Embed Size (px)
Citation preview
1Antriebstechnik \ Antriebsautomatisierung \ Systemintegration \ Services
Smart Servo Package
Einfach, schnell und lösungsstark

2 Smart Servo Package
Das Smart Servo Package – einfach, schnell und lösungsstark
Das Smart Servo Package von SEW-EURODRIVE ist ein Produktpaket, das alle notwendigen
Komponenten für eine komplette Automationslösung in einem abgestimmten Gesamtpaket
beinhaltet. Es wurde speziell für die wichtigsten Anwendungskriterien im Leistungsbereich
bis 5.5 kW, im Spannungsbereich von 1x und 3x AC 230 V optimiert.
Der Anspruch ist, eine Servo- bzw. Automationsaufgabe einfacher, schneller und leistungs-
fähig umsetzbar zu machen. Hierfür wurden verschiedenste Bereiche der Anwender- bzw.
Kundenschnittstellen optimiert und vereinfacht.

3
Gateway
– Programmierbare oder rein konfi gurierbare
SEW-Controller (MOVI-PLC® / CCU)
– Flexible Servo-Universalumrichter
(MOVITRAC® LTX)
– Hochdynamische Servomotoren mit Absolut-
wertgebern (CMP40, 50, 63)
– Kompakte Servogetriebe
(Planeten / Winkel*, PSC / W*)
– „Ready-to-use“-Zubehör
(Kabel, Drosseln, Filter, etc.)
Das Smart Servo Package setzt sich aus folgenden Komponenten zusammen:
Der einfache kombinatorische Aufbau des Smart
Servo Package erlaubt eine extrem hohe Flexi-
bilität mit verschiedenen optional kombinierbaren
Erweiterungsprodukten basierend auf einem
Standardpaket. Somit lässt sich das Smart Servo
Package entsprechend den Applikations-,
Kommunikations- und Integrationsanforderungen
fl exibel ausgestalten und anpassen.
MOVI-PLC®/
CCU-standard/
advanced
PSKCx21 W10/20/30
Erweiterungsprodukte
(optional kominierbar)
Kernprodukte
(Standardpaket)
MOVITRAC® LTX
LTX-Servomodul
Vorkonfektionierte
Kabel
CMP40/50/63
Allg
em
. B
esc
hre
ibung
Techn.
Date
n
* in Vorbereitung

4 Smart Servo Package
Smart Automation – Mit den Controllern von
SEW-EURODRIVE lassen sich sowohl program-
mierbare als auch rein konfigurierbare Automa-
tionslösungen erstellen – grafisch geführt und
spielend einfach.
Smart Technology – Der MOVITRAC® LTP-
Universalumrichter mit dem LTX-Servomodul
bietet zwei Motorbetriebsarten. Servo closed
loop und Asynchronmotoren können betrieben
werden.
Smart Selection – Durch vordefinierte Kombina-
toriken wird der Produktauswahl- und Abstim-
mungsprozess effizienter, zeitsparender und weni-
ger fehleranfällig, bei gleichzeitig hoher Flexibilität.
Smart Integration – Mit Controllern und
Gateways lässt sich das Smart Servo Package
genauso einfach an übergeordnete Steuerun-
gen (Profibus, ProfiNet, EtherNet/IP, DeviceNet,
Modbus TCP) anbinden wie mit den analogen
Schnittstellen (+/- 10 V, step/dir, Encoder).
Die Vorteile des Smart Servo Package
im Überblick:
5
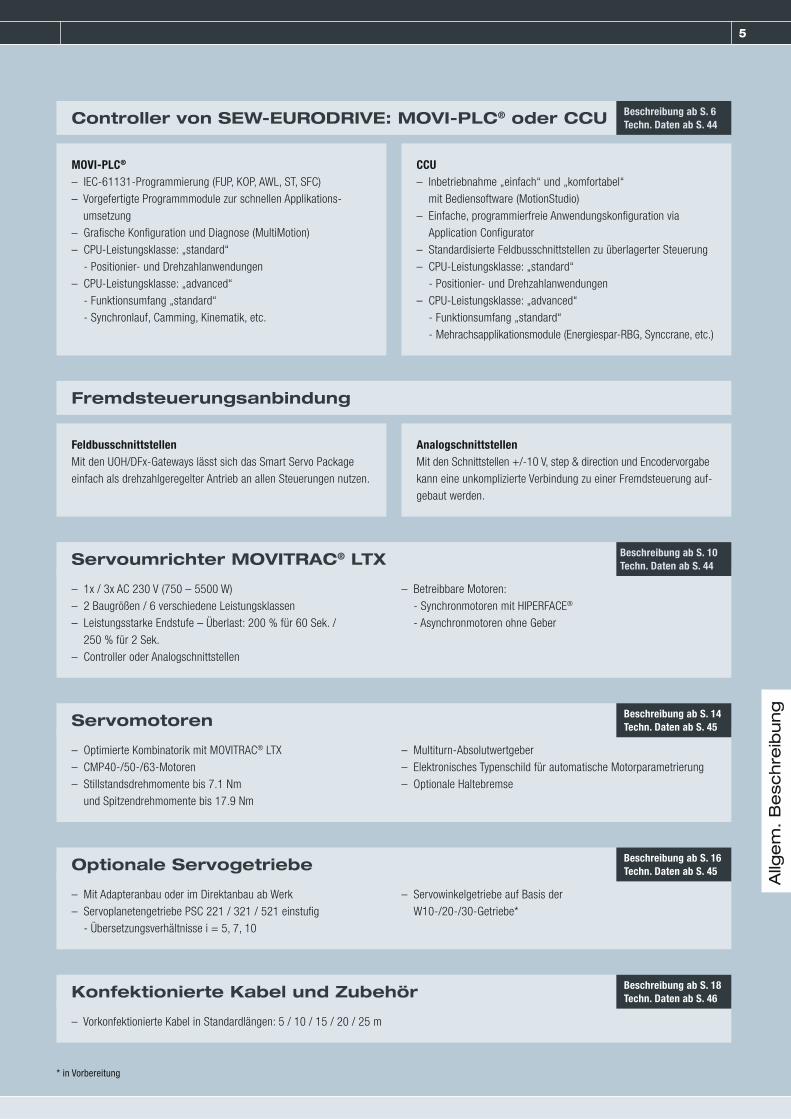
MOVI-PLC®
– IEC-61131-Programmierung (FUP, KOP, AWL, ST, SFC)
– Vorgefertigte Programmmodule zur schnellen Applikations-
umsetzung
– Grafische Konfiguration und Diagnose (MultiMotion)
– CPU-Leistungsklasse: „standard“
- Positionier- und Drehzahlanwendungen
– CPU-Leistungsklasse: „advanced“
- Funktionsumfang „standard“
- Synchronlauf, Camming, Kinematik, etc.
Feldbusschnittstellen
Mit den UOH/DFx-Gateways lässt sich das Smart Servo Package
einfach als drehzahlgeregelter Antrieb an allen Steuerungen nutzen.
– 1x / 3x AC 230 V (750 – 5500 W)
– 2 Baugrößen / 6 verschiedene Leistungsklassen
– Leistungsstarke Endstufe – Überlast: 200 % für 60 Sek. /
250 % für 2 Sek.
– Controller oder Analogschnittstellen
– Betreibbare Motoren:
- Synchronmotoren mit HIPERFACE®
- Asynchronmotoren ohne Geber
– Optimierte Kombinatorik mit MOVITRAC® LTX
– CMP40-/50-/63-Motoren
– Stillstandsdrehmomente bis 7.1 Nm
und Spitzendrehmomente bis 17.9 Nm
– Multiturn-Absolutwertgeber
– Elektronisches Typenschild für automatische Motorparametrierung
– Optionale Haltebremse
– Mit Adapteranbau oder im Direktanbau ab Werk
– Servoplanetengetriebe PSC 221 / 321 / 521 einstufig
- Übersetzungsverhältnisse i = 5, 7, 10
– Servowinkelgetriebe auf Basis der
W10-/20-/30-Getriebe*
– Vorkonfektionierte Kabel in Standardlängen: 5 / 10 / 15 / 20 / 25 m
Analogschnittstellen
Mit den Schnittstellen +/-10 V, step & direction und Encodervorgabe
kann eine unkomplizierte Verbindung zu einer Fremdsteuerung auf-
gebaut werden.
CCU
– Inbetriebnahme „einfach“ und „komfortabel“
mit Bediensoftware (MotionStudio)
– Einfache, programmierfreie Anwendungskonfiguration via
Application Configurator
– Standardisierte Feldbusschnittstellen zu überlagerter Steuerung
– CPU-Leistungsklasse: „standard“
- Positionier- und Drehzahlanwendungen
– CPU-Leistungsklasse: „advanced“
- Funktionsumfang „standard“
- Mehrachsapplikationsmodule (Energiespar-RBG, Synccrane, etc.)
* in Vorbereitung
Controller von SEW-EURODRIVE: MOVI-PLC® oder CCU
Fremdsteuerungsanbindung
Servoumrichter MOVITRAC® LTX
Servomotoren
Optionale Servogetriebe
Konfektionierte Kabel und Zubehör
Beschreibung ab S. 6
Techn. Daten ab S. 44
Beschreibung ab S. 10
Techn. Daten ab S. 44
Beschreibung ab S. 14
Techn. Daten ab S. 45
Beschreibung ab S. 16
Techn. Daten ab S. 45
Beschreibung ab S. 18
Techn. Daten ab S. 46
Allg
em
. B
esc
hre
ibung
6 Smart Automation
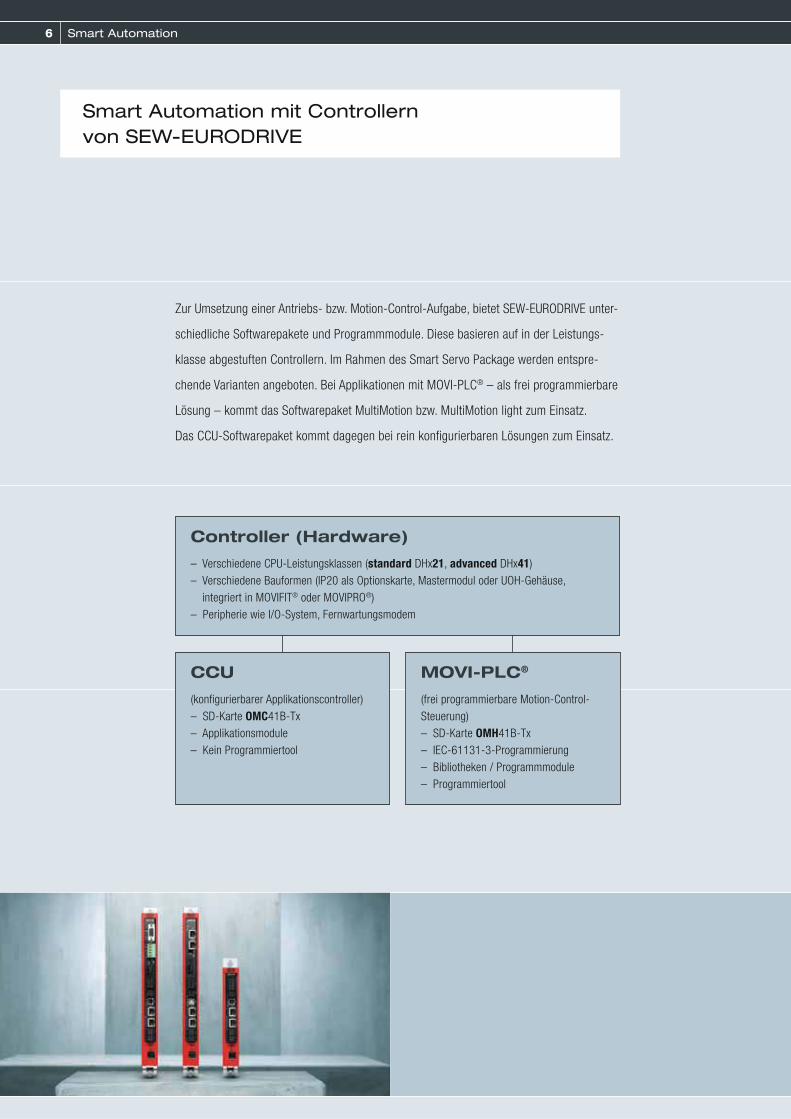
Smart Automation mit Controllern von SEW-EURODRIVE
Zur Umsetzung einer Antriebs- bzw. Motion-Control-Aufgabe, bietet SEW-EURODRIVE unter-
schiedliche Softwarepakete und Programmmodule. Diese basieren auf in der Leistungs-
klasse abgestuften Controllern. Im Rahmen des Smart Servo Package werden entspre-
chende Varianten angeboten. Bei Applikationen mit MOVI-PLC® – als frei programmierbare
Lösung – kommt das Softwarepaket MultiMotion bzw. MultiMotion light zum Einsatz.
Das CCU-Software paket kommt dagegen bei rein konfigurierbaren Lösungen zum Einsatz.
Controller (Hardware)
– Verschiedene CPU-Leistungsklassen (standard DHx21, advanced DHx41)
– Verschiedene Bauformen (IP20 als Optionskarte, Mastermodul oder UOH-Gehäuse,
integriert in MOVIFIT® oder MOVIPRO®)
– Peripherie wie I/O-System, Fernwartungsmodem
CCU
(konfigurierbarer Applikationscontroller)
– SD-Karte OMC41B-Tx
– Applikationsmodule
– Kein Programmiertool
MOVI-PLC®
(frei programmierbare Motion-Control-
Steuerung)
– SD-Karte OMH41B-Tx
– IEC-61131-3-Programmierung
– Bibliotheken / Programmmodule
– Programmiertool

7
Smart Automation –
mit dem CCU-Softwarepaket (Configurable Control Unit):
konfigurierbar, standardisiert und einfach
Konfiguration MOVITRAC® LTX
Konfiguration CCU-Controller
Die Vorteile im Überblick:
Für Applikationen mit überwiegendem Anteil an
Positionier- und Drehzahlanforderungen bietet
die Steuerungstechnik von SEW-EURODRIVE die
Configurable Control Unit (CCU) mit standardi-
sierten und direkt lauffähigen Applikationsmo-
dulen, die nur parametriert werden müssen. Ihre
Funktionalitäten sind der konkreten Applikation
angepasst und lassen sich, ganz ohne Program-
mierkenntnisse und zeitlichen Aufwand, einfach
konfigurieren. Eine integrierte Diagnose unter-
stützt zusätzlich bei der schnellen und unkom-
plizierten Inbetriebnahme. Eine Programmierung
ist dank der vordefinierten Lösungsmodule nicht
notwendig und möglich.
Tool: DriveStartup
– Motorinbetriebnahme
– Kommunikationseinstellungen
– Für jeden Antrieb durchzuführen
Tool: Application Configurator
– Kommunikationseinstellungen
– Auswahl der Applikationsmodule
– Konfiguration der Applikation
– Diagnose / Steuerbetrieb
– Parametrierbare Lösungen für anspruchsvolle
Motion-Control-Anwendungen
– Applikationsmodule übergreifend für Antriebs-
elektronik von SEW-EURODRIVE einsetzbar
– Einfache grafische Konfiguration
– Komfortable Moduldiagnose mit Steuerbetrieb
zur schnellen Inbetriebnahme ohne überlagerte
aktive SPS
– Prozessdatenmonitor mit Steuerbetrieb als
Unterstützung der Feldbusinbetriebnahme
– Integriertes Trace zur Antriebsoptimierung und
Prozessdiagnose
– Engineering über USB oder Ethernet
– Datenhaltung über eine SD-Karte für das
gesamte Applikationsmodul und alle Antriebs-
parameter
Allg
em
. B
esc
hre
ibung

8 Smart Automation
Smart Automation –
MOVI-PLC® mit dem MultiMotion-Softwarepaket:
universell, individualisierbar und schnell
MultiMotion ist das ideale Programmmodul für
Anwendungen bei denen mehrere Achsen über
Synchronisation oder Kurvenscheibe miteinander
gekoppelt sind. Damit ist es die Lösungsplatt-
form für alle Arten von be- und verarbeitenden
Maschinen. Die Funktionalität des Programm-
moduls ist völlig unabhängig von der eingesetzten
Antriebselektronik, z. B. dem Universalumrichter
MOVITRAC® LTX oder MOVIDRIVE®.
Die Automationslösung lässt sich offline mit
virtuellen Achsen am Schreibtisch simulieren,
parametrieren und programmieren. Das Pro-
grammmodul MultiMotion gibt es in zwei Aus-
prägungen: „MultiMotion“ oder „MultiMotion
light“. MultiMotion empfiehlt sich aufgrund
seiner Leistungsfähigkeit als generelle Lösungs-
plattform für alle Produktionsmaschinen und
MultiMotion light primär für positionier- und
drehzahlgeregelte Anwendungen.
Konfiguration MOVITRAC® LTX
Tool: DriveStartup
– Motorinbetriebnahme
– Kommunikationseinstellungen
– Für jeden Antrieb durchzuführen
9
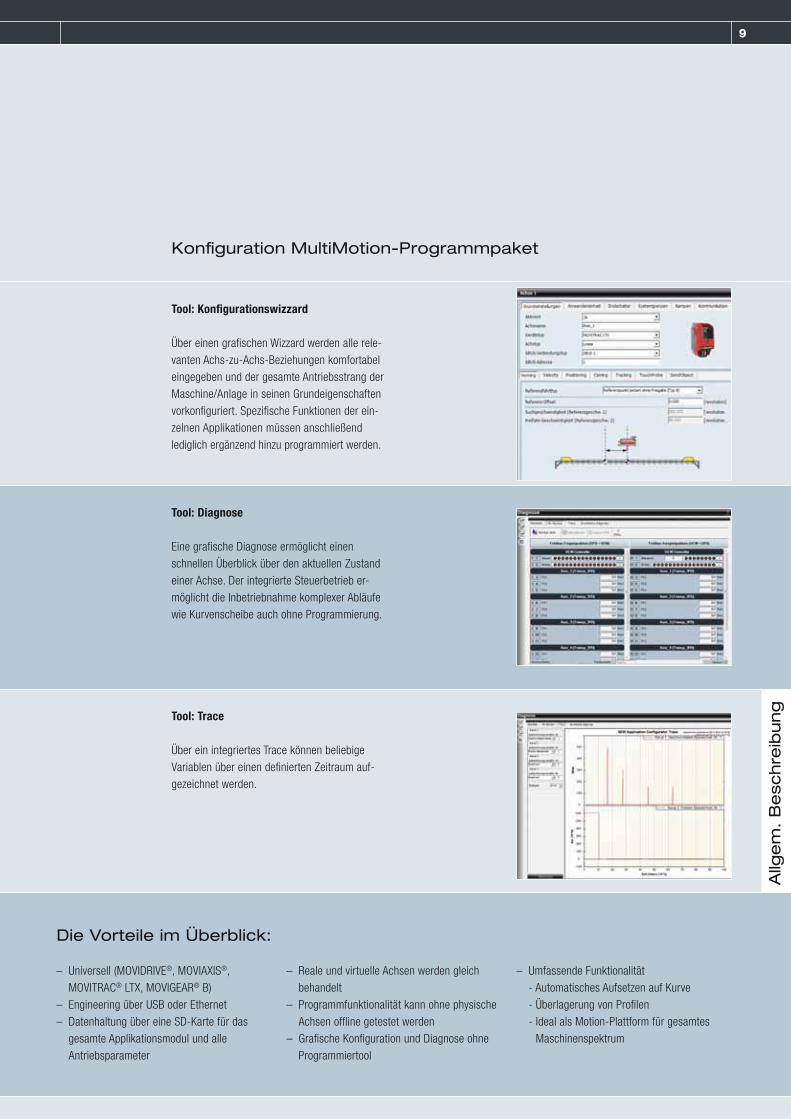
Konfiguration MultiMotion-Programmpaket
Tool: Konfigurationswizzard
Über einen grafischen Wizzard werden alle rele-
vanten Achs-zu-Achs-Beziehungen komfortabel
eingegeben und der gesamte Antriebsstrang der
Maschine/Anlage in seinen Grundeigenschaften
vorkonfiguriert. Spezifische Funktionen der ein-
zelnen Applikationen müssen anschließend
lediglich ergänzend hinzu programmiert werden.
Tool: Diagnose
Eine grafische Diagnose ermöglicht einen
schnellen Überblick über den aktuellen Zustand
einer Achse. Der integrierte Steuerbetrieb er-
möglicht die Inbetriebnahme komplexer Abläufe
wie Kurvenscheibe auch ohne Programmierung.
Tool: Trace
Über ein integriertes Trace können beliebige
Variablen über einen definierten Zeitraum auf-
gezeichnet werden.
Die Vorteile im Überblick:
– Universell (MOVIDRIVE®, MOVIAXIS®,
MOVITRAC® LTX, MOVIGEAR® B)
– Engineering über USB oder Ethernet
– Datenhaltung über eine SD-Karte für das
gesamte Applikationsmodul und alle
Antriebsparameter
– Reale und virtuelle Achsen werden gleich
behandelt
– Programmfunktionalität kann ohne physische
Achsen offline getestet werden
– Grafische Konfiguration und Diagnose ohne
Programmiertool
– Umfassende Funktionalität
- Automatisches Aufsetzen auf Kurve
- Überlagerung von Profilen
- Ideal als Motion-Plattform für gesamtes
Maschinenspektrum
Allg
em
. B
esc
hre
ibung

10
Grundsätzlich ist MOVITRAC® LTX für 1 x /
3 x AC 230 V in zwei Baugrößen verfügbar und
deckt einen Leistungsbereich von bis zu 5.5 kW
ab.
MOVITRAC® LTX ist einfach bedienbar, zeit-
sparend in der Inbetriebnahme und kostenopti-
miert für seinen Anwendungsbereich. Besonders
geeignet ist MOVITRAC® LTX bei normalen
Positionieranwendungen und Mehrachsanwen-
dungen mit dynamischer Regelungsgüte in
kleinen bis mittelgroßen Maschinen oder
Maschinenmodulen.
+ =
Smart Technology – MOVITRAC® LTX
Smart Drive mit Smart Technology – MOVITRAC® LTP und LTX-Servomodul
Der Servo-Universalumrichter MOVITRAC® LTX basiert auf einem MOVITRAC® LTP-B,
welches zusätzlich mit dem optionalen LTX-Servomodul ausgerüstet ist. Das Ergebnis ist
ein universell einsetzbarer Umrichter mit allen notwendigen Motion-Control-Funktionen,
hoher Leistungsdichte und einfacher Bedienung.
MOVITRAC® LTP-B LTX-Servomodul MOVITRAC® LTX
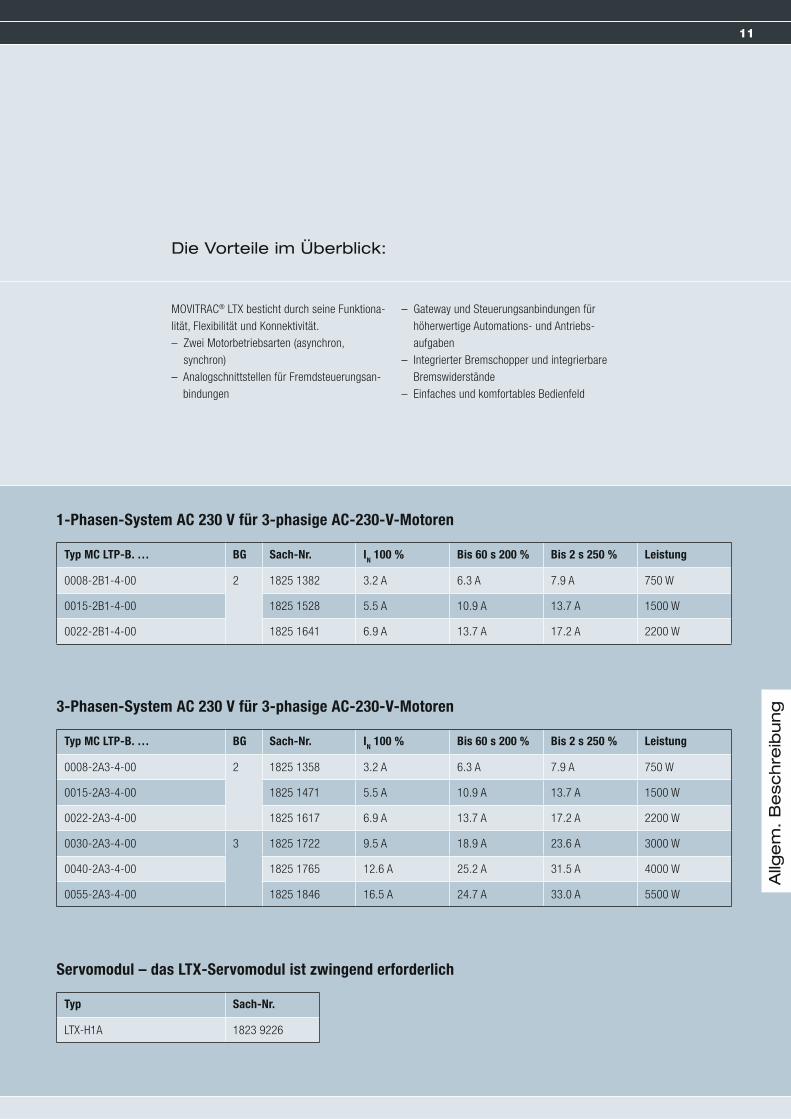
11
Typ MC LTP-B. … BG Sach-Nr. IN 100 % Bis 60 s 200 % Bis 2 s 250 % Leistung
0008-2B1-4-00 2 1825 1382 3.2 A 6.3 A 7.9 A 750 W
0015-2B1-4-00 1825 1528 5.5 A 10.9 A 13.7 A 1500 W
0022-2B1-4-00 1825 1641 6.9 A 13.7 A 17.2 A 2200 W
Typ Sach-Nr.
LTX-H1A 1823 9226
Typ MC LTP-B. … BG Sach-Nr. IN 100 % Bis 60 s 200 % Bis 2 s 250 % Leistung
0008-2A3-4-00 2 1825 1358 3.2 A 6.3 A 7.9 A 750 W
0015-2A3-4-00 1825 1471 5.5 A 10.9 A 13.7 A 1500 W
0022-2A3-4-00 1825 1617 6.9 A 13.7 A 17.2 A 2200 W
0030-2A3-4-00 3 1825 1722 9.5 A 18.9 A 23.6 A 3000 W
0040-2A3-4-00 1825 1765 12.6 A 25.2 A 31.5 A 4000 W
0055-2A3-4-00 1825 1846 16.5 A 24.7 A 33.0 A 5500 W
1-Phasen-System AC 230 V für 3-phasige AC-230-V-Motoren
3-Phasen-System AC 230 V für 3-phasige AC-230-V-Motoren
Servomodul – das LTX-Servomodul ist zwingend erforderlich
Die Vorteile im Überblick:
MOVITRAC® LTX besticht durch seine Funktiona-
lität, Flexibilität und Konnektivität.
– Zwei Motorbetriebsarten (asynchron,
synchron)
– Analogschnittstellen für Fremdsteuerungsan-
bindungen
– Gateway und Steuerungsanbindungen für
höherwertige Automations- und Antriebs-
aufgaben
– Integrierter Bremschopper und integrierbare
Bremswiderstände
– Einfaches und komfortables Bedienfeld
Allg
em
. B
esc
hre
ibung
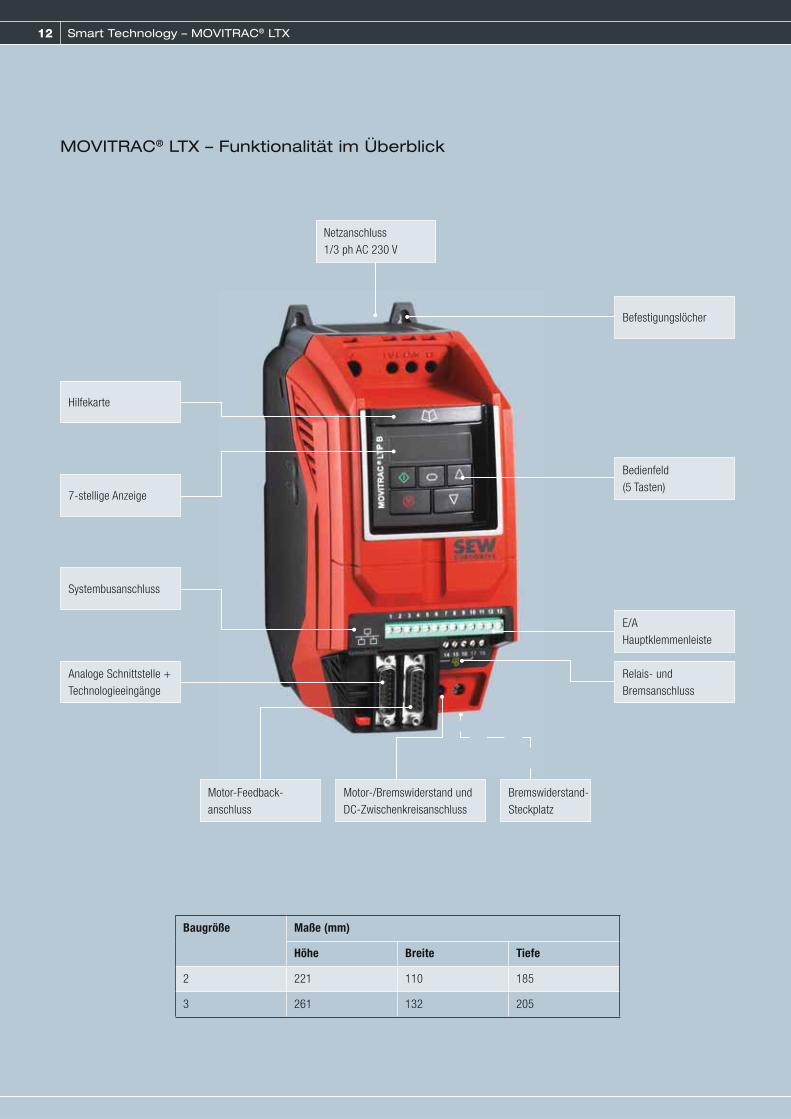
12
Baugröße Maße (mm)
Höhe Breite Tiefe
2 221 110 185
3 261 132 205
MOVITRAC® LTX – Funktionalität im Überblick
Analoge Schnittstelle +
Technologieeingänge
Systembusanschluss
Motor-Feedback-
anschluss
Motor-/Bremswiderstand und
DC-Zwischenkreisanschluss
Bremswiderstand-
Steckplatz
7-stellige Anzeige
Hilfekarte
Netzanschluss
1/3 ph AC 230 V
Befestigungslöcher
Bedienfeld
(5 Tasten)
E/A
Hauptklemmenleiste
Relais- und
Bremsanschluss
Smart Technology – MOVITRAC® LTX
13
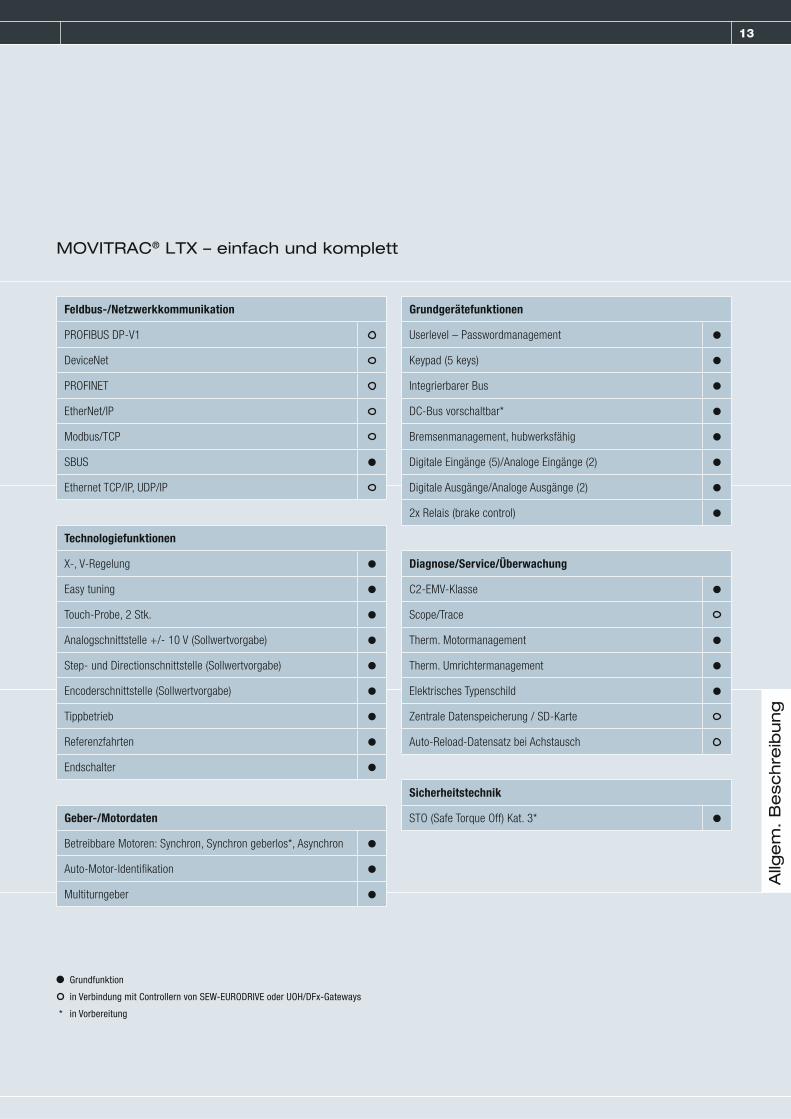
MOVITRAC® LTX – einfach und komplett
Grundgerätefunktionen
Userlevel – Passwordmanagement
Keypad (5 keys)
Integrierbarer Bus
DC-Bus vorschaltbar*
Bremsenmanagement, hubwerksfähig
Digitale Eingänge (5)/Analoge Eingänge (2)
Digitale Ausgänge/Analoge Ausgänge (2)
2x Relais (brake control)
Diagnose/Service/Überwachung
C2-EMV-Klasse
Scope/Trace
Therm. Motormanagement
Therm. Umrichtermanagement
Elektrisches Typenschild
Zentrale Datenspeicherung / SD-Karte
Auto-Reload-Datensatz bei Achstausch
Sicherheitstechnik
STO (Safe Torque Off) Kat. 3*
Feldbus-/Netzwerkkommunikation
PROFIBUS DP-V1
DeviceNet
PROFINET
EtherNet/IP
Modbus/TCP
SBUS
Ethernet TCP/IP, UDP/IP
Technologiefunktionen
X-, V-Regelung
Easy tuning
Touch-Probe, 2 Stk.
Analogschnittstelle +/- 10 V (Sollwertvorgabe)
Step- und Directionschnittstelle (Sollwertvorgabe)
Encoderschnittstelle (Sollwertvorgabe)
Tippbetrieb
Referenzfahrten
Endschalter
Geber-/Motordaten
Betreibbare Motoren: Synchron, Synchron geberlos*, Asynchron
Auto-Motor-Identifikation
Multiturngeber
Allg
em
. B
esc
hre
ibung
Grundfunktion
in Verbindung mit Controllern von SEW-EURODRIVE oder UOH/DFx-Gateways
* in Vorbereitung
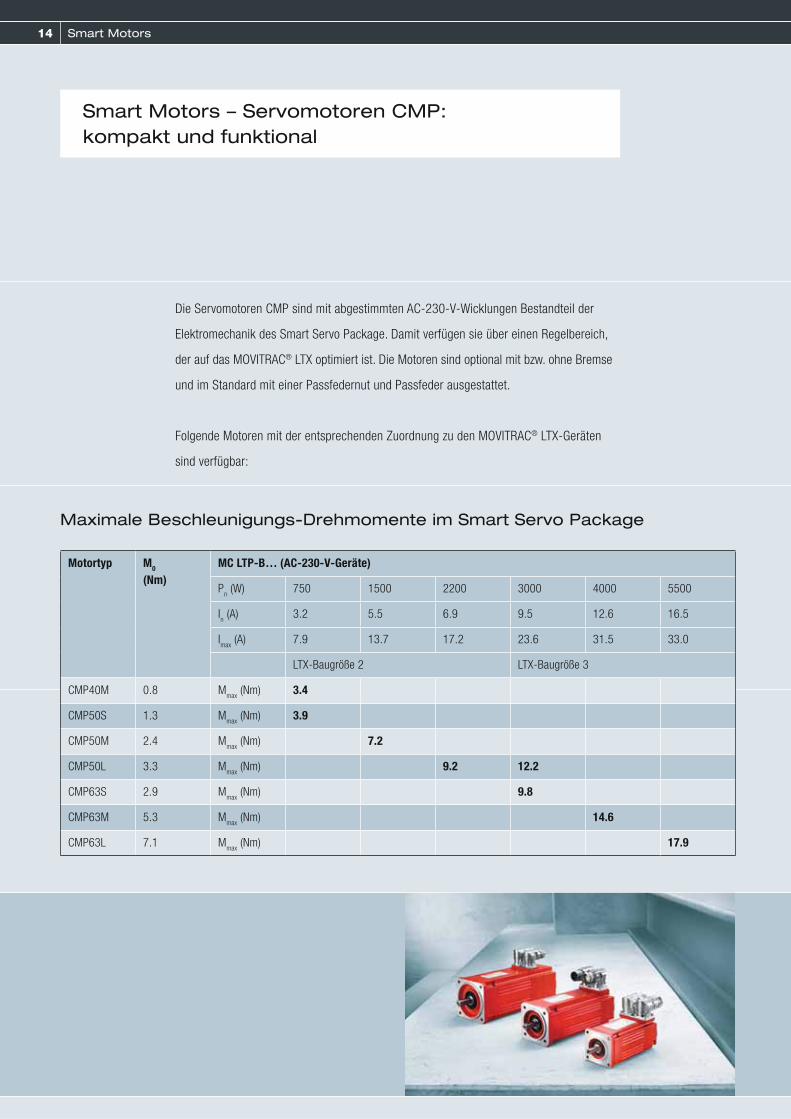
14
Maximale Beschleunigungs-Drehmomente im Smart Servo Package
Motortyp M0
(Nm)
MC LTP-B… (AC-230-V-Geräte)
Pn (W) 750 1500 2200 3000 4000 5500
In (A) 3.2 5.5 6.9 9.5 12.6 16.5
Imax
(A) 7.9 13.7 17.2 23.6 31.5 33.0
LTX-Baugröße 2 LTX-Baugröße 3
CMP40M 0.8 Mmax
(Nm) 3.4
CMP50S 1.3 Mmax
(Nm) 3.9
CMP50M 2.4 Mmax
(Nm) 7.2
CMP50L 3.3 Mmax
(Nm) 9.2 12.2
CMP63S 2.9 Mmax
(Nm) 9.8
CMP63M 5.3 Mmax
(Nm) 14.6
CMP63L 7.1 Mmax
(Nm) 17.9
Smart Motors – Servomotoren CMP:kompakt und funktional
Die Servomotoren CMP sind mit abgestimmten AC-230-V-Wicklungen Bestandteil der
Elektromechanik des Smart Servo Package. Damit verfügen sie über einen Regelbereich,
der auf das MOVITRAC® LTX optimiert ist. Die Motoren sind optional mit bzw. ohne Bremse
und im Standard mit einer Passfedernut und Passfeder ausgestattet.
Folgende Motoren mit der entsprechenden Zuordnung zu den MOVITRAC® LTX-Geräten
sind verfügbar:
Smart Motors
15
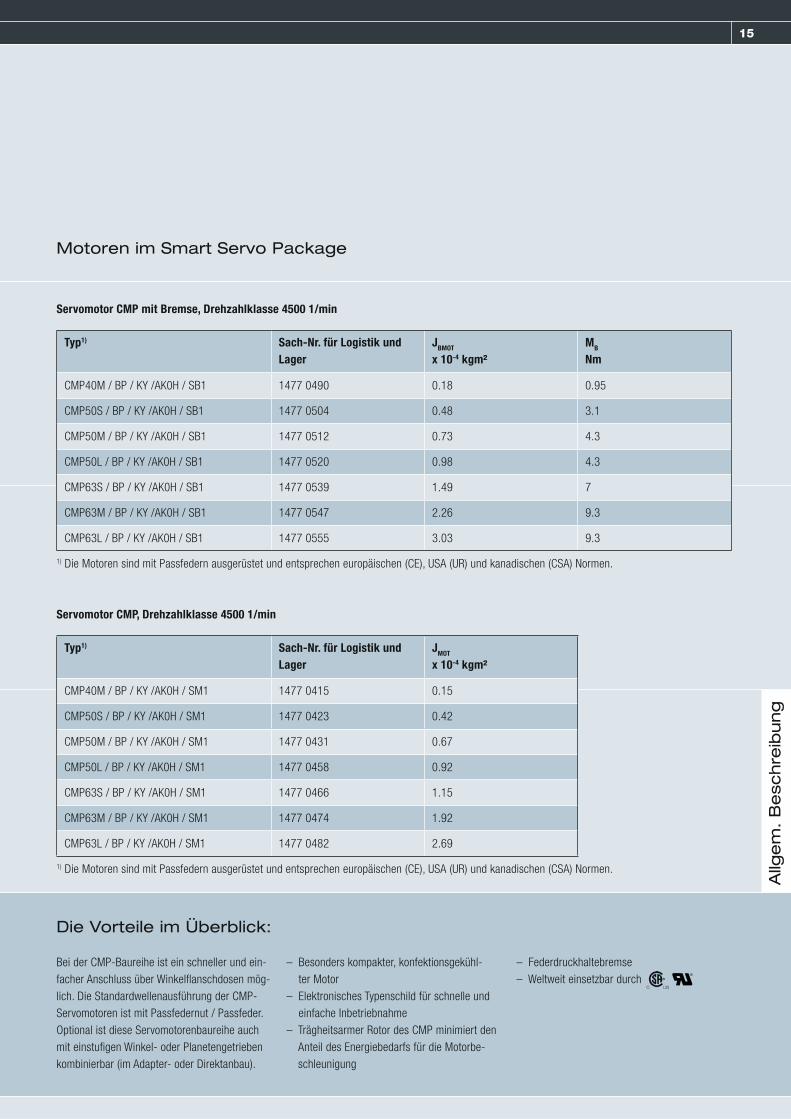
Motoren im Smart Servo Package
Servomotor CMP mit Bremse, Drehzahlklasse 4500 1/min
Servomotor CMP, Drehzahlklasse 4500 1/min
Typ1) Sach-Nr. für Logistik und
Lager
JBMOT
x 10-4 kgm²
MB
Nm
CMP40M / BP / KY /AK0H / SB1 1477 0490 0.18 0.95
CMP50S / BP / KY /AK0H / SB1 1477 0504 0.48 3.1
CMP50M / BP / KY /AK0H / SB1 1477 0512 0.73 4.3
CMP50L / BP / KY /AK0H / SB1 1477 0520 0.98 4.3
CMP63S / BP / KY /AK0H / SB1 1477 0539 1.49 7
CMP63M / BP / KY /AK0H / SB1 1477 0547 2.26 9.3
CMP63L / BP / KY /AK0H / SB1 1477 0555 3.03 9.3
Typ1) Sach-Nr. für Logistik und
Lager
JMOT
x 10-4 kgm²
CMP40M / BP / KY /AK0H / SM1 1477 0415 0.15
CMP50S / BP / KY /AK0H / SM1 1477 0423 0.42
CMP50M / BP / KY /AK0H / SM1 1477 0431 0.67
CMP50L / BP / KY /AK0H / SM1 1477 0458 0.92
CMP63S / BP / KY /AK0H / SM1 1477 0466 1.15
CMP63M / BP / KY /AK0H / SM1 1477 0474 1.92
CMP63L / BP / KY /AK0H / SM1 1477 0482 2.69
1) Die Motoren sind mit Passfedern ausgerüstet und entsprechen europäischen (CE), USA (UR) und kanadischen (CSA) Normen.
1) Die Motoren sind mit Passfedern ausgerüstet und entsprechen europäischen (CE), USA (UR) und kanadischen (CSA) Normen.
Die Vorteile im Überblick:
Bei der CMP-Baureihe ist ein schneller und ein-
facher Anschluss über Winkelfl anschdosen mög-
lich. Die Standardwellenausführung der CMP-
Servomotoren ist mit Passfedernut / Passfeder.
Optional ist diese Servomotorenbaureihe auch
mit einstufi gen Winkel- oder Planetengetrieben
kombinierbar (im Adapter- oder Direktanbau).
– Besonders kompakter, konfektionsgekühl-
ter Motor
– Elektronisches Typenschild für schnelle und
einfache Inbetriebnahme
– Trägheitsarmer Rotor des CMP minimiert den
Anteil des Energiebedarfs für die Motorbe-
schleunigung
– Federdruckhaltebremse
– Weltweit einsetzbar durch
Allg
em
. B
esc
hre
ibung
16
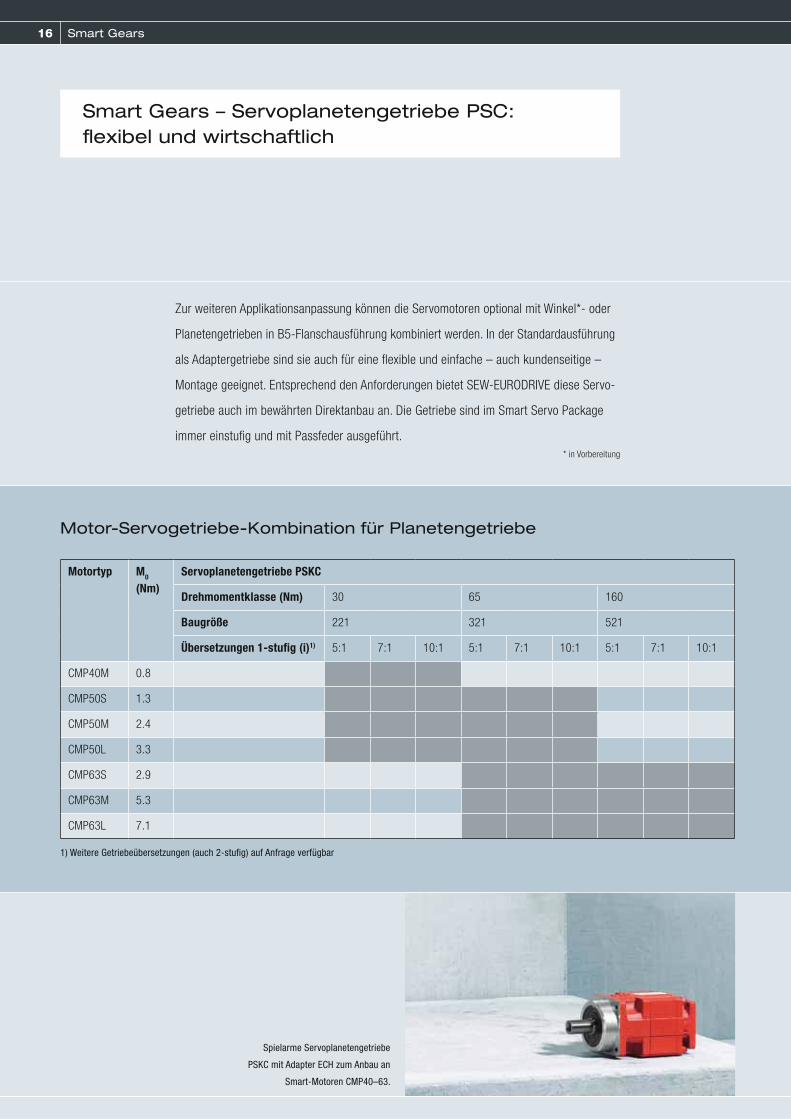
Motor-Servogetriebe-Kombination für Planetengetriebe
Motortyp M0
(Nm)
Servoplanetengetriebe PSKC
Drehmomentklasse (Nm) 30 65 160
Baugröße 221 321 521
Übersetzungen 1-stufig (i)1) 5:1 7:1 10:1 5:1 7:1 10:1 5:1 7:1 10:1
CMP40M 0.8
CMP50S 1.3
CMP50M 2.4
CMP50L 3.3
CMP63S 2.9
CMP63M 5.3
CMP63L 7.1
Smart Gears – Servoplanetengetriebe PSC: flexibel und wirtschaftlich
Zur weiteren Applikationsanpassung können die Servomotoren optional mit Winkel*- oder
Planetengetrieben in B5-Flanschausführung kombiniert werden. In der Standardausführung
als Adaptergetriebe sind sie auch für eine flexible und einfache – auch kundenseitige –
Montage geeignet. Entsprechend den Anforderungen bietet SEW-EURODRIVE diese Servo-
getriebe auch im bewährten Direktanbau an. Die Getriebe sind im Smart Servo Package
immer einstufig und mit Passfeder ausgeführt.
* in Vorbereitung
1) Weitere Getriebeübersetzungen (auch 2-stufig) auf Anfrage verfügbar
Spielarme Servoplanetengetriebe
PSKC mit Adapter ECH zum Anbau an
Smart-Motoren CMP40–63.
Smart Gears
17
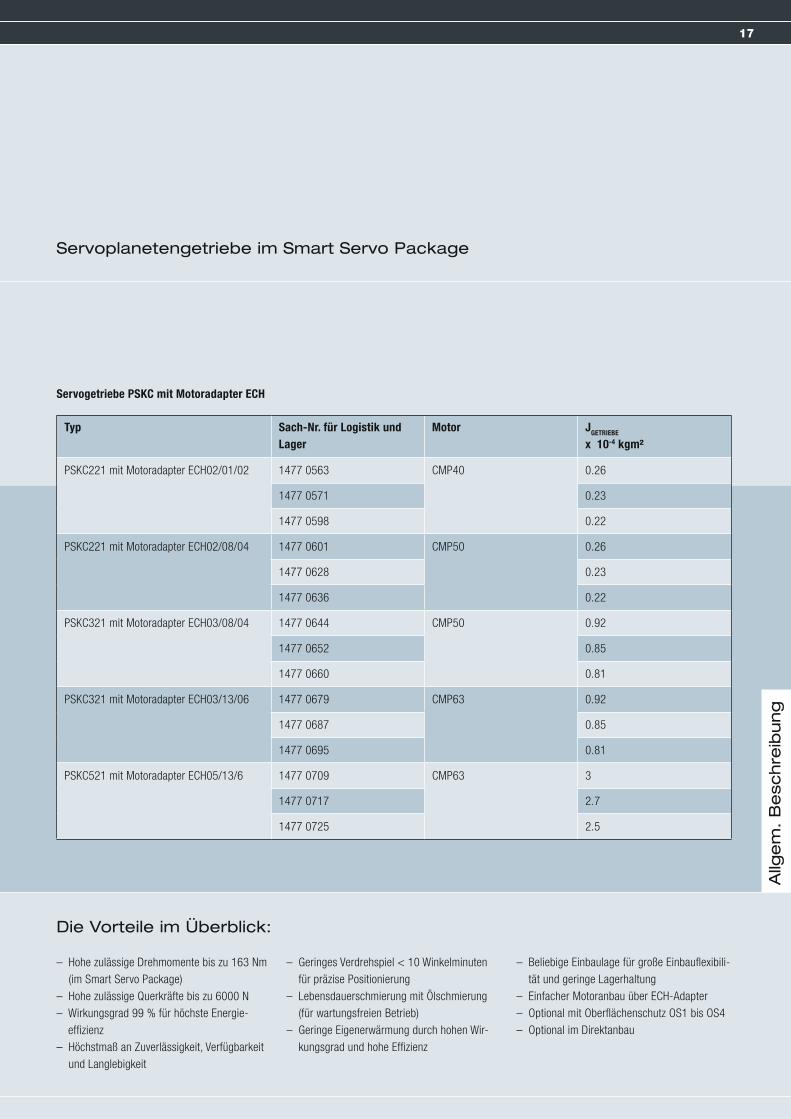
Typ Sach-Nr. für Logistik und
Lager
Motor JGETRIEBE
x 10-4 kgm²
PSKC221 mit Motoradapter ECH02/01/02 1477 0563 CMP40 0.26
1477 0571 0.23
1477 0598 0.22
PSKC221 mit Motoradapter ECH02/08/04 1477 0601 CMP50 0.26
1477 0628 0.23
1477 0636 0.22
PSKC321 mit Motoradapter ECH03/08/04 1477 0644 CMP50 0.92
1477 0652 0.85
1477 0660 0.81
PSKC321 mit Motoradapter ECH03/13/06 1477 0679 CMP63 0.92
1477 0687 0.85
1477 0695 0.81
PSKC521 mit Motoradapter ECH05/13/6 1477 0709 CMP63 3
1477 0717 2.7
1477 0725 2.5
Servoplanetengetriebe im Smart Servo Package
Servogetriebe PSKC mit Motoradapter ECH
Die Vorteile im Überblick:
– Hohe zulässige Drehmomente bis zu 163 Nm
(im Smart Servo Package)
– Hohe zulässige Querkräfte bis zu 6000 N
– Wirkungsgrad 99 % für höchste Energie-
effizienz
– Höchstmaß an Zuverlässigkeit, Verfügbarkeit
und Langlebigkeit
– Geringes Verdrehspiel < 10 Winkelminuten
für präzise Positionierung
– Lebensdauerschmierung mit Ölschmierung
(für wartungsfreien Betrieb)
– Geringe Eigenerwärmung durch hohen Wir-
kungsgrad und hohe Effizienz
– Beliebige Einbaulage für große Einbauflexibili-
tät und geringe Lagerhaltung
– Einfacher Motoranbau über ECH-Adapter
– Optional mit Oberflächenschutz OS1 bis OS4
– Optional im Direktanbau
Allg
em
. B
esc
hre
ibung
18
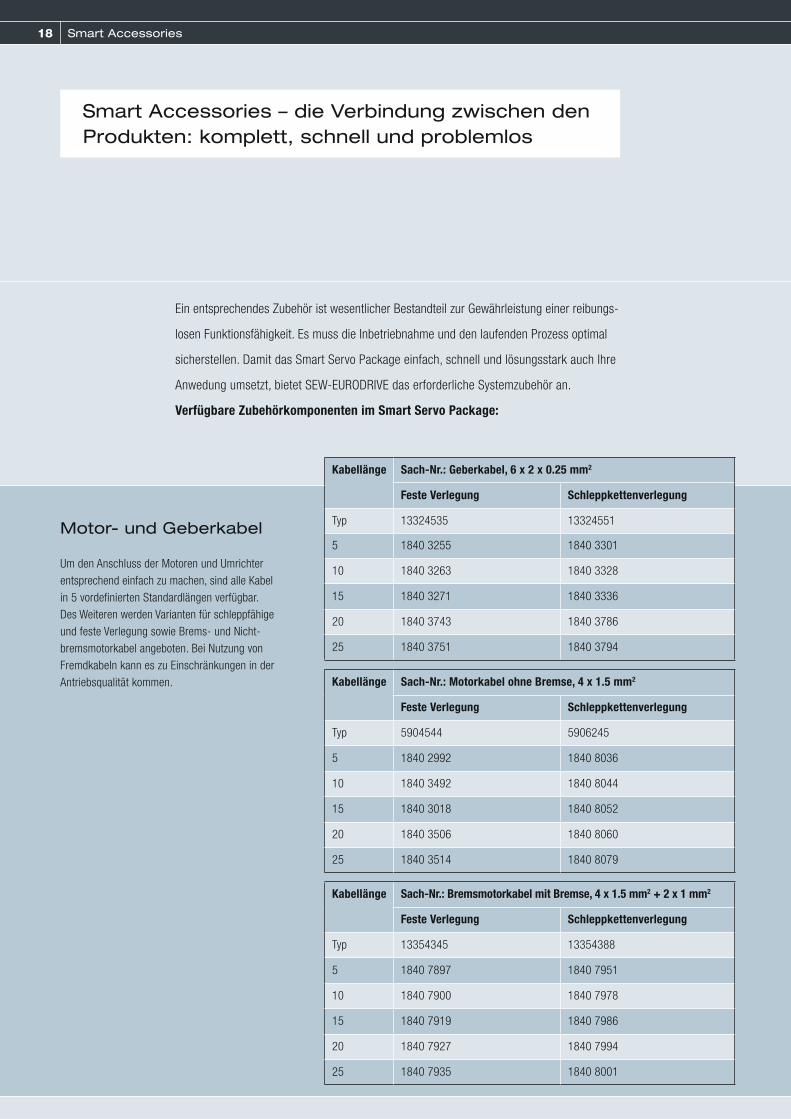
Um den Anschluss der Motoren und Umrichter
entsprechend einfach zu machen, sind alle Kabel
in 5 vordefinierten Standardlängen verfügbar.
Des Weiteren werden Varianten für schleppfähige
und feste Verlegung sowie Brems- und Nicht-
bremsmotorkabel angeboten. Bei Nutzung von
Fremdkabeln kann es zu Einschränkungen in der
Antriebsqualität kommen.
Smart Accessories – die Verbindung zwischen den Produkten: komplett, schnell und problemlos
Ein entsprechendes Zubehör ist wesentlicher Bestandteil zur Gewährleistung einer reibungs-
losen Funktionsfähigkeit. Es muss die Inbetriebnahme und den laufenden Prozess optimal
sicherstellen. Damit das Smart Servo Package einfach, schnell und lösungsstark auch Ihre
Anwedung umsetzt, bietet SEW-EURODRIVE das erforderliche Systemzubehör an.
Verfügbare Zubehörkomponenten im Smart Servo Package:
Motor- und Geberkabel
Kabellänge Sach-Nr.: Geberkabel, 6 x 2 x 0.25 mm2
Feste Verlegung Schleppkettenverlegung
Typ 13324535 13324551
5 1840 3255 1840 3301
10 1840 3263 1840 3328
15 1840 3271 1840 3336
20 1840 3743 1840 3786
25 1840 3751 1840 3794
Kabellänge Sach-Nr.: Motorkabel ohne Bremse, 4 x 1.5 mm2
Feste Verlegung Schleppkettenverlegung
Typ 5904544 5906245
5 1840 2992 1840 8036
10 1840 3492 1840 8044
15 1840 3018 1840 8052
20 1840 3506 1840 8060
25 1840 3514 1840 8079
Kabellänge Sach-Nr.: Bremsmotorkabel mit Bremse, 4 x 1.5 mm2 + 2 x 1 mm2
Feste Verlegung Schleppkettenverlegung
Typ 13354345 13354388
5 1840 7897 1840 7951
10 1840 7900 1840 7978
15 1840 7919 1840 7986
20 1840 7927 1840 7994
25 1840 7935 1840 8001
Smart Accessories
19
Allg
em
. B
esc
hre
ibung
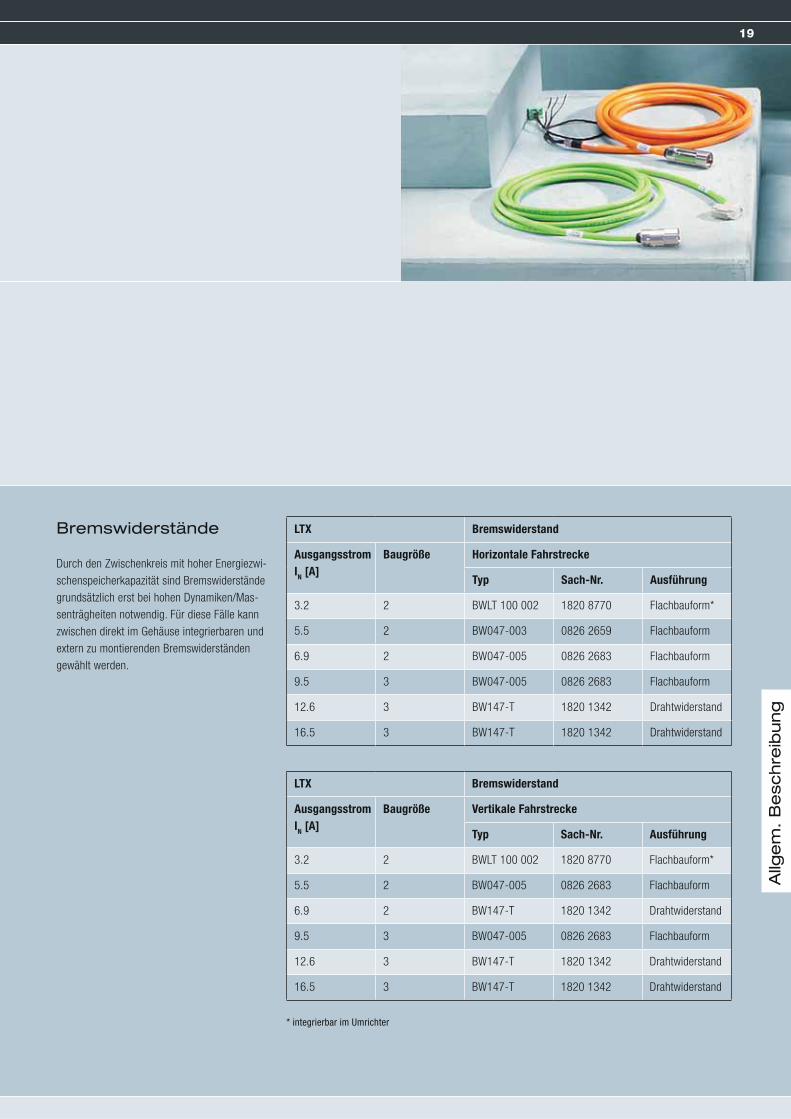
Durch den Zwischenkreis mit hoher Energiezwi-
schenspeicherkapazität sind Bremswiderstände
grundsätzlich erst bei hohen Dynamiken/Mas-
senträgheiten notwendig. Für diese Fälle kann
zwischen direkt im Gehäuse integrierbaren und
extern zu montierenden Bremswiderständen
gewählt werden.
Bremswiderstände LTX Bremswiderstand
Ausgangsstrom
IN [A]
Baugröße Horizontale Fahrstrecke
Typ Sach-Nr. Ausführung
3.2 2 BWLT 100 002 1820 8770 Flachbauform*
5.5 2 BW047-003 0826 2659 Flachbauform
6.9 2 BW047-005 0826 2683 Flachbauform
9.5 3 BW047-005 0826 2683 Flachbauform
12.6 3 BW147-T 1820 1342 Drahtwiderstand
16.5 3 BW147-T 1820 1342 Drahtwiderstand
LTX Bremswiderstand
Ausgangsstrom
IN [A]
Baugröße Vertikale Fahrstrecke
Typ Sach-Nr. Ausführung
3.2 2 BWLT 100 002 1820 8770 Flachbauform*
5.5 2 BW047-005 0826 2683 Flachbauform
6.9 2 BW147-T 1820 1342 Drahtwiderstand
9.5 3 BW047-005 0826 2683 Flachbauform
12.6 3 BW147-T 1820 1342 Drahtwiderstand
16.5 3 BW147-T 1820 1342 Drahtwiderstand
* integrierbar im Umrichter
20
A
A
A
B
B
B
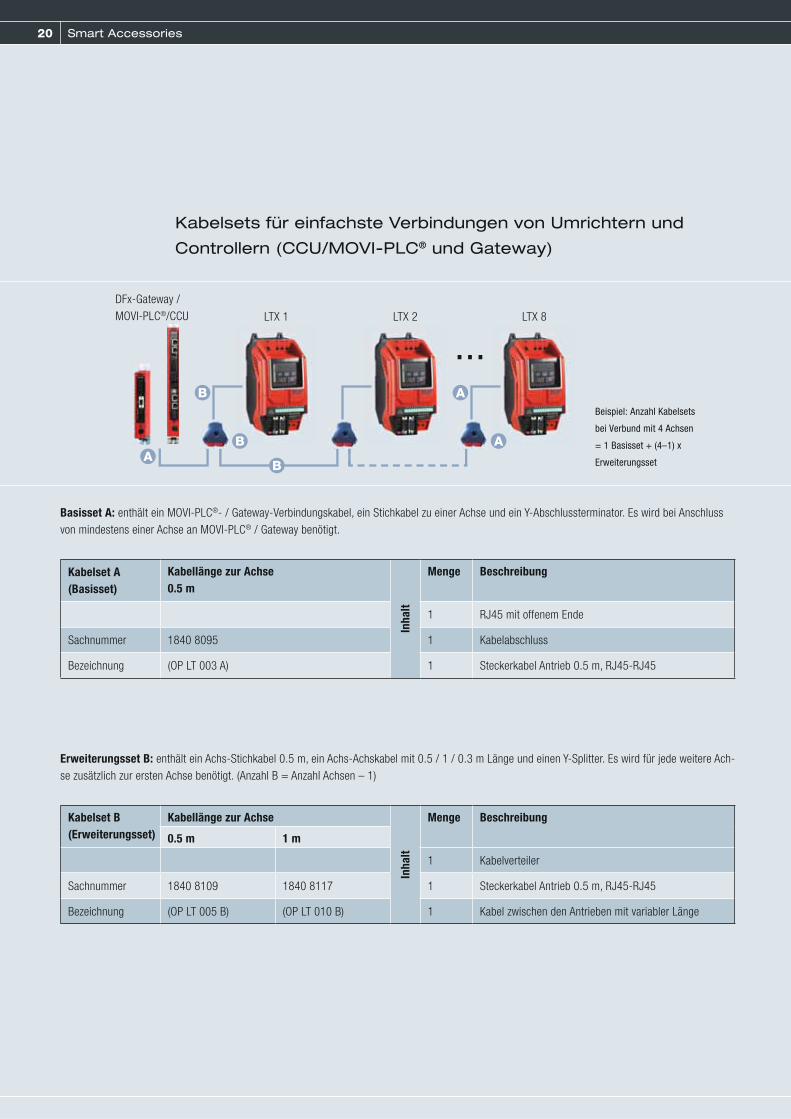
Kabelsets für einfachste Verbindungen von Umrichtern und
Controllern (CCU/MOVI-PLC® und Gateway)
Basisset A: enthält ein MOVI-PLC®- / Gateway-Verbindungskabel, ein Stichkabel zu einer Achse und ein Y-Abschlussterminator. Es wird bei Anschluss
von mindestens einer Achse an MOVI-PLC® / Gateway benötigt.
Erweiterungsset B: enthält ein Achs-Stichkabel 0.5 m, ein Achs-Achskabel mit 0.5 / 1 / 0.3 m Länge und einen Y-Splitter. Es wird für jede weitere Ach-
se zusätzlich zur ersten Achse benötigt. (Anzahl B = Anzahl Achsen – 1)
Beispiel: Anzahl Kabelsets
bei Verbund mit 4 Achsen
= 1 Basisset + (4–1) x
Erweiterungsset
LTX 1
DFx-Gateway /
MOVI-PLC®/CCU LTX 2 LTX 8
Kabelset A
(Basisset)
Kabellänge zur Achse
0.5 m
Inh
alt
Menge Beschreibung
1 RJ45 mit offenem Ende
Sachnummer 1840 8095 1 Kabelabschluss
Bezeichnung (OP LT 003 A) 1 Steckerkabel Antrieb 0.5 m, RJ45-RJ45
Kabelset B
(Erweiterungsset)
Kabellänge zur Achse
Inh
alt
Menge Beschreibung
0.5 m 1 m
1 Kabelverteiler
Sachnummer 1840 8109 1840 8117 1 Steckerkabel Antrieb 0.5 m, RJ45-RJ45
Bezeichnung (OP LT 005 B) (OP LT 010 B) 1 Kabel zwischen den Antrieben mit variabler Länge
Smart Accessories
21
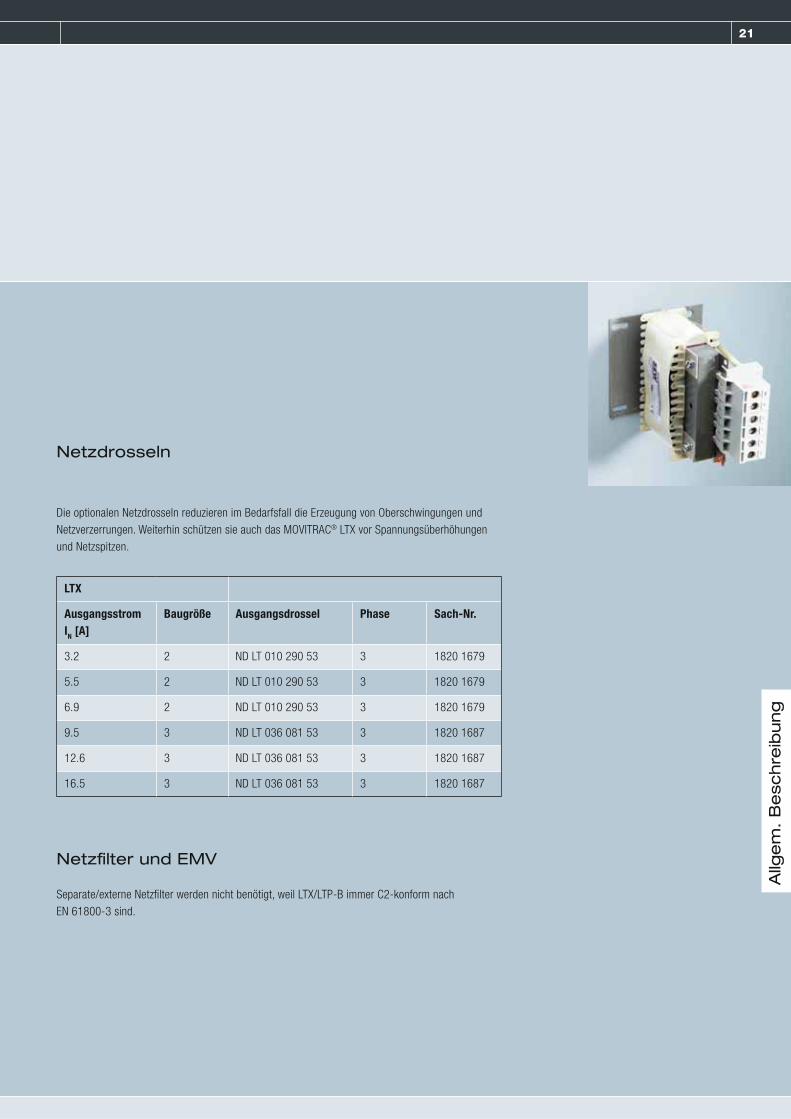
Netzdrosseln
Netzfilter und EMV
Die optionalen Netzdrosseln reduzieren im Bedarfsfall die Erzeugung von Oberschwingungen und
Netzverzerrungen. Weiterhin schützen sie auch das MOVITRAC® LTX vor Spannungsüberhöhungen
und Netzspitzen.
Separate/externe Netzfilter werden nicht benötigt, weil LTX/LTP-B immer C2-konform nach
EN 61800-3 sind.
LTX
Ausgangsstrom
IN [A]
Baugröße Ausgangsdrossel Phase Sach-Nr.
3.2 2 ND LT 010 290 53 3 1820 1679
5.5 2 ND LT 010 290 53 3 1820 1679
6.9 2 ND LT 010 290 53 3 1820 1679
9.5 3 ND LT 036 081 53 3 1820 1687
12.6 3 ND LT 036 081 53 3 1820 1687
16.5 3 ND LT 036 081 53 3 1820 1687A
llgem
. B
esc
hre
ibung
22 Das Automationskonzept von SEW-EURODRIVE
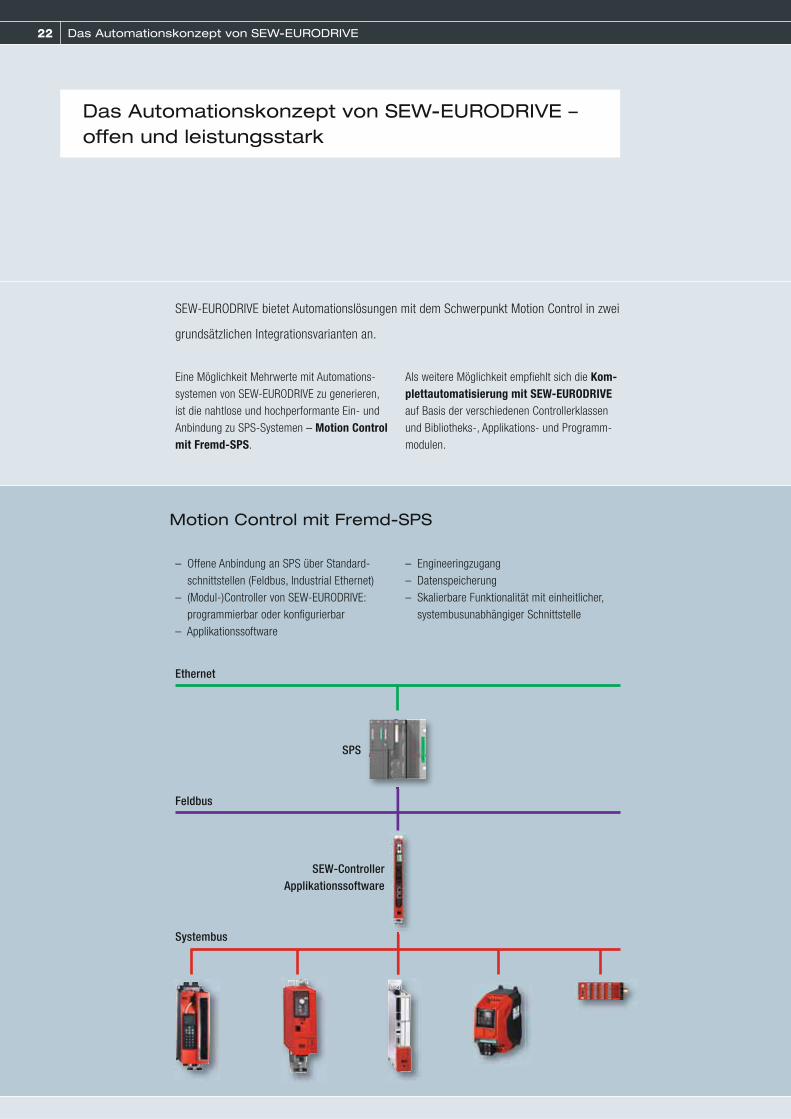
Das Automationskonzept von SEW-EURODRIVE – offen und leistungsstark
SEW-EURODRIVE bietet Automationslösungen mit dem Schwerpunkt Motion Control in zwei
grundsätzlichen Integrationsvarianten an.
– Offene Anbindung an SPS über Standard-
schnittstellen (Feldbus, Industrial Ethernet)
– (Modul-)Controller von SEW-EURODRIVE:
programmierbar oder konfi gurierbar
– Applikationssoftware
– Engineeringzugang
– Datenspeicherung
– Skalierbare Funktionalität mit einheitlicher,
systembusunabhängiger Schnittstelle
Eine Möglichkeit Mehrwerte mit Automations-
systemen von SEW-EURODRIVE zu generieren,
ist die nahtlose und hochperformante Ein- und
Anbindung zu SPS-Systemen – Motion Control
mit Fremd-SPS.
Als weitere Möglichkeit empfi ehlt sich die Kom-
plettautomatisierung mit SEW-EURODRIVE
auf Basis der verschiedenen Controllerklassen
und Bibliotheks-, Applikations- und Programm-
modulen.
Motion Control mit Fremd-SPS
Ethernet
Feldbus
SPS
SEW-ControllerApplikationssoftware
Systembus
23
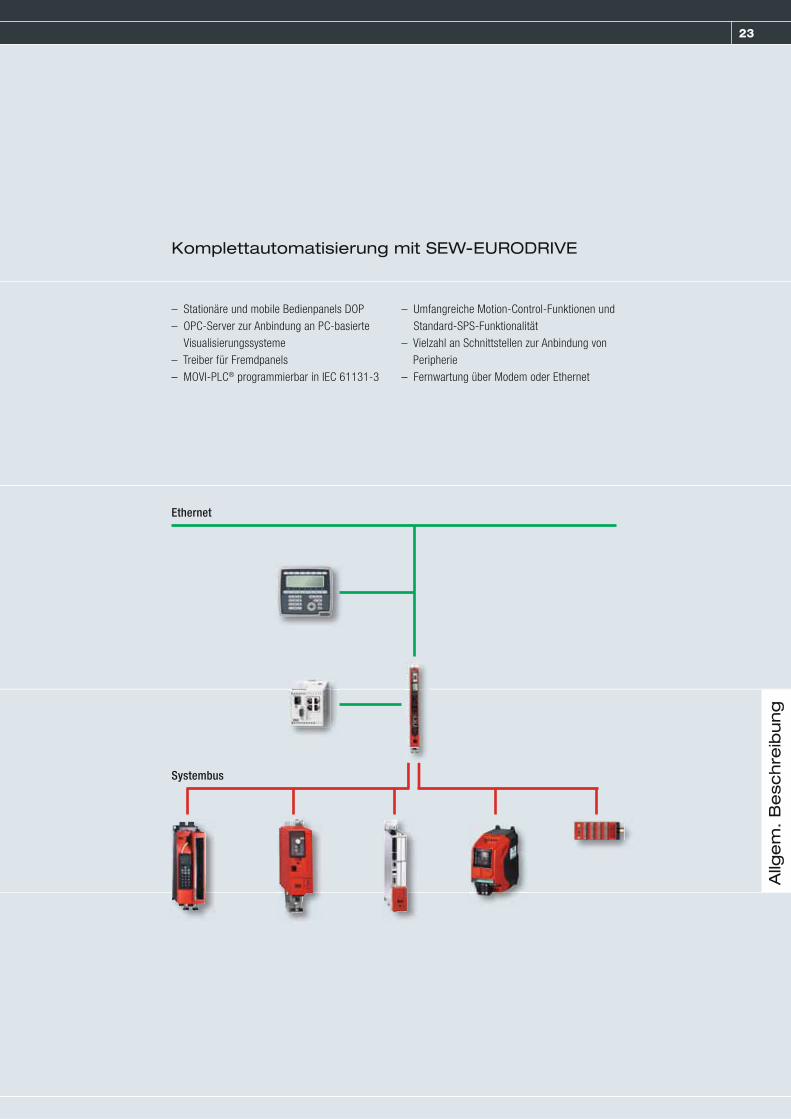
– Stationäre und mobile Bedienpanels DOP
– OPC-Server zur Anbindung an PC-basierte
Visualisierungssysteme
– Treiber für Fremdpanels
– MOVI-PLC® programmierbar in IEC 61131-3
– Umfangreiche Motion-Control-Funktionen und
Standard-SPS-Funktionalität
– Vielzahl an Schnittstellen zur Anbindung von
Peripherie
– Fernwartung über Modem oder Ethernet
Komplettautomatisierung mit SEW-EURODRIVE
Allg
em
. B
esc
hre
ibung
Ethernet
Systembus
24
* nur mit MultiMotion
Applikationen und Einsatzfelder
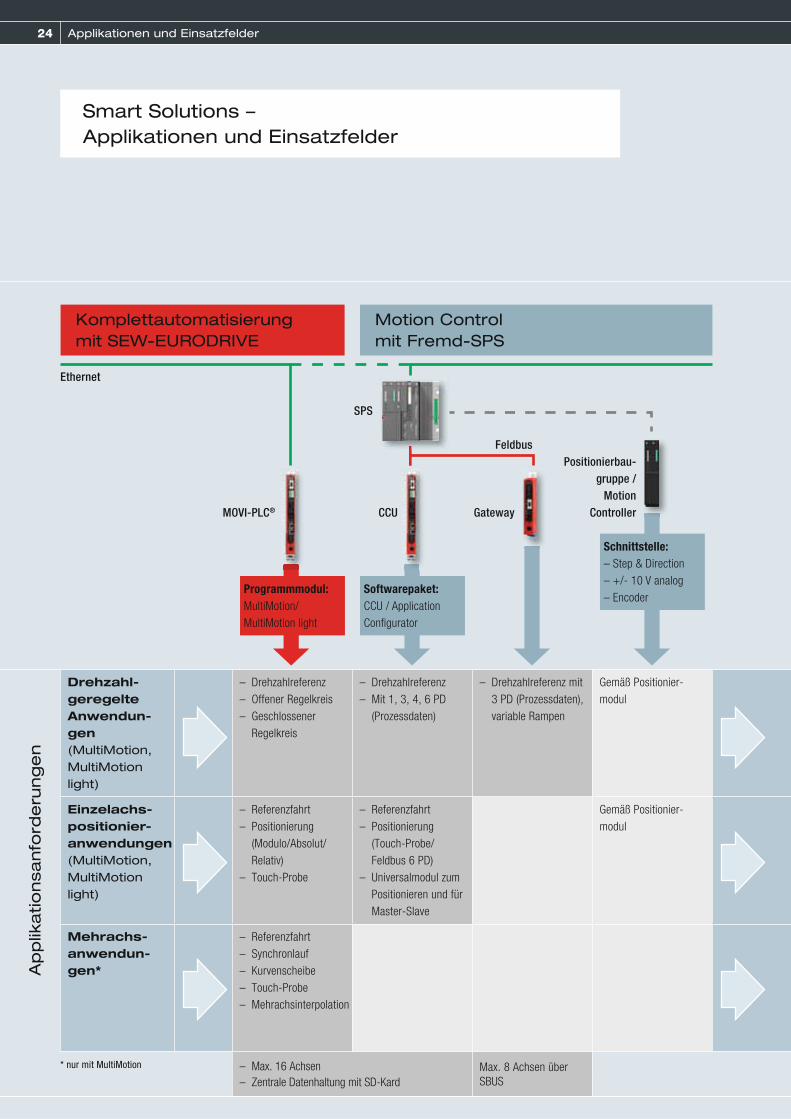
Smart Solutions – Applikationen und Einsatzfelder
Drehzahl-geregelte Anwendun-gen(MultiMotion, MultiMotion light)
– Drehzahlreferenz
– Offener Regelkreis
– Geschlossener
Regelkreis
– Drehzahlreferenz
– Mit 1, 3, 4, 6 PD
(Prozessdaten)
– Drehzahlreferenz mit
3 PD (Prozessdaten),
variable Rampen
Gemäß Positionier-
modul
Einzelachs- positionier-anwendungen(MultiMotion, MultiMotion light)
– Referenzfahrt
– Positionierung
(Modulo/Absolut/
Relativ)
– Touch-Probe
– Referenzfahrt
– Positionierung
(Touch-Probe/
Feldbus 6 PD)
– Universalmodul zum
Positionieren und für
Master-Slave
Gemäß Positionier-
modul
Mehrachs-anwendun-gen*
– Referenzfahrt
– Synchronlauf
– Kurvenscheibe
– Touch-Probe
– Mehrachsinterpolation
– Max. 16 Achsen
– Zentrale Datenhaltung mit SD-Kard
Max. 8 Achsen über
SBUS
Komplettautomatisierung mit SEW-EURODRIVE
Programmmodul:
MultiMotion/
MultiMotion light
Softwarepaket:
CCU / Application
Confi gurator
Schnittstelle:
– Step & Direction
– +/- 10 V analog
– Encoder
Motion Control mit Fremd-SPS
Ethernet
SPS
MOVI-PLC® CCU Gateway
FeldbusPositionierbau-
gruppe /Motion
Controller
Ap
plik
atio
nsanfo
rde
rung
en

25
Beispiele für drehzahlgeregelte
Applikationen:
– Einfaches, energieoptimiertes Förderband/
Lüfterapplikation mit Synchronmotoren
– Wickleranwendungen
Beispiele für Positionier-Applikationen:
– Zustellbewegungen
– Einfache Portale
– Ein-/Ausschieber
– Weichen
– Packer
– Aufrichter
Beispiele für Mehrachs-Applikationen:
– Verkettete Förderbänder mit Bearbeitungsstationen
– Kurvenscheibenapplikationen
– Applikationen mit elektronischem Getriebe
– Wrapper
– Packer, Aufrichter
Es stehen vielfältige Anwendungs- und Steuerungsoptionen angefangen bei einfachen, drehzahlgere-
gelten Applikationen über Positionieranwendungen bis hin zu Mehrachs anwendungen zur Verfügung.
Dabei lässt sich mit Hilfe der zwei Motorbetriebsarten zwischen Synchron- und Asynchronmotor ohne
Geber als Antriebsbasis wählen.
Die Anwendungsoptionen werden in der fol-
genden Tabelle aufgezeigt, wobei zwischen dem
Einsatz des Smart Servo Package mit SEW-
Controllern oder SEW-Gateways und der
Kombination mit Fremdsteuerungen unter-
schieden wird.
Weiterhin sind die Applikationskategorien (dreh-
zahlgeregelte Applikation, etc.) als Selektions-
kriterium abge bildet. Die Lösungsoptionen sind
entsprechend der gewählten Steuerung / des
Gateways und der gewünschten Applikation be-
schrieben.
Das Smart Servo Package ist nahezu in allen
Branchen zuhause. Insbesondere Logistik,
Verpackung oder Handhabungssysteme sind als
automationsintensive Branchen sich selbst
empfehlende Einsatzbereiche. Die vielfältigen
Ansteuerungs- und Integrationsmöglichkeiten
in die Automationsstruktur schaffen die Voraus-
setzung für den flexiblen Einsatz des Smart
Servo Package.
Allg
em
. B
esc
hre
ibung
26 Smart Benefits
Smart Benefits mit Controllern von SEW-EURODRIVE
Die komfortabelste und leistungsstärkste Möglichkeit das Smart Servo Package einzuset-
zen ist in Kombination mit Controllern von SEW-EURODRIVE, bedingt durch die optimale
Abstimmung und die Mehrwertfunktionen im Gesamtsystem.
Der Kundennutzen ist nicht nur vielfältig sondern auch eindeutig und lässt sich mit den
Schlagworten einfach, schnell und lösungsstark beschreiben:
Einfach
Einfach steht für unkomplizierte Abwick-
lung, optimierte Servicefähigkeit und
schlanke Lagerhaltung:
– weil ein Grundgerät zwei verschiedene
Motor betriebsarten bietet.
– da die Optionskarte kundenseitig integrierbar
ist und damit maximale Kommissionierflexibi-
lität erlaubt.
– denn alle Teile des Smart Servo Package sind
per Sachnummer einfach und schnell be-
stellbar.
– weil alle Getriebe als Adaptergetriebe verfüg-
bar und damit kundenseitig problemlos de-/
montierbar sind.
– durch eine zentrale Datenhaltung des Achs-
verbunds in den Controllern und Autoreload
im Servicefall.
Schnell
Schnell steht für maximale Zeitersparnis
mittels vordefinierter Produktkombinatio-
nen und Funktionslösungen:
– bei der Auswahl und Selektion Ihres Smart
Servo Package.
– bei der Projektierung der Antriebskomponenten.
– bei der Installation und Montage der Motoren
und Getriebe.
– bei der Inbetriebnahme des Antriebspakets
(z. B. das elektronische Typenschild zur auto-
matischen Basisinbetriebnahme des Motors).
Lösungsstark
Lösungsstark steht für breite Einsetzbar-
keit bzw. hohe Anpassungsfähigkeit:
– bei der Produktkombinatorik durch entspre-
chende Motor-/Getriebetypen.
– bei der Ein- und Anbindung durch ein gestuf-
tes Angebot an Controllern/Gateways/Analog-
schnittstellen.
– aufgrund der einbaulagenunabhängigen
Getriebeschmierung.
– durch konfigurierbare oder parametrierbare/
programmierbare Softwarepakete auf unter-
schiedlichen Controller-Plattformen.
Ist eine 1x / 3x AC-230-V-Antriebs-/Automationslösung bis ca. 5.5 kW mit Spitzendrehmomenten, mit optionalen Planeten- oder Winkelgetriebe* bis 163 Nm Maximalmoment gefragt, gibt es kaum eine „smartere“ Wahl, als das Smart Servo Package von SEW-EURODRIVE. www.smart-servo-package.com * in Vorbereitung

27
Auf Basis der angebotenen Analogschnittstellen ist jedoch auch ein performanter Einsatz
des Smart Servo Package mit Fremdsteuerungen möglich.
Die Vorteile im Überblick:
Smart Benefits mit Fremdsteuerungen
– Stepinterface, Directioninterface und Analog-
interface erlauben einen Ersatz von Schritt-
motorverstärkern genauso wie den Einsatz
mit einfachsten Steuerungen und Motion
Controllern.
– Das integrierte elektronische Getriebe erlaubt
abgestufte Anpassungen der Eingangspulse/
Frequenz an die zu erreichende Soll-
geschwindigkeit.
– Alle geräteinternen Funktionen sind per
Digitaleingänge verfügbar und nutzbar
(Referenzfahrten, Festdrehzahlen, Touch-
Probe-Eingänge, Endschalter, etc.).
– Die geräteinternen Komfortfunktionen, wie
z. B. elektronisches Typenschild bleiben
weiter voll nutzbar.
– Eine Geräteparametrierung und Diagnose ist
über LT Shell jederzeit über die frontseitig zu-
gängliche Parametrierschnittstelle möglich.
Allg
em
. B
esc
hre
ibung
28
Smart Selection
Mit dem Smart-Selection-Prozess wird die Auswahl und Zusammen-
stellung eines kundenspezifischen Packages extrem vereinfacht. Dies
wurde durch die konsequente Realisierung folgender Optimierungspo-
tenziale ermöglicht:
– Reduzierung der notwendigen Auslegungsberechnungen auf das
minimal notwendige
– Vereinfachung von Applikationsrandbedingungen nach dem Pareto-
Prinzip
– Iteratives einbinden der Massenträgheit des Servo-(Getriebe)motors
– Schaffung von geprüften, festen Kombinatoriken zwischen Motoren
und Servogetrieben
– Verwendung von kombinierten Motor-/Getriebe-Drehzahldrehmo-
mentkennlinien, in denen beide Arbeitspunkte direkt überprüft wer-
den können
Das Ergebnis ist ein einfach zu durchlaufender Selektions- und Aus-
wahlprozess. Aus diesem resultiert am Ende das richtige Lösungspaket
mit allen notwendigen Produktbestandteilen.
Smart Selection – schnell, sicher und ergebnisoptimal
– Verfahrdiagramm der Applikation (Verfahrzyklus) aus dem die
folgenden Werte pro Verfahrabschnitt (s1, s
2, … s
n) ersichtlich
sein müssen (siehe Beispiele unten):
a) Lastwerte
Entweder: Beschleunigungs- und/oder Bremsmomente (MDYN
)
innerhalb des Verfahrzyklus pro Verfahrabschnitt
Oder: Lastmassenträgheit an der Abtriebswelle (J-load) innerhalb
des Verfahrzyklus pro Verfahrabschnitt
b) Dauer (t1, t
2, … t
n) der einzelnen Verfahrabschnitte
) im Verfahrzyklus
c) Gesamtdauer (tGES
= ∑ t1, t
2, … t
n) des Verfahrzyklus
d) Verfahrgeschwindigkeiten (nmax
, nkonst
) der
Verfahrabschnitte mit konstanter Geschwindigkeit
e) Ggf. statische Drehmomente (MSTAT
, Reibung,
Gegenmomente etc.) pro Verfahrabschnitt während Konstantfahrt
– Querkraft an der Abtriebswelle
Notwendige Angaben für die Antriebsauswahl / Checkliste
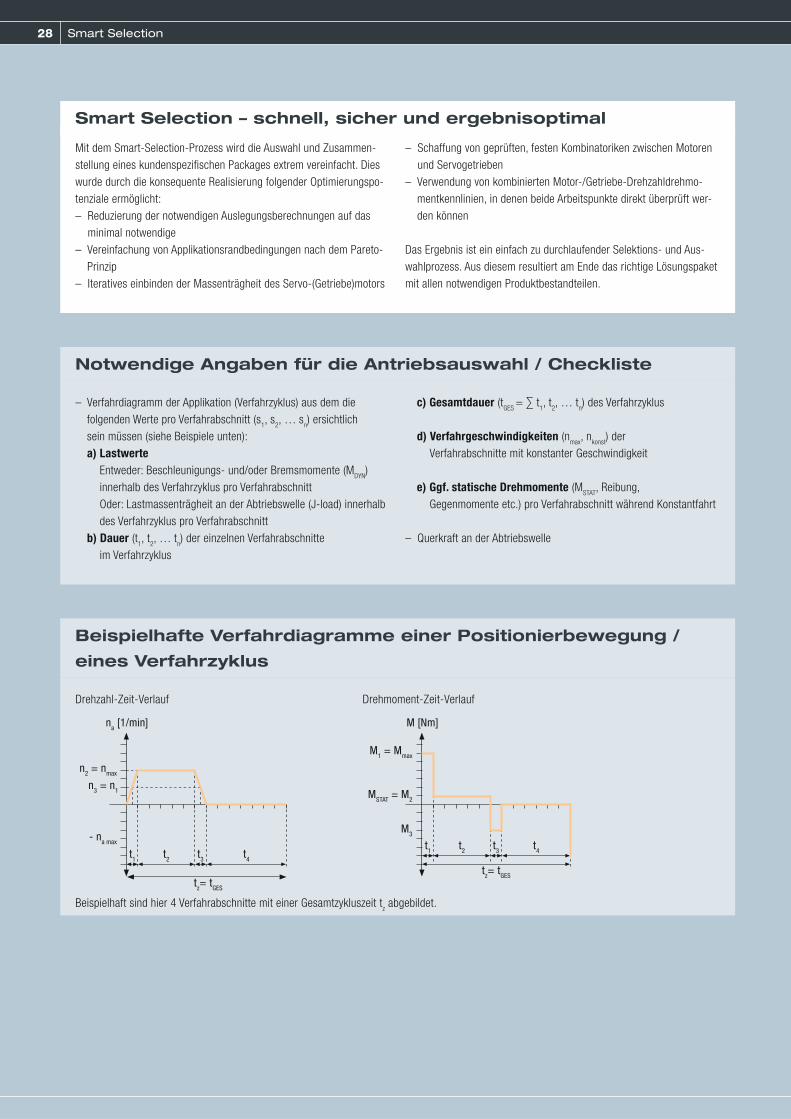
Drehzahl-Zeit-Verlauf Drehmoment-Zeit-Verlauf
Beispielhaft sind hier 4 Verfahrabschnitte mit einer Gesamtzykluszeit tz abgebildet.
Beispielhafte Verfahrdiagramme einer Positionierbewegung /
eines Verfahrzyklus
na [1/min]
t1 t3 t4t2
n2 = nmax
n3 = n1
- na max
M1 = Mmax
MSTAT = M2
M [Nm]
t1 t3 t4t2
tz= tGEStz= tGES
M3
29
Technis
che D
ate
n
Smart Selection –Kapitel Projektierung
– Herausnehmbares Projekierungsablaufdiagramm
– Drehzahl-Drehmoment-Diagramme für CMP und PSKF
– Außenmaße
– Formelsammlung
Ihr Weg zum Smart Servo Package
30
Smart Selection
Herausnehmbares Projektierungsablaufdiagramm mit zusätzlichen Informationen zur Dimensionierung und Auswahl aller benötigten Produkte.
Das Ablaufdiagramm enthält alle Sachnummern und eine ausführliche Gliederung zur Dimensionierung und Auswahl eines Smart Servo Package /
Seite 29 – 34
Detaillierte Zeichnung mit Außenmaßen (Details können der jeweiligen Dokumentation oder dem Systemhandbuch entnommen werden) /
Seite 44 – 46
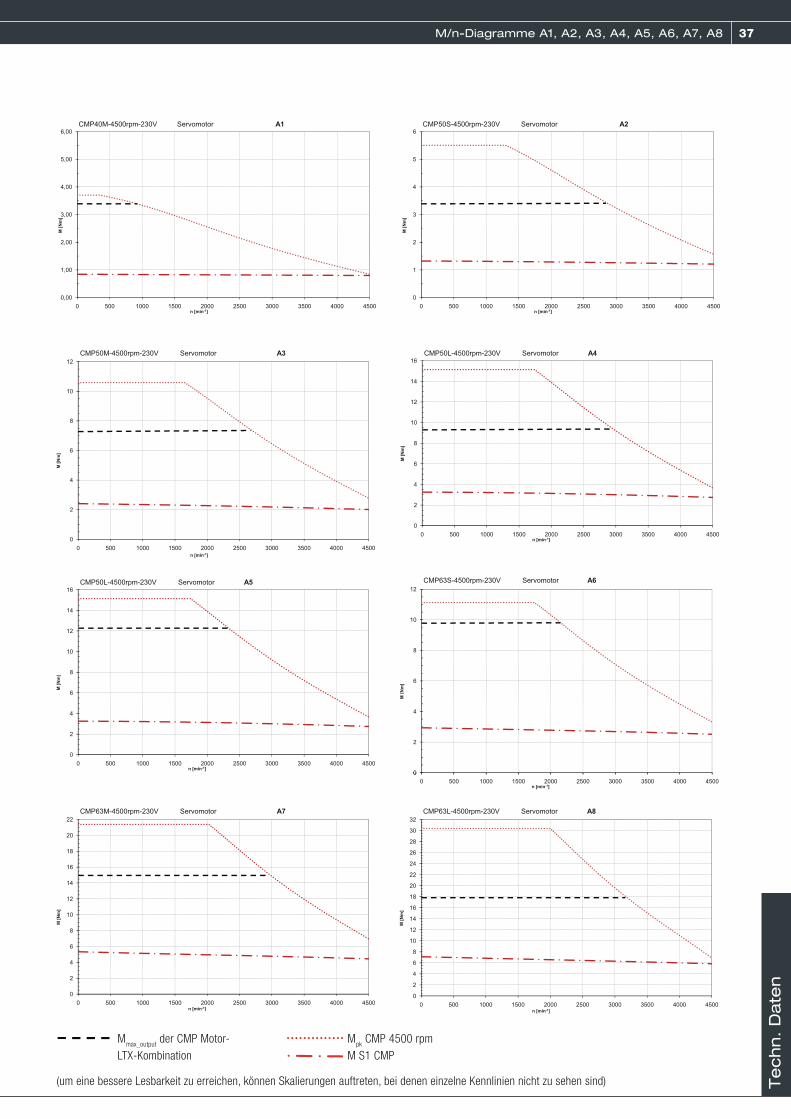
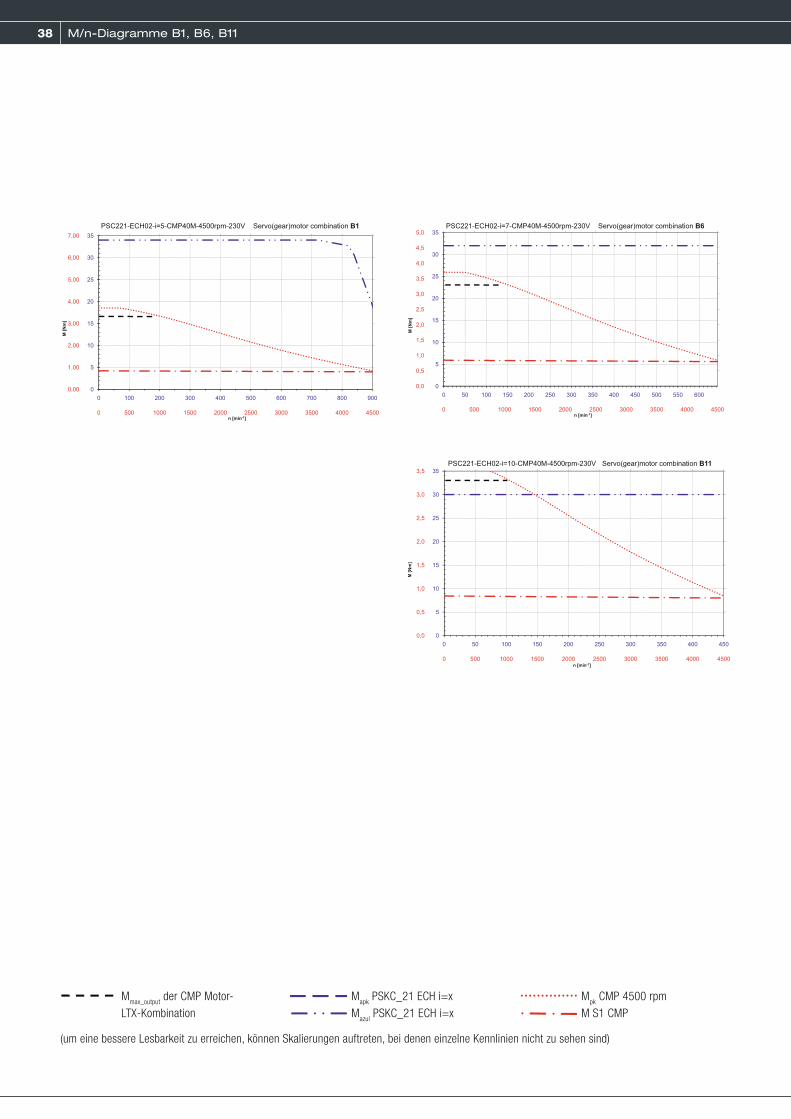
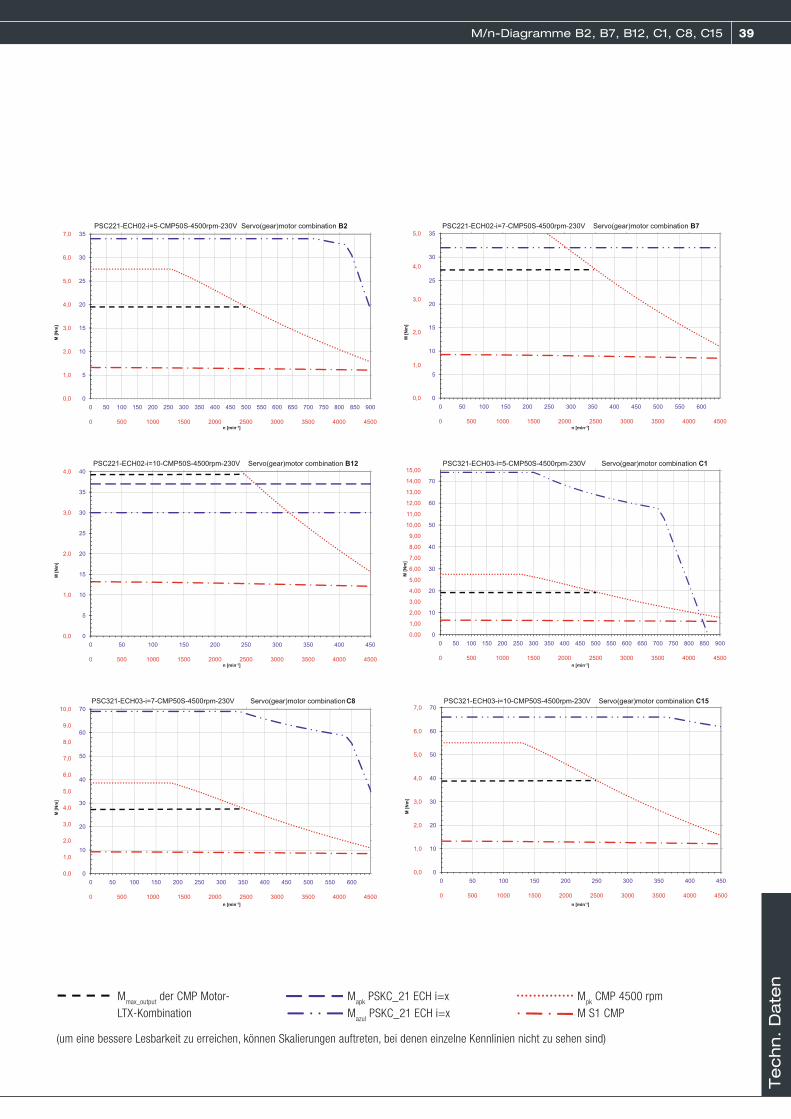
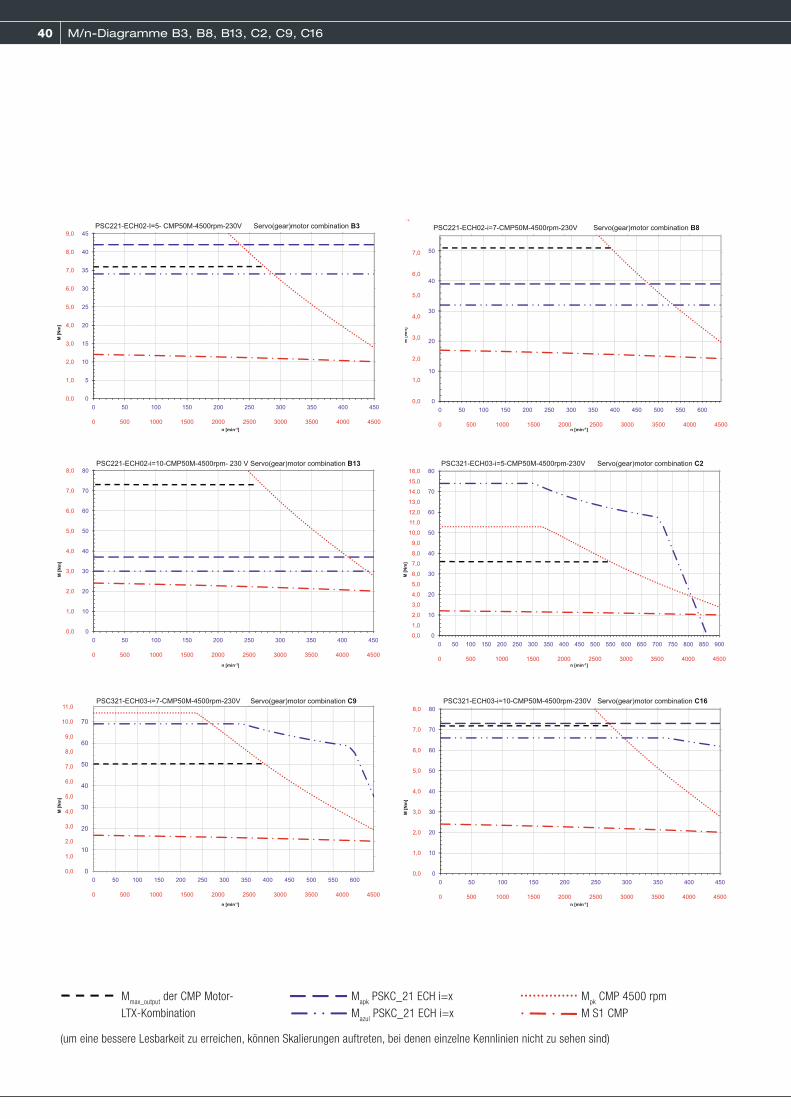
Drehzahl-Drehmoment-Diagramme aller Solomotoren und Servogetriebemotoren / Seite 35 – 43
Sammlung der wichtigsten Formeln zur Dimensionierung und Berechnung von Antriebssystemen / Seite 47 – 49
Projektierungsablaufdiagramm
Außenmaße
Drehzahl-Drehmoment-Diagramme
Formelsammlung
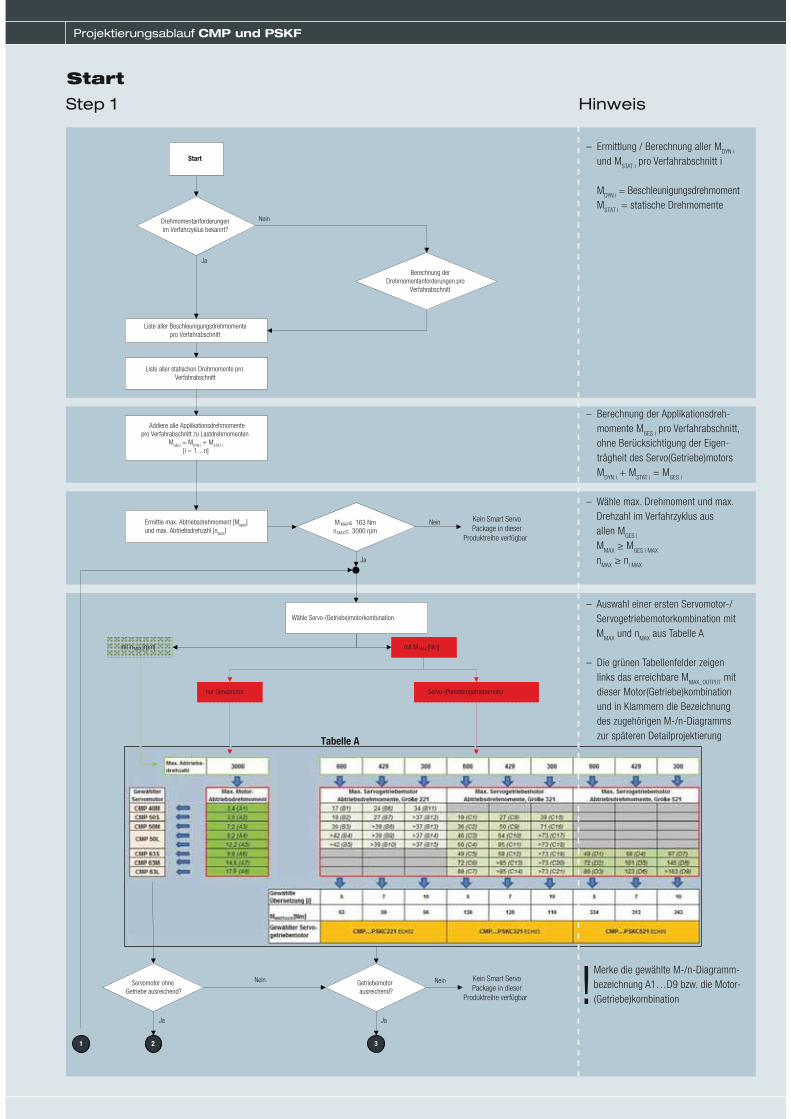
Projektierungsablauf CMP und PSKF
Hinweis
Addiere alle Applikationsdrehmomente
pro Verfahrabschnitt zu Lastdrehmomenten
MGES i
= MDYN i
+ MSTAT i
[i = 1…n]
Start
Drehmomentanforderungen
im Verfahrzyklus bekannt?
Nein
Berechnung der
Drehmomentanforderungen pro
Verfahrabschnitt
Liste aller Beschleunigungsdrehmomente
pro Verfahrabschnitt
Ermittle max. Abtriebsdrehmoment [MMAX
]
und max. Abtriebsdrehzahl [nMAX
]
Kein Smart Servo
Package in dieser
Produktreihe verfügbar
Wähle Servo-(Getriebe)motorkombination
Ja
Nein
Ja
Liste aller statischen Drehmomente pro
Verfahrabschnitt
mit n MAX [rpm] mit M MAX [Nm]
nur Servomotor Servo-(Planeten)getriebemotor
Servomotor ohne
Getriebe ausreichend?
Ja
Nein Kein Smart Servo
Package in dieser
Produktreihe verfügbar
NeinGetriebemotor
ausreichend?
Ja
Tabelle A
M MAX≤ 163 Nm
n MAX≤ 3000 rpm
21 3
Tabelle A
– Ermittlung / Berechnung aller MDYN i
und MSTAT i
pro Verfahrabschnitt i
MDYN i
= Beschleunigungsdrehmoment
MSTAT i
= statische Drehmomente
– Berechnung der Applikationsdreh-
momente MGES i
pro Verfahrabschnitt,
ohne Berücksichtigung der Eigen-
trägheit des Servo(Getriebe)motors
MDYN i
+ MSTAT i
= MGES i
– Wähle max. Drehmoment und max.
Drehzahl im Verfahrzyklus aus
allen MGES i
MMAX
≥ MGES i MAX
nMAX
≥ ni MAX
– Auswahl einer ersten Servomotor-/
Servogetriebemotorkombination mit
MMAX
und nMAX
aus Tabelle A
– Die grünen Tabellenfelder zeigen
links das erreichbare MMAX_OUTPUT
mit
dieser Motor(Getriebe)kombination
und in Klammern die Bezeichnung
des zugehörigen M-/n-Diagramms
zur späteren Detailprojektierung
Merke die gewählte M-/n-Diagramm-
bezeichnung A1…D9 bzw. die Motor-
(Getriebe)kombination!
Step 1
Start
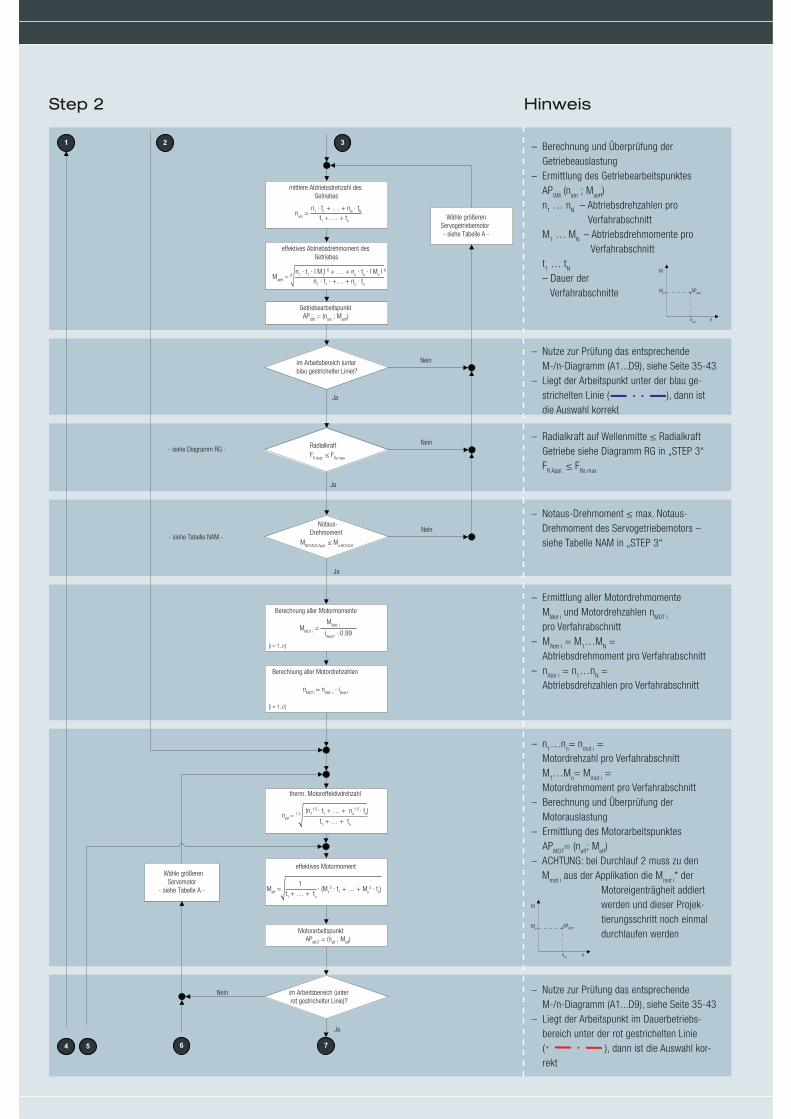
– Berechnung und Überprüfung der
Getriebeauslastung
– Ermittlung des Getriebearbeitspunktes
APGM
(nam
; Maeff
)
n1 … n
N – Abtriebsdrehzahlen pro
Verfahrabschnitt
M1 … M
N – Abtriebsdrehmomente pro
Verfahrabschnitt
t1 … t
N
– Dauer der
Verfahrabschnitte
– Nutze zur Prüfung das entsprechende
M-/n-Diagramm (A1...D9), siehe Seite 35-43
– Liegt der Arbeitspunkt unter der blau ge-
strichelten Linie ( ), dann ist
die Auswahl korrekt
– Radialkraft auf Wellenmitte ≤ Radialkraft
Getriebe siehe Diagramm RG in „STEP 3“
FR Appl.
≤ FRa max
– Notaus-Drehmoment ≤ max. Notaus-
Drehmoment des Servogetriebemotors –
siehe Tabelle NAM in „STEP 3“
– Ermittlung aller Motordrehmomente
MMot i
und Motordrehzahlen nMOT i
pro Verfahrabschnitt
– MAbtr i
= M1…M
N =
Abtriebsdrehmoment pro Verfahrabschnitt
– nAbtr i
= n1…n
N =
Abtriebsdrehzahlen pro Verfahrabschnitt
– n1…n
n= n
mot i =
Motordrehzahl pro Verfahrabschnitt
M1…M
n= M
mot i =
Motordrehmoment pro Verfahrabschnitt
– Berechnung und Überprüfung der
Motorauslastung
– Ermittlung des Motorarbeitspunktes
APMOT
= (neff
; Meff
)
– ACHTUNG: bei Durchlauf 2 muss zu den
Mmot i
aus der Applikation die Mmot i
* der
Motoreigenträgheit addiert
werden und dieser Projek-
tierungsschritt noch einmal
durchlaufen werden
– Nutze zur Prüfung das entsprechende
M-/n-Diagramm (A1...D9), siehe Seite 35-43
– Liegt der Arbeitspunkt im Dauerbetriebs-
bereich unter der rot gestrichelten Linie
( ), dann ist die Auswahl kor-
rekt
Step 2 Hinweis
mittlere Abtriebsdrehzahl des
Getriebes
effektives Abtriebsdrehmoment des
Getriebes
Getriebearbeitspunkt
im Arbeitsbereich (unter
blau gestrichelter Linie)?
Nein
Ja
Wähle größeren
Servogetriebemotor
- siehe Tabelle A -
Radialkraft- siehe Diagramm RG -
Nein
Notaus-
Drehmoment Nein
Ja
- siehe Tabelle NAM -
Berechnung aller Motormomente
Berechnung aller Motordrehzahlen
[i = 1..n]
[i = 1..n]
therm. Motoreffektivdrehzahl
effektives Motormoment
1
Motorarbeitspunkt
Wähle größeren
Servomotor
- siehe Tabelle A -
im Arbeitsbereich (unter
rot gestrichelter Linie)?
Nein
Ja
1 32
Ja
4 5 6 7
nam
=n
1 · t
1 + … + n
N · t
N
t1 + … + t
n
Maeff
= 8n
1 · t
1 · I M
1I 8 + … + n
n · t
n · I M
n I 8
n1 · t
1 · +… + n
n · t
n
APGM
= (nam
; Maeff
)
FR Appl.
≤ FRa max
MNOTAUS Appl.
≤ Ma NOTAUS
MMOT i
= M
Abtr. i
iGear1
· 0.99
nMOT i
= nAbtr. i
· iGear1
(n1
1.5 · t1 + … + n
n
1.5 · tn)
· (M1
2 · t1 + … + M
n
2 · tn)
APMOT
= (neff
; Meff
)
t1 + … + t
n
t1 + … + t
n
neff
= 1.5
Meff
=
neff
n
Meff
APMOT
M
nam
n
Meff
APGM
M
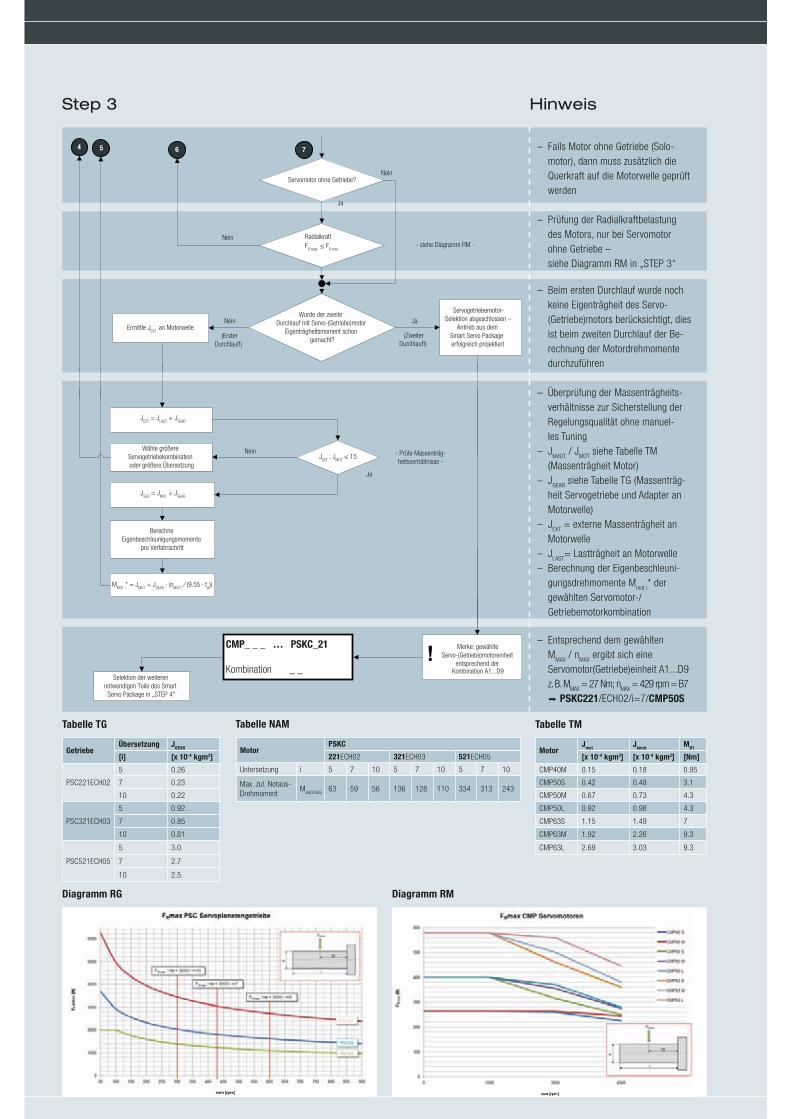
– Falls Motor ohne Getriebe (Solo-
motor), dann muss zusätzlich die
Querkraft auf die Motorwelle geprüft
werden
– Prüfung der Radialkraftbelastung
des Motors, nur bei Servomotor
ohne Getriebe –
siehe Diagramm RM in „STEP 3“
– Beim ersten Durchlauf wurde noch
keine Eigenträgheit des Servo-
(Getriebe)motors berücksichtigt, dies
ist beim zweiten Durchlauf der Be-
rechnung der Motordrehmomente
durchzuführen
– Überprüfung der Massenträgheits-
verhältnisse zur Sicherstellung der
Regelungsqualität ohne manuel-
les Tuning
– JbMOT
/ JMOT
siehe Tabelle TM
(Massenträgheit Motor)
– JGEAR
siehe Tabelle TG (Massenträg-
heit Servogetriebe und Adapter an
Motorwelle)
– JEXT
= externe Massenträgheit an
Motorwelle
– JLAST
= Lastträgheit an Motorwelle
– Berechnung der Eigenbeschleuni-
gungsdrehmomente Mmot i
* der
gewählten Servomotor-/
Getriebemotorkombination
– Entsprechend dem gewählten
MMAX
/ nMAX
ergibt sich eine
Servomotor(Getriebe)einheit A1...D9
z. B. MMAX
= 27 Nm; nMAX
= 429 rpm = B7
i PSKC221/ECH02/i=7/CMP50S
Step 3 Hinweis
GetriebeÜbersetzung J
GEAR
[i] [x 10-4 kgm2]
PSC221ECH02
5 0.26
7 0.23
10 0.22
PSC321ECH03
5 0.92
7 0.85
10 0.81
PSC521ECH05
5 3.0
7 2.7
10 2.5
MotorJ
motJ
bmotM
B1
[x 10-4 kgm2] [x 10-4 kgm2] [Nm]
CMP40M 0.15 0.18 0.95
CMP50S 0.42 0.48 3.1
CMP50M 0.67 0.73 4.3
CMP50L 0.92 0.98 4.3
CMP63S 1.15 1.49 7
CMP63M 1.92 2.26 9.3
CMP63L 2.69 3.03 9.3
MotorPSKC
221ECH02 321ECH03 521ECH05
Untersetzung i 5 7 10 5 7 10 5 7 10
Max. zul. Notaus-
DrehmomentM
aNOTAUS63 59 56 136 128 110 334 313 243
Tabelle TG
Diagramm RG Diagramm RM
Tabelle TMTabelle NAM
Radialkraft
Servomotor ohne Getriebe?
Ja
Nein
(Erster
Durchlauf!)
Wurde der zweite
Durchlauf mit Servo-(Getriebe)motor
Eigenträgheitsmoment schon
gemacht?
Servogetriebemotor-
Selektion abgeschlossen –
Antrieb aus dem
Smart Servo Package
erfolgreich projektiert
Nein
Ermittle an Motorwelle(Zweiter
Durchlauf!)
4 5 6 7
Nein Ja
- siehe Diagramm RM -FR Appl.
≤ FR max
JEXT
Wähle größere
Servogetriebekombination
oder größere Übersetzung
Nein
Ja
- Prüfe Massenträg-
heitsverhältnisse -
Berechne
Eigenbeschleunigungsmomente
pro Verfahrschritt
JEXT
= JLAST
+ JGEAR
JGES
= JMOT
+ JGEAR
MMOT i
* = JMOT
+ JGEAR
· (nMOT i
∕ (9.55 · tai))
JEXT
: JMOT
≤ 15
Merke: gewählte
Servo-(Getriebe)motoreinheit
entsprechend derKombination A1...D9
Selektion der weiteren
notwendigen Teile des Smart
Servo Package in „STEP 4"
CMP_ _ _ … PSKC_21
Kombination _ _
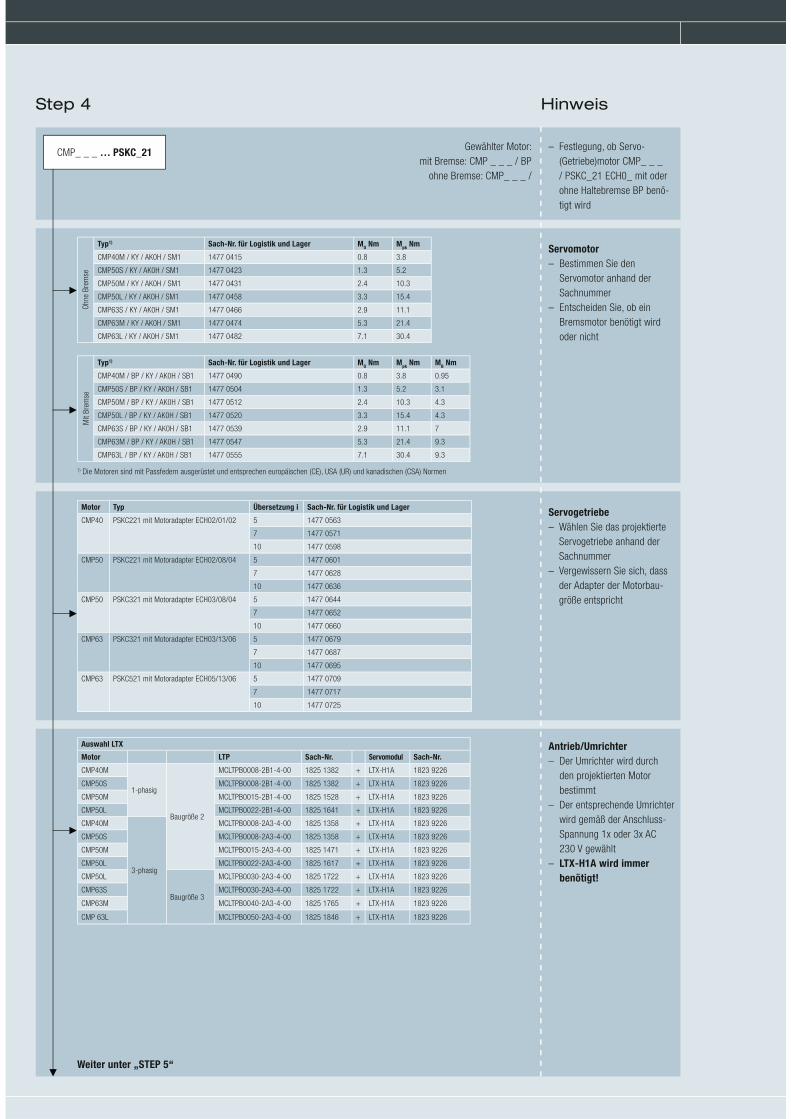
Step 4 Hinweis
– Festlegung, ob Servo-
(Getriebe)motor CMP_ _ _
/ PSKC_21 ECH0_ mit oder
ohne Haltebremse BP benö-
tigt wird
Servomotor
– Bestimmen Sie den
Servomotor anhand der
Sachnummer
– Entscheiden Sie, ob ein
Bremsmotor benötigt wird
oder nicht
Servogetriebe
– Wählen Sie das projektierte
Servogetriebe anhand der
Sachnummer
– Vergewissern Sie sich, dass
der Adapter der Motorbau-
größe entspricht
Antrieb/Umrichter
– Der Umrichter wird durch
den projektierten Motor
bestimmt
– Der entsprechende Umrichter
wird gemäß der Anschluss-
Spannung 1x oder 3x AC
230 V gewählt
– LTX-H1A wird immer
benötigt!
Gewählter Motor:
mit Bremse: CMP _ _ _ / BP
ohne Bremse: CMP_ _ _ /
Auswahl LTX
Motor LTP Sach-Nr. Servomodul Sach-Nr.
CMP40M
1-phasig
Baugröße 2
MCLTPB0008-2B1-4-00 1825 1382 + LTX-H1A 1823 9226
CMP50S MCLTPB0008-2B1-4-00 1825 1382 + LTX-H1A 1823 9226
CMP50M MCLTPB0015-2B1-4-00 1825 1528 + LTX-H1A 1823 9226
CMP50L MCLTPB0022-2B1-4-00 1825 1641 + LTX-H1A 1823 9226
CMP40M
3-phasig
MCLTPB0008-2A3-4-00 1825 1358 + LTX-H1A 1823 9226
CMP50S MCLTPB0008-2A3-4-00 1825 1358 + LTX-H1A 1823 9226
CMP50M MCLTPB0015-2A3-4-00 1825 1471 + LTX-H1A 1823 9226
CMP50L MCLTPB0022-2A3-4-00 1825 1617 + LTX-H1A 1823 9226
CMP50L
Baugröße 3
MCLTPB0030-2A3-4-00 1825 1722 + LTX-H1A 1823 9226
CMP63S MCLTPB0030-2A3-4-00 1825 1722 + LTX-H1A 1823 9226
CMP63M MCLTPB0040-2A3-4-00 1825 1765 + LTX-H1A 1823 9226
CMP 63L MCLTPB0050-2A3-4-00 1825 1846 + LTX-H1A 1823 9226
CMP_ _ _ … PSKC_21
Weiter unter „STEP 5“
Typ1) Sach-Nr. für Logistik und Lager MO Nm M
pk Nm
CMP40M / KY / AK0H / SM1 1477 0415 0.8 3.8
CMP50S / KY / AK0H / SM1 1477 0423 1.3 5.2
CMP50M / KY / AK0H / SM1 1477 0431 2.4 10.3
CMP50L / KY / AK0H / SM1 1477 0458 3.3 15.4
CMP63S / KY / AK0H / SM1 1477 0466 2.9 11.1
CMP63M / KY / AK0H / SM1 1477 0474 5.3 21.4
CMP63L / KY / AK0H / SM1 1477 0482 7.1 30.4
Ohne
Bre
mse
Motor Typ Übersetzung i Sach-Nr. für Logistik und Lager
CMP40 PSKC221 mit Motoradapter ECH02/01/02 5 1477 0563
7 1477 0571
10 1477 0598
CMP50 PSKC221 mit Motoradapter ECH02/08/04 5 1477 0601
7 1477 0628
10 1477 0636
CMP50 PSKC321 mit Motoradapter ECH03/08/04 5 1477 0644
7 1477 0652
10 1477 0660
CMP63 PSKC321 mit Motoradapter ECH03/13/06 5 1477 0679
7 1477 0687
10 1477 0695
CMP63 PSKC521 mit Motoradapter ECH05/13/06 5 1477 0709
7 1477 0717
10 1477 0725
Typ1) Sach-Nr. für Logistik und Lager MO Nm M
pk Nm M
B Nm
CMP40M / BP / KY / AK0H / SB1 1477 0490 0.8 3.8 0.95
CMP50S / BP / KY / AK0H / SB1 1477 0504 1.3 5.2 3.1
CMP50M / BP / KY / AK0H / SB1 1477 0512 2.4 10.3 4.3
CMP50L / BP / KY / AK0H / SB1 1477 0520 3.3 15.4 4.3
CMP63S / BP / KY / AK0H / SB1 1477 0539 2.9 11.1 7
CMP63M / BP / KY / AK0H / SB1 1477 0547 5.3 21.4 9.3
CMP63L / BP / KY / AK0H / SB1 1477 0555 7.1 30.4 9.3
Mit B
rem
se
1) Die Motoren sind mit Passfedern ausgerüstet und entsprechen europäischen (CE), USA (UR) und kanadischen (CSA) Normen
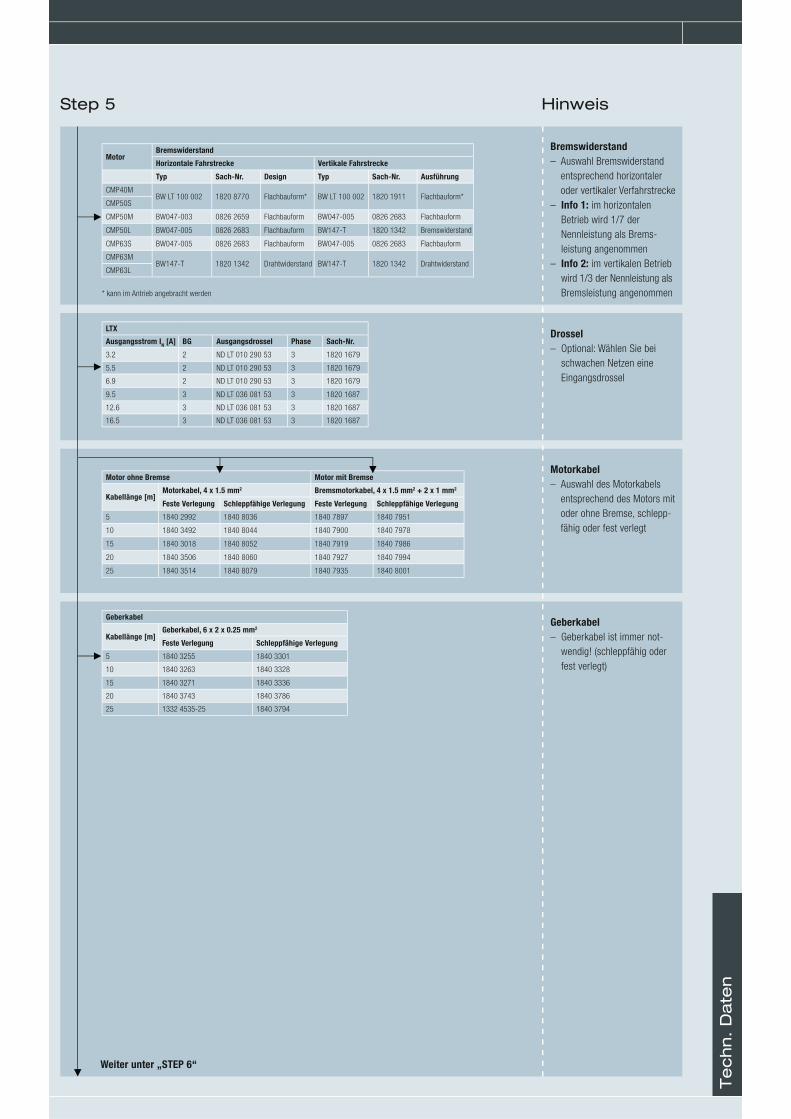
Hinweis
Bremswiderstand
– Auswahl Bremswiderstand
entsprechend horizontaler
oder vertikaler Verfahrstrecke
– Info 1: im horizontalen
Betrieb wird 1/7 der
Nennleistung als Brems-
leistung angenommen
– Info 2: im vertikalen Betrieb
wird 1/3 der Nennleistung als
Bremsleistung angenommen
Drossel
– Optional: Wählen Sie bei
schwachen Netzen eine
Eingangsdrossel
Motorkabel
– Auswahl des Motorkabels
entsprechend des Motors mit
oder ohne Bremse, schlepp-
fähig oder fest verlegt
Geberkabel
– Geberkabel ist immer not-
wendig! (schleppfähig oder
fest verlegt)
MotorBremswiderstand
Horizontale Fahrstrecke Vertikale Fahrstrecke
Typ Sach-Nr. Design Typ Sach-Nr. Ausführung
CMP40MBW LT 100 002 1820 8770 Flachbauform* BW LT 100 002 1820 1911 Flachbauform*
CMP50S
CMP50M BW047-003 0826 2659 Flachbauform BW047-005 0826 2683 Flachbauform
CMP50L BW047-005 0826 2683 Flachbauform BW147-T 1820 1342 Bremswiderstand
CMP63S BW047-005 0826 2683 Flachbauform BW047-005 0826 2683 Flachbauform
CMP63MBW147-T 1820 1342 Drahtwiderstand BW147-T 1820 1342 Drahtwiderstand
CMP63L
Motor ohne Bremse Motor mit Bremse
Kabellänge [m]Motorkabel, 4 x 1.5 mm2 Bremsmotorkabel, 4 x 1.5 mm2 + 2 x 1 mm2
Feste Verlegung Schleppfähige Verlegung Feste Verlegung Schleppfähige Verlegung
5 1840 2992 1840 8036 1840 7897 1840 7951
10 1840 3492 1840 8044 1840 7900 1840 7978
15 1840 3018 1840 8052 1840 7919 1840 7986
20 1840 3506 1840 8060 1840 7927 1840 7994
25 1840 3514 1840 8079 1840 7935 1840 8001
LTX
Ausgangsstrom IN [A] BG Ausgangsdrossel Phase Sach-Nr.
3.2 2 ND LT 010 290 53 3 1820 1679
5.5 2 ND LT 010 290 53 3 1820 1679
6.9 2 ND LT 010 290 53 3 1820 1679
9.5 3 ND LT 036 081 53 3 1820 1687
12.6 3 ND LT 036 081 53 3 1820 1687
16.5 3 ND LT 036 081 53 3 1820 1687
Geberkabel
Kabellänge [m]Geberkabel, 6 x 2 x 0.25 mm2
Feste Verlegung Schleppfähige Verlegung
5 1840 3255 1840 3301
10 1840 3263 1840 3328
15 1840 3271 1840 3336
20 1840 3743 1840 3786
25 1332 4535-25 1840 3794
Weiter unter „STEP 6“
Step 5
Techn.
Date
n
* kann im Antrieb angebracht werden
Antriebstechnik \ Antriebsautomatisierung \ Systemintegration \ Services
Kabelset A
(Basisset)
Kabellänge zur Achse
Inh
alt
Menge Beschreibung
0.5 m
1 Verbindung Controller Gateway RJ45 mit offenem Ende, 0.5 m
Sachnummer 1840 8095 1 Kabelabschluss
Bezeichnung (OP LT 003 A) 1Steckerkabel
Antrieb 0.5 m, RJ45-RJ45
Kabelset B
(Erweiterungsset)
Kabellänge zwischen den Achsen
Inh
alt
Menge Beschreibung
0.5 m 1 m
1 Kabelverteiler
Sachnummer 1840 8109 1840 8117 1 Steckerkabel Antrieb 0.5 m, RJ45-RJ45
Bezeichnung (OP LT 005 B) (OP LT 010 B) 1Kabel zwischen den Antrieben mit variabler
Länge
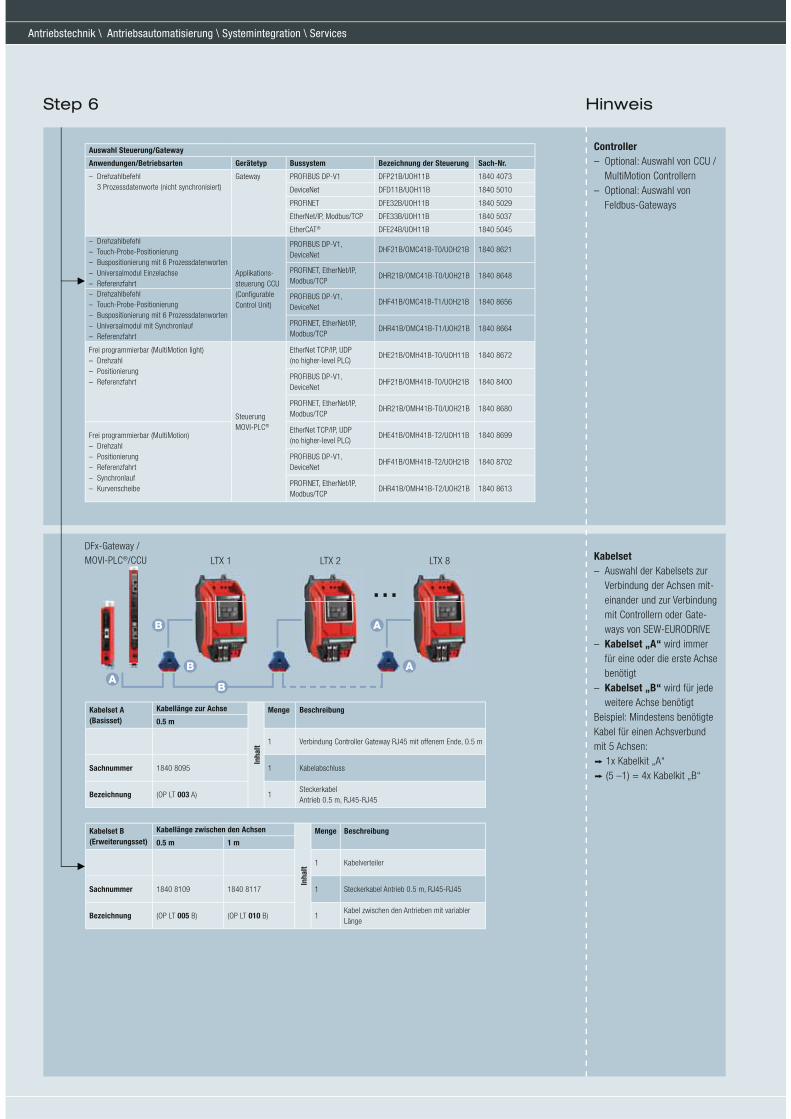
Controller
– Optional: Auswahl von CCU /
MultiMotion Controllern
– Optional: Auswahl von
Feldbus-Gateways
Kabelset
– Auswahl der Kabelsets zur
Verbindung der Achsen mit-
einander und zur Verbindung
mit Controllern oder Gate-
ways von SEW-EURODRIVE
– Kabelset „A“ wird immer
für eine oder die erste Achse
benötigt
– Kabelset „B“ wird für jede
weitere Achse benötigt
Beispiel: Mindestens benötigte
Kabel für einen Achsverbund
mit 5 Achsen:
i 1x Kabelkit „A“
i (5 –1) = 4x Kabelkit „B“
Step 6 Hinweis
Auswahl Steuerung/Gateway
Anwendungen/Betriebsarten Gerätetyp Bussystem Bezeichnung der Steuerung Sach-Nr.
– Drehzahlbefehl
3 Prozessdatenworte (nicht synchronisiert)
Gateway PROFIBUS DP-V1 DFP21B/UOH11B 1840 4073
DeviceNet DFD11B/UOH11B 1840 5010
PROFINET DFE32B/UOH11B 1840 5029
EtherNet/IP, Modbus/TCP DFE33B/UOH11B 1840 5037
EtherCAT® DFE24B/UOH11B 1840 5045
– Drehzahlbefehl
– Touch-Probe-Positionierung
– Buspositionierung mit 6 Prozessdatenworten
– Universalmodul Einzelachse
– Referenzfahrt
Applikations-
steuerung CCU
(Confi gurable
Control Unit)
PROFIBUS DP-V1,
DeviceNetDHF21B/OMC41B-T0/UOH21B 1840 8621
PROFINET, EtherNet/IP,
Modbus/TCPDHR21B/OMC41B-T0/UOH21B 1840 8648
– Drehzahlbefehl
– Touch-Probe-Positionierung
– Buspositionierung mit 6 Prozessdatenworten
– Universalmodul mit Synchronlauf
– Referenzfahrt
PROFIBUS DP-V1,
DeviceNetDHF41B/OMC41B-T1/UOH21B 1840 8656
PROFINET, EtherNet/IP,
Modbus/TCPDHR41B/OMC41B-T1/UOH21B 1840 8664
Frei programmierbar (MultiMotion light)
– Drehzahl
– Positionierung
– Referenzfahrt
Steuerung
MOVI-PLC®
EtherNet TCP/IP, UDP
(no higher-level PLC)DHE21B/OMH41B-T0/UOH11B 1840 8672
PROFIBUS DP-V1,
DeviceNetDHF21B/OMH41B-T0/UOH21B 1840 8400
PROFINET, EtherNet/IP,
Modbus/TCPDHR21B/OMH41B-T0/UOH21B 1840 8680
Frei programmierbar (MultiMotion)
– Drehzahl
– Positionierung
– Referenzfahrt
– Synchronlauf
– Kurvenscheibe
EtherNet TCP/IP, UDP
(no higher-level PLC)DHE41B/OMH41B-T2/UOH11B 1840 8699
PROFIBUS DP-V1,
DeviceNetDHF41B/OMH41B-T2/UOH21B 1840 8702
PROFINET, EtherNet/IP,
Modbus/TCPDHR41B/OMH41B-T2/UOH21B 1840 8613
LTX 1
DFx-Gateway /
MOVI-PLC®/CCU LTX 2 LTX 8
A
A
A
B
B
B
37
3,00
4,00
5,00
6,00
M [
Nm
]
CMP40M-4500rpm-230V Servomotor A1
0,00
1,00
2,00
0 500 1000 1500 2000 2500 3000 3500 4000 4500n [min-1]
6
8
10
12
14
16
M [
Nm
]
CMP50L-4500rpm-230V Servomotor A5
0
2
4
0 500 1000 1500 2000 2500 3000 3500 4000 4500n [min-1]
6
8
10
12
M [
Nm
]
CMP50M-4500rpm-230V Servomotor A3
0
2
4
0 500 1000 1500 2000 2500 3000 3500 4000 4500
M
10
12
14
16
18
20
22
M [
Nm
]
CMP63M-4500rpm-230V Servomotor A7
0
2
4
6
8
0 500 1000 1500 2000 2500 3000 3500 4000 4500n [min-1]
3
4
5
6
M [
Nm
]
CMP50S-4500rpm-230V Servomotor A2
0
1
2
0 500 1000 1500 2000 2500 3000 3500 4000 4500n [min-1]
6
8
10
12
[Nm
]
CMP63S-4500rpm-230V Servomotor A6
0
2
4
M[
6
8
10
12
14
16
M [
Nm
]
CMP50L-4500rpm-230V Servomotor A4
0
2
4
0 500 1000 1500 2000 2500 3000 3500 4000 4500n [min-1]
0
0 500 1000 1500 2000 2500 3000 3500 4000 4500n [min-1]
n [min-1]
n [min-1]
14
16
18
20
22
24
26
28
30
32
M [
Nm
]
CMP63L-4500rpm-230V Servomotor A8
0
2
4
6
8
10
12
0 500 1000 1500 2000 2500 3000 3500 4000 4500
M
M/n-Diagramme A1, A2, A3, A4, A5, A6, A7, A8
Mmax_output
der CMP Motor-
LTX-Kombination
Mpk
CMP 4500 rpm
M S1 CMP
Techn.
Date
n
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
38
3,00
4,00
5,00
6,00
7,00
15
20
25
30
35
M [
Nm
]
PSC221-ECH02-i=5-CMP40M-4500rpm-230V Servo(gear)motor combination B1
0,00
1,00
2,00
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
5
10
0 100 200 300 400 500 600 700 800 900
n [min-1]
1,5
2,0
2,5
3,0
3,5
15
20
25
30
35
M [
Nm
]
PSC221-ECH02-i=10-CMP40M-4500rpm-230V Servo(gear)motor combination B11
0,0
0,5
1,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
5
10
0 50 100 150 200 250 300 350 400 450
M
1 5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
15
20
25
30
35
M [
Nm
]
PSC221-ECH02-i=7-CMP40M-4500rpm-230V Servo(gear)motor combination B6
0,0
0,5
1,0
1,5
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
5
10
0 50 100 150 200 250 300 350 400 450 500 550 600
n [min-1]
n [min-1]
Mmax_output
der CMP Motor-
LTX-Kombination
Mapk
PSKC_21 ECH i=x
Mazul
PSKC_21 ECH i=x
Mpk
CMP 4500 rpm
M S1 CMP
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
M/n-Diagramme B1, B6, B11
39
2,0
3,0
4,0
15
20
25
30
35
40
M [
Nm
]
PSC221-ECH02-i=10-CMP50S-4500rpm-230V Servo(gear)motor combination B12
0,0
1,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
5
10
0 50 100 150 200 250 300 350 400 450
M
3,0
4,0
5,0
6,0
7,0
15
20
25
30
35
M [
Nm
]
PSC221-ECH02-i=5-CMP50S-4500rpm-230V Servo(gear)motor combination B2
0,0
1,0
2,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
5
10
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
M
4,0
5,0
6,0
7,0
8,0
9,0
10,0
30
40
50
60
70
M [
Nm
]
PSC321-ECH03-i=7-CMP50S-4500rpm-230V Servo(gear)motor combination C8
0,0
1,0
2,0
3,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600
M
6,00
7,00
8,00
9,00
10,00
11,00
12,00
13,00
14,00
15,00
30
40
50
60
70
M [
Nm
]
PSC321-ECH03-i=5-CMP50S-4500rpm-230V Servo(gear)motor combination C1
0,00
1,00
2,00
3,00
4,00
5,00
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
M
2,0
3,0
4,0
5,0
15
20
25
30
35
M [
Nm
]
PSC221-ECH02-i=7-CMP50S-4500rpm-230V Servo(gear)motor combination B7
0,0
1,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
5
10
0 50 100 150 200 250 300 350 400 450 500 550 600M
3,0
4,0
5,0
6,0
7,0
30
40
50
60
70
M [
Nm
]
PSC321-ECH03-i=10-CMP50S-4500rpm-230V Servo(gear)motor combination C15
0,0
1,0
2,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450
M
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
Mmax_output
der CMP Motor-
LTX-Kombination
Mapk
PSKC_21 ECH i=x
Mazul
PSKC_21 ECH i=x
Mpk
CMP 4500 rpm
M S1 CMP
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
Techn.
Date
n
M/n-Diagramme B2, B7, B12, C1, C8, C15
40
3,0
4,0
5,0
6,0
7,0
8,0
30
40
50
60
70
80
M [
Nm
]
PSC221-ECH02-i=10-CMP50M-4500rpm- 230 V Servo(gear)motor combination B13
0,0
1,0
2,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450
M
4,0
5,0
6,0
7,0
8,0
9,0
20
25
30
35
40
45
M [
Nm
]
PSC221-ECH02-I=5- CMP50M-4500rpm-230V Servo(gear)motor combination B3
0,0
1,0
2,0
3,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
5
10
15
0 50 100 150 200 250 300 350 400 450
M
4 0
5,0
6,0
7,0
8,0
9,0
10,0
11,0
30
40
50
60
70
M [
Nm
]
PSC321-ECH03-i=7-CMP50M-4500rpm-230V Servo(gear)motor combination C9
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600
M
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
14,0
15,0
16,0
30
40
50
60
70
80
M [
Nm
]
PSC321-ECH03-i=5-CMP50M-4500rpm-230V Servo(gear)motor combination C2
0,0
1,0
2,0
3,0
4,0
5,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
M
3,0
4,0
5,0
6,0
7,0
20
30
40
50
M [
Nm
]
PSC221-ECH02-i=7-CMP50M-4500rpm-230V Servo(gear)motor combination B8
0,0
1,0
2,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600M
3,0
4,0
5,0
6,0
7,0
8,0
30
40
50
60
70
80
M [
Nm
]
PSC321-ECH03-i=10-CMP50M-4500rpm-230V Servo(gear)motor combination C16
0,0
1,0
2,0
,
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450
M
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
M/n-Diagramme B3, B8, B13, C2, C9, C16
Mmax_output
der CMP Motor-
LTX-Kombination
Mapk
PSKC_21 ECH i=x
Mazul
PSKC_21 ECH i=x
Mpk
CMP 4500 rpm
M S1 CMP
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
41
4,0
5,0
6,0
7,0
8,0
9,0
10,0
40
50
60
70
80
90
100
M [
Nm
]
PSC221-ECH02-i=10-CMP50L-4500rpm-230V Servo(gear)motor combination B14
0,0
1,0
2,0
3,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
30
0 50 100 150 200 250 300 350 400 450
M
4,0
5,0
6,0
7,0
8,0
9,0
10,0
20
25
30
35
40
45
50
M [
Nm
]
PSC221-ECH02-i=5-CMP50L-4500rpm-230V Servo(gear)motor combination B4
0,0
1,0
2,0
3,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
5
10
15
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
M
4,0
5,0
6,0
7,0
8,0
9,0
10,0
30
40
50
60
70
M [
Nm
]
PSC321-ECH03-i=7-CMP50L-4500rpm-230V Servo(gear)motor combination C10
0,0
1,0
2,0
3,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600
M
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
14,0
15,0
16,0
30
40
50
60
70
80
M [
Nm
]
PSC321-ECH03-i=5-CMP50L-4500rpm-230V Servo(gear)motor combination C3
0,0
1,0
2,0
3,0
4,0
5,0
,
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
M
4,0
5,0
6,0
7,0
8,0
9,0
10,0
30
40
50
60
70
M [
Nm
]
PSC221-ECH02-i=7-CMP50L-4500rpm-230V Servo(gear)motor combination B9
0,0
1,0
2,0
3,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600
M
4 0
5,0
6,0
7,0
8,0
9,0
10,0
11,0
40
60
80
100
M [
Nm
]
PSC321-ECH03-i=10-CMP50L-4500rpm-230V Servo(gear)motor combination C17
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
0 50 100 150 200 250 300 350 400 450
M
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
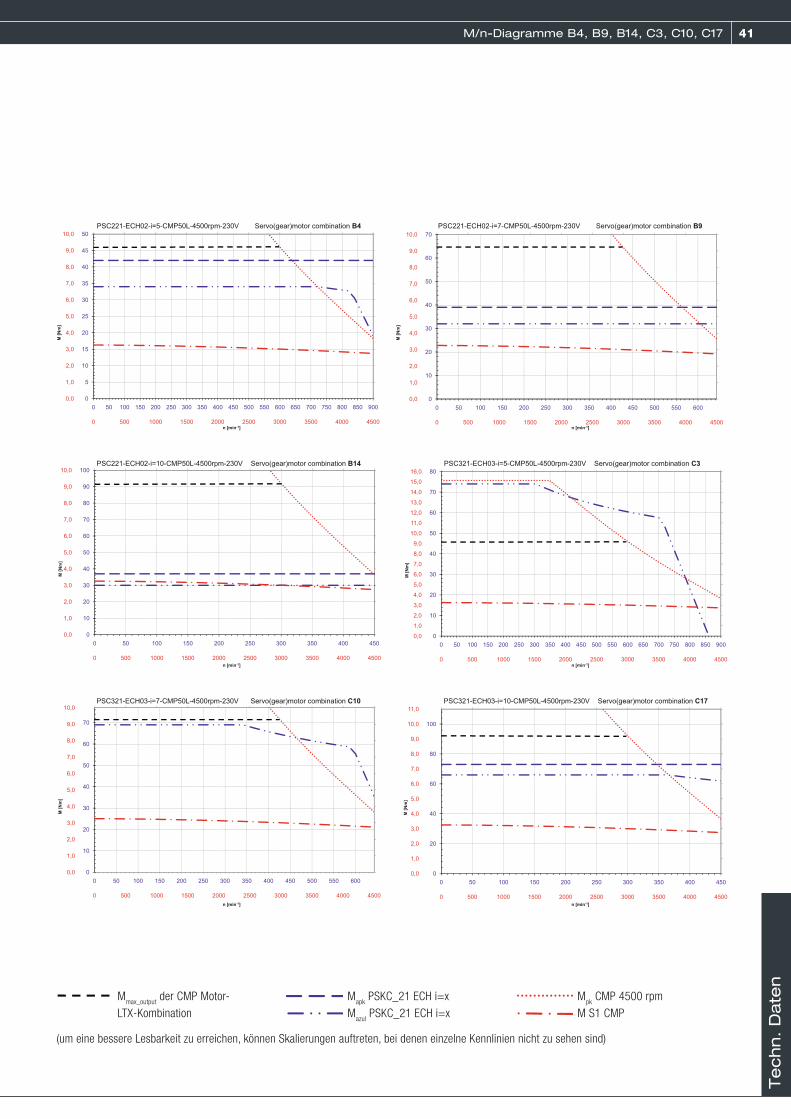
Mmax_output
der CMP Motor-
LTX-Kombination
Mapk
PSKC_21 ECH i=x
Mazul
PSKC_21 ECH i=x
Mpk
CMP 4500 rpm
M S1 CMP
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
Techn.
Date
n
M/n-Diagramme B4, B9, B14, C3, C10, C17
42
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
60
80
100
120
M [
Nm
]
PSC221-ECH02-i=10-CMP50L-4500rpm-230V Servo(gear)motor combination B15
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
0 50 100 150 200 250 300 350 400 450
M
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
30
40
50
60
M [
Nm
]
PSC221-ECH02-i=5-CMP50L-4500rpm-230V Servo(gear)motor combination B5
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
M
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
40
50
60
70
80
90
M [
Nm
]
PSC321-ECH03-i=7-CMP50L-4500rpm-230V Servo(gear)motor combination C11
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
30
0 50 100 150 200 250 300 350 400 450 500 550 600
M
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
14,0
15,0
16,0
30
40
50
60
70
80
M [
Nm
]
PSC321-ECH03-i=5-CMP50L-4500rpm-230V Servo(gear)motor combination C4
0,0
1,0
2,0
3,0
4,0
5,0
,
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
M
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
40
50
60
70
80
90
[]
PSC221-ECH02-i=7-CMP50L-4500rpm-230V Servo(gear)motor combination B10
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
30
0 50 100 150 200 250 300 350 400 450 500 550 600
5,0
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
60
80
100
120
M [
Nm
]
PSC321-ECH03-i=10-CMP50L-4500rpm-230V Servo(gear)motor combination C18
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
0 50 100 150 200 250 300 350 400 450
M
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
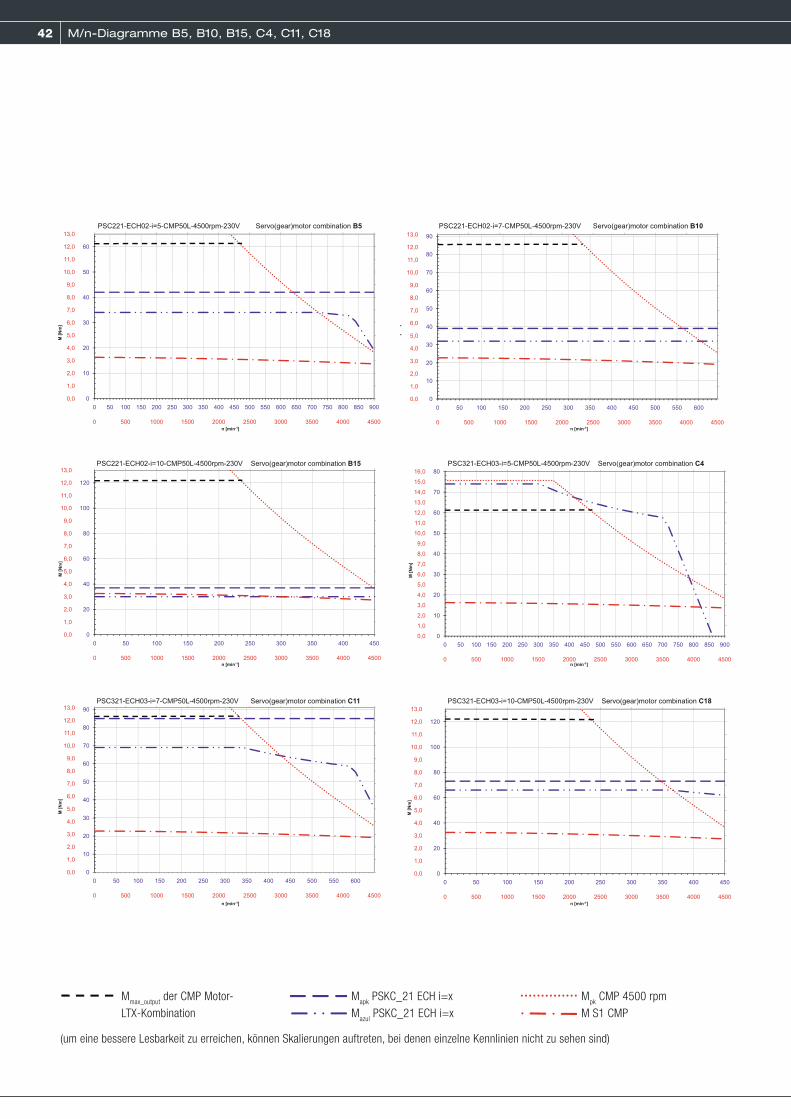
Mmax_output
der CMP Motor-
LTX-Kombination
Mapk
PSKC_21 ECH i=x
Mazul
PSKC_21 ECH i=x
Mpk
CMP 4500 rpm
M S1 CMP
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
M/n-Diagramme B5, B10, B15, C4, C11, C18
43
4 0
5,0
6,0
7,0
8,0
9,0
10,0
11,0
40
60
80
100
M [
Nm
]
PSC321-ECH03-i=10-CMP63S-4500rpm-230V Servo(gear)motor combination C19
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
0 50 100 150 200 250 300 350 400 450
M
6,0
7,0
8,0
9,0
10,0
11,0
12,0
13,0
14,0
15,0
16,0
30
40
50
60
70
80
M [
Nm
]
PSC321-ECH03-i=5-CMP63S-4500rpm-230V Servo(gear)motor combination C5
0,0
1,0
2,0
3,0
4,0
5,0
,
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
M
10,0
12,0
14,0
16,0
18,0
20,0
22,0
24,0
80
100
120
140
160
180
M [
Nm
]
PSC521-ECH05-i=7-CMP63S-4500rpm-230V Servo(gear)motor combination D4
0,0
2,0
4,0
6,0
8,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450 500 550 600
M [
Nm
]
14 0
16,0
18,0
20,0
22,0
24,0
26,0
28,0
30,0
32,0
34,0
36,0
38,0
80
100
120
140
160
180
M [
Nm
]
PSC521-ECH05-i=5-CMP63S-4500rpm-230V Servo(gear)motor combination D1
0,0
2,0
4,0
6,0
8,0
10,0
12,0
14,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
4 0
5,0
6,0
7,0
8,0
9,0
10,0
11,0
30
40
50
60
70
M [
Nm
]
PSC321-ECH03-i=7-CMP63S-4500rpm-230V Servo(gear)motor combination C12
0,0
1,0
2,0
3,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600M
7,0
8,0
9,0
10,0
11,0
12,0
13,0
14,0
15,0
16,0
17,0
18,0
80
100
120
140
160
180PSC521-ECH05-i=10-CMP63S-4500rpm-230V Servo(gear)motor combination D7
0,0
1,0
2,0
3,0
4,0
5,0
6,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
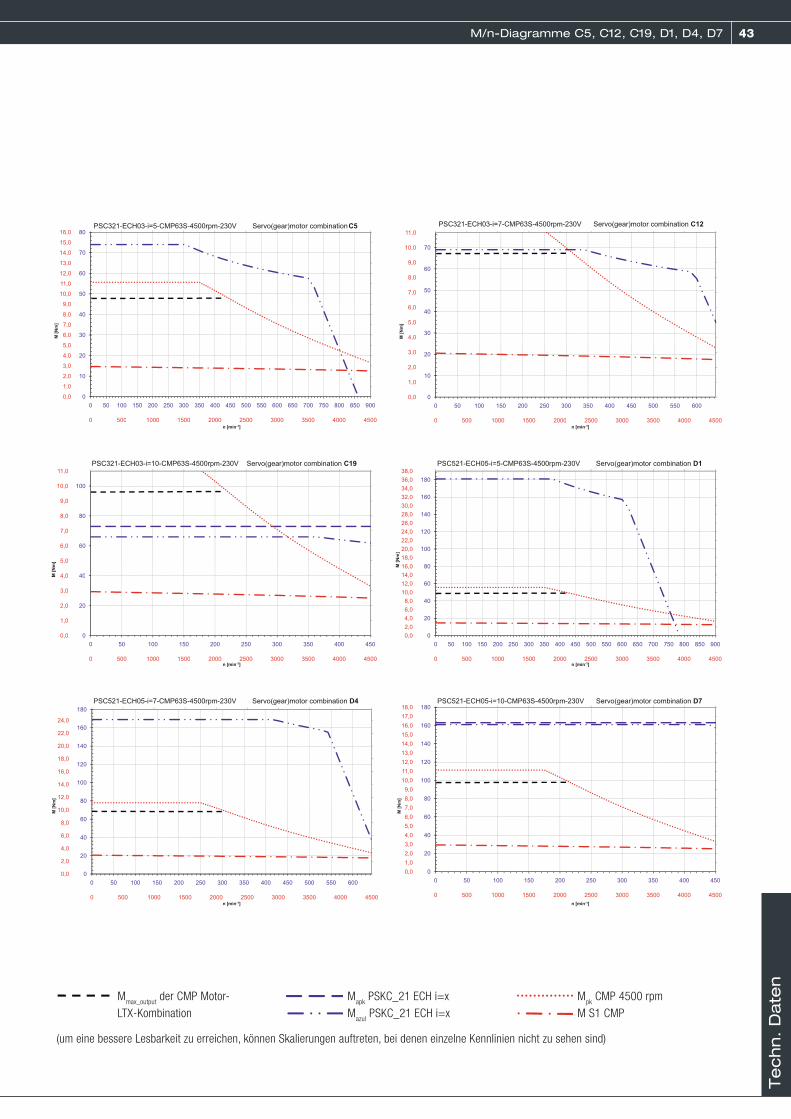
Mmax_output
der CMP Motor-
LTX-Kombination
Mapk
PSKC_21 ECH i=x
Mazul
PSKC_21 ECH i=x
Mpk
CMP 4500 rpm
M S1 CMP
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
M/n-Diagramme C5, C12, C19, D1, D4, D7
Techn.
Date
n
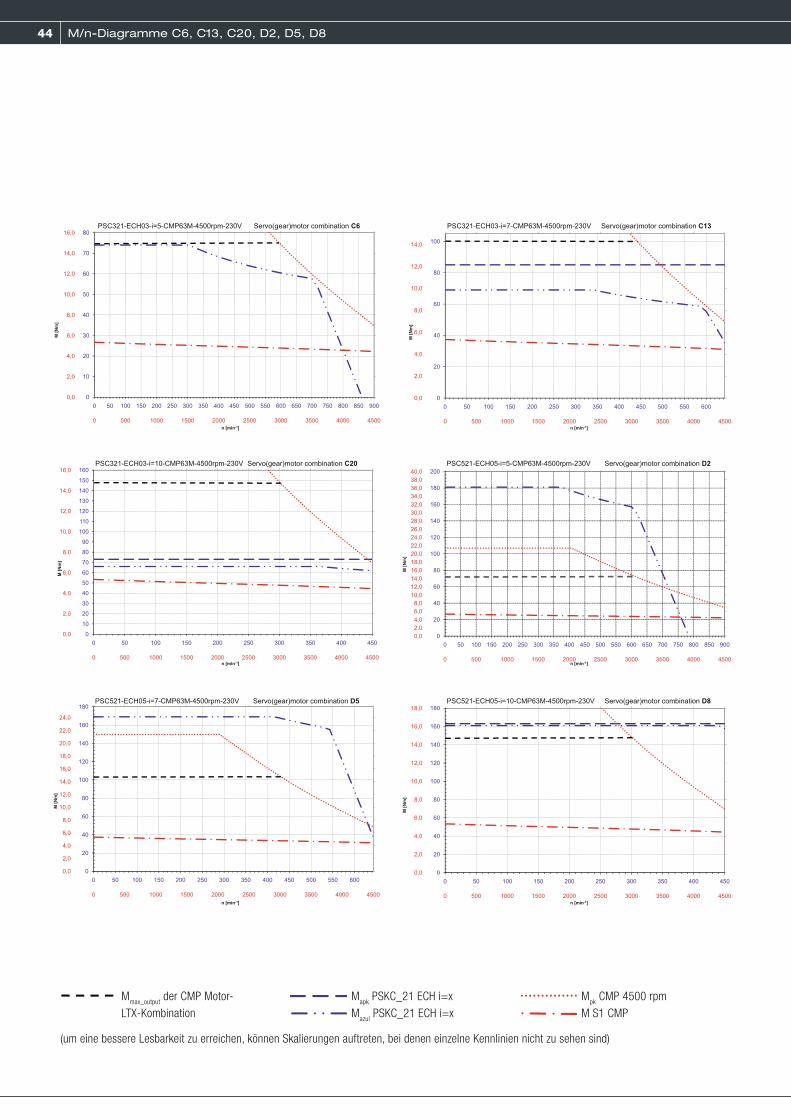
44 M/n-Diagramme C6, C13, C20, D2, D5, D8
6,0
8,0
10,0
12,0
14,0
16,0
60
70
80
90
100
110
120
130
140
150
160
M [
Nm
]
PSC321-ECH03-i=10-CMP63M-4500rpm-230V Servo(gear)motor combination C20
0,0
2,0
4,0
,
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
30
40
50
0 50 100 150 200 250 300 350 400 450
M
6,0
8,0
10,0
12,0
14,0
16,0
30
40
50
60
70
80
M [
Nm
]
PSC321-ECH03-i=5-CMP63M-4500rpm-230V Servo(gear)motor combination C6
0,0
2,0
4,0
,
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10,0
12,0
14,0
16,0
18,0
20,0
22,0
24,0
80
100
120
140
160
180
M [
Nm
]
PSC521-ECH05-i=7-CMP63M-4500rpm-230V Servo(gear)motor combination D5
0,0
2,0
4,0
6,0
8,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450 500 550 600
14 0
16,0
18,0
20,0
22,0
24,0
26,0
28,0
30,0
32,0
34,0
36,0
38,0
40,0
80
100
120
140
160
180
200
PSC521-ECH05-i=5-CMP63M-4500rpm-230V Servo(gear)motor combination D2
0,0
2,0
4,0
6,0
8,0
10,0
12,0
14,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
6,0
8,0
10,0
12,0
14,0
40
60
80
100
M [
Nm
]
PSC321-ECH03-i=7-CMP63M-4500rpm-230V Servo(gear)motor combination C13
0,0
2,0
4,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
0 50 100 150 200 250 300 350 400 450 500 550 600M
8,0
10,0
12,0
14,0
16,0
18,0
80
100
120
140
160
180PSC521-ECH05-i=10-CMP63M-4500rpm-230V Servo(gear)motor combination D8
0,0
2,0
4,0
6,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450
M [
Nm
]M
[N
m]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
Mmax_output
der CMP Motor-
LTX-Kombination
Mapk
PSKC_21 ECH i=x
Mazul
PSKC_21 ECH i=x
Mpk
CMP 4500 rpm
M S1 CMP
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
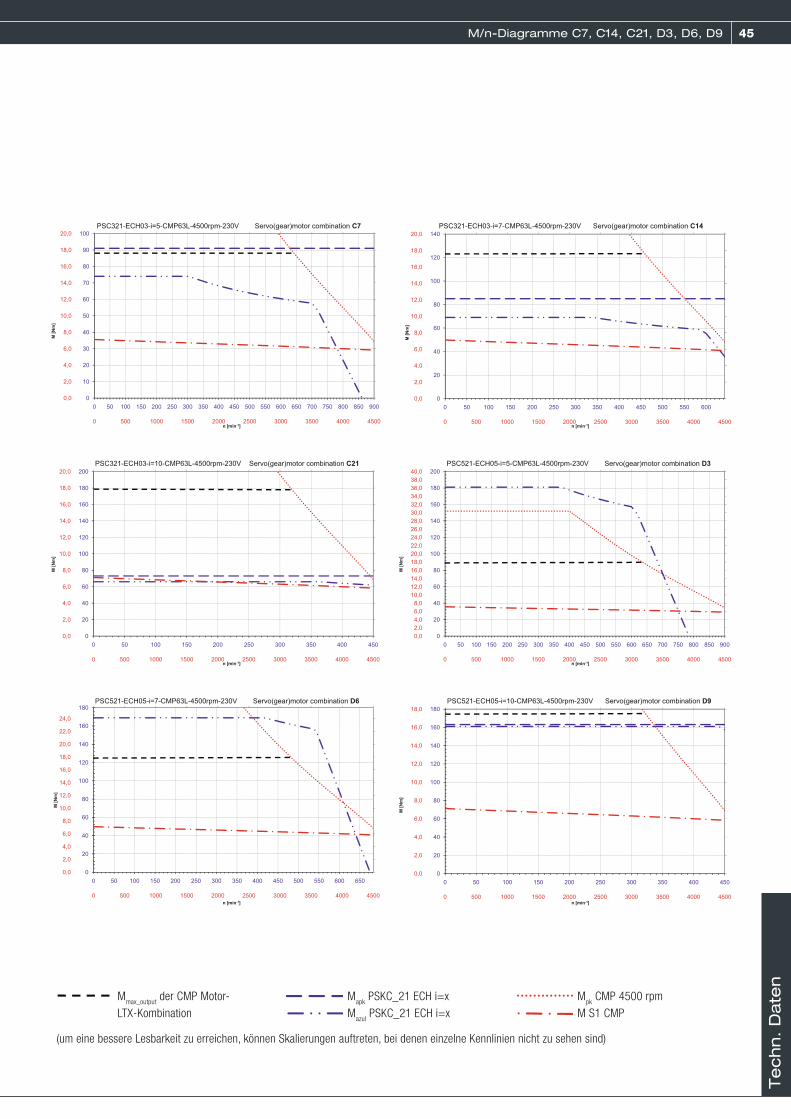
45
8,0
10,0
12,0
14,0
16,0
18,0
20,0
80
100
120
140
160
180
200
PSC321-ECH03-i=10-CMP63L-4500rpm-230V Servo(gear)motor combination C21
0,0
2,0
4,0
6,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450
8,0
10,0
12,0
14,0
16,0
18,0
20,0
40
50
60
70
80
90
100
PSC321-ECH03-i=5-CMP63L-4500rpm-230V Servo(gear)motor combination C7
0,0
2,0
4,0
6,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
10
20
30
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
10,0
12,0
14,0
16,0
18,0
20,0
22,0
24,0
80
100
120
140
160
180
M [
Nm
]
PSC521-ECH05-i=7-CMP63L-4500rpm-230V Servo(gear)motor combination D6
0,0
2,0
4,0
6,0
8,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450 500 550 600 650
14 0
16,0
18,0
20,0
22,0
24,0
26,0
28,0
30,0
32,0
34,0
36,0
38,0
40,0
80
100
120
140
160
180
200
PSC521-ECH05-i=5-CMP63L-4500rpm-230V Servo(gear)motor combination D3
0,0
2,0
4,0
6,0
8,0
10,0
12,0
14,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900
8,0
10,0
12,0
14,0
16,0
18,0
20,0
60
80
100
120
140
M [
Nm
]
PSC321-ECH03-i=7-CMP63L-4500rpm-230V Servo(gear)motor combination C14
0,0
2,0
4,0
6,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
0 50 100 150 200 250 300 350 400 450 500 550 600M
8,0
10,0
12,0
14,0
16,0
18,0
80
100
120
140
160
180
PSC521-ECH05-i=10-CMP63L-4500rpm-230V Servo(gear)motor combination D9
0,0
2,0
4,0
6,0
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0
20
40
60
0 50 100 150 200 250 300 350 400 450
M/n-Diagramme C7, C14, C21, D3, D6, D9
M [
Nm
]M
[N
m]
M [
Nm
]M
[N
m]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
n [min-1]
Mmax_output
der CMP Motor-
LTX-Kombination
Mapk
PSKC_21 ECH i=x
Mazul
PSKC_21 ECH i=x
Mpk
CMP 4500 rpm
M S1 CMP
(um eine bessere Lesbarkeit zu erreichen, können Skalierungen auftreten, bei denen einzelne Kennlinien nicht zu sehen sind)
Techn.
Date
n
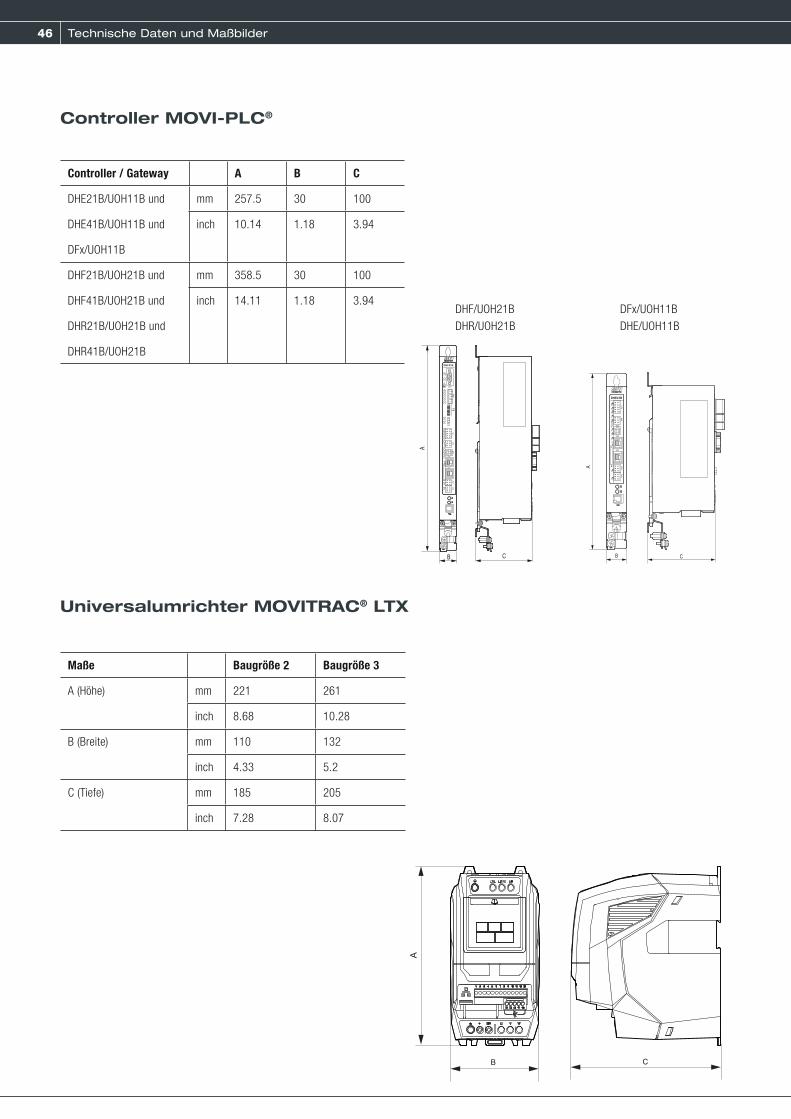
46
DHF41B
2222
0123
222
456
27
2
4
6
1
2
3
X34
X35
X36
X37
XM
1
3
5
1
2
3
1
2
3
1
2
3
1
2
3
X32
X33
2
4
6
1
3
58
10
7
9
X31
X38
L18
X30P
S1
3
4
2
1
1
5
X30D
S2
L16
L15
L14
L13
L12
L11
L10
L9
L8
L7
T1
L6
L5
L4
L3
L2
L1
L17
ON
A
B C
X35
X36
X37
2
4
6
1
3
5
X34
DHE41B
1
2
3
1
3
4
2
1
2
3
1
2
3
1
2
3
X32
X33
2
4
6
1
3
58
10
7
9
X31
T1
S1
L1
L2
L3
L5
XM
L6
L7
L8
L9
L4
L10
A
CB
CB
A
DHF/UOH21B
DHR/UOH21B
DFx/UOH11B
DHE/UOH11B
Technische Daten und Maßbilder
Controller MOVI-PLC®
Universalumrichter MOVITRAC® LTX
Controller / Gateway A B C
DHE21B/UOH11B und
DHE41B/UOH11B und
DFx/UOH11B
mm 257.5 30 100
inch 10.14 1.18 3.94
DHF21B/UOH21B und
DHF41B/UOH21B und
DHR21B/UOH21B und
DHR41B/UOH21B
mm 358.5 30 100
inch 14.11 1.18 3.94
Maße Baugröße 2 Baugröße 3
A (Höhe) mm 221 261
inch 8.68 10.28
B (Breite) mm 110 132
inch 4.33 5.2
C (Tiefe) mm 185 205
inch 7.28 8.07
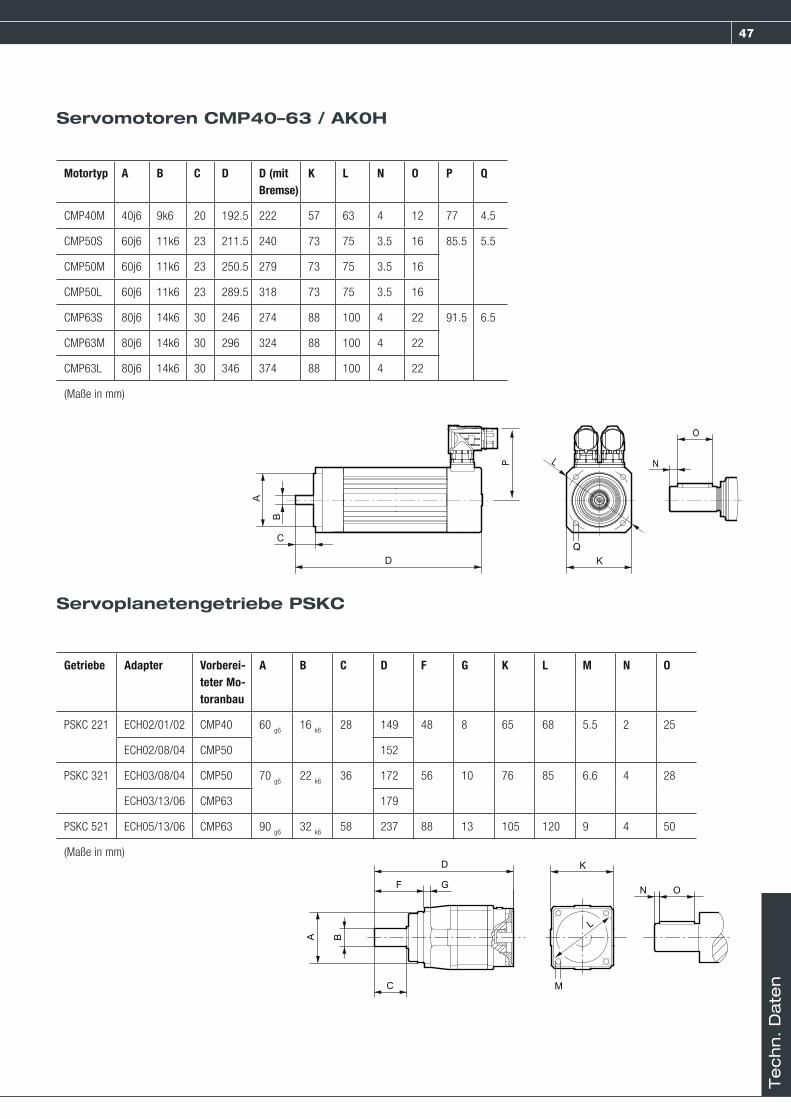
47
L
D
F G
C
BA
K
ON
M
N
O
K
L
D
C
B
A
P
Q
Servoplanetengetriebe PSKC
Servomotoren CMP40–63 / AK0H
Getriebe Adapter Vorberei-
teter Mo-
toranbau
A B C D F G K L M N O
PSKC 221 ECH02/01/02 CMP40 60 g6
16 k6
28 149 48 8 65 68 5.5 2 25
ECH02/08/04 CMP50 152
PSKC 321 ECH03/08/04 CMP50 70 g6
22 k6
36 172 56 10 76 85 6.6 4 28
ECH03/13/06 CMP63 179
PSKC 521 ECH05/13/06 CMP63 90 g6
32 k6
58 237 88 13 105 120 9 4 50
(Maße in mm)
Motortyp A B C D D (mit
Bremse)
K L N O P Q
CMP40M 40j6 9k6 20 192.5 222 57 63 4 12 77 4.5
CMP50S 60j6 11k6 23 211.5 240 73 75 3.5 16 85.5 5.5
CMP50M 60j6 11k6 23 250.5 279 73 75 3.5 16
CMP50L 60j6 11k6 23 289.5 318 73 75 3.5 16
CMP63S 80j6 14k6 30 246 274 88 100 4 22 91.5 6.5
CMP63M 80j6 14k6 30 296 324 88 100 4 22
CMP63L 80j6 14k6 30 346 374 88 100 4 22
(Maße in mm)
Techn.
Date
n
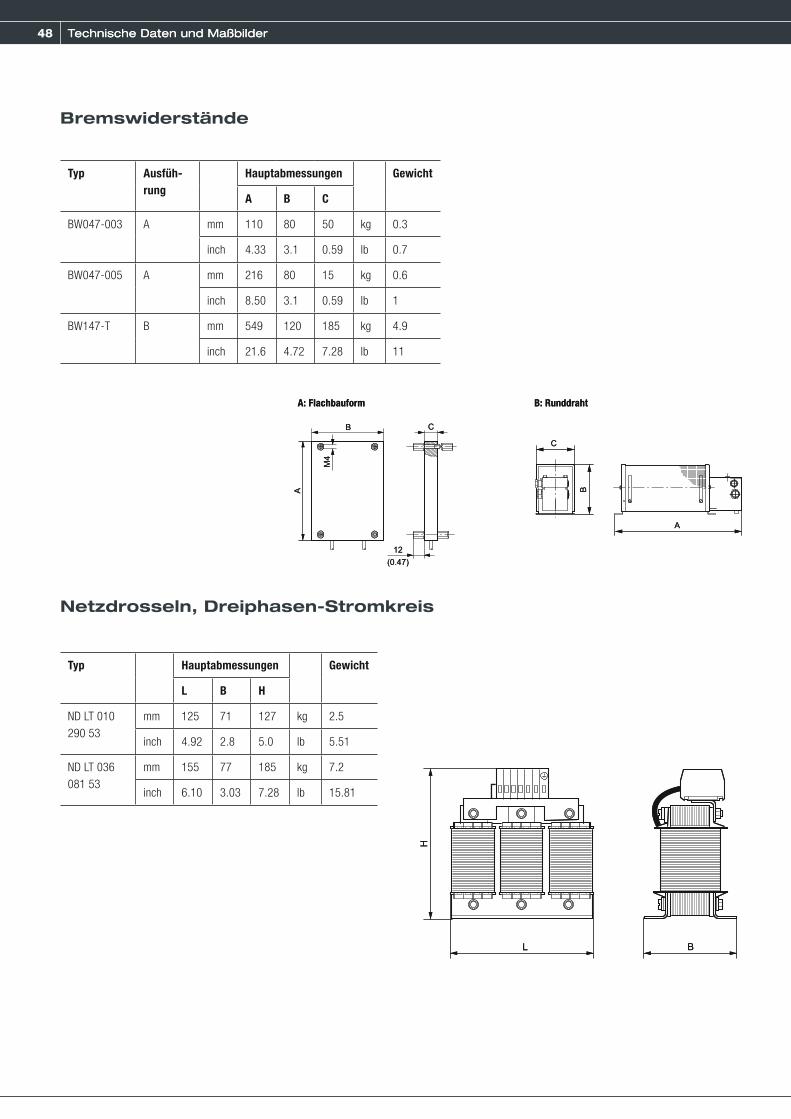
48
A
C
B
12
(0.47)
M4
CB
A
Bremswiderstände
Netzdrosseln, Dreiphasen-Stromkreis
B L
H
A: Flachbauform B: Runddraht
Technische Daten und Maßbilder
Typ Hauptabmessungen Gewicht
L B H
ND LT 010
290 53
mm 125 71 127 kg 2.5
inch 4.92 2.8 5.0 lb 5.51
ND LT 036
081 53
mm 155 77 185 kg 7.2
inch 6.10 3.03 7.28 lb 15.81
Bremswiderstände
Netzdrosseln, Dreiphasen-Stromkreis
Typ Ausfüh-
rung
Hauptabmessungen Gewicht
A B C
BW047-003 A mm 110 80 50 kg 0.3
inch 4.33 3.1 0.59 lb 0.7
BW047-005 A mm 216 80 15 kg 0.6
inch 8.50 3.1 0.59 lb 1
BW147-T B mm 549 120 185 kg 4.9
inch 21.6 4.72 7.28 lb 11
A
C
B
12
(0.47)
M4
CB
A
B L
H
A: Flachbauform B: Runddraht
Technische Daten und Maßbilder
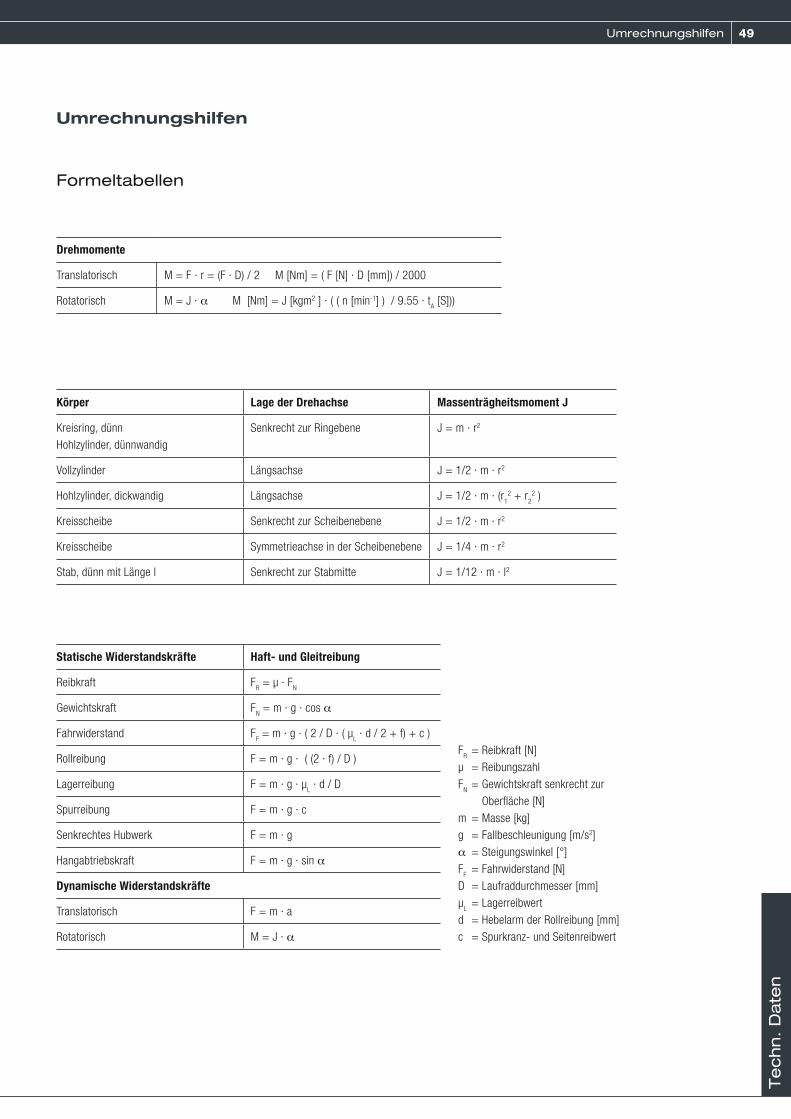
49Umrechnungshilfen
Umrechnungshilfen
Formeltabellen
Drehmomente
Translatorisch M = F ∙ r = (F ∙ D) / 2 M [Nm] = ( F [N] ∙ D [mm]) / 2000
Rotatorisch M = J ∙ � M [Nm] = J [kgm2 ] ∙ ( ( n [min-1] ) / 9.55 ∙ tA [S]))
Körper Lage der Drehachse Massenträgheitsmoment J
Kreisring, dünn
Hohlzylinder, dünnwandig
Senkrecht zur Ringebene J = m ∙ r2
Vollzylinder Längsachse J = 1/2 ∙ m ∙ r2
Hohlzylinder, dickwandig Längsachse J = 1/2 ∙ m ∙ (r1
2 + r2
2 )
Kreisscheibe Senkrecht zur Scheibenebene J = 1/2 ∙ m ∙ r2
Kreisscheibe Symmetrieachse in der Scheibenebene J = 1/4 ∙ m ∙ r2
Stab, dünn mit Länge l Senkrecht zur Stabmitte J = 1/12 ∙ m ∙ l2
Techn.
Date
n
Statische Widerstandskräfte Haft- und Gleitreibung
Reibkraft FR = μ ∙ F
N
Gewichtskraft FN = m ∙ g ∙ cos �
Fahrwiderstand FF = m ∙ g ∙ ( 2 / D ∙ ( μ
L ∙ d / 2 + f) + c )
Rollreibung F = m ∙ g ∙ ( (2 ∙ f) / D )
Lagerreibung F = m ∙ g ∙ μL ∙ d / D
Spurreibung F = m ∙ g ∙ c
Senkrechtes Hubwerk F = m ∙ g
Hangabtriebskraft F = m ∙ g ∙ sin �
Dynamische Widerstandskräfte
Translatorisch F = m ∙ a
Rotatorisch M = J ∙ �
FR = Reibkraft [N]
μ = Reibungszahl
FN = Gewichtskraft senkrecht zur
Oberfläche [N]
m = Masse [kg]
g = Fallbeschleunigung [m/s2]
� = Steigungswinkel [°]
FF = Fahrwiderstand [N]
D = Laufraddurchmesser [mm]
μL = Lagerreibwert
d = Hebelarm der Rollreibung [mm]
c = Spurkranz- und Seitenreibwert
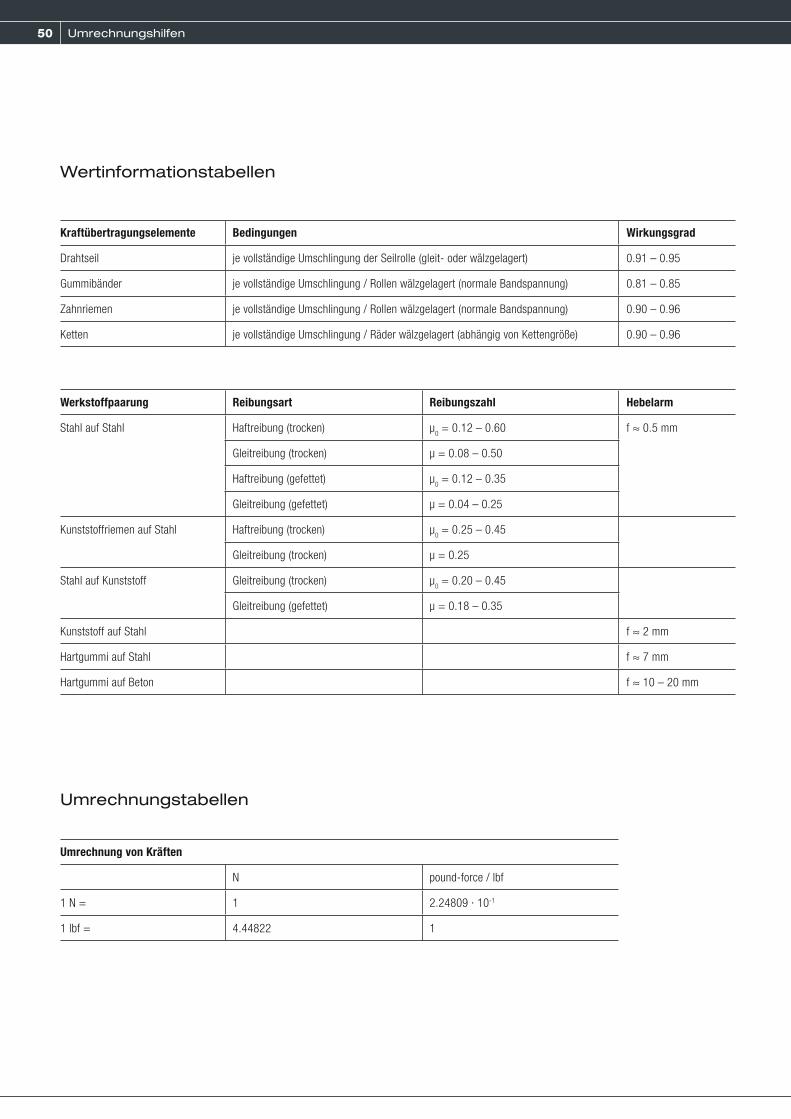
50 Umrechnungshilfen
Umrechnungstabellen
Umrechnung von Kräften
N pound-force / lbf
1 N = 1 2.24809 ∙ 10-1
1 lbf = 4.44822 1
Wertinformationstabellen
Kraftübertragungselemente Bedingungen Wirkungsgrad
Drahtseil je vollständige Umschlingung der Seilrolle (gleit- oder wälzgelagert) 0.91 – 0.95
Gummibänder je vollständige Umschlingung / Rollen wälzgelagert (normale Bandspannung) 0.81 – 0.85
Zahnriemen je vollständige Umschlingung / Rollen wälzgelagert (normale Bandspannung) 0.90 – 0.96
Ketten je vollständige Umschlingung / Räder wälzgelagert (abhängig von Kettengröße) 0.90 – 0.96
Werkstoffpaarung Reibungsart Reibungszahl Hebelarm
Stahl auf Stahl Haftreibung (trocken) μ0 = 0.12 – 0.60 f ≈ 0.5 mm
Gleitreibung (trocken) μ = 0.08 – 0.50
Haftreibung (gefettet) μ0 = 0.12 – 0.35
Gleitreibung (gefettet) μ = 0.04 – 0.25
Kunststoffriemen auf Stahl Haftreibung (trocken) μ0 = 0.25 – 0.45
Gleitreibung (trocken) μ = 0.25
Stahl auf Kunststoff Gleitreibung (trocken) μ0 = 0.20 – 0.45
Gleitreibung (gefettet) μ = 0.18 – 0.35
Kunststoff auf Stahl f ≈ 2 mm
Hartgummi auf Stahl f ≈ 7 mm
Hartgummi auf Beton f ≈ 10 – 20 mm
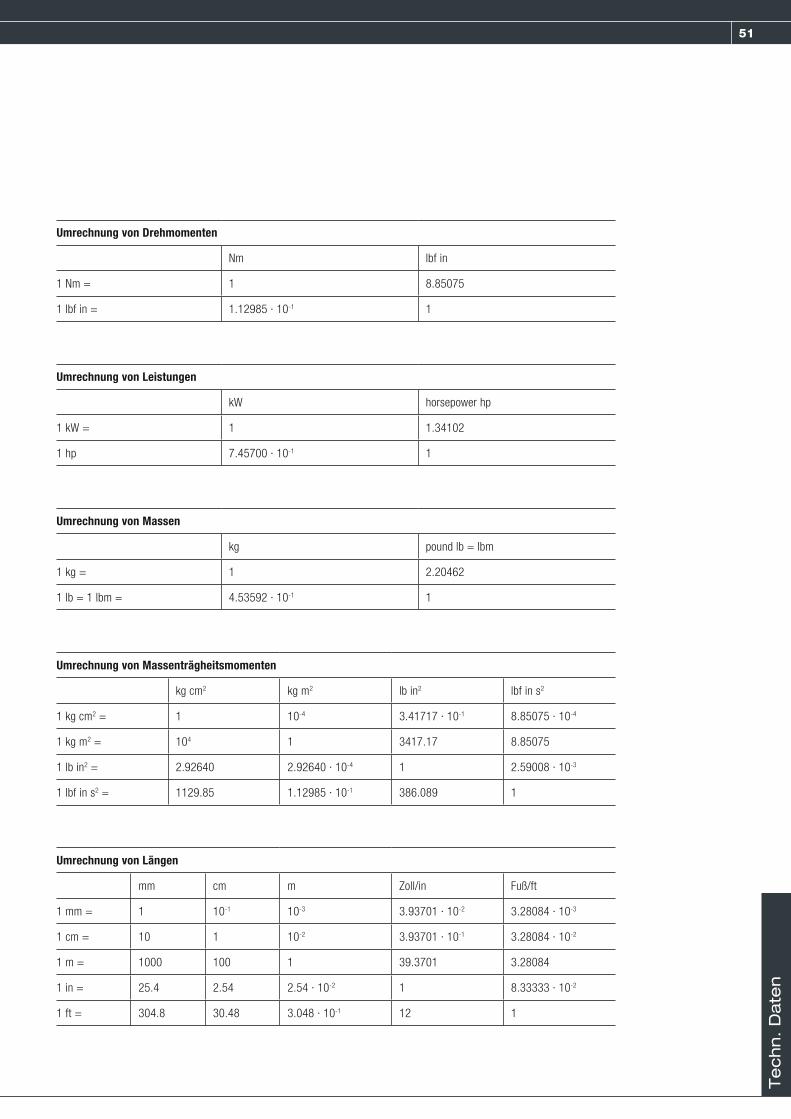
51
Umrechnung von Drehmomenten
Nm lbf in
1 Nm = 1 8.85075
1 lbf in = 1.12985 ∙ 10-1 1
Umrechnung von Leistungen
kW horsepower hp
1 kW = 1 1.34102
1 hp 7.45700 ∙ 10-1 1
Umrechnung von Massen
kg pound lb = lbm
1 kg = 1 2.20462
1 lb = 1 lbm = 4.53592 ∙ 10-1 1
Umrechnung von Massenträgheitsmomenten
kg cm2 kg m2 lb in2 lbf in s2
1 kg cm2 = 1 10-4 3.41717 ∙ 10-1 8.85075 ∙ 10-4
1 kg m2 = 104 1 3417.17 8.85075
1 lb in2 = 2.92640 2.92640 ∙ 10-4 1 2.59008 ∙ 10-3
1 lbf in s2 = 1129.85 1.12985 ∙ 10-1 386.089 1
Umrechnung von Längen
mm cm m Zoll/in Fuß/ft
1 mm = 1 10-1 10-3 3.93701 ∙ 10-2 3.28084 ∙ 10-3
1 cm = 10 1 10-2 3.93701 ∙ 10-1 3.28084 ∙ 10-2
1 m = 1000 100 1 39.3701 3.28084
1 in = 25.4 2.54 2.54 ∙ 10-2 1 8.33333 ∙ 10-2
1 ft = 304.8 30.48 3.048 ∙ 10-1 12 1
Techn.
Date
n
SEW-EURODRIVE
Driving the world
Antriebstechnik \ Antriebsautomatisierung \ Systemintegration \ Services
SEW-EURODRIVE ist überall in Ihrer Nähe:
Augsburg Tel. 0821 22779-10 Fax 0821 22779-50 [email protected]
Berlin Tel. 030 6331131-30 Fax 030 6331131-36 [email protected]
Bodensee Tel. 07551 9226-30 Fax 07551 9226-56 [email protected]
Bremen Tel. 0421 33918-10 Fax 0421 33918-22 [email protected]
Dortmund Tel. 0231 229028-10 Fax 0231 229028-20 [email protected]
Dresden Tel. 0351 26338-0 Fax 0351 26338-38 [email protected]
Erfurt Tel. 0361 21709-70 Fax 0361 21709-79 [email protected]
Güstrow Tel. 03843 8557-80 Fax 03843 8557-88 [email protected]
Hamburg Tel. 040 298109-60 Fax 040 298109-70 [email protected]
Hannover/Garbsen Tel. 05137 8798-10 Fax 05137 8798-50 [email protected]
Heilbronn Tel. 07143 8738-0 Fax 07143 8738-25 [email protected]
Herford Tel. 05221 9141-0 Fax 05221 9141-20 [email protected]
Karlsruhe Tel. 07245 9190-10 Fax 07245 9190-20 [email protected]
Kassel Tel. 0561 95144-80 Fax 0561 95144-90 [email protected]
Koblenz Tel. 02652 9713-30 Fax 02652 9713-40 [email protected]
Lahr Tel. 07821 90999-60 Fax 07821 90999-79 [email protected]
Langenfeld Tel. 02173 8507-10 Fax 02173 8507-50 [email protected]
Magdeburg Tel. 039203 7577-1 Fax 039203 7577-9 [email protected]
Mannheim Tel. 0621 71683-10 Fax 0621 71683-22 [email protected]
München/Kirchheim Tel. 089 90955-110 Fax 089 90955-150 [email protected]
Münster Tel. 0251 41475-11 Fax 0251 41475-50 [email protected]
Nürnberg Tel. 0911 98884-50 Fax 0911 98884-60 [email protected]
Regensburg Tel. 0941 46668-68 Fax 0941 46668-66 [email protected]
Rhein-Main/Bad Homburg Tel. 06172 9617-0 Fax 06172 9617-50 [email protected]
Stuttgart Tel. 0711 16072-0 Fax 0711 16072-72 [email protected]
Ulm Tel. 07348 9885-0 Fax 07348 9885-90 [email protected]
Würzburg Tel. 0931 27886-60 Fax 0931 27886-66 [email protected]
Zwickau/Meerane Tel. 03764 7606-0 Fax 03764 7606-20 [email protected]
Österreich/Wien Tel. 01 6175500-0 Fax 01 6175500-30 [email protected]
Schweiz/Basel Tel. 061 4171717 Fax 061 4171700 [email protected]
Wie man die Welt bewegt
SEW-EURODRIVE GmbH & Co KG
Postfach 30 23
76642 Bruchsal
Telefon 07251 75-0
Fax 07251 75-1970
i www.sew-eurodrive.de
1933
160
6 /
1011





























