Embed Size (px)
Citation preview

8/14/2019 Subaru Symmetrical AWD
http://slidepdf.com/reader/full/subaru-symmetrical-awd 1/8
Symmetrical AWDIm September 1972 führte Subaru als erster Hersteller der Welt den Allradantrieb in den industriel-len Personenwagenbau ein. Mit seinem serienmäßigen zuschaltbaren Allradantrieb startete der Su-
baru Leone Station Wagon AWD eine neue Antriebsära. Seither hat Subaru weltweit über zehnMillionen Allrad-Pkw gebaut und ist damit unangefochten Marktführer in diesem Segment.
Bis Anfang der 60er Jahre stand der Begriff "Allradantrieb" gleichbedeutend für "Nutzfahrzeug". Nur Militär- oder Baufahrzeuge und lupenreine Geländefahrzeuge besaßen Allradantrieb. Für best-möglichen Vortrieb war das zwar die ideale Lösung, doch die Fahrzeuge waren langsam, kurvenun-willig und kompromisslos auf die Bedingungen in schwerem Gelände getrimmt. In den 70er Jahren,als die Motoren immer stärker und die Fahrzeuge immer schneller wurden, lieferte das Prinzip der vier angetriebenen Räder das technische Potenzial für ein Antriebssystem, das hohe Motorleistungeffektiv und kontrolliert auf die Straße bringen und in Vortrieb umsetzen konnte.
Subaru - Pionier des Allradantriebs
Trotz aller Einschränkungen jedoch waren die strukturellen Vorteile des Allradantriebs evident: DasAntriebssystem liefert maximale Traktion, die Antriebskräfte beeinflussen das Lenkverhalten nicht,AWD sorgt für ein eindeutiges und vorhersehbares Fahrverhalten. Deshalb bedurfte es nur eineskleinen Anstoßes für die Übertragung der Allradtechnologie auf Personenwagen. Diesen Anstoß gabdie Tohoku Electric Supply Company, die die Tohoku Präfektur im Norden der japanischen Haupt-insel Honshu mit Strom versorgte. Der Großkunde verlangte ein Fahrzeug, mit dem die Mitarbeiter ihre Einsatzorte auch im Winter problemlos und sicher erreichen konnten. Subaru entwickelte denLeone Station Wagon AWD und lieferte im September 1972 den ersten Allrad-Pkw der Welt aus.Der Allrad-Leone löste einen Nachfrageboom bei Unternehmen aus, die seine Leistungsfähigkeit in
den schneereichen und bergigen Gebieten Japans brauchten. Doch er setzte sich auch auf denExportmärkten durch: Der Subaru Leone Station Wagon AWD wurde der bestverkaufte Allrad-Pkwder Welt und die Keimzelle der Subaru-Allradtechnologie. Notabene: Erst acht Jahre nach demSubaru Leone Station Wagon AWD brachte ein süddeutscher Automobilhersteller 1980 seinen "Ur-Quattro" auf den Markt.
September 1972: Die Ära des Allradantriebs beginnt
Innen und außen unterschied sich der Subaru Leone Station Wagon AWD nicht von den frontgetrie- benen Modellen. Doch er besaß einen zuschaltbaren Allradantrieb (üblicherweise Four-Wheel Drivegenannt), der einen Teil der Motorleistung auch an die Hinterachse transferierte: Beim Subaru
Leone bestand der 4WD in der mechanischen Herstellung eines starren Durchtriebs mittels einer Klauenkupplung von der ursprünglich angetriebenen Vorderachse zur Hinterachse.
Technische Daten Subaru Leone Station Wagon AWDLänge / Breite / Höhe: 3995mm x 1500mm x 1385mmGewicht: 855 kgMotor: Wassergekühlter Vierzylinder-Boxermotor EA63SBohrung x Hub: 85 mm x 60 mmHubraum: 1361 Kubikzentimeter Verdichtungsverhältnis: 8,5 : 1Max. Leistung: 53 kW / 72 PS bei 6.400/minMax. Drehmoment: 10,2 kg-m/3.000 min = 100,06 Nm bei 3.000/minGetriebe: Viergang-SchaltgetriebeAntrieb: zuschaltbarer Allradantrieb; mechanische Herstellung eines starren Durchtriebs mittels

8/14/2019 Subaru Symmetrical AWD
http://slidepdf.com/reader/full/subaru-symmetrical-awd 2/8
Klauenkupplung von der ursprünglich angetriebenen Vorderachse zur HinterachseFahrwerk vorne Einzelradaufhängung mit McPherson-Federbeinenhinten Schräglenkerachse
Systemvorteile des Allradantriebs
Allradantrieb birgt drei Vorteile für die Fahrdynamik: 1. Traktion, 2. Handling und 3. Stabilität.Grundsätzlich steht beim Allradantrieb das gesamte Drehmoment an der Abtriebsseite des Getriebeszur Verfügung. Die Antriebskräfte beeinflussen das Lenkverhalten nicht, und alle Subaru-Fahrzeugeüberzeugen durch ihr eindeutiges, gutmütiges und vorhersehbares Fahrverhalten. Um dieses(übrigens von allen Automobilherstellern) erwünschte Fahrverhalten zu erreichen, eignet sich der Allradantrieb auf ideale Weise, weil die Antriebskräfte sich auf alle vier Räder verteilen.
Das System der Kraftübertragung ist von entscheidender Bedeutung, denn die Art des Antriebs undder Kraftverteilung bestimmen wesentlich mit, wann der Zeitpunkt erreicht ist, an dem der maxi-male Reibwert zwischen Reifen und der Straßenoberfläche überschritten wird. Das wird besondersin Kurven deutlich, wo drei Kräfte ins Spiel kommen: die Antriebskraft des Motors, die das Fahr-
zeug vorwärts bewegt, die Reibkraft, die das Rad auf die Straßenoberfläche bringt, und die Seiten-führung (Zentripetalkraft), die sich als Resultierende zwischen den beiden anderen ergibt. DieseKraft wirkt der Zentrifugalkraft entgegen, und je stärker sie ist, desto sicherer wird das Kurvenver-halten. Die Seitenführung wächst mit abnehmenden Antriebskräften: Bei zwei Fahrzeugen mit der gleichen Motorleistung erzielt ein Wagen mit Allradantrieb (der die Antriebskraft durch vier teilt)eine größere Seitenführung als einer mit Zweiradantrieb (der die Antriebskraft nur durch zwei teilt).
Beispiel: Ein Motor leistet 100 PS, jedes Antriebsrad kann unter den angenommenen Bedingungenmaximal 30 PS auf der Straße in Vortrieb umsetzen. Bei einem Zweiradantrieb erhält jedes An-triebsrad (100:2) 50 PS - das sind 20 PS mehr, als es in Vortrieb umsetzen kann. Ergebnis: Die Rä-der drehen durch. Der Allradantrieb hingegen verteilt die 100 PS gleichmäßig auf alle vier Räder.Jedes Rad erhält (100:4) 25 PS, die Beanspruchung bleibt also unter der Belastungsgrenze von 30PS pro Rad: Die Räder drehen nicht durch. Dieser Unterschied gilt unter allen Bedingungen, ge-winnt aber auf diffizilerem Untergrund mit geringeren Reibwerten an Bedeutung. Je unfallträchtiger die Situation, desto deutlicher wird der Sicherheitsvorteil des Allradantriebs gegenüber dem Zwei-radantrieb.
Systematische Symmetrie: Subaru "Symmetrical AWD"
Die Symmetrie der Konstruktion ist das bestimmende Spezifikum des Subaru-Systems"Symmetrical AWD", das aus der Kombination von Boxermotor und Allradantrieb besteht.
Gegenüber allen V- und Reihenmotoren besitzt der Boxermotor die Vorteile eines sehr niedrigenSchwerpunktes und vollkommen symmetrischer Bauweise. Sein Kennzeichen sind gegenüber-liegend angeordnete Zylinder. In ihrem Innern stehen sich die Kolben paarweise wie zwei Boxer gegenüber, die Kolben bewegen sich horizontal. Diese Struktur ermöglicht einen steiferen Zylin-derblock. Der Massenausgleich beim Boxermotor ist vollkommen, er baut flach, kurz und kompakt,die kurze und steife Kurbelwelle erlaubt hohe Drehzahlen, die geringe Bauhöhe sichert einenniedrigen Schwerpunkt und eine fast ideale Gewichtsverteilung. Ein niedriger Schwerpunkt sorgtfür geringere Rollkräfte in Kurven, das wiederum führt zu geringerer Karosserieneigung und zustabilerem Fahrverhalten. Die Faszination des Boxermotors hat viel mit der Ästhetik seines Gleich-laufs zu tun: Auch ohne Ausgleichswellen dreht der Boxer weich hoch bis an die Nenndrehzahl.
Diese Vorzüge tragen wesentlich zur Ausgewogenheit und Leistungsfähigkeit des Subaru-Allrad-systems bei: Vom Motor über Getriebe, Kardan-Antriebswelle bis zum Hinterachs-Differenzialverläuft der gesamte Antriebsstrang in einer geraden Linie mit einer horizontal symmetrischen

8/14/2019 Subaru Symmetrical AWD
http://slidepdf.com/reader/full/subaru-symmetrical-awd 3/8
Auslegung. Alle wesentlichen Komponenten und Aggregate - vom längs eingebauten Boxermotor über Getriebe, Endabtrieb, Kardanwelle bis hin zum Hinterachsdifferential - sind in einer geradenLinie mit einer horizontalen Symmetrie ausgelegt. Dies führt zu einer neutralen Fahrzeugbalance.Aus der Verbindung von optimaler Traktion und perfekter Balance entsteht höchste Fahrstabilität.Alle schweren Komponenten wie Getriebe, Endabtrieb etc befinden sich zwischen den beidenAchsen. Dies vermeidet überflüssiges Gewicht durch diese Komponenten an Front und Heck und
verringert das Giermoment des Fahrzeugs. Ein geringes Giermoment optimiert das Lenkverhaltendes Fahrzeugs, denn es vermindert das Trägheitsmoment in der Lenkung und verbessert das ge-samte Fahrverhalten des Fahrzeugs. Aus der Verbindung von optimaler Traktion und perfekter Balance entstehen Fahrstabilität und "Unfallvermeidungsfähigkeit": Diese ist der wahre Schlüsselzur Sicherheit, denn es ist besser, einen Unfall zu vermeiden, als ihn "nur" zu überleben.
Die Symmetrie der Grundkonstruktion sorgt nicht nur für exzellente Fahreigenschaften, sondernträgt wesentlich zur passiven Sicherheit bei, denn sie lässt viel Platz auf beiden Seiten des Motor-raums. Dies erlaubt den Einsatz von Rahmenträgern, die aus der Fahrgastzelle direkt in den Stoß-fänger führen und eine wesentliche Rolle bei der Energieaufnahme beim Frontalaufprall spielen.Dank seiner Einbautiefe verschwindet der Boxermotor bei einem Frontalaufprall unter dem Boden-
blech und dringt nicht in den Fahrgastraum ein.
Die Zukunft: Verbesserung der Fahrzeugdynamik von Allradfahrzeugen
Subaru arbeitet derzeit an der Optimierung der elektronischen Kontrolle sämtlicher Aspekte desAllradsystems. Ziel ist ein komplexes Fahrzeugkonzept, in dem der Allradantrieb SymmetricalAWD, Fahrdynamikregelung Vehicle Dynamics Control, Giermomentkontrolle und Tire-Force-Control vernetzt sind. Die konstruktive Optimierung des Mittendifferentials, die Entwicklung deselektronisch gesteuerten zentralen Limited-Slip-Differentials sowie die konstruktive Optimierungder vorderen und hinteren LSD führen fast automatisch zur Verbesserung des dynamischen Verhal-tens von AWD-Fahrzeugen.
Die Gleichung der Zukunft: Subaru = Allradantrieb
Subaru hat die Entwicklung, die im September 1972 mit dem Leone Station Wagon AWD ihrenersten Protagonisten auf den Markt brachte, konsequent fortgesetzt. Die Gleichung Subaru =Allradantrieb gilt auch für die Zukunft. Das horizontal symmetrische Subaru-Allradsystem"Symmetrical AWD" ist und bleibt die Kerntechnologie des Pioniers der Allradtechnik, der vor 33Jahren die Allrad-Ära im industriellen Personenwagenbau einläutete. Das Potenzial desSymmetrical AWD ist noch längst nicht ausgeschöpft. Subaru arbeitet kontinuierlich weiter an der Optimierung dieser Kerntechnologie.
Subaru-AllradsystemeKonsequente Evolution von 1972 bis 2005
Die konstruktiven Unterschiede der jeweiligen Allradantriebssysteme ergeben sich aus der Notwen-digkeit, dass manuelle Schaltgetriebe andere Lösungen erfordern als Automatikgetriebe.
Subaru- Allrad-Systeme mit manuellem Schaltgetriebe
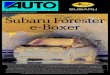
1972: Mechanisch zuschaltbarer AllradantriebDie einfachste Form des Allradsystems ist der zuschaltbare Allradantrieb, der üblicherweise Four-
Wheel-Drive genannt wird. Beim Subaru Leone AWD bestand der 4WD in der mechanischen Her-stellung eines starren Durchtriebs mittels einer Klauenkupplung von der ursprünglich angetriebenenVorderachse zur Hinterachse.

8/14/2019 Subaru Symmetrical AWD
http://slidepdf.com/reader/full/subaru-symmetrical-awd 4/8

8/14/2019 Subaru Symmetrical AWD
http://slidepdf.com/reader/full/subaru-symmetrical-awd 5/8
hinteren Antriebswelle verbunden ist. Bei zugeschaltetem Allradantrieb wird während der FahrtHydraulik-Druck aus der Getriebe-Ölpumpe automatisch in die Mehrscheibenkupplung übertragen,die einkuppelt und Drehmoment auf die hintere Antriebswelle überträgt. So gleicht MP-T Drehzahl-unterschiede zwischen Vorder- und Hinterrädern aus. Beim Modus "Auto-4WD" stellt sich dasFahrzeug auf einen "intelligenten" Allrad-Modus ein, in dem der Hydraulik-Druck für die Mehr-scheibenkupplung durch den Tritt auf die Bremse und das Einschalten der Scheibenwischer (sic!)
aktiviert wird.
1987: Permanenter AllradantriebBeim Subaru XT mit Viergang-Automatikgetriebe ACT-4 (ACT = Active Control of Torque =Aktive Drehmoment Verteilung) erfolgt die Drehmomentverteilung differenziert: mechanisch zur Vorderachse durch ein Paar gleich großer Zahnräder, hydraulisch zur Hinterachse durch eine imÖlbad laufende Lamellenkupplung.
1989: ECVT-Getriebe und zuschaltbarer AllradantriebBeim Justy mit ECVT-Getriebe (1989) wird der Allradantrieb per Knopfdruck im Schalthebelzugeschaltet. Der Schalter betätigt hydraulisch eine Schaltwelle, die über eine Schiebemuffe den
Verteilerantrieb kraftschlüssig verbindet.
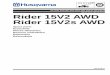
1991: Permanenter Allradantrieb mit VTDMit dem Gran Turismo SVX (1991) führt Subaru das weiterentwickelte Automatikgetriebe mit der variablen Drehmomentverteilung VTD (Variable Torque Distribution) ein: Ein Mittendifferential
bestehend aus einem Planetenradsatz und ein Hinterachsdifferential mit Viskokupplung leitet dieMotorkraft im Normalfall zu 36 Prozent an die Vorderräder und 64 Prozent an die Hinterräder. BeiKraftschlussveränderungen verteilt die Elektronik das Drehmoment neu an die Räder, die unter den
jeweiligen Bedingungen die beste Traktion liefern. Die hydraulische Lamellensperre sperrt stufen-los den Planetenradsatz bei auftretenden Drehzahlunterschieden zwischen Vorder- und Hinterachse.Die Viskokupplung sorgt an der Hinterachse dafür, dass keine Kraft am durchdrehenden Rad sinn-los verpufft.
1998: Permanenter Allradantrieb mit VTD und Vehicle Dynamics Control1998 integriert Subaru VTD und die Fahrdynamikregelung Vehicle Dynamics Control in die Top-modelle der Legacy-Baureihe. Die "Hardware" (die Konstruktion des VTD) bleib gleich, dieelektronische Kontrolle wird durch die optimierte Sensorik des Steuergerätes der Vehicle DynamicsControl über die CAN-Kommunikation deutlich verbessert.
2004: Permanenter Allradantrieb mit optimierter VTD und Vehicle Dynamics ControlBeim neu entwickelten Fünfgang-Automatikgetriebe mit VTD über einen Planetenradsatz kann die
Lamellensperre das Antriebsmoment für die Vorder- und Hinterachse in einem relativ großenBereich verändern. Deshalb eignet sich das Automatikgetriebe mit VTD besonders für Fahrzeugemit der Fahrdynamikregelung Vehicle Dynamics Control, denn dessen Steuergerät kommuniziertmit dem Getriebesteuergerät. Erkennt das Steuergerät für die Vehicle Dynamics Control ein Unter-oder Übersteuerverhalten des Fahrzeugs, sendet es entsprechende Informationen zum Getriebe-steuergerät. Dieses reduziert über die Regelung der Lamellensperre das Antriebsmoment der insta-
bilen Achse.
Über dieses System verfügen alle Legacy 3.0 ab Modelljahr 2004.

8/14/2019 Subaru Symmetrical AWD
http://slidepdf.com/reader/full/subaru-symmetrical-awd 6/8
Technik im Detail
Aufbau und Funktion der Lamellensperre (Automatikgetriebe mit VTD)
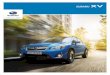
Das Ausgangsdrehmoment vom Getriebe zum Planetenradsatz wird auf das Primärsonnenrad über-tragen, das seinerseits die Planetenräder antreibt. Diese befinden sich in kraftschlüssiger Verbin-
dung mit dem Planetenradträger, der mit dem Abtriebszahnrad zur Vorderachse verbunden ist. Diehinteren Planetenräder treiben über das Sekundärsonnenrad die Abtriebswelle zur Hinterachse an.Die Verteilung der Antriebskraft zur Vorder- und Hinterachse erfolgt im Endabtrieb. Die Lamellen-sperre sperrt bei auftretenden Drehzahlunterschieden zwischen Vorder- und Hinterachse den Plane-tenradsatz. Die normale Drehmomentverteilung (36:64 Prozent) kann durch die Lamellensperrestufenlos geändert werden. Dabei richtet sich der Sperrgrad nach der Höhe der Drehzahldifferenzenund kann bei sehr hohen Drehzahlunterschieden 100 Prozent betragen. Bei voll gesperrten Plane-tenradsatz entfallen 60 Prozent des Antriebsdrehmoments auf die Vorderachse und 40 Prozent auf die Hinterachse.
Aufbau und Funktion der Lamellenkupplung (Automatikgetriebe ACT-4)
Die in einem Ölbad laufende Lamellenkupplung besteht aus abwechselnd angeordneten Außen- undInnenlamellen. Die Außenlamellen (Stahllamellen) sind kraftschlüssig mit dem Planetenradträger verbunden. Die Innenlamellen (Reiblamellen) sitzen auf dem Lamellenträger der kraftschlüssig mitder Abtriebswelle der Hinterachse verbunden ist. Der im Endabtriebsgehäuse untergebrachte Kol-
ben wird hydraulisch betätigt. Der am Kolben anliegende Öldruck wird über ein kennfeldgesteu-ertes Lastmagnetventil beeinflusst, das getaktete Signale vom Getriebesteuergerät erhält. Die wich-tigsten Eingangssignale für das Automatiksteuergerät zur Regelung der Sperre sind die Drehzahlsig-nale der Geschwindigkeitssensoren 1 und 2 und die Eingangsinformationen vom Steuergerät der Fahrdynamikregelung. Dadurch erkennt die Elektronik die Last des Fahrzeuges und eventuell auf-tretende Drehzahldifferenzen zwischen den beiden Achsen. Auf der Basis dieser Informationen be-rechnet das Steuergerät für jeden Fahrzustand den optimalen Öldruck am Kolben der Lamellen-kupplung (Allradkupplung): Je höher der Druck ist, der auf das Lamellenpaket wirkt, desto größer ist der Anpressdruck des Kolbens, desto größer ist die Antriebskraftverteilung zur Hinterachse.
Aufbau und Funktion der Viskosperre (Schaltgetriebe mit Mittendifferential)
Innerhalb eines nach außen abgedichteten Gehäuses mit Nabe sind Innen- und Außenlamellen ab-wechselnd mit der Nabe und dem Gehäuse verdrehfest verbunden. Die Scheibenpakete laufen dabeiin Silikonöl, Innen- und Außenlamellen berühren sich bei Drehung nicht. Die Außenlamelle drehtsich mit einer bestimmten Geschwindigkeit. Die Innenlamelle steht still. Durch die Bewegung der
Außenlamelle wird die berührende Flüssigkeit mit der gleichen Geschwindigkeit bewegt.Entsteht zwischen dem Gehäuse (Außenlamellen = Verbindung zur Vorderachse) und Nabe(Innenlamellen = Verbindung zur Hinterachse) eine Drehzahldifferenz, z. B. weil ein Rad oder eineAchse Schlupf aufweist, so bewirkt diese Strömungsdifferenz eine "Scherkraft", welche als Wider-stand auf die rotierende Außenlamelle wirkt. Durch die Scherwirkung wird Drehmoment zwischenden Lamellen übertragen. Bezogen auf die Innenlamelle wirkt die "Scherkraft" als Antriebskraft.Vergleichbar ist dies mit einem Löffel, den man durch ein Honigglas zieht. Zieht man den Löffelsehr langsam durch den Honig, bleibt das Glas auf dem Tisch stehen. Zieht man den Löffel schnell,wird das Glas mitgezogen.

8/14/2019 Subaru Symmetrical AWD
http://slidepdf.com/reader/full/subaru-symmetrical-awd 7/8
Bei anhaltenden Drehzahldifferenzen erwärmt sich das Silikonöl und dehnt sich im Gehäuse ent-sprechend aus. Im Gegensatz zu den meisten Flüssigkeiten verdickt sich das Silikonöl bei steigen-der Temperatur. Der Druck in dem geschlossenen Gehäuse nimmt zu, und ab einem bestimmtenPunkt werden Außen- und Innenlamellen zusammengepresst. Das Mittendifferential wird voll ge-sperrt und eine starre Verbindung zwischen Vorder- und Hinterachse hergestellt. Die 100-prozentigeSperrung des Differentials wird auch als "Hump-Effekt" (Buckel-Effekt) bezeichnet. Verringert sich
nach dem "Hump-Effekt" wieder die Drehzahldifferenz, verringern sich auch die Temperatur unddamit der Druck im Gehäuse: Die Viskosperre kehrt wieder zum normalen Betriebszustand zurück.
Helical LSD
Grundmerkmal des Helical LSD ist die Schraubenverzahnung (engl. helical), deren prinzipbedingteReibung und deren zusätzliche Kräfte (wegen des Flankenwinkels der Verzahnung) zu Gegenkräf-ten am Gehäuse führen und an den Kontaktstellen zusätzliche Reibung verursachen. Das HelicalLSD gehört zur Kategorie der drehmomentfühlenden, so genannten Torsen-Differenziale (Torsen =TORque SENsing).
Die Sperrwirkung wird durch die Drehzahldifferenz hervorgerufen und die Sperre versucht, dieDrehzahldifferenz klein zu halten. Die Sperrwirkung tritt erst ein, wenn eine Drehzahldifferenz auf-tritt. Beim Anfahren auf unterschiedlich griffiger Fahrbahn muss erst einmal ein Rad durchdrehen,
bevor die Sperre das Antriebsmoment auf das Rad mit guter Bodenhaftung umverteilt. Beim Ein-fahren einer Kurve unter Last (mit Antriebsmoment, Fuß auf dem Gas) erlaubt die Sperre zunächsteine Ausgleichsbewegung der Räder, mit steigender Drehzahldifferenz wird allerdings Moment auf das kurveninnere Rad umverteilt. Die Reibwirkung entsteht durch Reibung am bzw. im Gehäuse,durch Reiblamellen oder durch Reibung in gleitenden Gewinden. Sie beruht auf den Gesetzen der Coulombschen Reibung, d.h. die Sperrwirkung ist unabhängig von der Drehzahldifferenz. So langeAntriebsleistung übertragen wird, sperrt das Helical LSD. Auch bei weiten Kurven führt das dazu,dass das Differenzial das Fahrzeug wieder auf Geradeaus-Kurs bringen will. Das Sperrdifferenzialfördert in diesem Fahrzustand ein Untersteuern.
µ-Estimator
Ein entscheidendes Element für die Ausschöpfung des Potentials des elektronisch gesteuerten All-radantriebs ist der "µ-Estimator", der den Schlupf auf der Basis definierter Parameter berechnet.Entwicklungsziele sind die Optimierung der Fahrstabilität auf glatten Straßen (Sperrung desMittendifferentials) und des Handlings auf trockenen Straßen (optimale Drehmomentverteilung).Dies wird erreicht durch eine kooperative Kontrolle von Vehicle Dynamics Control und Giermo-ment-Feedback.
Das Konzept des "µ-Estimator" benötigt keine zusätzlichen oder exklusiven Sensoren und ist eben-so robust wie empfindlich. Dabei stand das Gesetz zur Parameter-Identifikation der Theorie der adaptiven Steuerung im Fokus der Entwicklungsarbeit. Durch die Anwendung der Theorie der adaptiven Steuerung lassen sich die Reifencharakteristika abschätzen, die dem Einfluss des µunterliegen. Zur Optimierung des Ansprechverhaltens der µ-Estimation werden außerdem die Än-derungen berücksichtigt, die sich aus der Querbeschleunigung des Fahrzeugs ergeben. Die Änder-ungen werden wirksam, wenn das Eingangssignal für die Parameter-Identifikation nicht ausreicht,denn gemäß der Theorie der adaptiven Steuerung müssen die Identifikationssignale nachhaltiger Artsein. Die Reifencharakteristika werden auf der Basis der Parameter-Identifikationslogik angepasst,das angenommene µ wird aus den kalkulierten Reifenwerten berechnet, die grundlegende Drehmo-
mentverteilung erfolgt auf der Basis des angenommenen µ.

8/14/2019 Subaru Symmetrical AWD
http://slidepdf.com/reader/full/subaru-symmetrical-awd 8/8
Auf Straßen mit geschlossener Schneedecke funktioniert die Bewertung unseres Kontrollsystemsanders. Der momentane Stabilitätsfaktor "K" dient als Index für das Lenkverhalten. "K" errechnetsich aus Lenkwinkel, Giermoment und Fahrzeuggeschwindigkeit. Bei Übersteuern ist der momen-tane Stabilitätsfaktor negativ, bei Untersteuern positiv. Bei offenem Mittendifferential ist die Häu-figkeit von neutralem bzw. übersteuerndem Lenkverhalten relativ hoch, bei gesperrtem Mitten-differential die Häufigkeit von ausgeprägtem Untersteuern relativ hoch.
Deshalb hat Subaru eine Distorsion des momentanen Stabilitätsfaktors eingeführt. Bei häufigemÜbersteuern ist die Distorsion negativ oder relativ gering. Beim aktuellen VTD-System wird dieKontrollierbarkeit des einzelnen Rades durch die Optimierung der Drehmomentverteilung innerhalbder Vehicle Dynamics Control verbessert. Damit wird die Drehmomentverteilung µ-abhängigoptimiert, und das Giermoment-Feedback sorgt für exzellentes Handling und Stabilität.