Embed Size (px)
Citation preview
Prof. Dr. Ernst Forgber
Multitasking mit AVR RISC-Controllern
· Entwicklung eines echtzeitfähigen, prioritätsgesteuerten, präemptiven Tasking-Systems
· Von der einfachen Programmschleife zu Multitasking- und Echtzeitkonzepten
· Anhand praktischer Beispiele für die Atmel-8-Bit-Controller
P C & E L E K T R O N I K
49,95 EUR [D] / 51,40 EUR [A]
ISBN 978-3-645-65270-4
Besuchen Sie unsere Website
www.franzis.de
Prof. Dr. Ernst Forgber
Das Buch stellt anhand praktischer Beispiele für die Atmel-8-Bit-Controller mehrere Ansätze für Multitasking-Programme vor. Ausgehend von der Lösung mit einer einfachen Programmschleifewerden Multitasking- und Echtzeitkonzepte erläutert – bis hin zur Entwicklung eines echtzeitfähigen, prioritätsgesteuerten, präemptiven Tasking-Systems.
Die Ausführungen der verschiedenen Konzepte erfolgen anhand durch-gehender Beispiele. Dabei wird zunächst immer die grundlegende Ideevorgestellt, die dann mithilfe der praktischen Beispielen konkretisiert undin einem anschließenden Blick auf die Details vertieft wird.
Aufbau des Buchs:
Multitasking, Kontext, Real-Time & Co.Begriffliche Erklärungen und grundlegende Mechanismen.
ExperimentierumgebungBeschreibung der Hard- und Software.
AVR-Controller in C programmierenBesonderheiten bei der Programmierung von AVR-Controllern.
Multitasking, die Erste: Die MinimalversionKlassischer Ansatz zum Multitasking unter komplettem Verzicht auf einen Scheduler und dem Versuch, alles über Interrupts und eine großeProgrammschleife zu realisieren. Betrachtung verschiedener Schedulermit wachsender Komplexität in Theorie und Praxis.
Multitasking, die Zweite: Ein Scheduler im EigenbauDarstellung der Funktionsweise eines einfachen prioritätsgesteuertenSchedulers für zyklische Funktionen.
Multitasking, die Dritte: Kooperation ist gefragtZeigt die Funktionsweise eines kooperativen Schedulers auf der Basis vonDunkels' Protothreads.
Multitasking, die Vierte: Präemptives TaskingVorstellung eines vollständig prioritätsgesteuerten RTOS-Schedulers mitPräemption.
P C & E L E K T R O N I K
Aus dem Inhalt:• Kooperatives Round Robin und
präemptives Scheduling
• Multitasking und Echtzeitfähigkeit
• Hard- und Software für die Programm-entwicklung
• Serielle Schnittstelle initialisieren, Daten senden und empfangen
• AD-Wandler initialisieren und analogeSpannungswerte einlesen
• Timer2 als PWM konfigurieren
• RTC-Drehzahlregler mit Tachogeneratoru. m.
• Scheduler: im Eigenbau und praktischer Einsatz
• Adam Dunkels' Protothreads
• COS-Drehzahlregler mit Drehgeber und Hardware-PWM
• Protothreads: Makros machen's möglich
• Taskliste, Semaphoren, FIFO, Scheduler und Speicherbedarf
• Präemptives Tasking und die Idee dahinter
• Semaphoren: gemeinsam genutzte Ressourcen schützen
• RTOS: Teste die Möglichkeiten
• RTOS-Drehzahlregler mit Drehgeberund Hardware-PWM
• Interface-Schaltung für zwei Gleichstrommotoren mit Drehgeber
• Pin-Belegung des benutzten Evaluation-Boards
• Softwaremodule und Beispielprogramme
Prof
. Dr.
Forg
ber
Mul
tita
skin
g m
it A
VR
RIS
C-C
ontr
olle
rn
Multitasking mit AVR RISC-Controllern
Lösungsansätze und praktische Beispiele für Multitasking-Programme
Lösungsansätze und praktische Beispiele für Multitasking-Programme
Über den Autor:
Prof. Dr. Ernst Forgber lehrt an der Hochschule Hannover an der FakultätElektro- und Informationstechnik. Er arbeitet auf den Gebieten Software-Technik, Echtzeitsysteme und Entwurf digitaler Schaltungen mit VHDL.
65270-4_U1+U4_2_Layout 1 29.10.14 17:06 Seite 1

Prof. Dr. Ernst Forgber
Multitasking mitAVR RISC-Controllern
65270-4_Titelei_Layout 1 29.10.14 17:06 Seite 1
Prof. Dr. Ernst Forgber
P C & E L E K T R O N I K
Multitasking mit AVR RISC-Controllern
· Entwicklung eines echtzeitfähigen, prioritätsgesteuerten, präemptiven Tasking-Systems
· Von der einfachen Programmschleife zu Multitasking- und Echtzeitkonzepten
· Anhand praktischer Beispiele für die Atmel-8-Bit-Controller
Lösungsansätze und praktische Beispiele für Multitasking-Programme
65270-4_Titelei_Layout 1 29.10.14 17:06 Seite 3

© 2014 Franzis Verlag GmbH, 85540 Haar bei München
Alle Rechte vorbehalten, auch die der fotomechanischen Wiedergabe und der Speicherung in elektronischen Medien. Das Erstellen und
Verbreiten von Kopien auf Papier, auf Datenträgern oder im Internet, insbesondere als PDF, ist nur mit ausdrücklicher Genehmigung des Verlags
gestattet und wird widrigenfalls strafrechtlich verfolgt.
Die meisten Produktbezeichnungen von Hard- und Software sowie Firmennamen und Firmenlogos, die in diesem Werk genannt werden, sind
in der Regel gleichzeitig auch eingetragene Warenzeichen und sollten als solche betrachtet werden. Der Verlag folgt bei den Produktbezeich-
nungen im Wesentlichen den Schreibweisen der Hersteller.
Herausgeber: Ulrich Dorn
Satz: DTP-Satz A. Kugge, München
art & design: www.ideehoch2.de
Druck: C.H. Beck, Nördlingen
Printed in Germany
ISBN 978-3-645-65270-4
Bibliografische Information der Deutschen Bibliothek
Die Deutsche Bibliothek verzeichnet diese Publikation in der Deutschen Nationalbibliografie;
detaillierte Daten sind im Internet über http://dnb.ddb.de abrufbar.
Hinweis: Alle Angaben in diesem Buch wurden vom Autor mit größter Sorgfalt erarbeitet bzw. zusammengestellt und unter Einschaltung wirk-samer Kontrollmaßnahmen reproduziert. Trotzdem sind Fehler nicht ganz auszuschließen. Der Verlag und der Autor sehen sich deshalb gezwun-gen, darauf hinzuweisen, dass sie weder eine Garantie noch die juristische Verantwortung oder irgendeine Haftung für Folgen, die auf fehlerhafteAngaben zurückgehen, übernehmen können. Für die Mitteilung etwaiger Fehler sind Verlag und Autor jederzeit dankbar. Internetadressen oderVersionsnummern stellen den bei Redaktionsschluss verfügbaren Informationsstand dar. Verlag und Autor übernehmen keinerlei Verantwortungoder Haftung für Veränderungen, die sich aus nicht von ihnen zu vertretenden Umständen ergeben. Evtl. beigefügte oder zum Download an-gebotene Dateien und Informationen dienen ausschließlich der nicht gewerblichen Nutzung. Eine gewerbliche Nutzung ist nur mit Zustimmungdes Lizenzinhabers möglich.
65270-4_Titelei_Layout 1 29.10.14 17:06 Seite 4
5
Worum geht es hier? Mittlerweile gibt es für praktisch alle Mikrocontroller einen leistungsfähigen C-Compi-ler mit ansprechender Entwicklungsumgebung, mit deren Hilfe man relativ schnell eigene Anwendungen erstellen kann. Aber selbst kleine Programme haben oft mehrere Dinge gleichzeitig zu erledigen: einen Motor steuern, eine Eingangsspannung messen, Taster und Schalter auslesen, LEDs schalten, Ausgaben über die serielle Schnittstelle an einen PC senden und vieles mehr.
Hat ein Programm mehrere Aufgaben praktisch gleichzeitig zu erledigen, lässt sich dieses Multitasking-Problem auf unterschiedliche Arten realisieren. Dieses Buch stellt anhand praktischer Beispiele für die Atmel-8-Bit-Controller mehrere Ansätze für Multitasking-Programme vor. Ausgehend von einer Lösung mit einer einfachen Pro-grammschleife werden Multitasking- und Echtzeitkonzepte erläutert – bis hin zur Ent-wicklung eines echtzeitfähigen, prioritätsgesteuerten, präemptiven Tasking-Systems.
Aufbau des Buchs
Das Buch ist wie folgt aufgebaut: Im Kapitel »Multitasking, Kontext, Real-Time & Co.« werden einige Begriffe und grundlegende Mechanismen zum Thema Multitasking erklärt. Das Kapitel »Experimentierumgebung« beschreibt Hardware und Software, mit denen die Beispielprogramme entwickelt und getestet wurden.
Einige Besonderheiten der Programmierung speziell auf AVR-Controllern, wie etwa die Verwendung der seriellen Schnittstelle, der Analogwerteingabe und der Hardware-PWM (Pulse-Width Modulation) sowie die Verwendung von Interrupts, werden im Kapitel »AVR-Controller in C programmieren« behandelt.
Das Kapitel »Multitasking, die Erste: Die Minimalversion« beschäftigt sich mit dem »klassischen« Ansatz zum Multitasking, bei dem man auf einen Scheduler komplett ver-zichtet und alles über Interrupts und eine große Programmschleife zu realisieren ver-sucht. Daran schließt sich die Betrachtung verschiedener Scheduler mit wachsender Komplexität in Theorie und Praxis an.
Ein einfacher prioritätsgesteuerter Scheduler für zyklische Funktionen wird im Kapitel »Multitasking, die Zweite: Ein Scheduler im Eigenbau« vorgestellt. Das Kapitel »Multi-tasking, die Dritte: Kooperation ist gefragt« beschäftigt sich mit einem kooperativen Scheduler auf der Basis von Dunkels‘ »Protothreads«. Im Kapitel »Multitasking, die Vierte: Präemptives Tasking« wird schließlich ein vollständiger präemptiver Scheduler mit Prioritätssteuerung vorgestellt.
6 Worum geht es hier?
Die Ausführungen zu den verschiedenen Konzepten erfolgen anhand durchgehender Beispiele. Dabei wird zunächst immer die grundlegende Idee vorgestellt, die dann anhand von praktischen Beispielen konkretisiert und in einem anschließenden Blick auf die Details vertieft wird.
Die Beispielprogramme können unter www.buch.cd heruntergeladen werden. Eine Übersicht der verwendeten Softwaremodule und Programme findet sich in Anhang A.3.

7
Inhaltsverzeichnis
1 Multitasking, Kontext, Real-Time & Co. ........................................................ 11 1.1 Kontext .......................................................................................... 11 1.2 Zustand einer Task ......................................................................... 12 1.3 Scheduler....................................................................................... 13 1.3.1 Kooperatives Scheduling ................................................................. 13 1.3.2 Round Robin Scheduling.................................................................. 14 1.3.3 Präemptives Scheduling .................................................................. 14 1.4 Multitasking und Echtzeitfähigkeit ................................................. 15
2 Experimentierumgebung.............................................................................. 17 2.1 Hardware........................................................................................ 17 2.2 Entwicklungsumgebung ................................................................. 18 2.3 Interface-Schaltung........................................................................ 18
3 AVR-Controller in C programmieren.............................................................. 19 3.1 Digitale Ein- und Ausgaben............................................................. 19 3.2 Die serielle Schnittstelle nutzen ..................................................... 21 3.2.1 Die serielle Schnittstelle initialisieren .............................................. 22 3.2.2 Daten senden und empfangen ......................................................... 22 3.2.3 Beispielprogramm: Zeichen vom Terminal lesen .............................. 23 3.3 Analoge Werte messen ................................................................... 25 3.3.1 Den Analog-Digital-Wandler initialisieren......................................... 25 3.3.2 Analoge Spannungswerte einlesen .................................................. 26 3.3.3 Beispielprogramm: Messungen am Spannungsteiler ....................... 27 3.4 PWM .............................................................................................. 30 3.4.1 Timer2 als PWM konfigurieren.......................................................... 30 3.4.2 Beispielprogramm: Motordrehzahl einstellen .................................. 32 3.5 Interrupt......................................................................................... 35 3.5.1 Timer-Interrupt: Systemuhr .............................................................. 35 3.5.2 Beispielprogramm: Uhrzeit und blinkende LED ................................ 36 3.5.3 Hardware-Interrupt........................................................................... 38 3.5.4 Beispielprogramm: Drehgeber auswerten ........................................ 41 3.6 Datenflussdiagramm ...................................................................... 43
8 Inhaltsverzeichnis
4 Multitasking, die Erste: Die Minimalversion................................................. 45 4.1 Die Grundidee ................................................................................ 45 4.2 Der praktische Einsatz.................................................................... 47 4.2.1 Drehzahlregler mit Tachogenerator und Hardware-PWM................... 47 4.3 Zusammenfassung ......................................................................... 58
5 Multitasking, die Zweite: Ein Scheduler im Eigenbau ................................... 59 5.1 Die Grundidee ................................................................................ 59 5.2 Modul RTC-Scheduler ..................................................................... 63 5.3 Der praktische Einsatz.................................................................... 65 5.3.1 RTC-Drehzahlregler mit Tachogenerator ........................................... 65 5.3.2 RTC-Drehzahlregler mit Drehgeber und Hardware-PWM .................... 72 5.3.3 RTC-Drehzahlregler mit Drehgeber und Software-PWM ..................... 82 5.3.4 RTC-Drehzahlregler für zwei Motoren mit FIFO und Software-
PWM ................................................................................................ 92 5.4 Ein Blick auf die Details ................................................................ 106 5.4.1 Task-Liste ...................................................................................... 106 5.4.2 Task-Synchronisation .................................................................... 108 5.4.3 FIFO ............................................................................................... 110 5.4.4 Scheduler ...................................................................................... 113 5.4.5 Speicherbedarf .............................................................................. 114 5.5 Zusammenfassung ....................................................................... 115
6 Multitasking, die Dritte: Kooperation ist gefragt ........................................ 117 6.1 Die Grundidee: Adam Dunkels‘ Protothreads ................................ 118 6.2 Modul COS-Scheduler .................................................................. 120 6.3 Der praktische Einsatz.................................................................. 123 6.3.1 COS: Teste die Möglichkeiten ........................................................ 123 6.3.2 COS-Drehzahlregler mit Tachogenerator und Hardware-PWM ......... 130 6.4 COS-Drehzahlregler mit Drehgeber und Hardware-PWM ............... 138 6.4.1 COS-Drehzahlregler für zwei Motoren mit FIFO und Software-
PWM .............................................................................................. 148 6.5 Ein Blick auf die Details ................................................................ 159 6.5.1 Protothreads: Makros machen‘s möglich ....................................... 159 6.5.2 Task-Liste ...................................................................................... 163 6.5.3 Semaphoren .................................................................................. 164 6.5.4 FIFO ............................................................................................... 166 6.5.5 Scheduler ...................................................................................... 170 6.5.6 Speicherbedarf .............................................................................. 172 6.6 Zusammenfassung ....................................................................... 173
Inhaltsverzeichnis 9
7 Multitasking, die Vierte: Präemptives Tasking ........................................... 175 7.1 Die Grundidee .............................................................................. 175 7.1.1 Task-Kontext .................................................................................. 177 7.1.2 Semaphoren: gemeinsam genutzte Ressourcen schützen.............. 179 7.1.3 Ablaufinvariante Funktionen: »Reentrant Functions«...................... 182 7.2 Modul RTOS-Scheduler ................................................................ 183 7.3 Der praktische Einsatz.................................................................. 187 7.3.1 RTOS: Teste die Möglichkeiten....................................................... 187 7.3.2 RTOS-Drehzahlregler mit Tachogenerator und Hardware-PWM........ 196 7.3.3 RTOS-Drehzahlregler mit Drehgeber und Hardware-PWM................ 205 7.3.4 RTOS-Drehzahlregler für zwei Motoren mit Software-PWM.............. 215 7.4 Ein Blick auf die Details ................................................................ 226 7.4.1 Task-Liste ...................................................................................... 227 7.4.2 Task-Kontext .................................................................................. 228 7.4.3 Kontext retten und wiederherstellen .............................................. 229 7.4.4 Initialer Kontext einer Task............................................................. 231 7.4.5 Kontextwechsel ............................................................................. 233 7.4.6 Semaphoren .................................................................................. 237 7.4.7 Messagebox .................................................................................. 240 7.4.8 Scheduler ...................................................................................... 241 7.4.9 Zeitverhalten ................................................................................. 245 7.4.10 Speicherbedarf .............................................................................. 249 7.5 Zusammenfassung ....................................................................... 250
A Anhang...................................................................................................... 251 A.1 Interface-Schaltung für zwei Gleichstrommotoren mit
Drehgeber .................................................................................... 251 A.2 Pin-Belegung des benutzten Evaluation-Boards ........................... 253 A.3 Softwaremodule und Beispielprogramme..................................... 254
Literaturverzeichnis................................................................................... 257
Stichwortverzeichnis ................................................................................. 259
45
4 Multitasking, die Erste: Die Minimalversion
Dieser erste Ansatz für ein Multitasking kommt ohne ein Tasking-System aus und kann praktisch auf jedem Rechnersystem implementiert werden, auf dem eine Uhr vorhanden ist.
4.1 Die Grundidee
Auf dem AVR-Controller läuft ein C-Programm in einer Schleife, die nur von Interrupts unterbrochen wird. In dieser Hauptschleife werden zyklisch einfache C-Funktionen auf-gerufen, die die Tasks realisieren. Eine solche Task-Funktion kann eine Zustands-maschine enthalten, durch die gesteuert wird, was im aktuellen Aufruf der Task-Funk-tion zu tun ist. Die Reihenfolge der Task-Aufrufe ist deterministisch durch die Hauptschleife vorgegeben.
Damit alle Tasks arbeiten können, ist es zwingend erforderlich, dass jede Task-Funktion möglichst schnell bis zum normalen Funktionsende durchlaufen wird. Keinesfalls darf eine Task-Funktion blockierend auf z. B. eine Eingabe warten oder etwa eine gewollte Wartezeit durch eine Verzögerungsschleife realisieren. Dies würde auch alle anderen Tasks ausbremsen, die ja erst nach Beendigung der laufenden Task-Funktion starten können.
Der prinzipielle Programmaufbau ist im folgenden (unvollständigen) Listing eines fikti-ven Robotersystems dargestellt. Die Software ist in Tasks gegliedert. Dies sind Funktio-nen, die zyklisch in einer Endlosschleife aufgerufen werden und bei jedem Aufruf kom-plett durchlaufen. Im einfachsten Fall haben die Funktionen keine Parameter und liefern auch keinen Ergebniswert. Es gibt noch keinen Echtzeitkern, der die Tasks unterbrechen könnte, Interrupts sind aber in gewohnter Weise nutzbar.
Listing Anfang
...
static void InitRoboterSystem(void);
static void Task_RS232Radio(void);
static void Task_pwm(void);
static void Task_Navigation(void);
static void Task_command_decoder(void);
...
int main(void)
{ InitRoboterSystem();
sei(); // enable interrupts
46 Kapitel 4: Multitasking, die Erste: Die Minimalversion
while(1)
{
Task_RS232Radio();
Task_pwm();
Task_Navigation();
Task_command_decoder();
...
}
return 0;
}
static void InitRoboterSystem(void)
{
...
InitSystemTime();
initRS232Radio();
init_pwm();
init_Navigation();
init_command_decoder();
...
}
...
Listing Ende
Eine Task soll möglichst wenig Rechenzeit verbrauchen, damit die anderen Tasks nicht lange warten müssen. Wenn eine Task eine längere Aufgabe bearbeiten muss, ist diese in kleine Teilaufgaben zu zerlegen. Die Task enthält dann eine Zustandsmaschine, über die gesteuert wird, welche Teilaufgabe im aktuellen Aufruf zu erledigen ist.
Angenommen, die Task Task_Navigation habe eine gewaltige Aufgabe zu erledigen, die in drei Teile A, B, C zerlegt werden kann. In Teil A muss auf ein bestimmtes Ereignis gewartet werden, danach werden Teil B und C durchgeführt. Wenn alle drei Teile abge-arbeitet sind, beginnt die Task mit Teil A wieder von vorn. Natürlich darf man in Teil A nicht etwa in einer Schleife auf das Ereignis warten, dies würde alle anderen Tasks blockieren. Der (Pseudo-)Quellcode dazu könnte im Prinzip so aussehen:
Listing Anfang
void Task_Navigation(void)
{ static enum State_t {part_A, part_B, part_C}
state = part_A;
/* store persistent data in static variables..*/
switch (state)
{ case part_A:
if(...) /* event occurred? */
{ /* next call shall execute part B... */
state = part_B;
}
else /* still waiting for event...*/
{ state = part_A;
}
4.2 Der praktische Einsatz 47
break;
case part_B: /* execute part B... */
...
/* next call will execute part C */
state = part_C;
break;
case part_C: /* execute part C...*/
...
/* next call will execute A */
state = part_A;
break;
default:break;
} // switch
return;
}
Listing Ende
Die Zustandsmaschine speichert ihren aktuellen Zustand in der static-Variablen state. Der Zusatz static ist erforderlich, da die Task-Funktion nach dem Verlassen sonst ihren Zustand vergessen würde. Alle Variablen, die den aktuellen Task-Aufruf überdauern sollen, sind mit der Speicherklasse static zu definieren.
Bei jedem Aufruf der Task läuft die Task-Funktion bis zu ihrem normalen Ende (Run to Completion, RTC). Im obigen Beispiel wird bei jedem Aufruf ein Zweig der switch-Anweisung durchlaufen.
Die Task-Funktion sollte möglichst schnell durchlaufen werden, damit auch andere Tasks Rechenzeit erhalten. Warteschleifen sind verboten, sie sind durch einen Warte-zustand zu ersetzen.
4.2 Der praktische Einsatz
Im Folgenden wird Timer0 des AVR-Controllers als Interrupt-Quelle für die Systemuhr verwendet, und es kommt das schon bekannte Modul avr_systime zum Einsatz. Dabei wird die Zeit in Ticks gemessen, wobei mit den gewählten Einstellungen gilt: 1 Tick entspricht etwa 1 ms.
4.2.1 Drehzahlregler mit Tachogenerator und Hardware-PWM
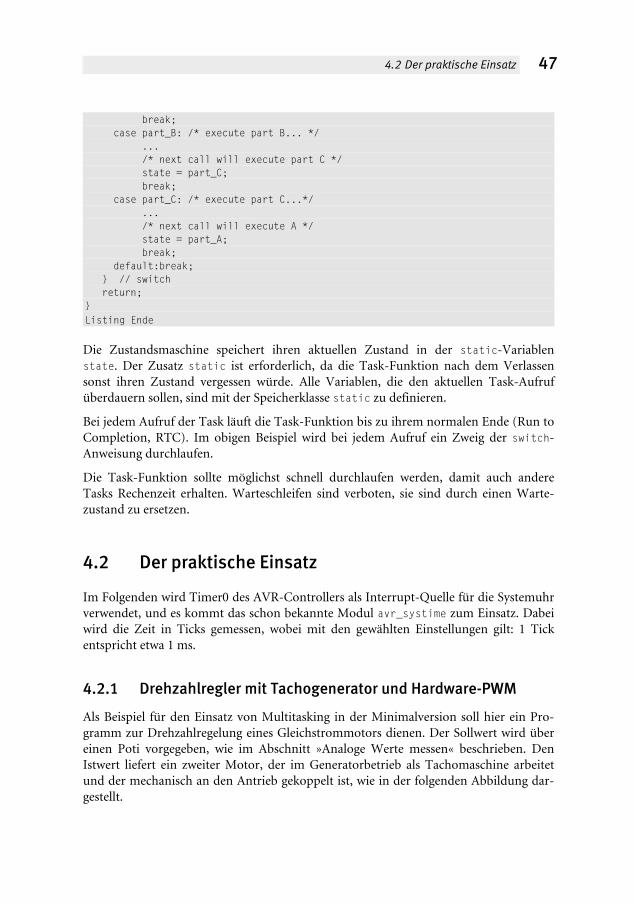
Als Beispiel für den Einsatz von Multitasking in der Minimalversion soll hier ein Pro-gramm zur Drehzahlregelung eines Gleichstrommotors dienen. Der Sollwert wird über einen Poti vorgegeben, wie im Abschnitt »Analoge Werte messen« beschrieben. Den Istwert liefert ein zweiter Motor, der im Generatorbetrieb als Tachomaschine arbeitet und der mechanisch an den Antrieb gekoppelt ist, wie in der folgenden Abbildung dar-gestellt.
48 Kapitel 4: Multitasking, die Erste: Die Minimalversion
Bild 4.1: Antrieb mit zweitem Motor als Tachogenerator.
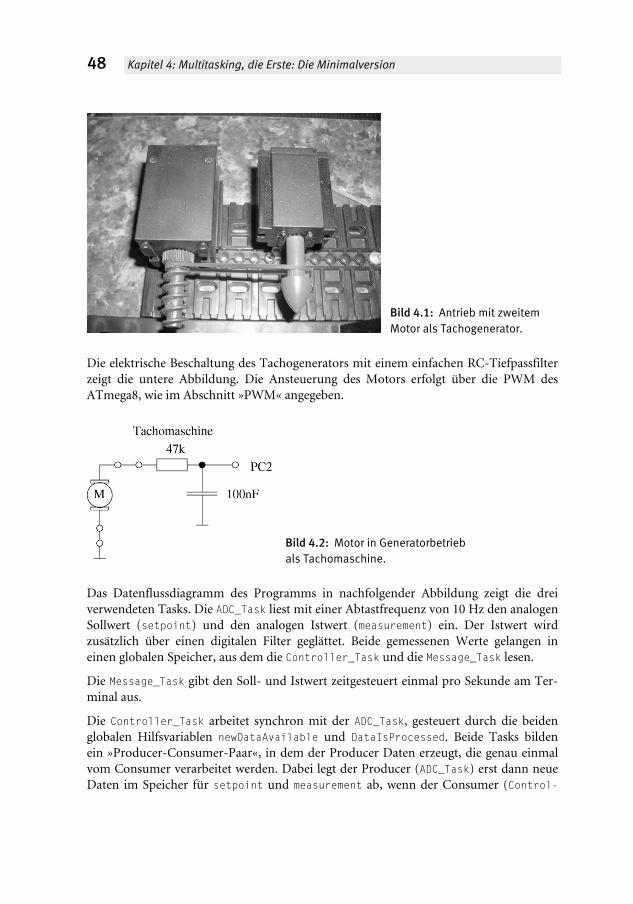
Die elektrische Beschaltung des Tachogenerators mit einem einfachen RC-Tiefpassfilter zeigt die untere Abbildung. Die Ansteuerung des Motors erfolgt über die PWM des ATmega8, wie im Abschnitt »PWM« angegeben.
Bild 4.2: Motor in Generatorbetrieb als Tachomaschine.
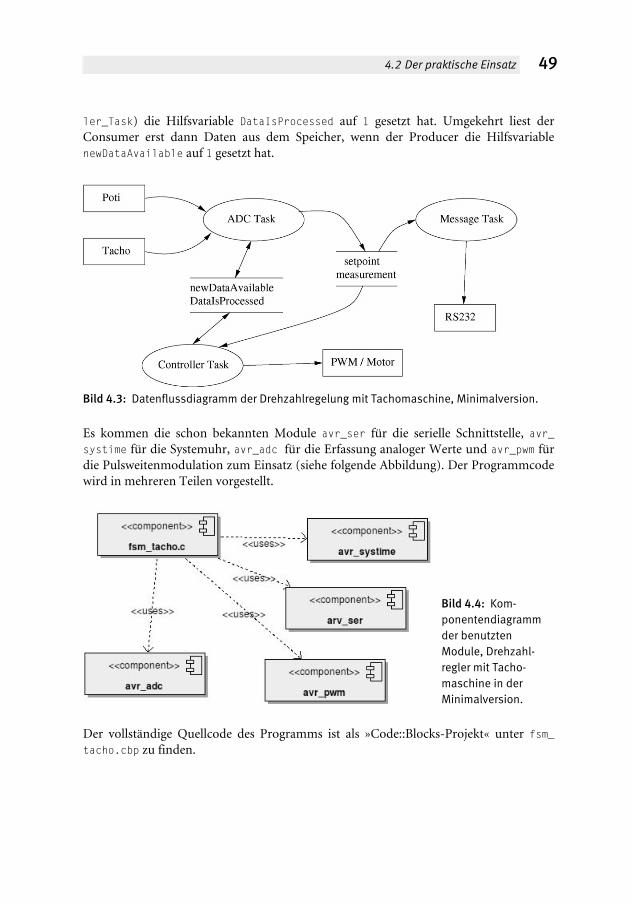
Das Datenflussdiagramm des Programms in nachfolgender Abbildung zeigt die drei verwendeten Tasks. Die ADC_Task liest mit einer Abtastfrequenz von 10 Hz den analogen Sollwert (setpoint) und den analogen Istwert (measurement) ein. Der Istwert wird zusätzlich über einen digitalen Filter geglättet. Beide gemessenen Werte gelangen in einen globalen Speicher, aus dem die Controller_Task und die Message_Task lesen.
Die Message_Task gibt den Soll- und Istwert zeitgesteuert einmal pro Sekunde am Ter-minal aus.
Die Controller_Task arbeitet synchron mit der ADC_Task, gesteuert durch die beiden globalen Hilfsvariablen newDataAvailable und DataIsProcessed. Beide Tasks bilden ein »Producer-Consumer-Paar«, in dem der Producer Daten erzeugt, die genau einmal vom Consumer verarbeitet werden. Dabei legt der Producer (ADC_Task) erst dann neue Daten im Speicher für setpoint und measurement ab, wenn der Consumer (Control-
4.2 Der praktische Einsatz 49
ler_Task) die Hilfsvariable DataIsProcessed auf 1 gesetzt hat. Umgekehrt liest der Consumer erst dann Daten aus dem Speicher, wenn der Producer die Hilfsvariable newDataAvailable auf 1 gesetzt hat.
Bild 4.3: Datenflussdiagramm der Drehzahlregelung mit Tachomaschine, Minimalversion.
Es kommen die schon bekannten Module avr_ser für die serielle Schnittstelle, avr_ systime für die Systemuhr, avr_adc für die Erfassung analoger Werte und avr_pwm für die Pulsweitenmodulation zum Einsatz (siehe folgende Abbildung). Der Programmcode wird in mehreren Teilen vorgestellt.
Bild 4.4: Kom-ponentendiagramm der benutzten Module, Drehzahl-regler mit Tacho-maschine in der Minimalversion.
Der vollständige Quellcode des Programms ist als »Code::Blocks-Projekt« unter fsm_ tacho.cbp zu finden.
50 Kapitel 4: Multitasking, die Erste: Die Minimalversion
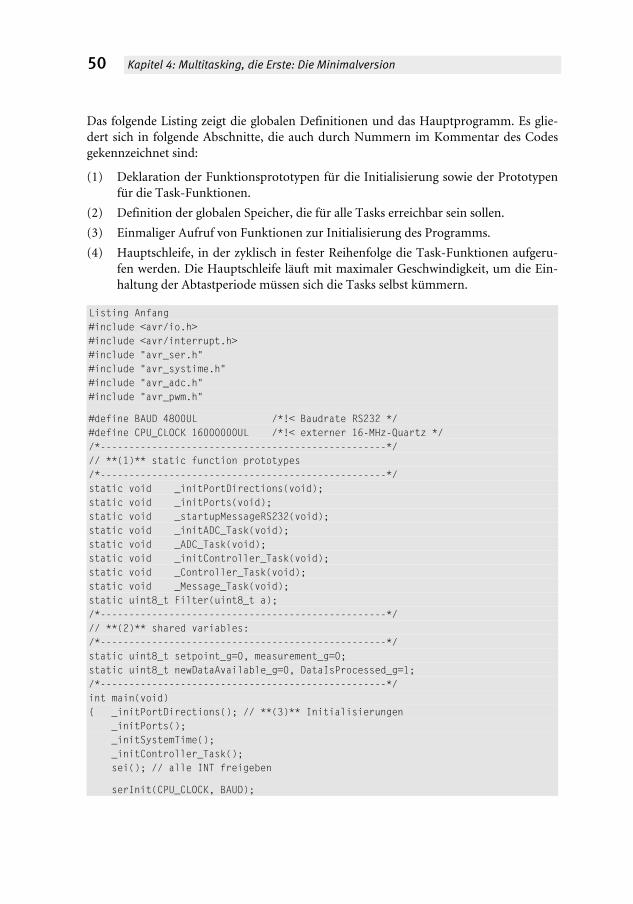
Das folgende Listing zeigt die globalen Definitionen und das Hauptprogramm. Es glie-dert sich in folgende Abschnitte, die auch durch Nummern im Kommentar des Codes gekennzeichnet sind:
(1) Deklaration der Funktionsprototypen für die Initialisierung sowie der Prototypen für die Task-Funktionen.
(2) Definition der globalen Speicher, die für alle Tasks erreichbar sein sollen.
(3) Einmaliger Aufruf von Funktionen zur Initialisierung des Programms.
(4) Hauptschleife, in der zyklisch in fester Reihenfolge die Task-Funktionen aufgeru-fen werden. Die Hauptschleife läuft mit maximaler Geschwindigkeit, um die Ein-haltung der Abtastperiode müssen sich die Tasks selbst kümmern.
Listing Anfang
#include <avr/io.h>
#include <avr/interrupt.h>
#include "avr_ser.h"
#include "avr_systime.h"
#include "avr_adc.h"
#include "avr_pwm.h"
#define BAUD 4800UL /*!< Baudrate RS232 */
#define CPU_CLOCK 16000000UL /*!< externer 16-MHz-Quartz */
/*--------------------------------------------------*/
// **(1)** static function prototypes
/*--------------------------------------------------*/
static void _initPortDirections(void);
static void _initPorts(void);
static void _startupMessageRS232(void);
static void _initADC_Task(void);
static void _ADC_Task(void);
static void _initController_Task(void);
static void _Controller_Task(void);
static void _Message_Task(void);
static uint8_t Filter(uint8_t a);
/*--------------------------------------------------*/
// **(2)** shared variables:
/*--------------------------------------------------*/
static uint8_t setpoint_g=0, measurement_g=0;
static uint8_t newDataAvailable_g=0, DataIsProcessed_g=1;
/*--------------------------------------------------*/
int main(void)
{ _initPortDirections(); // **(3)** Initialisierungen
_initPorts();
_initSystemTime();
_initController_Task();
sei(); // alle INT freigeben
serInit(CPU_CLOCK, BAUD);
4.2 Der praktische Einsatz 51
_startupMessageRS232();
_initADC_Task();
while (1) // **(4)** Hauptschleife
{ _ADC_Task();
_Controller_Task();
_Message_Task();
}
return 0;
}
Listing Ende
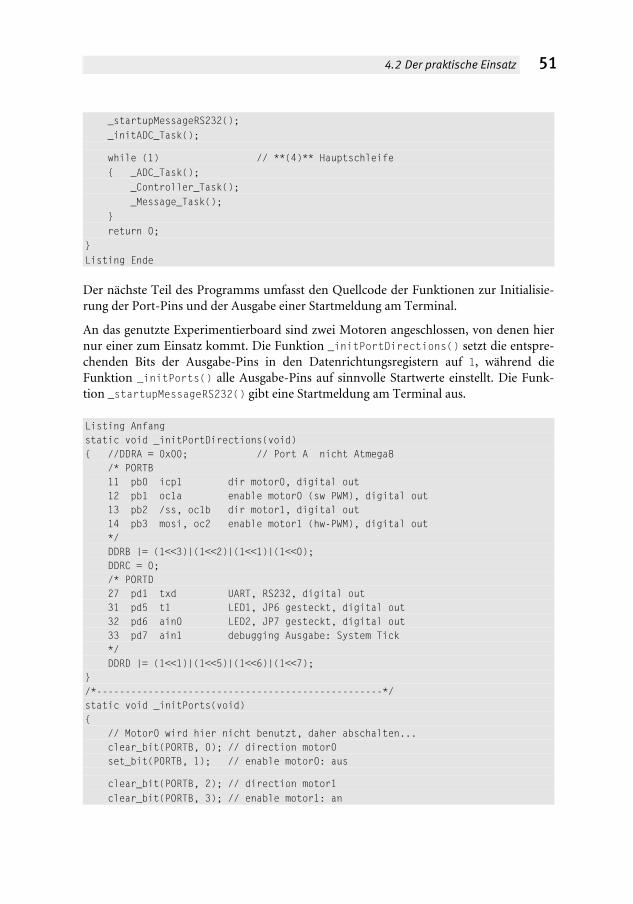
Der nächste Teil des Programms umfasst den Quellcode der Funktionen zur Initialisie-rung der Port-Pins und der Ausgabe einer Startmeldung am Terminal.
An das genutzte Experimentierboard sind zwei Motoren angeschlossen, von denen hier nur einer zum Einsatz kommt. Die Funktion _initPortDirections() setzt die entspre-chenden Bits der Ausgabe-Pins in den Datenrichtungsregistern auf 1, während die Funktion _initPorts() alle Ausgabe-Pins auf sinnvolle Startwerte einstellt. Die Funk-tion _startupMessageRS232() gibt eine Startmeldung am Terminal aus.
Listing Anfang
static void _initPortDirections(void)
{ //DDRA = 0x00; // Port A nicht Atmega8
/* PORTB
11 pb0 icp1 dir motor0, digital out
12 pb1 oc1a enable motor0 (sw PWM), digital out
13 pb2 /ss, oc1b dir motor1, digital out
14 pb3 mosi, oc2 enable motor1 (hw-PWM), digital out
*/
DDRB |= (1<<3)|(1<<2)|(1<<1)|(1<<0);
DDRC = 0;
/* PORTD
27 pd1 txd UART, RS232, digital out
31 pd5 t1 LED1, JP6 gesteckt, digital out
32 pd6 ain0 LED2, JP7 gesteckt, digital out
33 pd7 ain1 debugging Ausgabe: System Tick
*/
DDRD |= (1<<1)|(1<<5)|(1<<6)|(1<<7);
}
/*--------------------------------------------------*/
static void _initPorts(void)
{
// Motor0 wird hier nicht benutzt, daher abschalten...
clear_bit(PORTB, 0); // direction motor0
set_bit(PORTB, 1); // enable motor0: aus
clear_bit(PORTB, 2); // direction motor1
clear_bit(PORTB, 3); // enable motor1: an
52 Kapitel 4: Multitasking, die Erste: Die Minimalversion
clear_bit(PORTD, 5); // LED1 aus
clear_bit(PORTB, 6); // LED2 aus
}
/*--------------------------------------------------*/
static void _startupMessageRS232(void)
{
serPuts("\n\r\n\r");
serPuts("*************************************\n\r");
serPuts("* Pollin-Board Atmega8, 16MHz *\n\r");
serPuts("*************************************\n\r");
serPuts("FSM01: Task als State Machine\n\r");
}
Listing Ende
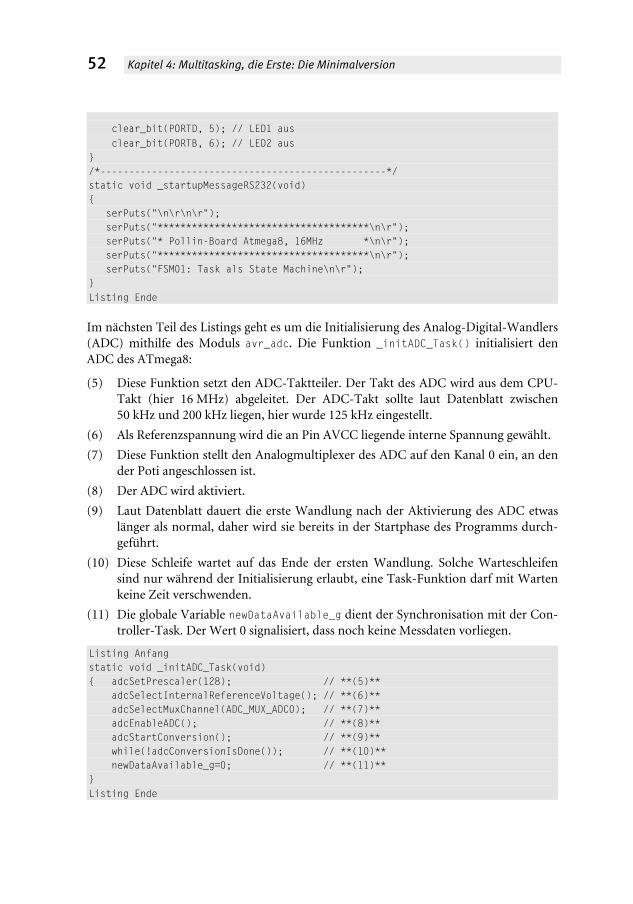
Im nächsten Teil des Listings geht es um die Initialisierung des Analog-Digital-Wandlers (ADC) mithilfe des Moduls avr_adc. Die Funktion _initADC_Task() initialisiert den ADC des ATmega8:
(5) Diese Funktion setzt den ADC-Taktteiler. Der Takt des ADC wird aus dem CPU-Takt (hier 16 MHz) abgeleitet. Der ADC-Takt sollte laut Datenblatt zwischen 50 kHz und 200 kHz liegen, hier wurde 125 kHz eingestellt.
(6) Als Referenzspannung wird die an Pin AVCC liegende interne Spannung gewählt.
(7) Diese Funktion stellt den Analogmultiplexer des ADC auf den Kanal 0 ein, an den der Poti angeschlossen ist.
(8) Der ADC wird aktiviert.
(9) Laut Datenblatt dauert die erste Wandlung nach der Aktivierung des ADC etwas länger als normal, daher wird sie bereits in der Startphase des Programms durch-geführt.
(10) Diese Schleife wartet auf das Ende der ersten Wandlung. Solche Warteschleifen sind nur während der Initialisierung erlaubt, eine Task-Funktion darf mit Warten keine Zeit verschwenden.
(11) Die globale Variable newDataAvailable_g dient der Synchronisation mit der Con-troller-Task. Der Wert 0 signalisiert, dass noch keine Messdaten vorliegen.
Listing Anfang
static void _initADC_Task(void)
{ adcSetPrescaler(128); // **(5)**
adcSelectInternalReferenceVoltage(); // **(6)**
adcSelectMuxChannel(ADC_MUX_ADC0); // **(7)**
adcEnableADC(); // **(8)**
adcStartConversion(); // **(9)**
while(!adcConversionIsDone()); // **(10)**
newDataAvailable_g=0; // **(11)**
}
Listing Ende
4.2 Der praktische Einsatz 53
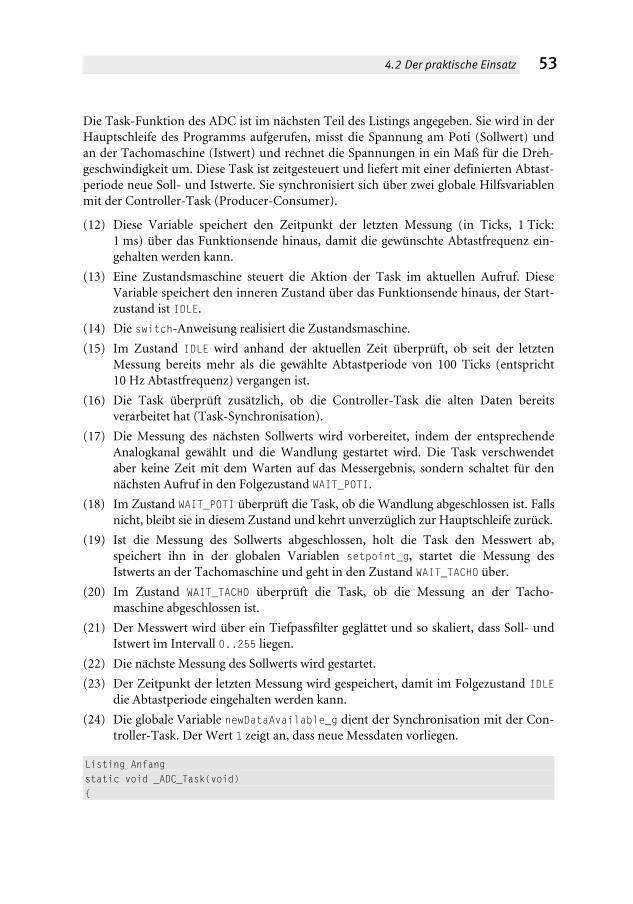
Die Task-Funktion des ADC ist im nächsten Teil des Listings angegeben. Sie wird in der Hauptschleife des Programms aufgerufen, misst die Spannung am Poti (Sollwert) und an der Tachomaschine (Istwert) und rechnet die Spannungen in ein Maß für die Dreh-geschwindigkeit um. Diese Task ist zeitgesteuert und liefert mit einer definierten Abtast-periode neue Soll- und Istwerte. Sie synchronisiert sich über zwei globale Hilfsvariablen mit der Controller-Task (Producer-Consumer).
(12) Diese Variable speichert den Zeitpunkt der letzten Messung (in Ticks, 1 Tick: 1 ms) über das Funktionsende hinaus, damit die gewünschte Abtastfrequenz ein-gehalten werden kann.
(13) Eine Zustandsmaschine steuert die Aktion der Task im aktuellen Aufruf. Diese Variable speichert den inneren Zustand über das Funktionsende hinaus, der Start-zustand ist IDLE.
(14) Die switch-Anweisung realisiert die Zustandsmaschine.
(15) Im Zustand IDLE wird anhand der aktuellen Zeit überprüft, ob seit der letzten Messung bereits mehr als die gewählte Abtastperiode von 100 Ticks (entspricht 10 Hz Abtastfrequenz) vergangen ist.
(16) Die Task überprüft zusätzlich, ob die Controller-Task die alten Daten bereits verarbeitet hat (Task-Synchronisation).
(17) Die Messung des nächsten Sollwerts wird vorbereitet, indem der entsprechende Analogkanal gewählt und die Wandlung gestartet wird. Die Task verschwendet aber keine Zeit mit dem Warten auf das Messergebnis, sondern schaltet für den nächsten Aufruf in den Folgezustand WAIT_POTI.
(18) Im Zustand WAIT_POTI überprüft die Task, ob die Wandlung abgeschlossen ist. Falls nicht, bleibt sie in diesem Zustand und kehrt unverzüglich zur Hauptschleife zurück.
(19) Ist die Messung des Sollwerts abgeschlossen, holt die Task den Messwert ab, speichert ihn in der globalen Variablen setpoint_g, startet die Messung des Istwerts an der Tachomaschine und geht in den Zustand WAIT_TACHO über.
(20) Im Zustand WAIT_TACHO überprüft die Task, ob die Messung an der Tacho-maschine abgeschlossen ist.
(21) Der Messwert wird über ein Tiefpassfilter geglättet und so skaliert, dass Soll- und Istwert im Intervall 0..255 liegen.
(22) Die nächste Messung des Sollwerts wird gestartet.
(23) Der Zeitpunkt der letzten Messung wird gespeichert, damit im Folgezustand IDLE die Abtastperiode eingehalten werden kann.
(24) Die globale Variable newDataAvailable_g dient der Synchronisation mit der Con-troller-Task. Der Wert 1 zeigt an, dass neue Messdaten vorliegen.
Listing Anfang
static void _ADC_Task(void)
{
54 Kapitel 4: Multitasking, die Erste: Die Minimalversion
static uint16_t t_1=0; //**(12)**
uint16_t t;
static enum States {IDLE, WAIT_POTI, WAIT_TACHO}
state=IDLE; //**(13)**
uint8_t x;
switch(state) //**(14)**
{
case IDLE:
t = _gettime_Ticks();
if((t – t_1) > (uint16_t)100) //**(15)**
{
if(DataIsProcessed_g) //**(16)**
{ DataIsProcessed_g = 0;
adcSelectMuxChannel(ADC_MUX_ADC0);//**(17)**
adcStartConversion();
state = WAIT_POTI;
}
}
break;
case WAIT_POTI:
if(adcConversionIsDone()) //**(18)**
{ x=adcGetValue8Bit();
setpoint_g=x;
adcSelectMuxChannel(ADC_MUX_ADC2); //**(19)**
adcStartConversion();
state = WAIT_TACHO;
}
break;
case WAIT_TACHO:
if(adcConversionIsDone()) //**(20)**
{ x=adcGetValue8Bit();
x = Filter (x); //**(21)**
measurement_g=x;
adcSelectMuxChannel(ADC_MUX_ADC0); //**(22)**
adcStartConversion();
t_1 = _gettime_Ticks(); //**(23)**
newDataAvailable_g = 1; //**(24)**
state = IDLE;
}
break;
default: break;
}
}
Listing Ende

4.2 Der praktische Einsatz 55
Die Spannung an der Tachomaschine enthält einen drehzahlabhängigen Wechselanteil, der auszufiltern ist, bevor der Regler den Istwert verarbeitet. Ferner ist die Tachospan-nung so zu skalieren, dass sich bei maximaler Antriebsdrehzahl ein Istwert von 255 ergibt. Diese beiden Aufgaben übernimmt die Funktion Filter, in der ein digitaler Tiefpassfilter mit Gesamtverstärkung 2 realisiert ist. Ohne auf die Einzelheiten des Filterentwurfs einzugehen, sei hier nur die Differenzengleichung angegeben:
14
3
2
1 ny+nx=ny
Der aktuelle Filterausgangswert y(n) ergibt sich aus der gewichteten Summe des aktuel-len Filtereingangswerts x(n) und des Filterausgangs im letzten Aufruf y(n–1). Um Rech-nungen mit Gleitkommazahlen zu vermeiden, arbeitet die Funktion mit Brüchen und Skalierungsfaktoren.
Listing Anfang
static uint8_t Filter(uint8_t a)
{ int16_t x;
static int16_t y_1=0;
int16_t y;
int16_t b=1, c=4;
x = a; // Typumwandlung Skalierung für Fixpunktarithmetik
x = x << 4; // Skalierung fuer Fixpunktarithmetik
y = (b*x + (c-b)*y_1)/c;
y_1 = y;
// Skalierung fuer Fixpunktarithmetik rueckgaengig machen und
y = y >> 3; // umskalieren auf Mass fuer Drehzahl (Faktor 2)
if (y>255) return 255; // Saettigung
else return (uint8_t) (y&0xFF); //nur die unteren 8 Bit
}
Listing Ende
Im folgenden Teil des Listings sind die Funktion zur Initialisierung des Reglers und die zugehörige Task-Funktion angegeben. Als Regler wird ein einfacher PI-Algorithmus benutzt:
jek+nek=nyn
=jip ∑
0
Der Regler berechnet aus Soll- und Istwert die Stellgröße und steuert damit über die PWM den Motor an. Diese Task synchronisiert sich mit der ADC-Task: Eine neue Stell-größe wird erst berechnet, wenn neue Messdaten vorliegen. Sind die Messdaten verar-beitet und wurde die neue Stellgröße an die PWM gegeben, erfolgt eine Bestätigung an die ADC-Task.

56 Kapitel 4: Multitasking, die Erste: Die Minimalversion
Auch hier wird zur Vermeidung von Gleitkommazahlen mit Brüchen und Skalierungs-faktoren gerechnet.
(25) Diese Routine initialisiert Timer2 (8 Bit) für den Betrieb im »Fast PWM«-Modus. Der Takt ist der CPU-Takt, geteilt durch einen »Prescaler«, hier ergibt sich ein Takt von 15.625 Hz. Damit läuft die PWM mit einer Periode von etwa 61 Hz. Das Ver-gleichsregister bekommt den Startwert 255, was maximale Motordrehzahl bedeutet.
(26) Synchronisation mit der ADC-Task: Nur falls neue Messwerte vorliegen, werden diese einmalig verarbeitet.
(27) Berechnung der neuen Stellgröße in Fixpunktarithmetik.
(28) Begrenzung der Stellgröße auf die Werte 0..255.
(29) Synchronisation mit der ADC-Task: Die Messdaten wurden verarbeitet.
Listing Anfang
static void _initController_Task(void)
{
pwmInitTimer2FastPWM(1024); //**(25)**
pwmSetpointOCR2(255);
}
/*--------------------------------------------------*/
static void _Controller_Task(void)
{ int16_t x,w,y,e;
static int16_t e_integral=0;
int16_t F=6, Kp_F=12, Ki_F=1;
if(newDataAvailable_g) //**(26)**
{
newDataAvailable_g = 0;
// neue Stellgroesse berechnen...
x = measurement_g; // Typumwandlung
x = x << 3; // Skalierung für Fixpunkt Arithmetik
w = setpoint_g;
w = w << 3;
e = w – x;
e_integral += e;
y = (Kp_F*e + Ki_F*e_integral)/F; //**(27)**
y = y >> 3; // Skalierung rueckgaengig
if (y>255) pwmSetpointOCR2(255); //**(28)**
else pwmSetpointOCR2((uint8_t) (y&0xFF));
DataIsProcessed_g = 1; //**(29)**
}
}
Listing Ende
Der letzte Teil des Listings zeigt die Message-Task, die einmal pro Sekunde den aktuellen Soll- und Istwert am Terminal ausgibt.
4.2 Der praktische Einsatz 57
(30) Auch diese Task wird durch eine Zustandsmaschine gesteuert. Die Variable state speichert den Zustand über das Funktionsende hinaus für den nächsten Aufruf der Task-Funktion.
(31) Die Task bleibt im Zustand IDLE, bis die Task-Periode von einer Sekunde (1000 Ticks) seit der letzten Terminalausgabe verstrichen ist.
(32) Im Zustand SEND_POTI erfolgt die Ausgabe des Sollwerts. Die Ausgaben werden auf verschiedene Zustände verteilt, um die Durchlaufzeit der Task-Funktion kurz zu halten.
(33) Ausgabe des Istwerts in einem separaten Zustand.
(34) Speichern des Zeitpunkts der letzten Ausgabe, damit die Task-Periode eingehalten werden kann.
Listing Anfang
static void _Message_Task(void)
{ static uint16_t t=0, t_1=0;
static enum States {IDLE, SEND_POTI, SEND_TACHO}
state=IDLE; //**(30)**
switch(state)
{
case IDLE:
t = _gettime_Ticks();
// Zeit seit letzter Aktivierung...
if((t-t_1) > (uint16_t)1000) //**(31)**
{ state = SEND_POTI;
}
break;
case SEND_POTI:
serOutUint16Dec(setpoint_g); //**(32)**
serPutc(' ');
state = SEND_TACHO;
break;
case SEND_TACHO:
serOutUint16Dec(measurement_g); //**(33)**
serPutc('\r');
serPutc('\n');
state = IDLE;
t_1 = _gettime_Ticks(); //**(34)**
break;
default : break;
}
}
Listing Ende
58 Kapitel 4: Multitasking, die Erste: Die Minimalversion
4.3 Zusammenfassung
In dem vorgestellten Ansatz zum Multitasking kommt man ohne einen zusätzlichen Kernel aus, was insbesondere bei knappem Speicher wichtig ist. Tasks sind normale Funktionen, die bei jedem Durchlauf der Hauptschleife aufgerufen werden und bis zu ihrem normalen Funktionsende laufen. Was die Task-Funktion im jeweiligen Aufruf tut, regelt z. B. eine Zustandsmaschine. Dies führt bei periodischen Tasks dazu, dass man in jeder Task-Funktion ähnlichen Code für die Zeitsteuerung benötigt.
Man hat als Programmierer alle Freiheiten, muss aber auch alles selbst implementieren. So ist es etwa über globale Hilfsvariablen möglich, eine Task-Synchronisation (Produ-cer-Consumer) zu realisieren oder über die Abfrage der Uhr verschiedene Task-Perio-den zu erreichen.
Ein echter Kontextwechsel findet nicht statt, Task-Funktionen unterbrechen sich nicht gegenseitig. Aufgaben, die eine längere Bearbeitungszeit benötigen, sind manuell in Teile zu zerlegen, damit die Task-Funktion schnell terminiert.
Eine Task wird durch genau eine Task-Funktion repräsentiert. Es gibt nicht die Mög-lichkeit, mehrere Instanzen einer Task zu verwenden.
Die Minimalversion hat sicherlich einige Vorteile:
• Es gibt keinen Kernel, der zusätzliche Rechenleistung oder Speicher benötigt.
• Das Verfahren ist einfach zu implementieren.
• Es ergibt sich ein deterministisches Zeitverhalten.
• Alle Interrupts (außer einem für die Uhr) stehen zur Verfügung.
Dem stehen aber auch einige Einschränkungen gegenüber:
• Es gibt keine unterschiedlichen Prioritäten für Tasks.
• Alle Tasks werden in der Hauptschleife gleich oft aufgerufen, individuelle Perioden sind für jede Task neu zu programmieren.
• Umfangreiche Aufgaben sind von Hand zu zerlegen.
• Nur eine Instanz einer Task ist möglich.
• Persistente lokale Daten sind nur über die static-Variable realisierbar.
• Die Task-Liste ist fix, man kann keine Task löschen oder neu erzeugen.
251
A Anhang
A.1 Interface-Schaltung für zwei Gleichstrommotoren mit Drehgeber
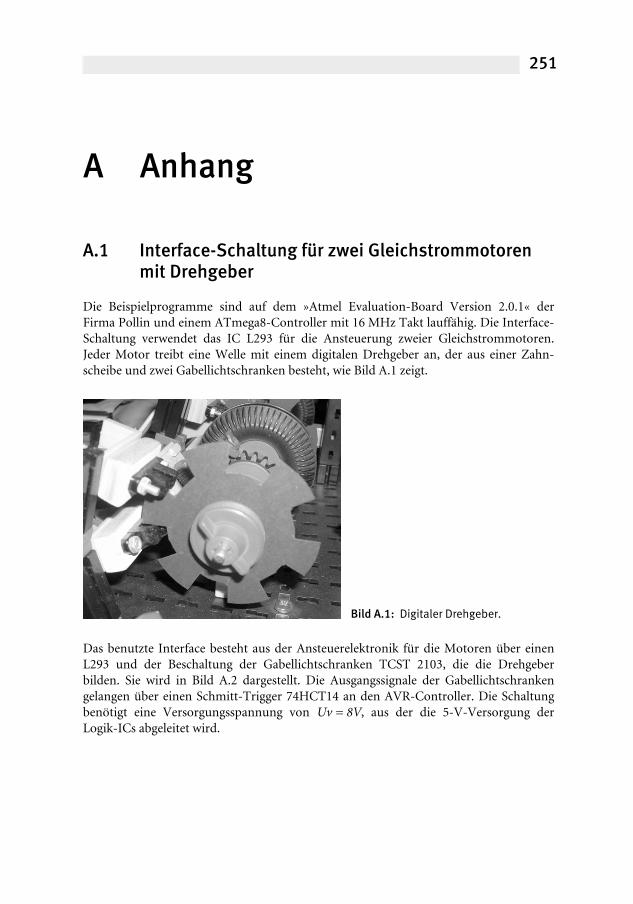
Die Beispielprogramme sind auf dem »Atmel Evaluation-Board Version 2.0.1« der Firma Pollin und einem ATmega8-Controller mit 16 MHz Takt lauffähig. Die Interface-Schaltung verwendet das IC L293 für die Ansteuerung zweier Gleichstrommotoren. Jeder Motor treibt eine Welle mit einem digitalen Drehgeber an, der aus einer Zahn-scheibe und zwei Gabellichtschranken besteht, wie Bild A.1 zeigt.
Bild A.1: Digitaler Drehgeber.
Das benutzte Interface besteht aus der Ansteuerelektronik für die Motoren über einen L293 und der Beschaltung der Gabellichtschranken TCST 2103, die die Drehgeber bilden. Sie wird in Bild A.2 dargestellt. Die Ausgangssignale der Gabellichtschranken gelangen über einen Schmitt-Trigger 74HCT14 an den AVR-Controller. Die Schaltung benötigt eine Versorgungsspannung von Uv = 8V, aus der die 5-V-Versorgung der Logik-ICs abgeleitet wird.
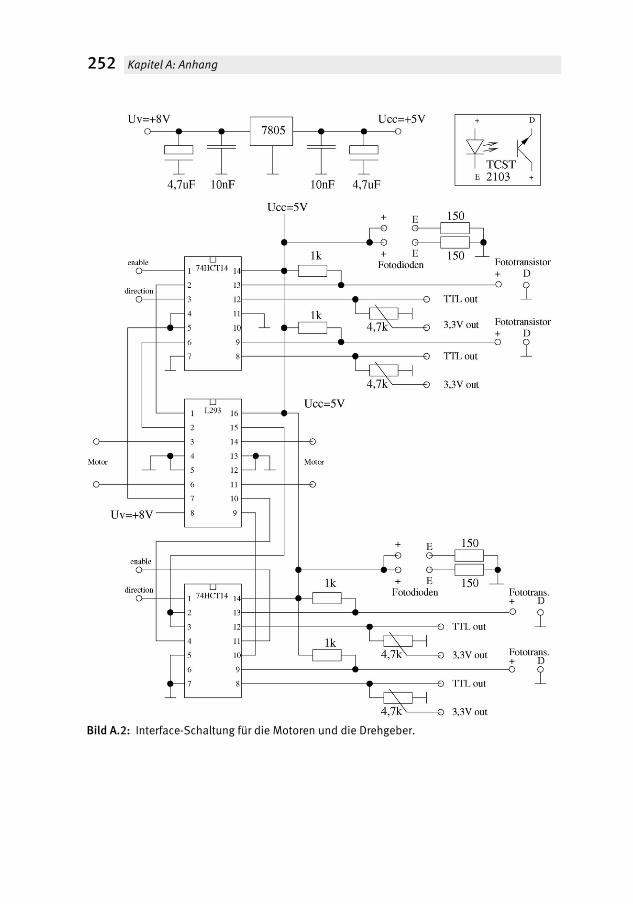
252 Kapitel A: Anhang
Bild A.2: Interface-Schaltung für die Motoren und die Drehgeber.
A.2 Pin-Belegung des benutzten Evaluation-Boards 253
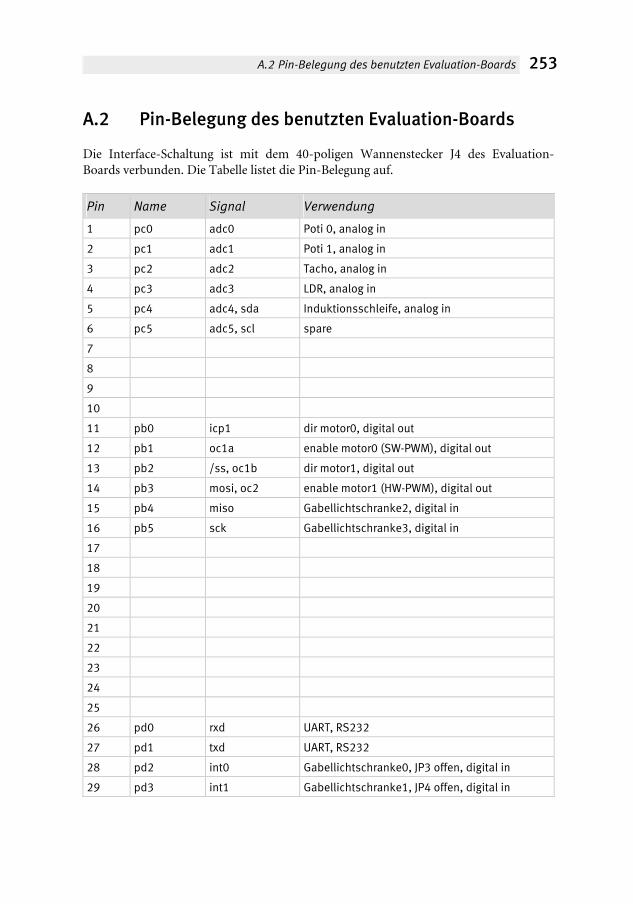
A.2 Pin-Belegung des benutzten Evaluation-Boards
Die Interface-Schaltung ist mit dem 40-poligen Wannenstecker J4 des Evaluation-Boards verbunden. Die Tabelle listet die Pin-Belegung auf.
Pin Name Signal Verwendung
1 pc0 adc0 Poti 0, analog in
2 pc1 adc1 Poti 1, analog in
3 pc2 adc2 Tacho, analog in
4 pc3 adc3 LDR, analog in
5 pc4 adc4, sda Induktionsschleife, analog in
6 pc5 adc5, scl spare
7
8
9
10
11 pb0 icp1 dir motor0, digital out
12 pb1 oc1a enable motor0 (SW-PWM), digital out
13 pb2 /ss, oc1b dir motor1, digital out
14 pb3 mosi, oc2 enable motor1 (HW-PWM), digital out
15 pb4 miso Gabellichtschranke2, digital in
16 pb5 sck Gabellichtschranke3, digital in
17
18
19
20
21
22
23
24
25
26 pd0 rxd UART, RS232
27 pd1 txd UART, RS232
28 pd2 int0 Gabellichtschranke0, JP3 offen, digital in
29 pd3 int1 Gabellichtschranke1, JP4 offen, digital in
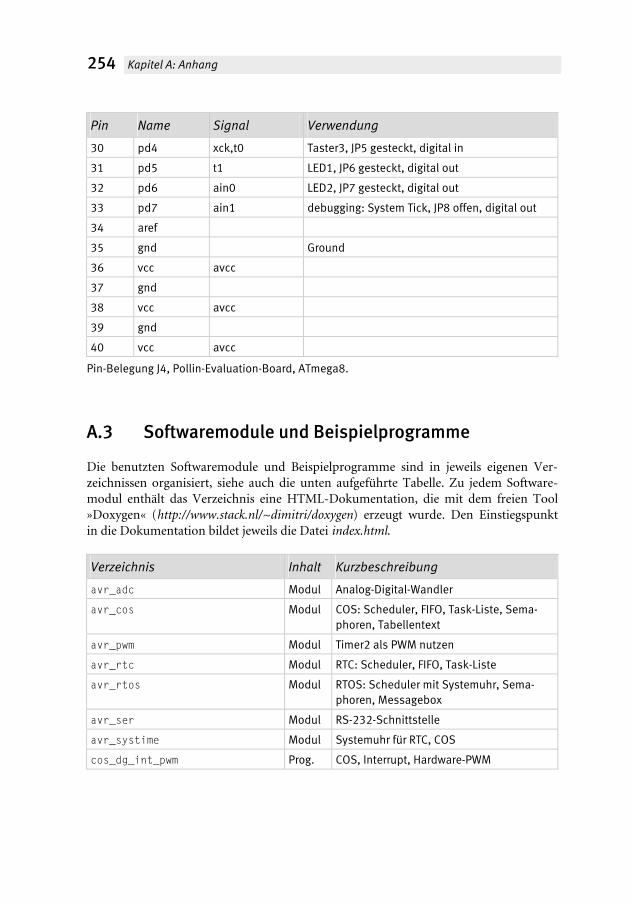
254 Kapitel A: Anhang
Pin Name Signal Verwendung
30 pd4 xck,t0 Taster3, JP5 gesteckt, digital in
31 pd5 t1 LED1, JP6 gesteckt, digital out
32 pd6 ain0 LED2, JP7 gesteckt, digital out
33 pd7 ain1 debugging: System Tick, JP8 offen, digital out
34 aref
35 gnd Ground
36 vcc avcc
37 gnd
38 vcc avcc
39 gnd
40 vcc avcc
Pin-Belegung J4, Pollin-Evaluation-Board, ATmega8.
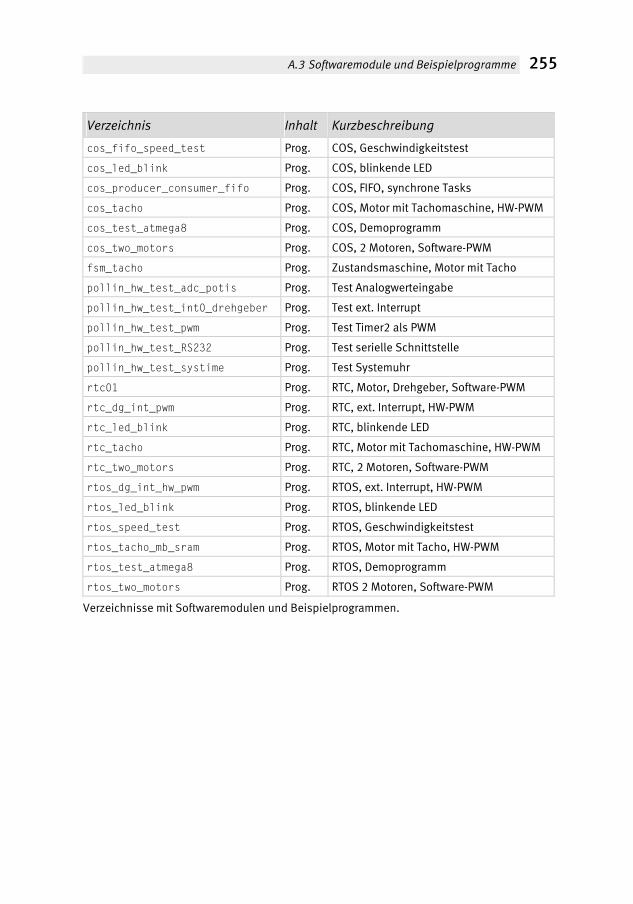
A.3 Softwaremodule und Beispielprogramme
Die benutzten Softwaremodule und Beispielprogramme sind in jeweils eigenen Ver-zeichnissen organisiert, siehe auch die unten aufgeführte Tabelle. Zu jedem Software-modul enthält das Verzeichnis eine HTML-Dokumentation, die mit dem freien Tool »Doxygen« (http://www.stack.nl/~dimitri/doxygen) erzeugt wurde. Den Einstiegspunkt in die Dokumentation bildet jeweils die Datei index.html.
Verzeichnis Inhalt Kurzbeschreibung
avr_adc Modul Analog-Digital-Wandler
avr_cos Modul COS: Scheduler, FIFO, Task-Liste, Sema-phoren, Tabellentext
avr_pwm Modul Timer2 als PWM nutzen
avr_rtc Modul RTC: Scheduler, FIFO, Task-Liste
avr_rtos Modul RTOS: Scheduler mit Systemuhr, Sema-phoren, Messagebox
avr_ser Modul RS-232-Schnittstelle
avr_systime Modul Systemuhr für RTC, COS
cos_dg_int_pwm Prog. COS, Interrupt, Hardware-PWM
A.3 Softwaremodule und Beispielprogramme 255
Verzeichnis Inhalt Kurzbeschreibung
cos_fifo_speed_test Prog. COS, Geschwindigkeitstest
cos_led_blink Prog. COS, blinkende LED
cos_producer_consumer_fifo Prog. COS, FIFO, synchrone Tasks
cos_tacho Prog. COS, Motor mit Tachomaschine, HW-PWM
cos_test_atmega8 Prog. COS, Demoprogramm
cos_two_motors Prog. COS, 2 Motoren, Software-PWM
fsm_tacho Prog. Zustandsmaschine, Motor mit Tacho
pollin_hw_test_adc_potis Prog. Test Analogwerteingabe
pollin_hw_test_int0_drehgeber Prog. Test ext. Interrupt
pollin_hw_test_pwm Prog. Test Timer2 als PWM
pollin_hw_test_RS232 Prog. Test serielle Schnittstelle
pollin_hw_test_systime Prog. Test Systemuhr
rtc01 Prog. RTC, Motor, Drehgeber, Software-PWM
rtc_dg_int_pwm Prog. RTC, ext. Interrupt, HW-PWM
rtc_led_blink Prog. RTC, blinkende LED
rtc_tacho Prog. RTC, Motor mit Tachomaschine, HW-PWM
rtc_two_motors Prog. RTC, 2 Motoren, Software-PWM
rtos_dg_int_hw_pwm Prog. RTOS, ext. Interrupt, HW-PWM
rtos_led_blink Prog. RTOS, blinkende LED
rtos_speed_test Prog. RTOS, Geschwindigkeitstest
rtos_tacho_mb_sram Prog. RTOS, Motor mit Tacho, HW-PWM
rtos_test_atmega8 Prog. RTOS, Demoprogramm
rtos_two_motors Prog. RTOS 2 Motoren, Software-PWM
Verzeichnisse mit Softwaremodulen und Beispielprogrammen.


257
Literaturverzeichnis • Florian Schäffer: »AVR Hardware und C-Programmierung in der Praxis«, Elektor-
Verlag Aachen, 2008.
• Günter Schmitt: »Mikrocomputertechnik mit Controllern der Atmel AVR-Risc-Familie«, Oldenbourg Verlag München, 2008.
• Dieter Werner et. al.: »Taschenbuch der Informatik«, Fachbuchverlag Leipzig, 1995.
• Tom DeMarco: »Structured Analysis and Systems Specification«, Englewood Cliffs, NJ, Prentice-Hall, 1979.
• David Bellin, Susan Suchman: »The Structured Systems Developement Manual«, Englewood Cliffs, NJ, Prentice-Hall, 1990.
• Richard Barry (2004): »Multitasking on an AVR«, http://www.avrfreaks.net
• »FreeRTOS«, http://www.freertos.org
• Neil Klingensmith: »Helium«, http://helium.sourceforge.net/index.html
• Michael Dorin (2008): »Building 'instant-up' real-time operating systems«, http://www.embedded.com
• Adam Dunkels et al. (2006): »Protothreads: Simplifying Event-Driven Programming of Memory-Constraint Embedded Systems«, http://www.sics.se/~adam/dunkels06protothreads.pdf
• Dimitri van Heesch: »Doxygen«, http://www.stack.nl/~dimitri/doxygen/
• »Code::Blocks«, http://www.codeblocks.org/
• »WinAVR«, http://sourceforge.net/projects/winavr/

259
Stichwortverzeichnis
A Ablaufinvariante Funktionen
182 ADC, Task-Funktion 53 ADC-Taktteiler 25 ADC-Task 148 ADC-Task, COS-Version 143 Adressraum 11 Analog-Digital-Wandler
initialisieren 25 Analoge Spannungswerte
einlesen 26 Analogmultiplexer
programmieren 26 Analog-Wandler-Task 210 ATtiny2323 17 ATmega16 17 ATmega32 17 ATmega644 17 ATmega8 17, 19 ATmega8535 17 Atmel Evaluation-Board 17 Ausgabe-Task 225 AVR-Controller 45 AVR-Controller,
Programmierung 19 AVR-Experimentierboard 17 AVR-Studio 18
B Betriebsanzeige, LED-Task
225 Bit-Banging 17
C C-Compiler 5 C-Compiler AVR-GCC 18 Consumer-Task 108 Controller-Task 148, 156 Co-Routinen 118 COS-Drehzahlregler
mit Drehgeber 138 mit FIFO 148 mit Tachogenerator 130 zwei Motoren 148
COS-Scheduler 120 kooperativer 173 Möglichkeiten 123 praktischer Einsatz 123 Zusammenfassung 173
COS-System, Scheduler 170 COS-Tasking-System 174 CPU-Register 12 CPU-Zeit 11
D Data Direction Register 19 Datenfluss 43 Datenflussdiagramm 43 DIL-Gehäuse 17 Drehgeber auswerten 41 Drehgeber-Task 79, 90, 148,
156, 157 Drehzahlregler 47, 65
E Echtzeitfähigkeit 15 Entwicklungsumgebung 18 Experimentierumgebung 17
F Fast-Modus 30 FIFO 93, 110, 166 Filter-Task 200 FreeRTOS 175
G Gleichstrommotoren 251 Gleichzeitigkeit 15 GNU-C-Compiler 159, 162
H Hardware 17 Hardware-Interrupt 38 Hilfsvariablen, globale 58,
108
I I/O-Register 19 IC L293 30 Idle-Task 113, 171 Interface-Schaltung 18 Interface-Schaltung,
Gleichstrommotoren 251 Interrupt 35 Interrupt Service Routine 147 ISP-Schnittstelle 17
K Kontext 11 Kontextwechsel 233
L LED 36 LED-Task 225
260 Stichwortverzeichnis
M Messagebox 240 Message-Task 79, 86, 146 Messungen am
Spannungsteiler 27 Multitasking 11, 15
Kooperation 117 Minimalversion 45 Präemptives Tasking 175 Scheduler 59
Multitasking-Kern, FreeRTOS 175
mySmartUSB MK3 18
O OCR2 31
P PonyProg 18 Port-Richtungen 76 Präemptives Tasking 175 Präemptives Tasking,
Grundidee 175 Producer-Consumer,
Datenflussdiagramm 108 Producer-Task 108 Program-Counter 177 Protothreads 118, 159 Prozess 11 PWM 30 PWM-Task 149
R Real-Time 11 Rechenzeit 14 Rechtzeitigkeit 15 Referenzspannung definieren
26
Regler-Task 200, 202, 224 RS232 21 RS232-Schnittstelle 93, 191 RTC-Drehzahlregler
für zwei Motoren 92 mit Drehgeber 72, 82
RTC-Scheduler 59, 63, 108, 113 Algorithmus 62 Arbeitsweise 106 praktischer Einsatz 65 Zusammenfassung 115
RTOS Kontextwechsel 229 Möglichkeiten 187
RTOS-Drehzahlregler Drehgeber 205 Tachogenerator 196 zwei Motoren 215
RTOS-Scheduler 183 Details 226 praktischer Einsatz 187 Zeitverhalten 245
RTOS-System 190 Rücksprungadressen 12
S Scheduler 11, 113, 170, 241 Scheduling-Prinzipien 13 Semaphoren 123, 164, 179,
237 Signalscheibe 38 Speicherbedarf 114, 172, 249 Stack-Pointer 177 Stack-Speicher, 12 Startpegel, Ausgangs-Pins 76 STK500 17 Systemuhr 35
T Tachogenerator 47, 65 Task 11, 12, 58
Endlosschleife 123 initialer Kontext 231
Task-Funktion 58 Task-Kontext 177 Task-Liste 106, 163, 227 Task-Ringliste 107 Task-Struktur 108 Task-Synchronisation 108 Task-Wechsel 13 Threads 11 Ticks 35, 47 Tick-Zähler 35 Timer2 30 TX-Task 148, 155
U Uhrzeit 36 USART 22 USART-Schnittstelle 21 USB-RS232-Konverter 21
V Variablen
globale 12 lokale 12 private 108
W WinAVR 18
Z Zeitscheibe 14 Zeitverhalten 245 Zustandsmaschine 47, 58
Prof. Dr. Ernst Forgber
Multitasking mit AVR RISC-Controllern
· Entwicklung eines echtzeitfähigen, prioritätsgesteuerten, präemptiven Tasking-Systems
· Von der einfachen Programmschleife zu Multitasking- und Echtzeitkonzepten
· Anhand praktischer Beispiele für die Atmel-8-Bit-Controller
P C & E L E K T R O N I K
Besuchen Sie unsere Website
www.franzis.de
Prof. Dr. Ernst Forgber
Das Buch stellt anhand praktischer Beispiele für die Atmel-8-Bit-Controller mehrere Ansätze für Multitasking-Programme vor. Ausgehend von der Lösung mit einer einfachen Programmschleifewerden Multitasking- und Echtzeitkonzepte erläutert – bis hin zur Entwicklung eines echtzeitfähigen, prioritätsgesteuerten, präemptiven Tasking-Systems.
Die Ausführungen der verschiedenen Konzepte erfolgen anhand durch-gehender Beispiele. Dabei wird zunächst immer die grundlegende Ideevorgestellt, die dann mithilfe der praktischen Beispielen konkretisiert undin einem anschließenden Blick auf die Details vertieft wird.
Aufbau des Buchs:
Multitasking, Kontext, Real-Time & Co.Begriffliche Erklärungen und grundlegende Mechanismen.
ExperimentierumgebungBeschreibung der Hard- und Software.
AVR-Controller in C programmierenBesonderheiten bei der Programmierung von AVR-Controllern.
Multitasking, die Erste: Die MinimalversionKlassischer Ansatz zum Multitasking unter komplettem Verzicht auf einen Scheduler und dem Versuch, alles über Interrupts und eine großeProgrammschleife zu realisieren. Betrachtung verschiedener Schedulermit wachsender Komplexität in Theorie und Praxis.
Multitasking, die Zweite: Ein Scheduler im EigenbauDarstellung der Funktionsweise eines einfachen prioritätsgesteuertenSchedulers für zyklische Funktionen.
Multitasking, die Dritte: Kooperation ist gefragtZeigt die Funktionsweise eines kooperativen Schedulers auf der Basis vonDunkels' Protothreads.
Multitasking, die Vierte: Präemptives TaskingVorstellung eines vollständig prioritätsgesteuerten RTOS-Schedulers mitPräemption.
P C & E L E K T R O N I K
Aus dem Inhalt:• Kooperatives Round Robin und
präemptives Scheduling
• Multitasking und Echtzeitfähigkeit
• Hard- und Software für die Programm-entwicklung
• Serielle Schnittstelle initialisieren, Daten senden und empfangen
• AD-Wandler initialisieren und analogeSpannungswerte einlesen
• Timer2 als PWM konfigurieren
• RTC-Drehzahlregler mit Tachogeneratoru. m.
• Scheduler: im Eigenbau und praktischer Einsatz
• Adam Dunkels' Protothreads
• COS-Drehzahlregler mit Drehgeber und Hardware-PWM
• Protothreads: Makros machen's möglich
• Taskliste, Semaphoren, FIFO, Scheduler und Speicherbedarf
• Präemptives Tasking und die Idee dahinter
• Semaphoren: gemeinsam genutzte Ressourcen schützen
• RTOS: Teste die Möglichkeiten
• RTOS-Drehzahlregler mit Drehgeberund Hardware-PWM
• Interface-Schaltung für zwei Gleichstrommotoren mit Drehgeber
• Pin-Belegung des benutzten Evaluation-Boards
• Softwaremodule und BeispielprogrammePr
of. D
r. Fo
rgbe
rM
ulti
task
ing
mit
AV
R R
ISC
-Con
trol
lern
Multitasking mit AVR RISC-Controllern
Lösungsansätze und praktische Beispiele für Multitasking-Programme
Lösungsansätze und praktische Beispiele für Multitasking-Programme
Über den Autor:
Prof. Dr. Ernst Forgber lehrt an der Hochschule Hannover an der FakultätElektro- und Informationstechnik. Er arbeitet auf den Gebieten Software-Technik, Echtzeitsysteme und Entwurf digitaler Schaltungen mit VHDL.
65270-4_U1+U4_2_Layout 1 29.10.14 17:06 Seite 1