme-trischen Operators B. A ist selbstadjungiert und streng monoton in HA.
Es gilt:
a) (EV G) besitzt ein abzahlbares System von Eigenwerten (λk,uk), wobei die EVuk∞k=1 ⊂ HA ein vollstandiges ONS in L2 (Ω) bilden.
b) Alle EW haben endliche Vielfachheit und
0 < λ1 ≤ λ2 ≤ ... ≤ λk ≤ ... mit λk → ∞ fur k → ∞
c) Die Eigenlosungen (λk,uk) k = 1, 2, ... von (EV G) heißen verallgemeinerte Ei-genlosungen von (EDP ) .
Beispiel 6.3 (EW-Problem der schwingenden Saite)
Gesucht sind (λk, uk)mit uk ∈ C2 (0, l) und
−u′′ (x) = λu (x) 0 < x < lu (0) = u (l) = 0
(EDP )
u ( x )
x0 l
Gesucht sind (λk, uk) mit uk ∈ HA und(u, v)HA
= λ (u, v) fur bel. v ∈ HA(EV G)
Damit liegt ein Spezialfall des DIRICHLETschen EW-Problems vor, wobei
HA =u ∈ H1
2 (0, l) | u (0) = u (l) = 0
(u, v)HA− λ (u, v) =
l∫
0
u′v′dx− λ
l∫
0
uvdx
Analytische Losung von (EDP ): Die gewohnliche Differentialgleichung−u′′ (x) = λu (x) hat die allgemeine Losung
u (x) = c1 sin(√
λx)
+ c2 cos(√
λx)
Mit den Randbedingungen folgt
u (0) = 0 ⇒ c2 = 0 ⇒ u (x) = c1 sin(√
λx)
u (l) = 0 ⇒ c1 sin(√
λl)
= 0 ⇒√λl = kπ k = 1, 2, ...

128 6. Lineare Operatorgleichungen
und damit uk (x) = c1 sin(kπlx)
λk =(kπl
)2
Nach Normierung von uk (x) erhalt man schließlich die EW und EV von (EDP )
λk =
(kπ
l
)2
uk (x) =
√
2
lsin
(kπ
lx
)
k = 1, 2, ...
Das System uk (x) bildet in L2 (0, l) ein vollstandiges ONS.Losung der Operatorgleichung bzw. der aquivalenten Variationsgleichung
Gesucht ist u ∈ HA mitAu = f
⇔ Gesucht ist u ∈ HA mita (u, v)− (f, v) = 0 fur bel. v ∈ HA
dabei ist a (u, v)− (f, v) =l∫
0
u′v′ dx−l∫
0
fv dx und folglich:
Au =∞∑
k=1
λk (u, uk) uk fur bel. u mit∞∑
k=1
|λk (u, uk)|2 <∞ und
u = A−1f =∞∑
k=1
1
λk(f, uk) uk fur bel. f ∈ L2 (0, l)
Numerische Losung der EW-Variationsgleichung
Gesucht sind alle EW λk ∈ R undEV uk ∈ HA (uk 6= 0) mit
(u,v)HA= λ (u,v) fur bel. v ∈ HA
(EV G)
HAm sei ein m− dimensionaler Unterraum von HA.
RITZsche EW-Variationsgleichung
Gesucht sind alle EW λ(m)k ∈ R und
EV u(m)k ∈ HAm
(
u(m)k 6= 0
)
mit(
u(m)k ,v
)
HA
= λ(m)k
(
u(m)k ,v
)
fur bel. v ∈ HAm
(EV G)m
Ist e1m, e2m, ..., emm eine Basis im RaumHAm, so setzt man an:
u(m) =m∑
i=1
αimeim fur bel. u(m) ∈ HAm αim ∈ R
Dann folgt fur (u,v)HA= λ (u,v) mit bel. v ∈ HAm
m∑
i=1
αim (eim, ejm)HA= λ
m∑
i=1
αim (eim, ejm) j = 1, ...,m

6.1. Eigenwertprobleme 129
Mit den Matrizen K =
(eim, ejm)HA
m
i,j=1, M = (eim, ejm)mi,j=1 und
−→a=(α1m, ..., αmm)T erhalt man das zu (EV G)m aquivalente
Matrizen EW-Problem
Gesucht sind alle EW λ(m)k ∈ R und
EV −→a (m)k ∈ Rm −→a (m)
k ( 6= 0) mit
K−→a (m)k = λ
(m)k M−→a (m)
k
(MEW )
Satz 6.3 A : D (A) ⊆ H → H sei ein selbstadjungierter streng monotoner Operatorund besitze ein abzahlbares System von Eigenlosungen (λk,uk) . Dann gilt:
a) (EV G)m besitzt fur bel. m = 1, 2, ... die Eigenlosungen(
λ(m)k ,u
(m)k
)
k = 1, ...,m.
mit
u(m)k =
m∑
i=1
α(k)imeim ,
wobei(
λ(m)k ,−→a (m)
k
)
mit −→a (m)k =
(
α(k)1m, ..., α
(k)mm
)T
die Eigenlosungen von (MEW ) sind.
b) Die Matrizen K und M sind symmetrisch und positiv definit.
c) Es sei∞⋃
m=1
HAm = HA , dann gilt
u(m)k → uk und λ
(m)k → λk bei m→ ∞
Dabei ist λk ≤ λ(m)k fur bel. k,m ∈ N
( Abschatzung der EW von oben ).

130 6. Lineare Operatorgleichungen
Beispiel 6.4 Num. Berechnung der EW und EV der schwingenden Saite.Im Raum HAm ⊂ HA = u ∈ H1
2 (0, l) | u (0) = u (l) = 0 wird folgende Basis ein-gefuhrt:
a a a a aa 1 m
x
h h. . . . . .
1e i m
i - 1 i i + 1 m + 1 = l0a = 0
eim =
1h(x− ai−1) ai−1 ≤ x ≤ ai
1h(ai+1 − x) ai ≤ x ≤ ai+1
0 sonst
i = 1, ...,m
Damit ist
(eim, ejm)HA=
l∫
0
e′ime′jmdx =
2h
fur i = j = 1, ...,m
− 1h
fur |i− j| = 1
0 fur |i− j| > 1
(eim, ejm) =
l∫
0
eimejm dx =
2h2
h∫
0
x2dx = 23h fur i = j = 1, ...,m
1h2
h∫
0
(h− x) xdx = h6
fur |i− j| = 1
0 fur |i− j| > 1
und man erhalt die Matrizeneigenwertgleichung K−→a = λM−→a mit den Matrizen
K =1
h
2 −1 0 ... 0−1 2 −1 ... 0... ... ... ... ...0 ... −1 2 −10 ... 0 −1 2
; M =h
6
4 1 0 ... 01 4 1 ... 0... ... ... ... ...0 ... 1 4 10 ... 0 1 4
.

6.2. Dynamische Systeme und Prozesse 131
6.2. Dynamische Systeme und Prozesse
6.2.1. Diffusionsgleichung
Im separablen HILBERT-Raum H sei A : D (A) ⊆ H → H ein linearer selbst-adjungierter streng monotoner Operator, der inH ein abzahlbares vollstandigesONS von Eigenlosungen (λk,uk) k = 1, 2, ... besitzt. Dann gilt:
Au =∞∑
k=1
λk (u,uk)uk fur bel. u ∈D (A)
D (A) =
u ∈ H
∣∣∣∣∣
∞∑
k=1
|λk (u,uk)|2 <∞
.
abstraktes Diffusionsproblem:
Gesucht ist u (t) ≡ u (x,t) mitut +Au = f (t > 0)
u (x,0) = u0 (x)(ADP )
Satz 6.4 (ADP ) hat fur einen beliebigen Anfangswert u0 ∈ D (A) und eine beliebigeFunktion f ∈ H eine eindeutig bestimmte stetig differenzierbare Losungu (t) : [0,∞) → H mit
u (t) =∞∑
k=1
[
(u0,uk)−1
λk(f ,uk)
]
exp (−λkt)uk +∞∑
k=1
1
λk(f ,uk)uk
Beweis. Mit dem Ansatz
u (t) =∞∑
k=1
αk (t)uk αk (t) : [0,∞) → R
folgt ut (t) =∞∑
k=1
α′k (t)uk und
Au (t) =∞∑
k=1
αk (t)Auk =∞∑
k=1
αk (t)λkuk
f =∞∑
k=1
(f ,uk)uk.
Substituiert man diese Ausdrucke in der Gleichung ut+Au− f = 0, so entsteht
∞∑
k=1
[α′k (t) + λkαk (t)− (f ,uk)]uk = 0

132 6. Lineare Operatorgleichungen
und damit ein System gewohnlicher linearer Differentialgleichungen 1. Ordnung
α′k (t) + λkαk (t) = (f ,uk) k = 1, 2, ...
mit der allgemeinen Losung
αk (t) = ck exp (−λkt) +1
λk(f ,uk) ck ∈ R.
Eingesetzt in den Ansatz fur u (t) liefert dies zunachst
u (t) =∞∑
k=1
[
ck exp (−λkt) +1
λk(f ,uk)
]
uk.
Mit der Anfangsbedingung u (0) = u0 folgt weiter
u (0) =∞∑
k=1
[
ck +1
λk(f ,uk)
]
uk!= u0 =
∞∑
k=1
(u0,uk)uk
⇒ ck = (u0,uk)−1
λk(f ,uk)
und so die Losung
u (t) =∞∑
k=1
[
(u0,uk)−1
λk(f ,uk)
]
exp (−λkt)uk +∞∑
k=1
1
λk(f ,uk)uk.
u (t) ist gliedweise differenzierbar
ut (t) =∞∑
k=1
[−λk (u0,uk) + (f ,uk)] exp (−λkt)uk
Wegen∞∑
k=1
|λk (u0,uk)|2 <∞ und∞∑
k=1
|(f ,uk)|2 <∞ ist die Reihe fur ut (t) auf [0,∞)
gleichmaßig konvergent. Folglich ist ut (t) : [0,∞) → H die Ableitung von u (t) undstetig.
Bemerkung 6.6
1. Probleme vom Typ (ADP ) beschreiben unter den genannten Bedingungen nichtexpansive Prozesse (Zerfallsprozesse, kein Wachstum, Warmeausbreitung).
2. Wird der Operator A durch einen streng elliptischen Differentialausdruck 2. Ord-nung erzeugt, so ist die abstrakte Differentialgleichung ut +Au = f vom para-bolischen Typ.

6.2. Dynamische Systeme und Prozesse 133
3. Sind u (t) und v (t) Losungen von (ADP ), die den Anfangsbedingungen u (0) =u0 und v (0) = v0 entsprechen, so gilt fur bel. t > 0:
‖u (t)− v (t)‖2 =∞∑
k=1
|exp (−λkt) (u0 − v0,uk)|2
≤∞∑
k=1
|(u0 − v0,uk)|2 = ‖u0 − v0‖2
Aus dieser Beziehung folgt die Stabilitat der Losungen von (ADP ) gegenuberStorungen der Anfangswerte. Diese Eigenschaft bildet die Voraussetzung fur dieStabilitat numerischer Verfahren zur Losung von (ADP ) .
4. Bei t→ ∞ erhalt man die stationare Losung
u = A−1f =∞∑
k=1
1
λk(f ,uk)uk.
5. Als Losung fur das homogene Problem (f = 0) erhalt man
u (t) =∞∑
k=1
exp (−λkt) (u0,uk)uk.

134 6. Lineare Operatorgleichungen
Beispiel 6.5 Warmeausbreitung in einem Stab
Differentialgleichung fur die Temperaturverteilung u (x, t) in einem Stab zur Zeit tam Ort x: Vorausgesetzt wird eine Warmeleitzahl κ = 1 und es sind keine außerenWarmequellen vorhanden ( f (x) = 0 ). Aus der Energiebilanz ergibt sich damit diegewohnliche Differentialgleichung:
d
dtu (x, t)− d2
dx2u (x, t) = 0 fur 0 < x < l und t > 0
Die Stabenden werden an Eis gelegt, d.h. es liegen die Randbedingungen u (0, t) =u (l, t) = 0 vor. Die Temperaturverteilung im Stab zur Zeit t = 0 (Anfangsbedingung)sei u (x, 0) = u0 fur 0 < x < l. Dabei mussen die Vertraglichkeitsbedingung u (0, 0) =u (l, 0) = 0 zu den Randwerten beachtet werden. Zusammengefaßt ergibt sich folgendeverallgemeinerte Problemstellung zur Berechnung der Temperaturverteilung u (x, t) imStab:
Gesucht ist u (t) = u (x, t) mitut +Au = 0 fur t > 0
u (x, 0) = u0
(ADP )
Dabei ist
A : D (A) ⊂ H → H mit D (A) = H1
2 (0, l) v HA und H = L2 (0, l)
ein selbstadjungierter streng monotoner Operator. A ist die FRIEDRICHSsche Erwei-terung des symmetrischen Operators
B : D (B) ⊂ H → H mit Bu = −u′′ und D (B) = C20 (0, l) .
A besitzt in H ein vollstandiges ONS von Eigenlosungen (λk,uk) :
λk =
(kπ
l
)2
uk (x) =
√
2
lsin
(kπ
lx
)
und damit ist
Au =(π
l
)2 2
l
∞∑
k=1
k2l∫
0
u (y) sin
(kπ
ly
)
dy
sin
(kπ
lx
)
D (A) =
u ∈ L2 (0, l)
∣∣∣∣∣∣∣
∞∑
k=1
∣∣∣∣∣∣
k2l∫
0
u (y) sin
(kπ
ly
)
dy
∣∣∣∣∣∣
2
<∞
.
Als Losung von (ADP ) erhalt man damit:
u (x, t) =2
l
∞∑
k=1
exp
(
−(kπ
l
)2
t
) l∫
0
u0 (y) sin
(kπ
ly
)
dy
sin
(kπ
lx
)
.

6.2. Dynamische Systeme und Prozesse 135
Numerische Losung des Diffusionsproblems (ADP )
Gesucht ist u (t) ≡ u (x,t) mitut +Au = f fur t > 0
u (x,0) = u0 (x)(ADP )
I. Methode:
Berechnung von u (x,t) uber die EW und EV von ANach dem Verfahren von RITZ werden fur hinreichend großes m Naherungswerte furdie EW λk und EV uk (x) von A berechnet:
λ(m)k ≈ λk u
(m)k ≈ uk k = 1, ...,m
Damit erhalt man fur (ADP ) die Naherungslosung:
um (t) =m∑
k=1
[(
u0,u(m)k
)
− 1
λ(m)k
(
f ,u(m)k
)]
exp(
−λ(m)k t)
u(m)k
+m∑
k=1
1
λ(m)k
(
f ,u(m)k
)
u(m)k .
II. Methode:
Berechnung von u (x,t) aus der Variationsgleichung
Gesucht ist u (t) ≡ u (x,t) mit(ut,v) + (u,v)HA
= (f ,v) fur bel. v ∈ HA und t > 0(u (0)− u0,v) = 0
(ADG)
Bemerkung 6.7 u (x,t) ist genau dann Losung von (ADG), wenn u (x,t) Losung von(ADP ) .
Es seiHAm ⊂ HA einm− dimensionaler Unterraum vonHA mit der Basis e1m, ..., emm.
Ansatz fur eine Naherungslosung von (ADG)
um (t) =m∑
k=1
αkm (t) ekm (1)
mit den Koeffizienten αkm (t) : [0,∞) → R. Dann ist
((um)t ,v) + (um,v)HA= (f ,v) fur bel. v ∈ HAm

136 6. Lineare Operatorgleichungen
aquivalent zu
m∑
k=1
[d
dtαkm (ekm, ejm) + αkm (ekm, ejm)HA
]
= (f , ejm) j = 1, ...,m
und(um (0)− u0,v) = 0 fur bel. v ∈ HAm
ist aquivalent zu
m∑
k=1
αkm (0) (ekm, ejm)− (u0, ejm) = 0 j = 1, ...,m.
Mit den Matrizen
K =
(ekm, ejm)HA
m
k,j=1M = (ekm, ejm)mk,j=1
−→a (t) = αkm (t)mk=1
−→b = (f , ejm)mj=1
−→c = (u0, ejm)mj=1
erhalt man im Rm die RITZsche Variationsgleichung
Gesucht ist −→a (t) : [0,∞) → Rm mit
Md
dt−→a (t) +K−→a (t) =
−→b fur t > 0
M−→a (0) = −→c(AWA)
Bemerkung 6.8
1. (AWA) ist eine Anfangswertaufgabe fur ein System gewohnlicher Diffe-rentialgleichungen 1. Ordnung mit konstanten Koeffizienten. Mit demLosungsvektor −→a (t) folgt aus (1) eine Naherungslosung fur (ADP ) .
2. Die Matrizen K und M sind symmetrisch und positiv definit. Zur nu-merischen Losung von (AWA) kann z.B. ein RUNGE-KUTTA-VerfahrenAnwendung finden.
3. Der Startvektor −→a (0) (dieser entspricht den Anfangsbedingungen fur das Systemgew. Dgln.) ist aus dem linearen Gleichungssystem M−→a (0) = −→c zu berechnen.Damit ist:
um (0) = um (x,0) =m∑
k=1
αkm (0) ekm (x) .
um (0) ∈ HAm ist im Sinne des Raumes H die bestmogliche Approximationder AB u (0) = u0 durch Elemente aus HAm.Findet als Diskretisierungsverfahren die Finite Elemente Methode oder ein Diffe-renzenverfahren Anwendung, so nimmt man i. R. fur αkm (0) k = 1, ...,m direktdie Funktionswerte von u0 (x) am entsprechenden Knotenpunkt des Netzes.

6.2. Dynamische Systeme und Prozesse 137
6.2.2. Wellengleichung
Im separablen HILBERT-Raum H sei A : D (A) ⊆ H → H ein linearer selbst-adjungierter und streng monotoner Operator, der in H ein abzahlbares voll-standiges ONS von Eigenlosungen (λk,uk) k = 1, 2, ... besitzt.
Au =∞∑
k=1
λk (u,uk)uk fur bel. u ∈D (A)
D (A) =
u ∈ H
∣∣∣∣∣
∞∑
k=1
|λk (u,uk)|2 <∞
.
abstraktes Wellenausbreitungsproblem:
Gesucht ist u (t) ≡ u (x,t) mitutt +Au = 0 fur −∞ < t <∞
u (x, 0) = u0 (x)ut (x,0) = v0 (x)
(AWP )
Satz 6.5 (AWP ) hat fur bel. Anfangswerte u0 ∈ HA , v0 ∈ H eine eindeutig be-stimmte stetig differenzierbare Losung u (t) : (−∞,∞) → H mit
u (t) =∞∑
k=1
[
cos(√
λkt)
(u0,uk) +1√λk
sin(√
λkt)
(v0,uk)
]
uk
und der Geschwindigkeit v (t) = ut (t)
v (t) = ut (t) =∞∑
k=1
[
−√
λk sin(√
λkt)
(u0,uk) + cos(√
λkt)
(v0,uk)]
uk.
Beweis. Mit dem Ansatz
u (t) =∞∑
k=1
αk (t)uk erhalt man
utt =∞∑
k=1
α′′k (t)uk und Au =
∞∑
k=1
αk (t)λkuk.
Setzt man diese Ausdrucke in utt+Au = 0 ein, so entsteht folgendes System gewohnlicherDgln.
α′′k + λkαk = 0 k = 1, 2, ...

138 6. Lineare Operatorgleichungen
mit der allgemeinen Losung
αk (t) = c1k cos(√
λkt)
+ c2k sin(√
λkt)
und damit
u (t) =∞∑
k=1
[
c1k cos(√
λkt)
+ c2k sin(√
λkt)]
uk.
Die Konstanten c1k und c2k werden aus den Anfangsbedingungen ermittelt.
Aus u (0) = u0 ⇒∞∑
k=1
c1kuk!=
∞∑
k=1
(u0,uk)uk
⇒ c1k = (u0,uk)
Aus ut (0) = v0 ⇒∞∑
k=1
√λkc2kuk
!=
∞∑
k=1
(v0,uk)uk
⇒ c2k =1√λk
(v0,uk)
Folglich ist
u (t) =∞∑
k=1
[
cos(√
λkt)
(u0,uk) +1√λk
sin(√
λkt)
(v0,uk)
]
uk
u (t) ist gliedweise differenzierbar:
ut (t) =∞∑
k=1
[
−√
λk sin(√
λkt)
(u0,uk) + cos(√
λkt)
(v0,uk)]
uk
Wegen∞∑
k=1
λk |(u0,uk)|2 < ∞ und∞∑
k=1
|(v0,uk)|2 < ∞ ist die Reihe fur ut (t) auf
(−∞,∞) gleichmaßig konvergent und folglich ut (t) : (−∞,∞) → H stetig und dieAbleitung von u (t) .
Bemerkung 6.9 Die Gesamtenergie E (t) des dynamischen Systems (AWP ) istgleich der Summe aus kinetischer Energie Ekin (t) =
12(ut,ut) und potentieller
Energie Epot (t) =12(Au,u) :
E (t) =1
2(ut,ut) +
1
2(Au,u)
wobei
(ut,ut) =∞∑
k=1
∣∣∣−√
λk sin(√
λkt)
(u0,uk) + cos(√
λkt)
(v0,uk)∣∣∣
2
(Au,u) =∞∑
k=1
λk
∣∣∣∣cos(√
λkt)
(u0,uk) +1√λk
sin(√
λkt)
(v0,uk)
∣∣∣∣
2
und damit schließlich
E (t) =1
2
∞∑
k=1
(λk |(u0,uk)|2 + |(v0,uk)|2
).

6.2. Dynamische Systeme und Prozesse 139
WegendE
dt= 0 bzw. E (t) = const. ist die Gesamtenergie E eine Erhaltungs-
große. Folglich sind dynamische Prozesse vom Typ (AWP ) reversible Pro-zesse.
Beispiel 6.6 Schwingungen einer eingespannten Saite
Differentialgleichung fur die Auslenkung u (x, t) einer Saite der Lange l zur Zeit t amOrt x:
d2
dt2u (x, t)− d2
dx2u (x, t) = 0 fur 0 < x < l und −∞ < t <∞
Die Saite sei an den Enden fest eingespannt, d.h. es gilt u (0, t) = u (l, t) = 0. ZurZeit t = 0 besitze die Saite die Anfangsauslenkung u (x, 0) = u0 (x) und die Anfangs-geschwindigkeit ut (x, 0) = v0 (x) .Zusammengefasst ergibt sich folgende verallgemeinerte Problemstellung zur Berechnungder Auslenkung u (x, t) der Saite:
Gesucht ist u (t) ≡ u (x, t) mitutt +Au = 0 −∞ < t <∞
u (x, 0) = u0 (x)ut (x, 0) = v0 (x)
(AWP )
Dabei ist
A : D (A) ⊂ H → H mit D (A) = H1
2 (0, l) v HA und H = L2 (0, l)
ein selbstadjungierter streng monotoner Operator. A ist die FRIEDRICHSsche Erwei-terung des symmetrischen Operators
B : D (B) ⊂ H → H mit Bu = −uxx und D (B) = C20 (0, l) .
A besitzt in H ein vollstandiges ONS von Eigenlosungen (λk,uk) :
λk =
(kπ
l
)2
uk (x) =
√
2
lsin
(kπ
lx
)
.
Mit
ak =
l∫
0
u0 (x) sin
(kπ
lx
)
dx und bk =
l∫
0
v0 (x) sin
(kπ
lx
)
dx
erhalt man
u (x, t) =2
l
∞∑
k=1
[
ak cos
(kπ
lt
)
+l
kπbk sin
(kπ
lt
)]
sin
(kπ
lx
)
v (x, t) =2
l
∞∑
k=1
[
−kπlak sin
(kπ
lt
)
+ bk cos
(kπ
lt
)]
sin
(kπ
lx
)
E (t) =1
l
∞∑
k=1
[(kπ
l
)2
a2k + b2k
]

140 6. Lineare Operatorgleichungen
Bemerkungen zur numerischen Losung von (AWP )
Gesucht ist u (t) ≡ u (x,t) mitutt +Au = 0 fur −∞ < t <∞
u (x,0) = u0 (x)ut (x,0) = v0 (x)
(AWP )
1. Methode:u (x,t) kann direkt aus den angegebenen Reihenentwicklungen berechnet werden, wennfur die EW λk und EV uk von A Naherungswerte zur Verfugung stehen.
2. Methode:Berechnung von u (x,t) aus der zu (AWP ) aquivalenten Variationsgleichung:
Gesucht ist u (t) ≡ u (x,t) mit(utt,v) + (u,v)HA
= 0 fur −∞ < t <∞(u (0)− u0,v) = 0 fur bel. v ∈ HA
(ut (0)− v0,v) = 0
Dabei ist HA der zum Operator A gehorende energetische Raum und (u,v)HAdie von
A erzeugte symmetrische positiv definite Bilinearform.Die numerische Losung der Variationsgleichung in einemm− dimensionalen UnterraumHAm ⊂ HA fuhrt zu einer AWA fur ein System linearer gewohnlicher Differentialgleich-ungen 2. Ordnung mit konstanten Koeffizienten.

6.2. Dynamische Systeme und Prozesse 141
6.2.3. Schrodinger Gleichung
Im komplexen separablen HILBERT-Raum H sei A : D (A) ⊆ H → H ein line-arer selbstadjungierter Operator, der in H ein abzahlbares vollstandiges ONSvon Eigenlosungen (λk, uk) k = 1, 2, ... besitzt:
Au =∞∑
k=1
λk (u,uk)uk fur ∀ u ∈ H
D (A) =
u ∈ H
∣∣∣∣∣
∞∑
k=1
|λk (u,uk)|2 <∞
.
abstrakte SCHRODINGER-Gleichung
Gesucht ist u (t) ≡ u (x,t) mitut + iAu = 0 −∞ < t <∞
u (x,0) = u0 (x)(ASP )
Satz 6.6 Die abstrakte SCHRODINGER-Gleichung (ASP ) hat fureinen beliebigen Anfangswert u0 ∈ D (A) eine eindeutig bestimmte ste-tig differenzierbare Losung u (t) : (−∞,∞) → H mit
u (t) = (exp (−itA))u0 =∞∑
k=1
exp (−iλk t) (u0,uk)uk fur −∞ < t <∞.
( i− imaginare Einheit ).
Beweis.Analog zu den Beweisen fur die Diffusions- undWellengleichung.
Bemerkung 6.10Durch den Operator U =exp (−itA) wird fur feste t ∈ R jedem u0 ∈ D (A) eindeutigein u (t) ∈ H zugeordnet.
U : D (A) ⊆ H → H mit Uu0 = u (t) .
Es seien u0, v0 beliebige Anfangswerte mit den entsprechenden Losungen des Problems(ASP )
u (t) = Uu0 = (exp (−itA))u0 =∞∑
k=1
exp (−iλk t) (u0,uk)uk
v (t) = Uv0 = (exp (−itA))v0 =∞∑
k=1
exp (−iλk t) (v0,uk)uk.

142 6. Lineare Operatorgleichungen
Bildet man in H das skalare Produkt
(u (t) ,v (t)) = (Uu0,Uv0)
=∞∑
k=1
∞∑
l=1
exp (−iλk t) exp (iλl t) (u0,uk) (v0,ul) (uk,ul)
=∞∑
k=1
(u0,uk) (v0,uk) = (u0,v0)
so erkennt man, dass gilt:
‖u (t)‖ = ‖Uu0‖ = ‖u0‖‖v (t)‖ = ‖Uv0‖ = ‖v0‖ fur bel. t ∈ R.
Schlußfolgerung: Unter der Abbildung U =exp (−itA) bleiben die skalarenProdukte (Winkel) und Normen (Langen) der Elemente unverandert (invari-ant). Solche Abbildungen heißen unitare Operatoren. Diese sind die direkten Ver-allgemeinerungen unitarer und orthogonaler Matrizen.
Definition 6.4 (Unitarer Operator)Der lineare bijektive Operator U : H → H heißt unitar, wenn gilt:
(Uv,Uw) = (v,w) fur ∀ v,w ∈ H.
Folgende Aussagen sind aquivalent:
(1) U ist unitar
(2) U−1 = U∗ und damit U ·U∗= U∗ ·U = I
(3) ‖ Uv ‖= ‖ v ‖ fur ∀ v ∈ H.

6.2. Dynamische Systeme und Prozesse 143
Beispiel 6.7 In der Quantenmechanik wird die Bewegung eines harmonischen Oszil-lators durch die SCHRODINGER-Gleichung beschrieben:
Gesucht ist der quantenmechanische Zustandψ (t) ≡ ψ (x, t) mit
i~d
dtψ (x, t) = − ~2
2m
d2
dx2ψ (x, t) +
1
2mω2x2ψ (x, t)
fur x ∈ R ; −∞ < t <∞
und ψ (x, 0) = ψ0 (x) wobei∞∫
−∞|ψ0 (x)|2 dx = 1
(SG)
Erklarung der Bezeichnungen:
|ψ (x, t)|2 − Dichte der Verteilungsfunktion fur die Aufenthalts-wahrscheinlichkeit des Oszillators zur Zeit t.
~ =h
2π− h− PLANCKsches Wirkungsquantum
h = 6.625× 10−34 kgm2/s
m − Masse des Oszillatorsω − Winkelgeschwindigkeit des Oszillators
Darstellung der Schrodinger-Gleichung in abstrakter Form
Gesucht ist ψ (t) = ψ (x, t) mit
ψt +i
~Hψ = 0 −∞ < t <∞
ψ (x, 0) = ψ0 (x) mit ‖ψ0‖ = 1
(ASG)
Dabei ist
‖ψ0‖ =
∞∫
−∞
|ψ0 (x)|2 dx
1/2
und H der formale HAMILTON-Operator
H : D (H) ⊂ H → H und H = L2 (R)
H ist die FRIEDRICHSsche Erweiterung von
H0ψ = − ~2
2m
d2
dx2ψ +
1
2mω2x2ψ
Die Eigenlosungen (Ek, ϕk) von H sind:
Ek = ~ω
(
k +1
2
)
ϕk (x) = uk
(x
c
) 1√c
k = 0, 1, 2, ...
mit
c =
√
~2
mωund uk (y) =
(−1)k
π1/4√2kk!
exp
(y2
2
)dk
dyk(exp
(−y2
))

144 6. Lineare Operatorgleichungen
Es gilt dann:H ϕk = Ek ϕk k = 0, 1, 2, ...
und das System der Eigenvektoren ϕk∞k=0 bildet in L2 (R) ein vollstandiges ONS.Der Operator H ist selbstadjungiert und
Hψ =∞∑
k=0
Ek (ψ, ϕk)ϕk
mit D (H) =
ψ ∈ L2 (R) |∞∑
k=0
|Ek (ψ, ϕk)|2 <∞
Damit erhalt man folgende Losung fur (ASG) und (SG)
ψ (t) =∞∑
k=0
exp
(
− itEk
~
)
(ψ0, ϕk)ϕk −∞ < t <∞
und es gilt:
‖ψ (t)‖2 =
∞∫
−∞
|ψ (x, t)|2 dx =
∞∫
−∞
|ψ0 (x)|2 dx = ‖ψ0‖2 = 1
fur −∞ < t <∞.

6.3. Spektraldarstellung selbstadj. Operatoren 145
6.3. Spektraldarstellung selbstadj. Operatoren
Fur jeden selbstadjungierten Operator A : D (A) ⊆ H → H im HILBERT-Raum H existiert eine eindeutig bestimmte Familie von Spektraloperatoren Eλmit folgenden Eigenschaften:
1. Fur jedes λ ∈ R ist der Operator Eλ : H → H linear, stetig und selbstad-jungiert. Außerdem ist E2
λ = Eλ, d. h. Eλ ist ein Orthoprojektor.
2. Fur ∀ u ∈ H ist die Funktion f : R → R mit f (λ) = (Eλu,u) nicht fallend.
3. Fur ∀ u ∈ H gilt: limλ→−∞
Eλu = 0 und limλ→+∞
Eλu = u.
4. Fur ∀ u ∈ H und µ ∈ R gilt: limλ→µ−0
Eλu = Eµu.
( D. h. Eλu ist linksseitig stetig. )
5. Der Operator A hat die formale Darstellung A =∞∫
−∞λdEλ , wobei
(Au,v) =
∞∫
−∞
λd (Eλu,v) fur ∀ u ∈ D (A) , v ∈ H
D (A) =
u ∈ H
∣∣∣∣∣∣
‖Au‖2 =∞∫
−∞
|λ|2 d (Eλu,u) <∞
.
6. Fur eine Funktion F : R → C existiert der Operator F (A) mit der formalen
Darstellung F (A) =∞∫
−∞F (λ) dEλ , wobei
(F (A)u,v) =
∞∫
−∞
F (λ) d (Eλu,v) fur ∀ u ∈ D (F (A)) , v ∈ H
D (F (A)) =
u ∈ H
∣∣∣∣∣∣
‖F (A)u‖2 =∞∫
−∞
|F (λ)|2 d (Eλu,u) <∞
.
7. Der zu F (A) adjungierte Operator F (A)∗ =∞∫
−∞F (λ)dEλ ist:
(F (A)∗ u,v) =
∞∫
−∞
F (λ)d (Eλu,v)
fur ∀ u ∈ D (F (A)∗) = D (F (A)) , v ∈ H.
Im Falle einer reellwertigen Funktion F : R → R ist F (A) selbstadjungiert,d. h. es gilt: F (A)∗ = F (A) .

146 6. Lineare Operatorgleichungen
Beispiel 6.8 Der selbstadjungierte Operator A : D (A) ⊆ H → H besitze in H einabzahlbares vollstandiges ONS von Eigenlosungen (λk,uk) , d.h. es gilt Auk = λkuk
(k = 1, 2, ...) .Dann ist:
Eλu =∞∑
k=1
eλ (λk) (u,uk)uk fur bel. u ∈ H, λ ∈ R
mit
eλ (µ) =
0 wenn λ ≤ µ1 wenn λ > µ
und d (Eλu,v) =
0 wenn λ 6= λk(u,uk) (uk,v) wenn λ = λk
.
Fur eine beliebige Funktion F : R → C ist demzufolge:
(F (A)u,v) =
∞∫
−∞
F (λ) d (Eλu,v) =∞∑
k=1
F (λk) (u,uk) (uk,v) .
Beispiel 6.9 Im Raum H = Lc2 (R) sei der Multiplikationsoperator gegeben
(Au) (x) = xu (x) fur bel. x ∈ R und
D (A) =
u ∈ Lc
2 (R)
∣∣∣∣∣∣
∞∫
−∞
|xu (x)|2 dx <∞
Der Operator A ist selbstadjungiert. Denn, sei
(Au,v) = (u,w) fur bel. u ∈ D (A) und v,w ∈ H fest
dann folgt
∞∫
−∞
u (x) [xv (x)−w (x)] dx = 0 fur bel. u ∈ C∞0 (R) ⊂ D (A) .
Damit ist xv (x) = w (x) fast uberall auf R, also ist w = Av und (Au,v) = (u,Av) .Weiter ist
Eλu =
u (x) wenn x ≤ λ0 wenn x > λ
fur bel. u ∈ H λ ∈ R
und
d (Eλu,v) = u (λ)v (λ) dλ und (Au,v) =
∞∫
−∞
λd (Eλu,v) =
∞∫
−∞
λu (λ)v (λ) dλ.
Mit dem Multiplikationsoperator wird in der Quantenmechanik der Ortsoperator be-schrieben.

6.4. Energetischer Raum und FRIEDRICHSsche Erweiterung 147
6.4. Energetischer Raum und FRIEDRICHSsche
Erweiterung
Im HILBERT-Raum H sei der lineare Operator B : D (B) ⊆ H → H symme-trisch und streng monoton :
(Bu,u) ≥ c ‖ u ‖2 fur ∀ u ∈ D (B) und c > 0.
In D (B) wird das energetische innere Produkt und die energetische Normeingefuhrt:
(u,v)HB= (Bu,v) fur ∀ u,v ∈ D (B)
‖ u ‖HB=√
(u,u)HBfur ∀ u ∈ D (B)
Definition 6.5 ( Energetischer Raum )Der energetische Raum HB zum Operator B besteht aus den Elementen u ∈ H, furdie eine Folge un∞n=1 ⊂ D (B) existiert, die in der energetischen Norm ‖ · ‖HB
gegenu konvergiert:
HB = u ∈ H | ∃ un∞n=1 ⊂ D (B) mit ‖ un − u ‖HB→ 0 .
Folgerung:
1. HB ist ein HILBERT-Raum.
2. Fur alle u,v ∈ HB existieren Folgen un∞n=1 , vn∞n=1 ⊂ D (B) mit
‖ un − u ‖ → 0 und ‖ vn − v ‖ → 0 und es gilt:
(u,v)HB= lim
n→∞(un,vn)HB
.
Definition 6.6 Es sei
D (A) =u ∈ HB | ∃ f ∈ H mit (u,v)HB
= (f ,v) fur ∀ v ∈ HB
.
Der Operator A : D (A) ⊆ H → H gemaß Au = f heißt
FRIEDRICHSsche Erweiterung des Operators B.

148 6. Lineare Operatorgleichungen
Der Operator A : D (A) ⊆ H → Hbesitzt folgende Eigenschaften:
a) Au = Bu fur ∀ u ∈ D (B) .
b)A ist selbstadjungiert, bijektiv und streng monoton.
(Au,u) ≥ c ‖ u ‖2 fur ∀ u ∈ D (A)
c)A−1 : H → H ist linear, beschrankt und selbstadjungiert.

6.5. Funktionen selbstadjungierter Operatoren 149
6.5. Funktionen selbstadjungierter Operatoren
Im separablen HILBERT-Raum H sei A : D (A) ⊆ H → H ein linearer selbst-adjungierter, streng monotoner Operator, der inH ein abzahlbares vollstandigesONS von Eigenlosungen (λk, uk) k = 1, 2, ... besitzt:
Au =∞∑
k=1
λk (u,uk)uk fur ∀ u ∈ H
D (A) =
u ∈ H
∣∣∣∣∣
∞∑
k=1
|λk (u,uk)|2 <∞
.
Satz 6.7 Gegeben sei die reellwertige Funktion F (λ) : R → R.Der lineare Operator F (A) : D (F (A)) ⊆ H → H :
F (A)u =∞∑
k=1
F (λk) (u,uk)uk ∀u ∈ D (F (A))
D (F (A)) =
u ∈ H
∣∣∣∣∣
∞∑
k=1
|F (λk) (u,uk)|2 <∞
ist selbstadjungiert und es gilt: F (A)uk = F (λk)uk.
Satz 6.8 Die reellwertige Funktion G (λ,t) : R × I → R ( I ⊆ R− Intervall desZeitparameters t ) sei fur jedes λ ∈ R bezuglich t stetig und stetig differenzierbarauf I, dann sind folgende lineare Operatoren definiert:
G (A,t)u =∞∑
k=1
G (λk, t) (u,uk)uk ∀u ∈ D (G (A,t))
Gt (A, t)u =∞∑
k=1
Gt (λk, t) (u,uk)uk ∀u ∈ D (Gt (A,t)) .
Unter den Bedingungen∞∑
k=1
| ck (u,uk) |2<∞ mit ck = supt ∈ I
| G (λk,t) |
∞∑
k=1
| dk (u,uk) |2<∞ mit dk = supt ∈ I
| Gt (λk,t) |
und fur jedes fest gewahlte u ∈ H ist w (t) = G (A,t)u auf I stetig und stetigdifferenzierbar, wobei wt (t) = Gt (A,t)u.


7. Variationsprinzipien
Aus der klassischen Analysis ist die Losung von Extremwertaufgaben bekannt: Gege-ben ist eine reellwertige Funktion f (x), gesucht sind die reellen Zahlen x0, fur die f (x)bezuglich einer Umgebung von x0 extreme Werte (Minima, Maxima) annimmt.Gelost wird diese Aufgabe, indem zunachst die extremwertverdachtigen Punkte aus dernotwendigen Bedingung f ′ (x0) = 0 ermittelt werden. Aus den Werten f ′′ (x0) istdann zu entscheiden ob ein Extremum vorliegt - hinreichende Bedingung.Diese Vorgehensweise laßt sich weitestgehend auf die Losung von Extremwertaufgabenin allgemeinen Funktionenraumen X ubertragen: Gegeben ist ein FunktionalF (u) : X → R, gesucht sind Funktionen u0 ∈ X, fur die F (u0) bezuglich einer Umge-bung von u0 extreme Werte annimmt.Zur Losung dieser Aufgabe wird der Begriff der Ableitung f ′, f ′′, ... einer Funktionf (x) durch Einfuhrung der Variation δF, δ2F, ... und der GATEAUX-Ableitung F ′
eines Funktionals F verallgemeinert. In Extrempunkten u0 von F (u) muß die notwen-dige Bedingung F ′ (u0) = 0 ( EULER-Gleichung ) erfullt sein.Hinreichende Bedingungen fur ein Extremum sind im allgemeinen Fall weitaus kompli-zierter.

152 7. Variationsprinzipien
7.1. Variation, Ableitung, Extremum
F : U (u0) ⊆ X → R sei ein Funktional, dass in einer Umgebung U (u0) eines Punk-tes u0 im linearen normierten Raum X definiert ist.Fur jedes h ∈ X ist ϕ (t) = F (u0 + th) eine reellwertige Funktion des reellen Parame-ters t.
Definition 7.1 Die n-te Variation δnF (u0;h) des Funktionals F im Punkt u0 undin Richtung h ist gleich der n-ten Ableitung von ϕ (t) fur t = 0 :
δnF (u0;h) ≡ ϕ(n) (0) n = 1, 2, ...
δF (u0;h) ≡ ϕ′ (0) heißt erste Variation von F im Punkt u0 und in Richtung h.
Definition 7.2 F besitzt im Punkt u0 eine GATEAUX-Ableitung F ′ (u0), wenndie erste Variation δF (u0;h) fur ∀ h ∈ X existiert und das Funktional
F ′ (u0) (·) : X → R gemaß F ′ (u0) (h) = δF (u0;h) fur ∀ h ∈ X
linear und stetig ist.Die GATEAUX-Ableitung F ′ (u0) heißt FRECHET-Ableitung, wenn gilt:
F (u0 + h)− F (u0) = F ′ (u0) (h)+ ‖ h ‖ e (h)mit lim
h→0e (h) = 0 fur ∀ h ∈ X.
Satz 7.1 (notwendige Bedingung fur ein Extremum)Existiert eine Umgebung V (u0) ⊆ U (u0) und hat F im Punkt u0 ein Extremum(lokales Maximum bzw. Minimum), so gilt:
δF (u0;h) = 0 fur ∀ h ∈ X. (∗)
Bezeichnung fur ein Extremum von F (u) in u0: F (u0) = Extremum!

7.1. Variation, Ableitung, Extremum 153
Definition 7.3 Das Funktional F (u) heißt im Punkt u0 stationar, wenn die Beding-ung (∗) gilt.Bezeichnung: F (u0) = stationar!.
Existiert die GATEAUX-Ableitung F ′ (u0), so ist die Bedingung (∗) aquivalent zurEULER-Gleichung:
F ′ (u0) = 0.
Beispiel 7.1 X = R, F (u) sei eine stetig differenzierbare Funktion
F : (a, b) ⊆ R → R.
1. Variation von F :
δF (u, h) =d
dtF (u+ th)|t=0 =
dF (u)
duh ≡ dF (u)
2. Variation von F :
δ2F (u, h) =d2
dt2F (u+ th)|t=0 =
d2F (u)
du2h2
GATEAUX-Ableitung l gewohnlicher Ableitungd
duF (u) .
FRECHET-Ableitung existiert, wenn F (u) zweimal stetig differenzierbar ist. Ausder TAYLOR-Reihenentwicklung fur F (u) an der Stelle u bis zum zweiten Glied folgtdann
F (u+ h)− F (u) =dF (u)
duh+
d2F (v)
du2h2
2=dF (u)
duh+ e (h)h
mit |e (h)| → 0 bei h→ 0.
EULER-Gleichung:d
duF (u) = 0 entspricht der notwendigen Bedingung fur ein
Extremum von F (u) .
Beispiel 7.2 X = Rn, F(−→u)= F (u1, ..., un) sei eine stetig differenzierbare skalare
FunktionF : M ⊆ Rn → R.
1. Variation von F ( entspricht der Richtungsableitung von F(−→u)im Punkt −→u ∈ M
in Richtung−→h=(h1, ..., hn) :
δF(−→u ,−→h
)
=d
dtF (u1 + th1, ..., un + thn)|t=0
=n∑
i=1
∂F(−→u)
∂uihi ≡ grad
(F(−→u))
· −→h .

154 7. Variationsprinzipien
2. Variation von F :
δ2F(−→u ,−→h
)
=d
dt
n∑
i=1
∂F(−→u)
∂ui
(−→u+t−→h)
hi
∣∣∣∣∣t=0
=n∑
i=1
n∑
j=1
∂2F(−→u)
∂ui∂ujhihj =
(
G(−→u)−→h ,
−→h)
mit der Funktionalmatrix G(−→u)=
∂2F(−→u)
∂ui∂uj
.
GATEAUX-Ableitung: F ′ (−→u)= grad
(F(−→u))
F ′ (−→u) (−→
h)
=(
F ′ (−→u),−→h)
= grad(F(−→u))
· −→h
Damit gilt die Abschatzung
∣∣∣F ′ (−→u
) (−→h)∣∣∣ ≤
∥∥grad
(F(−→u))∥∥
∥∥∥−→h∥∥∥ .
Die GATEAUX-Ableitung im Punkt −→u existiert, wenn F in einer Umgebung von−→u stetig differenzierbar ist.FRECHET-Ableitung: TAYLOR-Entwicklung von F
(−→u):
F(−→u +
−→h)
− F(−→u)
= grad(F(−→u))
· −→h +1
2
(
G(−→v)−→h ,
−→h)
= F ′ (−→u) (−→
h)
+∥∥∥−→h∥∥∥ e(−→h)
mit
∣∣∣e(−→h)∣∣∣ =
1
2∥∥∥−→h∥∥∥
∣∣∣
(
G(−→v)−→h ,
−→h)∣∣∣ ≤ 1
2
∥∥G
(−→v)∥∥
∥∥∥−→h∥∥∥→ 0 fur
∥∥∥−→h∥∥∥→ 0
Die FRECHET-Ableitung im Punkt −→u existiert, wenn F in einer Umgebung von −→uzweimal stetig differenzierbar ist.−→u 0 ist ein kritischer Punkt von F , wenn die EULER-Gleichung
grad(F(−→u 0
))= 0
erfullt ist (notwendige Bedingung fur ein Extremum).

7.1. Variation, Ableitung, Extremum 155
Beispiel 7.3 X = H sei ein HILBERT-Raum und
F (u) =1
2a (u,u)− (b,u)
ein quadratisches Funktional F : H → R mit der symmetrischen beschranktenBilinearform a (·, ·)
|a (u,v)| ≤ d ‖u‖ ‖v‖ fur bel. u,v ∈ H
und dem linearen Funktional (b,u) mit b ∈ H fest gewahlt.Setzen
ϕ (t) = F (u+th) =1
2a (u+ th,u+ th)− (b,u+ th)
=t2
2a (h,h) + t [a (u,h)− (b,h)] + F (u)
1. Variation von F :
δF (u,h) = ϕ′ (0) = a (u,h)− (b,h)
2. Variation von F :δ2F (u,h) = ϕ′′ (0) = a (h,h)
GATEAUX-Ableitung:
F ′ (u) (h) = a (u,h)− (b,h) und
|F ′ (u) (h)| ≤ (d ‖u‖+ ‖b‖) ‖h‖
Existiert ein linearer Operator A : H → H mit
(Au,h) = a (u,h) fur bel. h ∈H,
so ist die GATEAUX-Ableitung F ′ (u) = Au− b.Die FRECHET-Ableitung existiert, denn es gilt
F (u+ h)− F (u) = a (u,h)− (b,h) +1
2a (h,h)
= F ′ (u) (h) + ‖h‖ e (h)
mit
|e (h)| = 1
2 ‖h‖ |a (h,h)| ≤ 1
2d ‖h‖ → 0 fur ‖h‖ → 0.
u0 ∈ H ist ein kritischer Punkt von F , wenn die EULER-Gleichung
Au0−b = 0
erfullt ist.

156 7. Variationsprinzipien
7.2. Klassische Variationsrechnung
7.2.1. Variationsrechnung mit einfachen Funktionalen
Gegeben sei die LAGRANGE-Funktion
L : [a, b]× R2 → R mit L = L (x,u (x) ,u′ (x))
fur ∀ u (x) ∈ X = C1 (a, b) .
L sei bezuglich aller Argumente stetig differenzierbar.Mit der LAGRANGE-Funktion wird folgendes Funktional gebildet:
F : X → R mit F = F (u) =
b∫
a
L (x,u (x) ,u′ (x)) dx
klassischesVariationsproblem:
Gesucht ist u (x) ∈ C1 (a, b) mitF (u) = Extremum!
wobei u (a) = α und u (b) = β
Problem derstationaren Wirkung:
Gesucht ist u (x) ∈ C1 (a, b) mitF (u) = stationar!
wobei u (a) = α und u (b) = β
Satz 7.2 Jede Losung u0 (x) des klassischen Variationsproblems bzw. des Problemsder stationaren Wirkung ist auch eine Losung der EULER-Gleichung
d
dx(Lu′ (x,u,u′)) = Lu (x,u,u
′) (EG)1
bzw. in der voll ausdifferenzierten Form:
Lu − Lu′x − Luu′u′ − Lu′u′u′′ = 0 (EG)2 .

7.2. Klassische Variationsrechnung 157
Beweis. Bildet man die erste Variation von F (u) mit h ∈ C1 (a, b) undh (a) = h (b) = 0 (t ∈ R) :
ϕ (t) = F (u0+th) =
b∫
a
L (x,u0 (x) + th (x) ,u′0 (x) + th′ (x)) dx,
so ist
ϕ′ (t)|t=0 =
b∫
a
[Lu′ (x,u0,u′0)h
′ (x) + Lu (x,u0,u′0)h (x)] dx.
Wegen h (a) = h (b) = 0 erhalt man nach partieller Integration
δF (u0,h) = ϕ′ (t)|t=0
=
b∫
a
[
− d
dxLu′ (x,u0,u
′0) + Lu (x,u0,u
′0)
]
h (x) dx.
Aus der Bedingung δF (u0,h) = 0 fur alle zulassigen h ∈ R folgt fur einen kritischen(bzw. stationaren) Punkt die EULERsche Gleichung (EG)1 .
Bemerkung 7.1 Die EULER-Gleichung ist eine i.A. nichtlineare gewohnliche Dif-ferentialgleichung 2. Ordnung fur die Funktion u (x). Jede Losung dieser Dgl.ist eine ”extremwertverdachtige” Funktion des klasischen Variationsproblems bzw. einestationare Losung des Problems der stationaren Wirkung.

158 7. Variationsprinzipien
Beispiel 7.4 Gesucht ist der kurzeste Weg zwischen den Punkten P0 (x0, y0) und P1 (x1, y1)(mit x0 6= x1) in der Ebene. Mit u = u (x) wird die Funktion der Verbindungskurve zwi-schen den Punkten P0 und P1 bezeichnet. Fur die Lange F (u) dieser Verbindungskurveerhalt man:
F (u) =
x1∫
x0
√
1 + (u′ (x))2dx
damit ist die LAGRANGE-Funktion
L = L (u′) =
√
1 + (u′ (x))2
und es entsteht das Variationsproblem
Gesucht ist u (x) ∈ C1 (x0, x1) mitF (u) → min
u (x0) = y0 und u (x1) = y1
Mit
Lu = 0 und Lu′ =u′
√
1 + (u′ (x))2
erhalt man die EULER-Gleichung
d
dx
u′
√
1 + (u′ (x))2
= 0
Dann ist
u′√
1 + (u′ (x))2= c und weiter (u′)
2 (1− c2
)= c2
⇒ u′ (x) = ±√
c2
1− c2≡ a
Damit erhalt man wie zu erwarten war als kurzeste Verbindungskurve die Gerade
u (x) = ax+ b.
Wegen
u (x0) = ax0 + b = y0u (x1) = ax1 + b = y1
⇒(x0 1x1 1
)(ab
)
=
(y0y1
)
⇒ a =y0 − y1x0 − x1
b =x0y1 − x1y0x0 − x1

7.2. Klassische Variationsrechnung 159
Sonderfalle fur die LAGRANGEsche Fkt. L = L (x,u,u′)
1. L ist linear in u′, d.h. L (x,u,u′) = P (x,u) +Q (x,u)u′. Dann ist
Lu′ = Q (x,u) und damitd
dxLu′ = Qx +Quu
′
Lu = Pu +Quu′
und ausd
dxLu′ = Lu folgt die EULERsche Gleichung Qx = Pu.
Dies ist aber genau die notwendige und hinreichende Bedingung zur Losung derexakten Differentialgleichung
P (x,u) dx+Q (x,u) du = 0
2. Es sei L = L (x,u′) :Man erhalt sofort die EULERsche Gleichung
d
dxLu′ (x,u′) = 0 und damit Lu′ (x,u′) = const = c
Lost man Lu′ (x,u′) = c nach u′ = u′ (x) auf, so erhalt man u (x) durch einfacheIntegration
u (x) =
∫
u′ (x) dx+ C.
3. Es sei L = L (x,u) :Die EULER-Gleichung hat dann die Form
Lu (x,u) = 0
und ist damit schon die implizite Darstellung der Losung u (x) .
4. Es sei L = L (u,u′) :Die EULER-Gleichung hat die Form:
Lu − Lu′uu′ − Lu′u′u′′ =
d
dx(L− u′Lu′) = 0,
denn es ist
d
dx(L− u′Lu′) = Luu
′ + Lu′u′′ − u′′Lu′ − u′ (Lu′uu′ + Lu′u′u′′)
= u′ (Lu − Lu′uu′ − Lu′u′u′′) = 0 .
Damit ist L− u′Lu′ = c = const. (langs jeder Losung u = u (x)). Die Auflosungdieser Beziehung nach u′ liefert eine Differentialgleichung 1. Ordnungu′ (x) = Φ (u (x) , c) .

160 7. Variationsprinzipien
Beispiel 7.5 ( Brachistochrone - Problem )
In der Ebene ist die Bahnkurve von P0 (0, 0) nach P1 (a, b) (mit a 6= 0, b < 0) gesucht,langs der ein Massenpunkt m reibungsfrei unter der Einwirkung der Schwerkraft g inminimaler Zeit gleitet.
u = u (x) Funktion der Bahnkurvevon P0 nach P1
s = s (x) Parameter der Bogenlangeder Kurve von P0 nach P1
mit s (0) = 0 und
ds =√
1 + (u′)2dx
P
P
u ( x )
x
u
m
1
0
Aus der Energieerhaltung 12mv2 −mgu = 0 folgt fur die Geschwindigkeit v des Masse-
punktes
v =ds
dt=√
2gu
Damit erhalt man
F (u) =
T∫
0
dt =
L∫
0
1
vds =
a∫
0
√
1 + (u′)2
2gudx
und
L = L (u, u′) =
√
1 + (u′)2
2gu= γ
√
1 + (u′)2
umit γ =
1√2g
Variationsproblem:
Gesucht ist u (x) ∈ C1 (0, a) mitF (u) → min
u (0) = 0 und u (a) = b
Wegen L = L (u, u′) liegt der Sonderfall 4 vor und folglich erhalt man die EULER-Gleichung
L− u′Lu′ = γ
√
1 + (u′)2
u− (u′)2√
u(1 + (u′)2
)
= c
Mit dem Zusammenhang
√
1 + (u′)2
u− (u′)2√
u(1 + (u′)2
)=
1√
u(1 + (u′)2
)

7.2. Klassische Variationsrechnung 161
entsteht die Differentialgleichung
u(
1 + (u′)2)
=1
c2mit c =
c
γ. (1)
Losung der Dgl. (1) :
Wegen 1uc2
= 1 + (u′)2 = 1 folgt 0 ≤ uc2 ≤ 1Da u (x) = const. als Losung nicht in Frage kommt, ist u′ (x) 6= 0. Damit folgt weiter,daß u (x) eine monotone Funktion sein muss. Damit ist auch die Substitution
c2u = sin2(ϕ
2
)
=1
2(1− cosϕ)
moglich.
u (ϕ) =1
2c2(1− cosϕ) (2)
Setzt man (2) in (1) ein, so ist
(u′)2=
1
c2u− 1 =
1− c2u2
c2u=
cos2(ϕ2
)
sin2(ϕ2
) = cot2(ϕ
2
)
und damit u′ = cot(ϕ
2
)
Aus cot(ϕ
2
)
=du
dx=du
dϕ
dϕ
dxfolgt
dx
dϕ=
1
cot(ϕ2
)du
dϕund wegen
du
dϕ=
2
c21
2sin(ϕ
2
)
cos(ϕ
2
)
weiterdx
dϕ=
1
c2sin(ϕ2
)cos(ϕ2
)
cot(ϕ2
) =1
c2sin2
(ϕ
2
)
=1
2c2(1− cosϕ) .
Damit ist
x (ϕ) =1
2c2(ϕ− sinϕ) + c1 (3)
Randbedingungen: Durchlauft ϕ den Parameterbereich 0 ≤ ϕ ≤ ϕ1, so ist
x (0) = c1!= 0 x (ϕ1) =
12c2
(ϕ1 − sinϕ1)!= a (4)
u (0) = 0 u (ϕ1) =12c2
(1− cosϕ1)!= b
⇒ 12c2
= b1−cosϕ1
Fur (4) erhalt man dannϕ1 − sinϕ1
1− cosϕ1
=a
b. Dies ist eine Gleichung zur Berechnung von
ϕ1. Eine Losung kann mittels des NEWTON-Verfahrens berechnet werden.
Losung der RWA:
x (ϕ) =b (ϕ− sinϕ)
1− cosϕ1
u (ϕ) =b (1− cosϕ)
1− cosϕ1
Die Losungsfunktion ist somit eine Zykloide.

162 7. Variationsprinzipien
7.2.2. Variationsrechnung mit allgemeinen Funktionalen
Gegeben sei die LAGRANGE-Funktion: L : [a, b]×Rn+1 → R mit
L = L(x,u (x) ,u′ (x) , ...,u(n) (x)
)
fur ∀ u (x) ∈ X = Cn (a, b) .
L sei hinreichend oft stetig differenzierbar bezuglich aller Argumente.Mit der LAGRANGE-Funktion wird folgendes Funktional gebildet:
F = F (u) =
b∫
a
L(x,u (x) ,u′ (x) , ...,u(n) (x)
)dx
Problem derstationaren Wirkung:
Gesucht ist u (x) ∈ Cn (a, b) mitF (u) = stationar!
mit u(k) (a) = αk und u(k) (b) = βkαk ∈ R, βk ∈ R k = 0, 1, ..., n− 1
Satz 7.3 Jede Losung u0 (x) des Problems der stationaren Wirkung ist auch eineLosung der EULER-Gleichung
Lu −d
dxLu′ +
d2
dx2Lu′′ ∓ ...+ (−1)n
dn
dxnLu(n) = 0 (EG)
Beweis.Bildet man die erste Variation von F (u) mit h ∈ Cn (a, b),h(k) (a) = h(k) (b) = 0 k = 0, 1, ..., n− 1 und t ∈ R, so ist:
ϕ (t) = F (u0 + th) =
b∫
a
L(
x,u0 + th,u′0 + th′, ...,u
(n)0 + th(n)
)
dx
ϕ′ (t)|t=0 =
b∫
a
[Luh+ Lu′h′ + ...+ Lu(n)h(n)
]dx

7.2. Klassische Variationsrechnung 163
Fur k = 1, ..., n und mit den jeweils k partiellen Integrationen
b∫
a
(Lu(k))h(k)dx
=[(Lu(k))h(k−1)
]b
a−
b∫
a
(d
dxLu(k)
)
h(k−1)dx
=[(Lu(k))h(k−1)
]b
a−[(
d
dxLu(k)
)
h(k−2)
]b
a
+
b∫
a
(d2
dx2Lu(k)
)
h(k−2)dx
= ...
=
[k−1∑
i=0
(−1)i(di
dxiLu(k)
)
h(k−1−i)
]b
a
+ (−1)kb∫
a
(dk
dxkLu(k)
)
h dx
erhalt man die EULER-Gleichung
ϕ′ (t)|t=0 =
b∫
a
n∑
k=0
(−1)k(dk
dxkLu(k)
)
h dx!= 0.
Dabei wurde[k−1∑
i=0
(−1)i(di
dxiLu(k)
)
h(k−1−i)
]b
a
= 0
berucksichtigt ⇒ EULER-Gleichung (EG).

164 7. Variationsprinzipien
Beispiel 7.6 ( Balkenbiegung):
Gesucht: Auslenkung y (x)eines bei x = 0 und x = aeingespannten Balkens mitder Streckenlast q (x) undder Biegesteifigkeit EI (x)E − Elastizitatsmodul z
y
x
y
q ( x )
x - A c h s e
0 ( x )x = 0 x = a
I (x) =∫
Q(x)
y2dy − Tragheitsmoment der Querschnittsflache Q (x) .
Definition der Formanderungsarbeit:
W (y) =
a∫
0
[1
2EI (x) (y′′ (x))
2+ y (x) q (x)
]
dx
mit den Randbedingungen:
y (0) = y′ (0) = y (a) = y′ (a) = 0
Die Auslenkung y (x) erfullt dann die Bedingung
W (y) → min .
Damit ist
L (x, y, y′, y′′) =1
2EI (x) (y′′ (x))
2+ y (x) q (x)
und folglich
Ly = q (x) ;
Ly′ = 0 und folglichd
dxLy′ = 0
Ly′′ = EI (x) y′′ (x) und folglichd2
dx2Ly′′ = (EI (x) y′′ (x))
′′
Als EULERsche Gleichung entsteht dann die Differentialgleichung der Balken-biegung
(EI (x) y′′ (x))′′+ q (x) = 0.

7.2. Klassische Variationsrechnung 165
7.2.3. Das HAMILTON Prinzip
Der Zustand eines mechanischen Systems werde durch n unabhangige Funktionen( n Freiheitsgrade ) xi = xi (t) (i = 1, ..., n) beschrieben.−→x (t) = (x1 (t) , ..., xn (t))
T
Die Differenz aus kinetischer Energie T und potentieller Energie U heißtLAGRANGE-Funktion
L
(
t,−→x (t) ,·−→x (t)
)
= T
(
t,·−→x (t)
)
− U(t,−→x (t)
)
wobei·−→x (t) =
d−→xdt
= (x1 (t) , ..., xn (t))T
und
W(−→x)
=
Te∫
t0
L
(
t,−→x (t) ,·−→x (t)
)
dt
(t0 − Anfangszeit, Te − Endzeit des mechanischen Vorgangs)
wird Wirkungsintegral genannt.
HAMILTON-Prinzip (Prinzip der kleinsten Wirkung):In konservativen Systemen (Systemen mit Potentialkraften) lauft der tatsachliche me-chanische Vorgang mit extremaler Wirkung ab:
W(−→x)= Extremum
Aus der notwendigen Bedingung fur ein Extremum von W folgen mit den EULER-Gleichungen dieBewegungsgleichungen von LAGRANGE:
∂L
∂xi− d
dt
∂L
∂xi= 0 i = 1, ..., n.
Dies ist ein System von n gewohnlichen Differentialgleichungen zur Berech-nung der Bahnkurven x1 (t) , ..., xn (t). Zur eindeutigen Losbarkeit sind Anfangsbe-dingungen in Form von Anfangsorten −→x (t0) =
−→x 0 und Anfangsgeschwindigkei-
ten·−→x (t0) =
−→v 0 erforderlich.

166 7. Variationsprinzipien
Beispiel 7.7 (Pendel mit kleiner Auslenkung):
T = m2s2 = m
2(lϕ)2 mit s = lϕ
U = −s∫
0
Fudu = mgϕ∫
0
sinψldψ
≈ mglϕ∫
0
ψdψ = 12mglϕ2
mit du = ldψ und sinψ ≈ ψbei kleinen Auslenkungen
d u
s m
m g
ul
F = - m g s i n ( )s jj
j
Dann istL (t, ϕ, ϕ) =
m
2
(l2ϕ2 − glϕ2
)
und damit folgt die Bewegungsgleichung
∂L
∂ϕ− d
dt
∂L
∂ϕ= −mglϕ−ml2ϕ = 0
mit der allgemeinen Losung
ϕ (t) = c1 sin (ωt) + c2 cos (ωt) und der Kreisfrequenz ω =
√g
l.
Beispiel 7.8 ( Feder-Masse-System ):
x1 (t) , x2 (t) - Auslenkungender Massen m = m1 = m2
aus der Ruhelagek - Federsteifigkeit
k k km m
x x
1 2
1 2
T =m
2
(x21 + x22
)U =
1
2kx21 +
1
2k (x1 − x2)
2 +1
2kx22
L =m
2
(x21 + x22
)− k
(x21 − x1x2 + x22
)
∂L
∂x1− d
dt
∂L
∂x1= −k (2x1 − x2)−mx1 = 0
∂L
∂x2− d
dt
∂L
∂x2= −k (2x2 − x1)−mx2 = 0
Damit entsteht das folgende System von Bewegungsgleichungen
mx1 + k (2x1 − x2) = 0 mx2 + k (2x2 − x1) = 0.

7.2. Klassische Variationsrechnung 167
7.2.4. Variationsrechnung mit Funktionen mehrerer Variabler
Ω sei eine offene beschrankte Menge des Rn; −→x = (x1, ..., xn) ∈ Rn.Gegeben sind die Funktionen −→g
(−→x)=(g1(−→x), ..., gm
(−→x))
mit gi(−→x)∈ C1
(Ω)
und die LAGRANGE-Funktion
L = L(−→x ,−→u
(−→x), ∂1
−→u(−→x), ..., ∂
n
−→u(−→x))
fur ∀ −→u(−→x)
=(u1(−→x), ..., um
(−→x))
ui(−→x)∈ C1
(Ω)
mit ∂j−→u(−→x)
=(∂ju1
(−→x), ..., ∂jum
(−→x))
wobei ∂jui(−→x)
=∂ui(−→x)
∂xjj = 1, ..., n i = 1, ...,m
L sei bezuglich aller Argumente stetig differenzierbar.Mit der Funktion L wird folgendes Funktional gebildet:
F(−→u)=
∫
Ω
L(−→x ,−→u
(−→x), ∂1
−→u(−→x), ..., ∂
n
−→u(−→x))
dΩ
Problem derstationaren Wirkung:
Gesucht ist −→u(−→x)mit
F(−→u)= stationar!
wobei −→u = −→g auf ∂Ω = Γ
Satz 7.4 Jede Losung −→u 0
(−→x)
=(u01(−→x), ..., u0m
(−→x))
des Problems der stati-onaren Wirkung ist auch eine Losung der EULER-Gleichungen
n∑
j=1
d
dxj
[L∂jui
(−→s(−→x))]
= Lui
(−→s(−→x))
i = 1, ...m (EG)
mit −→s(−→x)
=(−→x ,−→u 0
(−→x), ∂1
−→u 0
(−→x), ..., ∂
n
−→u 0
(−→x))
.
Dabei bezeichnen L∂juiund Lui
die partiellen Ableitungen von L bezuglich der Argu-mente ∂jui bzw. ui.

168 7. Variationsprinzipien
Beweis.Bildet man die erste Variation von F
(−→u)mit
−→h(−→x)=(h1(−→x), ..., hm
(−→x))
und−→h(−→x)=
−→0 fur bel. −→x ∈ Γ = ∂Ω, so ist
ϕ (t) = F(−→u 0 + t
−→h)
=
∫
Ω
L(−→x ,−→u 0 + t
−→h ,∂1
−→u 0 + t∂1−→h , ...,∂n
−→u 0 + t∂n−→h)
dΩ
ϕ′ (t)|t=0 =
∫
Ω
m∑
i=1
[
Luihi +
n∑
j=1
(L∂jui
)∂jhi
]
dΩ
Mittels partieller Integration erhalt man (j = 1, ..., n; i = 1, ...,m)
∫
Ω
(L∂jui
)∂jhi dΩ =
∫
Γ
(L∂jui
)hinj ‖dΓ‖ −
∫
Ω
d
dxj
(L∂jui
)hi dΩ
und damit die EULERsche Gleichung
ϕ′ (t)|t=0 =m∑
i=1
∫
Ω
[
Lui−
n∑
j=1
d
dxj
(L∂jui
)
]
hi dΩ!= 0
Dabei wurde berucksichtigt, dass gilt
∫
Γ
(L∂jui
)hinj ‖dΓ‖ = 0
( nj ist die j− te Komponente des Randnormalenvektors−→n ).
Bemerkung 7.2 Die EULER-Gleichungen sind ein System aus m partiellen Diffe-rentialgleichungen 2. Ordnung zur Berechnung der m Funktionen u1
(−→x), ..., um
(−→x).

7.2. Klassische Variationsrechnung 169
Beispiel 7.9 ( Deformation eines scheibenformigen Korpers )
( ebener Verzerrungszustand der linearen Elastizitat )
Gegeben: eingepragte Kraft−→f(−→x)=(f1(−→x), f2
(−→x))T
−→x = (x1, x2)T
H = 1
x
x
1
2
W
G = d W
Parameter der Scheibe: Scheibendicke: H = 1Elastizitatsmodul: EQuerkontraktion: ν
Randbedingung: feste Einspannung am Rand
−→g(−→x)=
−→0 fur −→x ∈ Γ = ∂Ω
Gesucht ist der Verschiebungszustand −→u(−→x)der Scheibe
−→u(−→x)=(u1(−→x), u2
(−→x))T −→x ∈ Ω
Die LAGRANGE-Funktion entspricht der Dichtefunktion der in Ω gespeicher-ten gesamten potentiellen Energie:
L(−→x ,−→u
(−→x), ∂1
−→u(−→x), ∂2
−→u(−→x))
= L (x1, x2, u1, u2, u1,1, u1,2, u2,1, u2,2)
=1
2
(u1,1 u2,2 u1,2 + u2,1
)
D11 D12 0D12 D11 00 0 G
u1,1u2,2
u1,2 + u2,1
−(u1 u2
)(f1f2
)
= ( Verzerrungsenergiedichte) −(
Dichte der Arbeitder eingepragten Krafte
)
=1
2
[D11
(u21,1 + u22,2
)+ 2D12u1,1u2,2 +G (u1,2 + u2,1)
2]− (u1f1 + u2f2)
Dabei sind u1,1, u2,2 und u1,2+u2,1 die Verzerrungen. Bei isotropem Materialverhaltenerhalt man fur die Komponenten der HOOKEschen Matrix
D11 =E (1− ν)
(1 + ν) (1− 2ν); D12 =
νE
(1 + ν) (1− 2ν); G =
E
2 (1 + ν).
Die Gesamte in der Scheibe gespeicherte Energie wird durch
F(−→u)=
∫
Ω
L(−→x ,−→u
(−→x), ∂1
−→u(−→x), ∂2
−→u(−→x))
dΩ

170 7. Variationsprinzipien
beschrieben. Die Grundlage zur Berechnung von −→u(−→x)bildet das
Prinzip der minimalen potentiellen Energie:Unter allen moglichen Verschiebungszustanden mit −→u
(−→x)=
−→0 auf Γ minimiert der
tatsachliche Gleichgewichtszustand die potentielle Energie F(−→u).
Folglich entsteht das Minimumproblem:
Gesucht ist −→u(−→x)mit
F(−→u)→ min .
wobei −→u =−→0 auf Γ
Mit den Ableitungen
Lui= −fi i = 1, 2
L∂1u1 = Lu1,1 = D11u1,1 +D12u2,2 folglichd
dx1Lu1,1 = D11
∂2u1∂x21
+D12∂2u2∂x1∂x2
L∂2u2 = Lu2,2 = D12u1,1 +D11u2,2 folglichd
dx2Lu2,2 = D12
∂2u1∂x1∂x2
+D11∂2u2∂x22
L∂1u2 = Lu2,1 = G (u1,2 + u2,1) folglichd
dx2Lu2,1 = G
(∂2u1∂x22
+∂2u2∂x1∂x2
)
L∂2u1 = Lu1,2 = G (u1,2 + u2,1) folglichd
dx1Lu1,2 = G
(∂2u1∂x1∂x2
+∂2u2∂x21
)
entstehen die EULER-Gleichungen
d
dx1Lu1,1 +
d
dx2Lu2,1 − Lu1
= D11∂2u1∂x21
+D12∂2u2∂x1∂x2
+G
(∂2u1∂x22
+∂2u2∂x1∂x2
)
+ f1 = 0
d
dx1Lu1,2 +
d
dx2Lu2,2 − Lu2
= D11∂2u2∂x22
+D12∂2u1∂x1∂x2
+G
(∂2u1∂x1∂x2
+∂2u2∂x21
)
+ f2 = 0.

7.3. Numerische Losung von Variationsaufgaben 171
7.3. Numerische Losung von Variationsaufgaben
Die klassische Variationsaufgabe aus Abschnitt 7.2. besitzt i.A. keine Losung. DieUrsache dafur ist, dass die stetige Differenzierbarkeit der Losungsfunktion nichterfullt werden kann. Ein Ausweg bildet der Ubergang zu den verallgemeinertenLosungen in SOBOLEW-Raumen:
C1 (Ω) → H12 (Ω) , ..., Cn (Ω) → Hn
2 (Ω) .
Als Verallgemeinerung des Problems aus Abschnitt 7.2.4. erhalt man dasProblem der stationaren Wirkung:
Gesucht ist −→u(−→x)∈ H1
2 (Ω) mitF(−→u)= stationar!
wobei −→u−−→g ∈ H1
2 (∂Ω)
(P1)
Existiert die erste Variation δF(−→u ,−→h
)
fur F(−→u), so ist (P1) aquivalent zum
Problem:Gesucht ist −→u
(−→x)∈ H1
2 (Ω) mit
δF(−→u ,−→h
)
= 0 fur bel.−→h∈ H
1
2 (Ω) ,
wobei −→u−−→g ∈ H1
2 (∂Ω)
(P2)
Die numerische Losung von Variationsaufgaben wird auf der Grundlage dieser beidenProblemstellungen vorgenommen.
7.3.1. Methode von RITZ
Bekannt sei eine Funktion −→g 0
(−→x)∈ H1
2 (Ω) mit
−→g(−→x)−−→g 0
(−→x)∈ H
1
2 (∂Ω) .
Weiterhin seiUm ⊂ H1
2 (Ω) einm− dimensionaler Unterraummit der Basis
−→e 1m
(−→x), ...,−→e mm
(−→x).
Dann werden Naherungslosungen−→u m
(−→x)fur (P1) in der Form
−→u m
(−→x)= −→g 0
(−→x)+
m∑
i=1
αim−→e im
(−→x)
angesetzt und man erhalt dasm− dimensionale Problem der stationaren Wirkung zu (P1)
Gesucht ist −→u m
(−→x)mit
F(−→u m
)= stationar!
(P1)m

172 7. Variationsprinzipien
mit F(−→um
)= F
(
−→g 0 +m∑
i=1
αim−→e im
(−→x))
.
Die notwendige Bedingung fur einen stationarenWert von (P1)m lautet:
∂F
∂αim
= 0 i = 1, ...,m (3)
Bemerkung 7.3 (3) ist i.A. ein nichtlineares algebraisches System von m Gleichun-gen zur Berechnung von α1m, ..., αmm. Im nichtlinearen Fall kann das NEWTON-Verfahren zur Losung Verwendung finden.
Bemerkung 7.4 Konvergenzuntersuchungen∥∥−→um −−→u
∥∥ → 0 (m → ∞) erfordern
tiefere Einblicke in die Struktur der Unterraume Um und zur eindeutigen Losbarkeitvon (P1) .
Beispiel 7.10
Gesucht ist u (x) ∈ H12 (−1, 1) mit
F (u) =1∫
−1
[12(u′ (x))2 + 3u (x) sin (πx)
]dx = stationar,
wobei u (−1) = 0 und u (1) = 2
(P1)
Nimmt man g0 (x) = 1 + x, dann ist g0 (−1) = 0 und g0 (1) = 2.
Wahlen den Unterraum U2 ⊂ H1
2 (−1, 1) mit der Basis −→e 1 = 1− x2 und−→e 2 = x (1− x2) .Die Naherungslosung u2 (x) kann dann wie folgt angesetzt werden:
u2 (x) = 1 + x+ α1
(1− x2
)+ α2x
(1− x2
)
Setzt man weiter u2 (x) in F (u) ein und fuhrt die Integration aus, so entsteht
F (u2) = 1 +6
π+
4
3α21 +
4
5α22 +
36
π3α2
Die Koeffizienten α1, α2 sind aus folgendem linearen Gleichungssystem berechenbar
∂F
∂α1
=8
3α1
!= 0 α1 = 0
⇒∂F
∂α2
=8
5α2 +
36
π3
!= 0 α2 = − 45
2π3
Damit entsteht die Naherungslosung
u2 (x) = 1 + x− 45
2π3x(1− x2
)

7.3. Numerische Losung von Variationsaufgaben 173
Mit L = L (x, u, u′) = 12(u′ (x))2 + 3u (x) sin (πx) erhalt man die EULER-Gleichung
zu (P1) :∂L
∂u− d
dx
∂L
∂u′= 3 sin (πx)− u′′
!= 0
Damit entsteht die RWA:u′′ (x) = 3 sin (πx)
u (−1) = 0, u (1) = 2
mit der exakten Losung( Losung von (P1) ):
u (x) = 1 + x− 3
π2sin (πx)
u
x- 1 1
1
2u ( x )
u ( x )2
7.3.2. Methode von GALERKIN
Um ⊂ H1
2 (Ω) sei einm− dimensionaler Unterraummit der Basis
−→e 1m
(−→x), ...,−→e mm
(−→x).
Eine Naherungslosung−→u m
(−→x)von (P2) wird in der Form
−→um
(−→x)
= −→g 0
(−→x)+
m∑
i=1
αim−→e im
(−→x)
mit −→g(−→x)−−→g 0
(−→x)
∈ H1
2 (Ω)
angesetzt.
Außerdem sei Vm ⊂ H1
2 (Ω) ebenfalls ein m− dimensionaler Unterraum mit der Ba-sis
−→v 1m
(−→x), ...,−→v mm
(−→x).
Dieser Raum heißt auch Raum der Testfunktionen. Ein beliebiges Element aus Vm
hat die Form−→hm
(−→x)=
m∑
j=1
βjm−→v jm
(−→x).
Wird die Problemstellung (P2) auf die Unterraume Um und Vm eingeschrankt, soentsteht
Gesucht ist −→u m
(−→x)mit
δF(−→um,
−→h m
)
= 0 fur bel.−→hm∈ Vm
(P2)m
Dabei gilt
δF(−→u m,
−→hm
)
= 0 fur bel.−→hm∈ Vm ⇔
δF(−→u m,β1m
−→v 1m+...+βmm−→v mm
)= 0 fur bel. (β1m, ..., βmm)
T ∈ Rm

174 7. Variationsprinzipien
Ist δF(−→u ,−→h
)
linear in−→h , so gilt weiter
δF(−→um,
−→hm
)
= 0 fur bel.−→hm∈ Vm ⇔
δF(−→u m,
−→v jm
)= 0 fur bel. j = 1, ...,m
Unter diesen Bedingungen ist (P2)m aquivalent zu
Gesucht ist (α1m, ..., αmm)T ∈ Rm mit
δF
(
−→g 0 +m∑
i=1
αim−→e im,
−→v jm
)
= 0 j = 1, ...,m(P2)m
Dies ist i.A. ein nichtlineares algebraisches System von m Gleichungen zur Berechnungvon α1m, ..., αmm.
Beispiel 7.11 ( gleiches Beispiel wie in Abschn. 7.3.1. )
Fur
F (u) =
1∫
−1
[1
2(u′ (x))
2+ 3u (x) sin (πx)
]
dx
und mit
ϕ (t) = F (u+ th) =
1∫
−1
[1
2(u′ + th′)
2+ 3 (u+ th) sin (πx)
]
dx
fur bel. h ∈ H1
2 (−1, 1)
ist
δF (u, h) = ϕ′ (t)|t=0 =
1∫
−1
[u′ (x)h′ (x) + 3 sin (πx)h (x)] dx.
Da δF (u, h) linear in h, folgt das Problem
Gesucht ist u (x) ∈ H12 (−1, 1) mit
1∫
−1
[u′ (x)h′ (x) + 3 sin (πx)h (x)] dx = 0 fur bel. h ∈ H1
2 (−1, 1)
wobei u (−1) = 0; u (1) = 2
(P2)
Wir definieren den Raum U2 = span(−→e 1,
−→e 2
)⊂ H
1
2 (−1, 1) mit−→e 1 (x) = 1− x2; −→e 2 (x) = x (1− x2) . Ansatz fur die Naherungslosung u2 (x) :
u2 (x) = g0 (x) + α1−→e 1 (x) + α2
−→e 2 (x) mit g0 (x) = 1 + x.

7.3. Numerische Losung von Variationsaufgaben 175
Weiter wird V2 = U2 gewahlt und −→v 1 =−→e 1;
−→v 2 =−→e 2.
Damit wird das Problem (P2) auf die Losung der beiden Gleichungen
1∫
−1
[(1− 2xα1 +
(1− 3x2
)α2
)(−2x) + 3 sin (πx)
(1− x2
)]dx = 0
1∫
−1
[(1− 2xα1 +
(1− 3x2
)α2
) (1− 3x2
)+ 3 sin (πx) x
(1− x2
)]dx = 0
zuruckgefuhrt. Damit erhalt man
8
3α1 = 0
8
5α2 = −36
π3
⇒α1 = 0
α2 = − 45
2π3
und schließlich die Losung
u2 (x) = 1 + x− 45
2π3x(1− x2
).
Diese Naherungslosung ist identisch mit jener im Falle des Verfahrens von RITZ.

176 7. Variationsprinzipien
7.4. Existenz und Eindeutigkeit der Losung von
Variationsproblemen
Definition 7.4 Eine Menge M im HILBERT-Raum H heißt genau dann konvex,wenn fur ∀ u,v ∈ M und ∀α ∈ (0, 1) gilt: αu+ (1− α)v ∈ M.
Definition 7.5 Die Folge un aus dem HILBERT-Raum H heißt schwach kon-vergent gegen ein u ∈ H, wenn gilt:
(un,v) → (u,v) fur ∀ v ∈ H.
Bezeichnung: un u fur n→ ∞.
Definition 7.6 F : M ⊆ H → R sei ein Funktional auf einer Teilmenge M desHILBERT-Raumes H.1. F heißt schwach Folgen-stetig, wenn fur jede schwach konvergente Folge
un⊂ M ; u ∈ M und un u gilt: F (u) ≤ limn→∞
F (un) .
2. F heißt schwach koerciv, wenn gilt:
F (u) → +∞ fur ‖ u ‖→ ∞ mit u ∈ M.
3. F heißt streng konvex, wenn die Menge M konvex ist und gilt:
F (αu+ (1− α)v) < αF (u) + (1− α)F (v)
fur ∀α ∈ (0, 1) und ∀u,v ∈ M mit u 6= v .
Satz 7.5 Das Funktional F : M ⊆ H → R auf der konvexen Teilmenge M desreellen HILBERT-Raumes H habe folgende Eigenschaften:a) F sei schwach Folgen-stetig.

7.4. Existenz und Eindeutigkeit der Losung von Variationsproblemen 177
b) Ist die Menge M unbeschrankt, so sei F schwach koerciv.Dann hat das Minimumproblem
F (u) → min ∀ u ∈ M
eine Losung.Ist außerdem F streng konvex, so existiert eine eindeutig bestimmte Losungu0 ∈ M.


A. Anhang
A.1. Konvexe Mengen und konvexe Funktionen
Definition A.1 Die Menge A eines linearen Raumes heißt konvex, wenn
αx+ (1− α)y ∈ A fur bel. x,y ∈ A ; α ∈ (0, 1)
Die Funktion f : A → R heißt konvex, wenn A eine konvexe Menge ist und
f (αx+ (1− α)y) ≤ αf (x) + (1− α) f (y) fur bel. x,y ∈ A; α ∈ (0, 1)
xy
a x + ( 1 - a ) y
x y
f ( t ) g ( t )
t
konvexe Mengen konvexe Funktion
Bemerkung A.1 A ist konvex, wenn die Verbindungsstrecke zwischen beliebigen Punk-ten x,y ∈ A ganz in A verlauft (siehe Abbildung).
Bemerkung A.2 Eine reelle Funktion f : [a, b] → R ist konvex, wenn fur jede Gerade
g (t) = f (x) +f (y)− f (x)
y − x(t− x) mit a ≤ x < y ≤ b
gilt f (t) ≤ g (t) fur alle t ∈ [x,y] (d.h. uber dem Intervall [x,y] verlauft die Gerade goberhalb des Grafen der Funktion f).
Beispiel A.1 U sei ein normierter Raum und x0 ∈ U. Dann ist jede Kugel
B = x ∈ U | ‖x− x0‖ ≤ r r > 0
eine konvexe Menge.

180 A. Anhang
Beweis. Fur bel. x,y ∈ B ist
‖αx+(1− α)y − x0‖ = ‖α (x− x0)+ (1− α) (y − x0)‖≤ α ‖x− x0‖+(1− α) ‖y − x0‖ ≤ r.
Damit ist αx+(1− α)y ∈ B.
Beispiel A.2 U sei ein normierter Raum und f : U → R mit f (x) = ‖x‖ fur bel.x ∈ U. Dann ist f eine konvexe Funktion.
Beweis.Der RaumU selbst ist konvex. Mit bel. x,y ∈ U folgt
f (αx+(1− α)y) = ‖αx+(1− α)y‖ ≤ α ‖x‖+ (1− α) ‖y‖= αf (x) + (1− α) f (y) .
Damit ist f (x) konvex.
Bemerkung A.3 B sei eine nicht leere Menge des linearen Raumes U, dann heißt
conv (B) =
α1u1 + ...+ αnun
∣∣∣∣
ui ∈ B; i = 1, ..., nα1 + ...+ αn = 1; αi = 0; n ∈ N
konvexe Hulle der Menge B. conv (B) ist die “kleinste” B enthaltende konvexe Men-ge, d.h. fur jede konvexe Menge C, die B enthalt, gilt conv (B) ⊂ C.Ausdrucke der Form u = α1u1 + ... + αnun mit αi = 0 und α1 + ... + αn = 1 hei-ßen konvexe Linearkombinationen der Elemente u1, ...,un. Jede konvexe MengeC, die B enthalt, muß auch alle konvexen Linearkombinationen von Elementen ausB enthalten, deshalb gilt conv (B) ⊂ C. Außerdem ist conv (B) eine konvexe Menge,
denn sind u =n∑
i=1
αiui und v =m∑
j=1
βjvj konvexe Linearkombinationen von Elementen
aus B, so ist
w = αu+ (1− α)v =n∑
i=1
ααiui +m∑
j=1
(1− α)βjvj
wegen 1 = α
n∑
i=1
αi + (1− α)m∑
j=1
βj fur alle α mit 0 < α < 1
eine konvexe Linearkombination der Elemente u1, ...,un,v1, ...,vm und damitw ∈ conv (B).

A.2. Messbare Mengen und messbare Funktionen 181
A.2. Messbare Mengen und messbare Funktionen
Definition A.2 Es sei A eine Familie von Mengen aus dem Rn mit folgenden Eigen-schaften ( A,B ∈ A ; Ak ∈ A k = 1, 2, ... ) :a) Jede offene oder abgeschlossene Menge aus dem Rn gehort zu A.b) A ∩B ∈ A A ∪B ∈ A A−B ∈ A und
∞⋃
k=1
Ak ∈ A
∞⋂
k=1
Ak ∈ A
c) Fur jedes A ∈ A existiert eine Zahl µ (A) mit 0 ≤ µ (A) ≤ ∞, wobei gilt
µ (A ∪B) = µ (A) + µ (B) , wenn A ∩B = ∅
µ
( ∞⋃
k=1
Ak
)
=∞∑
k=1
µ (Ak) , wenn Ak∩ Am= ∅ fur k 6= m.
Eine beliebige Menge A ∈ A heißt dann messbar im Rn und µ (A) heißt das n−dimensionale Maß der Menge A.
Definition A.3 Das n− dimensionale Maß µ (·) auf der Mengenfamile A besitze fol-gende Eigenschaften:a) Fur jeden n− dimensionalen Kubus
C = (ξ1, ..., ξn) ∈ Rn | aj ≤ ξj ≤ bj j = 1, ..., n
gilt
µ (C) =n∏
j=1
(bj − aj) .
b) A ∈ A mit µ (A) = 0 ⇔ fur bel. ε > 0 existiert eine Folge von n− dim. Kuben
Ck mit A ⊆∞⋃
k=1
Ck und∞∑
k=1
µ (Ck) < ε.
c) Ist A,B ∈ A und µ (A) = 0 so folgt aus B ⊂ A auch µ (B) = 0.Dann heißt µ (·) ( n− dim.) LEBESGUEsches Maß.
Bemerkung A.4 Ist die Mengenfamilie A in dem Sinne “minimal”, dass jede andereMengenfamile A, die auch die Bedingungen der Definitionen A.2 und A.3 erfullt, dieFamile A enthalt
(A ⊂ A
), so ist das LEBESGUEsche Maß µ (·) eindeutig bestimmt.

182 A. Anhang
Folgerung A.1 Jede endliche oder abzahlbare Menge von Punkten aus dem Rn hatdas LEBESGUEsche Maß Null. Insbesondere hat die Menge aller ”rationalen Punkte”Qn = (ξ1, ..., ξn) ∈ Rn | ξj ∈ Q das LEBESGUEsche Maß Null (µ (Qn) = 0).
Beweis. Es sei A =x(k)mit x(k) = (x1k, ..., xnk) ∈ Rn k = 1, 2, ... und fur beliebiges
ε > 0 sei
Ck =
(η1, ..., ηn) ∈ Rn
∣∣∣∣xjk −
1
2n
√ε
2k≤ ηj ≤ xjk +
1
2n
√ε
2k; j = 1, ..., n
.
Dann gilt A ⊆∞⋃
k=1
Ck und µ (Ck) =ε
2k. Folglich ist
∞∑
k=1
µ (Ck) =ε
2
∞∑
k=0
(1
2
)k
= ε.
Vereinbarung zum Begriff ”fast uberall”Eine Eigenschaft P heißt fast uberall wahr auf einer Menge M, wenn sie fur allePunkte aus M mit moglicher Ausnahme der Punkte einer Menge Z ⊂ M mit demMaße Null (µ (Z) = 0) wahr ist.Z.B. ist die Sprechweise: fn (x) konvergiert fast uberall auf M ⊂ Rn gegen f (x)( oder fn (x) konvergiert fur fast alle x ∈ M ⊂ Rn gegen f (x) ) aquivalent zuf (x) = lim
n→∞fn (x) fur alle x ∈ M− Z, wobei Z ein beliebige Menge vom Maße Null
(µ (Z) = 0) ist.
Definition A.4 ( Sprungfunktion )M ⊂ Rn sei eine messbare Menge und
M =n⋃
j=1
Mj mit Mj ∩Mi = ∅ fur i 6= j und µ (Mj) <∞.
Die Funktion f : M → K (= R oder C) mit f (x) = aj fur x ∈ Mj heißt Sprung-funktion (D.h. eine Sprungfunktion ist stuckweise konstant). Das Integral uber eineSprungfunktion ist durch
∫
M
f (x) dx ≡n∑
j=1
µ (Mj) aj
definiert.

A.3. LEBESGUEsches Integral 183
Definition A.5 ( messbare Funktion )Eine Funktion f : M ⊂ Rn → K heißt messbar, wenn gilt:a) Das Definitionsgebiet Df = M ist eine messbare Menge.b) Es existiert eine Folge fk von Sprungfunktionen fk : M → K, so dass
f (x) = limk→∞
fk (x) fur fast alle x ∈ M.
Bemerkung A.5 Die Funktion f : M ⊂ Rn → K ist messbar, wenn sie auf der mess-baren Menge M fast uberall stetig ist.
Bemerkung A.6 Die Funktionen α, β, f ,g : M ⊂ Rn → K und fk: M ⊂ Rn → K
seien messbar. Dann sind auch die Funktionen
h (x) = α (x) f (x) + β (x)g (x) ; b (x) = |f (x)| und
F (x) = limk→∞
fk (x)
messbare Funktionen.
Bemerkung A.7 Andert man eine messbare Funktion auf einer Menge vom MaßeNull, so ist die modifizierte Funktion ebenfalls messbar.
A.3. LEBESGUEsches Integral
Definition A.6 ( LEBESGUEsches Integral )M ⊂ Rn sei eine nichtleere messbare Menge. Die Funktion f : M → K heißt uber Mintegrierbar, wenn folgende Bedingungen erfullt sind:a) Es existiert eine Folge von Sprungfunktionen fk: M → K mit
limk→∞
fk (x) = f (x) fur fast alle x ∈ M.
b) Fur bel. ε > 0 existiert ein n0 (ε), so dass∫
M
|fk (x)− fm (x)| dx < ε fur bel. k,m = n0 (ε) .
Ist f integrierbar, so gilt∫
M
f (x) dx = limk→∞
∫
M
fk (x) dx.

184 A. Anhang
Bemerkung A.8 1. Ist M = ∅, so ist∫
∅
f (x) dx = 0.
2. Folgende Aussagen sind aquivalent:
a) f ist uber M integrabel
b)∫
M
f (x) dx existiert
c)
∣∣∣∣
∫
M
f (x) dx
∣∣∣∣<∞.
Beispiel A.3 M ⊂ Rn sei offen und beschrankt oder kompakt und f : M → K seibeschrankt und fast uberall stetig. Dann ist f uber M integrierbar.
Beispiel A.4 f : M ⊆ Rn → K sei fast uberall stetig auf der messbaren Menge M(eingeschlossen M = Rn) und es gelte
|f (x)| ≤ const
(1 + ‖x‖)α fur bel. x ∈ M und festes α > n.
Dann ist f uber M integrierbar.
Beispiel A.5 f : M ⊂ Rn → K sei fast uberall stetig auf der beschrankten messbarenMenge M und es existiere ein x0 ∈ M mit
|f (x)| ≤ const
‖x− x0‖βfur bel. x ∈ M (x 6= x0)
und festes β ∈ N
mit 0 ≤ β < n.
Dann ist f uber M integrierbar.
Eigenschaften des LEBESGUE-Integrals
1. M ⊂ Rn sei eine messbare Menge mit µ (M) <∞. Dann gilt
∫
M
dx = µ (M) .
2. Linearitat:Die Funktionen f ,g : M → K seien uber M integrierbar und α, β ∈ K. Dann istauch αf + βg uber M integrierbar und es gilt
∫
M
(αf + βg) dx = α
∫
M
f dx + β
∫
M
g dx.

A.3. LEBESGUEsches Integral 185
3. Absolute Integrierbarkeit:f : M → K seien uber M integrierbar. Dann gilt
∫
M
f dx existiert ⇔∫
M
|f | dxexistiert. Außerdem gilt: ∣
∣∣∣∣∣
∫
M
f dx
∣∣∣∣∣∣
≤∫
M
|f | dx.
4. Transformationsregel:f : M ⊆ Rn → K sei integrierbar uber der nichtleeren offenen Menge M undg : N → M sei ein C1− Diffeomorphismus ( d.h. g ist bijektiv und g ∈ C1 undg−1∈ C1) der offenen Menge N ⊆ Rn auf M. Dann gilt
∫
M
f (x) dx =
∫
N
f (g (y)) det
∂gi (y)
∂yj
dy.
5. Majoranten Kriterium:f : M → K sei messbar und es existiere eine uber M integrierbare Funktiong : M → K mit |f (x)| ≤ g (x) fur fast alle x ∈ M. Dann sind die Funktionen fund |f | auch uber M integrierbar und es gilt
∣∣∣∣∣∣
∫
M
f dx
∣∣∣∣∣∣
≤∫
M
|f | dx ≤∫
M
g dx.
6. f : M → K sei eine messbare Funktion mit f (x) = 0 fur bel. x ∈ M. Dann gilt∫
M
f dx = 0 ⇔ f (x) = 0 fast uberall auf M.
7. Additivitat des Integrationsgebietes:M,N ⊆ Rn seien disjunkte messbare Mengen und f : M ∪N → K sei integrierbaruber M und N. Dann ist f integrabel uber M ∪N und es gilt
∫
M∪N
f dx =
∫
M
f dx +
∫
N
f dx.
8. Konvergenz bzg. des Integrationsgebietes:
Es seiM1 ⊆ M2 ⊆ ... undM =∞⋃
k=1
Mk. f : M ⊆ Rn → K ist genau dann uberM
integrierbar, wenn f integrierbar uber Mk (k = 1, 2, ...) und supn
∣∣∣∣∣
∫
Mn
f dx
∣∣∣∣∣<∞.
in diesem Fall gilt ∫
M
f dx = limk→∞
∫
Mk
f dx.

186 A. Anhang
9. Absolute Stetigkeit:f : M ⊆ Rn → K sei integrierbar, dann gilt: Fur bel. ε > 0 existiert ein
δ = δ (ε) > 0, so dass
∣∣∣∣
∫
A
f dx
∣∣∣∣< ε fur eine bel. Teilmenge A ⊂ M mit µ (A) < δ.
10. Satz von FUBINI:f : M ⊆ Rn+m → K sei integrierbar, dann gilt die Formel (Außerhalb von Mwird hier f (x,y) = 0 gesetzt und x ∈ Rn, y ∈ Rm):
∫
M
f (x,y) dxdy =
∫
Rn
∫
Rm
f (x,y) dy
dx =
∫
Rm
∫
Rn
f (x,y) dx
dy
11. Folgende Voraussetzungen seien erfullt:a) Die Funktionen fk: M ⊆ Rn → K seien messbar und der Grenzwert lim
k→∞fk (x)
existiere fur fast alle x ∈ M.b) Es existiere eine integrierbare Funktion g : M → R, so dass |fk (x)| ≤ g (x)fur fast alle x ∈ M.Dann gilt:
limk→∞
∫
M
fk (x) dx =
∫
M
limk→∞
fk (x) dx.
12. Lemma von FATOU:fk sei eine Folge integrierbarer Funktionen fk : M ⊆ Rn → R und es geltea) fk (x) = 0 fur bel. x ∈ M und k = 1, 2, ...b)∫
M
fk (x) dx ≤ C k = 1, 2, ...
Dann ist: ∫
M
limk→∞
fk (x) dx ≤ limk→∞
∫
M
fk (x) dx.
13. Parameterintegrale:Es sei f : M×P → K, wobei M ⊂ Rn eine messbare Menge und P ⊂ Km.Dann heißt das Integral F (p) =
∫
M
f (x,p) dx Parameterintegral bezuglich des
Parameters p ∈ P.Stetigkeit von Parameterintegralen:Die Funktion F : P → K ist stetig, wenn folgende Bedingungen erfullt sind:a) Die Funktion x → f (x,p) sei uber M messbar fur jedes p ∈ P.b) Es existiere eine integrierbare Funktion g : M → R, so dass
|f (x,p)| ≤ g (x) fur jedes p ∈ P und fast alle x ∈ M.
c) Die Funktion p → f (x,p) sei stetig auf P fur fast alle x ∈ M.

A.3. LEBESGUEsches Integral 187
14. Differenzierbarkeit von Parameterintegralen:Die Funktion F : P → K auf der nicht leeren offenen Menge P ⊂ K ist differen-zierbar und es gilt
d
dpF (p) =
∫
M
∂
∂pf (x,p) dx fur jedes p ∈ P,
wenn folgende Bedingungen erfullt sind:a) Es existiere F (p) =
∫
M
f (x,p) dx fur jedes p ∈ P.
b) Es existiere eine integrierbare Funktion g : M → R, so dass
∣∣∣∣
∂
∂pf (x,p)
∣∣∣∣≤ g (x) fur jedes p ∈ P und fast alle x ∈ M.
LEBESGUE-STILTJES-Integral
a) Die Funktionen f ,h : (a, b) → C ( mit −∞ ≤ a < b ≤ ∞ ) seien messbar und dieFunktionen h und f · h seien uber (a, b) im LEBESGUEschen Sinne integrierbar.
b) Fur bel. x ∈ (a, b) sei g (x) =x∫
a
h (y) dy.
Dann gilt:b∫
a
f (x) dg (x) =
b∫
a
f (x)g′ (x) dx
und
b∫
a
f (x) dg (x) − LEBESGUE-STILTJES-Integral
b∫
a
f (x)g′ (x) dx − LEBESGUE-Integral
Funktionen von beschrankter Variation
Die Funktion g : [a, b] → C (−∞ < a < b <∞) heißt von beschrankter Variation,wenn
V (g) = infD
m∑
k=1
∣∣∣g(
x(m)k
)
− g(
x(m)k−1
)∣∣∣ <∞,
wobei das Infimum uber alle moglichen endlichen Zerlegungen D des Intervalles [a, b],d.h.
a = x(m)0 < x
(m)1 < ... < x(m)
m = b mit m = 1, 2, ...
zu nehmen ist.

188 A. Anhang
A.4. Geordnete Mengen und ZORNsches Lemma
Definition A.7 Eine Menge C heißt geordnet, wenn zwischen gewissen Paarenvon Elementen u,v ∈ C eine Relation u v besteht, die folgende Bedingungen erfullt:a) u u fur alle u ∈ C.b) Aus u v und v w folgt u w.c) Aus u v und v u folgt u = v.
Ein m ∈ C heißt maximales Element von C, wenn gilt:
Aus m u und u ∈ C folgt m = u.
Eine nichtleere Teilmenge T aus C heißt total geordent, wenn fur bel. u,v ∈ Tentweder u v oder v u gilt.
Satz A.1 ( ZORNsches Lemma )C sei eine nichtleere geordnete Menge mit der Eigenschaft, dass jede total geordneteTeilmenge T aus C eine obere Schranke besitzt, d.h. es existiert ein b ∈ C mit u bfur bel. u ∈ T ( b ist von T abhangig ). Dann existiert in C ein maximales Element.
Beispiel A.6 S sei eine bel. Menge und C die Menge aller Teilmengen von S. FurU,V ∈ C sei U V, wenn U ⊆ V ( U,V− Teilmengen von S ). Damit ist C einegeordnete Menge.
Beispiel A.7 Die Menge R der reellen Zahlen ist total geordnet, aber R hat kein ma-ximales Element.
Bemerkung A.9 Das ZORNsche Lemma findet im Beweis des Satzes von HAHN-BANACH Anwendung.

A.5. BANACH - Algebren 189
A.5. BANACH - Algebren
1. Eine BANACH - Algebra B uber einem Korper K ist ein BANACH-Raumuber K, in dem zusatzlich eine Multiplikation ”A ·B” gemaß
A ·B ∈ B ∀ A, B ∈ B
definiert ist, wobei fur ∀ A, B, C ∈ B und α ∈ K gilt:
(B1) (A ·B) ·C = A · (B ·C)
(B2) A · (B+C) = A ·B+A ·C(B3) (B+C) ·A = B ·A+C ·A(B4) α (A ·B) = (αA) ·B = A · (α ·B)
(B5) ‖A ·B‖ ≤ ‖A‖ ‖B‖(B6) Es existiert ein I ∈ B mit
‖I‖ = 1 und A · I = I ·A fur ∀ A ∈ B
2. U sei ein BANACH-Raum uber dem Korper K und L (U,U) sei derBANACH-Raum aller linearen Operatoren A : U → U. Wird in L (U,U) eineMultiplikation A ·B (A,B ∈ L (U,U)) gemaß
(A ·B) (u) = A (B (u)) ∀ u ∈ U
definiert, so ist L (U,U) eine BANACH-Algebra.
3. B sei eine BANACH-Algebra und A,B,An,Bn ∈ B (n = 1, 2, ...) .Sind die Voraussetzungen
a)∥∥Ak
∥∥ ≤ ‖A‖k k = 1, 2, ..., wobei A0 = I und
b) Aus An → A und Bn → B (n→ ∞) in B
erfullt, so gilt: An ·Bn → A ·B (n→ ∞) in B.
Beweis. zu a)∥∥Ak+1
∥∥ =
∥∥AkA
∥∥ ≤
∥∥Ak
∥∥ ‖A‖ fur alle k = 1, 2, ...
zu b) Die Operatorfolgen An , Bn sind beschrankt (weil sie konvergent sind).Deshalb ist
‖An ·Bn −A ·B‖ = ‖(An −A)Bn −A (B−Bn)‖≤ ‖An −A‖ ‖Bn‖+ ‖A‖ ‖B−Bn‖ → 0 fur n→ ∞.

190 A. Anhang
Beispiele fur BANACH-Algebren
1. B = R (bzw. B = C) ist mit ‖x‖ = |x| (x ∈ R oder C) und der fur reelle (kom-plexe) Zahlen definierten Addition und Multiplikation eine BANACH-Algebra.
2. B = C [a, b] mit ‖x‖ = maxa ≤ t≤ b
|x (t)| fur x ∈ C [a, b] .
Addition und Multiplikation werden gemaß
αx+ βy = αx (t) + βy (t) ; x · y = x (t)y (t) fur bel. t ∈ [a, b]
x,y ∈ C [a, b] ; α, β ∈ K
definiert. Damit ist B = C [a, b] eine BANACH-Algebra.Insbesondere ist:
‖x · y‖ = maxa ≤ t≤ b
|x (t)y (t)| ≤ maxa ≤ t≤ b
|x (t)| maxa ≤ t≤ b
|y (t)| = ‖x‖ ‖y‖
Das Einselement in B ist I (t) = 1.
3. U = Rn und A : U → U mit
A =
a11 ... a1n... ... ...an1 ... ann
und ‖A‖ = max1 ≤ i ≤ n
n∑
k=1
|aik|
Fuhrt man in L (U,U) als Multiplikation die normale Matrizenmultiplikationein, so wird B = L (U,U) zu einer BANACH-Algebra.
Operatorfunktionen in BANACH-Algebren
FurA ∈ B und beliebiges n ∈ N werden die Partialsummen (Operatorpolynome)
Fn (A) =n∑
k=0
akAk ak ∈ K (K = R oder C)
gebildet, wobei fur die Potenzreihe F (z) =∞∑
k=0
akzk mit ak ∈ K und z ∈ K
gilt∞∑
k=0
|ak| |z|k <∞ fur bel. z ∈ K mit |z| < r (r > 0) .
Unter diesen Bedingungen konvergiert die Folge Fn (A) (n = 1, 2, ...) fur alle A ∈ B
mit ‖A‖ < r absolut gegen die Operatorfunktion
F (A) =∞∑
k=0
akAk ∈ B , wobei
‖Fn (A)− F (A)‖ ≤∞∑
k=n+1
|ak| ‖A‖k < ε fur bel. n = n0 (ε)
‖F (A)‖ ≤∞∑
k=0
|ak| ‖A‖k < ∞.

A.5. BANACH - Algebren 191
I. Exponentialfunktion
U sei ein BANACH-Raum uber K und B = L (U,U) sei die BANACH-Algebra allerlinearen Operatoren A : U → U. Die Operatorfunktion
exp (A) =∞∑
k=0
1
k!Ak
heißt Exponentialfunktion und konvergiert absolut fur alle A ∈ L (U,U) .
Bemerkung A.10 Fur alle A ∈ L (U,U) und alle t, s ∈ K gilt
exp ((t+ s)A) = exp (tA) · exp (sA) .
Beweis. Zunachst ist(
n∑
m=0
tm
m!Am
)(n∑
k=0
sk
k!Ak
)
=n∑
p=0
∑
m+k=p
tmsk
m!k!Ap =
n∑
p=0
p∑
m=0
tmsp−m
(p−m)!m!Ap
=n∑
p=0
p∑
m=0
1
p!
( p
m
)
tmsp−mAp =n∑
p=0
1
p!(t+ s)p Ap.
Mit n→ ∞ erhalt man die zu beweisende Beziehung.
Anwendung auf lineare Anfangswertaufgaben (AWA):
Beispiel A.8 Eindimensionale AWA:
x′ (t) = ax (t)x (t0) = x0
mit der Losung: x (t) = x0 exp (a (t− t0))
U sei ein BANACH-Raum uber K und B = L (U,U) sei eine BANACH-Algebra.x (t) ⊂ U sei eine parameterabhangige Familie von Elementen, wobei
lim4t→0
x (t+4t)− x (t)
4t ≡ x′ (t)
existiert. Weiter sei A : U → U ein linearer Operator, d.h. A ∈ L (U,U) .Allgemeine AWA eines Systems linearer Differentialgleichungen 1. Ordnung:
x′ (t) = Ax (t)x (t0) = x0 x0 ∈ U
(1)
Diese Aufgabe hat die eindeutig bestimmte Losung
x (t) = [exp ((t− t0)A)] (x0) ∈ U.

192 A. Anhang
1. Beweis.
x (t) = [exp ((t− t0)A)] (x0) =∞∑
k=0
1
k!(t− t0)
k Ak (x0)
erfullt die AWA (1) , denn
x′ (t) =∞∑
k=0
1
k!(t− t0)
k Ak+1 (x0) = A (x (t)) und x (t0) = I (x0) = x0.
Spezialfall:
U =
x (t) = (x1 (t) , ..., xn (t))T | xi (t) ∈ C [a, b] ; i = 1, ..., n
Mit ‖x‖ = maxa ≤ t ≤ b
n∑
k=1
|xk (t)| ist U ein BANACH-Raum. Weiter sei A : U → U
mit
A =
a11 ... a1n... ... ...an1 ... ann
‖A‖ ≤n∑
i=1
max1 ≤ k ≤ n
|aik|
und folglich A ∈ L (U,U) .
Beweis.
‖Ax‖ = maxa ≤ t ≤ b
n∑
i=1
∣∣∣∣∣
n∑
k=1
aikxk (t)
∣∣∣∣∣≤
n∑
i=1
max1 ≤ k ≤ n
|aik| maxa ≤ t ≤ b
n∑
k=1
|xk (t)|
=n∑
i=1
max1 ≤ k ≤ n
|aik| ‖x‖ ⇒ ‖A‖ ≤n∑
i=1
max1 ≤ k ≤ n
|aik| .
Damit hat die AWA (1) mit dem Anfangswert x0 ∈ Rn die Losung
x (t) = [exp ((t− t0)A)] (x0) = x0 + (t− t0)A (x0)+1
2(t− t0)
2 A2(x0) + ...
II. Geometrische Reihe
U sei ein BANACH-Raum uber K und B = L (U,U) sei die BANACH-Algebra allerlinearen Operatoren A : U → U. Die Operatorfunktion
(I−A)−1 =∞∑
k=0
Ak
heißt NEUMANNsche Reihe und konvergiert absolut fur bel. A ∈ L (U,U) mit

A.5. BANACH - Algebren 193
‖A‖ < 1, denn
∥∥(I−A)−1
∥∥ ≤
∞∑
k=0
‖A‖k = 1
1− ‖A‖ <∞
und es gilt
(I−A) (I−A)−1 = limn→∞
(I−A)(I+A+A2+...+An
)
= limn→∞
(I−An+1
)= I ,
denn∥∥An+1
∥∥ = ‖A‖n+1 → 0.
Die Operatorgleichung u−Au = f mit A : U → U und ‖A‖ < 1 ist im B-RaumU eindeutig losbar und es gilt:
u =∞∑
k=0
Akf .
Bemerkung A.11 Man kann die Ubereinstimmung mit der Methode der sukzessivenApproximation zeigen:
u = ϕ (u) = Au+ f ist eine kontrahierende Abbildung und es gilt:
u(n+1) = Au(n)+f mit u(0) = 0; u(n+1) =n∑
k=0
Akf .
Beispiel A.9 ( FREDHOLMsche Integralgleichung 2. Art )
u (t)−b∫
a
K (t, s)u (s) ds = f (t) t ∈ [a, b]
Der Integraloperator
(Au) (t) =
b∫
a
K (t, s)u (s) ds ; A : C [a, b] → C [a, b]
‖u‖ = maxa ≤ t ≤ b
|u (t)| ; K (t, s) stetig auf [a, b]× [a, b]
ist linear und im Falle
‖A‖ ≤ maxa ≤ t ≤ b
b∫
a
|K (t, s)| ds !< 1
beschrankt. Unter diesen Bedingungen besitzt die Integralgleichung eine eindeutig be-stimmte Losung
u (t) =∞∑
k=0
Akf (t) ∈ C [a, b] .

194 A. Anhang
Beispiel A.10 ( VOLTERRAsche Integralgleichung )
u (t)−t∫
a
K (t, s)u (s) ds = f (t) t ∈ [a, b]
mit dem auf [a, b]× [a, b] stetigen Kern K (t, s) .a) Integraloperator A : C [a, b] → C [a, b]
(Au) (t) =b∫
a
m (t, s)u (s) ds
mit
m (t, s) =
K (t, s) fur a ≤ s ≤ t
0 fur t < s ≤ b
a b
a
b
t
s
m ( t , s ) = K ( t , s )
m ( t , s ) = 0
Damit kann eine VOLTERRAsche Integralgleichung auch als FREDHOLMsche Inte-gralgleichung 2. Art geschrieben werden.
u (t)−b∫
a
m (t, s)u (s) ds = f (t) t ∈ [a, b]
bzw. (I−A)u = f .
b) Bildung ”iterierter Kerne”
m(1) (t, s) = m (t, s)
m(2) (t, s) =
b∫
a
m (t, r)m(1) (r, s) dr
−−−−−−−−−−
m(n) (t, s) =
b∫
a
m (t, r)m(n−1) (r, s) dr
damit ist
(Anf) (t) =
b∫
a
m(n) (t, s) f (s) ds t ∈ [a, b] .
c) Abschatzung von ‖An‖ :Mit M = max
a ≤ t, s ≤ b|K (t, s)| folgt |m (t, s)| =
∣∣m(1) (t, s)
∣∣ ≤M.

A.5. BANACH - Algebren 195
Wegen m (t, r) = 0 fur t < r und m (r, s) = 0 fur r < s folgt
m(2) (t, s) =
b∫
a
m (t, r)m (r, s) dr = 0 fur t < s
⇒ m(2) (t, s) =
t∫
s
m (t, r)m (r, s) dr
und damit
∣∣m(2) (t, s)
∣∣ ≤ M2 (t− s) fur s < t
m(2) (t, s) = 0 fur s = t.
Mittels vollstandiger Induktion erhalt man:
∣∣m(n) (t, s)
∣∣ ≤ Mn (t− s)n−1
(n− 1)!fur s < t
m(n) (t, s) = 0 fur s = t.
Folglich ist
|(Anf) (t)| ≤ maxa ≤ s ≤ b
|f (s)|b∫
a
∣∣m(n) (s, t)
∣∣ ds
≤ ‖f‖ Mn
(n− 1)!
t∫
a
(t− s)n−1 ds
= ‖f‖Mn
n!(t− a)n ≤ ‖f‖M
n
n!(b− a)n
und damit schließlich
‖An‖ ≤ Mn
n!(b− a)n .
d) Die Reihe∞∑
n=0
An konvergiert absolut, denn
∥∥∥∥∥
∞∑
n=0
An
∥∥∥∥∥≤
∞∑
n=0
‖An‖ ≤∞∑
n=0
Mn
n!(b− a)n = exp (M (b− a)) <∞.
Folglich hat die VOLTERRAsche Integralgleichung unter den Bedingungen, dass f (t)auf [a, b] und K (t, s) auf [a, b] × [a, b] stetig sind, eine eindeutig bestimmte auf [a, b]stetige Losung
u (t) =∞∑
n=0
(Anf) (t) .

196 A. Anhang
A.6. Operatorgruppen
Eine Operatorgruppe S = S (t) | t ∈ I ⊆ R auf dem HILBERT-Raum H bestehtaus einer Familie von
Operatoren
S (t) : H → H mit
S (0) = I und S (t+ s) = S (t) · S (s) ∀ t, s ∈ I
Der Generator A : D (A) ⊆ H → H von S ist durch
Au ≡ limt→0
1
t(S (t)− I)u
definiert.
S heißt einparametrische Gruppe (dynamisches System) ⇔ I = R.
S =S+ heißt Halbgruppe ⇔ I = [0,∞) .
Es sei u (t)= S (t)u0 ∀ t ∈ I, u0 ∈ H :
1) S heißt streng stetig
⇔ u (t) : I → H fur ∀ u0 ∈ H stetig.
2) S heißt linear
⇔ S (t) : H → H fur ∀ t ∈ I linearer beschrankter Operator.
3) S heißt gleichmaßig stetig
⇔ S ist linear und es gilt
‖S (t+ h)− S (t)‖ → 0 fur h→ 0 und ∀ t ∈ I.
4) S heißt unitar
⇔S ist streng stetig und jeder Operator S (t) : H → H
ist ein unitarer Operator, d. h.
‖S (t)u‖ = ‖u‖ fur ∀ u ∈ H und ∀ t ∈ I.

A.6. Operatorgruppen 197
Reversible und irreversible physikalische Prozesse
ImHILBERT-Raum H sei dieOperatorgruppe S = S (t) | t ∈ I ⊆ Rgegeben. DurchS wird ein physikalisches System beschrieben.
* I ist das Intervall des Zeitparameters t.
* Jedes Element u ∈ H heißt Zustand des physikalischen Systems.
* Jede Funktion u (t)= S (t)u0 fur ∀ t ∈ I und festes u0 ∈ H heißt
moglicher Prozeß des physikalischen Systems.
Man sagt, das System befindet sich zur Zeit t im Zustand u (t) .
u (0) = S (0)u0 = u0 heißtAnfangszustand des Systens.
1. Reversible physikalische Prozessewerden durch einparametrische Gruppen (dynamische Systeme) beschrie-ben und es gilt:
a) Strenge Kausalitat:Durch den Zustand u (t0) des Systems zur Zeit t0 sind alle zukunftigen Zustandeu (t) fur t > t0 und alle vergangenen Zustande u (t) fur t < t0 eindeutig bestimmt.
b) Homogenitat in der Zeit:Ist u (t) ein moglicher Prozeß des physikalischen Systems, dann ist u (t+ t0) furbeliebiges festes t0 ∈ R ebenfalls ein moglicher Prozeß des Systems (Zeittransla-tion).
c) Reversibilitat:Zu jedem moglichen Prozeß u (t) existiert der umgekehrte Prozess u (−t) .WegenS (t)·S (−t) = S (−t)·S (t) = S (0) = I fur ∀ t ∈ R ist der Operator S (t) : H → Hbijektiv und
S (t)−1 = S (−t) fur ∀ t ∈ R ⇒ u (−t) = S (t)−1 u0.
2. Irreversible physikalische Prozesse werden durch Halbgruppen beschrie-ben.
a) Kausalitat:Durch den Zustand u (t0) des Systems zur Zeit t0 = 0 sind alle zukunftigenZustande u (t) fur t > t0 eindeutig bestimmt.
b) Homogenitat in der Zeit:Ist u (t) mit t = 0 ein moglicher Prozess des physikalischen Systems, dann istu (t+ t0) fur beliebiges festes t0 = 0 ebenfalls ein moglicher Prozess des Systems.


Literaturverzeichnis
[1] BURG; HAF; WILLE: Hohere Mathematik fur Ingenieure, Bd. V: Funktional-analysis und partielle Differentialgleichungen
[2] ZEIDLER: Applied FunctionalanalysisBd. I: Application to Mathematical PhysicsBd. II: Main Principles and Their Applications
[3] ZEIDLER: Nonlinear Functional Analysis and Its Applications (Vol. 1-5)
[4] WERNER: Funktionalanalysis
[5] DEUDONNE: Grundzuge der modernen Analysis
[6] KOLMOGOROV; FOMIN: Reelle Funktionen und Funktionalanalysis
[7] ACHIESER; GLASMANN: Theorie der linearen Operatoren im Hilbertraum
[8] RIESZ; NAGY: Vorlesungen uber Funktionalanalysis
[9] KANTOROWITSCH; AKILOW: Funktionalanalysis in normierten Raumen
[10] YOSIDA: Functional Analysis
[11] KATO: Pertubation Theory for linear Operators
[12] ALEXANDROFF: Einfuhrung in die Mengenlehre und die allgemeine Topologie
[13] BOGEL; TASCHE: Analysis in normierten Raumen
[14] BREHMER: Hilbert-Raume und Spektralmaße
[15] DUNFORD; SCHWARTZ: Lineare Operatoren
[16] SCHRODER: Funktionalanalysis
[17] SAXE: Beginning Functional Analysis; Springer Verlag New York, Berlin, Hei-delberg, 2002
[18] LEBEDEV; VOROVICH: Functional Analysis in mechanics; Springer VerlagNew York, Berlin, Heidelberg, 2002


Stichwortverzeichnis
Aquivalente Norm, 45
Abbildungbijektiv, 17Dualitats-, 77injektiv, 17kontrahierende, 20surjektiv, 17
AbleitungFRECHET-, 144GATEAUX-, 144schwache, 71verallgemeinerte, 71
Abschatzunga posteriori, 20a priori, 20
Abschließung, 8absolut integrierbar, 174Abstandsfunktion, 1Anfangswertaufgabe, 117Anfangswertproblem, 24Assoziativgesetz, 38
BANACH-Algebra, 179Basis, 40Bestapproximation, 33, 59Bilinearform, 78
beschrankte, 78positiv definite, 78positive, 78symmetrische, 78
Brachistochrone-Problem, 152
CAUCHY-Folge, 13
Definitheit, positive, 113Differentialausdruck
elliptischer, 95
linearer, 95Diffusionsproblem, abstraktes, 125Direkte Summe, 40direkte Summe, 57DIRICHLETsche Variationsgleichung, 82DIRICHLETsches Prinzip, 82, 86DIRICHLETsches Problem, 81Distributivgesetz, 38Dreiecksungleichung, 2dynamische Vorgange, 113
Eigenlosungen, 137Eigenwertproblem, 117, 119Element, bestapproximierendes, 59Extremum, 144
fast uberall, 55, 172Finite Element Methode, 90Fixpunktgleichung, 20Fixpunktsatz
BANACHscher, 20BROUWERscher, 48SCHAUDERscher, 49
Folgen-stetig, schwach, 168Formel
Erste GREENsche, 71FOURIER-Koeffizient, 61FREDHOLMsche Alternative, 104, 110FRIEDRICHSsche Erweiterung, 141Funktion
beschrankter Variation, 177Exponential-, 181konvex, 169LAGRANGE-, 148messbar, 172quadratisch summierbar, 54
Funktional, 144beschranktes, 76

202 Stichwortverzeichnis
quadratisches, 82
GleichungEULER-, 144LAPLACEsche, 81PARSEVALsche, 61POISSONsche, 67SCHRODINGER-, 135
Haufungspunkt, 8Hulle, abgeschlossene, 8Hulle, lineare, 39HAMILTON-Prinzip, 157HAUSDORFF-Abstand, 27homoomorph, 18Homoomorphismus, 18Homogenitat, 44, 187
Inneres, 8Inneres Produkt, 52Integralgleichung
FREDHOLMsche 2. Art, 183VOLTERRAsche, 184
Inverses Element, 38Isomorphismus, 40Iterierte Funktionensysteme, 27
Kausalitat, 187strenge, 187
koerciv, schwach, 168Kommutativgesetz, 38kompakter Trager, 69Kompaktheit, 30Komplementarer Unterraum, 40Konvergenz
gleichmaßige, 14im quadratischen Mittel, 15koordinatenweise, 13
konvex, streng, 168konvexe Linearkombination, 170konvexe Teilmenge, 168Kugel
abgeschlossen, 8offen, 8
Losungschwache, 82verallgemeinerte, 82
LEBESGUE-STILTJES-Integral, 177LEBESGUEsches Integral, 173LEBESGUEsches Maß, 171LEMMA
von FATOU, 176Lemma
ZORNsches, 178linear isomorph, 40linear unabhangig, 40
Majoranten Kriterium, 175Mannigfaltigkeit, lineare, 39maximales Element, 178Menge
abgeschlossen, 8beschrankt, 8derivierte, 8dicht, 8geordnete, 178kompakt, 30konvex, 169messbar, 171offen, 8relativ kompakt, 30total geordnet, 178
Methode von GALERKIN, 165Methode von RITZ, 163Metrik
diskrete, 5kanonische, 42
Minimumproblem, 162
Norm, 42, 116induzierte, 73
normisomorph, 66Normkonvergenz, 44Nullelement, 38
Operator, 17adjungierter, 113Differential-, 18FREDHOLMscher Integral-, 18gleichmaßig stetiger, 17HAMILTON-, 137HUTCHINSON-, 29Integral-, 18inverser, 17

Stichwortverzeichnis 203
kompakt, 34Multiplikations-, 140schief-adjungierter, 114schief-symmetrischer, 114selbstadjungierter, 114Spektral-, 139stetig, 33stetiger, 17streng monoton, 113symmetrischer, 103, 114unitarer, 136VOLTERRAscher Integral-, 18
Operatorgleichungen, 113Operatorgruppe, 186
einparametrische, 186Generator der, 186gleichmaßig stetige, 186lineare, 186streng stetige, 186unitare, 186
orthogonal, 57orthogonale Projektion, 58orthogonales Komplement, 57Orthogonalitat, 57orthonormales System, 61Orthonormierungsverfahren, SCHMIDT-
sches, 64Orthoprojektor, 58, 139
Parallelogramm-Identitat, 53Polynome
HERMITEsche, 65LEGENDREsche-, 65
Prozessirreversibler physikalischer, 187reversibler physikalischer, 187
Punktinnerer, 8
Quasioptimalitat, 90
Rand, 8Randbedingung
DIRICHLETsche, 95naturliche, 95NEUMANNsche, 95wesentliche, 95
Raumaffiner, 37BANACH-, 40Energetischer, 141energetischer, 96, 116EUKLIDischer, 37HILBERT-, 51linearer, 38Linearer normierter, 37linearer normierter, 42metrisch, 1Pre-HILBERT-, 53separabler, 47, 62SOBOLEW-, 70topologischer, 1Unter-, 39vollstandiger, 42vollstandiger metrischer, 13
Reihe, 47absolut konvergente, 47FOURIER-, 61Geometrische, 182NEUMANNsche, 182
Residuum, gewichtetes, 99Reversibilitat, 187reversible Prozesse, 132RITZsche Variationsgleichung, 88
SatzAPOLLONIUS, 53ARZELA-ASCOLI, 32FUBINI, 175HAHN-BANACH, 178HILBERT-SCHMIDT, 106LAX-MILGRAM, 83PICARD-LINDELOF, 25PYTHAGORAS, 57RIESZ, 76WEIERSTRASS, 33
skalares Produkt, 116Spektraldarstellung, 139Spektrum
symmetrischer Operatoren, 106Sprungfunktion, 172Sukzessive Approximation, 20Support, 70

204 Stichwortverzeichnis
Testfunktionen, 165Topologie, 1Transformation, 17Translationsinvarianz, 44
Umgebung, 8Ungleichung
BESSELsche, 61FRIEDRICHSsche, 81, 85HOLDERsche, 3MINKOWSKIsche, 3SCHWARZsche-, 52
Variationerste, 144n-te, 144
Variationsgleichung, 83Variationsproblem
DIRICHLETsches, 82quadratisches, 67, 80RITZsches, 88
Variationsrechnung, klassische, 148Verfahren von RITZ, 88Vollstandigkeit, 12
Wellenausbreitungsproblem, abstraktes,131
Wirkung, stationar, 154, 163Wirkung, stationare, 148Wirkungsintegral, 157
Zahlenfolge, quadratisch summierbar, 54Zykloide, 153