Embed Size (px)
Citation preview

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 1 (Seite 1 von 3)
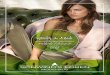
a)Gegeben ist das folgende, in den Punkten A und B gelagerte und durch eine Kraft F wiedargestellt belastete Fachwerk.
A
B
l
l
l
ll
F
F
1
2 3
4 5
6
7
8
9 10
11
Nennen Sie samtliche Nullstabe, welche auf Grund gangiger Kriterien direkt als solcheidentifiziert werden konnen (keine Rechnung). Das Nennen falscher Stabnummern fuhrtzu Punktabzug. (2,0 Punkte)
5, 9, 10, 11

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 1 (Seite 2 von 3)
b)Das unten dargestellte Fachwerk ist in den Punkten A und B gelagert und wird wie gezeigtdurch Einzelkrafte belastet.
x
y
A B
llllll
l
l
l
F
2F
2F
3F
4F1 2 3
4 5 6 7 8 9 10 11
12 13 14 15 16 17
18 19 20 21 22
23 24
25 26 27
Berechnen Sie die Auflagerreaktionen in den Punkten A und B bezuglich der durch dasvorgegebene Koordinatensystem positiv definierten Richtungen. (3,0 Punkte)
Ay =
(7
6+
3
4
√2
)F =
14 + 9√2
12F ≈ 2, 227F
Bx = −(2 +
√2
2
)F = −4 +
√2
2F ≈ −2, 707F
By =
(11
6+
3
4
√2
)F =
22 + 9√2
12F ≈ 2, 894F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 1 (Seite 3 von 3)
c)An dem selben Fachwerk greifen nun die aus nachfolgender Zeichnung zu entnehmendenKrafte an.
x
y
A B
llllll
l
l
l
1
2F
1
3F
√2F
1 2 3
4 5 6 7 8 9 10 11
12 13 14 15 16 17
18 19 20 21 22
23 24
25 26 27
Die Auflagerreaktionen sind dabei gemaß des vorgegebenen Koordinatensystems zu
Ay =3
4F , Bx = −1
2F , By =
7
12F
vorgegeben. Berechnen Sie die Stabkrafte S1, S13, und S18 sowie S11 und S17 unter derVoraussetzung, dass Zugkrafte positiv sind. (5,0 Punkte)
S1 = −1
4F S13 = 0 S18 =
3
2√2F =
3√2
4F
S11 = −7√2
12F S17 =
1
12F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 2 (Seite 1 von 2)
Die dargestellte homogene Lochscheibe A (Gesamtmasse m, Radius r = a) ist auf derlinken Seite fest gelagert, wahrend die rechte Seite reibungsfrei (µ0 = 0) auf einem alsmasselos anzusehenden Keil B aufliegt. Der Keil selbst ruht auf einer reibungsbehaftetenEbene (Haftreibungskoeffizient µ0).
2a
3a
4a 5a
6a
a
A
B
rµ0 = 0
µ0
x
y
α
g
a)Bestimmen Sie die Koordinaten xs und ys des Schwerpunktes der abgebildeten Lochschei-be A bezuglich des angegebenen Koordinatensystems. (2 Punkte)
xs = 3a
ys =(61− 2π)a
27− π

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 2 (Seite 2 von 2)
b)Die Lochscheibe wird nun durch einen massiven, homogenen Korper (Gesamtmasse m)mit identischen Außenabmessungen ersetzt. Gleichzeitig wirkt eine horizontale Kraft F inder unten dargestellten Weise auf den Keil ein. Vervollstandigen Sie die unten gegebeneVorlage zu einem kompletten Freikorperbild. (3 Punkte)
F
Ax
Ay
mg
N1
N1
H
N2
Bestimmen Sie die von Ihnen im Freikorperbild definierten Kraftkomponenten zwischendem Korper und dem Keil sowie dem Keil und dem Fundament. (3 Punkte)
N1 =mg
2 cos(α)N2 =
mg
2H = F +
mg tan(α)
2
Wie groß muss die Kraft F > 0 sein, sodass sich der Keil nach rechts zu bewegen beginnt?(2 Punkte)
F ≥ mg
2(µ0 − tan(α))

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 3 (Seite 1 von 3)
Das dargestellte Balkentragwerk besteht aus zwei Teilelementen und wird durch eine KraftF sowie eine veranderliche Streckenlast
q(x2) = q0
(1−
(x2L
)2), 0 ≤ x2 ≤ L
belastet. Die Teilelemente 1 und 2 sind im Punkt B gelenkig miteinander verbundenund im Punkt A und D wie dargestellt gelagert. Die Ecke im Punkt C ist als biegestarranzusehen.
A
BC
Dx1
z1
x2z2
q(x2)
L
L
LL
L
2
F
1
2
a)Erganzen Sie die folgende Abbildung zu einem vollstandigen Freikorperbild. Ersetzen Siedie Streckenlast durch eine noch nicht naher zu spezifizierende Resultierende. (1,0 Punk-te)
A
MA
F
Fres
Dx
Dy
Gx
Gx
Gy
Gy
x∗2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 3 (Seite 2 von 3)
b)Bestimmen Sie die aus der veranderlichen Streckenlast resultierende Gesamtkraft Fres undgeben Sie den Angriffspunkt x∗2 der Resultierenden auf dem Balken an. (2,0 Punkte)
Fres =2
3q0L x∗2 =
3
8L
c)Das zuvor gezeigte System ist nun hin-sichtlich Geometrie und Belastung gean-dert worden. Der abgewinkelte Balkenwird nun mit einer konstanten Linienlastq0 belastet wohingegen der horizontaleBalken einer linear veranderlichen Lini-enlast
q(x2) = q0
(1− x2
L
)
ausgesetzt wird.
A
B
C
Dx1
z1
x2z2
q0q0
L
LL
x
y
z
I©II©
Die Auflagerreaktionen sind bezuglich des x, y-Koordinantensystems wie folgt vorgege-ben:
Ax =1
6q0L , Ay =
1
6q0L , MA = −q0L2 , Dx = −7
6q0L , Dy =
4
3q0L
Geben Sie die Funktion M II(x2) fur 0 ≤ x2 ≤ L sowie die Werte der Schnittgroßen furdie folgenden Positionen an. (4,0 Punkte)
M II(x2) = −5
6q0Lx2 − q0
[1
2x22 −
1
6
x32L
]
N I(x1 = 0) = − 1
3√2q0L N II(x2 = L) = −7
6q0L
QI(x1 = 0) = 0 QII(x2 = 0) = −5
6q0L
QI(x1 =√2L) = −
√2q0L QII(x2 = L) = −4
3q0L

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 3 (Seite 3 von 3)
Zeichnen Sie qualitativ die Schnittgroßenverlaufe unter Angabe der jeweiligen Werte anden Punkten A, B, C und D bezuglich der Koordinaten xi, yi und unter Angabe desjeweiligen Polynomgrades p. (3,0 Punkte)
N(xi) →
p = 0
p = 0
p = 0
− 1
3√2q0L
−7
6q0L
−4
3q0L
Q(xi) →
p = 0
p = 1
p = 2
−√2q0L
−5
6q0L −4
3q0L
7
6q0L
M(xi) →
p = 1
p = 2
p = 3
q0L2
−7
6q0L
2
−7
6q0L
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 4 (Seite 1 von 3)
a)Der dargestellte, in A und C gelagerte Balken wird durch eine Streckenlast q0 sowie eineEinzelkraft F belastet. Im Punkt B befindet sich ein Vollgelenk.
x
z
A
B C
q0
lll
F
I II III
Geben Sie die kinematischen (geometrischen) Rand- und Ubergangsbedingungen an, diezur vollstandigen Bestimmung der Biegelinie w(x) erforderlich sind. Geben Sie dabei ein-deutige Zuweisungen hinsichtlich der jeweiligen Bereiche I, II und III unter Verwendungdes vorgegebenen Koordinatensystems an. (3,0 Punkte)
Bereich I : 0 ≤ x ≤ l Bereich II : l ≤ x ≤ 2l Bereich III : 2l ≤ x ≤ 3l
wI(x = 0) = 0
w′I(x = 0) = 0
wI(x = l) = wII(x = l)
wII(x = 2l) = 0
w′II(x = 2l) = w′
III(x = 2l)
wII(x = 2l) = wIII(x = 2l) = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 4 (Seite 2 von 3)
b)Fur das nun gegebene System sind die Auf-lagerreaktion gemaß der angegebenen x- undz-Koordinate durch
Ax = 0 , Az = −q0 l24
, Bz = −5 q0 l
24
vorgegeben. Der Balken weist die Biegestei-figkeit EI auf.
x1
z1
x2
z2
A B
q0
l/2 l/2
I II
Bestimmen Sie die Funktionen des Biegemomentes MI(x1) fur 0 ≤ x1 ≤ l/2 sowieMII(x2)fur 0 ≤ x2 ≤ l/2. (2,0 Punkte)
MI(x1) =q0l
24x1
MII(x2) = − q03lx32 +
q0l
24x2 +
q0l2
48
Geben Sie die sowohl die Verdrehung des Balkens w′II(x2) als auch die Biegelinie wII(x2)
fur den Bereich II (0 ≤ x2 ≤ l/2) ohne Berechnung der Integrationskonstanten an. (2,0Punkte)
wII(x2) =1
EI
[q060l
x5 − q0l
144x32 −
q0l2
96x22
]+ C1x2 + C2
w′II(x2) =
1
EI
[q012l
x42 −q0l
48x22 −
q0l2
48x2
]+ C1

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 4 (Seite 3 von 3)
c)Der dargestellte, linksseitig eingespannte Balken (Biegesteifigkeit EI ) wird durch ein lini-enhaft verteiltes Moment m belastet. Das Biegemoment ergibt sich bei dieser Belastungzu M(x) = m(l − x).
x
z
AB
m
l
Berechnen Sie sowohl die Verdrehung des Balkens w′(x) als auch die Biegelinie w(x) furdas System inklusive der Bestimmung aller Integrationskonstanten. (2,0 Punkte)
w′(x) = − 1
EI
[mlx− mx2
2
]C1 = C2 = 0
w′(x) = − 1
EI
[mlx2
2− mx3
6
]
Bestimmen Sie die Durchbiegung wB und die Verdrehung w′B des Balkenendes B. (1,0
Punkte)
wB = − ml3
3EI
w′B = − ml2
2EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 5 (Seite 1 von 3)
Die Koordinaten des Schwerpunkts S furdunnwandige (t≪ a, b, c) Profile mit den Ab-messungen a, b und c berechnen sich allge-mein zu
yS =a2 + c2
2 [a+ b+ c]sowie
zS =b [ b
2+ c]
a+ b+ c.
S
a
b
c
tz
y
zS
yS
a)Berechnen Sie fur den speziellen Fall b = c = 2a zunachst die resultierenden Schwerpunkt-koordinaten in Abhangigkeit der Lange a. (1 Punkt)
yS =a
2=b
4zS =
6 a
5=
3 b
5
Berechnen Sie fur die Abmessungen b = c = 2a die auf das angegebene Schwerpunkt-Koordinatensystem bezogenen Flachentragheitsmomente Iy und Iz des Profils als Funktionvon a und t.Teilen Sie Ihre Losung dazu jeweils in das Flachentragheitsmoment um die Teilprofil-hauptachse sowie den Steiner-Anteil fur alle Teilprofile auf. Vernachlassigen Sie Termehoherer Ordnung von t. (3 Punkte)
Iy =b3 t
12+
[1
10b
]2bt +
[6
5a
]2at +
[2
5b
]2ct
=2
3a3t +
2
25a3t +
36
25a3t +
32
25a3t =
52
15a3t
Iz =a3 t
12+
[1
2a
]2bt +
c3 t
12+
[1
2a
]2ct
=1
12a3t +
1
2a3t +
2
3a3t +
1
2a3t =
7
4a3t

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
b)Die Maße des Querschnitts werden nun aufa = c = b
2geandert. Damit ergeben sich die
Schwerpunktkoordinaten sowie die Hauptfla-chentragheitsmomente zu
yS =a
4zS = a
Iy =8
3a3 t Iz =
5
12a3 t.
Die Verhaltnisse der Schnittreaktionen ander betrachteten Stelle sind zu
N
Mz=
36
5aund
My
Mz= −32
5
gegeben.
S
a
b
tz
y
zS
ySσmax
Bestimmen Sie die Funktion der neutralen Faser yNF (z) (2 Punkte), tragen Sie diesemaßstablich in den obigen Profilquerschnitt ein (1 Punkt) und bestimmen Sie denOrtsvektor ~rmax = y∗ ~ey + z∗ ~ez des Punktes der betragsgroßten Normalspannung im ge-gebenen Koordinatensystem. (1 Punkt)
yNF (z) = −z + 3
4a ~rmax = −1
4~ey + [−a]~ez
c)Fur die Reaktionsmomente und -krafte im angegebenen Profil-Querschnitt aus Aufgaben-teil b) gelte nun
N = 8F, My = 2 aF und Mz = 5 aF
Berechnen Sie die Normalspannung σxx in der unteren rechten Ecke des Profils (2 Punk-te).
σxx = 2F
at+
3
4
F
at+ 3
F
at=
23
4
F
at

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 6 (Seite 1 von 3)
a)Ein Rahmen ist im Punkt A wie dargestelltgelagert und wird daruber hinaus durch zweiStabe gestutzt. Der waagerechte Rahmenab-schnitt wird mit einer Kraft F belastet. DerWinkel α betragt π/4. Der Rahmen weist dieBiegesteifigkeit EI auf und ist als dehnstarr(EA → ∞) anzusehen, wahrend die Stabedie Dehnsteifigkeit EA besitzen.
Fur dieses System soll mit Hilfe von Energie-methoden die horizontale Komponente derAuflagerkraft im Punkt A ermittelt wer-den, die positiv in x−Richtung angenommenwird.
EA
EI
l
l
l/2
A B
12
α
F
x
y
x1
z1
x2z2
x3
x 4
Die Verlaufe der Schnittgroßen, die jeweils allein aus der Kraft F bzw. der statisch Uber-zahligen X resultieren, sind wie folgt gegeben.
MF (xi) :
0 0
0
−F l/4
MX(xi) :
0
0
X lX l
NF (x3) :
−F/2
−F/2
NX(x3) :
X
X
NF (x4) :
0
0
NX(x4) :
−√2X
−√2X

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 6 (Seite 2 von 3)
Geben Sie die im System gespeicherte Gesamtenergie Π als Summe einzelner (nicht zuvernachlassigender) Integrale unter Angabe der jeweiligen Integrationsgrenzen und Ver-wendung der zuvor angegebenen Schnittgroßenfunktionen (z.B. MF (xi)) an. (3,0 Punk-te)
Π =1
2
lˆ
0
[MX(x1)]2
EIdx1 +
1
2
lˆ
0
[MF (x2) +MX(x2)]2
EIdx2
+1
2
lˆ
0
[NF (x3) +NX(x3)]2
EAdx3 +
1
2
√2lˆ
0
[NX(x4)]2
EAdx4
Berechnen Sie nun konkret die unbekannte Lagerkraft X . Geben Sie hierbei sowohl dasErgebnis als auch die wesentlichen Zwischenschritte auf der nachsten Seite an und beruck-sichtigen Sie, dass das Verhaltnis zwischen der Biege- und Dehnsteifigkeit der einzelnenStrukturen zu
EA
EI=
2
l2
gegeben ist. (5,0 Punkte)
b)Nehmen Sie nun an, dass Stab 2 einen kreisrunden Querschnitt (Radius r) aufweist unddie Stabkraft S2 > 0 bekannt ist. Geben Sie zunachst allgemein die Bedingung fur r an,so dass die maximal zulassige Spannung σzul des Materials nicht uberschritten wird. (1,0Punkte)
r ≥√
S2
π σzul
Spezifizieren Sie das obere Ergebnis fur die nun gegebenen Zahlenwerte S2 = 100 kN undσzul = 650 MPa. Geben Sie genau 3 relevante Nachkommastellen an. (1,0 Punkte)
r ≥ 6.998mm

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 6 (Seite 3 von 3)
Losung zu Aufgabenteil a):
Anwendung des Satzes von Castigliano:
∂Π
∂X= 0 =
lˆ
0
MX(x1)
EI
∂MX(x1)
∂Xdx1
︸ ︷︷ ︸I.
+
lˆ
0
[MF (x2) +MX(x2)]
EI
∂MX(x2)
∂Xdx2
︸ ︷︷ ︸II.
+
lˆ
0
[NF (x3) +NX(x3)]
EA
∂NX(x3)
∂Xdx3
︸ ︷︷ ︸III.
+
√2lˆ
0
NX(x4)
EA
∂NX(x4)
∂Xdx4
︸ ︷︷ ︸IV.
Wobei auch die Schreibweise M(xi) =∂MX(xi)
∂Xbzw. N(xi) =
∂NX(xi)
∂Xverwendet
werden kann.
Die Integrale werden mit Hilfe von Koppeltabellen gelost, da die Schnittgroßen-Verlaufe mit Randwerten gegeben sind:
0 =l X l l
3EI︸ ︷︷ ︸I.
+l2
−F l4
[l + 2 l
2
]
6EI+
l2
−F l4
l2
3EI+l X l l
3EI︸ ︷︷ ︸II.
+l −F
21
EA+l X 1
EA︸ ︷︷ ︸III.
+
√2 l [−
√2X ] [−
√2]
EA︸ ︷︷ ︸IV.
=1
EI
[2X l3
3− F l3
16
]+
l2
2EI
[−F l
2+ [1 + 2
√2]X l
]
=[7 + 6
√2]X l3
6EI− 5F l3
16EI
Umstellen nach X liefert dann schließlich:
X =5/16F
[7 + 6√2]/6
=15F
8 [7 + 6√2]
= 0.1211F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 6 (Seite 3 von 3)
Losung zu Aufgabenteil a):
Losung mittels des Prinzips der virtuellen Krafte:
Die Schnittgroßenverkaufe des ”0”-Systems entsprechen denen aus F resultierendenVerlaufen. Die Schnittgroßenverlaufe des ”1”-Systems entsprechen denen nach X ab-geleiteten Verlaufen. Die statisch Uberzahlige X errechnet sich durch:
α10 +X α11 = 0 → X = −α10
α11
Die Einflusszahlen errechnen sich zu:
α10 =
lˆ
0
M0(x2) M1(x2)
EIdx2
︸ ︷︷ ︸II.
+
lˆ
0
N0(x3) N1(x3)
EAdx3
︸ ︷︷ ︸III.
α11 =
lˆ
0
M1(x1)2
EIdx1
︸ ︷︷ ︸I.
+
lˆ
0
M1(x2)2
EIdx2
︸ ︷︷ ︸II.
+
lˆ
0
N1(x3)2
EAdx3
︸ ︷︷ ︸III.
+
√2lˆ
0
N1(x4)2
EAdx4
︸ ︷︷ ︸IV.
Die Integrale werden mit Hilfe von Koppeltabellen gelost, da die Schnittgroßen-Verlaufe mit Randwerten gegeben sind:
α10 =l2
−F l4
[l + 2 l
2
]
6EI+
l2
−F l4
l2
3EI︸ ︷︷ ︸II.
+l −F
21
EA︸ ︷︷ ︸III.
= − 5F l3
16EI
α11 =l l l
3EI︸ ︷︷ ︸I.
+l l l
3EI︸ ︷︷ ︸II.
+l 1 1
EA︸ ︷︷ ︸III.
+
√2 l [−
√2] [−
√2]
EA︸ ︷︷ ︸IV.
=[7 + 6
√2] l3
6EI
Fur X ergibt sich schließlich:
X =5/16F
[7 + 6√2]/6
=15F
8 [7 + 6√2]
= 0.1211F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 7 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Korpern, welche durch dehnstar-re Seile miteinander verbunden sind. Die jeweiligen Massen und Abmessungen sind derZeichnung zu entnehmen, wobei das Massentragheitsmoment der gesamten abgesetztenRolle 4 bezuglich des zugehorigen Schwerpunktes D durch θ4 gegeben ist und die Rolle2 als masselos angesehen werden soll. Der Kreisring 1 rollt dabei zu jedem Zeitpunktschlupffrei ab und die Seile sind stets gespannt.
µ0
m1
x1
M0
ϕ1
r1
ϕ2
2 r2
ϕ3
m3
x
y
r3
r4
R4
4
g
1
2
3
m4, θ4ϕ4
α
β
A
B
C
D
Erweitern Sie die folgenden Skizzen der Teilkorper 1, 3 und 4 zu vollstandigen Freikor-perbildern (inklusive etwaiger Auflagerreaktionen). (2,0 Punkte)
Massentragheitskrafte und -momente wurden hier nicht bewertet!
S1
m1gH1
N1
m3g
Cx
CyS2
S3
S3
m4g
Dx
DyM0
θ1θ3
θ4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 7 (Seite 2 von 3)
a)Geben Sie die Impulsbilanz (Kraftesatz) des Kreisrings 1 bezuglich der x1-Koordinate an.(1,0 Punkte)
m1x1 = S1 +H1 −m1g sin(α)
b)Geben Sie die Drehimpulsbilanz (Drallsatz) des Kreisrings 1 bezuglich des Schwerpunktsund der ϕ1-Koordinate an. Spezifizieren Sie das zu verwendende Massentragheitsmomentmittels der gegebenen Großen. (1,0 Punkte)
Θ1ϕ1 = −S1r1 +H1r1 mit Θ1 = m1r21
c)Geben Sie die Impulsbilanz (Kraftesatz) der Rolle 3 bezuglich der y-Koordinate an. (1,0Punkte)
m4y4︸ ︷︷ ︸=0
= Cy −m3g − S2 − S3 cos(β)
d)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 4 bezuglich des Schwerpunkts undder ϕ4-Koordinate an. (1,0 Punkte)
Θ4ϕ4 = S3r4 −M0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 7 (Seite 3 von 3)
e)Geben Sie die folgenden kinematischen Bindungen zwischen den Geschwindigkeiten dereinzelnen Koordinaten und der Geschwindigkeit des Freiheitsgrades x1 an. (2,0 Punkte)
ϕ1(x1) = − x1r1
ϕ2(x1) = −2x1r2
ϕ3(x1) = −2x1r3
ϕ4(x1) = −2x1r4
Berechnen Sie die von dem Moment M0 vom Zeitpunkt t = 0 bis zum Zeitpunkt t =t1 verrichtete Arbeit WM0
. Das System befindet sich anfanglich in Ruhe (x1(t = 0) =0, x1(t = 0) = 0) und es gilt x1(t1) = a. (2,0 Punkte)
WM0=
ˆ
M0 dϕ = 2M0a
r4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 8 (Seite 1 von 3)
Die unten gezeigte Bahn besteht aus zwei reibungsbehafteten Ebenen (Gleitreibungskoef-fizient µ, Lange l) sowie zwei als reibungsfrei anzunehmenden Kreisbogen (Offnungswinkelα). Im Punkt D befindet sich das Ende einer elastischen Feder (Federsteifigkeit c), wel-che in der dargestellten Lage entspannt ist. Bis zu einem Zeitpunkt t ≤ t0 wird ein alsPunktmasse anzusehender Korper (Masse m) im Punkt O in Ruhe gehalten. Dann wirddieser los gelassen, wobei vorausgesetzt werden soll, dass sich der Korper anschließendtatsachlich in Bewegung setzt (Hangabtriebskraft großer als Haftreibungskraft).
µ
µ
m
x
y
α
α
l
l
ϕ
r
r
g
c
O
A
BC
D
NN
a)Geben Sie die potenzielle Energie (Lageenergie) EO
pot des Korpers im Punkt O bezuglichdes angegebenen Nullniveaus NN an. (1,0 Punkte)
EOpot = mg (r (1− cos(α)) + l sin(α))
Geben Sie die verrichtete Reibarbeit WOAR auf der Strecke zwischen den Punkten O und
A an. (1,0 Punkte)
WOAR = −µmg l cos(α)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 8 (Seite 2 von 3)
Berechnen Sie die Geschwindigkeit vB der Masse im Punkt B. (1,5 Punkte)
vB =√
2 g (r (1− cos(α)) + l sin(α)− µ l cos(α))
b)Die Geschwindigkeit des Korpers im Punkt B ist nun durch vB > 0 vorgegeben. BerechnenSie die Geschwindigkeit im Punkt C. Verwenden Sie nicht den oben berechneten Wertfur vB. (1,0 Punkte)
vC =√v2B − 2µ g l
c)Die Geschwindigkeit des Korpers im Punkt C ist nun durch vC > 0 vorgegeben. Geben Siezunachst die Funktion der Geschwindigkeit v(ϕ) des Korpers in Abhangigkeit des Winkelsϕ an. Verwenden Sie nicht den oben berechneten Wert fur vC. (1,5 Punkte)
v(ϕ) =√v2C + 2 g r (1− cos(ϕ))

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 8 (Seite 3 von 3)
Geben Sie des Weiteren die Funktion der Normalkraft N(ϕ) zwischen Korper und Bahnin Abhangigkeit des Winkels ϕ an. (1,5 Punkte)
N(ϕ) = m
(g (3 cos(ϕ)− 2)− v2C
r
)
Geben Sie die Bedingung fur den Offnungswinkel α an, so dass der Korper an keiner Stelleder kreisformigen Bahn zwischen den Punkten C und D den Kontakt zu dieser verliert.(1,0 Punkte)
α ≤ arccos
(v2C3 g r
+2
3
)
d)Die Geschwindigkeit des Korpers im Punkt D ist nun durch vD > 0 vorgegeben. GebenSie die Gleichung zur Bestimmung der Stauchung ∆l der Feder an. Ein Auflosen dieserGleichung nach ∆l ist nicht erforderlich. (1,5 Punkte)
1
2c∆l2 −mg∆l sin(α) =
1
2m v2D

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 9 (Seite 1 von 2)
Das dargestellte System besteht aus zweistarren Kreisscheiben (Masse M1 bzw. M2,Radius jeweils R), welche uber eine starreStange (Masse m, Lange l) verbundensind und schlupffrei auf dem Untergrundabrollen. Die Bewegung findet auf einerschiefen Ebene (Neigungswinkel α) undunter Einfluss der Erdbeschleunigung gstatt. Die wie dargestellt angeknupfte Federist fur den nicht naher spezifizierten Wertξ = ξ0 entspannt. Beachten Sie, dass ξ = 0nicht die statische Ruhelage beschreibt.
M1, R
M2, R
m, l
c
α
ξ
x
NN
g
a)Geben Sie den Zusammenhang zwischen den Geschwindigkeiten ξ und x an. (1,0 Punkte)
ξ(x) =x
cosα
b)Bestimmen Sie die potentielle Energie Epot in Abhangigkeit der Koordinate ξ und dengegebenen Großen bezogen auf das dargestellte Nullniveau NN. (3,0 Punkte)
Epot(ξ) =M1 g [ ξ sinα +R1 cosα ] +mg
[(ξ +
l
2
)sinα +R cosα
]
+M2 g [ ( ξ + l ) sinα+R cosα ] +1
2c [ ξ0 − ξ ]2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 9 (Seite 2 von 2)
c)Bestimmen Sie die kinetische Energie Ekin in Abhangigkeit der Koordinate ξ und dengegebenen Großen. Beachten Sie, dass insbesondere die Massentragheitsmomente nichtals gegeben angesehen werden konnen. (2,0 Punkte)
Ekin(ξ) =1
2M1 ξ
2 +1
2m ξ2 +
1
2M2 ξ
2
+1
2
[1
2M1R
2
]
︸ ︷︷ ︸θ1
[ξ
R
]2
︸ ︷︷ ︸ϕ21
+1
2
[1
2M2R
2
]
︸ ︷︷ ︸θ2
[ξ
R
]2
︸ ︷︷ ︸ϕ22
d)Fur einen nicht naher spezifizierten Sonderfall und unter Verwendung einer abweichendenKoordinate η ergeben sich im Folgenden die Energien des Systems zu
Epot(η) = 3mg η sin(α) + 1/2 c η2 , Ekin(η) = 2m η2 .
Stellen Sie basierend auf diesen Energien die Bewegungsgleichung dieses Sonderfalls be-zuglich η auf. (2,0 Punkte)
4 η +c
mη + 3 g sinα = 0
Bestimmen Sie, basierend auf obiger Bewegungsgleichung, die Eigenkreisfrequenz ω0 sowiedie Periodendauer T der Eigenschwingung des Systems. (2,0 Punkte)
ω0 =
√c
4mT = 2 π
√4m
c

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 10 (Seite 1 von 4)
a)Das skizzierte Balkensystem besteht aus drei Balkenabschnitten I, II und III (jeweils Bie-gesteifigkeit EI und Dehnsteifigkeit EA → ∞), ist wie dargestellt gelagert und wird ander Stelle A durch eine horizontale Kraft F und ein Moment M belastet sowie durch eineFeder (Federkonstante c), welche in der dargestellten Lage entspannt ist, gestutzt.
x1
z1
x2
z2 x3
z3
l
l
l
l
I
II
III
c
F
M
EI
A
Bestimmen Sie das Potential der inneren Krafte Πi und das Potential der außeren La-sten Πa fur das dargestellte Balkensystem. Integrale sollen nicht gelost und die zu be-rucksichtigenden Verschiebungsfunktionen nicht spezifiziert werden. Verwenden Sie dievorgegebenen Koordinatensysteme. (2,0 Punkte)
Π = Πi +Πa
mitΠi =12
´ 2l
0EI w′′
I (x1)2 dx1+
12
´ l
0EI w′′
II(x2)2 dx2+
12
´ l
0EI w′′
III(x3)2 dx3+
12c w′
III(0)2
und Πa = −F wII(0)−M w′III(0)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 10 (Seite 2 von 4)
b)Der skizzierte Trager (Biegesteifigkeit EI) ist wie dargestellt gelagert und wird links durcheine Kraft F belastet.
x
z
l
F
EI
Geben Sie alle kinematischen Randbedingungen an. (0,5 Punkte)
w′(0) = 0 , w(l) = 0 , w′(l) = 0
Spezifizieren Sie damit einen fur das Ritz-Verfahren zulassigen Naherungsansatz vom Typ
w(x) = a1 + a2 x2 + a3 x
3 . (1,5 Punkte)
w(x) = a1
[2[xl
]3− 3
[xl
]2+ 1
]
oder w(x) = a2 l2
[−2
3
[xl
]3+[xl
]2− 1
3
]
oder w(x) = a3 l3
[[xl
]3− 3
2
[xl
]2+
1
2
]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 10 (Seite 3 von 4)
c)Der skizzierte Biegetrager (Biegesteifigkeit EI) ist am linken Rand wie dargestellt durchein Festlager sowie eine Drehfeder (Drehfederkonstante cT) gelagert und wird des Weiterendurch eine linear veranderliche Streckenlast (Amplitude q0) belastet.
x
z
l
q0
cT
EI
Das Gesamtpotential des Biegetragers lautet
Π =1
2
ˆ l
0
EI w′′(x)2 d x+1
2cT w
′(x = 0)2 −ˆ l
0
q(x)w(x) dx
Bestimmen Sie die Freiwerte a1 und a2 fur den zweigliedrigen Naherungsansatz vom Typ
w(x) = a1 x+ a2 x2
unter Verwendung des Ritz-Verfahrens. Tragen Sie sowohl das Ergebnis fur die Koeffizi-enten a1 und a2 als auch wesentliche Zwischenschritte der Rechnung auf der folgendenSeite ein. (4,0 Punkte)
d)Geben Sie fur das System aus c) das Drehfedermoment MT in Abhangigkeit gegebenerGroßen an. (2,0 Punkte)
MT =1
6q0 l
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 10 (Seite 4 von 4)
Losung zu Aufgabenteil c):
q(x) = q0
[1− x
l
]
w′(x) = a1 + 2 a2 x
w′′(x) = 2 a2
⇒ Π =1
2
ˆ l
0
4EI a22 d x+1
2cT a
21 −ˆ l
0
q0
[1− x
l
] [a1 x+ a2 x
2]dx
∂Π
∂a1= cT a1 −
1
6q0 l
2 = 0 ⇒ a1 =q0 l
2
6 cT
∂Π
∂a2= 4EI a2 −
1
12q0 l
3 = 0 ⇒ a2 =q0 l
2
48EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 11 (Seite 1 von 3)
Die rechts dargestellte Kreisscheibe (Innen-radius R, Außenradius 2R) wird durch einenkonstanten Innendruck p belastet. Der auße-re Rand der Scheibe ist unverschieblich gela-gert. Das Material, aus dem die Scheibe be-steht, ist linear elastisch isotrop (Elastizitats-modul E, Querkontraktionszahl ν).
x
y
p
R
2R r
ϕ
a)Die Airysche Spannungsfunktion F , welche zur Berechnung dieser rotations-symmetrischenProblemstellung angewandt werden kann, lautet in ihrer allgemeinen Form
F = C0 + C1 ln(r) + C2 r2 + C3 r
2 ln(r) ,
wobei Ci reelle Koeffizienten darstellen. Die daraus folgenden Funktionen fur die Span-nungskomponenten σrr und σϕϕ ergeben sich zu
σrr =C1
r2+ 2C2 + C3 (1 + 2 ln(r)) , σϕϕ = −C1
r2+ 2C2 + C3 (3 + 2 ln(r)) .
Im Folgenden ist C3 = 0 sowie ein ebener Spannungszustand (ESZ) anzuneh-men. Geben Sie die Dehnung εϕϕ in Abhangigkeit der ubrigen Koeffizienten sowie diedaraus folgende Verschiebungsfunktion ur(r) an. (2,0 Punkte)
εϕϕ =1
E(σϕϕ − ν σrr) =
1
E
(−C1
r2(1 + ν) + 2C2 (1− ν)
)
ur(r) = εϕϕ r =1
E
(−C1
r(1 + ν) + 2C2 r (1− ν)
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 11 (Seite 2 von 3)
Nennen Sie die Randbedingungen zur Bestimmung der Koeffizienten C1 und C2 und gebenSie deren Werte an. (2,5 Punkte)
Randbedinungen: σrr(r = R) = −p , ur(r = 2R) = 0
C1 = −p (1− ν2) 4R2
5− 3 ν
C2 = − p (1 + ν)
2 (5− 3 ν)
b)Die radiale Verschiebung der Kreisscheibe ist nun durch die kinematisch zulassige Funktion
ur = Kr2 − 4R2
r
vorgegeben, wobei K einen reellen Koeffizienten darstellt. Geben Sie die aus dieser Ver-schiebungsfunktion herzuleitenden Dehnungen εrr und εϕϕ in Abhangigkeit des Koeffizi-enten K an. (1,0 Punkte)
εrr =∂ur∂r
= Kr2 + 4R2
r2
εϕϕ =urr
= Kr2 − 4R2
r2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 11 (Seite 3 von 3)
Geben Sie unter der Voraussetzung eines vorliegenden ebenen Dehnungszustan-des (EDZ) die daraus folgende Spannung σrr in Abhangigkeit des Koeffizienten K an.(1,0 Punkte)
σrr =E
1− ν2(εrr + ν εϕϕ) =
EK
r2 (1− ν2)(r2 (1 + ν) + 4R2 (1− ν))
Berechnen Sie aus der nicht-trivialen Spannungs-Randbedingung (siehe (a)) den Koeffizi-enten K. (1,0 Punkte)
K = − p (1− ν2)
E (5− 3 ν)
c)Gegeben ist die Airysche Spannungsfunktion
F = C1 r ln(r) cos(ϕ) + C2 ϕ2
mit den reellen Koeffizienten C1 und C2. Geben Sie die daraus folgenden Spannungskom-ponenten σrr, σϕϕ und σrϕ an. (2,5 Punkte)
σrr =C1
rcos(ϕ) +
2C2
r2
σϕϕ =C1
rcos(ϕ)
σrϕ =C1
rsin(ϕ) +
2C2
r2ϕ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 12 (Seite 1 von 3)
a)Das dargestellte System, bestehend aus einem in Punkt A gelagerten, abgewinkelten Rah-men und zwei gelenkig angebrachten Staben, befindet sich im Schwerefeld. Alle Teilstuckehaben jeweils die Lange l und die Masse m. In Punkt B greift eine Einzelkraft F an.Ferner sind an dem System zwei Federn (Federsteifigkeit c) und eine Drehfeder (Drehfe-dersteifigkeit k) befestigt. Fur q1=q2=0 sind alle Federn entspannt.
F
l,m
l,m
l,ml,m
c
c
k
g
q1
q2A
B
NN
Stellen Sie das Gesamtpotential Π des Systems bezuglich des angegebenen NullniveausNN in Abhangigkeit der Freiheitsgrade q1 und q2 auf. Fassen Sie die einzelnen Termenicht zusammen. (4,0 Punkte)
Π =1
2k(q2 − q1)
2 +1
2c(l sin (q1) + l sin (q2))
2 +1
2c(l sin (q1))
2 −mgl
2sin (q1)
−mg(l sin (q1) +l
2sin (q2)) +mg
l
2cos (q1) +
3
2mgl cos (q1)− 2F l(1− cos (q1))

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 12 (Seite 2 von 3)
b)Fur ein anderes, nicht naher spezifiziertes System, ist das Gesamtpotential durch
Π = k
[3
2q21 − 2q1 q2 + q22 +
1
4sin2(q1)
]−mg l
[5
2sin(q1) + sin(q2)
]−M q2+F l cos(q1)
in Abhangigkeit einer Kraft F , eines Momentes M und der Freiheitsgrade q1 und q2gegeben. Geben Sie die Gleichgewichtsbedingungen dieses Systems an. (2,0 Punkte)
∂Π
∂q1=3kq1 − 2kq2 +
1
2sin (q1) cos (q1)k −mgl
5
2cos (q1)− F l sin (q1) = 0
∂Π
∂q2=− 2kq1 + 2kq2 −mgl cos (q2)−M = 0
Geben Sie zudem die Bedingungen fur F und M an, so dass fur q1=π/6 und q2=−π/4eine Gleichgewichtslage besteht. (2,0 Punkte)
F =2kπ
l+
√3k
4l−mg
5√3
2, M = −5
6kπ −mgl
√2
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Aufgabe 12 (Seite 3 von 3)
Abschließend soll die Stabilitat dieser Gleichgewichtslage (q1 = π/6, q2 = −π/4) fur dievon Ihnen errechneten Großen F und M fur k = 4mg l analysiert werden. Treffen Sieeine Aussage daruber, ob diese Gleichgewichtslage stabil ist. Begrunden Sie diese Aussagedurch entsprechende, eindeutige Terme im nachfolgenden Kastchen. (2,0 Punkte)Hinweis: Das nachfolgende Kastchen wird mit 0 Punkten gewertet, sollte keine Begrun-dung fur die getroffene Aussage erfolgen.
D11 =∂2Π
∂q21= 3k +
1
2cos2 (q1)k −
1
2sin2 (q1)k +mgl
5
2sin (q1)− F l cos (q1)
mit F =2kπ
l+
√3k
4l−mg
5√3
2ergibt sich
D11 =− 2, 5664k + 5mgl = −5, 2656mgl < 0 ⇒ nicht stabil!

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 1 (Seite 1 von 3)
Das unten dargestellte Fachwerk ist in den Punkten A und B gelagert und wird wie ge-zeigt durch Einzelkrafte F1, F2 und F3 belastet. Die Lange der schragen Stabe betragtjeweils l.
x
y
A
B
F1F2
F3
l
l
l
l
l
1
8
9
10
11
2
3 4
67
5
a)Berechnen Sie die Auflagerreaktionen in den Punkten A und B bezuglich der durch dasvorgegebene Koordinatensystem positiv definierten Richtungen. (4 Punkte)
Ax = 0 Bx =1√2(F1 + F3)− F2
Ay =1√2(F1 + F3) +
1
2F2 By = −1
2F2 −
√2F3

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 1 (Seite 2 von 3)
b)Geben Sie die Nummern aller Stabe an, die auf Grundlage gangiger Kriterien direkt alsNullstabe identifiziert werden konnen (keine Rechnung). (2 Punkte)Hinweis: Die Angabe falscher Stabe fuhrt zu Punktabzug.
1,6,10,11 (S6 = 0 folgt aus S10 = 0)
c)An dem selben Fachwerk greifen nun die aus nachfolgender Zeichnung zu entnehmendenKrafte an.
x
y
A
B2F
F
F
l
l
l
l
l
1
8
9
10
11
2
3 4
67
5

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 1 (Seite 3 von 3)
Die Auflagerreaktionen sind dabei gemaß des vorgegebenen Koordinatensystems zu
Ax = 0 , Ay = −1
2F , Bx = F , By =
3
2F
vorgegeben. Berechnen Sie die Stabkrafte S2, S3, S4 und S8. (4 Punkte)
S2 =1
2F S3 =
1√2F
S4 =1√2F S8 = −F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 2 (Seite 1 von 2)
a)Das dargestellte System besteht aus einemBalken (Masse m1), welcher im Punkt Cgelenkig mit einem weiteren Stab (Massem2) verbunden ist und sich im Punkt Aan einer reibungsbehafteten Wand (Haftrei-bungskoeffizient µ0) abstutzt. Des Weiterenist am oberen Ende des Balkens eine drei-eckformige Scheibe (Masse m3) starr mitdiesem verbunden.
Berechnen Sie die Lage rS = xS ex+yS ey desMassen-Schwerpunktes des Systems bezug-lich des vorgegebenen Koordinatensystems.(3,0 Punkte)
m1
m2
m3g
a
b b
b
b
b
xy
A B
Cµ0
xS =[√2 b+ a/3]m3
m1 +m2 +m3yS =
[m3/3−√2/2m2] b
m1 +m2 +m3
b)Das vorherige System ist nun dahingehendgeandert worden, dass eine Kugel der Massem3 mittels einer Bohrung uber das Ende desBalkens geschoben wurde. Die Lage des Mas-senschwerpunktes der Kugel kann dabei alsidentisch mit ihrem Mittelpunkt angenom-men werden. Die Masse m2 ist in diesem Fallals vernachlassigbar gegenuber m1 und m3
anzusehen (m2 ≪ m1, m3).
Erweitern Sie die nachfolgende Zeichnung zuvollstandigen Freikorperbildern. (1,0 Punk-te)
m1
m2 ≈ 0
m3
g
b b
b
b
x
yA B
Cµ0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 2 (Seite 2 von 2)
m1 g
m3 g
B
C
C
H
N
Berechnen Sie die von Ihnen angetragenen Reaktionskrafte. (3,0 Punkte)
C = B = − 1√2[m1 + 2m3] g N =
1
2[m1 + 2m3] g H =
1
2m1 g
Geben Sie die Bedingung fur die Masse m3 an, so dass an der Kontaktstelle A Haftungbesteht. (2,0 Punkte)
m3 ≥1− µ0
2µ0m1
Lasst sich fur diesen Fall eine Bedingung fur Selbsthemmung ableiten und falls ja, wielautet diese? (1,0 Punkte)
4 ja 2 nein µ0 ≥ 1

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 3 (Seite 1 von 3)
a)Der dargestellte Rahmen ist in den PunktenA und B wie dargestellt gelagert und wirddurch die veranderliche Flachenlast mit derFunktion
q(x1) = 3 q0
[1−
(x1l
)2+
2
3
(x1l
)3]
belastet. Die Rahmenecke im Punkt C istbiegestarr und der Winkel α ist als α = π/4gegeben.
l l/2
x2
y2
z2
x1
y1
z1
A
B
C
α
q(x1)
Die vertikale Komponente der Auflagerkraft im Punkt A ist bezuglich des angegebenenKoordinatensystems durch Az1 = −26
15q0 l gegeben. Berechnen Sie die Funktionen der
Schnittgroßen Q(x1) und M(x1) im Bereich 0 ≤ x1 ≤ l. (2,0 Punkte)
Q(x1) = −3 q0 x1 +q0 x
31
l2− q0 x
41
2 l3+
26 q0 l
15
M(x1) = −3 q0 x21
2+q0 x
41
4 l2− q0 x
51
10 l3+
26 q0 l x115
Berechnen Sie die Auflagerreaktion Bz1 im Punkt B in Richtung der vorgegebenen z1-Koordinate. (1,0 Punkte)
Bz1 = −23 q0 l
30

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 3 (Seite 2 von 3)
b)Das rechts dargestellte System besteht auseinem geraden und einem abgewinkeltenBalken, wobei die Ecke im Punkt D als bie-gestarr anzusehen ist. Das System ist in denPunkten A und B wie dargestellt gelagertund die beiden Balken sind im Punkt C ge-lenking miteinander verbunden. Der geradeBalken wird mit einer konstanten Linienlastq0 belastet, wohingegen der abgewinkelteBalken einer linear veranderlichen Linienlastmit dem Maximalwert q0 ausgesetzt wird.
+
ll l/2
x
y
x1
y1
z1
x2
y2
z2
A
B
C
D q0
q0
Die Auflagerreaktionen sind bezuglich des x, y-Koordinantensystems wie folgt gegeben:
+
ll l/2
x
y
x1y1
z1
x2
y2z2
Ax
MA
Bx
By
C
D q0q0
Ax =5 q0 l
6
MA = −q0 l2
2
Bx = −1 q0 l
3
By = q0 l
Geben Sie die Randwerte der Schnittgroßen im Punkt D bezuglich beider Bereiche an.(3,0 Punkte)
N I(x1 = 3/2 l) = −5/6 q0 l N II(x2 = l) = −q0 l
QI(x1 = 3/2 l) = −q0 l QII(x2 = l) = −5/6 q0 l
M I(x1 = 3/2 l) = −1/2 q0 l2 M II(x2 = l) = −1/2 q0 l
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 3 (Seite 3 von 3)
Zeichnen Sie qualitativ die Schnittgroßenverlaufe unter Angabe der jeweiligen Werte anden Punkten A, B, C und D bezuglich der Koordinaten xi, yi und unter Angabe desjeweiligen Polynomgrades p. (4,0 Punkte)
N(xi) → −5 q0 l
6−5 q0 l
6
−q0 l
−q0 lp = 0
p = 0
Q(xi) →
0
−q0 l −q0 l
−5/6 q0 l
−1/3 q0 l
p = 0p = 1
p = 2
M(xi) →
1/2 q0 l2
0
0−1/2 q0 l
2
−1/2 q0 l2
p = 2
p = 1
p = 3

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 4 (Seite 1 von 3)
a)Das dargestellte Balkensystem (Biegesteifigkeit E I) ist in Punkt A mit einem Festlagerverknupft und in Punkt C fest eingespannt. Die beiden Teilsysteme sind in Punkt B ge-lenkig miteinander verbunden. Zudem greift in Punkt B eine Einzelkraft F in vertikaleRichtung an. Die axiale Verformung der Balken sei im Folgenden vernachlassigbar (dehn-starr E A→ ∞).
x1
z1
x2z2
l
l
2l
F
A
BC
Geben Sie samtliche kinematische (geometrische) Rand- und Ubergangsbedingungenan, die zur vollstandigen Bestimmung der Biegelinie w(xi) erforderlich sind. Tragen Siezur eindeutigen Indizierung die Biegelinienbereiche in obige Skizze ein und verweisen Sieeindeutig auf diese. Verdeutlichen Sie zudem, auf welches Koordinatensystem sich IhreAngaben beziehen. (3,5 Punkte)
Bereich 1: 0 ≤ w1(x1) ≤ l , Bereich 2: 0 ≤ w2(x2) ≤ 2l , Bereich 3: 2l ≤ w3(x2) ≤ 3lw1(x1 = 0) = 0 , w3(x2 = 3l) = 0 , w′
3(x2 = 3l) = 0 , w1(x1 = l) = 0 , w2(x2 = 0) = 0, w′
1(x1 = l) = w′2(x2 = 0) , w2(x2 = 2l) = w3(x2 = 2l)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 4 (Seite 2 von 3)
b)Der dargestellte, linksseitig eingespannteBalken (Biegesteifigkeit E I) wird mit derlinear veranderlichen Streckenlast q(x) =q0 [2−x/l] belastet. Das Biegemoment ergibtsich bei vorliegender Belastung zu
M(x) = q0
[x3
6 l− x2 +
3 x l
2− 2 l2
3
].
xz
l
q0
2q0
Berechnen Sie sowohl die Verdrehung des Balkens w′(x) als auch die Biegelinie w(x) fur dasgegebene System inklusive der Bestimmung aller Integrationskonstanten. (2,0 Punkte)
w′(x) =q0EI
[− x4
24 l+x3
3− 3 x2 l
4+
2 x l2
3
]
w(x) =q0EI
[− x5
120 l+x4
12− x3 l
4+x2 l2
3
]
c)Der dargestellte, linksseitig eingespannte Balken (Biegesteifigkeit E I) wird mit einer kon-stanten Streckenlast q(x) = q0 und einer Einzelkraft F belastet. Die Biegelinie w(x) ergibtsich bei vorliegender Belastung zu
w(x) =1
E I
[q0x4
24− q0
x3 l
6+ q0
x2 l2
4+ F
x3
6− F
x2 l
2
].
xz
l
q0
F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 4 (Seite 3 von 3)
Wie groß muss die Kraft F sein, damit die Verschiebung des Kraftangriffspunktes von Fgleich Null ist? (1,0 Punkte)
F =3 q0 l
8
Wie groß muss die Kraft F sein, damit die Tangente der Biegelinie am Kraftangriffspunktvon F horizontal verlauft? (1,0 Punkte)
F =q0 l
3
Geben Sie fur diese Kraft die Durchbiegung des Kraftangriffspunktes an. (1,0 Punkte)
w(x = l) =q0 l
4
72E I
An welcher Stelle tritt die betragsmaßig großte Durchbiegung fur F = q0 l auf und welchenWert hat diese? (1,5 Punkte)
wmax(x = l) = − 5 q0 l4
24E I

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 5 (Seite 1 von 3)
Der dargestellte Querschnitt mit der einheitlichen Wandstarke t ≪ a ist als dunnwandiganzunehmen.
x
y
z
a/2
a/2
a/2
a/2
aa
s1
s2
s3
s4
s5
a)Bestimmen Sie das Flachentragheitsmoment Iy des Querschnitts bezuglich des eingezeich-neten Schwerpunktskoordinatensystems. (1,0 Punkte)
Iy =13
4a3 t

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 5 (Seite 2 von 3)
b)Bestimmen Sie das statische Moment Sy(s1) bezuglich der Koordinate s1 fur den Teilbe-reich 0 ≤ s1 ≤ a/2. (1,0 Punkte)
Sy(s1) =12s1 t [a + s1]
Bestimmen Sie das statische Moment Sy(s2) bezuglich der Koordinate s2 fur den Teilbe-reich 0 ≤ s2 ≤ a. (1,0 Punkte)
Sy(s2) =38t a2 + s2 t a
Bestimmen Sie das statische Moment Sy(s3) bezuglich der Koordinate s3 fur den Teilbe-reich 0 ≤ s3 ≤ 2 a. (1,0 Punkte)
Sy(s3) =118t a2 + s3 t
[a− s3
2
]
Bestimmen Sie das statische Moment Sy(s4) bezuglich der Koordinate s4 fur den Teilbe-reich 0 ≤ s4 ≤ a. (1,0 Punkte)
Sy(s4) =118t a2 − s4 t a
Bestimmen Sie das statische Moment Sy(s5) bezuglich der Koordinate s5 fur den Teilbe-reich 0 ≤ s5 ≤ a/2. (1,0 Punkte)
Sy(s5) =38t a2 − s5 t
[a− s5
2
]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 5 (Seite 3 von 3)
c)Der dargestellte zur y-Achse symmetrische Querschnitt mit der einheitlichen Wandstarket ist als dunnwandig anzunehmen (t≪ a). Die in z-Richtung wirkende Querkraft ist gege-ben als Q und das Flachentragheitsmoment des Querschnitts bezuglich des Schwerpunktsist gegeben als Iy. Das statische Moment des rechten oberen Flansches fur den Teilbereich0 ≤ s1 ≤ b/2 ist zu Sy(s1) =
12s1 t [b− s1] bestimmt worden.
a xy
z
l
s1
b
Bestimmen Sie die aus der Schubspannung resultierende Kraft F im rechten oberenFlansch fur den Teilbereich 0 ≤ s1 ≤ b/2. (2,0 Punkte)
F =Qt b3
24 Iy
Geben Sie die y-Koordinate des Schubmittelpunktes M bezuglich des vorgegebenen y, z-Koordinatensystems an. (2,0 Punkte)
yM = − t b3 l
12 Iy

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 6 (Seite 1 von 3)
a)Der dargestellte Rahmen (Biegesteifigkeit EI, Dehnsteifigkeit EA→ ∞) wird bei A undB von einem Loslager und bei C von einer Schiebehulse gestutzt. Zwischen den PunktenB und C greift eine konstante Linienlast mit dem Wert q0 an. Die Verbindungsstellensind als biegestarr anzunehmen. Verwenden Sie die angegebenen Koordinatensysteme x1-z1, x2-z2 und x3-z3.
A
B
C
I
II
III
x1
z1 x2
z2
x3
z3 ll
l
q0
Zeichnen Sie die Freikorperbilder fur das ”0”-System und das ”1”-System unter der Vor-aussetzung, dass das Auflagermoment in C als statisch Uberzahlige X gewahlt wird. (2,0Punkte)
”0”-System
A
B
C
q0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 6 (Seite 2 von 3)
”1”-System
A
B
C
1
Bestimmen Sie die Momentenverlaufe in den Teilbereichen I, II und III fur das ”0”-Systemin Abhangigkeit der außeren Belastung. (1,5 Punkte)
M I0 (x1) = Ax1 =
1
4lq0x1
M II0 (x2) = Al =
1
4q0l
2
M III0 (x3) = A (l + x3)−
1
2q0x
23 =
1
4q0l (l + x3)−
1
2q0x
23
Bestimmen Sie die Momentenverlaufe in den Teilbereichen I, II und III fur das ”1”-Systemin Abhangigkeit der ”1”-Last. (1,5 Punkte)
M I1 (x1) = Ax1 =
1
2lx1
M II1 (x2) = Al =
1
2
M III1 (x3) = A (l + x3) =
1
2(l + x3)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 6 (Seite 3 von 3)
b)Fur das in a) gegebene System ergeben sich fur nicht naher spezifizierte außere Belastun-gen die folgenden (fiktiven) Momentenverlaufe in den Teilbereichen I, II und III fur das”0”-System
M I0 (x1) =
1
2q0 l x1
M II0 (x2) =
1
2q0 l
2
M III0 (x3) = 2 q0 x
23
und fur das ”1”-System
M I1 (x1) = 2
x1l
M II1 (x2) = 2
M III1 (x3) =
2
l(l + x3)
Berechnen Sie die Einflusszahlen α10 und α11. (4,0 Punkte)
α10 =1
EI
(1
3q0l
3 + q0l3 +
7
3q0l
3
)=
1
EI
11
3q0l
3
α11 =1
EI
(4
3l + 4l +
28
3l
)=
1
EI
44
3l
Berechnen Sie die statisch Uberzahlige X . (1,0 Punkte)
X = −α10
α11= −1
4q0l
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 7 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Korpern, die durch dehnstarreSeile miteinander verbunden sind und sich im Schwerefeld der Erde (Erdbeschleunigungg) befinden. Die jeweiligen Massen, Massentragheitsmomente und Abmessungen sind derZeichnung zu entnehmen. Rolle 2 wird von dem konstanten DrehmomentM0 angetrieben.Der Haftreibungskoeffizient zwischen der Rolle 1 — welche zu allen Zeitpunkten schlupffreiabrollt — und der schiefen Ebene (Neigungswinkel α) betragt µ0. Das Massentragheits-moment der gesamten abgesetzen Rolle 3 ist durch θ3 gegeben.
µ0
m1
x1
M0
ϕ1
r1
ϕ2
m2
r2
ϕ3
m3, θ3
x3
r3
R3
m4
x4
g1
2
3
4
α
a)Tragen Sie im nachfolgenden Bild samtliche fehlenden Krafte bzw. Momente ein. Die Auf-lagersymbole sollen in der Zeichnung beibehalten und nicht freigeschnitten werden. (1,5Punkte)
θ1ϕ1
θ2ϕ2
θ3ϕ3
m1x1
m3x3
m4x4
m1g
m2g
m3gm4g
M0
H1
N1
S1
S1
S2
S2
S3
S3
S4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 7 (Seite 2 von 3)
b)Geben Sie die Impulsbilanz (Kraftesatz) der Rolle 1 bezuglich der der x1-Koordinate an.(1,0 Punkte)
S1 +H1 −m1g sin(α)−m1x1 = 0
c)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 1 bezuglich ihres Schwerpunktes undder ϕ1-Koordinate an. Spezifizieren Sie θ1 mittels der gegebenen Großen. (1,0 Punkte)
−H1 r1 − 12m1r
21 ϕ1 = 0
d)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 2 bezuglich ihres Schwerpunktes undder ϕ2-Koordinate an. Spezifizieren Sie θ2 mittels der gegebenen Großen. (1,0 Punkte)
M0 + [S2 − S1] r2 − 12m2r
22 ϕ2 = 0
e)Geben Sie die Impulsbilanz (Kraftesatz) der Rolle 3 bezuglich der x3-Koordinate an. (1,0Punkte)
S3 − S2 − S4 +m3g −m3x3 = 0
f)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 3 bezuglich ihres Schwerpunktesund der ϕ3-Koordinate an. (1,0 Punkte)
S4R3 − S2r3 − θ3ϕ3 = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 7 (Seite 3 von 3)
g)Geben Sie die Impulsbilanz (Kraftesatz) der Masse 4 bezuglich der x4-Koordinate an. (1,0Punkte)
m4g − S3 −m4x4 = 0
h)Geben Sie die (Winkel-)Geschwindigkeiten x1, ϕ1, x3, ϕ3, x4 in Abhangigkeit von ϕ2 an.(2,5 Punkte)
x1 = r2 ϕ2
ϕ1 =r2r1ϕ2
x3 =R3r2R3 + r3
ϕ2
ϕ3 =r2
R3 + r3ϕ2
x4 =R3r2R3 + r3
ϕ2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 8 (Seite 1 von 2)
Eine Punktmasse m befindet sich auf der dargestellten Bahn und wird aus der Ruhe durcheine vorgespannte Feder auf reibungsfreiem Untergrund bis zum Punkt A beschleunigt.Die geraden Abschnitte der Bahn sind reibungsbehaftet (Reibkoeffizienten µ1 bzw. µ2)wahrend die kreisformigen Abschnitte (Radien R1 bzw. R2) reibungsfrei sind.
c
replacemen
∆ x
µ = 0
µ = 0
µ = 0
µ1
µ2
l1
l2
R1
R2
α
mϕ
A B
C
D
E
N.N.
g
x
y
a)Berechnen Sie die Geschwindigkeit der Punktmasse im Punkt A in Abhangigkeit deraufgebrachten Federstauchung ∆x.
vA =
√c
m∆x
Geben Sie weiterhin die Geschwindigkeit der Punktmasse im Punkt B in Abhangigkeitvon ∆x an, nachdem diese uber den rauhen (Reibkoeffizient µ1) Bahnabschnitt AB derLange l1 geglitten ist.
vB =
√c
m[∆x]2 − 2µ g l1

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 8 (Seite 2 von 2)
b)Berechnen Sie den Betrag der Bahngeschwindigkeit v(ϕ) der Punktmasse im Verlauf desersten reibungsfreien Kreisbogens BC in Abhangigkeit des Winkels ϕ und einer als be-kannt anzunehmenden Geschwindigkeit vB im Punkt B.
Setzen Sie nicht die Geschwindigkeit vB aus dem vorigen Aufgabenteil ein!
v(ϕ) =√v2B − 2R1 g [1− cos(ϕ)]
Geben Sie weiterhin die Geschwindigkeit der Punktmasse im Punkt D in Abhangigkeitvon vB an, nachdem diese uber den rauhen (Reibkoeffizient µ2) Bahnabschnitt CD derLange l2 geglitten ist.
vD =√v2B − 2 g [R1 [1− cos(ϕ)] + l2 sin(α) + l2 µ2 cos(α)]
c)Die beiden Bahnabschnitte AB und CD seien nun als reibungsfrei (µ1 = µ2 = 0) anzu-nehmen, die Punktmasse wird nochmals mit der Feder am Anfang der Bahn beschleunigt.
Berechnen Sie die Vorspannkraft der Feder F0 so, dass die Punktmasse im oberen Kreis-bogen DE (Radius R2) nicht von der Bahn abhebt.
vD =
√√√√√c
m[∆x]2
︸ ︷︷ ︸F20
cm
−2 g [R1 [1− cos(ϕ)] + l2 sin(α)
mitmv2DR2
≤ mg cos(α)
F0 =√cm g [R2 cos(α) + 2 [R1 [1− cos(ϕ)] + l2 sin(α)]]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 9 (Seite 1 von 3)
Im dargestellten System wird ein Korper der Masse m reibungsfrei in einer Nut gefuhrtund ist durch eine Feder (Federsteifigkeit c) und einen Dampfer (Dampfungskonstanted) innerhalb der Nut gestutzt. Uber eine starre, masselose Stange der Lange l ist derKorper mit einer drehbaren Scheibe (Radius R, Masse M) exzentrisch (Exzentrizitat e)verbunden. Die Feder ist in der Lage ϕ = 0 ungespannt. Die Erdbeschleunigung ist zuvernachlassigen.
m
M
x
l
c
d
eR
ϕ
a)Bestimmen Sie mittels der gegebenen Großen die kinetische und potentielle Energie desGesamtsystems. Verwenden Sie dazu die Koordinaten ϕ und x. (2,0 Punkte)
Ekin =1
2MR2 ϕ2 +
1
2mx2
Epot =1
2c x2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 9 (Seite 2 von 3)
b)Bestimmen Sie die virtuelle Arbeit δW der nichtkonservativen Lasten in Abhangigkeit derKoordinate x. (1,0 Punkte)
δW = −x d δx
c)Geben Sie die kinematische Beziehung der Koordinate x als Funktion von ϕ fur großeAuslenkungen an. (2,5 Punkte)
x(ϕ) = l
(1−
√1− e2
l2sin2 ϕ
)+ e (1− cosϕ) mit cos(arcsin(a)) =
√1− a2
d)In dem unten dargestellten System rollt eine Scheibe (Masse M , Radius R) schlupffrei aufdem Untergrund ab. Eine Feder (Federsteifigkeit c) ist exzentrisch (Exzentrizitat e) ander Scheibe angebracht. An ihrem außeren Rand ist die Scheibe des Weiteren mit einemDampfer (Dampfungskonstante d) verbunden. In der dargestellten Ruhelage der Scheibe(ϕ = 0) ist die Feder ungespannt. Die Erdbeschleunigung ist zu vernachlassigen.
M
x
y
c
d
e
R
ϕ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 9 (Seite 3 von 3)
Bestimmen Sie die Bewegungsdifferentialgleichung des Systems bezuglich der Koordinateϕ unter der Annahme kleiner Auslenkungen. Geben Sie unbedingt wesentliche Zwischen-schritte an, welche zur Losung der Aufgabe notwendig sind. (3,5 Punkte)
ϕ+ ϕ8 d
3M+ ϕ
2 c e2
3R2M= 0
Wie lauten die Eigenkreisfrequenz ω0 und der Abklingkoeffizient δ des Systems? (1,0Punkte)
ω0 =
√2 c e2
3R2Mδ =
4 d
3M

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 10 (Seite 1 von 3)
Der obere Balken (Lange 2 l, BiegesteifigkeitEI1) des dargestellten Balkensystems wirdvon einer linear ansteigenden Streckenlastq(x1) mit dem Maximalwert q0 belastet. Deruntere Balken (Lange 3 l, BiegesteifigkeitEI2) wird bei x2 = 3 l von einer Feder(Federkonstante c) gestutzt. Die Federist entspannt, wenn das Gesamtsystemunbelastet ist. Alle Balken sind dehnstarr(EA → ∞), der vertikale Verbindungsstabist zudem auch biegestarr (EI → ∞).
q0
x1
x2
z1
z2 c
2 l, EI1
3 l, EI2EA→ ∞EI → ∞
I
II
a)Geben Sie samtliche kinematische Rand- und Ubergangsbedingungen zur eindeutigen Be-stimmung der Biegelinien-Funktionen wI(x1) und wII(x2) an. (2,5 Punkte)
wI(x1 = 0) = 0
wII(x2 = 0) = 0
w′I(x1 = 0) = 0
wI(x1 = 2 l) = wII(x2 = 3 l)
w′I(x1 = 2 l) = w′
II(x2 = 3 l) = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 10 (Seite 2 von 3)
b)Spezifizieren Sie die Federkraft Fc in Abhangigkeit der Balkenverschiebung an der Feder-angriffsstelle x2 = 3 l. Geben Sie zudem die konkrete Funktion fur q(x1) an. (1,0 Punkte)
Fc = −c wII(x2 = 3 l) q(x1) =q02 lx1
c)Bestimmen Sie das Potential Πi der inneren Lasten.Hinweis: Integrale sollen nicht gelost werden und die Verschiebungsfunktionen wI(x1)und wII(x2) sollen nicht weiter spezifiziert werden. (1,5 Punkte)
Πi =1
2
2 lˆ
0
EI1 [w′′I (x1)]
2dx1 +
1
2
3 lˆ
0
EI2 [w′′II(x2)]
2dx2 +
1
2c w2
II(x2 = 3 l)
Bestimmen Sie nun das Potential Πa der außeren Lasten. (1,5 Punkte)
Πa = −2 lˆ
0
q(x1)wI(x1) dx1

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 10 (Seite 3 von 3)
d)Fur ein anderes, nicht naher spezifiziertes System ist das Gesamtpotential
Π =
lˆ
0
1
2E I [w′′(x)]2 dx− F w(l)
und die Randbedingungen w(x = 0) = 0 und w′(x = 0) = 0 gegeben. Ein moglicherRitz-Ansatz lautet
w(x) = b0 + b1 x+ b2 x2 .
Bestimmen Sie zwei der Ansatz-Freiwerte durch Auswertung der Randbedingungen. (1,0 Punk-te)
w(0) = 0 ⇒ b0 = 0
w′(0) = 0 ⇒ b1 = 0
Bestimmen Sie den verbliebenen Freiwert mittels des Rayleigh-Ritz-Verfahrens.Hinweis: wichtige Zwischenschritte bitte ebenfalls in das Kastchen eintragen. (2,5 Punk-te)
Mit w(x) = b2 x2 ⇒ w′(x) = 2 b2 x ⇒ w′′(x) = 2 b2
folgt Π =1
2EI
lˆ
0
4 b22 dx− F b2 l2 =
1
2EI 4 b22 l − F b2 l
2
und∂Π
∂b2= 0 = 4EI b2 l − F l2 ⇒ b2 =
F l
4EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 11 (Seite 1 von 3)
Die dargestellte Halbkreisscheibe (Dicke t) wird auf der Innenseite (Oberflache ∂Ω0) durchdie konstante Flachenlast p0 und an der Oberflache ∂Ω1 durch die konstante Flachenlastp1 belastet.
p0
p1
ra
r
riϕ
∂Ω0
∂Ω1
O
a)Bestimmen Sie samtliche Verschiebungs- und Spannungsrandbedingungen im angegebe-nen Polarkoordinatensystem (r, ϕ). (4,0 Punkte).
Verschiebungsrandbedingungen:
ur(r, ϕ = π) = 0 uϕ(r, ϕ = π) = 0
Spannungsrandbedingungen:
∂Ω0 : σrr(r = ri, ϕ) = −p0σrϕ(r = ri, ϕ) = 0
∂Ω1 : σϕϕ(r, ϕ = 0) = −p1σrϕ(r, ϕ = 0) = 0
∂Ω2 : σrr(r = ra, ϕ) = 0
σrϕ(r = ra, ϕ) = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 11 (Seite 2 von 3)
Die Halbkreisscheibe (Innenradius ri = R, Außenradius ra = 2R, Dicke t, Zeichnung nichtmaßstablich) wird nun durch zwei entgegengesetzt wirkende Momente M0 belastet.
ra
r
riϕ
∂Ω0
∂Ω1
O
M0M0
b)Die Airysche Spannungsfunktion fur diese Problemstellung ist durch
F = C1 r2 ln r + C2 r
2 − C3 ln r + C4
gegeben. Hierbei sind C1, C2, C3 und C4 nicht weiter spezifizierte Konstanten. Fur dieSpannungskomponenten σrr und σϕϕ des ebenen Spannungszustands gilt
σrr = 2C1 ln r + 2C2 −C3
r2+ C1 σϕϕ = 2C1 ln r + 2C2 +
C3
r2+ 3C1
Bestimmen Sie die Spannungskomponente σrϕ. (1,0 Punkte).
σrϕ=0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 11 (Seite 3 von 3)
Bestimmen sie des Weiteren mittels des Cauchy-Postulats den Spannungsvektor t∗1 aufdem Rand ∂Ω1. Geben Sie ebenfalls die Randbedingungen fur die Rander ∂Ω0 und ∂Ω1
an. Nennen Sie auch solche Randbedingungen, welche im Mittel erfullt sein mussen. (3,0Punkte).
t∗1 = −σϕϕ eϕ = −2C1 ln r − 2C2 − C3
r2− 3C1
Randbedingungen:∂Ω0:
σrr(r = R,ϕ) = 0
σrϕ(r = R,ϕ) = 0
∂Ω1:
t
ˆ 2R
R
σϕϕ dr = 0
−tˆ 2R
R
σϕϕ r dr = M0
Geben Sie die Große des Einzelmomentes M0 in Abhangigkeit von R, t und den Kon-stanten C1, C2, C3, C4 an. Geben Sie wichtige Zwischenschritte fur die Berechnung desEndergebnisses an. Nutzen Sie dafur den Platz im unteren Kastchen. (2,0 Punkte)
Hinweis:´
x ln x = x2
4(−1 + 2 ln x)
M0 = −t [C1R2 (4 ln(2R)− ln(R)) + 3C2R
2 + C3 (ln(2R)− ln(R)) + 3C1R2]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 12 (Seite 1 von 3)
Das dargestellte System besteht aus 3 Teilstaben. Am Punkt B, welcher sich genau in derMitte von Stab 1 (Masse m1, Lange l1) befindet, ist Stab 2 (Masse m2, Lange l2) gelenkigangebracht. Zusatzlich sind an diesem Punkt die Stabe 1 und 2 uber eine Drehfeder derDrehsteifigkeit cT miteinander verbunden. Am Punkt C greift eine horizontale Kraft F an,wahrend der horizontale Balken (Masse m3, Lange l3) durch eine Feder der Federsteifigkeitc zwischen den Punkten D und E abgestutzt wird. Die Federn sind fur q1 = π/2 und q2 = 0ungespannt.
N.N
g
A
B
C
c
D
E
q1
q2
m1, l1
m2, l2
m3, l3
cT
x
y
F
a)
Stellen Sie das Gesamtpotenzial Π des Systems in Abhangigkeit der Freiheitsgrade q1 undq2 auf. Fassen Sie die einzelnen Terme nicht zusammen. (4,0 Punkte)
Π =1
2cT
[q2 +
(π2− q1
)]2+
1
2c l21 [cos (q1)]
2 + m1g
[l12sin(q1)
]+
m2g
[l12sin (q1)−
l22cos (q2)
]− Fc l1 cos (q1)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 12 (Seite 2 von 3)
b)
Fur ein anderes, nicht naher spezifiziertes System ist das Gesamtpotenzial Π durch
Π = −M0 q1 +mg
lq22 +
mg
2sin(q1) [l sin(q1)− l − 2 q2]
in Abhangigkeit eines eingepragten Momentes M0 und der Freiheitsgrade q1 und q2 ge-geben. Die Gleichgewichtslage des Systems soll dabei fur q1 = π/4 bestehen. Geben Siedie Bedingungen fur q2 und M0 an, so dass der angegebene Wert fur q1 tatsachlich einenGleichgewichtszustand beschreibt. (3,0 Punkte)
q2 =l
4
√2 M0 = mg l
(1−
√2
4
)
Abschließend soll nun die Stabilitat dieser Gleichgewichtslage — charakterisiert durchdie angegebenen Werte fur q1 sowie Ihr Ergebnis fur q2 und M0 — analysiert werden.Geben sie die dazu notwendige(n) und auf die Aufgabenstellung spezifizierte(n) Große(n)an und klassifizieren Sie die Art der vorgegebenen Gleichgewichtslage unter Angabe einereindeutigen Begrundung. (3,0 Punkte)Hinweis:Das nachfolgende Kastchen (Fortsetzung auf nachster Seite) wird mit 0 Punktengewertet, sollte lediglich die Art der Gleichgewichtslage genannt werden.
∂2Π
∂q1∂q1= mg l
(√2 + 1
4
)∂2Π
∂q2∂q2=
2mg
l
∂2Π
∂q1∂q2= −mg
√2
2
A =
∂2Π
∂q1∂q1
∂2Π
∂q1∂q2
∂2Π
∂q2∂q1
∂2Π
∂q2∂q2
=
mg l
(√2 + 1
4
)−mg
√2
2
−mg
√2
2
2mg
l
A11 = mg l
(√2 + 1
4
)> 0; det (A) = m2 g2
√2
2> 0
=⇒ stabile Gleichgewichtslage

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2014
Aufgabe 12 (Seite 3 von 3)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 1 (Seite 1 von 2)
Das unten dargestellte Fachwerk ist in den Punkten A und B gelagert und wird wiegezeigt durch Einzelkrafte F1 bis F2 belastet. Die vertikale und horizontale Einheitslangedes Fachwerks betragt l.
F1
F2
l
l
ll ll
1
2 3 4
5 6
78 9
10 1112
13
14 15 16 17
45
A B
x
y
a)Berechnen Sie die Auflagerreaktionen in den Punkten A und B fur F1 = F2 = F bezuglichdes vorgegebenen Koordinatensystems.
Ax = 0 Ay = 0
Bx = −F By = F (or By = −Bx or −By = Bx)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 1 (Seite 2 von 2)
b)Geben Sie die Nummern aller Stabe an, die auf Grundlage gangiger Kriterien direkt alsNullstabe identifiziert werden konnen (keine Rechnung).Hinweis: Die Angabe falscher Stabe fuhrt zu Punktabzug.
1, 2, 8, 12, 16, 17,
by computing, 14 and 15 are also zero, NOT wrong
c)Die außeren Krafte sind nun zu
F1 = F, F2 = 2F
sowie die daraus resultierenden Auflagerreaktionen zu
Ax = −1
2F, Ay = −1
2F, Bx = −3
2F, By =
3
2F
vorgegeben. Berechnen Sie die Stabkrafte S5, S6, S9 und S15.
S5 = F S6 = F
S9 = −√2
2F S15 = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 2 (Seite 1 von 3)
Die dargestellte Lochscheibe mit den Radien r1 = 0.2 cm and r2 = 0.15 cm besteht auszwei unterschiedlichen, jeweils homogenen Werkstoffen A und B. Die Massen sind furWerkstoff A mit m und fur Werkstoff B mit 2m angegeben. Die schiefe Ebene weist denReibungskoeffizienten µ0 auf, wahrend die andere Ebene links als reibungsfrei angesehenwerden kann (µ0 = 0).
2 cm2 cm
α
x
y
A B
0.5 cm0.5 cm
µ0
µ0 = 0
1 cm
1 cm
0.4 cm
g
r1r1
r2
a)
Berechnen Sie die Lage des Schwerpunktes SA von Teilkorper A unter Verwendung desvorgegebenen Koordinatensystems (2 Punkte)
xSA= −1, 107 cm
ySA= 1, 227 cm
Berechnen Sie die Lage des Schwerpunktes S des gesamten Korpers unter Verwendungdes vorgegebenen Koordinatensystems. (2 Punkte)
xS = 0, 369 cm
yS = 1, 227 cm

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 2 (Seite 2 von 3)
b)
Die Lochscheibe wird nun durch einen massiven Korper (Gesamtmasse m) gleicher Geo-metrie und homogener Masseverteilung ersetzt. Zudem lagert dieser Korper zum einenreibungsfrei (µ0 = 0) auf einem als masselos anzunehmenden Klotz, zum anderen befin-det sich nun links ein Festlager. Der Klotz ruht auf einer um den Winkel α geneigten,rauhen Ebene (Haftreibungskoeffizient µ0) und wird wie gezeigt durch eine Einzelkraft Fbelastet.
replacemen
2 cm 2 cm
α
x
y
µ0
µ0 = 0
1 cm
1 cm
g
m
F
c)
Erganzen Sie die folgende Abbildung des Klotzes unter der Bedingung, dass dieser dieschiefe Ebene hinauf zu gleiten droht, zu einem vollstandigen Freikorperbild. Geben Siedes Weiteren samtliche Reaktionskrafte dieses Teilsystems rechts neben der Skizze an.(2 Punkte)
N1
N2
(i)
(ii)
F
H N1 = N2 =mg
2 cos(α)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 2 (Seite 3 von 3)
Geben Sie die Bedingung fur die Kraft F in Abhangigkeit der Großen m, g, µ0 und α an,damit das System im Gleichgewicht verweilt und der Klotz die schiefe Ebene nicht hinaufgleitet. (2 Punkte)
F ≤ µ0mg
2 cos(α)(i)
Geben Sie die Bedingung fur die Masse m in Abhangigkeit der Großen F , g, µ0 und αan, damit das System im Gleichgewicht verweilt und der Klotz die schiefe Ebene nichthinunter gleitet. (2 Punkte)
m ≥ −2F cos(α)
µ0 g(ii)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 3 (Seite 1 von 4)
Der dargestellte Rahmen bestehend aus den Teilelementen 1 und 2 ist statisch bestimmtgelagert und wird durch zwei konstante Streckenlasten mit Betrag q0 wie dargestellt be-lastet.
D
q0
q0l
l
l/2
α
A
B
1
2
D
x1z1
x2
z2
a)Erganzen Sie folgende Abbildung zu einem vollstandigen Freikorperbild zur Bestimmungaller Auflagerreaktionen. (0,5 Punkte)
q0
q0
ACV
CV
CH
CH
DV
DH
MD
Stellen Sie die Momentensumme bezuglich des Punktes C fur den abgewinkelten Teilstab1 auf. Die Summanden mussen nicht zusammengefasst werden. (1 Punkt)
∑MC : 0 = − A l cosα (cosα + 1)−A l sin2 α + q0 l
2 cosα(12cosα + 1)
+ 12q0 l
2 sin2 α + 12q0 l
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 3 (Seite 2 von 4)
b)Die Belastung des Systems und die Lange des horizontalen Teilstucks von Teilelement 1werden nun geandert. Im Bereich 0 ≤ x2 ≤ l greift nun eine linear-veranderliche Strecken-last q(x2) = q0(1− x2
l) an. (1 Punkt)
D
q0
q0l
ll
l/21
2A
α
B D
x1z1
x2
z2
Geben Sie den Zusammenhang (keine Werte) zwischen den Schnittgroßen im abgewinkel-ten Teil und der Querkraft im horizontalen Teil des Rahmenteils 1 im Punkt B (Ecke) an.Geben Sie ebenfalls fur diesen Punkt den Zusammenhang zwischen den Biegemomentenim abgewinkelten und horizontalen Teil des Rahmenteils 1 an.
Q(x2 = 0) = Q(x1 = l) cosα M(x2 = 0) =M(x1 = l)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 3 (Seite 3 von 4)
c)Die aus der geanderten Belastung resultierenden außeren Auflagerreaktionen des obigenSystem sind nun wie folgt vorgegeben:
q0
α
14√3q0 l
18√3q0 l
2
5/12 q0 l7/6 q0 l
x1z1
x2
z2
Geben Sie die Randbedingungen zur Losung der Schnittgroßen-Differentialgleichungen inForm von konkreten Werten fur die folgenden Stellen an (3 Punkte):
N(x1 = 0) = 0 N(x2 = 0) = − 1
4√3q0 l
Q(x1 = 0) =7
6q0l Q(x2 = 2l) = − 5
12q0l
M(x1 = 0) = 0 M(x1 = l) =2
3q0l
2
Komplettieren Sie schließlich die folgenden Graphiken zu vollstandigen Verlaufen derSchnittgroßenfunktionen uber den gesamten Rahmen. Geben Sie auch die Polynomgradep der Verlaufe sowie die Funktionswerte an markanten Stellen an. (4 Punkte)
Verwenden Sie dabei die vorgegebenen lokalen Koordinatensysteme sowie die Ergebnisseaus den vorherigen Aufgabenteilen b) und c).

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 3 (Seite 4 von 4)
0
ll
p = 0
p = 0p = 0p = 0
p = 1
p = 1
p = 2
p = 2
p = 3
x1
x1
x1
z1
z1
z1
x2
x2
x2
z2
z2
z2
N(xi)
M(xi)
Q(xi)
7/6 q0 l
2/3 q0 l2
2/3 q0 l2
1/6 q0 l 1/12 q0 l
5/12 q0 l2
−5/12 q0 l −5/12 q0 l
− 14√3q0 l− 1
4√3q0 l− 1
4√3q0 l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 4 (Seite 1 von 3)
Der dargestellte Rahmen (BiegesteifigkeitEI) ist in den Punkten A, B und C gela-gert und wird durch eine Einzelkraft F be-lastet. Am Angriffspunkt der Kraft befindetsich ein Vollgelenk, der waagerechte Rahmen-teil ist mit dem senkrechten Trager biegesteifverbunden.
Die Dehnsteifigkeit des Rahmens ist gegen-uber der Biegesteifigkeit als unendlich großanzunehmen.
1©
2©
3© 4©F
A
B
C
l
l
l/2 l/2
x1
z1
x2
z2
a)Bestimmen Sie samtliche kinematischen Randbedingungen, welche zur Berechnung derBiegelinie w(x) in den angegebenen 4 Bereichen notwendig sind. (3.5 Punkte)
Hinweis: Verwenden Sie zur eindeutigen Indizierung der Biegelinienbereiche bitte dieeingekreisten Bereichsnummern, also z.B. w2(x1 = ...) = ....
w1(x1 = 0) = 0; w′1(x1 = 0) = 0
w2(x1 = 2) = 0
w1(x1 = l) = w2(x1 = l)
w′1(x1 = l) = w′
2(x1 = l)
w′2(x1 = l) = w′
4(x2 = l)
w3(x2 = 0) = 0; w′3(x2 = 0) = 0
w3(x2 = l/2) = w4(x2 = l/2)
w4(x2 = l) = u(x1 = l) = 0 da dehnstarre Stabe

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 4 (Seite 2 von 3)
b)Der nebenstehende elastische Balken (Bie-gesteifigkeit EI) ist mittels eines elasti-schen Stabs (Dehnsteifigkeit EA) gelagertund mit einer parabolischen, zur Mitte desBalkens symmetrischen Streckenlast q(x) be-aufschlagt. Die Funktion der Streckenlast istmit
q(x) = 4 q0
[x2
l2− x
l+
1
4
]
gegeben. Es soll die Biegelinie des Balkensbestimmt werden.
q(x)
EI
l
l/2EA
A
x
z
Berechnen Sie zunachst die Resultierende FR der Streckenlast sowie die senkrechte Lager-reaktion im linken Auflager Az und die Stabkraft S. (2 Punkte)
Hinweis: Schneiden Sie dazu die Stabkraft als Druckkraft frei und berucksichtigenSie im Punkt A die positiv angenommene z-Richtung!
FR =1
3q0 l
Az = −1
6q0 l S =
1
6q0 l
Geben Sie nun samtliche zur Losung der Biegelinien-Differentialgleichung vierter Ordnungnotigen kinematischen und dynamischen Randbedingungen an. (2.5 Punkte)
Bestimmung von 4 Konstanten (andere dynamische RB moglich):
Q(0) = −Az = −EI w′′′(0) ⇔ EI w′′′(0) = Az = −1
6q0 l
M(0) = 0 = −EI w′′(0) ⇔ w′′(0) = 0
w(0) = 0
w(l) =S lStabEA
=q0 l
2
12EA

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 4 (Seite 3 von 3)
Geben Sie ausgehend von der Biegelinien-Differentialgleichung vierter Ordnung die fol-genden Funktionen unter Verwendung allgemeiner, nicht spezifizierter Integrations-konstanten an. (2 Punkte)
EI w′′′′(x) = 4 q0
[x2
l2− x
l+
1
4
]= q(x)
EI w′′′(x) = 4 q0
[x3
3 l2− x2
2 l+x
4
]+ C1
EI w′′(x) = 4 q0
[x4
12 l2− x3
6 l+x2
8
]+ C1 x+ C2
EI w′(x) = 4 q0
[x5
60 l2− x4
24 l+x3
24
]+
1
2C1 x2 + C2 x+ C3
EI w(x) = 4 q0
[x6
360 l2− x5
120 l+x4
96
]+
1
6C1 x3 +
1
2C2 x2 + C3 x+ C4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 5 (Seite 1 von 3)
Das nebenstehende, zur z-Achse symmetri-sche Balkenprofil sei als dunnwandig (t≪ a)anzunehmen. Der Schwerpunkt befindet sichim angegebenen Abstand von a/3 von derProfilmittellinie des waagerechten oberenTeils.
S
a
a
a/3
tz
y
NF
a/4
z/2
a)Berechnen Sie die auf die angegebenen Hauptachsen bezogenen FlachentragheitsmomenteIy und Iz des Profils. (2 Punkte)
Iy =1
3a3 t Iz =
7
12a3 t
Fur den obigen Querschnitt sind die Verhaltnisse zwischen den Biegemomenten My undMz sowie der Normalkraft N unter einer gegebenen Belastung zu
Mz =7
2My und N =
9
2 aMy
gegeben. Berechnen Sie die Funktion der neutralen Faser yNF (z) (2 Punkte), tragen Siediese in den obigen Profilquerschnitt ein (1 Punkt) und bestimmen Sie den Ortsvek-tor ~rmax = y∗ ~ey + z∗ ~ez des Punktes der betragsgroßten Normalspannung im gegebenenKoordinatensystem. (1 Punkt)
yNF (z) =1
2z +
1
4a ~rmax = −a
2~ey +
2 a
3~ez

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 5 (Seite 2 von 3)
b)Fur das abgebildete, zur y-Achse symmetri-sche, rechtwinklige und dunnwandige (t≪ b)Profil ist das Flachentragheitsmoment Iy zu
Iy =b3t
3
gegeben. Das Profil wird im gezeigten Quer-schnitt in z-Richtung durch eine Querkraft Qbelastet; die Lage des Profilschwerpunkts Sist zu
yS =b
2√2
gegeben.
s
Q
t
b
yS
Sy
z
Skizzieren Sie qualitativ den Verlauf der Schubspannung τ(s) fur das gesamte Profil unterAngabe des Polynomgrads p. (1 Punkt)
Sp = 2
fur korrekten Verlauf (inkl. richtiger Krummung!) der Schubspannung

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 5 (Seite 3 von 3)
Berechnen Sie den Verlauf der Schubspannung τ(s) fur den unteren Schenkel in Abhan-gigkeit der lokalen Koordinate s. (2 Punkte)
τ(s) =3Qs√2 b3 t
[b− s
2
]
Geben Sie die Stelle yM des Schubmittelpunkts fur das obige Profil mit Bezug auf dengegebenen Schwerpunkt an. (1 Punkt)
Da beide Schenkel des Profils gerade sind und sich in einem Punkt schneiden, mussdieser der Schubmittelpunkt sein. Damit lasst sich dieser ohne Rechnung zu
yM = yS
bestimmen.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 6 (Seite 1 von 3)
Aufgabenteil a)Der dargestellte Rahmen (Biegesteifigkeit EI, Dehnsteifigkeit EA → ∞) wird bei Aund C von einem Loslager und bei B von einem Festlager gestutzt. Im Punkt C greiftein außeres Moment M an. Die Verbindungsstellen sind als biegestarr anzunehmen. DieAuflagerreaktion in C wird als statisch Unbekannte X gewahlt. Verwenden Sie die ange-gebenen Koordinatensysteme sI , sII und sIII .
sIsII
sIII
I
II
IIIM
l
ll
AB
C
x
y
Zeichnen Sie die Freikorperbilder fur das ”0”-System und das ”1”-System. (2 Punkte)
”0”-System
M
Ay
Bx
By

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 6 (Seite 2 von 3)
”1”-System
1
Ay
Bx
By
Bestimmen Sie die Momentenverlaufe in den Teilbereichen I, II und III fur das ”0”-System in Abhangigkeit der außeren Last. (1.5 Punkte)
M I0 (sI) =
M
2lsI
M II0 (sII) = −M
M III0 (sIII) = −M
Bestimmen Sie die Momentenverlaufe in den Teilbereichen I, II und III fur das ”1”-System in Abhangigkeit der ”1”-Last. (1.5 Punkte)
M I1 (sI) = −1
21sI
M II1 (sII) = 1l
M III1 (sIII) = 1sIII

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 6 (Seite 3 von 3)
Aufgabenteil b)Verwenden Sie in diesem Aufgabenteil die folgenden (fiktiven) Momentenverlaufe in denTeilbereichen I, II und III fur das ”0”-System aus Aufgabenteil a)
M I0 (sI) =M
M II0 (sII) = 3M + 2
M
lsII
M III0 (sIII) = 5
M
lsIII
und fur das ”1”-System aus Aufgabenteil a)
M I1 (sI) = −2sI
M II1 (sII) = 7 l
M III1 (sIII) = 5 [sIII − l]
Rechnen Sie die Einflusszahlen α10 und α11 aus. (4 Punkte)
α10 =119
6M
l2
EI
α11 = 68l3
EI
Rechnen Sie die statisch Unbekannte X aus. (1 Punkt)
X = − 7
24
M
l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 7 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Korpern, die durch dehnstarre,schlupffrei abrollende Seile miteinander verbunden sind und sich im Schwerefeld der Erde(Erdbeschleunigung g) befinden. Die jeweiligen Massen und Abmessungen der Korpersind der Zeichnung zu entnehmen. Es wird davon ausgegangen, dass die Massen 1 und 6auf rauhen schiefen Ebenen gleiten.
g
x1
x3
x4
x6
ϕ2
ϕ3
ϕ5
m 1 m2
m3
m4
m5 m6
R2
r2
R3
r5
βα
C

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 7 (Seite 2 von 3)
a)Zeichnen Sie ein vollstandiges Freikorperbild (2 Punkte)
r
m1g
m2g
m3g
m4g
m5g
m6g
S 1
S1
S2
S2
S3
S3
S4
S4
S5
S6
H 1
H6
N 1 N6
Ax
Ay
Bx
Dx
Dy
b)Geben Sie die Impulsbilanz (Kraftesatz) der Masse 1 bezuglich der x1-Koordinate an.(1 Punkt)
m1x1 = −S1 −H1 +m1g sinβ
c)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 2 bezuglich ihres Schwerpunktesund der ϕ2-Koordinate an. Spezifizieren Sie das Massentragheitsmoment θ2 mittels dergegebenen Großen, wobei der kleinere Radius r2 zu vernachlassigen ist. (1 Punkt)
12m2R
22ϕ2 = S1R2 − S2r2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 7 (Seite 3 von 3)
d)Geben Sie die Impulsbilanz (Kraftesatz) der Rolle 3 bezuglich der x3-Koordinate an.(1 Punkt)
m3x3 = S2 + S3 − S4 −m3g
e)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 3 bezuglich des Punktes C und derϕ3-Koordinate an. Spezifizieren Sie die Massentragheitsmomente θ3 mittels der gegebenenGroßen. (1 Punkt)
12m3R
23ϕ3 +m3R
23ϕ3 = 2S2R3 −m3gR3 − S4R3
f)Geben Sie die Impulsbilanz (Kraftesatz) der Masse 6 bezuglich der x6-Koordinate an.(1 Punkt)
m6x6 = S5 −m6g sinα−H6
g)Es sei nun das folgende modifizierte Systemgegeben. Geben Sie ϕ2, ϕ3 und x3 in Abhan-gigkeit von x1 fur das modifizierte Systeman. (3 Punkte)
ϕ2(x1) =x1R2
ϕ3(x1) =x1r22R2R3
x3(x1) = − x1r22R2
g
x1
x3
x4
ϕ2
ϕ3
m1 m2
m3
m4
R2
r2
R3
β

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 8 (Seite 1 von 2)
Ein punktformiger Korper der Masse m gleitet von einer Kraft F angetrieben auf einerreibungsbehafteten schiefen Ebene vom Punkt O zum Punkt A. Auf dem reibungsbehaf-teten Abschnitt betragt der Gleitreibungskoeffizient µ. Die Kraft F wirkt ausschließlichim Abschnitt O − A auf das System ein. Samtliche Kreisbogen weisen den Radius r auf.
m
α
α
rr
µ
l1
g
cϕ0
ϕ0
∆l
A
B C
D
O
F
N.N.
a)Berechnen Sie die Große der richtungstreuen, zeitlich konstanten Kraft F , derart dass derMassenpunkt im Punkt A die Geschwindigkeit vA erreicht. Der Massenpunkt befindet sichim Punkt O in Ruhe. (3 Punkte)
F = 12mv2A
cosαl
+mg (µ cosα + sinα)
b)Wie groß muss der Betrag der Geschwindigkeit vA mindestens sein, damit der Massen-punkt den Punkt B erreicht? (1 Punkt)Hinweis: Es soll hier davon ausgegangen werden, dass die Kraft F nicht mehr auf dieMasse einwirkt und diese standigen Kontakt zur Bahn haben soll.
vA ≥√2gr (1− sinϕ0)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 8 (Seite 2 von 2)
c)Wie groß darf die Geschwindigkeit vA des Massenpunkts maximal sein, damit der Massen-punkt die Bahn auf seinem Weg vom Punkt A zum Punkt B nicht verlasst? (3 Punkte)
vA ≤ √gr sinϕ0
d)Der Betrag der Geschwindigkeit der Punktmasse im Punkt A ist nun durch vA so vorge-geben, dass beide Kriterien aus den vorherigen Teilaufgaben erfullt sind. Geben Sie dieGeschwindigkeit des Massenpunktes in Abhangigkeit der Geschwindigkeit vA im Punkt Dan. (1 Punkt)
vD = vA
e)Im Punkt D stoßt der Massenpunkt gegen eine starre Kontaktplatte, die mit einer Federder Steifigkeit c verbunden ist. Legen Sie die Steifigkeit der Feder c so aus, dass sicheine maximale Stauchung der Feder von ∆l einstellt. Der Betrag der Geschwindigkeit derPunktmasse im Punkt D ist durch vD gegeben. (2 Punkte)
c =(2mg∆l sinα+mv2
D)
∆l2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 9 (Seite 1 von 2)
Ein System aus starren, homogenen Staben (Lange 2 l und Lange l) und einer starren,homogenen Kreisscheibe (Radius l/2) ist im Punkt A drehbar gelagert. Die Komponentensind starr aneinander befestigt und das System ist daruber hinaus mit den dargestelltenFedern und Dampfern (Materialkonstanten sind der Zeichnung zu entnehmen) verbunden.Im Punkt B wird das System durch eine zeitabhangige Kraft F (t) belastet, wobei in dergezeichneten Ausgangslage F (t = 0) = 0 gilt und die Federn ungespannt sind. Der Ein-fluss der Schwerkraft ist zu vernachlassigen.
A
B
CD
F (t)
ll
l
ll/2
c
cT
d
m
2m
8m
ϕ
x
y
a)Berechnen Sie das Massentragheitsmoment θ(A) des Systems bezuglich des Punktes A. (1Punkt)
θ(A) = 28ml2
b)Geben Sie die horizontale Verschiebung xB des Punkte B sowie die horizontale Geschwin-digkeitskomponente xD des Punktes D in Abhangigkeit von ϕ und ϕ fur große Auslen-kungen des Systems an.( 2 Punkte)
xB =√10/2 l [− sin(ϕ+ arctan(1/3)) + sin(arctan(1/3))]
xD = −√5 l ϕ cos(ϕ+ arctan(1/3))

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 9 (Seite 2 von 2)
c)Geben Sie die potentielle Energie Epot bezuglich des Drehwinkels ϕ fur große Auslenkun-gen des Systems an. (1 Punkt)
Epot = 1/2 cT ϕ2 + 5/2 c l2 [sin(arctan(1/2)− ϕ)− sin(arctan(1/2))]2
Das Massentragheitsmoment des Systems sei nun als θ gegeben. Geben Sie die Bewegungs-Differentialgleichung bezuglich des Drehwinkels ϕ fur große Auslenkungen des Systems an.(3 Punkte)
ϕ + 5 d l2/θ ϕ cos(ϕ+ arctan(1/2))2 + cT/θ ϕ
+ 5 c l2/(2 θ) [2 cos(arctan(1/2)− ϕ) [sin(arctan(1/2− ϕ))− sin(arctan(1/2))]]
=√10F (t) l/(2 θ) cos(ϕ+ arctan(1/2))
d)Es ist nun folgende Bewegungs-Differentialgleichung fur große Auslenkungen in φ gegeben:
4 θ φ+ 3 d l2 cos(φ) φ + c l2[7 sin(φ) cos(φ) + sin(φ) + 2 sin(φ)2
]= l cos(φ)F (t)
Geben Sie die linearisierte Form der gegebenen Bewegungs-Differentialgleichung fur kleineAuslenkungen (φ≪ 1) an. (1 Punkt)
φ+ 3 d l2/θ φ+ 2 c l2/θ φ = F (t) l/(4 θ)
Geben Sie fur F (t) = F0 cos(Ω t) die Weg-Zeit-Funktion φ(t) fur den eingeschwungenenZustand an. Spezifizieren Sie dazu die Konstanten der allgemeinen Losung: (2 Punkte)
φ(t) = C cos(Ω t− φ0)
C = F0 l/
(4 θ
√4 δ2Ω2 + [ω2 − Ω2]2
)δ = 3 d l2/(8 θ)
tan(φ0) = 2 δΩ/(ω2 − Ω2) ω =√
2 c l2/θ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 10 (Seite 1 von 2)
Das Balkensystem, bestehend aus dem horizontalen Balken I (Biegesteifigkeit EI/4, Ge-samtlange 2 l) und dem vertikalen Balken II (Biegesteifigkeit EI/2, Lange l/2) weist wiedargestellt eine biegestarre Verbindungsstelle auf und wird uber eine horizontale Kraft Fbelastet. Fur die Dehnsteifigkeiten der Balken soll jeweils EA→ ∞ gelten. Alle weiterenGroßen und Zwangsbedingungen sind der Zeichnung zu entnehmen.
x1
x3
z1z1
z3x
z
ll
l/2
F
II
I
a)Bestimmen Sie samtliche kinematischen Rand- und Ubergangsbedingungen des Systems.Wahlen Sie dazu geeignete und unmissverstandliche Bezeichnungen. (2 Punkte)
Balkenabschnitte:wI,1(x1) Bereich: 0 ≤ x1 ≤ lwI,2(x1) Bereich: l ≤ x1 ≤ 2 lwII(x3) Bereich: 0 ≤ x3 ≤ l/2
Rand-/Ubergangsbedingungen:wI,1(x1 = 0) = 0 w′
I,1(x1 = 0) = 0wI,2(x1 = 2l) = 0 w′
I,2(x1 = 2 l) = 0wI,1(x1 = l) = wI,2(x1 = l) w′
I,1(x1 = l) = w′I,2(x1 = l)
w′I,1(x1 = l) = w′
II(x3 = l/2) wII(x3 = l/2) = 0
b)Bestimmen Sie fur das gegebene System das Gesamtpotential Π = Πi + Πa der innerenund außeren Lasten. Integrale sollen nicht gelost werden. Verwenden Sie die angetragenenKoordinatensysteme. (2 Punkte)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 10 (Seite 2 von 2)
Π =1
2
lˆ
0
EI
4(w′′
I,1(x1))2 dx+
2 lˆ
l
EI
4(w′′
I,2(x1))2 dx
l/2ˆ
0
EI
2(w′′
II(x3))2 dx
− F wII(x3 = 0)
c)
Der dargestellte, zweiseitig eingespannte Balken (Biegesteifigkeit EI, DehnsteifigkeitEA → ∞) soll im Folgenden mittels des Ritz-Rayleigh Verfahrens berechnet werden.Alle weiteren Großen sind der Skizze zu entnehmen.
A
x
x
z
l3
l3
l3
l3
l3
l3
q0q0
Unter Ausnutzung der Symmetrie lasst sich das Gesamtpotential des Systems mit
Π =1
2EI
ˆ l
0
(w′′
(x))2dx−ˆ 2
3l
13l
q0w(x)dx
bestimmen. Spezifizieren Sie die Freiwerte a0, a1, a2, a3 der Ansatzfunktion
w(x) = a0 + a1x+ a2x2 + a3x
3
unter Verwendung des Ritz-Rayleigh Verfahrens. Tragen Sie dazu die wesentlichen Re-chenschritte ebenfalls in das folgende Kastchen ein. (6 Punkte)
w(x = 0) ⇒ a0 = 0w′(x = 0) ⇒ a1 = 0
w′(x = l) ⇒ a2 = −3
2a3 l
∂Π
∂a3= 0 ⇒ a3 = − 1
36
q0 l
EI⇒ a2 =
1
24
q0 l2
EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 11 (Seite 1 von 2)
Der dargestellte Kragbalken mitveranderlichem Querschnitt (Dicket) ist einseitig eingespannt und wirdauf der Oberflache ∂Ω1 durch diekonstante Flachenlast p0 belastet.
p0
x1
L
x2
hr
∂Ω1
∂Ω2
α
ϕ
a)Bestimmen Sie samtliche Spannungsrandbedingungen in den Polarkoordinaten (r, ϕ) undsamtliche Verschiebungsrandbedingungen in kartesischen Koordinaten (x1, x2).(3 Punkte)
Spannungsrandbedingungen:Rand ∂Ω1: σrϕ(r, ϕ = 0) = 0 σϕϕ(r, ϕ = 0) = −p0Rand ∂Ω2: σrϕ(r, ϕ = α) = 0 σϕϕ(r, ϕ = α) = 0
Verschiebungsrandbedingungen:u1(x1 = L, x2) = 0 u2(x1 = L, x2) = 0
b)Mittels der Airyschen Spannungsfunktion
F = C(r2 (α− ϕ) + r2 sinϕ cosϕ− r2 cos2 ϕ tanα
)
konnen fur den ebenen Spannungszustand folgende Spannungen
σrr = 2C(α− ϕ− cosϕ sinϕ− sin2 ϕ tanα
)σrϕ = − 2C
cosαsin(α− ϕ) sinϕ
ermittelt werden. Bestimmen Sie die fehlenden Spannungen des ebenen Spannungszu-stands.(1 Punkt)
σϕϕ = ∂2F∂r2
= 2C ((α− ϕ) + sinϕ cosϕ− cos2 ϕ tanα)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 11 (Seite 2 von 2)
Bestimmen Sie des Weiteren mittels des Cauchy-Postulats die Spannungsvektoren t∗1 undt∗2 auf den Randern ∂Ω1 und ∂Ω2.(2 Punkte)
t∗1 = σ(r, ϕ = 0) ·(
0−1
)=
(0
−2C [α− tanα]
); t∗2 = σ(r, ϕ = α) ·
(01
)=
(00
)
Berechnen Sie den Wert der Konstanten C.(1,5 Punkte)
C = −p02
1
[α− tanα]
c)Der gegebene Kragbalken ist nun einer Einzelkraft F ausgesetzt.
F
x1
L
x2h
a
b
t
C − CC
C
Fur den vertikalen Schnitt C−C an der Stelle x1 = a lasst sich im Folgenden die Spannung
σ11(x1 = a, x2) = C0
(x32 −
b3
4
)
ermitteln. Die ubrigen Spannungen des ebenen Spannungszustandes sind vernachlassigbarklein. Bestimmen Sie die unbekannte Konstante C0.(2,5 Punkte)
C0 = − F a
t b5(15− 1
8)= −40
3
F a
t b5

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 12 (Seite 1 von 2)
Das dargestellte System besteht aus ho-mogenen, starren Stangen, die gelenkigmiteinander verbunden sind und sich imSchwerefeld der Erde (Erdbeschleunigungg) befinden. Der im Punkt A uber eineDrehfeder (Federkonstante k1) gelenkigangebundene Stab 1 habe die Masse m1,die Lange l1 und den Drehfreiheitsgrad q1.Am Ende des ersten Stabes ist im Punkt Buber eine weitere Drehfeder (Federkonstantek2) ein weiterer Stab (Masse m2, Lange l2,Drehfreiheitsgrad q2) angebunden. Am Endedes zweiten Stabes befindet sich zudem eineKreisscheibe der Masse m3. Beide Federnseien entspannt fur q1 = q2 = 0.
g
A
B
q1
q2
k1
k2
l1, m1
l2, m2
m3
a)
Stellen Sie die potentielle Gesamtenergie des Systems auf. Fassen Sie die einzelnen Termenicht zusammen. (3 Punkte)
Epot =1
2k1 q
21 +m1 g
l12cos q1 +m2 g
[l1 cos q1 +
l22cos q2
]
+ m3 g [l1 cos q1 + l2 cos q2] +1
2k2 [q1 + q2]
2
Stellen Sie die Bedingung(en) fur Gleichgewichtszustande dieses Systems auf. (2 Punkte)
∂Epot/∂q1 = 0 = k1 q1 +m1 gl12[− sin q1] +m2 g l1 [− sin q2]
+m3 g l1 [− sin q1] + k2 [q1 + q2]
∂Epot/∂q2 = 0 = m2 gl22[− sin q2] +m3 g l2 [− sin q2] + k2 [q1 + q2]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Aufgabe 12 (Seite 2 von 2)
b)
Fur ein anderes, nicht naher spezifiziertes System ist die potentielle Energie hypothetischdurch
Epot = 3mg l cos(q1) + 5mg [l cos(q1) + 2 l cos(q2)] +1
2k [2 q21 + q22]
gegeben. Ein moglicher Gleichgewichtszustand ist dabei durch
q1 = 0 , q2 = π/6
fur bestimmte, ebenfalls nicht naher spezifizierte Werte fur m, l und k vorgegeben.
Geben Sie die Bedingung fur die Masse m in Abhangigkeit der Großen k, g und l an,so dass die angegebenen Werte fur q1 und q2 tatsachlich einen Gleichgewichtszustandbeschreiben. (2 Punkte)
m =π
30
k
g l
Abschließend soll nun die Stabilitat dieser Gleichgewichtslage — charakterisiert durch dieangegebenen Werte fur q1 und q2 sowie Ihr Ergebnis fur m — analysiert werden. Gebensie die dazu notwendige(n) und auf die Aufgabenstellung spezifizierte(n) Große(n) an undklassifizieren Sie die Art der vorgegebenen Gleichgewichtslage. (3 Punkte)Hinweis: Das nachfolgende Kastchen wird mit 0 Punkten gewertet, sollte lediglich dieArt der Gleichgewichtslage genannt werden.
∂2Epot/∂q21 = −8mg l cos q1 + 2 k = −8mg l + 2 k = −8/30 π k + 2 k > 0
∂2Epot/∂q22 = −10mg l cos q2 + k = −5
√3mg l + k = −
√3/6 π k + k > 0
∂2Epot/∂q1∂q2 = 0
⇒ det(H) > 0
⇒ stabiles Gleichgewicht

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 1 (Seite 1 von 2)
Das dargestellte Fachwerk mit gegebener Einheitslange l ist in den Punkten A und Bstatisch bestimmt gelagert und wird durch zwei Einzelkrafte F1 und F2 wie dargestelltbelastet.
Es gelte die Konvention, dass Zugkrafte positiv sind.
F1
F2
1
2
3
4
5
6
7
8
9
10
11
12
13
1415l
l
l l lA
B
x
y
a)Geben Sie die Nummern aller Nullstabe an, die auf Grundlage gangiger Kriterien direktals solche identifiziert werden konnen (keine Rechnung). Die Angabe falscher Stabe fuhrtzu Punktabzug.
Nullstabe: 1, 5, 10, 13, 15; aus 10,13,15 resultiert, dass auch 11 ein Nullstab ist.
Geben Sie fur weiterhin die Nummern derjenigen Nullstabe an, welche aus der Kon-struktion entfernt werden konnen, ohne die kinematische Bestimmtheit des Fachwerks zubeeintrachtigen.
10, 13

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 1 (Seite 2 von 2)
b)Berechnen Sie die Auflagerreaktionen in den Punkten A und B sowie die Stabkraft S3 furgegebene F1 und F2 bezuglich des vorgegebenen Koordinatensystems.
Ax = 2F2 Bx = −[F1 + 2F2]
Ay = F2 S3 = −√2F2
c)Die außeren Krafte sind nun zu F2 = 3F1 =: F sowie die daraus resultierenden Auflager-reaktionen zu
Ax = 2F , Ay = F und Bx = −7/3F
vorgegeben. Berechnen Sie die Stabkrafte S6, S7 und S8.
S6 = −F S8 = 1/3F
S7 =√2F
Als Ingenieur vom Fach(werk) wissen Sie, dass auf Zug belastete Stabe bei gleichem Pro-filquerschnitt stets “stabiler” sind als Druckstabe, da bei letzteren die Gefahr des Knickensbesteht.Welcher der drei obigen Stabe wird dementsprechend unter der Gegebenheit identischerQuerschnitte bei zu großer Belastung F des Fachwerks zuerst versagen?
S6 wird zuerst versagen, da dieser als einziger auf Druck belastet wird.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 2 (Seite 1 von 2)
a)Bestimmen Sie die Koordinaten xS und yS des Schwerpunktes S der abgebildeten gelochtenhomogenen Scheibe (Gesamtmasse m) bezuglich des angegebenen Koordinatensystems.
x
y
αµ0
A
g
10a
12a
20a
a4a
a
xS = 11, 39a
yS = 4, 72a

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 2 (Seite 2 von 2)
b)Zeichnen Sie fur das oben stehende System ein vollstandiges Freikorperbild.
NT
mg
Ay
Ermitteln Sie alle durch das Eigengewicht des Korpers (Erdbeschleunigung g) hervorge-rufenen Reaktionskrafte in Abhangigkeit von m, g, a und der nun als allgemeine GroßexS gegebenen x-Koordinate des Schwerpunkts.
Ay = mg
[1− 1
20axS
]
N =1
20amgxS cos(α)
T =1
20amgxS sin(α)
Wie groß darf der Neigungswinkel α der schiefen Ebene bei gegebenem Haftreibungsko-effizienten µ0 zwischen der Scheibe und der schiefen Ebene hochstens sein, damit Gleich-gewicht moglich ist?
α ≤ arctan(µ0)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 3 (Seite 1 von 4)
Der dargestellte Rahmen mit gegebener Einheitslange l ist in den Punkten A, B und Cstatisch bestimmt gelagert und wird durch eine konstante Streckenlast mit Betrag q0 wiedargestellt belastet.
q0
G
l l
l
A
B C
x1
z1
x2z2
a)Erganzen Sie folgende Abbildung zu einem vollstandigen Freikorperbild inklusive externerLasten. Tragen Sie auch Reaktionen ein, die direkt als “null” identifiziert werden konnen.
1/2 q0 l
B
q0 lq0 l
GxGx
Gy Gy
MC
Cy
Analysieren Sie die statische Bestimmtheit des Systems und geben Sie die notwendigeAnzahl von Bereichen an, welche zur Berechnung der Schnittgroßenfunktionen notig ist.
2 statisch bestimmt
statisch unbestimmtAnzahl Bereiche: 2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 3 (Seite 2 von 4)
b)Das System wird nun auf folgende Weise geandert:
q0
G
ll l
l
A
BC
x1
z1
x2z2
Geben Sie den allgemeinen Zusammenhang (keine Werte) zwischen Querkraft und Biege-moment des vertikalen und horizontalen Rahmenteils im Punkt B (Ecke) sowie den Wertdes Biegemoments an der Stelle x2 = 2 l an.
Q(x1 = l) = −N(x2 = 0) M(x2 = 2 l) = 0
M(x1 = l) =M(x2 = 0)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 3 (Seite 3 von 4)
Die aus der Streckenlast resultierenden Auflagerreaktionen des obigen System sind nunwie folgt vorgegeben.
G
7/6 q0 l
B
2 q0 l2
5/2 q0 l
7/6 q0 l
Geben Sie die Randbedingungen zur Losung der Schnittgroßen-Differentialgleichungen inForm von konkreten Werten fur die folgenden Stellen an:
N(x1 = 0) = 0 N(x2 = 3 l) = −7/6 q0 l
Q(x1 = 0) = 7/6 q0 l Q(x2 = 3 l) = −5/2 q0 l
M(x1 = 0) = 0 M(x2 = 3 l) = −2 q0 l2
Komplettieren Sie schließlich die folgenden Graphiken zu vollstandigen Verlaufen derSchnittgroßenfunktionen uber den gesamten Rahmen. Geben Sie auch die Polynomgradep der Verlaufe sowie die Funktionswerte an markanten Stellen an.
Verwenden Sie dabei die vorgegebenen lokalen Koordinatensysteme, vgl. vorgegebene Ein-zelwerte von Q(x) und M(x) sowie vorgegebener Ausschnitt (!!!) des NormalkraftverlaufsN(x).

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 3 (Seite 4 von 4)
ll l
x1
x1
x1
z1
z1
z1
x2
x2
x2
z2
z2
z2
p = 0
p = 0
p = 1
p = 1p = 1
p = 2
p = 2
p = 2
p = 3
−7/6 q0 l
q0 l2
N(x)
Q(x)
M(x)
7/6 q0 l2
−2 q0 l2
−1/2 q0 l
−5/2 q0 l
7/6 q0 l
tangentenstetig

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 4 (Seite 1 von 3)
a)Das dargestellte Balkensystem (Biegesteifigkeit EI) weist im Punkt A eine Einspannungsowie im Punkt B und C ein Vollgelenk auf. Die zusatzlich mit den Balken verbunde-ne Pendelstutze 1 besitzt die Dehnsteifigkeit EA, wahrend Pendelstutze 2 als dehnstarr(EA→ ∞) anzusehen ist.
cm
AB C
I II III IV
x
z
y
EA
EI
EA→ ∞
1
2
llll
Stab 1 wird nun einer Langenanderung ∆L ausgesetzt. Nennen Sie samtliche kinemati-schen (geometrischen) Rand- und Ubergangsbedingungen in den Bereichen I (0 ≤ x ≤ l),II(l < x ≤ 2 l), III(2 l < x ≤ 3 l) und IV(3 l < x ≤ 4 l) bezogen auf das vorgegebeneKoordinatensystem.
wI(x = 0) = 0 w′I(x = 0) = 0 wI(x = l) = wII(x = l)
wII(x = 2 l) = wIII(x = 2 l) = ∆L ∆L im KOS positiv nach unten.
w′II(x = 2 l) = w′
III(x = 2 l) wIII(x = 3 l) = wIV(x = 3 l) wIV(x = 4 l) = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 4 (Seite 2 von 3)
b)
Ein beidseitig eingespannter Balken wird mit einer linearen Linienlast im Bereich 0 ≤ x ≤L und einer konstanten Linienlast q0 im Bereich L ≤ x ≤ 2L belastet. Die Auflagerreak-tionen am Einspannpunkt A seien dabei mit VA und MA gegeben.
A
q0
xy
zLL
MA VA
Bestimmen Sie die Biegemomente MI(x) und MII(x) in den Bereichen (0 ≤ x < L) und(L < x ≤ 2L).
M(x)I(0 ≤ x < L) = VAx−MA − q0x3
6L
M(x)II(L < x ≤ 2L) = VAx−MA − q0L
2
(x− 2
3L)−((x− L)2q0
2
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 4 (Seite 3 von 3)
Nun seien die Biegemomente konkret durch:
M(x)I = −qox3
6L+
11qoLx
20− 19qoL
2
80
M(x)II = −qox2
2+
21qoLx
20− 97qoL
2
240
vor gegeben. Geben Sie die Funktionen der Biegelinie in den Bereichen I(0 ≤ x < L) undII(L < x ≤ 2l) mit noch nicht spezifizierten Integrationskonstanten an.
−EIwI(0 ≤ x < L) =qo120
x2L
(11x− x3
L2− 57
4L
)+ C1x+ C2
−EIwII(L < x ≤ 2L) =q0Lx
2
24
(21
5x− x2
L− 97L
20
)+ C3x+ C4
Geben Sie die fur die von Ihnen verwendeten Integrationskonstanten an. Hinweis: DieUbergangsbedingungen an der Stelle x = L sind fur die Losung dieser Aufgabe irrelevant,da sie durch die Funktionen der Biegemomente a priori erfullt werden.
C1 = 0
C2 = 0
C3 = − 1
24q0L
3
C4 =1
120q0L
4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 5 (Seite 1 von 3)
Der dargestellte Querschnitt mit der Wanddicke t bzw. 2 t ist als dunnwandig anzuneh-men, t≪ a. Der Flachenschwerpunkt befindet sich im Abstand von zS = 12/5 a von derOberseite des Profils.
4 a
4 a
a
a
t
tt
t t
t t
2 t2 t
z
y
zS
S
a)Bestimmen Sie das Flachentragheitsmoment Iwaag.y der beiden waagerechten Teile desQuerschnitts bezuglich des eingezeichneten Schwerpunktkoordinatensystems.
Iwaag.y =1088
25a3 t
b)Bestimmen Sie das Flachentragheitsmoment Iy des gesamten Querschnitts bezuglich deseingezeichneten Schwerpunktkoordinatensystems.
Iy =892
15a3 t

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 5 (Seite 2 von 3)
Der dargestellte zur y-Achse symmetrische Querschnitt mit der einheitlichen Wanddicket ist als dunnwandig anzunehmen, t≪ a.
2 a
a
a
z
yWanddicke t
S
s1s2
60
60
c)Bestimmen Sie das statische Moment Sy(s1) fur den Teilbereich 0 ≤ s1 ≤ a.
Sy(s1) = −1
2a t s1 −
1
4t s21
(1
2a t s1 +
1
4t s21
)
d)Bestimmen Sie das statische Moment Sy(s2) fur den Teilbereich 0 ≤ s2 ≤ 2 a.
Sy(s2) = −3
4a2 t− a t s2 +
1
2t s22
(3
4a2 t+ a t s2 −
1
2t s22
)
e)Das Flachentragheitsmoment des Querschnitts betragt Iy = 11/6 a3 t und die in z-Richtungwirkende Querkraft ist gegeben als Q. Geben Sie den maximalen Wert der Schubspannungτmax(Q, a, t) fur den gegebenen Querschnitt an.
τmax(Q, a, t) =15Q
22 a t
(− 15Q
22 a t
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 5 (Seite 3 von 3)
Der dargestellte zur y-Achse symmetrische Querschnitt mit der einheitlichen Wanddicket ist als dunnwandig anzunehmen.
4 b
4 b
b
b
z
y
Wanddicke t
f)Zeichnen Sie qualitativ die Schubspannungsverteilung fur den Querschnitt und kennzeich-nen Sie qualitativ die Lage des Schubmittelpunktes M .
M

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 6 (Seite 1 von 4)
a)Der auf der linken Seite dargestellte Rahmen (Biegesteifigkeit EI, Dehnsteifigkeit EA→∞) besteht aus einem Teilstuck der Lange 2l und zwei Teilstucken der Lange l. Die Ver-bindungsstellen sind als biegestarr anzunehmen. In der Mitte des oberen Teilstucks greifteine Einzellast F an. Im rechten Bild ist ein statisch bestimmtes Ersatzsystem darge-stellt, bei dem das linke untere Lager entfernt und die Einzelkraft F ∗ eingefuhrt wurde.Mit Hilfe des Satzes von Castigliano ist diese Lagerkraft zu bestimmen. Verwenden Siedie angegebenen Koordinatensysteme.
x1x2
x3
z1
z2
z3
FF
F ∗
l l
l
Ersatzsystem:
Welche allgemeine Bedingung wird zur Bestimmung der Kraft F ∗ benotigt? (Hinweis: Esmuss noch nichts berechnet werden!) (0.5 Pkt)
∂Π
∂F ∗ = 0
Zur Bestimmung der Lagerkraft werden dieBiegemomentenverlaufe MF und MF ∗
auf-grund der Krafte F und F ∗ bezuglich des Er-satzsystems benotigt. Der Biegemomenten-verlauf MF wurde bereits bestimmt und istrechts angegeben.
F
F
2
F
2F l
2
MF

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 6 (Seite 2 von 4)
Zeichnen Sie den BiegemomentenverlaufMF ∗
aufgrund der Kraft F ∗ in die linke Zeichnungein. Zudem soll die Ableitung des Biegemomentenverlaufs nach der Kraft F ∗ (MF ∗
) rechtseingezeichnet werden. Die Lagerkrafte mussen nicht mit angegeben werden. (1.5 Pkt)
MF ∗
MF ∗
F ∗ 1
l
l
F ∗l
F ∗l
Zur Bestimmung der partiellen Ableitung der Formanderungsenergie Π nach der Kraft F ∗
mussen im hier betrachteten Fall mehrere Integrale aufgestellt und ausgewertet werden.Geben Sie die Integrale als Funktion vonMF ,MF ∗
, EI und MF ∗
an ohne die Funktioneneinzusetzen. Geben Sie ebenfalls die Integrationsgrenzen an. (1.0 Pkt)
∂Π
∂F ∗ =
lˆ
0
MF MF ∗
EIdx1 +
lˆ
0
MF ∗
MF ∗
EIdx1 +
lˆ
0
MF ∗
MF ∗
EIdx2 +
lˆ
0
MF ∗
MF ∗
EIdx3
Setzen Sie nun die Funktionen ein und integrieren Sie. Geben Sie das Ergebnis der Inte-gration fur jedes Integral separat an. (2.0 Pkt)
∂Π
∂F ∗ =F l3
6EI+F ∗l3
3EI+F ∗l3
EI+F ∗l3
3EI
Berechnen Sie nun die Lagerkraft F ∗ als Funktion von F . (1.0 Pkt)
F ∗ =F
10

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 6 (Seite 3 von 4)
b)Der nebenstehende Rahmen (BiegesteifigkeitEI, Dehnsteifigkeit EA → ∞) bestehtaus einem Teilstuck der Lange l und zweiTeilstucken der Lange 2l. Das rechte untereEnde des Rahmens ist fest eingespannt. DieEcken sind als biegestarr anzunehmen. Amlinken unteren Ende greift eine Kraft F inhorizontale Richtung an. Mit Hilfe des Satzesvon Castigliano ist die Vertikalverschiebungz∗ des linken oberen Eckpunktes (x2=0) zubestimmen. Verwenden Sie die angegebenenKoordinatensysteme.
x1
x2x3
z1
z2
z3
F
l
2l
2l
Um die Vertikalverschiebung fur x2=0 bestimmen zu konnen wird eine zusatzliche virtu-elle Kraft F ∗ eingefuhrt, die in positive z2 Richtung zeigt. Welchen Wert hat diese Kraft?(0.5 Pkt)
F ∗ = 0
Zur Bestimmung der Verschiebung z∗ wird der Biegemomentenverlauf MF aufgrund derKraft F und der Biegemomentenverlauf MF ∗
aufgrund einer “1“–Kraft in Richtung vonF ∗ benotigt. Der Biegemomentenverlauf MF ist links angegeben. Zeichnen Sie den Biege-momentenverlauf MF ∗
und die “1“–Kraft in die rechte Skizze ein. Weitere Lagerreaktionenmussen nicht angegeben werden. (1.5 Pkt)
FL
MF MF ∗
−F l−F l
F
1−2l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 6 (Seite 4 von 4)
Die partielle Ableitung der Formanderungsenergie Π nach der Kraft F ∗ ergibt die Ver-schiebung z∗. Zur Bestimmung dieser Ableitung mussen mehrere Integrale aufgestellt undausgewertet werden. Geben Sie die Integrale als Funktion von MF , EI und MF ∗
an ohnedie Funktionen einzusetzen. Geben Sie ebenfalls die Integrationsgrenzen an. (1.0 Pkt)
z∗ =∂Π
∂F ∗ =
lˆ
0
MF MF ∗
EIdx2 +
lˆ
0
MF MF ∗
EIdx3 +
2lˆ
l
MF MF ∗
EIdx3
Setzen Sie nun die Funktionen ein und geben den Wert fur die Verschiebung z∗ an. (1.0Pkt)
z∗ =2F l3
EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 7 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Korpern, die durch dehnstarre,schlupffrei abrollende Seile miteinander verbunden sind und sich im Schwerefeld der Erde(Erdbeschleunigung g) befinden. Die beiden den Freiheitsgraden ϑ1 und ϑ2 zugeordne-ten Planetenrollen (je Radius r3, Masse m3) sind an einen ortsfest drehbar gelagertenPlanetentrager (Gesamtmasse M2) angeknupft und rollen in einem rauhen Hohlzylinderschlupffrei ab. Das Seil wird uber eine in Punkt A gelagerte Stufenrolle (Masse M1) ge-lenkt und von einem Masseklotz (Masse M0) gezogen.
g
α ψ
ϕ
ϑ1
ϑ2
x0M0
M2
r3, m3
r3, m3
r1
r2
R1
R2
ls
µ
µ
A
er
eϕ
a)Zeichnen Sie ein Freikorperbild ohne Tragheitskrafte.
gα
α
G1r
G1r
G2r
G2r
G1ϕ
G1ϕ
G2ϕ
G2ϕH1
H2
N1
N2m3g
m3gBx
By
AxAy
S1
S1
S2
S2
M0 g
M1 g
M2 g

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 7 (Seite 2 von 3)
Geben Sie die Impulsbilanz (Kraftesatz) des Klotzes (Masse M0) bzgl. der x0-Koordinatean.
M0 x0 =M0 g − S1
Geben Sie die Drehimpulsbilanz (Drallsatz) der in Punkt A gelagerten Stufenrolle bezug-lich ihres Schwerpunktes und der ψ-Koordinate an. Die schwerpunktsbezogene Massen-tragheit sei als θ1 gegeben und soll hier nicht spezifiziert werden.
θ1 ψ = S1 r1 − S2R1
Geben Sie die Drehimpulsbilanz (Drallsatz) des ortsfest drehbar gelagerten Planetentra-gers (Gesamtmasse M2) bezuglich seines Schwerpunktes und der ϕ-Koordinate an. Dieschwerpunktsbezogene Massentragheit sei als θ2 gegeben und soll hier nicht spezifiziertwerden.
θ2 ϕ = S2 r2 −G1ϕ [R2 + ls]−G2ϕ [R2 + ls]
b)Spezifizieren Sie nun das schwerpunktsbezogene Massentragheitsmoment θ2 des Plane-tentragers. Der Planetentrager besteht aus einer Stufenrolle (kleine Stufung: Radius r2,Masse M2/3, große Stufung: Radius R2, Masse 2 ·M2/3) und zwei angeschweißten Staben(je Lange ls, Masse ms).
θ2 =1
2
M2
3r22 +
1
2
2
3M2R
22 + 2
[1
12msl
2s +ms
[ls2+R2
]2]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 7 (Seite 3 von 3)
c)Geben Sie die Winkelgeschwindigkeit ϑ1 in Abhangigkeit von ϕ an.
ϑ1(ϕ) = ϕR2 + lsr3
d)Geben Sie nun die Winkelgeschwindigkeiten ψ, ϕ, ϑ1 und ϑ2 in Abhangigkeit von x0 an.
ψ(x0) =x0r1
ϕ(x0) = ψR1
r2= x0
R1
r1 r2
ϑ1(x0) = x0R1 [R2 + ls]
r1 r2 r3
ϑ2(x0) = ϑ1 (s.o.)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 8 (Seite 1 von 2)
Ein punktformiger Korper der Masse m beginnt im Punkt O aus der Ruhelage herauseine glatte, schiefe Ebene (Lange L, µ = 0) herunterzugleiten. Im Punkt 1 geht die schie-fe Ebene tangential in eine rauhe Kreisbahn uber (Gleitreibungskoeffizient µ, Radius r,Winkel θ). Die Geschwindigkeit zwischen Punkt 1 und 2 ist mittels eines außeren Antriebskonstant gehalten, so dass in diesem Bereich v = const. und insbesondere |v1| = |v2| = vgilt.Die rauhe Kreisbahn mundet im Punkt 2 tangential in eine rauhe, schiefe Ebene (Nei-gungswinkel β, Lange L, µ=0). Im Punkt 3 befindet sich ein punktformiger Korper derMasse 2m, welcher dort in Ruhe gehalten wird. Im Punkt 3 geht die glatte, schiefe Ebenetangential in eine glatte Kreisbahn uber (µ=0). Im Punkt 4 befindet sich das Ende einerelastischen Feder (Steifigkeit/Federkonstante c). Das System befindet sich im Schwerfeldder Erde (Erdbeschleunigung g).
g
µ
θ
ϕ
`
β β
α
L/4
L
L
x
C
m
12
3 4
O
H r
r
N.N.
2m
ψ
g
a)Geben Sie die potentielle Energie EO
pot im Punkt O bezuglich des vorgegebenen NullniveausN.N. in Abhangigkeit der Großen m, g, H , r und ϕ an.
EOpot = mg [H + r (1− cos(ϕ/2))]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 8 (Seite 2 von 2)
b)Geben Sie die Reibkraft R(ψ) als Funktion von ψ unter Berucksichtigung der Vorgabe|v1| = v bzgl. des Punktes 1 an.Hinweis: Nicht mit dem Ergebnis der vorherigen Teilaufgabe weiterrechnen!
R(ψ) = µ [mg cos(π/2− (θ + α) + ψ)−mv2/r]
Berechnen Sie die auf der Strecke von Punkt 1 zu Punkt 2 verrichtete Reibarbeit WR.
WR = µm [−v2 θ + g r cos(α)− g r cos(θ + α)]
c)Nehmen Sie an, dass nun |v3| = v am Punkt 3 vorgegeben ist. Geben Sie den Betragder Geschwindigkeit beider Massen v1 (fur Masse m) und v2 (fur Masse 2m) unmittelbarnach dem vollplastischen Stoß an.Hinweis: Mit Ausnahme des Kraftstoßes sind alle etwaigen Krafte wahrend des Stoßvor-gangs zu vernachlassigen!
|v1| = v/3
|v2| = v/3
d)
Bestimmen Sie die Federsteifigkeit/Federkonstante c derart, dass die maximale Stauchungder Feder l/5 betragen soll. Nehmen Sie hier an, dass nur ein Korper der Masse 3mKontakt mit der Feder hat. Die Geschwindigkeit dieser Masse ist im Punkt 4 zu v4 =|v4| = 6 v vorgegeben.
C = 2700mv2
L2 − 30mg sin βL

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Losung 9 (Seite 1 von 2)
Das dargestellte System befindet sich im Schwerefeld der Erde (Erdbeschleunigung g).Das masselose Seil rollt schlupffrei uber zwei homogene Kreisscheiben (MassenM, m undRadien R, r). Dessen Ende ist mit einer Parallelschaltung einer Feder (Federsteifigkeit c)und eines Dampfers (Dampfungskonstante d) verbunden. Das Seil soll als stets gespanntangenommen werden. Die Feder ist in der Ausgangslage ungespannt.
c
d
y
h
g
M, R
m, rN.N.
Geg.: m, M, r, R, c, d, g.
a)Geben Sie die gesamte kinetische Energie Ekin sowie die gesamte potenzielle Energie Epot
des Systems in Abhangigkeit des Freiheitsgrades y an.
Ekin = y2(M + 34m)
Epot = 2cy2 −mgy +Mgh
4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Losung 9 (Seite 2 von 2)
b)Geben Sie die zugehorige Bewegungs-Differentialgleichung an.
32my + 2My + 4cy −mg + 4dy = 0
4c)Bei vernachlassigter Schwerkraft und Federsteifigkeit (g = c = 0) sowie einem be-stimmten, nicht naher aufgefuhrten Verhaltnis zwischen den Massen hat die Bewegungs-differentialgleichung die Form
5 m y + d y = 0.
Geben Sie y(t) fur die Anfangsbedingungen y(t = 0) = 0, y(t = 0) = dm
an.
y(t) = 5− 5e(−d
5m)t
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 10 (Seite 1 von 3)
Das folgende Balkensystem soll mittels des Ritz-Verfahrens approximiert werden. DieBalken weisen eine Dehnsteifigkeit von EA→ ∞ und eine Beigesteifigkeit von EI auf.
2F2F
2F
2F
2L
2L
a) Unter Ausnutzung der Symmetriebedingungen wird nun ein Ersatzsystem betrachtet.Kreuzen Sie das richtige Ersatzsystem an und geben Sie die Rand- und Ubergangsbedin-gungen der Balkenfunktionen wI(x1) und wII(x2) an. Hinweis: Es gilt EA→ ∞.
2F
2F
F
F
F
F
F
F
x1
x1
x1
x1
x2
x2
x2
x2
Rand- Ubergangsbedingungen:
w′I(x1 = 0) = 0; w′
II(x2 = L) = 0;w′I(x1 = L) = w′
II(x2 = 0) = 0; wI(x1 = L) = wII(x2 = 0) = 0;

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 10 (Seite 2 von 3)
b)Wie lautet das Gesamtpotential Π der inneren und außeren Lasten (Π = Πi + Πa) furdas unter a) dargestellte System? Fur das Potential der inneren Krafte sollen dabei nurBeitrage infolge des Biegemoments berucksichtigt werden.Hinweis: Integrale mussen nicht gelost werden und die Verschiebungsfunktionen wI(x1)und wII(x2) sind bekannt.
Π =
ˆ L
0
1
2EI (w′′
I (x1))2 dx+
ˆ L
0
1
2EI (w′′
II(x2))2 dx−F wI(x1 = 0)−F wII(x2 = L)
c)Fur ein anderes, nicht naher spezifiziertes Balkensystem sind die folgenden Randbedin-gungen fur die Verschiebungsfunktion w(x) bekannt:
w(x = L) = w0 , w′(x = L) = 0
w0 stellt dabei eine gegebene Große dar. Bestimmen Sie einen gultigen Ritz-Ansatz w(x)aus der Funktion:
w(x) = a0 cos(πLx)+ a1 sin
(πLx)+ a2 x
3
w(x) = (a2 L3 − w0) cos
(πLx)+ 3 a2
L3
πsin(πLx)+ a2 x
3
oder w(x) =(a1 π
3− w0
)cos(πLx)+ a1 sin
(πLx)+a1 π
3L3x3
oder w(x) = a0 cos(πLx)+
3 (a0 + w0)
πsin(πLx)+a0 + w0
L3x3

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 10 (Seite 3 von 3)
d) Das Gesamtpotential des Systems sei nun mit
Π =
L
0
(w′′(x))2dx− q0
L
L
0
w′(x) dx
angegeben. Ein zulassiger Ritz-Ansatz lautet
w(x) = b1 x3 .
Bestimmen Sie den Freiwert b1 mittels des Rayleigh-Ritz-Verfahrens. Hinweis: WichtigeZwischenschritte bitte ebenfalls ins Kastchen eintragen.
w′(x) = 3 b1 x2 w′′(x) = 6 b1 x
=⇒ Π = 12 b21 L3 − q0 b1 L
2
Rayleigh-Ritz:∂ Π
∂ b1= 0
=⇒ ∂ Π
∂ b1= 24 b1L
3 − q0 L2 = 0 =⇒ b1 =
q024L

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 11 (Seite 1 von 4)
Das nachfolgende System soll mittels der Fließgelenktheorie bemessen werden.
F
LL
L2L
a)Bestimmen Sie die Anzahl n der einzusetzenden Fließgelenke um eine Fließgelenkkette zuerhalten.
n = 2
b)Bestimmen Sie nun alle moglichen Fließgelenkketten, wobei die Anzahl dieser so gering wiemoglich sein soll. Zeichnen Sie dazu die Fließgelenkketten quantitativ in den verformtenLagen ein. Berucksichtigen Sie hierbei nur die Konfigurationen, die aufgrund der Krafteine außere Arbeit leisten. Zeichnen Sie ebenfalls die Randbedingungen ein.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 11 (Seite 2 von 4)
c)Das nachfolgende System soll mittels der Fließgelenktheorie bemessen werden. Spannun-gen infolge Quer- und Normalkraften konnen dabei vernachlassigt werden. Das Materialdes Systems weist in jedem Querschnitt jeweils das plastische Grenzmonent Mpl,Y auf.
L
LL
F2L
In nachfolgender Skizze (siehe nachste Seite, Querformat-Darstellung) sind die hier rele-vanten Fließgelenkpositionen und die mit 1.), 2.) und 3.) bezifferten Fließgelenk-Konfigurationenschon in den ausgelenkten Lagen dargestellt. Geben Sie die jeweiligen Beziehungen zwi-schen den Winkeln in samtlichen Systemen an und zeichnen Sie zudem die plastischenMomente ein.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 11 (Seite 3 von 4)
1.)
2.)
3.)
Mpl
Mpl
Mpl
Mpl
Mpl
Mpl
Mpl
Mpl
Mpl
Mpl
Mpl
δϕ
δϕ
δϕ
δϕ
δϕ
δϕδϕ δϕ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 11 (Seite 4 von 4)
Ermitteln Sie fur alle Fließgelenkkonfigurationen jeweils die Tragkraft FT . Geben Sie desWeiteren den zulassigen Grenzwert Fgrenz an.
1.) FT = 3Mpl
L
2.) FT = 2Mpl
L
3.) FT = 2Mpl
L
Fgrenz = 2Mpl
L

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 12 (Seite 1 von 2)
a)Das abgebildete System aus starren Staben ist durch die richtungstreuen Krafte F1 undF2 belastet und durch vier Federn der Steifigkeiten c1, c2, c3 und c4 gestutzt. In derdargestellten Gelichgewichtslage seien die Federn ungespannt. Der Einfluss derSchwerkraft ist zu vernachlassigen. Die zu verwendenden kinematischen Freiheitsgradesind der unteren Skizze zu entnehmen.
F1 F2
c1
c2 c3
c4
l1 l2
l3
ϕ ψ
Stellen Sie das Potential Πi der in den Federn gespeicherten Energie und das Potential Πa
der außeren Krafte fur finite Auslenkungen des Systems in Abhangigkeit der vorgegebenenkinematischen Freiheitsgrade ϕ und ψ fur die dargestellte Lage auf.
Πi(ϕ, ψ) =12[c1(l1 sinϕ)
2 + c2(l3 sinϕ)2 + c3(l3 sinϕ+ l3 sinψ)
2 + c4(l2 sinψ)2]
Πa(ϕ, ψ) = F1 l1 cosϕ+ F2 l2 cosψ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 12 (Seite 2 von 2)
b)Fur bestimmte, nicht naher spezifizierte, Langenverhaltnisse und Zusammenhange zwi-schen den Federkonstanten und den außeren Kraften erhalt man
∂ Π
∂ϕ= 2c l2(sinϕ cosϕ+ cosϕ sinψ)− F l sinϕ
∂ Π
∂ψ= 2c l2(sinψ cosψ + sinϕ cosψ) + 3c l2 sinψ cosψ − F l sinψ
fur die partiellen Ableitungen des zu Grunde liegenden Potentials nach den Freiheitsgradenϕ und ψ. Berechnen Sie die maßgebende kritische Last Fkrit, bei welcher die durch ϕ = 0und ψ = 0 gegebene Gleichgewichtslage instabil wird.
Hinweis: Da die vorgegebene Gleichgewichtslage der Ausgangskonfiguration des Systemsentspricht, ist es moglich und eventuell sinnvoll, bestimmte Terme zu linearisieren. GebenSie ebenfalls sinnvolle Zwischenschritte fur die Berechnung des Endergebnisses an. NutzenSie dafur den Platz im unteren Kastchen.
Fkrit = c l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 13 (Seite 1 von 2)
Folgend sind durch x, y, z die Koordinaten der kartesischen Basis bestehend aus denEinheitsvektoren ex, ey und ez bezeichnet. Alle nachfolgenden Angaben bzw. Ergebnissebeziehen sich auf diese Basis.
a)Gegeben ist das Verschiebungsfeld
u = k[x (a2 + y2) ex + b x y ey + x (c2 − z2) ez
].
Dabei stellen die Großen a, b, c und k allgemeine Konstanten dar. Geben Sie den zuge-horigen Verschiebungsgradienten-Tensor G in Matrixschreibweise an.
[G] = k
a2 + y2 2 x y 0b y b x 0
c2 − z2 0 −2 x z
b)In einem anderen Fall nehmen die Koordinaten des Verschiebungsgradienten-Tensor dieForm
[G] = k
a2 + y z x z x y
0 2 b y 0−2 x z 0 c2 − x2
an. Berechnen Sie die Koeffizienten des daraus resultierenden, linearisierten Dehnunsten-sors ε. Die Große k stellt dabei eine allgemeine Konstante dar.
[ε] = k
a2 + y z 1/2 x z 1/2 [x y − 2 x z]
2 b y 0sym. c2 − x2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 13 (Seite 2 von 2)
c)Fur ein linear isotrop elastisches Material (Elastizitatsmodul E, Querkontraktionszahlν = 1/3) wurden die Koeffizienten des linearisierten Dehnungstensors ε zu
[ε] = k
a2 + y2 1/2 (b+ 2 x) y 1/2 (c2 − z2)
1/2 (b+ 2 x) y b x 01/2 (c2 − z2) 0 −2 x z
bestimmt. Geben Sie die Koeffizienten des zugehorigen Spannungstensors σ im Punkt Pmit dem Ortsvektor xP = 1 ex + 0 ey + 0 ez in Matrixschreibweise an. Die Große k stelltdabei eine allgemeine Konstante dar.
[σ] = E k8
6 [2 a2 + b] 0 3 c2
6 [a2 + 2 b] 0sym. 6 [a2 + b]
Berechnen Sie zudem die Hauptspannungen in diesem Punkt.
σI =E k8
[3 a2 + 2 b+
√a4 + c4
]
σII =E k8
[3 a2 + 2 b+
√a4 + c4
]
σIII =3E k4 [a2 + 2 b]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 14 (Seite 1 von 2)
a)Der dargestellte Korper der Masse m ist innerhalb einer Nut mit 2 Federn (Federsteifigkeitc) verbunden und kann in dieser reibungsfrei gleiten. Der Hohlkorper, welcher als masse-los gilt, ist im Punkt A frei drehbar gelagert und im Punkt B mit einer weiteren Feder(Federsteifigkeit c) verbunden. In der dargestellten Lage (x = 0, ϕ = 0) sind samtlicheFedern ungespannt.
x
x
y
A
B
a
b
m
g
ϕ
Bestimmen Sie den Betrag der Absolutgeschwindigkeit vm = |vm| der Masse m in Abhan-gigkeit der Freiheitsgrade x und ϕ.
vm(x, ϕ) =√x2 + [a + x]2 ϕ2
Geben Sie die gesamte kinetische Energie Ekin sowie die gesamte potenzielle Energie Epot
an. Das Nullniveau hinsichtlich der potenziellen Energie ist durch y = 0 gegeben.
Hinweis: Sollten Sie die vorherige Aufgabe nicht gelost haben, verwenden Sie den Aus-druck vm als Betrag der Absolutgeschwindigkeit des Gleitkorpers.
Ekin = 12mv2m = 1
2m [x2 + [a+ x]2 ϕ2]
Epot =12c [b sin(ϕ)]2 + 2× 1
2c x2 −mg [a+ x] sin(ϕ)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2013
Aufgabe 14 (Seite 2 von 2)
b)Fur ein alternatives kinematisches System mit den Freiheitsgraden x und ϕ sind die ki-netische Energie Ekin sowie die potentielle Energie Epot wie folgt vorgegeben:
Ekin =1
2m[x2 + [3/4 l + x]2 ϕ2
],
Epot =mg
4 l
[2 x2 + l sin(ϕ)[l sin(ϕ)− 3 l− 4 x]
].
Geben Sie das zugehorige Bewegungs-Differentialgleichungs-System an.
x : mx−mg sin(ϕ) + mglx+m
[34l + x
]ϕ2 = 0
ϕ : 2m[34l + x
]x ϕ+m
[34l + x
]2ϕ+ 1
4mg cos(ϕ) [l [−3 + 2 sin(ϕ)]− 4 x]
= 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 1 (Seite 1 von 2)
Das unten dargestellte Fachwerk ist in den Punkten A und B gelagert und wird wie gezeigtdurch vertikale Einzelkrafte F1 bis F7 belastet. Die vertikale und horizontale Einheitslangedes Fachwerks betragt l.
3 5 6
11 12 13 14 15 16 1718
19 20 21 22
23 24 25 26
2 4
78
9 10
1
F1 F2 F3 F4 F5 F6 F7
A Bx
y
a)Berechnen Sie die Auflagerreaktionen in den Punkten A und B fur F1 = F2 = F3 = F4 =F5 = F5 = F6 = F7 = F bezuglich des vorgegebenen Koordinatensystems.
Ax =94F Ay =
72F
Bx = −94F (Ax = −Bx or −Ax = Bx) By =
72F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 1 (Seite 2 von 2)
b)Geben Sie die Nummern von genau 2 Nullstaben an, die auf Grundlage gangiger Kriteriendirekt als solche identifiziert werden konnen (keine Rechnung).
19 und 22
c)Die außeren Krafte sind nun zu F1 = F2 = F3 = F und F4 = F5 = F6 = F7 = 2F sowiedie daraus resultierenden Auflagerreaktionen zu Ax = 15/4F , Ay = 9/2F , Bx = −15/4Fund By = 13/2F vorgegeben. Berechnen Sie die Stabkrafte S23 und S24 sowie S2, S10 undS20 unter Berucksichtigung der Konvention, dass Zugstabe positiv sind.
S23 = −34F S24 =
−15√2
4F
S2 = −94F S10 =
5√2
2F
S20 = −4F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 2 (Seite 1 von 3)
a)Berechnen Sie die Lage des Schwerpunkts S des aus einer Halbkreisscheibe (Radius r =3a/
√π) und einer quadratischen Scheibe (Kantenlange a) zusammengesetzten Korpers.
Geben Sie dessen Lage bezuglich des dargestellten x-y Koordinatensystems sowohl furα = 0 als auch fur allgemeine Winkel α an. Die Verteilung der Massendichte ist homogen.
O O
α = 0 α 6= 0
aa
rrα
x x
y y
Gegeben: a, r = 3a√π, α
xS(a, α = 0) = 0 yS(a, α = 0) = −10+36π−32
11a
xS(a, α) = −10+36π−32
11a sinα yS(a, α) = −10+36π−
32
11a cosα
Die dargestellte homogene Halbkreisscheibe(Masse m1) ist uber ein horizontales, dehn-starres Seil mit einer Masse m2 auf einerschiefen Ebene verbunden. Das System be-findet sich im Schwerefeld der Erde. DerHaftreibungskoeffizient zwischen den Kor-pern und ihrer jeweiligen Auflagerflache be-tragt µ0.
O
r
µ0
µ0
g
α
m1 m2
β

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 2 (Seite 2 von 3)
b)Es soll des Weiteren untersucht werden, fur welche Bedingungen Teilkorper 2 fur ein gege-benes α > 0 die schiefe Ebene nicht herunter rutscht. Vervollstandigen Sie dazu zunachstdas hier dargestellte Freikorperbild. Tragen Sie alle fur das Aufstellen der Gleichgewichts-bedingungen relevanten Großen deutlich ein. Fur den Abstand |OS| des Schwerpunkts Svom Punkt O gilt die Vorgabe |OS| = ls.
s α
A
N1
H1 N2
H2
S1
S1
m2g
m1g
β
ls
x1
y1 x2
y2
Teilkorper 1 Teilkorper 2
Stellen Sie die zur Losung der Aufgabe unbedingt notwendigen Gleichgewichtsbedingun-gen fur die Teilkorper 1 und 2 auf Grundlage Ihres Freikorperbildes auf. Verwenden Siedie fur den jeweiligen Teilkorper angetragenen Koordinatensysteme.
Teilkorper 1∑Fx1 : S1 = H1
∑MA : 0 = m1gls sinα− S1r
Teilkorper 2∑Fx2 : 0 = −H2 − S1 +m2g sin β
∑Fy2 : 0 = N2 −m2g cos β

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 2 (Seite 3 von 3)
Geben Sie die Bedingung fur die Masse m2 an, damit Teilkorper 2 die schiefe Ebene nichtherunter rutscht.
Gegeben: sinα = 12, cosα =
√32, sin β =
√32, cos β = 1
2, lsr= 1
2, µ0 =
12, m1
m2 ≤ m1
2(√3−1/2)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 3 (Seite 1 von 3)
Ein rechtwinkliger Rahmen, welcher in denPunkten A und B wie dargestellt gelagertist, wird durch eine lineare Streckenlast derFunktion
q(x1) = q0
[1− 2 x1
l
]
belastet. Die Rahmenecken in den PunktenB und C sind biegestarr und das Eigenge-wicht des Rahmens ist zu vernachlassigen.
A B
C
x1
z1
x2
z2
l
l
q0
q0
a)Berechnen Sie die Funktionen der Schnittgroßen Q(x1) und M(x1) im Bereich 0 ≤ x1 ≤ l.
Q(x1) =q0 [x
21 − x1 l]
l
M(x1) =q0 x
21 [2 x1 − 3 l]
6 l
Betrachten Sie nun den Punkt C und geben Sie die allgemeinen Zusammenhange zwischenden Schnittgroßen N , Q, M fur x1 = l (Bereich 1) und den Schnittgroßen N , Q, M furx2 = l (Bereich 2) an. Hinweis: Es ist nicht nach den Funktionswerten gefragt.
N(x1 = l) = −Q(x2 = l)
Q(x1 = l) = +N(x2 = l)
M(x1 = l) = −M(x2 = l)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 3 (Seite 2 von 3)
Wie groß ist die aus der Streckenlast resultierende Gesamtkraft Fres und welchen Werthat die Reaktionskraft By des Lagers im Punkt B?
Fres = 0 By = ±1/6 q0 l
b)Das rechts abgebildete Tragwerk ist in denPunkten A und B wie dargestellt gelagertund wird im rechten Bereich durch eine kon-stante Streckenlast q0 wie gezeigt belastet.Die im Punkt C befindliche Ecke des Rah-mens ist biegestarr, das Eigengewicht desTragwerks ist zu vernachlassigen. A
B
C
ll
√2 l
q0
4545
Die Auflagerreaktionen des Systems sind wie folgt in Abhangigkeit des unten angegebenenglobalen x-y-Koordinatensystems vorgegeben.
C
l
l
q0x
y
Ax
Ay By
x1
z1
x2z2
Ax =1√2q0 l
Ay =
√24 q0 l
By = Ay =
√24 q0 l
Geben Sie die Werte der Schnittgroßen im Punkt C des Rahmens bezuglich beider Bereichean.
N(x1 = l) = −3/4 q0 l N(x2 = 0) = −1/4 q0 l
Q(x1 = l) = −1/4 q0 l Q(x2 = 0) = +3/4 q0 l
M(x1 = l) = −1/4 q0 l2 M(x2 = 0) = −1/4 q0 l
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 3 (Seite 3 von 3)
Geben Sie die Werte der Schnittgroßen (Randbedingungen) in den Punkten A und B an.
N(x1 = 0) = −3/4 q0 l N(x2 = l) = −1/4 q0 l
Q(x1 = 0) = −1/4 q0 l Q(x2 = l) = −1/4 q0 l
M(x1 = 0) = 0 M(x2 = l) = 0
Zeichnen Sie qualitativ die Schnittgroßenverlaufe unter Angabe der Randwerte, Vorzeichenund des Polynomgrades p.
N(x) →
(−)(−)
−3/4 q0 l −1/4 q0 l
p = 0 p = 0
Q(x) →
(−)(−)
(+)−1/4 q0 l
3/4 q0 l
−1/4 q0 l
p = 0 p = 1
M(x) →
(−)(−)
−1/4 q0 l2 −1/4 q0 l
2
p = 1 p = 2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 4 (Seite 1 von 2)
a)Das dargestellte Balkensystem weist im Punkt A eine Einspannung sowie im Punkt Bein Vollgelenk auf. Die zusatzlich mit den Balken verbundene Pendelstutze 1 besitzt dieDehnsteifigkeit EA, wahrend Pendelstutze 2 als dehnstarr (EA→ ∞) anzusehen ist.
xy
z
AB
1
2
lll
IIIIII
EA
EA→ ∞
Stab 1 wird nun einer Langenanderung ∆l ausgesetzt. Nennen Sie samtliche kinematsichen(geometrischen) Rand- und Ubergangsbedingungen in den Bereichen I (0 ≤ x ≤ l), II(l ≤ x ≤ 2 l) und III (2 l ≤ x ≤ 3 l) bezogen auf das vorgegebene Koordinatensystem.
wI(0) = 0 w′I(0) = 0 wI(l) = −∆l wII(l) = wI(l) = −∆l w′
II(l) = w′I(l)
wII(2 l) = wIII(2 l) wIII(3 l) = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 4 (Seite 2 von 2)
b)Fur das nun vorgegebene, durch eine kon-stante Linienkraft q0 belastete System wur-den die Funktionen des Biegemomentes zu
M Iy = − 1
48q0 [24 x
2−39 x l+11 l2] , 0 ≤ x ≤ l
und
M IIy = − 1
48q0 l [9 x− 13 l] , l ≤ x ≤ 2 l
bestimmt.
xy
z
A B
ll
q0
III
Geben Sie die Funktionen der Biegelinie in den Bereichen I (0 ≤ x ≤ l) und II (l ≤ x ≤ 2 l)mit noch nicht spezifizierten Integrationskonstanten an.
wI(x) =q0
96EI[4 x4 − 13 x3 l + 11 x2 l2] + C1 x+ C2
wII(x) =q0
96EI [3 x3 l − 13 x2 l2] + C3 x+ C4
Nennen Sie die zur eindeutigen Berechnung der Biegelinie notwendigen Randbedingungen.
Hinweis: Die Ubergangsbedingungen an der Stelle x = l sind fur die Losung dieserAufgabe irrelevant, da sie durch die Funktionen der Biegemomente a priori erfullt werden.
wI(0) = 0 w′I(0) = 0 wII(2 l) = 0 w′
II(2 l) = 0
Geben Sie die Werte fur die von Ihnen verwendeten Integrationskonstanten an.
C1 = 0 C2 = 0 C3 = q0 l3
6EI C4 = − q0 l4
24EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 5 (Seite 1 von 3)
a)Der dargestellte, vertikale Trager (Lange l,Biegesteifigkeit EI) wird durch eine linearanwachsende Streckenlast (Maximalwert q0)belastet.
Unter Verwendung des Satzes von Castig-
liano soll die Verdrehung ϕ des oberen Bal-kenendes (x = 0) berechnet werden.
q0
l
x
Skizzieren Sie den aus der Streckenlast resultierenden Biegemomentenverlauf M q0 (links)sowie den aus der hier notwendigen virtuellen Große resultierenden BiegemomentenverlaufM (rechts). Zeichnen Sie diese virtuelle Große ebenfalls in die rechte Skizze ein. Geben Siejeweils den Polynomgrad p der Funktion der Biegemomente sowie den Extremwert Mext
fur beide Falle an.
M q0 M
z +
x
P2
P1
M∗ oder “1”
pq0 = 3
M q0ext =
1
6q0 l
2
p = 0
Mext =M∗oder 1
Geben Sie sowohl die allgemein gultige Berechnungsvorschrift (Bruchterm) sowie den Inte-gralausdruck zur Berechnung der gesuchten Verdrehung an. Verwenden Sie dazu die obenangegebenen allgemeinen Bezeichnungen der Biegemomentenfunktionen. Tragen Sie auchdie Integrationsgrenzen ein.
ϕ =∂Π
∂M∗ =
ˆ l
0
M q0 M
EIdx

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 5 (Seite 2 von 3)
Berechnen Sie die Verdrehung ϕ des Balkenendes (x = 0).
ϕ =q0 l
3
24EI
b)Ein Kragtrager der Biegesteifigkeit EI1 istuber eine Pendelstutze (Dehnsteifigkeit EA)mit einem Trager (Biegesteifigkeit EI2) zwi-schen zwei Stutzen verbunden. Das freie En-de des oberen Tragers wird durch eine Ein-zelkraft F belastet.
Fur dieses System soll nun die in der Pendel-stutze wirkende Stabkraft S berechnet wer-den.
F
EI1
EI2
EA l
ll
x1
x2
x3
Die Verlaufe des allein aus der Kraft F resultierenden Biegemomentes MF (x1) sowiedes allein aus der unbekannten Stabkraft S resultierenden Biegemomentes MS(x1), derNormalkraft N(x3) und des Biegemomentes MS(x2) sind wie folgt gegeben:
MF (x1) MS(x1) N(x3) MS(x2)
−2F lSl
−S
12Sl
x1 x1 x2
x3

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 5 (Seite 3 von 3)
Geben Sie sowohl die zur Bestimmung der Stabkraft S notwendige allgemein gultige Be-dingung als auch den Integralausdruck unter Verwendung der oben genannten allgemeinenBezeichnungen der Schnittgroßenfunktionen an. Beachten Sie dabei, dass die Schnittgro-ßenverlaufe fur die virtuelle Kraft S =
”1“ durch MS(x1), N(x3) sowie M
S(x2) gekenn-zeichnet werden sollen. Geben Sie auch jeweils die Integrationsgrenzen an.
∂Π
∂S= 0 =
ˆ 2l
0
MF MS(x1)
EI1dx1 +
ˆ 2l
0
MS MS(x1)
EI1dx1
+
ˆ 2l
0
MSMS(x2)
EI2dx2 +
ˆ l
0
NSN(x3)
EAdx3
Die Verhaltnisse zwischen den Biege- und Dehnsteifigkeiten der einzelnen Strukturen sindzu
EI2EI1
= 2,EA
EI1=
12
l2.
vorgegeben. Geben Sie die oben angegebene Bedingung fur die Berechnung der StabkraftS nun in ausintegrierter Form unter Verwendung dieser Zusammenhange an. Losen Sienicht nach der Stabkraft S auf!
0 = −1
2
F l3
EI1− 1
3
F l3
EI1+
1
3
Sl3
EI1+ 2
13
12Sl l
2l
EI2+
Sl
EA
= −5
6
F l3
EI1+
1
3
Sl3
EI1+
1
6
Sl3
2EI1+
Sl3
12EI1
Geben Sie abschließend den Wert der Stabkraft S an.
S =5
3F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 6 (Seite 1 von 3)
Der dargestellte Querschnitt mit der einheitlichen Wandstarke t ist als dunnwandig anzu-nehmen. Der Flachenschwerpunkt befindet sich im Abstand zS = 11a/12 von der Oberseitedes Profils.
y
z
a
a
3a
Wandstarke t
zS =11a
12S
a)Bestimmen Sie das Flachentragheitsmoment Iy des Querschnitts bezuglich des eingezeich-neten Schwerpunktskoordinatensystems.
Iy =23
24a3 t

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 6 (Seite 2 von 3)
Der dargestellte zur y-Achse symmetrische Querschnitt mit der einheitlichen Wandstarket ist als dunnwandig anzunehmen. Das Flachentragheitsmoment bezuglich des vorgegebe-nen Schwerpunktkoordinatensystems ist zu Iy = t d2 [b+ d
3] bestimmt worden.
d
b
Wandstarke t
45
45
s1
s2
s3
s4
S
y
z
b)Bestimmen Sie das statische Moment Sy(s1) fur den Teilbereich 0 ≤ s1 ≤ b.
Sy(s1) =1√2d t s1
Bestimmen Sie das statische Moment Sy(s2) fur den Teilbereich 0 ≤ s2 ≤ d.
Sy(s2) =1√2t
[d[b+ s2]−
s222
]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 6 (Seite 3 von 3)
c)Fur den Querschnitt aus Aufgabenteil b) wurde die Schubspannungsverteilung gemaßder folgenden Skizze bestimmt. Das Flachentragheitsmoment bezuglich des vorgegebenenSchwerpunktkoordinatensystems lautet Iy = t d2 [b+ d
3].
τ(s1 = 0) = 0
τ(s2 = 0) = τ(s1 = b)
τ(s2 = d) = τ(s3 = 0)
τ(s3 = d) = τ(s4 = 0)
τ(s4 = b) = 0
y
z
τ(s2 = 0) = τ(s1 = b) = τ(s3 = d) = τ(s4 = 0) =Qb√
2 t d [b+ d3]
τ(s2 = d) = τ(s3 = 0) =Q [b+ d
2]√
2 t d [b+ d3]
Geben Sie die Ortskoordinaten des Schubmittelpunktes M bezuglich des vorgegebeneny, z-Koordinatensystems an.
yM =b2
2[b+ d
3
] zM = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 7 (Seite 1 von 2)
Ein System aus starren, homogenen Staben ist im Punkt A drehbar gelagert und des Wei-teren mit den dargestellten Federn und Dampfern (Materialkonstanten sind der Zeichnungzu entnehmen) verbunden. Im Punkt D ist zusatzlich eine Punktmasse (Masse m) ange-bracht. Im Punkt E wird das System durch eine zeitabhangige Kraft F (t) belastet, wobeiin der gezeichneten Ausgangslage F (t = 0) = 0 gilt und die Federn ungespannt sind. DerEinfluss der Schwerkraft ist zu vernachlassigen.
A
B C
D
E
F (t)l
ll 2 l
c
cT
d
d
mm
4m
ϕ
x
y
a)Berechnen Sie das Massentragheitsmoment θ(A) des Systems bezuglich des Punktes A.
θ(A) =20
3ml2
b)Geben Sie die vertikale Verschiebung yB des Punktes B sowie die Geschwindigkeitskoordi-nate xD des Punktes D in Abhangigkeit von ϕ und ϕ fur große Auslenkungen des Systemsan.
yB = sin(ϕ) l xD = ϕ cos(ϕ) l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 7 (Seite 2 von 2)
c)Das Massentragheitsmoment des Systems sei nun als θ gegeben. Geben Sie fur die An-nahme kleiner Auslenkungen (ϕ ≪ 1) die Bewegungs-Differentialgleichung bezuglich desDrehwinkels ϕ an.
ϕ+5 d l2
θϕ+
c l2 + cTθ
ϕ =2 l F (t)
θ
Nennen Sie die Bedingung fur die Federkonstante c, so dass sich fur das gegebene Systemeine schwach gedampfte Schwingung ergeben wurde.
c >25 d2 l4 − 4 cT θ
4 θ2 l2
Spezifizieren Sie fur F (t) = F0 cos(Ω t) die Konstanten C und ϕ0 der allgemeinen Losung
ϕ(t) = C cos(Ω t− ϕ0)
fur den eingeschwungenen Zustand.
C =2 l F0
θ√
4 δ2Ω2 + [ω2 − Ω2]2δ =
5 d l2
2 θ
ϕ0 = arctan
(2 δΩ
ω2 − Ω2
)ω =
√c l2 + cT
θ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 8 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Korpern, die durch dehnstar-re, schlupffrei abrollende Seile miteinander verbunden sind und sich im Schwerefeld derErde (Erdbeschleunigung g) befinden. Die jeweiligen Massen und Abmessungen sind derZeichnung zu entnehmen. Es wird davon ausgegangen, dass die Rollen 1 und 3 auf rauhenEbenen schlupffrei abrollen. Dabei wird Rolle 1 von dem konstanten Drehmoment M0 dieschiefe Ebene hinauf angetrieben. Die Umlenkrolle in Punkt A ist als masselos anzusehen.
g
α
ϕ1
ϕ2
ϕ3
x1
x3
x4
M0
m1 m2
m3
m4
r1 r2
r3
R1
A
1 2
3
4
a)Zeichnen Sie ein vollstandiges Freikorperbild
M0
N1N3
H1H3
S1
S1
S2
S2
S3
S3
m1 g m3 g
m4 g

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 8 (Seite 2 von 3)
b)Geben Sie die Impulsbilanz (Kraftesatz) der Rolle 1 bezuglich der x1-Koordinate an.
−S1 +H1 −m1 g sin(α) = m1 x1
c)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 1 bezuglich ihres Schwerpunktesund der ϕ1-Koordinate an. Nehmen Sie θ1 als gegeben an.
M0 − S1 r1 −H1R1 = θ1 ϕ1
d)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 2 bezuglich ihres Schwerpunktesund der ϕ2-Koordinate an. Spezifizieren Sie θ2 mittels der gegebenen Großen.
S2 r2 − S1 r2 =1
2m2 r
22 ϕ2
e)Geben Sie die Impulsbilanz (Kraftesatz) der Rolle 3 bezuglich der x3-Koordinate an.
S3 − S2 −H3 = m3 x3
f)Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 3 bezuglich ihres Schwerpunktesund der ϕ3-Koordinate an. Spezifizieren Sie θ3 mittels der gegebenen Großen.
H3 r3 − S2 r3 =1
2m3 r
23 ϕ3
g)Geben Sie die Impulsbilanz (Kraftesatz) der Masse 4 bezuglich der x4-Koordinate an.
S3 −m4 g = m4 x4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 8 (Seite 3 von 3)
h)Geben Sie die (Winkel-)Geschwindigkeiten x1, ϕ2, x3, ϕ3 und x4 in Abhangigkeit von ϕ1
an.
x1(ϕ1) = ϕ1R1
ϕ2(ϕ1) = −ϕ1R1 + r1r2
x3(ϕ1) = −ϕ1R1 + r1
2
ϕ3(ϕ1) = −ϕ1R1 + r12 r3
x4(ϕ1) = ϕ1R1 + r1
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 9 (Seite 1 von 2)
Eine punktformiger Korper der Masse m rutscht aus seiner Ruhelage (Hohe h bezuglichN.N.) im Punkt O eine reibungslose Ebene hinab. Auf seinem Weg uber die Punkte Abis H passiert er 2 reibungsbehaftete Teilabschnitte mit den Gleitreibungskoeffizienten µ1
und µ2. Samtliche Kreisbogen weisen den Radius r auf.
N.N.
O I
D E
G
C
x
y
A
B
cm
g
F
H
m
h
α
α α
α
r
rr
rθ
µ1 µ2
l1
l2
l3γ γ
φ
a)Berechnen Sie den Betrag der Geschwindigkeit der Punktmasse zwischen den Punkten Aund B als Funktion des Winkels θ.
v(θ)A→B =√2g[h− r (1− Cos(θ))]
b)Berechnen Sie den Betrag der Geschwindigkeit der Punktmasse im Punkt C.
vC =√
2g[h− r(1− Cos(α))− l1(Sin(α) + µ1Cos(α))]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 9 (Seite 2 von 2)
c)Der Betrag der Geschwindigkeit der Punktmasse im Punkt C ist nun durch vC vorgegeben,wobei diese als groß genug vorausgesetzt ist, um Punkt D zu erreichen. Geben Sie dieGeschwindigkeit der Punktmasse in Abhangigkeit der Große vC in den Punkten F und Gan.
vF = vC
vG =√v2C + 2gl3(Sin(α)− µ2Cos(α))
d)Im Punkt G stoßt die Punktmasse mit dem gegebenen Geschwindigkeitsbetrag vG gegeneinen masselosen Stab, welcher mit einer Drehfeder (Federkonstante cT ) verbunden ist.Berechnen Sie die Winkelgeschwindigkeit der Punktmasse zwischen den Punkten G undH .
φ =√
2r2[gr(1− Sin(γ)) + 1
2v2G − gr(1− Sin(γ + φ))− 1
2mcTφ2]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 10 (Seite 1 von 3)
Gegeben ist das nebenstehende Bal-kensystem. In den Bereichen 0 ≤x ≤ l und 3 l ≤ x ≤ 4 l betragtdie Biegesteifigkeit des Balkens EI.Im mittleren Bereich l ≤ x ≤ 3 l(schraffiert) ist der Trager als biege-starr (EI → ∞) anzusehen.
l l
F
2 l 2 l
x
z
a)Geben Sie unter Ausnutzung der Symmetrie die kinematischen Randbedingungen fur dielinke Balkenhalfte 0 ≤ x ≤ l an und bestimmen Sie einen zulassigen Ritzansatz w(x) ausdem Polynom w(x) = a0 + a1 x+ a2 x
2 + a3 x3.
Randbedingungen: w(x = 0) = 0, w′(x = 0) = 0, w′(x = l) = 0
w(x) = a3 (x3 − 3
2l x2) oder w(x) = a2 (x
2 − 23x3
l)
b)Wie lautet das Gesamtpotential Π der inneren und außeren Lasten (Π = Πi+Πa) furdas dargestellte System? Fur das Potential der inneren Krafte sollen dabei nur Beitrageinfolge des Biegemoments berucksichtigt werden.Hinweis: Integrale mussen nicht gelost werden.
Π = 2
ˆ l
0
1
2EI (w′′(x))2dx− F w(l)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 10 (Seite 2 von 3)
c)Fur ein anderes, nicht naher spezifiziertes Balkensystem ergibt sich ein Gesamtpotentialvon
Π =
ˆ l
0
1
2c1 (w
′′(x))2 dx−ˆ l
0
c2 xw(x) dx .
Die Großen c1 und c2 stellen dabei Konstanten dar. Bestimmen Sie fur den kinematischzulassigen Ritzansatz w(x) = a x2 den Freiwert a mittels des Ritz-Rayleigh-Verfahrens.
a =c2c1
l3
16
Im Folgenden ist das rechts dar-gestellte Tragwerksystem gegeben.Die schraffierten Bereiche (l ≤x ≤ 3 l) des Balkensystems sindals biege- und dehnstarr anzusehen.Die nicht schraffierten Bereiche wei-sen die Biegesteifigkeit EI auf. Deh-nungen aus Quer- und Normalkraf-ten sind zu vernachlassigen. An derKraftangriffsstelle befindet sich einGelenk, welches die Balken verbin-det.
l l
F
2 l 2 l
x
z
d)Bestimmen Sie unter Ausnutzung der Symmetrie die kinematischen Randbedingungen derlinken Systemhalfte an der Stelle x = 0, sowie die Ubergangsbedingungen an den Stellenx = l und x = 2 l fur die Verschiebungsfunktion w(x).
w(0) = 0 w′(0) = 0
w′(l) = w′(2 l)
w(2 l) = w′(l) l + w(l)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 10 (Seite 3 von 3)
e) Wie lautet das Gesamtpotential Π als Funktion der vertikalen Verschiebungen w(x)?Hinweis: Integrale mussen nicht gelost werden.
Π = 2
ˆ l
0
1
2EI (w′′(x))2dx− F (w′(l) l + w(l))

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 11 (Seite 1 von 4)
Das nachfolgend dargestellte System soll mittels der Fließgelenktheorie bemessen werden.
l
l
F
F
2 l
a)Ermitteln Sie dazu zunachst den Grad der statischen Unbestimmtheit p.
p = 2
Bestimmen Sie nun alle moglichen Fließgelenkketten, wobei die Anzahl dieser so geringwie moglich sein soll. Es ist dabei ausreichend die entsprechenden Fließgelenke in dieunverformten Lage des Systems einzuzeichnen.
1.) 2.)
3.) 4.)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 11 (Seite 2 von 4)
b)Das nachfolgende System soll ebenfalls mittels der Fließgelenktheorie bemessen werden.Spannungen infolge von Quer- und Normalkraften konnen dabei vernachlassigt werden.Das Material des Systems weist in jedem Querschnitt jeweils das plastische GrenzmonentMpl,Y.
l
l l
F
2F
2 l
In nachfolgender Skizze (siehe nachste Seite, Querformat-Darstellung) sind die hier rele-vanten Fließgelenkpositionen und die mit 1.), 2.) und 3.) bezifferten Fließgelenk-Konfigurationendargestellt. Fur die Konfigurationen 1.) und 2.) sind die ausgelenkten Lagen bereits vorge-geben. Zeichnen Sie die ausgelenkte Lage der dritten Konfiguration ein. Geben Sie zudemdie jeweiligen Beziehungen zwischen den Winkeln in samtlichen Systemen an.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 11 (Seite 3 von 4)
δϕ
δϕδϕ
δϕδϕ
δϕδϕ
δϕ
2δϕ
δϕ/2
1.)
2.)
3.)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 11 (Seite 4 von 4)
d)Ermitteln Sie fur alle vorgegebenen Fließgelenkkonfigurationen jeweils die Tragkraft FT .Geben Sie des Weiteren den maßgebenden zulassigen Grenzwert Fgrenz an.
1.)
FT = 2Mpl,Y
l
2.)
FT =1
3
Mpl,Y
l
3.)
FT =2
5
Mpl,Y
l
Fgrenz =1
3
Mpl,Y
l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 12 (Seite 1 von 2)
a)Das abgebildete System aus starren Staben ist durch die richtungstreuen Krafte F1 undF2 belastet und durch zwei Federn der Steifigkeiten c1 und c2 gestutzt. Stellen Sie das Ge-samtpotential Π fur finite (große) Auslenkungen um die dargestellte Gleichgewichtslage(Federn sind ungespannt) auf. Der Einfluss der Schwerkraft ist zu vernachlassigen. Die zuverwendenden kinematischen Freiheitsgrade sind der folgenden Skizze zu entnehmen.
F1
F2
c1 c2
l1 l2 l3
ϕ
ϕ
ψ
Stellen Sie das Gesamtpotential Π fur finite Auslenkungen des Systems in Abhangigkeitder vorgegebenen kinematischen Rotationsfreiheitsgrade ϕ und ψ um die dargestellte Lageauf.
Π(ϕ, ψ) = 12[c1(l2 sinϕ)
2 + c2(l2 sinϕ+ l3 sinψ)2] + F1l1 cosϕ+ F2(l2 cosϕ+ 3 cosψ)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 12 (Seite 2 von 2)
b)Fur bestimmte, nicht naher spezifizierte Langenverhaltnisse und Zusammenhange zwi-schen den Federkonstanten und den außeren Kraften erhalt man
∂ Π
∂ϕ= c l2(2 sinϕ cosϕ+ cosϕ sinψ)− 3
2F l sinϕ
∂ Π
∂ψ= c l2(sinψ cosψ + sinϕ cosψ)− F l sinψ
fur die partiellen Ableitungen des zu Grunde liegenden Potentials nach den Freiheitsgradenϕ und ψ. Berechnen Sie die maßgebende kritische Last Fkrit, bei welcher die durch ϕ = 0und ψ = 0 gegebene Gleichgewichtslage instabil wird.
Hinweis: Da die vorgegebene Gleichgewichtslage der Ausgangskonfiguration des Systemsentspricht, ist es moglich und eventuell sinnvoll, bestimmte Terme zu linearisieren. GebenSie ebenfalls sinnvolle Zwischenschritte fur die Berechnung des Endergebnisses an. NutzenSie dafur den Platz unter dem Kastchen.
Fkrit =13cl

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 13 (Seite 1 von 3)
a)Das dargestellte Balkensystem ist in denPunkten A und B frei drehbar gelagert undweist zudem im Punkt C ein Vollgelenk auf.Das System wird durch zwei Einzelkrafte F1
und F2 belastet. Die rechtwinklige Ecke desabgewinkelten Balken ist als biegestarr anzu-sehen.
x
y
A B
C
l
ll
F1
F2
Zur Berechnung der Auflagerreaktion Bx (Vorzeichendefinition gemaß des vorgegebenenKoordinatensystems) mittels des Prinzips der virtuellen Verruckung wird in einem ent-sprechenden, hinsichtlich der statischen Bestimmtheit reduzierten System der abgewinkel-te Balken gedanklich um den Winkel ϕ entgegen des Uhrzeigersinns ausgelenkt (Drehachseverlauft durch den Punkt A). Zeichen Sie die daraus resultierende Lage des reduziertenSystems in nachfolgende Vorlage ein.
x
y
ϕ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 13 (Seite 2 von 3)
Bestimmen Sie die x-Koordinate xB des Punktes B in Abhangigkeit des finiten Winkelsϕ (ϕ 6≪ 1 !).
xB(ϕ) = l [cos(ϕ)− sin(ϕ)] + l√
1− 2 sin(ϕ) cos(ϕ)
Geben Sie die virtuelle Arbeit δWBxder gesuchten Auflagerreaktion Bx an.
Hinweis: Gegebenenfalls kann die Approximation√1− x ≈ 1 − x
2fur x ≪ 1 verwendet
werden.
δWBx= Bx 2 l δϕ
b)Fur das folgende System soll nun die Auflagerreaktion By gemaß des vorgegebenen Ko-ordinatensystems berechnet werden. Dazu wird das System entsprechend hinsichtlich derstatischen Bestimmtheit reduziert und erneut der abgewinkelte Balken gedanklich um dievirtuelle Verdrehung δϕ entgegen des Uhrzeigersinns ausgelenkt (Drehachse verlauft durchden Punkt A). Die von der gesuchten Kraftkoordinate By verrichtete, virtuelle Arbeit istals
δWBy= 3 l δϕ
bereits vorgegeben.
x
y
A B
C
l
l2 l
F1
F2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 13 (Seite 3 von 3)
Geben Sie die gesamte virtuelle Arbeit δW in Abhangigkeit der virtuellen Verdrehung δϕan.
δW (δϕ) = −F1 l δϕ− F2 2 l δϕ+By 3 l δϕ
Berechnen Sie die Koordinate By der Auflagerkraft im Punkt B.
By =13[F1 + 2F2]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 14 (Seite 1 von 2)
a)Der dargestellte Korper der Masse m ist innerhalb einer Nut mit 2 Federn (Federsteifigkeitc) verbunden und kann in dieser reibungsfrei gleiten. Der Hohlkorper, welcher als masse-los gilt, ist im Punkt A frei drehbar gelagert und im Punkt B mit einer weiteren Feder(Federsteifigkeit c) verbunden. In der dargestellten Lage (x = 0, ϕ = 0) sind samtlicheFedern ungespannt.
x
x
y
A
B
a
b
m
g
ϕ
Bestimmen Sie den Betrag der Absolutgeschwindigkeit vm = |vm| der Masse m in Abhan-gigkeit der Freiheitsgrade x und ϕ.
vm(x, ϕ) =√x2 + [a + x]2 ϕ2
Geben Sie die gesamte kinetische Energie Ekin sowie die gesamte potenzielle Energie Epot
an. Das Nullniveau hinsichtlich der potenziellen Energie ist durch y = 0 gegeben.
Hinweis: Sollten Sie die vorherige Aufgabe nicht gelost haben, verwenden Sie den Aus-druck vm als Betrag der Absolutgeschwindigkeit des Gleitkorpers.
Ekin = 12mv2m = 1
2m [x2 + [a+ x]2 ϕ2]
Epot =12c [b sin(ϕ)]2 + 2× 1
2c x2 −mg [a+ x] sin(ϕ)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 14 (Seite 2 von 2)
b)Fur ein alternatives kinematisches System mit den Freiheitsgraden x und ϕ sind die ki-netische Energie Ekin sowie die potentielle Energie Epot wie folgt vorgegeben:
Ekin =1
2m[x2 + [3/4 l + x]2 ϕ2
],
Epot =mg
4 l
[2 x2 + l sin(ϕ)[l sin(ϕ)− 3 l− 4 x]
].
Geben Sie das zugehorige Bewegungs-Differentialgleichungs-System an.
x : mx−mg sin(ϕ) + mglx+m
[34l + x
]ϕ2 = 0
ϕ : 2m[34l + x
]x ϕ+m
[34l + x
]2ϕ+ 1
4mg cos(ϕ) [l [−3 + 2 sin(ϕ)]− 4 x]
= 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 15 (Seite 1 von 2)
Folgend sind durch x, y, z die Koordinaten der kartesischen Basis bestehend aus denEinheitsvektoren ex, ey und ez bezeichnet. Alle nachfolgenden Angaben bzw. Ergebnissebeziehen sich auf diese Basis.
a)Gegeben ist das Verschiebungsfeld
u = k[x (a2 + y2) ex + b x y ey + x (c2 − z2) ez
].
Dabei stellen die Großen a, b, c und k allgemeine Konstanten dar. Geben Sie den zuge-horigen Verschiebungsgradienten-Tensor G in Matrixschreibweise an.
[G] = k
a2 + y2 2 x y 0b y b x 0
c2 − z2 0 −2 x z
b)In einem anderen Fall nehmen die Koordinaten des Verschiebungsgradienten-Tensor dieForm
[G] = k
a2 + y z x z x y
0 2 b y 0−2 x z 0 c2 − x2
an. Berechnen Sie die Koeffizienten des daraus resultierenden, linearisierten Dehnunsten-sors ε. Die Große k stellt dabei eine allgemeine Konstante dar.
[ε] = k
a2 + y z 1/2 x z 1/2 [x y − 2 x z]
2 b y 0sym. c2 − x2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Aufgabe 15 (Seite 2 von 2)
c)Fur ein linear isotrop elastisches Material (Elastizitatsmodul E, Querkontraktionszahlν = 1/3) wurden die Koeffizienten des linearisierten Dehnungstensors ε zu
[ε] = k
a2 + y2 1/2 (b+ 2 x) y 1/2 (c2 − z2)
1/2 (b+ 2 x) y b x 01/2 (c2 − z2) 0 −2 x z
bestimmt. Geben Sie die Koeffizienten des zugehorigen Spannungstensors σ im Punkt Pmit dem Ortsvektor xP = 1 ex + 0 ey + 0 ez in Matrixschreibweise an. Die Große k stelltdabei eine allgemeine Konstante dar.
[σ] = E k8
6 [2 a2 + b] 0 3 c2
6 [a2 + 2 b] 0sym. 6 [a2 + b]
Berechnen Sie zudem die Hauptspannungen in diesem Punkt.
σI =E k8
[3 a2 + 2 b+
√a4 + c4
]
σII =E k8
[3 a2 + 2 b+
√a4 + c4
]
σIII =3E k4 [a2 + 2 b]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 1 (Seite 1 von 2)
Das dargestellte Fachwerk ist in den Punkten A und B gelagert und durch die EinzelkrafteF1, F2, F3, F4, F5 6= 0 in den Knoten IV , VI, IIX , IX und X belastet.
A B
l
l
llll
F1
F2
F3
F4
F5
x
y
I II
IIIIV V VI
VII
IIX IX X
1 2 34
5 67
8 9 10 11
1213 14
15 1617
a)Nennen Sie die durch entsprechende Kriterien direkt als Nullstabe zu identifizierendenStabe des Systems anhand der in der Zeichnung angegebenen Stabnummern.
S2, S6 (fur jeden richtigen Stab: 1,0 Punkt. falschen Stab: -0,5 Punkt)
Die eingepragten Krafte sind nun als F1 = 2F , F2 = F , F3 = 5F , F4 = 3F undF5 = F gegeben. Berechnen Sie die vertikalen Komponenten der Auflagerreaktionen inden Punkten A und B in Abhangigkeit von F , wobei diese positiv gemaß der Richtungendes vorgegebenen Koordinatensystems anzutragen sind.
Ay = +6F , By = +6F (Wichtig: beide Richtung und Betrag)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 1 (Seite 2 von 2)
b)Fur die alternativ wirkende außere Belastung F1 = F2 = F3 = F4 = F5 = F ergeben sichdie Auflagerreaktionen zu Ay = By = 5/2F . Berechnen Sie fur diesen Fall die StabkrafteSi in den Staben 6, 11 und 17 sowie 3, 9 und 14 in Abhangigkeit von F .
S6 = 0 S3 = −2√2F
S11 = −32F S9 = +1
2F
S17 = + 3√2F S14 = + 3√
2F
(Wichtig: beide Richtung und Betrag)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 2 (Seite 1 von 2)
a)Gegeben sind die zwei rechts abgebildetenKorper mit homogener Massendichte ρ undder Dicke t. Der dreieckformige Korper II(Offnungswinkel α = 60) weist eine kreisfor-mige Aussparung mit dem Radius r auf. DerKorper I ist aus einem Quadrat der Kanten-lange R sowie einem Viertelkreis mit RadiusR zusammen gesetzt.
Hinweis: Die Zeichnung istNichtmaßstab-lich!
α
r
R
R
I
II
r2
r2
l
x1
y1
x2
y2
Berechnen Sie die Flacheninhalte beider Korper I und II und geben Sie die x-Koordinatedes Schwerpunkts beider Flachen bezuglich des jeweils vorgegebenen Koordinatensystemsan.
Teilsystem I: Teilsystem II:AI = [π/4 + 1]R2 AII =
√3/2 l2 − π r2
xSI
1 = 10R/[3 π + 12] xSII
2 = [3/2 π r3 − 1/2 l3]/[√3/2 l2 − π r2]
b)Das rechts dargestellte System besteht ausdem im Punkt A frei drehbar gelagerten,halbkreisformigen Korper I (Massendichte ρ,Dicke t) sowie dem im Punkt B frei drehbargelagerten, dreieckformigen Korper II (Mas-sendichte ρ, Dicke t, Offnungswinkel α =60). Die Kantenlange l des Korpers II seistets ausreichend groß, sodass beide Korpereinen Kontaktpunkt C in der dargestelltenKonfiguration aufweisen. Der Haftreibungs-koeffizient an der Beruhrstelle C betragt µ0.Die Lage des Schwerpunktes des Korpers Iist mit xSI
1 = 4R/(3 π) und ySI
1 = R vorge-geben.
Hinweis: Die Zeichnung istNichtmaßstab-lich!
A
B
C
α
µ0
R
I
II
g
l
x1
y1
x2
y2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 2 (Seite 2 von 2)
Erganzen Sie die folgenden Abbildungen der Teilsysteme I und II zu vollstandigen Frei-korperbildern.
Ax
Ay Bx
By
N
N
H
Hm1 g
m2 g
Berechnen Sie die Betrage der Haftkraft H und der Normalkraft N an der KontaktstelleC. Gehen Sie dabei davon aus, dass der Abstand |BC| zwischen dem Beruhrpunkt C unddem Lager B durch die Große d gegeben ist.
H = 2/3R2 ρ g t N = ρ g t l3/[2 d]
Geben Sie den Wertebereich fur die Lange l des rechten Korpers an, so dass zwischenbeiden Korpern Haftung besteht.
l ≥ 3√
4 dR2/[3µ0]
Berechnen Sie nun den Abstand d := |BC| zwischen dem Beruhrpunkt C und dem LagerB des Teilkorpers II.
Hinweis: tan(15) = 2−√3, cot(15) = 2 +
√3
d = [2 +√3]R = R/[2−
√3]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 3 (Seite 1 von 3)
Ein rechtwinkliger Rahmen, welcher in denPunkten A und B wie dargestellt gelagertist, wird durch eine symmetrische Strecken-last der Funktion
q(x1) = 4 q0
[−x
21
l2+x1l+
1
16
]
belastet. Die Rahmenecke im Punkt C istbiegestarr und das Eigengewicht des Rah-mens ist zu vernachlassigen. A
BC
x1z1
x2z2
l
l
q0
a)Die horizontale Komponente der Auflagerkraft im Punkt A ist durch Az1 = −11/12 q0 lgegeben. Berechnen Sie die Funktionen der Schnittgroßen Q(x1) und M(x1) im Bereich0 ≤ x1 ≤ l.
Q(x1) =1112q0 l + 4 q0
[x313 l2
− x212 l
− x116
]
M(x1) =1112q0 l x1 + 4 q0
[x4112 l2
− x316 l
− x2132
]
Geben Sie die allgemeinen Zusammenhange zwischen den Schnittgroßen N , Q, M imPunkt C fur x1 = l (Bereich 1) und den Schnittgroßen N , Q, M fur x2 = 0 (Bereich 2)an.
N(x1 = l) = −Q(x2 = 0)Q(x1 = l) = +N(x2 = 0)M(x1 = l) = +M(x2 = 0)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 3 (Seite 2 von 3)
b)Das rechts abgebildete Tragwerk ist in denPunkten A und B wie dargestellt gelagertund wird durch eine dreieckformige Strecken-last mit dem Maximalwert q0 belastet. Derobere Teil des Rahmens ist gegenuber derHorizontalen um den Winkel α = 30 ge-neigt. Die im Punkt C befindliche Ecke desRahmens ist biegestarr, das Eigengewicht desTragwerks ist zu vernachlassigen.
A
B
Cα
q0
l
l
x1
z1
x2
z2
Die Auflagerreaktionen des Systems sind wie folgt in Abhangigkeit des unten angegebenenglobalen Koordinatensystems vorgegeben.
+
PSfrag
x
y
Ax
Ay
BAx =
12 q0 l
Ay = − 13√3q0 l
B = 13√3q0 l
Geben Sie die Schnittgroßen im Punkt C des Rahmens bezuglich beider Bereiche an.
N(x1 = l) =√3/18 q0 l N(x2 = 0) =
√3/9 q0 l
Q(x1 = l) = 1/6 q0 l Q(x2 = 0) = 0
M(x1 = l) = 1/6 q0 l2 M(x2 = 0) = 1/6 q0 l
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 3 (Seite 3 von 3)
Geben Sie die Werte der Schnittgroßen (Randbedingungen) in den Punkten A und B an.
N(x1 = 0) =√3/18 q0 l N(x2 = l) =
√3/9 q0 l
Q(x1 = 0) = 1/6 q0 l Q(x2 = l) = −1/2 q0 l
M(x1 = 0) = 0 M(x2 = l) = 0
Zeichnen Sie die Schnittgroßenverlaufe unter Angabe der Randwerte, Vorzeichen und desPolynomgrads.
N(x) Q(x) M(x)
replacements
√3
18q0 l
√39q0 l
p = 0
p = 0
16q0 l
−12q0 l
p = 0
p = 2
16q0 l
2
p = 1
p = 3
p : Polynomgrad

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 4 (Seite 1 von 2)
Das rechts abgebildete System besteht auseinem homogenen, starren Winkel, dessenSchenkel die Langen 2 l bzw. l sowie die Mas-sen 2m bzw. m aufweisen. Der Winkel ist imPunkt A wie dargestellt uber eine Drehfeder(Federkonstante cT ) gelagert, welche fur denWinkel ψ1 = ϑ0 ungespannt ist. Im Punkt Bist eine homogene und starre Stange (Massem, Lange l) gelenkig mit demWinkel verbun-den. Das System befindet sich im Schwerefeld(Erdbeschleunigung g).
ψ1
ψ1
ψ2
g
cT
A
Bm, l
m, l
2m, 2 l
a)Bestimmen Sie die potentielle Energie Epot(ψ1, ψ2) des Systems in Abhangigkeit von denFreiheitsgraden ψ1 und ψ2.
Epot(ψ1, ψ2) = mg l[2 sin(ψ1) +
32cos(ψ1) +
12cos(ψ1 + ψ2)
]+ 1
2cT [ψ1 − ϑ0]
2
Die stabile Gleichgewichtslage der angelenkten Stange ist durch ψ2 = π − ψ1 gegeben.Bestimmen Sie unter Berucksichtigung dieser Vorgabe die notwendige Bedingung fur eineGleichgewichtslage dieses Systems bezuglich des verbleibenden Freiheitsgrades ψ1.Hinweis: Das Auflosen dieser Bedingung nach ψ1 ist hier Nicht erforderlich.
∂Epot(ψ1,ψ2=π−ψ1)
∂ψ1= 0 = mg l
[2 cos(ψ1)− 3
2sin(ψ1)
]+ cT [ψ1 − ϑ0]
Fur welchen Wert von ϑ0 stellt ψ1 = 0 eine Gleichgewichtslage dar?
ϑ0 = 2mg l/ct

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 4 (Seite 2 von 2)
b)Die potentielle Energie eines hier nicht spezifizierten Systems sei durch
Epot =1
2c l2 (1− cos(ϕ))2 +
1
8c l2 sin2(ϕ) +
1
2mg l cos(ϕ)
in Abhangigkeit des Freiheitsgrades ϕ sowie der bekannten Systemgroßen m, g, l und cgegeben. Fur welche Winkel ϕ ist das zu Grunde liegende System im Gleichgewicht.
ϕGGW = nπ , n ∈ N ∪ 0 , cos(ϕ) = 43
[1− mg
2 c l
]
Geben Sie die Bedingung fur die Große m an, sodass fur ϕ = 0 eine stabile Gleichge-wichtslage besteht.
m < c l2 g

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 5 (Seite 1 von 2)
Ein starrer Stab (Lange 2 l, Masse m) istwie dargestellt gelagert. Die im Punkt A be-findliche Drehfeder weist die Federsteifigkeit(Federkonstante) cT , der im Punkt B ange-schlossene viskose Dampfer die Dampferkon-stante d auf. Im Punkt C ist ein System ausparallel und seriell geschalteten Federn (Fe-dersteifigkeiten bzw. /-konstanten c1 bis c4)angebracht. Zudem wird das unter dem Ein-fluss des Schwerefelds (Erdbeschleunigung g)stehende System im Punkt C durch eine zeit-abhangige Kraft F (t) belastet. Fur den Zeit-punkt t = t0 = 0 gelte F (t0) = 0 sowie, dasssamtliche Federn ungespannt sind.
A
B
C
ϕ
F (t)
c1
c2
c3
c4
d
l
l
cT
g
m
x
y
a)Geben Sie die effektive Steifigkeit (Federkonstante) ceff des Federsystems in Abhangigkeitder Werte c1, c2, c3 und c4 an.
ceff = c1 +1
1c2
+ 1c3+c4
b)Berechnen Sie das Massentragheitsmoment θ(A) des Stabes bezuglich des Punktes A.
θ(A) = 4/3ml2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 5 (Seite 2 von 2)
c)Geben Sie die den Betrag der Geschwindigkeit vB des Punktes B sowie die horizontaleVerschiebung xC des Punktes C in Abhangigkeit von ϕ und ϕ fur große Auslenkungendes Systems an.
vB = ϕ lxC = −2 l sin(ϕ)
Die effektive Steifigkeit (Konstante) des Federsystems ist nun durch den Wert c vorgege-ben, ebenso ist der Wert fur das Massentragheitsmoment des Stabes bezuglich des PunktesA als θ festgelegt. Fur die Federkonstante der Drehfeder gilt des Weiteren cT = mg l.
Leiten Sie fur die Annahme kleiner Auslenkungen ϕ≪ 1 die Bewegungs-Differentialgleichungdes Systems bezuglich des Drehwinkels ϕ her.
ϕ+ d l2
θϕ+ 4 c l2
θϕ = 2F (t) l
θ
Nennen Sie die systemspezifische Bedingung fur die Dampferkonstante d, so dass sich furF (t) ≡ 0 und ϕ(t0) 6= 0 eine schwach gedampfte Schwingung ergeben wurde.
d < 4√θ c/l2
Geben Sie fur die Vorgaben F (t) = F0 cos(Ω t) die Weg-Zeit-Funktion ϕ(t) fur den einge-schwungenen Zustand an. Nennen Sie zunachst die allgemeine Losung und spezifizierenSie dann die darin enthaltenen Konstanten.
ϕ(t) = A cos(Ω t− ϕ0)mit:A = 2F0 l
θ√
4 δ2 Ω2+[ω2−Ω2]2
tan(ϕ0) =2 δΩω2−Ω2
δ = d l2
2 θ
ω = 2 l√c/θ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 6 (Seite 1 von 3)
Das dargestellte Blech (Breite b, Hohe h,Dicke d) wird in eine Prufmaschine gespanntund in der x-y-Ebene belastet, sodass sich einhomogener ebener Spannungszustand ein-stellt. Anschließend werden die Hauptspan-nungen σI und σII (mit σI > σII) bestimmt.Die Messung ergibt, dass die Hauptspan-nungsachsen im Vergleich zum gegebenen x-y-System um 45 gedreht sind. Die Werte derHauptspannungen werden von der Prufma-schine als Vielfache eines Basiswertes σ0 > 0ausgegeben. In dem vorliegenden Fall betra-gen die gemessenen Werte σI = 3 σ0 undσII = −2 σ0. Das Blech besteht aus einemlinear elastischen, isotropen Werkstoff (E-Modul E = 210GPa, Querkontraktionszahlν = 0.3).
h
b
d
x
y
σIσII
45
a)Wie groß ist die maximale im Blech auftretende Schubspannung τmax in Abhangigkeit desBasiswertes σ0?
τmax = 5/2 σ0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 6 (Seite 2 von 3)
b)Zeichnen Sie den Mohrschen Spannungskreis fur den gegebenen Spannungszustand undbeschriften Sie die markanten Punkte σI, σII, |τmax|.
σ
τ
σ0
σ0
σIσII
M
|τmax|
c)Welche Kraftkomponente Fy in y-Richtung muss von der Prufmaschine aufgebracht wer-den?
Fy =σ02b d
d)Welche Dehnungen εxx, εyy, εzz stellen sich im Blech ein, wenn im gegebenen x-y-Koor-dinatensystem ein ebener Spannungszustand mit σxx = 200MPa, σyy = −50MPa, τxy =0MPa vorliegt?
εxx = 0, 00102 εyy = −0, 00052 εzz = −0, 00021

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 6 (Seite 3 von 3)
e)Im Blech befindet sich eine um 30 rela-tiv zur x-Achse gedrehte Schweißnaht. Be-stimmen Sie im dargestellten x-y-Systemdie Normalspannung σyy und die Schub-spannung τxy in der Schweißnaht sowie dievon-Mises-Vergleichsspannung σvM. Gegebensind die Spannungen σxx = 200MPa, σyy =−50MPa, τxy = 0MPa bezuglich des gege-benen x-y-Systems.
x
y
xy
30
σyy = 12, 5MPa τxy = −108, 25MPa σvM = 229, 13MPa

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 7 (Seite 1 von 2)
Der in folgender Abbildung dargestellte horizontale Balken 1 (Lange 3 l, Masse 3m, E-Modul E, Flachentragheitsmoment I) wird durch sein Eigengewicht sowie durch einenmit ihm im Punkt D starr verbundenen, starren Korper (Masse 6m, Lange l/3) belastet.Im Punkt C ist Stab 1 an den masselosen Stab 2 (Lange l, E-Modul E, QuerschnittsflacheA) angelenkt.
A1
2
l/3
EI, 3m
EA
B
C DE
l
l
g
2 l
x1z1
x2z2
6m
a)Bestimmen Sie die unten angegebenen Schnittgroßenfunktionen unter Verwendung dervorgegebenen lokalen Koordinatensysteme. Die hinsichtlich der positiven Richtung aufdie jeweiligen Koordinatensysteme bezogenen Auflagerkrafte sind als Az1 = 11/4mg undBx2 = 47/4mg vorgegeben.Geg.: E, I, m, g, l, Az1 = 11/4mg, Bx2 = 47/4mg
M(x1) = −mg ( 114x1 +
x212l) 0 ≤ x1 ≤ 2 l
M(x1) = −mg4(94 l − 36 x1 +
2x21l) 2 l ≤ x1 ≤ 3 l
N(x2) = −474mg 0 ≤ x2 ≤ l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 7 (Seite 2 von 2)
b)Geben Sie samtliche zur eindeutigen Bestimmung der Biegelinie notwendigen kinemati-schen Bedingungen (Rand- und Ubergangsbedingungen) fur den horizontalen Stab 1 an.
w1(x1) = 0w′
1(x1 = 2l) = w′2(x1 = 2l) w1(x1 = 2l) = w2(x1 = 2l)
u(x2 = 0) = 0 u(x2 = l) = −w1(x1 = 2l)
Bestimmen Sie die Biegelinie des Stabes 1 in Form der Funktionen w1(x1) und w2(x1),ohne dass Sie die darin enthaltenen Konstanten berechnen.
w1(x1) =mgEI
(1124x31 +
x4124l
) + c1x1 + c2 0 ≤ x1 ≤ 2 l
w2(x1) =mgEI
(474lx21 −
3x312
+x4124l
) + c3x1 + c4 2 l < x1 ≤ 3 l
c)Fur ein anderes Verhaltnis der Massen der Teilkorper zueinander ist die Funktion w2(x1)fur die Verschiebung in z1-Richtung im Bereich 2 l ≤ x1 ≤ 3 l durch
w2(x1) = c1 l3 + c2 x1 l
2 + c3 x21 l + c4 x
31 + c5
x41l
gegeben. Die Konstanten c1, c2, c3, c4, c5 sind dabei als bekannt vorauszusetzen. Wie großist die Verschiebung wE des Punktes E in z1-Richtung?
wE = l3(c1 +103c2 + 11 c3 + 36 c4 + 117 c5)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 8 (Seite 1 von 3)
a)Das im Bild gezeigte, geschlossene und zur z-Achse symmetrische Hohlprofil ist als dunn-wandig anzunehmen. Die in diesem Balken-Querschnitt wirksame Querkraft Qz wird ex-zentrisch eingeleitet, so dass zusatzlich einTorsionsmoment MT = 3Qz a wirkt. Die La-ge des Schwerpunktes des Profils ist vorgege-ben und der Zeichnung zu entnehmen.
Geg.: Qz, h1 = h, h2 = 11/9 h, a, h≪ a
Qz
Sh1
h1
h2
s1
s2
s3
a
3a
3a3a
4a
zy
Bestimmen Sie die von der in der Zeichnung vermaßten Profilmittellinie umschlosseneFlache AM des Profils.
AM = 36 a2
Berechnen Sie die Schubspannungsverteilung τ(s), welche allein aus dem vorgegebenenTorsionsmoment MT = 3Qz a folgt.
τ(s1) =MT/[2AM h] = Qz/[24 a h] 0 ≤ s1 ≤ 5 a
τ(s2) =MT/[2AM h] = Qz/[24 a h] 0 ≤ s2 ≤ 4 a
τ(s3) = 9MT/[22AM h] = 3Qz/[88 a h] 0 ≤ s2 ≤ 3 a

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 8 (Seite 2 von 3)
b)Das in Aufgabenteil a) gezeigte dunnwandigeProfil ist nun im obersten Punkt geschlitzt.Zudem wird die Querkraft Qz nun symme-trisch eingeleitet. Das Flachentragheitsmo-ment des Querschnitts ist durch Iy = 188 a3 hgegeben.
Geg.: Qz, h1 = h, h2 = 11/9 h, a, h≪ a
Qz
S
h1
h1
h1
h2
s2
s3
s1
a
4a
3a
3a3a
zy
Berechnen Sie die Funktionen des statischen Momentes Sy in Abhangigkeit der lokalenKoordinaten s1, s2 und s3.
Sy(s1) = −5 a h s1 + 2/5 h s21 0 ≤ s1 ≤ 5 a
Sy(s2) = −15 a2 h− a h s2 + 1/2 h s22 0 ≤ s1 ≤ 4 a
Sy(s3) = −11 a2 h + 11/3 a h s3 0 ≤ s1 ≤ 3 a

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 8 (Seite 3 von 3)
Skizzieren Sie den Verlauf der aus der Querkraft Qz resultierenden Schubspannung τ inAbhangigkeit der lokalen Koordinaten s1, s2 und s3, wobei die Krummung der jeweili-gen Funktion eindeutig aus der Zeichnung hervor gehen muss. Geben Sie die Werte derSchubspannung an den jeweiligen Bereichsgrenzen sowie Extremwerte der Funktion an.
15Qz
188 a h
31Qz
376 a h
11Qz
188 a h
a

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 9 (Seite 1 von 2)
Eine Kreisscheibe (Masse m, Radius r) undeine Stange (MasseM , Lange l) sind wie dar-gestellt gelenkig miteinander verbunden undgelagert. Beide Korper sind als homogen undstarr anzunehmen. Die Federkonstanten derlinearen Federn sind c1, c2 bzw. c3. Der ge-schwindigkeitsproportionale Dampfer besitztdie Dampferkonstante d. Fur die Untersu-chung kleiner Bewegungen sollen die ein-gefuhrten generalisierten Koordinaten q1, q2und q3 verwendet werden. In der dargestell-ten Gleichgewichtslage q1 = 0, q2 = 0, q3 = 0sind die Federn entspannt. Das Schwerefeldder Erde ist zu vernachlassigen.
r
ml,M
c3
c2
c1
dq1
q2q3
a)Geben Sie die kinetische Energie ESch
kin der Kreisscheibe an.
ESchkin = m
2(12r2q1
2 + q22)
Geben Sie die kinetische Energie EStkin der Stange an.
EStkin = M
2(q22 − lq2q3 +
l2
3q23)
Geben Sie die potentielle Energie E1pot der Feder mit der Federkonstanten c1 an.
E1pot =
12c1r
2q21
Geben Sie die potentielle Energie E2pot der Feder mit der Federkonstanten c2 an.
E2pot =
12c2q
22

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 9 (Seite 2 von 2)
Geben Sie die potentielle Energie E3pot der Feder mit der Federkonstanten c3 an.
E3pot =
12c3(q
22 − 2q2q3l + l2q23)
Geben Sie die von der Dampferkraft verrichtete virtuelle Arbeit δWd an.
δWd = −d(−q2 + lq3) (−δq2 + lδq3)
b)Die Kreisscheibe und die Stange (Masse M ,Lange l) sind nun starr miteinander verbun-den. Fur c1 = c2 = c3 = c, d = 0 und einbestimmtes Verhaltnis der Massen m und Msowie der Langen r und l zueinander sind diegesamte Bewegungsenergie Ekin und die ge-samte potentielle Energie Epot wie folgt ge-geben:
Ekin =m
2
(9 l2 q21 − 8 lq1 q2 + 3 q22
),
Epot =c
2
(10 l2 q1
2 − 6 l q1 q2 + 2 q22).
r
l,Mc3
c2
c1
d
m
q1
q2
Stellen Sie die Bewegungsgleichungen des Systems auf.
9ml2q1 − 4mlq2 + 10cl2q1 − 3clq2 = 0− 4mlq1 + 3mq2 − 3clq1 + 2cq2 = 0
Geben Sie alle Eigenkreisfrequenzen des Systems an.
ω1/2 =
√12±
√23c
11m

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 10 (Seite 1 von 3)
Das dargestellte System besteht aus homoge-nen, starren Korpern, die durch dehnstarre,schlupffrei abrollende Seile miteinander ver-bunden sind und sich im Schwerefeld der Er-de (Erdbeschleunigung g) befinden. Die je-weiligen Massen und Abmessungen der Kor-per sind der Zeichnung zu entnehmen. Dieabgesetze Rolle 3 weist eine Unwucht (Ex-zentrizitat e, Masse me) auf, deren Lage imAusgangszustand durch ϕ3 = 0 gegeben ist.Die Walze 4 rollt schlupffrei auf einer rauhenEbene ab und wird dabei von dem konstan-ten Drehmoment M0 angetrieben.
g
x1
x2 x4
ϕ2
ϕ3
ϕ4
M0
m1
m2
m3
e me
m4
r1
r2
r3
R3
r4
1
23
4
a)Erganzen Sie die hier dargestellten Teilkorper des Systems zu vollstandigen Freikorper-bildern.
M0
m1 g
m4 g
S1
S2
S3
S3S4
S4
S1 + m2 g
me g
N
H

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 10 (Seite 2 von 3)
b)Geben Sie den Impulssatz (Kraftesatz) der Rolle 1 bezuglich der x1-Koordinate an.
S1 −m1 g = m1 x1
Geben Sie den Impulssatz (Kraftesatz) der Rolle 2 bezuglich der x2-Koordinate an.
S2 + S3 − S1 − m2 g = m2 x2
Geben Sie den Drehimpulssatz (Drallsatz) der Rolle 2 bezuglich ihres Schwerpunktes undder ϕ2-Koordinate an.
S3 r2 − S2 r2 = 12m2 r
22 ϕ2
Geben Sie den Drehimpulssatz (Drallsatz) der Rolle 3 bezuglich des Drehzentrums undder ϕ3-Koordinate an.
S4 r3 − S3R3 + me g e cos(ϕ3) = (12m3R
23 + me e
2) ϕ3
Geben Sie den Impulssatz (Kraftesatz) der Walze 4 bezuglich der x4-Koordinate an.
−S4 + H = m4 x4
Geben Sie den Drehimpulssatz (Drallsatz) der Walze 4 bezuglich ihres Schwerpunktes undder ϕ4-Koordinate an.
−S4 r4 − H r4 + M0 = 12m4 r
24 ϕ4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 10 (Seite 3 von 3)
c)Geben Sie ϕ2, x2, ϕ3, ϕ4 und x4 in Abhangigkeit von x1 an.
ϕ2(x1) = x1 / r2
x2(x1) = x1
ϕ3(x1) = 2 x1 /R3
ϕ4(x1) = x1 r3 / (R3 r4)
x4(x1) = x1 r3 /R3
d)Betrachten Sie nun die rechts dargestellteWalze (Masse m, Radius r) auf einer um denWinkel α geneigten Ebene. Sie befindet sichim Schwerefeld der Erde (Erdbeschleunigungg), wird von dem konstanten DrehmomentM0 angetrieben und rollt schlupffrei auf derrauhen Ebene ab.
gx
α
ϕ
M0
m
r
Die Walze bewege sich mit x(t = 0) = 2√r g fort und es gelte x(t = 0) = − r. Wie groß
muss M0 sein, so dass zum Zeitpunkt t∗ die Zusammenhange x(t∗) = 0 und x4(t∗) = 3 r
gelten?
M0 = mg r [sin(α) − 34]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 11 (Seite 1 von 2)
Eine punktformige Masse m beginnt im Punkt O aus der Ruhelage heraus eine rauhe,schiefe Ebene (Neigungswinkel α, Lange l, Gleitreibungskoeffizient µ) herunterzugleiten.Im Punkt A geht die schiefe Ebene tangential in eine glatte Kreisbahn uber (µ = 0).Diese mundet im Punkt B tangential in eine rauhe, schiefe Ebene (Neigungswinkel β,Lange l, Gleitreibungskoeffizient µ). Im Punkt C geht die schiefe Ebene in eine glatteBahn uber, die im Punkt D tangential in eine glatte, schiefe Ebene (Neigungswinkel γ,Lange a, µ = 0) ubergeht. Am Ende dieser schiefen Ebene ist eine Feder (Federkonstantec, ungespannte Lange a/6) befestigt. Das System befindet sich im Schwerefeld der Erde(Erdbeschleunigung g).
gα
β
γ
ϕ
x1
x2
x3
N.N.
m
A
B
C D
O
c
l
la
a/6
r
h
µ
µ
µ = 0
µ = 0
a)Geben Sie die potentielle Energie EO
pot im Punkt O bezuglich des vorgegebenen NullniveausN.N. an.
EOpot = mg h oder mg [l (sin(α) + sin(β)) + r (cos(α) − cos(β))]
Berechnen Sie den Betrag |vA| der Geschwindigkeit im Punkt A.
|vA| =√2 g l [sin(α) − µ cos(α)]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 11 (Seite 2 von 2)
b)Der Betrag der Geschwindigkeit im Punkt A sei nun als |vA| = vA gegeben. (Hinweis:Nicht mit dem Ergebnis der vorherigen Teilaufgabe weiterrechnen!)
Geben Sie den Betrag der Geschwindigkeit der Punktmasse auf der Bahn zwischen denPunkten A und B in Abhangigkeit von ϕ an.
|v|(ϕ) =√v2A − 2 g r [cos(ϕ) − cos(α)]
Wie groß darf vA maximal sein, so dass die Punktmasse nicht von der Kreisbahn abhebt?
vA ≤√g r [3 cos(β) − 2 cos(α)]
c)Der Betrag der Geschwindigkeit im Punkt B sei nun als |vB| = vB gegeben. (Hinweis:Nicht mit dem Ergebnis der vorherigen Teilaufgabe weiterrechnen!)
Bestimmen Sie die Gesamtenergie des Massepunktes bei x2 = l/2.
Eges(x2 = l/2) = 12mv2B + mg l [sin(β) − µ cos(β) / 2]
Bestimmen Sie den Betrag der Geschwindigkeit im Punkt D.
|vD| =√v2B + 2 g l [sin(β) − µ cos(β)]
d)Der Betrag der Geschwindigkeit im Punkt D sei nun als |vD| = vD =
√5/3 g a sin(γ)
vorgegeben. (Hinweis: Nicht mit dem Ergebnis der vorherigen Teilaufgabe weiterrech-nen! Die gegebene Geschwindigkeit ergibt sich nicht aus dem System!)
Um welchen Betrag ∆a wird die Feder gestaucht?
∆a = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 12 (Seite 1 von 3)
Ein System aus zwei starren, homogenen und gelenkig miteinander verbundenen Stangen(Massen m1, m2, Schwerpunkte B und D, Langen l1, l2) befindet sich im Schwerefeld (Erd-beschleunigung g) und wird im Punkt A durch ein MomentM0 und im Punkt C durch eineKraft F0 belastet. Die im Punkt E wirkende Reaktionskraft soll mit Hilfe des Prinzips dervirtuellen Arbeit derart ermittelt werden, dass sich das System fur denWinkel ϕ im Gleich-
gewicht befindet.
A
B
C
D
Ex
y
F0
M0ϕ
ψ
g
m1, l1 m2, l2
xE
a)Geben Sie den Zusammenhang zwischen dem gegebenen Winkel ϕ und dem Winkel ψ an.
ψ(ϕ) = arcsin(l1l2sin(ϕ)
)
Geben Sie den Zusammenhang zwischen dem gegebenen Winkel ϕ und der OrtskoordinatexE an.
xE(ϕ) = l1 cos(ϕ) +√l22 − l21 sin
2(ϕ)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2012
Aufgabe 12 (Seite 2 von 3)
b)Fur den Spezialfall l = l1 = l2 undm = m1 =m2 soll nun zunachst die x-Komponente derReaktionskraft im Punkt E ermittelt werden.Vervollstandigen Sie dazu das unten stehendeBild durch geeignete Lager-Symbole, Krafteund dazugehorige virtuelle Verschiebungen.
δyB
δyC
δyD
δxE
δϕ
F0
M0 mg mg
Cx
Geben Sie die virtuelle Verdrehung δϕ sowie die virtuellen Verschiebungen δyB, δyC undδyD bezuglich des gegebenen Koordinatensystems in Abhangigkeit von ϕ und δxE an.
δϕ = − 12l sin(ϕ)
δxE
δyB = − 14 tan(ϕ)
δxE
δyC = − 12 tan(ϕ)
δxE
δyD = − 14 tan(ϕ)
δxE
Formulieren Sie fur den vorliegenden Fall das Prinzip der virtuellen Arbeit in Abhangigkeitvon ϕ und δxE.
δW =[− M0
2l sin(ϕ)+ mg
2 tan(ϕ)+ F0
2 tan(ϕ)− Ex
]δxE = 0
Geben Sie die Kraftkomponente Ex in Abhangigkeit von ϕ an.
Ex =mgl cos(ϕ)+F0l cos(ϕ)−M0
2l sin(ϕ)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 1 (Seite 1 von 1)
Eine homogene, aus einem gleichseitigenDreieck (Seitenlange a) und einer Halbkreis-scheibe (Durchmesser a) zusammengesetzteScheibe (Gesamtmasse m) ist an zwei glei-chen Staben (Lange l, Dehnsteifigkeit EA,Warmeausdehnungskoeffizient α) im Schwe-refeld (Erdbeschleunigung g) befestigt. Derobere Stab ist mit einer von ∆T1 auf ∆T2 li-near anwachsenden Temperaturanderung be-aufschlagt.
l, EA, α
l, EA
x1
x2s
g
a
a
a
m
∆T1∆T2
a)N1 sei die Normalkraft im oberen Stab. N2 sei die Normalkraft im unteren Stab. GebenSie die Funktionen u1(x1) und u2(x2) der Langsverschiebung des oberen und des unterenStabes an, ohne die Werte von N1 und N2 zu spezifizieren.
u1(x1) =N1
EAx1 + α
(∆T1x1 + (∆T2 −∆T1)
x212l
)
u2(x2) =N2
EAx2
b)Bestimmen Sie die Normalkraft N1 im oberen Stab und die Normalkraft N2 im unterenStab in Abhangigkeit von der Schwerpunktskoordinate ss der Gesamtscheibe. ss soll hiernicht spezifiziert werden.
N1 = mgs/a N2 = −mgs/a
c)Geben Sie die Schwerpunktskoordinate des Dreiecks sd und die Schwerpunktskoordinateder Halbkreisscheibe sk an.
sd =a
2√3
sk =
√3
4+
1
3 πa
Bestimmen Sie die Schwerpunktskoordinate der Gesamtscheibe ss.
ss =4/3 + π
√3/4
2√3 + π
a

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 2 (Seite 1 von 2)
Auf einer rauen, schiefen Ebene (Anstellwin-kel α) ruht ein Block (Massem2) im Schwere-feld (Erdbeschleunigung g). Eine vertikal rei-bungsfrei gefuhrte Stange (Masse m1) stutztsich auf dem Block ab. Der Haftreibungskoef-fizient zwischen Stange und Block bzw. zwi-schen Block und schiefer Ebene ist µ01 bzw.µ02.
g m1
m2
α
µ01
µ02
x1
y1x2
y2
a)Erganzen Sie die folgenden Abbildungen der Teilsysteme I und II zu vollstandigen Frei-korperbildern.
I IIA
B
N2
H1H1
H2
N1
N1
m2gm1g
α
α
α
Stellen Sie fur Teilsysteme I und II die Kraftegleichgewichtsbedingungen bezuglich desjeweils vorgegebenen Koordinatensystems x1, y1 bzw. x2, y2 auf.
Teilsystem I:
∑Fx1 = −A− B −H1 cos(α)−N1 sin(α) = 0
∑Fy1 = −m1g +N1 cos(α)−H1 sin(α) = 0
Teilsystem II:
∑Fx2 = H1 +H2 −m2g sin(α) = 0
∑Fy2 = −N1 +N2 −m2g cos(α) = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 2 (Seite 2 von 2)
Leiten Sie fur den Sonderfall µ02 = 0 die Bedingung fur die Masse m2 her, so dass Haftungbesteht.
m2 ≤µ01
sin(α) cos(α) [1− µ01 tan(α)]m1
b)Die reibungsfrei vertikal gefuhrte Stange(Masse m1) stutzt sich nun auf einer homo-genen Kreisscheibe (Masse m2, Radius r) wiedargestellt ab. Fur die Haftreibungskoeffizi-enten an den beiden Kontaktstellen soll gel-ten
µ01 = µ02 6= 0.
m1
m2
α
α
µ01
µ02
r
g
Welche Stelle ist fur die Haftung des Systems maßgebend?
Maßgebend ist die Kontaktstelle zwischen Walze und
[x] Stange
[ ] schiefer Ebene
Geben Sie die maßgebende Bedingung fur die Masse m1 an, so dass Haftung besteht.
m1 ≥1
2m2 sin(α)
[cos(α)
µ01
− sin(α)
]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 3 (Seite 1 von 2)
Gegeben ist das dargestellte, in den Punkten A und B gelagerte sowie durch eine Einzel-kraft F belastete Fachwerk.
A B
α ββ
ββ
h
F
1
234
5
4/√3h 1/
√3h
a)Geben Sie die Werte der Stabkrafte an. Halten Sie sich an die Konvention, dass Zugkraftepositiv und Druckkrafte negativ sind.
Geg.: F , α = 30, β = 60
S1 =1√3F S2 = − 2√
3F
S3 = − 12√3F S4 =
12F
S5 = −√34F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 3 (Seite 2 von 2)
b)Gegeben ist das folgende, durch zwei Einzelkrafte F belastete und in den Punkten A undB gelagerte Fachwerk.
A B
aaaa
a
F
F
x
y
1
2
3
XXXX
X
X
Markieren Sie in der obigen Skizze zur Aufgabenstellung samtliche Nullstabe durch ein“X” auf dem jeweiligen Stab gemaß der Nullstabkriterien.
Berechnen Sie die Auflagerreaktionen in den Punkten A und B bezuglich des angegebenenKoordinatensystems.Geg.: F , a
Ay =32F
Bx = −F
By = −12F
Berechnen Sie die Krafte in den Staben 1, 2, 3.Geg.: F , a
S1 = F
S2 =1√2F
S3 = −32F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 4 (Seite 1 von 3)
a)Ein wie dargestellt gelagerter Balken der Lange 4 l wird bereichsweise durch konstanteStreckenlasten q0 belastet. Im Punkt G befindet sich ein Gelenk.
A
B C
Gx
z
I
2 l ll
q0q0
Bestimmen Sie die folgenden Auflagerreaktionen bezuglich des angegebenen Koordinaten-systems.Geg.: q0, l
Az = −34qo l Bz = −7
4q0 l Cz = −1
2q0 l
Geben Sie die Funktionen der Schnittgroßenverlaufe Qz(x) und My(x) fur den vorgegebe-nen Bereich I (0 < x < 2l) an.
Qz(x) =14q0 l [3l − 4x] fur 0 < x < 2l
My(x) =14q0 x [3l − 2x] fur 0 < x < 2l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 4 (Seite 2 von 3)
b)Fur die unten dargestellte Rahmenkonstruktion sind die Auflagerreaktionen bezuglich derim Bild angegebenen Koordinatensysteme zu
Az3 =1
4q0 l , Ax3 =
5
4q0 l , Bz1 = −3
4q0 l , Bx1 = −1
4q0 l
vorgegeben.
A B
CD
E
l
llllllllllllllllll
q0l
q0
x1
x2
x3
z1
z2
z3
Geben Sie zunachst den jeweiligen Betrag des Biegemomentes in den Punkten D und Ean.Geg.: q0, l
|MDy | = 1
4q0 l
2 |MEy | = 1
4q0 l
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 4 (Seite 3 von 3)
Skizzieren Sie die Funktionen des Biegemomentes My unter Angaben der Werte an denPunkten A, B, C, D und E bezuglich der angegebenen Koordinaten xi, zi.
−q0 l2
4
−q0 l2
4
q0 l2
4
q0 l2
4
quadratisch
−−+
+

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 5 (Seite 1 von 2)
Ein starre Walze (Radius r) rollt auf der In-nenseite eines starren Ringes (Radius R+ r)bei einer vorgegebenen Geschwindigkeit desWalzenmittelpunktes vw = vwex. Der Ringrollt auf einer raumfesten Unterlage. DieDicke des Ringes ist zu vernachlassigen.ϕ ist die Winkelgeschwindigkeit des Ringes.ψ ist die Winkelgeschwindigkeit der Walze.
a)Geben Sie im nebenstehenden Bild die Lagedes Momentanpols der Walze an. ZeichnenSie die fur die Konstruktion benotigten Ge-raden deutlich sichtbar ein.
r
R
ϕ
ψvw
ex
ey
α
M
b)Bestimmen Sie die Komponenten des Geschwindigkeitsvektors vk = vkxex + vkyey an derKontaktstelle zwischen Walze und Ring in Abhangigkeit von der Winkelgeschwindigkeitdes Ringes ϕ.
vkx = ϕ(R + r)(1− cos(α))
vky = −ϕ(R + r) sin(α)
Bestimmen Sie die Komponenten des Geschwindigkeitsvektors vk = vkxex + vkyey an derKontaktstelle zwischen Walze und Ring in Abhangigkeit von der Winkelgeschwindigkeitder Walze ψ und (ggf.) der Geschwindigkeit des Walzenmittelpunktes vw.
vkx = vw − ψr cos(α)
vky = −ψr sin(α)
Geben Sie die Winkelgeschwindigkeit ϕ in Abhangigkeit von vw an.
ϕ = vw/(R+ r)
Geben Sie die Winkelgeschwindigkeit ϕ in Abhangigkeit von ψ an.
ϕ = ψr/(r +R)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 5 (Seite 2 von 2)
c)Zum Zeitpunkt t = t0 sei die Geschwindigkeit des Walzenmittelpunktes vw = v0ex, v0 > 0.Fur t > t0 besitze der Walzenmittelpunkt eine konstante Beschleunigung aw = −a0ex,a0 > 0, wahrend der Ring mit der konstanten Mittelpunktsgeschwindigkeit vr = v0exweiter rolle. Zu welchem Zeitpunkt t = t1 befinden sich der Walzenmittelpunkt und derRingmittelpunkt genau untereinander?
t1 = t0 +
√2R sin(α)
a0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 6 (Seite 1 von 2)
Das nebenstehende System aus homogenen,starren Walzen (Masse M bzw. m, Radius Rbzw. r) setzt sich infolge der Belastung durchdas konstante MomentM0 aus der Ruhe her-aus in Bewegung. Die Walze mit dem RadiusR rolle auf der horizontalen Unterlage. DieBeschreibung der Bewegung soll unter Ver-wendung der Koordinate x und des Winkelsϕ erfolgen.
Mm
M0
r
R
g
µ
µ0
exx ϕ
a)Unter der Annahme, dass die Walzenoberflachen im Kontaktpunkt aufeinander gleiten,erzeugen Sie in der unten stehenden Vorlage ein vollstandiges Freikorperbild unter Einbe-ziehung aller nichtverschwindenden Tragheitswirkungen. Die Tangentialkraft an der Kon-taktstelle zwischen den Walzen ist in Abhangigkeit von dem Gleitreibungskoeffizienten µanzugeben.
M0
mxmx
Mg mg
N2
mr2
2ϕ
MR
2x
H
µN1
µN1
N1N1
A
Formulieren Sie die Drehimpulsbilanz an der Walze mit dem Radius R bezuglich desKontaktpunktes mit der Ebene.
M0 −3
2MRx−N1R(1 + µ) = 0
Geben Sie die Impulsbilanz der Walze mit dem Radius r in Richtung von ex an.
N1 −mx = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 6 (Seite 2 von 2)
Welche Beschleunigung a = xex erfahren die Mittelpunkte der Walzen?
x =2M0/R
3M + 2m(1 + µ)
b)Fur den Fall, dass die Oberflache der Walze mit dem Radius r ideal glatt ist (µ = 0), seidie Beschleunigung der Walzenmittelpunkte a = agex. Wie groß muss der Haftreibungs-koeffizient µ0 sein, damit die Walze mit dem Radius R auf der Unterlage rollen kann? agsoll hier nicht weiter spezifiziert werden.
µ0 ≥agg
(1 +
m
M
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 7 (Seite 1 von 2)
Ein starrer, unter dem Winkel α zur Ho-rizontalen gleitender Block (Masse m1) istuber zwei homogene, starre Rollen (RadiusR, Masse m2 bzw. m3) durch ein dehnstar-res Seil mit einem starren Block (Masse m4)verbunden. Die Rolle mit der Masse m3 istdrehbar am Block (Masse m4) befestigt. DieRollen rollen auf dem Seil ab.
m1
m2
m3
m4
R
R
g
α
v0
a)Im dargestellten Zustand habe der Block mit dem Masse m1 die Geschwindigkeit v0. InAbhangigkeit von v0 bestimmen Sie
die kinetische Energie des Blockes mit der Masse m1,
E1kin(v0) =
m1v20
2
die kinetische Energie der Rolle mit der Masse m2,
E2kin(v0) =
m2v20
4
die kinetische Energie der Rolle mit der Masse m3,
E3kin(v0) =
3m3v20
16
die kinetische Energie des Blockes mit der Masse m4.
E4kin(v0) =
m4v20
8

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 7 (Seite 2 von 2)
b)Um welchen Wert ∆Eges
kin andert sich die gesamte kinetische Energie des Systems, wennder Block mit der Masse m1 eine Strecke ∆s im Schwerefeld (Erdbeschleunigung g) inRichtung von v0 zurucklegt? Die Bewegung erfolge reibungsfrei.
∆Egeskin(∆s) = g∆s
(m1 sin(α)−
m3 +m4
2
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 8 (Seite 1 von 2)
a)Auf die Oberflache eines belasteten Bauteils werden 3 Dehnungsmess-Streifen (DMS) inder dargestellten Anordnung appliziert. Bei Kenntnis der ursprunglichen Lange l0 werdendie jeweiligen Langenanderungen ∆l1, ∆l2 und ∆l3 der DMS gemessen.
α x
y
1
2
3l0l0
l0
Geben Sie die aus den Messdaten zu bestimmenden Werte der Dehnungskomponentenεxx, εyy und εxy an.Geg.: l0 = 10 mm, ∆l1 = 0.05 mm, ∆l2 = 0.03 mm, ∆l3 = −0.025 mm, α = 45
εxx = 0.005 εyy = −0.0025 εxy = 0.00175
b)In einem gleichartigen Versuch wurden fur ein isotrop linear elastisches Material (Elasti-zitatsmodul E, Querkontraktionszahl ν) die folgenden Dehnungskomponenten ermittelt:
εxx =1
300, εyy = − 1
500, εxy =
1
2000
Geben Sie die Spannungskomponenten σxx, σyy, σzz sowie τxy unter Annahme eines ebenenDehnungszustands an.Geg.: E = 210000 N/mm2, ν = 0.25
σxx = 672 N/mm2 σyy = −224 N/mm2
σzz = 112 N/mm2 τxy = 84 N/mm2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 8 (Seite 2 von 2)
Welchen Wert musste die Dehnungskomponente εzz im Fall eines ebenen Spannungszu-standes (ESZ) aufweisen?Geg.: E = 210000 N/mm2, ν = 0.3
εESZzz = − 11750
= −5.714 · 10−4
c)Gegeben ist der folgende zweidimensionale Spannungszustand bezuglich eines kartesischenKoordinatensystems:
[σ] =
[σxx τxyτxy σyy
]=
[400 150150 −55
]MN/m2
Berechnen Sie die Hauptnormalspannungen σ1/2 sowie den Rotationswinkel ϕH zwischenden kartesischen Achsen (x, y) und den Hauptspannungsrichtungen. Alternativ konnenSie auch die Hauptrichtungen in Form von normierten Vektoren angeben.
σ1 = 445 MN/m2 σ2 = −100 MN/m2 ϕH = 16, 7
bzw. (alternativ)
n1 =10√109
ex +3√109
ey , n2 = − 3√109
ex +10√109
ey
Werten Sie fur den oben angegebenen, zweidimensionalen Spannungszustand die Ver-gleichsspannungen σV gemaß der Festigkeitshypothese nach von Mises aus.
σvonMisesV = 502.52 MN/m2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 9 (Seite 1 von 3)
Ein Balken mit dem dargestellten, dunnwandigen Querschnitt weist eine Beanspruchungin Form von Schnittgroßen N , Qz,My undMz auf. Das Material verhalt sich isotrop linearelastisch (Elastizitatsmodul E, Querkontraktionszahl ν). Die Lage des Profil-SchwerpunktesS ist durch zS = a/4 vorgegeben.
a
a/2a/2
y
yNF(z)
z
zS
t
t
S
a)Berechnen Sie die Flachentragheitsmomente Iy, Iz.Geg.: zS = a/4, a, t≪ a
Iy =at3+7a3t
12≈ 7
12a3t Iz =
a3t+at3
12≈ a3t
12
b)Geben Sie fur vorgegebene Flachentragheitsmomente Iy, Iz und Schnittgroßen N ,My,Mz
die Funktion y(z) der neutralen Faser (NF) an und zeichnen Sie diese qualitativ in dieSkizze der Aufgabenstellung ein.Geg.: Iy, Iz = 2/5 Iy, A = 48/(5 a2) Iy, N = 48/5 kN, My = 10 kN a, Mz = 2 kN a, a,t≪ a
yNF(z) = a+ 2z

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 9 (Seite 2 von 3)
c)Fur eine andere Beanspruchung des Querschnitts ist die Normalspannung durch
σxx(y, z) = −4N/m3 y − 4N/m3 z + 0.25N/m3 a
sowie die Lage der neutralen Faser durch
yNF(z) = −z + a
4
gegeben. Identifizieren Sie den Punkt P ∗ anhand dessen Koordinaten yP∗
, zP∗
, in welchemdie betragsmaßig großte Normalspannung σmax des Querschnitts vorherrscht und gebenSie deren Wert an.Geg.: a
yP∗
ey + zP∗
ez =−a2ey +
−a4ez
σmax = 3.25N/m3 a
d)Zur Bestimmung der aus Qz folgendenSchubspannungen sind lokale Koordinatens1, s2 und s3 wie in der Abbildung rechts ge-zeigt definiert worden. Begrunden Sie kurz,warum insbesondere die Definition fur s1 unds2 sinnvoll ist.
τ(si = 0) = 0 an freien Enden, entsprichtdann Ursprung der lokalen Koordinaten-systeme.
s1s2
s3 12
3
Geben Sie die Funktionen des statischen Momentes Sy(s1) im Bereich 1 sowie Sy(s3) imBereich 3 an.Geg.: a, t
Sy(s1) = −14a t s1 Sy(s3) =
t2s23 − t
4a s3

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 9 (Seite 3 von 3)
Geben Sie zunachst die Stelle des Querschnitts an, an der die maximale Schubspannungτmaxxs vorherrscht.Geg.: a
s3 = a ⇒ Smaxy (s3 = a) = −1
2a2 t
Geben Sie weiterhin den Wert der maximalen Schubspannung τmaxxs an.
Geg.: a, Qz/Iy = 16 kN/m4
τmaxxs = −8kN a2
m4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 10 (Seite 1 von 2)
a)Ein im Punkt A eingespannter und dehnstar-rer Balken (Biegesteifigkeit EIy, Dehnsteifig-keit EA → ∞) ist wie dargestellt belastet.Die im Punkt C befindliche Ecke ist biegest-arr. Die Biegemomentenverlaufe sind zu
M Iy (x1) = −F l − 1
2q0 l
2
und
M IIy (x2) = −F [l − x2]−
1
2q0[l − x2]
2
vorgegeben. Geben Sie alle zur Bestimmungder Biegelinie w(x) notwendigen kinemati-schen Rand- und Ubergangsbedingungen an.
w1(x1 = 0) = 0 w′1(x1 = 0) = 0
w2(x2 = 0) = 0 w′1(x1 = 2l) = w′
1(x2)
x1
z1
x2
z2
2 l
F
q0
l
A
B C
I
II
Geben Sie die Verschiebung wF des Kraftangriffspunktes in z2-Richtung an.Geg.: q0, F = 1/4 q0 l, EIy, l
wF = 41 q0 l4
24EIy

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 10 (Seite 2 von 2)
b)Das System aus Aufgabenteil a) ist nun wiedargestellt modifiziert worden.
Berechnen Sie die Auflagerreaktion im PunktB gemaß der Richtung z2.Geg.: q0, l
wF = −27 q0 l4
56EIy
x1
z1
x2
z2
2 l
q0
l
A
B C
I
II

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 11 (Seite 1 von 2)
Eine starre Walze (Masse M , Radius R) istuber eine homogene, starre Stange (Massem)mit einer raumfesten Kreisbahn verbundenund durch zwei zwischen Walze und Stan-ge bzw. zwischen Stange und Festlager ange-brachte Drehfedern (Drehfederkonstante k1bzw. k2) im Schwerefeld (Erdbeschleunigungg) gestutzt. Der Massenmittelpunkt der Wal-ze ist um den Abstand e aus dem Kreismit-telpunkt versetzt. ϕ ist der Winkel zwischender Vertikalen und der Stange. In der darge-stellten Gleichgewichtslage (ϕ = 0) sind dieDrehfedern entspannt. Bei Auslenkungen desSystems aus dieser Gleichgewichtslage rolltdie Walze auf der Kreisbahn ab.
m
M
r
R
g
k1
k2
e
ϕ
a)Geben Sie die potentielle Energie der Schwerkraft fur die Walze in Abhangigkeit von ϕan.
EMpot(ϕ) =Mg
((R + r) cos(ϕ) + e cos
(ϕR + r
R
))
Geben Sie die potentielle Energie der Schwerkraft fur die Stange in Abhangigkeit von ϕan.
Empot(ϕ) = mg
R + r
2cos(ϕ)
Geben Sie die potentielle Energie der Drehfeder (Drehfederkonstante k1) in Abhangigkeitvon ϕ an.
Ek1pot(ϕ) =
k1ϕ2
2
Geben Sie die potentielle Energie der Drehfeder (Drehfederkonstante k2) in Abhangigkeitvon ϕ an.
Ek2pot(ϕ) =
k2ϕ2r2
2R2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 11 (Seite 2 von 2)
b)Fur den Spezialfall r = R, m = 0, k2 = 0, e = 0 ist die gesamte potentielle Energie desSystems
Epot(ϕ) = 2Mgr cos(ϕ) +k1ϕ
2
2.
Wie groß muss k1 sein, damit fur diesen Spezialfall ϕ = 0 eine stabile Gleichgewichtslageist?
k1 > 2Mgr
Wie ist k1 = k⋆ zu wahlen, damit ϕ =π
2fur diesen Spezialfall eine Gleichgewichtslage
des Systems ist?
k⋆ =4Mgr
π
Bewerten Sie fur den Fall k1 = k⋆ die Stabilitat der Gleichgewichtslagen ϕ1 = 0 und
ϕ2 =π
2, indem Sie die jeweils falsche Aussage durchstreichen.
ϕ1 ist eine stabile instabile Gleichgewichtslage.
ϕ2 ist eine stabile (((((instabile Gleichgewichtslage.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 12 (Seite 1 von 1)
Das nebenstehende System aus zwei homo-gen, starren Stangen (Masse m1 bzw. m2,Lange l1 bzw. l2) bewegt sich in horizonta-ler Ebene. Die Richtung der Kraft F (t) istkonstant. Fur die Beschreibung der Konfigu-ration des Systems bei beliebig großen Aus-lenkungen sollen im Folgenden die Winkel ϕund ψ verwendet werden.
l1, m1
l2, m2
F (t)
ψϕ
Bestimmen Sie die kinetische Energie der Stange mit der Masse m1.
E1kin =
m1l21ϕ
2
6
Bestimmen Sie die kinetische Energie der Stange mit der Masse m2.
E2kin =
m2
2
(l21 sin
2(ϕ)ϕ2 − l1l2 sin(ϕ) cos(ψ)ϕψ +l22ψ
2
3
)
Geben Sie die virtuelle Arbeit der Kraft F (t) an.
δA = (l1 sin(ϕ)δϕ− l2 cos(ψ)δψ)F
Mit Hilfe der Lagrangeschen Gleichungen bestimmen Sie die Bewegungsgleichungen desSystems ausgehend von den oben angegebenen Ausdrucken.
m1l21
3ϕ + m2l1 sin(ϕ)
(l1 (sin(ϕ)ϕ+ cos(ϕ)ϕ2) +
l22
(sin(ψ)ψ2 − cos(ψ)ψ
))=
l1 sin(ϕ)F
m2l22
3ψ − m2l1l2
2cos(ψ) (sin(ϕ)ϕ+ cos(ϕ)ϕ2)) = −l2 cos(ψ)F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2011
Aufgabe 13 (Seite 1 von 1)
Eine homogene, starre Stange (Masse m,Lange 2l) ist in ihrem Mittelpunkt gelen-kig gelagert und uber zwei Federn (Federstei-figkeit c1 bzw. c2) mit einem starren Block(Masse M) wie dargestellt verbunden. Furdie Beschreibung kleiner Bewegungen um dieGleichgewichtslage soll neben der Verschie-bung des Blockes die Verdrehung der Stangeverwendet werden.
M m
l
l
c1
c2
a)Bestimmen Sie die Bewegungsgleichungen.
M 0
0ml2
3
q1
q2
+
c1 + c2 l(c2 − c1)
l(c2 − c1) l2(c1 + c2)
q1
q2
=
0
0
b)Geben Sie den Losungsansatz fur die Bestimmung der Eigenschwingungen an.
q(t) = a (sin(ωt) + cos(ωt))
c)Bei einer speziellen Wahl der Verhaltnisse c1/c2 und M/m konnen die Massen- und Stei-figkeitsmatrix in der Form
M =M
(1 00 l2
)C = 2c1
(3 2l2l 3l2
)
geschrieben werden. Bestimmen Sie fur diesen Fall die Eigenkreisfrequenzen
ω1 =√
2c1/M ω2 =√10c1/M
und die zugehorigen Eigenvektoren.
a1 = (1, −1/l)T a2 = (1, 1/l)T

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 1 (Seite 1 von 2)
Ein starrer, als masselos anzunehmenderBlock ruht auf einem reibungsfreien Funda-ment (µF = 0) und wird durch eine Einzel-kraft F belastet. Zwischen dem Block und ei-ner schragen Ebene ist eine Walze (Radius r,Masse m) geklemmt. An den jeweiligen Kon-taktstellen A und B herrsche Reibung (Haft-reibungskoeffizient µ0).
Geg.: F , α, m, g, µ0, µF = 0
A
B
F
r
m
g
α
µ0
µ0
µF = 0
x
y
a)Zeichnen Sie das vollstandige Freikorperbild des Blocks (linkes Kastchen) und geben Siedas Ergebnis der Berechnung fur die Horizontalkomponente der Kraft zwischen Block undWalze im Punkt A an (rechtes Kastchen).
NA
HA
F
NF
HA = F
b)Stellen Sie zunachst das vollstan-dige Freikorperbild der Walze dar.Der Betrag der Horizontalkompo-nente der Kraft zwischen Block undWalze im Punkt A sei dabei nundurch HA vorgegeben.
mg α
α
HA
NA
HB
NB

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 1 (Seite 2 von 2)
Berechnen Sie gemaß des Freikorperbildes die unbekannten Krafte in Abhangigkeit dergegebenen Großen.
Geg.: HA, m, g, α
HB = HA
NB = HA1 + cos(α)
sin(α)
NA = mg +HA
[sin(α) +
1 + cos(α)
sin(α)cos(α)
]= mg +HA
1 + cos(α)
sin(α)
Geben Sie die Bedingung fur den Haftreibungskoeffizienten µ0 an, so dass im Punkt BHaftung besteht.
µ0 ≥sin(α)
1 + cos(α)= tan
(α2
)
c)Die Komponenten der Kraft an der Kontaktstelle A seien nun durch HA = K in horizon-taler und NA = mg + K cot
(α2
)in vertikaler Richtung vorgegeben. Bestimmen Sie die
Bedingung fur den Term cot(α2
)derart, dass im Punkt A fur beliebig große Belastungen
K → ∞ immer Haftung besteht.
cot(α2
)≥ 1
µ0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 2 (Seite 1 von 2)
a)Geben Sie alle notwendigen Rand– und Uber-gangsbedingungen an, wenn fur das darge-stellte System die Biegelinie w(x) ausgehendvom bekannten Biegemomentenverlauf M(x)bestimmt werden soll. Verwenden Sie dazudas vorgegebene x, z–Koordinatensystem.
Geg.: M0, q0, l
A BC
ll2 l
q0
M0
x
z
wI(x = 0) = 0 wI(x = 2 l) = wII(x = 2 l) w′II(x = 3 l) = w′
III(x = 3 l)
w′I(x = 0) = 0 wII(x = 3 l) = wIII(x = 3 l) wIII(x = 4 l) = 0
b)Berechnen Sie fur das nun gegebene, aus ei-nem Balken (Lange l, Biegesteifigkeit EI) be-stehende System die Funktion des Biegemo-mentesM(x). Verwenden Sie dazu die vorge-gebene x–Achse.
Geg.: F , q0, l, EI
M(x) = F x− 1
2q0 x
2
A
F
l
q0
x

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 2 (Seite 2 von 2)
Geben Sie sowohl die Funktionen der Durchbiegung w(x) als auch die der Verdrehungw′(x) an, ohne dabei zunachst die Integrationskonstanten explizit zu bestimmen.
Geg.: F , q0, l, EI
w(x) =1
EIy
[1
24q0 x
4 − 1
6F x3
]+ C1 x+ C2
w′(x) =1
EIy
[1
6q0 x
3 − 1
2F x2
]+ C1
Wie lauten die Randbedingungen fur dieses System?
w(x = l) = 0 w′(x = l) = 0
Bestimmen Sie die Integrationskonstanten fur die oben angegebene, allgemeine Form derFunktion w(x).
C1 =1
EIy
[−1
6q0 l
3 +1
2F l2
]C2 =
1
EIy
[1
8q0 l
4 − 1
3F l3
]
Geben Sie die Funktion der Biegelinie w(x) nach Bestimmung der dazu notwendigenIntegrationskonstanten an.
w(x) =1
EIy
[1
24q0 x
4 − 1
6F x3 − 1
6q0 l
3 x+1
8q0 l
4 − 1
3F l3
]
In welchem Verhaltnis mussen F 6= 0 und q0 6= 0 stehen, damit der Angriffspunkt derKraft F keine Verschiebung erfahrt?
F
q0=
3
8l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 3 (Seite 1 von 4)
a)Ein im Punkt A frei drehbar gelagerter, horizontaler Balken der Lange 2 l wird durch einekonstante Streckenlast q0 = const. belastet. Zusatzlich wird dieser durch einen im PunktB gelagerten Stab wie dargestellt im Punkt C abgestutzt.
A
B
C
l
ll
q0
x
z
Fur das vorgegebene System wurden die Auflagerkrafte im Punkt A bezuglich des vor-gegebenen x, z–Koordinatensystems bereits zu Ax = −3
2q0 l sowie Az =
12q0 l berechnet.
Berechnen Sie zunachst die Normalkraft im Stab, welcher die Punkte B und C verbindet.
Geg.: q0, l
NStab = − 3√2q0 l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 3 (Seite 2 von 4)
Berechnen Sie die Funktionen samtlicher Schnittgroßen des horizontalen Balkens bezuglichdes vorgegebenen x, z–Koordinatensystems. Machen Sie eindeutige Angaben zum jeweilsbetrachteten Bereich.
Bereich I: 0 ≤ x < l
N I(x) =3
2q0 l
QIz(x) = −1
2q0 l
M Iy (x) = −1
2q0 l x
Bereich II: l ≤ x ≤ 2 l
N II(x) = 0
QIIz (x) = q0 [2 l− x]
M IIy (x) = q0
[−2 l2 + 2 l x− 1
2x2]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 3 (Seite 3 von 4)
b) Fur den hier dargestellten, abknickenden Balken sind die Schnittgroßenfunktionen
N I(x1) = −2 q0 l, QIz(x1) = −q0 x1, M I
y (x1) = −1
2q0 x
21,
bezuglich des x1, z1–Koordinatensystems fur den Bereich I gegeben. Die Auflagerreaktio-nen im Punkt B bezuglich des x2, z2–Koordinatensystems lauten
Bx2 = −q0 l, Bz2 =1
2q0 l, MB =
1
2q0 l
2.
A
B
CD
l
ll
q0
F = 3/2 q0 l
x1
z1
x2
z2
I
II
Skizzieren Sie die Schnittgroßenfunktionen fur Qz undMy in der jeweiligen Vorlage (siehenachste Seite) unter Angabe der Werte an den Stellen A, B, C und D. Verwenden Siedazu die eingetragenen Hilfslinien.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 3 (Seite 4 von 4)
Qz
0
− +−q0 l
1/2 q0 l
My
0
0
−
−
+
−1/2 q0 l2
−1/2 q0 l2
1/2 q0 l2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 4 (Seite 1 von 3)
a)Das dargestellte System besteht aus zweistarren Staben (Lange l) sowie einer Feder(Federsteifigkeit c, ungespannte Lange l0).Am Punkt C wird eine Einzelkraft F ein-gepragt.
Geg.: F , l, c
Hilfestellung:sin(γ + δ) = sin(γ) cos(δ) + cos(γ) sin(δ)cos(γ + δ) = cos(γ) cos(δ)− sin(γ) sin(δ)
x
y
c, l0
ϕ
F
l
l
A
B
C
Geben Sie die kinematisch vertraglichen virtuellen Verruckungen δrA, δrB und δrC derPunkte A, B und C bezuglich des vorgegebenen Koordinatensystems als Vektor an. Ver-wenden Sie dazu als Freiheitsgrad den Winkel ϕ.
δrA = 0 ex + 0 ey
δrB = 0 ex − 2 l sin(ϕ) δϕ ey
δrC = l cos(ϕ) δϕ ex − l sin(ϕ) δϕ ey
Geben Sie die virtuelle Arbeit an, welche durch die virtuelle Zustandsanderung δϕ ver-richtet wird.
δW (δϕ) = F l cos(ϕ) δϕ+ 2 c l sin(ϕ) [2 l cos(ϕ)− l0] δϕ
Welchen Wert muss die ungespannte Lange l0 der Feder aufweisen, damit fur den Winkelϕ = 45 eine Gleichgewichtslage besteht?
l0 =F
2 c+√2 l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 4 (Seite 2 von 3)
b)Ein abgeknickter Balken ist wie dargestelltim Punkt A gelagert. Des Weiteren sind imPunkt A eine Drehfeder (DrehfedersteifigkeitcT ), im Punkt B eine Wegfeder (Federsteifig-keit c) sowie im Punkt C eine Masse m mitdem Balken verbunden. Die Federn sind inder dargestellten Lage (ϕ = 0) ungespannt.
Geg.: m, g, l, c, cT
c
cT
m
2 l
l
gϕ
NNx
y
A
B
C
Geben Sie das Gesamtpotenzial Π in Abhangigkeit des Freiheitsgrades ϕ an. Berucksich-tigen Sie dabei die Lage des vorgegebenen Nullniveaus “NN”.
Π(ϕ) = 2mg l cos(ϕ) +1
2cT ϕ
2 +1
2c l2 sin2(ϕ)
Bestimmen Sie die Bedingung fur die Existenz einer Gleichgewichtslage basierend aufΠ(ϕ). Spezifizieren Sie diese Bedingung fur das obige System. Losen Sie dabei nicht nachdem Freiheitsgrad auf!
∂Π
∂ϕ= −2mg l sin(ϕ) + cT ϕ+ c l2 sin(ϕ) cos(ϕ) = 0
Wie lauten die Gleichgewichtslagen bezuglich ϕ im Bereich ϕ ≥ 0 fur den SonderfallcT = 0?
ϕ = 0 ∨ ϕ = arccos
(2mg
c l
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 4 (Seite 3 von 3)
Anhand welcher Bedingung lasst sich fur den Fall cT 6= 0 die Stabilitat der Gleichge-wichtslagen dieses Systems untersuchen? Spezifizieren Sie diese Bedingung fur das obigeSystem.
∂2Π
∂ϕ2= −2mg l cos(ϕ) + cT + c l2
[cos2(ϕ)− sin2(ϕ)
]
Fur den allgemeinen Fall mit cT 6= 0 und den Werten m = 100 kg, g = 9.81 m/s2,l = 1.00 m, c = 2500 N/m und cT = 500 Nm seien die Gleichgewichtslagen durch ϕ = 0
und ϕ = 56.778 vorgegeben. Untersuchen Sie die Stabilitat der beiden vorgegebenenGleichgewichtslagen und kreuzen Sie das jeweilige Ergebnis an.
ϕ = 0 : 4 stabil 2 instabil 2 indifferentϕ = 56.778 : 2 stabil 4 instabil 2 indifferent

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 5 (Seite 1 von 2)
Eine im Punkt O frei drehbar gelagerte Stan-ge (Lange l) ist im Punkt A gelenkig mit ei-nem starren Pleuel wie dargestellt verbun-den. Der Endpunkt B des Pleuels wird furein bestimmtes Zeitintervall gemaß des Weg–Zeit–Gesetzes yB(t) = C t2 mit C = const. invertikaler Richtung bewegt.
A
B
O
P
l
x
y yB(t)
p(t)
ϕ
r
t
a)Berechnen Sie die Winkelgeschwindigkeit ω(t) der Stange und die Geschwindigkeit vA(t)des Punkts A bezuglich des x, y–Koordinatensystems.
Geg.: l, yB(t) = C t2, C
ω(t) = 2C t [l sin(ϕ)]−1
vA(t) = −2C t cot(ϕ) ex + 2C t ey
b)Der Abstand des Punktes P auf der Stange vom Punkt O betrage p(t) = k sin(Ψ t) mitΨ = const. Die Winkelgeschwindigkeit der Stange sei hier durch den allgemeinen Ausdruckϕ(t) = ω(t) gegeben. Berechnen Sie die Geschwindigkeit vP (t) und die BeschleunigungaP (t) des Punktes P gemaß der Koordinatenbasis er, et.
Geg.: p(t) = k sin(Ψ t), ω(t)
vP = kΨ cos(Ψ t) er + k ω(t) sin(Ψ t) et
aP = [−kΨ2 sin(Ψ t)− k ω(t)2 sin(Ψ t)] er + [2 k ω(t) Ψ cos(Ψ t) + k ω(t) sin(Ψ t)] et

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 5 (Seite 2 von 2)
c)Der Endpunkt A der dargestellten Stange(Lange l) bewegt sich vertikal mit der Ge-schwindigkeit vA. Des Weiteren gleitet dieStange reibungsfrei in einer frei drehbarenFuhrung (Punkt B), welche durch eine wei-tere starre Stange (Lange a) mit dem Funda-ment verbunden ist.
Geg.: vA, a
A
B
a
l
x
yvAϕ
Geben Sie den Betrag der Winkelgeschwindigkeit ϕ in Abhangigkeit des Winkel ϕ an.
|ϕ(ϕ)| = vAa
sin2(ϕ)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 6 (Seite 1 von 2)
a)Der dargestellte Stab (Lange l, Masse m1)wird durch ein außeres MomentM0 angetrie-ben und rotiert um das Auflager im PunktA. Das Ende des Stabs ist fest mit einemquadratischen Korper (Kantenlange a, Mas-se m2) verbunden.Hinweis: Das System befindet sich nicht imSchwerefeld der Erde.
Geg.: M0, m1 = m, m2 = 96/245m, l,a = l/4
ϕ
M0
a
a
l
x
y
m1
m2
A
Geben Sie das Massentragheitsmoment θA des Systems bezuglich des Punktes A in Ab-hangigkeit von m und l an.
θA =5
6ml2
Berechnen Sie die Winkelbeschleunigung ϕ des Systems in Abhangigkeit von M0, m undl.
ϕ = 6M0 [5ml2]−1
b)Gehen Sie nun davon aus, dass die Winkelbeschleunigung durch ϕ = C t mit C = const.gegeben sei. Ferner gelte ϕ(t0) = ω0 und ϕ(t0) = 0 als Anfangsbedingungen zum Zeitpunktt0 6= 0. Geben Sie die Funktionen der Winkelgeschwindigkeit ϕ(t) und des Winkels ϕ(t)in Abhangigkeit der Zeit an.
Geg.: C, t0 6= 0, ω0
ϕ(t) =1
2C [t2 − t20] + ω0, ϕ(t) =
1
6C t3 +
1
3C t30 −
1
2C t20 t+ ω0 [t− t0]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 6 (Seite 2 von 2)
c)Fur das System aus Teil a) gelte nun weiter-hin m1 = m sowie m2 = 0 und M0 = 0. DasSystem befinde sich nun im Schwerefeld derErde.
Geg.: m, g, l ϕ
l
x
y
r t
m
A
g
Berechnen Sie gemaß des r, t–Koordinatensystems die Komponenten Ar(ϕ) und At(ϕ)der Auflagerkraft im Punkt A in Abhangigkeit des Winkels ϕ. Gehen Sie dafur zunachstdavon aus, dass die Winkelbeschleunigung ϕ(ϕ) sowie die Winkelgeschwindigkeit ϕ(ϕ)gegeben sind.
Ar(ϕ) = −1/2ml ϕ2 −mg sin(ϕ)
At(ϕ) = 1/2ml ϕ−mg cos(ϕ)
Leiten Sie nun aus der Vorgabe ϕ(ϕ) = 6 glcos(ϕ) die Funktion der Winkelgeschwindigkeit
ϕ(ϕ) in Abhangigkeit des Winkels ϕ unter den Voraussetzungen ϕ(ϕ = 0) = 0, ϕ(t =0) = 0 her.
ϕ(ϕ) =√
12 g/l sin(ϕ)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 7 (Seite 1 von 2)
Ein als Massepunkt idealisierter Korper rutsche aus seiner Ruhelage im Punkt A eineglatte Ebene herab, die gemaß der Abbildung im Punkt B in eine ebenfalls reibungsfreieKreisbahn einmundet. An die Kreisbahn schließt sich im Punkt D eine raue Ebene an(µ 6= 0). Im Punkt C gelte EC
pot = 0 fur die potentielle Energie des Korpers.
Geg.: m, g, r, α, µ
A
B
C
D
rx
4 r
µ
αα
g
NN
a)Geben Sie die potentielle Energie EA
pot des Korpers im Punkt A an.
EApot = mg r [4 sin(α) + 1− cos(α)]
Geben Sie den Betrag der Geschwindigkeit des Korpers im Punkt C an.
vC =√
2 g r [4 sin(α) + 1− cos(α)]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 7 (Seite 2 von 2)
b)Fur eine nicht naher spezifizierte Aushangshohe des Korpers sei die Geschwindigkeit vD =√8 g r sin(α) im Punkt D vorgegeben.
Wie lautet die potentielle Energie EDpot des Korpers im Punkt D?
EDpot = mg r [1− cos(α)]
Der Korper erreicht zu einem bestimmten Zeitpunkt auf der reibungsbehafteten Ebeneeinen maximalen Weg xmax. Geben Sie die potentielle Energie Emax
pot des Korpers zu diesemZeitpunkt an.
Emaxpot = mg r [1− cos(α)] +mg xmax sin(α)
Welche Arbeit AR wird entlang des Weges von D nach xmax durch Reibung verrichtet?
AR = −µmg cos(α) xmax
Berechnen Sie die Strecke xmax, welche der Korper auf der rauen Ebene maximal erreicht.
xmax =4 r sin(α)
sin(α) + µ cos(α)
c)Welche Zeit benotigt der Korper um die Strecke vom Punkt A zum Punkt B zuruckzule-gen?
t =
√8 r
g sin(α)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 8 (Seite 1 von 2)
a)Die drei dargestellten Systeme bestehen je aus einem Teilkorper mit gegebener Bie-gesteifigkeit (EI1,EI2,EI3) sowie einem schraffiert gezeichneten, biegestarren Element(EI → ∞).
FF
F
EI1 EI2 EI3
EI → ∞ EI → ∞EI → ∞
l1 l2 l3
1 2 3
Bestimmen Sie die kritischen Langen/Knicklangen l1 bis l3 der gegebenen Systeme.
l1 =π
2
√EI
F, l2 = π
√EI
F, l3 ≈ 1.43 π
√EI
F
b)Gegeben sei nun ein Stab mit quadratischer Querschnittsflache (Kantenlange a) sowie derbekannten Knicklange lk. Bestimmen Sie den Grenzwert fur a, so dass die vorgegebeneaußere, achsial wirkende Drucklast F exakt der kritischen Last des Systems entspricht.
a ≈ 1.05 4√F l2k/E

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 8 (Seite 2 von 2)
c)Der dargestellte, dehnstarre Stab besteht aus zwei Bereichen unterschiedlicher Biegestei-figkeit. Das linke Ende von Stab 1 ist eingespannt, die Lagerung am Kontaktpunkt zwi-schen den Bereichen 1 und 2 lasst horizontale Verschiebungen aber keine Verdrehungenzu. Das rechte Ende von Stab 2 wird durch eine Einzelkraft F belastet.
F
EI 2EI
ll1 2
Geben Sie die jeweiligen Knicklangen der beiden Bereiche 1 und 2 an.
l1 = l/2, l2 = 2 l
Berechnen Sie die maßgebende kritische Last/Knicklast Fkrit des gesamten Systems.
Fkrit =π2
2
EI
l2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 9 (Seite 1 von 3)
a)Gegeben sei der dargestellte, linksseitig ein-gespannte Balken (Lange l, BiegesteifigkeitEI), welcher am freien Ende durch eine Ein-zelkraft F belastet wird.
Geg.: F , l, EI
F
l
x
z
EI
Berechnen Sie die Durchbiegung w des Balkens an der Stelle x = l.
w(x = l) =F l3
3EI
Geben Sie fur dieses System mit der dargestellten Belastung die Ersatzfedersteifigkeit can.
c = 3EI/l3
b)Ein ebenfalls linksseitig (Punkt A) einge-spannter Balken (Lange 2 l, BiegesteifigkeitEI) sei am rechten Ende (Punkt B) durchein Loslager gestutzt und mittig durch eineEinzelkraft F belastet.
Geg.: F , l, EI
F
AB
ll
x
z
EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 9 (Seite 2 von 3)
Definieren Sie anhand der Skizze ein zweckmaßiges statisch bestimmtes Ersatzsystemdurch Einzeichnen der Auflagersymbole und der korrespondierenden Ersatzkraftgroße X .Hinweis: alternative Losungen moglich!
F
X
Geben Sie die Auflagerreaktionen dieses Systems gemaß des angegebenen Koordinaten-systems in Abhangigkeit der Ersatzkraftgroße X an. Hinweis: alternative Losungenmoglich!
Ax = 0, Az = X − F, MA = −2X l + F l, B = X
Zeichnen Sie des Weiteren den Verlauf des Biegemomentes auf Grund von i.) der Er-satzkraftgroße X fur F = 0 (linkes Kastchen) und ii.) der Kraft F fur X = 0 (rechtesKastchen). Hinweis: alternative Losungen moglich!
+
XX l
2X l−
F
−F l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 9 (Seite 3 von 3)
Berechnen Sie abschließend die unbekannte Kraftgroße X sowie die Verschiebung wF desAngriffpunktes von F in Richtung der Kraft F .
X = 5/16F, wF = 7/96F l3/EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 10 (Seite 1 von 2)
a)Der Spannungszustand σ in einem Punkt sei bezuglich der raumfesten Koordinatenbasisex, ey durch die Komponenten
(σxx σxyσyx σyy
)=
(20 −10−10 −30
)MN
m2
gegeben. Zeichnen Sie anhand dieses Spannungszustands den Mohrschen Spannungskreis.
σ
ττmax
σ1σ2 ϕ
10 MPa
10
10
20
20
−10
−10
−20
−20−30
Geben Sie ausgehend von dem Mohrschen Spannungskreis die Haupt–Normalspannungenσ1, σ2 an.
σ1 ≈ 22 MPa, σ2 ≈ −32 MPa

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 10 (Seite 2 von 2)
Um welchen Winkel ϕH ist das zu Grunde liegende Koordinatensystem zu drehen, umden Hauptspannungszustand zu erreichen?
ϕH =1
2arctan
(10
25
)≈ 10.4
Wie groß ist die maximale Schubspannung τmax?
τmax ≈ 27 MPa
b)Gegeben sei das Verschiebungsvektorfeld
u = x2 ex + 2 x y ey .
Geben Sie die daraus resultierenden Komponenten des linearisierten Dehnungstensors ε
an.
(εxx εxyεyx εyy
)=
2 x y 0y 2 x 00 0 0
Berechnen Sie die Haupt–Normaldehnungen ε1 und ε2 in Abhangigkeit der Koordinatenx, y und bestimmen Sie die zu der jeweiligen Hauptdehnung gehorende Richtung n1 bzw.n2 mittels der Komponenten n1x , n1y bzw. n2x , n2y (Normierung nicht erforderlich).
ε1 = 2 x+ y, ε2 = 2 x− y
(n1x
n1y
)=
(11
) (n2x
n2y
)=
(1−1
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 11 (Seite 1 von 2)
Eine homogene, starre Stange (Lange l, Mas-se m) und eine homogene, starre Kreisschei-be (Radius r, Masse M) sind wie darge-stellt miteinander verbunden bzw. gelagert.Im Auflagerpunkt der Stange ist zusatzlicheine Drehfeder (Drehfedersteifigkeit k) ange-bracht. Die Kreisscheibe rollt ohne zu gleitenauf dem kreisbogenformigen Fundament ab.Das System befindet sich im Schwerefeld derErde.
Geg.: m, M , l, k, g
l,m
r,M
k
g
ϕ
a)Bestimmen Sie den rotatorischen Anteil der kinetischen Energie EStange
rot sowie den transla-torischen Anteil der kinetischen Energie EStange
trans der Stange bezuglich ihres Schwerpunktesin Abhangigkeit der gegebenen Großen.
EStangerot = 1/24ml2 ϕ2
EStangetrans = 1/8ml2 ϕ2
Bestimmen Sie den rotatorischen Anteil der kinetischen Energie EScheiberot und den transla-
torischen Anteil der kinetischen Energie EScheibetrans der Kreisscheibe bezuglich ihres Schwer-
punktes in Abhangigkeit der gegebenen Großen.
EScheiberot = 1/4M l2 ϕ2
EScheibetrans = 1/2M l2 ϕ2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 11 (Seite 2 von 2)
b)Fur die potentielle Energie des Systems gelte Epot(ϕ = 0) = 0. Geben Sie die potentielleEnergie des Systems fur beliebig große Auslenkungen ϕ an.
Epot(ϕ) =1
2k ϕ2 +M g l [1− cos(ϕ)] +mg
l
2[1− cos(ϕ)]
c)Fur kleine Auslenkungen |ϕ| ≪ 1 um die Gleichgewichtslage ergibt sich fur den SpezialfallM = 2m als Naherung fur die Energien
Ekin =5
3ml2ϕ2, Epot =
1
2kϕ2.
Geben Sie, ausgehend von diesen beiden Energietermen, die zugehorige Bewegungsglei-chung an.
10ml2 ϕ+ 3 k ϕ = 0
d)Welche physikalische Einheit hat der Ausdruck b/a, wenn die allgemeine Bewegungsglei-chung die Form
a ϕ+ b ϕ = 0
hat (bitte ankreuzen)?
2Nkg
m4
N
kgm2
m
Nkg2kgm
N

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 12 (Seite 1 von 2)
Zwei homogene, starre Scheiben (Masse mbzw. M , Radius r bzw. R) sind wie dar-gestellt durch eine homogene, starre Stange(Lange L, Masse M) verbunden. Des Wei-teren ist ein Pendel (Lange l, Masse m) ander Stange angebracht. Das System, welchessich nicht in einem Schwerefeld befindet, wirddurch eine zeitlich veranderliche Kraft F (t)angeregt. Ein Gleiten der Scheiben ist auszu-schließen.
Geg.: m, M , l, L, r, R, F (t)
m, r
M,R
M,L
m, l
F (t)
x
ϕ
a)Geben Sie in Abhangigkeit der Freiheitsgrade die kinetische Energie Ea
kin der linken Schei-be,
Eakin = 1/2mx2 + 1/4mr2 [x/r]2 = 3/4mx2
die kinetische Energie Ebkin der rechten Scheibe,
Ebkin = 1/2M x2 + 1/4M R2 [x/R]2 = 3/4M x2
die kinetische Energie Eckin der Verbindungsstange,
Eckin = 1/2M x2
an.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2011
Aufgabe 12 (Seite 2 von 2)
b)Wie lautet der Betrag der Schwerpunktsgeschwindigkeit |vS| der frei pendelnden Stange?
|vS| =√
[x+ ϕ l/2 cos(ϕ)]2 + [ϕ l/2 sin(ϕ)]2 =√x2 + x ϕ l cos(ϕ) + 1/4 ϕ2 l2
c)Welche virtuelle Arbeit δWF verrichtet die Kraft F (t) und wie lautet die zugehorigegeneralisierte Kraftgroße QF ?
δWF = −F (t) δx
QF = −F (t)
d)Fur den Spezialfall m = M und unter Annahme kleiner Auslenkungen ϕ ≪ 1 soll furdie kinetische Gesamtenergie Eges
kin des Systems folgender Zusammenhang angenommenwerden:
Egeskin =
1
2m
(5x2 + l ϕ
(x+
1
4ϕ l
)).
Bestimmen Sie die Bewegungsgleichungen des Systems fur beide Koordinaten x und ϕmit der Methode von Lagrange (Lagrangesche Gleichungen 2. Art). Nehmen Sie hierfurF (t) = 0 an. Anmerkung (siehe Aufgabenstellung): Das System befindet sich nichtin einem Schwerefeld.
x : 10 x+ l ϕ = 0
ϕ : 2 x+ l ϕ = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 4 (Seite 1 von 2)
Eine Dreieckscheibe (Schenkellange b) istuber eine starre Stange (Lange l) mit einemim Punkt D drehbar gelagerten Rad (Radiusr) verbunden und dreht mit der Winkelge-schwindigkeit ω1 um das Lager A.
a)Konstruieren Sie im nebenstehenden Bilddie Lage des Momentanpols der Stange.Zeichnen Sie die fur die Konstruktion beno-tigten Hilfsgeraden deutlich sichtbar ein!1P
b)Geben Sie die Ortsvektoren rAB, rBC undrCD fur die dargestellte Lage des Systemsin Abhangigkeit der Winkel β und δ bezug-lich des vorgegebenen Koordinatensystemsan und ermitteln Sie den Geschwindigkeits-vektor vB des Punktes B.
A B
C
D
b
l
r
β
δ
ω1
ω2
ω3
ex
ey
rAB = b ex
rBC = −l sin β ex − l cos β ey
rCD = −r cos δ ex + r sin δ ey
vB = −ω1b ey

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 4 (Seite 2 von 2)
c)Die Ortsvektoren rBC und rCD sowie der Geschwindigkeitsvektor vB seien nun fur einevon obiger Abbildung abweichende Konfiguration wie folgt vorgegeben:
rBC = −√2
2l ex −
√2
2l ey
rCD = −r ex
vB = −ω1 b
2ex −
√3ω1 b
2ey .
Geben Sie die Geschwindigkeit vC in Abhangigkeit der Winkelgeschwindigkeit ω2 desRades an.
vC(ω2) = ω2rey
Geben Sie zusatzlich die Geschwindigkeit vC in Abhangigkeit der Winkelgeschwindigkeitω3 der Stange an.
vC(ω3) =[−1
2ω1b+
√22lω3
]ex +
[−
√32ω1b−
√22lω3
]ey
Berechnen Sie hieraus die Winkelgeschwindigkeit ω3 der Stange sowie die Winkelgeschwin-digkeit ω2 des Rades.
ω3 =b√2lω1
ω2 = − b[√3+1]r
ω1

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 5 (Seite 1 von 3)
Ein dehnstarres Seil wird uber eine lose, starre Rolle (Masse m1, MassentragheitsmomentΘ1, Radius r1) und eine feste, starre Rolle (Masse m2, Massentragheitsmoment Θ2, Radiusr2) gefuhrt. Das Seil ist mit dem einen Ende an der Decke befestigt und mit dem ande-ren Ende mit einem starren Block (Masse m3) verbunden. Der Gleitreibungskoeffizientzwischen dem Block und der schiefen Ebene (Neigungswinkel α) betragt µ. Das Systembefindet sich im Schwerefeld der Erde (Erdbeschleunigung g). Es kann davon ausgegangenwerden, dass die Massenverhaltnisse derart gewahlt wurden, so dass stets x3 ≥ 0 gilt.
m1
m2
r1
r2
ϕ1
ϕ2
g
x1
m3
x3
α
µ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 5 (Seite 2 von 3)
a)Zeichnen Sie das Freikorperbild.
S1 S2
S2S3
S3
m1g
m1x1
Θ1ϕ1
Θ2ϕ2
T
N m3g
m3x3
Geben Sie die Impuls- und Drehimpulsbilanzen jeweils in Bezug auf den Schwerpunkt an.Verwenden Sie hierfur unbedingt die angegebenen Koordinaten.
Masse m1:
m1x1 + S1 + S2 −m1g = 0
Θ1ϕ1 − S1r1 + S2r1 = 0
Masse m2:
Θ2ϕ2 + S3r2 − S2r2 = 0
Masse m3:
m3x3 +m3g sinα + T − S3 mit T = µN = µmg cosα

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 5 (Seite 3 von 3)
b)Bestimmen Sie die kinematischen Bindungen fur ϕ1, ϕ2, x1 in Abhangigkeit der Koordi-nate x3.
ϕ1 =x32r1
ϕ2 =x3r2
x1 =x32
c)Die Bewegungsgleichung des Systems kann in der Form x3 = −a mit einer Konstantena angegeben werden. Das System habe die Anfangsbedingungen x3(t = 0) = v0 undx3(t = 0) = x0. Ermitteln Sie die Zeit t, in der die Geschwindigkeit des Blockes x3(t) = 0ist sowie die in dieser Zeit zuruckgelegte Wegstrecke x3(t).
t = v0a
x3(t) =12at2 + v0t+ x0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 6 (Seite 1 von 2)
Ein als Punktmasse geltender Korper (Masse m) wird im Punkt O auf einer schiefenEbene (Anstellwinkel α) aus der Ruhelage los gelassen. Die schiefe Ebene weist die Langel auf sowie den Gleitreibungskoeffizienten µ. Im Punkt A andert sich die Geometrie derBahn, wobei diese zwischen den Punkten A und B als reibungsfrei (µ = 0) gilt. Im PunktB weist die Bahn einen Neigungswinkel β auf. Des Weiteren befindet sich der Punkt Cmittig auf einer starren Platte, welche durch eine um 45 geneigte elastische Feder (Fe-dersteifigkeit c, in der dargestellten Lage ist die Feder entspannt) mit dem Fundamentverbunden ist. Das System befindet sich im Schwerefeld der Erde (Erdbeschleunigung g).
mO
A
B
C
l
α h1 h2
β
g
b
c
45
µ
µ = 0
a)Nennen Sie aus folgender Auswahl die Bedingung dafur, dass sich die Punktmasse auf derschiefen Ebene (Haftreibungskoeffizient µ0) uberhaupt in Bewegung setzt. Kreuzen Siedas entsprechende Kastchen an.
eα < tan(µ0)
eµ0 < arctan(α) 4 µ0 < tan(α)
eα > tan(µ0)
b)Es soll nun im Folgenden davon ausgegangen werden, dass sich die Punktmasse in Be-wegung setzt. Zunachst sei die Bewegung zwischen den Punkten O und B betrachtet.Berechnen Sie die Geschwindigkeit des Korpers im Punkt A.
Gegeben: µ, g, l, α
vA =√
2 g l [sin(α)− µ cos(α)]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 6 (Seite 2 von 2)
Welchen Wert darf die Hohe h1 maximal haben, so dass der Korper den Punkt B uber-haupt erreicht?
Gegeben: µ, l, α
hmax1 = [sin(α)− µ cos(α)] l
c)Gehen Sie nun davon aus, dass der Korper im Punkt B eine Geschwindigkeit vB = |vB| > 0aufweist, so dass dieser die Bahn dort verlasst. Bestimmen Sie den GeschwindigkeitsbetragvB derart, dass die Punktmasse exakt im Punkt C auf die starre Platte trifft.
Gegeben: g, h, l, β = 30
vB =√2 g/
[3[h + l/
√3]]l
c)Fur die Vorgabe vB = 2 g
√m/c soll nun berechnet werden, um welchen Betrag ∆l sich
die Feder nach dem Aufprall des Korpers im Punkt C staucht. Es kann dabei angenom-men werden, dass wahrend dieses Vorgangs immer Kontakt zwischen der Platte und derPunktmasse herrsche sowie, dass der Korper exakt senkrecht auf die starre Platte auftrifft.
Gegeben: vB = 2 g√m/c, m, g, c
Nennen Sie zunachst die Gleichung gemaß Ihres Ansatzes, die zur Bestimmung der ge-suchten Lange ∆l fuhrt.
12c∆l2 −mg
√22∆l − 1
2m2 g2
c= 0
Losen Sie diese Gleichung anschließend nach ∆l auf und geben Sie das Ergebnis an.
∆l = 2√2 mg
c

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 7 (Seite 1 von 3)
F
a)Fur das oben dargestellte System bestimme man ein mogliches, statisch bestimmtes Er-satzsystem.
statisch bestimmtes Ersatzsystem:
F
R2R1
R3
Fur ein anderes, unten dargelltes System, wurde bereits ein statisch bestimmtes Ersatzsy-
stem bestimmt.
z
z
x
x
c
lll
lll
α
α
EI
EI
R2
R1

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 7 (Seite 2 von 3)
b)Bestimmen Sie die Biegemomentenverlaufe MR1
(x) fur R1 6= 0, R2 = 0 und MR2(x) fur
R1 = 0, R2 6= 0 und stellen Sie diese grafisch dar.
MR1(x):
0 ≤ x ≤ l: MR1(x) = −2R1 x l ≤ x ≤ 3l: MR1
(x) = −R1(3l− x)
z
x lll
−2R1 l
MR2(x):
0 ≤ x ≤ l: MR2(x) = R2 sinαx
l ≤ x ≤ 2l: MR2(x) = R2 sinα (2l− x)
z
x lll
R2 sinα l

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 7 (Seite 3 von 3)
c)Im weiteren Verlauf sollen mit Hilfe des Satzes von Castigliano die Verschiebungen fR1
und fR2der Kraftangriffspunkte von R1 und R2 in Richtung dieser Krafte berechnet wer-
den. Arbeiten Sie hierbei mit dem Ausdruck
M(x) = R1 MR1(x) +R2 MR2
(x)
und nehmen Sie MR1(x) und MR2
(x) als bekannt an.
Weiterhin sei die Feder fur fR1= 0 um fV in negative z-Richtung vorgespannt (Druck).
Es genugt, das zur Losung notwendige, vollstandige Gleichungssystem in Abhangigkeitvon MR1
(x) und MR2(x) anzugeben. Ggf. auftretende Integrale sollen nicht ausgewertet
werden.
Gleichungssystem:
fR1= R1
´ 3l
0
MR1(x)MR1
(x)
EIdx+R2
´ 3l
0
MR1(x)MR2
(x)
EIdx
fR2= R1
´ 3l
0
MR1(x)MR2
(x)
EIdx+R2
´ 3l
0
MR2(x)MR2
(x)
EIdx
fR2= 0
R1 = −c(fR1− fV )

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 8 (Seite 1 von 2)
Die in Abb. (1) dargestellte Ablage der Masse m1 ist linksseitig vertikal verschieblich miteiner Wand verbunden. Die rechte Seite wird wie abgebildet von einem in den Punkten Aund B gelenkig gelagerten Stab der Lange l mit der Biegesteifigkeit EI abgestutzt. Aufder Ablage befindet sich eine Masse m2.
lll
AAA
BBB
EIEIEI
g
m1
m2
1
2 3
a)Geben Sie die kritische Kraft Fkrit an, bei der der Stutzstab bei der in Abb. (1) darge-stellten Lagerung ausknickt.Bestimmen Sie die maximal zulassige Masse m2,max, bei der der Stab aufgrund der Bela-stung durch Masse und Ablage ausknickt.
1. Eulerfall ⇒ Fkrit = π2EIl2
Fkrit = mgesg = (m1 +m2,max)g ⇔ m2,max = π2EIgl2
−m1
b)In Abb. (2) ist der rechte Ausschnitt der Ablage mit dem Stutzstab dargestellt. DasFestlager B ist hier durch eine Einspannung ersetzt worden.Bestimmen Sie die maximal zulassige Lange lmax des Stutzstabes, bevor er ausknickt,wenn sich auf der Ablage eine Masse m2 = m1 befindet.
4. Eulerfall ⇒ lmax =√
2,045π2
2m1gEI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 8 (Seite 2 von 2)
c)Abb. (3) zeigt den rechten Ausschnitt der Ablage, bei der der Stutzstab nun beidseitigdurch Einspannungen an A und B mit Ablage und Boden verbunden ist.Bestimmen Sie die maximal zulassige Lange lmax des Stutzstabes, bevor er ausknickt,wenn sich auf der Ablage eine Masse m2 = m1 befindet.
3. Eulerfall ⇒ lmax =√
2π2
m1gEI
d)
Q
MF
Mb(x)
w(x) w(l)
x
z
l
Fur einen wie dargestellt geschnittenen Stab ergibt sich nach der Biegetheorie 2. Ordnungfur die Verschiebung in z-Richtung die Losung
w(x) = C1 cos(λx) + C2 sin(λx) + w(l)− M(l)
F− (x− l)
Q(l)
F.
c
kF
x
z
l
Die Abbildung zeigt einen Stab der Lange l, der rechtsseitig von einer Feder mit derFedersteifigkeit c gehalten und mit einer Kraft F belastet wird. Am linken Festlagerbefindet sich eine zusatzliche Drehfeder mit der Federsteifigkeit k.Geben Sie fur den wie dargestellt gelagerten Stab das vollstandige Gleichungssystem an,das zur Bestimmung der kritischen Knicklast notwendig ist. Das Gleichungssystem solldabei nicht gelost werden!
1.) M(l) = 02.) Q(l) = −c w(l)3.) w(0) = 04.) Momentengleichgewicht:
∑M = 0 = −F w(l) + cl w(l) + k w′(0)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 9 (Seite 1 von 3)
Folgend seien x, y, z die Komponenten einer orthonormalen Basis gebildet aus den Ein-heitsvektoren ex, ey, ez.
a)Geben Sie die Koeffizienten des GradiententensorsG bezuglich ex, ey, ez in Matrixschreib-weise an, die sich aus dem Verschiebungsvektorfeld
u =u0a b2
[x(a2 + yz
)ex + by2 ey + z
(c2 − x2
)ez].
ergeben.
G =u0a b2
a2 + yz xz xy0 2by 0
−2xz 0 c2 − x2
b)Fur ein anderes Verschiebungsfeld u nehmen die Koeffizienten des Gradiententensors Gbezuglich ex, ey, ez die Form
k
1 + yz xz xy0 2y 0
−2xz 0 4− x2
an. Geben Sie die Koeffizienten des daraus resultierenden Deformationstensors ε bezuglichder gleichen Basis in Matrixschreibweise an.
ε = k
yz + 1 12xz 1
2xy − xz
12xz 2y 0
12xy − xz 0 −x2 + 4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 9 (Seite 2 von 3)
c)Bezuglich ex, ey, ez sei ein Deformationstensor ε mit den Koeffizienten
k
yz + 2 xz 0xz 2y2 00 0 x2 + 4
gegeben.Bestimmen Sie unter der Annahme der linearen isotropen Elastizitat (isotropes Hooke-sches Gesetz, Querkontraktionszahl ν = 1
3, Elastizitatsmodul E) die Koeffizienten des
zugehorigen Spannungstensors σ in Matrixschreibweise bezuglich der gleichen Basis.Geben Sie daruber hinaus die Hauptspannungen an, die im Punkt P = 0 ex + 1 ey + 0 ezauftreten.
σ =3
4Ek
x2 + 2y2 + 2yz + 8 xz 0xz x2 + 4y2 + yz + 6 00 0 2x2 + 2y2 + yz + 10
σI = 10 34Ek
σII = 10 34Ek
σIII = 12 34Ek

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 9 (Seite 3 von 3)
d)Bezuglich der Basis ex, ey wirke ein ebener Spannungszustand σ mit den Koeffizienten
σ0
(−7
565
65
25
).
Bestimmen Sie die Hauptspannungen und die Koeffizienten der Hauptspannungsrichtun-gen bezuglich der gleichen Basis.
σI = σ0
σII = −2σ0
u1 =1√3
(12
)
u2 =1√3
(2−1
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 10 (Seite 1 von 2)
Zwei homogene, starre Stangen (jeweils Mas-se m, Lange l) sind im Schwerefeld (Erd-beschleunigung g) gelenkig miteinander ver-bunden. Der Endpunkt von Stange 2 istortsfest drehbar gelagert, der Endpunkt vonStange 1 vertikal verschieblich gelagert. Diebeiden Stangenendpunkte sind untereinan-der durch eine Feder (Federkonstante c =mg/l) verbunden. Fur ϕ = 0 ist die Federentspannt.
m, l (Stange 1)
m, l (Stange 2)
c =mg
l g
ϕ
ϕ
a)Die potentielle Energie des Systems hat die Form
Epot = E0
(cos2(ϕ)− cos(ϕ)
),
wobei E0 eine positive Konstante ist.Welche Bedingung fur die potentielle Energie muss erfullt sein, damit sich das System furϕ = ϕ⋆ im Gleichgewicht befindet?
∂Epot
∂ϕ
∣∣∣ϕ⋆
= 0
Welche Bedingung fur die potentielle Energie muss zusatzlich gelten, damit ϕ = ϕ⋆ einestabile Gleichgewichtslage ist?
∂2Epot
∂ϕ2
∣∣∣ϕ⋆> 0
b)Fur ϕ = ϕ1 = 0 befindet sich das System im Gleichgewicht. Ist diese Gleichgewichtslagestabil, indifferent oder instabil?
stabil [ ] indifferent [ ] instabil [X]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 10 (Seite 2 von 2)
c)Neben der unter b) angegebenen Gleichgewichtslage ϕ1 = 0 besitzt das System weitereGleichgewichtslagen ϕ2, .... Bestimmen Sie diese verbleibenden Gleichgewichtlagen ausge-hend von dem unter a) angegebenen Ausdruck fur die potentielle Energie.
∂Epot
∂ϕ= 0
= sin(ϕ)− 2 sin(ϕ) cos(ϕ)
= sin(ϕ) [1− 2 cos(ϕ)]
⇒ sin(ϕ) = 0 ∨ cos(ϕ) = 1/2
damit sind die verbleibenden Gleichgewichtslagen:
ϕ2 = −π/3 , ϕ3 = π/3 , ϕ4 = π
d)Die unter a) angegebene potentielle Energie des Gesamtsystems setzt sich additiv zu-sammen aus der potentiellen Energie Ea
pot der Stange 1, der potentiellen Energie Ebpot
der Stange 2 und der potentiellen Energie Ecpot der Feder. Geben Sie diese Energieanteile
einzeln an.
Eapot =
12mg l cos(ϕ)
Ebpot =
32mg l cos(ϕ)
Ecpot = 2 c l2 [1− cos(ϕ)]2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 11 (Seite 1 von 2)
Eine homogene, starre Stange (Masse m,Lange 5r) ist an einem Ende vertikal ver-schieblich gelagert und am anderen Ende ge-lenkig mit einer homogenen, starren Kreis-scheibe (Radius 2r, Masse 4m) verbunden.Das System befindet sich im Schwerefeld(Erdbeschleunigung g). Die Scheibe rollt aufder Unterlage ab. Die Koordinate ϕ be-schreibt die Verdrehung der Stange gegen-uber einer raumfesten Richtung; Fur ϕ =π/4 ist die Feder (Federkonstante c) ent-spannt.
5r,m
2r, 4mϕ
c
g
a)In Abhangigkeit der Koordinate ϕ bestimmen Sie den rotatorischen Anteil Ea
kin der kine-tischen Energie der Stange,
Eakin = 25
24mr2ϕ2
den translatorischen Anteil Ebkin der kinetischen Energie der Stange,
Ebkin = 25
8mr2ϕ2
den rotatorischen Anteil Eckin der kinetischen Energie der Scheibe,
Eckin = 25mr2ϕ2 sin2(ϕ)
und den translatorischen Anteil Edkin der kinetischen Energie der Scheibe.
Edkin = 50mr2ϕ2 sin2(ϕ)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 11 (Seite 2 von 2)
b)Bestimmen Sie die potentielle Energie des Gesamtsystems, wenn Epot(ϕ = π/4) = 0 geltensoll.
Epot =252c r2
[1√2− cos(ϕ)
]2+ 5
2mg r
[sin(ϕ)− 1√
2
]
c)Bei Vernachlassigung der Schwerkraft und unter Annahme kleiner Verdrehungen ψ (|ψ| ≪1) um die Gleichgewichtslage ϕ = π/4 hat die Bewegungsgleichung die Form
10mψ +3
2c ψ = 0.
Geben Sie ψ(t) fur die Anfangsbedingungen ψ(t = 0) = 0, ψ(t = 0) = ψ0 an.
ψ(t) = ψ0 cos(√
32cmt)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 12 (Seite 1 von 2)
Zwei homogene, starre Stangen sind gelenkigmiteinander verbunden und wie dargestelltgestutzt. Die Masse der Stange mit der Lan-ge b ist m. Die Masse der Stange mit derLange 2a ist M . Die Federkonstanten der li-nearen Federn sind c1, c2 bzw. c3. Der ge-schwindigkeitsproportionale Dampfer besitztdie Dampferkonstante d. In der dargestelltenGleichgewichtslage q1 = 0, q2 = 0, q3 = 0sind die Federn entspannt. Fur die Untersu-chung kleiner Bewegungen um die Gleichge-wichtslage sollen die eingefuhrten Koordina-ten q1, q2, q3 verwendet werden.
aa
b,m
M
c3
c2c1
d
q1q2
q3
a)Geben Sie die kinetische Energie der Stange mit der Lange 2a an.
Eakin = 1
2
(Mq21 +
13Ma2q22
)
Geben Sie die kinetische Energie der Stange mit der Lange b an.
Ebkin = 1
2
(mq21 +mbq21 q
23 +
13mb2q23
)
Geben Sie die potentielle Energie der Feder mit der Federkonstanten c1 an.
E1pot =
12c1q
21
Geben Sie die potentielle Energie der Feder mit der Federkonstanten c2 an.
E2pot =
12c2a
2q22
Geben Sie die potentielle Energie der Feder mit der Federkonstanten c3 an.
E3pot =
12c3 (q
21 + 2q1q3 + b2q23)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2010
Aufgabe 12 (Seite 2 von 2)
Geben Sie die virtuelle Arbeit der Dampferkraft an.
δWd = −d(q1 + bq3)(δq1 + bδq3)
b)Fur c1 = c2 = c3 = c,M = m, b = 2a und d = 0 liefert die Auswertung der LagrangeschenGleichungen die Bewegungsgleichungen
2mq1 +mb
2q3 + 2cq1 + cbq3 = 0,
m
3q2 + cq2 = 0,
mb
2q1 +
mb2
3q3 + cbq1 + cb2q3 = 0.
Berechnen Sie alle Eigenkreisfrequenzen.
ω1/2 =
√2cm
(1−
√105
)ω3 =
√3cm

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 1 (Seite 1 von 2)
Ein masseloser Starrkorperverbund, beste-hend aus einer Stange und einer Kreisschei-be, liegt an einer vertikal verschiebbarenMasse an und ist an seinem oberen Endedrehbar gelagert. Die Scheibe ist fest mit derStange verbunden. Durch Haftreibung solldie Masse in ihrer Position festgehalten wer-den. Hierbei ist zwischen Hebel und Mas-se mit dem Haftreibungskoeffizienten µ0 zurechnen. Der Hebel ist zusatzlich mit einemMomentM beaufschlagt. Weiterhin wirkt dieErdbeschleunigung.
R
l⋆
µ0
α
b
m
M
g
a)Bestimmen Sie zunachst die vom Winkel α abhangige Lange l⋆.
l⋆(α) =R + b
sin(α)
b)Bestimmen Sie nun die zwischen Kreisscheibe und Masse wirkenden Normal- und Haft-kraft. Rechnen Sie im Folgenden mit Lange l⋆(α) = l.
N =M +mgb
l cos(α)
H = mg (am Block nach oben)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 1 (Seite 2 von 2)
c)Rechnen Sie im Folgenden mit
H = m k1 und N = mk2 tanα +M k3 tanα,
wobei k1, k2, k3 Konstanten sind.
Bestimmen Sie den fur Haftreibung gultigen Bereich des MomentesM (α undm gegeben).
gultiger Bereich fur M : M ≥ m
k3
(k1
µ0 tan(α)− k2
)
Bestimmen Sie den Bereich des Winkels α, innerhalb dessen Selbsthemmung auftritt, d.h.die Masse fur beliebig große Werte m im Gleichgewicht bleibt.
Selbsthemmung: tan(α) ≥ k1µ0k2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 2 (Seite 1 von 3)
Ein masseloser Balken der BiegesteifigkeitEI ist im Punkt A eingespannt. Im Punkt Gdes Balkens ist eine starre Umlenkrolle (Ra-dius r) der Masse ms drehbar gelagert. Ei-ne Masse mk ist uber ein dehnstarres Seil ander Wand befestigt. Der Balken ist zusatz-lich mit einer linear-veranderlichen Strecken-last q(x) = q0
lx belastet. Es wirke die Erdbe-
schleunigung.
r
x
z
ms
mk
g
l
q(x)
AG
EI
a)Berechnen Sie die Auflagerreaktionen in A und Gelenkkrafte in G. Rechnen Sie hierbeiam Balken mit Vektorkomponenten in positive Koordinatenrichtungen (s. eingezeichnetesKoordinatensystem).
Ax = −mkg
Az = −q0l/2− (ms +mk)g
MA = −q0l2/6− (ms +mk)gl
Gx = mkg
Gz = (ms +mk)g

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 2 (Seite 2 von 3)
b)Fur ein ahnliches System sind die Auflager-reaktionen in der nebenstehenden Zeichnungangegeben. Der Balken der Biegesteifikeit EIist neben dem Moment M und der Kraft Fdurch sein Eigengewicht mb belastet. StellenSie die Biegelinie fur das angegebene Systemohne eine explizite Bestimmung der Integra-tionskonstanten an. Verwenden Sie das abge-bildetete Koordinatensystem.
F
l
F +mbg
F l + 12mbglx
z
mbgl
EI
w′′(x) =
(Fx+
mbgx2
2l
)1
EI
w′(x) =
(Fx2
2+mbgx
3
6l+ C1
)1
EI
w(x)EI =
(Fx3
6+mbgx
4
24l+ C1x+ C2
)1
EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 2 (Seite 3 von 3)
c)Fur das aus Aufgabenteil a) bekannte System, in dem der Balken an Stelle der linearveranderlichen Streckenlast durch sein Eigengewicht belastet ist, ist die Biegelinie
w(x) =g
EI
(mb
24
x4
l+
(ms +mk)
6x3 −
(ms +mk
2+mb
6
)l2x+
(ms +mk
3+mb
8
)l3)
gegeben. Welche Werte darf die Masse mk nicht uberschreiten, wenn die horizontale Ab-lenkung des Endes eines am Balkenende angebrachten starren Stabes der Lange h denWert a nicht uberschreiten soll? Nehmen Sie an, dass w(x) ≪ h, u(x) ≈ 0 und a ≪ h.
r
x
z
ms
mk
g
l
A
a
G
h
EI
mk ≤2aEI
l2hg−ms −
mb
3

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 3 (Seite 1 von 2)
Im dargestellten System befinden sich zwei Balken der Lange l bzw. 12l jeweils mit dem
E-Modul E, der Querschnittsflache A und dem Warmeausdehnungskoeffizienten α. Diebeiden Balken sind uber einen biegestarren Hebel miteinander verbunden, der am raum-festen Punkt B drehbar gelagert ist. Der obere Balken weist uber seine Lange ein Tempe-raturprofil auf, dessen Verlauf mit der Gleichung
∆T (x1) = T0 sin(π
lx1)
beschrieben wird.l/2
l
EA, α
EA, α
EI = ∞
x1
x2
A
B
C
∆T (x1)
a2a
a)Geben Sie die Dehnungsfunktion u′1(x1) in Langsrichtung fur den oberen Balken an, wennder gegebene Temperaturverlauf ∆T (x1) = T0 sin(π
lx1) wirkt, und bestimmen Sie die
Funktion der Langsverschiebung u(x1). Die Normalkraft sei konstant und als N1 bekannt.
u′1(x1) =N1
EA+ α∆T (x1)
u1(x1) =N1
EAx1 +
αT0l
π
(1− cos
(πx1l
))

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 3 (Seite 2 von 2)
b)Geben Sie die Dehnungsfunktion u′2(x2) in Langsrichtung fur den unteren Balken an undbestimmen Sie die Funktion der Langsverschiebung u2(x2). Die Normalkraft sei konstantund als N2 bekannt.
u′2(x2) =N2
EA
u2(x2) =N2
EAx2
c)Stellen Sie die Ubergangsbedingung fur die Langsverschiebungen u1 und u2 der beidenBalken auf, die durch den Hebel zwischen den Punkten A und C besteht. Geben Sie dieNormalkraft N2 am Punkt C des unteren Balkens in x2-Richtung in Abhangigkeit von derNormalkraft N1 am Punkt A des oberen Balkens in x1-Richtung an. Bestimmen Sie dieNormalkraft N1, die im oberen Balken wirkt, wenn die Verschiebungsfunktionen
u1(x1) = k1N1x1 + k2
u2(x2) = k3N2x2
lauten, wobei k1, k2, k3 Konstanten seien. Berucksichtigen Sie, wie die Normalenkraftedurch den Hebel ubertragen werden.
u2(x2 = l/2) = 2u1(x1 = l)
N2(N1) = N1/2
N1(k1, k2, k3, l) =8k2
l(k3 − 8k1)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 4 (Seite 1 von 2)
In dem skizzierten System aus den drei starren Staben AB, BC und BD der Langen l1bzw. l2 wird der Stab AB mit der Winkelgeschwindigkeit ωAB in der angegebenen Rich-tung gedreht. Die Schiebehulsen gleiten entlang der Fuhrung.
MBD
MAB
MBC
u
u
u
a)Zeichnen Sie die Richtungen der Geschwindigkeiten vB, vC und vD in das Bild ein.
b)Konstruieren Sie im oben stehenden Bild die Lage der Momentanpole MAB, MBC und MBD
der Stabe AB, BC und BD. Zeichnen Sie die fur die Konstruktion benotigten Hilfsliniendeutlich sichtbar ein!
c)Wie viele Freiheitsgrade hat das System?
einen

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 4 (Seite 2 von 2)
d)Geben Sie die Geschwindigkeit und die Beschleunigung der Schiebehulsen relativ zuein-ander in Abhangigkeit von dem Winkel β an.
vrel(β) = −2l1 sin(β)β
arel(β) = −2l1
(sin(β)β + cos(β)β2
)
e)Geben Sie die Ortsvektoren rA, rB, rC und rD in Abhangigkeit der Winkel ϕ und βbezuglich des vorgegebenen Koordinatensystems an.
rA = 0
rB = l2 (sin(ϕ)ex + cos(ϕ)ey)
rC = aex + (l2 cos(ϕ) + l1 cos(β))ey
rD = aex + (l2 cos(ϕ)− l1 cos(β))ey
f)Bestimmen Sie den Winkel ϕ in Abhangigkeit von dem Winkel β.
ϕ(β) = arcsin
(l1 sin(β)− a
l2
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 5 (Seite 1 von 2)
Eine abgesetzte, starre Walze (Masse m,Massentragheitsmoment bzgl. des Schwer-punktes ΘS = 2mr2, Innenradius r, Außen-radius 2r) ist uber ein dehnstarres, masse-loses Seil und eine masselose, reibungsfreieUmlenkrolle mit einem starren Block (Massem) wie dargestellt verbunden. Der Haftrei-bungskoeffizient zwischen der schiefen Ebe-ne (Neigungswinkel α) und der Walze ist µ0,der Gleitreibungskoeffizient ist µ. Das Sy-stem befindet sich im Schwerefeld der Erde(Erdbeschleunigung g).
g
xW
µ0, µ
2r
r
m,ΘS
m xB
α
a)Die Beschleunigung des Blockes sei xB = a. Geben Sie die Schwerpunktsbeschleunigungder Walze xW an unter der Annahme, dass die Walze rollt. Wie groß muss µ0 minde-stens sein, damit die Walze rollen kann? Die Konstante a soll hier nicht weiter spezifiziertwerden.
xW =2
3a µ0 =
| sin(α)− 1 + 5a3g|
cosα
b)Berechnen Sie die Beschleunigung des Blocks xB unter der Annahme, dass die Walze rollt.
xB = a = g3− 2 sin(α)
5

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 5 (Seite 2 von 2)
c)Unter der Annahme, dass der Aufstandspunkt der oben gezeichneten Walze herabgleitet,tragen Sie die an der Walze wirkenden Krafte an.
α
S
mg T
N
d) Geben Sie die Komponenten der im Aufstandspunkt wirkenden Kraft an.
N = mg cos(α) T = µmg cos(α)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 6 (Seite 1 von 2)
Beim nebenstehenden System ist ein Gewichtdurch ein Seil mit einer Walze (Masse m2,Massentragheitsmoment bezuglich des Wal-zenschwerpunkts ΘS) verbunden, die auf ei-ner schiefen Ebene rollt. Seil und Umlenkrol-le seien masselos und es trete an der Umlen-krolle keine Reibung auf.
a)Bestimmen Sie die potentielle und kinetischeEnergie fur den Ausgangszustand sowie einenausgelenkten Zustand, wenn das System beientspannter Feder aus der Ruhe losgelassenwird. Das System befindet sich im Schwere-feld.
,xs
m1x1
α
m2ΘS
cr
S
g
ϕ
Ep0 = 0
Ek0 = 0
Ep(x1, xs) =x2sc
2−m2gxs sin(α) +m1gx1
Ek(x1, xs, ϕ) =Θsϕ
2
2+m2x
2s
2+m1x
21
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 6 (Seite 2 von 2)
b)Fur das unter Aufgabenteil a) zu sehende System sollen nun die Schwerpunktskoordinateder Walze xs(x1) fur die Anfangsbedingungen xs(t0) = x1(t0) = 0, die Winkelgeschwindig-keit der Walze ϕ(x1) sowie die Geschwindigkeit des Gewichtes x1(x1) angegeben werden:
xs(x1) =x12
ϕ(x1) =x12r
Gehen Sie davon aus, dass gilt: 12m1x
21 +m1gx1 = m2gxs sinα− 1
2ΘSϕ
2 − 12cxs
2 − 12m2x
2s
x1(x1) =
√x1
4m2g sin(α)/2− 8m1g − cx14m1 +Θs/r2 +m2
c)Ein als Massepunkt idealisierter Klotz rut-sche aus seiner Ruhelage in A eine raue Ebe-ne herab (Reibkoeffinzient µ), die gemaß Ab-bildung in eine glatte Kreisbahn einmundet.Der Massepunkt tritt im Punkt B horizontalaus der Bahn aus. Berechnen Sie die Aus-trittsgeschwindigkeit vB des als Massepunktidealisierten Klotzes. Das System befindetsich im Schwerefeld.
α
A
B3r
rr
rau (µ > 0)
glatt (µ = 0)
g
vB(r, α) =√
2rg (3 sin(α)− (3µ+ 1) cos(α) + 1) fur 0 < α <π
2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 7 (Seite 1 von 4)
a)Nebenstehender Rahmen, bestehend auszwei fest miteinander verbundenen Balken(Lange l, Biegesteifigkeit EI = const), ist inden Punkten A, B und C gelenkig gelagertund wird mit einer konstanten Streckenquer-last q belastet.
A B
C
l
l
x1
x2
z1
z2
q
Ist das System einfach statisch bestimmt oder statisch unbestimmt?
Das System ist statisch unbestimmt.
Zeichnen Sie das Freikorperbild.
AV
BH
BV
CH
q

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 7 (Seite 2 von 4)
Stellen Sie die Gleichgewichtsbedingungen auf.
∑FH = 0 = CH − BH
∑FV = 0 = AV +BV − ql
∑MB = 0 = CH l +
ql2
2−AV l
Die Auflagerkraft in C sei gegeben mit CH = 116ql (in positiver z1−Richtung). Bestim-
men Sie unter Verwendung der angegebenen Koordinaten den Momentenverlauf fur beideAbschnitte des Rahmens und stellen Sie ihn graphisch dar.
My(x1) = −qlx116
fur 0 ≤ x1 ≤ l
My(x2) = −ql2
16
(8(x2l
)2− 9
x2l+ 1
)fur 0 ≤ x2 ≤ l
A B
C
x1
x2
z1
z2 (−)
(−) (+)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 7 (Seite 3 von 4)
b)Ein statisch unbestimmtes Rahmensystem aus fest miteinander verbundenen Balken (Lan-ge a, Biegesteifigkeit EI = const) wird mit einer Einzelkraft F belastet. Die Biegemo-mentenverlaufe in den einzelnen Teilabschnitten wurden zu
My(x1) = CV x1 fur 0 ≤ x1 ≤ a
My(x2) = Fx2 fur 0 ≤ x2 ≤ a
My(x3) = (F − CV )a fur 0 ≤ x3 ≤ a
My(x4) = CV (a+ x4)− F (a− x4) fur 0 ≤ x4 ≤ a
bestimmt, wobei CV die noch unbekannte Reaktionskraft in C darstellt.
a
aa
a
C
B
F
x1 x2x3
x4
z1 z2
z3
z4
Vervollstandigen Sie das Freikorperbild.
CV F
MB
BV
BH

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 7 (Seite 4 von 4)
Bestimmen Sie unter Verwendung der Gleichgewichtsbedingungen und des Satzes vonCastigliano die Auflagerreaktionen in B und C.
BV =16
11F
MB =10
11Fa
CV =5
11F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 8 (Seite 1 von 3)
a)Das dargestellte System besteht aus einem vertikalen und durch die Kraft F belastetenStab der Lange l und Biegesteifigkeit EI, welcher am unteren Ende eingespannt ist. Zu-satzlich wird dieser Stab am oberen Ende durch eine angelenkte horizontale Pendelstutze
der Dehnsteifigkeit EA stabilisiert.
l
F
Schatzen Sie die Knicklast des vertikalen Stabs ab, indem Sie eine untere und obereSchranke fur diese angeben.
π2EI
4l2≤ Fkrit ≤ (1.43)2
π2EI
l2
Hinweis: Betrachten Sie zur Losung extremale Werte fur die Dehnsteifigkeit EA deshorizontalen Stabs und die daraus resultierenden Euler-Falle.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 8 (Seite 2 von 3)
b)Der hier gegebene und wie dargestellt gelagerte, druckbelastete Stab soll hinsichtlich sei-ner Tragfahigkeit uberpruft werden. Dazu ist ein Spannungsnachweis sowie ein Nach-weis gegen Knicken erforderlich. Der Stab weist die Biegesteifigkeit EI und die Quer-schnittflache A auf, das verwendete Material habe eine zulassige Normalspannung σzul.
l
F
Geben Sie die Bedingung fur die Lange l an, bei der ein Knicken des Stabs vor demVersagen des Materials durch Uberschreitung der maximal zulassigen Normalspannungauftritt.
l2 >π2EI
σzulA

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 8 (Seite 3 von 3)
c)Fur die konstruktive Ausbildung eines druckbeanspruchten und damit knickgefahrdetenBauteils stehen zwei Querschnitte mit identischem Flacheninhalt zur Wahl. Der quadra-tische Hohlquerschnitt weist eine außere Kantenlange a =
√π r sowie eine innere b = κ a
auf. Der alternative Rohrquerschnitt ist durch die Radien ra = r und ri = κ r definiert.Fur den Skalierungsparameter gilt 0 < κ < 1.
rira
a
b
Geben Sie zunachst das Flachentragheitsmoment beider Querschnitte (quadratischer Hohl-querschnitt 2 und Rohrquerschnitt ©) in Abhangigkeit von r und κ an.
I2
y = (1− κ4)π2r4
12
I©y = (1− κ4)πr4
4
Bestimmen Sie das Verhaltnis der kritischen Lasten (F2
krit/F©krit), die sich fur die beiden
unterschiedlichen Querschnitte ergeben. Geben Sie das Ergebnis entweder als exakten odereinen auf drei Nachkommastellen gerundeten Wert an.
F2
krit
F©krit
=π
3
Welcher Querschnittsform ware demnach im Allgemeinen der Vorzug zu geben?
dem quadratischen Querschnitt

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 9 (Seite 1 von 3)
a)Ein linear elastischer Stab mit einem kreisformigen Querschnitt (Radius r = 10mm) er-fahrt ein Torsionsmoment T = 80Nm und wird zudem durch eine Kraft F = 20 kN inx-Richtung belastet. Der Stab ist an einem Ende fest eingespannt.
Bestimmen Sie die Normalspannung σxx und die maximale im Querschnitt auftretendeSchubspannung τmax und geben Sie diese mit Einheiten an.
σxx = 63, 66MPa
τmax = 50, 93MPa
x 2 rF T

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 9 (Seite 2 von 3)
b)In einem Punkt eines Bauteils herrsche der an dem Flachenelement dargestellte, ebeneSpannungszustand.
20MPa20MPa
30MPa
30MPa
50MPa
50MPa
50MPa
50MPa
x
y
Zeichnen Sie fur diesen Spannungszustand den Mohrschen Spannungskreis. Tragen Siedazu die Achsenbeschriftungen sowie einen Maßstab fur die Spannungen in die Vorlageein.
50
20-30
τmax = 56MPa10 MPa
51-61
2ϕH = tan−1(5025) ≃ 63, 4

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 9 (Seite 3 von 3)
Geben Sie ausgehend von dem Mohrschen Spannungskreis die Hauptnormalspannungenσ1, σ2 sowie den Winkel ϕH an, unter dem die Hauptspannungen auftreten. BestimmenSie zudem die maximal mogliche Schubspannung τmax. Alle Werte sind dabei mit denjeweiligen Einheiten anzugeben.
σ1 = 51MPa
σ2 = −61MPa
ϕH = 31, 7
τmax = 56MPa
c)Der Spannungszustand eines Bauteils in einem bestimmten Punkt sei durch die folgendenKomponenten bezuglich des x− y−Koordinatensystems gegeben.
[σxx σxyσyx σyy
]=
[15 2020 10
]MPa
Berechnen Sie die Spannungen in einem Schnitt unter ϕ = 45 zur x−Achse und tragenSie diese in die Abbildung unter Angabe der Einheiten ein.
y
x
2, 5MPa
2, 5MPa2, 5MPa
2, 5MPa
32, 5MPa
32, 5MPa
7, 5MPa
7, 5MPa
45

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 10 (Seite 1 von 2)
Das dargestellte System besteht aus zwei masselosen Stangen, welche in den Punkten Bund C gelagert und im Punkt G durch ein Gelenk verbunden sind. Auf die Mittelpunkteder Stangen wirkt eine Feder (Federsteifigkeit c). Im Punkt B ist ein Seil angebracht,welches uber eine Umlenkrolle im Punkt A gefuhrt und an seinem anderen Ende mit einerMasse m verbunden ist. Weiterhin wirkt im Punkt G eine Kraft F . Die Lage der Stan-gen wird durch den Winkel ϕ, die Lage der Masse durch die Koordinate x beschrieben.
G
CA B
l2
l2
x
ϕ
m
c
g
F
a)Bestimmen Sie die potentielle Energie der Feder in Abhangigkeit vom Winkel ϕ. Die Federsei fur ϕ = 30 entspannt.
EFpot(ϕ) =
1
2cl2(1
2− sin(ϕ)
)2
b)Bestimmen Sie die potentielle Energie der Masse m in Abhangigkeit von der Auslenkungx. Hierbei gelte Em
pot(x = 0) = 0.
Empot(x) = −mgx

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 10 (Seite 2 von 2)
c)Geben Sie nun die Auslenkung x der Masse m in Abhangigkeit vom Winkel ϕ an. Es geltex(ϕ = 30) = 0.
x(ϕ) = l(2 sin(ϕ)− 1)
d)Geben Sie die Beziehung fur die virtuelle Arbeit der Kraft F an.
δW F = F l cos(ϕ)δϕ
e)Geben Sie nun die generalisierte Kraft Qϕ an. Arbeiten Sie hierbei mit den allgemei-nen Ausdrucken EF
pot(ϕ), Empot(x), x(ϕ), δϕ. Die virtuelle Arbeit der Kraft F sei durch den
Ausdruck δW F = QFϕ δϕ bestimmt.
Qϕ = −∂EF
pot(ϕ)
∂ϕ−∂Em
pot(x)
∂x
∂x(ϕ)
∂ϕ+QF
ϕ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 11 (Seite 1 von 2)
Zwei homogene, starre Stangen (Masse mbzw. 2m, Lange l bzw. 2l) sind uber eineDrehfeder (Drehfederkonstante k) gelenkigmiteinander verbunden. Der Geschwindig-keitsproportionale Dampfer hat die Dampfer-konstante d. Die Bewegung des Systems imSchwerefeld (Erdbeschleunigung g) soll mitHilfe der Koordinate ϕ beschrieben werden.Fur ϕ = 0 ist die Drehfeder entspannt.
d
k
m, l
2m, 2l
g
ϕϕ
a)Bestimmen Sie fur beliebige Werte des Winkels ϕ die kinetische Energie Ekin, die po-tentielle Energie Epot, die Dampferkraft FD und die virtuelle Arbeit der DampferkraftδWD.
Ekin =1
2ml2ϕ2
(3 + 2 sin2(ϕ)
)
Epot =5
2mgl sin(ϕ) + 2kϕ2
FD = −2dlϕ cos(ϕ)
δWD = FD2l cos(ϕ)δϕ = −4dl2ϕ cos2(ϕ)δϕ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 11 (Seite 2 von 2)
b)Bei Vernachlassigung der Erdbeschleunigung und unter der Annahme kleiner Auslenkun-gen aus der Gleichgewichtslage ϕ = 0 (|ϕ| ≪ 1) gelten folgende Naherungsausdrucke furkinetische Energie, potentielle Energie und die virtuelle Arbeit der Dampferkraft:
Ekin =3
2ml2ϕ2, Epot = 2kϕ2, δWD = −4dl2ϕ δϕ.
Ausgehend von diesen Ausdrucken werten Sie die Lagrangesche Gleichung aus und gebenSie die linearisierte Bewegungsgleichung an.
ϕ+4d
3mϕ+
4k
3ml2ϕ = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 12 (Seite 1 von 2)
Eine homogene, starre Stange (Masse 2m,Lange 2l) ist an einem Ende gelenkig gela-gert und am anderen Ende uber eine Drehfe-der (Drehfederkonstante k) gelenkig mit ei-ner homogenen, starren Kreisscheibe (Radi-us l, Masse m) verbunden. Die Koordinateq1 beschreibt die Verdrehung der Stange ge-genuber einer raumfesten Richtung, die Ko-ordinate q2 misst die Verdrehung der Scheiberelativ zur Stange. Fur q2 = 0 ist die Drehfe-der entspannt.
M(t)
2m, 2lq1
q2
m, l
k
a)Berechnen Sie die kinetische Energie Ekin, die potentielle Energie Epot sowie die Massen-und Steifigkeitsmatrix M und C des Systems.
Ekin = ml2(43
12q1
2 +1
2q1q2 +
1
4q2
2
)
Epot =1
2kq22
M =ml2
6
(43 33 3
)C = k
(0 00 1
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Fruhjahr 2010
Aufgabe 12 (Seite 2 von 2)
b)Geben Sie den Vektor Q = [Q1, Q2]
T der generalisierten Krafte infolge des an der Stangewirkenden Momentes M(t) (s. Abb.) an.
Q = [M(t), 0]T
c)Fur ein anderes System seien die Massenmatrix M und Steifigkeitsmatrix C zu
M = m
(1 00 2
), C = c
(1 11 3
)
bestimmt worden. Bestimmen Sie die Eigenkreisfrequenzen ω1 und ω2 dieses Systems.
ω1 =√0.5c/m ω2 =
√2c/m

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 1 (Seite 1 von 2)
Ein im Schwerefeld (Erdbeschleunigung g)reibungsfrei vertikal gefuhrter Block (Mas-se M) soll durch einen unter dem Winkel αzur Horizontalen reibungsfrei gefuhrten Keil(Masse m) fixiert werden. Der Haftreibungs-koeffizient zwischen Block und Keil ist µ0.
mM
α
µ0
g
a)Zwischen Keil und Block wirken die Normalkraft N und die Haftreibungskraft H . WelcheBedingung muss fur diese Krafte gelten, damit sich das System im Gleichgewicht befindenkann?
|H| ≤ µ0N
b)Erzeugen Sie fur das oben stehende System ein vollstandiges Freikorperbild.
Mg
mgN
N
HH
c)Bestimmen Sie die Betrage der zwischen Keil und Block wirkenden Krafte.
H =Mg (1)
N = (Mg +mg) tanα (2)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 1 (Seite 2 von 2)
d)Fur welche Werte des Winkels α kann sich das System unabhangig von der Masse desBlockes im Gleichgewicht befinden?
arctan1
µ0≤ α (3)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 2 (Seite 1 von 2)
Eine homogene Scheibe (Masse m) mit dennebenstehend angegebenen Abmessungen istim Schwerefeld (Erdbeschleunigung g) aneinem homogenen Stab (Lange l, Elastizi-tatsmodul E, Dichte ρ, QuerschnittsflacheA, Warmeausdehnungskoeffizient α) aufge-hangt. Der Stab wird durch eine linear veran-derliche Temperaturanderung mit den Wer-ten ∆T1 bzw. ∆T2 an den Stabenden bean-sprucht.
∆T1
∆T2
l, EA, α
x
a
3a3a3a
2a
2a
m g
a)Die Scheibe ube auf das untere Stabende eine Zugkraft S aus. Geben Sie die Differenti-algleichung fur den Dehnstab unter Verwendung der vorgegebenen Koordinate x an. DieKraft S soll hier nicht weiter spezifiziert werden!
u′(x) =S + ρAg(l − x)
EA+ α
(∆T1 +
∆T2 −∆T1l
x
)
b)Fur den Spezialfall einer konstanten Temperaturanderung (∆T1 = ∆T2) und einer ver-nachlassigbaren Stabmasse (ρA = 0) geben Sie die Verschiebung des unteren Stabendesin Abhangigkeit von S und ∆T1 an.
u(l) =
(S
EA+ α∆T1
)l
Es soll nun die Kraft S zwischen Stab und Scheibe ermittelt werden.
c)Sei d der horizontale Abstand zwischen dem Festlager und dem Schwerpunkt der Scheibe.Geben sie die Kraft S in Abhangigkeit von d an.
S =mgd
6a

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 2 (Seite 2 von 2)
d)Bestimmen Sie den horizontalen Abstand zwischen dem Festlager und dem Schwerpunktder Scheibe ausgehend von den in der oberen Abbildung angegebenen Abmessungen.Runden Sie nach der zweiten Stelle hinter dem Komma.
d =55
23a ≈ 2, 39a

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 3 (Seite 1 von 3)
Bekanntermaßen lasst sich die Durchbiegung eines Balkens aus dem Biegemomentenver-lauf berechnen. Geben Sie die entsprechende Formel an.
w′′(x) = −My(x)
EIy
a)Der nebenstehende Balken wird durch einekonstante Streckenquerlast q0 und eine Ein-zelkraft F wie dargestellt belastet.
l2l
Fq0
x
z
A B
Tragen Sie die in den Punkten A und B wirkenden Lagerkrafte an.
Fq0
xyA
AB
Geben Sie die Werte der Lagerkrafte an.
Ax = 0 Ay = q0 l −1
2F
B = q0 l +3
2F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 3 (Seite 2 von 3)
Bestimmen Sie den Momentenverlauf im Balken infolge der dargestellten Beanspruchungunter Verwendung des vorgegebenen Koordinatensystems.
My(x) =12q0 x (2 l− x)− 1
2F x fur 0 ≤ x ≤ 2l
My(x) = −F (3 l− x) fur 2l ≤ x ≤ 3l
b)Fur das nebenstehende System wurde dieFunktion des Biegemomentes zu
My(x) =q0lx
6
(1− x2
l2
)
bestimmt.l
q0
x
zEI = const
Berechnen Sie die Funktion der Durchbiegung w(x) des elastischen Balkens (Biegesteifig-keit EI) zunachst in Abhangigkeit von den Integrationskonstanten C1 und C2.
w(x) = 1EIy
(1
120q x5
l− 1
36q l x3
)+ C1 x+ C2
Geben Sie die Randbedingungen zur Bestimmung dieser Integrationskonstanten an.
w(x = 0) = 0 , w(x = l) = 0
Bestimmen Sie die Werte der Integrationskonstanten.
C1 =7
360q l3
EIy
C2 = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 3 (Seite 3 von 3)
c)Ein links eingespannter und rechts durch einLager gestutzter elastischer Balken ist wiedargestellt belastet.
l l
q0
xz
Geben Sie alle zur Bestimmung der Funktion der Durchbiegung w(x) notwendigen Rand-und Ubergangsbedingungen unter Verwendung des vorgegebenen Koordinatensystems an.
w1(x = 0) = 0
w′1(x = 0) = 0
w1(x = l) = w2(x = l)
w′1(x = l) = w′
2(x = l)
w2(x = 2 l) = 0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 4 (Seite 1 von 2)
Ein Endpunkt einer starren Stange (Lange2r) ist mit einem starren Rad (Radius r) amRadumfang im Punkt A gelenkig verbunden.Das andere Stangenende (Punkt B) wird iny-Richtung gefuhrt. Das Rad rollt auf derUnterlage mit einer konstanten Geschwindig-keit v0ex des Radmittelpunktes.
a)Konstruieren Sie im nebenstehenden Bild dieLage des Momentanpols der Stange. Zeich-nen Sie die fur die Konstruktion benotigtenHilfsgeraden deutlich sichtbar ein!
x
y
ϕ
ψ
A
B M
v0
r
2r
ex
ey
b)Bestimmen Sie den Geschwindigkeitsvektor vA des Punktes A bezuglich des vorgegebenenKoordinatensystems in Abhangigkeit von v0 und dem Winkel ϕ.
vA = (v0 + rϕ cosϕ)ex − rϕ sinϕey
c)Geben Sie den Winkel ϕ in Abhangigkeit von v0 und der Zeit t an fur die Anfangsbedin-gung ϕ(t = 0) = 0.
ϕ(t) = v0rt
d)Bestimmen Sie den Winkel ψ in Abhangigkeit von dem Winkel ϕ fur die Anfangsbedin-gungen ϕ(t = 0) = 0, ψ(t = 0) = 0.
ψ(ϕ) = arcsin(12(ϕ+ sinϕ)
)

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 4 (Seite 2 von 2)
e)Der Ortsvektor des Punktes B ist gegeben durch
rB = r(cosϕ+ 2 cosψ)ey.
Geben Sie den Geschwindigkeitsvektor des Punktes B bezuglich des vorgegebenen Koor-dinatensystems an.
vB = r(− sinϕ ϕ− 2 sinψ ψ)ey
f)Geben Sie den Ortsvektor rM des Momentanpols der Stange in Abhangigkeit von ϕ undψ bezuglich des vorgegebenen Koordinatensystems an.
rM = 2r(sinψ + cosψ r sinϕ
r+r cosϕ
)ex + (r cosϕ+ 2r cosψ)ey

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 5 (Seite 1 von 3)
Das nebenstehende System bestehend aushomogenen, starren Korpern, die durchdehnstarre Seile miteinander verbunden sind,befindet sich im Schwerefeld (Erdbeschleuni-gung g). Die abgesetzte Rolle (Innneradius r,Außenradius R) stutzt sich auf einer Unterla-ge ab. Der Gleitreibungskoeffizient zwischenRolle und Unterlage ist µ.
r
rrR
gϕ1
ϕ2
ϕ3
x3
x4
µ
a)Erzeugen Sie fur die freigeschnittene abgesetzte Rolle ein vollstandiges Freikorperbildunter der Annahme, dass die Rolle in positiver Richtung der Koordinate ϕ2 rotiert. TragenSie die Gleitreibungskraft nach Richtung und Betrag in Abhangigkeit von der Normalkraftan. Die Masse der abgesetzten Rolle sei M , das Massentragheitsmoment bezuglich desSchwerpunkts ΘM .
S1
M g
S2µN
N
b)Erzeugen Sie fur die freigeschnittene vertikal gefuhrte Rolle ein vollstandiges Freikorper-bild. Die Masse der Rolle sei m.

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 5 (Seite 2 von 3)
S2mg S3
S4
M3
c)Geben Sie die Impulsbilanz fur diese Rolle bezuglich der vertikalen Richtung unter Ver-wendung der vorgegebenen Schwerpunktskoordinate x3 an.
∑Fx3 = S4 +mg − S2 − S3 = mx3
d)Geben Sie die Drehimpulsbilanz fur diese Rolle bezuglich ihres Schwerpunktes unter Ver-wendung der vorgegebenen Koordinate ϕ3 zur Beschreibung der Orientierung der Rollean. Das Massentragheitsmoment ist in Abhangigkeit von der Masse m und dem Radius rder Rolle zu bestimmen.
∑M (S3) = S3 r − S2 r =
12mr2 ϕ3
e)Geben Sie die Drehimpulsbilanz fur diese Rolle bezuglich ihres Momentanpols unter Ver-wendung der vorgegebenen Koordinate ϕ3 an. Das Massentragheitsmoment ist in Abhan-gigkeit von der Masse m und dem Radius r der Rolle zu bestimmen.
∑M (M3) = −S2 r + (S4 +mg) r = 3
2mr2 ϕ3
f)Ermitteln Sie die kinematischen Bindungen fur das Gesamtsystem und geben Sie diesein Abhangigkeit von der Winkelgeschwindigkeit ϕ1 an. Die Seile sind zu jedem Zeitpunktgespannt und werden auf die Rollen aufgerollt.
ϕ2(ϕ1) =rRϕ1

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 5 (Seite 3 von 3)
ϕ3(ϕ1) = − r2R
ϕ1
x3(ϕ1) = − r2
2Rϕ1
x4(ϕ1) = − r2
2Rϕ1
g)Die Bewegungsgleichung des Systems kann in der Form x4 = a mit einer Konstatena angegeben werden. Geben Sie das Weg-Zeit-Gesetz x4(t) zu den Anfangsbedingungenx4(t = 0) = x0 und x4(t = 0) = x0 an.
x4(t) =12a t2 + x0 t+ x0

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 6 (Seite 1 von 2)
Eine homogene, starre Scheibe (Masse mS,Massentragheitsmoment ΘS bezuglich desSchwerpunktes, Radius r) ist in ihremSchwerpunkt mit einer homogenen, starrenFuhrung (Masse mF , Massentragheitsmo-ment ΘF bezuglich des Schwerpunktes, Lan-ge 2L) drehbar verbunden und federnd ge-stutzt (Federsteifigkeit c). Die Lange der ent-spannten Feder ist h. Die Scheibe wird inder Fuhrung reibungsfrei gefuhrt und rollt imSchwerefeld (Erdbeschleunigung g) auf derUnterlage ab.
ϕ
r mS, ΘS
mF , ΘF
g
h
a)Sei vS die Schwerpunktsgeschwindigkeit der Scheibe, ψ die Winkelgeschwindigkeit derScheibe, vF die Schwerpunktsgeschwindigkeit der Fuhrung und ϕ die Winkelgeschwin-digkeit der Fuhrung. Geben Sie die kinetische Energie des Systems in Abhangigkeit vonvS, ψ, vF , ϕ an.
Ekin(vS, ψ, vF , ϕ) =12
[ΘSΨ
2 +mSv2S +ΘFϕ
2 +mFv2F
]
b)Geben Sie die potentielle Energie des Systems in Abhangigkeit von dem Winkel ϕ an,wenn Epot(ϕ = π
2) = 0 gelten soll.
Epot(ϕ) =12c(h( 1
sinϕ− 1))2 −mFgL(1− sinϕ)
c)Wie groß ist die Winkelgeschwindigkeit ϕ in der Lage ϕ = π
2, wenn sich das System in der
Lage ϕ = ϕ0 6= π2aus der Ruhe heraus in Bewegung setzt? Verwenden Sie als kinematische
Bindungen folgende Beziehungen: vS = aϕ, ψ = λϕ, vF = bϕ.
ϕ(ϕ = π2) =
√c(h(2/
√2−1))2−2mFgL(1−
√2/2))
ΘSλ2+mSa2+ΘF+mFb2

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 6 (Seite 2 von 2)
d)Bestimmen Sie nun vS, ψ, vF , in Abhangigkeit von ϕ, ϕ und geben Sie sie dem Betragenach an.
|vS(ϕ)| = hϕ(1 + cot2 ϕ) = hϕsin2 ϕ
|ψ(ϕ)| = hrϕ(1 + cot2 ϕ)
|vF (ϕ)| = Lϕ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 7 (Seite 1 von 2)
a)Ein Balken (Lange 3l) wird durch eine Fe-der (Federsteifigkeit c) gestutzt. Geben Siedie Verschiebung des Balkens an der Stellex = 2l an, wenn der Balken durch eine vonNull auf q0 linear ansteigende Streckenquer-last wie dargestellt belastet wird.
l2l
c
q0
x
z
w(2l) = 23cq0L
Bestimmen Sie den Momentenverlauf im Balken infolge dieser Belastung unter Verwen-dung des vorgegebenen Koordinatensystems.
My(x) = −16q0Lx fur 0 ≤ x ≤ 2l
My(x) =16q0Lx3 − q0x
2 + 32q0xL fur 2l ≤ x ≤ 3l
b)Fur den nebenstehenden durch eine Kraft Fbelasteten Balken (Lange 3l, BiegesteifigkeitEI) ist der Biegemomentenverlauf durch
My(x) = −F2x fur 0 ≤ x ≤ 2l
My(x) = F (x− 3l) fur 2l ≤ x ≤ 3l
l2l
F
x
z
EI = const
gegeben. Stellen Sie den Momentenverlauf grafisch dar.
−Fl
3l2l
My(x)
x

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 7 (Seite 2 von 2)
Mit Hilfe des Satzes von Castigliano bestimmen Sie die Durchbiegung des Balkens imAngriffspunkt der Kraft F .
w(3l) = FL3
EI
Es soll nun die Verdrehung des Querschnittes an der Stelle x = 3l mit Hilfe des Satzesvon Castigliano ermittelt werden. Stellen Sie den Momentenverlauf My(x) infolge derBelastung durch eine geeignete
”1“-Große grafisch dar.
1
3l2l
My(x)
x
Geben Sie die Verdrehung des Endquerschnittes an.
ϕ(3l) = −76F l2
EI

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 8 (Seite 1 von 2)
a)In einem Punkt eines Bauteils herrsche deram nebenstehenden Volumenelement darge-stellte ebene Spannungszustand.
x
y
90 MPa90 MPa
60 MPa
60 MPa
60 MPa
60 MPa
Zeichnen Sie fur diesen Spannungszustand den Mohrschen Spannungskreis.
10MPa
(−90/60)
(0/−60)
R
M0
2
σ
τ
σ1σ2
τmax
2ϕH
60
Ausgehend von dem Mohrschen Spannungskreis geben Sie die Hauptspannungen σ1, σ2sowie den Winkel ϕH , unter dem die Hauptspannungen auftreten, an.
σ1 = 30MPa
σ2 = −120MPa
ϕH = 63, 44

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 8 (Seite 2 von 2)
Ausgehend von dem Mohrschen Spannungskreis tragen Sie am unten stehenden um ϕ =30 gedrehten Volumenelement die bei dieser Orientierung vorliegenden Zahlenwerte desSpannungstensors an.
x
y
30
−15, 53MPa
−15, 53MPa
−74, 46MPa
−74, 46MPa
68, 97MPa
b)In einem Bauteil liegt ein ebener Verzerrungszustand mit εxx = 10−5, εyy = 3 · 10−5 undεxy = εyx = −0.3 · 10−5 vor. Bestimmen Sie die Dehnung einer Faser in der Richtung, dieeinen Winkel von ϕ = 30 mit der x-Achse einschließt.
ε30 = 12, 4 · 10−6
Bestimmen Sie die Hauptdehnungen ε1 und ε2.
ε1 = 30, 44 · 10−6
ε2 = 9, 56 · 10−6
c)Gegeben sei ein ebener Verzerrungszustand mit εxx = 5 · 10−6, εyy = −5 · 10−6, εxy =εyx = 3 ·10−6 und der Hauptdehnung ε1 = 10−6 ·
√34. Bestimmen Sie die zu dieser Haupt-
dehnung gehorende Hauptdehnungsrichtung und geben Sie sie durch den entsprechendenEinheitsvektor n = (nx, ny)
T an.
nx = 0, 9637 ny = 0, 2669

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 9 (Seite 1 von 2)
Ein mit einer Kraft F belasteter Balken (Lange 2l) wird durch einen elastischen Stab(Elastizitatsmodul E) gestutzt. Der Winkel zwischen Balken und Stutzstab ist α.
α
Fx
ll
Querschnitt
di
da
a)Die Koordinate x gibt die Lage des Angriffspunktes der Kraft F an. Fur welchen Wertder Koordinate x = x wird der Stutzstab am starksten belastet und wie groß ist in diesemFall die Stabkraft S?
x = 2 l
S = 2Fsinα
b)Bei welcher Stabkraft Skrit kann der Stab erstmals knicken? Das Flachentragheitsmomentdes Stabquerschnittes sei I. (Der Wert des Flachentragheitsmomentes soll hier nicht weiterspezifiziert werden!)
Skrit =π2 E I cos2 α
l2
c)Bestimmen Sie das Flachentragheitsmoment fur den oben abgebildeten Stabquerschnittin Abhangigkeit von dem Außendurchmesser da fur da/di = 1, 5.
I = 655184
π d4a

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 9 (Seite 2 von 2)
d)Wie ist der Außendurchmesser da des Stabquerschnittes zu wahlen, wenn die vorliegendeStabkraft S hochstens 50% der kritischen Knicklast Skrit = λEI
l2betragen darf? Verwenden
Sie fur das Flachentragheitsmoment den Wert I = 0, 04d4a.
da ≥ 4
√50S l2
E λ

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 10 (Seite 1 von 2)
Der nebenstehende links eingespannte Tra-ger bestehend aus Staben mit kreisformigemQuerschnitt (Radius R) wird durch drei Ein-zelkrafte wie dargestellt belastet.
xy z
a bb
c
cF
2F
3F
a)Bestimmen Sie fur den in Richtung der x-Achse verlaufenden Stab die Funktionen desBiegemomentes um die y-Achse My(x), des Torsionsmomentes Mx(x) und der Querkraftin z-Richtung Qz(x).
My(x) = F (6x− 6a− b) fur 0 ≤ x ≤ a
My(x) = F (x− a− b) fur a ≤ x ≤ a + b
Mx(x) = −5Fb− 2Fc fur 0 ≤ x ≤ a
Mx(x) = Fc fur a < x ≤ a + b
Qz(x) = 6F fur 0 ≤ x ≤ a
Qz(x) = F fur a ≤ x ≤ a + b

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 10 (Seite 2 von 2)
b)Fur speziell gewahlte Langen a, b und c ergibt sich fur den in Richtung der x-Achseverlaufenden Stab die Funktion des Biegemomentes zu
My(x) = F (6x− 7a) fur 0 ≤ x ≤ a
My(x) = F (x− 2a) fur a < x ≤ a + b
und die Funktion des Torsionsmomentes zu
Mx(x) = −5Fa fur 0 ≤ x ≤ a
Mx(x) = 0 fur a < x ≤ a+ b.
Wie ist der Radius R des Querschnittes zu wahlen, wenn die Vergleichsspannung σv nachder Gestaltanderungsenergie-Hypothese die zulassige Spannung σzul an keiner Stelle diesesStabes uberschreiten darf? (Schubspannungen infolge Querkraft werden vernachlassigt.)
R ≥ 6
√1084 F 2a2
π2σ2zul
c)Die nebenstehende einseitig eingespannteWelle mit kreisformigem Querschnitt (Ra-dius R, Lange a + b, Schubmodul G) wirddurch ein an der Stelle x = a wirkendesTorsionsmoment MT1 und ein an der Stel-le x = a+ b wirkendes Torsionsmoment MT2
belastet. Geben Sie die Verdrehung des Quer-schnittes an der Stelle x = a+ b an.
a bx
MT1 MT2G
ϕ(a+ b) = 2GπR4 [MT2(a+ b)−MT1a]

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 11 (Seite 1 von 2)
Das nebenstehende System aus zwei starren,gelenkig miteinander verbundenen Stangenwird durch eine Kraft F belastet. Die imPunkt B wirkende Reaktionskraft soll mitHilfe des Prinzips der virtuellen Arbeit er-mittelt werden.
x
y
Fα
β
l1
l2
A
B
a)Sei δyA die virtuelle Verschiebung des An-griffspunktes der Kraft F in Richtung derKraft F und δxB die virtuelle Verschiebungder in x-Richtung wirkenden Komponenteder Reaktionskraft im Punkt B in Richtungdieser Kraft (vgl. nebenstehendes Bild). Ge-ben Sie die Kraftkomponente Bx in Abhan-gigkeit von F , δyA und δxB an.
F
δyA
δxBBx
Bx = − δyAδxB
F

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 11 (Seite 2 von 2)
b)Es soll nun die y-Komponente der Reaktionskraft im Punkt B ermittelt werden. Vervoll-standigen Sie das unten stehende Bild durch ein geeignetes Lager-Symbol und tragen Siedie Kraftkomponente By und die zugehorige virtuelle Verschiebung δyB an.
F
δyA
By
δyB
c)Geben Sie die virtuellen Verschiebungen δxB und δyB in Abhangigkeit von der virtuellenVerschiebung δyA und den Winkeln α und β an.
δxB = 1tanα
δyA
δyB = 1tanα tan β
δyA

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 12 (Seite 1 von 2)
Ein horizontal gefuhrter starrer Block (Masse M) ist durch eine Feder (Federsteifigkeit c)gestutzt und uber eine masselose, starre Stange (Lange L) mit einer weiteren in der Mittedrehbar gelagerten masselosen, starren Stange (Lange 2L) gelenkig verbunden. Am freienEnde der Stange mit der Lange 2L ist eine Punktmasse m angebracht. Die Bewegung desSystems soll im Folgenden unter Verwendung der Koordinate ϕ beschrieben werden.
L
LL
m
M
c
g
ϕ
a)Geben Sie die kinetische Energie des Blockes an.
EBkin = 2ML2ϕ2cos2(ϕ)
b)Geben Sie die kinetische Energie der Punktmasse an.
EPkin = 1
2mL2ϕ2
c)Geben Sie die potentielle Energie der Feder EF
pot an. Fur ϕ = 0 ist die Feder entspannt.
EFpot =2cL2sin2(ϕ)
d)Geben Sie die potentielle Energie der Punktmasse EP
pot an, wenn sich das System imSchwerefeld (Erdbeschleunigung g) befindet. Es soll EP
pot(ϕ = 0) = 0 gelten.
EPpot = mgL(1− cos(ϕ))

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 12 (Seite 2 von 2)
e)Die linearisierte Bewegungsgleichung des Systems hat die Form
(4M +m)Lϕ + (4cL+mg)ϕ = 0.
Geben Sie die Losung ϕ(t) dieser Bewegungsgleichung zu den Anfangsbedingungenϕ(t = 0) = 0 und ϕ(t = 0) = ϕ0 an.
ϕ(t) = ϕ0
ω0sin(ω0t); ω2
0 = 4cL+mg(4M+m)L

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 13 (Seite 1 von 2)
Eine homogene, starre Stange (Lange 2l,Masse m, Massentragheitsmoment Θ bezug-lich des Schwerpunktes) ist im Schwerefeld(Erdbeschleunigung g) an zwei gleichen Fe-dern (Federsteifigkeit c) wie dargestellt auf-gehangt und durch eine im Schwerpunkt derStange angreifende Kraft F (t) belastet. DasSystem soll unter Verwendung der vorgege-benen Koordinaten x zur Beschreibung derLage des Schwerpunktes und ϕ zur Beschrei-bung der Orientierung der Stange unter derAnnahme kleiner Auslenkungen analysiertwerden. In der gestrichelt gezeichneten Lageϕ = 0, x = 0 sind beide Federn entspannt.
ll
ϕ
F (t)
cc
x
m, Θ
g
a)
Bestimmen Sie die kinetische Energie des Systems fur Θ =ml2
3.
Ekin = 12mx2 + 1
6ml2ϕ2
b)Bestimmen Sie die potentielle Energie des Systems, wobei Epot = 0 fur x = 0 und ϕ = 0gelten soll.
Epot =12c(x− lϕ)2 + 1
2c(x+ lϕ)2 −mgx
c)Geben Sie die virtuelle Arbeit der Kraft F (t) an.
δA = F (t)δx

TU Dortmund
Fakultat Maschinenbau
Institut fur Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2009
Aufgabe 13 (Seite 2 von 2)
d)Fur ein anderes System soll gelten
Ekin =1
2mx2 + 2mxϕl sin(ϕ), Epot = c(x− 2lϕ)2, δA = F (t)(δx− δϕ
l
2).
Ausgehend von diesen Ausdrucken bestimmen Sie mit Hilfe der Lagrangeschen Gleichun-gen die Bewegungsgleichungen dieses Systems in den Koordinaten x und ϕ.
mx+ 2mlϕ sin(ϕ) + 2mlϕ2 cos(ϕ) + 2c(x− 2lϕ) = F (t)
2mxl sin(ϕ)− 4cl(x− 2lϕ) = −F (t) l2