Embed Size (px)
Citation preview

MAG – Magnetisches Feld
5. August 2011
Ubersicht
Ziele
Aussehen des Magnetfeldes eines Helmholtz-Spulenpaares. Studium der Kraftwirkung eines Magnetfeldes auf einestromdurchflossene Spule. Klarung der Zusammenhange von magnetischer Flussanderung und induzierter Span-nung. Bestatigung des Induktionsgesetzes.
Teilversuche
1. Sichtbarmachen der Magnetfeldlinien mit Hilfe von Eisenspanen
In eine Ebene parallel zur Feldspulenachse werden kleine Teilchen aus Eisen gestreut, die sich nach denMagnetfeldlinien ausrichten.
2. Drehmoment eines Magnetfeldes auf eine stromdurchflossene Spule
Messung des Drehmoments, das ein Magnetfeld auf eine stromdurchflossene Spule ausubt, in Abhangigkeitdes Winkels zwischen Spulenachse und Feldrichtung.
3. Induktion durch Drehen einer Spule in einem Magnetfeld
Induktion einer Spannung durch Drehung einer Spule in einem zeitlich konstanten Magnetfeld, Registrierungdes zeitlichen Verlaufs der induzierten Spannung. Bestimmung der Feldstarke aus den Messwerten und ausder Feldspulengeometrie.
4. Induktion durch ein zeitlich veranderliches Magnetfeld
Induktion einer Spannung in einer unbewegten Spule durch ein zeitlich variables Feld. Registrierung deszeitlichen Verlaufs der Feldstarke und der induzierten Spannung. Bestatigung, dass die Induktionsspannungproportional zur negativen Zeitableitung der Feldstarke ist.
1

Inhaltsverzeichnis
1 Physikalische Grundlagen 3
1.1 Das magnetische Feld der Helmholtz-Spule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Bewegungsinduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3 Induktion durch ein zeitlich veranderliches Magnetfeld . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4 Allgemeines Induktionsgesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Technische Grundlagen 12
2.1 Drehmoment auf eine stromdurchflossene Spule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Induktion durch Bewegung eines Leiters im Magnetfeld . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Beschreibung des Funktionsgenerators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Beschreibung des XY/t-Schreibers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 Beschreibung des Multimeters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Versuchsdurchfuhrung 17
3.1 Teilversuch 1: Sichtbarmachen der Magnetfeldlinien mit Hilfe von Eisenspanen . . . . . . . . . . . . 17
3.2 Teilversuch 2: Drehmoment des Feldes auf eine stromdurchflossene Spule . . . . . . . . . . . . . . . . 17
3.3 Teilversuch 3: Induktion durch Drehen einer Spule in einem Magnetfeld . . . . . . . . . . . . . . . . 18
3.4 Teilversuch 4: Induktion durch ein zeitlich veranderliches Magnetfeld . . . . . . . . . . . . . . . . . . 19
3.5 1. Freiwilliger Zusatzversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.6 2. Freiwilliger Zusatzversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 Auswertung 20
4.1 Teilversuch 2: Drehmoment des Feldes auf eine stromdurchflossene Spule . . . . . . . . . . . . . . . . 20
4.2 Teilversuch 3: Induktion durch Drehen einer Spule in einem Magnetfeld . . . . . . . . . . . . . . . . 20
4.3 Teilversuch 4: Induktion durch ein zeitlich veranderliches Magnetfeld . . . . . . . . . . . . . . . . . . 20
4.4 1. Freiwilliger Zusatzversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2
1 Physikalische Grundlagen
1.1 Das magnetische Feld der Helmholtz-Spule
Definition des Magnetfeldes
Die Kraft zwischen elektrisch geladenen Teilchen setzt sich aus zwei Komponenten zusammen. Die eine wirkt sowohlauf ruhende als auch bewegte Teilchen (elektrische Kraft). Die andere ist nur dann vorhanden, wenn die Teilcheneine von null verschiedene Relativgeschwindigkeit besitzen (magnetische Kraft).
Betrachtet man nur ein Teilchen der Ladung Q und der Geschwindigkeit ~v und fasst die Kraftwirkung, die es vonden anderen Teilchen erfahrt, zu einem elektrischen Feld ~E und einem magnetischen Feld ~B zusammen, so lasstsich die resultierende Kraft ~Fem durch das Gesetz von H. A. Lorentz beschreiben:
~Fem = ~Fe + ~Fm = Q( ~E + ~v × ~B) (1)
Existiert nur ein magnetisches Feld, das auf eine mit der Geschwindigkeit ~v bewegte Ladung Q die magnetischeLorentz-Kraft ausubt, so ergibt sich:
~Fm = Q(~v × ~B) (2)
Der Ausdruck Q(~v × ~B) ist ein Vektorprodukt, es steht senkrecht auf der von ~v und ~B aufgespannten Ebene, undsein Betrag ist gleich der Flache des von ~v und ~B gebildeten Parallelogramms: Fm = QvB sinα
Erzeugung von Magnetfeldern
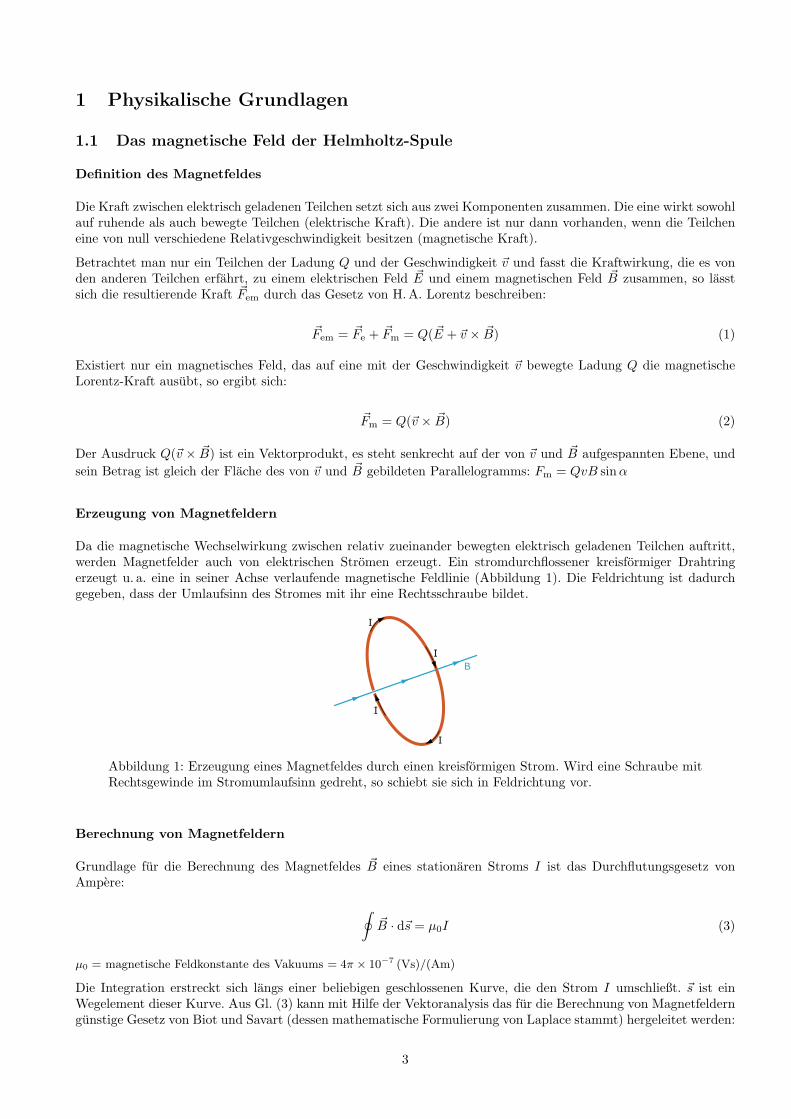
Da die magnetische Wechselwirkung zwischen relativ zueinander bewegten elektrisch geladenen Teilchen auftritt,werden Magnetfelder auch von elektrischen Stromen erzeugt. Ein stromdurchflossener kreisformiger Drahtringerzeugt u. a. eine in seiner Achse verlaufende magnetische Feldlinie (Abbildung 1). Die Feldrichtung ist dadurchgegeben, dass der Umlaufsinn des Stromes mit ihr eine Rechtsschraube bildet.
Abbildung 1: Erzeugung eines Magnetfeldes durch einen kreisformigen Strom. Wird eine Schraube mitRechtsgewinde im Stromumlaufsinn gedreht, so schiebt sie sich in Feldrichtung vor.
Berechnung von Magnetfeldern
Grundlage fur die Berechnung des Magnetfeldes ~B eines stationaren Stroms I ist das Durchflutungsgesetz vonAmpere:
∮~B · d~s = µ0I (3)
µ0 = magnetische Feldkonstante des Vakuums = 4π × 10−7 (Vs)/(Am)
Die Integration erstreckt sich langs einer beliebigen geschlossenen Kurve, die den Strom I umschließt. ~s ist einWegelement dieser Kurve. Aus Gl. (3) kann mit Hilfe der Vektoranalysis das fur die Berechnung von Magnetfelderngunstige Gesetz von Biot und Savart (dessen mathematische Formulierung von Laplace stammt) hergeleitet werden:
3
~B =µ0I
4π
∮~r ′ − ~r|~r ′ − ~r |3
× d~r ′ (4)
~r = Ortsvektor des Punktes P , fur den das Feld berechnet werden soll, ~r ′ = Ortsvektor eines stromdurchflossenen Draht-
elements
Feld eines Kreisrings
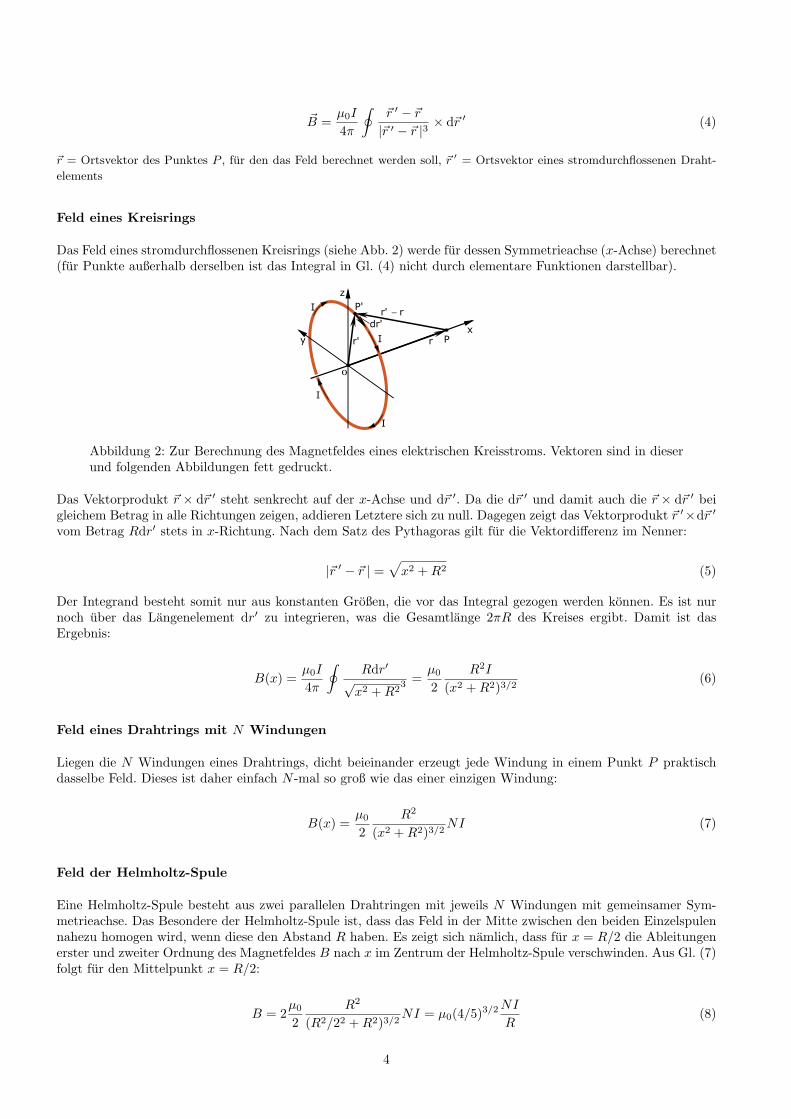
Das Feld eines stromdurchflossenen Kreisrings (siehe Abb. 2) werde fur dessen Symmetrieachse (x-Achse) berechnet(fur Punkte außerhalb derselben ist das Integral in Gl. (4) nicht durch elementare Funktionen darstellbar).
Abbildung 2: Zur Berechnung des Magnetfeldes eines elektrischen Kreisstroms. Vektoren sind in dieserund folgenden Abbildungen fett gedruckt.
Das Vektorprodukt ~r × d~r ′ steht senkrecht auf der x-Achse und d~r ′. Da die d~r ′ und damit auch die ~r × d~r ′ beigleichem Betrag in alle Richtungen zeigen, addieren Letztere sich zu null. Dagegen zeigt das Vektorprodukt ~r ′×d~r ′
vom Betrag Rdr′ stets in x-Richtung. Nach dem Satz des Pythagoras gilt fur die Vektordifferenz im Nenner:
|~r ′ − ~r | =√x2 +R2 (5)
Der Integrand besteht somit nur aus konstanten Großen, die vor das Integral gezogen werden konnen. Es ist nurnoch uber das Langenelement dr′ zu integrieren, was die Gesamtlange 2πR des Kreises ergibt. Damit ist dasErgebnis:
B(x) =µ0I
4π
∮Rdr′
√x2 +R2
3 =µ0
2R2I
(x2 +R2)3/2(6)
Feld eines Drahtrings mit N Windungen
Liegen die N Windungen eines Drahtrings, dicht beieinander erzeugt jede Windung in einem Punkt P praktischdasselbe Feld. Dieses ist daher einfach N -mal so groß wie das einer einzigen Windung:
B(x) =µ0
2R2
(x2 +R2)3/2NI (7)
Feld der Helmholtz-Spule
Eine Helmholtz-Spule besteht aus zwei parallelen Drahtringen mit jeweils N Windungen mit gemeinsamer Sym-metrieachse. Das Besondere der Helmholtz-Spule ist, dass das Feld in der Mitte zwischen den beiden Einzelspulennahezu homogen wird, wenn diese den Abstand R haben. Es zeigt sich namlich, dass fur x = R/2 die Ableitungenerster und zweiter Ordnung des Magnetfeldes B nach x im Zentrum der Helmholtz-Spule verschwinden. Aus Gl. (7)folgt fur den Mittelpunkt x = R/2:
B = 2µ0
2R2
(R2/22 +R2)3/2NI = µ0(4/5)3/2NI
R(8)
4
B = µ0(4/5)3/2NI
R(9)
Diese Formel gilt aus Stetigkeitsgrunden auch außerhalb der Spulenachse fur den mittleren Teil der Spulenan-ordnung mit etwa 2 % Genauigkeit. Der ”mittlerer Teil“ ist ein gedachtes zylindrisches Volumen in der Mitte desHelmholtzspulenpaares mit einer Lange von etwa einem Drittel des Spulenabstandes und einem Durchmesser vonetwa der Halfte des Spulendurchmessers. Das Besondere der Helmholtzspule ist demnach die experimentell einfachzu realisierende Homogenitat ihres Magnetfelds.
Das Feldlinienbild der Helmholtz-Spule
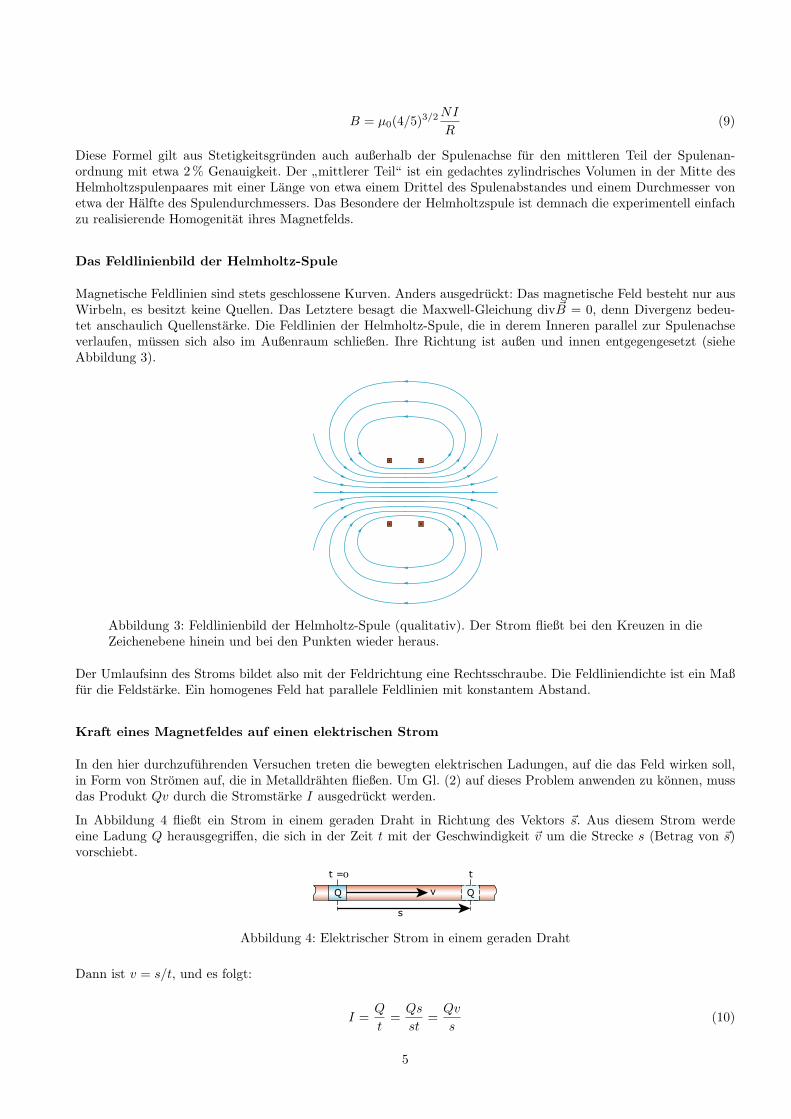
Magnetische Feldlinien sind stets geschlossene Kurven. Anders ausgedruckt: Das magnetische Feld besteht nur ausWirbeln, es besitzt keine Quellen. Das Letztere besagt die Maxwell-Gleichung div ~B = 0, denn Divergenz bedeu-tet anschaulich Quellenstarke. Die Feldlinien der Helmholtz-Spule, die in derem Inneren parallel zur Spulenachseverlaufen, mussen sich also im Außenraum schließen. Ihre Richtung ist außen und innen entgegengesetzt (sieheAbbildung 3).
Abbildung 3: Feldlinienbild der Helmholtz-Spule (qualitativ). Der Strom fließt bei den Kreuzen in dieZeichenebene hinein und bei den Punkten wieder heraus.
Der Umlaufsinn des Stroms bildet also mit der Feldrichtung eine Rechtsschraube. Die Feldliniendichte ist ein Maßfur die Feldstarke. Ein homogenes Feld hat parallele Feldlinien mit konstantem Abstand.
Kraft eines Magnetfeldes auf einen elektrischen Strom
In den hier durchzufuhrenden Versuchen treten die bewegten elektrischen Ladungen, auf die das Feld wirken soll,in Form von Stromen auf, die in Metalldrahten fließen. Um Gl. (2) auf dieses Problem anwenden zu konnen, mussdas Produkt Qv durch die Stromstarke I ausgedruckt werden.
In Abbildung 4 fließt ein Strom in einem geraden Draht in Richtung des Vektors ~s. Aus diesem Strom werdeeine Ladung Q herausgegriffen, die sich in der Zeit t mit der Geschwindigkeit ~v um die Strecke s (Betrag von ~s)vorschiebt.
Abbildung 4: Elektrischer Strom in einem geraden Draht
Dann ist v = s/t, und es folgt:
I =Q
t=Qs
st=Qv
s(10)
5

Durch Einsetzen in Gl. (2) unter Berucksichtigung der Richtungen von ~s und ~v ergibt sich fur die magnetischeKraft auf einen Strom:
~F = I(~s× ~B) (11)
Drehmoment eines Magnetfeldes auf einen Ringstrom
In Abbildung 5 ist die Spule vereinfacht als kreisformiger Drahtring dargestellt. Hier ist die Ringflache parallel undder Torsionsdraht senkrecht zum Feld ausgerichtet. Die auf die einzelnen Stromelemente wirkenden Lorentz-Kraftesind in der linken und rechten Halfte des Ringes paarweise gleich groß aber entgegengesetzt gerichtet. So ergebensich Kraftepaare (~Fm, −~Fm), welche den Ring um den Torsionsdraht als Achse drehen. Ihnen ist ein Drehmoment~M zugeordnet. Dieses soll aus den im Experiment messbaren Großen berechnet werden.
Abbildung 5: Krafte auf einen stromdurchflossenen Kreisring im Magnetfeld. Das Kraftepaar (~Fm, −~Fm)ergibt mit den Ringradien als Hebelarmen ein Drehmoment ~M .
Zur weiteren Vereinfachung der quantitativen Berechnung von ~M werde der Kreisring zunachst durch ein Quadratersetzt (Abbildung 6).
Abbildung 6: Strom, der durch eine quadratische Leiterschleife fließt
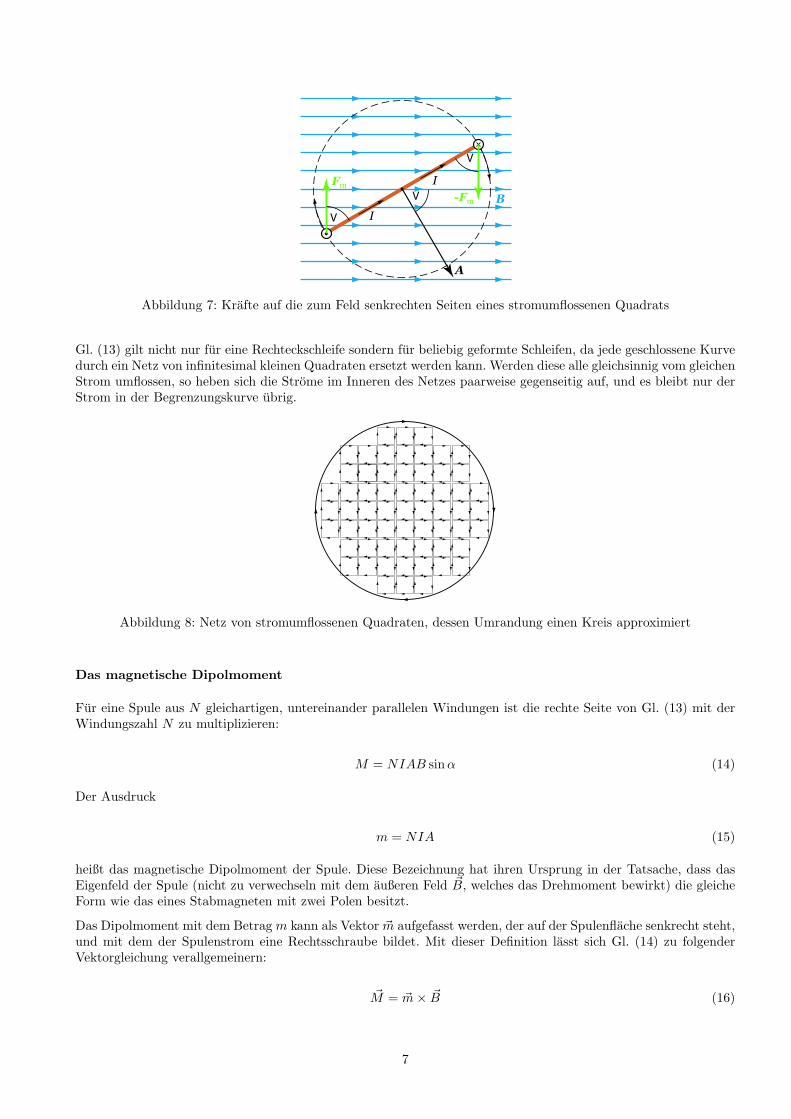
Auf den waagerechten Seiten sind die Lorentz-Krafte parallel zur Torsionsachse gerichtet, also wirkungslos (außer-dem heben sich die an Ober- und Unterseite angreifenden gegenseitig auf). Die auf die senkrechten Seiten wirkendenKrafte sind langs jeder Seite konstant und bilden das in Abbildung 7 dargestellte Kraftepaar.
Die das Kraftepaar bildenden Einzelkrafte ~Fm bzw. −~Fm bilden mit den dazugehorigen Hebelarmen denselbenWinkel α, um den die Normale ~A auf der Schleifenflache gegenuber der Richtung von ~B verdreht ist. Der Betragdes wirksamen Drehmoments ~M = ~a× ~Fm ist daher:
M = aFm sinα = aIaB sinα = Ia2B sinα = IAB sinα (12)
M = IAB sinα (13)
6
I
IB
A
Fm
-Fm
V
V
V
Abbildung 7: Krafte auf die zum Feld senkrechten Seiten eines stromumflossenen Quadrats
Gl. (13) gilt nicht nur fur eine Rechteckschleife sondern fur beliebig geformte Schleifen, da jede geschlossene Kurvedurch ein Netz von infinitesimal kleinen Quadraten ersetzt werden kann. Werden diese alle gleichsinnig vom gleichenStrom umflossen, so heben sich die Strome im Inneren des Netzes paarweise gegenseitig auf, und es bleibt nur derStrom in der Begrenzungskurve ubrig.
Abbildung 8: Netz von stromumflossenen Quadraten, dessen Umrandung einen Kreis approximiert
Das magnetische Dipolmoment
Fur eine Spule aus N gleichartigen, untereinander parallelen Windungen ist die rechte Seite von Gl. (13) mit derWindungszahl N zu multiplizieren:
M = NIAB sinα (14)
Der Ausdruck
m = NIA (15)
heißt das magnetische Dipolmoment der Spule. Diese Bezeichnung hat ihren Ursprung in der Tatsache, dass dasEigenfeld der Spule (nicht zu verwechseln mit dem außeren Feld ~B, welches das Drehmoment bewirkt) die gleicheForm wie das eines Stabmagneten mit zwei Polen besitzt.
Das Dipolmoment mit dem Betrag m kann als Vektor ~m aufgefasst werden, der auf der Spulenflache senkrecht steht,und mit dem der Spulenstrom eine Rechtsschraube bildet. Mit dieser Definition lasst sich Gl. (14) zu folgenderVektorgleichung verallgemeinern:
~M = ~m× ~B (16)
7
Sie besagt u. a., dass ein magnetisches Feld ~B die Tendenz hat, magnetische Dipolmomente, wie sie in der Naturz. B. bei elektrisch geladenen Elementarteilchen mit eingepragtem Drehimpuls (Spin) auftreten, in Feldrichtung zudrehen.
1.2 Bewegungsinduktion
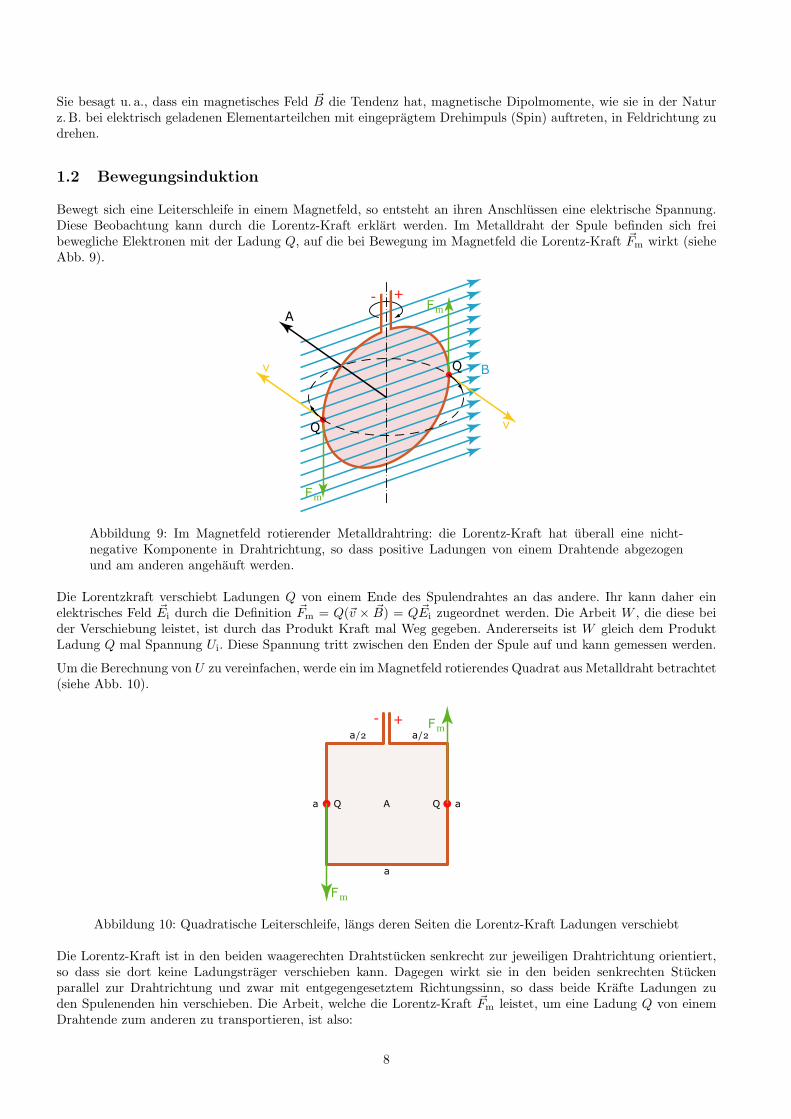
Bewegt sich eine Leiterschleife in einem Magnetfeld, so entsteht an ihren Anschlussen eine elektrische Spannung.Diese Beobachtung kann durch die Lorentz-Kraft erklart werden. Im Metalldraht der Spule befinden sich freibewegliche Elektronen mit der Ladung Q, auf die bei Bewegung im Magnetfeld die Lorentz-Kraft ~Fm wirkt (sieheAbb. 9).
Abbildung 9: Im Magnetfeld rotierender Metalldrahtring: die Lorentz-Kraft hat uberall eine nicht-negative Komponente in Drahtrichtung, so dass positive Ladungen von einem Drahtende abgezogenund am anderen angehauft werden.
Die Lorentzkraft verschiebt Ladungen Q von einem Ende des Spulendrahtes an das andere. Ihr kann daher einelektrisches Feld ~Ei durch die Definition ~Fm = Q(~v × ~B) = Q~Ei zugeordnet werden. Die Arbeit W , die diese beider Verschiebung leistet, ist durch das Produkt Kraft mal Weg gegeben. Andererseits ist W gleich dem ProduktLadung Q mal Spannung Ui. Diese Spannung tritt zwischen den Enden der Spule auf und kann gemessen werden.
Um die Berechnung von U zu vereinfachen, werde ein im Magnetfeld rotierendes Quadrat aus Metalldraht betrachtet(siehe Abb. 10).
Abbildung 10: Quadratische Leiterschleife, langs deren Seiten die Lorentz-Kraft Ladungen verschiebt
Die Lorentz-Kraft ist in den beiden waagerechten Drahtstucken senkrecht zur jeweiligen Drahtrichtung orientiert,so dass sie dort keine Ladungstrager verschieben kann. Dagegen wirkt sie in den beiden senkrechten Stuckenparallel zur Drahtrichtung und zwar mit entgegengesetztem Richtungssinn, so dass beide Krafte Ladungen zuden Spulenenden hin verschieben. Die Arbeit, welche die Lorentz-Kraft ~Fm leistet, um eine Ladung Q von einemDrahtende zum anderen zu transportieren, ist also:
8
B
ωt
Q
Q
v
v
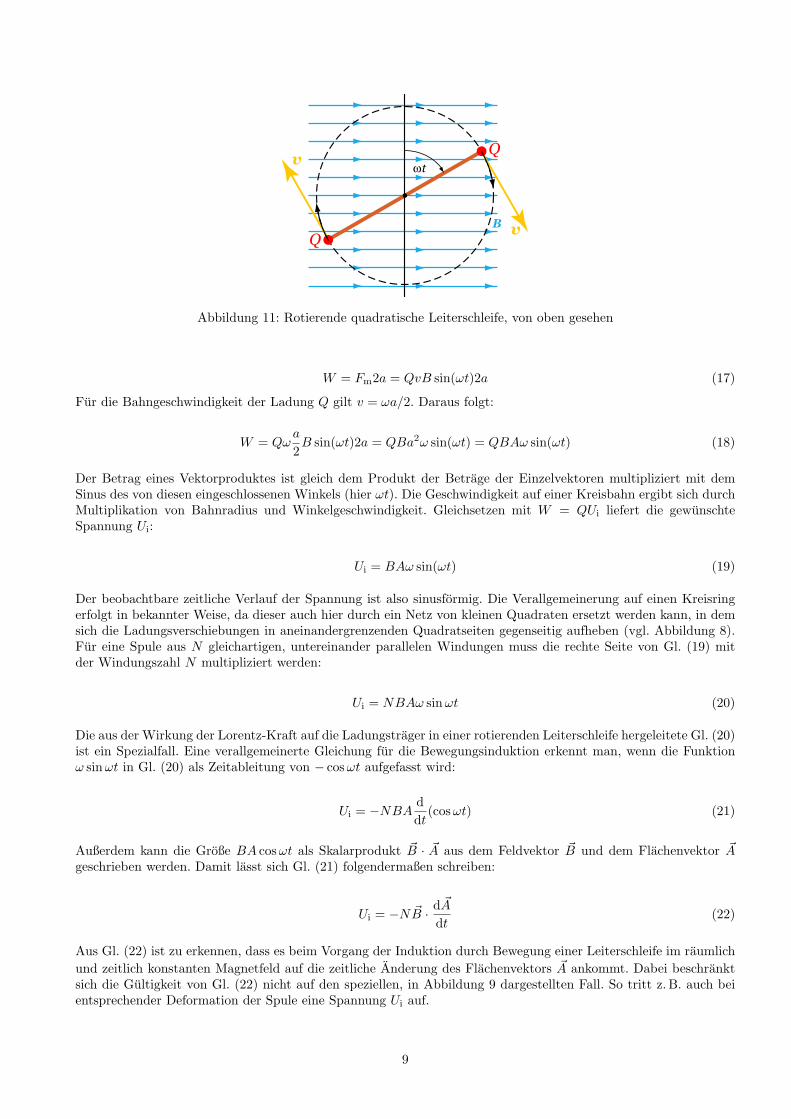
Abbildung 11: Rotierende quadratische Leiterschleife, von oben gesehen
W = Fm2a = QvB sin(ωt)2a (17)
Fur die Bahngeschwindigkeit der Ladung Q gilt v = ωa/2. Daraus folgt:
W = Qωa
2B sin(ωt)2a = QBa2ω sin(ωt) = QBAω sin(ωt) (18)
Der Betrag eines Vektorproduktes ist gleich dem Produkt der Betrage der Einzelvektoren multipliziert mit demSinus des von diesen eingeschlossenen Winkels (hier ωt). Die Geschwindigkeit auf einer Kreisbahn ergibt sich durchMultiplikation von Bahnradius und Winkelgeschwindigkeit. Gleichsetzen mit W = QUi liefert die gewunschteSpannung Ui:
Ui = BAω sin(ωt) (19)
Der beobachtbare zeitliche Verlauf der Spannung ist also sinusformig. Die Verallgemeinerung auf einen Kreisringerfolgt in bekannter Weise, da dieser auch hier durch ein Netz von kleinen Quadraten ersetzt werden kann, in demsich die Ladungsverschiebungen in aneinandergrenzenden Quadratseiten gegenseitig aufheben (vgl. Abbildung 8).Fur eine Spule aus N gleichartigen, untereinander parallelen Windungen muss die rechte Seite von Gl. (19) mitder Windungszahl N multipliziert werden:
Ui = NBAω sinωt (20)
Die aus der Wirkung der Lorentz-Kraft auf die Ladungstrager in einer rotierenden Leiterschleife hergeleitete Gl. (20)ist ein Spezialfall. Eine verallgemeinerte Gleichung fur die Bewegungsinduktion erkennt man, wenn die Funktionω sinωt in Gl. (20) als Zeitableitung von − cosωt aufgefasst wird:
Ui = −NBA ddt
(cosωt) (21)
Außerdem kann die Große BA cosωt als Skalarprodukt ~B · ~A aus dem Feldvektor ~B und dem Flachenvektor ~Ageschrieben werden. Damit lasst sich Gl. (21) folgendermaßen schreiben:
Ui = −N ~B · d ~Adt
(22)
Aus Gl. (22) ist zu erkennen, dass es beim Vorgang der Induktion durch Bewegung einer Leiterschleife im raumlichund zeitlich konstanten Magnetfeld auf die zeitliche Anderung des Flachenvektors ~A ankommt. Dabei beschranktsich die Gultigkeit von Gl. (22) nicht auf den speziellen, in Abbildung 9 dargestellten Fall. So tritt z. B. auch beientsprechender Deformation der Spule eine Spannung Ui auf.
9
Magnetfeldmessung
Im Versuch wird aus der registrierten Spannung Ui(t) die Amplitude Ui bestimmt. Sie ist als Maximalwert derSinusfunktion aus Gl. (20) definiert:
Ui = NBAω (23)
Aus dem Ergebnis fur Ui kann die Flussdichte B berechnet werden:
B =Ui
NAω(24)
1.3 Induktion durch ein zeitlich veranderliches Magnetfeld
In Teilversuch 4 konnen Sie sich davon uberzeugen, dass an einer Drahtschleife im Magnetfeld auch bei konstanterFlache aber zeitlich verandlichem Magnetfeld eine elektrische Spannung induziert wird.
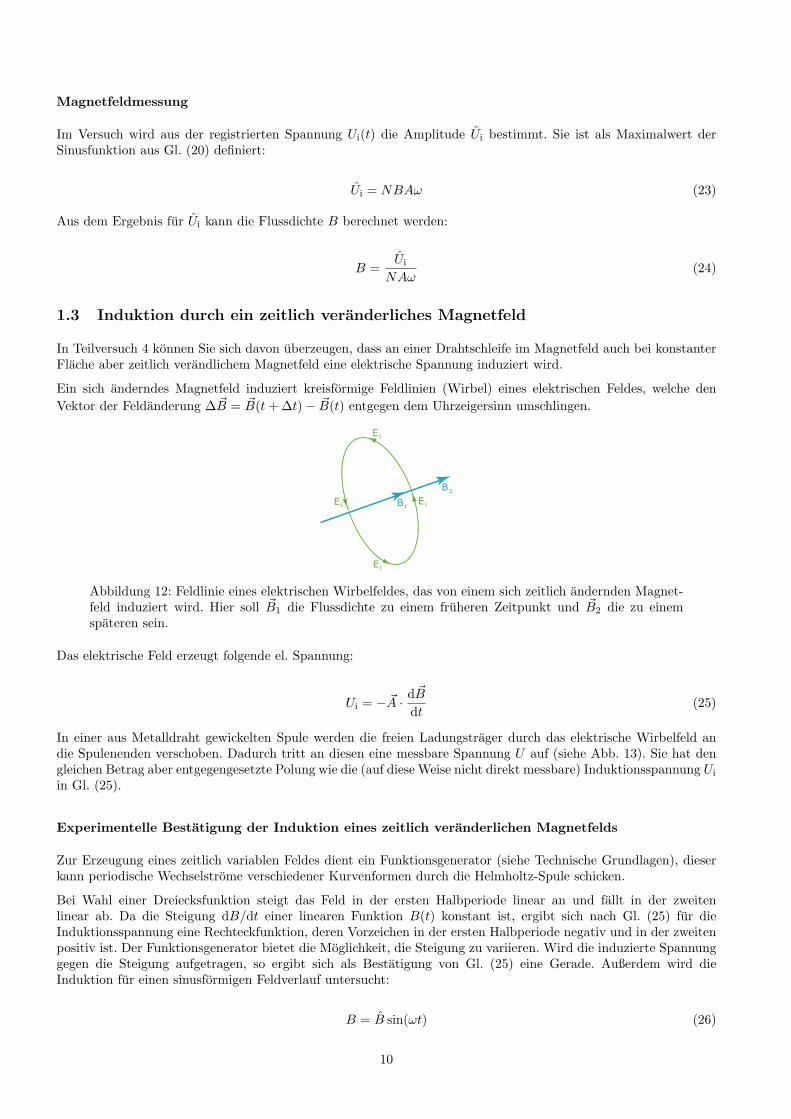
Ein sich anderndes Magnetfeld induziert kreisformige Feldlinien (Wirbel) eines elektrischen Feldes, welche denVektor der Feldanderung ∆ ~B = ~B(t+ ∆t)− ~B(t) entgegen dem Uhrzeigersinn umschlingen.
Abbildung 12: Feldlinie eines elektrischen Wirbelfeldes, das von einem sich zeitlich andernden Magnet-feld induziert wird. Hier soll ~B1 die Flussdichte zu einem fruheren Zeitpunkt und ~B2 die zu einemspateren sein.
Das elektrische Feld erzeugt folgende el. Spannung:
Ui = − ~A · d ~Bdt
(25)
In einer aus Metalldraht gewickelten Spule werden die freien Ladungstrager durch das elektrische Wirbelfeld andie Spulenenden verschoben. Dadurch tritt an diesen eine messbare Spannung U auf (siehe Abb. 13). Sie hat dengleichen Betrag aber entgegengesetzte Polung wie die (auf diese Weise nicht direkt messbare) Induktionsspannung Ui
in Gl. (25).
Experimentelle Bestatigung der Induktion eines zeitlich veranderlichen Magnetfelds
Zur Erzeugung eines zeitlich variablen Feldes dient ein Funktionsgenerator (siehe Technische Grundlagen), dieserkann periodische Wechselstrome verschiedener Kurvenformen durch die Helmholtz-Spule schicken.
Bei Wahl einer Dreiecksfunktion steigt das Feld in der ersten Halbperiode linear an und fallt in der zweitenlinear ab. Da die Steigung dB/dt einer linearen Funktion B(t) konstant ist, ergibt sich nach Gl. (25) fur dieInduktionsspannung eine Rechteckfunktion, deren Vorzeichen in der ersten Halbperiode negativ und in der zweitenpositiv ist. Der Funktionsgenerator bietet die Moglichkeit, die Steigung zu variieren. Wird die induzierte Spannunggegen die Steigung aufgetragen, so ergibt sich als Bestatigung von Gl. (25) eine Gerade. Außerdem wird dieInduktion fur einen sinusformigen Feldverlauf untersucht:
B = B sin(ωt) (26)
10

Abbildung 13: Drahtschleife in einem sich zeitlich andernden Magnetfeld. Vom induzierten elektrischenFeld ~Ei wurden nur die langs des Drahtes wirkenden Komponenten gezeichnet.
B = Feldamplitude, ω = Kreisfrequenz
Einsetzen in Gl. (25) fur den Fall, dass ~A parallel zu ~B ist, ergibt:
Ui(t) = −NAB ddt
(sin(ωt)) = −NABω cos(ωt) = −U cos(ωt) (27)
Die Registrierung von Ui(t) liefert daher ebenfalls eine sinusformige Kurve, die aber gegenuber derjenigen fur dasFeld um eine Viertelperiode verschoben ist. Fur die Spannungsamplitude U folgt aus Gl. (27):
U = NABω (28)
Zwischen der Feld- und der Spannungsamplitude besteht also ein linearer Zusammenhang.
1.4 Allgemeines Induktionsgesetz
Gl. (22) und Gl. (25) sind Spezialfalle des allgemeinen Induktionsgesetzes:
Ui = −N ddt
( ~B · ~A) (29)
Ui = −N dΦdt
(30)
Dabei ist Φ der die Spule durchsetzende magnetische Fluss. Das Induktionsgesetz gilt auch fur ein inhomogenesFeld ~B, wobei die Definition von Φ zu
Φ =∫
~B · d ~A (31)
erweitert werden muss.
11
2 Technische Grundlagen
2.1 Drehmoment auf eine stromdurchflossene Spule
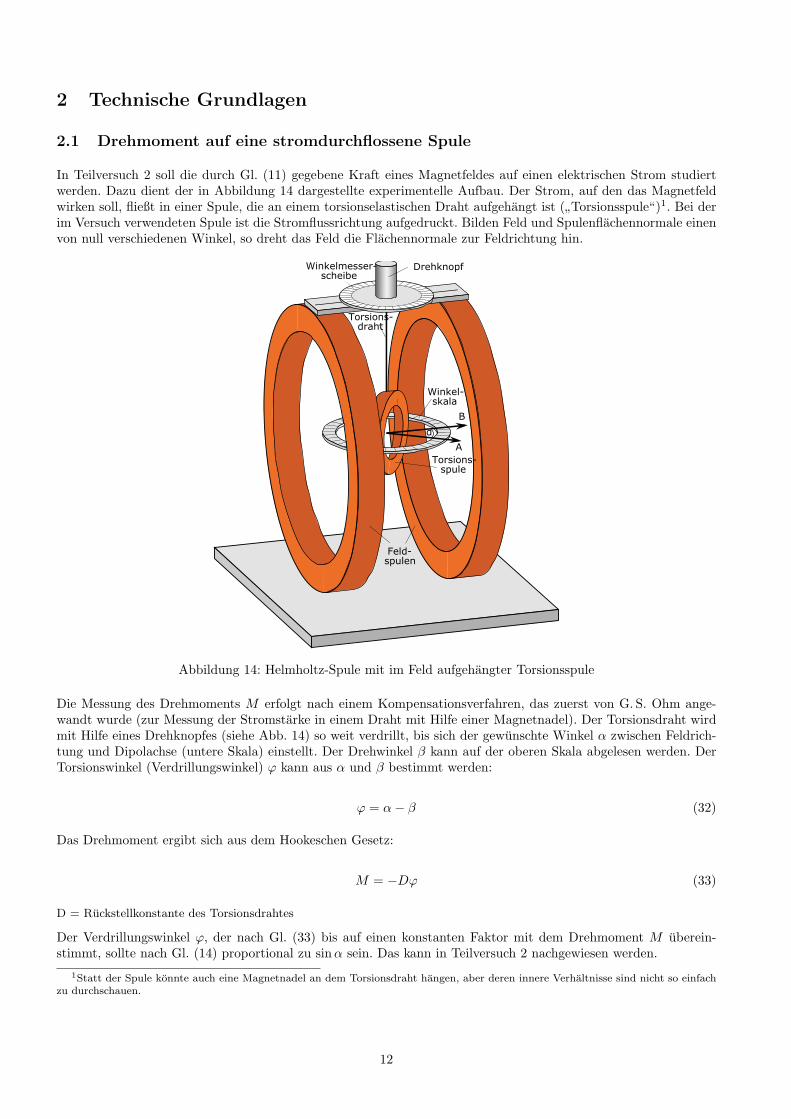
In Teilversuch 2 soll die durch Gl. (11) gegebene Kraft eines Magnetfeldes auf einen elektrischen Strom studiertwerden. Dazu dient der in Abbildung 14 dargestellte experimentelle Aufbau. Der Strom, auf den das Magnetfeldwirken soll, fließt in einer Spule, die an einem torsionselastischen Draht aufgehangt ist (”Torsionsspule“)1. Bei derim Versuch verwendeten Spule ist die Stromflussrichtung aufgedruckt. Bilden Feld und Spulenflachennormale einenvon null verschiedenen Winkel, so dreht das Feld die Flachennormale zur Feldrichtung hin.
Abbildung 14: Helmholtz-Spule mit im Feld aufgehangter Torsionsspule
Die Messung des Drehmoments M erfolgt nach einem Kompensationsverfahren, das zuerst von G. S. Ohm ange-wandt wurde (zur Messung der Stromstarke in einem Draht mit Hilfe einer Magnetnadel). Der Torsionsdraht wirdmit Hilfe eines Drehknopfes (siehe Abb. 14) so weit verdrillt, bis sich der gewunschte Winkel α zwischen Feldrich-tung und Dipolachse (untere Skala) einstellt. Der Drehwinkel β kann auf der oberen Skala abgelesen werden. DerTorsionswinkel (Verdrillungswinkel) ϕ kann aus α und β bestimmt werden:
ϕ = α− β (32)
Das Drehmoment ergibt sich aus dem Hookeschen Gesetz:
M = −Dϕ (33)
D = Ruckstellkonstante des Torsionsdrahtes
Der Verdrillungswinkel ϕ, der nach Gl. (33) bis auf einen konstanten Faktor mit dem Drehmoment M uberein-stimmt, sollte nach Gl. (14) proportional zu sinα sein. Das kann in Teilversuch 2 nachgewiesen werden.
1Statt der Spule konnte auch eine Magnetnadel an dem Torsionsdraht hangen, aber deren innere Verhaltnisse sind nicht so einfachzu durchschauen.
12
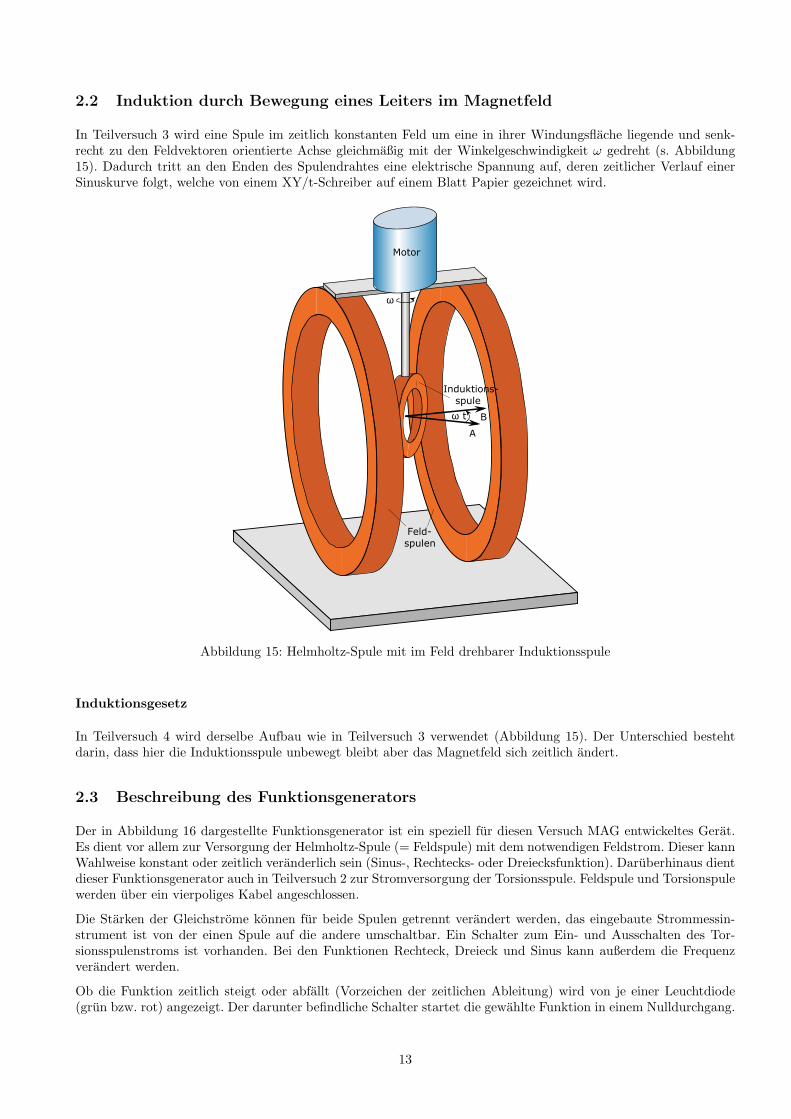
2.2 Induktion durch Bewegung eines Leiters im Magnetfeld
In Teilversuch 3 wird eine Spule im zeitlich konstanten Feld um eine in ihrer Windungsflache liegende und senk-recht zu den Feldvektoren orientierte Achse gleichmaßig mit der Winkelgeschwindigkeit ω gedreht (s. Abbildung15). Dadurch tritt an den Enden des Spulendrahtes eine elektrische Spannung auf, deren zeitlicher Verlauf einerSinuskurve folgt, welche von einem XY/t-Schreiber auf einem Blatt Papier gezeichnet wird.
Abbildung 15: Helmholtz-Spule mit im Feld drehbarer Induktionsspule
Induktionsgesetz
In Teilversuch 4 wird derselbe Aufbau wie in Teilversuch 3 verwendet (Abbildung 15). Der Unterschied bestehtdarin, dass hier die Induktionsspule unbewegt bleibt aber das Magnetfeld sich zeitlich andert.
2.3 Beschreibung des Funktionsgenerators
Der in Abbildung 16 dargestellte Funktionsgenerator ist ein speziell fur diesen Versuch MAG entwickeltes Gerat.Es dient vor allem zur Versorgung der Helmholtz-Spule (= Feldspule) mit dem notwendigen Feldstrom. Dieser kannWahlweise konstant oder zeitlich veranderlich sein (Sinus-, Rechtecks- oder Dreiecksfunktion). Daruberhinaus dientdieser Funktionsgenerator auch in Teilversuch 2 zur Stromversorgung der Torsionsspule. Feldspule und Torsionspulewerden uber ein vierpoliges Kabel angeschlossen.
Die Starken der Gleichstrome konnen fur beide Spulen getrennt verandert werden, das eingebaute Strommessin-strument ist von der einen Spule auf die andere umschaltbar. Ein Schalter zum Ein- und Ausschalten des Tor-sionsspulenstroms ist vorhanden. Bei den Funktionen Rechteck, Dreieck und Sinus kann außerdem die Frequenzverandert werden.
Ob die Funktion zeitlich steigt oder abfallt (Vorzeichen der zeitlichen Ableitung) wird von je einer Leuchtdiode(grun bzw. rot) angezeigt. Der darunter befindliche Schalter startet die gewahlte Funktion in einem Nulldurchgang.
13
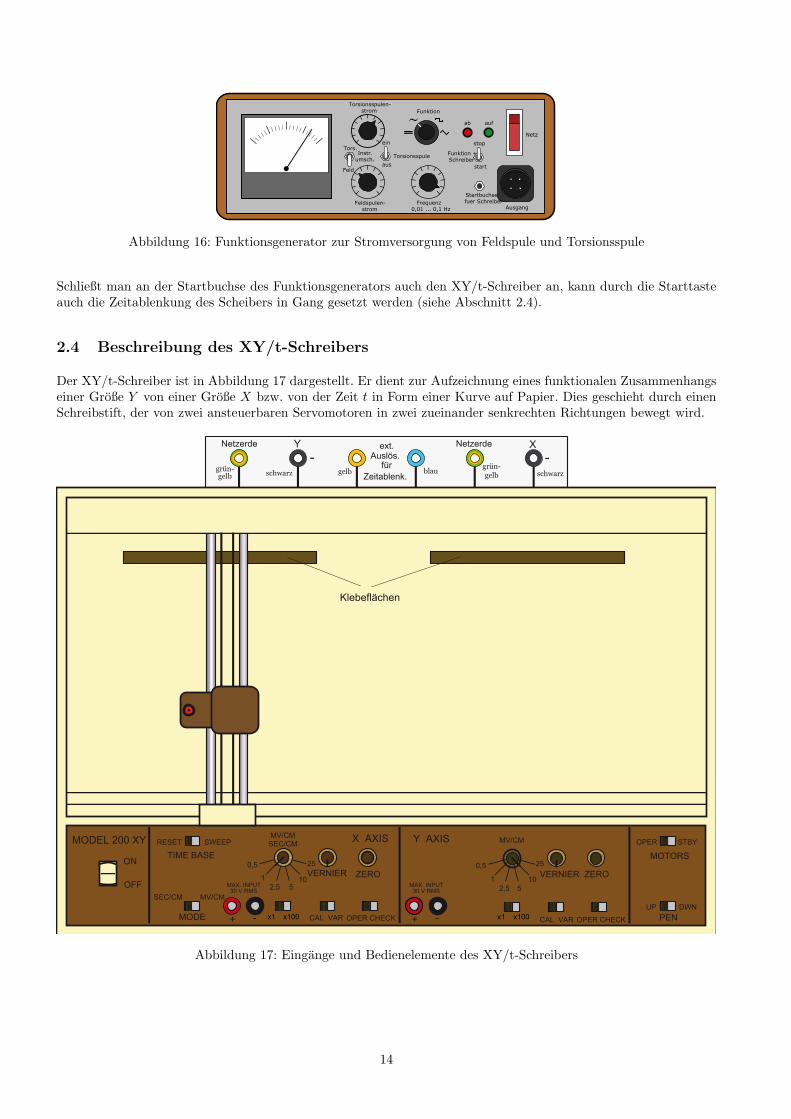
Abbildung 16: Funktionsgenerator zur Stromversorgung von Feldspule und Torsionsspule
Schließt man an der Startbuchse des Funktionsgenerators auch den XY/t-Schreiber an, kann durch die Starttasteauch die Zeitablenkung des Scheibers in Gang gesetzt werden (siehe Abschnitt 2.4).
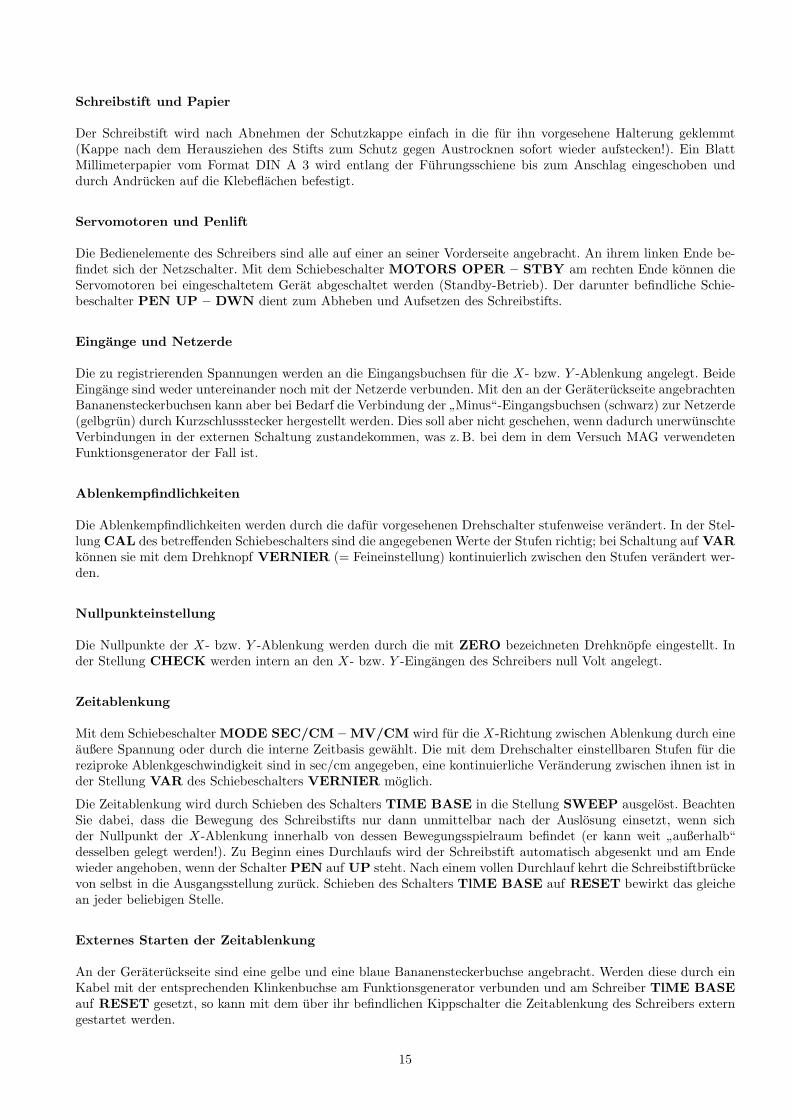
2.4 Beschreibung des XY/t-Schreibers
Der XY/t-Schreiber ist in Abbildung 17 dargestellt. Er dient zur Aufzeichnung eines funktionalen Zusammenhangseiner Große Y von einer Große X bzw. von der Zeit t in Form einer Kurve auf Papier. Dies geschieht durch einenSchreibstift, der von zwei ansteuerbaren Servomotoren in zwei zueinander senkrechten Richtungen bewegt wird.
Netzerde ext.Auslös.
fürZeitablenk.
NetzerdeY-
X-
grün-gelb schwarz gelb blau
grün-gelb schwarz
MODEL 200 XY
ON
OFF
TIME BASE
MODE
VERNIER ZERO
X AXIS Y AXIS
MAX. INPUT30 V RMS
CAL VAR OPER CHECK
RESET SWEEP
SEC/CM MV/CM
0,5
12,5 5
10
25
MV/CMSEC/CM
0,5
12,5 5
10
25
+ -
MAX. INPUT30 V RMS
+ -
MV/CM
CAL VAR OPER CHECK
VERNIER ZERO
OPER
UP
STBY
DWN
MOTORS
PEN
Klebeflächen
x1 x100x1 x100
Abbildung 17: Eingange und Bedienelemente des XY/t-Schreibers
14
Schreibstift und Papier
Der Schreibstift wird nach Abnehmen der Schutzkappe einfach in die fur ihn vorgesehene Halterung geklemmt(Kappe nach dem Herausziehen des Stifts zum Schutz gegen Austrocknen sofort wieder aufstecken!). Ein BlattMillimeterpapier vom Format DIN A 3 wird entlang der Fuhrungsschiene bis zum Anschlag eingeschoben unddurch Andrucken auf die Klebeflachen befestigt.
Servomotoren und Penlift
Die Bedienelemente des Schreibers sind alle auf einer an seiner Vorderseite angebracht. An ihrem linken Ende be-findet sich der Netzschalter. Mit dem Schiebeschalter MOTORS OPER – STBY am rechten Ende konnen dieServomotoren bei eingeschaltetem Gerat abgeschaltet werden (Standby-Betrieb). Der darunter befindliche Schie-beschalter PEN UP – DWN dient zum Abheben und Aufsetzen des Schreibstifts.
Eingange und Netzerde
Die zu registrierenden Spannungen werden an die Eingangsbuchsen fur die X- bzw. Y -Ablenkung angelegt. BeideEingange sind weder untereinander noch mit der Netzerde verbunden. Mit den an der Gerateruckseite angebrachtenBananensteckerbuchsen kann aber bei Bedarf die Verbindung der ”Minus“-Eingangsbuchsen (schwarz) zur Netzerde(gelbgrun) durch Kurzschlussstecker hergestellt werden. Dies soll aber nicht geschehen, wenn dadurch unerwunschteVerbindungen in der externen Schaltung zustandekommen, was z. B. bei dem in dem Versuch MAG verwendetenFunktionsgenerator der Fall ist.
Ablenkempfindlichkeiten
Die Ablenkempfindlichkeiten werden durch die dafur vorgesehenen Drehschalter stufenweise verandert. In der Stel-lung CAL des betreffenden Schiebeschalters sind die angegebenen Werte der Stufen richtig; bei Schaltung auf VARkonnen sie mit dem Drehknopf VERNIER (= Feineinstellung) kontinuierlich zwischen den Stufen verandert wer-den.
Nullpunkteinstellung
Die Nullpunkte der X- bzw. Y -Ablenkung werden durch die mit ZERO bezeichneten Drehknopfe eingestellt. Inder Stellung CHECK werden intern an den X- bzw. Y -Eingangen des Schreibers null Volt angelegt.
Zeitablenkung
Mit dem Schiebeschalter MODE SEC/CM – MV/CM wird fur die X-Richtung zwischen Ablenkung durch eineaußere Spannung oder durch die interne Zeitbasis gewahlt. Die mit dem Drehschalter einstellbaren Stufen fur diereziproke Ablenkgeschwindigkeit sind in sec/cm angegeben, eine kontinuierliche Veranderung zwischen ihnen ist inder Stellung VAR des Schiebeschalters VERNIER moglich.
Die Zeitablenkung wird durch Schieben des Schalters TIME BASE in die Stellung SWEEP ausgelost. BeachtenSie dabei, dass die Bewegung des Schreibstifts nur dann unmittelbar nach der Auslosung einsetzt, wenn sichder Nullpunkt der X-Ablenkung innerhalb von dessen Bewegungsspielraum befindet (er kann weit ”außerhalb“desselben gelegt werden!). Zu Beginn eines Durchlaufs wird der Schreibstift automatisch abgesenkt und am Endewieder angehoben, wenn der Schalter PEN auf UP steht. Nach einem vollen Durchlauf kehrt die Schreibstiftbruckevon selbst in die Ausgangsstellung zuruck. Schieben des Schalters TlME BASE auf RESET bewirkt das gleichean jeder beliebigen Stelle.
Externes Starten der Zeitablenkung
An der Gerateruckseite sind eine gelbe und eine blaue Bananensteckerbuchse angebracht. Werden diese durch einKabel mit der entsprechenden Klinkenbuchse am Funktionsgenerator verbunden und am Schreiber TlME BASEauf RESET gesetzt, so kann mit dem uber ihr befindlichen Kippschalter die Zeitablenkung des Schreibers externgestartet werden.
15
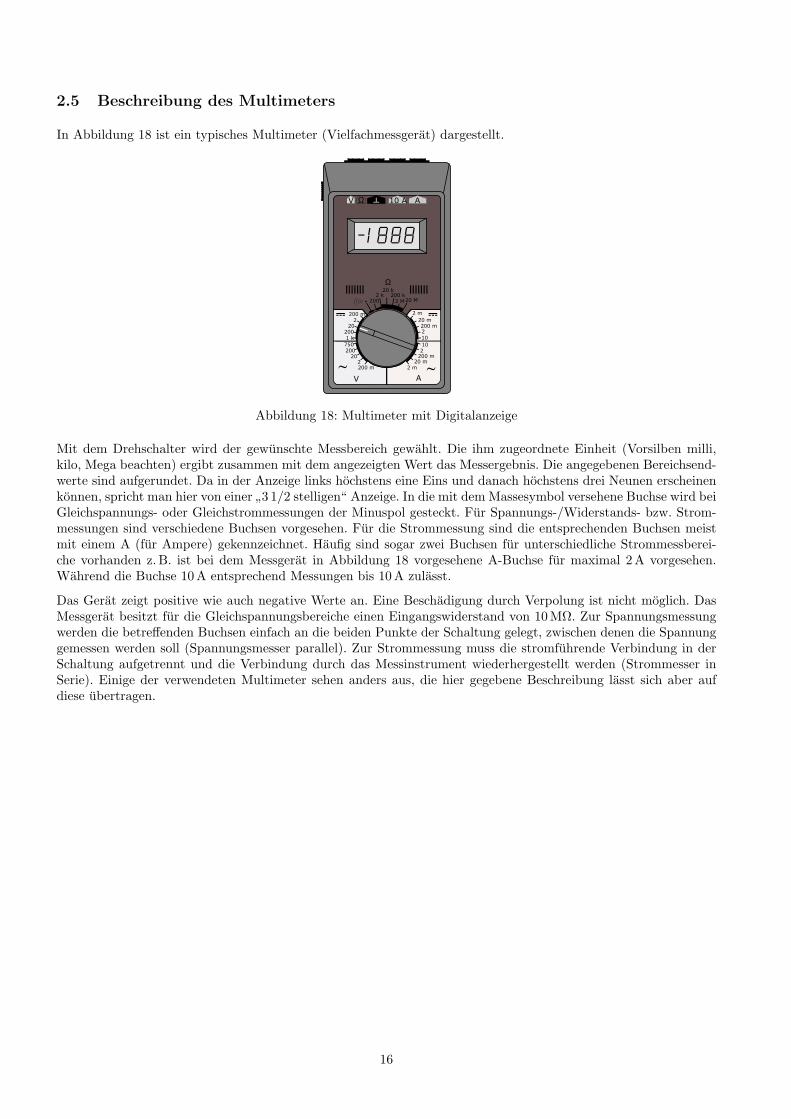
2.5 Beschreibung des Multimeters
In Abbildung 18 ist ein typisches Multimeter (Vielfachmessgerat) dargestellt.
Abbildung 18: Multimeter mit Digitalanzeige
Mit dem Drehschalter wird der gewunschte Messbereich gewahlt. Die ihm zugeordnete Einheit (Vorsilben milli,kilo, Mega beachten) ergibt zusammen mit dem angezeigten Wert das Messergebnis. Die angegebenen Bereichsend-werte sind aufgerundet. Da in der Anzeige links hochstens eine Eins und danach hochstens drei Neunen erscheinenkonnen, spricht man hier von einer ”3 1/2 stelligen“ Anzeige. In die mit dem Massesymbol versehene Buchse wird beiGleichspannungs- oder Gleichstrommessungen der Minuspol gesteckt. Fur Spannungs-/Widerstands- bzw. Strom-messungen sind verschiedene Buchsen vorgesehen. Fur die Strommessung sind die entsprechenden Buchsen meistmit einem A (fur Ampere) gekennzeichnet. Haufig sind sogar zwei Buchsen fur unterschiedliche Strommessberei-che vorhanden z. B. ist bei dem Messgerat in Abbildung 18 vorgesehene A-Buchse fur maximal 2 A vorgesehen.Wahrend die Buchse 10 A entsprechend Messungen bis 10 A zulasst.
Das Gerat zeigt positive wie auch negative Werte an. Eine Beschadigung durch Verpolung ist nicht moglich. DasMessgerat besitzt fur die Gleichspannungsbereiche einen Eingangswiderstand von 10 MΩ. Zur Spannungsmessungwerden die betreffenden Buchsen einfach an die beiden Punkte der Schaltung gelegt, zwischen denen die Spannunggemessen werden soll (Spannungsmesser parallel). Zur Strommessung muss die stromfuhrende Verbindung in derSchaltung aufgetrennt und die Verbindung durch das Messinstrument wiederhergestellt werden (Strommesser inSerie). Einige der verwendeten Multimeter sehen anders aus, die hier gegebene Beschreibung lasst sich aber aufdiese ubertragen.
16
3 Versuchsdurchfuhrung
Vorbemerkung zum Funktionsgenerator
Vor dem Ausschalten des Funktionsgenerators den eingestellten Feldstrom stets langsam auf null herunterregeln,da sonst die beim abrupten Abschalten am Helmholtz-Spulenpaar auftretenden hohen Induktionsspannungen dieempfindliche Elektronik des Funktionsgenerators zerstoren konnen.
3.1 Teilversuch 1: Sichtbarmachen der Magnetfeldlinien mit Hilfe von Eisenspanen
Inhalt
In eine Ebene parallel zur Feldspulenachse werden kleine Teilchen aus Eisen gestreut, die sich nach den Magnet-feldlinien ausrichten.
Versuch
Schneiden Sie ein unbedrucktes DIN A3 Blatt nach der am Arbeitsplatz liegenden Aluminiumplatte zu und klebenSie dies mit Klebestreifen auf dieselbe.
Schieben Sie nun die Aluminiumplatte mit dem Blatt in die Halterung am Spulenpaar. Streuen Sie jetzt dieEisenteilchen (Spane oder Pulver) dunn und gleichmaßig auf das Blatt.
Funktionsgenerator bei auf null gestelltem Feldspulenstrom einschalten. Dann den Feldspulenstrom langsam aufden Maximalwert erhohen. Klopfen Sie vorsichtig auf die Unterseite der Tragerplatte, bis sich die Eisenteilchenausgerichtet haben. Skizzieren Sie das beobachtete Feldlinienbild und erganzen Sie die Skizze um den fehlenden Teil.Zeichnen Sie auch die Feldrichtung ein, die sich aus dem an den Spulen angegebenen Umlaufsinn des Feldstromesergibt.
3.2 Teilversuch 2: Drehmoment des Feldes auf eine stromdurchflossene Spule
Inhalt
Messung des Drehmoments, das ein Magnetfeld auf eine stromdurchflossene Spule ausubt, in Abhangigkeit vomWinkel zwischen Spulenachse und Feldrichtung.
Vorbereitung der Apparatur
• Schalten Sie zunachst den Funktionsgenerator aus (Vorbemerkung beachten).
• Schieben Sie die Winkelskala in das Helmholtz-Spulenpaar ein (Nullstrich nach rechts).
• Bauen Sie die Torsionsspule ein.
• Verbinden Sie die Torsionsspule mit den Stromzufuhrungsbuchsen. Damit die Drehbewegung der Torsionspulemoglichst nicht durch die Anschlussleitungen gestort wird, sind diese extrem dunn, dementsprechend leichtkonnen diese aber auch reißen. Bitte gehen Sie deshalb mit diesen Leitungen sehr vorsichtig um.
• Positionieren Sie die Winkelskala nun so, dass die Torsionsspule in ihr nach Augenmaß zentriert ist, undziehen Sie dann die Klemmschrauben fest.
• Richten Sie die Achse der Torsionsspule senkrecht zur Achse des Helmholtz-Spulenpaares aus.
• Schalten Sie den Funktionsgenerator ein und fahren Sie Feld- und Torsionsspulenstrom auf ihre Maximalwertehoch (grobe Kontrolle mit dem eingebauten Strommessgerat). Die Torsionsspule sollte vom Feld um einengroßen Winkel (bis maximal 90) verdreht werden. Lassen Sie von jetzt ab die Drehknopfe fur beide Stromefur diesen Teilversuch unverandert.
17
• Schalten Sie nun den Torsionsspulenstrom aus.
• Richten Sie den Flachenvektor (angegebene Stromflussrichtung beachten) der Torsionsspule so aus, dass ermoglichst genau in Feldrichtung des Helmholtz-Spulenpaares zeigt. Beim Wiedereinschalten des Torsions-spulenstroms sollte kein Drehmoment auf die Torsionsspule wirken. Aluminiumplatte mit Winkelskala ggf.nachjustieren.
Messreihe
• Schalten Sie Feld- und Torsionsspulenstrom ein. Variieren Sie den Winkel α zwischen der Torsionsspulenachseund der Achse des Helmholtz-Spulenpaares in Schritten von 10 auf 90 durch Drehen des Drehknopfes amTorsionsdrahtes.
• Messen Sie den Drehwinkel des Drehknopfes. Sie mussen daraus in der Auswertung den Torsionswinkelausrechnen.
• Schatzen Sie den Fehler der Winkelmessung ab.
3.3 Teilversuch 3: Induktion durch Drehen einer Spule in einem Magnetfeld
Vorbemerkung zum XY/t-Schreiber
• Machen Sie sich zunachst gemaß Abschnitt 2.4 mit dem Schreiber vertraut.
• Wenn Sie am Schreiber Kabel an- oder abschließen, sollten Sie den Schreiber in den Standby-Modus schalten.
Inhalt
Induktion einer Spannung durch Drehung einer Spule in einem zeitlich konstanten Magnetfeld, Registrierung deszeitlichen Verlaufs der induzierten Spannung. Bestimmung der Flussdichte aus den Messwerten und aus der Feld-spulengeometrie.
Vorbereitung der Apparatur
• Schalten Sie zunachst den Funktionsgenerator aus (Vorbemerkung beachten).
• Schließen Sie zur genaueren Messung des Feldstroms (das im Funktionsgenerator eingebaute Messinstrumentist zu ungenau) ein Multimeter in die Feldspulenzuleitung.
• Montieren Sie die motorgetriebene Induktionsspule.
• Schließen Sie die Induktionsspule mit flexiblen dunnen Kabeln an die Y -Ablenkung des Schreibers.
• Schalten Sie den Motor an (Vorsicht: Die Verbindungskabel werden durch die Drehung der Spule verdrillt,was aber nicht grenzenlos moglich ist).
• Schalten Sie den Funktionsgenerator ein und fahren Sie den Feldstrom auf einen Wert hoch, bei dem die Am-plitude der Schreiberbewegung fur die Y -Ablenkempfindlichkeit 100 mV/cm ohne Ubersteuerung moglichstgroß ist.
Messungen
• Zeichnen Sie mit dem Schreiber die Nulllinie fur die induzierte Spannung.
• Zeichen Sie die induzierte Spannung bei laufendem Motor mit dem Ablenkfaktor 1 s/cm auf.
• Notiern Sie die Schreibereinstellung, damit Sie in der Auswertung die Y und die t-Achse skalieren konnen.
• Messen und notieren Sie alle weiteren physikalischen Großen, um aus der Amplitude der induzierten Spannungdie magnetische Flußsdichte B zu bestimmen.
18
3.4 Teilversuch 4: Induktion durch ein zeitlich veranderliches Magnetfeld
Inhalt
Induktion einer Spannung in einer unbewegten Spule durch ein zeitlich variables Feld. Registrierung des zeitlichenVerlaufs der Feldstarke und der induzierten Spannung. Uberprufung, ob die Induktionsspannung proportional zurnegativen Zeitableitung der Feldstarke ist.
Vorbereitung der Apparatur
• Schalten Sie zunachst den Funktionsgenerator aus (Vorbemerkung beachten), entfernen Sie das Multimeteraus dem Feldstromkreis und schalten Sie den Schreiber in den Standby-Modus.
• Bringen Sie den Flachenvektor der Induktionsspule (Umlaufrichtung beachten) durch vorsichtiges Drehen derMotorwelle mit der Hand in Ubereinstimmung mit der Feldrichtung.
• Verbinden Sie die Startbuchse fur den Schreiber am Funktionsgenerator mit den entsprechenden Bananen-steckerbuchsen auf der Ruckseite des Schreibers.
• Schalten Sie den Funktionsgenerator auf Dreieck und verbinden ihn mit dem Y-Eingang des Schreibers.
• Schalten Sie den Funktionsgenerator ein, und starten Sie die Dreiecksfunkion.
• Stellen Sie die Frequenz der Dreiecksfunktion mit Hilfe der Stoppuhr (Frequenzskala zu ungenau) so ein, dassdie Periodendauer etwa 20 s betragt.
• Verbinden Sie den Y -Eingang des Schreibers so mit der Feldspule, dass Sie den Feldstrom messen.
• Wahlen Sie als Ablenkfaktor fur den Y -Eigang 25 mV/cm.
• Stellen Sie die Amplitude der Dreiecksfunktion so ein, dass der Schreiber etwas weniger als die halbe Blatthoheausnutzt.
• Verwenden Sie nun die Zeitablenkung des Schreibers. Einstellung: Mode auf SEC/CM, reziproke Ge-schwindgiekt auf 1 s/cm und TIME BASE auf RESET.
Messungen
• Starten Sie den Feldstrom und zeichnen ihn mit dem Schreiber in der oberen Blatthalfte auf. Nach Been-digung des Schreibvorgangs die zeitliche Funktion des Feldstroms stoppen (aber erst, wenn wieder dieselbeLeuchtdiode wie am Anfang in Betrieb ist).
• Zeichnen Sie mit dem Schreiber die Nulllinie fur den Feldstrom.
• Zeichnen Sie mit dem Schreiber die Induktionsspannung auf (untere Blatthalfte).
• Zeichnen Sie mit dem Schreiber die Nulllinie fur die Induktionsspannung.
• Zeichnen Sie vier weitere Verlaufe von Feldstrom und induzierter Spannung auf, indem Sie die Amplitude desFeldstroms in aquidistanten Schritten reduzieren.
• Notiern Sie die Schreibereinstellung, damit Sie in der Auswertung Y - und t-Achse skalieren konnen.
• Schalten Sie den Fuktionsgenerator aus (Vorbemerkung beachten).
3.5 1. Freiwilliger Zusatzversuch
Funktion auf Sinus umschalten und in gleicher Weise funf Kurvenpaare auf einem neuen Blatt schreiben.
3.6 2. Freiwilliger Zusatzversuch
Funktion auf Rechteck umschalten und zuerst die Feldspannung aufnehmen. Uberlegen Sie, wie sich die induzierteSpannung verhalten wird, und messen Sie diese mit dem Schreiber. Beurteilen Sie nach den Ergebnissen die Qualitatdes Schreibers.
19
4 Auswertung
4.1 Teilversuch 2: Drehmoment des Feldes auf eine stromdurchflossene Spule
• Berechnen Sie aus Ihren Messwerten den Torsionswinkel ϕ.
• Tragen Sie den Torsionswinkel ϕ gegen sinα auf.
• Tragen Sie die Fehler von ϕ in das Diagramm ein (die von α sind zu vernachlassigen).
• Prufen Sie, ob die Messpunkte im Rahmen der Fehlergrenzen auf einer durch den Nullpunkt gehenden Geradenliegen.
4.2 Teilversuch 3: Induktion durch Drehen einer Spule in einem Magnetfeld
• Erganzen Sie das Schreiberdiagramm durch ein skaliertes Koordinatensystem.
• Lesen Sie aus dem Schreiberdiagramm moglichst viele Amplituden fur die Induktionsspannung ab, und bildenSie daraus eine mittlere Amplitude.
• Berechnen Sie die magnetische Flussdichte | ~B| nach Abschnitt 1.2 aus Ihren Messwerten mit Fehlerangabe.
• Berechnen Sie den theoretischen Wert fur | ~B| nach Abschnitt 1.1, und vergleichen Sie ihn mit dem vorherigenWert.
Hinweis: Die aufgedruckte Drehfrequenz des Motors bezieht sich auf das amerikanische 60 Hz-Netz und mussdeshalb auf das europaische 50 Hz-Netz umgerechnet werden. Die Umdrehungsfrequenz ist bei dem verwendetenMotortyp proportional zur Netzfrequenz.
4.3 Teilversuch 4: Induktion durch ein zeitlich veranderliches Magnetfeld
• Erganzen Sie das Schreiberdiagramm durch ein skaliertes Koordinatensystem.
• Legen Sie fur eine ausgewahlte Halbperiode Ausgleichsgeraden in die Kurvenverlaufe fur den Feldstrom, undbestimmen Sie deren Steigungen.
• Legen Sie fur eine ausgewahlte Halbperiode waagerechten Geraden in die Kurvenverlaufe fur die Induktionss-pannung.
• Prufen Sie, ob das Induktionsgesetz gilt.
4.4 1. Freiwilliger Zusatzversuch
Tragen Sie die Amplituden des Feldstroms gegen die induzierten Spannung auf. Die Messpunkte sollten auf einerGeraden liegen.
20




























