Embed Size (px)
DESCRIPTION
In diesem Kapitel werden die Teilsysteme, aus denen ein Roboter aufgebaut ist,vorgestellt. Zun¨ achst wird in den technische Aufbau von Roboter eingef¨ uhrt.Hierzu werden Gelenktypen, die Grundkonfiguration f¨ ur Roboter sowie dieoft eingesetzten Antriebe vorgestellt und die Arbeitsraumproblematik disku-tiert. Elektrische Antriebe und deren Kraft¨ ubertragung werden ausf¨ uhrlicherbehandelt, da sie bei Robotersystemen am h¨ aufigsten eingesetzt werden. Die-ses Kapitel endet mit einer kurzen Einf¨ uhrung in Sensoren f¨ ur Robotersystemeund der Vorstellung der Grundmechanismen der Regelung und der Steuerung.Einige der folgenden Abschnitte sind aus [?] entnommen.
Citation preview

Inhaltsverzeichnis
1 Teilsysteme 31.1 Mechanische Komponenten . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Gelenktypen . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.2 Grundkonfiguration fur Roboter . . . . . . . . . . . . . . 41.1.3 Roboterhandgelenke . . . . . . . . . . . . . . . . . . . . 51.1.4 Freiheitsgrade und Gelenke . . . . . . . . . . . . . . . . . 51.1.5 Antrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.1.6 Arbeitsraum . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Antriebssysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3 Kraftubertragung . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4 Regelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.5 Sensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.6 Robotersteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1

2 INHALTSVERZEICHNIS

Kapitel 1
Teilsysteme
In diesem Kapitel werden die Teilsysteme, aus denen ein Roboter aufgebaut ist,vorgestellt. Zunachst wird in den technische Aufbau von Roboter eingefuhrt.Hierzu werden Gelenktypen, die Grundkonfiguration fur Roboter sowie dieoft eingesetzten Antriebe vorgestellt und die Arbeitsraumproblematik disku-tiert. Elektrische Antriebe und deren Kraftubertragung werden ausfuhrlicherbehandelt, da sie bei Robotersystemen am haufigsten eingesetzt werden. Die-ses Kapitel endet mit einer kurzen Einfuhrung in Sensoren fur Robotersystemeund der Vorstellung der Grundmechanismen der Regelung und der Steuerung.Einige der folgenden Abschnitte sind aus [?] entnommen.
1.1 Mechanische Komponenten
1.1.1 Gelenktypen
Die Bewegungen eines Roboters werden erst durch seine Gelenke moglich. EinRoboter besteht aus einer Folge von Gliedern, die mit Gelenken verbundensind. Die 4 wichtigsten Gelenktypen sind nach [?]:
Rotationsgelenk (R) Die Drehachse bildet einen rechten Winkel mit denAchsen der beiden angeschlossenen Gliedern
Torsionsgelenk (T) Die Drehachse des Torsionsgelenks verlauft parallel zuden Achsen der beiden Glieder
Revolvergelenk (V) Das Eingangsglied verlauft parallel zur Drehachse, dasAusgangsglied steht im rechten Winkel zur Drehachse.
Lineargelenk (L) auch Translationsgelenk, Schubgelenk oder prismatischesGelenk. Lineare Gelenke bewirken eine gleitende oder fortschreitende Be-wegung entlang einer Achse.
3

4 KAPITEL 1. TEILSYSTEME
In Abbildung 1.1 und in Abbildung 1.2 sind diese Gelenktypen dargestellt.
(a) (b)
Abbildung 1.1: Gelenktypen (a) Rotationsgelenk (b)Torsionsgelenk (aus [?]S.14).
1.1.2 Grundkonfiguration fur Roboter
Der Arbeitsraum besteht aus denjenigen Punkten im dreidimensionalen Raum,die von der Roboterhand angefahren werden konnen. Hierzu sind drei Frei-heitsgrade in der Bewegung, also mindestens drei Gelenke, erforderlich. Durchdie Konstruktion der Roboterarme und ihrer Gelenke ist der Arbeitsraum ei-nes Roboters definiert. Je nach Grundform des Arbeitsbereichs unterscheidenwir folgende Grundkonfigurationen fur Industrieroboter: - Roboter mit kartesi-schen Koordinaten; Grundform des Arbeitsraums ist ein Quader - Roboter mitZylinderkoordinaten; Grundform ist ein Zylinder - SCARA-Roboter; Grund-form ist ein Zylinder. Der SCARA-Roboter (selective compliance assemblyrobot arm) wurde Anfang der 80er Jahre in Japan zur Montage entwickelt.Sein mechanischer Aufbau wurde so festgelegt, dass er in z-Richtung steif ist,aber in der x, y-Ebene nachgiebig. Er ist daher besonders zum Einsetzen vonObjekten mit einer Einsetzbewegung in z-Richtung geeignet. - Roboter mitPolarkoordinaten; Grundform des Arbeitsraums ist eine Kugel - Roboter mitGelenkarm; Grundform des Arbeitsraums ist eine Kugel Unter Grundform desArbeitsraums verstehen wir denjenigen Arbeitsraum, der sich ergeben wurde,wenn man die gegenseitige Behinderung der Arme des Roboters und die Be-grenzungen der Gelenkwinkel nicht berucksichtigt.

1.1. MECHANISCHE KOMPONENTEN 5
(a) (b)
Abbildung 1.2: Gelenktypen (a) Revolvergelenk (b) Lineargelenk(aus [?] S.14und S.15).
1.1.3 Roboterhandgelenke
Der Roboter soll Arbeiten verrichten, beispielsweise soll er Gegenstande grei-fen. Hierzu ist es nicht ausreichend, nur entsprechen der Position des Gegen-stands einen geeigneten Raumpunkt anzufahren. Es ist vielmehr notwendig,den Greifer in die geeignete Greifrichtung zu orientieren. Eine Roboterstellungbesteht also aus der Postition und der Orientierung des Greifers. Um den Grei-fer orientieren zu konnen, werden dem letzten Roboterarm Handgelenke nach-geschaltet. Das letzte Handgelenk tragt einen Flansch zur Ankopplung einesEffektors. Beispiele fur Effektoren sind: Greifer, Schraubendreher, Schweißzan-ge. Die Handgelenke einschließlich des Flansches werden auch als Handwurzelbezeichnet. Die Orientierung im Raum ist durch drei Winkel beschrieben. ZurEinstellung einer beliebigen Orientierung sind daher drei Freiheitsgrade erfor-derlich. Diese sind durch drei Drehgelenke, die Handgelenke, erreichbar. In denbereits vorgestellten Grundkonfigurationen fur Roboter wurden diese Hand-gelenke noch nicht dargestellt. For den Aufbau einer Handwurzel sind zweiGrundformen ublich. Diese sind in Abb. ??? und Abb. ??? dargestellt.
1.1.4 Freiheitsgrade und Gelenke
Unter Freiheitsgrad versteht man die Anzahl moglicher unabhangiger Bewe-gungen eines Objektes gegenuber einem festen Koordinatensystem. Die Lageeines im Raum frei beweglichen Objekts ist duch seine Stellung definiert. Eine

6 KAPITEL 1. TEILSYSTEME
Stellung wird durch die Postition (3 Werte) und die Orientierung (3 Werte)festgelegt. Insgesamt wird also die Stellung durch sechs Werte beschrieben, d.h.der Freiheitsgrad eines im Raum befindlichen Objekts ist = . Unter Getriebe-freiheitsgrad eines Roboters versteht man die Anzahl der Gelenke. Es gilt: 1.Um den Freiheitsgrad zu erreichen sind mindestens Gelenke erforderlich, d.h.es gilt 2. Fur die Orientierung sind Drehgelenke erforderlich, da Lineragelenkedie Orientierung der Handwurzel nicht andern wurden. Daraus ergibt sich un-mittelbar: Falls ( ) folgt ( ) ( ). Nicht in allen Anordnungen bringt ein Gelnkeinen zusatzlichen Freiheitsgrad. Beispiele: - Zwei aufeinanderfolgende Linear-gelenke, deren Schubachsen in dieselbe Richtung zeigen, sind bezuglich desFreiheitsgrades einem einzigen Lineargelenk aquivalent (Teleskopantenne). -Da der maximale Freiheitsgrad ist, bringen mehr als 6 Glenke keine zusatlichenFreiheitsgrade.
Neben dem Freiheitsgrad spielen bei Anwendungen aber weitere Gesichts-punkte eine Rolle, die den Einsatz von Robotern mit notwendig machen konnen.Beispielsweise kann ein achtachsiger Roboter (Abb. ) in einem Raum mit Hin-dernissen um Hindernisse herumgreifen. Er erreicht damit Punkte, die einemsechsachsigen Roboter zwar theoretsich auch zuganglich sind, aber bei der spe-ziellen Lage der Hindernisse unzuganglich werden.
1.1.5 Antrieb
Durch den Antrieb wird die erforderliche Engergie auf die Bewegungsachsenubertragen. Der Antrieb muß auch die Krafte und Momente durch das Gewichtder Glieder des Roboters und der Objekte im Effektor kompensieren. Energiewird also auch dann benotigt, wenn der Roboter sich nicht bewegt. Es gibtdrei Antriebsarten:
• Pneumatisch
• Hydraulisch
• Elektrisch
Diese drei Antriebsarten haben typische Eigenschaften, die nachfogend skiz-ziert werden: Pneumatischer Antrieb - Stellenergie: komprimierte Luft bewegtKolben, kein Getriebe; - Voteile: billig, einfacher Aufbau, schnelle Reakti-onszeit, auch in ungunstigen Umgebungen brauchbar; - Nachteile: laut, kei-ne Steuerung der Geschwindigketi bei der Bewegung, nur Punkt-zu-Punkt-Betrieb, schlechte Positioniergenauigkeit, da Luft kompressibel ist; - Einsatz:kleinere Roboter mit schnellen Arbeitszyklen und wenig Kraft, beispielsweisezur Palettierung kleinerer Werkstucke. 2. Hydraulischer Antrieb: - Stellenergie:

1.1. MECHANISCHE KOMPONENTEN 7
ldruckpumpe und steuerbare Ventile; - Vorteile: sehr große Krafte, mittlererGeschwindigkeit; - Nachteile:laut, zusatzlicher Platz fur Hydraulik, lverlustfuhrt zu Verunreinigung, lviskositat erlaubt keine guten Reaktionszeiten undkeine hohen Positionier- oder Wiederholungsgenauigkeiten; - Einsatz: großeRoboter, beispielsweise zum Schweißen. 3. Elektrischer Antrieb: - Stellenergie:Schritt- oder Servomotoren; - Vorteile: wenig Platzbedarf, kompakt, ruhig, gu-te Regelbarkeit der Drehzahl und des Drehmoments, hohe Positionier- undWiederholgenauigkeit, daher auch Abfahren von Flachen oder gekrummtenBahnen prazis moglich; - Nachteiel: wenig Kraft, keine hohen Geschwindig-keiten; - Einsatz: kleinere Roboter fur Prazissionsarbeiten, beispielsweise zurLeiterplattenbestuckung.
KinematikmodulDer kinematikmodul (Steuermodul) eines Roboters erlaubt das Psotitio-
nieren der Glenke. Die Grundaufgaben sind: - die Vorwartsrechnung, - dieRuckwartsrechnung, - das Lehren (”Teachen”) von Bahnen oder Bahnpunk-ten. Diese Methoden werden nachfolgend vur kurz definiert und in einemspateren Kapitel noch ausfuhrlich besprochen. Bei der Vorwartsrechnung gibtder Benutzer direkt die Gelenkkoordinaten (Gelenkwinkel) an, die der Kine-matikmodul dann einstellt. Da sich alle Gelenke gleichzeitig von ihrer Aus-gagsstellung in die Zielstellung bewegen, ist die resultierende Bahnbewegungder Hand dem Beruzter nicht bekannt, es sei denn sie wurde jedesmal be-rechnet werden. Wenn sich alle Gelenke mit maximaler Geschwindigkeit bewe-gen, dann erreichen sie außerdem nicht gleichzeitig ihre Endposition. Es gibtjedoch bei den meisten Robotern die ”Interpolierte Gelenkbewegung”. Hierwird die Geschwindigkeit aller Gelenke durch lineare Zeit-Interpolation so ge-regelt, daß alle Glenke gleichzeitig ihre Enstellung erreichen. Es entsteht so einegleichmaßigere Bewegung. Bei der Ruckwarterechnung gibt der Benutzer dieStellung des Effektors an, die der Roboter anfahren bzw. mit einer bestimm-ten Geschwindigkeit und Beschleunigung durchfahren soll. Hierbei wird eineStellung durch die Position und die Orientierung im Weltkoordinatensystemangegeben. Der Kinematikmodul muß aus der angegebenen Stellung die Ge-lenkkoordinaten berechnen und dies einstellen. Die Ruckwartsrechnug ist einekomplexe Augabe und erfordert hohe Rechenleistung, da sie in Echtzeit (eini-ge Millisekunden) durchgefuhrt werden muß. Die Gelenkstellungen zu einemRaumpunkt sind zudem nicht eindeutig. Bei Ruckwartsrechnungen kann - eine”Punkt-zu-Punkt-Bewegung” oder - eine ”Interpolierte Bewegung” erfolgen.Bei der Punkt-zu-Punkt-Bewegung ist der Bahnverlauf zwischen Ausgangs-und Zielpunkt normalerweise dem Benutzer nicht bekannt und interessiert ihnauch nicht. Bei der interpolierten Bewegung wird der Effektor moglichst ge-nau auf einer wahlbaran Bahn vom Ausgangspunkt zum Zielpunkt bewegt,beispielsweise bei linerarer Interpolation auf einer Verbindungsgeraden zwi-

8 KAPITEL 1. TEILSYSTEME
schn Ausgangspunkt und Zielpunkt. Die Bahn wird dabei immer durch Be-rechnung und Ansteuerung von vielen Zwischenpunkten realisiert. Fur jedendieser Zwischenpunkte ist eine eigene Ruckwartsrechnung notwendig. Daherauch die obengenannte Echtzeitforderung fur die Ruckwartsrechnung. BeimLehren (”Teachen”) der Bahnpunkte und der Orientierung steuert der Beutzermanuell den Roboterarm in eine Folge von Zielstellungen. Ist eine Zielstellungerreicht, dann veranlaßt der Benutzer, daß die aktuelle Gelenkstellung im Ki-nematikmodul gespeicher wird. Es ergibt sich eine Punkt-zu-Punkt-Bewegung.Die gespeicherten (”geteachten”) Punkte konnen in Roboterprogrammen ver-wendet werden und beispielswerise spater beliebig oft wieder angefahren wer-den.
GelenkregelungDer Roboter stellt ein bewegtes System mit Massen dar. Bei der Ausfuhrug
von Gelenkbewegungen werden diese Massen beschleunigt und wieder abge-bremst. Der Zielpunkt soll dabei moglischt prazis und schnell erreicht werden.Am Zielpunkt soll der Roboter stehen, d.h. alle Gelenke haben die Geschwin-digkeit 0 erreicht. Im einfachsten Fall wird mit fester Beschleunigung gearbeitetbis die Sollgeschwindigkeit erreicht ist, und rechtzeitig vor dem Ziel wird mitfester Verzogerung wieder abgebremst. Man erhalt so einen rampenformigenGeschwindiketisverlauf (siehe Abb. ) In allgemeineren Fallen kann der Be-nutzer Zwischenpunkte mit Sollgeschwindigkeiten vorgeben. In jedem Fall hatder Kinematikmodul also einen Bewegungsplan, bei dem zu jedem Zeitpunktdie Sollstellung und die Sollgeschwindigkeit der Gelenke bekannt ist. DurchWinkelgeber oder andere Meßeinrichtungen in den Gelenken wird die Ist- undSollstellung eingeht. An die Regelung werden folgende Anforderungen gestellt:- moglichst schnelle Armbewegungen, - Bewegung entlang der vorgegebenenBahn ohne Schwingen, insbesondere kein berschwingen bei engen Kurven oderan der Zielstellung; - Adaption an Lasten in der Hand; - Halten des Armsmit Last an der Zielpostion (kein Abdriften aufgrund des Lastgewichtes) DieRealisierung erfolgt im Prinzip uber PID-Regelstrecken. In die Berechnung derStellgroße geht also ein: - die Differenz zwischen Soll- und Ist-Wert (Proportio-nalteil), - das Zeitintegral uber die Differenz zwischen soll Soll- und Ist-Wert(Integralteil) - die nderungsgeschwindikeit der Differenz zwischen Soll- und Ist-Wert, d.h. deren Ableitung nach der Zeit (Differenzialteil). Das grundsatzlicheVerhalten von Regelkreisen zeigt Abb. Das angestrebte Verhalten des Regel-systems entspricht dem aperiodischen Fall, also der durchgezogenen Kurve inder Abbildung.
EffektorenEffektoren sind die an der Hanwurzel angeflanschten Werkzeuge. Beispiele
sind Greifer, Bohrer, Schweißgerat oder bei einem nur beobachtenden Roboterdie Kamera. Die Effektoren mussen ebenfalls gesteuert werden, z.B. das ffnen

1.2. ANTRIEBSSYSTEME 9
und Schließen eines Greifers bis zu einer bestimmten Weite. Man benotigt auchSensoren, um den Zustand der Effektoren zu erfassen, z.B fur die ffnungsweiteoder die Schließkraft eines Greifers. Die Steuerung des Effektors erfolgt selbstwieder mit Mikroprozessoren. Die Ansteuerung des Effektors wird in die Ro-boterprogrammiersprache integriert. Wichtige Zustande des Effektros werdendem Robotersteuerrechner permanent gemeldet. Hierdurch kann beispielswei-se das Festhalten eines Werkstuckes wahrend der Roboterbewegung uberwachtwerden.
SensorenMan unterscheidet interne und externe Sensoren. Interne Sensoren messen
Zustandsgroßen des Roboters selbst. Externe Sensoren erfassen Eigenschafender Umwelt eines Roboters. - Beispiele fur Großen, die interne Sensoren messen:Stellung der Gelenke Geschwindigkeit, mit der sich Gelenke bewegen, Krafteund Momente, die auf die Gelenke einwirken. - Beispiele fur Großen, die ex-terne Sensoren messen bzw. erkennen: Physikalische Großen im technischenProzeß Entfernungen Lage von Positioniermarken und Objekten, Kontur vonObjekten, Pixelbidler der Umwelt (CCD-Kamera). Die Abfrage der internenSensoren ist in die Regelkreise fur die Gelenke eingebunden. Sie erfolgt durchdie je Gekenk vohandenen Mikropoozessoren. Die Ansteuerung der externenSensoren muß in der Roboterprogrammiersprache moglich sein. Die Steuerungund Auswetung solcher Sensoren kann große Sensorrechner (Bildverarbeitung!)erfordern.
1.1.6 Arbeitsraum
1.2 Antriebssysteme
Antriebsarten, die bei Industrierobotern oder auch bei autonomen mobilenSystemen vorkommen, sind:
• pneumatische Antriebe,
• hydraulische Antriebe,
• elektrische Antriebe.
Pneumatische Antriebe, also Systeme, bei denen durch Luftdruck ein Kol-ben bewegt wird, sind fur Laufmaschinen aufgrund der geringen Stellkrafte unddes hohen Aufwands zur Generierung des Luftdrucks wenig geeignet (Luft-druck bei den ublichen Systemen etwa 100N/cm2). Bei diesem vor allem inGrenzbereichen stark nichtlinearen Antriebssystem stellt die Ventilsteuerung

10 KAPITEL 1. TEILSYSTEME
das Hauptproblem dar. Bisher wurden nur wenige Laufmaschinen mit pneu-matischen Systemen angetrieben. Beispiele sind Raiberts hopping machine[Raibert et al., 1986], der Robug II von Collie und eine kleine vierbeinige Lauf-maschine, die in England in den 90er Jahren entwickelt wurde [Snaith and Holland, 1991],wobei sich aus Gewichtsgrunden bei diesen Systemen der Kompressor zu Ge-nerierung des Lufdrucks außerhalb der Maschine befand.
Hydraulische Antriebe, die vom Prinzip pneumatischen Antrieben gleichen,arbeiten bei einem Oldruck von 1000N/cm2 bis 2500N/cm2. Diese Syste-me ermoglichen hohe Stellkrafte und -geschwindigkeit, eine Kopplung meh-rerer Stellglieder ohne Zwischengetriebe und ein hohes Leistungsgewicht (Lei-stung/Gewicht). Nachteile von hydraulischen Antrieben sind das hohe Gewichtfur die Stellglieder und Versorgungssysteme, die beschankte Stellgeschwindig-keit, der hohe Wartungsaufwand und das sehr umfangreiche Versorgungssy-stem. Der Vorteil von hydraulischen Antrieben liegt darin, daß im Gegensatzzu den Elektroantrieben die Große des Systems nicht proportional zu den Ko-sten ist. Ab einer bestimmten Systemgroße nimmt der Aufwand nur noch ge-ringfugig zu. Aufgrund des hohen Gewichtes konnen hydraulische Antriebe nurbei sehr großen Maschinen eingesetzt werden. Laufmaschinen, die mit Hydrau-lik angetrieben wurden, sind bspw. G.E. Quadruped [Mosher, 1968] oder derin Finnland gebaute MECANT I [?]. Auch bei der Realisierung des roboTRAC[Hiller, 1994] der Universitat Duisburg wird ein hydraulischer Antrieb verwen-det.
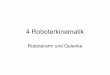
In Abbildung 1.3 ist das Prinzip fur hydraulische und pneumatische Li-nearantriebe dargestellt. Es ist auch moglich, rotatorische, hydraulische undpneumatische Antriebe aufzubauen. Beide Antriebsformen findet man bei derLaufmaschine.
Es wird nach folgendem Arbeitsprinzip vorgegangen: Uber eine Offnung imZylinder (Flussigkeitseintritt) wird das Medium (Luft bzw. Ol) in den Zylindergepreßt und somit der Kolben bewegt. In Gleichung 1.1 und Gleichung refftwird der Zusammenhang der Geschwindigkeit bzw. Kraft des Kolbens in Bezugauf die Fließgeschwindigkeit des Mediums f(t), die Flache A des Kolbens undder Druck des Mediums P (t) gezeigt.
V (t) = f(t)/A (1.1)
F (t) = P (t)A (1.2)
Fur kleinere Laufmaschinen sind Elektroantriebe am besten geeignet. Vor-teile dieser Systeme sind die einfache Integration in die Mechanik des Gerates,die relativ gute Steuer- und Regelbarkeit, die einfache Energieversorgung und

1.2. ANTRIEBSSYSTEME 11
Abbildung 1.3: Hydraulisches und pneumatisches Antriebskonzept (aus[Groover et al., 1987], S.82).
(a)(b)
Abbildung 1.4: Pneumatische Antriebe im Bein von Robug III (a) Steuerungs-konzept (b) ([Luk et al., 1995]).

12 KAPITEL 1. TEILSYSTEME
die sehr hohen Geschwindigkeiten, die erzielt werden konnen. Elektromotorenkonnen nochmals in Linearantriebe und rotatorische Elektromotoren unter-schieden werden. Linearantriebe sind aufgrund ihres hohen Baugewichts undder geringen Vorschubgeschwindigkeit fur Laufmaschinen weniger geeignet.Rotatorische Elektromotoren werden nochmals in Gleichstromservomotoren,Wechselstromservomotoren und Schrittmotoren unterschieden.
Gleichstromservomotoren bestehen im wesentlichen aus dem Rotor unddem Stator. Teilkomponenten des Rotors sind Anker und Umschalter, beimStator der Dauermagnet und die Bursten. Der Motor wird betrieben, indemdurch einen Stromfluß am Anker ein magnetisches Feld aufgebaut wird, dasdem Dauermagneten entgegengerichtet ist. Dadurch wird der Rotor gedreht.Um immer ein gegengesetzes Magnetfeld zu erzeugen, wird der Ankerstromentsprechend umgeschaltet. Das Drehmoment des Rotors bleibt konstant underrechnet sich aus
Tm(t) = KmIa(t) (1.3)
mit Tm als Drehmoment, Km Drehmomentkonstante des Motors und Ia
Strom durch den Anker. Durch Rotation im magnetischen Feld wird eine Span-nung eb(t) am Anker induziert, die zur Winkelgeschwindigkeit ω(t) proportio-nal ist.
eb(t) = Kbω(t) (1.4)
wobei Kb die Spannungskonstante des Motors ist. Der Ankerstrom bei derDrehung des Motors laßt sich berechnen nach:
Ia(t) = (V(in)(t) − eb(t))/Ra (1.5)
mit Ra als Widerstand des Ankers und V(in) als Spannung, die am An-ker angelegt wird. Die Vorteile des Gleichstrommotors liegen im sehr gu-ten Verhaltnis zwischen Leistung und Gewicht, der linearen Drehmoment-Drehzahl-Kennlinie und dem im Vergleich zu anderen Motoren hoheren Spit-zendrehmoment. In Abbildung ?? ist der Regelkreis und die Beziehung zwi-schen Drehmoment und Drehzahl eines Gleichstrommotors dargestellt.
Einem Wechselstromservomotor wird durch ein wechselndes Magnetfeld imStator eine Rotation ermoglicht. Diese Motoren sind preiswerter und robu-ster als Gleichstromservomotoren bei hoherer Ausgangsleistung. Allerdings istder Aufwand fur die Elektronik zum Umschalten der Magnetfelder am Statorhoher. Der Schlupf zwischen Stator- und Rotorfeld ist fur die im Vergleich zuGleichstrommotorenen schlechtere Regelbarkeit verantwortlich.
Schrittmotoren oder Schrittschaltmotoren werden durch eine Folge diskre-ter elektrischer Impulse angetrieben. Dabei bewirkt jeder elektrische Impuls

1.3. KRAFTUBERTRAGUNG 13
eine Drehung um einen festen Winkelschritt. Bei Schrittmotoren besteht derStator aus mindestens vier elektromagnetischen Polen (Anordung in Nord-Ost-Sud-West- Richtung), der Rotor ist ein Dauermagnet. Beispielsweise wird, fallsder Stator aus vier elektromagnetischen Polen besteht, beim Impuls der Rotorum 90 Grad gedreht. Schrittmotoren werden im wesentlichen fur Anwendungeneingesetzt, bei denen kleine Lasten bewegt werden sollen. Die Steuerung desSchrittmotors wird von einer Schaltelektronik ubernommen, indem der Stator-strom an den unterschiedlichen Polen standig umgeschaltet wird. Es kommtgenau dann zu einem Fehlverhalten des Motors, wenn aufgrund externer undinterner Einflusse der Rotor nicht der Schaltgeschwindigkeit folgen kann.
Abbildung 1.5: Vergleich verschiedener Antriebssysteme (aus[Weidemann, 1993] S.16).
1.3 Kraftubertragung
Geht man davon aus, daß man fur die Entwicklung einer speziellen Laufma-schine die Antriebe aufgrund des Leistungsgewichtes ausgewahlt hat, so stelltsich als nachste Frage, ob die Drehmomente und Stellgeschwindigkeiten furden speziellen Einsatz ausreichen. Beim Einsatz von Gleichstrommotoren furden Antrieb der Beinsegmente einer Laufmaschine sind die erzeugten Drehmo-

14 KAPITEL 1. TEILSYSTEME
mente normalerweise erheblich zu niedrig, wobei die Rotationsgeschwindigkeitviel zu hoch ist.
Um die gewunschten Stellgeschwindigkeiten und Stellkrafte zu erzielen,werden unterschiedliche Getriebe zur Kraftubertragung eingesetzt. Beispielehierfur sind:
• Planetengetriebe,
• Zuge,
• Schrauben- bzw. Spindelantriebe,
• Harmonic Drive,
• Mechanischer Muskel.
Planetengetriebe sind aus mehreren Zahnradern von unterschiedlicher Großeaufgebaut, die ineinander greifen, um so die Uber- bzw. Untersetzung des An-triebs zu ermoglichen. In Abbildung ?? ist die einfachste Form eines Getriebesmit Zahnradern dargestellt.Bei diesem sogenannten Stirnradgetriebe liegen dieAntriebswellen parallel. Sei im Folgenden N1 die Anzahl der Zahne des antrei-benden Ritzels und N2 die Anzahl der Zahne des angetriebenen Ritzels, solautet das Ubersetzungsverhaltnis
n =N1
N2
(1.6)
Die Winkelgeschwindigkeit des angetriebenen Stirnrades ergibt sich zu
Ω2 = nΩ1 (1.7)
Das Ausgansdrehmoment wird bestimmt durch
T2 =T1
n(1.8)
Bei Kettenantrieben, Seilzugen oder Zahnriemenantrieben konnen die Ubersetzung,das Drehmoment und die Winkelgeschwindigkeit fast analog berechnet wer-den. Als Unterschied laufen die beiden Ritzel nicht direkt aneinander, sondernsind durch o.g. Ubertragungsmittel verbunden. Allerdings entstehen hierbeiabhangig von der gewahlten Ubertragung Reibungsverluste.
Bei Schrauben- und Spindelantrieben ist die erzeugte Kraft und Bewe-gungsgeschwindigkeit abhangig von der Steigung der Windung der Schraubebzw. Spindel. Bei dieser Antriebsform wird eine Drehbewegung in eine Linear-bewegung umgeformt. Die Steigungskonstante p, auch Ganghohe genannt, ent-spricht den Ubersetzungsverhaltnis bei Stirnradgetrieben. p ist die Entfernung,

1.4. REGELUNG 15
Abbildung 1.6: Stirnradgetriebe
die die Schraube bei einer Umdrehung zurucklegt. Sei v(t) die Lineargeschwin-digkeit, Ω(t) die Winkelgeschwindigkeit und p die Steigungskonstante, so ergibtsich
v(t) = p ∗ Ω(t) (1.9)
Sei weiterhin T das Drehmoment, F die Kraft, β der Gewindewinkel, dm
der mittlere Durchmesser der Schraube, sec Sekans und µ der Reibungskoeffi-zient des Gewindes so ergibt sich folgender Zusammmenhang:
F =2Tπ ∗ dm − µ ∗ psecβ
dm ∗ p + µπd ∗m secβ(1.10)
Harmonic Drives stellen eine hervorragende Moglichkeit dar, auf gering-stem Raum eine große Ubersetzung zu verwirklichen. Das Funktionsprinzipvon Harmonic Drive besteht darin, daß eine elyptische Scheibe (Wave Genera-tor) im Inneren eines flexiblen Zahnrades (Flex Spline) liegt. Dieser Flex Splinebesitzt weniger Zahne als das umschließende Zahnrad (Circular Spline), wo-durch die Ubersetzung entsteht. In Abblidung ?? ist dieses Funktionsprinzipdargestellt.
1.4 Regelung
1.5 Sensoren
1.6 Robotersteuerung

16 KAPITEL 1. TEILSYSTEME

Literaturverzeichnis
[Groover et al., 1987] Groover, M., Weiss, M., Nagel, R., and Odrey, N. G.(1987). Robotic umfassend. Mc Graw - Hill.
[Hiller, 1994] Hiller, M. (1994). Mobile platform for robots and heavyloadmanipulators in unstructured terrain. In Proceedings of 5th. Int. Symposiumon Robotics and Manufactoring (ISRAM), Maui, Hawaii, USA.
[Luk et al., 1995] Luk, B. L., Galt, S., Cooke, D., and Collie, A. (1995). Anarthropodous robot for working in hazardous environments. In 2nd IFACConference on Intelligent Vehicles 95,. Helsinki University of Technology.
[Mosher, 1968] Mosher, R. (1968). Test and evaluation of a versatile walkingtruck. In Proceedings of Off-Road Mobility Research Symposium, pages 359–379, Washington, USA. International Society for Terrain Vehicle Systems.
[Raibert et al., 1986] Raibert, M. H., Chepponis, M., and Brown, H. (1986).Running on four legs as though they were one. ieeera, 2(2):70–82.
[Snaith and Holland, 1991] Snaith, M. and Holland, O. (1991). Quadrupedwalking using trained and untrained neural models. internal paper, TAG,TAG Bolams Mill, Dispensary Street, Alnwick, U.K.
[Weidemann, 1993] Weidemann, H.-J. (1993). Dynamik und Regelung vonsechsbeinigen Robotern und naturlichen Hexapoden. Number 362 in VDI-Fortschrittsberichte, Reihe 8. VDI-Verlag.
17