Embed Size (px)
Citation preview
Inhaltsverzeichnis
Allgemeines zurBausteinbeschreibung 1Allgemeines zu denBildbausteinen 2
Messen und Regeln 3
Motor und Ventil 4Sonstige TechnologischeBausteine 5
Konvertierungsbausteine 6
Bedienbausteine 7
Meldebausteine 8
Bausteine für Batch Flexible 9
Anhang
Technische Daten AGlossar, Index
SIMATIC
Process Control System PCS 7Technological Blocks
Referenzhandbuch
Ausgabe 08/2001A5E00127670-01
23.08.2001
Copyright © Siemens AG 2001 All rights reservedWeitergabe sowie Vervielfältigung dieser Unterlage,Verwertung und Mitteilung ihres Inhalts ist nicht gestattet,soweit nicht ausdrücklich zugestanden. Zuwiderhandlungenverpflichten zu Schadenersatz. Alle Rechte vorbehalten,insbesondere für den Fall der Patenterteilung oder GM-Eintragung
Siemens AGBereich Automatisierungs- und AntriebstechnikGeschäftsgebiet Industrie-AutomatisierungsystemePostfach 4848, D- 90327 Nürnberg
HaftungsausschlussWir haben den Inhalt der Druckschrift auf Übereinstimmung mit derbeschriebenen Hard-und Software geprüft. Dennoch könnenAbweichungen nicht ausgeschlossen werden, so dass wir für dievollständige Übereinstimmung keine Gewähr übernehmen. Die Angabenin dieser Druckschrift werden regelmäßig überprüft, und notwendigeKorrekturen sind in den nachfolgenden Auflagen enthalten. FürVerbesserungsvorschläge sind wir dankbar.
© Siemens AG 2001Technische Änderungen bleiben vorbehalten
Siemens Aktiengesellschaft A5E00127670
Sicherheitstechnische Hinweise
Dieses Handbuch enthält Hinweise, die Sie zu Ihrer persönlichen Sicherheit sowie zur Vermeidung von
Sachschäden beachten müssen. Die Hinweise sind durch ein Warndreieck hervorgehoben und je nach
Gefährdungsgrad folgendermaßen dargestellt:
! Gefahrbedeutet, dass Tod, schwere Körperverletzung oder erheblicher Sachschaden eintreten werden,wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
! Warnungbedeutet, dass Tod, schwere Körperverletzung oder erheblicher Sachschaden eintreten können ,wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
! Vorsichtbedeutet, dass eine leichte Körperverletzung oder ein Sachschaden eintreten können, wenn dieentsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
Vorsichtbedeutet, dass ein Sachschaden eintreten kann, wenn die entsprechenden Vorsichtsmaßnahmennicht getroffen werden.
Achtungist eine wichtige Information über das Produkt, die Handhabung des Produktes oder den jeweiligenTeil der Dokumentation, auf den besonders aufmerksam gemacht werden soll.
Qualifiziertes PersonalInbetriebsetzung und Betrieb eines Gerätes dürfen nur von qualifiziertem Personal vorgenommenwerden. Qualifiziertes Personal im Sinne der sicherheitstechnischen Hinweise dieses Handbuchs sindPersonen, die die Berechtigung haben, Geräte, Systeme und Stromkreise gemäß den Standards derSicherheitstechnik in Betrieb zu nehmen, zu erden und zu kennzeichnen.
Bestimmungsgemäßer Gebrauch
Beachten Sie Folgendes:
! WarnungDas Gerät darf nur für die im Katalog und in der technischen Beschreibung vorgesehenen Einsatzfälleund nur in Verbindung mit von Siemens empfohlenen bzw. zugelassenen Fremdgeräten und -komponenten verwendet werden.
Der einwandfreie und sichere Betrieb des Produktes setzt sachgemäßen Transport, sachgemäßeLagerung, Aufstellung und Montage sowie sorgfältige Bedienung und Instandhaltung voraus.
MarkenSIMATIC®, SIMATIC HMI® und SIMATIC NET® sind Marken der Siemens AG.
Die übrigen Bezeichnungen in dieser Schrift können Marken sein, deren Benutzung durch Dritte für
deren Zwecke die Rechte der Inhaber verletzen können.
23.08.2001
Process Control System PCS 7, Technological BlocksA5E00127670-01 iii
Inhaltsverzeichnis
1 Allgemeines zur Bausteinbeschreibung
2 Allgemeines zu den Bildbausteinen
3 Messen und Regeln
3.1 CTRL_PID: PID-Reglerbaustein .......................................................................3-13.1.1 Beschreibung von CTRL_PID ...........................................................................3-13.1.2 Signalverarbeitung im Soll- und Istwertzweig von CTRL_PID..........................3-33.1.3 Stellgrößenbildung von CTRL_PID...................................................................3-53.1.4 Hand-, Automatik- und Nachführbetrieb von CTRL_PID ..................................3-63.1.5 Betriebsartenumschaltung von CTRL_PID .......................................................3-73.1.6 Fehlerbehandlung von CTRL_PID....................................................................3-93.1.7 Anlauf-, Zeit- und Meldeverhalten von CTRL_PID..........................................3-103.1.8 Blockschaltbild von CTRL_PID .......................................................................3-113.1.9 Anschlüsse von CTRL_PID.............................................................................3-133.1.10 Bedienen und Beobachten von CTRL_PID ....................................................3-193.2 CTRL_S: PID-Schrittreglerbaustein ................................................................3-243.2.1 Beschreibung von CTRL_S.............................................................................3-243.2.2 Signalverarbeitung im Soll- und Istwertzweig von CTRL_S ...........................3-263.2.3 Stellsignalbildung von CTRL_S.......................................................................3-283.2.4 Hand-, Automatik- und Nachführbetrieb von CTRL_S....................................3-303.2.5 Betriebsartenumschaltung von CTRL_S.........................................................3-333.2.6 Fehlerbehandlung von CTRL_S......................................................................3-353.2.7 Bedienen, Beobachten und Inbetriebnahme von CTRL_S.............................3-363.2.8 Anlauf-, Zeit- und Meldeverhalten von CTRL_S .............................................3-363.2.9 Blockschaltbild von CTRL_S...........................................................................3-383.2.10 Anschlüsse von CTRL_S ................................................................................3-413.2.11 Bedienen und Beobachten von CTRL_S ........................................................3-503.3 DIG_MON: Digitalwertüberwachung...............................................................3-553.3.1 Beschreibung von DIG_MON..........................................................................3-553.3.2 Anschlüsse von DIG_MON .............................................................................3-583.3.3 Bedienen und Beobachten von DIG_MON .....................................................3-593.4 MEAS_MON: Messwertüberwachung.............................................................3-603.4.1 Beschreibung von MEAS_MON......................................................................3-603.4.2 Anschlüsse von MEAS_MON .........................................................................3-623.4.3 Bedienen und Beobachten von MEAS_MON .................................................3-643.5 RATIO_P: Verhältnisregelung.........................................................................3-663.5.1 Beschreibung von RATIO_P...........................................................................3-663.5.2 Anschlüsse von RATIO_P...............................................................................3-673.5.3 Bedienen und Beobachten von RATIO_P ......................................................3-69
Inhaltsverzeichnis
Process Control System PCS 7, Technological Blocksiv A5E00127670-01
3.6 FMCS_PID: Reglerbaustein............................................................................3-703.6.1 Beschreibung von FMCS_PID ........................................................................3-703.6.2 Adressierung ...................................................................................................3-723.6.3 Funktion...........................................................................................................3-723.6.4 Sollwert-, Grenzwert-, Regeldifferenz- und Stellgrößenbildung......................3-733.6.5 Hand-, Automatik- und Nachführbetrieb .........................................................3-753.6.6 Betriebsartenumschaltung ..............................................................................3-763.6.7 Sicherheitsbetrieb............................................................................................3-763.6.8 Parameter zur Baugruppe übertragen ............................................................3-773.6.9 Daten von der Baugruppe lesen .....................................................................3-773.6.10 Fehlerbehandlung ...........................................................................................3-773.6.11 Anlauf-, Zeit- und Meldeverhalten von FMCS_PID.........................................3-783.6.12 Backup-Betrieb der FM355 .............................................................................3-793.6.13 Anschlüsse von FMCS_PID............................................................................3-803.6.14 Bedienen und Beobachten von FMCS_PID....................................................3-89
4 Motor und Ventil
4.1 MOT_REV: Motor mit zwei Drehrichtungen......................................................4-14.1.1 Beschreibung von MOT_REV...........................................................................4-14.1.2 Anschlüsse von MOT_REV...............................................................................4-54.1.3 Bedienen und Beobachten von MOT_REV ......................................................4-94.2 MOT_SPED: Motor mit zwei Geschwindigkeiten............................................4-114.2.1 Beschreibung von MOT_SPED.......................................................................4-114.2.2 Anschlüsse von MOT_SPED ..........................................................................4-154.2.3 Bedienen und Beobachten von MOT_SPED..................................................4-194.3 MOTOR: Motor mit einem Steuersignal ..........................................................4-204.3.1 Beschreibung von MOTOR.............................................................................4-204.3.2 Anschlüsse von MOTOR.................................................................................4-244.3.3 Bedienen und Beobachten von MOTOR ........................................................4-274.4 VAL_MOT: Motorventilsteuerung....................................................................4-294.4.1 Beschreibung von VAL_MOT..........................................................................4-294.4.2 Anschlüsse von VAL_MOT .............................................................................4-344.4.3 Bedienen und Beobachten von VAL_MOT .....................................................4-384.5 VALVE: Ventilsteuerung..................................................................................4-404.5.1 Beschreibung von VALVE...............................................................................4-404.5.2 Anschlüsse von VALVE ..................................................................................4-444.5.3 Bedienen und Beobachten von VALVE ..........................................................4-47
5 Sonstige Technologische Bausteine
5.1 ADD4_P: Addition für maximal 4 Werte............................................................5-15.1.1 ADD4_P: Addition für maximal 4 Werte............................................................5-15.1.2 Anschlüsse von ADD4_P ..................................................................................5-25.2 ADD8_P: Addition für maximal 8 Werte............................................................5-25.2.1 ADD8_P: Addition für maximal 8 Werte............................................................5-25.2.2 Anschlüsse von ADD8_P ..................................................................................5-35.3 AVER_P: Zeitlicher Mittelwert ...........................................................................5-35.3.1 Beschreibung von AVER_P ..............................................................................5-35.3.2 Anschlüsse von AVER_P..................................................................................5-55.4 COUNT_P: Zähler .............................................................................................5-55.4.1 Beschreibung von COUNT_P ...........................................................................5-55.4.2 Anschlüsse von COUNT_P...............................................................................5-75.5 DEADT_P: Totzeitglied .....................................................................................5-85.5.1 Beschreibung von DEADT_P............................................................................5-85.5.2 Anschlüsse von DEADT_P ...............................................................................5-9
Inhaltsverzeichnis
Process Control System PCS 7, Technological BlocksA5E00127670-01 v
5.6 DIF_P: Differentiation......................................................................................5-105.6.1 Beschreibung von DIF_P ................................................................................5-105.6.2 Anschlüsse von DIF_P....................................................................................5-115.7 DOSE: Dosiervorgang.....................................................................................5-125.7.1 Beschreibung von DOSE ................................................................................5-125.7.2 Anschlüsse von DOSE....................................................................................5-165.7.3 Bedienen und Beobachten von DOSE............................................................5-225.8 ELAP_CNT: Betriebsstundenzähler................................................................5-265.8.1 Beschreibung von ELAP_CNT........................................................................5-265.8.2 Anschlüsse von ELAP_CNT ...........................................................................5-285.8.3 Bedienen und Beobachten von ELAP_CNT ...................................................5-295.9 INTERLOK: Verriegelungsanzeige .................................................................5-305.9.1 Beschreibung von INTERLOK ........................................................................5-305.9.2 Anschlüsse von INTERLOK............................................................................5-325.9.3 Bedienen und Beobachten von INTERLOK....................................................5-345.10 INT_P: Integration ...........................................................................................5-345.10.1 Beschreibung von INT_P ................................................................................5-345.10.2 Anschlüsse von INT_P....................................................................................5-375.11 LIMITS_P: Begrenzung...................................................................................5-395.11.1 Beschreibung von LIMITS_P ..........................................................................5-395.11.2 Anschlüsse von LIMITS_P ..............................................................................5-405.12 MEANTM_P: Zeitliche Mittelwertbildung.........................................................5-415.12.1 Beschreibung von MEANTM_P ......................................................................5-415.12.2 Anschlüsse von MEANTM_P..........................................................................5-435.13 MUL4_P: Multiplikation für maximal 4 Werte ..................................................5-435.13.1 Beschreibung von MUL4_P ............................................................................5-435.13.2 Anschlüsse von MUL4_P ................................................................................5-445.14 MUL8_P: Multiplikation für maximal 8 Werte ..................................................5-455.14.1 Beschreibung von MUL8_P ............................................................................5-455.14.2 Anschlüsse von MUL8_P ................................................................................5-465.15 OB1_TIME: Ermittlung der CPU-Auslastung ..................................................5-465.15.1 Beschreibung von OB1_TIME.........................................................................5-465.15.2 Anschlüsse von OB1_TIME ............................................................................5-485.16 POLYG_P: Polygonzug mit maximal 8 Stützstellen........................................5-495.16.1 Beschreibung von POLYG_P..........................................................................5-495.16.2 Anschlüsse von POLYG_P .............................................................................5-505.17 PT1_P: Verzögerungsglied 1. Ordnung ..........................................................5-515.17.1 Beschreibung von PT1_P ...............................................................................5-515.17.2 Anschlüsse von PT1_P ...................................................................................5-525.18 RAMP_P: Rampenbildung ..............................................................................5-525.18.1 Beschreibung von RAMP_P............................................................................5-525.18.2 Anschlüsse von RAMP_P ...............................................................................5-545.19 SPLITR_P: Split Range...................................................................................5-555.19.1 Beschreibung von SPLITR_P .........................................................................5-555.19.2 Anschlüsse von SPLITR_P.............................................................................5-575.20 SWIT_CNT: Schaltspielzähler.........................................................................5-585.20.1 Beschreibung von SWIT_CNT........................................................................5-585.20.2 Anschlüsse von SWIT_CNT............................................................................5-605.20.3 Bedienen und Beobachten von SWIT_CNT ...................................................5-62

Inhaltsverzeichnis
Process Control System PCS 7, Technological Blocksvi A5E00127670-01
6 Konvertierungsbausteine
6.1 Allgemeines zu Konvertierungsbausteine.........................................................6-16.2 Beschreibung von R_TO_DW...........................................................................6-16.3 Anschlüsse von R_TO_DW ..............................................................................6-2
7 Bedienbausteine
7.1 Übersicht über die Bedienbausteine .................................................................7-17.2 OP_A: Analogwert-Bedienung ..........................................................................7-67.2.1 Beschreibung von OP_A...................................................................................7-67.2.2 Anschlüsse von OP_A ......................................................................................7-87.2.3 Bedienen und Beobachten von OP_A ..............................................................7-97.3 OP_A_LIM: Analogwert-Bedienung (begrenzend)............................................7-97.3.1 Beschreibung von OP_A_LIM...........................................................................7-97.3.2 Anschlüsse von OP_A_LIM ............................................................................7-127.3.3 Bedienen und Beobachten von OP_A_LIM ....................................................7-137.4 OP_A_RJC: Analogwert-Bedienung (abweisend) ..........................................7-137.4.1 Beschreibung von OP_A_RJC........................................................................7-137.4.2 Anschlüsse von OP_A_RJC ...........................................................................7-167.4.3 Bedienen und Beobachten von OP_A_RJC ...................................................7-177.5 OP_D: Digitalwert-Bedienung (2-Taster) ........................................................7-177.5.1 Beschreibung von OP_D.................................................................................7-177.5.2 Anschlüsse von OP_D ....................................................................................7-197.5.3 Bedienen und Beobachten von OP_D ............................................................7-207.6 OP_D3: Digitalwert-Bedienung (3-Taster) ......................................................7-207.6.1 Beschreibung von OP_D3...............................................................................7-207.6.2 Anschlüsse von OP_D3 ..................................................................................7-237.6.3 Bedienen und Beobachten von OP_D3 ..........................................................7-257.7 OP_TRIG: Digitalwert-Bedienung (1-Taster) ..................................................7-267.7.1 Beschreibung von OP_TRIG...........................................................................7-267.7.2 Anschlüsse von OP_TRIG ..............................................................................7-287.7.3 Bedienen und Beobachten von OP_TRIG ......................................................7-28
8 Meldebausteine
8.1 Übersicht über die Meldebausteine...................................................................8-18.2 MESSAGE: Meldebaustein (projektierbare Meldungen) ..................................8-28.2.1 Beschreibung von MESSAGE...........................................................................8-28.2.2 Anschlüsse von MESSAGE ..............................................................................8-5
9 Bausteine für Batch Flexible
9.1 Übersicht über die Batchbausteine ...................................................................9-19.2 AF_6: Automatisierungsfunktion-Schnittstelle BATCH flexible.........................9-49.2.1 Beschreibung von AF_6....................................................................................9-49.2.2 Anschlüsse von AF_n .......................................................................................9-59.2.3 Bedienen und Beobachten von AF_6 ...............................................................9-89.3 AF_12: Automatisierungsfunktion-Schnittstelle BATCH flexible.......................9-99.3.1 Beschreibung von AF_12..................................................................................9-99.3.2 Bedienen und Beobachten von AF_12 ...........................................................9-109.4 AF_16S: Automatisierungsfunktion-Schnittstelle BATCH flexible ..................9-119.4.1 Beschreibung von AF_16S .............................................................................9-119.4.2 Bedienen und Beobachten von AF_16S.........................................................9-12
Inhaltsverzeichnis
Process Control System PCS 7, Technological BlocksA5E00127670-01 vii
9.5 AF_24: Automatisierungsfunktion-Schnittstelle BATCH flexible.....................9-139.5.1 Beschreibung von AF_24................................................................................9-139.5.2 Bedienen und Beobachten von AF_24 ...........................................................9-149.6 TRANS: Transition-Schnittstelle BATCH flexible ............................................9-159.6.1 Beschreibung von TRANS ..............................................................................9-159.6.2 Anschlüsse von TRANS..................................................................................9-169.7 UNIT: Apparatebelegung-Schnittstelle BATCH flexible ..................................9-169.7.1 Beschreibung von UNIT ..................................................................................9-169.7.2 Anschlüsse von UNIT......................................................................................9-189.7.3 Bedienen und Beobachten von UNIT .............................................................9-18
A Anhang
A.1 Technische Daten ............................................................................................ A-1
Glossar
Index

Inhaltsverzeichnis
Process Control System PCS 7, Technological Blocksviii A5E00127670-01
Process Control System PCS 7, Technological BlocksA5E00127670-01 1-1
1 Allgemeines zur Bausteinbeschreibung
Die Bausteinbeschreibungen sind immer in der gleichen Form gegliedert. DieAbschnitte haben folgende Bedeutung:
Überschrift der Bausteinbeschreibung
Beispiel: CTRL_PID: PID-Reglerbaustein
Die Überschrift beginnt mit dem Typnamen des Bausteins (CTRL_PID). DieserSymbolname wird in der Symboltabelle eingetragen und muss im Projekt eindeutigsein.Zu dem Typnamen finden Sie das Stichwort zu der Aufgabe/Funktion desBausteins (PID-Reglerbaustein).
Objektname (Art + Nummer)
FB x
Der Objektname für den Bausteintyp setzt sich zusammen aus derRealisierungsartFunktionsbaustein = FB, Funktion = FC und der Bausteinnummer = x.
Schaltfläche zum Anzeigen der Bausteinanschlüsse
Beispiel:
Durch Mausklick auf die Schaltfläche "Bausteinanschlüsse" können Sie direkt zuder Liste der Bausteinanschlüsse des bezeichneten Bausteins springen. Das vorangestellte Bausteinsymbol dient als Blickfang zum schnellen Auffinden derSchaltfläche.
Funktion
Hier finden Sie in Kurzform die Funktion des Bausteins beschrieben.Bei komplexen Bausteinen werden weitere Informationen im AbschnittArbeitsweise eingebracht.
Arbeitsweise
Es werden weitergehende Informationen zu der Funktion einzelner Eingänge,Betriebsarten, Zeitabläufe u.a. gebracht. Sie sollten die hier beschriebenenZusammenhänge kennen, um den Baustein effektiv einzusetzen.
Allgemeines zur Bausteinbeschreibung
Process Control System PCS 7, Technological Blocks1-2 A5E00127670-01
Aufrufende OBs
Hier finden Sie Angaben zu den Organisationsbausteinen (OBs), in die derbeschriebene Baustein eingebaut werden muss. Beim Einsatz des CFC erfolgt derEinbau in den zyklischen OB (Weckalarm) und automatisch in die OBs, die in derTaskliste des Bausteins aufgeführt sind (z.B. in OB100 für Wiederanlauf).
Der CFC erzeugt beim Übersetzen die nötigen OBs. Beim Einsatz der Bausteineohne CFC müssen Sie diese OBs programmieren und in ihnen die Bausteininstanzaufrufen.
Fehlerbehandlung
Die Fehleranzeige finden Sie im CFC-Plan am boolschen Baustein-Ausgang ENO .Der Wert entspricht dem BIE (Binäres Ergebnis in STEP 7-AWL nach Beendendes Bausteins), bzw. dem OK-Bit (in SCL-Schreibweise) und bedeutet:
ENO=BIE=OK=1 (TRUE) -> Das Ergebnis des Bausteins ist o.k.
ENO=BIE=OK=0 (FALSE) -> Das Ergebnis bzw. die Rahmenbedingungen fürdessen Berechnung (z.B. Eingangswerte, Betriebsarten usw.) sind nicht gültig.
Zusätzlich finden Sie bei FBs das invertierte BIE im Ausgang QERR des Instanz-DBs gespeichert.
QERR=NOT ENO
Die Fehleranzeige entsteht auf zwei unabhängigen Wegen:
Das Betriebssystem erkennt einen Bearbeitungsfehler (z.B. Wertüberlauf,aufgerufene Systemfunktionen liefern eine Fehlerkennung mit BIE=0 ).Dieses ist eine Systemleistung und wird in der einzelnen Bausteinbeschreibungnicht besonders erwähnt.
Der Bausteinalgorithmus prüft Werte und Betriebsarten auf funktionaleUnzulässigkeit. Diese Fehlerfälle werden in der Beschreibung des Bausteinsdokumentiert.
Die Auswertung der Fehleranzeige können Sie nutzen, um z.B. Meldungen zuerzeugen (siehe Meldebausteine) oder mit Ersatzwerten für fehlerhafte Ergebnissezu arbeiten.
Anlaufverhalten
Es wird unterschieden:
• ErstlaufDer Baustein wird aus dem OB, in dem er eingefügt ist, zum ersten Malaufgerufen. In der Regel ist das der OB in dem die normale, prozessbezogeneBearbeitung stattfindet (z.B. der Weckalarm-OB).Der Baustein nimmt den Zustand ein, der den Eingangsparametern entspricht.Das können vorbesetzte Werte (siehe auch Anschlüsse) oder schonprojektierte Werte sein, die Sie z.B. im CFC parametriert haben. DasErstlaufverhalten wird nicht besonders beschrieben, es sei denn, der Bausteinweist Abweichungen von dieser Regel auf.
Allgemeines zur Bausteinbeschreibung
Process Control System PCS 7, Technological BlocksA5E00127670-01 1-3
• AnlaufDer Baustein wird einmalig bei einem CPU-Anlauf bearbeitet. Dadurch wirderreicht, dass der Baustein aus einem Anlauf-OB aufgerufen wird (wo er überdas ES automatisch bzw. über STEP 7 durch Sie von Hand zusätzlicheingebaut wird). In diesem Fall wird das Anlaufverhalten beschrieben.
Zeitverhalten
Der Baustein mit diesem Verhalten muss in einem Weckalarm-OB eingebaut sein.Er errechnet seine Zeitkonstanten/Parameter anhand seiner Abtastzeit (dieZeitspanne zwischen zwei aufeinander folgenden zyklischen Bearbeitungen).Bei CFC-Projektierung auf ES wird die Abtastzeit auch durch die Untersetzung derso genannten Ablaufgruppe bestimmt. Über diese wird erreicht, dass der Bausteinnicht bei jedem OB-Durchlauf bearbeitet wird.Diese Abtastzeit wird bei den Anschlüssen, im Parameter SAMPLE_T eingetragen.
Bei CFC-Projektierung geschieht dies automatisch nach dem Einfügen desBausteins in OB und Ablaufgruppe (aus diesem Grund wird dieser Eingang im CFCunsichtbar geschaltet).
Bei STEP 7-Projektierung müssen Sie es von Hand durchführen.
Das Zeitverhalten wird nur dann erwähnt, wenn der Baustein es vorweist.
Meldeverhalten
Der Baustein mit diesem Verhalten meldet verschiedene Ereignisse an dasübergeordnete OS. Falls vorhanden, werden die notwendigen Parameter für dieMeldungserzeugung dokumentiert.Bausteine ohne Meldeverhalten können durch zusätzliche Meldebausteine ergänztwerden. Einen Verweis auf das Meldeverhalten finden Sie bei der Beschreibungder einzelnen meldefähigen Bausteine.
Anschlüsse von ...
Die Anschlüsse stellt die Datenschnittstelle des Bausteins bereit. Über diesekönnen Sie dem Baustein Daten übergeben und vom Baustein Ergebnisseabholen.
Anschluss(Parameter)
Bedeutung Datentyp Vorbesetzung Art Attr. B&B ZulässigeWerte
U1 Summand 1 REAL 0 I Q + >0
.....
In der Tabelle "Anschlüsse" werden alle Ein- und Ausgangsparameter desBausteintyps dargestellt, auf die der Anwender mit seinen Projektierungsmittelzugreifen kann. Sie sind alphabetisch sortiert. Elemente, die nur vom Algorithmusdes Bausteins erreicht werden, sind nicht aufgeführt (so genannte interneVariablen).
Allgemeines zur Bausteinbeschreibung
Process Control System PCS 7, Technological Blocks1-4 A5E00127670-01
Dabei haben die Spalten folgende Bedeutung:
Anschluss = Name des Parameters, abgeleitet von der englischen Bezeichnungz.B. PV_IN = Process Variable INput (Prozessgröße, Regelgröße).Es wurden, soweit durch SIMATIC-Konventionen vorgesehen, die gleichenNamensregeln benutzt.
Der Auslieferungszustand der Bausteindarstellung im CFC ist wie folgtgekennzeichnet: Anschlussname fett = Anschluss sichtbar, normal = unsichtbar.
Bedeutung = Funktion (evtl. Kurzbeschreibung)
Datentyp = S7-Datentyp des Parameters (BOOL, REAL u.a.).
Vorbes. (Vorbesetzung) = Der Wert des Parameters vor dem Erstlauf desBausteins (falls nicht durch die Projektierung verändert).
Art = Art des Zugriffs des Bausteinalgorithmus auf den Parameter; unterscheidetEingänge, nicht rückwirkungsfreie Eingänge und Ausgänge (siehe Tabelle)
Kürzel Art
I Eingang. Wertversorgung des Bausteins (Darstellung im CFC: linke Bausteinseite)
O Ausgang. Ausgangswert. (Darstellung im CFC: rechte Bausteinseite)
IO Eingang/Ausgang. Nicht rückwirkungsfreier Eingang, der von der OS beschrieben undvom Baustein aus zurückgeschrieben werden kann (Darstellung im CFC: linkeBausteinseite)
Attr. (Attribute) = zusätzliche Merkmale des Parameters beim Einsatz unter CFC.Nicht verschaltete Eingangs- und Einausgangsparameter sind parametrierbar (beiFCs online nur Ein-/Ausgangsparameter).Ausgangsparameter sind nicht parametrierbar und können im CFC durchVerschaltung auf einen Eingang des gleichen Datentyps übertragen werden.
Zusätzliche Eigenschaften des Parameters werden wie folgt angegeben:
Kürzel Attribut
B Bedienbar (nur über OS-Baustein). Auf den Anschluss kann schreibend von einer OS auszugegriffen werden. Im CFC unsichtbar gesetzt.
E Wird änderungsgesteuert zur OS übertragen
M MESSAGE ID für Meldebaustein (z.B. ALARM_8P) nicht parametrierbar.ID wird vom Meldeserver vergeben.
Q Verschaltbar. Der Anschluss kann mit einem anderen, typgleichen Ausgang verschaltetwerden.
B&B = die mit "+" gekennzeichneten Parameter können über den zugehörigen OS-Baustein bedient bzw. beobachtet werden.
Zulässige Werte = zusätzliche Begrenzung innerhalb des Datentyp-Wertebereichs.
Allgemeines zur Bausteinbeschreibung
Process Control System PCS 7, Technological BlocksA5E00127670-01 1-5
Bedienen und Beobachten
Wenn zum AS-Baustein ein OS-Baustein vorhanden ist, werden in einer Tabelledie Sichten der Bildbausteine beschrieben.

Allgemeines zur Bausteinbeschreibung
Process Control System PCS 7, Technological Blocks1-6 A5E00127670-01
Process Control System PCS 7, Technological BlocksA5E00127670-01 2-1
2 Allgemeines zu den Bildbausteinen
Was ist ein Bildbaustein?
Die grafische Darstellung aller Elemente eines technologischen Bausteins aus demAS, die zum Bedienen und Beobachten vorgesehen sind. Der Bildbaustein wird ineinem eigenen Fenster in der OS abgebildet und kann über Bildanwahltasten,Messstellenliste, Bausteinsymbol etc. aufgerufen werden.
Voraussetzungen
Um die Bildbausteine nutzen zu können, brauchen Sie ein System mit WinCC unddie Leittechnikpakete "Basis Process Control" und “Advanced Process Control“.
Die Bildbausteine sind für Grafikkarten mit einer Auflösung von 1280x1024 Pixelausgelegt. Bei einer Größe von 320x256 Pixel können in einem Bild 12Bildbausteine matrixförmig in 3 Reihen zu je 4 Spalten ohne Scrollbars dargestelltwerden. Bei Betrieb mit Grafikkarten kleinerer Auflösung muss das Einblenden vonScrollbars bzw. eine Verminderung der Bausteinanzahl hingenommen werden.
Vorteile der Bildbausteine
Die Bildbausteine haben folgende Vorteile:
• leichte Erlernbarkeit
• einfache Projektierung durch definierte Schnittstelle zwischen Bildbaustein undAS-Baustein
• einfache Handhabung durch wenige Bedienvorschriften
• übersichtliche Darstellung des Prozessgeschehens
• WinCC- und Windows-Konformität
Darstellung
Bei den Bildbausteinen gibt es zwei unterschiedliche Darstellungsformen:
• Gruppendarstellung: Darstellung der AS-Werte in unterschiedlichen Sichtenmit Anwahlelement für die Kreisbilddarstellung
• Kreisbilddarstellung: Darstellung der Elemente aller Sichten derGruppendarstellung.
Allgemeines zu den Bildbausteinen
Process Control System PCS 7, Technological Blocks2-2 A5E00127670-01
Weiterführende Informationen
Über Entwurf, Projektierung und Test eines Bildbausteins finden Sie ausführlicheInformationen im Handbuch "Programmieranleitung Bausteine erstellen für PCS 7".
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-1
3 Messen und Regeln
3.1 CTRL_PID: PID-Reglerbaustein
3.1.1 Beschreibung von CTRL_PID
Objektname (Art + Nummer)
FB 61
Funktion
Der CTRL_PID ist ein kontinuierlicher PID-Regler und dient zum Aufbau folgenderStandard-Reglerschaltungen: Festwertregelung, Kaskadenregelung (Einfach-/Mehrfachkaskaden), Verhältnisregelung, Gleichlaufregelung, Mischungsregelung
Der Reglerbaustein beinhaltet neben der eigentlichen Reglerfunktion nochfolgende Verarbeitungsmöglichkeiten:
• Betriebsarten: Handbetrieb, Automatik oder Nachführen
• Grenzwertüberwachung der Regelgröße und Regeldifferenz undMeldungsgenerierung über den ALARM8_P-Baustein.
• Störgrößenaufschaltung
• Sollwertnachführung (SP=PV_IN)
• Wertebereichseinstellung für Soll- und Istwert (physikalische Normierung)
• Wertebereichseinstellung für die Stellgröße (physikalische Normierung)
• Totzone (Ansprechschwelle) im Regeldifferenzzweig
• Einzel zu- und abschaltbarer P-, I- und D-Anteil
• P- und D-Anteil können in die Rückführung gelegt werden
• Arbeitspunkteinstellung für den P-bzw. PD-Reglerbetrieb
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-2 A5E00127670-01
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB100 (siehe Anlaufverhalten).
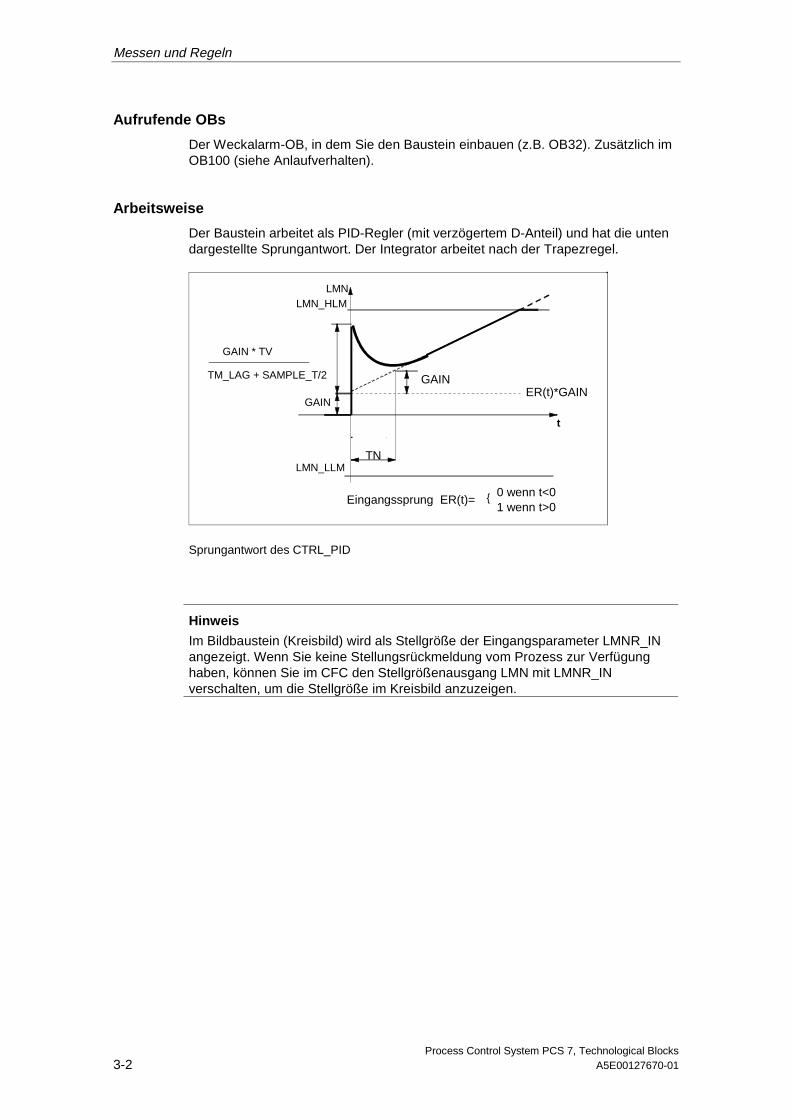
Arbeitsweise
Der Baustein arbeitet als PID-Regler (mit verzögertem D-Anteil) und hat die untendargestellte Sprungantwort. Der Integrator arbeitet nach der Trapezregel.
t
GAIN * TV
TM_LAG + SAMPLE_T/2
LMN_HLM
LMN_LLM
LMN
1 wenn t>00 wenn t<0
Eingangssprung ER(t)=
GAIN
GAIN
TN
{
ER(t)*GAIN
Sprungantwort des CTRL_PID
Hinweis
Im Bildbaustein (Kreisbild) wird als Stellgröße der Eingangsparameter LMNR_INangezeigt. Wenn Sie keine Stellungsrückmeldung vom Prozess zur Verfügunghaben, können Sie im CFC den Stellgrößenausgang LMN mit LMNR_INverschalten, um die Stellgröße im Kreisbild anzuzeigen.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-3
3.1.2 Signalverarbeitung im Soll- und Istwertzweig von CTRL_PID
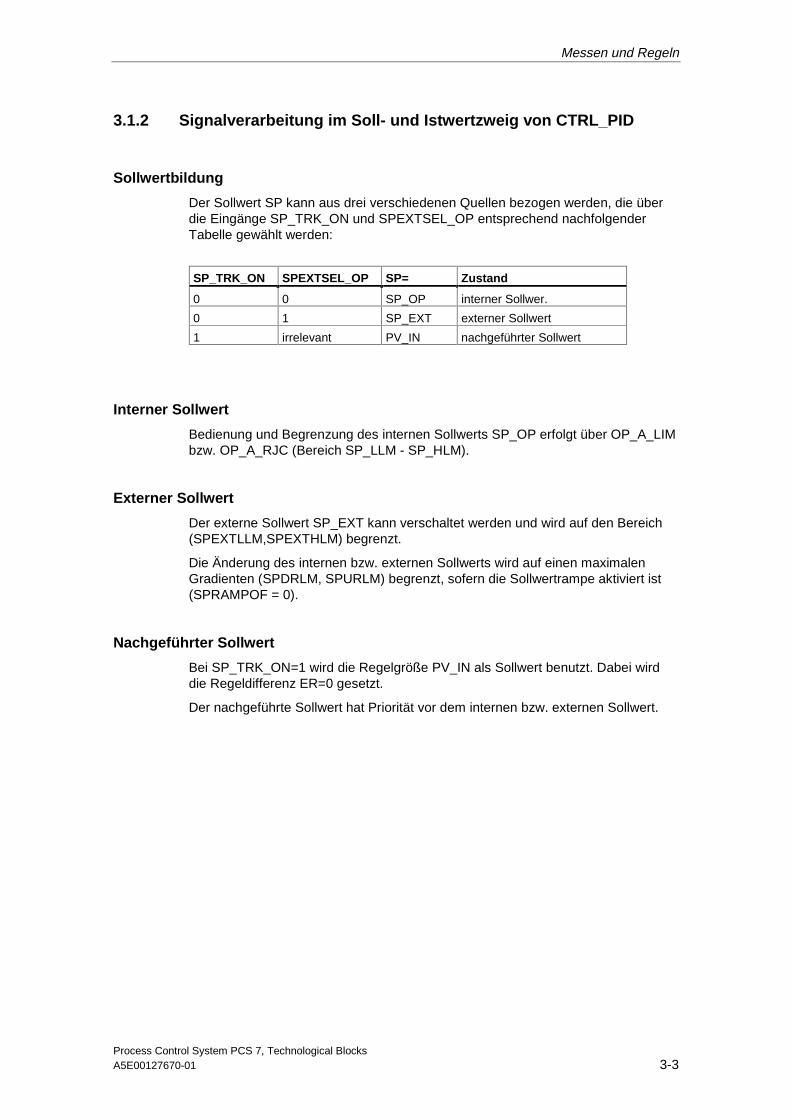
Sollwertbildung
Der Sollwert SP kann aus drei verschiedenen Quellen bezogen werden, die überdie Eingänge SP_TRK_ON und SPEXTSEL_OP entsprechend nachfolgenderTabelle gewählt werden:
SP_TRK_ON SPEXTSEL_OP SP= Zustand
0 0 SP_OP interner Sollwer.
0 1 SP_EXT externer Sollwert
1 irrelevant PV_IN nachgeführter Sollwert
Interner Sollwert
Bedienung und Begrenzung des internen Sollwerts SP_OP erfolgt über OP_A_LIMbzw. OP_A_RJC (Bereich SP_LLM - SP_HLM).
Externer Sollwert
Der externe Sollwert SP_EXT kann verschaltet werden und wird auf den Bereich(SPEXTLLM,SPEXTHLM) begrenzt.
Die Änderung des internen bzw. externen Sollwerts wird auf einen maximalenGradienten (SPDRLM, SPURLM) begrenzt, sofern die Sollwertrampe aktiviert ist(SPRAMPOF = 0).
Nachgeführter Sollwert
Bei SP_TRK_ON=1 wird die Regelgröße PV_IN als Sollwert benutzt. Dabei wirddie Regeldifferenz ER=0 gesetzt.
Der nachgeführte Sollwert hat Priorität vor dem internen bzw. externen Sollwert.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-4 A5E00127670-01
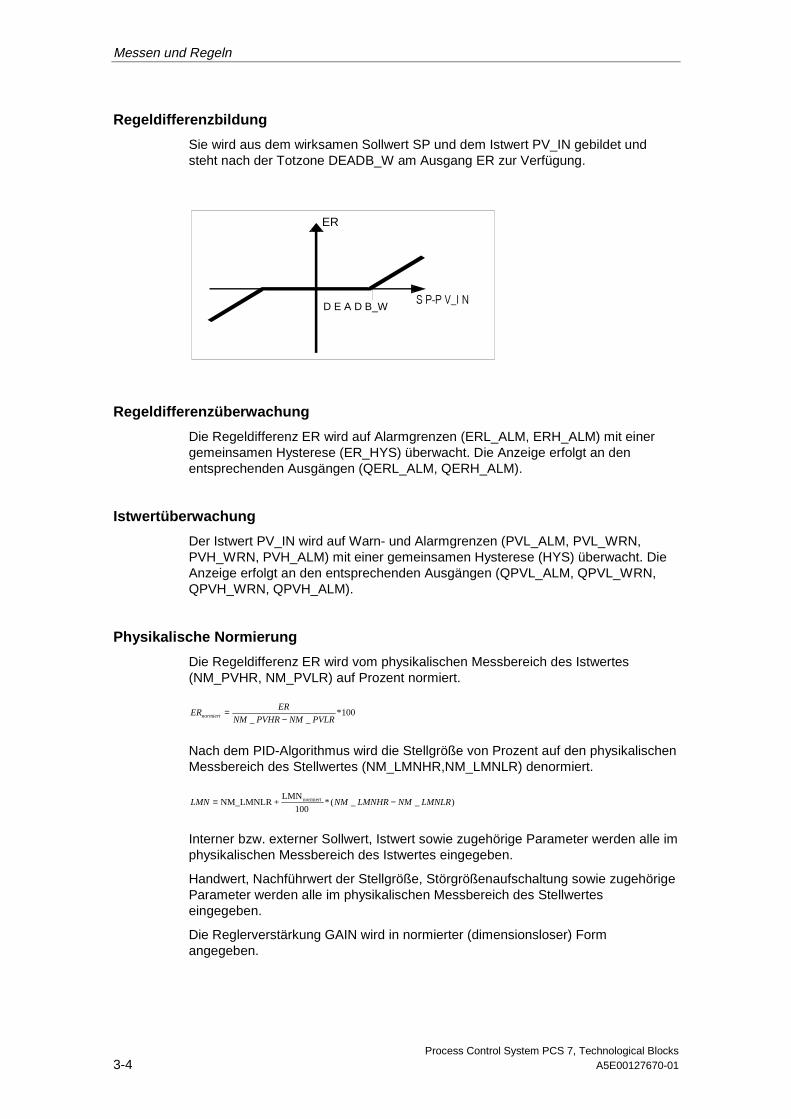
Regeldifferenzbildung
Sie wird aus dem wirksamen Sollwert SP und dem Istwert PV_IN gebildet undsteht nach der Totzone DEADB_W am Ausgang ER zur Verfügung.
D E A D B_W
ER
6�3�3�9B,�1
Regeldifferenzüberwachung
Die Regeldifferenz ER wird auf Alarmgrenzen (ERL_ALM, ERH_ALM) mit einergemeinsamen Hysterese (ER_HYS) überwacht. Die Anzeige erfolgt an denentsprechenden Ausgängen (QERL_ALM, QERH_ALM).
Istwertüberwachung
Der Istwert PV_IN wird auf Warn- und Alarmgrenzen (PVL_ALM, PVL_WRN,PVH_WRN, PVH_ALM) mit einer gemeinsamen Hysterese (HYS) überwacht. DieAnzeige erfolgt an den entsprechenden Ausgängen (QPVL_ALM, QPVL_WRN,QPVH_WRN, QPVH_ALM).
Physikalische Normierung
Die Regeldifferenz ER wird vom physikalischen Messbereich des Istwertes(NM_PVHR, NM_PVLR) auf Prozent normiert.
100*__ PVLRNMPVHRNM
ERERnormiert −
=
Nach dem PID-Algorithmus wird die Stellgröße von Prozent auf den physikalischenMessbereich des Stellwertes (NM_LMNHR,NM_LMNLR) denormiert.
)__(*100
LMN + NM_LMNLR normiert LMNLRNMLMNHRNMLMN −=
Interner bzw. externer Sollwert, Istwert sowie zugehörige Parameter werden alle imphysikalischen Messbereich des Istwertes eingegeben.
Handwert, Nachführwert der Stellgröße, Störgrößenaufschaltung sowie zugehörigeParameter werden alle im physikalischen Messbereich des Stellwerteseingegeben.
Die Reglerverstärkung GAIN wird in normierter (dimensionsloser) Formangegeben.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-5
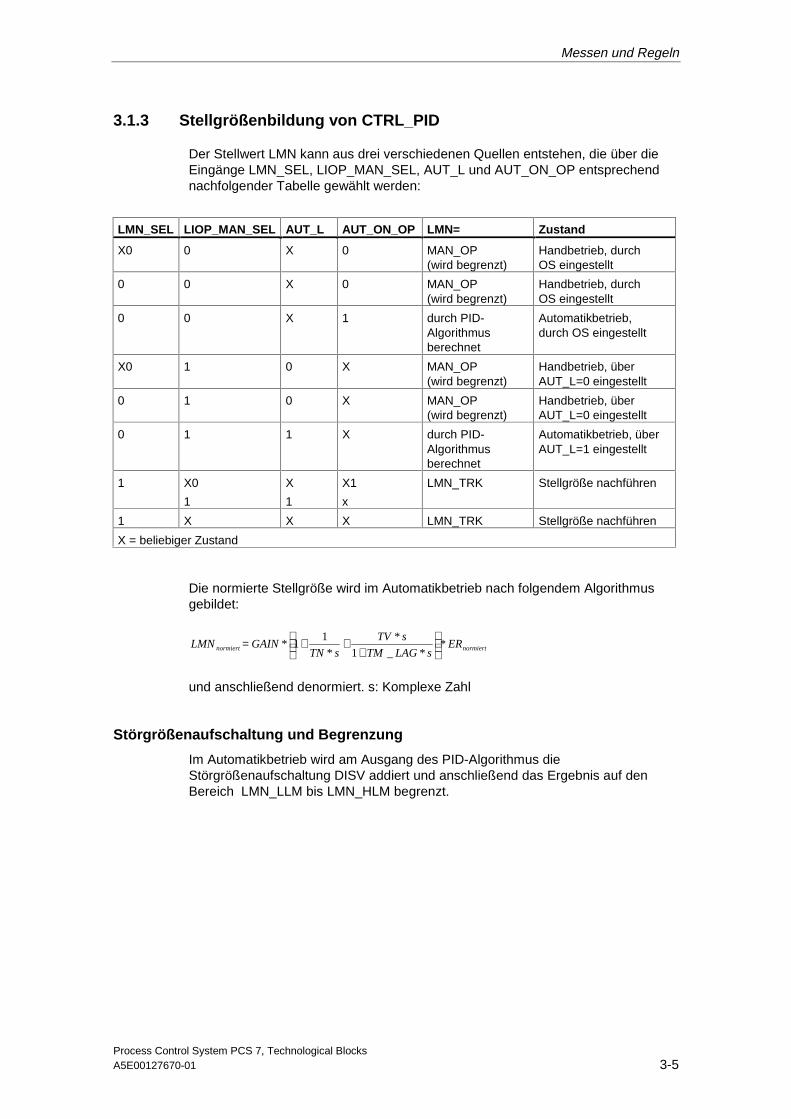
3.1.3 Stellgrößenbildung von CTRL_PID
Der Stellwert LMN kann aus drei verschiedenen Quellen entstehen, die über dieEingänge LMN_SEL, LIOP_MAN_SEL, AUT_L und AUT_ON_OP entsprechendnachfolgender Tabelle gewählt werden:
LMN_SEL LIOP_MAN_SEL AUT_L AUT_ON_OP LMN= Zustand
X0 0 X 0 MAN_OP(wird begrenzt)
Handbetrieb, durchOS eingestellt
0 0 X 0 MAN_OP(wird begrenzt)
Handbetrieb, durchOS eingestellt
0 0 X 1 durch PID-Algorithmusberechnet
Automatikbetrieb,durch OS eingestellt
X0 1 0 X MAN_OP(wird begrenzt)
Handbetrieb, überAUT_L=0 eingestellt
0 1 0 X MAN_OP(wird begrenzt)
Handbetrieb, überAUT_L=0 eingestellt
0 1 1 X durch PID-Algorithmusberechnet
Automatikbetrieb, überAUT_L=1 eingestellt
1 X0
1
X
1
X1
x
LMN_TRK Stellgröße nachführen
1 X X X LMN_TRK Stellgröße nachführen
X = beliebiger Zustand
Die normierte Stellgröße wird im Automatikbetrieb nach folgendem Algorithmusgebildet:
normiertnormiert ERsLAGTM
sTV
sTNGAINLMN *
*_1
*
*
11*
+
++=
und anschließend denormiert. s: Komplexe Zahl
Störgrößenaufschaltung und Begrenzung
Im Automatikbetrieb wird am Ausgang des PID-Algorithmus dieStörgrößenaufschaltung DISV addiert und anschließend das Ergebnis auf denBereich LMN_LLM bis LMN_HLM begrenzt.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-6 A5E00127670-01
3.1.4 Hand-, Automatik- und Nachführbetrieb von CTRL_PID
Handbetrieb
Die Stellgröße wird durch OS-Bedienung des Eingangs MAN_OP bestimmt.Bedienung und Begrenzung erfolgt über OP_A_LIM bzw OP_A_RJC (BereichMAN_HLM – MAN_LLM).Die Ausgangswerte von QVHL und QVLL des OP_A_LIMbzw. OP_A_RJC werden an die Ausgänge QLMN_HLM und QLMN_LLMweitergereicht.
Automatikbetrieb
Die Stellgröße wird durch den PID-Algorithmus berechnet. Die RegelparameterGAIN, TN, TVund TM_LAG sind verschaltbar.
• Der Reglerwirksinn kann reversiert werden (steigende Regeldifferenz bewirktfallende Stellgröße), indem der Proportionalbeiwert GAIN negativ parametriertwird. Der P-Anteil kann über P_SEL = 0 deaktiviert werden.Der I-Anteil ist überTN=0 abschaltbar. Bei Begrenzung der Stellgröße LMN im Automatikbetriebwird der Integrierer eingefroren (Anti Wind Up). Durch eineVorzeichenänderung des Parameters TN wird die Wirkrichtung des Integrierersumgekehrt.
• Arbeitspunkt: Sie stellen den Arbeitspunkt am Eingang LMN_OFF ein. DieserWert ersetzt im Automatikbetrieb den I-Anteil des PID-Algorithmus, wenn der I-Anteil deaktiviert ist. Der Arbeitspunkt wird im Messbereich des Stellwerteseingegeben.
• Der D-Anteil ist als verzögerndes Differenzierglied ausgeführt. Er ist über TV=0abschaltbar. Durch eine Vorzeichenänderung des Parameters TV wird dieWirkrichtung des Differenzierers umgekehrt.
• P-Anteil in Rückführung schalten: Mit PFDB_SEL = TRUE ist der P-Anteil indie Rückführung geschaltet. Ein Führungssprung hat somit keinen Einfluss aufden P-Anteil. Die Umschaltung von PFDB_SEL ist nicht stoßfrei.
• D-Anteil in Rückführung schalten: Mit DFDB_SEL = TRUE ist der D-Anteil indie Rückführung geschaltet. Ein Führungssprung hat somit keinen Einfluss aufden D-Anteil. Die Umschaltung von DFDB_SEL ist nicht stoßfrei.
Nachführbetrieb
In diesem Zustand (LMN_SEL=1) wird die Stellgröße von dem verschaltetenNachführwert LMN_TRK geholt und auf den Ausgang gelegt. Die AusgängeQLMN_HLM und QLMN_LLM werden auf FALSE gesetzt.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-7
Kaskadierung mehrerer PID-Regler
Die Stellgröße LMN des Führungsreglers wird mit dem Eingang SP_EXT desFolgereglers verbunden. Zusätzlich muss dafür gesorgt werden, dass derFührungsregler in den Nachführbetrieb übernommen wird, falls die Kaskadeaufgetrennt wird. Dazu wird im Folgeregler ein Signal QCAS_CUT gebildet und mitdem Eingang LMN_SEL des Führungsreglers verschaltet. Eine Trennung kanndurch Hand- oder Nachführbetrieb, durch Sollwertbedienung oderSollwertnachführung des Folgereglers verursacht werden:
QCAS_CUT= NOT( QMAN_AUT) OR LMN_SEL OR SP_TRK_ON OR NOT(QSPEXT_ON)
Der Nachführeingang LMN_TRK des Führungsreglers wird mit dem Ausgang SPdes Folgereglers verbunden, damit kein Sprung entsteht, wenn die Kaskadewieder geschlossen wird.
3.1.5 Betriebsartenumschaltung von CTRL_PID
Betriebsartenumschaltung
Diese kann entweder durch Bedienung oder über verschaltbare Eingängeausgelöst werden.
Sollwert Extern/Intern
Die Umschaltung erfolgt durch OS-Bedienung des Eingangs SPEXTSEL_OP oderVerschaltung von SPEXON_L. Diese Umschaltungen müssen Sie über dieentsprechenden Freigabeeingänge SPINT_EN, SPEXT_EN bzw. AuswahleingangLIOP_INT_SEL ermöglichen.
Bei SPBUMPON = 1 wird der wirksame Sollwert auf den internen Sollwertübernommen, um einen stoßfreien Übergang von Extern- bzw. Nachführbetriebnach Internbetrieb zu ermöglichen.
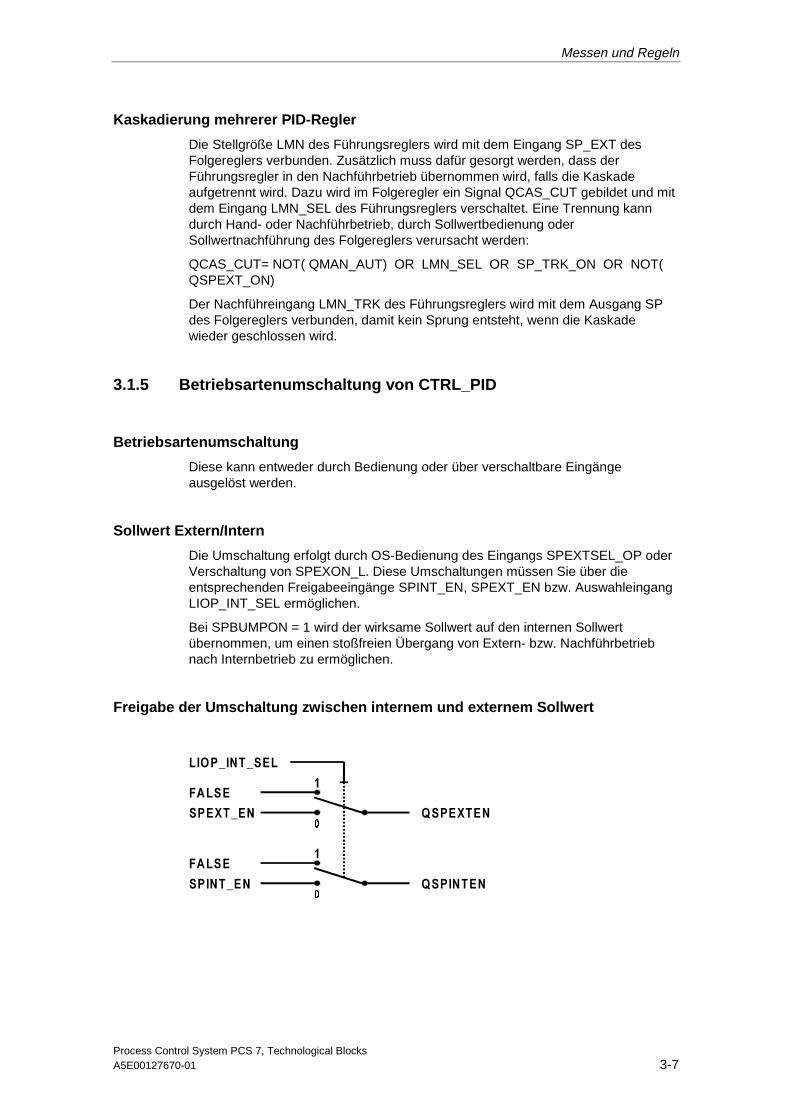
Freigabe der Umschaltung zwischen internem und externem Sollwert
/,23B,17B6(/
63(;7B(1
63,17B(1
)$/6(
)$/6(
463,17(1
463(;7(1
�
�
�
�
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-8 A5E00127670-01
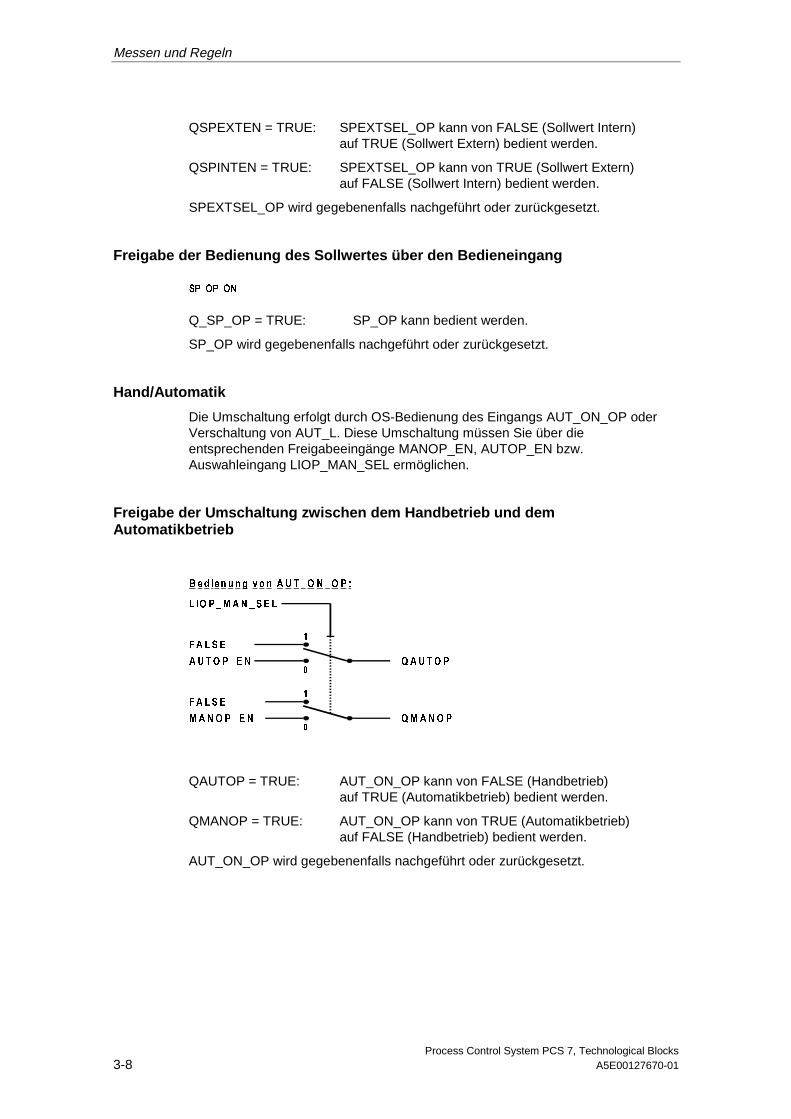
QSPEXTEN = TRUE: SPEXTSEL_OP kann von FALSE (Sollwert Intern)auf TRUE (Sollwert Extern) bedient werden.
QSPINTEN = TRUE: SPEXTSEL_OP kann von TRUE (Sollwert Extern)auf FALSE (Sollwert Intern) bedient werden.
SPEXTSEL_OP wird gegebenenfalls nachgeführt oder zurückgesetzt.
Freigabe der Bedienung des Sollwertes über den Bedieneingang
63B23B21
Q_SP_OP = TRUE: SP_OP kann bedient werden.
SP_OP wird gegebenenfalls nachgeführt oder zurückgesetzt.
Hand/Automatik
Die Umschaltung erfolgt durch OS-Bedienung des Eingangs AUT_ON_OP oderVerschaltung von AUT_L. Diese Umschaltung müssen Sie über dieentsprechenden Freigabeeingänge MANOP_EN, AUTOP_EN bzw.Auswahleingang LIOP_MAN_SEL ermöglichen.
Freigabe der Umschaltung zwischen dem Handbetrieb und demAutomatikbetrieb
/ ,2 3 B0 $ 1 B6 ( /
$ 8 72 3 B( 1
0 $ 1 2 3 B( 1
)$ /6 (
)$ /6 (
4 0 $ 1 2 3
4 $8 72 3
�
�
�
�
% HG LHQ X Q J Y R Q $ 8 7 B2 1 B2 3 �
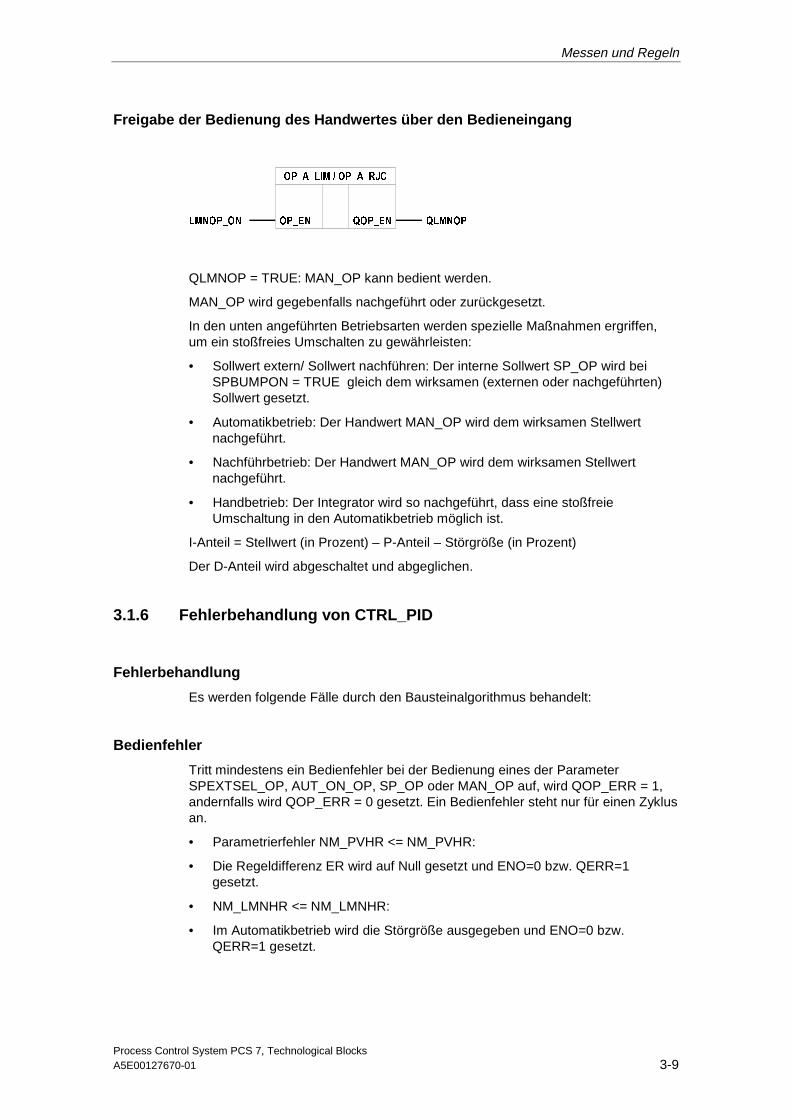
QAUTOP = TRUE: AUT_ON_OP kann von FALSE (Handbetrieb)auf TRUE (Automatikbetrieb) bedient werden.
QMANOP = TRUE: AUT_ON_OP kann von TRUE (Automatikbetrieb)auf FALSE (Handbetrieb) bedient werden.
AUT_ON_OP wird gegebenenfalls nachgeführt oder zurückgesetzt.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-9
Freigabe der Bedienung des Handwertes über den Bedieneingang
23B$B/,0���23B$B5-&
23B(1 423B(1/0123B21 4/0123
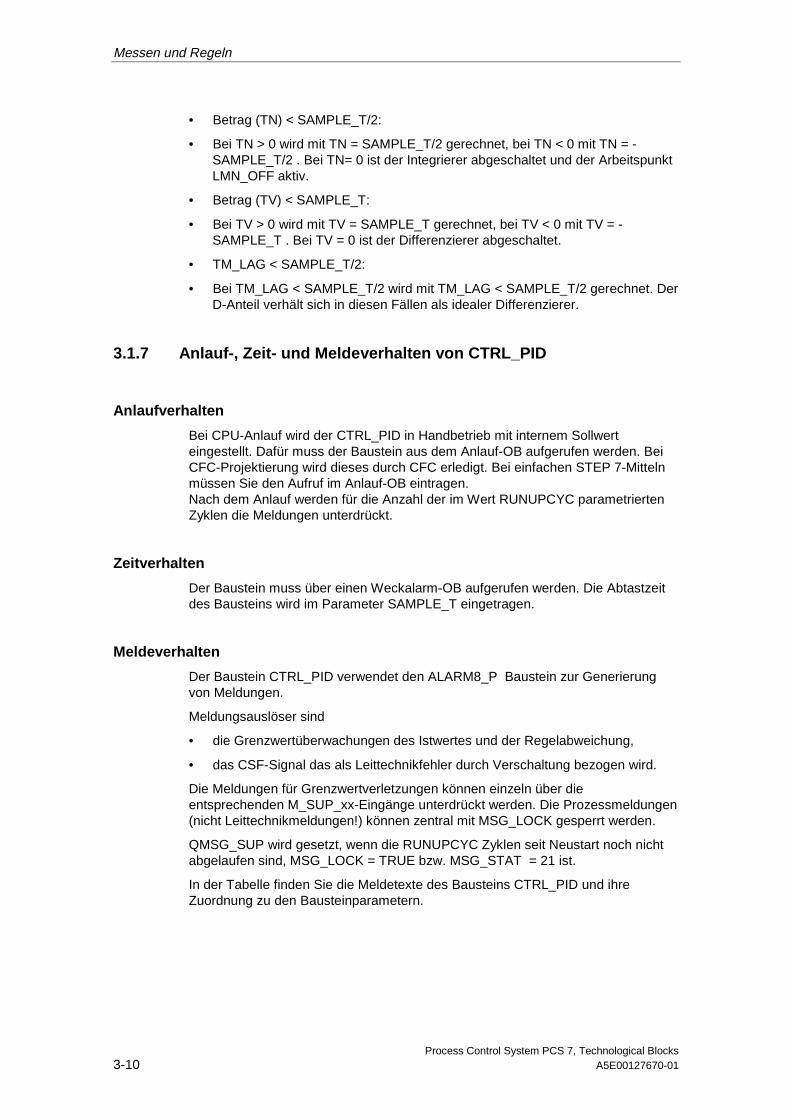
QLMNOP = TRUE: MAN_OP kann bedient werden.
MAN_OP wird gegebenfalls nachgeführt oder zurückgesetzt.
In den unten angeführten Betriebsarten werden spezielle Maßnahmen ergriffen,um ein stoßfreies Umschalten zu gewährleisten:
• Sollwert extern/ Sollwert nachführen: Der interne Sollwert SP_OP wird beiSPBUMPON = TRUE gleich dem wirksamen (externen oder nachgeführten)Sollwert gesetzt.
• Automatikbetrieb: Der Handwert MAN_OP wird dem wirksamen Stellwertnachgeführt.
• Nachführbetrieb: Der Handwert MAN_OP wird dem wirksamen Stellwertnachgeführt.
• Handbetrieb: Der Integrator wird so nachgeführt, dass eine stoßfreieUmschaltung in den Automatikbetrieb möglich ist.
I-Anteil = Stellwert (in Prozent) – P-Anteil – Störgröße (in Prozent)
Der D-Anteil wird abgeschaltet und abgeglichen.
3.1.6 Fehlerbehandlung von CTRL_PID
Fehlerbehandlung
Es werden folgende Fälle durch den Bausteinalgorithmus behandelt:
Bedienfehler
Tritt mindestens ein Bedienfehler bei der Bedienung eines der ParameterSPEXTSEL_OP, AUT_ON_OP, SP_OP oder MAN_OP auf, wird QOP_ERR = 1,andernfalls wird QOP_ERR = 0 gesetzt. Ein Bedienfehler steht nur für einen Zyklusan.
• Parametrierfehler NM_PVHR <= NM_PVHR:
• Die Regeldifferenz ER wird auf Null gesetzt und ENO=0 bzw. QERR=1gesetzt.
• NM_LMNHR <= NM_LMNHR:
• Im Automatikbetrieb wird die Störgröße ausgegeben und ENO=0 bzw.QERR=1 gesetzt.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-10 A5E00127670-01
• Betrag (TN) < SAMPLE_T/2:
• Bei TN > 0 wird mit TN = SAMPLE_T/2 gerechnet, bei TN < 0 mit TN = -SAMPLE_T/2 . Bei TN= 0 ist der Integrierer abgeschaltet und der ArbeitspunktLMN_OFF aktiv.
• Betrag (TV) < SAMPLE_T:
• Bei TV > 0 wird mit TV = SAMPLE_T gerechnet, bei TV < 0 mit TV = -SAMPLE_T . Bei TV = 0 ist der Differenzierer abgeschaltet.
• TM_LAG < SAMPLE_T/2:
• Bei TM_LAG < SAMPLE_T/2 wird mit TM_LAG < SAMPLE_T/2 gerechnet. DerD-Anteil verhält sich in diesen Fällen als idealer Differenzierer.
3.1.7 Anlauf-, Zeit- und Meldeverhalten von CTRL_PID
Anlaufverhalten
Bei CPU-Anlauf wird der CTRL_PID in Handbetrieb mit internem Sollwerteingestellt. Dafür muss der Baustein aus dem Anlauf-OB aufgerufen werden. BeiCFC-Projektierung wird dieses durch CFC erledigt. Bei einfachen STEP 7-Mittelnmüssen Sie den Aufruf im Anlauf-OB eintragen.Nach dem Anlauf werden für die Anzahl der im Wert RUNUPCYC parametriertenZyklen die Meldungen unterdrückt.
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
Meldeverhalten
Der Baustein CTRL_PID verwendet den ALARM8_P Baustein zur Generierungvon Meldungen.
Meldungsauslöser sind
• die Grenzwertüberwachungen des Istwertes und der Regelabweichung,
• das CSF-Signal das als Leittechnikfehler durch Verschaltung bezogen wird.
Die Meldungen für Grenzwertverletzungen können einzeln über dieentsprechenden M_SUP_xx-Eingänge unterdrückt werden. Die Prozessmeldungen(nicht Leittechnikmeldungen!) können zentral mit MSG_LOCK gesperrt werden.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, MSG_LOCK = TRUE bzw. MSG_STAT = 21 ist.
In der Tabelle finden Sie die Meldetexte des Bausteins CTRL_PID und ihreZuordnung zu den Bausteinparametern.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-11
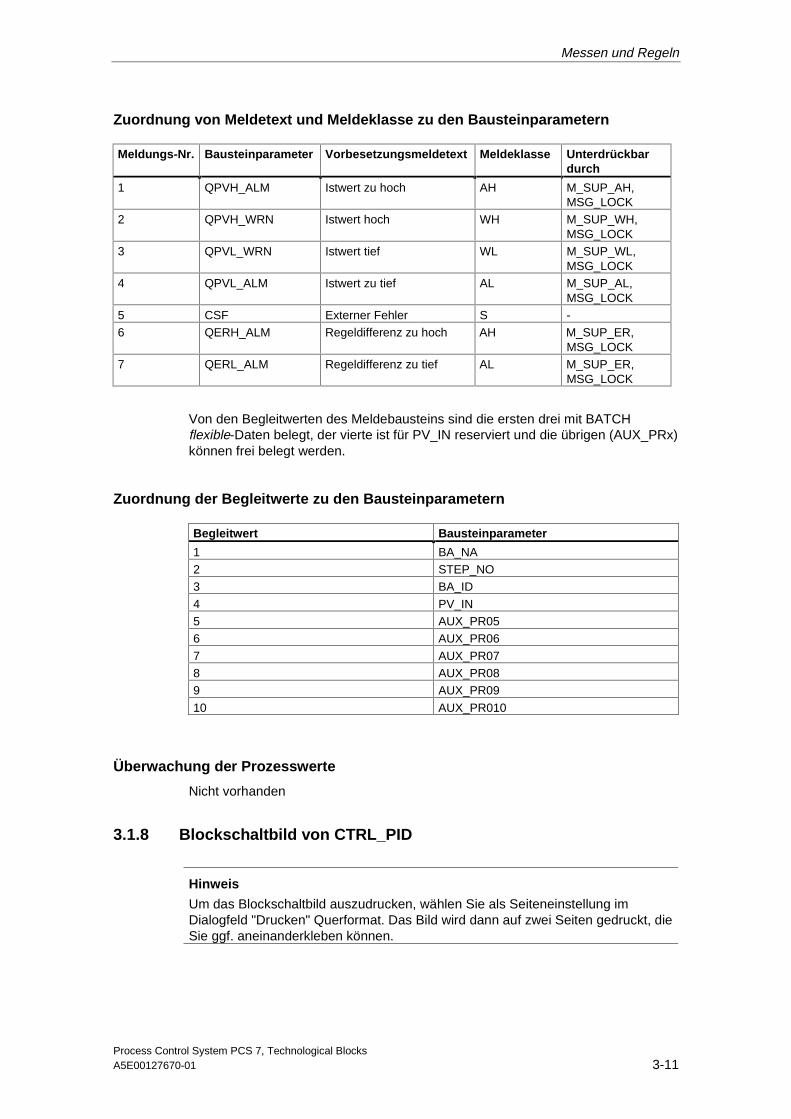
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse Unterdrückbardurch
1 QPVH_ALM Istwert zu hoch AH M_SUP_AH,MSG_LOCK
2 QPVH_WRN Istwert hoch WH M_SUP_WH,MSG_LOCK
3 QPVL_WRN Istwert tief WL M_SUP_WL,MSG_LOCK
4 QPVL_ALM Istwert zu tief AL M_SUP_AL,MSG_LOCK
5 CSF Externer Fehler S -6 QERH_ALM Regeldifferenz zu hoch AH M_SUP_ER,
MSG_LOCK7 QERL_ALM Regeldifferenz zu tief AL M_SUP_ER,
MSG_LOCK
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten belegt, der vierte ist für PV_IN reserviert und die übrigen (AUX_PRx)können frei belegt werden.
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA2 STEP_NO3 BA_ID
4 PV_IN5 AUX_PR056 AUX_PR06
7 AUX_PR078 AUX_PR089 AUX_PR09
10 AUX_PR010
Überwachung der Prozesswerte
Nicht vorhanden
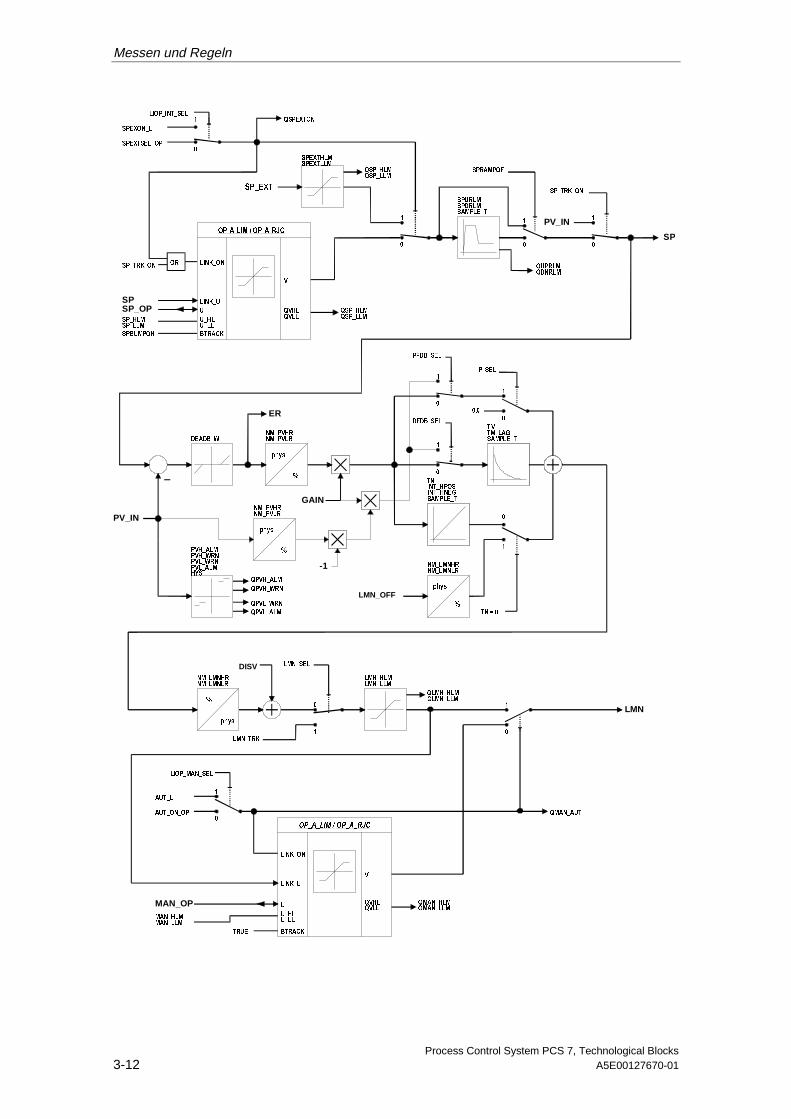
3.1.8 Blockschaltbild von CTRL_PID
Hinweis
Um das Blockschaltbild auszudrucken, wählen Sie als Seiteneinstellung imDialogfeld "Drucken" Querformat. Das Bild wird dann auf zwei Seiten gedruckt, dieSie ggf. aneinanderkleben können.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-12 A5E00127670-01
4835/0
4/01B//04/01B+/0
LMN_OFF
10B/01+5
'($'%B:�
GAIN
�
SK\V
10B/01/5
�
SK\V
10B/01/510B/01+5
�
SK\V
70B/$*79
4'15/0
23B$B/,0���23B$B5-&
/,1.B21
/,1.B88
9
�
�
/,23B,17B6(/
63(;21B/
63(;76(/B23
SP_OP63B+/063B//0
23B$B/,0���23B$B5-&
/,1.B21
8
9
�
�
/,23B0$1B6(/
$87B/
$87B21B23
MAN_OP0$1B+/00$1B//0
71� ��
�
�
�
�
���
/01B6(/
�
�/01B75.
�
�
635$032)
6$03/(B7
6385/063'5/0
SP
�
�
PV_IN
63B75.B21
PV_IN
/01B+/0/01B//0
LMN
40$1B$87
ER
463B+/0463B//0
40$1B+/040$1B//0
DISV
49+/49//
49+/49//
25
�
�
463(;721
-1+<6
439/B$/0439/B:51
439+B:51439+B$/0
39/B$/039/B:5139+B:5139+B$/0
6$03/(B7
10B39/510B39+5
6$03/(B7�
�
�
�
')'%B6(/
3)'%B6(/
SP
8B+/8B//
8B+/8B//
71
758( %75$&.
/,1.B8
%75$&.63%80321
63B75.B21
63B(;7
63(;7+/063(;7//0
463B+/0463B//0
�
�
3B6(/
�
SK\V
10B39/510B39+5
,17B+1(*,17B+326
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-13
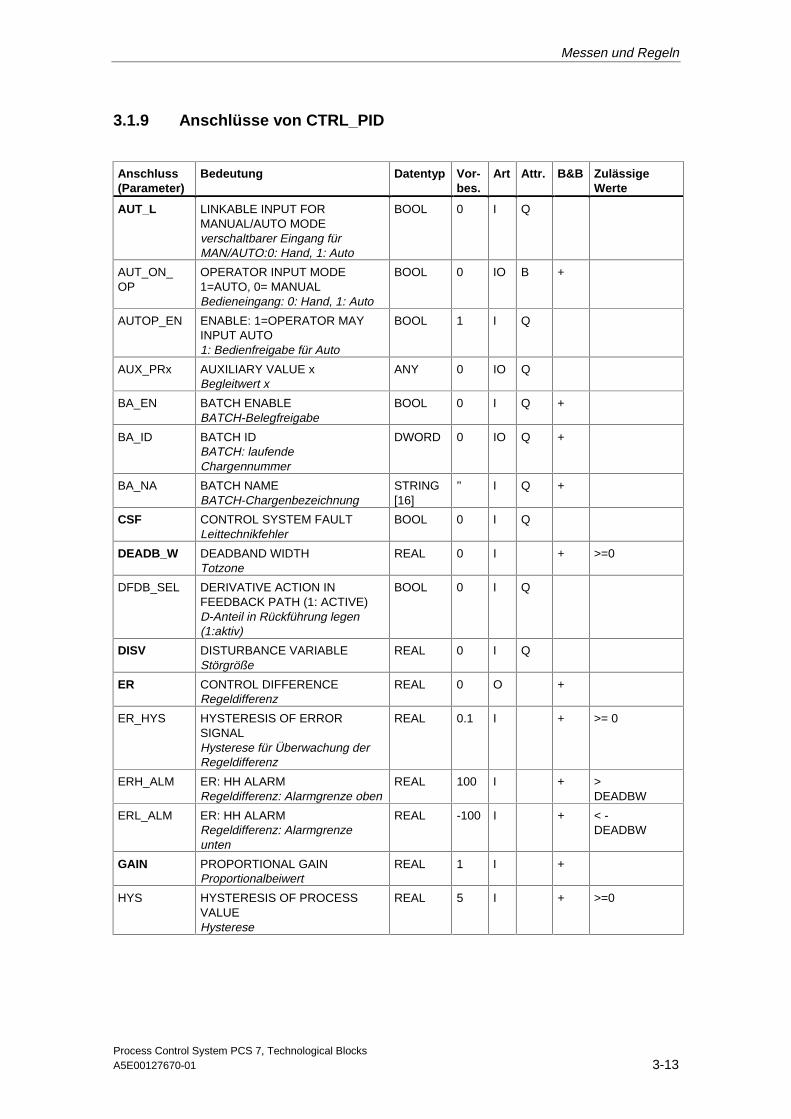
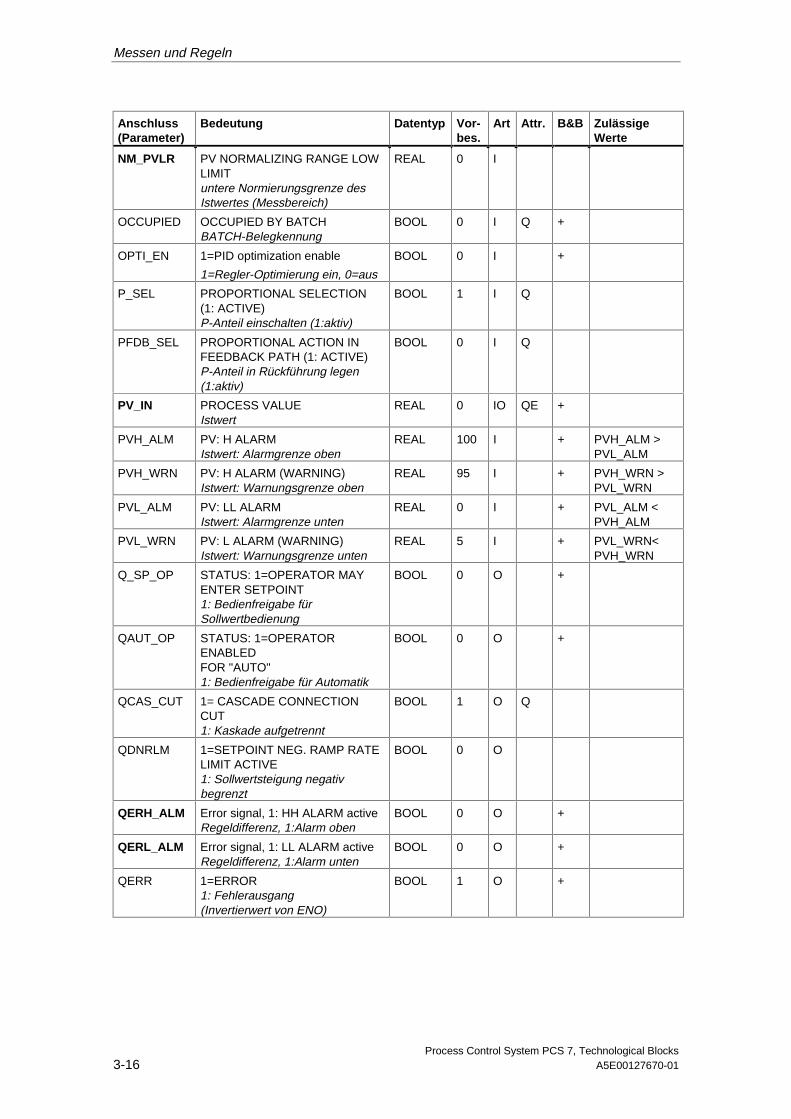
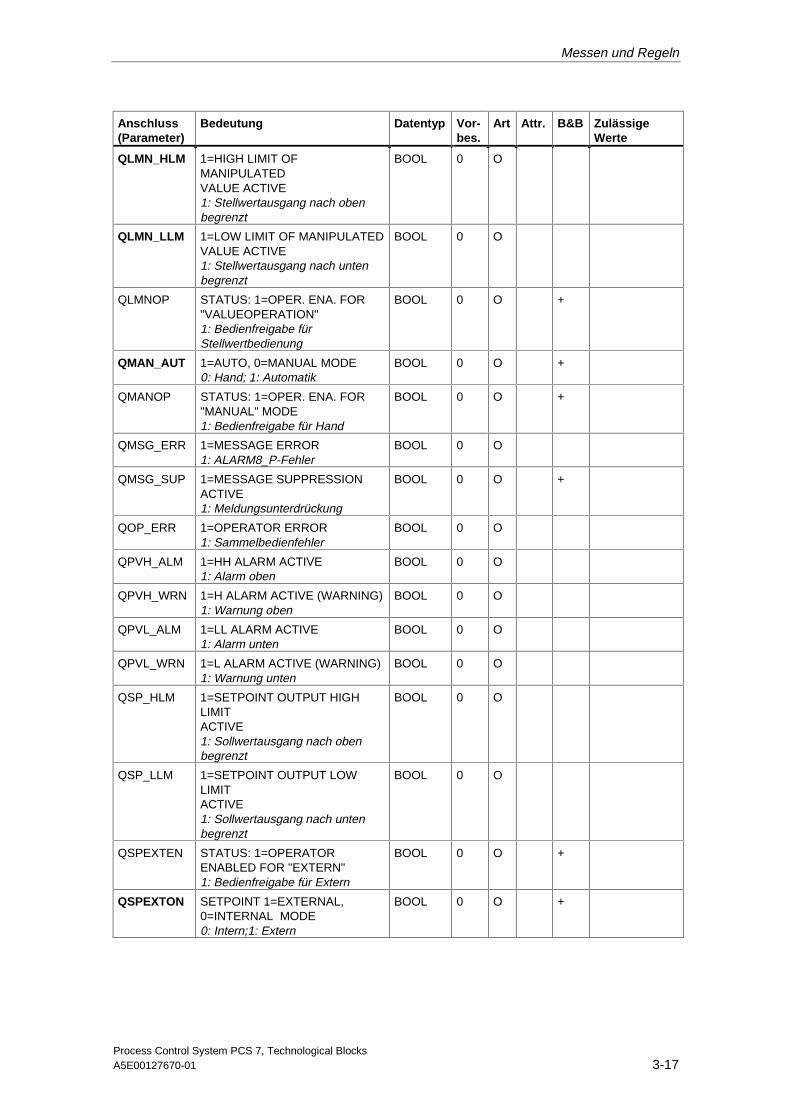
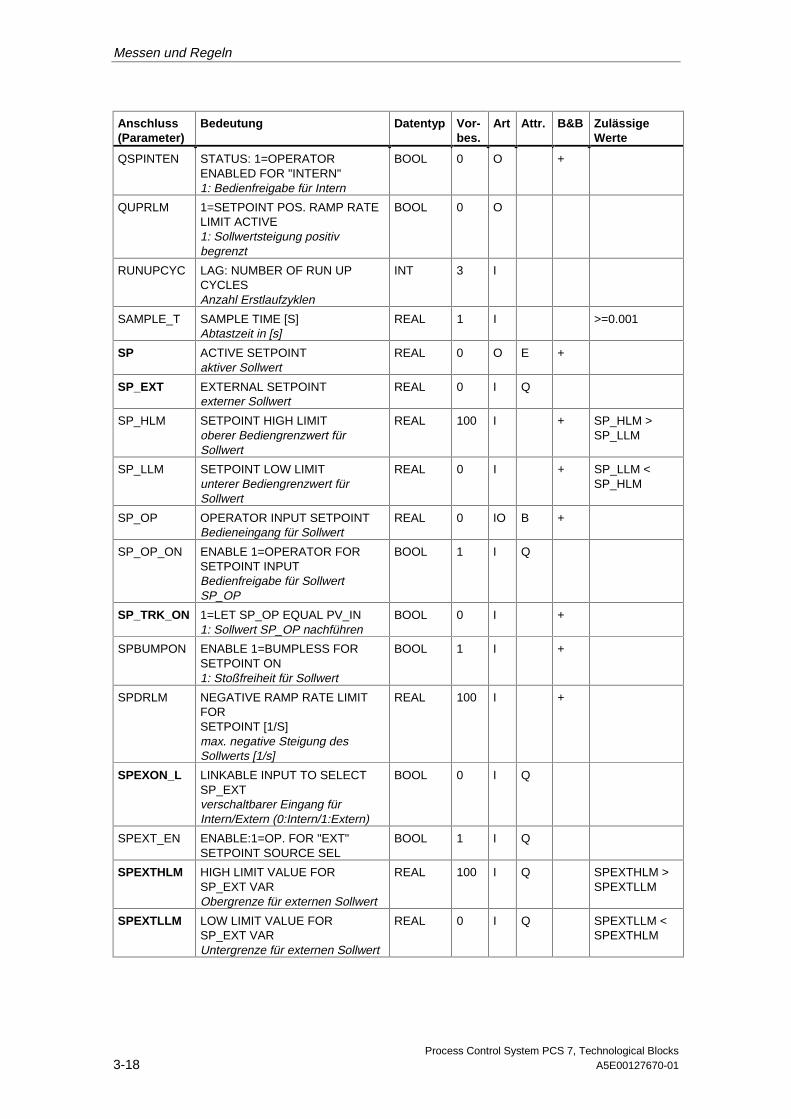
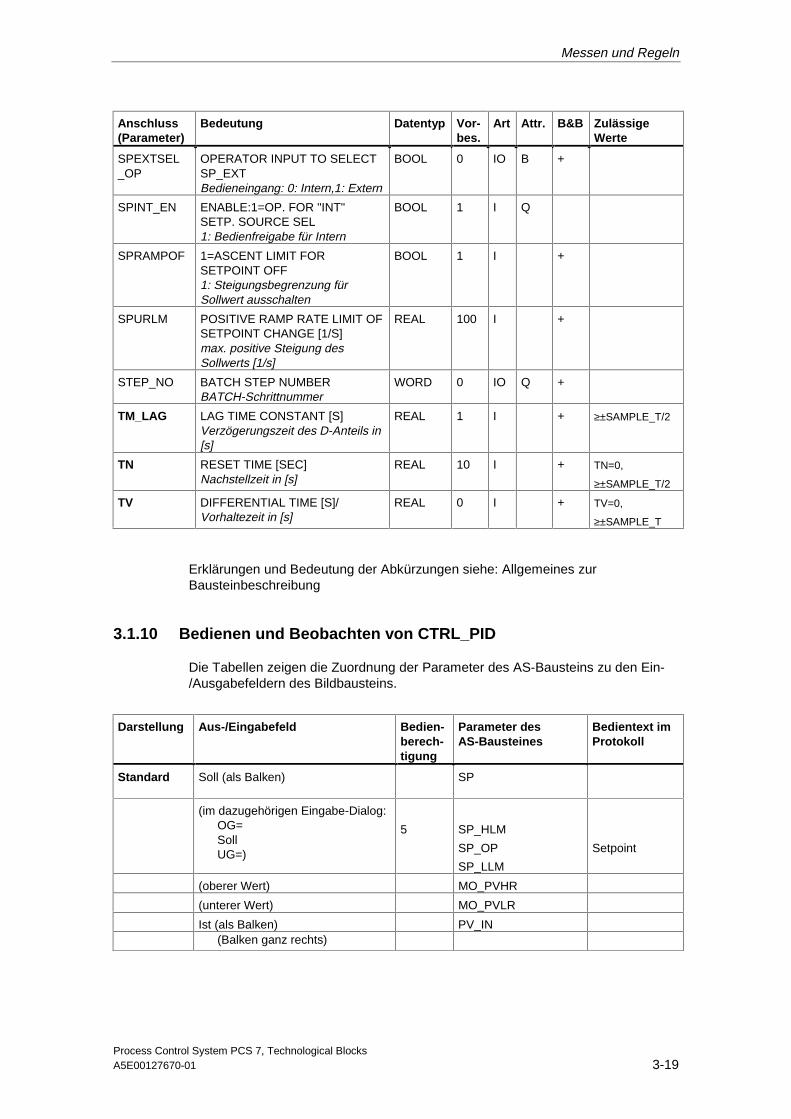
3.1.9 Anschlüsse von CTRL_PID
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUT_L LINKABLE INPUT FORMANUAL/AUTO MODEverschaltbarer Eingang fürMAN/AUTO:0: Hand, 1: Auto
BOOL 0 I Q
AUT_ON_OP
OPERATOR INPUT MODE1=AUTO, 0= MANUALBedieneingang: 0: Hand, 1: Auto
BOOL 0 IO B +
AUTOP_EN ENABLE: 1=OPERATOR MAYINPUT AUTO1: Bedienfreigabe für Auto
BOOL 1 I Q
AUX_PRx AUXILIARY VALUE xBegleitwert x
ANY 0 IO Q
BA_EN BATCH ENABLEBATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH IDBATCH: laufendeChargennummer
DWORD 0 IO Q +
BA_NA BATCH NAMEBATCH-Chargenbezeichnung
STRING[16]
’’ I Q +
CSF CONTROL SYSTEM FAULTLeittechnikfehler
BOOL 0 I Q
DEADB_W DEADBAND WIDTHTotzone
REAL 0 I + >=0
DFDB_SEL DERIVATIVE ACTION INFEEDBACK PATH (1: ACTIVE)D-Anteil in Rückführung legen(1:aktiv)
BOOL 0 I Q
DISV DISTURBANCE VARIABLEStörgröße
REAL 0 I Q
ER CONTROL DIFFERENCERegeldifferenz
REAL 0 O +
ER_HYS HYSTERESIS OF ERRORSIGNALHysterese für Überwachung derRegeldifferenz
REAL 0.1 I + >= 0
ERH_ALM ER: HH ALARMRegeldifferenz: Alarmgrenze oben
REAL 100 I + >DEADBW
ERL_ALM ER: HH ALARMRegeldifferenz: Alarmgrenzeunten
REAL -100 I + < -DEADBW
GAIN PROPORTIONAL GAINProportionalbeiwert
REAL 1 I +
HYS HYSTERESIS OF PROCESSVALUEHysterese
REAL 5 I + >=0
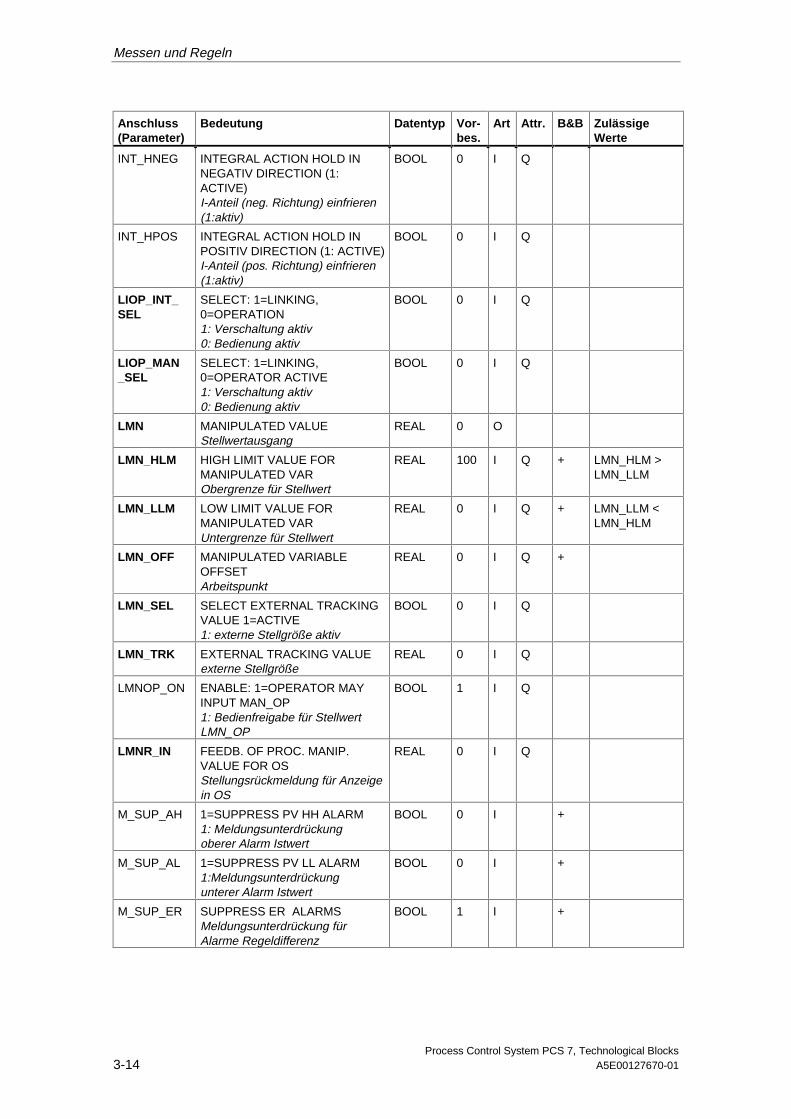
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-14 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
INT_HNEG INTEGRAL ACTION HOLD INNEGATIV DIRECTION (1:ACTIVE)I-Anteil (neg. Richtung) einfrieren(1:aktiv)
BOOL 0 I Q
INT_HPOS INTEGRAL ACTION HOLD INPOSITIV DIRECTION (1: ACTIVE)I-Anteil (pos. Richtung) einfrieren(1:aktiv)
BOOL 0 I Q
LIOP_INT_SEL
SELECT: 1=LINKING,0=OPERATION1: Verschaltung aktiv0: Bedienung aktiv
BOOL 0 I Q
LIOP_MAN_SEL
SELECT: 1=LINKING,0=OPERATOR ACTIVE1: Verschaltung aktiv0: Bedienung aktiv
BOOL 0 I Q
LMN MANIPULATED VALUEStellwertausgang
REAL 0 O
LMN_HLM HIGH LIMIT VALUE FORMANIPULATED VARObergrenze für Stellwert
REAL 100 I Q + LMN_HLM >LMN_LLM
LMN_LLM LOW LIMIT VALUE FORMANIPULATED VARUntergrenze für Stellwert
REAL 0 I Q + LMN_LLM <LMN_HLM
LMN_OFF MANIPULATED VARIABLEOFFSETArbeitspunkt
REAL 0 I Q +
LMN_SEL SELECT EXTERNAL TRACKINGVALUE 1=ACTIVE1: externe Stellgröße aktiv
BOOL 0 I Q
LMN_TRK EXTERNAL TRACKING VALUEexterne Stellgröße
REAL 0 I Q
LMNOP_ON ENABLE: 1=OPERATOR MAYINPUT MAN_OP1: Bedienfreigabe für StellwertLMN_OP
BOOL 1 I Q
LMNR_IN FEEDB. OF PROC. MANIP.VALUE FOR OSStellungsrückmeldung für Anzeigein OS
REAL 0 I Q
M_SUP_AH 1=SUPPRESS PV HH ALARM1: Meldungsunterdrückungoberer Alarm Istwert
BOOL 0 I +
M_SUP_AL 1=SUPPRESS PV LL ALARM1:Meldungsunterdrückungunterer Alarm Istwert
BOOL 0 I +
M_SUP_ER SUPPRESS ER ALARMSMeldungsunterdrückung fürAlarme Regeldifferenz
BOOL 1 I +
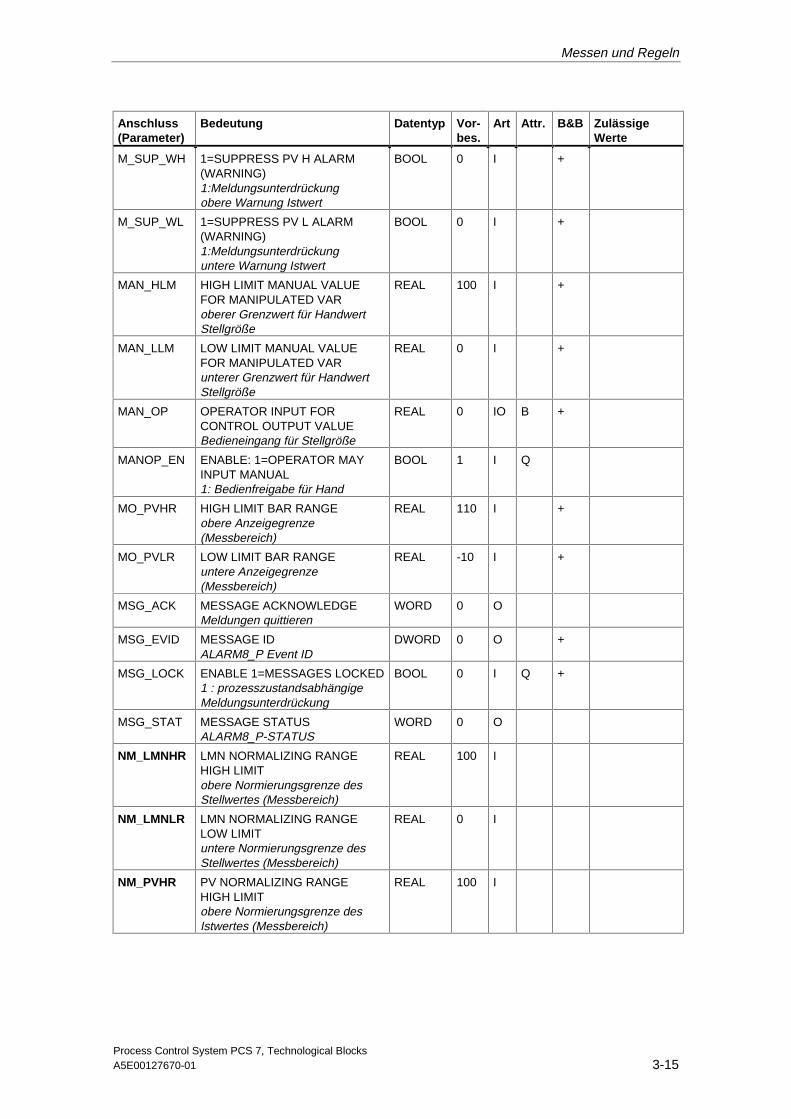
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-15
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
M_SUP_WH 1=SUPPRESS PV H ALARM(WARNING)1:Meldungsunterdrückungobere Warnung Istwert
BOOL 0 I +
M_SUP_WL 1=SUPPRESS PV L ALARM(WARNING)1:Meldungsunterdrückunguntere Warnung Istwert
BOOL 0 I +
MAN_HLM HIGH LIMIT MANUAL VALUEFOR MANIPULATED VARoberer Grenzwert für HandwertStellgröße
REAL 100 I +
MAN_LLM LOW LIMIT MANUAL VALUEFOR MANIPULATED VARunterer Grenzwert für HandwertStellgröße
REAL 0 I +
MAN_OP OPERATOR INPUT FORCONTROL OUTPUT VALUEBedieneingang für Stellgröße
REAL 0 IO B +
MANOP_EN ENABLE: 1=OPERATOR MAYINPUT MANUAL1: Bedienfreigabe für Hand
BOOL 1 I Q
MO_PVHR HIGH LIMIT BAR RANGEobere Anzeigegrenze(Messbereich)
REAL 110 I +
MO_PVLR LOW LIMIT BAR RANGEuntere Anzeigegrenze(Messbereich)
REAL -10 I +
MSG_ACK MESSAGE ACKNOWLEDGEMeldungen quittieren
WORD 0 O
MSG_EVID MESSAGE IDALARM8_P Event ID
DWORD 0 O +
MSG_LOCK ENABLE 1=MESSAGES LOCKED1 : prozesszustandsabhängigeMeldungsunterdrückung
BOOL 0 I Q +
MSG_STAT MESSAGE STATUSALARM8_P-STATUS
WORD 0 O
NM_LMNHR LMN NORMALIZING RANGEHIGH LIMITobere Normierungsgrenze desStellwertes (Messbereich)
REAL 100 I
NM_LMNLR LMN NORMALIZING RANGELOW LIMITuntere Normierungsgrenze desStellwertes (Messbereich)
REAL 0 I
NM_PVHR PV NORMALIZING RANGEHIGH LIMITobere Normierungsgrenze desIstwertes (Messbereich)
REAL 100 I
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-16 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
NM_PVLR PV NORMALIZING RANGE LOWLIMITuntere Normierungsgrenze desIstwertes (Messbereich)
REAL 0 I
OCCUPIED OCCUPIED BY BATCHBATCH-Belegkennung
BOOL 0 I Q +
OPTI_EN 1=PID optimization enable
1=Regler-Optimierung ein, 0=aus
BOOL 0 I +
P_SEL PROPORTIONAL SELECTION(1: ACTIVE)P-Anteil einschalten (1:aktiv)
BOOL 1 I Q
PFDB_SEL PROPORTIONAL ACTION INFEEDBACK PATH (1: ACTIVE)P-Anteil in Rückführung legen(1:aktiv)
BOOL 0 I Q
PV_IN PROCESS VALUEIstwert
REAL 0 IO QE +
PVH_ALM PV: H ALARMIstwert: Alarmgrenze oben
REAL 100 I + PVH_ALM >PVL_ALM
PVH_WRN PV: H ALARM (WARNING)Istwert: Warnungsgrenze oben
REAL 95 I + PVH_WRN >PVL_WRN
PVL_ALM PV: LL ALARMIstwert: Alarmgrenze unten
REAL 0 I + PVL_ALM <PVH_ALM
PVL_WRN PV: L ALARM (WARNING)Istwert: Warnungsgrenze unten
REAL 5 I + PVL_WRN<PVH_WRN
Q_SP_OP STATUS: 1=OPERATOR MAYENTER SETPOINT1: Bedienfreigabe fürSollwertbedienung
BOOL 0 O +
QAUT_OP STATUS: 1=OPERATORENABLEDFOR "AUTO"1: Bedienfreigabe für Automatik
BOOL 0 O +
QCAS_CUT 1= CASCADE CONNECTIONCUT1: Kaskade aufgetrennt
BOOL 1 O Q
QDNRLM 1=SETPOINT NEG. RAMP RATELIMIT ACTIVE1: Sollwertsteigung negativbegrenzt
BOOL 0 O
QERH_ALM Error signal, 1: HH ALARM activeRegeldifferenz, 1:Alarm oben
BOOL 0 O +
QERL_ALM Error signal, 1: LL ALARM activeRegeldifferenz, 1:Alarm unten
BOOL 0 O +
QERR 1=ERROR1: Fehlerausgang(Invertierwert von ENO)
BOOL 1 O +
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-17
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QLMN_HLM 1=HIGH LIMIT OFMANIPULATEDVALUE ACTIVE1: Stellwertausgang nach obenbegrenzt
BOOL 0 O
QLMN_LLM 1=LOW LIMIT OF MANIPULATEDVALUE ACTIVE1: Stellwertausgang nach untenbegrenzt
BOOL 0 O
QLMNOP STATUS: 1=OPER. ENA. FOR"VALUEOPERATION"1: Bedienfreigabe fürStellwertbedienung
BOOL 0 O +
QMAN_AUT 1=AUTO, 0=MANUAL MODE0: Hand; 1: Automatik
BOOL 0 O +
QMANOP STATUS: 1=OPER. ENA. FOR"MANUAL" MODE1: Bedienfreigabe für Hand
BOOL 0 O +
QMSG_ERR 1=MESSAGE ERROR1: ALARM8_P-Fehler
BOOL 0 O
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE1: Meldungsunterdrückung
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR1: Sammelbedienfehler
BOOL 0 O
QPVH_ALM 1=HH ALARM ACTIVE1: Alarm oben
BOOL 0 O
QPVH_WRN 1=H ALARM ACTIVE (WARNING)1: Warnung oben
BOOL 0 O
QPVL_ALM 1=LL ALARM ACTIVE1: Alarm unten
BOOL 0 O
QPVL_WRN 1=L ALARM ACTIVE (WARNING)1: Warnung unten
BOOL 0 O
QSP_HLM 1=SETPOINT OUTPUT HIGHLIMITACTIVE1: Sollwertausgang nach obenbegrenzt
BOOL 0 O
QSP_LLM 1=SETPOINT OUTPUT LOWLIMITACTIVE1: Sollwertausgang nach untenbegrenzt
BOOL 0 O
QSPEXTEN STATUS: 1=OPERATORENABLED FOR "EXTERN"1: Bedienfreigabe für Extern
BOOL 0 O +
QSPEXTON SETPOINT 1=EXTERNAL,0=INTERNAL MODE0: Intern;1: Extern
BOOL 0 O +
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-18 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QSPINTEN STATUS: 1=OPERATORENABLED FOR "INTERN"1: Bedienfreigabe für Intern
BOOL 0 O +
QUPRLM 1=SETPOINT POS. RAMP RATELIMIT ACTIVE1: Sollwertsteigung positivbegrenzt
BOOL 0 O
RUNUPCYC LAG: NUMBER OF RUN UPCYCLESAnzahl Erstlaufzyklen
INT 3 I
SAMPLE_T SAMPLE TIME [S]Abtastzeit in [s]
REAL 1 I >=0.001
SP ACTIVE SETPOINTaktiver Sollwert
REAL 0 O E +
SP_EXT EXTERNAL SETPOINTexterner Sollwert
REAL 0 I Q
SP_HLM SETPOINT HIGH LIMIToberer Bediengrenzwert fürSollwert
REAL 100 I + SP_HLM >SP_LLM
SP_LLM SETPOINT LOW LIMITunterer Bediengrenzwert fürSollwert
REAL 0 I + SP_LLM <SP_HLM
SP_OP OPERATOR INPUT SETPOINTBedieneingang für Sollwert
REAL 0 IO B +
SP_OP_ON ENABLE 1=OPERATOR FORSETPOINT INPUTBedienfreigabe für SollwertSP_OP
BOOL 1 I Q
SP_TRK_ON 1=LET SP_OP EQUAL PV_IN1: Sollwert SP_OP nachführen
BOOL 0 I +
SPBUMPON ENABLE 1=BUMPLESS FORSETPOINT ON1: Stoßfreiheit für Sollwert
BOOL 1 I +
SPDRLM NEGATIVE RAMP RATE LIMITFORSETPOINT [1/S]max. negative Steigung desSollwerts [1/s]
REAL 100 I +
SPEXON_L LINKABLE INPUT TO SELECTSP_EXTverschaltbarer Eingang fürIntern/Extern (0:Intern/1:Extern)
BOOL 0 I Q
SPEXT_EN ENABLE:1=OP. FOR "EXT"SETPOINT SOURCE SEL
BOOL 1 I Q
SPEXTHLM HIGH LIMIT VALUE FORSP_EXT VARObergrenze für externen Sollwert
REAL 100 I Q SPEXTHLM >SPEXTLLM
SPEXTLLM LOW LIMIT VALUE FORSP_EXT VARUntergrenze für externen Sollwert
REAL 0 I Q SPEXTLLM <SPEXTHLM
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-19
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
SPEXTSEL_OP
OPERATOR INPUT TO SELECTSP_EXTBedieneingang: 0: Intern,1: Extern
BOOL 0 IO B +
SPINT_EN ENABLE:1=OP. FOR "INT"SETP. SOURCE SEL1: Bedienfreigabe für Intern
BOOL 1 I Q
SPRAMPOF 1=ASCENT LIMIT FORSETPOINT OFF1: Steigungsbegrenzung fürSollwert ausschalten
BOOL 1 I +
SPURLM POSITIVE RAMP RATE LIMIT OFSETPOINT CHANGE [1/S]max. positive Steigung desSollwerts [1/s]
REAL 100 I +
STEP_NO BATCH STEP NUMBERBATCH-Schrittnummer
WORD 0 IO Q +
TM_LAG LAG TIME CONSTANT [S]Verzögerungszeit des D-Anteils in[s]
REAL 1 I + ≥±SAMPLE_T/2
TN RESET TIME [SEC]Nachstellzeit in [s]
REAL 10 I + TN=0,
≥±SAMPLE_T/2
TV DIFFERENTIAL TIME [S]/Vorhaltezeit in [s]
REAL 0 I + TV=0,
≥±SAMPLE_T
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
3.1.10 Bedienen und Beobachten von CTRL_PID
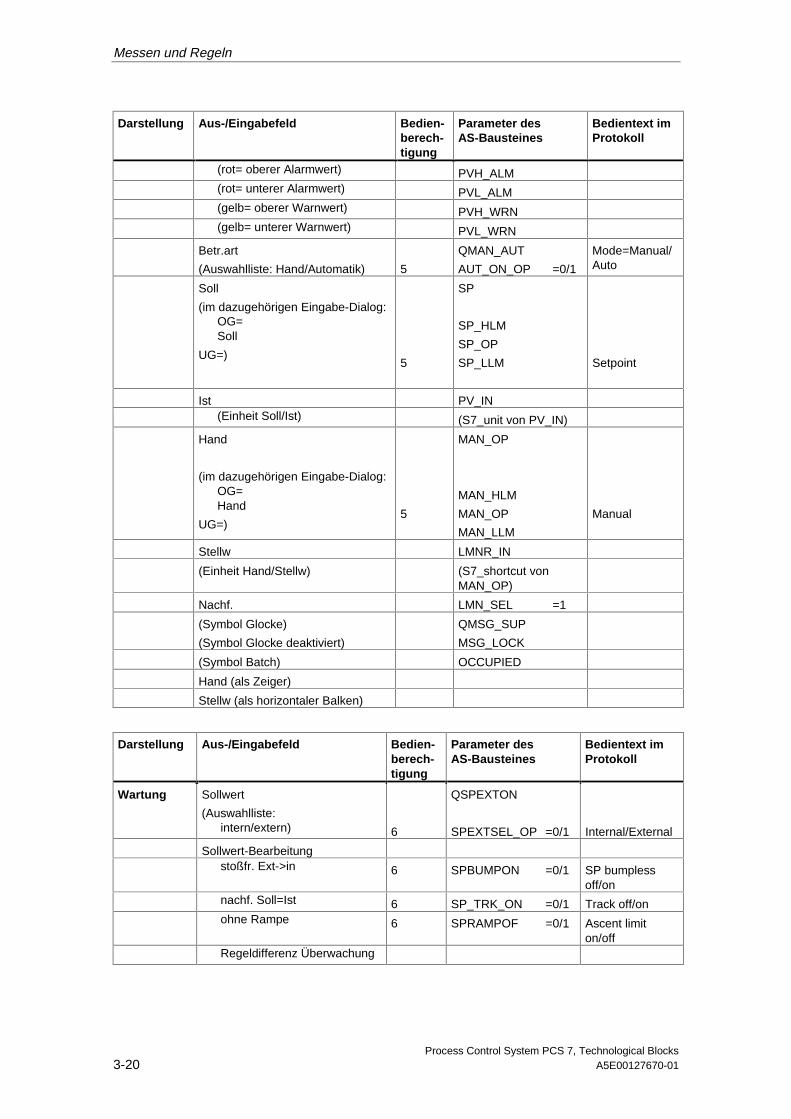
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Soll (als Balken) SP
(im dazugehörigen Eingabe-Dialog:OG=SollUG=)
5 SP_HLM
SP_OP
SP_LLM
Setpoint
(oberer Wert) MO_PVHR
(unterer Wert) MO_PVLR
Ist (als Balken) PV_IN(Balken ganz rechts)
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-20 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
(rot= oberer Alarmwert) PVH_ALM(rot= unterer Alarmwert) PVL_ALM(gelb= oberer Warnwert) PVH_WRN(gelb= unterer Warnwert) PVL_WRN
Betr.art
(Auswahlliste: Hand/Automatik) 5
QMAN_AUT
AUT_ON_OP =0/1
Mode=Manual/Auto
Soll
(im dazugehörigen Eingabe-Dialog:OG=Soll
UG=)5
SP
SP_HLM
SP_OP
SP_LLM Setpoint
Ist PV_IN(Einheit Soll/Ist) (S7_unit von PV_IN)
Hand
(im dazugehörigen Eingabe-Dialog:OG=Hand
UG=)5
MAN_OP
MAN_HLM
MAN_OP
MAN_LLM
Manual
Stellw LMNR_IN
(Einheit Hand/Stellw) (S7_shortcut vonMAN_OP)
Nachf. LMN_SEL =1
(Symbol Glocke)
(Symbol Glocke deaktiviert)
QMSG_SUP
MSG_LOCK
(Symbol Batch) OCCUPIED
Hand (als Zeiger)
Stellw (als horizontaler Balken)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung Sollwert
(Auswahlliste:intern/extern) 6
QSPEXTON
SPEXTSEL_OP =0/1 Internal/External
Sollwert-Bearbeitungstoßfr. Ext->in 6 SPBUMPON =0/1 SP bumpless
off/onnachf. Soll=Ist 6 SP_TRK_ON =0/1 Track off/onohne Rampe 6 SPRAMPOF =0/1 Ascent limit
on/offRegeldifferenz Überwachung
Messen und Regeln
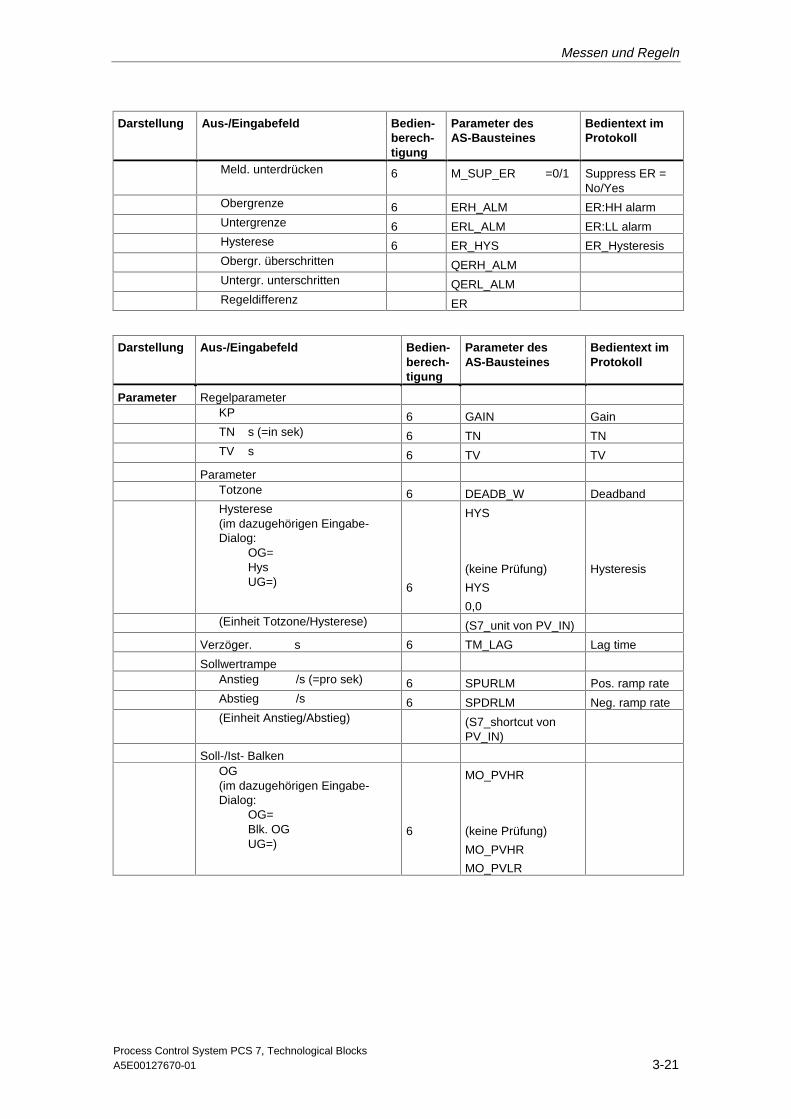
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-21
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Meld. unterdrücken 6 M_SUP_ER =0/1 Suppress ER =No/Yes
Obergrenze 6 ERH_ALM ER:HH alarmUntergrenze 6 ERL_ALM ER:LL alarmHysterese 6 ER_HYS ER_HysteresisObergr. überschritten QERH_ALMUntergr. unterschritten QERL_ALMRegeldifferenz ER
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Parameter RegelparameterKP 6 GAIN GainTN s (=in sek) 6 TN TNTV s 6 TV TV
ParameterTotzone 6 DEADB_W DeadbandHysterese(im dazugehörigen Eingabe-Dialog:
OG=HysUG=) 6
HYS
(keine Prüfung)
HYS
0,0
Hysteresis
(Einheit Totzone/Hysterese) (S7_unit von PV_IN)
Verzöger. s 6 TM_LAG Lag time
SollwertrampeAnstieg /s (=pro sek) 6 SPURLM Pos. ramp rateAbstieg /s 6 SPDRLM Neg. ramp rate(Einheit Anstieg/Abstieg) (S7_shortcut von
PV_IN)
Soll-/Ist- BalkenOG(im dazugehörigen Eingabe-Dialog:
OG=Blk. OGUG=)
6
MO_PVHR
(keine Prüfung)
MO_PVHR
MO_PVLR
Messen und Regeln
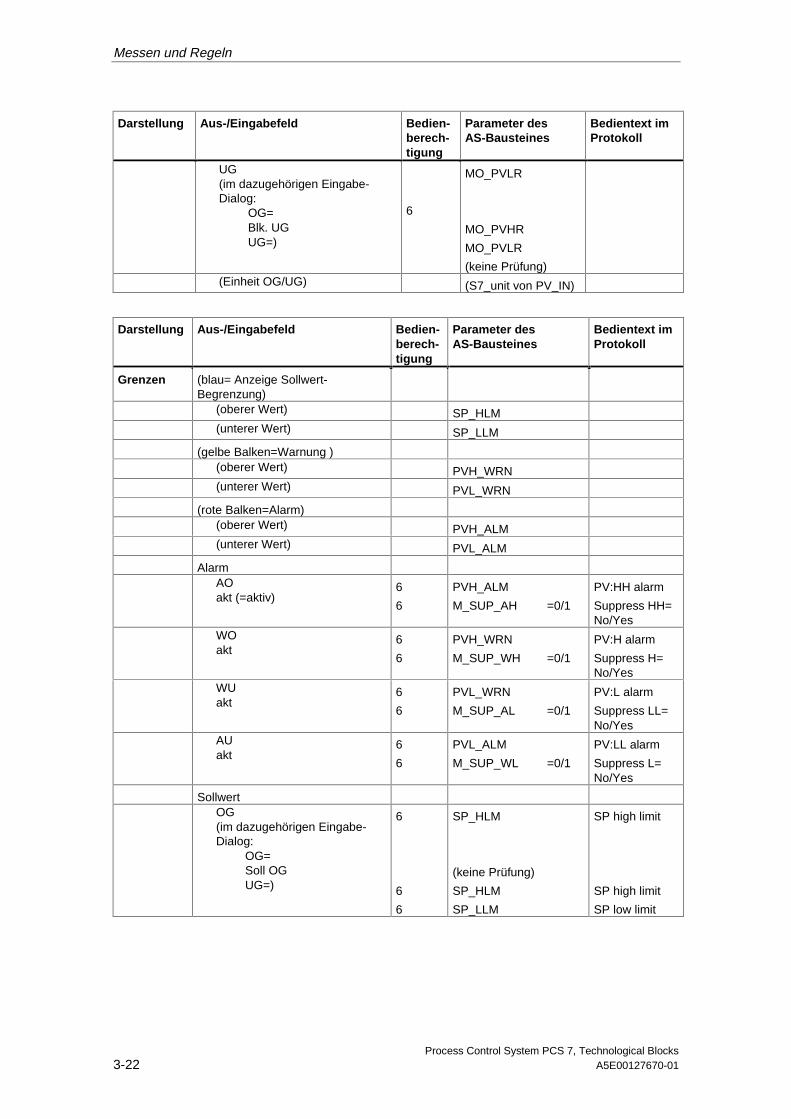
Process Control System PCS 7, Technological Blocks3-22 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
UG(im dazugehörigen Eingabe-Dialog:
OG=Blk. UGUG=)
6
MO_PVLR
MO_PVHR
MO_PVLR
(keine Prüfung)(Einheit OG/UG) (S7_unit von PV_IN)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Grenzen (blau= Anzeige Sollwert-Begrenzung)
(oberer Wert) SP_HLM(unterer Wert) SP_LLM
(gelbe Balken=Warnung )(oberer Wert) PVH_WRN(unterer Wert) PVL_WRN
(rote Balken=Alarm)(oberer Wert) PVH_ALM(unterer Wert) PVL_ALM
AlarmAOakt (=aktiv)
6
6
PVH_ALM
M_SUP_AH =0/1
PV:HH alarm
Suppress HH=No/Yes
WOakt
6
6
PVH_WRN
M_SUP_WH =0/1
PV:H alarm
Suppress H=No/Yes
WUakt
6
6
PVL_WRN
M_SUP_AL =0/1
PV:L alarm
Suppress LL=No/Yes
AUakt
6
6
PVL_ALM
M_SUP_WL =0/1
PV:LL alarm
Suppress L=No/Yes
SollwertOG(im dazugehörigen Eingabe-Dialog:
OG=Soll OGUG=)
6
6
6
SP_HLM
(keine Prüfung)
SP_HLM
SP_LLM
SP high limit
SP high limit
SP low limit
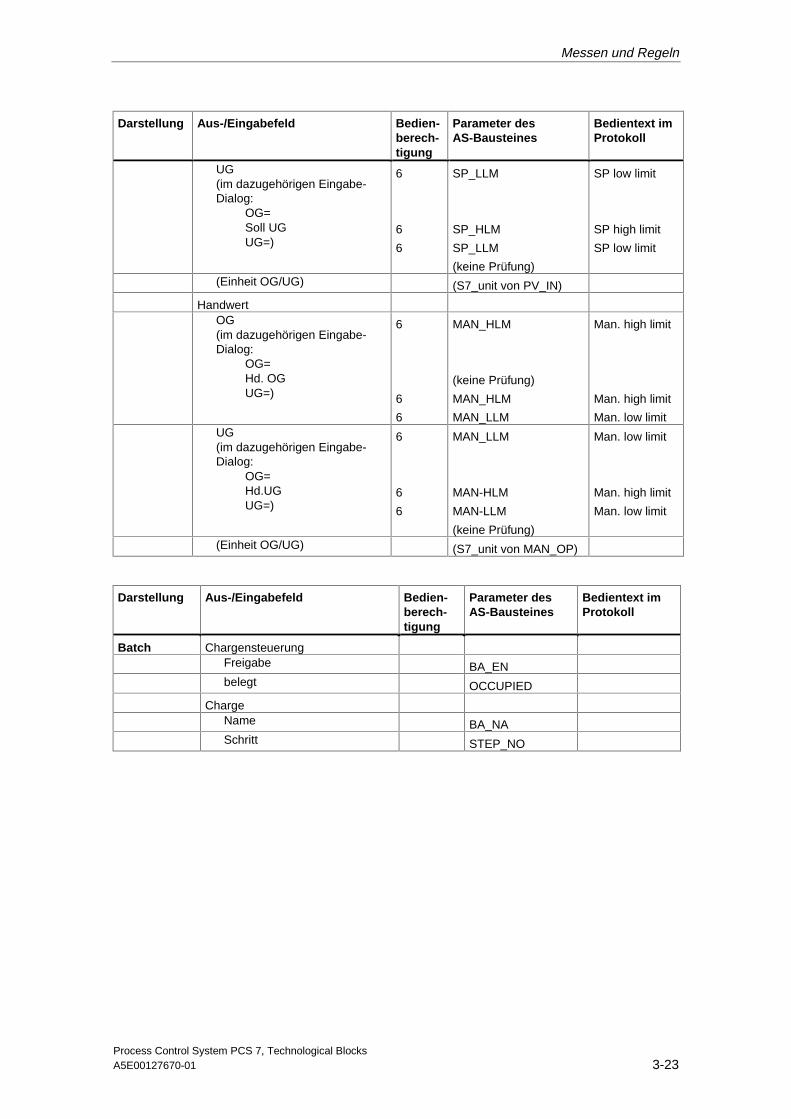
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-23
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
UG(im dazugehörigen Eingabe-Dialog:
OG=Soll UGUG=)
6
6
6
SP_LLM
SP_HLM
SP_LLM
(keine Prüfung)
SP low limit
SP high limit
SP low limit
(Einheit OG/UG) (S7_unit von PV_IN)
HandwertOG(im dazugehörigen Eingabe-Dialog:
OG=Hd. OGUG=)
6
6
6
MAN_HLM
(keine Prüfung)
MAN_HLM
MAN_LLM
Man. high limit
Man. high limit
Man. low limitUG(im dazugehörigen Eingabe-Dialog:
OG=Hd.UGUG=)
6
6
6
MAN_LLM
MAN-HLM
MAN-LLM
(keine Prüfung)
Man. low limit
Man. high limit
Man. low limit
(Einheit OG/UG) (S7_unit von MAN_OP)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-24 A5E00127670-01
3.2 CTRL_S: PID-Schrittreglerbaustein
3.2.1 Beschreibung von CTRL_S
Objektname (Art + Nummer)
FB 76
Funktion
Der CTRL_S-Reglerbaustein ist ein Schrittregler für Prozess-Regelungen, beidenen integral wirkende Stellglieder (z.B. motorgetriebene Ventile) eingesetztwerden. Die Ansteuerung der Ventile erfolgt dabei über zwei binäre Steuersignale.
Die Arbeitsweise des Schrittreglers basiert auf einer Kombination vom PID-Algorithmus eines Abtastreglers und einer nachgeschalteten Stellungsregelung.Dabei wird das kontinuierliche Stellsignal in eine Folge von Steuerimpulsenumgesetzt.
Über die Parametrierung können Sie Teilfunktionen des PID-Algorithmus zu- oderabschalten und damit diesen an die Regelstrecke anpassen:
• Betriebsarten: Handbetrieb, Automatik oder Nachführen
• Grenzwertüberwachung der Regelgröße, Regeldifferenz undMeldungsgenerierung über den ALARM_8P Baustein.
• Störgrößenaufschaltung
• Sollwertnachführung (SP=PV_IN)
• Wertebereichseinstellung für Soll- und Istwert (physikalische Normierung)
• Einzel zu- und abschaltbarer P-, I- und D-Anteil
• P- und D-Anteil können in die Rückführung gelegt werden
• Arbeitspunkteinstellung für den P-bzw. PD-Reglerbetrieb
• Die nachgeschaltete Stellungsregelung berücksichtigt folgendeEinsatzmöglichkeiten:
• Regelung mit Stellungsrückmeldung
• Regelung ohne Stellungsrückmeldung
• Direkte Signalverstellung über Handbedienung bzw. verschaltete Signale
• Unterdrücken von Stellsignalen durch Rückmeldungen vom Motor bzw. Ventil.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-25
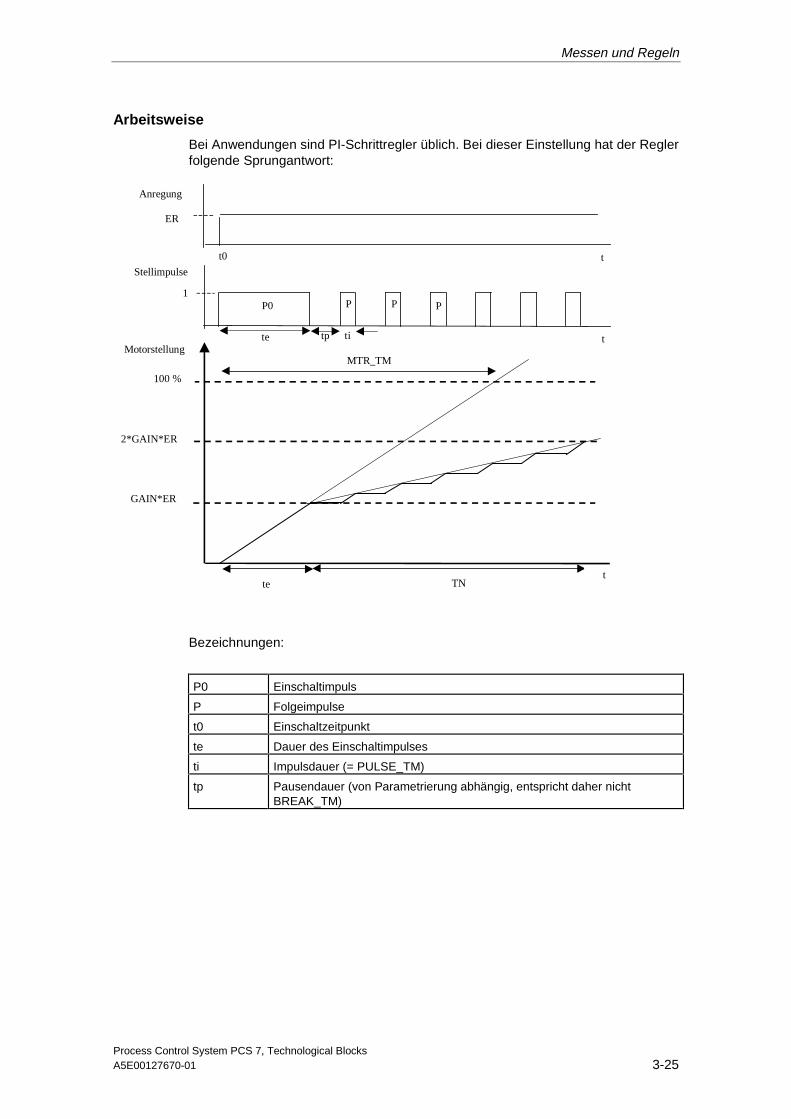
Arbeitsweise
Bei Anwendungen sind PI-Schrittregler üblich. Bei dieser Einstellung hat der Reglerfolgende Sprungantwort:
t
Anregung
ER
t0
MotorstellungMTR_TM
100 %
2*GAIN*ER
GAIN*ER
te TNt
PP
titpte
P
Stellimpulse
1P0
t
Bezeichnungen:
P0 Einschaltimpuls
P Folgeimpulse
t0 Einschaltzeitpunkt
te Dauer des Einschaltimpulses
ti Impulsdauer (= PULSE_TM)
tp Pausendauer (von Parametrierung abhängig, entspricht daher nichtBREAK_TM)
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-26 A5E00127670-01
Hinweis
Im Bildbaustein (Kreisbild) wird als wirksame Stellgröße der EingangsparameterLMNR_IN angezeigt. Auf diesen Parameter wird die Stellungsrückmeldungverschaltet.
Mit dem Steuereingang LMNR_ON wird festgelegt, ob dieser Wert auch imRegelalgorith mus verwendet wird. Bei LMNR_ON=0 erfolgt die Regelung ohneStellungsrückmeldung.
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB100 (siehe Anlaufverhalten).
3.2.2 Signalverarbeitung im Soll- und Istwertzweig von CTRL_S
Sollwertbildung
Der Sollwert SP kann aus drei verschiedenen Quellen bezogen werden, die überdie Eingänge SP_TRK_ON und SPEXTSEL_OP entsprechend nachfolgenderTabelle gewählt werden:
SP_TRK_ON SPEXTSEL_OP SP= Zustand
0 0 SP_OP interner Sollwert.
0 1 SP_EXT externer Sollwert
1 irrelevant PV_IN Nachgeführter Sollwert
Interner Sollwert
Bedienung und Begrenzung des internen Sollwerts SP_OP erfolgt über OP_A_LIMbzw. OP_A_RJC (Bereich SP_LLM - SP_HLM).
Externer Sollwert
Der externe Sollwert SP_EXT kann verschaltet werden und wird auf den Bereich(SPEXTLLM,SPEXTHLM) begrenzt.
Die Änderung des internen bzw. externen Sollwerts wird auf einen maximalenGradienten (SPDRLM, SPURLM) begrenzt, sofern die Sollwertrampe aktiviert ist(SPRAMPOF = 0).
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-27
Nachgeführter Sollwert
Bei SP_TRK_ON=1 wird die Regelgröße PV_IN als Sollwert benutzt. Dabei wirddie Regeldifferenz ER=0 gesetzt.
Der nachgeführte Sollwert hat Priorität vor dem internen bzw. externen Sollwert
Regeldifferenzbildung
Sie wird aus dem wirksamen Sollwert SP und dem Istwert PV_IN gebildet undsteht nach der Totzone DEADB_W am Ausgang ER zur Verfügung.
' ( $ ' % B :
( 5
6 3 � 3 9 B ,1
Regeldifferenzüberwachung
Die Regeldifferenz ER wird auf Alarmgrenzen (ERL_ALM, ERH_ALM) mit einergemeinsamen Hysterese (ER_HYS) überwacht. Die Anzeige erfolgt an denentsprechenden Ausgängen (QERL_ALM, QERH_ALM).
Istwertüberwachung
Der Istwert PV_IN wird auf Warn- und Alarmgrenzen (PVL_ALM, PVL_WRN,PVH_WRN, PVH_ALM) mit einer gemeinsamen Hysterese (HYS) überwacht. DieAnzeige erfolgt an den entsprechenden Ausgängen (QPVL_ALM, QPVL_WRN,QPVH_WRN,QPVH_ALM).
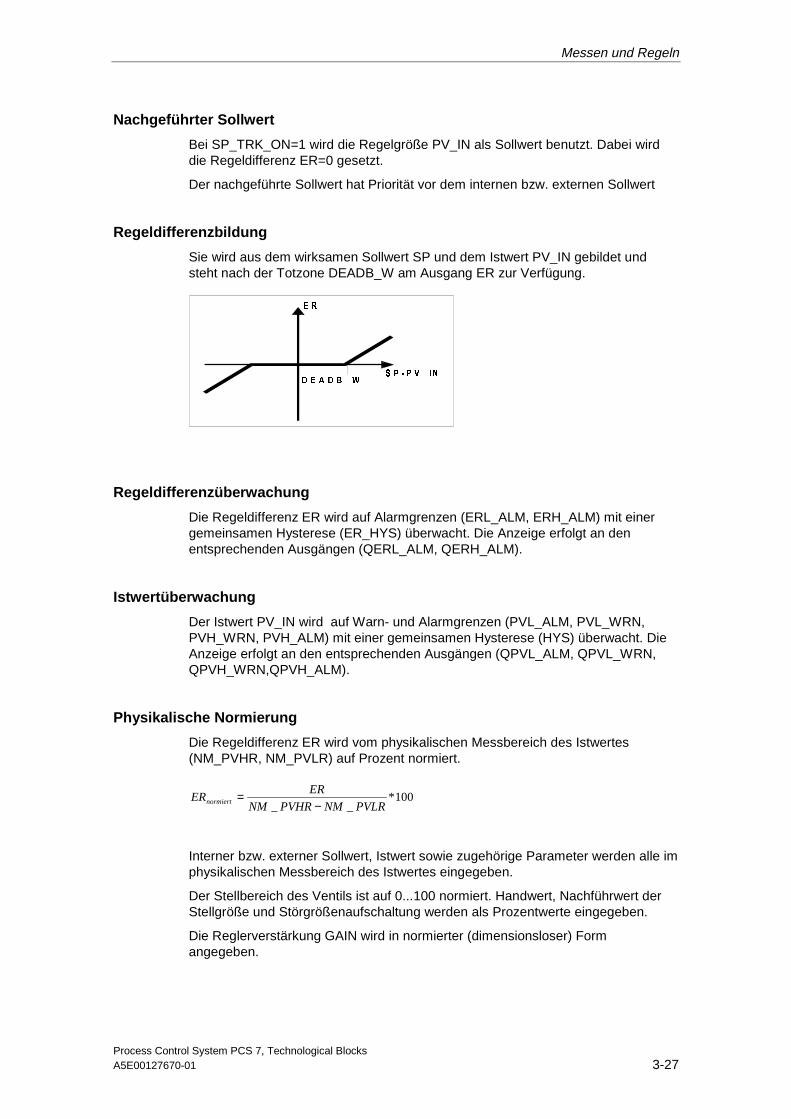
Physikalische Normierung
Die Regeldifferenz ER wird vom physikalischen Messbereich des Istwertes(NM_PVHR, NM_PVLR) auf Prozent normiert.
100*__ PVLRNMPVHRNM
ERERnormiert −
=
Interner bzw. externer Sollwert, Istwert sowie zugehörige Parameter werden alle imphysikalischen Messbereich des Istwertes eingegeben.
Der Stellbereich des Ventils ist auf 0...100 normiert. Handwert, Nachführwert derStellgröße und Störgrößenaufschaltung werden als Prozentwerte eingegeben.
Die Reglerverstärkung GAIN wird in normierter (dimensionsloser) Formangegeben.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-28 A5E00127670-01
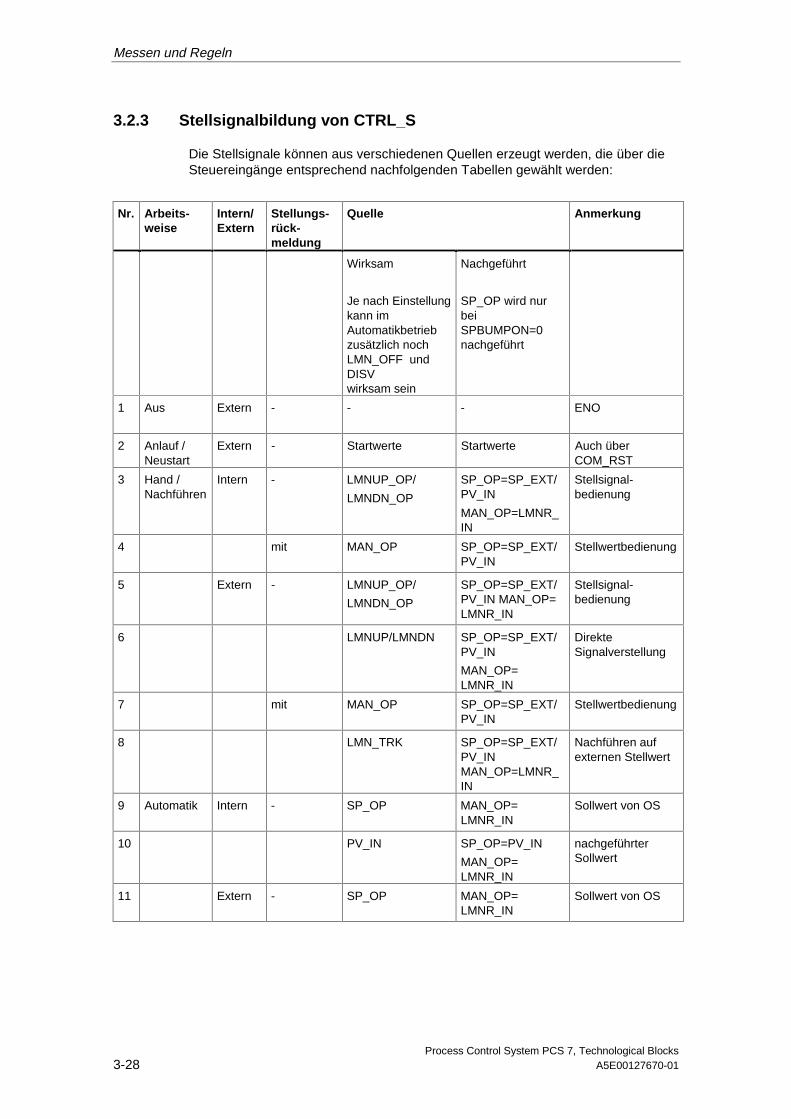
3.2.3 Stellsignalbildung von CTRL_S
Die Stellsignale können aus verschiedenen Quellen erzeugt werden, die über dieSteuereingänge entsprechend nachfolgenden Tabellen gewählt werden:
Nr. Arbeits-weise
Intern/Extern
Stellungs-rück-meldung
Quelle Anmerkung
Wirksam
Je nach Einstellungkann imAutomatikbetriebzusätzlich nochLMN_OFF undDISVwirksam sein
Nachgeführt
SP_OP wird nurbeiSPBUMPON=0nachgeführt
1 Aus Extern - - - ENO
2 Anlauf /Neustart
Extern - Startwerte Startwerte Auch überCOM_RST
3 Hand /Nachführen
Intern - LMNUP_OP/
LMNDN_OP
SP_OP=SP_EXT/PV_IN
MAN_OP=LMNR_IN
Stellsignal-bedienung
4 mit MAN_OP SP_OP=SP_EXT/PV_IN
Stellwertbedienung
5 Extern - LMNUP_OP/
LMNDN_OP
SP_OP=SP_EXT/PV_IN MAN_OP=LMNR_IN
Stellsignal-bedienung
6 LMNUP/LMNDN SP_OP=SP_EXT/PV_IN
MAN_OP=LMNR_IN
DirekteSignalverstellung
7 mit MAN_OP SP_OP=SP_EXT/PV_IN
Stellwertbedienung
8 LMN_TRK SP_OP=SP_EXT/PV_INMAN_OP=LMNR_IN
Nachführen aufexternen Stellwert
9 Automatik Intern - SP_OP MAN_OP=LMNR_IN
Sollwert von OS
10 PV_IN SP_OP=PV_IN
MAN_OP=LMNR_IN
nachgeführterSollwert
11 Extern - SP_OP MAN_OP=LMNR_IN
Sollwert von OS
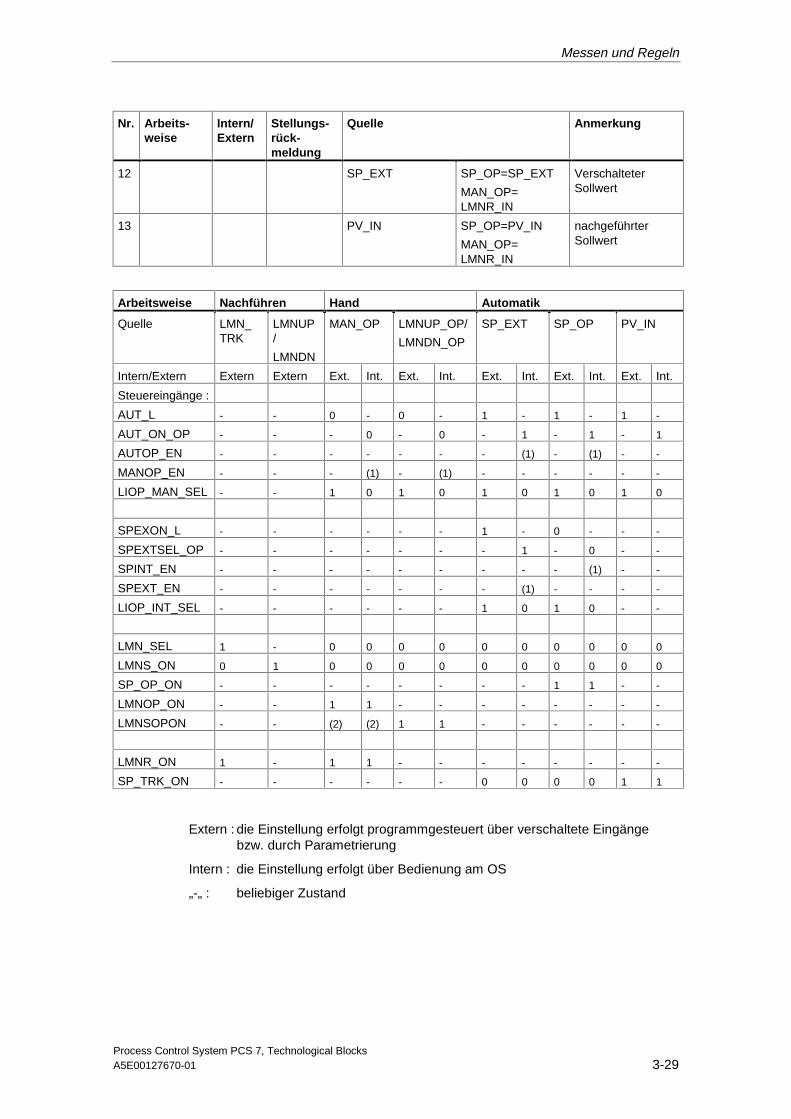
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-29
Nr. Arbeits-weise
Intern/Extern
Stellungs-rück-meldung
Quelle Anmerkung
12 SP_EXT SP_OP=SP_EXT
MAN_OP=LMNR_IN
VerschalteterSollwert
13 PV_IN SP_OP=PV_IN
MAN_OP=LMNR_IN
nachgeführterSollwert
Arbeitsweise Nachführen Hand Automatik
Quelle LMN_TRK
LMNUP/
LMNDN
MAN_OP LMNUP_OP/
LMNDN_OP
SP_EXT SP_OP PV_IN
Intern/Extern Extern Extern Ext. Int. Ext. Int. Ext. Int. Ext. Int. Ext. Int.
Steuereingänge :
AUT_L - - 0 - 0 - 1 - 1 - 1 -
AUT_ON_OP - - - 0 - 0 - 1 - 1 - 1
AUTOP_EN - - - - - - - (1) - (1) - -
MANOP_EN - - - (1) - (1) - - - - - -
LIOP_MAN_SEL - - 1 0 1 0 1 0 1 0 1 0
SPEXON_L - - - - - - 1 - 0 - - -
SPEXTSEL_OP - - - - - - - 1 - 0 - -
SPINT_EN - - - - - - - - - (1) - -
SPEXT_EN - - - - - - - (1) - - - -
LIOP_INT_SEL - - - - - - 1 0 1 0 - -
LMN_SEL 1 - 0 0 0 0 0 0 0 0 0 0
LMNS_ON 0 1 0 0 0 0 0 0 0 0 0 0
SP_OP_ON - - - - - - - - 1 1 - -
LMNOP_ON - - 1 1 - - - - - - - -
LMNSOPON - - (2) (2) 1 1 - - - - - -
LMNR_ON 1 - 1 1 - - - - - - - -
SP_TRK_ON - - - - - - 0 0 0 0 1 1
Extern : die Einstellung erfolgt programmgesteuert über verschaltete Eingängebzw. durch Parametrierung
Intern : die Einstellung erfolgt über Bedienung am OS
„-„ : beliebiger Zustand
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-30 A5E00127670-01
1. die Einstellung wird nur bei einer Umschaltung an der OS geprüft.
2. Es darf keine Stellsignalbedienung aktiv sein. ( = not (LMNSOPON and(LMNUP_OP xor LMNDN_OP)) ). Die Stellsignalbedienung über LMNUP_OPbzw. LMNDN_OP hat höhere Priorität wie die Stellwertbedienung überMAN_OP.
Die analoge Stellgröße des PID-Algorithmus wird folgendermaßen gebildet:
normiertnormiert ERsLAGTM
sTV
sTNGAINLMN *
*_1
*
*
11*
+
++=
s: Komplexe Zahl
Störgrößenaufschaltung und Begrenzung
Im Automatikbetrieb wird am Ausgang des PID-Algorithmus dieStörgrößenaufschaltung DISV addiert und anschließend das Ergebnis auf denBereich LMN_LLM bis LMN_HLM begrenzt.
3.2.4 Hand-, Automatik- und Nachführbetrieb von CTRL_S
Handbetrieb
Im Handbetrieb gibt es drei Möglichkeiten, mit denen Sie die Stellsignale manuellbeeinflussen können:
• Stellwertvorgabe über MAN_OP
• Tippbetrieb von MAN_OP
• Direkte Schaltung der Stellsignale über Stellbefehle
Die Bedienung von MAN_OP über Stellwertvorgabe bzw. Tippbetrieb ist nur beiRegelungen mit Stellungsrückmeldung (LMNR_ON=1) möglich. Bedienung undBegrenzung erfolgt über OP_A_LIM bzw. OP_A_RJC (Bereich MAN_HLM –MAN_LLM).Die Ausgangswerte von QVHL und QVLL des OP_A_LIM bzw.OP_A_RJC werden an die Ausgänge QLMN_HLM und QLMN_LLM weitergereicht.Der Wert von MAN_OP wird dann auf den Ausgang LMN gelegt und der Motorwird über die Stellsignale verfahren, bis der Wert der StellungsrückmeldungLMNR_IN den Wert von MAN_OP erreicht.
Die direkte Schaltung der Stellsignale über Stellbefehle ist dagegen beiRegelungen mit und ohne Stellungsrückmeldung möglich. Die Signalbedienungwird über LMNSOPON freigegeben und die Stellsignale werden über LMNUP_OPbzw. LMNDN_OP gesetzt. Das Ventil wird dann solange verfahren, bis dieBedienung zurückgenommen wird oder die Endlage erreicht ist.
Die Stellsignalbedienung hat Vorrang gegenüber der Stellwertbedienung. WennMAN_OP nicht das wirksames Eingangssignal ist, dann wird der Wert aufLMNR_IN nachgeführt.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-31
Automatikbetrieb
Die Stellgröße LMN wird durch den PID-Algorithmus berechnet. DieRegelparameter GAIN, TN, TV und TM_LAG sind verschaltbar.
Der Reglerwirksinn kann reversiert werden (steigende Regeldifferenz bewirktfallende Stellgröße), indem der Proportionalbeiwert GAIN negativ parametriert wird.Der P-Anteil kann über P_SEL = 0 deaktiviert werden.
Der I-Anteil ist über TN=0 abschaltbar. Bei Regelungen mit Stellungsrückmeldungkann der I-Anteil richtungsabhängig blockiert werden. Dies erfolgt über INTH_POSbzw. INTH_NEG, bei Ansprechen der Endlagenschalter LMNR_HS bzw.LMNR_LS oder wenn die Stellungsrückmeldung LMNR_IN wirksam ist und denBereich LMN_HLM,LMN_LLM verlässt. Bei Regelungen ohneStellungsrückmeldung sind keine speziellen Anti-Windup-Maßnahmen erforderlich.
Arbeitspunkt: Sie stellen den Arbeitspunkt am Eingang LMN_OFF ein. Dieser Wertersetzt im Automatikbetrieb den I-Anteil des PID-Algorithmus, wenn der I-Anteildeaktiviert ist. Der Arbeitspunkt wird im Messbereich des Stellwertes eingegeben.Der D-Anteil ist als verzögerndes Differenzierglied ausgeführt. Er ist über TV=0abschaltbar.
P-Anteil in Rückführung des Reglers schalten: Mit PFDB_SEL = TRUE ist der P-Anteil in die Rückführung des Reglers geschaltet. Ein Führungssprung hat somitkeinen Einfluss auf den P-Anteil. Die Umschaltung von PFDB_SEL ist nichtstoßfrei.
D-Anteil in Rückführung des Reglers schalten: Mit DFDB_SEL = TRUE ist der D-Anteil in die Rückführung des Reglers geschaltet. Ein Führungssprung hat somitkeinen Einfluss auf den D-Anteil. Die Umschaltung von DFDB_SEL ist nichtstoßfrei.
Der berechnete Stellwert wird dann in eine Folge von Stellimpulsen umgesetzt: DerAlgorithmus zur Erzeugung der Stellimpulse wird durch folgende Parameterbeeinflusst:
• MTR_TM: Motorlaufzeit; die Zeitdauer, die erforderlich ist um das Ventil vonAnschlag zu Anschlag zu verfahren.
• PULSE_TM: Mindestimpulsdauer; die kleinste Schrittweite, mit der das Ventilverfahren wird, beträgt 100%*PULSE_TM/MTR_TM.
• BREAK_TM: Mindestpausendauer: nach Beenden eines Stellimpulses mussmindestens diese Zeitdauer verstreichen bevor ein neuer Impuls ausgegebenwerden kann.
• LMNR_HS,LMNR_LS: Endlagenschalter; ist einer der Endlagenschaltergesetzt, so wird das entsprechende Ausgangssignal QLMNUP bzw. QLMNDNgesperrt.
Bei fallender Flanke des Motorschutzsignales MSS wird der Motorschutzfehlerspeichernd gesetzt und an den Ausgang QMSS_ST geleitet. Mit dem ParameterMSS_SIG wird festgelegt, ob lediglich eine Anzeige stattfindet (MSS_SIG=0), oderob der Motor ohne Beachtung aller anderen Eingänge und Systemzuständeabgeregelt werden soll (MSS_SIG = 1). Der Motorschutzfehler (QMSS_ST = 1)wird an die OS gemeldet.Sie können QMSS_ST entweder durch Bedienung vonRESET oder automatisch durch eine Verschaltung von L_RESET mit "1" beisteigender Flanke von MSS zurücksetzten.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-32 A5E00127670-01
• LMNR_ON: Bei LMNR_ON erfolgt die Regelung mit Stellungsrückmeldung.Der Steuereingang darf nicht im laufenden Betrieb umgeschaltet werden.
• DEADB_W: die Totzone in der Regeldifferenz ist notwendig, um dieSchalthäufikeit des Reglers bei kleinen Schwankungen der Regeldifferenz umden Nullpunkt zu verringern. Im Arbeitspunkt des Regelkreises ändert sich dieRegeldifferenz aufgrund eines Mindest-impulses um den Wert : (100%*PULSE_TM/MTR_TM) * Prozessverstärkung. Die Totzone sollte daher größerals dieser Wert sein. Bei negativen Werten für DEADB_W wird die Totzoneignoriert.
Nachführbetrieb
Im Nachführbetrieb gibt es zwei Möglichkeiten, um die Stellsignale zu beeinflussen:
Nachführen über den externen Stellwert LMN_TRK
Direkte Schaltung der Stellsignale über verschaltete Eingänge LMNS_ON, LMNUPund LMNDN
Das Nachführen über den externen Stellwert LMN_TRK ist nur bei Regelungen mitStellungsrückmeldung möglich. Mit der Einstellung LMN_SEL=1 wird dieStellgröße von dem verschalteten Nachführwert LMN_TRK geholt und auf denAusgang LMN gelegt. Das Ventil wird über die Stellsignale verfahren, bis der Wertder Stellungsrückmeldung LMNR_IN den Wert von LMN_TRK erreicht. DieAusgänge QLMN_HLM und QLMN_LLM sind dabei auf FALSE gesetzt.
Der Nachführbetrieb mit direkter Schaltung der Stellsignale über verschalteteEingänge LMNS_ON, LMNUP und LMNDN hat von allen Einstellungen die höchstePriorität. Ist nur LMNS_ON gesetzt, dann werden Stellsignale unterdrückt und dasVentil wird angehalten. Die Stellsignale können dann nur über die EingängeLMNUP bzw. LMNDN gesetzt werden. Die Eingänge sind aber nur wirksam, wenngleichzeitig LMNS_ON gesetzt ist.
Kaskadierung mehrerer PID-Regler
Die Stellgröße LMN des Führungsreglers wird mit dem Eingang SP_EXT desFolgereglers verbunden. Zusätzlich muss dafür gesorgt werden, dass derFührungsregler in den Nachführbetrieb übernommen wird, falls die Kaskadeaufgetrennt wird. Dazu wird im Folgeregler ein Signal QCAS_CUT gebildet und mitdem Eingang LMN_SEL des Führungsreglers verschaltet. Eine Trennung kanndurch Hand- oder Nachführbetrieb, durch Sollwertbedienung oderSollwertnachführung des Folgereglers verursacht werden:
QCAS_CUT=LMNS_ON or LMN_SEL or (not QMAN_AUT) or (QMAN_AUT andSP_TRK_ON)
Der Nachführbetrieb mit direkter Schaltung der Stellsignale über verschalteteEingänge LMNS_ON, LMNUP und LMNDN hat von allen Einstellungen die höchstePriorität. Ist nur LMNS_ON gesetzt, dann werden Stellsignale unterdrückt und dasVentil wird angehalten. Die Stellsignale können dann nur über die EingängeLMNUP bzw. LMNDN gesetzt werden. Die Eingänge sind aber nur wirksam, wenngleichzeitig LMNS_ON gesetzt ist.
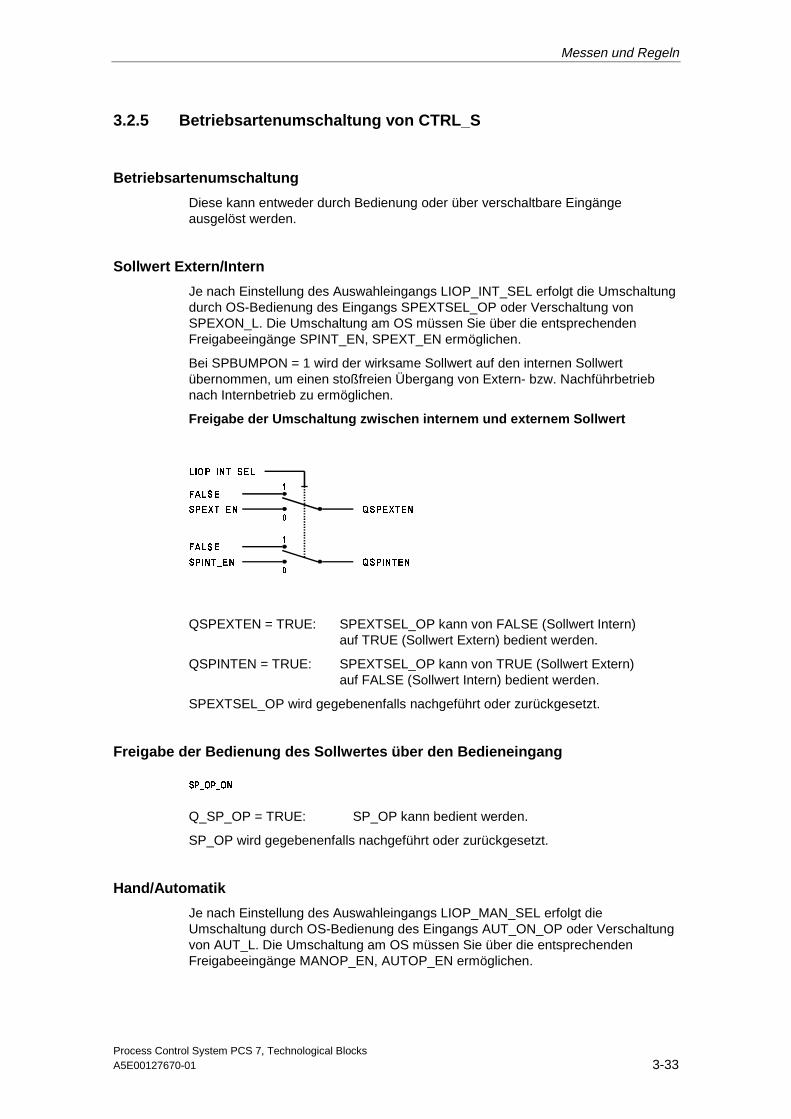
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-33
3.2.5 Betriebsartenumschaltung von CTRL_S
Betriebsartenumschaltung
Diese kann entweder durch Bedienung oder über verschaltbare Eingängeausgelöst werden.
Sollwert Extern/Intern
Je nach Einstellung des Auswahleingangs LIOP_INT_SEL erfolgt die Umschaltungdurch OS-Bedienung des Eingangs SPEXTSEL_OP oder Verschaltung vonSPEXON_L. Die Umschaltung am OS müssen Sie über die entsprechendenFreigabeeingänge SPINT_EN, SPEXT_EN ermöglichen.
Bei SPBUMPON = 1 wird der wirksame Sollwert auf den internen Sollwertübernommen, um einen stoßfreien Übergang von Extern- bzw. Nachführbetriebnach Internbetrieb zu ermöglichen.
Freigabe der Umschaltung zwischen internem und externem Sollwert
/,23B,17B6(/
63(;7B(1
63,17B(1
)$/6(
)$/6(
463,17(1
463(;7(1
�
�
�
�
QSPEXTEN = TRUE: SPEXTSEL_OP kann von FALSE (Sollwert Intern)auf TRUE (Sollwert Extern) bedient werden.
QSPINTEN = TRUE: SPEXTSEL_OP kann von TRUE (Sollwert Extern)auf FALSE (Sollwert Intern) bedient werden.
SPEXTSEL_OP wird gegebenenfalls nachgeführt oder zurückgesetzt.
Freigabe der Bedienung des Sollwertes über den Bedieneingang
63B23B21
Q_SP_OP = TRUE: SP_OP kann bedient werden.
SP_OP wird gegebenenfalls nachgeführt oder zurückgesetzt.
Hand/Automatik
Je nach Einstellung des Auswahleingangs LIOP_MAN_SEL erfolgt dieUmschaltung durch OS-Bedienung des Eingangs AUT_ON_OP oder Verschaltungvon AUT_L. Die Umschaltung am OS müssen Sie über die entsprechendenFreigabeeingänge MANOP_EN, AUTOP_EN ermöglichen.
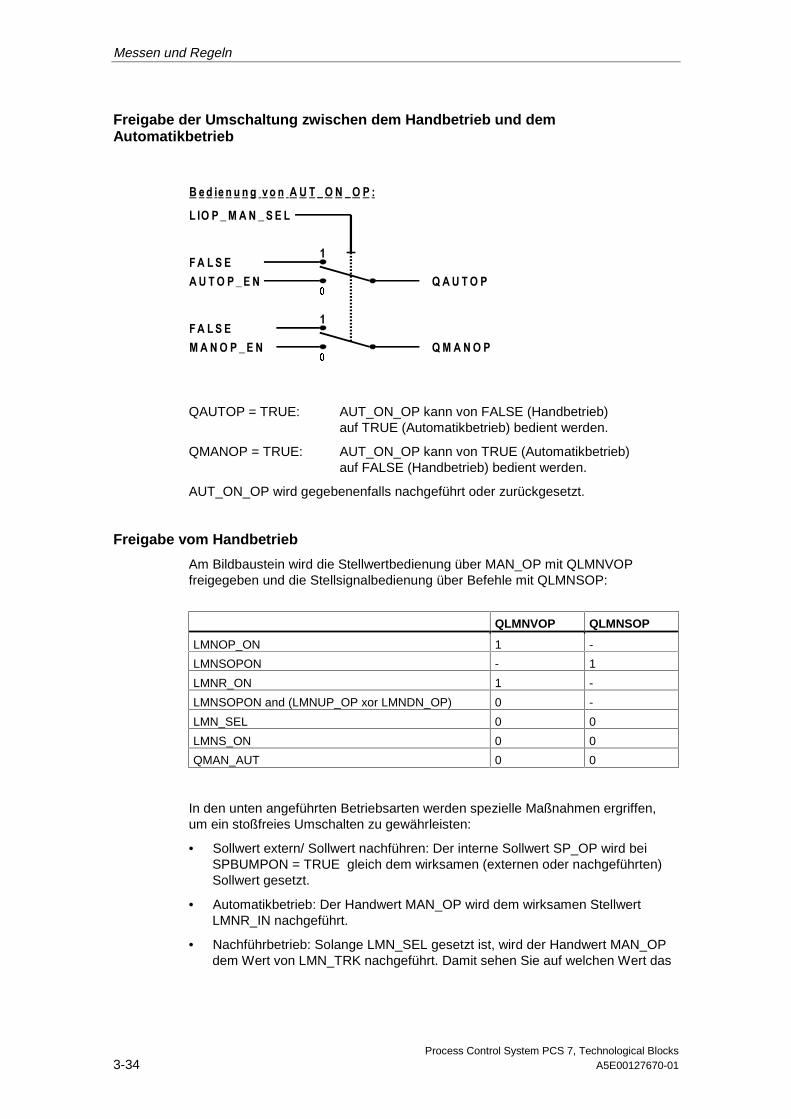
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-34 A5E00127670-01
Freigabe der Umschaltung zwischen dem Handbetrieb und demAutomatikbetrieb
/ ,2 3 B0 $1 B6 ( /
$8 72 3 B(1
0 $ 12 3 B(1
)$ /6 (
)$ /6 (
40 $ 12 3
4 $8 72 3
�
�
�
�
% HG LH Q X Q J �YR Q �$ 8 7 B2 1 B2 3 �
QAUTOP = TRUE: AUT_ON_OP kann von FALSE (Handbetrieb)auf TRUE (Automatikbetrieb) bedient werden.
QMANOP = TRUE: AUT_ON_OP kann von TRUE (Automatikbetrieb)auf FALSE (Handbetrieb) bedient werden.
AUT_ON_OP wird gegebenenfalls nachgeführt oder zurückgesetzt.
Freigabe vom Handbetrieb
Am Bildbaustein wird die Stellwertbedienung über MAN_OP mit QLMNVOPfreigegeben und die Stellsignalbedienung über Befehle mit QLMNSOP:
QLMNVOP QLMNSOP
LMNOP_ON 1 -
LMNSOPON - 1
LMNR_ON 1 -
LMNSOPON and (LMNUP_OP xor LMNDN_OP) 0 -
LMN_SEL 0 0
LMNS_ON 0 0
QMAN_AUT 0 0
In den unten angeführten Betriebsarten werden spezielle Maßnahmen ergriffen,um ein stoßfreies Umschalten zu gewährleisten:
• Sollwert extern/ Sollwert nachführen: Der interne Sollwert SP_OP wird beiSPBUMPON = TRUE gleich dem wirksamen (externen oder nachgeführten)Sollwert gesetzt.
• Automatikbetrieb: Der Handwert MAN_OP wird dem wirksamen StellwertLMNR_IN nachgeführt.
• Nachführbetrieb: Solange LMN_SEL gesetzt ist, wird der Handwert MAN_OPdem Wert von LMN_TRK nachgeführt. Damit sehen Sie auf welchen Wert das
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-35
Ventil verfahren wird. Wird LMN_SEL zurückgenommen, dann wird MAN_OPwieder auf den Wert von LMNR_IN gesetzt, damit beim Bedienen vonMAN_OP kein Umschaltstoß entsteht.
• Handbetrieb: Bei Regelungen mit Stellungsrückmeldung wird der Integrator sonachgeführt, dass eine stoßfreie Umschaltung in den Automatikbetrieb möglichist.
I-Anteil = Stellwert (in Prozent) – P-Anteil – Störgröße (in Prozent)Der D-Anteil wird abgeschaltet und abgeglichen.
3.2.6 Fehlerbehandlung von CTRL_S
Fehlerbehandlung
Es werden folgende Fälle durch den Bausteinalgorithmus behandelt:
Bedienfehler
Tritt mindestens ein Bedienfehler bei der Bedienung eines der ParameterSPEXTSEL_OP, AUT_ON_OP, SP_OP oder MAN_OP auf, wird QOP_ERR = 1,andernfalls wird QOP_ERR = 0 gesetzt. Ein Bedienfehler steht nur für einen Zyklusan.
Parametrierfehler: NM_PVHR <= NM_PVLR: die Regeldifferenz ER wird auf Nullgesetzt und ENO=0 bzw. QERR=1 gesetzt
Parametrierfehler: SAMPLE_T<0.001: die Abtastzeit SAMPLE_T wird auf 0.001gesetzt und ENO=0 bzw. QERR=1 gesetzt
Parametrierfehler: GAIN=0: die Regeldifferenz ER wird auf Null gesetzt undENO=0 bzw. QERR=1 gesetzt
TN < SAMPLE_T/2: bei TN > 0 wird mit TN = SAMPLE_T/2 gerechnet. Bei TN= 0ist der Integrierer abgeschaltet und der Arbeitspunkt LMN_OFF aktiv.
TV < SAMPLE_T: bei TV > 0 wird mit TV = SAMPLE_T gerechnet. Bei TV = 0 istder Differenzierer abgeschaltet.
TM_LAG < SAMPLE_T/2: bei TM_LAG < SAMPLE_T/2 wird mit TM_LAG <SAMPLE_T/2 gerechnet. Der D-Anteil verhält sich in diesen Fällen als idealerDifferenzierer.
MTR_TM, PULSE_TM und BREAK_TM werden nach unten hin auf SAMPLE_Tbegrenzt.
Wenn im laufenden Betrieb die Freigabeeingänge *_EN zurückgesetzt werden,dann wird dies über die Ausgänge QMAN_ERR bzw. QAUT_ERR angezeigt.
QMAN_ERR wird auch gesetzt, wenn beim Nachführen des Reglers auf LMN_TRKder Steuereingang für die Stellungsrückmeldung LMNR_ON zurückgenommenwird. In diesem Fall wird das Ventil angehalten.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-36 A5E00127670-01
3.2.7 Bedienen, Beobachten und Inbetriebnahme von CTRL_S
Bedienen und Beobachten
Der Bildbaustein bildet für den Operator das Fenster zu dem Funktionsbaustein.Der Bildbaustein bietet dem Anwender folgende Funktionen:
• Anwahlbedienung des Bildbausteins
• Bedienung des Prozesses / Parametrierungen mit Bedienmeldungen
• Beobachten des Prozesses
• Der Bildbaustein ist in drei Darstellungsformen anwählbar:
• Symbolbild
• Leitfeld
• Kreisbild
Inbetriebnahme
Zusätzlich zu den allgemeinen Inbetriebnahmeregeln sollen Sie auch die Gültigkeitder Treiberfunktion überprüfen:
• Liefert der Eingangstreiber die gültige Regelgröße, von der richtigenMessstelle, in den richtigen Einheiten (vgl. physikalische Normierung)?
• Wird die Stellgröße des Reglers über den Ausgangstreiber an den richtigenAktor ausgegeben, in den richtigen Einheiten (vgl. physikalische Normierung)?
3.2.8 Anlauf-, Zeit- und Meldeverhalten von CTRL_S
Anlaufverhalten
Bei CPU-Anlauf wird der CTRL_S in Handbetrieb mit internem Sollwert eingestellt.Dafür muss der Baustein aus dem Anlauf-OB aufgerufen werden. Bei CFC-Projektierung wird dieses durch CFC erledigt. Bei einfachen STEP 7-Mittelnmüssen Sie den Aufruf im Anlauf-OB eintragen.Nach dem Anlauf werden für die Anzahl der im Wert RUNUPCYC parametriertenZyklen die Meldungen unterdrückt.
Im Anlauf werden MAN_OP und LMN mit LMNR_IN initialisiert. Der I-Anteil wirdauf Null gesetzt.
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
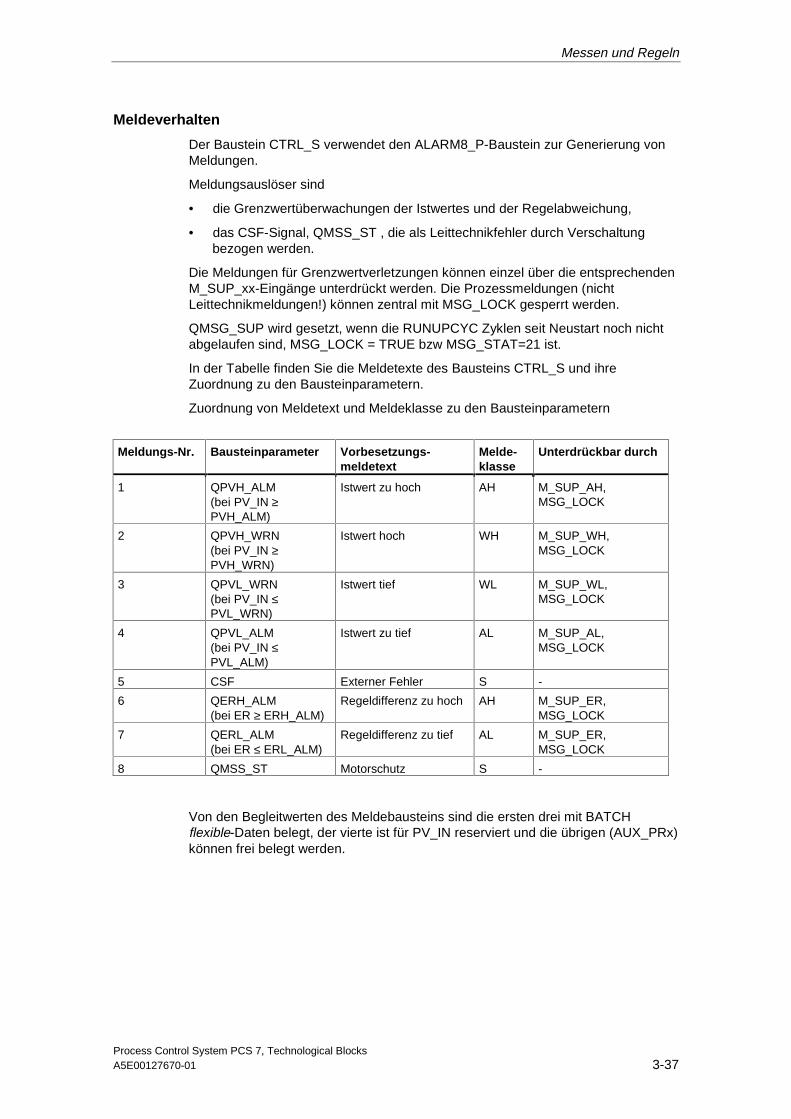
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-37
Meldeverhalten
Der Baustein CTRL_S verwendet den ALARM8_P-Baustein zur Generierung vonMeldungen.
Meldungsauslöser sind
• die Grenzwertüberwachungen der Istwertes und der Regelabweichung,
• das CSF-Signal, QMSS_ST , die als Leittechnikfehler durch Verschaltungbezogen werden.
Die Meldungen für Grenzwertverletzungen können einzel über die entsprechendenM_SUP_xx-Eingänge unterdrückt werden. Die Prozessmeldungen (nichtLeittechnikmeldungen!) können zentral mit MSG_LOCK gesperrt werden.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, MSG_LOCK = TRUE bzw MSG_STAT=21 ist.
In der Tabelle finden Sie die Meldetexte des Bausteins CTRL_S und ihreZuordnung zu den Bausteinparametern.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungs-meldetext
Melde-klasse
Unterdrückbar durch
1 QPVH_ALM(bei PV_IN ≥PVH_ALM)
Istwert zu hoch AH M_SUP_AH,MSG_LOCK
2 QPVH_WRN(bei PV_IN ≥PVH_WRN)
Istwert hoch WH M_SUP_WH,MSG_LOCK
3 QPVL_WRN(bei PV_IN ≤PVL_WRN)
Istwert tief WL M_SUP_WL,MSG_LOCK
4 QPVL_ALM(bei PV_IN ≤PVL_ALM)
Istwert zu tief AL M_SUP_AL,MSG_LOCK
5 CSF Externer Fehler S -
6 QERH_ALM(bei ER ≥ ERH_ALM)
Regeldifferenz zu hoch AH M_SUP_ER,MSG_LOCK
7 QERL_ALM(bei ER ≤ ERL_ALM)
Regeldifferenz zu tief AL M_SUP_ER,MSG_LOCK
8 QMSS_ST Motorschutz S -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten belegt, der vierte ist für PV_IN reserviert und die übrigen (AUX_PRx)können frei belegt werden.
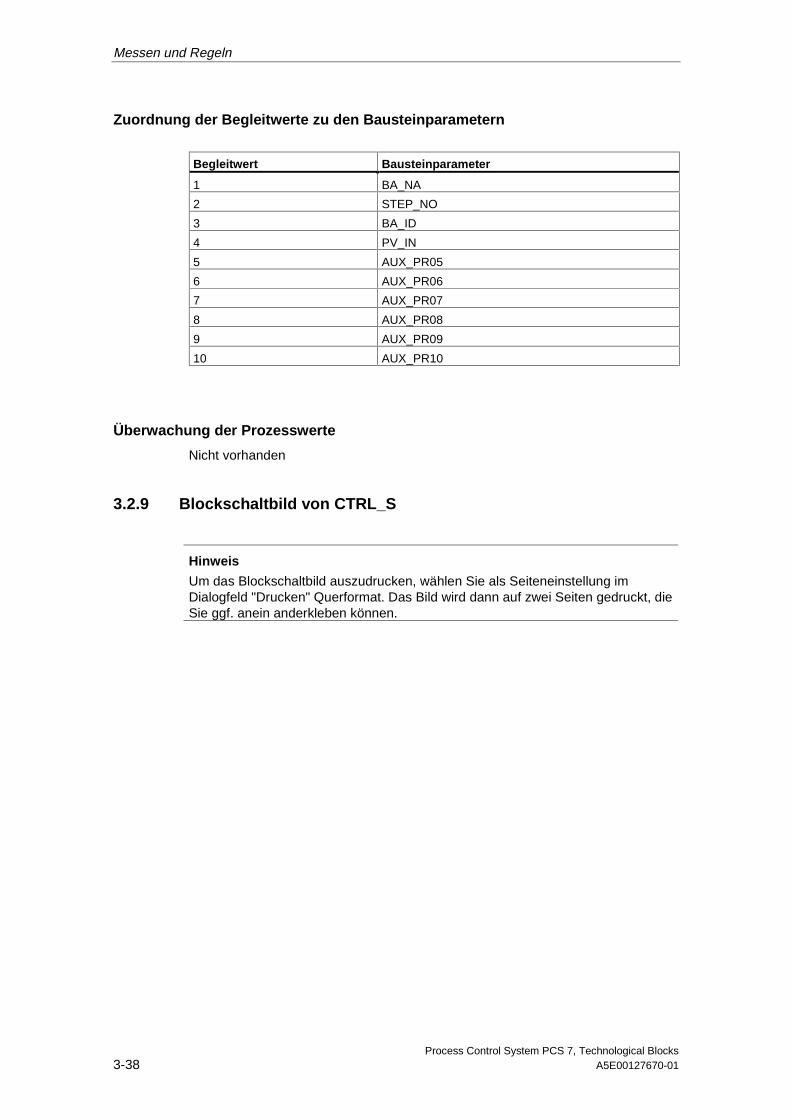
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-38 A5E00127670-01
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 PV_IN
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden
3.2.9 Blockschaltbild von CTRL_S
Hinweis
Um das Blockschaltbild auszudrucken, wählen Sie als Seiteneinstellung imDialogfeld "Drucken" Querformat. Das Bild wird dann auf zwei Seiten gedruckt, dieSie ggf. anein anderkleben können.
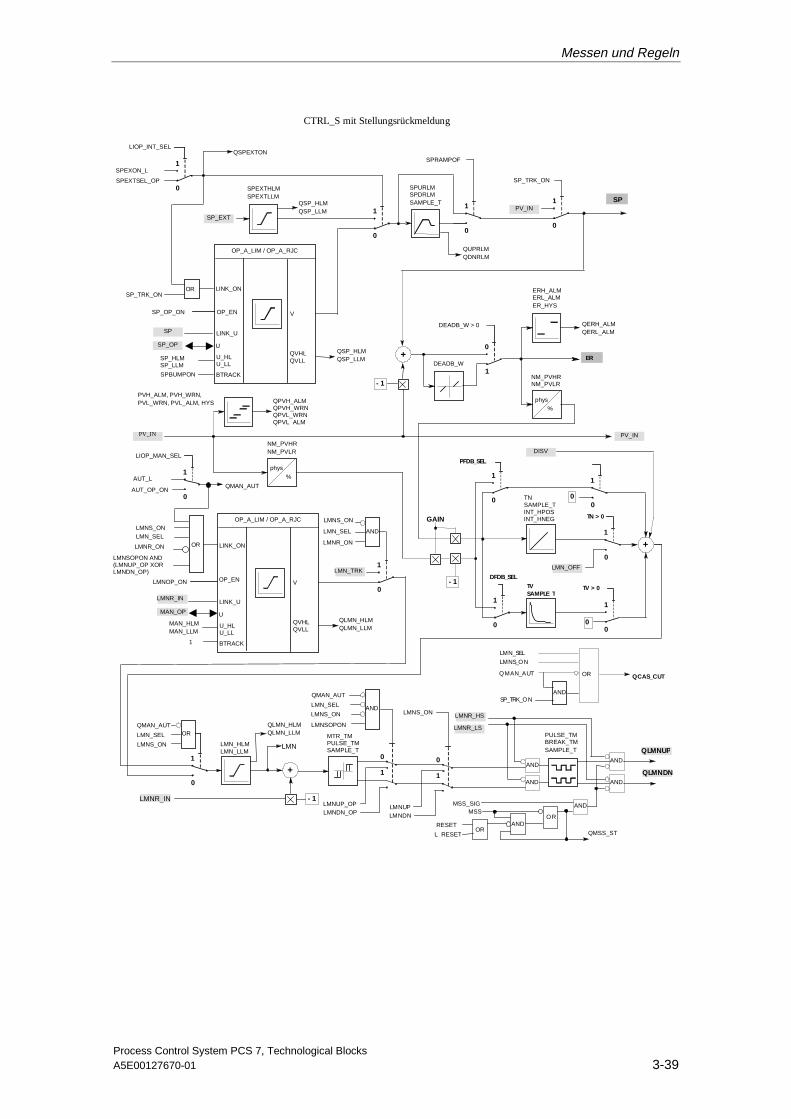
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-39
+
- 1
QSP_HLMQSP_LLM ER
%phys
NM_PVHRNM_PVLR
1
0
SPRAMPOF
1
0
SPURLMSPDRLMSAMPLE_T
QUPRLMQDNRLM
DEADB_W > 0
0
1DEADB_W
QERH_ALMQERL_ALM
ERH_ALMERL_ALMER_HYS
SP
SP_TRK_ON
1
0
PV_IN
QMAN_AUT
LMN_SEL
LMNS_ON
SP_TRK_ON
QCAS_CUT
AND
OR
SPEXON_L
SPEXTSEL_OP
LIOP_INT_SEL
1
0
QSPEXTON
SPEXTHLMSPEXTLLM
QSP_HLMQSP_LLM
SP_EXT
SPBUMPON
ORSP_TRK_ON
LINK_U
V
U
U_HLU_LL
QVHLQVLL
LINK_ON
BTRACK
OP_A_LIM / OP_A_RJC
SP_HLMSP_LLM
SP
SP_OP
OP_ENSP_OP_ON
PV_IN
0
GAIN
- 1DFDB_SEL
TV > 0
+
PFDB_SEL
TN > 0
1
0
1
0
1
0
1
0
TVSAMPLE_T
TNSAMPLE_TINT_HPOSINT_HNEG
DISV
LMN_OFF
P_SE
0
1
0
PV_IN
%
phys
NM_PVHRNM_PVLR
PVH_ALM, PVH_WRN,PVL_WRN, PVL_ALM, HYS QPVH_ALM
QPVH_WRNQPVL_WRNQPVL_ALM
MAN_OP
MAN_HLMMAN_LLM
1
LMNR_IN
LMNOP_ON
QLMN_HLMQLMN_LLM
LINK_U
V
U
U_HLU_LL
QVHLQVLL
LINK_ON
BTRACK
OP_A_LIM / OP_A_RJC
1
0
ANDLMN_SEL
LMNS_ON
LMNR_ON
LMN_TRK
OP_EN
QMAN_AUT
LMNSOPON AND(LMNUP_OP XORLMNDN_OP)
ORLMN_SELLMNS_ON
LMNR_ON
1
0
AUT_L
AUT_OP_ON
LIOP_MAN_SEL
1
0
LMNS_ON
LMNUPLMNDN
LMNR_IN
1
0
LMNS_ON
QMAN_AUT
LMN_SEL OR
LMN_HLMLMN_LLM
LMN
+
QLMN_HLMQLMN_LLM
- 1LMNUP_OPLMNDN_OP
1
0
LMNS_ON
QMAN_AUT
LMN_SEL
LMNSOPON
AND
MTR_TMPULSE_TMSAMPLE_T
CTRL_S mit Stellungsrückmeldung
QLMNDN
QLMNUP
PULSE_TMBREAK_TMSAMPLE_T
AND
LMNR_HS
LMNR_LS
AND
AND
AND
QMSS_ST
OR
MSS_SIGMSS
AND
ANDRESETOR
L_RESET
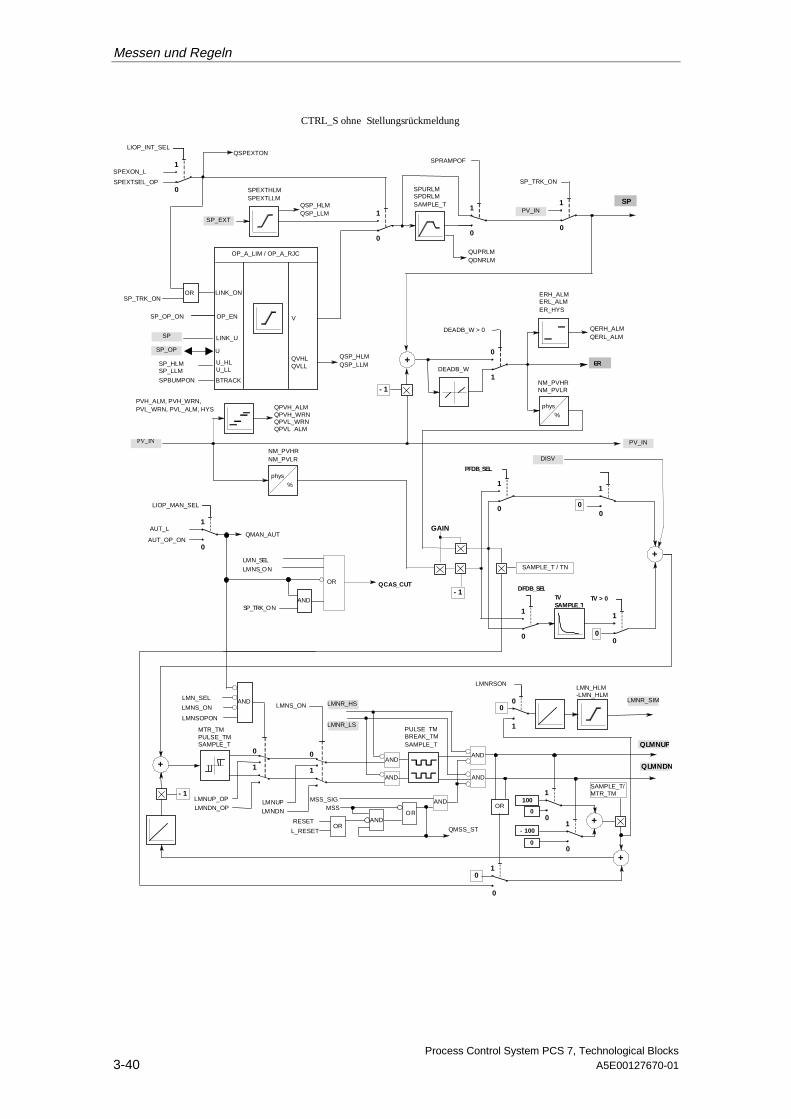
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-40 A5E00127670-01
+
- 1
1
0
SPRAMPOF
1
0
SPURLMSPDRLMSAMPLE_T
QUPRLMQDNRLM
PVH_ALM, PVH_WRN,PVL_WRN, PVL_ALM, HYS QPVH_ALM
QPVH_WRNQPVL_WRNQPVL_ALM
PV_IN
ER
%phys
NM_PVHRNM_PVLR
DEADB_W > 0
0
1DEADB_W
QERH_ALMQERL_ALM
ERH_ALMERL_ALMER_HYS
SP
SP_TRK_ON
1
0
PV_IN
LMNR_SIM
SPEXON_L
SPEXTSEL_OP
LIOP_INT_SEL
1
0
QSPEXTON
QSP_HLMQSP_LLM
SPEXTHLMSPEXTLLM
QSP_HLMQSP_LLM
SP_EXT
SPBUMPON
ORSP_TRK_ON
LINK_U
V
U
U_HLU_LL
QVHLQVLL
LINK_ON
BTRACK
OP_A_LIM / OP_A_RJC
SP_HLMSP_LLM
SP
SP_OP
OP_ENSP_OP_ON
PV_IN
%phys
NM_PVHRNM_PVLR
QLMNDN
QLMNUP
PULSE_TMBREAK_TMSAMPLE_T
AND
LMNR_HS
LMNR_LS
AND
AND
AND1
0
LMNS_ON
LMNUPLMNDN
LMNUP_OPLMNDN_OP
1
0
LMNS_ON
LMN_SEL
LMNSOPON
AND
MTR_TMPULSE_TMSAMPLE_T
CTRL_S ohne Stellungsrückmeldung
1001
0
0
0
- 1001
0
+
0
OR
0
1
+
- 1
0
GAIN
- 1 DFDB_SEL
TV > 0
+
PFDB_SEL
1
0
1
0
1
0
TVSAMPLE_T
DISV
P_SE
0
1
0
SAMPLE_T / TN
+
SAMPLE_T/MTR_TM
0
1
LMNRSONLMN_HLM-LMN_HLM
0
QMAN_AUT
1
0
AUT_L
AUT_OP_ON
LIOP_MAN_SEL
LMN_SELLMNS_ON
SP_TRK_ON
QCAS_CUT
AND
OR
QMSS_ST
OR
MSS_SIGMSS
AND
ANDRESETOR
L_RESET
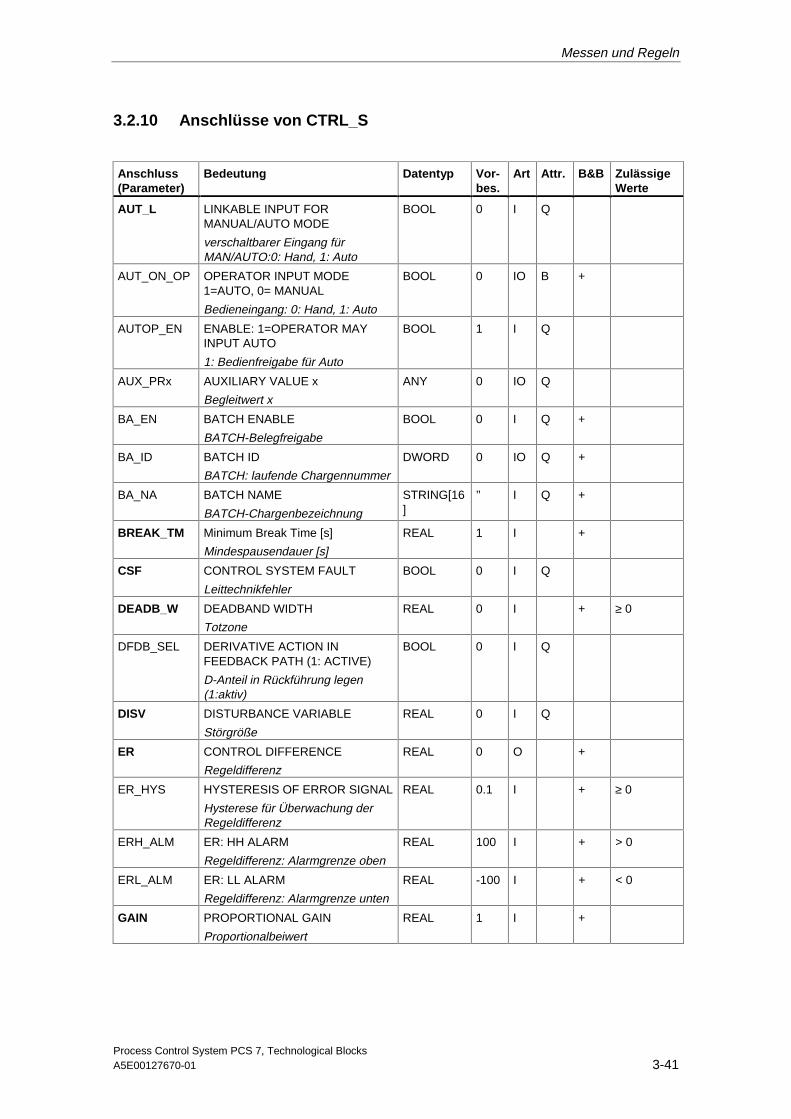
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-41
3.2.10 Anschlüsse von CTRL_S
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUT_L LINKABLE INPUT FORMANUAL/AUTO MODE
verschaltbarer Eingang fürMAN/AUTO:0: Hand, 1: Auto
BOOL 0 I Q
AUT_ON_OP OPERATOR INPUT MODE1=AUTO, 0= MANUAL
Bedieneingang: 0: Hand, 1: Auto
BOOL 0 IO B +
AUTOP_EN ENABLE: 1=OPERATOR MAYINPUT AUTO
1: Bedienfreigabe für Auto
BOOL 1 I Q
AUX_PRx AUXILIARY VALUE x
Begleitwert x
ANY 0 IO Q
BA_EN BATCH ENABLE
BATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH ID
BATCH: laufende Chargennummer
DWORD 0 IO Q +
BA_NA BATCH NAME
BATCH-Chargenbezeichnung
STRING[16]
’’ I Q +
BREAK_TM Minimum Break Time [s]
Mindespausendauer [s]
REAL 1 I +
CSF CONTROL SYSTEM FAULT
Leittechnikfehler
BOOL 0 I Q
DEADB_W DEADBAND WIDTH
Totzone
REAL 0 I + ≥ 0
DFDB_SEL DERIVATIVE ACTION INFEEDBACK PATH (1: ACTIVE)
D-Anteil in Rückführung legen(1:aktiv)
BOOL 0 I Q
DISV DISTURBANCE VARIABLE
Störgröße
REAL 0 I Q
ER CONTROL DIFFERENCE
Regeldifferenz
REAL 0 O +
ER_HYS HYSTERESIS OF ERROR SIGNAL
Hysterese für Überwachung derRegeldifferenz
REAL 0.1 I + ≥ 0
ERH_ALM ER: HH ALARM
Regeldifferenz: Alarmgrenze oben
REAL 100 I + > 0
ERL_ALM ER: LL ALARM
Regeldifferenz: Alarmgrenze unten
REAL -100 I + < 0
GAIN PROPORTIONAL GAIN
Proportionalbeiwert
REAL 1 I +
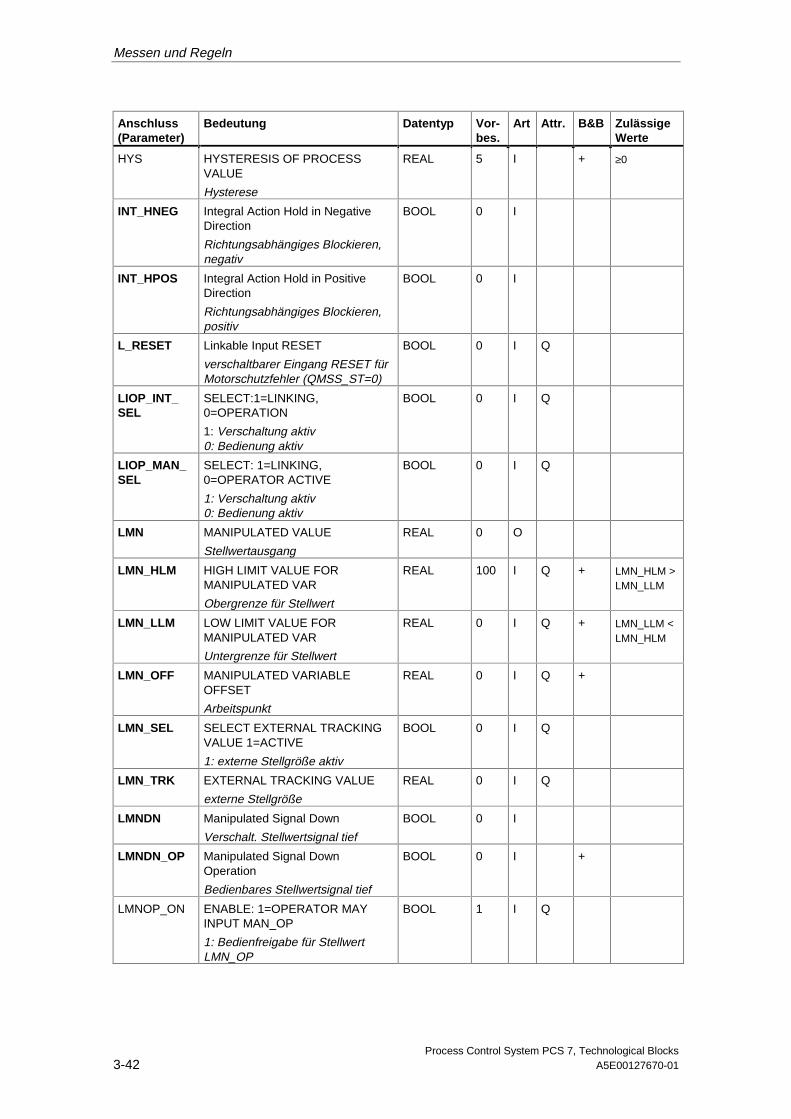
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-42 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
HYS HYSTERESIS OF PROCESSVALUE
Hysterese
REAL 5 I + ≥0
INT_HNEG Integral Action Hold in NegativeDirection
Richtungsabhängiges Blockieren,negativ
BOOL 0 I
INT_HPOS Integral Action Hold in PositiveDirection
Richtungsabhängiges Blockieren,positiv
BOOL 0 I
L_RESET Linkable Input RESET
verschaltbarer Eingang RESET fürMotorschutzfehler (QMSS_ST=0)
BOOL 0 I Q
LIOP_INT_SEL
SELECT:1=LINKING,0=OPERATION
1: Verschaltung aktiv0: Bedienung aktiv
BOOL 0 I Q
LIOP_MAN_SEL
SELECT: 1=LINKING,0=OPERATOR ACTIVE
1: Verschaltung aktiv0: Bedienung aktiv
BOOL 0 I Q
LMN MANIPULATED VALUE
Stellwertausgang
REAL 0 O
LMN_HLM HIGH LIMIT VALUE FORMANIPULATED VAR
Obergrenze für Stellwert
REAL 100 I Q + LMN_HLM >LMN_LLM
LMN_LLM LOW LIMIT VALUE FORMANIPULATED VAR
Untergrenze für Stellwert
REAL 0 I Q + LMN_LLM <LMN_HLM
LMN_OFF MANIPULATED VARIABLEOFFSET
Arbeitspunkt
REAL 0 I Q +
LMN_SEL SELECT EXTERNAL TRACKINGVALUE 1=ACTIVE
1: externe Stellgröße aktiv
BOOL 0 I Q
LMN_TRK EXTERNAL TRACKING VALUE
externe Stellgröße
REAL 0 I Q
LMNDN Manipulated Signal Down
Verschalt. Stellwertsignal tief
BOOL 0 I
LMNDN_OP Manipulated Signal DownOperation
Bedienbares Stellwertsignal tief
BOOL 0 I +
LMNOP_ON ENABLE: 1=OPERATOR MAYINPUT MAN_OP
1: Bedienfreigabe für StellwertLMN_OP
BOOL 1 I Q
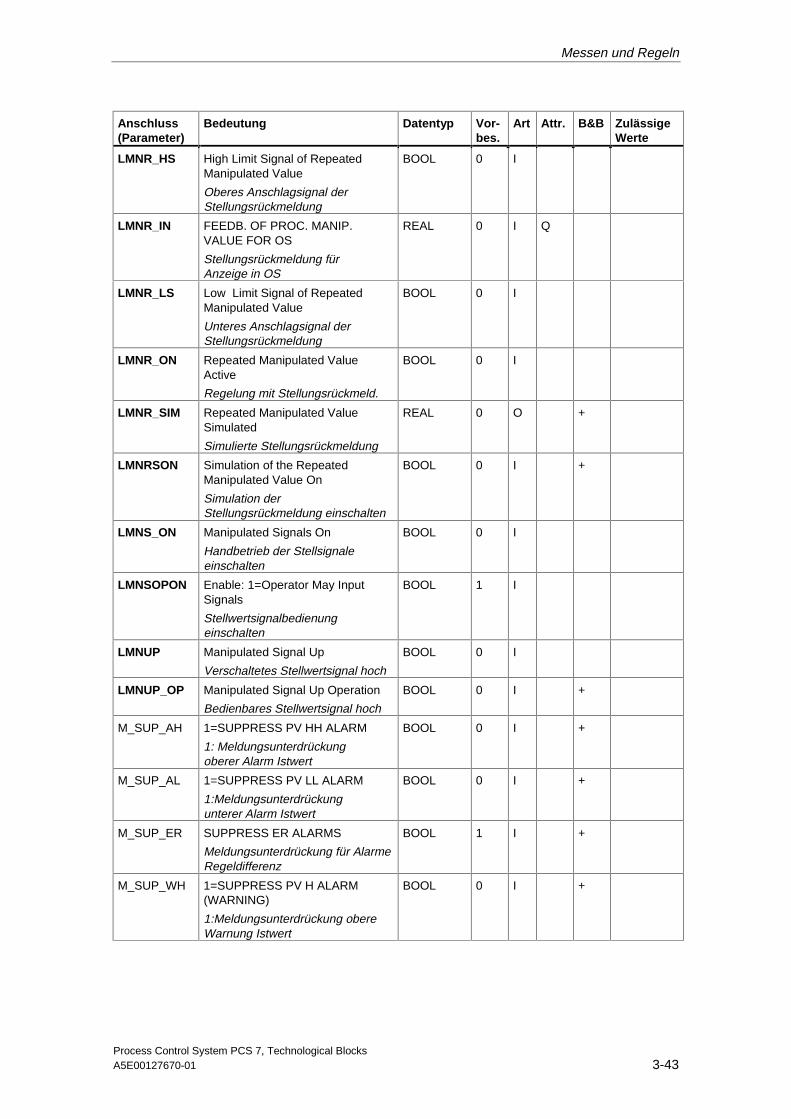
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-43
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
LMNR_HS High Limit Signal of RepeatedManipulated Value
Oberes Anschlagsignal derStellungsrückmeldung
BOOL 0 I
LMNR_IN FEEDB. OF PROC. MANIP.VALUE FOR OS
Stellungsrückmeldung fürAnzeige in OS
REAL 0 I Q
LMNR_LS Low Limit Signal of RepeatedManipulated Value
Unteres Anschlagsignal derStellungsrückmeldung
BOOL 0 I
LMNR_ON Repeated Manipulated ValueActive
Regelung mit Stellungsrückmeld.
BOOL 0 I
LMNR_SIM Repeated Manipulated ValueSimulated
Simulierte Stellungsrückmeldung
REAL 0 O +
LMNRSON Simulation of the RepeatedManipulated Value On
Simulation derStellungsrückmeldung einschalten
BOOL 0 I +
LMNS_ON Manipulated Signals On
Handbetrieb der Stellsignaleeinschalten
BOOL 0 I
LMNSOPON Enable: 1=Operator May InputSignals
Stellwertsignalbedienungeinschalten
BOOL 1 I
LMNUP Manipulated Signal Up
Verschaltetes Stellwertsignal hoch
BOOL 0 I
LMNUP_OP Manipulated Signal Up Operation
Bedienbares Stellwertsignal hoch
BOOL 0 I +
M_SUP_AH 1=SUPPRESS PV HH ALARM
1: Meldungsunterdrückungoberer Alarm Istwert
BOOL 0 I +
M_SUP_AL 1=SUPPRESS PV LL ALARM
1:Meldungsunterdrückungunterer Alarm Istwert
BOOL 0 I +
M_SUP_ER SUPPRESS ER ALARMS
Meldungsunterdrückung für AlarmeRegeldifferenz
BOOL 1 I +
M_SUP_WH 1=SUPPRESS PV H ALARM(WARNING)
1:Meldungsunterdrückung obereWarnung Istwert
BOOL 0 I +
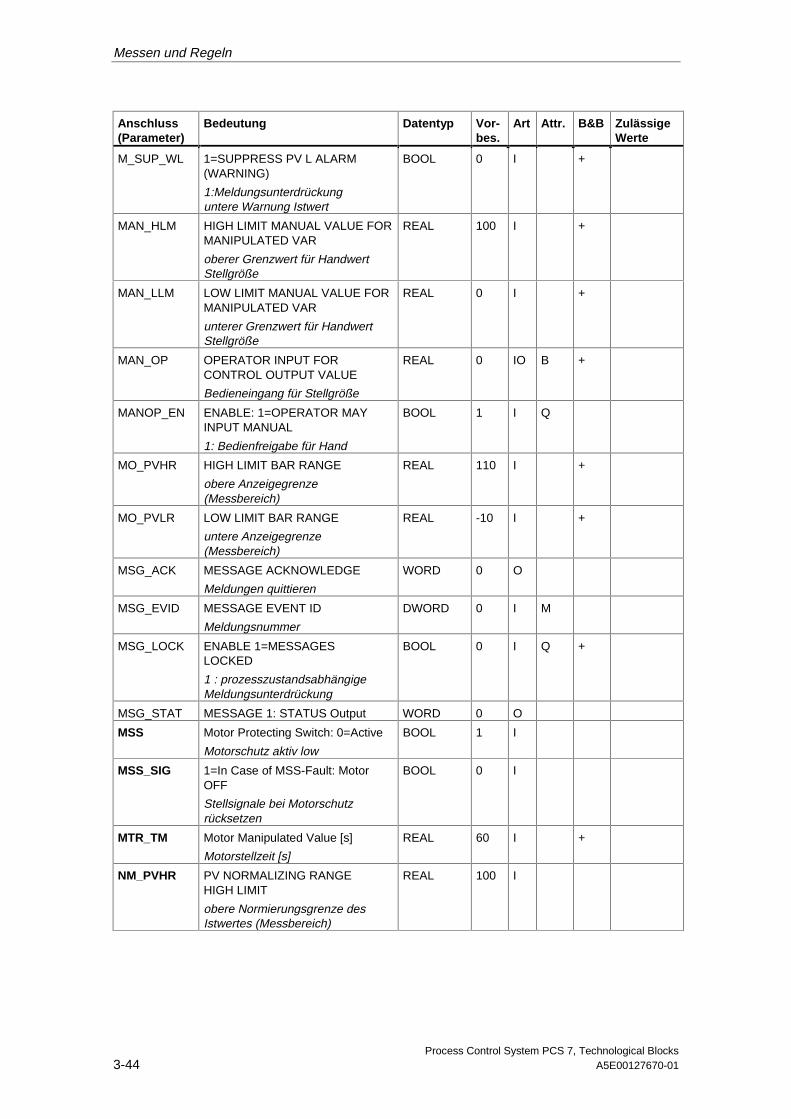
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-44 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
M_SUP_WL 1=SUPPRESS PV L ALARM(WARNING)
1:Meldungsunterdrückunguntere Warnung Istwert
BOOL 0 I +
MAN_HLM HIGH LIMIT MANUAL VALUE FORMANIPULATED VAR
oberer Grenzwert für HandwertStellgröße
REAL 100 I +
MAN_LLM LOW LIMIT MANUAL VALUE FORMANIPULATED VAR
unterer Grenzwert für HandwertStellgröße
REAL 0 I +
MAN_OP OPERATOR INPUT FORCONTROL OUTPUT VALUE
Bedieneingang für Stellgröße
REAL 0 IO B +
MANOP_EN ENABLE: 1=OPERATOR MAYINPUT MANUAL
1: Bedienfreigabe für Hand
BOOL 1 I Q
MO_PVHR HIGH LIMIT BAR RANGE
obere Anzeigegrenze(Messbereich)
REAL 110 I +
MO_PVLR LOW LIMIT BAR RANGE
untere Anzeigegrenze(Messbereich)
REAL -10 I +
MSG_ACK MESSAGE ACKNOWLEDGE
Meldungen quittieren
WORD 0 O
MSG_EVID MESSAGE EVENT ID
Meldungsnummer
DWORD 0 I M
MSG_LOCK ENABLE 1=MESSAGESLOCKED
1 : prozesszustandsabhängigeMeldungsunterdrückung
BOOL 0 I Q +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
MSS Motor Protecting Switch: 0=Active
Motorschutz aktiv low
BOOL 1 I
MSS_SIG 1=In Case of MSS-Fault: MotorOFF
Stellsignale bei Motorschutzrücksetzen
BOOL 0 I
MTR_TM Motor Manipulated Value [s]
Motorstellzeit [s]
REAL 60 I +
NM_PVHR PV NORMALIZING RANGEHIGH LIMIT
obere Normierungsgrenze desIstwertes (Messbereich)
REAL 100 I
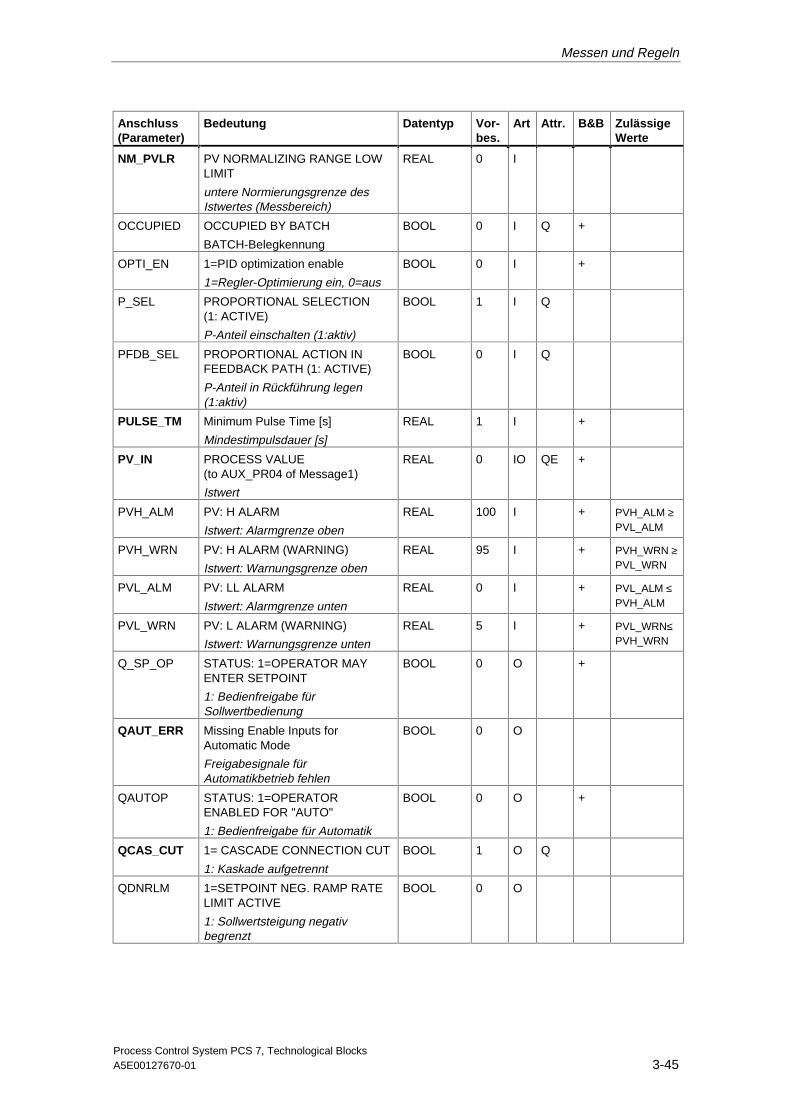
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-45
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
NM_PVLR PV NORMALIZING RANGE LOWLIMIT
untere Normierungsgrenze desIstwertes (Messbereich)
REAL 0 I
OCCUPIED OCCUPIED BY BATCH
BATCH-Belegkennung
BOOL 0 I Q +
OPTI_EN 1=PID optimization enable
1=Regler-Optimierung ein, 0=aus
BOOL 0 I +
P_SEL PROPORTIONAL SELECTION(1: ACTIVE)
P-Anteil einschalten (1:aktiv)
BOOL 1 I Q
PFDB_SEL PROPORTIONAL ACTION INFEEDBACK PATH (1: ACTIVE)
P-Anteil in Rückführung legen(1:aktiv)
BOOL 0 I Q
PULSE_TM Minimum Pulse Time [s]
Mindestimpulsdauer [s]
REAL 1 I +
PV_IN PROCESS VALUE(to AUX_PR04 of Message1)
Istwert
REAL 0 IO QE +
PVH_ALM PV: H ALARM
Istwert: Alarmgrenze oben
REAL 100 I + PVH_ALM ≥PVL_ALM
PVH_WRN PV: H ALARM (WARNING)
Istwert: Warnungsgrenze oben
REAL 95 I + PVH_WRN ≥PVL_WRN
PVL_ALM PV: LL ALARM
Istwert: Alarmgrenze unten
REAL 0 I + PVL_ALM ≤PVH_ALM
PVL_WRN PV: L ALARM (WARNING)
Istwert: Warnungsgrenze unten
REAL 5 I + PVL_WRN≤PVH_WRN
Q_SP_OP STATUS: 1=OPERATOR MAYENTER SETPOINT
1: Bedienfreigabe fürSollwertbedienung
BOOL 0 O +
QAUT_ERR Missing Enable Inputs forAutomatic Mode
Freigabesignale fürAutomatikbetrieb fehlen
BOOL 0 O
QAUTOP STATUS: 1=OPERATORENABLED FOR "AUTO"
1: Bedienfreigabe für Automatik
BOOL 0 O +
QCAS_CUT 1= CASCADE CONNECTION CUT
1: Kaskade aufgetrennt
BOOL 1 O Q
QDNRLM 1=SETPOINT NEG. RAMP RATELIMIT ACTIVE
1: Sollwertsteigung negativbegrenzt
BOOL 0 O
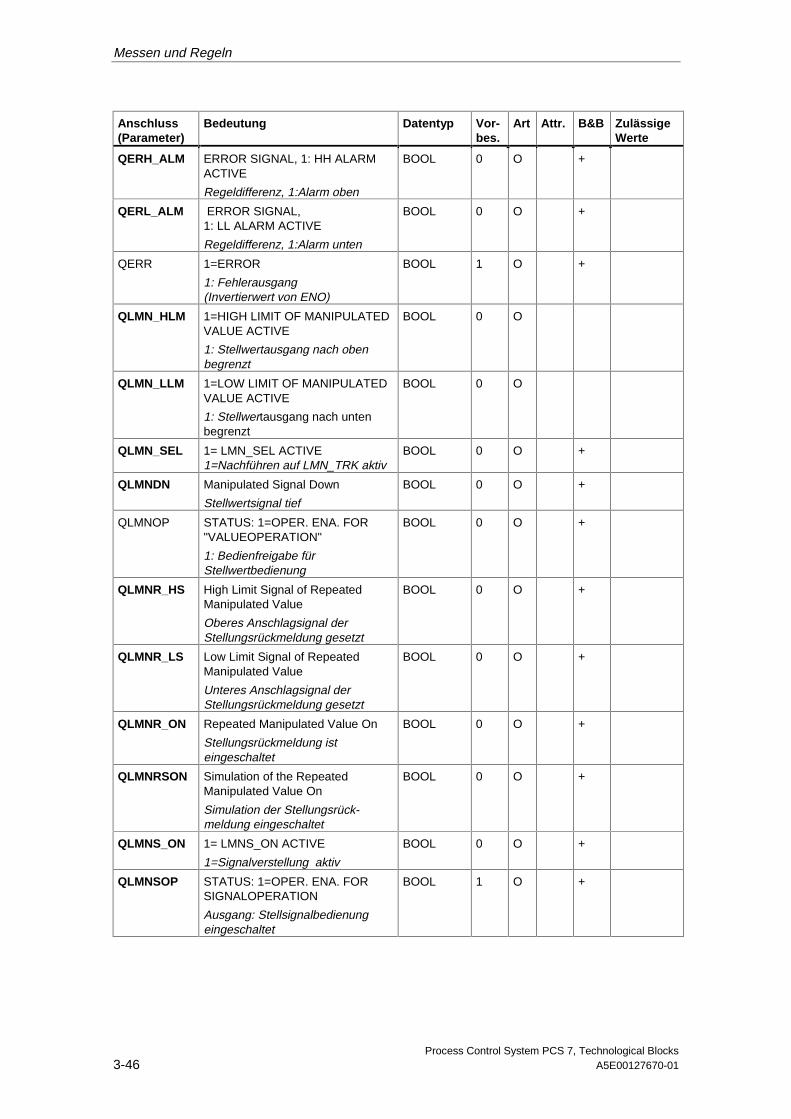
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-46 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QERH_ALM ERROR SIGNAL, 1: HH ALARMACTIVE
Regeldifferenz, 1:Alarm oben
BOOL 0 O +
QERL_ALM ERROR SIGNAL,1: LL ALARM ACTIVE
Regeldifferenz, 1:Alarm unten
BOOL 0 O +
QERR 1=ERROR
1: Fehlerausgang(Invertierwert von ENO)
BOOL 1 O +
QLMN_HLM 1=HIGH LIMIT OF MANIPULATEDVALUE ACTIVE
1: Stellwertausgang nach obenbegrenzt
BOOL 0 O
QLMN_LLM 1=LOW LIMIT OF MANIPULATEDVALUE ACTIVE
1: Stellwertausgang nach untenbegrenzt
BOOL 0 O
QLMN_SEL 1= LMN_SEL ACTIVE1=Nachführen auf LMN_TRK aktiv
BOOL 0 O +
QLMNDN Manipulated Signal Down
Stellwertsignal tief
BOOL 0 O +
QLMNOP STATUS: 1=OPER. ENA. FOR"VALUEOPERATION"
1: Bedienfreigabe fürStellwertbedienung
BOOL 0 O +
QLMNR_HS High Limit Signal of RepeatedManipulated Value
Oberes Anschlagsignal derStellungsrückmeldung gesetzt
BOOL 0 O +
QLMNR_LS Low Limit Signal of RepeatedManipulated Value
Unteres Anschlagsignal derStellungsrückmeldung gesetzt
BOOL 0 O +
QLMNR_ON Repeated Manipulated Value On
Stellungsrückmeldung isteingeschaltet
BOOL 0 O +
QLMNRSON Simulation of the RepeatedManipulated Value On
Simulation der Stellungsrück-meldung eingeschaltet
BOOL 0 O +
QLMNS_ON 1= LMNS_ON ACTIVE
1=Signalverstellung aktiv
BOOL 0 O +
QLMNSOP STATUS: 1=OPER. ENA. FORSIGNALOPERATION
Ausgang: Stellsignalbedienungeingeschaltet
BOOL 1 O +
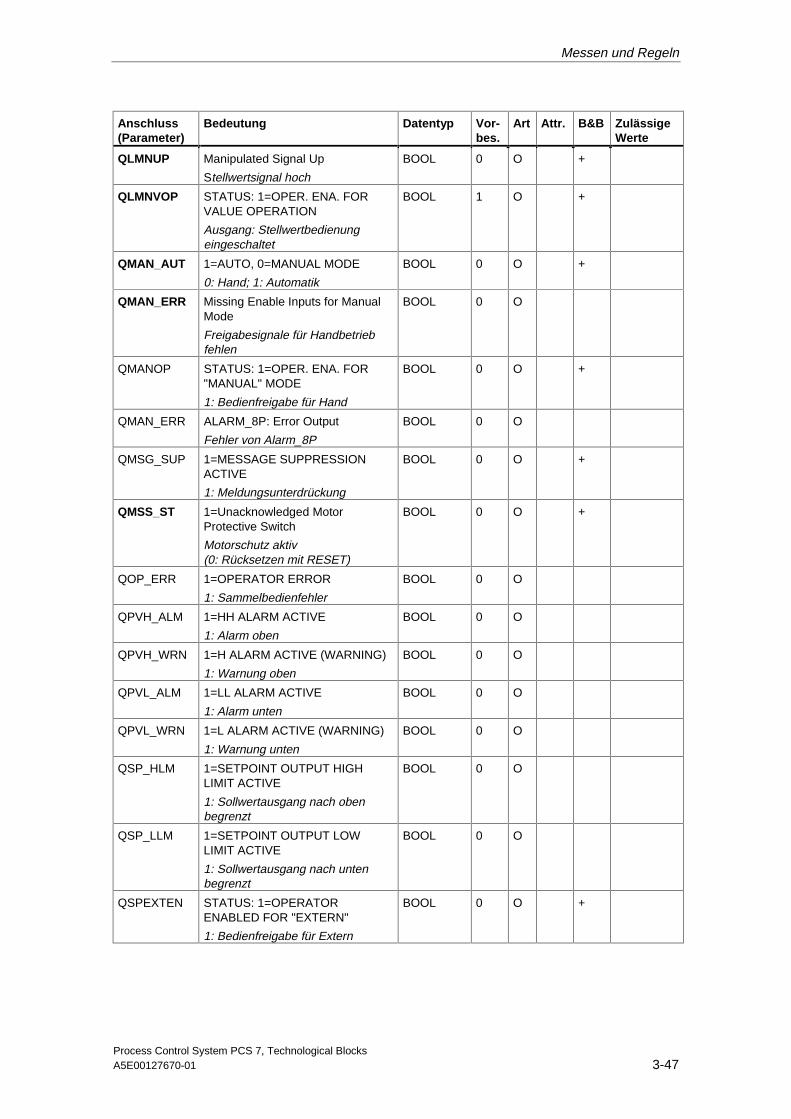
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-47
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QLMNUP Manipulated Signal Up
Stellwertsignal hoch
BOOL 0 O +
QLMNVOP STATUS: 1=OPER. ENA. FORVALUE OPERATION
Ausgang: Stellwertbedienungeingeschaltet
BOOL 1 O +
QMAN_AUT 1=AUTO, 0=MANUAL MODE
0: Hand; 1: Automatik
BOOL 0 O +
QMAN_ERR Missing Enable Inputs for ManualMode
Freigabesignale für Handbetriebfehlen
BOOL 0 O
QMANOP STATUS: 1=OPER. ENA. FOR"MANUAL" MODE
1: Bedienfreigabe für Hand
BOOL 0 O +
QMAN_ERR ALARM_8P: Error Output
Fehler von Alarm_8P
BOOL 0 O
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE
1: Meldungsunterdrückung
BOOL 0 O +
QMSS_ST 1=Unacknowledged MotorProtective Switch
Motorschutz aktiv(0: Rücksetzen mit RESET)
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1: Sammelbedienfehler
BOOL 0 O
QPVH_ALM 1=HH ALARM ACTIVE
1: Alarm oben
BOOL 0 O
QPVH_WRN 1=H ALARM ACTIVE (WARNING)
1: Warnung oben
BOOL 0 O
QPVL_ALM 1=LL ALARM ACTIVE
1: Alarm unten
BOOL 0 O
QPVL_WRN 1=L ALARM ACTIVE (WARNING)
1: Warnung unten
BOOL 0 O
QSP_HLM 1=SETPOINT OUTPUT HIGHLIMIT ACTIVE
1: Sollwertausgang nach obenbegrenzt
BOOL 0 O
QSP_LLM 1=SETPOINT OUTPUT LOWLIMIT ACTIVE
1: Sollwertausgang nach untenbegrenzt
BOOL 0 O
QSPEXTEN STATUS: 1=OPERATORENABLED FOR "EXTERN"
1: Bedienfreigabe für Extern
BOOL 0 O +
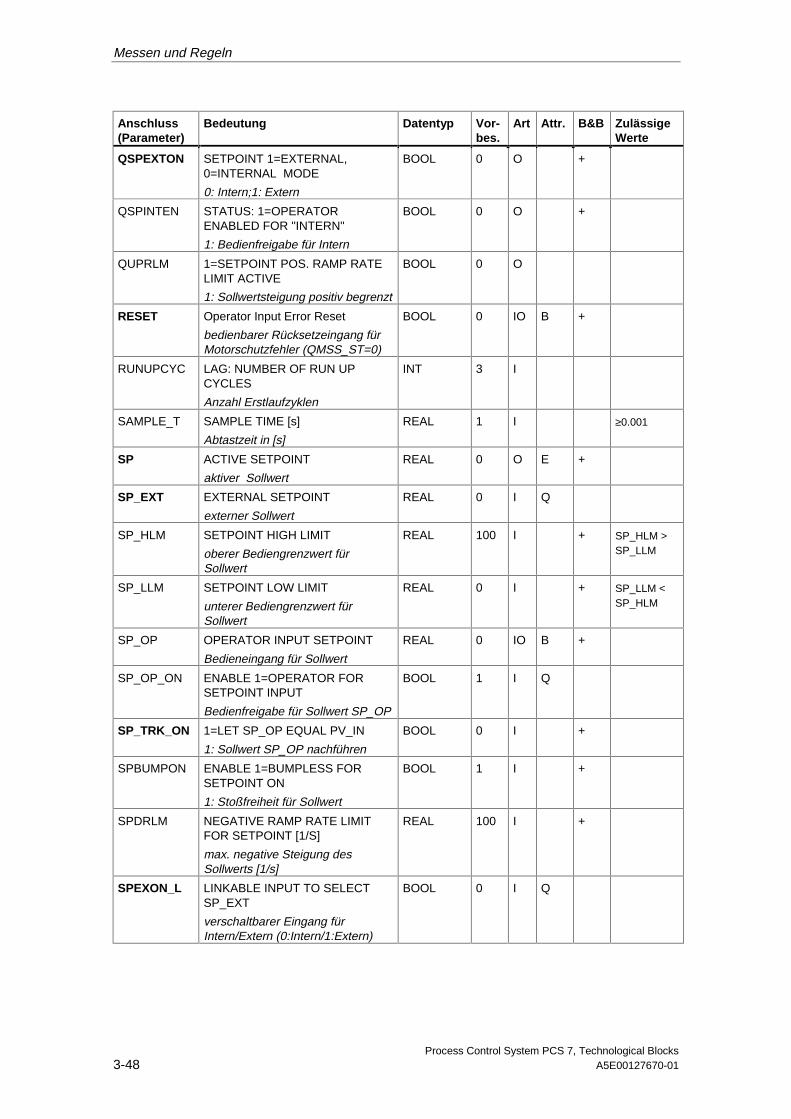
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-48 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QSPEXTON SETPOINT 1=EXTERNAL,0=INTERNAL MODE
0: Intern;1: Extern
BOOL 0 O +
QSPINTEN STATUS: 1=OPERATORENABLED FOR "INTERN"
1: Bedienfreigabe für Intern
BOOL 0 O +
QUPRLM 1=SETPOINT POS. RAMP RATELIMIT ACTIVE
1: Sollwertsteigung positiv begrenzt
BOOL 0 O
RESET Operator Input Error Reset
bedienbarer Rücksetzeingang fürMotorschutzfehler (QMSS_ST=0)
BOOL 0 IO B +
RUNUPCYC LAG: NUMBER OF RUN UPCYCLES
Anzahl Erstlaufzyklen
INT 3 I
SAMPLE_T SAMPLE TIME [s]
Abtastzeit in [s]
REAL 1 I ≥0.001
SP ACTIVE SETPOINT
aktiver Sollwert
REAL 0 O E +
SP_EXT EXTERNAL SETPOINT
externer Sollwert
REAL 0 I Q
SP_HLM SETPOINT HIGH LIMIT
oberer Bediengrenzwert fürSollwert
REAL 100 I + SP_HLM >SP_LLM
SP_LLM SETPOINT LOW LIMIT
unterer Bediengrenzwert fürSollwert
REAL 0 I + SP_LLM <SP_HLM
SP_OP OPERATOR INPUT SETPOINT
Bedieneingang für Sollwert
REAL 0 IO B +
SP_OP_ON ENABLE 1=OPERATOR FORSETPOINT INPUT
Bedienfreigabe für Sollwert SP_OP
BOOL 1 I Q
SP_TRK_ON 1=LET SP_OP EQUAL PV_IN
1: Sollwert SP_OP nachführen
BOOL 0 I +
SPBUMPON ENABLE 1=BUMPLESS FORSETPOINT ON
1: Stoßfreiheit für Sollwert
BOOL 1 I +
SPDRLM NEGATIVE RAMP RATE LIMITFOR SETPOINT [1/S]
max. negative Steigung desSollwerts [1/s]
REAL 100 I +
SPEXON_L LINKABLE INPUT TO SELECTSP_EXT
verschaltbarer Eingang fürIntern/Extern (0:Intern/1:Extern)
BOOL 0 I Q
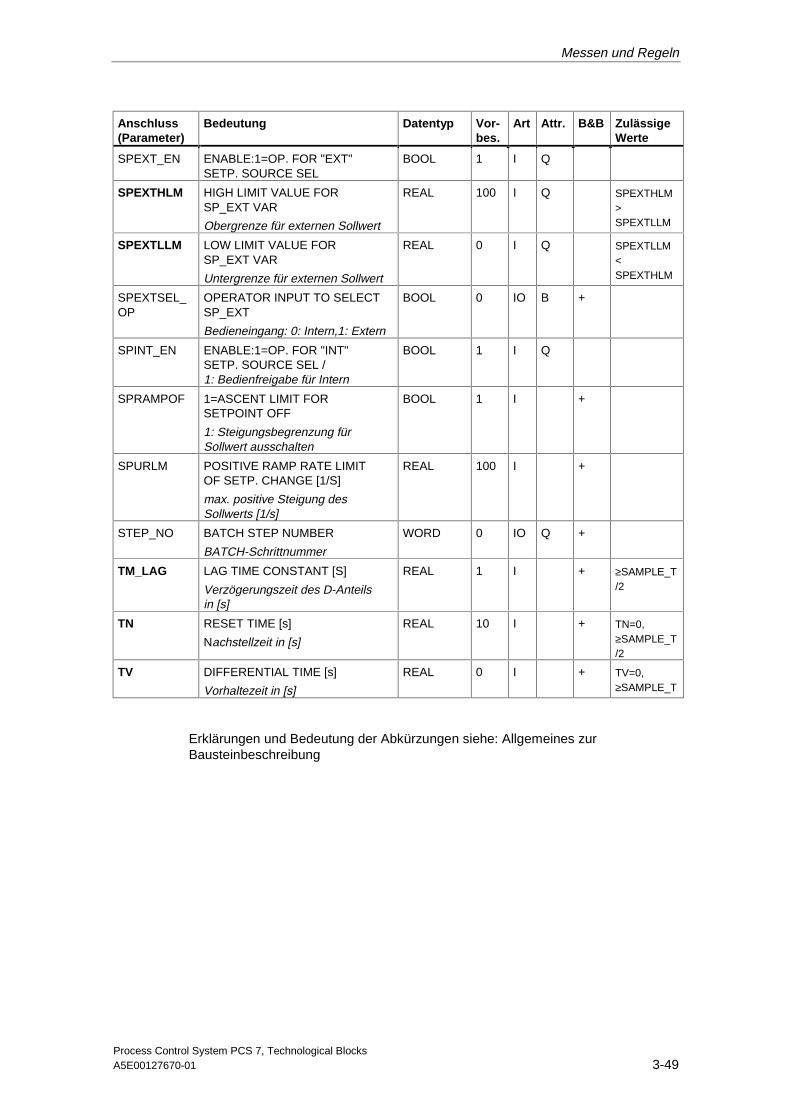
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-49
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
SPEXT_EN ENABLE:1=OP. FOR "EXT"SETP. SOURCE SEL
BOOL 1 I Q
SPEXTHLM HIGH LIMIT VALUE FORSP_EXT VAR
Obergrenze für externen Sollwert
REAL 100 I Q SPEXTHLM>SPEXTLLM
SPEXTLLM LOW LIMIT VALUE FORSP_EXT VAR
Untergrenze für externen Sollwert
REAL 0 I Q SPEXTLLM<SPEXTHLM
SPEXTSEL_OP
OPERATOR INPUT TO SELECTSP_EXT
Bedieneingang: 0: Intern,1: Extern
BOOL 0 IO B +
SPINT_EN ENABLE:1=OP. FOR "INT"SETP. SOURCE SEL /1: Bedienfreigabe für Intern
BOOL 1 I Q
SPRAMPOF 1=ASCENT LIMIT FORSETPOINT OFF
1: Steigungsbegrenzung fürSollwert ausschalten
BOOL 1 I +
SPURLM POSITIVE RAMP RATE LIMITOF SETP. CHANGE [1/S]
max. positive Steigung desSollwerts [1/s]
REAL 100 I +
STEP_NO BATCH STEP NUMBER
BATCH-Schrittnummer
WORD 0 IO Q +
TM_LAG LAG TIME CONSTANT [S]
Verzögerungszeit des D-Anteilsin [s]
REAL 1 I + ≥SAMPLE_T/2
TN RESET TIME [s]
Nachstellzeit in [s]
REAL 10 I + TN=0,≥SAMPLE_T/2
TV DIFFERENTIAL TIME [s]
Vorhaltezeit in [s]
REAL 0 I + TV=0,≥SAMPLE_T
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
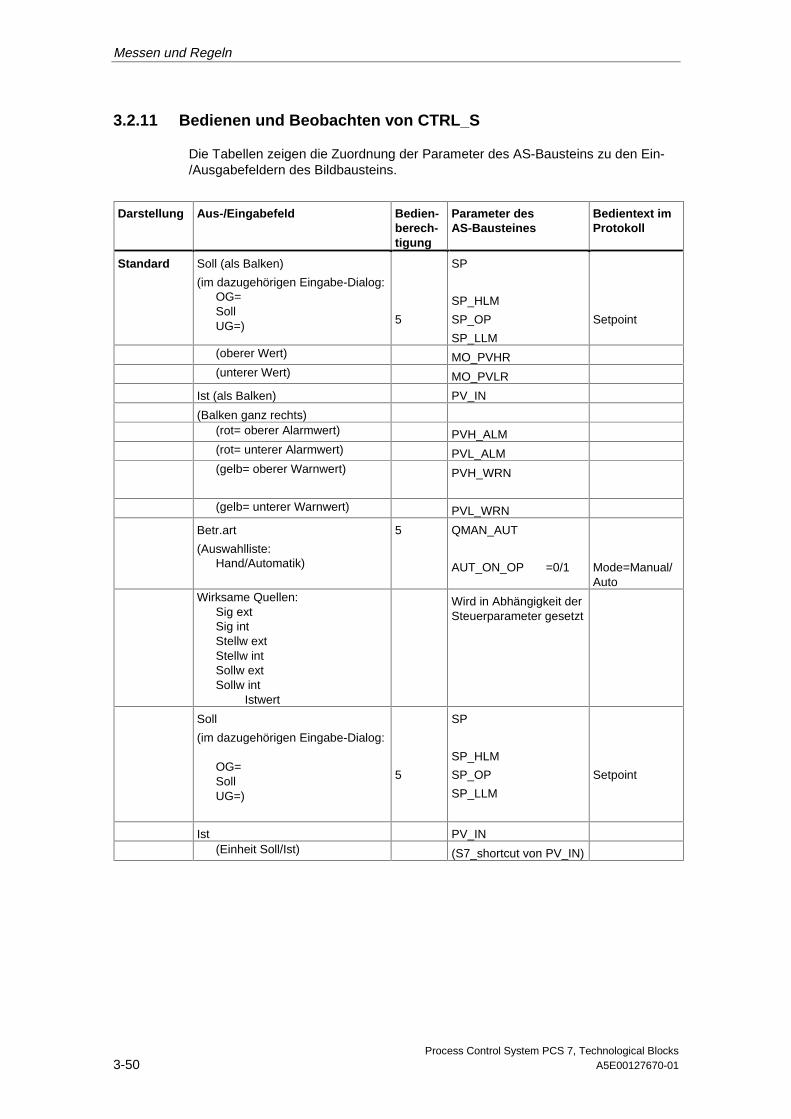
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-50 A5E00127670-01
3.2.11 Bedienen und Beobachten von CTRL_S
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Soll (als Balken)
(im dazugehörigen Eingabe-Dialog:OG=SollUG=) 5
SP
SP_HLM
SP_OP
SP_LLM
Setpoint
(oberer Wert) MO_PVHR(unterer Wert) MO_PVLR
Ist (als Balken) PV_IN
(Balken ganz rechts)(rot= oberer Alarmwert) PVH_ALM(rot= unterer Alarmwert) PVL_ALM(gelb= oberer Warnwert) PVH_WRN
(gelb= unterer Warnwert) PVL_WRN
Betr.art
(Auswahlliste:Hand/Automatik)
5 QMAN_AUT
AUT_ON_OP =0/1 Mode=Manual/Auto
Wirksame Quellen:Sig extSig intStellw extStellw intSollw extSollw int
Istwert
Wird in Abhängigkeit derSteuerparameter gesetzt
Soll
(im dazugehörigen Eingabe-Dialog:
OG=SollUG=)
5
SP
SP_HLM
SP_OP
SP_LLM
Setpoint
Ist PV_IN(Einheit Soll/Ist) (S7_shortcut von PV_IN)
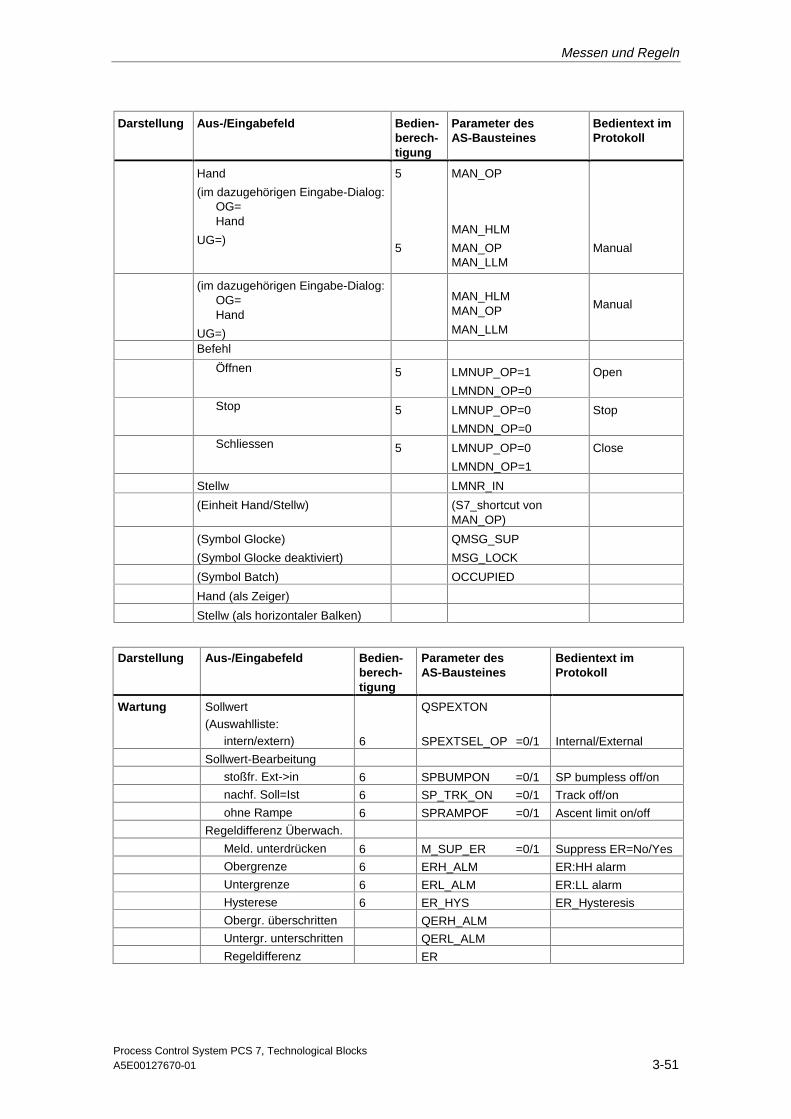
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-51
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Hand
(im dazugehörigen Eingabe-Dialog:OG=Hand
UG=)
5
5
MAN_OP
MAN_HLM
MAN_OPMAN_LLM
Manual
(im dazugehörigen Eingabe-Dialog:OG=Hand
UG=)
MAN_HLMMAN_OP
MAN_LLM
Manual
Befehl
Öffnen 5 LMNUP_OP=1
LMNDN_OP=0
Open
Stop 5 LMNUP_OP=0
LMNDN_OP=0
Stop
Schliessen 5 LMNUP_OP=0
LMNDN_OP=1
Close
Stellw LMNR_IN
(Einheit Hand/Stellw) (S7_shortcut vonMAN_OP)
(Symbol Glocke)
(Symbol Glocke deaktiviert)
QMSG_SUP
MSG_LOCK
(Symbol Batch) OCCUPIED
Hand (als Zeiger)
Stellw (als horizontaler Balken)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung Sollwert(Auswahlliste:
intern/extern) 6
QSPEXTON
SPEXTSEL_OP =0/1 Internal/External
Sollwert-Bearbeitung
stoßfr. Ext->in 6 SPBUMPON =0/1 SP bumpless off/on
nachf. Soll=Ist 6 SP_TRK_ON =0/1 Track off/on
ohne Rampe 6 SPRAMPOF =0/1 Ascent limit on/off
Regeldifferenz Überwach.
Meld. unterdrücken 6 M_SUP_ER =0/1 Suppress ER=No/Yes
Obergrenze 6 ERH_ALM ER:HH alarm
Untergrenze 6 ERL_ALM ER:LL alarm
Hysterese 6 ER_HYS ER_Hysteresis
Obergr. überschritten QERH_ALM
Untergr. unterschritten QERL_ALM
Regeldifferenz ER
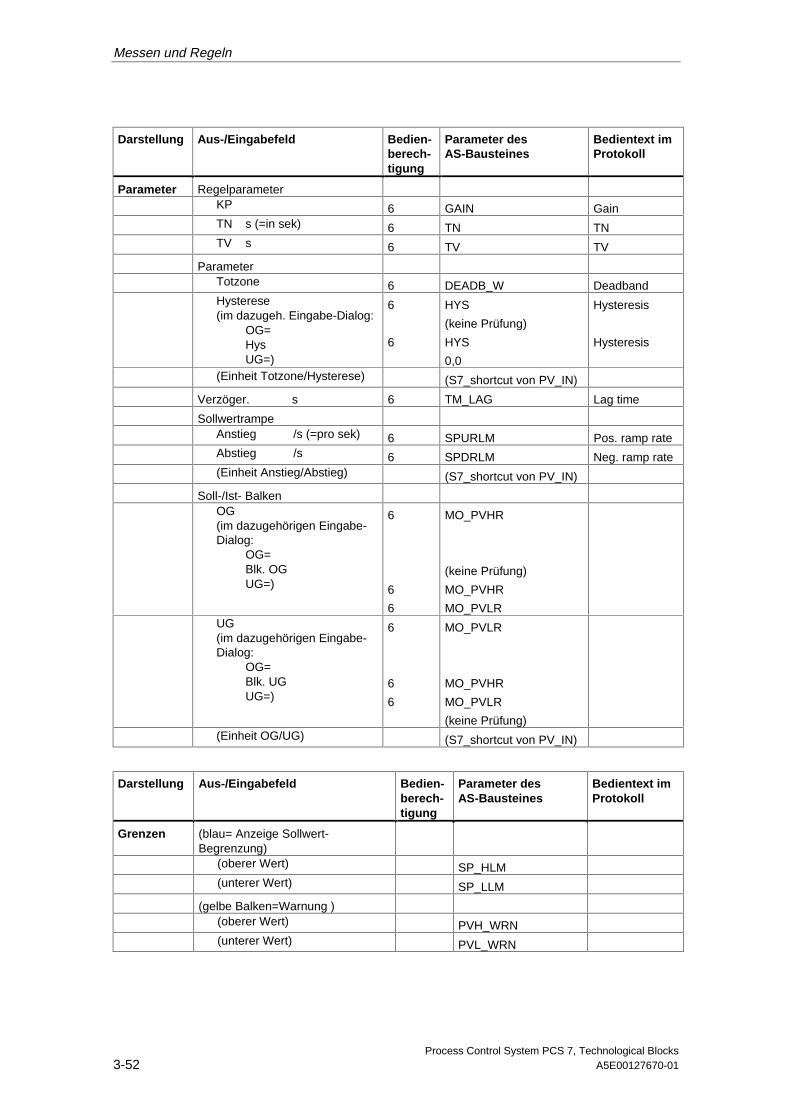
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-52 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Parameter RegelparameterKP 6 GAIN GainTN s (=in sek) 6 TN TNTV s 6 TV TV
ParameterTotzone 6 DEADB_W DeadbandHysterese(im dazugeh. Eingabe-Dialog:
OG=HysUG=)
6
6
HYS
(keine Prüfung)
HYS
0,0
Hysteresis
Hysteresis
(Einheit Totzone/Hysterese) (S7_shortcut von PV_IN)
Verzöger. s 6 TM_LAG Lag time
SollwertrampeAnstieg /s (=pro sek) 6 SPURLM Pos. ramp rateAbstieg /s 6 SPDRLM Neg. ramp rate(Einheit Anstieg/Abstieg) (S7_shortcut von PV_IN)
Soll-/Ist- BalkenOG(im dazugehörigen Eingabe-Dialog:
OG=Blk. OGUG=)
6
6
6
MO_PVHR
(keine Prüfung)
MO_PVHR
MO_PVLRUG(im dazugehörigen Eingabe-Dialog:
OG=Blk. UGUG=)
6
6
6
MO_PVLR
MO_PVHR
MO_PVLR
(keine Prüfung)(Einheit OG/UG) (S7_shortcut von PV_IN)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Grenzen (blau= Anzeige Sollwert-Begrenzung)
(oberer Wert) SP_HLM(unterer Wert) SP_LLM
(gelbe Balken=Warnung )(oberer Wert) PVH_WRN(unterer Wert) PVL_WRN
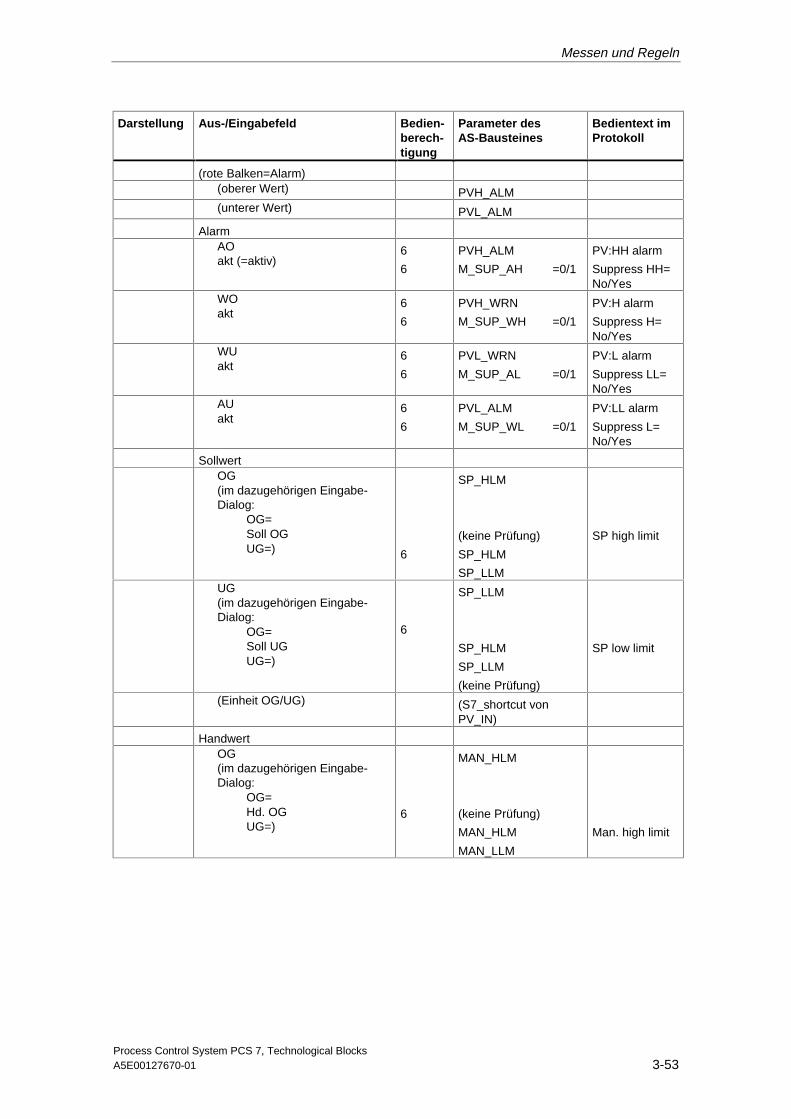
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-53
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
(rote Balken=Alarm)(oberer Wert) PVH_ALM(unterer Wert) PVL_ALM
AlarmAOakt (=aktiv)
6
6
PVH_ALM
M_SUP_AH =0/1
PV:HH alarm
Suppress HH=No/Yes
WOakt
6
6
PVH_WRN
M_SUP_WH =0/1
PV:H alarm
Suppress H=No/Yes
WUakt
6
6
PVL_WRN
M_SUP_AL =0/1
PV:L alarm
Suppress LL=No/Yes
AUakt
6
6
PVL_ALM
M_SUP_WL =0/1
PV:LL alarm
Suppress L=No/Yes
SollwertOG(im dazugehörigen Eingabe-Dialog:
OG=Soll OGUG=) 6
SP_HLM
(keine Prüfung)
SP_HLM
SP_LLM
SP high limit
UG(im dazugehörigen Eingabe-Dialog:
OG=Soll UGUG=)
6
SP_LLM
SP_HLM
SP_LLM
(keine Prüfung)
SP low limit
(Einheit OG/UG) (S7_shortcut vonPV_IN)
HandwertOG(im dazugehörigen Eingabe-Dialog:
OG=Hd. OGUG=)
6
MAN_HLM
(keine Prüfung)
MAN_HLM
MAN_LLM
Man. high limit
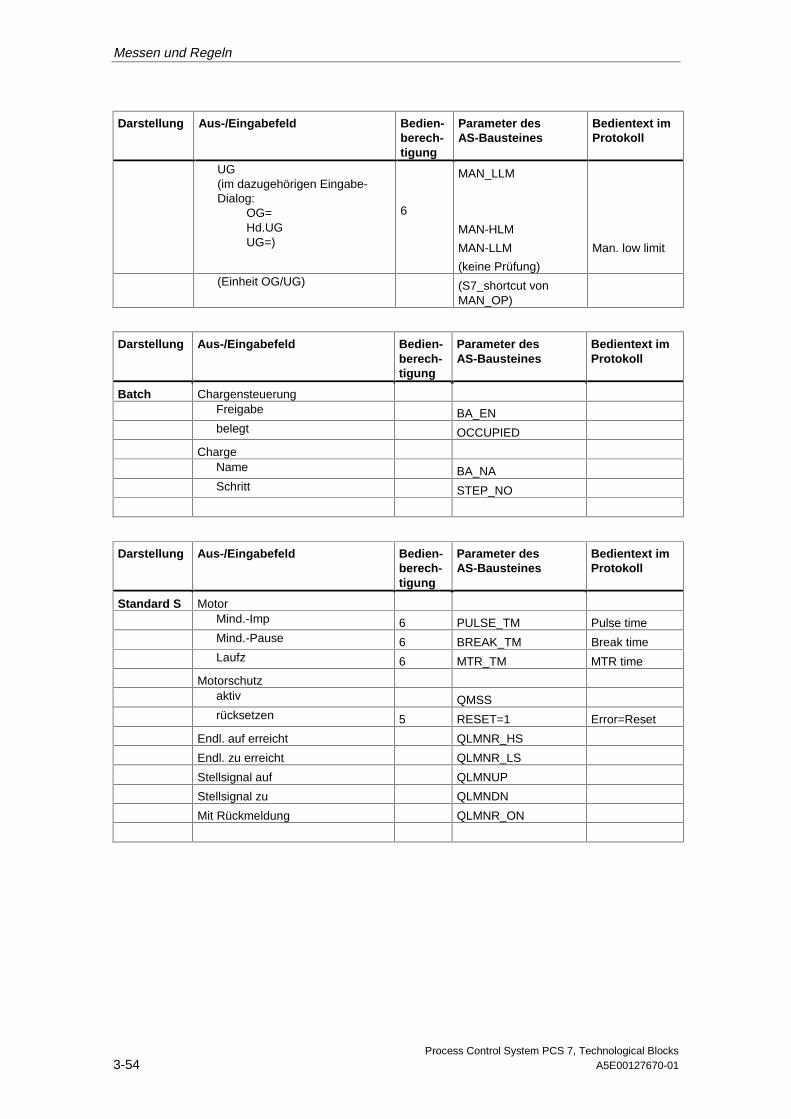
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-54 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
UG(im dazugehörigen Eingabe-Dialog:
OG=Hd.UGUG=)
6
MAN_LLM
MAN-HLM
MAN-LLM
(keine Prüfung)
Man. low limit
(Einheit OG/UG) (S7_shortcut vonMAN_OP)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard S MotorMind.-Imp 6 PULSE_TM Pulse timeMind.-Pause 6 BREAK_TM Break timeLaufz 6 MTR_TM MTR time
Motorschutzaktiv QMSSrücksetzen 5 RESET=1 Error=Reset
Endl. auf erreicht QLMNR_HS
Endl. zu erreicht QLMNR_LS
Stellsignal auf QLMNUP
Stellsignal zu QLMNDN
Mit Rückmeldung QLMNR_ON
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-55
3.3 DIG_MON: Digitalwertüberwachung
3.3.1 Beschreibung von DIG_MON
Objektname (Art + Nummer)
FB 62
Funktion
Der Baustein dient zum Beobachten einer digitalen Messstelle mitFlatterunterdrückung. Zur Messstelle gehört der Signalzustand sowie derleittechnische Zustand (externer Leittechnikfehler, Kanalfehler). Über denParameter MSG_CLAS kann bestimmt werden, mit welcher Meldeklasse dieMessstelle gemeldet wird.
Arbeitsweise
Der Digitalwert am Eingang I wird auf Änderungen überwacht. Mit jeder Flanke desEingang signals wird der Timer neu gestartet . Nach Ablauf der unter SUPPTIMEparametrierten Wartezeit wird der Eingangswert I an den Ausgang Qweitergereicht.Es wird damit erreicht, dass nur Signale, die mindestens die unter SUPPTIMEangegebene Zeit anstehen, an den Ausgang weitergegeben werden. Sichschneller ändernde Signale werden nicht durchgereicht.Bei SUPPTIME<SAMPLE_T wird das Eingangssignal I auf den Ausgang Qdurchgereicht.
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB100 (siehe Anlaufverhalten).
Fehlerbehandlung
Bei ungültiger Parametrierung der Meldeklasse (siehe Meldeverhalten) wirdQERR=1, und es wird keine Meldung abgesetzt.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-56 A5E00127670-01
Anlaufverhalten
Bei CPU-Anlauf bleibt der alte Ausgangswert Q erhalten. Die Überwachungbeginnt erneut für Änderungen nach dem Anlauf. Dafür muss der Baustein ausdem Anlauf-OB aufgerufen werden. Bei CFC-Projektierung wird dieses durch CFCerledigt. Bei einfachen STEP 7-Mitteln müssen Sie den Aufruf im Anlauf-OBeintragen.Nach dem Anlauf werden für die Anzahl der im Wert RUNUPCYC parametriertenZyklen die Meldungen unterdrückt.
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
Meldeverhalten
Der Baustein DIG_MON verwendet den ALARM8_P Baustein zur Generierungvon Meldungen.
Meldungsauslöser sind
• eine Änderung des Ausgangsignals Q
• das CSF-Signal das als Leittechnikfehler durch Verschaltung bezogen wird.
Die Prozessmeldungen (nicht Leittechnikmeldungen!) können mit MSG_LOCKgesperrt werden.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, MSG_LOCK = TRUE (MSG_STAT = 21 ist.
Meldeklassen
Durch Parametrieren des Eingangs MSG_CLAS (siehe Tabelle) kann dieÄnderung des Ausgangs Q mit einer wählbaren Meldeklasse an das OS gemeldetwerden. Sie können folgende Meldeklassen der Meldung zuordnen:
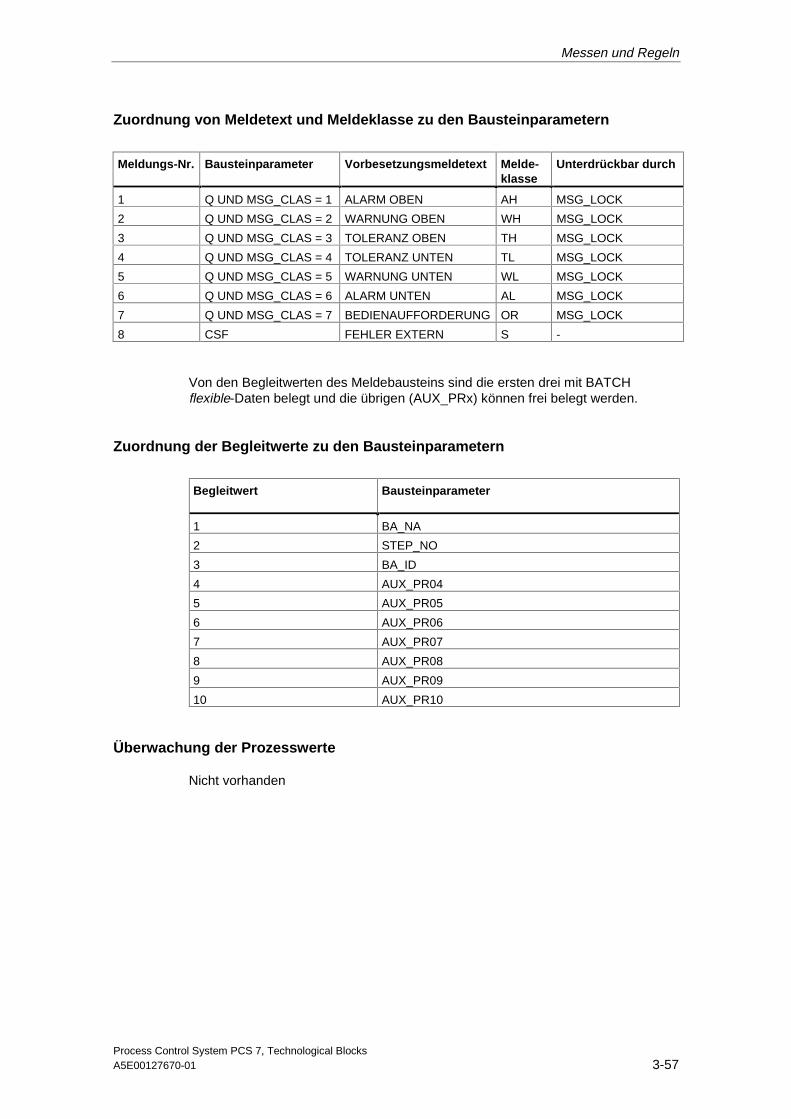
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-57
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Melde-klasse
Unterdrückbar durch
1 Q UND MSG_CLAS = 1 ALARM OBEN AH MSG_LOCK
2 Q UND MSG_CLAS = 2 WARNUNG OBEN WH MSG_LOCK
3 Q UND MSG_CLAS = 3 TOLERANZ OBEN TH MSG_LOCK
4 Q UND MSG_CLAS = 4 TOLERANZ UNTEN TL MSG_LOCK
5 Q UND MSG_CLAS = 5 WARNUNG UNTEN WL MSG_LOCK
6 Q UND MSG_CLAS = 6 ALARM UNTEN AL MSG_LOCK
7 Q UND MSG_CLAS = 7 BEDIENAUFFORDERUNG OR MSG_LOCK
8 CSF FEHLER EXTERN S -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten belegt und die übrigen (AUX_PRx) können frei belegt werden.
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 AUX_PR04
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden
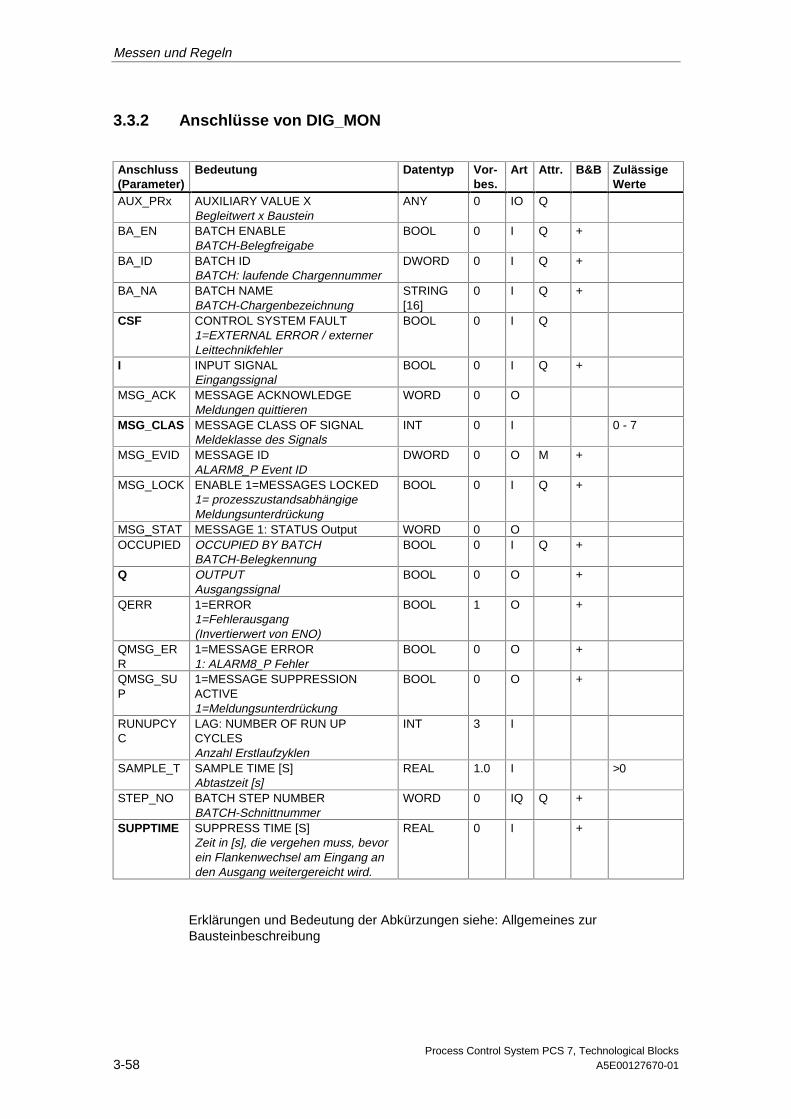
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-58 A5E00127670-01
3.3.2 Anschlüsse von DIG_MON
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUX_PRx AUXILIARY VALUE XBegleitwert x Baustein
ANY 0 IO Q
BA_EN BATCH ENABLEBATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH IDBATCH: laufende Chargennummer
DWORD 0 I Q +
BA_NA BATCH NAMEBATCH-Chargenbezeichnung
STRING[16]
0 I Q +
CSF CONTROL SYSTEM FAULT1=EXTERNAL ERROR / externerLeittechnikfehler
BOOL 0 I Q
I INPUT SIGNALEingangssignal
BOOL 0 I Q +
MSG_ACK MESSAGE ACKNOWLEDGEMeldungen quittieren
WORD 0 O
MSG_CLAS MESSAGE CLASS OF SIGNALMeldeklasse des Signals
INT 0 I 0 - 7
MSG_EVID MESSAGE IDALARM8_P Event ID
DWORD 0 O M +
MSG_LOCK ENABLE 1=MESSAGES LOCKED1= prozesszustandsabhängigeMeldungsunterdrückung
BOOL 0 I Q +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 OOCCUPIED OCCUPIED BY BATCH
BATCH-BelegkennungBOOL 0 I Q +
Q OUTPUTAusgangssignal
BOOL 0 O +
QERR 1=ERROR1=Fehlerausgang(Invertierwert von ENO)
BOOL 1 O +
QMSG_ERR
1=MESSAGE ERROR1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP
1=MESSAGE SUPPRESSIONACTIVE1=Meldungsunterdrückung
BOOL 0 O +
RUNUPCYC
LAG: NUMBER OF RUN UPCYCLESAnzahl Erstlaufzyklen
INT 3 I
SAMPLE_T SAMPLE TIME [S]Abtastzeit [s]
REAL 1.0 I >0
STEP_NO BATCH STEP NUMBERBATCH-Schnittnummer
WORD 0 IQ Q +
SUPPTIME SUPPRESS TIME [S]Zeit in [s], die vergehen muss, bevorein Flankenwechsel am Eingang anden Ausgang weitergereicht wird.
REAL 0 I +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
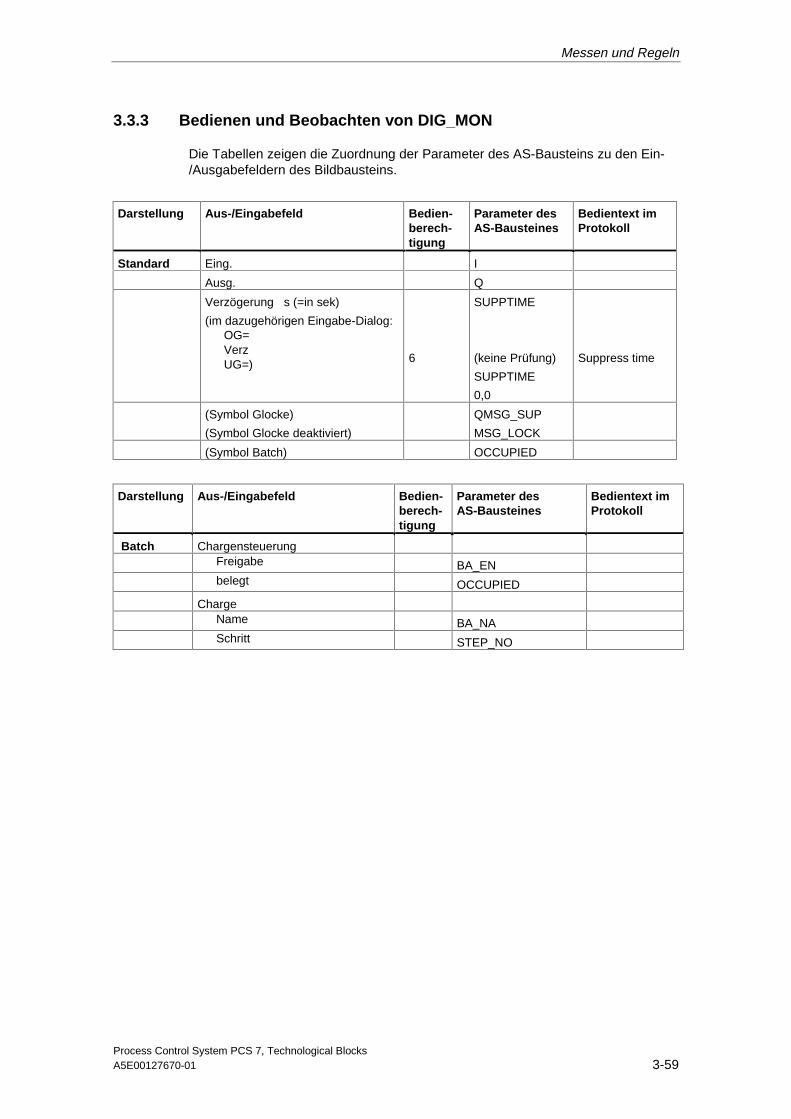
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-59
3.3.3 Bedienen und Beobachten von DIG_MON
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Eing. I
Ausg. Q
Verzögerung s (=in sek)
(im dazugehörigen Eingabe-Dialog:OG=VerzUG=) 6
SUPPTIME
(keine Prüfung)
SUPPTIME
0,0
Suppress time
(Symbol Glocke)
(Symbol Glocke deaktiviert)
QMSG_SUP
MSG_LOCK
(Symbol Batch) OCCUPIED
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-60 A5E00127670-01
3.4 MEAS_MON: Messwertüberwachung
3.4.1 Beschreibung von MEAS_MON
Objektname (Art + Nummer)
FB 65
Funktion
Der Baustein dient zur Überwachung eines Messwertes (Analogsignal) auf dieGrenzwertpaare
• Warngrenze (oben/unten) und
• Alarmgrenze (oben/unten).
Arbeitsweise
Der Baustein überwacht den am Eingang U angeschlossenen Messwert. Diejeweilige Über- bzw. Unterschreitung eines Grenzwertes wird auf einementsprechenden Ausgang angezeigt und ggf. gemeldet (siehe Meldeverhalten).
Aufrufende OBs
Im selben OB mit und nach dem Baustein, dessen Messwert überwacht werdensoll. Zusätzlich im OB100 (siehe Anlaufverhalten).
Fehlerbehandlung
Bei Arithmetikfehler werden ENO=0 bzw. QERR=1 gesetzt.
Anlaufverhalten
Nach dem Anlauf werden für die Anzahl der im Wert RUNUPCYC parametriertenZyklen die Meldungen unterdrückt.
Zeitverhalten
Kein Zeitverhalten. Der Baustein soll in der gleichen Ablaufgruppe (s. CFC) mitdem Messwertlieferanten laufen.
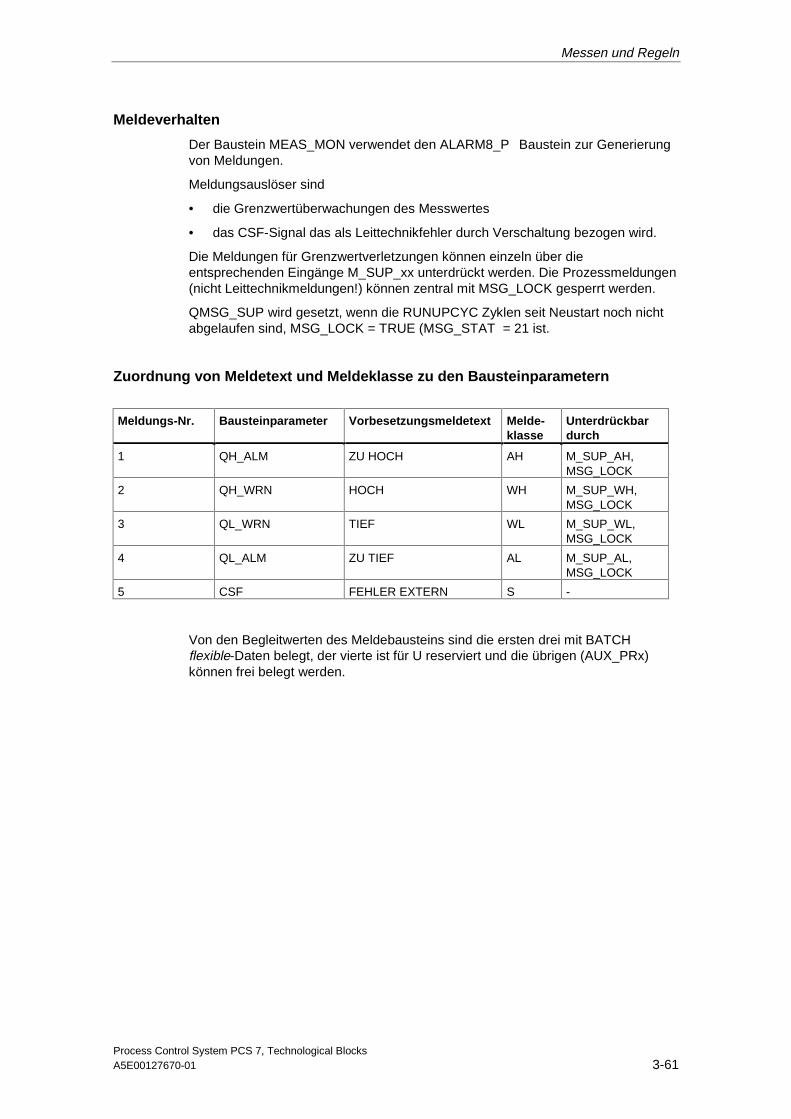
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-61
Meldeverhalten
Der Baustein MEAS_MON verwendet den ALARM8_P Baustein zur Generierungvon Meldungen.
Meldungsauslöser sind
• die Grenzwertüberwachungen des Messwertes
• das CSF-Signal das als Leittechnikfehler durch Verschaltung bezogen wird.
Die Meldungen für Grenzwertverletzungen können einzeln über dieentsprechenden Eingänge M_SUP_xx unterdrückt werden. Die Prozessmeldungen(nicht Leittechnikmeldungen!) können zentral mit MSG_LOCK gesperrt werden.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, MSG_LOCK = TRUE (MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Melde-klasse
Unterdrückbardurch
1 QH_ALM ZU HOCH AH M_SUP_AH,MSG_LOCK
2 QH_WRN HOCH WH M_SUP_WH,MSG_LOCK
3 QL_WRN TIEF WL M_SUP_WL,MSG_LOCK
4 QL_ALM ZU TIEF AL M_SUP_AL,MSG_LOCK
5 CSF FEHLER EXTERN S -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten belegt, der vierte ist für U reserviert und die übrigen (AUX_PRx)können frei belegt werden.
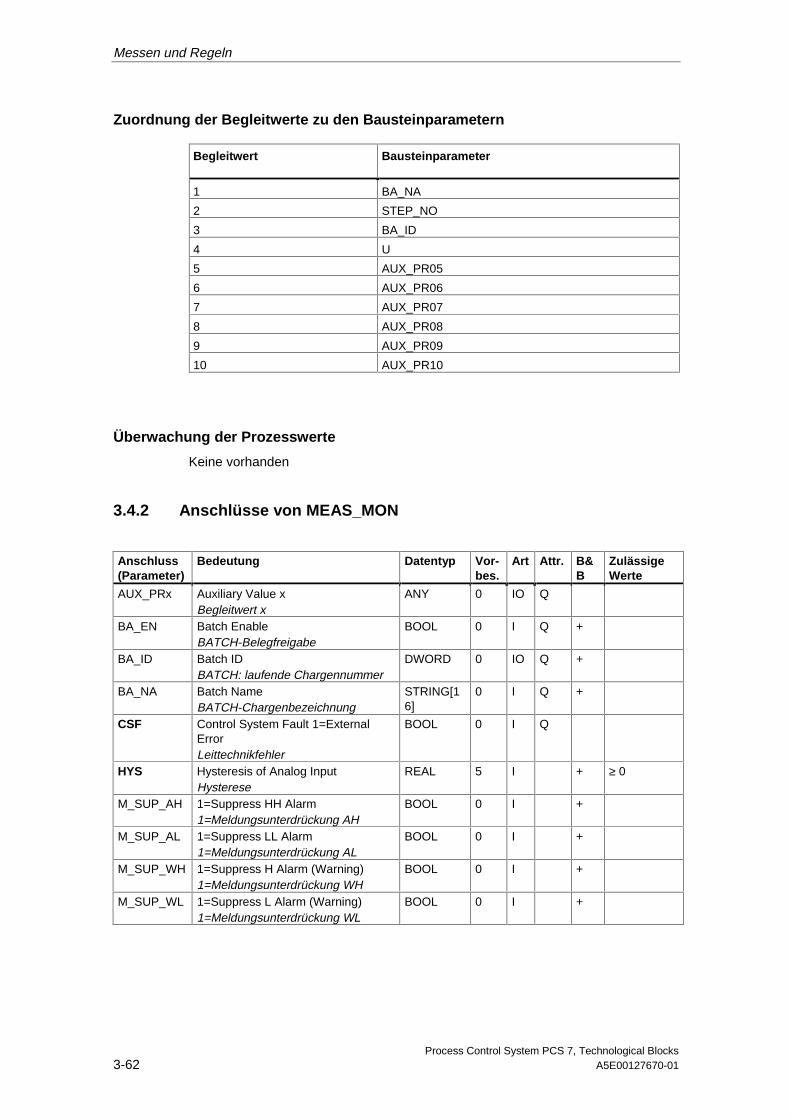
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-62 A5E00127670-01
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 U
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Keine vorhanden
3.4.2 Anschlüsse von MEAS_MON
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B
ZulässigeWerte
AUX_PRx Auxiliary Value xBegleitwert x
ANY 0 IO Q
BA_EN Batch EnableBATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID Batch IDBATCH: laufende Chargennummer
DWORD 0 IO Q +
BA_NA Batch NameBATCH-Chargenbezeichnung
STRING[16]
0 I Q +
CSF Control System Fault 1=ExternalErrorLeittechnikfehler
BOOL 0 I Q
HYS Hysteresis of Analog InputHysterese
REAL 5 I + ≥ 0
M_SUP_AH 1=Suppress HH Alarm1=Meldungsunterdrückung AH
BOOL 0 I +
M_SUP_AL 1=Suppress LL Alarm1=Meldungsunterdrückung AL
BOOL 0 I +
M_SUP_WH 1=Suppress H Alarm (Warning)1=Meldungsunterdrückung WH
BOOL 0 I +
M_SUP_WL 1=Suppress L Alarm (Warning)1=Meldungsunterdrückung WL
BOOL 0 I +
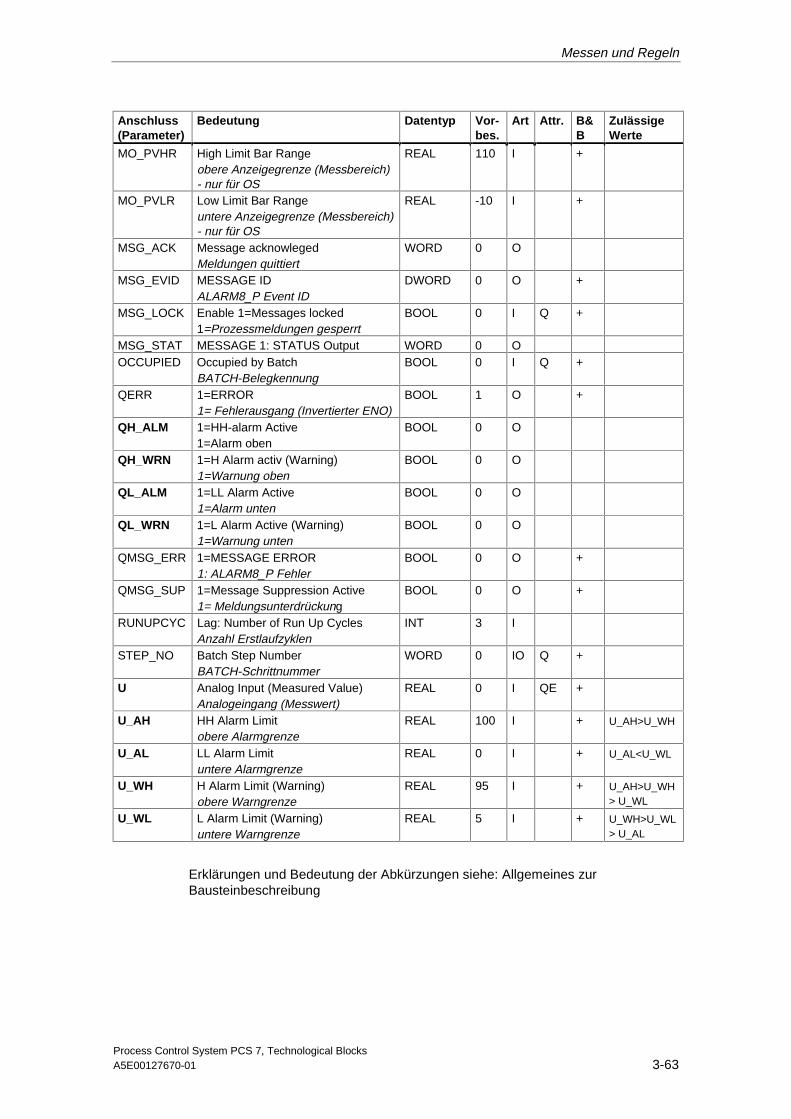
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-63
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B
ZulässigeWerte
MO_PVHR High Limit Bar Rangeobere Anzeigegrenze (Messbereich)- nur für OS
REAL 110 I +
MO_PVLR Low Limit Bar Rangeuntere Anzeigegrenze (Messbereich)- nur für OS
REAL -10 I +
MSG_ACK Message acknowlegedMeldungen quittiert
WORD 0 O
MSG_EVID MESSAGE IDALARM8_P Event ID
DWORD 0 O +
MSG_LOCK Enable 1=Messages locked1=Prozessmeldungen gesperrt
BOOL 0 I Q +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 OOCCUPIED Occupied by Batch
BATCH-BelegkennungBOOL 0 I Q +
QERR 1=ERROR1= Fehlerausgang (Invertierter ENO)
BOOL 1 O +
QH_ALM 1=HH-alarm Active1=Alarm oben
BOOL 0 O
QH_WRN 1=H Alarm activ (Warning)1=Warnung oben
BOOL 0 O
QL_ALM 1=LL Alarm Active1=Alarm unten
BOOL 0 O
QL_WRN 1=L Alarm Active (Warning)1=Warnung unten
BOOL 0 O
QMSG_ERR 1=MESSAGE ERROR1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1=Message Suppression Active1= Meldungsunterdrückung
BOOL 0 O +
RUNUPCYC Lag: Number of Run Up CyclesAnzahl Erstlaufzyklen
INT 3 I
STEP_NO Batch Step NumberBATCH-Schrittnummer
WORD 0 IO Q +
U Analog Input (Measured Value)Analogeingang (Messwert)
REAL 0 I QE +
U_AH HH Alarm Limitobere Alarmgrenze
REAL 100 I + U_AH>U_WH
U_AL LL Alarm Limituntere Alarmgrenze
REAL 0 I + U_AL<U_WL
U_WH H Alarm Limit (Warning)obere Warngrenze
REAL 95 I + U_AH>U_WH> U_WL
U_WL L Alarm Limit (Warning)untere Warngrenze
REAL 5 I + U_WH>U_WL> U_AL
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
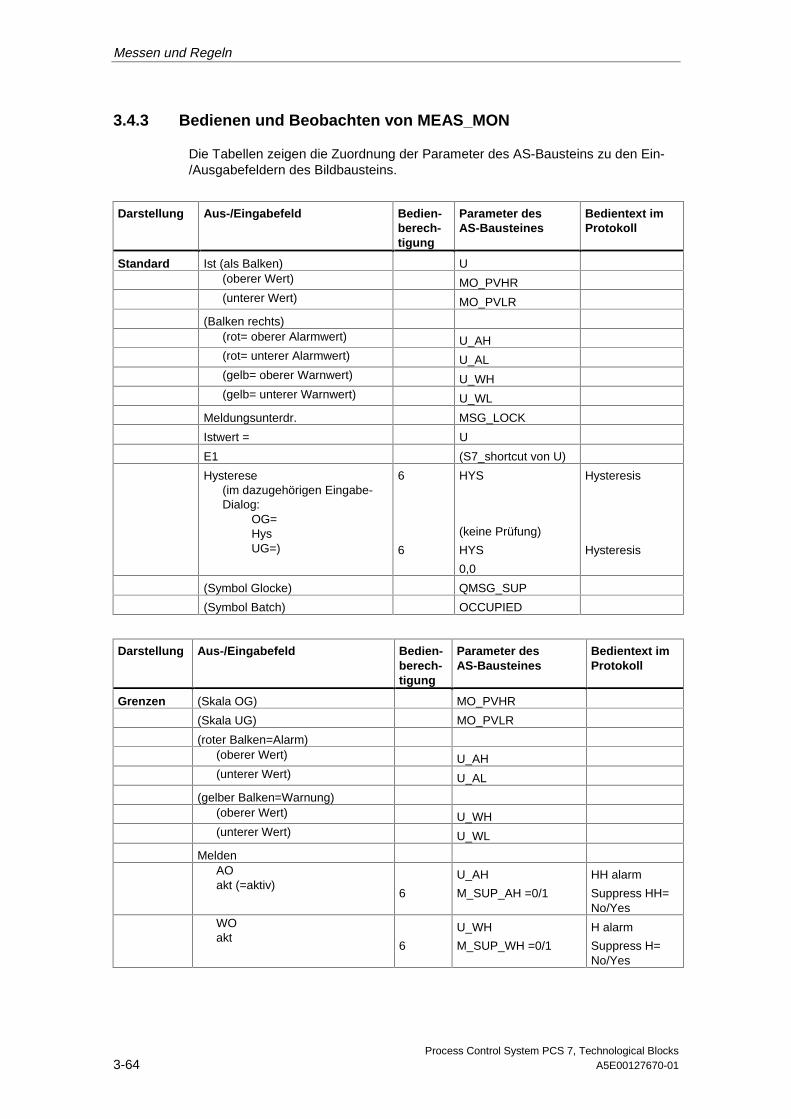
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-64 A5E00127670-01
3.4.3 Bedienen und Beobachten von MEAS_MON
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Ist (als Balken) U(oberer Wert) MO_PVHR(unterer Wert) MO_PVLR
(Balken rechts)(rot= oberer Alarmwert) U_AH(rot= unterer Alarmwert) U_AL(gelb= oberer Warnwert) U_WH(gelb= unterer Warnwert) U_WL
Meldungsunterdr. MSG_LOCK
Istwert = U
E1 (S7_shortcut von U)
Hysterese(im dazugehörigen Eingabe-Dialog:
OG=HysUG=)
6
6
HYS
(keine Prüfung)
HYS
0,0
Hysteresis
Hysteresis
(Symbol Glocke) QMSG_SUP
(Symbol Batch) OCCUPIED
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Grenzen (Skala OG) MO_PVHR
(Skala UG) MO_PVLR
(roter Balken=Alarm)(oberer Wert) U_AH(unterer Wert) U_AL
(gelber Balken=Warnung)(oberer Wert) U_WH(unterer Wert) U_WL
MeldenAOakt (=aktiv)
6
U_AH
M_SUP_AH =0/1
HH alarm
Suppress HH=No/Yes
WOakt
6
U_WH
M_SUP_WH =0/1
H alarm
Suppress H=No/Yes
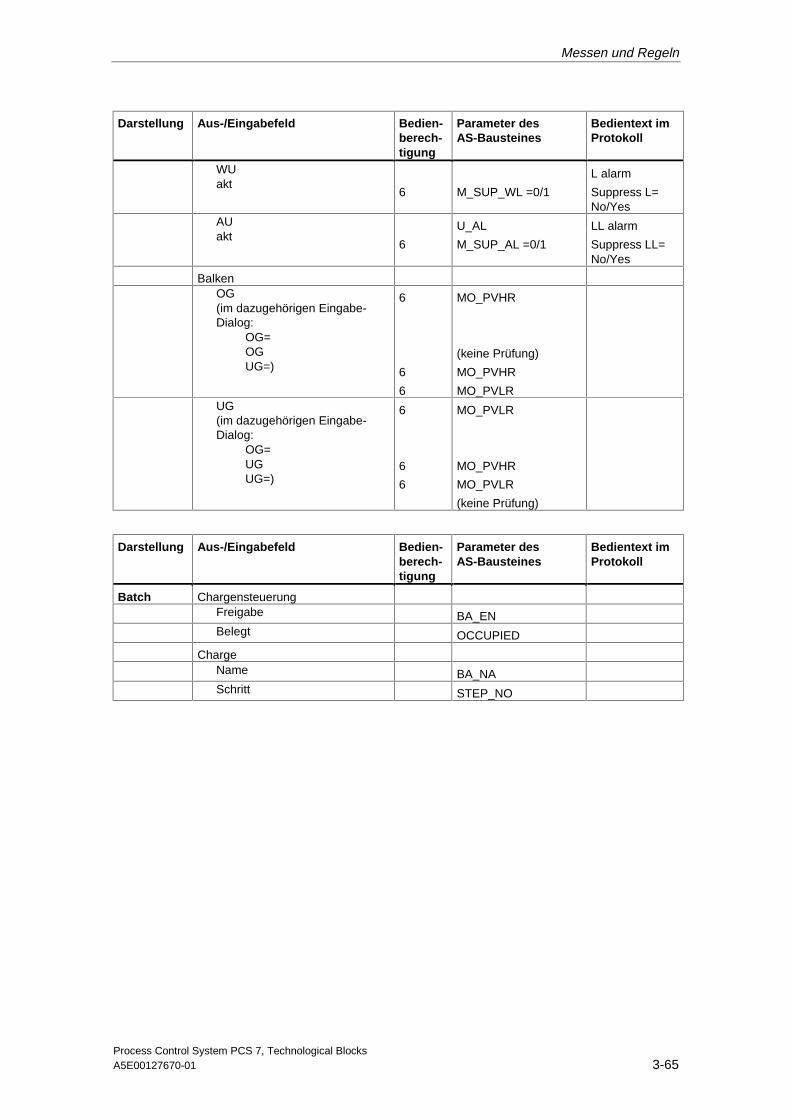
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-65
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
WUakt
6 M_SUP_WL =0/1
L alarm
Suppress L=No/Yes
AUakt
6
U_AL
M_SUP_AL =0/1
LL alarm
Suppress LL=No/Yes
BalkenOG(im dazugehörigen Eingabe-Dialog:
OG=OGUG=)
6
6
6
MO_PVHR
(keine Prüfung)
MO_PVHR
MO_PVLRUG(im dazugehörigen Eingabe-Dialog:
OG=UGUG=)
6
6
6
MO_PVLR
MO_PVHR
MO_PVLR
(keine Prüfung)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENBelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-66 A5E00127670-01
3.5 RATIO_P: Verhältnisregelung
3.5.1 Beschreibung von RATIO_P
Objektname (Art + Nummer)
FB 70
Funktion
Der Baustein wird zur Bildung eines Verhältnisses z.B. bei einer Verhältnisregelungverwendet. Ebenso findet er Verwendung als Anteilsteller (z.B.Gleichlaufregelung), oder um die Führungsgröße einer Kaskade zu beeinflussen.
Arbeitsweise
Der RATIO_P-Baustein arbeitet nach der Gleichung: V = U1 * U2 + BIASDabei wird U1 durch Verschaltung bezogen, während U2 abhängig von derBetriebsart Intern/Extern gewählt wird.
Intern/Extern-Umschaltung
Die Betriebsart wird durch folgende Maßnahmen gewählt und am AusgangQIN_EX angezeigt:
• Bedienung des Eingangs IN_EX, wenn L_IE_ON=0 ist und die FreigabenIN_OP_EN bzw. EX_OP_EN vorhanden sind.
• Verschaltung von L_IN_EX, falls L_IE_ON=1 ist.
Intern: Der Parameter U2 in der Formel wird durch Bedienung vorgegeben undnach Begrenzung auf (U2_LL, U2_HL) in der Formel eingesetzt. DieBedienfreigabe U2_OP_EN muss vorhanden sein.
Extern: Der Parameter U2 wird durch Verschaltung des Eingangs U2_EXTbezogen und nach Begrenzung auf (U2_LL, U2_HL) in der Formel eingesetzt. Derbedienbare Eingang U2 wird auf U2_EXT nachgeführt, um ein stoßfreiesUmschalten nach "Intern" zu ermöglichen.
Aufrufende OBs
Der Einbau erfolgt in dem OB, in dem sich der Baustein befindet der das Ergebnisverwertet. Der RATIO_P muss vor (zuerst berechnen, dann verwerten).
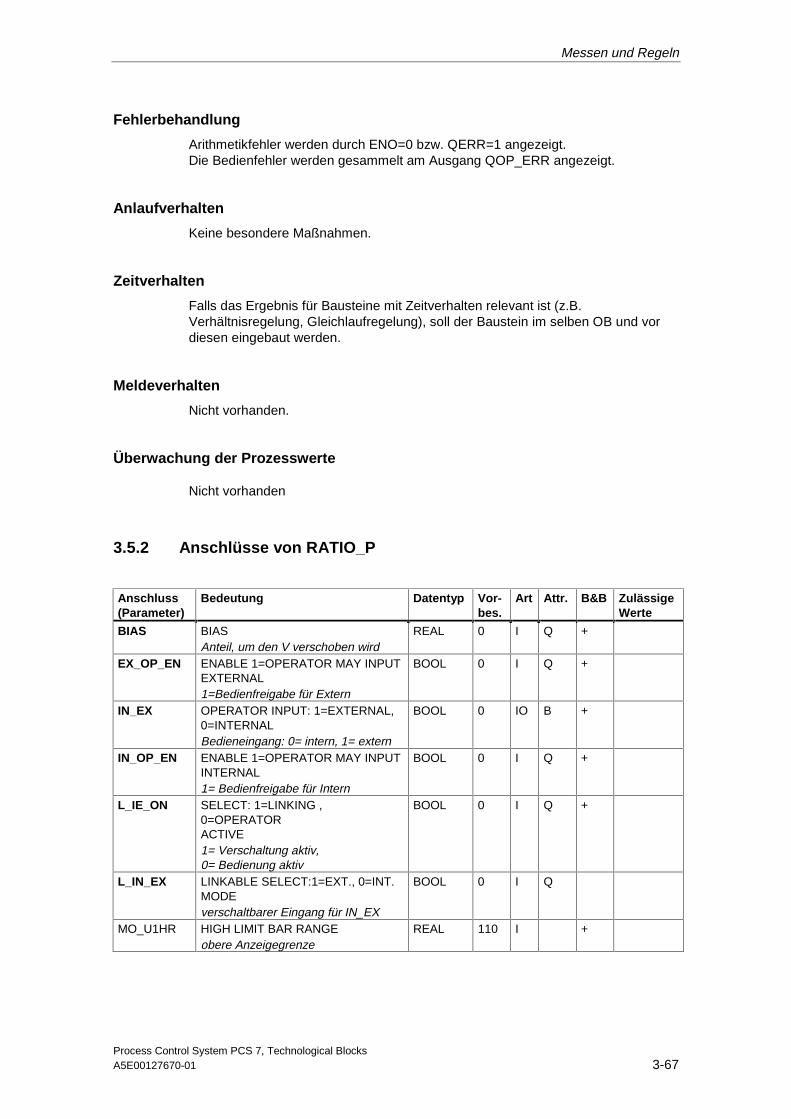
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-67
Fehlerbehandlung
Arithmetikfehler werden durch ENO=0 bzw. QERR=1 angezeigt.Die Bedienfehler werden gesammelt am Ausgang QOP_ERR angezeigt.
Anlaufverhalten
Keine besondere Maßnahmen.
Zeitverhalten
Falls das Ergebnis für Bausteine mit Zeitverhalten relevant ist (z.B.Verhältnisregelung, Gleichlaufregelung), soll der Baustein im selben OB und vordiesen eingebaut werden.
Meldeverhalten
Nicht vorhanden.
Überwachung der Prozesswerte
Nicht vorhanden
3.5.2 Anschlüsse von RATIO_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
BIAS BIASAnteil, um den V verschoben wird
REAL 0 I Q +
EX_OP_EN ENABLE 1=OPERATOR MAY INPUTEXTERNAL1=Bedienfreigabe für Extern
BOOL 0 I Q +
IN_EX OPERATOR INPUT: 1=EXTERNAL,0=INTERNALBedieneingang: 0= intern, 1= extern
BOOL 0 IO B +
IN_OP_EN ENABLE 1=OPERATOR MAY INPUTINTERNAL1= Bedienfreigabe für Intern
BOOL 0 I Q +
L_IE_ON SELECT: 1=LINKING ,0=OPERATORACTIVE1= Verschaltung aktiv,0= Bedienung aktiv
BOOL 0 I Q +
L_IN_EX LINKABLE SELECT:1=EXT., 0=INT.MODEverschaltbarer Eingang für IN_EX
BOOL 0 I Q
MO_U1HR HIGH LIMIT BAR RANGEobere Anzeigegrenze
REAL 110 I +
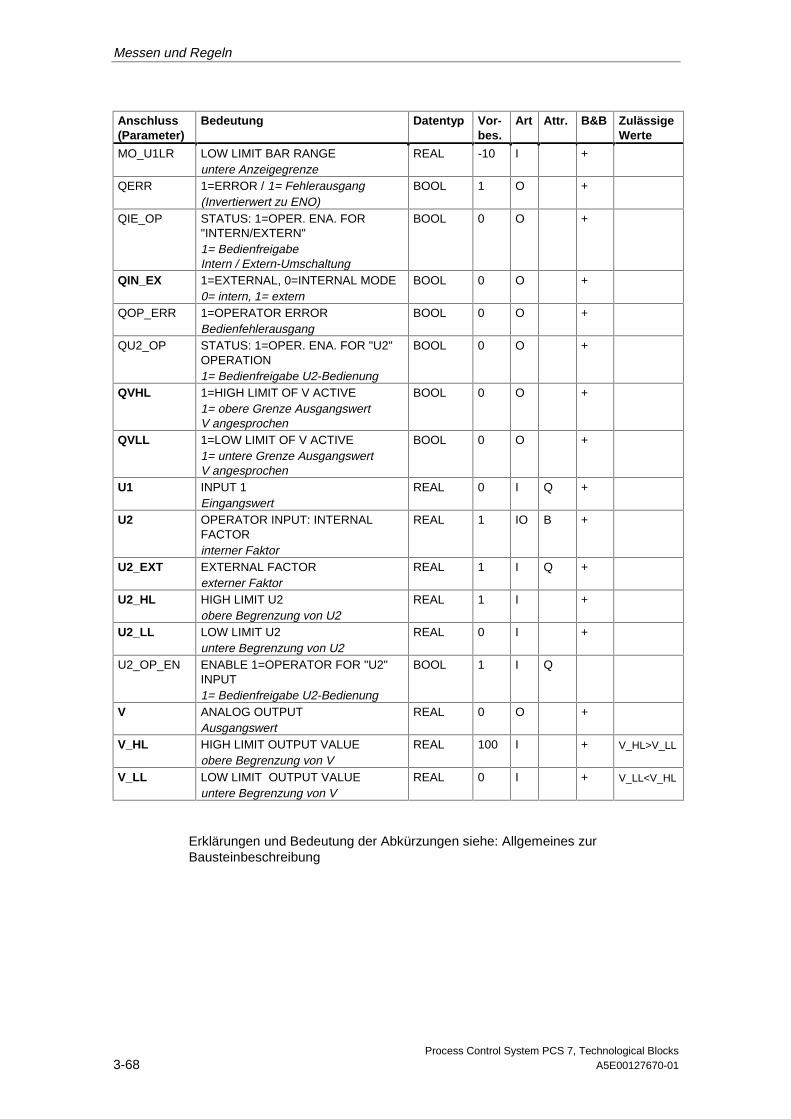
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-68 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
MO_U1LR LOW LIMIT BAR RANGEuntere Anzeigegrenze
REAL -10 I +
QERR 1=ERROR / 1= Fehlerausgang(Invertierwert zu ENO)
BOOL 1 O +
QIE_OP STATUS: 1=OPER. ENA. FOR"INTERN/EXTERN"1= BedienfreigabeIntern / Extern-Umschaltung
BOOL 0 O +
QIN_EX 1=EXTERNAL, 0=INTERNAL MODE0= intern, 1= extern
BOOL 0 O +
QOP_ERR 1=OPERATOR ERRORBedienfehlerausgang
BOOL 0 O +
QU2_OP STATUS: 1=OPER. ENA. FOR "U2"OPERATION1= Bedienfreigabe U2-Bedienung
BOOL 0 O +
QVHL 1=HIGH LIMIT OF V ACTIVE1= obere Grenze AusgangswertV angesprochen
BOOL 0 O +
QVLL 1=LOW LIMIT OF V ACTIVE1= untere Grenze AusgangswertV angesprochen
BOOL 0 O +
U1 INPUT 1Eingangswert
REAL 0 I Q +
U2 OPERATOR INPUT: INTERNALFACTORinterner Faktor
REAL 1 IO B +
U2_EXT EXTERNAL FACTORexterner Faktor
REAL 1 I Q +
U2_HL HIGH LIMIT U2obere Begrenzung von U2
REAL 1 I +
U2_LL LOW LIMIT U2untere Begrenzung von U2
REAL 0 I +
U2_OP_EN ENABLE 1=OPERATOR FOR "U2"INPUT1= Bedienfreigabe U2-Bedienung
BOOL 1 I Q
V ANALOG OUTPUTAusgangswert
REAL 0 O +
V_HL HIGH LIMIT OUTPUT VALUEobere Begrenzung von V
REAL 100 I + V_HL>V_LL
V_LL LOW LIMIT OUTPUT VALUEuntere Begrenzung von V
REAL 0 I + V_LL<V_HL
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
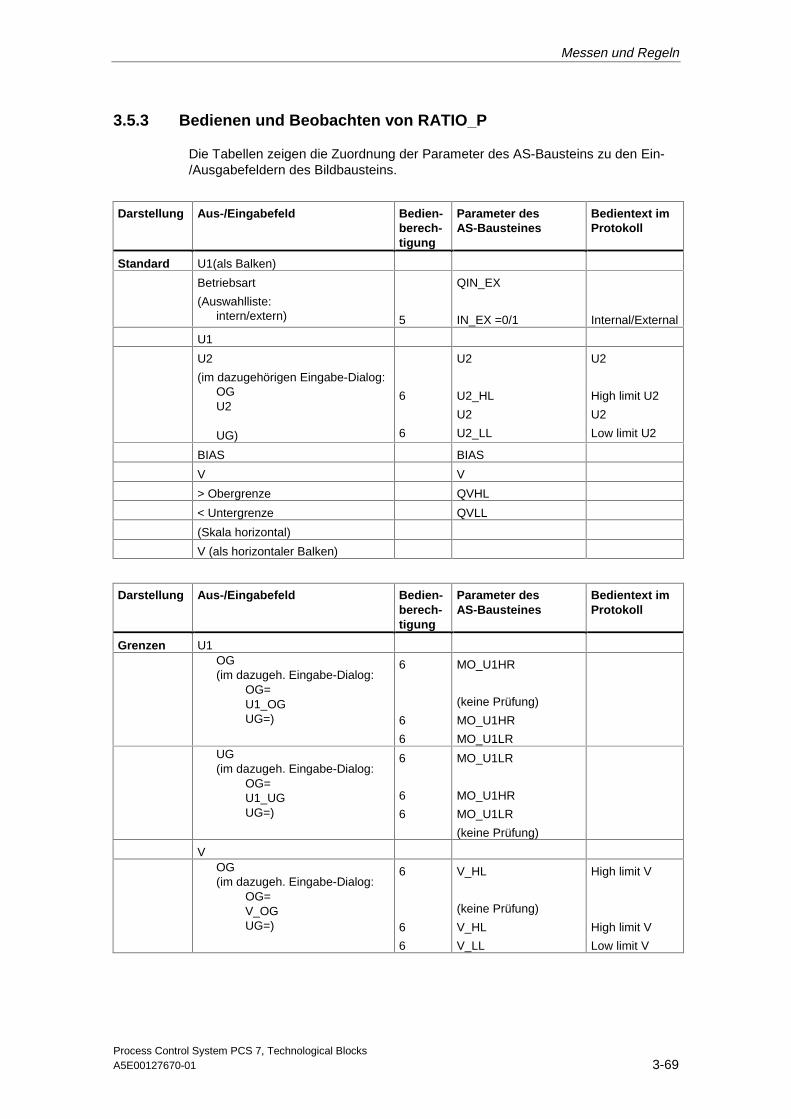
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-69
3.5.3 Bedienen und Beobachten von RATIO_P
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard U1(als Balken)
Betriebsart
(Auswahlliste:intern/extern) 5
QIN_EX
IN_EX =0/1 Internal/External
U1
U2
(im dazugehörigen Eingabe-Dialog:OGU2
UG)
6
6
U2
U2_HL
U2
U2_LL
U2
High limit U2
U2
Low limit U2
BIAS BIAS
V V
> Obergrenze QVHL
< Untergrenze QVLL
(Skala horizontal)
V (als horizontaler Balken)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Grenzen U1OG(im dazugeh. Eingabe-Dialog:
OG=U1_OGUG=)
6
6
6
MO_U1HR
(keine Prüfung)
MO_U1HR
MO_U1LRUG(im dazugeh. Eingabe-Dialog:
OG=U1_UGUG=)
6
6
6
MO_U1LR
MO_U1HR
MO_U1LR
(keine Prüfung)
VOG(im dazugeh. Eingabe-Dialog:
OG=V_OGUG=)
6
6
6
V_HL
(keine Prüfung)
V_HL
V_LL
High limit V
High limit V
Low limit V
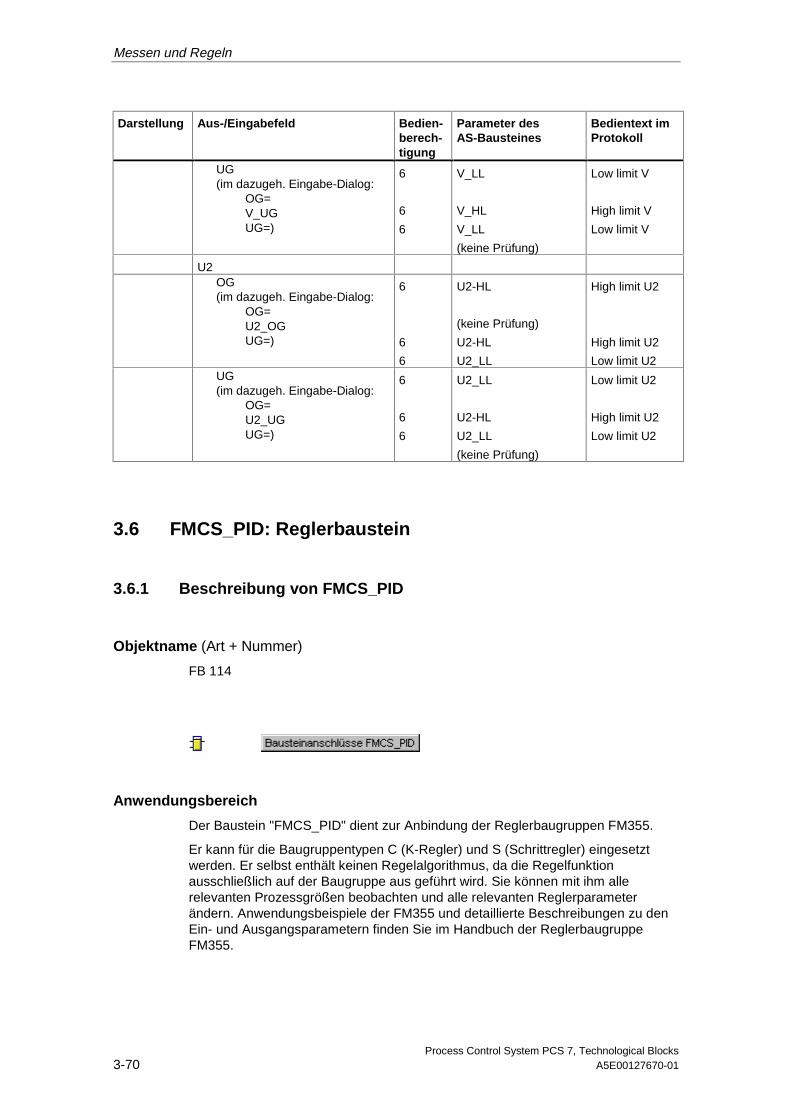
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-70 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
UG(im dazugeh. Eingabe-Dialog:
OG=V_UGUG=)
6
6
6
V_LL
V_HL
V_LL
(keine Prüfung)
Low limit V
High limit V
Low limit V
U2OG(im dazugeh. Eingabe-Dialog:
OG=U2_OGUG=)
6
6
6
U2-HL
(keine Prüfung)
U2-HL
U2_LL
High limit U2
High limit U2
Low limit U2UG(im dazugeh. Eingabe-Dialog:
OG=U2_UGUG=)
6
6
6
U2_LL
U2-HL
U2_LL
(keine Prüfung)
Low limit U2
High limit U2
Low limit U2
3.6 FMCS_PID: Reglerbaustein
3.6.1 Beschreibung von FMCS_PID
Objektname (Art + Nummer)
FB 114
Anwendungsbereich
Der Baustein "FMCS_PID" dient zur Anbindung der Reglerbaugruppen FM355.
Er kann für die Baugruppentypen C (K-Regler) und S (Schrittregler) eingesetztwerden. Er selbst enthält keinen Regelalgorithmus, da die Regelfunktionausschließlich auf der Baugruppe aus geführt wird. Sie können mit ihm allerelevanten Prozessgrößen beobachten und alle relevanten Reglerparameterändern. Anwendungsbeispiele der FM355 und detaillierte Beschreibungen zu denEin- und Ausgangsparametern finden Sie im Handbuch der ReglerbaugruppeFM355.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-71
Einsatz der Reglerbaugruppe als K-Regler
Der Baustein liefert folgende Anzeigen bzw. bietet folgende Einstellmöglichkeiten:
• Anzeige des Ergebnisses der auf der Baugruppe durchgeführtenGrenzwertüberwachung auf zwei Grenzwertpaare für die Prozessgröße PVoder die Regeldifferenz ER (Ausgänge QH_ALM, QH_WRN, QL_WRN,QL_ALM). Ob PV oder ER überwacht wird, geben Sie über MONERSEL vor.
• Abschaltung der Erzeugung einzelner Meldungen bei Grenzwertverletzung
• Splitrangefunktion
• Totzone (DEADB_W, Ansprechschwelle) im Regeldifferenzzweig
• Vorgabe des Regelalgorithmus: PID-Algorithmus (QFUZZY = 0) oder FUZZY-Algorithmus (QFUZZY = 1)
• Stellgrößennachführung
• Abschaltung des I-Anteils
• Sollwertnachführung (SP = PV)
Einsatz der Reglerbaugruppe als Impulsregler
Es gilt das für den Einsatz als K-Regler Gesagte mit dem Unterschied, dass keineSplitrangeregelung möglich ist.
Einsatz der Reglerbaugruppe als S-Regler
Wie beim K-Regler, aber mit folgenden Unterschieden:
• Am Ausgang QLMNR_ON wird angezeigt, ob eine Stellungsrückmeldungvorliegt (1: liegt vor, 0: liegt nicht vor).
• Es ist keine Splitrangeregelung möglich.
Beim Einsatz als S-Regler ohne Stellungsrückmeldung (QLMNR_ON = 0) ist einmanuelles Verfahren der Stellgröße nur in den Endlagen möglich. DieSicherheitsstellung oder der Handwert wird in diesem Fall durch dieReglerbaugruppe wie folgt interpretiert:
LMN_SAFE < 40 %: Stellglied völlig schließen
LMN_SAFE > 60 %: Stellglied völlig öffnen
40 % ≤ LMN_SAFE ≤ 60 %: Aktuelle Stellung halten
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-72 A5E00127670-01
Aufrufende OBs
Der Baustein kann alternativ in folgende OBs eingebaut werden:
Zyklische Task: OB1
Weckalarm-OB: z. B. OB32
Der Baustein muss mit gleicher Instanz in folgende OBs eingebaut werden:
- OB82 für Diagnosealarmerkennung
- OB83 für Ziehen/Stecken-Erkennung
- OB100 für Anlauferkennung
3.6.2 Adressierung
Sie adressieren den zur Instanz gehörigen Reglerkanal einer FM355 über dielogische Basisadresse (wird mit HW-Konfig eingestellt) (Eingang LADDR) und dieReglerkanalnummer (Eingang CHANNEL). Der Baugruppenträger (Rack), in demdie FM355 gesteckt ist, wird durch den RACK-Baustein überwacht. Sie müssenden Eingang RAC_DIAG mit dem Ausgang RAC_DIAG der zutreffenden Instanzdes RACK-Bausteins verbinden. Am RACK-Baustein stellen Sie die Rack-Nr. desBaugruppenträgers ein.
• Falls auf dem Steckplatz, den Sie durch die logische Basisadresse angegebenhaben, keine Reglerbaugruppe FM355 steckt, werden die Ausgänge QPARAFund QCH_F gesetzt. Ebenso wird verfahren, wenn Sie für die Kanalnummerkeinen gültigen Wert eingegeben haben. Zulässige Werte für den EingangCHANNEL sind 1 bis 4.
Der Baustein "FMCS_PID" kommuniziert nicht mit der zugehörigenReglerbaugruppe, wenn der Baugruppenträger ausgefallen ist (QRACKF = 1), dieBaugruppe gezogen ist (QMODF = 1), eine falsche logische Basisadresse odereine falsche Kanalnummer eingestellt ist.
3.6.3 Funktion
Der Baustein "FMCS_PID" bildet die Nahtstelle zwischen der Reglerbaugruppe(FM355) und den Bausteinen der SIMATIC PCS 7-Bibliotheken. Er kann auch mitanderen SIMATIC S7-Bausteinen verschaltet werden.
Der Baustein und die Reglerbaugruppe laufen asynchron zueinander.
Alle relevanten Prozess- und Störgrößen werden von der Baugruppe zurVerfügung gestellt und können vom Baustein nur gelesen werden. Darüber hinauskann der Baustein verschiedene Betriebsarten und Einstellungen an dieReglerbaugruppe übertragen.
In der Regel erhalten die FM355 ihre Parameter durch den Baustein. Bei jederÄnderung eines Parameters am Baustein wird dies an die Baugruppeweitergegeben. Falls Sie jedoch mit dem Operator Panel (OP) eineParameteränderung direkt an der FM355 durchführen wollen, müssen Sie dieszunächst mit Hilfe des Eingangs OP_SEL freigeben (OP_SEL = 1). Falls Sie nachder Benutzung des OP die Bedienung und Parametrierung wieder ausschließlichdurch den Baustein zulassen wollen, müssen Sie OP_SEL wieder zurücksetzen.
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-73
Bei zugelassener Parametrierung über das OP übernimmt die Reglerbaugruppekeine Parameter vom Baustein. Der Baustein aktualisiert jedoch stets dieProzesswerte SP_OP_ON, LMNOP_ON, SP_OP und LMN, damit ein stoßfreiesUmschalten in den Modus, bei dem die Parametrierung durch den Baustein erfolgt,möglich ist. Die restlichen Parameter (z.B. GAIN) werden mit den Daten derBausteininstanz überschrieben, sobald Sie OP_SEL = 0 setzen. Die erfolgtenEingaben mit dem OP gehen verloren, wenn Sie nicht vor Rücknahme vonOP_SEL die Daten in die Bausteininstanz nachgetragen haben.
Ein Teil der Parameter kann nicht nur über das Parametrierwerkzeug, sondernauch über den Funktionsbaustein vorgegeben werden. Diese beidenParametersätze können voneinander abweichen. Um diesen Konflikt zuvermeiden, gibt es den Eingang SDB_SEL am Funktionsbaustein. Mit SDB_SEL =1 legen Sie fest, dass die Baugruppe diese Parameter nur vom Funktionsbausteinsübernimmt und nicht vom Parametrierwerkzeug. Mit SDB_SEL = 0 legen Sie fest,dass die Baugruppe diese Parameter vom Parametrierwerkzeug und vom FBübernimmt. Hierbei ist zu beachten, dass die Parameter vom Parametrierwerkzeugbei jedem STOP-RUN-Übergang der CPU zur Baugruppe übertragen werden. DieParameter des FB werden dagegen bei jeder Änderung am Bausteineingang zurBaugruppe übertragen.
Bei zugelassener Parametrierung über das OP sind Bedieneingaben gesperrt mitfolgender Ausnahme: Die Bedienung OP_SEL = 0 (P-BUS-Betrieb wiedereinschalten) ist möglich.
3.6.4 Sollwert-, Grenzwert-, Regeldifferenz- und Stellgrößenbildung
Sollwertbildung
Der Sollwert SP kann aus vier verschiedenen Quellen bezogen werden:
• Er kann von der Reglerbaugruppe übernommen werden (Sie haben ihn überOP parametriert, oder die Baugruppe befindet sich im Backupbetrieb). Indiesem Fall ist die Sollwertbedienung gesperrt, und der übernommene Wertwird auf den Bedieneingang SP_OP des Bausteins zurückgeschrieben.
• Die drei anderen Quellen sind abhängig von den Eingängen SP_TRK_ON undLIOP_INT_SEL.
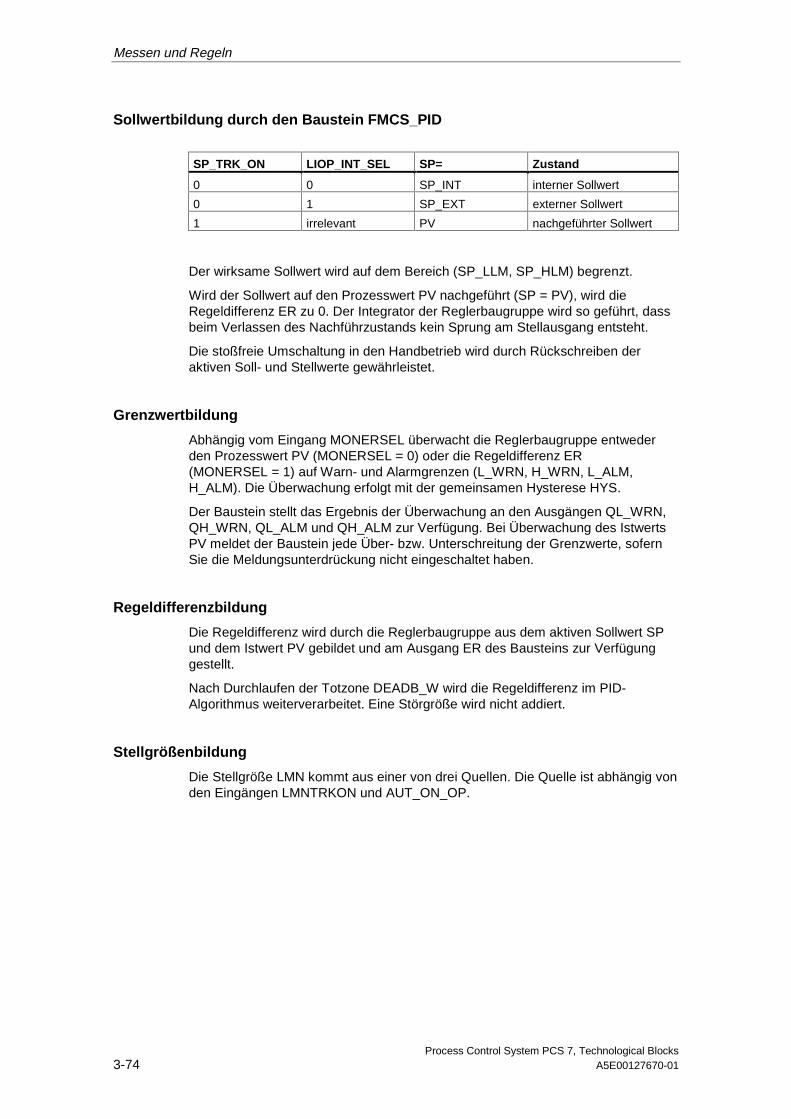
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-74 A5E00127670-01
Sollwertbildung durch den Baustein FMCS_PID
SP_TRK_ON LIOP_INT_SEL SP= Zustand
0 0 SP_INT interner Sollwert
0 1 SP_EXT externer Sollwert
1 irrelevant PV nachgeführter Sollwert
Der wirksame Sollwert wird auf dem Bereich (SP_LLM, SP_HLM) begrenzt.
Wird der Sollwert auf den Prozesswert PV nachgeführt (SP = PV), wird dieRegeldifferenz ER zu 0. Der Integrator der Reglerbaugruppe wird so geführt, dassbeim Verlassen des Nachführzustands kein Sprung am Stellausgang entsteht.
Die stoßfreie Umschaltung in den Handbetrieb wird durch Rückschreiben deraktiven Soll- und Stellwerte gewährleistet.
Grenzwertbildung
Abhängig vom Eingang MONERSEL überwacht die Reglerbaugruppe entwederden Prozesswert PV (MONERSEL = 0) oder die Regeldifferenz ER(MONERSEL = 1) auf Warn- und Alarmgrenzen (L_WRN, H_WRN, L_ALM,H_ALM). Die Überwachung erfolgt mit der gemeinsamen Hysterese HYS.
Der Baustein stellt das Ergebnis der Überwachung an den Ausgängen QL_WRN,QH_WRN, QL_ALM und QH_ALM zur Verfügung. Bei Überwachung des IstwertsPV meldet der Baustein jede Über- bzw. Unterschreitung der Grenzwerte, sofernSie die Meldungsunterdrückung nicht eingeschaltet haben.
Regeldifferenzbildung
Die Regeldifferenz wird durch die Reglerbaugruppe aus dem aktiven Sollwert SPund dem Istwert PV gebildet und am Ausgang ER des Bausteins zur Verfügunggestellt.
Nach Durchlaufen der Totzone DEADB_W wird die Regeldifferenz im PID-Algorithmus weiterverarbeitet. Eine Störgröße wird nicht addiert.
Stellgrößenbildung
Die Stellgröße LMN kommt aus einer von drei Quellen. Die Quelle ist abhängig vonden Eingängen LMNTRKON und AUT_ON_OP.
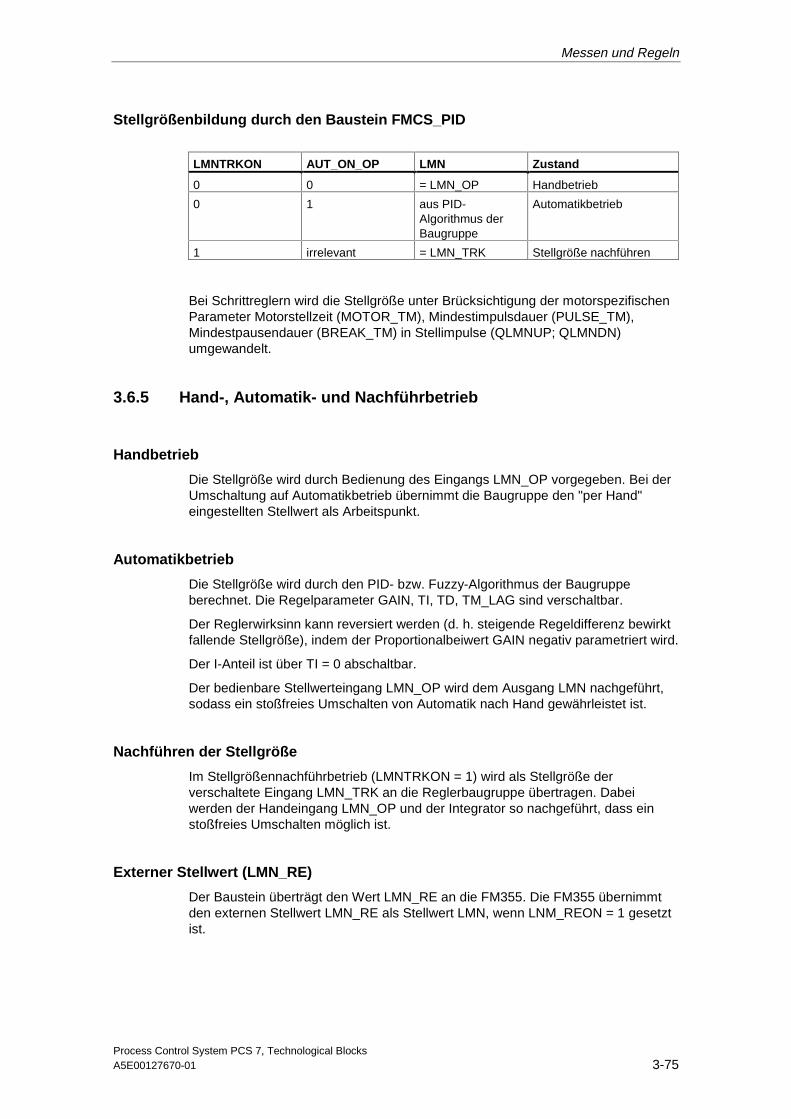
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-75
Stellgrößenbildung durch den Baustein FMCS_PID
LMNTRKON AUT_ON_OP LMN Zustand
0 0 = LMN_OP Handbetrieb
0 1 aus PID-Algorithmus derBaugruppe
Automatikbetrieb
1 irrelevant = LMN_TRK Stellgröße nachführen
Bei Schrittreglern wird die Stellgröße unter Brücksichtigung der motorspezifischenParameter Motorstellzeit (MOTOR_TM), Mindestimpulsdauer (PULSE_TM),Mindestpausendauer (BREAK_TM) in Stellimpulse (QLMNUP; QLMNDN)umgewandelt.
3.6.5 Hand-, Automatik- und Nachführbetrieb
Handbetrieb
Die Stellgröße wird durch Bedienung des Eingangs LMN_OP vorgegeben. Bei derUmschaltung auf Automatikbetrieb übernimmt die Baugruppe den "per Hand"eingestellten Stellwert als Arbeitspunkt.
Automatikbetrieb
Die Stellgröße wird durch den PID- bzw. Fuzzy-Algorithmus der Baugruppeberechnet. Die Regelparameter GAIN, TI, TD, TM_LAG sind verschaltbar.
Der Reglerwirksinn kann reversiert werden (d. h. steigende Regeldifferenz bewirktfallende Stellgröße), indem der Proportionalbeiwert GAIN negativ parametriert wird.
Der I-Anteil ist über TI = 0 abschaltbar.
Der bedienbare Stellwerteingang LMN_OP wird dem Ausgang LMN nachgeführt,sodass ein stoßfreies Umschalten von Automatik nach Hand gewährleistet ist.
Nachführen der Stellgröße
Im Stellgrößennachführbetrieb (LMNTRKON = 1) wird als Stellgröße derverschaltete Eingang LMN_TRK an die Reglerbaugruppe übertragen. Dabeiwerden der Handeingang LMN_OP und der Integrator so nachgeführt, dass einstoßfreies Umschalten möglich ist.
Externer Stellwert (LMN_RE)
Der Baustein überträgt den Wert LMN_RE an die FM355. Die FM355 übernimmtden externen Stellwert LMN_RE als Stellwert LMN, wenn LNM_REON = 1 gesetztist.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-76 A5E00127670-01
3.6.6 Betriebsartenumschaltung
Diese kann entweder durch Bedienung oder über verschaltbare Eingängeausgelöst werden. Die Umschaltung erfolgt durch die den Betriebsartenzugeordneten Bedienbausteine.
Sollwert Extern/Intern
Die Umschaltung erfolgt durch OS-Bedienung des Eingangs SPEXTSEL_OP oderVerschaltung von SPEXON_L. Diese Umschaltungen müssen Sie über diezugehörigen Freigabeeingänge SPINT_EN, SPEXT_EN bzw. über denAuswahleingang LIOP_INT_SEL ermöglichen.
Hand/Automatik
Die Umschaltung erfolgt durch OS-Bedienung des Eingangs AUT_ON_OP oderVerschaltung von AUT_L. Diese Umschaltung müssen Sie über dieentsprechenden Freigabeeingänge MANOP_EN, AUTOP_EN bzw. über denAuswahleingang LIOP_MAN_SEL ermöglichen.
Um eine stoßfreie Umschaltung zu gewährleisten, wird in den unten angeführtenZuständen Folgendes durchgeführt:
Externer Sollwert mit "Sollwert nachführen" (SP_TRK_ON = 1)
Der Baustein überträgt den Wert SP_EXT an die FM355. Der Hand-SollwertSP_OP (des Bausteins) wird dem von der FM355 zurückgelesenen Sollwertnachgeführt.
"Stellgröße nachführen" (LMNTRKON = 1)
Der Baustein überträgt den Wert LMN_TRK an die FM355. Der Hand-StellwertLMN_OP (des Bausteins) wird dem von der FM355 zurückgelesenen Stellwertnachgeführt.
3.6.7 Sicherheitsbetrieb
Über den verschaltbaren Eingang SAFE_ON aktivieren Sie den Sicherheitsbetrieb.Dieser wird von der Reglerbaugruppe mit höchster Priorität ausgeführt. ImSicherheitsbetrieb wird der am Eingang LMN_SAFE des Bausteins anliegendeWert am Stellausgang ausgegeben.
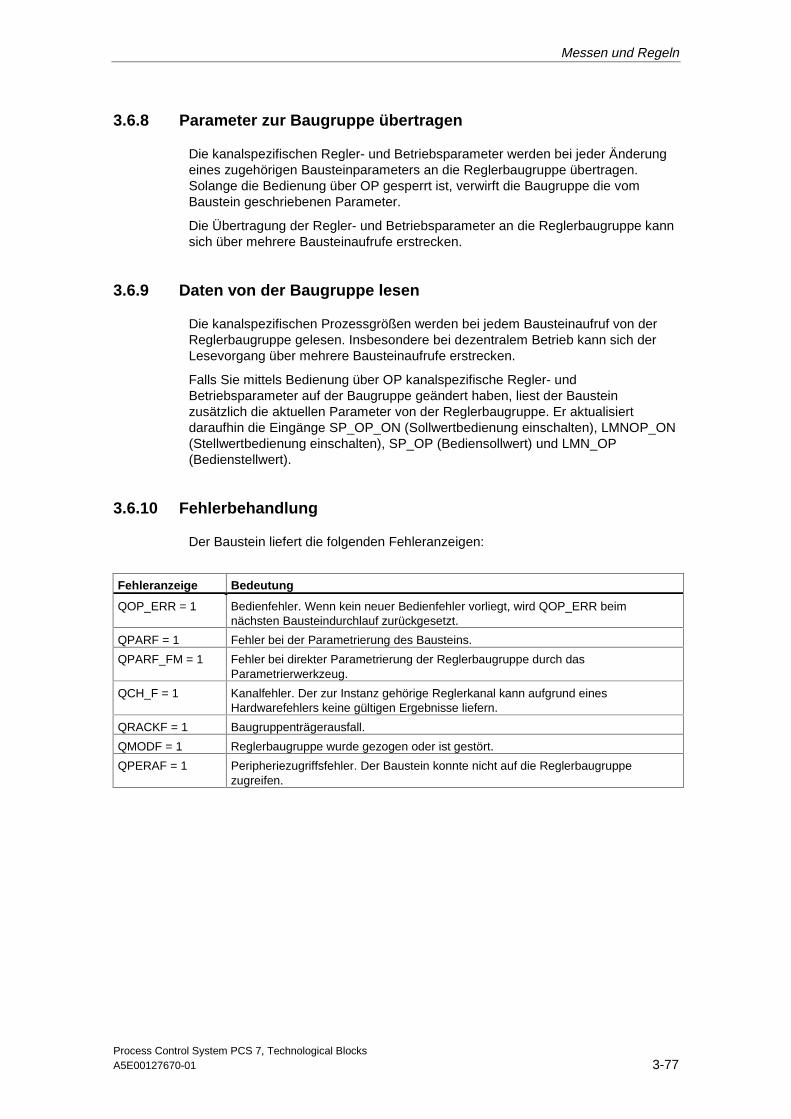
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-77
3.6.8 Parameter zur Baugruppe übertragen
Die kanalspezifischen Regler- und Betriebsparameter werden bei jeder Änderungeines zugehörigen Bausteinparameters an die Reglerbaugruppe übertragen.Solange die Bedienung über OP gesperrt ist, verwirft die Baugruppe die vomBaustein geschriebenen Parameter.
Die Übertragung der Regler- und Betriebsparameter an die Reglerbaugruppe kannsich über mehrere Bausteinaufrufe erstrecken.
3.6.9 Daten von der Baugruppe lesen
Die kanalspezifischen Prozessgrößen werden bei jedem Bausteinaufruf von derReglerbaugruppe gelesen. Insbesondere bei dezentralem Betrieb kann sich derLesevorgang über mehrere Bausteinaufrufe erstrecken.
Falls Sie mittels Bedienung über OP kanalspezifische Regler- undBetriebsparameter auf der Baugruppe geändert haben, liest der Bausteinzusätzlich die aktuellen Parameter von der Reglerbaugruppe. Er aktualisiertdaraufhin die Eingänge SP_OP_ON (Sollwertbedienung einschalten), LMNOP_ON(Stellwertbedienung einschalten), SP_OP (Bediensollwert) und LMN_OP(Bedienstellwert).
3.6.10 Fehlerbehandlung
Der Baustein liefert die folgenden Fehleranzeigen:
Fehleranzeige Bedeutung
QOP_ERR = 1 Bedienfehler. Wenn kein neuer Bedienfehler vorliegt, wird QOP_ERR beimnächsten Bausteindurchlauf zurückgesetzt.
QPARF = 1 Fehler bei der Parametrierung des Bausteins.
QPARF_FM = 1 Fehler bei direkter Parametrierung der Reglerbaugruppe durch dasParametrierwerkzeug.
QCH_F = 1 Kanalfehler. Der zur Instanz gehörige Reglerkanal kann aufgrund einesHardwarefehlers keine gültigen Ergebnisse liefern.
QRACKF = 1 Baugruppenträgerausfall.
QMODF = 1 Reglerbaugruppe wurde gezogen oder ist gestört.
QPERAF = 1 Peripheriezugriffsfehler. Der Baustein konnte nicht auf die Reglerbaugruppezugreifen.
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-78 A5E00127670-01
3.6.11 Anlauf-, Zeit- und Meldeverhalten von FMCS_PID
Anlaufverhalten
Beim Anlauf der CPU bzw. Erstlauf des Bausteins ermittelt der Baustein, ob amprojektierten Steckplatz (festgelegt durch die Eingänge SUBN_ID, RACK_NO undSLOT_NO) eine Reglerbaugruppe vom Typ FM355 steckt. Falls nicht, erfolgt dieFehleranzeige QPARF = 1 (siehe Fehlerbehandlung). Die Betriebsarten HAND undINTERN werden eingestellt.
Es werden die folgenden Fälle unterschieden:
• Die FM355 war ausgefallen, und vor ihrem Ausfall wurde nicht über OPbedient.Der Baustein überträgt die aktuellen Regler- und Betriebsparameter an dieFM355.
• Die FM355 war ausgefallen, und vor ihrem Ausfall wurde über OP bedient.Der Baustein liest die aktuellen Werte aus der FM355 und aktualisiert seineAusgänge SP, LMN, Q_SP_OP und QLMNOP.
• Die FM355 war nicht ausgefallen, und sie wurde über OP bedient.Der Baustein liest die aktuellen Werte aus der FM355 und aktualisiert seineAusgänge SP, LMN, Q_SP_OP und QLMNOP.
• Die FM355 war nicht ausgefallen, und sie wurde nicht über OP bedient.Regler- und Betriebsparameter von FM355 und Baustein sind identisch. DerBaustein unternimmt nichts.
Der Baustein überträgt im Anlauf (jedoch nicht im Erstlauf) die Regler- undBetriebsparameter an die FM355.
Zeitverhalten
Nicht vorhanden.
Meldeverhalten
Der Baustein FMCS_PID verwendet den ALARM8_P-Baustein zur Generierungvon Meldungen.
Meldungsauslöser sind:
- die Grenzwertüberwachungen des Istwertes bzw. der Regelabweichung
- die Hardwareüberwachung der Baugruppe
Die Meldungen für Grenzwertverletzungen können einzeln über dieentsprechenden M_SUP_xx-Eingänge unterdrückt werden. Die Prozessmeldungen(nicht Leittechnikmeldungen!) können zentral mit MSG_LOCK gesperrt werden.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, MSG_LOCK = TRUE bzw MSG_STAT = 21 ist.
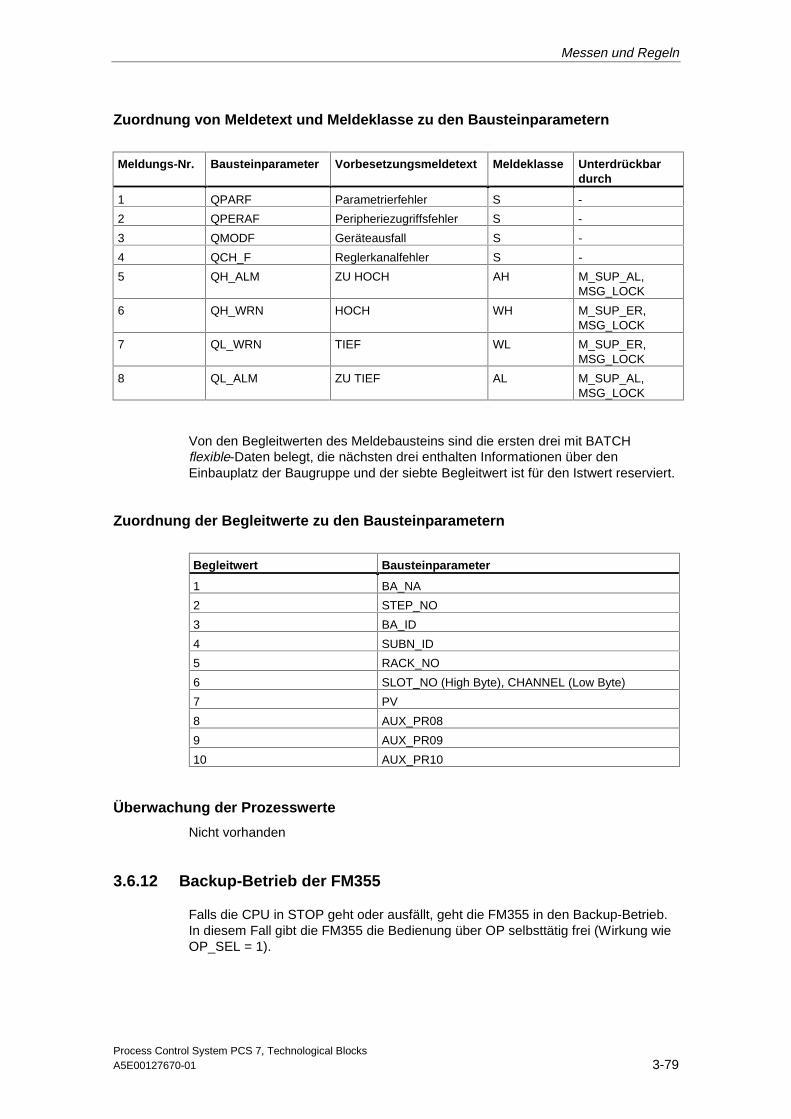
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-79
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse Unterdrückbardurch
1 QPARF Parametrierfehler S -
2 QPERAF Peripheriezugriffsfehler S -
3 QMODF Geräteausfall S -
4 QCH_F Reglerkanalfehler S -
5 QH_ALM ZU HOCH AH M_SUP_AL,MSG_LOCK
6 QH_WRN HOCH WH M_SUP_ER,MSG_LOCK
7 QL_WRN TIEF WL M_SUP_ER,MSG_LOCK
8 QL_ALM ZU TIEF AL M_SUP_AL,MSG_LOCK
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten belegt, die nächsten drei enthalten Informationen über denEinbauplatz der Baugruppe und der siebte Begleitwert ist für den Istwert reserviert.
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 SUBN_ID
5 RACK_NO
6 SLOT_NO (High Byte), CHANNEL (Low Byte)
7 PV
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden
3.6.12 Backup-Betrieb der FM355
Falls die CPU in STOP geht oder ausfällt, geht die FM355 in den Backup-Betrieb.In diesem Fall gibt die FM355 die Bedienung über OP selbsttätig frei (Wirkung wieOP_SEL = 1).
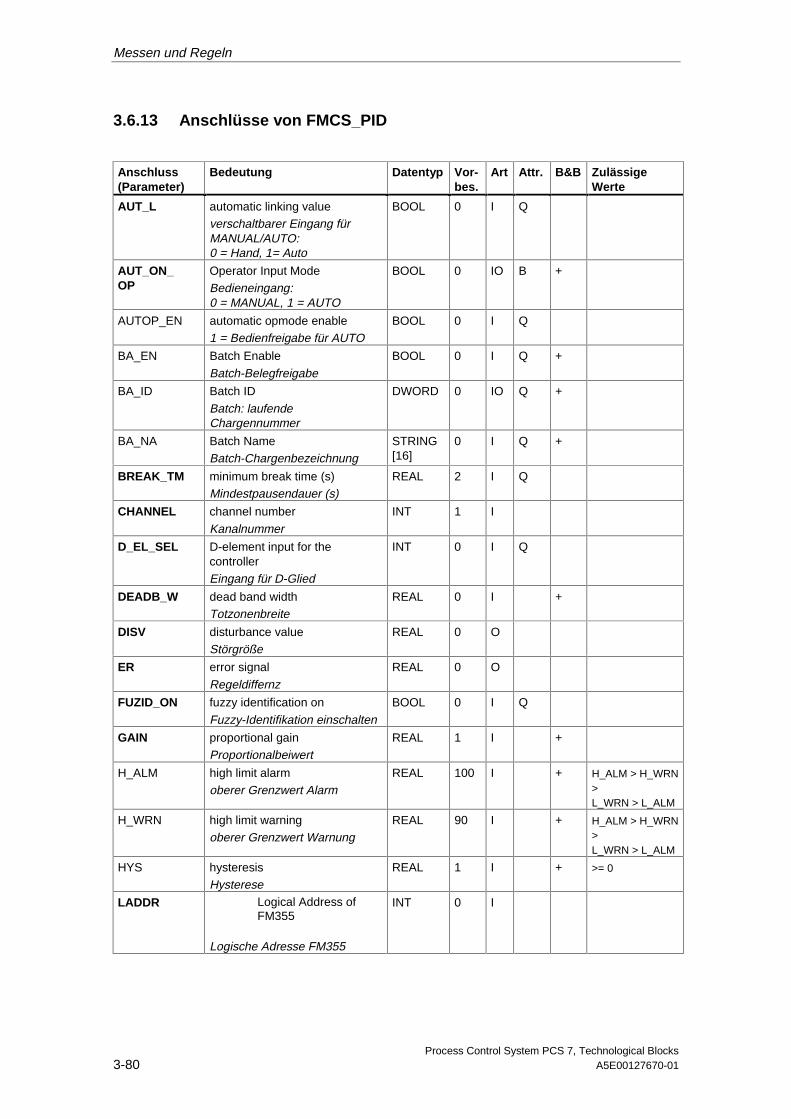
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-80 A5E00127670-01
3.6.13 Anschlüsse von FMCS_PID
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUT_L automatic linking valueverschaltbarer Eingang fürMANUAL/AUTO:0 = Hand, 1= Auto
BOOL 0 I Q
AUT_ON_OP
Operator Input ModeBedieneingang:0 = MANUAL, 1 = AUTO
BOOL 0 IO B +
AUTOP_EN automatic opmode enable1 = Bedienfreigabe für AUTO
BOOL 0 I Q
BA_EN Batch Enable
Batch-BelegfreigabeBOOL 0 I Q +
BA_ID Batch ID
Batch: laufendeChargennummer
DWORD 0 IO Q +
BA_NA Batch NameBatch-Chargenbezeichnung
STRING[16]
0 I Q +
BREAK_TM minimum break time (s)Mindestpausendauer (s)
REAL 2 I Q
CHANNEL channel number
KanalnummerINT 1 I
D_EL_SEL D-element input for thecontrollerEingang für D-Glied
INT 0 I Q
DEADB_W dead band widthTotzonenbreite
REAL 0 I +
DISV disturbance valueStörgröße
REAL 0 O
ER error signal
RegeldiffernzREAL 0 O
FUZID_ON fuzzy identification on
Fuzzy-Identifikation einschaltenBOOL 0 I Q
GAIN proportional gainProportionalbeiwert
REAL 1 I +
H_ALM high limit alarmoberer Grenzwert Alarm
REAL 100 I + H_ALM > H_WRN>L_WRN > L_ALM
H_WRN high limit warningoberer Grenzwert Warnung
REAL 90 I + H_ALM > H_WRN>L_WRN > L_ALM
HYS hysteresisHysterese
REAL 1 I + >= 0
LADDR Logical Address ofFM355
Logische Adresse FM355
INT 0 I
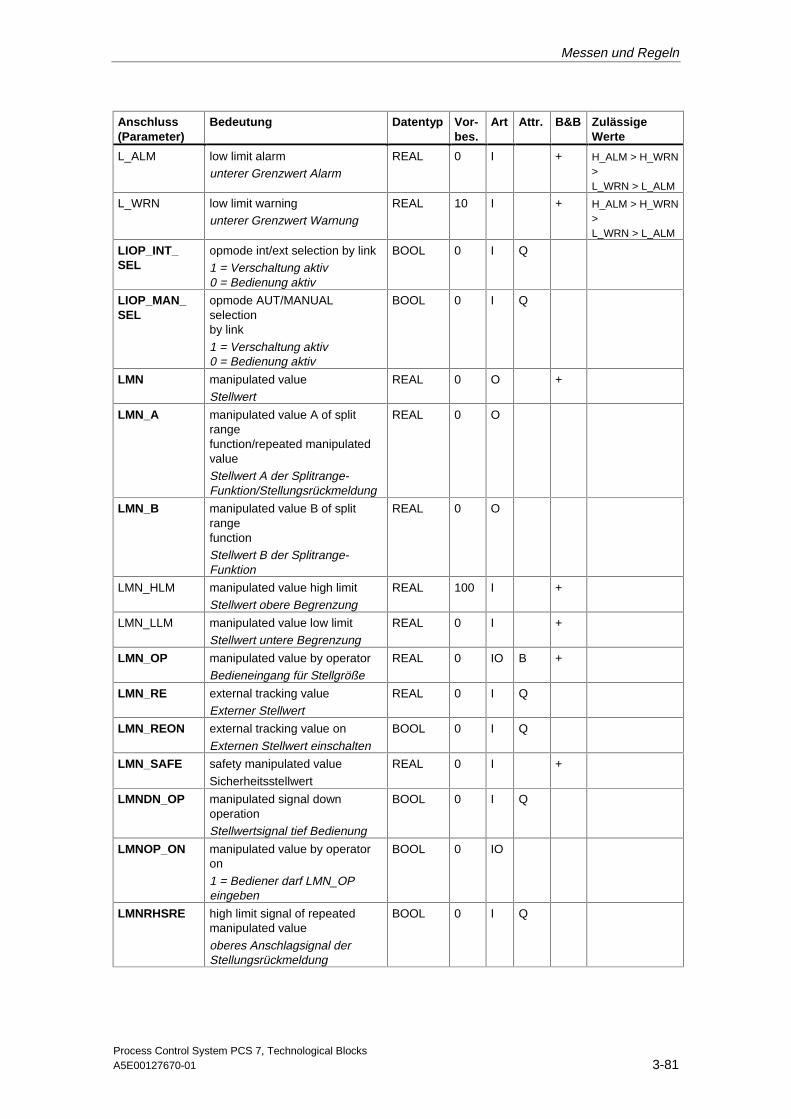
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-81
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
L_ALM low limit alarmunterer Grenzwert Alarm
REAL 0 I + H_ALM > H_WRN>L_WRN > L_ALM
L_WRN low limit warningunterer Grenzwert Warnung
REAL 10 I + H_ALM > H_WRN>L_WRN > L_ALM
LIOP_INT_SEL
opmode int/ext selection by link1 = Verschaltung aktiv0 = Bedienung aktiv
BOOL 0 I Q
LIOP_MAN_SEL
opmode AUT/MANUALselectionby link
1 = Verschaltung aktiv0 = Bedienung aktiv
BOOL 0 I Q
LMN manipulated valueStellwert
REAL 0 O +
LMN_A manipulated value A of splitrangefunction/repeated manipulatedvalueStellwert A der Splitrange-Funktion/Stellungsrückmeldung
REAL 0 O
LMN_B manipulated value B of splitrangefunctionStellwert B der Splitrange-Funktion
REAL 0 O
LMN_HLM manipulated value high limitStellwert obere Begrenzung
REAL 100 I +
LMN_LLM manipulated value low limitStellwert untere Begrenzung
REAL 0 I +
LMN_OP manipulated value by operatorBedieneingang für Stellgröße
REAL 0 IO B +
LMN_RE external tracking valueExterner Stellwert
REAL 0 I Q
LMN_REON external tracking value on
Externen Stellwert einschaltenBOOL 0 I Q
LMN_SAFE safety manipulated value
Sicherheitsstellwert
REAL 0 I +
LMNDN_OP manipulated signal downoperationStellwertsignal tief Bedienung
BOOL 0 I Q
LMNOP_ON manipulated value by operatoron
1 = Bediener darf LMN_OPeingeben
BOOL 0 IO
LMNRHSRE high limit signal of repeatedmanipulated value
oberes Anschlagsignal derStellungsrückmeldung
BOOL 0 I Q
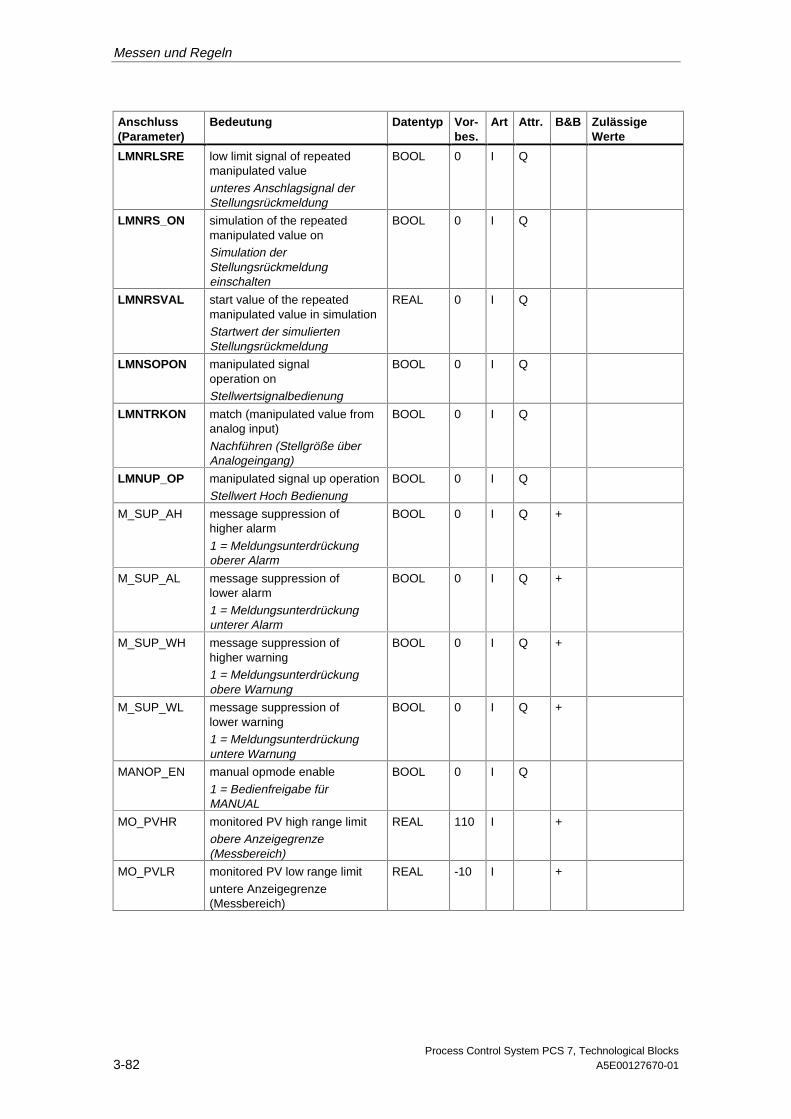
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-82 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
LMNRLSRE low limit signal of repeatedmanipulated value
unteres Anschlagsignal derStellungsrückmeldung
BOOL 0 I Q
LMNRS_ON simulation of the repeatedmanipulated value onSimulation derStellungsrückmeldungeinschalten
BOOL 0 I Q
LMNRSVAL start value of the repeatedmanipulated value in simulationStartwert der simuliertenStellungsrückmeldung
REAL 0 I Q
LMNSOPON manipulated signaloperation onStellwertsignalbedienung
BOOL 0 I Q
LMNTRKON match (manipulated value fromanalog input)
Nachführen (Stellgröße überAnalogeingang)
BOOL 0 I Q
LMNUP_OP manipulated signal up operationStellwert Hoch Bedienung
BOOL 0 I Q
M_SUP_AH message suppression ofhigher alarm
1 = Meldungsunterdrückungoberer Alarm
BOOL 0 I Q +
M_SUP_AL message suppression oflower alarm
1 = Meldungsunterdrückungunterer Alarm
BOOL 0 I Q +
M_SUP_WH message suppression ofhigher warning1 = Meldungsunterdrückungobere Warnung
BOOL 0 I Q +
M_SUP_WL message suppression oflower warning1 = Meldungsunterdrückunguntere Warnung
BOOL 0 I Q +
MANOP_EN manual opmode enable
1 = Bedienfreigabe fürMANUAL
BOOL 0 I Q
MO_PVHR monitored PV high range limitobere Anzeigegrenze(Messbereich)
REAL 110 I +
MO_PVLR monitored PV low range limit
untere Anzeigegrenze(Messbereich)
REAL -10 I +
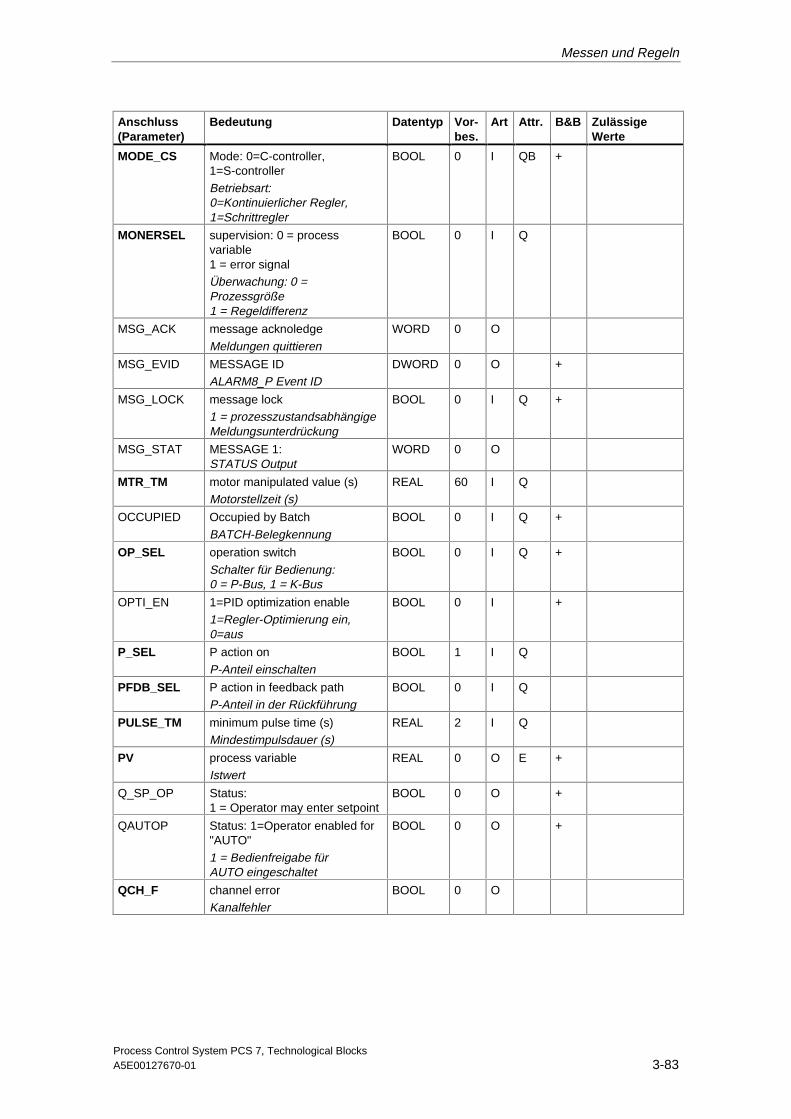
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-83
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
MODE_CS Mode: 0=C-controller,1=S-controller
Betriebsart:0=Kontinuierlicher Regler,1=Schrittregler
BOOL 0 I QB +
MONERSEL supervision: 0 = processvariable1 = error signalÜberwachung: 0 =Prozessgröße1 = Regeldifferenz
BOOL 0 I Q
MSG_ACK message acknoledge
Meldungen quittierenWORD 0 O
MSG_EVID MESSAGE IDALARM8_P Event ID
DWORD 0 O +
MSG_LOCK message lock1 = prozesszustandsabhängigeMeldungsunterdrückung
BOOL 0 I Q +
MSG_STAT MESSAGE 1:STATUS Output
WORD 0 O
MTR_TM motor manipulated value (s)Motorstellzeit (s)
REAL 60 I Q
OCCUPIED Occupied by Batch
BATCH-BelegkennungBOOL 0 I Q +
OP_SEL operation switch
Schalter für Bedienung:0 = P-Bus, 1 = K-Bus
BOOL 0 I Q +
OPTI_EN 1=PID optimization enable1=Regler-Optimierung ein,0=aus
BOOL 0 I +
P_SEL P action on
P-Anteil einschaltenBOOL 1 I Q
PFDB_SEL P action in feedback pathP-Anteil in der Rückführung
BOOL 0 I Q
PULSE_TM minimum pulse time (s)Mindestimpulsdauer (s)
REAL 2 I Q
PV process variableIstwert
REAL 0 O E +
Q_SP_OP Status:1 = Operator may enter setpoint
BOOL 0 O +
QAUTOP Status: 1=Operator enabled for"AUTO"
1 = Bedienfreigabe fürAUTO eingeschaltet
BOOL 0 O +
QCH_F channel errorKanalfehler
BOOL 0 O
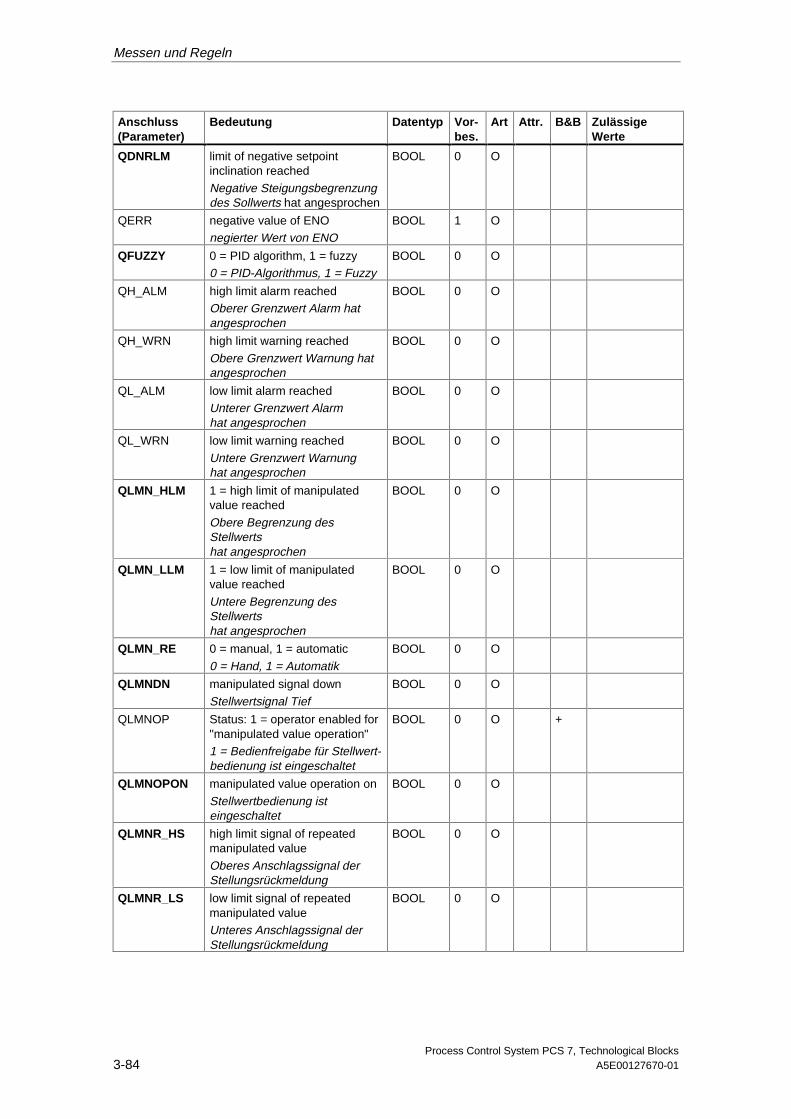
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-84 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QDNRLM limit of negative setpointinclination reached
Negative Steigungsbegrenzungdes Sollwerts hat angesprochen
BOOL 0 O
QERR negative value of ENOnegierter Wert von ENO
BOOL 1 O
QFUZZY 0 = PID algorithm, 1 = fuzzy0 = PID-Algorithmus, 1 = Fuzzy
BOOL 0 O
QH_ALM high limit alarm reachedOberer Grenzwert Alarm hatangesprochen
BOOL 0 O
QH_WRN high limit warning reached
Obere Grenzwert Warnung hatangesprochen
BOOL 0 O
QL_ALM low limit alarm reachedUnterer Grenzwert Alarmhat angesprochen
BOOL 0 O
QL_WRN low limit warning reached
Untere Grenzwert Warnunghat angesprochen
BOOL 0 O
QLMN_HLM 1 = high limit of manipulatedvalue reached
Obere Begrenzung desStellwertshat angesprochen
BOOL 0 O
QLMN_LLM 1 = low limit of manipulatedvalue reached
Untere Begrenzung desStellwertshat angesprochen
BOOL 0 O
QLMN_RE 0 = manual, 1 = automatic
0 = Hand, 1 = AutomatikBOOL 0 O
QLMNDN manipulated signal down
Stellwertsignal TiefBOOL 0 O
QLMNOP Status: 1 = operator enabled for"manipulated value operation"1 = Bedienfreigabe für Stellwert-bedienung ist eingeschaltet
BOOL 0 O +
QLMNOPON manipulated value operation on
Stellwertbedienung isteingeschaltet
BOOL 0 O
QLMNR_HS high limit signal of repeatedmanipulated value
Oberes Anschlagssignal derStellungsrückmeldung
BOOL 0 O
QLMNR_LS low limit signal of repeatedmanipulated valueUnteres Anschlagssignal derStellungsrückmeldung
BOOL 0 O
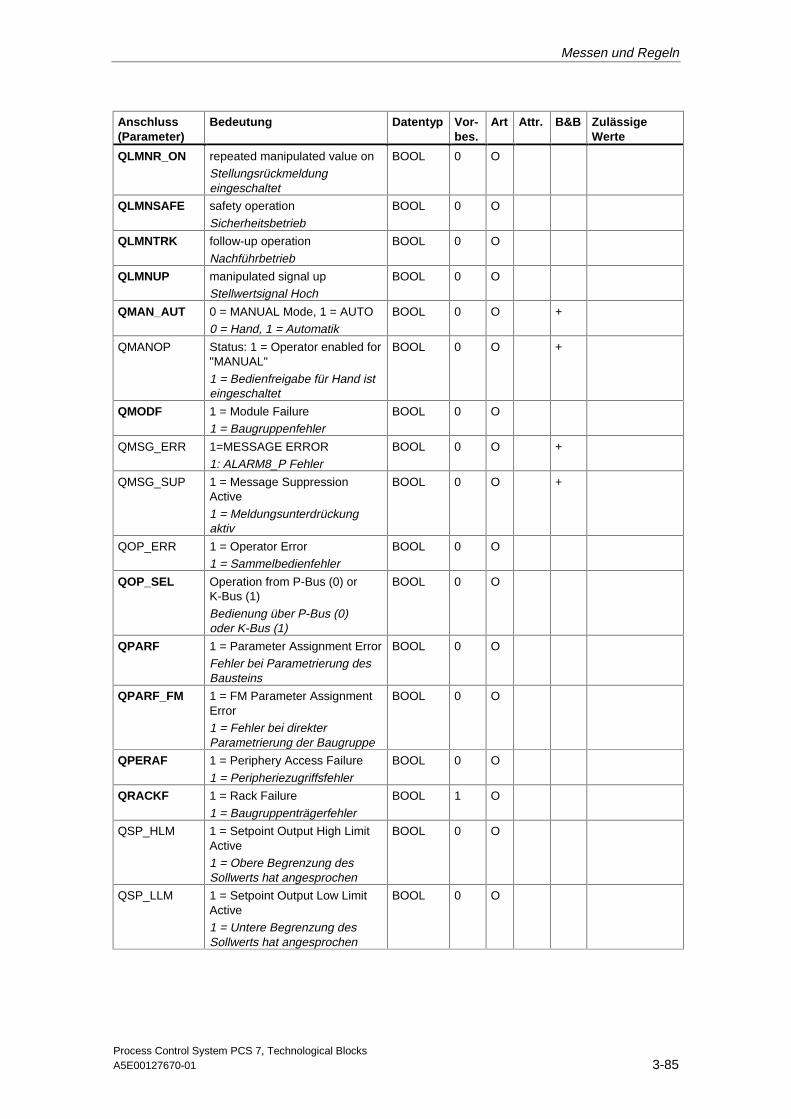
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-85
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QLMNR_ON repeated manipulated value onStellungsrückmeldungeingeschaltet
BOOL 0 O
QLMNSAFE safety operation
SicherheitsbetriebBOOL 0 O
QLMNTRK follow-up operation
NachführbetriebBOOL 0 O
QLMNUP manipulated signal upStellwertsignal Hoch
BOOL 0 O
QMAN_AUT 0 = MANUAL Mode, 1 = AUTO0 = Hand, 1 = Automatik
BOOL 0 O +
QMANOP Status: 1 = Operator enabled for"MANUAL"
1 = Bedienfreigabe für Hand isteingeschaltet
BOOL 0 O +
QMODF 1 = Module Failure1 = Baugruppenfehler
BOOL 0 O
QMSG_ERR 1=MESSAGE ERROR1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1 = Message SuppressionActive
1 = Meldungsunterdrückungaktiv
BOOL 0 O +
QOP_ERR 1 = Operator Error1 = Sammelbedienfehler
BOOL 0 O
QOP_SEL Operation from P-Bus (0) orK-Bus (1)
Bedienung über P-Bus (0)oder K-Bus (1)
BOOL 0 O
QPARF 1 = Parameter Assignment ErrorFehler bei Parametrierung desBausteins
BOOL 0 O
QPARF_FM 1 = FM Parameter AssignmentError1 = Fehler bei direkterParametrierung der Baugruppe
BOOL 0 O
QPERAF 1 = Periphery Access Failure
1 = PeripheriezugriffsfehlerBOOL 0 O
QRACKF 1 = Rack Failure
1 = BaugruppenträgerfehlerBOOL 1 O
QSP_HLM 1 = Setpoint Output High LimitActive1 = Obere Begrenzung desSollwerts hat angesprochen
BOOL 0 O
QSP_LLM 1 = Setpoint Output Low LimitActive1 = Untere Begrenzung desSollwerts hat angesprochen
BOOL 0 O
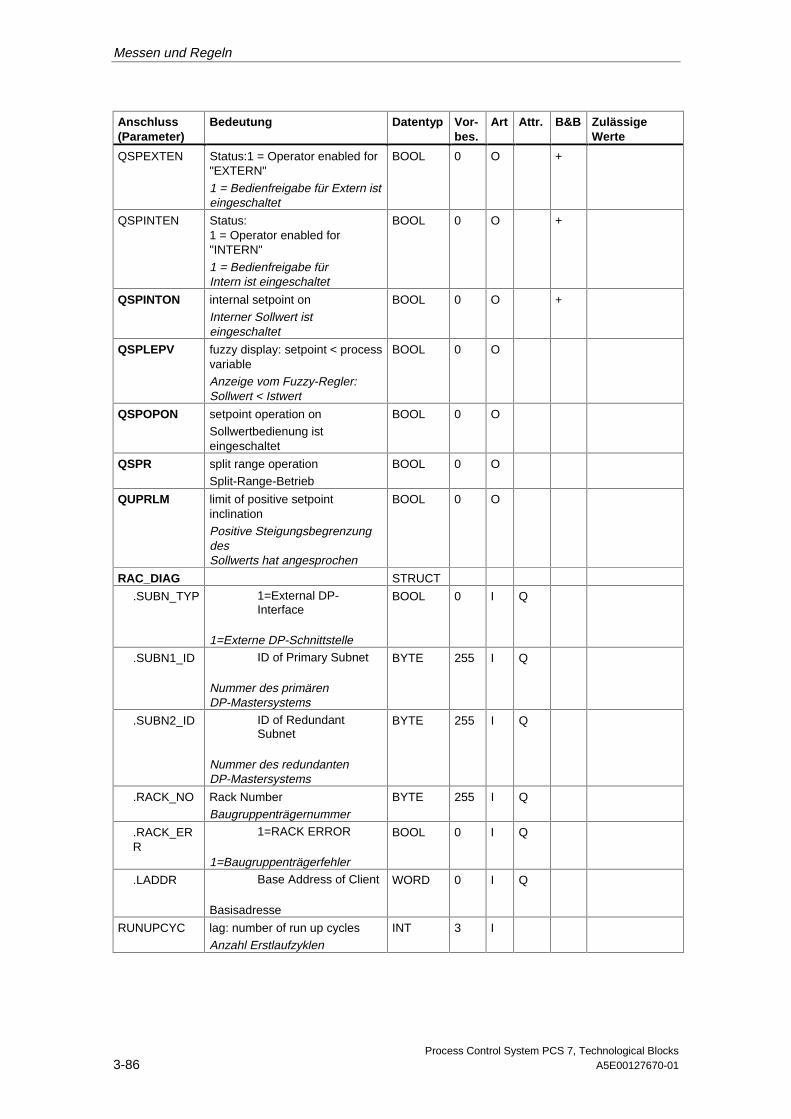
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-86 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QSPEXTEN Status:1 = Operator enabled for"EXTERN"
1 = Bedienfreigabe für Extern isteingeschaltet
BOOL 0 O +
QSPINTEN Status:1 = Operator enabled for"INTERN"
1 = Bedienfreigabe fürIntern ist eingeschaltet
BOOL 0 O +
QSPINTON internal setpoint onInterner Sollwert isteingeschaltet
BOOL 0 O +
QSPLEPV fuzzy display: setpoint < processvariableAnzeige vom Fuzzy-Regler:Sollwert < Istwert
BOOL 0 O
QSPOPON setpoint operation onSollwertbedienung isteingeschaltet
BOOL 0 O
QSPR split range operationSplit-Range-Betrieb
BOOL 0 O
QUPRLM limit of positive setpointinclinationPositive SteigungsbegrenzungdesSollwerts hat angesprochen
BOOL 0 O
RAC_DIAG STRUCT
.SUBN_TYP 1=External DP-Interface
1=Externe DP-Schnittstelle
BOOL 0 I Q
.SUBN1_ID ID of Primary Subnet
Nummer des primärenDP-Mastersystems
BYTE 255 I Q
.SUBN2_ID ID of RedundantSubnet
Nummer des redundantenDP-Mastersystems
BYTE 255 I Q
.RACK_NO Rack NumberBaugruppenträgernummer
BYTE 255 I Q
.RACK_ERR
1=RACK ERROR
1=Baugruppenträgerfehler
BOOL 0 I Q
.LADDR Base Address of Client
Basisadresse
WORD 0 I Q
RUNUPCYC lag: number of run up cyclesAnzahl Erstlaufzyklen
INT 3 I
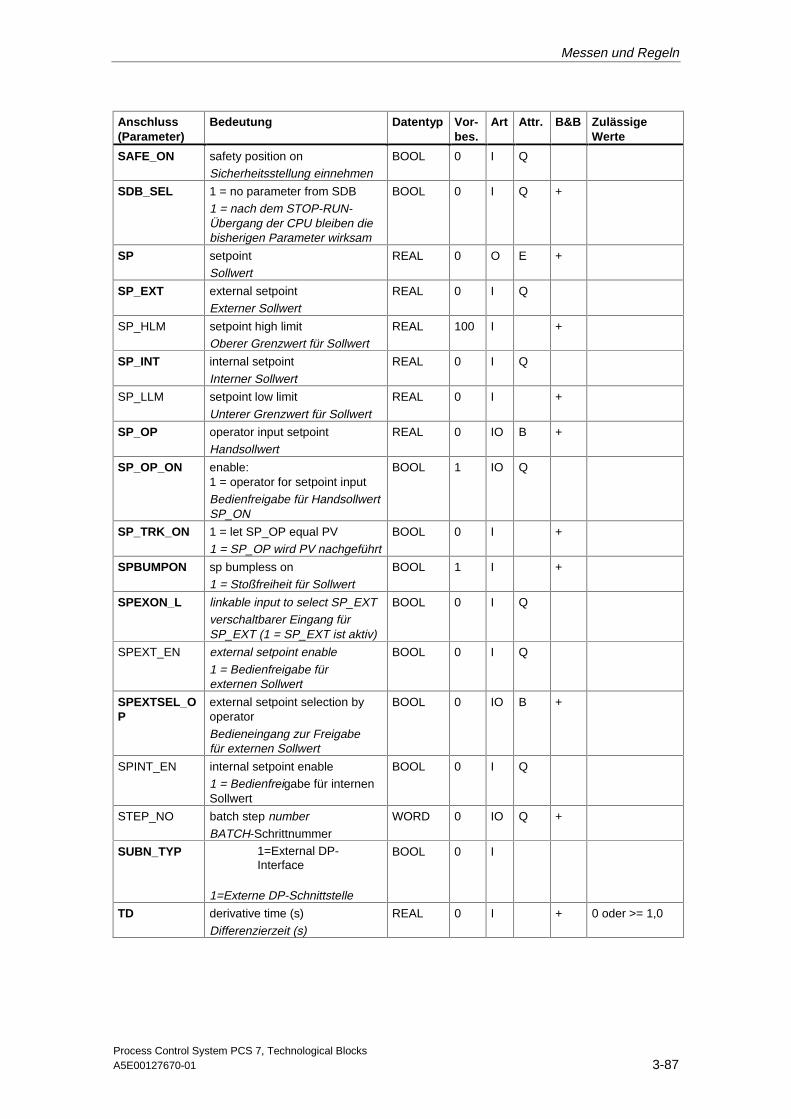
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-87
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
SAFE_ON safety position onSicherheitsstellung einnehmen
BOOL 0 I Q
SDB_SEL 1 = no parameter from SDB1 = nach dem STOP-RUN-Übergang der CPU bleiben diebisherigen Parameter wirksam
BOOL 0 I Q +
SP setpointSollwert
REAL 0 O E +
SP_EXT external setpointExterner Sollwert
REAL 0 I Q
SP_HLM setpoint high limitOberer Grenzwert für Sollwert
REAL 100 I +
SP_INT internal setpoint
Interner SollwertREAL 0 I Q
SP_LLM setpoint low limit
Unterer Grenzwert für SollwertREAL 0 I +
SP_OP operator input setpointHandsollwert
REAL 0 IO B +
SP_OP_ON enable:1 = operator for setpoint inputBedienfreigabe für HandsollwertSP_ON
BOOL 1 IO Q
SP_TRK_ON 1 = let SP_OP equal PV1 = SP_OP wird PV nachgeführt
BOOL 0 I +
SPBUMPON sp bumpless on1 = Stoßfreiheit für Sollwert
BOOL 1 I +
SPEXON_L linkable input to select SP_EXTverschaltbarer Eingang fürSP_EXT (1 = SP_EXT ist aktiv)
BOOL 0 I Q
SPEXT_EN external setpoint enable1 = Bedienfreigabe fürexternen Sollwert
BOOL 0 I Q
SPEXTSEL_OP
external setpoint selection byoperator
Bedieneingang zur Freigabefür externen Sollwert
BOOL 0 IO B +
SPINT_EN internal setpoint enable1 = Bedienfreigabe für internenSollwert
BOOL 0 I Q
STEP_NO batch step numberBATCH-Schrittnummer
WORD 0 IO Q +
SUBN_TYP 1=External DP-Interface
1=Externe DP-Schnittstelle
BOOL 0 I
TD derivative time (s)
Differenzierzeit (s)REAL 0 I + 0 oder >= 1,0
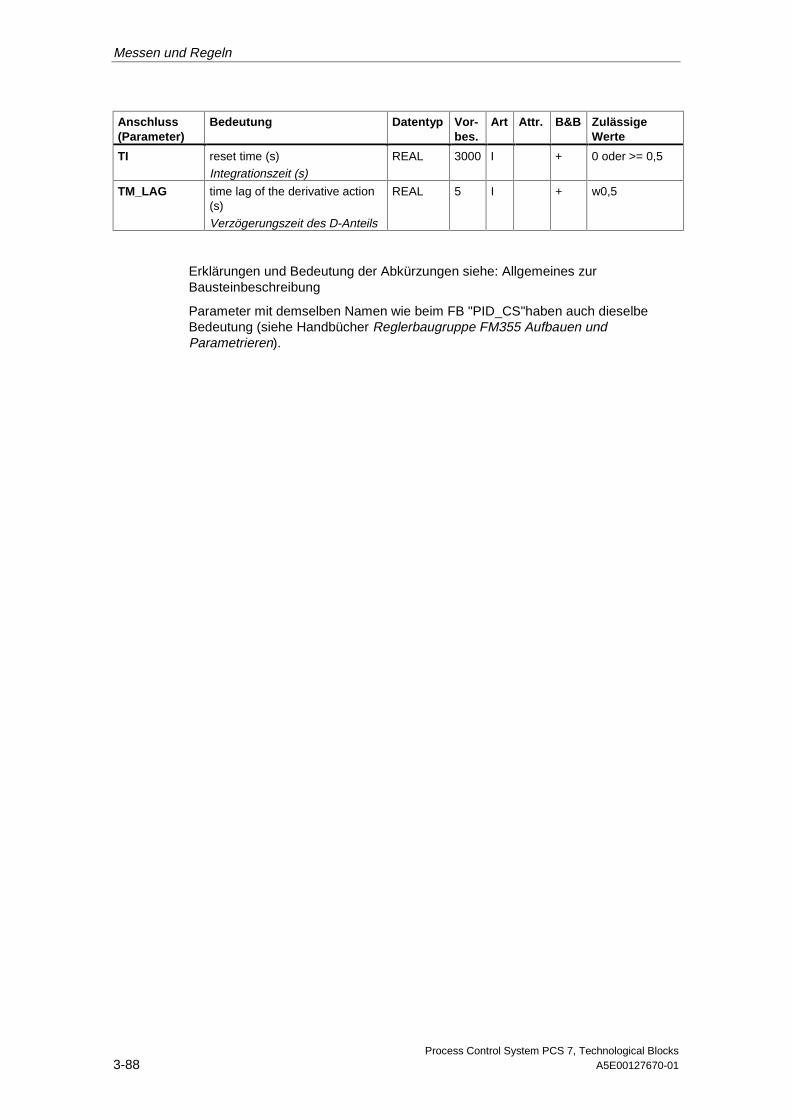
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-88 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
TI reset time (s)Integrationszeit (s)
REAL 3000 I + 0 oder >= 0,5
TM_LAG time lag of the derivative action(s)
Verzögerungszeit des D-Anteils
REAL 5 I + w0,5
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Parameter mit demselben Namen wie beim FB "PID_CS"haben auch dieselbeBedeutung (siehe Handbücher Reglerbaugruppe FM355 Aufbauen undParametrieren).
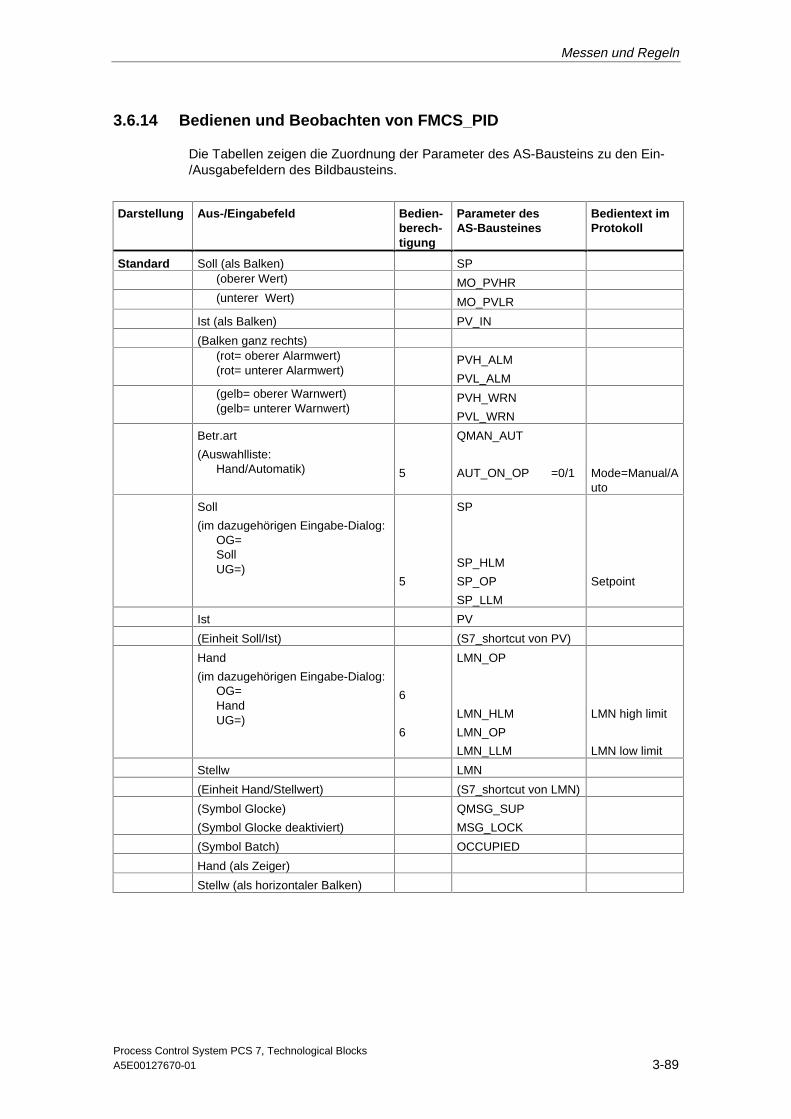
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-89
3.6.14 Bedienen und Beobachten von FMCS_PID
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Soll (als Balken) SP(oberer Wert) MO_PVHR(unterer Wert) MO_PVLR
Ist (als Balken) PV_IN
(Balken ganz rechts)(rot= oberer Alarmwert)(rot= unterer Alarmwert)
PVH_ALM
PVL_ALM(gelb= oberer Warnwert)(gelb= unterer Warnwert)
PVH_WRN
PVL_WRN
Betr.art
(Auswahlliste:Hand/Automatik) 5
QMAN_AUT
AUT_ON_OP =0/1 Mode=Manual/Auto
Soll
(im dazugehörigen Eingabe-Dialog:OG=SollUG=)
5
SP
SP_HLM
SP_OP
SP_LLM
Setpoint
Ist PV
(Einheit Soll/Ist) (S7_shortcut von PV)
Hand
(im dazugehörigen Eingabe-Dialog:OG=HandUG=)
6
6
LMN_OP
LMN_HLM
LMN_OP
LMN_LLM
LMN high limit
LMN low limit
Stellw LMN
(Einheit Hand/Stellwert) (S7_shortcut von LMN)
(Symbol Glocke)
(Symbol Glocke deaktiviert)
QMSG_SUP
MSG_LOCK
(Symbol Batch) OCCUPIED
Hand (als Zeiger)
Stellw (als horizontaler Balken)
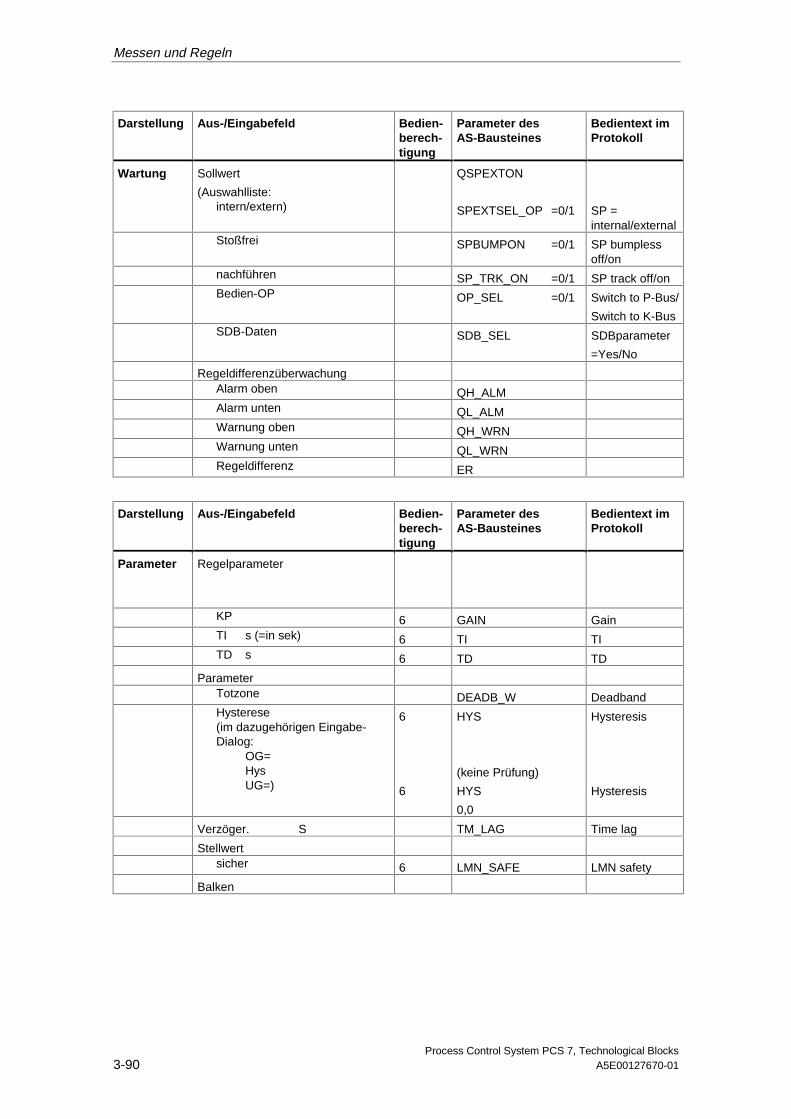
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-90 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung Sollwert
(Auswahlliste:intern/extern)
QSPEXTON
SPEXTSEL_OP =0/1 SP =internal/external
Stoßfrei SPBUMPON =0/1 SP bumplessoff/on
nachführen SP_TRK_ON =0/1 SP track off/onBedien-OP OP_SEL =0/1 Switch to P-Bus/
Switch to K-BusSDB-Daten SDB_SEL SDBparameter
=Yes/No
RegeldifferenzüberwachungAlarm oben QH_ALMAlarm unten QL_ALMWarnung oben QH_WRNWarnung unten QL_WRNRegeldifferenz ER
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Parameter Regelparameter
KP 6 GAIN GainTI s (=in sek) 6 TI TITD s 6 TD TD
ParameterTotzone DEADB_W DeadbandHysterese(im dazugehörigen Eingabe-Dialog:
OG=HysUG=)
6
6
HYS
(keine Prüfung)
HYS
0,0
Hysteresis
Hysteresis
Verzöger. S TM_LAG Time lag
Stellwertsicher 6 LMN_SAFE LMN safety
Balken
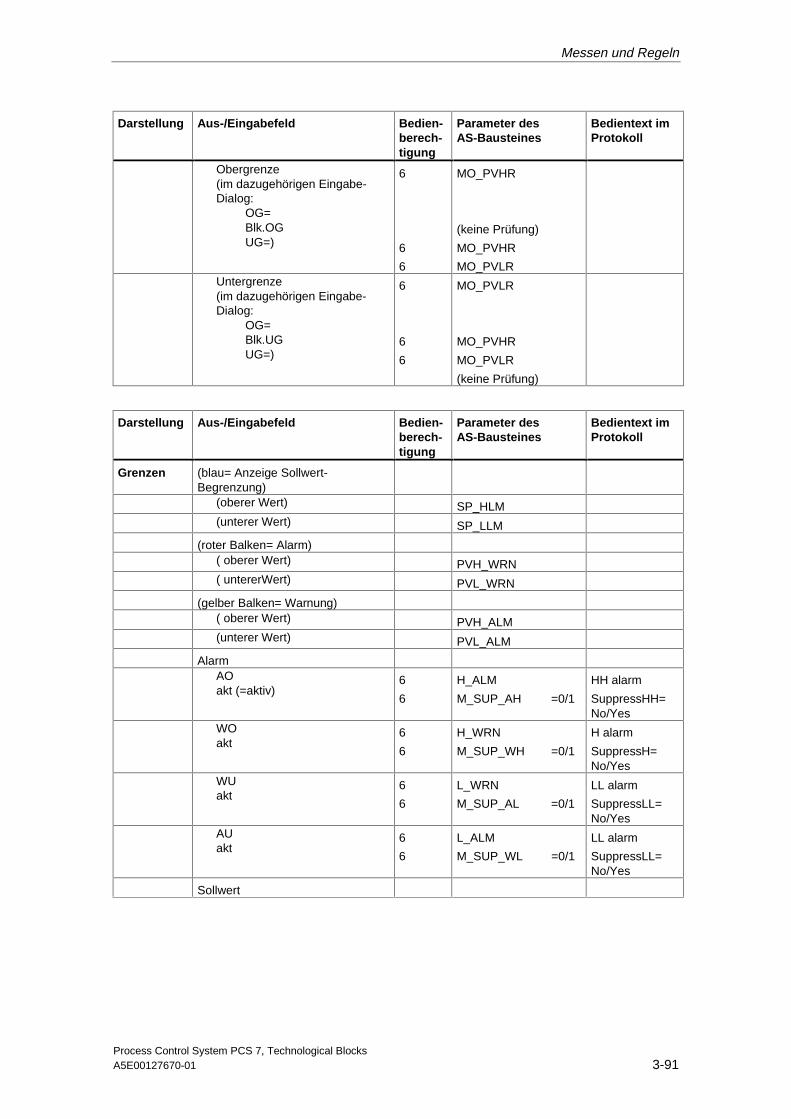
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-91
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Obergrenze(im dazugehörigen Eingabe-Dialog:
OG=Blk.OGUG=)
6
6
6
MO_PVHR
(keine Prüfung)
MO_PVHR
MO_PVLRUntergrenze(im dazugehörigen Eingabe-Dialog:
OG=Blk.UGUG=)
6
6
6
MO_PVLR
MO_PVHR
MO_PVLR
(keine Prüfung)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Grenzen (blau= Anzeige Sollwert-Begrenzung)
(oberer Wert) SP_HLM(unterer Wert) SP_LLM
(roter Balken= Alarm)( oberer Wert) PVH_WRN( untererWert) PVL_WRN
(gelber Balken= Warnung)( oberer Wert) PVH_ALM(unterer Wert) PVL_ALM
AlarmAOakt (=aktiv)
6
6
H_ALM
M_SUP_AH =0/1
HH alarm
SuppressHH=No/Yes
WOakt
6
6
H_WRN
M_SUP_WH =0/1
H alarm
SuppressH=No/Yes
WUakt
6
6
L_WRN
M_SUP_AL =0/1
LL alarm
SuppressLL=No/Yes
AUakt
6
6
L_ALM
M_SUP_WL =0/1
LL alarm
SuppressLL=No/Yes
Sollwert
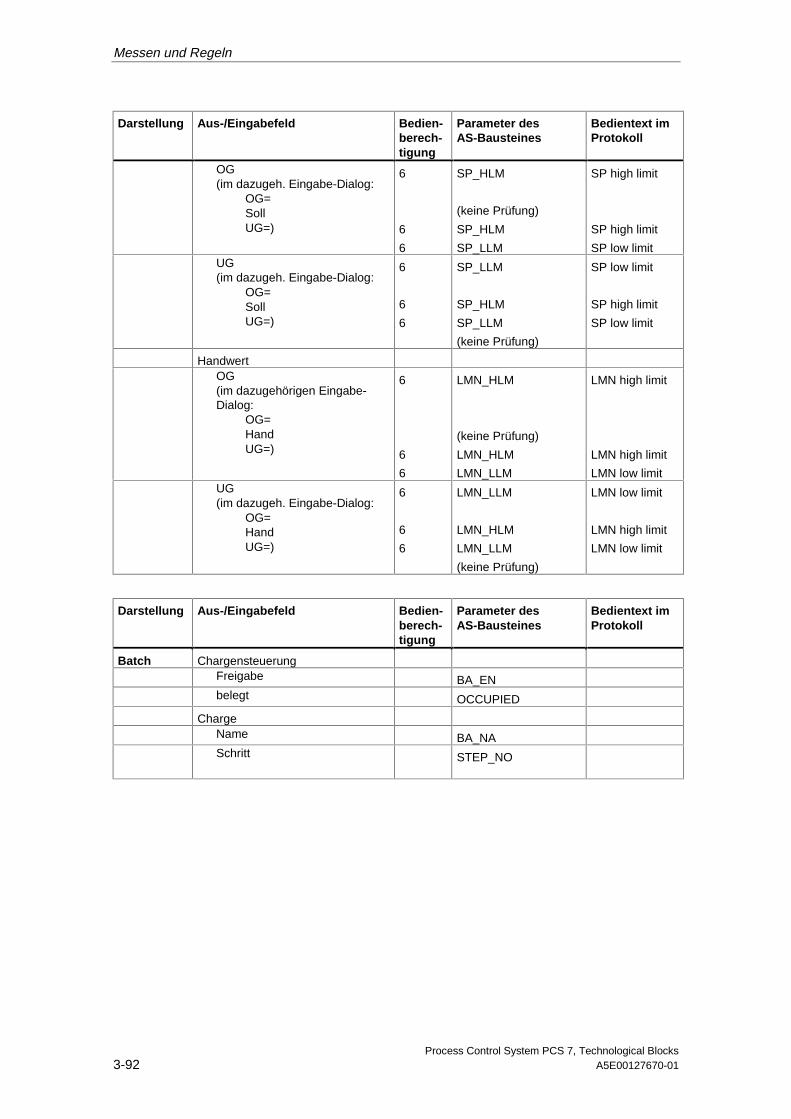
Messen und Regeln
Process Control System PCS 7, Technological Blocks3-92 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
OG(im dazugeh. Eingabe-Dialog:
OG=SollUG=)
6
6
6
SP_HLM
(keine Prüfung)
SP_HLM
SP_LLM
SP high limit
SP high limit
SP low limitUG(im dazugeh. Eingabe-Dialog:
OG=SollUG=)
6
6
6
SP_LLM
SP_HLM
SP_LLM
(keine Prüfung)
SP low limit
SP high limit
SP low limit
HandwertOG(im dazugehörigen Eingabe-Dialog:
OG=HandUG=)
6
6
6
LMN_HLM
(keine Prüfung)
LMN_HLM
LMN_LLM
LMN high limit
LMN high limit
LMN low limitUG(im dazugeh. Eingabe-Dialog:
OG=HandUG=)
6
6
6
LMN_LLM
LMN_HLM
LMN_LLM
(keine Prüfung)
LMN low limit
LMN high limit
LMN low limit
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
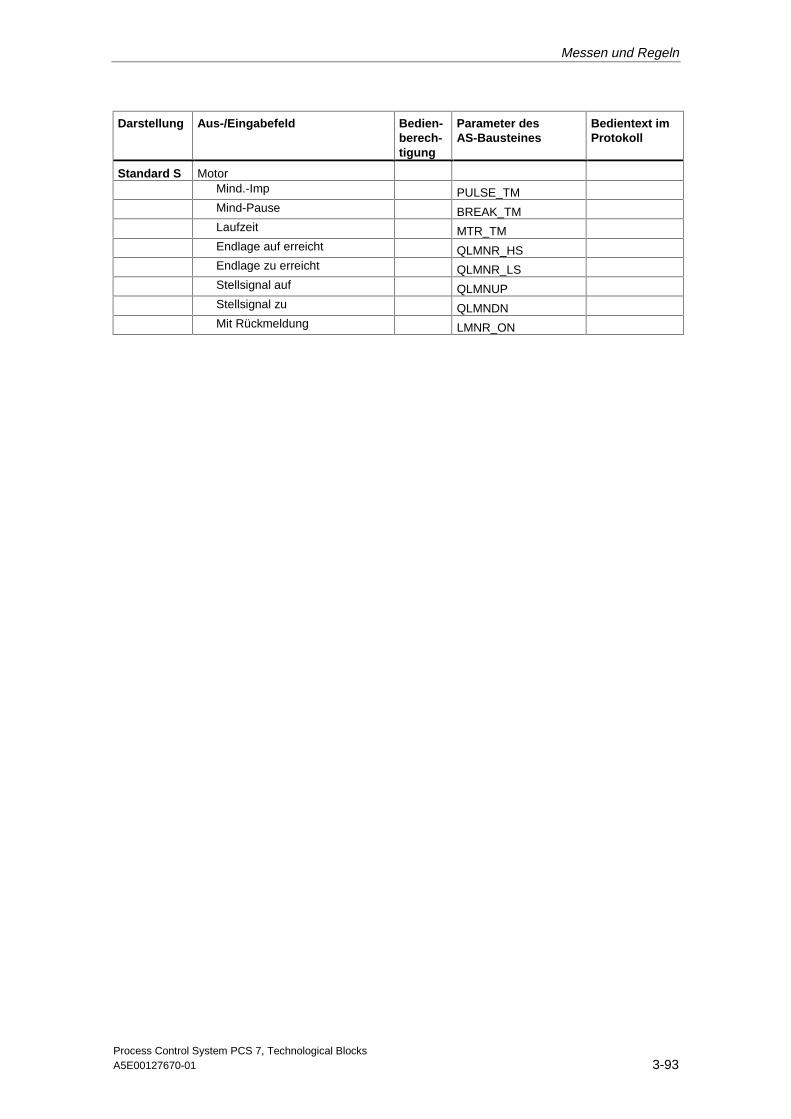
Messen und Regeln
Process Control System PCS 7, Technological BlocksA5E00127670-01 3-93
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard S MotorMind.-Imp PULSE_TMMind-Pause BREAK_TMLaufzeit MTR_TMEndlage auf erreicht QLMNR_HSEndlage zu erreicht QLMNR_LSStellsignal auf QLMNUPStellsignal zu QLMNDNMit Rückmeldung LMNR_ON

Messen und Regeln
Process Control System PCS 7, Technological Blocks3-94 A5E00127670-01
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-1
4 Motor und Ventil
4.1 MOT_REV: Motor mit zwei Drehrichtungen
4.1.1 Beschreibung von MOT_REV
Objektname (Art + Nummer)
FB 67
Aufrufende OBs
Der Weckalarm OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB 100 (siehe Anlaufverhalten).
Funktion
Der Baustein dient zur Ansteuerung von Motoren mit 2 Drehrichtungen (Rechts-/Linkslauf ). Wahlweise werden maximal 2 Rückmeldungen überwacht, die vonHilfsschützen erzeugt werden.
Arbeitsweise
Zur Steuerung des Motors stehen verschiedene Eingänge zur Verfügung. Sie sindin einer konkreten hierarchischen Abhängigkeit untereinander und zu denMotorzuständen implementiert. Besonders die Verriegelung, die Rückmeldungs-bzw. Drehrichtungsüberwachung und der Motorschutzschalter beeinflussen dieSteuersignale QSTART (1: ein, 0: aus) und QDIR (1: Links, 0: Rechtslauf).
Die Prioritätsverteilung der einzelnen Eingangsgrößen und Ereignisse bezüglichihres Einflusses auf die Steuersignale ist in der folgenden Tabellezusammengefasst. Einzelheiten erläutern die darauf folgenden Abschnitte.
Priorität: Ereignis:
Hoch Motorschutzfehler, wenn MSS_OFF = 1
⇑ Wartezeit bei Drehrichtungswechsel
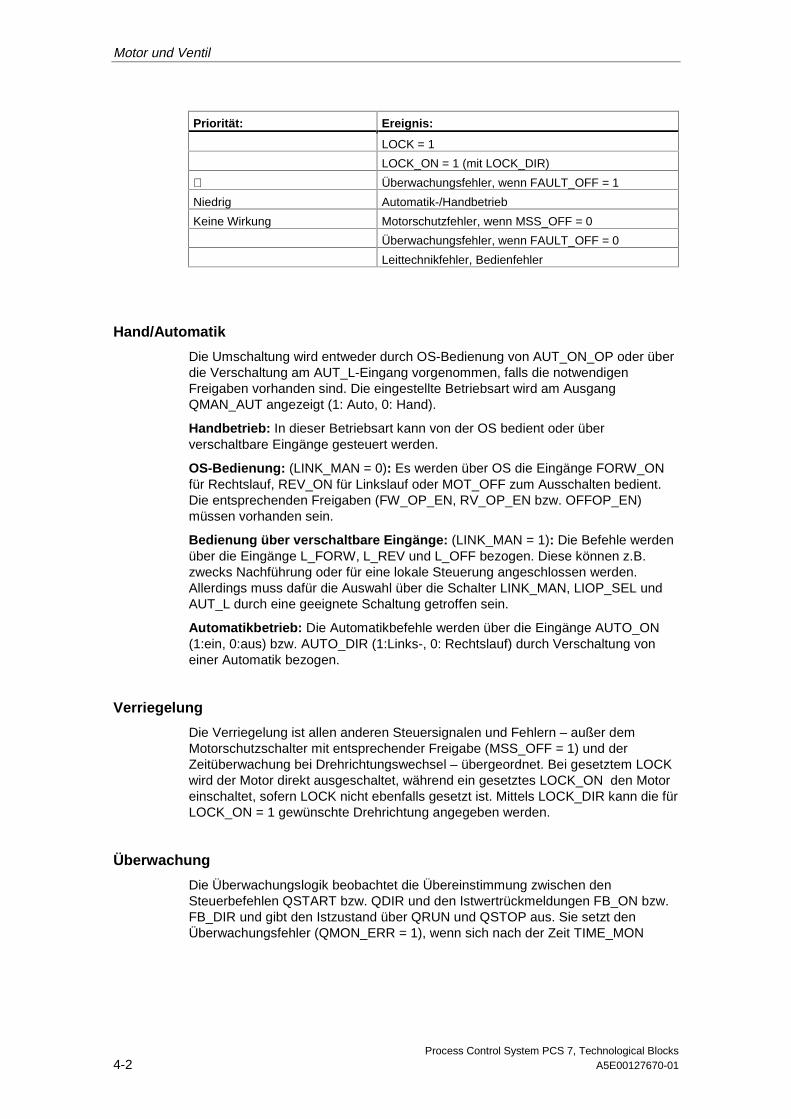
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-2 A5E00127670-01
Priorität: Ereignis:
LOCK = 1
LOCK_ON = 1 (mit LOCK_DIR)
⇓ Überwachungsfehler, wenn FAULT_OFF = 1
Niedrig Automatik-/Handbetrieb
Keine Wirkung Motorschutzfehler, wenn MSS_OFF = 0
Überwachungsfehler, wenn FAULT_OFF = 0
Leittechnikfehler, Bedienfehler
Hand/Automatik
Die Umschaltung wird entweder durch OS-Bedienung von AUT_ON_OP oder überdie Verschaltung am AUT_L-Eingang vorgenommen, falls die notwendigenFreigaben vorhanden sind. Die eingestellte Betriebsart wird am AusgangQMAN_AUT angezeigt (1: Auto, 0: Hand).
Handbetrieb: In dieser Betriebsart kann von der OS bedient oder überverschaltbare Eingänge gesteuert werden.
OS-Bedienung: (LINK_MAN = 0): Es werden über OS die Eingänge FORW_ONfür Rechtslauf, REV_ON für Linkslauf oder MOT_OFF zum Ausschalten bedient.Die entsprechenden Freigaben (FW_OP_EN, RV_OP_EN bzw. OFFOP_EN)müssen vorhanden sein.
Bedienung über verschaltbare Eingänge: (LINK_MAN = 1): Die Befehle werdenüber die Eingänge L_FORW, L_REV und L_OFF bezogen. Diese können z.B.zwecks Nachführung oder für eine lokale Steuerung angeschlossen werden.Allerdings muss dafür die Auswahl über die Schalter LINK_MAN, LIOP_SEL undAUT_L durch eine geeignete Schaltung getroffen sein.
Automatikbetrieb: Die Automatikbefehle werden über die Eingänge AUTO_ON(1:ein, 0:aus) bzw. AUTO_DIR (1:Links-, 0: Rechtslauf) durch Verschaltung voneiner Automatik bezogen.
Verriegelung
Die Verriegelung ist allen anderen Steuersignalen und Fehlern – außer demMotorschutzschalter mit entsprechender Freigabe (MSS_OFF = 1) und derZeitüberwachung bei Drehrichtungswechsel – übergeordnet. Bei gesetztem LOCKwird der Motor direkt ausgeschaltet, während ein gesetztes LOCK_ON den Motoreinschaltet, sofern LOCK nicht ebenfalls gesetzt ist. Mittels LOCK_DIR kann die fürLOCK_ON = 1 gewünschte Drehrichtung angegeben werden.
Überwachung
Die Überwachungslogik beobachtet die Übereinstimmung zwischen denSteuerbefehlen QSTART bzw. QDIR und den Istwertrückmeldungen FB_ON bzw.FB_DIR und gibt den Istzustand über QRUN und QSTOP aus. Sie setzt denÜberwachungsfehler (QMON_ERR = 1), wenn sich nach der Zeit TIME_MON
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-3
keine QSTART bzw. QDIR entsprechende Rückmeldung eingestellt hat oder diesesich ohne Anforderung durch QSTART bzw. QDIR unerwartet verändert.
Ist keine Rückmeldung vorhanden, so kann entweder QSTART mit FB_ON undQDIR mit FB_DIR verschaltet oder die Überwachung durch MONITOR = 0deaktiviert werden.
Der Parameter FAULT_OFF legt die Relevanz des Überwachungsfehlers fest. IstFAULT_OFF = 1, wird der Motor im Fehlerfall ausgeschaltet, während der Fehlerbei FAULT_OFF = 0 keine Auswirkung auf die Steuerausgänge hat.
Motorschutz
• Bei fallender Flanke des Motorschutzsignales MSS wird der Motorschutzfehlerspeichernd gesetzt und an den Ausgang QMSS_ST geleitet. Mit demParameter MSS_OFF wird festgelegt, ob lediglich eine Anzeige stattfindet(MSS_OFF = 0), oder ob der Motor ohne Beachtung aller anderen Eingängeund Systemzustände abgeregelt werden soll (MSS_OFF = 1).
Stoßfreies Umschalten
Um in allen Betriebssituationen ein stoßfreies Umschalten auf Handbetrieb zugewährleisten, werden die Handwerte FORW_ON, REV_ON und MOT_OFF immerden aktuellen Werten von QSTART und QDIR nachgeführt (Ausnahme:Drehrichtungswechsel).
Drehrichtungsumkehr
Wird diese angewählt, so wird folgendermaßen verfahren:
• Der Motor wird gestoppt (QSTART=0).
• Die interne Ausschaltüberwachung wartet die Zeitspanne TIME_OFF ab undstartet den Motor in die andere Richtung, sofern die Ausschaltüberwachungkeinen Fehler meldet. Hierbei ist zu beachten, dass die AusschaltzeitTIME_OFF die mutmaßliche Zeit bis zum tatsächlichen Stillstand des Motorsangibt, sodass die Drehrichtung ohne Schaden gewechselt werden kann. DieRückmeldung über den Motorstillstand verkürzt diese Zeit nicht, da dieseMeldung vom Hilfsschütz erzeugt wird und über den tatsächlichen Zustand desMotors keine Aussage macht.
Fehlerbehandlung
Der Motorschutzfehler (QMSS_ST = 1) und der Überwachungsfehler(QMON_ERR = 1) werden an die OS gemeldet und beeinflussen, wie obenbeschrieben, die Funktionsweise des Bausteines. Sie können entweder durchBedienung von RESET oder automatisch durch eine Verschaltung von L_RESETmit "1" bei steigender Flanke von MSS zurückgesetzt werden. Der LeittechnikfehlerCSF wird lediglich an die OS gemeldet und zusammen mit Motorschutz undÜberwachung auf den Sammelfehler QGR_ERR gelegt. Er hat auf denBausteinalgorithmus keinen weiteren Einfluss.
Bedienfehler werden ohne Meldung durch den Ausgang QOP_ERR angezeigt.
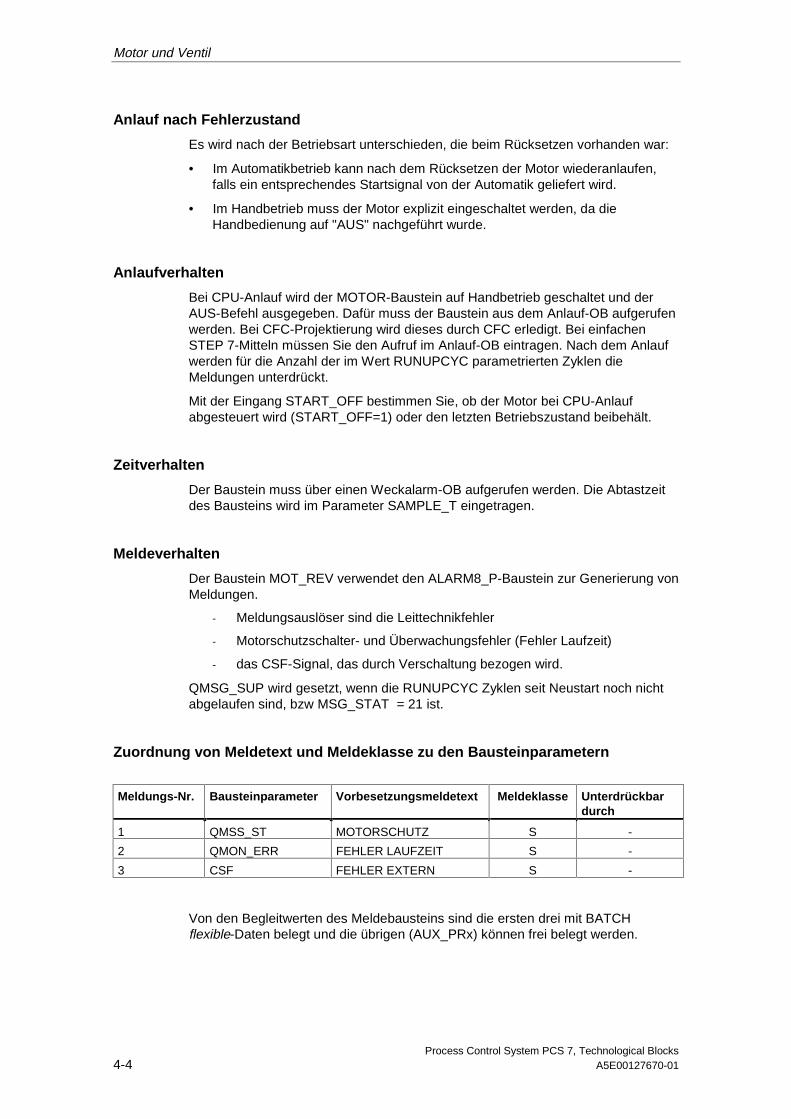
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-4 A5E00127670-01
Anlauf nach Fehlerzustand
Es wird nach der Betriebsart unterschieden, die beim Rücksetzen vorhanden war:
• Im Automatikbetrieb kann nach dem Rücksetzen der Motor wiederanlaufen,falls ein entsprechendes Startsignal von der Automatik geliefert wird.
• Im Handbetrieb muss der Motor explizit eingeschaltet werden, da dieHandbedienung auf "AUS" nachgeführt wurde.
Anlaufverhalten
Bei CPU-Anlauf wird der MOTOR-Baustein auf Handbetrieb geschaltet und derAUS-Befehl ausgegeben. Dafür muss der Baustein aus dem Anlauf-OB aufgerufenwerden. Bei CFC-Projektierung wird dieses durch CFC erledigt. Bei einfachenSTEP 7-Mitteln müssen Sie den Aufruf im Anlauf-OB eintragen. Nach dem Anlaufwerden für die Anzahl der im Wert RUNUPCYC parametrierten Zyklen dieMeldungen unterdrückt.
Mit der Eingang START_OFF bestimmen Sie, ob der Motor bei CPU-Anlaufabgesteuert wird (START_OFF=1) oder den letzten Betriebszustand beibehält.
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
Meldeverhalten
Der Baustein MOT_REV verwendet den ALARM8_P-Baustein zur Generierung vonMeldungen.
- Meldungsauslöser sind die Leittechnikfehler
- Motorschutzschalter- und Überwachungsfehler (Fehler Laufzeit)
- das CSF-Signal, das durch Verschaltung bezogen wird.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, bzw MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse Unterdrückbardurch
1 QMSS_ST MOTORSCHUTZ S -
2 QMON_ERR FEHLER LAUFZEIT S -
3 CSF FEHLER EXTERN S -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten belegt und die übrigen (AUX_PRx) können frei belegt werden.
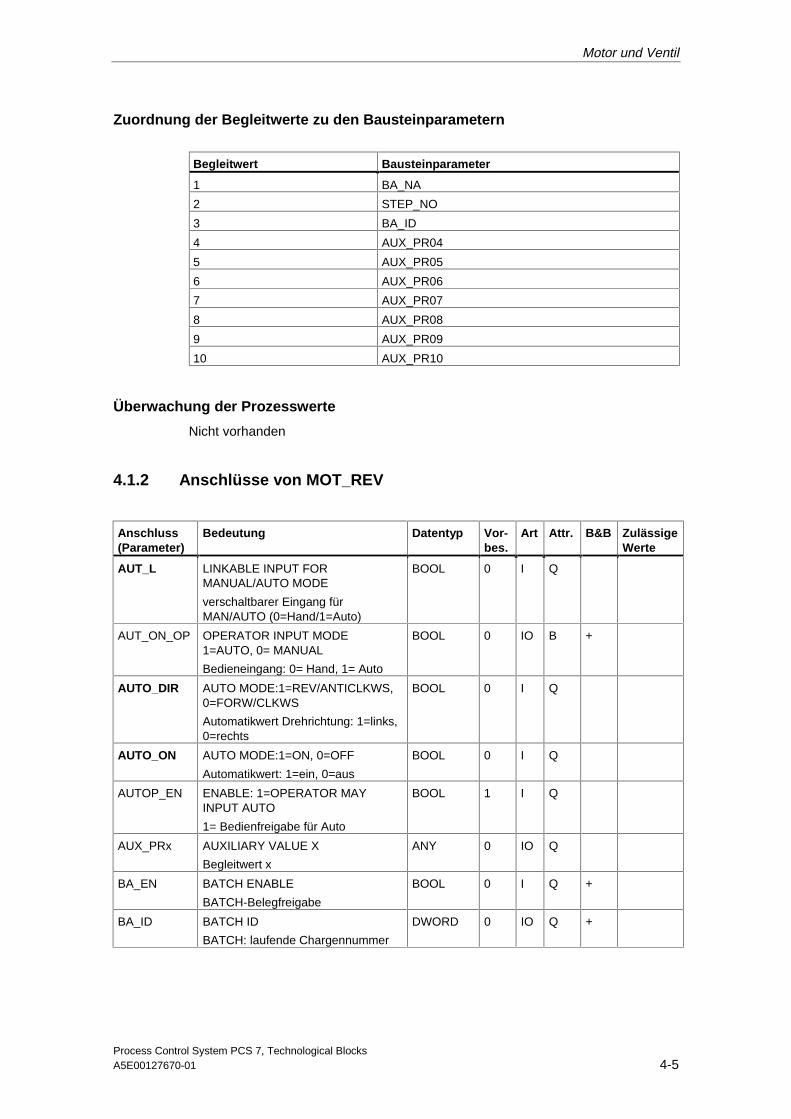
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-5
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 AUX_PR04
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden
4.1.2 Anschlüsse von MOT_REV
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUT_L LINKABLE INPUT FORMANUAL/AUTO MODE
verschaltbarer Eingang fürMAN/AUTO (0=Hand/1=Auto)
BOOL 0 I Q
AUT_ON_OP OPERATOR INPUT MODE1=AUTO, 0= MANUAL
Bedieneingang: 0= Hand, 1= Auto
BOOL 0 IO B +
AUTO_DIR AUTO MODE:1=REV/ANTICLKWS,0=FORW/CLKWS
Automatikwert Drehrichtung: 1=links,0=rechts
BOOL 0 I Q
AUTO_ON AUTO MODE:1=ON, 0=OFF
Automatikwert: 1=ein, 0=aus
BOOL 0 I Q
AUTOP_EN ENABLE: 1=OPERATOR MAYINPUT AUTO
1= Bedienfreigabe für Auto
BOOL 1 I Q
AUX_PRx AUXILIARY VALUE X
Begleitwert x
ANY 0 IO Q
BA_EN BATCH ENABLE
BATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH ID
BATCH: laufende Chargennummer
DWORD 0 IO Q +
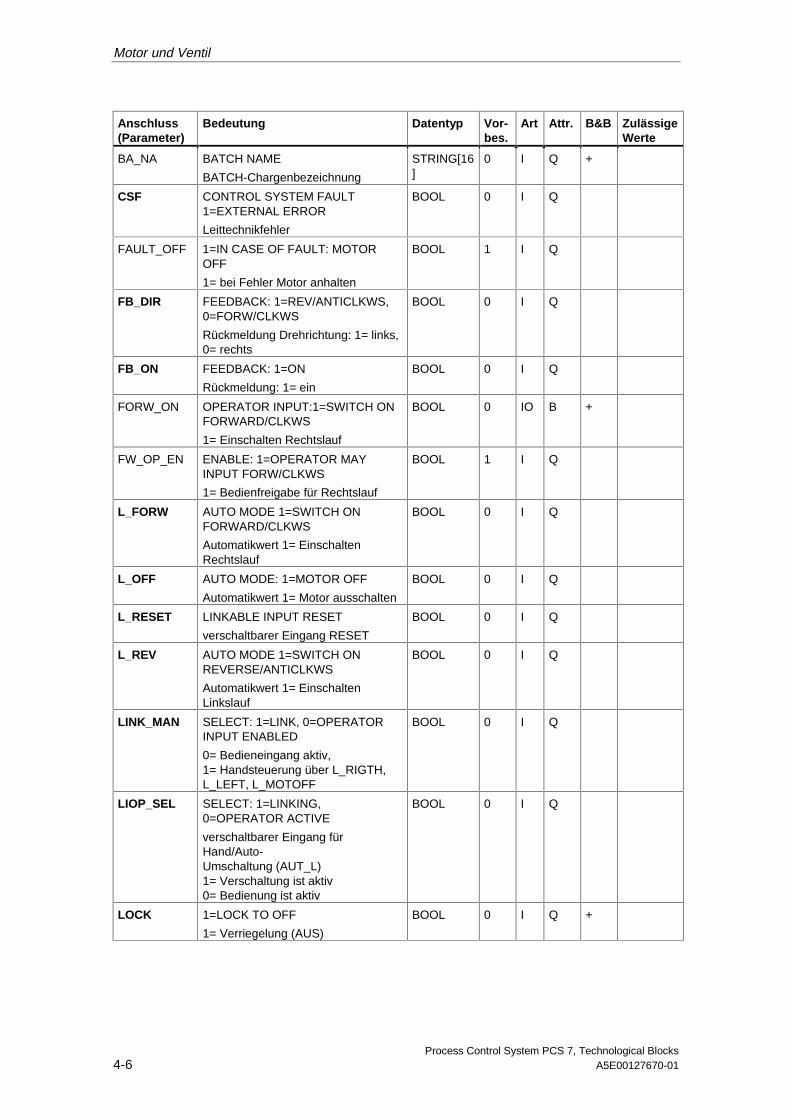
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-6 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
BA_NA BATCH NAME
BATCH-Chargenbezeichnung
STRING[16]
0 I Q +
CSF CONTROL SYSTEM FAULT1=EXTERNAL ERROR
Leittechnikfehler
BOOL 0 I Q
FAULT_OFF 1=IN CASE OF FAULT: MOTOROFF
1= bei Fehler Motor anhalten
BOOL 1 I Q
FB_DIR FEEDBACK: 1=REV/ANTICLKWS,0=FORW/CLKWS
Rückmeldung Drehrichtung: 1= links,0= rechts
BOOL 0 I Q
FB_ON FEEDBACK: 1=ON
Rückmeldung: 1= ein
BOOL 0 I Q
FORW_ON OPERATOR INPUT:1=SWITCH ONFORWARD/CLKWS
1= Einschalten Rechtslauf
BOOL 0 IO B +
FW_OP_EN ENABLE: 1=OPERATOR MAYINPUT FORW/CLKWS
1= Bedienfreigabe für Rechtslauf
BOOL 1 I Q
L_FORW AUTO MODE 1=SWITCH ONFORWARD/CLKWS
Automatikwert 1= EinschaltenRechtslauf
BOOL 0 I Q
L_OFF AUTO MODE: 1=MOTOR OFF
Automatikwert 1= Motor ausschalten
BOOL 0 I Q
L_RESET LINKABLE INPUT RESET
verschaltbarer Eingang RESET
BOOL 0 I Q
L_REV AUTO MODE 1=SWITCH ONREVERSE/ANTICLKWS
Automatikwert 1= EinschaltenLinkslauf
BOOL 0 I Q
LINK_MAN SELECT: 1=LINK, 0=OPERATORINPUT ENABLED
0= Bedieneingang aktiv,1= Handsteuerung über L_RIGTH,L_LEFT, L_MOTOFF
BOOL 0 I Q
LIOP_SEL SELECT: 1=LINKING,0=OPERATOR ACTIVE
verschaltbarer Eingang fürHand/Auto-Umschaltung (AUT_L)1= Verschaltung ist aktiv0= Bedienung ist aktiv
BOOL 0 I Q
LOCK 1=LOCK TO OFF
1= Verriegelung (AUS)
BOOL 0 I Q +
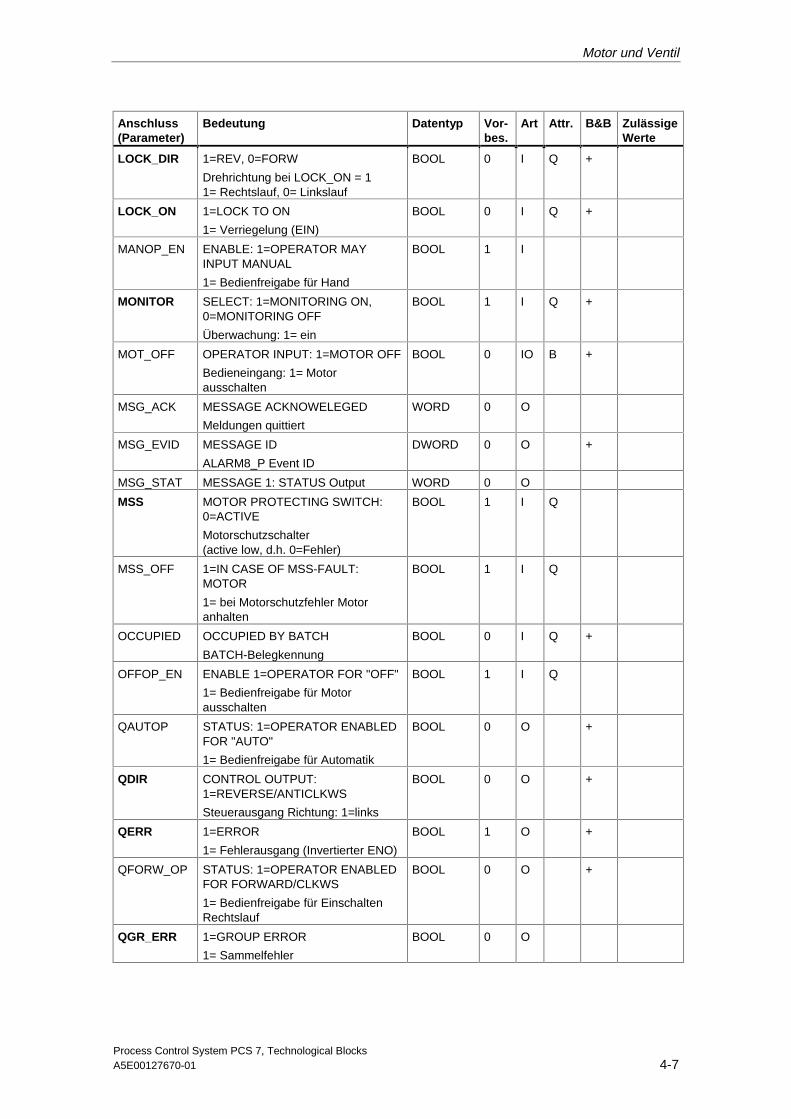
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-7
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
LOCK_DIR 1=REV, 0=FORW
Drehrichtung bei LOCK_ON = 11= Rechtslauf, 0= Linkslauf
BOOL 0 I Q +
LOCK_ON 1=LOCK TO ON
1= Verriegelung (EIN)
BOOL 0 I Q +
MANOP_EN ENABLE: 1=OPERATOR MAYINPUT MANUAL
1= Bedienfreigabe für Hand
BOOL 1 I
MONITOR SELECT: 1=MONITORING ON,0=MONITORING OFF
Überwachung: 1= ein
BOOL 1 I Q +
MOT_OFF OPERATOR INPUT: 1=MOTOR OFF
Bedieneingang: 1= Motorausschalten
BOOL 0 IO B +
MSG_ACK MESSAGE ACKNOWELEGED
Meldungen quittiert
WORD 0 O
MSG_EVID MESSAGE ID
ALARM8_P Event ID
DWORD 0 O +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
MSS MOTOR PROTECTING SWITCH:0=ACTIVE
Motorschutzschalter(active low, d.h. 0=Fehler)
BOOL 1 I Q
MSS_OFF 1=IN CASE OF MSS-FAULT:MOTOR
1= bei Motorschutzfehler Motoranhalten
BOOL 1 I Q
OCCUPIED OCCUPIED BY BATCH
BATCH-Belegkennung
BOOL 0 I Q +
OFFOP_EN ENABLE 1=OPERATOR FOR "OFF"
1= Bedienfreigabe für Motorausschalten
BOOL 1 I Q
QAUTOP STATUS: 1=OPERATOR ENABLEDFOR "AUTO"
1= Bedienfreigabe für Automatik
BOOL 0 O +
QDIR CONTROL OUTPUT:1=REVERSE/ANTICLKWS
Steuerausgang Richtung: 1=links
BOOL 0 O +
QERR 1=ERROR
1= Fehlerausgang (Invertierter ENO)
BOOL 1 O +
QFORW_OP STATUS: 1=OPERATOR ENABLEDFOR FORWARD/CLKWS
1= Bedienfreigabe für EinschaltenRechtslauf
BOOL 0 O +
QGR_ERR 1=GROUP ERROR
1= Sammelfehler
BOOL 0 O
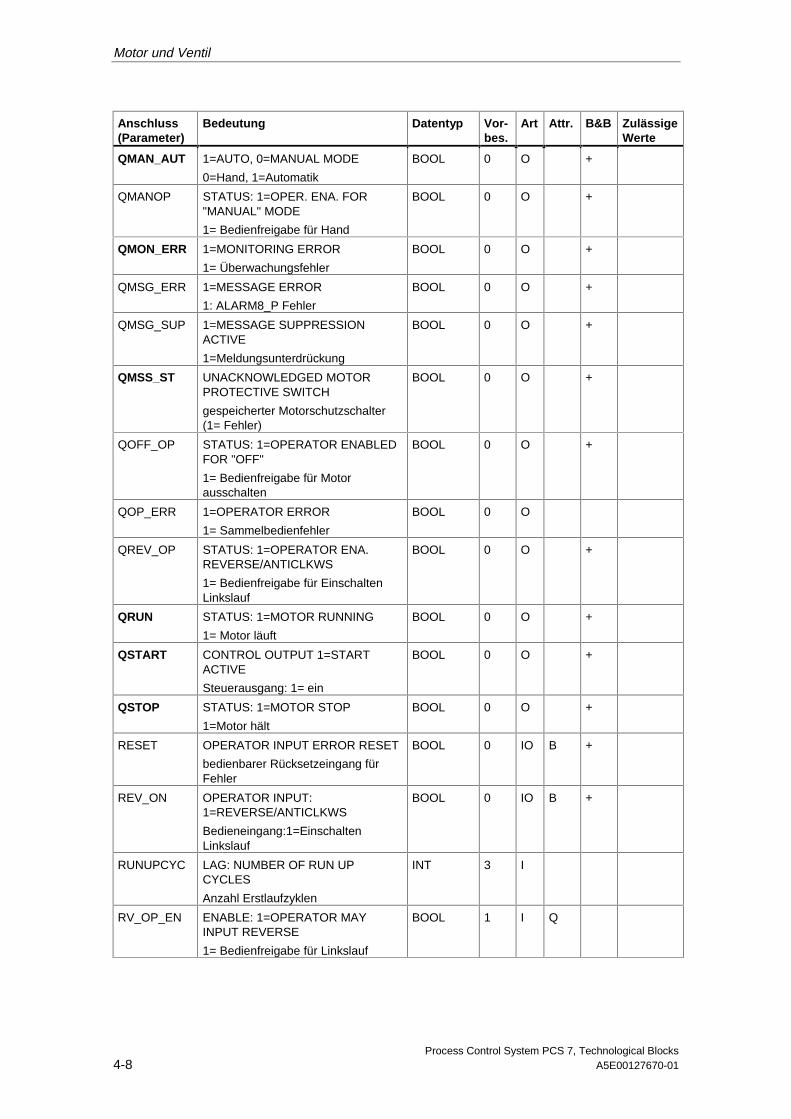
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-8 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QMAN_AUT 1=AUTO, 0=MANUAL MODE
0=Hand, 1=Automatik
BOOL 0 O +
QMANOP STATUS: 1=OPER. ENA. FOR"MANUAL" MODE
1= Bedienfreigabe für Hand
BOOL 0 O +
QMON_ERR 1=MONITORING ERROR
1= Überwachungsfehler
BOOL 0 O +
QMSG_ERR 1=MESSAGE ERROR
1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE
1=Meldungsunterdrückung
BOOL 0 O +
QMSS_ST UNACKNOWLEDGED MOTORPROTECTIVE SWITCH
gespeicherter Motorschutzschalter(1= Fehler)
BOOL 0 O +
QOFF_OP STATUS: 1=OPERATOR ENABLEDFOR "OFF"
1= Bedienfreigabe für Motorausschalten
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1= Sammelbedienfehler
BOOL 0 O
QREV_OP STATUS: 1=OPERATOR ENA.REVERSE/ANTICLKWS
1= Bedienfreigabe für EinschaltenLinkslauf
BOOL 0 O +
QRUN STATUS: 1=MOTOR RUNNING
1= Motor läuft
BOOL 0 O +
QSTART CONTROL OUTPUT 1=STARTACTIVE
Steuerausgang: 1= ein
BOOL 0 O +
QSTOP STATUS: 1=MOTOR STOP
1=Motor hält
BOOL 0 O +
RESET OPERATOR INPUT ERROR RESET
bedienbarer Rücksetzeingang fürFehler
BOOL 0 IO B +
REV_ON OPERATOR INPUT:1=REVERSE/ANTICLKWS
Bedieneingang:1=EinschaltenLinkslauf
BOOL 0 IO B +
RUNUPCYC LAG: NUMBER OF RUN UPCYCLES
Anzahl Erstlaufzyklen
INT 3 I
RV_OP_EN ENABLE: 1=OPERATOR MAYINPUT REVERSE
1= Bedienfreigabe für Linkslauf
BOOL 1 I Q
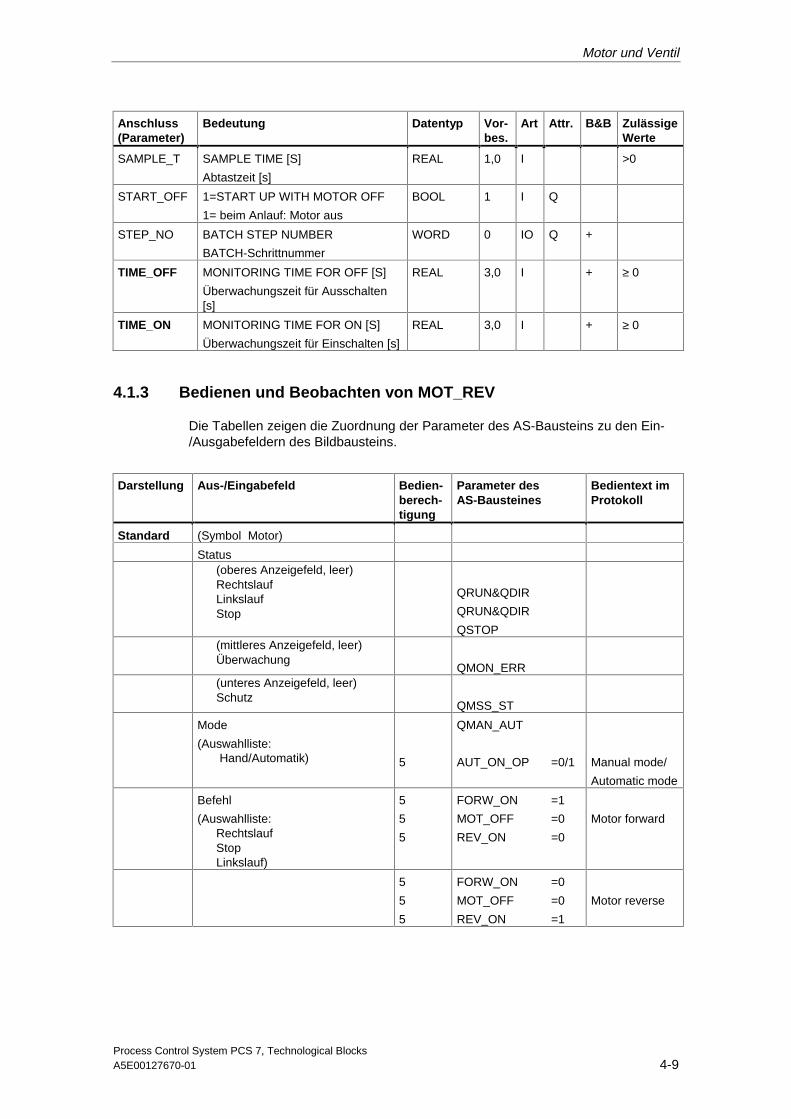
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-9
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
SAMPLE_T SAMPLE TIME [S]
Abtastzeit [s]
REAL 1,0 I >0
START_OFF 1=START UP WITH MOTOR OFF
1= beim Anlauf: Motor aus
BOOL 1 I Q
STEP_NO BATCH STEP NUMBER
BATCH-Schrittnummer
WORD 0 IO Q +
TIME_OFF MONITORING TIME FOR OFF [S]
Überwachungszeit für Ausschalten[s]
REAL 3,0 I + ≥ 0
TIME_ON MONITORING TIME FOR ON [S]
Überwachungszeit für Einschalten [s]
REAL 3,0 I + ≥ 0
4.1.3 Bedienen und Beobachten von MOT_REV
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard (Symbol Motor)
Status(oberes Anzeigefeld, leer)RechtslaufLinkslaufStop
QRUN&QDIR
QRUN&QDIR
QSTOP(mittleres Anzeigefeld, leer)Überwachung
QMON_ERR(unteres Anzeigefeld, leer)Schutz
QMSS_ST
Mode
(Auswahlliste: Hand/Automatik) 5
QMAN_AUT
AUT_ON_OP =0/1 Manual mode/
Automatic mode
Befehl
(Auswahlliste:RechtslaufStopLinkslauf)
5
5
5
FORW_ON =1
MOT_OFF =0
REV_ON =0
Motor forward
5
5
5
FORW_ON =0
MOT_OFF =0
REV_ON =1
Motor reverse
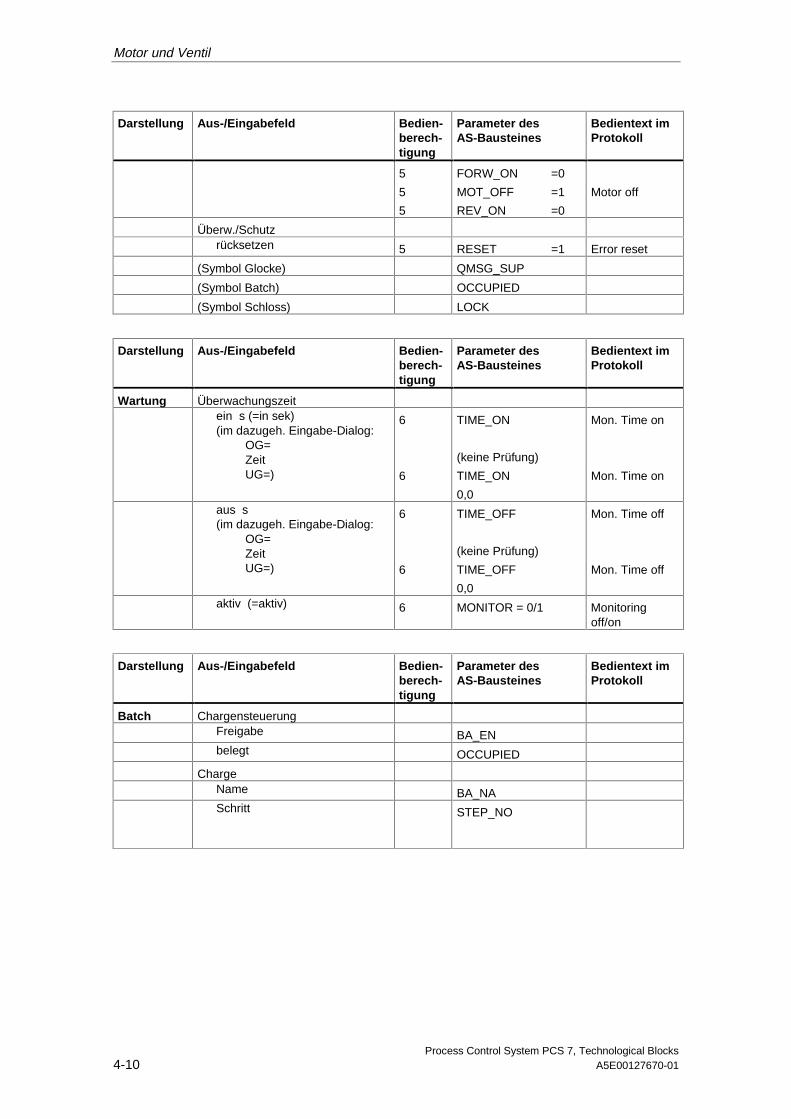
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-10 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
5
5
5
FORW_ON =0
MOT_OFF =1
REV_ON =0
Motor off
Überw./Schutzrücksetzen 5 RESET =1 Error reset
(Symbol Glocke) QMSG_SUP
(Symbol Batch) OCCUPIED
(Symbol Schloss) LOCK
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung Überwachungszeitein s (=in sek)(im dazugeh. Eingabe-Dialog:
OG=ZeitUG=)
6
6
TIME_ON
(keine Prüfung)
TIME_ON
0,0
Mon. Time on
Mon. Time on
aus s(im dazugeh. Eingabe-Dialog:
OG=ZeitUG=)
6
6
TIME_OFF
(keine Prüfung)
TIME_OFF
0,0
Mon. Time off
Mon. Time off
aktiv (=aktiv) 6 MONITOR = 0/1 Monitoringoff/on
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-11
4.2 MOT_SPED: Motor mit zwei Geschwindigkeiten
4.2.1 Beschreibung von MOT_SPED
Objektname (Art + Nummer)
FB 68
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB100 (siehe Anlaufverhalten).
Funktion
Der Baustein dient zur Ansteuerung von Motoren mit 2 Geschwindigkeiten(langsam/schnell). Wahlweise werden maximal 2 Rückmeldungen überwacht, dievon Hilfsschützen erzeugt werden.
Arbeitsweise
Zur Steuerung des Motors stehen verschiedene Eingänge zur Verfügung. Sie sindin einer konkreten hierarchischen Abhängigkeit untereinander und zu denMotorzuständen implementiert. Besonders die Verriegelung, dieRückmeldungsüberwachung und der Motorschutzschalter beeinflussen dieSteuersignale QSTART (1: ein, 0: aus) und QSPEED (1: schnell, 0: langsam).
Die Prioritätsverteilung der einzelnen Eingangsgrößen und Ereignisse bezüglichihres Einflusses auf die Steuersignale ist in der folgenden Tabellezusammengefasst. Einzelheiten erläutern die darauf folgenden Abschnitte.
Priorität: Ereignis:
Hoch Motorschutzfehler, wenn MSS_OFF = 1
LOCK = 1
c LOCK_ON = 1 (mit LOCK_SPD)
Überwachungsfehler, wenn FAULT_OFF = 1
Niedrig Automatik-/Handbetrieb
Keine Wirkung Motorschutzfehler, wenn MSS_OFF = 0
Überwachungsfehler, wenn FAULT_OFF = 0
Leittechnikfehler, Bedienfehler
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-12 A5E00127670-01
Hinweis
Auslaufzeiten beim Umschalten von der schnellen auf die langsame Drehzahlmüssen mit einen Timer (Einschaltverzögerung) außerhalb des Bausteinseingestellt werden.
Hand/Automatik
Die Umschaltung erfolgt entweder durch OS-Bedienung von AUT_ON_OP oderüber die Verschaltung am AUT_L-Eingang, falls die notwendigen Freigabenvorhanden sind. Die eingestellte Betriebsart wird am Ausgang QMAN_AUTangezeigt (1: Auto, 0: Hand).
• Handbetrieb: In dieser Betriebsart kann von der OS bedient oder überverschaltbare Eingänge gesteuert werden.
- OS-Bedienung: (LINK_MAN = 0): Es werden über OS die EingängeSP1_ON für Langsamlauf, SP2_ON für Schnelllauf oder MOT_OFF zumAusschalten bedient. Die Freigaben dafür (S1_OP_EN, S2_OP_EN bzw.OFFOP_EN) müssen vorhanden sein.
- Bedienung über verschaltbare Eingänge: (LINK_MAN = 1): Die Befehlewerden über die Eingänge L_SP1, L_SP2 und L_OFF bezogen. Diesekönnen z.B. zwecks Nachführung oder für eine lokale Steuerungangeschlossen werden. Allerdings muss dafür die Auswahl über dieSchalter LINK_MAN, LIOP_SEL und AUT_L durch eine geeigneteSchaltung getroffen sein.
- Automatikbetrieb: Die Automatikbefehle werden über die EingängeAUTO_ON (1:ein, 0:aus) bzw. AUTO_SPD (1:schnell-, 0: langsam) durchVerschaltung von einer Automatik bezogen.
Verriegelung
Die Verriegelung ist allen anderen Steuersignalen und Fehlern – außer demMotorschutzschalter mit entsprechender Freigabe (MSS_OFF = 1) – übergeordnet.Bei gesetztem LOCK wird der Motor direkt ausgeschaltet, während ein gesetztesLOCK_ON den Motor einschaltet, sofern LOCK nicht ebenfalls gesetzt ist. MittelsLOCK_SPD kann die für LOCK_ON = 1 gewünschte Motordrehzahl angegebenwerden (1: schnell, 0: langsam).
Überwachung
Die Überwachungslogik beobachtet die Übereinstimmung zwischen denSteuerbefehlen QSTART bzw. QSPEED und den Istwertrückmeldungen FB_ONbzw. FB_SPEED und gibt den Istzustand über QRUN und QSTOP aus. Sie setztden Überwachungsfehler (QMON_ERR = 1), wenn sich nach der Zeit TIME_MONkeine QSTART bzw. QSPEED entsprechende Rückmeldung eingestellt hat oderdiese sich ohne Anforderung durch QSTART bzw. QSPEED unerwartet verändert.
Ist keine Rückmeldung vorhanden, so kann entweder QSTART mit FB_ON undQSPEED mit FB_SPEED verschaltet oder die Überwachung durch MONITOR = 0deaktiviert werden.
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-13
Der Parameter FAULT_OFF legt die Relevanz des Überwachungsfehlers fest. IstFAULT_OFF = 1, wird der Motor im Fehlerfall ausgeschaltet, während der Fehlerbei FAULT_OFF = 0 keine Auswirkung auf die Steuerausgänge hat.
Motorschutz
Bei fallender Flanke des Motorschutzsignales MSS wird der Motorschutzfehlerspeichernd gesetzt und an den Ausgang QMSS_ST geleitet. Mit dem ParameterMSS_OFF wird festgelegt, ob lediglich eine Anzeige stattfindet (MSS_OFF = 0),oder ob der Motor ohne Beachtung aller anderen Eingänge und Systemzuständeabgeregelt werden soll (MSS_OFF = 1).
Stoßfreies Umschalten
Um in allen Betriebssituationen ein stoßfreies Umschalten auf Handbetrieb zugewährleisten, werden die Handwerte SP1_ON, SP2_ON und MOT_OFF immerden aktuellen Werten von QSTART und QSPEED nachgeführt.
Fehlerbehandlung
Der Motorschutzfehler (QMSS_ST = 1) und der Überwachungsfehler (QMON_ERR= 1) werden an die OS gemeldet und beeinflussen, wie oben beschrieben, dieFunktionsweise des Bausteines. Sie können entweder durch Bedienung vonRESET oder automatisch durch eine Verschaltung von L_RESET mit "1" beisteigender Flanke von MSS zurückgesetzt werden. Der Leittechnikfehler CSF wirdlediglich an die OS gemeldet und zusammen mit Motorschutz und Überwachungauf den Sammelfehler QGR_ERR gelegt. Er hat auf den Bausteinalgorithmuskeinen weiteren Einfluss.
Bedienfehler werden ohne Meldung durch den Ausgang QOP_ERR angezeigt.
Anlauf nach Fehlerzustand
Es wird nach der Betriebsart unterschieden, die beim Rücksetzen vorhanden war:
• Im Automatikbetrieb kann nach dem Rücksetzen der Motor wiederanlaufen,falls ein entsprechendes Startsignal von der Automatik geliefert wird.
• Im Handbetrieb muss der Motor explizit eingeschaltet werden, da dieHandbedienung auf "AUS" nachgeführt wurde.
Anlaufverhalten
Bei CPU-Anlauf wird der MOTOR-Baustein auf Handbetrieb geschaltet und derAUS-Befehl ausgegeben. Dafür muss der Baustein aus dem Anlauf-OB aufgerufenwerden. Bei CFC-Projektierung wird dieses durch CFC erledigt. Bei einfachenSTEP 7-Mitteln müssen Sie den Aufruf im Anlauf-OB eintragen. Nach dem Anlaufwerden für die Anzahl der im Wert RUNUPCYC parametrierten Zyklen dieMeldungen unterdrückt.
Mit der Eingang START_OFF bestimmen Sie, ob der Motor bei CPU-Anlaufabgesteuert wird (START_OFF=1) oder den letzten Betriebszustand beibehält.
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-14 A5E00127670-01
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
Meldeverhalten
Der Baustein MOT_SPED verwendet den ALARM8_P-Baustein zur Generierungvon Meldungen. Meldungsauslöser sind:
• Leittechnikfehler
• Motorschutzschalter- und Überwachungsfehler (Fehler Laufzeit)
• das CSF-Signal, das durch Verschaltung bezogen wird.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, bzw MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse Unterdrückbardurch
1 QMSS_ST MOTORSCHUTZ S -
2 QMON_ERR FEHLER LAUFZEIT S -
3 CSF FEHLER EXTERN S -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit Batch flexible-Daten belegt und die übrigen (AUX_PRx) können frei belegt werden.
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 AUX_PR04
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden
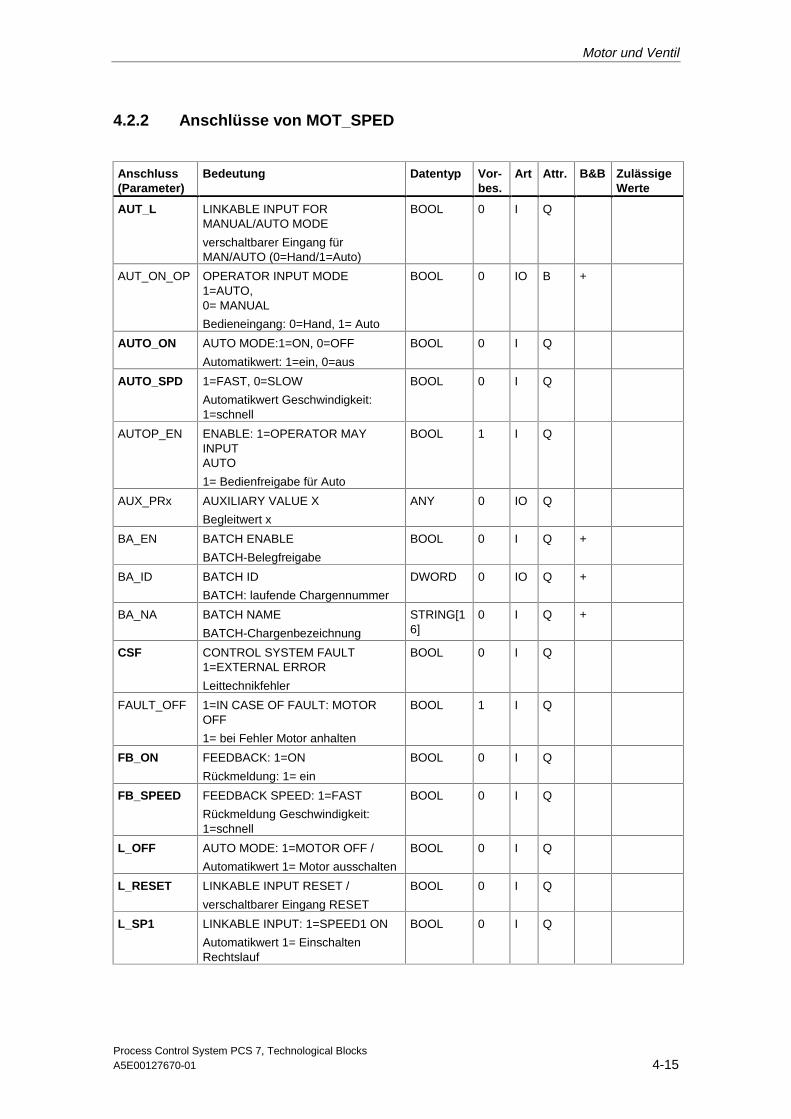
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-15
4.2.2 Anschlüsse von MOT_SPED
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUT_L LINKABLE INPUT FORMANUAL/AUTO MODE
verschaltbarer Eingang fürMAN/AUTO (0=Hand/1=Auto)
BOOL 0 I Q
AUT_ON_OP OPERATOR INPUT MODE1=AUTO,0= MANUAL
Bedieneingang: 0=Hand, 1= Auto
BOOL 0 IO B +
AUTO_ON AUTO MODE:1=ON, 0=OFF
Automatikwert: 1=ein, 0=aus
BOOL 0 I Q
AUTO_SPD 1=FAST, 0=SLOW
Automatikwert Geschwindigkeit:1=schnell
BOOL 0 I Q
AUTOP_EN ENABLE: 1=OPERATOR MAYINPUTAUTO
1= Bedienfreigabe für Auto
BOOL 1 I Q
AUX_PRx AUXILIARY VALUE X
Begleitwert x
ANY 0 IO Q
BA_EN BATCH ENABLE
BATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH ID
BATCH: laufende Chargennummer
DWORD 0 IO Q +
BA_NA BATCH NAME
BATCH-Chargenbezeichnung
STRING[16]
0 I Q +
CSF CONTROL SYSTEM FAULT1=EXTERNAL ERROR
Leittechnikfehler
BOOL 0 I Q
FAULT_OFF 1=IN CASE OF FAULT: MOTOROFF
1= bei Fehler Motor anhalten
BOOL 1 I Q
FB_ON FEEDBACK: 1=ON
Rückmeldung: 1= ein
BOOL 0 I Q
FB_SPEED FEEDBACK SPEED: 1=FAST
Rückmeldung Geschwindigkeit:1=schnell
BOOL 0 I Q
L_OFF AUTO MODE: 1=MOTOR OFF /
Automatikwert 1= Motor ausschalten
BOOL 0 I Q
L_RESET LINKABLE INPUT RESET /
verschaltbarer Eingang RESET
BOOL 0 I Q
L_SP1 LINKABLE INPUT: 1=SPEED1 ON
Automatikwert 1= EinschaltenRechtslauf
BOOL 0 I Q
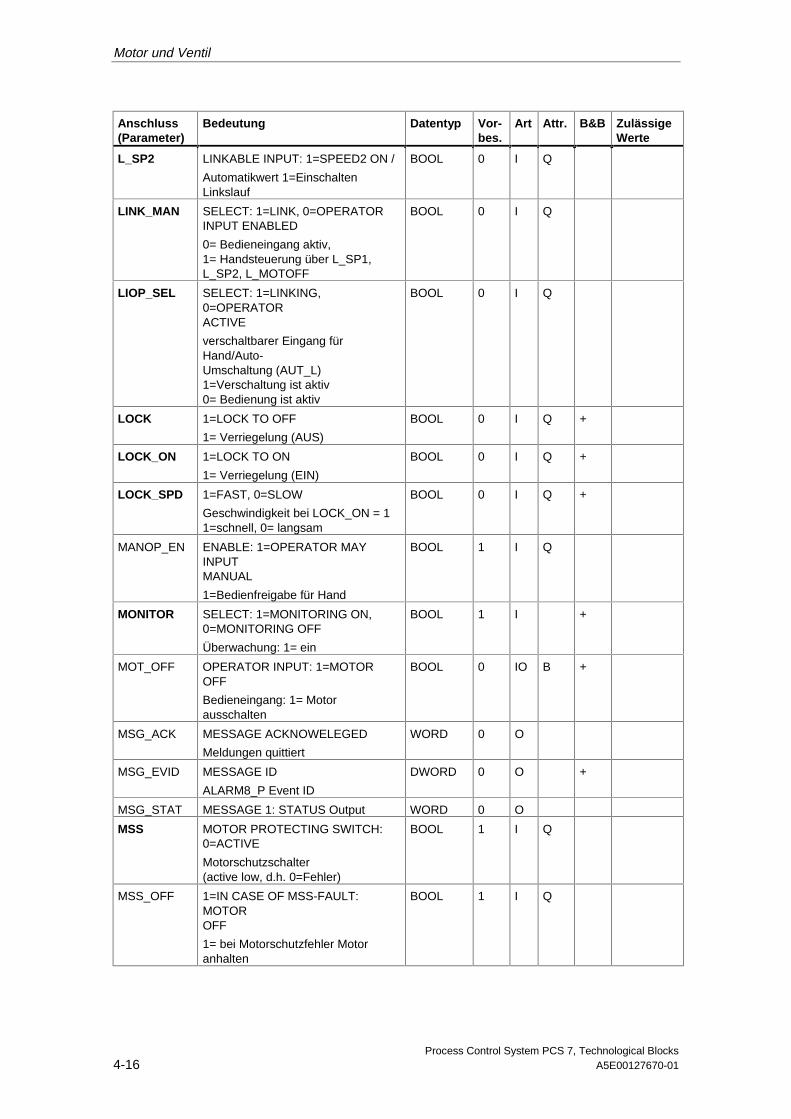
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-16 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
L_SP2 LINKABLE INPUT: 1=SPEED2 ON /
Automatikwert 1=EinschaltenLinkslauf
BOOL 0 I Q
LINK_MAN SELECT: 1=LINK, 0=OPERATORINPUT ENABLED
0= Bedieneingang aktiv,1= Handsteuerung über L_SP1,L_SP2, L_MOTOFF
BOOL 0 I Q
LIOP_SEL SELECT: 1=LINKING,0=OPERATORACTIVE
verschaltbarer Eingang fürHand/Auto-Umschaltung (AUT_L)1=Verschaltung ist aktiv0= Bedienung ist aktiv
BOOL 0 I Q
LOCK 1=LOCK TO OFF
1= Verriegelung (AUS)
BOOL 0 I Q +
LOCK_ON 1=LOCK TO ON
1= Verriegelung (EIN)
BOOL 0 I Q +
LOCK_SPD 1=FAST, 0=SLOW
Geschwindigkeit bei LOCK_ON = 11=schnell, 0= langsam
BOOL 0 I Q +
MANOP_EN ENABLE: 1=OPERATOR MAYINPUTMANUAL
1=Bedienfreigabe für Hand
BOOL 1 I Q
MONITOR SELECT: 1=MONITORING ON,0=MONITORING OFF
Überwachung: 1= ein
BOOL 1 I +
MOT_OFF OPERATOR INPUT: 1=MOTOROFF
Bedieneingang: 1= Motorausschalten
BOOL 0 IO B +
MSG_ACK MESSAGE ACKNOWELEGED
Meldungen quittiert
WORD 0 O
MSG_EVID MESSAGE ID
ALARM8_P Event ID
DWORD 0 O +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
MSS MOTOR PROTECTING SWITCH:0=ACTIVE
Motorschutzschalter(active low, d.h. 0=Fehler)
BOOL 1 I Q
MSS_OFF 1=IN CASE OF MSS-FAULT:MOTOROFF
1= bei Motorschutzfehler Motoranhalten
BOOL 1 I Q
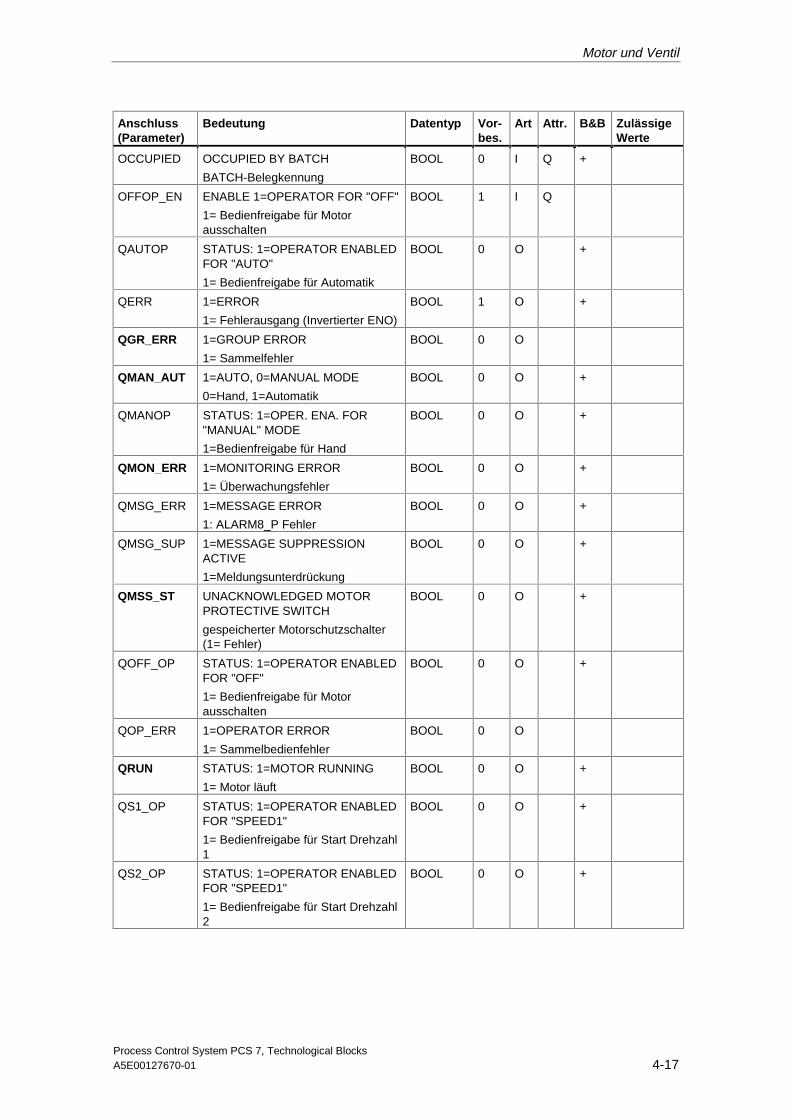
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-17
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
OCCUPIED OCCUPIED BY BATCH
BATCH-Belegkennung
BOOL 0 I Q +
OFFOP_EN ENABLE 1=OPERATOR FOR "OFF"
1= Bedienfreigabe für Motorausschalten
BOOL 1 I Q
QAUTOP STATUS: 1=OPERATOR ENABLEDFOR "AUTO"
1= Bedienfreigabe für Automatik
BOOL 0 O +
QERR 1=ERROR
1= Fehlerausgang (Invertierter ENO)
BOOL 1 O +
QGR_ERR 1=GROUP ERROR
1= Sammelfehler
BOOL 0 O
QMAN_AUT 1=AUTO, 0=MANUAL MODE
0=Hand, 1=Automatik
BOOL 0 O +
QMANOP STATUS: 1=OPER. ENA. FOR"MANUAL" MODE
1=Bedienfreigabe für Hand
BOOL 0 O +
QMON_ERR 1=MONITORING ERROR
1= Überwachungsfehler
BOOL 0 O +
QMSG_ERR 1=MESSAGE ERROR
1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE
1=Meldungsunterdrückung
BOOL 0 O +
QMSS_ST UNACKNOWLEDGED MOTORPROTECTIVE SWITCH
gespeicherter Motorschutzschalter(1= Fehler)
BOOL 0 O +
QOFF_OP STATUS: 1=OPERATOR ENABLEDFOR "OFF"
1= Bedienfreigabe für Motorausschalten
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1= Sammelbedienfehler
BOOL 0 O
QRUN STATUS: 1=MOTOR RUNNING
1= Motor läuft
BOOL 0 O +
QS1_OP STATUS: 1=OPERATOR ENABLEDFOR "SPEED1"
1= Bedienfreigabe für Start Drehzahl1
BOOL 0 O +
QS2_OP STATUS: 1=OPERATOR ENABLEDFOR "SPEED1"
1= Bedienfreigabe für Start Drehzahl2
BOOL 0 O +
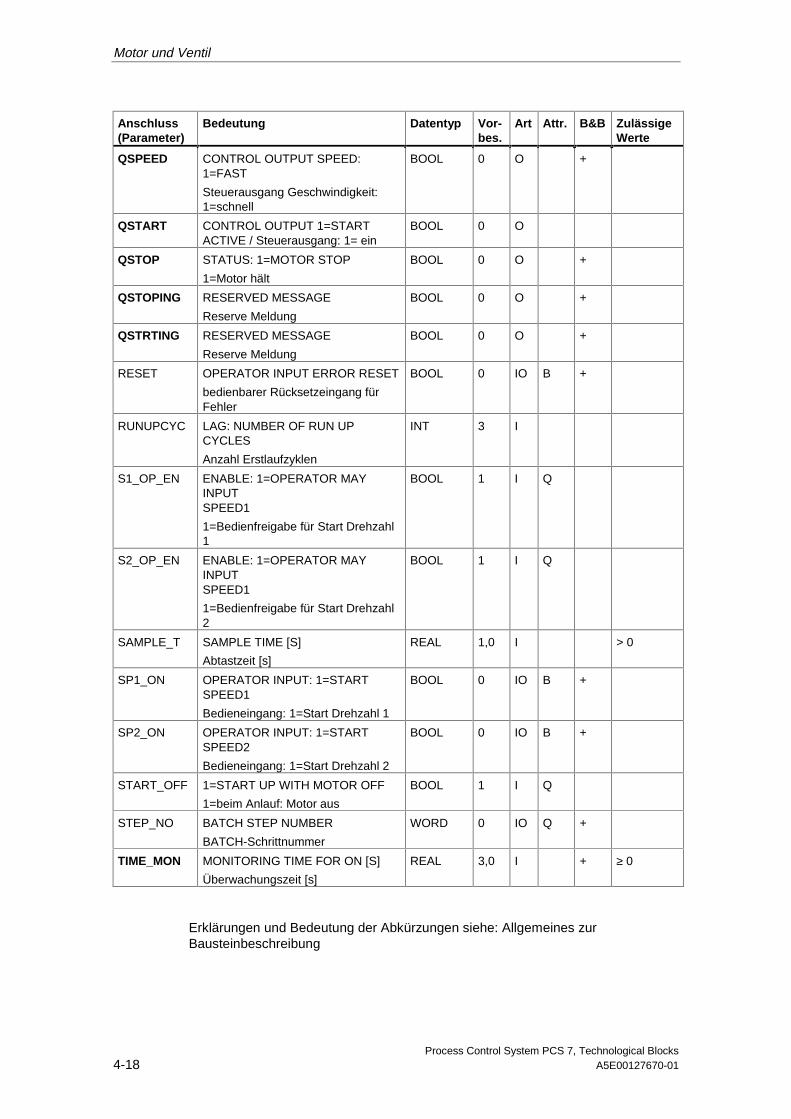
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-18 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QSPEED CONTROL OUTPUT SPEED:1=FAST
Steuerausgang Geschwindigkeit:1=schnell
BOOL 0 O +
QSTART CONTROL OUTPUT 1=STARTACTIVE / Steuerausgang: 1= ein
BOOL 0 O
QSTOP STATUS: 1=MOTOR STOP
1=Motor hält
BOOL 0 O +
QSTOPING RESERVED MESSAGE
Reserve Meldung
BOOL 0 O +
QSTRTING RESERVED MESSAGE
Reserve Meldung
BOOL 0 O +
RESET OPERATOR INPUT ERROR RESET
bedienbarer Rücksetzeingang fürFehler
BOOL 0 IO B +
RUNUPCYC LAG: NUMBER OF RUN UPCYCLES
Anzahl Erstlaufzyklen
INT 3 I
S1_OP_EN ENABLE: 1=OPERATOR MAYINPUTSPEED1
1=Bedienfreigabe für Start Drehzahl1
BOOL 1 I Q
S2_OP_EN ENABLE: 1=OPERATOR MAYINPUTSPEED1
1=Bedienfreigabe für Start Drehzahl2
BOOL 1 I Q
SAMPLE_T SAMPLE TIME [S]
Abtastzeit [s]
REAL 1,0 I > 0
SP1_ON OPERATOR INPUT: 1=STARTSPEED1
Bedieneingang: 1=Start Drehzahl 1
BOOL 0 IO B +
SP2_ON OPERATOR INPUT: 1=STARTSPEED2
Bedieneingang: 1=Start Drehzahl 2
BOOL 0 IO B +
START_OFF 1=START UP WITH MOTOR OFF
1=beim Anlauf: Motor aus
BOOL 1 I Q
STEP_NO BATCH STEP NUMBER
BATCH-Schrittnummer
WORD 0 IO Q +
TIME_MON MONITORING TIME FOR ON [S]
Überwachungszeit [s]
REAL 3,0 I + ≥ 0
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
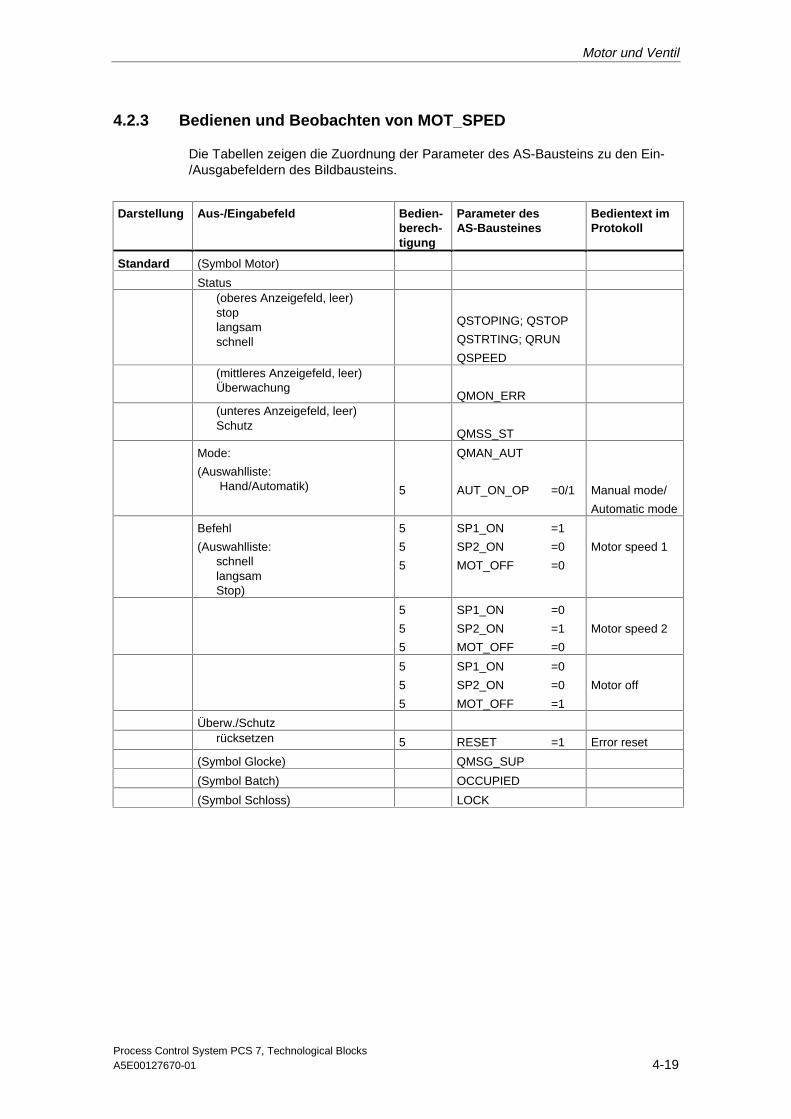
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-19
4.2.3 Bedienen und Beobachten von MOT_SPED
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard (Symbol Motor)
Status(oberes Anzeigefeld, leer)stoplangsamschnell
QSTOPING; QSTOP
QSTRTING; QRUN
QSPEED(mittleres Anzeigefeld, leer)Überwachung
QMON_ERR(unteres Anzeigefeld, leer)Schutz
QMSS_ST
Mode:
(Auswahlliste: Hand/Automatik) 5
QMAN_AUT
AUT_ON_OP =0/1 Manual mode/
Automatic mode
Befehl
(Auswahlliste:schnelllangsamStop)
5
5
5
SP1_ON =1
SP2_ON =0
MOT_OFF =0
Motor speed 1
5
5
5
SP1_ON =0
SP2_ON =1
MOT_OFF =0
Motor speed 2
5
5
5
SP1_ON =0
SP2_ON =0
MOT_OFF =1
Motor off
Überw./Schutzrücksetzen 5 RESET =1 Error reset
(Symbol Glocke) QMSG_SUP
(Symbol Batch) OCCUPIED
(Symbol Schloss) LOCK
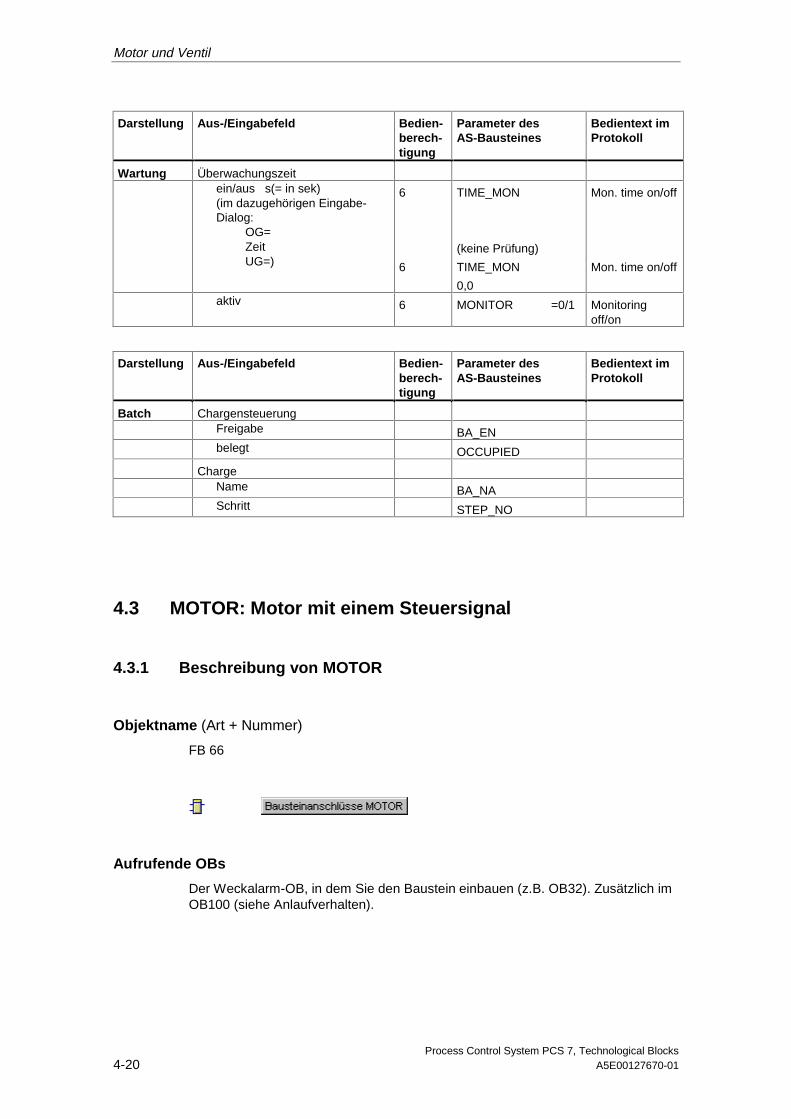
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-20 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung Überwachungszeitein/aus s(= in sek)(im dazugehörigen Eingabe-Dialog:
OG=ZeitUG=)
6
6
TIME_MON
(keine Prüfung)
TIME_MON
0,0
Mon. time on/off
Mon. time on/off
aktiv 6 MONITOR =0/1 Monitoringoff/on
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
4.3 MOTOR: Motor mit einem Steuersignal
4.3.1 Beschreibung von MOTOR
Objektname (Art + Nummer)
FB 66
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB100 (siehe Anlaufverhalten).
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-21
Funktion
Der Baustein dient zur Ansteuerung von Motoren mit einem Steuersignal (ein/aus).Wahlweise wird eine Laufrückmeldung (ein/aus) überwacht. Die Laufrückmeldungwird von einem Hilfsschütz bereitgestellt.
Arbeitsweise
Zur Steuerung des Motors stehen verschiedene Eingänge zur Verfügung. Sie sindin einer konkreten hierarchischen Abhängigkeit untereinander und zu denMotorzuständen implementiert. Besonders die Verriegelung, dieRückmeldungsüberwachung und der Motorschutzschalter beeinflussen dasSteuersignal QSTART.
Die Prioritätsverteilung der einzelnen Eingangsgrößen und Ereignisse bezüglichihres Einflusses auf das Steuersignal ist in der folgenden Tabellezusammengefasst. Einzelheiten erläutern die darauf folgenden Abschnitte.
Priorität: Ereignis:
Hoch Motorschutzfehler, wenn MSS_OFF = 1
LOCK = 1
c LOCK_ON = 1
Überwachungsfehler, wenn FAULT_OFF = 1
Niedrig Automatik-/Handbetrieb
Keine Wirkung Motorschutzfehler, wenn MSS_OFF = 0
Überwachungsfehler, wenn FAULT_OFF = 0
Leittechnikfehler, Bedienfehler
Hand/Automatik
Die Umschaltung zwischen den beiden Betriebsarten erfolgt entweder durch OS-Bedienung mittels AUT_ON_OP (LIOP_SEL = 0) oder über die Verschaltung desEinganges AUT_L (LIOP_SEL = 1). Bei einer Auswahl über das OS-System sinddie entsprechenden Freigaben AUTOP_EN und MANOP_EN erforderlich. Dieeingestellte Betriebsart wird am Ausgang QMAN_AUT angezeigt (1: Auto, 0:Hand).
• Handbetrieb: Die Bedienung erfolgt über den Eingang MAN_ON durch dasOS-System, falls die entsprechenden Freigaben ON_OP_EN und OFFOP_ENvorhanden sind.
• Automatikbetrieb: Der Steuerbefehl wird über den verschalteten EingangAUTO_ON von einer Automatik bezogen.
Verriegelung
Die Verriegelung ist allen anderen Steuersignalen und Fehlern – außer demMotorschutzschalter mit entsprechender Freigabe (MSS_OFF = 1) – übergeordnet.Bei gesetztem LOCK wird der Motor direkt ausgeschaltet, während ein gesetztesLOCK_ON den Motor einschaltet, sofern LOCK nicht ebenfalls gesetzt ist.
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-22 A5E00127670-01
Überwachung
Die Überwachungslogik beobachtet die Übereinstimmung zwischen demSteuerbefehl QSTART und der Istwertrückmeldung FB_ON und gibt den Istzustandüber QRUN und QSTOP aus. Sie setzt den Überwachungsfehler(QMON_ERR = 1), wenn sich nach der Zeit TIME_MON keine QSTARTentsprechende Rückmeldung eingestellt hat oder diese sich ohne Anforderungdurch QSTART unerwartet verändert.
Ist keine Rückmeldung vorhanden, so kann entweder QSTART mit FB_ONverschaltet oder die Überwachung durch MONITOR = 0 deaktiviert werden.
Der Parameter FAULT_OFF legt die Relevanz des Überwachungsfehlers fest. IstFAULT_OFF = 1, wird der Motor im Fehlerfall ausgeschaltet, während der Fehlerbei FAULT_OFF = 0 keine Auswirkung auf die Steuerausgänge hat.
Motorschutz
Bei fallender Flanke des Motorschutzsignales MSS wird der Motorschutzfehlerspeichernd gesetzt und an den Ausgang QMSS_ST geleitet. Mit dem ParameterMSS_OFF wird festgelegt, ob lediglich eine Anzeige stattfindet (MSS_OFF = 0),oder ob der Motor ohne Beachtung aller anderen Eingänge und Systemzuständeabgeregelt werden soll (MSS_OFF = 1).
Stoßfreies Umschalten
Um in allen Betriebssituationen ein stoßfreies Umschalten auf Handbetrieb zugewährleisten, wird der Handwert MAN_ON immer dem aktuellen Wert vonQSTART nachgeführt.Verriegelung
Fehlerbehandlung
Der Motorschutzfehler (QMSS_ST = 1) und der Überwachungsfehler (QMON_ERR= 1) werden an die OS gemeldet und beeinflussen, wie oben beschrieben, dieFunktionsweise des Bausteines. Sie können entweder durch Bedienung vonRESET oder automatisch durch eine Verschaltung von L_RESET mit "1" beisteigender Flanke von MSS zurückgesetzt werden.Der Leittechnikfehler CSF wirdlediglich an die OS gemeldet und zusammen mit Motorschutz und Überwachungauf den Sammelfehler QGR_ERR gelegt. Er hat auf den Bausteinalgorithmuskeinen weiteren Einfluss.
Bedienfehler werden ohne Meldung durch den Ausgang QOP_ERR angezeigt.
Anlauf nach Fehlerzustand
Es wird nach der Betriebsart unterschieden, die beim Rücksetzen vorhanden war:
• Im Automatikbetrieb kann nach dem Rücksetzen der Motor wiederanlaufen,falls ein entsprechendes Startsignal von der Automatik geliefert wird.
• Im Handbetrieb muss der Motor explizit eingeschaltet werden, da dieHandbedienung auf "AUS" nachgeführt wurde.
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-23
Anlaufverhalten
Bei CPU-Anlauf wird der MOTOR-Baustein auf Handbetrieb geschaltet und derAUS-Befehl ausgegeben. Dafür muss der Baustein aus dem Anlauf-OB aufgerufenwerden. Bei CFC-Projektierung wird dieses durch CFC erledigt. Bei einfachenSTEP 7-Mitteln müssen Sie den Aufruf im Anlauf-OB eintragen. Nach dem Anlaufwerden für die Anzahl der im Wert RUNUPCYC parametrierten Zyklen dieMeldungen unterdrückt.
Mit der Eingang START_OFF bestimmen Sie, ob der Motor bei CPU-Anlaufabgesteuert wird (START_OFF=1) oder den letzten Betriebszustand beibehält.
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
Meldeverhalten
Der Baustein MOTOR verwendet den ALARM8_P Baustein zur Generierung vonMeldungen.
Meldungsauslöser sind die Leittechnikfehler
• Motorschutzschalter- und Überwachungsfehler (Fehler Laufzeitf)
Das CSF-Signal, das als Leittechnikfehler durch Verschaltung bezogen wird.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, bzw MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse Unterdrückbar durch
1 QMSS_ST MOTORSCHUTZ S -
2 QMON_ERR FEHLER LAUFZEIT S -
3 CSF FEHLER EXTERN S -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit Batch flexible-Daten belegt und die übrigen (AUX_PRx) können frei belegt werden.
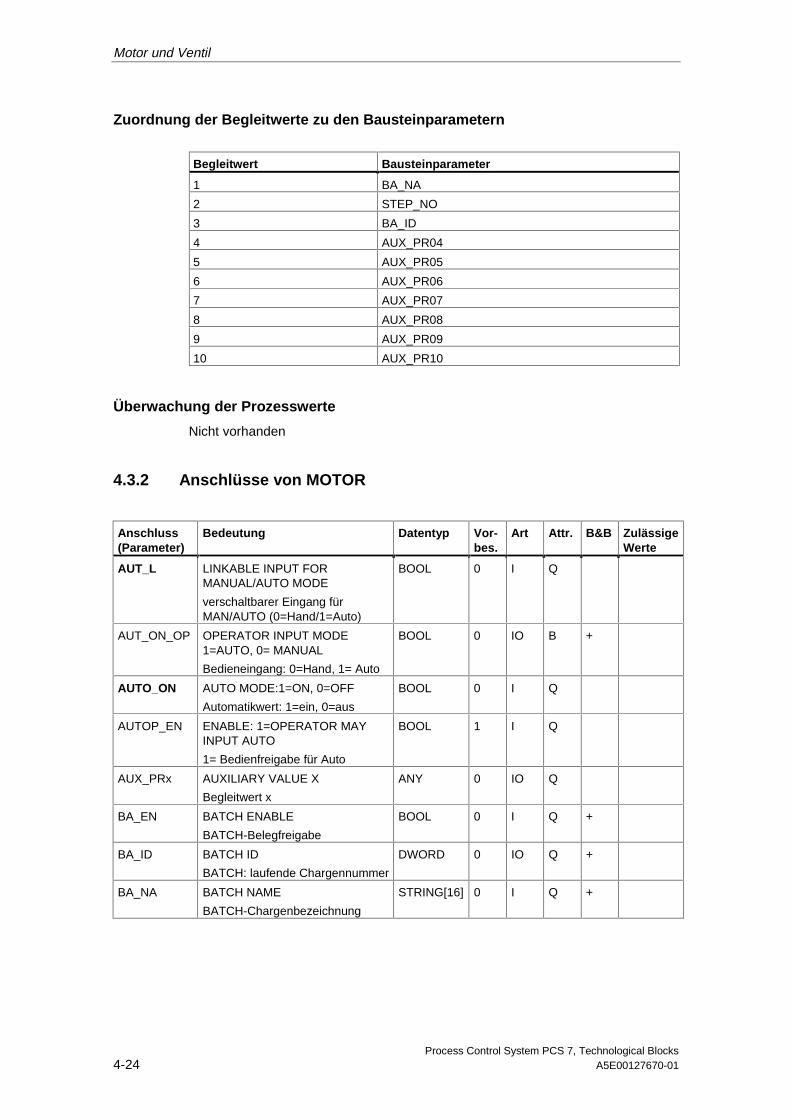
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-24 A5E00127670-01
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 AUX_PR04
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden
4.3.2 Anschlüsse von MOTOR
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUT_L LINKABLE INPUT FORMANUAL/AUTO MODE
verschaltbarer Eingang fürMAN/AUTO (0=Hand/1=Auto)
BOOL 0 I Q
AUT_ON_OP OPERATOR INPUT MODE1=AUTO, 0= MANUAL
Bedieneingang: 0=Hand, 1= Auto
BOOL 0 IO B +
AUTO_ON AUTO MODE:1=ON, 0=OFF
Automatikwert: 1=ein, 0=aus
BOOL 0 I Q
AUTOP_EN ENABLE: 1=OPERATOR MAYINPUT AUTO
1= Bedienfreigabe für Auto
BOOL 1 I Q
AUX_PRx AUXILIARY VALUE X
Begleitwert x
ANY 0 IO Q
BA_EN BATCH ENABLE
BATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH ID
BATCH: laufende Chargennummer
DWORD 0 IO Q +
BA_NA BATCH NAME
BATCH-Chargenbezeichnung
STRING[16] 0 I Q +
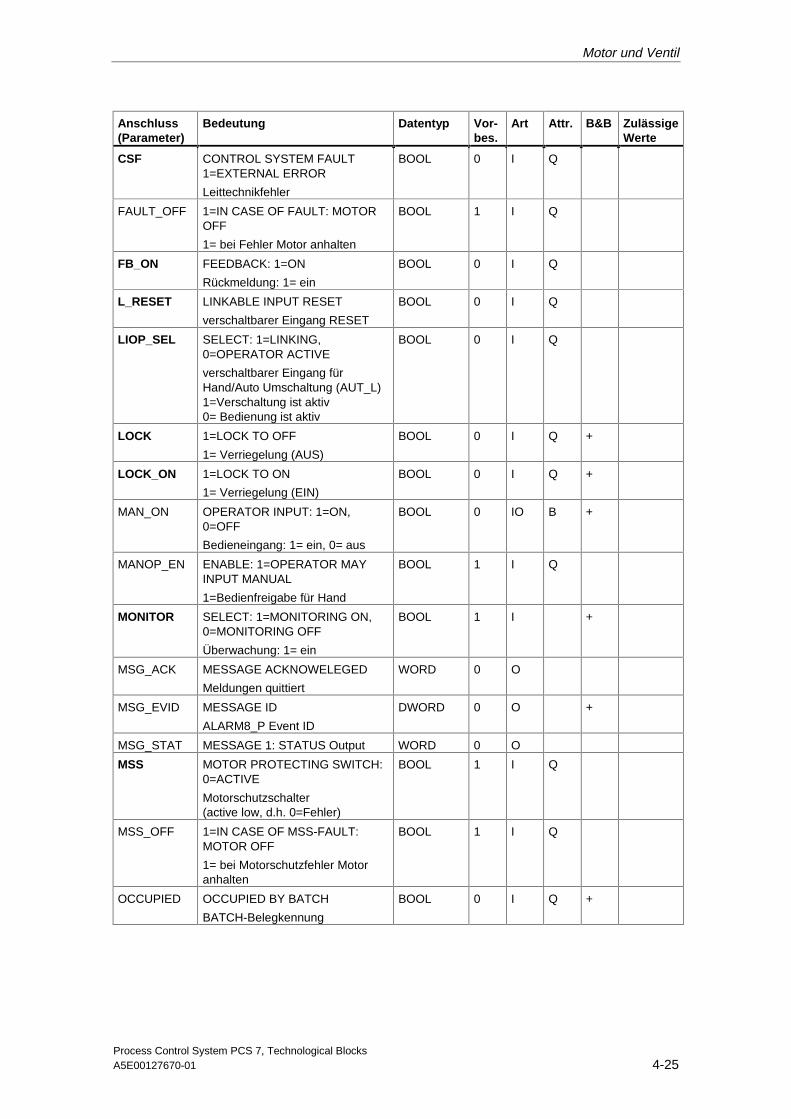
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-25
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
CSF CONTROL SYSTEM FAULT1=EXTERNAL ERROR
Leittechnikfehler
BOOL 0 I Q
FAULT_OFF 1=IN CASE OF FAULT: MOTOROFF
1= bei Fehler Motor anhalten
BOOL 1 I Q
FB_ON FEEDBACK: 1=ON
Rückmeldung: 1= ein
BOOL 0 I Q
L_RESET LINKABLE INPUT RESET
verschaltbarer Eingang RESET
BOOL 0 I Q
LIOP_SEL SELECT: 1=LINKING,0=OPERATOR ACTIVE
verschaltbarer Eingang fürHand/Auto Umschaltung (AUT_L)1=Verschaltung ist aktiv0= Bedienung ist aktiv
BOOL 0 I Q
LOCK 1=LOCK TO OFF
1= Verriegelung (AUS)
BOOL 0 I Q +
LOCK_ON 1=LOCK TO ON
1= Verriegelung (EIN)
BOOL 0 I Q +
MAN_ON OPERATOR INPUT: 1=ON,0=OFF
Bedieneingang: 1= ein, 0= aus
BOOL 0 IO B +
MANOP_EN ENABLE: 1=OPERATOR MAYINPUT MANUAL
1=Bedienfreigabe für Hand
BOOL 1 I Q
MONITOR SELECT: 1=MONITORING ON,0=MONITORING OFF
Überwachung: 1= ein
BOOL 1 I +
MSG_ACK MESSAGE ACKNOWELEGED
Meldungen quittiert
WORD 0 O
MSG_EVID MESSAGE ID
ALARM8_P Event ID
DWORD 0 O +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
MSS MOTOR PROTECTING SWITCH:0=ACTIVE
Motorschutzschalter(active low, d.h. 0=Fehler)
BOOL 1 I Q
MSS_OFF 1=IN CASE OF MSS-FAULT:MOTOR OFF
1= bei Motorschutzfehler Motoranhalten
BOOL 1 I Q
OCCUPIED OCCUPIED BY BATCH
BATCH-Belegkennung
BOOL 0 I Q +
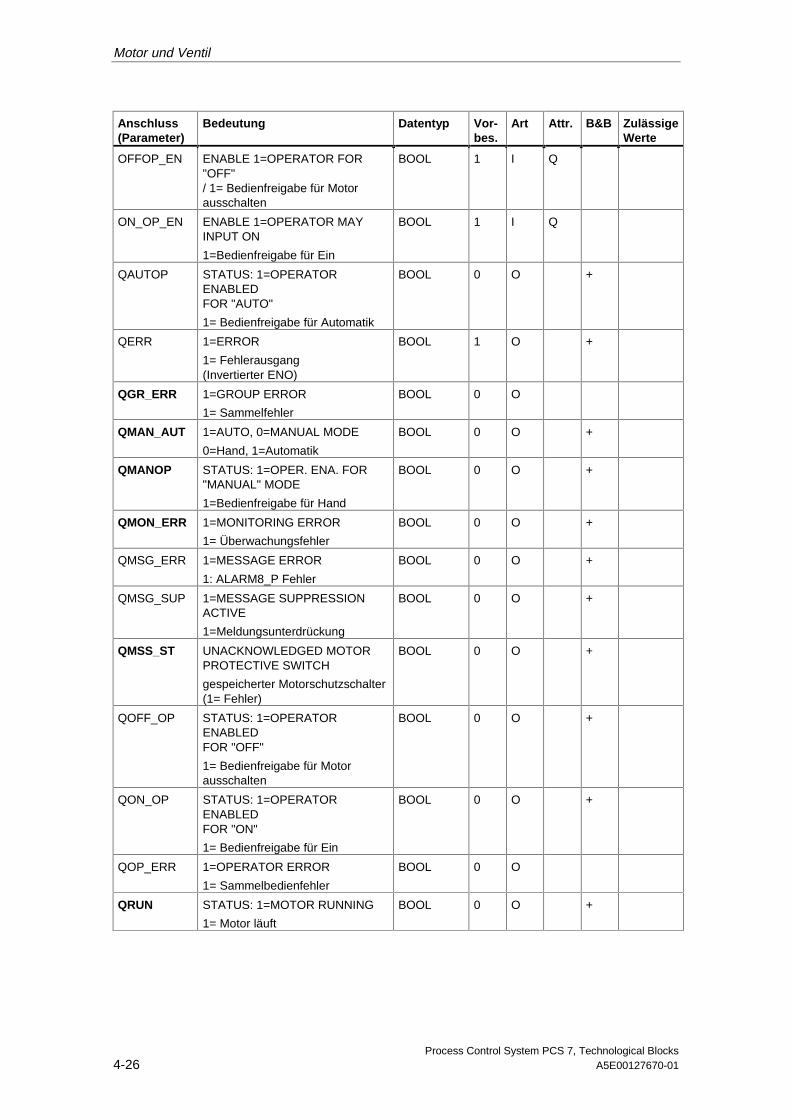
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-26 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
OFFOP_EN ENABLE 1=OPERATOR FOR"OFF"/ 1= Bedienfreigabe für Motorausschalten
BOOL 1 I Q
ON_OP_EN ENABLE 1=OPERATOR MAYINPUT ON
1=Bedienfreigabe für Ein
BOOL 1 I Q
QAUTOP STATUS: 1=OPERATORENABLEDFOR "AUTO"
1= Bedienfreigabe für Automatik
BOOL 0 O +
QERR 1=ERROR
1= Fehlerausgang(Invertierter ENO)
BOOL 1 O +
QGR_ERR 1=GROUP ERROR
1= Sammelfehler
BOOL 0 O
QMAN_AUT 1=AUTO, 0=MANUAL MODE
0=Hand, 1=Automatik
BOOL 0 O +
QMANOP STATUS: 1=OPER. ENA. FOR"MANUAL" MODE
1=Bedienfreigabe für Hand
BOOL 0 O +
QMON_ERR 1=MONITORING ERROR
1= Überwachungsfehler
BOOL 0 O +
QMSG_ERR 1=MESSAGE ERROR
1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE
1=Meldungsunterdrückung
BOOL 0 O +
QMSS_ST UNACKNOWLEDGED MOTORPROTECTIVE SWITCH
gespeicherter Motorschutzschalter(1= Fehler)
BOOL 0 O +
QOFF_OP STATUS: 1=OPERATORENABLEDFOR "OFF"
1= Bedienfreigabe für Motorausschalten
BOOL 0 O +
QON_OP STATUS: 1=OPERATORENABLEDFOR "ON"
1= Bedienfreigabe für Ein
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1= Sammelbedienfehler
BOOL 0 O
QRUN STATUS: 1=MOTOR RUNNING
1= Motor läuft
BOOL 0 O +
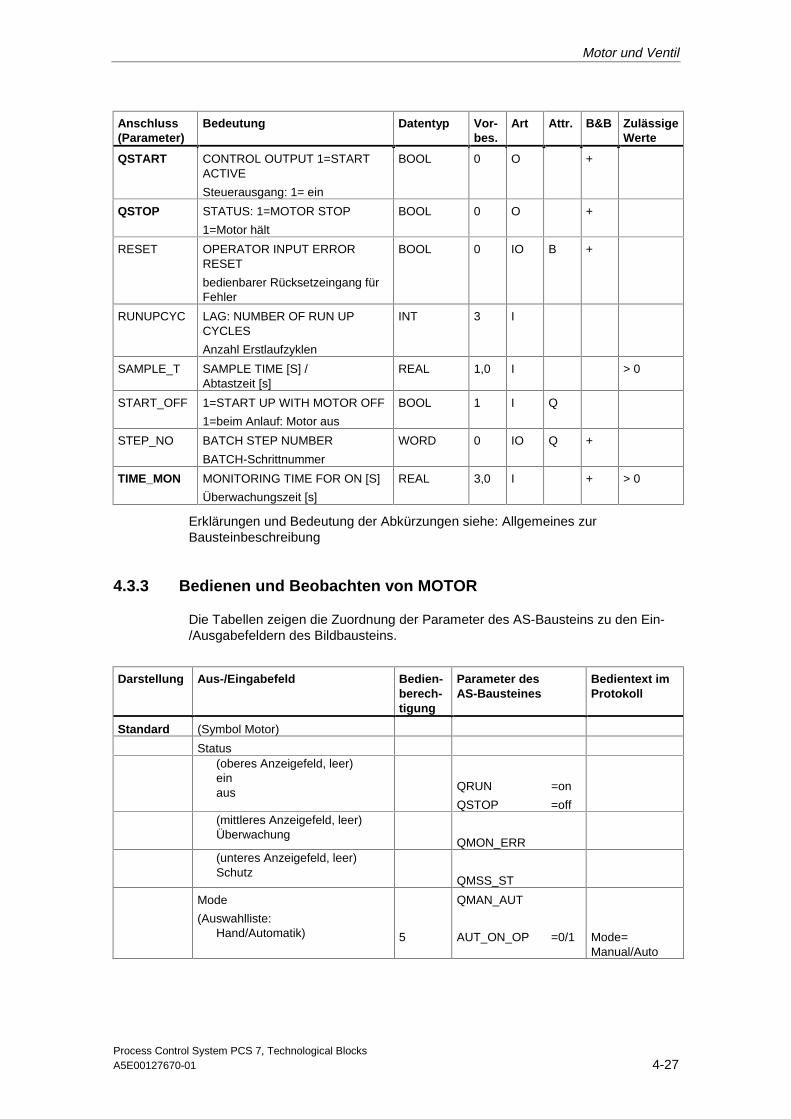
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-27
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QSTART CONTROL OUTPUT 1=STARTACTIVE
Steuerausgang: 1= ein
BOOL 0 O +
QSTOP STATUS: 1=MOTOR STOP
1=Motor hält
BOOL 0 O +
RESET OPERATOR INPUT ERRORRESET
bedienbarer Rücksetzeingang fürFehler
BOOL 0 IO B +
RUNUPCYC LAG: NUMBER OF RUN UPCYCLES
Anzahl Erstlaufzyklen
INT 3 I
SAMPLE_T SAMPLE TIME [S] /Abtastzeit [s]
REAL 1,0 I > 0
START_OFF 1=START UP WITH MOTOR OFF
1=beim Anlauf: Motor aus
BOOL 1 I Q
STEP_NO BATCH STEP NUMBER
BATCH-Schrittnummer
WORD 0 IO Q +
TIME_MON MONITORING TIME FOR ON [S]
Überwachungszeit [s]
REAL 3,0 I + > 0
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
4.3.3 Bedienen und Beobachten von MOTOR
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard (Symbol Motor)
Status(oberes Anzeigefeld, leer)einaus QRUN =on
QSTOP =off(mittleres Anzeigefeld, leer)Überwachung
QMON_ERR(unteres Anzeigefeld, leer)Schutz
QMSS_ST
Mode
(Auswahlliste:Hand/Automatik) 5
QMAN_AUT
AUT_ON_OP =0/1 Mode=Manual/Auto

Motor und Ventil
Process Control System PCS 7, Technological Blocks4-28 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Befehl
(Auswahlliste:aus/ ein) 5 MAN_ON =0/1 Motor=Stop/Star
t
Überw./Schutz/Verr.rücksetzen 5 RESET =1 Error reset
(Symbol Glocke) QMSG_SUP
(Symbol Batch) OCCUPIED
(Symbol Schloss) LOCK
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung Überwachungszeitein/aus s(= in sek)(im dazugehörigen Eingabe-Dialog:
OG=ZeitUG=)
6
6
TIME_MON
(keine Prüfung)
TIME_MON
0,0
Mon. time on/off
Mon. time on/off
aktiv 6 MONITOR =0/1 Monitoringoff/on
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-29
4.4 VAL_MOT: Motorventilsteuerung
4.4.1 Beschreibung von VAL_MOT
Objektname (Art + Nummer)
FB 74
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB100 (siehe Anlaufverhalten).
Funktion
Der Baustein dient zur Ansteuerung von Motor-Ventilen mit zwei Steuersignalen.Das Ventil kann in jeder Stellung angehalten werden. Wahlweise werden diebeiden Stellungsrückmeldesignale (offen/geschlossen) überwacht. DieStellungsrückmeldungen werden von Endlagenschaltern erzeugt.
Arbeitsweise
Zur Steuerung des Motor-Ventils stehen verschiedene Eingänge zur Verfügung.Sie sind in einer konkreten hierarchischen Abhängigkeit untereinander und zu denSystemzuständen implementiert. Besonders die Verriegelung, die Rückmeldungs-bzw. Drehrichtungsüberwachung und der Motorschutzschalter beeinflussen dieSteuersignale QSTART (1: Motor ein, 0: Motor aus) bzw. QOC (1: öffnen, 0:schließen).
Die Prioritätsverteilung der einzelnen Eingangsgrößen und Ereignisse bezüglichihres Einflusses auf das Steuersignal ist in der folgenden Tabellezusammengefasst. Einzelheiten erläutern die darauf folgenden Abschnitte.
Priorität: Ereignis:
Hoch Motorschutzfehler, wenn MSS_OFF = 1
⇑ Überwachungsfehler, wenn FAULT_OFF = 1
Wartezeit bei Drehrichtungswechsel
V_LOCK = 1
VL_CLOSE = 1
VL_OPEN = 1
⇓ VL_HOLD = 1
Niedrig Automatik-/Handbetrieb
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-30 A5E00127670-01
Priorität: Ereignis:
Keine Wirkung Motorschutzfehler, wenn MSS_OFF = 0
Überwachungsfehler, wenn FAULT_OFF = 0
Leittechnikfehler, Bedienfehler
Hand/Automatik
Die Umschaltung erfolgt entweder durch OS-Bedienung von AUT_ON_OP oderüber die Verschaltung am AUT_L_Eingang, falls die notwendigen Freigabenvorhanden sind. Die eingestellte Betriebsart wird am Ausgang QMAN_AUTangezeigt (1:Auto, 0:Hand).
• Handbetrieb: In dieser Betriebsart kann von der OS bedient oder überverschaltbare Eingänge gesteuert werden.
- OS-Bedienung (LINK_MAN = 0): Es werden über OS die EingängeOPEN_VAL zum Öffnen, CLOS_VAL zum Schließen oder STOP_VAL zumAnhalten bedient. Die Freigaben dafür (OP_OP_EN, CL_OP_EN bzw.ST_OP_EN) müssen vorhanden sein.
- Bedienung über verschaltbare Eingänge (LINK_MAN = 1): In diesemFall werden die Befehle über die Eingänge L_OPEN, L_CLOSE undL_STOP bezogen. Diese können z.B. zwecks Nachführen oder für einelokale Steuerung angeschlossen werden. Allerdings muss die Auswahlüber die Schalter LINK_MAN, LIOP_SEL und AUT_L durch eine geeigneteSchaltung getroffen sein.
• Automatikbetrieb: Die Automatikbefehle werden über die EingängeAUTO_ON (1:ein, 0:aus) bzw. AUTO_OC (1:öffnen, 0: schließen) durchVerschaltung von einer Automatik bezogen.
Verriegelung
Die Verriegelung ist allen anderen Steuereingängen übergeordnet. Sie wird nurvon dem Motorschutzfehler und dem Überwachungsfehler mit den entsprechendenFreigaben (MSS_OFF = 1, FAULT_OFF = 1) überschrieben. Bei gesetztemV_LOCK wird das Motor-Ventil in seine durch SS_POS definierte Ruhelagegebracht. Entsprechend wird es durch VL_OPEN bzw. VL_CLOSE geöffnet bzw.geschlossen. VL_HOLD sperrt die Automatik- und Handeingänge und behält dieletzte Zustandsanforderung bei. Die Prioritäten der einzelnenVerriegelungseingänge können dem Abschnitt Arbeitsweise entnommen werden.
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-31
Überwachung
Mit der Überwachungslogik (aktiv bei MONITOR = 1) wird die Übereinstimmungzwischen dem Sollzustand (bestimmt durch QSTART und QOC) und derRückmeldung des Istzustandes des Ventils (gegeben durch FB_OPEN undFB_CLOSE) geprüft. Ist der Sollzustand nach Ablauf der ÜberwachungszeitTIME_ON nicht erreicht, so wird der Ausgang QMON_ERR gesetzt. QMON_ERRwird auch ohne Wartezeit gesetzt, falls sich die Rückmeldung ohne Anlass (Befehl)verändert.Falls keine Rückmeldungen angeschlossen sind, muss dies der Überwachung mitMONITOR = 0 mitgeteilt werden. Diese nimmt dann an, dass nach Ablauf der ZeitTIME_ON der Sollzustand des Ventils erreicht ist.Im fehlerlosen Überwachungsbetrieb zeigen die Ausgänge QOPENING undQCLOSING, ob das Ventil auf- oder zufährt, sowie QOPENED und QCLOSED, obdas Ventil die Endstellung erreicht hat.Wird das Ventil in einer Zwischenstellung angehalten, so wird die Laufrichtungweiterhin mit QOPENING=1 oder QCLOSING=1, jedoch die Endlagen mit 0angezeigt.
Der Parameter FAULT_OFF legt die Relevanz des Überwachungsfehlers fest. IstFAULT_OFF = 1, wird der Motor im Fehlerfall ausgeschaltet und das Ventilverharrt in der aktuellen Position, während der Fehler bei FAULT_OFF = 0 keineAuswirkung auf die Steuerausgänge hat. In letztgenanntem Fall verhält sich derBaustein wie bei ausgeschalteter Überwachung und zeigt den Überwachungsfehlerlediglich am Ausgang QMON_ERR an.
Mit dem Parameter TIME_OFF wird die Wartezeit festgelegt bis der Motor nachAusschalten wieder eingeschaltet werden darf. Bei Erreichen der Endlage desVentils wird QSTART = FALSE gesetzt. Ein Neustart des Motors in die andereRichtung mit QSTART=TRUE erfolgt erst nach Ablauf der parametrierten ZeitTIME_OFF. (siehe auch Laufrichtungsumkehr).
Motorschutz
Bei fallender Flanke des Motorschutzsignales MSS wird der Motorschutzfehlerspeichernd gesetzt und an den Ausgang QMSS_ST geleitet. Mit dem ParameterMSS_OFF wird festgelegt, ob lediglich eine Anzeige stattfindet (MSS_OFF = 0)oder ob der Motor ohne Beachtung aller anderen Eingänge und Systemzuständeangehalten werden soll (MSS_OFF = 1) und das Ventil in der aktuellen Positionverharrt.
Stoßfreies Umschalten
Um in allen Betriebssituationen ein stoßfreies Umschalten auf Handbetrieb zugewährleisten, werden die Handwerte OPEN_VAL, CLOS_VAL und STOP_VALimmer den aktuellen Werten von QSTART und QOC nachgeführt (Ausnahme:Drehrichtungswechsel).
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-32 A5E00127670-01
Laufrichtungsumkehr
Wird die Laufrichtung des Ventils vor Erreichen der Endlage umgeschaltet, so wirdfolgendermaßen verfahren:
• Der Motor wird gestoppt (QSTART=0).
• Die interne Ausschaltüberwachung wartet die Zeitspanne TIME_OFF ab undstartet den Motor in die andere Richtung, sofern die Ausschaltüberwachungkeinen Fehler meldet.
Fehlerbehandlung
Der Motorschutzfehler (QMSS_ST = 1) und der Überwachungsfehler (QMON_ERR= 1) werden an die OS gemeldet und beeinflussen, wie oben beschrieben, dieFunktionsweise des Bausteines. Sie können entweder durch Bedienung vonRESET oder automatisch durch eine Verschaltung von L_RESET mit "1" beisteigender Flanke von MSS zurückgesetzt werden. Der Leittechnikfehler CSF wirdlediglich an die OS gemeldet und zusammen mit Motorschutz und Überwachungauf den Sammelfehler QGR_ERR gelegt. Er hat auf den Bausteinalgorithmuskeinen weiteren Einfluss.
Bedienfehler werden ohne Meldung durch den Ausgang QOP_ERR angezeigt.
Anlauf nach Fehlerzustand
Es wird nach der Betriebsart unterschieden, die beim Rücksetzen vorhanden war:
• Im Automatikbetrieb kann das Motorventil erst wieder anlaufen, wenn derÜberwachungs- bzw. Motorschutzfehler zurückgesetzt ist und einentsprechendes Startsignal von der Automatik geliefert wird.
• Im Handbetrieb muss der Motor explizit eingeschaltet werden, da dieHandbedienung auf "HALT" nachgeführt wurde.
Anlaufverhalten
Bei CPU-Anlauf wird der VAL_MOT-Baustein auf Handbetrieb geschaltet und derHALT-Befehl ausgegeben. Dafür muss der Baustein aus dem Anlauf-OBaufgerufen werden. Bei CFC-Projektierung wird dieses durch CFC erledigt. Beieinfachen STEP 7-Mitteln müssen Sie den Aufruf im Anlauf-OB eintragen. Nachdem Anlauf werden für die Anzahl der im Wert RUNUPCYC parametrierten Zyklendie Meldungen unterdrückt.
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
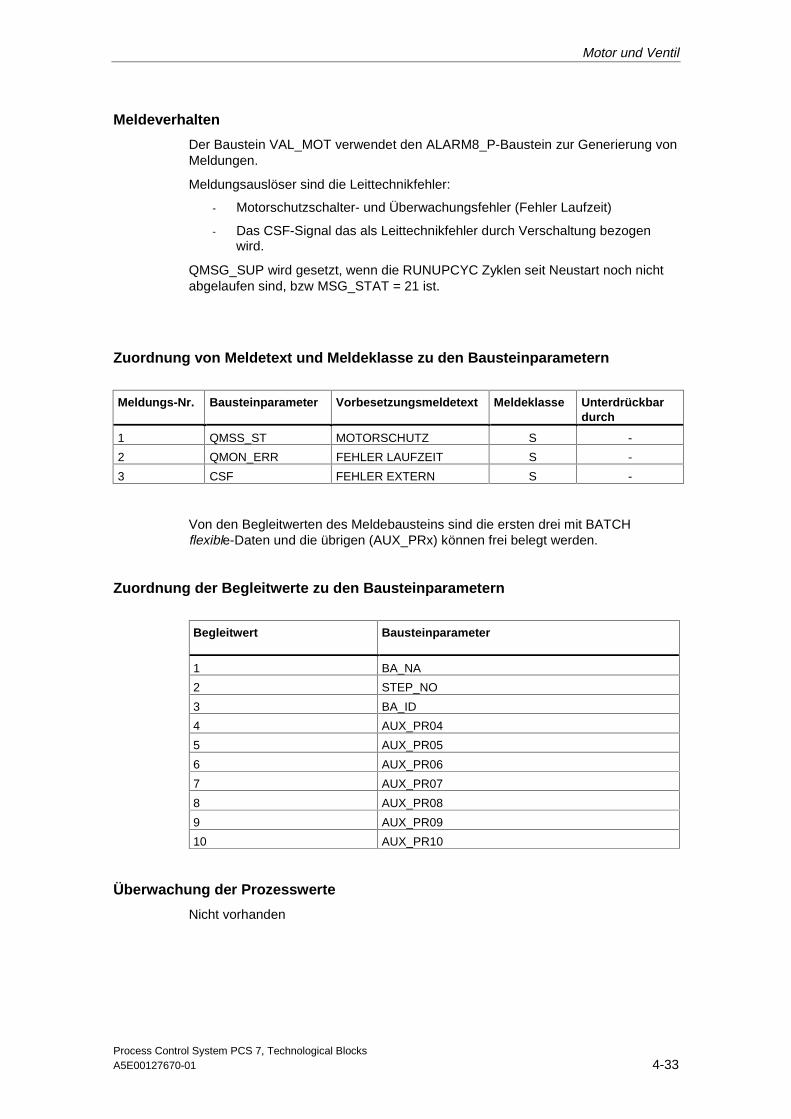
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-33
Meldeverhalten
Der Baustein VAL_MOT verwendet den ALARM8_P-Baustein zur Generierung vonMeldungen.
Meldungsauslöser sind die Leittechnikfehler:
- Motorschutzschalter- und Überwachungsfehler (Fehler Laufzeit)
- Das CSF-Signal das als Leittechnikfehler durch Verschaltung bezogenwird.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, bzw MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse Unterdrückbardurch
1 QMSS_ST MOTORSCHUTZ S -
2 QMON_ERR FEHLER LAUFZEIT S -
3 CSF FEHLER EXTERN S -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten und die übrigen (AUX_PRx) können frei belegt werden.
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 AUX_PR04
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden

Motor und Ventil
Process Control System PCS 7, Technological Blocks4-34 A5E00127670-01
4.4.2 Anschlüsse von VAL_MOT
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUT_L LINKABLE INPUT FORMANUAL/AUTO MODE
verschaltbarer Eingang fürMAN/AUTO(0: Hand/1:Auto)
BOOL 0 I Q
AUT_ON_OP OPERATOR INPUT MODE1=AUTO, 0= MANUAL
Bedieneingang: 0: Hand, 1: Auto
BOOL 0 IO B +
AUTO_OC AUTO MODE:1=OPEN, 0=CLOSE
Automatikwert Drehrichtung:1=öffnen, 0=schließen
BOOL 0 I Q
AUTO_ON AUTO MODE:1=ON, 0=OFF
Automatikwert: 1: ein
BOOL 0 I Q
AUTOP_EN ENABLE: 1=OPERATOR MAYINPUT AUTO
1=Bedienfreigabe für Auto
BOOL 1 I Q
AUX_PRx AUXILIARY VALUE X
Begleitwert x
ANY 0 IO Q
BA_EN BATCH ENABLE
BATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH ID
BATCH: laufende Chargennummer
DWORD 0 IO Q +
BA_NA BATCH NAME
BATCH-Chargenbezeichnung
STRING[16] 0 I Q +
CL_OP_EN ENABLE: 1=OPERATOR MAYINPUT CLOSE
1= Bedienfreigabe für Start Ventilschließen
BOOL 1 I Q
CLOS_VAL OPERATOR INPUT: 1=STARTVALVE CLOSE
Bedieneingang:1= Start Ventil schließen
BOOL 0 IO B +
CSF CONTROL SYSTEM FAULT
1=externer Fehler
BOOL 0 I Q
FAULT_OFF 1=IN CASE OF FAULT: MOTOROFF
1= bei Fehler Motor anhalten
BOOL 1 I Q
FB_CLOSE FEEDBACK: 1=CLOSE
Rückmeldung: 1= geschlossen
BOOL 0 I Q
FB_OPEN FEEDBACK: 1=OPEN
Rückmeldung: 1= offen
BOOL 0 I Q
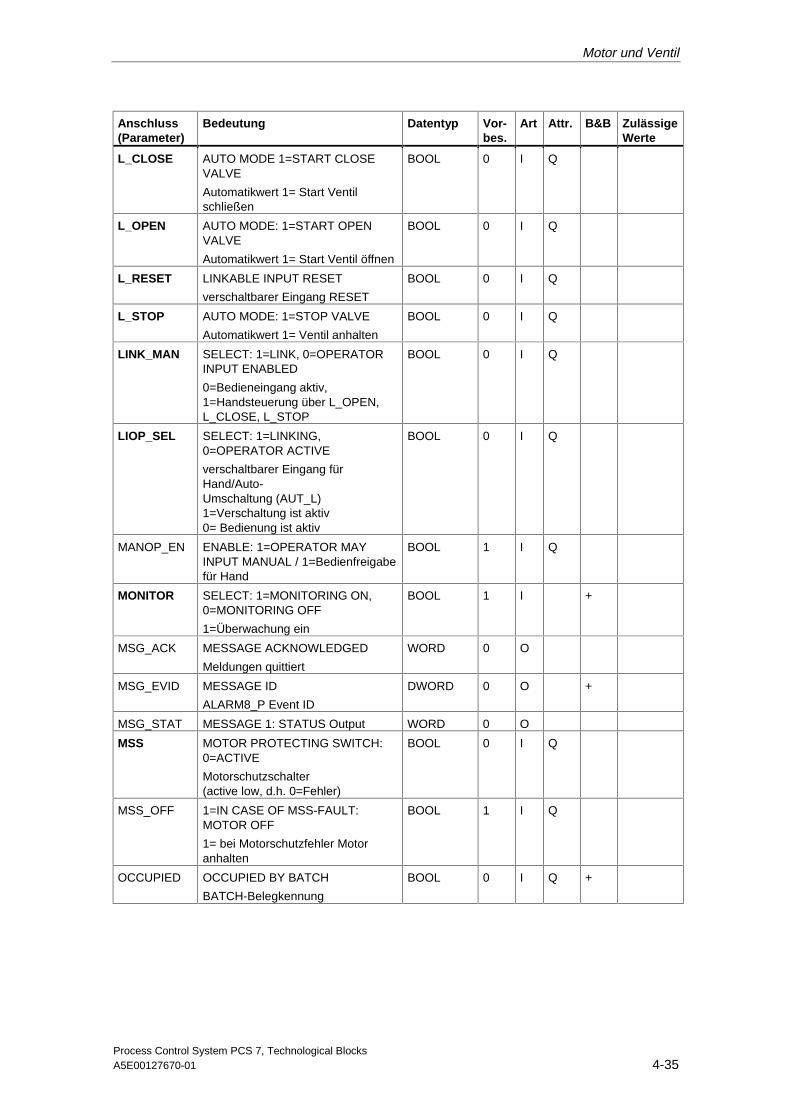
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-35
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
L_CLOSE AUTO MODE 1=START CLOSEVALVE
Automatikwert 1= Start Ventilschließen
BOOL 0 I Q
L_OPEN AUTO MODE: 1=START OPENVALVE
Automatikwert 1= Start Ventil öffnen
BOOL 0 I Q
L_RESET LINKABLE INPUT RESET
verschaltbarer Eingang RESET
BOOL 0 I Q
L_STOP AUTO MODE: 1=STOP VALVE
Automatikwert 1= Ventil anhalten
BOOL 0 I Q
LINK_MAN SELECT: 1=LINK, 0=OPERATORINPUT ENABLED
0=Bedieneingang aktiv,1=Handsteuerung über L_OPEN,L_CLOSE, L_STOP
BOOL 0 I Q
LIOP_SEL SELECT: 1=LINKING,0=OPERATOR ACTIVE
verschaltbarer Eingang fürHand/Auto-Umschaltung (AUT_L)1=Verschaltung ist aktiv0= Bedienung ist aktiv
BOOL 0 I Q
MANOP_EN ENABLE: 1=OPERATOR MAYINPUT MANUAL / 1=Bedienfreigabefür Hand
BOOL 1 I Q
MONITOR SELECT: 1=MONITORING ON,0=MONITORING OFF
1=Überwachung ein
BOOL 1 I +
MSG_ACK MESSAGE ACKNOWLEDGED
Meldungen quittiert
WORD 0 O
MSG_EVID MESSAGE ID
ALARM8_P Event ID
DWORD 0 O +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
MSS MOTOR PROTECTING SWITCH:0=ACTIVE
Motorschutzschalter(active low, d.h. 0=Fehler)
BOOL 0 I Q
MSS_OFF 1=IN CASE OF MSS-FAULT:MOTOR OFF
1= bei Motorschutzfehler Motoranhalten
BOOL 1 I Q
OCCUPIED OCCUPIED BY BATCH
BATCH-Belegkennung
BOOL 0 I Q +
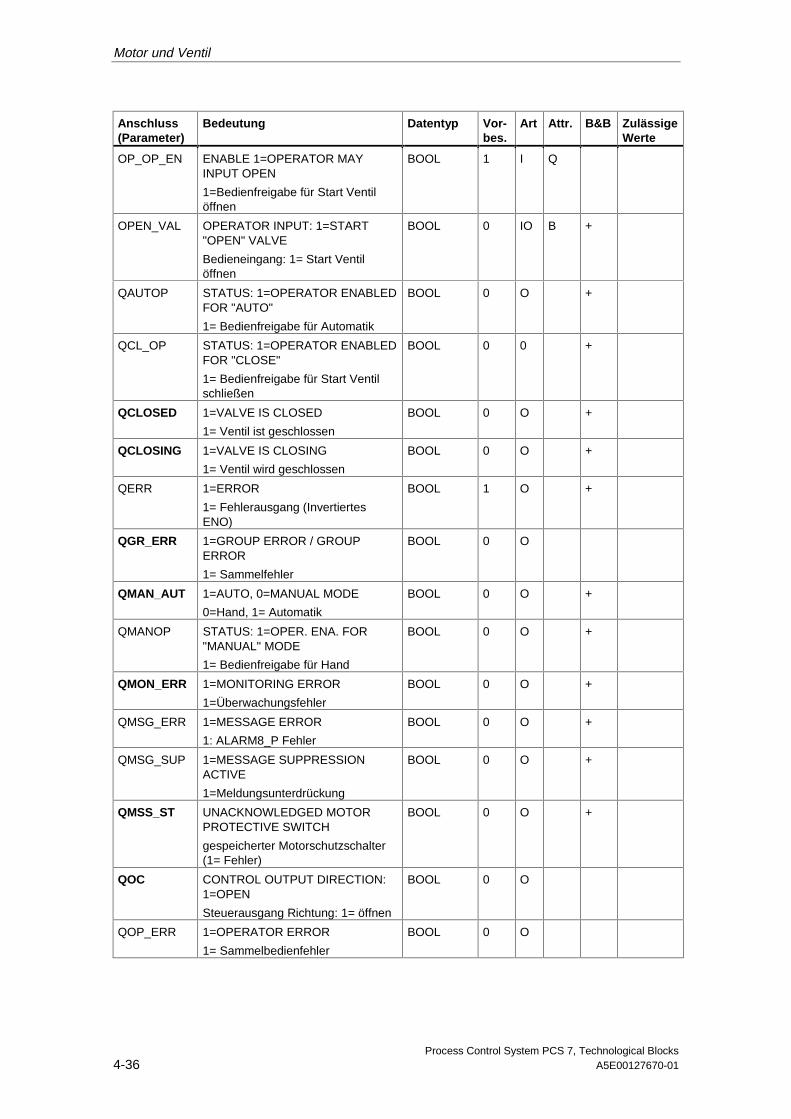
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-36 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
OP_OP_EN ENABLE 1=OPERATOR MAYINPUT OPEN
1=Bedienfreigabe für Start Ventilöffnen
BOOL 1 I Q
OPEN_VAL OPERATOR INPUT: 1=START"OPEN" VALVE
Bedieneingang: 1= Start Ventilöffnen
BOOL 0 IO B +
QAUTOP STATUS: 1=OPERATOR ENABLEDFOR "AUTO"
1= Bedienfreigabe für Automatik
BOOL 0 O +
QCL_OP STATUS: 1=OPERATOR ENABLEDFOR "CLOSE"
1= Bedienfreigabe für Start Ventilschließen
BOOL 0 0 +
QCLOSED 1=VALVE IS CLOSED
1= Ventil ist geschlossen
BOOL 0 O +
QCLOSING 1=VALVE IS CLOSING
1= Ventil wird geschlossen
BOOL 0 O +
QERR 1=ERROR
1= Fehlerausgang (InvertiertesENO)
BOOL 1 O +
QGR_ERR 1=GROUP ERROR / GROUPERROR
1= Sammelfehler
BOOL 0 O
QMAN_AUT 1=AUTO, 0=MANUAL MODE
0=Hand, 1= Automatik
BOOL 0 O +
QMANOP STATUS: 1=OPER. ENA. FOR"MANUAL" MODE
1= Bedienfreigabe für Hand
BOOL 0 O +
QMON_ERR 1=MONITORING ERROR
1=Überwachungsfehler
BOOL 0 O +
QMSG_ERR 1=MESSAGE ERROR
1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE
1=Meldungsunterdrückung
BOOL 0 O +
QMSS_ST UNACKNOWLEDGED MOTORPROTECTIVE SWITCH
gespeicherter Motorschutzschalter(1= Fehler)
BOOL 0 O +
QOC CONTROL OUTPUT DIRECTION:1=OPEN
Steuerausgang Richtung: 1= öffnen
BOOL 0 O
QOP_ERR 1=OPERATOR ERROR
1= Sammelbedienfehler
BOOL 0 O
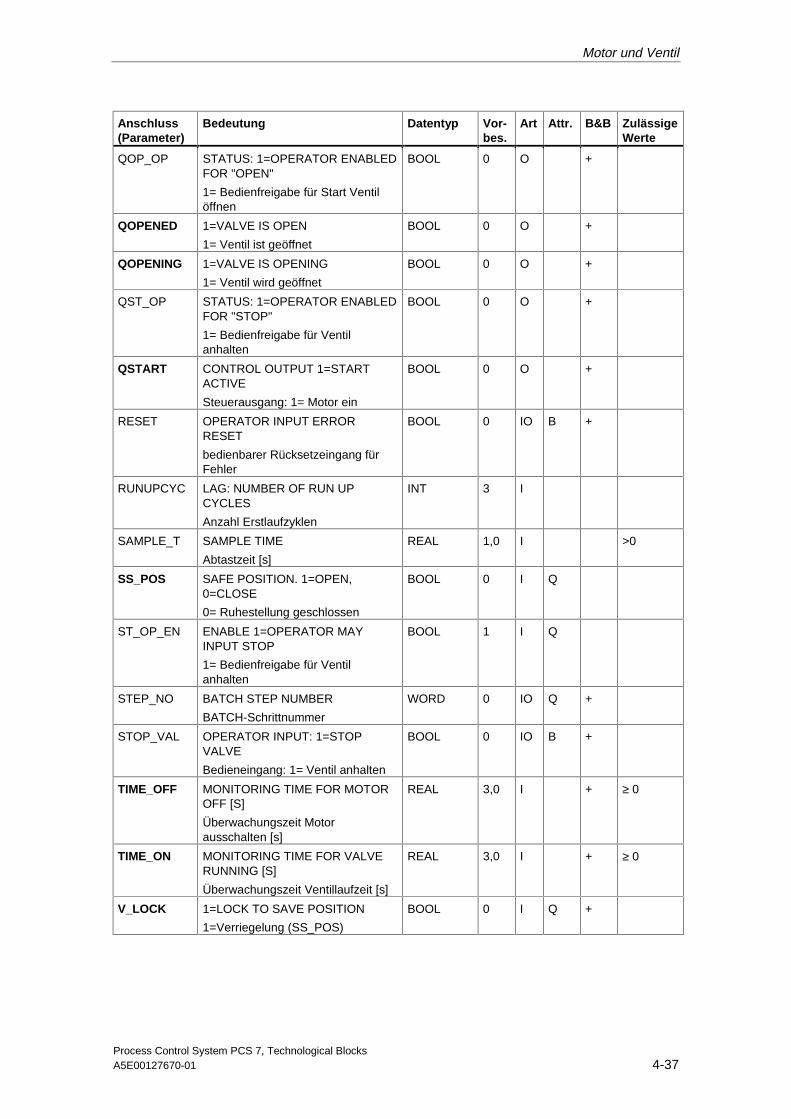
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-37
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QOP_OP STATUS: 1=OPERATOR ENABLEDFOR "OPEN"
1= Bedienfreigabe für Start Ventilöffnen
BOOL 0 O +
QOPENED 1=VALVE IS OPEN
1= Ventil ist geöffnet
BOOL 0 O +
QOPENING 1=VALVE IS OPENING
1= Ventil wird geöffnet
BOOL 0 O +
QST_OP STATUS: 1=OPERATOR ENABLEDFOR "STOP"
1= Bedienfreigabe für Ventilanhalten
BOOL 0 O +
QSTART CONTROL OUTPUT 1=STARTACTIVE
Steuerausgang: 1= Motor ein
BOOL 0 O +
RESET OPERATOR INPUT ERRORRESET
bedienbarer Rücksetzeingang fürFehler
BOOL 0 IO B +
RUNUPCYC LAG: NUMBER OF RUN UPCYCLES
Anzahl Erstlaufzyklen
INT 3 I
SAMPLE_T SAMPLE TIME
Abtastzeit [s]
REAL 1,0 I >0
SS_POS SAFE POSITION. 1=OPEN,0=CLOSE
0= Ruhestellung geschlossen
BOOL 0 I Q
ST_OP_EN ENABLE 1=OPERATOR MAYINPUT STOP
1= Bedienfreigabe für Ventilanhalten
BOOL 1 I Q
STEP_NO BATCH STEP NUMBER
BATCH-Schrittnummer
WORD 0 IO Q +
STOP_VAL OPERATOR INPUT: 1=STOPVALVE
Bedieneingang: 1= Ventil anhalten
BOOL 0 IO B +
TIME_OFF MONITORING TIME FOR MOTOROFF [S]
Überwachungszeit Motorausschalten [s]
REAL 3,0 I + ≥ 0
TIME_ON MONITORING TIME FOR VALVERUNNING [S]
Überwachungszeit Ventillaufzeit [s]
REAL 3,0 I + ≥ 0
V_LOCK 1=LOCK TO SAVE POSITION
1=Verriegelung (SS_POS)
BOOL 0 I Q +
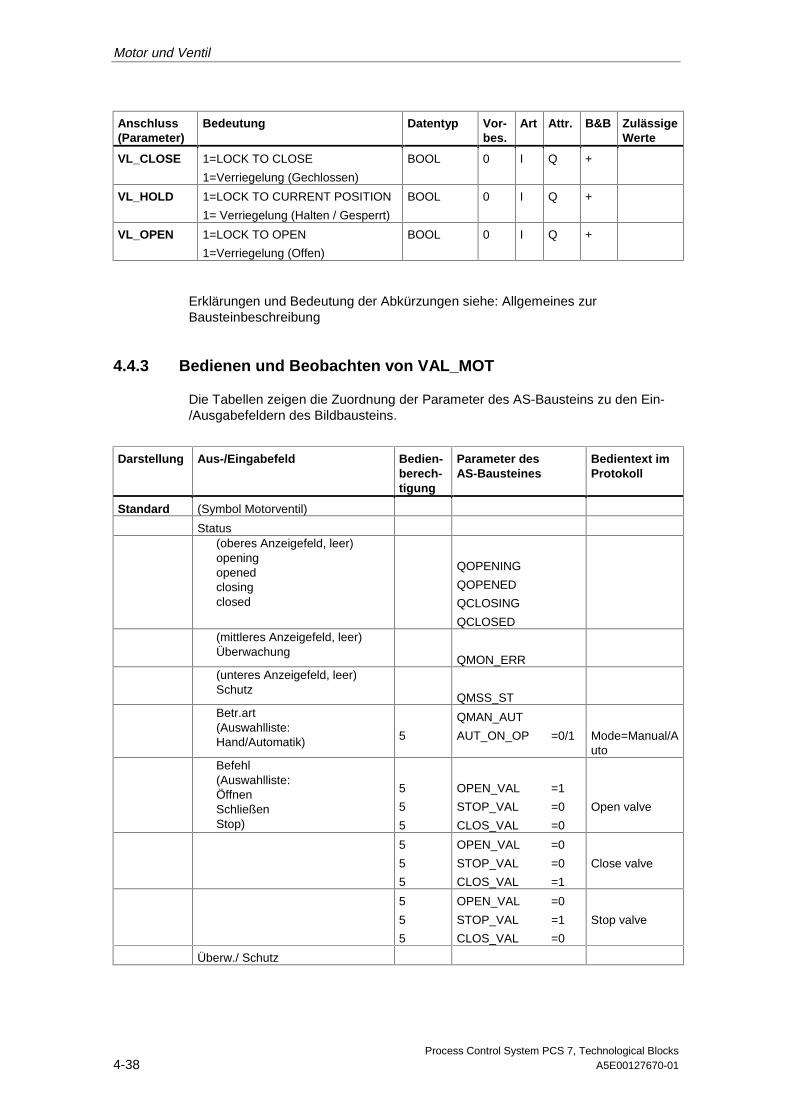
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-38 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
VL_CLOSE 1=LOCK TO CLOSE
1=Verriegelung (Gechlossen)
BOOL 0 I Q +
VL_HOLD 1=LOCK TO CURRENT POSITION
1= Verriegelung (Halten / Gesperrt)
BOOL 0 I Q +
VL_OPEN 1=LOCK TO OPEN
1=Verriegelung (Offen)
BOOL 0 I Q +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
4.4.3 Bedienen und Beobachten von VAL_MOT
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard (Symbol Motorventil)
Status(oberes Anzeigefeld, leer)openingopenedclosingclosed
QOPENING
QOPENED
QCLOSING
QCLOSED(mittleres Anzeigefeld, leer)Überwachung
QMON_ERR(unteres Anzeigefeld, leer)Schutz
QMSS_STBetr.art(Auswahlliste:Hand/Automatik) 5
QMAN_AUT
AUT_ON_OP =0/1 Mode=Manual/Auto
Befehl(Auswahlliste:ÖffnenSchließenStop)
5
5
5
OPEN_VAL =1
STOP_VAL =0
CLOS_VAL =0
Open valve
5
5
5
OPEN_VAL =0
STOP_VAL =0
CLOS_VAL =1
Close valve
5
5
5
OPEN_VAL =0
STOP_VAL =1
CLOS_VAL =0
Stop valve
Überw./ Schutz
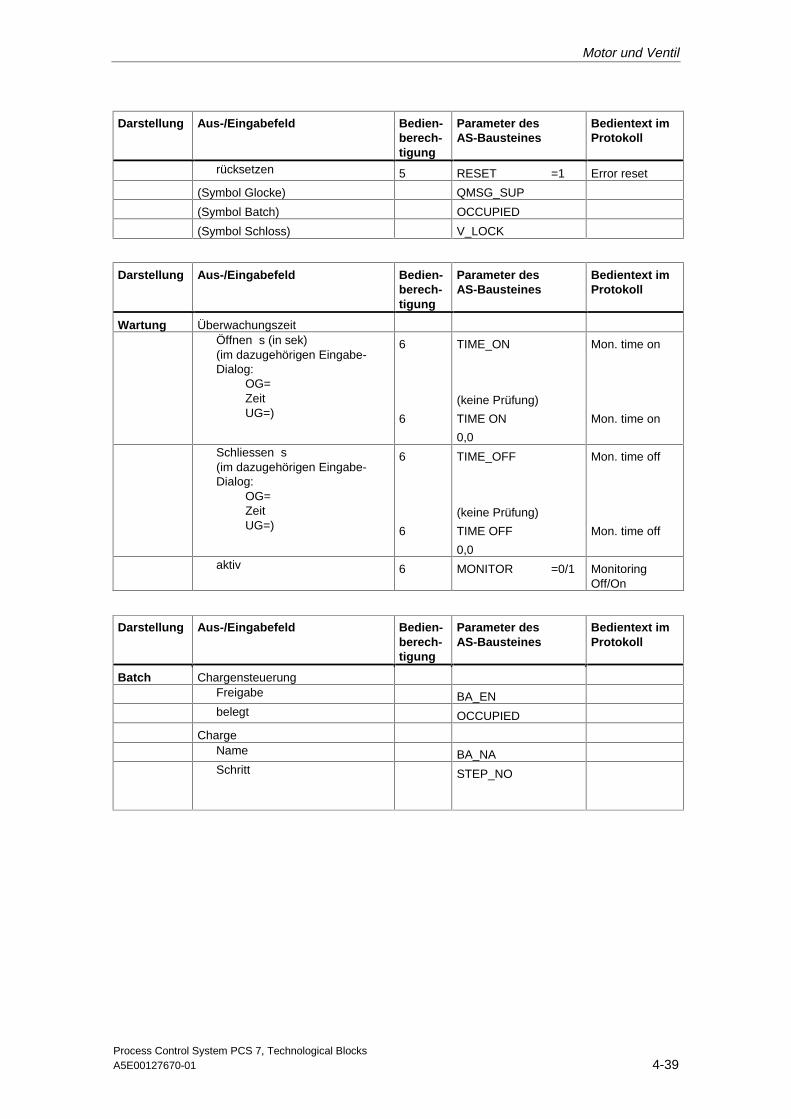
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-39
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
rücksetzen 5 RESET =1 Error reset
(Symbol Glocke) QMSG_SUP
(Symbol Batch) OCCUPIED
(Symbol Schloss) V_LOCK
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung ÜberwachungszeitÖffnen s (in sek)(im dazugehörigen Eingabe-Dialog:
OG=ZeitUG=)
6
6
TIME_ON
(keine Prüfung)
TIME ON
0,0
Mon. time on
Mon. time on
Schliessen s(im dazugehörigen Eingabe-Dialog:
OG=ZeitUG=)
6
6
TIME_OFF
(keine Prüfung)
TIME OFF
0,0
Mon. time off
Mon. time off
aktiv 6 MONITOR =0/1 MonitoringOff/On
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
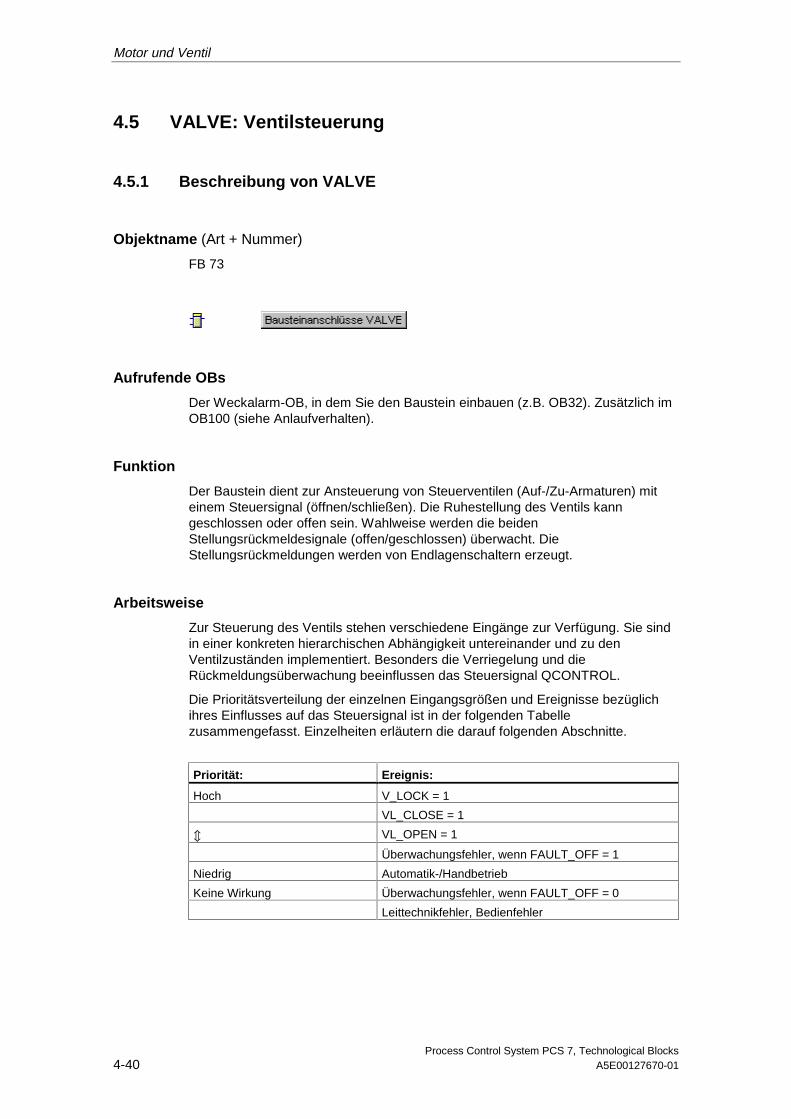
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-40 A5E00127670-01
4.5 VALVE: Ventilsteuerung
4.5.1 Beschreibung von VALVE
Objektname (Art + Nummer)
FB 73
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB100 (siehe Anlaufverhalten).
Funktion
Der Baustein dient zur Ansteuerung von Steuerventilen (Auf-/Zu-Armaturen) miteinem Steuersignal (öffnen/schließen). Die Ruhestellung des Ventils kanngeschlossen oder offen sein. Wahlweise werden die beidenStellungsrückmeldesignale (offen/geschlossen) überwacht. DieStellungsrückmeldungen werden von Endlagenschaltern erzeugt.
Arbeitsweise
Zur Steuerung des Ventils stehen verschiedene Eingänge zur Verfügung. Sie sindin einer konkreten hierarchischen Abhängigkeit untereinander und zu denVentilzuständen implementiert. Besonders die Verriegelung und dieRückmeldungsüberwachung beeinflussen das Steuersignal QCONTROL.
Die Prioritätsverteilung der einzelnen Eingangsgrößen und Ereignisse bezüglichihres Einflusses auf das Steuersignal ist in der folgenden Tabellezusammengefasst. Einzelheiten erläutern die darauf folgenden Abschnitte.
Priorität: Ereignis:
Hoch V_LOCK = 1
VL_CLOSE = 1
c VL_OPEN = 1
Überwachungsfehler, wenn FAULT_OFF = 1
Niedrig Automatik-/Handbetrieb
Keine Wirkung Überwachungsfehler, wenn FAULT_OFF = 0
Leittechnikfehler, Bedienfehler
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-41
Ruhelage
Die Ruhelage des angesteuerten Ventils wird über Parametrierung des EingangsSS_POS dem Baustein mitgeteilt (1: offen, 0: geschlossen). Dieses wirkt sich nurauf die Definition des Steuerausgangs QCONTROL aus (0: Ruhelage, Ventilabgesteuert). Die eingangsseitigen Befehle bleiben davon unberührt ("1" heißt amEingang immer "öffnen").
Beispiel: bei SS_POS=1 (Ventil mit Ruhelage "offen") bedeutet derSteuerausgang QCONTROL=1 "Ventil schließen".
Hand/Automatik
Die Umschaltung erfolgt entweder durch OS-Bedienung von AUT_ ON_OP oderüber die Verschaltung am AUT_L-Eingang, falls die notwendigen Freigabenvorhanden sind. Die eingestellte Betriebsart wird am Ausgang QMAN_AUTangezeigt (1: Auto, 0: Hand).
• Handbetrieb: Es wird über OS der Eingang MAN_OC bedient. Die Freigabendafür (OP_OP_EN bzw. CL_OP_EN) müssen vorhanden sein.
• Automatikbetrieb: Der Steuerbefehl wird über den Eingang AUTO_OC (1:öffnen, 0: schließen) durch Verschaltung auf eine Automatik bezogen.
Verriegelung
Die Verriegelung ist allen anderen Steuersignalen und Fehlern übergeordnet. Beigesetztem V_LOCK wird das Ventil in seine Ruhelage gebracht (QCONTROL =0). Sofern V_LOCK nicht gesetzt ist, kann über die Eingänge VL_OPEN undVL_CLOSE auch ein Verriegelungszustand (offen / geschlossen) direkt angewähltwerden. Das Signal VL_CLOSE sperrt VL_OPEN.
Überwachung
Mit der Überwachungslogik wird die Übereinstimmung zwischen demausgegebenen Steuerbefehl QCONTROL und der Rückmeldung des Istzustandesdes Ventils (FB_OPEN, FB_CLOSE) geprüft. Ist die Endlage nach Ablauf derÜberwachungszeit TIME_MON nicht erreicht, so wird der Ausgang QMON_ERRgesetzt. QMON_ERR wird auch (ohne Wartezeit) gesetzt, falls sich dieRückmeldung ohne Anlass (Befehl) verändert. Das Ventil wird in die Ruhelage(energielos) versetzt.Falls keine Endlagenrückmeldung angeschlossen ist, muss dies der Überwachungmit MONITOR = 0 mitgeteilt werden. Diese nimmt dann an, dass nach Ablauf derZeit TIME_MON die Endlage des Ventils erreicht ist. Bis dahin wird QOPENINGbzw. QCLOSING angezeigt.Im fehlerlosen Überwachungsbetrieb zeigen die Ausgänge QOPENING undQCLOSING, ob das Ventil auf-/zufährt, sowie QOPENED und QCLOSED, ob dasVentil die Endstellung erreicht hat.
Mit den Eingängen NO_FB_xx und NOMON_xx parametrieren Sie, ob keineRückmeldung für die Zustände "offen" bzw. "geschlossen" vorhanden ist(NO_FB_xx=1) oder die vorhandene Rückmeldung z. B. wegen Ausfall desEndlagenschalters nicht ausgewertet werden soll (NOMON_xx=1).
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-42 A5E00127670-01
Der Parameter FAULT_SS legt die Relevanz des Überwachungsfehlers fest. IstFAULT_SS = 1 wird der Motor im Fehlerfall in seine durch SS_POS definierteRuhelage gebracht, während der Fehler bei FAULT_SS = 0 keine Auswirkung aufdie Steuerausgänge hat.
Stoßfreies Umschalten
Um in allen Betriebssituationen ein stoßfreies Umschalten auf Handbetrieb zugewährleisten, wird der Handwert MAN_OC immer entsprechend dem aktuellenWert von QCONTROL nachgeführt.
Fehlerbehandlung
Der Überwachungsfehler (QMON_ERR = 1) wird an die OS gemeldet undbeeinflusst, wie oben beschrieben, die Funktionsweise des Bausteines. Er kannentweder durch Bedienung von RESET oder automatisch durch eine Verschaltungmit steigender Flanke von L_RESET zurückgesetzt werden.Der LeittechnikfehlerCSF wird lediglich an die OS gemeldet und zusammen mit der Überwachung aufden Sammelfehler QGR_ERR gelegt. Er hat auf den Bausteinalgorithmus keinenweiteren Einfluss.
Bedienfehler werden ohne Meldung durch den Ausgang QOP_ERR angezeigt.
Anlauf nach Fehlerzustand
Es wird nach der Betriebsart unterschieden, die beim Rücksetzen vorhanden war:
• Im Automatikbetrieb kann das Motorventil erst wieder anlaufen, wenn derÜberwachungs- bzw. Motorschutzfehler zurückgesetzt ist und einentsprechendes Startsignal von der Automatik geliefert wird.
• Im Handbetrieb muss der Motor explizit eingeschaltet werden, da dieHandbedienung auf "HALT" nachgeführt wurde.
Anlaufverhalten
Bei CPU-Anlauf wird der VALVE-Baustein auf Handbetrieb geschaltet und derQCONTROL=0 (Ruhelage) ausgegeben. Dafür muss der Baustein aus demAnlauf-OB aufgerufen werden. Bei CFC-Projektierung wird dieses durch CFCerledigt. Bei einfachen STEP 7-Mitteln müssen Sie den Aufruf im Anlauf-OBeintragen. Nach dem Anlauf werden für die Anzahl der im Wert RUNUPCYCparametrierten Zyklen die Meldungen unterdrückt.
Mit der Eingang START_SS bestimmen Sie, ob das Ventil bei CPU-Anlauf dieSicherheitsstellung einnimmt (START_SS=1) oder den letzten Betriebszustandbeibehält.
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
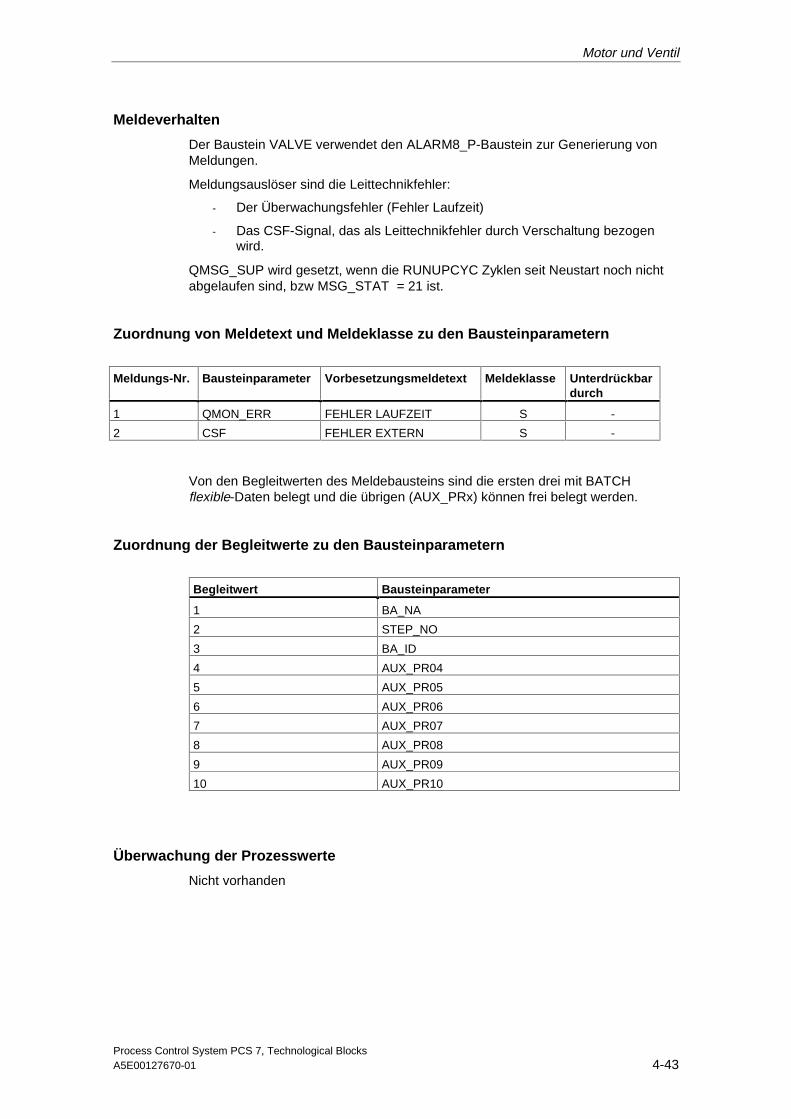
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-43
Meldeverhalten
Der Baustein VALVE verwendet den ALARM8_P-Baustein zur Generierung vonMeldungen.
Meldungsauslöser sind die Leittechnikfehler:
- Der Überwachungsfehler (Fehler Laufzeit)
- Das CSF-Signal, das als Leittechnikfehler durch Verschaltung bezogenwird.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, bzw MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse Unterdrückbardurch
1 QMON_ERR FEHLER LAUFZEIT S -
2 CSF FEHLER EXTERN S -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten belegt und die übrigen (AUX_PRx) können frei belegt werden.
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 BA_NA
2 STEP_NO
3 BA_ID
4 AUX_PR04
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden
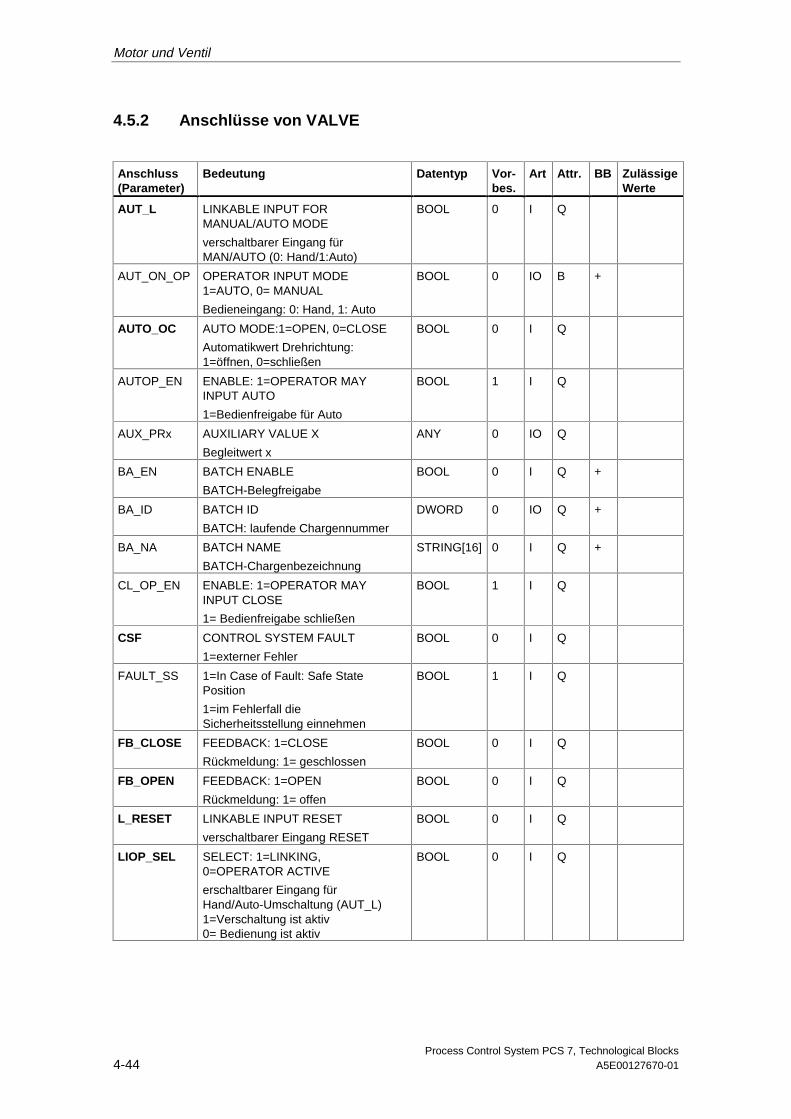
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-44 A5E00127670-01
4.5.2 Anschlüsse von VALVE
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. BB ZulässigeWerte
AUT_L LINKABLE INPUT FORMANUAL/AUTO MODE
verschaltbarer Eingang fürMAN/AUTO (0: Hand/1:Auto)
BOOL 0 I Q
AUT_ON_OP OPERATOR INPUT MODE1=AUTO, 0= MANUAL
Bedieneingang: 0: Hand, 1: Auto
BOOL 0 IO B +
AUTO_OC AUTO MODE:1=OPEN, 0=CLOSE
Automatikwert Drehrichtung:1=öffnen, 0=schließen
BOOL 0 I Q
AUTOP_EN ENABLE: 1=OPERATOR MAYINPUT AUTO
1=Bedienfreigabe für Auto
BOOL 1 I Q
AUX_PRx AUXILIARY VALUE X
Begleitwert x
ANY 0 IO Q
BA_EN BATCH ENABLE
BATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH ID
BATCH: laufende Chargennummer
DWORD 0 IO Q +
BA_NA BATCH NAME
BATCH-Chargenbezeichnung
STRING[16] 0 I Q +
CL_OP_EN ENABLE: 1=OPERATOR MAYINPUT CLOSE
1= Bedienfreigabe schließen
BOOL 1 I Q
CSF CONTROL SYSTEM FAULT
1=externer Fehler
BOOL 0 I Q
FAULT_SS 1=In Case of Fault: Safe StatePosition
1=im Fehlerfall dieSicherheitsstellung einnehmen
BOOL 1 I Q
FB_CLOSE FEEDBACK: 1=CLOSE
Rückmeldung: 1= geschlossen
BOOL 0 I Q
FB_OPEN FEEDBACK: 1=OPEN
Rückmeldung: 1= offen
BOOL 0 I Q
L_RESET LINKABLE INPUT RESET
verschaltbarer Eingang RESET
BOOL 0 I Q
LIOP_SEL SELECT: 1=LINKING,0=OPERATOR ACTIVE
erschaltbarer Eingang fürHand/Auto-Umschaltung (AUT_L)1=Verschaltung ist aktiv0= Bedienung ist aktiv
BOOL 0 I Q
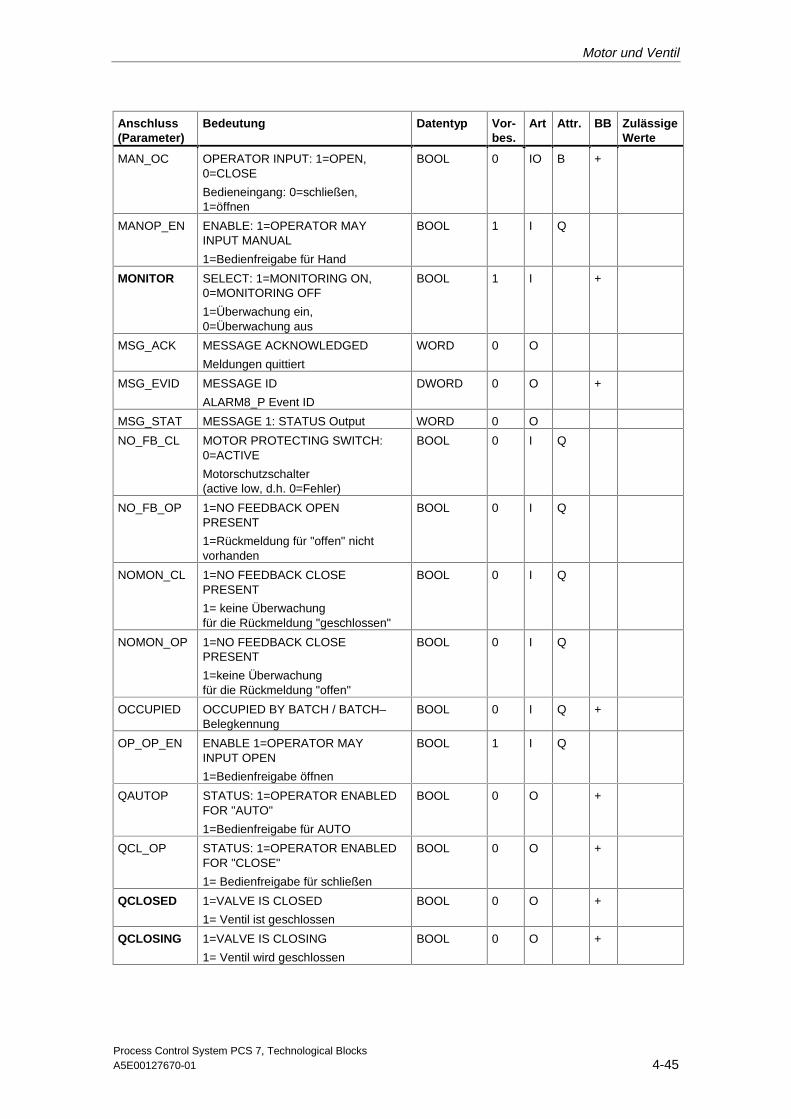
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-45
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. BB ZulässigeWerte
MAN_OC OPERATOR INPUT: 1=OPEN,0=CLOSE
Bedieneingang: 0=schließen,1=öffnen
BOOL 0 IO B +
MANOP_EN ENABLE: 1=OPERATOR MAYINPUT MANUAL
1=Bedienfreigabe für Hand
BOOL 1 I Q
MONITOR SELECT: 1=MONITORING ON,0=MONITORING OFF
1=Überwachung ein,0=Überwachung aus
BOOL 1 I +
MSG_ACK MESSAGE ACKNOWLEDGED
Meldungen quittiert
WORD 0 O
MSG_EVID MESSAGE ID
ALARM8_P Event ID
DWORD 0 O +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
NO_FB_CL MOTOR PROTECTING SWITCH:0=ACTIVE
Motorschutzschalter(active low, d.h. 0=Fehler)
BOOL 0 I Q
NO_FB_OP 1=NO FEEDBACK OPENPRESENT
1=Rückmeldung für "offen" nichtvorhanden
BOOL 0 I Q
NOMON_CL 1=NO FEEDBACK CLOSEPRESENT
1= keine Überwachungfür die Rückmeldung "geschlossen"
BOOL 0 I Q
NOMON_OP 1=NO FEEDBACK CLOSEPRESENT
1=keine Überwachungfür die Rückmeldung "offen"
BOOL 0 I Q
OCCUPIED OCCUPIED BY BATCH / BATCH–Belegkennung
BOOL 0 I Q +
OP_OP_EN ENABLE 1=OPERATOR MAYINPUT OPEN
1=Bedienfreigabe öffnen
BOOL 1 I Q
QAUTOP STATUS: 1=OPERATOR ENABLEDFOR "AUTO"
1=Bedienfreigabe für AUTO
BOOL 0 O +
QCL_OP STATUS: 1=OPERATOR ENABLEDFOR "CLOSE"
1= Bedienfreigabe für schließen
BOOL 0 O +
QCLOSED 1=VALVE IS CLOSED
1= Ventil ist geschlossen
BOOL 0 O +
QCLOSING 1=VALVE IS CLOSING
1= Ventil wird geschlossen
BOOL 0 O +
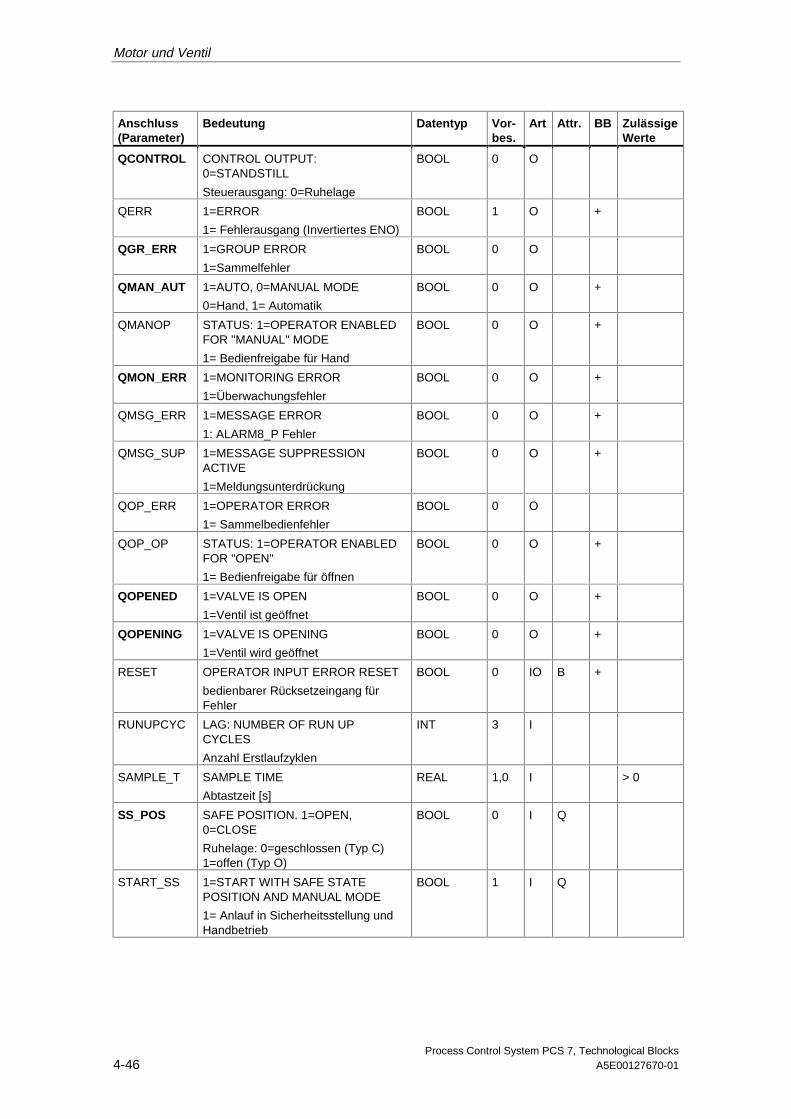
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-46 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. BB ZulässigeWerte
QCONTROL CONTROL OUTPUT:0=STANDSTILL
Steuerausgang: 0=Ruhelage
BOOL 0 O
QERR 1=ERROR
1= Fehlerausgang (Invertiertes ENO)
BOOL 1 O +
QGR_ERR 1=GROUP ERROR
1=Sammelfehler
BOOL 0 O
QMAN_AUT 1=AUTO, 0=MANUAL MODE
0=Hand, 1= Automatik
BOOL 0 O +
QMANOP STATUS: 1=OPERATOR ENABLEDFOR "MANUAL" MODE
1= Bedienfreigabe für Hand
BOOL 0 O +
QMON_ERR 1=MONITORING ERROR
1=Überwachungsfehler
BOOL 0 O +
QMSG_ERR 1=MESSAGE ERROR
1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE
1=Meldungsunterdrückung
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1= Sammelbedienfehler
BOOL 0 O
QOP_OP STATUS: 1=OPERATOR ENABLEDFOR "OPEN"
1= Bedienfreigabe für öffnen
BOOL 0 O +
QOPENED 1=VALVE IS OPEN
1=Ventil ist geöffnet
BOOL 0 O +
QOPENING 1=VALVE IS OPENING
1=Ventil wird geöffnet
BOOL 0 O +
RESET OPERATOR INPUT ERROR RESET
bedienbarer Rücksetzeingang fürFehler
BOOL 0 IO B +
RUNUPCYC LAG: NUMBER OF RUN UPCYCLES
Anzahl Erstlaufzyklen
INT 3 I
SAMPLE_T SAMPLE TIME
Abtastzeit [s]
REAL 1,0 I > 0
SS_POS SAFE POSITION. 1=OPEN,0=CLOSE
Ruhelage: 0=geschlossen (Typ C)1=offen (Typ O)
BOOL 0 I Q
START_SS 1=START WITH SAFE STATEPOSITION AND MANUAL MODE
1= Anlauf in Sicherheitsstellung undHandbetrieb
BOOL 1 I Q
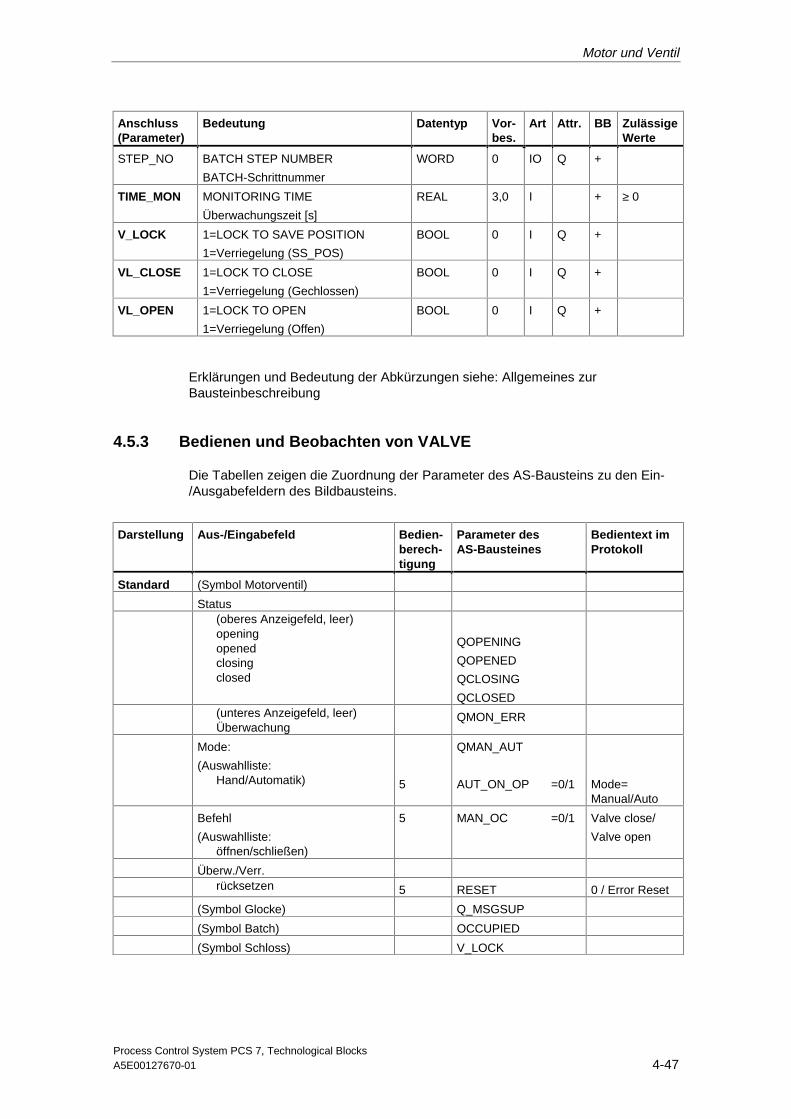
Motor und Ventil
Process Control System PCS 7, Technological BlocksA5E00127670-01 4-47
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. BB ZulässigeWerte
STEP_NO BATCH STEP NUMBER
BATCH-Schrittnummer
WORD 0 IO Q +
TIME_MON MONITORING TIME
Überwachungszeit [s]
REAL 3,0 I + ≥ 0
V_LOCK 1=LOCK TO SAVE POSITION
1=Verriegelung (SS_POS)
BOOL 0 I Q +
VL_CLOSE 1=LOCK TO CLOSE
1=Verriegelung (Gechlossen)
BOOL 0 I Q +
VL_OPEN 1=LOCK TO OPEN
1=Verriegelung (Offen)
BOOL 0 I Q +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
4.5.3 Bedienen und Beobachten von VALVE
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard (Symbol Motorventil)
Status(oberes Anzeigefeld, leer)openingopenedclosingclosed
QOPENING
QOPENED
QCLOSING
QCLOSED(unteres Anzeigefeld, leer)Überwachung
QMON_ERR
Mode:
(Auswahlliste:Hand/Automatik) 5
QMAN_AUT
AUT_ON_OP =0/1 Mode=Manual/Auto
Befehl
(Auswahlliste:öffnen/schließen)
5 MAN_OC =0/1 Valve close/
Valve open
Überw./Verr.rücksetzen 5 RESET 0 / Error Reset
(Symbol Glocke) Q_MSGSUP
(Symbol Batch) OCCUPIED
(Symbol Schloss) V_LOCK
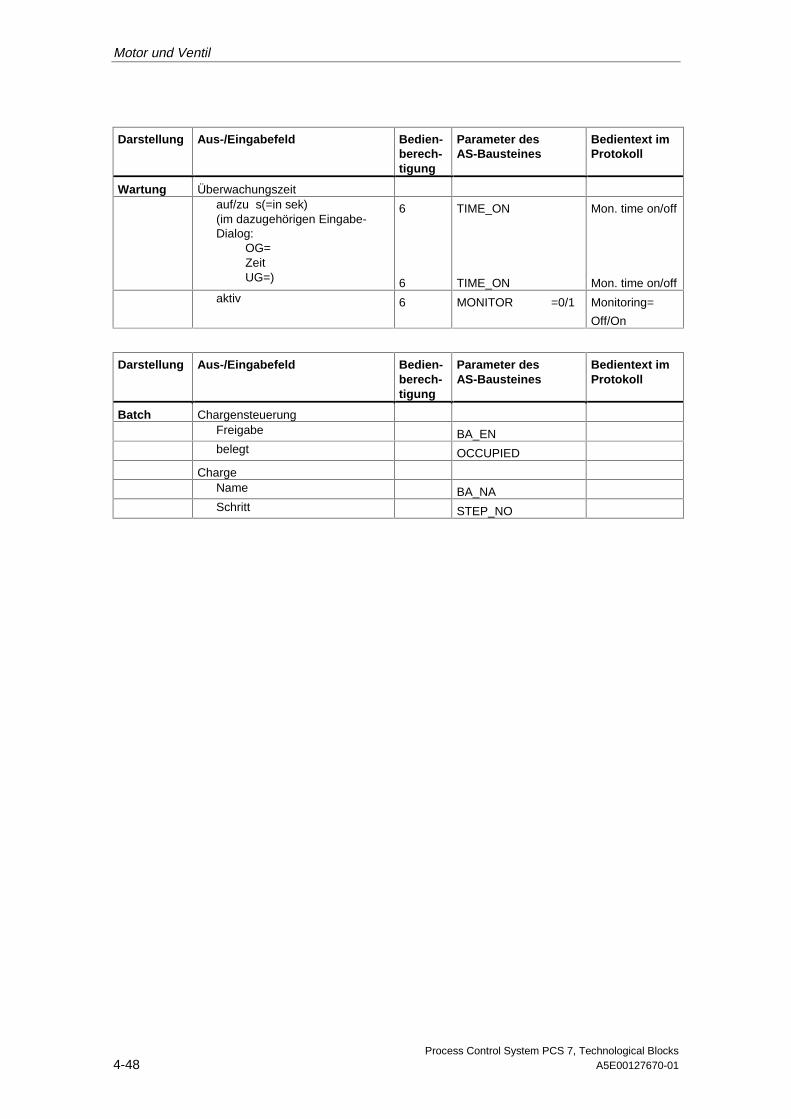
Motor und Ventil
Process Control System PCS 7, Technological Blocks4-48 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung Überwachungszeitauf/zu s(=in sek)(im dazugehörigen Eingabe-Dialog:
OG=ZeitUG=)
6
6
TIME_ON
TIME_ON
Mon. time on/off
Mon. time on/offaktiv 6 MONITOR =0/1 Monitoring=
Off/On
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENbelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-1
5 Sonstige Technologische Bausteine
5.1 ADD4_P: Addition für maximal 4 Werte
5.1.1 ADD4_P: Addition für maximal 4 Werte
Objektname (Art + Nummer)
FC 256
Funktion
Der Baustein berechnet die Summe von bis zu 4 WertenV = U1+...+Un (n≤4)
Aufrufende OBs
Nur der OB, in dem Sie den Baustein einbauen.
Fehlerbehandlung
Bei Überlauf wird die über- bzw. unterschrittene Bereichsgrenze des Typs REAL imErgebnis V eingesetzt und ENO = 0 belegt.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-2 A5E00127670-01
5.1.2 Anschlüsse von ADD4_P
Anschluss(Parameter)
Bedeutung Datentyp Vorbesetzung Art Attr.
U1 Summand 1 REAL I Q
U2 Summand 2 REAL I Q
U3 Summand 3 REAL I Q
U4 Summand 4 REAL I Q
V Ergebnis REAL O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
5.2 ADD8_P: Addition für maximal 8 Werte
5.2.1 ADD8_P: Addition für maximal 8 Werte
Objektname (Art + Nummer)
FC 257
Funktion
Der Baustein berechnet die Summe von bis zu 8 WertenV = U1+U2+U3+...+Un (n≤8)
Fehlerbehandlung
Bei Überlauf wird die über- bzw. unterschrittene Bereichsgrenze des Typs REAL imErgebnis V eingesetzt und ENO = 0 belegt.
Aufrufende OBs
Nur der OB, in dem Sie den Baustein einbauen.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-3
5.2.2 Anschlüsse von ADD8_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr.
U1 Summand 1 REAL I Q
U2 Summand 2 REAL I Q
U3 Summand 3 REAL I Q
.... .... .... .... .... ....
U8 Summand 8 REAL I Q
V Ergebnis REAL O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
5.3 AVER_P: Zeitlicher Mittelwert
5.3.1 Beschreibung von AVER_P
Objektname (Art + Nummer)
FB 34
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB 32). Zusätzlich imOB 100 (Siehe Anlaufverhalten).
Funktion
Der Baustein berechnet den zeitlichen Mittelwert eines anliegenden Parametersüber die nach seinem Start vergangene Zeit nach folgender Formel :
V = (N ∗ Valt + U) / (N+1) wobei:
• U: anliegender Parameter
• V: aktueller Mittelwert
• Valt : Mittelwert der seit dem Start abgelaufenen Zyklen
• N: Anzahl der Zyklen, über die gemittelt wird
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-4 A5E00127670-01
Arbeitsweise
Der Baustein arbeitet nach folgendem Schema:
• Durch die Aufwärtsflanke des Eingangs RUN wird die Berechnung gestartet.Dabei wird ein noch anstehendes Ergebnis V durch den Eingangswert Uüberschrieben (siehe auch Anlaufverhalten).
• In den darauf folgenden Zyklen wird das Ergebnis im Ausgang V jeweils neuberechnet und der Zykluszähler N inkrementiert.
• Durch Rücksetzen des Eingangs RUN wird die Berechnung beendet und dieErgebnisse V und N auf dem letzten Stand gespeichert.
Fehlerbehandlung
Bei Überlauf wird die über- bzw. unterschrittene Bereichsgrenze des Typs REAL imErgebnis V eingesetzt und ENO = 0 sowie QERR=1 belegt.
Anlaufverhalten
Im Erstlauf sowie bei einem CPU-Anlauf wird :
• der Eingangswert U auf den Ausgang V geschrieben,
• der Zyklenzähler N rückgesetzt.
Dafür wird der Baustein aus dem Anlauf-OB aufgerufen.
Zeitverhalten
Um seiner ausgewiesenen Funktion gerecht zu werden, wird der Baustein auseinem Weckalarm-OB aufgerufen. Dabei kann die für den Mittelwertherangezogene Zeit Tmittel vom Anwender nach der unteren Formel berechnetwerden:
Tmittel = N ∗ Tabtast
wobei Tabtast die Abtastzeit des Bausteins ist.Bei CFC-Projektierung muss ggf. die übergeordnete Ablaufgruppe des Bausteinsmit ihrem Abtastparameter berücksichtigt werden.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-5
5.3.2 Anschlüsse von AVER_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr.
N NUMBER OF CYCLES
Anzahl Zyklen, über die gemittelt wird
REAL 0 O
QERR 1=ERROR
1= Fehlerausgang (Invertierwert zu ENO)
BOOL 1 O
RUN MODE: 1=CALC. AVERAGE,0=HOLD LAST VALUE
Mittelwertbildung 0=AUS, 1=EIN
BOOL 0 I Q
U INPUT VALUE
Eingang
REAL 0 I Q
V ANALOG OUTPUT
Mittelwert
REAL 0 O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
5.4 COUNT_P: Zähler
5.4.1 Beschreibung von COUNT_P
Objektname (Art + Nummer)
FB 36
Aufrufende OBs
Nur der OB, in dem Sie den Baustein einbauen (z.B. OB 32).
Funktion
Bei positiven Flanken des binären Eingangssignals I0 wird der Zählwert V, je nachEinstellung, vorwärts bzw. rückwärts gezählt.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-6 A5E00127670-01
Arbeitsweise
Der Baustein arbeitet nach folgendem Schema:
• Über den Parameter MODE kann die Betriebsart eingestellt werden:
- MODE=0 Vorwärtszähler
- MODE=1 Rückwärtszähler
• Als Vorwärtszähler verhält sich der Baustein wie folgt:
• Bei jeder positiven Flanke des Eingangs I0 wird der Zähler inkrementiert.
- Bei Erreichen der oberen Grenze V=V_HL wird der Zähler nicht weiterinkrementiert und der Ausgang QVHL=1 gesetzt.
- Durch Wechseln der Betriebsart nach "Rückwärtszählen" wird derAusgang V mit der nächsten positiven Flanke von I0 dekrementiert undQVHL zurückgesetzt.
- Durch RESET=1 werden V=V_LL , QVLL=1, QVHL=0 sowie der interneFlankenmerker dem Eingangswert nachgeführt.
- Als Rückwärtszähler verhält sich der Baustein wie folgt:
- Bei jeder positiven Flanke des Eingangs I0 wird der Zähler dekrementiert.
- Bei Erreichen der unteren Grenze V=V_LL wird der Zähler nicht weiterdekrementiert und der Ausgang QVLL=1 gesetzt.
- Durch Wechseln der Betriebsart nach "Vorwärtszählen" wird der AusgangV mit der nächsten positiven Flanke von I0 inkrementiert und QVLLzurückgesetzt.
- Durch RESET=1 werden V=V_HL , QVHL=1, QVLL=0 sowie der interneFlankenmerker dem Eingangswert nachgeführt.
Fehlerbehandlung
Bei Überlauf wird die über- bzw. unterschrittene Bereichsgrenze des Typs REAL imErgebnis V eingesetzt und ENO = 0 sowie QERR=1 belegt.
Anlaufverhalten
Im Erstlauf oder bei einem CPU-Anlauf führt der Baustein einmalig einen RESET-Vorgang durch, entsprechend der parametrierten Betriebsart (siehe unterArbeitsweise, RESET).
Zeitverhalten
Nicht vorhanden. Sinnvollerweise sollte der Baustein aber in den OB eingebautwerden, in dem sich auch der Baustein befindet, der die Signalflanken liefert.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-7
5.4.2 Anschlüsse von COUNT_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes
Art Attr. ZulässigeWerte
I0 INPUT
Eingang
BOOL 0 I Q
MODE COUNTER MODE1=DECREMENT, 0INCREMENT
Betriebsart0= vorwärts, 1= rückwärtszählen
BOOL 0 I Q
QERR 1=ERROR
1= Fehler
BOOL 1 O
QVHL 1=V > V_HL
1= V_HL erreicht
BOOL 0 O
QVLL 1=V < V_LL
1= V_LL erreicht
BOOL 0 O
RESET 1=RESET
1= Rücksetzen
BOOL 0 I Q
V NUMBER OF SWITCHES
Zählwert
DINT 0 O
V_HL HIGH LIMIT OUTPUT VALUE
obere Begrenzung von V
DINT 100 I V_HL ≥ V_LL
V_LL LOW LIMIT OUTPUT VALUE
untere Begrenzung von V
DINT 0 I V_LL ≤ V_HL
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
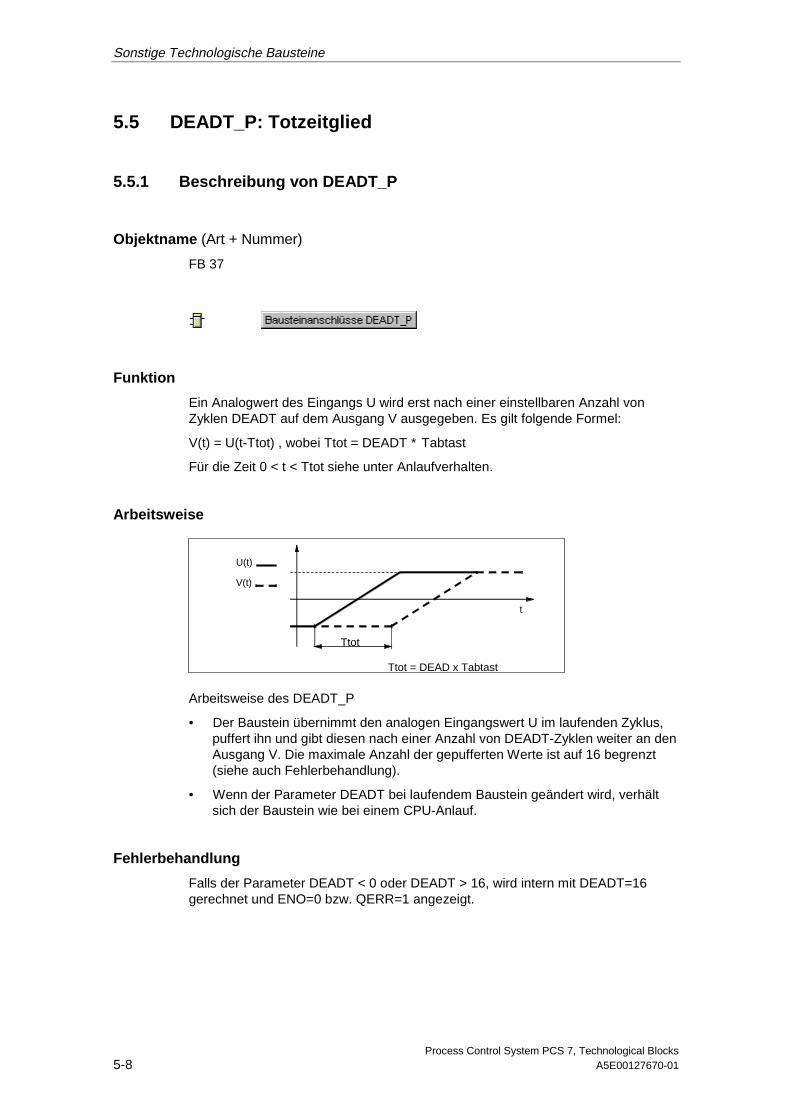
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-8 A5E00127670-01
5.5 DEADT_P: Totzeitglied
5.5.1 Beschreibung von DEADT_P
Objektname (Art + Nummer)
FB 37
Funktion
Ein Analogwert des Eingangs U wird erst nach einer einstellbaren Anzahl vonZyklen DEADT auf dem Ausgang V ausgegeben. Es gilt folgende Formel:
V(t) = U(t-Ttot) , wobei Ttot = DEADT ∗ Tabtast
Für die Zeit 0 < t < Ttot siehe unter Anlaufverhalten.
Arbeitsweise
t
U(t)
V(t)
Ttot = DEAD x Tabtast
Ttot
Arbeitsweise des DEADT_P
• Der Baustein übernimmt den analogen Eingangswert U im laufenden Zyklus,puffert ihn und gibt diesen nach einer Anzahl von DEADT-Zyklen weiter an denAusgang V. Die maximale Anzahl der gepufferten Werte ist auf 16 begrenzt(siehe auch Fehlerbehandlung).
• Wenn der Parameter DEADT bei laufendem Baustein geändert wird, verhältsich der Baustein wie bei einem CPU-Anlauf.
Fehlerbehandlung
Falls der Parameter DEADT < 0 oder DEADT > 16, wird intern mit DEADT=16gerechnet und ENO=0 bzw. QERR=1 angezeigt.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-9
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB 32). Zusätzlich imOB 100 (siehe Anlaufverhalten).
Anlaufverhalten
Bei einem CPU-Anlauf oder einer Veränderung der Totzeit über den ParameterDEADT wird der interne Totzeitpuffer mit dem anliegenden Eingangswert Uvorbesetzt.
Zeitverhalten
Um seiner ausgewiesenen Funktion gerecht zu werden, wird der Baustein auseinem Weckalarm-OB aufgerufen. Dabei kann die Totzeit Ttot vom Anwender nachfolgender Formel berechnet werden:
• Ttot = DEADT ∗ Tabtast wobei Tabtast die Abtastzeit des Bausteins ist.
• Bei CFC-Projektierung muss ggf. die übergeordnete Ablaufgruppe desBausteins mit ihrem Abtastparameter berücksichtigt werden.
5.5.2 Anschlüsse von DEADT_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. ZulässigeWerte
DEADT DEADTIME IN CYCLE
Totzeit in Zyklen
INT 0 I Q < 16
QERR 1 = ERROR
1= Fehler
BOOL 1 O
U INPUT VALUE
Eingang
REAL 0 I Q
V ANALOG OUTPUT
Ausgang
REAL 0 O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
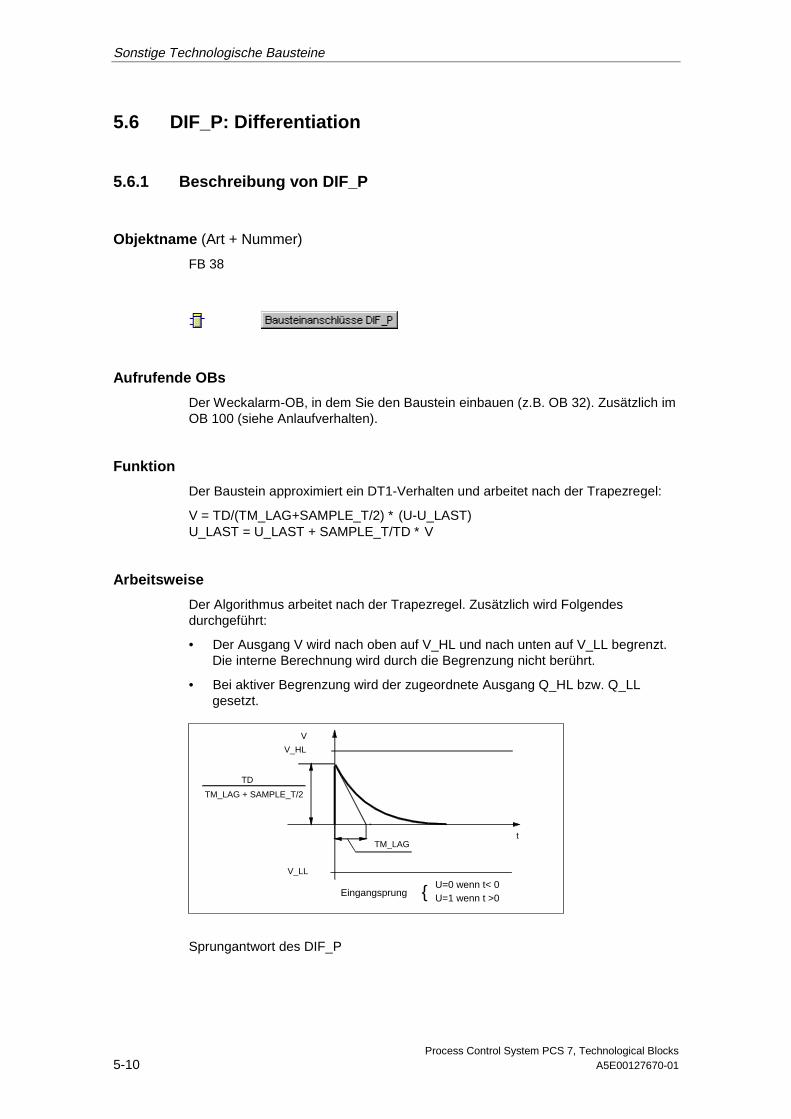
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-10 A5E00127670-01
5.6 DIF_P: Differentiation
5.6.1 Beschreibung von DIF_P
Objektname (Art + Nummer)
FB 38
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB 32). Zusätzlich imOB 100 (siehe Anlaufverhalten).
Funktion
Der Baustein approximiert ein DT1-Verhalten und arbeitet nach der Trapezregel:
V = TD/(TM_LAG+SAMPLE_T/2) ∗ (U-U_LAST)U_LAST = U_LAST + SAMPLE_T/TD ∗ V
Arbeitsweise
Der Algorithmus arbeitet nach der Trapezregel. Zusätzlich wird Folgendesdurchgeführt:
• Der Ausgang V wird nach oben auf V_HL und nach unten auf V_LL begrenzt.Die interne Berechnung wird durch die Begrenzung nicht berührt.
• Bei aktiver Begrenzung wird der zugeordnete Ausgang Q_HL bzw. Q_LLgesetzt.
t
TD
TM_LAG + SAMPLE_T/2
V_HL
V_LL
V
U=1 wenn t >0U=0 wenn t< 0
Eingangsprung {
TM_LAG
Sprungantwort des DIF_P
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-11
Fehlerbehandlung
Bei Überlauf wird die über- bzw. unterschrittene Bereichsgrenze des Typs REALeingesetzt und ENO = 0 gesetzt. Zusätzlich führt jeder der folgendenFehlparametrierungen zu ENO=0 und V=0:
• V_LL > 0
• V_HL < 0
Anlaufverhalten
Nach einem CPU-Anlauf wird der interne Merker für den Altwert des Eingangs Udiesem nachgeführt. Dadurch wird bei der ersten zyklischen Bearbeitung derAusgangswert V=0.
Zeitverhalten
Der Baustein wird aus einem Weckalarm-OB aufgerufen.
5.6.2 Anschlüsse von DIF_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QERR 1=ERROR1=Fehler
BOOL 1 O
QVHL 1= V > V_HL BOOL 0 O
QVLL 1= V < V_LL BOOL 0 O
SAMPLE_T SAMPLE TIME [S]Abtatstzeit [s]
REAL 1 I > 0
TD TIME DIFFERENCE [S] /Differenzierzeit [s]
REAL 1 I Q ≥ 0
TM_LAG Verzögerungszeit [s] REAL 10 I Q ≥ 0
U INPUT VALUEEingang
REAL 0 I Q
V ANALOG OUTPUTAusgangswert
REAL 0 O
V_HL HIGH LIMIT OUTPUT VALUEoberer Grenzwert von V
REAL 100 I Q V_HL ≥ V_LL
V_LL LOW LIMIT OUTPUT VALUEunterer Grenzwert von V
REAL -100 I Q V_LL ≥ V_HL
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-12 A5E00127670-01
5.7 DOSE: Dosiervorgang
5.7.1 Beschreibung von DOSE
Objektname (Art + Nummer)
FB 63
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32), zusätzlich imOB100 (siehe Anlaufverhalten).
Funktion
Der DOSE-Baustein dient zur auf-/abwärtsgattierenden Einkomponenten-Dosierung mit Wägeeinrichtungen sowie für Dosiervorgänge mit volumetrischenMesseinrichtungen. Beim Einsatz von Durchflussmessern ist der Durchflussintegriert am Eingang PV_IN zur Verfügung zu stellen. Bei Dosierende kann eineautomatische Nachlaufkorrektur durchgeführt werden, die beim nächstenDosiervorgang aktiv wird. Der anfängliche Nachlauf wird am Eingang DRIBBvorgegeben.Der Dosierwert wird gegenüber dem Sollwert auf Toleranzüber- bzw -unterschreitung überwacht und das Ergebnis nach Dosierende an zweientsprechenden Ausgängen zur Verfügung gestellt.
Betriebsarten
Die Betriebsarten Intern/Extern sind einstellbar entweder über den BedieneingangSPEXTSEL_OP oder den verschalteten Eingang SPEXON_L. Das Ergebnisschaltet zwischen "internem Sollwert" und "externem Sollwert" um:
• Intern. Der Sollwert (SP) wird durch Bedienung von SP_OP eingegeben undauf (SP_LLM, SP_HLM) begrenzt.
• Extern. Der Sollwert (SP) wird vom SP_EXT bezogen und wie obenbeschrieben begrenzt.
Dosierstart
Folgende Operationen werden in diesem Schritt durchgeführt:
• Der Dosiervorgang wird gestartet durch Bedienung des Eingangs START_OPoder durch die Aufflanke des verschalteten Signals L_START am selbenBaustein.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-13
• Es wird gewartet, bis die Waage stillsteht, d.h. STNDSTLL=1. Steht keinStillstandsignal zur Verfügung, muss dieser Eingang mit 1 parametriertwerden. Danach wird tariert, d.h. der aktuelle Prozesswert PV_IN wird in denTaraspeicher übernommen.
• Abhängig davon, ob es sich um einen aufwärts- oder abwärtsgattierendenVorgang handelt (Auswahl über REVERSE), wird der aktuelle DosierwertPV_OUT wie folgt berechnet:
- REVERSE=0: PV_OUT=PV_IN - TARA (PV_IN steigt)
- REVERSE=1: PV_OUT=TARA - PV_IN (PV_IN fällt)
• Es wird QSTRTDOS gesetzt und QEND_DOS, QTOL_P, QTOL_Nzurückgesetzt (siehe Komponentenwechsel).
Dosierende
Das Dosierende verläuft in folgenden Schritten:
• Sobald PV_OUT ≥ SP - DRIBB_F wird QSTRTDOS zurückgesetzt.
• Sobald Stillstand gemeldet wird (STNDSTLL=1), wird ein Zähler mit der unterREALAXTME angegebenen Zeit[s] geladen und danach zyklisch um dieAbtastzeit SAMPLE_T erniedrigt. Solange der Zähler > 0 ist, läuft dieBeruhigungszeit (QRELXING=1).
• Nach Ablauf der Beruhigungszeit wird entsprechend den parametriertenToleranzgrenzen TOL_N und TOL_P eine Unter-/Überdosierung ausgewertetund eine Nachlaufkorrektur (siehe unten) durchgeführt, falls DRIB_COR=1 ist.
• Liegt die Dosiermenge innerhalb des Toleranzbandes, so wird Dosierende(QEND_DOS=1) gesetzt.
Komponentenwechsel
Bei Komponentenwechsel ist vor Dosierstart COMP_CHG = 1 zu setzen. Bei Startder Dosierung (QSTRTDOS = 1) wird der zu diesem Zeitpunkt parametrierteNachlaufwert DRIBB am Ausgang DRIBB_F übernommen.
Nachlaufkorrektur
Ist diese gefordert (DRIB_COR=1), so errechnet sich der Nachlaufwert wie folgt(siehe auch Komponentenwechsel):
DRIBB_F = DRIBB_F - ( SP - PV_OUT ) * DCF / 100
wobei die Bedingung eingehalten wird:
0 ≤ DRIBB_F ≤ DRIBBMAX
Der Korrekturfaktor DCF wird intern auf 0...100 begrenzt.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-14 A5E00127670-01
Über-/Unterdosierung
• Im Falle der Überdosierung (PV_OUT > SP + TOL_P) werden QTOL_P undQEND_DOS gesetzt.
• Bei Unterdosierung (PV_OUT < SP - TOL_N) wird nur QTOL_N gesetzt. Eskann von Hand nachdosiert werden (siehe Nachdosieren). Sobald diesesbeendet ist, wird Dosierende angezeigt (QEND_DOS=1). DieBausteinausgänge werden nicht mehr aktualisiert, solange kein weitererDosiervorgang gestartet wird.
Nachdosieren
Nur im Falle einer Unterdosierung kann von Hand nachdosiert werden. Dieses wirdüber die Bedienung von POSTDOSE oder den verschaltbaren Eingang L_PDOSEerledigt.
• DRIB_COR = 1 setzen
• Mit der Aufflanke des Signals wird für die Zeit PDOS_TME das SignalQSTRT_DOS für Dosierstart gesetzt. Der Vorgang kann wiederholt werden,bis entweder der Sollwert überschritten ist oder mittels Bedienung desACK_TOL_OP-Eingangs bzw. verschaltbaren ACK_TOL das Ende desVorgangs quittiert wird.
• Nach dem Quittieren wird das Dosierende (QEND_DOS=1) angezeigt undkeine Aktualisierung der Ausgänge mehr vorgenommen.
Abbrechen
Der Dosiervorgang kann bei Bedarf durch den CANCEL_OP-Befehl oder über denverschaltbaren Eingang CANCEL vorzeitig beendet werden. Anschließend kannein neuer Dosiervorgang gestartet werden.
Fehlerbehandlung
Erkannte Bedienfehler der verschiedenen Bedienbausteine werden verodert aufden Sammelausgang QOP_ERR gelegt. Bei Arithmetikfehler werden die AusgängeENO=0 und QERR=1 belegt.
Anlaufverhalten
Bei CPU-Anlauf wird "Dosieren abbrechen" simuliert, ohne dabei eine Meldung zuerzeugen. Dafür muss der Baustein aus dem Anlauf-OB aufgerufen werden. BeiCFC-Projektierung wird dieses durch CFC erledigt. Bei einfachen STEP 7-Mittelnmüssen Sie den Aufruf im Anlauf-OB eintragen. Nach dem Anlauf werden für dieAnzahl der im Wert RUNUPCYC parametrierten Zyklen die Meldungen unterdrückt.
Zeitverhalten
Der Baustein muss über einen Weckalarm-OB aufgerufen werden. Die Abtastzeitdes Bausteins wird im Parameter SAMPLE_T eingetragen.
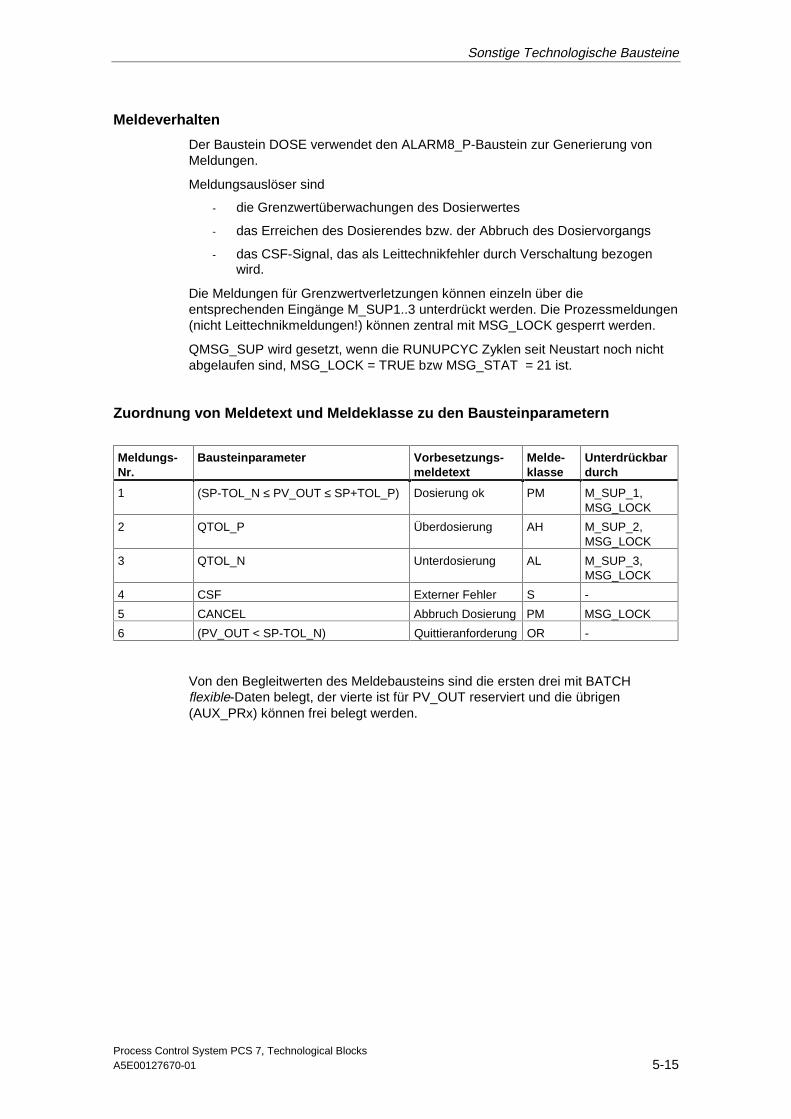
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-15
Meldeverhalten
Der Baustein DOSE verwendet den ALARM8_P-Baustein zur Generierung vonMeldungen.
Meldungsauslöser sind
- die Grenzwertüberwachungen des Dosierwertes
- das Erreichen des Dosierendes bzw. der Abbruch des Dosiervorgangs
- das CSF-Signal, das als Leittechnikfehler durch Verschaltung bezogenwird.
Die Meldungen für Grenzwertverletzungen können einzeln über dieentsprechenden Eingänge M_SUP1..3 unterdrückt werden. Die Prozessmeldungen(nicht Leittechnikmeldungen!) können zentral mit MSG_LOCK gesperrt werden.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, MSG_LOCK = TRUE bzw MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr.
Bausteinparameter Vorbesetzungs-meldetext
Melde-klasse
Unterdrückbardurch
1 (SP-TOL_N ≤ PV_OUT ≤ SP+TOL_P) Dosierung ok PM M_SUP_1,MSG_LOCK
2 QTOL_P Überdosierung AH M_SUP_2,MSG_LOCK
3 QTOL_N Unterdosierung AL M_SUP_3,MSG_LOCK
4 CSF Externer Fehler S -
5 CANCEL Abbruch Dosierung PM MSG_LOCK
6 (PV_OUT < SP-TOL_N) Quittieranforderung OR -
Von den Begleitwerten des Meldebausteins sind die ersten drei mit BATCHflexible-Daten belegt, der vierte ist für PV_OUT reserviert und die übrigen(AUX_PRx) können frei belegt werden.
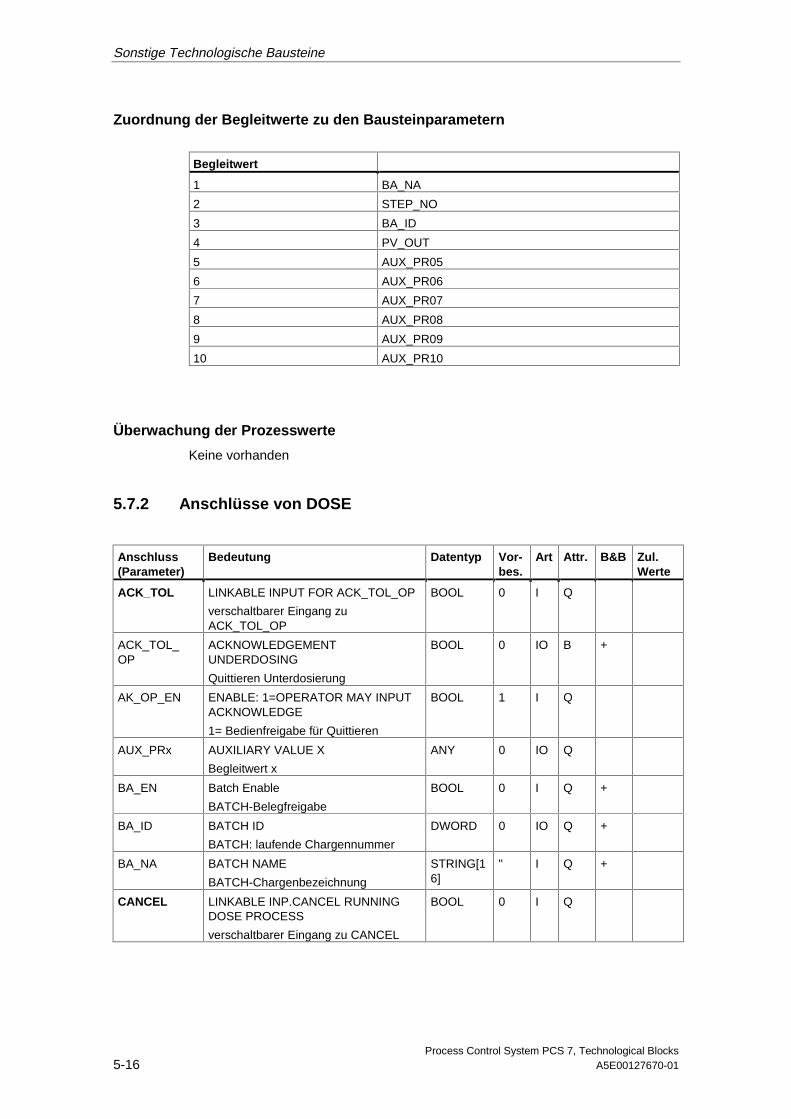
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-16 A5E00127670-01
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert
1 BA_NA
2 STEP_NO
3 BA_ID
4 PV_OUT
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Keine vorhanden
5.7.2 Anschlüsse von DOSE
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B Zul.Werte
ACK_TOL LINKABLE INPUT FOR ACK_TOL_OP
verschaltbarer Eingang zuACK_TOL_OP
BOOL 0 I Q
ACK_TOL_OP
ACKNOWLEDGEMENTUNDERDOSING
Quittieren Unterdosierung
BOOL 0 IO B +
AK_OP_EN ENABLE: 1=OPERATOR MAY INPUTACKNOWLEDGE
1= Bedienfreigabe für Quittieren
BOOL 1 I Q
AUX_PRx AUXILIARY VALUE X
Begleitwert x
ANY 0 IO Q
BA_EN Batch Enable
BATCH-Belegfreigabe
BOOL 0 I Q +
BA_ID BATCH ID
BATCH: laufende Chargennummer
DWORD 0 IO Q +
BA_NA BATCH NAME
BATCH-Chargenbezeichnung
STRING[16]
" I Q +
CANCEL LINKABLE INP.CANCEL RUNNINGDOSE PROCESS
verschaltbarer Eingang zu CANCEL
BOOL 0 I Q
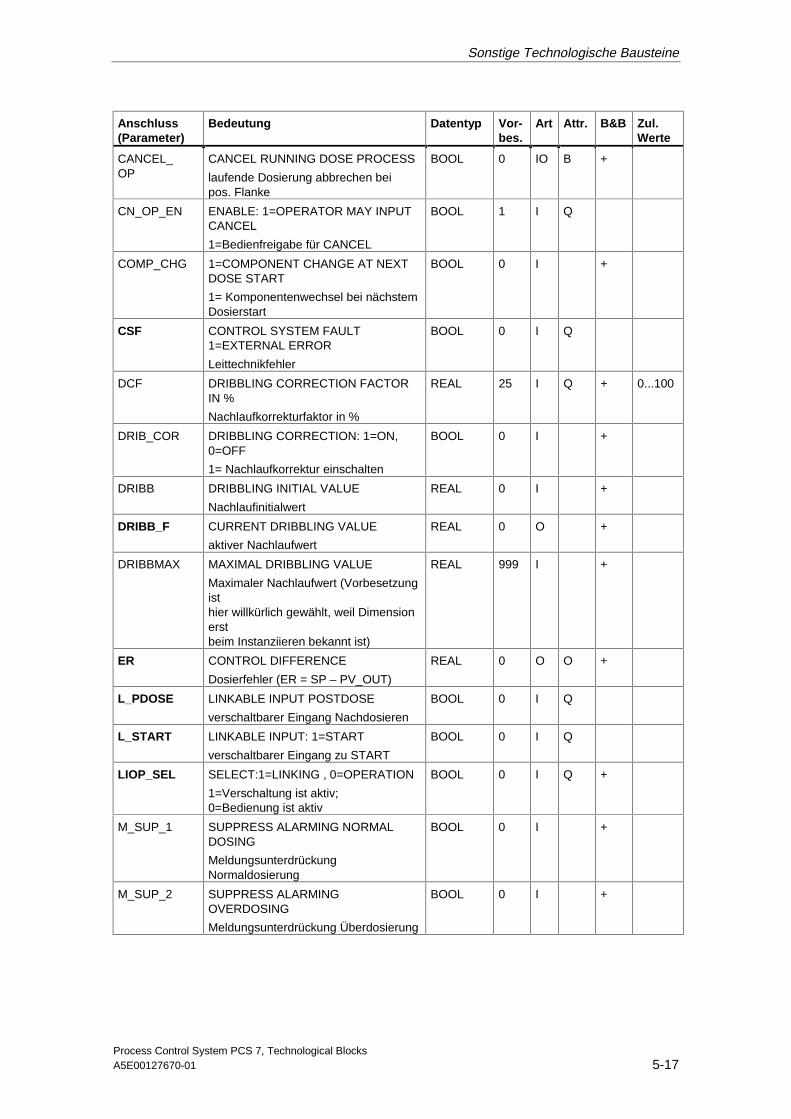
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-17
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B Zul.Werte
CANCEL_OP
CANCEL RUNNING DOSE PROCESS
laufende Dosierung abbrechen beipos. Flanke
BOOL 0 IO B +
CN_OP_EN ENABLE: 1=OPERATOR MAY INPUTCANCEL
1=Bedienfreigabe für CANCEL
BOOL 1 I Q
COMP_CHG 1=COMPONENT CHANGE AT NEXTDOSE START
1= Komponentenwechsel bei nächstemDosierstart
BOOL 0 I +
CSF CONTROL SYSTEM FAULT1=EXTERNAL ERROR
Leittechnikfehler
BOOL 0 I Q
DCF DRIBBLING CORRECTION FACTORIN %
Nachlaufkorrekturfaktor in %
REAL 25 I Q + 0...100
DRIB_COR DRIBBLING CORRECTION: 1=ON,0=OFF
1= Nachlaufkorrektur einschalten
BOOL 0 I +
DRIBB DRIBBLING INITIAL VALUE
Nachlaufinitialwert
REAL 0 I +
DRIBB_F CURRENT DRIBBLING VALUE
aktiver Nachlaufwert
REAL 0 O +
DRIBBMAX MAXIMAL DRIBBLING VALUE
Maximaler Nachlaufwert (Vorbesetzungisthier willkürlich gewählt, weil Dimensionerstbeim Instanziieren bekannt ist)
REAL 999 I +
ER CONTROL DIFFERENCE
Dosierfehler (ER = SP – PV_OUT)
REAL 0 O O +
L_PDOSE LINKABLE INPUT POSTDOSE
verschaltbarer Eingang Nachdosieren
BOOL 0 I Q
L_START LINKABLE INPUT: 1=START
verschaltbarer Eingang zu START
BOOL 0 I Q
LIOP_SEL SELECT:1=LINKING , 0=OPERATION
1=Verschaltung ist aktiv;0=Bedienung ist aktiv
BOOL 0 I Q +
M_SUP_1 SUPPRESS ALARMING NORMALDOSING
MeldungsunterdrückungNormaldosierung
BOOL 0 I +
M_SUP_2 SUPPRESS ALARMINGOVERDOSING
Meldungsunterdrückung Überdosierung
BOOL 0 I +
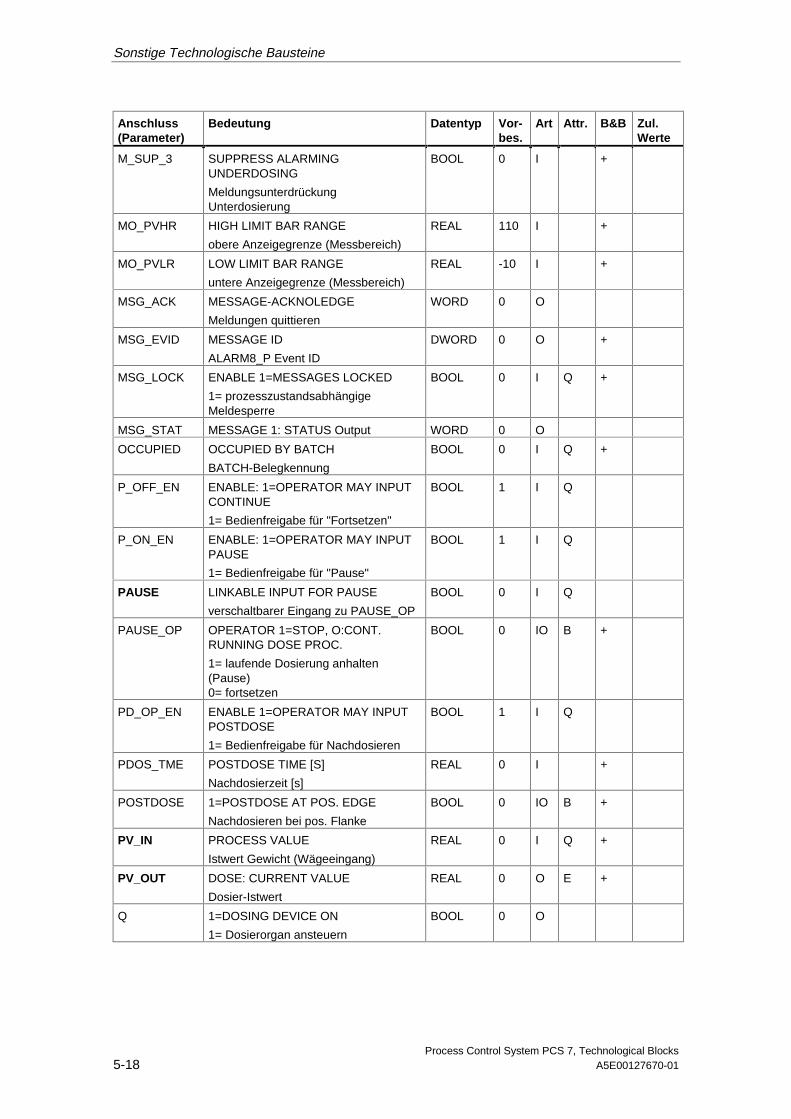
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-18 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B Zul.Werte
M_SUP_3 SUPPRESS ALARMINGUNDERDOSING
MeldungsunterdrückungUnterdosierung
BOOL 0 I +
MO_PVHR HIGH LIMIT BAR RANGE
obere Anzeigegrenze (Messbereich)
REAL 110 I +
MO_PVLR LOW LIMIT BAR RANGE
untere Anzeigegrenze (Messbereich)
REAL -10 I +
MSG_ACK MESSAGE-ACKNOLEDGE
Meldungen quittieren
WORD 0 O
MSG_EVID MESSAGE ID
ALARM8_P Event ID
DWORD 0 O +
MSG_LOCK ENABLE 1=MESSAGES LOCKED
1= prozesszustandsabhängigeMeldesperre
BOOL 0 I Q +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
OCCUPIED OCCUPIED BY BATCH
BATCH-Belegkennung
BOOL 0 I Q +
P_OFF_EN ENABLE: 1=OPERATOR MAY INPUTCONTINUE
1= Bedienfreigabe für "Fortsetzen"
BOOL 1 I Q
P_ON_EN ENABLE: 1=OPERATOR MAY INPUTPAUSE
1= Bedienfreigabe für "Pause"
BOOL 1 I Q
PAUSE LINKABLE INPUT FOR PAUSE
verschaltbarer Eingang zu PAUSE_OP
BOOL 0 I Q
PAUSE_OP OPERATOR 1=STOP, O:CONT.RUNNING DOSE PROC.
1= laufende Dosierung anhalten(Pause)0= fortsetzen
BOOL 0 IO B +
PD_OP_EN ENABLE 1=OPERATOR MAY INPUTPOSTDOSE
1= Bedienfreigabe für Nachdosieren
BOOL 1 I Q
PDOS_TME POSTDOSE TIME [S]
Nachdosierzeit [s]
REAL 0 I +
POSTDOSE 1=POSTDOSE AT POS. EDGE
Nachdosieren bei pos. Flanke
BOOL 0 IO B +
PV_IN PROCESS VALUE
Istwert Gewicht (Wägeeingang)
REAL 0 I Q +
PV_OUT DOSE: CURRENT VALUE
Dosier-Istwert
REAL 0 O E +
Q 1=DOSING DEVICE ON
1= Dosierorgan ansteuern
BOOL 0 O
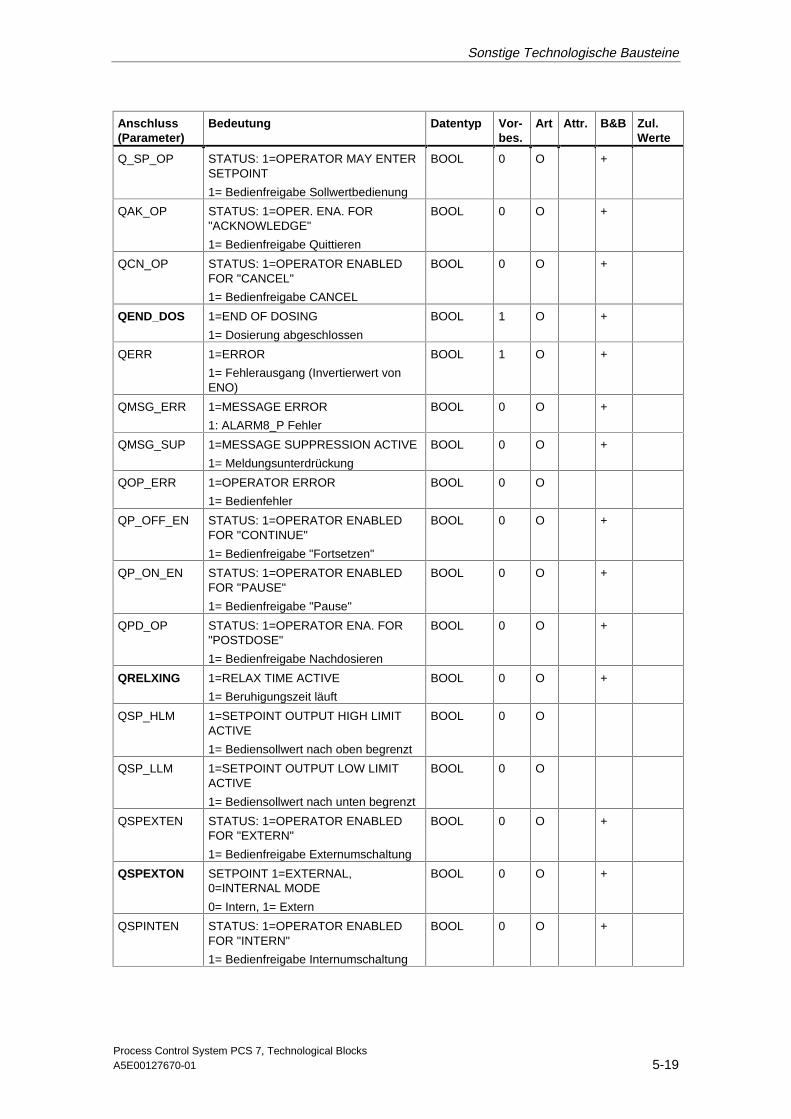
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-19
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B Zul.Werte
Q_SP_OP STATUS: 1=OPERATOR MAY ENTERSETPOINT
1= Bedienfreigabe Sollwertbedienung
BOOL 0 O +
QAK_OP STATUS: 1=OPER. ENA. FOR"ACKNOWLEDGE"
1= Bedienfreigabe Quittieren
BOOL 0 O +
QCN_OP STATUS: 1=OPERATOR ENABLEDFOR "CANCEL"
1= Bedienfreigabe CANCEL
BOOL 0 O +
QEND_DOS 1=END OF DOSING
1= Dosierung abgeschlossen
BOOL 1 O +
QERR 1=ERROR
1= Fehlerausgang (Invertierwert vonENO)
BOOL 1 O +
QMSG_ERR 1=MESSAGE ERROR
1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1=MESSAGE SUPPRESSION ACTIVE
1= Meldungsunterdrückung
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1= Bedienfehler
BOOL 0 O
QP_OFF_EN STATUS: 1=OPERATOR ENABLEDFOR "CONTINUE"
1= Bedienfreigabe "Fortsetzen"
BOOL 0 O +
QP_ON_EN STATUS: 1=OPERATOR ENABLEDFOR "PAUSE"
1= Bedienfreigabe "Pause"
BOOL 0 O +
QPD_OP STATUS: 1=OPERATOR ENA. FOR"POSTDOSE"
1= Bedienfreigabe Nachdosieren
BOOL 0 O +
QRELXING 1=RELAX TIME ACTIVE
1= Beruhigungszeit läuft
BOOL 0 O +
QSP_HLM 1=SETPOINT OUTPUT HIGH LIMITACTIVE
1= Bediensollwert nach oben begrenzt
BOOL 0 O
QSP_LLM 1=SETPOINT OUTPUT LOW LIMITACTIVE
1= Bediensollwert nach unten begrenzt
BOOL 0 O
QSPEXTEN STATUS: 1=OPERATOR ENABLEDFOR "EXTERN"
1= Bedienfreigabe Externumschaltung
BOOL 0 O +
QSPEXTON SETPOINT 1=EXTERNAL,0=INTERNAL MODE
0= Intern, 1= Extern
BOOL 0 O +
QSPINTEN STATUS: 1=OPERATOR ENABLEDFOR "INTERN"
1= Bedienfreigabe Internumschaltung
BOOL 0 O +
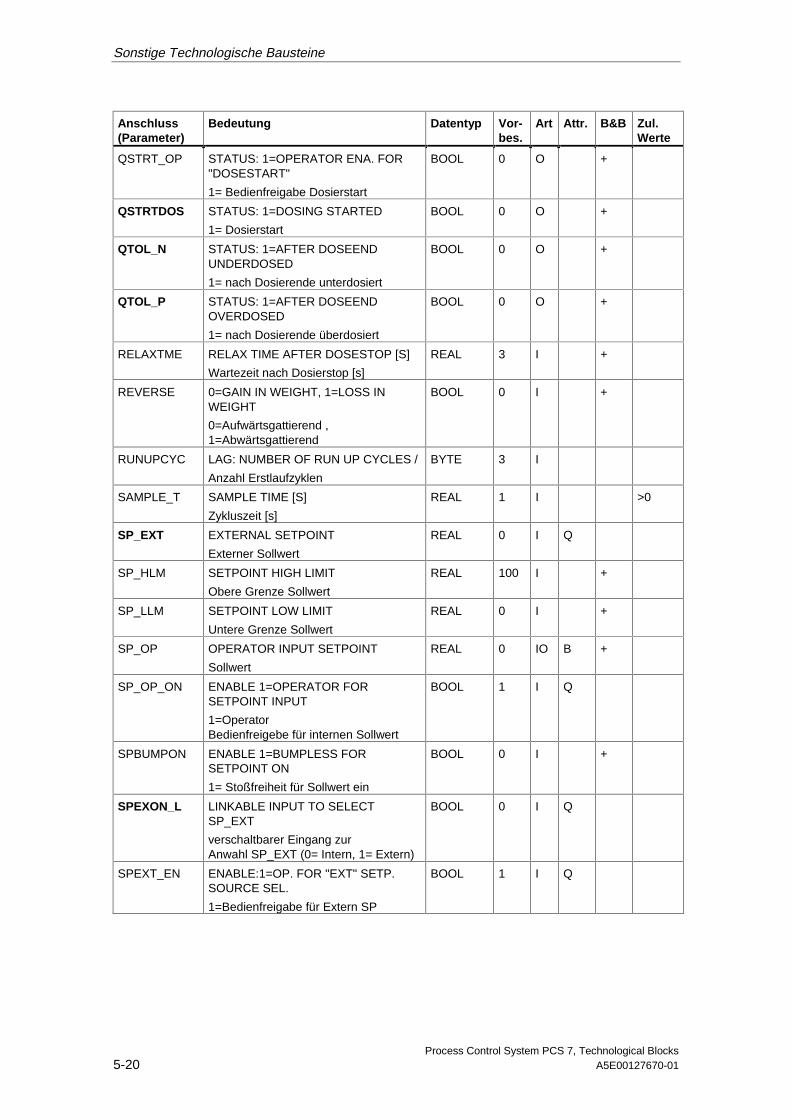
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-20 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B Zul.Werte
QSTRT_OP STATUS: 1=OPERATOR ENA. FOR"DOSESTART"
1= Bedienfreigabe Dosierstart
BOOL 0 O +
QSTRTDOS STATUS: 1=DOSING STARTED
1= Dosierstart
BOOL 0 O +
QTOL_N STATUS: 1=AFTER DOSEENDUNDERDOSED
1= nach Dosierende unterdosiert
BOOL 0 O +
QTOL_P STATUS: 1=AFTER DOSEENDOVERDOSED
1= nach Dosierende überdosiert
BOOL 0 O +
RELAXTME RELAX TIME AFTER DOSESTOP [S]
Wartezeit nach Dosierstop [s]
REAL 3 I +
REVERSE 0=GAIN IN WEIGHT, 1=LOSS INWEIGHT
0=Aufwärtsgattierend ,1=Abwärtsgattierend
BOOL 0 I +
RUNUPCYC LAG: NUMBER OF RUN UP CYCLES /
Anzahl Erstlaufzyklen
BYTE 3 I
SAMPLE_T SAMPLE TIME [S]
Zykluszeit [s]
REAL 1 I >0
SP_EXT EXTERNAL SETPOINT
Externer Sollwert
REAL 0 I Q
SP_HLM SETPOINT HIGH LIMIT
Obere Grenze Sollwert
REAL 100 I +
SP_LLM SETPOINT LOW LIMIT
Untere Grenze Sollwert
REAL 0 I +
SP_OP OPERATOR INPUT SETPOINT
Sollwert
REAL 0 IO B +
SP_OP_ON ENABLE 1=OPERATOR FORSETPOINT INPUT
1=OperatorBedienfreigebe für internen Sollwert
BOOL 1 I Q
SPBUMPON ENABLE 1=BUMPLESS FORSETPOINT ON
1= Stoßfreiheit für Sollwert ein
BOOL 0 I +
SPEXON_L LINKABLE INPUT TO SELECTSP_EXT
verschaltbarer Eingang zurAnwahl SP_EXT (0= Intern, 1= Extern)
BOOL 0 I Q
SPEXT_EN ENABLE:1=OP. FOR "EXT" SETP.SOURCE SEL.
1=Bedienfreigabe für Extern SP
BOOL 1 I Q
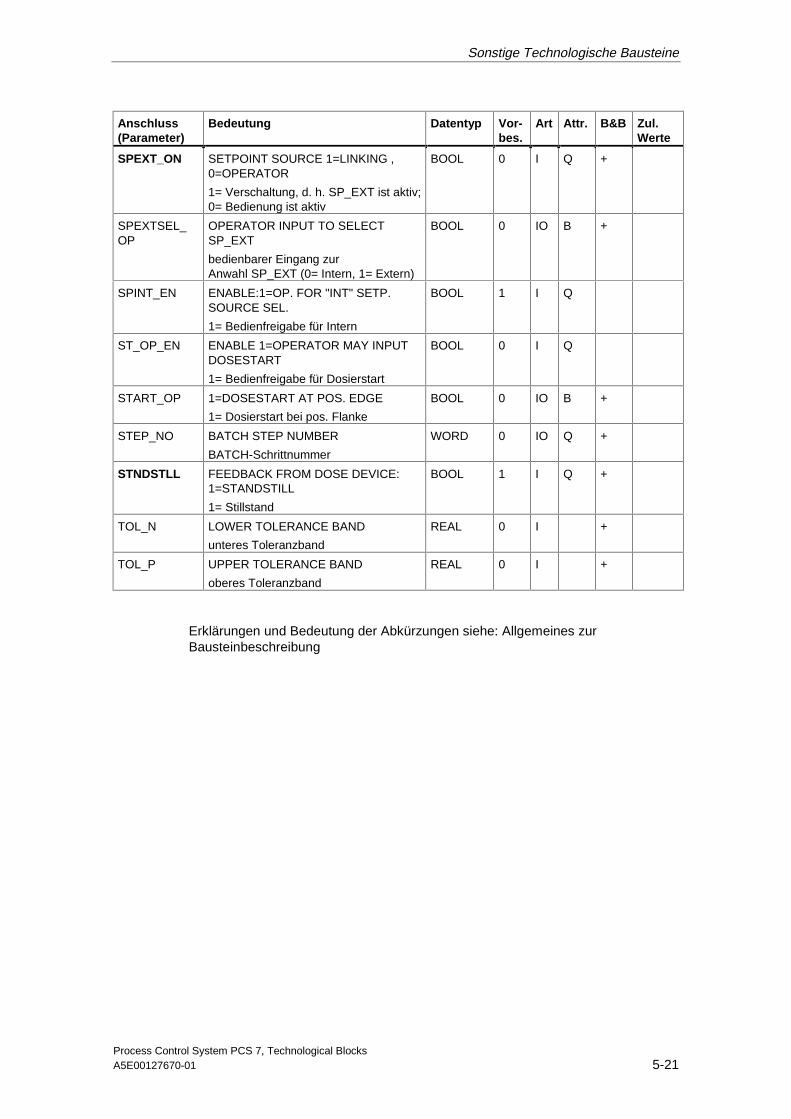
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-21
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B Zul.Werte
SPEXT_ON SETPOINT SOURCE 1=LINKING ,0=OPERATOR
1= Verschaltung, d. h. SP_EXT ist aktiv;0= Bedienung ist aktiv
BOOL 0 I Q +
SPEXTSEL_OP
OPERATOR INPUT TO SELECTSP_EXT
bedienbarer Eingang zurAnwahl SP_EXT (0= Intern, 1= Extern)
BOOL 0 IO B +
SPINT_EN ENABLE:1=OP. FOR "INT" SETP.SOURCE SEL.
1= Bedienfreigabe für Intern
BOOL 1 I Q
ST_OP_EN ENABLE 1=OPERATOR MAY INPUTDOSESTART
1= Bedienfreigabe für Dosierstart
BOOL 0 I Q
START_OP 1=DOSESTART AT POS. EDGE
1= Dosierstart bei pos. Flanke
BOOL 0 IO B +
STEP_NO BATCH STEP NUMBER
BATCH-Schrittnummer
WORD 0 IO Q +
STNDSTLL FEEDBACK FROM DOSE DEVICE:1=STANDSTILL
1= Stillstand
BOOL 1 I Q +
TOL_N LOWER TOLERANCE BAND
unteres Toleranzband
REAL 0 I +
TOL_P UPPER TOLERANCE BAND
oberes Toleranzband
REAL 0 I +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
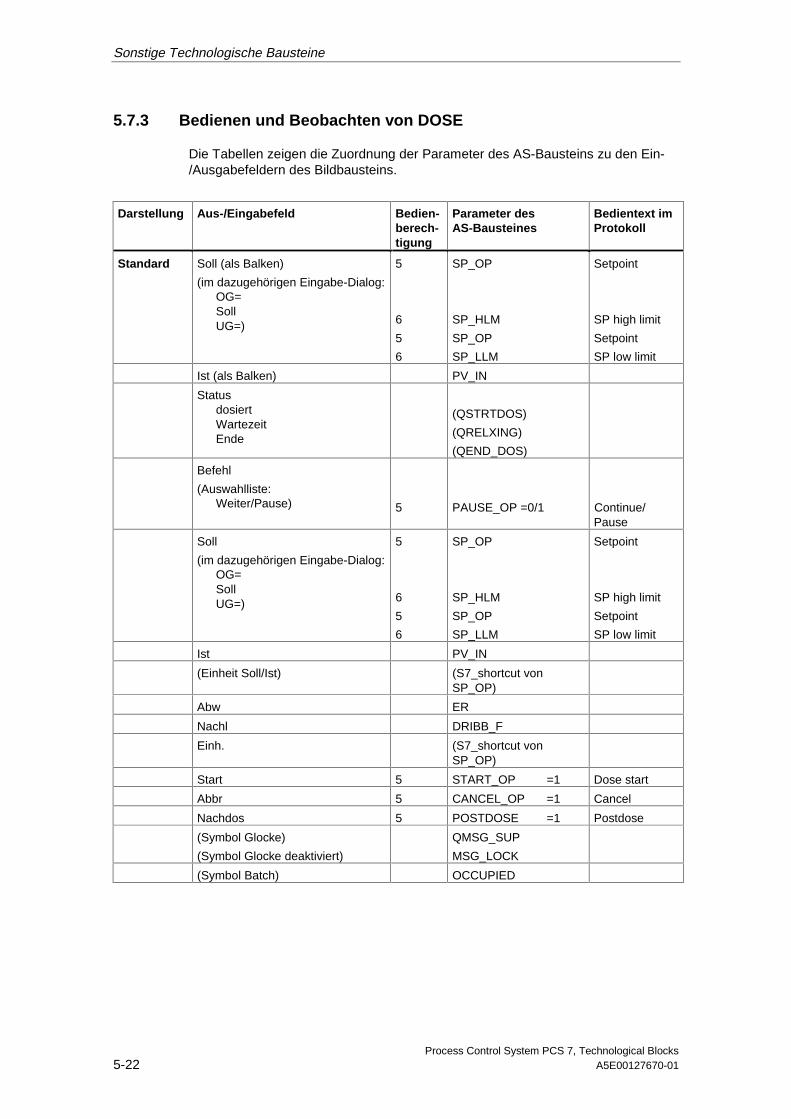
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-22 A5E00127670-01
5.7.3 Bedienen und Beobachten von DOSE
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Soll (als Balken)
(im dazugehörigen Eingabe-Dialog:OG=SollUG=)
5
6
5
6
SP_OP
SP_HLM
SP_OP
SP_LLM
Setpoint
SP high limit
Setpoint
SP low limit
Ist (als Balken) PV_IN
StatusdosiertWartezeitEnde
(QSTRTDOS)
(QRELXING)
(QEND_DOS)
Befehl
(Auswahlliste:Weiter/Pause) 5 PAUSE_OP =0/1 Continue/
Pause
Soll
(im dazugehörigen Eingabe-Dialog:OG=SollUG=)
5
6
5
6
SP_OP
SP_HLM
SP_OP
SP_LLM
Setpoint
SP high limit
Setpoint
SP low limit
Ist PV_IN
(Einheit Soll/Ist) (S7_shortcut vonSP_OP)
Abw ER
Nachl DRIBB_F
Einh. (S7_shortcut vonSP_OP)
Start 5 START_OP =1 Dose start
Abbr 5 CANCEL_OP =1 Cancel
Nachdos 5 POSTDOSE =1 Postdose
(Symbol Glocke)
(Symbol Glocke deaktiviert)
QMSG_SUP
MSG_LOCK
(Symbol Batch) OCCUPIED
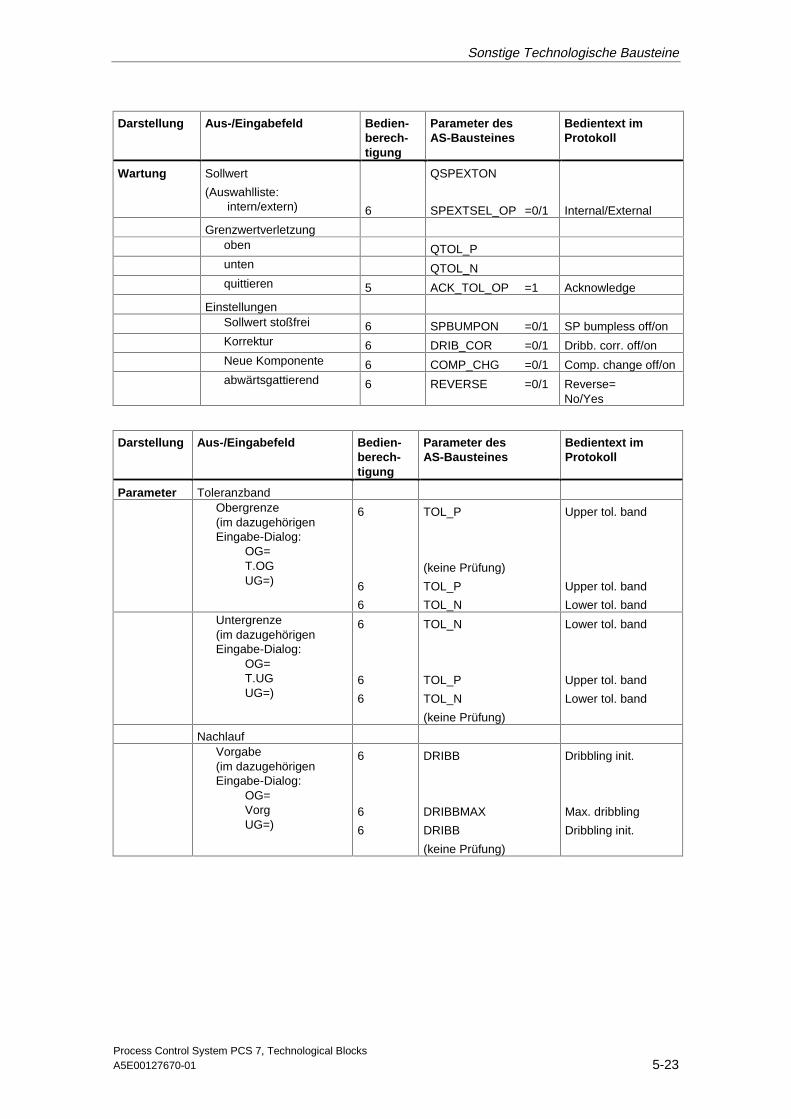
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-23
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung Sollwert
(Auswahlliste: intern/extern) 6
QSPEXTON
SPEXTSEL_OP =0/1 Internal/External
Grenzwertverletzungoben QTOL_Punten QTOL_Nquittieren 5 ACK_TOL_OP =1 Acknowledge
EinstellungenSollwert stoßfrei 6 SPBUMPON =0/1 SP bumpless off/onKorrektur 6 DRIB_COR =0/1 Dribb. corr. off/onNeue Komponente 6 COMP_CHG =0/1 Comp. change off/onabwärtsgattierend 6 REVERSE =0/1 Reverse=
No/Yes
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Parameter ToleranzbandObergrenze(im dazugehörigenEingabe-Dialog:
OG=T.OGUG=)
6
6
6
TOL_P
(keine Prüfung)
TOL_P
TOL_N
Upper tol. band
Upper tol. band
Lower tol. bandUntergrenze(im dazugehörigenEingabe-Dialog:
OG=T.UGUG=)
6
6
6
TOL_N
TOL_P
TOL_N
(keine Prüfung)
Lower tol. band
Upper tol. band
Lower tol. band
NachlaufVorgabe(im dazugehörigenEingabe-Dialog:
OG=VorgUG=)
6
6
6
DRIBB
DRIBBMAX
DRIBB
(keine Prüfung)
Dribbling init.
Max. dribbling
Dribbling init.
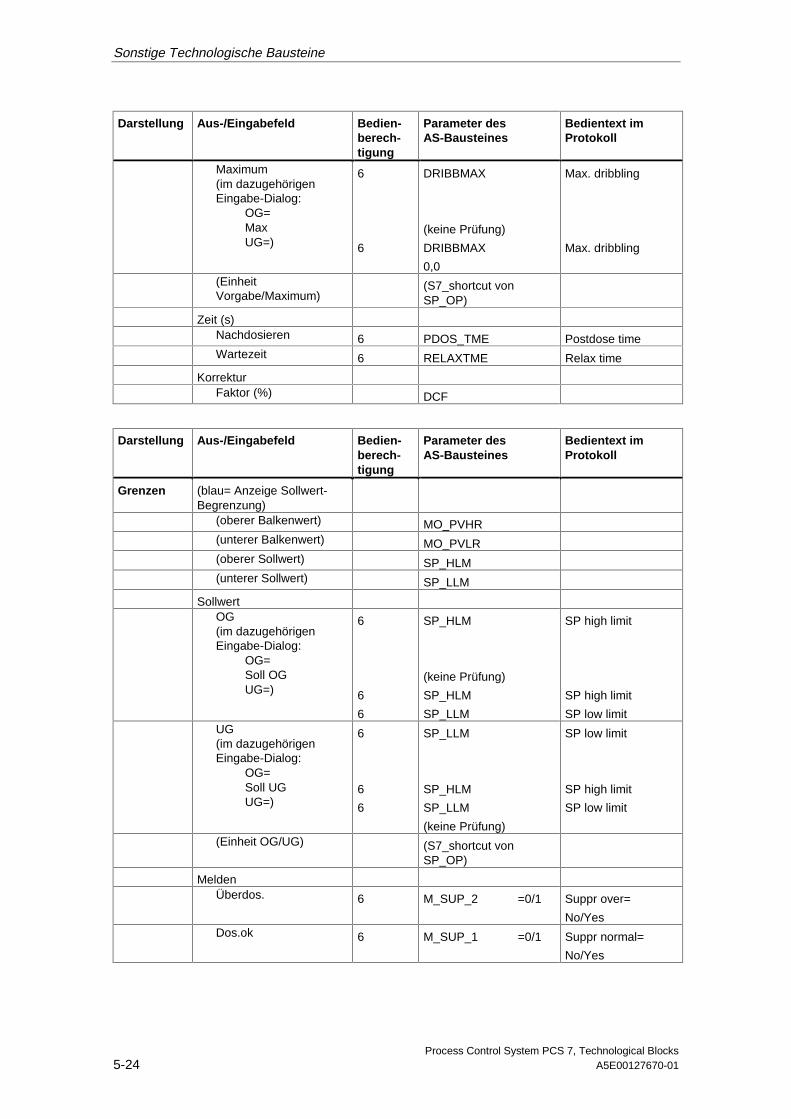
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-24 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Maximum(im dazugehörigenEingabe-Dialog:
OG=MaxUG=)
6
6
DRIBBMAX
(keine Prüfung)
DRIBBMAX
0,0
Max. dribbling
Max. dribbling
(EinheitVorgabe/Maximum)
(S7_shortcut vonSP_OP)
Zeit (s)Nachdosieren 6 PDOS_TME Postdose timeWartezeit 6 RELAXTME Relax time
KorrekturFaktor (%) DCF
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Grenzen (blau= Anzeige Sollwert-Begrenzung)
(oberer Balkenwert) MO_PVHR(unterer Balkenwert) MO_PVLR(oberer Sollwert) SP_HLM(unterer Sollwert) SP_LLM
SollwertOG(im dazugehörigenEingabe-Dialog:
OG=Soll OGUG=)
6
6
6
SP_HLM
(keine Prüfung)
SP_HLM
SP_LLM
SP high limit
SP high limit
SP low limitUG(im dazugehörigenEingabe-Dialog:
OG=Soll UGUG=)
6
6
6
SP_LLM
SP_HLM
SP_LLM
(keine Prüfung)
SP low limit
SP high limit
SP low limit
(Einheit OG/UG) (S7_shortcut vonSP_OP)
MeldenÜberdos. 6 M_SUP_2 =0/1 Suppr over=
No/YesDos.ok 6 M_SUP_1 =0/1 Suppr normal=
No/Yes
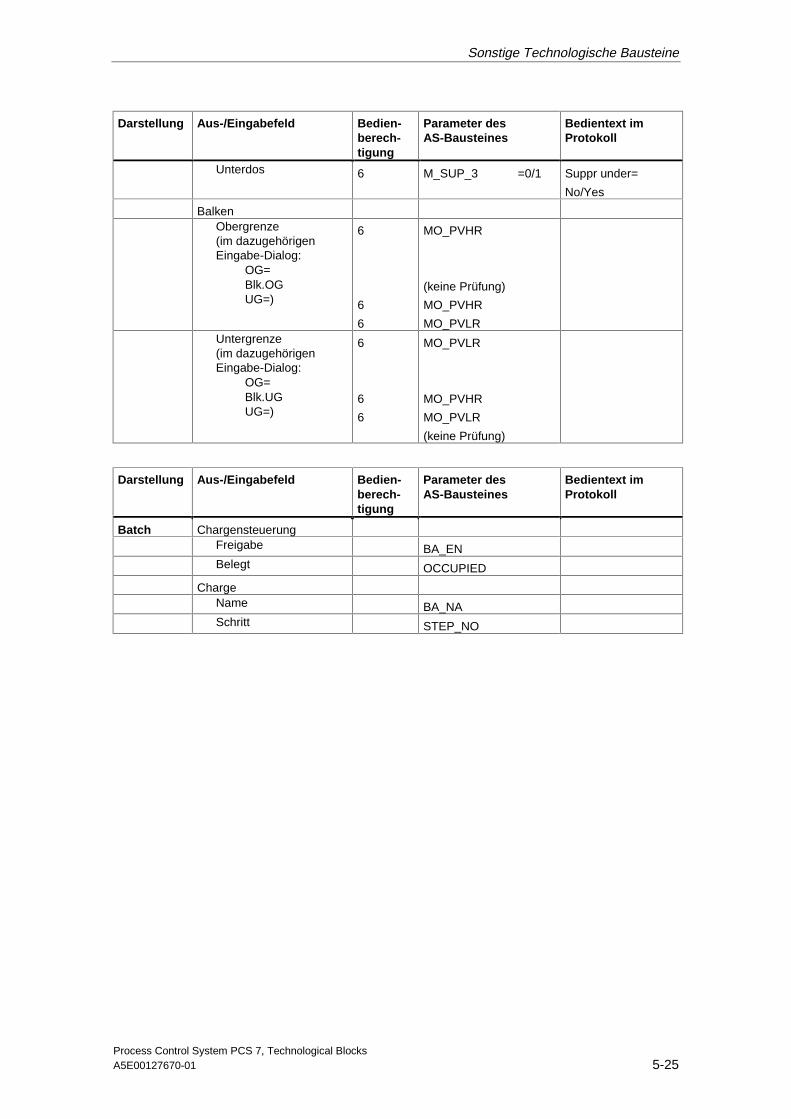
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-25
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Unterdos 6 M_SUP_3 =0/1 Suppr under=
No/Yes
BalkenObergrenze(im dazugehörigenEingabe-Dialog:
OG=Blk.OGUG=)
6
6
6
MO_PVHR
(keine Prüfung)
MO_PVHR
MO_PVLRUntergrenze(im dazugehörigenEingabe-Dialog:
OG=Blk.UGUG=)
6
6
6
MO_PVLR
MO_PVHR
MO_PVLR
(keine Prüfung)
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe BA_ENBelegt OCCUPIED
ChargeName BA_NASchritt STEP_NO
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-26 A5E00127670-01
5.8 ELAP_CNT: Betriebsstundenzähler
5.8.1 Beschreibung von ELAP_CNT
Objektname (Art + Nummer)
FB 64
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB32). Zusätzlich imOB100 (siehe Anlaufverhalten).
Funktion
Der Baustein dient zur Messung der Betriebszeit von Aggregaten.
Arbeitsweise
Der Baustein erfasst die Zeit, solange der Eingang ON_OFF=1 ist, d.h. derangeschlossene Aggregat in Betrieb ist. Bei jeder Bearbeitung wird zum AusgangHOURS der Wert SAMPLE_T[s]/3600 addiert. Dadurch gibt der Ausgang HOURSdie Betriebsstundenzahl an.
Stellen des Zählers
Unter gewissen Umständen (z.B. nach Wartung oder Austausch des Aggregats)muss der Anfangswert der Betriebsstundenzählung vorgegeben werden (imRegelfall 0). Durch OS-Bedienung des Eingangs HOURS_OP wird derNachführwert vorgegeben und anschließend durch Bedienung des EingangsTRACK_OP oder über die Verschaltung des Eingangs TRACK an den AusgangHOURS durchgereicht.
Fehlerbehandlung
Arithmetikfehler werden durch ENO=0 bzw. QERR=1 angezeigt.
Anlaufverhalten
Keine besonderen Maßnahmen. Nach dem Anlauf werden für die Anzahl der imWert RUNUPCYC parametrierten Zyklen die Meldungen unterdrückt.
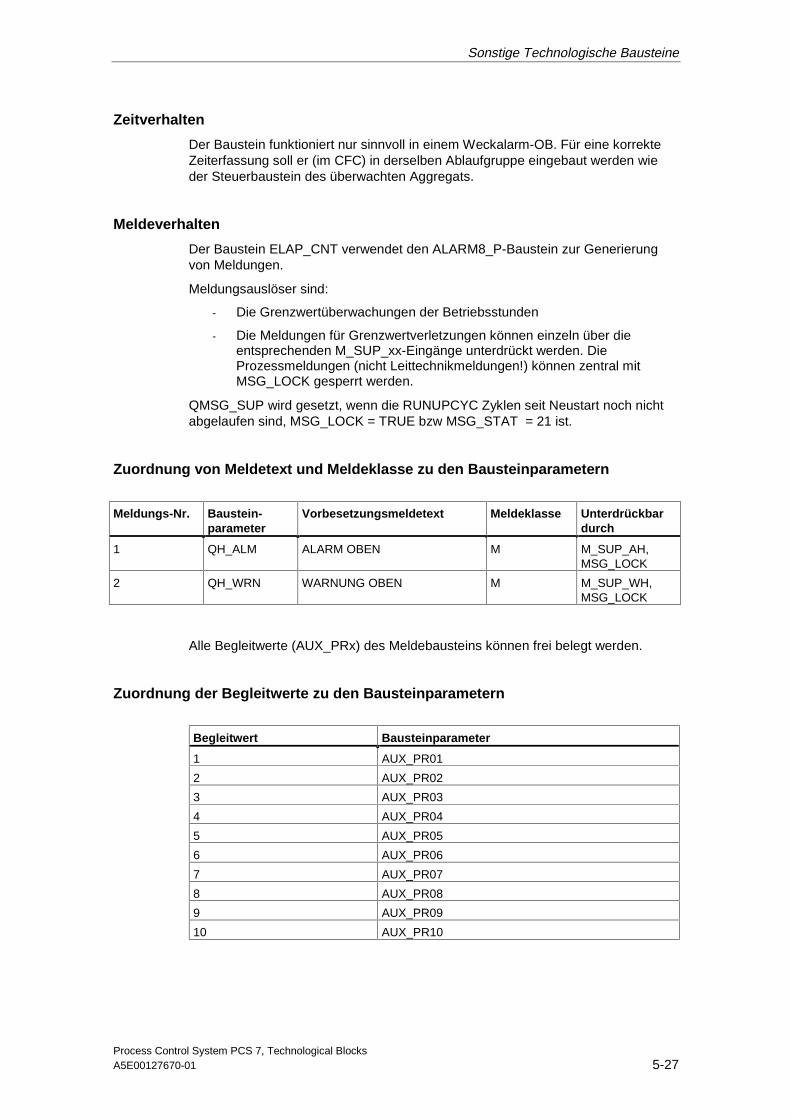
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-27
Zeitverhalten
Der Baustein funktioniert nur sinnvoll in einem Weckalarm-OB. Für eine korrekteZeiterfassung soll er (im CFC) in derselben Ablaufgruppe eingebaut werden wieder Steuerbaustein des überwachten Aggregats.
Meldeverhalten
Der Baustein ELAP_CNT verwendet den ALARM8_P-Baustein zur Generierungvon Meldungen.
Meldungsauslöser sind:
- Die Grenzwertüberwachungen der Betriebsstunden
- Die Meldungen für Grenzwertverletzungen können einzeln über dieentsprechenden M_SUP_xx-Eingänge unterdrückt werden. DieProzessmeldungen (nicht Leittechnikmeldungen!) können zentral mitMSG_LOCK gesperrt werden.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, MSG_LOCK = TRUE bzw MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Baustein-parameter
Vorbesetzungsmeldetext Meldeklasse Unterdrückbardurch
1 QH_ALM ALARM OBEN M M_SUP_AH,MSG_LOCK
2 QH_WRN WARNUNG OBEN M M_SUP_WH,MSG_LOCK
Alle Begleitwerte (AUX_PRx) des Meldebausteins können frei belegt werden.
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 AUX_PR01
2 AUX_PR02
3 AUX_PR03
4 AUX_PR04
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
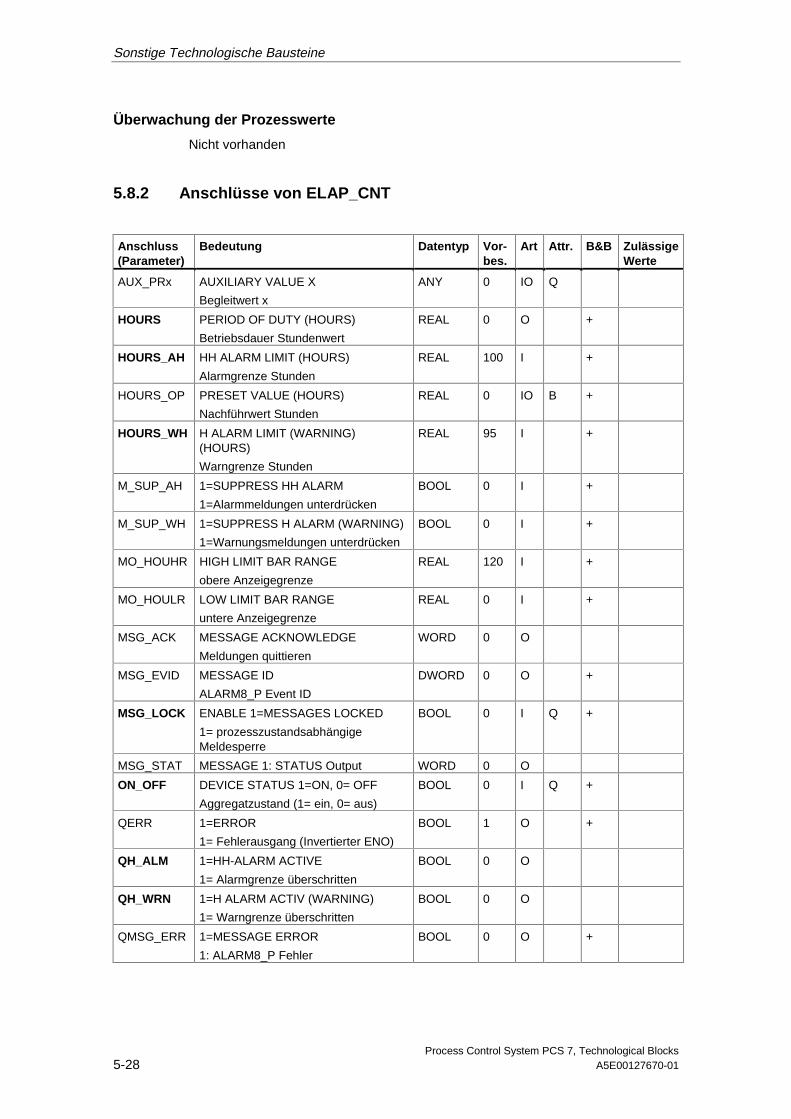
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-28 A5E00127670-01
Überwachung der Prozesswerte
Nicht vorhanden
5.8.2 Anschlüsse von ELAP_CNT
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUX_PRx AUXILIARY VALUE X
Begleitwert x
ANY 0 IO Q
HOURS PERIOD OF DUTY (HOURS)
Betriebsdauer Stundenwert
REAL 0 O +
HOURS_AH HH ALARM LIMIT (HOURS)
Alarmgrenze Stunden
REAL 100 I +
HOURS_OP PRESET VALUE (HOURS)
Nachführwert Stunden
REAL 0 IO B +
HOURS_WH H ALARM LIMIT (WARNING)(HOURS)
Warngrenze Stunden
REAL 95 I +
M_SUP_AH 1=SUPPRESS HH ALARM
1=Alarmmeldungen unterdrücken
BOOL 0 I +
M_SUP_WH 1=SUPPRESS H ALARM (WARNING)
1=Warnungsmeldungen unterdrücken
BOOL 0 I +
MO_HOUHR HIGH LIMIT BAR RANGE
obere Anzeigegrenze
REAL 120 I +
MO_HOULR LOW LIMIT BAR RANGE
untere Anzeigegrenze
REAL 0 I +
MSG_ACK MESSAGE ACKNOWLEDGE
Meldungen quittieren
WORD 0 O
MSG_EVID MESSAGE ID
ALARM8_P Event ID
DWORD 0 O +
MSG_LOCK ENABLE 1=MESSAGES LOCKED
1= prozesszustandsabhängigeMeldesperre
BOOL 0 I Q +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
ON_OFF DEVICE STATUS 1=ON, 0= OFF
Aggregatzustand (1= ein, 0= aus)
BOOL 0 I Q +
QERR 1=ERROR
1= Fehlerausgang (Invertierter ENO)
BOOL 1 O +
QH_ALM 1=HH-ALARM ACTIVE
1= Alarmgrenze überschritten
BOOL 0 O
QH_WRN 1=H ALARM ACTIV (WARNING)
1= Warngrenze überschritten
BOOL 0 O
QMSG_ERR 1=MESSAGE ERROR
1: ALARM8_P Fehler
BOOL 0 O +
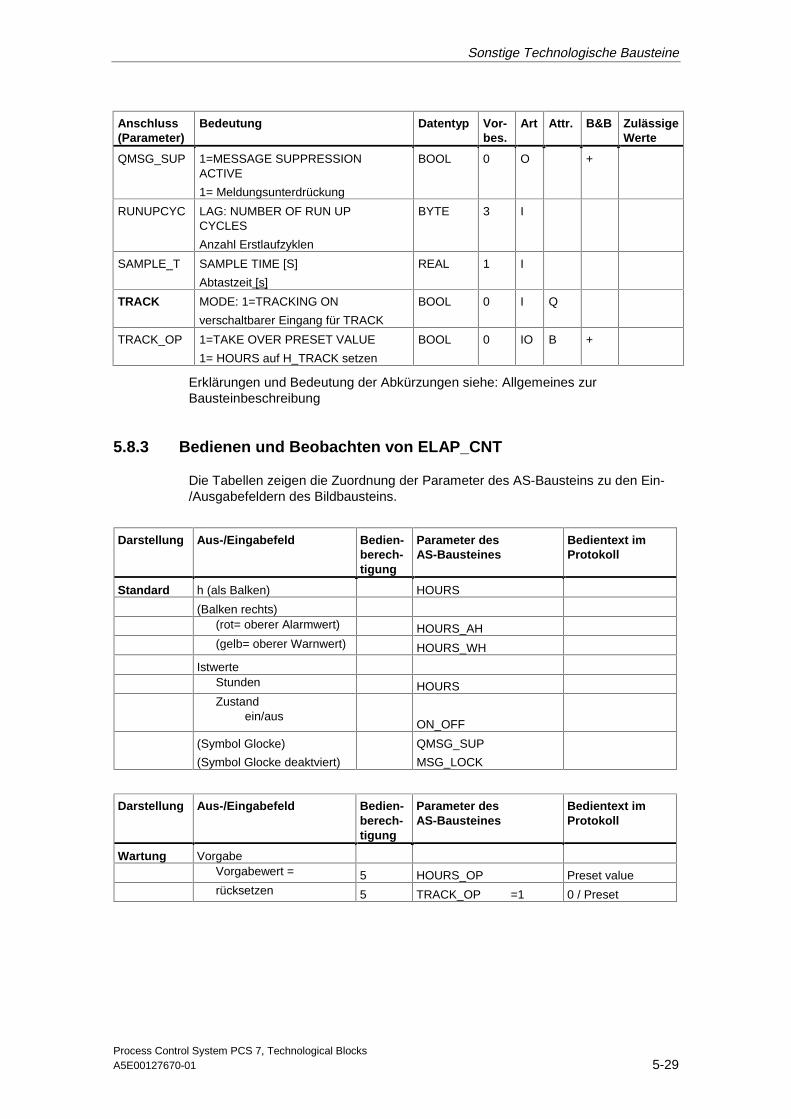
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-29
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE
1= Meldungsunterdrückung
BOOL 0 O +
RUNUPCYC LAG: NUMBER OF RUN UPCYCLES
Anzahl Erstlaufzyklen
BYTE 3 I
SAMPLE_T SAMPLE TIME [S]
Abtastzeit [s]
REAL 1 I
TRACK MODE: 1=TRACKING ON
verschaltbarer Eingang für TRACK
BOOL 0 I Q
TRACK_OP 1=TAKE OVER PRESET VALUE
1= HOURS auf H_TRACK setzen
BOOL 0 IO B +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
5.8.3 Bedienen und Beobachten von ELAP_CNT
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard h (als Balken) HOURS
(Balken rechts)(rot= oberer Alarmwert) HOURS_AH(gelb= oberer Warnwert) HOURS_WH
IstwerteStunden HOURSZustand
ein/ausON_OFF
(Symbol Glocke)
(Symbol Glocke deaktviert)
QMSG_SUP
MSG_LOCK
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung VorgabeVorgabewert = 5 HOURS_OP Preset valuerücksetzen 5 TRACK_OP =1 0 / Preset
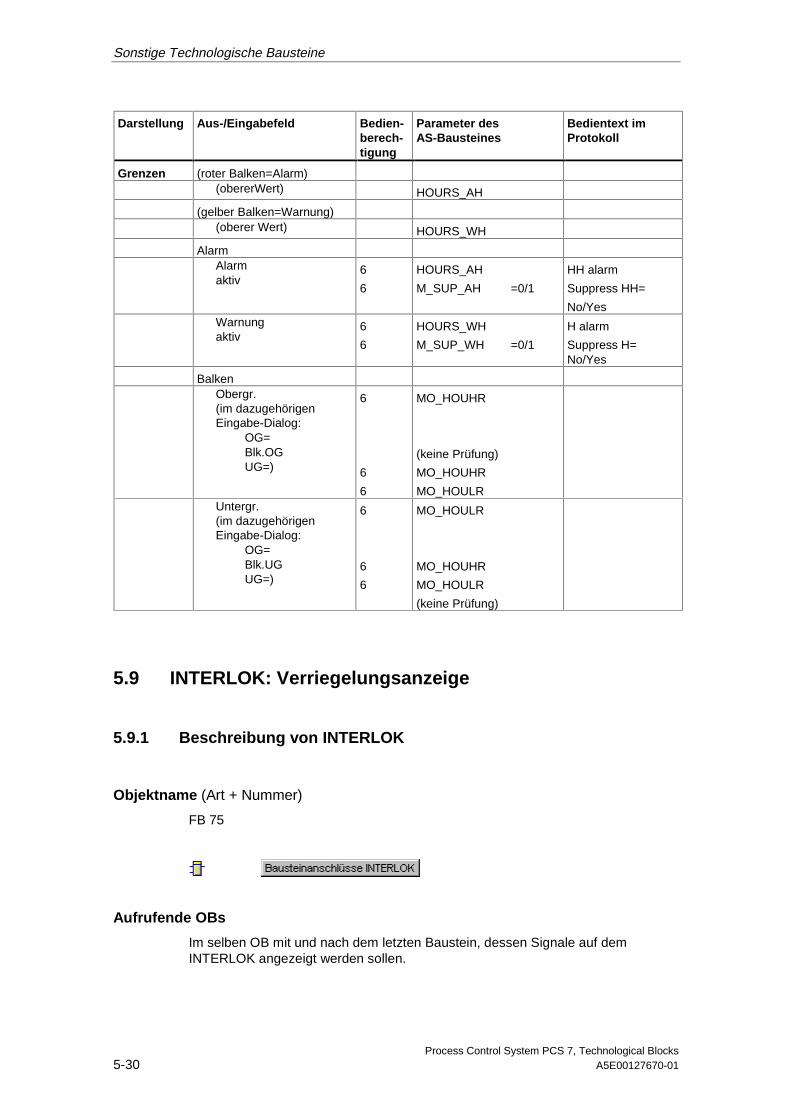
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-30 A5E00127670-01
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Grenzen (roter Balken=Alarm)(obererWert) HOURS_AH
(gelber Balken=Warnung)(oberer Wert) HOURS_WH
AlarmAlarmaktiv
6
6
HOURS_AH
M_SUP_AH =0/1
HH alarm
Suppress HH=
No/YesWarnungaktiv
6
6
HOURS_WH
M_SUP_WH =0/1
H alarm
Suppress H=No/Yes
BalkenObergr.(im dazugehörigenEingabe-Dialog:
OG=Blk.OGUG=)
6
6
6
MO_HOUHR
(keine Prüfung)
MO_HOUHR
MO_HOULRUntergr.(im dazugehörigenEingabe-Dialog:
OG=Blk.UGUG=)
6
6
6
MO_HOULR
MO_HOUHR
MO_HOULR
(keine Prüfung)
5.9 INTERLOK: Verriegelungsanzeige
5.9.1 Beschreibung von INTERLOK
Objektname (Art + Nummer)
FB 75
Aufrufende OBs
Im selben OB mit und nach dem letzten Baustein, dessen Signale auf demINTERLOK angezeigt werden sollen.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-31
Funktion
Der INTERLOK-Baustein dient zur Realisierung einer standardisiertenVerriegelungsanzeige, die auf dem OS aufgerufen werden kann. Dem Bausteinkönnen maximal 10 Eingangssignale zugeführt werden, die jeweils wahlweisenegiert werden können.
Arbeitsweise
Die ersten 5 Eingänge I1_1 bis I1_5 bilden eine Gruppe. Jedes Signal kann direktbzw. invertiert verknüpft werden, wählbar über die entsprechenden EingängeNEG1_1 bis NEG1_5.Die Art der Verknüpfung der ersten Gruppe wird über AND_OR1 festgelegt. DasErgebnis kann invertiert werden (NEGRES_1).Für die zweite Gruppe von 5 Eingängen gilt das Gleiche wie oben.Die beiden Gruppenergebnisse können über Und/Oder verknüpft werden.
Mit dem Eingang OVERWRITE=1 können Sie den Ausgang Q bei eineranstehenden Verriegelung (Q=1) auf 0 setzen. Dies ist nur möglich, wennOVERW_EN=1. Bei OVERW_EN=0 oder wenn keine Verriegelungsbedingungerfüllt ist, wird der Eingang OVERWRITE=0 gesetzt. Am Ausgang wird mitQ_OVERWR=1 angezeigt, dass der Ausgang Q überschrieben wurde.
Gilt nur, wenn Eingang CHECK_EN = TRUE ist:
Im Ausgangsparameter FIRST_I steht die Nummer (1 bis 10) des Eingangs Ix, derals erster TRUE bzw. invertiert FALSE wurde. Sind mehrere Bedingungengleichzeitig gesetzt, wird in FIRST_I die niedrigste Nummer eingetragen. Beipositiver Flanke des Eingangs RESET wird FIRST_I gleich Null gesetzt, wennkeine der obigen Bedingungen erfüllt ist. Im Normalfall verschaltet man denAusgang Q mit RESET.
Fehlerbehandlung
Nur durch das Betriebssystem.
Anlaufverhalten
Keine besondere Maßnahmen.
Zeitverhalten
Der Baustein hat kein Zeitverhalten.
Meldeverhalten
Nicht vorhanden.
Überwachung der Prozesswerte
Nicht vorhanden
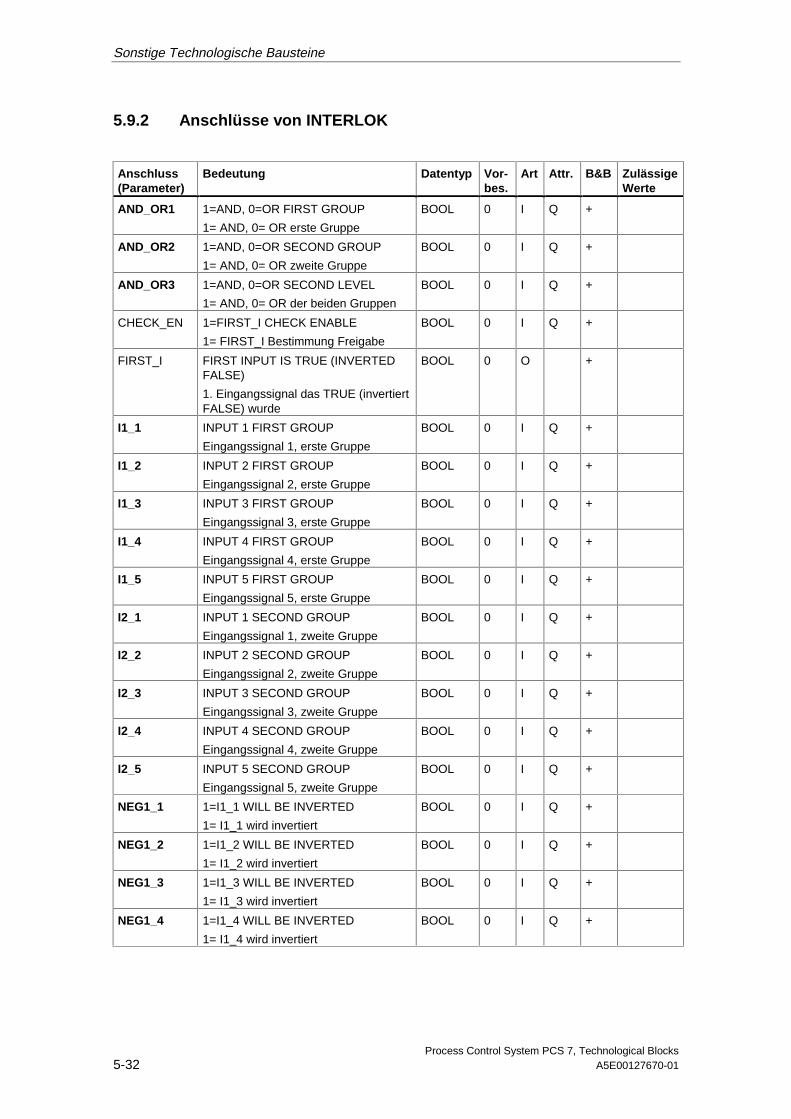
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-32 A5E00127670-01
5.9.2 Anschlüsse von INTERLOK
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AND_OR1 1=AND, 0=OR FIRST GROUP
1= AND, 0= OR erste Gruppe
BOOL 0 I Q +
AND_OR2 1=AND, 0=OR SECOND GROUP
1= AND, 0= OR zweite Gruppe
BOOL 0 I Q +
AND_OR3 1=AND, 0=OR SECOND LEVEL
1= AND, 0= OR der beiden Gruppen
BOOL 0 I Q +
CHECK_EN 1=FIRST_I CHECK ENABLE
1= FIRST_I Bestimmung Freigabe
BOOL 0 I Q +
FIRST_I FIRST INPUT IS TRUE (INVERTEDFALSE)
1. Eingangssignal das TRUE (invertiertFALSE) wurde
BOOL 0 O +
I1_1 INPUT 1 FIRST GROUP
Eingangssignal 1, erste Gruppe
BOOL 0 I Q +
I1_2 INPUT 2 FIRST GROUP
Eingangssignal 2, erste Gruppe
BOOL 0 I Q +
I1_3 INPUT 3 FIRST GROUP
Eingangssignal 3, erste Gruppe
BOOL 0 I Q +
I1_4 INPUT 4 FIRST GROUP
Eingangssignal 4, erste Gruppe
BOOL 0 I Q +
I1_5 INPUT 5 FIRST GROUP
Eingangssignal 5, erste Gruppe
BOOL 0 I Q +
I2_1 INPUT 1 SECOND GROUP
Eingangssignal 1, zweite Gruppe
BOOL 0 I Q +
I2_2 INPUT 2 SECOND GROUP
Eingangssignal 2, zweite Gruppe
BOOL 0 I Q +
I2_3 INPUT 3 SECOND GROUP
Eingangssignal 3, zweite Gruppe
BOOL 0 I Q +
I2_4 INPUT 4 SECOND GROUP
Eingangssignal 4, zweite Gruppe
BOOL 0 I Q +
I2_5 INPUT 5 SECOND GROUP
Eingangssignal 5, zweite Gruppe
BOOL 0 I Q +
NEG1_1 1=I1_1 WILL BE INVERTED
1= I1_1 wird invertiert
BOOL 0 I Q +
NEG1_2 1=I1_2 WILL BE INVERTED
1= I1_2 wird invertiert
BOOL 0 I Q +
NEG1_3 1=I1_3 WILL BE INVERTED
1= I1_3 wird invertiert
BOOL 0 I Q +
NEG1_4 1=I1_4 WILL BE INVERTED
1= I1_4 wird invertiert
BOOL 0 I Q +
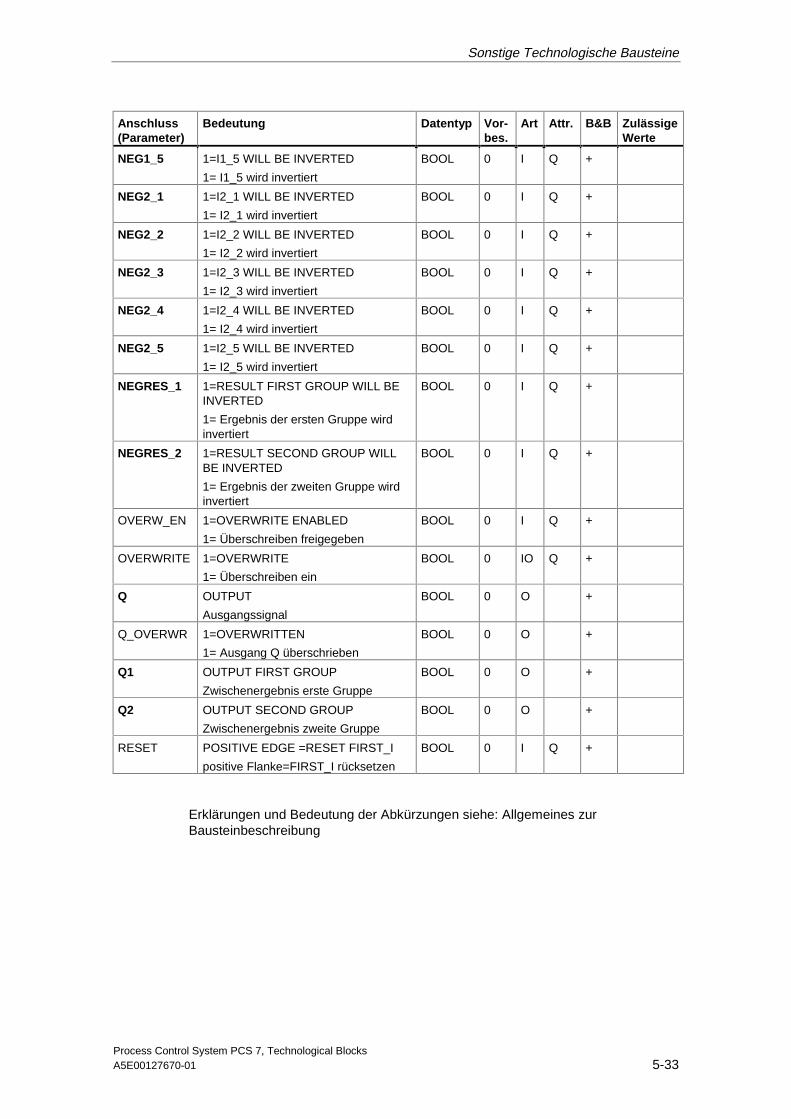
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-33
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
NEG1_5 1=I1_5 WILL BE INVERTED
1= I1_5 wird invertiert
BOOL 0 I Q +
NEG2_1 1=I2_1 WILL BE INVERTED
1= I2_1 wird invertiert
BOOL 0 I Q +
NEG2_2 1=I2_2 WILL BE INVERTED
1= I2_2 wird invertiert
BOOL 0 I Q +
NEG2_3 1=I2_3 WILL BE INVERTED
1= I2_3 wird invertiert
BOOL 0 I Q +
NEG2_4 1=I2_4 WILL BE INVERTED
1= I2_4 wird invertiert
BOOL 0 I Q +
NEG2_5 1=I2_5 WILL BE INVERTED
1= I2_5 wird invertiert
BOOL 0 I Q +
NEGRES_1 1=RESULT FIRST GROUP WILL BEINVERTED
1= Ergebnis der ersten Gruppe wirdinvertiert
BOOL 0 I Q +
NEGRES_2 1=RESULT SECOND GROUP WILLBE INVERTED
1= Ergebnis der zweiten Gruppe wirdinvertiert
BOOL 0 I Q +
OVERW_EN 1=OVERWRITE ENABLED
1= Überschreiben freigegeben
BOOL 0 I Q +
OVERWRITE 1=OVERWRITE
1= Überschreiben ein
BOOL 0 IO Q +
Q OUTPUT
Ausgangssignal
BOOL 0 O +
Q_OVERWR 1=OVERWRITTEN
1= Ausgang Q überschrieben
BOOL 0 O +
Q1 OUTPUT FIRST GROUP
Zwischenergebnis erste Gruppe
BOOL 0 O +
Q2 OUTPUT SECOND GROUP
Zwischenergebnis zweite Gruppe
BOOL 0 O +
RESET POSITIVE EDGE =RESET FIRST_I
positive Flanke=FIRST_I rücksetzen
BOOL 0 I Q +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-34 A5E00127670-01
5.9.3 Bedienen und Beobachten von INTERLOK
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard (Logik-Plan)
(Ausgabefeld) in_1 I1_1 0 / in_1
in_2 I1_2 0 / in_2
in_3 I1_3 0 / in_3
in_4 I1_4 0 / in_4
in_5 I1_5 0 / in_5
in_6 I2_1 0 / in_6
in_7 I2_2 0 / in_7
in_8 I2_3 0 / in_8
in_9 I2_4 0 / in_9
in_10 I2_5 0 / in_10
Wartung Überschreiben
Freigabe OVERW_EN
aktiv 5 OVERWRITE=0/1 Overwrite=Off/On
5.10 INT_P: Integration
5.10.1 Beschreibung von INT_P
Objektname (Art + Nummer)
FB 40
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB 32). Zusätzlich imOB 100 (siehe Anlaufverhalten).
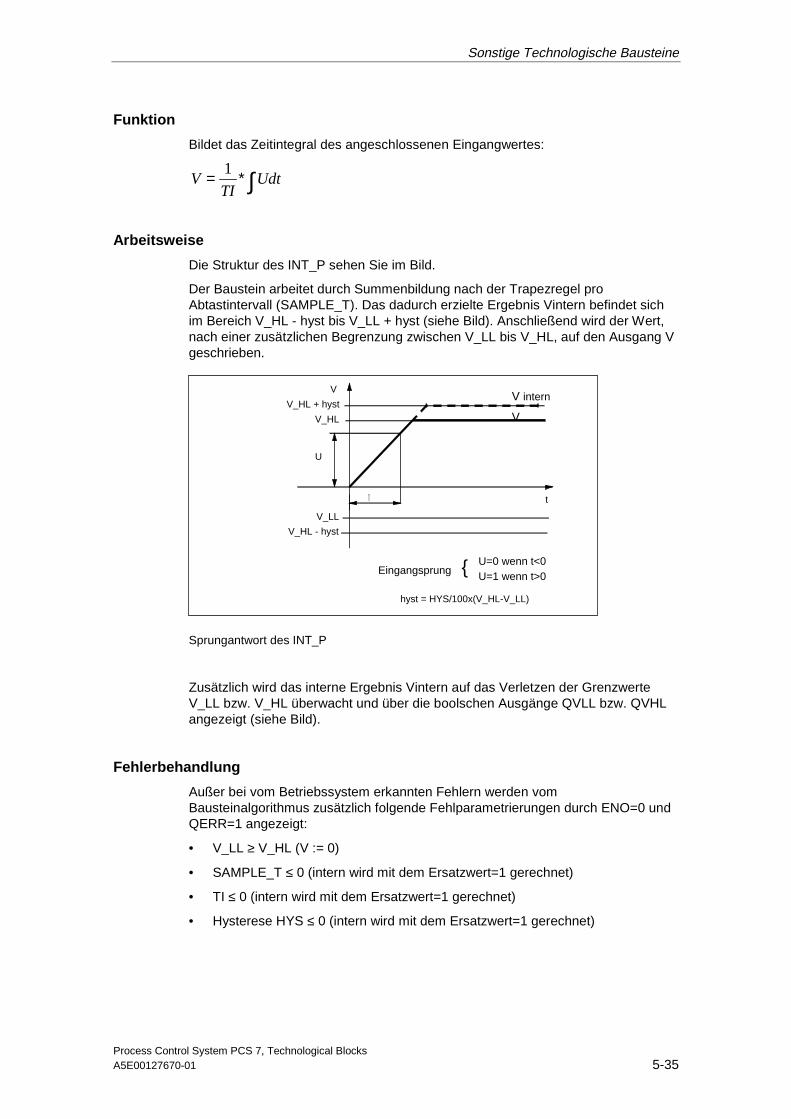
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-35
Funktion
Bildet das Zeitintegral des angeschlossenen Eingangwertes:
VTI
Udt= ∗∫1
Arbeitsweise
Die Struktur des INT_P sehen Sie im Bild.
Der Baustein arbeitet durch Summenbildung nach der Trapezregel proAbtastintervall (SAMPLE_T). Das dadurch erzielte Ergebnis Vintern befindet sichim Bereich V_HL - hyst bis V_LL + hyst (siehe Bild). Anschließend wird der Wert,nach einer zusätzlichen Begrenzung zwischen V_LL bis V_HL, auf den Ausgang Vgeschrieben.
t
V_HL
V_LL
V
U=1 wenn t>0U=0 wenn t<0
Eingangsprung {
V_HL + hyst
V_HL - hyst
TI
U
hyst = HYS/100x(V_HL-V_LL)
V intern
V
Sprungantwort des INT_P
Zusätzlich wird das interne Ergebnis Vintern auf das Verletzen der GrenzwerteV_LL bzw. V_HL überwacht und über die boolschen Ausgänge QVLL bzw. QVHLangezeigt (siehe Bild).
Fehlerbehandlung
Außer bei vom Betriebssystem erkannten Fehlern werden vomBausteinalgorithmus zusätzlich folgende Fehlparametrierungen durch ENO=0 undQERR=1 angezeigt:
• V_LL ≥ V_HL (V := 0)
• SAMPLE_T ≤ 0 (intern wird mit dem Ersatzwert=1 gerechnet)
• TI ≤ 0 (intern wird mit dem Ersatzwert=1 gerechnet)
• Hysterese HYS ≤ 0 (intern wird mit dem Ersatzwert=1 gerechnet)
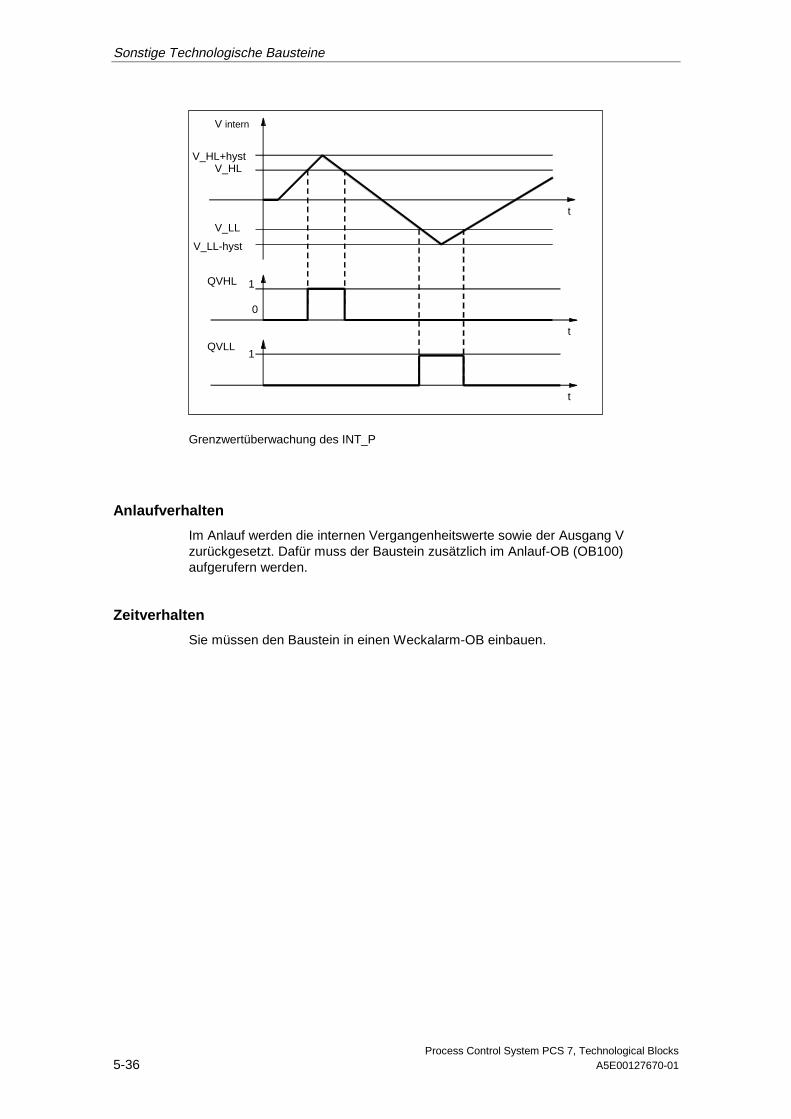
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-36 A5E00127670-01
t
t
QVHL 1
t
QVLL1
V_HL
V_LL
V intern
0
V_HL+hyst
V_LL-hyst
Grenzwertüberwachung des INT_P
Anlaufverhalten
Im Anlauf werden die internen Vergangenheitswerte sowie der Ausgang Vzurückgesetzt. Dafür muss der Baustein zusätzlich im Anlauf-OB (OB100)aufgerufern werden.
Zeitverhalten
Sie müssen den Baustein in einen Weckalarm-OB einbauen.
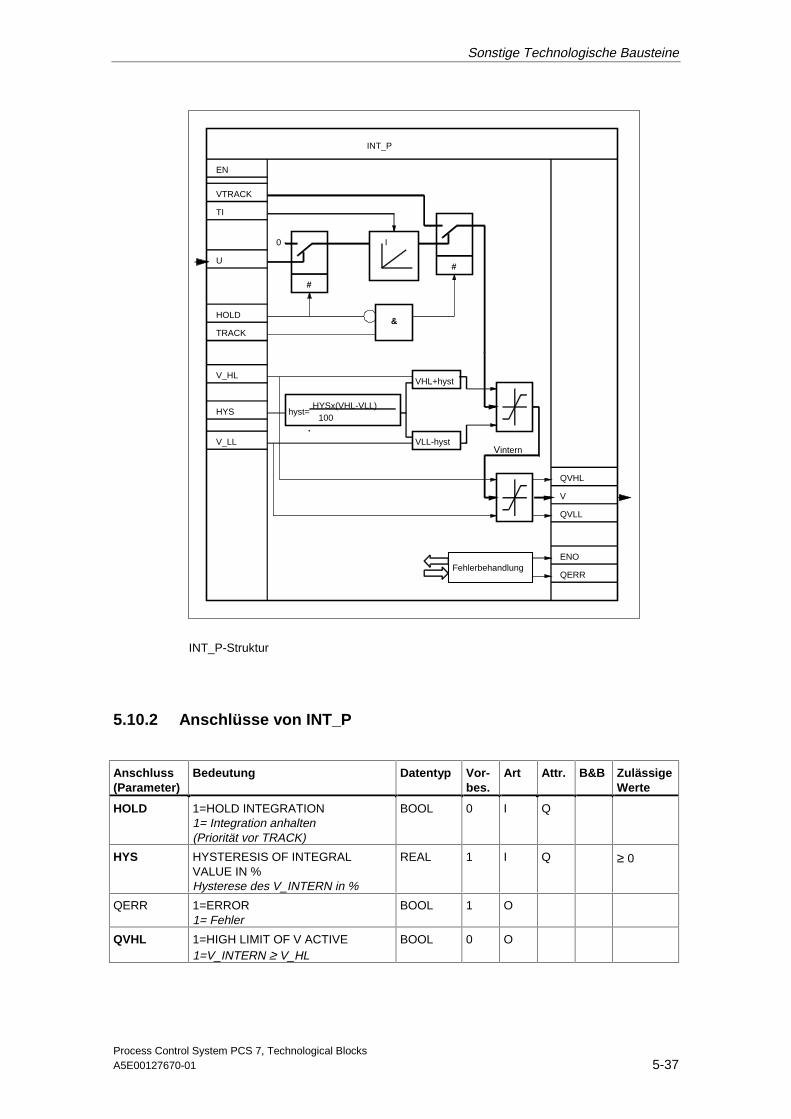
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-37
EN
TI
HOLD
0
U
ENO
V
#
&TRACK
VTRACK
QVHL
QVLL
FehlerbehandlungQERR
I
#
V_HL
V_LL
HYS hyst=HYSx(VHL-VLL)
100
VHL+hyst
VLL-hystVintern
INT_P
INT_P-Struktur
5.10.2 Anschlüsse von INT_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
HOLD 1=HOLD INTEGRATION1= Integration anhalten(Priorität vor TRACK)
BOOL 0 I Q
HYS HYSTERESIS OF INTEGRALVALUE IN %Hysterese des V_INTERN in %
REAL 1 I Q ≥ 0
QERR 1=ERROR1= Fehler
BOOL 1 O
QVHL 1=HIGH LIMIT OF V ACTIVE1=V_INTERN ≥ V_HL
BOOL 0 O
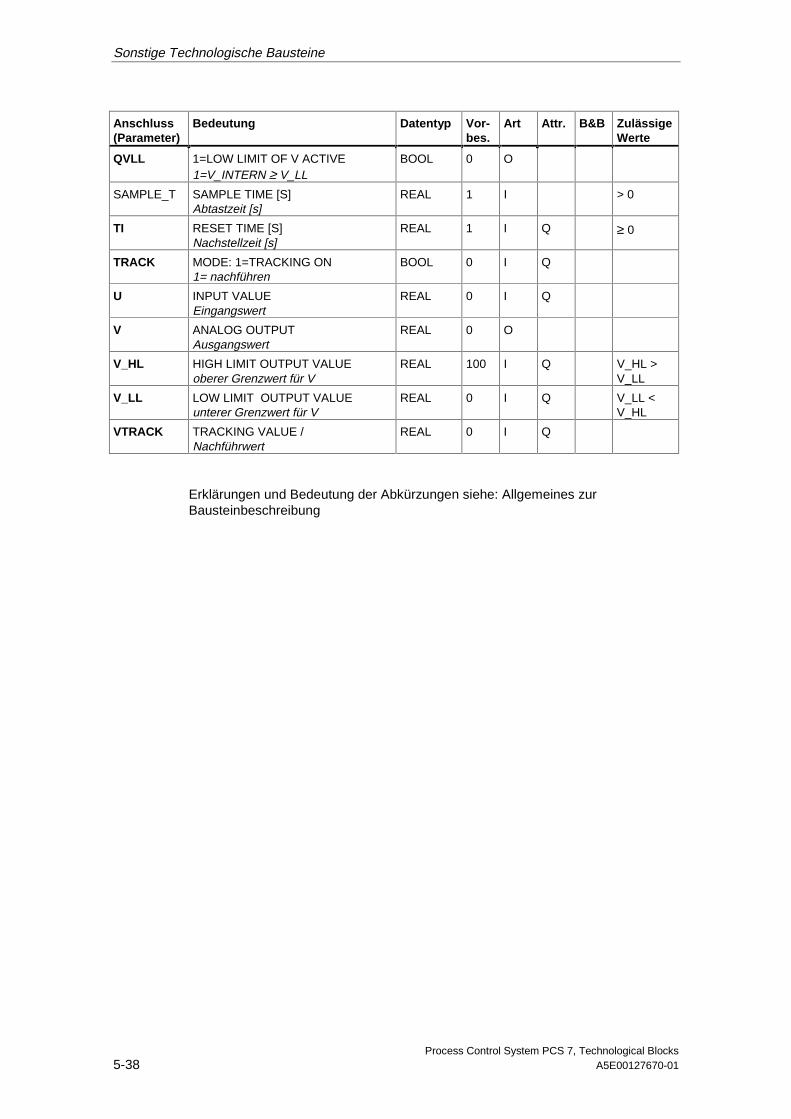
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-38 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QVLL 1=LOW LIMIT OF V ACTIVE1=V_INTERN ≥ V_LL
BOOL 0 O
SAMPLE_T SAMPLE TIME [S]Abtastzeit [s]
REAL 1 I > 0
TI RESET TIME [S]Nachstellzeit [s]
REAL 1 I Q ≥ 0
TRACK MODE: 1=TRACKING ON1= nachführen
BOOL 0 I Q
U INPUT VALUEEingangswert
REAL 0 I Q
V ANALOG OUTPUTAusgangswert
REAL 0 O
V_HL HIGH LIMIT OUTPUT VALUEoberer Grenzwert für V
REAL 100 I Q V_HL >V_LL
V_LL LOW LIMIT OUTPUT VALUEunterer Grenzwert für V
REAL 0 I Q V_LL <V_HL
VTRACK TRACKING VALUE /Nachführwert
REAL 0 I Q
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-39
5.11 LIMITS_P: Begrenzung
5.11.1 Beschreibung von LIMITS_P
Objektname (Art + Nummer)
FB 41
Aufrufende Obs
Der OB, in dem Sie den Baustein einbauen.
Funktion
Begrenzung einer Analoggröße auf einen einstellbaren Bereich.
Arbeitsweise
Der Baustein reicht den analogen Eingangswert U auf den Ausgang V, solange ersich innerhalb der eingestellten Bereichsgrenzen befindet.
• Bei Unterschreitung der Bereichsgrenze wird der untere Grenzwert, beiÜberschreitung der Bereichsgrenze der obere Grenzwert ausgegeben.
• Die aktive Begrenzung wird durch das Setzen von binären Ausgängenangezeigt. Eine Hystereseangabe kann genutzt werden, um ein Flattern derAnzeige zu vermeiden, falls der Eingangswert um den Grenzwert schwankt.
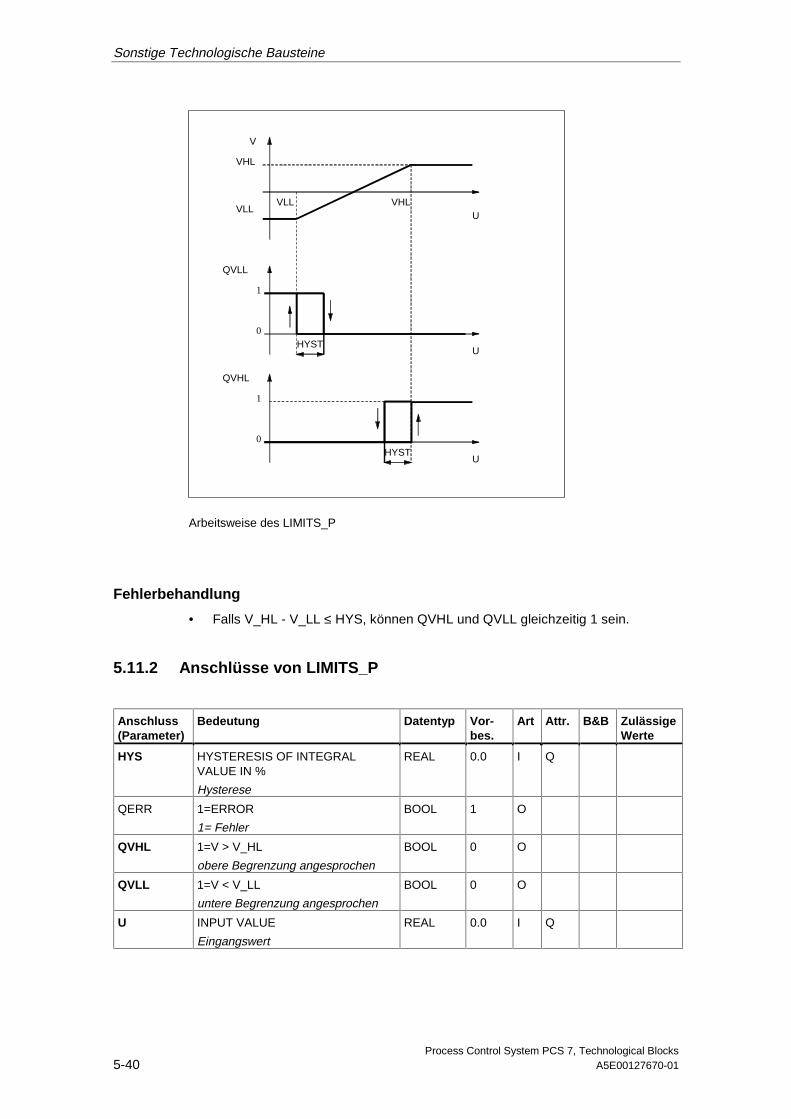
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-40 A5E00127670-01
U
U
U
V
QVLL
QVHL
VLL VHL
VHL
VLL
1
1
0
0HYST
HYST
Arbeitsweise des LIMITS_P
Fehlerbehandlung
• Falls V_HL - V_LL ≤ HYS, können QVHL und QVLL gleichzeitig 1 sein.
5.11.2 Anschlüsse von LIMITS_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
HYS HYSTERESIS OF INTEGRALVALUE IN %
Hysterese
REAL 0.0 I Q
QERR 1=ERROR
1= Fehler
BOOL 1 O
QVHL 1=V > V_HL
obere Begrenzung angesprochen
BOOL 0 O
QVLL 1=V < V_LL
untere Begrenzung angesprochen
BOOL 0 O
U INPUT VALUE
Eingangswert
REAL 0.0 I Q
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-41
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
V ANALOG OUTPUT
Ausgangswert
REAL 0.0 O
V_HL HIGH LIMIT OUTPUT VALUE
obere Begrenzung
REAL 100.0 I Q
V_LL LOW LIMIT OUTPUT VALUE
untere Begrenzung
REAL 0.0 I Q
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
5.12 MEANTM_P: Zeitliche Mittelwertbildung
5.12.1 Beschreibung von MEANTM_P
Objektname (Art + Nummer)
FB 42
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB 32); zusätzlich imOB 100 (siehe Anlaufverhalten).
Funktion
Der Baustein dient zur zeitlichen Mittelwertbildung eines analogen Eingangssignalsüber eine zurückliegende, parametrierbare Zeitspanne, nach der Formel:
Vn = ( U1 + U2 +...+Un) / n
wobei U1...Un die n erfassten Werte darstellen, über die gemittelt wird.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-42 A5E00127670-01
Arbeitsweise
Bei jeder Bearbeitung des Bausteins wird aus dem aktuellen Eingangswert U undden über die Zeit T_WINDOW gespeicherten Werten der arithmetische Mittelwertberechnet. Dieser wird an dem Ausgang V aktualisiert. Der aktuelle Eingangswertüberschreibt anschließend den ältesten Vergangenheitswert.
• Das Zeitfenster, über welches gemittelt werden soll, wird im ParameterT_WINDOW eingetragen.
• Die Anzahl n der zu speichernden Werte ermittelt der Baustein aus demganzzahligen Anteil des Quotienten T_WINDOW / SAMPLE_T.
• Der Baustein kann intern maximal 20 Vergangenheitswerte speichern. Beieinem längeren Zeitfenster wird eine Datenreduktion vorgenommen.
• Über den Eingang STOP_RES kann man:
- mit "1" den Rechenvorgang anhalten. Der Ausgangswert bleibt solangeunverändert.
- durch fallende Flanke 1→0 die zeitliche Mittelwertbildung rücksetzen.
• Wenn SAMPLE_T oder T_WINDOW verändert werden, erfolgt ein Rücksetzender Mittelwertbildung.
Fehlerbehandlung
Nur durch das Betriebssystem.
Anlaufverhalten
Nicht vorhanden.
• Falls vor dem CPU-Stopp der Baustein aktiv war und danach weiterrechnet,muss die CPU-Ausfallzeit relativ zu T_WINDOW berücksichtigt werden. Damitkönnen Sie entscheiden, ob das Ergebnis noch brauchbar ist oder derRechenvorgang über den Eingang STOP_RES zurückgesetzt werden muss.
Zeitverhalten
Der Baustein muss aus einem Weckalarm-OB aufgerufen werden.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-43
5.12.2 Anschlüsse von MEANTM_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QERR 1=ERROR
1=Fehler
BOOL 1 O
SAMPLE_T SAMPLE TIME [S]
Abtastzeit [s]
REAL 1.0 I >0
STOP_RES STOP/RESET OF MIDVALUECALCULATION
Anhalten / Rücksetzen derMittelwertbildung
BOOL 0 I Q
T_WINDOW SIZE OF TIMEWINDOW [S]
Größe des Zeitfensters [s]
REAL 20 I
U INPUT VALUE
Eingangswert
REAL 0 I Q
V ANALOG OUTPUT
Ausgangswert
REAL 0 O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
5.13 MUL4_P: Multiplikation für maximal 4 Werte
5.13.1 Beschreibung von MUL4_P
Objektname (Art + Nummer)
FC 262
Aufrufende OBs
Der OB, in dem Sie den Baustein einbauen.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-44 A5E00127670-01
Funktion
Der Baustein multipliziert bis zu 4 Werte
V := U1∗...∗Un (n≤4)
je nach Ausprägung (siehe folgende Tabelle).Verwenden Sie die Ausprägung mit möglichst kleinster Anzahl der Eingänge, umRechenzeit zu sparen.
Ausprägung Art Nr. Bedeutung
MUL4_P FC 262 Multiplizierer mit 4 Eingängen
Fehlerbehandlung
Bei Überlauf wird die über- bzw. unterschrittene Bereichsgrenze des Typs REAL imErgebnis V eingesetzt und ENO = 0 belegt.
5.13.2 Anschlüsse von MUL4_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
U1 INPUT 1
Eingang 1
REAL I Q
.... .... .... .... .... ....
U4 INPUT 4
Eingang 4
REAL I Q
V ANALOG OUTPUT
Ergebnis
REAL O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-45
5.14 MUL8_P: Multiplikation für maximal 8 Werte
5.14.1 Beschreibung von MUL8_P
Objektname (Art + Nummer)
FC 263
Aufrufende OBs
Der OB, in dem Sie den Baustein einbauen.
Funktion
Der Baustein multipliziert bis zu 8 Werte
V := U1∗U2∗U3∗...∗Un (n≤8)
je nach Ausprägung (siehe folgende Tabelle).Verwenden Sie die Ausprägung mit möglichst kleinster Anzahl der Eingänge, umRechenzeit zu sparen.
Ausprägung Art Nr. Bedeutung
MUL8_P FC 263 Multiplizierer mit 8 Eingängen
Fehlerbehandlung
Bei Überlauf wird die über- bzw. unterschrittene Bereichsgrenze des Typs REAL imErgebnis V eingesetzt und ENO = 0 belegt.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-46 A5E00127670-01
5.14.2 Anschlüsse von MUL8_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr.
U1 INPUT 1
Eingang 1
REAL I Q
.... .... .... .... ....
U8 INPUT 8
Eingang 8
REAL I Q
V ANALOG OUTPUT
Ergebnis
REAL O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
5.15 OB1_TIME: Ermittlung der CPU-Auslastung
5.15.1 Beschreibung von OB1_TIME
Objektname (Art + Nummer)
FB 69
Aufrufende OBs
Der OB1
Funktion
Der OB1_TIME-Baustein ermöglicht eine Aussage über die Auslastung der CPU.
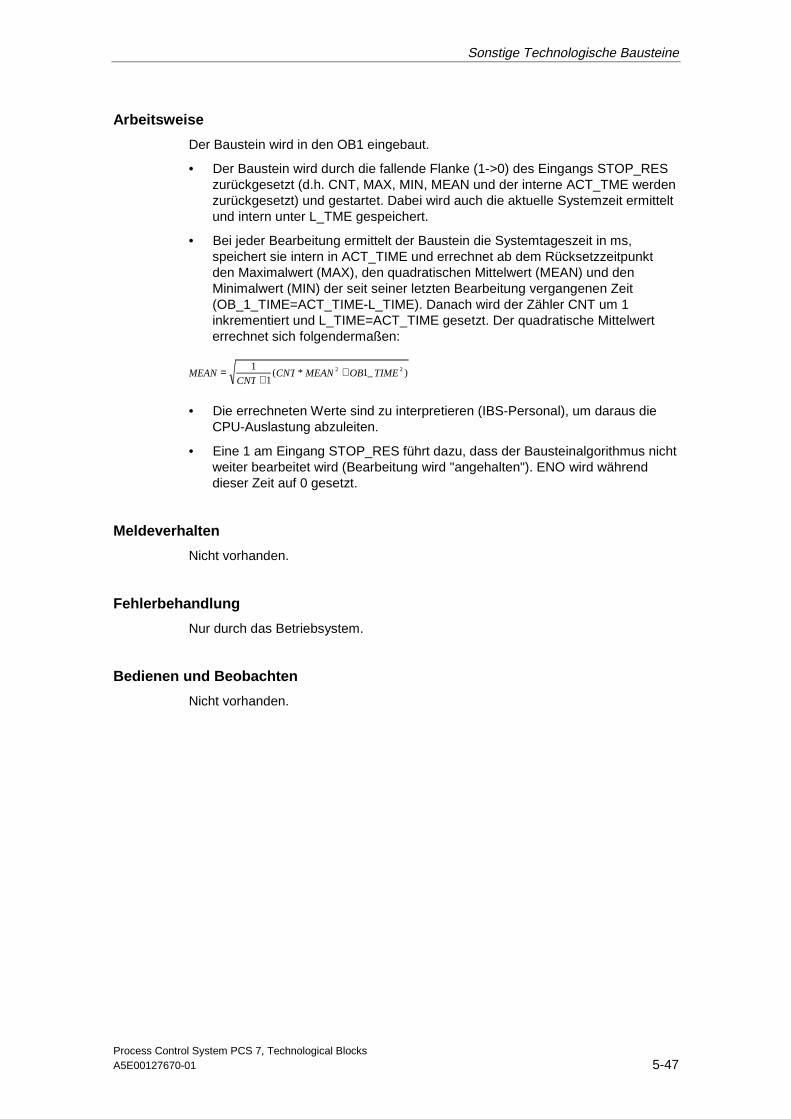
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-47
Arbeitsweise
Der Baustein wird in den OB1 eingebaut.
• Der Baustein wird durch die fallende Flanke (1->0) des Eingangs STOP_RESzurückgesetzt (d.h. CNT, MAX, MIN, MEAN und der interne ACT_TME werdenzurückgesetzt) und gestartet. Dabei wird auch die aktuelle Systemzeit ermitteltund intern unter L_TME gespeichert.
• Bei jeder Bearbeitung ermittelt der Baustein die Systemtageszeit in ms,speichert sie intern in ACT_TIME und errechnet ab dem Rücksetzzeitpunktden Maximalwert (MAX), den quadratischen Mittelwert (MEAN) und denMinimalwert (MIN) der seit seiner letzten Bearbeitung vergangenen Zeit(OB_1_TIME=ACT_TIME-L_TIME). Danach wird der Zähler CNT um 1inkrementiert und L_TIME=ACT_TIME gesetzt. Der quadratische Mittelwerterrechnet sich folgendermaßen:
MEANCNT
CNT MEAN OB TIME=+
+11
12 2( * _ )
• Die errechneten Werte sind zu interpretieren (IBS-Personal), um daraus dieCPU-Auslastung abzuleiten.
• Eine 1 am Eingang STOP_RES führt dazu, dass der Bausteinalgorithmus nichtweiter bearbeitet wird (Bearbeitung wird "angehalten"). ENO wird währenddieser Zeit auf 0 gesetzt.
Meldeverhalten
Nicht vorhanden.
Fehlerbehandlung
Nur durch das Betriebsystem.
Bedienen und Beobachten
Nicht vorhanden.
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-48 A5E00127670-01
5.15.2 Anschlüsse von OB1_TIME
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
CNT COUNTER OUTPUT: CURRENTVALUE
Zähler
DINT 0 O
MAX MAX TIME
Maximaler Zeitwert
DINT 0 O
MAX_CNT HIGH LIMIT VALUE COUNTER
Maximalwert CNT
DINT 10000 I
MEAN QUADRATIC MEAN
quadratischer Mittelwert
DINT 0 O
MIN MIN TIME
Minimaler Zeitwert
DINT 0 O
OB1_TIME CYCLE EXECUTION TIME
Zyklische Ausführungszeit:ACT_TIME - L_TIME
DINT 0 O
QERR 1=ERROR
Invertierter Wert von ENO
BOOL 1 O
STOP_MAX MODE: 1=STOP ATCNT=MAX_CNT
1=Stop bei CNT=MAX_CNT
BOOL 0 I Q
STOP_RES STOP/RESET 1= STOP,0=Rücksetzen
BOOL 1 I Q
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
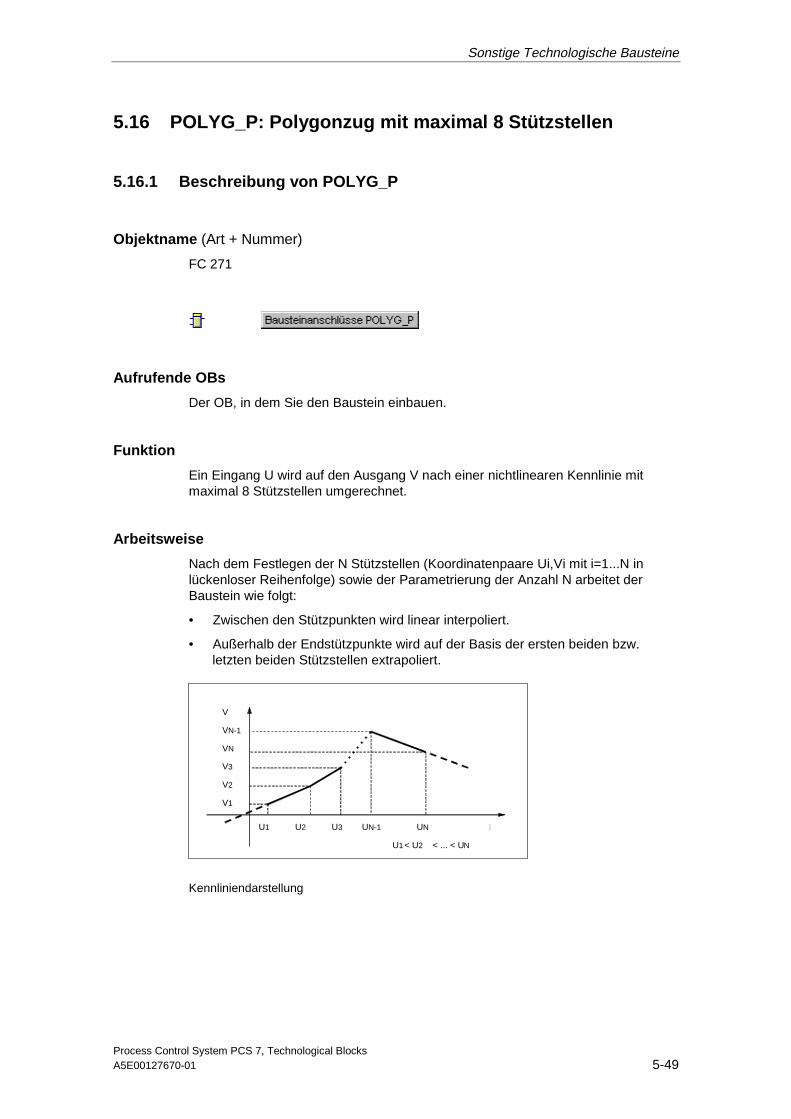
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-49
5.16 POLYG_P: Polygonzug mit maximal 8 Stützstellen
5.16.1 Beschreibung von POLYG_P
Objektname (Art + Nummer)
FC 271
Aufrufende OBs
Der OB, in dem Sie den Baustein einbauen.
Funktion
Ein Eingang U wird auf den Ausgang V nach einer nichtlinearen Kennlinie mitmaximal 8 Stützstellen umgerechnet.
Arbeitsweise
Nach dem Festlegen der N Stützstellen (Koordinatenpaare Ui,Vi mit i=1...N inlückenloser Reihenfolge) sowie der Parametrierung der Anzahl N arbeitet derBaustein wie folgt:
• Zwischen den Stützpunkten wird linear interpoliert.
• Außerhalb der Endstützpunkte wird auf der Basis der ersten beiden bzw.letzten beiden Stützstellen extrapoliert.
VN
V3
V2
V1
VN-1
U1 U2 U3 UN-1 UN U
V
U1 < U2 < ... < UN
Kennliniendarstellung
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-50 A5E00127670-01
Fehlerbehandlung
Es wird ausgegeben ENO=0 sowie V=U wenn:
• Anzahl der Stützpunkte N < 2 oder N > 8
• Ui > Ui+1 für i=1,2...N-1
5.16.2 Anschlüsse von POLYG_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
N NUMBER
Anzahl Stützpunkte
INT 0 I 2 ≤ N ≤ 8
U INPUT VALUE
Eingang
REAL 0.0 I Q
U1 INPUT 1
U-Wert Stützpunkt 1
REAL 0.0 I Q
U2 INPUT 2
U-Wert Stützpunkt 2
REAL 0.0 I Q
... ... ... ... ... ...
U8 INPUT 8
U-Wert Stützpunkt 8
REAL 0.0 I Q
V1 INTERPOLATION POINT V 1
V-Wert Stützpunkt 1
REAL 0.0 I Q
V2 INTERPOLATION POINT V 2
V-Wert Stützpunkt 2
REAL 0.0 I Q
... ... ... ... ... ...
V8 INTERPOLATION POINT V 8
V-Wert Stützpunkt 8
REAL 0.0 I Q
V ANALOG OUTPUT
Ausgangswert
REAL 0.0 O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
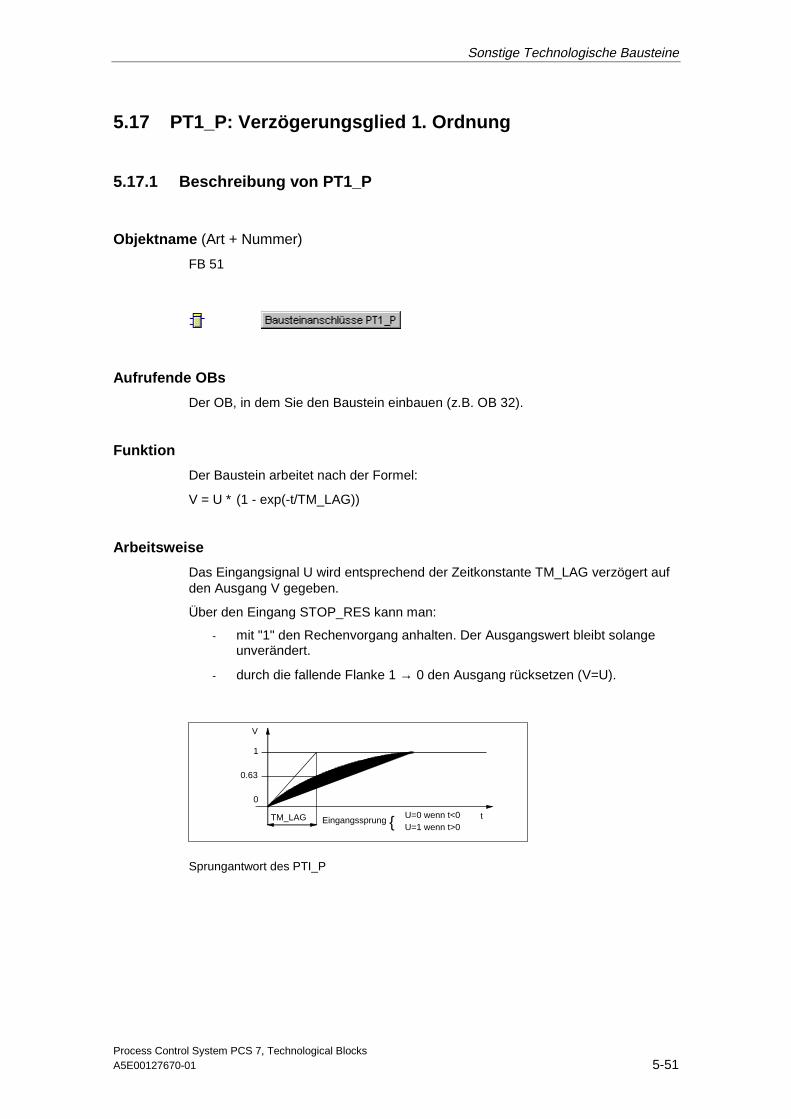
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-51
5.17 PT1_P: Verzögerungsglied 1. Ordnung
5.17.1 Beschreibung von PT1_P
Objektname (Art + Nummer)
FB 51
Aufrufende OBs
Der OB, in dem Sie den Baustein einbauen (z.B. OB 32).
Funktion
Der Baustein arbeitet nach der Formel:
V = U ∗ (1 - exp(-t/TM_LAG))
Arbeitsweise
Das Eingangsignal U wird entsprechend der Zeitkonstante TM_LAG verzögert aufden Ausgang V gegeben.
Über den Eingang STOP_RES kann man:
- mit "1" den Rechenvorgang anhalten. Der Ausgangswert bleibt solangeunverändert.
- durch die fallende Flanke 1 → 0 den Ausgang rücksetzen (V=U).
V
tTM_LAGU=1 wenn t>0U=0 wenn t<0
Eingangssprung {
0
1
0.63
Sprungantwort des PTI_P
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-52 A5E00127670-01
Fehlerbehandlung
Nur durch das Betriebssystem
5.17.2 Anschlüsse von PT1_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. ZulässigeWerte
QERR 1=ERROR
1=Fehler
BOOL 1 O
SAMPLE_T SAMPLE TIME [S]
Abtastzeit [s]
REAL 1.0 I >0
STOP_RES STOP/RESET OF PT1 FUNCTION
Anhalten / Rücksetzen der PT1-Funktion
BOOL 0 I Q
TM_LAG LAG TIME CONSTANT [S]
Größe der Zeitkonstanten
REAL 0.0 I
U INPUT VALUEEingangswert
REAL 0.0 I Q
V ANALOG OUTPUTAusgangswert
REAL 0.0 O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
5.18 RAMP_P: Rampenbildung
5.18.1 Beschreibung von RAMP_P
Objektname (Art + Nummer)
FB 52
Aufrufende OBs
Der Weckalarm-OB, in dem Sie den Baustein einbauen (z.B. OB 32). Zusätzlich imOB 100 (siehe Anlaufverhalten).
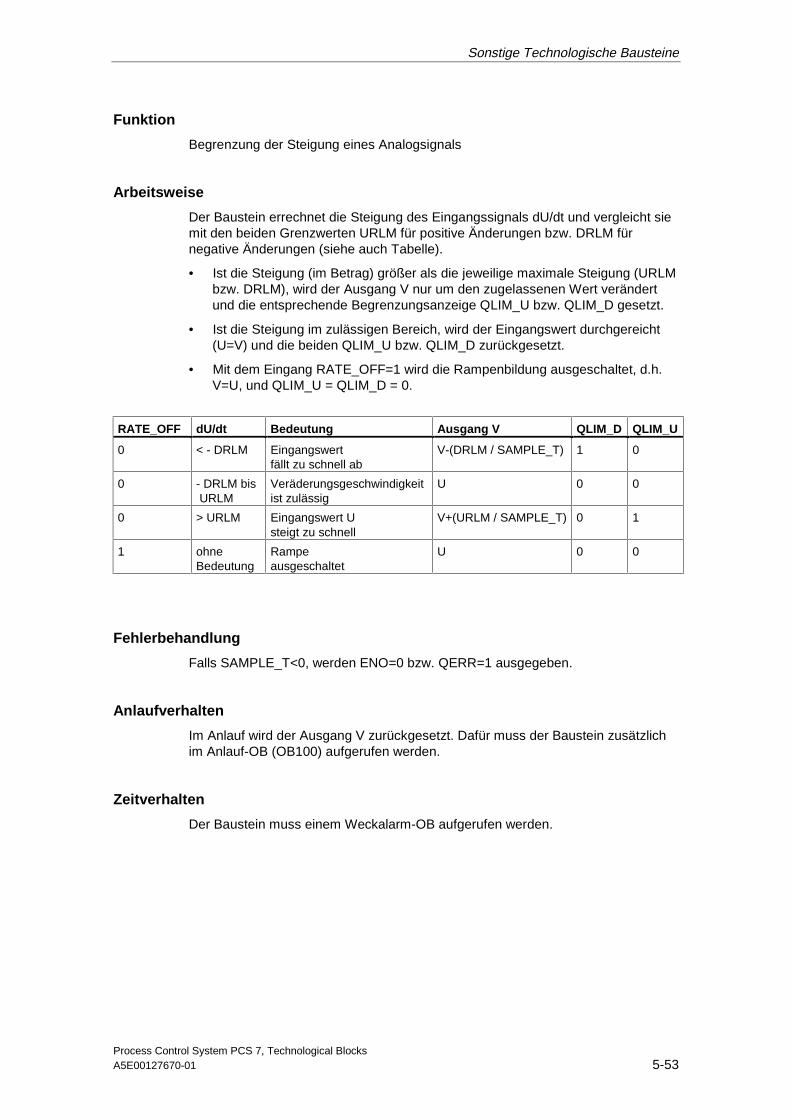
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-53
Funktion
Begrenzung der Steigung eines Analogsignals
Arbeitsweise
Der Baustein errechnet die Steigung des Eingangssignals dU/dt und vergleicht siemit den beiden Grenzwerten URLM für positive Änderungen bzw. DRLM fürnegative Änderungen (siehe auch Tabelle).
• Ist die Steigung (im Betrag) größer als die jeweilige maximale Steigung (URLMbzw. DRLM), wird der Ausgang V nur um den zugelassenen Wert verändertund die entsprechende Begrenzungsanzeige QLIM_U bzw. QLIM_D gesetzt.
• Ist die Steigung im zulässigen Bereich, wird der Eingangswert durchgereicht(U=V) und die beiden QLIM_U bzw. QLIM_D zurückgesetzt.
• Mit dem Eingang RATE_OFF=1 wird die Rampenbildung ausgeschaltet, d.h.V=U, und QLIM_U = QLIM_D = 0.
RATE_OFF dU/dt Bedeutung Ausgang V QLIM_D QLIM_U
0 < - DRLM Eingangswertfällt zu schnell ab
V-(DRLM / SAMPLE_T) 1 0
0 - DRLM bis URLM
Veräderungsgeschwindigkeitist zulässig
U 0 0
0 > URLM Eingangswert Usteigt zu schnell
V+(URLM / SAMPLE_T) 0 1
1 ohneBedeutung
Rampeausgeschaltet
U 0 0
Fehlerbehandlung
Falls SAMPLE_T<0, werden ENO=0 bzw. QERR=1 ausgegeben.
Anlaufverhalten
Im Anlauf wird der Ausgang V zurückgesetzt. Dafür muss der Baustein zusätzlichim Anlauf-OB (OB100) aufgerufen werden.
Zeitverhalten
Der Baustein muss einem Weckalarm-OB aufgerufen werden.
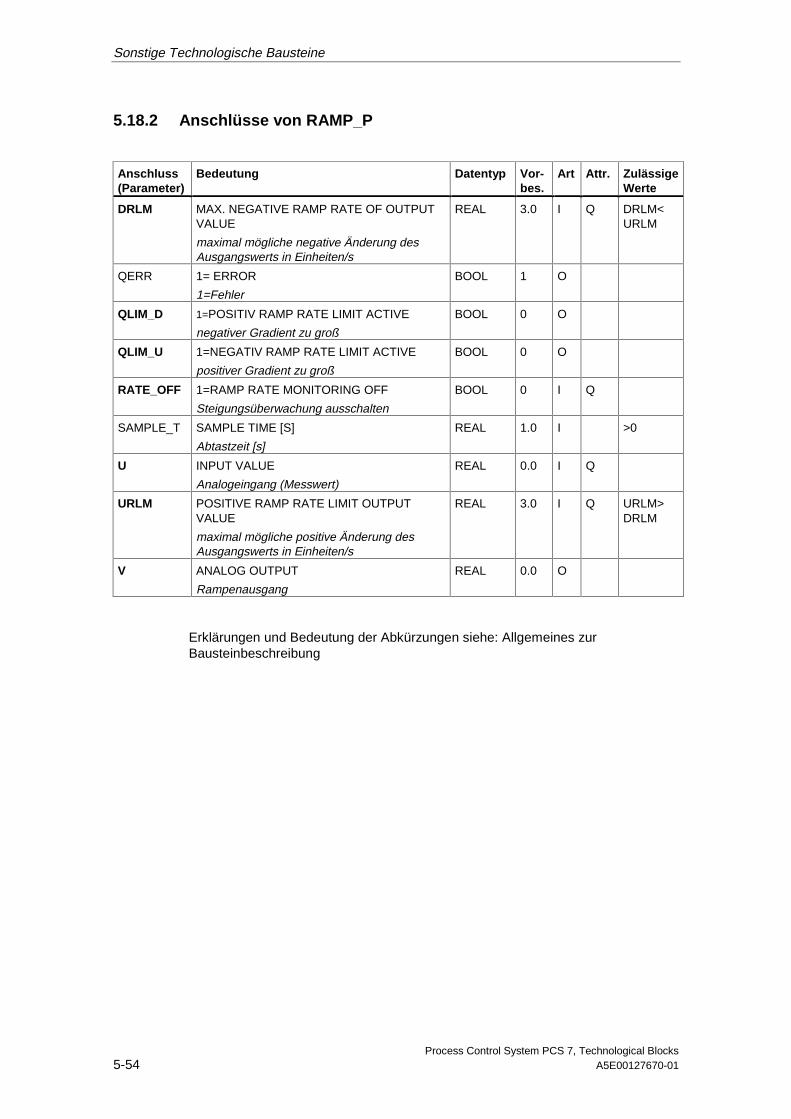
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-54 A5E00127670-01
5.18.2 Anschlüsse von RAMP_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. ZulässigeWerte
DRLM MAX. NEGATIVE RAMP RATE OF OUTPUTVALUE
maximal mögliche negative Änderung desAusgangswerts in Einheiten/s
REAL 3.0 I Q DRLM<URLM
QERR 1= ERROR
1=Fehler
BOOL 1 O
QLIM_D 1=POSITIV RAMP RATE LIMIT ACTIVE
negativer Gradient zu groß
BOOL 0 O
QLIM_U 1=NEGATIV RAMP RATE LIMIT ACTIVE
positiver Gradient zu groß
BOOL 0 O
RATE_OFF 1=RAMP RATE MONITORING OFF
Steigungsüberwachung ausschalten
BOOL 0 I Q
SAMPLE_T SAMPLE TIME [S]
Abtastzeit [s]
REAL 1.0 I >0
U INPUT VALUE
Analogeingang (Messwert)
REAL 0.0 I Q
URLM POSITIVE RAMP RATE LIMIT OUTPUTVALUE
maximal mögliche positive Änderung desAusgangswerts in Einheiten/s
REAL 3.0 I Q URLM>DRLM
V ANALOG OUTPUT
Rampenausgang
REAL 0.0 O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-55
5.19 SPLITR_P: Split Range
5.19.1 Beschreibung von SPLITR_P
Objektname (Art + Nummer)
FC 272
Aufrufende OBs
Der OB, in dem der Reglerbaustein läuft, dessen Stellgröße verarbeitet wird.
Funktion
Der Baustein dient in Verbindung mit einem Reglerbaustein der Realisierung einerSplit-Range-Regelung.
Arbeitsweise
Der Baustein wird in der Ablaufreihenfolge hinter den Reglerbaustein eingebaut.Der Stell ausgang des Reglerbausteins wird mit dem Eingang U des SPLITR_P-Bausteins verschaltet. Die Neutralstellung und Totbandzone ist über dieentsprechenden Parameter einstellbar. Die Anpassung von V1 und V2 an diephysikalische Größe geschieht über die Parametrierung der oberen- / unterenGrenzen von V1 und V2. Die Übertragungskennlinien sehen wie folgt aus:
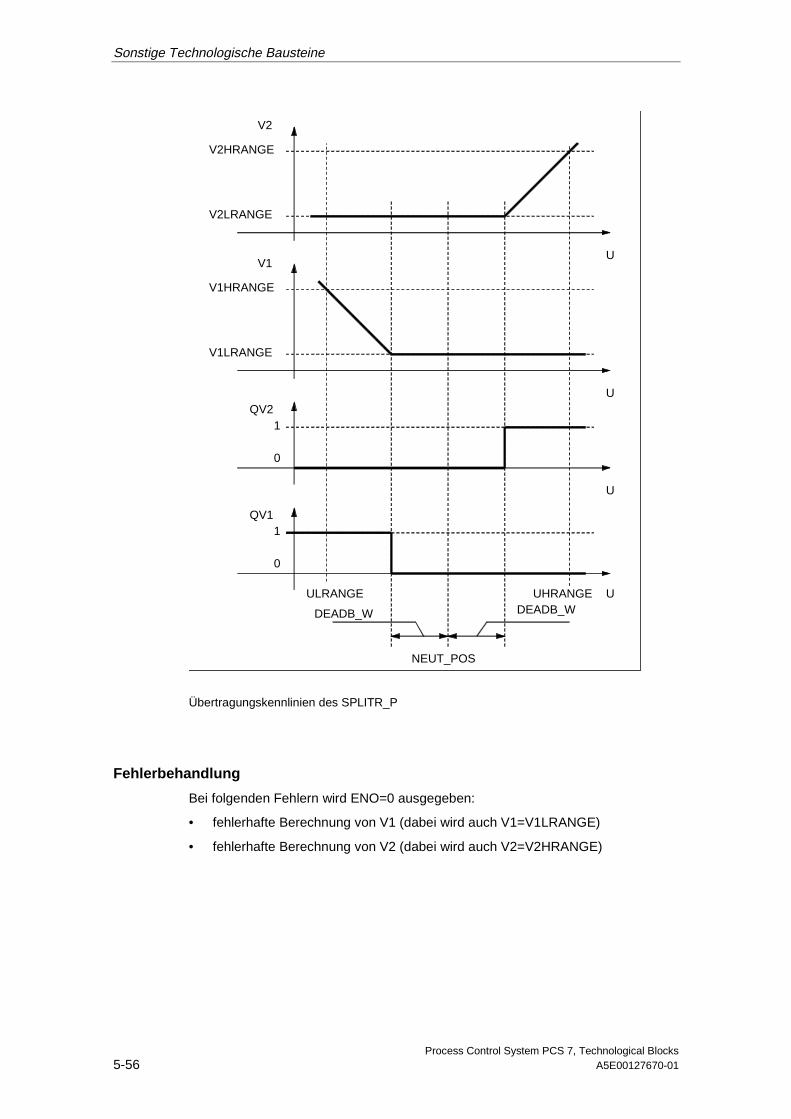
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-56 A5E00127670-01
V2HRANGE
V1HRANGE
V2LRANGE
V1LRANGE
UHRANGEULRANGE
NEUT_POS
DEADB_W
V2
V1U
U
QV2U
U
QV1
1
1
0
0
DEADB_W
Übertragungskennlinien des SPLITR_P
Fehlerbehandlung
Bei folgenden Fehlern wird ENO=0 ausgegeben:
• fehlerhafte Berechnung von V1 (dabei wird auch V1=V1LRANGE)
• fehlerhafte Berechnung von V2 (dabei wird auch V2=V2HRANGE)
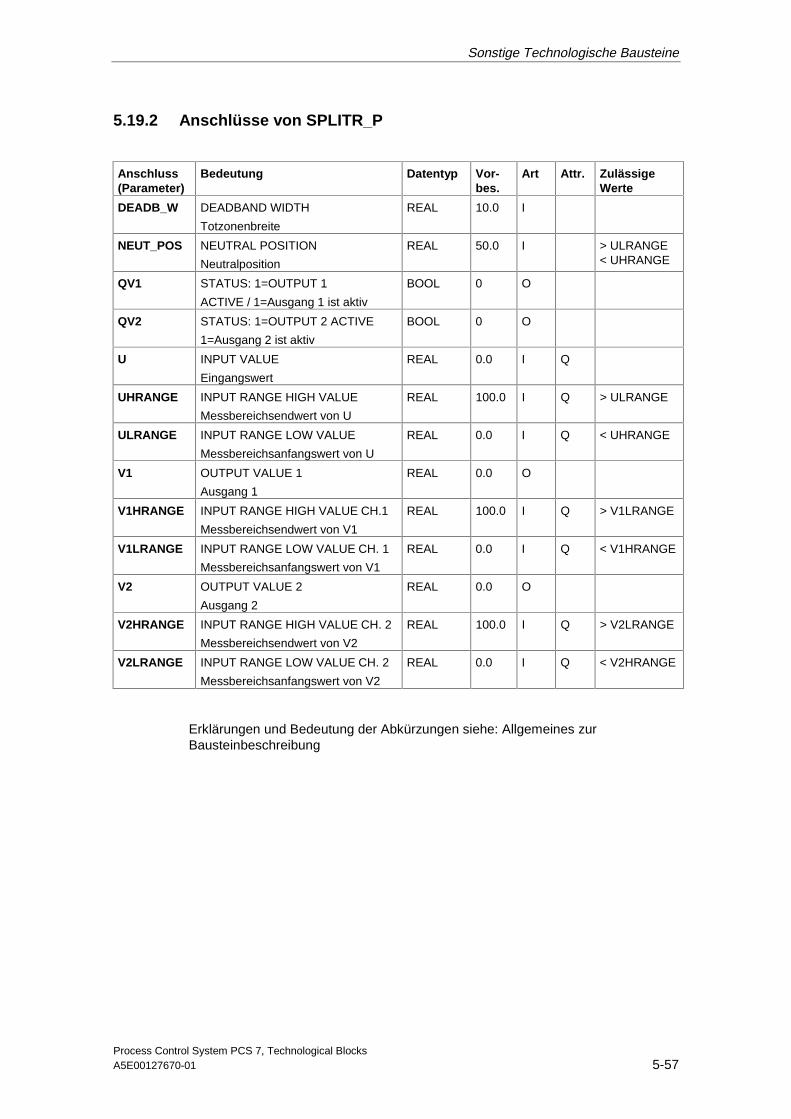
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-57
5.19.2 Anschlüsse von SPLITR_P
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. ZulässigeWerte
DEADB_W DEADBAND WIDTH
Totzonenbreite
REAL 10.0 I
NEUT_POS NEUTRAL POSITION
Neutralposition
REAL 50.0 I > ULRANGE< UHRANGE
QV1 STATUS: 1=OUTPUT 1
ACTIVE / 1=Ausgang 1 ist aktiv
BOOL 0 O
QV2 STATUS: 1=OUTPUT 2 ACTIVE
1=Ausgang 2 ist aktiv
BOOL 0 O
U INPUT VALUE
Eingangswert
REAL 0.0 I Q
UHRANGE INPUT RANGE HIGH VALUE
Messbereichsendwert von U
REAL 100.0 I Q > ULRANGE
ULRANGE INPUT RANGE LOW VALUE
Messbereichsanfangswert von U
REAL 0.0 I Q < UHRANGE
V1 OUTPUT VALUE 1
Ausgang 1
REAL 0.0 O
V1HRANGE INPUT RANGE HIGH VALUE CH.1
Messbereichsendwert von V1
REAL 100.0 I Q > V1LRANGE
V1LRANGE INPUT RANGE LOW VALUE CH. 1
Messbereichsanfangswert von V1
REAL 0.0 I Q < V1HRANGE
V2 OUTPUT VALUE 2
Ausgang 2
REAL 0.0 O
V2HRANGE INPUT RANGE HIGH VALUE CH. 2
Messbereichsendwert von V2
REAL 100.0 I Q > V2LRANGE
V2LRANGE INPUT RANGE LOW VALUE CH. 2
Messbereichsanfangswert von V2
REAL 0.0 I Q < V2HRANGE
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-58 A5E00127670-01
5.20 SWIT_CNT: Schaltspielzähler
5.20.1 Beschreibung von SWIT_CNT
Objektname (Art + Nummer)
FB 71
Aufrufende OBs
Im selben OB mit und nach dem Baustein, der die Schaltsignale liefert. Zusätzlichim OB100 (siehe Anlaufverhalten).
Funktion
Der Baustein dient zum Zählen der Schaltvorgänge eines Aggregats.
Arbeitsweise
Der Baustein zählt die Schaltspiele bei positiver Flanke (0->1) am EingangON_OFF und gibt das Ergebnis am Ausgang V aus. Durch den Datentyp DINT istder Maximalwert begrenzt auf 2 hoch 31 Schaltspiele.
Nachführen
Durch Bedienen von TRACK_OP über OS oder Verschalten von TRACK kann derZählerausgang V dem Wert VTRACK_OP nachgeführt werden. VTRACK_OPwiederum kann bedient werden.
Grenzwerte überwachen
Über die Eingänge VWH und VAH können jeweils ein Warn- bzw. Alarmgrenzwertparametriert werden, bei deren Überschreitung durch den Zählwert V eine Anzeige(QH_WRN bzw. QH_ALM) und ggf. eine Meldung (siehe Meldeverhalten) erzeugtwird.
Fehlerbehandlung
Der Fehlerausgang QERR wird bei Zählerüberlauf von V für einen Zyklus gesetztund eine Leittechnikmeldung gesendet. Anschließend wird mit 0 weitergezählt.Bedienfehler werden am Ausgang QOP_ERR angezeigt.
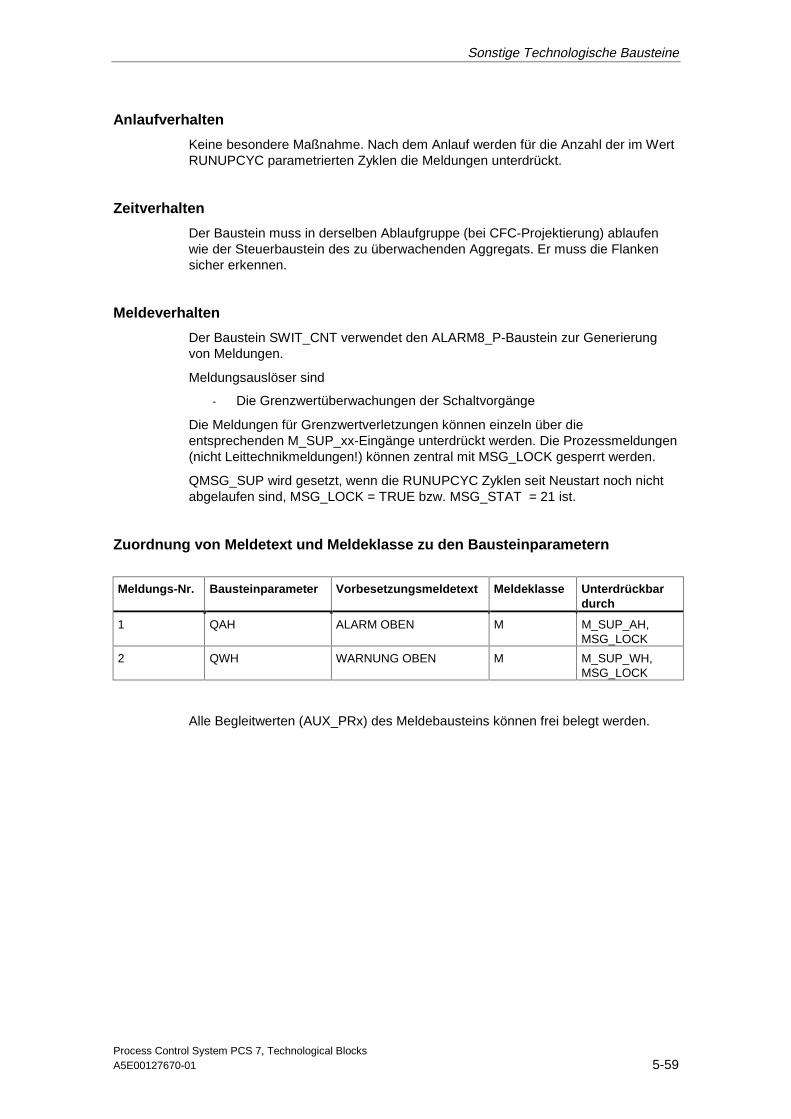
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-59
Anlaufverhalten
Keine besondere Maßnahme. Nach dem Anlauf werden für die Anzahl der im WertRUNUPCYC parametrierten Zyklen die Meldungen unterdrückt.
Zeitverhalten
Der Baustein muss in derselben Ablaufgruppe (bei CFC-Projektierung) ablaufenwie der Steuerbaustein des zu überwachenden Aggregats. Er muss die Flankensicher erkennen.
Meldeverhalten
Der Baustein SWIT_CNT verwendet den ALARM8_P-Baustein zur Generierungvon Meldungen.
Meldungsauslöser sind
- Die Grenzwertüberwachungen der Schaltvorgänge
Die Meldungen für Grenzwertverletzungen können einzeln über dieentsprechenden M_SUP_xx-Eingänge unterdrückt werden. Die Prozessmeldungen(nicht Leittechnikmeldungen!) können zentral mit MSG_LOCK gesperrt werden.
QMSG_SUP wird gesetzt, wenn die RUNUPCYC Zyklen seit Neustart noch nichtabgelaufen sind, MSG_LOCK = TRUE bzw. MSG_STAT = 21 ist.
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse Unterdrückbardurch
1 QAH ALARM OBEN M M_SUP_AH,MSG_LOCK
2 QWH WARNUNG OBEN M M_SUP_WH,MSG_LOCK
Alle Begleitwerten (AUX_PRx) des Meldebausteins können frei belegt werden.
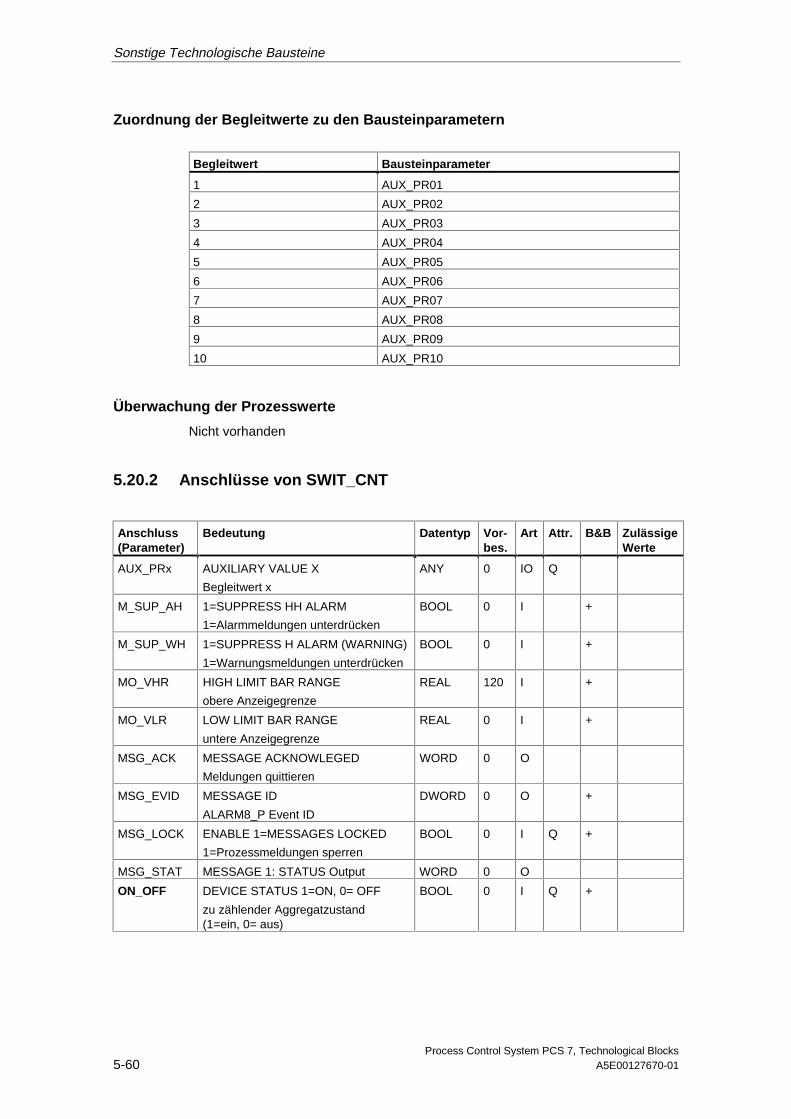
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-60 A5E00127670-01
Zuordnung der Begleitwerte zu den Bausteinparametern
Begleitwert Bausteinparameter
1 AUX_PR01
2 AUX_PR02
3 AUX_PR03
4 AUX_PR04
5 AUX_PR05
6 AUX_PR06
7 AUX_PR07
8 AUX_PR08
9 AUX_PR09
10 AUX_PR10
Überwachung der Prozesswerte
Nicht vorhanden
5.20.2 Anschlüsse von SWIT_CNT
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AUX_PRx AUXILIARY VALUE X
Begleitwert x
ANY 0 IO Q
M_SUP_AH 1=SUPPRESS HH ALARM
1=Alarmmeldungen unterdrücken
BOOL 0 I +
M_SUP_WH 1=SUPPRESS H ALARM (WARNING)
1=Warnungsmeldungen unterdrücken
BOOL 0 I +
MO_VHR HIGH LIMIT BAR RANGE
obere Anzeigegrenze
REAL 120 I +
MO_VLR LOW LIMIT BAR RANGE
untere Anzeigegrenze
REAL 0 I +
MSG_ACK MESSAGE ACKNOWLEGED
Meldungen quittieren
WORD 0 O
MSG_EVID MESSAGE ID
ALARM8_P Event ID
DWORD 0 O +
MSG_LOCK ENABLE 1=MESSAGES LOCKED
1=Prozessmeldungen sperren
BOOL 0 I Q +
MSG_STAT MESSAGE 1: STATUS Output WORD 0 O
ON_OFF DEVICE STATUS 1=ON, 0= OFF
zu zählender Aggregatzustand(1=ein, 0= aus)
BOOL 0 I Q +
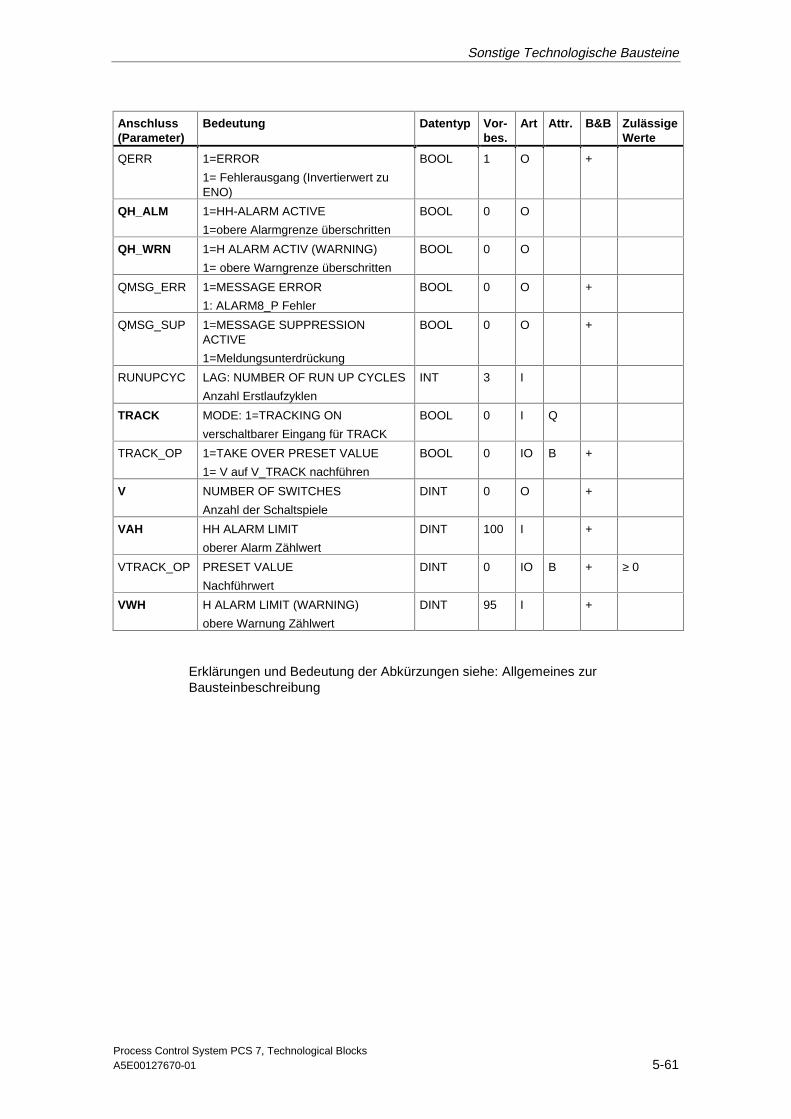
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-61
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
QERR 1=ERROR
1= Fehlerausgang (Invertierwert zuENO)
BOOL 1 O +
QH_ALM 1=HH-ALARM ACTIVE
1=obere Alarmgrenze überschritten
BOOL 0 O
QH_WRN 1=H ALARM ACTIV (WARNING)
1= obere Warngrenze überschritten
BOOL 0 O
QMSG_ERR 1=MESSAGE ERROR
1: ALARM8_P Fehler
BOOL 0 O +
QMSG_SUP 1=MESSAGE SUPPRESSIONACTIVE
1=Meldungsunterdrückung
BOOL 0 O +
RUNUPCYC LAG: NUMBER OF RUN UP CYCLES
Anzahl Erstlaufzyklen
INT 3 I
TRACK MODE: 1=TRACKING ON
verschaltbarer Eingang für TRACK
BOOL 0 I Q
TRACK_OP 1=TAKE OVER PRESET VALUE
1= V auf V_TRACK nachführen
BOOL 0 IO B +
V NUMBER OF SWITCHES
Anzahl der Schaltspiele
DINT 0 O +
VAH HH ALARM LIMIT
oberer Alarm Zählwert
DINT 100 I +
VTRACK_OP PRESET VALUE
Nachführwert
DINT 0 IO B + ≥ 0
VWH H ALARM LIMIT (WARNING)
obere Warnung Zählwert
DINT 95 I +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
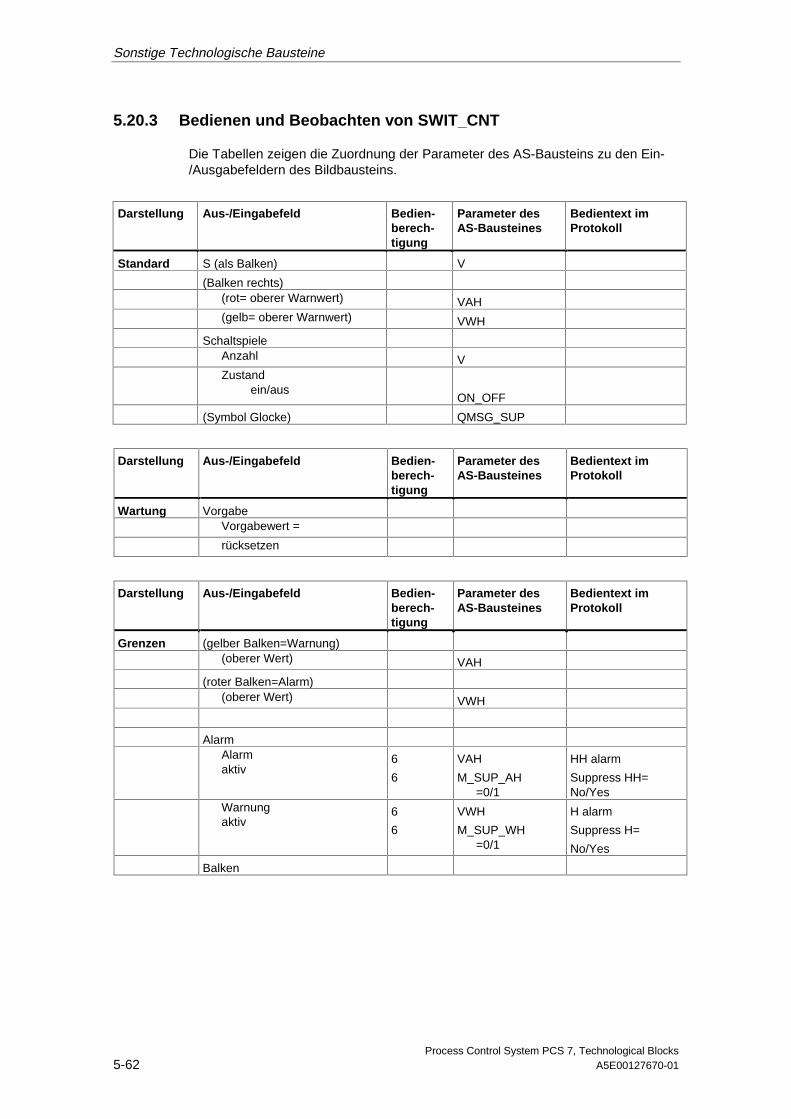
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological Blocks5-62 A5E00127670-01
5.20.3 Bedienen und Beobachten von SWIT_CNT
Die Tabellen zeigen die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard S (als Balken) V
(Balken rechts)(rot= oberer Warnwert) VAH(gelb= oberer Warnwert) VWH
SchaltspieleAnzahl VZustand
ein/ausON_OFF
(Symbol Glocke) QMSG_SUP
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Wartung VorgabeVorgabewert =
rücksetzen
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Grenzen (gelber Balken=Warnung)(oberer Wert) VAH
(roter Balken=Alarm)(oberer Wert) VWH
AlarmAlarmaktiv
6
6
VAH
M_SUP_AH=0/1
HH alarm
Suppress HH=No/Yes
Warnungaktiv
6
6
VWH
M_SUP_WH=0/1
H alarm
Suppress H=
No/Yes
Balken
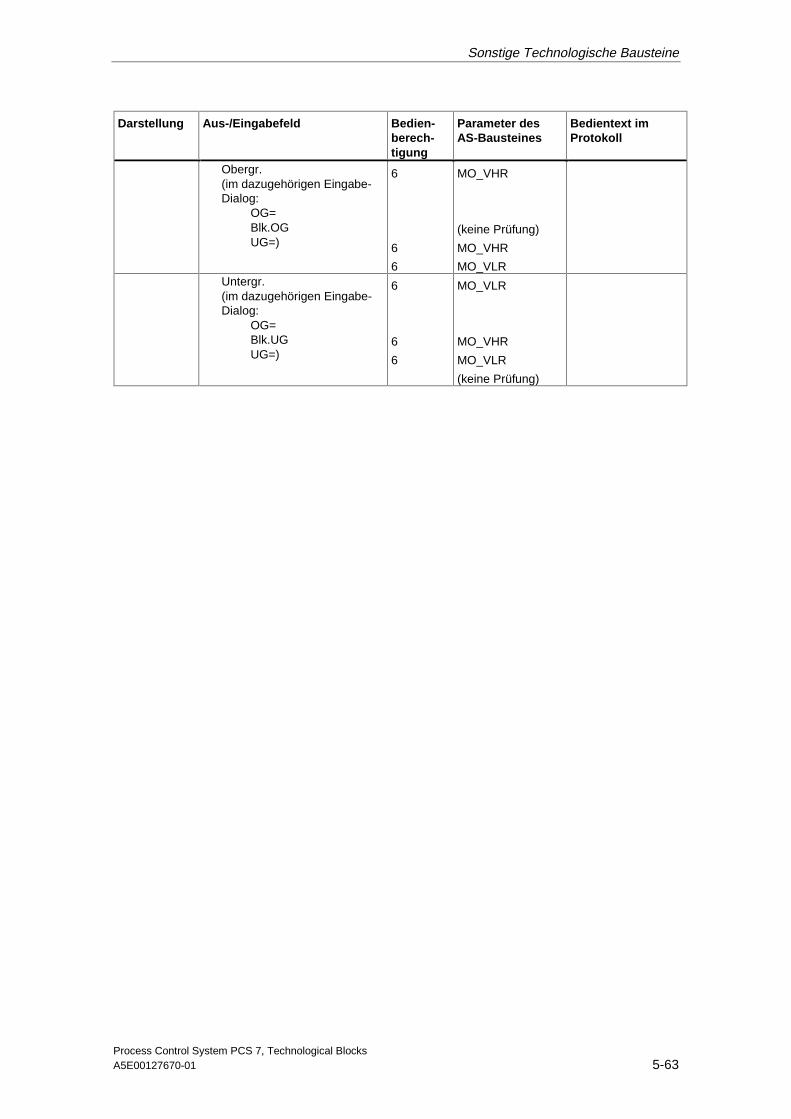
Sonstige Technologische Bausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 5-63
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Obergr.(im dazugehörigen Eingabe-Dialog:
OG=Blk.OGUG=)
6
6
6
MO_VHR
(keine Prüfung)
MO_VHR
MO_VLRUntergr.(im dazugehörigen Eingabe-Dialog:
OG=Blk.UGUG=)
6
6
6
MO_VLR
MO_VHR
MO_VLR
(keine Prüfung)

Process Control System PCS 7, Technological BlocksA5E00127670-01 6-1
6 Konvertierungsbausteine
6.1 Allgemeines zu Konvertierungsbausteine
Wofür Konvertierbausteine ?
Im CFC kann man nur Bausteinausgänge (Quelltyp) mit Eingängen (Zieltyp)verbinden, wenn die beiden Datentypen identisch sind (z.B. REAL-Ausgang mitREAL-Eingang). Um unterschiedliche Datentypen zu verschalten, müssenKonvertierbausteine eingesetzt werden. Diese besitzen Ein- und Ausgängeunterschiedlichen Typs und setzen den Eingangswert in den Datentyp desAusgangs um. Die zum Verschalten benötigten Konvertierbausteine sind schonBestandteil der CFC-Bausteinbibliothek ELEMENTA. Hinzu kommt nur noch derR_TO_DW-Baustein, mit einer für verfahrenstechnische Anwendungen ergänztenEigenschaft.
Aufrufende OBs
Den Konvertierbaustein müssen Sie vor dem Baustein, der dasKonvertierungsergebnis verwertet, in den OB einbauen.
6.2 Beschreibung von R_TO_DW
Objektname (Art + Nummer)
FC 282
Funktion
Eine REAL-Zahl wird nach Doppelword (DW) konvertiert. Bei einer REAL-Zahlzwischen 0 und 4294967000 wird der Wert übernommen.
Fehlerbehandlung
Bei Werten außerhalb der o.a. Grenzen wird das ENO = 0 und nach unten (= 0)bzw. oben (=4294967000) begrenzt.
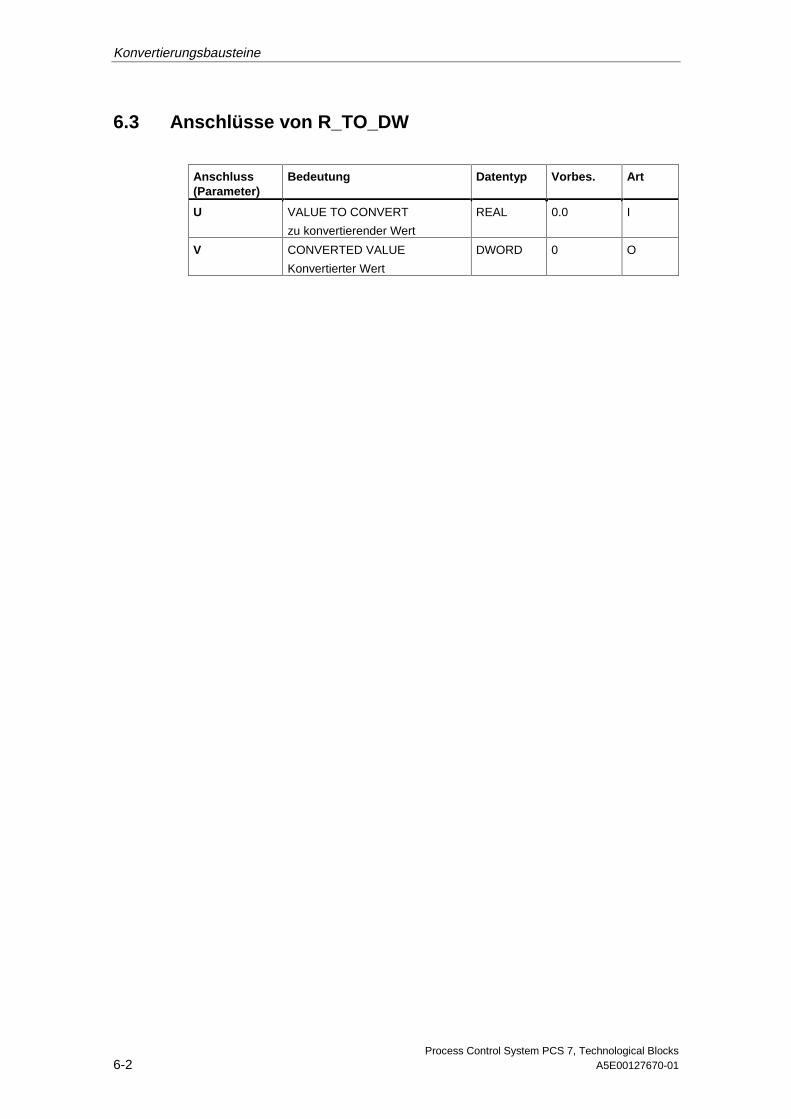
Konvertierungsbausteine
Process Control System PCS 7, Technological Blocks6-2 A5E00127670-01
6.3 Anschlüsse von R_TO_DW
Anschluss(Parameter)
Bedeutung Datentyp Vorbes. Art
U VALUE TO CONVERT
zu konvertierender Wert
REAL 0.0 I
V CONVERTED VALUE
Konvertierter Wert
DWORD 0 O
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-1
7 Bedienbausteine
7.1 Übersicht über die Bedienbausteine
In diesem Kapitel stellen wir Ihnen die Bedienbausteine vor. Hier erfahren Sie, wieman mit deren Hilfe Bausteinparameter bedienen kann.
Wofür Bedienbausteine ?
Ein Bedienbaustein stellt die Bedienschnittstelle zwischen Bausteinen des AS unddes OS dar. Er bietet Ihnen die Standardlösung für Problemstellungen folgenderArt:
Wie kann der Eingangsparameter "W" des Funktionsbausteins "FB_yyy" sowohldurch den Anlagenfahrer bedient als auch durch das AS-Programm verändertwerden?
Die prinzipielle Lösung wird im Bild durch den Bedienbaustein OP_xx mit seinenzwei Teilen OP_AS und OP_OS dargestellt.
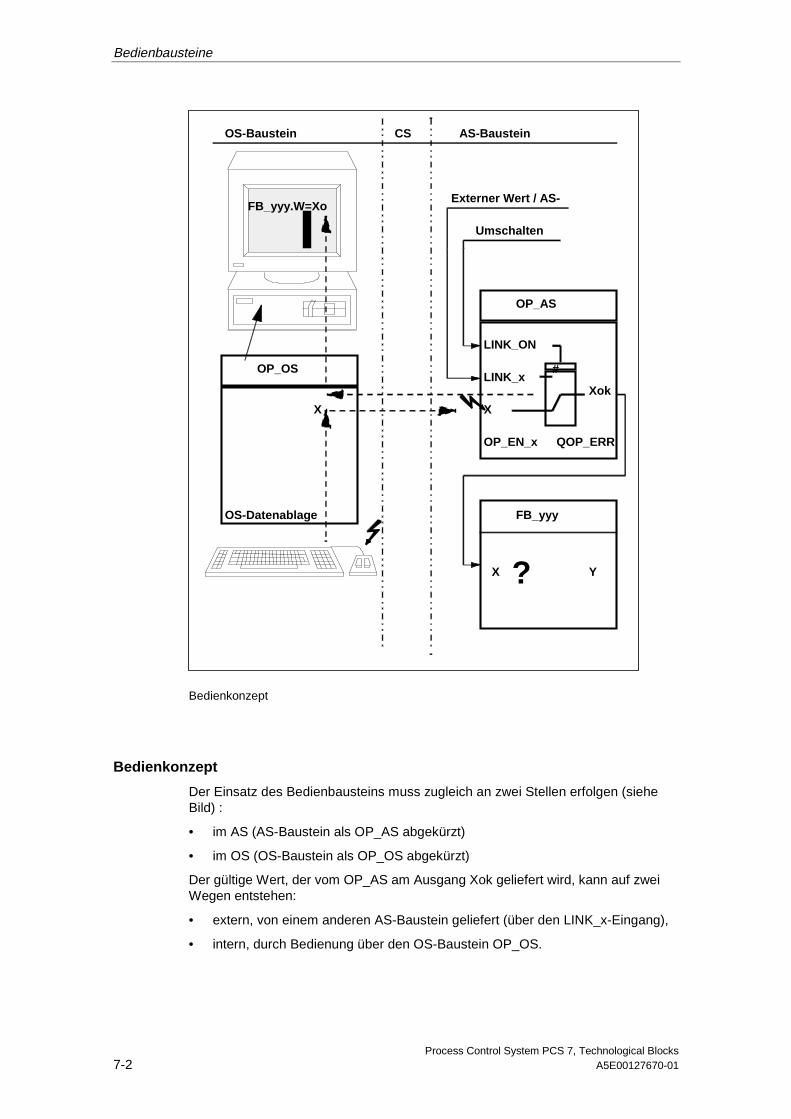
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-2 A5E00127670-01
OS-Baustein AS-BausteinCS
LINK_ON
LINK_x
X
Xok
#
X
OP_AS
FB_yyy
Y
OP_OS
X
Externer Wert / AS-
Umschalten
OS-Datenablage
?
FB_yyy.W=Xo
OP_EN_x QOP_ERR
Bedienkonzept
Bedienkonzept
Der Einsatz des Bedienbausteins muss zugleich an zwei Stellen erfolgen (sieheBild) :
• im AS (AS-Baustein als OP_AS abgekürzt)
• im OS (OS-Baustein als OP_OS abgekürzt)
Der gültige Wert, der vom OP_AS am Ausgang Xok geliefert wird, kann auf zweiWegen entstehen:
• extern, von einem anderen AS-Baustein geliefert (über den LINK_x-Eingang),
• intern, durch Bedienung über den OS-Baustein OP_OS.
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-3
Der allgemeine Bedienvorgang läuft ab wie folgt:
• Der an der OS angewählte OP_OS fragt die Werte des OP_AS bzw. dieFreigabe/Sperre der Bedienbarkeit ab. Durch seine Anzeige wird derAnlagenfahrer über den Zustand des OP_AS am laufenden gehalten. DieAnzeige erfolgt asynchron zum OP_AS, in einem OS-spezifischenAblaufzyklus.
• Der Anlagenfahrer bedient/verändert einen bedienbaren Anschluss desOP_OS. Dessen Algorithmus prüft die Eingabe auf Zulässigkeit:
- falls die Eingabe unzulässig ist (bausteinspezifisch), wird diese je nach Fallkorrigiert oder abgewiesen. Der Bediener wird informiert.
- der korrigierte bzw. der zulässige Wert wird an den OP_AS gesendet undOS-seitig protokolliert.
• Der OP_AS nimmt den Wert entgegen und prüft ihn auf Zulässigkeit (es könnteja sein, dass inzwischen im AS ein anderer Zustand herrscht als zum Zeitpunktder Bedienung des OP_OS).
Falls die Eingabe jetzt unzulässig ist (bausteinspezifisch), wird diese je nach Fallkorrigiert oder abgewiesen. Der OP_AS zeigt dieses durch den bool'schenAusgang QOP_ERR an, und zwar durch einen Impuls mit der Dauer der Abtastzeitdes OP_AS.
- Der korrigierte bzw. der zulässige Wert oder - bei Abweisung - der alteWert wird an dem der Bedienung entsprechenden Xok-Ausgang desOP_AS zur weiteren Verwertung bereitgestellt.
Übersicht
Eine Übersicht der Bedienbausteine wird in der Tabelle gezeigt. Diese sind als FBsrealisiert und benötigen für jede Anwendung je einen Instanz-DB.
Baustein-Name
Bedeutung Bedien-methode
FB-Nr.
OP_A Analogwert Bedienung 45
OP_A_LIM Analogwert Bedienung begrenzend 46
OP_A_RJC Analogwert Bedienung abweisend 47
OP_D Digitalwert Bedienung 2-Taster 48
OP_D3 Digitalwert Bedienung 3-Taster 49
OP_TRIG Digitalwert Bedienung Taster-Funktion 50
Allgemeine Anschlüsse
Die Bedienbausteine (siehe Bild) haben genau festgelegte Anschlüssen, jeweils fürBinärwert- und für Analogwertbedienung. Dabei weisen sie Ein- und Ausgänge vor,deren Bedeutung für alle Bedienbausteine gleich ist, sowie solche, die nur beiBedienbausteinen für Analogwerte vorkommen (im Bild in Klammern benannt).
Die Funktion dieser Ein- und Ausgänge wird kurz beschrieben.
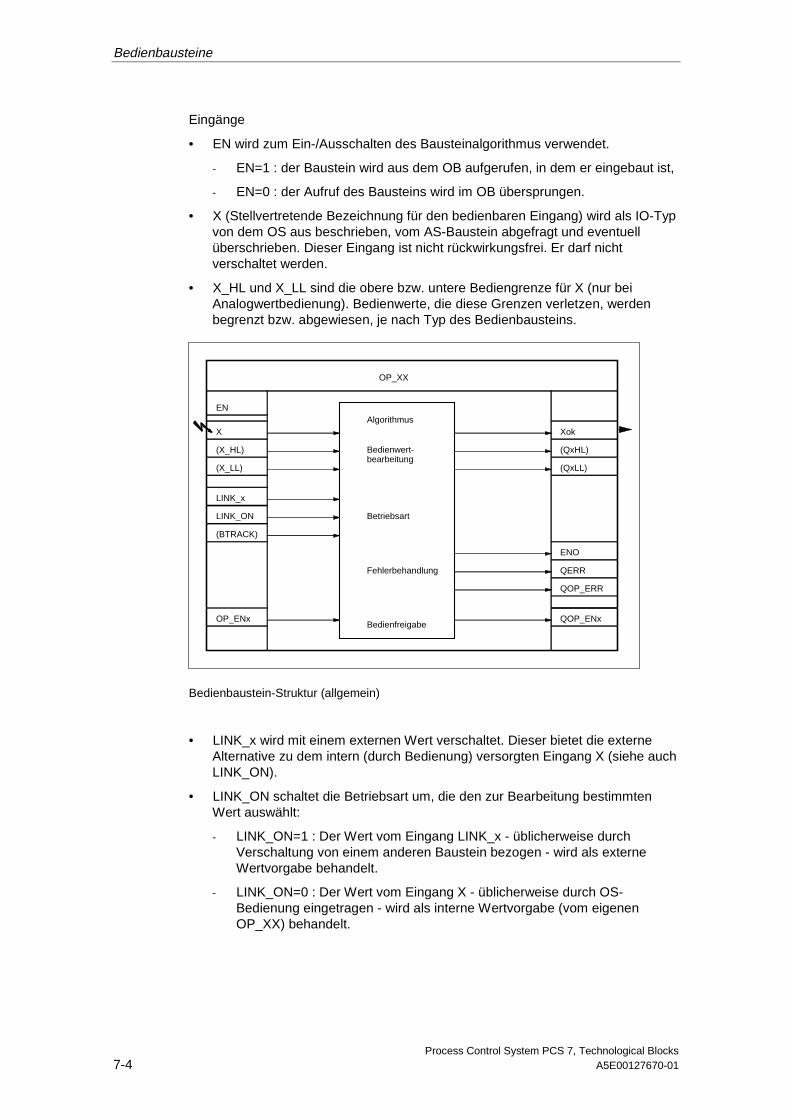
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-4 A5E00127670-01
Eingänge
• EN wird zum Ein-/Ausschalten des Bausteinalgorithmus verwendet.
- EN=1 : der Baustein wird aus dem OB aufgerufen, in dem er eingebaut ist,
- EN=0 : der Aufruf des Bausteins wird im OB übersprungen.
• X (Stellvertretende Bezeichnung für den bedienbaren Eingang) wird als IO-Typvon dem OS aus beschrieben, vom AS-Baustein abgefragt und eventuellüberschrieben. Dieser Eingang ist nicht rückwirkungsfrei. Er darf nichtverschaltet werden.
• X_HL und X_LL sind die obere bzw. untere Bediengrenze für X (nur beiAnalogwertbedienung). Bedienwerte, die diese Grenzen verletzen, werdenbegrenzt bzw. abgewiesen, je nach Typ des Bedienbausteins.
EN
X
(X_HL)
LINK_x
LINK_ON
OP_ENx
(BTRACK)
QERR
Xok
QOP_ERR
(QxHL)
(QxLL)
QOP_ENx
(X_LL)
Algorithmus
Bedienwert-bearbeitung
Betriebsart
Bedienfreigabe
Fehlerbehandlung
OP_XX
ENO
Bedienbaustein-Struktur (allgemein)
• LINK_x wird mit einem externen Wert verschaltet. Dieser bietet die externeAlternative zu dem intern (durch Bedienung) versorgten Eingang X (siehe auchLINK_ON).
• LINK_ON schaltet die Betriebsart um, die den zur Bearbeitung bestimmtenWert auswählt:
- LINK_ON=1 : Der Wert vom Eingang LINK_x - üblicherweise durchVerschaltung von einem anderen Baustein bezogen - wird als externeWertvorgabe behandelt.
- LINK_ON=0 : Der Wert vom Eingang X - üblicherweise durch OS-Bedienung eingetragen - wird als interne Wertvorgabe (vom eigenenOP_XX) behandelt.
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-5
• BTRACK (falls vorhanden) wird zum stoßfreien Umschalten benutzt, beimÜbergang von LINK_ON=1 nach 0.
- BTRACK=1 : während LINK_ON=1 führt der Algorithmus die bedienbarenEingänge X den LINK_x Eingängen entsprechend nach. Sinn dieserOperation ist, dass beim Umschalten auf Handbedienung (LINK_ON=0)der Baustein keine alten Bedienwerte der X-Eingänge bearbeitet unddadurch die ausgegebenen, aktiven Werte verändert.
- BTRACK=0 : während LINK_ON=1 werden die bedienbaren Eingänge Xnicht überschrieben und bleiben somit in der Regel unterschiedlich zumLINK_x-Wert. Beim Umschalten LINK_ON=0 werden diese alten Wertewieder gültig und führen zu entsprechenden Änderungen derausgegebenen, aktiven Xok-Werten (ein so genannter Stoß).
• OP_EN_x wird als Freigabe/Sperre für die Bedienbarkeit des zugeordnetenEingangs X benutzt:
- OP_EN_x=1 : der Eingang X ist für Bedienungen freigegeben.
- OP_EN_x=0 : die Bedienung ist gesperrt bzw. wird abgewiesen.
Ausgänge
• ENO zeigt die Gültigkeit des Ergebnis Xok an(1 = o.k., 0 = ungültig).
• QERR = invertiertes ENO (wird in der Bausteininstanz gespeichert).
• QOP_ERR zeigt durch eine 1 nach einer Bedienung an, dass diese eineFehlbedienung war. Der Ausgang wird nach einem Zyklus (Abtastzeit) wiederzurückgesetzt.
• Xok (Stellvertretender Bezeichner für den wirksamen, aktiven Ausgang). Erbeinhaltet den je nach Bedienbausteintyp und Betriebsart gültigenAusgangswert. Er wird durch Verschalten dem jenigen AS-Baustein zurVerfügung gestellt, dessen Eingang bedient werden soll. Je nachBedienbaustein wird der konkrete Bezeichner dann V, Q_1 o.ä. heißen.
• QxHL und QxLL sind die Anzeigen bei Verletzen der oberen bzw. unterenBediengrenze für X (nur bei Analogwertbedienung). Bedienwerte, welche dieseGrenzen verletzen, werden begrenzt bzw. abgewiesen, je nach Typ desBedienbausteins.
• QOP_ENx ist der jeweils dem OP_ENx entsprechend durchgereichteAusgangswert. Er kann von anderen AS-Bausteinen als Information über dieaugenblickliche Bedienbarkeit des OP_AS abgefragt werden.
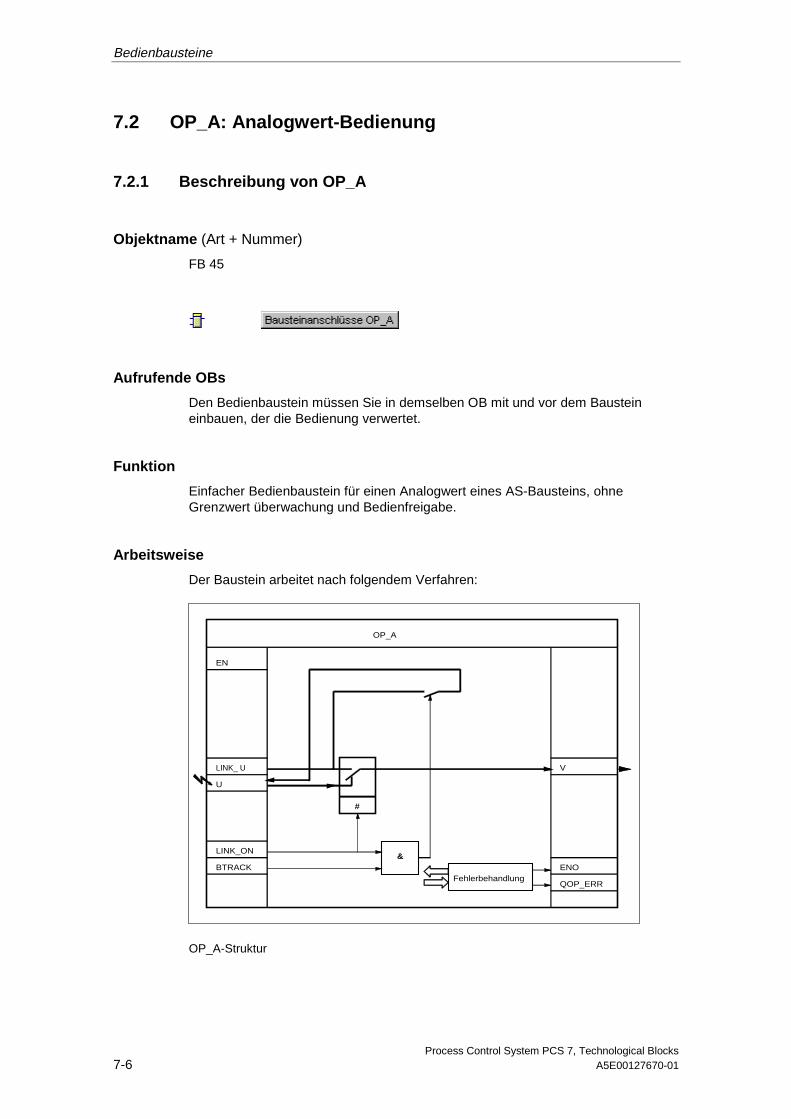
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-6 A5E00127670-01
7.2 OP_A: Analogwert-Bedienung
7.2.1 Beschreibung von OP_A
Objektname (Art + Nummer)
FB 45
Aufrufende OBs
Den Bedienbaustein müssen Sie in demselben OB mit und vor dem Bausteineinbauen, der die Bedienung verwertet.
Funktion
Einfacher Bedienbaustein für einen Analogwert eines AS-Bausteins, ohneGrenzwert überwachung und Bedienfreigabe.
Arbeitsweise
Der Baustein arbeitet nach folgendem Verfahren:
EN
U
LINK_ U
LINK_ON
BTRACK
V
#
&ENO
QOP_ERRFehlerbehandlung
OP_A
OP_A-Struktur
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-7
• U wird durch die OS-Bedienung beschrieben.
• LINK_U wird mit einem extern Wert versorgt (parametriert oder verschaltet).
• LINK_ON schaltet den externen/internen Wert:
- LINK_ON=1 : LINK_U wird an V durchgereicht.
- LINK_ON=0 : U wird an V durchgereicht.
• BTRACK ermöglicht das Nachführen des bedienbaren Eingangs U (nur beiLINK_ON=1).
- BTRACK=1 : U wird dem Wert LINK_U nachgeführt. Dadurch wird beimUmschalten auf LINK_ON=0 kein Stoß am Ausgang V erzeugt.
- BTRACK=0 : U bleibt unverändert mit dem letzten (bedienten) Wert. NachUmschalten auf LINK_ON=0 wird er wieder aktiv.
Fehlerbehandlung
Es werden folgende Fehleranzeigen gebracht:
• ENO=0 nur systemseitig (keine besondere Behandlung im Baustein)
• QOP_ERR=1 wird für einen Zyklus gesetzt, falls bei anstehendem externenWert (LINK_ON=1) eine Bedienung des Eingangs U erfolgt. Der Eingang Ubehält seinen alten Wert (vor der Bedienung).
Fehleranzeigen des OP_A
ENO QOP_ERR Ursache, ggf. Reaktion
0 X Systemseitig erkannte Fehler (keine besondere Behandlung im Baustein)
1 1 ( Π ) Bedienung während LINK_ON=1 unzulässig. Eingang U bleibt unverändert.
Π: Impuls mit Abtastzeit-Dauer X: beliebiger Wert
Zeitverhalten
Nicht vorhanden. Bauen Sie den OP_A im gleichen OB und vor dem Baustein ein,dessen Eingang bedient werden soll.
Meldeverhalten
Nicht vorhanden. Falls eine Fehlbedienung gemeldet werden soll, kann derAusgang QOP_ERR auf einen Meldebaustein verschaltet werden (siehe AbschnittMeldebausteine).
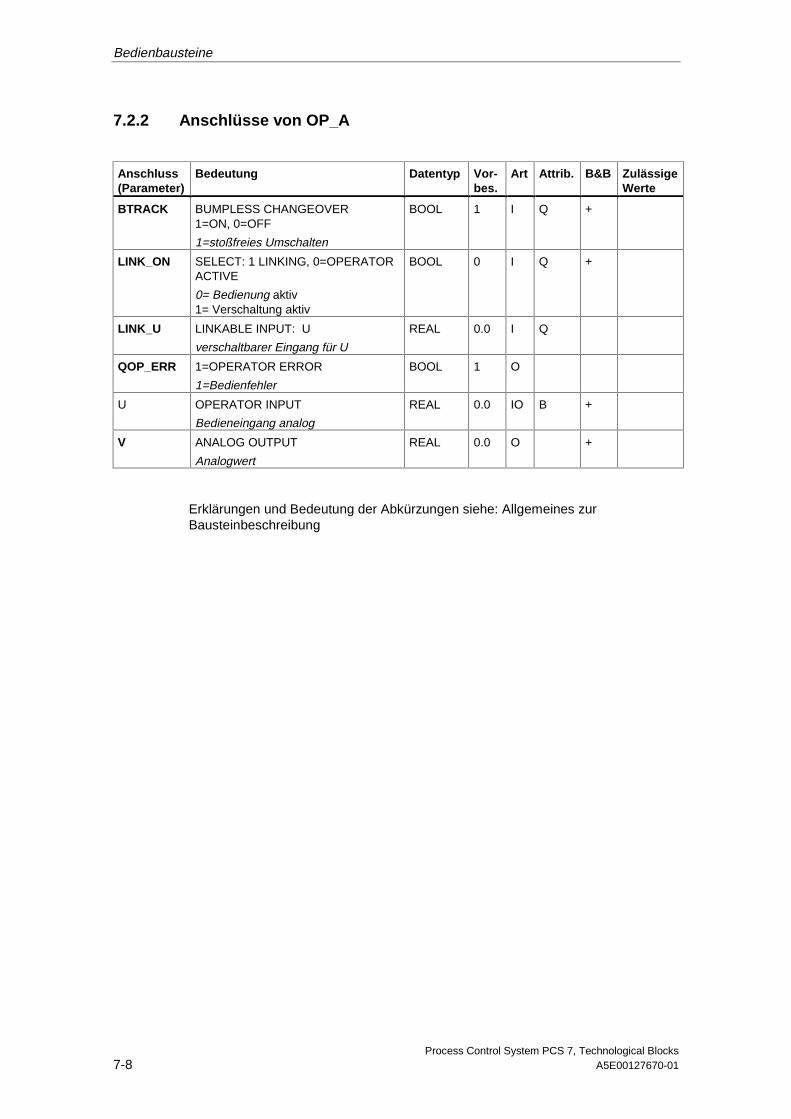
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-8 A5E00127670-01
7.2.2 Anschlüsse von OP_A
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attrib. B&B ZulässigeWerte
BTRACK BUMPLESS CHANGEOVER1=ON, 0=OFF
1=stoßfreies Umschalten
BOOL 1 I Q +
LINK_ON SELECT: 1 LINKING, 0=OPERATORACTIVE
0= Bedienung aktiv1= Verschaltung aktiv
BOOL 0 I Q +
LINK_U LINKABLE INPUT: U
verschaltbarer Eingang für U
REAL 0.0 I Q
QOP_ERR 1=OPERATOR ERROR
1=Bedienfehler
BOOL 1 O
U OPERATOR INPUT
Bedieneingang analog
REAL 0.0 IO B +
V ANALOG OUTPUT
Analogwert
REAL 0.0 O +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-9
7.2.3 Bedienen und Beobachten von OP_A
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Ausgang V
Sollwert
(Einheit Sollwert/Ausgang)
5 U
(S7_unit von U)
U
Nachführungstoßfrei 6 BTRACK =0/1 Bumpless off/on
7.3 OP_A_LIM: Analogwert-Bedienung (begrenzend)
7.3.1 Beschreibung von OP_A_LIM
Objektname (Art + Nummer)
FB 46
Aufrufende OBs
Den Bedienbaustein müssen Sie in demselben OB mit und vor dem Bausteineinbauen, der die Bedienung verwertet.
Funktion
Über den Bedienbaustein OP_A_LIM (operation analog limited) wird einAnalogwert eines Bausteins bedient.Eine Bedienung außerhalb der Bediengrenzen wird auf den jeweils verletztenGrenzwert begrenzt. Anstatt dem Bedienwert (U) kann ein verschalteter oderparametrierter Wert (LINK_U) geprüft werden (LINK_ON=1).
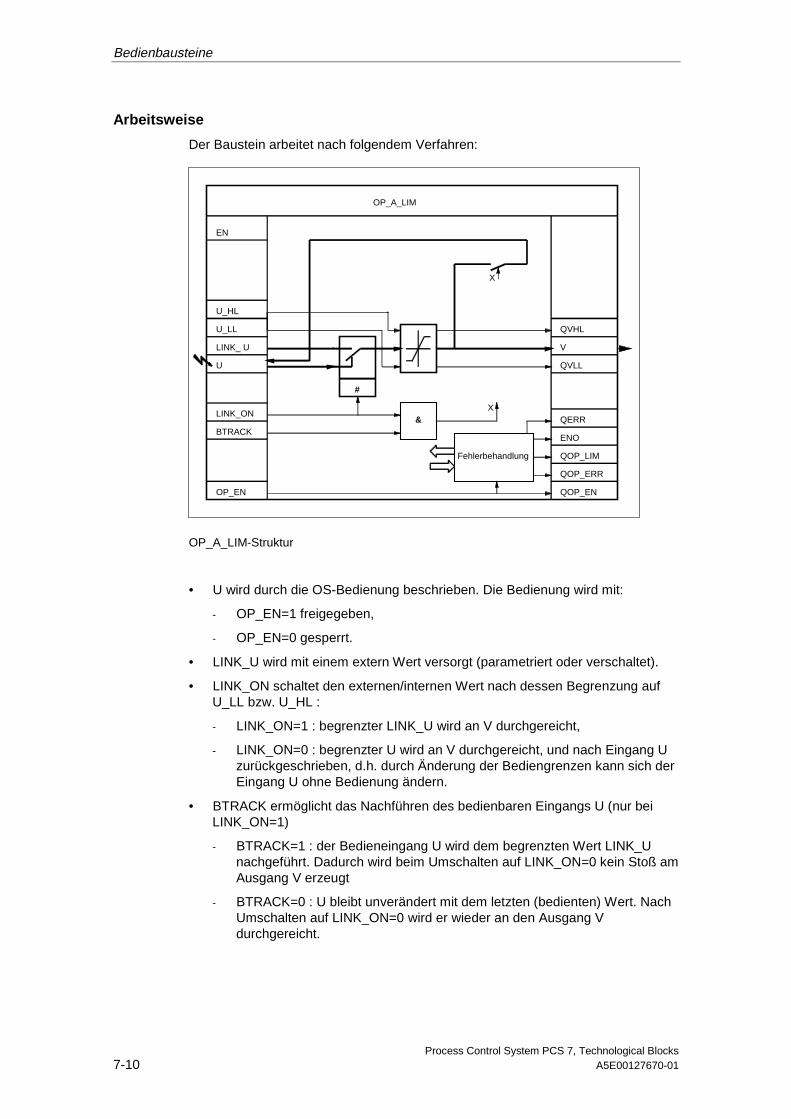
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-10 A5E00127670-01
Arbeitsweise
Der Baustein arbeitet nach folgendem Verfahren:
EN
U
LINK_ U
LINK_ON
BTRACKENO
V
QOP_ERR
#
&
U_HL
U_LL QVHL
QVLL
OP_EN
Fehlerbehandlung QOP_LIM
X
X
QOP_EN
OP_A_LIM
QERR
OP_A_LIM-Struktur
• U wird durch die OS-Bedienung beschrieben. Die Bedienung wird mit:
- OP_EN=1 freigegeben,
- OP_EN=0 gesperrt.
• LINK_U wird mit einem extern Wert versorgt (parametriert oder verschaltet).
• LINK_ON schaltet den externen/internen Wert nach dessen Begrenzung aufU_LL bzw. U_HL :
- LINK_ON=1 : begrenzter LINK_U wird an V durchgereicht,
- LINK_ON=0 : begrenzter U wird an V durchgereicht, und nach Eingang Uzurückgeschrieben, d.h. durch Änderung der Bediengrenzen kann sich derEingang U ohne Bedienung ändern.
• BTRACK ermöglicht das Nachführen des bedienbaren Eingangs U (nur beiLINK_ON=1)
- BTRACK=1 : der Bedieneingang U wird dem begrenzten Wert LINK_Unachgeführt. Dadurch wird beim Umschalten auf LINK_ON=0 kein Stoß amAusgang V erzeugt
- BTRACK=0 : U bleibt unverändert mit dem letzten (bedienten) Wert. NachUmschalten auf LINK_ON=0 wird er wieder an den Ausgang Vdurchgereicht.
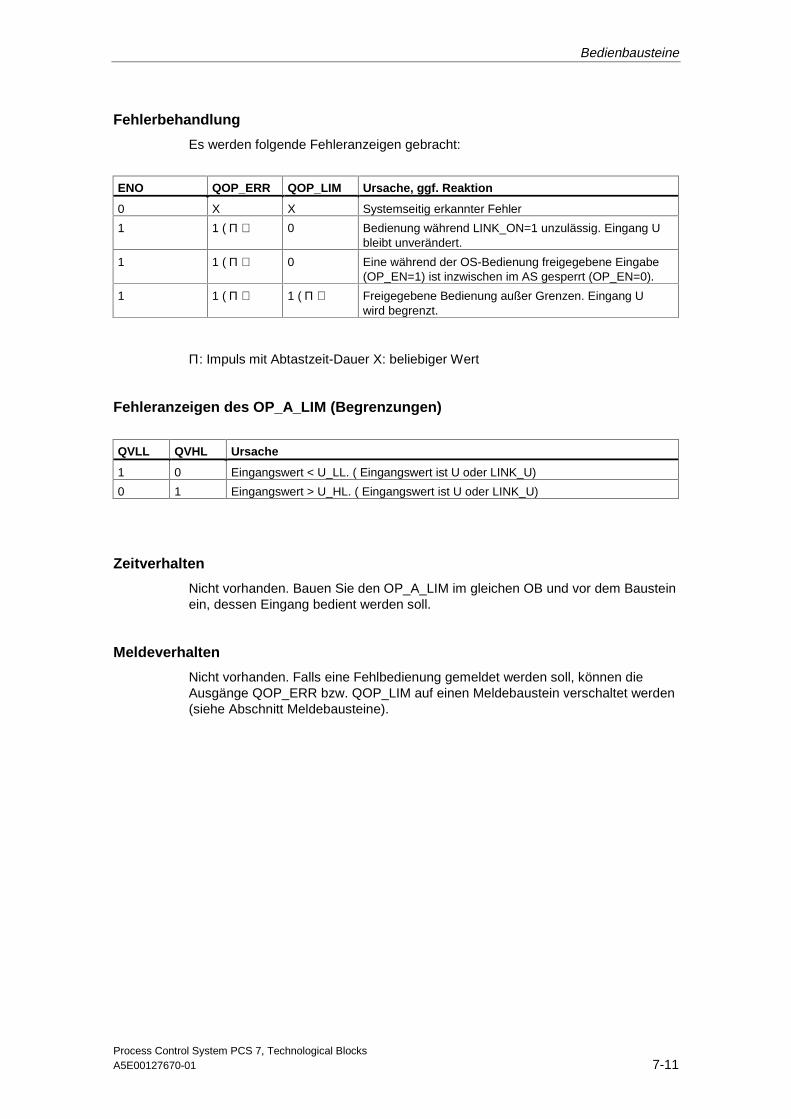
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-11
Fehlerbehandlung
Es werden folgende Fehleranzeigen gebracht:
ENO QOP_ERR QOP_LIM Ursache, ggf. Reaktion
0 X X Systemseitig erkannter Fehler
1 1 ( Π ) 0 Bedienung während LINK_ON=1 unzulässig. Eingang Ubleibt unverändert.
1 1 ( Π ) 0 Eine während der OS-Bedienung freigegebene Eingabe(OP_EN=1) ist inzwischen im AS gesperrt (OP_EN=0).
1 1 ( Π ) 1 ( Π ) Freigegebene Bedienung außer Grenzen. Eingang Uwird begrenzt.
Π: Impuls mit Abtastzeit-Dauer X: beliebiger Wert
Fehleranzeigen des OP_A_LIM (Begrenzungen)
QVLL QVHL Ursache
1 0 Eingangswert < U_LL. ( Eingangswert ist U oder LINK_U)
0 1 Eingangswert > U_HL. ( Eingangswert ist U oder LINK_U)
Zeitverhalten
Nicht vorhanden. Bauen Sie den OP_A_LIM im gleichen OB und vor dem Bausteinein, dessen Eingang bedient werden soll.
Meldeverhalten
Nicht vorhanden. Falls eine Fehlbedienung gemeldet werden soll, können dieAusgänge QOP_ERR bzw. QOP_LIM auf einen Meldebaustein verschaltet werden(siehe Abschnitt Meldebausteine).
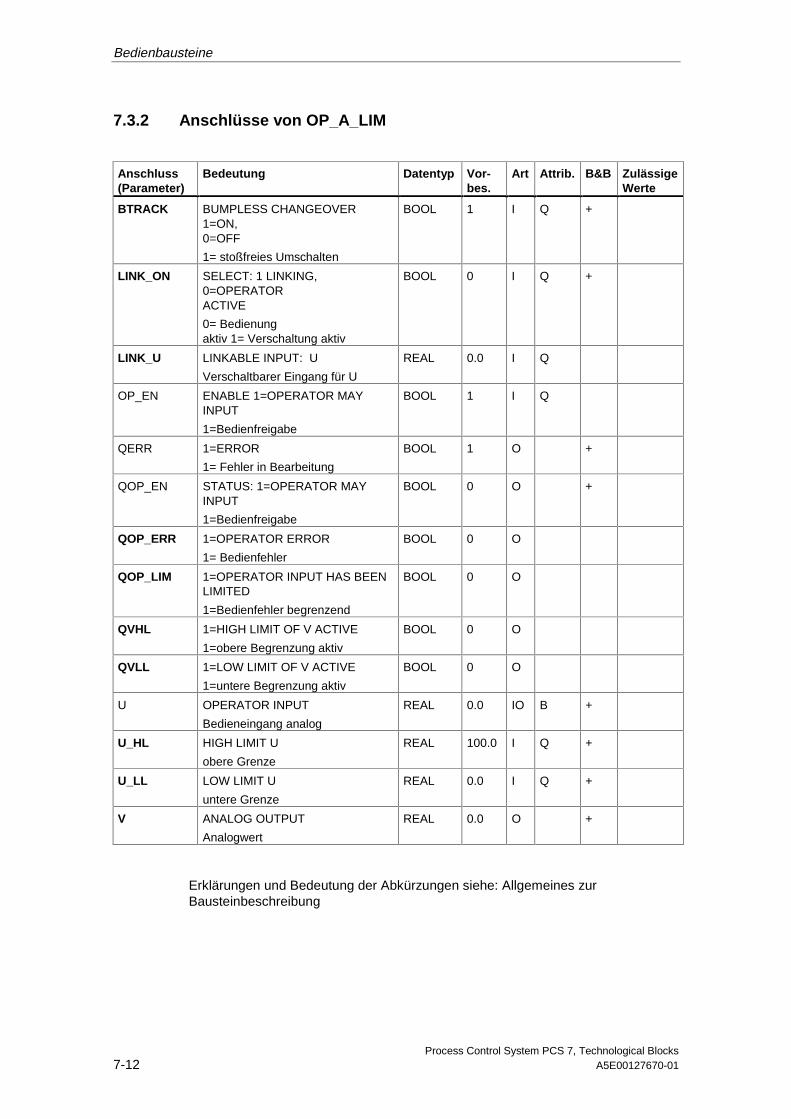
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-12 A5E00127670-01
7.3.2 Anschlüsse von OP_A_LIM
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attrib. B&B ZulässigeWerte
BTRACK BUMPLESS CHANGEOVER1=ON,0=OFF
1= stoßfreies Umschalten
BOOL 1 I Q +
LINK_ON SELECT: 1 LINKING,0=OPERATORACTIVE
0= Bedienungaktiv 1= Verschaltung aktiv
BOOL 0 I Q +
LINK_U LINKABLE INPUT: U
Verschaltbarer Eingang für U
REAL 0.0 I Q
OP_EN ENABLE 1=OPERATOR MAYINPUT
1=Bedienfreigabe
BOOL 1 I Q
QERR 1=ERROR
1= Fehler in Bearbeitung
BOOL 1 O +
QOP_EN STATUS: 1=OPERATOR MAYINPUT
1=Bedienfreigabe
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1= Bedienfehler
BOOL 0 O
QOP_LIM 1=OPERATOR INPUT HAS BEENLIMITED
1=Bedienfehler begrenzend
BOOL 0 O
QVHL 1=HIGH LIMIT OF V ACTIVE
1=obere Begrenzung aktiv
BOOL 0 O
QVLL 1=LOW LIMIT OF V ACTIVE
1=untere Begrenzung aktiv
BOOL 0 O
U OPERATOR INPUT
Bedieneingang analog
REAL 0.0 IO B +
U_HL HIGH LIMIT U
obere Grenze
REAL 100.0 I Q +
U_LL LOW LIMIT U
untere Grenze
REAL 0.0 I Q +
V ANALOG OUTPUT
Analogwert
REAL 0.0 O +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-13
7.3.3 Bedienen und Beobachten von OP_A_LIM
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Ausgang V
Sollwert
(Einheit Sollwert/Ausgang)
(im dazugehörigen Eingabe-Dialog:OGSollwertUG=)
5
5
U
(S7_unit von U)
U_HL
U
U_LL
U
U
Nachführungstoßfrei 6 BTRACK =0/1 Bumpless off/on
7.4 OP_A_RJC: Analogwert-Bedienung (abweisend)
7.4.1 Beschreibung von OP_A_RJC
Objektname (Art + Nummer)
FB 47
Aufrufende OBs
Den Bedienbaustein müssen Sie in demselben OB mit und vor dem Bausteineinbauen, der die Bedienung verwertet.
Funktion
Über den Bedienbaustein OP_A_RJC (operation analog rejected) wird einAnalogwert eines Bausteins bedient.Eine Bedienung außerhalb der Bediengrenzen wird verworfen. Anstatt demBedienwert (U) kann ein verschalteter oder parametrierter Wert (LINK_U) geprüftwerden (LINK_ON=1). In diesem Fall begrenzt der Baustein den Wertentsprechend OP_A_LIM.
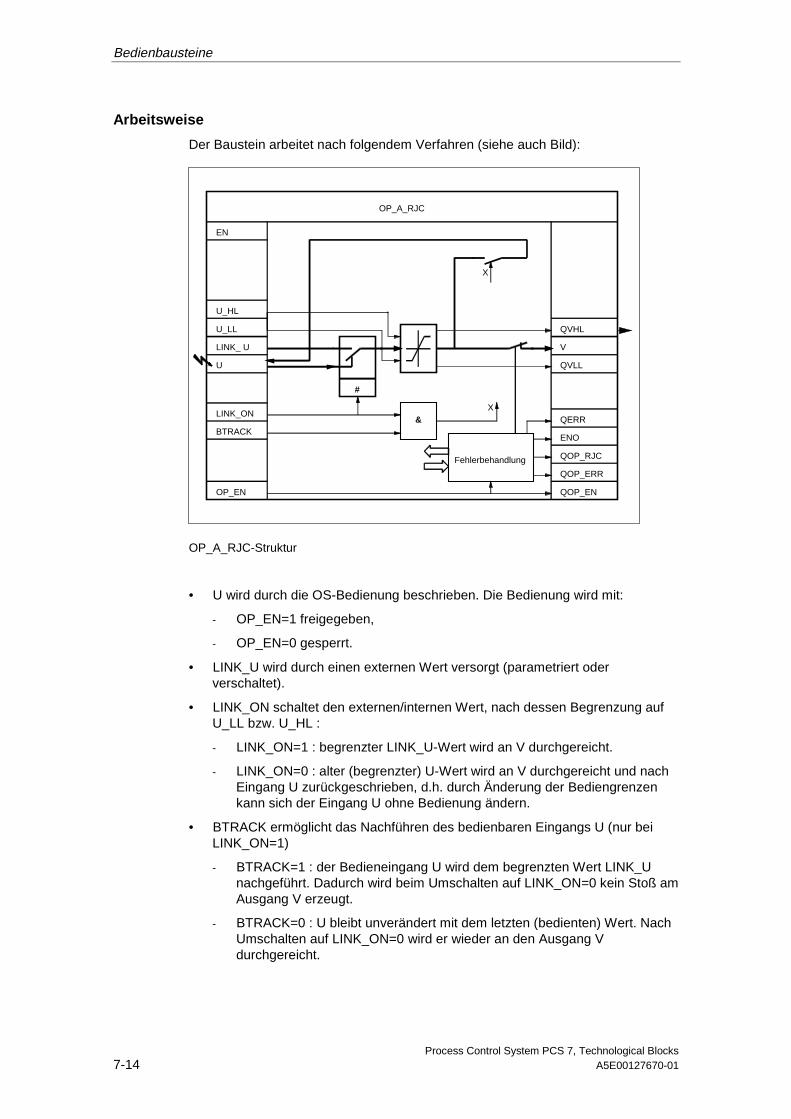
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-14 A5E00127670-01
Arbeitsweise
Der Baustein arbeitet nach folgendem Verfahren (siehe auch Bild):
EN
U
LINK_ U
LINK_ON
BTRACKENO
V
QOP_ERR
#
&
U_HL
U_LL QVHL
QVLL
OP_EN
Fehlerbehandlung QOP_RJC
X
X
QOP_EN
OP_A_RJC
QERR
OP_A_RJC-Struktur
• U wird durch die OS-Bedienung beschrieben. Die Bedienung wird mit:
- OP_EN=1 freigegeben,
- OP_EN=0 gesperrt.
• LINK_U wird durch einen externen Wert versorgt (parametriert oderverschaltet).
• LINK_ON schaltet den externen/internen Wert, nach dessen Begrenzung aufU_LL bzw. U_HL :
- LINK_ON=1 : begrenzter LINK_U-Wert wird an V durchgereicht.
- LINK_ON=0 : alter (begrenzter) U-Wert wird an V durchgereicht und nachEingang U zurückgeschrieben, d.h. durch Änderung der Bediengrenzenkann sich der Eingang U ohne Bedienung ändern.
• BTRACK ermöglicht das Nachführen des bedienbaren Eingangs U (nur beiLINK_ON=1)
- BTRACK=1 : der Bedieneingang U wird dem begrenzten Wert LINK_Unachgeführt. Dadurch wird beim Umschalten auf LINK_ON=0 kein Stoß amAusgang V erzeugt.
- BTRACK=0 : U bleibt unverändert mit dem letzten (bedienten) Wert. NachUmschalten auf LINK_ON=0 wird er wieder an den Ausgang Vdurchgereicht.
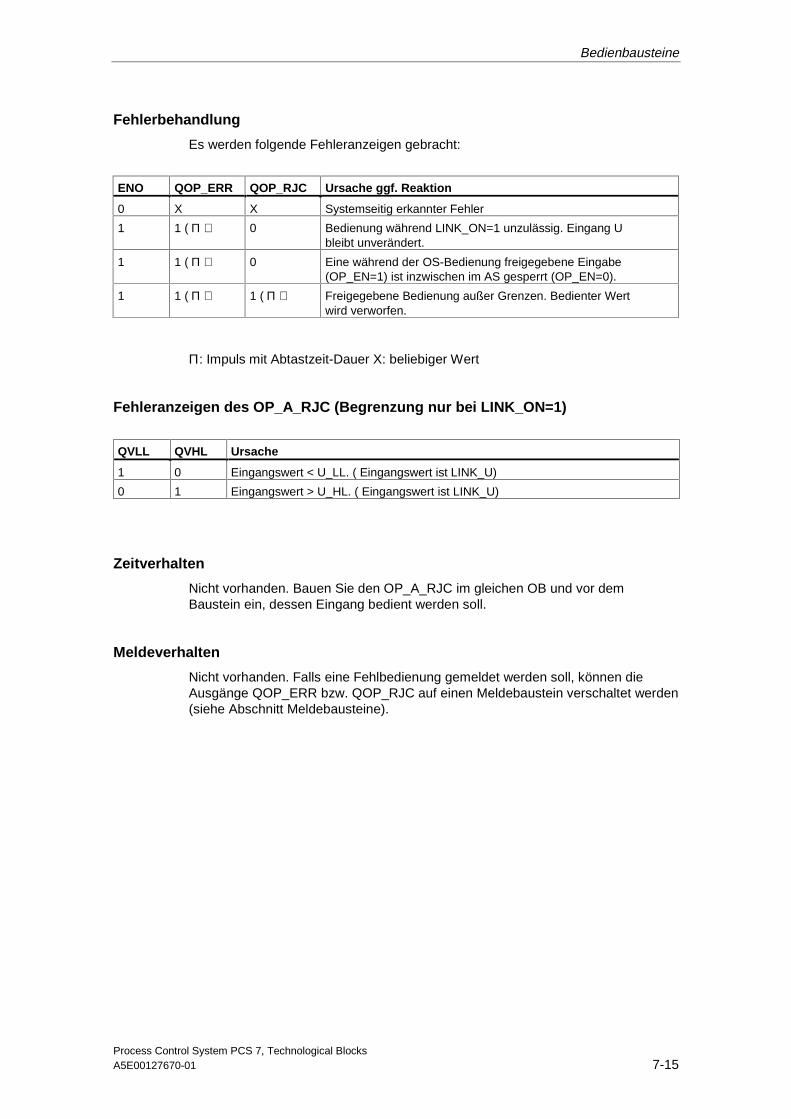
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-15
Fehlerbehandlung
Es werden folgende Fehleranzeigen gebracht:
ENO QOP_ERR QOP_RJC Ursache ggf. Reaktion
0 X X Systemseitig erkannter Fehler
1 1 ( Π ) 0 Bedienung während LINK_ON=1 unzulässig. Eingang Ubleibt unverändert.
1 1 ( Π ) 0 Eine während der OS-Bedienung freigegebene Eingabe(OP_EN=1) ist inzwischen im AS gesperrt (OP_EN=0).
1 1 ( Π ) 1 ( Π ) Freigegebene Bedienung außer Grenzen. Bedienter Wertwird verworfen.
Π: Impuls mit Abtastzeit-Dauer X: beliebiger Wert
Fehleranzeigen des OP_A_RJC (Begrenzung nur bei LINK_ON=1)
QVLL QVHL Ursache
1 0 Eingangswert < U_LL. ( Eingangswert ist LINK_U)
0 1 Eingangswert > U_HL. ( Eingangswert ist LINK_U)
Zeitverhalten
Nicht vorhanden. Bauen Sie den OP_A_RJC im gleichen OB und vor demBaustein ein, dessen Eingang bedient werden soll.
Meldeverhalten
Nicht vorhanden. Falls eine Fehlbedienung gemeldet werden soll, können dieAusgänge QOP_ERR bzw. QOP_RJC auf einen Meldebaustein verschaltet werden(siehe Abschnitt Meldebausteine).
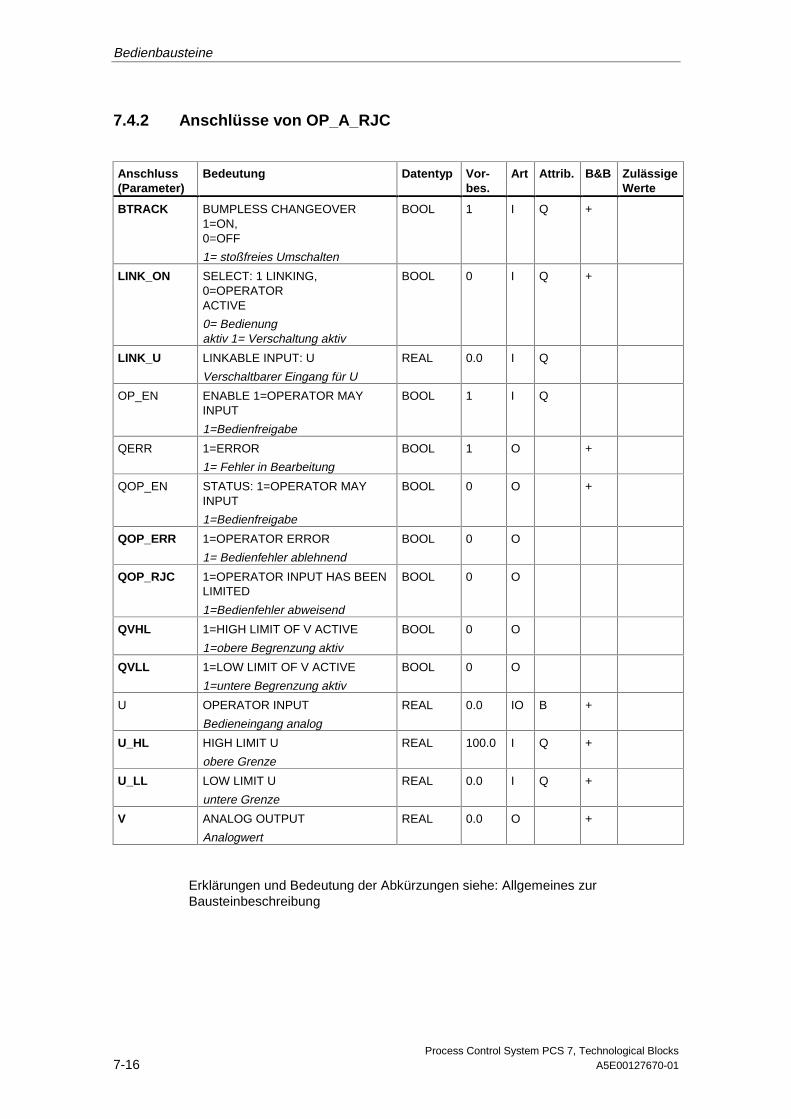
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-16 A5E00127670-01
7.4.2 Anschlüsse von OP_A_RJC
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attrib. B&B ZulässigeWerte
BTRACK BUMPLESS CHANGEOVER1=ON,0=OFF
1= stoßfreies Umschalten
BOOL 1 I Q +
LINK_ON SELECT: 1 LINKING,0=OPERATORACTIVE
0= Bedienungaktiv 1= Verschaltung aktiv
BOOL 0 I Q +
LINK_U LINKABLE INPUT: U
Verschaltbarer Eingang für U
REAL 0.0 I Q
OP_EN ENABLE 1=OPERATOR MAYINPUT
1=Bedienfreigabe
BOOL 1 I Q
QERR 1=ERROR
1= Fehler in Bearbeitung
BOOL 1 O +
QOP_EN STATUS: 1=OPERATOR MAYINPUT
1=Bedienfreigabe
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1= Bedienfehler ablehnend
BOOL 0 O
QOP_RJC 1=OPERATOR INPUT HAS BEENLIMITED
1=Bedienfehler abweisend
BOOL 0 O
QVHL 1=HIGH LIMIT OF V ACTIVE
1=obere Begrenzung aktiv
BOOL 0 O
QVLL 1=LOW LIMIT OF V ACTIVE
1=untere Begrenzung aktiv
BOOL 0 O
U OPERATOR INPUT
Bedieneingang analog
REAL 0.0 IO B +
U_HL HIGH LIMIT U
obere Grenze
REAL 100.0 I Q +
U_LL LOW LIMIT U
untere Grenze
REAL 0.0 I Q +
V ANALOG OUTPUT
Analogwert
REAL 0.0 O +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
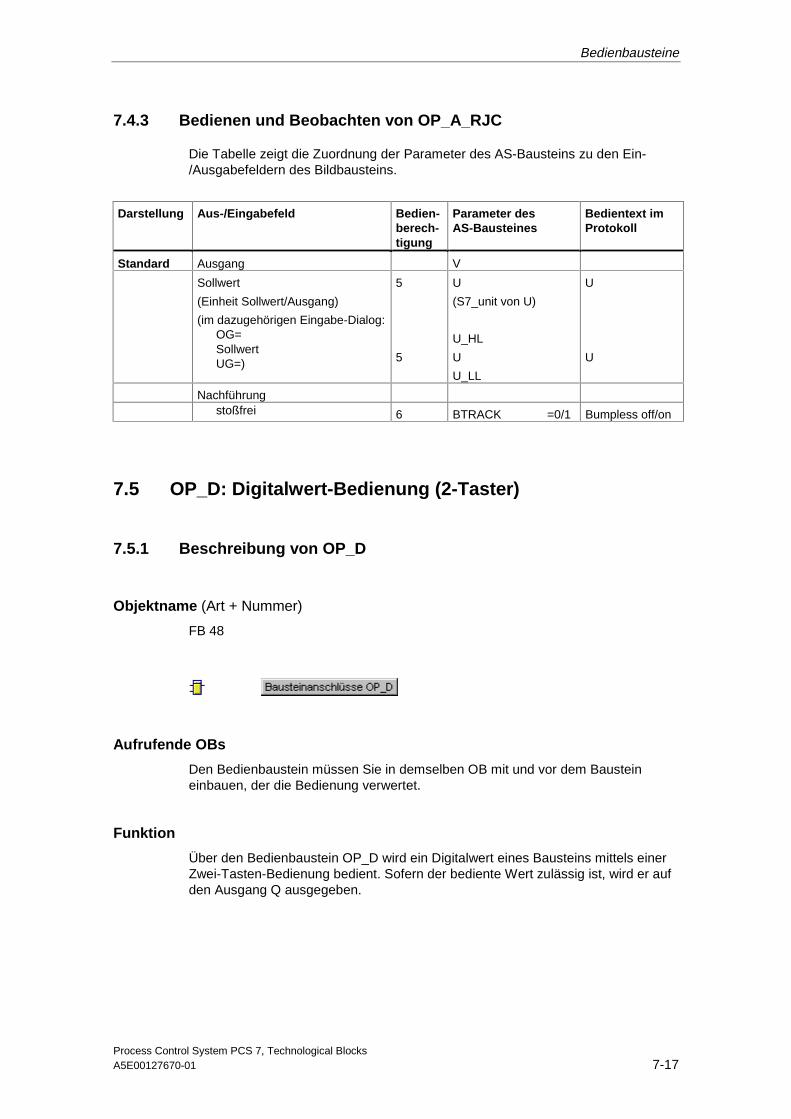
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-17
7.4.3 Bedienen und Beobachten von OP_A_RJC
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Ausgang V
Sollwert
(Einheit Sollwert/Ausgang)
(im dazugehörigen Eingabe-Dialog:OG=SollwertUG=)
5
5
U
(S7_unit von U)
U_HL
U
U_LL
U
U
Nachführungstoßfrei 6 BTRACK =0/1 Bumpless off/on
7.5 OP_D: Digitalwert-Bedienung (2-Taster)
7.5.1 Beschreibung von OP_D
Objektname (Art + Nummer)
FB 48
Aufrufende OBs
Den Bedienbaustein müssen Sie in demselben OB mit und vor dem Bausteineinbauen, der die Bedienung verwertet.
Funktion
Über den Bedienbaustein OP_D wird ein Digitalwert eines Bausteins mittels einerZwei-Tasten-Bedienung bedient. Sofern der bediente Wert zulässig ist, wird er aufden Ausgang Q ausgegeben.
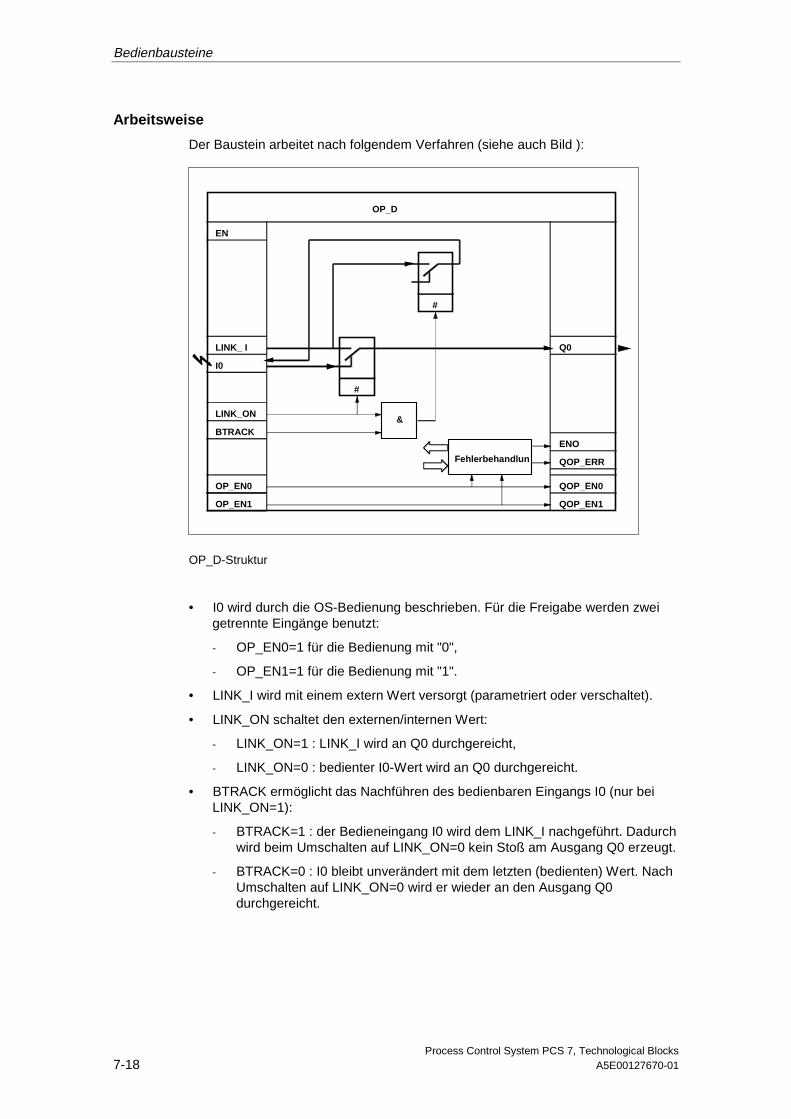
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-18 A5E00127670-01
Arbeitsweise
Der Baustein arbeitet nach folgendem Verfahren (siehe auch Bild ):
EN
I0
LINK_ I
LINK_ON
BTRACK
Q0
#
&
#
ENO
QOP_ERR
OP_EN0
Fehlerbehandlun
QOP_EN0
OP_EN1 QOP_EN1
OP_D
OP_D-Struktur
• I0 wird durch die OS-Bedienung beschrieben. Für die Freigabe werden zweigetrennte Eingänge benutzt:
- OP_EN0=1 für die Bedienung mit "0",
- OP_EN1=1 für die Bedienung mit "1".
• LINK_I wird mit einem extern Wert versorgt (parametriert oder verschaltet).
• LINK_ON schaltet den externen/internen Wert:
- LINK_ON=1 : LINK_I wird an Q0 durchgereicht,
- LINK_ON=0 : bedienter I0-Wert wird an Q0 durchgereicht.
• BTRACK ermöglicht das Nachführen des bedienbaren Eingangs I0 (nur beiLINK_ON=1):
- BTRACK=1 : der Bedieneingang I0 wird dem LINK_I nachgeführt. Dadurchwird beim Umschalten auf LINK_ON=0 kein Stoß am Ausgang Q0 erzeugt.
- BTRACK=0 : I0 bleibt unverändert mit dem letzten (bedienten) Wert. NachUmschalten auf LINK_ON=0 wird er wieder an den Ausgang Q0durchgereicht.
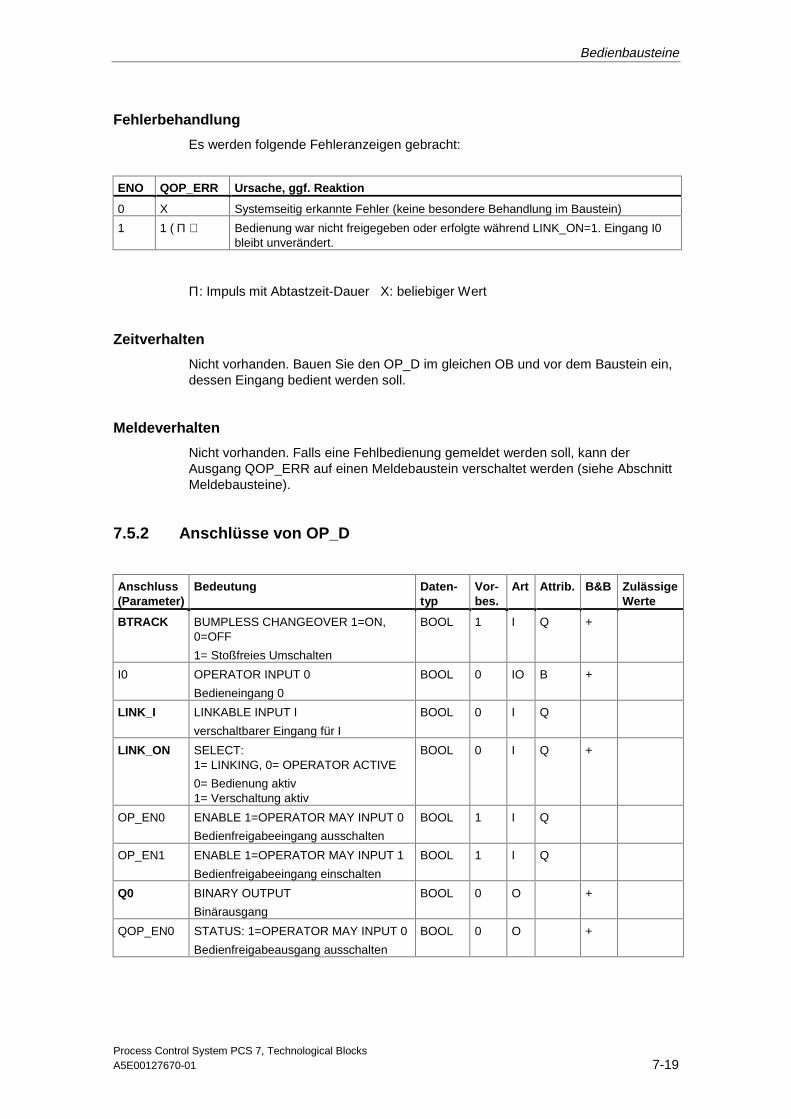
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-19
Fehlerbehandlung
Es werden folgende Fehleranzeigen gebracht:
ENO QOP_ERR Ursache, ggf. Reaktion
0 X Systemseitig erkannte Fehler (keine besondere Behandlung im Baustein)
1 1 ( Π ) Bedienung war nicht freigegeben oder erfolgte während LINK_ON=1. Eingang I0bleibt unverändert.
Π: Impuls mit Abtastzeit-Dauer X: beliebiger Wert
Zeitverhalten
Nicht vorhanden. Bauen Sie den OP_D im gleichen OB und vor dem Baustein ein,dessen Eingang bedient werden soll.
Meldeverhalten
Nicht vorhanden. Falls eine Fehlbedienung gemeldet werden soll, kann derAusgang QOP_ERR auf einen Meldebaustein verschaltet werden (siehe AbschnittMeldebausteine).
7.5.2 Anschlüsse von OP_D
Anschluss(Parameter)
Bedeutung Daten-typ
Vor-bes.
Art Attrib. B&B ZulässigeWerte
BTRACK BUMPLESS CHANGEOVER 1=ON,0=OFF
1= Stoßfreies Umschalten
BOOL 1 I Q +
I0 OPERATOR INPUT 0
Bedieneingang 0
BOOL 0 IO B +
LINK_I LINKABLE INPUT I
verschaltbarer Eingang für I
BOOL 0 I Q
LINK_ON SELECT:1= LINKING, 0= OPERATOR ACTIVE
0= Bedienung aktiv1= Verschaltung aktiv
BOOL 0 I Q +
OP_EN0 ENABLE 1=OPERATOR MAY INPUT 0
Bedienfreigabeeingang ausschalten
BOOL 1 I Q
OP_EN1 ENABLE 1=OPERATOR MAY INPUT 1
Bedienfreigabeeingang einschalten
BOOL 1 I Q
Q0 BINARY OUTPUT
Binärausgang
BOOL 0 O +
QOP_EN0 STATUS: 1=OPERATOR MAY INPUT 0
Bedienfreigabeausgang ausschalten
BOOL 0 O +
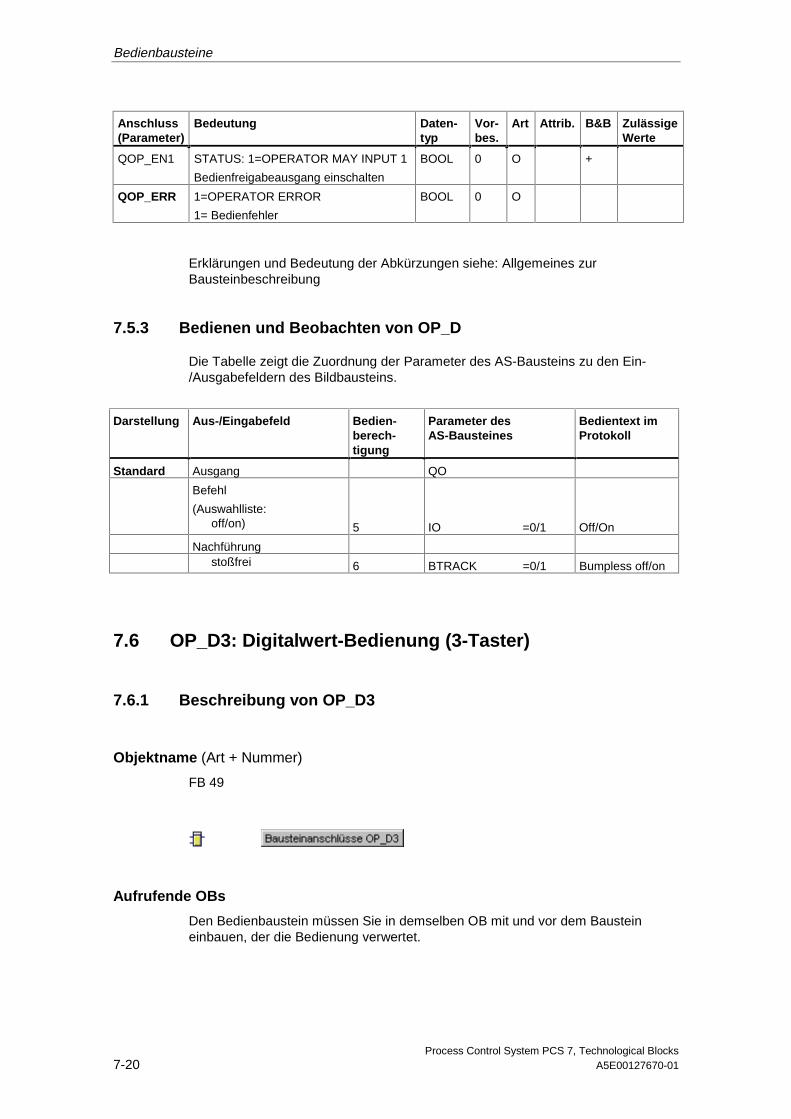
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-20 A5E00127670-01
Anschluss(Parameter)
Bedeutung Daten-typ
Vor-bes.
Art Attrib. B&B ZulässigeWerte
QOP_EN1 STATUS: 1=OPERATOR MAY INPUT 1
Bedienfreigabeausgang einschalten
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1= Bedienfehler
BOOL 0 O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
7.5.3 Bedienen und Beobachten von OP_D
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Ausgang QO
Befehl
(Auswahlliste:off/on) 5 IO =0/1 Off/On
Nachführungstoßfrei 6 BTRACK =0/1 Bumpless off/on
7.6 OP_D3: Digitalwert-Bedienung (3-Taster)
7.6.1 Beschreibung von OP_D3
Objektname (Art + Nummer)
FB 49
Aufrufende OBs
Den Bedienbaustein müssen Sie in demselben OB mit und vor dem Bausteineinbauen, der die Bedienung verwertet.
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-21
Funktion
Über den Bedienbaustein OP_D3 wird eine Eins-aus-drei-Digitalwertbedienungdurchgeführt. Beim Bedienen eines der drei Bedieneingängen I1, I2 oder I3 wird,sofern die Bedienung zulässig war, der entsprechende Ausgang auf 1 gesetzt, unddie anderen Ausgänge zurückgesetzt.
Arbeitsweise
Der Baustein arbeitet nach dem weiter unten beschriebenen Verfahren (siehe auchBild). Dabei wird x=1..3 als Index für die jeweiligen drei Ein-/Ausgänge benutzt:
• I1, I2 und I3 werden durch die OS-Bedienung zugleich belegt (der zuaktivierende Eingang mit "1" und die beiden anderen mit "0"). Für dieFreigabe/Sperre werden drei getrennte Eingänge benutzt:
- OP_EN_Ix=1 : Freigabe der Bedienung für Eingang Ix
- OP_EN_Ix=0 : Sperre der Bedienung für Eingang Ix
• LINK_Ix werden mit je einem externen Wert versorgt (parametriert oderverschaltet).
• LINK_ON schaltet die externen/internen Werte:
- LINK_ON=1 : LINK_Ix werden bearbeitet und an Qx durchgereicht.
- LINK_ON=0 : Bedienbare Ix-Eingänge werden bearbeitet und an Qxdurchgereicht.
• BTRACK ermöglicht das Nachführen der bedienbaren Eingänge Ix (nur beiLINK_ON=1):
- BTRACK=1 : die Bedieneingänge Ix werden dem LINK_Ix nachgeführt.Dadurch wird beim Umschalten auf LINK_ON=0 kein Stoß an denAusgängen Qx erzeugt.
- BTRACK=0 : Ix bleibt unverändert mit dem letzten (bedienten) Wert. NachUmschalten auf LINK_ON=0 wird er wieder an den Ausgang Qxdurchgereicht.
• Die Auswahllogik übernimmt die drei Eingangswerte (Ix oder LINK_Ix) in ihrerReihenfolge x=1,2,3 und merkt sich den höchsten Index "x" des Eingangs, dereine "1" führt. Der diesem Index entsprechende Ausgang Qx wird gesetzt ("1")und die beiden anderen Ausgänge Qx rückgesetzt ("0"). Falls alle dreiEingänge I1=I2=I3=0 sind, werden die Ausgänge nicht verändert.
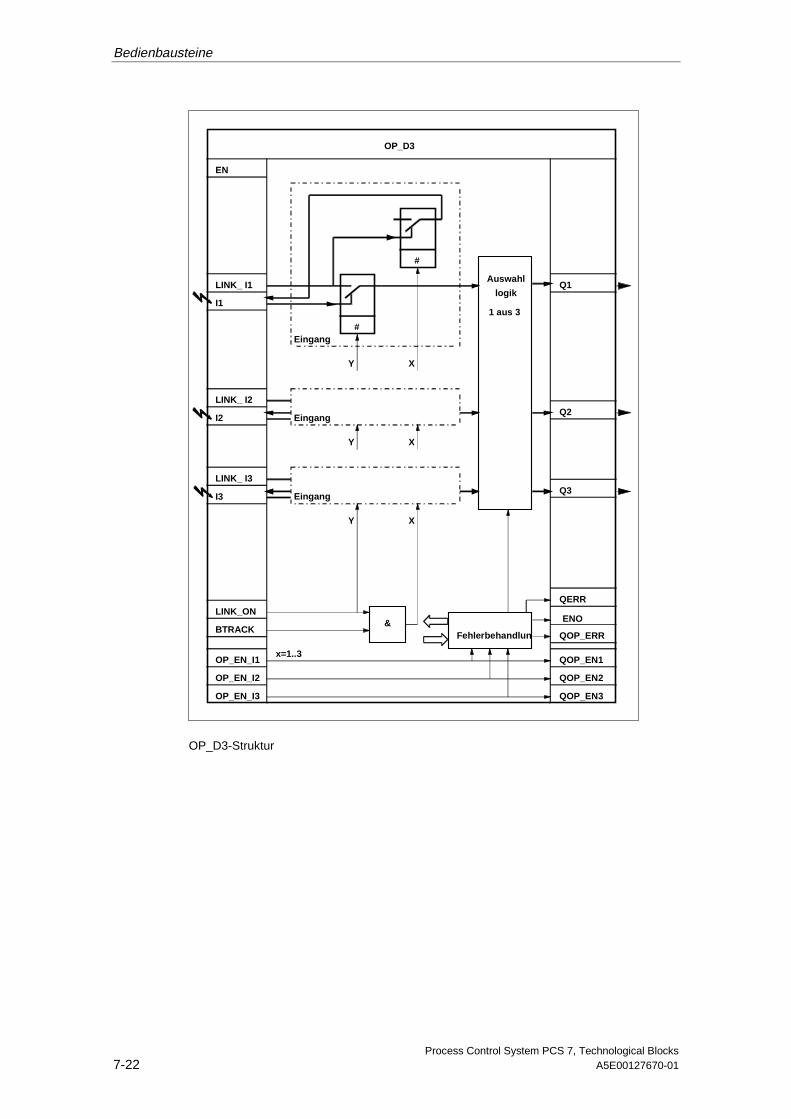
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-22 A5E00127670-01
EN
I1
LINK_ I1
LINK_ON
BTRACK
Q1
#
&
#
ENO
QOP_ERR
OP_EN_I1
Fehlerbehandlun
QOP_EN1x=1..3
Eingang
I2
LINK_ I2
I3
LINK_ I3
Eingang
Eingang
Auswahl
logik
1 aus 3
Q2
Q3
X
X
XY
Y
Y
OP_EN_I2 QOP_EN2
OP_EN_I3 QOP_EN3
OP_D3
QERR
OP_D3-Struktur
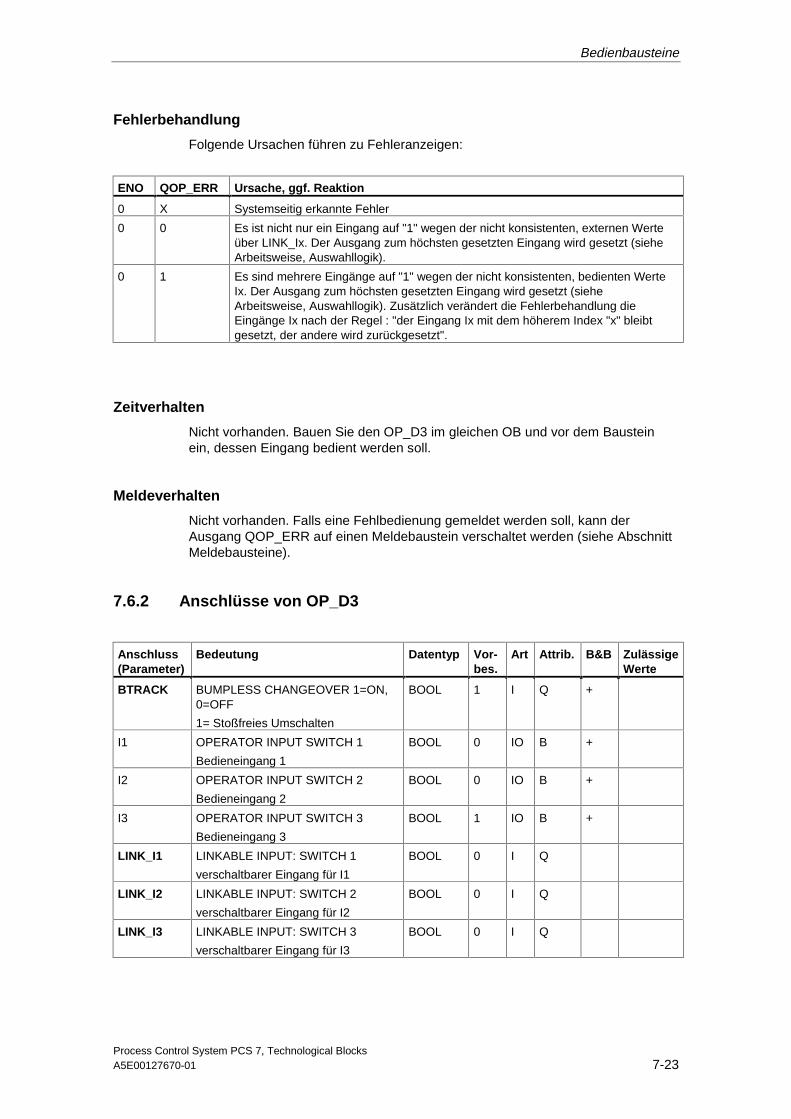
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-23
Fehlerbehandlung
Folgende Ursachen führen zu Fehleranzeigen:
ENO QOP_ERR Ursache, ggf. Reaktion
0 X Systemseitig erkannte Fehler
0 0 Es ist nicht nur ein Eingang auf "1" wegen der nicht konsistenten, externen Werteüber LINK_Ix. Der Ausgang zum höchsten gesetzten Eingang wird gesetzt (sieheArbeitsweise, Auswahllogik).
0 1 Es sind mehrere Eingänge auf "1" wegen der nicht konsistenten, bedienten WerteIx. Der Ausgang zum höchsten gesetzten Eingang wird gesetzt (sieheArbeitsweise, Auswahllogik). Zusätzlich verändert die Fehlerbehandlung dieEingänge Ix nach der Regel : "der Eingang Ix mit dem höherem Index "x" bleibtgesetzt, der andere wird zurückgesetzt".
Zeitverhalten
Nicht vorhanden. Bauen Sie den OP_D3 im gleichen OB und vor dem Bausteinein, dessen Eingang bedient werden soll.
Meldeverhalten
Nicht vorhanden. Falls eine Fehlbedienung gemeldet werden soll, kann derAusgang QOP_ERR auf einen Meldebaustein verschaltet werden (siehe AbschnittMeldebausteine).
7.6.2 Anschlüsse von OP_D3
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attrib. B&B ZulässigeWerte
BTRACK BUMPLESS CHANGEOVER 1=ON,0=OFF
1= Stoßfreies Umschalten
BOOL 1 I Q +
I1 OPERATOR INPUT SWITCH 1
Bedieneingang 1
BOOL 0 IO B +
I2 OPERATOR INPUT SWITCH 2
Bedieneingang 2
BOOL 0 IO B +
I3 OPERATOR INPUT SWITCH 3
Bedieneingang 3
BOOL 1 IO B +
LINK_I1 LINKABLE INPUT: SWITCH 1
verschaltbarer Eingang für I1
BOOL 0 I Q
LINK_I2 LINKABLE INPUT: SWITCH 2
verschaltbarer Eingang für I2
BOOL 0 I Q
LINK_I3 LINKABLE INPUT: SWITCH 3
verschaltbarer Eingang für I3
BOOL 0 I Q
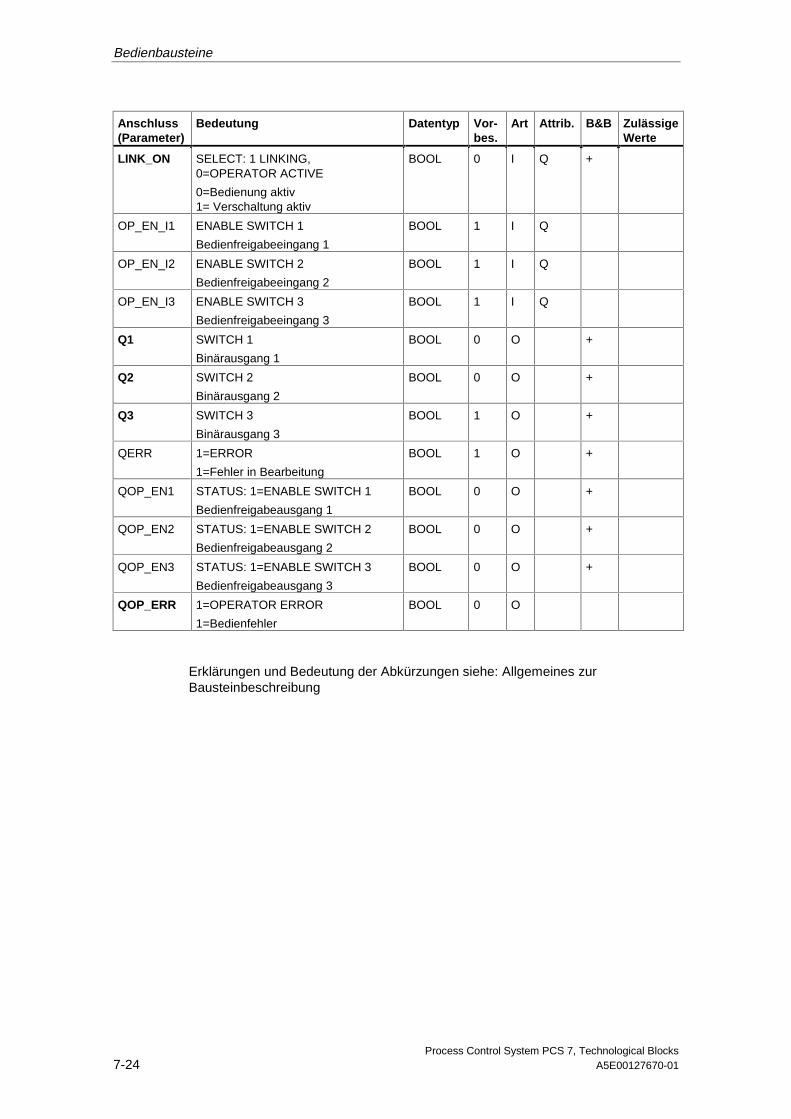
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-24 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attrib. B&B ZulässigeWerte
LINK_ON SELECT: 1 LINKING,0=OPERATOR ACTIVE
0=Bedienung aktiv1= Verschaltung aktiv
BOOL 0 I Q +
OP_EN_I1 ENABLE SWITCH 1
Bedienfreigabeeingang 1
BOOL 1 I Q
OP_EN_I2 ENABLE SWITCH 2
Bedienfreigabeeingang 2
BOOL 1 I Q
OP_EN_I3 ENABLE SWITCH 3
Bedienfreigabeeingang 3
BOOL 1 I Q
Q1 SWITCH 1
Binärausgang 1
BOOL 0 O +
Q2 SWITCH 2
Binärausgang 2
BOOL 0 O +
Q3 SWITCH 3
Binärausgang 3
BOOL 1 O +
QERR 1=ERROR
1=Fehler in Bearbeitung
BOOL 1 O +
QOP_EN1 STATUS: 1=ENABLE SWITCH 1
Bedienfreigabeausgang 1
BOOL 0 O +
QOP_EN2 STATUS: 1=ENABLE SWITCH 2
Bedienfreigabeausgang 2
BOOL 0 O +
QOP_EN3 STATUS: 1=ENABLE SWITCH 3
Bedienfreigabeausgang 3
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1=Bedienfehler
BOOL 0 O
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
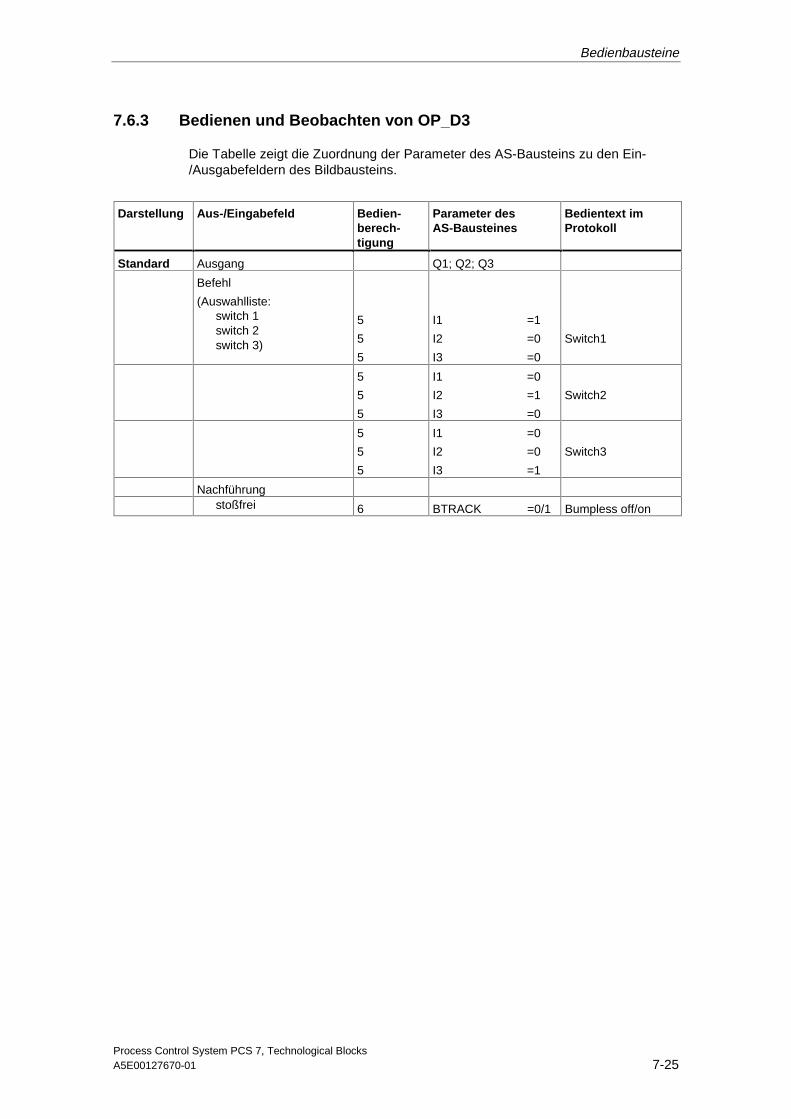
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-25
7.6.3 Bedienen und Beobachten von OP_D3
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Ausgang Q1; Q2; Q3
Befehl
(Auswahlliste:switch 1switch 2switch 3)
5
5
5
I1 =1
I2 =0
I3 =0
Switch1
5
5
5
I1 =0
I2 =1
I3 =0
Switch2
5
5
5
I1 =0
I2 =0
I3 =1
Switch3
Nachführungstoßfrei 6 BTRACK =0/1 Bumpless off/on
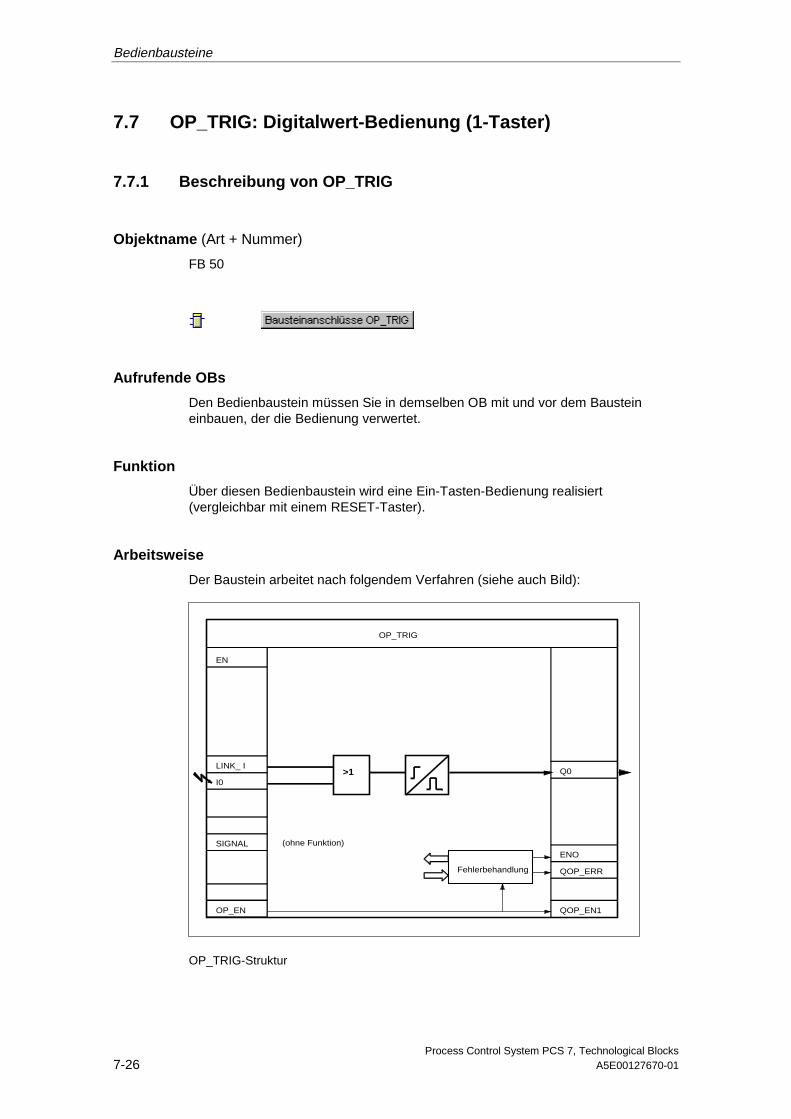
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-26 A5E00127670-01
7.7 OP_TRIG: Digitalwert-Bedienung (1-Taster)
7.7.1 Beschreibung von OP_TRIG
Objektname (Art + Nummer)
FB 50
Aufrufende OBs
Den Bedienbaustein müssen Sie in demselben OB mit und vor dem Bausteineinbauen, der die Bedienung verwertet.
Funktion
Über diesen Bedienbaustein wird eine Ein-Tasten-Bedienung realisiert(vergleichbar mit einem RESET-Taster).
Arbeitsweise
Der Baustein arbeitet nach folgendem Verfahren (siehe auch Bild):
EN
I0
LINK_ IQ0
ENO
QOP_ERRFehlerbehandlung
OP_EN QOP_EN1
SIGNAL
>1
OP_TRIG
(ohne Funktion)
OP_TRIG-Struktur
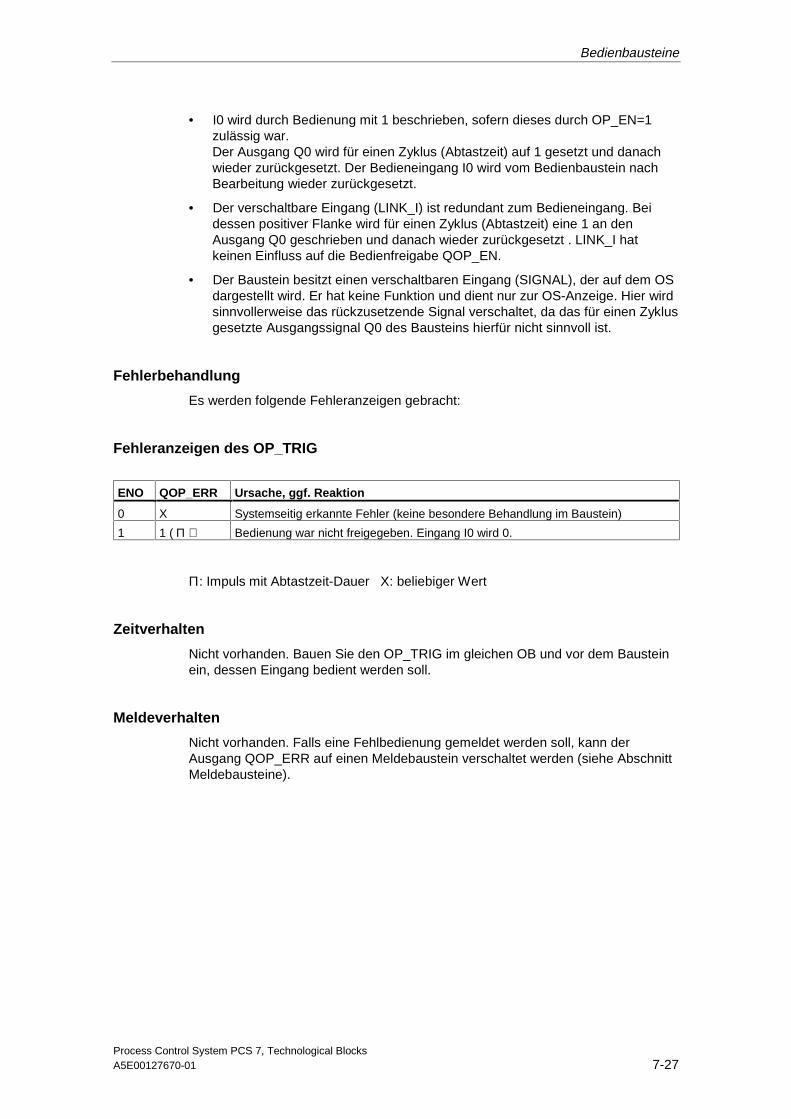
Bedienbausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 7-27
• I0 wird durch Bedienung mit 1 beschrieben, sofern dieses durch OP_EN=1zulässig war.Der Ausgang Q0 wird für einen Zyklus (Abtastzeit) auf 1 gesetzt und danachwieder zurückgesetzt. Der Bedieneingang I0 wird vom Bedienbaustein nachBearbeitung wieder zurückgesetzt.
• Der verschaltbare Eingang (LINK_I) ist redundant zum Bedieneingang. Beidessen positiver Flanke wird für einen Zyklus (Abtastzeit) eine 1 an denAusgang Q0 geschrieben und danach wieder zurückgesetzt . LINK_I hatkeinen Einfluss auf die Bedienfreigabe QOP_EN.
• Der Baustein besitzt einen verschaltbaren Eingang (SIGNAL), der auf dem OSdargestellt wird. Er hat keine Funktion und dient nur zur OS-Anzeige. Hier wirdsinnvollerweise das rückzusetzende Signal verschaltet, da das für einen Zyklusgesetzte Ausgangssignal Q0 des Bausteins hierfür nicht sinnvoll ist.
Fehlerbehandlung
Es werden folgende Fehleranzeigen gebracht:
Fehleranzeigen des OP_TRIG
ENO QOP_ERR Ursache, ggf. Reaktion
0 X Systemseitig erkannte Fehler (keine besondere Behandlung im Baustein)
1 1 ( Π ) Bedienung war nicht freigegeben. Eingang I0 wird 0.
Π: Impuls mit Abtastzeit-Dauer X: beliebiger Wert
Zeitverhalten
Nicht vorhanden. Bauen Sie den OP_TRIG im gleichen OB und vor dem Bausteinein, dessen Eingang bedient werden soll.
Meldeverhalten
Nicht vorhanden. Falls eine Fehlbedienung gemeldet werden soll, kann derAusgang QOP_ERR auf einen Meldebaustein verschaltet werden (siehe AbschnittMeldebausteine).
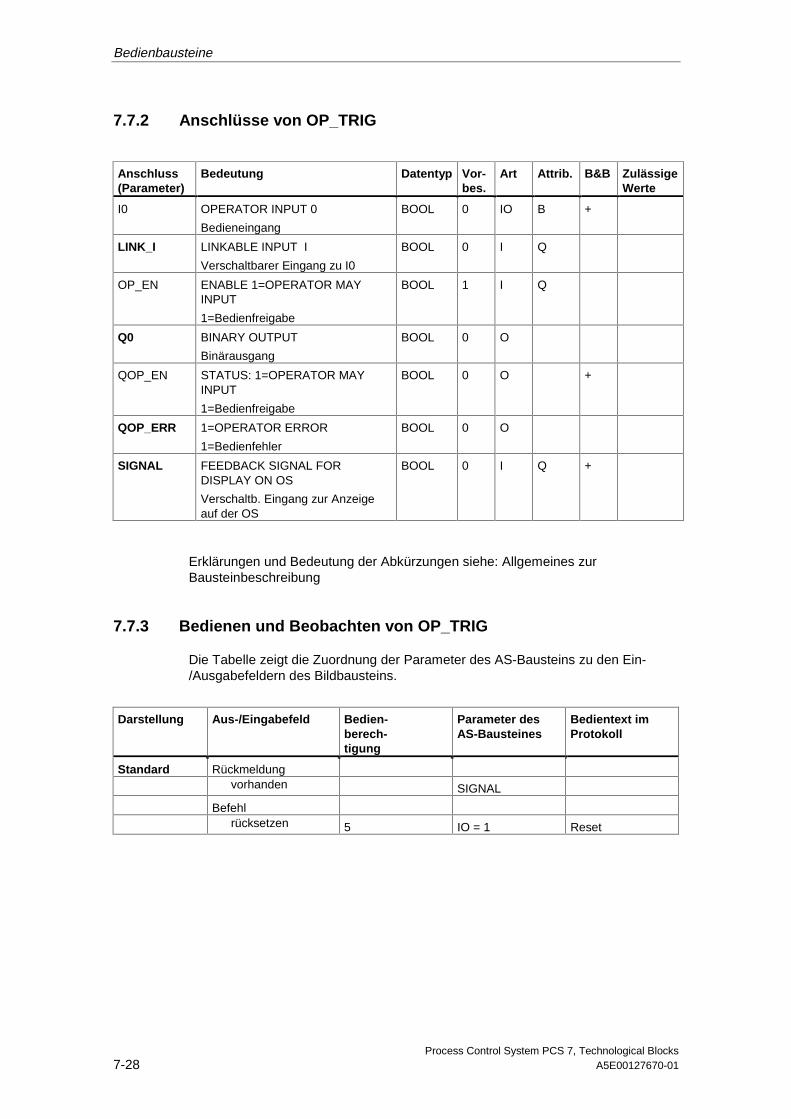
Bedienbausteine
Process Control System PCS 7, Technological Blocks7-28 A5E00127670-01
7.7.2 Anschlüsse von OP_TRIG
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attrib. B&B ZulässigeWerte
I0 OPERATOR INPUT 0
Bedieneingang
BOOL 0 IO B +
LINK_I LINKABLE INPUT I
Verschaltbarer Eingang zu I0
BOOL 0 I Q
OP_EN ENABLE 1=OPERATOR MAYINPUT
1=Bedienfreigabe
BOOL 1 I Q
Q0 BINARY OUTPUT
Binärausgang
BOOL 0 O
QOP_EN STATUS: 1=OPERATOR MAYINPUT
1=Bedienfreigabe
BOOL 0 O +
QOP_ERR 1=OPERATOR ERROR
1=Bedienfehler
BOOL 0 O
SIGNAL FEEDBACK SIGNAL FORDISPLAY ON OS
Verschaltb. Eingang zur Anzeigeauf der OS
BOOL 0 I Q +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
7.7.3 Bedienen und Beobachten von OP_TRIG
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Standard Rückmeldungvorhanden SIGNAL
Befehlrücksetzen 5 IO = 1 Reset
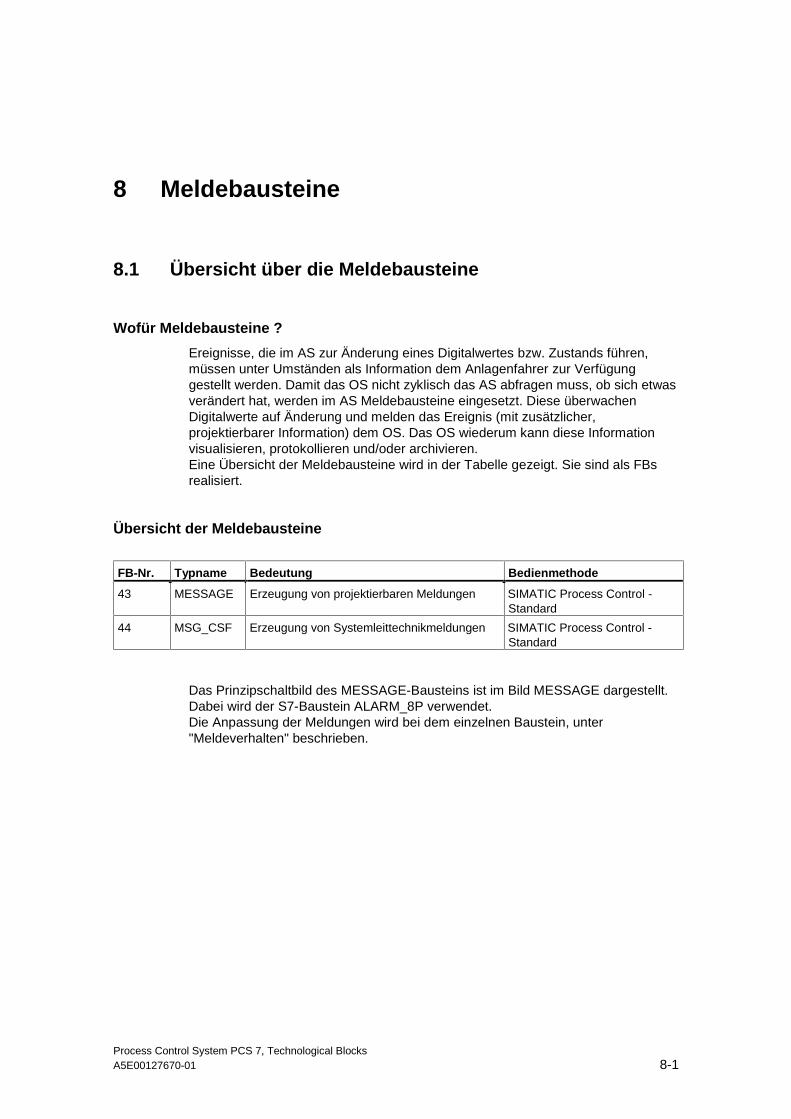
Process Control System PCS 7, Technological BlocksA5E00127670-01 8-1
8 Meldebausteine
8.1 Übersicht über die Meldebausteine
Wofür Meldebausteine ?
Ereignisse, die im AS zur Änderung eines Digitalwertes bzw. Zustands führen,müssen unter Umständen als Information dem Anlagenfahrer zur Verfügunggestellt werden. Damit das OS nicht zyklisch das AS abfragen muss, ob sich etwasverändert hat, werden im AS Meldebausteine eingesetzt. Diese überwachenDigitalwerte auf Änderung und melden das Ereignis (mit zusätzlicher,projektierbarer Information) dem OS. Das OS wiederum kann diese Informationvisualisieren, protokollieren und/oder archivieren.Eine Übersicht der Meldebausteine wird in der Tabelle gezeigt. Sie sind als FBsrealisiert.
Übersicht der Meldebausteine
FB-Nr. Typname Bedeutung Bedienmethode
43 MESSAGE Erzeugung von projektierbaren Meldungen SIMATIC Process Control -Standard
44 MSG_CSF Erzeugung von Systemleittechnikmeldungen SIMATIC Process Control -Standard
Das Prinzipschaltbild des MESSAGE-Bausteins ist im Bild MESSAGE dargestellt.Dabei wird der S7-Baustein ALARM_8P verwendet.Die Anpassung der Meldungen wird bei dem einzelnen Baustein, unter"Meldeverhalten" beschrieben.
Meldebausteine
Process Control System PCS 7, Technological Blocks8-2 A5E00127670-01
8.2 MESSAGE: Meldebaustein (projektierbare Meldungen)
8.2.1 Beschreibung von MESSAGE
Objektname (Art + Nummer)
FB 43
Aufrufende OBs
Der Meldebaustein muss mit seiner Instanz, außer in dem OB (z.B. OB32) in demdie zu überwachende Ereignisse erkannt werden, zusätzlich im OB100 eingebautwerden (siehe Anlaufverhalten).
Funktion
Der Meldebaustein MESSAGE dient zur Erzeugung von projektierbarenMeldungen. Er bildet die Schnittstelle zwischen den Bausteinausgängen, derenÄnderung gemeldet werden soll, und dem S7-Baustein ALARM_8P.
Arbeitsweise
Der Baustein besitzt Eingänge, über die einerseits die einzelnen Meldungen denüberwachten Signalen zugeordnet werden, andererseits dieseprozesszustandsabhängig frei/gesperrt werden können.
• EN: EN=1 gibt die Bausteinbearbeitung frei.
• I_1 bis I_8: Überwachte Signale, deren Änderung gemeldet werden soll.Jedem dieser Signale ist ein projektierbarer Meldetext (24-Zeichen)zugeordnet, den Sie durch Projektierung anpassen können und anschließendin der OS-Projektierung weiterbenutzen.Jede Änderung dieser Eingänge führt - sofern nicht gesperrt - zum Abstrahleneiner Meldung an das OS.
• I_1ISCSF bis I_8ISCSF: durch parametrieren mit "1" wird die zugehörigeMeldung als Leittechnikmeldung (CSF) ausgewiesen.
• MSG_LOCK: damit ist ein prozessabhängiges Sperren der Meldung dieseBausteins möglich. Bei einer Aufflanke des Sperrsignals werden alleanstehenden Prozessmeldungen (keine Leittechnikmeldungen) zurückgesetzt,und somit als gegangen an das OS gesendet.
Meldebausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 8-3
• AUX_PR01 bis AUX_PR10: diese Eingänge können mit beliebigen Wertenbeliebigen Datentyps verschaltet werden. Diese Werte, auch als Begleitwertebezeichnet, werden auf 16 Zeichen begrenzt und mit der Meldung an das OSgesendet. Dadurch können Sie eine nähere Beschreibung der Meldeursacheerreichen.
• OS-seitig kann der Anlagenfahrer die Meldungen einer Messstelle sperren.Dieses wird vom OS an den zuständigen Meldebaustein gesendet. Diesermeldet (über seinen ALARM_8P) die erfolgte Sperre zurück. Hierauf wird imOS die Meldung als quittiert und gegangen in das Meldefolgeprotokolleingetragen.
• QMSG_SUP zeigt die erfolgte Meldungsunterdrückung an.
• MSG_STAT, QMSG_ERR und MSG_ACK werden durch das OS ausgewertet.
Fehlerbehandlung
Die Fehlerbehandlung des Message-Bausteins beschränkt sich auf dieFehlerinformation des ALARM_8P (Siehe Handbuch "Systemsoftware fürS7-300/400 - System- und Standardfunktionen").
Fehlermeldungen des Parameters MSG_STAT siehe Online Hilfe ALARM_8P,Parameter STAT.
Anlaufverhalten
Der Meldebaustein unterdrückt während des Anlaufs sämtliche Meldungen (auchleittechnischer Art). Die Dauer (Anzahl der Zyklen) der Meldungsunterdrückungwird über den Parameter RUNUPCYC eingestellt. Bei Neustart wird ein internerZähler mit diesem Wert geladen und anschließend bei jeder Bearbeitungdekrementiert. Solange dieser nicht Null ist, werden keine Meldungen erzeugt.
Meldungen
Meldungen werden über ALARM_8P (SFB35) erzeugt. Alle Bausteine benutzenden PMC-Kommunikationskanal. Der ALARM_8P hat 8 Digitaleingänge und 10Begleitwerte. Jeder erkannte Flankenwechsel eines oder mehrerer Digitaleingängeführt zu einer Meldung, unabhängig von einer erfolgten Quittierung. DieBegleitwerte sind zum Zeitpunkt der Flankenauswertung konsistent der Meldungzugeordnet. Für alle 8 Signale gibt es eine gemeinsame Meldungsnummer(MSG_ID), die am OS in 8 Meldungen unterteilt wird. Das ES vergibt dieMeldungsnummer automatisch durch Aufruf des Meldeservers.
Meldetext
Jede Meldung eines Bausteins hat einen Vorbesetzungsmeldetext von max. 24Zeichen und ist einem (internen oder externen) Parameter des Bausteins und einerbestimmten Meldeklasse zugeordnet (siehe Tabelle). Bei der Projektierung könnenMeldetexte und Meldeklasse geändert werden. Bei einer Änderung derMeldeklasse wird der Bausteinalgorithmus nicht beeinflusst.
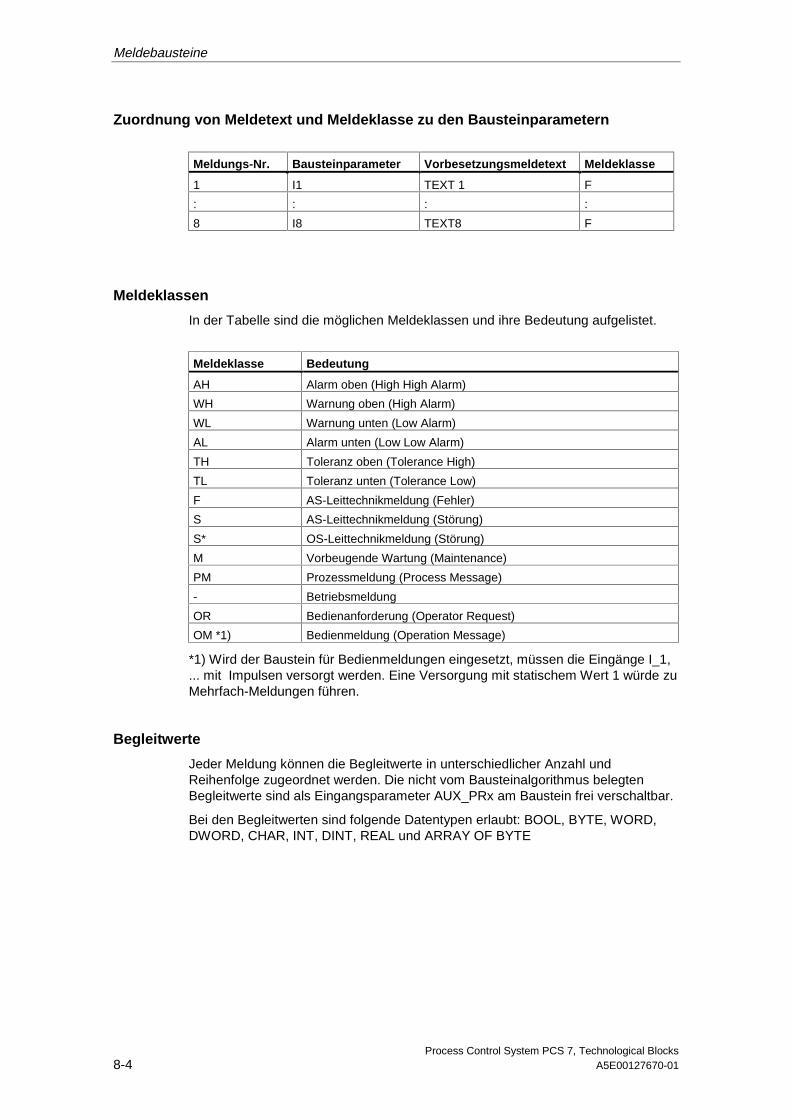
Meldebausteine
Process Control System PCS 7, Technological Blocks8-4 A5E00127670-01
Zuordnung von Meldetext und Meldeklasse zu den Bausteinparametern
Meldungs-Nr. Bausteinparameter Vorbesetzungsmeldetext Meldeklasse
1 I1 TEXT 1 F
: : : :
8 I8 TEXT8 F
Meldeklassen
In der Tabelle sind die möglichen Meldeklassen und ihre Bedeutung aufgelistet.
Meldeklasse Bedeutung
AH Alarm oben (High High Alarm)
WH Warnung oben (High Alarm)
WL Warnung unten (Low Alarm)
AL Alarm unten (Low Low Alarm)
TH Toleranz oben (Tolerance High)
TL Toleranz unten (Tolerance Low)
F AS-Leittechnikmeldung (Fehler)
S AS-Leittechnikmeldung (Störung)
S* OS-Leittechnikmeldung (Störung)
M Vorbeugende Wartung (Maintenance)
PM Prozessmeldung (Process Message)
- Betriebsmeldung
OR Bedienanforderung (Operator Request)
OM *1) Bedienmeldung (Operation Message)
*1) Wird der Baustein für Bedienmeldungen eingesetzt, müssen die Eingänge I_1,... mit Impulsen versorgt werden. Eine Versorgung mit statischem Wert 1 würde zuMehrfach-Meldungen führen.
Begleitwerte
Jeder Meldung können die Begleitwerte in unterschiedlicher Anzahl undReihenfolge zugeordnet werden. Die nicht vom Bausteinalgorithmus belegtenBegleitwerte sind als Eingangsparameter AUX_PRx am Baustein frei verschaltbar.
Bei den Begleitwerten sind folgende Datentypen erlaubt: BOOL, BYTE, WORD,DWORD, CHAR, INT, DINT, REAL und ARRAY OF BYTE
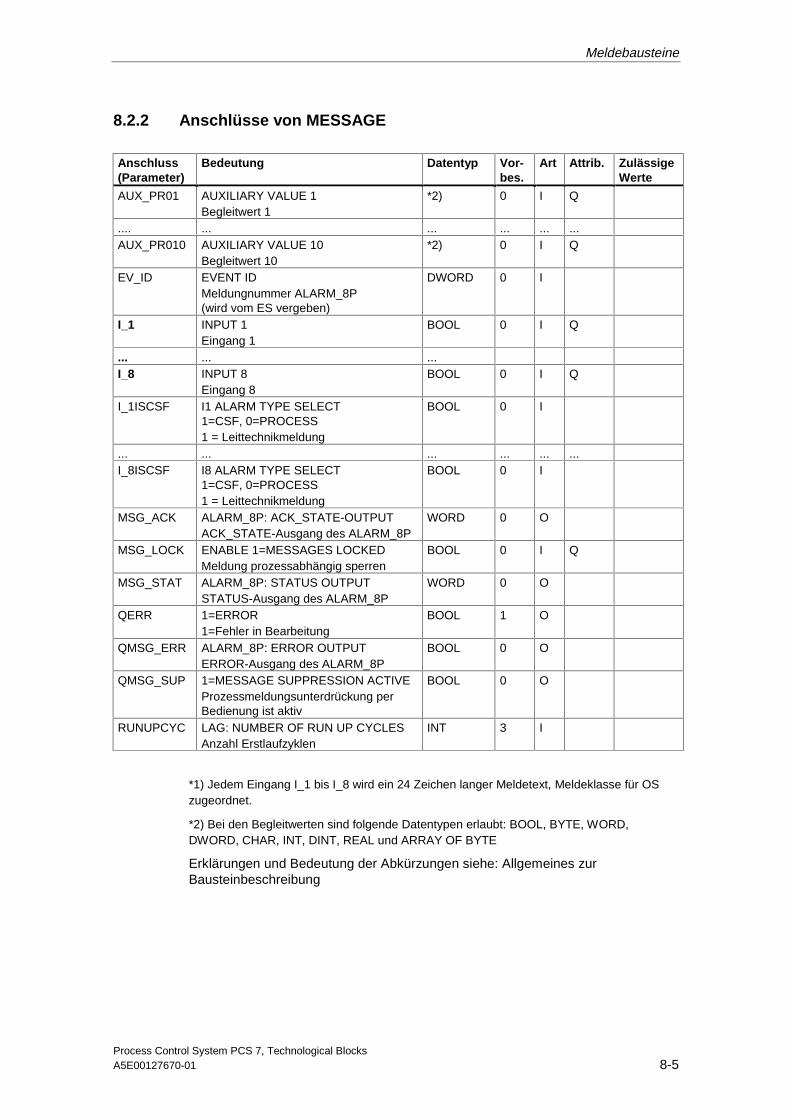
Meldebausteine
Process Control System PCS 7, Technological BlocksA5E00127670-01 8-5
8.2.2 Anschlüsse von MESSAGE
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attrib. ZulässigeWerte
AUX_PR01 AUXILIARY VALUE 1Begleitwert 1
*2) 0 I Q
.... ... ... ... ... ...AUX_PR010 AUXILIARY VALUE 10
Begleitwert 10*2) 0 I Q
EV_ID EVENT IDMeldungnummer ALARM_8P(wird vom ES vergeben)
DWORD 0 I
I_1 INPUT 1Eingang 1
BOOL 0 I Q
... ... ...I_8 INPUT 8
Eingang 8BOOL 0 I Q
I_1ISCSF I1 ALARM TYPE SELECT1=CSF, 0=PROCESS1 = Leittechnikmeldung
BOOL 0 I
... ... ... ... ... ...I_8ISCSF I8 ALARM TYPE SELECT
1=CSF, 0=PROCESS1 = Leittechnikmeldung
BOOL 0 I
MSG_ACK ALARM_8P: ACK_STATE-OUTPUTACK_STATE-Ausgang des ALARM_8P
WORD 0 O
MSG_LOCK ENABLE 1=MESSAGES LOCKEDMeldung prozessabhängig sperren
BOOL 0 I Q
MSG_STAT ALARM_8P: STATUS OUTPUTSTATUS-Ausgang des ALARM_8P
WORD 0 O
QERR 1=ERROR1=Fehler in Bearbeitung
BOOL 1 O
QMSG_ERR ALARM_8P: ERROR OUTPUTERROR-Ausgang des ALARM_8P
BOOL 0 O
QMSG_SUP 1=MESSAGE SUPPRESSION ACTIVEProzessmeldungsunterdrückung perBedienung ist aktiv
BOOL 0 O
RUNUPCYC LAG: NUMBER OF RUN UP CYCLESAnzahl Erstlaufzyklen
INT 3 I
*1) Jedem Eingang I_1 bis I_8 wird ein 24 Zeichen langer Meldetext, Meldeklasse für OSzugeordnet.
*2) Bei den Begleitwerten sind folgende Datentypen erlaubt: BOOL, BYTE, WORD,DWORD, CHAR, INT, DINT, REAL und ARRAY OF BYTE
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung

Meldebausteine
Process Control System PCS 7, Technological Blocks8-6 A5E00127670-01
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-1
9 Bausteine für Batch Flexible
9.1 Übersicht über die Batchbausteine
Wofür Batchbausteine ?
Die an einem Batchprozess beteiligten Apparate werden mit Hilfe des ASautomatisiert. Diese "Basisautomatisierung" wird AS-spezifisch mit CFC oder SFCerstellt. Die Rezeptsteuerung der Software BATCH flexible läuft im OS ab. Damitdie Rezeptsteuerung auf die Daten der Basisautomatisieung lesend/schreibendzugreifen kann, benötigt sie Schnittstellenbausteine. Deren Aufgabe besteht imRangieren von apparatespezifischen Daten der Basisautomatisierung, die inunterschiedlichen Bausteinen abgelegt sind, auf die der Rezeptsteuerungbekannten Schnittstellenbausteine. Diese Rangierung wird mit den AS-Strukturiermitteln durchgeführt (z.B. CFC, durch das Verschalten derentsprechenden Parameter). Die Zusammenhänge finden Sie im Bild dargestellt.Dabei steht die Abkürzung AF für "Automatisierungsfunktion"(im Beispiel"Rührersteuerung").
Basisautomatisierung
Der Rezepterstellung vorgelagert ist die Festlegung der Teilanlagenstruktur(Apparatestruktur) und der verwendbaren Automatisierungsfunktionen (AF)inklusive der notwendigen Daten für die AF-Parametermasken (auchBasisautomatisierung genannt). Diese Festlegungen erfolgen in derKonfigurierungsphase der Anlage und zwar mit Standard ES-Mitteln. Die Erstellungder eigentlichen Verarbeitungsbausteine der Automatisierungsfunktionen (dierezeptunabhängige Basisautomatisierung) erfolgt vom Anwender mit dem ES. DieSchnittstelle zur rezeptunabhängigen Basisautomatisierung bilden die folgendenBATCH flexible Bausteine:
• AF-Schnittstellenbausteine AF_n
- Jeder Verarbeitungsbaustein einer Automatisierungsfunktion besitzt eineneigenen AF-Schnittstellenbaustein, aus dem er die Rezeptparameter(Sollwerte) liest und in den er die Istwerte zur Visualisierung schreibt. DerEintrag der Rezeptparameter erfolgt durch die Rezeptsteuerung.
- Da die Anzahl der Soll- und Istparameter einer Automatisierungsfunktion jenach Anwendung schwankt, werden 4 Typen der AF-Schnittstellenbausteine zur Verfügung gestellt:
- AF_6 (mit je 6 Soll- und Istwerten)
- AF_12 (mit je 12 Soll- und Istwerten)
- AF_16S (mit je 16 Soll- und Istwerten)
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-2 A5E00127670-01
- AF_24 (mit je 24 Soll- und Istwerten)
• Transitions-Schnittstellenbausteine TRANS
- Ein Transitions-Schnittstellenbaustein ist apparatespezifisch und je 10analoge und binäre Transitionsparameter. Es können mehrere Instanzenkonfiguriert werden
• Apparatebelegungsbaustein UNIT
- Pro Apparat steht ein Belegungsbaustein zur Verfügung. DieRezeptsteuerung koordiniert die Apparatebelegung über diese Bausteine.
Basisautomatisierung mit Schnittstellenbausteinen
Im Bild wird das Prinzip des Zugriffs der BATCH flexible Software auf dieBasisautomatisierung dargestellt. Die Basisautomatisierung (Konfigurierung derAnlage) wird vom MSR-Techniker und Leittechnikspezialisten mit denStandardmitteln des ES durchgeführt. Für eine Rezeptfahrweise mit BATCHflexible müssen während der Basisautomatisierung zusätzlich die Schnittstellen fürdie Kommunikation zwischen Batchsystem und Basisautomatisierung angelegtwerden. Diese Schnittstelle besteht aus BATCH flexible spezifischenBausteintypen, die in 3 Klassen eingeteilt werden können:
• UNIT als Informationsspeicher zur Apparatebelegung durch dieRezeptsteuerung,
• AF_6/12/16S/24 als Schnittstelle zwischen Rezeptsteuerung undAutomatisierungsfunktion (AF) im AS,
• TRANS als Schnittstelle zwischen Prozess und Rezeptsteuerung.
Rezeptsteuerung und Apparatebelegung liegen im OS. Die Rezeptsteuerung lädteinen Rezeptparametersatz vom OS in den AF-Schnittstellenbaustein AF_n. DieAusgänge dieses Schnittstellenbausteins sind mit den Eingängen der AFverbunden (AF mit CFC realisiert), bzw. die Rezeptparameter werden von einemSFC aus den Ausgängen gelesen und auf die Eingänge derVerarbeitungsbausteine geschrieben (AF mit SFC). Die AF läuft dann selbstständigab und liefert ihre Rückmeldungen an den zugehörigen AF-Schnittstellenbaustein.OS überwacht diese Parameter und 'weckt' die Rezeptsteuerung, sobald sich derRückmeldungsparameter verändert. In der Rezeptsteuerung wird der Zustandvisualisert und die weitere Bearbeitung durchgeführt. Die Rezeptsteuerung bildetdie Transitionsbedingung, indem die relevanten Parameter des TRANS-Schnittstellenbausteins (im AS) gelesen werden. Ist die Transitionsbedingungerfüllt, so wird der nächste Rezeptparametersatz in den zugehörigen AF-Schnittstellenbaustein geschrieben. Da mehrere Chargen parallel ablaufenkönnen, wird die Verwaltung der Apparate über den im AS liegenden UNIT-Baustein geregelt.
Folgende Funktionen werden durch diese Bausteine realisiert:
• UNIT-Schnittstellenbaustein zur Apparatebelegung. Eine Apparatebelegung /-freigabe ist erforderlich, da ein Apparat aus Auslastungsgründen nicht für diegesamte Laufzeit eines Rezeptes blockiert werden darf, falls er im weiterenRezeptverlauf nicht mehr benötigt wird. Dieses trifft in der Regel beiKonstellationen mit Vorlagen-Reaktor zu. Zur Apparatebelegung gibt es denBausteintyp UNIT, der mit dem CFC instanziiert und parametriert wird. Somitlegt der CFC auch fest, in welches AS die UNIT-Bausteininstanz geladen
Bausteine für Batch Flexible
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-3
wird.In der Basisautomatisierung wird pro Apparat mit dem CFC ein UNIT miteinem Instanznamen (Empfehlung <= 16 Zeichen) instantiiert. Da mit einemAS u.U. mehrere Apparate automatisiert werden können, müssen auchmehrere UNIT-Bausteininstanzen pro AS konfiguriert und geladen werden. DerProjekteur trägt die Apparatebezeichnung (Empfehlung: Instanznamen desUNIT-Bausteins) in den Parameter UNITNAME ein. Beim Rezeptablauf nutztdie Rezeptsteuerung den Baustein zur Apparatebelegung bzw. dieApparatebelegungsliste zur Visualisierung des Anlagenzustands.
• AF-Schnittstellenbausteine. Da die Anzahl der Rezept-Parameter jeAutomatisierungsfunktion je nach Anwendung schwankt, werden vier Typendieser AF-Schnittstellenbausteine realisiert; AF_6 (mit 6 Rezeptparameternund 6 Prozesswerten für Istwertmeldungen), AF_12 (mit 12 Parametern und 12Prozesswerten), AF_16S (mit 16 Parametern und 16 Prozesswerten) undAF_24 (mit 24 Parametern und 24 Prozesswerten).Während der Basisautomatisierung werden Instanzen dieser 4 Typen mit demCFC angelegt und in das AS geladen.Während der Produktion schreibt und liest die Rezeptsteuerung von diesenInstanzen, die als Stellvertreter für die dahinterliegendenAutomatisierungsfunktionen gesehen werden müssen. DieAutomatisierungsfunktionen werden mit Standard ES-Mitteln (SFC, CFC)während der Basisautomatisierung konfiguriert. Die Rezeptparameter werdenvon der Rezeptsteuerung in die AF_6/12/16S/24 Schnittstellenbausteine (sieheAF_n-Anschlüsse) geschrieben. Dieser AF_Schnittstellenbaustein stellt die'Verteilerstelle' in der Basisautomatisierung dar. Prinzipiell gibt es 2Möglichkeiten:
- Der AF-Verarbeitungsbaustein ist ein SFC und dieser holt sich die Werteaus dem AF_6/12/16S/24 Schnittstellen-Baustein und schreibt sie in dieStandardfunktionsbausteine. Gleichzeitig ist der SFC für die Belegung derStandardfunktionsbausteine bei shared resources zuständig (über Eintragvon Chargenname BA_NA, Schrittnummer STEP_NO, lfd.Chargennummer BA_ID und Belegung OCCUPIED). Daraus resultiert einedynamische Zuordnung zwischen AF-Schnittstellenbaustein undVerarbeitungsbaustein.
- Die Standardfunktionsbausteine werden direkt mit den entsprechendenZellen AF-Schnittstellenbausteins verbunden (im CFC). Eine Belegung istin diesem Fall nicht notwendig (Holprinzip). Daraus resultiert eine statischeZuordnung zwischen AF-Schnittstellenbaustein undVerarbeitungsbaustein.
• TRANS-Schnittstellenbaustein. Als Schnittstelle zwischen Rezeptsteuerungund dem Prozess wird ein TRANS-Schnittstellenbaustein genutzt. Da dieAnzahl der Transitionsparameter je Apparat je nach Anwendung schwankt,können pro Apparat mehrere Instanzen des Typs TRANS mit dem CFCkonfiguriert werden. Jeweils die Hälfte sind analoge bzw. binäreTransitionsparameter. Während der Basisautomatisierung werden Instanzendieses Typs mit dem CFC angelegt und in das AS geladen. DieRezeptsteuerung liest aktuelle Werte aus dem Prozess über dieseSchnittstelle, um die Transitionsbedingungen für die Übergänge von einer AFzur nächsten AF zu bilden.
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-4 A5E00127670-01
9.2 AF_6: Automatisierungsfunktion-Schnittstelle BATCHflexible
9.2.1 Beschreibung von AF_6
Objektname (Art + Nummer)
FB 31
Aufrufende OBs
Der Baustein wird im selben OB und vor dem Baustein der am schnellstenlaufenden Basisautomatisierung eingebaut, der über den AF_6 Sollwerte bezieht.
Funktion
Der Baustein wird als Schnittstelle für Sollwerte und Istwerte der BATCH flexibleSoftware im AS eingesetzt. Er besitzt je nach Ausprägung (siehe untere Tabelle)Anschlüsse für bis zu 6 Sollwerte und 6 Istwerte.
Ausprägung Art Nr. Bedeutung
AF_6 FB 31 Anschluss für 6 Sollwerte und 6 Istwerte
Arbeitsweise
Er leitet die bis zu 6 von dem OS kommende Sollwerte der Rezeptsteuerung an dieAS-seitige Automatisierungsfunktion weiter, sowie die AS-seitig angeschlossenen6 Prozesswerte zurück an die Rezeptsteuerung im OS.
Verwenden Sie die Ausprägung mit möglichst kleinster Anzahl der Eingänge, umSpeicherplatz zu sparen.
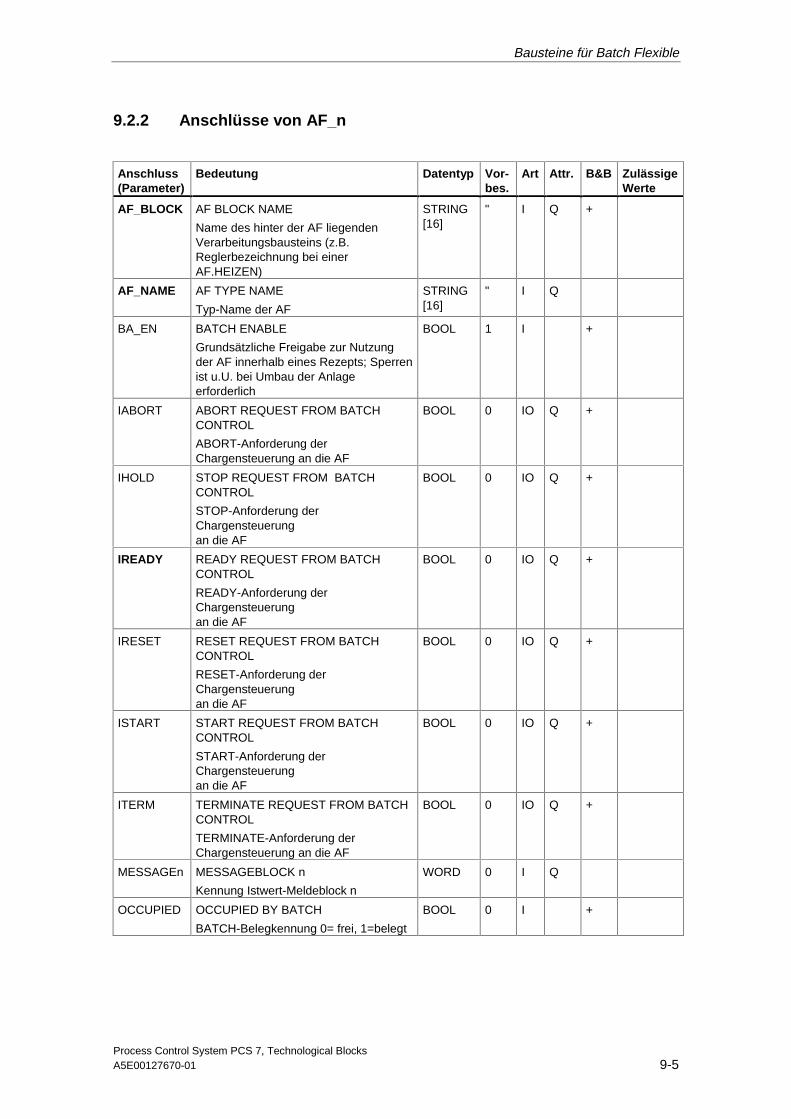
Bausteine für Batch Flexible
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-5
9.2.2 Anschlüsse von AF_n
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
AF_BLOCK AF BLOCK NAME
Name des hinter der AF liegendenVerarbeitungsbausteins (z.B.Reglerbezeichnung bei einerAF.HEIZEN)
STRING[16]
" I Q +
AF_NAME AF TYPE NAME
Typ-Name der AF
STRING[16]
" I Q
BA_EN BATCH ENABLE
Grundsätzliche Freigabe zur Nutzungder AF innerhalb eines Rezepts; Sperrenist u.U. bei Umbau der Anlageerforderlich
BOOL 1 I +
IABORT ABORT REQUEST FROM BATCHCONTROL
ABORT-Anforderung derChargensteuerung an die AF
BOOL 0 IO Q +
IHOLD STOP REQUEST FROM BATCHCONTROL
STOP-Anforderung derChargensteuerungan die AF
BOOL 0 IO Q +
IREADY READY REQUEST FROM BATCHCONTROL
READY-Anforderung derChargensteuerungan die AF
BOOL 0 IO Q +
IRESET RESET REQUEST FROM BATCHCONTROL
RESET-Anforderung derChargensteuerungan die AF
BOOL 0 IO Q +
ISTART START REQUEST FROM BATCHCONTROL
START-Anforderung derChargensteuerungan die AF
BOOL 0 IO Q +
ITERM TERMINATE REQUEST FROM BATCHCONTROL
TERMINATE-Anforderung derChargensteuerung an die AF
BOOL 0 IO Q +
MESSAGEn MESSAGEBLOCK n
Kennung Istwert-Meldeblock n
WORD 0 I Q
OCCUPIED OCCUPIED BY BATCH
BATCH-Belegkennung 0= frei, 1=belegt
BOOL 0 I +
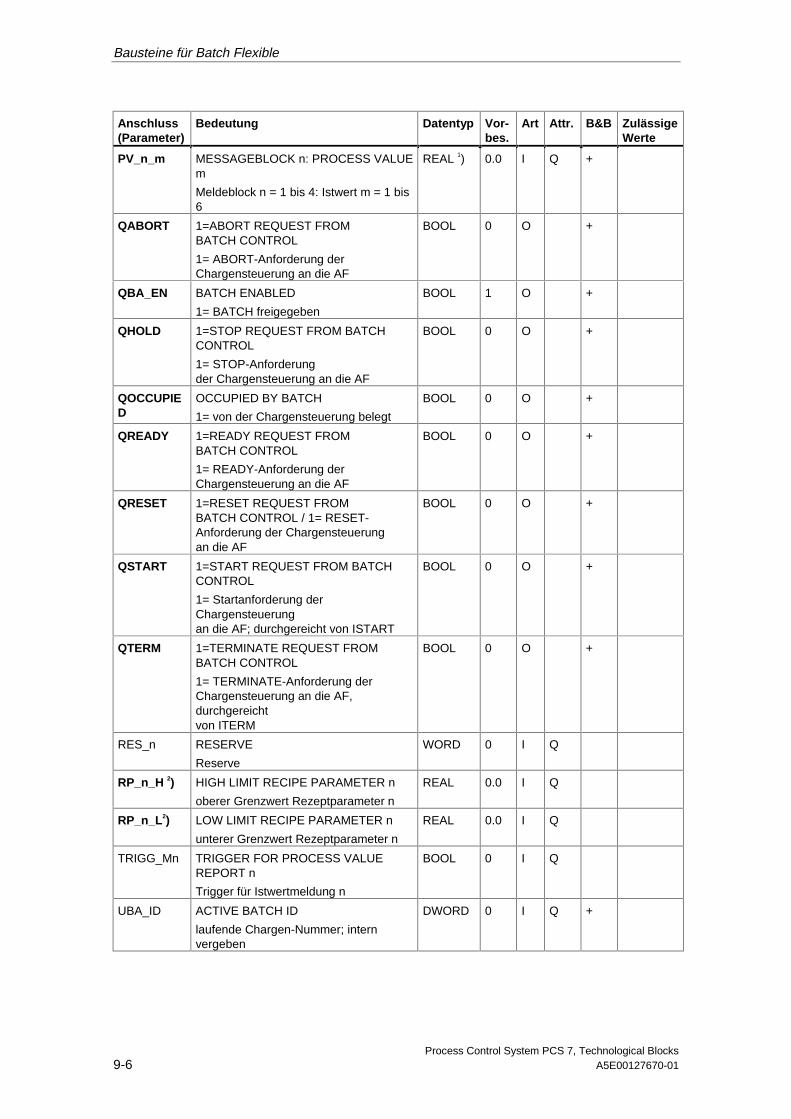
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-6 A5E00127670-01
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
PV_n_m MESSAGEBLOCK n: PROCESS VALUEm
Meldeblock n = 1 bis 4: Istwert m = 1 bis6
REAL 1) 0.0 I Q +
QABORT 1=ABORT REQUEST FROMBATCH CONTROL
1= ABORT-Anforderung derChargensteuerung an die AF
BOOL 0 O +
QBA_EN BATCH ENABLED
1= BATCH freigegeben
BOOL 1 O +
QHOLD 1=STOP REQUEST FROM BATCHCONTROL
1= STOP-Anforderungder Chargensteuerung an die AF
BOOL 0 O +
QOCCUPIED
OCCUPIED BY BATCH
1= von der Chargensteuerung belegt
BOOL 0 O +
QREADY 1=READY REQUEST FROMBATCH CONTROL
1= READY-Anforderung derChargensteuerung an die AF
BOOL 0 O +
QRESET 1=RESET REQUEST FROMBATCH CONTROL / 1= RESET-Anforderung der Chargensteuerungan die AF
BOOL 0 O +
QSTART 1=START REQUEST FROM BATCHCONTROL
1= Startanforderung derChargensteuerungan die AF; durchgereicht von ISTART
BOOL 0 O +
QTERM 1=TERMINATE REQUEST FROMBATCH CONTROL
1= TERMINATE-Anforderung derChargensteuerung an die AF,durchgereichtvon ITERM
BOOL 0 O +
RES_n RESERVE
Reserve
WORD 0 I Q
RP_n_H 2) HIGH LIMIT RECIPE PARAMETER n
oberer Grenzwert Rezeptparameter n
REAL 0.0 I Q
RP_n_L2) LOW LIMIT RECIPE PARAMETER n
unterer Grenzwert Rezeptparameter n
REAL 0.0 I Q
TRIGG_Mn TRIGGER FOR PROCESS VALUEREPORT n
Trigger für Istwertmeldung n
BOOL 0 I Q
UBA_ID ACTIVE BATCH ID
laufende Chargen-Nummer; internvergeben
DWORD 0 I Q +
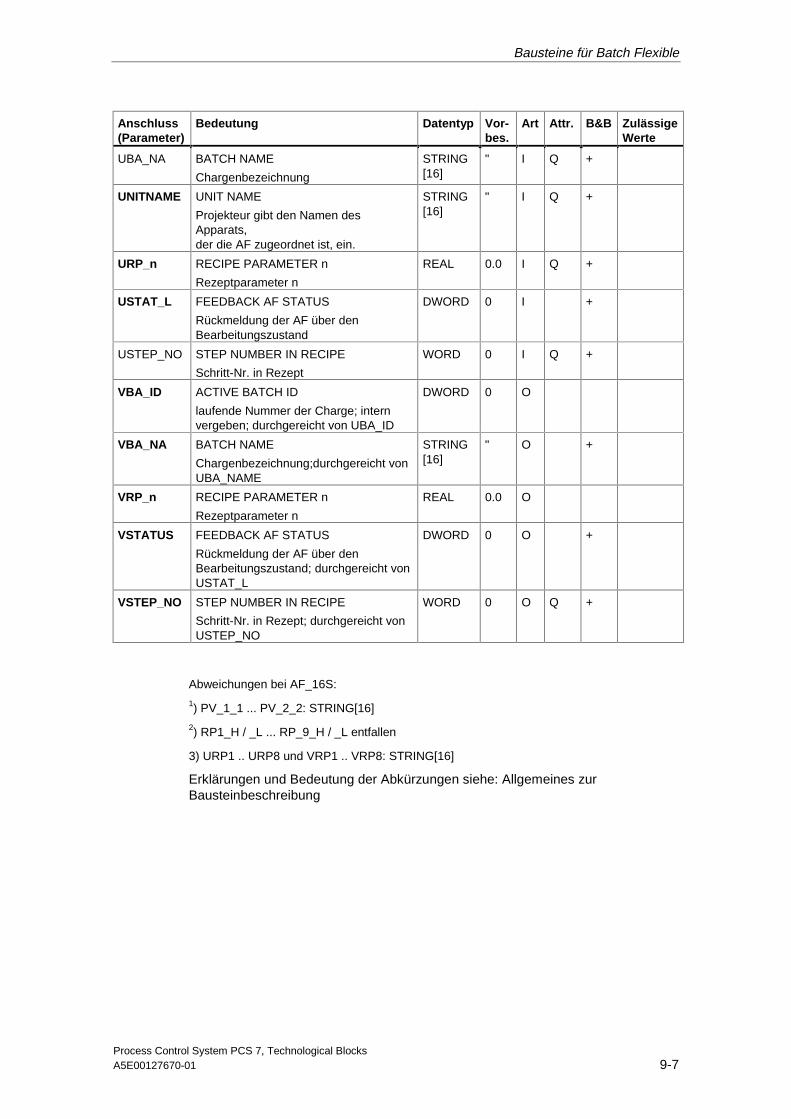
Bausteine für Batch Flexible
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-7
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
UBA_NA BATCH NAME
Chargenbezeichnung
STRING[16]
" I Q +
UNITNAME UNIT NAME
Projekteur gibt den Namen desApparats,der die AF zugeordnet ist, ein.
STRING[16]
" I Q +
URP_n RECIPE PARAMETER n
Rezeptparameter n
REAL 0.0 I Q +
USTAT_L FEEDBACK AF STATUS
Rückmeldung der AF über denBearbeitungszustand
DWORD 0 I +
USTEP_NO STEP NUMBER IN RECIPE
Schritt-Nr. in Rezept
WORD 0 I Q +
VBA_ID ACTIVE BATCH ID
laufende Nummer der Charge; internvergeben; durchgereicht von UBA_ID
DWORD 0 O
VBA_NA BATCH NAME
Chargenbezeichnung;durchgereicht vonUBA_NAME
STRING[16]
" O +
VRP_n RECIPE PARAMETER n
Rezeptparameter n
REAL 0.0 O
VSTATUS FEEDBACK AF STATUS
Rückmeldung der AF über denBearbeitungszustand; durchgereicht vonUSTAT_L
DWORD 0 O +
VSTEP_NO STEP NUMBER IN RECIPE
Schritt-Nr. in Rezept; durchgereicht vonUSTEP_NO
WORD 0 O Q +
Abweichungen bei AF_16S:
1) PV_1_1 ... PV_2_2: STRING[16]
2) RP1_H / _L ... RP_9_H / _L entfallen
3) URP1 .. URP8 und VRP1 .. VRP8: STRING[16]
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
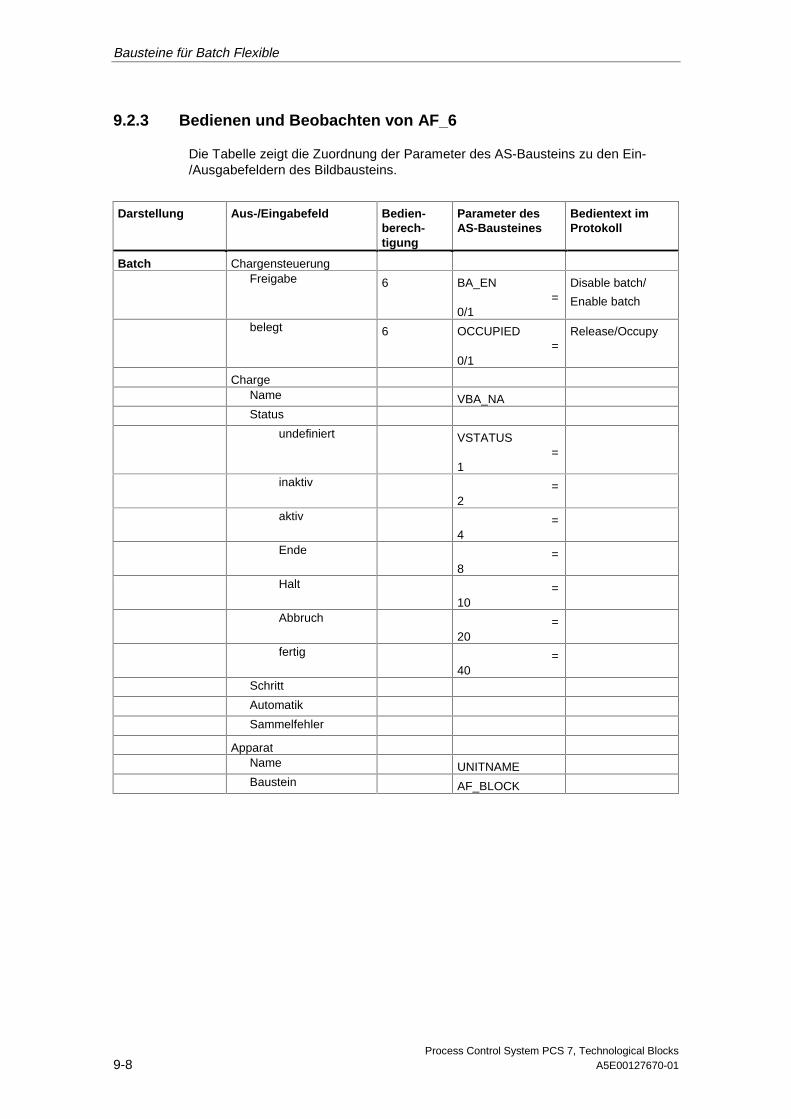
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-8 A5E00127670-01
9.2.3 Bedienen und Beobachten von AF_6
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe 6 BA_EN
=0/1
Disable batch/
Enable batch
belegt 6 OCCUPIED=
0/1
Release/Occupy
ChargeName VBA_NAStatus
undefiniert VSTATUS=
1inaktiv =
2aktiv =
4Ende =
8Halt =
10Abbruch =
20fertig =
40Schritt
Automatik
Sammelfehler
ApparatName UNITNAMEBaustein AF_BLOCK
Bausteine für Batch Flexible
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-9
9.3 AF_12: Automatisierungsfunktion-Schnittstelle BATCHflexible
9.3.1 Beschreibung von AF_12
Objektname (Art + Nummer)
FB 32
Aufrufende OBs
Der Baustein wird im selben OB und vor dem Baustein der am schnellstenlaufenden Basisautomatisierung eingebaut, der über den AF_12 Sollwerte bezieht.
Funktion
Der Baustein wird als Schnittstelle für Sollwerte und Istwerte der BATCH flexibleSoftware im AS eingesetzt. Er besitzt je nach Ausprägung (siehe untere Tabelle)Anschlüsse für bis zu 12 Sollwerte und 12 Istwerte.
Ausprägung Art Nr. Bedeutung
AF_12 FB 32 Anschluss für 12 Sollwerte und 12 Istwerte
Arbeitsweise
Er leitet die bis zu 12 von dem OS kommende Sollwerte der Rezeptsteuerung andie AS-seitige Automatisierungsfunktion weiter, sowie die AS-seitigangeschlossenen 12 Prozesswerte zurück an die Rezeptsteuerung im OS.
Verwenden Sie die Ausprägung mit möglichst kleinster Anzahl der Eingänge, umSpeicherplatz zu sparen.
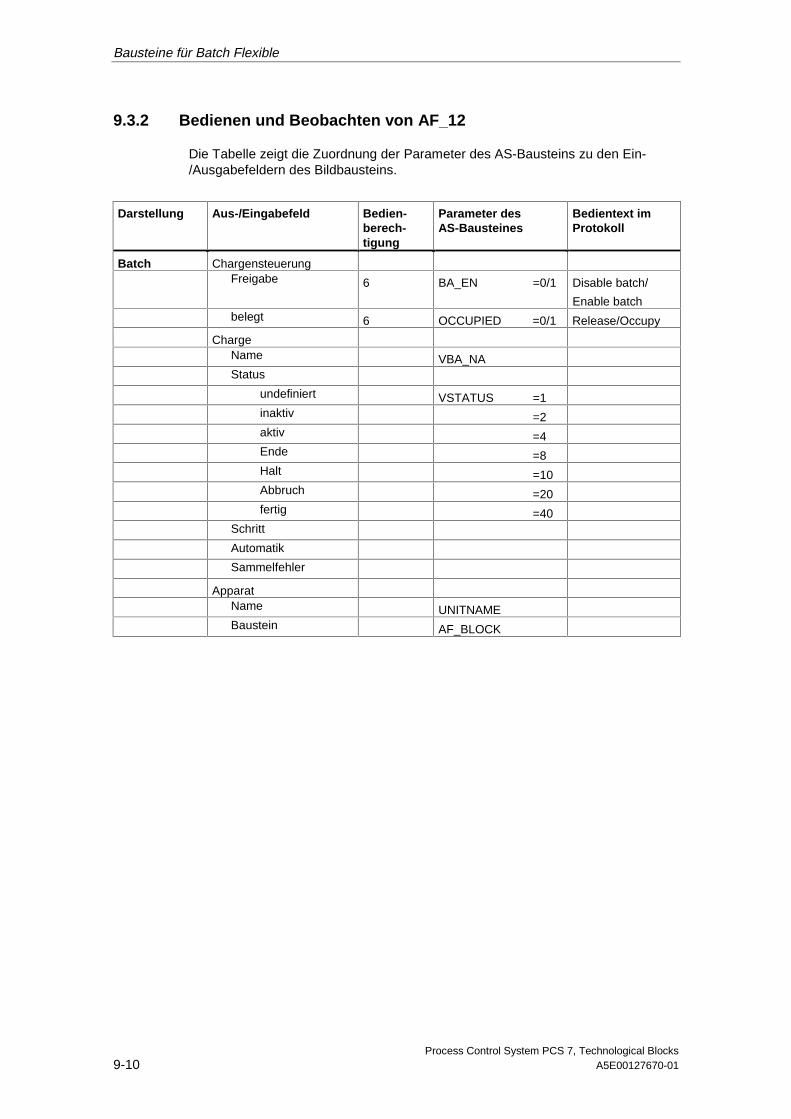
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-10 A5E00127670-01
9.3.2 Bedienen und Beobachten von AF_12
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe 6 BA_EN =0/1 Disable batch/
Enable batchbelegt 6 OCCUPIED =0/1 Release/Occupy
ChargeName VBA_NAStatus
undefiniert VSTATUS =1inaktiv =2aktiv =4Ende =8Halt =10Abbruch =20fertig =40
Schritt
Automatik
Sammelfehler
ApparatName UNITNAMEBaustein AF_BLOCK
Bausteine für Batch Flexible
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-11
9.4 AF_16S: Automatisierungsfunktion-Schnittstelle BATCHflexible
9.4.1 Beschreibung von AF_16S
Objektname (Art + Nummer)
FB 57
Aufrufende OBs
Der Baustein wird im selben OB und vor dem Baustein der am schnellstenlaufenden Basisautomatisierung eingebaut, der über den AF_16S Sollwertebezieht.
Funktion
Der Baustein wird als Schnittstelle für Sollwerte und Istwerte der BATCH flexibleSoftware im AS eingesetzt. Er besitzt je nach Ausprägung (siehe untere Tabelle)Anschlüsse für bis zu 16 Sollwerte und 16 Istwerte.
Ausprägung Art Nr. Bedeutung
AF_16S FB 57 Anschluss für 16 Sollwerte und 16 Istwerte
Arbeitsweise
Er leitet die bis zu 16 von dem OS kommende Sollwerte der Rezeptsteuerung andie AS-seitige Automatisierungsfunktion weiter, sowie die AS-seitigangeschlossenen 16 Prozesswerte zurück an die Rezeptsteuerung im OS.
Verwenden Sie die Ausprägung mit möglichst kleinster Anzahl der Eingänge, umSpeicherplatz zu sparen.
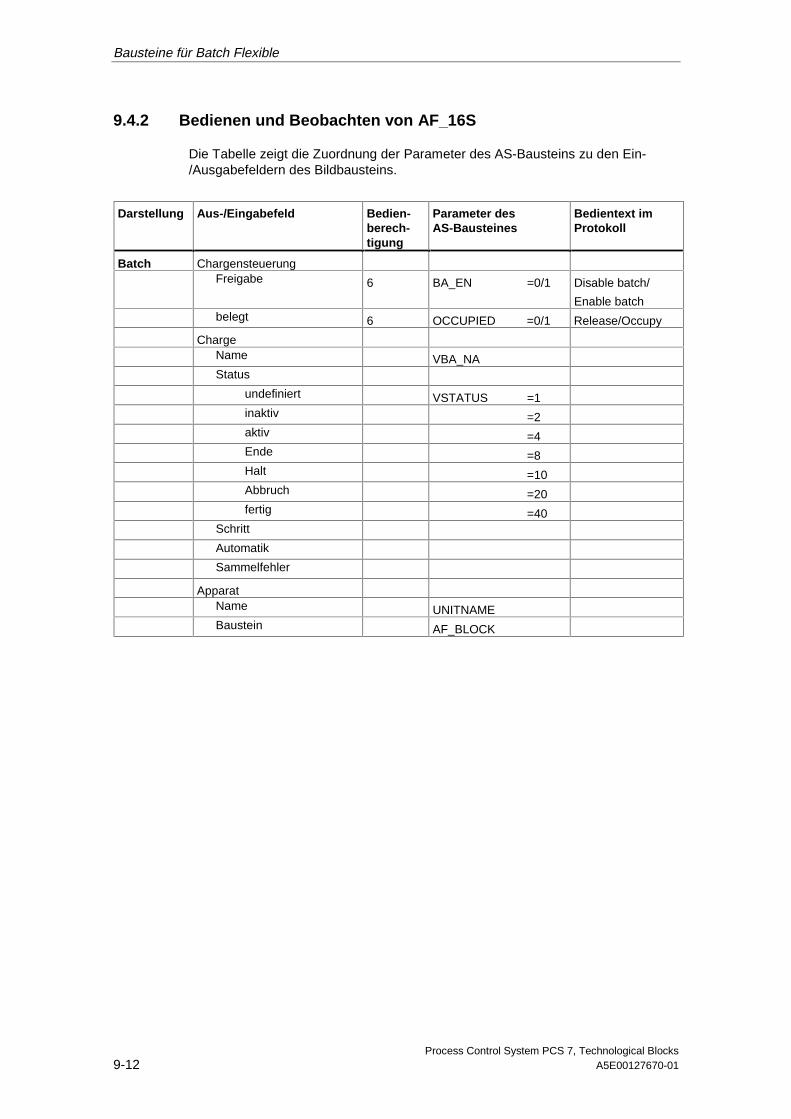
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-12 A5E00127670-01
9.4.2 Bedienen und Beobachten von AF_16S
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe 6 BA_EN =0/1 Disable batch/
Enable batchbelegt 6 OCCUPIED =0/1 Release/Occupy
ChargeName VBA_NAStatus
undefiniert VSTATUS =1inaktiv =2aktiv =4Ende =8Halt =10Abbruch =20fertig =40
Schritt
Automatik
Sammelfehler
ApparatName UNITNAMEBaustein AF_BLOCK
Bausteine für Batch Flexible
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-13
9.5 AF_24: Automatisierungsfunktion-Schnittstelle BATCHflexible
9.5.1 Beschreibung von AF_24
Objektname (Art + Nummer)
FB 33
Aufrufende OBs
Der Baustein wird im selben OB und vor dem Baustein der am schnellstenlaufenden Basisautomatisierung eingebaut, der über den AF_24 Sollwerte bezieht.
Funktion
Der Baustein wird als Schnittstelle für Sollwerte und Istwerte der BATCH flexibleSoftware im AS eingesetzt. Er besitzt je nach Ausprägung (siehe untere Tabelle)Anschlüsse für bis zu 24 Sollwerte und 24 Istwerte.
Ausprägung Typ Nr. Bedeutung
AF_24 FB 33 Anschluss für 24 Sollwerte und 24 Istwerte
Arbeitsweise
Er leitet die bis zu 24 von dem OS kommende Sollwerte der Rezeptsteuerung andie AS-seitige Automatisierungsfunktion weiter, sowie die AS-seitigangeschlossenen 24 Prozesswerte zurück an die Rezeptsteuerung im OS.
Verwenden Sie die Ausprägung mit möglichst kleinster Anzahl der Eingänge, umSpeicherplatz zu sparen.
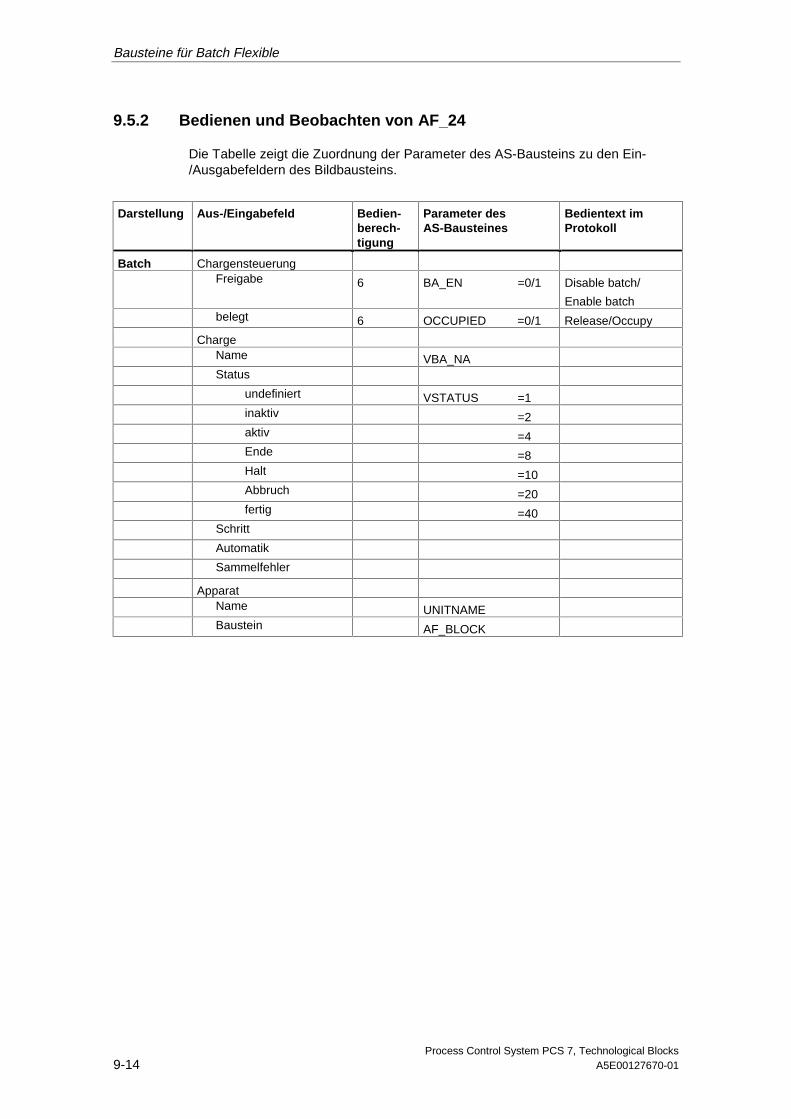
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-14 A5E00127670-01
9.5.2 Bedienen und Beobachten von AF_24
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe 6 BA_EN =0/1 Disable batch/
Enable batchbelegt 6 OCCUPIED =0/1 Release/Occupy
ChargeName VBA_NAStatus
undefiniert VSTATUS =1inaktiv =2aktiv =4Ende =8Halt =10Abbruch =20fertig =40
Schritt
Automatik
Sammelfehler
ApparatName UNITNAMEBaustein AF_BLOCK
Bausteine für Batch Flexible
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-15
9.6 TRANS: Transition-Schnittstelle BATCH flexible
9.6.1 Beschreibung von TRANS
Objektname (Art + Nummer)
FB 55
Aufrufende OBs
Der Baustein wird im selben OB und nach dem letzten Baustein der am schnellstenlaufenden Basisautomatisierung eingebaut, dessen Daten alsTransitionsbedingungen auf den TRANS verschaltet sind.
Funktion
Der Baustein wird als Schnittstelle für Transitionsbedingungen der BATCH flexibleSoftware im AS eingesetzt.
Arbeitsweise
Der Baustein wird mit jeweils bis zu 10 boolschen und 10 analogenTransitionsparametern aus der Basisautomatisierung verschaltet. Er stellt diese derRezeptsteuerung von BATCH flexible zur Verfügung.
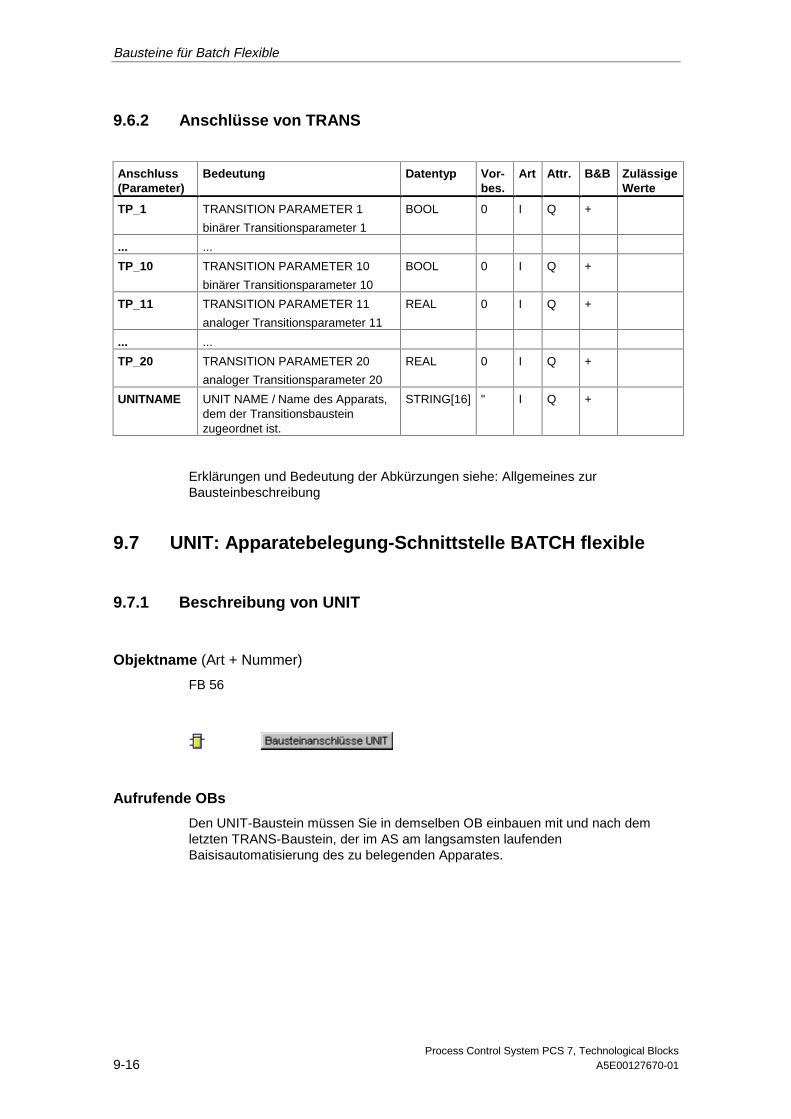
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-16 A5E00127670-01
9.6.2 Anschlüsse von TRANS
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
TP_1 TRANSITION PARAMETER 1
binärer Transitionsparameter 1
BOOL 0 I Q +
... ...
TP_10 TRANSITION PARAMETER 10
binärer Transitionsparameter 10
BOOL 0 I Q +
TP_11 TRANSITION PARAMETER 11
analoger Transitionsparameter 11
REAL 0 I Q +
... ...
TP_20 TRANSITION PARAMETER 20
analoger Transitionsparameter 20
REAL 0 I Q +
UNITNAME UNIT NAME / Name des Apparats,dem der Transitionsbausteinzugeordnet ist.
STRING[16] " I Q +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
9.7 UNIT: Apparatebelegung-Schnittstelle BATCH flexible
9.7.1 Beschreibung von UNIT
Objektname (Art + Nummer)
FB 56
Aufrufende OBs
Den UNIT-Baustein müssen Sie in demselben OB einbauen mit und nach demletzten TRANS-Baustein, der im AS am langsamsten laufendenBaisisautomatisierung des zu belegenden Apparates.
Bausteine für Batch Flexible
Process Control System PCS 7, Technological BlocksA5E00127670-01 9-17
Funktion
Er dient der Chargensteuerung als Apparate-Stellvertreter für dessenBelegungsverwaltung. Der Apparat (vertreten durch einen UNIT-Baustein) mussnicht für die Gesamtdauer der Chargenbearbeitung von dieser belegt werden. Erkann nach Beenden seiner Aufgabe innerhalb einer Charge anschließend für eineandere Charge bereitgestellt werden.
Arbeitsweise
Der Baustein wird von der Chargensteuerung eingesetzt, um die Belegung deszugeordneten Apparates zu verwalten.Der Algorithmus des UNIT-Bausteins transferiert den Wert vom Eingang UBA_IDzum Ausgang VBA_ID nur wenn UBA_ID=0 oder VBA_ID=0. Die Werte habenfolgende Bedeutung:UBA_IB=0 -> Apparat freigeben,
VBA_ID=0 -> Apparat ist frei,
UBA_ID>0 -> Apparat durch Charge mit Nummer UBA_ID belegen,
VBA_ID>0 -> Apparat ist durch Charge mit Nummer VBA_ID belegt.Die Chargensteuerung, die den Apparat belegen möchte, erledigt dies wie folgt:
• Sie beginnt die Überwachung von VBA_ID (aktive Belegung).
• Wenn VBA_ID=0 (der Apparat frei ist) wird in UBA_ID die eigeneChargennummer eingetragen (Belegungswunsch).
• Wenn VBA_ID=eigene Chargennummer, so ist die Belegung erfolgt und dieÜberwachung von VBA_ID kann beendet werden. Im weiteren Verlauf werdendie Rezept-/Prozessdaten über den entsprechende SchnittstellenbausteinTRANS und AF_n gelesen bzw. geschrieben.
• Anderenfalls ist die Belegung nicht wirksam geworden und die Überwachungvon VBA_ID wird fortgesetzt.
• Nach Beenden der Apparatbelegung schreibt die ChargensteuerungUBA_ID=0 und gibt damit den Apparat frei.
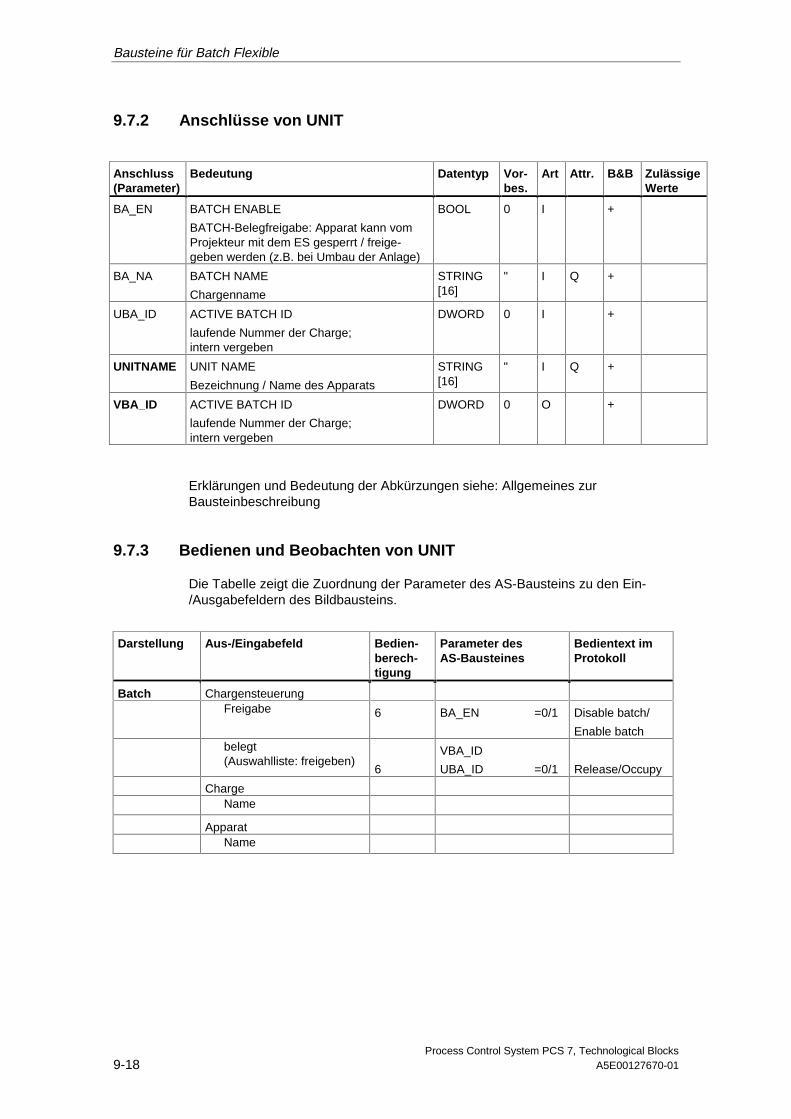
Bausteine für Batch Flexible
Process Control System PCS 7, Technological Blocks9-18 A5E00127670-01
9.7.2 Anschlüsse von UNIT
Anschluss(Parameter)
Bedeutung Datentyp Vor-bes.
Art Attr. B&B ZulässigeWerte
BA_EN BATCH ENABLE
BATCH-Belegfreigabe: Apparat kann vomProjekteur mit dem ES gesperrt / freige-geben werden (z.B. bei Umbau der Anlage)
BOOL 0 I +
BA_NA BATCH NAME
Chargenname
STRING[16]
" I Q +
UBA_ID ACTIVE BATCH ID
laufende Nummer der Charge;intern vergeben
DWORD 0 I +
UNITNAME UNIT NAME
Bezeichnung / Name des Apparats
STRING[16]
" I Q +
VBA_ID ACTIVE BATCH ID
laufende Nummer der Charge;intern vergeben
DWORD 0 O +
Erklärungen und Bedeutung der Abkürzungen siehe: Allgemeines zurBausteinbeschreibung
9.7.3 Bedienen und Beobachten von UNIT
Die Tabelle zeigt die Zuordnung der Parameter des AS-Bausteins zu den Ein-/Ausgabefeldern des Bildbausteins.
Darstellung Aus-/Eingabefeld Bedien-berech-tigung
Parameter desAS-Bausteines
Bedientext imProtokoll
Batch ChargensteuerungFreigabe 6 BA_EN =0/1 Disable batch/
Enable batchbelegt(Auswahlliste: freigeben)
6
VBA_ID
UBA_ID =0/1 Release/Occupy
ChargeName
ApparatName
Process Control System PCS 7, Technological BlocksA5E00127670-01 A-1
A Anhang
A.1 Technische Daten
Die technischen Daten gelten für die Bibliothek PCS 7 Technological Blocks.
Es bedeuten:
Baustein-Typname
Der symbolische Bezeichner in der Symboltabelle der Bibliothek für den jeweiligenFB bzw. FC. Er muss im Projekt eindeutig sein.
FB/FC-Nr.
Bausteinnummer.
Typische Laufzeit
Die Zeit, die von der CPU zur Bearbeitung des zugehörigen Bausteinprogrammsim Normalfall benötigt wird ( z.B. im Fall eines Treibers die Bearbeitungszeit imWeckalarm-Organisationsbaustein (OB), ohne Meldungserzeugung beiKanalfehler).
In unten stehender Tabelle finden Sie die Laufzeiten in einer CPU S7 414-2 DP6ES7414-2XG02-0AB0, und S7 416-2 DP 6ES7416-2XK01-0AB0. Bei anderenCPUs ist die Laufzeit von deren Performance abhängig.
Bausteinlänge
Speicherbedarf des Programmcodes, einmalig pro Bausteintyp.
Instanzdatenlänge
Speicherbedarf eines Instanz-DB
Temporärer Speicher
Der bei einem Aufruf des Bausteins in einer Ablaufebene benötigteLokaldatenspeicher. Dieser ist CPU-spezifisch begrenzt, und dessenÜberschreitung führt zum CPU-Stopp. Sie müssen diesen in der CPU-Konfiguration überprüfen und ggf. auf die OBs nach tatsächlichem Bedarfumverteilen.
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
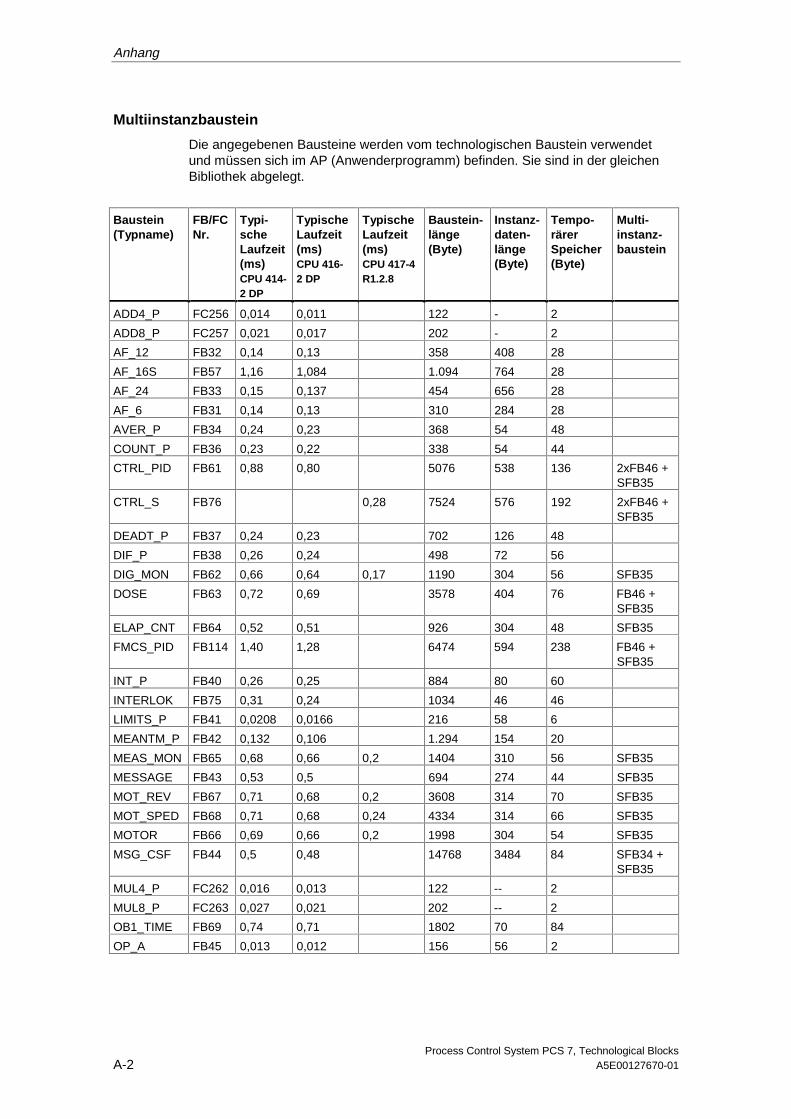
Anhang
Process Control System PCS 7, Technological BlocksA-2 A5E00127670-01
Multiinstanzbaustein
Die angegebenen Bausteine werden vom technologischen Baustein verwendetund müssen sich im AP (Anwenderprogramm) befinden. Sie sind in der gleichenBibliothek abgelegt.
Baustein(Typname)
FB/FCNr.
Typi-scheLaufzeit(ms)CPU 414-2 DP
TypischeLaufzeit(ms)CPU 416-2 DP
TypischeLaufzeit(ms)CPU 417-4R1.2.8
Baustein-länge(Byte)
Instanz-daten-länge(Byte)
Tempo-rärerSpeicher(Byte)
Multi-instanz-baustein
ADD4_P FC256 0,014 0,011 122 - 2
ADD8_P FC257 0,021 0,017 202 - 2
AF_12 FB32 0,14 0,13 358 408 28
AF_16S FB57 1,16 1,084 1.094 764 28
AF_24 FB33 0,15 0,137 454 656 28
AF_6 FB31 0,14 0,13 310 284 28
AVER_P FB34 0,24 0,23 368 54 48
COUNT_P FB36 0,23 0,22 338 54 44
CTRL_PID FB61 0,88 0,80 5076 538 136 2xFB46 +SFB35
CTRL_S FB76 0,28 7524 576 192 2xFB46 +SFB35
DEADT_P FB37 0,24 0,23 702 126 48
DIF_P FB38 0,26 0,24 498 72 56
DIG_MON FB62 0,66 0,64 0,17 1190 304 56 SFB35
DOSE FB63 0,72 0,69 3578 404 76 FB46 +SFB35
ELAP_CNT FB64 0,52 0,51 926 304 48 SFB35
FMCS_PID FB114 1,40 1,28 6474 594 238 FB46 +SFB35
INT_P FB40 0,26 0,25 884 80 60
INTERLOK FB75 0,31 0,24 1034 46 46
LIMITS_P FB41 0,0208 0,0166 216 58 6
MEANTM_P FB42 0,132 0,106 1.294 154 20
MEAS_MON FB65 0,68 0,66 0,2 1404 310 56 SFB35
MESSAGE FB43 0,53 0,5 694 274 44 SFB35
MOT_REV FB67 0,71 0,68 0,2 3608 314 70 SFB35
MOT_SPED FB68 0,71 0,68 0,24 4334 314 66 SFB35
MOTOR FB66 0,69 0,66 0,2 1998 304 54 SFB35
MSG_CSF FB44 0,5 0,48 14768 3484 84 SFB34 +SFB35
MUL4_P FC262 0,016 0,013 122 -- 2
MUL8_P FC263 0,027 0,021 202 -- 2
OB1_TIME FB69 0,74 0,71 1802 70 84
OP_A FB45 0,013 0,012 156 56 2
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
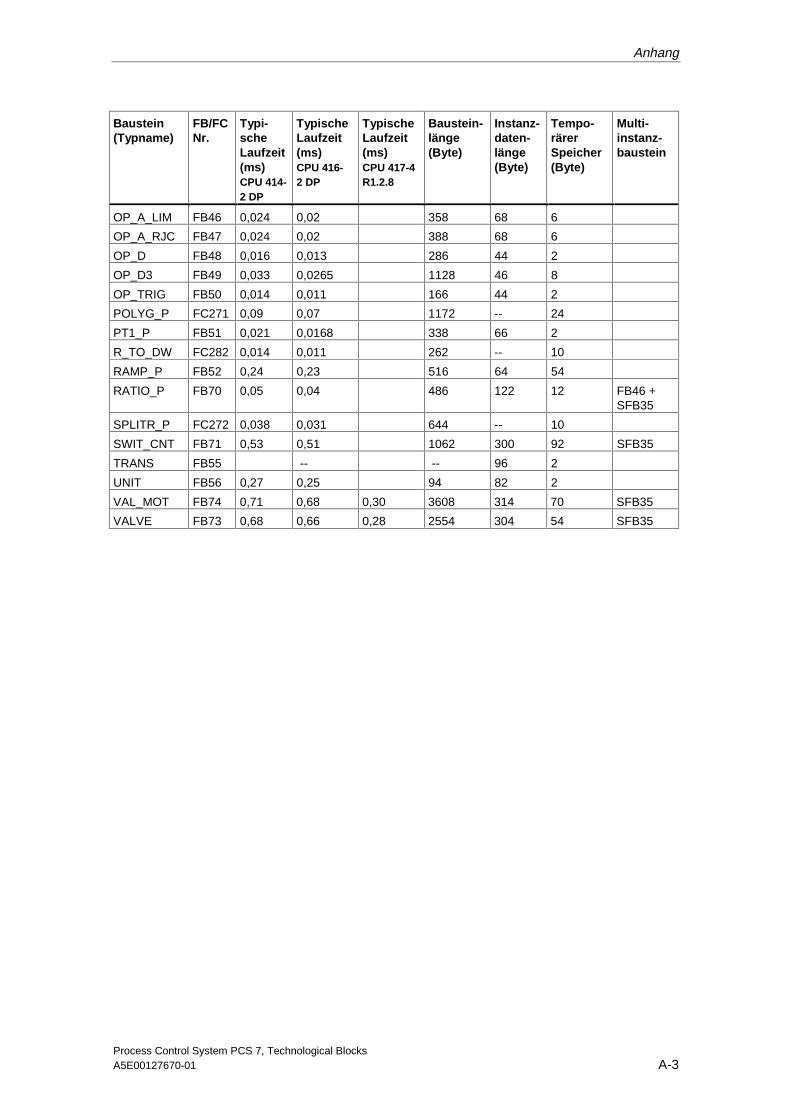
Anhang
Process Control System PCS 7, Technological BlocksA5E00127670-01 A-3
Baustein(Typname)
FB/FCNr.
Typi-scheLaufzeit(ms)CPU 414-2 DP
TypischeLaufzeit(ms)CPU 416-2 DP
TypischeLaufzeit(ms)CPU 417-4R1.2.8
Baustein-länge(Byte)
Instanz-daten-länge(Byte)
Tempo-rärerSpeicher(Byte)
Multi-instanz-baustein
OP_A_LIM FB46 0,024 0,02 358 68 6
OP_A_RJC FB47 0,024 0,02 388 68 6
OP_D FB48 0,016 0,013 286 44 2
OP_D3 FB49 0,033 0,0265 1128 46 8
OP_TRIG FB50 0,014 0,011 166 44 2
POLYG_P FC271 0,09 0,07 1172 -- 24
PT1_P FB51 0,021 0,0168 338 66 2
R_TO_DW FC282 0,014 0,011 262 -- 10
RAMP_P FB52 0,24 0,23 516 64 54
RATIO_P FB70 0,05 0,04 486 122 12 FB46 +SFB35
SPLITR_P FC272 0,038 0,031 644 -- 10
SWIT_CNT FB71 0,53 0,51 1062 300 92 SFB35
TRANS FB55 -- -- 96 2
UNIT FB56 0,27 0,25 94 82 2
VAL_MOT FB74 0,71 0,68 0,30 3608 314 70 SFB35
VALVE FB73 0,68 0,66 0,28 2554 304 54 SFB35
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001

Anhang
Process Control System PCS 7, Technological BlocksA-4 A5E00127670-01
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
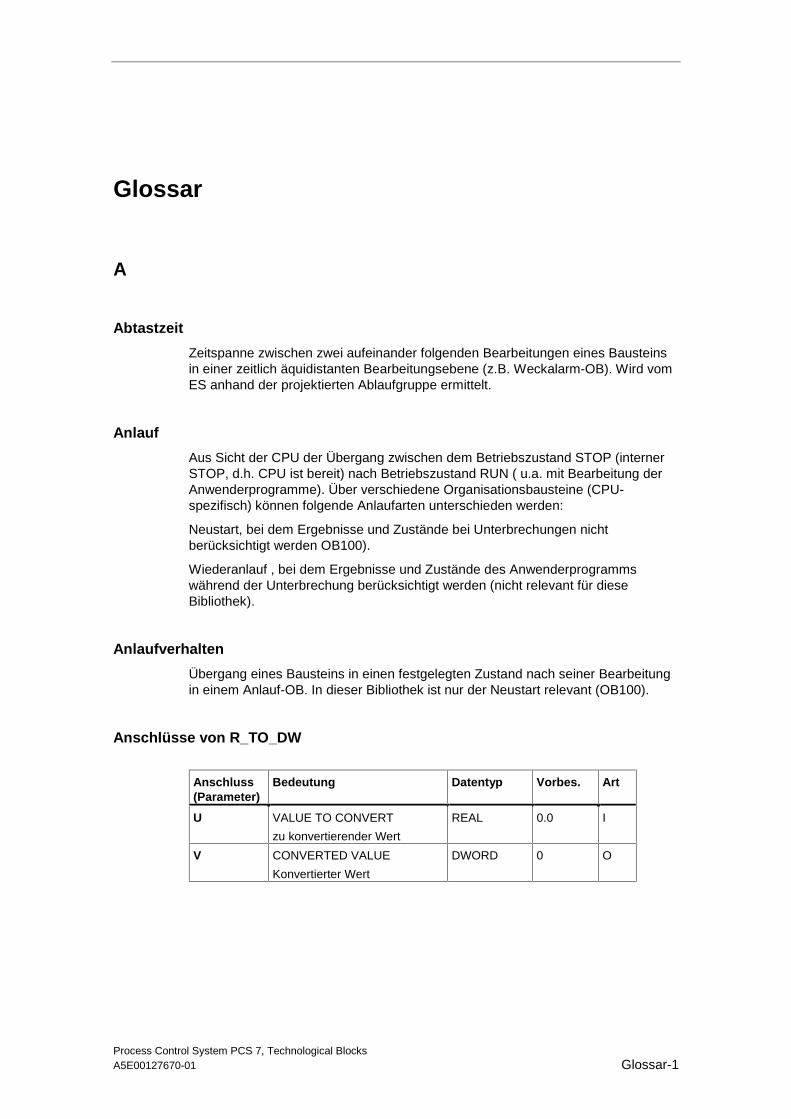
Process Control System PCS 7, Technological BlocksA5E00127670-01 Glossar-1
Glossar
A
Abtastzeit
Zeitspanne zwischen zwei aufeinander folgenden Bearbeitungen eines Bausteinsin einer zeitlich äquidistanten Bearbeitungsebene (z.B. Weckalarm-OB). Wird vomES anhand der projektierten Ablaufgruppe ermittelt.
Anlauf
Aus Sicht der CPU der Übergang zwischen dem Betriebszustand STOP (internerSTOP, d.h. CPU ist bereit) nach Betriebszustand RUN ( u.a. mit Bearbeitung derAnwenderprogramme). Über verschiedene Organisationsbausteine (CPU-spezifisch) können folgende Anlaufarten unterschieden werden:
Neustart, bei dem Ergebnisse und Zustände bei Unterbrechungen nichtberücksichtigt werden OB100).
Wiederanlauf , bei dem Ergebnisse und Zustände des Anwenderprogrammswährend der Unterbrechung berücksichtigt werden (nicht relevant für dieseBibliothek).
Anlaufverhalten
Übergang eines Bausteins in einen festgelegten Zustand nach seiner Bearbeitungin einem Anlauf-OB. In dieser Bibliothek ist nur der Neustart relevant (OB100).
Anschlüsse von R_TO_DW
Anschluss(Parameter)
Bedeutung Datentyp Vorbes. Art
U VALUE TO CONVERT
zu konvertierender Wert
REAL 0.0 I
V CONVERTED VALUE
Konvertierter Wert
DWORD 0 O
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
Glossar
Process Control System PCS 7, Technological BlocksGlossar-2 A5E00127670-01
Anwender (-baustein, -bildbaustein)
Oberbegriff für alle vom Anwender (Kunde, Ingenieurbüro, für einen Kunden/einProjekt projektierende Abteilung) gelieferten Objekte in anwenderspezifischenBibliotheken.
B
Baustein
Objekt einer Bibliothek oder einer Bausteinstruktur, unterteilt in Funktionsbaustein(auf AS lauffähig) und Bildbaustein (auf OS lauffähig). Der Baustein hat Facettenfür AS, OS und ES, die durch Attribute beschrieben werden. Beide Bausteinewerden mit ES projektiert. Der Bausteintyp befindet sich in der Bibliothek. DurchES wird eine Bausteininstanz erzeugt und weiter projektiert.
Bausteinbibliothek
Softwarepaket mit nach gemeinsamen Merkmalen zusammengefasstenBausteintypen. Wird über das ES installiert.
Bausteinkopf
Abschnitt des Bausteintyps mit Verwaltungsinformationen zu dessen Zuordnung(z.B. Typname, Bausteinname usw.).
Bausteinrumpf
Abschnitt des Bausteintyps mit funktionsspezifischer Information (z.B. Werte beiDatenbausteinen, Programmcode bei Funktionen ).
Bausteintyp
Objekt einer Bibliothek, welches bei Verwendung in einer Bausteinstruktur seineEigenschaften an die zugehörige Bausteininstanz vererbt. Der Bausteintyp(Methode, Datenhaltung und Facettenbeschreibung) wird im ES hinterlegt.
Bedienung
Vorgang, bei dem der Operator Wert- bzw. Zustandsveränderungen bei einemBaustein veranlasst. In der Regel wird dies durch Eingaben am OS eingeleitet,überprüft und über das CS an den Bedienbaustein im AS weitergeleitet. Dorterfolgt eine letzte Überprüfung vor der Zuweisung an den Baustein, weil in der Zeitzwischen dem OS-Senden und AS-Empfang die Prozessbedingungen sichverändern könnten.
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
Glossar
Process Control System PCS 7, Technological BlocksA5E00127670-01 Glossar-3
Bedienbaustein
Baustein, der die auf OS-Seite erfolgte Bedienung des Anlagenfahrers überprüftund falls zulässig, im AS dem an ihm verschalteten Bausteineingang zur Verfügungstellt. Zugleich bietet er auf der OS-Seite die Bestätigung der Bedienung.
Bedientext
Text der einem Bausteineingang zugeordnet wird und für die Bildanzeige bzw. dasProtokollieren der Bedienung auf dem OS verwendet wird.
Beobachtung
Teil der Aufgaben eines OS, der die Visualisierung der Prozessparameter undZustände in verschiedenen Formen (numerisch, grafisch) ermöglicht.
Betriebsart
Merkmal eines Bausteins, das bei verschiedenen möglichen Fällen im Ablauf desBaustein-Programms einen bestimmten anwendungsspezifischenBearbeitungsabschnitt kennzeichnet.So bezeichnet z.B. Betriebsart HAND bei einem Reglerbaustein bezeichnet denAblauf des Programms, in dem der Regleralgorithmus nicht bearbeitet wird und dieAusgangsgröße (Stellgröße) von Hand durch Bedienung vorgegeben wird.Die Betriebsart wird üblicherweise im Baustein codiert. Sie wird über einen Integer-Parameter oder Kombinationen von Binär-Parametern ausgewählt bzw. angezeigt.
Bildbaustein
Baustein, der auf der OS ablauffähig ist und zur Bedienung und Beobachtung deszugehörigen AS-Bausteins verwendet wird. Wird für bestimmte Bausteintypen derBibliotheken mitgeliefert. Beinhaltet auch Überprüfungen der bedienten Werte.
Bildelement
Objekt als Bestandteil des Bildbausteins, welches mit einem bestimmtenBausteinanschluss eines Bausteintyps korrespondiert.
C
CS
Bussystem zum Datenaustausch zwischen Komponenten
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
Glossar
Process Control System PCS 7, Technological BlocksGlossar-4 A5E00127670-01
D
Datenbaustein
Wird als Ablage für Daten benutzt, die von Programmen/Funktionen bearbeitetwerden.
E
Einbauen
Vorgang, durch den ein Baustein (FB oder FC) in einem OB zwecks Bearbeitungangemeldet wird. In der Regel muss dabei eine schon vorhandene Reihenfolge derBearbeitung berücksichtigt werden, daher "Einbauen".
Enable-Eingang
Freigabe-Eingang, über den die Bearbeitung eines Funktionsbausteinsfreigegeben bzw. gesperrt wird (nur im CFC darstellbar).
Erstanlauf
Aus Bausteinsicht der Vorgang, bei dem der Baustein nach seiner Instanziierungzum ersten Mal bearbeitet wird. Anschließend befindet sich der Baustein in einemdefinierten Zustand bezüglich der Parameter bzw. Betriebsarten.
F
Facette
Attribute eines Bausteins bezüglich der Anwendung im AS (FB, FC), ES(Darstellung in der Bibliothek oder im CFC, Darstellung für TIS-Aufgaben) und OS(Texte für Meldungen und Bedienungen, zugehöriger Bildbaustein für dieVisualisierung im OS).
Funktion
Dieser Begriff wird in IEC 1131-3 festgelegt als Softwareeinheit, die beimAusführen ein einziges Ergebnis liefert (es kann auch ein strukturierter Datentypsein) und keine speichernde Datenablage (Gedächtnis) hat.Der wesentliche Unterschied zum FB ist die fehlende Datenablage (Instanz). Somitmuss das Ergebnis des FC-Aufrufs explizit vom Anwender gespeichert oderweiterverwendet werden. Für den PLS-Anwender, der mit dem ES projektiert, wirdder FC ähnlich dem FB dargestellt (mit Eingängen und einem Ausgang), damitdessen Hantieren einheitlich abläuft.
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
Glossar
Process Control System PCS 7, Technological BlocksA5E00127670-01 Glossar-5
Funktionsbaustein
Nach dem Normenentwurf IEC TC65/WG6 von Mai 1995 wird für den erläutertenBegriff Folgendes festgelegt:
Der Funktionsbaustein (FB-Instanz) ist eine funktionale Softwareeinheit, bestehendaus einer individuellen, mit Namen versehenen Kopie der durch denFunktionsbausteintyp vorgegebenen Datenstruktur, welche von einem Aufruf desFunktionsbausteins zum nächsten bestehen bleibt.
Die Hauptmerkmale der FB-Instanz sind:
• Typ- und Instanzbezeichner
• Ein- und Ausgangsereignisse. Diese benutzen Algorithmen des OB, in dem dieFB-Instanz abläuft bzw. werden von diesen Algorithmen benutzt.
• Ein- und Ausgangsvariablen, die von dem FB-Algorithmus gelesen bzw.verändert werden.
• Funktionsmerkmale, die durch die Typbeschreibung definiert sind und i.a. überden Algorithmus des FBs realisiert werden.
Der Algorithmus eines FB ist in der Regel von außerhalb des FB unsichtbar, es seidenn, er wird in irgend einer Form vom Hersteller des FB beschrieben.
Ergebnis: Der Anwender sieht den FB bzw. dessen Instanz durch die Datenablageals Ein-/Ausgangsleiste mit der Information "was muss an welchem Einganganstehen, um an dem fesgelegten Ausgang das gewünschte Ergebnis zu erzielen?". Mit der Frage, wie das Ergebnis zustande kommt, hat sich der FB-Herstellerbefasst. Der Anwender kann sich um die technologischen Belange kümmern, ohnesich mit Programmierungsdetails auseinander zu setzen. Durch geeignete Mittel(ES) kann das Hantieren der FBs grafisch, übersichtlich und mit zusätzlichemKomfort erfolgen.
G
Grenzwert
Vergleichswert für eine analoge Größe bei dessen Erreichen bzw. Verletzen eineReaktion stattfindet.
H
Holprinzip
Der auf einem Eingang eines Bausteins verschaltete Wert wird erst von derMethode aktualisiert (geholt), die zum Baustein des verschalteten Eingangs gehört.Wird dieser Baustein nicht bearbeitet, besitzt der Eingang trotz Verschaltungkeinen aktuellen Wert.
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
Glossar
Process Control System PCS 7, Technological BlocksGlossar-6 A5E00127670-01
I
Instanz-DB
Datenbaustein, der aus einem Bausteintyp hervorgeht und als Ablage für einekonkrete Anwendung dieses Typs dient. Zum Beispiel wird in einem Projekt derBausteintyp "Regler" durch mehrere Instanzen (Instanz-DB) vertreten, um für jedeRegelungsaufgabe den jeweiligen Sollwert, Betriebsart, Parameter usw. zuspeichern.
M
Meldeklasse
Einteilung von Meldungen nach deren Ursache. Im SIMATIC-Prozessleitsystemwerden folgende Meldeklassen verwendet:
• Prozessmeldungen, die ausgelöst werden durch Erreichen bzw. Verletzen vonprozess spezifischen Überwachungswerten (z.B. Alarm, Warnung, Toleranzoben/unten, allgemeine Prozessmeldungen).
• Leittechnikmeldungen, die durch die Leittechnik (Systemmeldungen), durch diePeripherie (Fehler im Feld) oder für vorbeugende Wartung ausgegebenwerden.
• Bedienmeldungen, die bei bestimmten Abläufen den Bediener auf dieNotwendigkeit seines Eingriffs hinweist (z.B. Bedienanforderung zumQuittieren einer Schrittsteuerung von Hand, zwecks Weiterschaltung) bzw.Bedienprotokolle.
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
Glossar
Process Control System PCS 7, Technological BlocksA5E00127670-01 Glossar-7
Tabelle der möglichen Meldeklassen und ihre Bedeutung
Meldeklasse Bedeutung
AH Alarm oben (High High Alarm)
WH Warnung oben (High Alarm)
WL Warnung unten (Low Alarm)
AL Alarm unten (Low Low Alarm)
TH Toleranz oben (Tolerance High)
TL Toleranz unten (Tolerance Low)
F Prozessfehler (Field)
S Leittechnikmeldung (System)
S* OS-Leittechnikmeldung (Störung)
M Vorbeugende Wartung (Maintenance)
PM Prozessmeldung (Process Message)
- Betriebsmeldung
OR Bedienanforderung (Operator Request)
OM*1) Bedienmeldung (Operation Message)
*1) Wird der Baustein für Bedienmeldungen eingesetzt, müssen die Eingänge I_1,... mit Impulsen versorgt werden. Eine Versorgung mit statischen Wert 1 würde zuMehrfach-Meldungen führen.
Multiinstanzbaustein
Man spricht von Mutiinstanzen, wenn aus einem Funktionsbaustein weitereFunktionsbausteine aufgerufen werden, unter Benutzung des eigenen (d. h. ohnezusätzliche) Instanz-DBs.
Voraussetzung ist, dass die aufzurufenden FBs als statische Variablen in dieVariablen deklaration des aufrufenden FBs aufgenommen werden.
Damit erreicht man eine Konzentrierung der Instanzdaten in einem Instanz-Datenbaustein, d.h. man kann die verfügbare Anzahl der DBs besser ausnutzen.
N
Nachführung
Einschaltbarer Zustand eines Bausteins, während dessen ein (nachgeführter)Parameter durch das eigene Programm mit dem Wert eines anderen Parameters(Nachführwert) überschrieben wird. Damit kann üblicherweise einem Parameter,der sonst prozess-/programmabhängig bestimmt wird, ein vom Anwenderfestgelegter Wert aufgezwungen werden.
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
Glossar
Process Control System PCS 7, Technological BlocksGlossar-8 A5E00127670-01
R
Redundanz
Das mehrfache Vorhandensein von Komponenten mit denselben Aufgaben, die beiBedarf (z.B. Fehlerfall) sich gegenseitig ablösen können.
S
Standard (-baustein, -bildbaustein)
Oberbegriff für alle von Siemens gelieferten Objekte in Standardbibliotheken.
T
Treiberbaustein
Baustein zum Einlesen/Ausgeben von AS-Werten von der bzw. an die Baugruppe.Er bildet die Software-Schnittstelle zum Prozess, wandelt die physikalischen Wertezu Prozesswerten (und umgekehrt) und liefert zusätzlich Informationen bezüglichder Verfügbarkeit der angesprochenen Hardware.
20.08.200121.08.200121.08.200122.08.200123.08.200123.08.2001
Process Control System PCS 7, Technological BlocksA5E00127670-01 Index-1
Index
AADD4_P......................................................... 5-1ADD8_P......................................................... 5-2Addition für maximal 4 Werte......................... 5-1Addition für maximal 8 Werte......................... 5-2Adressierung eines Reglerkanals ................ 3-72AF_12 ................................................... 9-9, 9-10
Bedienen und Beobachten....................... 9-10Beschreibung............................................. 9-9
AF_16S............................................... 9-11, 9-12Bedienen und Beobachten....................... 9-12Beschreibung........................................... 9-11
AF_24 ................................................. 9-13, 9-14Bedienen und Beobachten....................... 9-14Beschreibung........................................... 9-13
AF_6 .............................................................. 9-8Bedienen und Beobachten......................... 9-8Beschreibung............................................. 9-4
AF_n .............................................................. 9-5Anschlüsse ................................................ 9-5
Allgemeines zu den Bildbausteinen ............... 2-1Allgemeines zur Bausteinbeschreibung......... 1-1Analogwert-Bedienung................................... 7-6Analogwert-Bedienung (abweisend) ............ 7-13Analogwert-Bedienung (begrenzend) ............ 7-9Anbindung der FM 355 ................................ 3-70Anlauf- Zeit- und Meldeverhalten
von CTRL_S ............................................ 3-36Anlaufverhalten von CTRL_PID................... 3-10Anlaufverhalten von FMCS_PID .................. 3-78Anschlüsse von ADD4_P............................... 5-2Anschlüsse von ADD8_P............................... 5-3Anschlüsse von AF_n .................................... 9-5Anschlüsse von AVER_P............................... 5-5Anschlüsse von COUNT_P............................ 5-7Anschlüsse von CTRL_PID ......................... 3-13Anschlüsse von CTRL_S ............................. 3-41Anschlüsse von DEADT_P ............................ 5-9Anschlüsse von DIF_P................................. 5-11Anschlüsse von DIG_MON .......................... 3-58Anschlüsse von DOSE................................. 5-16Anschlüsse von ELAP_CNT ........................ 5-28Anschlüsse von FMCS_PID......................... 3-80Anschlüsse von INT_P................................. 5-37Anschlüsse von INTERLOK......................... 5-32Anschlüsse von LIMITS_P........................... 5-40Anschlüsse von MEANTM_P....................... 5-43Anschlüsse von MEAS_MON ...................... 3-62Anschlüsse von MESSAGE ........................... 8-5Anschlüsse von MOT_REV............................ 4-5Anschlüsse von MOT_SPED ....................... 4-15
Anschlüsse von MOTOR ..............................4-24Anschlüsse von MUL4_P .............................5-44Anschlüsse von MUL8_P .............................5-46Anschlüsse von OB1_TIME..........................5-48Anschlüsse von OP_A....................................7-8Anschlüsse von OP_A_LIM..........................7-12Anschlüsse von OP_A_RJC.........................7-16Anschlüsse von OP_D..................................7-19Anschlüsse von OP_D3................................7-23Anschlüsse von OP_TRIG............................7-28Anschlüsse von POLYG_P...........................5-50Anschlüsse von PT1_P ................................5-52Anschlüsse von R_TO_DW............................6-2Anschlüsse von RAMP_P.............................5-54Anschlüsse von RATIO_P............................3-67Anschlüsse von SPLITR_P ..........................5-57Anschlüsse von SWIT_CNT.........................5-60Anschlüsse von TRANS ...............................9-16Anschlüsse von UNIT...................................9-18Anschlüsse von VAL_MOT...........................4-34Anschlüsse von VALVE................................4-44Automatikbetrieb ..........................................3-75Automatikbetrieb von CTRL_PID ...................3-6Automatikbetrieb von CTRL_S .....................3-30AVER_P ................................................. 5-3, 5-5
Anschlüsse .................................................5-5Beschreibung .............................................5-3
BBackup-Betrieb der FM 355..........................3-79Batchbausteine...............................................9-1
Übersicht ....................................................9-1Baugruppenträgerausfall ..............................3-77Bedienbausteine..................................... 7-1, 7-3
Übersicht ....................................................7-3Bedienen Beobachten und
Inbetriebnahme von CTRL_S ...................3-36Bedienen und Beobachten von AF_12.........9-10Bedienen und Beobachten von AF_16S ......9-12Bedienen und Beobachten von AF_24.........9-14Bedienen und Beobachten von AF_6.............9-8Bedienen und Beobachten von CTRL_PID ..3-19Bedienen und Beobachten von CTRL_S......3-50Bedienen und Beobachten von DIG_MON...3-59Bedienen und Beobachten von DOSE .........5-22Bedienen und Beobachten von ELAP_CNT.5-29Bedienen und Beobachten von FMCS_PID .3-89Bedienen und Beobachten von INTERLOK..5-34Bedienen und Beobachten von
MEAS_MON.............................................3-64Bedienen und Beobachten von MOT_REV ....4-9
22.08.200123.08.200123.08.2001
Index
Process Control System PCS 7, Technological BlocksIndex-2 A5E00127670-01
Bedienen und Beobachten vonMOT_SPED ............................................. 4-19
Bedienen und Beobachten von MOTOR...... 4-27Bedienen und Beobachten von OP_A ........... 7-9Bedienen und Beobachten von OP_A_LIM . 7-13Bedienen und Beobachten von OP_A_RJC 7-17Bedienen und Beobachten von OP_D ......... 7-20Bedienen und Beobachten von OP_D3 ....... 7-25Bedienen und Beobachten von OP_TRIG ... 7-28Bedienen und Beobachten von RATIO_P.... 3-69Bedienen und Beobachten von SWIT_CNT. 5-62Bedienen und Beobachten von UNIT........... 9-18Bedienen und Beobachten von VAL_MOT .. 4-38Bedienen und Beobachten von VALVE ....... 4-47Bedienfehler................................................. 3-77Begrenzung ................................................. 5-39Beschreibung von AF_12............................... 9-9Beschreibung von AF_16S .......................... 9-11Beschreibung von AF_24............................. 9-13Beschreibung von AF_6................................. 9-4Beschreibung von AVER_P ........................... 5-3Beschreibung von COUNT_P ........................ 5-5Beschreibung von CTRL_PID........................ 3-1Beschreibung von CTRL_S ......................... 3-24Beschreibung von DEADT_P......................... 5-8Beschreibung von DIF_P ............................. 5-10Beschreibung von DIG_MON....................... 3-55Beschreibung von DOSE ............................. 5-12Beschreibung von ELAP_CNT..................... 5-26Beschreibung von FMCS_PID ..................... 3-70Beschreibung von INT_P ............................. 5-34Beschreibung von INTERLOK ..................... 5-30Beschreibung von LIMITS_P ....................... 5-39Beschreibung von MEANTM_P ................... 5-41Beschreibung von MEAS_MON................... 3-60Beschreibung von MESSAGE........................ 8-2Beschreibung von MOT_REV........................ 4-1Beschreibung von MOT_SPED.................... 4-11Beschreibung von MOTOR.......................... 4-20Beschreibung von MUL4_P ......................... 5-43Beschreibung von MUL8_P ......................... 5-45Beschreibung von OB1_TIME...................... 5-46Beschreibung von OP_A................................ 7-6Beschreibung von OP_A_LIM........................ 7-9Beschreibung von OP_A_RJC..................... 7-13Beschreibung von OP_D ............................. 7-17Beschreibung von OP_D3 ........................... 7-20Beschreibung von OP_TRIG........................ 7-26Beschreibung von POLYG_P....................... 5-49Beschreibung von PT1_P ............................ 5-51Beschreibung von R_TO_DW........................ 6-1Beschreibung von RAMP_P......................... 5-52Beschreibung von RATIO_P........................ 3-66Beschreibung von SPLITR_P ...................... 5-55Beschreibung von SWIT_CNT..................... 5-58Beschreibung von TRANS ........................... 9-15Beschreibung von UNIT............................... 9-16Beschreibung von VAL_MOT....................... 4-29Beschreibung von VALVE............................ 4-40Betriebsartenumschaltung ........................... 3-76Betriebsartenumschaltung von CTRL_PID .... 3-7Betriebsartenumschaltung von CTRL_S...... 3-33
Betriebsstundenzähler..................................5-26Bildbausteine..................................................2-1Blockschaltbild von CTRL_PID.....................3-11Blockschaltbild von CTRL_S ........................3-38
CCOUNT_P .............................................. 5-5, 5-7
Anschlüsse .................................................5-7Beschreibung .............................................5-5
CTRL_PID ................... 3-1, 3-5, 3-11, 3-13, 3-19Anschlüsse ...............................................3-13Bedienen und Beobachten .......................3-19Beschreibung .............................................3-1Betriebsartenumschaltung..........................3-7Blockschaltbild..........................................3-11Fehlerbehandlung ......................................3-9Hand-
Automatik- und Nachführbetrieb.............3-6Sollwert-
Grenzwert- und Regeldifferenzbildung: ..3-3Stellgrößenbildung......................................3-5
CTRL_S.................. 3-24, 3-26, 3-28, 3-30, 3-33,...................3-35, 3-36, 3-37, 3-38, 3-41, 3-50Anlaufverhalten ........................................3-36Anschlüsse ...............................................3-41Bedienen und Beobachten ............. 3-36, 3-50Beschreibung ...........................................3-24Betriebsartenumschaltung........................3-33Blockschaltbild..........................................3-38Fehlerbehandlung ....................................3-35Hand- Automatik- und Nachführbetrieb ....3-30Inbetriebnahme ........................................3-36Meldeverhalten.........................................3-37Signalverarbeitung....................................3-26Stellsignalbildung .....................................3-28Zeitverhalten.............................................3-36
DDaten............................................................3-77
lesen.........................................................3-77Daten von der Baugruppe lesen...................3-77DEADT_P............................................... 5-8, 5-9
Anschlüsse .................................................5-9Beschreibung .............................................5-8
DIF_P ................................................. 5-10, 5-11Anschlüsse ...............................................5-11Beschreibung ...........................................5-10
Differentiation ...............................................5-10DIG_MON.................................. 3-56, 3-58, 3-59
Anschlüsse ...............................................3-58Bedienen und Beobachten .......................3-59Beschreibung ...........................................3-55
Digitalwert-Bedienung (1-Taster)..................7-26Digitalwert-Bedienung (2-Taster)..................7-17Digitalwert-Bedienung (3-Taster)..................7-20Digitalwertüberwachung ...............................3-55DOSE .............5-15, 5-16, 5-17, 5-18, 5-21, 5-22
Anschlüsse ...............................................5-16Bedienen und Beobachten .......................5-22
22.08.200123.08.200123.08.2001
Index
Process Control System PCS 7, Technological BlocksA5E00127670-01 Index-3
Beschreibung........................................... 5-12Dosiervorgang .................................... 5-12, 5-14
EELAP_CNT ................................5-27, 5-28, 5-29
Anschlüsse .............................................. 5-28Bedienen und Beobachten....................... 5-29Beschreibung........................................... 5-26
Ermittlung der CPU-Auslastung ................... 5-46
FFehler........................................................... 3-77Fehler bei Parametrierung ........................... 3-77Fehlerbehandlung........................................ 3-77Fehlerbehandlung von CTRL_PID................. 3-9Fehlerbehandlung von CTRL_S................... 3-35FM 355......................................................... 3-79
Backup-Betrieb ........................................ 3-79FMCS_PID........................3-70, 3-72, 3-80, 3-89
Anschlüsse .............................................. 3-80Bedienen und Beobachten....................... 3-89Beschreibung........................................... 3-70Funktion ................................................... 3-72
Funktion von FMCS_PID ............................. 3-72
GGrenzwertbildung......................................... 3-74
HHand- Automatik- und Nachführbetrieb....... 3-75Handbetrieb ................................................. 3-75Handbetrieb von CTRL_PID .......................... 3-6Handbetrieb von CTRL_S............................ 3-30
IINT_P.........................................5-35, 5-36, 5-37
Anschlüsse .............................................. 5-37Beschreibung........................................... 5-34
Integration.................................................... 5-34INTERLOK.................................5-30, 5-32, 5-34
Anschlüsse .............................................. 5-32Bedienen und Beobachten....................... 5-34Beschreibung........................................... 5-30
KKanalfehler................................................... 3-77Konvertierungsbausteine ............................... 6-1
LLIMITS_P..................................................... 5-40
Anschlüsse .............................................. 5-40Beschreibung........................................... 5-39
MMEANTM_P ....................................... 5-41, 5-43
Anschlüsse ...............................................5-43Beschreibung ...........................................5-41
MEAS_MON.............................. 3-61, 3-62, 3-64Anschlüsse ...............................................3-62Bedienen und Beobachten .......................3-64Beschreibung ...........................................3-60
Meldebaustein (projektierbare Meldungen) ....8-2Meldebausteine ..............................................8-1
Übersicht ....................................................8-1Meldeverhalten von CTRL_PID....................3-10Meldeverhalten von FMCS_PID ...................3-78MESSAGE.............................................. 8-2, 8-5
Anschlüsse .................................................8-5Beschreibung .............................................8-3
Messwertüberwachung.................................3-60MOT_REV ....................................... 4-4, 4-5, 4-9
Anschlüsse .................................................4-5Bedienen und Beobachten .........................4-9Beschreibung .............................................4-1
MOT_SPED............................... 4-14, 4-15, 4-19Anschlüsse ...............................................4-15Bedienen und Beobachten .......................4-19Beschreibung ...........................................4-11
MOTOR ................... 4-22, 4-23, 4-25, 4-26, 4-27Anschlüsse ...............................................4-24Bedienen und Beobachten .......................4-27Beschreibung ...........................................4-20
Motor mit einem Steuersignal.......................4-20Motor mit zwei Drehrichtungen.......................4-1Motor mit zwei Geschwindigkeiten ...............4-11Motorventilsteuerung....................................4-29MUL4_P .......................................................5-44
Beschreibung ...........................................5-43MUL8_P .......................................................5-45
Beschreibung ...........................................5-45Multiplikation für maximal 4 Werte................5-43Multiplikation für maximal 8 Werte................5-45
NNachführbetrieb............................................3-75Nachführbetrieb von CTRL_PID.....................3-6Nachführbetrieb von CTRL_S ......................3-30
OOB1_TIME.......................................... 5-46, 5-48
Anschlüsse ...............................................5-48Beschreibung ...........................................5-46
OP_A...................................................... 7-8, 7-9Anschlüsse .................................................7-8Bedienen und Beobachten .........................7-9Beschreibung .............................................7-6
OP_A_LIM.......................... 7-9, 7-11, 7-12, 7-13Anschlüsse ...............................................7-12Bedienen und Beobachten .......................7-13Beschreibung .............................................7-9
OP_A_RJC....................... 7-13, 7-15, 7-16, 7-17
22.08.200123.08.200123.08.2001
Index
Process Control System PCS 7, Technological BlocksIndex-4 A5E00127670-01
Anschlüsse .............................................. 7-16Bedienen und Beobachten....................... 7-17Beschreibung........................................... 7-13
OP_D .........................................7-17, 7-19, 7-20Anschlüsse .............................................. 7-19Bedienen und Beobachten....................... 7-20Beschreibung........................................... 7-17
OP_D3 .......................................7-21, 7-23, 7-25Anschlüsse .............................................. 7-23Bedienen und Beobachten....................... 7-25Beschreibung........................................... 7-20
OP_TRIG ............................................ 7-27, 7-28Anschlüsse .............................................. 7-28Bedienen und Beobachten....................... 7-28Beschreibung........................................... 7-26
PParameter .................................................... 3-77
übertragen ............................................... 3-77Parameter zur Baugruppe übertragen ......... 3-77Peripheriezugriffsfehler ................................ 3-77PID-Regler .............................................. 3-1, 3-2PID-Reglerbaustein........................................ 3-1POLYG_P ........................................... 5-49, 5-50
Anschlüsse .............................................. 5-50Beschreibung........................................... 5-49
Polygonzug mit maximal 8 Stützstellen........ 5-49PT1_P................................................. 5-51, 5-52
Anschlüsse .............................................. 5-52Beschreibung........................................... 5-51
RR_TO_DW .............................................. 6-1, 6-2
Anschlüsse ................................................ 6-2Beschreibung............................................. 6-1
RAMP_P ............................................. 5-52, 5-54Anschlüsse .............................................. 5-54Beschreibung........................................... 5-52
Rampenbildung............................................ 5-53RATIO_P....................................3-66, 3-67, 3-69
Anschlüsse .............................................. 3-67Bedienen und Beobachten....................... 3-69Beschreibung........................................... 3-66
Regeldifferenzbildung .................................. 3-74Regler ............................................................ 3-1Reglerbaustein............................................. 3-70
SSchaltspielzähler.......................................... 5-58Sicherheitsbetrieb ........................................ 3-76Signalverarbeitung im Soll- und Istwertzweig von
CTRL_PID.................................................. 3-3Signalverarbeitung im Soll- und Istwertzweig von
CTRL_S ................................................... 3-26Sollwert nachführen ..................................... 3-76Sollwertbildung ................................... 3-73, 3-74
Split Range...................................................5-55SPLITR_P .......................................... 5-56, 5-57
Anschlüsse ...............................................5-57Beschreibung ...........................................5-55
Stellgröße nachführen ..................................3-76Stellgrößenbildung ............................. 3-74, 3-75Stellgrößenbildung von CTRL_PID ................3-5Stellsignalbildung von CTRL_S ....................3-28SWIT_CNT................................ 5-59, 5-60, 5-62
Anschlüsse ...............................................5-60Bedienen und Beobachten .......................5-62Beschreibung ...........................................5-58
TTechnische Daten ......................................... A-1Totzeitglied .....................................................5-8TRANS ............................................... 9-15, 9-16
Anschlüsse ...............................................9-16Beschreibung ...........................................9-15
Transition-Schnittstelle BATCH flexible ........9-15
UUNIT................................................... 9-16, 9-18
Anschlüsse ...............................................9-18Bedienen und Beobachten .......................9-18Beschreibung ...........................................9-16
ÜÜbersicht über die Batchbausteine.................9-1Übersicht über die Bedienbausteine...............7-1Übersicht über die Meldebausteine ................8-1
VVAL_MOT.................................. 4-33, 4-34, 4-38
Anschlüsse ...............................................4-34Bedienen und Beobachten .......................4-38Beschreibung ...........................................4-29
VALVE....................................... 4-43, 4-44, 4-47Anschlüsse ...............................................4-44Bedienen und Beobachten .......................4-47Beschreibung ...........................................4-40
Ventilsteuerung ............................................4-40Verhältnisregelung ............................. 3-66, 3-67Verhältnisregelung: ......................................3-66Verriegelungsanzeige...................................5-31Verzögerungsglied 1. Ordnung.....................5-51
ZZähler .............................................................5-6Zeitliche Mittelwertbildung ............................5-42Zeitlicher Mittelwert.........................................5-3Zeitverhalten von CTRL_PID........................3-10Zeitverhalten von FMCS_PID.......................3-78
22.08.200123.08.200123.08.2001





























