Embed Size (px)
DESCRIPTION
Softwarepraktikum Teamrobotik SS05. Die Aufgabe Erste Ideen Probleme Weiteres Vorgehen Das Endprodukt Aufbau und Steuerung Software Webseite Review Jan Jurczynski, Patrick Gerlach, Marcus Förster. Die Aufgabe. Robo-Sokoban: - PowerPoint PPT Presentation
Citation preview

Softwarepraktikum Teamrobotik SS05
● Die Aufgabe● Erste Ideen● Probleme● Weiteres Vorgehen● Das Endprodukt● Aufbau und Steuerung● Software● Webseite● Review
Jan Jurczynski, Patrick Gerlach, Marcus Förster

Die Aufgabe
Robo-Sokoban:Ziel ist es Fotodosen in kürzester Zeit in einen bestimmten Bereich zu befördern. Dazu sollten 2 Roboter entworfen, gebaut und programmiert werden. Zur Verfügung standen 2 Lego Mindstorm Baukästen. Im Wettbewerb soll die Steuerung der Roboter durch eine Person via PC erfolgen. B-Note für gelungene Endmelodie.
Erste Ideen
● Diesmal Kettenantrieb
● Effizienter Aufbau in Hinsicht auf den Transport der Dosen
● Sensoren zur Dosenerkennung und Steuerung
● autonome Steuerung

Erste Ideen
● schnelle und wendige Bewegungen
● Musik erstmal unwichtig
● Steuerung via Tastatur
● Einfach drauflos bauen

Probleme
● Schnelle Bewegung schränkt Genauigkeit ein● Kettenantrieb „schluckt“ Leistung
● Kompromiss zwischen Geschwindigkeit und Kraft● Transport der Dosen
● Dosen im Mittelpunkt der Roboter – gute Drehmöglichkeiten● Autonome Steuerung zu kompliziert und
ineffizient in Bezug auf die Zeit● Ansteuerung von 2 RCX

Weiteres Vorgehen
● Aufbau zum Zwischenergebnis nicht verändert
● Geeignete Getriebe Über- bzw. Untersetzung für Kettenantrieb
● Dadurch wendig aber auch recht flott
● Einfache Beförderung der Dosen durch Aufbau gewährleistet
Weiteres Vorgehen
● Erweiterung der Software um mit Tastatur zu Steuern und später für die Musik
● Sensoren sind geblieben, haben aber keine Funktion, da nicht autonom
● Optimierung der Steuerung (Folge von Pfeiltasten berücksichtigt)
Das Endprodukt
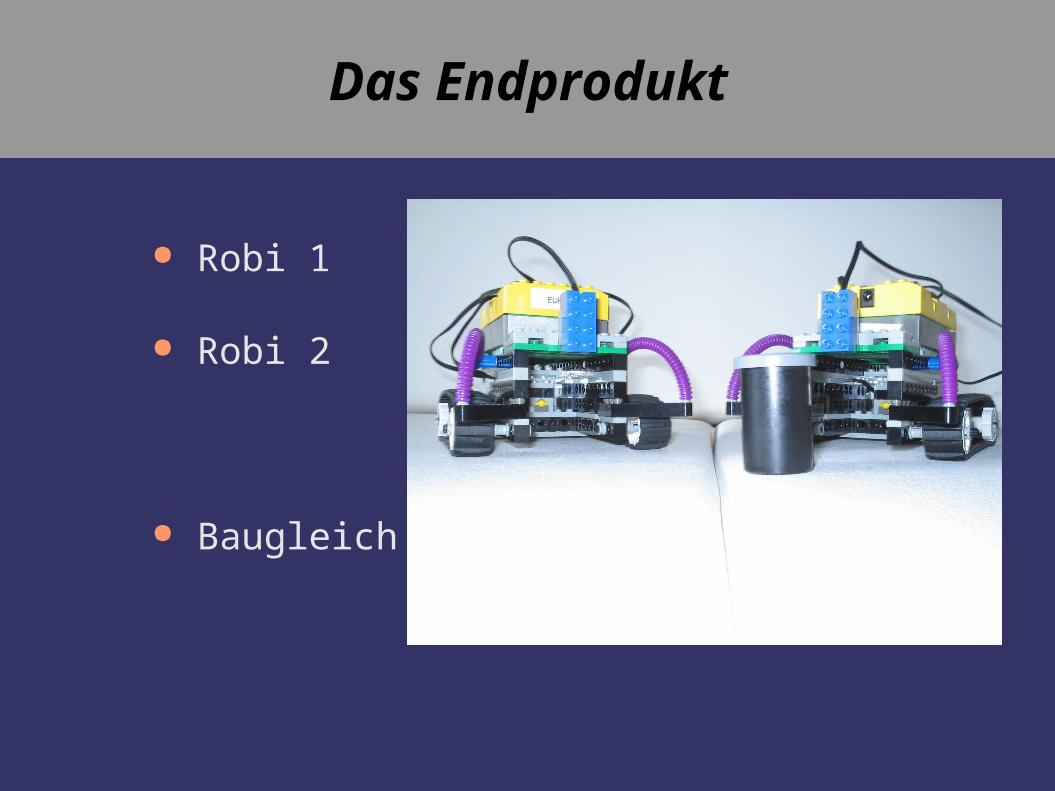
● Robi 1
● Robi 2
● Baugleich
Aufbau und Steuerung
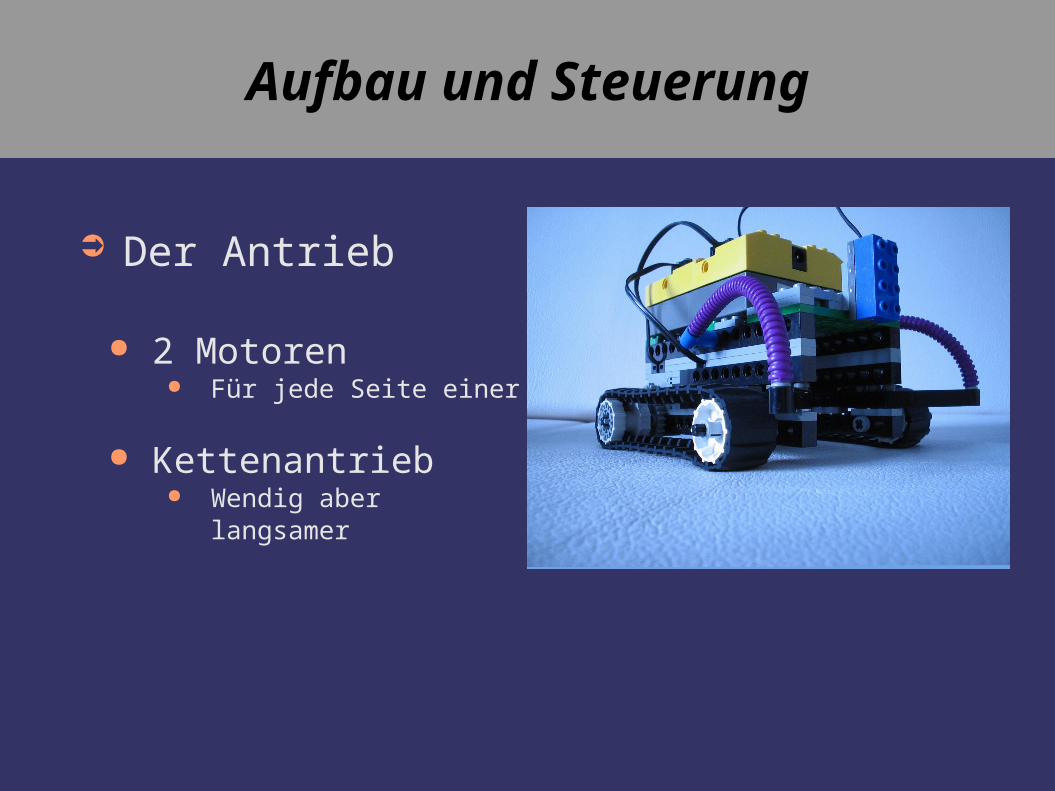
➲ Der Antrieb
● 2 Motoren● Für jede Seite einer
● Kettenantrieb● Wendig aber langsamer
Aufbau und Steuerung
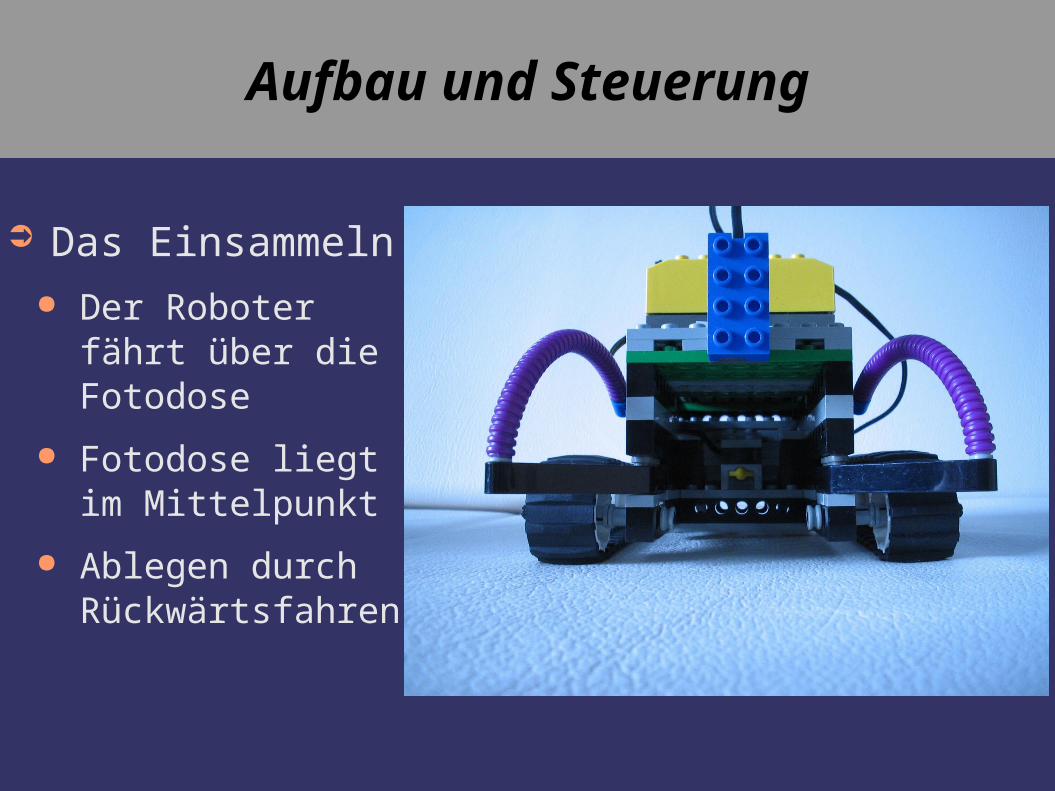
➲ Das Einsammeln● Der Roboter fährt
über die Fotodose
● Fotodose liegt im Mittelpunkt
● Ablegen durch Rückwärtsfahren

Aufbau und Steuerung
➲ Steuerung● Manuelle
Steuerung
● per PC und IR-Tower
● Separate Tasten für Robi 1 und Robi 2

Aufbau und Steuerung
● Berührungs- und Tastsensor
● Ohne Funktion

Aufbau und Steuerung
➲ Motoren über Getriebe untersetzt
● Mehr Kraft, sonst gelingt die Drehung nicht
● Dadurch Geschwindigkeit begrenzt

Software
● Grundschema● 3 unabhängige
Schichten
● GUI als oberste Schicht
● Control als Vermittlungsschicht
● Ganz unten erst die Roboter
GUI
Control
Robi 1 Robi 2

Software
● Die GUI● Layout leicht
verändert
● Erweitert um Debug-Textfeld und Musik-Button
● Nun auch mit Tastenanschlägen

Software
● Die Control-Schicht
● Kapselt die Methoden zur Steuerung
● Verhindert, dass Befehle mehrfach hintereinander gesendet werden
● Verwaltet das Tower-Objekt und managed das Senden
Software
● Die Control-Schicht
● Indizes für die Bots (0, 1), um zu wissen, wer gemeint ist, Offset von 0 bzw. 64 Befehlsbereich 64 Befehle pro Bot
● Index * Offset + Befehlscode liefert das fertige zu übertragene Byte
Software
● Die beiden Receiver Schichten● Nehmen die Befehle direkt von der Control Schicht
entgegen
● Verteilen die ankommenden Befehle auf die Motoren
● Bei Kommando “13” reagieren beide mit Musik, zwei unabhängige Spuren in der jeweilige .java-Datei gespeichert

Webseite
➲ Erreichbar unter:http://home.arcor.de/pappag83/
Webseite
➲ Kleines Menü
● Übersichtlich
● Struktoriert
● Mittels CSS formatiert
Webseite
➲ Zu finden ist:
● Infos zu den Aufgaben
● Bilder
● Erläuterungen
● Quelltexte

Review
➲ Was haben wir gelernt?
● Teamarbeit an einen gegebenen Problem
● Gemeinsam Lösungen erarbeiten
● Aufkommende Probleme lösen

Review
➲ Was haben wir gelernt?
● Programmierung eines RCX
● Teilweises wissenschaftliches Arbeiten
● Präsentation der Arbeit und Erstellung einer Webseite
● Kurz: das bauen von Robotern ist nicht einfach





























