Embed Size (px)
Citation preview

SpezielleRelativitätstheorie
Skript zur Vorlesung von Apl. Prof. Jörg MainBerbeitung von Sebastian Boblest
Vorläufige Version SS 2011
1. Institut für Theoretische PhysikUniversität StuttgartPfaffenwaldring 5770550 Stuttgart
Korrekturen und Verbesserungsvorschläge bitte an:[email protected]

Inhaltsverzeichnis
Inhaltsverzeichnis
1 Einführung 11.1 Newtonsche Mechanik . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Elektrodynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Transformationsverhalten der Maxwellgleichungen . . . . . . . . . 2Möglichkeit 1 . . . . . . . . . . . . . . . . . . . . . . . . . 2Möglichkeit 2 . . . . . . . . . . . . . . . . . . . . . . . . . 3Die Lorentz-Transformation . . . . . . . . . . . . . . . . . 3Bemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Definitionen und Schreibweisen in der SRT 52.1 Matrixdarstellung von Lorentz-Transformationen . . . . . . . . . . . . . 5
2.1.1 Spezielle Lorentz-Transformationen . . . . . . . . . . . . . . . . . 62.1.2 Verknüpfung von Lorentz-Transformationen . . . . . . . . . . . . 6
2.2 Lorentz-Transformationen und klassische Mechanik . . . . . . . . . . . . 7
3 Revolutionäre Konsequenzen der Lorentz-Transformation 83.1 Lorentz-Kontraktion bewegter Maßstäbe . . . . . . . . . . . . . . . . . . 8
3.1.1 Bewegte Uhren: Zeitdilatation . . . . . . . . . . . . . . . . . . . . 9Beispiel: Bewegte Elementarteilchen . . . . . . . . . . . . . 9
3.1.2 Verlust der Gleichzeitigkeit . . . . . . . . . . . . . . . . . . . . . . 93.1.3 Das Addititionstheorem der Geschwindigkeit . . . . . . . . . . . . 103.1.4 Raum-Zeit-Diagramme . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2 Paradoxa der SRT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2.1 Das Stab-Rahmen-Paradoxon . . . . . . . . . . . . . . . . . . . . 13
Betrachtung im System K . . . . . . . . . . . . . . . . . . 14Betrachtung im System K ′ . . . . . . . . . . . . . . . . . . 14Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.2 Das Uhren-Paradoxon . . . . . . . . . . . . . . . . . . . . . . . . 15Erklärung . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.3 Zwillingsparadoxon . . . . . . . . . . . . . . . . . . . . . . . . . . 17Lösung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Mathematischer Formalismus der SRT 194.1 Der Minkowski-Raum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.1.1 Definition des Minkowski-Raumes . . . . . . . . . . . . . . . . . . 204.1.2 Definition der Lorentz-Transformationen . . . . . . . . . . . . . . 21
4.2 Kontra- und kovariante Vektoren . . . . . . . . . . . . . . . . . . . . . . 234.2.1 Definition des kontravarianten Vierervektors . . . . . . . . . . . . 234.2.2 Definition des kovarianten Vierervektors . . . . . . . . . . . . . . 23
i

Inhaltsverzeichnis
4.2.3 Transformationsverhalten der Differentiale und Koordinatenablei-tungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Lorentz-Skalare . . . . . . . . . . . . . . . . . . . . . . . . 244.3 Tensoralgebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3.1 Definition von Tensoren . . . . . . . . . . . . . . . . . . . . . . . 251) Multilinearität . . . . . . . . . . . . . . . . . . . . . . . 252) Indexschreibweise . . . . . . . . . . . . . . . . . . . . . . 253) Tensorprodukt . . . . . . . . . . . . . . . . . . . . . . . 264) Tensorverjüngung (Kontraktion) . . . . . . . . . . . . . 265) Tensor-Transformationen . . . . . . . . . . . . . . . . . 266) Lorentz-Tensoren . . . . . . . . . . . . . . . . . . . . . . 277) Das Differential der Eigenzeit . . . . . . . . . . . . . . . 28
5 Relativistische Mechanik 295.1 Vierer-Geschwindigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.1.1 Vierer-Beschleunigung . . . . . . . . . . . . . . . . . . . . . . . . 305.1.2 Vierer-Impuls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.1.3 Vierer-Kraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.1.4 Beschreibung der kräftefreien Bewegung . . . . . . . . . . . . . . 315.1.5 Konstant beschleunigte Rakete . . . . . . . . . . . . . . . . . . . 34
1) Aufstellen und Lösen der Bewegungsgleichungen . . . . . 342) Betrachtung der Eigenzeit . . . . . . . . . . . . . . . . . 36
5.1.6 Relativistische Energie . . . . . . . . . . . . . . . . . . . . . . . . 371) Photonen . . . . . . . . . . . . . . . . . . . . . . . . . . 382) Stöße . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.2 Äquivalenz von Masse und Energie . . . . . . . . . . . . . . . . . . . . . 395.2.1 Konsequenzen der Äquivalenz von Masse und Energie . . . . . . . 405.2.2 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.3 Drehimpulstensor und Drehmoment . . . . . . . . . . . . . . . . . . . . . 425.3.1 Klassischer Drehimpuls . . . . . . . . . . . . . . . . . . . . . . . . 425.3.2 Kovarianter Drehimpuls und Drehmoment . . . . . . . . . . . . . 42
5.4 Relativistische Erhaltungssätze . . . . . . . . . . . . . . . . . . . . . . . 43
6 Kovariante Formulierung der Elektrodynamik 446.1 Grundlagen der klassischen Elektrodynamik . . . . . . . . . . . . . . . . 44
6.1.1 Die homogenen Maxwellgleichungen . . . . . . . . . . . . . . . . . 44Die inhomogenen Maxwellgleichungen . . . . . . . . . . . . 46Beispiel: Spezielle Lorentz-Transformation in x-Richtung . 47
6.2 Lorentz-Tensoren 2. Stufe in der Elektrodynamik . . . . . . . . . . . . . 496.2.1 Der Feldstärketensor . . . . . . . . . . . . . . . . . . . . . . . . . 50
1) Der kontravariante Feldstärketensor . . . . . . . . . . . . 512) Schlussfolgerungen . . . . . . . . . . . . . . . . . . . . . 51
ii

Inhaltsverzeichnis
6.3 Kovariante Form der Erregungsgleichungen . . . . . . . . . . . . . . . . . 526.4 Kovariante Form der inneren Feldgleichungen . . . . . . . . . . . . . . . 53
6.4.1 Der duale Feldstärketensor . . . . . . . . . . . . . . . . . . . . . . 536.4.2 Formulierung der inneren Feldgleichungen . . . . . . . . . . . . . 53
6.5 Kovariante Form der Lorentz-Kraft . . . . . . . . . . . . . . . . . . . . . 546.6 Der Energie-Impuls-Tensor des elektromagnetischen Feldes . . . . . . . . 55
6.6.1 Klassische Energiegrößen der Elektrodynamik . . . . . . . . . . . 556.6.2 Einführung des Energie-Impuls-Tensors . . . . . . . . . . . . . . . 556.6.3 Interpretation des Energie-Impuls-Tensors . . . . . . . . . . . . . 57
6.7 Der relativistische Doppler-Effekt . . . . . . . . . . . . . . . . . . . . . . 596.7.1 Elektromagnetische Wellen im Vakuum . . . . . . . . . . . . . . . 596.7.2 Transformation in ein bewegtes Bezugsystem . . . . . . . . . . . . 596.7.3 Der longitudinale Doppler-Effekt . . . . . . . . . . . . . . . . . . 606.7.4 Der transversale Doppler-Effekt . . . . . . . . . . . . . . . . . . . 61
Literaturverzeichnis 63
iii


1 EinführungDie fundamentalsten Begriffe in der Physik sind wohl Raum und Zeit. 3 Raum- und 1Zeitdimension sind uns vertraut.Unsere (klassische) Vorstellung ist die folgende:
• Jeder Raumpunkt ist beschreibbar durch Koordinaten (x,y,z) ∈ R3 in einem be-liebig gewählten Koordinatensystem.
• Jeder Zeitpunkt ist beschreibbar durch die Zeit t relativ zu einem beliebig gewähl-ten Zeitnullpunkt (z.B. Greenwichzeit).
In dieser Raumzeit werden wichtige physikalische Theorien formuliert, z.B. die Newton-sche Mechanik und die Elektrodynamik.
1.1 Newtonsche Mechanik
Für die Bewegung eines Punktteilchens mit Masse m gilt
F = m · a = mx bzw. x(t) =1
mF (x,t). (1.1)
Aus dieser Differentialgleichung ergibt sich die Bahnkurve des Teilchens.Nach dem klassischen Verständnis von Raum und Zeit gelten die Gesetze der (New-tonschen) Mechanik in jedem Inertialsystem (= unbeschleunigtes System). Ein Wechseldes Inertialsystems in ein mit der Geschwindigkeit v bewegtes System erfolgt über dieUmrechnung
x 7→ x′ = x− v · t (1.2)
Die allgemeinst mögliche Transformation zwischen Inertialsystemen heißt Galilei-Trans-formation mit der Gleichung
x′ = D · x− v · t− x0
t′ = t− t0.(1.3)
Dabei bezeichnet D eine orthogonale Drehmatrix, v die Relativgeschwindigkeit zwischenden Inertialsystemen und x0, t0 sind Verschiebungen des Raum- und Zeitursprungs.
Mit den jeweils drei freien Parametern von D, x0 und v und dem einen Parametervon t0 ergeben sich insgesamt 10 Parameter für eine allgemeine Galileo-Transformation.Die Menge der Galilei-Transformationen bildet daher ein 10-parametrige Gruppe.
1

1 Einführung
Die klassische Mechanik ist invariant unter Galilei-Transformation.
1.2 Elektrodynamik
Grundgleichungen der Elektrodynamik sind die Maxwellschen Gleichungen:
1
µ0
∇×B − ε0E = j, ∇×E + B = 0,
∇ ·E =1
ε0
%, ∇ ·B = 0
(1.4)
Die Maxwellschen Gleichungen sind ein Differentialgleichungssystem zur Bestimmungder elektrischen und magnetischen Felder E(x,t) und B(x,t) bei gegebener Verteilungder elektrischen Ladungen %(x,t) und Ströme j(x,t).Mögliche Lösungen sind statische Felder (Elektro-, Magnetostatik) oder elektromagne-tische Wellen, die sich im Vakuum mit der Lichtgeschwindigkeit
c =1√ε0µ0
= 299792458ms
(1.5)
ausbreiten.
1.2.1 Transformationsverhalten der Maxwellgleichungen
Die Maxwellschen Gleichungen sind nicht invariant unter Galilei-Transformationen.Um dies klar zu machen betrachten wir die Ausbreitung einer ebenen Welle in x-Richtung. In einem bewegten System mit x′ = x − v · ex · t breitet sich die Wellemit der Geschwindigkeit c′ = c+ v 6= c aus.Diese Welle mit Geschwindigkeit c′ ist keine Lösung der Maxwellschen Gleichungen.
Es sind zwei mögliche Konsequenzen dieser Feststellung denkbar.
Möglichkeit 1
Die Maxwellschen Gleichungen gelten nicht in beliebigen, sondern nur in einem ausge-zeichneten Inertialsystem, dem so genannten Weltäther. Experimente zeigen: Es gibtkeinen Weltäther. Die Maxwellschen Gleichungen gelten in jedem Inertialsystem. DieVakuumlichtgeschwindigkeit ist in allen Inertialsystemen gleich c.Diese Möglichkeit kann daher ausgeschlossen werden!
2

1.2 Elektrodynamik
Möglichkeit 2
Die Maxwellschen Gleichungen gelten in allen Inertialsystemen, aber der Wechsel zwi-schen Inertialsystemen erfolgt nicht über die Galilei-Transformation!
Die Lorentz-Transformation
Vor Einstein war bereits bekannt, dass die Maxwellschen Gleichungen invariant unterLorentz-Transformationen sind.Wir wollen im Folgenden eine „Herleitung“, bzw. eine Motivation der Lorentz-Transformationgeben. Wir gehen aus von einem Spezialfall der Galilei-Transformation mit D = 1,v = vex, x0 = 0, t0 = 0, also
x′ = x− vt, y′ = y, z′ = z, t′ = t. (1.6)
Wir betrachten einen im Raum-Zeit-Ursprung (x = 0, t = 0) startenden Lichtstrahl. Esmuss gelten:
x2 + y2 + z2 = c2t2 und x′2 + y′2 + z′2 = c2t′2, (1.7)
alsox′2 + y′2 + z′2 − c2t′2 = 0 = x2 + y2 + z2 − c2t2. (1.8)
Dagegen führt die Galilei-Transformation führt auf
(x− vt)2 + y2 + z2 − c2t2 = x2 + y2 + z2 − c2t2 − 2xvt+ v2t2. (1.9)
Der Term −2xvt + v2t2 soll jetzt durch eine Transformation der Zeit beseitigt werden.Dazu werden wir zwei Ansätze ausprobieren.
• 1.Ansatz:x′ = x− vt, y′ = y, z′ = z, t′ = t− α. (1.10)
Einsetzen führt auf
x′2 + y′2 + z′2 − c2t′2 = x2 + y2 + z2 − c2t2 − 2xvt+ v2t2 + 2αtc2 − c2α2 − c2t2
=
(1− v2
c2
)x2 + y2 + z2 +
(1− v2
c2
)c2t2.
(1.11)Dabei wurde in der letzten Zeile α = xv
c2gesetzt. Die Faktoren
(1− v2
c2
)sind
störend. Der Ansatz führt also nicht zum gewünschten Ergebnis.
• 2.Ansatz:
x′ =1√
1− v2
c2
(x− vt), y′ = y, z′ = z, t′ =1√
1− v2
c2
(t− xv
c2
). (1.12)
3

1 Einführung
Einsetzen liefert das gewünschte Ergebnis
x′2 + y′2 + z′2 − c2t′2 = x2 + y2 + z2 − c2t2. (1.13)
Wir haben in Gleichung (1.12) die spezielle Lorentz-Transformation für v = vex einge-führt.
Bemerkungen
1. Für v � c geht die Lorentz-Transformation in die Galilei-Transformation über.
2. Die Größe s2 = x2 + y2 + z2 − c2t2 ist invariant unter Lorentz-Transformation.
3. Die Formeln für die spezielle Lorentz-Transformation gelten analog auch für v =vey und v = vez.
4. Die Maxwellschen Gleichungen sind, wie bereits erwähnt, invariant unter der Lorentz-Transformation. In der Notation wie in Gleichung 1.4 wird diese Invarianz nichtdeutlich. Die Gleichungen lassen sich aber auf eine mathematisch sehr elegan-te Form bringen, die kovariante Formulierung der Elektrodynamik, bei der dieLorentz-Invarianz klar zu erkennen ist.
4

2 Definitionen und Schreibweisen inder SRT
2.1 Matrixdarstellung von Lorentz-Transfor-mationen
Im Folgenden werden wir die folgenden Abkürzungen verwenden:
βDef.=
v
c, γ
Def.=
1√1− v2
c2
=1√
1− β2. (2.1)
Des Weiteren werden wir von nun an Ort und Zeit zur 4-dim. Raum-Zeit zusammenfas-sen:
x0 = ctx1 = xx2 = yx3 = z
xµ ∈ R4. (2.2)
Dabei bezeichnet man xµ als Vierervektor und es gilt µ ∈ {0,1,2,3}. Die spezielle Lorentz-Tranformation in x-Richtung ergibt in dieser Schreibweise
x′0 = γ(x0 − βx1), x′1 = γ(x1 − βx0), x′2 = x2, x′3 = x3. (2.3)
Die Lorentz-Transformation ist also eine lineare Transformation in den Raum-Zeit-Koordinaten.In Matrix-Schreibweise ergibt sich
x′0
x′1
x′2
x′3
=
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
x0
x1
x2
x3
Def.= Λ
x0
x1
x2
x3
, (2.4)
bzw. in Kurzschreibung(x′µ) = Λ · xµ. (2.5)
5

2 Definitionen und Schreibweisen in der SRT
2.1.1 Spezielle Lorentz-Transformationen
Sonderfälle der Lorentz-Transformationen sind die Boosts Λx, Λy und Λz in x-, y- undz-Richtung, sowie reine Drehungen ΛR:
Λx =
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
, Λy =
γ 0 −βγ 00 1 0 0−βγ 0 γ 0
0 0 0 1
,
Λz =
γ 0 0 −βγ0 1 0 00 0 1 0−βγ 0 0 γ
, ΛR =
1 0 0 0000
D
,
(2.6)
mit einer Drehmatrix D, für die gilt DTD = DDT = 1.
2.1.2 Verknüpfung von Lorentz-Transformationen
Lorentz-Transformationen lassen sich miteinander verknüpfen. Seien Λ1,Λ2,...,Λn Lorentz-Transformationen, dann ist auch
Λ = Λ1 ·Λ2 · ... ·Λn (2.7)
eine Lorentz-Transformation, wobei “·“ die normale Matrixmultiplikation ist.Als Beispiel betrachten wir hier die Verknüpfung einer Drehung mit einem Boost undanschließender Rückdrehung, d.h. die Form D−1ΛD:
Λ =
1 0 0 00 vx
v−vy
v0
0 vyv
vxv
00 0 0 1
·
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
·
1 0 0 00 vx
v
vyv
00 −vy
vvxv
00 0 0 1
=
γ −βγ vxv
−βγ vyv
0
−βγ vxv
1 + (1− γ)v2x
v2(γ − 1)vxvy
v20
−βγ vyv
(γ − 1)vxvyv2
1 + (1− γ)v2yv2
00 0 0 1
.
(2.8)
6

2.2 Lorentz-Transformationen und klassische Mechanik
2.2 Lorentz-Transformationen und klassischeMechanik
Aus den bisherigen Bemerkungen könnte man folgern, dass sich die klassische Mechaniknach der Galilei-Transformation und die Elektrodynamik nach der Lorentz-Tranformationtransformiert.
Einsteins Verdienst war es zu erkennen, dass die Lorentz-Transformationen nicht aufdie Elektrodynamik beschränkt sind, sondern eine allgemeine Eigenschaft von Raumund Zeit darstellen.Die (mit der Galilei-Transformation verbundenen) uns vertrauten Eigenschaften vonRaum und Zeit (z.B. Existenz einer absoluten Zeit) gelten in der Relativitätstheorienicht mehr.
7

3 Revolutionäre Konsequenzen der Lorentz-Transformation
3 Revolutionäre Konsequenzen derLorentz-Transformation
3.1 Lorentz-Kontraktion bewegter Maßstäbe
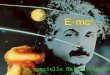
Wir betrachten zwei Koordinatensysteme K und K ′, die sich relativ zueinander mit derGeschwindigkeit v = vex bewegen und eine Strecke parallel zur x-Achse zwischen zweiPunkten A und B, die in K ′ ruhen, siehe Abbildung 3.1. Für die x-Koordinaten derPunkte ergibt sich
ct
x
ct′
x′l′
K
K ′
v
l′/γ
Abbildung 3.1: Zur Lorentz-Kontraktion: Der Stab mit Länge l′ im SystemK ′ erscheint im unbewegten System K mit der verkürzten Länge l.
x′A = 0LT= γ(xA − vt) also xA(t) = vt,
x′B = l′LT= γ(xB − vt) also xB(t) =
1
γl′ + vt.
(3.1)
In K ergibt sich der Abstand zwischen beiden Punkten zu
l = xB(t)− xA(t) =1
γl′ =
√1− v2
c2· l′ < l′ (3.2)
8

3.1 Lorentz-Kontraktion bewegter Maßstäbe
für v 6= 0.Diese Erscheinung heißt Längenkontraktion: Bewegte Objekte erscheinen in Bewe-gungsrichtung um den Faktor 1
γ=√
1− v2
c2verkürzt.
3.1.1 Bewegte Uhren: Zeitdilatation
Wir positionieren zwei baugleiche Uhren in den Koordinatenursprüngen von K und K ′.Die in K ′ ruhende Uhr zeigt die Zeit t′ am Ort x′ = 0. Im System K bewegt sich dieseUhr mit Geschwindigkeit v. Wir rechnen die Koordinaten wieder ins System K um:
x′ = 0LT= γ(x− vt) also x(t) = vt und damit
t′LT= γ
(t− v
c2x)
= γ
(t− v2
c2t
)=
1− v2
c2√1− v2
c2
t =
√1− v2
c2t < t
(3.3)
für v 6= 0.Diese Erscheinung heißt Zeitdilatation: Bewegte Uhren gehen langsamer.
Beispiel: Bewegte Elementarteilchen
Viele Elementarteilchen haben (in ihrem Ruhesystem) eine kurze mittlere Lebensdauer,etwa Myonen µ− mit τ ≈ 2 · 10−6 s.Ohne Zeitdilatation ergäbe sich daraus eine mittlere Reichweite von maximal c · τ ≈600m. Mit Zeitdilatation dagegen erhält man eine mittlere Reichweite von maximalc · γτ ≈ 6000m bei v = 0,995c.Im Teilchenbeschleuniger haben kurzlebige Teilchen daher eine lange Lebensdauer. Die-ser Effekt spielt beim Zwillingsparadoxon eine wichtige Rolle.
3.1.2 Verlust der Gleichzeitigkeit
Wir betrachten zwei Systeme K und K ′. In K ′ mögen zwei Ereignisse gleichzeitig statt-finden. Ein “Ereignis“ ist dabei gegeben durch Ort und Zeit, d.h. alle vier Komponenteneines Vierervektors xµ:
P1 : (x′1,t′) , P2 : (x′2, t
′) , mit x′1 6= x′2. (3.4)
Uns interessieren die Zeitkoordinaten in K. Aus der Lorentz-Transformation ergibt sich
t′(1,2)LT != γ
(t1 −
v
c2x1
)= γ
(t2 −
v
c2x2
). (3.5)
9

3 Revolutionäre Konsequenzen der Lorentz-Transformation
Mitx′1
LT= γ (x1 − vt1) und daher x1 =
1
γx′1 + vt1 und genauso
x′2LT= γ (x2 − vt2) , d.h. x2 =
1
γx′2 + vt2
(3.6)
folgt
t′ = γt1 −v
c2x′1 − γ
v2
c2t1 =
1
γt1 −
v
c2x′1 =
1
γt1 −
v
c2x′2. (3.7)
Durch inverse Lorentz-Transformation folgt schließlich:
t1 = γ(t′ + v
c2x′1)
t2 = γ(t′ + v
c2x′2)}
also t2 − t1 = γv
c2(x′2 − x′1) 6= 0. (3.8)
Dabei ist die inverse Lorentz-Transformation in x-Richtung gegeben durch
x = (x′ + vt′), t = γ(t′ +
v
c2x), y = y′, z = z′, (3.9)
bzw. in Matrixschreibweise
Λ−1 =
γ βγ 0 0βγ γ 0 00 0 1 00 0 0 1
. (3.10)
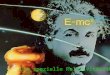
3.1.3 Das Addititionstheorem der Geschwindigkeit
ct
x
ct′
x′
ct′′
x′′
K K ′ K ′′
v1(K,K ′) v2(K′,K ′′)
v3(K,K ′′)
Abbildung 3.2: Zum Geschwindigkeits-Additionstheorem: Gesucht ist dieGeschwindigkeit v3 des Systems K ′′ relativ zum System K in Abhängigkeitvon den Geschwindigkeiten v1 von K ′ relativ zu K und v2 von K ′′ relativzu K ′.
Gegeben seien drei Koordinatensysteme K, K ′ und K ′′, die sich relativ zueinander mit
10

3.1 Lorentz-Kontraktion bewegter Maßstäbe
Geschwindigkeiten parallel zur x-Achse bewegen, siehe Abbildung 3.2. Zu klären ist jetzt,wie sich das System K ′′ relativ zum System K bewegt. Laut Galilei-Transformationergäbe sich einfach v3 = v1 + v2. In der SRT dagegen gilt Λ3 = Λ2Λ1. Diese Bedingungergibt für die relevanten Koordinaten
Λ3 =
(γ2 −β2γ2
−β2γ2 γ2
)(γ1 −β1γ1
−β1γ1 γ1
)
=
(γ1γ2(1 + β1β2) −γ1γ2(β1 + β2)−γ1γ2(β1 + β2) γ1γ2(1 + β1β2)
)!
=
(γ3 −β3γ3
−β3γ3 γ3
).
(3.11)
Daraus lässt sich der Zusammenhang
γ3 = γ1γ2(1 + β1β2) =1 + β1β2√
1− β21
√1− β2
2
=1 + β1β2√
1− β21 − β2
2 + β21β
22 + 2β1β2 − 2β1β2
=1 + β1β2√
(1 + β1β2)2 − (β1 + β2)2
=1√
1−(β1+β21+β1β2
)2
!=
1√1− β2
3
(3.12)
ableiten.Damit folgt das Additionstheorem der Geschwindigkeit:
β3 =β1 + β2√1 + β1β2
, v3 =v1 + v2
1 + v1v2c2
. (3.13)
Für v1 < c, v2 = c ergibt sich z.B.:
v3 =v1 + c
1 + v1cc2
=v1 + cv1+cc
= c. (3.14)
Es gilt also v3 ≤ c, wie erwartet.
3.1.4 Raum-Zeit-Diagramme
Abbildung 3.3 zeigt ein Raum-Zeit-Diagramm, wie es in der SRT zur Veranschaulichunggut geeignet ist. Alle Punkte für die gilt s2 > 0 heißen zeitartig, für s2 < 0 raumartigund für s2 = 0 lichtartig. Raumartige Punkte können nicht kausal verbunden sein,da keine Signalausbreitung mit v > c möglich ist.
11

3 Revolutionäre Konsequenzen der Lorentz-Transformation
ct
x
Lichtkegel
x2 +
y2 +
z2 =
c2 t2
zeitartig(Zukunft)
zeitartig(Vergangenheit)
raumartig
Abbildung 3.3: Raum-Zeit-Diagramm mit den raumartigen (s2 > 0) undzeitartigen Bereichen (s2 < 0). Der Lichtkegel mit s2 = 0 trennt diese Berei-che voneinander.
12

3.2 Paradoxa der SRT
x x′l0 0 lxA(t) xB(t) x′1(t) x′
2(t)
l/γ γ
l/γ
v v
Rahmensystem K Stabsystem K ′
Abbildung 3.4: Stab-Rahmen-Paradoxon: Im RuhesystemK des Rahmensgelte x1 = 0, x2 = l und im Ruhesystem K ′ des Stabes entsprechend x′A = 0und x′B = l. Je nach Bezugssystem erscheint entweder der Rahmen oder derStab um den Faktor 1/γ verkürzt.
3.2 Paradoxa der SRT
Die Konsequenzen der SRT (Längenkontraktion, Zeitdilatation) widersprechen unserengewohnten Vorstellungen. Kritiker haben versucht, widersprüchliche Aussagen aus derTheorie zu gewinnen und sie so „ad absurdum“ zu führen.
3.2.1 Das Stab-Rahmen-Paradoxon
Wir betrachten einen bewegten Stab der Länge l und einen ruhenden Rahmen mit dersel-ben Länge l, siehe Abbildung 3.4. Wegen der Längenkontraktion passt der Stab bequemin den Rahmen.
Kritiker wendeten hier ein:
„Im Bezugssystem des Stabes erfährt der Rahmen eine Längenkontraktion. Der Stabpasst nicht in den Rahmen.“
Damit ergibt sich ein scheinbarer Widerspruch zur Beobachtung im Bezugssystem desRahmens!
13

3 Revolutionäre Konsequenzen der Lorentz-Transformation
Erklärung des Paradoxons
Die Sprechweise: “passt in den Rahmen“ bedeutet Anfangs- und Endpunkt befinden sichgleichzeitig innerhalb des Rahmens. Im Folgenden bewege sich der Stab mit Geschwindig-keit v in x-Richtung, K sei das Ruhesystem des Rahmens. Wir wählen den Zeitnullpunktin K so, dass der Anfangspunkt xA des Stabes zur Zeit t = 0 den Anfangspunkt desRahmens erreicht: xA(t = 0) = 0.
Betrachtung im System K
Für den Rahmen giltx1(t) = 0, x2(t) = l (3.15)
und für den Stab
x′ALT= γ(xA − vt) = 0 also xA(t) = vt,
x′BLT= γ(xB − vt) = l also xB(t) =
1
γl + vt.
(3.16)
Bei t1 = 0 erreicht der Anfangspunkt des Stabes den Anfangspunkt des Rahmens. Wirberechnen den Zeitpunkt t2, zu dem die beiden Endpunkte zusammenfallen:
xB(t) =1
γl + vt = x2 = l also folgt t2 =
1
v
(1− 1
γ
)l. (3.17)
Fazit: Im Zeitintervall t1 = 0 < t < t2 =(
1− 1γ
)lvbefindet sich der Stab vollständig
innerhalb des Rahmens.
Betrachtung im System K′
Für den Stab giltx′A(t′) = 0, x′B(t′) = l (3.18)
und für den Rahmen
x1inv. LT
= γ(x′1 + vt′) = 0 also x′1(t′) = −vt′
x2inv. LT
= γ(x′2 + vt′) = l also x′2(t′) =1
γ− vt′
(3.19)
Bei t′1 = 0 erreicht der Anfangspunkt des Rahmens x′1 den Anfangspunkt des Stabes x′A.Der Endpunkt des Rahmens befindet sich zu diesem Zeitpunkt wegen der Längenkon-traktion des Rahmens bei x′2(t′1 = 0) = 1
γl < l.
Die Endpunkte des Rahmens x′2 und des Stabes x′B treffen aufeinander, wenn gilt
x′2(t′2) =1
γl − vt′2 = x′B = l. (3.20)
14

3.2 Paradoxa der SRT
Daraus folgt
t′2 =
(1
γ− 1
)l
v< 0. (3.21)
Das Kleinerzeichen gilt wegen(
1γ− 1)< 0.
Fazit
Es gilt t′2 < t′1, also befindet sich der Stab zu keinem Zeitpunkt vollständig innerhalbdes Rahmens. Das ist aber kein Widerspruch zur Beobachtung in K. In K erreicht derEndpunkt xB des Stabes den Punkt x2 des Rahmens bei t2 =
(1− 1
γ
)lv> 0, x2 = l.
Wir führen wieder eine Lorentz-Transformation ins System K ′ durch:
x′2(t)LT= γ (x2 − vt2) = γl − (γ − 1)l = l. (3.22)
(Position der Stabspitze in K ′, Endpunkt des Stabes)
t′2LT= γ
(t2 −
v
c2x2
)= (γ − 1)
l
v− γ v
c2l =
(1
γ− 1
)l
v< 0 (3.23)
Die Lösung des Paradoxons liegt in der Transformation der Zeit und einer dabei mögli-chen Umkehr der zeitlichen Abfolge (raumartiger) Ereignisse.
• System K:Ereignis 1: xA = x1 = 0 bei t1 = 0
Ereignis 2: xB = x2 = l bei t2 =(
1− 1γ
)lv> t1
• System K ′: die beiden Ergeinisse vertauschen die zeitliche AbfolgeEreignis 2: x′2 = x′B = l bei t2 =
(1γ
)lv< 0
Ereignis 1: x′1 = x′A = 0 bei t′1 = 0 > t2
Für den “Abstand“ zwischen den Ereignissen 1 und 2 erhalten wir
(∆s)2 = c2(∆t)2 − (∆x)2 = c2
(1− 1
γ
)2l2
v2− l2 = − 2
γ + 1l2 < 0. (3.24)
Der Abstand ist also raumartig, d.h. es besteht kein kausaler Zusammenhang zwischenden beiden Ereignissen.
3.2.2 Das Uhren-Paradoxon
Wir betrachten zwei (baugleiche) Uhren. Uhr 1 ruht, Uhr 2 bewegt sich mit Geschwin-digkeit v. Uhr 2 läuft dann also langsamer als Uhr 1 (Zeitdilatation) (siehe Abbildung3.5).
15

3 Revolutionäre Konsequenzen der Lorentz-Transformation
vUhr 2 Uhr 1
0 lx
Abbildung 3.5: Uhrenparadoxon: Im Ruhesystem von Uhr 1 läuft die mitGeschwindigkeit v bewegte Uhr 2 langsamer als Uhr 1.
Kritiker bemerkten nun:
„Im Ruhesystem von Uhr 2 bewegt sich Uhr 1 und erfährt eine Zeitdilatation, es läuftalso Uhr 1 langsamer als Uhr 2, dies ist ein Widerspruch.“
Erklärung
Im Ruhesystem K von Uhr 1 ruht diese bei x1(t) = l, Uhr 2 bewegt sich mit Geschwin-digkeit v auf Uhr 1 zu, also gilt x2(t) = vt. Für Uhr 1 gilt in K genauer
E1 : (x = l, t = 0), E2 :
(x = l, t =
l
v
), ∆t1 =
l
v. (3.25)
mit der Anzeige ∆t1 der Uhr 1 bei Kollision.
Für Uhr 2 gilt in K
E1 : (x = 0, t = 0), E2 :
(x = l, t =
l
v
), ∆t2 =
l
v. (3.26)
Jetzt führen wir die Lorentz-Transformation x′ = γ(x − vt) und t′ = γ(t− xv
c2
)von K
nach K ′ durch.
Für Uhr 1 in K ′ erhalten wir
E1 :
(x′ = γl, t′ = −γ vl
c2
), E2 :
(x′ = 0, t′ =
1
γ
l
v
),
∆t′1 =1
γ
l
v+ γ
vl
c2=l
vγ
(1
γ2+ β2
)=l
vγ.
(3.27)
16

3.2 Paradoxa der SRT
Für Uhr 2 gilt in K ′
E1 : (x′ = 0, t′ = 0), E2 :
(x′ = 0, t′ =
1
γ
l
v
), ∆t′2 =
1
γ
l
v, (3.28)
mit der Anzeige ∆t′2 der Uhr 2 bei Kollision.
Wir berechnen die Zeitdilatation von Uhr 2 im System K. Diese ist definiert über
∆t′2∆t2
=Eigenzeit der in K ′ ruhenden Uhr 2
Zeitdifferenz der Ereignisse für Uhr 2 in System K
=1
γ=
∆t′2∆t1
=1
γ
=Anzeige Uhr 2 bei KollisionAnzeige Uhr 1 bei Kollision
< 1.
(3.29)
Die bewegte Uhr 2 geht also langsamer.
Analog betrachten wir die Zeitdilatation von Uhr 1 im System K ′:
∆t1∆t′1
=Eigenzeit der in K ruhenden Uhr 1
Zeitdifferenz der Ereignisse für Uhr 1 in System K ′
=1
γ< 1 6= Anzeige Uhr 1
Anzeige Uhr 2
(3.30)
Die bewegte Uhr 1 geht also langsamer.
Die in K ′ vergangene Zeit zwischen den Ereignissen E1 und E2 ist nicht die von Uhr 2angezeigte Zeit.
Welche Uhr schneller oder langsamer geht, hängt also von der Wahldes Bezugssystems ab!
3.2.3 Zwillingsparadoxon
Ein Zwilling bleibt auf der Erde, der andere reist mit hoher Geschwindigkeit und kehrtzur Erde zurück. Auf der Erde ist mehr Zeit vergangen als im Raumschiff.Das Paradoxon bei dieser Situation ergibt sich, wenn man sie aus der Sicht des anderenZwillings betrachtet:
Vom Raumschiff aus betrachtet bewegt sich der Zwilling auf der Erde mit hoher Ge-schwindigkeit. Kommt es also Zeitdilatation auf der Erde?
17

3 Revolutionäre Konsequenzen der Lorentz-Transformation
Lösung
Start und Ende der Reise ist die Erde, diese ist das gewählte Bezugssystem, wobei imRaumschiff die Zeitdilatation auftritt. Der reisende Zwilling ist nicht während der gesam-ten Reise im gleichen Inertialsystem, da er um zurückzukehren beschleunigen muss. Wirbetrachten das Zwillingsparadoxon nochmals im Kapitel zur relativistischen Mechanik.
18

4 Mathematischer Formalismus derSRT
Wir hatten bereits Vierervektoren xµ = (x0, x1, x2, x3) = (ct,x,y,z) und die Lorentz-Transformation x′µ = Λµ
νxν kennengelernt. Die Lorentz-Transformation entspricht hier
einer Matrix-Vektor-Multiplikation, wobei wir die Einsteinsche Summenkonventi-on benutzen, das heißt über mehrfach vorkommende Indizes wird summeriert:
x′µ ≡3∑
ν=0
Λνµx
ν . (4.1)
Als Beispiel sei nochmals der Lorentz-Boost in x-Richtung gezeigt, d.h. die Transforma-tion in ein mit v = vex bewegtes System:
Λµν =
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
. (4.2)
Unter Lorentz-Transformationen ist die Größe
s2 = c2t2 − x2 − y2 − z2 (4.3)
invariant, d.h. es gilt s2 = s′2, bzw.
(x′0)2 − (x′1)2 − (x′2)2 − (x′3)2 = (x0)2 − (x1)2 − (x2)2 − (x3)2. (4.4)
Bei nur positiven Vorzeichen in Gleichung (4.4) würde
||x′||2 = ||x||2 (4.5)
gelten, d.h. Λ würde als Drehmatrix die Norm des Vektors erhalten, wie in der Euklidi-schen Geometrie.In diesem Kapitel werden wir die Mathematik zur Formulierung der SRT genauer dis-kutieren. Insbesondere die Struktur des Minkowski-Raumes und die mathematische Be-handlung von Tensoren sind hier wichtig, insbesondere auch um später die kovarianteFormulierung der Elektrodynamik besprechen zu können. Darüberhinaus ist dieser For-malismus notwendig, um leichter die Verallgemeinerung hin zur Allgemeinen Relativi-tätstheorie vornehmen zu können.
19

4 Mathematischer Formalismus der SRT
Euklidischer Raum Minkowski-Raum
Skalarprodukt (a,b) =∑
i aibi aµbµ = ηµνa
µbν
Matrix-Vektor-Multiplikation y = D · x yµ = Aµνxν
yi =∑
j Aijxj
Matrizenmultiplikation C = A ·B Cµν = AµλBλν
cij =∑
k aikbkj
Transponierte Matrix AT =(AT)
ij(Aµν) = A µ
ν
= Aji = ηναηµβAαβ
Tabelle 4.1: Vergleich von Schreibweisen im Euklidischen und im Minkow-ski-Raum.
4.1 Der Minkowski-Raum
4.1.1 Definition des Minkowski-Raumes
Der Minkowski-Raum ist ein vierdimensionaler, reeller Vektorraum mit folgendem Ska-larprodukt: Seien aµ und bµ Vierervektoren. Das Skalarprodukt (a,b) ist gegeben durch:
(a,b) = aµbµ = a0b
0 + a1b1 + a2b
2 + a3b3
= a0b0 − a1b1 − a2b2 − a3b3
= ηµνaµbν ,
(4.6)
mit η = diag (1,−1,−1,−1), dem kontravarianten Vektor bµ = (b0,b1,b2,b3) mithochgestelltem Index und dem kovarianten Vektor aµ = (a0,a1,a2,a3) = ηµνa
ν =(a0,− a1,− a2,− a3) mit tiefgestelltem Index.Im Euklidischen Raum gilt
(x,x) > 0 ∀x 6= 0 und (x,x) = 0⇔ x = 0. (4.7)
Das Skalarprodukt ist hier also positiv definit. Im Gegensatz dazu folgt aus der Definitiondes Skalarproduktes im Minkowski-Raum:
Das Skalarprodukt im Minkowski-Raum ist nicht positiv definit!
Die verschiedenen Schreibweisen im Euklidischen Raum und im Minkowski-Raum mitHilfe der Einsteinschen Summenkonvention sind in Tabelle 4.1 verglichen.Die Matrix ηµν = ηµν ermöglicht im Minkowski-Raum das Herauf- und Herunterziehenvon Indizes.
20

4.1 Der Minkowski-Raum
4.1.2 Definition der Lorentz-Transformationen
Die Lorentz-Transformationen sind die Drehungen (orhogonalen Transformationen) imMinkowski-Raum:
Λ µλ Λλ
ν = δµν , (4.8)
mitΛ µλ = (Λµ
λ)T , bzw. Λ µ
λ = ηλαηµβΛα
β. (4.9)
Beispiele
• Als erstes betrachten wir wieder den Lorentz-Boost in x-Richtung:
Λαβ =
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
. (4.10)
Hochziehen des zweiten Index geschieht über
Λαµ = ηβµΛαβ = Λα
βηβµ. (4.11)
In Matrixdarstellung ausgeschrieben lautet diese Gleichung
Λαµ =
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
·
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
=
γ βγ 0 0−βγ −γ 0 0
0 0 −1 00 0 0 −1
(4.12)
Herunterziehen des ersten Index erfolgt weiter durch
Λ µλ = ηλαΛαµ. (4.13)
21

4 Mathematischer Formalismus der SRT
Diese Gleichung können wir wiederum auch in Matrixschreibweise darstellen:
Λ µλ =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
·
γ βγ 0 0−βγ −γ 0 0
0 0 −1 00 0 0 −1
=
γ βγ 0 0βγ γ 0 00 0 −1 00 0 0 −1
.
(4.14)
Damit gilt insgesamt
Λ µλ Λλ
ν =
γ βγ 0 0βγ γ 0 00 0 −1 00 0 0 −1
·
γ −βγ 0 0−βγ γ 0 0
0 0 −1 00 0 0 −1
=
γ2(1− β2) 0 0 00 γ2(1− β2) 0 00 0 1 00 0 0 1
=
1 0 0 00 1 0 00 0 1 00 0 0 1
= δµν ,
(4.15)
wie gefordert.Bei diesen Beispielen wird auch erkennbar, dass in Einsteinscher Summenkonven-tion dargestellte mathematische Operationen nicht immer oder nicht direkt alsMatrixgleichung dargestellt werden können. So muss in Gleichung (4.11) die Rei-henfolge vertauscht werden um eine gültige Matrixmultiplikation zu finden.
• Sei eine Lorentz-Transformation durch eine reine Drehung gegeben, also
Λµλ =
(1 00 D
), mit DDT = DTD = 1. (4.16)
Dann ergibt sich ebenfalls
Λ µλ Λλ
ν =
(1 00 DT
)(1 00 D
)= δµν . (4.17)
22

4.2 Kontra- und kovariante Vektoren
4.2 Kontra- und kovariante Vektoren
Sei aµ ∈ V ein kontravarianter Vektor. Dann ist aµ = ηµνaν ∈ V ∗ ein kovarianter Vektor
und ein Element des Dualraumes V ∗ der 1-Formen, d.h.
ϕa : V 7→ R ist lineare Abbildung mitaµ : bµ → (a,b) = aµb
µ ∈ R. (4.18)
4.2.1 Definition des kontravarianten Vierervektors
Jede vierkomponentige Größe aµ, die sich unter Lorentz-Transformation mit der Lorentz-Matrix transformiert gemäß
a′µ = Λµνα
ν , (4.19)
nennt man einen kontravarianten Tensor 1. Stufe.
4.2.2 Definition des kovarianten Vierervektors
Sei aµ kontravarianter Vektor mit a′µ = Λµνα
ν , dann gilt
a′µ = ηµαa′α = ηµαΛα
ν aν︸︷︷︸ηνβαβ
= ηµαηνβΛα
νaβ = Λ βµ aβ, (4.20)
mit der inversen Lorentz-Transformation Λ βµ . Jede vierkomponentige Größe, die sich
mit der inversen Lorentz-Matrix transformiert gemäß
a′µ = Λ νµ aν (4.21)
heißt kovarianter Tensor 1. Stufe.
4.2.3 Transformationsverhalten der Differentiale undKoordinatenableitungen
Sei xµ kontravarianter Vektor. Es gilt dann
x′µ = Λµνx
ν also auch dx′µ = Λµνdx
ν (4.22)
Die Differentiale dxµ tranformieren sich wie kontravariante Vektoren.
Sei f = f(xµ) skalare Funktion, dann gilt für df :
df =∂f
∂xµdxµ. (4.23)
23

4 Mathematischer Formalismus der SRT
Mitx′µ = Λµ
νxν also xν =
(Λ−1
)νµx′µ (4.24)
folgt
df =∂f
∂x′µdx′µ =
∂f
∂xν∂xν
∂x′µdx′µ =
[(Λ−1
)νµ
∂
∂xν
]fdx′µ (4.25)
mit der inversen Lorentz-Transformation ∂xν
∂x′µ = (Λ−1)νµ. Ein Vergleich liefert folgendes
wichtige Resultat:
Die Koordinatenableitungen
∂
∂xµ≡ ∂µ (4.26)
transformieren sich wie kovariante Vektoren.
Lorentz-Skalare
Ein Lorentz-Skalar ist eine reelle Größe, die invariant bleibt unter Lorentz-Transformation.Wir betrachten zwei Beispiele:
• Das Skalarprodukt zwischen Lorentz-Vektoren:
S = aµbµ, S ′ = a′µb
′µ = aαΛ αµ Λµ
βbβ = aαb
βδαβ = aµbµ = S. (4.27)
• Die Eigenzeit τ : Das differentielle Linienelement ds2 = dxµdxµ = c2dt′2 − (dx)2
ist invariant unter Lorentz-Transformation.Dann ist auch
dτ =1
cds =
1
c
√dxµdxµ (4.28)
invariant unter Lorentz-Transformation und damit schließlich die Eigenzeit
τ =
τ2ˆ
τ1
dτ (4.29)
ein Lorentz-Skalar.
24

4.3 Tensoralgebra
4.3 Tensoralgebra
4.3.1 Definition von Tensoren
Ein Tensor vom Typ (r,s) ist eine multilineare Abbildung
T : V ∗ × V ∗ × ...× V ∗︸ ︷︷ ︸r mal
×V × V × ...× V︸ ︷︷ ︸s mal
7→ R
(ϕ,χ,...,ω︸ ︷︷ ︸r mal
;u,v,...,w︸ ︷︷ ︸s mal
)→ T (ϕ,χ,...,ω;u,v,...,w) ∈ R. (4.30)
Dabei bezeichnen griechische Buchstaben Elemente von V ∗ und lateinische BuchstabenElemente von V . T heißt r-fach kontra und s-fach kovarianter Tensor.
1) Multilinearität
Unter Multilinearität versteht man die Eigenschaft, linear in jedem Argument (bei Fest-halten der übrigen) zu sein. Es lässt sich zerlegen:
χ = aχ1 + bχ2 + ... (4.31)
Die Menge aller Tensoren des Typs (r,s) bildet einen Vektorraum V rs .
2) Indexschreibweise
In Indexschreibweise kann diese Abbildung in der Form
T
r mal︷ ︸︸ ︷α1...αr
β1...βs︸ ︷︷ ︸s mal
ϕα1χα2 ...ωαruβ1vβ2 ...wβs ∈ R (4.32)
dargestellt werden.
25

4 Mathematischer Formalismus der SRT
3) Tensorprodukt
Seien T ∈ V rs und S ∈ V r′
s′ , dann gilt
T ⊗ S ∈ V rs × V r′
s′ = V r+r′s+s′ ,
Tα1...αrβ1...βs
Sα′1...α
′r′β′1...β
′s′
= Uα1...αr α′
1...α′r′
β1...βs β′1...β
′s′.
(4.33)
Die Operation “⊗“ heißt Tensorprodukt oder direktes Produkt.
4) Tensorverjüngung (Kontraktion)
Sei T ∈ V rs ein Tensor vom Typ (r,s). Indem in Komponentenschreibweise der k-te
kovarianter und der j-te kontravarianter Index das gleiche Symbol bekommen und überdiese zwei Indizes aufsummiert wird, erhält man einen Tensor aus V r−1
s−1 :
Tα1...βj ...αr
β1...βj ...βs∈ V r
s = SpkjT ∈ V r−1s−1 . (4.34)
Diese Operation heißt Tensorverjüngung oder Kontraktion.
Beispiele
Seien aµ und bµ ∈ V 10 kontravariante Vierervektoren. Dann ist
• ηµνaν = aµ ∈ V 0
1 ein kovarianter Vektor
• aµbν ∈ V 20 ein direktes Produkt und kontravarianter Tensor 2. Stufe
• cµν = aµbν ∈ V 11 ein direktes Produkt und einfach kontra-, einfach kovarianter
Tensor
• cµµ = aµbµ ∈ V 00 = R eine Kontraktion und Tensor 0. Stufe, d.h. ein Skalar
5) Tensor-Transformationen
Sei die Transformation der kovarianten, bzw. kontravarianten Basisvektoren gegebendurch
eα′ = Aαα′eα und ωβ′= A β′
β ωβ. (4.35)
Weiter gilt
Tα1...αrβ1...βs
eα1 ...eαrωβ1 ...ωβs = T
α′1...α
′r
β′1...β
′seα′
1...eα′
rωβ
′1 ...ωβ
′s . (4.36)
26

4.3 Tensoralgebra
Dies führt dann auf
Tα′1...α
′r
β′1...β
′s
= Tα1...αrβ1...βs
Aα′1α1...Aα
′rαrA
β1β′1...A βs
β′s. (4.37)
Das heißt also A, bzw. A−1 kommt für jeden ko-, bzw. kontravarianten Index einmal vor.
6) Lorentz-Tensoren
Folgende Tensoren spielen in der SRT wichtige Rollen
• Vektoren aus R4 (Vierervektoren)
• Aµν = Λµν ist Lorentz-Transformation
• Metrischer Tensor ist gµν = ηµν =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
mit xµ = ηµνx
ν . Damit
ergibt sich das infinitesimale Wegelement
ds2 = gµνdxµdxν = ηµνdxµdxν = dxµdxµ. (4.38)
• Der Differentialoperator:
∂µ =∂
∂xµ=
(∂
∂(ct),∂
∂x,∂
∂y,∂
∂z
)(4.39)
heißt Vierergradient.
– Anwendung auf Lorentz-Skalar ϕ:
∂µϕ ≡ ϕµ (4.40)
ist kovarianter Vektor.
– Anwendung auf Vierervektor aµ:
∂µaµ (4.41)
ist ein Lorentz-Skalar und heißt Viererdivergenz. Weiter ist
∂νaµ − ∂µaν (4.42)
ein antisymmetrischer, kovarianter Tensor 2. Stufe und heißt Viererrota-tion.
27

4 Mathematischer Formalismus der SRT
7) Das Differential der Eigenzeit
Im Ruhesystem eines in einem Inertialsystem ungleichförmig bewegten Teilchens gilt:
dx = dy = dz = 0⇒ (ds)2 = c2(dτ)2 (4.43)
mit der Eigenzeit τ im Ruhesystem des Teilchens. Das infinitesimale Wegelement (ds)2
ist Lorentz-invariant, im Inertialsystem lautet es:
(ds)2 = dxµdxµ = c2(dt)2 − (dx)2 = c2(dt)2 − v(t)2(dt)2
= c2
(1− v2(t)
c2
)(dt)2 = c2(1− β(t)2)(dt)2 !
= c2(dτ)2(4.44)
Daraus folgt
dτ =√
1− β(t)2dt =1
γ(t)dt (4.45)
Integration liefert die Eigenzeit
τ =
τ2ˆ
τ1
dτ = τ2 − τ1 =
t2ˆ
t1
√1− β(t)2dt < t2 − t1. (4.46)
Die Eigenzeit ist Lorentz-Skalar aber wegabhängig!
28

5 Relativistische Mechanik
Wie wir bereits gesehen haben ist die Newtonsche Mechanik nicht kovariant unterLorentz-Transformation, zum Beispiel führt eine konstante Beschleunigung a auf v(t) =at > c für t > c
a. Unser Ziel ist die Formulierung einer Lorentz-kovarianten Mechanik,
die bei kleinen Geschwindigkeiten in die Newtonsche Mechanik übergeht. Wir betrachtendazu ein Punktteilchen in der 4-dimensionalen Raum-Zeit. Die Größe
xµ = xµ(t) =
(ctx(t)
)(5.1)
ist kontravarianter Vierervektor, wie wir bereits gesehen haben.
5.1 Vierer-Geschwindigkeit
Bei der Definition einer Vierergeschwindigkeit haben wir das Problem, dass t kein Lorentz-Skalar ist, deshalb ist dxµ/dt nicht Lorentz-kovariant. Wir haben aber bereits gesehen,dass die Eigenzeit τ ein Lorentz-Skalar ist. Deshalb ist
uµ =dxµ
dτ(5.2)
ein kontravarianter Vierervektor und heißt Vierergeschwindigkeit. Mit der Defini-tion des Eigenzeitdifferentials folgt
uµ = γ(t)dxµ
dt= γ(t)
cxyz
= γ(t)
(cv
)(5.3a)
uµ = ηµνuν = γ(t)
c−x−y−z
= γ(t)
(c−v
). (5.3b)
Kontraktion der Vierergeschwindigkeit liefert dann ein Lorentz-Skalar:
uµuµ = γ2c2 − γ2v2 = γ2c2(1− β2) = c2 > 0 (5.4)
Es ist also uµuµ > 0 und daher ist uµ ein zeitartiger Vektor.
29

5 Relativistische Mechanik
5.1.1 Vierer-Beschleunigung
Analoges Vorgehen führt zur Vierer-Beschleunigung
bµ =duµ
dτ=
d2xµ
dτ 2. (5.5)
Eine explizite Rechnung führt auf
bµ = γduµ
dt= γ
ddt
γ
cxyz
= γγ
cxyz
+ γ2
0xyz
. (5.6)
Mitγ =
ddt
1√1− β2
= γ3β · β = γ3v · vc2
(5.7)
folgt dann
bµ = γ4v · vc2
(cv
)+ γ2
(0v
)=
(γ4 v·v
c
γ2v + γ4 v·vc2v
)(5.8)
Im Grenzfall v � c gilt damit bµ 7→(
0v
), wie verlangt.
5.1.2 Vierer-Impuls
Die Ruhemasse eines Teilchens ist Lorentz-Skalar. Damit lässt sich schreiben:
pµ = muµ = mγ
(cv
). (5.9)
Achtung:
Es gilt nicht
m(γ) = m0 · γ bzw. m(v) =m0√1− v2
c2
(5.10)
Die Ruhemasse eines Teilchens ist ein Lorentz-Skalar und nicht ge-schwindigkeitsabhängig.
Das γ in Gleichung (5.9) gehört zur Vierer-Geschwindigkeit und nicht zur Masse.
30

5.1 Vierer-Geschwindigkeit
5.1.3 Vierer-Kraft
Bei Newton giltFN = p. (5.11)
Also führen wir analog ein:
F µ =dpµ
dτ= γ
dpµ
dt= mbµ =
(mcγ4 · v · v
mγ2v +mγ4 vvc2· v
)=
(mcγ4v · vγFN
)(5.12)
Dabei ist zu bemerken, dass die Identifikation F µ = dpµ/dτ nicht beweisbar ist, dieIdentifikation mγ2v +mγ4 v·v
c2v = γFN ist die kritische Stelle der SRT.
Weiter ergibt sich
1
cγv · FN = γ2m
cv · v + γ4v
2
c2
m
cv · v =
[γ2 + γ4β2
]︸ ︷︷ ︸
γ4
m
cv · v = γ4m
cv · v = F 0 (5.13)
und damit
F µ = γ
(v·FNc
FN
)!
= mbµ. (5.14)
Mit der eingeführten Vierer-Kraft lassen sich dann die relativistischen Bewegungsglei-chungen formulieren. Über
FN = F (x,v,t) (5.15)
folgt eine Differentialgleichung für x(t).
5.1.4 Beschreibung der kräftefreien Bewegung
Eine kräftefreie Bewegung ist beschreibbar als die kürzeste Verbindung zwischen zweiRaum-Zeit-Ereignissen A und B. Die Berechnung erfolgt über Variation des Weges (Abb.5.1), d.h.
δ
A
B
ds != 0. (5.16)
31

5 Relativistische Mechanik
A
B
r(t)
r(t)+ δr(t
)
b
b
Abbildung 5.1: Variation des Weges: Betrachtet werden kleine Variationenδr(t) des Weges r(t) von Ereignis A zu Ereignis B, mit der Bedingung, dassδr(tA) = δr(tB) = 0.
Wobei wir den Weg über die Zeit t parametrisieren. Nach Einsetzen der Definition desLinienelementes folgt
δ
B
A
√−(dx)2 − (dy)2 − (dz)2 + c2(dt)2
= δ
B
A
dt√−r2 + c2 = −
B
A
dtrδr√c2 − r2
.
(5.17)
Zur Auswertung des Integrals wenden wir die Produktintegration an. Wir setzen
u =r√
c2 − r2und dv = δr · dt (5.18)
und erhalten nach Differentiation bzw. Integration
du =ddt
r√c2 − r2
· dt und v = δr. (5.19)
Dabei haben wir ausgenutzt, das gilt
δr = δdr
dt=
ddtδr, (5.20)
32

5.1 Vierer-Geschwindigkeit
d.h. die Differentiationen sind vertauschbar.
Wir setzen diese Ergebnisse ein und erhalten
− r√c2 − r2
· δr∣∣∣∣∣
B
A
+
B
A
δr(t)ddt
r√c2 − r2
· dt = 0. (5.21)
Da δr(A) = δr(B) = 0 verschwindet der erste Term. Wir wollen auch noch r2 durch v2
ersetzen. Jetzt haben wir
B
A
δr(t)ddt
r√c2 − v2
· dt = 0 ∀ δr(t). (5.22)
Diese Gleichung läßt sich für beliebige δr(t) nur erfüllen, wenn
ddt
r√c2 − v2
= 0 (5.23)
gilt.
Wir führen die Ableitung aus und erhalten:
0 =r√
c2 − v2+
rv2
(c2 − v2)32
=r
(c2 − v2)32
·[c2 − v2 + v2
]
= r · c2
(c2 − v2)32
.
(5.24)
Das bedeutetr = 0 oder r = const = v. (5.25)
Durch Multiplikation der rechten Seite der Gleichung (5.23) mit der Masse m0 erhaltenwir eine Aussage über den relativistischen Impuls p:
0 =ddt
m0 · r√c2 − v2
=ddt
m0 · rc√
1− β2mit β =
v
c. (5.26)
Dabei ist die Lichtgeschwindigkeit c eine Konstante und wird von der Ableitung nichtbeeinflußt. Dann folgt also:
0 =ddt
m0 · r√1− β2
. (5.27)
33

5 Relativistische Mechanik
Dies ist die Gleichung für den relativistischen Impuls für den Fall, dass eine kräftefreieBewegung vorliegt. Er ist dann eine Erhaltungsgröße. Für den relativistischen Impulsallgemein gilt:
prel =m0 · r√1− β2
= γpklass, mit γ =1√
1− β2. (5.28)
Wie in der klassischen Mechanik gilt also auch in der relativistischen Mechanik:
dp
dt= F . (5.29)
5.1.5 Konstant beschleunigte Rakete
Wir betrachten eine Rakete die in ihrem Ruhesystem konstant mit a = g in x-Richtungbeschleunigt wird.
1) Aufstellen und Lösen der Bewegungsgleichungen
Inertialsystem K sei die Erde, das Ruhesystem der Rakete K ′.Dann folgt:
b′µ =
0g00
inv LT⇒ bµ =
γ βγ 0 0βγ γ 0 00 0 1 00 0 0 1
· b
′µ (5.30)
und damit wegen v = veex
bx = γg =ddτux =
ddτ
(γv) = γddt
(γv) (5.31)
und damitg =
ddt
(γv). (5.32)
Mit den Anfangsbedingungen x(t = 0) = 0 und v(t = 0) = 0, sowie dx(t)/dt = v(t) folgt
γv = gt = γdxdt
und weiterdxdt
= v = cβ =√
1− β2gt. (5.33)
Mitc2β2 = (1− β2)g2t2 also (c2 + g2t2)β2 = g2t2 (5.34)
folgtβ =
gt√c2 + g2t2
=v
cund damit v(t) =
gt√1 + g2t2
c2
< c. (5.35)
34

5.1 Vierer-Geschwindigkeit
c
v
t
Abbildung 5.2: Relativistische Bewegungsgleichung der Rakete: Währendin der Newtonschen Mechanik die Geschwindigkeit der Rakete über alleGrenzen wächst (gestrichtelte Linie), ist in der SRT die Lichtgeschwindig-keit c die obere Schranke (durchgezogene Linie).
Siehe auch Abbildung 5.2.
Integration der Geschwindigkeit liefert
x(t) =
tˆ
0
v(t′)dt′ = c
√t′2 +
c2
g2
∣∣∣∣∣
t
0
= c
√t2 +
c2
g2− c2
g2=c2
g
√
1 +
(gt
c
)2
− 1
.
(5.36)
für kleine t gilt also x(t) ≈ g2t2 wie in der Newtonschen Mechanik, für große Zeiten
dagegen ist x(t) ≈ ct, unabhängig vom Wert der Beschleunigung, siehe Abbildung 5.3.
35

5 Relativistische Mechanik
∼ gt2/2
∼ ct
x
t
Abbildung 5.3: Relativistische Bewegungsgleichung der Rakete: Währendin der Newtonschen Mechanik der zurückgelegte Weg x für alle Zeit mit g
2 t2
pro Zeit t zunimmt (gestrichelte Linie), ändert er sich in der SRT für großet proportional zu ct, unabhängig von der Beschleunigung g.
2) Betrachtung der Eigenzeit
Für die Eigenzeit τ erhalten wir
τ =
tˆ
0
√1− β2(t′)dt′ =
tˆ
0
√1− g2t′2
c2 + gt′2dt′
=c
gln
gtc
+
√1 +
(gt
c
)2
=c
qarsinh
gt
c.
(5.37)
Auflösen nach t ergibtt(τ) =
c
gsinh
gτ
c(5.38)
Diese Ergebnisse erlauben uns eine genauere Betrachtung des Zwillingsparadoxons.
36

5.1 Vierer-Geschwindigkeit
Zwillingsparadoxon
Wir nehmen an, einer der beiden Zwillinge reise 5 Jahre in seiner Eigenzeit mit Be-schleunigung g, dann 10 Jahre mit Beschleunigung −g und schließlich wieder 5 Jahremit Beschleunigung g, d.h. er kehrt nach 20 Jahren Eigenzeit zur Erde zurück. Für denZwilling auf der Erde ergibt sich aus Gleichung (5.38)
t(5 Jahre) = 84,4 Jahre. (5.39)
Der reisende Zwilling kehrt für ihn also erst nach 4t(5 Jahre) = 337,4 Jahren wiederzurück. Die maximale Entfernung zwischen den beiden Zwillingen ergibt sich aus Glei-chung (5.36) zu 167 Lichtjahren. Eine umfassende Betrachtung des Zwillingsparadoxonsfindet sich in [1].
5.1.6 Relativistische Energie
Schauen wir uns nochmal die Vierer-Kraft an:
F µ = γ
(v·FNc
FN
)(5.40)
Für die nullte Komponente gilt:
F 0 = mdu0
dτ= mγ
ddt
(γc) = γv · FN
c. (5.41)
Daraus ersehen wir den Zusammenhang
ddt
(mγc2) = v · FN =FN · dx
dt=
dWdt
. (5.42)
Dabei ist zu beachten das dW = FN · dx auch relativistisch gilt. Damit ist die relati-vistische Energie
W = γmc2 = E (5.43)
eingeführt. Die auftretende Integrationskonstante haben wir so gewählt, dass die Energiedes ruhenden Teilchens E = mc2 ist. Weiter folgt
E = γmc2 = cp0 bzw. p0 =E
c, (5.44)
also ist der Energie-Impuls-Vektor gegeben durch
pµ =
(Ec
mγv
)=
(Ec
p
). (5.45)
37

5 Relativistische Mechanik
Für ihn gilt
pµpµ =
E2
c2− p2 = m2c2, (5.46)
wobei das letzte Gleichheitszeichen in das Ruhesystem des Teilchens führt, wo p = 0und γ = 1 gelten. Da pµpµ Lorentz-Skalar ist gilt schließlich
E2 = m2c4 + c2p2 bzw. E =√m2c4 + c2p2 (5.47)
Damit ist der relativistische Energiesatz eingeführt. Für kleine Impulse lässt sichder Ausdruck für E in Gleichung (5.47) in eine Taylorreihe entwickeln:
E = mc2
√1 +
p2
m2c2≈ mc2
(1 +
p2
2m2c2+ ...
)=p2
2m+mc2 +O(p4), (5.48)
mit der Ruheenergie mc2 und der kinetischen Energiep2
2m+ O(p4). Wichtig ist zu er-
kennen, dass für m > 0 giltE 7→ ∞ für |v| 7→ c (5.49)
Daraus folgt, dass sich Teilchen mit nicht verschwindender Ruheenergie langsamer alsLicht bewegen!
1) Photonen
Photonen haben keine Ruhemasse. Deswegen gilt
pµpµ =
E2
c2− p2 = m2c2 = 0. (5.50)
Daraus folgt dann
E = c|p| = }ω =hcλ. (5.51)
Mit den Zusammenhängen
p = }k und E = hν = }ω (5.52)
zwischen Impuls und Wellenvektor, bzw. Energie und Frequenz für Photonen haben wirdann
pµ =
( }ωc
}k
)= }
(ωc
k
)= }kµ, (5.53)
mit dem relativistischen Wellenvektor kµ.
38

5.2 Äquivalenz von Masse und Energie
2) Stöße
Ohne äußere Kräfte ist der Viererimpuls erhalten, also ist
ddτpµ =
ddτ
(Ec
p
)= F µ = 0. (5.54)
Für Stöße zwischen zwei Teilchen gilt
pµ1 + pµ2 = p′µ1 + p′µ2 . (5.55)
Dieser Zusammenhang gilt auch für Photonen (Compton-Streuung).
5.2 Äquivalenz von Masse und Energie
Wir betrachten noch einmal den Vierer-Impuls:
pµ =
(Ec
p
)(5.56)
mit p = mγv. Da pµ Vierer-Vektor ist gelten die Lorentz-Transformationen (wie für xµ).Wir betrachten wie immer die spezielle Lorentz-Transformation in x-Richtung. Für xµgilt:
ct = γ(ct′ + βx′), x = γ(x′ + βct′). (5.57)
Für pµ gilt entsprechend
E
c= γ
(E ′
c+ βp′x
), px = γ
(p′x + β
E ′
c
). (5.58)
Im Ruhesystem des Teilchens gilt p′x = 0 und E ′ = E ′0 = E0. Daraus folgt
E = γE0 und px = γβE0
c= γ
vE0
c2
rel. Imp.= mγv (5.59)
und damitE0 = mc2 (5.60)
für die Ruhenergie im Ruhesystem. Es ist also keine Integrationskonstante möglich!
39

5 Relativistische Mechanik
m1 m2
p−p
Abbildung 5.4: Zur Äquivalenz von Masse und Energie: Ein Teilchen, das2 Photonen gleicher Energie in entgegengesetzte Richtung emittiert, ändertseinen Impuls und entsprechend auch seine kinetische Energie nicht, es mussalso seine Ruhemasse verringern.
5.2.1 Konsequenzen der Äquivalenz von Masse und Energie
Wir betrachten ein Teilchen mit Masse m1, das zwei Photonen in entgegengesetzterRichtung emittiert (so dass kein Rückstoss erfolgt) (siehe Abbildung 5.4). Erhaltung desGesamt-Viererimpulses:
(E1
c
0
)=
(|p|−p
)+
(E2
c
0
)+
(|p|p
)(5.61)
Daraus folgt für E2
E2 = E1 − 2c|p| bzw. m2c2 = m1c
2 − 2c|p|. (5.62)
Daher können wir schliessen, dass weiter
m2 = m1 − 2‖p|c
= m1 − 2EPhoton
c2(5.63)
gilt.Abgestrahlte Energie, d.h. Photonen bzw. elektromagnetische Strahlung, verringert alsodie Ruhemasse des Teilchens (z.B. ein angeregtes Atom).
Zusammengefasst haben wir damit die Äquivalenz von Masse und Energie:
Jeder Form von Energie kann eine träge Masse zugeordnet werden,nach der Vorschrift
E = mc2. (5.64)
5.2.2 Beispiele
Bei den folgenden Situationen wird die Äquivalenz von Masse und Energie deutlich:
40

5.2 Äquivalenz von Masse und Energie
1. Angeregte Atome oder Moleküle sind schwerer als Atome oder Moleküle im Grund-zustand. Wir betrachten das Wasserstoffatom. Die Massen von Proton und Elek-tron ergeben zusammen
mp +me = 1,67261 · 10−27 kg + 9,11 · 10−31 kg = 1,67352 · 10−27 kg. (5.65)
Für Wasserstoff im Grundzustand findet man
mH = mp +me −13,6 eVc2
= 1,67352 · 10−27 kg− 2,42 · 10−35 kg
≈ 1,67352 · 10−27 kg− 10−8mp
(5.66)
Die Masse des Wasserstoffatoms ist also kleiner als die Masse von Proton plusElektron. Man spricht vom Massendefekt, hier verursacht von der negativenBindungsenergie von Elektron und Proton. Für das Wasserstoffatom ist dieserEffekt sehr klein.
2. Atomkerne zeigen ebenfalls einen Massendefekt. Die Gesamtmasse von Atomker-nen ist kleiner als die Summe der Massen der Protonen und Neutronen.Der Massendefekt ergibt sich aus der Bindungsenergie EB/c
2 aufgrund der starkenWechselwirkung. Die Masse des Atomkernes ist also
m(A,Z) = Zmp + (A− Z)mn +EB
c2(5.67)
wobei EB < 0 ist. Wir betrachten als Beispiel das Nuklid 12C. Hier ist A = 12 undZ = 6. Die atomare Masseneinheit ist
1
12m(
12C)
= 1,6605 · 10−27 kg. (5.68)
Im Vergleich ergibt sich
1
12(6mp + 6mn) =
1
2(1,67261 · 10−27 kg + 1,67482 · 10−27 kg)
= 1,67372 · 10−27 kg.(5.69)
Das heißt etwa 0,8% der Masse der Protonen und Neutronen geht in die Bindungs-energie.
3. Teilchen und Antiteilchen können paarweise erzeugt oder vernichtet werden, z.Bin der Reaktion
e+ + e− ←→ 2γ. (5.70)
41

5 Relativistische Mechanik
Aus Elektron und Positron entstehen also zwei Photonen. Es gilt:
me = 9,11 · 10−31 kg also Eγ ≥ mec2 = 8,2 · 10−14 J = 512 keV. (5.71)
Hier werden 100% der Masse in Energie umgewandelt.
5.3 Drehimpulstensor und Drehmoment
5.3.1 Klassischer Drehimpuls
In der klassischen Mechanik gilt für den Drehimpuls
L = r × p. (5.72)
In Komponentenschreibweise ergibt dies
Li = xjpk − xkpj mit (i,j,k) = (1,2,3) und zyklischen Permutationen. (5.73)
5.3.2 Kovarianter Drehimpuls und Drehmoment
Wir definieren eines Lorentz-kovarianten Drehimpuls über
Lµν = xµpν − xνpµ = −Lνµ. (5.74)
Lµν ist also antisymmetrischer Tensor 2. Stufe. In der klassischen Mechanik gilt weiterfür das Drehmoment
M =dLdt
= r × FN . (5.75)
In kovariante Formulierung erhalten wir entsprechend
ddτLµν =
ddτ
(xµpν − xνpµ) = uµpν + xµdpν
dτ− uνpµ − xν dp
µ
dτ= xµF ν − xνF µ = Mµν .
(5.76)
Dabei wurde ausgenutzt, dass sich die Terme uµpν und −uνpµ zu Null addieren.
42

5.4 Relativistische Erhaltungssätze
5.4 Relativistische Erhaltungssätze
Wir betrachten ein System von N Massepunkten, die keinen äußeren Kräften unterlie-gen.Erhaltungsgrössen in der klassischen Mechanik sind für solch ein System der Gesamtim-puls, der Gesamtdrehimpuls und die Gesamtenergie.In der SRT gilt entsprechend
N∑
i=1
pµi = const, (5.77)
also
E =N∑
i=1
Ei = const, (5.78a)
p =N∑
i=1
pi =N∑
i=1
miγivi = const, (5.78b)
mit den relativistischen Energien Ei.
43

6 Kovariante Formulierung der Elektrodynamik
6 Kovariante Formulierung der Elek-trodynamik
Die Newtonsche Mechanik ist Galilei-invariant. Deshalb mussten wir im vorherigen Ka-pitel eine kovariante Formulierung für eine relativistische Mechanik finden. Dies führtezu einer Modifikation der Bewegungsgleichungen.
Im Gegensatz dazu ist die Elektrodynamik, d.h. die Maxwellschen Gleichungen, be-reits Lorentz-invariant. Dies kommt jedoch bei der Formulierung mit (E,B,j,%) nichtexplizit zum Ausdruck, insbesondere sind E, B und j keine Vierervektoren und % keinLorentz-Skalar.In diesem Kapitel wollen wir daher die Maxwellschen Gleichungen in einer kovariantenFormulierung darstellen. Dies wird es uns möglich machen, direkt zu sehen, wie sich dieelektrischen und magnetischen Felder, sowie Ladungen und Ströme transformieren.
6.1 Grundlagen der klassischen Elektrodyna-mik
Das elektrische Feld E ist definiert über die Kraft F el, die auf eine (ruhende) kleineProbeladung q wirkt:
F el(r) = qE(r) (6.1)
Die magnetische Induktion ist definiert über die Kraft Fm, die auf eine sich mit Ge-schwindigkeit v bewegende Ladung q wirkt:
Fm = q (v ×B(r)) (6.2)
Daraus ergibt sich die Lorentzkraft, die Kraft auf eine Probeladung q im elektromagne-tischen Feld, zu
F = q(E(r) + v ×B(r)) (6.3)
6.1.1 Die homogenen Maxwellgleichungen
Für das elektrische und magnetische Feld gelten Nebenbedingungen (innere Feldglei-chungen), die homogenen Maxwellgleichungen. Zum einen
∇×E + B = 0. (6.4)
44

6.1 Grundlagen der klassischen Elektrodynamik
Daraus ergibt sich das Induktionsgesetzˆ
F
(∇×E)df Stokes=
ˆ
∂F
E · ds = Uind = −ˆ
F
B · df = −Φ. (6.5)
mit dem magnetischen Fluss Φ =´F
B · df durch die Fläche F. Zum anderen haben wir
∇ ·B = 0. (6.6)
Gleichung (6.6) besagt, dass es keine magnetischen Monopole gibt. Mit Ergebnissen derVektoranalysis folgt, dass B darstellbar ist als Rotation eines Vektorpotentials:
B = ∇×A. (6.7)
Damit folgt:∇×E +∇× A = ∇× (E + A) = 0. (6.8)
In der Vektoranalysis wird weiter gezeigt, dass sich ein Vektorfeld als Gradient eines ska-laren Feldes darstellen lässt, falls seine Rotation verschwindet. Also können wir schreiben
E + A = −∇ϕ, (6.9)
mit dem elektrodynamischen Potential ϕ. Aufgelöst nach dem elektrischen Feld ergibtsich
E = −∇ϕ− A. (6.10)
Das skalare Potential und das Vektorpotential sind nicht eindeutig, man spricht in diesemZusammenhang von Eichfreiheit. Setzt man etwa
A′ = A+∇χ so folgt daraus ∇×A′ = ∇×A+∇× (∇χ)︸ ︷︷ ︸0
= ∇×A = B.
(6.11a)
Für das elektrische Feld ergibt sich dann
E = −∇ϕ− A′ +∇χ = −∇ (ϕ− χ′)︸ ︷︷ ︸ϕ′
−A′, (6.11b)
dabei ist χ(r,t) ein beliebiges skalares Feld und heißt Eichfunktion. Weiter wurde aus-genutzt, dass die Rotation des Gradienten eines beliebigen skalaren Feldes verschwindet.Die Operation
(A,ϕ) 7→ (A′,ϕ′) (6.12)
heißt Eichtransformation.
45

6 Kovariante Formulierung der Elektrodynamik
Die inhomogenen Maxwellgleichungen
Die beiden inhomogenen Maxwellgleichungen oder Erregungsgleichungen lauten
∇×B = µ0(j + ε0E), (6.13a)
∇ ·E =%
ε0
. (6.13b)
Einsetzen der Potentiale und Umformen liefert
∇×(∇× 1
µ0
A
)+ ε0(∇ϕ+ A) = j, (6.14a)
∇ ·(−∇ϕ− A
)=
%
ε0
. (6.14b)
Mit der Relationa× (b× c) = b · (a · c)− c · (a · b) (6.15)
kann Gleichung (6.14a) weiter umgeformt werden zu
∇(∇ · 1
µ0
A
)− 1
µ0
∆A+ ε0∇ϕ+ ε0 · A = j. (6.16)
Nutzt man nun die Eichfreiheit aus, so können die Potentiale so gewählt werden, dass
ε0µ0ϕ+∇ ·A = 0 (6.17)
gilt. Dabei ist
ε0µ0 =1
c2. (6.18)
Diese Eichung heißt Lorentz-Eichung. Die Eichfunktion χ(r,t) ist hier Lösung derDifferentialgleichung
1
c2χ−∆χ = g(r,t) =
1
c2ϕ+∇ ·A. (6.19)
Mit Lorentz-Eichung gilt1
c
∂
∂t
ϕ
c+∇ ·A = 0. (6.20)
Wir führen das Vierer-Potential
Aµ =
(ϕc
A
)(6.21)
ein. Zusammen mit der kovarianten Ableitung ∂µ =(
1c∂∂t,∇)gilt dann in Lorentz-
Eichung∂µA
µ = 0. (6.22)
46

6.1 Grundlagen der klassischen Elektrodynamik
Die Lorentz-Eichung kann in jedem Bezugssystem gewählt werden. Damit ist ∂µAµein Lorentz-Skalar. Dementsprechend ist Aµ ein kontravarianter Lorentz-Tensor 1.Stufe,transformiert sich also wie die Koordinaten mit der Lorentz-Transformation.
Beispiel: Spezielle Lorentz-Transformation in x-Richtung
Bei einer speziellen Lorentz-Transformation in x-Richtung von System K nach SystemK ′ mit Relativgeschwindigkeit v transformieren sich die Koordinaten über
ct′ = γ(ct− βx), x′ = γ(x− βct), y′ = y, z′ = z. (6.23)
Also gilt für das Viererpotential bei diesem Koordinatenübergang
1
cϕ′ = γ
(1
cϕ− βAx
), A′x = γ
(Ax − β
1
cϕ
), A′y = Ay, A′z = Az. (6.24)
In System K existiere nur ein statisches elektrisches Feld E = ∇ϕ und kein Magnetfeld,also A = 0.
Der Beobachter im System K ′ sieht dann auch ein Magnetfeld B′ = ∇′ × A′, fallsϕ von y oder z abhängt.
Gelte z.B. für das elektrodynamische Potential und Vektorpotential, sowie das elek-trische Feld in K
ϕ = −E0z, bzw. E = E0 · ez und A = 0. (6.25)
In K ′ ergibt sich dann
A′x = −γβ 1
cϕ =
v
c2γE0z
z = z′=
v
c2γE0z
′ (6.26a)
und damit erhält man das Magnetfeld
B′ = ∇′ ×A′ = γv
c2E0 · ey =
vE0
c2
√1− v2
c2
· ey. (6.26b)
Aus Gleichung (6.14b) folgt−∇A−∆ϕ =
%
ε0
. (6.27)
Aus ∂µAµ folgt durch Zeitableitung weiter
1
c2ϕ = −∇ · A. (6.28)
47

6 Kovariante Formulierung der Elektrodynamik
Unter Verwendung der Gleichungen (6.27) und (6.28) finden wir schließlich
1
c2
∂2
∂t2ϕ
c−∆
ϕ
c= ∂µ∂
µϕ
c= �
ϕ
c=
1
c
%
ε0
=
õ0
ε0
%. (6.29)
Im letzten Schritt haben wir dabei Gleichung (6.18) eingesetzt.In dieser Gleichung haben wir den d’Alembert-Operator
∂µ∂µ =
1
c2
∂2
∂t2−∆ = � (6.30)
eingeführt. Unter Verwendung der Gleichungen (6.16), (6.18) und (6.20) können wir dend’Alembert-Operator nun auf A anwenden und finden
�A = µ0j + µ0ε0∇ϕ+∇(∇ ·A) = µ0j. (6.31)
Insgesamt haben wir dann die zu den vier Maxwellgleichungen äqui-valente Gleichung
�Aµ =
( √µ0ε0%
µ0 · j
)= µ0
(c%j
)= µ0j
µ, (6.32)
mit dem Viererstrom jµ, der ein kontravarianter Tensor 1. Stufe ist.Daraus ergibt sich weiter, dass
∂µjµ = %+∇ · j (6.33)
ein Lorentz-Skalar ist.Wegen ∇×B = µ0(j + ε0E) aus Gleichung (6.13a) gilt
∇ · (∇×B) = 0 = µ0(∇ · j + ε0∇E) = µ0(∇ · j + %). (6.34)
Da der hintere Teil von Gleichung (6.34) ein Lorentz-Skalar ist, muss diese Gleichung inallen Bezugssystemen gelten.Damit ist die Kontinuitätsgleichung
∂µjµ = ϕ+ ∇ · j = 0 (6.35)
begründet, die in allen Inertialsystemen gilt.Wir betrachten wieder die Beziehung
∂µ∂µAν = �Aν = µ0j
ν (6.36)
48

6.2 Lorentz-Tensoren 2. Stufe in der Elektrodynamik
in Gleichung (6.32).Im Vakuum gilt jµ = 0 und damit ergibt sich die Wellengleichung
�A = 0 (6.37)
deren Lösung eine Superposition ebener Wellen darstellt:
f(xµ) = e(−ikµxµ) = ei(k·x−ωt), (6.38)
mit dem kovarianten Wellenvektor
kµ =
(ωc
k
). (6.39)
Damit ergibt sich für f die Gleichung:
�f(xµ) =
(1
c2
∂
∂t2−∆
)f(xµ) =
(ω2
c2− k2)
)!
= 0. (6.40)
Um diese Bedingung zu erfüllen muss
ω = c|k| (6.41)
gelten. Also ist kµ ein lichtartiger Vektor ist.Es folgt dann
Aν(xµ) =
ˆ
R4
Aν(kµ)δ[(k0)2 − k2]e−ikµxµ
d4k (6.42)
wobei Aν(kµ) frei wählbar ist.
6.2 Lorentz-Tensoren 2. Stufe in der Elektro-dynamik
Das elektrische Feld und das Magnetfeld sind wie bereits diskutiert nicht Lorentz-kovariant. Es stellt sich nun die Frage, ob die Maxwell-Gleichungen auch für die Felderin kovarianter Form geschrieben werden können.Es zeigt sich, dass dies möglich ist, allerdings werden dann Lorentz-Tensoren 2. Stufebenötigt. Wir werden diese Tensoren nicht herleiten, sondern direkt einführen und dannihre Eigenschaften betrachten.
49

6 Kovariante Formulierung der Elektrodynamik
6.2.1 Der Feldstärketensor
Die zentrale Größe zur kovarianten Formulierung der Elektrodynamik ist der Feldstär-ketensor. Um ihn zu erhalten bilden wir die Vierer-Rotation des Vektorpotentials:
Fµν = ∂µAν − ∂νAµ (6.43)
Fµν ist also ein antisymmetrischer kovarianter Lorentz-Tensor 2.Stufe, wobei gilt
Aν = ηµνAµ =
(ϕc
−A
). (6.44)
Für die einzelnen Komponenten ergibt sich
F00 = F11 = F22 = F33 = 0, (6.45a)
Fi0 = ∂iA0 − ∂0Ai =1
c
∂ϕ
∂xi+
1
cAi = −1
cEi = −F0i, (6.45b)
F12 = −∂A2
∂x1+∂A1
∂x2= −B3 = −F21, (6.45c)
F13 = B2 = −F31, (6.45d)F23 = −B1 = −F32, (6.45e)
und damit in Matrixschreibweise
Fµν =
0 Exc
Eyc
Ezc
−Exc
0 −Bz By
−Eyc
Bz 0 −Bx
−Ezc−By Bx 0
(6.46)
Die Transformation des Feldstärketensors erfolgt über
F ′µν = (Λ−1) αµ (Λ−1) β
ν Fαβ. (6.47)
Beim Wechsel zwischen Bezugssystemen (Inertialsystemen) transformieren sich also dieelektrischen und die magnetischen Felder zusammen. Eine getrennte Betrachtung istdaher nicht sinnvoll.
50

6.2 Lorentz-Tensoren 2. Stufe in der Elektrodynamik
1) Der kontravariante Feldstärketensor
Weiter lässt sich der kontravariante Feldstärketensor über den allgemeinen Zusammen-hang zwischen ko- und kontravarianten Tensoren definieren:
F µν = ηµαηνβFαβ =
0 −Exc−Ey
c−Ez
cExc
0 −Bz ByEyc
Bz 0 −BxEzc−By Bx 0
. (6.48)
Außerdem gilt, zunächst ohne Beweis
FµνFµν =
2
c2(E2 − c2B2) ist Lorentz-Skalar und E ·B ist ein Pseudo-Skalar.
(6.49)Dabei verhält sich ein Pseudo-Skalar abgesehen von einem Vorzeichenwechsel bei Raum-spiegelungen wie ein gewöhnlicher Skalar.
2) Schlussfolgerungen
Mit den Ergebnissen des vorherigen Abschnittes erhalten wir folgende wichtige Aussagen:
1. Gilt E ·B = 0, bzw. E ⊥ B in einem Inertialsystem, dann ist E ·B = 0, bzw.E ⊥ B in allen Inertialsystemen.
2. Gilt zusätzlich E2 − c2B2 > 0, dann gibt es ein System mit B′ = 0, d.h. dasMagnetfeld lässt sich wegtransformieren. Gilt E2 − c2B2 < 0, dann gibt es einSystem mit E′ = 0 und das elektrische Feld lässt sich wegtransformieren.
3. Gilt E ·B 6= 0 in einem System, dann gilt es in allen Systemen, d.h. keines derFelder lässt sich wegtransformieren.
4. Gilt E2 − c2B2 = 0 in einem System, dann ist |E| = c|B| in allen Systemen. Giltzusätzlich E ·B = 0, dann bilden E, B und k ein Orthogonalsystem.
51

6 Kovariante Formulierung der Elektrodynamik
6.3 Kovariante Form der Erregungsgleichun-gen
Mit Hilfe des Feldstärketensors lässt sich
∂νFµν = −µ0j
µ (6.50)
schreiben.
Um zu zeigen, dass diese Gleichung erfüllt ist, werten wir sie im Einzelnen aus.
Für µ = 0 haben wir
∂νF0ν = −µ0j
0, mit ∂νF0ν = −1
c∇ ·E = −µ0c%, (6.51a)
bzw. ∇ ·E = µ0c2% =
%
ε0
.
Für µ = 1 ergibt sich
∂νF1ν =
1
c2Ex +
(∂By
∂z− ∂Bz
∂y
)=
1
c2Ex − (∇×B)x, (6.51b)
bzw. insgesamt für µ = i 6= 0:
∂νFiν =
1
c2E − (∇×B) = −µ0j, (6.51c)
bzw.1
µ0
∇×B − ε0E = j.
Wir kommen damit zu folgendem wichtigen Ergebnis:
Die Gleichung ∂νFµν = −µ0j
µ ist die kovariante Form der beidenErregungsgleichungen ∇ ·E = %/ε0 und 1
µ0∇×B − ε0E = j.
52

6.4 Kovariante Form der inneren Feldgleichungen
6.4 Kovariante Form der inneren Feldgleichun-gen
Wir definieren zunächst den total antisymmetrischen Levi-Civita-Tensor:
εκλµν =
1 wenn {κλµν} gerade Permutation von 1,2,3,4 ist,−1 wenn {κλµν} ungerade Permutation von 1,2,3,4 ist
0 sonst.(6.52)
Der Levi-Civita-Tensor ist Pseudo-Tensor 4. Stufe. Bei einem Koordinatenwechsel giltalso wie üblich
ΛακΛ
βλΛ
γµΛδ
νεκλµν = εαβγδ, (6.53)
bei Raumspiegelungen verhält sich εκλµν aber anders als normale Tensoren, es tritt einVorzeichenwechsel auf.
6.4.1 Der duale Feldstärketensor
Mit Hilfe des Levi-Civita-Tensor kann man den dualen Feldstärketensor definierenals
F µν =1
2εµναβFαβ =
0 −Bx −By −Bz
Bx 0 Ezc−Ey
c
By −Ezc
0 Exc
BzEyc−Ex
c0
. (6.54)
F µν ist auch ein Pseudo-Tensor, hat also einen Vorzeichenwechsel bei Raumspiegelungen.Man erhält außerdem
FµνFµν = −1
4B ·E. (6.55)
Damit ist gezeigt, dass B · E ein Pseudo-Skalar ist, wie wir es bei der Einführung deskontravarianten Feldstärketensors bereits ohne Beweis angemerkt hatten.
6.4.2 Formulierung der inneren Feldgleichungen
Die inneren Feldgleichungen lassen sich nun schreiben als
∂νFµν = 0. (6.56)
Wir betrachten diese Gleichung wieder im Einzelnen:
53

6 Kovariante Formulierung der Elektrodynamik
Für µ = 0 ergibt sich
∂νF0ν = −∇ ·B = 0. (6.57a)
Für µ = 1 haben wir
∂νF1ν =
1
cBx +
1
c
(−∂Ey∂z
+∂Ez∂y
)=
1
c
[Bx + (∇×E)x
], (6.57b)
und insgesamt für µ = i 6= 0:
∂νFiν =
1
c
(B +∇×E
)= 0. (6.57c)
Insgesamt ergibt sich als kovariante Form der Maxwellgleichungenalso
∂νFµν = 0, (6.58a)
∂νFµν = −µ0j
µ. (6.58b)
6.5 Kovariante Form der Lorentz-Kraft
Mit dem Feldstärketensor lässt sich die Lorentz-Kraft kovariant formulieren:
ddτpµ = q · Fµνuν . (6.59)
Für µ = i ∈ {1,2,3} ergibt sich
ddτpi = γ
ddtpi = −γq(E + v ×B) = − d
dτpi, (6.60a)
und für µ = 0
ddτp0 =
ddτ
(mγc) = γq
cE · v, (6.60b)
bzw.ddt
(γmc2) = qE · v =ddtErel =
ddtW = qE · ds
dt.
54

6.6 Der Energie-Impuls-Tensor des elektromagnetischen Feldes
Es gilt alsodW = qE · ds, (6.61)
d.h. der Energiezuwachs ist gleich der vom elektrischen Feld geleisteten Arbeit.Alternativ lässt sich schreiben:
ddτpµ = F µ = qηµαFανu
ν , (6.62)
mit der Minkowski-Kraft F µ. Wir definieren zusätzlich die Minkowski-Kraft-Dichte fµ, indem wir die Ersetzungen q → %0, quν → %uν = jν vornehmen. Wirerhalten dann
fµDef.= ηµαFανj
ν =
(1cj ·E
%E + j ×B
). (6.63)
6.6 Der Energie-Impuls-Tensor des elektro-magnetischen Feldes
6.6.1 Klassische Energiegrößen der Elektrodynamik
In der klassischen Elektrodynamik sind die nicht Lorentz-kovarianten Größen Feldenergiew als
w =1
2
(ε0E
2 +1
µ0
B2
)(6.64)
und der Poynting-Vektor (Energiestrom) S als
S =1
µ0
E ×B (6.65)
definiert.
6.6.2 Einführung des Energie-Impuls-Tensors
Als entsprechende Lorentz-kovariante Grösse definieren wir den Energie-Impuls-Ten-sor über
T νµ =
1
µ0
(FµαF
αν +1
4ηνµFαβF
αβ
), (6.66a)
55

6 Kovariante Formulierung der Elektrodynamik
bzw.
T µν =1
µ0
(ηµβFβαF
αν +1
4ηµνFαβF
αβ
). (6.66b)
Dabei istηνµ = δνµ (6.67)
und FαβFαβ = −2(
E2
c2−B2
)nach Gleichung (6.49). Wir werten nun die Komponenten
von FµαFαν aus.
Für µ = ν = 0 ergibt sich einfach
F0αFα0 =
E2
c2, (6.68a)
und für µ = 0,ν = i
F0αFαi =
1
c(E ×B)i =
µ0
c(S)i (6.68b)
Mit diesen Ergebnissen können wir nun die Komponenten von T νµ bestimmen:
T 00 =
1
µ0
[1
c2E2 − 1
2
(E2
c2−B2
)]=
1
2µ0
(E2
c2+B2
)= w, (6.69a)
T i0 =
1
c(S)i = −T 0
i , (6.69b)
T ji = G j
i . (6.69c)
Dabei ist G ji der Maxwellsche Spannungstensor. Insgesamt erhalten wir in Ma-
trixschreibweise:
T νµ =
(w 1
cST
−1cS G j
i
)und T µν =
(w 1
cSt
1cS Gij
). (6.70)
Dabei giltGij = −G j
i . (6.71)
Der Tensor T νµ ist außerdem spurfrei:
T µµ = SpT ν
µ = 0. (6.72)
56

6.6 Der Energie-Impuls-Tensor des elektromagnetischen Feldes
︸ ︷︷ ︸Flache ∆A
E
Abbildung 6.1: Zur Interpretation des Energie-Impuls-Tensor: Betrachtetwird ein kleiner Quader im elektromagnetischen Feld
6.6.3 Interpretation des Energie-Impuls-Tensors
Um die Bedeutung des Energie-Impuls-Tensors klar zu machen, betrachten wir einenkleinen Quader in einer elektromagnetischen Welle, die sich in x-Richtung ausbreitet,d.h. für den Poynting-Vektor ergibt sich S = Sxex. Siehe auch Abbildung 6.1. Dann gilt:
∆W = Sx∆A ·∆t != Fx∆x = Fx c ·∆t. (6.73a)
bzw. umgeformt
Fx∆A
= pS =1
cSx =
∆px∆A ·∆t = c
∆px∆V
, (6.73b)
wobei pS den Strahlungsdruck bezeichnet. Weiter gilt
∆px∆V
= Πx, (6.74)
mit der Impulsdichtekomponente Πx. Allgemein ist die Impulsdichte definiert über
Π =1
c2S. (6.75)
Der Maxwellsche Spannungstensor Gij bestimmt den Druck, den eine elektromagnetischeKraft auf ein Volumenelement, hier der kleine Quader, ausübt:
F
∆A= −G · n, (6.76)
57

6 Kovariante Formulierung der Elektrodynamik
mit dem Normalenvektor n senkrecht zum Flächenelement ∆A. Daraus folgt
F = −Gdf , (6.77)
mit df = n · dA. Die Dimension von T µν ist also gleich Energie durch Volumen, bzw.Kraft pro Fläche also Druck. Aus ∂µF µν = −µ0j
µ folgt
∂νTν
µ =1
µ0
(−µ0Fµαjα) = −Fµαjα, (6.78a)
∂νTµν = −ηµβFβαjα = −fµ, (6.78b)
mit der Minkowski-Kraft-Dichte fµ. In Komponenten führt dies auf
∂w
∂t+ ∇ · S = −j ·E, für µ = 0, (6.79a)
1
c2
∂Si∂t
+∇ ·Gi = %Ei + (j ×B)i für µ = i. (6.79b)
dabei steht der Index i in Gi für die entsprechende Zeile.
Betrachtung im Vakuum
Im Vakuum ist jµ = 0, also auch fµ = 0 und daher ∂νT µν = 0. Es existieren danninsgesamt vier Kontinuitätsgleichungen:
∂ω
∂t+∇ · S = 0,
1
c2
∂Si∂t
+∇ ·Gi = 0,
(6.80)
mit 1c2∂Si∂t
= ∂Πi∂t
. Gij beschreibt also eine Impulsstromdichte. Man kann T µν aufspaltenüber
T µν = T µνem + T µνmat, (6.81)
wobei T µνem nur elektromagnetische Felder beschreibt und T µνmat Materie, also Ladungenund Ströme und auch andere Beiträge, etwa Teilchenfelder und Gravitationsfelder.
58

6.7 Der relativistische Doppler-Effekt
6.7 Der relativistische Doppler-Effekt
6.7.1 Elektromagnetische Wellen im Vakuum
Elektromagnetische Wellen im Vakuum werden durch die Gleichungen
E(r, t) = E0 · ei(k·r−ωt)
B(r, t) = B0 · ei(k·r−ωt) (6.82)
beschrieben, dabei gilt für diese ebenen Wellen
E0 ⊥ B0 ⊥ k. (6.83)
Mit dem Vierer-Wellenvektor
kµ =
(ωc
k
)=
1
}pµ bzw. kµ = ηµνk
ν =
(ωc
−k
)(6.84)
giltei(k·r−ωt) 7→ e−ikµkµ . (6.85)
6.7.2 Transformation in ein bewegtes Bezugsystem
Es stellt sich die Frage, welche Welle ein Beobachter in einem bewegten Bezugssystemsieht. Wir betrachten dazu ein entlang der x-Achse bewegtes System. Eine Lorentz-Transformation des Vierer-Wellenvektors ergibt
k′0 = γ(k0 − βk1),
k′1 = γ(k1 − βk0),
k′2 = k2,
k′3 = k3,
(6.86)
bzw.ω′ = γ(ω − v · kx) =
ω − vkx√1− β2
= ω1− βnx√
1− β2, (6.87)
mitn =
k
|k| =c
ωk. (6.88)
59

6 Kovariante Formulierung der Elektrodynamik
Der Zusammenhang |k| = ωcfolgt dabei direkt aus kµkµ = 0, siehe auch Gleichung
(6.41). Es gilt also
k′x =kx − β ωc√
1− β2. (6.89)
6.7.3 Der longitudinale Doppler-Effekt
Seik = ±k · ex, d.h. nx = ±1. (6.90)
Dann gilt
ω′ = ω1∓ β√1− β2
= ω1∓ β√
1− β√1 + β= ω
√1∓ β1± β , (6.91a)
und
±k′ = ±k − βk√1− β2
, bzw. k′ = k1∓ β√1− β2
= k
√1∓ β1± β =
ω′
c. (6.91b)
Daraus folgt für die Frequenzverschiebung:
∆ω
ω=ω′ − ωω
=
√1∓ β1± β − 1. (6.92)
Für die Wellenlängenverschiebung ergibt sich wegen
λ =2π
ωc (6.93)
dann∆λ
λ=λ′ − λλ
=
√1± β1∓ β − 1. (6.94)
Für die nichtrelativistische Näherung für v � c, β � 1 folgt:
∆ω
ω'(
1∓ β +1
2β2 ∓ ...
)− 1 ≈ ∓β +O(β2), (6.95a)
∆λ
λ'(
1± β +1
2β2 ± ...
)− 1 ≈ ±β +O(β2). (6.95b)
In der Kosmologie heißt
z =∆λ
λ(6.96)
60

6.7 Der relativistische Doppler-Effekt
Rotverschiebungsparameter.
6.7.4 Der transversale Doppler-Effekt
Sei k ⊥ v, d.h. nx = 0. Dann gilt
ω′ =ω√
1− β2= ω
(1 +
1
2β2 +O(β4)
). (6.97)
Wir nehmen an es geltek = k · ez. (6.98)
Dann gilt
k′x = − βk√1− β2
,
k′y = ky = 0,
k′z = kz = k.
(6.99)
Für einen bewegten Beobachter erscheint die Wellenfront gekippt um den Winkel α,gegeben durch:
tan (α) =k′xk′z
= − β√1− β2
. (6.100)
Diese Erscheinung heißt Aberration. Im nichrelativistischen Grenzfall gilt
tan (α) ' −β = −vc. (6.101)
61


Literaturverzeichnis
[1] T. Müller, A. King und D. Adis. A trip to the end of the universe and the twin“paradox“. Am. J. Phys. 76 (2008).
[2] H. Ruder und M. Ruder. Die Spezielle Relativitätstheorie. Vieweg-Studium (1993).
[3] W. Rindler. Relativity - Special, General and Cosmology. Oxford University Press,zweite Auflage (2006).
63


IndexAberration, 61
d’Alembert-Operator, 48
Eichfreiheit, 45Eichfunktion, 45Eichtransformation, 45Eigenzeit, 28Einsteinsche Summenkonvention, 19Energie-Impuls-Tensor, 55Energie-Impuls-Vektor, 37
Feldstärketensordualer, 53
Galilei-Transformation, 1
Impulsdichte, 57
Kontinuitätsgleichung, 48kontravarianter Tensor 1. Stufe
SRT, 23kovarianter Tensor 1. Stufe
SRT, 23
Längenkontraktion, 9Levi-Civita-Tensor, 53Lichtartigkeit, 11Lorentz-Eichung, 46
Massendefekt, 41Maxwellsches Spannungstensor, 56Minkowski-Kraft, 55Minkowski-Kraft-Dichte, 55
Poynting-Vektor, 55
Raumartigkeit, 11relativistische Energie, 37relativistischer Energiesatz, 38relativistischer Wellenvektor, 38Rotverschiebungsparameter, 61
Strahlungsdruck, 57
Vektorkontravariant, 20kovariant, 20
Vierer-Potential, 46Viererdivergenz, 27Vierergeschwindigkeit, 29Vierergradient, 27Viererrotation, 27Viererstrom, 48
Wellengleichung, 49Weltäther, 2
Zeitartigkeit, 11Zeitdilatation, 9Zwillingsparadoxon, 9
65