Embed Size (px)
Citation preview

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Kraft/Momentregelung vonIndustrierobotern
Dipl.-Ing. Alexander WinklerProf. Dr.-Ing. Jozef Suchý
Technische Universität ChemnitzFakultät für Elektrotechnik und Informationstechnik
Professur Robotersysteme
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Grundgedanken zur Kraft/Momentregelung
Auf dem Gebiet der Kraft/Momentregelung (KM-Regelung) von stationären Roboter finden seit mehr als 20 Jahren umfangreiche Forschungsaktivitäten internationaler Institute statt.
Trotz der hohen Verbreitung von Robotern in der Industrie sind diese in den seltensten Fällen mit Kraft/Momentsensorik ausgerüstet.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Gründe für den mangelnden Einsatz vonKM-Regelungen sind u. A.:
Hoher Preis der Sensoren,
Oft unzureichende Einbindung des Sensors in die Robotersteuerung,
Widerspruch zwischen Forschungsergebnissen und Implementierung (Ebene der Einflussnahme).
Grundgedanken zur Kraft/Momentregelung
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Ziel dieses Vortrages
Aufzeigen der Möglichkeiten von KM-Regelung an3 unterschiedlichen Robotersystemen. Dazu zählen:
Beschreibung des Systemaufbaus,
Darstellung der Programmiermöglichkeiten,
Implementierung einer Beispielanwendungen,
Charakterisierung der Eigenschaften im Vergleich zu anderen Robotersystemen.

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 1 - Beschreibung
Roboter STÄUBLI RX90B mit Steuerung CS7B und6D-KMS von JR3 (Messbereich 200N/20Nm).
Der KMS wird über die dazugehörige VME-Buskarte und das Software-paket AdeptForce in die Steuerung integriert.

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Die Programmierung erfolgt in V+. Der Syntax ist ähnlich zu C oder Pascal mit zusätzlichen Kommandos für:
Robotersystem 1 - Programmierung
Positionsabfrage,
Bewegungsgenerierung und -parametrierung,
Koordinatentansformationen.
Durch das Softwarepaket AdeptForce stehen zusätzliche Befehle für den KMS zu Verfügung.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
V+ Beispielbefehle
Abfragen der aktuellen Position:here aktuelle_position
Auslesen der Messwerte des KMS:force.read (0) f[ ]
Starten einer Bewegung:move zielposition
MOVE übergibt die Zielposition an den Trajektoriengenerator, der eine ruckfreie Bewegung erzeugt. Er stellt die Sollwinkel für die Achsregler zur Verfügung.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 1 - Beispielanwendung
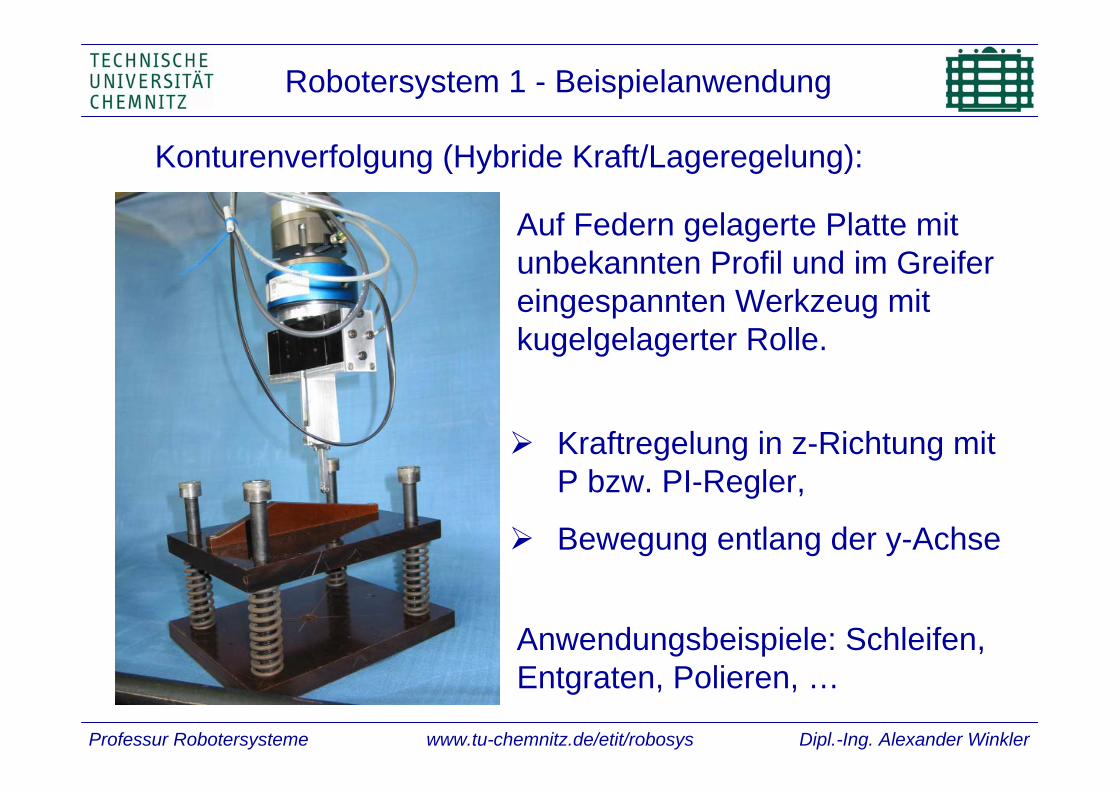
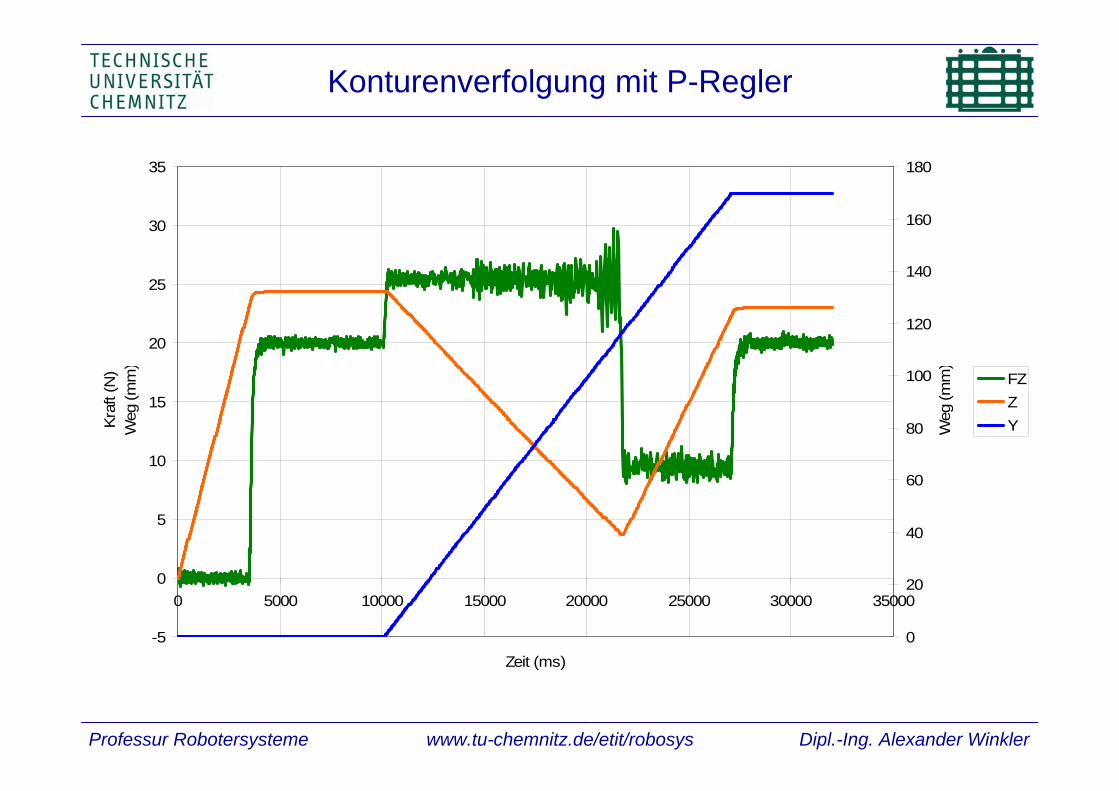
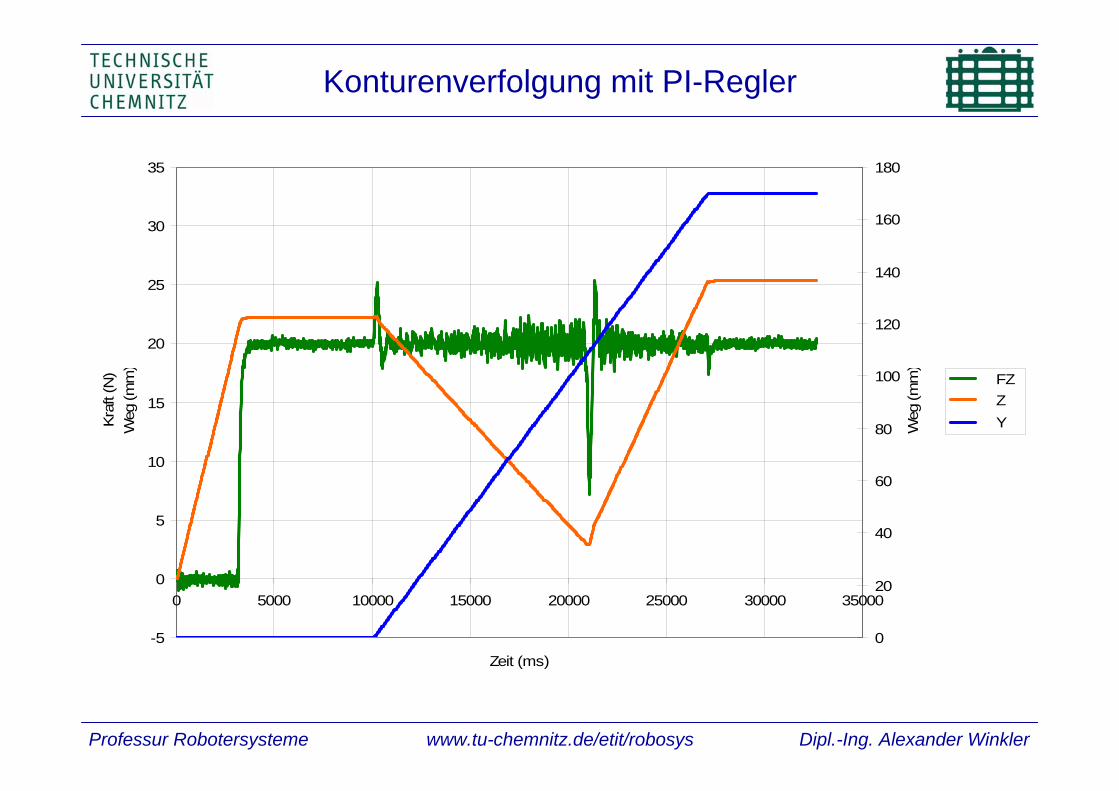
Konturenverfolgung (Hybride Kraft/Lageregelung):
Kraftregelung in z-Richtung mit P bzw. PI-Regler,
Bewegung entlang der y-Achse
Anwendungsbeispiele: Schleifen, Entgraten, Polieren, …
Auf Federn gelagerte Platte mit unbekannten Profil und im Greifer eingespannten Werkzeug mit kugelgelagerter Rolle.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Fzsoll∆Fz ∆zD z Fz
-
-z0
KzD
Regelstrecke
(z)GRobRegler
Robotersystem 1 - Beispielanwendung
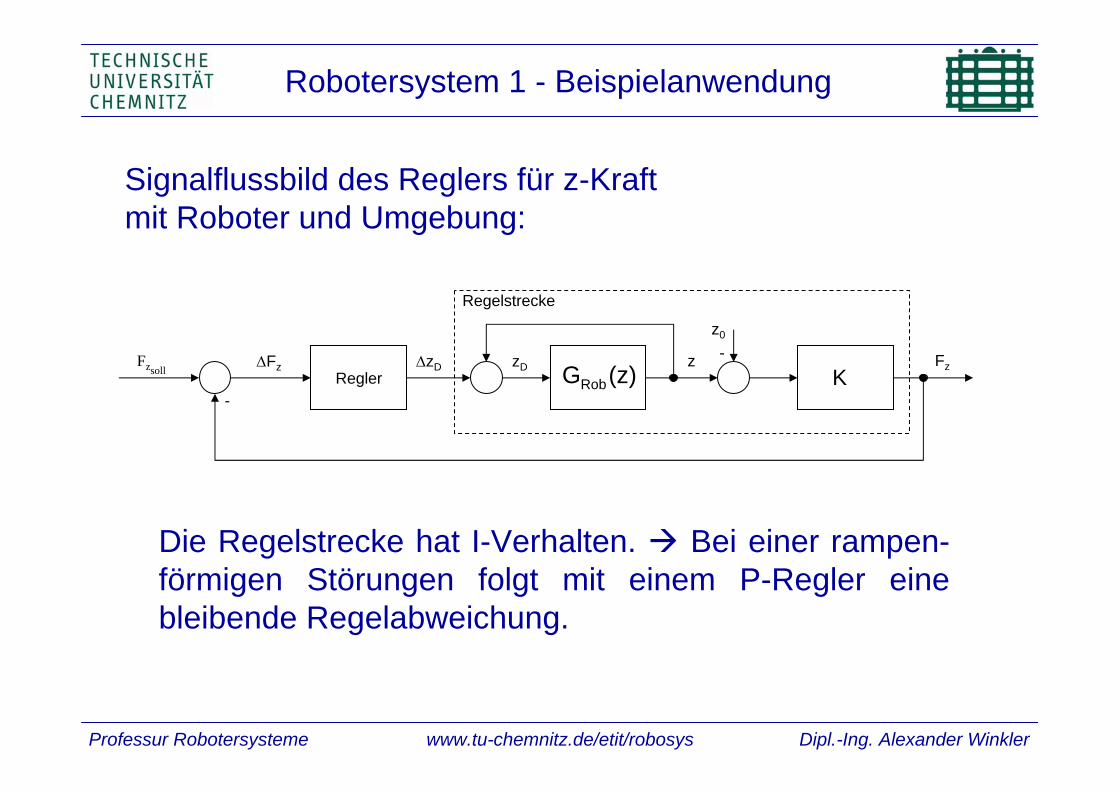
Signalflussbild des Reglers für z-Kraft mit Roboter und Umgebung:
Die Regelstrecke hat I-Verhalten. Bei einer rampen-förmigen Störungen folgt mit einem P-Regler eine bleibende Regelabweichung.

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Film - Konturenverfolgung mit STÄUBLI RX90B
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
-5
0
5
10
15
20
25
30
35
0 5000 10000 15000 20000 25000 30000 35000
Zeit (ms)
Kra
ft (N
)W
eg (m
m)
0
20
40
60
80
100
120
140
160
180
Weg
(mm
)
FZZY
Konturenverfolgung mit P-Regler
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Konturenverfolgung mit PI-Regler
-5
0
5
10
15
20
25
30
35
0 5000 10000 15000 20000 25000 30000 35000
Zeit (ms)
Kraf
t (N
)W
eg (m
m)
0
20
40
60
80
100
120
140
160
180
Weg
(mm
)
FZ Z Y

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 2 - Beschreibung
Roboter KUKA KR6/2 mit Steuerung KRC2 und6D-KMS von SCHUNK (Messbereich 660N/60Nm).
Der KMS wird über die dazuge-hörige ISA-Buskarte und das Soft-warepaket FTCtrl in die PC-basier-ende Robotersteuerung integriert.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
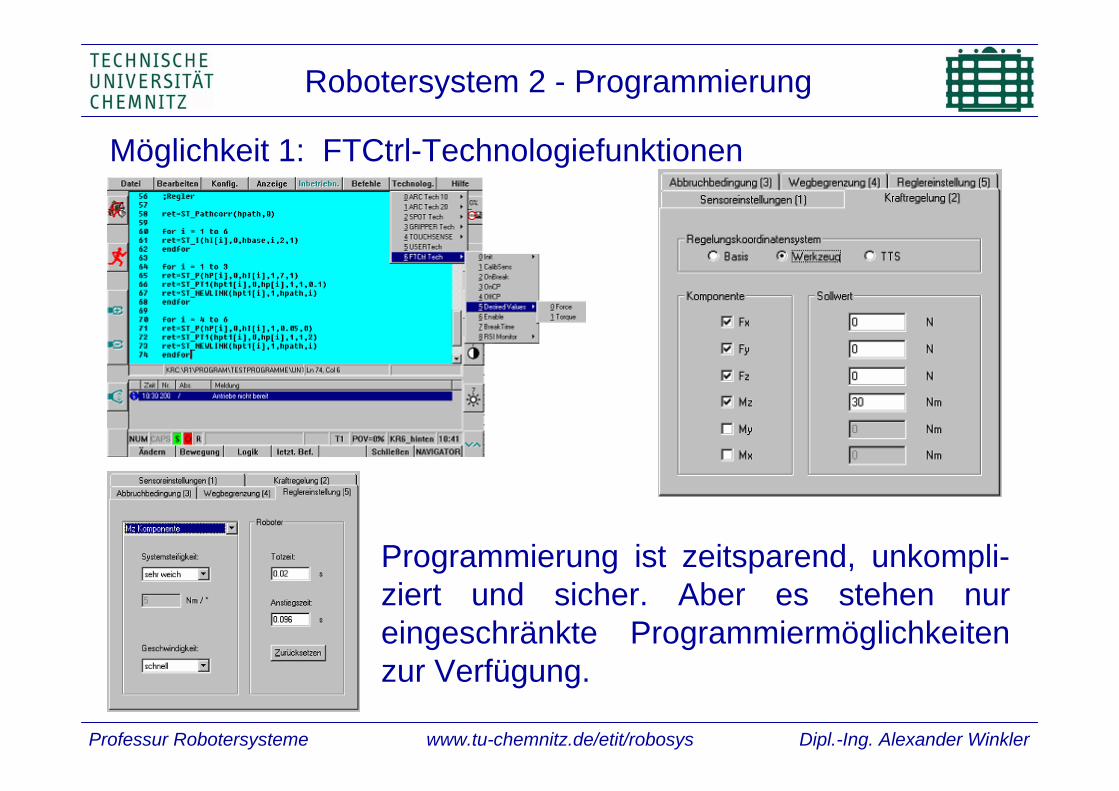
Robotersystem 2 - Programmierung
Möglichkeit 1: FTCtrl-Technologiefunktionen
Programmierung ist zeitsparend, unkompli-ziert und sicher. Aber es stehen nur eingeschränkte Programmiermöglichkeiten zur Verfügung.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
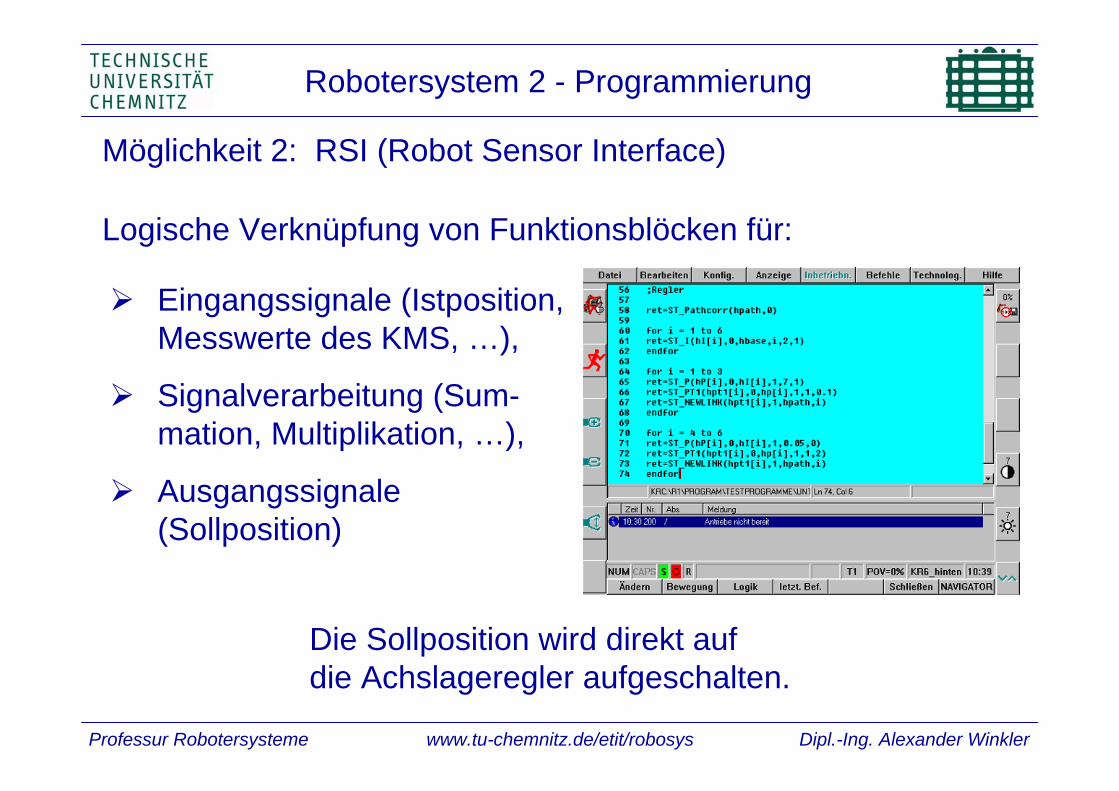
Robotersystem 2 - Programmierung
Möglichkeit 2: RSI (Robot Sensor Interface)
Logische Verknüpfung von Funktionsblöcken für:
Eingangssignale (Istposition, Messwerte des KMS, …),
Signalverarbeitung (Sum-mation, Multiplikation, …),
Ausgangssignale (Sollposition)
Die Sollposition wird direkt aufdie Achslageregler aufgeschalten.

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 2 - Beispielanwendung
Kraft/Momentgeregeltes Schrauben:
Anfädeln der Mutter auf dem Gewindebolzen mit einer in RSI programmierten Funktion,
Festschrauben der Mutter mittels Funktionen von FTCtrl.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Film: Kraft/Momentgeregeltes Schrauben

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 3 - Beschreibung
Roboter MANUTEC r3 mit WinDDC Mikrocontrollersteuerung und 6D-KMS von SCHUNK (Messbereich 660N/60Nm).
Von dem originalem Steuerschrank des Roboters wurden nur die Leitungsbau-gruppen beibehalten.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
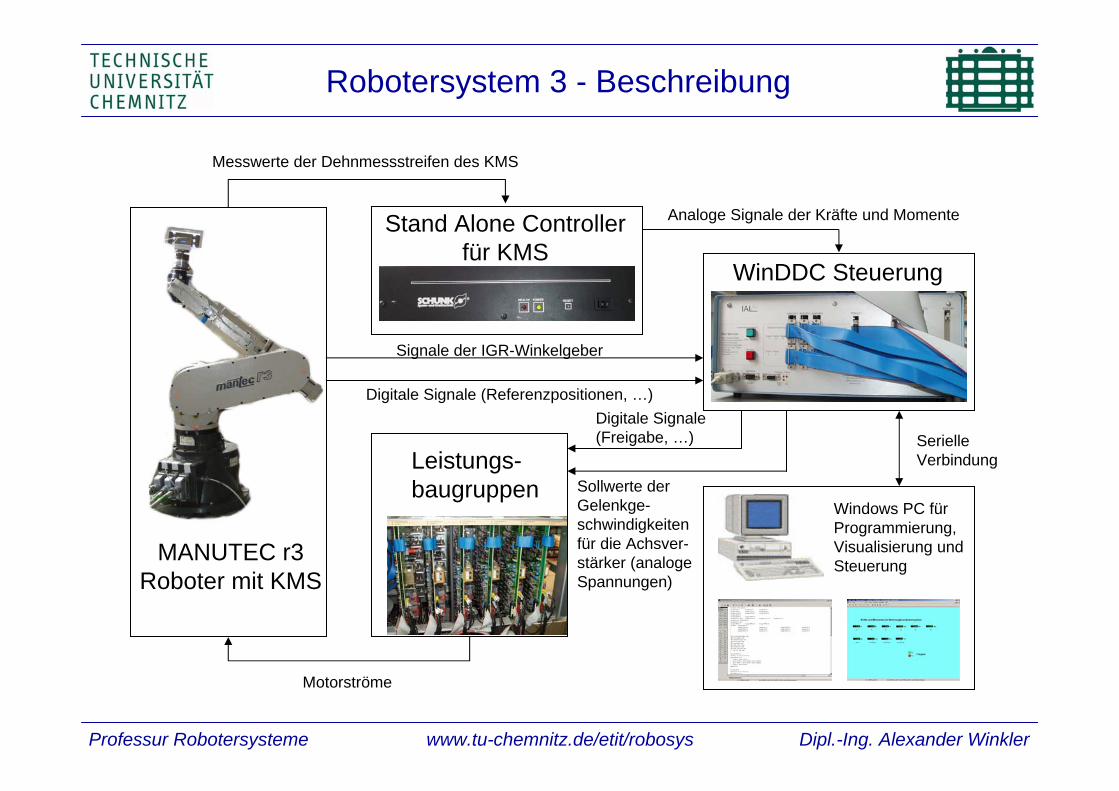
Robotersystem 3 - Beschreibung
MANUTEC r3 Roboter mit KMS
Leistungs-baugruppen
WinDDC Steuerung
Stand Alone Controllerfür KMS
Signale der IGR-Winkelgeber
Digitale Signale (Referenzpositionen, …)
Analoge Signale der Kräfte und Momente
Sollwerte der Gelenkge-schwindigkeitenfür die Achsver-stärker (analoge Spannungen)
Motorströme
Messwerte der Dehnmessstreifen des KMS
Digitale Signale(Freigabe, …) Serielle
Verbindung
Windows PC für Programmierung, Visualisierung und Steuerung
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 3 - Programmierung
Die Programmierung der WinDDC Mikrocontrollersteuerung erfolgt am PC mit der Sprache DDC. Sie besteht aus folgenden Funktionen:
Funktionen zur Abfrage und zum Ansteuern der Peripherie (AD, DA),
Regelungstechnischen Grundfunktionen (P, I, D, GP, GZ, PSUM, …)
Sonstigen Funktionen (BEGR, PVE, …).
Das Anwenderprogramm wird zyklisch und in Echtzeit in der Steuerung abgearbeitet. Es kann auch am PC simuliert werden. Visualisierung und Steuerung sind ebenfalls vom PC aus möglich.

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 3 - Beispielanwendung
Kraftgeführte Bewegung:
Der Roboter weicht externen Kräften und Momenten aus.
Anwendung:
Komfortables Anlernen von Positionen und Orientierungen ohne Verwendung des Handbediengerätes,
Assistenzaufgaben, z. B. beim Bohren
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
Z
Y
X
Z
Y
X
T
6
5
4
3
2
1
MMMFFF
J
MMMMMM
Robotersystem 3 - Beispielanwendung
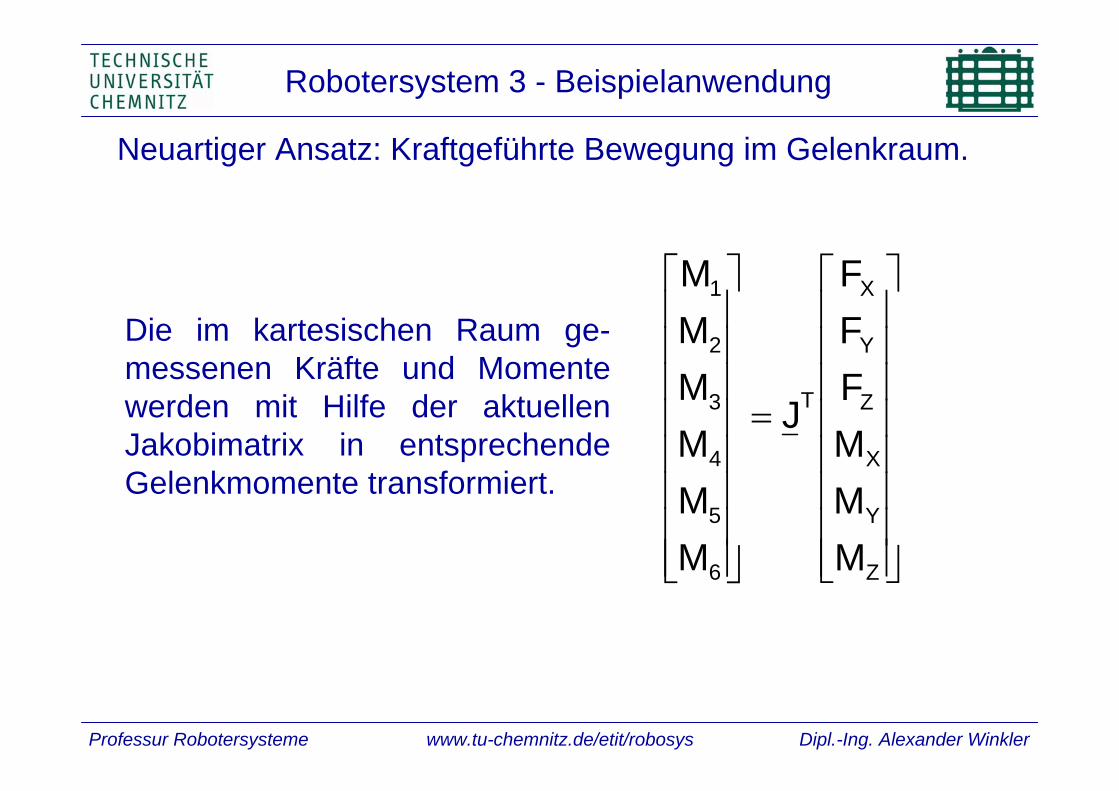
Neuartiger Ansatz: Kraftgeführte Bewegung im Gelenkraum.
Die im kartesischen Raum ge-messenen Kräfte und Momente werden mit Hilfe der aktuellen Jakobimatrix in entsprechende Gelenkmomente transformiert.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 3 - Beispielanwendung
Neuartiger Ansatz: Kraftgeführte Bewegung im Gelenkraum.
Vorteile:
Das Verhalten des Roboters entspricht mehr unseren natürlichen Erwartungen,
Gleichzeitiges Ändern von Position und Orientierung ist mit gleicher Dynamik möglich,
Es bestehen keine Arbeitsraumbeschränkungen auf-grund des gerade aktiven Konfigurationsraumes,
Singularitäten können ohne Gefahr überfahren werden.
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Robotersystem 3 - Beispielanwendung
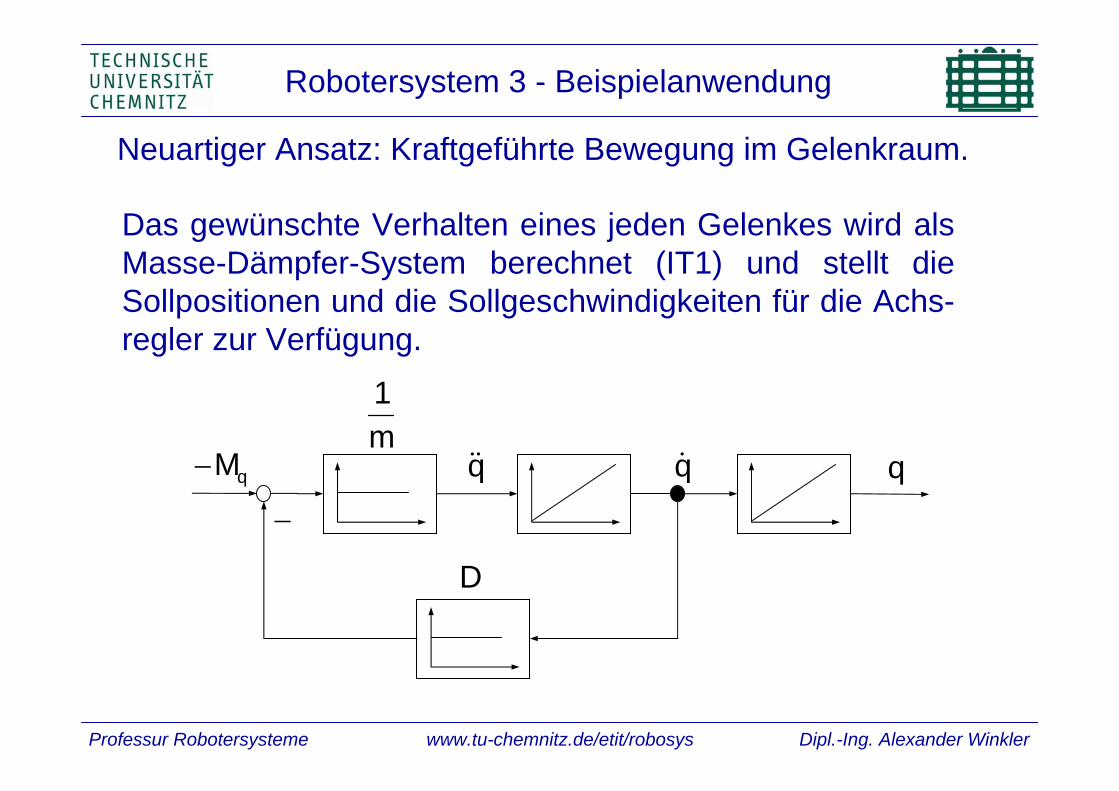
Neuartiger Ansatz: Kraftgeführte Bewegung im Gelenkraum.
Das gewünschte Verhalten eines jeden Gelenkes wird als Masse-Dämpfer-System berechnet (IT1) und stellt die Sollpositionen und die Sollgeschwindigkeiten für die Achs-regler zur Verfügung.
−qM− q&& qq&
m1
D

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Film: Kraftgeführte Bewegung
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
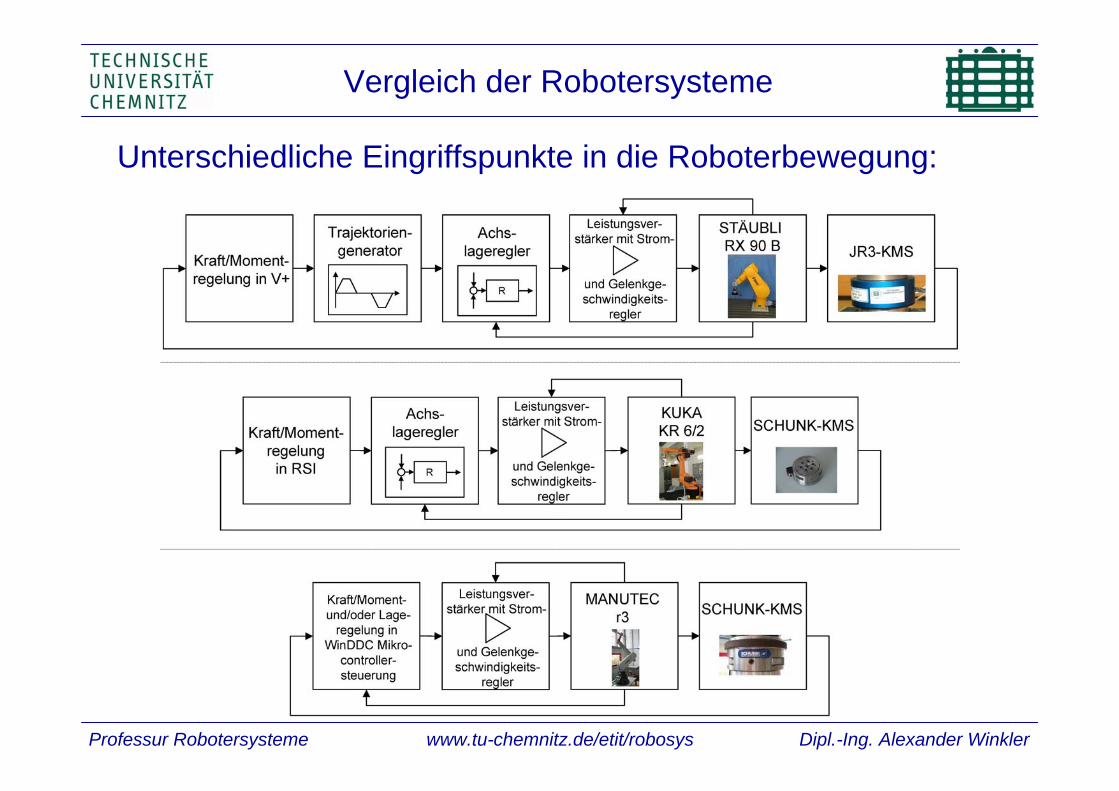
Vergleich der Robotersysteme
Unterschiedliche Eingriffspunkte in die Roboterbewegung:
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
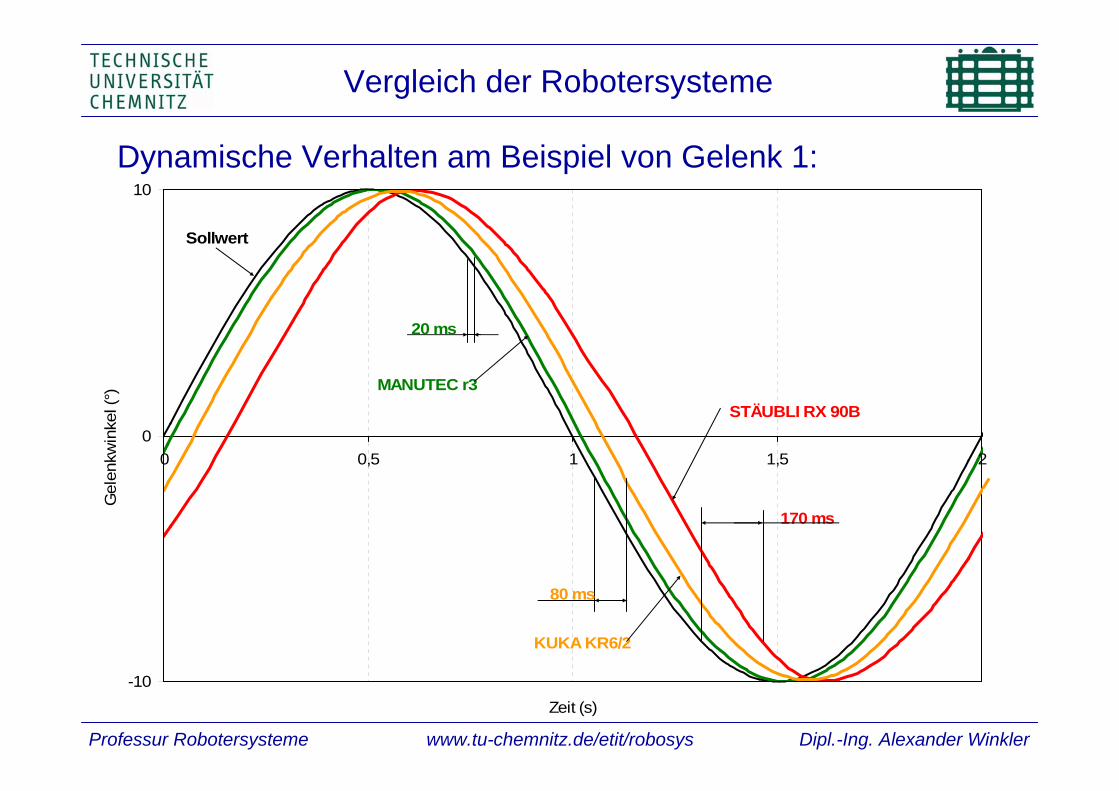
Vergleich der Robotersysteme
Dynamische Verhalten am Beispiel von Gelenk 1:
-10
0
10
0 0,5 1 1,5 2
Zeit (s)
Gel
enkw
inke
l (°)
Sollwert
MANUTEC r3STÄUBLI RX 90B
20 ms
170 ms
KUKA KR6/2
80 ms
Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Zusammenfassung
Anspruchsvolle Aufgaben der Kraft/Momentregelung sind auch mit Standardindustrierobotern möglich.
Je nach verwendeten Steuerungssystem ergeben sich unterschiedliche Beeinflussungsmöglichkeiten der Ro-boterbewegung Dadurch sind die Roboterdynamiken verschieden .
Theoretische Aspekte auf der Basis der Gelenkmomente können bei der Verwendung kommerzieller Roboter zur Kraft/Momentregelung häufig vernachlässigt werden, da auf diese meist keine Möglichkeit der Einflussnahme besteht.

Professur Robotersysteme Dipl.-Ing. Alexander Winklerwww.tu-chemnitz.de/etit/robosys
Danke für Ihre Aufmerksamkeit.