Embed Size (px)
DESCRIPTION
Skripta iz statike (rješeni primjeri)
Citation preview

SKRIPTUM ZUR VORLESUNG
Statik und Festigkeitslehre
von
Prof. Dr.-Ing. habil. G. Kuhn
Prof. Dr.-Ing. habil. P. Steinmann
LEHRSTUHL FÜR TECHNISCHE MECHANIK
UNIVERSITÄT ERLANGEN - NÜRNBERG
Stand: WS 2010/2011

i
Das vorliegende Skriptum ist zum Ge-
brauch neben der Vorlesung gedacht;
es kann den Besuch der Lehrveranstaltung
und das selbständige Erarbeiten des Vorle-
sungsinhaltes nicht ersetzen.
ii Inhaltsverzeichnis
Inhaltsverzeichnis
1 Statik 1
1.1 Grundlagen und Grundbegriffe . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Die Kraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2 Einteilung der Kräfte und Schnittprinzip . . . . . . . . . . . . . . 3
1.1.3 Die Axiome der Statik . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Zentrale ebene Kräftegruppe . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Reduktion der zentralen Kräftegruppe . . . . . . . . . . . . . . . 7
1.2.2 Zerlegung einer Kraft in zwei Richtungen . . . . . . . . . . . . . . 8
1.2.3 Gleichgewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3 Allgemeine ebene Kräftegruppe . . . . . . . . . . . . . . . . . . . . . . . 9
1.3.1 Das Kräftepaar . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3.2 Moment einer Kraft . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.3 Reduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.4 Gleichgewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Räumliche Kräftegruppe . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.1 Momentenvektor . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.2 Gleichgewichtsbedingungen . . . . . . . . . . . . . . . . . . . . . 13
1.5 Der Schwerpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.1 Kräfteschwerpunkt von parallelen Kräften . . . . . . . . . . . . . 13
1.5.2 Massenschwerpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.3 Flächen– und Linienschwerpunkt . . . . . . . . . . . . . . . . . . 15
1.6 Auflagerreaktionen ebener Tragwerke . . . . . . . . . . . . . . . . . . . . 17
1.6.1 Elemente eines Tragwerks . . . . . . . . . . . . . . . . . . . . . . 17
1.6.2 Belastungs– und Lagerungsarten . . . . . . . . . . . . . . . . . . 17
1.6.3 Statische Bestimmtheit . . . . . . . . . . . . . . . . . . . . . . . . 19
1.6.4 Bestimmung der Auflagerreaktionen . . . . . . . . . . . . . . . . . 21
1.6.5 Mehrgliedrige Tragwerke . . . . . . . . . . . . . . . . . . . . . . . 22
Inhaltsverzeichnis iii
1.7 Schnittreaktionen eines Balkens . . . . . . . . . . . . . . . . . . . . . . . 25
1.7.1 Definition der Schnittreaktionen in der Ebene . . . . . . . . . . . 25
1.7.2 Gerader Balken . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.7.3 Rahmenträger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.7.4 Bogenträger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.7.5 Definition der Schnittreaktionen im Raum . . . . . . . . . . . . . 33
1.8 Reibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.8.1 Haftreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.8.2 Gleitreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.8.3 Reibkegel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2 Elastostatik und Festigkeitslehre 41
2.1 Grundlagen und Grundbegriffe . . . . . . . . . . . . . . . . . . . . . . . . 41
2.1.1 Einführende Bemerkungen . . . . . . . . . . . . . . . . . . . . . . 41
2.1.2 Spannungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.1.3 Verschiebungen und Verzerrungen . . . . . . . . . . . . . . . . . . 46
2.1.4 Stoffgesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.2 Zug– und Druckbeanspruchung von Stäben . . . . . . . . . . . . . . . . . 55
2.2.1 Statisch bestimmte Aufgaben . . . . . . . . . . . . . . . . . . . . 55
2.2.2 Statisch unbestimmte Aufgaben . . . . . . . . . . . . . . . . . . . 56
2.2.3 Mehrbereichsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . 60
2.3 Biegebeanspruchung gerader Balken . . . . . . . . . . . . . . . . . . . . . 61
2.3.1 Flächenmomente 2. Ordnung . . . . . . . . . . . . . . . . . . . . . 61
2.3.2 Spannung bei gerader Biegung . . . . . . . . . . . . . . . . . . . . 69
2.3.3 Spannung bei schiefer Biegung . . . . . . . . . . . . . . . . . . . . 71
2.3.4 Biegeverformung gerader Balken (Elastische Linie) . . . . . . . . . 73
2.4 Torsion gerader Stäbe . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.4.1 Kreis– und kreisringförmiger Querschnitt . . . . . . . . . . . . . . 81
2.4.2 Dünnwandige geschlossene Querschnitte . . . . . . . . . . . . . . 84
iv Inhaltsverzeichnis
2.4.3 Dünnwandige offene Querschnitte . . . . . . . . . . . . . . . . . . 88
2.5 Energiemethoden der Elastostatik . . . . . . . . . . . . . . . . . . . . . . 89
2.5.1 Spezifische Formänderungsenergie . . . . . . . . . . . . . . . . . . 90
2.5.2 Formänderungsenergie eines Balkens . . . . . . . . . . . . . . . . 91
2.5.3 Kombinierte Beanspruchung und Mehrbereichsaufgaben . . . . . . 93
2.5.4 Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . . . . . . 94
2.5.5 Verfahren von Castigliano . . . . . . . . . . . . . . . . . . . . . . 95
2.6 Beurteilung des Beanspruchungszustandes . . . . . . . . . . . . . . . . . 103
2.6.1 Materialprüfung und Werkstoffkennwerte . . . . . . . . . . . . . . 103
2.6.2 Spannungstransformation und Hauptspannungen . . . . . . . . . 105
2.6.3 Spezifische Volumen– und Gestaltänderungsenergie . . . . . . . . 111
2.6.4 Festigkeitshypothesen . . . . . . . . . . . . . . . . . . . . . . . . . 113
2.7 Stabilität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
2.7.1 Stabilitätsprobleme . . . . . . . . . . . . . . . . . . . . . . . . . . 116
2.7.2 Knicken im elastischen Bereich . . . . . . . . . . . . . . . . . . . 117
2.7.3 Die vier EULERschen Knickfälle . . . . . . . . . . . . . . . . . . . 121
3 Empfohlene Literatur 124
A Anhang 125
A.1 Torsionsträgheitsmomente It und Torsionswiderstandsmomente Wt . . . . 125
A.2 Flächenträgheitsmomente Iyy, Izz, Iyz . . . . . . . . . . . . . . . . . . . . 126
Statik 1
1 Statik
1.1 Grundlagen und Grundbegriffe
1.1.1 Die Kraft
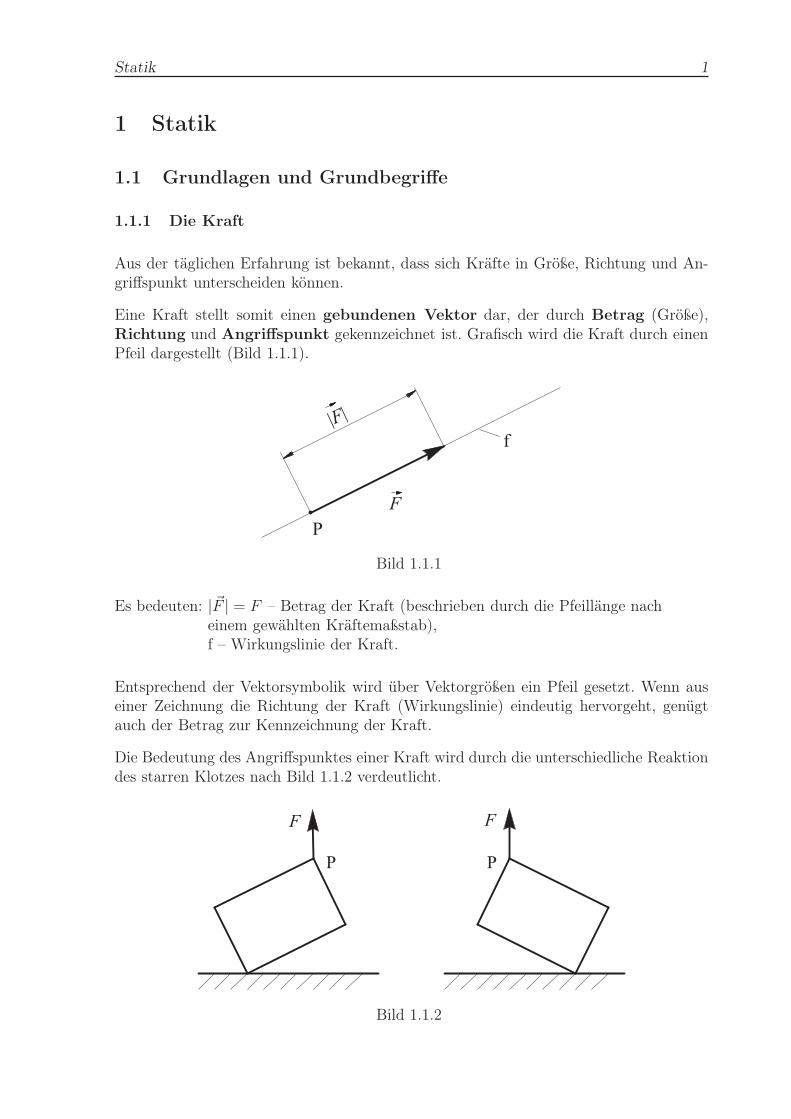
Aus der täglichen Erfahrung ist bekannt, dass sich Kräfte in Größe, Richtung und An-griffspunkt unterscheiden können.
Eine Kraft stellt somit einen gebundenen Vektor dar, der durch Betrag (Größe),Richtung und Angriffspunkt gekennzeichnet ist. Grafisch wird die Kraft durch einenPfeil dargestellt (Bild 1.1.1).
|F|
F
f
P
Bild 1.1.1
Es bedeuten: |~F | = F – Betrag der Kraft (beschrieben durch die Pfeillänge nacheinem gewählten Kräftemaßstab),f – Wirkungslinie der Kraft.
Entsprechend der Vektorsymbolik wird über Vektorgrößen ein Pfeil gesetzt. Wenn auseiner Zeichnung die Richtung der Kraft (Wirkungslinie) eindeutig hervorgeht, genügtauch der Betrag zur Kennzeichnung der Kraft.
Die Bedeutung des Angriffspunktes einer Kraft wird durch die unterschiedliche Reaktiondes starren Klotzes nach Bild 1.1.2 verdeutlicht.
F F
P P
Bild 1.1.2

2 Statik
In kartesischen Koordinaten (x, y, z) mit den Einheitsvektoren ~ex, ~ey, ~ez als Basis ergibtsich
~F = ~Fx + ~Fy + ~Fz = ~ex Fx + ~ey Fy + ~ez Fz , (1.1)
~Fx, ~Fy, ~Fz − Komponenten der Kraft ~F ,Fx, Fy, Fz − Koordinaten der Kraft ~F .
Für den Betrag der Kraft gilt
|~F | = F =√
F 2x + F 2
y + F 2z . (1.2)
Die Richtung der Kraft ist bestimmt durch
cosα =Fx
F; cos β =
Fy
F; cos γ =
Fz
F. (1.3)
FFy
Fx
F
Fy
Fx
Fz
y
x
z
x
y
ez
exex
eya a
b
b
g
a) Kraft F im Raum b) Kraft F in der x-y-Ebene
ey
Bild 1.1.3
(1.3) eingesetzt in (1.2) liefert die Beziehung zwischen den Winkeln
cos2 α+ cos2 β + cos2 γ = 1 . (1.4)
Für die Kraft in der Ebene ist aus Bild 1.1.3 b) abzulesen α + β =π
2und
Fx = F cosα Fy = F sinα . (1.5)
Grundlagen und Grundbegriffe 3
1.1.2 Einteilung der Kräfte und Schnittprinzip
Kräfte lassen sich nach verschiedenen Gesichtspunkten einteilen.
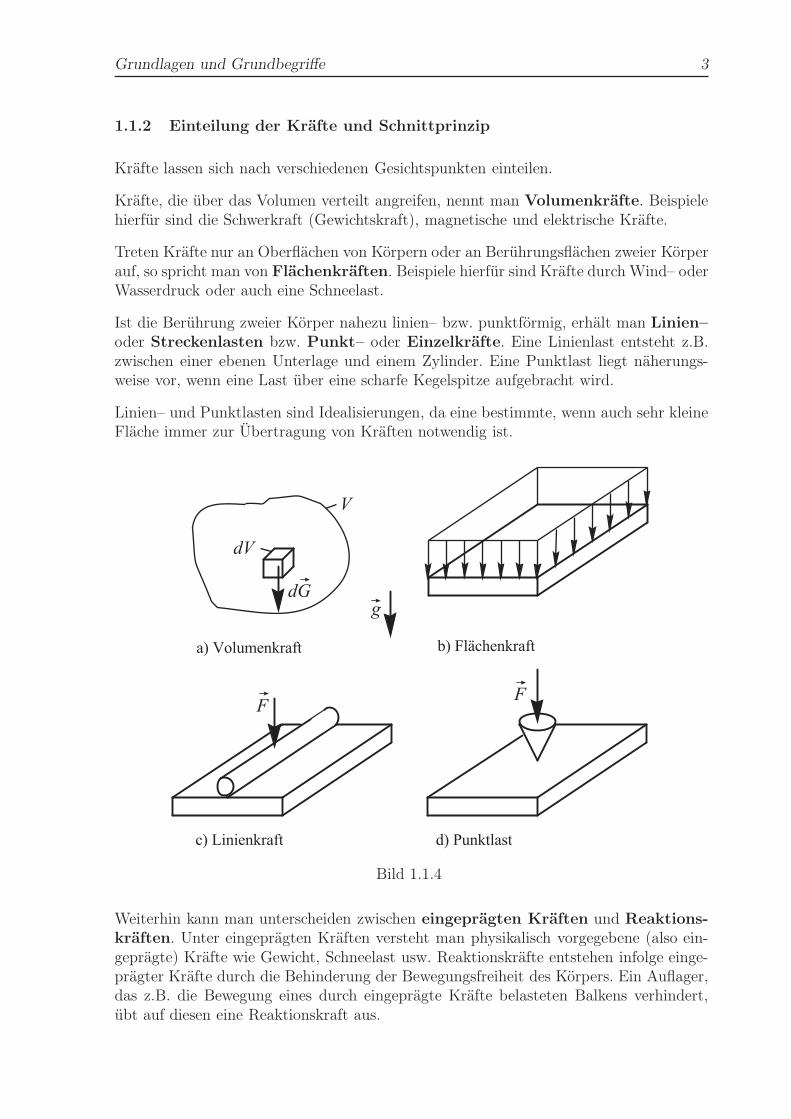
Kräfte, die über das Volumen verteilt angreifen, nennt man Volumenkräfte. Beispielehierfür sind die Schwerkraft (Gewichtskraft), magnetische und elektrische Kräfte.
Treten Kräfte nur an Oberflächen von Körpern oder an Berührungsflächen zweier Körperauf, so spricht man von Flächenkräften. Beispiele hierfür sind Kräfte durch Wind– oderWasserdruck oder auch eine Schneelast.
Ist die Berührung zweier Körper nahezu linien– bzw. punktförmig, erhält man Linien–oder Streckenlasten bzw. Punkt– oder Einzelkräfte. Eine Linienlast entsteht z.B.zwischen einer ebenen Unterlage und einem Zylinder. Eine Punktlast liegt näherungs-weise vor, wenn eine Last über eine scharfe Kegelspitze aufgebracht wird.
Linien– und Punktlasten sind Idealisierungen, da eine bestimmte, wenn auch sehr kleineFläche immer zur Übertragung von Kräften notwendig ist.
dG
V
dV
FF
g
a) Volumenkraft b) Flächenkraft
c) Linienkraft d) Punktlast
Bild 1.1.4
Weiterhin kann man unterscheiden zwischen eingeprägten Kräften und Reaktions-kräften. Unter eingeprägten Kräften versteht man physikalisch vorgegebene (also ein-geprägte) Kräfte wie Gewicht, Schneelast usw. Reaktionskräfte entstehen infolge einge-prägter Kräfte durch die Behinderung der Bewegungsfreiheit des Körpers. Ein Auflager,das z.B. die Bewegung eines durch eingeprägte Kräfte belasteten Balkens verhindert,übt auf diesen eine Reaktionskraft aus.
4 Statik
Der letzte Satz weist auf das Schnittprinzip hin, denn Reaktionskräfte können erstdurch das gedankliche Lösen des betrachteten Körpers von den geometrischen Bindungenzu den benachbarten Körpern veranschaulicht werden.
Das geschieht durch einen geschlossenen Schnitt.
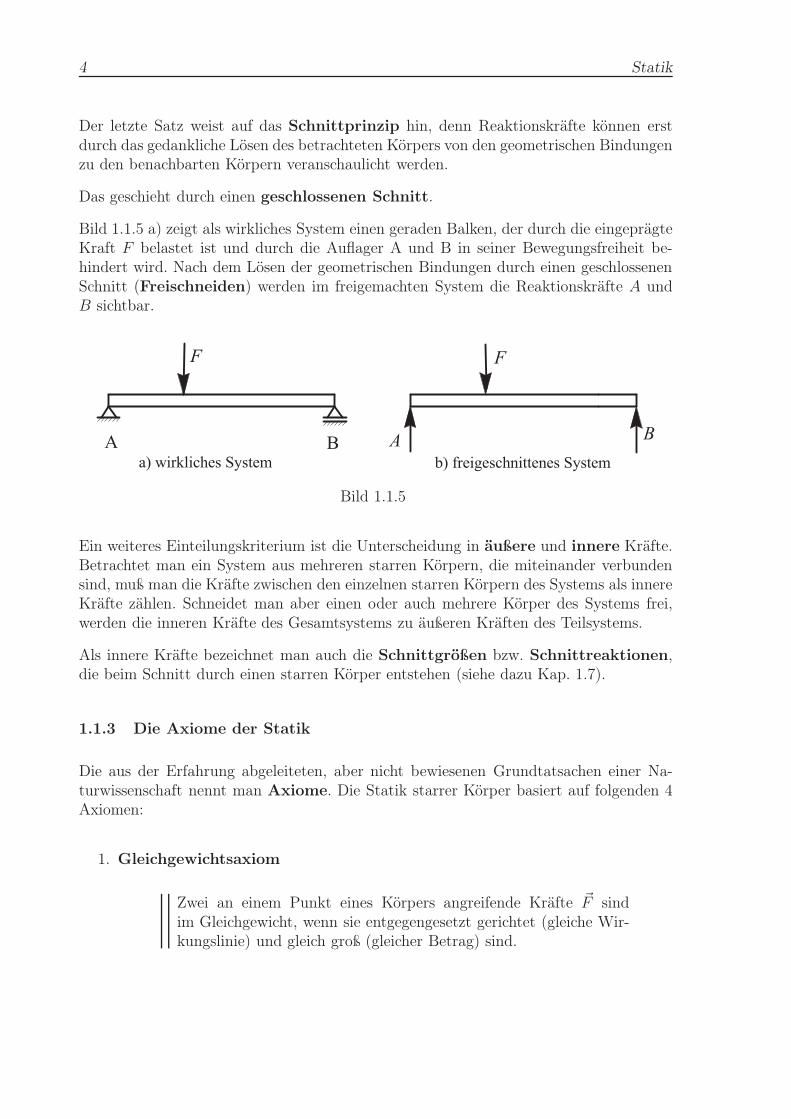
Bild 1.1.5 a) zeigt als wirkliches System einen geraden Balken, der durch die eingeprägteKraft F belastet ist und durch die Auflager A und B in seiner Bewegungsfreiheit be-hindert wird. Nach dem Lösen der geometrischen Bindungen durch einen geschlossenenSchnitt (Freischneiden) werden im freigemachten System die Reaktionskräfte A undB sichtbar.
A
F
B A
F
B
a) wirkliches System b) freigeschnittenes System
Bild 1.1.5
Ein weiteres Einteilungskriterium ist die Unterscheidung in äußere und innere Kräfte.Betrachtet man ein System aus mehreren starren Körpern, die miteinander verbundensind, muß man die Kräfte zwischen den einzelnen starren Körpern des Systems als innereKräfte zählen. Schneidet man aber einen oder auch mehrere Körper des Systems frei,werden die inneren Kräfte des Gesamtsystems zu äußeren Kräften des Teilsystems.
Als innere Kräfte bezeichnet man auch die Schnittgrößen bzw. Schnittreaktionen,die beim Schnitt durch einen starren Körper entstehen (siehe dazu Kap. 1.7).
1.1.3 Die Axiome der Statik
Die aus der Erfahrung abgeleiteten, aber nicht bewiesenen Grundtatsachen einer Na-turwissenschaft nennt man Axiome. Die Statik starrer Körper basiert auf folgenden 4Axiomen:
1. Gleichgewichtsaxiom
Zwei an einem Punkt eines Körpers angreifende Kräfte ~F sindim Gleichgewicht, wenn sie entgegengesetzt gerichtet (gleiche Wir-kungslinie) und gleich groß (gleicher Betrag) sind.
Grundlagen und Grundbegriffe 5
PF
F
Bild 1.1.6
Man spricht auch von einer Gleichgewichtsgruppe. Eine Gleichgewichtsgruppehat keine Wirkung auf einen starren Körper.
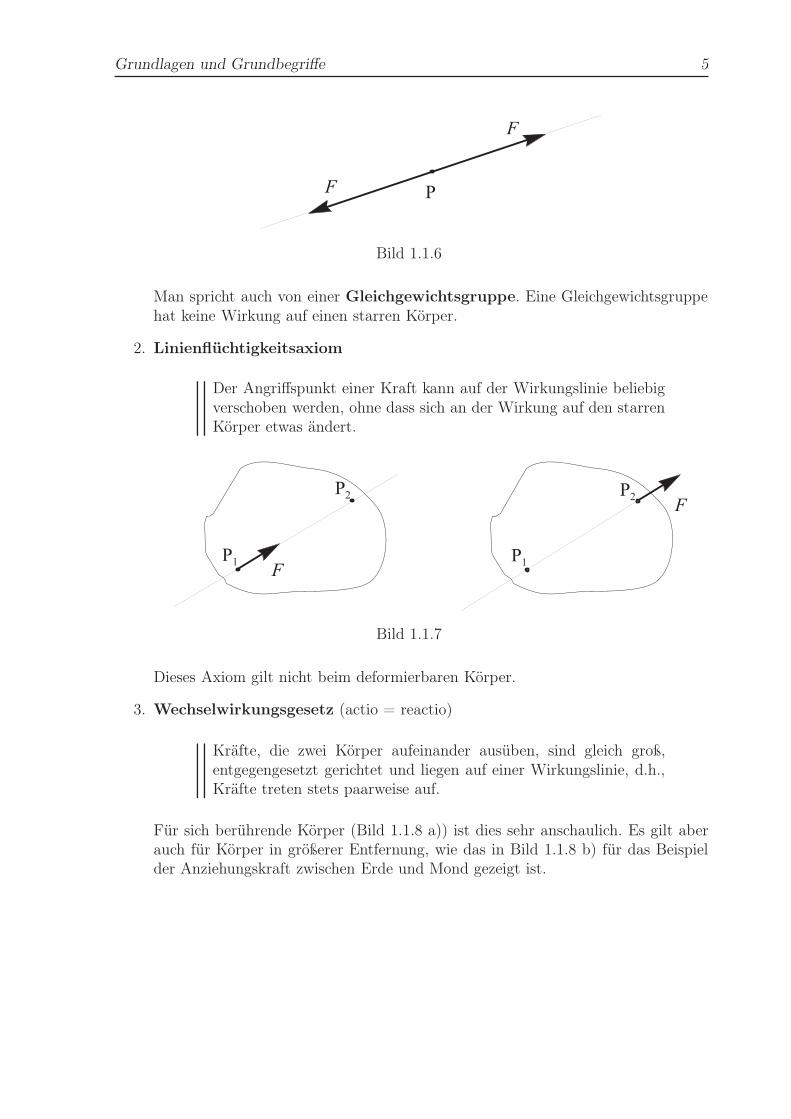
2. Linienflüchtigkeitsaxiom
Der Angriffspunkt einer Kraft kann auf der Wirkungslinie beliebigverschoben werden, ohne dass sich an der Wirkung auf den starrenKörper etwas ändert.
P1F
P2F
P1
P2
Bild 1.1.7
Dieses Axiom gilt nicht beim deformierbaren Körper.
3. Wechselwirkungsgesetz (actio = reactio)
Kräfte, die zwei Körper aufeinander ausüben, sind gleich groß,entgegengesetzt gerichtet und liegen auf einer Wirkungslinie, d.h.,Kräfte treten stets paarweise auf.
Für sich berührende Körper (Bild 1.1.8 a)) ist dies sehr anschaulich. Es gilt aberauch für Körper in größerer Entfernung, wie das in Bild 1.1.8 b) für das Beispielder Anziehungskraft zwischen Erde und Mond gezeigt ist.
6 Statik
F1 F2
FG
F4F5
F3
F4 F5
F2F3
F1 FG
a) b)
Bild 1.1.8
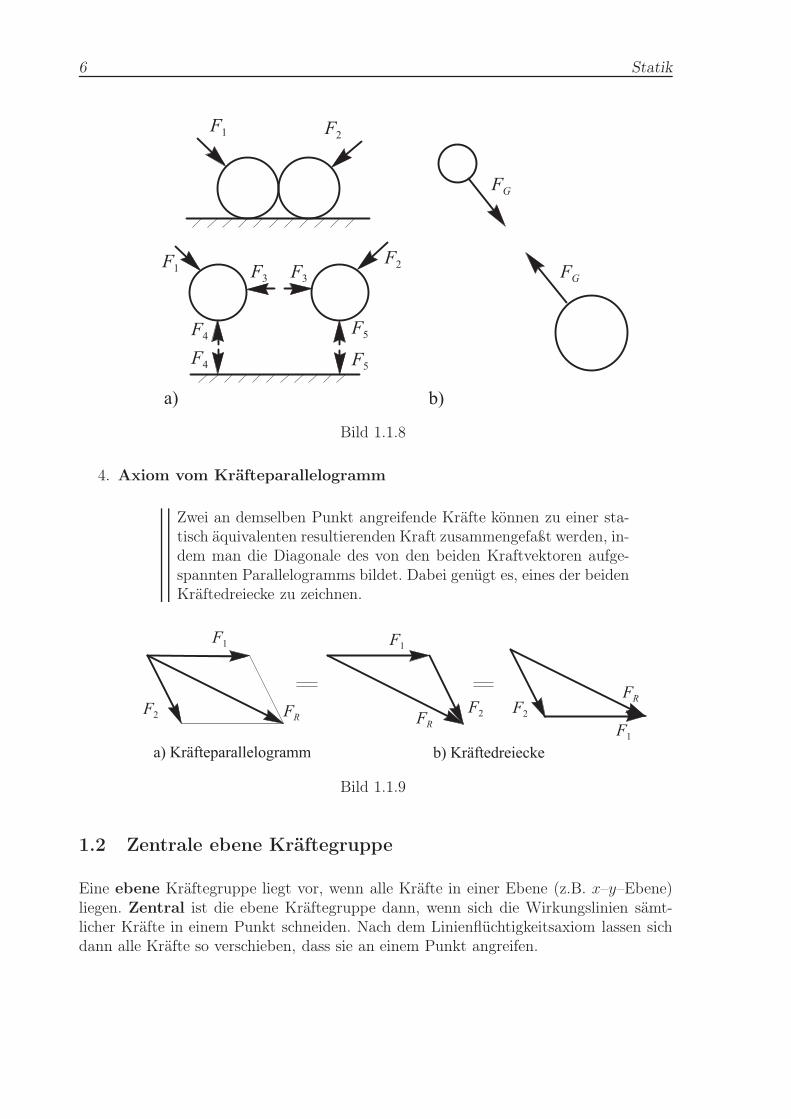
4. Axiom vom Kräfteparallelogramm
Zwei an demselben Punkt angreifende Kräfte können zu einer sta-tisch äquivalenten resultierenden Kraft zusammengefaßt werden, in-dem man die Diagonale des von den beiden Kraftvektoren aufge-spannten Parallelogramms bildet. Dabei genügt es, eines der beidenKräftedreiecke zu zeichnen.
F1
F2 FR
F1
F2F2
F1
FR
FR
a) Kräfteparallelogramm b) Kräftedreiecke
Bild 1.1.9
1.2 Zentrale ebene Kräftegruppe
Eine ebene Kräftegruppe liegt vor, wenn alle Kräfte in einer Ebene (z.B. x–y–Ebene)liegen. Zentral ist die ebene Kräftegruppe dann, wenn sich die Wirkungslinien sämt-licher Kräfte in einem Punkt schneiden. Nach dem Linienflüchtigkeitsaxiom lassen sichdann alle Kräfte so verschieben, dass sie an einem Punkt angreifen.
Zentrale ebene Kräftegruppe 7
1.2.1 Reduktion der zentralen Kräftegruppe
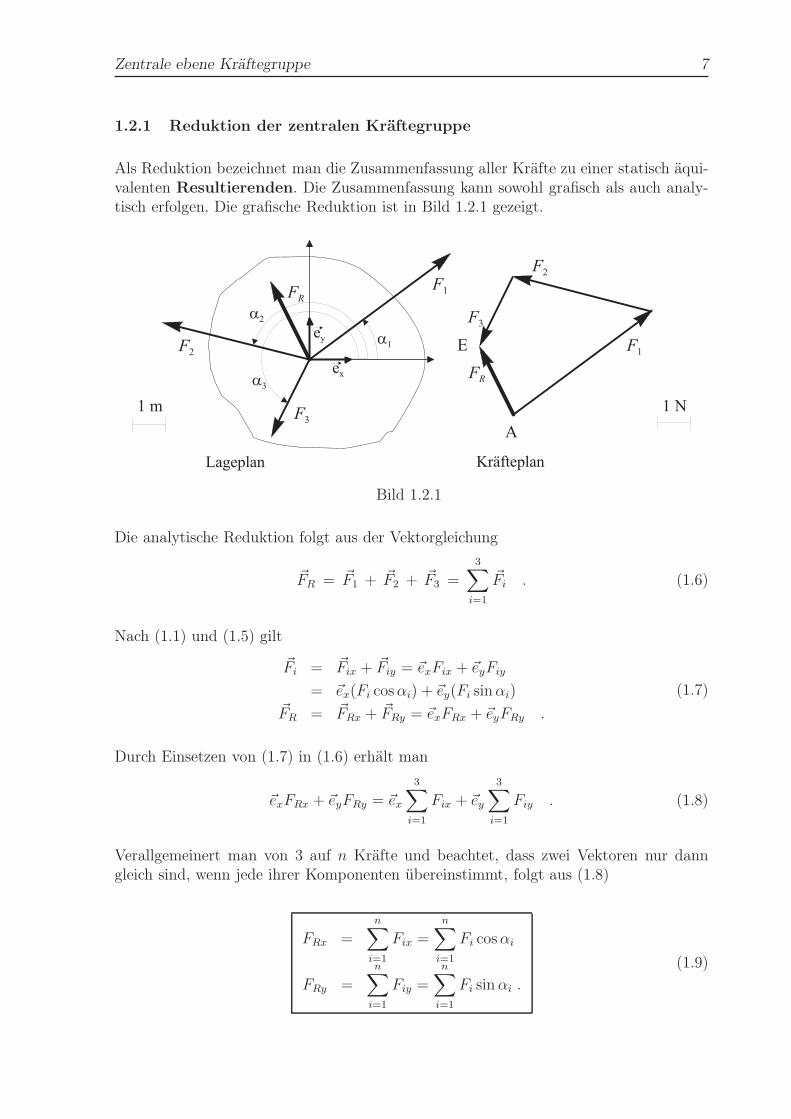
Als Reduktion bezeichnet man die Zusammenfassung aller Kräfte zu einer statisch äqui-valenten Resultierenden. Die Zusammenfassung kann sowohl grafisch als auch analy-tisch erfolgen. Die grafische Reduktion ist in Bild 1.2.1 gezeigt.
F R
F 1
F 2
F R
F 3
L a g e p l a n K r ä f t e p l a n
F 1
F 2
F 3
A
E
1 N1 m
e x
e y
a 2
a 3
a 1
Bild 1.2.1
Die analytische Reduktion folgt aus der Vektorgleichung
~FR = ~F1 + ~F2 + ~F3 =
3∑
i=1
~Fi . (1.6)
Nach (1.1) und (1.5) gilt
~Fi = ~Fix + ~Fiy = ~exFix + ~eyFiy
= ~ex(Fi cosαi) + ~ey(Fi sinαi)~FR = ~FRx + ~FRy = ~exFRx + ~eyFRy .
(1.7)
Durch Einsetzen von (1.7) in (1.6) erhält man
~exFRx + ~eyFRy = ~ex
3∑
i=1
Fix + ~ey
3∑
i=1
Fiy . (1.8)
Verallgemeinert man von 3 auf n Kräfte und beachtet, dass zwei Vektoren nur danngleich sind, wenn jede ihrer Komponenten übereinstimmt, folgt aus (1.8)
FRx =n∑
i=1
Fix =n∑
i=1
Fi cosαi
FRy =
n∑
i=1
Fiy =
n∑
i=1
Fi sinαi .
(1.9)
8 Statik
FR
FRy
y
x
aR
FRx
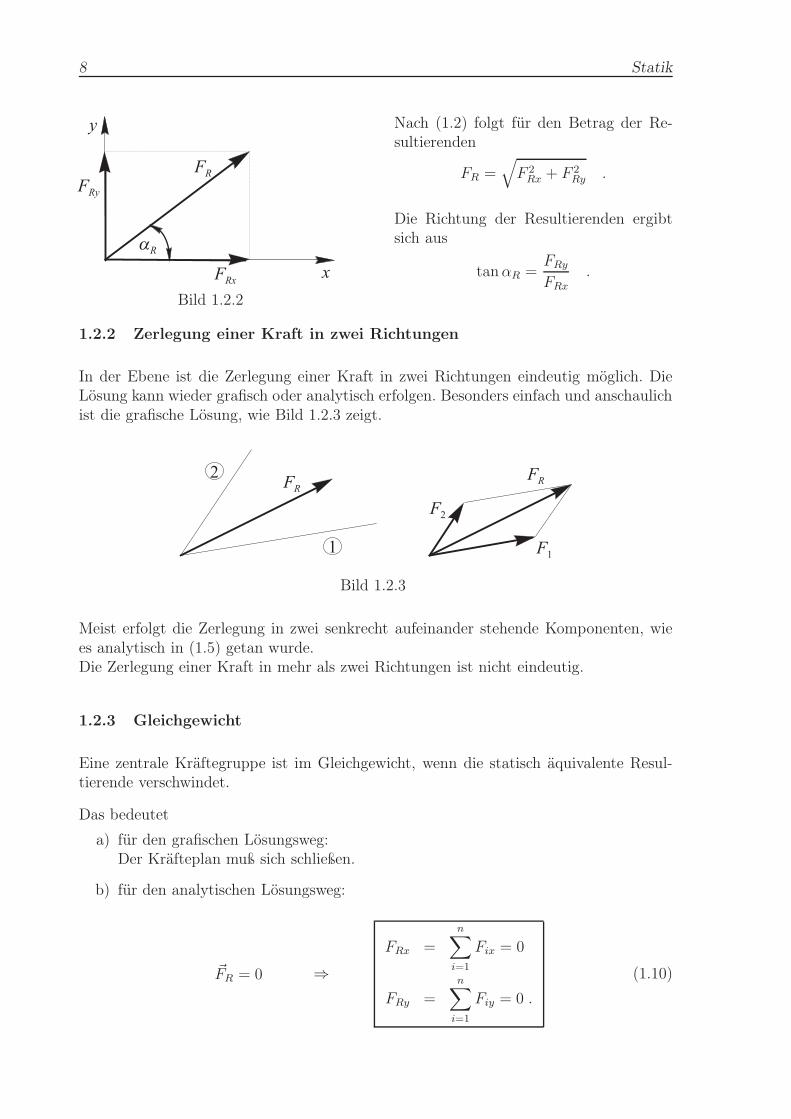
Bild 1.2.2
Nach (1.2) folgt für den Betrag der Re-sultierenden
FR =√
F 2Rx + F 2
Ry .
Die Richtung der Resultierenden ergibtsich aus
tanαR =FRy
FRx
.
1.2.2 Zerlegung einer Kraft in zwei Richtungen
In der Ebene ist die Zerlegung einer Kraft in zwei Richtungen eindeutig möglich. DieLösung kann wieder grafisch oder analytisch erfolgen. Besonders einfach und anschaulichist die grafische Lösung, wie Bild 1.2.3 zeigt.
FR
FR
F2
1
2
F1
Bild 1.2.3
Meist erfolgt die Zerlegung in zwei senkrecht aufeinander stehende Komponenten, wiees analytisch in (1.5) getan wurde.Die Zerlegung einer Kraft in mehr als zwei Richtungen ist nicht eindeutig.
1.2.3 Gleichgewicht
Eine zentrale Kräftegruppe ist im Gleichgewicht, wenn die statisch äquivalente Resul-tierende verschwindet.
Das bedeutet
a) für den grafischen Lösungsweg:Der Kräfteplan muß sich schließen.
b) für den analytischen Lösungsweg:
~FR = 0 ⇒FRx =
n∑
i=1
Fix = 0
FRy =n∑
i=1
Fiy = 0 .
(1.10)

Allgemeine ebene Kräftegruppe 9
(1.10) bezeichnet man als Kräftegleichgewichtsbedingungen (in diesem Fall für dieKraftkomponenten in x– und y–Richtung).
1.3 Allgemeine ebene Kräftegruppe
Bei der allgemeinen Kräftegruppe schneiden sich nicht mehr alle Wirkungslinien in einemPunkt. Man spricht in diesem Falle auch von einer nichtzentralen Kräftegruppe. Esist notwendig, auch die Momentenwirkung der Kräfte zu berücksichtigen.
1.3.1 Das Kräftepaar
Als Kräftepaar bezeichnet man zwei gleich große, entgegengesetztgerichtete, aber auf parallel zueinander verlaufenden Wirkungslini-en liegende Kräfte.
F
F
a
Bild 1.3.1
Man erkennt, dass das Kräftegleichgewicht(1.10) zwar erfüllt ist, dass aber das Kräfte-paar eine Drehwirkung erzeugt. Die Drehwir-kung ist proportional der Kraft F und demAbstand a. Damit entsteht das Moment desKräftepaares
M = aF (x
+y
−) .
Der Drehsinn des Kräftepaares wird im mathematisch positiven Sinn (entgegen dem
Uhrzeigersinn) mit dem positiven Vorzeichen (x
+ ) und im mathematisch negativen Sinn
(im Uhrzeigersinn) mit dem negativen Vorzeichen (y
− ) beschrieben. Ein Kräftepaar istdurch Angabe des Betrages und des Drehsinns des Moments eindeutig bestimmt.
Für das Kräftepaar gelten folgende Aussagen:
a) Das Moment eines Kräftepaares ist gleich der Summe der Momente der beidenEinzelkräfte bez. eines beliebigen Bezugspunktes (siehe hierzu Kap. 1.3.2).
b) Ein Kräftepaar darf in seiner Wirkungsebene beliebig verschoben werden, ohnedass sich seine Wirkung auf den starren Körper ändert.
c) Das resultierende Moment mehrerer Kräftepaare folgt aus der algebraischen Sum-me der Momente der einzelnen Kräftepaare (unter Beachtung des Drehsinns). Istdie Summe Null, herrscht Gleichgewicht.
Daß ein Moment im Raum ein Vektor ist, von dem bei einer ebenen Kräftegruppe nureine Komponente übrigbleibt, wird im Kapitel 1.4.1 behandelt.

10 Statik
1.3.2 Moment einer Kraft
FFy
Fx
y
xaA xF
yF
Bild 1.3.2
Eine Kraft F bewirkt bez. eines nicht auf sei-ner Wirkungslinie liegenden beliebigen Be-zugspunktes A ein Moment vom Betrag
MA = aF (x
+y
−) . (1.11)
Der senkrechte Abstand a des Bezugspunk-tes A von der Wirkungslinie wird Hebel-arm genannt. In Komponentendarstellunggilt:
MA = aF = xFFy − yFFx (1.12)
Die Parallelverschiebung der Kraft F um den Abstand a bedingt demnach die Hinzu-nahme eines Momentes M = aF (Bild 1.3.3).
x
y
F
M = a F
x
Fy
a
=
Bild 1.3.3
1.3.3 Reduktion
Mehrere Kräfte ergeben das Moment
MA =∑
i
ai Fi =∑
i
(xiFiy − yiFix) . (1.13)
Will man die Kräfte Fi zu einer Resultierenden FR zusammenfassen, so muß die Resul-tierende die gleiche Momentenwirkung haben wie die einzelnen Kräfte, d.h.
MA = aR FR = xRFRy − yRFRx =∑
i
ai Fi . (1.14)
Räumliche Kräftegruppe 11
Bei der analytischen Reduktion einer allgemeinen ebenen Kräftegruppe folgen somit dieKomponenten FRx und FRy aus (1.10) und die Wirkungslinie der Resultierenden yR(xR)aus (1.14).
1.3.4 Gleichgewicht
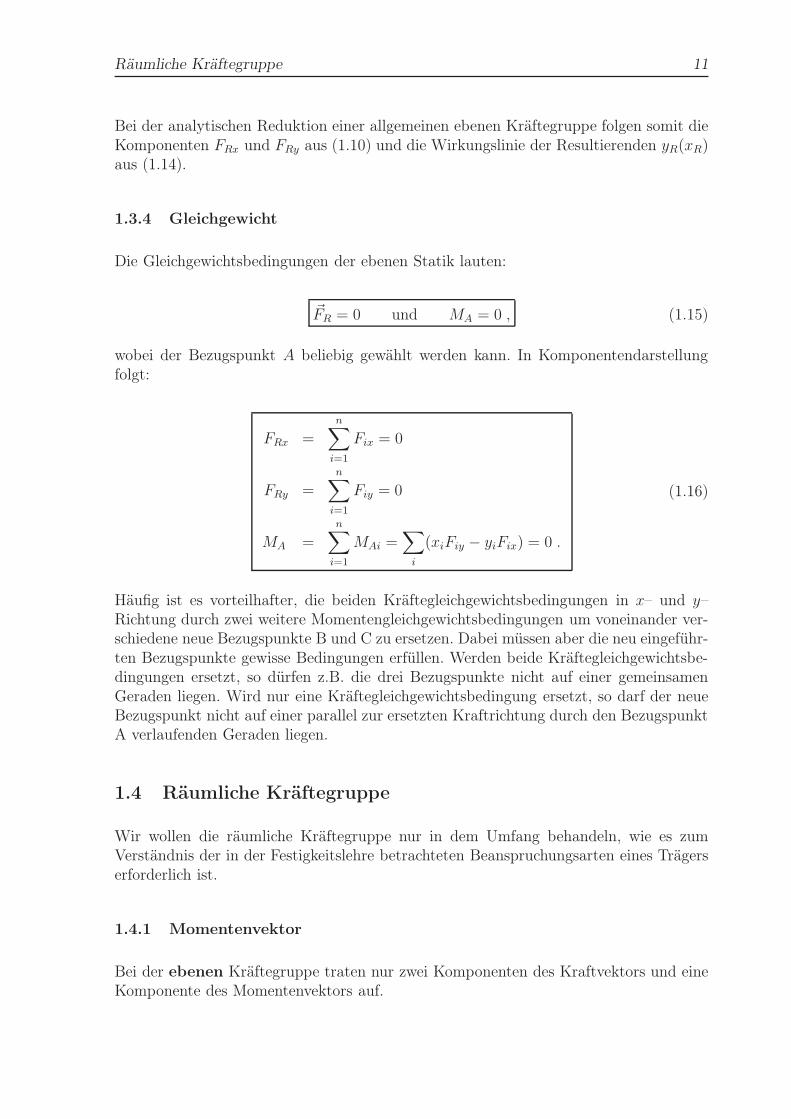
Die Gleichgewichtsbedingungen der ebenen Statik lauten:
~FR = 0 und MA = 0 , (1.15)
wobei der Bezugspunkt A beliebig gewählt werden kann. In Komponentendarstellungfolgt:
FRx =n∑
i=1
Fix = 0
FRy =
n∑
i=1
Fiy = 0
MA =n∑
i=1
MAi =∑
i
(xiFiy − yiFix) = 0 .
(1.16)
Häufig ist es vorteilhafter, die beiden Kräftegleichgewichtsbedingungen in x– und y–Richtung durch zwei weitere Momentengleichgewichtsbedingungen um voneinander ver-schiedene neue Bezugspunkte B und C zu ersetzen. Dabei müssen aber die neu eingeführ-ten Bezugspunkte gewisse Bedingungen erfüllen. Werden beide Kräftegleichgewichtsbe-dingungen ersetzt, so dürfen z.B. die drei Bezugspunkte nicht auf einer gemeinsamenGeraden liegen. Wird nur eine Kräftegleichgewichtsbedingung ersetzt, so darf der neueBezugspunkt nicht auf einer parallel zur ersetzten Kraftrichtung durch den BezugspunktA verlaufenden Geraden liegen.
1.4 Räumliche Kräftegruppe
Wir wollen die räumliche Kräftegruppe nur in dem Umfang behandeln, wie es zumVerständnis der in der Festigkeitslehre betrachteten Beanspruchungsarten eines Trägerserforderlich ist.
1.4.1 Momentenvektor
Bei der ebenen Kräftegruppe traten nur zwei Komponenten des Kraftvektors und eineKomponente des Momentenvektors auf.

12 Statik
Bei der räumlichen Kräftegruppe können alle Komponenten sowohl des Kraftvektorsals auch des Momentenvektors vorkommen.
In einem kartesischen Koordinatensystem bedeutet das
F x y
F y
F z
F
r
z
x
0
M
Bild 1.4.1
~F = ~exFx + ~eyFy + ~ezFz
~M = ~exMx + ~eyMy + ~ezMz
(1.17)
Das Moment ~M einer Kraft ~F bez. ei-nes Punktes 0 (Bild 1.4.1) lautet
~M = ~r × ~F
= (~exxF + ~eyyF + ~ezzF )× (~exFx + ~eyFy + ~ezFz)
= (yFFz − zFFy)~ex + (zFFx − xFFz)~ey + (xFFy − yFFx)~ez
=
∣∣∣∣∣∣∣
~ex ~ey ~ez
xF yF zF
Fx Fy Fz
∣∣∣∣∣∣∣
.
(1.18)
Man erkennt, dass sich (1.18) mit Fz = 0, z = 0 für die ebene Kräftegruppe auf
~M = (xFFy − yFFx)~ez
reduziert, was in Übereinstimmung mit (1.12) ist.
Vom physikalischen Charakter unterscheiden sich Kraft– und Momentenvektor dadurch,dass
– ~F ein gebundener bzw. ein linienflüchtiger Vektor ist, der bez. der Wirkung aufeinen starren Körper nur entlang seiner Wirkungslinie verschoben werden darf,
– ~M ein freier Vektor ist, der beliebig im Raum parallel verschoben werden darf, ohneseine Wirkung auf einen starren Körper zu ändern.
In der Darstellung wird für den Momentenvektor häufig ein Doppelpfeil benutzt.

Der Schwerpunkt 13
1.4.2 Gleichgewichtsbedingungen
Ein Körper befindet sich im Gleichgewicht, wenn resultierende Kraft und resultierendesMoment Null sind. Das bedeutet
~FR = 0 ⇒n∑
i=1
~Fi = 0 ⇒
~MR = 0 ⇒n∑
i=1
~Mi = 0 ⇒
n∑
i=1
Fix = 0
n∑
i=1
Fiy = 0
n∑
i=1
Fiz = 0
n∑
i=1
Mix = 0
n∑
i=1
Miy = 0
n∑
i=1
Miz = 0
(1.19)
1.5 Der Schwerpunkt
1.5.1 Kräfteschwerpunkt von parallelen Kräften
Wir betrachten eine Gruppe von n parallelen Kräften F1, · · · , Fi, · · · , Fn, die alle in derx–y–Ebene liegen und parallel zur y–Achse wirken (Bild 1.5.1). Faßt man die Kräfte Fi
zur Resultierenden FR =
n∑
i=1
Fi zusammen, dann ergibt sich für den Kräftemittelpunkt
xR = xs =1
FR
n∑
i=1
Fixi . (1.20)
14 Statik
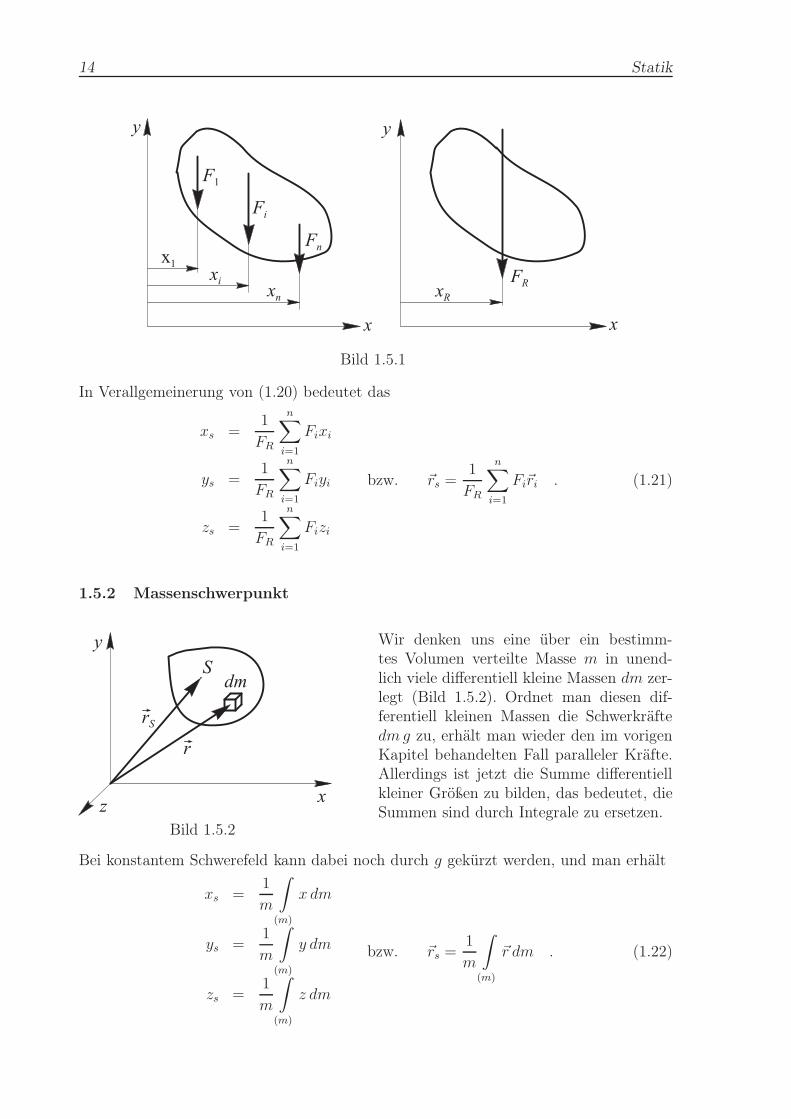
xR
xx
y y
xn
xi
x1
F1
FR
Fn
Fi
Bild 1.5.1
In Verallgemeinerung von (1.20) bedeutet das
xs =1
FR
n∑
i=1
Fixi
ys =1
FR
n∑
i=1
Fiyi
zs =1
FR
n∑
i=1
Fizi
bzw. ~rs =1
FR
n∑
i=1
Fi~ri . (1.21)
1.5.2 Massenschwerpunkt
x
y
S.dm
z
rS
r
Bild 1.5.2
Wir denken uns eine über ein bestimm-tes Volumen verteilte Masse m in unend-lich viele differentiell kleine Massen dm zer-legt (Bild 1.5.2). Ordnet man diesen dif-ferentiell kleinen Massen die Schwerkräftedmg zu, erhält man wieder den im vorigenKapitel behandelten Fall paralleler Kräfte.Allerdings ist jetzt die Summe differentiellkleiner Größen zu bilden, das bedeutet, dieSummen sind durch Integrale zu ersetzen.
Bei konstantem Schwerefeld kann dabei noch durch g gekürzt werden, und man erhält
xs =1
m
∫
(m)
x dm
ys =1
m
∫
(m)
y dm
zs =1
m
∫
(m)
z dm
bzw. ~rs =1
m
∫
(m)
~r dm . (1.22)

Der Schwerpunkt 15
Für homogene Körper mit konstanter Dichte kann (1.22) durch gekürzt werden, undman erhält den geometrischen Schwerpunkt
~rs =1
V
∫
(V )
~r dV (1.23)
mit den entsprechenden Komponenten analog (1.22).
Läßt sich die Masse m in Teilmassen mi mit bekannten Teilschwerpunkten ~rsi aufteilen,so folgt der Schwerpunkt aus
~rs =1
m
∑
i
~rsimi . (1.24)
Für die Aufteilung des Gesamtvolumens V in Teilvolumina Vi gilt
~rs =1
V
∑
i
~rsi Vi . (1.25)
1.5.3 Flächen– und Linienschwerpunkt
dAy
z
x
h
S .
rS
Bild 1.5.3
Für einen flächenhaften Körper (z.B. dünnesBlech) mit konstanter Wanddicke h und kon-stanter Dichte (Bild 1.5.3) ist
dm = h dA ,
und aus (1.22) wird
xs =1
A
∫
(A)
x dA
ys =1
A
∫
(A)
y dA
zs =1
A
∫
(A)
z dA
bzw. ~rs =1
A
∫
(A)
~r dA . (1.26)

16 Statik
In der Festigkeitslehre ist vor allem der Schwerpunkt ebener Flächen (Querschnittsflä-chen) von Bedeutung.
∫
(A)
x dA,
∫
(A)
y dA,
∫
(A)
z dA bezeichnet man als Flächenmomente 1. Ordnung.
Merke:
Die Flächenmomente 1. Ordnung verschwinden in Bezug auf ein imSchwerpunkt verankertes Koordinatensystem.
Bei bekannten Teilflächen Ai mit den Teilschwerpunkten ~rsi erhält man
~rs =1
A
∑
i
Ai~rsi bzw.
xs =1
A
∑
i
Ai xsi
ys =1
A
∑
i
Ai ysi
zs =1
A
∑
i
Aizsi .
(1.27)
Bei linienförmigen Körpern (z.B. schlanker Träger) mit konstanter Querschnittsfläche Aund konstanter Dichte (Bild 1.5.4) gilt dm = A ds und
y
z
x
rS
. S
s dsL
Bild 1.5.4
~rs =1
L
∫
(L)
~r ds mit L =
∫
(L)
ds .
(1.28)
Bei bekannten Teillinien Li mit den Teilschwer-punkten ~rsi folgt
~rs =1
L
∑
i
Li~rsi bzw.
xs =1
L
∑
i
Lixsi
ys =1
L
∑
i
Liysi
zs =1
L
∑
i
Lizsi .
(1.29)

Auflagerreaktionen ebener Tragwerke 17
1.6 Auflagerreaktionen ebener Tragwerke
1.6.1 Elemente eines Tragwerks
Allgemein versteht man unter einem Tragwerk ein aus mehreren Elementen zusam-mengesetztes Bauwerk, dessen Beweglichkeit durch geometrische Bindungen (Auflager,Übertragungselemente) eingeschränkt ist und das in der Lage ist, eingeprägte Kräfteaufzunehmen.
Die Elemente eines Tragwerks werden entsprechend ihrer Form und Beanspruchungsartin verschiedene Klassen eingeteilt.
Unter einem Stab versteht man ein Bauteil, dessen Querschnittsabmessungen sehr vielkleiner sind als seine Längsabmessung und das nur in seiner (geraden) Stabachse bean-sprucht wird. Treten auch Momenten- und Querbeanspruchungen auf, so spricht manvon einem geraden Balken, wenn die Längsachse gerade, vom Bogenträger, wenn dieLängsachse gekrümmt und von Rahmen, wenn mehrere Balken mit unterschiedlichenAchsrichtungen zusammengesetzt sind. Alle diese Tragwerke faßt man auch (unabhängigvon ihrer Beanspruchung) unter dem Begriff Linientragwerk zusammen.
Ebene Bauteile, bei denen die Dickenabmessung sehr viel kleiner ist als die sonstigen Ab-messungen, werden als Scheiben bezeichnet, wenn sie nur in der Scheibenebene belastetwerden und als Platten, wenn sie auch Momenten- und Querbelastungen aufnehmen.Handelt es sich um gekrümmte Elemente, so spricht man von Schalen. Scheiben, Plattenund Schalen werden zusammenfassend auch als Flächentragwerke bezeichnet.
1.6.2 Belastungs– und Lagerungsarten
Eingeprägte Kräfte belasten ein Tragwerk, Auflager und Verbindungselemente verhin-dern die Beweglichkeit und ergeben die Reaktionskräfte.
Werden nur Linientragwerke betrachtet, so kommen als Belastungen Kräfte, Momenteund Streckenlasten (Linienlasten) in Frage. In den Gleichgewichtsbedingungen (1.16)erscheinen jedoch nur Kräfte und Momente. Es wird daher im folgenden gezeigt, welcheKraft– und Momentenwirkungen Streckenlasten haben.
Die resultierende Kraft der Streckenlast q(x) im Bereich 0 ≤ x ≤ l beträgt
|Fq| =l∫
0
q(x) dx . (1.30)
18 Statik
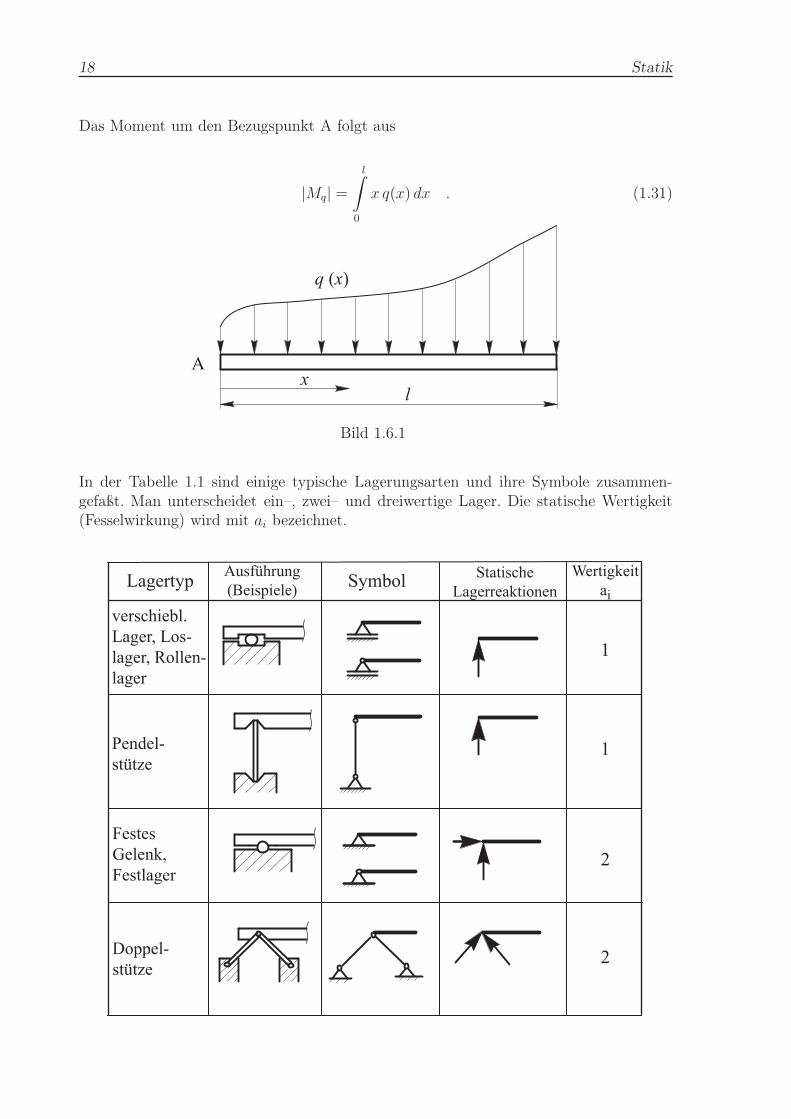
Das Moment um den Bezugspunkt A folgt aus
|Mq| =l∫
0
x q(x) dx . (1.31)
A
lx
q (x)
Bild 1.6.1
In der Tabelle 1.1 sind einige typische Lagerungsarten und ihre Symbole zusammen-gefaßt. Man unterscheidet ein–, zwei– und dreiwertige Lager. Die statische Wertigkeit(Fesselwirkung) wird mit ai bezeichnet.
verschiebl.
Lager, Los-
lager, Rollen-
lager
Pendel-
stütze
Festes
Gelenk,
Festlager
Doppel-
stütze
1
1
2
2
Wertigkeit
aiSymbol
Statische
Lagerreaktionen
Ausführung
(Beispiele)Lagertyp
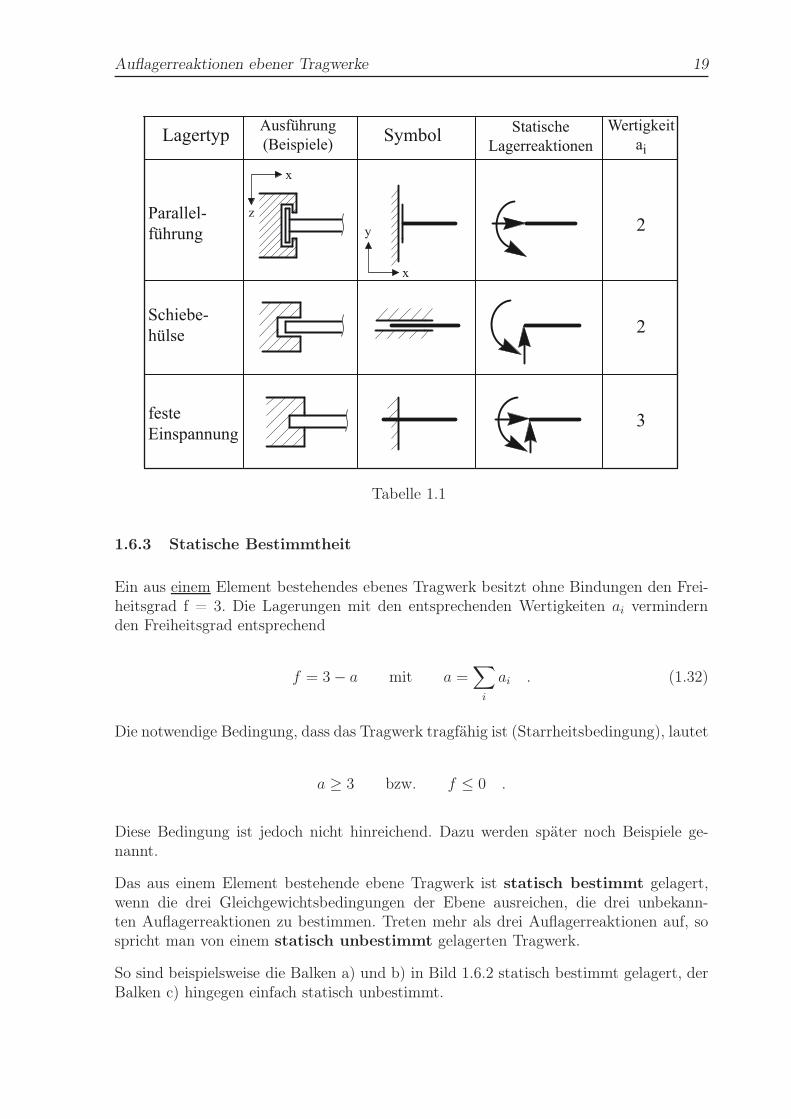
Auflagerreaktionen ebener Tragwerke 19
Parallel-
führung
Schiebe-
hülse
feste
Einspannung
2
2
3
Wertigkeit
aiSymbol
Statische
Lagerreaktionen
Ausführung
(Beispiele)Lagertyp
Tabelle 1.1
1.6.3 Statische Bestimmtheit
Ein aus einem Element bestehendes ebenes Tragwerk besitzt ohne Bindungen den Frei-heitsgrad f = 3. Die Lagerungen mit den entsprechenden Wertigkeiten ai vermindernden Freiheitsgrad entsprechend
f = 3− a mit a =∑
i
ai . (1.32)
Die notwendige Bedingung, dass das Tragwerk tragfähig ist (Starrheitsbedingung), lautet
a ≥ 3 bzw. f ≤ 0 .
Diese Bedingung ist jedoch nicht hinreichend. Dazu werden später noch Beispiele ge-nannt.
Das aus einem Element bestehende ebene Tragwerk ist statisch bestimmt gelagert,wenn die drei Gleichgewichtsbedingungen der Ebene ausreichen, die drei unbekann-ten Auflagerreaktionen zu bestimmen. Treten mehr als drei Auflagerreaktionen auf, sospricht man von einem statisch unbestimmt gelagerten Tragwerk.
So sind beispielsweise die Balken a) und b) in Bild 1.6.2 statisch bestimmt gelagert, derBalken c) hingegen einfach statisch unbestimmt.
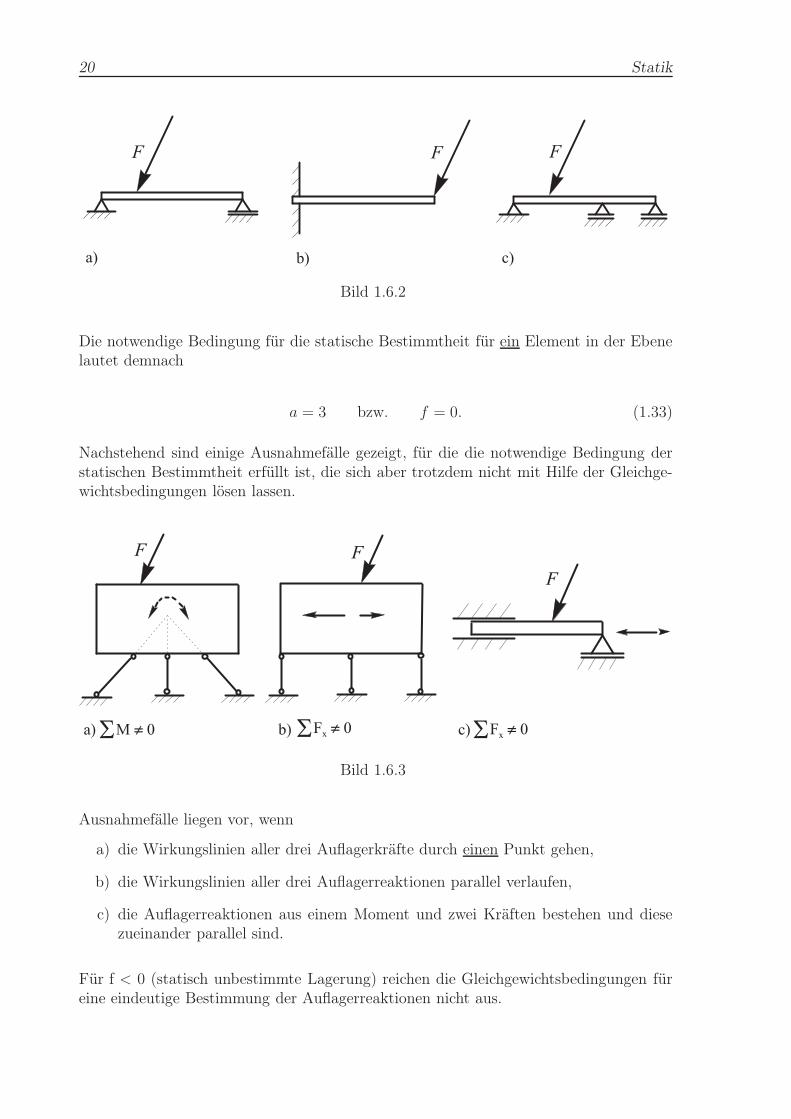
20 Statik
F F F
a) b) c)
Bild 1.6.2
Die notwendige Bedingung für die statische Bestimmtheit für ein Element in der Ebenelautet demnach
a = 3 bzw. f = 0. (1.33)
Nachstehend sind einige Ausnahmefälle gezeigt, für die die notwendige Bedingung derstatischen Bestimmtheit erfüllt ist, die sich aber trotzdem nicht mit Hilfe der Gleichge-wichtsbedingungen lösen lassen.
Bild 1.6.3
Ausnahmefälle liegen vor, wenn
a) die Wirkungslinien aller drei Auflagerkräfte durch einen Punkt gehen,
b) die Wirkungslinien aller drei Auflagerreaktionen parallel verlaufen,
c) die Auflagerreaktionen aus einem Moment und zwei Kräften bestehen und diesezueinander parallel sind.
Für f < 0 (statisch unbestimmte Lagerung) reichen die Gleichgewichtsbedingungen füreine eindeutige Bestimmung der Auflagerreaktionen nicht aus.
Auflagerreaktionen ebener Tragwerke 21
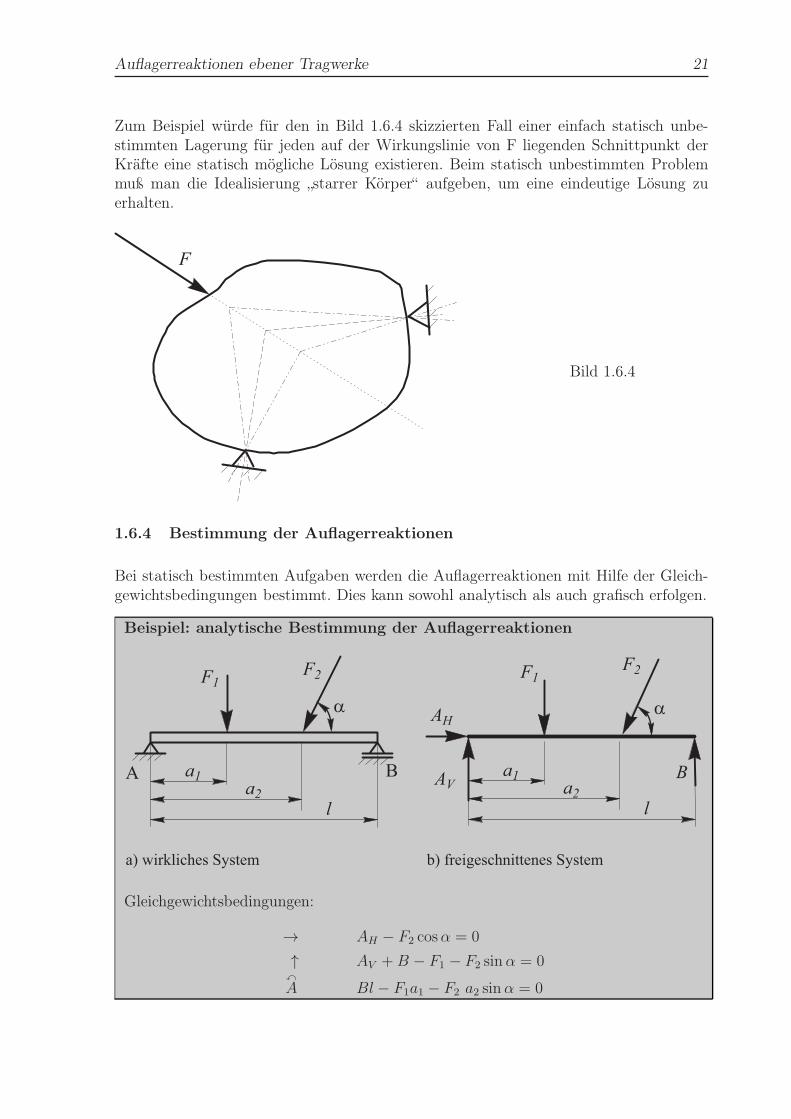
Zum Beispiel würde für den in Bild 1.6.4 skizzierten Fall einer einfach statisch unbe-stimmten Lagerung für jeden auf der Wirkungslinie von F liegenden Schnittpunkt derKräfte eine statisch mögliche Lösung existieren. Beim statisch unbestimmten Problemmuß man die Idealisierung „starrer Körper“ aufgeben, um eine eindeutige Lösung zuerhalten.
Bild 1.6.4
1.6.4 Bestimmung der Auflagerreaktionen
Bei statisch bestimmten Aufgaben werden die Auflagerreaktionen mit Hilfe der Gleich-gewichtsbedingungen bestimmt. Dies kann sowohl analytisch als auch grafisch erfolgen.
Beispiel: analytische Bestimmung der Auflagerreaktionen
A
α α
a1
F1F2 F1
AH
AV
F2
a2
l
a1a2
l
a) wirkliches System b) freigeschnittenes System
B B
Gleichgewichtsbedingungen:
→ AH − F2 cosα = 0
↑ AV +B − F1 − F2 sinα = 0x
A Bl − F1a1 − F2 a2 sinα = 0
22 Statik
Aus den 3 Gleichungen ergeben sich die 3 Unbekannten:
AH = F2 cosα
AV = F1
(
1− a1l
)
+ F2 sinα(
1− a2l
)
B = F1a1l+ F2 sinα
a2l
Durch ein Momentengleichgewicht um B
x
B − AV l + F1(l − a1) + F2 sinα(l − a2) = 0
anstelle des Gleichgewichts der vertikalen Kräfte läßt sich gleich ein entkoppeltesGleichungssystem bilden.
Man kann das Aufstellen einer weiteren Momentengleichgewichtsbedingung auch alsKontrolle der Berechnung benutzen.
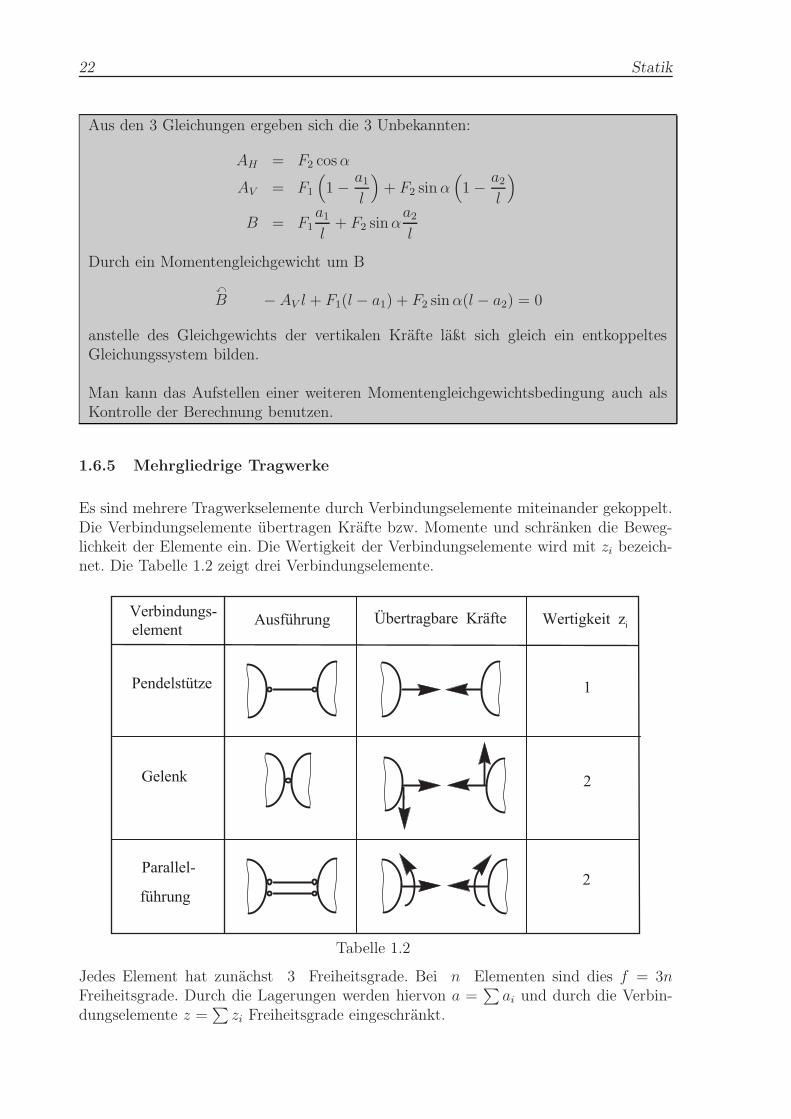
1.6.5 Mehrgliedrige Tragwerke
Es sind mehrere Tragwerkselemente durch Verbindungselemente miteinander gekoppelt.Die Verbindungselemente übertragen Kräfte bzw. Momente und schränken die Beweg-lichkeit der Elemente ein. Die Wertigkeit der Verbindungselemente wird mit zi bezeich-net. Die Tabelle 1.2 zeigt drei Verbindungselemente.
Wertigkeit ziVerbindungs-element
Ausführung Übertragbare Kräfte
Pendelstütze
Gelenk
Parallel-
1
2
2führung
Tabelle 1.2
Jedes Element hat zunächst 3 Freiheitsgrade. Bei n Elementen sind dies f = 3nFreiheitsgrade. Durch die Lagerungen werden hiervon a =
∑ai und durch die Verbin-
dungselemente z =∑zi Freiheitsgrade eingeschränkt.
Auflagerreaktionen ebener Tragwerke 23
Somit gilt:
f = 3n− (a+ z) (1.34)
Die notwendige Bedingung für die Tragfähigkeit des Systems lautet f ≤ 0. Einstatisch bestimmtes System muß die Bedingung f = 0 erfüllen.
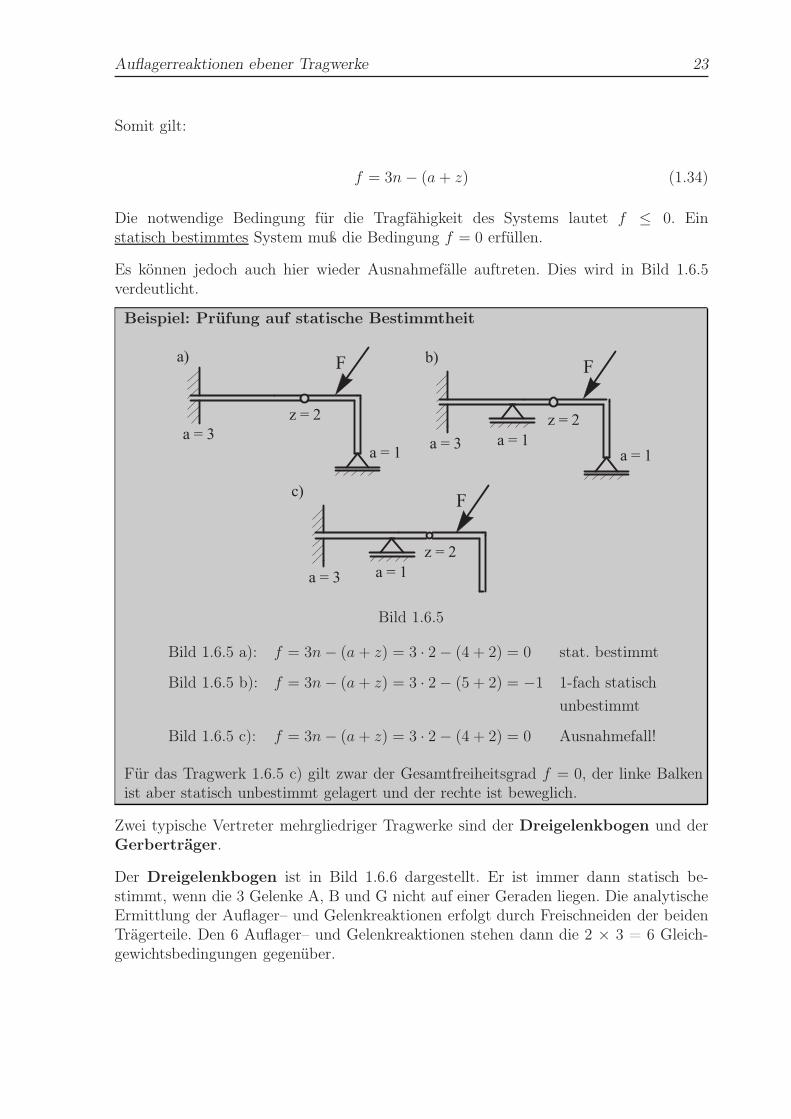
Es können jedoch auch hier wieder Ausnahmefälle auftreten. Dies wird in Bild 1.6.5verdeutlicht.
Beispiel: Prüfung auf statische Bestimmtheit
F
z = 2
a = 3
a = 1a = 3
z = 2
a = 1a = 1
a = 1
z = 2
a = 3
F
F
a) b)
c)
Bild 1.6.5
Bild 1.6.5 a): f = 3n− (a + z) = 3 · 2− (4 + 2) = 0 stat. bestimmt
Bild 1.6.5 b): f = 3n− (a + z) = 3 · 2− (5 + 2) = −1 1-fach statisch
unbestimmt
Bild 1.6.5 c): f = 3n− (a + z) = 3 · 2− (4 + 2) = 0 Ausnahmefall!
Für das Tragwerk 1.6.5 c) gilt zwar der Gesamtfreiheitsgrad f = 0, der linke Balkenist aber statisch unbestimmt gelagert und der rechte ist beweglich.
Zwei typische Vertreter mehrgliedriger Tragwerke sind der Dreigelenkbogen und derGerberträger.
Der Dreigelenkbogen ist in Bild 1.6.6 dargestellt. Er ist immer dann statisch be-stimmt, wenn die 3 Gelenke A, B und G nicht auf einer Geraden liegen. Die analytischeErmittlung der Auflager– und Gelenkreaktionen erfolgt durch Freischneiden der beidenTrägerteile. Den 6 Auflager– und Gelenkreaktionen stehen dann die 2 × 3 = 6 Gleich-gewichtsbedingungen gegenüber.
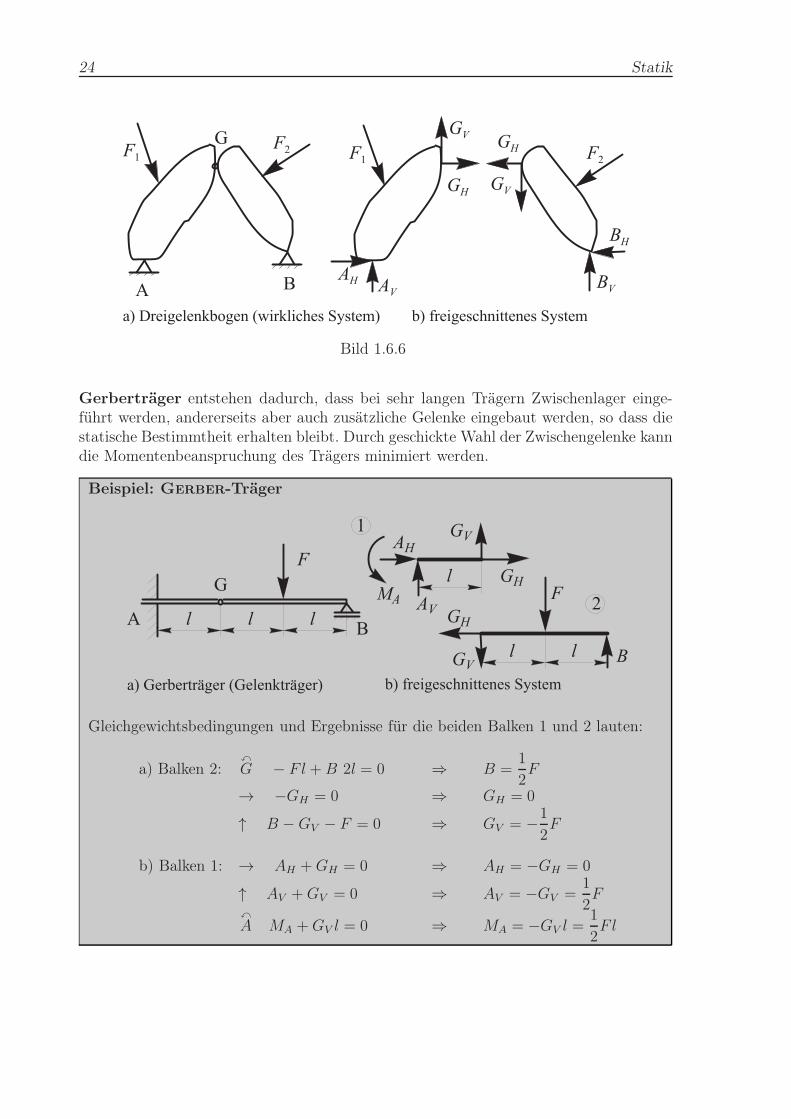
24 Statik
G
A BAH AV
GV
GH
BV
BH
F1 F2
GH
GV
F2F1
a) Dreigelenkbogen (wirkliches System) b) freigeschnittenes System
Bild 1.6.6
Gerberträger entstehen dadurch, dass bei sehr langen Trägern Zwischenlager einge-führt werden, andererseits aber auch zusätzliche Gelenke eingebaut werden, so dass diestatische Bestimmtheit erhalten bleibt. Durch geschickte Wahl der Zwischengelenke kanndie Momentenbeanspruchung des Trägers minimiert werden.
Beispiel: Gerber-Träger
2
1
a) Gerberträger (Gelenkträger) b) freigeschnittenes System
G
BA
AH
MA AV
GV
GH
GH
GV
F
F
B
l l l
l
l l
Gleichgewichtsbedingungen und Ergebnisse für die beiden Balken 1 und 2 lauten:
a) Balken 2:x
G − F l +B 2l = 0 ⇒ B =1
2F
→ −GH = 0 ⇒ GH = 0
↑ B −GV − F = 0 ⇒ GV = −1
2F
b) Balken 1: → AH +GH = 0 ⇒ AH = −GH = 0
↑ AV +GV = 0 ⇒ AV = −GV =1
2F
x
A MA +GV l = 0 ⇒ MA = −GV l =1
2F l
Schnittreaktionen eines Balkens 25
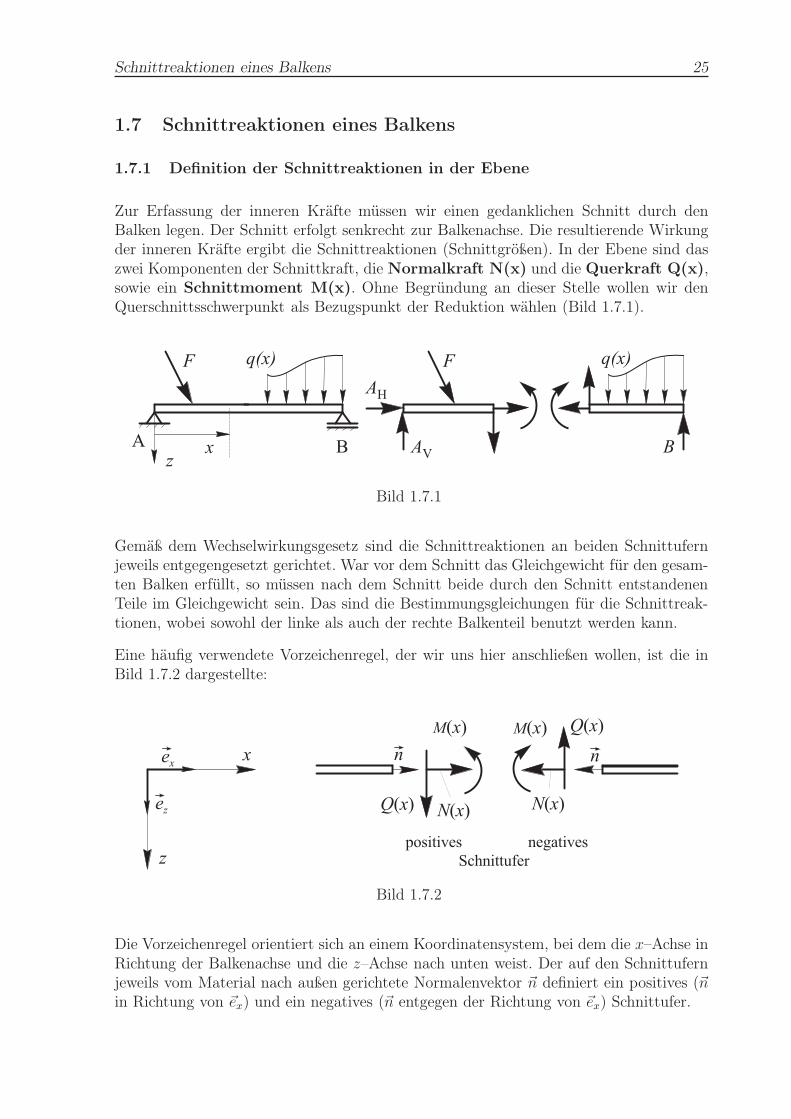
1.7 Schnittreaktionen eines Balkens
1.7.1 Definition der Schnittreaktionen in der Ebene
Zur Erfassung der inneren Kräfte müssen wir einen gedanklichen Schnitt durch denBalken legen. Der Schnitt erfolgt senkrecht zur Balkenachse. Die resultierende Wirkungder inneren Kräfte ergibt die Schnittreaktionen (Schnittgrößen). In der Ebene sind daszwei Komponenten der Schnittkraft, die Normalkraft N(x) und die Querkraft Q(x),sowie ein Schnittmoment M(x). Ohne Begründung an dieser Stelle wollen wir denQuerschnittsschwerpunkt als Bezugspunkt der Reduktion wählen (Bild 1.7.1).
xz
q(x) q(x)
A B BAV
AH
F F
Bild 1.7.1
Gemäß dem Wechselwirkungsgesetz sind die Schnittreaktionen an beiden Schnittufernjeweils entgegengesetzt gerichtet. War vor dem Schnitt das Gleichgewicht für den gesam-ten Balken erfüllt, so müssen nach dem Schnitt beide durch den Schnitt entstandenenTeile im Gleichgewicht sein. Das sind die Bestimmungsgleichungen für die Schnittreak-tionen, wobei sowohl der linke als auch der rechte Balkenteil benutzt werden kann.
Eine häufig verwendete Vorzeichenregel, der wir uns hier anschließen wollen, ist die inBild 1.7.2 dargestellte:
xex
z
ez N(x)Q(x)
n
M(x)
positives negativesSchnittufer
n
M(x) Q(x)
N(x)
Bild 1.7.2
Die Vorzeichenregel orientiert sich an einem Koordinatensystem, bei dem die x–Achse inRichtung der Balkenachse und die z–Achse nach unten weist. Der auf den Schnittufernjeweils vom Material nach außen gerichtete Normalenvektor ~n definiert ein positives (~nin Richtung von ~ex) und ein negatives (~n entgegen der Richtung von ~ex) Schnittufer.

26 Statik
Die Regel lautet:
Positive Schnittgrößen zeigen am positiven Schnittufer in positi-ve Koordinatenrichtungen und am negativen Schnittufer in ne-gative Koordinatenrichtungen.
0
q(x)
n(x)
M(x)
N(x)
M(x+dx)=M(x)+dM(x)
N(x+dx)=N(x)+dN(x)
Q(x+dx)=Q(x)+dQ(x)
Q(x)
x dx
Bild 1.7.3
Schneidet man ein differentiell klei-nes Teilchen des Balkens herausund stellt die Gleichgewichtsbedin-gungen für dieses Teilchen auf, er-hält man einen differentiellen Zu-sammenhang zwischen Strecken-last q(x), Querkraft Q(x) undMoment M(x).
→ −N(x) + [N(x) + dN(x)] + n(x)dx = 0
↑ Q(x)− [Q(x) + dQ(x)]− q(x)dx = 0x
0 −M(x) + [M(x) + dM(x)]−Q(x)dx
2− [Q(x) + dQ(x)]
dx
2= 0
(1.35)
Daraus folgt:
dN(x) + n(x)dx = 0 ⇒
dQ(x) + q(x)dx = 0 ⇒
dM(x)−Q(x)dx = 0 ⇒
dN(x)
dx= −n(x)
dQ(x)
dx= −q(x)
Q(x) = −∫
q(x) dx
dM(x)
dx= +Q(x)
M(x) = +
∫
Q(x) dx .
(1.36)
(1.36) ermöglicht die Ermittlung der Schnittgrößen Q(x) und M(x) durch ein– bzw.zweimalige Integration der Streckenlast q(x).
1.7.2 Gerader Balken
Bei geraden Balken liegen alle Querschnittsschwerpunkte auf einer Geraden. Als Bela-stung können Einzelkräfte, Momente und kontinuierlich verteilte Lasten (Streckenlasten)vorkommen. Schräge Einzellasten zerlegt man zweckmäßigerweise in Komponenten inLängs– und Querrichtung des Balkens.
Schnittreaktionen eines Balkens 27
Zur Bestimmung der Schnittreaktionen dienen entweder die Gleichgewichtsbedingungenfür den linken oder den rechten Balkenteil nach einem entsprechenden Schnitt oder dieBeziehungen (1.36). Beide Vorgehensweisen werden an je einem Beispiel erklärt.
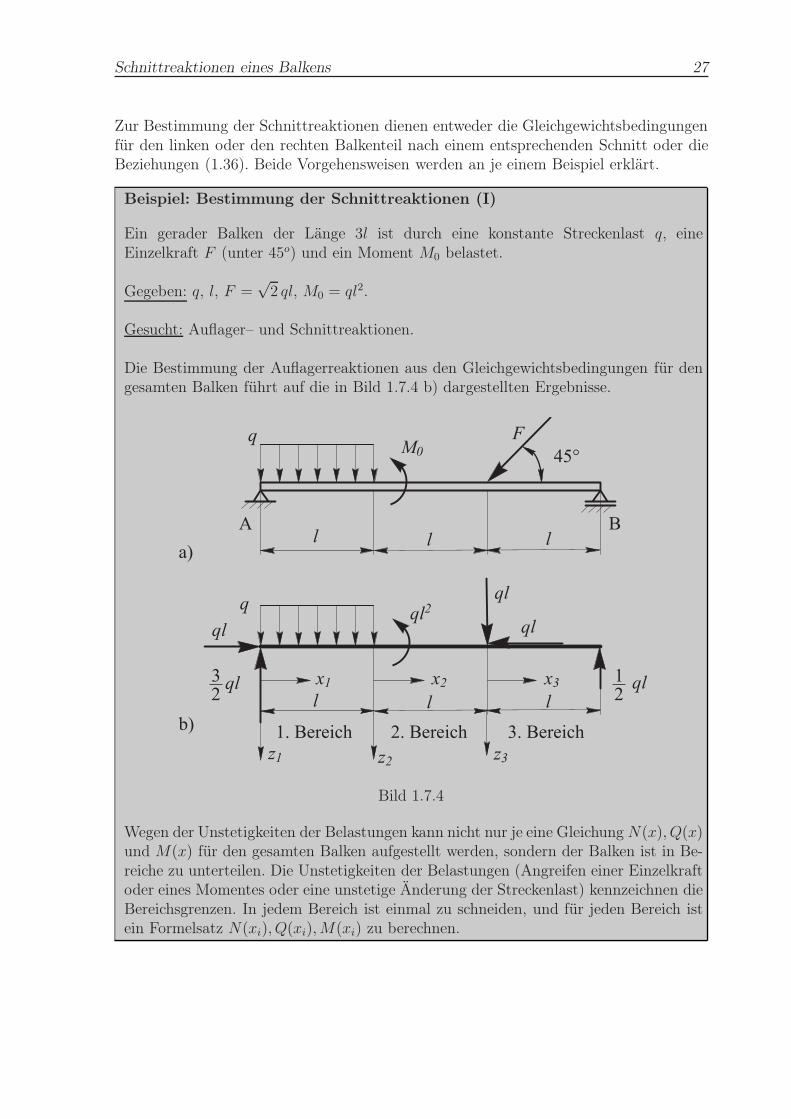
Beispiel: Bestimmung der Schnittreaktionen (I)
Ein gerader Balken der Länge 3l ist durch eine konstante Streckenlast q, eineEinzelkraft F (unter 45o) und ein Moment M0 belastet.
Gegeben: q, l, F =√2 ql, M0 = ql2.
Gesucht: Auflager– und Schnittreaktionen.
Die Bestimmung der Auflagerreaktionen aus den Gleichgewichtsbedingungen für dengesamten Balken führt auf die in Bild 1.7.4 b) dargestellten Ergebnisse.
qlql2
ql ql
qlql
M0q
l ll
l ll
F
q
x1
z3z2z1
x2 x3
A B
45°
a)
1. Bereichb)
32
2. Bereich 3. Bereich
12
Bild 1.7.4
Wegen der Unstetigkeiten der Belastungen kann nicht nur je eine Gleichung N(x), Q(x)und M(x) für den gesamten Balken aufgestellt werden, sondern der Balken ist in Be-reiche zu unterteilen. Die Unstetigkeiten der Belastungen (Angreifen einer Einzelkraftoder eines Momentes oder eine unstetige Änderung der Streckenlast) kennzeichnen dieBereichsgrenzen. In jedem Bereich ist einmal zu schneiden, und für jeden Bereich istein Formelsatz N(xi), Q(xi),M(xi) zu berechnen.
28 Statik
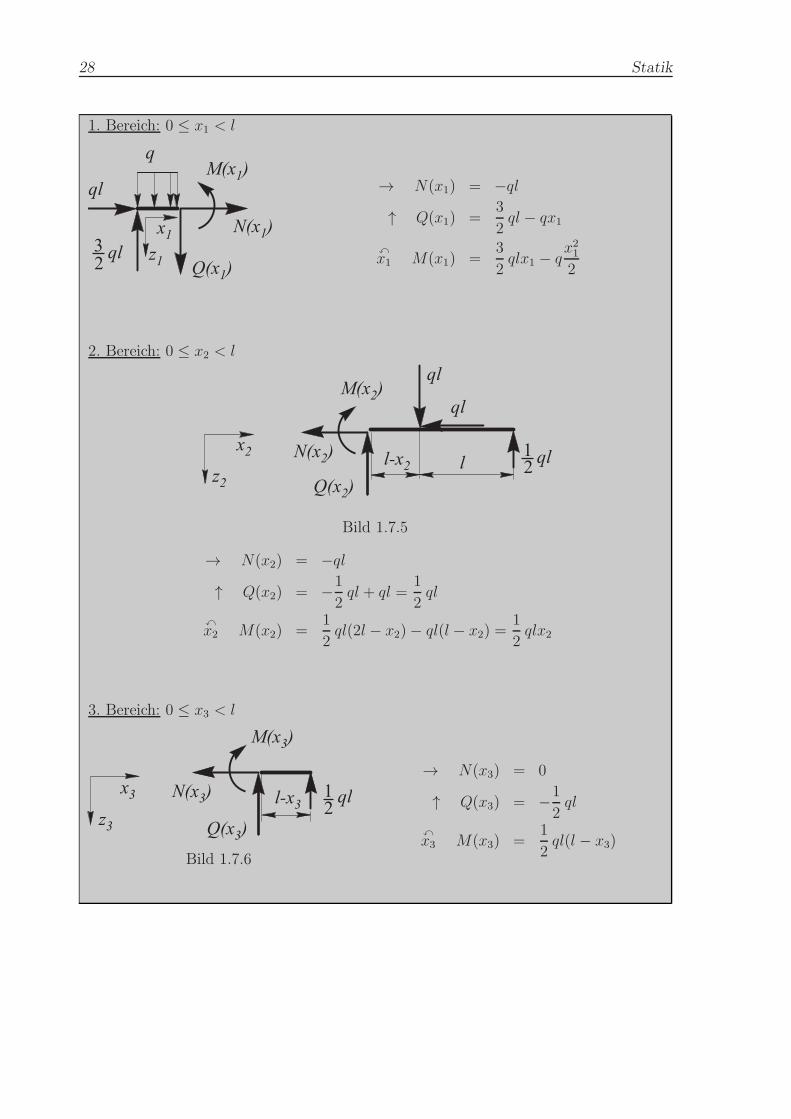
1. Bereich: 0 ≤ x1 < l
M(x1)q
ql
32
ql
N(x1)
Q(x1)
x1
z1
→ N(x1) = −ql
↑ Q(x1) =3
2ql − qx1
x
x1 M(x1) =3
2qlx1 − q
x212
2. Bereich: 0 ≤ x2 < l
12l-x2
x2
z2
ql
l
ql
ql
Q(x2)
N(x2)
M(x2)
Bild 1.7.5
→ N(x2) = −ql
↑ Q(x2) = −1
2ql + ql =
1
2ql
x
x2 M(x2) =1
2ql(2l − x2)− ql(l − x2) =
1
2qlx2
3. Bereich: 0 ≤ x3 < l
ql12
l-x3
Q(x3)
N(x3)x3
z3
M(x3)
Bild 1.7.6
→ N(x3) = 0
↑ Q(x3) = −1
2ql
x
x3 M(x3) =1
2ql(l − x3)
Schnittreaktionen eines Balkens 29
N(x) Q(x)
- ql
ql32
ql
ql²ql²M(x)
12
ql12
12
- -
+
+
+
Bild 1.7.7
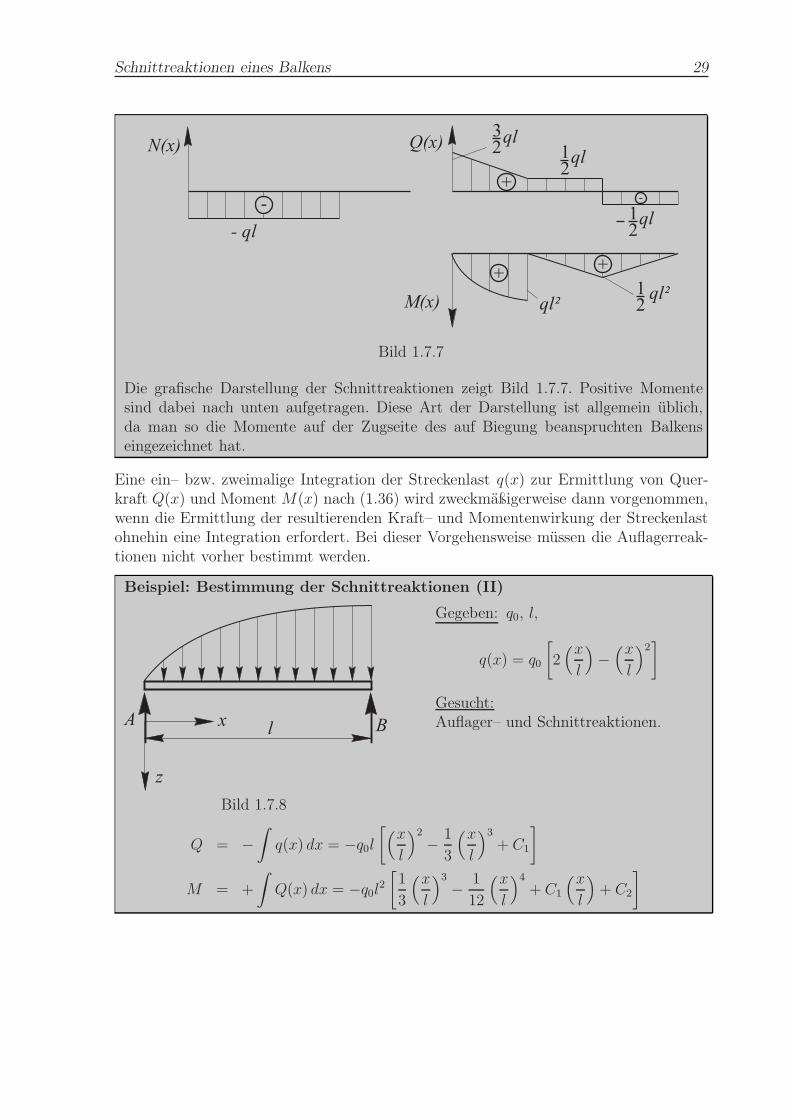
Die grafische Darstellung der Schnittreaktionen zeigt Bild 1.7.7. Positive Momentesind dabei nach unten aufgetragen. Diese Art der Darstellung ist allgemein üblich,da man so die Momente auf der Zugseite des auf Biegung beanspruchten Balkenseingezeichnet hat.
Eine ein– bzw. zweimalige Integration der Streckenlast q(x) zur Ermittlung von Quer-kraft Q(x) und Moment M(x) nach (1.36) wird zweckmäßigerweise dann vorgenommen,wenn die Ermittlung der resultierenden Kraft– und Momentenwirkung der Streckenlastohnehin eine Integration erfordert. Bei dieser Vorgehensweise müssen die Auflagerreak-tionen nicht vorher bestimmt werden.
Beispiel: Bestimmung der Schnittreaktionen (II)
lx
z
A B
Bild 1.7.8
Gegeben: q0, l,
q(x) = q0
[
2(x
l
)
−(x
l
)2]
Gesucht:Auflager– und Schnittreaktionen.
Q = −∫
q(x) dx = −q0l[(x
l
)2
− 1
3
(x
l
)3
+ C1
]
M = +
∫
Q(x) dx = −q0l2[1
3
(x
l
)3
− 1
12
(x
l
)4
+ C1
(x
l
)
+ C2
]
30 Statik
Die Integrationskonstanten C1 und C2 folgen aus den Randbedingungen
M(x = 0) = 0 und M(x = l) = 0 .
Das führt auf C2 = 0 und C1 = −1
4sowie
Q = q0l
[1
4−(x
l
)2
+1
3
(x
l
)3]
M = q0l2
[1
4
(x
l
)
− 1
3
(x
l
)3
+1
12
(x
l
)4]
.
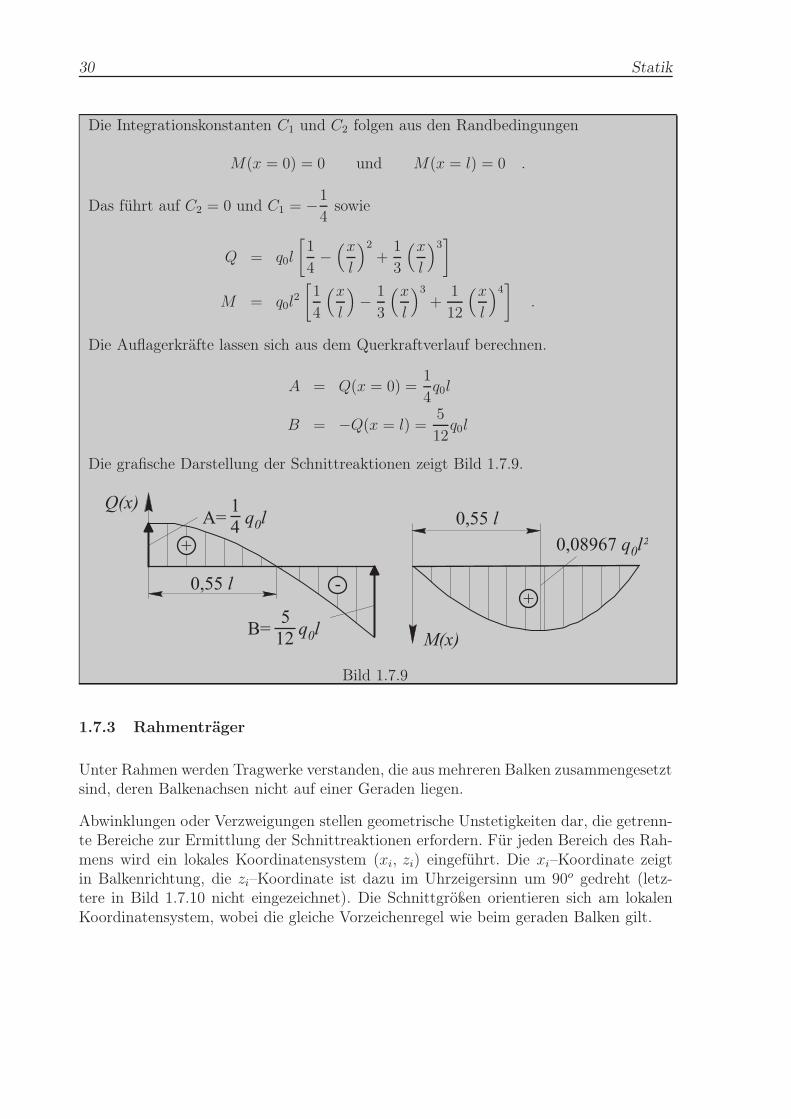
Die Auflagerkräfte lassen sich aus dem Querkraftverlauf berechnen.
A = Q(x = 0) =1
4q0l
B = −Q(x = l) =5
12q0l
Die grafische Darstellung der Schnittreaktionen zeigt Bild 1.7.9.
-+
+
Q(x)
M(x)
0,08967 q0l²
A= q0l1
4
B= q0l
0,55 l
0,55 l
5
12
Bild 1.7.9
1.7.3 Rahmenträger
Unter Rahmen werden Tragwerke verstanden, die aus mehreren Balken zusammengesetztsind, deren Balkenachsen nicht auf einer Geraden liegen.
Abwinklungen oder Verzweigungen stellen geometrische Unstetigkeiten dar, die getrenn-te Bereiche zur Ermittlung der Schnittreaktionen erfordern. Für jeden Bereich des Rah-mens wird ein lokales Koordinatensystem (xi, zi) eingeführt. Die xi–Koordinate zeigtin Balkenrichtung, die zi–Koordinate ist dazu im Uhrzeigersinn um 90o gedreht (letz-tere in Bild 1.7.10 nicht eingezeichnet). Die Schnittgrößen orientieren sich am lokalenKoordinatensystem, wobei die gleiche Vorzeichenregel wie beim geraden Balken gilt.
Schnittreaktionen eines Balkens 31
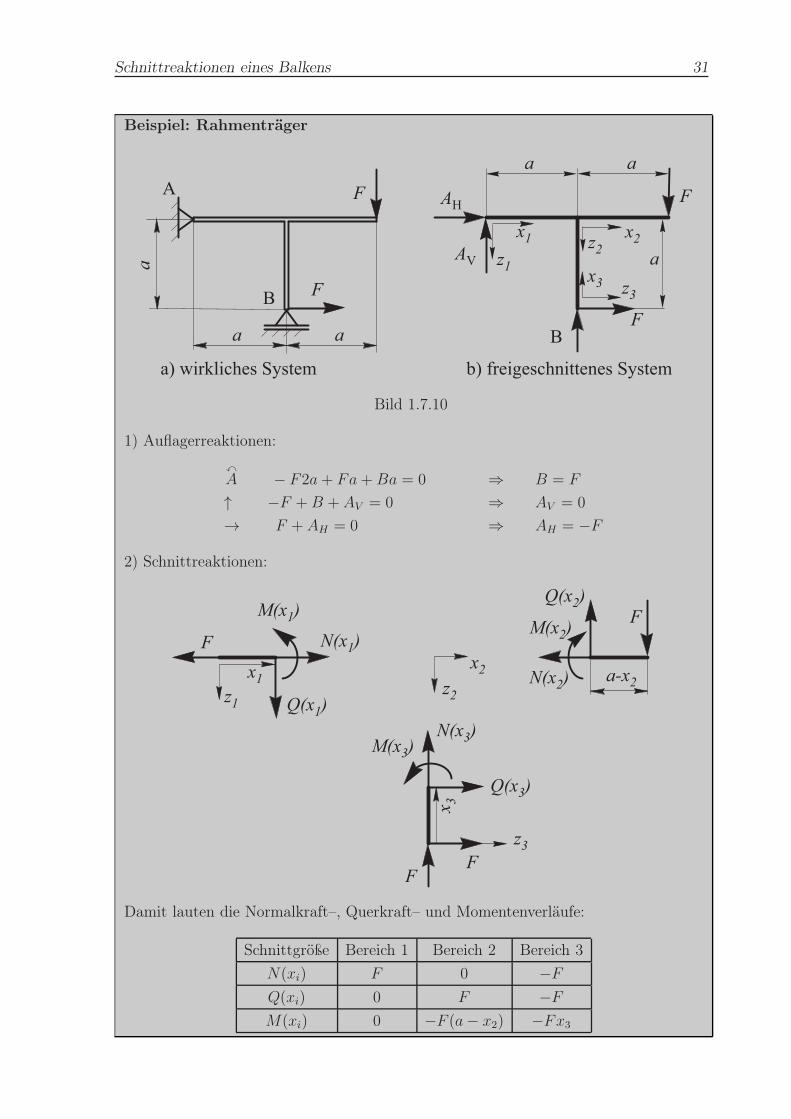
Beispiel: Rahmenträger
x1
z1
x2z2
x3 z3
F F
aa
aa
aa
F
F
AV
AHA
B
B
a) wirkliches System b) freigeschnittenes System
Bild 1.7.10
1) Auflagerreaktionen:
x
A − F2a+ Fa+Ba = 0 ⇒ B = F
↑ −F +B + AV = 0 ⇒ AV = 0
→ F + AH = 0 ⇒ AH = −F
2) Schnittreaktionen:
x1
z1
x2
z2
z3
x 3
a-x2
F
F
F
F
Q(x1)
Q(x2)
Q(x3)
N(x1)
N(x2)
N(x3)
M(x1)M(x2)
M(x3)
Damit lauten die Normalkraft–, Querkraft– und Momentenverläufe:
Schnittgröße Bereich 1 Bereich 2 Bereich 3
N(xi) F 0 −FQ(xi) 0 F −FM(xi) 0 −F (a− x2) −Fx3
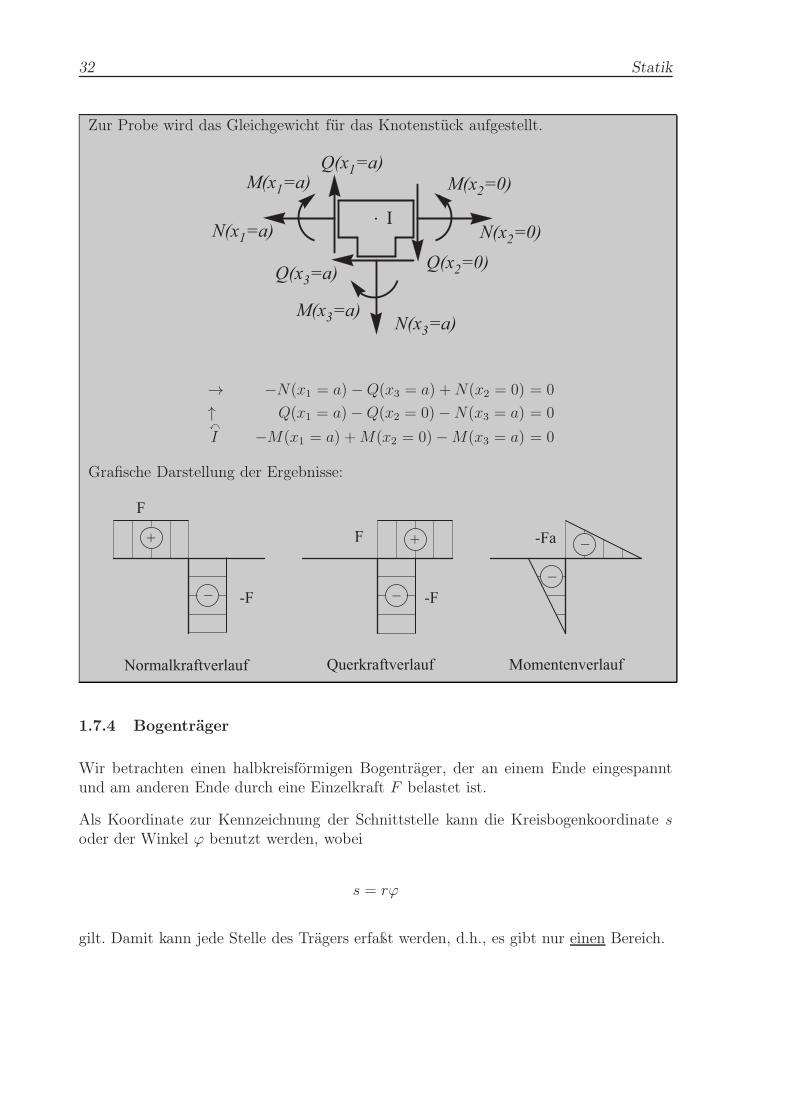
32 Statik
Zur Probe wird das Gleichgewicht für das Knotenstück aufgestellt.
M(x1=a)
N(x1=a)
Q(x1=a)
Q(x2=0)
N(x2=0)
N(x3=a)
Q(x3=a)
M(x3=a)
M(x2=0)
→ −N(x1 = a)−Q(x3 = a) +N(x2 = 0) = 0
↑ Q(x1 = a)−Q(x2 = 0)−N(x3 = a) = 0x
I −M(x1 = a) +M(x2 = 0)−M(x3 = a) = 0
Grafische Darstellung der Ergebnisse:
Normalkraftverlauf Querkraftverlauf Momentenverlauf
F
F -Fa
-F
+ _+
_ _
_
-F
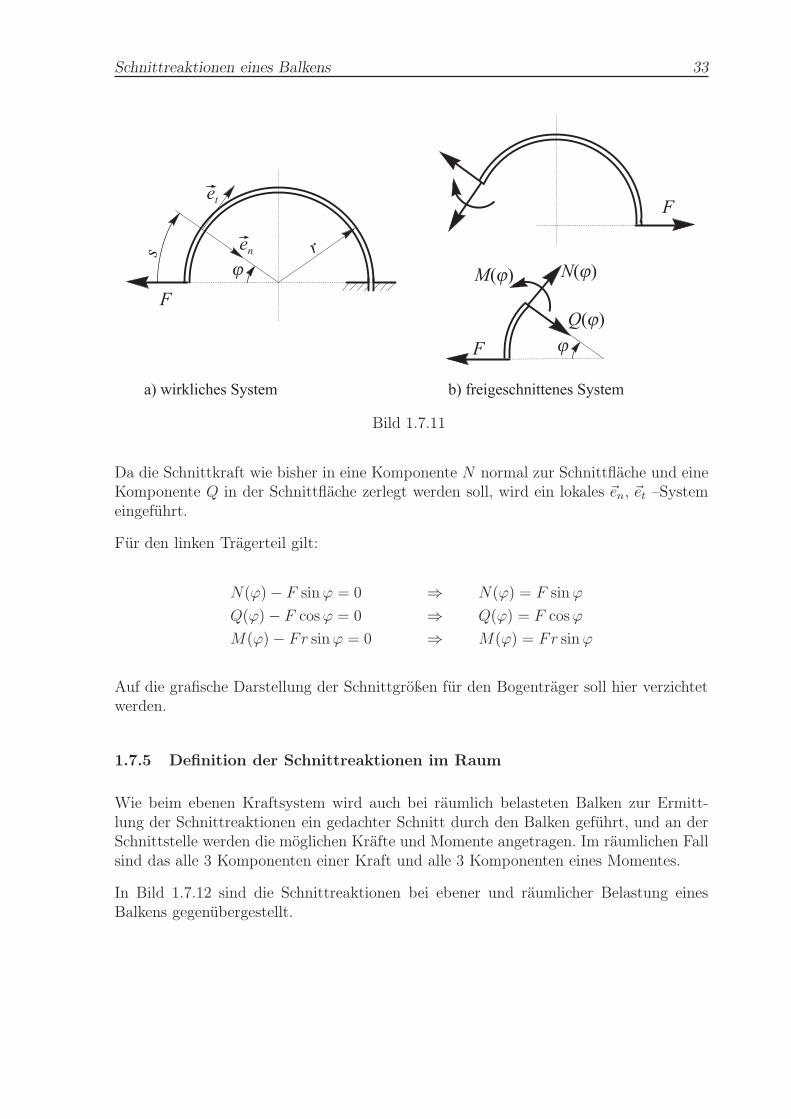
1.7.4 Bogenträger
Wir betrachten einen halbkreisförmigen Bogenträger, der an einem Ende eingespanntund am anderen Ende durch eine Einzelkraft F belastet ist.
Als Koordinate zur Kennzeichnung der Schnittstelle kann die Kreisbogenkoordinate soder der Winkel ϕ benutzt werden, wobei
s = rϕ
gilt. Damit kann jede Stelle des Trägers erfaßt werden, d.h., es gibt nur einen Bereich.
Schnittreaktionen eines Balkens 33
s
et
en
jr
F
F
j
Q(j)
M(j) N(j)
F
a) wirkliches System b) freigeschnittenes System
Bild 1.7.11
Da die Schnittkraft wie bisher in eine Komponente N normal zur Schnittfläche und eineKomponente Q in der Schnittfläche zerlegt werden soll, wird ein lokales ~en, ~et –Systemeingeführt.
Für den linken Trägerteil gilt:
N(ϕ)− F sinϕ = 0
Q(ϕ)− F cosϕ = 0
M(ϕ)− Fr sinϕ = 0
⇒ N(ϕ) = F sinϕ
⇒ Q(ϕ) = F cosϕ
⇒ M(ϕ) = Fr sinϕ
Auf die grafische Darstellung der Schnittgrößen für den Bogenträger soll hier verzichtetwerden.
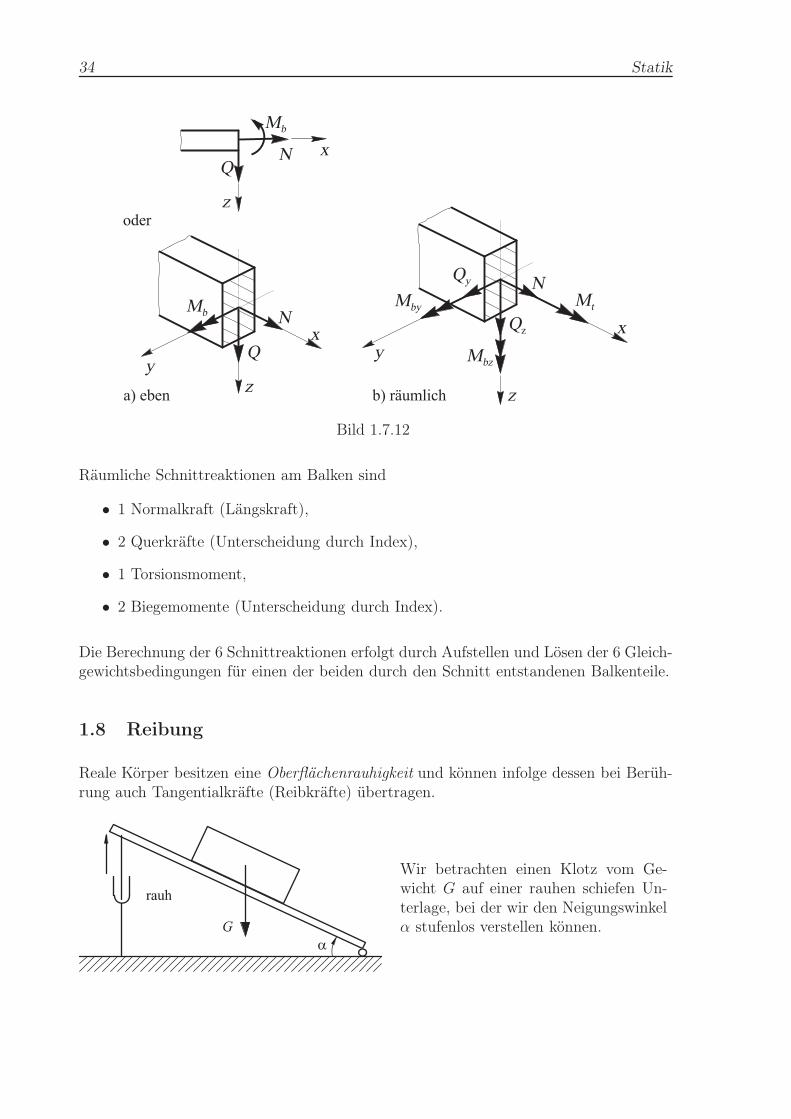
1.7.5 Definition der Schnittreaktionen im Raum
Wie beim ebenen Kraftsystem wird auch bei räumlich belasteten Balken zur Ermitt-lung der Schnittreaktionen ein gedachter Schnitt durch den Balken geführt, und an derSchnittstelle werden die möglichen Kräfte und Momente angetragen. Im räumlichen Fallsind das alle 3 Komponenten einer Kraft und alle 3 Komponenten eines Momentes.
In Bild 1.7.12 sind die Schnittreaktionen bei ebener und räumlicher Belastung einesBalkens gegenübergestellt.
34 Statik
x x
zz
yy
Mby
Mbz
Mt
Qz
Qy N
NMb
Q
a) eben b) räumlich
xN
Mb
z
Q
oder
Bild 1.7.12
Räumliche Schnittreaktionen am Balken sind
• 1 Normalkraft (Längskraft),
• 2 Querkräfte (Unterscheidung durch Index),
• 1 Torsionsmoment,
• 2 Biegemomente (Unterscheidung durch Index).
Die Berechnung der 6 Schnittreaktionen erfolgt durch Aufstellen und Lösen der 6 Gleich-gewichtsbedingungen für einen der beiden durch den Schnitt entstandenen Balkenteile.
1.8 Reibung
Reale Körper besitzen eine Oberflächenrauhigkeit und können infolge dessen bei Berüh-rung auch Tangentialkräfte (Reibkräfte) übertragen.
Wir betrachten einen Klotz vom Ge-wicht G auf einer rauhen schiefen Un-terlage, bei der wir den Neigungswinkelα stufenlos verstellen können.
Reibung 35
1.8.1 Haftreibung
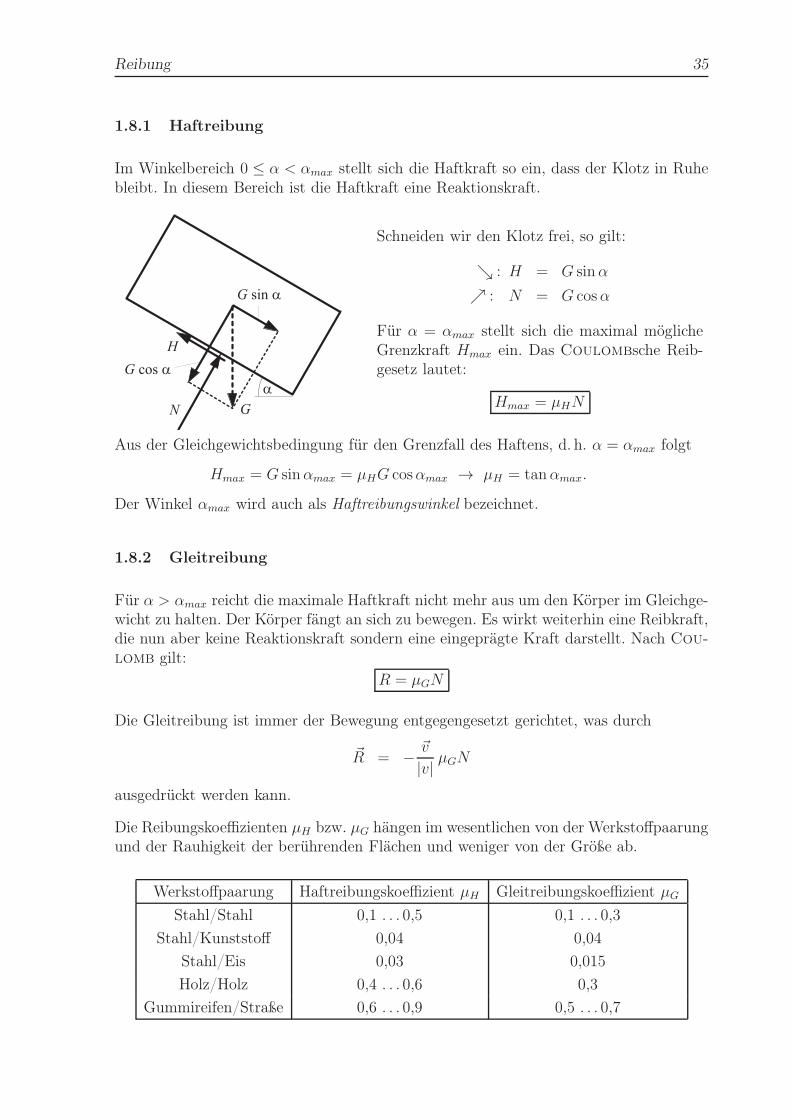
Im Winkelbereich 0 ≤ α < αmax stellt sich die Haftkraft so ein, dass der Klotz in Ruhebleibt. In diesem Bereich ist die Haftkraft eine Reaktionskraft.
G
G cos α
α
G sin α
N
H
Schneiden wir den Klotz frei, so gilt:
ց : H = G sinα
ր : N = G cosα
Für α = αmax stellt sich die maximal möglicheGrenzkraft Hmax ein. Das Coulombsche Reib-gesetz lautet:
Hmax = µHN
Aus der Gleichgewichtsbedingung für den Grenzfall des Haftens, d. h. α = αmax folgt
Hmax = G sinαmax = µHG cosαmax → µH = tanαmax.
Der Winkel αmax wird auch als Haftreibungswinkel bezeichnet.
1.8.2 Gleitreibung
Für α > αmax reicht die maximale Haftkraft nicht mehr aus um den Körper im Gleichge-wicht zu halten. Der Körper fängt an sich zu bewegen. Es wirkt weiterhin eine Reibkraft,die nun aber keine Reaktionskraft sondern eine eingeprägte Kraft darstellt. Nach Cou-
lomb gilt:R = µGN
Die Gleitreibung ist immer der Bewegung entgegengesetzt gerichtet, was durch
~R = − ~v
|v| µGN
ausgedrückt werden kann.
Die Reibungskoeffizienten µH bzw. µG hängen im wesentlichen von der Werkstoffpaarungund der Rauhigkeit der berührenden Flächen und weniger von der Größe ab.
Werkstoffpaarung Haftreibungskoeffizient µH Gleitreibungskoeffizient µG
Stahl/Stahl 0,1 . . . 0,5 0,1 . . . 0,3
Stahl/Kunststoff 0,04 0,04
Stahl/Eis 0,03 0,015
Holz/Holz 0,4 . . . 0,6 0,3
Gummireifen/Straße 0,6 . . . 0,9 0,5 . . . 0,7
36 Statik
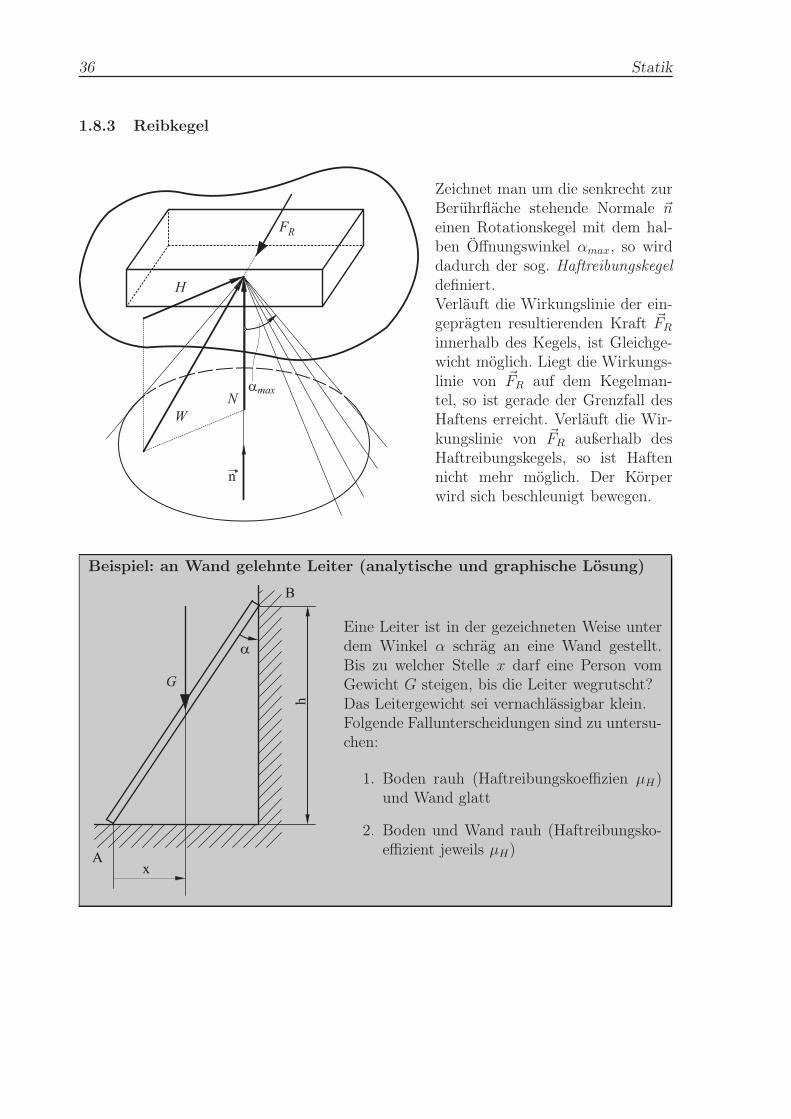
1.8.3 Reibkegel
αmax
FR
H
N
n
W
Zeichnet man um die senkrecht zurBerührfläche stehende Normale ~neinen Rotationskegel mit dem hal-ben Öffnungswinkel αmax, so wirddadurch der sog. Haftreibungskegeldefiniert.Verläuft die Wirkungslinie der ein-geprägten resultierenden Kraft ~FR
innerhalb des Kegels, ist Gleichge-wicht möglich. Liegt die Wirkungs-linie von ~FR auf dem Kegelman-tel, so ist gerade der Grenzfall desHaftens erreicht. Verläuft die Wir-kungslinie von ~FR außerhalb desHaftreibungskegels, so ist Haftennicht mehr möglich. Der Körperwird sich beschleunigt bewegen.
Beispiel: an Wand gelehnte Leiter (analytische und graphische Lösung)
Eine Leiter ist in der gezeichneten Weise unterdem Winkel α schräg an eine Wand gestellt.Bis zu welcher Stelle x darf eine Person vomGewicht G steigen, bis die Leiter wegrutscht?Das Leitergewicht sei vernachlässigbar klein.Folgende Fallunterscheidungen sind zu untersu-chen:
1. Boden rauh (Haftreibungskoeffizien µH)und Wand glatt
2. Boden und Wand rauh (Haftreibungsko-effizient jeweils µH)
Reibung 37
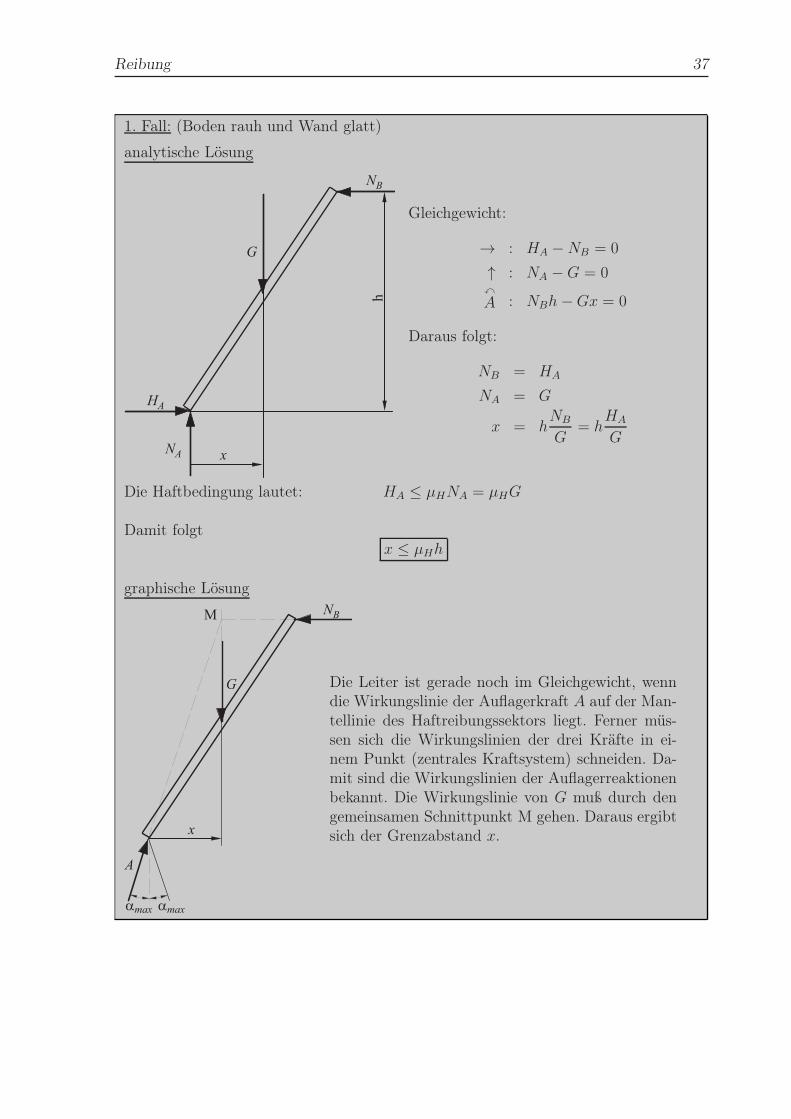
1. Fall: (Boden rauh und Wand glatt)
analytische Lösung
HA
NB
NA x
G
h
Gleichgewicht:
→ : HA −NB = 0
↑ : NA −G = 0x
A : NBh−Gx = 0
Daraus folgt:
NB = HA
NA = G
x = hNB
G= h
HA
G
Die Haftbedingung lautet: HA ≤ µHNA = µHG
Damit folgtx ≤ µHh
graphische Lösung
αmaxαmax
NB
x
M
A
G Die Leiter ist gerade noch im Gleichgewicht, wenndie Wirkungslinie der Auflagerkraft A auf der Man-tellinie des Haftreibungssektors liegt. Ferner müs-sen sich die Wirkungslinien der drei Kräfte in ei-nem Punkt (zentrales Kraftsystem) schneiden. Da-mit sind die Wirkungslinien der Auflagerreaktionenbekannt. Die Wirkungslinie von G muß durch dengemeinsamen Schnittpunkt M gehen. Daraus ergibtsich der Grenzabstand x.
38 Statik
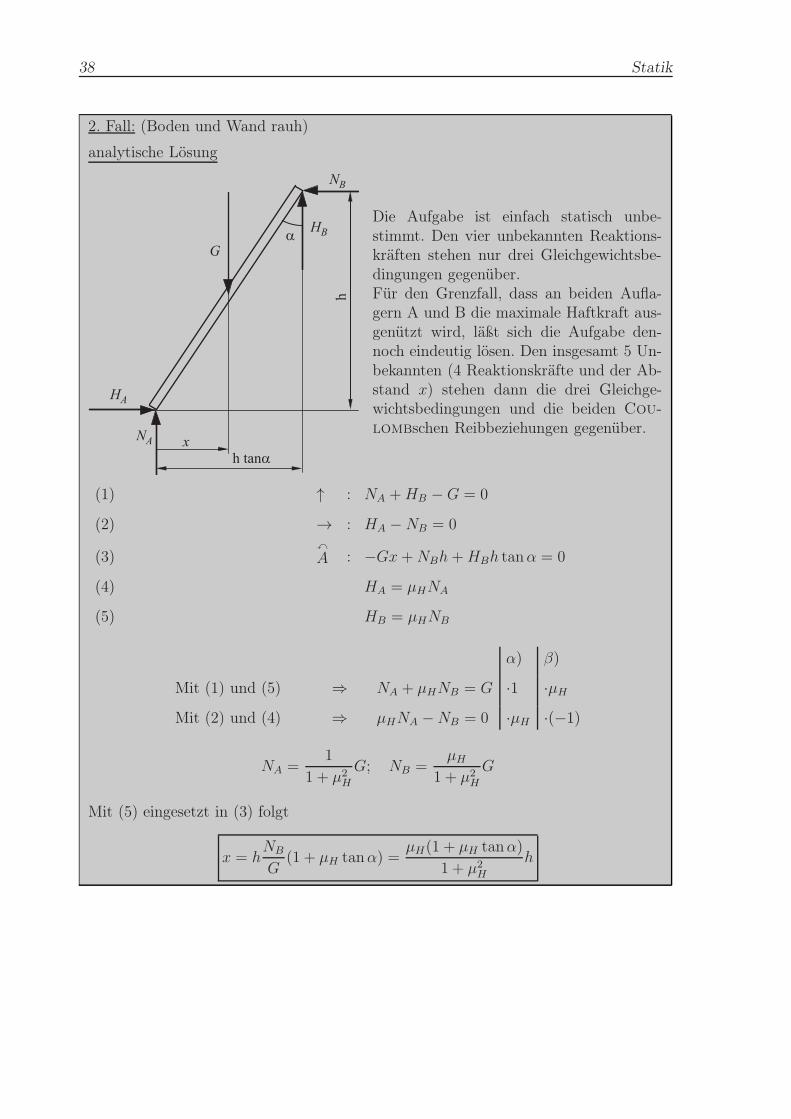
2. Fall: (Boden und Wand rauh)
analytische Lösung
HA
HB
NB
NA xh tanα
αG
h
Die Aufgabe ist einfach statisch unbe-stimmt. Den vier unbekannten Reaktions-kräften stehen nur drei Gleichgewichtsbe-dingungen gegenüber.Für den Grenzfall, dass an beiden Aufla-gern A und B die maximale Haftkraft aus-genützt wird, läßt sich die Aufgabe den-noch eindeutig lösen. Den insgesamt 5 Un-bekannten (4 Reaktionskräfte und der Ab-stand x) stehen dann die drei Gleichge-wichtsbedingungen und die beiden Cou-
lombschen Reibbeziehungen gegenüber.
(1) ↑ : NA +HB −G = 0
(2) → : HA −NB = 0
(3)x
A : −Gx+NBh+HBh tanα = 0
(4) HA = µHNA
(5) HB = µHNB
α) β)
Mit (1) und (5) ⇒ NA + µHNB = G ·1 ·µH
Mit (2) und (4) ⇒ µHNA −NB = 0 ·µH ·(−1)
NA =1
1 + µ2H
G; NB =µH
1 + µ2H
G
Mit (5) eingesetzt in (3) folgt
x = hNB
G(1 + µH tanα) =
µH(1 + µH tanα)
1 + µ2H
h
Reibung 39
graphische Lösung
2αmax
2αmax
x
G
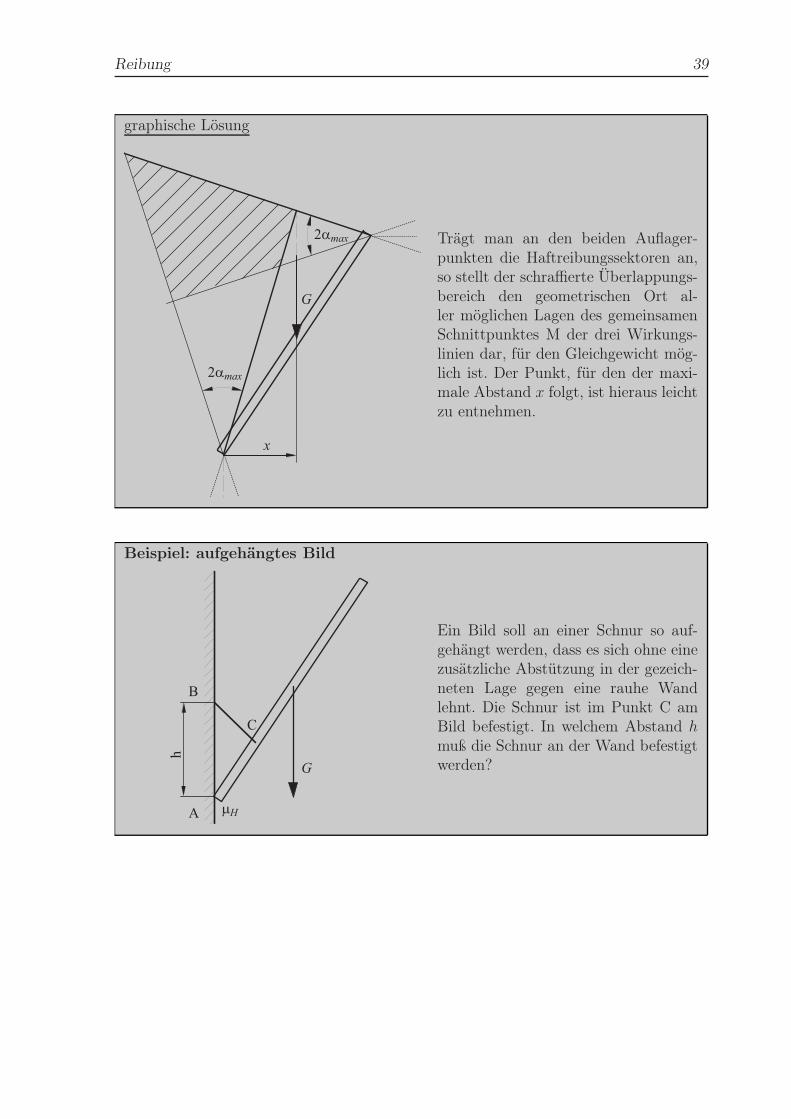
Trägt man an den beiden Auflager-punkten die Haftreibungssektoren an,so stellt der schraffierte Überlappungs-bereich den geometrischen Ort al-ler möglichen Lagen des gemeinsamenSchnittpunktes M der drei Wirkungs-linien dar, für den Gleichgewicht mög-lich ist. Der Punkt, für den der maxi-male Abstand x folgt, ist hieraus leichtzu entnehmen.
Beispiel: aufgehängtes Bild
B
C
A µH
h
G
Ein Bild soll an einer Schnur so auf-gehängt werden, dass es sich ohne einezusätzliche Abstützung in der gezeich-neten Lage gegen eine rauhe Wandlehnt. Die Schnur ist im Punkt C amBild befestigt. In welchem Abstand hmuß die Schnur an der Wand befestigtwerden?
40 Statik
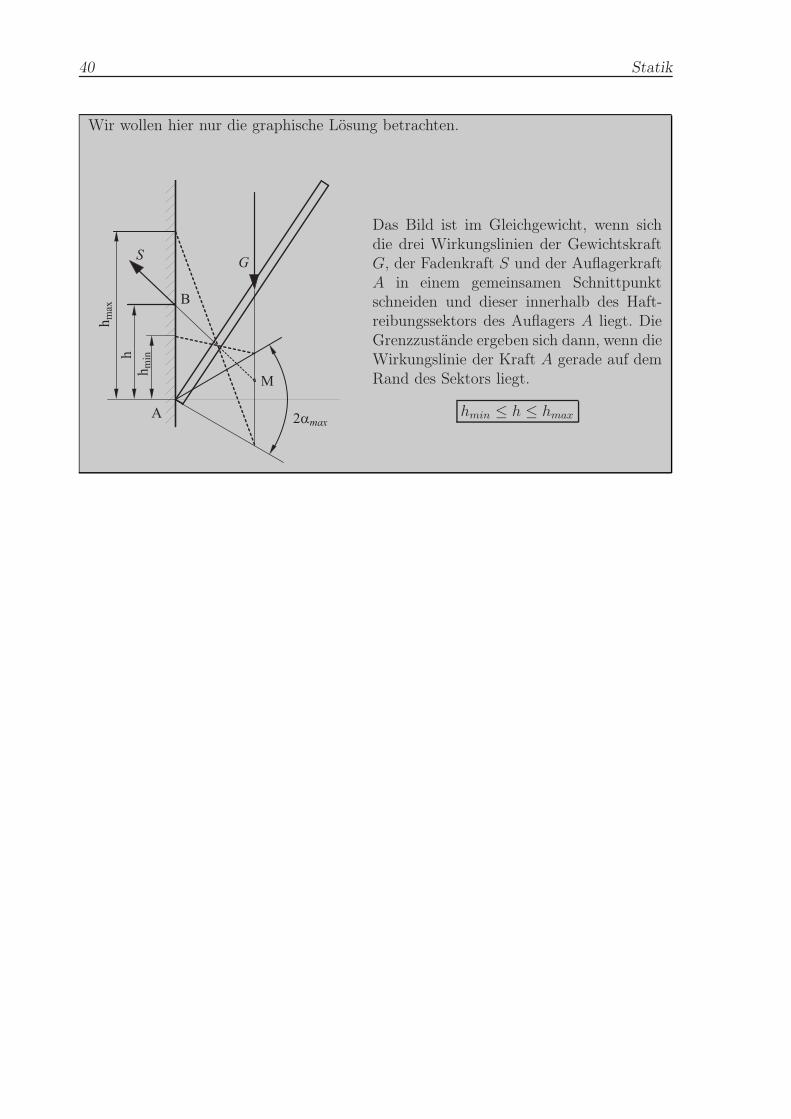
Wir wollen hier nur die graphische Lösung betrachten.
Β
S
Μ
Α
h
hm
ax
hm
in
G
2αmax
Das Bild ist im Gleichgewicht, wenn sichdie drei Wirkungslinien der GewichtskraftG, der Fadenkraft S und der AuflagerkraftA in einem gemeinsamen Schnittpunktschneiden und dieser innerhalb des Haft-reibungssektors des Auflagers A liegt. DieGrenzzustände ergeben sich dann, wenn dieWirkungslinie der Kraft A gerade auf demRand des Sektors liegt.
hmin ≤ h ≤ hmax
Elastostatik und Festigkeitslehre 41
2 Elastostatik und Festigkeitslehre
2.1 Grundlagen und Grundbegriffe
2.1.1 Einführende Bemerkungen
Innerhalb der Statik starrer Körper haben wir uns mit der Ermittlung der Schnittgrößen,die die resultierende Wirkung der inneren Kräfte im Balken darstellen, zufriedengegeben. Innerhalb der Elastostatik und Festigkeitslehre wollen wir einen Schritt weiter-gehen und uns über die Verteilung der inneren Kräfte ein Bild verschaffen. Fernerinteressieren wir uns dafür, wie der Körper unter Einwirkung äußerer Lasten seine Formändert. Hierzu müssen wir die Idealisierung „starrer“ Körper verlassen und zur Statikder deformierbaren Körper übergehen.
Wir wollen uns im Rahmen dieser Betrachtungen auf elastische Körper beschränken (Ela-stostatik) und homogenes (ortsunabhängiges), isotropes (richtungsunabhängiges) Ma-terialverhalten voraussetzen. Ferner wollen wir nur kleine Verformungen zulassen, d.h.,die Verformungen sollen klein gegenüber den Bauteilabmessungen sein. Bei der Aufstel-lung der Gleichgewichtsbedingungen können wir dann in der Regel von der Geometriedes unverformten Körpers ausgehen (Theorie 1. Ordnung). Eine Ausnahme davonwerden wir im Kapitel über Stabilität kennenlernen.
Die Betrachtung der Verformungen der Körper ermöglicht es, auch statisch unbestimmteAufgaben zu lösen.
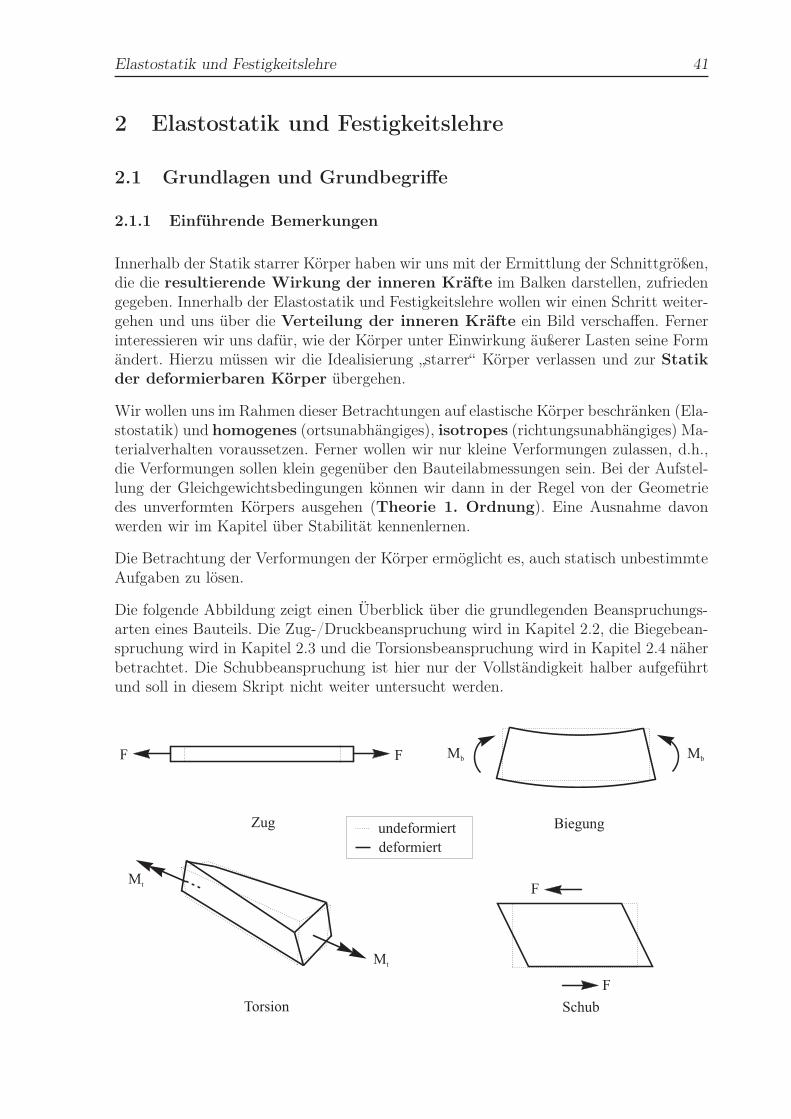
Die folgende Abbildung zeigt einen Überblick über die grundlegenden Beanspruchungs-arten eines Bauteils. Die Zug-/Druckbeanspruchung wird in Kapitel 2.2, die Biegebean-spruchung wird in Kapitel 2.3 und die Torsionsbeanspruchung wird in Kapitel 2.4 näherbetrachtet. Die Schubbeanspruchung ist hier nur der Vollständigkeit halber aufgeführtund soll in diesem Skript nicht weiter untersucht werden.
F
Zug
deformiert
undeformiert
Torsion Schub
Biegung
F
F
F
MbMb
Mt
Mt

42 Elastostatik und Festigkeitslehre
2.1.2 Spannungen
Um den tatsächlichen an der Trennfläche vorhandenen lokalen Kräfteübertragungsme-chanismus besser zu erkennen, betrachten wir ein Flächenelement ∆A der gedanklichenTrennfläche (Bild 2.1.1).
A
DA
DF
DM
Bild 2.1.1
Über dieses Flächenelement werde gerade die resultierende Kraftwirkung ∆~F und dieresultierende Momentenwirkung ∆ ~M übertragen. Diese jeweils auf die Flächeneinheitbezogenen Schnittreaktionsanteile bezeichnet man im Grenzfall ∆A → 0 als
Spannungsvektor ~σ = lim∆A→0
∆~F
∆A=d~F
dA
bzw. Momentenspannungsvektor ~m = lim∆A→0
∆ ~M
∆A=d ~M
dA
Innerhalb der klassischen Mechanik wird der Momentenspannungsvektor ~m vernachläs-sigt und nur der bereits von Cauchy eingeführte Spannungsvektor berücksichtigt. Damitlassen sich auch die Schnittmomente beschreiben. Die Einbeziehung des Momentenspan-nungsvektors würde auf die sog. Cosserat–Theorie führen, die von einer verfeinertenMaterieauffassung ausgeht.
Die Spannung hat die Dimension Kraft/Fläche, die im SI–System allgemein durch dasPascal (Pa) gemäß 1Pa = 1 N
m2 angegeben wird. In der Mechanik wird häufig die
Dimension Nmm2 verwendet.
Es gilt: 1N
mm2= 106
Nm2
= 1MPa.
Für die weitere Beschreibung des Spannungsvektors verwenden wir ein lokales Basissy-stem ~ex, ~ey, ~ez, das wir so einführen, dass ~ex mit der vom Material nach außen gerichtetenFlächennormalen übereinstimmt (Bild 2.1.2)

Grundlagen und Grundbegriffe 43
Bild 2.1.2
Den auf das nun mit dAx bezeichnete Flächenelement bezogenen Spannungsvektor wollenwir mit ~σx kennzeichnen. Die senkrecht zur Schnittfläche wirkende Komponente σxx wirdals Normalspannung und die in der Schnittfläche wirkenden Komponenten σxy und σxzwerden als Tangential– oder Schubspannungen bezeichnet.
~σx = ~exσxx + ~eyσxy + ~ezσxz (2.1)
Man erkennt, dass der erste Index der Spannungskomponente die Orientierung des Flä-chenelementes beschreibt und der zweite Index die Richtung der Spannungskomponenteangibt. Die Normalspannungskomponente wird durch gleiche Indizes, die Schubspan-nungskomponenten durch ungleiche Indizes charakterisiert.
Um den allgemeinen räumlichen Spannungszustand in einem Innenpunkt des Körperszu erfassen, trennt man gedanklich ein infinitesimales Volumenelement dV mit den Kan-tenlängen dx, dy und dz aus dem belasteten Körper heraus (Bild 2.1.3).
ey
ez
ex
y
z
x
dx
dz
dy
syy
syz syx
sy
szz szx
szszy
sxz
sxx
sx
sxy
Bild 2.1.3

44 Elastostatik und Festigkeitslehre
An den Schnittflächen dAx, dAy und dAz greifen die Spannungsvektoren ~σx, ~σy und ~σzan, deren Komponentendarstellung durch
~σx = ~exσxx + ~eyσxy + ~ezσxz
~σy = ~exσyx + ~eyσyy + ~ezσyz
~σz = ~exσzx + ~eyσzy + ~ezσzz
kurz~σi =
∑
j
~ejσij = ~ejσij
(i, j = x, y, z)
(2.2)
gegeben ist. Durch die Angabe der drei Spannungsvektoren bzw. deren Koordinaten istder Spannungszustand in dem betrachteten Punkt eindeutig beschrieben.
Mit dieser Darstellung (je ein Vektor in jeder der drei Raumrichtungen) ergibt sich dieSpannung allgemein als Tensor 2. Stufe.
Man faßt die 9 Spannungskomponenten bezüglich einer gewählten Basis zum Span-nungstensor zusammen.
[σij ] =
σxx σxy σxz
σyx σyy σyz
σzx σzy σzz
(2.3)
In der technischen Anwendung, in der auf die abkürzende Indexschreibweise verzichtetwird, hat sich die Bezeichnung σ für Normalspannungen und τ für Tangentialspannungeneingebürgert. Bei den Normalspannungen genügt dann ein Index zur Kennzeichnung. Esgilt
σxx = σx σxy = τxy
σyy = σy σyz = τyz
σzz = σz σzx = τzx .
Als nächstes wollen wir die Bedingungen für das Gleichgewicht eines Spannungszustandesherleiten. Dazu denken wir uns wieder ein infinitesimales Volumenelement dV = dx dy dzaus dem Körper herausgetrennt. Das Element muß unter Einwirkung aller angreifendenSpannungskomponenten in Kräfte– und Momentengleichgewicht sein. Wir wollen fernereine auf das Volumen bezogene Kraft ~f = ~f(x, y, z) zulassen.
Bei der vorzeichenrichtigen Eintragung der Spannungskomponenten in die Abbildung ha-ben wir zwischen positiven und negativen Schnittufern zu unterscheiden. Für die Span-nungskomponenten gelte die gleiche Vorzeichenregel wie für die Schnittgrößen.
Vorzeichenregel: Am positiven Schnittufer zeigen positiveSpannungskomponenten in positive Koordinatenrichtung, am ne-gativen Schnittufer in negative Koordinatenrichtung.
Wir gehen bei der weiteren Betrachtung von einem stetigen, ortsabhängigen Spannungs-zustand σij = σij(x, y, z) aus. Für den zu dem Punkt P (x, y, z) infinitesimal benachbar-ten Punkt P ′(x+ dx, y + dy, z + dz) gilt
Grundlagen und Grundbegriffe 45
σij(x+ dx, y + dy, z + dz) =
σij(x, y, z) +∂σij(x, y, z)
∂xdx+
∂σij(x, y, z)
∂ydy +
∂σij(x, y, z)
∂zdz .
(2.4)
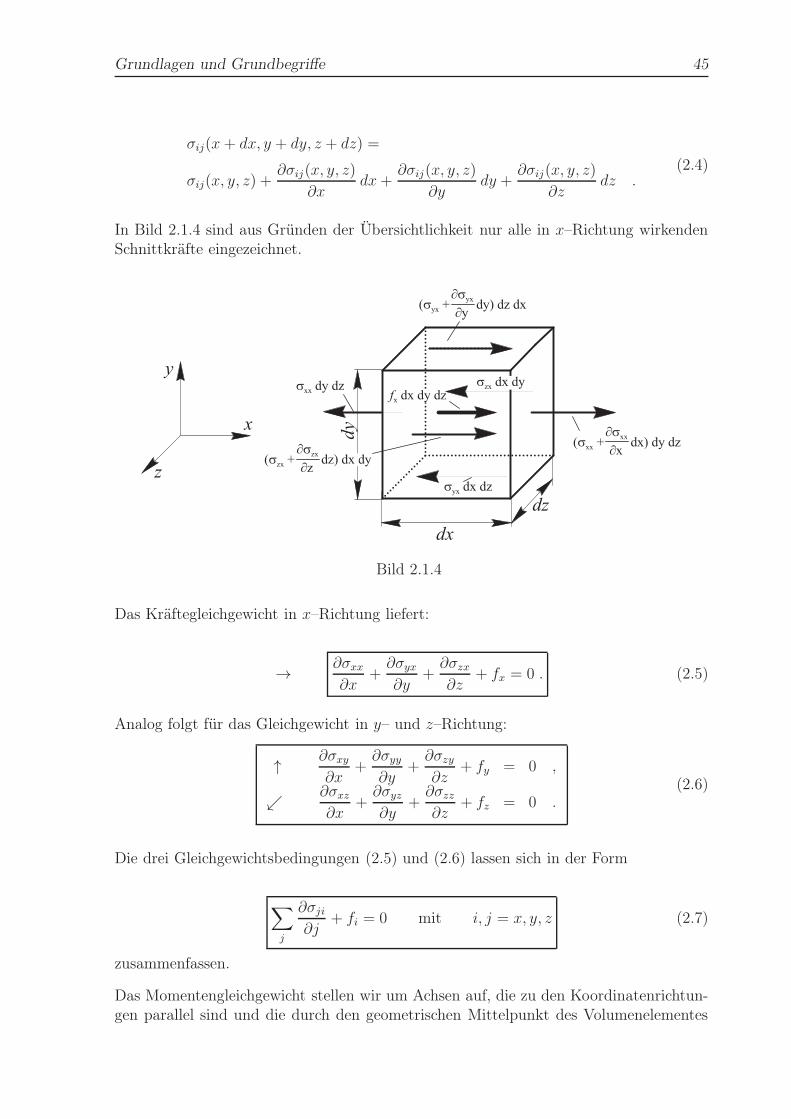
In Bild 2.1.4 sind aus Gründen der Übersichtlichkeit nur alle in x–Richtung wirkendenSchnittkräfte eingezeichnet.
y
x
z
d x
d z
dy
( s y x + d y ) d z d x¶ s y x
¶ y
( s z x + d z ) d x d y¶ s z x
¶ z
( s x x + d x ) d y d z¶ s x x
¶ x
s x x d y d z
s y x d x d z
s z x d x d yf x d x d y d z
Bild 2.1.4
Das Kräftegleichgewicht in x–Richtung liefert:
→ ∂σxx∂x
+∂σyx∂y
+∂σzx∂z
+ fx = 0 . (2.5)
Analog folgt für das Gleichgewicht in y– und z–Richtung:
↑ ∂σxy∂x
+∂σyy∂y
+∂σzy∂z
+ fy = 0 ,
ւ ∂σxz∂x
+∂σyz∂y
+∂σzz∂z
+ fz = 0 .(2.6)
Die drei Gleichgewichtsbedingungen (2.5) und (2.6) lassen sich in der Form
∑
j
∂σji∂j
+ fi = 0 mit i, j = x, y, z (2.7)
zusammenfassen.
Das Momentengleichgewicht stellen wir um Achsen auf, die zu den Koordinatenrichtun-gen parallel sind und die durch den geometrischen Mittelpunkt des Volumenelementes

46 Elastostatik und Festigkeitslehre
verlaufen. Die für das Momentengleichgewicht um die zur x–Achse parallele Achse maß-gebenden Schnittkräfte sind in Bild 2.1.5 eingezeichnet.
. I
x
y
z
Bild 2.1.5
Das Momentengleichgewicht um die Bezugsachse I lautet
(σyz +
∂σyz∂y
dy)dxdz
dy
2+ σyzdxdz
dy
2
−(σzy +
∂σzy∂z
dz)dxdy
dz
2− σzydxdy
dz
2= 0 .
(2.8)
Daraus erhält man σyz = σzy.
Eine analoge Aussage ergibt sich aus dem Momentengleichgewicht um die zur y– undz–Richtung parallelen Achsen.
Damit gilt: Das Momentengleichgewicht ist erfüllt, wenn
σij = σji mit i, j = x, y, z (2.9)
gilt, d.h., wenn die Schubspannungskomponenten symmetrisch sind.
2.1.3 Verschiebungen und Verzerrungen
a) Eindimensionales Verschiebungsfeld:
Wir betrachten einen elastischen Stab, der durch die Kraft S belastet wird. Die Verfor-mung des Stabes werde durch das eindimensionale Verschiebungsfeld
~u = ~u(x) = ~exu(x) (2.10)
beschrieben. Um die lokale Dehnung εx eines Stabelementes dx zu erfassen, betrachtenwir die Verformung zweier infinitesimal benachbarter Punkte A(x) und B(x+ dx).

Grundlagen und Grundbegriffe 47
A B. .
A' B' SS. .
u u+du
x dx
du+dx
l Dl
undeformierter Zustand
deformierter Zustand
Bild 2.1.6
Der Punkt A erfährt eine Verschiebung u(x), der infinitesimal benachbarte Punkt B dieVerschiebung u(x+ dx) = u(x) + du.
Die Dehnung εx des Stabelementes dx ist definiert als der dimensionslose Quotient ausVerlängerung des Elementes zu ursprünglicher Länge, d.h.
εx =A′B′ −AB
AB=
(dx+ du)− dx
dx=du
dx. (2.11)
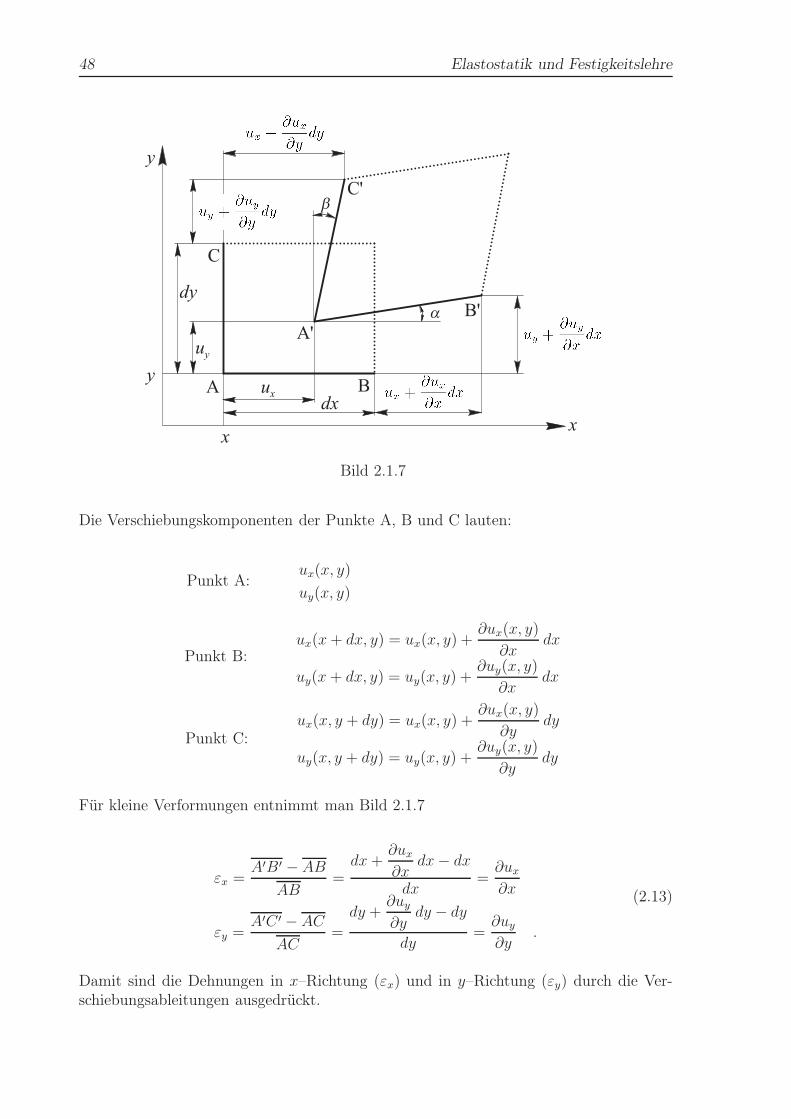
b) Zweidimensionales Verschiebungsfeld:
Wir wenden uns der ebenen Verformung einer elastischen Scheibe zu, die durch daszweidimensionale Verschiebungsfeld
~u = ~u(x, y) = ~exux(x, y) + ~eyuy(x, y) (2.12)
beschrieben werde. Um die lokalen Dehnungen und Winkeländerungen eines Scheiben-elementes zu erfassen, betrachten wir das von den Punkten A(x, y), B(x + dx, y) undC(x, y + dy) aufgespannte Zweibein vor der Verformung, das nach der Verformung diePunkte A’, B’ und C’ einnimmt. Der Punkt A verschiebt sich um ux bzw. uy, der Punkt
B um ux+∂ux∂x
dx bzw. uy+∂uy∂x
dx und der Punkt C um ux+∂ux∂y
dy bzw. uy+∂uy∂y
dy
(Bild 2.1.7).
48 Elastostatik und Festigkeitslehre
b
a
A
A'B'
B
C
C'
y
y
xx
dy
uy
uxdx
Bild 2.1.7
Die Verschiebungskomponenten der Punkte A, B und C lauten:
Punkt A:ux(x, y)
uy(x, y)
Punkt B:ux(x+ dx, y) = ux(x, y) +
∂ux(x, y)
∂xdx
uy(x+ dx, y) = uy(x, y) +∂uy(x, y)
∂xdx
Punkt C:ux(x, y + dy) = ux(x, y) +
∂ux(x, y)
∂ydy
uy(x, y + dy) = uy(x, y) +∂uy(x, y)
∂ydy
Für kleine Verformungen entnimmt man Bild 2.1.7
εx =A′B′ − AB
AB=dx+
∂ux∂x
dx− dx
dx=∂ux∂x
εy =A′C ′ − AC
AC=
dy +∂uy∂y
dy − dy
dy=∂uy∂y
.
(2.13)
Damit sind die Dehnungen in x–Richtung (εx) und in y–Richtung (εy) durch die Ver-schiebungsableitungen ausgedrückt.
Grundlagen und Grundbegriffe 49
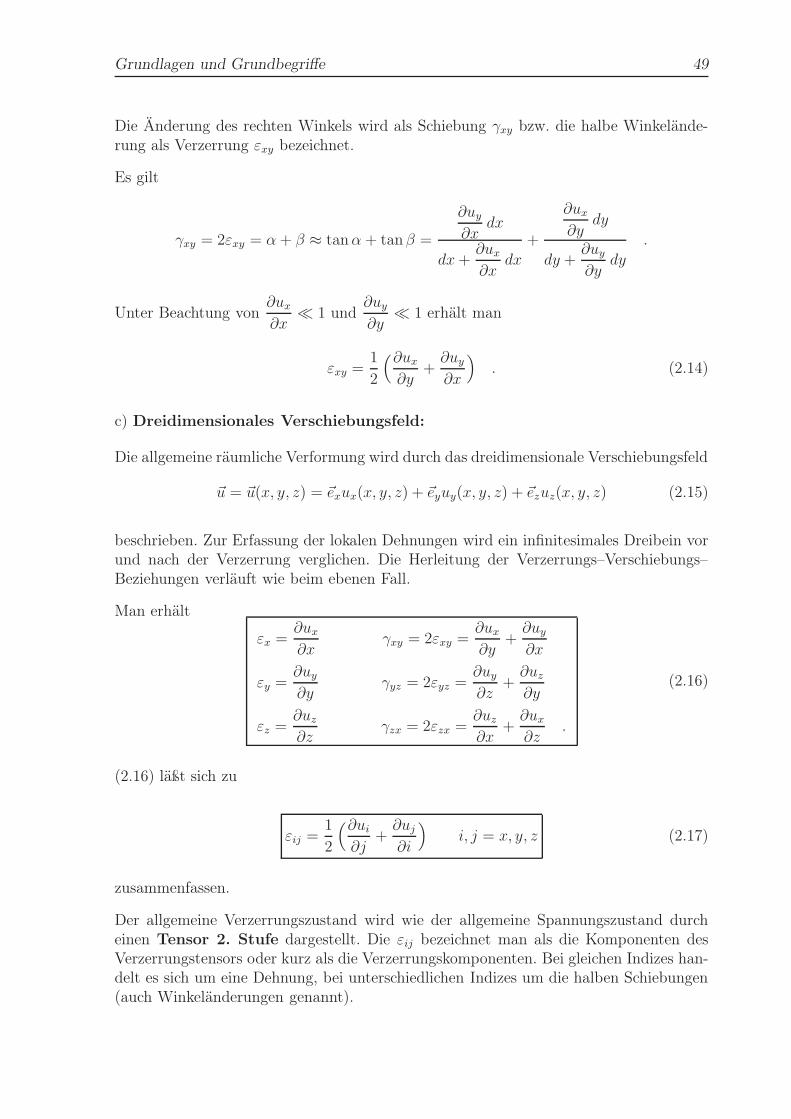
Die Änderung des rechten Winkels wird als Schiebung γxy bzw. die halbe Winkelände-rung als Verzerrung εxy bezeichnet.
Es gilt
γxy = 2εxy = α + β ≈ tanα + tanβ =
∂uy∂x
dx
dx+∂ux∂x
dx
+
∂ux∂y
dy
dy +∂uy∂y
dy
.
Unter Beachtung von∂ux∂x
≪ 1 und∂uy∂y
≪ 1 erhält man
εxy =1
2
(∂ux∂y
+∂uy∂x
)
. (2.14)
c) Dreidimensionales Verschiebungsfeld:
Die allgemeine räumliche Verformung wird durch das dreidimensionale Verschiebungsfeld
~u = ~u(x, y, z) = ~exux(x, y, z) + ~eyuy(x, y, z) + ~ezuz(x, y, z) (2.15)
beschrieben. Zur Erfassung der lokalen Dehnungen wird ein infinitesimales Dreibein vorund nach der Verzerrung verglichen. Die Herleitung der Verzerrungs–Verschiebungs–Beziehungen verläuft wie beim ebenen Fall.
Man erhält
εx =∂ux∂x
γxy = 2εxy =∂ux∂y
+∂uy∂x
εy =∂uy∂y
γyz = 2εyz =∂uy∂z
+∂uz∂y
εz =∂uz∂z
γzx = 2εzx =∂uz∂x
+∂ux∂z
.
(2.16)
(2.16) läßt sich zu
εij =1
2
(∂ui∂j
+∂uj∂i
)
i, j = x, y, z (2.17)
zusammenfassen.
Der allgemeine Verzerrungszustand wird wie der allgemeine Spannungszustand durcheinen Tensor 2. Stufe dargestellt. Die εij bezeichnet man als die Komponenten desVerzerrungstensors oder kurz als die Verzerrungskomponenten. Bei gleichen Indizes han-delt es sich um eine Dehnung, bei unterschiedlichen Indizes um die halben Schiebungen(auch Winkeländerungen genannt).

50 Elastostatik und Festigkeitslehre
Aus (2.17) erkennt man die Symmetrie der Winkelverzerrungen
εij = εji (2.18)
Analog zum Spannungstensor faßt man die dimensionslosen Verzerrungskomponentenzum symmetrischen Verzerrungstensor
[εij] =
εxx εxy εxz
εyx εyy εyz
εzx εzy εzz
(2.19)
zusammen. In der praktischen Anwendung hat sich die Bezeichnung ε für Dehnungenund γ für Schiebungen eingebürgert. Es gilt
εxx = εx
εyy = εy
εzz = εz
2εxy = γxy
2εyz = γyz
2εzx = γzx .
Nach den 6 Komponenten des Spannungstensors haben wir in diesem Kapitel6 Komponenten des Verzerrungstensors und 3 Komponenten des Verschie-bungsvektors kennengelernt.
2.1.4 Stoffgesetz
Das Stoffgesetz beschreibt den Zusammenhang zwischen dem Spannungs– und dem Ver-zerrungszustand. Es muß für den jeweiligen Werkstoff durch das Experiment ermitteltwerden.
Dl
S
x
l
Bild 2.1.8
Hierzu dient meist der einfache Zugversuch als ein Grund-versuch der Materialprüfung (Bild 2.1.8). Er liefert einen ex-perimentellen Zusammenhang zwischen der Belastung S undder Stabverlängerung ∆l eines geeigneten Probestabes. Die ge-messene Kraft–Verlängerungskurve wird in eine Spannungs–Dehnungskurve umgerechnet. Dabei wird bei der Spannungs-berechnung die Stabkraft auf den unverformten Stabquer-schnitt bezogen.
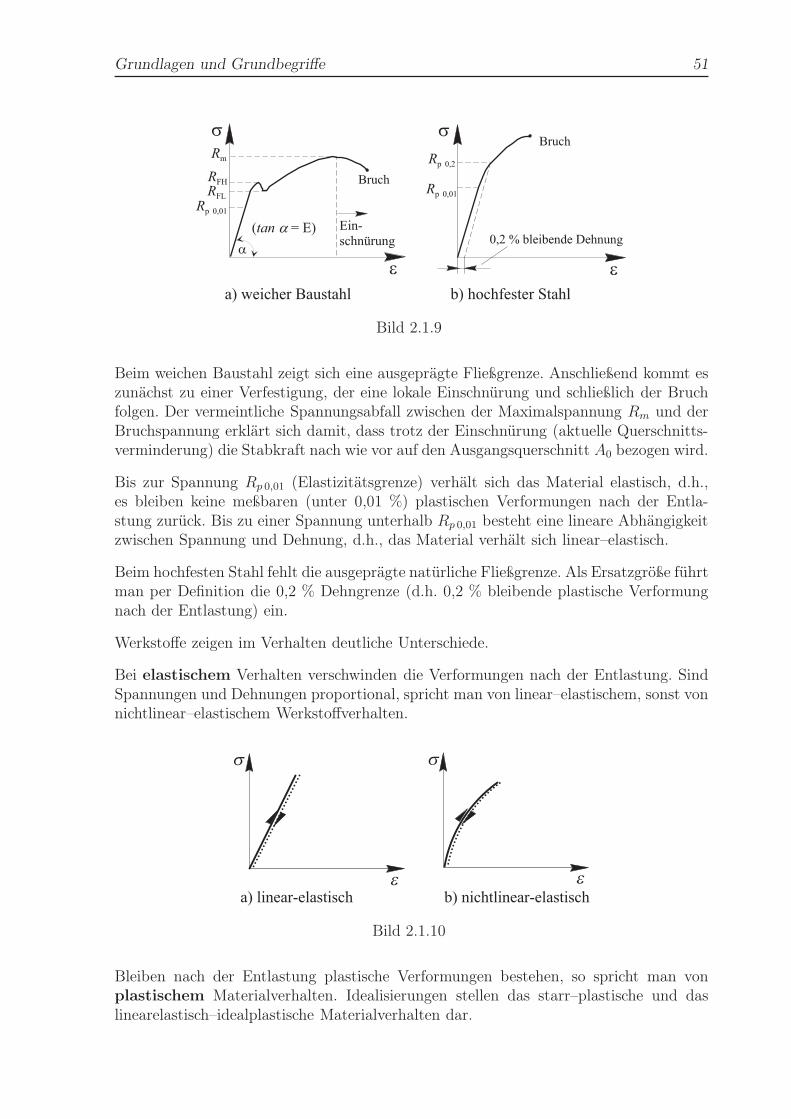
Bild 2.1.9 zeigt zwei typische Spannungs–Dehnungslinien, wiesie für weiche Baustähle bzw. hochfeste Stähle gemessen wer-den.
Grundlagen und Grundbegriffe 51
Bild 2.1.9
Beim weichen Baustahl zeigt sich eine ausgeprägte Fließgrenze. Anschließend kommt eszunächst zu einer Verfestigung, der eine lokale Einschnürung und schließlich der Bruchfolgen. Der vermeintliche Spannungsabfall zwischen der Maximalspannung Rm und derBruchspannung erklärt sich damit, dass trotz der Einschnürung (aktuelle Querschnitts-verminderung) die Stabkraft nach wie vor auf den Ausgangsquerschnitt A0 bezogen wird.
Bis zur Spannung Rp 0,01 (Elastizitätsgrenze) verhält sich das Material elastisch, d.h.,es bleiben keine meßbaren (unter 0,01 %) plastischen Verformungen nach der Entla-stung zurück. Bis zu einer Spannung unterhalb Rp 0,01 besteht eine lineare Abhängigkeitzwischen Spannung und Dehnung, d.h., das Material verhält sich linear–elastisch.
Beim hochfesten Stahl fehlt die ausgeprägte natürliche Fließgrenze. Als Ersatzgröße führtman per Definition die 0,2 % Dehngrenze (d.h. 0,2 % bleibende plastische Verformungnach der Entlastung) ein.
Werkstoffe zeigen im Verhalten deutliche Unterschiede.
Bei elastischem Verhalten verschwinden die Verformungen nach der Entlastung. SindSpannungen und Dehnungen proportional, spricht man von linear–elastischem, sonst vonnichtlinear–elastischem Werkstoffverhalten.
s s
e ea) linear-elastisch b) nichtlinear-elastisch
Bild 2.1.10
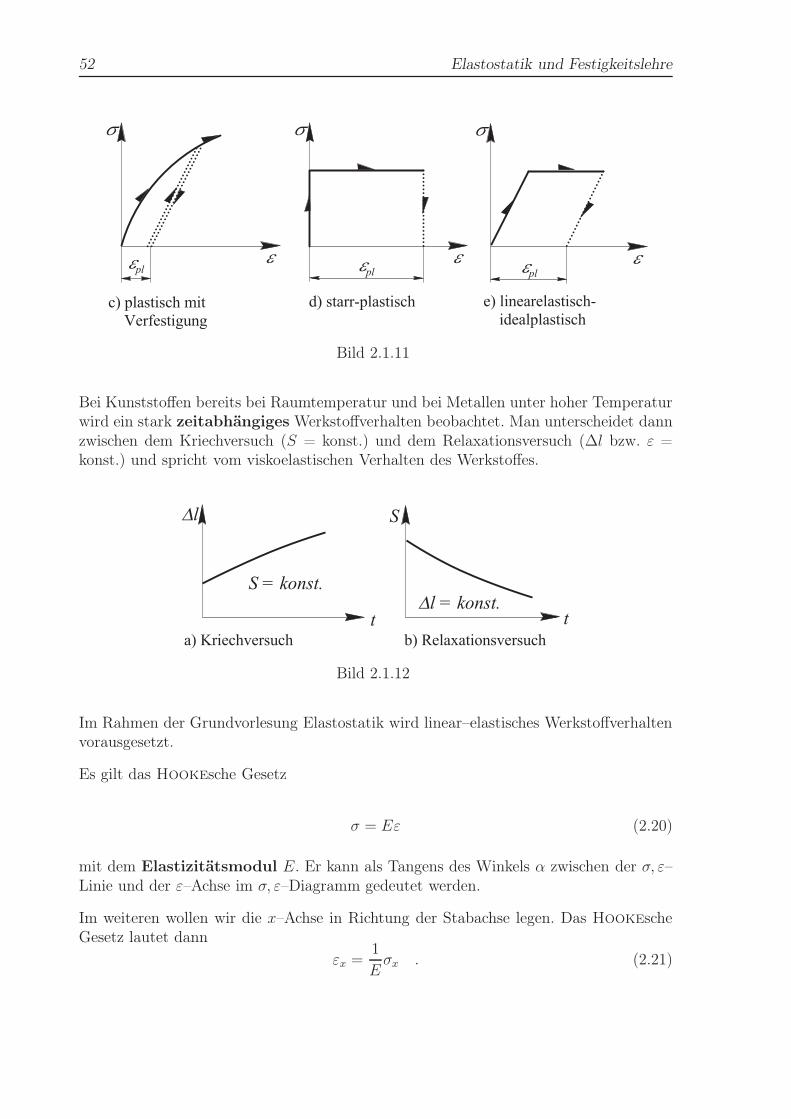
Bleiben nach der Entlastung plastische Verformungen bestehen, so spricht man vonplastischem Materialverhalten. Idealisierungen stellen das starr–plastische und daslinearelastisch–idealplastische Materialverhalten dar.
52 Elastostatik und Festigkeitslehre
s s s
e e ee p l e p l e p l
c ) p l a s t i s c h m i t
V e r f e s t i g u n g
d ) s t a r r - p l a s t i s c h e ) l i n e a r e l a s t i s c h -
i d e a l p l a s t i s c h
Bild 2.1.11
Bei Kunststoffen bereits bei Raumtemperatur und bei Metallen unter hoher Temperaturwird ein stark zeitabhängiges Werkstoffverhalten beobachtet. Man unterscheidet dannzwischen dem Kriechversuch (S = konst.) und dem Relaxationsversuch (∆l bzw. ε =konst.) und spricht vom viskoelastischen Verhalten des Werkstoffes.
t t
Dl S
S = konst.Dl = konst.
a) Kriechversuch b) Relaxationsversuch
Bild 2.1.12
Im Rahmen der Grundvorlesung Elastostatik wird linear–elastisches Werkstoffverhaltenvorausgesetzt.
Es gilt das Hookesche Gesetz
σ = Eε (2.20)
mit dem Elastizitätsmodul E. Er kann als Tangens des Winkels α zwischen der σ, ε–Linie und der ε–Achse im σ, ε–Diagramm gedeutet werden.
Im weiteren wollen wir die x–Achse in Richtung der Stabachse legen. Das HookescheGesetz lautet dann
εx =1
Eσx . (2.21)
Grundlagen und Grundbegriffe 53
Beobachtet man während der Versuchsdurchführung neben der Axialdehnung εx auchdie Querdehnungen εy und εz, so findet man den Zusammenhang
εy = −νεx = − ν
Eσx, εz = −νεx = − ν
Eσx . (2.22)
Man erkennt, dass der einachsige Zugversuch einen räumlichen Verformungszustandhervorruft. Die dimensionslose Proportionalitätskonstante ν wird als Querdehnzahl(Poisson–Zahl) bezeichnet.
Für Stahl gelten mittlere Werte E = 2 · 105 Nmm2 und ν = 0,3. Sie können in einem
begrenzten Bereich als temperaturunabhängig angesehen werden.
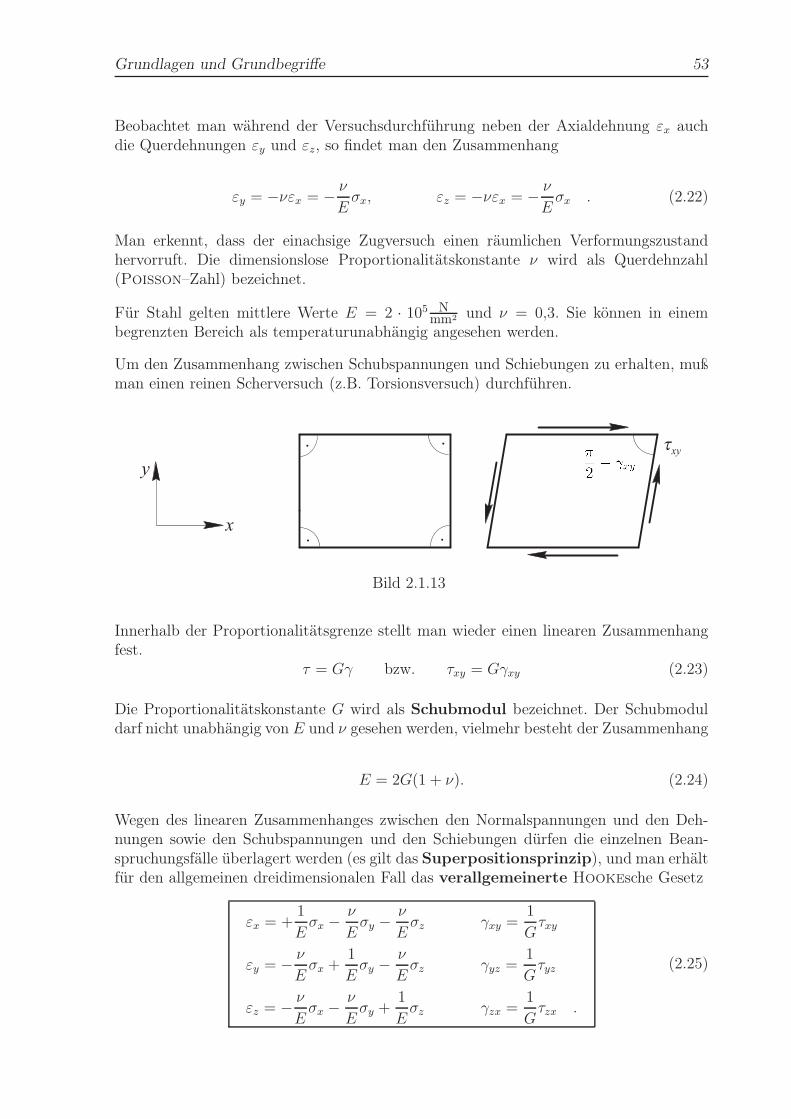
Um den Zusammenhang zwischen Schubspannungen und Schiebungen zu erhalten, mußman einen reinen Scherversuch (z.B. Torsionsversuch) durchführen.
. .
. .
y
x
txy
Bild 2.1.13
Innerhalb der Proportionalitätsgrenze stellt man wieder einen linearen Zusammenhangfest.
τ = Gγ bzw. τxy = Gγxy (2.23)
Die Proportionalitätskonstante G wird als Schubmodul bezeichnet. Der Schubmoduldarf nicht unabhängig von E und ν gesehen werden, vielmehr besteht der Zusammenhang
E = 2G(1 + ν). (2.24)
Wegen des linearen Zusammenhanges zwischen den Normalspannungen und den Deh-nungen sowie den Schubspannungen und den Schiebungen dürfen die einzelnen Bean-spruchungsfälle überlagert werden (es gilt das Superpositionsprinzip), und man erhältfür den allgemeinen dreidimensionalen Fall das verallgemeinerte Hookesche Gesetz
εx = +1
Eσx −
ν
Eσy −
ν
Eσz
εy = − ν
Eσx +
1
Eσy −
ν
Eσz
εz = − ν
Eσx −
ν
Eσy +
1
Eσz
γxy =1
Gτxy
γyz =1
Gτyz
γzx =1
Gτzx .
(2.25)
54 Elastostatik und Festigkeitslehre
Mit E = 2G(1 + ν) und γij = 2εij sowie unter Benutzung des Kronecker–Symbols
δij =
{
1 für i = j
0 für i 6= j
lassen sich die 6 Beziehungen (2.25) zu einer gemeinsamen Formel
εij =1
2G
[
σij − δijν
1 + νs]
i, j = x, y, z und s = σxx + σyy + σzz
(2.26)
zusammenfassen.
Ändert sich die Temperatur eines Körpers, so dehnt er sich aus, und die thermischenDehnungen überlagern sich den bisher behandelten elastischen Dehnungen. Man sprichtdann von einem thermoelastischen Problem. Bei linearer Temperaturausdehnung gilt imFalle der Isotropie
εθx = εθy = εθz = αΘ (2.27)
mit Θ als Temperaturdifferenz (positiv bei Temperaturerhöhung) gegenüber dem Aus-gangszustand und α als Temperaturausdehnungskoeffizient. In einem begrenzten Bereichkann α als temperaturunabhängig angesehen werden.
Innerhalb eines Temperaturbereiches von 0 bis 100◦ C gilt z.B.
Eisen, rein α ≈ 12 · 10−6 1/K
Stahl α ≈ (9 · · ·19) · 10−6 1/K
Aluminium α ≈ 24 · 10−6 1/K
Das verallgemeinerte Hookesche Gesetz für den Fall der Thermoelastizität ergibt sichaus der Überlagerung der elastischen und der thermischen Dehnungen zu
εij =1
2G
[
σij − δij( ν
1 + νs− 2GαΘ
)]
i, j = x, y, z und s = σxx + σyy + σzz .(2.28)
Mit (2.7) (3 Gleichungen), (2.17) (6 Gleichungen) und (2.26) bzw. (2.28) (6 Gleichungen)stehen insgesamt 15 Gleichungen für die 15 Unbekannten σij (6), εij (6) und ui (3)zur Verfügung. Lösungen dieses Gleichungssystems existieren jedoch nur für einfacheSonderfälle.
Zug– und Druckbeanspruchung von Stäben 55
2.2 Zug– und Druckbeanspruchung von Stäben
Wir betrachten in diesem Abschnitt Stäbe mit gerader Achse, die durch Kräfte belastetwerden, deren Wirkungslinien mit der Stabachse zusammenfallen (zentrische Kraftein-leitung). Ist der Stabquerschnitt konstant (prismatischer Stab) oder nur wenig veränder-lich, so können wir (in genügender Entfernung von der Krafteinleitungsstelle) annehmen,dass die Spannung gleichmäßig über den Querschnitt verteilt ist. Es treten nur Nor-malspannungen in Stablängsrichtung auf, es handelt sich daher um einen einachsigenSpannungszustand (σxx = σ).
2.2.1 Statisch bestimmte Aufgaben
Bei statisch bestimmt gelagerten Tragwerken lassen sich die Schnittgrößen allein mitHilfe der Gleichgewichtbedingungen berechnen.
Ist die Normalkraft auf diese Weise bestimmt, lassen sich anschließend Spannung undVerformung berechnen.
Am einfachsten läßt sich das bei einem Stab mit konstanter Normalkraft und kon-stantem Querschnitt verfolgen.
F F
S ( x )
S ( x )
x
lDl
Bild 2.2.1
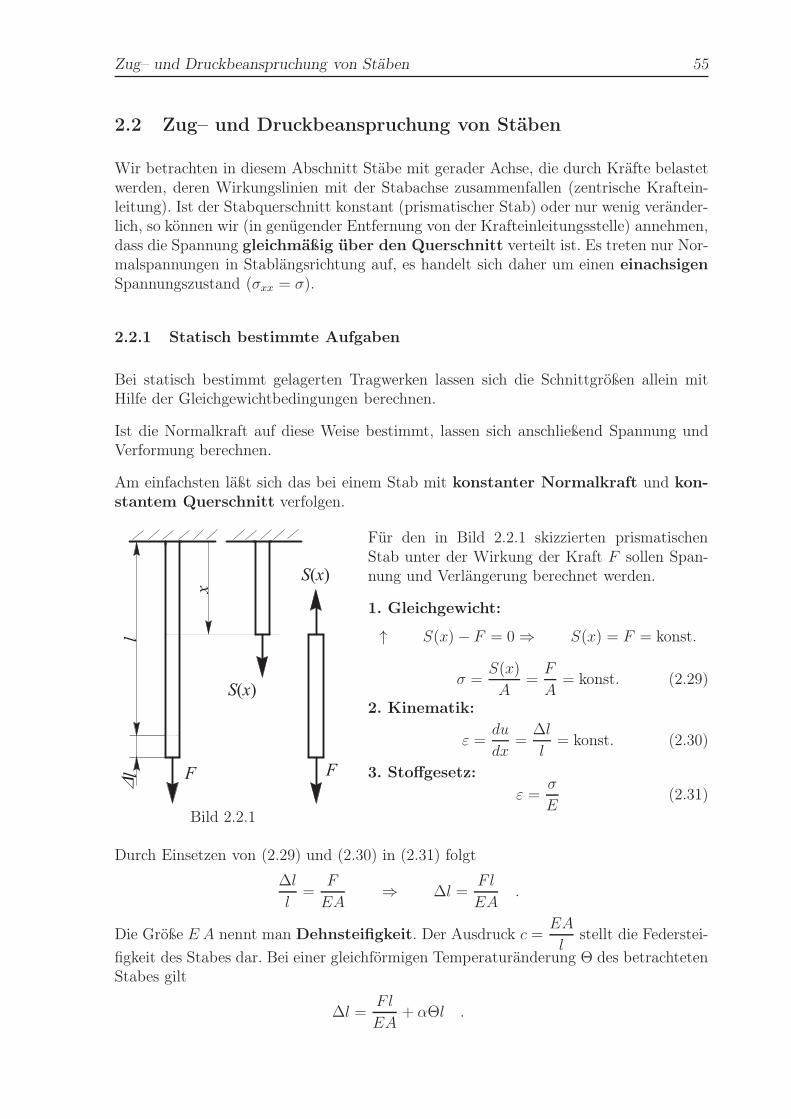
Für den in Bild 2.2.1 skizzierten prismatischenStab unter der Wirkung der Kraft F sollen Span-nung und Verlängerung berechnet werden.
1. Gleichgewicht:
↑ S(x)− F = 0 ⇒ S(x) = F = konst.
σ =S(x)
A=F
A= konst. (2.29)
2. Kinematik:
ε =du
dx=
∆l
l= konst. (2.30)
3. Stoffgesetz:ε =
σ
E(2.31)
Durch Einsetzen von (2.29) und (2.30) in (2.31) folgt
∆l
l=
F
EA⇒ ∆l =
F l
EA.
Die Größe E A nennt man Dehnsteifigkeit. Der Ausdruck c =EA
lstellt die Federstei-
figkeit des Stabes dar. Bei einer gleichförmigen Temperaturänderung Θ des betrachtetenStabes gilt
∆l =F l
EA+ αΘl .
56 Elastostatik und Festigkeitslehre
Auf die Spannung hat die Temperaturausdehnung in diesem Fall keinen Einfluß, da derStab statisch bestimmt gelagert ist und die thermische Dehnung somit nicht behindertwird.
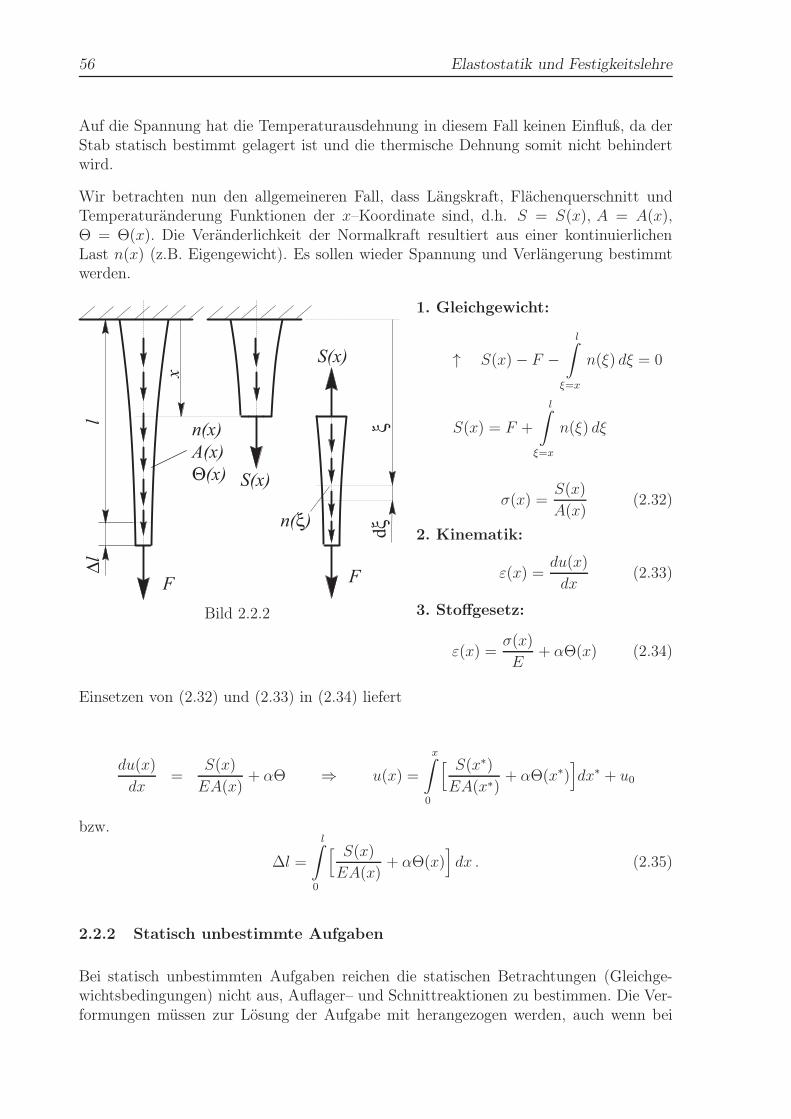
Wir betrachten nun den allgemeineren Fall, dass Längskraft, Flächenquerschnitt undTemperaturänderung Funktionen der x–Koordinate sind, d.h. S = S(x), A = A(x),Θ = Θ(x). Die Veränderlichkeit der Normalkraft resultiert aus einer kontinuierlichenLast n(x) (z.B. Eigengewicht). Es sollen wieder Spannung und Verlängerung bestimmtwerden.
S(x)
x
l
S(x)
n(x)
A(x)
Θ(x)
n(ξ)
ξdξ
∆l
F F
Bild 2.2.2
1. Gleichgewicht:
↑ S(x)− F −l∫
ξ=x
n(ξ) dξ = 0
S(x) = F +
l∫
ξ=x
n(ξ) dξ
σ(x) =S(x)
A(x)(2.32)
2. Kinematik:
ε(x) =du(x)
dx(2.33)
3. Stoffgesetz:
ε(x) =σ(x)
E+ αΘ(x) (2.34)
Einsetzen von (2.32) und (2.33) in (2.34) liefert
du(x)
dx=
S(x)
EA(x)+ αΘ ⇒ u(x) =
x∫
0
[ S(x∗)
EA(x∗)+ αΘ(x∗)
]
dx∗ + u0
bzw.
∆l =
l∫
0
[ S(x)
EA(x)+ αΘ(x)
]
dx . (2.35)
2.2.2 Statisch unbestimmte Aufgaben
Bei statisch unbestimmten Aufgaben reichen die statischen Betrachtungen (Gleichge-wichtsbedingungen) nicht aus, Auflager– und Schnittreaktionen zu bestimmen. Die Ver-formungen müssen zur Lösung der Aufgabe mit herangezogen werden, auch wenn bei
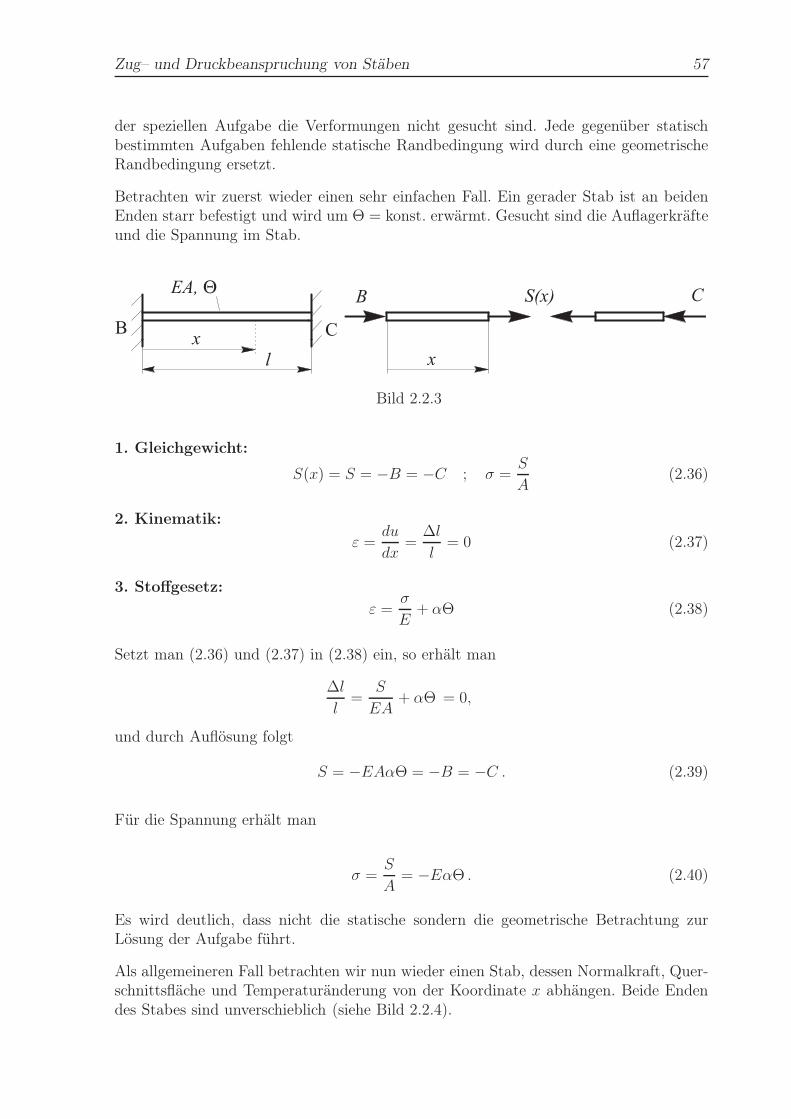
Zug– und Druckbeanspruchung von Stäben 57
der speziellen Aufgabe die Verformungen nicht gesucht sind. Jede gegenüber statischbestimmten Aufgaben fehlende statische Randbedingung wird durch eine geometrischeRandbedingung ersetzt.
Betrachten wir zuerst wieder einen sehr einfachen Fall. Ein gerader Stab ist an beidenEnden starr befestigt und wird um Θ = konst. erwärmt. Gesucht sind die Auflagerkräfteund die Spannung im Stab.
S(x)
lx
x
B
B
C
CEA, Θ
Bild 2.2.3
1. Gleichgewicht:
S(x) = S = −B = −C ; σ =S
A(2.36)
2. Kinematik:
ε =du
dx=
∆l
l= 0 (2.37)
3. Stoffgesetz:ε =
σ
E+ αΘ (2.38)
Setzt man (2.36) und (2.37) in (2.38) ein, so erhält man
∆l
l=
S
EA+ αΘ = 0,
und durch Auflösung folgt
S = −EAαΘ = −B = −C . (2.39)
Für die Spannung erhält man
σ =S
A= −EαΘ . (2.40)
Es wird deutlich, dass nicht die statische sondern die geometrische Betrachtung zurLösung der Aufgabe führt.
Als allgemeineren Fall betrachten wir nun wieder einen Stab, dessen Normalkraft, Quer-schnittsfläche und Temperaturänderung von der Koordinate x abhängen. Beide Endendes Stabes sind unverschieblich (siehe Bild 2.2.4).
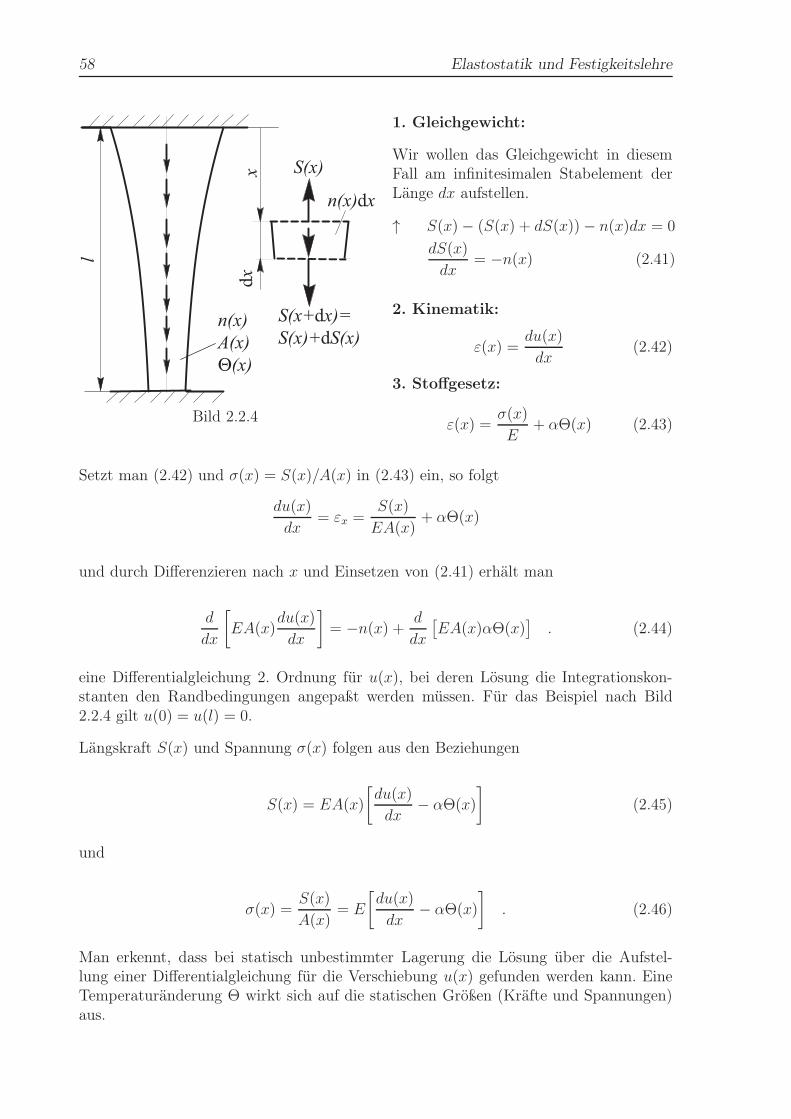
58 Elastostatik und Festigkeitslehre
x
l
dx
n(x)
A(x)
Θ(x)
n(x)dx
S(x+dx)=
S(x)+dS(x)
S(x)
Bild 2.2.4
1. Gleichgewicht:
Wir wollen das Gleichgewicht in diesemFall am infinitesimalen Stabelement derLänge dx aufstellen.
↑ S(x)− (S(x) + dS(x))− n(x)dx = 0
dS(x)
dx= −n(x) (2.41)
2. Kinematik:
ε(x) =du(x)
dx(2.42)
3. Stoffgesetz:
ε(x) =σ(x)
E+ αΘ(x) (2.43)
Setzt man (2.42) und σ(x) = S(x)/A(x) in (2.43) ein, so folgt
du(x)
dx= εx =
S(x)
EA(x)+ αΘ(x)
und durch Differenzieren nach x und Einsetzen von (2.41) erhält man
d
dx
[
EA(x)du(x)
dx
]
= −n(x) + d
dx
[EA(x)αΘ(x)
]. (2.44)
eine Differentialgleichung 2. Ordnung für u(x), bei deren Lösung die Integrationskon-stanten den Randbedingungen angepaßt werden müssen. Für das Beispiel nach Bild2.2.4 gilt u(0) = u(l) = 0.
Längskraft S(x) und Spannung σ(x) folgen aus den Beziehungen
S(x) = EA(x)
[du(x)
dx− αΘ(x)
]
(2.45)
und
σ(x) =S(x)
A(x)= E
[du(x)
dx− αΘ(x)
]
. (2.46)
Man erkennt, dass bei statisch unbestimmter Lagerung die Lösung über die Aufstel-lung einer Differentialgleichung für die Verschiebung u(x) gefunden werden kann. EineTemperaturänderung Θ wirkt sich auf die statischen Größen (Kräfte und Spannungen)aus.

Zug– und Druckbeanspruchung von Stäben 59
Beispiel: statisch unbestimmt gelagerter Stab
x
l
C
A0,Θ0 = konst
n(x)=γA0= konst
B
Wir betrachten den beidseitig eingespannten, hängen-den Stab (A0 = konst.) unter Eigengewicht und gleich-förmiger Temperaturverteilung (Θ0 = konst.).
Gegeben: A0, l, γ, α,Θ0, E.
Gesucht: B,C, σ(x) und u(x).
Für A0 = konst. und Θ0 = konst. geht die Gleichung(2.44) über in
d2u(x)
dx2= −n(x)
EA0
= − γ
E.
Zweimalige Integration ergibt
u(x) = − γ
E
x2
2+ C1x+ C2.
Die Randbedingungen liefern
x = 0 : u(0) = 0 ⇒ C2 = 0
x = l : u(l) = 0 ⇒ C1 =γ
E
l
2.
Damit folgt
u(x) =γ
E
lx
2
(
1− x
l
)
.
Mitdu(x)
dx=γ
E
l
2
(
1− 2x
l
)
in (2.45) erhält man den Verlauf der Stabkraft
S(x) =γA0l
2
(
1− 2x
l
)
− EA0αΘ0
bzw. für den Verlauf der Stabspannung
σ(x) =γl
2
(
1− 2x
l
)
− EαΘ0.
Mit dem Gesamtgewicht des Stabes γA0l = G folgen die Auflagerreaktionen zu
B = −S(l) = G
2+ EA0αΘ0, sowie C = −S(0) = −G
2+ EA0αΘ0.
Die durch die gleichförmige Temperaturverteilung hervorgerufenen Anteile der statischunbestimmten Auflagerreaktionen betragen
Bth = Cth = EA0αΘ0.
Bth und Cth sind gerade die Kräfte, die benötigt werden, um die thermische Dehnungzu verhindern.
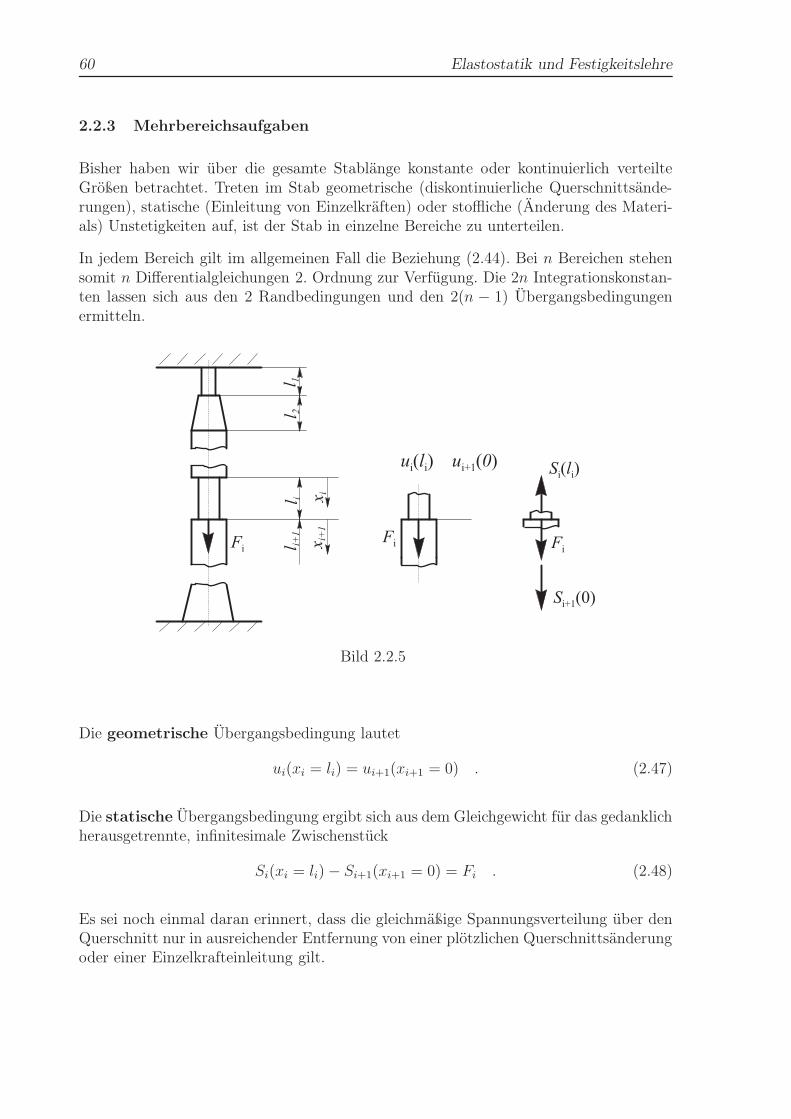
60 Elastostatik und Festigkeitslehre
2.2.3 Mehrbereichsaufgaben
Bisher haben wir über die gesamte Stablänge konstante oder kontinuierlich verteilteGrößen betrachtet. Treten im Stab geometrische (diskontinuierliche Querschnittsände-rungen), statische (Einleitung von Einzelkräften) oder stoffliche (Änderung des Materi-als) Unstetigkeiten auf, ist der Stab in einzelne Bereiche zu unterteilen.
In jedem Bereich gilt im allgemeinen Fall die Beziehung (2.44). Bei n Bereichen stehensomit n Differentialgleichungen 2. Ordnung zur Verfügung. Die 2n Integrationskonstan-ten lassen sich aus den 2 Randbedingungen und den 2(n − 1) Übergangsbedingungenermitteln.
l 1l 2
u i ( l i ) u i + 1 ( 0 ) S i ( l i )
S i + 1 ( 0 )
F i F i
l il i +
1
x i+1
x i
F i
Bild 2.2.5
Die geometrische Übergangsbedingung lautet
ui(xi = li) = ui+1(xi+1 = 0) . (2.47)
Die statische Übergangsbedingung ergibt sich aus dem Gleichgewicht für das gedanklichherausgetrennte, infinitesimale Zwischenstück
Si(xi = li)− Si+1(xi+1 = 0) = Fi . (2.48)
Es sei noch einmal daran erinnert, dass die gleichmäßige Spannungsverteilung über denQuerschnitt nur in ausreichender Entfernung von einer plötzlichen Querschnittsänderungoder einer Einzelkrafteinleitung gilt.

Biegebeanspruchung gerader Balken 61
2.3 Biegebeanspruchung gerader Balken
Wir werden uns ausschließlich mit der sog. Technischen Biegelehre beschäftigen, inder einige vereinfachende Annahmen getroffen werden. Im folgenden wird vorausgesetzt:
• der Balken ist im unbelasteten Zustand gerade,
• der Balken ist schlank (Querschnittsabmessungen ≪ Längenabmessung),
• der Bereich des Hookeschen Gesetzes wird an keiner Stelle verlassen,
• die Verformungen sind klein, und die Gleichgewichtsbedingungen können am un-verformten Balken aufgestellt werden (Theorie 1. Ordnung).
2.3.1 Flächenmomente 2. Ordnung
In den Gleichungen zur Bestimmung der Biegespannung, die in den folgenden Abschnit-ten hergeleitet werden, tauchen bestimmte Terme, die sogenannten Flächenmomente2. Ordnung, auf. Diese Terme sollen zunächst genauer betrachtet werden.
Es sei daran erinnert, dass bei der Berechnung des Flächenschwerpunktes (Kapitel 1.5.3)die Flächenmomente 1. Ordnung
∫
(A)
x dA,∫
(A)
y dA und∫
(A)
z dA vorkamen.
Die Flächenmomente 2. Ordnung, mit denen wir uns hier beschäftigen wollen, sind fol-gendermaßen definiert:
Iyy =
∫
(A)
z2 dA Izz =
∫
(A)
y2 dA Iyz = −∫
(A)
yz dA (2.49)
Iyy und Izz werden als axiale Flächenträgheitsmomente bezeichnet, Iyz nennt manDeviations– oder Zentrifugalmoment.
Bei der Torsion von Trägern mit Kreisquerschnitt wird uns noch das polare Flächen-trägheitsmoment
Ip =
∫
(A)
r2 dA (2.50)
begegnen, für das wegen r2 = y2 + z2 die Beziehung Ip = Iyy + Izz gilt.
Die axialen Flächenträgheitsmomente sind stets positiv; das Deviationsmoment kannpositiv, negativ oder Null sein. Ist mindestens eine der beiden Achsen y oder z eineSymmetrieachse, so gilt Iyz = 0.
Die Flächenträgheitsmomente 2. Ordnung lassen sich mittels der Index–Schreibweise inkompakter Form darstellen
Iij =
∫
(A)
(r2δij − ij) dA i, j = y, z δij =
{
1 für i = j
0 für i 6= j. (2.51)

62 Elastostatik und Festigkeitslehre
Die Flächenmomente einiger einfacher Flächen werden im folgenden berechnet.
Rechteckquerschnitt:
y
z
S
bh
dA = b dz
Iyz = 0 (y und z sind Symmetrieachsen)
Iyy =
∫
(A)
z2 dA = b
h2∫
−h2
z2 dz = bz3
3
∣∣∣∣∣
h2
−h2
Iyy =bh3
12
Analog dazu gilt Izz =b3h
12.
Kreisquerschnitt:
Ry
z dA = 2 p r dr
Iyz = 0 (y und z sind Symmetrieachsen)
Eine besonders einfache Berechnung der axialenFlächenträgheitsmomente kann mit Hilfe despolaren Flächenträgheitsmomentes erfolgen.
Ip =
∫
(A)
r2 dA =
R∫
r=0
r22πr dr =π
2R4
Wegen Iyy = Izz und Ip = Iyy + Izz gilt
Iyy = Izz =Ip2
=π
4R4 .

Biegebeanspruchung gerader Balken 63
Rechtwinkliges Dreieck:
-
b
h
h 3
y
z
-b3
S.
dA = b(z) dz
Iyy =
∫
(A)
z2 dA =
2
3h∫
z=−h3
z2b(z) dz
Mit b(z) = b(2
3− z
h
)
ergibt sich nach Ausfüh-
rung der Integration
Iyy =1
36bh3 .
Analog dazu gilt Izz =1
36b3h .
Das Deviationsmoment in der Form
Iyz = −
2
3h∫
z=−h3
( b( 13−
zh)
∫
y=−b3
y dy
)
z dz
ergibt nach ausgeführter Integration
Iyz =1
72b2h2 .
Bisher wurde das Koordinatensystem stets in den Flächenschwerpunkt gelegt. Setzt sichein Querschnitt aus mehreren bekannten Teilquerschnitten zusammen, so dürfen die Flä-chenträgheitsmomente der Teilflächen addiert werden, wenn sie auf das gleiche Ko-ordinatensystem bezogen sind. Das erfordert die Berechnung von Trägheitsmomentenum Achsen, die parallel zu den Achsen durch den Flächenschwerpunkt liegen.

64 Elastostatik und Festigkeitslehre
Parallelverschiebung der Koordinatenachsen — Satz von Steiner:
S.
yS
_
y
y_
z z_
z S_
Bild 2.3.1
Die Flächenmomente Iyy, Izz und Iyz be-züglich des im Flächenschwerpunkt ver-ankerten y, z–Koordinatensystems seienbekannt. Der Satz von Steiner (teil-weise auch als Satz von Huygens–
Steiner bezeichnet) erlaubt hierausdie Berechnung der Flächenmomen-te Iyy, Izz, Iyz bezüglich eines y, z –Koordinatensystems (Bild 2.3.1).
Es gilt
y = y + ys und z = z + zs .
Durch Einsetzen in (2.49) folgt
Iyy =
∫
(A)
(z + zs)2 dA =
∫
(A)
z2 dA
︸ ︷︷ ︸
Iyy
+z2s
∫
(A)
dA
︸ ︷︷ ︸
A
+2zs
∫
(A)
z dA
︸ ︷︷ ︸
0
.
Damit ergibt sich Iyy = Iyy + z2s A. Analog dazu folgen die anderen Transformationsglei-chungen, somit insgesamt
Iyy = Iyy + z2sA
Izz = Izz + y2sA
Iyz = Iyz − yszsA .
(2.52)
Man erkennt, dass die axialen Flächenträgheitsmomente für Achsen durch den Flächen-schwerpunkt stets kleiner sind als für hierzu parallele Achsen.
Als Beispiel für die Anwendung des Satzes von Steiner betrachten wir ein T–Profil,das aus zwei gleich großen Rechtecken (1 und 2) besteht.
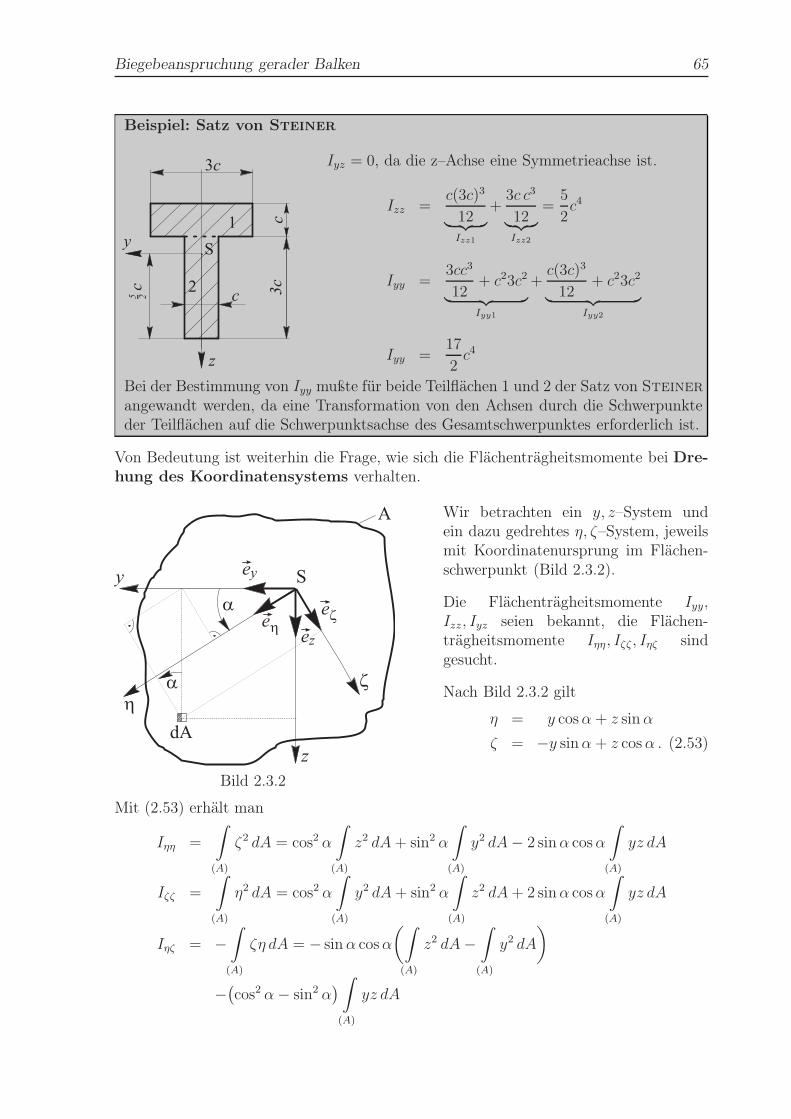
Biegebeanspruchung gerader Balken 65
Beispiel: Satz von Steiner
3c
S.
3c
c
c-5 2
z
y1
c2
Iyz = 0, da die z–Achse eine Symmetrieachse ist.
Izz =c(3c)3
12︸ ︷︷ ︸
Izz1
+3c c3
12︸ ︷︷ ︸
Izz2
=5
2c4
Iyy =3cc3
12+ c23c2
︸ ︷︷ ︸
Iyy1
+c(3c)3
12+ c23c2
︸ ︷︷ ︸
Iyy2
Iyy =17
2c4
Bei der Bestimmung von Iyy mußte für beide Teilflächen 1 und 2 der Satz von Steiner
angewandt werden, da eine Transformation von den Achsen durch die Schwerpunkteder Teilflächen auf die Schwerpunktsachse des Gesamtschwerpunktes erforderlich ist.
Von Bedeutung ist weiterhin die Frage, wie sich die Flächenträgheitsmomente bei Dre-hung des Koordinatensystems verhalten.
A
S
α
α ζ
η
dA
eηeζ
ez
ey
z
y
Bild 2.3.2
Wir betrachten ein y, z–System undein dazu gedrehtes η, ζ–System, jeweilsmit Koordinatenursprung im Flächen-schwerpunkt (Bild 2.3.2).
Die Flächenträgheitsmomente Iyy,Izz, Iyz seien bekannt, die Flächen-trägheitsmomente Iηη, Iζζ, Iηζ sindgesucht.
Nach Bild 2.3.2 gilt
η = y cosα + z sinα
ζ = −y sinα + z cosα . (2.53)
Mit (2.53) erhält man
Iηη =
∫
(A)
ζ2 dA = cos2 α
∫
(A)
z2 dA+ sin2 α
∫
(A)
y2 dA− 2 sinα cosα
∫
(A)
yz dA
Iζζ =
∫
(A)
η2 dA = cos2 α
∫
(A)
y2 dA+ sin2 α
∫
(A)
z2 dA+ 2 sinα cosα
∫
(A)
yz dA
Iηζ = −∫
(A)
ζη dA = − sinα cosα
(∫
(A)
z2 dA−∫
(A)
y2 dA
)
−(cos2 α− sin2 α
)∫
(A)
yz dA

66 Elastostatik und Festigkeitslehre
oder ausgerechnet
Iηη = Iyy cos2 α + Izz sin
2 α+ 2Iyz sinα cosα
Iζζ = Izz cos2 α+ Iyy sin
2 α− 2Iyz sinα cosα
Iηζ = −(Iyy − Izz
)sinα cosα + Iyz
(cos2 α− sin2 α
).
(2.54)
In kompakter Indexschreibweise lautet (2.54)
Iλµ =∑
i
∑
j
cos(λ, i) cos(µ, j)Iij mit i, j = y, z; λ, µ = η, ζ (2.55)
Mit cos(λ, i) bzw. cos(µ, j) ist der Kosinus des jeweils zwischen der ~eλ– und ~ei– bzw. der~eµ– und ~ej–Richtung eingeschlossenen Winkels bezeichnet.
Die Flächenträgheitsmomente stellen somit einen Tensor 2. Stufe dar. In Matrix–Schreibweise ergibt sich
[Iij] =
[
Iyy Iyz
Izy Izz
]
bzw. [Iλµ] =
[
Iηη Iηζ
Iζη Iζζ
]
(2.56)
wobei die Transformationsgleichungen (2.54) und (2.55) die Elemente des Flächenträg-heitstensors [Iij] bei Drehung des Bezugssystems in den Tensor [Iλµ] überführen.
Invarianten des Flächenträgheitstensors sind
a) seine Spur Iyy + Izz = Iηη + Iζζ
b) seine Determinante IyyIzz − I2yz = IηηIζζ − I2ηζ
Mit den geometrischen Beziehungen
2 sinα cosα = sin 2α; sin2 α =1
2(1− cos 2α); cos2 α =
1
2(1 + cos 2α)
lassen sich die Transformationsgleichungen (2.54) in der Form
Iηη =1
2(Iyy + Izz) +
1
2(Iyy − Izz) cos 2α+ Iyz sin 2α
Iζζ =1
2(Iyy + Izz) − 1
2(Iyy − Izz) cos 2α− Iyz sin 2α
Iηζ = Iζη = − 1
2(Iyy − Izz) sin 2α+ Iyz cos 2α
(2.57)
angeben.

Biegebeanspruchung gerader Balken 67
y
z
S
u v
a~
Bild 2.3.3
Wir suchen uns nun aus der Schar der ge-drehten Bezugssysteme jenes spezielle u, v–System heraus, für das die axialen Flä-chenträgheitsmomente Extremwerte werden.Den zugehörigen Winkel bezeichnen wir mitα.
dIηηdα
= −dIζζdα
= −(Iyy − Izz) sin 2α+ 2Iyz cos 2α = 0 (2.58)
tan 2α =2Iyz
Iyy − Izz(2.59)
(2.59) erhält man auch aus der Forderung, dass das Deviationsmoment Iηζ Null wird.
(2.59) besitzt im Intervall 0 ≤ 2α ≤ 2π zwei Lösungen, die sich um π unterscheiden.Entsprechend existieren im Intervall 0 ≤ α ≤ π für α zwei um π
2unterschiedliche Lö-
sungen. Das bedeutet, es gibt zwei senkrecht aufeinander stehende Achsen u und v, fürdie die axialen Flächenträgheitsmomente zu Extremwerten werden und das Deviations-moment Null ist. Diese Achsen werden als Hauptträgheitsachsen oder Hauptachsenbezeichnet.
Die zugehörigen Extremwerte der axialen Flächenträgheitsmomente, die man Haupt-trägheitsmomente nennt, bestimmt man durch Einsetzen von (2.59) in (2.57).
2 a ~
( I y y - I z z )- 12
I y z
Hierzu lesen wir aus dem nebenstehenden Dreieckab:
sin 2α =Iyz
√(Iyy−Izz
2
)2+ Iyz
2
cos 2α =Iyy−Izz
2√(Iyy−Izz
2
)2+ Iyz
2Damit folgt
Iuu = Imax =1
2(Iyy + Izz) +
√(Iyy − Izz
2
)2
+ Iyz2
Ivv = Imin =1
2(Iyy + Izz)−
√(Iyy − Izz
2
)2
+ Iyz2
(2.60)
Um eine eindeutige Zuordnung von Winkel und Hauptträgheitsmoment zu haben (Bild2.3.3), geht man über auf die Beziehung
tan α =1− cos 2α
sin 2α=
1
Iyz
[√(Iyy − Izz
2
)2+ Iyz
2 − Iyy − Izz2
]
=Iuu − IyyIyz
. (2.61)

68 Elastostatik und Festigkeitslehre
Achsen maximalen Deviationsmomentes ergeben sich aus
dIηζdα
= −(Iyy − Izz) cos 2α− 2Iyz sin 2α = 0 (2.62)
tan 2α =Izz − Iyy2Iyz
(2.63)
Das maximale Deviationsmoment beträgt
Iuv =
√(Iyy − Izz
2
)2
+ I2yz (2.64)
Zwischen den Winkeln α und α besteht die Beziehung α = α− π4.
Alle Beziehungen für die Tranformation der Flächenträgheitsmomente bei Drehung desKoordinatensystems lassen sich anschaulich im Mohrschen Trägheitskreis darstellen(Bild 2.3.4).
Hierzu eliminiert man durch Quadrieren und Addieren der 1. und 3. Gleichung von (2.57)den Winkel 2α und erhält mit
(
Iηη −Iyy + Izz
2
)2
+ I2ηζ =
(Iyy − Izz
2
)2
+ I2yz
die Gleichung eines Kreises.
Beispiel: Mohrscher Trägheitskreis: Iyy > Izz und Iyz > 0
2a~a~A M B
a~
z
y
v
u Ihh , Izz
Iyy
Iuu-Iyy(Iyy-Izz)
1-2
(Iyy+Izz)1-2
Iuu
Ivv
Ihz
Iyz
Izz
II
I
2
-+
22( )z
yz
yy z
Bild 2.3.4
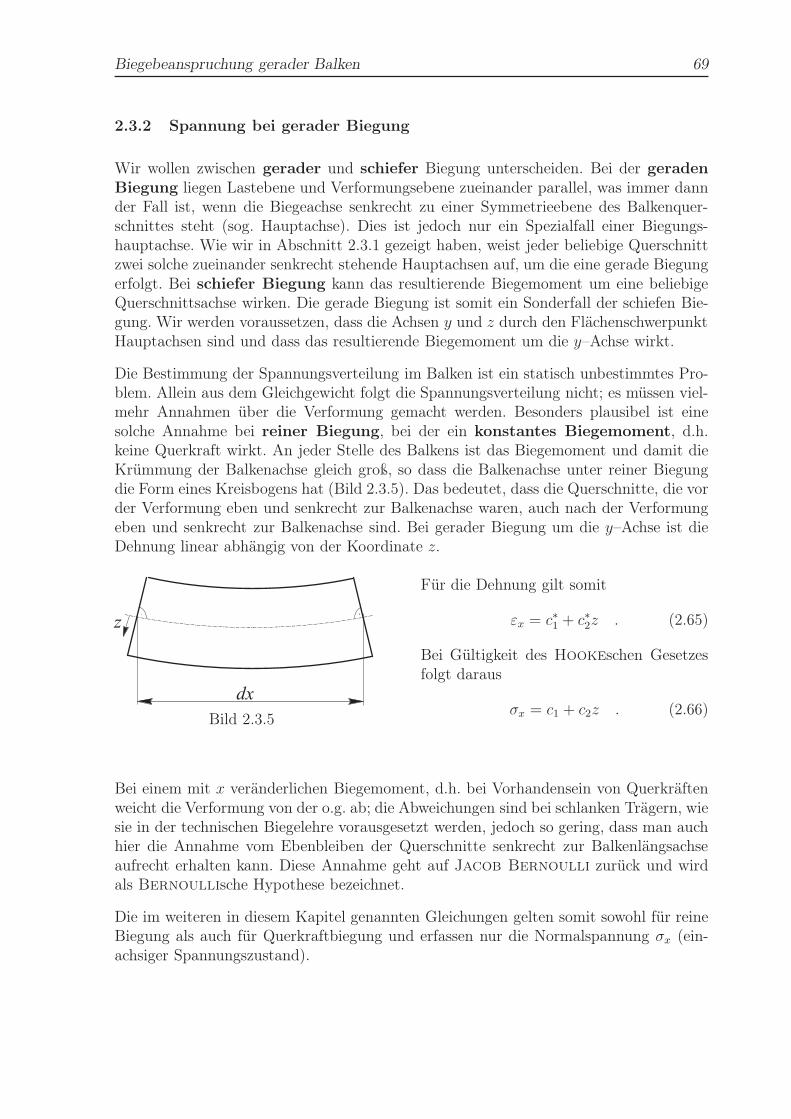
Biegebeanspruchung gerader Balken 69
2.3.2 Spannung bei gerader Biegung
Wir wollen zwischen gerader und schiefer Biegung unterscheiden. Bei der geradenBiegung liegen Lastebene und Verformungsebene zueinander parallel, was immer dannder Fall ist, wenn die Biegeachse senkrecht zu einer Symmetrieebene des Balkenquer-schnittes steht (sog. Hauptachse). Dies ist jedoch nur ein Spezialfall einer Biegungs-hauptachse. Wie wir in Abschnitt 2.3.1 gezeigt haben, weist jeder beliebige Querschnittzwei solche zueinander senkrecht stehende Hauptachsen auf, um die eine gerade Biegungerfolgt. Bei schiefer Biegung kann das resultierende Biegemoment um eine beliebigeQuerschnittsachse wirken. Die gerade Biegung ist somit ein Sonderfall der schiefen Bie-gung. Wir werden voraussetzen, dass die Achsen y und z durch den FlächenschwerpunktHauptachsen sind und dass das resultierende Biegemoment um die y–Achse wirkt.
Die Bestimmung der Spannungsverteilung im Balken ist ein statisch unbestimmtes Pro-blem. Allein aus dem Gleichgewicht folgt die Spannungsverteilung nicht; es müssen viel-mehr Annahmen über die Verformung gemacht werden. Besonders plausibel ist einesolche Annahme bei reiner Biegung, bei der ein konstantes Biegemoment, d.h.keine Querkraft wirkt. An jeder Stelle des Balkens ist das Biegemoment und damit dieKrümmung der Balkenachse gleich groß, so dass die Balkenachse unter reiner Biegungdie Form eines Kreisbogens hat (Bild 2.3.5). Das bedeutet, dass die Querschnitte, die vorder Verformung eben und senkrecht zur Balkenachse waren, auch nach der Verformungeben und senkrecht zur Balkenachse sind. Bei gerader Biegung um die y–Achse ist dieDehnung linear abhängig von der Koordinate z.
dx
z
Bild 2.3.5
Für die Dehnung gilt somit
εx = c∗1 + c∗2z . (2.65)
Bei Gültigkeit des Hookeschen Gesetzesfolgt daraus
σx = c1 + c2z . (2.66)
Bei einem mit x veränderlichen Biegemoment, d.h. bei Vorhandensein von Querkräftenweicht die Verformung von der o.g. ab; die Abweichungen sind bei schlanken Trägern, wiesie in der technischen Biegelehre vorausgesetzt werden, jedoch so gering, dass man auchhier die Annahme vom Ebenbleiben der Querschnitte senkrecht zur Balkenlängsachseaufrecht erhalten kann. Diese Annahme geht auf Jacob Bernoulli zurück und wirdals Bernoullische Hypothese bezeichnet.
Die im weiteren in diesem Kapitel genannten Gleichungen gelten somit sowohl für reineBiegung als auch für Querkraftbiegung und erfassen nur die Normalspannung σx (ein-achsiger Spannungszustand).
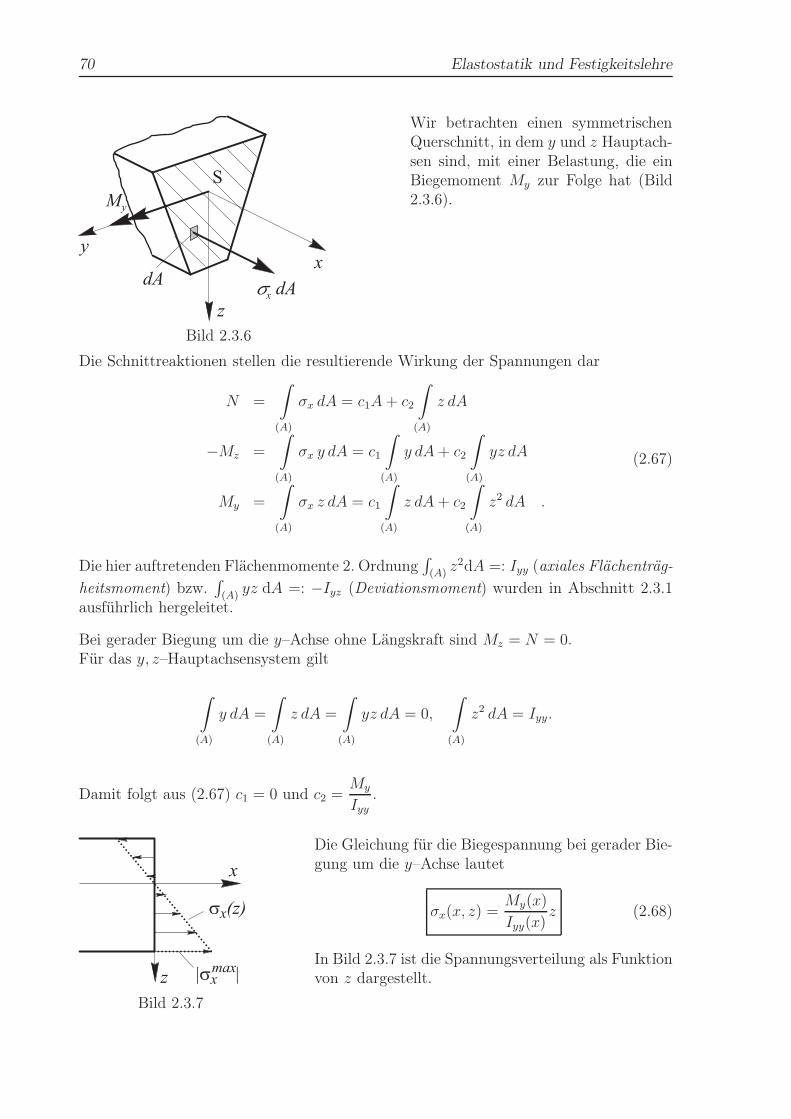
70 Elastostatik und Festigkeitslehre
S
z
y
d Ax
s x d A
M y
Bild 2.3.6
Wir betrachten einen symmetrischenQuerschnitt, in dem y und z Hauptach-sen sind, mit einer Belastung, die einBiegemoment My zur Folge hat (Bild2.3.6).
Die Schnittreaktionen stellen die resultierende Wirkung der Spannungen dar
N =
∫
(A)
σx dA = c1A+ c2
∫
(A)
z dA
−Mz =
∫
(A)
σx y dA = c1
∫
(A)
y dA+ c2
∫
(A)
yz dA
My =
∫
(A)
σx z dA = c1
∫
(A)
z dA+ c2
∫
(A)
z2 dA .
(2.67)
Die hier auftretenden Flächenmomente 2. Ordnung∫
(A)z2dA =: Iyy (axiales Flächenträg-
heitsmoment) bzw.∫
(A)yz dA =: −Iyz (Deviationsmoment) wurden in Abschnitt 2.3.1
ausführlich hergeleitet.
Bei gerader Biegung um die y–Achse ohne Längskraft sind Mz = N = 0.Für das y, z–Hauptachsensystem gilt
∫
(A)
y dA =
∫
(A)
z dA =
∫
(A)
yz dA = 0,
∫
(A)
z2 dA = Iyy.
Damit folgt aus (2.67) c1 = 0 und c2 =My
Iyy.
σx(z)
x
|σx |max
z
Bild 2.3.7
Die Gleichung für die Biegespannung bei gerader Bie-gung um die y–Achse lautet
σx(x, z) =My(x)
Iyy(x)z (2.68)
In Bild 2.3.7 ist die Spannungsverteilung als Funktionvon z dargestellt.
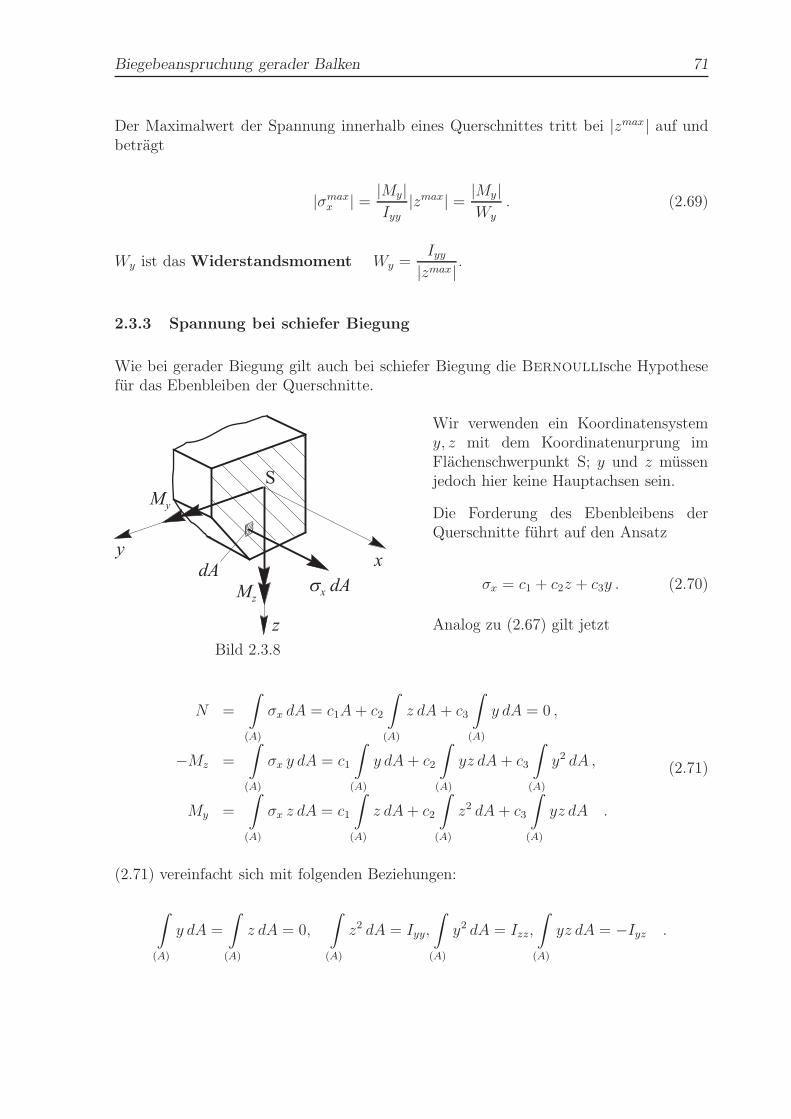
Biegebeanspruchung gerader Balken 71
Der Maximalwert der Spannung innerhalb eines Querschnittes tritt bei |zmax| auf undbeträgt
|σmaxx | = |My|
Iyy|zmax| = |My|
Wy
. (2.69)
Wy ist das Widerstandsmoment Wy =Iyy
|zmax| .
2.3.3 Spannung bei schiefer Biegung
Wie bei gerader Biegung gilt auch bei schiefer Biegung die Bernoullische Hypothesefür das Ebenbleiben der Querschnitte.
My
sx dA
z
xy
S
dA
Mz
Bild 2.3.8
Wir verwenden ein Koordinatensystemy, z mit dem Koordinatenurprung imFlächenschwerpunkt S; y und z müssenjedoch hier keine Hauptachsen sein.
Die Forderung des Ebenbleibens derQuerschnitte führt auf den Ansatz
σx = c1 + c2z + c3y . (2.70)
Analog zu (2.67) gilt jetzt
N =
∫
(A)
σx dA = c1A+ c2
∫
(A)
z dA+ c3
∫
(A)
y dA = 0 ,
−Mz =
∫
(A)
σx y dA = c1
∫
(A)
y dA+ c2
∫
(A)
yz dA+ c3
∫
(A)
y2 dA ,
My =
∫
(A)
σx z dA = c1
∫
(A)
z dA+ c2
∫
(A)
z2 dA+ c3
∫
(A)
yz dA .
(2.71)
(2.71) vereinfacht sich mit folgenden Beziehungen:
∫
(A)
y dA =
∫
(A)
z dA = 0,
∫
(A)
z2 dA = Iyy,
∫
(A)
y2 dA = Izz,
∫
(A)
yz dA = −Iyz .
72 Elastostatik und Festigkeitslehre
Damit erhalten wir c1 = 0 und
−Mz = −c2Iyz + c3Izz
My = +c2Iyy − c3Iyz .
Die Konstanten c2 und c3 ergeben sich zu
c2 =MyIzz −MzIyzIyyIzz − I2yz
, c3 = −MzIyy −MyIyzIyyIzz − I2yz
.
Die Gleichung für die Spannung bei schiefer Biegung lautet damit
σx(x, y, z) =My(x)Izz −Mz(x)Iyz
IyyIzz − I2yzz − Mz(x)Iyy −My(x)Iyz
IyyIzz − I2yzy . (2.72)
Für den Sonderfall, dass das y–z–System ein Hauptachsensystem ist, gilt Iyz = 0 und(2.72) vereinfacht sich zu
σx(x, y, z) =My(x)
Iyyz − Mz(x)
Izzy . (2.73)
Um die Spannungsnullinie des Querschnittes zu ermitteln, wird in (2.72) bzw. in (2.73)die Spannung σx(x, y, z) = 0 gesetzt, und man erhält
z =Mz(x)Iyy −My(x)IyzMy(x)Izz −Mz(x)Iyz
y (2.74)
bzw.
z =Mz(x)
My(x)
IyyIzz
y . (2.75)
Die Richtungen des resultierenden Biegemomentes und der Spannungsnullinie stimmeni.a. nicht überein.
Um bei schiefer Biegung die größte Spannung |σx|max im Querschnitt zu bestimmen, mußman zuerst die Spannungsnullinie berechnen und dann den Ort suchen, der den größtenAbstand von der Spannungsnullinie hat. Dies ist die Stelle der größten Spannung, unddie entsprechenden Koordinaten sind in (2.72) bzw. in (2.73) einzusetzen, um |σx|max zuermitteln.
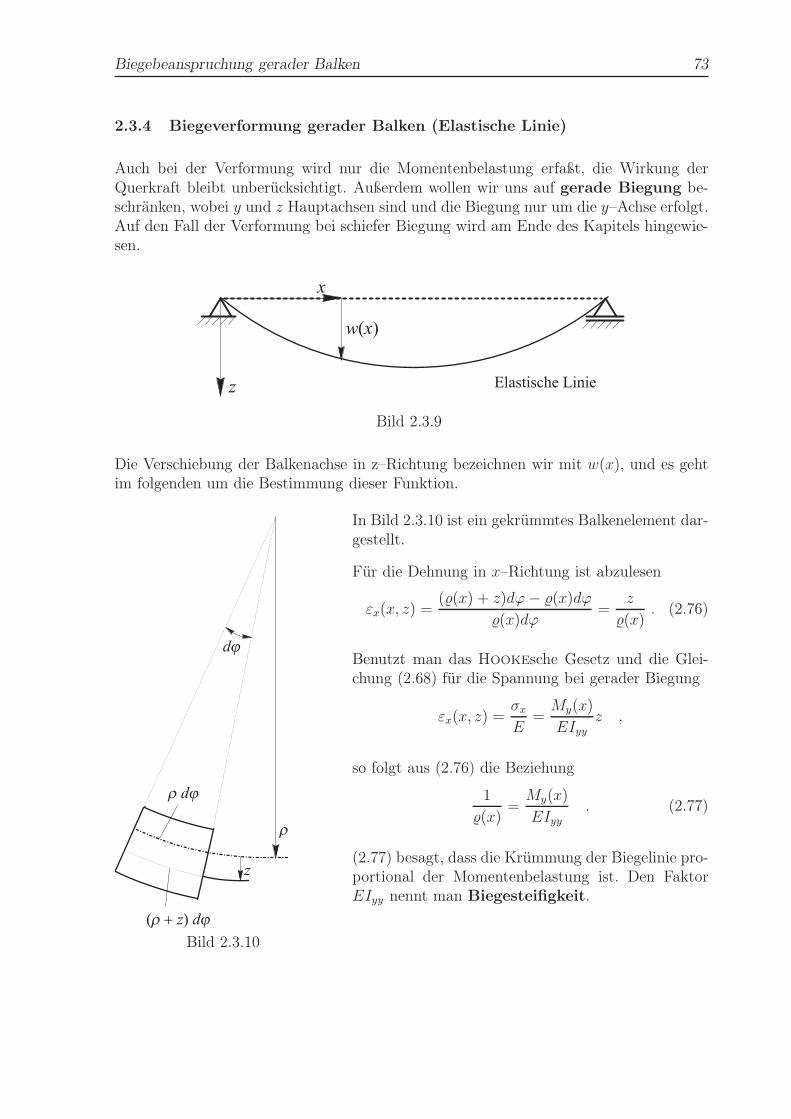
Biegebeanspruchung gerader Balken 73
2.3.4 Biegeverformung gerader Balken (Elastische Linie)
Auch bei der Verformung wird nur die Momentenbelastung erfaßt, die Wirkung derQuerkraft bleibt unberücksichtigt. Außerdem wollen wir uns auf gerade Biegung be-schränken, wobei y und z Hauptachsen sind und die Biegung nur um die y–Achse erfolgt.Auf den Fall der Verformung bei schiefer Biegung wird am Ende des Kapitels hingewie-sen.
x
Elastische Liniez
w(x)
Bild 2.3.9
Die Verschiebung der Balkenachse in z–Richtung bezeichnen wir mit w(x), und es gehtim folgenden um die Bestimmung dieser Funktion.
r
z
r dj
dj
(r + z) dj
Bild 2.3.10
In Bild 2.3.10 ist ein gekrümmtes Balkenelement dar-gestellt.
Für die Dehnung in x–Richtung ist abzulesen
εx(x, z) =((x) + z)dϕ− (x)dϕ
(x)dϕ=
z
(x). (2.76)
Benutzt man das Hookesche Gesetz und die Glei-chung (2.68) für die Spannung bei gerader Biegung
εx(x, z) =σxE
=My(x)
EIyyz ,
so folgt aus (2.76) die Beziehung
1
(x)=My(x)
EIyy. (2.77)
(2.77) besagt, dass die Krümmung der Biegelinie pro-portional der Momentenbelastung ist. Den FaktorEIyy nennt man Biegesteifigkeit.

74 Elastostatik und Festigkeitslehre
Für die Krümmung ebener Kurven (x–w–Ebene) gilt
1
= − w′′
(1 + w′2)3
2
mit w′ =dw
dxund w′′ =
d2w
dx2.
Damit geht (2.77) über in
w′′
(1 + w′2)3
2
= −My(x)
EIyy.
Beschränkt man sich auf kleine Verformungen, so ist w′ ≪ 1, und als Differentialglei-chung der elastischen Linie ergibt sich
w′′(x) = − My(x)
EIyy(x). (2.78)
Durch zweimalige Integration von (2.78) erhält man w(x). Die dabei auftretenden Inte-grationskonstanten lassen sich aus den Randbedingungen für die durch die Integrationgewonnenen Größen w′ und w bestimmen.
In (2.78) wird vom Biegemomentenverlauf My(x) ausgegangen. Stellen wir (2.78) um,differenzieren zweimal und verwenden dabei die Beziehungen (1.36), so erhalten wir
[(EIyy(x)
)w′′(x)
]= −My(x)
[(EIyy(x)
)w′′(x)
]′
= −Qz(x)[(EIyy(x)
)w′′(x)
]′′
= qz(x) .
(2.79)
Für konstante Biegesteifigkeit EIyy folgt aus der 3. Gleichung von (2.79)
EIyyw(x)IV = qz(x) . (2.80)
Bei (2.80) geht man von der Streckenlast qz(x) aus und hat viermal zu integrieren,um w(x) zu erhalten. Entsprechend sind zur Bestimmung der IntegrationskonstantenRandbedingungen für w′′′, w′′, w′ und w zu formulieren.
Im folgenden wollen wir einige Beispiele betrachten.

Biegebeanspruchung gerader Balken 75
Beispiel: DGL der elastischen Linie (I)
q
q
A
AMA
F
x
l
F
EI
Ein gerader Träger der Länge l ist bei Aeingespannt und wird durch eine konstanteStreckenlast q und eine Einzelkraft F belastet.
Gegeben: F, q, l, EIyy = EI (konst.).
Gesucht: Durchbiegung w(x).
↑ A− F − ql = 0x
A MA − F l − ql2
2= 0
A = F + ql MA = F l + ql2
2My(x) =M(x) = −F (l − x)− q
2(l − x)2
EIw′′(x) = −M(x) = F l[
1−(x
l
)]
+ql2
2
[
1− 2(x
l
)
+(x
l
)2]
EIw′(x) = F l2[(x
l
)
− 1
2
(x
l
)2]
+ql3
2
[(x
l
)
−(x
l
)2
+1
3
(x
l
)3]
+ C1
EIw(x) = F l3[1
2
(x
l
)2
− 1
6
(x
l
)3]
+ql4
2
[1
2
(x
l
)2
− 1
3
(x
l
)3
+1
12
(x
l
)4]
+ C1x+ C2
Randbedingungen: w(x = 0) = 0
w′(x = 0) = 0
}
⇒ C2 = 0
C1 = 0
Damit lautet das Ergebnis
w(x) =F l3
6EI
[
3(x
l
)2
−(x
l
)3]
+ql4
24EI
[
6(x
l
)2
− 4(x
l
)3
+(x
l
)4]
.
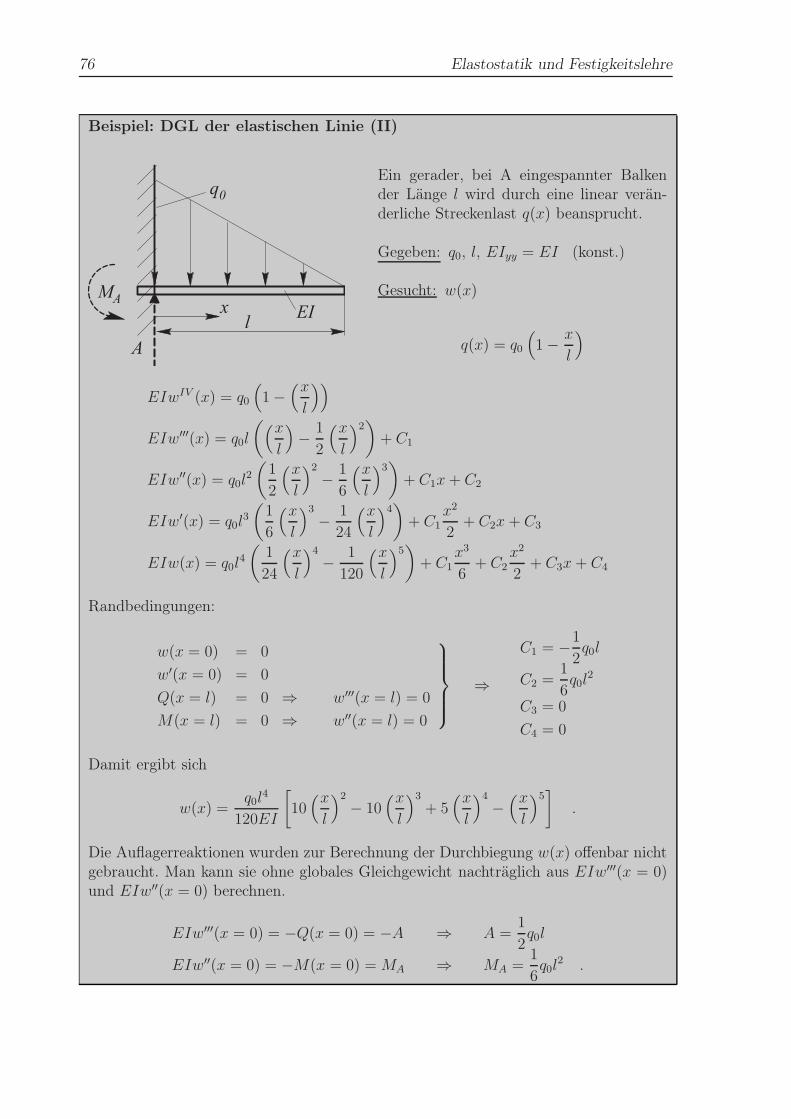
76 Elastostatik und Festigkeitslehre
Beispiel: DGL der elastischen Linie (II)
A
xl
q0
MAEI
Ein gerader, bei A eingespannter Balkender Länge l wird durch eine linear verän-derliche Streckenlast q(x) beansprucht.
Gegeben: q0, l, EIyy = EI (konst.)
Gesucht: w(x)
q(x) = q0
(
1− x
l
)
EIwIV (x) = q0
(
1−(x
l
))
EIw′′′(x) = q0l
((x
l
)
− 1
2
(x
l
)2)
+ C1
EIw′′(x) = q0l2
(1
2
(x
l
)2
− 1
6
(x
l
)3)
+ C1x+ C2
EIw′(x) = q0l3
(1
6
(x
l
)3
− 1
24
(x
l
)4)
+ C1x2
2+ C2x+ C3
EIw(x) = q0l4
(1
24
(x
l
)4
− 1
120
(x
l
)5)
+ C1x3
6+ C2
x2
2+ C3x+ C4
Randbedingungen:
w(x = 0) = 0
w′(x = 0) = 0
Q(x = l) = 0 ⇒ w′′′(x = l) = 0
M(x = l) = 0 ⇒ w′′(x = l) = 0
⇒
C1 = −1
2q0l
C2 =1
6q0l
2
C3 = 0
C4 = 0
Damit ergibt sich
w(x) =q0l
4
120EI
[
10(x
l
)2
− 10(x
l
)3
+ 5(x
l
)4
−(x
l
)5]
.
Die Auflagerreaktionen wurden zur Berechnung der Durchbiegung w(x) offenbar nichtgebraucht. Man kann sie ohne globales Gleichgewicht nachträglich aus EIw′′′(x = 0)und EIw′′(x = 0) berechnen.
EIw′′′(x = 0) = −Q(x = 0) = −A ⇒ A =1
2q0l
EIw′′(x = 0) = −M(x = 0) =MA ⇒ MA =1
6q0l
2 .
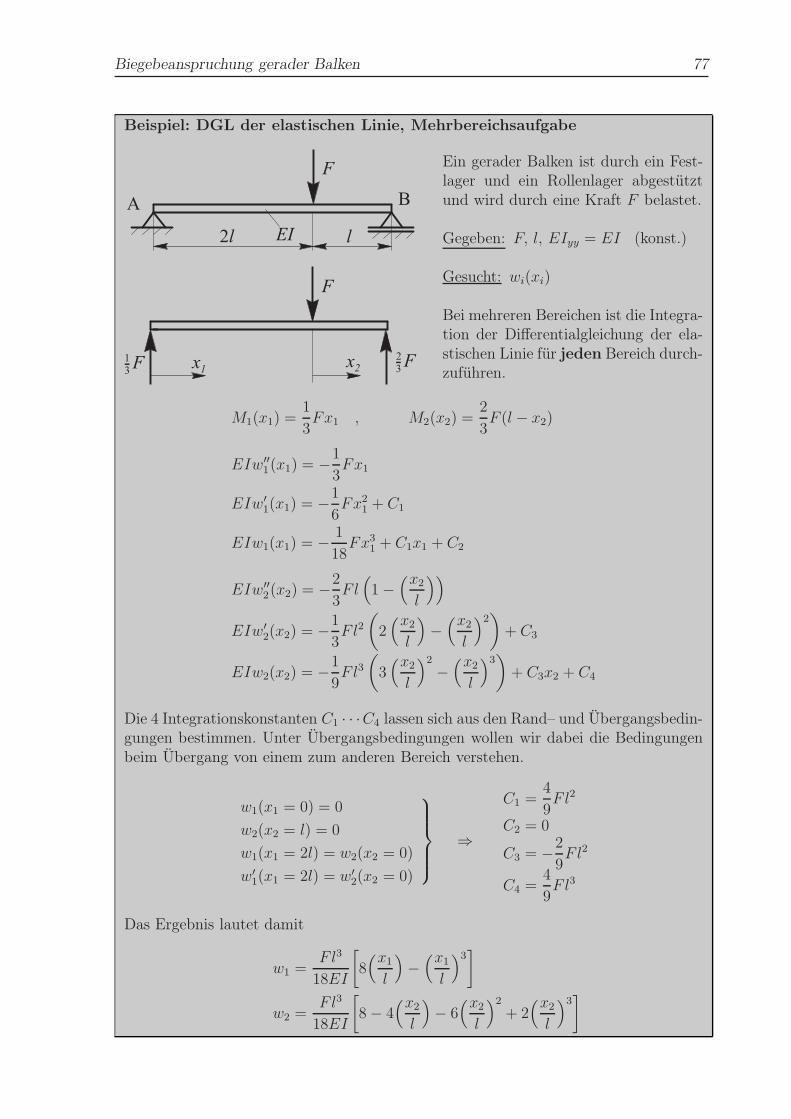
Biegebeanspruchung gerader Balken 77
Beispiel: DGL der elastischen Linie, Mehrbereichsaufgabe
2l EI l
A B
F
- F x1x2
13
- F23
F
Ein gerader Balken ist durch ein Fest-lager und ein Rollenlager abgestütztund wird durch eine Kraft F belastet.
Gegeben: F, l, EIyy = EI (konst.)
Gesucht: wi(xi)
Bei mehreren Bereichen ist die Integra-tion der Differentialgleichung der ela-stischen Linie für jeden Bereich durch-zuführen.
M1(x1) =1
3Fx1 , M2(x2) =
2
3F (l − x2)
EIw′′
1(x1) = −1
3Fx1
EIw′
1(x1) = −1
6Fx21 + C1
EIw1(x1) = − 1
18Fx31 + C1x1 + C2
EIw′′
2(x2) = −2
3F l(
1−(x2l
))
EIw′
2(x2) = −1
3F l2
(
2(x2l
)
−(x2l
)2)
+ C3
EIw2(x2) = −1
9F l3
(
3(x2l
)2
−(x2l
)3)
+ C3x2 + C4
Die 4 Integrationskonstanten C1 · · ·C4 lassen sich aus den Rand– und Übergangsbedin-gungen bestimmen. Unter Übergangsbedingungen wollen wir dabei die Bedingungenbeim Übergang von einem zum anderen Bereich verstehen.
w1(x1 = 0) = 0
w2(x2 = l) = 0
w1(x1 = 2l) = w2(x2 = 0)
w′
1(x1 = 2l) = w′
2(x2 = 0)
⇒
C1 =4
9F l2
C2 = 0
C3 = −2
9F l2
C4 =4
9F l3
Das Ergebnis lautet damit
w1 =F l3
18EI
[
8(x1l
)
−(x1l
)3]
w2 =F l3
18EI
[
8− 4(x2l
)
− 6(x2l
)2
+ 2(x2l
)3]
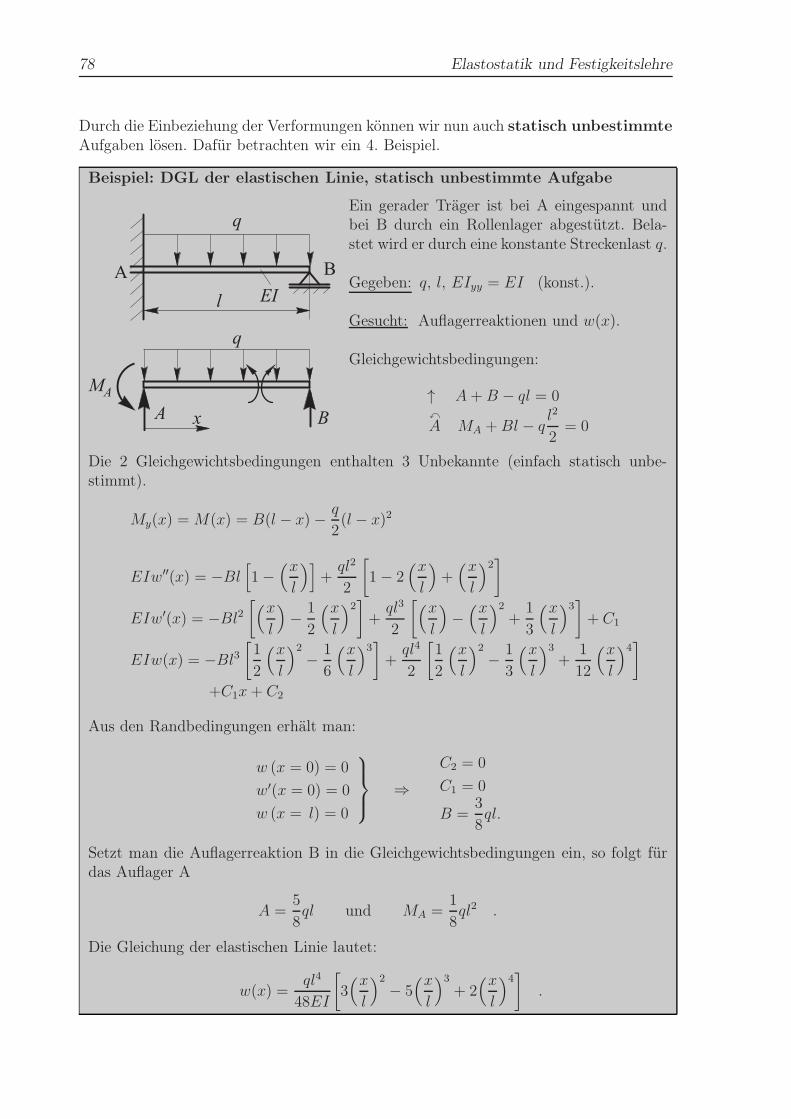
78 Elastostatik und Festigkeitslehre
Durch die Einbeziehung der Verformungen können wir nun auch statisch unbestimmteAufgaben lösen. Dafür betrachten wir ein 4. Beispiel.
Beispiel: DGL der elastischen Linie, statisch unbestimmte Aufgabe
B
B
q
q
A
A
MA
x
l EI
Ein gerader Träger ist bei A eingespannt undbei B durch ein Rollenlager abgestützt. Bela-stet wird er durch eine konstante Streckenlast q.
Gegeben: q, l, EIyy = EI (konst.).
Gesucht: Auflagerreaktionen und w(x).
Gleichgewichtsbedingungen:
↑ A +B − ql = 0x
A MA +Bl − ql2
2= 0
Die 2 Gleichgewichtsbedingungen enthalten 3 Unbekannte (einfach statisch unbe-stimmt).
My(x) =M(x) = B(l − x)− q
2(l − x)2
EIw′′(x) = −Bl[
1−(x
l
)]
+ql2
2
[
1− 2(x
l
)
+(x
l
)2]
EIw′(x) = −Bl2[(x
l
)
− 1
2
(x
l
)2]
+ql3
2
[(x
l
)
−(x
l
)2
+1
3
(x
l
)3]
+ C1
EIw(x) = −Bl3[1
2
(x
l
)2
− 1
6
(x
l
)3]
+ql4
2
[1
2
(x
l
)2
− 1
3
(x
l
)3
+1
12
(x
l
)4]
+C1x+ C2
Aus den Randbedingungen erhält man:
w (x = 0) = 0
w′(x = 0) = 0
w (x = l) = 0
⇒C2 = 0
C1 = 0
B =3
8ql.
Setzt man die Auflagerreaktion B in die Gleichgewichtsbedingungen ein, so folgt fürdas Auflager A
A =5
8ql und MA =
1
8ql2 .
Die Gleichung der elastischen Linie lautet:
w(x) =ql4
48EI
[
3(x
l
)2
− 5(x
l
)3
+ 2(x
l
)4]
.

Biegebeanspruchung gerader Balken 79
Geht man bei statisch unbestimmten Aufgaben von der Differentialgleichung 2.Ordnung aus, so ist die Anzahl von Gleichgewichts– und Randbedingungen stetsgleich der Anzahl von unbekannten Auflagerreaktionen und Integrationskonstanten.
Benutzt man (2.80), so folgt für das 4. Beispiel
EIwIV (x) = q
EIw′′′(x) = qx+ C1
EIw′′(x) = qx2
2+ C1x+ C2
EIw′(x) = qx3
6+ C1
x2
2+ C2x+ C3
EIw(x) = qx4
24+ C1
x3
6+ C2
x2
2+ C3x+ C4
Randbedingungen:w(x = 0) = 0
w′(x = 0) = 0
w′′(x = l) = 0
w(x = l) = 0
⇒
C1 = −5
8ql
C2 =1
8ql2
C3 = 0
C4 = 0
Ohne Aufstellung des globalen Gleichgewichtes erhält man
EIw′′′(x = 0) = −Q(x = 0) = −A ⇒ A =5
8ql
EIw′′(x = 0) = −M(x = 0) =MA ⇒ MA =1
8ql2
EIw′′′(x = l) = −Q(x = l) = B ⇒ B =3
8ql
Geht man bei statisch unbestimmten Aufgaben von der Differentialgleichung 4. Ord-nung aus, ergeben sich stets ebenso viele Randbedingungen wie Integrationskonstan-ten, und die unbekannten Auflagerreaktionen lassen sich ohne globales Gleichgewichtaus EI w′′′ und EI w′′ berechnen.
Im folgenden wollen wir noch einmal Rand– und Übergangsbedingungen systematischzusammenstellen. Es handelt sich um Bedingungen für die kinematischen Größen wund w′ und für die statischen Größen Qz = Q (=w′′′) und My =M (=w′′).
Randbedingungen: (2 Bedingungen)
x
1.w(x = 0) = 0
w′(x = 0) = 0
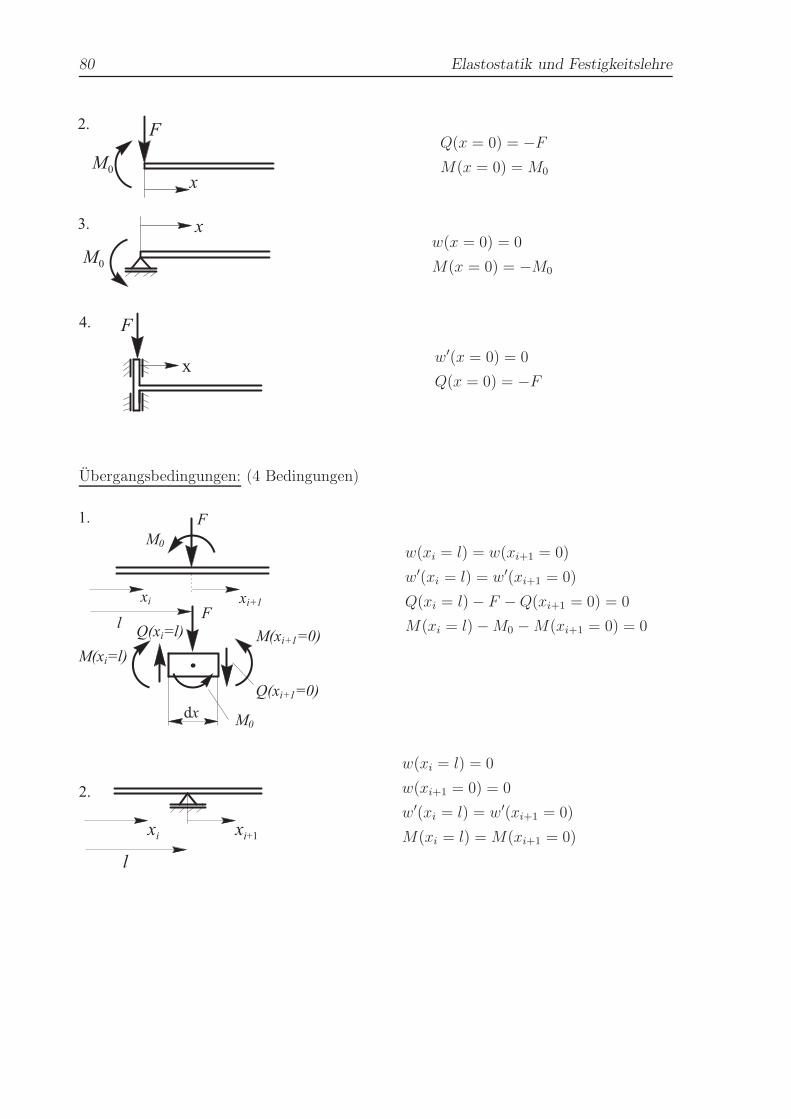
80 Elastostatik und Festigkeitslehre
xM0
F2.Q(x = 0) = −FM(x = 0) =M0
M0
x3.w(x = 0) = 0
M(x = 0) = −M0
x
F4.
w′(x = 0) = 0
Q(x = 0) = −F
Übergangsbedingungen: (4 Bedingungen)
1.
dx
M0
M0
F
F
l
xi xi+1
Q(xi=l)
M(xi=l)
Q(xi+1=0)
M(xi+1=0)
w(xi = l) = w(xi+1 = 0)
w′(xi = l) = w′(xi+1 = 0)
Q(xi = l)− F −Q(xi+1 = 0) = 0
M(xi = l)−M0 −M(xi+1 = 0) = 0
w(xi = l) = 0
w(xi+1 = 0) = 0
w′(xi = l) = w′(xi+1 = 0)
M(xi = l) =M(xi+1 = 0)

Torsion gerader Stäbe 81
w(xi = l) = w(xi+1 = 0)
M(xi = l) = 0
M(xi+1 = 0) = 0
Q(xi = l) = Q(xi+1 = 0)
Bei schiefer Biegung ist die Berechnung der Durchbiegungen in zwei senkrecht aufein-ander stehenden, durch die Lage der Hauptachsen y und z gegebenen Ebenen vorzuneh-men. Die Gesamtdurchbiegung folgt dann aus
w(x) =√
w2z(x) + w2
y(x) (2.81)
2.4 Torsion gerader Stäbe
Im folgenden betrachten wir gerade Stäbe, die durch ein Moment Mt um ihre Stabachsebeansprucht werden. Spannungs– und Verformungszustand des Stabes werden berechnet.
Bei Torsion erhält man einen zweiachsigen Spannungszustand. Zug und Biegung (oh-ne Berücksichtigung des Querkraftschubs) eines prismatischen Trägers ergaben eineneinachsigen Spannungszustand.
Ein weiterer Unterschied zu den bisher betrachteten Beanspruchungsarten Zug (Druck)und Biegung besteht darin, dass bei Torsion Spannungsverteilungen auftreten, die vonder Querschnittsform abhängen. Dementsprechend wird in den folgenden Kapitel eineEinteilung gewählt, die sich nach verschiedenen Querschnittsformen orientiert.
2.4.1 Kreis– und kreisringförmiger Querschnitt
raMt(x)
Mt0
r
y
z
x
ϕ
Bild 2.4.1
Es wird ein prismatischer Stabangenommen. Das Schnittmomentan der Stelle x bezeichnen wirmit Mt(x) und die Querschnitts-verdrehung mit ϕt(x). In der Quer-schnittsebene benutzen wir ein Po-larkoordinatensystem.
1. Statik (Gleichgewicht):Das Momentengleichgewicht umdie x–Achse liefert eine Bezie-hung für das SchnittmomentMt(x). Bei einer Belastung vonMt0 an beiden Stabenden erhältman
Mt(x) =Mt0.
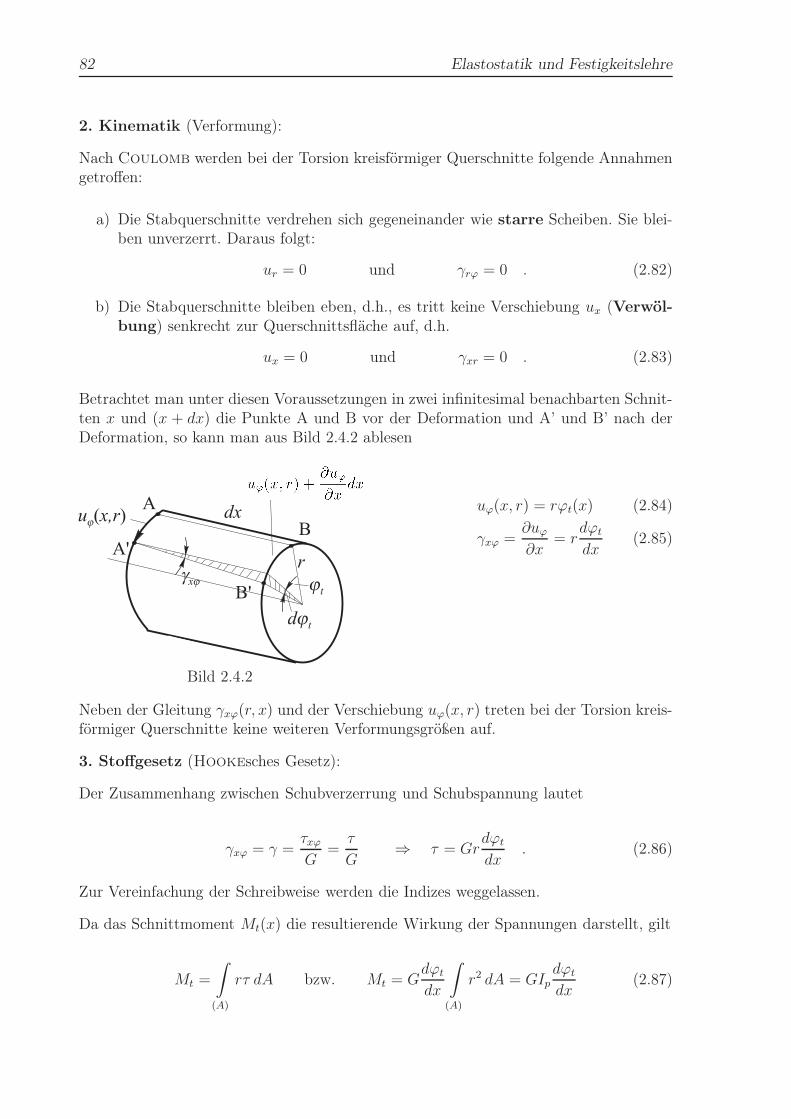
82 Elastostatik und Festigkeitslehre
2. Kinematik (Verformung):
Nach Coulomb werden bei der Torsion kreisförmiger Querschnitte folgende Annahmengetroffen:
a) Die Stabquerschnitte verdrehen sich gegeneinander wie starre Scheiben. Sie blei-ben unverzerrt. Daraus folgt:
ur = 0 und γrϕ = 0 . (2.82)
b) Die Stabquerschnitte bleiben eben, d.h., es tritt keine Verschiebung ux (Verwöl-bung) senkrecht zur Querschnittsfläche auf, d.h.
ux = 0 und γxr = 0 . (2.83)
Betrachtet man unter diesen Voraussetzungen in zwei infinitesimal benachbarten Schnit-ten x und (x + dx) die Punkte A und B vor der Deformation und A’ und B’ nach derDeformation, so kann man aus Bild 2.4.2 ablesen
djt
jt
B
r
Adx
B'
A'
uj(x,r)
gxj
Bild 2.4.2
uϕ(x, r) = rϕt(x) (2.84)
γxϕ =∂uϕ∂x
= rdϕt
dx(2.85)
Neben der Gleitung γxϕ(r, x) und der Verschiebung uϕ(x, r) treten bei der Torsion kreis-förmiger Querschnitte keine weiteren Verformungsgrößen auf.
3. Stoffgesetz (Hookesches Gesetz):
Der Zusammenhang zwischen Schubverzerrung und Schubspannung lautet
γxϕ = γ =τxϕG
=τ
G⇒ τ = Gr
dϕt
dx. (2.86)
Zur Vereinfachung der Schreibweise werden die Indizes weggelassen.
Da das Schnittmoment Mt(x) die resultierende Wirkung der Spannungen darstellt, gilt
Mt =
∫
(A)
rτ dA bzw. Mt = Gdϕt
dx
∫
(A)
r2 dA = GIpdϕt
dx(2.87)

Torsion gerader Stäbe 83
mit dem bereits bekannten polaren Flächenträgheitsmoment
y
z
ra
r i Ip =
∫
(A)
r2 dA =
π
2r4a bei Vollquerschnitt
π
2(r4a − r4i ) bei Ringquerschnitt
Das Elastizitätsgesetz der Torsion eines kreisförmigen Stabes lautet somit
ϑ(x) =dϕt
dx=Mt(x)
GIp. (2.88)
Die Größe GIp wird als Torsionssteifigkeit bezeichnet, und ϑ(x) nennt man Verwin-dung, Verdrillung oder Drillung.
In (2.88) wäre auch eine mit x veränderliche Torsionssteifigkeit möglich.
(2.88) zeigt im Prinzip den gleichen Aufbau wie (2.77) für Biegung.
y
z
tmax
t (r)
Bild 2.4.3
Der in Bild 2.4.3 dargestellte Spannungsverlauf im Stabquer-schnitt folgt aus (2.87) mit (2.86) und (2.88)
τ(x, r) =Mt(x)
Ipr . (2.89)
Die Torsionsspannung wächst linear mit r an. Die maximale Spannung tritt am Außen-rand ra auf. Es gilt
|τmax| =|Mt|Wt
mit Wt =Ipra
(2.90)
Analog zur Gleichung für die maximale Spannung bei gerader Biegung (2.69) wird hierdas Torsionswiderstandsmoment Wt eingeführt.
Schließlich ergibt sich durch Integration von (2.88) die Verdrehung zweier um ∆l ent-fernter Querschnitte des Stabes
∆ϕt =
l+∆l∫
x=l
ϑ(x) dx =1
GIp
l+∆l∫
x=l
Mt(x) dx . (2.91)
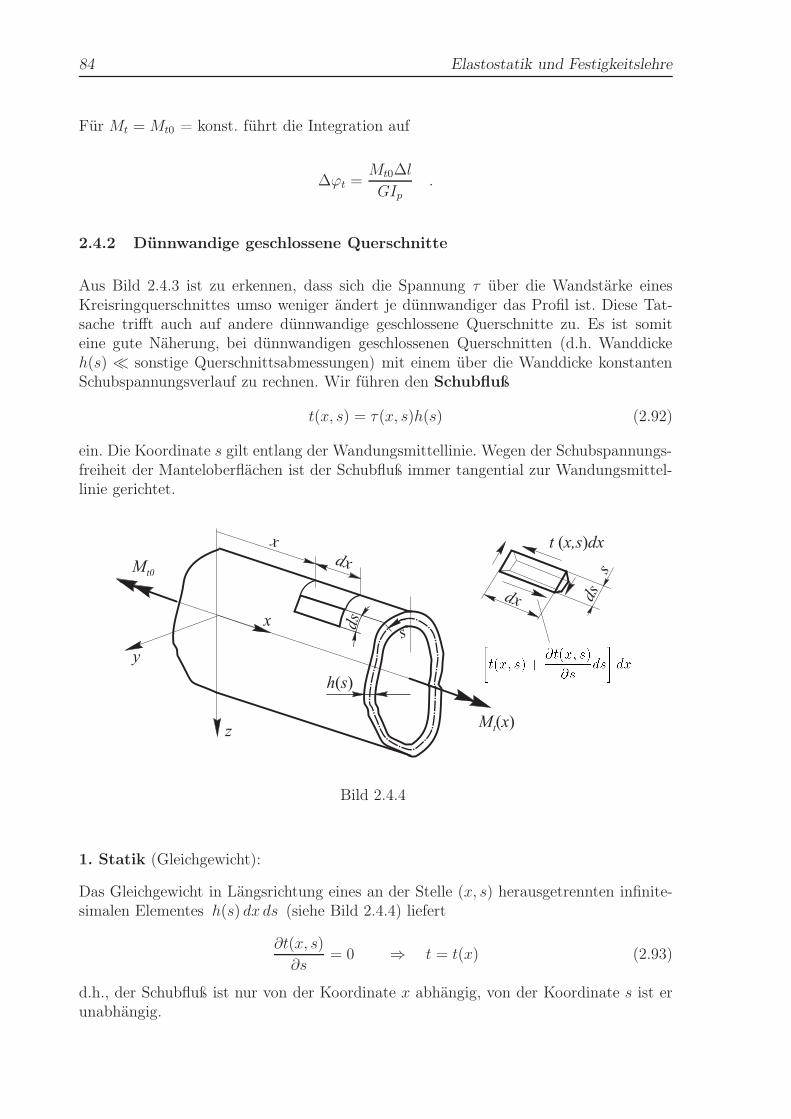
84 Elastostatik und Festigkeitslehre
Für Mt =Mt0 = konst. führt die Integration auf
∆ϕt =Mt0∆l
GIp.
2.4.2 Dünnwandige geschlossene Querschnitte
Aus Bild 2.4.3 ist zu erkennen, dass sich die Spannung τ über die Wandstärke einesKreisringquerschnittes umso weniger ändert je dünnwandiger das Profil ist. Diese Tat-sache trifft auch auf andere dünnwandige geschlossene Querschnitte zu. Es ist somiteine gute Näherung, bei dünnwandigen geschlossenen Querschnitten (d.h. Wanddickeh(s) ≪ sonstige Querschnittsabmessungen) mit einem über die Wanddicke konstantenSchubspannungsverlauf zu rechnen. Wir führen den Schubfluß
t(x, s) = τ(x, s)h(s) (2.92)
ein. Die Koordinate s gilt entlang der Wandungsmittellinie. Wegen der Schubspannungs-freiheit der Manteloberflächen ist der Schubfluß immer tangential zur Wandungsmittel-linie gerichtet.
Mt0
z
y
x
xdx
Mt(x)
s
h(s)
ds
t (x,s)dx
dss
dx
Bild 2.4.4
1. Statik (Gleichgewicht):
Das Gleichgewicht in Längsrichtung eines an der Stelle (x, s) herausgetrennten infinite-simalen Elementes h(s) dx ds (siehe Bild 2.4.4) liefert
∂t(x, s)
∂s= 0 ⇒ t = t(x) (2.93)
d.h., der Schubfluß ist nur von der Koordinate x abhängig, von der Koordinate s ist erunabhängig.

Torsion gerader Stäbe 85
B
Mt(x)
dF
t
ds
s
~r
Bild 2.4.5
Das resultierende Torsionsmoment Mt(x) bezüglicheines zunächst beliebigen Bezugspunktes B folgt aus(siehe Bild 2.4.5)
Mt(x) =
∮
rt ds und mitrds
2= dΦ
Mt(x) = 2tΦ (2.94)
wobei Φ die von der Wandungsmittellinie umschlos-sene Fläche ist.
Damit gilt der 1. Satz von Bredt:
t(x) =Mt(x)
2Φ. (2.95)
Die Schubspannung folgt aus
τ(x, s) =t(x)
h(s)=
Mt(x)
2Φh(s), (2.96)
und für die maximale Schubspannung gilt
|τmax| =|t|hmin
=|Mt|Wt
mit Wt = 2Φhmin . (2.97)
Das Problem der Torsion dünnwandiger geschlossener Profile ist unter den getroffenenAnnahmen offensichtlich statisch bestimmt. Wir konnten die Spannungsverteilung imQuerschnitt ermitteln, ohne die Verformungsgleichungen mit heranziehen zu müssen.
2. Kinematik (Verformung):
Nach Saint Venant drehen sich die Querschnitte beliebiger prismatischer Stäbe beireiner Torsion zwar „quasi–starr“ in ihrer Ebene um einen Drehpol, es können aberVerschiebungen ux (Verwölbungen) parallel zur Stabachse auftreten.
In der Querschnittsebene gilt nach wie vor
ur = 0 und duϕ(x, r) = rdϕt(x) . (2.98)
Dabei zählt r vom zunächst unbekannten Drillmittelpunkt D aus.

86 Elastostatik und Festigkeitslehre
r~
djt
dusdun
duj
r
D
Bild 2.4.6
Durch die „quasi–starre“ Querschnittsdrehung um denDrillmittelpunkt ergibt sich beim Fortschreiten um dx derin Bild 2.4.6 dargestellte Sachverhalt.
dusduϕ
=dusrdϕt
=r
r⇒ dus = rdϕt . (2.99)
ds
dx
gxs- - gxs
p2
Bild 2.4.7
Ein am Ort (x, s) gedanklich herausgeschnitteneskleines Wandelement h(s) dx ds erfährt infolge derTorsionsspannungen die Winkeländerung γxs.
Das infinitesimale Element kann als eben angese-hen werden. Aus (2.16) folgt mit uy → uϕ unddy → ds unter Beachtung von (2.99)
γxs = γ =∂ux∂s
+∂us∂x
=∂ux∂s
+ rdϕt
dx=∂ux∂s
+ r ϑ
(2.100)
3. Stoffgesetz (Hookesches Gesetz):
Nach (2.25) erhalten wir für reine Schubbeanspruchung
γxs =τxsG
bzw. abgekürzt γ =τ
G(2.101)
Setzt man (2.101) in (2.100) ein und integriert, so folgt für die Querschnittsverwölbung
ux − ux0 =1
G
s∫
s∗=0
τ ds∗ − ϑ
s∫
s∗=0
r ds∗ (2.102)
Die Integration von (2.102) über den gesamten Umfang ergibt wegen der Stetigkeit derVerwölbung (Kompatibilität)
0 =1
G
∮
τ ds− ϑ
∮
r ds =1
G
∮
τ ds− 2ϑΦ
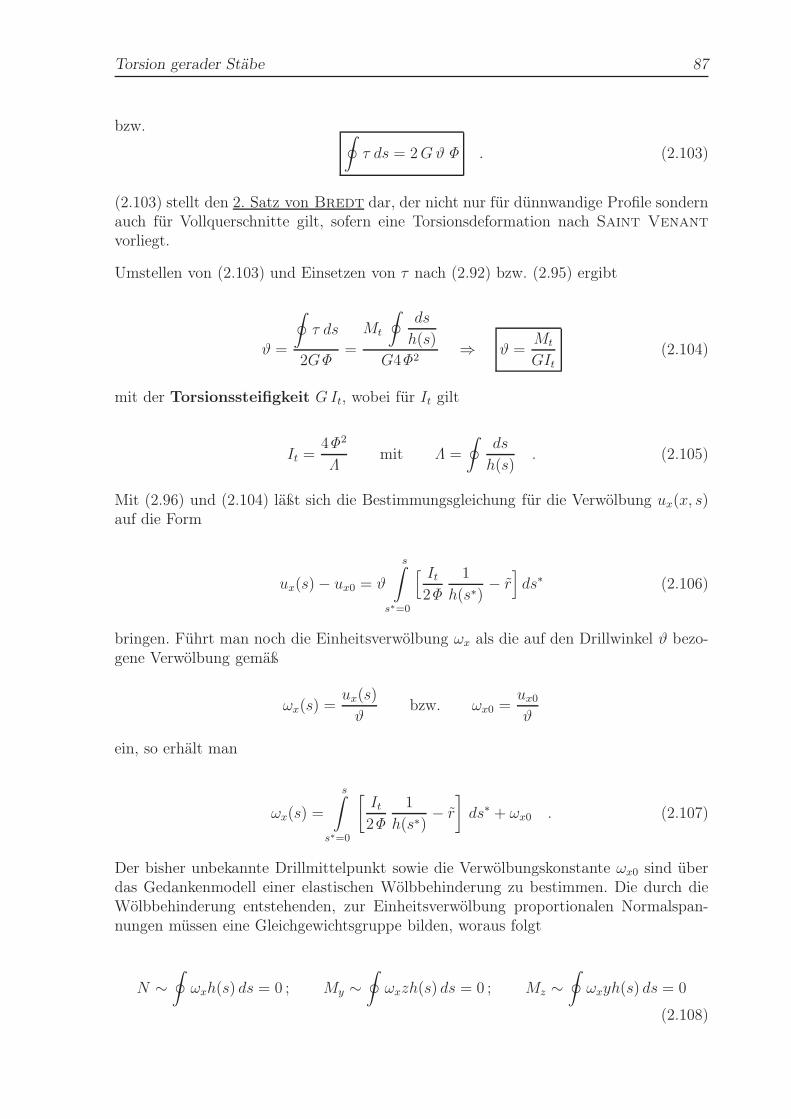
Torsion gerader Stäbe 87
bzw.∮
τ ds = 2GϑΦ . (2.103)
(2.103) stellt den 2. Satz von Bredt dar, der nicht nur für dünnwandige Profile sondernauch für Vollquerschnitte gilt, sofern eine Torsionsdeformation nach Saint Venant
vorliegt.
Umstellen von (2.103) und Einsetzen von τ nach (2.92) bzw. (2.95) ergibt
ϑ =
∮
τ ds
2GΦ=
Mt
∮ds
h(s)
G4Φ2⇒ ϑ =
Mt
GIt(2.104)
mit der Torsionssteifigkeit GIt, wobei für It gilt
It =4Φ2
Λmit Λ =
∮ds
h(s). (2.105)
Mit (2.96) und (2.104) läßt sich die Bestimmungsgleichung für die Verwölbung ux(x, s)auf die Form
ux(s)− ux0 = ϑ
s∫
s∗=0
[ It2Φ
1
h(s∗)− r]
ds∗ (2.106)
bringen. Führt man noch die Einheitsverwölbung ωx als die auf den Drillwinkel ϑ bezo-gene Verwölbung gemäß
ωx(s) =ux(s)
ϑbzw. ωx0 =
ux0ϑ
ein, so erhält man
ωx(s) =
s∫
s∗=0
[It2Φ
1
h(s∗)− r
]
ds∗ + ωx0 . (2.107)
Der bisher unbekannte Drillmittelpunkt sowie die Verwölbungskonstante ωx0 sind überdas Gedankenmodell einer elastischen Wölbbehinderung zu bestimmen. Die durch dieWölbbehinderung entstehenden, zur Einheitsverwölbung proportionalen Normalspan-nungen müssen eine Gleichgewichtsgruppe bilden, woraus folgt
N ∼∮
ωxh(s) ds = 0 ; My ∼∮
ωxzh(s) ds = 0 ; Mz ∼∮
ωxyh(s) ds = 0
(2.108)
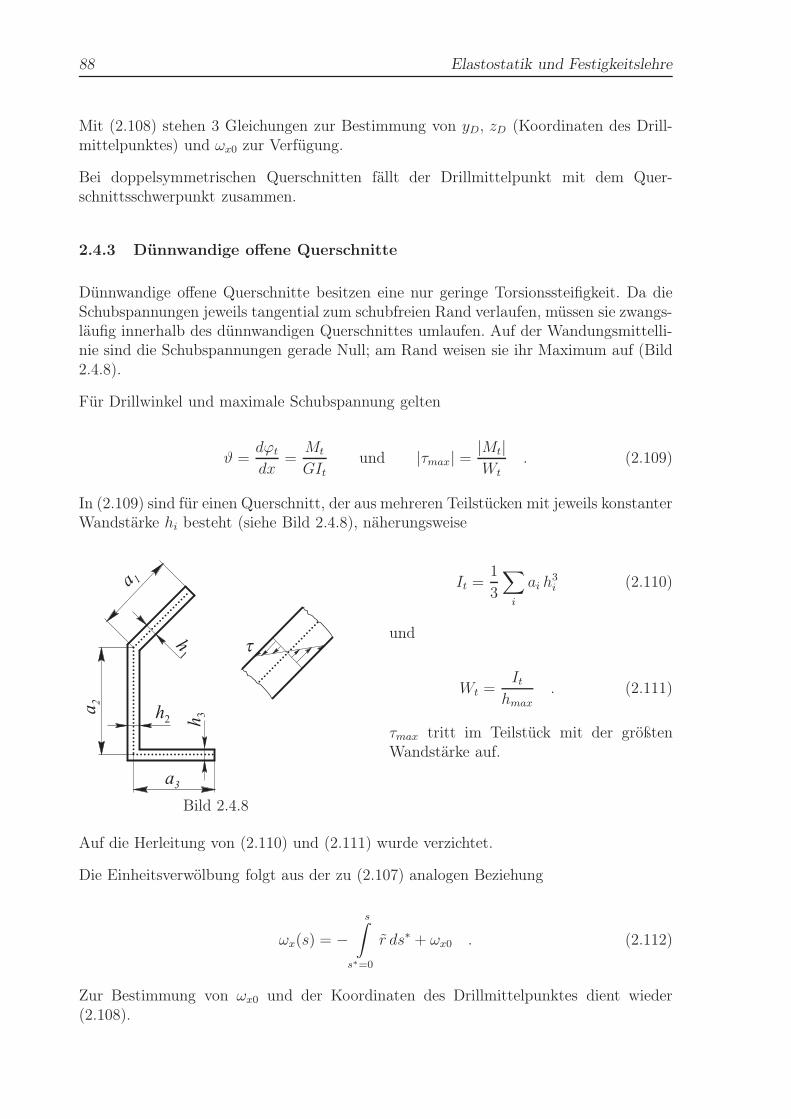
88 Elastostatik und Festigkeitslehre
Mit (2.108) stehen 3 Gleichungen zur Bestimmung von yD, zD (Koordinaten des Drill-mittelpunktes) und ωx0 zur Verfügung.
Bei doppelsymmetrischen Querschnitten fällt der Drillmittelpunkt mit dem Quer-schnittsschwerpunkt zusammen.
2.4.3 Dünnwandige offene Querschnitte
Dünnwandige offene Querschnitte besitzen eine nur geringe Torsionssteifigkeit. Da dieSchubspannungen jeweils tangential zum schubfreien Rand verlaufen, müssen sie zwangs-läufig innerhalb des dünnwandigen Querschnittes umlaufen. Auf der Wandungsmittelli-nie sind die Schubspannungen gerade Null; am Rand weisen sie ihr Maximum auf (Bild2.4.8).
Für Drillwinkel und maximale Schubspannung gelten
ϑ =dϕt
dx=Mt
GItund |τmax| =
|Mt|Wt
. (2.109)
In (2.109) sind für einen Querschnitt, der aus mehreren Teilstücken mit jeweils konstanterWandstärke hi besteht (siehe Bild 2.4.8), näherungsweise
h1
a3
a 1
a2
h2 h3
t
Bild 2.4.8
It =1
3
∑
i
ai h3i (2.110)
und
Wt =Ithmax
. (2.111)
τmax tritt im Teilstück mit der größtenWandstärke auf.
Auf die Herleitung von (2.110) und (2.111) wurde verzichtet.
Die Einheitsverwölbung folgt aus der zu (2.107) analogen Beziehung
ωx(s) = −s∫
s∗=0
r ds∗ + ωx0 . (2.112)
Zur Bestimmung von ωx0 und der Koordinaten des Drillmittelpunktes dient wieder(2.108).
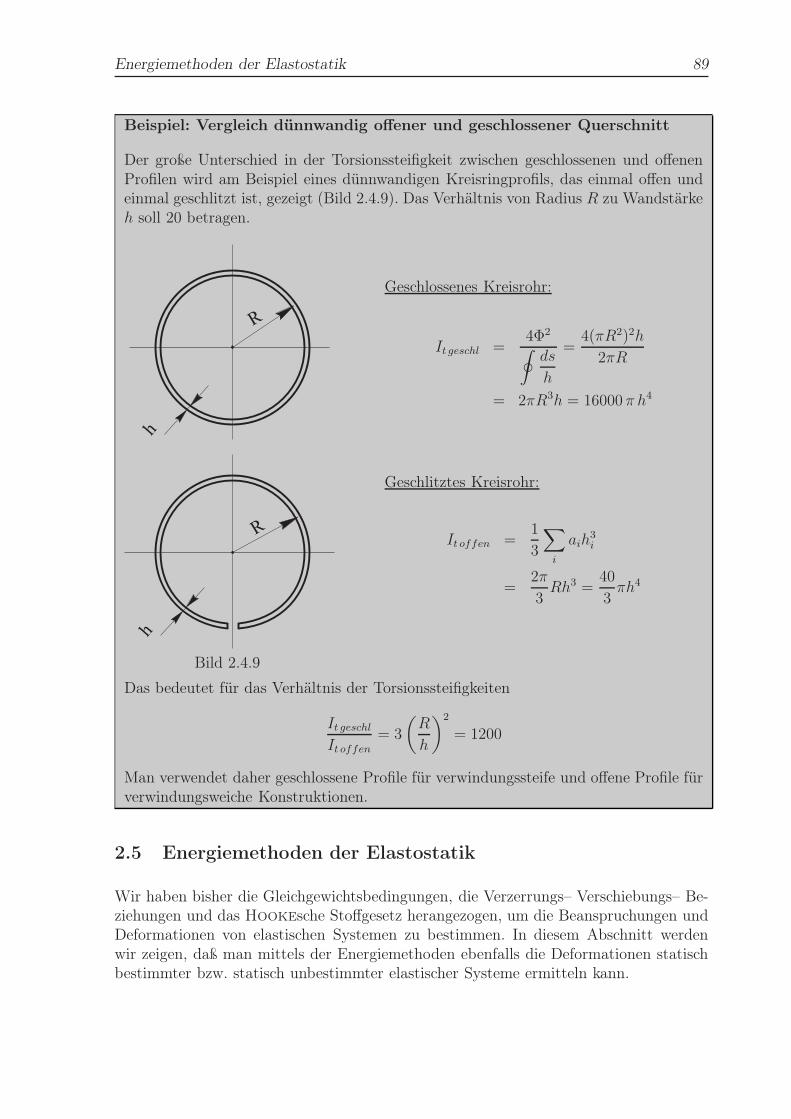
Energiemethoden der Elastostatik 89
Beispiel: Vergleich dünnwandig offener und geschlossener Querschnitt
Der große Unterschied in der Torsionssteifigkeit zwischen geschlossenen und offenenProfilen wird am Beispiel eines dünnwandigen Kreisringprofils, das einmal offen undeinmal geschlitzt ist, gezeigt (Bild 2.4.9). Das Verhältnis von Radius R zu Wandstärkeh soll 20 betragen.
hh
R
R
Bild 2.4.9
Geschlossenes Kreisrohr:
It geschl =4Φ2
∮ds
h
=4(πR2)2h
2πR
= 2πR3h = 16000 π h4
Geschlitztes Kreisrohr:
It offen =1
3
∑
i
aih3i
=2π
3Rh3 =
40
3πh4
Das bedeutet für das Verhältnis der Torsionssteifigkeiten
It geschlIt offen
= 3
(R
h
)2
= 1200
Man verwendet daher geschlossene Profile für verwindungssteife und offene Profile fürverwindungsweiche Konstruktionen.
2.5 Energiemethoden der Elastostatik
Wir haben bisher die Gleichgewichtsbedingungen, die Verzerrungs– Verschiebungs– Be-ziehungen und das Hookesche Stoffgesetz herangezogen, um die Beanspruchungen undDeformationen von elastischen Systemen zu bestimmen. In diesem Abschnitt werdenwir zeigen, daß man mittels der Energiemethoden ebenfalls die Deformationen statischbestimmter bzw. statisch unbestimmter elastischer Systeme ermitteln kann.
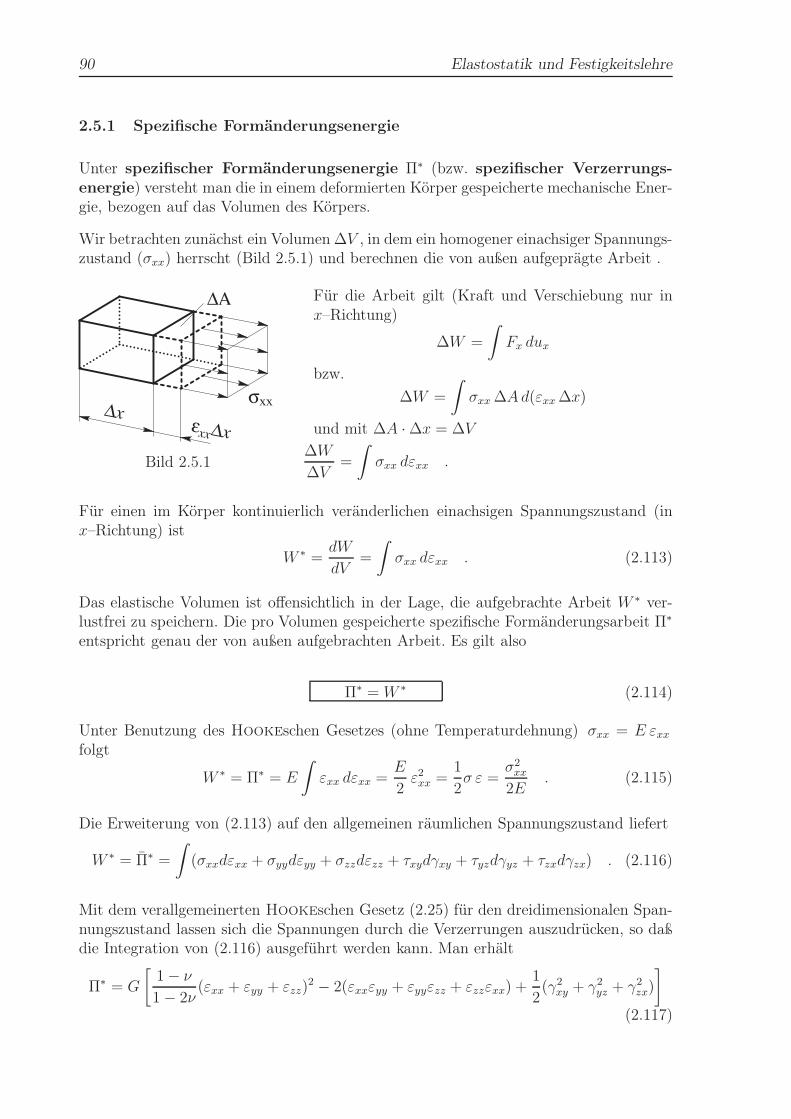
90 Elastostatik und Festigkeitslehre
2.5.1 Spezifische Formänderungsenergie
Unter spezifischer Formänderungsenergie Π∗ (bzw. spezifischer Verzerrungs-energie) versteht man die in einem deformierten Körper gespeicherte mechanische Ener-gie, bezogen auf das Volumen des Körpers.
Wir betrachten zunächst ein Volumen ∆V , in dem ein homogener einachsiger Spannungs-zustand (σxx) herrscht (Bild 2.5.1) und berechnen die von außen aufgeprägte Arbeit .
σxx
∆Α
∆xεxx∆x
Bild 2.5.1
Für die Arbeit gilt (Kraft und Verschiebung nur inx–Richtung)
∆W =
∫
Fx dux
bzw.
∆W =
∫
σxx ∆Ad(εxx∆x)
und mit ∆A ·∆x = ∆V
∆W
∆V=
∫
σxx dεxx .
Für einen im Körper kontinuierlich veränderlichen einachsigen Spannungszustand (inx–Richtung) ist
W ∗ =dW
dV=
∫
σxx dεxx . (2.113)
Das elastische Volumen ist offensichtlich in der Lage, die aufgebrachte Arbeit W ∗ ver-lustfrei zu speichern. Die pro Volumen gespeicherte spezifische Formänderungsarbeit Π∗
entspricht genau der von außen aufgebrachten Arbeit. Es gilt also
Π∗ =W ∗ (2.114)
Unter Benutzung des Hookeschen Gesetzes (ohne Temperaturdehnung) σxx = E εxxfolgt
W ∗ = Π∗ = E
∫
εxx dεxx =E
2ε2xx =
1
2σ ε =
σ2xx
2E. (2.115)
Die Erweiterung von (2.113) auf den allgemeinen räumlichen Spannungszustand liefert
W ∗ = Π∗ =
∫
(σxxdεxx + σyydεyy + σzzdεzz + τxydγxy + τyzdγyz + τzxdγzx) . (2.116)
Mit dem verallgemeinerten Hookeschen Gesetz (2.25) für den dreidimensionalen Span-nungszustand lassen sich die Spannungen durch die Verzerrungen auszudrücken, so daßdie Integration von (2.116) ausgeführt werden kann. Man erhält
Π∗ = G
[1− ν
1− 2ν(εxx + εyy + εzz)
2 − 2(εxxεyy + εyyεzz + εzzεxx) +1
2(γ2xy + γ2yz + γ2zx)
]
(2.117)

Energiemethoden der Elastostatik 91
oder, ausgedrückt durch die Spannungen,
Π∗ =1
2E(σxx+σyy+σzz)
2− 1
2G(σxxσyy+σyyσzz+σzzσxx)+
1
2G(τ 2xy+τ
2yz+τ
2zx) . (2.118)
Die gesamte in einem elastischen Körper gespeicherte Formänderungsenergie erhält mandurch Integration der spezifischen Formänderungsenergie über das Körpervolumen
Π =
∫
(V )
Π∗ dV . (2.119)
2.5.2 Formänderungsenergie eines Balkens
Wir haben bisher ausschließlich den Beanspruchungszustand in Stäben und Balken, d.h.in Linientragwerken untersucht. Die Berechnung der Formänderungsenergie soll daherauch nur für diese Tragwerke erfolgen. Dabei werden wir der Reihe nach die Bean-spruchungsarten Zug (Druck), Biegung, Torsion und Querkraftschub betrachten.Letzterer spielt bei schlanken Trägern eine untergeordnete Rolle.
Beim Balken wird die Integration über das Volumen aufgespalten in eine Integrationüber die Querschnittsfläche A und eine Integration über die Balkenlänge l gemäß
Π =
∫
(V )
Π∗ dV =
∫
(l)
∫
(A)
Π∗ dA dx . (2.120)
Zug (Druck):
Es ist nur eine über die Querschnittsfläche konstante Normalspannung σxx = σ =N(x)
A(einachsiger Spannungszustand) vorhanden. Das ergibt
Π =
∫
(l)
∫
(A)
σ2
2EdAdx =
∫
(l)
N2(x)
2EA2
∫
(A)
dA dx =
∫
(l)
N2(x)
2EAdx . (2.121)
Biegung:
Wie bei Zug gibt es nur eine Normalspannungskomponente σxx = σ. Wir setzen einegerade Biegung um die y-Achse (Hauptachse) voraus, so daß für die Spannung
σ =My(x)
Iyyz gilt.

92 Elastostatik und Festigkeitslehre
Damit folgt
Π =
∫
(l)
M2y (x)
2EI2yy
∫
(A)
z2 dA dx =
∫
(l)
M2y (x)
2EIyydx . (2.122)
Torsion:
Wir betrachten zunächst Kreis– und Kreisringquerschnitte, bei denen nur eine Tangen-
tialspannung τxϕ = τ =Mt(x)
Ipr auftritt.
Π =
∫
(l)
∫
(A)
τ 2
2GdAdx =
∫
(l)
M2t (x)
2GI2p
∫
(A)
r2 dA dx =
∫
(l)
M2t
2GIpdx . (2.123)
Neben der Torsionsspannungsverteilung bei Kreis– und Kreisringquerschnitten habenwir im Kap. 2.4 noch die Spannunsverteilung bei dünnwandigen geschlossenen Quer-
schnitten mit τxs = τ =Mt(x)
2 Φh(s)kennengelernt. Setzt man noch dA = h(s) ds, so ergibt
sich
Π =
∫
(l)
∮M2
t (x)
8GΦ2h(s)ds dx (2.124)
Da It =4φ2
∮dsh(s)
ist, erhält man
Π =
∫
(l)
M2t
2GItdx . (2.125)
Benutzt man auch bei Kreis– und Kreisringquerschnitt die Bezeichnung It, d.h. Ip = It,so gilt einheitlich (2.125).
Querkraftschub:
Die Gleichung für die Schubspannungsverteilung infolge Qz(x) läßt sich in der Form
τxz(x, z) = τ(x, z) =Qz(x)
Afz(z)
anschreiben.
fz(z) bezeichnet man als Verteilungsfunktion. Damit kann die spezifische Formände-rungsenergie in der Form
Π∗ =τ 2
2G=Q2
z(x)
2GA2f 2z (z)
angeschrieben werden und nach Integration über das Volumen folgt

Energiemethoden der Elastostatik 93
Π =
∫
(l)
Q2z(x)
2GA2
∫
(A)
f 2z (z) dA dx.
Führt man die (dimensionslose) Querschubzahl
κz =1
A
∫
(A)
f 2z (z) dA. (2.126)
ein, so folgt
Π =
∫
(l)
κzQ2
z(x)
2GAdx . (2.127)
In der nachstehenden Abbildung ist die Querschubzahl für einige wichtige Querschnitts-formen zusammengestellt. 1
y
z
y y
a
21212106κz = 555 9
2
az z
y
z
y
z
y
z
2.5.3 Kombinierte Beanspruchung und Mehrbereichsaufgaben
Die Überlagerung von Zug (Druck), Biegung, Torsion und Querkraftschub ergibt insge-samt die Formänderungsarbeit für einen Balken
Π =
∫
(l)
[N2(x)
2EA+M2
y (x)
2EIyy+M2
t (x)
2GIt+ κz
Q2z(x)
2GA
]
dx (2.128)
Bei mehreren Bereichen des Balkens sind die entsprechenden Anteile bereichsweise zuaddieren.
1Nach Neuber, Band 2, Seite 302, Springer-Verlag 1971.

94 Elastostatik und Festigkeitslehre
Beispiel: Kragträger unter Einzellast
x
F
l
wF
M(x)
EIDer Querkraftanteil kann vernachlässigt wer-den.
Gegeben: F, l, EI
Gesucht: wF
Statik: M(x) = −F (l − x)
Arbeitssatz: W = Π
mit W =1
2FwF
und Π =
l∫
0
M2(x)
2EIdx =
F 2
2EI
l∫
0
(l − x)2 dx =F 2l3
6EI
Damit erhält man
1
2FwF =
F 2l3
6EI⇒ wF =
F l3
3EI.
2.5.4 Prinzip der virtuellen Arbeit
Das Prinzip der virtuellen Arbeit, im engeren Sinn auch als Prinzip der virtuellenVerschiebungen bezeichnet, besagt, daß bei einem mechanischen System im Gleichge-wicht die Gesamtarbeit bei einer virtuellen Änderung der Verschiebungen verschwindet.
Virtuelle Verschiebungen sind
• gedacht, d.h. in Wirklichkeit nicht vorhanden,
• differentiell klein,
• mit den kinematischen Bedingungen des Systems verträglich,
• beliebig
Bei einem deformierbaren Körper setzt sich die gesamte virtuelle Arbeit aus der äußerenvirtuellen Arbeit (Arbeit der äußeren eingeprägten Kräfte) und der inneren virtuellenArbeit (negative virtuelle Formänderungsarbeit) zusammen.
δW = δW (a) − δW (i) = δW (a) − δΠ = 0 ⇒ δW (a) = δΠ (2.129)
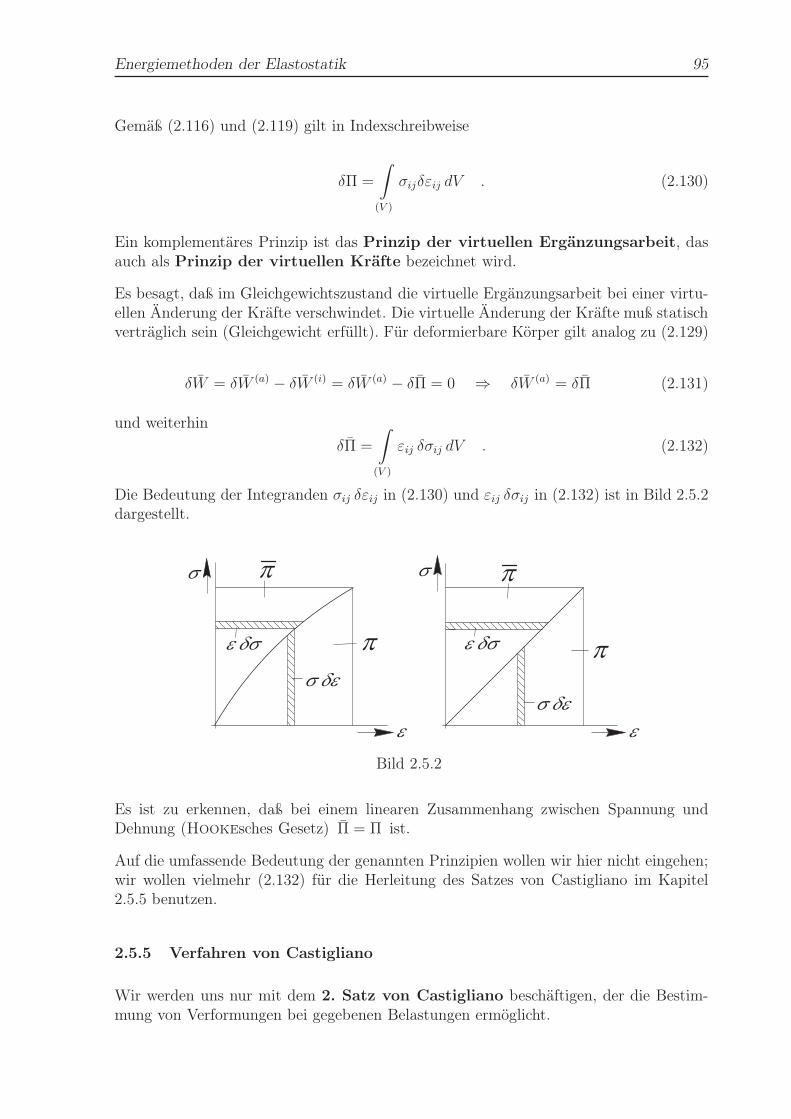
Energiemethoden der Elastostatik 95
Gemäß (2.116) und (2.119) gilt in Indexschreibweise
δΠ =
∫
(V )
σijδεij dV . (2.130)
Ein komplementäres Prinzip ist das Prinzip der virtuellen Ergänzungsarbeit, dasauch als Prinzip der virtuellen Kräfte bezeichnet wird.
Es besagt, daß im Gleichgewichtszustand die virtuelle Ergänzungsarbeit bei einer virtu-ellen Änderung der Kräfte verschwindet. Die virtuelle Änderung der Kräfte muß statischverträglich sein (Gleichgewicht erfüllt). Für deformierbare Körper gilt analog zu (2.129)
δW = δW (a) − δW (i) = δW (a) − δΠ = 0 ⇒ δW (a) = δΠ (2.131)
und weiterhin
δΠ =
∫
(V )
εij δσij dV . (2.132)
Die Bedeutung der Integranden σij δεij in (2.130) und εij δσij in (2.132) ist in Bild 2.5.2dargestellt.
ss
e
s d e
s d e
e d s e d s
e
p p
p p
Bild 2.5.2
Es ist zu erkennen, daß bei einem linearen Zusammenhang zwischen Spannung undDehnung (Hookesches Gesetz) Π = Π ist.
Auf die umfassende Bedeutung der genannten Prinzipien wollen wir hier nicht eingehen;wir wollen vielmehr (2.132) für die Herleitung des Satzes von Castigliano im Kapitel2.5.5 benutzen.
2.5.5 Verfahren von Castigliano
Wir werden uns nur mit dem 2. Satz von Castigliano beschäftigen, der die Bestim-mung von Verformungen bei gegebenen Belastungen ermöglicht.
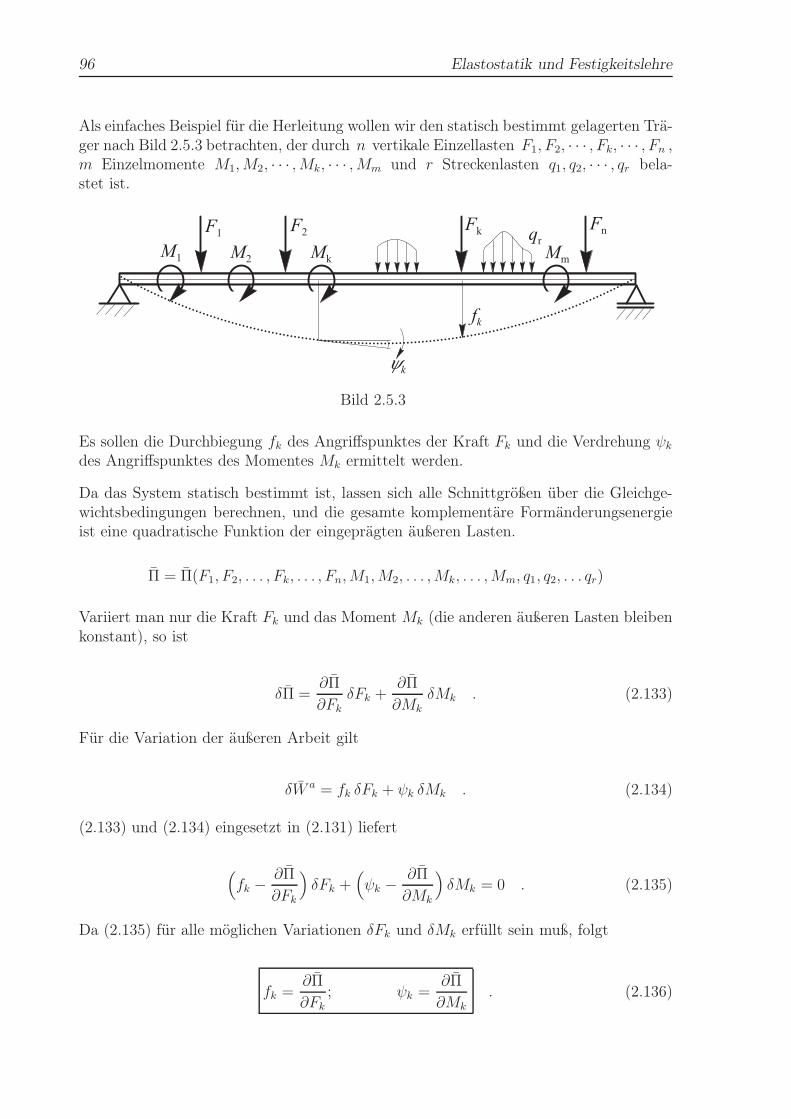
96 Elastostatik und Festigkeitslehre
Als einfaches Beispiel für die Herleitung wollen wir den statisch bestimmt gelagerten Trä-ger nach Bild 2.5.3 betrachten, der durch n vertikale Einzellasten F1, F2, · · · , Fk, · · · , Fn ,m Einzelmomente M1,M2, · · · ,Mk, · · · ,Mm und r Streckenlasten q1, q2, · · · , qr bela-stet ist.
F 1F 2
F k F n
f k
y k
M 1 M 2 M k M m
q r
Bild 2.5.3
Es sollen die Durchbiegung fk des Angriffspunktes der Kraft Fk und die Verdrehung ψk
des Angriffspunktes des Momentes Mk ermittelt werden.
Da das System statisch bestimmt ist, lassen sich alle Schnittgrößen über die Gleichge-wichtsbedingungen berechnen, und die gesamte komplementäre Formänderungsenergieist eine quadratische Funktion der eingeprägten äußeren Lasten.
Π = Π(F1, F2, . . . , Fk, . . . , Fn,M1,M2, . . . ,Mk, . . . ,Mm, q1, q2, . . . qr)
Variiert man nur die Kraft Fk und das Moment Mk (die anderen äußeren Lasten bleibenkonstant), so ist
δΠ =∂Π
∂Fk
δFk +∂Π
∂Mk
δMk . (2.133)
Für die Variation der äußeren Arbeit gilt
δW a = fk δFk + ψk δMk . (2.134)
(2.133) und (2.134) eingesetzt in (2.131) liefert
(
fk −∂Π
∂Fk
)
δFk +(
ψk −∂Π
∂Mk
)
δMk = 0 . (2.135)
Da (2.135) für alle möglichen Variationen δFk und δMk erfüllt sein muß, folgt
fk =∂Π
∂Fk
; ψk =∂Π
∂Mk
. (2.136)

Energiemethoden der Elastostatik 97
(2.136) ist der 2. Satz von Castigliano, der verbal folgendermaßen lautet:
Die partielle Ableitung der komplementären FormänderungsenergieΠ nach einer äußeren Kraft (bzw. einem äußeren Moment) liefertdie Verschiebung (bzw. Verdrehung) des entsprechenden Angriffs-punktes in Richtung der Kraft (bzw. des Momentes).
Will man die Verschiebung (bzw. Verdrehung) an einer Stelle wissen, an der keine ent-sprechende äußere Last angreift, so führt man eine Hilfskraft FH (bzw. ein HilfsmomentMH) ein und setzt diese Hilfslasten nach der partiellen Ableitung von Π(i) wieder Null,d.h.
fH =∂Π
∂FH
∣∣∣∣FH=0
; ψH =∂Π
∂MH
∣∣∣∣MH=0
. (2.137)
Von einem linear elastischen System wissen wir, daß Π = Π ist. Für einen Träger mit jBereichen ergibt sich damit
Π = Π =∑
j
∫
(lj)
[N2
j
2EAj
+M2
yj
2EIyyj+
M2tj
2GItj+ κzj
Q2zj
2GAj
]
dxj . (2.138)
Die Schnittgrößen sind Funktionen der äußeren Lasten.
Die partielle Differentiation erfolgt nach der Kettenregel und ergibt unter Beachtung derTatsache, daß Integration und Differentiation im vorliegenden Fall vertauschbar sind
fk =∑
j
∫
(lj)
(Nj
EAj
∂Nj
∂Fk
+Myj
EIyyj
∂Mbyj
∂Fk
+Mtj
GItj
∂Mtj
∂Fk
+ κzjQzj
GAj
∂Qzj
∂Fk
)
dxj , (2.139)
ψk =∑
j
∫
(lj)
(Nj
EAj
∂Nj
∂Mk
+Myj
EIyyj
∂Mbyj
∂Mk
+Mtj
GItj
∂Mtj
∂Mk
+ κzjQzj
GAj
∂Qzj
∂Mk
)
dxj . (2.140)
Besondere Vorteile bietet der Satz von Castigliano bei der Berechnung von Deformatio-nen, wenn mehrere Beanspruchungsarten überlagert sind. Weiterhin können auch Defor-mationen von gekrümmten Trägern bestimmt werden.
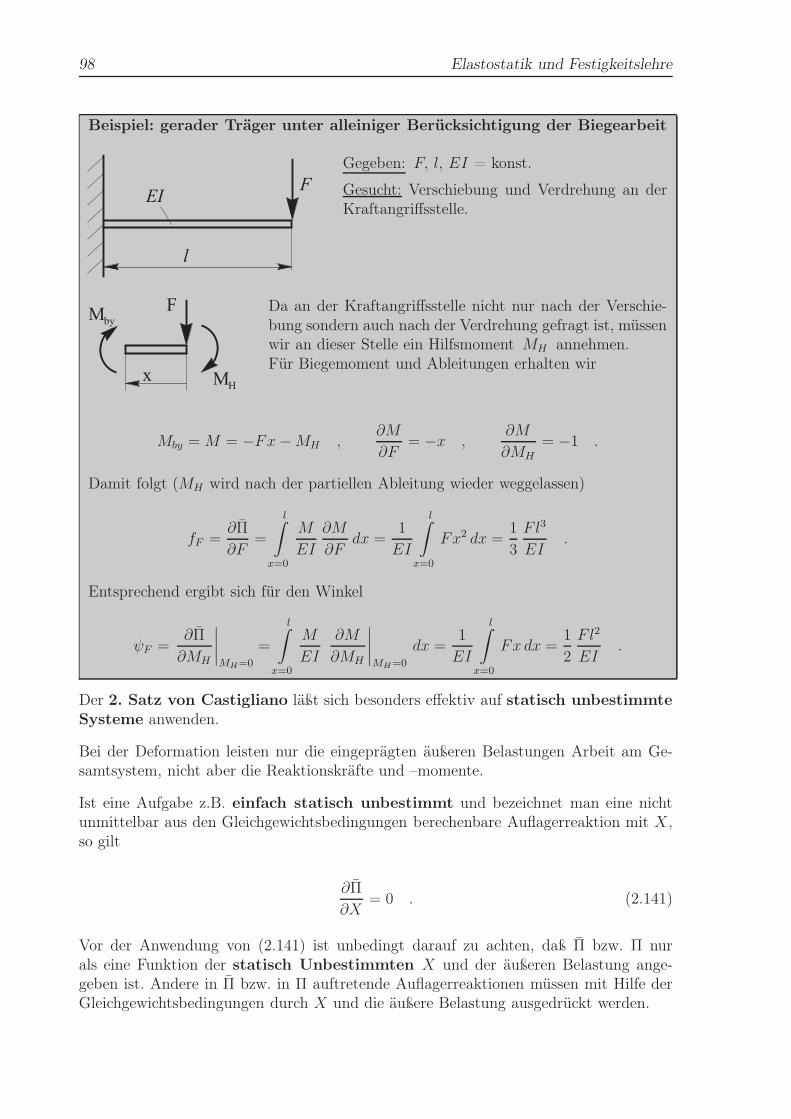
98 Elastostatik und Festigkeitslehre
Beispiel: gerader Träger unter alleiniger Berücksichtigung der Biegearbeit
l
EIF
Gegeben: F, l, EI = konst.
Gesucht: Verschiebung und Verdrehung an derKraftangriffsstelle.
Mby
MHx
F Da an der Kraftangriffsstelle nicht nur nach der Verschie-bung sondern auch nach der Verdrehung gefragt ist, müssenwir an dieser Stelle ein Hilfsmoment MH annehmen.Für Biegemoment und Ableitungen erhalten wir
Mby =M = −Fx−MH ,∂M
∂F= −x ,
∂M
∂MH
= −1 .
Damit folgt (MH wird nach der partiellen Ableitung wieder weggelassen)
fF =∂Π
∂F=
l∫
x=0
M
EI
∂M
∂Fdx =
1
EI
l∫
x=0
Fx2 dx =1
3
F l3
EI.
Entsprechend ergibt sich für den Winkel
ψF =∂Π
∂MH
∣∣∣∣MH=0
=
l∫
x=0
M
EI
∂M
∂MH
∣∣∣∣MH=0
dx =1
EI
l∫
x=0
Fx dx =1
2
F l2
EI.
Der 2. Satz von Castigliano läßt sich besonders effektiv auf statisch unbestimmteSysteme anwenden.
Bei der Deformation leisten nur die eingeprägten äußeren Belastungen Arbeit am Ge-samtsystem, nicht aber die Reaktionskräfte und –momente.
Ist eine Aufgabe z.B. einfach statisch unbestimmt und bezeichnet man eine nichtunmittelbar aus den Gleichgewichtsbedingungen berechenbare Auflagerreaktion mit X,so gilt
∂Π
∂X= 0 . (2.141)
Vor der Anwendung von (2.141) ist unbedingt darauf zu achten, daß Π bzw. Π nurals eine Funktion der statisch Unbestimmten X und der äußeren Belastung ange-geben ist. Andere in Π bzw. in Π auftretende Auflagerreaktionen müssen mit Hilfe derGleichgewichtsbedingungen durch X und die äußere Belastung ausgedrückt werden.
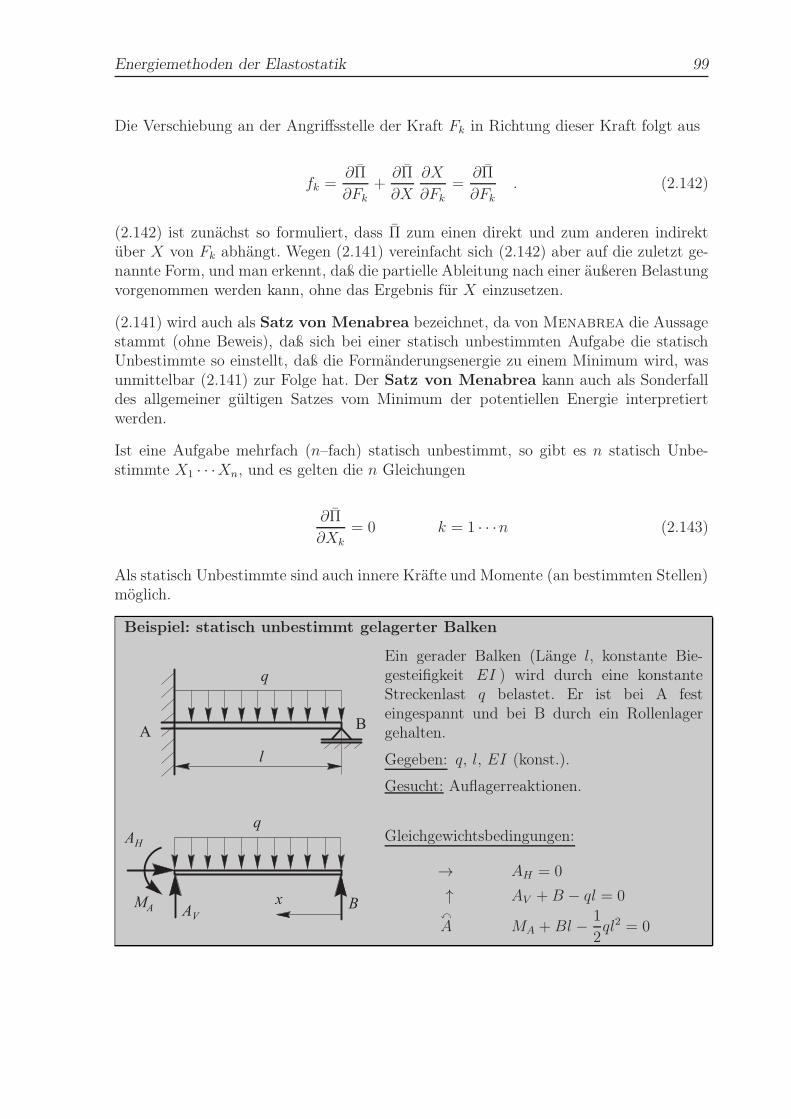
Energiemethoden der Elastostatik 99
Die Verschiebung an der Angriffsstelle der Kraft Fk in Richtung dieser Kraft folgt aus
fk =∂Π
∂Fk
+∂Π
∂X
∂X
∂Fk
=∂Π
∂Fk
. (2.142)
(2.142) ist zunächst so formuliert, dass Π zum einen direkt und zum anderen indirektüber X von Fk abhängt. Wegen (2.141) vereinfacht sich (2.142) aber auf die zuletzt ge-nannte Form, und man erkennt, daß die partielle Ableitung nach einer äußeren Belastungvorgenommen werden kann, ohne das Ergebnis für X einzusetzen.
(2.141) wird auch als Satz von Menabrea bezeichnet, da von Menabrea die Aussagestammt (ohne Beweis), daß sich bei einer statisch unbestimmten Aufgabe die statischUnbestimmte so einstellt, daß die Formänderungsenergie zu einem Minimum wird, wasunmittelbar (2.141) zur Folge hat. Der Satz von Menabrea kann auch als Sonderfalldes allgemeiner gültigen Satzes vom Minimum der potentiellen Energie interpretiertwerden.
Ist eine Aufgabe mehrfach (n–fach) statisch unbestimmt, so gibt es n statisch Unbe-stimmte X1 · · ·Xn, und es gelten die n Gleichungen
∂Π
∂Xk
= 0 k = 1 · · ·n (2.143)
Als statisch Unbestimmte sind auch innere Kräfte und Momente (an bestimmten Stellen)möglich.
Beispiel: statisch unbestimmt gelagerter Balken
B
q
q
xAV
MA
AH
l
BA
Ein gerader Balken (Länge l, konstante Bie-gesteifigkeit EI ) wird durch eine konstanteStreckenlast q belastet. Er ist bei A festeingespannt und bei B durch ein Rollenlagergehalten.
Gegeben: q, l, EI (konst.).
Gesucht: Auflagerreaktionen.
Gleichgewichtsbedingungen:
→ AH = 0
↑ AV +B − ql = 0x
A MA +Bl − 1
2ql2 = 0

100 Elastostatik und Festigkeitslehre
Die Aufgabe ist einfach statisch unbestimmt. Als statisch Unbestimmte kommenAV , MA oder B in Frage. Mit der in der Skizze angegebenen Koordinate x läßt sich
das Biegemoment in der Form M = Bx− 1
2qx2 schreiben.
Es wird B als statisch Unbestimmte gewählt, da so bereits ohne Benutzung der Gleich-gewichtsbedingungen die Forderung erfüllt ist, daß in den Schnittgrößen nur die äußereBelastung und die statisch Unbestimmte vorkommen.
M = Bx− 1
2qx2
∂M
∂B= x
∂Π
∂B= 0 =
1
EI
l∫
0
M∂M
∂Bdx =
1
EI
l∫
0
(Bx− 1
2qx2)x dx
0 =l3
EI
(1
3B − 1
8ql
)
⇒ B =3
8ql
Aus den Gleichgewichtsbedingungen folgen:
AH = 0 , AV =5
8ql und MA =
1
8ql2 .
Beispiel: Rahmen
F
l
l
G
A B
Gegeben: F, l, EI (konst.)
Gesucht: 1. Auflagerreaktionen,2. Verschiebung des Gelenkes.
Es soll nur die Biegearbeit berücksichtigt wer-den.
F
x2
x1
x3GV
GH
AH BH
MA MBAV BV
GV
I
II
Gleichgewicht:
I : → AH + F −GH = 0
↑ AV +GV = 0x
A MA +GV l +GH l − F l = 0
II : → GH +BH = 0
↑ BV −GV = 0x
B MB −GH l = 0
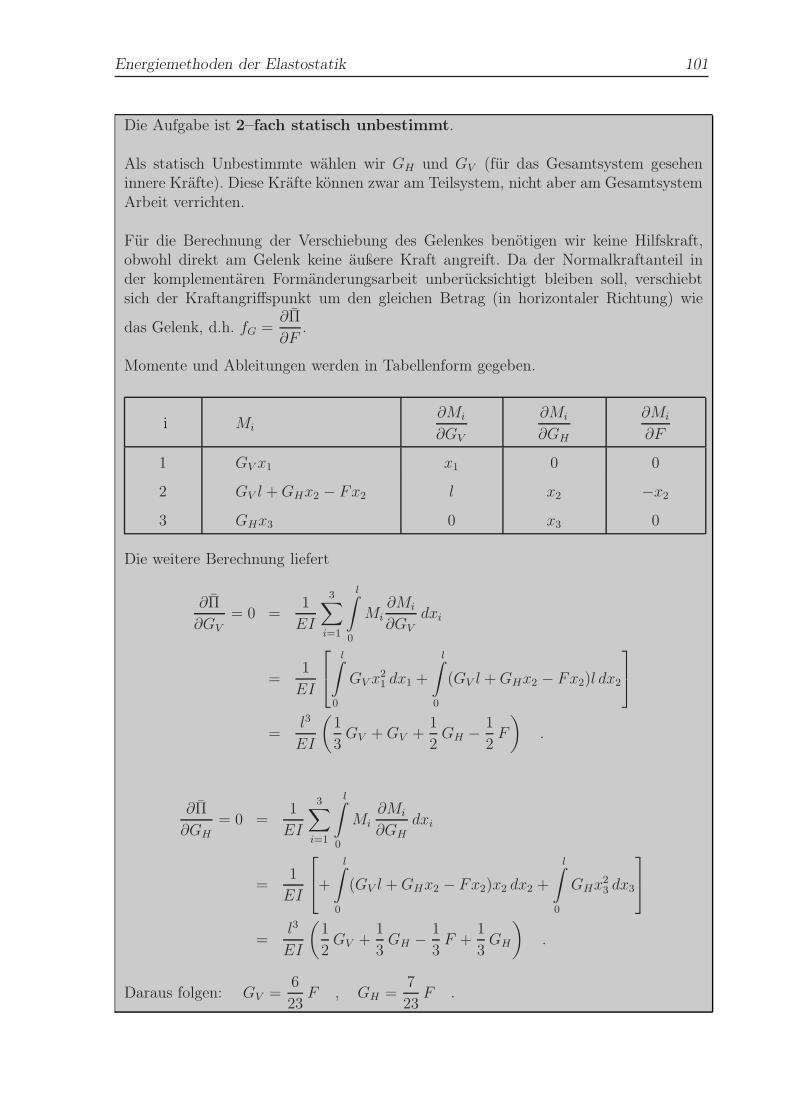
Energiemethoden der Elastostatik 101
Die Aufgabe ist 2–fach statisch unbestimmt.
Als statisch Unbestimmte wählen wir GH und GV (für das Gesamtsystem geseheninnere Kräfte). Diese Kräfte können zwar am Teilsystem, nicht aber am GesamtsystemArbeit verrichten.
Für die Berechnung der Verschiebung des Gelenkes benötigen wir keine Hilfskraft,obwohl direkt am Gelenk keine äußere Kraft angreift. Da der Normalkraftanteil inder komplementären Formänderungsarbeit unberücksichtigt bleiben soll, verschiebtsich der Kraftangriffspunkt um den gleichen Betrag (in horizontaler Richtung) wie
das Gelenk, d.h. fG =∂Π
∂F.
Momente und Ableitungen werden in Tabellenform gegeben.
i Mi
∂Mi
∂GV
∂Mi
∂GH
∂Mi
∂F
1 GV x1 x1 0 0
2 GV l +GHx2 − Fx2 l x2 −x23 GHx3 0 x3 0
Die weitere Berechnung liefert
∂Π
∂GV
= 0 =1
EI
3∑
i=1
l∫
0
Mi
∂Mi
∂GV
dxi
=1
EI
l∫
0
GV x21 dx1 +
l∫
0
(GV l +GHx2 − Fx2)l dx2
=l3
EI
(1
3GV +GV +
1
2GH − 1
2F
)
.
∂Π
∂GH
= 0 =1
EI
3∑
i=1
l∫
0
Mi
∂Mi
∂GH
dxi
=1
EI
+
l∫
0
(GV l +GHx2 − Fx2)x2 dx2 +
l∫
0
GHx23 dx3
=l3
EI
(1
2GV +
1
3GH − 1
3F +
1
3GH
)
.
Daraus folgen: GV =6
23F , GH =
7
23F .

102 Elastostatik und Festigkeitslehre
Die (horizontale) Verschiebung des Gelenkes beträgt
fG =∂Π
∂F=
1
EI
3∑
i=1
l∫
0
Mi
∂Mi
∂Fdxi
=1
EI
l∫
0
(GV l +GHx2 − Fx2) (−x2) dx2
=l3
EI
(
−1
2GV − 1
3GH +
1
3F
)
⇒ fG =7
69
F l3
EI.
Die Verschiebung fG erhält man auch dadurch, daß man nur das Teilsystem IIbetrachtet und GH als äußere Kraft auffaßt.
Die Gleichgewichtsbedingungen liefern schließlich:
AH = −16
23F
BH = − 7
23F
AV = − 6
23F
BV = +6
23F
MA = +10
23F l
MB = +7
23F l .
Beispiel: Überlagerung verschiedener Beanspruchungsarten
x2
Seil
l
F
x 1 b
b
Das Tragwerk besteht aus einem abgewinkelten Trägerund einem Seil. Die Belastung erfolgt durch die KraftF . Seil und äußere Last F liegen in einer Richtungsenkrecht zur Trägerebene.
Gegeben:Kraft F ; Längen b, l;Biege– und Torsionssteifigkeit des Trägers (EI)T und(GIt)T ;Dehnsteifigkeit des Seils (EA)S .
Gesucht: Seilkraft S.
Zu berücksichtigen sind die Zugarbeit im Seil sowieBiege– und Torsionsarbeit im Träger.
Die Aufgabe ist einfach statisch unbestimmt. Als statisch Unbestimmte wählenwir die Seilkraft S.

Beurteilung des Beanspruchungszustandes 103
Seil: N = S∂N
∂S= 1
Träger, Bereich 1: Mb1 = (S − F )x1∂Mb1
∂S= x1
Träger, Bereich 2: Mb2 = (S − F )x2∂Mb2
∂S= x2
Mt2 = −(S − F )b∂Mt2
∂S= −b
∂Π
∂S= 0 =
N
(EA)S
∂N
∂Sl +
b∫
0
Mb1
(EI)T
∂Mb1
∂Sdx1
+
b∫
0
(Mb2
(EI)T
∂Mb2
∂S+
Mt2
(GIt)T
∂Mt2
∂S
)
dx2
0 =Sl
(EA)S+
2b3
3(EI)T(S − F ) +
b3
(GIt)T(S − F )
Ergebnis: S = F2 + 3
(EIGIt
)
T
3 l(EI)Tb3(EA)S
+ 2 + 3(
EIGIt
)
T
Bei einer Feder anstelle des Seils wäre lediglich die Dehnsteifigkeit(EA)Sl
durch die
Federsteifigkeit c zu ersetzen.
2.6 Beurteilung des Beanspruchungszustandes
Bisher haben wir uns nur mit der Ermittlung des Beanspruchungszustandes befaßt.Es geht in der Festigkeitslehre aber auch um seine Beurteilung. Das bedeutet, dasseine charakteristische Beanspruchungsgröße B einem experimentell ermittelten Werk-stoffkennwert W gegenübergestellt wird. Unsicherheiten und Streuungen von B und Werfordern Sicherheitsfaktoren S, die ein vertretbares Versagensrisiko zum Ausdruck brin-gen.
B ≤ Bzul =W
S(S > 1) (2.144)
Welches charakteristische Beanspruchungsgrößen B sind und was man als Werkstoff-kennwert W verwenden kann, wird in den folgenden Kapiteln behandelt.
2.6.1 Materialprüfung und Werkstoffkennwerte
Es gibt eine Reihe von genormten Materialprüfverfahren, von denen wir hier nur diewichtigsten ansprechen wollen. In den meisten Fällen werden die Materialkennwerteunter den Bedingungen des einachsigen Spannungszustandes bestimmt.
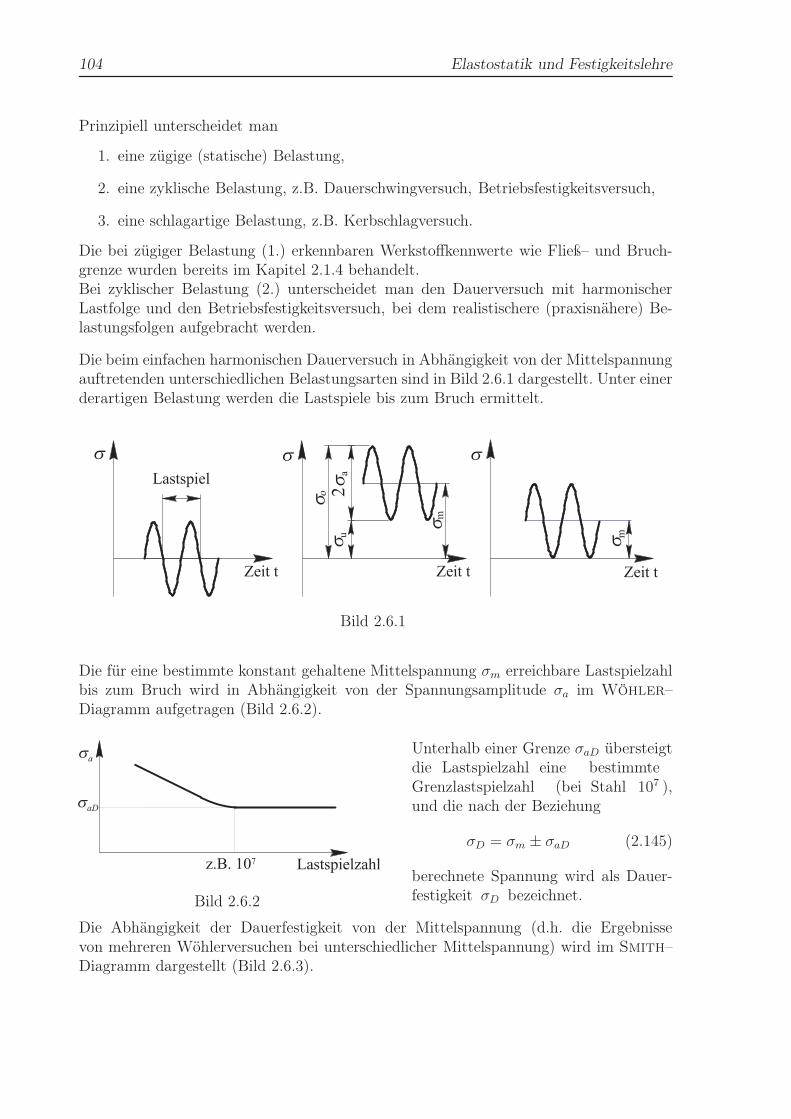
104 Elastostatik und Festigkeitslehre
Prinzipiell unterscheidet man
1. eine zügige (statische) Belastung,
2. eine zyklische Belastung, z.B. Dauerschwingversuch, Betriebsfestigkeitsversuch,
3. eine schlagartige Belastung, z.B. Kerbschlagversuch.
Die bei zügiger Belastung (1.) erkennbaren Werkstoffkennwerte wie Fließ– und Bruch-grenze wurden bereits im Kapitel 2.1.4 behandelt.Bei zyklischer Belastung (2.) unterscheidet man den Dauerversuch mit harmonischerLastfolge und den Betriebsfestigkeitsversuch, bei dem realistischere (praxisnähere) Be-lastungsfolgen aufgebracht werden.
Die beim einfachen harmonischen Dauerversuch in Abhängigkeit von der Mittelspannungauftretenden unterschiedlichen Belastungsarten sind in Bild 2.6.1 dargestellt. Unter einerderartigen Belastung werden die Lastspiele bis zum Bruch ermittelt.
s s s
Zeit t Zeit t Zeit t
so 2
sa
su
sm
sm
Lastspiel
Bild 2.6.1
Die für eine bestimmte konstant gehaltene Mittelspannung σm erreichbare Lastspielzahlbis zum Bruch wird in Abhängigkeit von der Spannungsamplitude σa im Wöhler–Diagramm aufgetragen (Bild 2.6.2).
sa
saD
z.B. 107 Lastspielzahl
Bild 2.6.2
Unterhalb einer Grenze σaD übersteigtdie Lastspielzahl eine bestimmteGrenzlastspielzahl (bei Stahl 107 ),und die nach der Beziehung
σD = σm ± σaD (2.145)
berechnete Spannung wird als Dauer-festigkeit σD bezeichnet.
Die Abhängigkeit der Dauerfestigkeit von der Mittelspannung (d.h. die Ergebnissevon mehreren Wöhlerversuchen bei unterschiedlicher Mittelspannung) wird im Smith–Diagramm dargestellt (Bild 2.6.3).
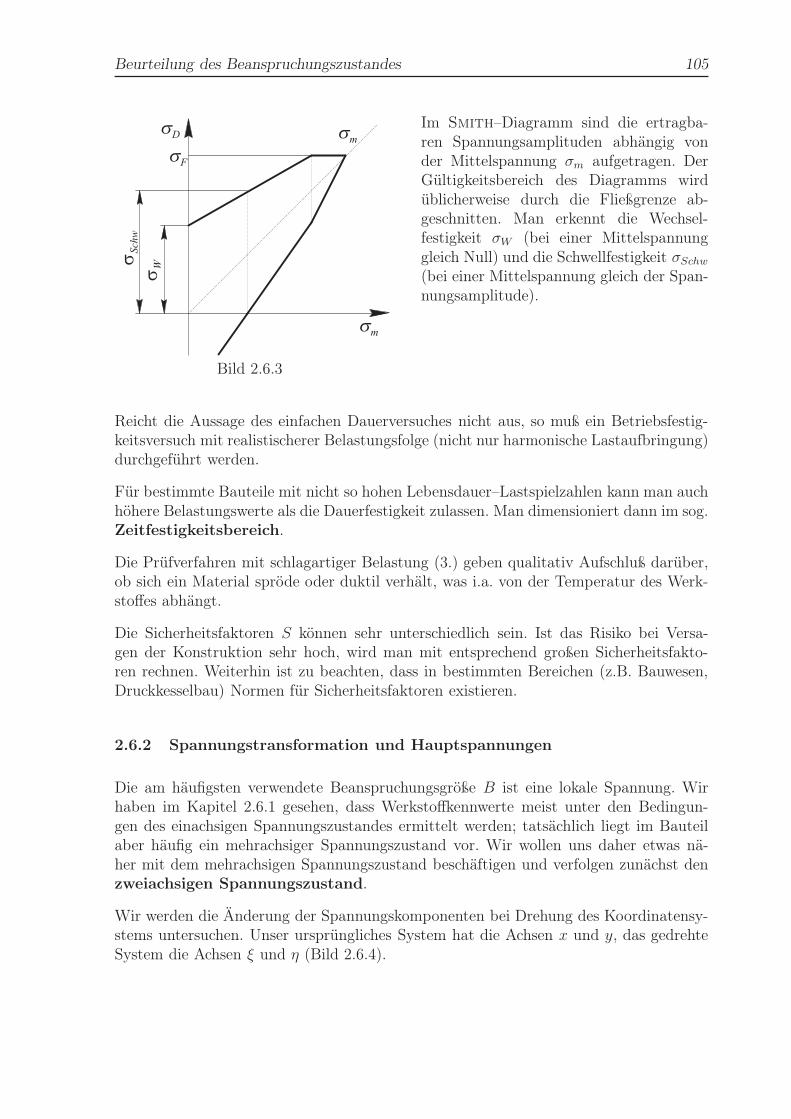
Beurteilung des Beanspruchungszustandes 105
sD
sF
sm
sm
sSch
w
sW
Bild 2.6.3
Im Smith–Diagramm sind die ertragba-ren Spannungsamplituden abhängig vonder Mittelspannung σm aufgetragen. DerGültigkeitsbereich des Diagramms wirdüblicherweise durch die Fließgrenze ab-geschnitten. Man erkennt die Wechsel-festigkeit σW (bei einer Mittelspannunggleich Null) und die Schwellfestigkeit σSchw(bei einer Mittelspannung gleich der Span-nungsamplitude).
Reicht die Aussage des einfachen Dauerversuches nicht aus, so muß ein Betriebsfestig-keitsversuch mit realistischerer Belastungsfolge (nicht nur harmonische Lastaufbringung)durchgeführt werden.
Für bestimmte Bauteile mit nicht so hohen Lebensdauer–Lastspielzahlen kann man auchhöhere Belastungswerte als die Dauerfestigkeit zulassen. Man dimensioniert dann im sog.Zeitfestigkeitsbereich.
Die Prüfverfahren mit schlagartiger Belastung (3.) geben qualitativ Aufschluß darüber,ob sich ein Material spröde oder duktil verhält, was i.a. von der Temperatur des Werk-stoffes abhängt.
Die Sicherheitsfaktoren S können sehr unterschiedlich sein. Ist das Risiko bei Versa-gen der Konstruktion sehr hoch, wird man mit entsprechend großen Sicherheitsfakto-ren rechnen. Weiterhin ist zu beachten, dass in bestimmten Bereichen (z.B. Bauwesen,Druckkesselbau) Normen für Sicherheitsfaktoren existieren.
2.6.2 Spannungstransformation und Hauptspannungen
Die am häufigsten verwendete Beanspruchungsgröße B ist eine lokale Spannung. Wirhaben im Kapitel 2.6.1 gesehen, dass Werkstoffkennwerte meist unter den Bedingun-gen des einachsigen Spannungszustandes ermittelt werden; tatsächlich liegt im Bauteilaber häufig ein mehrachsiger Spannungszustand vor. Wir wollen uns daher etwas nä-her mit dem mehrachsigen Spannungszustand beschäftigen und verfolgen zunächst denzweiachsigen Spannungszustand.
Wir werden die Änderung der Spannungskomponenten bei Drehung des Koordinatensy-stems untersuchen. Unser ursprüngliches System hat die Achsen x und y, das gedrehteSystem die Achsen ξ und η (Bild 2.6.4).
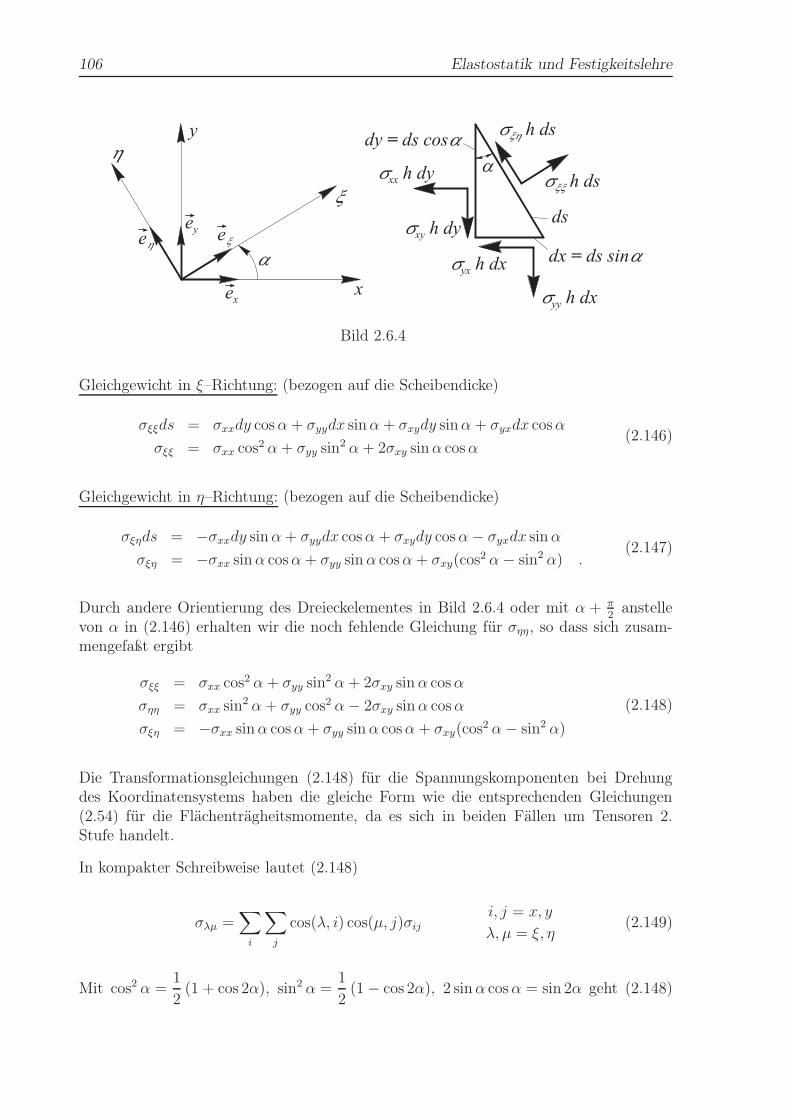
106 Elastostatik und Festigkeitslehre
e y
e x
e h e
h
x
y
x
a
a
d y = d s c o s a
d x = d s s i n a
s y y h d x
s x x h d y s x x h d s
s x h h d s
s x y h d y
s y x h d x
d s
x
Bild 2.6.4
Gleichgewicht in ξ–Richtung: (bezogen auf die Scheibendicke)
σξξds = σxxdy cosα + σyydx sinα + σxydy sinα + σyxdx cosα
σξξ = σxx cos2 α + σyy sin
2 α + 2σxy sinα cosα(2.146)
Gleichgewicht in η–Richtung: (bezogen auf die Scheibendicke)
σξηds = −σxxdy sinα + σyydx cosα + σxydy cosα− σyxdx sinα
σξη = −σxx sinα cosα + σyy sinα cosα + σxy(cos2 α− sin2 α) .
(2.147)
Durch andere Orientierung des Dreieckelementes in Bild 2.6.4 oder mit α + π2
anstellevon α in (2.146) erhalten wir die noch fehlende Gleichung für σηη, so dass sich zusam-mengefaßt ergibt
σξξ = σxx cos2 α + σyy sin
2 α + 2σxy sinα cosα
σηη = σxx sin2 α + σyy cos
2 α− 2σxy sinα cosα
σξη = −σxx sinα cosα + σyy sinα cosα + σxy(cos2 α− sin2 α)
(2.148)
Die Transformationsgleichungen (2.148) für die Spannungskomponenten bei Drehungdes Koordinatensystems haben die gleiche Form wie die entsprechenden Gleichungen(2.54) für die Flächenträgheitsmomente, da es sich in beiden Fällen um Tensoren 2.Stufe handelt.
In kompakter Schreibweise lautet (2.148)
σλµ =∑
i
∑
j
cos(λ, i) cos(µ, j)σiji, j = x, y
λ, µ = ξ, η(2.149)
Mit cos2 α =1
2(1 + cos 2α), sin2 α =
1
2(1− cos 2α), 2 sinα cosα = sin 2α geht (2.148)
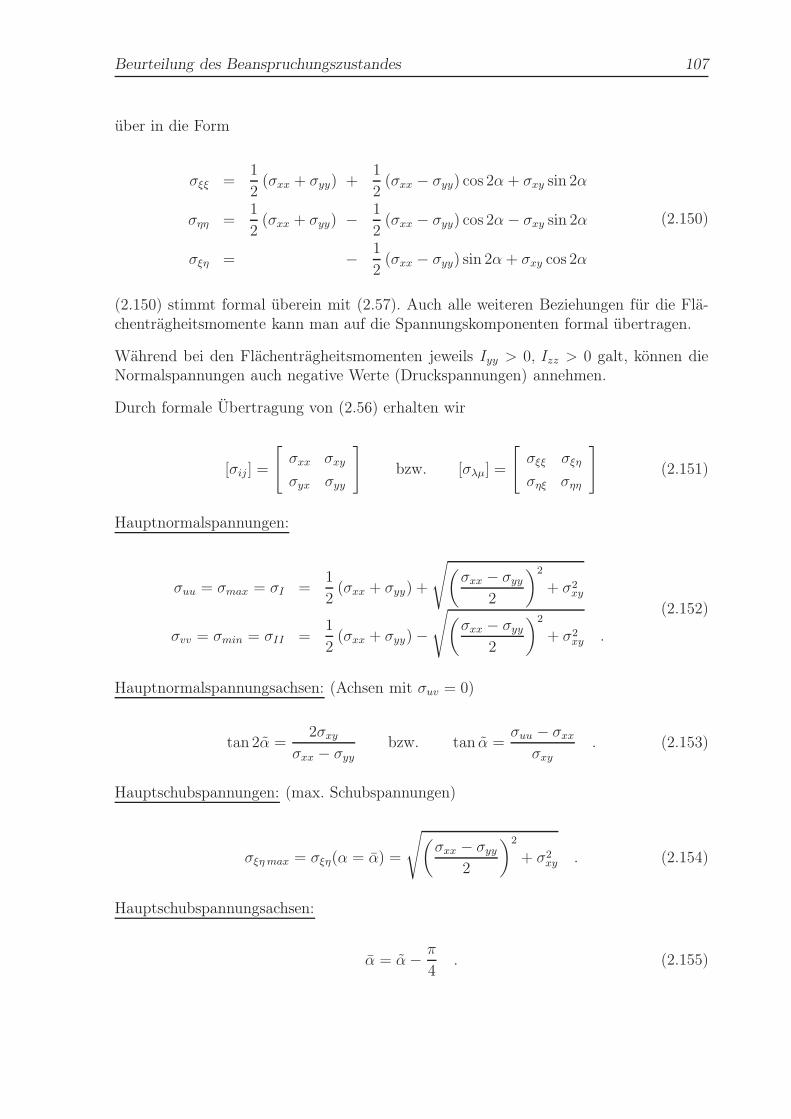
Beurteilung des Beanspruchungszustandes 107
über in die Form
σξξ =1
2(σxx + σyy) +
1
2(σxx − σyy) cos 2α + σxy sin 2α
σηη =1
2(σxx + σyy) − 1
2(σxx − σyy) cos 2α− σxy sin 2α
σξη = − 1
2(σxx − σyy) sin 2α + σxy cos 2α
(2.150)
(2.150) stimmt formal überein mit (2.57). Auch alle weiteren Beziehungen für die Flä-chenträgheitsmomente kann man auf die Spannungskomponenten formal übertragen.
Während bei den Flächenträgheitsmomenten jeweils Iyy > 0, Izz > 0 galt, können dieNormalspannungen auch negative Werte (Druckspannungen) annehmen.
Durch formale Übertragung von (2.56) erhalten wir
[σij ] =
[
σxx σxy
σyx σyy
]
bzw. [σλµ] =
[
σξξ σξη
σηξ σηη
]
(2.151)
Hauptnormalspannungen:
σuu = σmax = σI =1
2(σxx + σyy) +
√(σxx − σyy
2
)2
+ σ2xy
σvv = σmin = σII =1
2(σxx + σyy)−
√(σxx − σyy
2
)2
+ σ2xy .
(2.152)
Hauptnormalspannungsachsen: (Achsen mit σuv = 0)
tan 2α =2σxy
σxx − σyybzw. tan α =
σuu − σxxσxy
. (2.153)
Hauptschubspannungen: (max. Schubspannungen)
σξη max = σξη(α = α) =
√(σxx − σyy
2
)2
+ σ2xy . (2.154)
Hauptschubspannungsachsen:
α = α− π
4. (2.155)
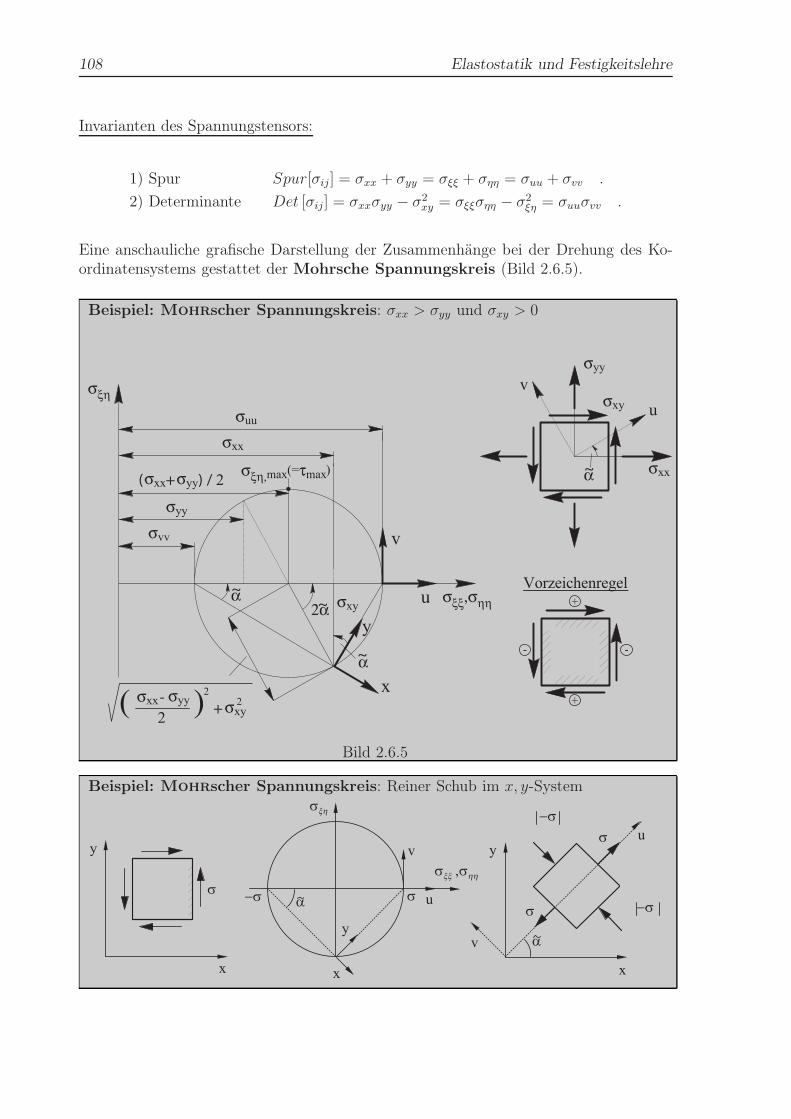
108 Elastostatik und Festigkeitslehre
Invarianten des Spannungstensors:
1) Spur Spur[σij] = σxx + σyy = σξξ + σηη = σuu + σvv .
2) Determinante Det [σij] = σxxσyy − σ2xy = σξξσηη − σ2
ξη = σuuσvv .
Eine anschauliche grafische Darstellung der Zusammenhänge bei der Drehung des Ko-ordinatensystems gestattet der Mohrsche Spannungskreis (Bild 2.6.5).
Beispiel: Mohrscher Spannungskreis: σxx > σyy und σxy > 0
~~
v
u
y
x
~
(= )
v
u
-
+
+
-
Vorzeichenregel
22
( + ) / 2
-
2( ) +
σξη
σξξ,σηη
σξη,max τmax
σxx
σxxσxx
σxx
σyy
σyy
σyy
σyyσxy
σxy
σxy
α
α
~α
2α
σvv
σuu
Bild 2.6.5
Beispiel: Mohrscher Spannungskreis: Reiner Schub im x, y-System

Beurteilung des Beanspruchungszustandes 109
Beispiel: Mohrscher Spannungskreis: Allseitiger Zug (hydrostatischer Span-nungszustand)
s
s s
s
s x h
s x x , s h hs
y
x
Der Mohrsche Spannungskreis reduziert sich hier auf einen Punkt. Es gibt keineSchubspannungen, und alle Achsen sind Hauptnormalspannungsachsen.
Erweiterung auf den räumlichen Spannungszustand
Bisher haben wir den ebenen Spannungszustand betrachtet. Nun wollen wir die Bezie-hungen auf den räumlichen Spannungszustand erweitern.
(2.149) gilt in der gleichen Form auch für den räumlichen Spannungszustand, wobeilediglich die z– bzw. ζ–Koordinate zu ergänzen ist, d.h.
σλµ =∑
i
∑
j
cos(λ, i) cos(µ, j)σiji, j = x, y, z
λ, µ = ξ, η, ζ(2.156)
Die Hauptnormalspannungen ergeben sich aufgrund der Bedingung
σλµ = 0 für λ 6= µ,
d.h., wir suchen Schnittflächen, auf denen der Spannungsvektor ~σλ gerade senkrechtsteht.
s y y
A l
x
z
y
s y x
s y z
s l
e l
A x ( 0 , I I , I I I )
0
I
I I
I I I
A z ( 0 , I , I I )
A y ( 0 , I , I I I )
Bild 2.6.6
Mit Ax = cos(λ, x)Aλ, Ay = cos(λ, y)Aλ undAz = cos(λ, z)Aλ gilt für das gezeichnete Tetraede-relement die vektorielle Gleichgewichtsbedingung
~eλσλAλ = ~σx cos(λ, x)Aλ + ~σy cos(λ, y)Aλ
+~σz cos(λ, z)Aλ
bzw.
~eλσλ =∑
i
~σi cos(λ, i).∣∣∣ · ~ej

110 Elastostatik und Festigkeitslehre
Multipliziert man die ganze Gleichung mit ~ej und beachtet
~eλ~ej = cos(λ, j) bzw. ~ej~σi = σij,
so folgt σλ cos(λ, j) =∑
i
σij cos(λ, i)
∑
i
[σij − δijσλ] cos(λ, i) = 0 (2.157)
als Bestimmungsgleichung für die Hauptnormalspannungen. Bei der Gleichung (2.157)handelt es sich um das Eigenwertproblem des Spannungstensors. Die Hauptnormalspan-nungen σλ = σI , σII , σIII sind die Eigenwerte, die durch die Richtungskosinusse cos(λ, i)beschriebenen Hauptnormalspannungsachsen sind die Eigenvektoren.
Nichttriviale Lösungen cos(λ, i) existieren nur, wenn die Koeffizientendeterminante von(2.157) verschwindet.
∣∣∣∣∣∣∣
σxx − σλ σxy σxz
σyx σyy − σλ σyz
σzx σzy σzz − σλ
∣∣∣∣∣∣∣
= 0
Als charakteristische Gleichung folgt die kubische Gleichung für σλ
σ3 − II σ2 + III σ − IIII = 0 (2.158)
In (2.158) sind
II = σxx + σyy + σzz (Spur)
III = σxxσyy + σyyσzz + σzzσxx − (σ2xy + σ2
yz + σ2zx)
IIII =
∣∣∣∣∣∣∣
σxx σxy σxz
σyx σyy σyz
σzx σzy σzz
∣∣∣∣∣∣∣
(Determinante)
die Invarianten des räumlichen Spannungstensors.
Wir setzen voraus, dass die Hauptspannungen als Lösungen von (2.158) so bezeichnetwerden, dass
σI ≥ σII ≥ σIII
gilt. Für die I–II–, II–III– und III–I–Ebene erhalten wir wieder die Mohrschen Span-nungskreise (Bild 2.6.7)

Beurteilung des Beanspruchungszustandes 111
t
s
tmax
sIIIsII sI
Bild 2.6.7
Die Kurven in Bild 2.6.7 stellen jeweils Grenzzustände dar. Der allgemeine räumlicheSpannungszustand liegt innerhalb der schraffierten Fläche.
Für τmax gilt
τmax =σI − σIII
2. (2.159)
Es gibt auch für den räumlichen Spannungszustand ein anschauliches grafisches Trans-formationsverfahren, auf das hier aber nicht eingegangen werden soll.
2.6.3 Spezifische Volumen– und Gestaltänderungsenergie
Die spezifische Formänderungsenergie Π∗, ausgedrückt durch die Spannungen, ist für denallgemeinen räumlichen Spannungszustand in (2.118) angegeben. Diese Energie wollenwir nun aufspalten in die
Volumenänderungsenergie und die Gestaltänderungsenergie.
Dazu spalten wir vom Spannungstensor und vom Verzerrungstensor den entsprechendenhydrostatischen Anteil
σoij =
1
3(σxx + σyy + σzz)δij =
1
3s δij
εoij =1
3(εxx + εyy + εzz)δij =
1
3e δij
(2.160)
ab, den man auch als den jeweiligen Kugeltensor bezeichnet. Die verbleibenden Größennennt man Deviatoranteile
σij = σij − σoij
εij = εij − εoij(2.161)

112 Elastostatik und Festigkeitslehre
Die Kugeltensoren enthalten nur Normalspannungen bzw. Dehnungen und keine Tan-gentialspannungen bzw. Winkeländerungen. Sie bewirken eine reine Volumenänderungund keine Änderung der Gestalt.
Hingegen weist der Deviator des Verzerrungstensors die Dehnungssumme e = 0 auf. DieDeviatorkomponenten bewirken keine Volumenänderung sondern eine reine Gestaltän-derung.
Damit gilt die Aufspaltung
Π∗ = Π∗
V +Π∗
G mit
Π∗
V =1
2
∑
i
∑
j
σoijε
oij
Π∗
G =1
2
∑
i
∑
j
σij εij .
(2.162)
Um Π∗
V bzw. Π∗
G allein durch die entsprechenden Spannungskomponenten auszudrücken,müssen wir das Hookesche Gesetz umformen. Unter Benutzung von (2.26) erhält man
∑
i
εii = e =1 + ν
E
∑
i
(
σii − δiiν
1 + νs
)
=1 + ν
E
(
s− 3ν
1 + νs
)
=1− 2ν
Es .
Hieraus folgt
εoij =1− 2ν
Eσoij . (2.163)
Ausgehend von (2.26) ergeben sich die Deviatoranteile zu
εij = εij − δije
3
=1 + ν
E
[
σij − δij
(ν
1 + νs+
1− 2ν
1 + ν
s
3
)]
=1 + ν
E
(
σij − δijs
3
)
=1 + ν
Eσij .
(2.164)
Bei der Formulierung des Hookeschen Stoffgesetzes hätten ein reiner Kompressionsver-such (Volumenänderung) und ein reiner Gestaltänderungsversuch für isotropes linear–elastisches Materialverhalten von vornherein nur zwei unabhängige Elastizitätskonstan-ten ergeben.

Beurteilung des Beanspruchungszustandes 113
Mit (2.163) bzw. (2.164) folgt aus (2.162)
Π∗
V =1− 2ν
2E
∑
i
∑
j
σoijσ
oij =
3(1− 2ν)
2E
(s
3
)2
=1− 2ν
6Es2 ,
Π∗
G =1 + ν
2E
∑
i
∑
j
σij σij =1 + ν
2E
[∑
i
∑
j
σijσij −s2
3
]
,
und ausführlich im x, y, z–Koordinatensystem
Π∗
V =1− 2ν
6E(σxx + σyy + σzz)
2 ,
Π∗
G =1 + ν
6E
[(σxx − σyy)
2 + (σyy − σzz)2 + (σzz − σxx)
2
+6(τ 2xy + τ 2yz + τ 2zx)]
,
(2.165)
bzw. im I, II, III–Hauptachsensystem
Π∗
V =1− 2ν
6E(σI + σII + σIII)
2 ,
Π∗
G =1 + ν
6E
[(σI − σII)
2 + (σII − σIII)2 + (σIII − σI)
2]
.
(2.166)
2.6.4 Festigkeitshypothesen
In einer Konstruktion stellt sich häufig ein mehrachsiger Spannungszustand ein; dage-gen werden Materialkennwerte meist im einfachen (einachsigen) Zugversuch ermittelt.Damit ergibt sich die Frage, wie zur Beurteilung des Festigkeitsverhaltens eines Bauteilsder mehrachsige Spannungszustand dem im einachsigen Zugversuch ermittelten Werk-stoffkennwert gegenübergestellt werden soll.
Eine Antwort hierauf geben die Festigkeitshypothesen, die den mehrachsigen Span-nungszustand auf eine einachsige Vergleichsspannung σv zurückführen. Da es keinphysikalisches Gesetz für eine solche Rückführung gibt, werden Hypothesen aufgestellt,deren Gültigkeitsbereich im Experiment nachzuweisen ist.
Die 4 bekanntesten Festigkeitshypothesen werden im folgenden genannt.
114 Elastostatik und Festigkeitslehre
1. Hypothese der maximalen Normalspannung
(Galilei, Leibniz, Navier, Lamé, Clapeyron)
Die Normalspannungshypothese beruht auf der Annahme, dass in einem Material Ver-sagen eintritt, wenn die betragsmäßig größte Hauptspannung σI bzw. |σIII | einen be-stimmten Wert erreicht. Damit ergibt sich
σv =
{
σI für σI ≥ |σIII ||σIII | für σI < |σIII | .
(2.167)
Diese Hypothese berücksichtigt offenbar nur eine Hauptspannung und besagt, dass all-seitiger Zug oder Druck ebenso zum Versagen führt wie einachsiger Zug oder Druck. Dassteht jedoch nicht im Einklang mit entsprechenden Experimenten.
Geeignet ist die Hypothese i.w. für den Zug–Trennbruch spröder Werkstoffe.
2. Hypothese der maximalen Dehnung
(Navier, Saint–Venant)
Als Beanspruchungsmaß bei der Hauptdehnungshypothese dient die betragsmäßig größteDehnung. Das führt auf
εv =
{
εI für εI ≥ |εIII||εIII | für εI < |εIII | .
(2.168)
In Spannungen ausgedrückt erhält man
σv =
{
σI − ν(σII + σIII) für σI ≥ |σIII |−σIII + ν(σI + σII) für σI < |σIII | .
(2.169)
Wie die Hauptspannungshypothese ist die Hauptdehnungshypothese geeignet zur Beur-teilung trennflächiger (spröder) Brüche. Beim Bewerten von mehrachsigen Spannungs-zuständen, bei denen eine Hauptspannung als Druckspannung auftritt, ist sie der Haupt-spannungshypothese überlegen.
3. Hypothese der maximalen Schubspannung
(Coulomb, Saint–Venant, Tresca, Mohr)
Als maßgebend wird in dieser Hypothese die größte auftretende Schubspannung angese-hen, die nach (2.159) durch die Differenz der maximalen und der minimalen Hauptnor-malspannung gegeben ist. Das ergibt
τv =σv2
= τmax =σI − σIII
2⇒ σv = σI − σIII . (2.170)

Beurteilung des Beanspruchungszustandes 115
Die Hypothese der maximalen Schubspannung ist sehr brauchbar für die Versagensar-ten Fließen und Gleitbruch. Es gibt eine von Mohr stammende Modifikation dieserHypothese, auf die aber hier nicht eingegangen werden soll.
4. Hypothese der Gestaltänderungsenergie
(Huber, Hencky, v. Mises, Nadai)
Hier wird die spezifische Gestaltänderungsenergie Π∗
G nach (2.166) als Vergleichsmaßherangezogen. Somit folgt
Π∗
Gv = Π∗
G
und mit Π∗
Gv = 21 + ν
6Eσ2v sowie Π∗
G nach (2.165)
σv =
√
1
2
[(σI − σII)
2 + (σII − σIII)2 + (σIII − σI)
2]
. (2.171)
Diese Hypothese, in der alle Hauptnormalspannungen erfaßt werden, hat sich für eineVielzahl von Fällen sehr gut bewährt; sie versagt jedoch für hydrostatische Spannungs-zustände.
Beispiel: Vergleichsspannungen
Wir wollen die vier Hypothesen für den Sonderfall nur einer Normalspannung (σxx)und einer Schubspannung (τxy), wie sie z.B. in einer auf Biegung und Torsionbeanspruchten Welle vorkommen, gegenüberstellen.
Nach (2.152) erhält man für den oben genannten Fall (unter der VoraussetzungσI ≥ σII ≥ σIII) die 3 Hauptspannungen
σI =σ
2+
√(σ
2
)2
+ τ 2 ,
σII = 0 ,
σIII =σ
2−√(σ
2
)2
+ τ 2 .
Eingesetzt in (2.167), (2.169), (2.170) und (2.171) ergibt das
σv1 =|σ|2
+
√(σ
2
)2
+ τ 2 ,
σv2 = (1− ν)|σ|2
+ (1 + ν)
√(σ
2
)2
+ τ 2 ,
σv3 =√σ2 + 4τ 2 ,
σv4 =√σ2 + 3τ 2 .
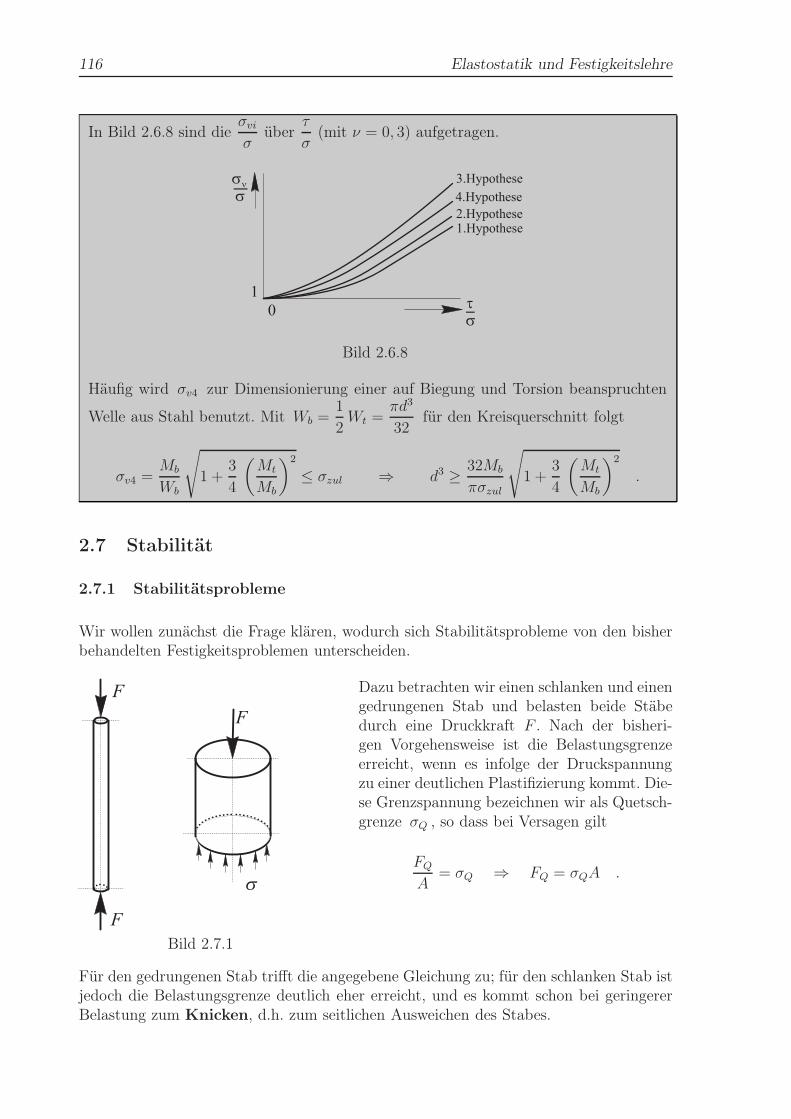
116 Elastostatik und Festigkeitslehre
In Bild 2.6.8 sind dieσviσ
überτ
σ(mit ν = 0, 3) aufgetragen.
sn
s-
ts-0
1
3.Hypothese
4.Hypothese2.Hypothese1.Hypothese
Bild 2.6.8
Häufig wird σv4 zur Dimensionierung einer auf Biegung und Torsion beanspruchten
Welle aus Stahl benutzt. Mit Wb =1
2Wt =
πd3
32für den Kreisquerschnitt folgt
σv4 =Mb
Wb
√
1 +3
4
(Mt
Mb
)2
≤ σzul ⇒ d3 ≥ 32Mb
πσzul
√
1 +3
4
(Mt
Mb
)2
.
2.7 Stabilität
2.7.1 Stabilitätsprobleme
Wir wollen zunächst die Frage klären, wodurch sich Stabilitätsprobleme von den bisherbehandelten Festigkeitsproblemen unterscheiden.
F
F
F
s
Bild 2.7.1
Dazu betrachten wir einen schlanken und einengedrungenen Stab und belasten beide Stäbedurch eine Druckkraft F . Nach der bisheri-gen Vorgehensweise ist die Belastungsgrenzeerreicht, wenn es infolge der Druckspannungzu einer deutlichen Plastifizierung kommt. Die-se Grenzspannung bezeichnen wir als Quetsch-grenze σQ , so dass bei Versagen gilt
FQ
A= σQ ⇒ FQ = σQA .
Für den gedrungenen Stab trifft die angegebene Gleichung zu; für den schlanken Stab istjedoch die Belastungsgrenze deutlich eher erreicht, und es kommt schon bei geringererBelastung zum Knicken, d.h. zum seitlichen Ausweichen des Stabes.
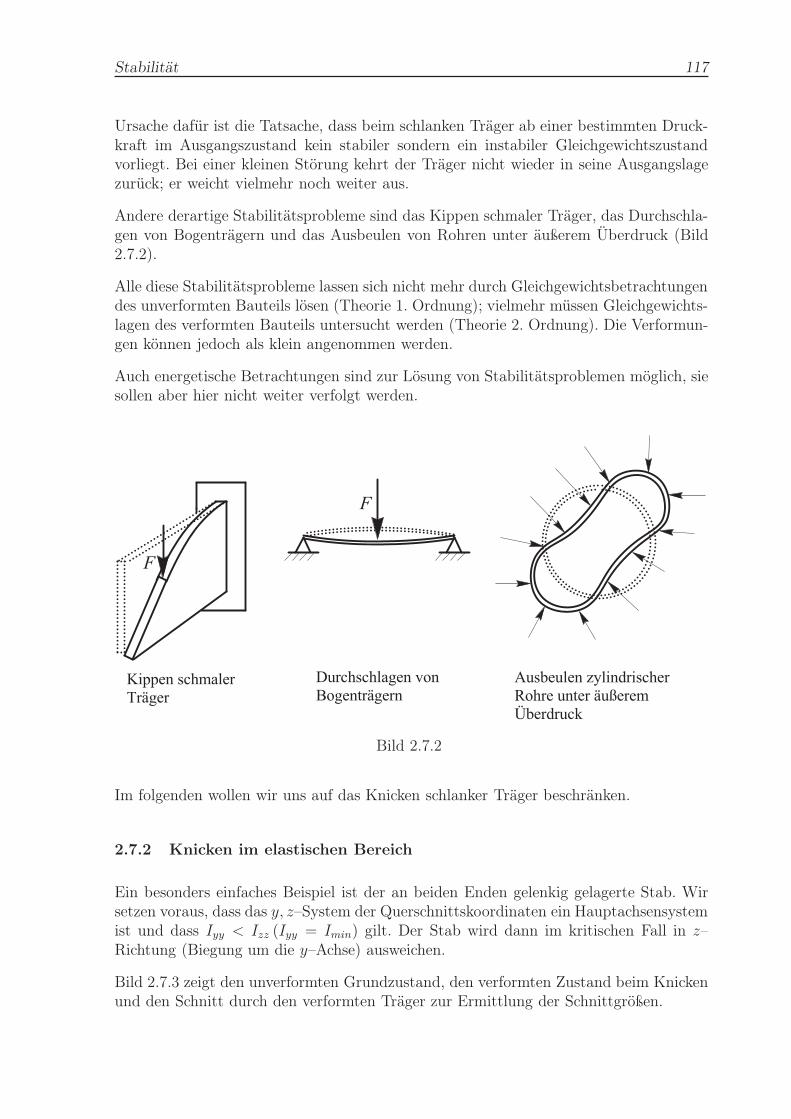
Stabilität 117
Ursache dafür ist die Tatsache, dass beim schlanken Träger ab einer bestimmten Druck-kraft im Ausgangszustand kein stabiler sondern ein instabiler Gleichgewichtszustandvorliegt. Bei einer kleinen Störung kehrt der Träger nicht wieder in seine Ausgangslagezurück; er weicht vielmehr noch weiter aus.
Andere derartige Stabilitätsprobleme sind das Kippen schmaler Träger, das Durchschla-gen von Bogenträgern und das Ausbeulen von Rohren unter äußerem Überdruck (Bild2.7.2).
Alle diese Stabilitätsprobleme lassen sich nicht mehr durch Gleichgewichtsbetrachtungendes unverformten Bauteils lösen (Theorie 1. Ordnung); vielmehr müssen Gleichgewichts-lagen des verformten Bauteils untersucht werden (Theorie 2. Ordnung). Die Verformun-gen können jedoch als klein angenommen werden.
Auch energetische Betrachtungen sind zur Lösung von Stabilitätsproblemen möglich, siesollen aber hier nicht weiter verfolgt werden.
F
F
Kippen schmalerTräger
Durchschlagen vonBogenträgern
Ausbeulen zylindrischerRohre unter äußeremÜberdruck
Bild 2.7.2
Im folgenden wollen wir uns auf das Knicken schlanker Träger beschränken.
2.7.2 Knicken im elastischen Bereich
Ein besonders einfaches Beispiel ist der an beiden Enden gelenkig gelagerte Stab. Wirsetzen voraus, dass das y, z–System der Querschnittskoordinaten ein Hauptachsensystemist und dass Iyy < Izz (Iyy = Imin) gilt. Der Stab wird dann im kritischen Fall in z–Richtung (Biegung um die y–Achse) ausweichen.
Bild 2.7.3 zeigt den unverformten Grundzustand, den verformten Zustand beim Knickenund den Schnitt durch den verformten Träger zur Ermittlung der Schnittgrößen.
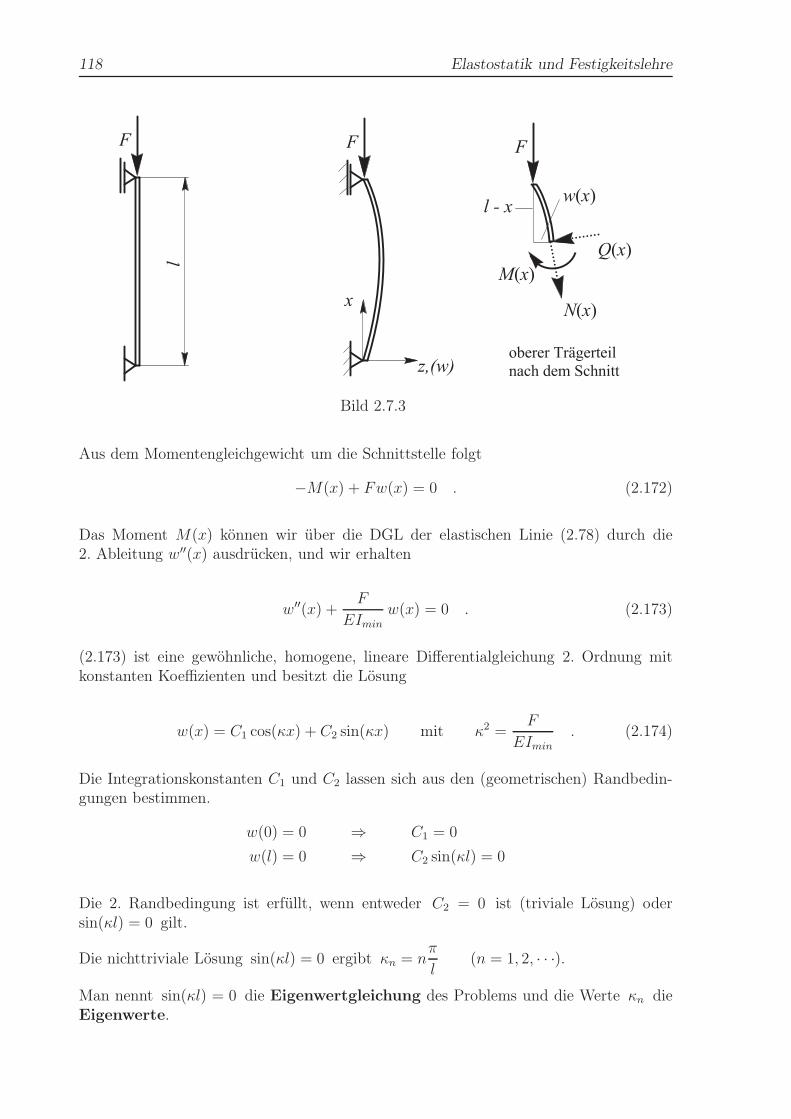
118 Elastostatik und Festigkeitslehre
FF
l
x
z , ( w )
F
N ( x )
M ( x )
Q ( x )
w ( x )l - x
o b e r e r T r ä g e r t e i l
n a c h d e m S c h n i t t
Bild 2.7.3
Aus dem Momentengleichgewicht um die Schnittstelle folgt
−M(x) + Fw(x) = 0 . (2.172)
Das Moment M(x) können wir über die DGL der elastischen Linie (2.78) durch die2. Ableitung w′′(x) ausdrücken, und wir erhalten
w′′(x) +F
EImin
w(x) = 0 . (2.173)
(2.173) ist eine gewöhnliche, homogene, lineare Differentialgleichung 2. Ordnung mitkonstanten Koeffizienten und besitzt die Lösung
w(x) = C1 cos(κx) + C2 sin(κx) mit κ2 =F
EImin
. (2.174)
Die Integrationskonstanten C1 und C2 lassen sich aus den (geometrischen) Randbedin-gungen bestimmen.
w(0) = 0 ⇒ C1 = 0
w(l) = 0 ⇒ C2 sin(κl) = 0
Die 2. Randbedingung ist erfüllt, wenn entweder C2 = 0 ist (triviale Lösung) odersin(κl) = 0 gilt.
Die nichttriviale Lösung sin(κl) = 0 ergibt κn = nπ
l(n = 1, 2, · · ·).
Man nennt sin(κl) = 0 die Eigenwertgleichung des Problems und die Werte κn dieEigenwerte.
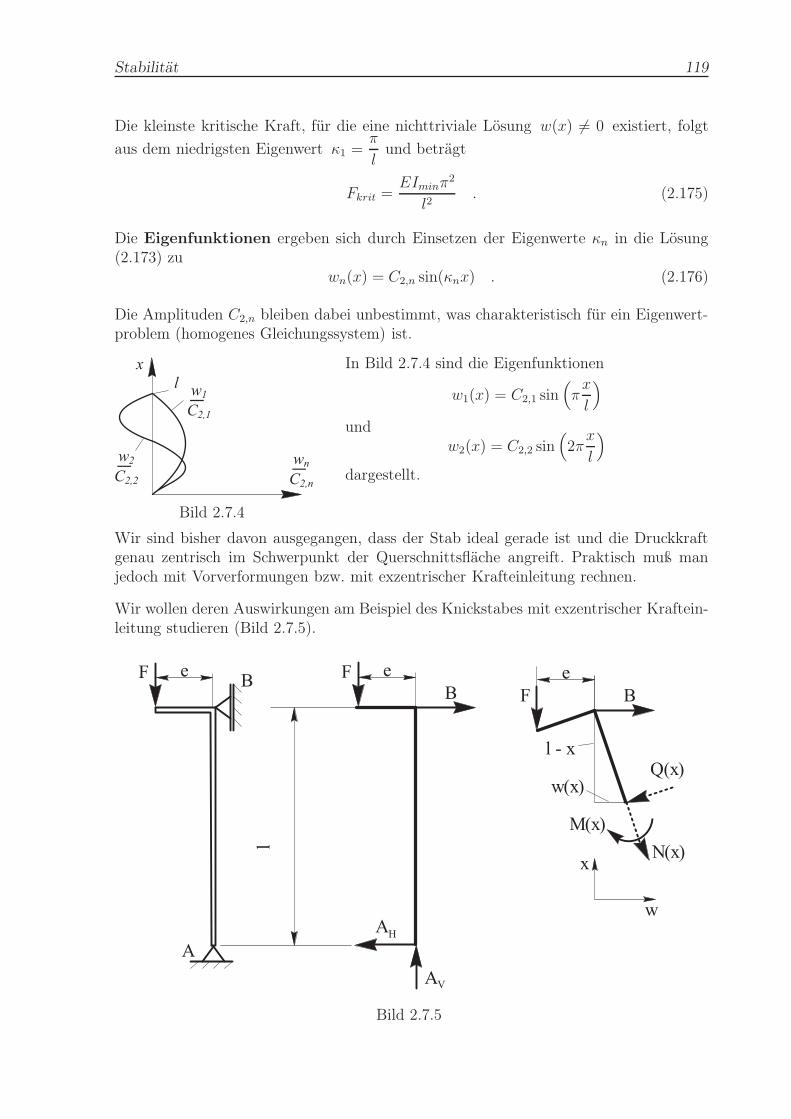
Stabilität 119
Die kleinste kritische Kraft, für die eine nichttriviale Lösung w(x) 6= 0 existiert, folgt
aus dem niedrigsten Eigenwert κ1 =π
lund beträgt
Fkrit =EIminπ
2
l2. (2.175)
Die Eigenfunktionen ergeben sich durch Einsetzen der Eigenwerte κn in die Lösung(2.173) zu
wn(x) = C2,n sin(κnx) . (2.176)
Die Amplituden C2,n bleiben dabei unbestimmt, was charakteristisch für ein Eigenwert-problem (homogenes Gleichungssystem) ist.
l
wn
C2,n
w2
C2,2
w1
C2,1
x
Bild 2.7.4
In Bild 2.7.4 sind die Eigenfunktionen
w1(x) = C2,1 sin(
πx
l
)
undw2(x) = C2,2 sin
(
2πx
l
)
dargestellt.
Wir sind bisher davon ausgegangen, dass der Stab ideal gerade ist und die Druckkraftgenau zentrisch im Schwerpunkt der Querschnittsfläche angreift. Praktisch muß manjedoch mit Vorverformungen bzw. mit exzentrischer Krafteinleitung rechnen.
Wir wollen deren Auswirkungen am Beispiel des Knickstabes mit exzentrischer Kraftein-leitung studieren (Bild 2.7.5).
A
F eB
l
F e
B
AH
AV
F
e
B
Q(x)
N(x)
M(x)
w(x)
l - x
x
w
Bild 2.7.5

120 Elastostatik und Festigkeitslehre
Die Auflagerkraft B folgt aus dem Momentengleichgewicht um A für den gesamten Stab:
−Bl + Fe = 0 ⇒ B = Fe
l
Für den Momentenverlauf M(x) ergibt sich
M(x) = F [e+ w(x)]− B(l − x) = F[
w(x) + ex
l
]
. (2.177)
(2.177) eingesetzt in die Gleichung der elastischen Linie liefert die inhomogene Differen-tialgleichung 2. Ordnung
w′′(x) + κ2w(x) = −κ2exl
(2.178)
mit der Lösung
w(x) = C1 cos(κx) + C2 sin(κx)− ex
l. (2.179)
Aus den Randbedingungen ergibt sich
w(0) = 0 ⇒ C1 = 0
w(l) = 0 ⇒ C2 sin(κl)− e = 0 ⇒ C2 =e
sin(κl)
und eingesetzt in (2.179)
w(x) = e
[sin(κx)
sin(κl)− x
l
]
. (2.180)
Für e 6= 0 existiert für jede beliebige Druckkraft F 6= 0 eine ausgelenkte Gleichgewichts-lage.
Für die Eigenwerte der homogenen Gleichung κn = nπ
l(n = 1, 2, · · ·) wird sin(κl) → 0
und damit w(x) → ∞.
Das bedeutet auch bei vorhandener Exzentrizität eine kritische Druckkraft
Fkrit =EIminπ
2
l2, (2.181)
die mit (2.175) übereinstimmt.
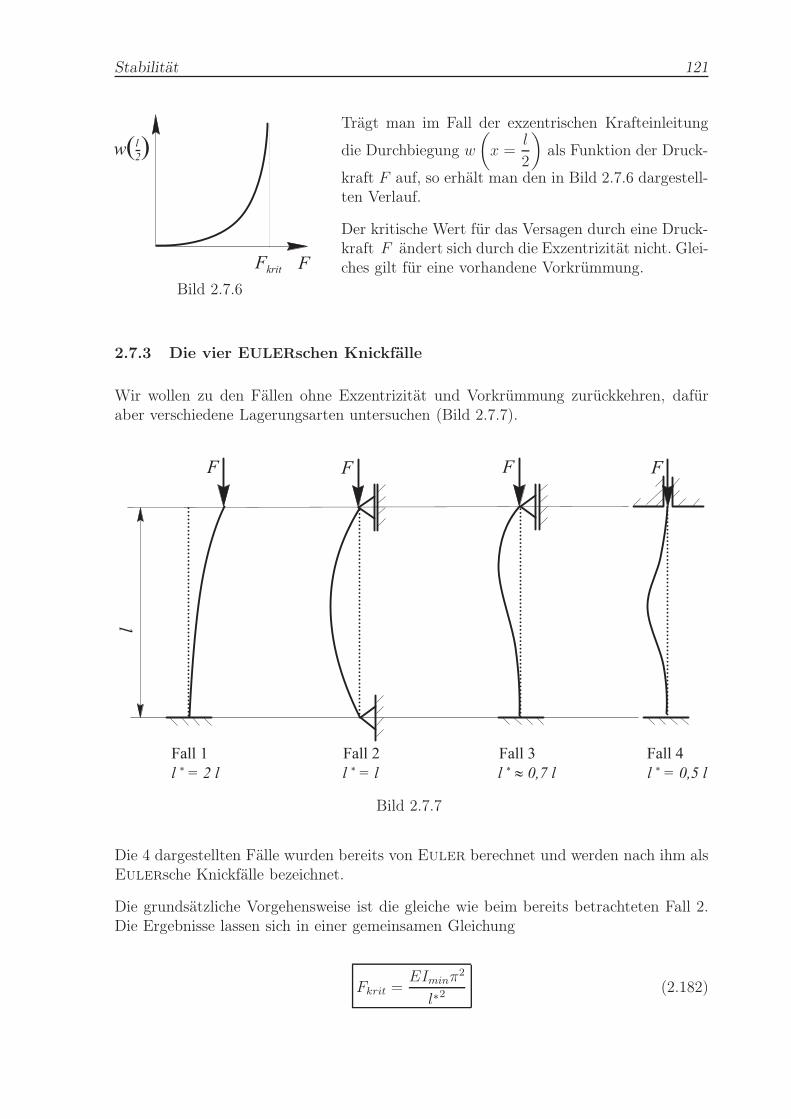
Stabilität 121
FFkrit
w(-)l2
Bild 2.7.6
Trägt man im Fall der exzentrischen Krafteinleitung
die Durchbiegung w
(
x =l
2
)
als Funktion der Druck-
kraft F auf, so erhält man den in Bild 2.7.6 dargestell-ten Verlauf.
Der kritische Wert für das Versagen durch eine Druck-kraft F ändert sich durch die Exzentrizität nicht. Glei-ches gilt für eine vorhandene Vorkrümmung.
2.7.3 Die vier EULERschen Knickfälle
Wir wollen zu den Fällen ohne Exzentrizität und Vorkrümmung zurückkehren, dafüraber verschiedene Lagerungsarten untersuchen (Bild 2.7.7).
FF
l
F F
Fall 1 Fall 2 Fall 3 Fall 4l * = 2 l l * = l l * » 0,7 l l * = 0,5 l
Bild 2.7.7
Die 4 dargestellten Fälle wurden bereits von Euler berechnet und werden nach ihm alsEulersche Knickfälle bezeichnet.
Die grundsätzliche Vorgehensweise ist die gleiche wie beim bereits betrachteten Fall 2.Die Ergebnisse lassen sich in einer gemeinsamen Gleichung
Fkrit =EIminπ
2
l∗2(2.182)
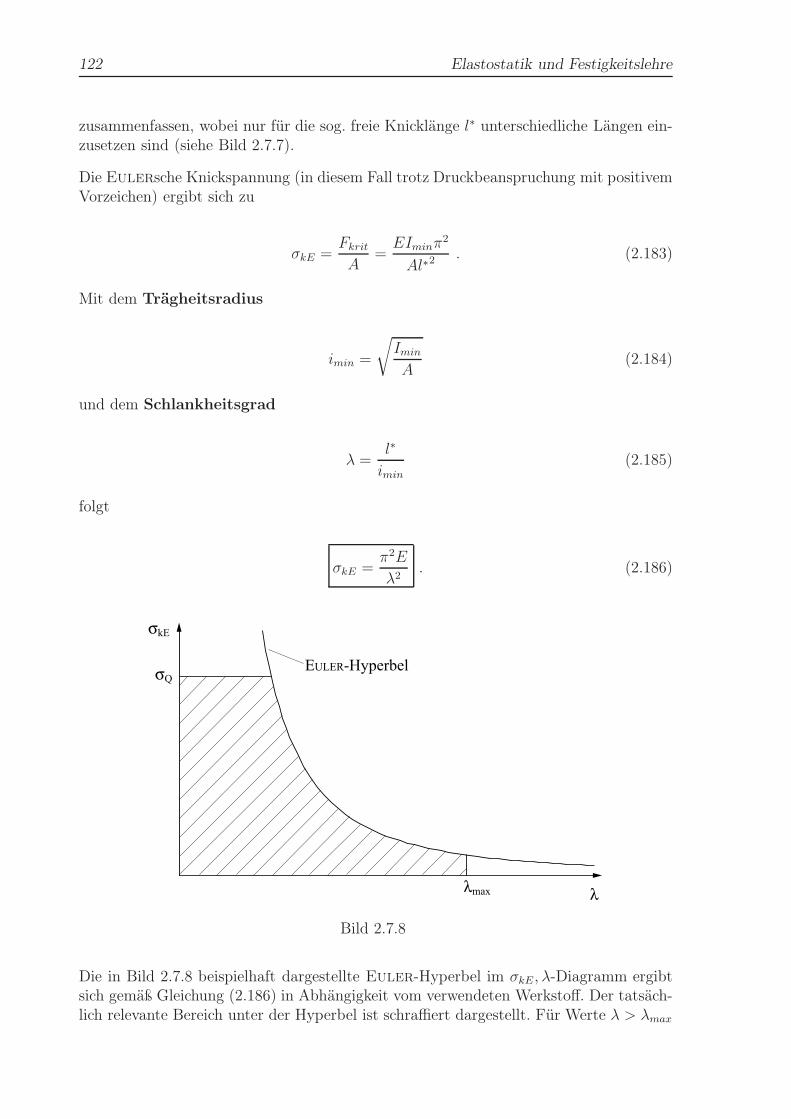
122 Elastostatik und Festigkeitslehre
zusammenfassen, wobei nur für die sog. freie Knicklänge l∗ unterschiedliche Längen ein-zusetzen sind (siehe Bild 2.7.7).
Die Eulersche Knickspannung (in diesem Fall trotz Druckbeanspruchung mit positivemVorzeichen) ergibt sich zu
σkE =Fkrit
A=EIminπ
2
Al∗2. (2.183)
Mit dem Trägheitsradius
imin =
√
Imin
A(2.184)
und dem Schlankheitsgrad
λ =l∗
imin
(2.185)
folgt
σkE =π2E
λ2. (2.186)
σkE
σQ
λmax λ
EULER-Hyperbel
Bild 2.7.8
Die in Bild 2.7.8 beispielhaft dargestellte Euler-Hyperbel im σkE , λ-Diagramm ergibtsich gemäß Gleichung (2.186) in Abhängigkeit vom verwendeten Werkstoff. Der tatsäch-lich relevante Bereich unter der Hyperbel ist schraffiert dargestellt. Für Werte λ > λmax

Stabilität 123
haben die Stäbe einen zu hohen Schlankheitsgrad und damit keine ausreichende Steifig-keit gegenüber unvermeidlichen Nebenbeanspruchungen (Herstellung, Transport, Mon-tage usw.), sowie ihrem Eigengewicht. Für Werte σ > σQ ist die Quetschspannung desMaterials erreicht, der elastische Bereich wird somit verlassen.
Bisher haben wir nur Stäbe mit konstanter Biegesteifigkeit und einem Bereich betrach-tet. Bei veränderlicher Biegesteifigkeit bzw. mehreren Bereichen kann in der gleichenWeise vorgegangen werden, der mathematische Aufwand bei der Lösung der Diffential-gleichung bzw. des Differentialgleichungssystems wächst jedoch deutlich. Daher sind insolchen Fällen häufig Näherungsverfahren gebräuchlich.
124 Elastostatik und Festigkeitslehre
3 Empfohlene Literatur
[1] Gross, D.; Hauger, W.; Schröder, J.; Wall, W.
Technische Mechanik, Band 1: Statik
Springer, Berlin, 2007
[2] Gross, D.; Ehlers, W.; Wriggers, P.
Formeln und Aufgaben zur Technischen Mechanik 1: Statik
Springer, Berlin, 2008
[3] Gross, D.; Hauger, W.; Schröder, J.; Wall, W.
Technische Mechanik, Band 2: Elastostatik
Springer, Berlin, 2007
[4] Gross, D.; Ehlers, W.; Wriggers, P.
Formeln und Aufgaben zur Technischen Mechanik 2: Elastostatik, Hydrostatik
Springer, Berlin, 2007
[5] Göldner, H.; Holzweissig, F.
Leitfaden der Technischen Mechanik
Steinkopff Verlag, Darmstadt, 1976
[6] Magnus, K.; Müller, H. H.
Grundlagen der Technischen Mechanik
Teubner Studienbücher, Stuttgart, 1982
[6] Magnus, K.; Müller, H. H.
Übungen zur Technischen Mechanik
Teubner Studienbücher, Stuttgart, 1982
[7] Hahn, H.-G.
Technische Mechanik
Carl Hanser Verlag, München, 1990
[8] Hahn, H.-G.; Barth, F.-J.
Aufgaben zur Technische Mechanik
Carl Hanser Verlag, München, 1995
[9] Szabo, I.
Einführung in die Technische Mechanik
Springer, Berlin, 1975

Stabilität 125
A Anhang
Der Anhang enthält Tabellen, wie man sie auch in Nachschlagewerken finden kann.Dadurch bedingt, können andere Bezeichnungsweisen auftreten. Es sollte aber keineSchwierigkeiten bereiten, diese mit den Beziehungen im vorliegenden Skriptum zu iden-tifizieren.
A.1 Torsionsträgheitsmomente It und Torsionswiderstandsmo-
mente Wt
Querschnitt It Wt Bemerkungen
1 d πd4
32(= Ip)
πd3
16τmax am Umfang
2 da
didm
t π(d4a − d4i )
32(= Ip)
t
dm≪ 1 :
πd3mt
4
π(d4a − d4i )
16dat
dm≪ 1 :
πd2mt
2
τmax am Umfang
32 a P 1
P 2
2b πa3b3
a2 + b2=
πn3b4
n2 + 1
πab2
2=πnb3
2
Voraussetzung:a
b= n ≥ 1
τmax in P1, in P2 τ =1
nτmax
4 P 1
P 2
2b1
2b2
2 a 22 a 1
πn3(b41 − b42)
n2 + 1
πn(b41 − b42)
2b1
Voraussetzung:a
b= n ≥ 1
τmax in P1, in P2 τ =1
nτmax
5b
b b
hP 1
P 2
b4
46, 19≈ h4
26
b3
20≈ h3
13
τmax in P1 (Seitenmitte)
in P2 τ2 = 0 (Ecke)
6
c1hb3 = c1nb
4 c2hb2 = c2nb
3
Voraussetzung:h
b= n ≥ 1
τmax in P1, in P3 τ3 = 0,
in P2 τ2 = c3τmax
b
h
P 2
P 1
P 3
n = h/b 1,0 1,5 2,0 3,0 4,0 6,0 8,0 10 ∞c1 0,141 0,196 0,229 0,263 0,281 0,298 0,307 0,312 0,333
c2 0,208 0,231 0,246 0,267 0,282 0,299 0,307 0,312 0,333
c3 1,000 0,858 0,796 0,753 0,745 0,743 0,743 0,743 0,743
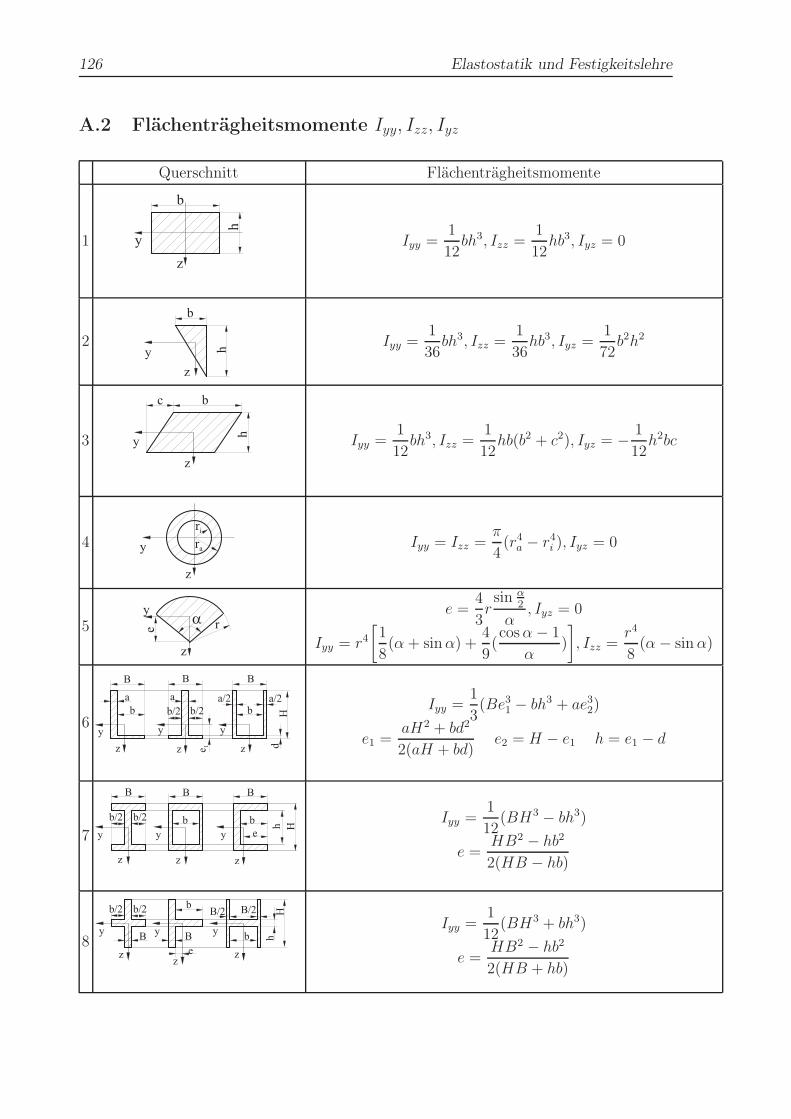
126 Elastostatik und Festigkeitslehre
A.2 Flächenträgheitsmomente Iyy, Izz, Iyz
Querschnitt Flächenträgheitsmomente
1z
b
yh
Iyy =1
12bh3, Izz =
1
12hb3, Iyz = 0
2y
z
b
h
Iyy =1
36bh3, Izz =
1
36hb3, Iyz =
1
72b2h2
3 h
y
z
bc
Iyy =1
12bh3, Izz =
1
12hb(b2 + c2), Iyz = − 1
12h2bc
4r ir ay
z
Iyy = Izz =π
4(r4a − r4i ), Iyz = 0
5 ra
z
y
e
e =4
3rsin α
2
α, Iyz = 0
Iyy = r4[1
8(α + sinα) +
4
9(cosα− 1
α)
]
, Izz =r4
8(α− sinα)
6
B B B
b H
a
b
d
y y y
z z ze 1
a
b / 2 b / 2
a / 2 a / 2 Iyy =1
3(Be31 − bh3 + ae32)
e1 =aH2 + bd2
2(aH + bd)e2 = H − e1 h = e1 − d
7
Hh
Iyy =1
12(BH3 − bh3)
e =HB2 − hb2
2(HB − hb)
8zz
y y y
z
hH
b
b
B
e
B
b / 2 b / 2 B / 2 B / 2
Iyy =1
12(BH3 + bh3)
e =HB2 − hb2
2(HB + hb)















![Deutsch für Deutsche / Bildungssprache Deutsch · Deutsch für Deutsche / Bildungssprache Deutsch ... Kasus bei Präpositionen, Verben, ... „Verben können mit Präpositionen […]](https://img.pdfslide.org/doc/110x75/5ba0073409d3f2df578c075a/deutsch-fuer-deutsche-bildungssprache-deutsch-deutsch-fuer-deutsche-bildungssprache.jpg)













