Embed Size (px)
Citation preview
Fakultät Elektrotechnik
Institut für Elektrische Anlagen und Automatisierungstechnik
Labor Regelungstechnik
Prof. Dr.-Ing. Dagmar Meyer [email protected]
Dipl.-Ing. Kris Rohrmann [email protected]
Versuch 6 – Magnetische Aufhängung
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 2 von 21
Inhalt
ZIELE DES VERSUCHS .............................................................................................................. 4
VORAUSGESETZTE KENNTNISSE ........................................................................................... 4
1 0BTHEORIE .............................................................................................................................. 5
1.1 3BEinführung ...................................................................................................................................... 5
1.2 4BLinearisierung ................................................................................................................................. 5
1.3 5BLinearisierung des Fadenpendels .................................................................................................. 6
1.4 6BVollständiges Nyquist-Kriterium .................................................................................................. 8
2 1BDER VERSUCHSAUFBAU ................................................................................................ 10
2.1 7BBeschreibung des Aufbaus ............................................................................................................10
2.2 8BSystembeschreibung ......................................................................................................................11
2.2.1 12BPrinzipschaltbild des Versuchsaufbaus .......................................................................................11
2.2.2 13BBlockschaltbild der Anordnung ...................................................................................................12
2.2.3 14BUnterlagerter Stromregelkreis .....................................................................................................13
2.2.4 15BDistanzsensor ...............................................................................................................................13
2.2.5 16BMechanischer Teil .......................................................................................................................13
2.2.6 17BPID-Regler...................................................................................................................................14
2.3 9BBedienoberfläche ...........................................................................................................................16
3 AUFGABEN ZUR VERSUCHSVORBEREITUNG ............................................................. 17
3.1 Linearisierung ................................................................................................................................17
3.2 Ermittlung der Übertragungsfunktion ........................................................................................17
3.3 19BStabilitätsuntersuchung der Strecke ............................................................................................17
3.4 20BResultierende Übertragungsfunktion ..........................................................................................17
3.5 21BBode-Diagramm .............................................................................................................................18
3.6 22BAnwendung des vollständigen Nyquist-Kriteriums ...................................................................18
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 3 von 21
4 11BAUFGABEN ZUR VERSUCHSDURCHFÜHRUNG ........................................................... 19
4.1 23BStreckenverhalten ohne Regler ....................................................................................................19
4.2 24BEinstellung des Stromes i0 im Arbeitspunkt................................................................................19
4.3 25BEinstellung des PID-Reglers .........................................................................................................19
4.4 26BEinstellung des PD-Reglers ...........................................................................................................20
4.5 27BStabilitätsgrenzen des PID-Reglers..............................................................................................20
4.6 28BSimulation des Regelkreises mit PID-Regler ..............................................................................20
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 4 von 21
Ziele des Versuchs
Der Versuch verfolgt drei wesentliche Zielstellungen:
Untersuchung der Eigenschaften nichtlinearer Regelstrecken
Praktische Untersuchungen an einer nichtlinearen Regelstrecke
Vergleich mit einer linearen Simulation
Nach der Vorbereitung und Durchführung des Versuchs sollten Sie über folgende Kenntnisse und Fertigkeiten verfügen:
Sie können nichtlineare Regelstrecken mit gegebener nichtlinearer Differentialgleichung durch Anwendung einer Taylorreihenentwicklung am Arbeitspunkt linearisieren.
Sie sind nach Abschluss des Versuches in der Lage, eine Regelung für eine instabile Regelstrecke experimentell unter Zuhilfenahme von Bodediagrammen einzustellen.
Sie können anhand einer gegebenen Modellbeschreibung ein komplexes Simulationsmodell mit einer Regelung in Simulink® erstellen.
Sie kennen die Grenzen der Gültigkeit eines linearisierten Streckenmodells für den Reglerentwurf.
Sie kennen das Verfahren der grafischen Stabilitätsanalyse im Bodediagramm für Regelkreise mit nichtlinearen Strecken und können dieses praktisch anwenden.
Vorausgesetzte Kenntnisse
Neben den in diesem Laborskript erläuterten theoretischen Grundlagen zur Linearisierung eines nichtlinearen Streckenmodells am Arbeitspunkt und zur Stabilität von Regelreisen mit instabilen Strecken werden in diesem Versuch insbesondere folgende Kenntnisse aus zuvor besuchten Lehrveranstaltungen vorausgesetzt:
Linearisierung
- Linearisierung einer nichtlinearen Differentialgleichung am Arbeitspunkt - Überführung der linearisierten Dgl. in eine Übertragungsfunktion - Grafische Darstellung von Werten und Formatierung der Diagramme
Stabilität von Regelkreisen
- Vollständiges Nyquist-Kriterium - Anwendung des vollständigen Nyquist-Kriteriums im Bodediagramm - Grenzen bei Anwendung auf ein linearisiertes Modell
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 5 von 21
1 0BTheorie 1.1 3BEinführung
Ziel dieses Versuches ist die Auslegung und Analyse der Positionsregelung eines frei schwebenden Objektes in einem magnetischen Feld. Hierbei sollen vor allem die Begriffe Instabilität und nichtlineares System in der praktischen Anwendung erläutert werden.
Die Realisierung erfolgt mittels eines digitalen Reglers, welcher wahlweise als P-, PI- oder PID-Regler betrieben werden kann.
Aufgrund der relativ einfachen mathematischen Zusammenhänge wird im Folgenden ein mathematisches Modell der Regelstrecke entwickelt, welches als Basis für den Reglerentwurf dienen kann.
1.2 4BLinearisierung
Die Suche nach formalen Beschreibungen physikalischer Systeme wird teilweise unter vereinfachenden Annahmen durchgeführt. So wird beispielsweise bei der Beschreibung eines Fadenpendels nur die Auslenkung um kleine Winkel betrachtet. Dadurch kann der Term sin( ) in der Bewegungsgleichung durch ersetzt werden und es ergibt sich eine vereinfachte lineare Differentialgleichung (siehe Abschnitt 1.3). Formal ergibt sich die Lösung durch Anwendung der mathematischen Methode der Linearisierung, die im Folgenden beschrieben wird.
Stetige Funktionen f(x), die an der Stelle x = x0 beliebig oft differenzierbar sind, können in eine spezielle Potenzreihe, die Taylorreihe entwickelt werden.
Die allgemeine Form der Taylorreihe für Funktionen einer Veränderlichen lautet:
2
0 0 0( )0 0 0 0( ) ( ) '( ) ''( ) ... ( )
1! 2! !
n
nn
x x x x x xf x f x f x f x f x R
n
(1.1)
wobei Rn das Restglied bei vorzeitigem Abbruch der Reihenentwicklung darstellt.
Der Abbruch der Reihenentwicklung nach dem linearen Glied liefert unter Vernachlässigung des Restgliedes eine lineare Funktion:
00 0( ) ( ) '( )
1!
x xf x f x f x
(1.2)
Aus Gl. 1.2 folgt direkt der Zusammenhang für Funktionen mehrerer Variabler. Im Sinne der Linearisierung und der Übersicht wird nur der lineare Teil der Taylorreihe mehrerer Veränderlicher angegeben:
0 0 0
1 10 2 20 00
1 2
( ) ( ) ( ) ( ) .... ( )1! 1! 1!
n n
x x x x x xn
x x x x x xf x f x f x f x f x
x x x
(1.3)
Die auftretenden Terme 0( )n nx x stellen anschaulich die Auslenkung aus der Ruhelage dar und
werden daher im Folgenden mit nx bezeichnet.
Somit lautet die Taylorreihe für den Entwicklungspunkt 0x
(Ruhelage) in der endgültigen Form:
0 0 0
1 20
1 2
( ) ( ) ( ) ( ) .... ( )1! 1! 1!
nx x x x x x
n
xx xf x f x f x f x f x
x x x
(1.4)
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 6 von 21
1.3 5BLinearisierung des Fadenpendels
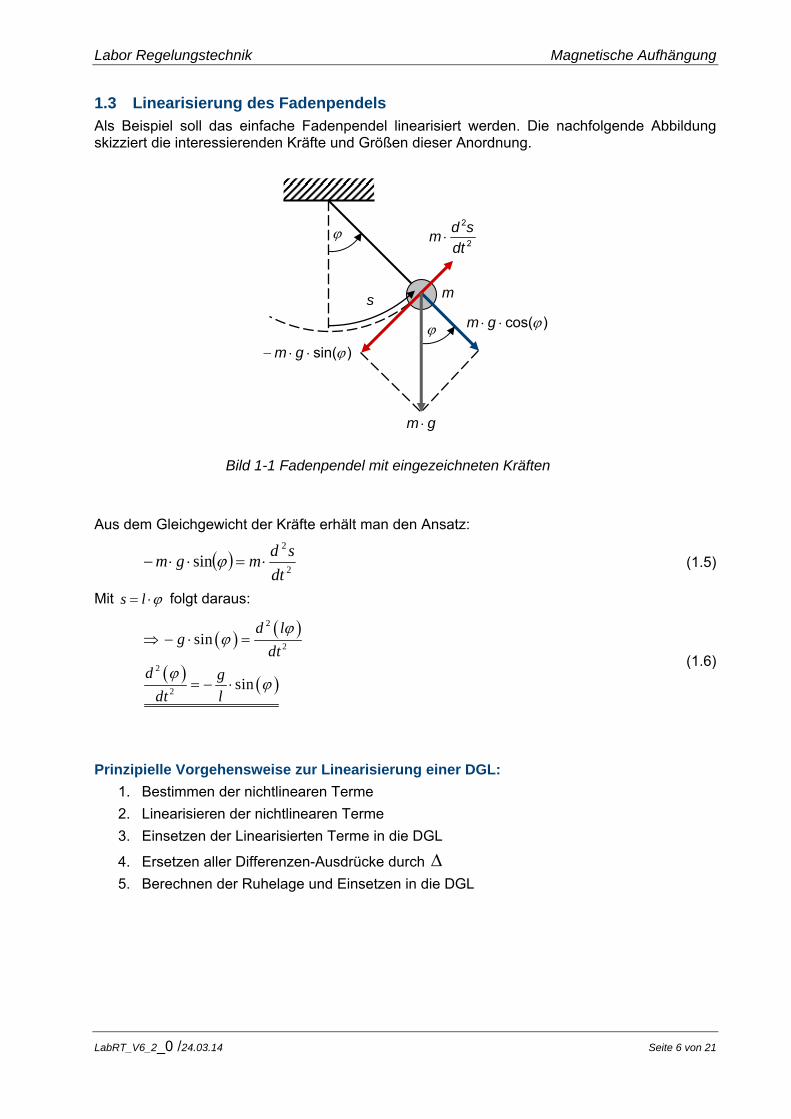
Als Beispiel soll das einfache Fadenpendel linearisiert werden. Die nachfolgende Abbildung skizziert die interessierenden Kräfte und Größen dieser Anordnung.
Aus dem Gleichgewicht der Kräfte erhält man den Ansatz:
2
2
sindt
sdmgm (1.5)
Mit s l folgt daraus:
2
2
2
2
sin
sin
d lg
dt
d g
dt l
(1.6)
Prinzipielle Vorgehensweise zur Linearisierung einer DGL:
1. Bestimmen der nichtlinearen Terme
2. Linearisieren der nichtlinearen Terme
3. Einsetzen der Linearisierten Terme in die DGL
4. Ersetzen aller Differenzen-Ausdrücke durch
5. Berechnen der Ruhelage und Einsetzen in die DGL
2
2
dt
sdm
m
)cos(gm
)sin( gm
gm
s
Bild 1-1 Fadenpendel mit eingezeichneten Kräften
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 7 von 21
Anwendung auf das Beispiel des Fadenpendels:
1. Der einzige nichtlineare Term der Anordnung ist sin .
2. Für diesen Ausdruck ergibt sich die Taylorreihe:
0 0 0sin sin cos (1.7)
3. Einsetzen der gefundenen Linearisierung in die DGL:
2
0 0 02sin cos
d g
dt l
(1.8)
4. Ersetzen der Differenzen-Terme
0 (1.9)
Das bedeutet aber:
0 (1.10)
und daher:
2
2
)(
dt
d
dt
d
dt
d
( 0 ist eine Konstante!) (1.11)
Eingesetzt in die linearisierte DGL:
0 0sin cosg
l (1.12)
5. Berechnung der Ruhelage und Einsetzen in die DGL
Im Arbeitspunkt (Ruhelage) ist keine momentane Auslenkung aus der Ruhelage
vorhanden. Das bedeutet, alle -Größen, welche die Auslenkung beschreiben, sind gleich null zu setzen. Außerdem ist die Ruhelage ein stationärer Zustand, in dem alle Ausgleichs- und Bewegungsvorgänge abgeschlossen sind. Daher sind die dynamischen Anteile (alle Ableitungen) der DGL ebenfalls zu null zu setzen.
Zusammengefasst:
0; 0
0
0
0
0 sin 0
sin 0
0
g
l
(1.13)
Es ergibt sich die erwartete Ruhelage bei 0 , welche nun durch ein abschließendes Einsetzen in Gl. 1.12 die gesuchte linearisierte DGL für kleine Auslenkungen um den Arbeitspunkt 0 ergibt.
0 0sin 0 cos 0g
lg
l
(1.14)
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 8 von 21
1.4 6BVollständiges Nyquist-Kriterium
Die vorliegende Strecke der magnetischen Aufhängung ist ohne Regler instabil und kann nur mit einem korrekt parametrierten Regler stabilisiert werden. Zur Untersuchung der Stabilität von Strecke und Regler soll im Weiteren das vollständige Nyquist-Kriterium herangezogen werden 0F
1.
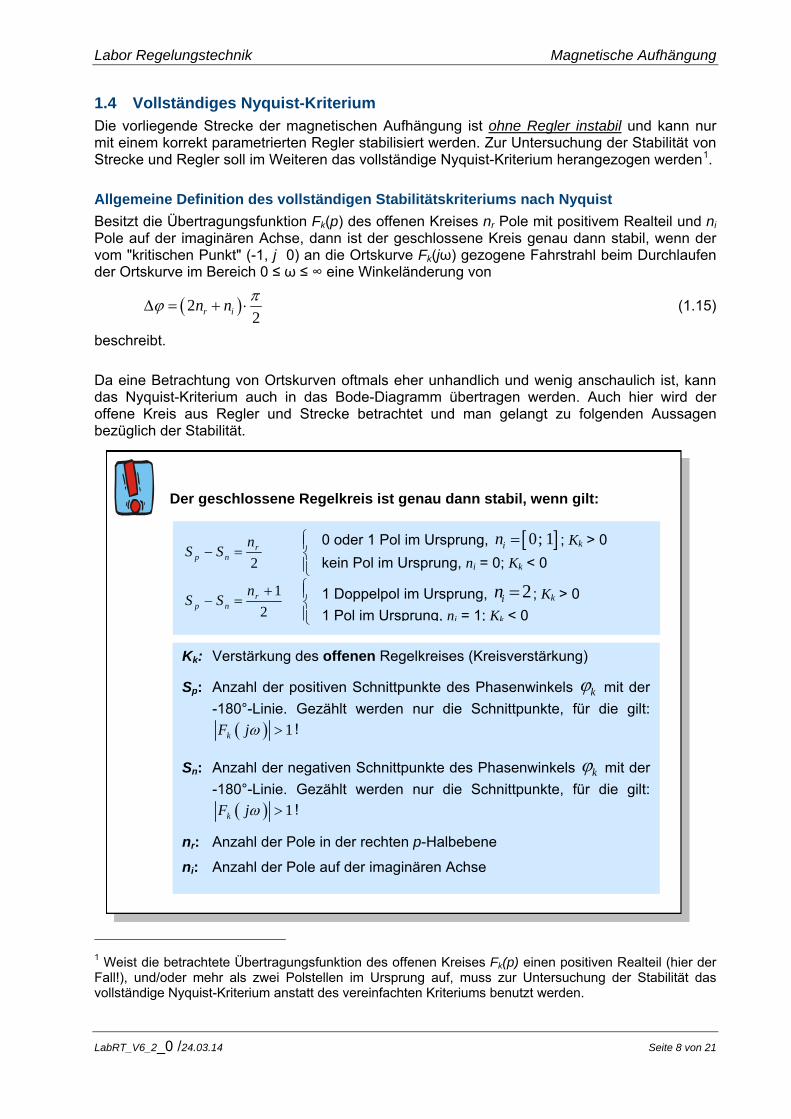
Allgemeine Definition des vollständigen Stabilitätskriteriums nach Nyquist
Besitzt die Übertragungsfunktion Fk(p) des offenen Kreises nr Pole mit positivem Realteil und ni Pole auf der imaginären Achse, dann ist der geschlossene Kreis genau dann stabil, wenn der vom "kritischen Punkt" (-1, j ·0) an die Ortskurve Fk(jω) gezogene Fahrstrahl beim Durchlaufen der Ortskurve im Bereich 0 ≤ ω ≤ ∞ eine Winkeländerung von
22r in n (1.15)
beschreibt.
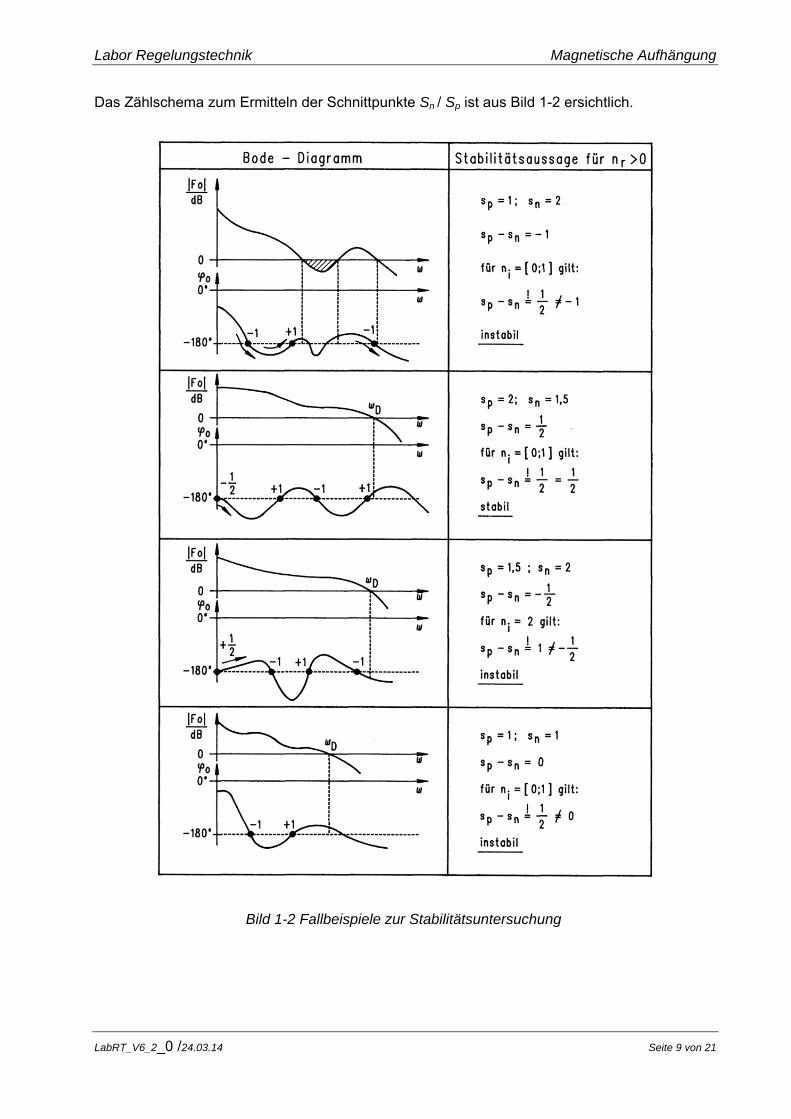
Da eine Betrachtung von Ortskurven oftmals eher unhandlich und wenig anschaulich ist, kann das Nyquist-Kriterium auch in das Bode-Diagramm übertragen werden. Auch hier wird der offene Kreis aus Regler und Strecke betrachtet und man gelangt zu folgenden Aussagen bezüglich der Stabilität.
Der geschlossene Regelkreis ist genau dann stabil, wenn gilt:
1 Weist die betrachtete Übertragungsfunktion des offenen Kreises Fk(p) einen positiven Realteil (hier der Fall!), und/oder mehr als zwei Polstellen im Ursprung auf, muss zur Untersuchung der Stabilität das vollständige Nyquist-Kriterium anstatt des vereinfachten Kriteriums benutzt werden.
Kk: Verstärkung des offenen Regelkreises (Kreisverstärkung)
Sp: Anzahl der positiven Schnittpunkte des Phasenwinkels k mit der
-180°-Linie. Gezählt werden nur die Schnittpunkte, für die gilt:
1kF j !
Sn: Anzahl der negativen Schnittpunkte des Phasenwinkels k mit der
-180°-Linie. Gezählt werden nur die Schnittpunkte, für die gilt:
1kF j !
nr: Anzahl der Pole in der rechten p-Halbebene
ni: Anzahl der Pole auf der imaginären Achse
2
1
2
rnp
rnp
nSS
nSS
0 oder 1 Pol im Ursprung, 0; 1in ; Kk > 0
kein Pol im Ursprung, ni = 0; Kk < 0
1 Doppelpol im Ursprung, 2in ; Kk > 0
1 Pol im Ursprung, ni = 1; Kk < 0
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 9 von 21
Das Zählschema zum Ermitteln der Schnittpunkte Sn / Sp ist aus Bild 1-2 ersichtlich.
Bild 1-2 Fallbeispiele zur Stabilitätsuntersuchung
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 10 von 21
2 1BDer Versuchsaufbau 2.1 7BBeschreibung des Aufbaus
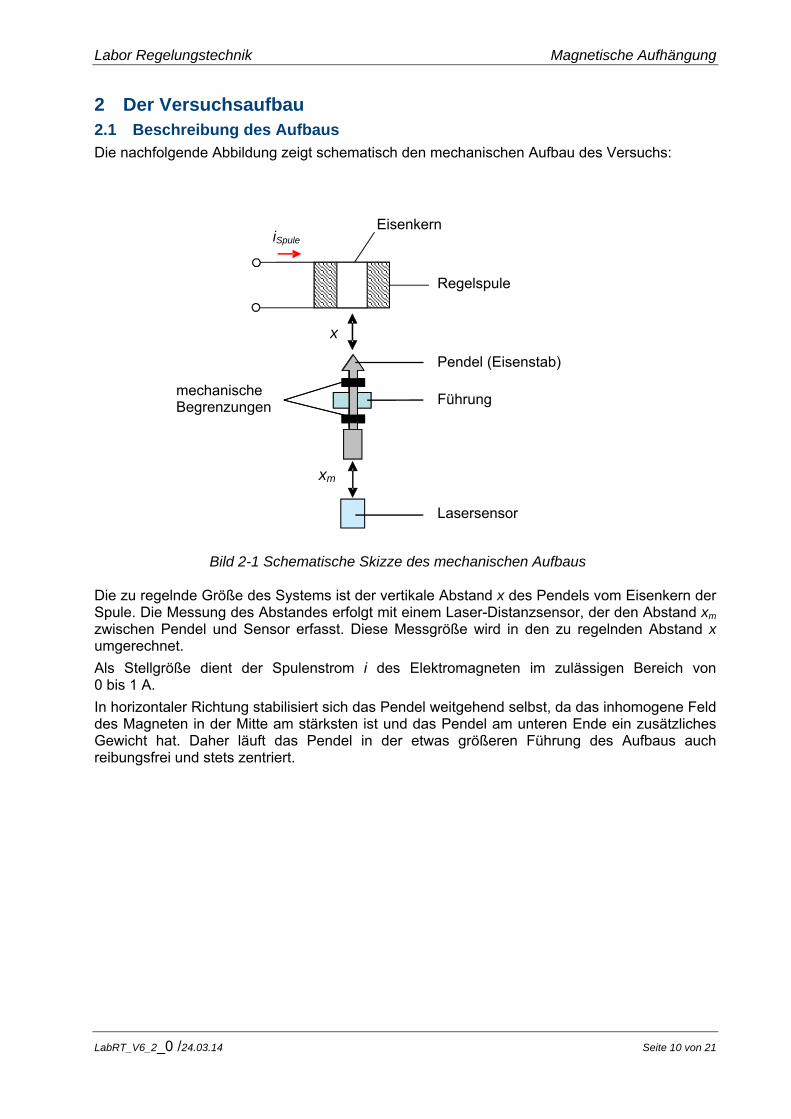
Die nachfolgende Abbildung zeigt schematisch den mechanischen Aufbau des Versuchs:
Die zu regelnde Größe des Systems ist der vertikale Abstand x des Pendels vom Eisenkern der Spule. Die Messung des Abstandes erfolgt mit einem Laser-Distanzsensor, der den Abstand xm zwischen Pendel und Sensor erfasst. Diese Messgröße wird in den zu regelnden Abstand x umgerechnet.
Als Stellgröße dient der Spulenstrom i des Elektromagneten im zulässigen Bereich von 0 bis 1 A.
In horizontaler Richtung stabilisiert sich das Pendel weitgehend selbst, da das inhomogene Feld des Magneten in der Mitte am stärksten ist und das Pendel am unteren Ende ein zusätzliches Gewicht hat. Daher läuft das Pendel in der etwas größeren Führung des Aufbaus auch reibungsfrei und stets zentriert.
Regelspule
Eisenkern
Pendel (Eisenstab)
Führung
iSpule
x
mechanische Begrenzungen
Lasersensor
xm
Bild 2-1 Schematische Skizze des mechanischen Aufbaus
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 11 von 21
2.2 8BSystembeschreibung
2.2.1 12BPrinzipschaltbild des Versuchsaufbaus
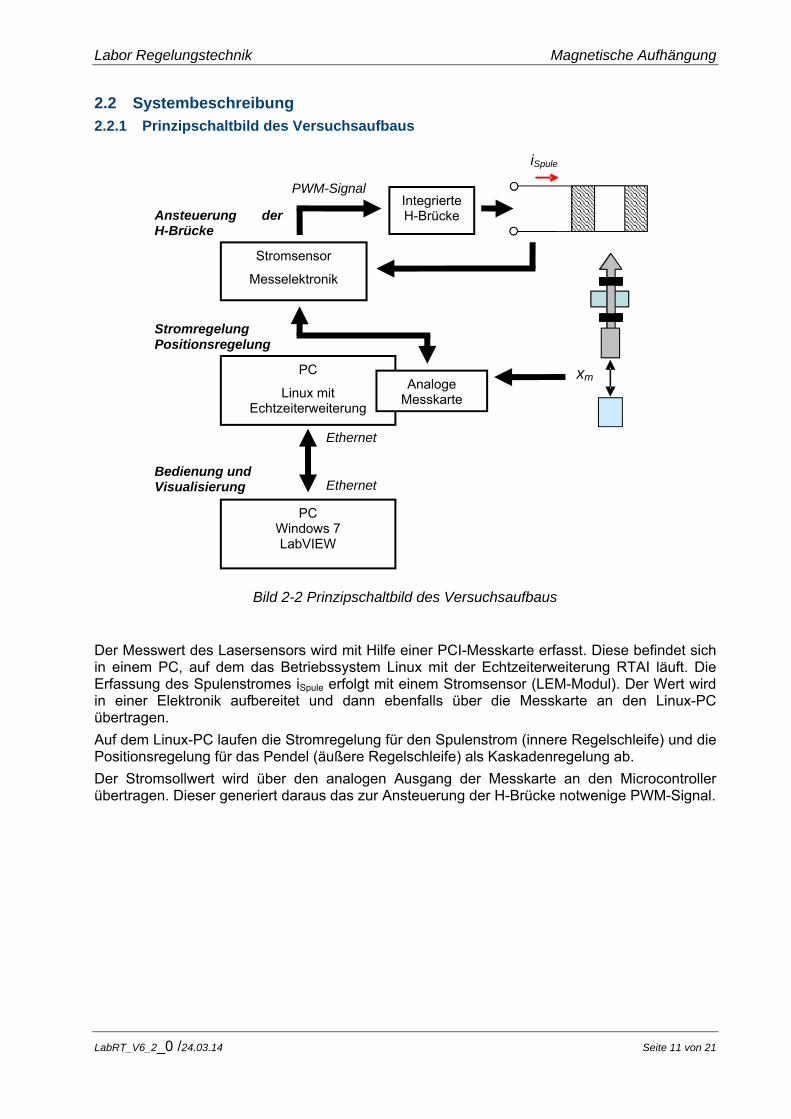
Der Messwert des Lasersensors wird mit Hilfe einer PCI-Messkarte erfasst. Diese befindet sich in einem PC, auf dem das Betriebssystem Linux mit der Echtzeiterweiterung RTAI läuft. Die Erfassung des Spulenstromes iSpule erfolgt mit einem Stromsensor (LEM-Modul). Der Wert wird in einer Elektronik aufbereitet und dann ebenfalls über die Messkarte an den Linux-PC übertragen.
Auf dem Linux-PC laufen die Stromregelung für den Spulenstrom (innere Regelschleife) und die Positionsregelung für das Pendel (äußere Regelschleife) als Kaskadenregelung ab.
Der Stromsollwert wird über den analogen Ausgang der Messkarte an den Microcontroller übertragen. Dieser generiert daraus das zur Ansteuerung der H-Brücke notwenige PWM-Signal.
iSpule
xm
Stromsensor
Messelektronik
Integrierte H-Brücke
PC
Linux mit Echtzeiterweiterung
Analoge Messkarte
Stromregelung Positionsregelung
Ansteuerung der H-Brücke
PC Windows 7 LabVIEW
Bedienung und Visualisierung
Bild 2-2 Prinzipschaltbild des Versuchsaufbaus
Ethernet
PWM-Signal
Ethernet
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 12 von 21
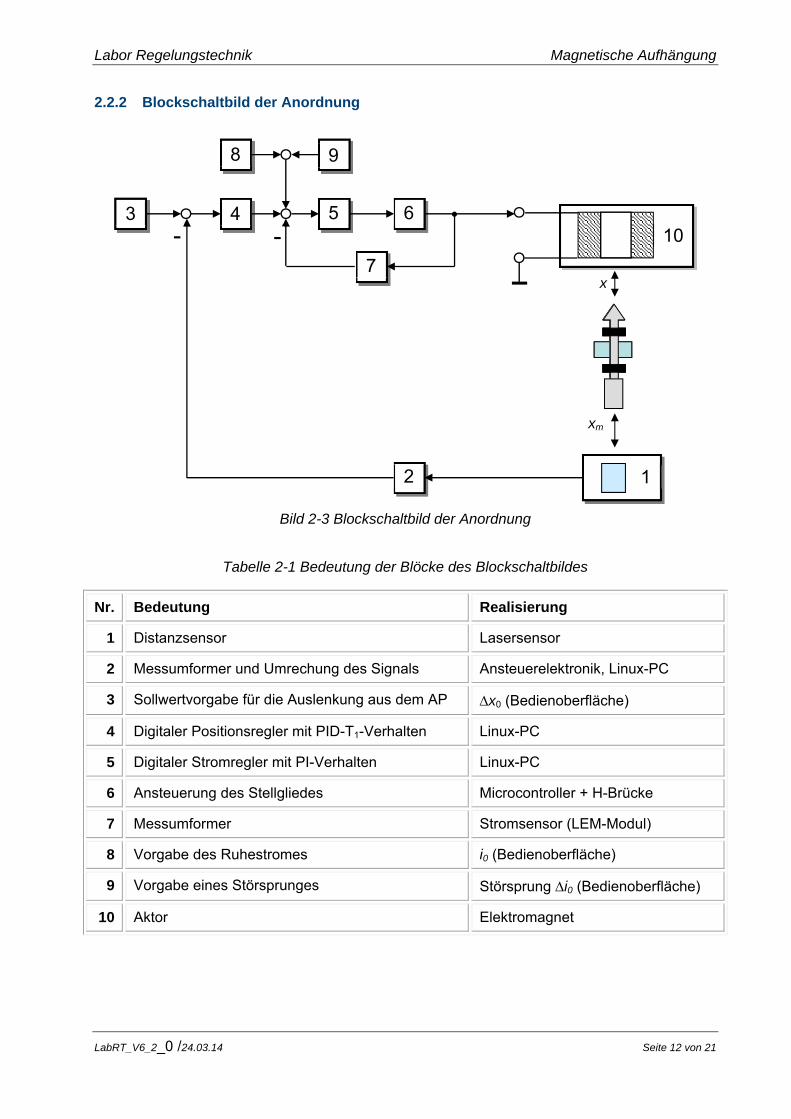
2.2.2 13BBlockschaltbild der Anordnung
Bild 2-3 Blockschaltbild der Anordnung
Nr. Bedeutung Realisierung
1 Distanzsensor Lasersensor
2 Messumformer und Umrechung des Signals Ansteuerelektronik, Linux-PC
3 Sollwertvorgabe für die Auslenkung aus dem AP x0 (Bedienoberfläche)
4 Digitaler Positionsregler mit PID-T1-Verhalten Linux-PC
5 Digitaler Stromregler mit PI-Verhalten Linux-PC
6 Ansteuerung des Stellgliedes Microcontroller + H-Brücke
7 Messumformer Stromsensor (LEM-Modul)
8 Vorgabe des Ruhestromes i0 (Bedienoberfläche)
9 Vorgabe eines Störsprunges Störsprung i0 (Bedienoberfläche)
10 Aktor Elektromagnet
Tabelle 2-1 Bedeutung der Blöcke des Blockschaltbildes
xm
x
- -
1 2
3
8
4 5 6
7
9
10
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 13 von 21
2.2.3 14BUnterlagerter Stromregelkreis
Der Stromkreis des Elektromagneten besteht aus einer Induktivität LS, dem ohmschen Widerstand RS der Spulenwicklung und dem Innenwiderstand Ri der internen Spannungsquelle.
Daraus resultiert ein PT1-Verhalten mit der Übertragungsfunktion
1)(
pT
KpF
S
SS mit
iS
SS RR
LT
und
SS R
K1
. (2.1)
Diese Strecke wird mit einem fest eingestellten PI-Regler geregelt. Für den geschlossenen Stromregelkreis ergibt sich dann näherungsweise folgende Übertragungsfunktion:
1
1)(
11
pT
pFS
S (2.2)
2.2.4 15BDistanzsensor
Der Laser-Distanzsensor liefert ein Spannungssignal im Bereich von 0 … 10 V. Aufgrund der sehr guten Linearität der Kennlinie des Sensors kann dieser als ideales P-Glied angesehen werden.
FS2(p) = KS2 (2.3)
2.2.5 16BMechanischer Teil
Für die magnetische Kraft eines Elektromagneten gilt näherungsweise der nur im homogenen Feld exakte Zusammenhang:
2
2
I dLF
dx mit:
lem RRCL
RL
11~ 1 (2.4)
Da Rl >> Re erhält man für die Induktivität:
1 2
1 1
l
L C CR x
mit: 2 1 0C C A (2.5)
Und damit für die Kraft F in hier ausreichender Näherung:
)(
)(
1
2
)(2
222
tx
tiC
dx
xCd
tiF
mit: 2
2
CC (2.6)
Da an dieser Stelle nur der Betrag der Kraft von Interesse ist, wird aus Gl. 2.6:
2
2
( )
( )
i tF C
x t (2.7)
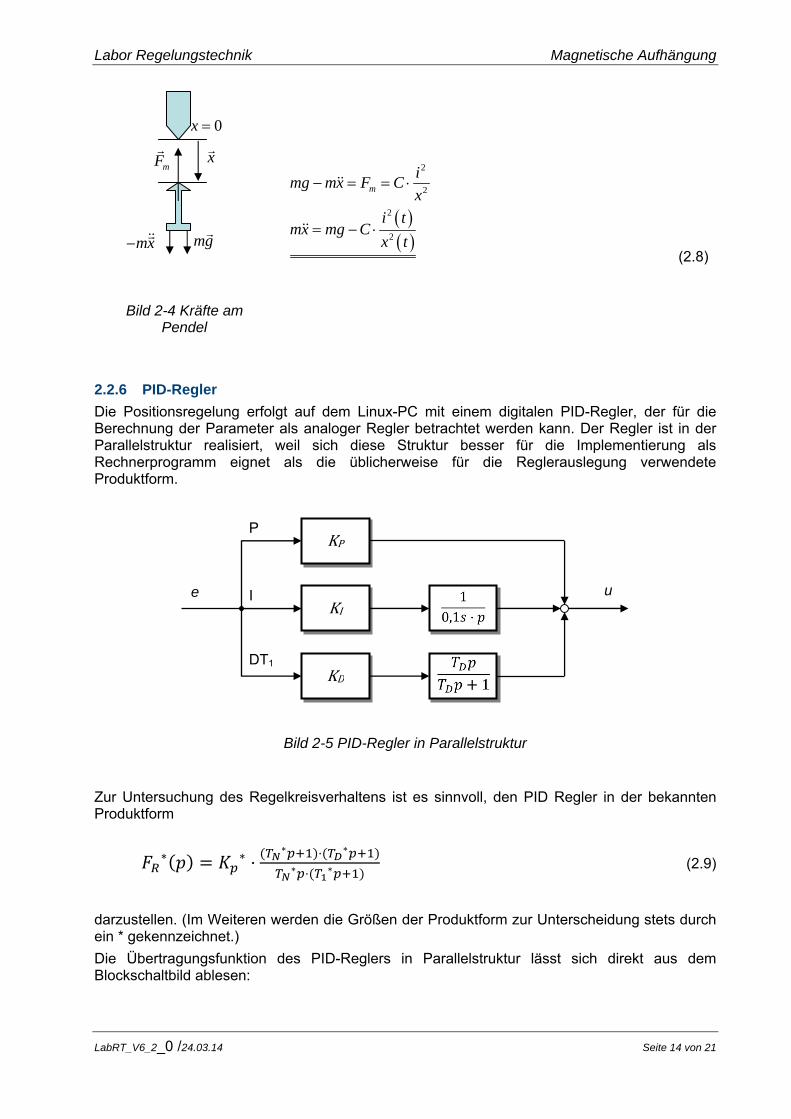
Unter Beachtung der Richtungen der Kräfte in Bild 2-4 kann man nun die DGL des Systems aufstellen.
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 14 von 21
(2.8)
2.2.6 17BPID-Regler
Die Positionsregelung erfolgt auf dem Linux-PC mit einem digitalen PID-Regler, der für die Berechnung der Parameter als analoger Regler betrachtet werden kann. Der Regler ist in der Parallelstruktur realisiert, weil sich diese Struktur besser für die Implementierung als Rechnerprogramm eignet als die üblicherweise für die Reglerauslegung verwendete Produktform.
Zur Untersuchung des Regelkreisverhaltens ist es sinnvoll, den PID Regler in der bekannten Produktform
∗ ∗ ⋅
∗ ⋅ ∗
∗ ⋅ ∗ (2.9)
darzustellen. (Im Weiteren werden die Größen der Produktform zur Unterscheidung stets durch ein * gekennzeichnet.)
Die Übertragungsfunktion des PID-Reglers in Parallelstruktur lässt sich direkt aus dem Blockschaltbild ablesen:
2
2
2
2
m
img mx F C
x
i tmx mg C
x t
Bild 2-5 PID-Regler in Parallelstruktur
KP
KI
KD
ps1,0
1
1pT
pT
V
V
e u
DT1
I
P
x
mg
mx
0x
mF
Bild 2-4 Kräfte am Pendel
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 15 von 21
1s1,0
1)(
pT
pTK
pKKpF
D
DDIPR (2.10)
Die einstellbaren Parameter in der Bedienoberfläche sind KP, KI, KD und TD.
Die Aufgabe besteht nun darin, einen Zusammenhang zwischen diesen Einstellwerten und den Rechengrößen aus der Produktform (Gl. 2.9) herzustellen.
Zuerst wird Gl. 2.10 durch Ausklammern und Einführen neuer Bezeichnungen auf folgende Form gebracht:
1
11)(
1 pT
pT
pTKpF D
NPR (2.11)
Durch Bilden des Hauptnenners und Ausmultiplizieren innerhalb der eckigen Klammern ergibt sich schließlich:
pTpTT
pTTpTTTKpF
NN
NNDPR 2
1
12
1 1)( (2.12)
Es gilt dabei folgender Bezug zwischen den auf der Bedienoberfläche einstellbaren Parametern und den Reglerparametern aus Gl. 2.11
1
1
s10
TT
T
TKK
T
KK
D
DPD
N
PI
(2.13)
Mittels Koeffizientenvergleich zwischen FR(p) und FR*(p) kann an dieser Stelle der Zusammenhang zwischen beiden Parametersätzen bestimmt werden.
Das Ergebnis lautet:
∗ ∗ ∗
∗ ⋅ ∗
∗ ∗ ∗∗
∗ ∗ ∗
∗ ⋅ ∗
∗ (2.14)
Durch Gl. 2.14 können die so bestimmten Werte TN, TD, T1 und Kp direkt in die Einstellgrößen des Reglers umgerechnet werden. Dies ist im weiteren Verlauf des Versuches nicht notwendig, allerdings konnte gezeigt werden, dass die Reglerstrukturen sich auch bei komplexeren Reglern durchaus ineinander überführen lassen.
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 16 von 21
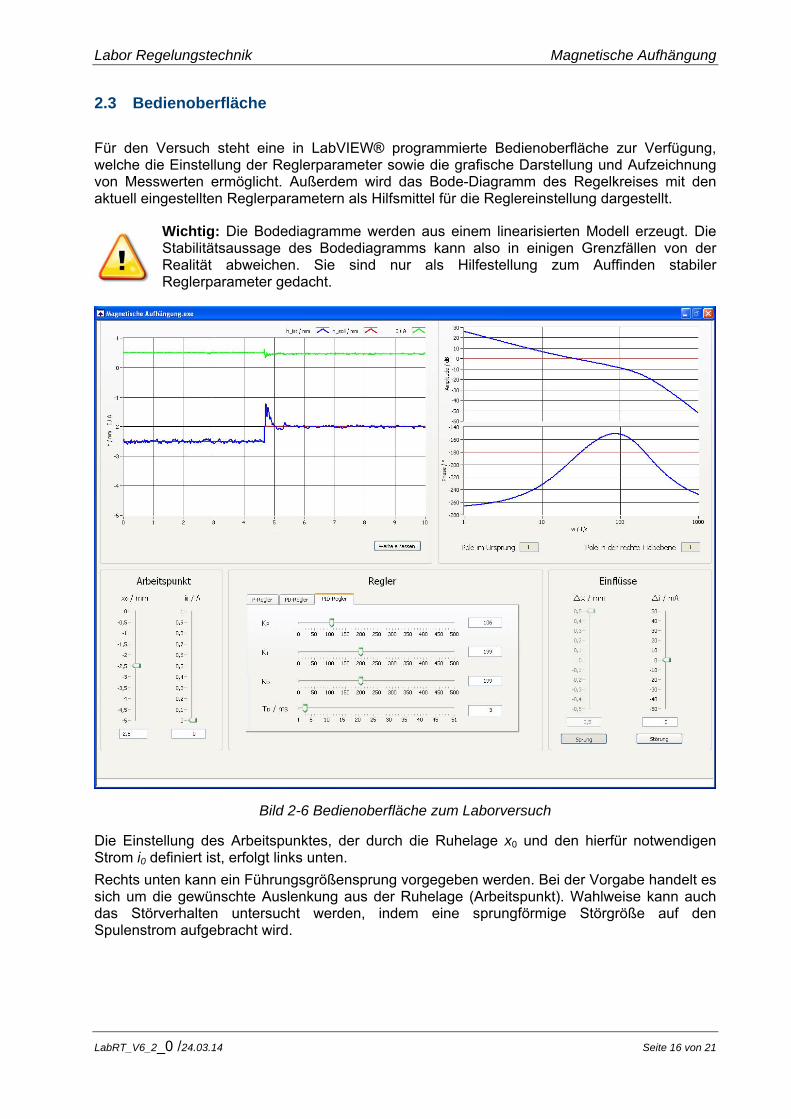
2.3 9BBedienoberfläche
Für den Versuch steht eine in LabVIEW® programmierte Bedienoberfläche zur Verfügung, welche die Einstellung der Reglerparameter sowie die grafische Darstellung und Aufzeichnung von Messwerten ermöglicht. Außerdem wird das Bode-Diagramm des Regelkreises mit den aktuell eingestellten Reglerparametern als Hilfsmittel für die Reglereinstellung dargestellt.
Wichtig: Die Bodediagramme werden aus einem linearisierten Modell erzeugt. Die Stabilitätsaussage des Bodediagramms kann also in einigen Grenzfällen von der Realität abweichen. Sie sind nur als Hilfestellung zum Auffinden stabiler Reglerparameter gedacht.
Die Einstellung des Arbeitspunktes, der durch die Ruhelage x0 und den hierfür notwendigen Strom i0 definiert ist, erfolgt links unten.
Rechts unten kann ein Führungsgrößensprung vorgegeben werden. Bei der Vorgabe handelt es sich um die gewünschte Auslenkung aus der Ruhelage (Arbeitspunkt). Wahlweise kann auch das Störverhalten untersucht werden, indem eine sprungförmige Störgröße auf den Spulenstrom aufgebracht wird.
Bild 2-6 Bedienoberfläche zum Laborversuch
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 17 von 21
3 Aufgaben zur Versuchsvorbereitung
Die Vorbereitungsaufgaben sind Bestandteil des Versuchs und müssen zu Hause vor dem Versuch bearbeitet werden. Die Ergebnisse werden für die Durchführung benötigt. Daher ist die Durchführung eines Versuches ohne Vorlage der Vorbereitungsaufgaben nicht möglich.
Die zugehörigen Berechnungen müssen am Versuchstag in handschriftlicher Form vorzulegen und werden vom Laborbetreuer mit einem Testat versehen. Die testierte handschriftliche Fassung ist dem Laborbericht beizufügen und soll auf keinen Fall im Rahmen des Laborberichtes nochmals abgeschrieben oder abgetippt werden. Auf dem PC erstellte Vorbereitungen werden nicht akzeptiert – sie gelten als nicht angefertigt.
3.1 Linearisierung Linearisieren Sie die Differentialgleichung für die magnetische Aufhängung mittels Taylorreihenentwicklung.
3.2 Ermittlung der Übertragungsfunktion Bestimmen Sie die Ruhelage und ermitteln Sie durch Transformation in den Bildbereich die Übertragungsfunktion FS3(p) des mechanischen Streckenteils. Vor der Transformation sollten Sie nachstehende Vereinfachungen in die DGL einsetzen:
2 0
2m
xT
g und 3s
CK
mg (3.1)
3.3 19BStabilitätsuntersuchung der Strecke Untersuchen Sie die Übertragungsfunktion FS3(p) auf Stabilität, z. B. durch Betrachtung der Polstellen.
Entspricht das Ergebnis Ihren Erwartungen?
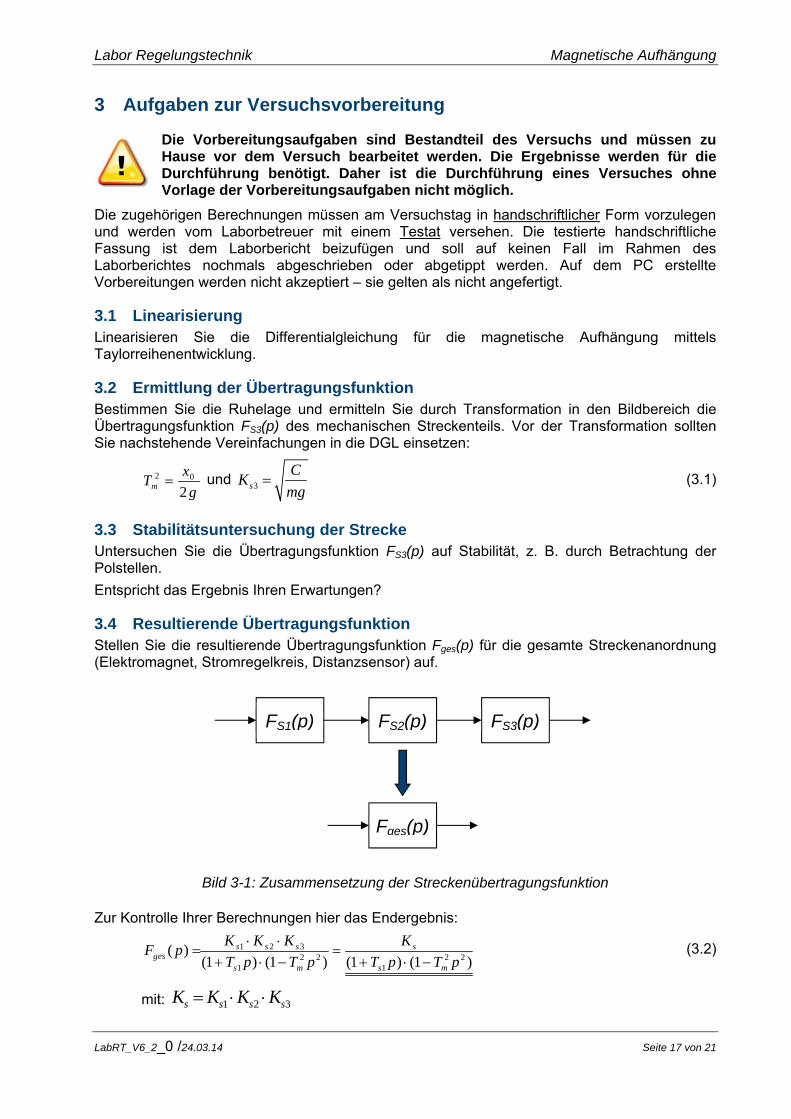
3.4 20BResultierende Übertragungsfunktion Stellen Sie die resultierende Übertragungsfunktion Fges(p) für die gesamte Streckenanordnung (Elektromagnet, Stromregelkreis, Distanzsensor) auf.
Zur Kontrolle Ihrer Berechnungen hier das Endergebnis:
1 2 32 2 2 2
1 1
( )(1 ) (1 ) (1 ) (1 )
s s s sges
s m s m
K K K KF p
T p T p T p T p
(3.2)
mit: 1 2 3s s s sK K K K
FS1(p) FS2(p) FS3(p)
Fges(p)
Bild 3-1: Zusammensetzung der Streckenübertragungsfunktion
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 18 von 21
3.5 21BBode-Diagramm Konstruieren Sie das maßstäbliche Bode-Diagramm für die Streckenübertragungsfunktion Fges(p). (Kleiner Hinweis zur Konstruktion: (1-Tm
2p2) Dritte Binomische-Formel... )
Für die Parameter der Übertragungsfunktion gelten näherungsweise folgende Werte:
Tm = 23 ms TS1 = 11,5 ms KS = 0,01
3.6 22BAnwendung des vollständigen Nyquist-Kriteriums Weisen Sie anhand des Bode-Diagramms nach, dass die Regelstrecke mit einem P- oder PI-Regler nicht stabilisierbar ist, während dies mit einem PD-Regler möglich ist. Bedenken Sie, dass ein P-Regler mit negativer Verstärkung eine konstante Phasenlage von 180 hat!
Die auch mit einem PID-Regler mögliche Stabilisierung muss an dieser Stelle nicht untersucht werden.
Was schafft der PD-Regler, wozu P- und PI-Regler nicht in der Lage sind? Stellen Sie Bedingungen für die Parameter des PD-Reglers zum Erfüllen des Stabilitätskriteriums auf.
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 19 von 21
4 11BAufgaben zur Versuchsdurchführung
4.1 23BStreckenverhalten ohne Regler Um die Messwertaufnahme am Versuchsaufbau zu aktivieren, muss kurzzeitig die P-Verstärkung des Reglers auf einen Wert >0 eingestellt werden.
Überprüfen Sie anschließend durch manuelles Bewegen des Pendels, ob im Diagramm Messwerte angezeigt werden.
Für diesen Versuchsteil müssen nun alle Reglerparameter den Wert 0 aufweisen, damit der Regelkreis aufgetrennt ist. Der Elektromagnet ist somit stromlos und das Pendel befindet sich am unteren Anschlag.
Stellen Sie nun in der Bedienoberfläche den Arbeitspunkt x0 auf den Wert -2,5 mm ein. Versuchen Sie, durch langsame Erhöhung des Offsets i0 für den Strom, das Pendel zum Schweben zu bringen.
Erhalten Sie eine stabile Lage, in welcher das Pendel schwebt? Erläutern und verknüpfen Sie die Beobachtungen mit dem Begriff „Instabilität“! Warum gelingt es nicht, einen dauerhaft stabilen Punkt einzustellen?
4.2 24BEinstellung des Stromes i0 im Arbeitspunkt Zunächst muss der Spulenstrom i0 im Arbeitspunkt so eingestellt werden, dass die Gewichtskraft des Pendels kompensiert wird.
Hierzu wird ein PID-Regler so eingestellt, dass er die Strecke stabilisiert. Aufgrund des I-Anteils des Reglers wird der vorgegebene Sollwert, d. h. der eingestellte Positionswert x0 am Arbeitspunkt, exakt erreicht.
Der Strom, der sich im stationären Zustand ergibt, entspricht dem Strom, der zur Kompensation der Gewichtskraft notwendig ist.
Nehmen Sie folgende Einstellungen vor:
Ruhelage:
x0 = -2,5 mm
Reglerparameter:
KP = 100
KI = 200
KD = 200
TD = 3 ms
Zeichnen Sie eine Messreihe im stationären Zustand auf und speichern Sie diese ab.
Der stationäre Wert des Spulenstromes kann nun aus der gespeicherten Datei exakt bestimmt werden.
Stellen Sie den ermittelten Wert als Ruhestrom i0 ein und verändern Sie diesen im Verlauf des Versuches nicht mehr.
4.3 25BEinstellung des PID-Reglers Optimieren Sie manuell die Parameter des PID-Reglers, indem Sie Führungs- und Störsprungantworten aufzeichnen.
Verwenden Sie hierbei die Bode-Diagramme, die rechts oben in der Bedienoberfläche angezeigt werden, als Hilfsmittel
Zeichnen Sie jeweils die Führungs- und Störsprungantwort mit den von Ihnen als optimal eingeschätzten Reglerparametern für Ihren Laborbericht auf. Notieren Sie die gefunden Werte der Reglerparameter.
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 20 von 21
4.4 26BEinstellung des PD-Reglers Wiederholen Sie die Reglereinstellung nun für einen PD-Regler. Verwenden Sie auch hier das Bode-Diagramm als Hilfsmittel!
4.5 27BStabilitätsgrenzen des PID-Reglers Wie in der Vorbereitung deutlich wurde, sind der P- und der D-Anteil des Reglers entscheidende Faktoren für die Stabilität. Um dies experimentell nachzuweisen, sollen nun Sprungantworten für veränderte Werte von KD und KP aufgenommen werden.
Stellen Sie hierzu als Ausgangspunkt wieder den PID-Regler mit den von Ihnen optimierten Parametern ein.
1. Verkleinern Sie KP schrittweise und nehmen Sie zwei markante Sprungantworten im instabilen und im grenzstabilen Bereich auf.
2. Vergrößern Sie nun KP ausgehend vom ursprünglich eingestellten Wert und nehmen Sie ebenfalls zwei charakteristische Sprungantworten auf.
3. Stellen Sie KP zurück auf seinen ursprünglichen Wert und wiederholen Sie die Messungen 1. und 2. für den Parameter KD.
Dokumentieren Sie alle Sprungantworten für Ihren Laborbericht. Interpretieren Sie die Ergebnisse.
4.6 28BSimulation des Regelkreises mit PID-Regler Entwerfen Sie ein Simulink-Modell der kompletten Kaskadenregelung aus innerem Stromregelkreis und äußerem Positionsregelkreis. Wenn Sie hierzu den Positionsregler in Parallelstruktur (vgl. Bild 2-5) realisieren, können Sie die im praktischen Versuch eingestellten Werte des Reglers direkt ohne Umrechnung in Simulink übernehmen.
Wichtige Hinweise zur Erstellung des Simulink®-Modells
Definieren Sie alle Parameter (Reglerparameter, Streckenparameter) in einem Matlab®-m-File.
Achtung: Kein Function-File erstellen, denn dann erzeugen Sie lokale Variablen, die nach Beendigung der Funktion automatisch wieder aus dem Workspace entfernt werden.
Verwenden Sie die gleichen Bezeichnungen für die Parameter wie in diesem Laborumdruck.
Verwenden Sie innerhalb der Übertragungsblöcke in Ihrem Simulink®-Modell die im m-File definierten Variablen. Diese müssen vor der Ausführung der Simulation durch Aufruf des m-Files in den Workspace geladen werden.
Labor Regelungstechnik Magnetische Aufhängung
LabRT_V6_2_0 /24.03.14 Seite 21 von 21
Streckenmodell
Das reale schwebende Pendel verhält sich nicht genauso wie das theoretisch ermittelte Modell. Daher wurde eine experimentelle Modellidentifikation durchgeführt, um ein möglichst realitätsnahes Modell der Strecke zu erhalten. Diese Identifikation hat folgende Übertragungsfunktion für den mechanischen Streckenanteil (FS3(p)) ergeben:
11)(
3231
33
pTpT
KpF
SS
SS (3.3)
Für die Parameter wurden folgende Werte ermittelt:
ms853,7
ms3828
m/A10178,10
32
31
33
S
S
S
T
,T
K
Es handelt sich demzufolge um ein System mit negativer Verstärkung und zwei unterschiedlichen reellen Polen, von denen einer in der rechten Halbebene liegt.
Stromregelkreis
Die Übertragungsfunktion der Spule (vgl. Gl. 2.1)
1)(
pT
KpF
S
SS (3.4)
hat die Parameterwerte
KS = 0,1 A/V
TS = 10 ms
Der als PI-Regler ausgeführte Stromregler ist wie folgt eingestellt:
KPi = 19,02 V/A
TNi = 5,18 ms
Wählen Sie für den Führungssprung in der Simulation eine Höhe von 0,5 mm und vergleichen Sie das Ergebnis qualitativ mit einer Führungssprungantwort von 0,5 mm an der realen Strecke.
Wodurch könnten auftretende Unterschiede verursacht werden?





























