Embed Size (px)
Citation preview

Lineare Algebra für Physiker ∗
Domenico P.L. Castrigiano †
15. Juli 2010
∗Vorlesungsskript WS 2008/09†Zentrum Mathematik TU München

Einleitung
Die lineare Algebra hat sich aus der analytischen Geometrie und der Behandlung linearer Glei-chungssysteme entwickelt. Inzwischen ist sie ein Grundbestandteil der Mathematik und ihre An-wendungen reichen in alle Bereiche der Naturwissenschaften hinein. Für die Physik ist die lineareAlgebra ein selbstverständliches Werkzeug zur Mathematisierung der Theorie. Die Linearität ist oft-mals eine grundlegende Eigenschaft der Naturgesetze, z.B. sind Teilchen und Feldgleichungen linearoder der Zustandsraum eines quantenmechanischen Systems ist ein Vektorraum. Wo nichtlineareZusammenhänge bestehen, ist die Linearisierung in vielen Fällen der erste Schritt zur Behandlungdes Problems. Viele numerische Verfahren beruhen auf linearer Approximation. Schlieÿlich ist dielineare Optimierung in weiten Teilen eine Anwendung der linearen Algebra.
Es gibt eine Vielzahl einführender Bücher zur linearen Algebra. Unterschiede bestehen vornehm-lich in einem mehr oder weniger abstrakten Zugang. Wir wählen einen axiomatischen Aufbau,wenden uns aber sehr schnell den Vektorräumen zu. Weil es keine besondere Mühe bereitet und dieSicht auf das Wesentliche erleichtert, werden die linearen Strukturen über einem allgemeinen Körperbetrachtet. Erst wenn das Skalarprodukt behandelt wird, beschränken wir uns auf die reellen oderkomplezen Zahlen. Im Mittelpunkt der Untersuchungen steht der Begri der linearen Abbildung.
Wie ein Blick auf das Inhaltsverzeichnis zeigt, wird eine Auswahl aus dem üblichen Stokanoneiner Vorlesung über Lineare Algebra 1 und 2 getroen. Sie ist bestimmt von den Bedürfnisseneines Physikstudiums. Bei der Behandlung der Stoes ist es uns wichtig, die allgemeinen Strukturenherauszustellen. Wesentlich ist das Konzept der Isomorphie, das auch in der Physik von grosser Be-deutung ist. Unter einem Vektorraumisomorphismus zum Beispiel bleiben lineare Zusammenhängeunverändert. Es ändert sich aber ihre Darstellung, wie etwa im Fall der Abbildungsmatrix anstel-le eines Homomorhpismus zwischen endlichdimensionalen Vektorräumen. Durch den Wechsel derDarstellung wird eine einfachere Beschreibung ermöglicht. Dieser Grundgedanke führt zu besondersinteressanten Ergebnissen, wenn die reichhaltigere Struktur der unitären bzw. euklidischen Vektor-räume im Spiel ist. Ebenso wichtig wie die abstrakten Strukturen sind in der linearen AlgebraVerfahren und Algorithmen für praktische Berechnungen. Für Anwendungen ist der Matrizenkalkülfür die Behandlung linearer Gleichungssysteme von besonderer Bedeutung.
Inhaltsverzeichnis
1 Mengen 4
2 Abbildungen 9
3 Vollständige Induktion und Abzählbarkeit 15
4 Gruppen, Körper, Vektorräume 18
5 Lineare Unabhängigkeit, Basen, Dimension 24
6 Lineare Abbildungen 31
7 Matrizen 39
8 Lineare Gleichungssysteme 50
9 Weitere Folgerungen des Eliminationsverfahrens 59
10 Determinanten 63
11 Eigenwerte und Eigenvektoren 73
12 Diagonalisierbarkeit und Trigonalisierbarkeit 82
13 Vektorräume mit Skalarprodukt 91
14 Endomorphismen in Vetorräumen mit Skalarprodukt 99
3
1 Mengen
Eine Menge ist eine Zusammenfassung (in der Vorstellung) von verschiedenen Objekten, z.B. dieMenge der Einwohner Münchens oder der Kraftfahrzeuge mit Münchener Kennzeichen oder dieMenge der Mitglieder eines Orchesters. Es können natürlich auch verschiedenartige Objekte zueiner Menge zusammengefasst werden, wie z.B. die Einrichtungsgegenstände eines Zimmers und diesich darin bendlichen Personen.Die einzelnen Objekte heiÿen Elemente der Menge. Bezeichnet X eine Menge und a ein Element
der Menge, so schreibt man:
a ∈ X a ist ein Element von X.
X heiÿt eine endliche Menge, wenn sie aus endlich vielen Elementen besteht. Alle oben betrach-teten Mengen sind endlich. Besteht z.B. eine Menge X aus 6 Elementen, die mit a1, a2, . . . , a5, a6
bezeichnet werden, so schreibt man:
X = a1, a2, a3, a4, a5, a6
und es ist a1 ∈ X, . . . , a6 ∈ X. Mengen können unendlich sein, d.h. nicht endlich, wie z.B. dieMenge der natürlichen Zahlen 1, 2, 3, . . .. Diese wird mit N bezeichnet. Also
N = 1, 2, 3, . . . .
Wenn ein Objekt kein Element einer Menge X ist, schreibt man
a /∈ X a ist kein Element von X.
Z.B. ist 0 /∈ N, d.h. die Null ist (bei uns) keine natürliche Zahl.Seien X und Y zwei Mengen. Man sagt X ist eine Teilmenge von Y , wenn jedes Element von
X auch ein Element von Y ist, d.h. wenn gilt:
(1.1) x ∈ X ⇒ x ∈ Y.
Dabei bezeichnet ⇒ daraus folgt eine Implikation. Man schreibt:
X ⊂ Y X ist Teilmenge von Y .
Oensichtlich ist X ⊂ X. Weiter gilt die Transitivität
X ⊂ Y und Y ⊂ Z ⇒ X ⊂ Z.
X
YZ
Wichtig für den Nachweis der Gleichheit zweier Mengen ist die Äquivalenz
(1.2) X = Y ⇔ X ⊂ Y und Y ⊂ X.
4

Dabei bezeichnet ⇔ äquivalent zu die Implikationen für beide Richtungen.
Ist X eine Menge und E eine Eigenschaft (die die Elemente von X besitzen können oder auchnicht), dann bezeichnet
x ∈ X : E(x)
die Menge von Elementen x von X, die E besitzen. Diese Menge ist eine Teilmenge von X. ZumBeispiel ist die Menge der geraden natürlichen Zahlen
n ∈ N : n gerade = 2, 4, 6, . . .
eine Teilmenge von N.Unerläÿlich ist die Einführung der leeren Menge ∅, die Menge, die kein Element enthält. Für
diese gilt nach (1.1) für jede Menge X:
(1.3) ∅ ⊂ X.
Schlieÿlich bezeichnet P(X) die Potenzmenge von X, die Menge aller Teilmengen von X. EinBeispiel dazu sei
X = 1, 2, 3 ⇒ P(X) = ∅, 1, 2, 3, 1, 2, 1, 3, 2, 3, X.
Allgemein gilt stets ∅ ∈ P(X), X ∈ P(X) und a ∈ P(X) für jedes a ∈ X. Dabei ist a eineeinelementige Menge.
Üb X n-elementig ⇒ P(X) ist 2n-elementig.
Mengenoperationen
Seien X,Y, Z Mengen.
(1.4) Der Durchschnitt zweier Mengen: X ∩ Y := z : z ∈ X und z ∈ Y .
Der Doppelpunkt bei := bedeutet, dass die linke Seite durch die rechte Seite deniert wird.
X
YY∩X
(1.5) Die Vereinigung zweier Mengen: X ∪ Y := z : z ∈ X oder z ∈ Y .
5
X
YZ
Y∪XX Y
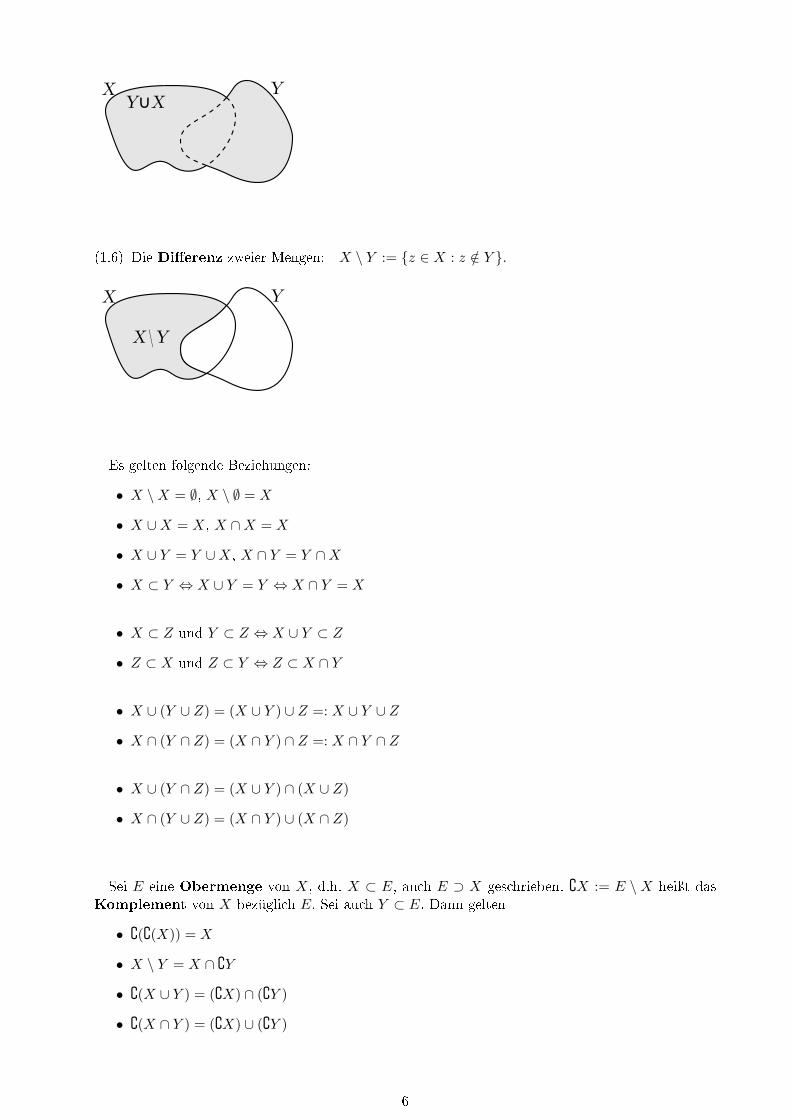
(1.6) Die Dierenz zweier Mengen: X \ Y := z ∈ X : z /∈ Y .
X Y
X\Y
Es gelten folgende Beziehungen:
• X \X = ∅, X \ ∅ = X
• X ∪X = X, X ∩X = X
• X ∪ Y = Y ∪X, X ∩ Y = Y ∩X
• X ⊂ Y ⇔ X ∪ Y = Y ⇔ X ∩ Y = X
• X ⊂ Z und Y ⊂ Z ⇔ X ∪ Y ⊂ Z
• Z ⊂ X und Z ⊂ Y ⇔ Z ⊂ X ∩ Y
• X ∪ (Y ∪ Z) = (X ∪ Y ) ∪ Z =: X ∪ Y ∪ Z
• X ∩ (Y ∩ Z) = (X ∩ Y ) ∩ Z =: X ∩ Y ∩ Z
• X ∪ (Y ∩ Z) = (X ∪ Y ) ∩ (X ∪ Z)
• X ∩ (Y ∪ Z) = (X ∩ Y ) ∪ (X ∩ Z)
Sei E eine Obermenge von X, d.h. X ⊂ E, auch E ⊃ X geschrieben. X := E \X heiÿt dasKomplement von X bezüglich E. Sei auch Y ⊂ E. Dann gelten
• ((X)) = X
• X \ Y = X ∩ Y
• (X ∪ Y ) = (X) ∩ (Y )
• (X ∩ Y ) = (X) ∪ (Y )
6

XE
Y
• X ⊂ Y ⇔ Y ⊂ X
• X ∩ Y = ∅ ⇔ X ⊂ Y ⇔ Y ⊂ X ⇔ (X) ∪ (Y ) = E
Weitere Beziehungen für Mengen X, Y , Z:
• (X ∪ Y ) \ Z = (X \ Z) ∪ (Y \ Z)
• (X ∩ Y ) \ Z = (X \ Z) ∩ Y = X ∩ (Y \ Z) = (X \ Z) ∩ (Y \ Z)
Kartesisches Produkt
Seien a, b zwei Objekte. Diesen entspricht ein neues Objekt, das geordnete Paar (a, b). Dafür giltdenitionsgemäÿ:
(a, b) = (a′, b′)⇔ a = a′, b = b′.
So bedeutet z.B. (a, b) = (b, c), dass a = b = c. Seien X, Y Mengen. Dann ist die Menge aller Paare
(1.7) X × Y := (x, y) : x ∈ X, Y ∈ Y
das kartesische Produkt von X mit Y . Es wird X ×X auch mit X2 bezeichnet.
X
y
Y
x
(x,y)
Zum Beispiel ist N2 = (n,m) : n ∈ N,m ∈ N die Menge der Gitterpunkte
3
2
1
1 2 3 4
Es gelten folgende Beziehungen für Mengen X, X ′, Y , Y ′:
7
• X × Y = ∅ ⇔ X = ∅ oder Y = ∅.
• Sei X × Y 6= ∅. Dann: X ′ × Y ′ ⊂ X × Y ⇔ X ′ ⊂ X und Y ′ ⊂ Y .
• (X × Y ) ∪ (X ′ × Y ) = (X ∪X ′)× Y
X
Y X'×YX×Y
X'
• (X × Y ) ∩ (X ′ × Y ′) = (X ∩X ′)× (Y ∩ Y ′).
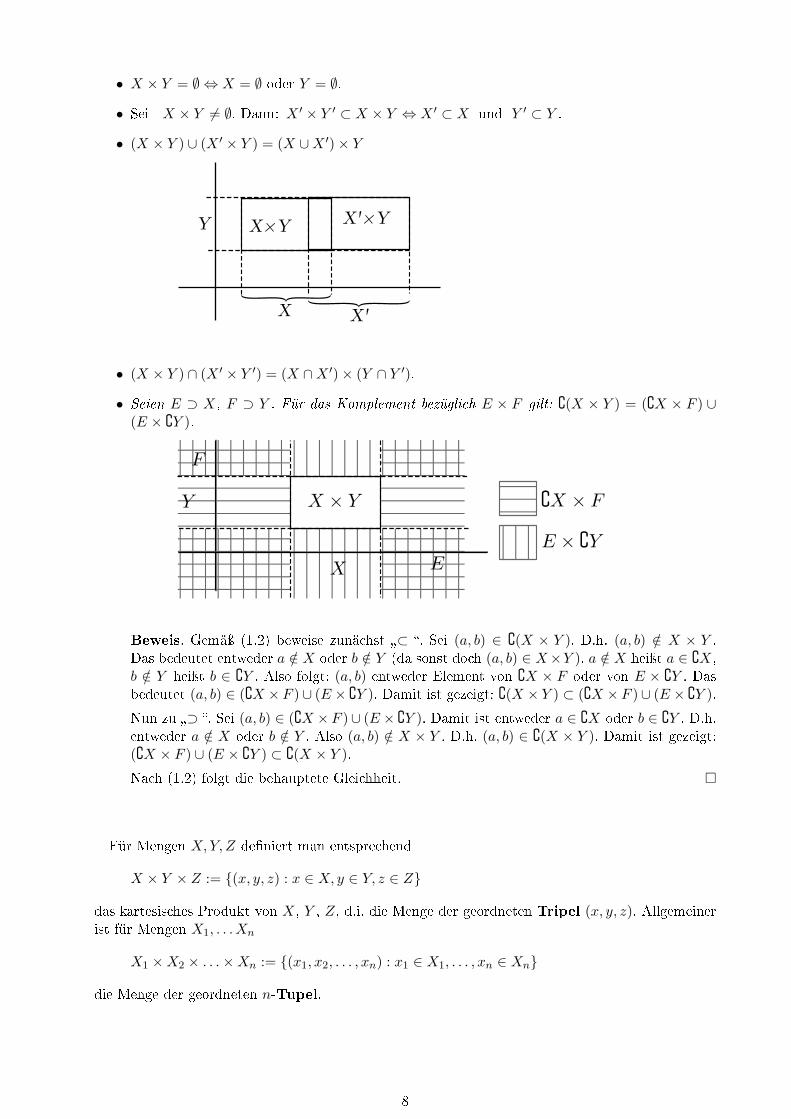
• Seien E ⊃ X, F ⊃ Y . Für das Komplement bezüglich E × F gilt: (X × Y ) = (X × F ) ∪(E × Y ).
Beweis. Gemäÿ (1.2) beweise zunächst ⊂ . Sei (a, b) ∈ (X × Y ). D.h. (a, b) /∈ X × Y .Das bedeutet entweder a /∈ X oder b /∈ Y (da sonst doch (a, b) ∈ X×Y ). a /∈ X heiÿt a ∈ X,b /∈ Y heiÿt b ∈ Y . Also folgt: (a, b) entweder Element von X × F oder von E × Y . Dasbedeutet (a, b) ∈ (X × F )∪ (E × Y ). Damit ist gezeigt: (X × Y ) ⊂ (X × F )∪ (E × Y ).
Nun zu ⊃ . Sei (a, b) ∈ (X ×F )∪ (E × Y ). Damit ist entweder a ∈ X oder b ∈ Y . D.h.entweder a /∈ X oder b /∈ Y . Also (a, b) /∈ X × Y . D.h. (a, b) ∈ (X × Y ). Damit ist gezeigt:(X × F ) ∪ (E × Y ) ⊂ (X × Y ).
Nach (1.2) folgt die behauptete Gleichheit.
Für Mengen X,Y, Z deniert man entsprechend
X × Y × Z := (x, y, z) : x ∈ X, y ∈ Y, z ∈ Z
das kartesisches Produkt von X, Y , Z, d.i. die Menge der geordneten Tripel (x, y, z). Allgemeinerist für Mengen X1, . . . Xn
X1 ×X2 × . . .×Xn := (x1, x2, . . . , xn) : x1 ∈ X1, . . . , xn ∈ Xn
die Menge der geordneten n-Tupel.
8

2 Abbildungen
Seien X, Y Mengen. Eine Abbildung f von X in (oder nach) Y ordnet jedem Element von Xgenau ein Element in Y zu. Zum Beispiel sei X die Menge der in München zugelassenen Autos, Ydie Menge der möglichen Münchner Kennzeichen und f ordnet jedem Auto sein Kennzeichen zu.Oder X sei die Menge der Personen in Deutschland, Y = N und f ordnet jeder Person ihr Gewicht(in kp) zu. Man schreibt
(2.1) f : X → Y, x 7→ f(x),
und nennt f(x) das Bild von x in Y unter der Abbildung f .
X Y
x
f(x)
Jedem Element x ∈ X wird ein Bild und nur ein Bild f(x) ∈ Y zugeordnet. Weiter heiÿt
(2.2) Graphf := (x, y) ∈ X × Y : y = f(x) ∈ P(X × Y )
der Graph von f . Er ist eine Teilmenge von X × Y .
(2.3) Lemma. G ∈ P(X × Y ) (d.h. G ⊂ X × Y ) ist genau dann der Graph einer Abbildung, wennzu jedem x ∈ X genau ein y ∈ Y existiert derart, dass (x, y) ∈ G.
X
YG
x0
G ist kein Abbildungsgraph, denn zu x0 ∈ X gibtes mehr als ein y ∈ Y mit (x0, y) ∈ G.
X
YG
x0
G ist kein Abbildungsgraph, denn zu x0 ∈ X gibtes kein y ∈ Y mit (x0, y) ∈ G.
X
Y
G
x
yG ist Abbildungsgraph, denn zu jedem x ∈ X gibtes genau ein y ∈ Y derart, dass (x, y) ∈ G.
9
Y X bezeichnet die Menge aller Abbildungen von X nach Y .
Beispiele für Abbildungen
(2.4) Sei b ∈ Y . f : X → Y, f(x) := b ∀ x ∈ X, ∗) heiÿt die konstante Abbildung von X in Y mitWert b. Es ist Graph f = X × b.
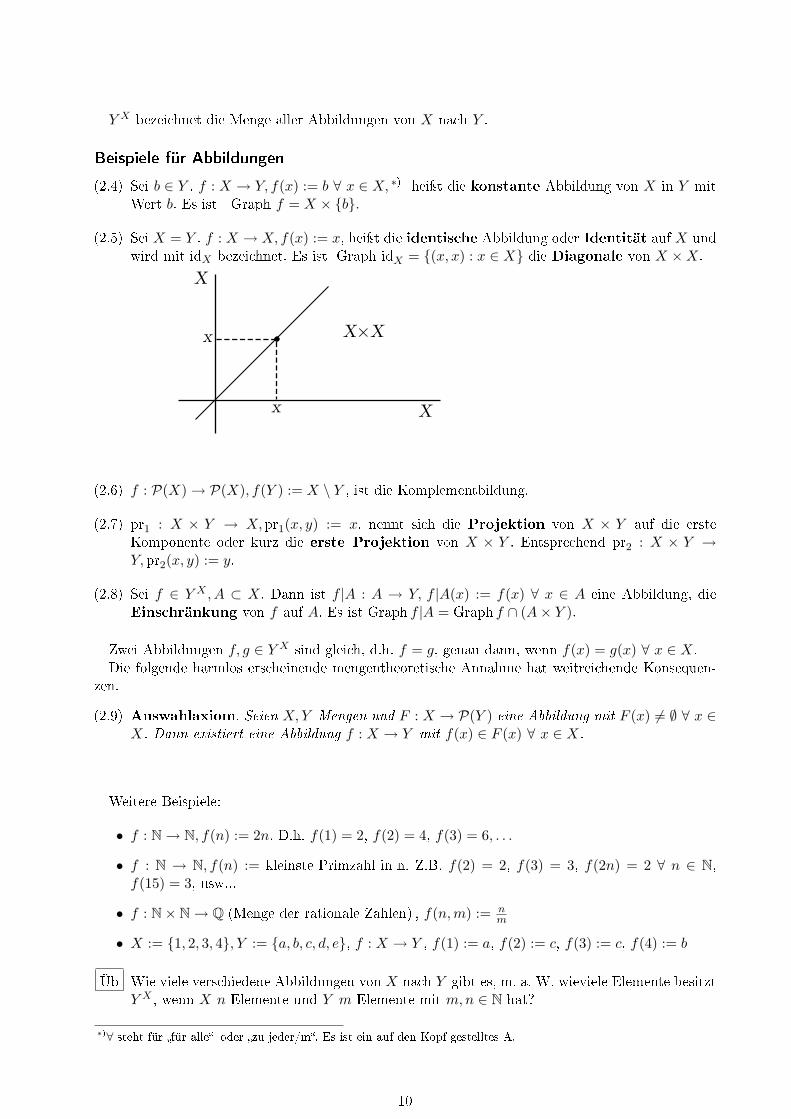
(2.5) Sei X = Y . f : X → X, f(x) := x, heiÿt die identische Abbildung oder Identität auf X undwird mit idX bezeichnet. Es ist Graph idX = (x, x) : x ∈ X die Diagonale von X ×X.
X
x
X
x
X×X
(2.6) f : P(X)→ P(X), f(Y ) := X \ Y , ist die Komplementbildung.
(2.7) pr1 : X × Y → X, pr1(x, y) := x, nennt sich die Projektion von X × Y auf die ersteKomponente oder kurz die erste Projektion von X × Y . Entsprechend pr2 : X × Y →Y, pr2(x, y) := y.
(2.8) Sei f ∈ Y X , A ⊂ X. Dann ist f |A : A → Y, f |A(x) := f(x) ∀ x ∈ A eine Abbildung, dieEinschränkung von f auf A. Es ist Graph f |A = Graph f ∩ (A× Y ).
Zwei Abbildungen f, g ∈ Y X sind gleich, d.h. f = g, genau dann, wenn f(x) = g(x) ∀ x ∈ X.Die folgende harmlos erscheinende mengentheoretische Annahme hat weitreichende Konsequen-
zen.
(2.9) Auswahlaxiom. Seien X,Y Mengen und F : X → P(Y ) eine Abbildung mit F (x) 6= ∅ ∀ x ∈X. Dann existiert eine Abbildung f : X → Y mit f(x) ∈ F (x) ∀ x ∈ X.
Weitere Beispiele:
• f : N→ N, f(n) := 2n. D.h. f(1) = 2, f(2) = 4, f(3) = 6, . . .
• f : N → N, f(n) := kleinste Primzahl in n. Z.B. f(2) = 2, f(3) = 3, f(2n) = 2 ∀ n ∈ N,f(15) = 3, usw...
• f : N× N→ Q (Menge der rationale Zahlen) , f(n,m) := nm
• X := 1, 2, 3, 4, Y := a, b, c, d, e, f : X → Y , f(1) := a, f(2) := c, f(3) := c, f(4) := b
Üb Wie viele verschiedene Abbildungen von X nach Y gibt es, m. a. W. wieviele Elemente besitztY X , wenn X n Elemente und Y m Elemente mit m,n ∈ N hat?
∗)∀ steht für für alle oder zu jeder/m. Es ist ein auf den Kopf gestelltes A.
10
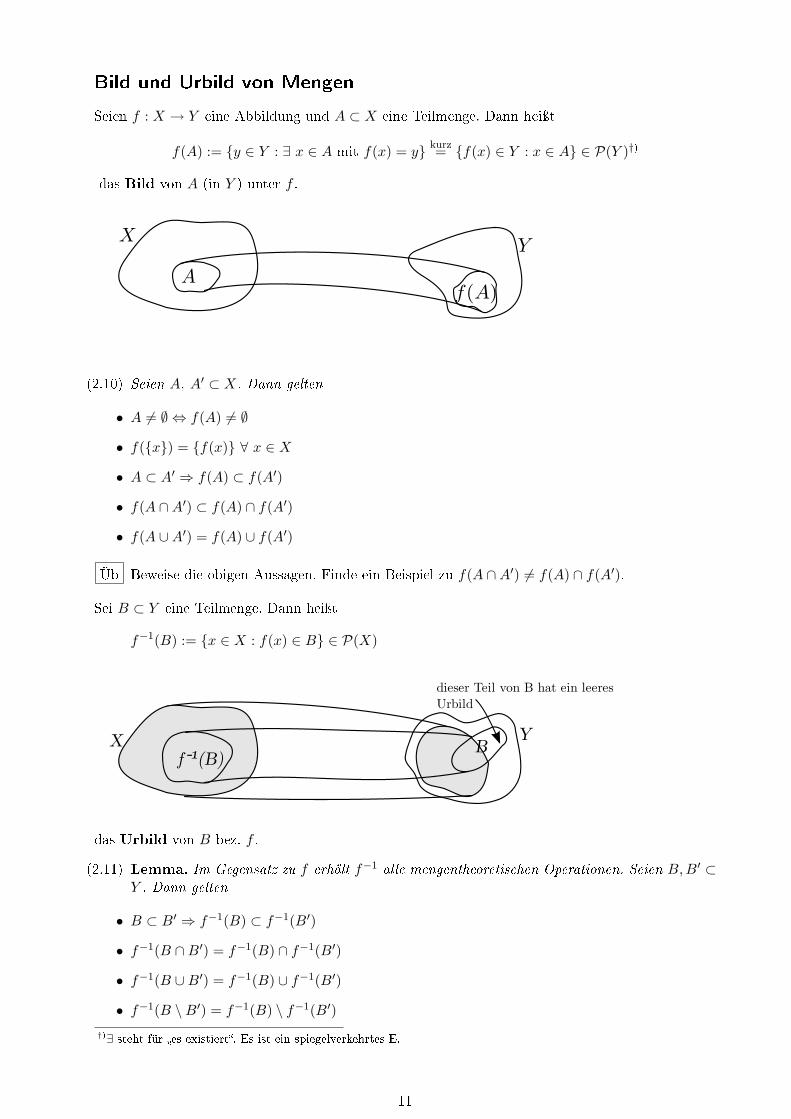
Bild und Urbild von Mengen
Seien f : X → Y eine Abbildung und A ⊂ X eine Teilmenge. Dann heiÿt
f(A) := y ∈ Y : ∃ x ∈ A mit f(x) = y kurz= f(x) ∈ Y : x ∈ A ∈ P(Y )†)
das Bild von A (in Y ) unter f .
(2.10) Seien A, A′ ⊂ X. Dann gelten
• A 6= ∅ ⇔ f(A) 6= ∅
• f(x) = f(x) ∀ x ∈ X
• A ⊂ A′ ⇒ f(A) ⊂ f(A′)
• f(A ∩A′) ⊂ f(A) ∩ f(A′)
• f(A ∪A′) = f(A) ∪ f(A′)
Üb Beweise die obigen Aussagen. Finde ein Beispiel zu f(A ∩A′) 6= f(A) ∩ f(A′).
Sei B ⊂ Y eine Teilmenge. Dann heiÿt
f−1(B) := x ∈ X : f(x) ∈ B ∈ P(X)
X Y
f ¹(B)-
dieser Teil von B hat ein leeres Urbild
B
das Urbild von B bez. f .
(2.11) Lemma. Im Gegensatz zu f erhält f−1 alle mengentheoretischen Operationen. Seien B,B′ ⊂Y . Dann gelten
• B ⊂ B′ ⇒ f−1(B) ⊂ f−1(B′)
• f−1(B ∩B′) = f−1(B) ∩ f−1(B′)
• f−1(B ∪B′) = f−1(B) ∪ f−1(B′)
• f−1(B \B′) = f−1(B) \ f−1(B′)
†)∃ steht für es existiert. Es ist ein spiegelverkehrtes E.
11
Üb Beweise obige Aussagen.
(2.12) Lemma. Sei A ⊂ X und B ⊂ Y . Es gelten folgende Beziehungen zwischen Bild und Urbild
• f(f−1(B)) = B ∩ f(X)
• f−1(f(A)) ⊃ A
Beweis der ersten Aussage. Gemäÿ (1.2) zeige zunächst ⊂. Sei y ∈ f(f−1(B)) ⇒ ∃ x ∈f−1(B) mit y = f(x) ⇒ ∃ x ∈ X mit f(x) ∈ B und y = f(x) ⇒ y ∈ B ∩ f(X).Nun zu ⊃. Sei y ∈ B∩f(X)⇒ y ∈ B und ∃ x ∈ X mit y = f(x)⇒ ∃ x ∈ f−1(B) mit f(x) = y⇒ y ∈ f(f−1(B)).
Üb Beweise die zweite Aussage und gebe ein Beispiel für f−1(f(A)) 6= A an.
(2.13) Lemma. Für die Projektionen (2.7) gelten:
• pr−11 (A) = A× Y, pr−1
2 (B) = X ×B für A ⊂ X und B ⊂ Y
• Z ⊂ X × Y ⇒ Z ⊂ pr1(Z)× pr2(Z)
Üb Beweise obige Aussagen und gebe ein Beispiel für Z 6= pr1(Z)× pr2(Z) an.
Üb Gebe ein Beispiel für f ∈ Y X und A,A′ ⊂ X mit A ⊂ A′ und f(A′ \A) 6= f(A′) \ f(A) an.
Üb Finde jeweils ein Beispiel für f ∈ Y X und A ⊂ X derart, dass gilt:
f(X \A) ⊂ Y \ f(A)
f(X \A) ⊃ Y \ f(A)
weder ⊂ noch ⊃ .
Surjektive, injektive und bijektive Abbildungen
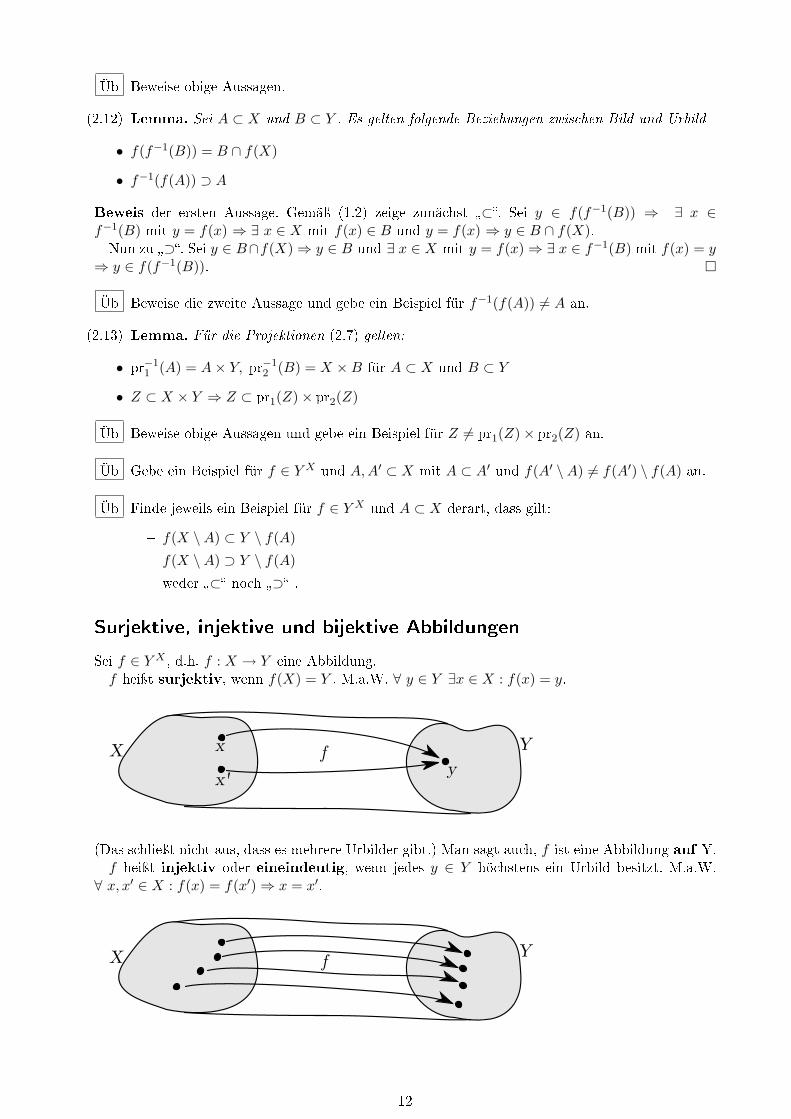
Sei f ∈ Y X , d.h. f : X → Y eine Abbildung.f heiÿt surjektiv, wenn f(X) = Y . M.a.W. ∀ y ∈ Y ∃x ∈ X : f(x) = y.
X Yfx
x'y
(Das schlieÿt nicht aus, dass es mehrere Urbilder gibt.) Man sagt auch, f ist eine Abbildung auf Y.f heiÿt injektiv oder eineindeutig, wenn jedes y ∈ Y höchstens ein Urbild besitzt. M.a.W.∀ x, x′ ∈ X : f(x) = f(x′)⇒ x = x′.
X Yf
12

(Das schlieÿt nicht aus, dass es zu einem y ∈ Y gar kein Urbild gibt.)
f heiÿt bijektiv, wenn f surjektiv und injektiv ist, m.a.W. ∀ y ∈ Y ∃1x ∈ X : f(x) = y. ‡)
(2.14) Sei f ∈ Y X . Setze f : X → f(X), f(x) := f(x). Dann ist f surjektiv (klar).
(2.15) Sei f ∈ Y X injektiv, A ⊂ X. Dann ist f |A injektiv (klar).
Üb Zeige mit Hilfe des Auswahlaxioms (2.9): Ist f ∈ Y X , dann existiert A ⊂ X derart, dass f |Ainjektiv ist und f(A) = f(X).
(2.16) Sei A ⊂ X. jA := idX |A heiÿt identische Einbettung von A in X. Für B ⊂ X giltj−1A (B) = A ∩B.
(2.17) Sei f ∈ Y X . Dann ist F : X → Graph f , F (x) := (x, f(x)), eine bijektive Abbildung.
(2.18) pr1 und pr2 sind surjektiv auf X bzw. Y .
(2.19) Die Komplementbildung (2.6) ist bijektiv.
(2.20) Lemma. Sei f ∈ Y X . Dann gelten für alle A ⊂ X und B ⊂ Y :
• f surjektiv ⇒ f(f−1(B)) = B
• f injektiv ⇒ f−1(f(A)) = A
Beweis. Die erste Aussage folgt sofort aus der ersten Aussage von (2.12), weil f(X) = Y .Zur zweiten Aussage: Wegen (2.12) bleibt f−1(f(A)) ⊂ A zu zeigen. Sei also x ∈ f−1(f(A))⇒ f(x) ∈ f(A) ⇒ ∃ x′ ∈ A mit f(x′) = f(x) ⇒ x′ = x, weil f injektiv ist. Also x ∈ A.
(2.21) Die Umkehrabbildung. Sei f : X → Y eine bijektive Abbildung. Dann gibt es eine Abbil-dung g : Y → X derart, dass
f(g(y)) = y ∀y ∈ Y und g(f(x)) = x ∀x ∈ X.
Oenbar ist g eindeutig und bijektiv. Man nennt g dieUmkehrabbildung von f und schreibtf−1 := g.
Beweis. Da f bijektiv ist, gilt: ∀ y ∈ Y ∃1 x ∈ X : f(x) = y. Nenne g(y) dieses eindeutigbestimmte x ∈ X. Damit ist eine Abbildung g : Y → X erklärt. Für diese gelten denitionsgemäÿobige Beziehungen.
Vorsicht, f−1 : P(Y )→ P(X) existiert immer, die Umkehrfunktion jedoch nur, wenn f bijektivist. Wenn f bijektiv ist, ist natürlich für jedes B ⊂ Y das Bild von B unter f−1 gleich dem Urbildvon B bezüglich f .
Hintereinanderschaltung (=Komposition) von Abbildungen
Seien X, Y, Z Mengen, f ∈ Y X , g ∈ ZY , d.h. f : X → Y, g : Y → Z Abbildungen. Dann ist
h : X → Z, x 7→ h(x) := g(f(x)),
eine Abbildung, denn jedem x ∈ X wird ein eindeutiges Bild g(f(x)) ∈ Z zugeordnet. Man schreibthierfür
h = g f
und nennt h die Hintereinanderschaltung oder Komposition von g und f .
‡)∃1 steht für es existiert genau ein
13

(2.22) Es gelten
• h(A) = g(f(A)) ∀ A ⊂ X
• h−1(C) = f−1(g−1(C)) ∀ C ⊂ Z
Üb Beweise obige Relationen.
(2.23) Wenn g und f injektiv bzw. surjektiv sind, dann ist auch h = g f injektiv bzw. surjektiv. Istf bijektiv, dann gilt nach (2.21)
f−1 f = idX , f f−1 = idY .
(2.24) Lemma. Sei f ∈ Y X , g ∈ XY , h ∈ XX mit g f = h. Dann gilt:
h bijektiv ⇒ f injektiv, g surjektiv.
Üb Zeige (2.24). Gebe ein Beispiel zu (2.24) an, wofür f nicht surjektiv und g nicht injektiv ist.
(2.25) Lemma. Seien A, B, C, D Mengen und f : A → B, g : B → C, h : C → D Abbildungen.Dann gilt h (g f) = (h g) f , d.i. die Assoziativität der Komposition.
Beweis. Für alle a ∈ A gilt: (h (g f))(a) = h((g f)(a)) = h(g(f(a))) = (h g)(f(a)) =((h g) f)(a).
Wegen (2.25) sind die Klammern nicht notwendig: man schreibt h g f .
14

3 Vollständige Induktion und Abzählbarkeit
Die natürlichen Zahlen N = 1, 2, 3, . . . sind angeordnet: 1 < 2 < 3 < . . .. Auf diese Weisedurchläuft man N, von einer natürlichen Zahl n zur nächsten n+ 1 ohne Wiederkehr.
Vollständige Induktion
Zu jeder natürlichen Zahl n sei eine Aussage A(n) gegeben. Die Richtigkeit dieser Aussagen sollbewiesen werden. Dazu kann man sich des Beweisprinzips der vollständigen Induktion bedienen:
Alle Aussagen A(n) für n ∈ N sind richtig, falls A(1) richtig ist (Induktionsanfang),und wenn für jedes n0 ∈ N, wofür A(1), A(2), . . . , A(n0) richtig sind (Induktionsvoraus-setzung), auch A(n0 + 1) richtig ist (Induktionsschluss).
(3.1) Beispiel. Arithmetische Summenformel
1 + 2 + 3 + . . .+ n =12n(n+ 1)
Beweis. A(n) ist die Aussage, dass die Summe der ersten n natürlichen Zahlen gleich 12n(n+1)
ist.
IA 1 =12· (1 + 1), d.h. A(1) ist richtig.
IV Sei n0 ∈ N derart, dass A(n0) gilt, d.h. dass 1 + 2 + . . .+ n0 =12n0(n0 + 1).
IS Zeige nun, dass A(n0 + 1) richtig ist:
1 + 2 + . . .+ n0 + (n0 + 1) = (1 + 2 + . . .+ n0) + (n0 + 1)
IV=12n0(n0 + 1) + (n0 + 1) =
(12n0 + 1
)(n0 + 1)
=12(n0 + 2)(n0 + 1). Das ist A(n0 + 1).
Bemerkung. Oft, wie auch in diesem Fall, wird nicht die volle IV ausgenutzt, sondern nur die Gül-tigkeit von A(n0); die Gültigkeit von A(n0 − 1), A(n0 − 2), . . . wird beim IS nicht benutzt . Beientsprechender Indizierung von A(n) kann der kleinste Index statt 1 irgendeine ganze Zahl (auchnegativ) sein.
Summenschreibweise. Für a1 + a2 + . . . + an (Pünktchenschreibweise) schreibt man∑n
i=1 ai.∗)
Dabei ist i der Summationsindex. (Dieser kann natürlich auch mit einem anderen Buchstabenbezeichnet werden.) Allgemeiner ist für zwei ganze (auch negative) Zahlen m ≤ n
(3.2)n∑
i=m
ai = am + am+1 + . . . an−1 + an
∗)P Sigma, das groÿe griechische S
15

(3.3) Beispiel. Geometrische Summenformel
n∑i=0
xi =1− xn+1
1− xfür jede Zahl x 6= 1.
Beweis.
IA x0 = 1,1− x0+1
1− x= 1, d.h. A(0) ist richtig.
ISn+1∑i=0
xi =n∑
i=0
xi + xn+1
IV=1− xn+1
1− x+ xn+1 =
1− xn+1 + (1− x)xn+1
1− x
=1− xn+2
1− x, d.h. A(n+ 1) ist richtig.
Mächtigkeit
Eine Menge X heiÿt gleichmächtig mit der Menge Y , wenn es eine bijektive Abbildung f : X → Ygibt. Da f−1 : Y → X nach (2.21) ebenfalls bijektiv ist, ist dann auch Y gleichmächtig mit X.Daher heiÿen X und Y gleichmächtig. Ist weiter Y gleichmächtig zu Z, dann sind X und Zgleichmächtig, denn
f : X → Y, g : Y → Z bijektiv ⇒ g f : X → Z bijektiv
nach (2.23). Eine Menge X heiÿt abzählbar unendlich, wenn X gleichmächtig mit N ist. X heiÿtabzählbar, wenn X endlich oder abzählbar unendlich ist.
(3.4) Satz. Sei A ⊂ N unendlich. Dann ist A abzählbar unendlich.
Beweis. Deniere eine Abbildung f : N → A, n 7→ an := f(n) wie folgt: a1 sei das kleinsteElement von A. Weiter sei a2 das kleinste Element von A \ a1, usw. Seien a1, . . . , an bereitsbestimmt, dann sei an+1 das kleinste Element von A \ a1, . . . , an (6= ∅, weil A unendlich).Oenbar ist
a1 < a2 < . . . < an
für jedes n. Hieraus folgt, dass f injektiv ist. Auÿerdem ist n ≤ an ∀ n ∈ N und damitinsbesondere
b ≤ ab ∀ b ∈ A.
Zum Beweis der Surjektivität von f sei x ∈ A \ a1. Dann existiert eine natürliche Zahl nmit an < x. Da ax ≥ x, gibt es eine gröÿte natürliche Zahl m < x mit am < x. Nehme nunan, es existiere b ∈ A mit am < b < x. Dann ist am+1 ≤ b < x nach Denition von am+1, wasaber ein Widerspruch zur Denition von m ist. Also ist am+1 = x.
(3.5) Satz. Sei A abzählbar und f : A→ B surjektiv. Dann ist B abzählbar.
Beweis. Für endliches A ist die Behauptung oensichtlich. Sei daher A unendlich. Wegen (3.4)ist es keine Einschränkung A = N anzunehmen. Nach Voraussetzung ist f−1(b) 6= ∅ ∀ b ∈ B.Sei g(b) das kleinste Element von f−1(b). Es ist f(g(b)) = b ∀ b ∈ B, weshalb g : B → Ninjektiv ist nach (2.24). Damit sind B und g(B) gleichmächtig und die Behauptung folgt aus(3.4).
16

Bemerkung am Rande: das Auswahlaxiom wurde in Beweis von (3.5) vermieden.
(3.6) Satz. N = N× N ist abzählbar.
3
2
1
1 2 3 4 X
Y
1 2 4 7
3 5 8
6
Beweis. f : N× N→ N, f(x, y) :=12(x+ y − 2)(x+ y − 1) + y, ist bijektiv (s. Bild).
Üb Zeige explizit, dass f in (3.6) bijektiv ist.
Familien und Folgen
Seien I, X nichtleere Mengen und f ∈ XI . Schreibt man f(ι) =: xι ∀ ι ∈ I †), dann nennt man(xι)ι∈I eine Familie in X mit Indexmenge I, und xι heiÿt Element oder Glied der Familiezum Index ι. Ist I = N, dann heiÿt (xn)n∈N eine Folge und wird auch als unendliches Tupel(x1, x2, x3, . . .) geschrieben. Ist I = 1, . . . , n, dann ist (xι)ι∈I = (x1, . . . , xn) ein n-Tupel.Sei (Aι)ι∈I eine Familie von Teilmengen einer Menge. Dann heiÿen⋃
ι∈I
Aι := x ∈ X : ∃ ι ∈ I mit x ∈ Aι
die Vereinigung der Mengen Aι, ι ∈ I, und⋂ι∈I
Aι := x ∈ X : ∀ ι ∈ I gilt x ∈ Aι
der Durchschnitt der Mengen Aι, ι ∈ I. Eine andere Schreibweise dafür ist⋃ι∈I
Aι =:⋃Aι : ι ∈ I,
⋂ι∈I
Aι =⋂Aι : ι ∈ I.
Üb Zeige:
•
(⋃ι∈I
Aι
)=⋂ι∈I
Aι
•
(⋃ι∈I
Aι
)∩
(⋃κ∈K
Bκ
)=
⋃(ι,κ)∈I×K
(Aι ∩Bκ)
•
(⋂ι∈I
Aι
)∪
(⋂κ∈K
Bκ
)=
⋂(ι,κ)∈I×K
(Aι ∪Bκ)
Die Mengen Aι, ι ∈ I, heiÿen paarweise disjunkt, wenn Aι ∩Aι′ = ∅ für ι, ι′ ∈ I mit ι 6= ι′.
(3.7) Satz. Eine Vereinigung von abzählbar vielen abzählbaren Mengen ist abzählbar. Ist also I eineabzählbare Menge und ist Aι abzählbar für jedes ι ∈ I, dann ist
⋃ι∈I Aι abzählbar.
Beweis. Ohne Einschränkung ist I ⊂ N und die An ⊂ N×n sind paarweise disjunkt. Dannist⋃
n∈I An ⊂⋃
n∈N N× n = N2 abzählbar nach (3.6). Die Behauptung folgt mit (3.4).
†)ι iota
17

4 Gruppen, Körper, Vektorräume
Uns werden vornehmlich reelle oder komplexe Vektorräume interessieren. In Hinblick auf spätereThemen ist es jedoch angebracht, etwas allgemeiner zu sein und mit Gruppen und Körpern zubeginnen.
(4.1) Denition und Lemma. Eine Gruppe ist eine Menge G mit einem Element e ∈ G undeiner inneren Verknüpfung, d.i. eine Abbildung von G×G in G, (x, y) 7→ xy, derart, dass∀ x, y, z ∈ G
a) x(yz) = (xy)z
b) ex = x
c) ∃ x−1 ∈ G mit x−1x = e.
Eigenschaft a) ist die Assoziativität der Verknüpfung. In jeder Gruppe gelten für alle x ∈ G
xx−1 = e
xe = x
e ist eindeutig
x−1 ist eindeutig und(x−1
)−1 = x.
Beweis. z := x−1 ⇒ z−1zxza)= (z−1z)xz
c)= exz
a)= e(xz)
b)= xz = xx−1; andererseits z−1zxz
a)=
z−1(zx)zc)= z−1ez
a)= z−1(ez)
b)= z−1z
c)= e. Also gilt xx−1 = e. Damit folgt x
b)= ex =
(xx−1
)xa)=
x(x−1x
) c)= xe. Sei e′ ∈ G mit e′x = x ∀ x ∈ G. Insbesondere ist e′e = e. Andererseits gilt e′e = e′
wie gerade gezeigt. Daher ist e = e′. Schlieÿlich gelte für x ∈ G sowohl zx = e wie z′x = e. Esfolgt z = ze = z
(xx−1
)= (zx)x−1 = ex−1 = x−1. und ebenso z′ = x−1. Also ist z = z′, d.h. x−1
ist eindeutig. Daher folgt aus(x−1
)−1x−1 = e = xx−1, dass
(x−1
)−1 = x.
Deshalb heiÿt e das Einselement der Gruppe G und x−1 das zu x inverse Element. Wir habendie Gruppenverknüpfung multiplikativ geschrieben. Dementsprechend heiÿt xy das Produkt vonx mit y. Man kann auch die additive Schreibweise x + y verwenden. Dann heiÿt x + y dieSumme von x mit y. In diesem Fall heiÿt e das Nullelement und wird mit 0 bezeichnet. Dasinverse Element wird mit −x bezeichnet und heiÿt entgegengesetztes Element. Die GruppeG heiÿt abelsch oder kommutativ, wenn xy = yx ∀ x, y ∈ G.
Beispiele
(4.2) Die ganzen Zahlen Z = . . . ,−2,−1, 0, 1, 2, . . . sind eine additive abelsche Gruppe: ∀ x, y, z ∈Z gilt x+ y = y + x ∈ Z, 0 + x = x+ 0 = x, x− x = 0 und die Assoziativität (x+ y) + z =x+ (y + z).
In der Physik begegnet man Z als der Gruppe derjenigen Translationen, die ein eindimensionalesbeidseitig unendlich ausgedehntes Kristallgitter mit Gitterkonstante 1 invariant lassen. Es bestehtein enger Zusammenhang zu den Fourierreihen.
N mit der gewöhnlicher Addition ist keine Gruppe, da kein Nullelement vorhanden ist. Aber auchN0 := N ∪ 0 ist keine Gruppe, da nur 0 ein inverses Element besitzt.Wie Z ist auch Q, die Menge der rationalen Zahlen, oder R, die Menge der reellen Zahlen, eine
additive abelsche Gruppe bez. der gewöhnlichen Addition.
18

Q∗ := Q \ 0 und R∗ := R \ 0 sind multiplikative abelsche Gruppen bez. der gewöhnlichenMultiplikation: Für r ∈ R, r 6= 0, ist r−1 = 1
r das inverse Element, wobei 1 ∈ R das Einselement ist.Q∗
+ := r ∈ Q : r > 0, R∗+ := r ∈ R : r > 0 sind ebenso multiplikative abelsche Gruppen bez.
der gewöhnlichen Multiplikation.
(4.3) Lemma und Denition. Sei X eine nichtleere Menge. Dann ist S(X) := f ∈ XX :f bijektiv eine Gruppe bez. der Komposition von Abbildungen. Einselement ist idX , das in-verse Element von f ist die Umkehrabbildung f−1. Zur Assoziativität siehe (2.25). S(X) heiÿtdie symmetrische Gruppe der Menge X.
Für n ∈ N schreibt man kurz Sn := S(1, . . . , n). f ∈ Sn heiÿt Permutation der Zahlen 1, . . . , n.
Eine Gruppe G heiÿt endlich, wenn G eine endliche Menge ist. |G| heiÿt die Ordnung von G.
Üb Zeige: |Sn| = 1 · 2 · 3 · 4 · . . . · (n− 1) · n =: n! ( n Fakultät ).
Üb Zeige: Sn ist für n ≥ 3 nicht abelsch.
(4.4) Lemma. Seien G, G′ Gruppen. Dann ist G×G′ eine Gruppe bez. der inneren Verknüpfung
(x, x′)(y, y′) := (xy, x′y′)
mit Einselement (e, e′). Das inverse Element (x, x′)−1 lautet(x−1, x′−1
).
Dies ist leicht zu verizieren und lässt sich sofort auf mehrere Faktoren verallgemeinern:G1× . . .×Gn wird mit der Gruppenverknüpfung (x1, . . . , xn)(x1, . . . , xn) = (x1y1, . . . , xnyn) verse-hen. In diesem Sinn ist insbesondere Gn = G× . . .×G (n Faktoren) eine Gruppe.
(4.5) Lemma. Rn ist mit der additiven Verknüpfung (x1, x2, . . . , xn) + (y1, y2, . . . , yn) = (x1 +y1, . . . , xn+yn), dem Nullelement 0 = (0, 0, . . . , 0) und dem entgegengesetzten Element −(x1, . . . , xn) =(−x1, . . . ,−xn) eine additive abelsche Gruppe.
Q und R sind Körper, weil man in Q und in R addieren und multiplizieren kann. Genauer geltenfolgende Körperaxiome.
(4.6) Denition. Ein Körper ist eine Menge K mit Elementen 0 ∈ K, 1 ∈ K, 0 6= 1 und zweiinneren Verknüpfungen
K ×K → K, (x, y) 7→ x+ y (Addition),
K ×K → K, (x, y) 7→ xy (Multiplikation)
derart, dass K mit 0 und Addition eine abelsche Gruppe ist, und K∗ := K \ 0 mit 1 undMultiplikation eine abelsche Gruppe ist, und die beiden Distributivgesetze
x(y + z) = xy + xz
(x+ y)z = xz + yz
∀ x, y, z ∈ K gelten. Um die Klammerungen zu reduzieren, vereinbart man dabei die Konven-tion Multiplikation vor Addition.
(4.7) Lemma. Q =
pq : p ∈ Z, q ∈ N
ist ein Körper: Zu r = p
q ∈ Q ist −r = −pq das entgegenge-
setzte Element und r−1 = qp falls p > 0 bzw. −q
−p falls p < 0, kurz 1r , das inverse Element bez.
der Multiplikation.
(4.8) Lemma. Sei K ein Körper. Es gelten folgende Regeln für x, y ∈ K:
• 0x = x 0
• xy = 0 ⇒ x = 0 oder y = 0
• x(−y) = (−x)y = −(xy) =: −xy.
Üb Beweise obige Aussagen.
19

Körper der komplexen Zahlen
Gemäÿ (5) ist R2 eine additive abelsche Gruppe bez. der Addition
(4.9) (x, y) + (x′, y′) = (x+ x′, y + y′)
mit 0 = (0, 0) als Nullelement und −(x, y) = (−x,−y) als entgegengesetztes Element. Nun wird aufR2 auch noch eine Multiplikation erklärt, womit R2 ein Körper gemäÿ Denition (6) wird. Für alle(x, y), (x′, y′) ∈ R2 sei
(4.10) (x, y)(x′, y′) := (xx′ − yy′, xy′ + yx′).
Die Assoziativität und die Distributivgesetze sind leicht nachzuprüfen. Die Kommutativität istklar. Das Einselement ist (1, 0), denn (1, 0)(x, y) = (1 · x − 0 · y, 1 · y + 0 · x) = (x, y). Dasinverse Element lautet (x, y)−1 =
(x
x2+y2 ,−y
x2+y2
)für (x, y) 6= 0, denn
(x
x2+y2 ,−y
x2+y2
)(x, y) =(
x2
x2+y2 − −y2
x2+y2 ,xy
x2+y2 + −xyx2+y2
)= (1, 0).
Also ist R2 mit Addition (9) und Multiplikation (10) ein Körper, der Körper der komplexenZahlen. Er wird mit C bezeichnet.
(4.11) Schreibweisen. Man setzt 1 := (1, 0) für das Einselement und i := (0, 1) für die imaginäreEinheit. Dann ist i2 = (0, 1)(0, 1) = (0 · 0− 1 · 1, 0 · 1 + 1 · 0) = −(1, 0) = −1. Weiter schreibtman jede komplexe Zahl z = (x, y) ∈ R2 in der Form
z = x+ iy
und nennt Re z := x den Realteil von z und Im z := y den Imaginärteil von z.
Damit rechnet sich leicht formal. So lautet die Addition (9)
z + z′ = (x+ iy) + (x′ + iy′) = x+ x′ + i(y + y′).
Das letzte Klammernpaar muss gesetzt werden. Das Produkt (10) ergibt sich durch Ausmultiplizie-ren
zz′ = (x+ iy)(x′ + iy′) = xx′ − yy′ + i(xy′ + yx′).
Die zu z = x+ iy konjugiert komplexe Zahl ist deniert als
(4.12) z := Re z − i Im z = x− iy, d.h. Re z = Re z, Im z = −Im z.
Für die komplexe Konjugation gelten folgende leicht zu verizierenden Rechenregeln:
• z + z′ = z + z′
• zz′ = z z′
20
• z ∈ R⇔ z = z
• zz = (Re z)2 + (Im z)2 ,denn (x+ iy)(x− iy) = x2 − (iy)2 = x2 − i2y2 = x2 + y2.
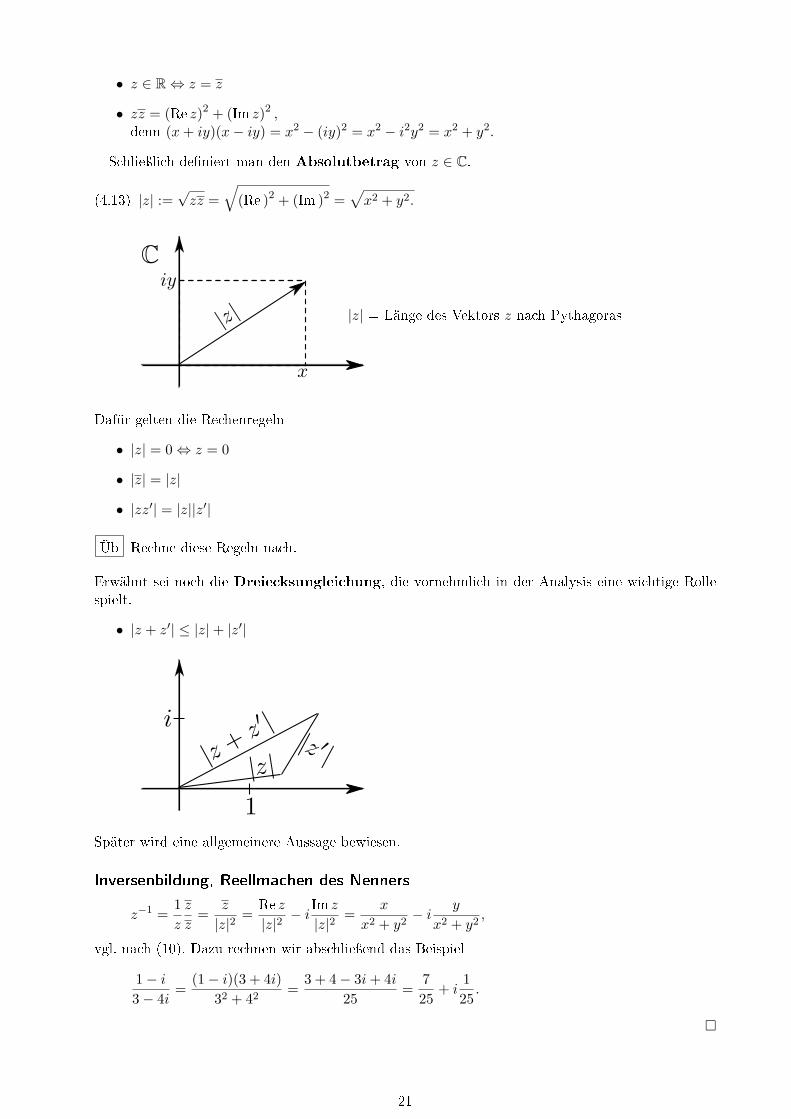
Schlieÿlich deniert man den Absolutbetrag von z ∈ C.
(4.13) |z| :=√zz =
√(Re )2 + (Im )2 =
√x2 + y2.
|z| = Länge des Vektors z nach Pythagoras
Dafür gelten die Rechenregeln
• |z| = 0⇔ z = 0
• |z| = |z|
• |zz′| = |z||z′|
Üb Rechne diese Regeln nach.
Erwähnt sei noch die Dreiecksungleichung, die vornehmlich in der Analysis eine wichtige Rollespielt.
• |z + z′| ≤ |z|+ |z′|
Später wird eine allgemeinere Aussage bewiesen.
Inversenbildung, Reellmachen des Nenners
z−1 =1z
z
z=
z
|z|2=
Re z|z|2
− i Im z
|z|2=
x
x2 + y2− i y
x2 + y2,
vgl. nach (10). Dazu rechnen wir abschlieÿend das Beispiel
1− i3− 4i
=(1− i)(3 + 4i)
32 + 42=
3 + 4− 3i+ 4i25
=725
+ i125.
21

(4.14) Denition. Sei K ein Körper. Ein Vektorraum oder linearer Raum über K oder auchK-Vektorraum ist eine additiv geschriebene abelsche Gruppe V mit einer Verknüpfung
K × V → V, (α, x) 7→ αx, Multiplikation mit Skalaren
derart, dass für alle α, β ∈ K und x, y ∈ V ∗)
• (αβ)x = α(βx) Assoziativität
• α(x+ y) = αx+ αy
• (α+ β)x = αx+ βx
Distributivgesetze
• 1x = x (1 ∈ K Einselement des Körpers).
Die Elemente von V heiÿen Vektoren, die von K heiÿen Skalare. Meist werden Vektoren mitlateinischen Buchstaben und Skalare mit griechischen Buchstaben bezeichnet. Es gilt die KonventionMultiplikation vor Addition. Damit kann man auf manche Klammerung verzichten. Ein R- bzw.C-Vektorraum heiÿt reeller bzw. komplexer Vektorraum. VR steht in Zukunft für Vektorraum.
(4.15) Beispiel. Die wichtigsten reellen bzw. komplexen VR sind Rn bzw. Cn für n ∈ N. Allgemeiner,ist K ein Körper, dann ist Kn ein K-VR mit der komponentenweise erklärten Addition
x+ x′ = (x1, . . . , xn) + (x′1 + . . .+ x′n) := (x1 + x′1, . . . , xn + x′n)
und Multiplikation mit Skalaren
λx = λ(x1, . . . , xn) := (λx1, . . . , λxn).
Insbesondere ist K = K1 ein K-VR. Die Gültigkeit der VR-Axiome veriziert man direkt.
Beachte, dass die Komponenten x1, . . . , xn von x ∈ Kn mit lateinischen Buchstaben bezeichnetwerden, obwohl es Körperelemente sind.
(4.16) Beispiel. Eine Verallgemeinerung von Kn ist der KVR KX aller Funktionen f : X → Kfür einen Körper K und einer nichtleeren Menge X. Für f, g aus KX und λ ∈ K deniertman die Linearkombination f + λ g punktweise, d.h. als die Funktion x 7→ f(x) + λ g(x). Esgilt also
(f + λ g)(x) = f(x) + λ g(x) ∀x ∈ X.Der Nullvektor 0 von KX ist die Funktion auf X, die konstant den Wert 0 ∈ K annimmt. DieGültigkeit der VR-Axiome für KX veriziert man leicht.
∗)α alpha , β beta
22

Üb Inwiefern ist der K-VR KX aus (16) eine Verallgemeinerung von Kn?
(4.17) Sei V K-VR. Dann gilt ∀ x ∈ V , α ∈ K
• 0x = 0
• α 0 = 0
• αx = 0⇒ α = 0 oder x = 0
• −x = (−1)x
• (−α)x = −(αx) = α (−x)
Achtung! Es treten zwei verschiedene Nullen auf: 0 ∈ K und 0 ∈ V .
Üb Beweise obige Gleichungen.
23

5 Lineare Unabhängigkeit, Basen, Dimension
In diesem Kapitel werden allgemeine strukturelle Eigenschaften eines Vektorraums untersucht.
Im Raum R3 hat eine Ebene E durch den Ursprung die Eigenschaft, dass mit je zwei Vektorenx, y ∈ E und jedem Skalar λ ∈ R gilt:
x+ λy ∈ E.
Auch jede Gerade durch den Ursprung hat diese Eigenschaft. Gibt es noch andere Teilmengen vonR3 mit dieser Eigenschaft?
(5.1) Denition. Sei V ein KVR und W ⊂ V mit 0 ∈ W . Dann heiÿt W Untervektorraum(UVR) von V , wenn für alle x, y ∈W,λ ∈ K gilt: x+ λy ∈W .
(5.2) Lemma. Jeder UVR W eines KVR V ist selbst ein KVR bez. der auf V erklärten VRVerknüpfungen.
Beweis. Die VROperationen x + y = x + 1y und λx = 0 + λx für x, y ∈ W,λ ∈ K bilden nachW ab. Auÿerdem ist −x = (−1)x ∈ W für x ∈ W . Insbesondere ist W eine abelsche Gruppe. Dieübrigen VR-Axiome gelten, weil sie für V gelten.
Ist in (2) ein UVR U von W gegeben, dann ist oensichtlich U ein UVR von V . Es sind 0 undV (triviale) UVR von V . Ebenen und Geraden in R3 durch 0 ∈ R3 sind (neben 0 und R3)die einzigen UVR von R3. Das wird noch begründet. Eine Gerade in R3 durch den Nullpunkt istjede Teilmenge G = λx0 : λ ∈ R von R3 mit x0 ∈ R3 \ 0. Je zwei Vektoren x1, x2 aus R3, dienicht auf einer Geraden durch den Nullpunkt liegen, d.h. x1, x2 6⊂ G ∀G, spannen eine EbeneE = λ1 x1 + λ2 x2 : λ1, λ2 ∈ R ⊂ R3 durch den Nullpunkt auf. Zwei weitere Beispiele für UVRfolgen.
(5.3) Beispiel. Seien K ein Körper und α1, . . . , αn ∈ K. Dann ist
W :=
x ∈ Kn :
n∑i=1
αixi = 0
ein UVR von Kn. Im Fall (α1, . . . , αn) 6= 0 heiÿt W Hyperebene.
Beweis. Es ist 0 ∈ W , denn 0 = (0, . . . , 0) und∑n
i=1 αi0 = 0. Seien x, y ∈ W , λ ∈ K. Dann istx = (x1, . . . , xn), y = (y1, . . . , yn) und somit λy = (λy1, . . . , λyn), x+λy = (x1 +λy1, . . . , xn +λyn).Es ist zu prüfen, ob x+ λy ∈W . Rechnen in K liefert:
n∑i=1
αi (xi + λyi) =n∑
i=1
(αixi + λαiyi)
= α1x1 + λα1y1 + . . .+ αnxn + λαnyn
=n∑
i=1
αixi + λn∑
i=1
αiyix,y∈W
= 0 + λ0 = 0⇒ x+ λy ∈W.
24
(5.4) Beispiel. SeiX eine Menge,K ein Körper. Dann istK(X) :=f ∈ KX : f−1(K \ 0)) ist endlich
ein UVR von KX .
Üb Weise (4) nach.
(5.5) Lemma und Denition. Sei V ein VR.
a) Der Durchschnitt von beliebig vielen UVR von V ist ein UVR von V .
b) Sei M ⊂ V und 〈M〉 :=⋂W : W ⊂ V UVR, W ⊃M. Dann ist 〈M〉 ein UVR von V mit
folgender Eigenschaft: Ist W ein UVR von V mit M ⊂W , dann ist 〈M〉 ⊂W . Daher ist 〈M〉der kleinste UVR von V , der M enthält. Er heiÿt der von M erzeugte UVR.
Üb Weise die Aussagen von (5) nach. Zu b) beachte, dass V ∈ W : W ⊂ V UVR ,W ⊃M 6= ∅und damit 〈M〉 deniert ist.
Im Folgenden bedeutet die Schreibweise x1, . . . , xn ∈ V , dass (xi)i=1,...,n eine Familie in V ist.
(5.6) Denition. Sei V ein K-VR, seien x1, . . . , xn ∈ V und sei x ∈ V . Dann ist x eine Linear-kombination der Vektoren x1, . . . , xn, wenn es α1, . . . , αn ∈ K gibt derart, dass
x = α1x1 + α2x2 + . . .+ αnxn =n∑
i=1
αixi.
(5.7) Denition. Sei V ein K-VR und M ⊂ V , M 6= ∅. Dann heiÿt die Menge aller Linearkombi-nationen von Vektoren aus M
SpanM :=
x ∈ V : ∃ n ∈ N, x1, . . . , xn ∈M, α1, . . . , αn ∈ K mit x =
n∑i=1
αixi
der vonM aufgespannte lineare Raum oder die lineare Hülle vonM . Man schreibt auchLinM füt SpanM . Es wird Span ∅ = 0 gesetzt.
(5.8) Satz. Es gilt: SpanM = 〈M〉.
Beweis. Oensichtlich ist M ⊂ SpanM . Weiter ist SpanM ein UVR, denn 0 ∈ SpanM (klar) undsind x, y ∈ SpanM , λ ∈ K, dann existieren x1, . . . , xn ∈M und α1, . . . , αn ∈ K mit x =
∑ni=1 αixi
sowie y1, . . . , ym ∈ M und β1, . . . , βm ∈ K mit y =∑m
j=1 βjyj , weshalb x + λy =∑n
i=1 αixi +∑mj=1 λβjyj ∈ SpanM .
Ist nun W ein UVR mit M ⊂ W , dann gilt für x1, . . . xn ∈ M : (. . . (((α1x1) + α2x2) + α3x3) +. . .+ αnxn) ∈W . Also gilt W ⊃ SpanM . Hieraus folgt die Behauptung.
(5.9) Denition und Lemma. Seien U , W UVR des VR V . Setze
U +W := z ∈ V : ∃ x ∈ U, y ∈W mit z = x+ y .
Oensichtlich ist U +W = Span (U ∪W ). Der UVR U +W heiÿt die (VR-)Summe von Uund W .
Entsprechend deniert man allgemein die Summe von endlich vielen VR. Für x ∈ V sei Kx :=αx : α ∈ K. Kx ist ein UVR. Hiermit erhält man speziell:
25
(5.10) Lemma. Für x1, . . . xn ∈ V gilt Span x1, . . . , xn = Kx1 +Kx2 + . . .+Kxn.
(5.11) Denition. Seien V ein VR, W ⊂ V ein UVR und M ⊂ W . Dann heiÿt M Erzeugenden-menge von W , wenn SpanM = W .
Ist Span x1, . . . , xn = V , dann sagt man, x1, . . . , xn erzeugen V .
(5.12) Beispiel. In Kn seien e1 := (1, 0, . . . , 0), e2 := (0, 1, . . . , 0),..., en := (0, . . . , 0, 1) die sog.kanonischen Einheitsvektoren. Diese erzeugen Kn, denn für x ∈ Kn gilt:
x = (x1, . . . , xn) = x1e1 + x2e2 + . . .+ xnen =n∑
i=1
xiei ∈ Ke1 +Ke2 + . . .+Ken.
(5.13) Lemma. Seien V ein VR und A,B ⊂ V . Dann gelten:
a) B ⊂ SpanA⇔ Span (A ∪B) = SpanA.
b) Span (SpanA) = SpanA.
c) W UVR ⇔ SpanW = W .
Üb Weise (13) nach.
Die Vektoren x1, . . . , xn ∈ V heiÿen paarweise verschieden, wenn xi 6= xj für i, j ∈ 1, . . . , nmit i 6= j. Man sagt auch, die Familie (xi)i=1,...,n ist injektiv.
(5.14) Denition. Sei V ein K-VR.
a) Die Familie (xi)i=1,...,n in V heiÿt linear unabhängig, wenn gilt: Sind α1, . . . , αn ∈ K
derart, dassn∑
i=1
αixi = 0, dann folgt α1 = α2 = . . . = αn = 0.
b) Die Teilmenge M ⊂ V heiÿt linear unabhängig, wenn jede endliche injektive Familie inM linear unabhängig ist.
Sprechweise. Man sagt in (14) a) etwas lax, dass x1, . . . , xn ∈ V linear unabhängig sind. Entspre-chend heiÿt (14) b), dass je endlich viele paarweise verschiedene Vektoren aus M linear unabhängigsind.
(5.15) Beispiel. In Kn sind die kanonischen Einheitsvektoren (s. (12)) linear unabhängig.
Beweis. Sei∑n
i=1 αiei = 0 für gewisse α1, . . . , αn ∈ K. Nun ist∑n
i=1 αiei = (α1, . . . , αn), s. (12).Also gilt (α1, . . . , αn) = 0 = (0, . . . , 0), d.h. α1 = 0, . . . , αn = 0.
Üb Zeige, dass Monome, Splines oder trigonometrische Monome linear unabhängige Mengen vonFunktionen bilden.
(5.16) Lemma. Es sind äquivalent:
(i) x1, . . . , xn sind linear unabhängig.
(ii) Keiner der Vektoren xi ist Linearkombination der anderen.
(iii) Die Darstellung eines Vektors als Linearkombination der xi ist eindeutig.
26

Beweis. (i) ⇒ (ii): Angenommen xi0 =∑n
i=1,i6=i0βixi mit βi ∈ K. Setze βi0 := −1. Dann ist∑n
i=0 βixi = 0, wobei (β1, . . . , βn) 6= 0. Das ist ein Widerspruch zu (i).
(ii) ⇒ (i): Angenommen es ist∑n
i=0 αixi = 0 mit (α1, . . . , αn) 6= 0. Dann existiert i0 mit ai0 6= 0.Damit folgt
xi0 =n∑
i=1,i6=i0
(−αi
αi0
)xi
im Widerspruch zu (ii).
(i) ⇒ (iii): Sei x ∈ V mit∑n
i=1 αixi =∑n
i=1 βixi ⇒∑n
i=1(αi − βi)xi = 0 ⇒ αi − βi = 0 für allei wegen (i), was (iii) bedeutet.
(iii)⇒ (i): Wäre 0 =∑n
i=1 αixi mit (α1, . . . , αn) 6= 0, dann hätte 0 ∈ V zwei verschiedeneDarstellungen als Linearkombination der xi im Widerspruch zu (iii).
Insbesondere gilt für linear unabhängige Vektoren x1, . . . , xn, dass kein xi = 0 ist und dass die xi
paarweise verschieden sind. Beides reicht aber natürlich nicht für die lineare Unabhängigkeit, dennz.B. für x1 ∈ V \ 0, α ∈ K \ 0, 1 ist x1 6= αx1 =: x2 6= 0 und dennoch x1 +
(− 1
α
)x2 = 0.
Allgemeiner als (16) ist das folgende Lemma.
(5.17) Lemma. Sei V ein VR und M ⊂ V . Dann sind äquivalent:
(i) M ist linear unabhängig.
(ii) Keiner der Vektoren x ∈M ist Linearkombination der Vektoren aus M \ x.(iii) Die Darstellung eines Vektors als Linearkombination von Vektoren aus M ist eindeutig.
Beweis. Jedes y ∈ SpanM läÿt sich in der Form y =∑
x∈M αxx schreiben, wobei αx ∈ K undαx 6= 0 nur für endlich viele x ∈M . Damit ist die Summe wohldeniert. Diese Schreibweise ist sehrbequem.
(i) ⇒ (iii): Sei nun auch y =∑
x∈M βxx mit βx ∈ K \ 0 nur für endlich viele x ∈M . Dann ist0 =
∑x∈M (αx − βx)x. Weil M linear unabhängig ist, folgt αx − βx = 0 ∀ x ∈M .
(iii) ⇒ (i): Wäre 0 =∑
x∈M αxx mit x ∈M : αx ∈ K \ 0 endlich aber nicht leer, dann hätte0 ∈ SpanM zwei verschiedene Darstellungen im Widerspruch zu (iii).
(i) ⇔ (ii): Der Beweis verläuft wie der zu (15), (i) ⇔ (ii).
(5.18) Denition. Sei V ein VR und M ⊂ V . Dann heiÿt M eine Basis von V , wenn gelten:
• M ist linear unabhängig
• M ist eine Erzeugendenmenge von V .
(5.19) Beispiel. Die Menge der kanonischen Einheitsvektoren e1, . . . , en ist eine Basis von Kn, diekanonische Basis oder Standardbasis. Das folgt aus (12),(15).
(5.20) Beispiel. Sei X 6= ∅ eine Menge. Zu y ∈ X betrachte ey : X → K, ey(x) :=
1 falls x = y0 falls x 6= y
.
Dann ist ey : y ∈ X eine Basis von K(X).
Üb Weise (20) nach.
(5.21) Satz und Denition. Es ist M ⊂ V genau dann eine Basis von V , wenn jeder Vektor eineeindeutige Darstellung als Linearkombination von Vektoren aus M hat, d.h. wenn es zu jedemy ∈ V eindeutige αx ∈ K, x ∈ M , mit αx = 0 bis auf endlich viele x ∈ M gibt derart,dass y =
∑x∈M αxx. Die zu y ∈ V eindeutig bestimmten Koezienten αx, x ∈ M , sind die
Koordinaten von y bez. der Basis M .
27

Beweis. Ist M eine Basis, dann folgt die Behauptung aus V = SpanM und (17), (i)⇒(iii). Umgekehrt gilt ebenfalls V = SpanM . Wende (17), (iii)⇒(i) an.
(5.22) Beispiel. Für x = (x1, . . . , xn) ∈ Kn sind x1, . . . , xn die Koordinaten von x bez. der kanoni-schen Basis.
(5.23) Basisergänzungssatz. Seien x1, . . . , xn ∈ V linear unabhängig. Weiter seien y1, . . . , ym ∈ Vderart, dass Span x1, . . . , xn, y1, . . . , ym = V . Dann lassen sich die x1, . . . , xn durch Hinzu-nahme von Vektoren aus y1, . . . , ym zu einer Basis von V ergänzen.
Beweis. Ist bereits Span x1, . . . , xn = V , dann gilt die Behauptung. Andernfalls ist y1, . . . , ym 6⊂Span x1, . . . , xn nach (13) a). Sei j1 ∈ 1, . . . ,m der kleinste Index mit yj1 /∈ Span x1, . . . , xn.Dann gelten:
a) x1, . . . , xn, yj1 sind linear unabhängig.
b) Span x1, . . . , xn, yj1 , yj1+1, ym = V .
Zum Nachweis von a) nehme an, dass (∑n
i=1 αixi)+βyj1 = 0 mit (α1, . . . , αn, β) 6= (0, . . . , 0). Dannist β 6= 0, weil sonst
∑ni=1 αixi = 0 mit (α1, . . . , αn) 6= (0, . . . , 0) im Widerspruch zur linearen
Unabhängigkeit von x1, . . . , xn. Damit ist jedoch yj1 =∑n
i=1
(−αiβ
)xi ∈ Span x1, . . . , xn im
Widerspruch zur Wahl von yj1 .Zum Nachweis von b) beachte, dass y1, . . . , yj1−1 ⊂ Span x1, . . . , xn und damit bereits V =
Span x1, . . . , xn, yj1 , . . . , ym nach (13) a).Die Behauptung folgt nun, indem man dieses Argument höchstens m mal wiederholt.
Üb SeiM ⊂ V linear unabhängig und y ∈ V mit y /∈ SpanM . Zeige:M∪y ist linear unabhängig.
In einer etwas laxen Sprechweise sagt man, dass x1, . . . , xn ∈ V eine Basis von V sind, wenn diexi paarweise verschieden sind und x1, . . . , xn eine Basis ist.
(5.24) Austauschlemma. Seien x1, . . . , xn und y1, . . . , xm Basen von V . Dann gibt es zu jedemi ∈ 1, . . . , n ein j ∈ 1, . . . ,m derart, dass aus x1, . . . , xn eine Basis entsteht, wenn xi
durch yj ersetzt wird.
Beweis. Ohne Einschränkung sei i = 1. Dann ist y1, . . . , ym 6⊂ Span x2, . . . , xn, da sonstx1 ∈ V = Span y1, . . . , ym ⊂ Span x2, . . . , xn im Widerspruch zu x1 /∈ Span x2, . . . , xn.Also existiert j ∈ 1, . . . ,m mit yj /∈ Span x2, . . . , xn. Daraus folgt, dass yj , x2, . . . , xn linearunabhängig sind (s. Beweis von a) in (23)).Es bleibt Span yj , x2, . . . , xn = V zu zeigen. Weil Spanx1, . . . , xn = V , gibt es α1, . . . , αn ∈
K mit yj =∑n
i=1 αixi. Dabei ist α1 6= 0, weil y /∈ Span x2, . . . , xn. Damit gilt x1 = 1α1yj +∑n
i=2
(−αiα1
)xi. Also ist x1, x2, . . . , xn ∈ Span yj , x2, . . . , xn, woraus die Behauptung mit (13) a)
folgt.
Üb Seien V ein VR, x, y ∈ V und M ⊂ V linear unabhängig. Zeige die folgende Implikation:y ∈ SpanM und y /∈ SpanM \ x ⇒ x ∈ Span (M \ x) ∪ y.
(5.25) Denition und Bemerkung. Ein VR V heiÿt endlich erzeugt, wenn es eine endliche Er-zeugendenmenge M von V gibt. Nach (23) Basisergänzungssatz enthält M eine Basis.
Üb Sei N ⊂ V, N 6= ∅, eine endliche Menge. Zeige: N enthält eine maximale linear unabhängigeTeilmenge M , d.h. für jede linear unabhängige Menge M ′ mit M ⊂M ′ ⊂ N gilt M = M ′.
(5.26) Satz und Denition. Sei V ein endlich erzeugter VR. Dann sind alle Basen von V endlichmit gleicher Anzahl von Elementen. Diese heiÿt Dimension von V und wird mit dimVbezeichnet.
28
Beweis. Nach (25) besitzt V eine endliche Basis x1, . . . , xn.
a) Sei y1, . . . ym ∈ V eine weitere endliche Basis. Angenommen n > m. Nach (24) kann jedes xi
gegen ein yj ausgetauscht werden. Es entsteht eine Basis, in der ein yj zweimal vorkommt (dan > m). Dies ist ein Widerspruch. Ebenso wird m > n ausgeschlossen. Also ist m = n.
b) Seien nun y1, . . . , yr ∈ V linear unabhängig. Da Span y1 . . . , yr, x1, . . . , xn ⊃ Span x1, . . . , xn= V , können nach (23) die y1, . . . , yr durch Vektoren aus x1, . . . , xn zu einer Basis ergänztwerden. Mit a) folgt daher r ≤ n.
Aus a) und b) folgt die Behauptung.
(5.27) Beispiel. Sei V ein K-VR und x ∈ V , x 6= 0. Dann ist dim Kx = 1.
(5.28) Beispiel. Wegen (19) ist dim Kn = n. Insbesondere ist jedes M ⊂ Kn mit mehr als nElementen linear abhängig.
(5.29) Denition. Ein VR V heiÿt endlich dimensional genau dann, wenn er endlich erzeugt ist.Andernfalls heiÿt V unendlich dimensional und man setzt dimV :=∞.
Üb Sei (α1, α2) ∈ R2 \ 0 und E := x ∈ R2 : α1x1 + α2x2 = 0. Nach (3) ist E ein UVR vonR2, eine Ebene. Gebe eine Basis von E an.
Üb Basis ist eine minimale Erzeugendenmenge. Sei V ein VR und N ⊂ M ⊂ V . Zeigefolgende Äquivalenz: M ist Basis von V ⇔ SpanM = V und SpanN 6= V falls N 6= M .
Üb Basis ist eine maximale linear unabhängige Menge. Sei V ein VR und M ⊂ N ⊂ V .Zeige die folgende Äquivalenz:M ist Basis von V ⇔ M ist linear unabhängig und N ist linearabhängig falls M 6= N .
Üb Seien V ein VR und W ⊂ V ein UVR. Zeige, dass dimW ≤ dimV . Weiter zeige:
• dimV <∞, W 6= V ⇒ dimW < dimV .
• dimV <∞, dimW = dimV ⇒W = V .
Schlieÿlich nde ein Beispiel mit W 6= V und dimW = dimV (=∞).
Üb Seien V ein VR und U , W UVR. Zeige die folgende Dimensionsformel
dim (U +W ) + dim (U ∩W ) = dimU + dimW
auch für den Fall dimU = ∞ oder dimW = ∞, wenn man vereinbart ∞ + n = ∞ ∀ n ∈N ∪ 0, ∞+∞ =∞. Insbesondere folgt im Fall dimU <∞ und dimW <∞:
U ∩W = 0 ⇔ dim (U +W ) = dimU + dimW.
Jeder VR 6= 0 hat eine Basis. Um dies beweisen zu können, benötigt man ein mengentheoreti-sches Hilfsmittel, das sog. Zornsche Lemma, was äquivalent zum Auswahlaxiom ist.
(5.30) Denition. Sei X eine Menge. Eine Halbordnung ≤ auf X ist eine Relation mit folgendenEigenschaften. Für alle x, y, z ∈ X gilt:
• x ≤ x (Reexivität)
• x ≤ y, y ≤ x⇒ x = y (Antisymmetrie)
• x ≤ y, y ≤ z ⇒ x ≤ z (Transitivität)
29

Sei Y ⊂ X. Dann heiÿt Y total geordnet oder eine Kette, wenn für alle y, y′ ∈ Y stets gilty ≤ y′ oder y′ ≤ y.Sei Y ⊂ X. Dann heiÿt a ∈ X eine obere Schranke von Y , wenn y ≤ a für alle y ∈ Y . EinElement b ∈ X ist ein maximales Element von X, wenn aus x ∈ X und b ≤ x folgt x = b.
(5.31) Beispiel. Sei X 6= ∅ eine Menge. Oensichtlich ist die gewöhnliche Mengeninklusion ⊂ eineHalbordnung auf P(X). Sei Y ⊂ P(X). Dann ist A :=
⋃Y : Y ∈ Y eine obere Schranke
von Y. K := 1, . . . , n : n ∈ N ist eine Kette in P(N).
Im allgemeinen hat nicht jede Teilmenge einer halbgeordneten Menge, auch nicht eine Kette, eineobere Schranke.
(5.32) Zornsches Lemma. Eine nichtleere halbgeordnete Menge, in der jede Kette eine obere Schran-ke besitzt, hat ein maximales Element.
(5.33) Basisexistenzsatz. Jeder VR V 6= 0 besitzt eine Basis.
Beweis. Sei L die Menge aller linear unabhängigen Teilmengen in V . Ist x ∈ V \ 0, dann ist xlinear unabhängig und damit ist L 6= ∅. L ist halbgeordnet mit der Mengeninklusion.Sei K ∈ L eine Kette. Setze L :=
⋃K : K ∈ K. Dann ist K ⊂ L ∀ K ∈ K. Zeige zunächst, dass
L linear unabhängig ist. Dazu seien x1, . . . , xn ∈ L paarweise verschieden. Dazu existieren Ki ∈ Kmit xi ∈ Ki für i = 1, . . . , n. Weil K eine Kette ist, gibt es ein K ∈ K1, . . . ,Kn mit Ki ⊂ K undsomit xi ∈ K für i = 1, . . . , n. Da K ∈ L, sind x1, . . . , xn linear unabhängig.Dies beweist, dass L ∈ L eine obere Schranke für K ist. Somit existiert nach (32) ein maximales
Element M in L. Dies ist eine Basis von V . Dazu bleibt zu zeigen, dass M eine Erzeugendenmengevon V ist.Angenommen es ist SpanM 6= V . Sei y ∈ V \ SpanV . Dann ist aber M ′ := M ∪ y linear
unabhängig (s. Üb. nach (23)). Dies ist ein Widerspruch zur Maximalität von M .
Üb Basisergänzungssatz. Sei V 6= 0 ein VR. Seien weiter L ⊂ V linear unabhängig und N ⊂V derart, dass Span (L∪N) = V . Zeige: Es existiert eine BasisM von V mit L ⊂M ⊂ L∪N .
Tipp: Betrachte L := X ⊂ V : L ⊂ X ⊂ L ∪ N, X ist linear unabhängig mit der Men-geninklusion als partielle Ordnung.
30

6 Lineare Abbildungen
Lineare Abbildungen stehen im Mittelpunkt aller unseren weiteren Untersuchungen. Seien V undW KVR. Eine Abbildung f : V 7→W heiÿt linear, wenn
f(x+ λx′) = f(x) + λf(x′) für alle x, x′ ∈ V, λ ∈ K.
Es folgt sofort f(0) = 0 und mit Induktion
f
(n∑
i=1
αixi
)=
n∑i=1
αif(xi) für alle n ∈ N, αi ∈ K, xi ∈ V.
Beispiele und grundlegende Eigenschaften
(6.1) Beispiel. Sei V = W und α0 ∈ K. Setze f : V → V, f(x) := α0x. Dann ist f linear, dennnach Denition ist
f(x+ λy) = αo(x+ λy) = α0x+ λα0y, f(x) = α0x, f(y) = α0y
und daher f(x+ λy) = f(x) + λf(y). Man nennt f eine Homothetie.
(6.2) Lemma. Sei f : K → K linear. Dann existiert α0 ∈ K mit f(z) = α0z für alle z ∈ K.
Beweis. Sei z ∈ K. Weil f linear ist, folgt f(z) = f(z1) = zf(1) = f(1)z. Setze α0 := f(1). Danngilt f(z) = α0z für alle z ∈ K. .
(6.3) Beispiel. Die Projektion auf die i-te Komponente pri : Kn → K, pri(x) := xi, für i ∈1, . . . , n ist linear, denn
x+ λy = (x1, . . . xn) + λ(y1, . . . , yn) = (x1 + λy1, . . . , xn + λyn)⇒ pri(x+ λy) = xi + λyi = pri(x) + λpri(y).
(6.4) Beispiel. Die Abbildung f : C3 → C3, f((x1, x2, x3)
):= (x2, 0, x1), ist linear, denn
(x1, x2, x3) + λ(y1, y2, y3) = (x1 + λy1, x2 + λy2, x3 + λy3)f ↓ f ↓ f ↓
(x2, 0, x1) + λ(y2, 0, y1) = (x2 + λy2, 0, x1 + λy1)
ist oenbar richtig.
Üb Translationen sind nicht linear. Seien V ein VR und a ∈ V \0 fest. Dann heiÿt ta : V →V, ta(x) := x+ a, die Translation um a. Sie ist nicht linear, denn
ta(2x) = 2x+ a, 2ta(x) = 2(x+ a) = 2x+ 2a ⇒a 6=0
ta(2x) 6= 2ta(x).
Üb Sei, wie üblich (s. (4.16)), V := RR versehen mit den punktweise denierten Vektorraumver-knüpfungen, d.h. denitionsgemäÿ ist (f + λg)(x) = f(x) + λg(x) für alle x ∈ R. Sei weiterϕ ∈ RR fest. Zeige, dass F : V → V, (F (f))(x) := ϕ(x)f(x) für alle x ∈ R, linear ist.
31

Üb Seien X eine Menge, V := KX der VR mit den punktweise denierten Verknüpfungen, Y eineweitere Menge und W := KY der entsprechende VR. Weiter sei ϕ : Y → X eine Abbildung.Zeige: F : V →W, F (f) := f ϕ ist eine wohldenierte lineare Abbildung.
(6.5) Satz. Seien x1, . . . , xn eine Basis in V und y1, . . . , yn Vektoren aus W . Dann gibt es genaueine lineare Abbildung f : V →W derart, dass f(xi) = yi für alle i ∈ 1, . . . , n.
Beweis. Zur Eindeutigkeit seien f, g : V → W linear mit f(xi) = g(xi) = yi ∀i. Sei x ∈ V .Dann gibt es αi ∈ K mit x =
∑ni=1 αixi. Weil f und g linear sind, folgt f(x) = f (
∑ni=1 αixi) =∑n
i=1 αif(xi) =∑n
i=1 αiyi =∑n
i=1 αig(xi) = g (∑n
i=1 αixi) = g(x). Weil x ∈ V beliebig ist, folgtf = g.Zur Existenz beachte, dass obige Koordinaten αi ∈ K von x ∈ V bez. der Basis x1, . . . , xn
eindeutig bestimmt sind. Ausgehend von x =∑n
i=1 αixi setze f : V → W, f(x) :=∑n
i=1 αiyi.Damit ist f wohldeniert und f(xi) = yi ∀i. Es bleibt die Lineraität von f zu zeigen:
f(x+ λx′) = f
(n∑
i=1
αixi + λn∑
i=1
α′ixi
)= f
(n∑
i=1
(αi + λα′i)xi
).
Letzteres ist nach Denition von f gleichn∑
i=1
(αi + λα′i)yi =n∑
i=1
αiyi + λn∑
i=1
α′iyi,
was wieder denitionsgemäÿ gleich ist
f
(n∑
i=1
αixi
)+ λf
(n∑
i=1
α′ixi
)= f(x) + λf(x′).
Üb Seien V,W K-VR, M ⊂ V eine Basis und (yx)x∈M (irgend)eine Familie in W . Zeige: Danngibt es genau eine lineare Abbildung f : V → W mit f(x) = yx für alle x ∈ M . Untersuche,wann f injektiv, surjektiv oder bijektiv ist.
Nach (5) und, allgemeiner, nach obiger Übung ist also eine lineare Abbildung durch ihre Werte aufeiner Basis bereits eindeutig bestimmt.
Üb Zeige: x1 := (1, 1, 1), x2 := (i, 1, 1), x3 := (0, i, 0) bilden eine Basis in C3. Weiter seien y1 :=(5i, 0, 1), y2 := (0, 0, 0), y3 := (0, 1 + i, 0). Nach (5) gibt es genau eine lineare Abbildung vonC3 in C3 mit f(xi) = yi für i = 1, 2, 3. Man berechne f
((i, 1, i+ 1)
).
(6.6) Denition. Sei f : V → W linear. Dann heiÿen f(V ) =: Bild (f) ⊂ W das Bild von f undf−1(0) =: Kern (f) ⊂ V der Kern von f .
(6.7) Lemma. Bild(f) bzw. Kern(f) ist ein UVR von W bzw. V.
Beweis. Es ist f(0) = 0 ∈ Bild (f). Seien y, y′ ∈ Bild (f). Dann existieren x, x′ ∈ V mit f(x) =y, f(x′) = y′. Mit λ ∈ K folgt für x+ λx′ ∈ V wegen der Linearität f(x+ λx′) = f(x) + λf(x′) =y + λy′ ∈ Bild (f). Also ist Bild(f) ein UVR von W .Für den Kern (f) = f−1(0) = x ∈ V : f(x) = 0 ist 0 ∈ Kern (f) oensichtlich. Seien x, x′ ∈
Kern (f) und λ ∈ K. Dann ist f(x+λx′) = f(x)+λf(x′) = 0+λ0 = 0, weshalb x+λx′ ∈ Kern (f).Also ist Kern (f) ein UVR von V.
Allgemeiner gilt
32

(6.8) Lemma. Seien f : V →W linear und V ′ ⊂ V und W ′ ⊂W UVR. Dann ist f(V ′) UVR vonW und f−1(W ′) UVR von V.
Üb Weise (6.8) nach.
(6.9) Denition und Lemma. Sei f : V → W linear. Dann heiÿt Rang (f) := dimBild (f) derRang von f . Sei dim W <∞. Dann gilt:
f surjektiv ⇐⇒ Rang(f) = dimW.
Beweis. Zur nicht trivialen Richtung ⇐ sei y1, . . . , yr eine Basis von Bild (f). Da r = Rang (f) =dimW , ist nach (5.23), (5.26) y1, . . . , yr bereits eine Basis von W und damit Bild (f) = W.
(6.10) Lemma. Sei f : V →W linear. Dann gilt:
f injektiv ⇐⇒ Kern (f) = 0.
Beweis. ⇒ Sei x ∈ Kern (f). Dann ist f(x) = 0. Es ist auch f(0) = 0. Weil f injektiv ist, folgtx = 0. ⇐ Seien x, x′ ∈ V mit f(x) = f(x′). Dann ist 0 = f(x) − f(x′) = f(x − x′). Weil nunKern (f) = 0, ist x− x′ = 0, d.h. x = x′.
(6.11) Beispiel. Die Abbildung f : Kn → Km, f((x1, . . . , xn)
):= (
∑ni=1 xi,
∑ni=1 xi, . . . ,
∑ni=1 xi)
ist linear mit Rang(f) = 1 und dim Kern(f) = n− 1.
Beweis. Die Linearität ist leicht nachzuweisen. Oenbar ist Bild(f) = K(1, 1, . . . , 1). Daher istRang(f) = 1. Jetzt wird dim Kern(f) = n − 1 gezeigt. Es ist Kern(f) = (x1, . . . , xn) ∈ Kn :∑n
i=1 xi = 0. Für n = 1 ist Kern(f) = 0. Sei nun n > 1. Oenbar liegen x1 := (1,−1, 0, . . . , 0),x2 := (1, 0,−1, 0, . . . , 0), . . . , xn−1 := (1, 0, . . . , 0,−1) in Kern(f). Weiter sind x1, . . . , xn−1 line-ar unabhängig, denn
∑n−1i=1 αixi = (
∑n−1i=1 αi,−α2, . . . ,−αn) = (0, . . . , 0) impliziert
∑n−1i=1 αi =
0, α2 = · · · = αn = 0 und somit auch α1 = 0. Damit ist dim Kern (f) ≥ n − 1. Andererseits istKern (f) 6= Kn, weil z.B. (1, 0, . . . , 0) /∈ Kern(f), weshalb dim Kern(f) < n.
In diesem Beispiel ist dimKern(f) +Rang(f) = dim Kn. Das ist ein allgemeiner Sachverhalt, s.(14).
Üb Untersuche Bild und Kern für die bisher betrachteten linearen Abbildungen
F : RR → RR, F (f) = ϕf
f aus (4)
F : KX → KY , F (f) = f ϕ
(6.12) Lemma. Seien V,W VR, M ⊂ V und f : V →W linear. Dann gilt:
f(Span M) = Span f(M).
Insbesondere ist f(M) eine Erzeugendenmenge von W , wenn M eine solche von V ist und fsurjektiv ist.
Üb Weise (12) nach.
(6.13) Lemma. Seien V,W VR und f : V → W linear und injektiv. Weiter seien x1, . . . , xn linearunabhängig in V . Dann sind f(x1), . . . , f(xn) linear unabhängig in W .
33

Beweis. Sei∑n
i=1 αif(xi) = 0 für αi ∈ K. Dann folgt: f (∑n
i=1 αixi) = 0⇒∑n
i=1 αixi = 0 (weil finjektiv ist)⇒ (α1, . . . , αn) = 0 (weil x1, . . . , xn linear unabhängig sind). Also sind f(x1), . . . , f(xn)linear unabhängig.
(6.14) Dimensionsformel. Sei dim V <∞ und f : V →W linear. Dann gilt:
dim V = Rang(f) + dim Kern(f).
Beweis.Weil V endlich erzeugt ist, ist wegen (12) auch Bild(f) endlich erzeugt. Damit ist Rang(f) <∞. Sei y1, . . . , yr eine Basis von Bild(f). Wähle xi ∈ f−1
(yi
)für i = 1, . . . , r. Weiter sei
xr+1, . . . , xr+s eine Basis von Kern(f) ⊂ V .Es bleibt zu zeigen, dass x1, . . . , xr+s eine Basis von V ist. Zunächst zeigen wir die lineare Unab-
hängigkeit der xi:
0 =r+s∑i=1
αixi ⇒ 0 = f(0) =r+s∑i=1
αif(xi) =r∑
i=1
αif(xi) + 0 =r∑
i=1
αiyi ⇒ α1 = α2 = · · · = αr = 0
weil y1, . . . , yr linear unabhängig sind. Damit ist 0 =∑r+s
i=r+1 αixi, woraus auch αr+1 = · · · =αr+s = 0 folgt, weil xr+1, . . . , xr+s linear unabhängig sind.Jetzt wenden wir uns dem Span der xi zu. Sei x ∈ V . Dann ist f(x) =
∑rj=1 αjyj mit bestimmten
αj ∈ K, da y1, . . . , yr eine Basis des Bildes sind. Nun betrachte x′ :=∑r
i=1 αixi. Dafür folgt
f(x− x′) = f(x)− f(x′) =r∑
j=1
αjyj − f(r∑
i=1
αixi) =r∑
j=1
αjyj −r∑
i=1
αif(xi) = 0,
weil f(xi) = yi. Deshalb ist x−x′ ∈ Kern(f) und somit x−x′ =∑r+s
i=r+1 αixi mit gewissen αi ∈ K.Also ist x = x′ +
∑r+si=r+1 αixi =
∑r+si=1 αixi. Das beweist Spanx1, . . . , xr+s = V .
Sehen wir uns den Beweis von (14) genauer an. Der UVR U := Span x1, . . . , xr erfüllt
U + Kern (f) = V und U ∩ Kern (f) = 0,
denn V = Span x1, . . . , xr+s ⊂ Span(U ∪ Kern (f)
)= U + Kern (f) ⊂ V , und U ∩ Kern (f) =
Span x1, . . . , xr ∩ Span xr+1, . . . , xr+s = 0, weil x1, . . . , xr+s linear unabhängig sind.
(6.15) Denition. Ein VR V heiÿt die direkte Summe der UVR U und U ′, wenn
U + U ′ = V und U ∩ U ′ = 0.
In diesem Fall heiÿt U (bzw. U ′) ein VR-Komplement von U (bzw. U ′). Man schreibt
V = U ⊕ U ′.
Beispiel.
a) R2 = G1 ⊕G2 für je zwei verschiedene Geraden durch den Ursprung.
34

b) R3 = E ⊕G für jede Ebene E und Gerade G, die den Ursprung enthalten und wofür G 6⊂ E.
(6.16) Lemma. Sei V = U ⊕ U ′. Dann gilt für jedes x ∈ V : Es existieren u ∈ U, u′ ∈ U ′ mit
x = u+ u′
Dabei sind u und u′ eindeutig bestimmt.
Beweis. Die Existenz von u, u′ folgt aus U + U ′ = V . Zur Eindeutigkeit seien v ∈ U und v′ ∈ U ′derart, dass ebenfalls x = v+ v′. Dann ist u− v = v′− u′, wobei u− v ∈ U und v′− u′ ∈ U ′. Daherfolgt u− v = v′ − u′ = 0, d.h. u = v und u′ = v′.
Wendet man (16) auf die Situation in (14). an, so folgt, dass
fU : U → Bild(f), fU (x) := f(x)
eine lineare Bijektion ist, d.h. ein sog. Isomorphismus (21).
Üb Sei dim V <∞ und f : V → W linear. Sei weiter U ein VR-Komplement von Kern(f) in V .Zeige, dass
fU : U → Bild (f), fU (x) := f(x)
ein Isomorphismus (21) ist.
Es folgt ein wichtiges Korollar zu (14).
(6.17) Korollar. Sei dimV = dimW <∞ und f : V →W linear. Dann gilt:
f injektiv⇐⇒ f surjektiv⇐⇒ f bijektiv.
Beweis. Es gelten allgemein: f surjektiv ⇔ Rang(f) = dimV (nach (9)), und f injektiv ⇔dimKern(f) = 0 (nach (10)). Die Behauptung folgt daher aus der Dimensionsformel (14).
Die lineare Gleichung f(x) = b
Sei f : V → W linear und b ∈ W . Die Gleichung f(x) = b heiÿt homogen, wenn b = 0, ansonstenist sie inhomogen. Die Menge aller Lösungen x ∈ V der Gleichung f(x) = b ist denitionsgemäÿf−1(b). Im Fall der homogenen Gleichung ist daher
f(x) = 0⇐⇒ x ∈ Kern (f).
Die homogene Gleichung hat stets (mindestens) eine Lösung, nämlich x = 0. Allgemein gilt, dass dieGleichung f(x) = b genau dann lösbar ist, d.h. (mindestens) eine Lösung hat, wenn b ∈ Bild (f).
35

(6.18) Lösungsmenge. Sei f : V →W linear und b ∈ Bild (f). Weiter sei x0 ∈ V eine Lösung vonf(x) = b. Dann gilt für die Lösungsmenge
f−1(b) = x0 + Kern (f) := x0 + z : z ∈ Kern (f).
Alle Lösungen x ∈ V von f(x) = b sind also von der Form x = x0 + z, wobei x0 eine sog.spezielle oder partikuläre Lösung der inhomogenen Gleichung ist und z alle Lösungen derhomogenen Gleichung durchläuft.
Beweis. Es ist x = x0 + z eine Lösung, denn f(x) = f(x0 + z) = f(x0) + f(z) = f(x0) = b.Umgekehrt sei x ∈ V eine Lösung, d.h. f(x) = b. Da auch f(x0) = b, folgt: f(x) = f(x0) ⇒ 0 =f(x)− f(x0) = f(x− x0)⇒ x− x0 =: z ∈ Kern (f).
(6.19) Korollar. Sei dimV = dimW <∞. Dann sind äquivalent:
a) Die inhomogene Gleichung f(x) = b hat für jedes b ∈W eine Lösung.
b) Die homogene Gleichung f(x) = 0 hat nur die triviale Lösung x = 0.
Gilt a) oder b), dann hat die inhomogene Gleichung f(x) = b für jedes b ∈ W genau eineLösung.
Beweis. Es bedeutet a), dass f surjektiv ist und b), dass f injektiv ist. Die Äquivalenz gilt nach(17). Der restliche Behauptung besagt die Bijektivität von f und folgt somit auch aus (17).
(6.20) Denition. Seien V ein VR, W ⊂ V ein UVR und a ∈ V . Dann nennt man
a+W := a+ x : x ∈W
einen anen Unterraum von V.
Ist w ∈ W , dann ist oenbar a + W = (a + w) + W . Die Lösungsmenge von f(x) = b ist alsoder ane Unteraum x0 +Kern (f).
Isomorphismen
(6.21) Denition. Seien V, W VR. Eine Abbildung f : V → W heiÿt (VR-)Isomorphismus,wenn f linear und bijektiv ist. V und W heiÿen isomorph, wenn es einen Isomorphismusf : V →W gibt. Man schreibt V 'W.
(6.22) Lemma. Es gilt: f Isomorphismus ⇒ f−1 Isomorphismus.
Beweis. Zur Linearität von f−1 seien y, y′ ∈ W, λ ∈ K : f(f−1(y + λy′)) = y + λy′, f(f−1(y) +λf−1(y′)) = f(f−1(y)) + λf(f−1(y′)) = y + λy′ ⇒ f−1(y + λy′) = f−1(y) + λf−1(y′).
(6.23) Satz. Seien f : V → W linear und M ⊂ V eine Basis. Dann ist f genau dann ein Isomor-phismus, wenn f |M injektiv und f(M) eine Basis ist.
Beweis. Sei f ein Isomorphismus. Die Behauptung folgt aus (12), (13). Sei nun f |M injektivund f(M) eine Basis. Dann ist f surjektiv nach (12). Zur Injektivität betrachte x ∈ Kern (f). WeilM eine Basis ist, ist x =
∑ni=1 αixi mit αi ∈ K und paarweise verschiedenen xi ∈ M . Damit
ist 0 = f(x) =∑n
i=1 αif(xi), wobei f(xi) paarweise verschiedene Basiselemente sind. Es folgt(α1, . . . , αn) = 0 und somit x = 0. Nach (10) ist f injektiv.
(6.24) Korollar. Seien V, W VR und dimV <∞ Dann gilt:
V 'W ⇐⇒ dimV = dimW.
36

Beweis. ⇒ Es gibt einen Isomorphismus f : V → W . Sei x1, . . . , xn eine Basis von V mitn = dimV. Nach (23) ist f(x1), . . . , f(xn) eine Basis inW , womit dimV = dimW . ⇐ Es existierenBasen x1, . . . , xn und y1, . . . , yn von V bzw. W mit n = dimV = dimW . Nach (5) gibt es einelineare Abbildung f : V →W mit f(xi) = yi für i = 1, . . . , n. Nach (23) ist f ein Isomorphismus.
Üb Seien V, W VR und M ⊂ V bzw. N ⊂ W eine Basis von V bzw. von W . Zeige: V und Wsind isomorph, wenn M und N gleichmächtig sind.
(6.25) Korollar. Sei V ein K-VR mit dimV <∞ und n ∈ N. Dann gilt:
V ' Kn ⇐⇒ n = dimV.
Beweis. Bilden x1, . . . , xn eine Basis von V , dann gibt es nach (5) genau eine lineare Abbildungf : V → Kn mit f(xi) = ei für i = 1, . . . , n. Dieses f ist ein Isomorphismus nach (23). Hiermit folgtdie Behauptung.
Üb Sei V ein K-VR und M ⊂ V eine Basis. Zeige: V ' K(M).
Tipp: Betrachte y 7→ ey für y ∈M mit ey aus (5.20).
(6.26) Korollar. Seien dimV = dimW <∞ und f : V →W linear. Dann ist f ein Isomorphismusgenau dann, wenn f injekiv oder surjektiv ist.
Beweis. Wende (17) an.
(6.27) Lemma. Seien V , V ′, W und W ′ VR, f : V →W linear, sowie s : V → V ′ und t : W →W ′
Isomorphismen. Setze f ′ := t f s−1. Dann ist f ′ surjektiv bzw. injektiv genau dann, wennf surjektiv bzw. injektiv ist, und es gelten:
Rang(f ′) = Rang(f) und dimKern(f ′) = dimKern(f).
Üb Beweise (27).
Üb Sei V ein KVR, X eine Menge und f : V → X eine Bijektion. Führe auf X eine abelscheGruppenstruktur ein und deniere dazu eine Multiplikation mit Skalaren derart, dass X einKVR ist und f ein (VR)Isomorphismus.
Mengen von linearen Abbildungen
Seien V und W K-VR. Dann bezeichnet Hom (V,W )∗) die Menge aller linearen Abbildungen vonV nach W .
(6.28) Lemma. Hom (V,W ) ist ein UVR von W V versehen mit den punktweise denierten VRVerknüpfungen.
Beweis. Seien f, g : V →W linear. Zu zeigen ist, dass f+λg für λ ∈ K linear ist: (f+λg)(x+αx′) =f(x + αx′) + λg(x + αx′) (nach Denition der VR-Verknüpfungen in W V ) = f(x) + αf(x′) +λf(x′) + λ(g(x) + αg(x′)) (weil f und g linear sind) = (f(x) + λg(x)) + α(f(x′) + λg(x′)) =(f + λg)(x) + α(f + λg)(x′) (nach Denition der VR-Verknüpfung in W V ). Schlieÿlich ist dieNullabbildung 0 ∈W V oensichtlich linear und somit 0 ∈ Hom (V,W ).
∗)Hom steht für Homomorphismus.
37
(6.29) Lemma. Seien V, W, U VR, f : V →W linear und g : W → U linear. Dann ist gf : V → Ulinear.
Üb Weise (29) nach.
Aut (V ) bezeichnet die Menge aller Automorphismen von V , d.i. die Menge aller Isomorphismenvon V auf sich.
(6.30) Lemma. Aut (V ) bildet eine Untergruppe der symmetrischen Gruppe S(V ), d.h. idV ∈Aut (V ) und mit f, g ∈ Aut (V ) gilt: f g−1 ∈ Aut (V ).
Beweis. Oensichtlich ist idV ein Isomorphismus. Nach (22) ist g−1 ein Isomorphismus. Nach (29)ist f g−1 linear und nach (2.24) bijektiv, also ein Isomorphismus.
38

7 Matrizen
Lineare Abbildungen zwischen endlichdimensionalen Vektorräumen können in eektiver Weise mit-tels Matrizen beschrieben werden.
Die Abbildungsmatrix
Seien V und W endlichdimensionale KVR mit n := dimV und m := dimW . Weiter seien indi-zierte Basen v1, . . . , vn und w1, . . . , wm von V bzw. W gegeben.Sei nun f : V → W eine lineare Abbildung. Für jedes l = 1, . . . , n ist das Bild f(vl) des l-
ten Basisvektors unter f eindeutig als Linearkombination der Basisvektoren wk, k = 1, . . . ,m,darstellbar. Es existieren also eindeutig bestimmte Skalare akl ∈ K derart, dass
(7.1) f(vl) =m∑
k=1
aklwk für l = 1, . . . , n.
Anders ausgedrückt, a1l, . . . , aml sind dieKoordinaten von f(vl) bez. der Basis w1, . . . , wm (s. (5.21)).Dies gilt für jedes l = 1, . . . , n. Sei nun x ∈ V beliebig. Seine Koordinaten bez. der Basis v1, . . . , vn
seien ξ1, . . . , ξn ∗), d.h.
(7.2) x =n∑
l=1
ξlvl.
Entsprechend seien η1, . . . , ηm die Koordinaten von f(x) bez. der Basis w1, . . . , wm, d.h.
(7.3) f(x) =m∑
k=1
ηkwk.†)
Welcher Zusammenhang besteht zwischen den Koordinaten ξ1, . . . , ξn und η1, . . . , ηm? Nach (2)
und (1) ist f(x) = f
(n∑
l=1
ξlvl
)=
n∑l=1
ξlf(vl) =n∑
l=1
ξlm∑
k=1
aklwk =m∑
k=1
(n∑
l=1
aklξl
)wk. Hieraus folgt
(7.4) ηk =n∑
l=1
aklξl für k = 1, . . . ,m.
Man beachte die unterschiedliche Stellung des Summationsindex in (1) und (4). Die Gleichungen(4) schreibt man in der Form
(7.5)
η1
η2...ηm
=
a11 a12 . . . a1n
a21 a22 . . . a2n...
.... . .
...am1 am2 . . . amn
ξ1ξ2...ξn
.
Dabei ist
ξ :=
ξ1...ξn
∗)ξ xi†)η eta
39

der Koordinatenvektor von x bez. der Basis v1, . . . , vn. Entsprechend bildet man den Koordina-tenvektor η. Koordinatenvektoren sind stets Spaltenvektoren. Durch Transponieren erhält manaus einem Spaltenvektor einen Zeilenvektor und umgekehrt:
ξT :=(ξ1 . . . ξn
),
(ξ1 . . . ξn
)T := ξ.
Weiter ist
A := (akl)k=1,...,ml=1,...,n
=
a11 . . . a1n...
. . ....
am1 . . . amn
eine (m×n)-Matrix von Elementen aus K bestehend aus m Zeilen und n Spalten. Die k-te Zeile
lautet(ak1 ak1 . . . akn
), die l-te Spalte lautet
a1l...aml
. Somit ist k der Zeilenindex und l der
Spaltenindex. Die Gleichung (5) schreibt man kurz
(7.6) η = Aξ.
Die Gleichungen (4) geben an, wie man eine (m× n)-Matrix A = (akl) mit einem Spaltenvektor ξder Länge n multipliziert, um einen Spaltenvektor η der Länge m zu erhalten.
Beispiel.4 0 1−8 2 01 −1 03 2 1
1
23
=
4 · 1 + 0 · 2 + 1 · 3−8 · 1 + 2 · 2 + 0 · 31 · 1− 1 · 2 + 0 · 33 · 1 + 2 · 2 + 1 · 3
=
7−4−110
.
Mit Hilfe dieser Multiplikation gestattet die Matrix A in (5), aus den Koordinaten des Vektorsx ∈ V bez. der Basis v1, . . . , vn die Koordinaten des Bildvektors f(x) ∈W bez. der Basis w1, . . . , wm
zu berechnen. A heiÿt die f darstellende Matrix oder die Abbildungsmatrix für f bez. derindizierten Basen v1, . . . , vn in V und w1, . . . , wm in W .
(7.7) Beispiel. Ist f : Kn → Km linear, dann ist die (m× n)-Matrix A, deren Spaltenvektoren al
aus den Komponenten von f(el) besteht, die Abbildungsmatrix von f bez. der Standardbasenin Kn und Km.
Die Menge der (m× n)-Matrizen über K mit m,n ∈ N wird mit Km×n bezeichnet. Ein Koordina-tenvektor ξ der Länge n ist eine (n× 1)-Matrix, d.h. ξ ∈ Kn×1.
Sei ϕ : V → Kn×1 die Koordinatenabbildung bez. der Basis v1, . . . , vn von V , d.h.
x =n∑
l=1
ϕ(x)lvl für x ∈ V.
Oenbar ist ϕ bijektiv. Wegen
n∑l=1
ϕ(x+ λx′)lvl = x+ λx′ =n∑
l=1
ϕ(x)lvl + λn∑
l=1
ϕ(x′)lvl
folgt ϕ(x+λx′)l = ϕ(x)l+λϕ(x′)l für jedes l = 1, . . . , n. Wir versehenKn×1 mit komponentenweisedenierter Addition und skalarer Multiplikation (so wie Kn). Dann ist Kn×1 ein K-VR und ϕ istlinear
ϕ(x+ λx′) = ϕ(x) + λϕ(x′)
40

und somit ein VR-Isomorphismus.Die Vektoren el :=
(0 . . . 0 1 0 . . . 0
)Tmit der 1 an der l-ten Stelle für l = 1, . . . , n
bilden die Standardbasis von Kn×1. Es gilt:
ϕ(vl) = el für l = 1, . . . , n.
(7.8) Zur Gleichung (6) gehört das Diagramm
mit ϕ, ψ ‡) die Koordinatenabbildungen. Das Diagramm ist kommutativ mit f := ψf ϕ−1,
d.h. es gilt ψ f = f ϕ. Die lineare Abbildung f (s. (6.29)) ist die Darstellung von f inKoordinaten.
(7.9) Korollar. Ist A die Abbildungsmatrix von f , dann gilt f(ξ) = Aξ für alle ξ ∈ Kn×1.
Bezeichnung. Im Folgenden ist al :=
a1l...aml
der l-te Spaltenvektor von A.
(7.10) Matrix als lineare Abbildung. Sei A ∈ Km×n. Dann ist
LA : Kn×1 → Km×1, LA(ξ) := Aξ,
eine lineare Abbildung, d.h. die Matrixmultiplikation erfüllt für ξ, ξ′ ∈ Kn×1, λ ∈ K:
A (ξ + λξ′) = Aξ + λA ξ′.
Es ist LA(el) = Ael = al für l = 1, . . . , n und A ist die Abbildungsmatrix für LA bez. derStandardbasen in Kn×1 und Km×1. Ist umgekehrt f : Kn×1 → Km×1 linear, dann giltf = LA, wobei A die f bez. der Standardbasen darstellende Matrix ist.
Beweis. (A(ξ + λξ′))k =n∑
l=1
akl(ξ + λξ′)l =n∑
l=1
akl(ξl + λξ′l) =n∑
l=1
aklξl + λn∑
l=1
aklξ′l = (Aξ + λAξ′)k
für k = 1, . . . ,m. Weiter gilt:
Ael =
a11 . . . a1n...
. . ....
am1 . . . amn
0...1...0
=
a1l...aml
= al =m∑
k=1
akl ek.
‡)ψ psi
41
Also ist LA(el) = al und A die Abbildungsmatrix zu LA (vgl. (1)). Schlieÿlich sei, gemäÿ (1),
f(el) =m∑
k=1
akl el. Dann ist f(el) = Ael = LA(el) für alle l. Daher ist f = LA.
Man deniert für jede Matrix naheliegenderweise
Kern(A) := Kern(LA), Bild(A) := Bild(LA), Rang(A) := Rang(LA), usw.
(7.11) Lemma. Sei A ∈ Km×n. Dann ist
Bild(A) = Spana1, . . . , an.
Insbesondere ist der Rang einer Matrix die maximale Anzahl ihrer linear unabhängigen Spal-tenvektoren.
Beweis. Mit (6.12) ist Bild(A) = LA(Kn×1) = LA(Spane1, . . . , en) = SpanLA(e1), . . . , LA(en)= Spana1, . . . , an.
Wegen (11) heiÿt Bild(A) auch der Spaltenraum von A.
(7.12) Korollar. Sei A ∈ Km×n eine darstellende Matrix von f ∈ Hom(V,W ). Dann ist LA surjektivbzw. injektiv genau dann, wenn f surjektiv bzw. injektiv ist, und es gelten:
Rang(A) = Rang(f), dim Kern(A) = dim Kern(f).
Beweis. Nach (9) ist LA = f = ψ f ϕ−1. Wende (6.27) an.
Linearkombination von Matrizen
Sei g : V → W eine weitere lineare Abbildung und B ihre Abbildungsmatrix (s. (1)). Sei λ ∈ K.Für die Linearkombination h := f + λg sei C die Abbildungsmatrix. In welcher Beziehung stehen
A, B und C? Nach (1) ist einerseits h(vl) =m∑
k=1
cklwk und andererseits h(vl) = (f + λg)(x) =
f(vl) + λg(vl) =m∑
k=1
aklwk + λm∑
k=1
bklwk =m∑
k=1
(akl + λbkl)wk. Der Koezientenvergleich ergibt
(7.13) ckl = akl + λbkl für k = 1, . . . ,m, k = 1, . . . , n.
Alternativ zu dieser Herleitung gilt nach (8) f + λg = ψ(f+λg)ϕ−1 = ψfϕ−1+λψgϕ−1 =f + λg. Das bedeutet nach (9)
C ξ = Aξ + λB ξ ∀ ξ ∈ Kn×1.
Setzt man speziell ξ = el ein, folgt, dass die Spaltenvektoren von C die Linearkombination derSpaltenvektoren von A und B sind. D.h. es gilt (13).
Also bildet man eine Linearkombination von Matrizen (wie inKn×1) komponentenweise. (Na-türlich können nur gleichartige Matrizen, d.h. Matrizen mit jeweils gleicher Zeilenzahl und gleicherSpaltenzahl linear kombiniert werden.) Die Menge Km×n wird so zu einem K-VR. Das Nullelementist die Nullmatrix
0 :=
0 0 . . . 00 0 . . . 0...
.... . .
...0 0 . . . 0
∈ Km×n.
42

Beispiel. 4 0 1−8 2 01 −1 0
−2
2 2 12
4 1 012 −1
2 0
=
4− 2 · 2 0− 2 · 2 1− 2 · 12
−8− 2 · 4 2− 2 · 1 0− 2 · 01− 2 · 1
2 −1− 2 · (−12) 0− 2 · 0
=
0 −4 0−16 0 00 0 0
.
Bezeichnen wir die Abbildungsmatrix A der linearen Abbildung f (s. (1)) mit M(f), um die Zuor-dung deutlich zu machen, dann haben wir gerade etabliert
M(f + λg) = M(f) + λM(g).
Nimmt man (10), (9) hinzu, folgt zusammenfassend (für Liebhaber der Abstraktion) der
(7.14) Darstellungssatz.
M : Hom(V,W )→ Km×n,
L : Km×n → Hom(Kn×1,Km×1), L(A) := LA,
sind VR-Isomorphismen und es gilt
f = L(M(f)) ∀ f ∈ Hom(V,W ).
Bemerkung. Sei A ∈ Km×n. Dann ist A die darstellende Matrix von f := M−1(A). Aber A istnatürlich auch die Abbildungsmatrix anderer linearer Abbildungen, z.B. von LA. Allgemeiner seienV ′, W ′ K-VR mit Basen v′1, . . . , v
′n und w′1, . . . , w
′m. Dann bestimmt
f ′(v′l) :=m∑
k=1
aklw′k für l = 1, . . . ,m
nach (6.5) eindeutig ein f ′ ∈ Hom(V ′,W ′), wofür A ebenfalls die Abbildungsmatrix ist, d.h. wofürM ′(f ′) = A ist. Allerdings ändert sich die darstellende Matrix von f , wenn man die Basen in Vund W wechselt. Das wird im Abschnitt Basiswechsel untersucht.
Üb Sei A ∈ Km×n darstellende Matrix für f ∈ Hom(V,W ) und f ′ ∈ Hom(V ′,W ′). Zeige: Es gibtIsomorphismen s : V → V ′ und t : W →W ′ derart, dass f ′ = t f s−1.
(7.15) Die Standardbasis von Km×n besteht aus den m · n Matrizen
0 . . . 0. . .
... 1...
. . .0 . . . 0
← k-te Zeile
↑l-te Spalte
Nach (14) ist dim Hom(V,W ) = dimKm×n = m · n.
(7.16) Bemerkung. Sei speziell dimW = dimV = n. Betrachte die durch f(vl) := wl, l =1, . . . , n, gemäÿ (6.5) eindeutig bestimmte lineare Abbildung f : V → W . Die zugehörigeAbbildungsmatrix ist die Einheitsmatrix
En = E = (δkl)k=1,...,nl=1,...,n
:=
1 0 . . . 00 1 . . . 0...
.... . .
...0 0 . . . 1
.
Dabei ist δkl :=
1 für k = l
0 für k 6= ldas Kronecker Symbol. Oenbar ist LE = idKn×1 .
43

Produkt von Matrizen
Seien U ein weiterer K-VR mit einer indizierten Basis u1, . . . , up und g : W → U eine lineareAbbildung. Damit ist h := g f eine lineare Abbildung von V nach U (s. (6.29)).
(7.17) Satz. Sei A ∈ Km×n bzw. B ∈ Kp×m die Abbildungsmatrix von f bez. der Basen v1, . . . , vn
in V und w1, . . . , wm in W bzw. von g bez. der Basen w1, . . . , wm in W und u1, . . . , up in U .Sei C = (cjl)j=1,...,p
l=1,...,n∈ Kp×n die Abbildungsmatrix von h bez. der Basen v1, . . . , vn in V und
w1, . . . , wm in W . Dann gilt:
(7.18) cjl =m∑
k=1
bjkakl für j = 1, . . . , p, l = 1, . . . , n.
Man schreibt hierfür kurz C = BA.
Beweis. Nach (1) ist h(vl) =p∑
j=1cjluj . Andererseits ergibt die Anwendung von (1) für f und
anschlieÿend für g:
h(vl) = g(f(vl)
)= g
(m∑
k=1
aklwk
)=
m∑k=1
aklg(wk) =m∑
k=1
akl
(p∑
j=1bjkuj
)=
p∑j=1
(m∑
k=1
bjkakl
)uj .
Der Koezientenvergleich liefert (18).Ein Alternativbeweis erfolgt unter Verwendung der Koordinatenabbbildungen ϕ : V → Kn×1,
ψ : W → Km×1 und χ§) : U → Kp×1: g f = χ (g f) ϕ−1 = (χ g ψ−1) (ψ f ϕ−1) = g f .Daher gilt nach (9)
C ξ = B (Aξ) ∀ ξ ∈ Kn×1.
Setzt man speziell ξ = el ein, folgt, dass der l-te Spaltenvektor von C sich aus dem l-ten Spalten-vektor von A ergibt, indem man auf diesen B gemäÿ (5) anwendet. Das ist (18).
Zu (18) gehört das kommutative Diagramm
Hieraus ist ersichtlich f g = f g.
Matrixmultiplikation. Formel (18) gibt an, wie man eine (p×m)-Matrix B mit einer (m×n)-Matrix A multipliziert, um eine (p × n)-Matrix C = BA zu erhalten. Wichtig dabei ist, dassdie Spaltenzahl von B mit der Zeilenzahl von A übereinstimmt. Es ist (5) ein Beispiel für eineMatrixmultiplikation. Formel (18) besagt auch LBA = LB LA.
§)χ chi
44

Beispiel.
(1 2 3 4−4 −3 −2 −1
)4 0 −33 1 −12 2 −21 3 0
=(
4 + 6 + 6 + 4 0 + 2 + 6 + 12 −3− 2− 6 + 0−16− 9− 4− 1 0− 3− 4− 3 12 + 3 + 4 + 0
)
=(
20 20 −11−30 −10 19
).
(7.19) Beispiel. Seien ξ ∈ Kn×1, ζ¶) ∈ Kn×1, η ∈ Km×1. Dann sind die Produkte
ξT ζ =(ξ1 . . . ξn
)ζ1...ζn
=n∑
l=1
ξl ζl ∈ K1×1 = K,
ζ ηT =
ζ1...ζn
(η1 . . . ηm
)=
ζ1η1 ζ1η2 . . . ζ1ηm
ζ2η1 ζ2η2 . . . ζ2ηm...
.... . .
...ζnη1 ζnη2 . . . ζnηm
= (ζlηk)l=1,...,nk=1,...,m
∈ Kn×m
deniert. Letzteres heiÿt das dyadische Produkt. Ebenso ist auch η ζT deniert.
Weil die Komposition von Abbildungen assoziativ ist (s. (2.25)), folgt aus (17), dass auch die Matrix-multiplikation assoziativ ist. Ebenso übertragen sich die Distributivgesetze für lineare Abbildungenauf Matrizen.
(7.20) Korollar. Die Matrixmultiplikation ist assoziativ und distributiv. Es gelten
A (BC) = (AB)C =: ABC,
λA = (λEm)A, A (λEn) = λA,
(A+A′)B = AB +A′B, A(B +B′) = AB +AB′
für A, A′ ∈ Km×n, B, B′ ∈ Kn×p, C ∈ Kp×q mit m,n, p, q ∈ N, λ ∈ K.
Insbesondere ist 0A = 0, 0A = 0 für 0 ∈ K und den entsprechenden Nullmatrizen.
Üb Zeige für m,n, p ∈ N und A ∈ Km×n, dass Kn×p → Km×p, X 7→ AX, linear ist. Wie lauteteine darstellende Matrix hierfür?
Invertierbare Matrizen
Sei, wie bisher, V ein K-VR der Dimension n ∈ N und v1, . . . , vn eine indizierte Basis von V .Weiter sei f : V → V linear. Man nennt f einen Endomorphismus. Wir bestimmen diejenigeAbbildungsmatrix für f , wofür auch die Bildvektoren f(x) nach der Basis v1, . . . , vn entwickeltwerden:
(7.21) f(vl) =m∑
k=1
aklvk für l = 1, . . . , n.
Die Abbildungsmatrix M(f) =: A = (akl)k,l=1,...,n ist quadratisch. Die identische Abbildung idV
wird durch E dargestellt, d.h. M(idV ) = E.
¶)ζ zeta
45

Man nennt End(V ) := Hom(V, V ) die Endomorphismenalgebra, weil der VR End(V ) eineweitere Verknüfung besitzt, nämlich die Komposition von Abbildungen
End(V )× End(V )→ End(V ), (g, f) 7→ g f,
wofür die Algebragesetze gelten:
h (g f) = (h g) f Assoziativität
(h+ g) f = h f + g fh (g + f) = h g + h f
Distributivgesetze
(λg) f = g (λf) = λ(g f), λ ∈ K.
Entsprechend ist auch Kn×n eine Algebra, die Matrixalgebra, bez. der Algebraverknüpfung
Kn×n ×Kn×n → Kn×n, (A,B) 7→ AB.
Üb Weise für End(V ) und Kn×n die Algebragesetze nach.
Aus (14) und (17) folgt
(7.22) Lemma. Die Matrixdarstellung M : End(V )→ Kn×n ist ein Algebraisomorphismus, d.i.ein VR-Isomoprhismus mit M(idV ) = E und M(g f) = M(g)M(f).
Ein Endomorphismus f ∈ End(V ) ist ein Automorphismus (genau dann), wenn es ein g ∈ End(V )gibt mit
g f = idV oder f g = idV .
Dies gilt nach (6.26) und (2.24). In diesem Fall folgt g = f−1. Die Anwendung von (22) ergibt
(7.23) Satz mit Denition. Seien A,B ∈ Kn×n. Wenn BA = E gilt, dann gilt auch AB = E. Esist B durch BA = E eindeutig bestimmt. Wenn BA = E gilt, dann heiÿt A invertierbarund A−1 := B die zu A inverse Matrix.
Insbesondere ist GL(n,K) := M(Aut(V )) = A ∈ Kn×n : A invertierbar eine Gruppe, die allge-meine lineare Gruppe über K. Daher gelten z.B. für A, B ∈ GL(n,K):
(A−1)−1 = A, (AB)−1 = B−1A−1.
Auÿerdem folgt LA−1 = (LA)−1.
(7.24) Satz. A ∈ Kn×n ist invertierbar genau dann, wenn Rang(A) = n oder wenn dim Kern(A) = 0.
Beweis. Wende (6.26), (6.9), (6.10), (12) an.
Üb Zeige: GL(n,R) ist für n ≥ 2 nicht kommutativ.
46

(7.25) Abbildungsmatrix eines Isomorphismus. Seien dimV = dimW = n, f : V → W einIsomorphismus und A die Abbildungsmatrix von f aus (1). Es ist
ein kommutatives Diagramm mit den durch h(vl) := wl, g(wl) := f(vl) für l = 1, . . . , n gemäÿ(6.5) eindeutig bestimmten Isomorphismen. Nach (16) wird h durch E dargestellt. Deshalbist A auch die Abbildungsmatrix des Automorphismus g.
Basiswechsel
Wir kehren zur Ausgangssituation zurück. Die Frage ist, wie sich die Abbildungsmatrix A verändert,wenn man die Basis in V bzw. in W wechselt. Sei v′1, . . . , v
′n eine weitere indizierte Basis in V . Wir
drücken die neuen Basisvektoren durch die alten aus:
(7.26) v′j =n∑
l=1
sljvl für j = 1, . . . , n.
Dabei sind s1j , . . . , snj die eindeutig bestimmten Koordinaten von v′j bez. der Basis v1, . . . , vn.Beachte, dass in (26) über den ersten Index von slj summiert wird. Mit (1) folgt
f(v′j) = f
(n∑
l=1
sljvl
)=
n∑l=1
sljf(vl) =n∑
l=1
slj
n∑k=1
aklwk =n∑
k=1
(n∑
l=1
aklslj
)wk.
Dabei ist S := (slj)l,j=1,...,n ∈ Kn×n invertierbar, denn S ist ja nach (1) auch die darstellendeMatrix des Automorphismus s : V → V , der durch s(vj) = v′j , j = 1, . . . , n eindeutig bestimmt ist((6.5), (6.23)).Die Matrix S beschreibt die Koordinatentransformation von den neuen auf die alten Ko-
ordinaten. Da x =n∑
l=1
ξ′lv′l =
n∑l=1
ξ′l
n∑j=1
sjlvj =n∑
j=1
(n∑
l=1
sjlξ′l
)vj , folgt nämlich wegen x =
n∑l=1
ξlvl
(7.27) ξ = S ξ′.
Indem man beide Seiten von (27) von links mit S−1 multipliziert, folgt äquivalent zu (27)
(7.28) ξ′ = S−1 ξ.
Jetzt betrachten wir auch in W eine weitere indizierte Basis w′1, . . . , w′m. Hierfür sei entsprechend
(7.29) w′q =m∑
p=1
tpqwp für q = 1, . . . ,m.
Wie S ist T := (tpq)p,q=1,...,m ∈ Km×m invertierbar. Wie S bestimmt T einen Automorphismust : W →W .
47

Sei T−1 = (tpq)p,q=1,...,m. Dafür gilt E = T T−1, d.h. δpq =m∑
r=1tpr trq für p, q = 1, . . . ,m. Damit
folgtm∑
r=1trpw
′r =
m∑r=1
trp
m∑q=1
tqrwq =m∑
q=1
(m∑
r=1tqr trp
)wq =
m∑q=1
δqpwq = wp, d.h.
(7.30) wp =m∑
q=1
tqpw′q für p = 1, . . . ,m.
Vgl. dies mit (29). Hiermit können wir die obige Rechnung fortführen:
f(v′l) =m∑
k=1
(n∑
l=1
aklslj
)m∑
q=1
tqkw′q =
m∑q=1
(m∑
k=1
n∑l=1
tqkaklslj
)w′q.
Für die Abbildungsmatrix A′ von f bez. der Basen v′1, . . . , v′n in V und w′1, . . . , w
′m in W gilt
denitionsgemäÿ
(7.31) f(v′j) =m∑
q=1
a′qjw′q.
Wir schlieÿen daraus
(7.32) a′qj =m∑
k=1
n∑l=1
tqkaklslj , q = 1, . . . ,m, j = 1, . . . , n.
Damit ist gezeigt:
(7.33) Satz. Seien V , W K-VR mit dimV = n, dimW = m und f : V → W linear. Weiter sei Adie Abbildungsmatrix von f bez. der Basen v1, . . . , vn von V und w1, . . . , wm von W . Dann ist
(7.34) A′ = T−1A S
die Abbildungsmatrix von f bez. der Basen v′1, . . . , v′n von V und w′1, . . . , w
′m in W , wobei
S und T in (26) und (29) die Basiswechsel beschreiben.
Das kommutative Diagramm zu (33) ist:
Dabei sind ϕ′ = ϕ s−1, ψ′ = ψ t−1 die Koordinatenabbildungen bez. der gestrichenen Basen.
Hieraus ist ersichtlich f ′ = t−1 f s.
(7.35) Bemerkung. Gleichung (34) ist die Transformation der Abbildungsmatrix unter Koordina-tentransformationen. Dabei ist
Rang (A′) = Rang (A), dimKern (A′) = dimKern (A)
48
wegen (12), weil LA′ = (LT )−1 LA LS . Allgemeiner folgt hieraus für A ∈ Km×n, T ∈GL(m,K) und S ∈ GL(n,K), dass
Kern (T A) = Kern (A), Rang (T A) = Rang (A),
dimKern (AS) = dimKern (A), Bild (AS) = Bild (A).
(7.36) Basiswechsel für einen Endomorphismus. Seien V = W , vl = wl für l = 1, . . . , n undf ∈ End(V ). Dann ist t = s und somit
(7.37) A′ = S−1A S
die Transformation der Abbildungsmatrix A bei einem Basiswechsel (26) bzw. unter einerKoordinatentransformation (27).
49

8 Lineare Gleichungssysteme
Für den Fall endlichdimensionaler VR V und W wird ein Verfahren zur Lösung der in Kapitel 6(speziell (6.18), (6.19)) untersuchten linearen Gleichung
(8.1) f(x) = b
entwickelt. Sei n := dim V , m := dim W . Wir wählen indizierte Basen in V und W und gehen zurKoordinatendarstellung von f , x und b (s. (7.8), (7.9)) über
(8.2) A x = b.
Dabei bezeichnet A = (akl) ∈ Km×n die f darstellende Matrix, x = (x1 . . . xn)T und b = (b1 . . . bm)T
die Koordinatenvektoren von x und b. Ausgeschrieben lautet (2)
(8.3)
a11x1 + a12x2 + · · · + a1nxn = b1a21x1 + a22x2 + · · · + a2nxn = b2...
......
...am1x1 + am2x2 + · · · + amnxn = bm
Das ist ein lineares Gleichungssystem (LGS) für n Unbekannte x1, . . . , xn aus K, was ausm skalaren Bedingungensgleichungen mit Koezienten akl ∈ K und Absolutgliedern bk ∈ Kbesteht. Das LGS (3) heiÿt homogen, wenn b = 0.
Beispiel
3x1 + 2x2 = 13x1 + x2 = 5
hat genau eine Lösung, nämlich x1 = 3, x2 = −4.
Beispiel
3x1 + 2x2 = 13x1 + 2x2 = 5
hat oenbar keine Lösung.
Beispiel
3x1 + 2x2 = 1−9x1 − 6x2 = −3
hat unendlich viele Lösungen, nämlich x1 =13(1−2λ), x2 = λ für jedes λ ∈ R, d.i. der ane Raum(1
3
0
)+ R
(−2
3
1
).
Im ersten Schritt bildet man die erweiterte Koezientenmatrix
(A|b) :=
a11 · · · a1n...
am1 · · · amn
∣∣∣∣∣∣∣b1...bm
.
Der vertikale Strich dient lediglich der deutlichen Abgrenzung.
50
(8.4) Lemma. Das LGS A x = b ist genau dann lösbar, wenn Rang ((A|b)) = Rang (A).
Beweis. Es gilt: Lösbarkeit ⇔ b ∈ Bild (A) ⇔ Span a1, . . . , an, b = Span a1, . . . , an (wegen(7.11)) ⇔ dim Span a1, . . . , an, b = dim Span a1, . . . , an.
Zwei LSG A x = b und B x = c für x = (x1 . . . xn)T mit A ∈ Km×n und B ∈ Kp×n nenntman äquivalent, wenn sie dieselbe Lösungsmenge (⊂ Kn×1) besitzen. Im Fall nichtleerer Lösungs-mengen (s.(4)) bedeutet dies nach (6.18), dass x0 ∈ Kn×1 existiert mit A x0 = b und B x0 = c unddass Kern (A) = Kern (B) gilt.
(8.5) Lemma. Sei T ∈ GL (m,K) Dann sind A x = b und (T A)x = T b äquivalent. Beachte, dass(T A|T b) = T (A|b). D.h. (A|b) und T (A|b) beschreiben äquivalente LGS.
Üb Weise (5) nach.
Üb Seien A,B ∈ Km×n derart, dass es zu jedem b ∈ Km×1 ein c ∈ Km×1gibt, wofür A x = b undB x = c äquivalent sind. Zeige: Es existiert T ∈ GL (m,K) mit B = T A.
Die Idee, die jetzt verfolgt wird, ist es, das LGS (2) gemäÿ (5) in ein äquivalentes System zutransformieren, wofür die Lösungen leicht zu bestimmen sind.
Elementare Zeilenumformungen
Oenbar geht das LGS (2) in ein äquivalentes über, wenn man an (A|b) eine der folgenden elemen-taren Zeilenumformungen vornimmt:
1© Vertauschung zweier Zeilen.
2© Multiplikation einer Zeile mit einem Skalar 6= 0.
3© Addition des Vielfachen einer Zeile zu einer anderen.
Betrachte dazu die folgenden (m×m) - Matrizen
Z1 :=
1...
.... . .
......
1...
...· · · · · · · · · 0 · · · · · · · · · 1 · · · · · · · · ·
... 1...
.... . .
...... 1
...· · · · · · · · · 1 · · · · · · · · · 0 · · · · · · · · ·
...... 1
......
. . ....
... 1
j-te Zeile
k-te Zeile
Z2 :=
1. . .
1λ · · · · · · · · ·
1. . .
1
k-te Zeile für λ 6= 0
51

Z3 :=
1...
. . ....
1 · · · α · · · · · ·. . .
...1 · · · · · ·...
. . .... 1
j-te Zeile
k-te Zeile
Alle übrigen Einträge in Z1, Z2, Z3 sind 0.
(8.6) Lemma. Sei C ∈ Km×p. Entsteht C aus C durch
1© Vertauschung der Zeilen j und k, dann ist C = Z1C.
2© Multiplikation der k-ten Zeile mit λ 6= 0, dann ist C = Z2C.
3© Addition des α-fachen der k-ten Zeile zur j-ten Zeile, dann ist C = Z3C.
Die Matrizen Zκ, κ = 1, 2, 3 , sind invertierbar ∗). Genauer gelten Z1 Z1 = Z2(λ)Z2( 1λ) =
Z3(α)Z3(−α) = Em für λ 6= 0. Sie heiÿen Elementarmatrizen. Daher ist ein Produkt von Ele-mentarmatrizen invertierbar und die Inverse des Produkts wieder ein Produkt von solchen.
Gauÿ Eliminationsverfahren
Sei A ∈ Km×n, A 6= 0. Durch wiederholte Anwendung von elementaren Zeilenumformungen 1©, 2©,3© wird A auf spezielle Zeilenstufenform gebracht. Der erste Teil des Verfahrens besteht aus der
(8.7) (Abwärts-) Elimination, Zeilenstufenform.
1© Sei l1 ∈ 1, . . . , n minimal derart, dass ein k ∈ 1, . . . ,m existiert mit akl1 6= 0. Vertauschedie erste Zeile mit der k-ten Zeile. Es entsteht aus A eine Matrix der Gestalt
∣∣∣∣∣∣∣∣∣β1
γ2...γm
∣∣∣∣∣∣∣∣∣ ∗
mit β1 6= 0 und gewissen γ2, . . . , γn ∈ K †) in der l1-ten Spalte und unspezizierten Einträgen∗. Alle übrigen Einträge sind null.
3© Addiere das (−γkβ1
)-fache der ersten Zeile zur k-ten Zeile für k = 2, . . . ,m. Es entsteht eine
neue Matrix A′, wofür in der l1-ten Spalte unterhalb β1 nur Nullen stehen: β1 ∗
↑l1-te Spalte
∗)κ kappa †)γ gamma
52

Gibt es kein a′kl 6= 0 für k ∈ 2, . . . ,m, dann ist
A′ =
β1 ∗ ↑
l1-te Spalte
und die Elimination endet hier. Andernfalls lassen sich 1© und 3© wiederholen:
1© Sei l2 ∈ l1 + 1, . . . , n minimal derart, dass ein k ∈ 2, . . . ,m existiert mit a′kl26= 0.
Vertausche die zweite Zeile mit der k-ten Zeile. Es entsteht aus A′ eine Matrix der Gestaltβ1
β2
δ3 ∗...δm
‡)
↑ ↑l1 l2 -te Spalte
mit β2 6= 0 in der l2-ten Spalte.
3© Addiere das (− δkβ2
)-fache der zweiten Zeile zur k-ten Zeile für k = 3, . . . ,m. Es entsteht eineneue Matrix, wofür in der l2-ten Spalte unterhalb β2 nur Nullen stehen:
β1
β2 ∗
↑ ↑l1 l2 -te Spalte
Die Elimination endet mit einer (m× n)-Matrix in Zeilenstufenform
(8.8)
β1
β2 ∗β3 . . .
βr
r Zeilen
m− r Zeilen
↑ ↑ ↑ · · · ↑l1 l2 l3 lr -te Spalte
Dabei sind β1 6= 0, . . . , βr 6= 0. In jeder Zeile der ersten r Zeilen stehen links von βk nur Nullen. Dieletzten m− r Zeilen (falls überhaupt vorhanden) sind Nullzeilen. Es ist 1 ≤ l1 < l2 < · · · < lr ≤ n.
(8.9) Beispiel. Gegeben sei das homogenen LGS
‡)δ delta
53

2x4 + x5 − 4x6 = 0x2 − 2x3 + 2x4 + 4x5 + 2x6 = 02x2 − 4x3 + 4x4 + 7x5 + 7x6 = 0−1
2x2 + x3 − 5x4 − 4x5 + 7x6 = 0
Man schreibt es in der Form A x = 0. Die Koezientenmatrix
A =
0 0 0 2 1 −40 1 −2 2 4 20 2 −4 4 7 70 −1
2 1 −5 −4 7
wird auf Zeilenstufenform durch Abwärtselimination gebracht.
1© Vertausche erste Zeile mit zweiter Zeile:0 1 −2 2 4 20 0 0 2 1 −40 2 −4 4 7 70 −1
2 1 −5 −4 7
3© Addiere das (−2)-fache der ersten Zeile zur dritten Zeile:
0 1 −2 2 4 20 0 0 2 1 −40 0 0 0 −1 30 −1
2 1 −5 −4 7
Addiere das 1
2 -fache der ersten Zeile zur vierten Zeile:0 1 −2 2 4 20 0 0 2 1 −40 0 0 0 −1 30 0 0 −4 −2 8
3© Addiere das 2-fache der zweiten Zeile zur vierten Zeile. Die entstehende Matrix hat Zeilen-
stufenform:
C :=
0 1 −2 2 4 20 0 0 2 1 −40 0 0 0 -1 30 0 0 0 0 0
.
Es sind r = 3 , l1 = 2 , l2 = 4 , l3 = 5 und β1 = 1 , β2 = 2 , β3 = −1.
Der zweite Teil des Verfahrens besteht in der
(8.10) (Aufwärts-)Substitution. An der Matrix in Zeilenstufenform aus (8) werden folgende Zei-lenumformungen vom Typ 3© vorgenommen: Addiere geeignete Vielfache der r-ten Zeile zuden Zeilen r − 1, r − 2, . . . , 1, um in der lr-ten Spalte oberhalb βr Nullen zu erzeugen. Ver-fahre anschlieÿend so mit der lr−1-ten Spalte und so fort. Die Substitution endet mit einer(m× n)-Matrix der folgenden Gestalt:
β1 ∗β2 ∗ ∗
β3 . . . ∗. . .
βr
54

Der letzte Teil besteht in der Freistellung der abhängigen Variablen. Dazu benötigt man Zeilenum-formungen von Typ 2©.
(8.11) Freistellung, spezielle Zeilenstufenform. Multipliziere die k-te Zeile der Matrix in (10)mit −1
βkfür k = 1, . . . , r. Es entsteht eine m× n - Matrix B in spezieller Zeilenstufenform
B =
−1 ∗−1 ∗ ∗
−1 . . . ∗. . .
−1
r Zeilen
m− r Zeilen
Speziell gegenüber der Matrix in (8) ist also, dass die lk-te Spalte von B gleich −ek ist fürk = 1, . . . , r. Damit ist
Rang (B) = r,
vgl. (7.11). Auch die maximale Anzahl linear unabhängiger Zeilenvektoren von B in K1×n,der sog. Zeilenrang, ist oenbar r.
Bemerkung. Der Übergang von βk nach −1 in (11) lässt sich bereits während der Eliminationvollziehen. Das hat den Vorteil, leichter rechnen zu können.
(8.12) Korollar. Sei A ∈ Km×n. Dann existiert Z ∈ GL(m,K) derart, dass B := Z A spezielleZeilenstufenform besitzt. Dabei ist Z als Produkt von Elementarmatrizen Zκ wählbar; für Bin der Form von (10) genügen Z1 und Z3 Matrizen.
Beweis. Wende das Verfahren (7), (10), (11) an und beachte (6).
Üb Eindeutigkeit der speziellen Zeilenstufenform. Seien A ∈ Km×n und Z ∈ GL (m,K)derart, dass B := Z A spezielle Zeilenstufenform besitzt. Zeige: B ist eindeutig, d.h. ist Z ′ ∈GL (m,K) derart, dass auch B′ := Z ′A spezielle Zeilenstufenform besitzt, dann ist B = B′.
Zeige weiter: Es existiert T ∈ GL (m,K) derart, dass T =(Er
∣∣∣∣∗) mit r := Rang (A) und
Z ′ = T Z. Zeige schlieÿlich: Z ist eindeutig genau dann, wenn r = m.
(8.13) Korollar. Für jede Matrix sind Spaltenrang und Zeilenrang gleich.
Beweis. Nach (11) gilt die Behauptung für Matrizen in spezieller Zeilenstufenform. ElementareZeilenumformungen erhalten oenbar den Zeilenrang. Wegen (6) gilt dies nach (7.35) auch für denSpaltenrang. Die Aussage gilt daher wegen (12).
(8.14) Lösung des homogenen LGS. Das LGS A x = 0 wird durch Elimination (7), Substitution(10), und Freistellung (11) in ein äquivalentes LGS B x = 0 transformiert, wofür B spezielleZeilenstufenform (s. (11)) besitzt. Die Menge aller Lösungen von A x = 0 ist
Kern (A) = Kern (B).
Die Unbekannten xl1 , . . . , xlr heiÿen abhängige Variable, die restlichen heiÿen freie Varia-ble. Das LGS B x = 0 mit freigestellten abhängigen Variablen lautet
xlk =n∑
l=1
bklxl, k = 1, . . . , r,
55

wobei auf der rechten Seite eektiv nur die freien Variablen vorkommen. Diese können beliebiggewählt werden. Jede Wahl liefert eine Lösung des LGS A x = 0. Um die Lösungsmengeleichter beschreiben zu können, benennen wir die Unbekannten so um, dass die ersten r dieabhängigen Variablen sind. Dann lautet die Lösungsmenge
Kern (A) =
x1......xn
=
n∑l=r+1
b1lxl
...n∑
l=r+1
brlxl
xr+1...xn
: xr+1, . . . , xn ∈ K
= K
b1,r+1...
br,r+1
10...0
+K
b1,r+2...
br,r+2
010...0
+ · · ·+K
b1,n...br,n0...01
in der Parameter- bzw. Basisdarstellung. Es ist ein (n−r)dimensionaler UVR von Kn×1.
(8.15) Bedeutung von m, n, r. Sei A ∈ Km×n und A x = 0 das zugehörige LGS. Dann ist
m Anzahl der Gleichungen = Anzahl der Zeilen
n Anzahl der Unbekannten = Anzahl der Spalten
r Anzahl der abhängigen Variablen = maximale Anzahl linear unabhängiger Zeilenvek-toren (Zeilenrang) = maximale Anzahl unabhängiger Spaltenvektoren (Spaltenrang) =Rang (A)
n− r Anzahl freier Variablen = Dimension des Lösungsraums = dim Kern (A).
(8.16) Folgerungen aus (15).
a) r ≤ n, r ≤ m.
b) r = n ⇐⇒ 0 ∈ Kn×1 ist die einzige Lösung.
c) m < n (d.h. mehr Unbekannte als Gleichungen) ⇒ es gibt mindestens n − m linearunabhängige Lösungen x ∈ Kn×1.
Bemerkung. Die Gleichheit Rang (A) + dim Kern (A) = r + n − r = n = dimKn×1 ist diealtbekannte Dimensionsformel (6.14) für LA.
Üb Sei A ∈ Kn×n. Zeige: A ∈ GL (n,K) ⇔ Spaltenvektoren von A bilden Basis von Kn×1 ⇔Zeilenvektoren von A bilden Basis von K1×n.
(8.17) Fortsetzung Beispiel (9). Die Matrix C in (9) wird auf spezielle Zeilenstufenform gebracht:
C →
0 1 −2 2 0 140 0 0 2 0 −10 0 0 0 −1 30 0 0 0 0 0
→
0 1 −2 0 0 150 0 0 2 0 −10 0 0 0 −1 30 0 0 0 0 0
56

→ B :=
0 −1 2 0 0 −150 0 0 −1 0 1
20 0 0 0 −1 30 0 0 0 0 0
.
Damit sind x1, x3, x6 die freien Variablen und das LGS mit freigestellten abhängigen Variablenlautet
x2 = 2x3 − 15x6
x4 = 12x6
x5 = 3x6.
Sei ν := x1, µ := x3, λ := x6.§) Hieraus folgt für die Lösungsmenge von A x = 0 in Parame-terdarstellung
x1
x2
x3
x4
x5
x6
=
ν2µ− 15λ
µ12λ3λλ
: ν, µ, λ ∈ R
und in Basisdarstellung
R
100000
+ R
021000
+ R
0−1501231
.
Die Lösungsmenge Kern (A) ist also ein 3-dimensionaler UVR von R6×1.
Üb Bestimme Z ∈ R4×4 als Produkt von Elementarmatrizen, so dass für A in (9) und B in (17)gilt: B = Z A. Bestimme Z−1. Tipp: s. (6).
Üb Sei W := Span a, b, c, d, e ⊂ C4, wobei a := (0, 0, i, 1 + i), b := (0, 2, 0, 1 − i), c := (2, 1 −i, 0, 0), d := (−1, 0, 1, 0) und e := (0, 2i, 2, 0). Berechne eine Basis von W .
Zur Lösung des inhomogenen LGS A x = b erinnern wir uns an (5). Wir führen an der erweiter-ten Koezientenmatrix (A|b) die gleichen elementaren Zeilenumformungen aus, die A auf spezielleZeilenstufenform B bringen. Dabei geht b in c über. Es ist B = Z A (s. (12)) und c = Z b mit
(8.18) (B|c) =
−1 ∗ c1
−1 ∗ ∗ c2−1 . . . c3
∗ .... . . −1 cr
cr+1...cm
.
(8.19) Lösbarkeit des inhomogenen LGS. Das LGS A x = b ist genau dann lösbar, wenn cr+1 =cr+2 = · · · = cm = 0. Insbesondere ist A x = b lösbar, wenn r = m.
§)ν nü, µ mü
57

Beweis. Nach (5) ist A x = b genau dann lösbar, wenn B x = c lösbar ist. Letzteres ist nach (4)genau dann lösbar, wenn Rang ((B|c)) = Rang (B). Hieraus folgt die Behauptung.
(8.20) Lösung des inhomogenen LGS. Im Fall der Lösbarkeit lautet das LGS B x = c mitfreigestellten abhängigen Variablen (14)
xlk =n∑
l=1
blkxl − ck, k = 1, . . . , r.
Eine partikuläre Lösung x0 = (γ1, . . . , γn)T erhält man durch Nullsetzen der freien Variablen:
γlk = −ck für k = 1, . . . , r und γl = 0 sonst.
Die Lösungsmenge von A x = b ist dann der ane Raum
x0 +Kern (A).
Beweis. Siehe (6.18), (6.20) und vor (5). Für den Kern (A) siehe (14).
58

9 Weitere Folgerungen des
Eliminationsverfahrens
Das Eliminationsverfahren nach Gauÿ erönet weitere Einsichten in die Matrizenrechnung.
(9.1) Dention. Sei A = (akl)k=1,...,ml=1,...,n
∈ Km×n. Die zu A transponierte Matrix AT hat als l-te
Zeile die l-te Spalte von A für l = 1, . . . , n:
AT =
a11 a21 . . . am1
a12 a22 . . . am2...
.... . .
...a1n a2n . . . amn
Damit ist AT =: (aT
lk)l=1,...,nk=1,...,m
∈ Kn×m mit aTlk = akl.
Beispiel.(
1 0 −3 2i8 −7 i 0
)T
=
1 80 −7−3 i2i 0
(9.2) Regeln für das Transponieren. Seien A, B ∈ Km×n, C ∈ Kn×p, λ ∈ K. Dann ist
(A+ λB)T = AT + λBT , (AT )T = A , (BC)T = CTBT .
Üb Weise (2) nach.
Beispiel. (Aξ)T = ξTAT für A ∈ Km×n, ξ ∈ Kn×1.
(9.3) Denition. Sei A ∈ Kn×n. Dann heiÿt A symmetrisch bzw. schiefsymmetrisch, wennAT = A bzw. AT = −A.
Es gilt: A symmetrisch ⇔ akl = alk; A schiefsymmetrisch ⇔ akl = −alk. Für schiefsymmetrischeMatrizen sind die Diagonalelemente akk null. Ist A ∈ Kn×n, dann ist A = 1
2(A+AT )+ 12(A−
AT ) die Summe einer symmetrischen und einer schiefsymmetrischen Matrix. Ist A ∈ Km×n,dann sind ATA und AAT deniert und symmetrisch.
Üb Seien A,B,C ∈ Kn×n mit A = B + C und B symmetrisch, C schiefsymmetrisch. Zeige:B = 1
2(A+AT ), C = 12(A−AT ).
(9.4) Defnition. Eine quadratische Matrix A heiÿt Diagonalmatrix, wenn akl = 0 für k 6= l,
d.h. es ist A =
∗∗
. . .∗
. Man schreibt diag(λ1, λ2, . . . , λn) :=
λ1
λ2
. . .λn
.
Jede Diagonalmatrix ist symmetrisch, insbesondere ist es λE für λ ∈ K.
(9.5) Lemma. Sei A ∈ GL(n,K). Dann ist AT ∈ GL(n,K) mit (AT )−1 = (A−1)T . Ist zudem A(schief-)symmetrisch, dann ist es auch A−1.
59
Beweis. Es ist: AT (A−1)T = (A−1A)T = ET = E ⇒ (AT )−1 = (A−1)T . Für AT = A folgt daraussofort A−1 = (A−1)T . Für AT = −A erhält man (−A)−1 = (A−1)T . Da (−A)(−A−1) = AA−1 = E,weshalb (−A)−1 = −A−1, gilt somit −A−1 = (A−1)T .
(9.6) Defnition. A ∈ Kn×n heiÿt obere Dreiecksmatrix, wenn akl = 0 für k > l, d.h.
A =
a11 a12 . . . a1n
a22 . . . a2n
. . ....ann
.
A ∈ Kn×n heiÿt untere Dreiecksmatrix, wenn AT eine obere Dreiecksmatrix ist.
(9.7) Lemma. Eine Dreiecksmatrix ist invertierbar genau dann, wenn die Diagonalelemente un-gleich Null sind.
Beweis. Sei A eine Dreiecksmatrix. Das LGS Ax = 0 hat oenbar genau dann nur die Lösungx = 0, wenn die Diagonalelemente 6= 0 sind. Wende (7.24) an.
Speziell ist diag(λ1, . . . , λn)−1 = diag( 1λ1, . . . , 1
λn) für λ1, λ2, . . . , λn 6= 0.
Sei A ∈ Km×n. Nach (7.11) ist der Spaltenraum von A gleich Spana1, . . . , an = Bild(A) =Ax : x ∈ Kn×1. Betrachte jetzt die Zeilenvektoren a′1, . . . , a′m ∈ K1×n von A. Entsprechend heiÿt
Spana′1, . . . , a′m = y A : y ∈ K1×m
der Zeilenraum von A. Wie in (8.13) gezeigt, ist Spaltenrang = Zeilenrang. Für T ∈ GL(m,K)gilt oenbar, dass A und TA gleichen Zeilenraum haben. Vgl. dazu die Aussagen in (7.35).
Üb Sei A ∈ Km×n. Zeige, dass RA : K1×m → K1×n, RA(ζ) := ζA ∗) eine lineare Abbildung ist.Oenbar ist Bild(RA) der Zeilenraum von A. Bestimme die Abbildungsmatrix für RA bez. derStandardbasen in K1×m und K1×n.
Üb Sei C ∈ GL(n,K). Zeige: LC und RC sind Automorphismen.
Üb Sei A ∈ Km×n, T ∈ GL(m,K), S ∈ GL(n,K). Welche Beziehungen bestehen zwischenBild(A), Kern(A), Bild(T A), Kern(T A), Bild(AS), Kern(AS), Bild(AT ), Kern(AT ),Bild((T A)T ), Kern((T A)T ), Bild((AS)T ), Kern((AS)T ), den zugehörigen Dimensionen undn, m, sowie den jeweiligen Spalten und Zeilenräumen?
Analog zu den elementaren Zeilenumformungen deniert man
(9.8) Elementare Spaltenumformungen. Seien C ∈ Kp×m und Zκ ∈ Km×m für κ = 1, 2, 3 dieElementarmatrizen aus Kap. 8. Ensteht C aus C durch
1© Vertauschen der Spalten j und k, dann ist C = C Z1.
2© Multiplikation der kten Spalte mit λ, dann ist C = C Z2.
3© Addition des αfachen der jten Spalte zur kten Spalte, dann ist C = C Z3.
Beweis. Da C ZT = (Z CT )T , folgt die Behauptung aus (8.6) aufgrund von (1). Beachte dabei,dass Z1, Z2 symmetrisch sind und dass (Z3(j, k))T = Z3(k, j) gilt.
(9.9) Struktursatz für Matrizen. Sei A ∈ Km×n. Es gibt T ∈ GL(m,K) und S ∈ GL(n,K)derart, dass
T AS =(Er
)mit r = Rang(A).
Jede invertierbare Matrix ist Produkt von Elementarmatrizen.∗)ζ zeta
60

Beweis. Nach (8.12) existiert Z ∈ GL(m,K) derart, dass B := Z A spezielle Zeilenstufenform hat.Indem man geeignete Vielfache der l1-ten Spalte von B zu den folgenden Spalten addiert, wird dieerste Zeile gleich −el1 . Verfahre ebenso mit den Zeilen 2, . . . , r. Jetzt vertausche die erste Spaltemit der l1-ten Spalte, dann die zweite Spalte mit der l2-ten Spalte, u.s.w. Anschlieÿend multipliziere
jede Spalte mit −1. Es entsteht aus B die Matrix
(Er
). Es folgt aus (8), dass es ein Produkt von
Elementarmatrizen S ∈ Kn×n gibt, so dass B S =(Er
). Mit T := Z folgt T AS =
(Er
).
Sei nun A ∈ GL(n,K). Dann ist B = −E und daher A = −Z−1. Die Behauptung folgt nun mit(8.6).
Üb Seien V und W endlichdimensionale VR, f : V → W eine lineare Abbildung und B eine(m × n)Matrix. Es gelte: n = dimV , m = dimW und Rang(f) = Rang(B). Gibt es Basenin V und W derart, dass B die darstellende Matrix von f bez. dieser Basen ist?
Seien A ∈ Km×n, B ∈ Km×p. Indem man A durch die p Spalten von B erweitert, erhält man(A|B) ∈ Km×(n+p). Für T ∈ Kq×m ist T (A|B) = (T A|T B). Das bedeutet: Nimmt man an (A|B)elementare Zeilenumformungen vor, so nimmt man diese gleichzeitig an A und B vor.
(9.10) Anwendung: Spezielle Zeilenstufenform. Sei A ∈ Km×n. Wie berechnet man Z ∈GL(m,K) derart, dass B := Z A spezielle Zeilenstufenform hat? Antwort: Wende auf(A|Em) jene elementaren Zeilenstufenumformungen (Elimination, Substitution, Freistellung)an, die A in B überführen. Em geht dabei in Z über, denn Z (A|Em) = (B|Z).
(9.11) Berechnung der Inversen. Sei A ∈ GL(n,K). Dann ist die spezielle Zeilenstufenform fürA gleich −En. Also ist A
−1 = −Z aus (10).
(9.12) Beispiel. Sei A =(α βγ δ
)und ∆ := αδ − βγ. Gemäÿ (11) wird (A|E2) umgeformt:(
α β 1 0γ δ 0 1
)→
(α 6=0)
(α β 1 00 ∆
α − γα 1
)→
(∆ 6=0)
(α 0 αδ
∆ −αβ∆
0 ∆α − γ
α 1
)→(
1 0 δ∆ − β
∆0 1 − γ
∆α∆
).
So ist
(α βγ δ
)−1
=1∆
(δ −β−γ α
)für ∆ 6= 0, auch falls α = 0. Allgemein gilt ∆E2 =(
α βγ δ
)(δ −β−γ α
), wie man leicht nachrechnet.
Seien A ∈ Km×n, C ∈ Kp×n. Indem man A durch die p Zeilen von C erweitert, erhält man(AC
)∈ K(m+p)×n. Für S ∈ Kn×q ist
(AC
)S =
(ASC S
). Das bedeutet: Nimmt man an
(AC
)elementare Spaltenumformungen vor, so nimmt man diese gleichzeitig an A und C vor.
(9.13) Anwendung: Spaltenstufenform. Die Spaltenstufenform einer Matrix ist analog zur Zei-lenstufenform deniert. C ∈ Km×n hat Spaltenstufenform genau dann, wenn CT Zeilenstu-fenform hat. Entsprechend lässt sich eine Matrix A ∈ Km×n mittels elementarer Spaltenum-formungen in Spaltenstufenform bringen. Damit gibt es ein Produkt S ∈GL(n,K) von Ele-mentarmatrizen derart, dass C = AS Spaltenstufenform besitzt. Man berechnet S dadurch,
dass man auf
(AEn
)jene elementaren Spaltenumformungen anwendet, die A in C überführen.
En geht dabei in S über, denn
(AEn
)S =
(CS
).
Da elementare Spaltenumformungen den Spaltenraum nicht verändern, haben A und Cden gleichen Spaltenraum. Eine Basis davon bilden die ersten r Spalten von C. Diese sind alsoeine Basis von Bild(A).
61
Üb Sei V ein VR und seien v1, v2, . . . , vp linear unabhängige Vektoren aus V . Weiter seien qVektoren ul =
∑pk=1 aklvk mit akl ∈ K für l = 1, . . . , q aus V gegeben. Berechne eine Basis
von Spanu1, . . . , uq für den Fall, dass p = 4, q = 5 und A = (akl) die folgende Matrix ist:
A =
0 0 2 −1 00 2 1− i 0 2ii 0 0 1 2
1 + i 1− i 0 0 0
.
62
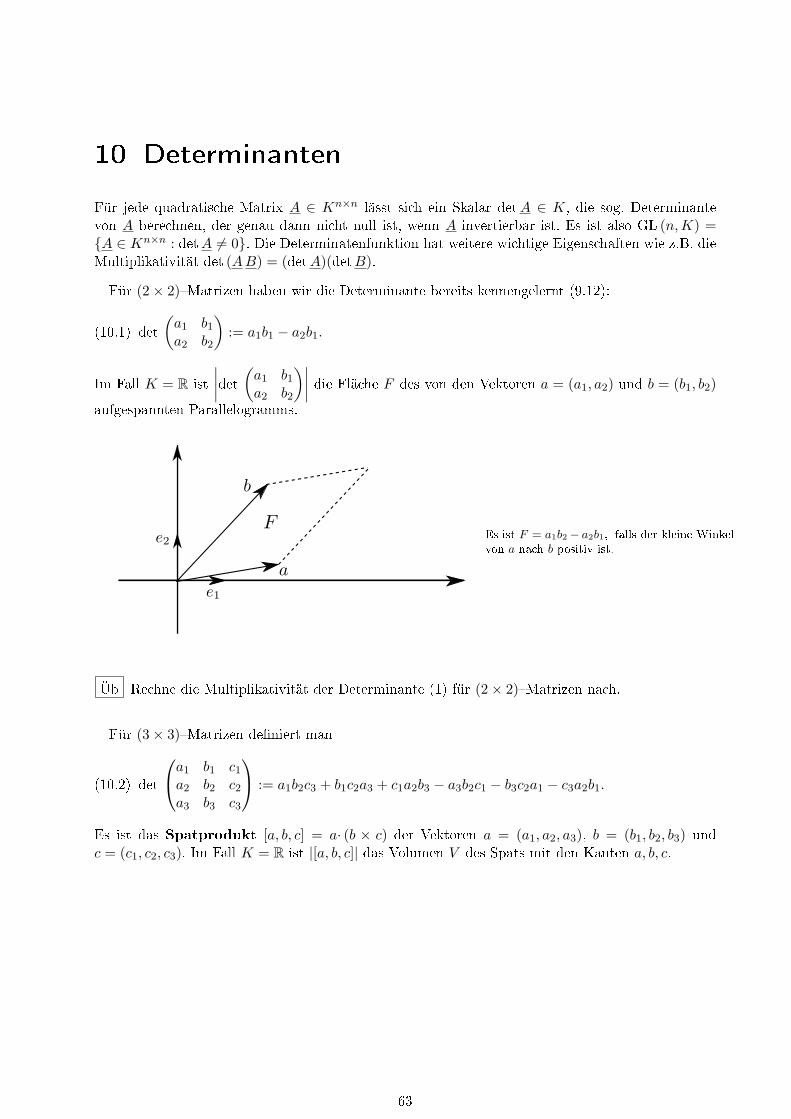
10 Determinanten
Für jede quadratische Matrix A ∈ Kn×n lässt sich ein Skalar detA ∈ K, die sog. Determinantevon A berechnen, der genau dann nicht null ist, wenn A invertierbar ist. Es ist also GL (n,K) =A ∈ Kn×n : detA 6= 0. Die Determinatenfunktion hat weitere wichtige Eigenschaften wie z.B. dieMultiplikativität det (AB) = (detA)(detB).
Für (2× 2)Matrizen haben wir die Determinante bereits kennengelernt (9.12):
(10.1) det
(a1 b1a2 b2
):= a1b1 − a2b1.
Im Fall K = R ist
∣∣∣∣det (a1 b1a2 b2
)∣∣∣∣ die Fläche F des von den Vektoren a = (a1, a2) und b = (b1, b2)
aufgespannten Parallelogramms.
Es ist F = a1b2 − a2b1, falls der kleine Winkelvon a nach b positiv ist.
Üb Rechne die Multiplikativität der Determinante (1) für (2× 2)Matrizen nach.
Für (3× 3)Matrizen deniert man
(10.2) det
a1 b1 c1a2 b2 c2a3 b3 c3
:= a1b2c3 + b1c2a3 + c1a2b3 − a3b2c1 − b3c2a1 − c3a2b1.
Es ist das Spatprodukt [a, b, c] = a· (b × c) der Vektoren a = (a1, a2, a3), b = (b1, b2, b3) undc = (c1, c2, c3). Im Fall K = R ist |[a, b, c]| das Volumen V des Spats mit den Kanten a, b, c.
63
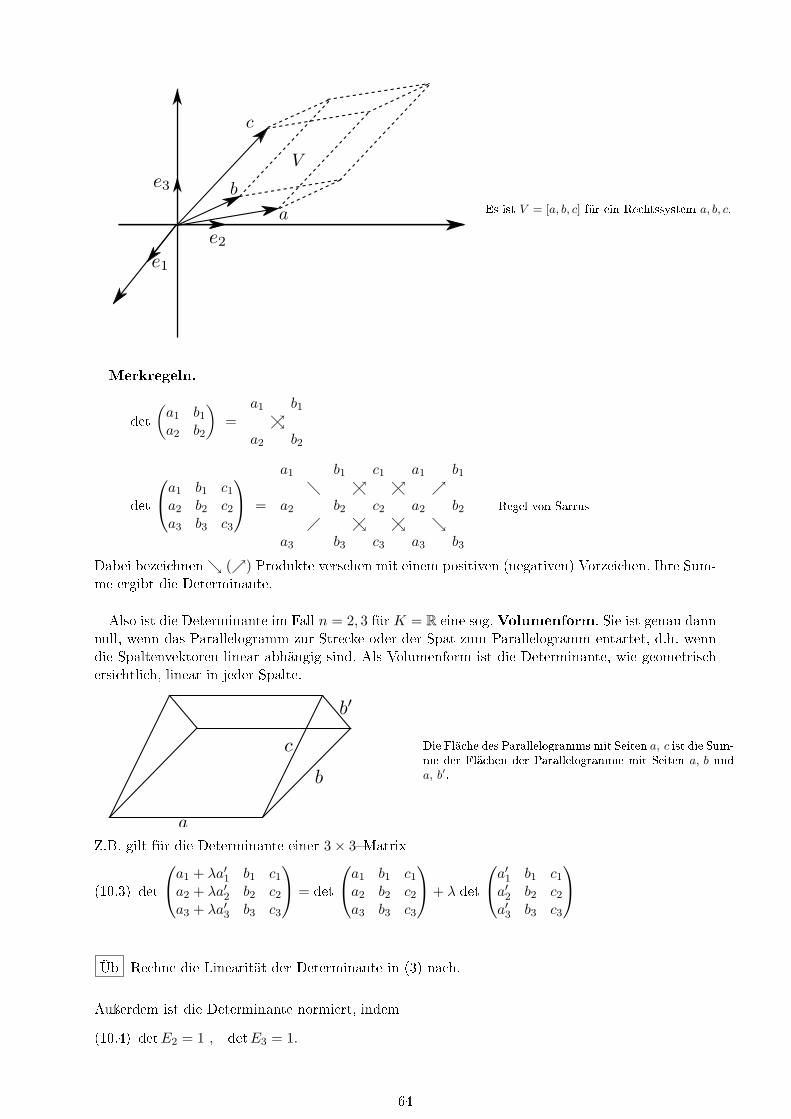
Es ist V = [a, b, c] für ein Rechtssystem a, b, c.
Merkregeln.
det
(a1 b1a2 b2
)=
a1 b1
a2 b2
det
a1 b1 c1a2 b2 c2a3 b3 c3
=
a1 b1 c1 a1 b1
a2 b2 c2 a2 b2
a3 b3 c3 a3 b3
Regel von Sarrus
Dabei bezeichnen () Produkte versehen mit einem positiven (negativen) Vorzeichen. Ihre Sum-me ergibt die Determinante.
Also ist die Determinante im Fall n = 2, 3 für K = R eine sog. Volumenform. Sie ist genau dannnull, wenn das Parallelogramm zur Strecke oder der Spat zum Parallelogramm entartet, d.h. wenndie Spaltenvektoren linear abhängig sind. Als Volumenform ist die Determinante, wie geometrischersichtlich, linear in jeder Spalte.
Die Fläche des Parallelogramms mit Seiten a, c ist die Sum-me der Flächen der Parallelogramme mit Seiten a, b unda, b′.
Z.B. gilt für die Determinante einer 3× 3Matrix
(10.3) det
a1 + λa′1 b1 c1a2 + λa′2 b2 c2a3 + λa′3 b3 c3
= det
a1 b1 c1a2 b2 c2a3 b3 c3
+ λ det
a′1 b1 c1a′2 b2 c2a′3 b3 c3
Üb Rechne die Linearität der Determinante in (3) nach.
Auÿerdem ist die Determinante normiert, indem
(10.4) detE2 = 1 , detE3 = 1.
64

Im Folgenden schreiben wir A ∈ Kn×n als nTupel (a1, a2, . . . , an) ihrer Spaltenvektoren. D.h. wiridentizieren Kn×n mit (Kn×1)n.
(10.5) Denition. Wir nennen eine Abbildung
det : Kn×n −→ K
eine Determinatenfunktion, wenn sie folgende Eigenschaften besitzt:
(a) det ist multilinear bez. der Spalten, d.h. für jedes k = 1, . . . , n istdet (a1, . . . , ak−1, ak + λa′k, ak+1, . . . , an) =det (a1, . . . , an) + λ det (a1, . . . , ak−1, a
′k, ak+1, . . . , an),
(b) det (a1, . . . , an) = 0 falls a1, . . . , an ∈ Kn×1 linear abhängig sind,
(c) detEn = 1.
Bemerkung. (a)(c) sind für (1) und (2) erfüllt. Im Fall n = 1 gilt dies oenbar für
(10.6) detA := a, wobei A = (a), a ∈ K.
Es geht nun darum, allgemein für n ∈ N die Existenz und Eindeutigkeit von det zu zeigen.
(10.7) Lemma. Sei δ : Kn×n −→ K multilinear im Sinne von (5)(a). Dann sind die folgendenAussagen (i), (ii) und (iii) äquivalent:
(i) Eigenschaft (5)(b).
(ii) δ(a1, . . . , an) = 0 falls a1, . . . , an nicht paarweise verschieden sind.
(iii) δ ist alternierend, d.h. δ ändert das Vorzeichen bei Platzwechsel, d.h. bei Vertauschungbenachbarter Spaltenvektoren.
Beweis. (i)⇒ (ii) gilt, weil nicht paarweise verschiedene ak linear abhängig sind. (ii)⇒ (iii): Ersetzedie l-te und (l + 1)-te Komponente für l < n durch al + al+1. Dann ist wegen der Multilinearität
0 = δ(. . . , al + al+1, al + al+1, . . . )= δ(. . . , al, al + al+1, . . . ) + δ(. . . , al+1, al + al+1, . . . )= δ(. . . , al, al, . . . ) + δ(. . . , al, al+1, . . . ) + δ(. . . , al+1, al, . . . ) + δ(. . . , al+1, al+1, . . . )= δ(. . . , al, al+1, . . . ) + δ(. . . , al+1, al, . . . ).
Es bleibt (iii)⇒ (i) zu zeigen. Sei aq =∑n
k=1,k 6=q αk ak mit αk ∈ K für ein q ∈ 1, . . . , n. Dann istδ(a1, . . . , aq, . . . , an) =
∑nk=1,k 6=q αk δ(a1, . . . , ak, . . . , a1) mit ak als q-te Komponente. Weil k 6= q,
stimmen für den k-ten Summanden die k-te und die q-te Komponente überein. Sind k und q be-nachbart, dann ist der Summand null als unmittelbare Folge von (iii). Den allgemeinen Fall führtman auf diesen durch mehrfachen Platzwechsel zurück:
. . . , ∗, a, ∗, ∗, a, ∗. · · · → . . . , ∗, ∗, a, ∗, a, ∗. · · · → . . . , ∗, ∗, ∗, a, a, ∗. . . .
Eine Determinatenfunktion ist demnach eine normierte alternierende Multilinearform aufKn×n ' (Kn×1)n. Existenz und Eindeutigkeit der Determinantenfunktion ist gleichbedeutendmit der Existenz eines einfacheren Objekts. Gemäÿ dem physikalischen Sprachgebrauch ist es
(10.8) Der vollständig antisymmetrische Tensor n-ter Stufe ε. Sei n ∈ N. Zu j1, . . . , jn ∈1, . . . , n gibt es εj1...jn ∈ K derart, dass ε12...n = 1 und ε bei Platzwechel der Indexwerte dasVorzeichen ändert. ε ist eindeutig und nimmt für n ≥ 2 genau die Werte −1, 0, 1 an.
65

Beweis. Zur Eindeutigkeit von ε stellt man fest, dass ε null ist, wenn zwei Indexwerte überein-stimmen, weil ε alternierend ist (vgl. Beweis von (7)). Aber auch der Wert von εj1...jn für paarweiseverschiedene Indexwerte j1, . . . , jn liegt fest, weil man diese durch mehrfache Vertauschung benach-barter Indizes in die Ordnung 12 . . . n bringen kann, wofür ε eins ist. Damit ist auch klar, dass ε fürn ≥ 2 genau die Werte −1, 0, 1 annimmt.Die Existenz wird durch rekursive Denition gezeigt. Für n=1 sei ε(1)1 := ε1 := 1. Seien nun die
Tensoren ε(1), . . . , ε(n) bereits konstruiert. Setze
ε(n+1)j1...jq ...jnjn+1
:=
0 falls zwei Indizes übereinstimmen
(−1)n+1−q ε(n)j1...\jq ...jnjn+1
sonst
wobei q ∈ 1, . . . , n + 1 derart, dass jq = n + 1. Zunächst beachte, dass jk ∈ 1, . . . , n für
k ∈ 1, . . . , n+ 1, k 6= q, womit die Denition sinnvoll ist. Weiter ist ε(n+1)1...n(n+1) = (−1)0· ε(n)
1...n = 1.
Bei einem Platzwechsel, der jq nicht betrit, liefert ε(n) ein Minuszeichen. Rückt hingegen jq umeinen Platz, bleibt ε(n) unverändert aber der Vorfaktor liefert ein Minuszeichen. Also ist ε(n+1)
normiert und vollständig antisymmetrisch.
Sind j1 . . . jn paarweise verschieden, dann deniert π(k) := jk eine Permutation π ∈ Sn (s. (4.3).).In diesem Fall schreibt man επ := εj1...jn und nennt επ das Vorzeichen oder Signum der Per-mutation. Es gilt stets επ = επ−1 , weil π und π−1 durch die gleiche Anzahl von Platzwechsel ausidSn hervorgehen.
Produktschreibweise. Alternativ zur Pünktchenschreibweise benutzt man für m < n, m,n ∈ Z,n∏
i=m
αi := αm αm+1 . . . αn∗)
(10.9) Leibniz Formel für Determinanten. Es gibt genau eine Determinantenfunktion, nämlich
detA :=∑π∈Sn
επ
n∏k=1
aπ(k)k für A ∈ Kn×n.
Beweis. Zum Nachweis der Eindeutigkeit sei δ eine Determinantenfunktion, d.h. eine normiertealternierende Multilinearform auf (Kn×1)n. Dann ist
δ(A) = δ
n∑j1=1
aj11 ej1 ,n∑
j2=1
aj22 ej2 , . . . ,n∑
jn=1
ajnn ejn
=
n∑j1=1
n∑j2=1
· · ·n∑
jn=1
aj11 aj22 . . . ajnn δ(ej1 , ej2 , . . . , ejn).
Oensichtlich ist δ(ej1 , ej2 , . . . , ejn) = εj1j2...jn und somit (s. (8).) δ(A) =
∑π∈Sn
επaπ(1)1 . . . aπ(n)n,d.h. δ(A) = det (A).
Zur Existenz bleibt zu zeigen, dass det wie oben deniert wirklich eine Determinatenfunktion ist,d.h. normiert, alternierend und multilinear.Es ist detE =
∑π∈Sn
επ (∏n
k=1 δπ(k)k) =∑
π∈Sn,π=id επ = 1.Bei einem Wechsel der Plätze l und l + 1 geht A in die Matrix B über mit bk = aσ(k), wobei
σ ∈ Sn, σ(l) := l + 1, σ(l + 1) =: l und σ(k) = k sonst. Demnach ist
n∏k=1
bπ(k)k =n∏
k=1
aπ(k)σ(k) =n∏
j=1
aπ(σ−1(j))j
∗)Q Pi , das groÿe griechische P
66

und somit
detB =∑π∈Sn
επ
n∏j=1
aπσ−1(j)j =∑κ∈Sn
εκσ
n∏j=1
aκ(j)j =∑κ∈Sn
(−εκ)n∏
j=1
aκ(j)j = −det (A).
Es bleibt die Multilinearität zu zeigen. Ersetzt man die l-te Spalte durch bl := al + λa′l, dann ist
n∏k=1
bπ(k)k =n∏
k=1
aπ(k)k + λn∏
k=1
a′π(k)k ,
wobei a′k := ak für k 6= l. Einsetzen in die Leibniz Formel liefert die Behauptung.
Konkrete Berechnungen mit Hilfe der Leibniz Formel sind oftmals sehr umfangreich wegen dergroÿen Anzahl n! von Summanden (s. Üb. zu (4.3)). Es werden jetzt ausgehend von (9) diewichtigsten Eigenschaften der Determinantenfunktion bewiesen.
(10.10) Korollar. Für A ∈ Kn×n gilt det (AT ) = det (A).
Beweis. Zunächst ist∏n
k=1 aπ(k)k =∏n
j=1 ajπ−1(j). Damit folgt det (A) =∑
κ∈Snεκ−1
∏nj=1 ajκ(j) =
det (AT ), weil εκ−1 = εκ nach (8).
Identiziert man Kn×n ' (K1×n)n und schreibt A ∈ Kn×n als n-Tupel ihrer Zeilenvektoren, dannfolgt sofort aus (10)
(10.11) Korollar. det : Kn×n −→ K ist eine (die einzige) normierte, alternierende Multilinearformbez. der Zeilen.
Sei A ∈ Kn×n und (k, l) ∈ 1, . . . , n2. Dann deniert man A(kl) ∈ K(k−1)×(n−1) als diejenigeMatrix, die aus A durch Streichen der k-ten Zeile und der l-ten Spalte ensteht.
(10.12) Lemma. Sei A ∈ Kn×n und (k, l) ∈ 1, . . . , n2 derart, dass al = ek, d.h. der l-te Spalten-vektor von A ist der k-te Standardspaltenvektor. Dann gilt
det (A) = (−1)k+l detA(kl),
Die gleiche Formel gilt, wenn der k-te Zeilenvektor von A gleich dem l-ten Standardspalten-vektor ist.
Beweis. Durch n− l Platzwechsel
. . . ∗ ek ∗∗∗ → . . . ∗∗ ek ∗∗→ . . . ∗∗∗ ek ∗→ . . . ∗∗∗∗ ek
tausche ek von der l-ten Spalte in die n-te Spalte ohne die Reihenfolge der übrigen Spaltenvektorenzu verändern. Anschlieÿend tausche analog durch n− k Platzwechsel den k-ten Zeilenvektor in dien-te Zeile. Für die neue Matrix B gelten:
67

(i) der letzte Spaltenvektor von B ist en,
(ii) durch Streichen der n-ten Zeile und der n-ten Spalte von B entsteht A(kl),
(iii) detB = (−1)(k+l)detA.
Letzteres gilt, weil (n− l) + (n− k) Platzwechsel vorgenommen werden. Jetzt wende (9) auf B an:
detB =∑π∈Sn
επ
n∏k=1
bπ(k)k(i)=
∑π∈Sn,π(n)=n
επ
n−1∏k=1
bπ(k)k
=∑
π∈Sn−1
εκ
n−1∏k=1
bκ(k)k(ii)= detA(kl).
Schlieÿlich beachte (iii). Der Rest der Behauptung gilt wegen (10).
Es folgt der Entwicklungssatz von Laplace.
(10.13) Entwicklung nach Zeile oder Spalte. Sei A ∈ Kn×n beliebig. Dann gelten die Entwicklungvon detA nach der lten Spalte
(Sl) detA =n∑
k=1
(−1)k+lakl detA(kl)
und die Entwicklung von detA nach der kten Zeile
(Zk) detA =n∑
l=1
(−1)k+lakl detA(kl).
Beweis. Aufgrund der Linearität bez. der lten Spalte ist detA = det (a1, . . . , al, . . . , an) =∑nk=1 akl det (a1, . . . , ek, . . . , an). Hieraus folgt (Sl) mit (12). Analog zeigt man (Zk).
(10.14) Verhalten bei elementaren Umformungen. Seien Zκ, κ = 1, 2, 3, die drei Typen vonElementarmatritzen und C ∈ Kn×n, vgl. (8.6) und (9.8). Dann gelten
1© det (Z1C) = det (C Z1) = −det (C),2© det (Z2C) = det (C Z2) = λdet (C),3© det (Z3C) = det (C Z3) = det (C).
Beweis. Diese Beziehungen sind eine unmittelbare Folge der Multilinearität und der vollständigenAntisymmetrie der Determinantenfunktion.
Üb Drücke in Worten die Bedeutung von (14) aus.
Die Sätze (13) und (14) erlauben in eektiver Weise Determinanten auszurechnen.
(10.15) Beispiel. Vandermonde Determinante.
det
1 x x2
1 y y2
1 z z2
= det
1 x x2
0 y − x y2 − x2
0 z − x z2 − x2
=
det
(y − x y2 − x2
z − x z2 − x2
)= (y − x)(z − x)det
(1 y + x1 z + x
)=
(y − x)(z − x)det(
1 y1 z
)= (y − x)(z − x)(z − y).
68

Allgemein gilt
det
1 x1 . . . xn−1
1
1 x2 . . . xn−12
......
...1 xn . . . xn−1
n
=∏
1≤i<j≤n
(xj − xi).
Üb Weise die allgemeine Formel für die Vandermonde Determinante aus (15) nach.
(10.16) Multiplikationssatz. Für A, B ∈ Kn×n gilt det (AB) = (detA)(detB).
Beweis. Da det (E) = 1, folgt aus (14) für C = E, dass
(10.17) det (Z1) = −1, det (Z2) = λ, det (Z3) = 1.
Daher gilt det (ZκC) = det (Zκ)det (C) für κ = 1, 2, 3. Dies wird nun mehrfach angewendet.
Sei zunächst A invertierbar. Dann existieren nach (9.9) Elementarmatritzen Z1, . . . , Zm derart,dass A = Z1 . . . Zm. Daher gilt:det (AB) = det (Z1 . . . ZmB) = det (Z1)det (Z2 . . . ZmB) = det (Z1)det (Z2)det (Z3 . . . ZmB) =· · · = det (Z1) . . . det (Zm)det (B) = det (Z1) . . . det (Zm−2)det (Zm−1Zm)det (B) = · · · = det (Z1
. . . Zm)det (B) = det (A)det (B).
Nun sei A nicht invertierbar, d.h. Rang(A)< n. Dann ist auch Rang(AB)< n. Nach Denition(5)(b) gilt det (A) = 0 und det (AB) = 0.
Wir erinnern an (7.24): A ∈ Kn×n ist invertierbar genau dann, wenn Rang (A) = n oder wenndim Kern (A) = 0.
(10.18) Invertierbarkeitskriterium. Es ist
GL(n,K) = A ∈ Kn×n : det (A) 6= 0,
d.h. für A ∈ Kn×n gilt:
A invertierbar⇔ det (A) 6= 0.
Beweis. Wir wissen bereits: A nicht invertierbar ⇒ Rang (A) < n⇒ det (A) = 0. Sei nun A inver-tierbar. Dann gilt: E = AA−1 ⇒ 1 = det (E) = det (AA−1) = detA det (A−1)⇒ detA 6= 0.
(10.19) Korrolar. Für A, B, C ∈ Kn×n und S ∈ GL(n,K) gelten:
• det (ABC) = det (BAC) = det (BC A).
• det (Ak) = (det A)k für k ∈ N, wobei Ak := . . . ((AA)A) . . . A mit k Faktoren.
• det (S−1) = (det S)−1.
• det (S−1AS) = det (A).
Üb Weise (19) nach.
69

Üb Blockmultiplikation von Matrizen. Für k = 1, . . . ,m, l = 1, . . . , n und j = 1, . . . , pseien Akl eine (mk × nl)Matrix und Blj eine (nl × pj)Matrix. Damit ist
Ckj :=n∑
l=1
AklBlj
eine (mk × pj)Matrix. Setze (Akl)k=1,...,m, l=1,...,n zu einer (M × N)Matrix A mit M :=∑mk=1mk und N :=
∑nl=1 nl zusammen:
A =
A11 A12 · · · A1n
A21 A22 · · · A2n...
.... . .
...Am1 Am2 · · · Amn
Ebenso bilde B ∈ KN×P und C ∈ KM×P mit P :=
∑pj=1 pj . Zeige C = AB.
Üb Sei A ∈ Kn×n derart, dass als Blockmatrix A =(B C
D
)bzw. A =
(B
C D
),
wobei B und D quadratisch sind. Zeige: detA = (detB)(detD).
Tipp: Zeige die Behauptung für den Spezialfall D = E und schreibe A in geeigneter Weise alsProdukt zweier Matrizen.
Üb Dreiecksblockmatrizen. Sei
A =
A11
A22 ∗. . .
App
eine obere Dreiecksblockmatrix mit quadratischen Aii, i = 1, . . . , p. Zeige die FormeldetA =
∏pi=1 detAii. Entsprechendes gilt für untere Dreiecksblockmatrizen.
Üb Sei A =(B C
D
)mit B, D quadratische invertierbare Matrizen. Aus der vorangegangenen
Übung folgt, dass A invertierbar ist. Wie lautet die Blockmatrix für A−1 unter Verwendungvon B−1 und D−1?
Üb Eine Matrix P ∈ Kn×n heiÿt Permutationsmatrix, wenn P aus En durch Vertauschungvon Spalten hervorgeht, d.h. wenn es eine Permutation π ∈ Sn (s. (4.3).) gibt derart, dass
P = (eπ(1)|eπ(2)| . . . |eπ(n))
oder, anders ausgedrückt, wenn P ek = eπ(k) für k = 1, . . . , n. Also besteht eine eineindeutigeZuordnung
π 7→ Pπ
zwischen den Permutationen aus Sn und den (n× n)Permutationsmatrizen. Sei Πn ⊂ Kn×n
die Menge der Permutationsmatrizen.
a) Zu welcher Permutation gehört
0 0 1 00 1 0 00 0 0 11 0 0 0
?
70

b) Wie sieht die Permutationsmatrix zu π ∈ S5 mit π(i) := i + 1 für i ∈ 1, . . . , 4 undπ(5) := 1 aus?
c) Weise nach: Es ist Πn ⊂ GL(n,K) und Sn → GL(n,K), π 7→ Pπ, ist ein injektiverGruppenhomomorphismus
Pπκ = PπPκ ∀π, κ ∈ Sn,
dessen Bild gleich Πn ist. Allgemein nennt man einen Gruppenhomomorphismus einerGruppe G in GL(n,K) eine ndimensionale Matrixdarstellung von G.
d) Weise nach: Πn ist eine Gruppe bez. der Gruppenmultiplikation, d.h. Πn ist eine Unter-gruppe von GL(n,K).
e) Sei επ das Vorzeichen der Permutation π ∈ Sn. Zeige: επκ = επεκ ∀π, κ ∈ Sn.Tipp: Wie hängen Pπ und επ zusammen?
f) Finde einen Zusammenhang zwischen gewissen (n × n)Matrizen und dem vollständigantisymmetrischen Tensor nter Stufe ε.
(10.20) Cramer Regel. Seien A ∈ GL(n,K) und b ∈ Kn×1. Dann hat Ax = b die eindeutige Lösungx mit
xk =1
detAdet (a1, . . . , ak−1, b, ak+1, . . . , an).
Beweis. Es ist b = Ax =∑n
l=1 xl al und somit det (a1, . . . , ak−1, b, ak+1, . . . , an) =∑n
l=1 xl det (a1,. . . , ak−1, al, ak+1, . . . , an) =
∑nl=1 xl δkl detA = xk detA.
(10.21) Korollar. Sei A ∈ GL(n,K). Setze (akl)k, l=1,...,n := A−1. Dann ist
akl =1
detA(−1)k+l detA(lk) für k, l = 1, . . . , n.
Beachte die Reihenfolge der Indizes.
Beweis. Für b = el in (20) ist x = A−1el = al die lte Spalte von A−1. Also ist nach (20) und (12)
akl = 1detA
det (a1, . . . , ak−1, el, ak+1, . . . , an) = 1detA
(−1)k+l detA(lk).
(10.22) Die Adjunkte. Zu A ∈ Kn×n setze
A = (akl)k,l=1,...,n mit akl := (−1)k+l detA(lk).
Die Matrix A heisst die Adjunkte zu A. Sie erfüllt (vgl. (21))
AA = AA = (detA)En.
Beweis.Mit (12) gilt∑n
l=1 akl alj =∑n
l=1 det (a1, . . . , ak−1, el, ak+1, . . . , an) alj = det (a1, . . . , ak−1,aj , ak+1, . . . , an) = δkj detA.
Also gilt AA = (detA)En. Nun ist (AT )T = A, wie man sich leicht überzeugt. Damit folgt aus
ATAT = (detAT )En durch Transponieren AA = (detA)En.
(10.23) Beispiel. Die Adjunkte zu A =(α βγ δ
)ist A =
(δ −β−γ α
), vgl. (9.12).
71

Üb Seien f : Rn → Rn linear und b1, . . . , bn Vektoren des Rn. Die Teilmenge des Rnn∑
l=1
λl bl : λl ∈ [0, 1] für l = 1, . . . , n
heiÿt Spat mit Kanten b1, . . . , bn.
Sei bl der Spaltenvektor in Rn×1 bestehend aus den Komponenten von bl ∈ Rn. Setze B :=(b1 . . . bn) ∈ Rn×n. In Übereinstimmung mit der Anschauung im R2 und R3 (vgl. die Erläute-rungen zu (1) und (2)) nennt man allgemein
V := |detB |
das Volumen des Spats mit Kanten b1, . . . , bn. Zeige: Das Volumen des Spats mit Kantenf(b1), . . . , f(bn) ist |det f |V .
72

11 Eigenwerte und Eigenvektoren
Gegeben sei eine lineare Abbildung f : V → W von einem ndimensionalen KVR V in einenmdimensionalen KVR W .
(11.1) Struktursatz für Homomorphismen. Bei geeigneter Wahl von Basen in V und W ist dieAbbildungsmatrix A ∈ Km×n von f gleich
A =(Er
)mit r := Rang (f).
Jede weitere Abbildungsmatrix A′ von f ist von der Form A′ = T−1AS mit T ∈ GL(m,K)und S ∈ GL(n,K).
Beweis. Die Behauptung folgt sofort aus (9.9) und (7.33).
Ähnlichkeit von Matrizen
Im Fall eines Endomorphismus f von V bestimmt man eine Abbildungsmatrix A ∈ Kn×n von f ,indem man auch die Bildvektoren f(x) bez. derselben Basis entwickelt. Ein Basiswechsel in V führtauf eine zu A ähnliche Matrix A′, nämlich
(11.2) A′ = S−1AS
mit S ∈ GL(n,K), s. (7.36). Die Aufgabe ist, S so zu bestimmen, dass A′ eine möglichst einfacheGestalt hat. Diese Aufgabenstellung hat einen prinzipiellen Aspekt, auf den wir kurz eingehenwollen.
(11.3) Denition. Sei X eine Menge. Eine Äquivalenzrelation ∼ auf X hat die folgenden Eigen-schaften für x, y, z ∈ X. Dabei steht x ∼ y für "x ist äquivalent zu y".
• x ∼ x (Reexivität)
• x ∼ y ⇒ y ∼ x (Symmetrie)
• x ∼ y, y ∼ z ⇒ x ∼ z (Transitivität).
Zu jedem x ∈ X bildet man nun die zugehörige Äquivalenzklasse
[x] := y ∈ X : y ∼ x ⊂ X.
Je zwei Äquivalenzklassen [x] und [x′] sind gleich [x] = [x′], wenn x ∼ x′, und disjunkt [x]∩ [x′] = ∅,wenn x x′. (Denn ist x ∼ x′ und sind y, y′ ∈ X mit y ∈ [x] und y′ ∈ [x′], dann gilt y ∼ x ∼ x′ ∼ y′,weshalb y ∈ [x′] und y′ ∈ [x]. Ist hingegen x x′, dann ist für jedes y′ ∈ [x] auch y x′ und somity /∈ [x′].) Ist K ⊂ X eine Äquivalenzklasse und x ∈ X, dann ist [x] = K und x heiÿt einRepräsentant von K.
(11.4) Beispiel. Sei X eine Menge. Sei K ⊂ P(X). Ist K eine Partition von X, d.h. die Mengenaus K sind paarweise disjunkt und ihre Vereinigung ist X, dann deniert "x ∼ y :⇔ ∃K ∈K mit x, y ∈ K" eine Äquivalenzrelation auf X.
73

(11.5) Beispiel. Die Isomorphie ist eine Äquivalenzrelation auf der Menge der endlichdimensionalenK-VR.
(11.6) Beispiel. Sei V ein VR und W ⊂ V ein UVR. Dann deniert "x ∼ y : y − x ∈ W" eineÄquivalenzrelation auf V . Zu x ∈ V ist [x] = x+W . Die Menge der Äquivalenzklassen heiÿtQuotientenraum und wird mit V/W bezeichnet.
(11.7) Beispiel. Für A,B ∈ Km×n sei A ∼ B, falls T ∈ GL(m,K) und S ∈ GL(n,K) existierenmit B = T−1AS. Damit ist eine Äquivalenzrelation auf Km×n deniert. Die Anzahl derÄquivalenzklassen ist endlich, nämlich minn,m+ 1. Repräsentanten der Äquivalenzklassen
sind die Nullmatrix und
(Er
)für r = 1, . . . ,minn,m. Vgl. (1).
(11.8) Beispiel. Die Ähnlichkeit (2) für Matrizen aus Kn×n ist eine Äquivalenzrelation.
Üb Weise die Behauptungen in (4) - (8) nach.
Die Aufgabe besteht also darin, möglichst einfache Repräsentanten der Ähnlichkeitsklassen zunden. Diagonalmatrizen D := diag(λ1, . . . , λn), λl ∈ K, sind besonders einfach. Wann ist D dieAbbildungsmatrix eines Endomorphismus f von V ? Die Antwort ist oenbar, wenn es eine Basisv1, . . . , vn von V gibt derart, dass nach (7.21)
(11.9) f(vl) =n∑
k=1
(λkδkl) vk = λlvl für l = 1, . . . , n.
(11.10) Denition. Sei V ein K-VR, f ∈ End (V ) und λ ∈ K. Dann heiÿt λ ein Eigenwert von f ,wenn ein v ∈ V , v 6= 0, existiert mit f(v) = λv. Man nennt v einen Eigenvektor von f zumEigenwert λ.
Beachte, Eigenvektoren sind stets ungleich 0 ∈ V , während 0 ∈ K ein Eigenwert sein kann. Jedesx ∈ Kern (f) \ 0 ist Eigenvektor zum Eigenwert 0.Man nennt einen Endomorphismus f diagonalisierbar, wenn es eine Basis von Eigenvektoren
von f gibt. Im Fall n = dimV < ∞ wird f bez. einer solchen Basis durch eine Diagonalmatrixdiag (λ1, . . . , λn), λl ∈ K dargestellt, wobei λl die zugehörigen Eigenwerte sind.
(11.11) Sei A ∈ Kn×n. Im Sinne von (7.10). spricht man von Eigenwerten, Eigenvektoren und Dia-gonalisierbarkeit von A anstelle von LA.
Sei dimV = n < ∞, f ∈ End (V ) und A ∈ Kn×n eine Abbildungsmatrix von f . Wie wir gesehenhaben, ist f genau dann diagonalisierbar, wenn A ähnlich zu einer Diagonalmatrix ist. Das ergibtzusammenfassend
(11.12) Lemma. Sei A ∈ Kn×n. Dann sind äquivalent:
(i) A ist diagonalisierbar.
(ii) A ist ähnlich zu einer Diagonalmatrix.
Üb Weise (12) direkt nach.
(11.13) Diagonalisierung. Sei A ∈ Kn×n diagonalisierbar. Sei s1, . . . , sn eine Basis in Kn×1 vonEigenvektoren von A zu den Eigenwerten λ1, . . . , λn in K. Setze
S := (s1 · · · sn) ∈ Kn×n.
Dann ist S invertierbar und S−1AS = diag (λ1, . . . λn). Umgekehrt, ist A ∈ Kn×n und sindS = (s1 . . . sn) ∈ GL(n,K) und λ1, . . . λn aus K derart, dass S−1AS = diag (λ1, . . . λn), dannist s1, . . . , sn eine Basis von Eigenvektoren von A zu den Eigenwerten λ1, . . . , λn.
74

Beweis. Da Rang (S) = n, ist S invertierbar (7.24). Weiter ist S el = sl und somit el = S−1sl
für l = 1, . . . , n. Damit folgt: S−1AS el = S−1Asl = S−1(λsl) = λS−1sl = λel für alle l. ZurUmkehrung beachte S el = sl und somit Asl = AS el = S diag(λ1, . . . , λn) el = Sλl el = λl sl.
(11.14) Lemma. Seien v1, . . . , vm Eigenvektoren zu paarweise verschiedenen Eigenwerten λ1, . . . , λm
von f ∈ End (V ). Dann sind v1, . . . , vm linear unabhängig.
Beweis. Der Beweis erfolgt durch Induktion nach m. Für m = 1 gilt die Aussage, weil v1 6= 0. Fürden Induktionsschluss von m nach m+ 1 betrachte
∑m+1k=1 αkvk = 0 mit αk ∈ K. Dann ist
0 = λm+10 =m+1∑k=1
λm+1αkvk,
0 = f(0) =m+1∑k=1
λkαkvk.
Die Dierenz der beiden Ausdrücke ist∑m
k=1(λm+1−λk)αkvk = 0. Aus der Induktionsvoraussetzungfolgt (λm+1−λk)αk = 0 und somit αk = 0 für k = 1, . . . ,m. Daher ist αm+1vm+1 = 0. Weil vm+1 6= 0als Eigenvektor, ist auch αm+1 = 0.
(11.15) Korollar. Ist n := dimV < ∞ und hat f ∈ End (V ) n paarweise verschiedene Eigenwerte,dann ist f diagonalisierbar.
Seien V und W (beliebig dimensionale) K-VR und s : V →W ein Isomorphismus. Das Diagramm
ist mit f ′ := s f s−1 kommutativ.
(11.16) Lemma. Sei v ein Eigenvektor zum Eigenwert λ von f ∈ End (V ). Dann ist λ ein Eigenwertund s(v) dazu ein Eigenvektor von f ′.
Üb Weise (16) nach.
Charakteristisches Polynom
Wie aus dem Bisherigen hervorgeht, ist es wichtig, die Eigenwerte eines Endomorphismus f zukennen. Dies gilt besonders in Hinblick auf die Aussage (15). Im Fall dim V <∞ folgt aus (16)mit (7.8)(7.10), dass jede Darstellungsmatrix A von f die gleichen Eigenwerte wie f besitzt.
(11.17) Hauptlemma. Für f ∈ End (V ) gilt:
λ Eigenwert von f ⇔ Kern (f − λidV ) 6= 0.
Für A ∈ Kn×n gilt:
λ Eigenwert von A⇔ Kern (A− λEn) 6= 0 ⇔ det (A− λEn) = 0.
75

Beweis. Oenbar ist f(x) = λx äquivalent zu (f − λidV )(x) = 0, d.h. x ∈ Kern (f − λidV ). Fernergilt: Kern (A− λEn) 6= 0 ⇔ A− λEn nicht invertierbar ⇔ det (A− λEn) = 0. Siehe dazu (7.24)und (10.18).
Sei X eine Unbestimmte. Dann ist
A−XEn =
a11 −X a12 · · · a1n
a21 a22 −X · · · a2n...
.... . .
...an1 an2 · · · ann −X
und
(11.18) χA := det (A−XEn)
bezeichnet das Polynom in X gemäÿ der Leibniz Formel (10.9). Danach ist
χA =n∏
k=1
(akk −X) +Q,
wobei das Produkt der Summand zu π = id ist und Q die Summe über π ∈ Sn \ id bezeichnet. Qist ein Polynom in X vom Grad ≤ n− 2. Nach fallenden Potenzen in X geordnet ist
(11.19) χA = (−1)nXn + (−1)n−1(SpurA)Xn−1 + . . .+ detA,
wobei die Spur von A deniert ist als
(11.20) SpurA :=n∑
k=1
akk die Summe der Diagonalelemente von A.
Man nennt χA das charakteristische Polynom von A ∈ Kn×n. Es ist ein Polynom vom Grad nin einer Unbestimmten mit Koezienten aus K. Der Leitkoezient ist (−1)n.
Üb Sei B ∈ Km×n und C ∈ Kn×m. Zeige: Spur (BC) = Spur (C B).
Polynome über K
Hier ist es angebracht, eine srenge Denition des Polynomrings K[X] einzuschieben. Die Elementevon K[X] heiÿen Polynome über K in einer Unbestimmten. K[X] ist der VR K(N0) (s. (5.4))versehen mit einer weiteren inneren Verknüpfung, einem Produkt. Zu seiner Denition wird diekanonische Basis in K(N0) wie folgt bezeichnet:
X l := (0, . . . , 0, 1, 0, . . .) für l ∈ N0, wobei l Nullen vor der 1 stehen.
Ein Polynom p ∈ K[X] schreibt man als Linearkombination der Basisvektoren X l, l ∈ N0, d.h. esexistiert ein n ∈ N0 und eindeutig bestimmte αl ∈ K für l = 0, . . . , n mit
p =n∑
l=0
αlXl.
Sind alle αl = 0, dann heiÿt p = 0 das Nullpolynom. Andernfalls existiert ein maximales d ∈ N0
mit d ≤ n und αd 6= 0. Dann heiÿt p ein Polynom von Grad d, bezeichnet mit d =: grad p, und
76

Leitkoezient αd. Im Fall d = 0 schreibt man p = α0X0 =: α0, wobei α0 6= 0. Das Nullpo-
lynom hat keinen Grad. Die Sprechweise "p ist ein Polynom vom Grad ≤ n" schlieÿt jedoch dasNullpolynom mit ein.Ist q =
∑mk=0 βkX
k ein weiteres Polynom, dann deniert man das Produkt
p q :=n∑
l=0
m∑k=0
αlβkXl+k =
n+m∑j=0
γjXj mit γj :=
∑l,k mitl+k=j
αlβk.
Dieses Produkt hat folgende Eigenschaften für p, q, r in K[X]:
a) p (q r) = (p q) r assoziativ
b) p q = q p kommutativ
c) p (q + r) = p q + p r, (p+ q) r = p r + q r distributiv
d) grad (p q) = (grad p) + (grad q) für p 6= 0, q 6= 0.
Mit Hilfe des Produkts deniert man auch die Komposition zweier Polynome:
p q :=n∑
l=0
αl
(m∑
k=0
βkXk
)l
.
Hierfür gilt die Assoziativität
(p q) r = p (q r),
denn (p q) r =∑n
l=0 αl
(∑mk=0 βk
(∑pj=0 γjX
j)k)l
= p (q r).
Jedem Polynom p ∈ K[X] ist die Polynomfunktion p : K → K, p(λ) :=∑n
l=0 αlλl, zugeordnet.
Die Abbildung p 7→ p ist für unendliche Körper injektiv, s. (22) unten. Für endliche Körper istdas nicht der Fall. Eine Nullstelle von p ist ein λ ∈ K mit p(λ) = 0. Wenn es nicht zuMissverständnissen führt, schreiben wir p(λ) anstelle von p(λ).Für p, q, r ∈ K[X], λ ∈ K gelten
(p+ q)(λ) = p(λ) + q(λ) und (pq)(λ) = p(λ)q(λ), sowie (p q r)(λ) = p(q(r(λ))).
Üb Polynomdivision mit Rest. Sei q ∈ K[X]\0 und p ∈ K[X]. Zeige: Es existieren eindeutigbestimmte h ∈ K[X] und r ∈ K[X] derart, dass p = hq + r mit r = 0 oder grad r < grad q.
Wir fahren mit der Untersuchung des charakteristischen Polynoms fort. Aus (17) folgt sofort
(11.21) Satz. Die Nullstellen von χA in K sind genau die Eigenwerte von A.
Sei A′ ähnlich zu A, s. (2). Dann ist χA(λ) = χA′(λ) für alle λ ∈ K, d.h. die charakteristischenPolynomfunktionen sind gleich, denn:
χA′ = det(A′−λEn) = det(S−1AS−λS−1S) = det(S−1(A−λEn)S) = det(A−λEn) = χA(λ).
Im Fall, dass K unendlich viele Elemente hat, wie etwa Q, R oder C, folgt daraus, dass χA und χA′
selbst gleich sind, denn es gilt:
(11.22) Lemma. Seien p, p′ zwei Polynome über K vom Grad ≤ n, die für n+1 paarweise verschie-dene Werte λ1, . . . , λn+1 aus K übereinstimmen. Dann ist p = p′.
77

Beweis. Oenbar genügt es zu zeigen, dass q := p− p′ das Nullpolynom ist. Sei
q =n∑
l=0
αlXl mit al ∈ K, l = 1, . . . , n.
Betrachte das LGS q(λj) = 0, j = 1, . . . , n+ 1, d.h.1 λ1 · · · λn
1
1 λ2 · · · λn2
......
...1 λn+1 · · · λn
n+1
x1
x2...
xn+1
= 0.
Eine Lösung davon ist (x1, . . . , xn+1) = (α0, . . . , αn). Die Vandermonde Determinante (10.15) ist∏1≤k<j≤n+1 (λj − λk) 6= 0. Daher hat das LGS nur die Nulllösung.
(11.23) Satz. Die charakteristischen Polynome für ähnliche Matrizen sind gleich.
Beweis. Für den Fall unendlichem K siehe (21) fol. Der Fall endlichen Körpers folgt mit etwasformalen Aufwand, indem man direkt von det(S−1(A−XEn)S) ausgeht.
(11.24) Denition. Ist dimV <∞ und f ∈ End (V ), dann setzt man χf := χA, wobei A (irgend)eineAbbildungsmatrix von f ist. Dies ist sinnvoll wegen (23) und (7.36). Ebenso ist detf := detAwohldeniert.
Eigenräume
Zu einem Eigenwert λ ∈ K von f kann es mehrere linear unabhängige Eigenvektoren geben. Eineinfaches Beispiel ist f := α idV für ein α ∈ K: Einziger Eigenwert von f ist α und jedes x ∈ V \0ist Eigenvektor dazu.Für λ ∈ K nennt man E(λ) := Ef (λ) := Kern(f − λ idV ) den Eigenraum von f bez. λ.
Oenbar ist λ genau dann ein Eigenwert von f , wenn Ef (λ) 6= 0 ; in diesem Fall heiÿt γf (λ) :=dim Ef (λ) die geometrische Vielfachheit oder die Entartung von λ. Jedes x ∈ Ef (λ) \ 0 istein Eigenvektor zu λ von f . Aufgrund von (14) ist für paarweise verschiedene λ1, . . . , λm aus Kgemäÿ folgender Denition die Summe der Eigenräume Ef (λi) direkt.
(11.25) Denition. Seien V ein VR und W1, . . . ,Wn UVR von V . In Verallgemeinerung von (6.15)heiÿt die SummeW := W1+W2+. . .+Wm direkt, wenn x1, . . . , xm\0 linear unabhängigist, falls xk ∈Wk für k = 1, . . . ,m. Man schreibt
W = W1 ⊕W2 ⊕ . . .⊕Wm.
Üb Sei V die direkte Summe der UVR W1, . . . ,Wm. Zeige: Jedes v ∈ V lässt sich in eindeutigerWeise als v = w1 + . . . + wm mit wk ∈ Wk für k = 1, . . . ,m schreiben. Zeige weiter: Ist Mk
eine Basis von Wk für k = 1, . . . ,m, dann ist M := M1 ∪ . . . ∪Mm eine Basis von V .
Üb Verallgemeinere die obige Denition der direkten Summe von UVR für beliebig viele UVRund beweise dafür die Aussagen der vorangegangenen Übung.
Für A ∈ Kn×n setzt man natürlich EA(λ) := Ef (λ) für f := LA. Zur Berechnung von EA(λ)löst man das homogene LGS (A− λE)x = 0. Es folgen drei typische Beispiele dazu.
78

(11.26) Beispiel 1.
Sei A =
0 −1 1−3 −2 3−2 −2 3
∈ K3×3. Dann ist A−XE3 =
−X −1 1−3 −2−X 3−2 −2 3−X
und
χA = −X det
(−2−X 3−2 3−X
)+ 3 det
(−1 1−2 3−X
)− 2 det
(−1 1
−2−X 3
)=
−X((−2−X)(3−X) + 6) + 3(−(3−X) + 2)− 2(−3 + 2 +X) = −X2(X − 1) + 3(X − 1)−2(X − 1) = (X − 1)(−X2 + 1) = −(X − 1)2(X + 1) = −X3 +X2 +X − 1.
Also ist χA = −X3 +X2 +X − 1. Die Nullstellen von χA sind die Eigenwerte von A. Sie lauten1,−1. Jetzt lassen sich die Eigenräume dazu berechnen.
EA(1) = Kern(A− E3) ist die Lösungsmenge des LGS
(A− E3)X = 0, d.h.
−1 −1 1−3 −3 3−2 −2 2
x1
x2
x3
=
000
.
Zur Berechnung von EA(1) wende das Gauÿ Verfahren an:−1 −1 1−3 −3 3−2 −2 2
−→−1 −1 1
0 0 00 0 0
ist bereits die spezielle Zeilenstufenform. Damit sind λ := x2, µ := x3 die freien Variablen und
EA(1) =
x1
x2
x3
=
−λ+ µλµ
: λ, µ ∈ K
= K
−110
+K
101
in Parameter und Basisdarstellung. Also ist der Eigenwert 1 zweifach entartet, d.h. die geometrischeVielfachheit von 1 ist γA(1) = dimEA(1) = 2.
Berechne jetzt EA(−1) = Kern(A+ E3):
A+ E3 =
1 −1 1−3 −1 3−2 −2 4
−→ 1 −1 1
0 −4 60 −4 6
−→ 1 −1 1
0 −4 60 0 0
−→ 1 0 −1
20 −4 60 0 0
−→ −1 0 1
20 −1 3
20 0 0
ist die spezielle Zeilenstufenform. Damit ist λ := x3 die freie Variable und
EA(−1) =
x1
x2
x3
=
12λ32λλ
: λ ∈ K
= K
12321
in Parameter und Basisdarstellung. Also ist −1 nicht entartet, d.h. die geometrische Vielfachheitvon −1 ist γA(−1) = dimEA(−1) = 1.
Es folgt K3×1 = EA(1)⊕ EA(−1). Damit ist A diagonalisierbar. Explizit erhält man nach (13)
S−1AS = diag(1, 1,−1) mit S :=
−1 1 12
1 0 32
0 1 1
.
79

(11.27) Beispiel 2.
Sei ϕ ∈ R und
Dϕ :=(
cos(ϕ) − sin(ϕ)sin(ϕ) cos(ϕ)
)∈ R2×2.
Die Matrix Dϕ beschreibt eine Drehung in der Ebene R2(' R2×1) in positivem Drehsinn um denWinkel ϕ, denn:
Dϕ
(cos(α)sin(α)
)=(
cos(ϕ) cos(α)− sin(ϕ) sin(α)sin(ϕ) cos(α) + cos(ϕ) sin(α)
)=(
cos(ϕ+ α)sin(ϕ+ α)
).
Das charakteristische Polynom χ = (cos(ϕ)−X)2 + sin2(ϕ) = X2 − (2 cos(ϕ))X + 1 hat eine reelleLösung nur für 4 cos2(ϕ) − 4 ≥ 0, d.h. nur für ϕ ∈ πZ, wozu zwei unterschiedliche Fälle gehören:D0 = E2 und Dπ = −E2 haben jeweils 2-fach entartete Eigenwerte 1 bzw. −1. Die Eigenräumedazu sind jeweils ganz R2. Für ϕ /∈ πZ ist E(λ) = 0 für jedes λ ∈ R.
Wir fassen nun Dϕ ∈ C2×2 auf. Dann gibt es Nullstellen von χ, nämlich
λ1,2 = cos(ϕ)± i sin(ϕ) =: e±iϕ.
Berechne E(eiϕ) für ϕ /∈ πZ:
(cos(ϕ)− eiϕ − sin(ϕ)
sin(ϕ) cos(ϕ)− eiϕ)
=(−i sin(ϕ) − sin(ϕ)sin(ϕ) −i sin(ϕ)
)= sinϕ
(−i −11 −i
)−→
(−i −10 0
)−→
(−1 i0 0
)ist die spezielle Zeilenstufenform. Damit ist λ := x2 die freie Variable und
E(eiϕ) =(
x1
x2
)=(iλλ
): λ ∈ C
= C
(i1
).
Analog folgt E(e−iϕ) = C(−i1
).
Also ist C2×1 = E(eiϕ)⊕ E(e−iϕ) und S−1AS = diag(eiϕ, e−iϕ) mit S =(i −i1 1
).
Fazit: Dϕ für ϕ /∈ πZ ist über R nicht diagonalisierbar, wohl aber über C.
80
(11.28) Beispiel 3.
Sei Jn(λ) :=
λ 1
λ. . .. . . 1
λ
∈ Kn×n, n ≥ 2 die Jordanmatrix zu λ ∈ K. Es ist eine obere
Dreiecksmatrix und somit χ = (λ −X)n (=n∑
i=0
(ni
)λn−iXi) ihr charakteristisches Polynom. Also
ist λ einziger Eigenwert.
Berechne E(λ) : Jn(λ)− λEn =
0 1
0. . .. . . 1
0
−→
0 −1
0. . .. . . −1
0
hat bereits spezielle Zeilenstufenform. Die freie Variable ist µ := x1 und
E(λ) =
x1
x2...xn
=
µ0...0
: µ ∈ K
= K
10...0
6= Kn×n.
Ist Jn(λ) diagonalisierbar? Nein, denn sonst müsste Jn(λ) zu λEn ähnlich sein, weil λ der einzigeEigenwert ist. Aber λEn ist nur zu sich selbst ähnlich. Beachte, dass dies für jedes n ≥ 2, jedesλ ∈ K und jeden Körper K gilt.
Üb Sei Dkl = (dkl) eine (n× n)−Dreiecksmatrix. Zeige: χD =∏n
l=1(dll −X).
Üb Wie lautet die Verallgemeinerung des Ergebnisses der vorangegangenen Übung auf Dreiecks-blockmatrizen?
81

12 Diagonalisierbarkeit und
Trigonalisierbarkeit
Im Folgenden ist V stets ein n-dimensionaler K-VR. Wir verfolgen hier weiter die anfangs desvorangegangenen Kapitels gestellte Aufgabe, einen Repräsentanten möglichst einfacher Gestalt fürjede Ähnlichkeitsklasse zu nden. Das charakteristische Polynom, das für ähnliche Matrizen gleichist, ist das entscheidende Hilfsmittel dazu.
Diagonalisierbarkeit
Aus den bisherigen Ergebnissen schlieÿen wir
(12.1) Lemma. Sei f ∈ End(V ) diagonalisierbar. Dann ist
χf = (λ−X)γ1(λ2 −X)γ2 . . . (λs −X)γs ,
wobei λ1, λ2, . . . , λs die paarweise verschiedenen Eigenwerte von f bezeichnen und γi := γf (λi)ihre geometrische Vielfachheiten sind.
Beweis. Für die f darstellende Diagonalmatrix
D :=
λ1Eγ1
. . .λsEγs
ist χf = χD nach (11.24), und χD = det(D −XEn) hat die behauptete Gestalt.
Umgekehrt, wenn für f ∈ End(V ) das charakteristische Polynom in n paarweise verschiedene Li-nearfaktoren (λ −X) zerfällt, dann ist f diagonalisierbar nach (11.15). Schwierigkeiten ergebensich, wenn Nullstellen von χf mehrfach auftreten.
(12.2) Denition und Lemma. Sei p ∈ K[X] vom Grad n ∈ N0 und λ ∈ K. Das maximaleα ∈ 0, . . . , n, wofür q ∈ K[X] existiert derart, das p = (λ −X)αq, heiÿt die Vielfachheitαp(λ) von λ.
Ist p = (λ −X)αq, für α = αp(λ), dann ist q(λ) 6= 0. Ist p = (λ −X)βq′ mit β ∈ 0, . . . , nund q′ ∈ K[X] mit q′(λ) 6= 0, dann ist α = β und q = q′.
Beweis. Angenommen es ist q(λ) = 0. Dann folgt für q := q l mit l := λ −X ∈ K[X]: q(0) =q(l(0)) = q(λ) = 0 ⇒ q =
∑nj=0 βjX
j mit βj ∈ K und β0 = 0 ⇒ q l = q (l l) =
q (λ− (λ−X)) = q X = q und somit q =∑n
j=0 βj(λ−X)j = (λ−X)(∑n
j=1 βj(λ−X)j−1)
=:
(λ−X)q1 ⇒ p = (λ−X)α+1q1 im Widerspruch zur Maximalität von α.
Zur Eindeutigkeit beachte α ≥ β und somit (λ−X)β((λ−X)α−βq − q′) = 0.Allgemein gilt für Q ∈ K[X], dass Q = 0 falls (λ −X)βQ = 0. Für β = 0 ist dies oensichtlich.
Aus (λ −X)Q′ = 0 für Q′ := (λ −X)β−1Q folgt λQ′ = XQ′. Der Fall λQ′ 6= 0 ist nicht möglich,weil sonst grad(λQ′) < grad(XQ′). Also ist 0 = λQ′ = XQ′, weshalb Q′ = 0. Nach β Schrittenfolgt Q = 0.Diese Überlegung zeigt q′ = (λ−X)α−βq. Wegen q′(λ) 6= 0 folgt α = β und somit q = q′.
82

Üb Weise das Ergebnis von (2) alternativ mit Hilfe der Polynomdivision mit Rest nach.
Sei λ ∈ K ein Eigenwert von f ∈ End(V ). Die algebraische Vielfachheit αf (λ) von λ ist dieVielfachheit von λ als Nullstelle des charakteristischen Polynoms.
(12.3) Lemma. Es ist stets γf (λ) ≤ αf (λ), d.h. die geometrische Vielfachheit eines Eigenwertes isthöchstens gleich der algebraischen.
Beweis. Sei γ := γf (λ). Ergänze eine Basis v1, . . . , vγ von Ef (λ) durch vγ+1, . . . , vn zu einer Basisvon V . Bezüglich dieser Basis ist
M(f) =(λEγ ∗
B
)und damit χf = (λ−X)γ det(B −XEn−γ) mittels Entwicklung nach den ersten γ Spalten. Daherist γ ≤ αf (λ) nach (2).
Bemerkung.Weil χf = χA für jede Abbildungsmatrix A von f gilt (s. (11.24)), ist die BezeichnungαA(λ) := αf (λ) sinnvoll.
Bemerkung. Für Jn(λ) aus (11.28) gilt der Extremfall γ(λ) = 1 < n = α(λ).
(12.4) Satz zur Diagonalisierbarkeit. Seien V ein KVR mit n := dimV <∞ und f ∈ End(V ).Dann sind äquivalent:
(i) f ist diagonalisierbar.
(ii) χf zerfällt in Linearfaktoren und γf (λ) = αf (λ) für alle Eigenwerte λ von f .
(iii) V = Ef (λ1)+© . . . +©Ef (λs), wobei λ1, . . . , λs die paarweise verschiedenen Eigenwerte vonf sind.
Beweis. (i) ⇒ (ii) gilt wegen (1) und (2). Aus (ii) folgt in Hinblick auf (iii), dass n = αf (λ1) +· · ·+αf (λs) = γf (λ1)+ · · ·+γf (λs). Wegen (11.14) folgt daraus (iii). Schlieÿlich bedeutet (iii), dasses eine Basis von Eigenvektoren von f gibt, d.h. es gilt (i).
(12.5) Beispiel. Es soll der Endomorphismus f : R3 −→ R3, f(x, y, z) := (y,−2x + z,−2x + 5y)wenn möglich diagonalisiert werden.
1. Schritt. Man bestimme die Abbildungsmatrix A von f bez. einer Basis v1, . . . , vn.
Bezüglich der kanonischen Basis liest man ab, dass
A =
0 1 0−2 0 1−2 5 0
.
2. Schritt. Man berechne des charakteristische Polynom χA.
Nach der Regel von Sarrus ist χA = det(A−XE3) = −X3+(−2)+0−0−(−X)· 5−1 (−2)(−X) =−X3 + 3X − 2.
3. Schritt. Finde die Linearfaktoren von χA. Eine explizite Angabe der Linearfaktoren ist oftmalsprinzipiell nicht möglich. Wenn χA nicht Produkt von Linearfaktoren ist, ist f nicht diagonalisierbar.Als Beispiel siehe dazu (11.27).
83

Oenbar ist χA(1) = 0. Polynomdivision liefert χA = (1−X)(X2 +X − 2) = (1−X)2(−2−X).Die Eigenwerte sind also 1 und −2. Der Eigenwert 1 ist doppelt.
4. Schritt. Für jeden Eigenwert bestimme man eine Basis des Eigenraums Ef (λ) = Kern(A−λEn).Dazu löst man das LGS (A− λEn)x = 0 und schreibt die Lösungsmenge in der Basisdarstellung.
Eigenwert −2:
A+2E =
2 1 0−2 2 1−2 5 2
−→2 1 0
0 3 10 6 2
−→2 1 0
0 3 10 0 0
−→2 0 −1
30 3 10 0 0
−→−1 0 1
60 −1 −1
30 0 0
.
Das ist die spezielle Zeilenstufenform. Damit ist µ := x3 die freie Variable und
EA(−2) =
x1
x2
x3
=
16µ−1
3µµ
: µ ∈ R
= R
16−1
31
.
Eigenwert 1:
A− E =
−1 1 0−2 −1 1−2 5 −1
−→−1 1 0
0 −3 10 3 −1
−→−1 1 0
0 −3 10 0 0
−→−1 0 1
30 −1 1
30 0 0
.
Das ist die spezielle Zeilenstufenform. Damit ist µ := x3 die freie Variable und
EA(1) =
x1
x2
x3
=
13µ13µµ
: µ ∈ R
= R
13131
.
5. Schritt. Ist für einen Eigenwert γf (λ) < αf (λ), dann ist f nach (4) nicht diagonalisiebar.Andernfalls bilde aus den Basisvektoren der Eigenräume in der Reihenfolge der Eigenwerte mitVielfachheiten die A diagonalisierende Matrix S, d.h.
diag(λ1, . . . , λn) = S−1A S.
In diesem Beispiel ist γA(1) = 1 < 2 = αA(1) (!) und somit A nicht diagonalisierbar. Ein Beispielfür eine diagonalisierbare Matrix ist A aus (11.26).
6. Schritt. Im Fall der Diagonalisierbarkeit von f bleibt eine Basis von Eigenvektoren anzugeben.Nach (7.26) ist diese gegeben durch
n∑j=1
sjlvj , l = 1, . . . , n.
Trigonalisierbarkeit
Nach den Diagonalmatrizen sind Dreiecksmatrizen von nächst einfacher Gestalt. Wenn eine Matrixschon nicht ähnlich zu einer Diagonalmatrix ist, so könnte sie es doch wenigstens zu einer Dreiecks-matrix sein. Welche Eigenschaft hat ein Endomorphismus mit einer solchen Abbildungsmatrix?
(12.6) Denition. f ∈ End(V ) heiÿt trigonalisierbar, wenn es eine Basis v1, . . . , vn in V gibtderart. dass f(Vl) ⊂ Vl für Vl := Spanv1, . . . , vl, l = 1, . . . , n− 1.
84

Beachte, f(V1) ⊂ V1 bedeutet genau, dass v1 Eigenvektor zu f ist. Nicht jeder Endomorphismusbesitzt einen Eigenvektor, s. (11.27). Ein UVR W von V mit f(W ) ⊂W heiÿt finvariant.
(12.7) Lemma. f ∈ End(V ) ist trigonalisierbar genau dann, wenn es eine Basis in V gibt, bez.welcher die Abbildungsmatrix von f obere Dreiecksmatrix ist. In der Diagonalen stehen dieEigenwerte von f , die gemäÿ ihren algebraischen Vielfachheiten auftreten.
Beweis. Sei f trigonalisierbar. Sei v1, . . . , vn eine Basis dazu gemäÿ Denition (6). Dann ist fürl = 1, . . . , n− 1:
f(vl) =l∑
k=1
aklvk mit akl = 0 für k > l.
Also ist A := (akl) obere Dreiecksmatrix. Umgekehrt, ist die Abbildungsmatrix A von f bez. ei-ner Basis v1, . . . , vn obere Dreiecksmatrix, dann besagt obige Gleichung, dass Vl := Spanv1, . . . , vldie Denition (6) erfüllen.Die letzte Behauptung folgt aus der Leibniz Formel (10.9), weil danach χA =
∏nk=1(akk − X),
siehe (11.18) .
Gemäÿ der allgemeinen Verabredung wird eine Martrix A trigonalisierbar genannt. wenn LA esist. Das ist gleichbedeutend damit, dass A ähnlich zu einer oberen Dreiecksmatrix ist.
(12.8) Satz zur Trigonalisierbarkeit, Schur Normalform. f ∈ End(V ) ist trigonalisierbar genaudann, wenn χf Produkt von (nicht notwendig verschiedenen) Linearfaktoren ist.
Beweis. Für eine Dreiecksmatrix D = (dkl) gilt nach der Leibniz Formel (10.9), dass χD = det(D−XEn) =
∏nl=1(dll −X). Nach (7) bleibt zu zeigen, dass A ∈ Kn×n ähnlich zu einer Dreiecksmatrix
ist, wenn χA =∏n
l=1(λl −X).
Sei t1 ∈ E(λ1) \ 0. Ergänze t1 zu einer Basis t1, . . . , tn von Kn×1. Dann ist T := (t1 . . . tn)invertierbar und A T = (A t1 . . . A tn) = (λ1t1 ∗ . . . ∗) = T (λ1e1 ∗ . . . ∗), d.h.
T−1A T =
λ1 ∗
A′
mit A′ ∈ K(n−1)×(n−1). Da χA = (λ1−X)χA′ nach (11.23) und dem Determinantenentwicklungssatz,ist χA′ =
∏nl=2(λl −X). Wie eben gezeigt, gibt es daher zu A′ eine invertierbare (n− 1)× (n− 1)
Matrix T ′ mit T ′−1A′T ′ = (λe2 ∗ . . . ∗). Dann gilt1
T ′−1
T−1A T
1
T ′
=
λ1
λ2 ∗ .
In insgesamt n− 1 solchen Schritten folgt die Behauptung.
Der Beweis von (8) gibt auch bereits ein Verfahren zur praktischen Trigonalisierung eines Endo-morphismus an.
(12.9) Beispiel. Es soll der Endomorphismus f : R3 −→ R3, f(x, y, z) := (3x+ 4y+ 3z,−x− z, x+2y + 3z) wenn möglich trigonalisiert werden.
85

1. Schritt. Man bestimme eine Abbildungsmatrix A von f .
Bezüglich der kanonischen Basis liest man ab
A =
3 4 3−1 0 −11 2 3
.
2. Schritt. Man berechne das charakteristische Polynom χA.
Nach der Regel von Sarrus ist χA = det(A−XE3) = (3−X)(−X)(3−X)+4 (−1) 1+3 (−1) 2−3 (−X) 1− (3−X)(−1) 2− 4 (−1)(3−X) = −X3 + 6X2− 9X − 4− 6 + 3X + 6− 2X + 12− 4X =−X3 + 6X2 − 12X + 8.
3. Schritt. Man nde die Linearfaktoren von χA. f ist genau dann trigonalisierbar, wenn χA
Produkt von Linearfaktoren ist.
Oenbar ist χA = (2−X)3. Also ist f trigonalisierbar. Der einzige Eigenwert 2 ist 3fach. Damitist γA(2) < 3 = αA(2) (!) und f nicht diagonalisierbar.
4. Schritt. Für den Eigenwert λ1 nde einen Eigenvektor t1. Nach dem Austauschlemma (5.24)existiert q ∈ 1, . . . , n derart, dass t1, e1, . . . , \eq, . . . , en eine Basis von Kn×1 ist. Bestimme zu dieserBasis die Abbildungsmatrix von f
λ1 ∗A′
.
Wiederhole diesen Schritt für A′ u.s.w., bis die Abbildungsmatrix trigonal ist.
Eigenvektor zu Eigenwert 2:
A− 2E3 =
1 4 3−1 −2 −11 2 1
−→ 1 4 3−1 −2 −10 0 0
−→1 4 3
0 2 20 0 0
−→1 0 −1
0 2 20 0 0
−→
−1 0 10 −1 −10 0 0
.
Das ist die spezielle Zeilenstufenform. Damit ist µ := x3 die freie Variable und
E(2) =
x1
x2
x3
=
µ−µµ
: µ ∈ R
= R
1−11
.
Also ist t1 =
1−11
Eigenvektor zu 2. Wähle t1, e2, e3 als neue Basis. T :=
1 0 0−1 1 01 0 1
besorgt
den Basiswechsel. Um A′ zu bestimmen, benötigt man T−1: 1 0 0−1 1 01 0 1
∣∣∣∣∣∣1 0 00 1 00 0 1
−→1 0 0
0 1 00 0 1
∣∣∣∣∣∣1 0 01 1 0−1 0 1
.
Mit T−1 =
1 0 01 1 0−1 0 1
folgt T−1A T =
2 4 30 4 20 −2 0
und A′ =(
4 2−2 0
). Bekannt ist χA′ =
(2−X)2. Nun wiederholt man den Schritt 4 für A′.
86

Eigenvektor zu Eigenwert 2:
A′ − 2E2 =(
2 2−2 −2
)−→
(2 20 0
)−→
(−1 −10 0
).
Das ist die spezielle Zeilenstufenform mit freier Variable x2. Daher ist
E(2) =(
x1
x2
)=(−µµ
): µ ∈ R
= R
(−11
).
Ergänze den Eigenvektor t′1 =(−11
)mit
(01
)zu neuer Basis. T ′ =
(−1 01 1
)besorgt den Basis-
wechsel. Bestimme T ′−1:(−1 01 1
∣∣∣∣ 1 00 1
)−→
(−1 00 1
∣∣∣∣ 1 01 1
)−→
(1 00 1
∣∣∣∣ −1 01 1
),
d.h. T ′−1 =(−1 01 1
). Hiermit folgt T ′−1
A′T ′ =(
2 −20 2
). Damit ist die Dreiecksform erreicht:
S−1A S =
2 4 30 2 −20 0 2
mit S := T
1T ′
=
1 0 0−1 1 01 0 1
1 0 00 −1 00 1 1
=
1 0 0−1 −1 01 1 1
.5. Schritt. Gebe gemäÿ (7.26) die Basis an, bez. welcher f trigonal ist. Die trigonalisierende Basis lautet:
3∑k=1
sklek, l = 1, 2, 3, das ist (1,−1, 1), (0,−1, 1), (0, 0, 1).
Üb Trigonalisiere den Endomorphismus aus (5).
(12.10) Polynome über C. Der Fundamentalsatz der Algebra besagt: Jedes Polynom p ∈ C[X] mitgrad p ≥ 1 hat mindestens eine Nullstelle. Hieraus folgt sofort mit (2), dass
p = c (λ1 −X)α1(λ2 −X)α2 . . . (λs −X)αs
mit gewissen c, λ1, . . . , λs aus C, und α1, . . . , αs aus N, wobei diese Darstellung eindeutig ist,wenn λ1, . . . , λs paarweise verschieden sind.
(12.11) Korollar. Sei V ein endlich dimensionaler C-VR. Dann ist jeder Endomorphismus von Vtrigonalisierbar.
Beweis. Folgt aus (8) und (10).
(12.12) Polynome über R. Reelle Polynome zerfallen bekanntlich i. allg. nicht in reelle Linearfak-toren, wie z.B. 1 +X2. Jedoch lässt sich folgende Überlegung anstellen: Sei p ∈ R[X]. Fassep ∈ C[X] auf. Sei λ ∈ C eine Nullstelle von p. Dann ist auch λ eine Nullstelle von p, dennp(λ) =
∑nl=0 αl(λ)l =
∑nl=0 αlλl = p(α) = 0, weil αl ∈ R. Die nicht reellen Nullstellen treten
also in Paaren konjugierter Nullstellen auf. Diese ergeben einen Faktor
87

(λ−X)(λ−X) = |λ|2 − 2(Reλ)X +X2 =: γ + βX +X2 =: q mit β, γ ∈ R und β2 < 4γ.
Daraus schlieÿt man: Jedes Polynom p ∈ R[X] mit grad p ≥ 1 besitzt eine Darstellung
p = c (X − λ1)α1 . . . (X − λs)αsqδ11 . . . qδt
t
mit c ∈ R, λi ∈ R, αi ∈ N für i = 1, . . . , s und qj = γj + βjX +X2 mit βj , γj ∈ R, β2j < 4γj,
δj ∈ N für j = 1, . . . , t. Dabei kann s oder t auch null sein.
Diese Darstellung ist eindeutig, wenn λ1, . . . , λs und q1, . . . , qt paarweise verschieden sind.
Vorstufe der Jordan Normalform
Eine Dreiecksmatrix läÿt sich mittels einer Ähnlichkeitstransformation auf diagonale Blockmatrix-form bringen, deren Blöcke Dreiecksmatrizen mit nur einem Eigenwert sind.
(12.13) Denition. Sei λ ein Eigenwert der Matrix A ∈ Kn×n. Dann heiÿt v ∈ Kn×1 ein Haupt-vektor der Stufe l ∈ N zum Eigenwert λ der Matrix A, wenn
(A− λE)lv = 0 und (A− λE)l−1v 6= 0.
Entsprechend deniert man einen Hauptvektor und seine Stufe für einen Endomorphismus.
Bemerkung. Die Hauptvektoren zur Stufe 1 sind genau die Eigenvektoren, denn für beide gilt(A− λE)v = 0 und (A− λE)0v = v 6= 0.
(12.14) Lemma und Denition. Ist v ein Hauptvektor der Stufe l, dann sind oenbar
v, (A− λE)v, (A− λE)2v, . . . , (A− λE)l−1v
Hauptvektoren der Stufen l, l − 1, . . . , 1. Diese Vektoren sind linear unabhängig. Sie bildendie durch v bestimmte Kette von Hauptvektoren.
Beweis. Zum Nachweis der linearen Unabhängigkeit werde die Gleichung∑l−1
i=0 αi(A − λE)iv =0 von links mit (A − λE)l−1 multipliziert. Es folgt α0(A − λE)l−1v = 0, weshalb α0 = 0. Dieverbleibende Summe multipliziert man nun mit (A− λE)l−2, womit α1 = 0 folgt, u.s.w.
(12.15) Lemma. Seien v1, . . . , vs Hauptvektoren zu den paarweise verschiedenen Eigenwerten λ1, . . . , λs
der Matrix A ∈ Kn×n. Dann sind v1, . . . , vs linear unabhängig.
Beweis. Seien l1, . . . , ls die Längen der Hauptvektoren und k ∈ 1, . . . , s. Die Faktoren des Pro-dukts Pk := (A − λkE)lk−1
∏sj=1,j 6=k(A − λjE)lj lassen sich vertauschen, da jeder Faktor eine
Linearkombination von Potenzen von A ist. Weiter ist uk := (A − λkE)lk−1vk ein Eigenvektor zuλk. Daher ist (A− λjE)ljuk = (λk − λj)ljuk. Damit ndet man Pkvi = δik
∏sj=1,j 6=k(λk − λj)ljuk.
Wendet man nun Pk auf die Gleichung∑s
i=1 αivi = 0 an, so folgt αk∏s
j=1,j 6=k(λk − λj)ljuk = 0,weshalb αk = 0. Dies gilt für jedes k, woraus die Behauptung folgt.
(12.16) Lemma. Das charakteristische Polynom χA der Matrix A ∈ Kn×n sei Produkt von Linear-faktoren. Weiter sei λ ein Eigenwert der algebraischen Vielfachheit k. Dann ist HA(λ) :=Kern
((A− λE)k
)ein Untervektorraum der Dimension k. Oenbar ist jedes v ∈ HA(λ) \ 0
ein Hauptvektor zu λ. Schlieÿlich ist HA(λ) unter A invariant, d.h. für jedes v ∈ HA(λ) istAv ∈ HA(λ).
88
Beweis. Gemäÿ (7), (8) kann man davon ausgehen, dass A eine obere Dreiecksmatrix ist, deren erstek Diagonalelemente gleich λ sind. Deshalb ist die Matrix (A−λE)k eine obere Dreiecksmatrix, derenerste k Spalten null sind und deren Diagonalelemente gleich (λi − λ)k sind, wobei λ1, . . . , λn dieEigenwerte mit algebraischen Vielfachheiten sind. Insbesondere sind genau k ihrer Diagonalelementegleich null. Damit ist Rang(A− λE)k = n− k, woraus mit (8.15) dimHA(λ) = k folgt. Schlieÿlichbeachte man (A− λE)kAv = A(A− λE)kv = A 0 = 0 für v ∈ HA(λ).
Seien λ1, . . . , λs die paarweise verschiedenen Eigenwerte von A und α1, . . . , αs ihre algebraischenVielfachheiten. Für den Fall, dass das charakteristische Polynom χA Produkt von Linearfaktorenist, ist
∑sj=1 αj = n. Damit beweisen (15) und (16), dass
Kn×1 = HA(λ1)+© . . . +©HA(λs)
gemäÿ Denition (11.25), wobei jeder Untervektorraum HA(λj) invariant unter A ist und eine Basisaus αj Hauptvektoren besitzt. Damit erhält man folgendes Ergebnis.
(12.17) Satz. Vorstufe der Jordan Normalform. Sei A ∈ Kn×n eine Matrix, deren charakteris-tisches Polynom χA Produkt von Linearfaktoren ist. Dann existiert eine Basis t1, . . . , tn vonKn×1 derart, dass die ersten α1 Elemente Hauptvektoren zum Eigenwert λ1 sind, die nächstenα2 Elemente Hauptvektoren zum Eigenwert λ2 sind und so fort. Mit der invertierbaren MatrixT := (t1 . . . tn) ist
T−1AT =
B1
B2. . .
Bs
eine diagonale Blockmatrix mit Blöcken Bj ∈ Kαj×αj . Das charakteristische Polynom von Bj
ist (λj −X)αj . Wendet man auf jeden Block das Trigonaliserungsverfahren aus (8) an, erhältman Bj in der Schur Normalform
Bj =
λj
λj ∗. . .
λj
,
das ist eine obere Dreiecksmatrix, deren Diagonalelemente alle gleich λj sind.
Aus der Denition von HA(λj) folgt sofort, dass Nαj
j = 0 für N j := Bj − λjE. Allgemein nennt
man N ∈ Kn×n nilpotent, wenn es ein k ∈ N gibt mit Nk = 0.Das Ergebnis (17) ndet eine wichtige praktische Anwendung in der Theorie der Linearen Die-
rentialgleichungssysteme bei der Berechnung der Matrix-Exponentialfunktion.
Üb Man zeige: Ist A ∈ Kn×n eine Matrix, deren charakteristisches Polynom χA Produkt vonLinearfaktoren ist (was für K = C stets der Fall ist), dann existieren eine diagonalisierbareMatrix D und eine nilpotente Matrix N mit
A = D +N und D N = N D.
Hinweis: Benutze (17) und überlege, warum eine Matrix genau dann diagonalisierbar bzw.nilpotent ist, wenn sie ähnlich zu einer solchen ist.
89

Üb Seien r, s ∈ N und A = (akl), B = (bkl) (n× n)Matrizen derart, dass
akl = 0 für k ≥ l − r + 1 und bkl = 0 für k ≥ l − s+ 1.
Das bedeutet, dass die Diagonale sowie die auschlieÿenden r− 1 bzw. s− 1 Nebendiagonalenvon A bzw. B null sind. Zeige: Für C := A B gilt ckj = 0 für k ≥ j − r − s + 1, d.h. dieDiagonale sowie die anschlieÿenden r + s− 1 Nebendiagonalen von C sind null. Also
C =
0 · · · 0 ∗. . . . . .. . . 0
. . ....0
r + s Nullzeilen
addieren sich bei der Multiplikation von A mit B die Anzahlen der Nullzeilen.
Jordan Normalform
Die Blöcke Bj in (17) lassen sich durch eine spezielle Wahl der Basis von Hauptvektoren noch weitervereinfachen. In der Jordan Normalform erzielt man in der ersten oberen Nebendiagonalen Einträge0 oder 1. Alle anderen Nebendiagonalen sind null. Wir verzichten auf einen Beweis des folgendenSatzes.Eine quadratische Matrix J über K heiÿt Jordanmatrix. wenn J = Jn(λ) für ein λ ∈ K und
n ∈ N, wobei J1(λ) := (λ) und Jn(λ) aus (11.28) für n ≥ 2.
(12.18) Satz. Sei V ein endlichdimensionaler KVR. Sei f ∈ End(V ) und χf sei Produkt von Linear-faktoren. Dann gibt es eine Basis in V aus Hauptvektoren, bez. welcher die AbbildungsmatrixA von f die Jordan Normalform besitzt, d.h.
A =
J1
J2. . .
Jm
,
wobei J1, . . . , Jm Jordanmatrizen sind. Sie sind nicht notwendigerweise paarweise verschiedenund sind bis auf Reihenfolge eindeutig.
Man bemerkt, dass Jn(λ) = λEn +Nn mit
Nn :=
0 1
. . . . . .. . . 1
0
,
wofür Nnn = 0 gilt.
Üb Sei N ∈ Kn×n nilpotent. Zeige: Es existiert ein k ∈ N mit k ≤ n, wofür Nk = 0. Gebe fürjedes k ∈ 1, . . . , n ein Beispiel N an mit Nk = 0 und Nk−1 6= 0.
Üb Bestimme die Potenzen Aj , j ∈ N, für A aus (18). Betrachte dazu zunächst (Jn(λ))j .
90
13 Vektorräume mit Skalarprodukt
Der Anschauungsraum R3 ist mehr als nur ein Vektorraum. In ihm lassen sich nämlich Längen undWinkel bestimmen. Der Begri der Orthogonalität und die Gültigkeit des Satzes von Pythagorassind fundamental für die Geometrie des R3. Sie sind auch fundamental für den sich der Anschau-nung entziehenden Zustandsraum eines quantenmenchannischen Systems, dem Hilbertraum. Diesezusätzliche Struktur eines Vektorraums wird im Sinne der analytischen Geometrie am einfachstenmit Hilfe eines Skalarprodukts eingeführt.Im Folgenden werden nur reelle und komplexe Vektorräume betrachtet. Das Symbol K steht für
R oder C. Mit z wird nach (4.12) die konjugiert komplexe Zahl zu z ∈ C bezeichnet.
Skalarprodukt
(13.1) Dention. Sei V ein K-VR. Eine Funktion V ×V → K, (x, y) 7→ 〈x, v〉, heiÿt Skalarprodukt(SP) auf V , wenn für x, y, y′ aus V und λ ∈ K gelten
〈x, y + λy′〉 = 〈x, y〉+ λ〈x, y′〉 linear im zweiten Argument
〈y, x〉 = 〈x, y〉 konjugiert symmetrisch
〈x, x〉 ≥ 0 und 〈x, x〉 = 0 nur für x = 0 positiv denit
Ein VR mit SP (V, 〈·, ·〉) heiÿt euklidischer Raum im Fall K = R und unitärer Raumim Fall K = C.
(13.2) Bemerkungen. Aus der Linearität im zweiten Argument und der konjugierten Symmetriefolgt 〈x + λx′, y〉 = 〈y, x+ λx′〉 = 〈y, x〉+ λ〈y, x′〉 = 〈y, x〉 + λ 〈y, x′〉 = 〈x, y〉 + λ 〈x′, y〉 füralle x, x′, y aus V und λ ∈ K, d. i. die konjugierte Liniearität im ersten Argument. Im euklidischen Raum ist 〈x, y〉 = 〈y, x〉 = 〈y, x〉, d.h. das SP ist symmetrisch. Als Folgeist es linear auch im ersten Argument und damit bilinear. Beachte, dass 〈x, x〉 = 〈x, x〉wegen der konjugierten Symmetrie. Daher ist 〈x, x〉 stets reell. Die positive Denitheit fordertinsbesondere 〈x, x〉 ≥ 0. Für jedes x ∈ V ist 〈x, 0〉 = 0, weil 〈x, ·〉 linear ist.
(13.3) Beispiel. Standard-SP. a) In Kn deniert für x = (x1, . . . , xn) und y = (y1, . . . , yn)
〈x, y〉 := x1 y1 + . . .+ xn yn =n∑
l=1
xl yl
das StandardSP. Insbesondere ist 〈x, x〉 =∑n
l=1 |xl|2 ≥ 0 und = 0 nur für xl = 0 ∀ l, d.h.für x = 0. Im Fall K = R ist 〈x, y〉 =
∑nl=1 xl yl.
b) In K(X) (vgl. (5.4)) lautet das StandardSP
〈f, g〉 :=∑x∈X
f(x) g(x).
(13.4) Lemma. Sei x ∈ V und M eine Erzeugendenmenge von V . Dann gilt:
〈x, y〉 = 0 ∀ y ∈M ⇒ x = 0.
91

Beweis. Es ist x =∑
y∈M αyy mit den Koordinaten αy ∈ K, die Null sind bis auf endlich viele.Daher ist 〈x, x〉 = 〈x,
∑y∈M αyy〉 =
∑y∈M αy〈x, y〉 = 0 nach Vorraussetzung. Aus der Denitheit
folgt x = 0.
Bekanntlich ist |x| =√x2
1 + x22 + x2
3 die Länge des Vektors x ∈ R3. Mit Hilfe des Standard-SPschreibt sich |x| =
√〈x, x〉. Dies verallgemeinert man auf K-VR mit SP.
(13.5) Defnition. Sei V ein K-VR mit SP. Dann heiÿt die Funktion V → R, x 7→ ‖x‖ :=√〈x, x〉
die (zugehörige) Norm auf V .
(13.6) Satz. Sei V ein VR mit SP. Die Norm erfüllt für x, y aus V und λ ∈ K
‖x‖ ≥ 0 und ‖x‖ = 0 nur für x = 0 positiv denit
‖λx‖ = |λ| ‖x‖ positiv homogen
‖x+ y‖ ≤ ‖x‖+ ‖y‖ Dreiecksungleichung (DU)
|〈x, y〉| ≤ ‖x‖‖y‖ Cauchy-Schwarz-Ungleichung (CSU)
In der CSU gilt Gleichheit genau dann, wenn x und y linear abhängig sind. Für die DU istdies für die Gleichheit notwendig.
Beweis. Positive Denitheit und Homogenität sind oensichtlich. Wir beweisen erst die CSU. Of-fenbar ist |〈x, 0〉| = ‖x‖‖0‖ (= 0) und x, 0 sind linear abhängig. Sei jetzt y 6= 0 und betrachte
ϕ(λ) := ‖x− λy‖2 für λ ∈ K.
Wir suchen das Minimum von ϕ auf. Dazu formen wir ϕ(λ) = 〈x− λy, x− λy〉 = ‖x‖2 − λ〈y, x〉 −λ〈x, y〉+λλ‖y‖2 = ‖x‖2−‖y‖−2 |〈x, y〉|2 +
∣∣λ‖y‖ − ‖y‖−1〈y, x〉∣∣2 um. Beachte dazu, dass |〈x, y〉|2 =
〈x, y〉〈y, x〉. Also ist ϕ minimimal genau für λ = ‖y‖−2〈y, x〉 =: λ0. Es folgt 0 ≤ ‖x − λ0y‖2 =ϕ(λ0) = ‖x‖2 − ‖y‖−2 |〈x, y〉|2, wobei Gleichheit genau dann vorliegt, wenn x− λ0y = 0, d.h. wennx und y linear abhängig sind.Zur DU beachte zunächst, dass 〈x, y〉+ 〈y, x〉 = 2Re(〈x, y〉) ≤ 2 |〈x, y〉| ≤ 2‖x‖‖y‖, wobei Gleich-
heit wegen CSU nur bestehen kann, wenn x und y linear abhängig sind. Damit folgt ‖x + y‖2 =〈x+ y, x+ y〉 = ‖x‖2 + ‖y‖2 + 〈x, y〉+ 〈y, x〉 ≤ ‖x‖2 + ‖y‖2 + 2‖x‖‖y‖ = (‖x‖+ ‖y‖)2, woraus DUmit dem Zusatz folgt.
Ein Spezialfall ist die DU für den Betrag in C nach (4.13), die aus der DU in R2 mit dem Standard-SP folgt.
Üb Der Hilbertraum l2, eine Verallgemeinerung von (3). Hierzu ist etwas Analysis erforderlich.Es ist l2 die Teilmenge von CN, die aus den Folgen (xn) besteht, wofür
supN∈N
N∑n=1
|xn|2 <∞
ist. Zeige, dass l2 ein UVR von CN ist. (Tipp: Weise |xn + yn|2 ≤ 2 |xn|2 + 2 |yn|2 nach.)Zeige weiter, dass 〈x, y〉 :=
∑∞n=1 xn yn absolut konvergiert und ein SP auf l2 deniert. (Tipp:
Wende DU in C und CSU in RN an.) Wie lautet explizit die zugehörige CSU?
(13.7) Denition. Das Standard-SP in Kn×1 lautet
〈ξ, η〉 :=n∑
l=1
ξl ηl.
Zu einer Matrix A = (akl) ∈ Km×n führen wir die
92

(i) konjugiert komplexe Matrix A := (akl)(ii) adjungierte Matrix A∗ := (aT
kl)
ein. Hiermit lässt sich insbesondere 〈ξ, η〉 = ξTη = ξ∗ η schreiben .
(13.8) Lemma. Seien A, B aus Km×n, C ∈ Kn×p, S ∈ GL(n,K). Dann gelten
A∗ = (A)T = (AT ) (A∗)∗ = A
(A+ λB)∗ = A∗ + λB∗
(BC)∗ = C∗B∗
(S∗)−1 = (S−1)∗
〈ξ,A η〉 = 〈A∗ξ, η〉 für alle ξ ∈ Km×1, η ∈ Kn×1.
Üb Weise (8) nach.
(13.9) Beispiel. Sei D := diag(λ1, . . . , λn) mit λl > 0 für alle l und sei S ∈ GL(n,K). Dann sind
a)[ξ, η]
:= 〈ξ,Dη〉b)[ξ, η]
:= 〈ξ, S∗Sη〉
SP auf Kn×1.
Beweis. b) ist wegen S := diag(√λ1, . . . ,
√λn) eine Verallgemeinerung von a). Es genügt b) zu
zeigen. Oenbar ist [·, ·] linear im zweiten Argument. Da 〈ξ, S∗Sη〉 = 〈Sξ, Sη〉 (s. (8)), ist [·, ·]konjugiert symmetrisch. Es ist auch positiv denit, da aus
[ξ, ξ]
= 0 zunächst ‖Sξ‖2 = 0 und somitξ = 0 folgt , weil S invertierbar.
Sei A ∈ Kn×n gegeben. Wir können nun umgekehrt fragen, welche Eigenschaften
(13.10)[ξ, η]
:= 〈ξ, A η〉
für ξ, η aus Kn×1 hat? Zunächst ist klar, dass [·, ·] aus (10) linear im zweiten und konjugiert linearim ersten Argument ist. Die Form [·, ·] nennt man daher sesquilinear. Wann ist [·, ·] konjugiertsymmetrisch? Dazu beachte
[η, ξ]
= 〈η,A ξ〉 = 〈A∗η, ξ〉 = 〈ξ,A∗η〉. Damit ist [·, ·] aus (10) genaudann konjugiert symmetrisch, wenn 〈ξ,A∗η〉 = 〈ξ,A η〉, d.h. 〈ξ, (A∗ − A) η〉 = 0 für alle ξ, η ausKn×1. Wegen (4) folgt daraus (A∗ −A) η = 0 für alle η ∈ Kn×1 und somit A∗ = A.
(13.11) Lemma und Denition. a) [·, ·] aus (10) ist genau dann konjugiert symmetrisch, wennA∗ = A. In diesem Fall nennt man A hermitesch oder selbstadjungiert. (Für K = R ist Asymmetrisch.)b) [·, ·] aus (10) ist genau dann positiv denit (s. (1)) und somit ein SP, wenn A positiv und,falls K = R, A symmetrisch ist. Dabei heiÿt A positiv, wenn 〈ξ,A ξ〉 > 0 (insbesondere reell)für alle ξ ∈ Kn×1\0.
Beweis. Aufgrund der Überlegungen zu (10) bleibt nur noch zu zeigen, dass
(13.12) A ∈ Cn×n positiv⇒ A selbstadjungiert.
Zum Beweis betrachte R 3 〈ξ,A ξ〉 = 〈A∗ξ, ξ〉 = 〈A∗ξ, ξ〉 = 〈ξ,A∗ξ〉 und somit 0 = 〈ξ,A ξ〉 −〈ξ,A∗ξ〉 = 〈ξ,A ξ −A∗ξ〉 = 〈ξ,B ξ〉 für alle ξ ∈ Cn×1 mit B := A−A∗. Hieraus folgt mit (13), dass〈ξ,B η〉 = 0 für alle ξ, η aus Cn×1 und somit, wie nach (10), B = 0.
93
(13.13) Polaridentität für komplexe Formen. Sei V ein C-VR und [·, ·] : V ×V → C sesquilinear,d.h. linear im zweiten und konjugiert linear im ersten Argument. Dann gilt
[x, y] =14
∑α∈Ω
α [αx+ y, αx+ y] für alle x, y aus V,
wobei Ω := 1,−1, i,−i. Daraus folgt, dass [·, ·] genau dann konjugiert symmetrisch ist, wenn[x, x] ∈ R für alle x ∈ V .
Üb Rechne (13) nach.
Üb Polaridentität für reelle Formen. Sei V ein R-VR und [·, ·] : V × V → R bilinear undsymmetrisch. Zeige [x, y] = 1
4 [x+ y, x+ y]− 14 [−x+ y,−x+ y] für alle x, y aus V .
Üb Zeige an einem Beispiel, dass (12) im Reellen nicht gilt, d.h. dass aus A ∈ Rn×n mit 〈ξ,Aξ〉 > 0für alle ξ ∈ Rn×1 \ 0 allgemein nicht A = AT folgt.
Sei allgemein [·, ·] eine konjugiert symmetrische Sesquilinearform auf dem K-VR V , was im FallK = R eine symmetrische Bilinearform ist. Wie mehrmals bemerkt, ist [x, x] reell für alle x ∈ V .Ist [x, x] > 0 für x 6= 0, dann ist [·, ·] positiv denit und somit ein SP. Gilt lediglich [x, x] ≥ 0∀x,dann heiÿt [·, ·] positiv semidenit. Entsprechend heiÿt [·, ·] negativ (semi)denit, wenn − [·, ·]positiv (semi)denit ist. Liegt keiner dieser Fälle vor, d.h. ∃x, x′ ∈ V : [x, x] > 0, [x′, x′] < 0,dann nennt man [·, ·] indenit. Wir werden solche Formen im Zusammenhang mit der Hauptach-sentransformation näher untersuchen.
Üb Sei V ein R-VR mit SP und x, y ∈ V \0. Zeige: 〈 1‖x‖x,
1‖y‖y〉 ∈ [−1, 1]. Damit existiert genau
ein Winkel α ∈ [0, π] derart, dass cos(α) = 〈 1‖x‖x,
1‖y‖y〉. Zeige: Für V = R3 ist α der von
den Vektoren x und y eingeschlossene (kleine) Winkel. Zeige den Kosinussatz in R3, nämlicha2 = b2 + c2 − 2bc cos(α).
Orthogonale Mengen
Sei V ein K-VR mit SP. Zwei Vektoren x, y aus V heiÿen orthogonal bzw. orthonormal, wenn〈x, y〉 = 0 bzw. zusätzlich ‖x‖ = ‖y‖ = 1 gilt. Allgemeiner heiÿt eine Menge M ⊂ V orthogonalbzw. orthonormal, wenn 〈x, y〉 = 0 für alle x, y aus M mit x 6= y bzw. wenn
〈x, y〉 = δxy =
0 für x 6= y
1 für x = y
für alle x, y aus M gilt. Ist M orthonormal und eine Basis, so heiÿt M eine Orthonormalbasis(ONB). Statt orthogonal sein sagt man auch aufeinander senkrecht stehen. Für 〈x, y〉 = 0schreibt man auch x ⊥ y.
(13.14) Lemma. Sei M ⊂ V \ 0 orthogonal. Dann ist M linear unabhängig.
94

Beweis. Seien x1, ..., xn paarweise verschiedene Vektoren aus M . Gemäÿ (5.14) b) ist ihre linea-re Unabhängigkeit zu zeigen. Sei also 0 =
∑ni=1 αi xi mit αi ∈ K. Dann folgt 0 = 〈xj , 0〉 =
〈xj ,∑n
i=1 αi xi〉 =∑n
i=1 αi〈xj , xi〉 =∑n
i=1 αi δji‖xj‖2 = αj‖xj‖2. Daraus folgt αj = 0 für jedesj ∈ 1, . . . , n. Das ist die Behauptung.
(13.15) Basisentwicklungssatz. Sei M ⊂ V eine ONB. Dann gilt für jedes y ∈ V
y =∑x∈M
〈x, y〉x,
wobei nur endlich viele Produkte 〈x, y〉 nicht Null sind. M.a.W. die Koordinaten von y bez.der Basis M sind 〈x, y〉, x ∈M , vgl. (5.21).
Beweis.Nach (5.21) ist y =∑
x∈M αx x. Hieraus folgt für jedes x′ ∈M : 〈x′, y〉 = 〈x′,∑
x∈M αx x〉 =∑x∈M αx〈x′, x〉 =
∑x∈M αx δx′x = αx′ .
(13.16) Korollar. In (15) gelten für y, y′ aus V die Parsevalgleichungen
〈y′, y〉 =∑x∈M
〈y′, x〉 〈x, y〉,
‖y‖2 =∑x∈M
|〈x, y〉|2.
Beweis. Nach (15) ist 〈y′, y〉 = 〈y′,∑
x∈M 〈x, y〉x〉 =∑
x∈M 〈x, y〉 〈y′, x〉. Setzt man y′ = y, so folgtdie zweite Gleichung.
(13.17) Satz von Pythagoras. Sei M ⊂ V eine endliche orthogonale Menge und
y :=∑x∈M
x.
Dann ist ‖y‖2 =∑
x∈M ‖x‖2.
Beweis. ‖y‖2 = 〈y, y〉 = 〈∑
x∈M x,∑
x′∈M x′〉 =∑
x∈M
∑x′∈M 〈x, x′〉 =
∑x,x′∈M 〈x, x〉 δxx′ =∑
x∈M ‖x‖2.
Man sagt etwas lax, dass x1, . . . , xn orthonormal sind, wenn 〈xi, xj〉 = δij für alle i, j. Das bedeutet,dass die xi paarweise verschieden sind (s. (14)) und x1, . . . , xn eine orthonormale Menge ist.
(13.18) Beispiel. Die Standardbasis in Kn ist eine ONB bez. des Standard-SP. Die Basis ey : y ∈ Xin K(X) (s. (5.20)) ist eine ONB bez. des Standard-SP (s. (3) b)).
Üb Prüfe (18) nach.
Die Existenz von ONB im Fall endlichdimensionaler K-VR folgt aus dem
(13.19) Orthonormalisierungsverfahren von Gram und Schmidt. Sei V ein K-VR mit SPund seien x1, . . . , xp linear unabhängig. Dann existieren orthonormale v1, . . . , vp derart, dassSpanv1, . . . , vj = Spanx1, . . . , xj für jedes j ∈ 1, . . . , p.
95

Beweis. Setze v′1 := x1. Weil x1 linear unabhängig ist, ist x1 6= 0 und ‖v′1‖ = ‖x1‖ > 0. Damitlässt sich v′1 auf 1 normieren. Setze v1 := ‖v′1‖−1v1. Es ist ‖v1‖ = 1.Seien nun orthonormale v1, . . . , vj mit j ≥ 1 und j ≤ p−1 bereits konstruiert, so dass Spanv1, . . . , vj =
Spanx1, . . . , xj. Setze
v′j+1 := xj+1 −j∑
l=1
〈vl, xj+1〉 vl.
Dann ist 〈vk, v′j+1〉 = 〈vk, xj+1〉 −
j∑l=1
〈vl, xj+1〉〈vk, vl〉 = 〈vk, xj+1〉 −j∑
l=1
〈vl, xj+1〉 δkl = 0 für k ∈
1, . . . , j. Weiter ist v′j+1 6= 0, da sonst xj+1 ∈ Spanv1, . . . , vj = Spanx1, . . . , xj entgegen der
Voraussetzung. Schlieÿlich ist xj+1 = v′j+1 +j∑
l=1
〈vl, xj+1〉 vl ∈ Spanv1, . . . , vj , v′j+1. Es bleibt v′j+1
zu normieren: vj+1 := ‖v′j+1‖−1v′j+1.
(13.20) Zusatz zu (19). Sind w1, . . . , wp orthonormal mit Spanw1, . . . , wj = Spanx1, . . . , xj fürj = 1, . . . , p, dann existieren γj ∈ K mit |γj | = 1 und wj = γjvj für j = 1, . . . , p.
Üb Weise (20) nach.
(13.21) Korollar. Jeder endlichdimensionale K-VR mit SP besitzt eine ONB.
Beweis. Wende (19) auf eine Basis des VR an.
(13.22) Beispiel.
In R3 mit Standard-SP seien x1 = (1, 1, 1) und x2 = (0, 2, 4) gegeben. Oenbar sind x1, x2 linearunabhängig. Wende darauf das Orthonormalisierungsverfahren (19) an:
v1 := ‖x1‖−1(1, 1, 1) = 1√3(1, 1, 1),
v′2 := x2 − 〈v1, x2〉v1 = (0, 2, 4)− 1√3(2 + 4) 1√
3(1, 1, 1) = (0, 2, 4)− 2(1, 1, 1) = (−2, 0, 2)⇒
v2 := 1√2(−1, 0, 1).
Damit sind v1, v2 orthonormal. Ergänze jetzt diese zu einer Basis von R3 durch x3 = (1, 0, 0).Man erhält aus v1, v2, x3 eine ONB mit (19):
v′3 := x3 − 〈v1, x3〉v1 − 〈v2, x3〉v2 = (1, 0, 0)− 1√3
1√3(1, 1, 1)−
(− 1√
2
)1√2(−1, 0, 1) = (1
6 ,−26 ,
16)⇒
v3 = 1√6(1,−2, 1).
Üb Sei V ein K-VR mit SP, M ⊂ V eine abzählbare Erzeugendenmenge. Als Anwendung desOrthonormierungsverfahrens zeige: V besitzt eine ONB.
Orthogonale Projektion
Sei M ⊂ V eine Menge. Dann heiÿt
M⊥ := y ∈ V : 〈x, y〉 = 0 ∀x ∈M
das orthogonale Komplement von M . Für M = ∅ setzt man ∅⊥ := V .
96

(13.23) Lemma. Seien V ein K-VR mit SP und M, N Teilmengen von V . Dann gelten
a) M⊥ ist ein UVR b) M ∩M⊥ ⊂ 0c) N ⊂M ⇒M⊥ ⊂ N⊥ d) M⊥ = (SpanM)⊥
e) SpanM ⊂ (M⊥)⊥ f) (M ∪N)⊥ = M⊥ ∩N⊥
Beweis. a) ∀x ∈M, y, y′ ∈M⊥, λ ∈ K : 〈x, y+λ y′〉 = 〈x, y〉+λ 〈x, y′〉 = 0 + 0 = 0 ⇒ y+λ y′ ∈M⊥. b) x ∈ M ∩M⊥ ⇒ 〈x, x〉 = 0 ⇒ x = 0. c) ∀x ∈ N, y ∈ M⊥ : 〈x, y〉 = 0 ⇒ y ∈ N⊥. d) "⊃"gilt nach c). ∀x, x′ ∈ M, y ∈ M⊥, λ ∈ K : 〈x + λx′, y〉 = 〈x, y〉 + λ 〈x′, y〉 = 0 + 0 =0 ⇒ y ∈ (SpanM)⊥. e) Nach a) genügt zu zeigen M ⊂ (M⊥)⊥. Dies jedoch folgt direkt aus derDenition von M⊥. f) "⊂" gilt nach c). ∀ z ∈ M⊥ ∩ N⊥, x ∈ M, y ∈ N : 〈z, x〉 = 0, 〈z, y〉 =0 ⇒ z ∈ (M ∪N)⊥.
Üb Zeige:M⊂ P(V ) : (⋃
M∈MM)⊥ =⋂
M∈MM⊥.
(13.24) Lemma und Dention. Seien W1, . . . ,Wm UVR eines KVR V mit SP, die paarweiseorthogonal sind, d.h.
〈x, x′〉 = 0 falls x ∈Wl, x′ ∈Wk mit l 6= k.
Dann ist die Summe W := W1 + · · ·+Wm direkt gemäÿ (11.25) und man schreibt dafür
W = W1 ⊥© . . . ⊥© Wm.
Beweis. Wende (14) an.
(13.25) Satz und Dention. Sei W ein UVR von V mit dimW <∞. Dann gibt es zu jedem x ∈ Vgenau ein PW (x) ∈W derart, dass x− PW (x) ∈W⊥. Es gilt also
V = W ⊥© W⊥.
Man nennt PW (x) die orthogonale Projektion von x auf W . Die dadurch denierte Abbil-dung PW : V → V ist linear und heiÿt der orthogonale Projektor von V auf W . Oenbargilt PW PW = PW .
Beweis. Nach (23) b) ist W ∩W⊥ = 0. Zeige jetzt W +W⊥ = V . Sei w1, . . . , wm eine ONB vonW . Für x ∈ V deniere
(13.26) PW (x) :=m∑
k=1
〈wk, x〉wk.
Oenbar ist PW (x) ∈ W . Setze y := x − PW (x). Dafür gilt 〈wl, y〉 = 〈wl, x〉 − 〈wl, PW (x)〉 =〈wl, x〉 −
∑mk=1〈wk, x〉〈wl, wk〉 = 〈wl, x〉 −
∑mk=1〈wk, x〉 δkl = 〈wl, x〉 − 〈wl, x〉 = 0 für l = 1, . . . ,m.
Hieraus folgt 〈w, y〉 = 0 für alle w ∈ W nach (23)d). Also ist y ∈ W⊥. Die Linearität von PW
ersieht man aus (26).
Üb Zeige, dass für den orthogonalen Projektor PW gilt: ‖PW (x)‖2 = 〈x, PW (x)〉 = 〈PW (x), x〉.
Ist auch dimW⊥ < ∞, d.h. dimV < ∞, dann ist oenbar PW⊥ = idV −PW . Daher setzen wirallgemein im Fall dimW <∞
PW⊥ := idV −PW .
Dann ist Bild(PW ) = W = Kern(PW⊥), Kern(PW ) = W⊥ = Bild(PW⊥), PW⊥ PW⊥ = PW⊥ , wasman leicht überprüft. Auÿerdem gilt dimW + dimW⊥ = dimV (auch im Fall dimV =∞).
97
(13.27) Korollar. Ist dimW <∞ und W ein UVR von V , dann gilt (W⊥)⊥ = W .
Beweis. W ⊂ (W⊥)⊥ gilt immer, s. (23) e). Auÿerdem ist W ⊥©W⊥ = V nach (25). Da W⊥ ⊥(W⊥)⊥ folgt daraus W⊥⊥© (W⊥)⊥= V nach (24). Für z ∈ (W⊥)⊥ gilt daher PW⊥(z) = 0 undsomit PW (z) = z, d.h. z ∈W .
(13.28) Satz. Bestapproximation. Sei W ein UVR von V mit dimW <∞. Dann gilt
‖x− PW (x)‖ ≤ ‖x− w‖ ∀x ∈ V, w ∈W.
D.h. von allen w ∈W hat PW (x) den kürzesten Abstand zu x.
Beweis. x − w = (x − PW (x)) + (PW (x) − w) = PW⊥(x) + w′ mit w′ := (PW (x) − w) ∈ W ⇒‖x−w‖2 = ‖PW⊥(x)‖2 + ‖w′‖2 nach dem Satz von Pythagoras. Also ist ‖x−w‖2 ≥ ‖PW⊥(x)‖2 =‖x− PW (x)‖2, wie behauptet.
Üb Sei V ein KVR und M ⊂ V eine Basis von V . Zeige: Es gibt es genau ein SP auf V derart,dass M eine ONB ist. Tipp: Betrachte zuerst den Fall dimV <∞.
98

14 Endomorphismen in Vetorräumen mit
Skalarprodukt
Es werden Endomorphismen untersucht, die besondere Eigenschaften bezüglich des Skalarproduktsbesitzen. Sie treten in Anwendungen in natürlicher Weise auf. Symmetrietransformationen werdendurch unitäre (spezieller: orthogonale) Endomorphismen dargestellt. Selbstadjungierte (spezieller:symmetrische) Endomorphismen hingegen beschreiben Eigenschaften eines Systems. Entscheidendfür die folgenden Untersuchungen ist das folgende Konzept.
Der adjungierte Homomorphismus
(14.1) Satz und Denition. Seien V und W endlichdimensionale KVR mit SP. Dann gibt es zuf ∈ Hom(V,W ) genau ein f∗ ∈ Hom(W,V ) derart, dass
〈w, f(v)〉 = 〈f∗(w), v〉 ∀v ∈ V, w ∈W.
Bemerke, dass links das SP in W und rechts da SP in V steht. Der Homomorphismus f∗ heiÿtder zu f adjungierte Homomorphismus.
Beweis. Zur Eindeutigkeit seien w ∈W und dazu zj ∈ V, i = 1, 2 derart, dass 〈w, f(v)〉 = 〈z1, v〉 =〈z2, v〉 für alle v ∈ V . Daraus folgt 〈z1 − z2, v〉 = 0. Für v = z1 − z2 folgt daher ‖z1 − z2‖2 = 0,weshalb z1 = z2.Zur Existenz wähle ONB v1, . . . , vn von V und w1, . . . , wm von W und bestimme dazu die Ab-
bildungsmatrix A von f . Sei f∗ : W → V der Homomorphismus mit A∗ als Abbildungsmatrix bez.obiger ONB, d.h.
f∗(wk) =n∑
l=1
aTlk vl =
n∑l=1
akl vl für k = 1, . . . ,m.
Hierfür rechnet man nach: 〈wk, f(vl)〉 = 〈wk,m∑
j=1ajlwj〉 =
m∑j=1
ajl〈wk, wj〉 =m∑
j=1ajlδkj = akl sowie
〈f∗(wk), vl〉 = 〈n∑
j=1akjvj , vl〉 =
n∑j=1
akj〈vj , vl〉 =n∑
j=1akjδjl = akl. Also gilt
〈wk, f(vl)〉 = 〈f∗(wk), vl〉 für k = 1, . . . ,m, l = 1, . . . , n.
Allgemein für w =m∑
k=1
ζkwk und v =n∑
l=1
ηlvl folgt daraus 〈w, f(v)〉 =m∑
k=1
n∑l=1
ζkηl〈wk, f(vl)〉 =
m∑k=1
n∑l=1
ζkηl〈f∗(wk), vl〉 = 〈f∗(w), v〉.
(14.2) Bemerkungen. a) Der Beweis von (1) zeigt: Ist w ∈ W und dazu z ∈ V derart, dass〈w, f(v)〉 = 〈z, v〉 ∀v ∈ V , dann ist z = f∗(w). Das bedeutet insbesondere, dass die Li-nearität von f∗ in (1) automatisch folgt.
b) Der Beweis von (1) besagt auch: Ist A die Abbildungsmatrix von f bez. ONB, dann ist A∗
die Abbildungsmatrix von f∗ bez. der gleichen Basen.
c) Erinnere an (13.8) letzter Punkt: Für alle ξ ∈ Km×1, η ∈ Kn×1, A ∈ Km×n gilt bez. derStandardskalarprodukte 〈ξ,A η〉 = 〈A∗ξ, η〉. Das bedeutet (LA)∗ = LA∗ (vgl. b) ).
99

(14.3) Lemma. Seien V undW endlichdimensionale KVR mit SP. Dann gelten für f, g ∈ Hom(V,W )
(a) (f∗)∗ = f
(b) (f + λg)∗ = f∗ + λg∗, λ ∈ K
und für f ∈ End(V ), M UVR von V
(c) det f∗ = det f(d) (idV )∗ = idV
(e) λ Eigenwert von f ⇔ λ Eigenwert von f∗
(f) M f − (bzw . f ∗−)invariant ⇒ M⊥ f∗−(bzw . f −)invariant .
Beweis. (a) ∀x, y ∈ V : 〈y, f∗(x)〉 = 〈f∗(x), y〉 = 〈x, f(y)〉 = 〈f(y), x〉. Daher ist (f∗)∗ = f nach(1). (c) Sei A eine Abbildungsmatrix von f bez. ONB. Dann ist A∗ die Abbildungsmatrix von
f∗ bez. der gleichen Basen, s. (2)b). Nun ist det f∗ = detA∗ (nach (11.24)) = detAT = detA (nach(10.10)) = detA = det f (nach (11.24)). (f) ∀x ∈M, y ∈M⊥ gilt: 0 = 〈y, f(x)〉 (weil f(x) ∈M)= 〈f∗(y), x〉 ⇒ f∗(y) ∈M⊥. Weil f∗∗ = f folgt hieraus auch der zweite Teil der Behauptung.(b), (d) und (e) bleiben als Übung.
Üb Weise (b), (d) und (e) aus (3) nach.
Normale Endomorphismen
(14.4) Denition. Sei V ein KVR mit SP endlicher Dimension. Dann heiÿt f ∈ End(V ) normal,wenn f∗ f = f f∗. Entsprechend heiÿt eine Matrix A ∈ Kn×n normal, wenn A∗A = AA∗
gilt.
(14.5) Lemma. Die Darstellungsmatrix eines Endomorphismus bez. einer ONB ist genau dann nor-mal, wenn der Endomorphimus normal ist.
Beweis. Allgemein gelten LA = ϕ f ϕ−1 (s. (7.8)(7.10)) und LB LA = LBA (s. Matrixmulti-plikation (7.17)). Daher ist LA∗A = LA∗ LA = ϕ f∗ ϕ−1 ϕ f ϕ−1 = ϕ f∗ f ϕ−1 =ϕ f f∗ ϕ−1 = . . . = LAA∗ . Hieraus folgt A∗A = AA∗. Die Umkehrung beweist man analog.
(14.6) Lemma. Seien f ∈ End(V ) normal und W ein UVR von V . Dann gelten
(a) Kern(f) = Kern(f∗)
(b) ∀x ∈ V, λ ∈ K : f(x) = λx⇔ f∗(x) = λx.
(c) x, y ∈ V Eigenvektoren zu verschiedenen Eigenwerten ⇒ x ⊥ y.
Beweis. (a) Sei x ∈ Kern(f). Dann gilt: f(x) = 0⇒ 0 = ‖f(x)‖2 = 〈f(x), f(x)〉 = 〈f∗(f(x)), x〉 =〈f(f∗(x)), x〉 = 〈f∗(x), f∗(x)〉 = ‖f∗(x)‖2 ⇒ x ∈ Kern(f∗). Ebenso folgt Kern(f∗) ⊂ Kern(f).(b) ⇒: Es folgt (f − λ idV )(x) = 0, d.h. x ∈ Kern(f − idV ). Da (f − λ idV )∗ = f∗− λ idV nach
(3)(b),(d), ist f − λ idV normal. Somit folgt x ∈ Kern(f∗ − λ idV ) nach (a). Also ist f∗(x) = λx.⇐ folgt analog.(c) Sei f(x) = λx, f(y) = µ y mit λ 6= µ. Dann gilt: λ 〈x, y〉 = 〈λx, y〉 = 〈f∗(x), y〉 (wegen (b))
= 〈x, f(y)〉 = 〈x, µ y〉 = µ 〈x, y〉, woraus die Behauptung folgt.
100

Üb Sei V ein K-VR mit SP endlicher Dimension und f ∈ End(V ) normal. Weiter sei W ein UVRvon V , der von Eigenvektoren von f erzeugt wird. Zeige: f(W ) ⊂W, f(W⊥) ⊂W⊥, f∗(W ) ⊂W, f∗(W⊥) ⊂W⊥.
Üb Sei V ein CVR mit SP endlicher Dimension. Seien f ∈ End(V ) normal und λ1, . . . λs diepaarweise verschiedenen Eigenwerte von f . Zeige:
V = Ef (λ1) ⊥© . . . ⊥© Ef (λs).
(14.7) Hauptsatz. Sei V ein C-VR mit SP und dimV =: n ∈ N. Ist f ∈ End(V ) normal, dann gibtes eine ONB von Eigenvektoren von f . Es gilt auch die Umkehrung.
Beweis. Weil χf in Linearfaktoren zerfällt (s. (12.11)) hat f einen Eigenwert λ1 und dazu einenEigenvektor v1. O.E. sei ‖v1‖ = 1.Seien bereits orthonormale Eigenvektoren v1, . . . , vj mit j ∈ 1, . . . , n− 1 für f gefunden. Setze
W := Spanv1, . . . , vj. Aus (6)(b) folgt f(W ) ⊂ W und f∗(W ) ⊂ W . Hieraus folgt bereits allesÜbrige:Zunächst ist auch f(W⊥) ⊂ W⊥, f∗(W⊥) ⊂ W⊥ nach (3)(f). Damit ist g : W⊥ → W⊥, g(x) :=
f(x), ein Endomorphismus von W⊥ mit g∗(x) = f∗(x), denn für x, y ∈ W⊥ gilt 〈x, g(y)〉 =〈x, f(y)〉 = 〈f∗(x), y〉 mit f∗(x) ∈ W⊥. Schlieÿlich ist g normal: g∗(g(x)) = g∗(f(x)) = f∗(f(x)) =f∗(f∗(x)) = f(g∗(x)) = g(g∗(x)).Weil dimW⊥ = n− j ≥ 1, ist W⊥ 6= 0. Damit gibt es, wie eingangs für f argumentiert, einen
Eigenvektor vj+1 ∈W⊥ von g mit ‖vj+1‖ = 1. Dieser ist auch Eigenvektor von f mit vj+1 ⊥W .Zur Umkehrung sei v1, . . . , vn eine ONB von V und seien λ1, . . . , λn aus C mit f(vl) = λl vl.
Dann folgt 〈vk, f(vl)〉 = 〈vk, λl vl〉 = δkl λl = δkl λk = λk〈vk, vl〉 = 〈λk vk, vl〉. Daher gilt allgemeinfür x =
∑nl=1 αl vl ∈ V , dass 〈vk, f(x)〉 =
∑nl=1 αl 〈vk, f(vl)〉 =
∑nl=1 αl 〈λk vk, vl〉 = 〈λk vk, x〉.
Nach (2)a) impliziert dies f∗(vk) = λk vk für k = 1, . . . , n. Damit rechnet man nach: f∗ f(vl) =f∗(λl vl) = λl f
∗(vl) = λl λl vl = . . . = f f∗(vl) für alle l. Hieraus folgt f∗ f = f f∗.
Insbesondere ist jeder normale Endomorphimus eines endlichdimensionalen C-VR diagonalisier-bar.
Unitäre Automorphismen
(14.8) ONBWechsel, unitäre Matrix. Sei V ein KVR mit SP und dimV =: n ∈ N. Seienv1, . . . , vn und v′1, . . . , v
′n zwei ONB von V . Dann ist die invertierbare Matrix S, die gemäÿ
(7.26)
v′j =n∑
l=1
slj vl, j = 1, . . . , n
den Basiswechsel beschreibt, unitär, d.h. sie erfüllt
S−1 = S∗.
Ist umgekehrt v1, . . . , vn eine ONB von V und S ∈ Kn×n unitär, dann deniert (7.26) eineONB v′1, . . . , v
′n.
Beweis. Zunächst folgt aus (7.26):
〈v′k, v′j〉 = 〈n∑
i=1
sik vi,
n∑l=1
slj vl〉 =n∑
i=1
n∑l=1
sik slj〈vi, vl〉 =n∑
i=1
n∑l=1
sik sljδil =n∑
i=1
sik sij =n∑
i=1
sTki sij .
101

Wenn nun v′j , . . . , v′n eine ONB ist, dann ist δkj = 〈v′k, v′j〉 und daher En = S∗S, was äquvalent zu
S−1 = S∗ ist. Ist umgekehrt S unitär, dann ist S∗S = En und somit 〈v′k, v′j〉 = δkj .
Wie bemerkt, ist S−1 = S∗ äquivalent zu S∗S = En und damit auch zu S S∗ = En. Im FallK = R ist S∗ = ST und man nennt spezieller S ∈ GL(n,R) mit S−1 = ST orthogonal.
U(n) := S ∈ GL(n,C) : S−1 = S∗,O(n) := S ∈ GL(n,R) : S−1 = ST
sind Gruppen bez. der Matrixmultplikation, d.h. also Untergruppen der allgemeinen linearen Gruppeüber C bzw. R. Daher heiÿt U(n) bzw. O(n) die unitäre bzw. orthogonale Matrixgruppe. Esist O(n) = U(n) ∩ Rn×n.
Üb Weise die Gruppeneigenschaften von U(n) ⊂ GL(n,C) und O(n) ⊂ GL(n,R) nach.
Üb Sei S ∈ Kn×n unitär. Zeige: |detS| = 1.
Es folgt eine Kennzeichnung unitärer Matrizen.
(14.9) Lemma. Sei S ∈ Kn×n. Dann sind äquvalent
(i) S ist unitär.
(ii) Die Spaltenvektoren von S bilden eine ONB in Kn×1 bez. des StandardSP.
(iii) Die Zeilenvektoren von S bilden eine ONB in K1×n bez. des StandardSP.
Beweis. Es ist S = (s1, . . . , sn), wobei wie üblich sk ∈ Kn×1 den k-ten Spaltenvektor von Sbezeichnet. Damit ist
S∗S =
s∗1...s∗n
(s1 . . . sn
).
Das (k, l)Element von S∗S ist s∗k sl = 〈sk, sl〉. Hieraus folgt sofort (i) ⇔ (ii). Ähnlich einfach folgt(i) ⇔ (iii).
Üb Weise (i) ⇔ (iii) von (9) nach.
Üb Gebe Beispiele für unitäre bzw. orthogonale (n× n)Matrizen für n = 1, 2, 3 an.
(14.10) Dention. Seien V und W KVR mit SP. Dann heiÿt f : V → W ein Isomorphismus,wenn f bijektiv, linear und SP-erhaltend ist. Letzteres bedeutet
〈f(x), f(y)〉 = 〈x, y〉 ∀x, y ∈ V.
Ist V = W , so heiÿt f auch unitär.
Üb Zeige: Ist f ein Isomorphismus von KVR mit SP, so ist es auch f−1 und es gilt ∀x ∈ V, y ∈W : 〈y, f(x)〉 = 〈f−1(y), x〉.
102

(14.11) Lemma. Seien V, W K-VR mit SP und f ∈ Hom(V,W ). Ist dimV = dimW < ∞, danngilt:
f SP-erhaltend ⇔ f bijektiv und f−1 = f∗.
Beweis. ⇒: ∀x, y ∈ V gilt nach (1): 〈x, y〉 = 〈f(x), f(y)〉 = 〈f∗(f(x)), y〉. Mit (13.4) folgtf∗(f(x)) = x ∀x ∈ V und somit f∗ f = idV . Aus (2.24), (6.17) folgt, dass f bijektiv ist undsomit f−1 = f∗. ⇐: 〈f(x), f(y)〉 = 〈f∗(f(x)), y〉 = 〈f−1(f(x)), y〉 = 〈x, y〉 ∀x, y ∈ V .
Unitäre Endomorphismen auf endlichdimensionalen VR sind oensichtlich normal. Ensprechendsind unitäre Matrizen normal. Im Fall K = R sagt man statt unitär spezieller orthogonal. Wie in(5) überzeugt man sich, dass die Abbildungsmatrix eines Endomorphismus bez. einer ONB genaudann unitär ist, wenn der Endomorphimus unitär ist.
Üb Seien V, W K-VR mit SP und f ∈ Hom(V,W ). Dann heiÿt f isometrisch, wenn ‖f(x)‖ =‖x‖ ∀x ∈ V . Zeige: Ist f isometrisch, dann ist f injektiv.
Üb Seien V, W K-VR mit SP und f ∈ Hom(V,W ). Zeige: f ist SP-erhaltend genau dann, wenn fisometrisch ist. Tipp: Wende auf 〈f(x), f(y)〉 die Polaridentität an. Achte auf die Fälle K = Cund K = R.
Üb Sei V K-VR mit SP, dimV <∞ und f ∈ End(V ). Zeige: f unitär ⇔ f isometrisch.
Üb Sei V ein K-VR mit SP, v1, . . . , vn eine ONB in V und ϕ : V → Kn×1 die zugehörige Koordi-natenabbildung. Versehe Kn×1 mit dem Standard-SP. Zeige: ϕ ist ein Isomorphismus.
Üb Sei V K-VR mit SP, dimV < ∞ und f ∈ End(V ). Weiter sei v1, . . . , vn eine ONB von V .Zeige: f ist unitär genau dann, wenn f(v1), . . . , f(vn) eine ONB von V ist.
(14.12) Lemma. Seien V ein C-VR mit SP endlicher Dimension und f ∈ End(V ). Dann sind äqui-valent:
(a) f ist unitär.
(b) f ist normal und alle Eigenwerte sind vom Betrag 1.
Beweis. Zu (a) ⇒ (b) sei λ ∈ C und x ∈ V , x 6= 0, mit f(x) = λx. Dann gilt: ‖x‖2 =〈x, x〉 = 〈f(x), f(x)〉 = 〈λx, λ x〉 = λ λ 〈x, x〉 = |λ|2‖x‖2 ⇒ |λ| = 1. Zu (b) ⇒ (a) betrach-te nach (7) eine ONB v1, . . . , vn von Eigenvektoren zu den Eigenwerten λ1, . . . λn vom Betrag 1.Für x =
∑nl=1 αl vl, y =
∑nl=1 βl vl gilt damit 〈f(x), f(y)〉 =
⟨∑nl=1 αl λl vl,
∑nj=1 βj λj vj
⟩=∑n
l=1
∑nj=1 αl λl βjλj 〈vl, vj〉 =
∑nl=1
∑nj=1 αl λl βj λj δlj . Letzteres ist gleich 〈x, y〉, weil λl λl = 1.
Also ist f SP-erhaltend.
Ist V ein RVR mit SP und f ∈ End(V ) orthogonal, dann ist jeder Eigenwert von f entweder +1oder −1. Das zeigt man wie in (a)⇒(b) von (12).
(14.13) Diagonalisierbarkeit normaler Matrizen. Sei A ∈ Cn×n normal. Dann existiert eineunitäre Matrix S derart, dass
S−1AS = diag(λ1, . . . , λn),
wobei λ1, . . . , λn die Eigenwerte von A sind.
103
Beweis. Da LA normal ist, existiert nach dem Hauptsatz (7) eine ONB von Eigenvektoren. DerBasiswechsel von der Standardbasis zu dieser Basis wird nach (8) durch eine unitäre Matrix Svermittelt. Die Abbildungsmatrix A (von LA) geht dabei gemäÿ (11.13) in die DiagonalmatrixS−1AS = diag(λ1, . . . , λn) über.
Die Umkehrung in (13) gilt auch:
(14.14) Lemma. Ist A ∈ Cn×n, S ∈ U(n) und ist S−1AS = diag(λ1, . . . , λn) mit gewissen λ1, . . . , λn
aus C, dann ist A normal und λ1, , . . . , λn sind die Eigenwerte von A. Die Spaltenvektorens1, . . . , sn von S sind dazu eine ONB aus Eigenvektoren.
Beweis. Mit D := diag(λ1, . . . , λn) ist A = S DS−1 und A∗ = (S−1)∗D∗S∗ = S D S−1, weil S−1 =S∗ und D∗ = D. Damit folgt A∗A = S D S−1S DS−1 = S DD S−1 = S D D S−1 = · · · = AA∗. Der Rest der Behauptung folgt aus (11.13) und (9).
Üb Sei V ein CVR mit SP endlicher Dimension und f ∈ End(V ) normal. Weiter sei W einfinvarinater UVR. Zeige: W⊥ ist finvariant.
Anleitung. Für p ∈ K[X], p =∑m
j=1 αj Xj und A ∈ Kn×n sei p(A) :=
∑mj=1 αj A
j . SeiD ∈ Cn×n eine Diagonalmatrix. Zeige: Dann gibt es ein Interpolationspolynom p ∈ C[X] vomGrad ≤ n derart, dass p(D) = D∗. Verallgemeinere obiges Ergebnis von Diagonalmatrizenauf normale Matrizen mit Hilfe von (13). Wende (3)(f) an.
Selbstadjungierte Endomorphismen
Sei V ein KVR mit SP und dimV < ∞. Dann heiÿt f ∈ End(V ) selbstadjungiert, wenn f = f∗,d.h. wenn 〈x, f(y)〉 = 〈f(x), y〉 für alle x, y aus V . Oenbar ist die Abbildungsmatrix eines Endomor-phismus bzgl. einer ONB genau dann selbstadjungiert, wenn der Endomorphismus selbstadjungiertist (vgl. (5)).Ein Beispiel im Fall dimV < ∞ für einen selbstadjungierten Endomorphismus ist der ortho-
gonale Projektor PW aus (13.25), denn für x, y aus V gilt: 〈y, PW (x)〉 = 〈PW (y), PW (x)〉 weil〈PW⊥(y), PW (x)〉 = 0 und ebenso 〈PW (y), x〉 = 〈PW (y), PW (x)〉 weil 〈PW (y), PW⊥(x)〉 = 0.
(14.15) Lemma. Sei V ein CVR mit SP endlicher Dimension und f ∈ End(V ). Dann sind äquiva-lent:
(a) f ist selbstadjungiert.
(b) f ist normal und alle Eigenwerte sind reell.
Beweis. Zu (a) ⇒ (b) sei λ ∈ C und x ∈ V , x 6= 0 mit f(x) = λx. Dann gilt: λ 〈x, x〉 =〈x, λx〉 = 〈x, f(x)〉 = 〈f∗(x), x〉 = 〈f(x), x〉 = 〈λx, x〉 = λ 〈x, x〉 ⇒ λ = λ. Zu (b) ⇒ (a)betrachte nach (7) eine ONB v1, . . . , vn von Eigenvektoren zu reellen Eigenwerten λ1, . . . , λn . Mitder gewohnten Notation folgt 〈x, f(y)〉 = 〈
∑nl=1 αl vl,
∑nj=1 βj λj vj〉 =
∑nl=1
∑nj=1 αl βj λj δlj =∑n
l=1
∑nj=1 αl βj〈λl vl, vj〉 = . . . = 〈f(x), y〉, weil λl = λl. Also ist f∗(x) = f(x) für alle x ∈ V .
Üb Sei V ein KVR mit SP endlicher Dimension und f ∈ End(V ) selbstadjungiert. Weiter seiW ⊂ V ein UVR. Zeige: Ist W finvariant, dann ist auch W⊥ finvariant. (Dies ist einleichter zu beweisender Spezialfall der vorangegangenen Übung.)
Üb Gebe Beispiele für normale Endomorphismen an, die weder unitär noch selbstadjungiert sind.
104

Diagonalisierbarkeit über R
Sieht man den Beweis des Hauptsatzes (7) durch, erkennt man sofort die Gültigkeit von
(14.16) Zusatz. Sei V ein RVR mit SP und dimV ∈ N. Ist f ∈ End (V ) normal und ist χf dasProdukt reeller Linearfaktoren, dann gibt es eine ONB von Eigenvektoren von f . Es gilt auchdie Umkehrung.
Daher gilt wegen (15) und aufgrund von (13), (14)
(14.17) Folgerung.
a) A ∈ Rn×n ist genau dann symmetrisch, wenn S ∈ O(n) existiert derart, dass S−1ASdiagonal ist. Damit folgt auch:
b) Sei V ein RVR mit SP mit dimV ∈ N. Ist f ∈ End (V ) selbstadjungiert (hier auchsymmetrisch genannt), dann gibt es eine ONB von Eigenvektoren von f . Es gilt auchdie Umkehrung.
Das charakteristische Polynom orthogonaler Matrizen zerfällt i. allg. nicht in reelle Linearfaktoren.Fundamental ist das Beispiel Dϕ für ϕ /∈ πZ aus (11.27), wie wir gleich sehen werden.
(14.18) Lemma. Seien V ein RVR mit dim V ∈ N und f ∈ End (V ). Dann gibt es einen finvarianten UVR W von V mit dim W ∈ 1, 2.
Beweis. Sei A ∈ Rn×n eine Abbildungsmatrix für f . Es genügt die Behauptung für LA statt f zuzeigen. Fasse A ∈ Cn×n auf. Dann existiert ein Eigenwert λ ∈ C von A. Sei z ∈ Cn×1 \ 0 mitAz = λ z. Hieraus folgt Az = Az = λ z = λ z. Setze x := 1
2(z + z) ∈ Rn×1 und y := 12i(z − z) ∈
Rn×1. Man rechnet leicht nach, dass W := Span x, y ⊂ Rn×1 die Behauptung erfüllt.
Üb Rechne nach, dass W in Beweis von (18) erfüllt: W 6= 0, LA(W ) ⊂W.
Orthogonale Endomorphismen lassen sich i. allg. nicht diagonalisieren (s. o.), aber es gilt immerhin
(14.19) Satz. Sei V ein RVR mit SP und dim V =: n ∈ N. Ist f ∈ End (V ) orthogonal, dann gibtes eine ONB von V , wofür die Abbildungsmatrix T von f die Blockdiagonalgestalt
T =
En1
−En2
D1. . .
Dp
hat, wobei Dj := Dϕj
, ϕj /∈ πZ (s. (11.27)) für j = 1, . . . , p.
Beweis. Der Beweis erfolgt durch Induktion nach n. Für n = 1 ist T = ±E1, weil f(x0) = λx0
für V = Rx0 mit |λ| = 1. Nach (18) existiert UVR W mit dimW ∈ 1, 2 und f(W ) ⊂ W .Weil f isometrisch ist, ist f injektiv und damit bijektiv. Daher gilt sogar f(W ) = W . Darausfolgt f−1(W ) = W und somit f∗(W ) = W . Nach (3)(f) folgt f(W⊥) ⊂ W⊥ und schlieÿlichf(W⊥) = W⊥.Nun läÿt sich die Induktionsvoraussetzung anwenden. Danach gibt es eine Abbildungsmatrix von
f von der Form
T =(T 1
T 2
),
wofür T 2 die behauptete Gestalt hat und T 1 eine Abbildungsmatrix von f auf W ist. Im FalldimW = 1 ist T 1 = ±E1. Der Rest des Beweises folgt sofort aus (20).
105

(14.20) Die Matrixgruppe O(2). Für T ∈ O(2) gilt: Es gibt ϕ ∈ R derart, dass entweder T = Dϕ
oder T = D−ϕ , wobei
Dϕ :=(
cosϕ − sinϕsinϕ cosϕ
), D−
ϕ :=(
cosϕ sinϕsinϕ − cosϕ
).
Zu D−ϕ existiert S ∈ O(2) mit S−1D−
ϕ S = diag(1,−1).
Beweis. Sei T =(α βγ δ
). Da 1 = detE2 = det (T T T ) = ( detT )2 ist detT = ±1. Wegen
T = (T−1)T ist
(α βγ δ
)= 1
∆
(δ −γ−β α
), s. (10.23). Das führt auf die beiden Fälle T =
(α β−β α
)und T =
(α ββ −α
)mit α2 + β2 = 1, die in der angegebenen Weise parametrisiert werden.
Das charakteristische Polynom von D−ϕ lautet (cosϕ − X)(− cosϕ − X) − sin2 ϕ = X2 − 1 =
(1−X)(−1−X). Folglich ist R2×1 = E(1) ⊥©E(−1).
Üb Deute Dϕ und D−ϕ geometrisch. Wie hängen Dϕ und D−
ϕ zusammen?
Üb Sei T ∈ O(n). Zeige: Dann gibt es S ∈ O(n) derart, dass S−1 T S = diag(En1,−En2
, D1, . . . , Dp),vgl. (19).
Hauptachsentransformation
Sei V ein KVR mit dimV =: n ∈ N. Darauf sei eine Sesquilinearform [, ] : V × V → K erklärt,d.h. [, ] ist linear im zweiten und konjugiert linear im ersten Argument. Wähle eine indizierte Basisv1, . . . , vn in V . Für x, y aus V seien ξ , η die zugehörigen Koordinatenvektoren aus Kn×1. Dannfolgt
[x, y] =
[n∑
l=1
ξl vl,n∑
k=1
ηk vk
]=
n∑l=1
n∑k=1
ξl ηk [vl, vk] = ξ∗Aη mit A := ([vl, vk])l,k=1,...,n.
D.h. es gilt
(14.21) [x, y] = ξ∗Aη = 〈ξ,A η〉.
Man nennt A = ([vl, vk])k,l die darstellende Matrix der Sesquilinearform [, ] bez. der indi-zierten Basis v1, . . . , vn (vgl. (13.10)). Wie transformiert sich die darstellende Matrix A bei einemWechsel zu einer neuen Basis v′1, . . . , v
′n? Mit S aus (7.26) folgt [v′l, v
′k] = [
∑ni=1 silvi,
∑nj=1 sjkvj ] =∑n
i=1
∑nj=1 silsjk[vi, vj ], was bedeutet
(14.22) A′ = S∗A S.
Bemerke, dass sich A als darstellende Matrix einer Sesquilinearform nicht in der gewohnten Weisemittels Ähnlichkeit (7.37) transformiert.
Üb Auf Kn×n betrachte die folgende Relation: A ∼ B, wenn S ∈ GL(n,K) existiert derart, dassB = S∗AS. Zeige: ∼ ist eine Äquivalenzrelation.
Nach (13.11) ist [, ] konjugiert symmetrisch genau dann, wenn A selbstadjungiert ist. Gilt letzteres,dann ist (13) anwendbar. Da S∗ = S−1 für S ∈ U(n), folgt aus (22) mit (8) die
106
(14.23) Hauptachsentransformation. Sei V ein KVR mit SP und dimV =: n ∈ N und sei [, ] einekonjugiert symmetrische Sesquilinearform auf V . Dann existieren eine ONB v1, . . . , vn von Vund λ1, . . . , λn aus R derart, dass
[x, y] =n∑
l=1
λl ξl ηl
für x, y ∈ V und ξ, η die zugehörigen Koordinatenvektoren. Es folgt, dass λ1, . . . , λn dieEigenwerte einer (jeden) selbstadjungierten darstellenden Matrix von [, ] sind. Es ist [, ] genaudann positiv denit (d.h. ein SP) bzw. positiv semidenit, wenn alle Eigenwerte positiv bzw.nichtnegativ sind. Es ist [, ] genau dann indenit, wenn es einen positiven und einen negativenEigenwert gibt.
Üb Es gelten die Voraussetzungen von (23). Zeige: Es gibt eine orthogonale Basis v1, . . . , vn vonV und p, r ∈ 0, . . . , n mit p ≤ r derart, dass
[x, y] =p∑
l=1
ξl ηl −r∑
l=p+1
ξl ηl
für alle x, y ∈ V mit Koordinatenvektoren ξ, η aus Kn×1.
Beachte, dass S∗AS mit A ∈ Kn×n und S ∈ GL(n,K) genau dann selbstadjungiert ist, wenn A esist. Der Trägheitssatz von Sylvester besagt: Seien A, A′ ∈ Kn×n selbstadjungiert. Es existiertgenau dann S ∈ GL(n,K) mit A′ = S∗AS, wenn Rang (A′) = Rang (A) sowie A und A′ gleich vielepositive Eigenwerte besitzen.
107






![Lineare Algebra I Bernd Ammann, WS 2007/08 · ... Lineare Algebra und Analytische Geometrie [8] Falko Lorenz, Lineare Algebra I und II [9] Serge Lang, Linear Algebra, Second Edition,](https://img.pdfslide.org/doc/110x75/5c66806a09d3f252168c7903/lineare-algebra-i-bernd-ammann-ws-200708-lineare-algebra-und-analytische.jpg)






















