Embed Size (px)
Citation preview

Vorlesungs-Skript
Technische Mechanik
© Prof. Dr. Dieter Joensson
HTW Berlin 2016Fachbereich Ingenieurwissenschaften
Technik und Leben
Technische Mechanik 1 bis 3
für das 1. bis 3. Fachsemester
des Bachelorstudienganges Maschinenbau
jeweils mit 4 Stunden pro Woche
Inhaltsverzeichnis Technische Mechanik 1
Übersicht Seite 1
Statik
1. Einleitung 2
2. Kräfte 3
2.1 Kraftbegriff 3
2.2 Die Einzelkraft als Vektor mit Wirkungslinie 3
2.3 Zerlegung einer Kraft in Komponenten 4
2.4 Ebenes zentrales Kräftesystem 5
3. Momente 8
3.1 Das Moment einer Einzelkraft 8
3.2 Das Moment eines Kräftepaares 10
3.3 Allgemeines ebenes Kräftesystem 12
4. Zwei Prinzipien der Statik 14
4.1 Das Gleichgewichtsprinzip 14
4.2 Das Schnittprinzip 15
5. Ebene Tragwerke 17
5.1 Elemente, Lager und Verbindungen 17
5.2 Berechnung der Auflagerreaktionen ebener Tragwerke 20
5.3 Streckenlasten 22
5.4 Mehrteilige Tragwerke 25
5.5 Auflagerreaktionen: Statisch bestimmt oder unbestimmt? 27
5.6 Schnittreaktionen ebener Tragwerke 29
5.6.1 Belastung durch Einzelkräfte und -momente 29
5.6.2 Schnittreaktionen infolge Streckenlasten 39
5.6.3 Schnittreaktionen statisch bestimmt oder unbestimmt? 43
5.6.4 Punktweise Berechnung von Schnittreaktionen 45
5.6.5 Krummlinige ebene Tragwerke 48
Inhaltsverzeichnis Technische Mechanik 1
6. Reibung 50
6.1 Einleitung 50
6.2 Haftreibung 50
6.3 Gleitreibung 53
6.4 Seilreibung 55
7. Raumstatik 59
7.1 Auflagerreaktionen 59
7.2 Schnittreaktionen 63
Festigkeitslehre Beginn
1. Einleitung 65
1.1 Mechanische Spannungen 65
1.2 Verformungen 66
2. Spannungen in Balken 67
2.1 Normalspannung σ infolge Längskraft FL (z) 67
2.2 Schubspannung τ infolge Längskraft 68
2.3 Schubspannung τ infolge Querkraft FQ (z) 70
2.4 Normalspannung σ infolge Biegemoment Mb (z) 72
2.5 Spannungsnachweis 78
Inhaltsverzeichnis zu TM 2 (Festigkeitslehre) ab Seite 84
der vorliegenden Datei Joen-Skript_TM.pdf
Siehe auch Lesezeichen der pdf-Datei.
Inhaltsverzeichnis zu TM 3 (Dynamik) ab Seite 156
Literatur-Empfehlungen zur Technischen Mechanik Seite 253
Technische Mechanik 1 Seite 1
Joensson HTW Berlin
© Prof. Dr. Joensson HTW Berlin 2015
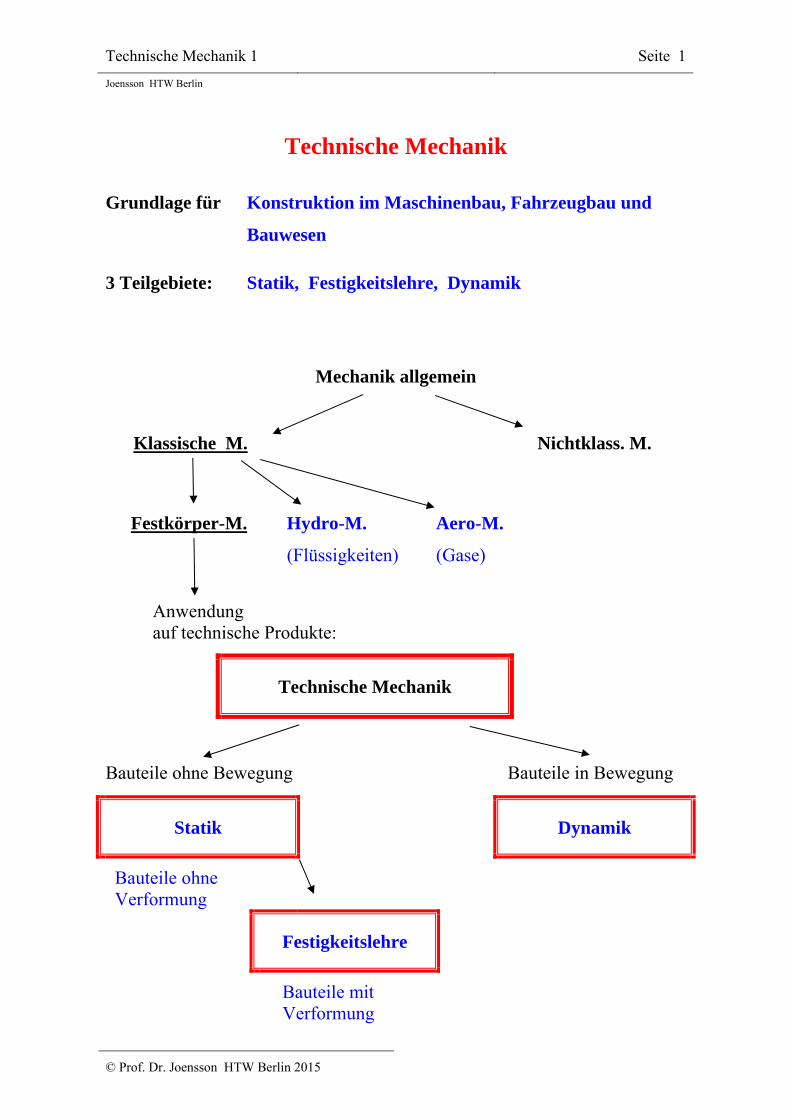
Technische Mechanik
Grundlage für Konstruktion im Maschinenbau, Fahrzeugbau und
Bauwesen
3 Teilgebiete: Statik, Festigkeitslehre, Dynamik
Mechanik allgemein
Klassische M. Nichtklass. M.
Festkörper-M. Hydro-M.
(Flüssigkeiten)
Aero-M.
(Gase)
Anwendung auf technische Produkte:
Technische Mechanik
Bauteile ohne Bewegung Bauteile in Bewegung
Statik Dynamik
Bauteile ohne Verformung
Festigkeitslehre
Bauteile mit Verformung
Technische Mechanik 1 Seite 2
Joensson HTW Berlin
S t a t i k
1. Einleitung
Statik: Lehre vom Kräfte-Gleichgewicht an ruhenden starren Körpern. Wesentliche Größen der Statik sind Kräfte und Momente
(das Moment = „Kraft mal Hebelarm“)
Die Bewegung eines Bauteils wird durch einzelne Befestigungen (Lager)
verhindert.
Ziele der Statik:
1.) Ermittlung der Lagerkräfte und Lagermomente des Bauteils infolge
gegebener Belastung.
2.) Ermittlung von Ort und Größe max. Kräfte und max. Momente im
Innern des Bauteils.
Die Statik ist eine notwendige Voraussetzung für jede Festigkeitsberechnung
von Bauteilen.
Erst die berechnete Festigkeit zeigt, ob das Bauteil die Belastung erträgt oder
nicht.
Beispiele: Brücken, Gebäude, Fahrzeuge, Maschinen ….
Technische Mechanik 1 Seite 3
Joensson HTW Berlin
2. Kräfte
2.1 Kraftbegriff Ursprüngliche Form: Gewichtskraft F = m · g
einer Masse m = ρ·V mit Dichte ρ und Volumen V
infolge Erdbeschleunigung g
Maßeinheit der Kraft: 1 kg · m·s-2 = 1 N
Je nach Einwirkungsgebiet unterscheidet man verschiedene Lasten:
Einwirkung räumlich: Volumenlast [ N / mm3 ]
flächenhaft Flächenlast bzw. Druck [ N / mm2 ]
linienförmig Linienlast bzw. Streckenlast [ N / mm ]
punktförmig Einzelkraft [ N ]
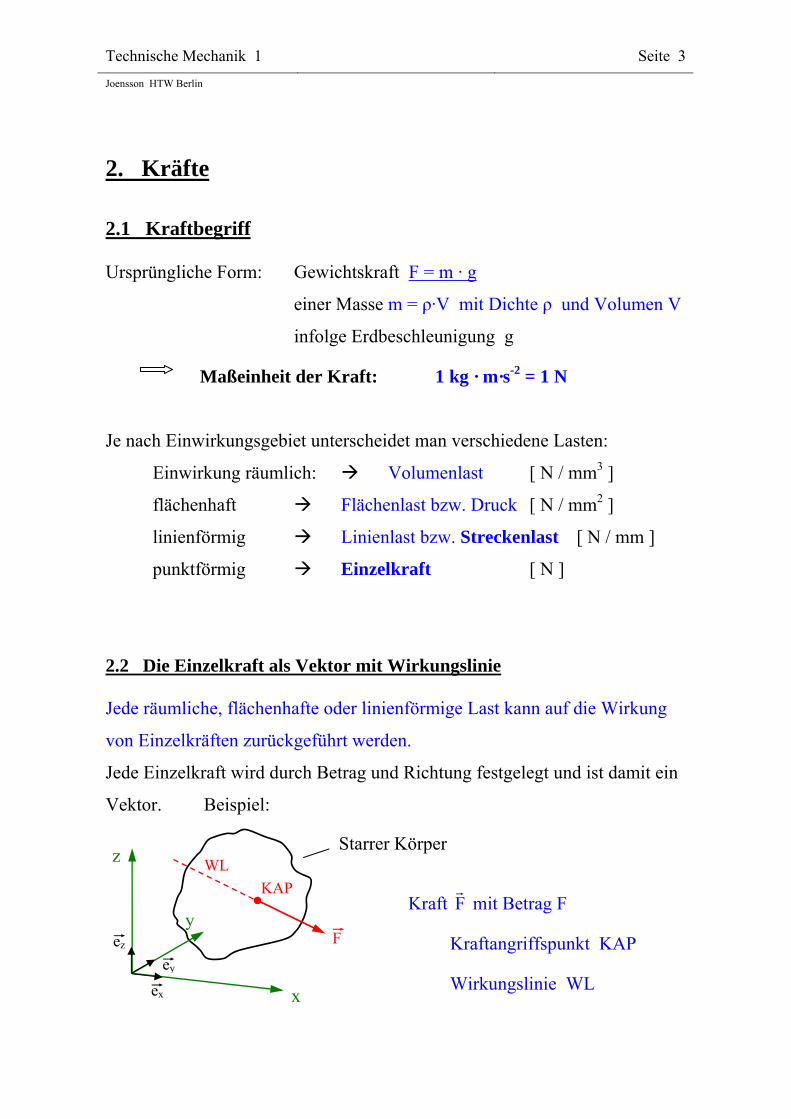
2.2 Die Einzelkraft als Vektor mit Wirkungslinie Jede räumliche, flächenhafte oder linienförmige Last kann auf die Wirkung
von Einzelkräften zurückgeführt werden.
Jede Einzelkraft wird durch Betrag und Richtung festgelegt und ist damit ein
Vektor. Beispiel:
Kraft F
mit Betrag F
Kraftangriffspunkt KAP
Wirkungslinie WL
z
y
x
WL
KAP
F
ey
ex
ez
Starrer Körper
Technische Mechanik 1 Seite 4
Joensson HTW Berlin
Die Kraft F
kann längs ihrer WL im starren Körper verschoben werden,
ohne ihre Wirkung zu verändern.
Die Kraft ist ein „linienflüchtiger“ Vektor.
2.3 Zerlegung einer Kraft in Komponenten
F
= F F Fx y z
= Fx · ex
+ Fy · e y
+ Fz · ez
mit
Fi
Kraftkomponente in Richtung i ei
Einheitsvektor der Richtung i
sowie
Fi · ei
= skalare Maßzahl Fi mal Vektor mit Betrag und Richtung
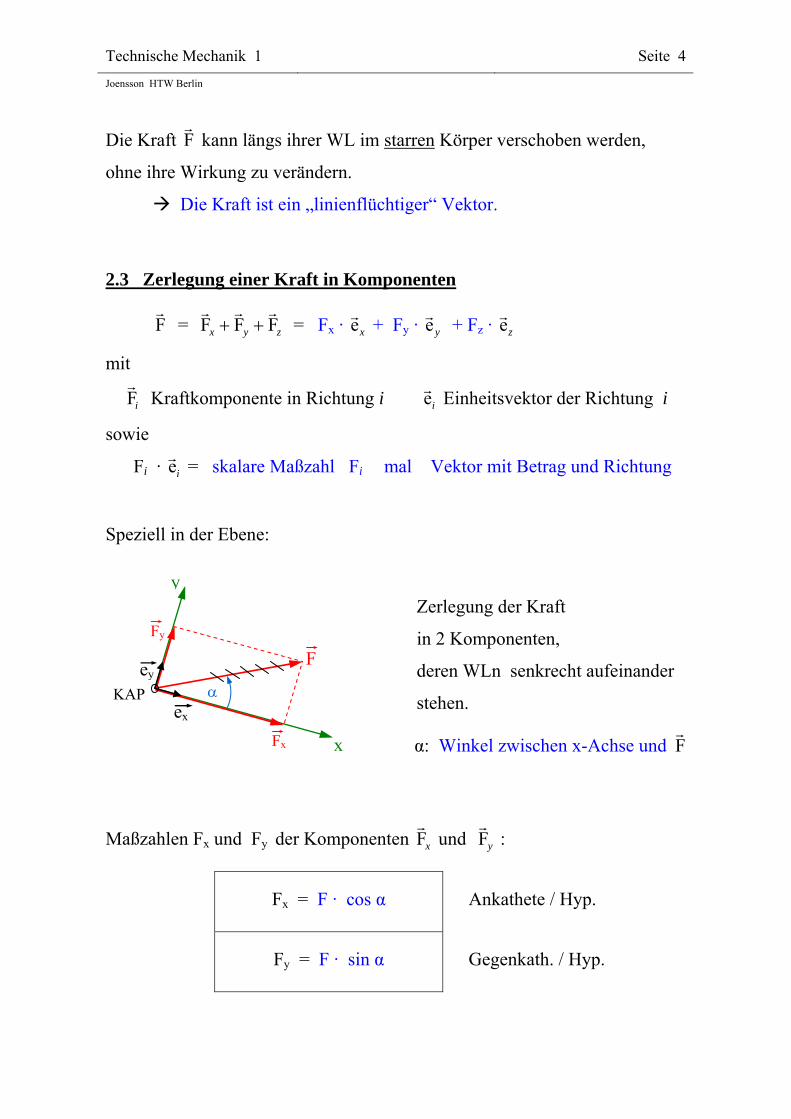
Speziell in der Ebene:
Zerlegung der Kraft
in 2 Komponenten,
deren WLn senkrecht aufeinander
stehen.
α: Winkel zwischen x-Achse und F
Maßzahlen Fx und Fy der Komponenten Fx
und Fy
:
Fx = F · cos α Ankathete / Hyp.
Fy = F · sin α Gegenkath. / Hyp.
KAP
y
x
ey
ex
Fx
Fy
F
Technische Mechanik 1 Seite 5
Joensson HTW Berlin
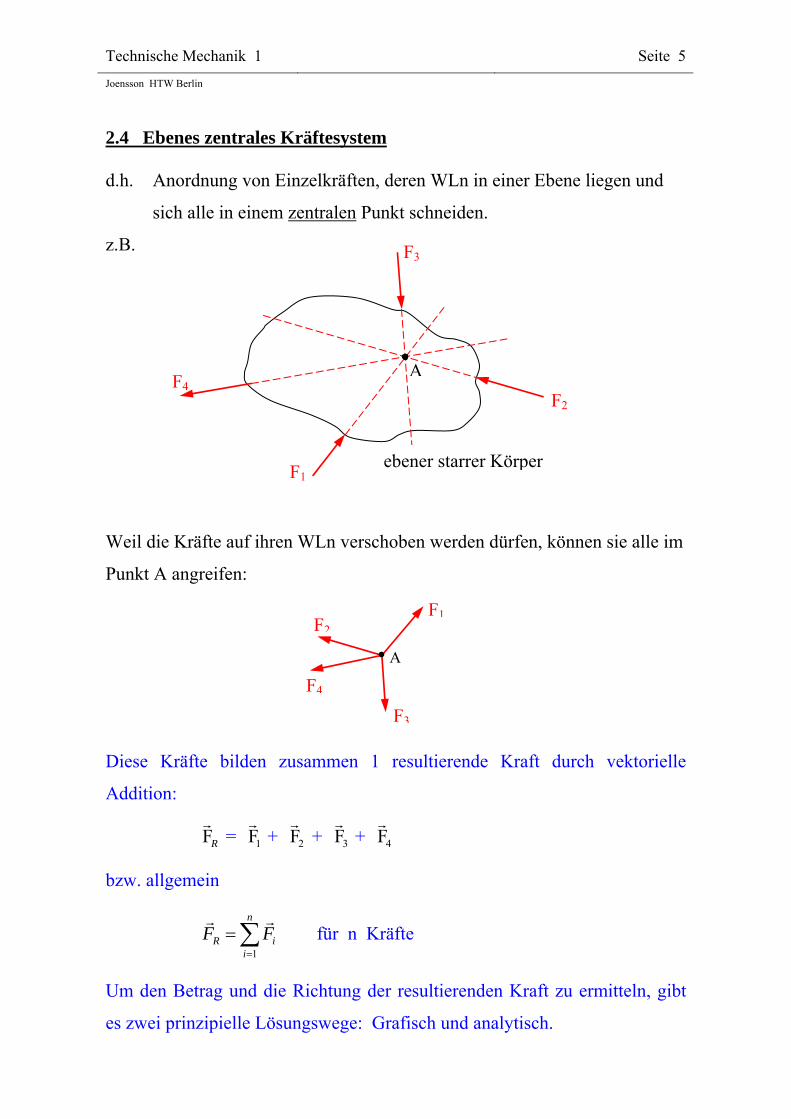
2.4 Ebenes zentrales Kräftesystem d.h. Anordnung von Einzelkräften, deren WLn in einer Ebene liegen und
sich alle in einem zentralen Punkt schneiden.
z.B.
Weil die Kräfte auf ihren WLn verschoben werden dürfen, können sie alle im
Punkt A angreifen:
Diese Kräfte bilden zusammen 1 resultierende Kraft durch vektorielle
Addition:
FR
= 1F
+ 2F
+ 3F
+ 4F
bzw. allgemein
1
n
R ii
F F
für n Kräfte
Um den Betrag und die Richtung der resultierenden Kraft zu ermitteln, gibt
es zwei prinzipielle Lösungswege: Grafisch und analytisch.
A
F1
F3
F2
F4
A
F3
F2
F1
F4
ebener starrer Körper

Technische Mechanik 1 Seite 6
Joensson HTW Berlin
a) Grafische Lösung
Kräfteparallelogramm für je 2 Kräfte: z.B.
oder „Kräfteplan“
bzw. Kräfteplan für alle Kräfte
d.h. die 4 Kräfte bilden hier folgende Resultierende als Lücke.
b) Analytische Lösung
Zweckmäßig: Koordinatensytem mit Ursprung im Punkt A des zentralen
Kräftesystems
Geg.: Kräfte Fi
Ges.: Betrag FR der resultierenden
Kraft FR
und Winkel α R
zwischen x-Achse und FR
Lösung:
F2 F1
F3
F4 A x
y
1
FRA
F2 F4
F3
F1
FRA
F2 F4
F24
F2
F4
F24

Technische Mechanik 1 Seite 7
Joensson HTW Berlin
Bezüglich x und y hat FR
je eine Komponente FR x
und FR y
.
Die skalaren Maßzahlen dieser Komponenten sind:
FR x =
1
n
i Fi x
FR y =
1
n
i Fi y
mit Fi x = Fi · cos α i
Fi y = Fi · sin α i
! Der Winkel α i muss mathematisch positiv definiert sein (von der x-Achse
beginnend, in Richtung y drehend)
Für den Betrag FR der resultierenden Kraft FR
gilt:
FR = 2 2Rx RyF F
und für den Winkel :
tan α R = Ry
Rx
F
F
bzw.
α R = arctan Ry
Rx
F
F
! Wenn FRx negativ ist, gilt: α R = α R + 180°
i
Fi
Fiy
Fix
Technische Mechanik 1 Seite 8
Joensson HTW Berlin
3. Momente
Maßeinheit Nm
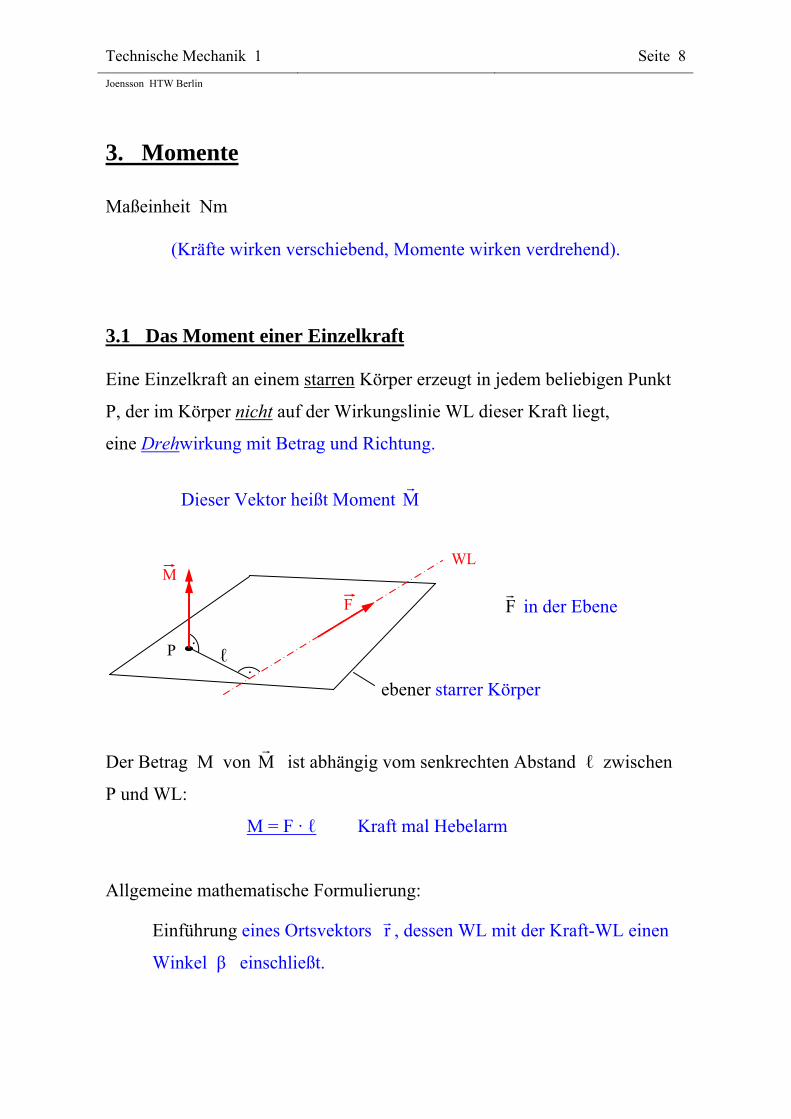
(Kräfte wirken verschiebend, Momente wirken verdrehend). 3.1 Das Moment einer Einzelkraft Eine Einzelkraft an einem starren Körper erzeugt in jedem beliebigen Punkt
P, der im Körper nicht auf der Wirkungslinie WL dieser Kraft liegt,
eine Drehwirkung mit Betrag und Richtung.
Dieser Vektor heißt Moment M
F
in der Ebene
Der Betrag M von M
ist abhängig vom senkrechten Abstand ℓ zwischen
P und WL:
M = F · ℓ Kraft mal Hebelarm
Allgemeine mathematische Formulierung:
Einführung eines Ortsvektors r
, dessen WL mit der Kraft-WL einen
Winkel β einschließt.
P ℓ
WL
F
M
ebener starrer Körper
Technische Mechanik 1 Seite 9
Joensson HTW Berlin
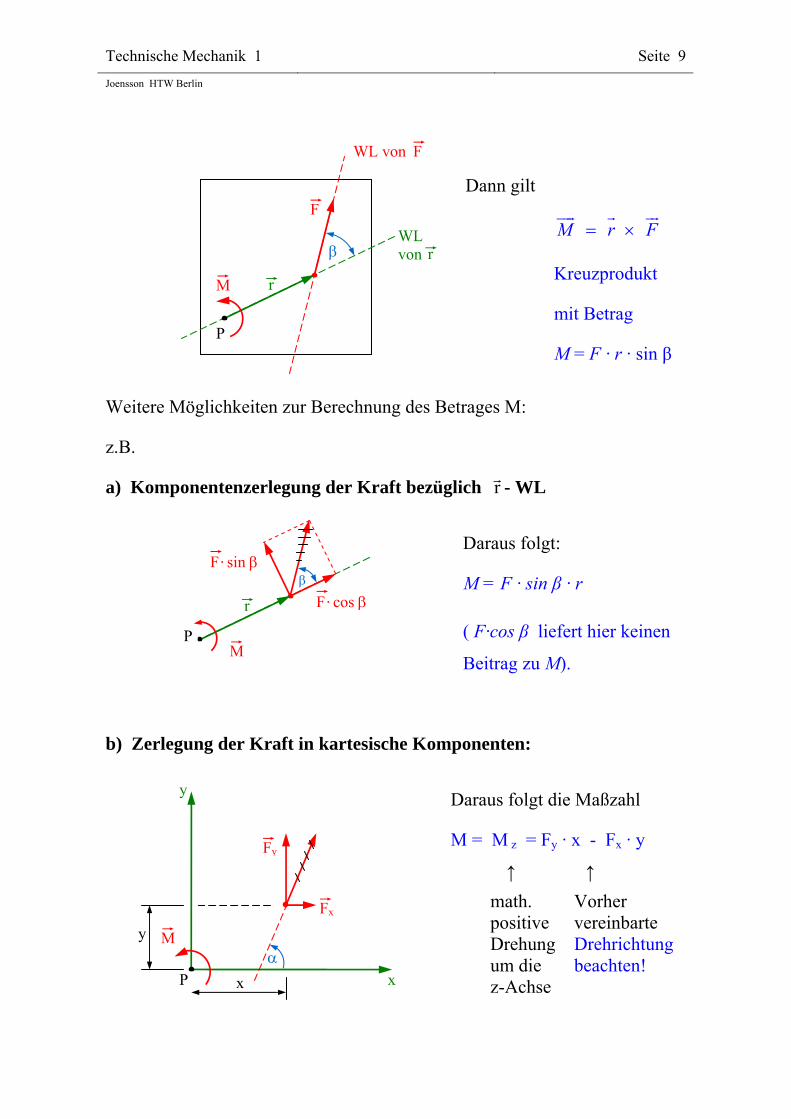
Dann gilt
M r F
Kreuzprodukt
mit Betrag
M = F · r · sin β
Weitere Möglichkeiten zur Berechnung des Betrages M:
z.B.
a) Komponentenzerlegung der Kraft bezüglich r
- WL
Daraus folgt:
M = F · sin β · r
( F·cos β liefert hier keinen
Beitrag zu M).
b) Zerlegung der Kraft in kartesische Komponenten:
Daraus folgt die Maßzahl
M = M z = Fy · x - Fx · y
↑ ↑
math. positive Drehung um die z-Achse
Vorher vereinbarte Drehrichtung beachten!
Fx
Fy
M
P x
y
x
y
M
r
P
F cos
F sin
M
F
r
r WL von
FWL von
P

Technische Mechanik 1 Seite 10
Joensson HTW Berlin
3.2 Das Moment eines Kräftepaares
Kräftepaar:
Zwei gleich große, entgegengesetzt gerichtete Kräfte, deren WLn
parallel im Abstand ℓ zueinander liegen.
z.B.
Geg.: 1F
und 2F
Ges.: M
am Punkt P
Betrag von M
: M = F2 · ℓ 2 - F1 · ℓ 1
Mit ℓ 2 = ℓ 1 + ℓ :
M = F2 · ℓ 1 + F2 · ℓ - F1 · ℓ 1
und mit F1 = F2 = F:
M = F · ℓ 1 + F · ℓ - F · ℓ 1
Also M = F · ℓ
Der Abstand zu P spielt hier keine Rolle!
P
F1
F2
ℓ1
ℓ2
ℓ
M
Technische Mechanik 1 Seite 11
Joensson HTW Berlin
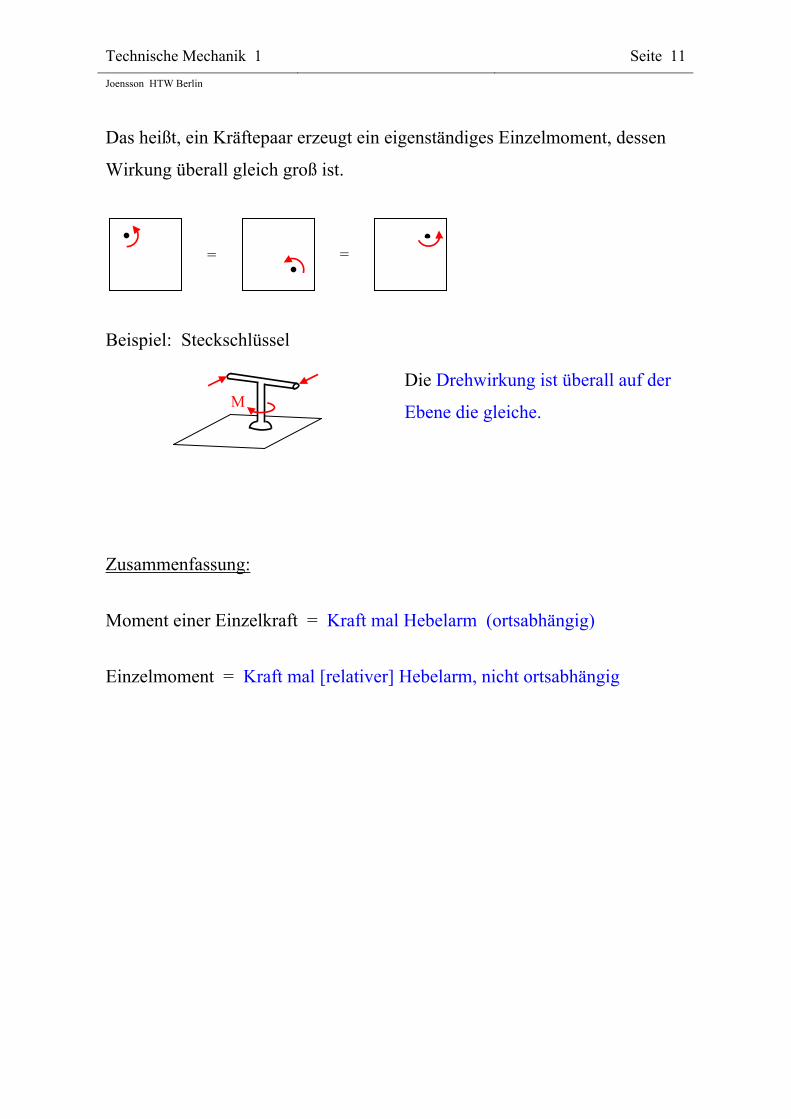
Das heißt, ein Kräftepaar erzeugt ein eigenständiges Einzelmoment, dessen
Wirkung überall gleich groß ist.
Beispiel: Steckschlüssel
Die Drehwirkung ist überall auf der
Ebene die gleiche.
Zusammenfassung:
Moment einer Einzelkraft = Kraft mal Hebelarm (ortsabhängig)
Einzelmoment = Kraft mal [relativer] Hebelarm, nicht ortsabhängig
M
= =
Technische Mechanik 1 Seite 12
Joensson HTW Berlin
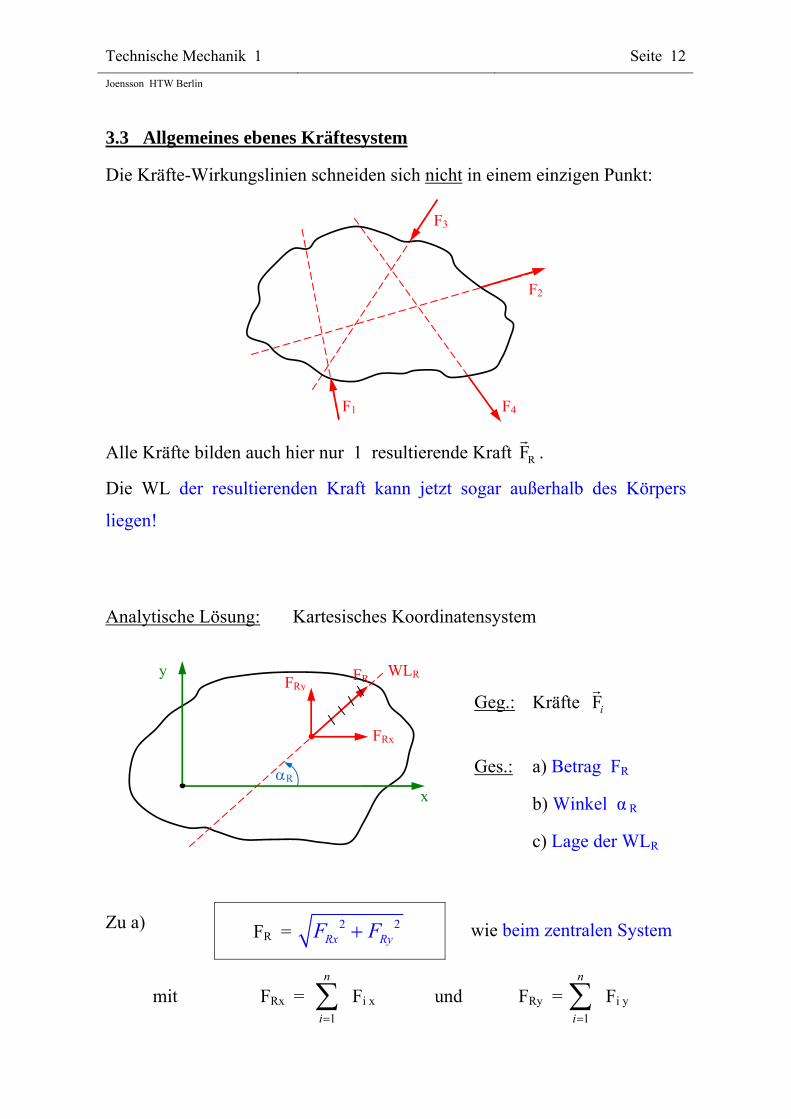
3.3 Allgemeines ebenes Kräftesystem
Die Kräfte-Wirkungslinien schneiden sich nicht in einem einzigen Punkt:
Alle Kräfte bilden auch hier nur 1 resultierende Kraft RF
.
Die WL der resultierenden Kraft kann jetzt sogar außerhalb des Körpers
liegen!
Analytische Lösung: Kartesisches Koordinatensystem
Geg.:
Kräfte Fi
Ges.: a) Betrag FR
b) Winkel α R
c) Lage der WLR
Zu a) FR = 2 2Rx RyF F wie beim zentralen System
mit FRx = 1
n
i Fi x und FRy =
1
n
i Fi y
x
y FR
FRx
FRy WLR
R
F1
F2
F3
F4
Technische Mechanik 1 Seite 13
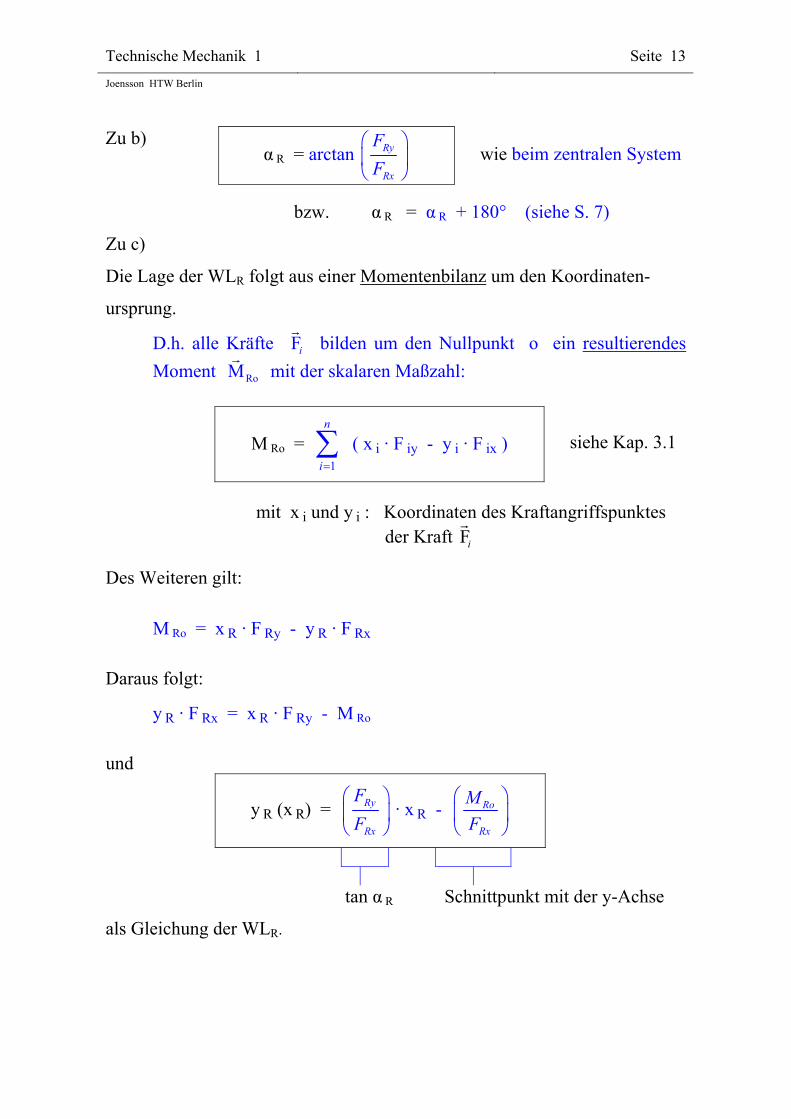
Joensson HTW Berlin
Zu b) α R = arctan Ry
Rx
F
F
wie beim zentralen System
bzw. α R = α R + 180° (siehe S. 7)
Zu c)
Die Lage der WLR folgt aus einer Momentenbilanz um den Koordinaten-
ursprung.
D.h. alle Kräfte Fi
bilden um den Nullpunkt o ein resultierendes
Moment RoM
mit der skalaren Maßzahl:
M Ro =
1
n
i ( x i · F iy - y i · F ix ) siehe Kap. 3.1
mit x i und y i : Koordinaten des Kraftangriffspunktes der Kraft F
i
Des Weiteren gilt:
M Ro = x R · F Ry - y R · F Rx
Daraus folgt:
y R · F Rx = x R · F Ry - M Ro
und
y R (x R) = Ry
Rx
F
F
· x R - Ro
Rx
M
F
tan α R Schnittpunkt mit der y-Achse
als Gleichung der WLR.
Technische Mechanik 1 Seite 14
Joensson HTW Berlin
4. Zwei Prinzipien der Statik
4.1 Das Gleichgewichtsprinzip
Ein starrer Körper ist im Gleichgewicht („in Ruhe“), wenn gilt:
RF
= 0
und RM
= 0
bzw. ∑ iF
= 0
und ∑ iM
= 0
(vektorielles Kräfte- und Momentengleichgewicht).
Für die analytische Behandlung ist die Zerlegung dieser Vektoren in
kartesische Komponenten zweckmäßig.
Das kartesische System im Raum R3 führt auf 3 „skalare“ Kräftegleich-
gewichte und 3 skalare Momentengleichgewichte (nur andere Schreibweise
zu oben):
∑ F ix = 0 ∑ M ix = 0
∑ F iy = 0 ∑ M iy = 0
∑ F iz = 0 ∑ M iz = 0
Im ebenen Fall bleiben nur 2 Kräftegleichgewichte übrig (z.B. für x und y)
und 1 Momentengleichgewicht (um z).
x
yz
Technische Mechanik 1 Seite 15
Joensson HTW Berlin
4.2 Das Schnittprinzip
Zielgrößen der Statik sind:
a) Lagerkräfte und Lagermomente
b) Max. Kräfte und Momente im Innern des starren Bauteils
Dazu Schnittprinzip erforderlich.
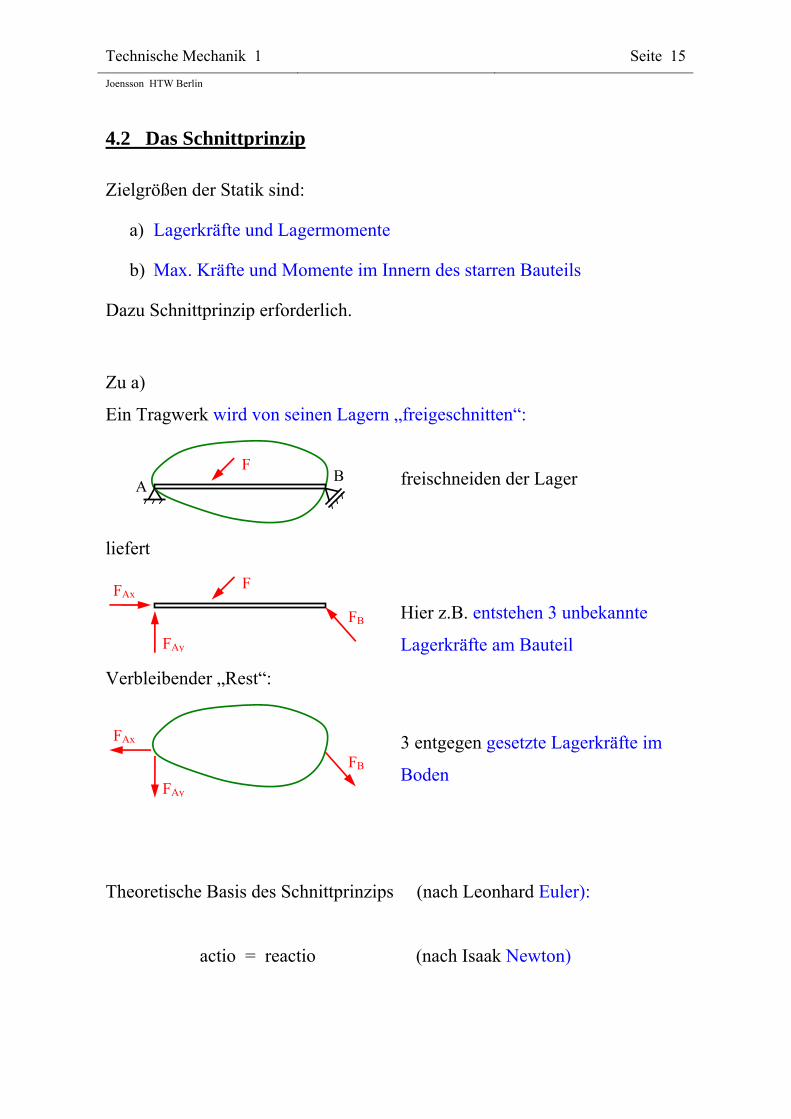
Zu a)
Ein Tragwerk wird von seinen Lagern „freigeschnitten“:
freischneiden der Lager
liefert
Hier z.B. entstehen 3 unbekannte
Lagerkräfte am Bauteil
Verbleibender „Rest“:
3 entgegen gesetzte Lagerkräfte im
Boden
Theoretische Basis des Schnittprinzips (nach Leonhard Euler):
actio = reactio (nach Isaak Newton)
FAx
FAy
FB
F FAx
FAy
FB
F B
A
Technische Mechanik 1 Seite 16
Joensson HTW Berlin
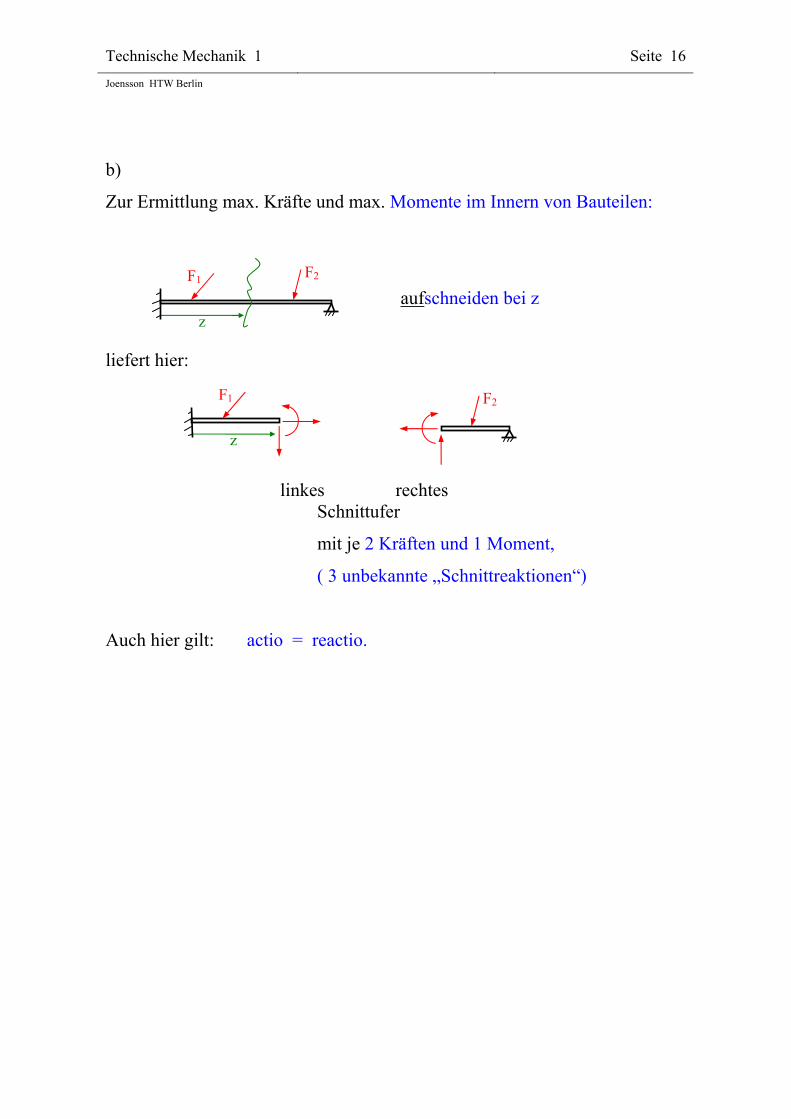
b)
Zur Ermittlung max. Kräfte und max. Momente im Innern von Bauteilen:
aufschneiden bei z
liefert hier:
linkes rechtes Schnittufer
mit je 2 Kräften und 1 Moment,
( 3 unbekannte „Schnittreaktionen“)
Auch hier gilt: actio = reactio.
F2F1
z
F2 F1
z
Technische Mechanik 1 Seite 17
Joensson HTW Berlin
5. Ebene Tragwerke
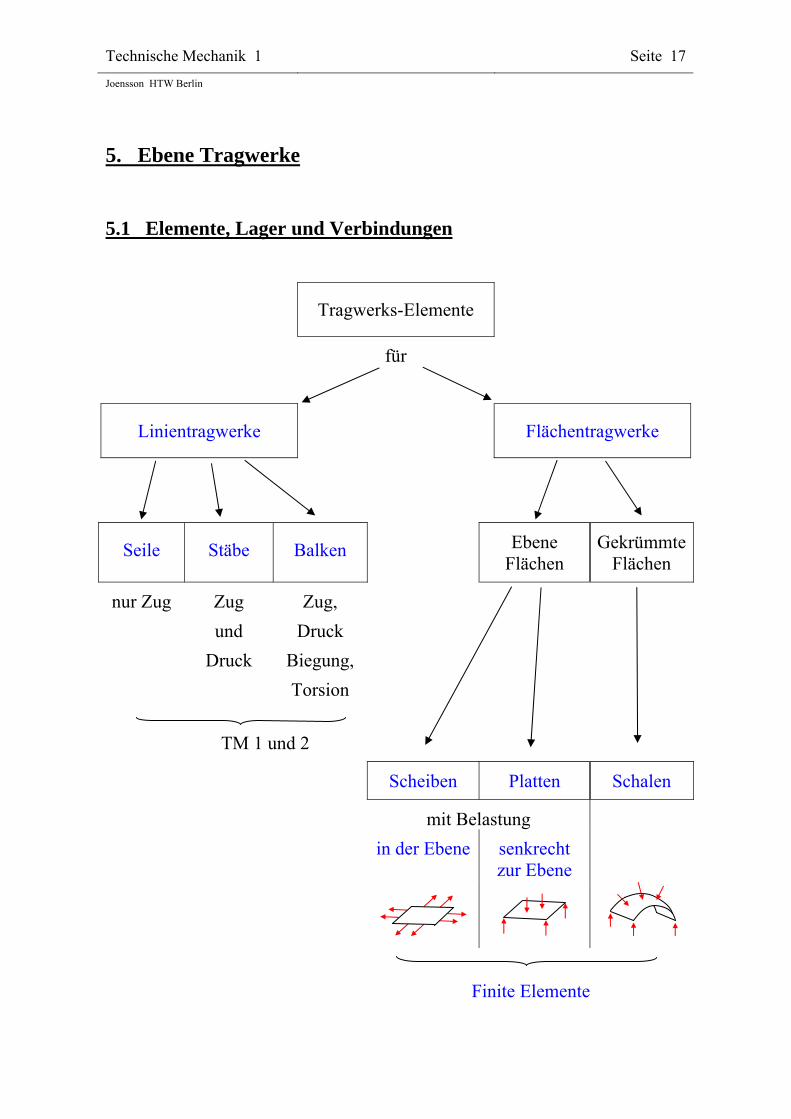
5.1 Elemente, Lager und Verbindungen
Tragwerks-Elemente
für
Linientragwerke Flächentragwerke
Seile Stäbe Balken Ebene Flächen
Gekrümmte Flächen
nur Zug Zug
und
Druck
Zug,
Druck
Biegung,
Torsion
TM 1 und 2
Scheiben Platten Schalen
mit Belastung
in der Ebene senkrecht zur Ebene
Finite Elemente
Technische Mechanik 1 Seite 18
Joensson HTW Berlin
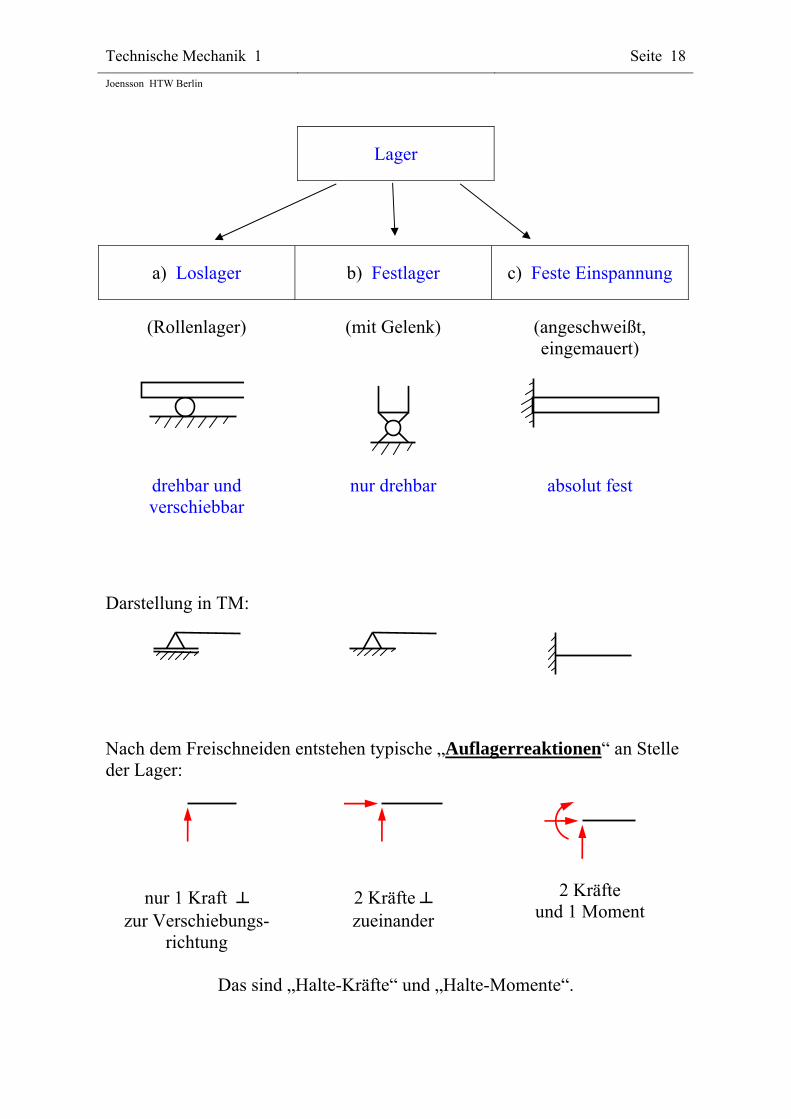
Lager
a) Loslager b) Festlager c) Feste Einspannung
(Rollenlager) (mit Gelenk) (angeschweißt, eingemauert)
drehbar und verschiebbar
nur drehbar
absolut fest
Darstellung in TM:
Nach dem Freischneiden entstehen typische „Auflagerreaktionen“ an Stelle der Lager:
nur 1 Kraft zur Verschiebungs-
richtung
2 Kräfte zueinander
2 Kräfte und 1 Moment
Das sind „Halte-Kräfte“ und „Halte-Momente“.
Technische Mechanik 1 Seite 19
Joensson HTW Berlin
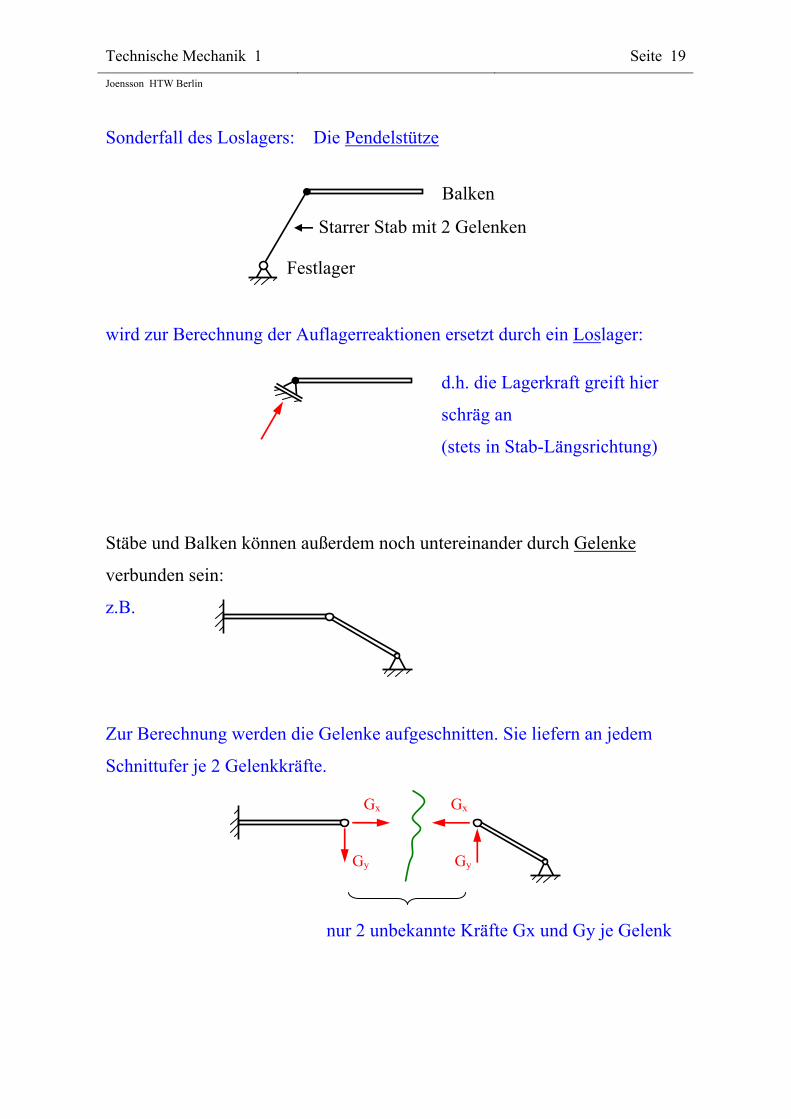
Sonderfall des Loslagers: Die Pendelstütze
Balken
wird zur Berechnung der Auflagerreaktionen ersetzt durch ein Loslager:
d.h. die Lagerkraft greift hier
schräg an
(stets in Stab-Längsrichtung)
Stäbe und Balken können außerdem noch untereinander durch Gelenke
verbunden sein:
z.B.
Zur Berechnung werden die Gelenke aufgeschnitten. Sie liefern an jedem
Schnittufer je 2 Gelenkkräfte.
nur 2 unbekannte Kräfte Gx und Gy je Gelenk
Gx Gx
GyGy
Festlager
Starrer Stab mit 2 Gelenken
Technische Mechanik 1 Seite 20
Joensson HTW Berlin
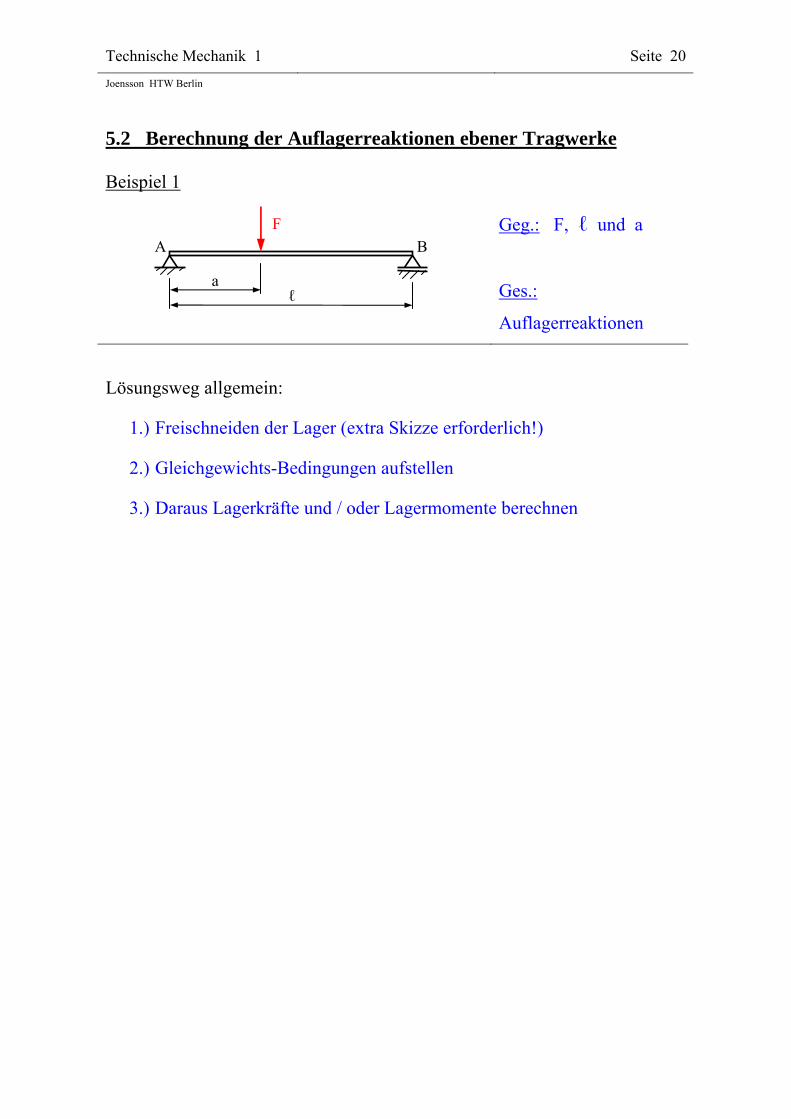
5.2 Berechnung der Auflagerreaktionen ebener Tragwerke Beispiel 1
Geg.: F, ℓ und a
Ges.:
Auflagerreaktionen
Lösungsweg allgemein:
1.) Freischneiden der Lager (extra Skizze erforderlich!)
2.) Gleichgewichts-Bedingungen aufstellen
3.) Daraus Lagerkräfte und / oder Lagermomente berechnen
F
A B
a ℓ
Technische Mechanik 1 Seite 21
Joensson HTW Berlin
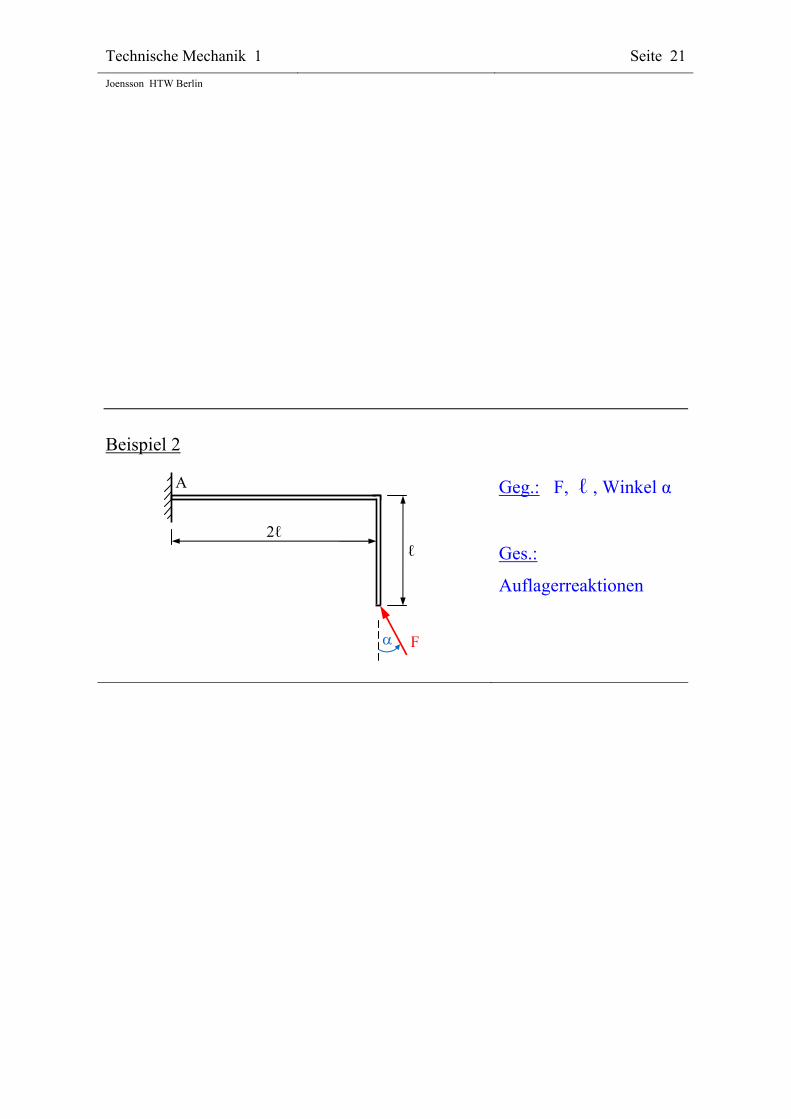
Beispiel 2
Geg.: F, ℓ , Winkel α
Ges.:
Auflagerreaktionen
F
ℓ2ℓ
A
Technische Mechanik 1 Seite 22
Joensson HTW Berlin
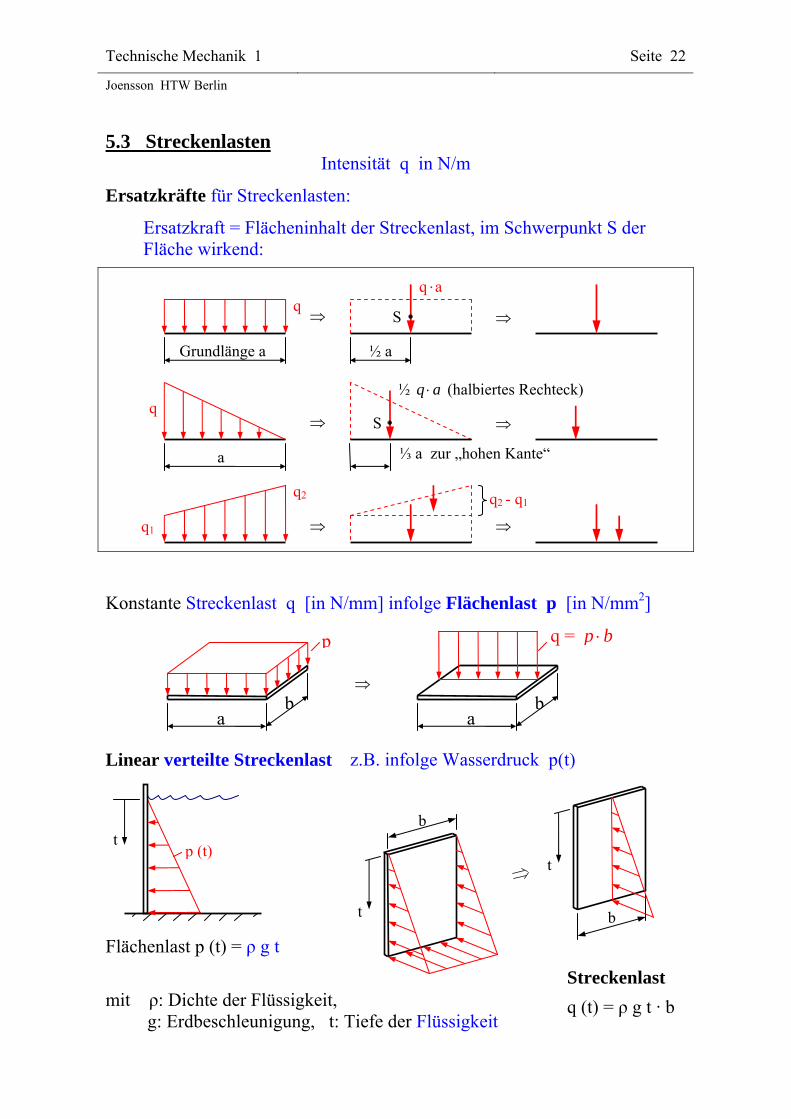
5.3 Streckenlasten Intensität q in N/m
Ersatzkräfte für Streckenlasten:
Ersatzkraft = Flächeninhalt der Streckenlast, im Schwerpunkt S der Fläche wirkend:
Konstante Streckenlast q [in N/mm] infolge Flächenlast p [in N/mm2]
Linear verteilte Streckenlast
Flächenlast p (t) = ρ g t
z.B. infolge Wasserdruck p(t)
mit ρ: Dichte der Flüssigkeit, g: Erdbeschleunigung, t: Tiefe der Flüssigkeit
t p (t)
b
t
t
b
p
b a
ba
q
Grundlänge a
S
q a
½ a
q ½ q a (halbiertes Rechteck)
S
⅓ a zur „hohen Kante“ a
q2
q1
q2 - q1
Streckenlast
q (t) = ρ g t · b
q = p b
Technische Mechanik 1 Seite 23
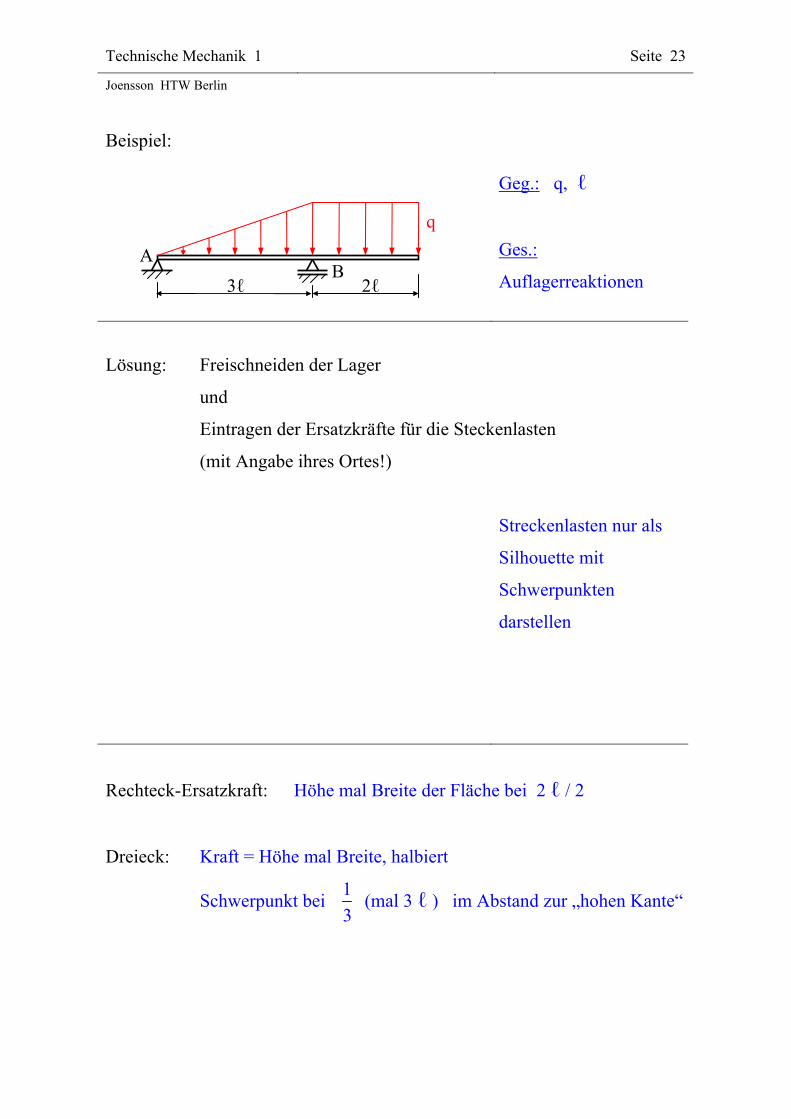
Joensson HTW Berlin Beispiel:
Geg.: q, ℓ
Ges.:
Auflagerreaktionen
Lösung: Freischneiden der Lager
und
Eintragen der Ersatzkräfte für die Steckenlasten
(mit Angabe ihres Ortes!)
Streckenlasten nur als
Silhouette mit
Schwerpunkten
darstellen
Rechteck-Ersatzkraft: Höhe mal Breite der Fläche bei 2 ℓ / 2
Dreieck: Kraft = Höhe mal Breite, halbiert
Schwerpunkt bei 1
3 (mal 3 ℓ ) im Abstand zur „hohen Kante“
q
2ℓ 3ℓ B
A

Technische Mechanik 1 Seite 24
Joensson HTW Berlin
Aus (3):
Einsetzen in (1):
d.h. FAy wirkt hier nach unten, damit das Tragwerk im Gleichgewicht
bleibt.
Technische Mechanik 1 Seite 25
Joensson HTW Berlin
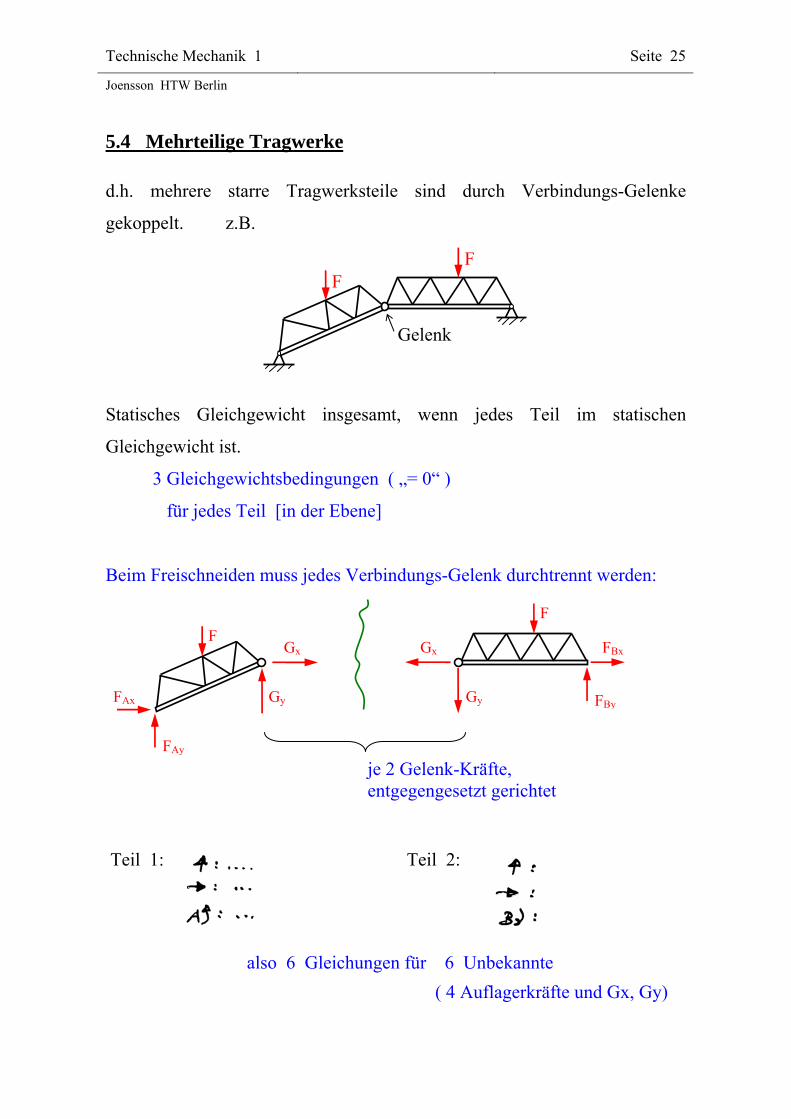
5.4 Mehrteilige Tragwerke
d.h. mehrere starre Tragwerksteile sind durch Verbindungs-Gelenke
gekoppelt. z.B.
Statisches Gleichgewicht insgesamt, wenn jedes Teil im statischen
Gleichgewicht ist.
3 Gleichgewichtsbedingungen ( „= 0“ )
für jedes Teil [in der Ebene]
Beim Freischneiden muss jedes Verbindungs-Gelenk durchtrennt werden:
Teil 1:
Teil 2:
also 6 Gleichungen für 6 Unbekannte
( 4 Auflagerkräfte und Gx, Gy)
F
F
Gx Gx
GyGy FAx
FAy
FBx
FBy
FF
Gelenk
je 2 Gelenk-Kräfte, entgegengesetzt gerichtet
Technische Mechanik 1 Seite 26
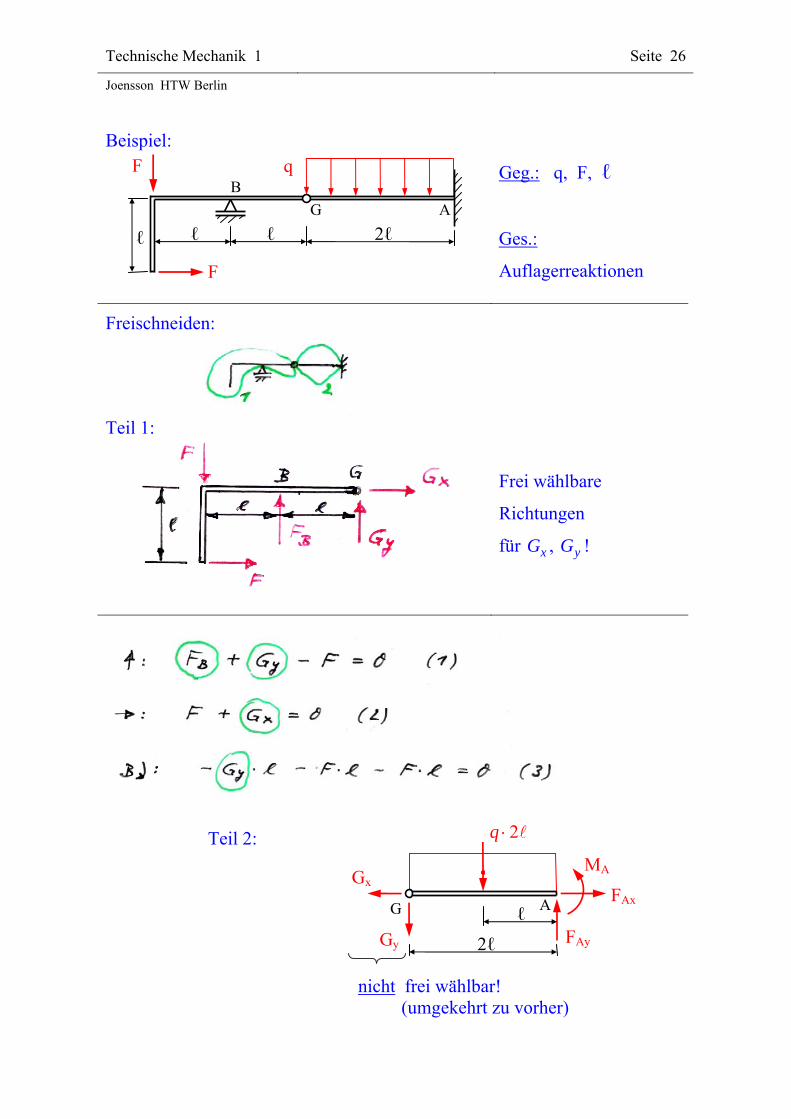
Joensson HTW Berlin Beispiel:
Geg.: q, F, ℓ
Ges.:
Auflagerreaktionen
Freischneiden:
Teil 1:
Frei wählbare
Richtungen
für xG , yG !
Teil 2:
nicht frei wählbar!
(umgekehrt zu vorher)
G A
2ℓGy
Gx
ℓFAy
FAx
MA
B
G A
ℓ ℓ ℓ 2ℓ
F
q F
2q
Technische Mechanik 1 Seite 27
Joensson HTW Berlin
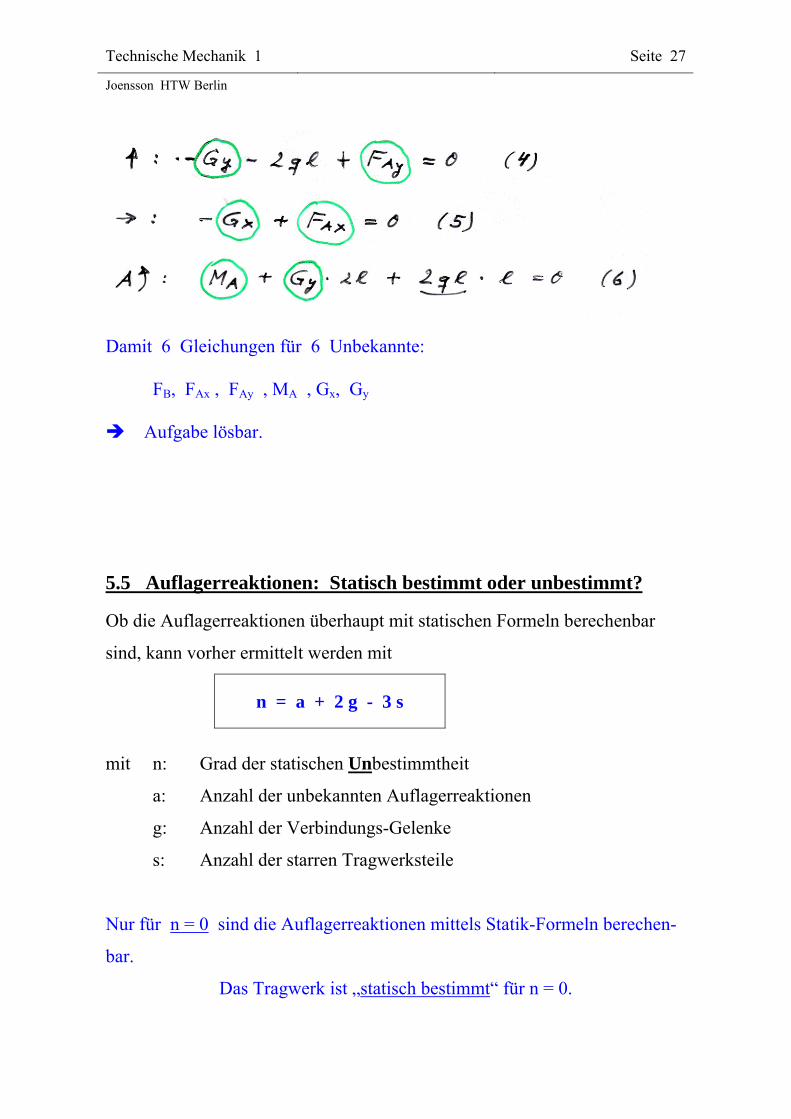
Damit 6 Gleichungen für 6 Unbekannte: FB, FAx , FAy , MA , Gx, Gy Aufgabe lösbar. 5.5 Auflagerreaktionen: Statisch bestimmt oder unbestimmt?
Ob die Auflagerreaktionen überhaupt mit statischen Formeln berechenbar
sind, kann vorher ermittelt werden mit
n = a + 2 g - 3 s
mit n: Grad der statischen Unbestimmtheit
a: Anzahl der unbekannten Auflagerreaktionen
g: Anzahl der Verbindungs-Gelenke
s: Anzahl der starren Tragwerksteile
Nur für n = 0 sind die Auflagerreaktionen mittels Statik-Formeln berechen-
bar.
Das Tragwerk ist „statisch bestimmt“ für n = 0.
Technische Mechanik 1 Seite 28
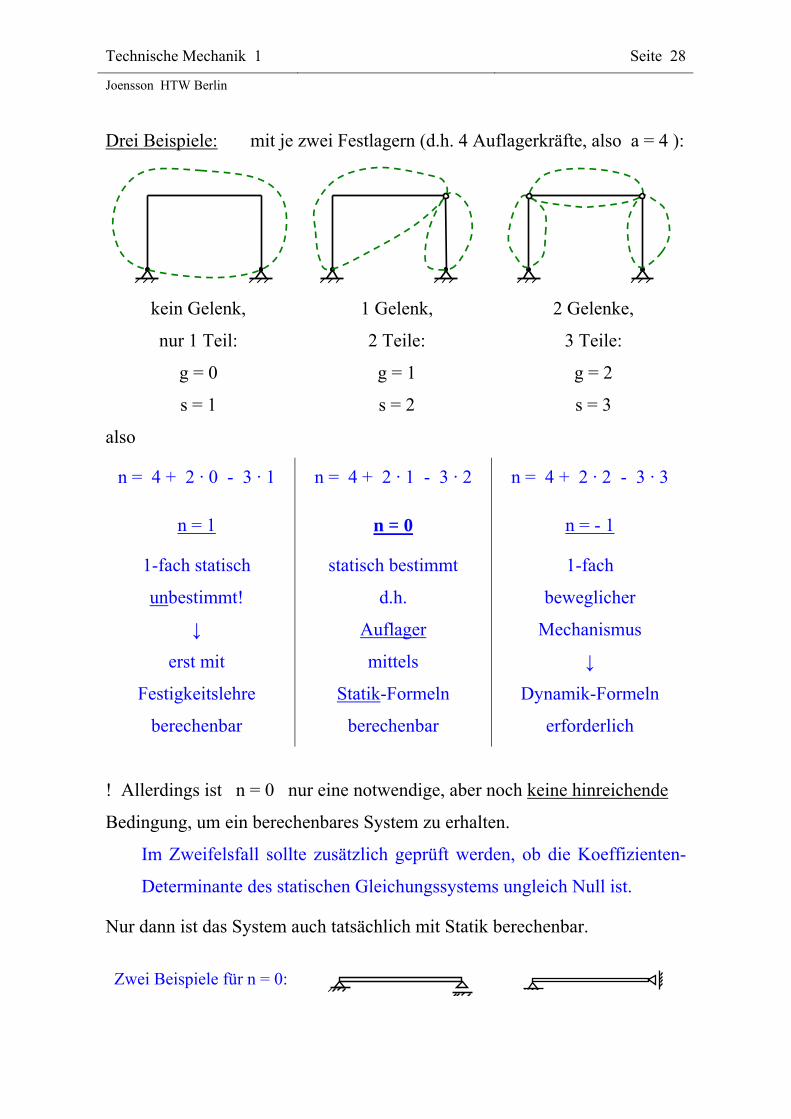
Joensson HTW Berlin Drei Beispiele: mit je zwei Festlagern (d.h. 4 Auflagerkräfte, also a = 4 ):
kein Gelenk,
nur 1 Teil:
g = 0
s = 1
1 Gelenk,
2 Teile:
g = 1
s = 2
2 Gelenke,
3 Teile:
g = 2
s = 3
also
n = 4 + 2 · 0 - 3 · 1
n = 1
1-fach statisch
unbestimmt!
↓
erst mit
Festigkeitslehre
berechenbar
n = 4 + 2 · 1 - 3 · 2
n = 0
statisch bestimmt
d.h.
Auflager
mittels
Statik-Formeln
berechenbar
n = 4 + 2 · 2 - 3 · 3
n = - 1
1-fach
beweglicher
Mechanismus
↓
Dynamik-Formeln
erforderlich
! Allerdings ist n = 0 nur eine notwendige, aber noch keine hinreichende
Bedingung, um ein berechenbares System zu erhalten.
Im Zweifelsfall sollte zusätzlich geprüft werden, ob die Koeffizienten-
Determinante des statischen Gleichungssystems ungleich Null ist.
Nur dann ist das System auch tatsächlich mit Statik berechenbar.
Zwei Beispiele für n = 0:
Technische Mechanik 1 Seite 29
Joensson HTW Berlin
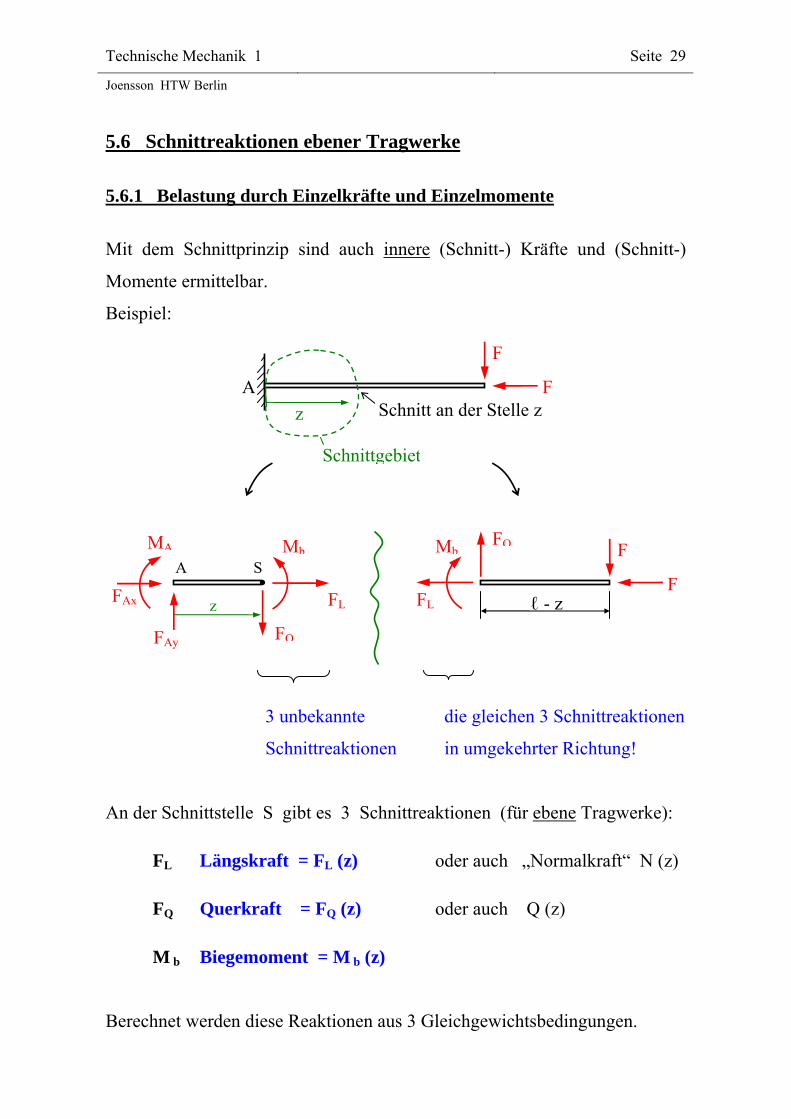
5.6 Schnittreaktionen ebener Tragwerke
5.6.1 Belastung durch Einzelkräfte und Einzelmomente
Mit dem Schnittprinzip sind auch innere (Schnitt-) Kräfte und (Schnitt-)
Momente ermittelbar.
Beispiel:
3 unbekannte die gleichen 3 Schnittreaktionen
Schnittreaktionen in umgekehrter Richtung!
An der Schnittstelle S gibt es 3 Schnittreaktionen (für ebene Tragwerke):
FL Längskraft = FL (z) oder auch „Normalkraft“ N (z)
FQ Querkraft = FQ (z) oder auch Q (z)
M b Biegemoment = M b (z)
Berechnet werden diese Reaktionen aus 3 Gleichgewichtsbedingungen.
F
FSchnitt an der Stelle z
Schnittgebiet
z
A
A S
z
MA Mb
FL
FQ FAy
FAx FL
FQMb F
Fℓ - z

Technische Mechanik 1 Seite 30
Joensson HTW Berlin Z.B. gilt hier für das linke Teil:
Die Unbekannten FL, FQ und M b können nur berechnet werden, wenn
vorher die Auflagerreaktionen ermittelt wurden!
Also zuerst
Einsetzen in (1) bis (3) liefert:
Aus (1): F + FL = 0 folgt FL = - F konstant über z
Aus (2): F - FQ = 0 FQ = + F konstant über z
Aus (3): M b - ( - F · ℓ ) - F · z = 0
M b = - F · ℓ + F · z
bzw. M b = F · (z - ℓ ) linear mit z veränderlich!
MA
FAy
FAx
F
Fℓ
Technische Mechanik 1 Seite 31
Joensson HTW Berlin
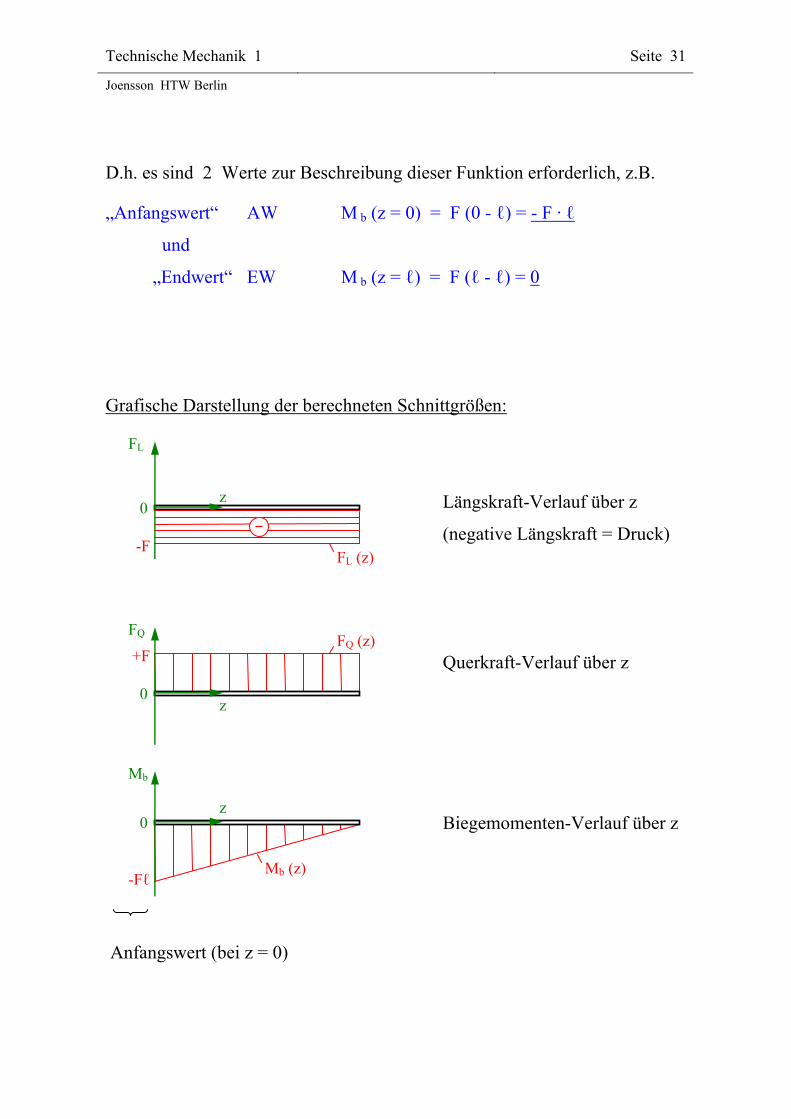
D.h. es sind 2 Werte zur Beschreibung dieser Funktion erforderlich, z.B.
„Anfangswert“ AW M b (z = 0) = F (0 - ℓ) = - F · ℓ
und
„Endwert“ EW M b (z = ℓ) = F (ℓ - ℓ) = 0
Grafische Darstellung der berechneten Schnittgrößen:
Längskraft-Verlauf über z
(negative Längskraft = Druck)
Querkraft-Verlauf über z
Biegemomenten-Verlauf über z
Anfangswert (bei z = 0)
z
FL
0
-F FL (z)
z
FQ
0
FQ (z)+F
z
Mb
0
Mb (z) -Fℓ
Technische Mechanik 1 Seite 32
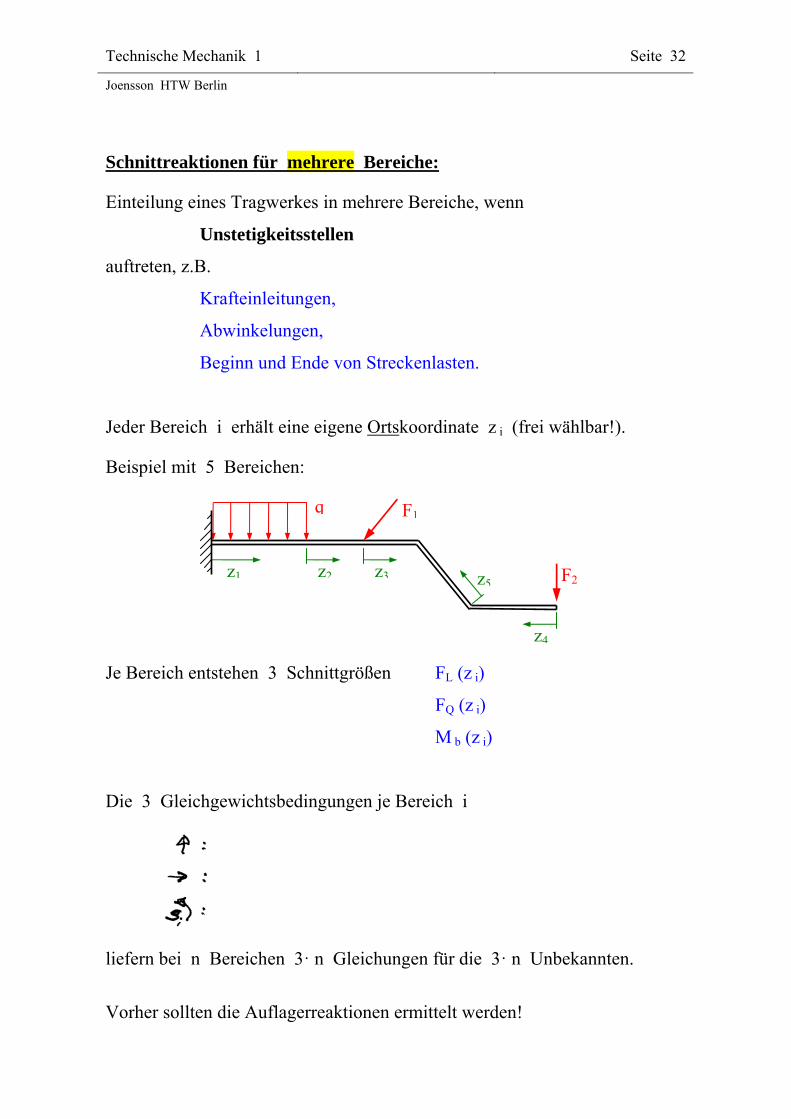
Joensson HTW Berlin Schnittreaktionen für mehrere Bereiche:
Einteilung eines Tragwerkes in mehrere Bereiche, wenn
Unstetigkeitsstellen
auftreten, z.B.
Krafteinleitungen,
Abwinkelungen,
Beginn und Ende von Streckenlasten.
Jeder Bereich i erhält eine eigene Ortskoordinate z i (frei wählbar!).
Beispiel mit 5 Bereichen:
Je Bereich entstehen 3 Schnittgrößen FL (z i)
FQ (z i)
M b (z i)
Die 3 Gleichgewichtsbedingungen je Bereich i
liefern bei n Bereichen 3· n Gleichungen für die 3· n Unbekannten.
Vorher sollten die Auflagerreaktionen ermittelt werden!
F1
F2 z1 z2 z3
z4
z5
q
Technische Mechanik 1 Seite 33
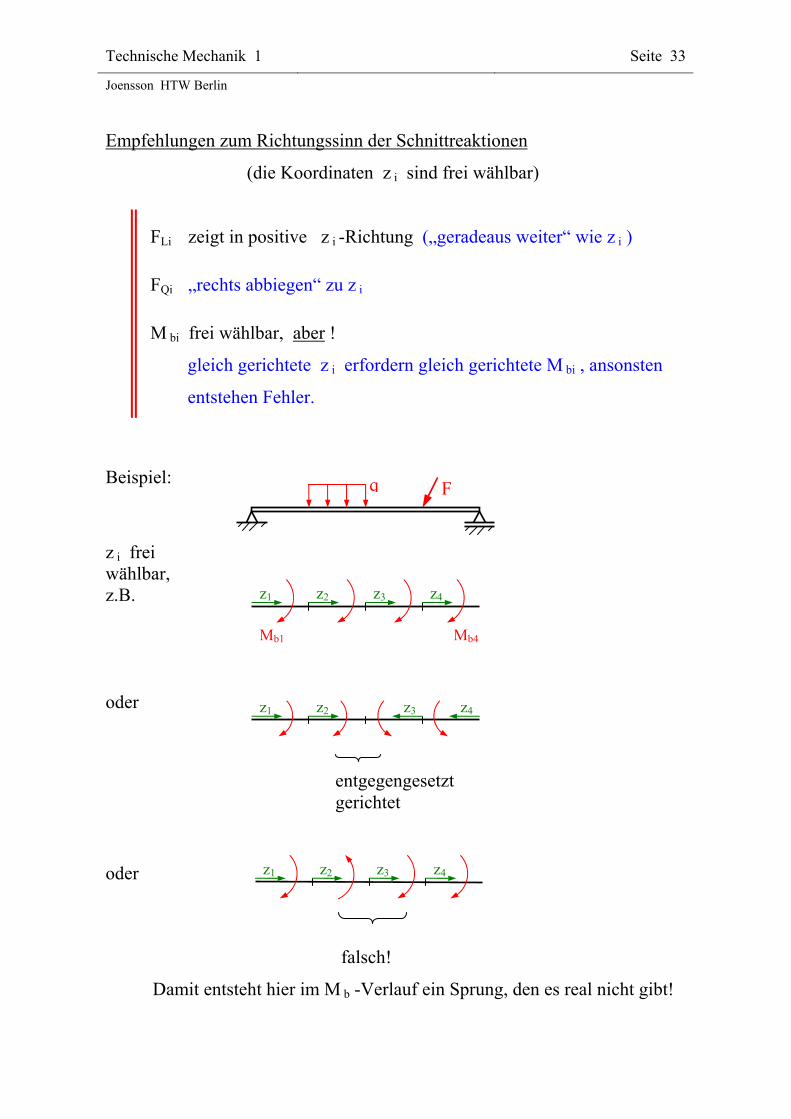
Joensson HTW Berlin Empfehlungen zum Richtungssinn der Schnittreaktionen
(die Koordinaten z i sind frei wählbar)
FLi zeigt in positive z i -Richtung („geradeaus weiter“ wie z i )
FQi „rechts abbiegen“ zu z i
M bi frei wählbar, aber !
gleich gerichtete z i erfordern gleich gerichtete M bi , ansonsten
entstehen Fehler.
Beispiel:
z i frei wählbar, z.B. oder oder
falsch!
Damit entsteht hier im M b -Verlauf ein Sprung, den es real nicht gibt!
z1 z2 z3 z4
Fq
z1 z2 z3 z4
Mb4Mb1
z1 z2 z3 z4
entgegengesetzt gerichtet
Technische Mechanik 1 Seite 34
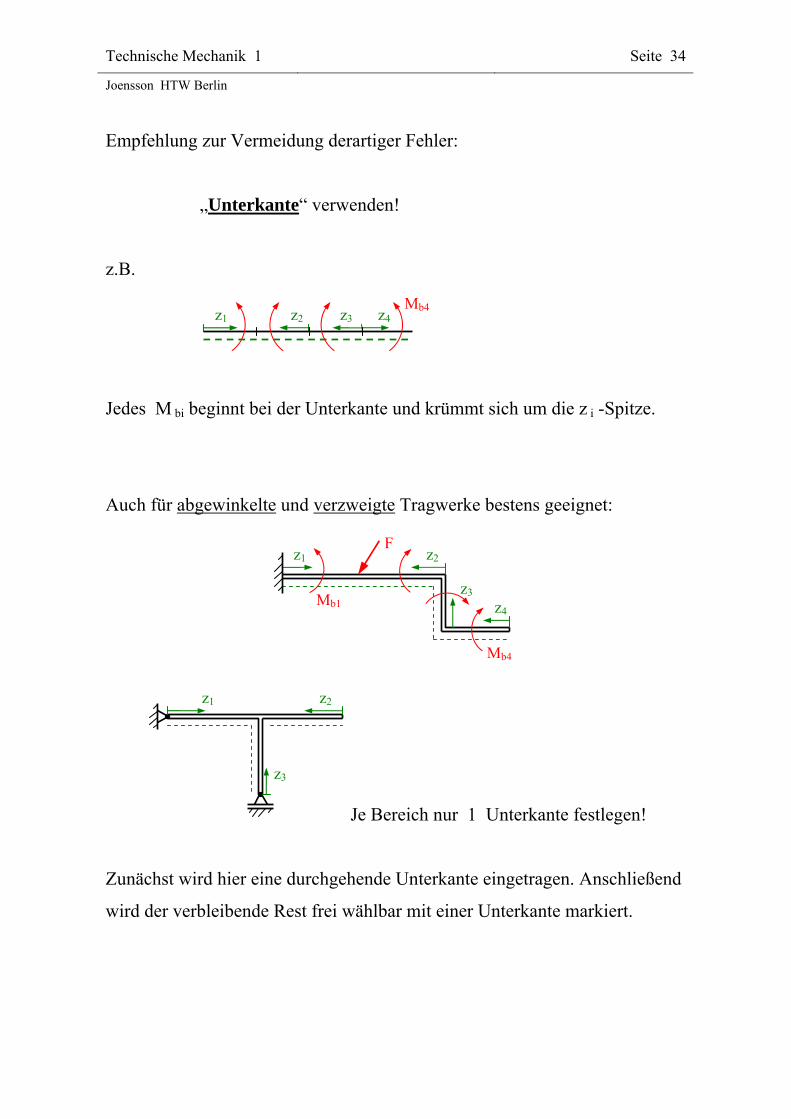
Joensson HTW Berlin Empfehlung zur Vermeidung derartiger Fehler:
„Unterkante“ verwenden!
z.B.
Jedes M bi beginnt bei der Unterkante und krümmt sich um die z i -Spitze.
Auch für abgewinkelte und verzweigte Tragwerke bestens geeignet:
Je Bereich nur 1 Unterkante festlegen!
Zunächst wird hier eine durchgehende Unterkante eingetragen. Anschließend
wird der verbleibende Rest frei wählbar mit einer Unterkante markiert.
z1 z2
z3
z2
z3
z1
z4
Mb4
Mb1
F
z3 z4z2 z1 Mb4
Technische Mechanik 1 Seite 35
Joensson HTW Berlin Lösungsweg Schnittreaktionen
1.) Auflagerreaktionen berechnen
2.) Prinzipskizze mit Unterkante speziell für M bi
Koordinaten z i frei wählbar
Unterkante frei wählbar
M bi nicht frei wählbar!
3.) Bereichsweise aufschneiden (je Bereich neue Skizze!)
4.) Je Bereich FL , FQ , M b aus den 3 Gleichgew.beding. ermitteln
5.) Grafische Darstellung der Schnittreaktionen
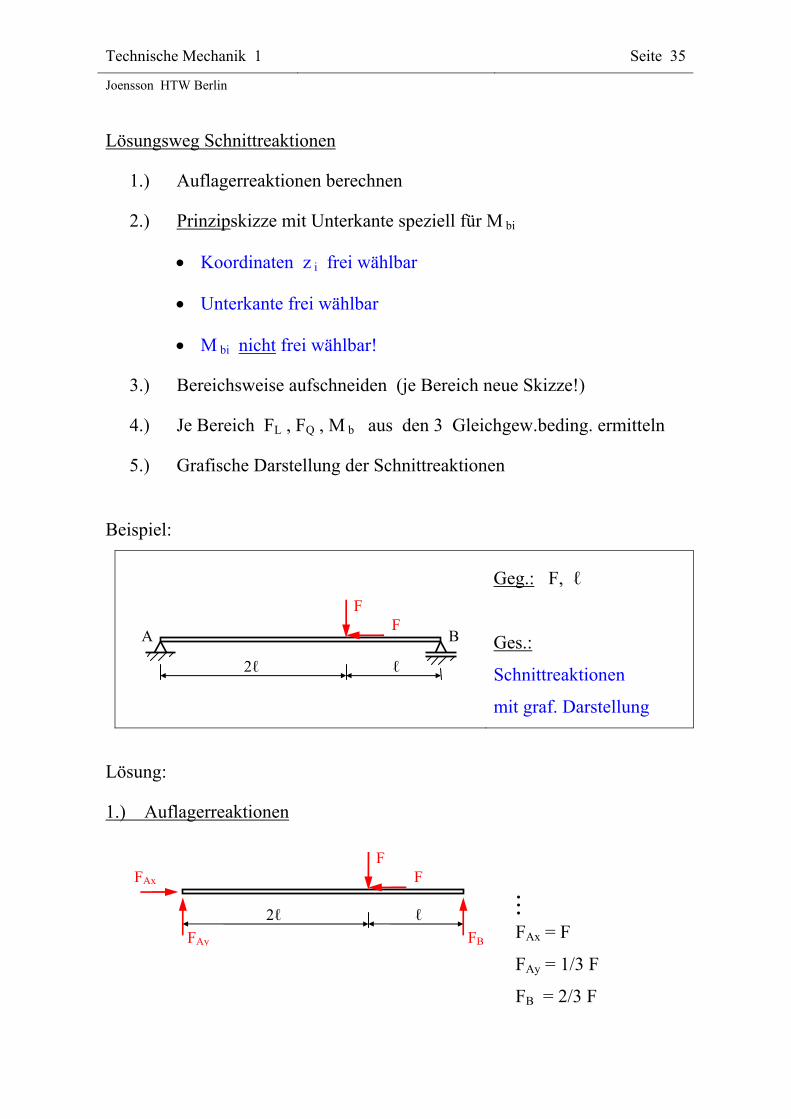
Beispiel:
Geg.: F, ℓ
Ges.:
Schnittreaktionen
mit graf. Darstellung
Lösung:
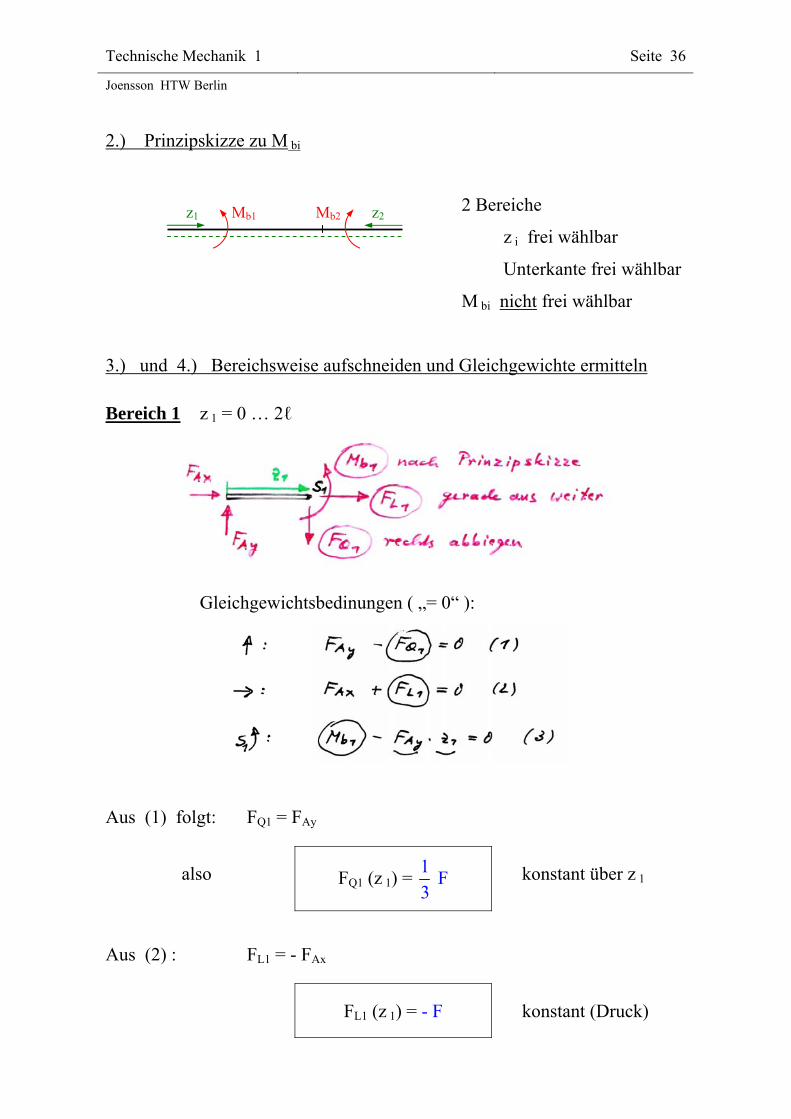
1.) Auflagerreaktionen
· · · FAx = F
FAy = 1/3 F
FB = 2/3 F
FF
ℓ2ℓ
FAx
FAy FB
FF
BA
ℓ2ℓ
Technische Mechanik 1 Seite 36
Joensson HTW Berlin 2.) Prinzipskizze zu M bi
2 Bereiche
z i frei wählbar
Unterkante frei wählbar
M bi nicht frei wählbar
3.) und 4.) Bereichsweise aufschneiden und Gleichgewichte ermitteln
Bereich 1 z 1 = 0 … 2ℓ
Gleichgewichtsbedinungen ( „= 0“ ):
Aus (1) folgt: FQ1 = FAy
also FQ1 (z 1) = 1
3 F konstant über z 1
Aus (2) : FL1 = - FAx
FL1 (z 1) = - F konstant (Druck)
z2z1 Mb1 Mb2

Technische Mechanik 1 Seite 37
Joensson HTW Berlin Aus (3) folgt: M b1 = FAy · z 1
M b1 (z 1) =
1
3 F· z 1 linear über z 1 verteilt
Also 2 Werte ermitteln bei z 1 = 0 und z 1 = 2ℓ:
M b1 (z 1 = 0 ) = 0 („Anfangswert“ AW)
M b1 (z 1 = 2ℓ ) = 2
3 F· ℓ („Endwert“ EW)
Bereich 2 z 2 = 0 … ℓ
Aus (1) FQ2 = - FB
FQ2 (z 2) = - 2
3 F konstant
Aus (2) : FL2 (z 2) = 0
Aus (3) M b2 = FB · z 2
z 2 S2
Mb2
FQ2 FL2
FB
Technische Mechanik 1 Seite 38
Joensson HTW Berlin
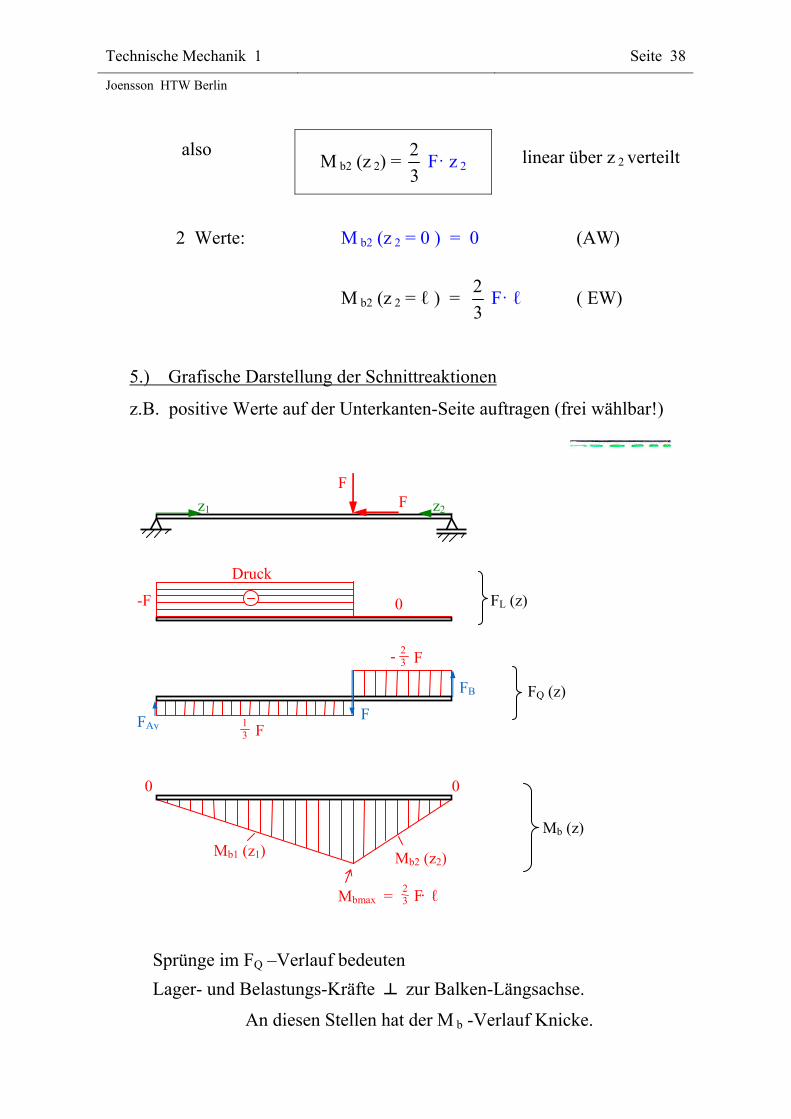
also M b2 (z 2) =
2
3 F· z 2 linear über z 2 verteilt
2 Werte: M b2 (z 2 = 0 ) = 0 (AW)
M b2 (z 2 = ℓ ) = 2
3 F· ℓ ( EW)
5.) Grafische Darstellung der Schnittreaktionen
z.B. positive Werte auf der Unterkanten-Seite auftragen (frei wählbar!)
Sprünge im FQ –Verlauf bedeuten
Lager- und Belastungs-Kräfte zur Balken-Längsachse.
An diesen Stellen hat der M b -Verlauf Knicke.
FFz1 z2
Druck
-F 0 FL (z)
FB
F FAy
FQ (z)
F 1 3
F23-
0 0
Mb1 (z1) Mb2 (z2)
Mbmax = F ℓ23
Mb (z)
Technische Mechanik 1 Seite 39
Joensson HTW Berlin
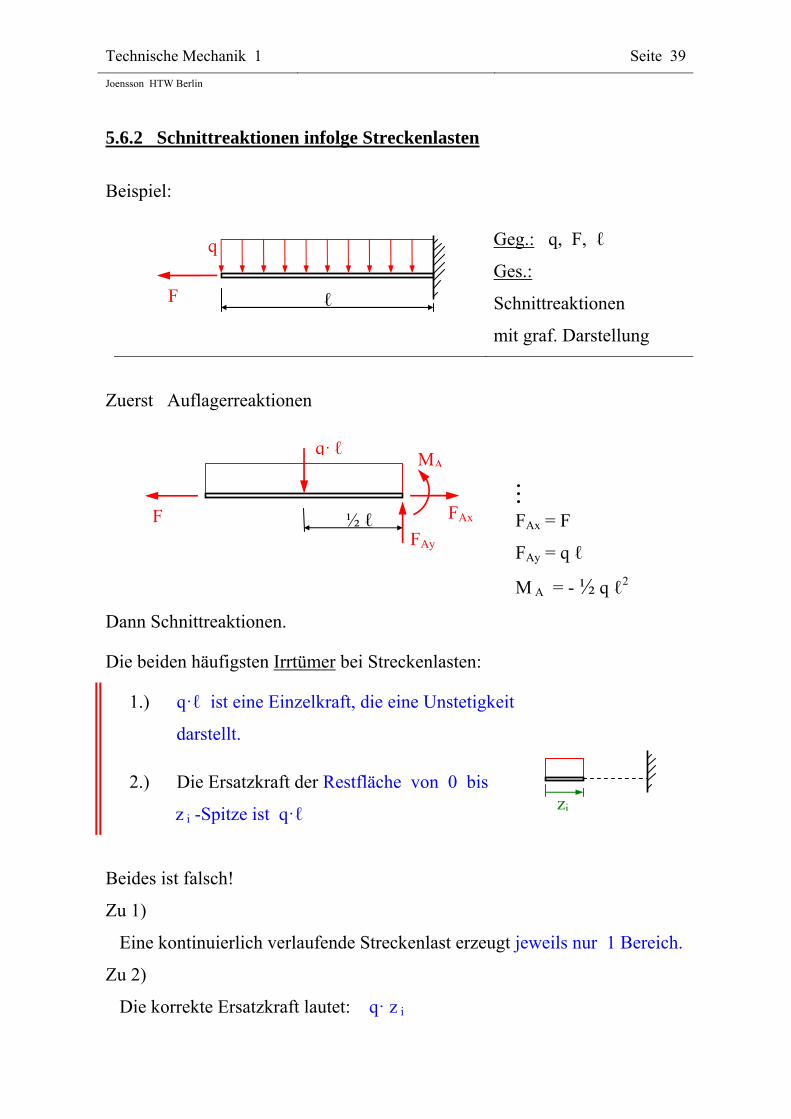
5.6.2 Schnittreaktionen infolge Streckenlasten
Beispiel:
Geg.: q, F, ℓ
Ges.:
Schnittreaktionen
mit graf. Darstellung
Zuerst Auflagerreaktionen
· · · FAx = F
FAy = q ℓ
M A = - ½ q ℓ2
Dann Schnittreaktionen.
Die beiden häufigsten Irrtümer bei Streckenlasten:
1.) q·ℓ ist eine Einzelkraft, die eine Unstetigkeit
darstellt.
2.) Die Ersatzkraft der Restfläche von 0 bis
z i -Spitze ist q·ℓ
Beides ist falsch!
Zu 1)
Eine kontinuierlich verlaufende Streckenlast erzeugt jeweils nur 1 Bereich.
Zu 2)
Die korrekte Ersatzkraft lautet: q· z i
zi
½ ℓ
q ℓ
F FAy
FAx
MA
ℓ
q
F
Technische Mechanik 1 Seite 40
Joensson HTW Berlin
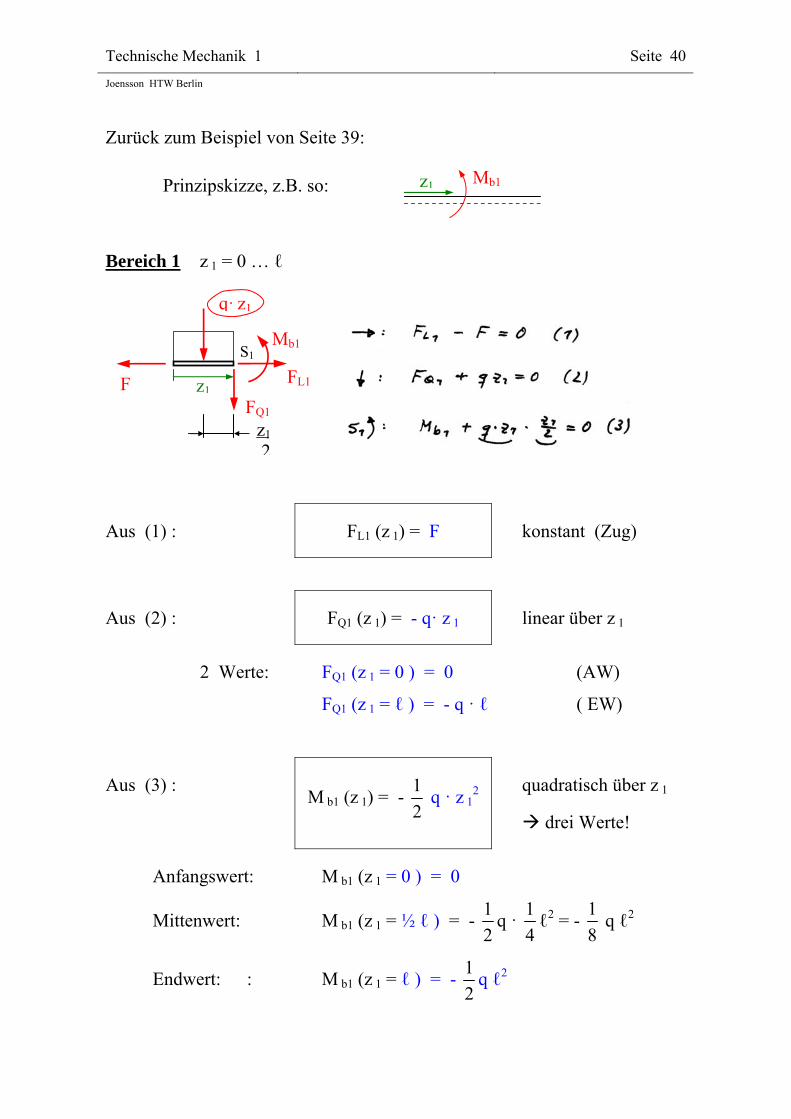
Zurück zum Beispiel von Seite 39:
Prinzipskizze, z.B. so:
Bereich 1 z 1 = 0 … ℓ
Aus (1) : FL1 (z 1) = F konstant (Zug)
Aus (2) : FQ1 (z 1) = - q· z 1 linear über z 1
2 Werte: FQ1 (z 1 = 0 ) = 0 (AW)
FQ1 (z 1 = ℓ ) = - q · ℓ ( EW)
Aus (3) : M b1 (z 1) = -
1
2 q · z 1
2 quadratisch über z 1
drei Werte!
Anfangswert: M b1 (z 1 = 0 ) = 0
Mittenwert: M b1 (z 1 = ½ ℓ ) = - 1
2q ·
1
4ℓ2 = -
1
8 q ℓ2
Endwert: : M b1 (z 1 = ℓ ) = - 1
2q ℓ2
z1
q z1
F FQ1
FL1
Mb1
z1
2
S1
Mb1z1
Technische Mechanik 1 Seite 41
Joensson HTW Berlin
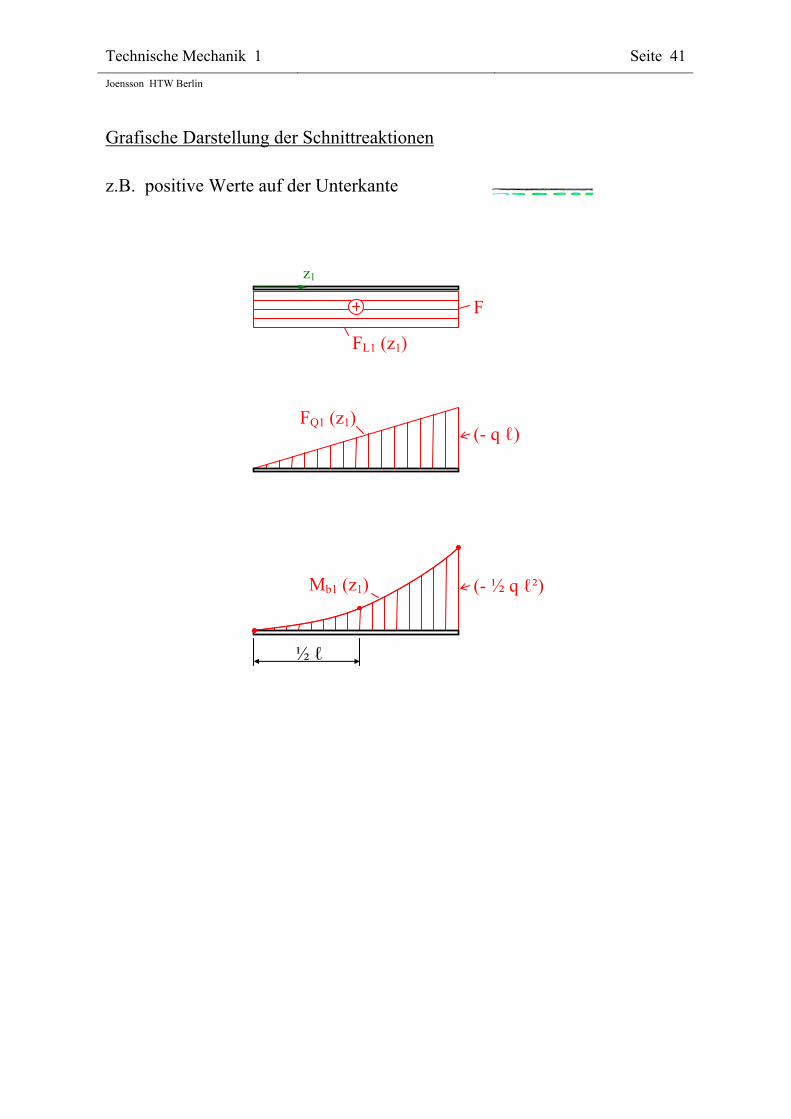
Grafische Darstellung der Schnittreaktionen
z.B. positive Werte auf der Unterkante
z1
F
FL1 (z1)
FQ1 (z1) (- q ℓ)
Mb1 (z1) (- ½ q ℓ²)
½ ℓ
Technische Mechanik 1 Seite 42
Joensson HTW Berlin
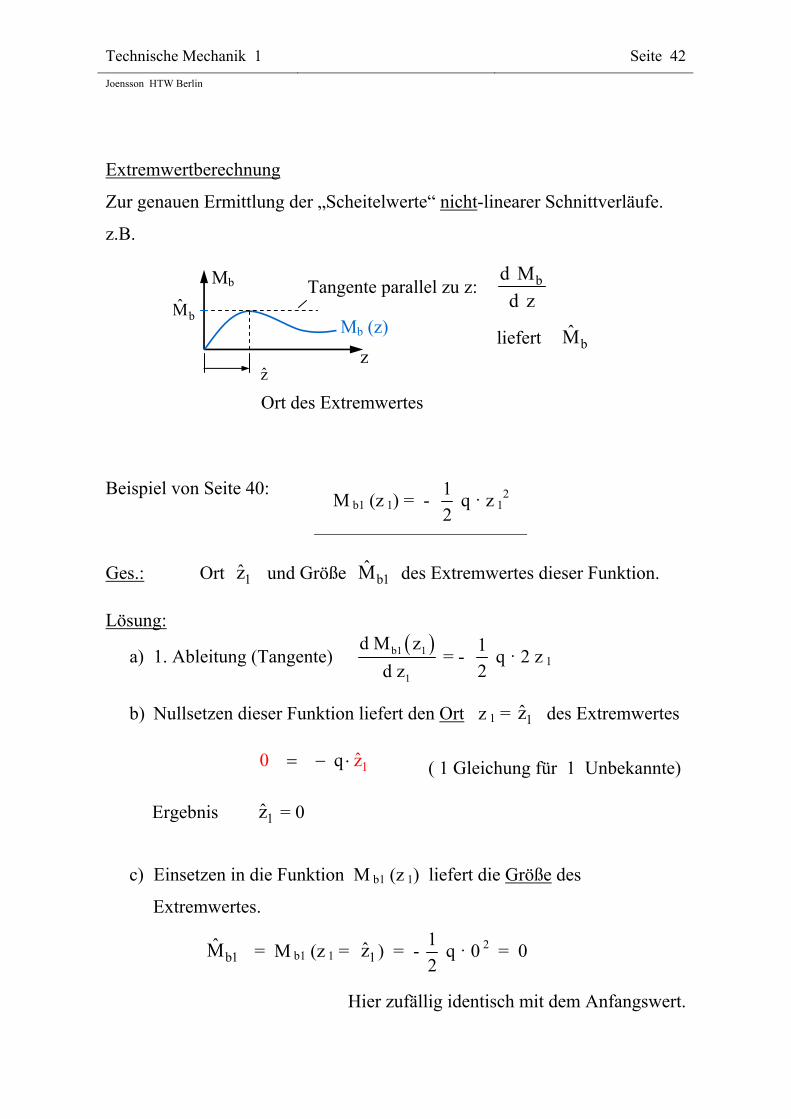
Extremwertberechnung
Zur genauen Ermittlung der „Scheitelwerte“ nicht-linearer Schnittverläufe.
z.B.
Ort des Extremwertes
Beispiel von Seite 40:
M b1 (z 1) = - 1
2 q · z 1
2
Ges.: Ort 1z und Größe b1M des Extremwertes dieser Funktion.
Lösung:
a) 1. Ableitung (Tangente) b1 1
1
d M z
d z = -
1
2 q · 2 z 1
b) Nullsetzen dieser Funktion liefert den Ort z 1 = 1z des Extremwertes
1ˆ0 zq ( 1 Gleichung für 1 Unbekannte)
Ergebnis 1z = 0
c) Einsetzen in die Funktion M b1 (z 1) liefert die Größe des
Extremwertes.
b1M = M b1 (z 1 = 1z ) = - 1
2 q · 0 2 = 0
Hier zufällig identisch mit dem Anfangswert.
Mb (z) bM
z
Mb
z
Tangente parallel zu z: bd M
d z
liefert bM
Technische Mechanik 1 Seite 43
Joensson HTW Berlin
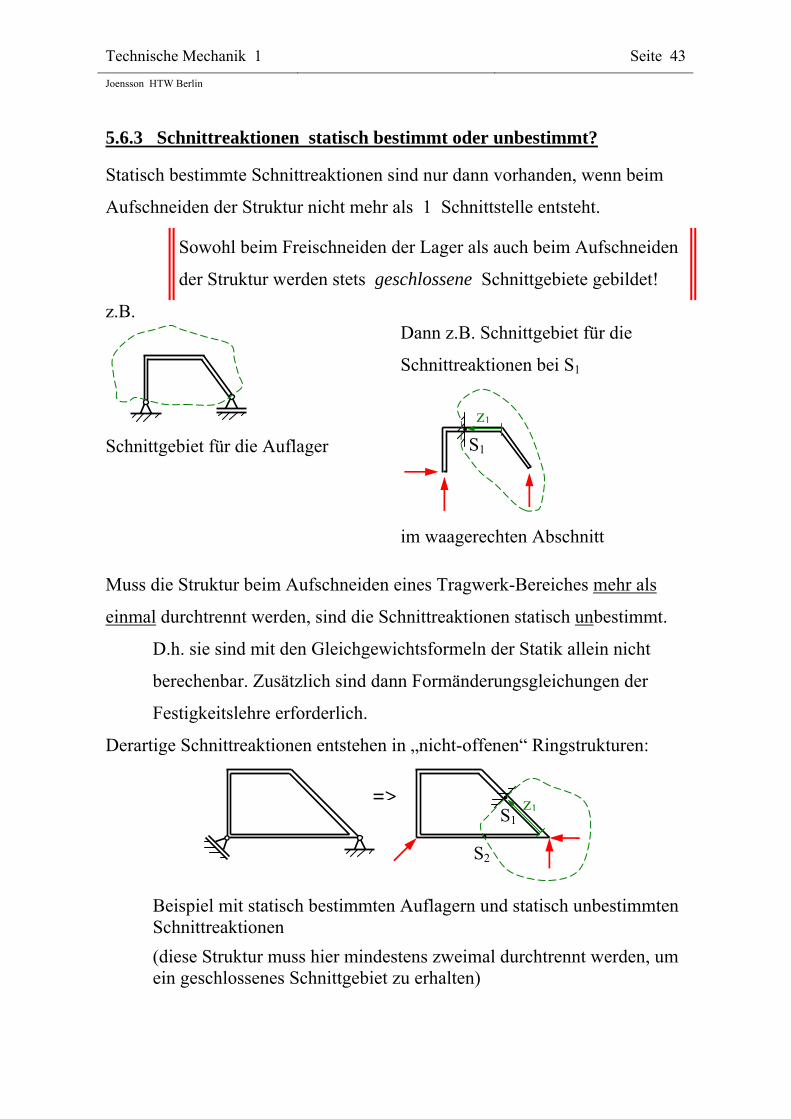
5.6.3 Schnittreaktionen statisch bestimmt oder unbestimmt?
Statisch bestimmte Schnittreaktionen sind nur dann vorhanden, wenn beim
Aufschneiden der Struktur nicht mehr als 1 Schnittstelle entsteht.
Sowohl beim Freischneiden der Lager als auch beim Aufschneiden
der Struktur werden stets geschlossene Schnittgebiete gebildet!
z.B.
Schnittgebiet für die Auflager
Dann z.B. Schnittgebiet für die
Schnittreaktionen bei S1
im waagerechten Abschnitt
Muss die Struktur beim Aufschneiden eines Tragwerk-Bereiches mehr als
einmal durchtrennt werden, sind die Schnittreaktionen statisch unbestimmt.
D.h. sie sind mit den Gleichgewichtsformeln der Statik allein nicht
berechenbar. Zusätzlich sind dann Formänderungsgleichungen der
Festigkeitslehre erforderlich.
Derartige Schnittreaktionen entstehen in „nicht-offenen“ Ringstrukturen:
Beispiel mit statisch bestimmten Auflagern und statisch unbestimmten Schnittreaktionen
(diese Struktur muss hier mindestens zweimal durchtrennt werden, um ein geschlossenes Schnittgebiet zu erhalten)
=> z1S1
S2
z1
S1
Technische Mechanik 1 Seite 44
Joensson HTW Berlin
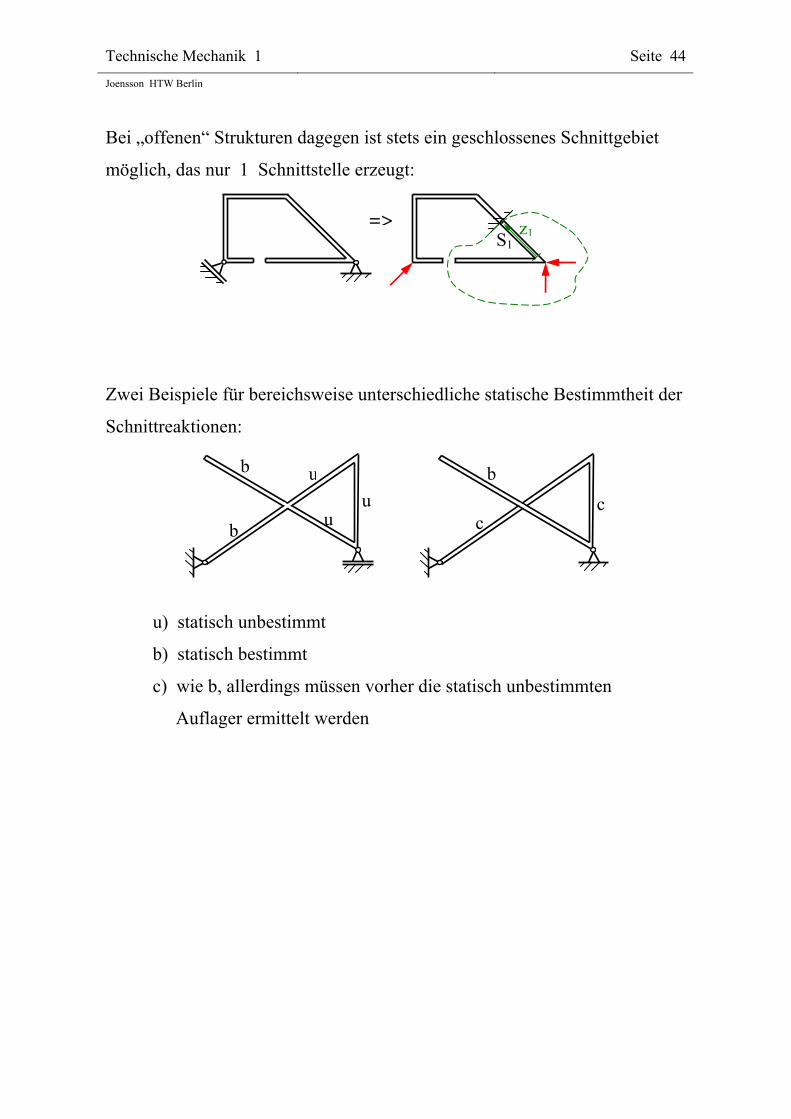
Bei „offenen“ Strukturen dagegen ist stets ein geschlossenes Schnittgebiet
möglich, das nur 1 Schnittstelle erzeugt:
Zwei Beispiele für bereichsweise unterschiedliche statische Bestimmtheit der
Schnittreaktionen:
u) statisch unbestimmt
b) statisch bestimmt
c) wie b, allerdings müssen vorher die statisch unbestimmten
Auflager ermittelt werden
b
b
b
ccu
u
u
=> z1S1
Technische Mechanik 1 Seite 45
Joensson HTW Berlin
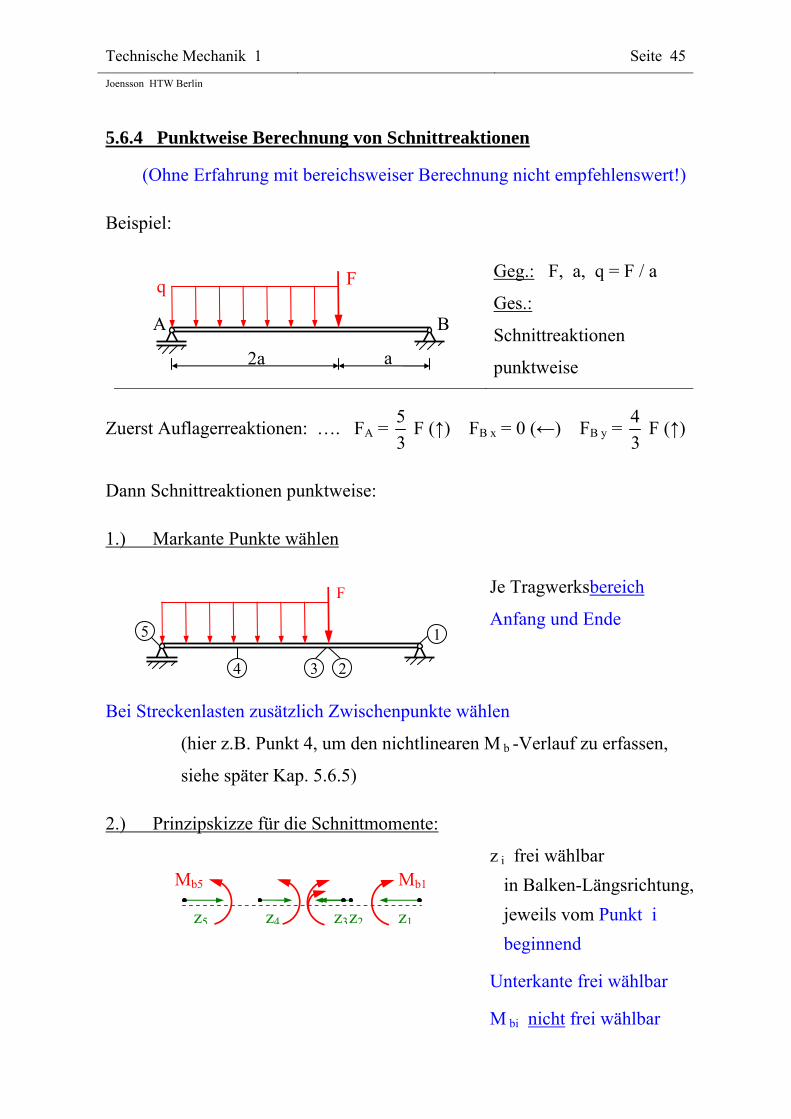
5.6.4 Punktweise Berechnung von Schnittreaktionen
(Ohne Erfahrung mit bereichsweiser Berechnung nicht empfehlenswert!)
Beispiel:
Geg.: F, a, q = F / a
Ges.:
Schnittreaktionen
punktweise
Zuerst Auflagerreaktionen: …. FA = 5
3 F (↑) FB x = 0 (←) FB y =
4
3 F (↑)
Dann Schnittreaktionen punktweise:
1.) Markante Punkte wählen
Je Tragwerksbereich
Anfang und Ende
Bei Streckenlasten zusätzlich Zwischenpunkte wählen
(hier z.B. Punkt 4, um den nichtlinearen M b -Verlauf zu erfassen,
siehe später Kap. 5.6.5)
2.) Prinzipskizze für die Schnittmomente:
z i frei wählbar
in Balken-Längsrichtung,
jeweils vom Punkt i
beginnend
Unterkante frei wählbar
M bi nicht frei wählbar
z1z2z3z4 z5
Mb1Mb5
F
15
4 3 2
Fq
BA
2a a
Technische Mechanik 1 Seite 46
Joensson HTW Berlin
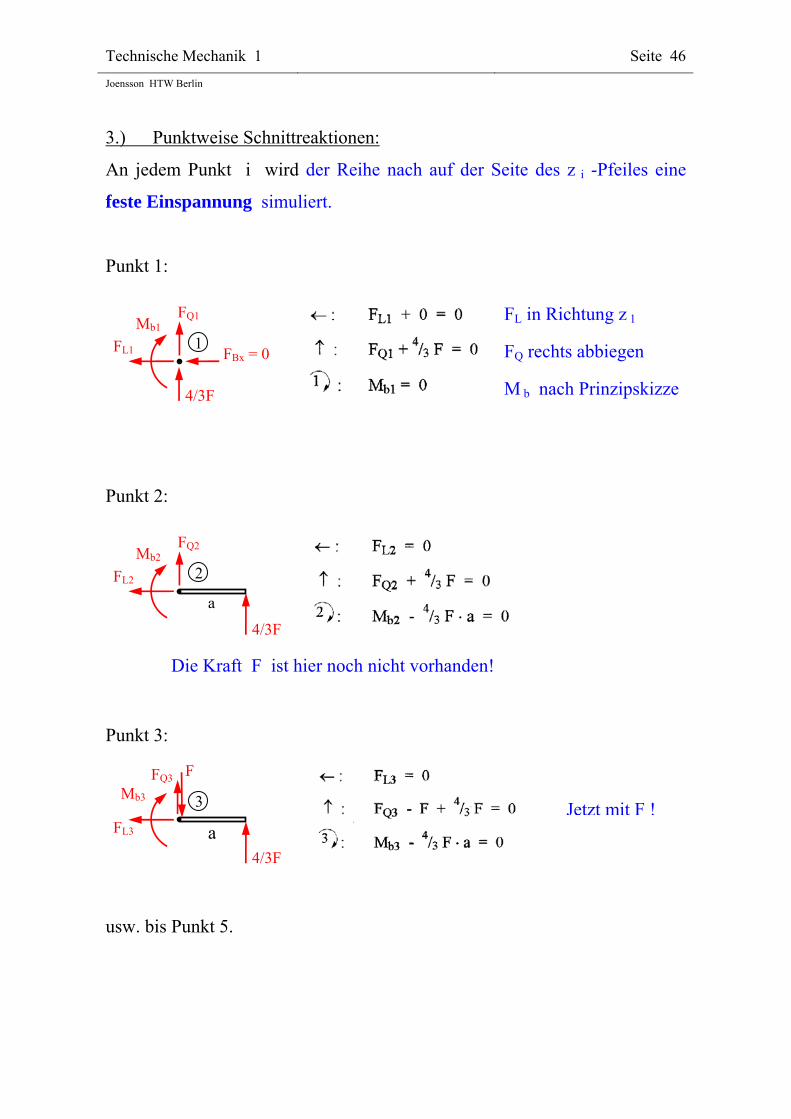
3.) Punktweise Schnittreaktionen:
An jedem Punkt i wird der Reihe nach auf der Seite des z i -Pfeiles eine
feste Einspannung simuliert.
Punkt 1:
FL in Richtung z 1
FQ rechts abbiegen
M b nach Prinzipskizze
Punkt 2:
Die Kraft F ist hier noch nicht vorhanden!
Punkt 3:
usw. bis Punkt 5.
4/3F
FQ3
FL3
Mb3 3
a
F
4/3F
FQ2
FL2
Mb2 2
a
1 FBx = 0
4/3F
FQ1
FL1
Mb1
Jetzt mit F !
Technische Mechanik 1 Seite 47
Joensson HTW Berlin
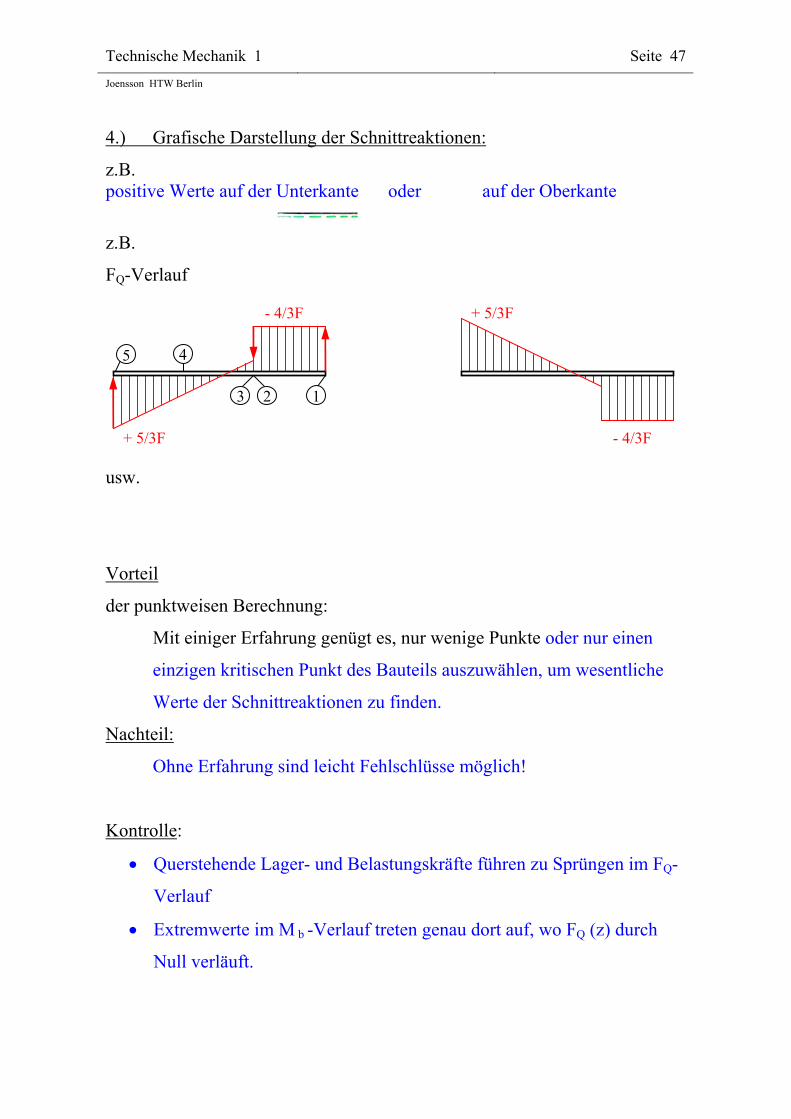
4.) Grafische Darstellung der Schnittreaktionen:
z.B. positive Werte auf der Unterkante oder auf der Oberkante
z.B.
FQ-Verlauf
usw.
Vorteil
der punktweisen Berechnung:
Mit einiger Erfahrung genügt es, nur wenige Punkte oder nur einen
einzigen kritischen Punkt des Bauteils auszuwählen, um wesentliche
Werte der Schnittreaktionen zu finden.
Nachteil:
Ohne Erfahrung sind leicht Fehlschlüsse möglich!
Kontrolle:
Querstehende Lager- und Belastungskräfte führen zu Sprüngen im FQ-
Verlauf
Extremwerte im M b -Verlauf treten genau dort auf, wo FQ (z) durch
Null verläuft.
+ 5/3F
- 4/3F
1
5 4
3 2
+ 5/3F
- 4/3F
Technische Mechanik 1 Seite 48
Joensson HTW Berlin
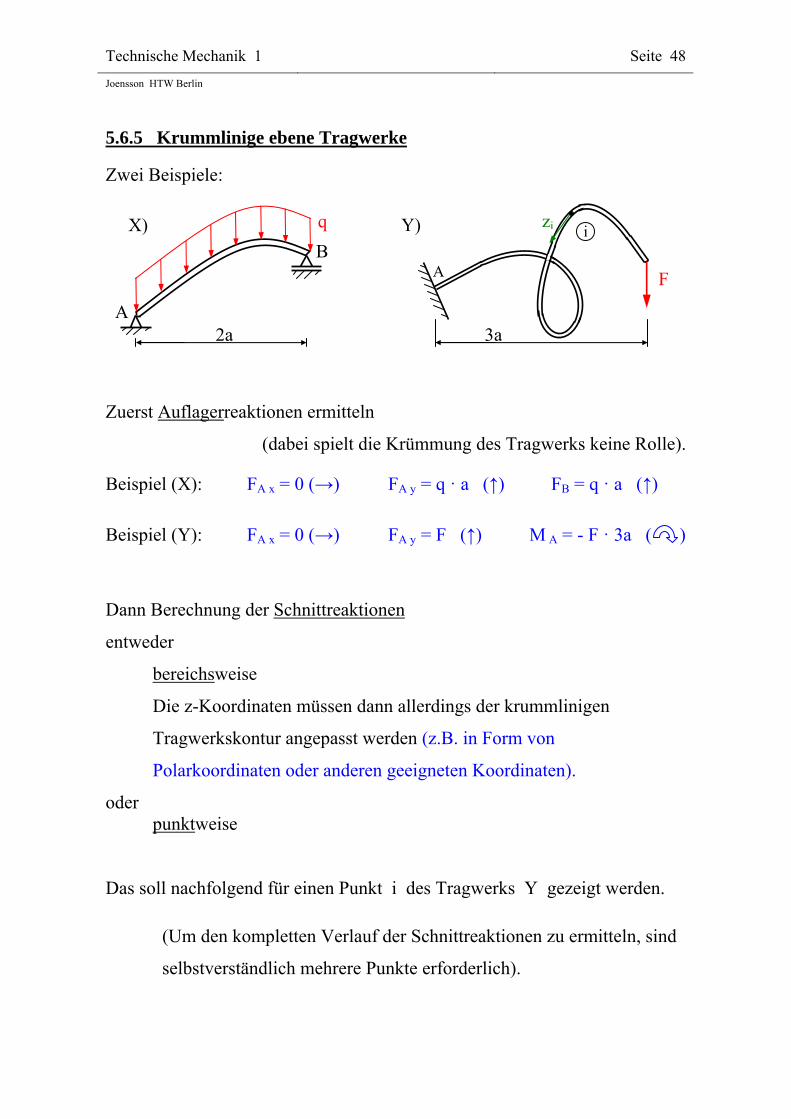
5.6.5 Krummlinige ebene Tragwerke
Zwei Beispiele:
Zuerst Auflagerreaktionen ermitteln
(dabei spielt die Krümmung des Tragwerks keine Rolle).
Beispiel (X): FA x = 0 (→) FA y = q · a (↑) FB = q · a (↑)
Beispiel (Y): FA x = 0 (→) FA y = F (↑) M A = - F · 3a ( )
Dann Berechnung der Schnittreaktionen
entweder
bereichsweise
Die z-Koordinaten müssen dann allerdings der krummlinigen
Tragwerkskontur angepasst werden (z.B. in Form von
Polarkoordinaten oder anderen geeigneten Koordinaten).
oder punktweise
Das soll nachfolgend für einen Punkt i des Tragwerks Y gezeigt werden.
(Um den kompletten Verlauf der Schnittreaktionen zu ermitteln, sind
selbstverständlich mehrere Punkte erforderlich).
i zi
A
3a
F
Y)q
B
A
X)
2a

Technische Mechanik 1 Seite 49
Joensson HTW Berlin
Für jeden gewählten Punkt i wird eine feste Einspannung auf der Seite der
Pfeilspitze von z i simuliert:
Am Festhaltepunkt i wird tangential zur Kontur die Koordinate z i angetra-
gen und in gleiche Richtung die Längskraft FL i.
FQ i „rechts abbiegend“ bezüglich z
M b i gemäß Unterkante (die vorher festgelegt wurde).
Anschließend wird hier die Last F in Komponenten zerlegt bezüglich FL i
und FQ i, Bild (c).
Dann folgen aus den Kräftebilanzen und die Schnittreaktionen FL i
und FQ i .
Für die Momentenbilanz genügt Bild (b), um mit Kraft mal Hebelarm M b i
zu ermitteln.
Auf diese Weise können für mehrere Punkte die Schnittreaktionen berechnet
und anschließend grafisch dargestellt werden.
Voraussetzung:
Schlanke Stäbe mit Krümmungen, deren Innen-Radien nicht kleiner als der
fünffache Balken-Durchmesser sein sollten.
FQi
FLi
Mbi
Fℓ Fq
F
FQi
FLi
Mbi
F
c)b) a)
= =
Technische Mechanik 1 Seite 50
Joensson HTW Berlin
6. Reibung
Haftreibung, Gleitreibung und Seilreibung 6.1 Einleitung Bisher nur Belastung durch physikalisch eingeprägte Kräfte (Einzelkräfte,
Streckenlasten) und Momente.
Zusätzlich können auch Zwangskräfte infolge Reibung als Belastung
oder als Lagerung auftreten.
Reibkräfte sind spezielle Auflagerkräfte, deren Richtungen beim
Freischneiden nicht frei wählbar sind!
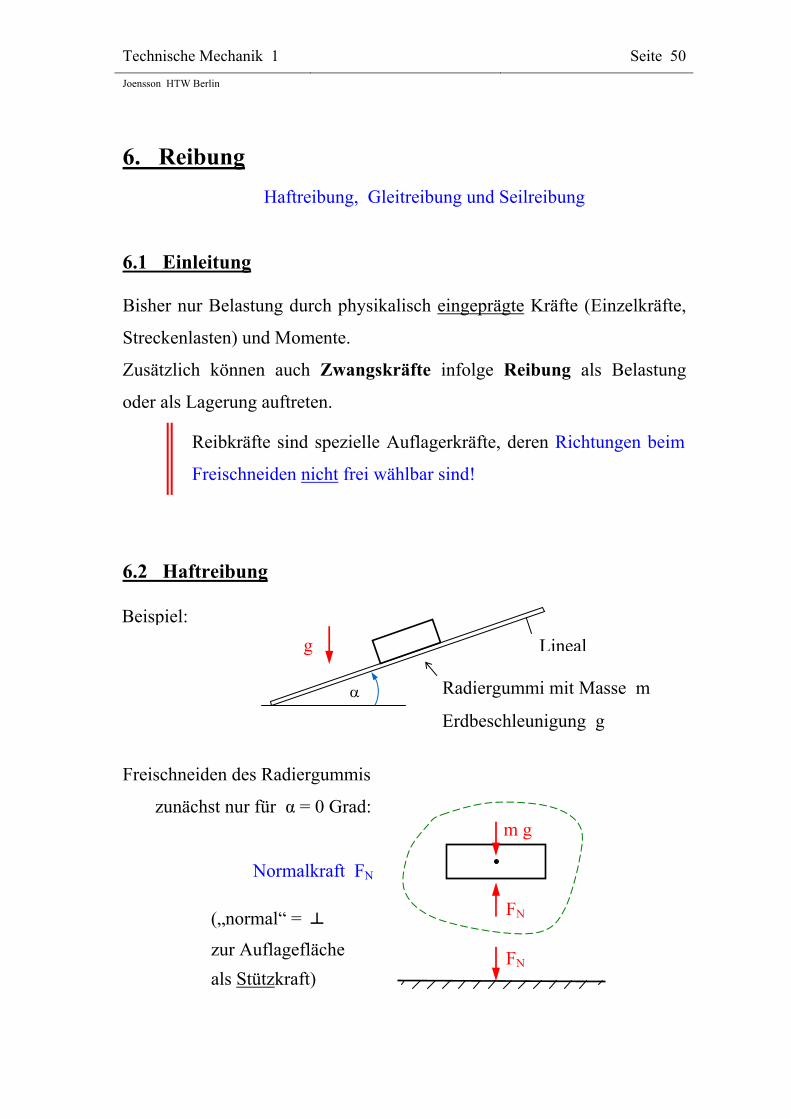
6.2 Haftreibung
Erdbeschleunigung g
Freischneiden des Radiergummis
zunächst nur für α = 0 Grad:
Normalkraft FN
(„normal“ =
zur Auflagefläche
als Stützkraft)
m g
FN
FN
g
Lineal
Radiergummi mit Masse m
Beispiel:

Technische Mechanik 1 Seite 51
Joensson HTW Berlin
In Schräglage α ≠ 0 sind zwei Stützkräfte erforderlich: FN und FR
Reibkraft FR :
entgegengesetzt zur möglichen
Bewegungsrichtung
Die Kraft FN ist außerdem um eine Strecke f parallel verschoben in
Richtung der möglichen Bewegungsrichtung.
Zerlegung der Gewichtskraft mg in zwei Komponenten:
also
Aus (3) ist die Größe der Parallelverschiebung f berechenbar.
Aus (1) folgt: FN = mg · cos α
und aus (2): FR = mg · sin α
FN
S
f
A
mg sin d 2
FR
S mg sin mg cos
FN FR
m g
S
f
„Hangabtriebskraft“
mg cos
Technische Mechanik 1 Seite 52
Joensson HTW Berlin
Erst bei einem bestimmten Winkel α = αo beginnt der Körper zu
rutschen!
Für diesen Winkel erreicht die statische Reibkraft ihren max. Wert
FRmax = mg · sin αo
Gleichzeitig wird FN minimal FNmin = mg · cos αo
Daraus folgt mg = FNmin / cos αo und eingesetzt in FRmax:
FRmax = FNmin · o
o
sin
cos
bzw. FR ≤ tan αo · FN
Der Faktor tan αo heißt Haftreibungskoeffizient μo .
Also FR ≤ μo · FN
bzw. bei voller Auslastung der Reibkraft: FR = μo · FN
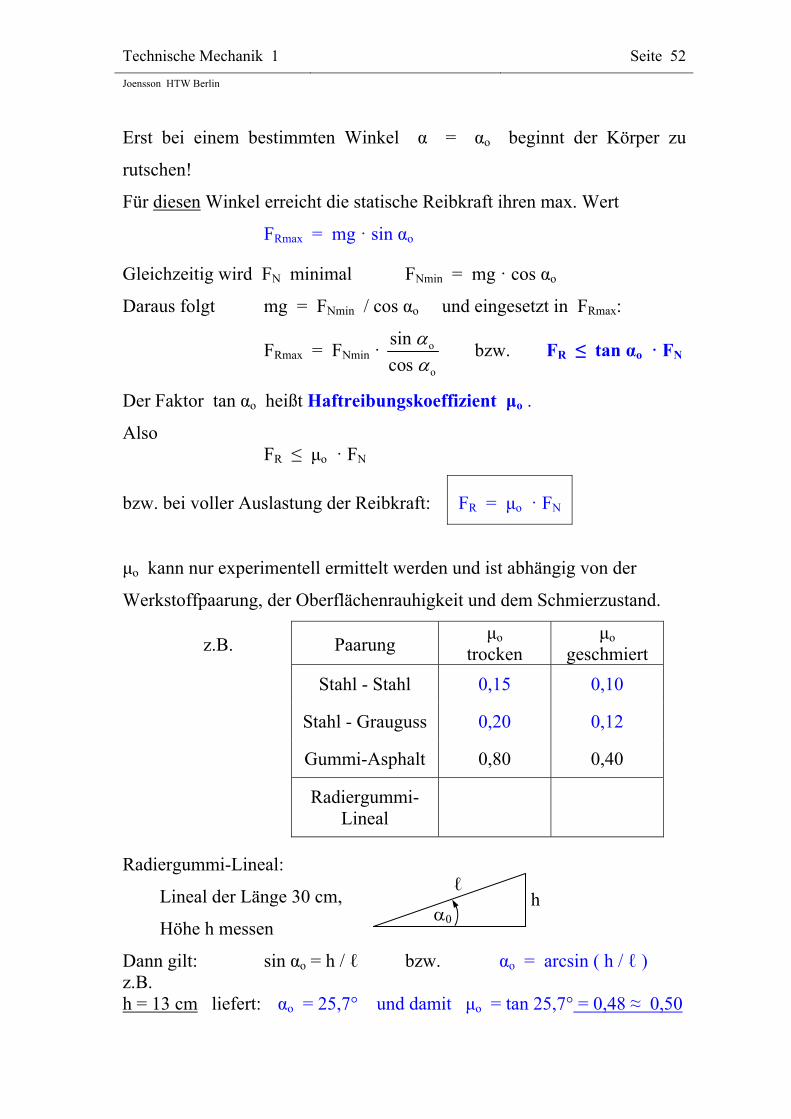
μo kann nur experimentell ermittelt werden und ist abhängig von der
Werkstoffpaarung, der Oberflächenrauhigkeit und dem Schmierzustand.
z.B. Paarung μo
trocken μo
geschmiert
Stahl - Stahl 0,15 0,10
Stahl - Grauguss 0,20 0,12
Gummi-Asphalt 0,80 0,40
Radiergummi-Lineal
Radiergummi-Lineal:
Lineal der Länge 30 cm,
Höhe h messen
Dann gilt: sin αo = h / ℓ bzw. αo = arcsin ( h / ℓ ) z.B. h = 13 cm liefert: αo = 25,7° und damit μo = tan 25,7° = 0,48 ≈ 0,50
h
ℓ
Technische Mechanik 1 Seite 53
Joensson HTW Berlin
6.3 Gleitreibung (für Bewegungsvorgänge)
trockene Reibung flüssige Reibung Mischreibung
Coulombsche vollkommen teilweise Reibung geschmiert geschmiert
mit Statik nicht berechenbar nur für konstante
Relativ-Geschwindigkeit
mit Statik-Formeln berechenbar:
FR = μ · FN Coulombsches Reibungsgesetz
mit μ Gleitreibungskoeffizient ( μ < μo )
Die Gleitreibungskraft FR ist unabhängig vom Betrag der relativen
Geschwindigkeit der aneinander reibenden Körper und wirkt stets auf das
schnellere Teil bremsend.
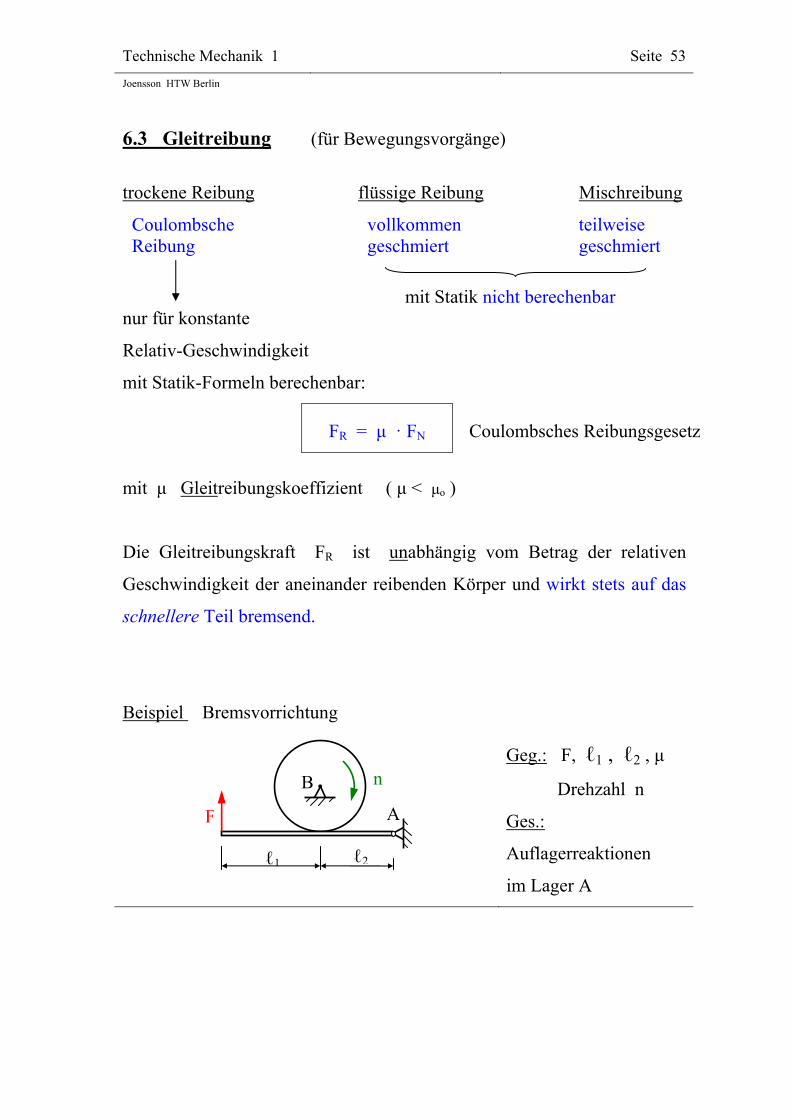
Beispiel Bremsvorrichtung
Geg.: F, ℓ1 , ℓ2 , μ
Drehzahl n
Ges.:
Auflagerreaktionen
im Lager A
F
B
A
n
ℓ2ℓ1
Technische Mechanik 1 Seite 54
Joensson HTW Berlin
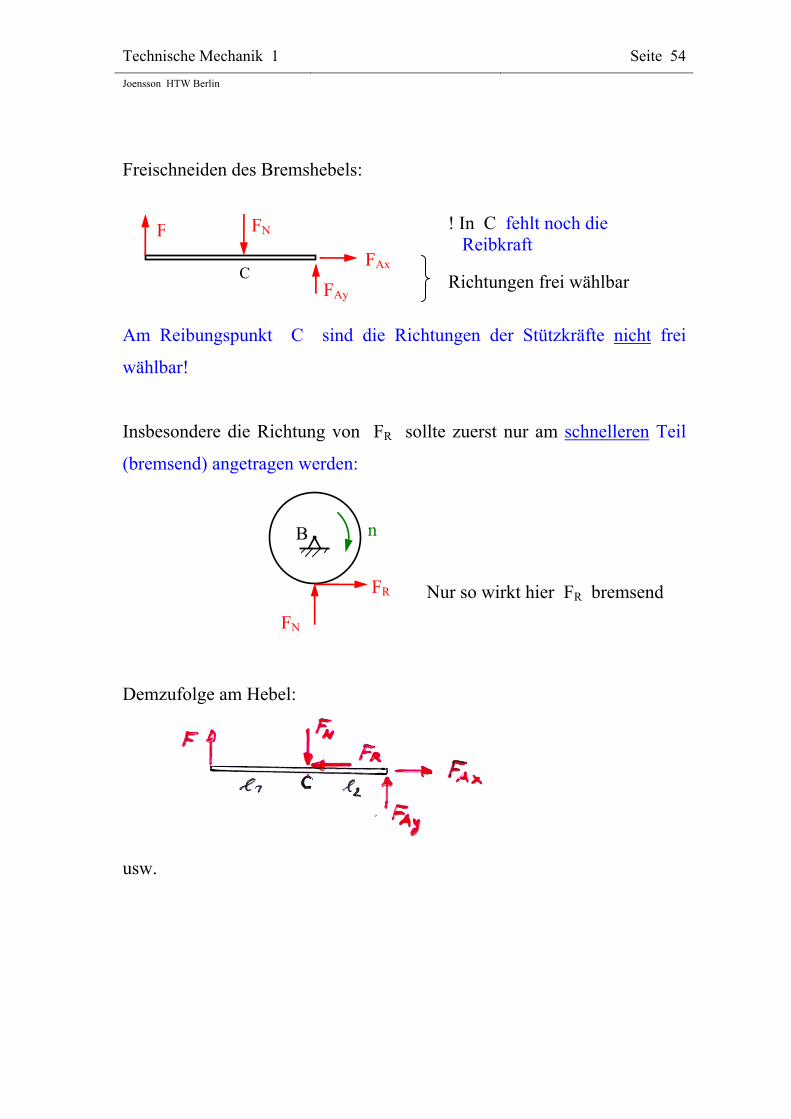
Freischneiden des Bremshebels:
! In C fehlt noch die Reibkraft
Richtungen frei wählbar
Am Reibungspunkt C sind die Richtungen der Stützkräfte nicht frei
wählbar!
Insbesondere die Richtung von FR sollte zuerst nur am schnelleren Teil
(bremsend) angetragen werden:
Nur so wirkt hier FR bremsend
Demzufolge am Hebel:
usw.
F
C
FN
FAx
FAy
FN
B n
FR

Technische Mechanik 1 Seite 55
Joensson HTW Berlin
6.4 Seilreibung (an Seiltrommeln)
nach Euler und Eytelwein
Umschlingungswinkel α
Seilkräfte FS1 , FS2
Für die Seilkräfte gilt:
FS1 = FS2 · e
bei Gleitreibung
d.h. für
Relativbewegung zwischen
Seil und Trommel (Bremsvorgänge)
sowie
FS1 = FS2 · oe
↑
bei Haftreibung
Keine Relativbewegung zwischen
Seil und Trommel (Transmission)
Jeweils mit α in Bogenmaß.
Außerdem gilt: FS1 > FS2
d.h. vor der Berechnung sollte geprüft werden, welche der beiden Seil-
kräfte die größere Kraft ist. Diese ist dann FS1 .
FS1
FS2

Technische Mechanik 1 Seite 56
Joensson HTW Berlin
Beispiel:
Geg.:
m = 1000 kg
g = 9,81 m/s2
α = 900° ( 2 ½ mal umschlungen)
μo = 0,30
μ = 0,20
Ges.: Erforderliche Haltekraft FH
Lösung:
Haftreibung FS1 = FS2 · oe
Die größere Kraft ist hier mg, d.h. FS1 = mg und FS2 = FH
also
mg = FH · oe
Daraus folgt:
FH = mg · oe
---------------------- . . . FH = 88,1 N ==========
FH
g
m

Technische Mechanik 1 Seite 57
Joensson HTW Berlin
Aufgabe K 51 Zunächst Berechnung der „Auflagerreaktionen“ FR i und FN i
Je Reibungspunkt
zwei Stützkräfte
FR und FN r = Restabstand zur Wand h = kritische Höhe (aus r über Strahlen- satz berechenbar)
Gleichgewichtsbedingungen:
Das sind nur 3 Gleichungen für 5 Unbekannte:
FR u , FN u , FR o , FN o und r.
Bei voller Auslastung der Haftreibung gilt:
r
h
b
a
U
O (Oben)
Länge ℓ
FG
FRU
FNU
FRO
FNO

Technische Mechanik 1 Seite 58
Joensson HTW Berlin
Aufgabe K 51: Lösungsweg in Matrix-Schreibweise
(nur zur Information) 5 Gleichungen mit 5 Unbekannten:
(1) (2) (3)
(4) (5)
Zuerst geordnete Reihenfolge der Unbekannten frei wählbar festlegen, z.B.
FN u , FN o , FR u , FR o und r
In dieser Reihenfolge wird jede Gleichung neu geschrieben, z.B. Gl. (1):
1 · FN u + 0 · FN o + 0 · FR u + 1 · FR o + 0 · r = + FG
usw.
bzw. rationeller in einem Matrix-Schema:
FN u FN o FR u FR o r = rechte Seite
1 0 0 1 0 FN u FG
0 1 - 1 0 0 FN o 0
- a 0 b 0 FG FR u = 0
- μo 0 1 0 0 FR o 0
0 - μo 0 1 0 r 0
Koeffizienten-Matrix K ↑ Vektor r der Unbekannten- rechten Seite
Vektor u in der gewählten Reihenfolge
d.h. K · u = r liefert den Vektor u durch Invertieren der Matrix K:
u = K -1
· r = ( 734, 220, 220, 66, 1.147 ) T für die vier Kräfte in N und die Länge r in Meter.
·
Technische Mechanik 1 Seite 59
Joensson HTW Berlin
7. Raumstatik
7.1 Auflagerreaktionen
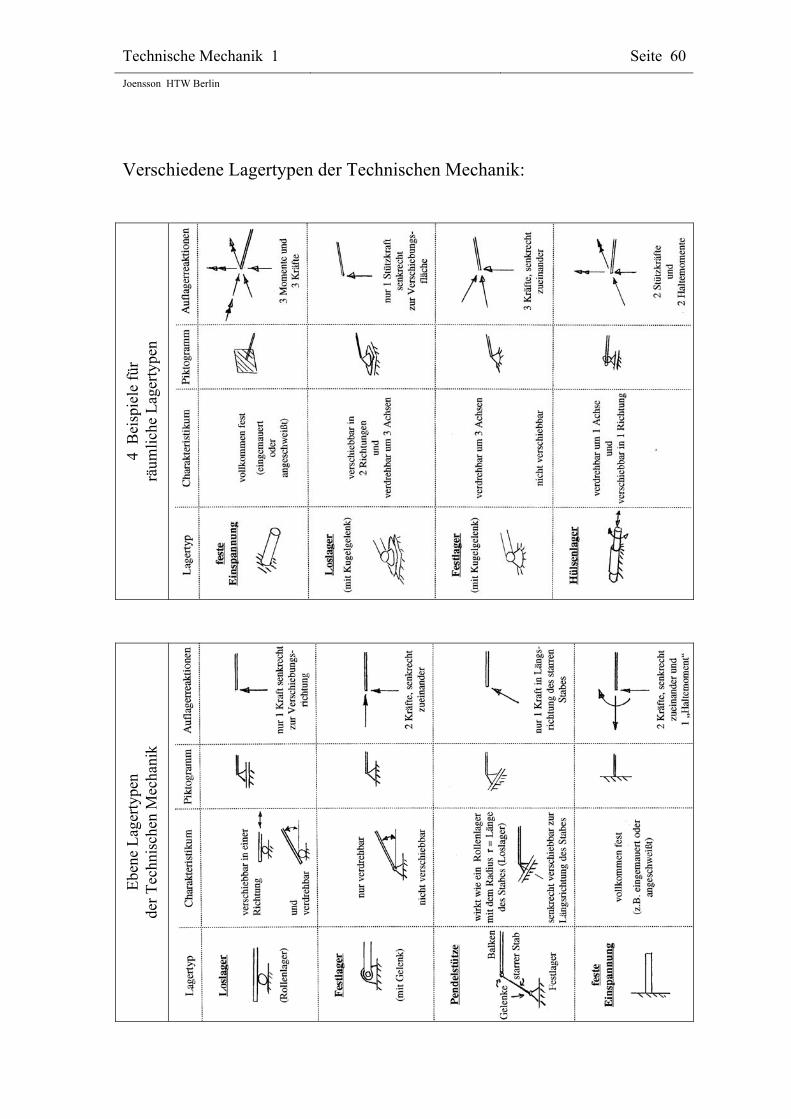
Ebene und räumliche Lagertypen Seite 60
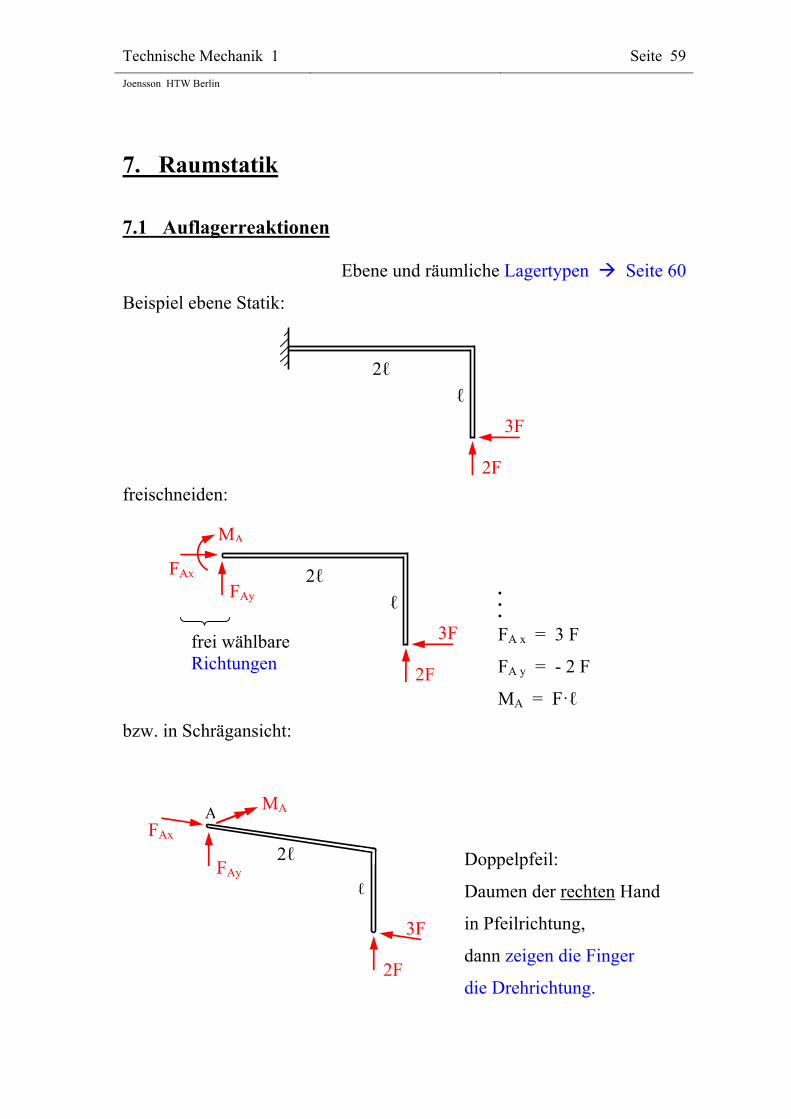
Beispiel ebene Statik:
freischneiden:
FA x = 3 F
FA y = - 2 F
MA = F·ℓ
bzw. in Schrägansicht:
Doppelpfeil:
Daumen der rechten Hand
in Pfeilrichtung,
dann zeigen die Finger
die Drehrichtung.
2ℓ
ℓ
3F
2F
2ℓ
ℓ
MA
FAy
2F
3F
FAx A
2ℓ
ℓ
3F
2F
MA
FAy FAx
frei wählbare Richtungen
Technische Mechanik 1 Seite 60
Joensson HTW Berlin
Verschiedene Lagertypen der Technischen Mechanik:
4 B
eisp
iele
für
rä
umli
che
Lag
erty
pen
Ebe
ne L
ager
type
n de
r T
echn
isch
en M
echa
nik
Technische Mechanik 1 Seite 61
Joensson HTW Berlin
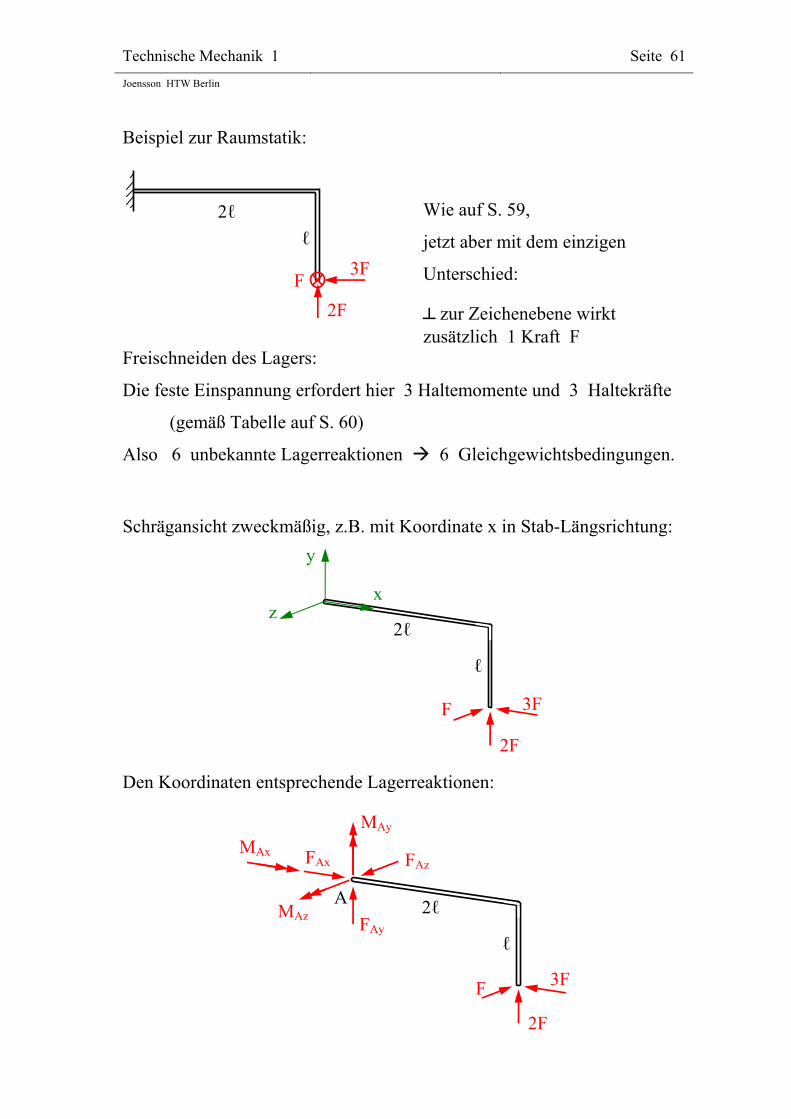
Beispiel zur Raumstatik:
Wie auf S. 59,
jetzt aber mit dem einzigen
Unterschied:
zur Zeichenebene wirkt zusätzlich 1 Kraft F
Freischneiden des Lagers:
Die feste Einspannung erfordert hier 3 Haltemomente und 3 Haltekräfte
(gemäß Tabelle auf S. 60)
Also 6 unbekannte Lagerreaktionen 6 Gleichgewichtsbedingungen.
Schrägansicht zweckmäßig, z.B. mit Koordinate x in Stab-Längsrichtung:
Den Koordinaten entsprechende Lagerreaktionen:
2ℓ
ℓ
2F
3F F
A
MAy
FAy
FAxMAx
FAz
MAz
2ℓ
ℓ
2F
3F
x
y
z
F
2ℓ
ℓ
3F
2F
F
Technische Mechanik 1 Seite 62
Joensson HTW Berlin
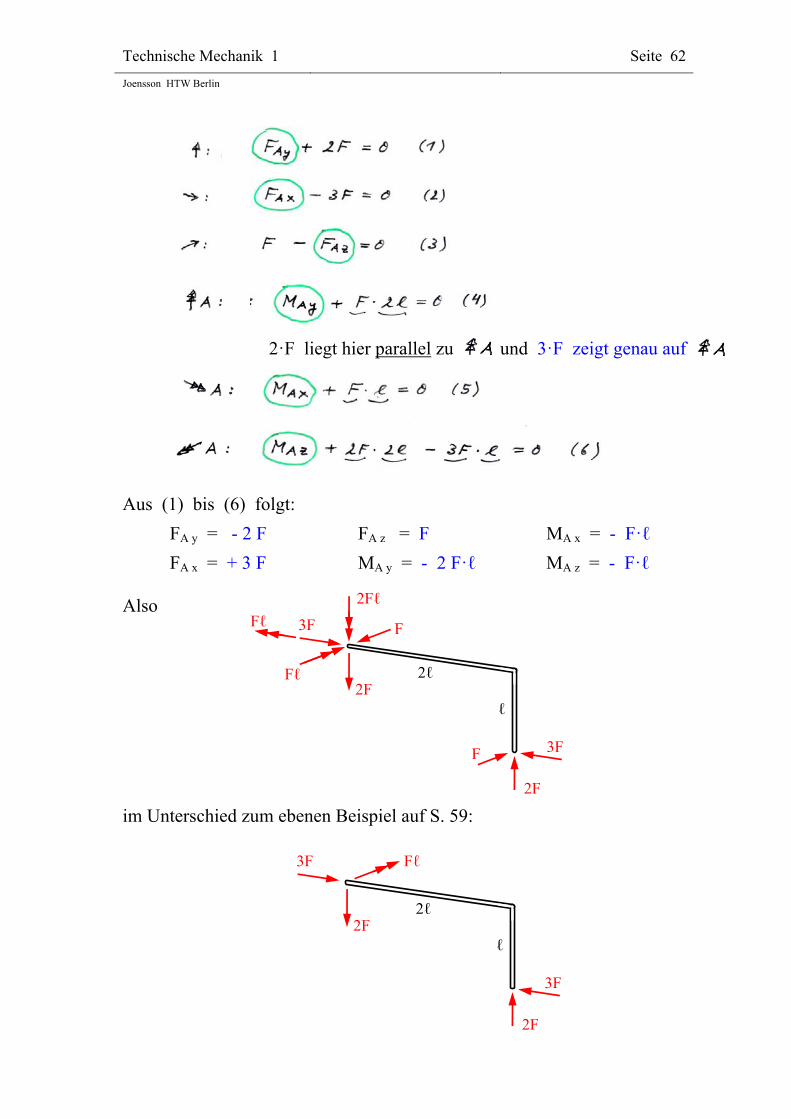
2·F liegt hier parallel zu und 3·F zeigt genau auf
Aus (1) bis (6) folgt:
FA y = - 2 F FA z = F MA x = - F·ℓ
FA x = + 3 F MA y = - 2 F·ℓ MA z = - F·ℓ
Also
im Unterschied zum ebenen Beispiel auf S. 59:
2ℓ
ℓ
2F
3F F
2Fℓ
2F
3F Fℓ F
Fℓ
2ℓ
ℓ
2F
3F
2F
3F Fℓ
Technische Mechanik 1 Seite 63
Joensson HTW Berlin
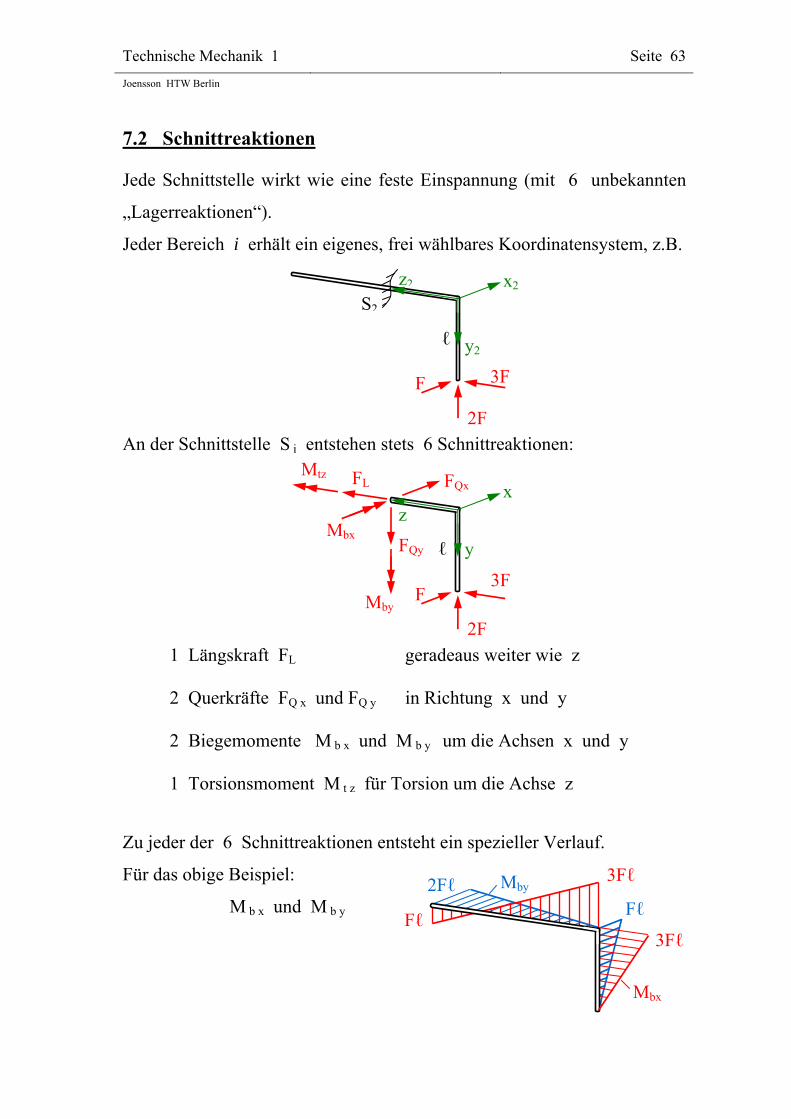
7.2 Schnittreaktionen
Jede Schnittstelle wirkt wie eine feste Einspannung (mit 6 unbekannten
„Lagerreaktionen“).
Jeder Bereich i erhält ein eigenes, frei wählbares Koordinatensystem, z.B.
An der Schnittstelle S i entstehen stets 6 Schnittreaktionen:
1 Längskraft FL geradeaus weiter wie z
2 Querkräfte FQ x und FQ y in Richtung x und y
2 Biegemomente M b x und M b y um die Achsen x und y
1 Torsionsmoment M t z für Torsion um die Achse z
Zu jeder der 6 Schnittreaktionen entsteht ein spezieller Verlauf.
Für das obige Beispiel:
M b x und M b y
3FℓFℓ
2Fℓ Mby
Fℓ
Mbx
ℓ
2F
3FF
x2
y2
z2
S2
ℓ
2F
3FF
x
y
z
FQx
FQy
Mby
Mbx
FLMtz
3Fℓ

Technische Mechanik 1 Seite 64
Joensson HTW Berlin
Leere Seite
Technische Mechanik 1 Seite 65
Joensson HTW Berlin
F e s t i g k e i t s l e h r e
1. Einleitung Technische Mechanik
Statik Festigkeitslehre Dynamik
- Auflagerreaktionen (statische Festigkeit) - Schnitt-
reaktionen Material- eigenschaften
Spannungen
und
Verformungen
Festigkeitslehre: Berechn. mechanischer Spannungen und Verformungen
sowie Vergleich dieser Werte mit zulässigen Werkstoff-
Kennwerten
1.1 Mechanische Spannungen
(„flächenbezogene“ Schnittreaktionen)
Spannung = Schnittkraft pro Fläche bzw. Schnittmoment pro Flächen- kennwert
Maßeinheit: N/mm2 oder MPa [ Mega-Pascal ]
Es gibt zwei Spannungsarten:
Normalspannung σ [ sigma ] und Schubspannung τ [ tau ]
(„normal“) zur Schnittfläche tangential zur Schnittfläche
Technische Mechanik 1 Seite 66
Joensson HTW Berlin
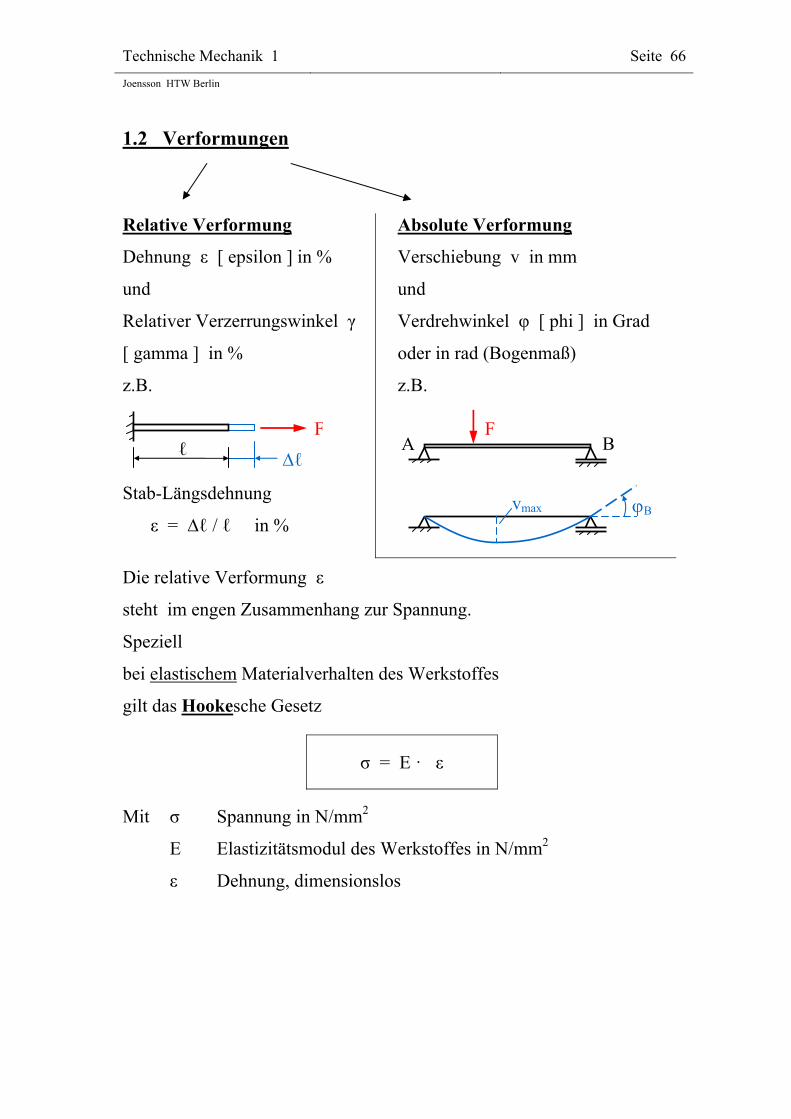
1.2 Verformungen
Relative Verformung
Dehnung ε [ epsilon ] in %
und
Relativer Verzerrungswinkel γ
[ gamma ] in %
z.B.
Stab-Längsdehnung
ε = ∆ℓ / ℓ in %
Absolute Verformung
Verschiebung v in mm
und
Verdrehwinkel φ [ phi ] in Grad
oder in rad (Bogenmaß)
z.B.
Die relative Verformung ε
steht im engen Zusammenhang zur Spannung.
Speziell
bei elastischem Materialverhalten des Werkstoffes
gilt das Hookesche Gesetz
σ = E · ε
Mit σ Spannung in N/mm2
E Elastizitätsmodul des Werkstoffes in N/mm2
ε Dehnung, dimensionslos
B AF
B vmax
Fℓ ℓ
Technische Mechanik 1 Seite 67
Joensson HTW Berlin
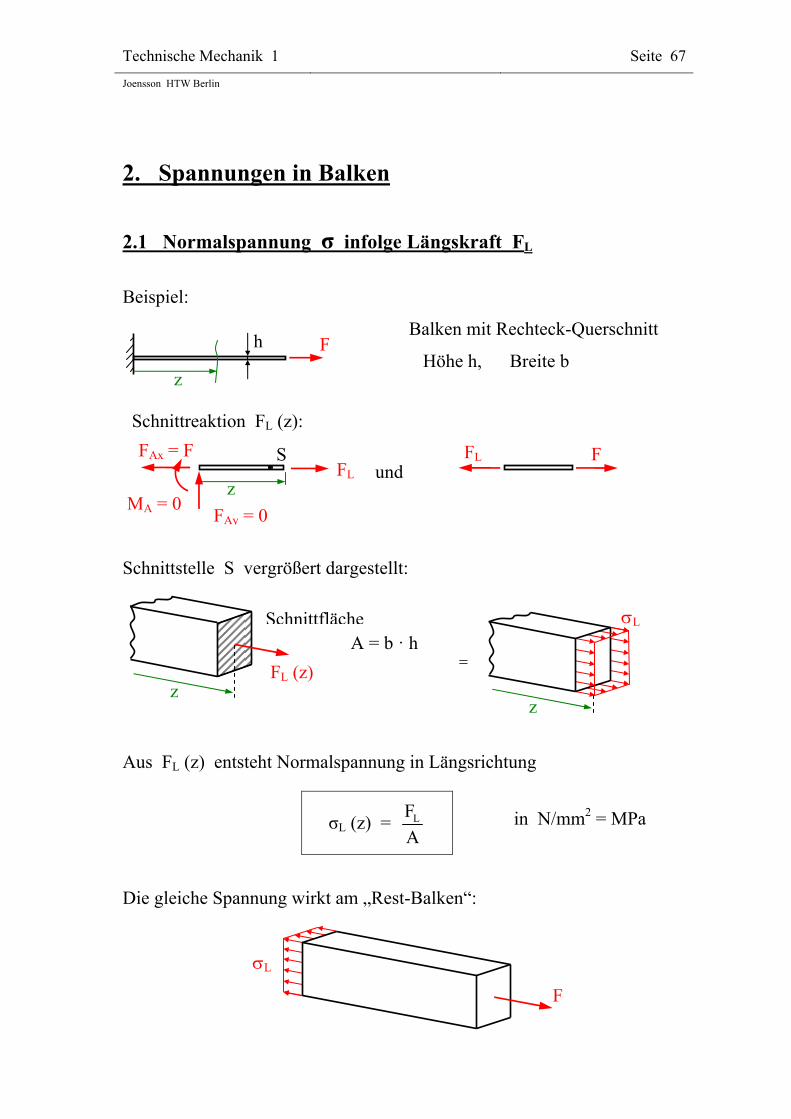
2. Spannungen in Balken
2.1 Normalspannung σ infolge Längskraft FL
Beispiel:
Balken mit Rechteck-Querschnitt
Höhe h, Breite b
Schnittreaktion FL (z):
und
Schnittstelle S vergrößert dargestellt:
A = b · h
Aus FL (z) entsteht Normalspannung in Längsrichtung
σL (z) = LF
A in N/mm2 = MPa
Die gleiche Spannung wirkt am „Rest-Balken“:
L
F
z
L
z FL (z)
F FL
S
z
FAy = 0
FAx = F
MA = 0
Fh
z
Schnittfläche
FL
Technische Mechanik 1 Seite 68
Joensson HTW Berlin
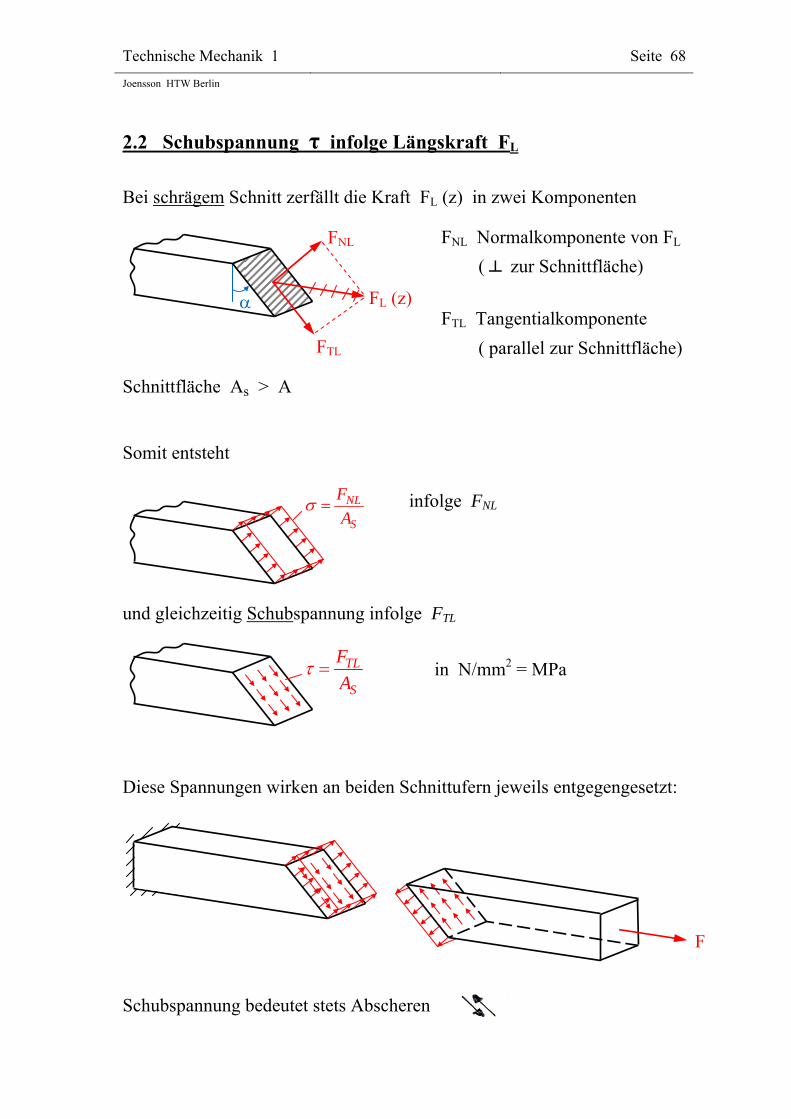
2.2 Schubspannung τ infolge Längskraft FL
Bei schrägem Schnitt zerfällt die Kraft FL (z) in zwei Komponenten
FNL Normalkomponente von FL
( zur Schnittfläche)
FTL Tangentialkomponente
( parallel zur Schnittfläche)
Schnittfläche As > A
Somit entsteht
infolge FNL
und gleichzeitig Schubspannung infolge FTL
in N/mm2 = MPa
Diese Spannungen wirken an beiden Schnittufern jeweils entgegengesetzt:
Schubspannung bedeutet stets Abscheren
F
TL
S
F
A
NL
S
F
A
FL (z)
FTL
FNL
Technische Mechanik 1 Seite 69
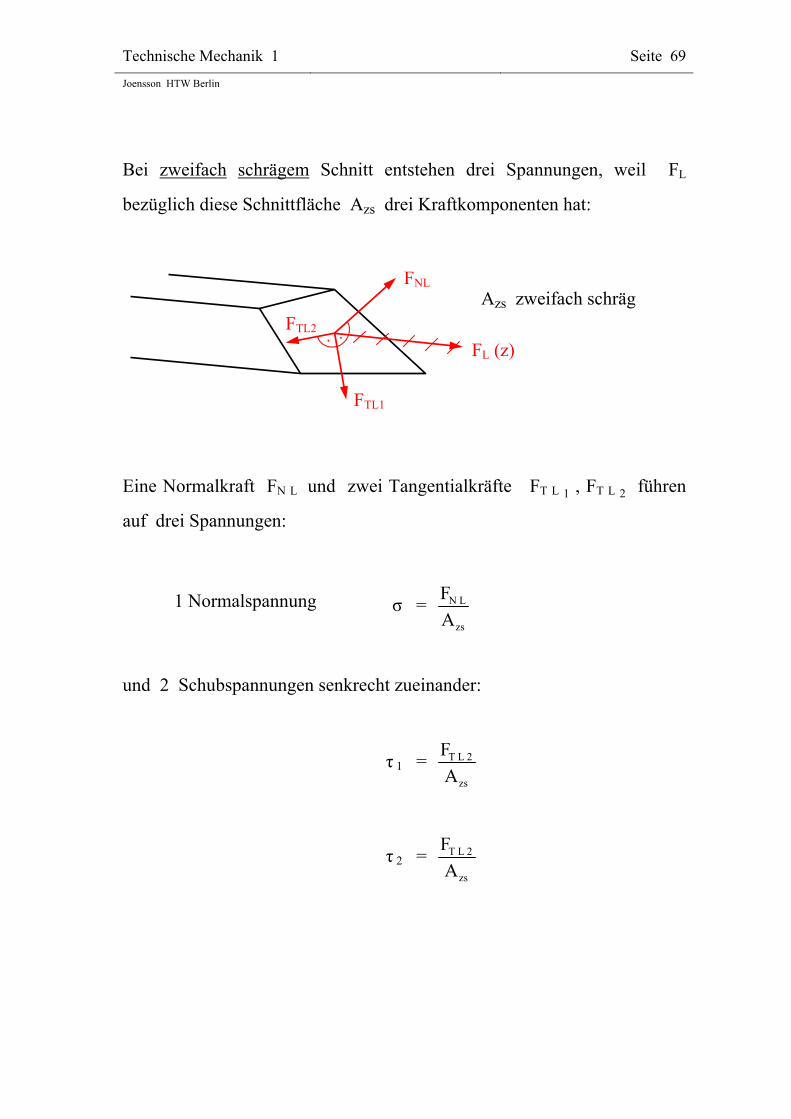
Joensson HTW Berlin
Bei zweifach schrägem Schnitt entstehen drei Spannungen, weil FL
bezüglich diese Schnittfläche Azs drei Kraftkomponenten hat:
Eine Normalkraft FN L und zwei Tangentialkräfte FT L 1 , FT L 2 führen
auf drei Spannungen:
1 Normalspannung σ = N L
zs
F
A
und 2 Schubspannungen senkrecht zueinander:
τ 1 = T L 2
zs
F
A
τ 2 = T L 2
zs
F
A
FL (z)
FTL1
FTL2
FNL Azs zweifach schräg
Technische Mechanik 1 Seite 70
Joensson HTW Berlin
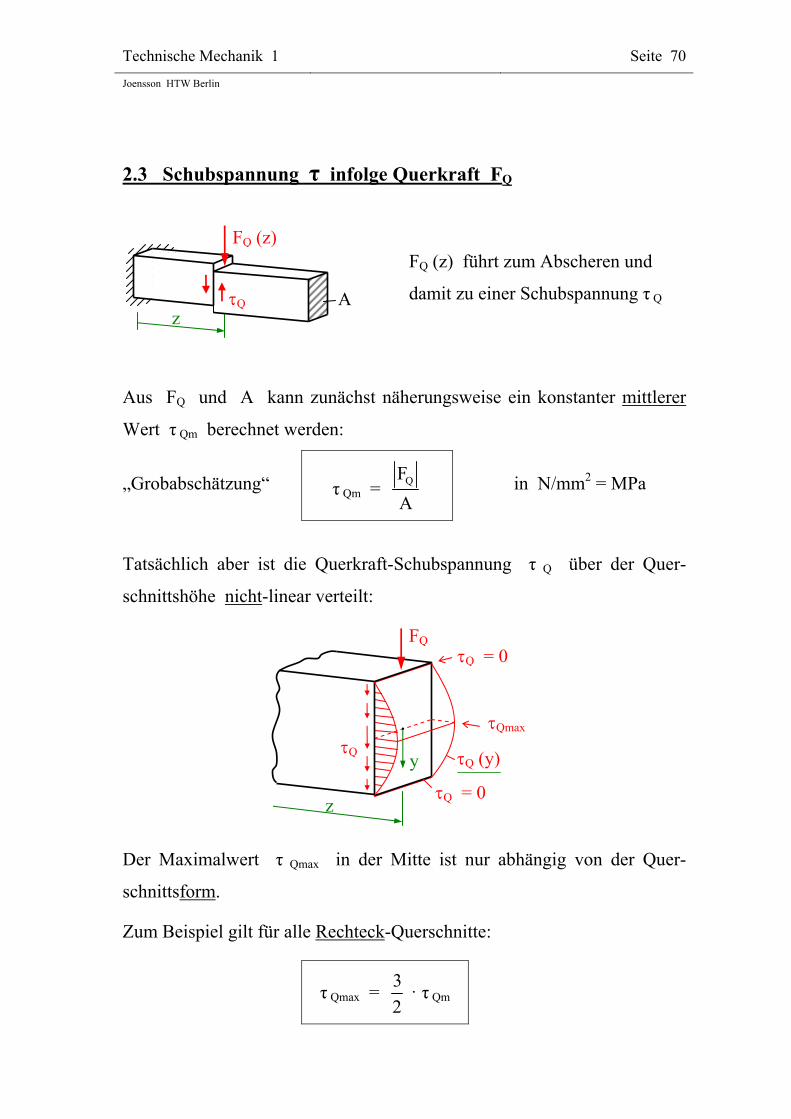
2.3 Schubspannung τ infolge Querkraft FQ
FQ (z) führt zum Abscheren und
damit zu einer Schubspannung τ Q
Aus FQ und A kann zunächst näherungsweise ein konstanter mittlerer
Wert τ Qm berechnet werden:
„Grobabschätzung“ τ Qm =
QF
A
in N/mm2 = MPa
Tatsächlich aber ist die Querkraft-Schubspannung τ Q über der Quer-
schnittshöhe nicht-linear verteilt:
Der Maximalwert τ Qmax in der Mitte ist nur abhängig von der Quer-
schnittsform.
Zum Beispiel gilt für alle Rechteck-Querschnitte:
τ Qmax =
3
2 · τ Qm
Q
FQ Q = 0
Qmax
Q = 0
y
z
Q (y)
FQ (z)
z A Q
Technische Mechanik 1 Seite 71
Joensson HTW Berlin
Für Vollkreis-Querschnitte:
τ Qmax =
4
3 · τ Qm
Für dünnwandige Rohr-Querschnitte:
τ Qmax = 2 · τ Qm
bzw. für beliebige Rohr-Querschnitte:
τ Qmax = k · τ Qm
mit k = 2 2
2 2
4 · ( r r · r r )
3 · ( r r )i i a a
i a
Bei schlanken Balken ist die Schubspannung τ Qmax deutlich kleiner als die
maximale Biegespannung:
τ Qmax << σ b max
und kann deshalb für derartige Balken vernachlässigt werden.
Bei nicht-schlanken Balken (kurze Schrauben, Nieten und Stifte) kann
jedoch τ Qmax größer werden als σ b max
und muss dann unbedingt mit berechnet werden, wenn die Festigkeit des
Bauteils ermittelt werden soll.
Technische Mechanik 1 Seite 72
Joensson HTW Berlin
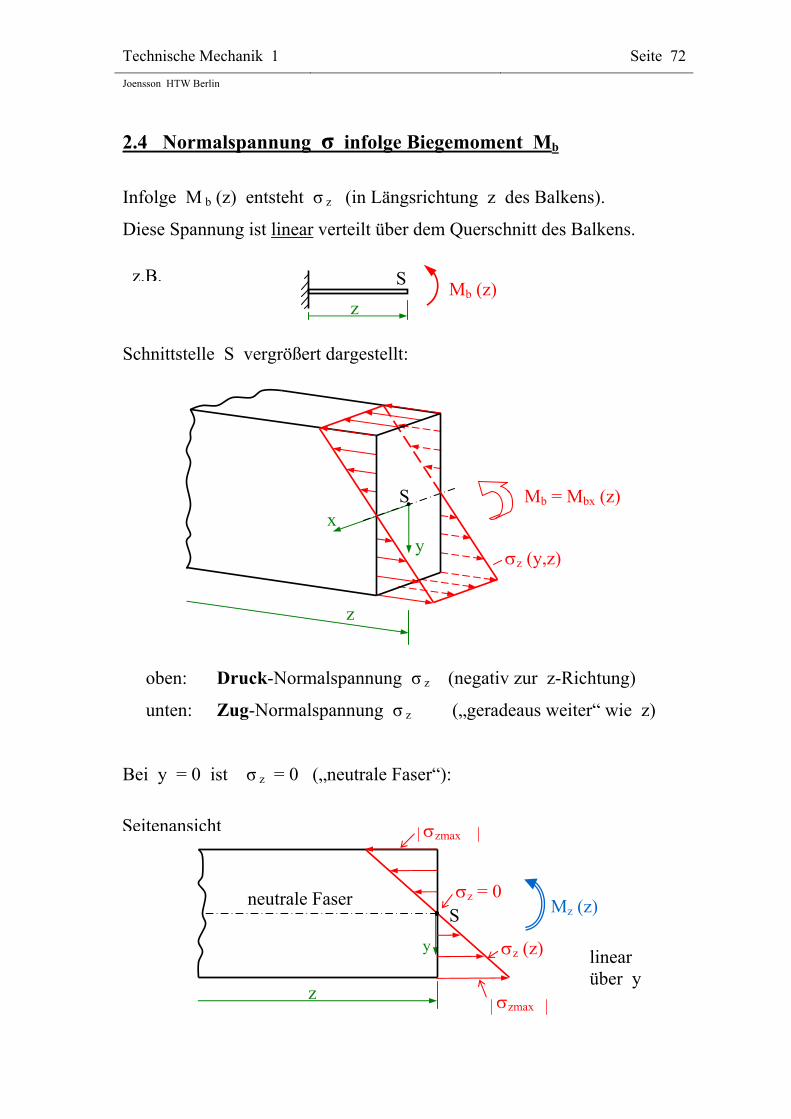
2.4 Normalspannung σ infolge Biegemoment Mb
Infolge M b (z) entsteht σ z (in Längsrichtung z des Balkens).
Diese Spannung ist linear verteilt über dem Querschnitt des Balkens.
Schnittstelle S vergrößert dargestellt:
oben: Druck-Normalspannung σ z (negativ zur z-Richtung)
unten: Zug-Normalspannung σ z („geradeaus weiter“ wie z)
Bei y = 0 ist σ z = 0 („neutrale Faser“):
neutrale Faser
z (z)
z = 0
zmax
zmax
S Mz (z)
z
y
y
x
z
z (y,z)
Mb = Mbx (z) S
S Mb (z)
z
Seitenansicht
linear über y
z.B.

Technische Mechanik 1 Seite 73
Joensson HTW Berlin
Der jeweils größte Betrag σ z max im Querschnitt bei z heißt
„ Biegespannung “ σ b = σ z max
Berechnungsformel:
Betrag des Biegemomentes σ b = b
b
M
W
=
Widerstandsmoment gegen Biegung
bzw. ausführlicher
σ b (z) =
b
b
M z
W z
Die so genannte Biegespannung ist lediglich eine Spannung am Rand des
Querschnittes!
Das „Widerstandsmoment“ W b ist kein mechanisches Moment (Kraft mal
Hebelarm), sondern
eine spezielle Querschnittskenngröße (ähnlich dem Flächeninhalt A),
allerdings mit der Maßeinheit mm3 Kubik-Millimeter.
W b ist nur eine abgeleitete Hilfsgröße
aus Flächenträgheitsmomenten I x x oder I y y (siehe später in TM 2).
Technische Mechanik 1 Seite 74
Joensson HTW Berlin
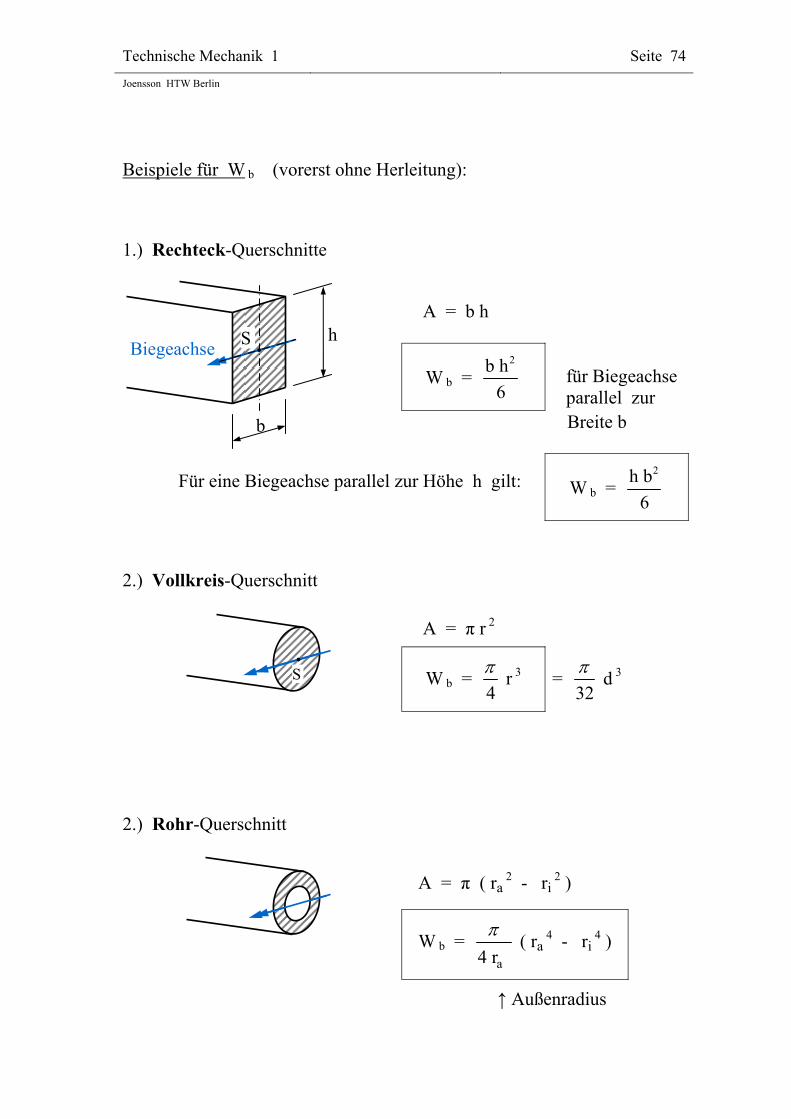
Beispiele für W b (vorerst ohne Herleitung):
1.) Rechteck-Querschnitte
A = b h
W b = 2b h
6
für Biegeachse parallel zur
Breite b
Für eine Biegeachse parallel zur Höhe h gilt: W b = 2h b
6
2.) Vollkreis-Querschnitt
A = π r 2
W b = 4
r 3 =
32
d 3
2.) Rohr-Querschnitt
A = π ( ra 2 - ri
2 )
W b = a4 r
( ra
4 - ri 4 )
↑ Außenradius
S
Biegeachse S h
b
Technische Mechanik 1 Seite 75
Joensson HTW Berlin
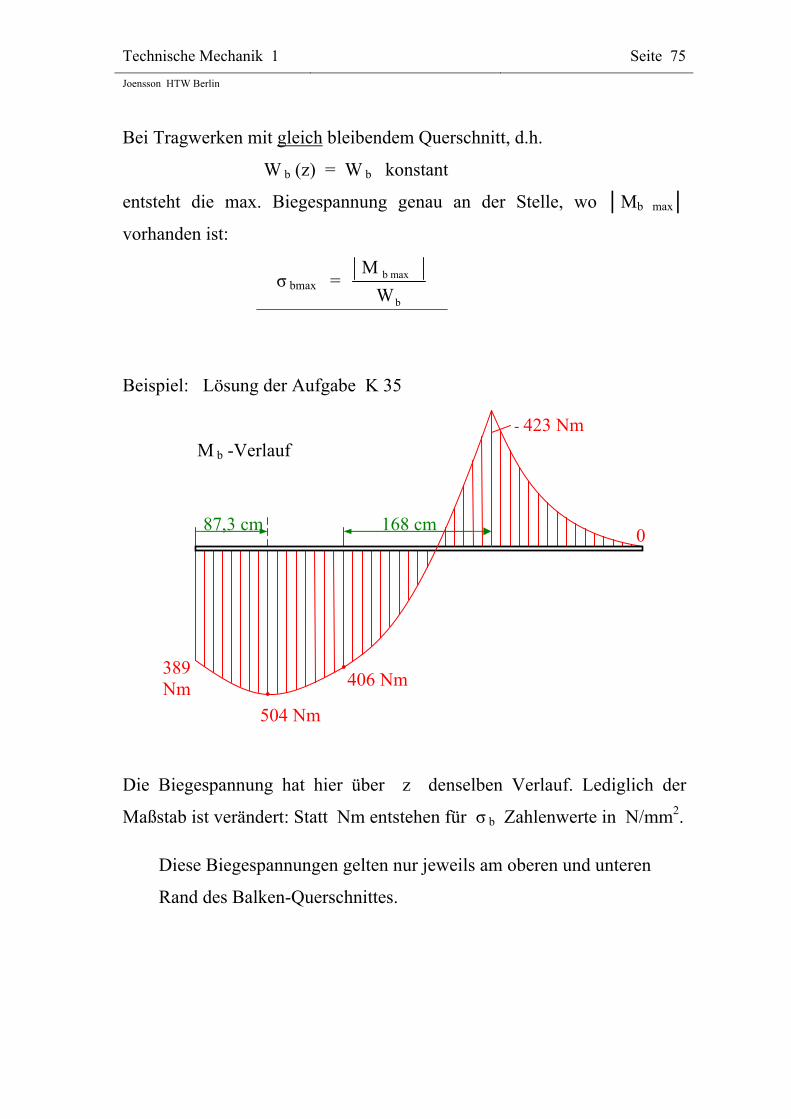
Bei Tragwerken mit gleich bleibendem Querschnitt, d.h.
W b (z) = W b konstant
entsteht die max. Biegespannung genau an der Stelle, wo Mb max
vorhanden ist:
σ bmax = b max
b
M
W
Beispiel: Lösung der Aufgabe K 35
Die Biegespannung hat hier über z denselben Verlauf. Lediglich der
Maßstab ist verändert: Statt Nm entstehen für σ b Zahlenwerte in N/mm2.
Diese Biegespannungen gelten nur jeweils am oberen und unteren
Rand des Balken-Querschnittes.
87,3 cm 168 cm
- 423 Nm
0
406 Nm
504 Nm
389 Nm
M b -Verlauf
Technische Mechanik 1 Seite 76
Joensson HTW Berlin
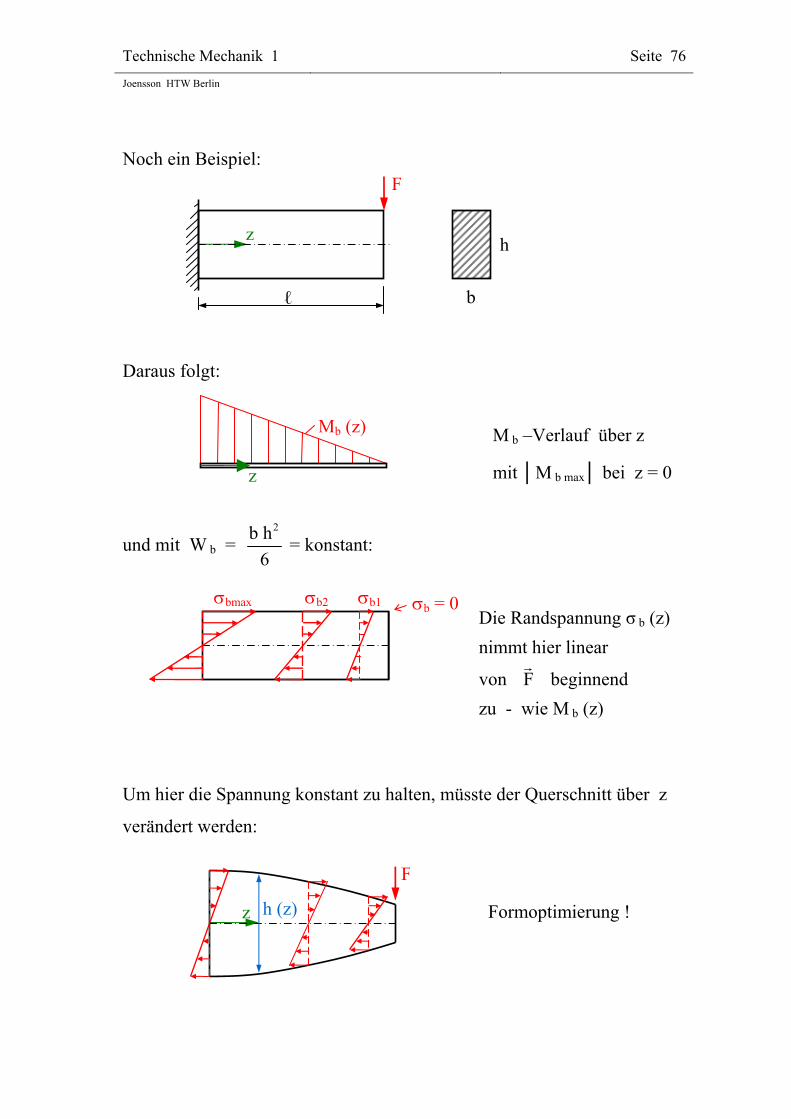
Noch ein Beispiel:
Daraus folgt:
M b –Verlauf über z
mit M b max bei z = 0
und mit W b = 2b h
6 = konstant:
Die Randspannung σ b (z)
nimmt hier linear
von F
beginnend
zu - wie M b (z)
Um hier die Spannung konstant zu halten, müsste der Querschnitt über z
verändert werden:
Formoptimierung !
F
z h (z)
bmax b2 b1 b = 0
z
Mb (z)
F
z
ℓ b
h
Technische Mechanik 1 Seite 77
Joensson HTW Berlin
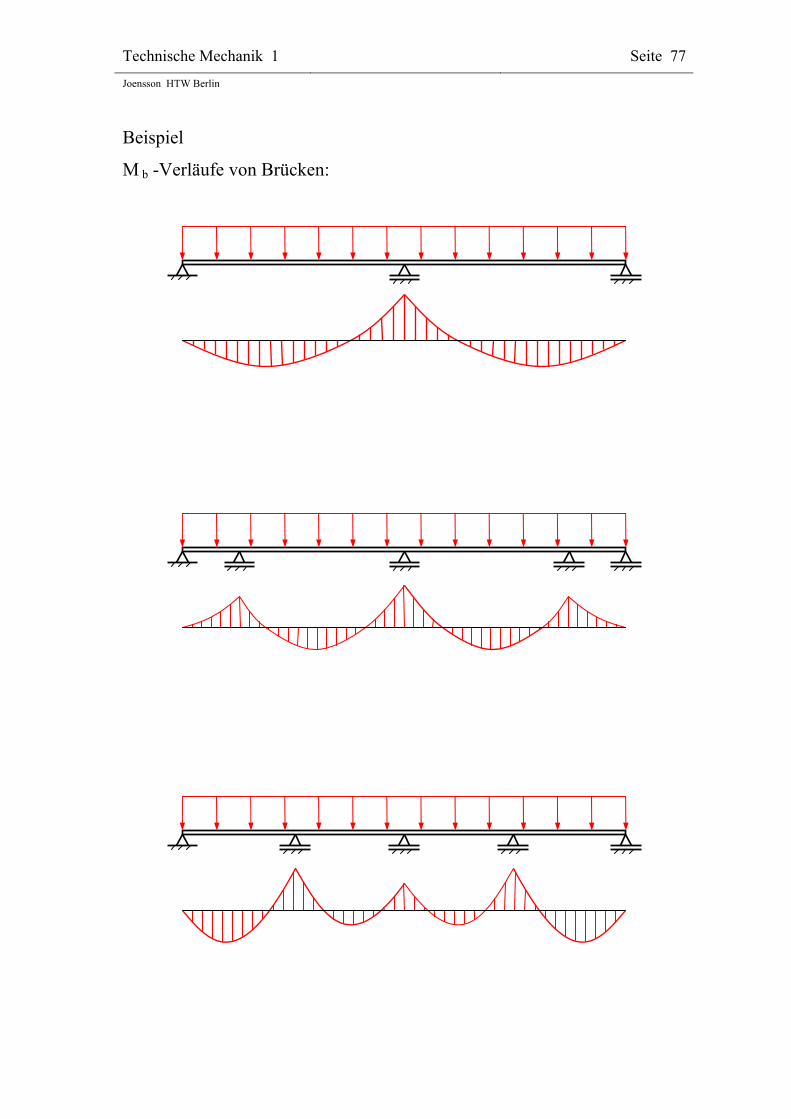
Beispiel
M b -Verläufe von Brücken:
Technische Mechanik 1 Seite 78
Joensson HTW Berlin
2.5 Spannungsnachweis
Die berechnete max. Spannung muss kleiner oder gleich einer zulässigen
Spannung sein:
σ max ≤ σzul Spannungsnachweis
bzw.
σ b max ≤ σzul wenn nur Biegespannung vorkommt
oder
τ max ≤ τzul wenn nur Schubspannung vorkommt
mit τzul ≈ 0,8 · σzul
Wenn Normalspannungen und Schubspannungen gleichzeitig auftreten:
Spannungsnachweis für mehrachsige Beanspruchung erforderlich
( TM 2)
σzul ist der zulässige Werkstoff-Kennwert:
σzul = krit
S
mit S: Sicherheitsfaktor
! Je nach Einsatzgebiet (Kranbau, allgemeiner Maschinenbau,
Fahrzeugbau usw.) gibt es für σzul und τzul verschiedene
Richtwerte!
In erster Näherung S ≈ 1,5 für statische Beanspruchung
und S > 2 für dynamische Beanspruchung
Technische Mechanik 1 Seite 79
Joensson HTW Berlin
σkrit ist der kritische Werkstoff-Kennwert:
z.B. = „ Streckgrenze “ Re bei Baustahl
oder = „ 0,2%-Dehngrenze “ Rp0,2 bei hochfestem Stahl oder bei Aluminium
oder = „ Zugfestigkeit “ Rm bei Gusseisen
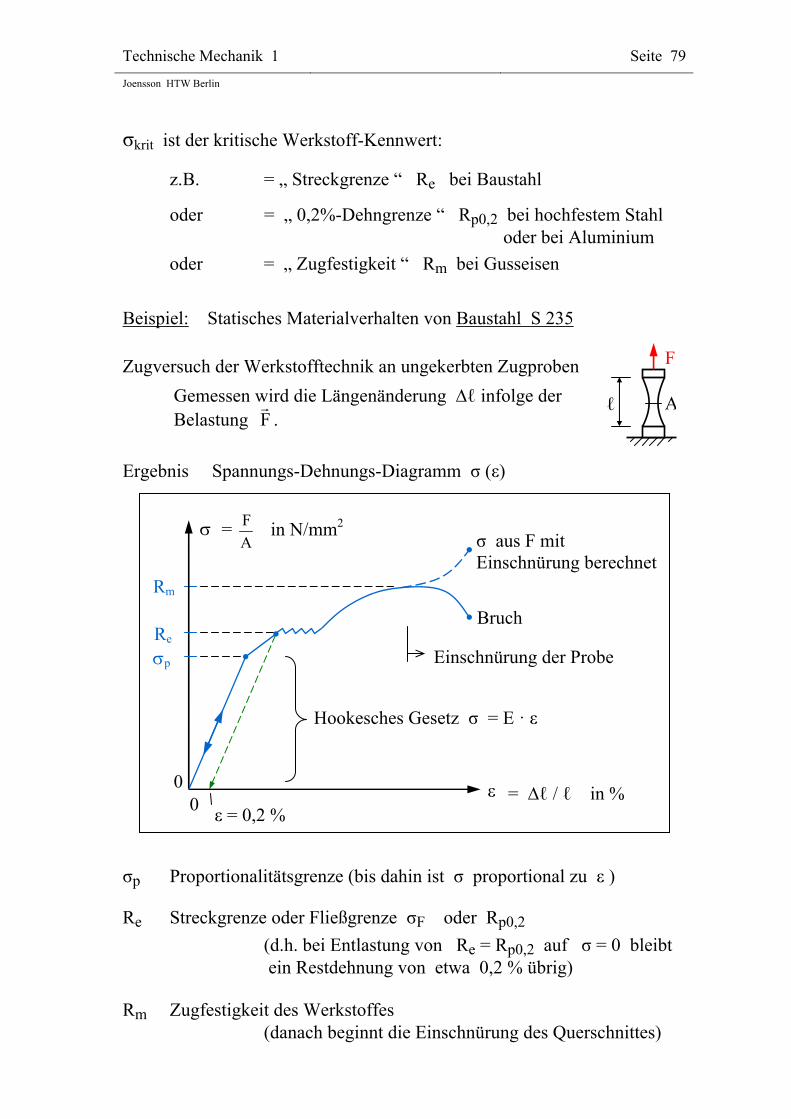
Beispiel: Statisches Materialverhalten von Baustahl S 235
Zugversuch der Werkstofftechnik an ungekerbten Zugproben
Gemessen wird die Längenänderung ∆ℓ infolge der Belastung F
.
Ergebnis Spannungs-Dehnungs-Diagramm σ (ε)
σp Proportionalitätsgrenze (bis dahin ist σ proportional zu ε )
Re Streckgrenze oder Fließgrenze σF oder Rp0,2
(d.h. bei Entlastung von Re = Rp0,2 auf σ = 0 bleibt ein Restdehnung von etwa 0,2 % übrig)
Rm Zugfestigkeit des Werkstoffes (danach beginnt die Einschnürung des Querschnittes)
0 0
pRe
Rm
ε = 0,2 %
Hookesches Gesetz σ = E · ε
σ aus F mit Einschnürung berechnet
Einschnürung der Probe
Bruch
= ∆ℓ / ℓ in %
= F
A in N/mm2
F
Aℓ
Technische Mechanik 1 Seite 80
Joensson HTW Berlin
Mit σzul = eR
1,5 wird sichergestellt, dass der größte Spannungswert
kleiner als σp ist.
Das Bauteil darf dann mit σzul unendlich oft statisch (langsam) belastet
und entlastet werden.
Wenn der Spannungsnachweis nicht erfüllt ist, muss das Tragwerk
neu dimensioniert
werden: Querschnitts-Dimensionen verändern
und / oder
anderen Werkstoff verwenden.
Spannungsnachweis und Auslastungsgrad:
σ max ≤ σzul durch σzul liefert den „Auslastungsgrad“ a:
a = max
zul
≤ 1,0
Der Spannungsnachweis ist erfüllt für a ≤ 100 %
und ist nicht erfüllt für a > 100 %.
Inhaltsverzeichnis Technische Mechanik 2
Festigkeitslehre weiter
3. Flächenträgheitsmomente 1
3.1 Einleitung 1
3.2 Berechnung von Flächenträgheitsmomenten 3
3.3 Flächenträgheitsmomente mit Steiner-Anteil 7
3.4 Flächenträgheitsmomente für zusammengesetzte Flächen 8
3.5 Berechnung des Flächenschwerpunktes 10
3.6 Hauptträgheitsmomente 12
4. Biegeverformung elastischer Balken 15
4.1 Einleitung 15
4.2 Lösungsweg „Biegelinie“ 15
4.3 Überlagerung von Verformungen 24
4.4 Statisch unbestimmte Auflager 28
5. Torsion 29
5.1 Einleitung 29
5.2 Torsion kreiszylindrischer Stäbe 31
5.3 Reine Torsion von Stäben mit beliebiger Querschnittsform 34
5.4 Ort der maximalen Torsions-Schubspannung 37
5.5 Der Schubmittelpunkt und seine Torsionswirkung 37
6. Vergleichsspannungen 39
6.1 Einleitung 39
6.2 Die Normalspannungshypothese 41
6.3 Die Gestaltänderungsenergiehypothese 41
6.4 Spannungsnachweis für mehrachsig beanspruchte Balken mit kreisförmigen Querschnitten
42

Inhaltsverzeichnis Technische Mechanik 2
7. Gestaltfestigkeit 46
7.1 Statische Festigkeit gekerbter Bauteile 46
7.2 Statischer Spannungsnachweis für gekerbte Bauteile 53
7.3 Dynamische Gestaltfestigkeit 54
8. Knickung elastischer Stäbe 55
8.1 Einleitung 55
8.2 Elastische Stabknickung nach Euler 55
8.3 Knickspannung und Gültigkeitsgrenze der elastischen Stabknickung 57
8.4 Nichtelastisches Knicken nach Tetmajer 61
8.5 Das Knickspannungs-Diagramm 62
8.6 Stab-Dimensionierung auf Druckbeanspruchung 64
8.7 Biegeknicken 65
Inhaltsverzeichnis zu TM 1 (Statik) ab Seite 2
der vorliegenden Datei Skript_TM.pdf
Inhaltsverzeichnis zu TM 3 (Dynamik) ab Seite 156
Technische Mechanik 2 Seite 1
Joensson HTW Berlin
3. Flächenträgheitsmomente
3.1 Einleitung
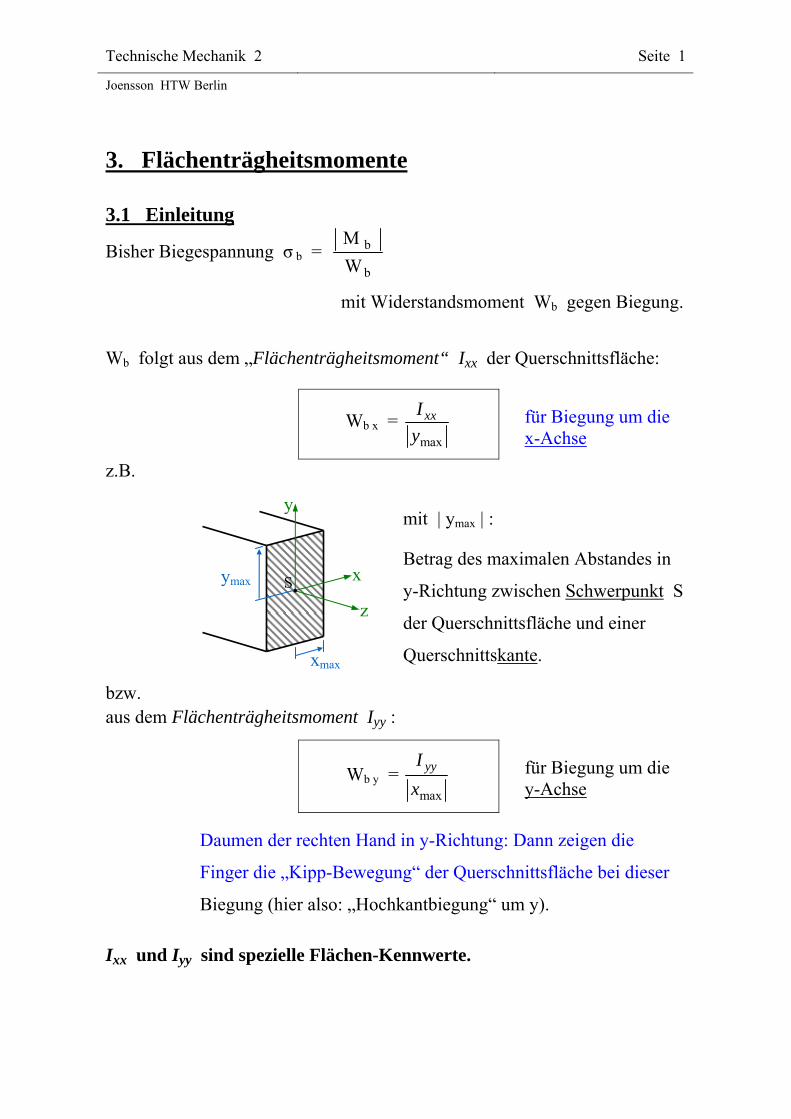
Bisher Biegespannung σ b = b
b
M
W
mit Widerstandsmoment Wb gegen Biegung.
Wb folgt aus dem „Flächenträgheitsmoment“ Ixx der Querschnittsfläche:
Wb x =
max
xxI
y für Biegung um die
x-Achse
z.B.
mit | ymax | :
Betrag des maximalen Abstandes in
y-Richtung zwischen Schwerpunkt S
der Querschnittsfläche und einer
Querschnittskante.
bzw. aus dem Flächenträgheitsmoment Iyy :
Wb y =
max
yyI
x für Biegung um die
y-Achse
Daumen der rechten Hand in y-Richtung: Dann zeigen die
Finger die „Kipp-Bewegung“ der Querschnittsfläche bei dieser
Biegung (hier also: „Hochkantbiegung“ um y).
Ixx und Iyy sind spezielle Flächen-Kennwerte.
S ymax
xmax
y
x
z
Technische Mechanik 2 Seite 2
Joensson HTW Berlin
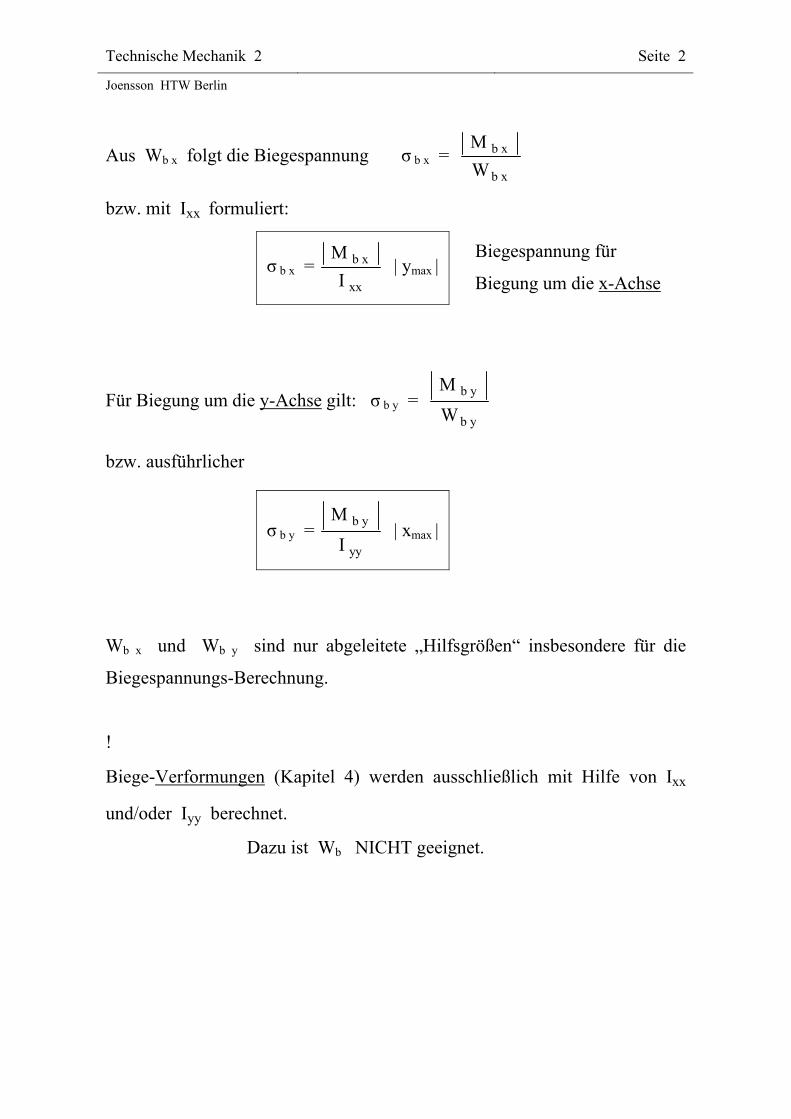
Aus Wb x folgt die Biegespannung σ b x = b x
b x
M
W
bzw. mit Ixx formuliert:
σ b x = b x
xx
M
I | ymax |
Biegespannung für
Biegung um die x-Achse
Für Biegung um die y-Achse gilt: σ b y = b y
b y
M
W
bzw. ausführlicher
σ b y =
b y
yy
M
I | xmax |
Wb x und Wb y sind nur abgeleitete „Hilfsgrößen“ insbesondere für die
Biegespannungs-Berechnung.
!
Biege-Verformungen (Kapitel 4) werden ausschließlich mit Hilfe von Ixx
und/oder Iyy berechnet.
Dazu ist Wb NICHT geeignet.
Technische Mechanik 2 Seite 3
Joensson HTW Berlin
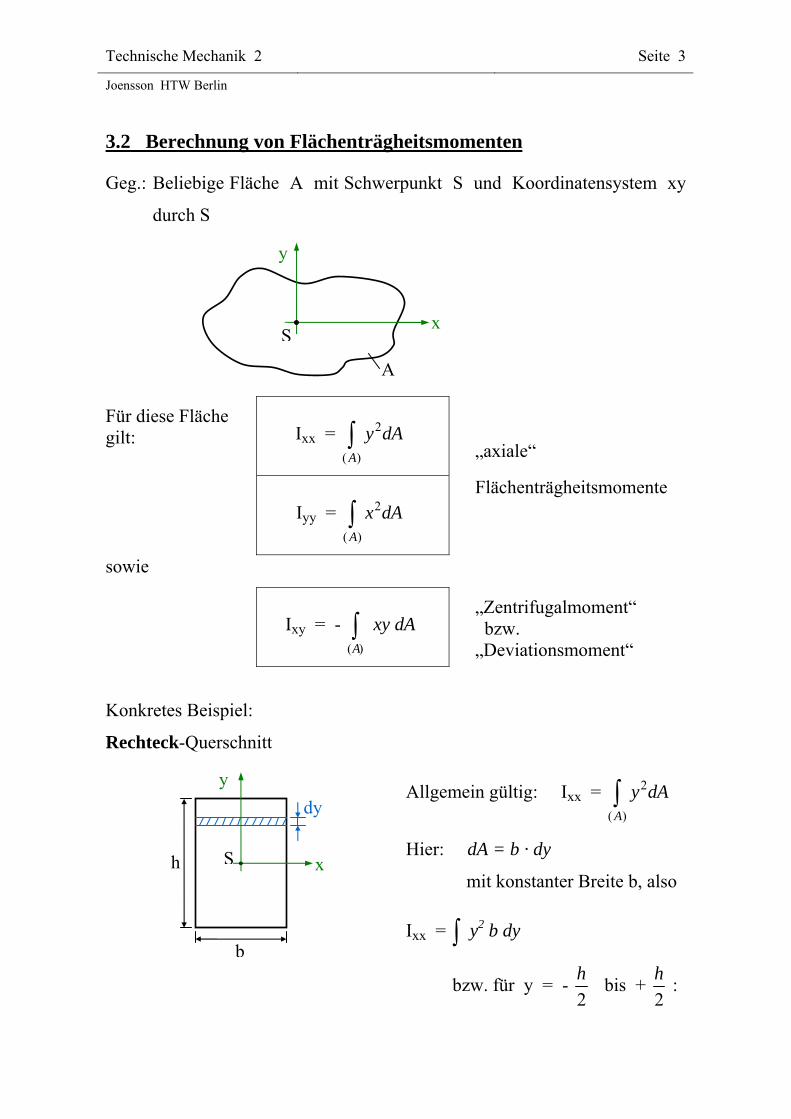
3.2 Berechnung von Flächenträgheitsmomenten
Geg.: Beliebige Fläche A mit Schwerpunkt S und Koordinatensystem xy
durch S
Für diese Fläche gilt: Ixx = 2
( )A
y dA „axiale“
Iyy = 2
( )A
x dA Flächenträgheitsmomente
sowie
Ixy = -
( )A xy dA
„Zentrifugalmoment“ bzw. „Deviationsmoment“
Konkretes Beispiel:
Rechteck-Querschnitt
Allgemein gültig: Ixx = 2
( )A
y dA
Hier: dA = b · dy
mit konstanter Breite b, also
Ixx = y2 b dy
bzw. für y = - 2
h bis +
2
h :
dy
x
y
h
b
S
x
y
S
A
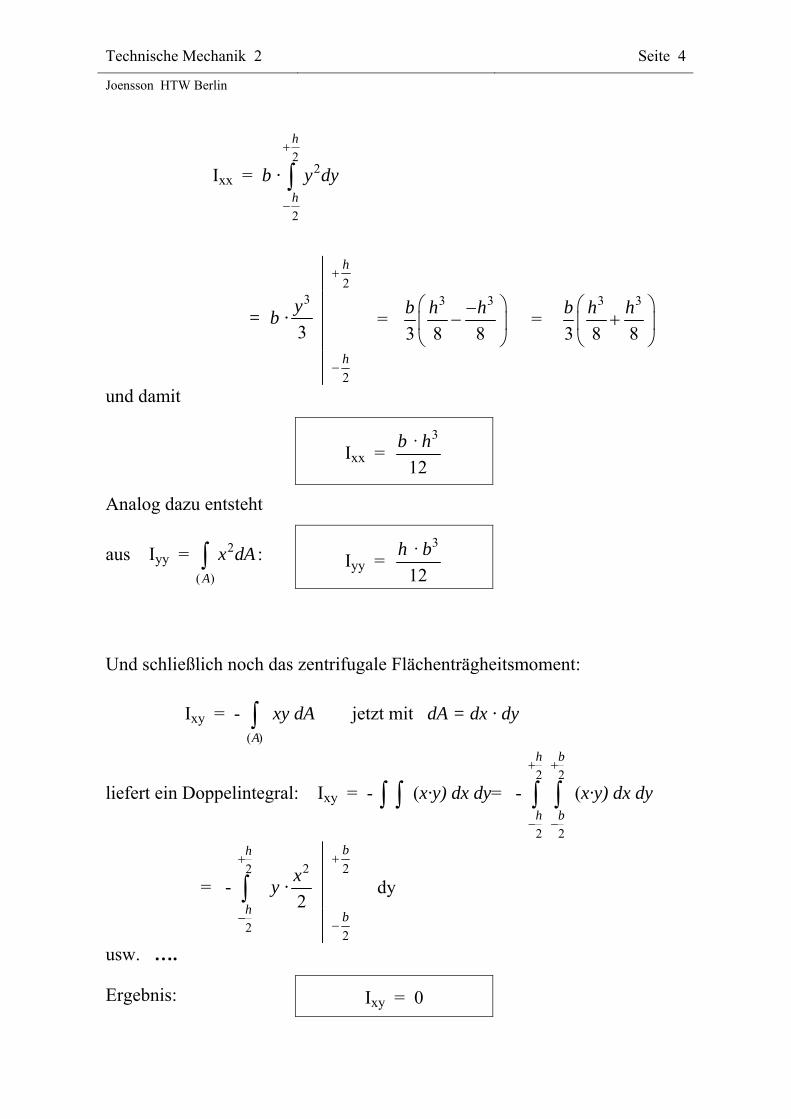
Technische Mechanik 2 Seite 4
Joensson HTW Berlin
Ixx = b ·2
2
2
h
h
y dy
2
h
= b ·
3
3
y
=
3 3
3 8 8
b h h
=
3 3
3 8 8
b h h
2
h
und damit
Ixx =
3·
12
b h
Analog dazu entsteht
aus Iyy = 2
( )A
x dA : Iyy = 3·
12
h b
Und schließlich noch das zentrifugale Flächenträgheitsmoment:
Ixy = - ( )A xy dA jetzt mit dA = dx · dy
liefert ein Doppelintegral: Ixy = - (x·y) dx dy= - 2 2
2 2
h b
h b
(x·y) dx dy
2
b
dy = - 2
2
h
h
y ·2
2
x
2
b
usw. ….
Ergebnis: Ixy = 0

Technische Mechanik 2 Seite 5
Joensson HTW Berlin Flächenkenngrößen des Rechteckes: (mit x parallel zur Breite b )
A = b · h in mm2
Wb x =
2 ·
6
b h in mm3 *)
Wb y =
2 ·
6
h b
Ixx =
3 ·
12
b h in mm4
Iyy =
3 ·
12
h b
Ixy = 0
*) wegen Wb x = max
xxI
y mit | ymax | =
2
h , Wb y =
max
yyI
x mit | xmax | =
2
b
Weitere Beispiele: Vollkreis und Kreisring
Die Integral-Herleitung für diese Flächen liefert folgende Ergebnisse:
Radius r
Ixx = Iyy = 4
r 4
Ixy = 0
Wegen | ymax | = | xmax | = r
entsteht daraus Wb x = Wb y = 4
r 3 r
Außenradius ra
Ixx = Iyy = 4
4 4
a ir r
Ixy = 0 x
y
S
ra
x
y
S
Technische Mechanik 2 Seite 6
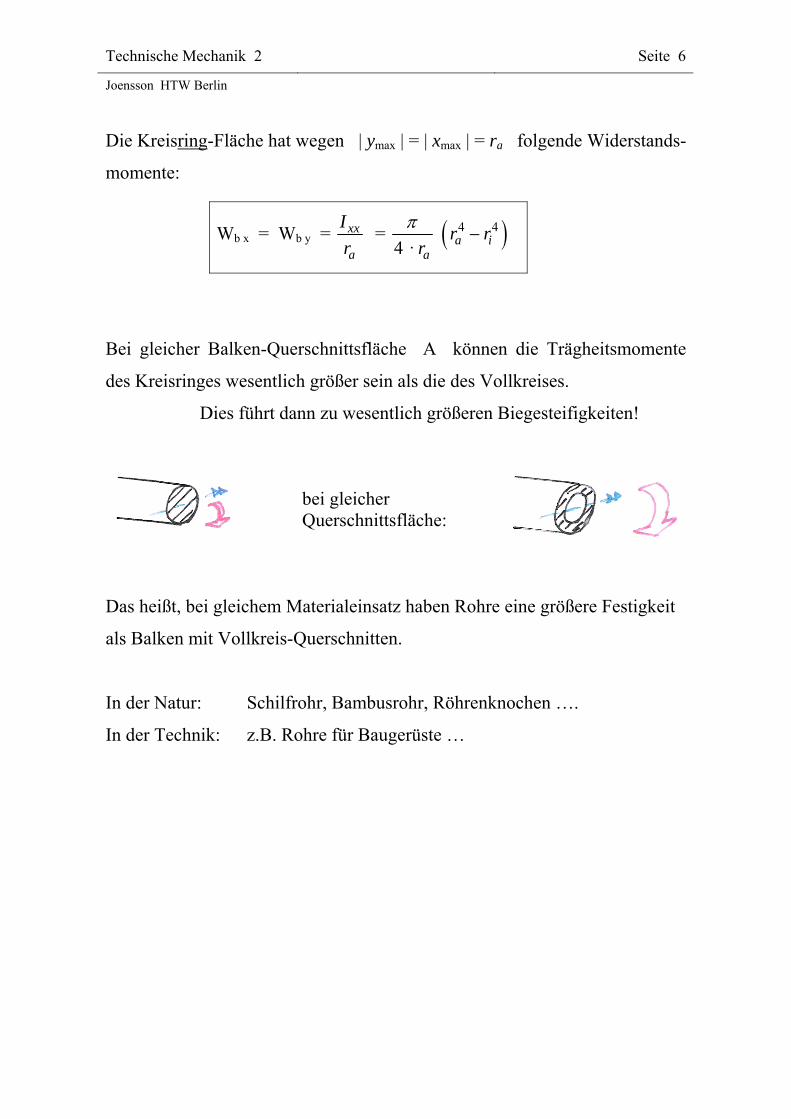
Joensson HTW Berlin Die Kreisring-Fläche hat wegen | ymax | = | xmax | = ra folgende Widerstands-
momente:
Wb x = Wb y = xx
a
I
r =
4 · ar
4 4
a ir r
Bei gleicher Balken-Querschnittsfläche A können die Trägheitsmomente
des Kreisringes wesentlich größer sein als die des Vollkreises.
Dies führt dann zu wesentlich größeren Biegesteifigkeiten!
bei gleicher Querschnittsfläche:
Das heißt, bei gleichem Materialeinsatz haben Rohre eine größere Festigkeit
als Balken mit Vollkreis-Querschnitten.
In der Natur: Schilfrohr, Bambusrohr, Röhrenknochen ….
In der Technik: z.B. Rohre für Baugerüste …
Technische Mechanik 2 Seite 7
Joensson HTW Berlin
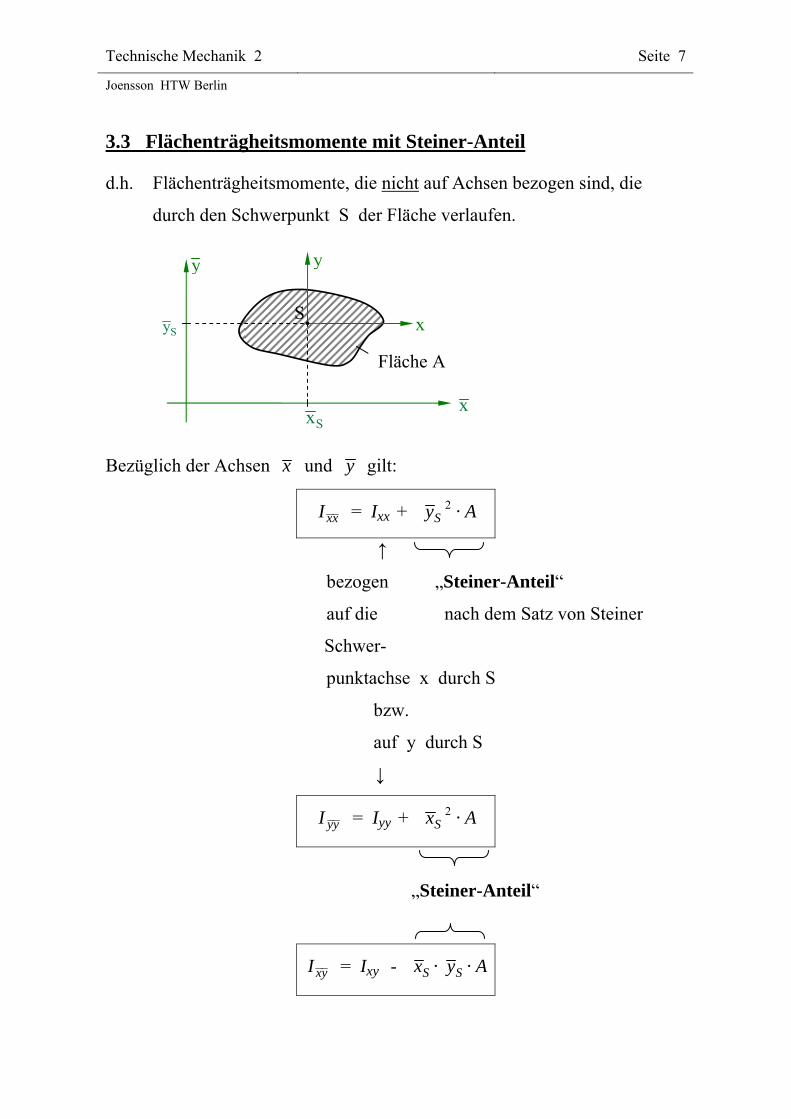
3.3 Flächenträgheitsmomente mit Steiner-Anteil
d.h. Flächenträgheitsmomente, die nicht auf Achsen bezogen sind, die
durch den Schwerpunkt S der Fläche verlaufen.
Bezüglich der Achsen x und y gilt:
xxI = Ixx + Sy 2 · A
↑
bezogen „Steiner-Anteil“
auf die nach dem Satz von Steiner
Schwer-
punktachse x durch S
bzw.
auf y durch S
↓
yyI = Iyy + Sx 2 · A
„Steiner-Anteil“
xyI = Ixy - Sx · Sy · A
Fläche A
y
x
y
S
Fläche A
x
Sy
Sx
Technische Mechanik 2 Seite 8
Joensson HTW Berlin
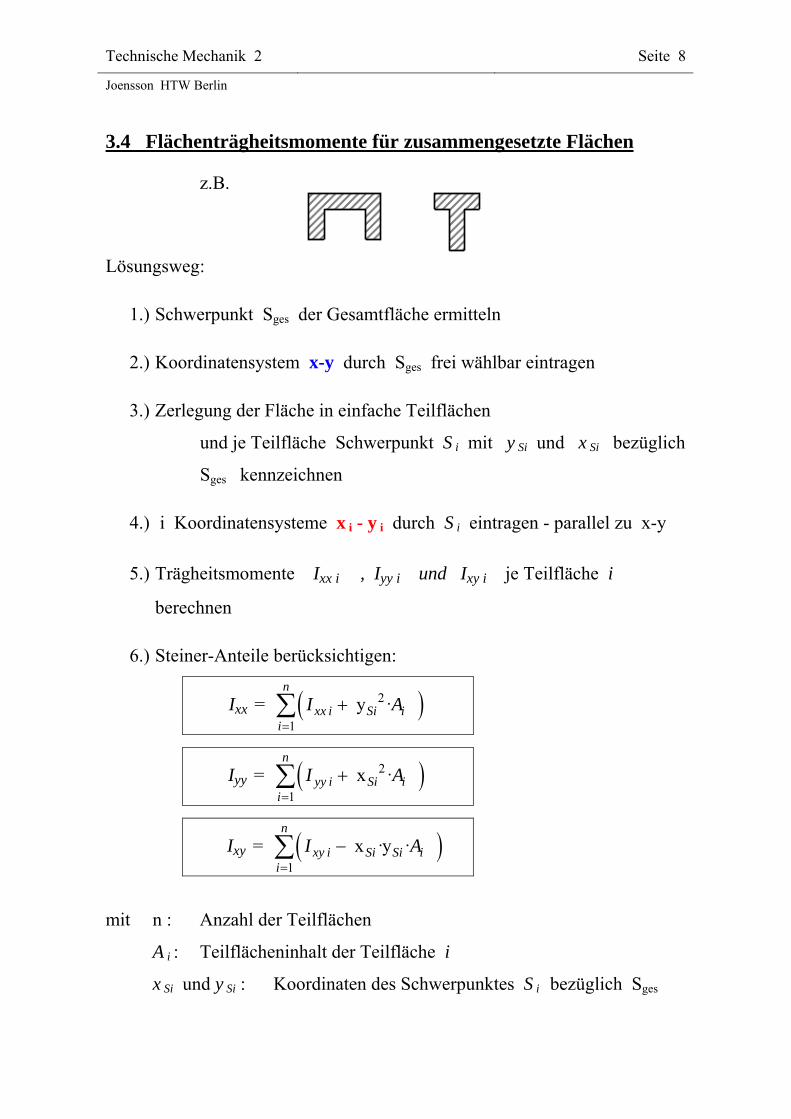
3.4 Flächenträgheitsmomente für zusammengesetzte Flächen
z.B.
Lösungsweg:
1.) Schwerpunkt Sges der Gesamtfläche ermitteln
2.) Koordinatensystem x-y durch Sges frei wählbar eintragen
3.) Zerlegung der Fläche in einfache Teilflächen
und je Teilfläche Schwerpunkt S i mit y Si und x Si bezüglich
Sges kennzeichnen
4.) i Koordinatensysteme x i - y i durch S i eintragen - parallel zu x-y
5.) Trägheitsmomente Ixx i , Iyy i und Ixy i je Teilfläche i
berechnen
6.) Steiner-Anteile berücksichtigen:
Ixx = 2
1
y · n
xx i Si ii
I A
Iyy = 2
1
x · n
yy i Si ii
I A
Ixy =
1
x ·y · n
xy i Si Si ii
I A
mit n : Anzahl der Teilflächen
A i : Teilflächeninhalt der Teilfläche i
x Si und y Si : Koordinaten des Schwerpunktes S i bezüglich Sges
Technische Mechanik 2 Seite 9
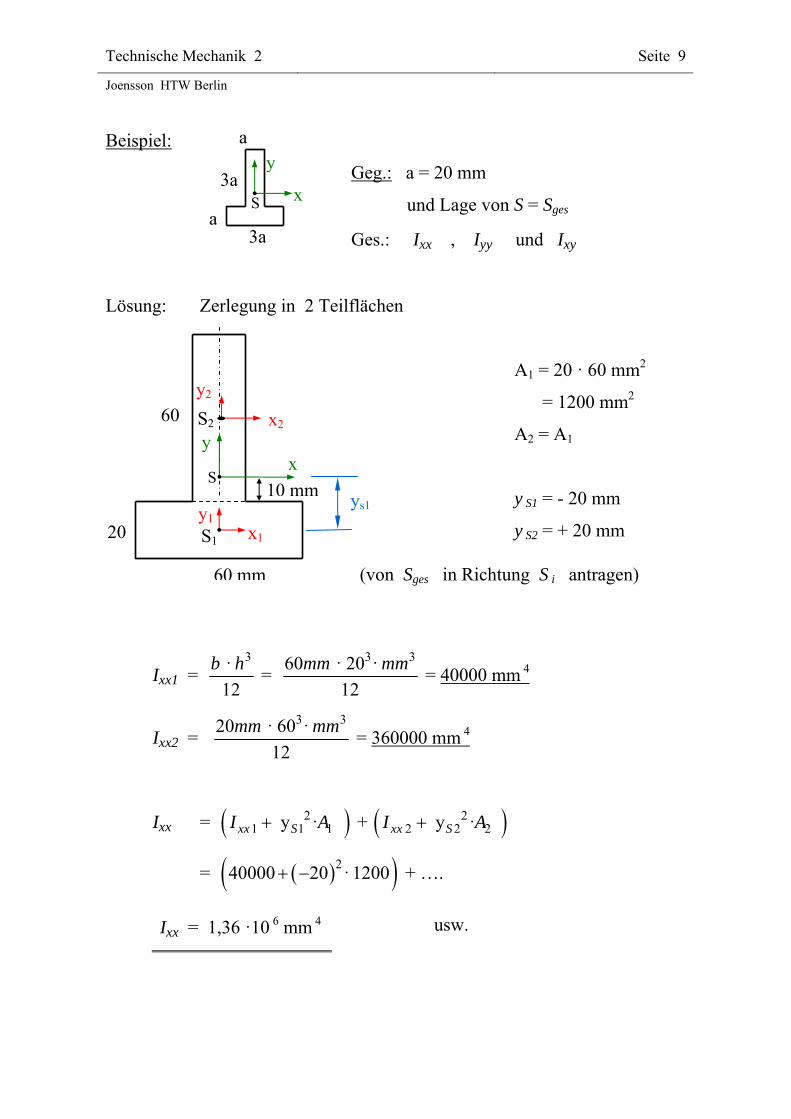
Joensson HTW Berlin Beispiel:
Geg.: a = 20 mm
und Lage von S = Sges
Ges.: Ixx , Iyy und Ixy
Lösung: Zerlegung in 2 Teilflächen
A1 = 20 · 60 mm2
= 1200 mm2
A2 = A1
y S1 = - 20 mm
y S2 = + 20 mm
Ixx1 = 3 ·
12
b h =
3 360 · 20 ·
12
mm mm = 40000 mm 4
Ixx2 = 3 320 · 60 ·
12
mm mm = 360000 mm 4
Ixx = 2 1 1 1 y · xx SI A + 2
2 2 2y · xx SI A
= 240000 20 · 1200 + ….
Ixx = 1,36 ·10 6 mm 4 usw.
S1
S2
S 10 mm
20
60 mm
x y
60 y2
x2
x1 y1
3aS
3a a
y
x
a
ys1
(von Sges in Richtung S i antragen)
Technische Mechanik 2 Seite 10
Joensson HTW Berlin
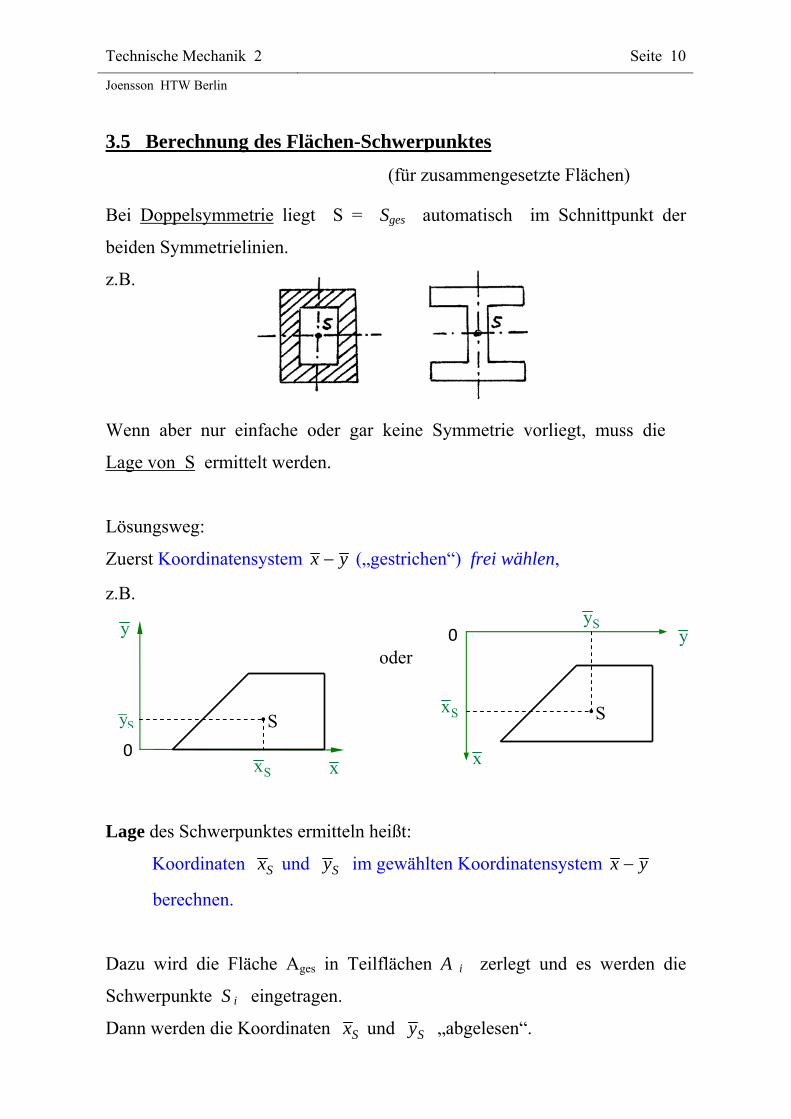
3.5 Berechnung des Flächen-Schwerpunktes
(für zusammengesetzte Flächen)
Bei Doppelsymmetrie liegt S = Sges automatisch im Schnittpunkt der
beiden Symmetrielinien.
z.B.
Wenn aber nur einfache oder gar keine Symmetrie vorliegt, muss die
Lage von S ermittelt werden.
Lösungsweg:
Zuerst Koordinatensystem x y („gestrichen“) frei wählen,
z.B.
oder
Lage des Schwerpunktes ermitteln heißt:
Koordinaten Sx und Sy im gewählten Koordinatensystem x y
berechnen.
Dazu wird die Fläche Ages in Teilflächen A i zerlegt und es werden die
Schwerpunkte S i eingetragen.
Dann werden die Koordinaten Sx und Sy „abgelesen“.
0
S
Sx x
y
Sy
0
S Sx
x
Sy y
Technische Mechanik 2 Seite 11
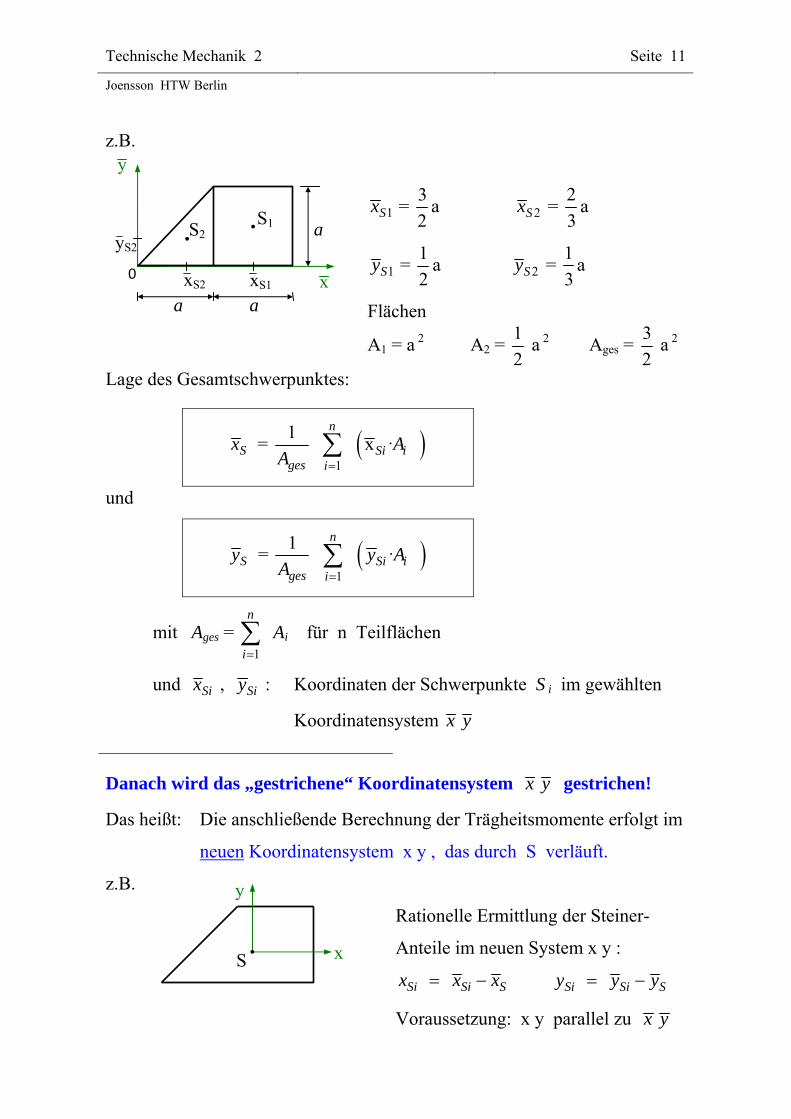
Joensson HTW Berlin z.B.
1Sx = 3
2a 2Sx =
2
3a
1Sy = 1
2a 2Sy =
1
3a
Flächen
A1 = a 2 A2 = 1
2 a 2 Ages =
3
2 a 2
Lage des Gesamtschwerpunktes:
Sx = 1
gesA
1
n
i x · Si iA
und
Sy = 1
gesA
1
n
i · Si iy A
mit Ages = 1
n
i Ai für n Teilflächen
und Six , Siy : Koordinaten der Schwerpunkte S i im gewählten
Koordinatensystem x y
Danach wird das „gestrichene“ Koordinatensystem x y gestrichen!
Das heißt: Die anschließende Berechnung der Trägheitsmomente erfolgt im
neuen Koordinatensystem x y , das durch S verläuft.
z.B.
Rationelle Ermittlung der Steiner-
Anteile im neuen System x y :
Si Si Sx x x Si Si Sy y y
Voraussetzung: x y parallel zu x y
S
y
x
0
S2 S1
xS2 xS1
yS2
a a
a
x
y

Technische Mechanik 2 Seite 12
Joensson HTW Berlin
3.6 Hauptträgheitsmomente
Das Koordinatensystem x-y für Flächenträgheitsmomente muss in S
beginnen, kann aber ansonsten beliebig schräg angeordnet sein:
z.B.
oder
Für jede Fläche gibt es eine Koordinatenlage x - y („Schlange“) mit einem
Winkel αO von x nach x , bei der das Zentrifugalmoment genau Null ist:
xyI = 0
z.B.
Bei diesem Winkel hat xxI seinen größtmöglichen oder kleinstmöglichen
Wert xxI . Außerdem ist yyI ein Extremwert von yyI .
Die Achsen x und y kennzeichnen die so genannten Hauptträgheitsachsen
(die „Hauptachsen“) der Fläche.
xxI und yyI sind die beiden Hauptträgheitsmomente der Fläche.
Die Hauptachsen stehen senkrecht zueinander und schneiden sich im Schwer-
punkt der Fläche.
y
x
S
y
x
y
x
SS
y x
Technische Mechanik 2 Seite 13
Joensson HTW Berlin Wenn bei einem beliebigen Koordinatensystem x-y das Zentrifugalmoment
xyI = 0 ist, dann sind die berechneten Trägheitsmomente xxI und yyI
bereits Hauptträgheitsmomente! Siehe z.B. Rechteck-Fläche, Kapitel 3.2.
Wenn aber 0xyI ist, dann sind die Hauptträgheitsmomente 1I und
2I aus folgender Formel zu berechnen:
1, 2I =
1
2 xx yyI I 2 21
4 xx yy xyI I I
1I ist das größte und 2I ist das kleinste aller möglichen Flächenträgheits-
momente der Fläche A.
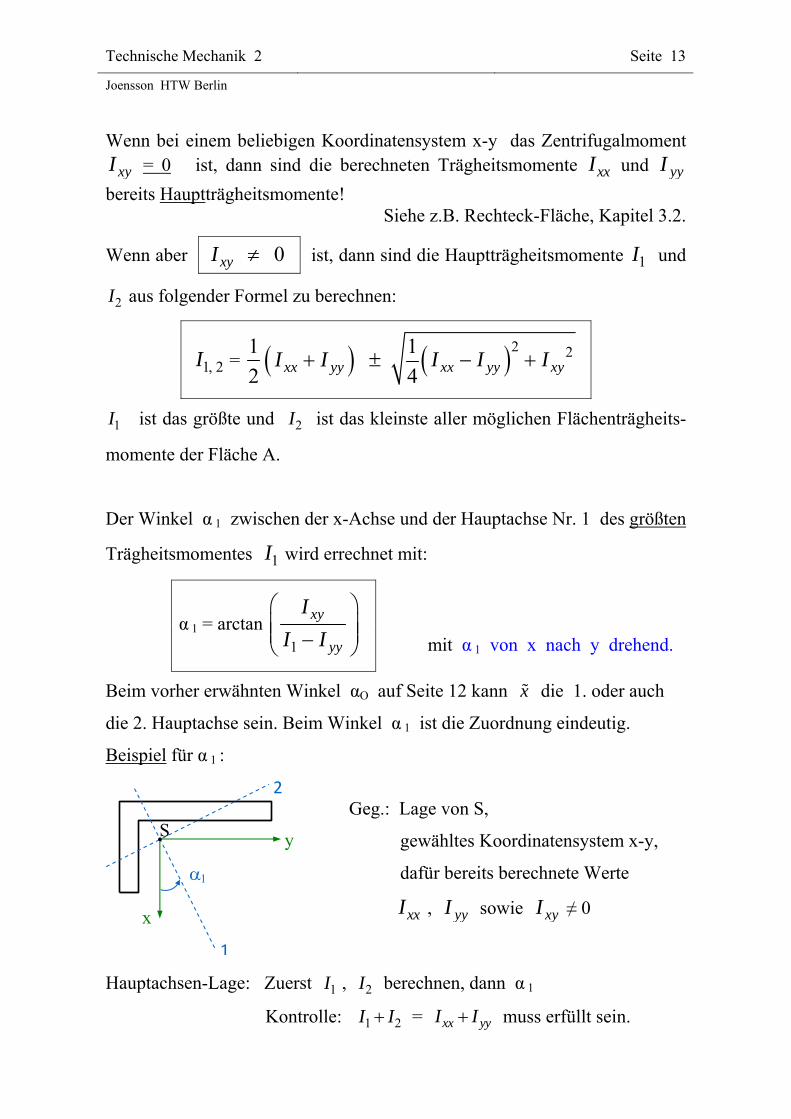
Der Winkel α 1 zwischen der x-Achse und der Hauptachse Nr. 1 des größten
Trägheitsmomentes 1I wird errechnet mit:
α 1 = arctan
1
xy
yy
I
I I
mit α 1 von x nach y drehend.
Beim vorher erwähnten Winkel αO auf Seite 12 kann x die 1. oder auch
die 2. Hauptachse sein. Beim Winkel α 1 ist die Zuordnung eindeutig.
Beispiel für α 1 :
Geg.: Lage von S,
gewähltes Koordinatensystem x-y,
dafür bereits berechnete Werte
xxI , yyI sowie xyI ≠ 0
Hauptachsen-Lage: Zuerst 1I , 2I berechnen, dann α 1
Kontrolle: 1 2I I = xx yyI I muss erfüllt sein.
1
2
S y
x
Technische Mechanik 2 Seite 14
Joensson HTW Berlin Wozu dieser Aufwand?
1.) Weil alle bisher verwendeten Biege-Spannungsformeln nur für Haupt-
Trägheitsmomente gelten!
2.) Biegung um die Achse 1 liefert die geringsten Spannungen und damit
die größte Festigkeit.
3.) Biegung um die Achse 2 liefert die größten Spannungen und damit
die geringste Festigkeit.
Vor Anwendung von Biege-Spannungsformeln ist also stets zu prüfen, ob
sich die Trägheitsmomente auf Hauptachsen beziehen.
(Die Formel für xyI muss den Wert Null ergeben).
Ist xyI ≠ 0 , so müssen 1I , 2I und α 1 berechnet werden.
Bei geschickter Wahl des Koordinatensystems x-y kann mitunter die
Berechnung von 1I , 2I und α 1 eingespart werden, insbesondere wenn
Symmetrie vorhanden ist.
Symmetrieachsen sind stets Hauptachsen!
Wenn eine Fläche symmetrisch ist, sollte möglichst eine der beiden Achsen
x oder y auf eine Symmetrieachse gelegt werden.
z.B.
Die vertikale Symmetrieachse ist hier
eine der beiden Hauptachsen.
Die andere Hauptachse verläuft
senkrecht dazu durch den Schwerpunkt.
Welche der beiden Achsen die Nr. 1 ist, zeigt die Berechnung der beiden
Werte xxI und yyI : Der größere Wert gehört zur Hauptachse Nr. 1.
S
Technische Mechanik 2 Seite 15
Joensson HTW Berlin
4. Biegeverformung elastischer Balken
4.1 Einleitung
Zwei übliche Lösungswege zur Berechnung der Biegeverformung:
Gleichung der elastischen Linie
( „Biegelinie“ )
Lösung einer Differenzialgleichung
Satz von Castigliano
Energiebilanz / Integralberechnung
4.2 Lösungsweg „Biegelinie“
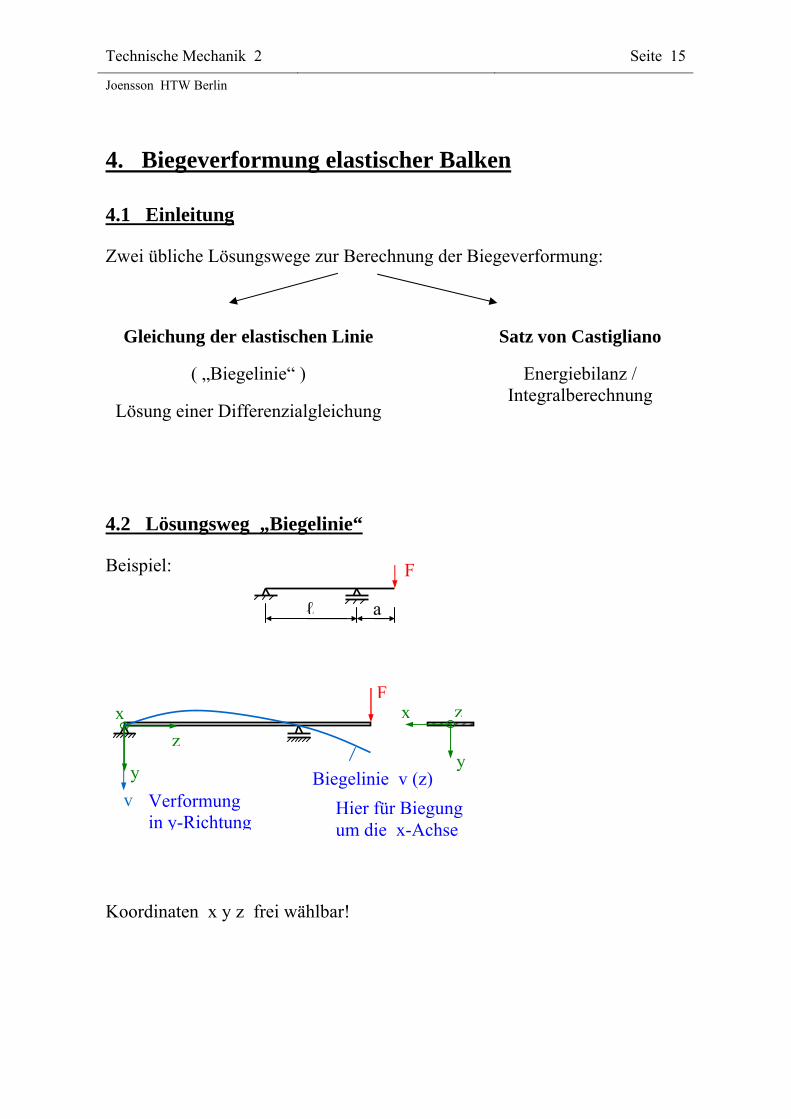
Beispiel:
Koordinaten x y z frei wählbar!
x
z
y
v
Fx z
y
Verformung in y-Richtung
F
a ℓ
Biegelinie v (z)
Hier für Biegung um die x-Achse
Technische Mechanik 2 Seite 16
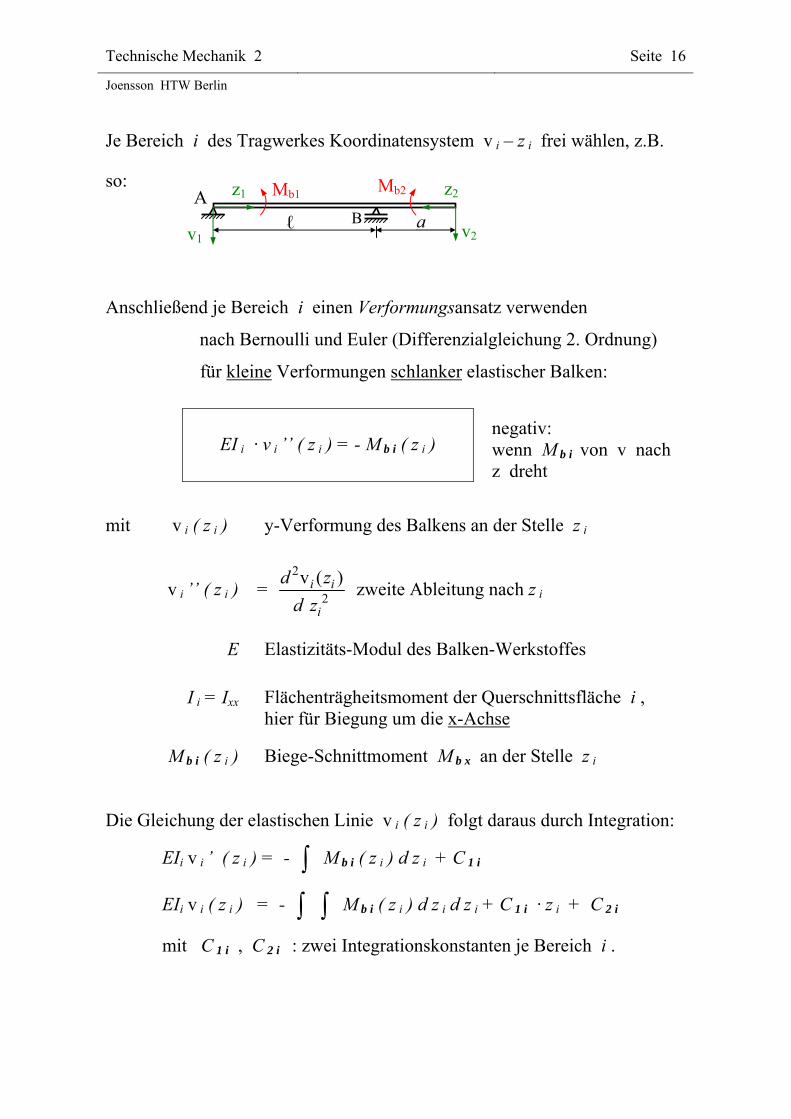
Joensson HTW Berlin Je Bereich i des Tragwerkes Koordinatensystem v i – z i frei wählen, z.B.
so:
Anschließend je Bereich i einen Verformungsansatz verwenden
nach Bernoulli und Euler (Differenzialgleichung 2. Ordnung)
für kleine Verformungen schlanker elastischer Balken:
EI i · v i ’’ ( z i ) = - M b i ( z i )
negativ: wenn M b i von v nach z dreht
mit v i ( z i ) y-Verformung des Balkens an der Stelle z i
v i ’’ ( z i ) = 2
2
v ( )
i i
i
d z
d z zweite Ableitung nach z i
E Elastizitäts-Modul des Balken-Werkstoffes
I i = Ixx Flächenträgheitsmoment der Querschnittsfläche i , hier für Biegung um die x-Achse
M b i ( z i ) Biege-Schnittmoment M b x an der Stelle z i
Die Gleichung der elastischen Linie v i ( z i ) folgt daraus durch Integration:
EIi v i ’ ( z i ) = - M b i ( z i ) d z i + C 1 i
EIi v i ( z i ) = - M b i ( z i ) d z i d z i + C 1 i · z i + C 2 i
mit C 1 i , C 2 i : zwei Integrationskonstanten je Bereich i .
Mb1 Mb2 z1 z2
v2 v1
A Bℓ a

Technische Mechanik 2 Seite 17
Joensson HTW Berlin
Berechnungs-Beispiel von S. 15 mit Überstand a:
Auflagerreaktionen : … FA x = 0 (→) , FA y = - a
· F (↑) ,
FB = 1a
· F (↑)
Schnittreaktion M b 1 im Bereich 1: (Bereichseinteilung von S. 16)
S1 : FA y · z 1 - M b 1 = 0
liefert:
M b 1 ( z 1 ) = - a
F · z 1
Biegelinie v 1 ( z 1 ):
Ansatz EI1 v 1 ’’ = - M b 1 (negativ, weil hier M b 1 von v nach z dreht)
und EI1 = EI2 = EI beide Bereiche haben die gleichen Werte E und I
also
EI v1 ’’ = +
a
F · z 1
(1)
Die Integration ergibt eine „Neigungswinkel-Funktion“ v 1’ ( z 1 ) :
EI v1 ’ =
a
F · 2
1
2
z + C1 (2)
Erneute Integration liefert die gesuchte Biegelinie v 1 ( z 1 ) :
EI v1 =
1
2
a
F · 3
1
3
z + C1 · z 1 + C2 (3)
S1 Mb1
FAy
FAx z1
F
a ℓ
A B

Technische Mechanik 2 Seite 18
Joensson HTW Berlin Bereich 2:
S2 : F · z 2 + M b 2 = 0
liefert: M b 2 ( z 2 ) = - F · z 2
Biegelinie v 2 ( z 2 ):
Ansatz EI v 2 ’’ = - M b 2 (negativ, weil auch M b 2 von v nach z dreht)
also
EI v 2 ’’ = + F · z 2
(4)
„Neigungswinkel-Funktion“ v 2’ ( z 2 ) :
EI v 2 ’ = F ·
22
2
z + C3 (5)
Biegelinie v 2 ( z 2 ) :
EI v 2 =
1
2 F ·
32
3
z + C3 · z 2 + C4 (6)
Die allgemeinen Lösungen (3) und (6) der Differenzialgleichungen (1) und
(4) enthalten vier unbekannte Integrationskonstanten C1 bis C4 .
Zur Ermittlung dieser 4 Konstanten sind 4 weitere Gleichungen erforder-
lich, die so genannten Rand- und Übergangsbedingungen.
Dafür ist eine Skizze zum möglichen Verformungsverlauf hilfreich:
S2 F
Mb2
z2
Technische Mechanik 2 Seite 19
Joensson HTW Berlin
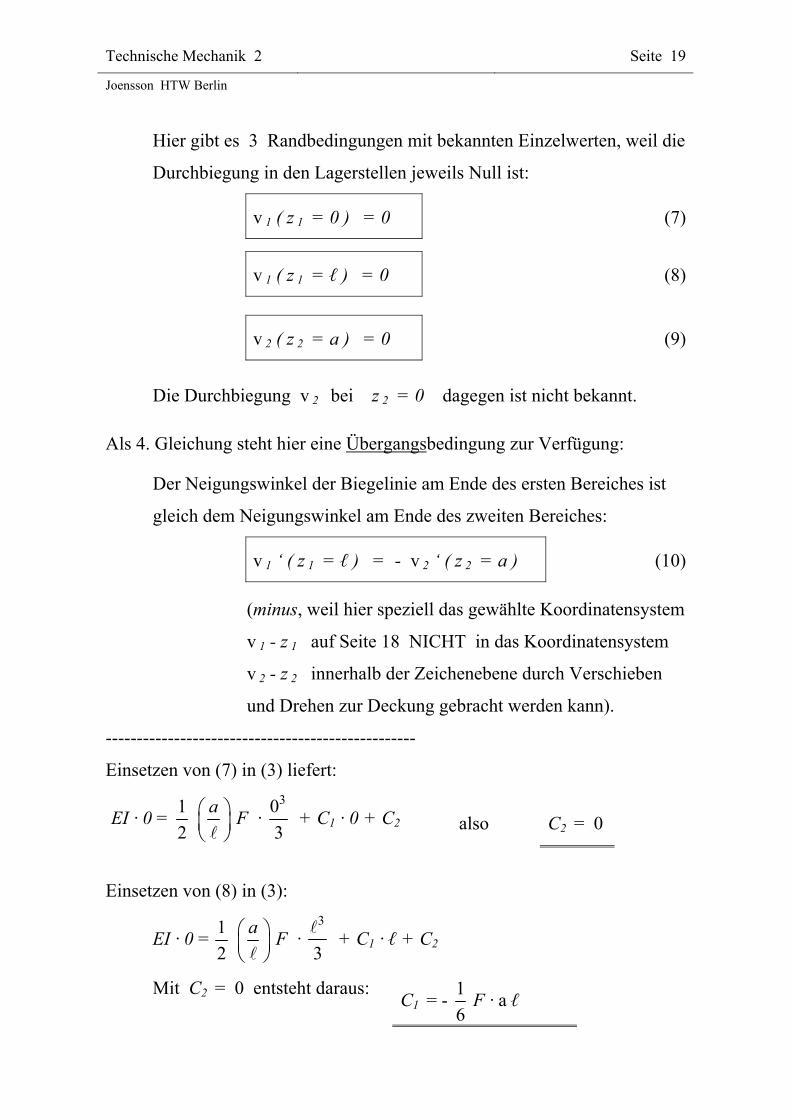
Hier gibt es 3 Randbedingungen mit bekannten Einzelwerten, weil die
Durchbiegung in den Lagerstellen jeweils Null ist:
v 1 ( z 1 = 0 ) = 0
(7)
v 1 ( z 1 = ℓ ) = 0
(8)
v 2 ( z 2 = a ) = 0
(9)
Die Durchbiegung v 2 bei z 2 = 0 dagegen ist nicht bekannt.
Als 4. Gleichung steht hier eine Übergangsbedingung zur Verfügung:
Der Neigungswinkel der Biegelinie am Ende des ersten Bereiches ist
gleich dem Neigungswinkel am Ende des zweiten Bereiches:
v 1 ‘ ( z 1 = ℓ ) = - v 2 ‘ ( z 2 = a ) (10)
(minus, weil hier speziell das gewählte Koordinatensystem
v 1 - z 1 auf Seite 18 NICHT in das Koordinatensystem
v 2 - z 2 innerhalb der Zeichenebene durch Verschieben
und Drehen zur Deckung gebracht werden kann).
--------------------------------------------------
Einsetzen von (7) in (3) liefert:
EI · 0 = 1
2
a
F · 30
3 + C1 · 0 + C2
also
C2 = 0
Einsetzen von (8) in (3):
EI · 0 = 1
2
a
F · 3
3
+ C1 · ℓ + C2
Mit C2 = 0 entsteht daraus: C1 = -
1
6 F · a ℓ

Technische Mechanik 2 Seite 20
Joensson HTW Berlin Einsetzen von (9) in (6):
EI · 0 = 1
2 F ·
3
3
a + C3 · a + C4
Zwischenergebnis: C4 = -
1
6 F · a 3 - C3 · a
(2) und (5) anwenden auf die Übergangsbedingung (10) liefert:
a
F · 2
1
2
z + C1 = - F ·
22
2
z - C3
bzw. mit z 1 = ℓ und z 2 = a:
a
F · 2
2
+ C1 = -
1
2 F · a 2 - C3
sowie mit C1 = - 1
6 F · a ℓ :
1
2 F · a ℓ -
1
6 F · a ℓ = -
1
2 F · a 2 - C3
entsteht: C3 = - F · 21 1
a 3 2
a
Und schließlich noch C4 :
Mit C4 = - 1
6 F · a 3 - C3 · a (siehe oben) folgt
C4 = - 1
6 F · a 3 + F · 21 1
a 3 2
a
· a
= - 1
6 F · a 3 + F · 21
3a +
1
2 F · a 3
also: C4 = +
1
3 F 2 3a a

Technische Mechanik 2 Seite 21
Joensson HTW Berlin Damit lauten die speziellen Lösungen der Diff.gleichungen (1) und (4):
Bereich 1: Aus (3) folgt mit C1 und C2 :
EI v 1 = 1
2
a
F · 3
1
3
z -
1
6 F · a ℓ · z 1 + 0
v 1 = 6
Fa
EI3
1 11
· · z z
bzw. erweitert mit 2 / 2 :
v 1 ( z 1 ) = -
2
6
Fa
EI
3 1 1 -
z z
(11)
Biegelinie für den Bereich 1 von z 1 = 0 bis ℓ
Bereich 2: Aus (6) folgt mit C3 und C4 :
EI v 2 = 1
2 F ·
3 2
3
z - F · 21 1
a 3 2
a
· z 2 + 1
3 F 2 3a a
v 2 ( z 2 ) =
6
F
EI 3 2 2 3
2 22 3 · 2 2z a a z a a (12)
Biegelinie für den Bereich 2 von z 2 = 0 bis a
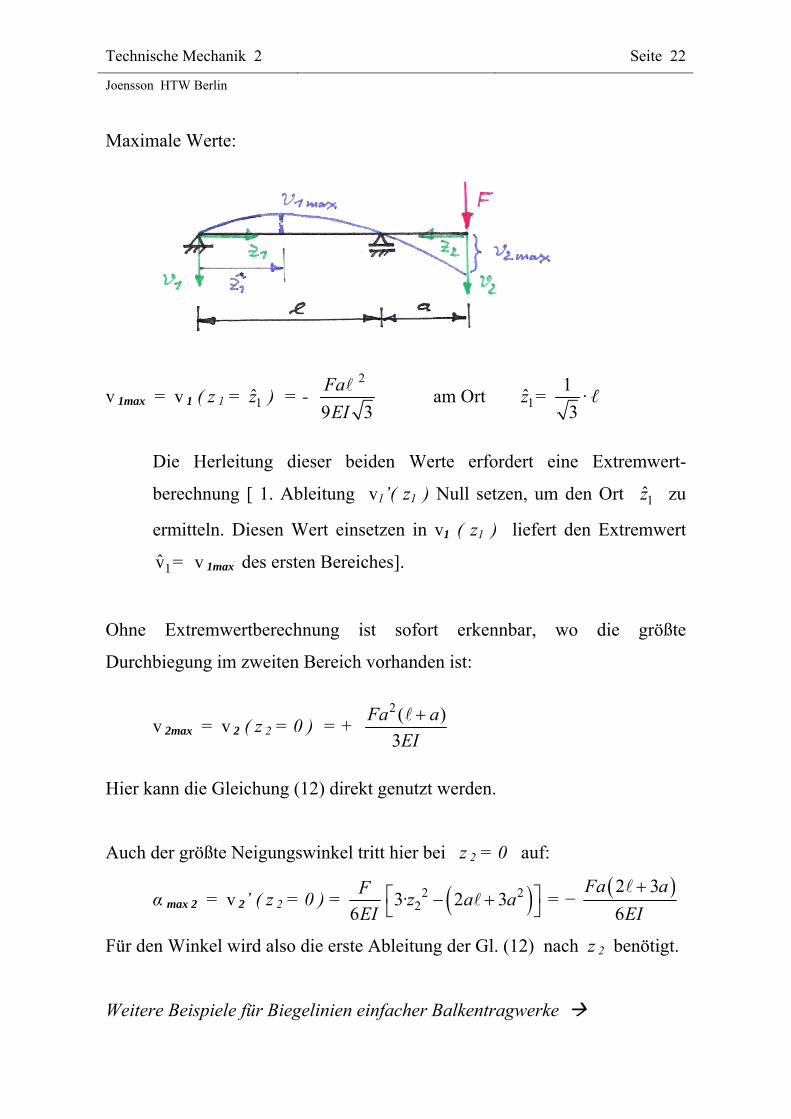
Technische Mechanik 2 Seite 22
Joensson HTW Berlin Maximale Werte:
v 1max = v 1 ( z 1 = 1z ) = - 2
9 3
Fa
EI
am Ort 1z =
1
3· ℓ
Die Herleitung dieser beiden Werte erfordert eine Extremwert-
berechnung [ 1. Ableitung v1’( z1 ) Null setzen, um den Ort 1z zu
ermitteln. Diesen Wert einsetzen in v1 ( z1 ) liefert den Extremwert
1v = v 1max des ersten Bereiches].
Ohne Extremwertberechnung ist sofort erkennbar, wo die größte
Durchbiegung im zweiten Bereich vorhanden ist:
v 2max = v 2 ( z 2 = 0 ) = + 2 ( )
3
Fa a
EI
Hier kann die Gleichung (12) direkt genutzt werden.
Auch der größte Neigungswinkel tritt hier bei z 2 = 0 auf:
α max 2 = v 2’ ( z 2 = 0 ) = 6
F
EI 2 2
23· 2 3z a a = − 2 3
6
Fa a
EI
Für den Winkel wird also die erste Ableitung der Gl. (12) nach z 2 benötigt.
Weitere Beispiele für Biegelinien einfacher Balkentragwerke
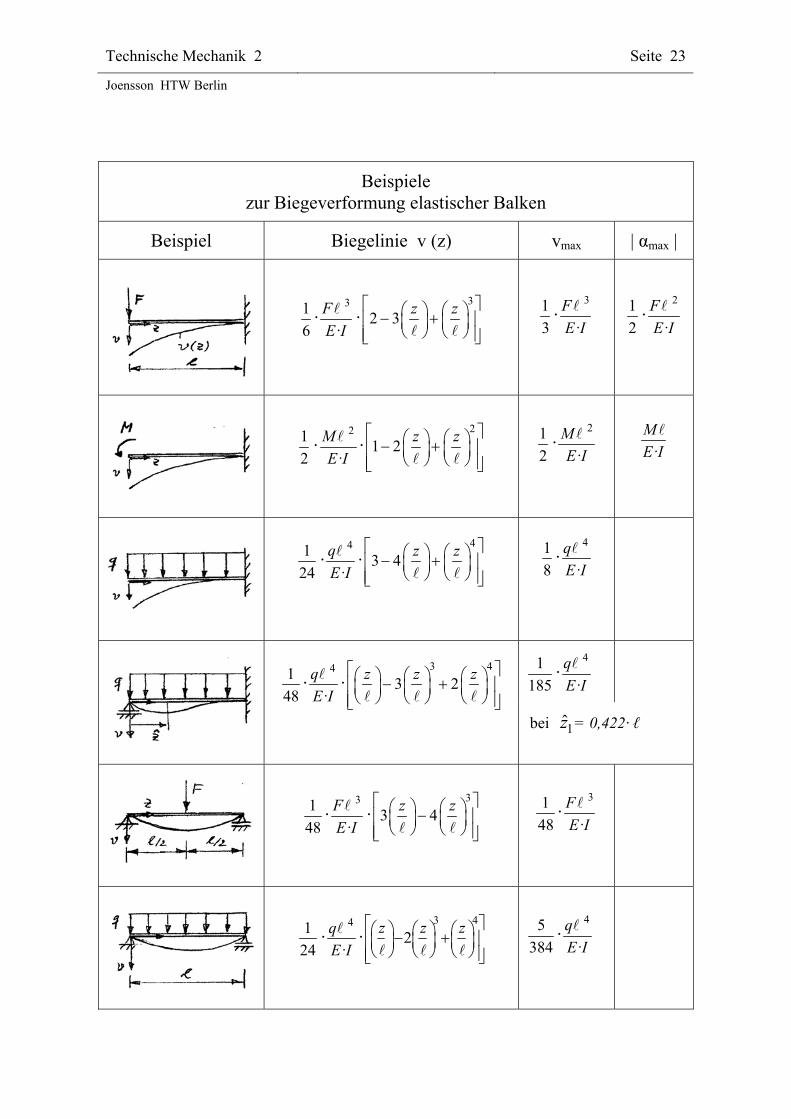
Technische Mechanik 2 Seite 23
Joensson HTW Berlin
Beispiele zur Biegeverformung elastischer Balken
Beispiel Biegelinie v (z) vmax | αmax |
1
6·
3
·
F
E I
·3
2 3z z
1
3·
3
·
F
E I
1
2·
2
·
F
E I
1
2·
2
·
M
E I
·2
1 2z z
1
2·
2
·
M
E I
·
M
E I
1
24·
4
·
q
E I
·4
3 4z z
1
8·
4
·
q
E I
1
185·
4
·
q
E I
1
48·
4
·
q
E I
·3 4
3 2z z z
bei 1z = 0,422· ℓ
1
48·
3
·
F
E I
·3
3 4z z
1
48·
3
·
F
E I
1
24·
4
·
q
E I
·3 4
2z z z
5
384·
4
·
q
E I
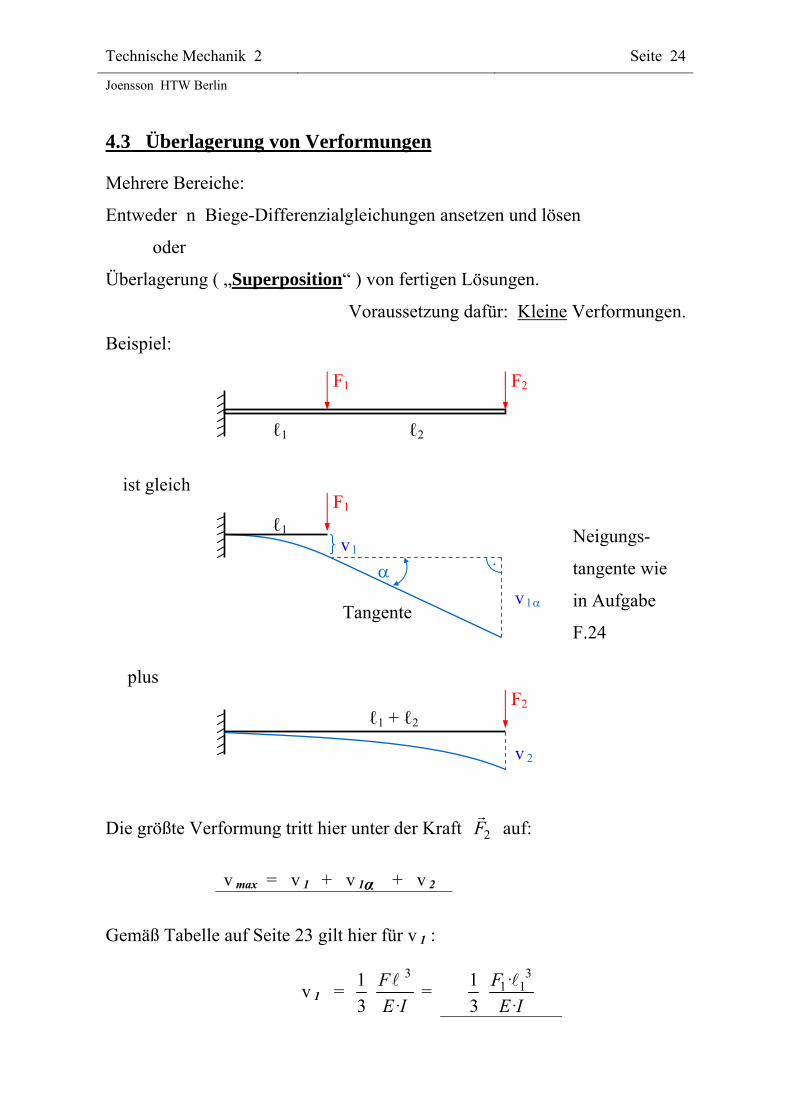
Technische Mechanik 2 Seite 24
Joensson HTW Berlin
4.3 Überlagerung von Verformungen
Mehrere Bereiche:
Entweder n Biege-Differenzialgleichungen ansetzen und lösen
oder
Überlagerung ( „Superposition“ ) von fertigen Lösungen.
Voraussetzung dafür: Kleine Verformungen.
Beispiel:
Neigungs-
tangente wie
in Aufgabe
F.24
Die größte Verformung tritt hier unter der Kraft 2F
auf:
v max = v 1 + v 1α + v 2
Gemäß Tabelle auf Seite 23 gilt hier für v 1 :
v 1 =
1
3
3
·
F
E I
=
1
3
31 1·
·
F
E I
F1 F2
ℓ1 ℓ2
F1
ℓ1
v
v
ℓ1 + ℓ2
v
F2
ist gleich
plus
Tangente
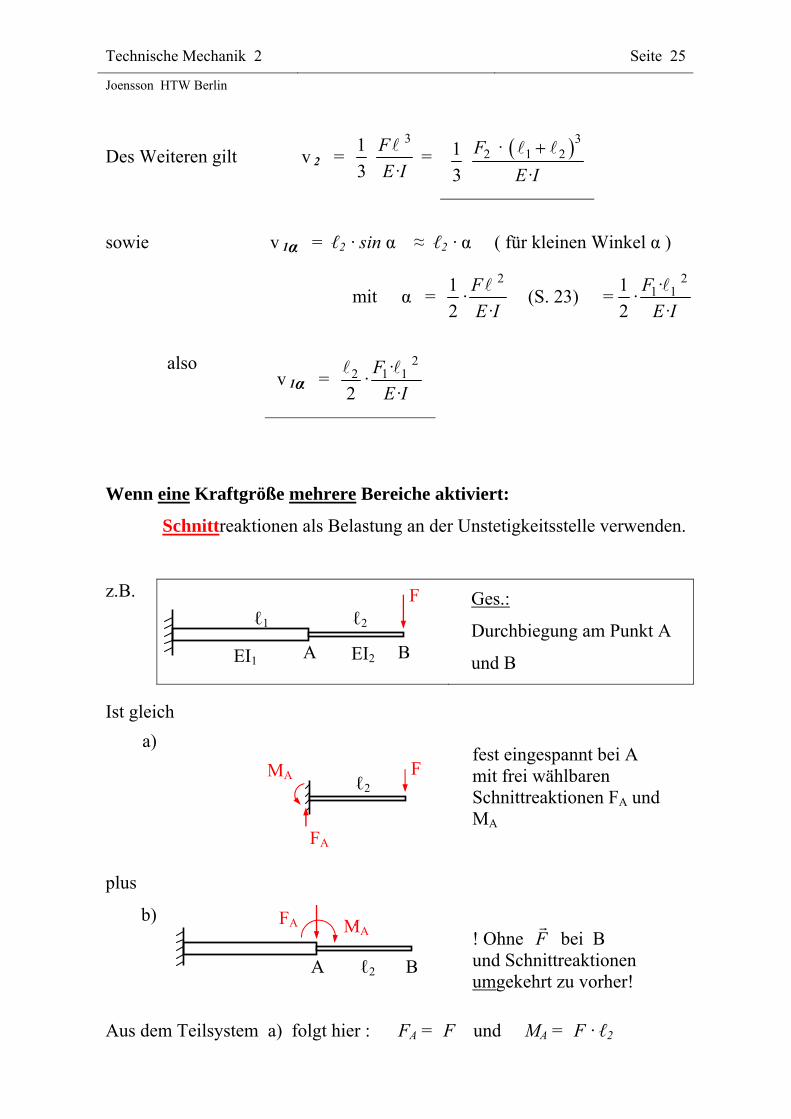
Technische Mechanik 2 Seite 25
Joensson HTW Berlin
Des Weiteren gilt
v 2 = 1
3
3
·
F
E I
= 1
3
32 1 2 ·
·
F
E I
sowie v 1α = ℓ2 · sin α ≈ ℓ2 · α ( für kleinen Winkel α )
mit α = 1
2·
2
·
F
E I
(S. 23) =
1
2·
21 1·
·
F
E I
also v 1α = 2
2
·
21 1·
·
F
E I
Wenn eine Kraftgröße mehrere Bereiche aktiviert:
Schnittreaktionen als Belastung an der Unstetigkeitsstelle verwenden.
z.B.
Ges.:
Durchbiegung am Punkt A
und B
Ist gleich
a)
fest eingespannt bei A mit frei wählbaren Schnittreaktionen FA und MA
plus
b)
! Ohne F
bei B
und Schnittreaktionen umgekehrt zu vorher!
Aus dem Teilsystem a) folgt hier : FA = F und MA = F · ℓ2
ℓ2
FA
A B ℓ2
MA
A BEI2EI1
ℓ1 ℓ2
F
FMA
FA
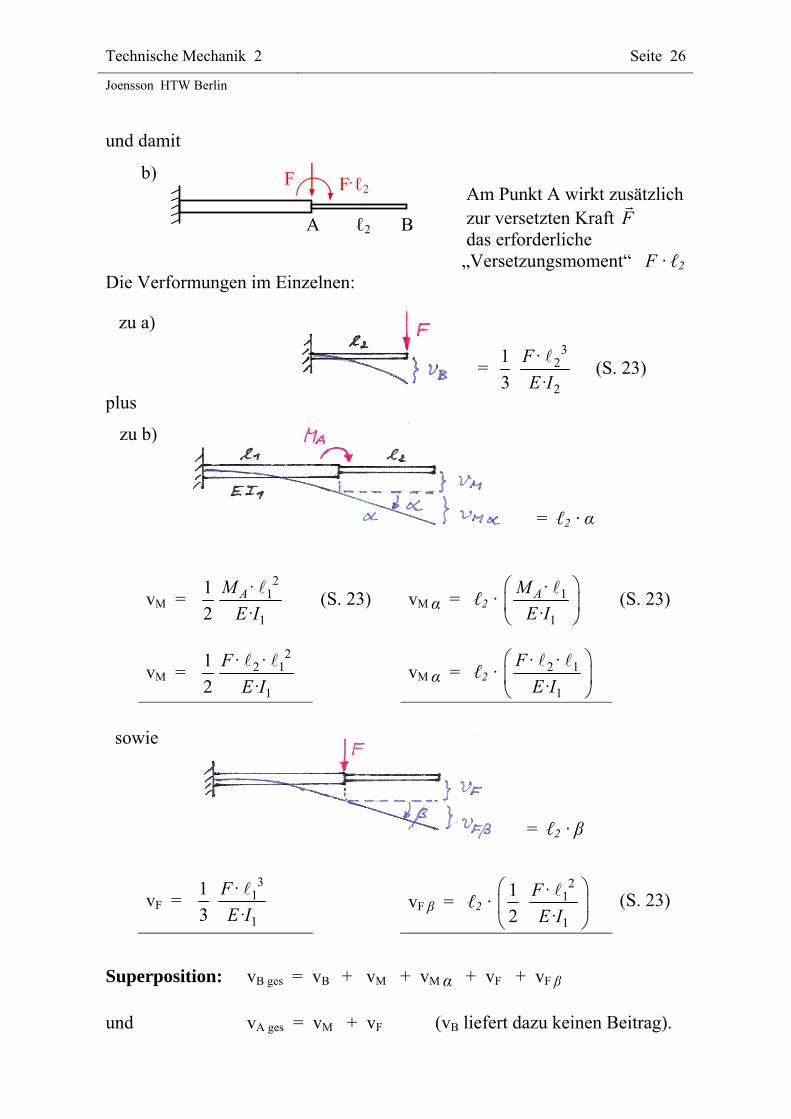
Technische Mechanik 2 Seite 26
Joensson HTW Berlin und damit
b)
Am Punkt A wirkt zusätzlich zur versetzten Kraft F
das erforderliche „Versetzungsmoment“ F · ℓ2
Die Verformungen im Einzelnen:
zu a)
plus
= 1
3
32
2
·
·
F
E I
(S. 23)
zu b)
= ℓ2 · α
vM =
1
2
21
1
·
·AM
E I
(S. 23) vM α = ℓ2 · 1
1
·
·AM
E I
(S. 23)
vM =
1
2
22 1
1
· ·
·
F
E I
vM α = ℓ2 · 2 1
1
· ·
·
F
E I
sowie
= ℓ2 · β
vF =
1
3
31
1
·
·
F
E I
vF β = ℓ2 ·
21
1
1 ·
2 ·
F
E I
(S. 23)
Superposition: vB ges = vB + vM + vM α + vF + vF β
und vA ges = vM + vF (vB liefert dazu keinen Beitrag).
A B ℓ2
F F ℓ2
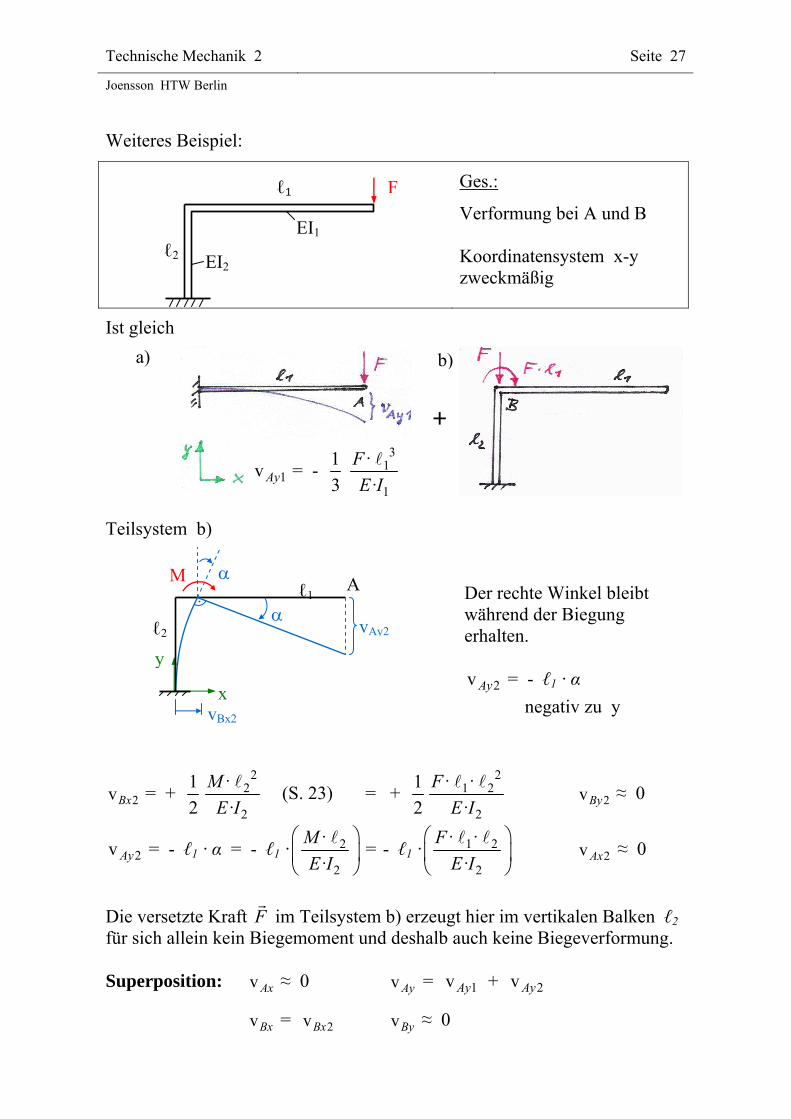
Technische Mechanik 2 Seite 27
Joensson HTW Berlin Weiteres Beispiel:
Ges.:
Verformung bei A und B Koordinatensystem x-y zweckmäßig
Ist gleich
a)
Teilsystem b)
Der rechte Winkel bleibt während der Biegung erhalten.
2v Ay = - ℓ1 · α
negativ zu y
2vBx = + 1
2
22
2
·
·
M
E I
(S. 23) = +
1
2
21 2
2
· ·
·
F
E I
2vBy ≈ 0
2v Ay = - ℓ1 · α = - ℓ1 · 2
2
·
·
M
E I
= - ℓ1 · 1 2
2
· ·
·
F
E I
2v Ax ≈ 0
Die versetzte Kraft F
im Teilsystem b) erzeugt hier im vertikalen Balken ℓ2 für sich allein kein Biegemoment und deshalb auch keine Biegeverformung. Superposition: v Ax ≈ 0 v Ay = 1v Ay + 2v Ay
vBx = 2vBx vBy ≈ 0
ℓ1 A
x
y
M
ℓ2
vAy2
vBx2
ℓ2 EI1
EI2
1v Ay = - 1
3
31
1
·
·
F
E I
b)
+
ℓ1 F
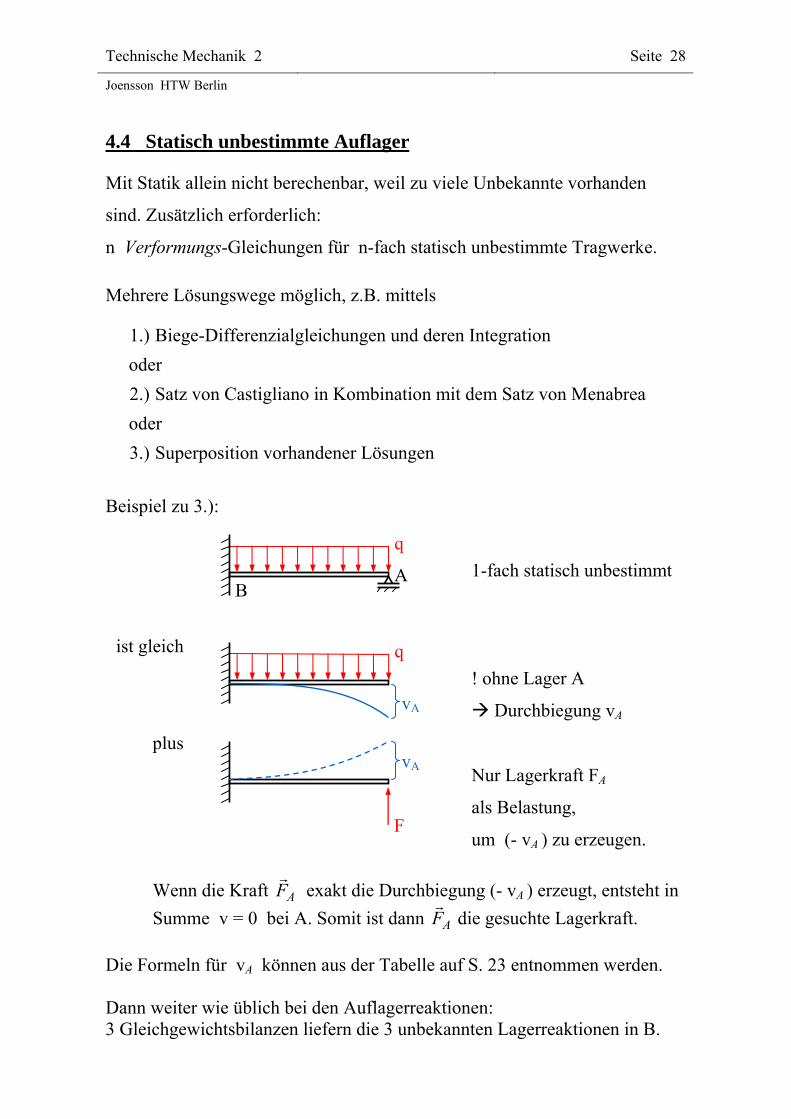
Technische Mechanik 2 Seite 28
Joensson HTW Berlin
4.4 Statisch unbestimmte Auflager
Mit Statik allein nicht berechenbar, weil zu viele Unbekannte vorhanden
sind. Zusätzlich erforderlich:
n Verformungs-Gleichungen für n-fach statisch unbestimmte Tragwerke.
Mehrere Lösungswege möglich, z.B. mittels
1.) Biege-Differenzialgleichungen und deren Integration
oder
2.) Satz von Castigliano in Kombination mit dem Satz von Menabrea
oder
3.) Superposition vorhandener Lösungen
Beispiel zu 3.):
1-fach statisch unbestimmt
ist gleich
! ohne Lager A
Durchbiegung vA
plus
Nur Lagerkraft FA
als Belastung,
um (- vA ) zu erzeugen.
Wenn die Kraft AF
exakt die Durchbiegung (- vA ) erzeugt, entsteht in
Summe v = 0 bei A. Somit ist dann AF
die gesuchte Lagerkraft. Die Formeln für vA können aus der Tabelle auf S. 23 entnommen werden. Dann weiter wie üblich bei den Auflagerreaktionen: 3 Gleichgewichtsbilanzen liefern die 3 unbekannten Lagerreaktionen in B.
vA
F
q
vA
q
A B
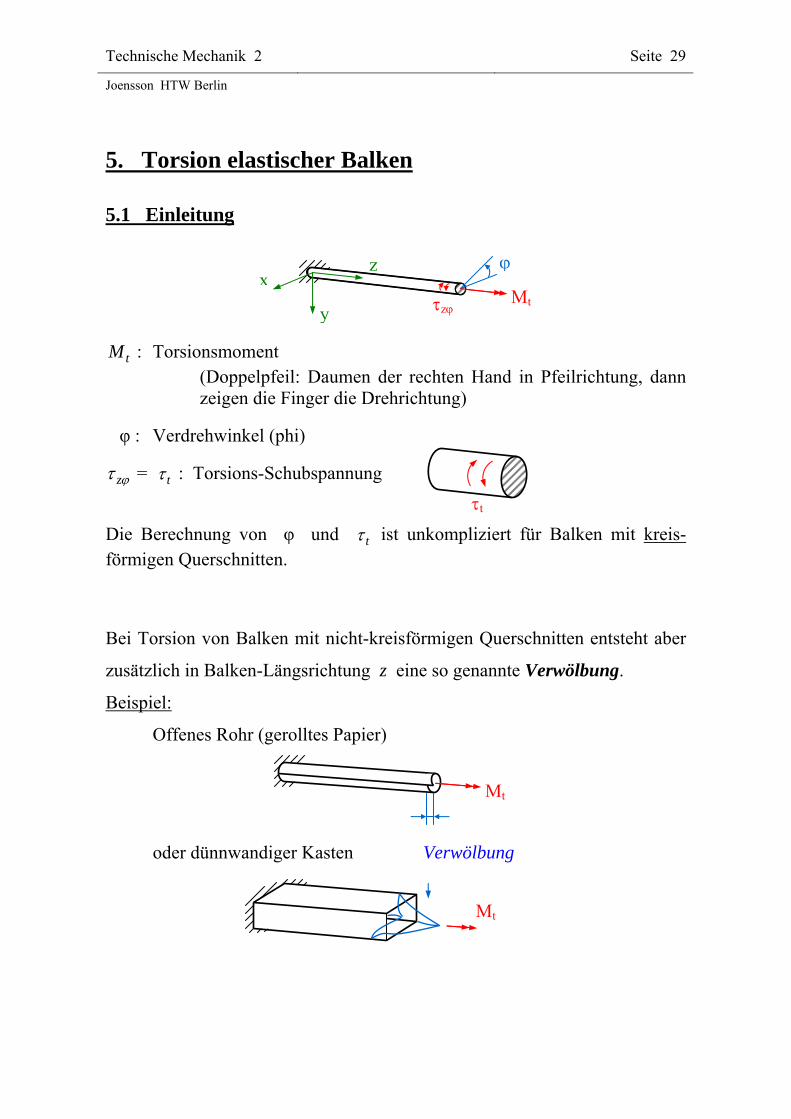
Technische Mechanik 2 Seite 29
Joensson HTW Berlin
5. Torsion elastischer Balken
5.1 Einleitung
tM : Torsionsmoment (Doppelpfeil: Daumen der rechten Hand in Pfeilrichtung, dann zeigen die Finger die Drehrichtung)
φ : Verdrehwinkel (phi)
z = t : Torsions-Schubspannung
Die Berechnung von φ und t ist unkompliziert für Balken mit kreis- förmigen Querschnitten.
Bei Torsion von Balken mit nicht-kreisförmigen Querschnitten entsteht aber
zusätzlich in Balken-Längsrichtung z eine so genannte Verwölbung.
Beispiel:
Offenes Rohr (gerolltes Papier)
oder dünnwandiger Kasten Verwölbung
Mt
Mt
t
Mt
z
x
y
z
Technische Mechanik 2 Seite 30
Joensson HTW Berlin Bei Wölbbehinderung (durch feste Lager oder durch Ankopplung an
benachbarte Bauteile) entstehen zusätzlich Normalspannungen z , die
größer als t max sein können!
Aufwendige analytische Berechnung der „Wölbkraft-Torsion“
oder Computerberechnungen erforderlich.
Ohne größeren Aufwand können nur Bauteile ohne Wölbbehinderung
berechnet werden:
„Reine Torsion“ (St.-Venantsche Torsion).
Dafür gibt es einfache Näherungsformeln zur Berechnung der Schub-
spannung t und des Verdrehwinkels φ [Kapitel 5.3].
Sonderfall kreisförmige Querschnitte:
Sämtliche Kreis- und Kreisring-Querschnitte sind bei Torsion absolut
wölbfrei.
Deshalb haben Wölbbehinderungen bei diesen Querschnitten keine Wirkung.
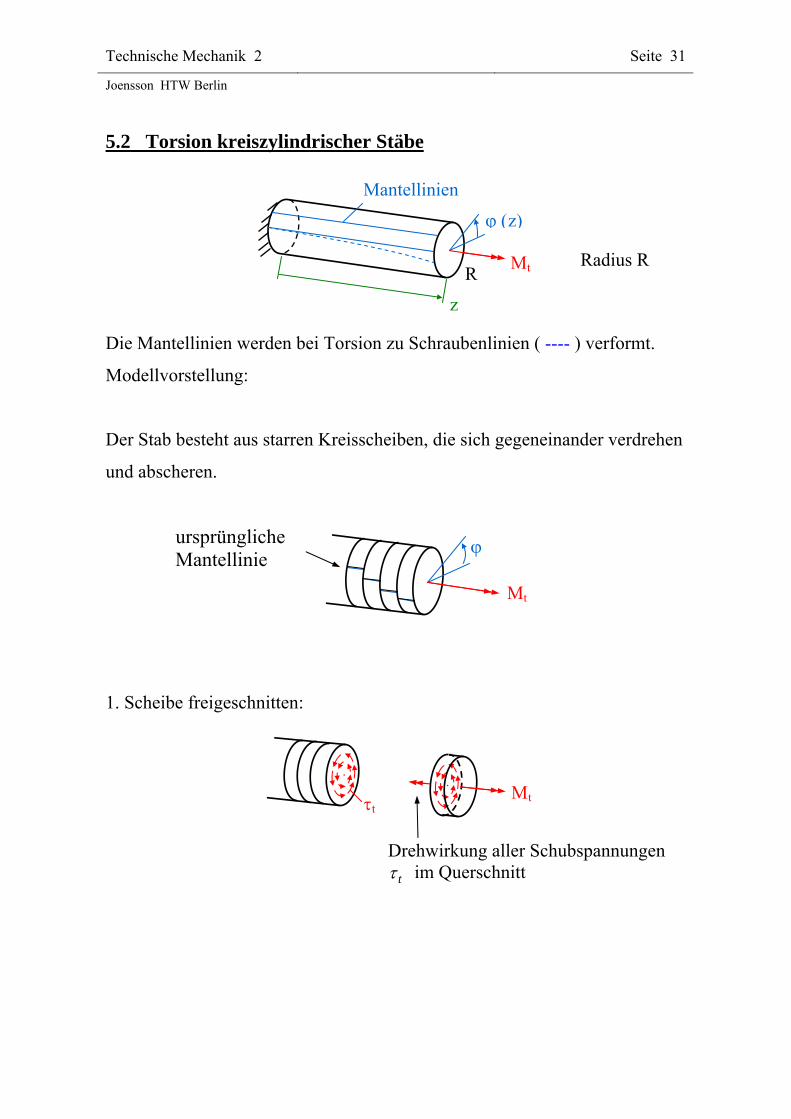
Technische Mechanik 2 Seite 31
Joensson HTW Berlin
5.2 Torsion kreiszylindrischer Stäbe
Radius R
Die Mantellinien werden bei Torsion zu Schraubenlinien ( ---- ) verformt.
Modellvorstellung:
Der Stab besteht aus starren Kreisscheiben, die sich gegeneinander verdrehen
und abscheren.
ursprüngliche Mantellinie
1. Scheibe freigeschnitten:
Drehwirkung aller Schubspannungen
t im Querschnitt
t t
z
Mantellinien
z
R Mt
MtA

Technische Mechanik 2 Seite 32
Joensson HTW Berlin Die Schubspannung auf der Kreisfläche nimmt von innen nach außen linear zu:
Torsions-Schubspannung t
im Unterschied zu Q
Querkraft-Schubspannung ( Kapitel 2.3 )
Bei Torsion gilt:
t (r) = G · · r mit r = 0 bis R (Außenradius)
Mit G : Gleitmodul des Werkstoffes [ in N/mm2 ]
: Drillung ( Theta ) bzw. Verdrehwinkel je Längeneinheit
[ in 1/m wegen Bogenmaß pro Meter ]
und speziell t (r = 0) = 0 und t (r = R) = t max
Sowohl G als auch sind jeweils konstante Werkstoff-Kenngrößen.
Für das Torsionsmoment tM gilt (ohne Herleitung):
tM = G · · pI (1)
mit
pI = xxI + yyI polares Flächenträgheitsmoment
z.B. Vollkreis
pI = 2
· R 4
Kreisring
pI = 2
· 4 4
a iR R
0
0Q (r)
Qmax
FQ
tmax
t = 0 t (r) r R
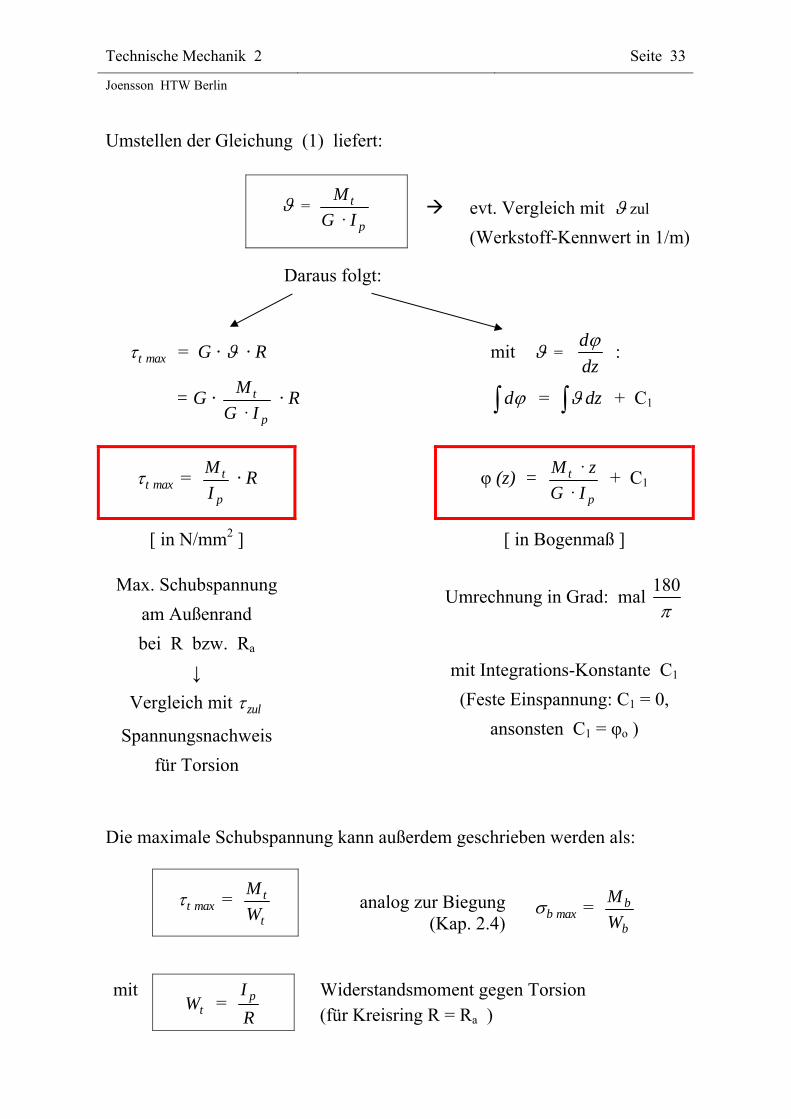
Technische Mechanik 2 Seite 33
Joensson HTW Berlin Umstellen der Gleichung (1) liefert:
=
· t
p
M
G I
evt. Vergleich mit zul
(Werkstoff-Kennwert in 1/m)
Daraus folgt:
t max = G · · R mit = d
dz
:
= G · ·
t
p
M
G I · R d = dz + C1
t max = t
p
M
I · R
φ (z) =
·
· t
p
M z
G I + C1
[ in N/mm2 ]
Max. Schubspannung
am Außenrand
bei R bzw. Ra
↓
Vergleich mit zul
Spannungsnachweis
für Torsion
[ in Bogenmaß ]
Umrechnung in Grad: mal 180
mit Integrations-Konstante C1
(Feste Einspannung: C1 = 0,
ansonsten C1 = φo )
Die maximale Schubspannung kann außerdem geschrieben werden als:
t max = t
t
M
W
analog zur Biegung
(Kap. 2.4) b max = b
b
M
W
mit tW = pI
R
Widerstandsmoment gegen Torsion (für Kreisring R = Ra )
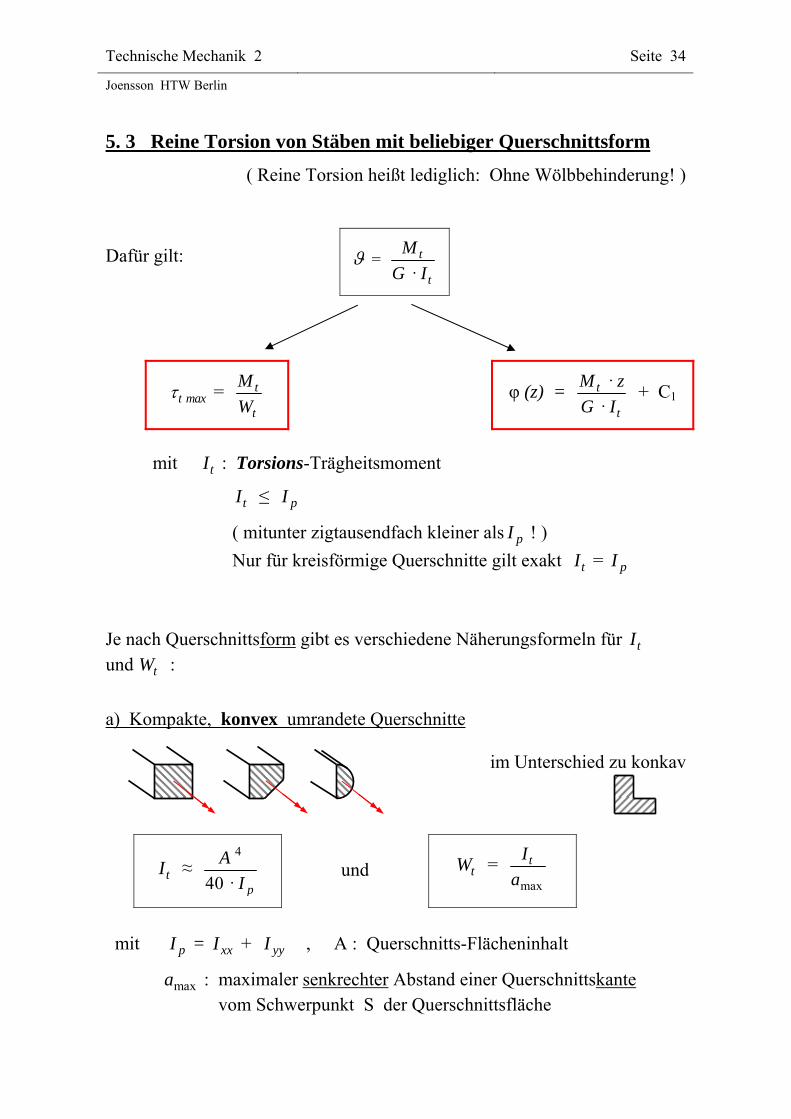
Technische Mechanik 2 Seite 34
Joensson HTW Berlin
5. 3 Reine Torsion von Stäben mit beliebiger Querschnittsform
( Reine Torsion heißt lediglich: Ohne Wölbbehinderung! )
Dafür gilt: = ·
t
t
M
G I
t max = t
t
M
W
φ (z) =
·
· t
t
M z
G I + C1
mit tI : Torsions-Trägheitsmoment
tI ≤ pI
( mitunter zigtausendfach kleiner als pI ! )
Nur für kreisförmige Querschnitte gilt exakt tI = pI
Je nach Querschnittsform gibt es verschiedene Näherungsformeln für tI und tW :
a) Kompakte, konvex umrandete Querschnitte
im Unterschied zu konkav
tI ≈ 4
40 · p
A
I und tW =
max
tI
a
mit pI = xxI + yyI , A : Querschnitts-Flächeninhalt
maxa : maximaler senkrechter Abstand einer Querschnittskante vom Schwerpunkt S der Querschnittsfläche
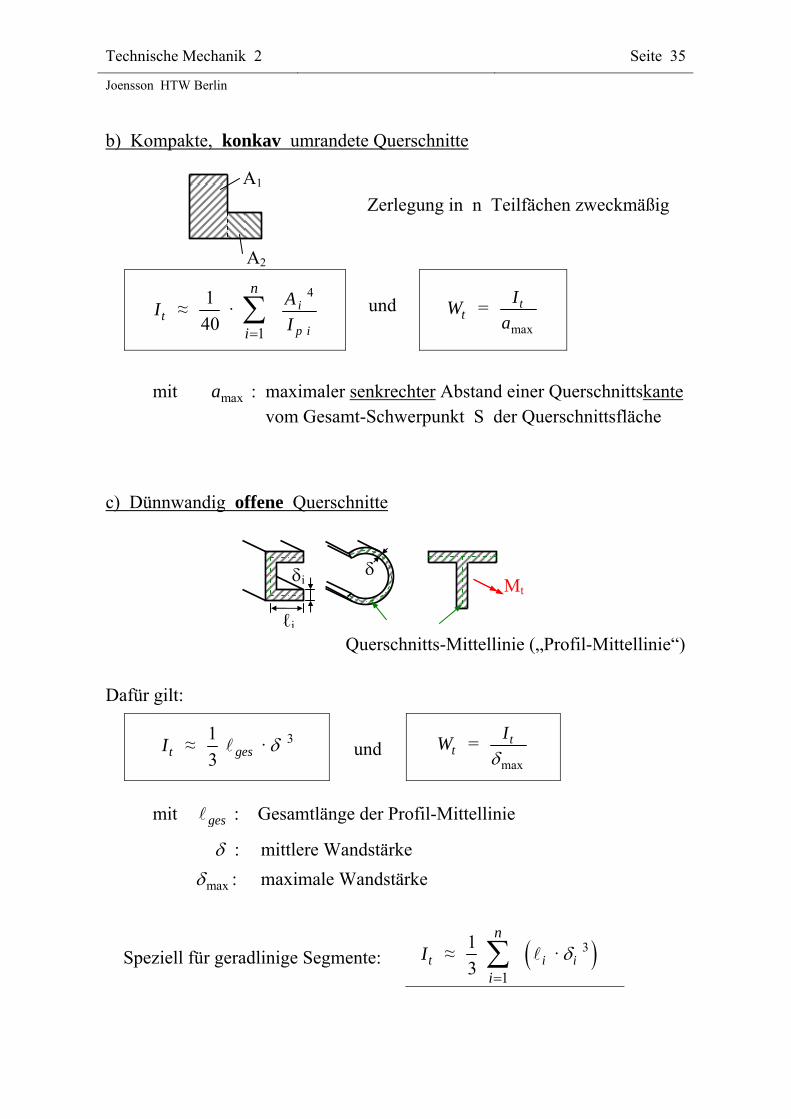
Technische Mechanik 2 Seite 35
Joensson HTW Berlin b) Kompakte, konkav umrandete Querschnitte
Zerlegung in n Teilfächen zweckmäßig
tI ≈ 1
· 40
1
n
i
4
i
p i
A
I und
tW = max
tI
a
mit maxa : maximaler senkrechter Abstand einer Querschnittskante vom Gesamt-Schwerpunkt S der Querschnittsfläche
c) Dünnwandig offene Querschnitte
Querschnitts-Mittellinie („Profil-Mittellinie“)
Dafür gilt:
tI ≈ 31 ·
3 ges und tW = max
tI
mit ges : Gesamtlänge der Profil-Mittellinie
: mittlere Wandstärke
max : maximale Wandstärke
Speziell für geradlinige Segmente: tI ≈ 1
3
1
n
i 3 · i i
i
ℓi
Mt
A1
A2
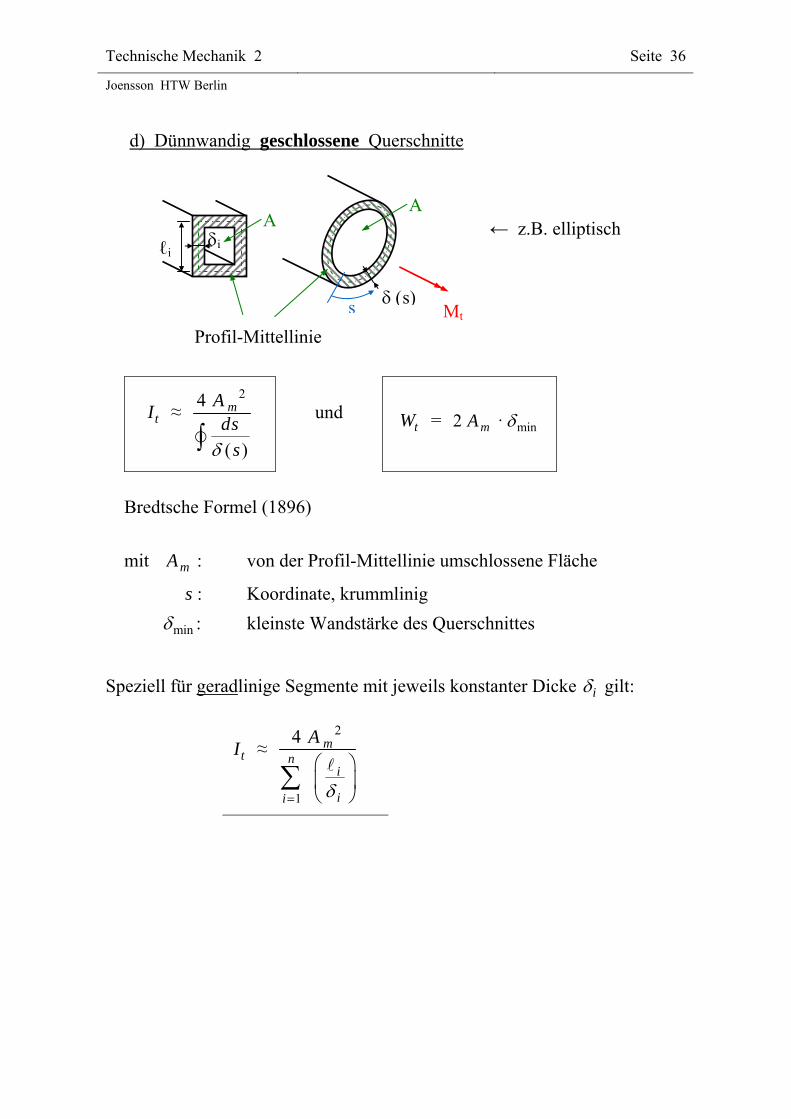
Technische Mechanik 2 Seite 36
Joensson HTW Berlin
d) Dünnwandig geschlossene Querschnitte
← z.B. elliptisch
Profil-Mittellinie
tI ≈ 2
4
( )
mAds
s und
tW = min2 · mA
Bredtsche Formel (1896)
mit mA : von der Profil-Mittellinie umschlossene Fläche
s : Koordinate, krummlinig
min : kleinste Wandstärke des Querschnittes
Speziell für geradlinige Segmente mit jeweils konstanter Dicke i gilt:
tI ≈ 2
1
4
mn
i
ii
A
iℓiA
A
Mts s
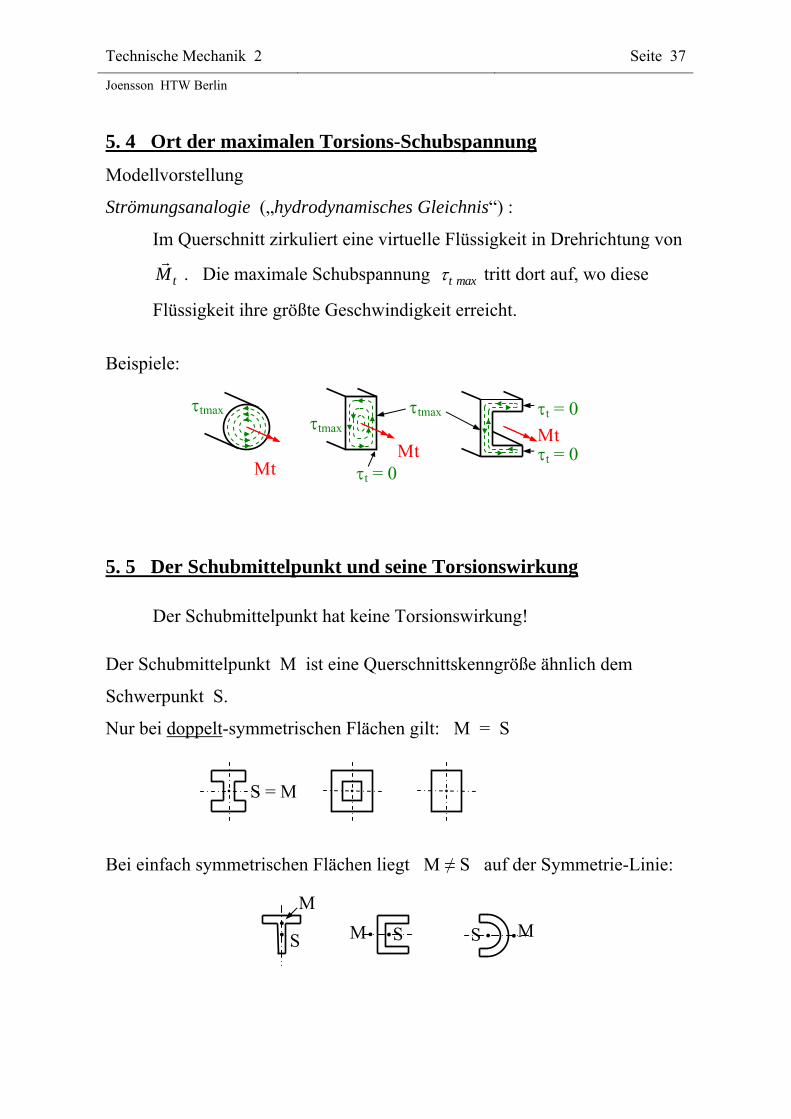
Technische Mechanik 2 Seite 37
Joensson HTW Berlin
5. 4 Ort der maximalen Torsions-Schubspannung
Modellvorstellung
Strömungsanalogie („hydrodynamisches Gleichnis“) :
Im Querschnitt zirkuliert eine virtuelle Flüssigkeit in Drehrichtung von
tM
. Die maximale Schubspannung t max tritt dort auf, wo diese
Flüssigkeit ihre größte Geschwindigkeit erreicht.
Beispiele:
5. 5 Der Schubmittelpunkt und seine Torsionswirkung
Der Schubmittelpunkt hat keine Torsionswirkung!
Der Schubmittelpunkt M ist eine Querschnittskenngröße ähnlich dem
Schwerpunkt S.
Nur bei doppelt-symmetrischen Flächen gilt: M = S
Bei einfach symmetrischen Flächen liegt M ≠ S auf der Symmetrie-Linie:
S M S S M
M
S = M
t = 0t = 0
t = 0 tmax
t t
t
tmax tmax
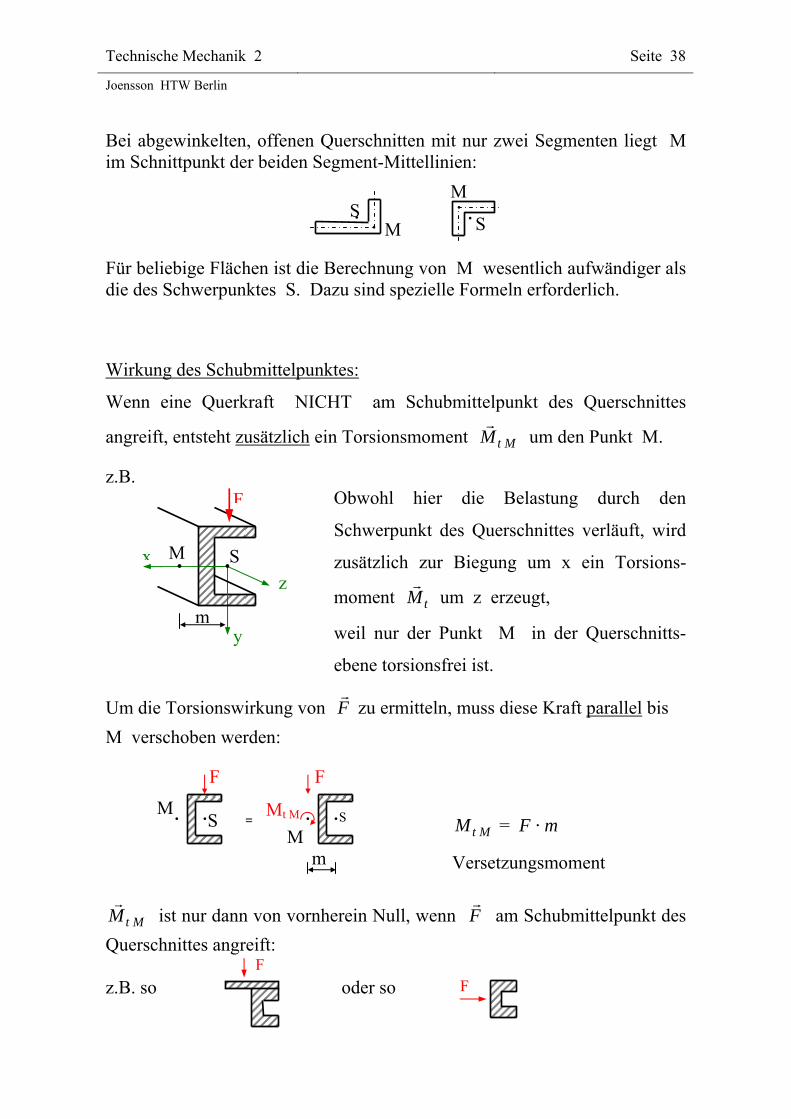
Technische Mechanik 2 Seite 38
Joensson HTW Berlin Bei abgewinkelten, offenen Querschnitten mit nur zwei Segmenten liegt M im Schnittpunkt der beiden Segment-Mittellinien:
Für beliebige Flächen ist die Berechnung von M wesentlich aufwändiger als die des Schwerpunktes S. Dazu sind spezielle Formeln erforderlich.
Wirkung des Schubmittelpunktes:
Wenn eine Querkraft NICHT am Schubmittelpunkt des Querschnittes
angreift, entsteht zusätzlich ein Torsionsmoment t MM
um den Punkt M.
z.B.
Obwohl hier die Belastung durch den
Schwerpunkt des Querschnittes verläuft, wird
zusätzlich zur Biegung um x ein Torsions-
moment tM
um z erzeugt,
weil nur der Punkt M in der Querschnitts-
ebene torsionsfrei ist.
Um die Torsionswirkung von F
zu ermitteln, muss diese Kraft parallel bis
M verschoben werden:
t MM = F · m
Versetzungsmoment
t MM
ist nur dann von vornherein Null, wenn F
am Schubmittelpunkt des
Querschnittes angreift: z.B. so
oder so
FF
S M
F
= S
M
F
Mt M
m
x
z
y
M
F
m
S
SM S
M
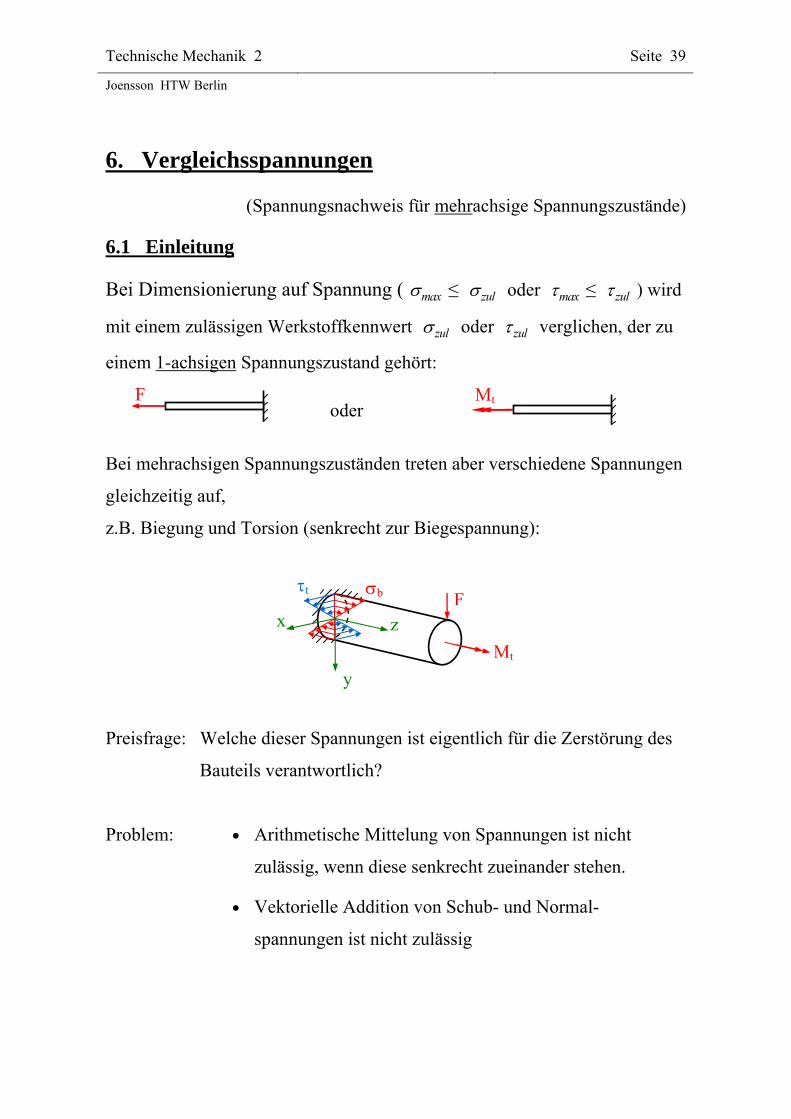
Technische Mechanik 2 Seite 39
Joensson HTW Berlin
6. Vergleichsspannungen
(Spannungsnachweis für mehrachsige Spannungszustände)
6.1 Einleitung
Bei Dimensionierung auf Spannung ( max ≤ zul oder max ≤ zul ) wird
mit einem zulässigen Werkstoffkennwert zul oder zul verglichen, der zu
einem 1-achsigen Spannungszustand gehört:
oder
Bei mehrachsigen Spannungszuständen treten aber verschiedene Spannungen
gleichzeitig auf,
z.B. Biegung und Torsion (senkrecht zur Biegespannung):
Preisfrage: Welche dieser Spannungen ist eigentlich für die Zerstörung des
Bauteils verantwortlich?
Problem: Arithmetische Mittelung von Spannungen ist nicht
zulässig, wenn diese senkrecht zueinander stehen.
Vektorielle Addition von Schub- und Normal-
spannungen ist nicht zulässig
zx F
Mt
bt
Mt F
y
Technische Mechanik 2 Seite 40
Joensson HTW Berlin Lösung: Berechnung 1-achsiger Vergleichsspannungen aus dem
mehrachsigen Spannungszustand mit Hilfe
von Festigkeitshypothesen (es gibt mehrere)
z.B. für
spröde Werkstoffe oder
(z.B. Gusseisen)
↓
duktile Werkstoffe
(z.B. Stahl)
↓
Normalspannungshypothese
d.h.
die größte Normalspannung
im Bauteil
ist verantwortlich für
die Zerstörung des Bauteils
Gestaltänderungsenergiehypothese
d.h.
die größte Gestaltänderung
(die Verzerrung) des Bauteils
ist verantwortlich für
die Zerstörung des Bauteils
Spannungsnachweis für mehrachsige Spannungszustände:
V max ≤ zul Allgemeiner
Spannungsnachweis
mit V max : max. Vergleichsspannung im konkreten Bauteil mit zul : 1-achsig ermittelte zulässige (Zug-) Normalspannung des
Werkstoffes an einfachen, ungekerbten Zug-Proben:
F

Technische Mechanik 2 Seite 41
Joensson HTW Berlin
6.2 Die Normalspannungshypothese
(nach Galilei, Lamé und Navier)
VN = 1max für spröde Werkstoffe
(Gusseisen, Glas, Stein … ) ↑ Vergleichsspannung nach Normalspannungshypothese d.h.
als Vergleichsspannung wird die jeweils größte Hauptnormalspannung 1
im Bauteil verwendet.
Die Formel für 1 bei dreidimensionaler Beanspruchung ist umfangreich
und enthält alle Spannungskomponenten x , y , z , xy , yz und zx .
6.3 Die Gestaltänderungsenergiehypothese
(nach Huber, Mises und Hencky)
VG = 2 2 2 2 2 21 3 2 x y y z z x xy yz zx
↑ Vergleichsspannung nach Gestaltänderungsenergiehypothese GEH
für duktile Werkstoffe (Stahl, Kupfer, …. ) Formänderung eines festen Körpers:
Volumen- + Gestaltänderung änderung ↑ ohne nur diese Gestaltänderung Änderung ist nach GEH maßgebend
= +
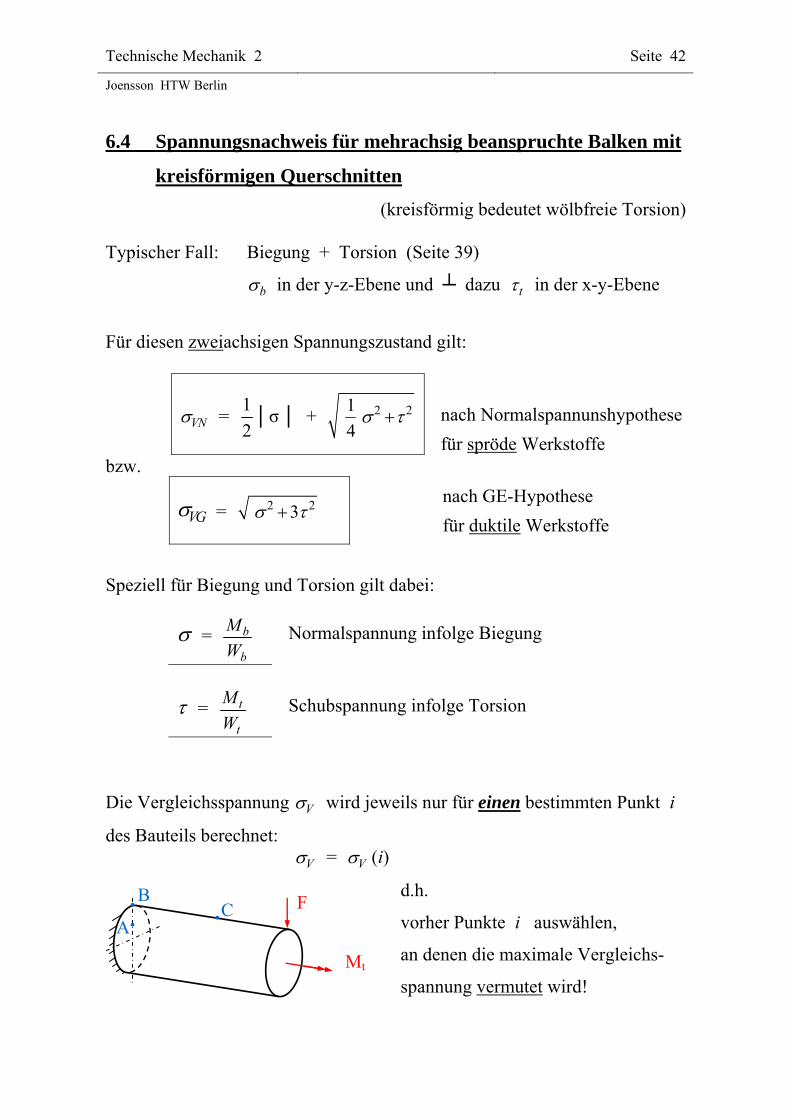
Technische Mechanik 2 Seite 42
Joensson HTW Berlin
6.4 Spannungsnachweis für mehrachsig beanspruchte Balken mit
kreisförmigen Querschnitten
(kreisförmig bedeutet wölbfreie Torsion) Typischer Fall: Biegung + Torsion (Seite 39)
b in der y-z-Ebene und dazu t in der x-y-Ebene
Für diesen zweiachsigen Spannungszustand gilt:
VN = 1
2σ + 2 21
4
nach Normalspannunshypothese
für spröde Werkstoffe bzw.
VG = 2 2 3 nach GE-Hypothese
für duktile Werkstoffe
Speziell für Biegung und Torsion gilt dabei:
= b
b
M
W Normalspannung infolge Biegung
= t
t
M
W Schubspannung infolge Torsion
Die Vergleichsspannung V wird jeweils nur für einen bestimmten Punkt i
des Bauteils berechnet:
V = V (i)
d.h.
vorher Punkte i auswählen,
an denen die maximale Vergleichs-
spannung vermutet wird!
CB
A F
Mt
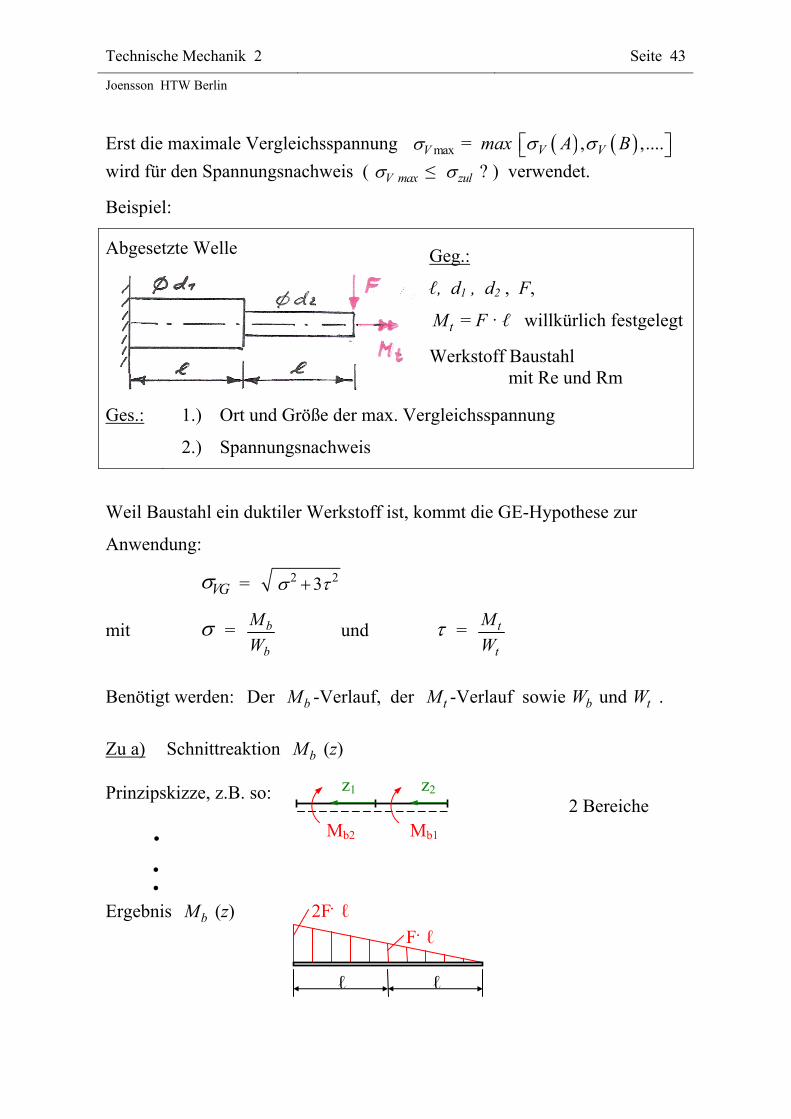
Technische Mechanik 2 Seite 43
Joensson HTW Berlin
Erst die maximale Vergleichsspannung maxV = max , ,....V VA B
wird für den Spannungsnachweis ( V max ≤ zul ? ) verwendet.
Beispiel:
Abgesetzte Welle Geg.:
ℓ, d1 , d2 , F,
tM = F · ℓ willkürlich festgelegt
Werkstoff Baustahl mit Re und Rm
Ges.: 1.) Ort und Größe der max. Vergleichsspannung
2.) Spannungsnachweis
Weil Baustahl ein duktiler Werkstoff ist, kommt die GE-Hypothese zur
Anwendung:
VG = 2 2 3
mit = b
b
M
W und = t
t
M
W
Benötigt werden: Der bM -Verlauf, der tM -Verlauf sowie bW und tW .
Zu a) Schnittreaktion bM (z)
Prinzipskizze, z.B. so:
2 Bereiche
Ergebnis bM (z)
ℓ ℓ
F ℓ
2F ℓ
z1 z2
Mb2 Mb1

Technische Mechanik 2 Seite 44
Joensson HTW Berlin Zu b) Schnittreaktion tM (z)
Prinzipskizze:
Ergebnis tM (z)
Zu c) Widerstandsmomente:
bW = 4
· r 3 Vollkreis-Querschnitt
tW = 2 · bW ! gilt immer bei Vollkreisen und Kreisringen
Punktweise Berechnung der Vergleichsspannung:
Zuerst Punkte auswählen, an denen die max. Vergleichsspannung vermutet
wird:
b AM = 2 F· ℓ
b BM = F· ℓ
t AM = t BM = F· ℓ
Punkt A:
A = b A
b A
M
W =
31
2 ·
· 4
F
r
=
31
8 ·
·
F
r
wegen b AW = 31 ·
4r
(A)
(B)
Radius r1 r2
F
Mt
ℓ ℓ
F ℓ

Technische Mechanik 2 Seite 45
Joensson HTW Berlin
A = t A
t A
M
W =
31
·
· 2
F
r
=
31
2 ·
·
F
r
wegen t AW = 31 ·
2r
Damit V G (A) = 2 2 3A A
z.B. für F = 1000 N, ℓ = 200 mm, 1r = 12 mm, 2r = 10 mm
Dafür gilt:
3
1
·
·
F
r
= 3 3
1000 · 200
· 12 ·
N mm
mm = 36,84
2
N
mm (MPa)
Also A = 294,73 MPa A = 73,68 MPa
und damit V G (A) = 321,2 MPa
Punkt B:
B = b B
b B
M
W =
32
·
· 4
F
r
=
32
4 ·
·
F
r
mit 2r !
B = 254,65 MPa
B = t B
t B
M
W =
32
·
· 2
F
r
=
32
2 ·
·
F
r
= 127,32 MPa
Einsetzen in V G (B) = 2 2 3B B
liefert V G (B) = 336,9 MPa
Insgesamt entsteht hier maxV = V G (B) für den Spannungsnachweis.
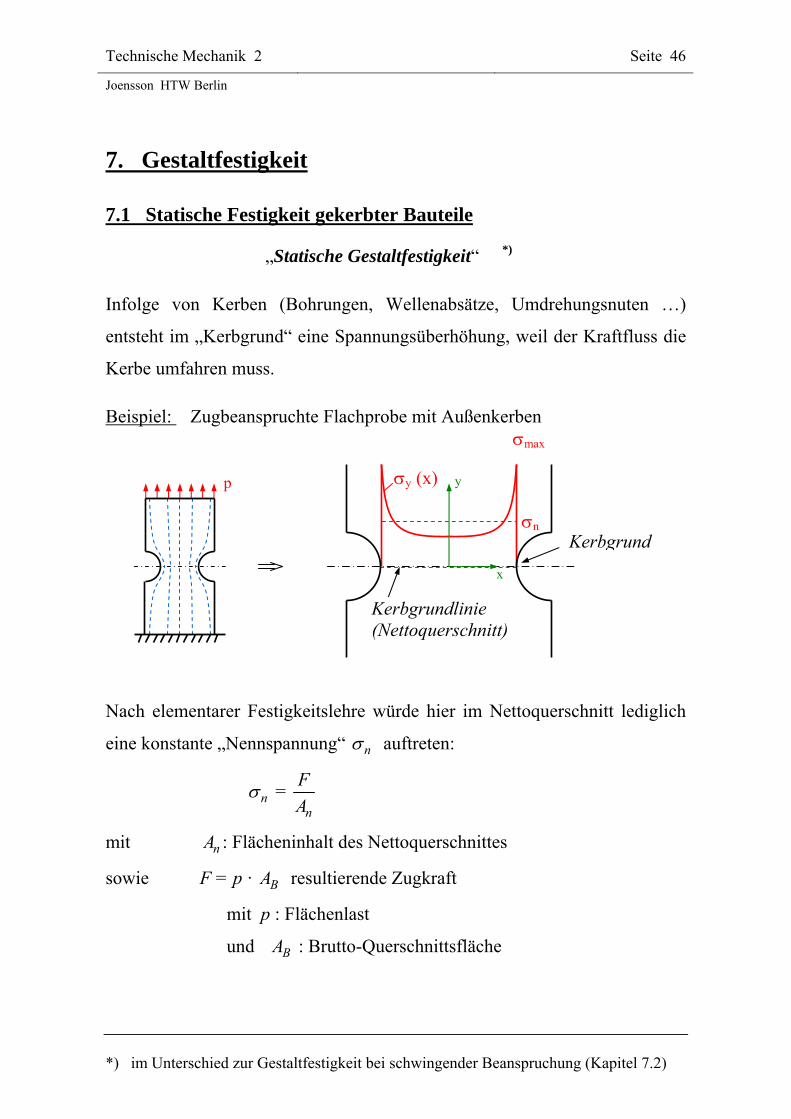
Technische Mechanik 2 Seite 46
Joensson HTW Berlin
*) im Unterschied zur Gestaltfestigkeit bei schwingender Beanspruchung (Kapitel 7.2)
7. Gestaltfestigkeit
7.1 Statische Festigkeit gekerbter Bauteile
„Statische Gestaltfestigkeit“ *)
Infolge von Kerben (Bohrungen, Wellenabsätze, Umdrehungsnuten …)
entsteht im „Kerbgrund“ eine Spannungsüberhöhung, weil der Kraftfluss die
Kerbe umfahren muss.
Beispiel: Zugbeanspruchte Flachprobe mit Außenkerben
Nach elementarer Festigkeitslehre würde hier im Nettoquerschnitt lediglich
eine konstante „Nennspannung“ n auftreten:
n = n
F
A
mit nA : Flächeninhalt des Nettoquerschnittes
sowie F = p · BA resultierende Zugkraft
mit p : Flächenlast
und BA : Brutto-Querschnittsfläche
p y
x
Kerbgrundlinie (Nettoquerschnitt)
n
y (x)
Kerbgrundlinie (Nettoquerschnitt)
Kerbgrund
max
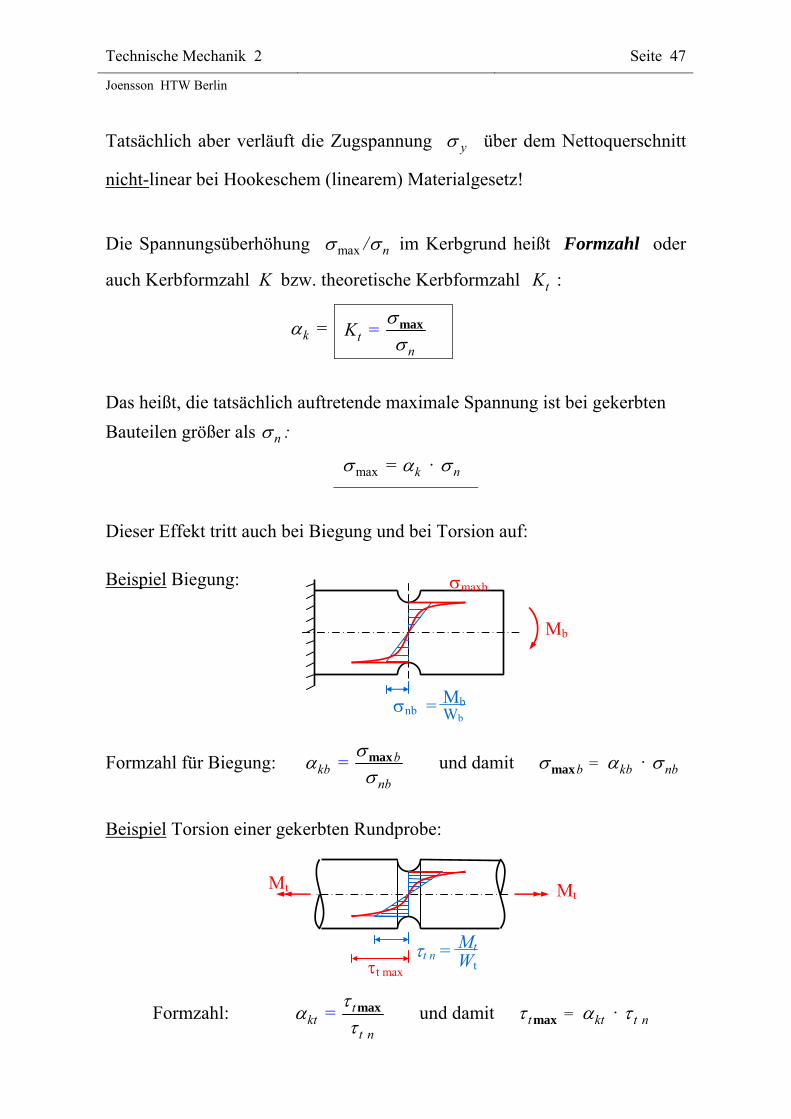
Technische Mechanik 2 Seite 47
Joensson HTW Berlin Tatsächlich aber verläuft die Zugspannung y über dem Nettoquerschnitt
nicht-linear bei Hookeschem (linearem) Materialgesetz!
Die Spannungsüberhöhung max / n im Kerbgrund heißt Formzahl oder
auch Kerbformzahl K bzw. theoretische Kerbformzahl tK :
k = tK =
n
max
Das heißt, die tatsächlich auftretende maximale Spannung ist bei gekerbten
Bauteilen größer als n :
max = k · n
Dieser Effekt tritt auch bei Biegung und bei Torsion auf:
Beispiel Biegung:
Formzahl für Biegung: kb = b
nb
max
und damit bmax = kb · nb
Beispiel Torsion einer gekerbten Rundprobe:
Formzahl: kt = t
t n
max
und damit t max = kt · t n
Mb
nb =MbWb
Mt Mt
t n =MtWtt max
maxb
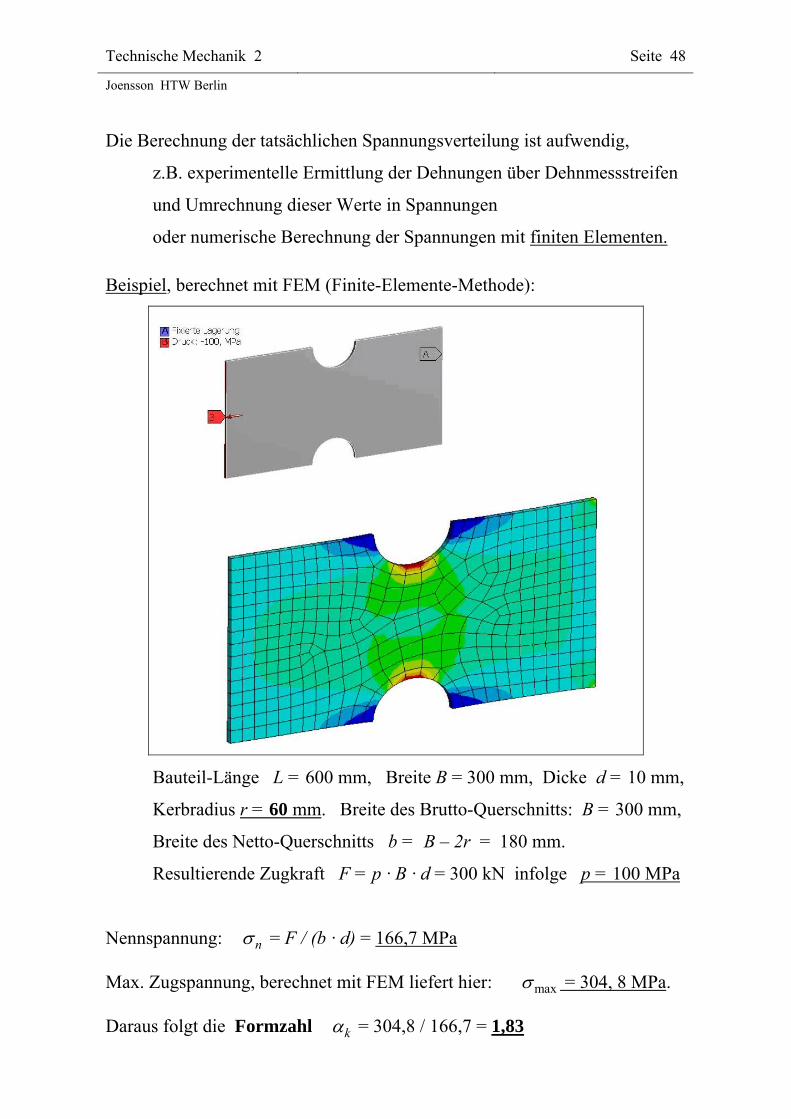
Technische Mechanik 2 Seite 48
Joensson HTW Berlin Die Berechnung der tatsächlichen Spannungsverteilung ist aufwendig,
z.B. experimentelle Ermittlung der Dehnungen über Dehnmessstreifen
und Umrechnung dieser Werte in Spannungen
oder numerische Berechnung der Spannungen mit finiten Elementen.
Beispiel, berechnet mit FEM (Finite-Elemente-Methode):
Bauteil-Länge L = 600 mm, Breite B = 300 mm, Dicke d = 10 mm,
Kerbradius r = 60 mm. Breite des Brutto-Querschnitts: B = 300 mm,
Breite des Netto-Querschnitts b = B – 2r = 180 mm.
Resultierende Zugkraft F = p · B · d = 300 kN infolge p = 100 MPa
Nennspannung: n = F / (b · d) = 166,7 MPa
Max. Zugspannung, berechnet mit FEM liefert hier: max = 304, 8 MPa.
Daraus folgt die Formzahl k = 304,8 / 166,7 = 1,83
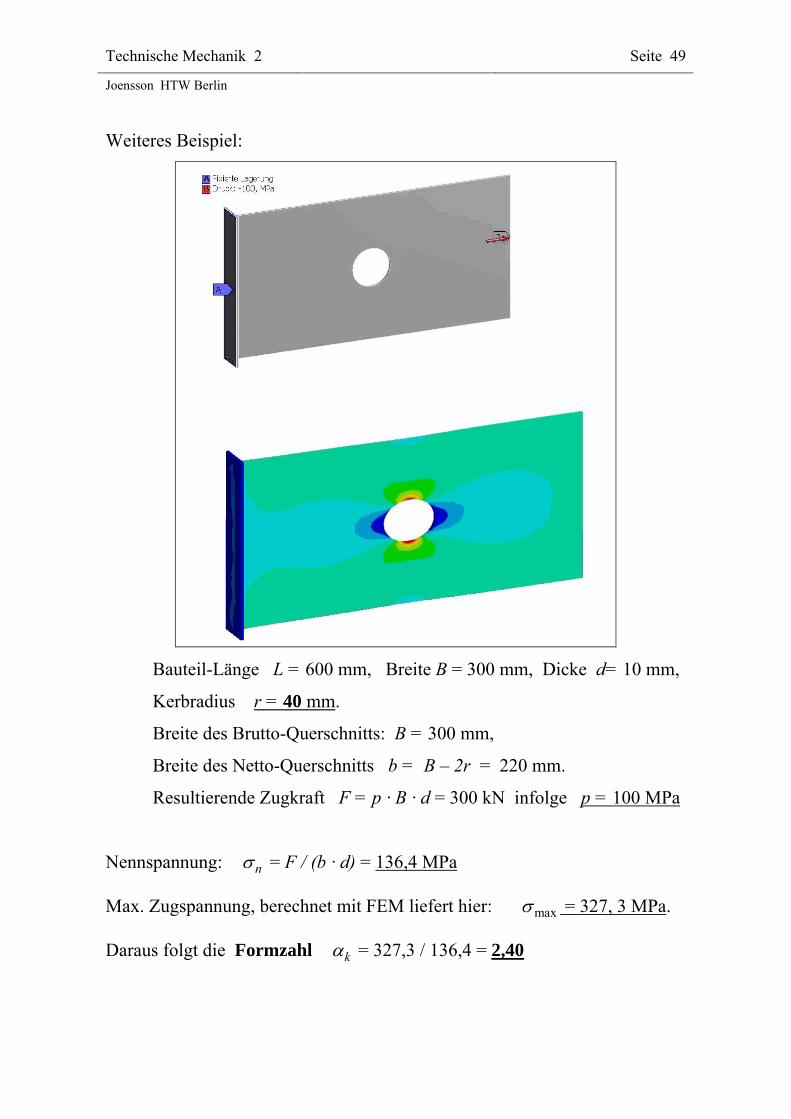
Technische Mechanik 2 Seite 49
Joensson HTW Berlin Weiteres Beispiel:
Bauteil-Länge L = 600 mm, Breite B = 300 mm, Dicke d= 10 mm,
Kerbradius r = 40 mm.
Breite des Brutto-Querschnitts: B = 300 mm,
Breite des Netto-Querschnitts b = B – 2r = 220 mm.
Resultierende Zugkraft F = p · B · d = 300 kN infolge p = 100 MPa
Nennspannung: n = F / (b · d) = 136,4 MPa
Max. Zugspannung, berechnet mit FEM liefert hier: max = 327, 3 MPa.
Daraus folgt die Formzahl k = 327,3 / 136,4 = 2,40
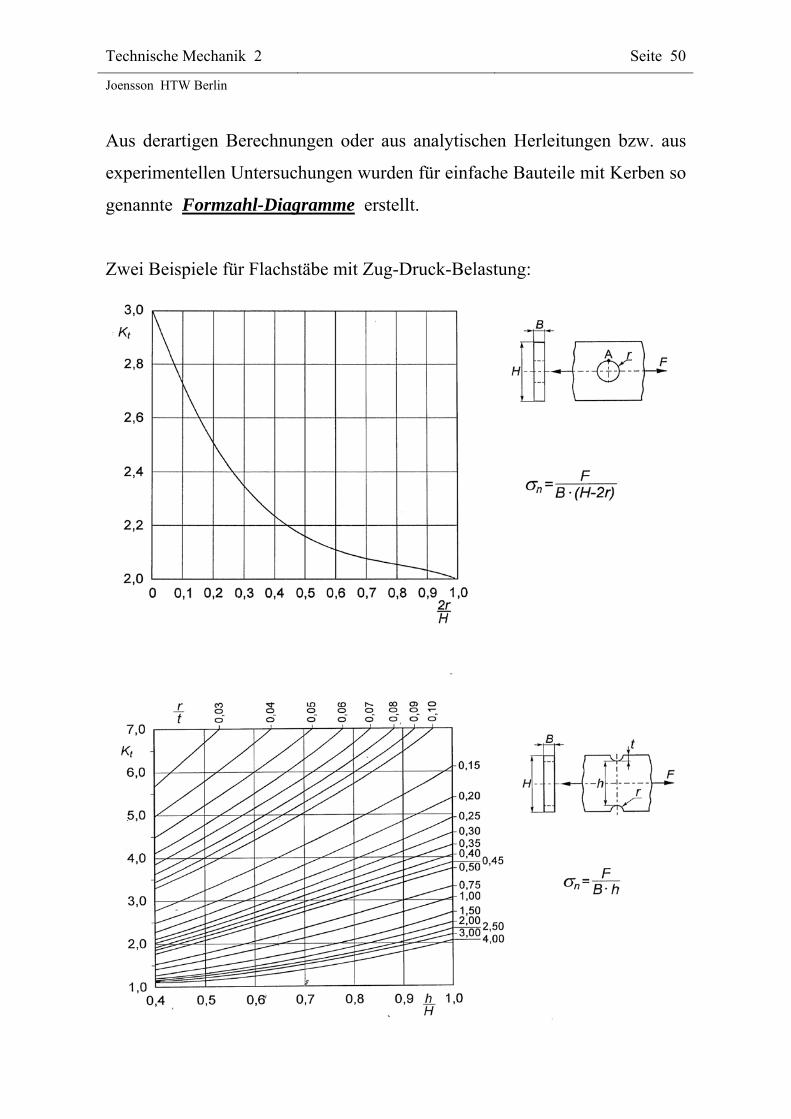
Technische Mechanik 2 Seite 50
Joensson HTW Berlin Aus derartigen Berechnungen oder aus analytischen Herleitungen bzw. aus
experimentellen Untersuchungen wurden für einfache Bauteile mit Kerben so
genannte Formzahl-Diagramme erstellt.
Zwei Beispiele für Flachstäbe mit Zug-Druck-Belastung:
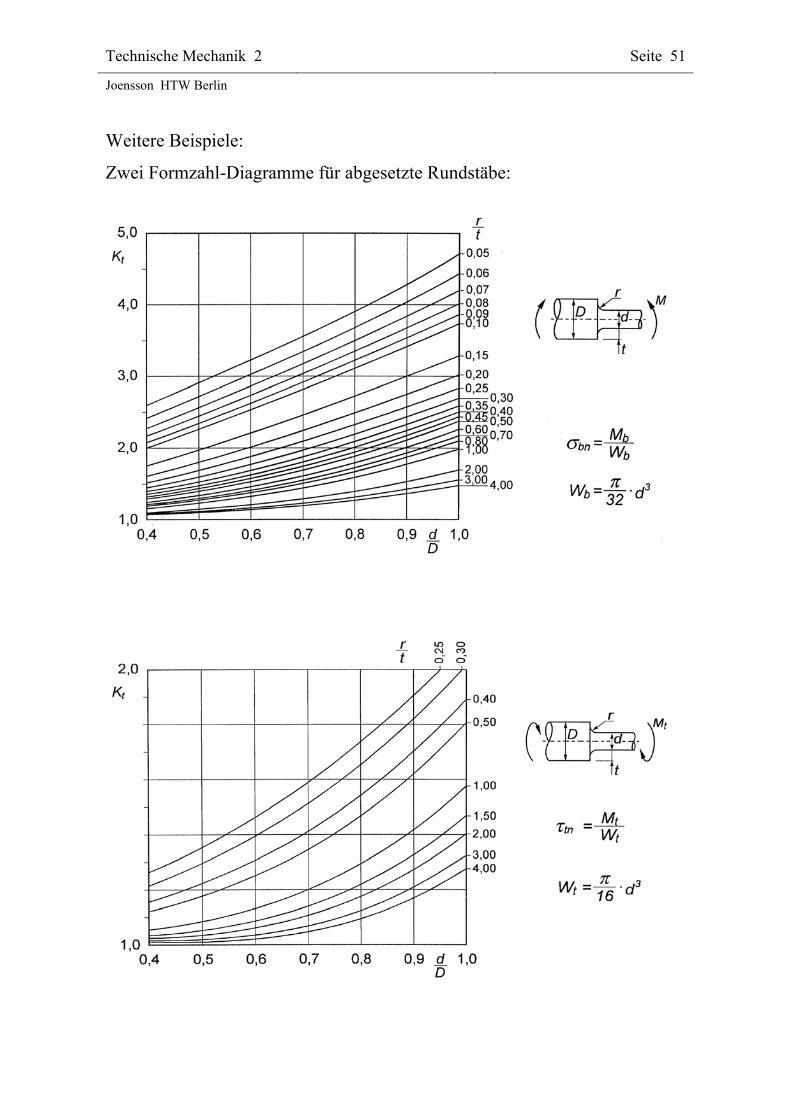
Technische Mechanik 2 Seite 51
Joensson HTW Berlin Weitere Beispiele:
Zwei Formzahl-Diagramme für abgesetzte Rundstäbe:
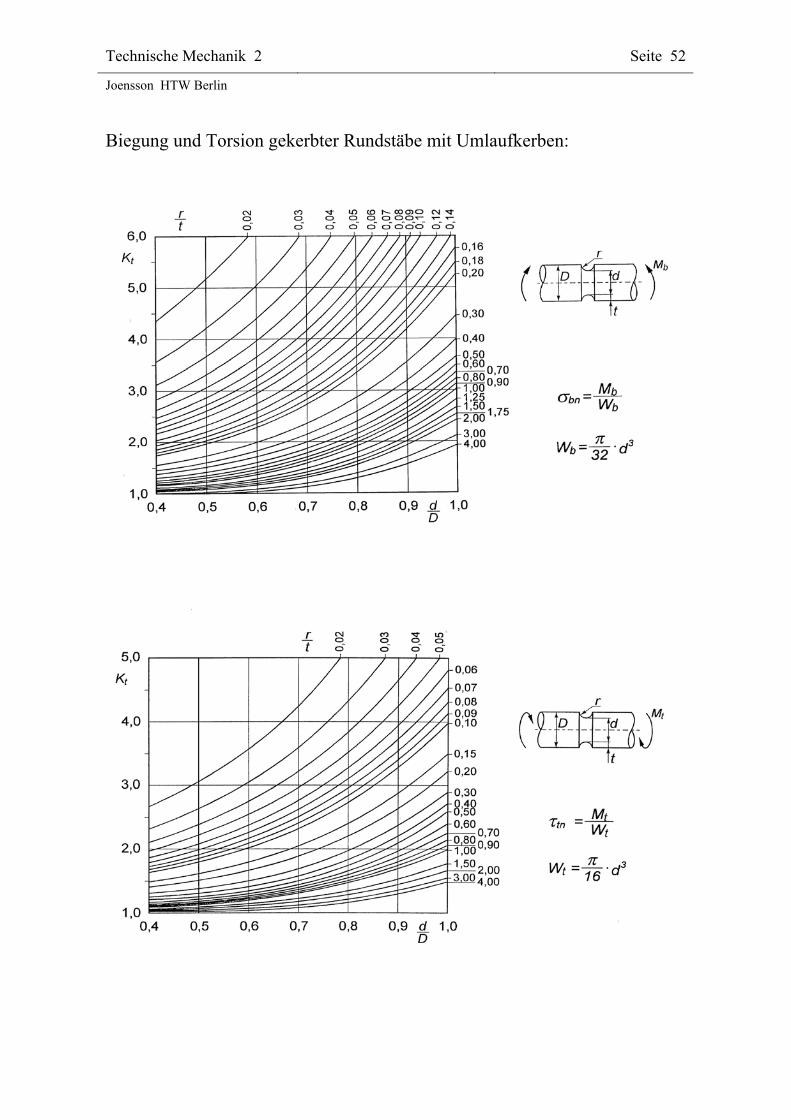
Technische Mechanik 2 Seite 52
Joensson HTW Berlin Biegung und Torsion gekerbter Rundstäbe mit Umlaufkerben:
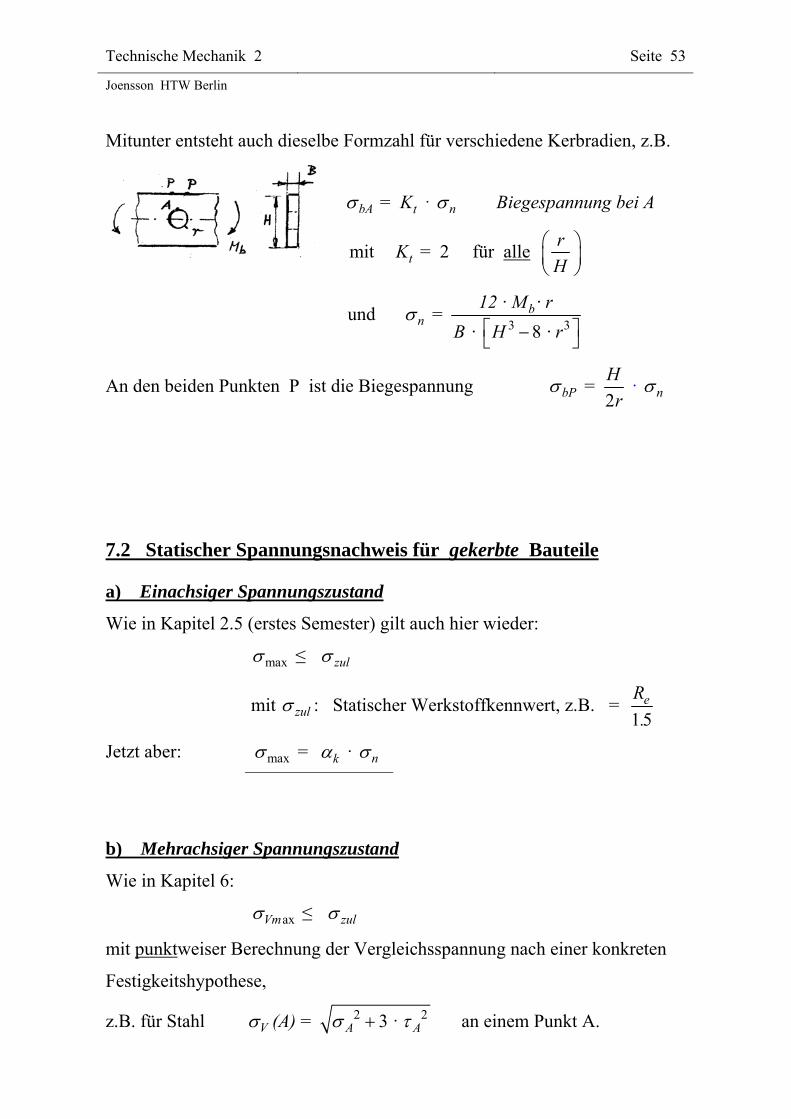
Technische Mechanik 2 Seite 53
Joensson HTW Berlin Mitunter entsteht auch dieselbe Formzahl für verschiedene Kerbradien, z.B.
bA = tK · n Biegespannung bei A
mit tK = 2 für alle r
H
und n = 3 38
b12 · M · r
B · H · r
An den beiden Punkten P ist die Biegespannung bP = 2
H
r · n
7.2 Statischer Spannungsnachweis für gekerbte Bauteile
a) Einachsiger Spannungszustand
Wie in Kapitel 2.5 (erstes Semester) gilt auch hier wieder:
max ≤ zul
mit zul : Statischer Werkstoffkennwert, z.B. = 1 5
eR
.
Jetzt aber: max = k · n
b) Mehrachsiger Spannungszustand
Wie in Kapitel 6:
axVm ≤ zul
mit punktweiser Berechnung der Vergleichsspannung nach einer konkreten
Festigkeitshypothese,
z.B. für Stahl V (A) = 2 23 · A A an einem Punkt A.
Technische Mechanik 2 Seite 54
Joensson HTW Berlin Jetzt aber sind A und A jeweils mit Formzahlen zu berechnen,
z.B. A = bA
bA
M
W · kb (A) für Biegung
bzw. A = tA
tA
M
W · kt (A) für Torsion
7.3 Dynamische Gestaltfestigkeit
Gemeint ist damit die Gestaltschwingfestigkeit, insbesondere die Festigkeit
gekerbter Bauteile unter harmonisch schwingender Dauerbeanspruchung.
Beispiel:
mit Amplitude F und Kreisfrequenz Ω = 2
T
und Schwingungsdauer T einer Schwingungsperiode.
Auch bei dynamischer Beanspruchung ist die (statische) Formzahl eine
wesentliche Einflussgröße siehe Grundlagen der Konstruktion.
F
t
F
T
F (t) = F sin t
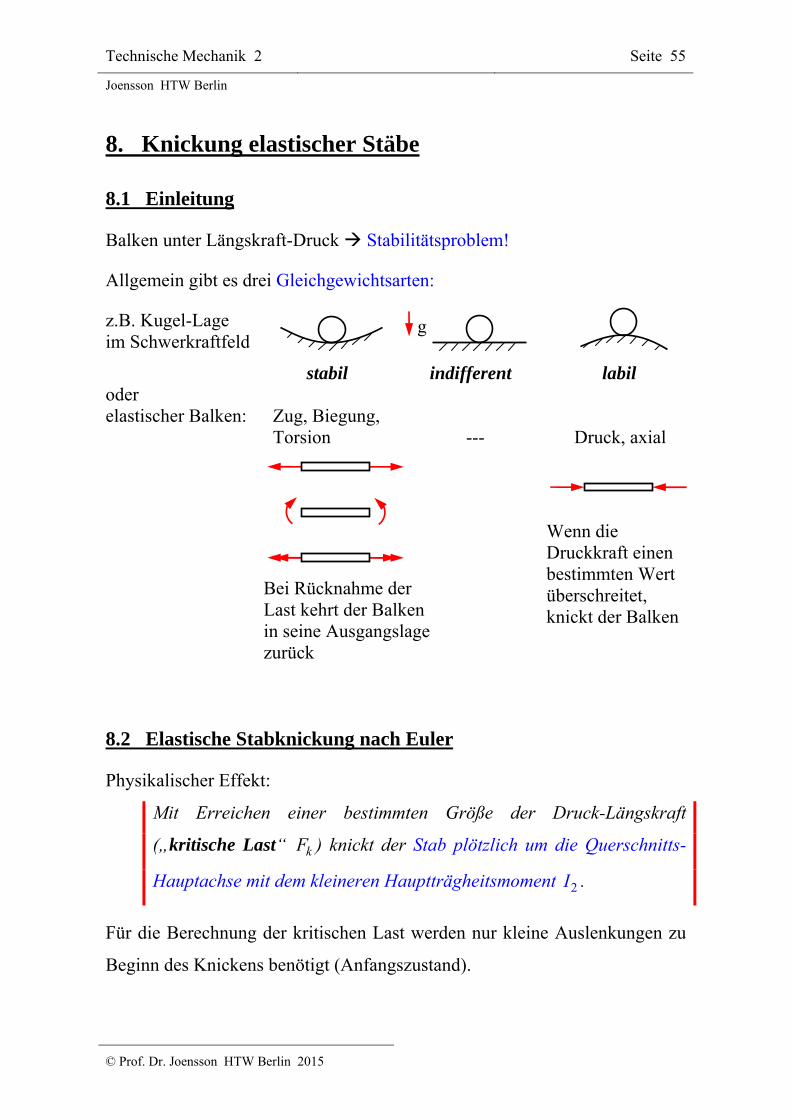
Technische Mechanik 2 Seite 55
Joensson HTW Berlin
© Prof. Dr. Joensson HTW Berlin 2015
8. Knickung elastischer Stäbe
8.1 Einleitung
Balken unter Längskraft-Druck Stabilitätsproblem!
Allgemein gibt es drei Gleichgewichtsarten:
z.B. Kugel-Lage im Schwerkraftfeld
oder
stabil indifferent labil
elastischer Balken: Zug, Biegung, Torsion
Bei Rücknahme der Last kehrt der Balken in seine Ausgangslage zurück
---
Druck, axial
Wenn die Druckkraft einen bestimmten Wert überschreitet, knickt der Balken
8.2 Elastische Stabknickung nach Euler
Physikalischer Effekt:
Mit Erreichen einer bestimmten Größe der Druck-Längskraft
(„kritische Last“ kF ) knickt der Stab plötzlich um die Querschnitts-
Hauptachse mit dem kleineren Hauptträgheitsmoment 2I .
Für die Berechnung der kritischen Last werden nur kleine Auslenkungen zu
Beginn des Knickens benötigt (Anfangszustand).
g
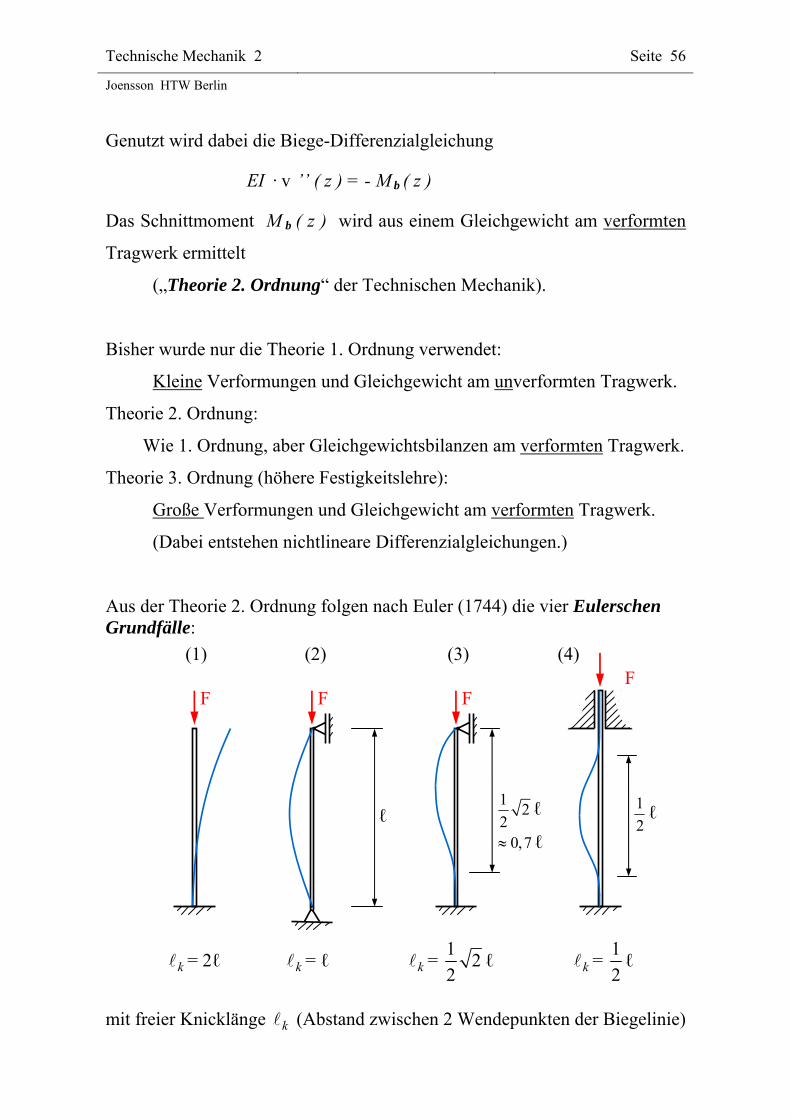
Technische Mechanik 2 Seite 56
Joensson HTW Berlin Genutzt wird dabei die Biege-Differenzialgleichung
EI · v ’’ ( z ) = - M b ( z )
Das Schnittmoment M b ( z ) wird aus einem Gleichgewicht am verformten
Tragwerk ermittelt
(„Theorie 2. Ordnung“ der Technischen Mechanik).
Bisher wurde nur die Theorie 1. Ordnung verwendet:
Kleine Verformungen und Gleichgewicht am unverformten Tragwerk.
Theorie 2. Ordnung:
Wie 1. Ordnung, aber Gleichgewichtsbilanzen am verformten Tragwerk.
Theorie 3. Ordnung (höhere Festigkeitslehre):
Große Verformungen und Gleichgewicht am verformten Tragwerk.
(Dabei entstehen nichtlineare Differenzialgleichungen.)
Aus der Theorie 2. Ordnung folgen nach Euler (1744) die vier Eulerschen Grundfälle:
k = 2ℓ k = ℓ k = 1
22
ℓ k = 1
2ℓ
mit freier Knicklänge k (Abstand zwischen 2 Wendepunkten der Biegelinie)
F FFF
ℓ1
22
ℓ
0,7 ℓ
1
2ℓ
(1) (2) (3) (4)
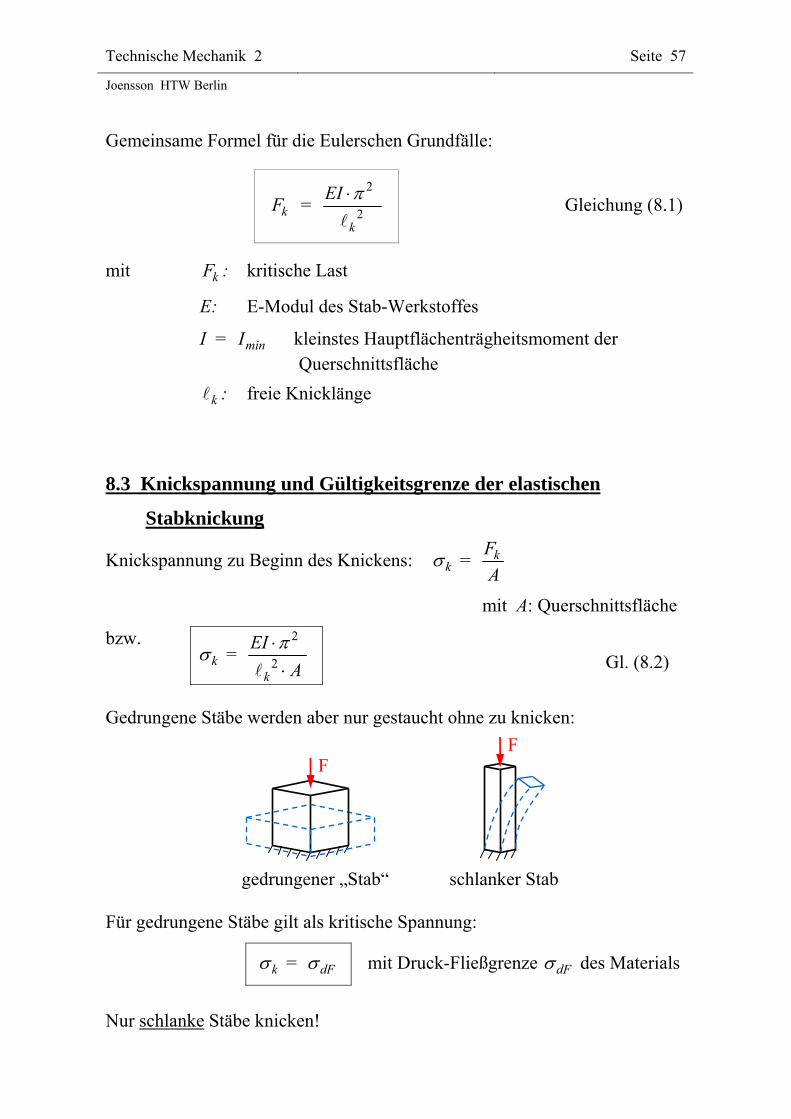
Technische Mechanik 2 Seite 57
Joensson HTW Berlin Gemeinsame Formel für die Eulerschen Grundfälle:
kF =
2
2k
EI
Gleichung (8.1)
mit kF : kritische Last
E: E-Modul des Stab-Werkstoffes
I = minI kleinstes Hauptflächenträgheitsmoment der Querschnittsfläche
k : freie Knicklänge 8.3 Knickspannung und Gültigkeitsgrenze der elastischen
Stabknickung
Knickspannung zu Beginn des Knickens: k = kF
A
mit A: Querschnittsfläche
bzw. k =
2
2
k
EI
A
Gl. (8.2)
Gedrungene Stäbe werden aber nur gestaucht ohne zu knicken:
gedrungener „Stab“ schlanker Stab Für gedrungene Stäbe gilt als kritische Spannung:
k = dF mit Druck-Fließgrenze dF des Materials
Nur schlanke Stäbe knicken!
FF
Technische Mechanik 2 Seite 58
Joensson HTW Berlin Wie schlank ein Stab ist, wird durch den Schlankheitsgrad
gekennzeichnet:
= k
i
mit Trägheitsradius i = minI
A
und minI : kleinstes Flächenträgheitsmoment der Querschnittsfläche A
Daraus folgt: =
min
k A
I
Gl. (8.3)
als dimensionslose Zahl.
Elastisches Knicken tritt nur auf, wenn größer als ein Mindest-Schlank-
heitsgrad p ist:
≥ p Gl. (8.4)
p ist im Unterschied zu werkstoffabhängig:
p ≈
dP
E
Gl. (8.5)
Mindest-Schlankheitsgrad des Stab-Werkstoffes
mit E : Elastizitätsmodul des Stab-Werkstoffes
dP : Betrag der Druck-Proportionalitätsgrenze
des Stab-Werkstoffes
Herleitung dieser Formel :
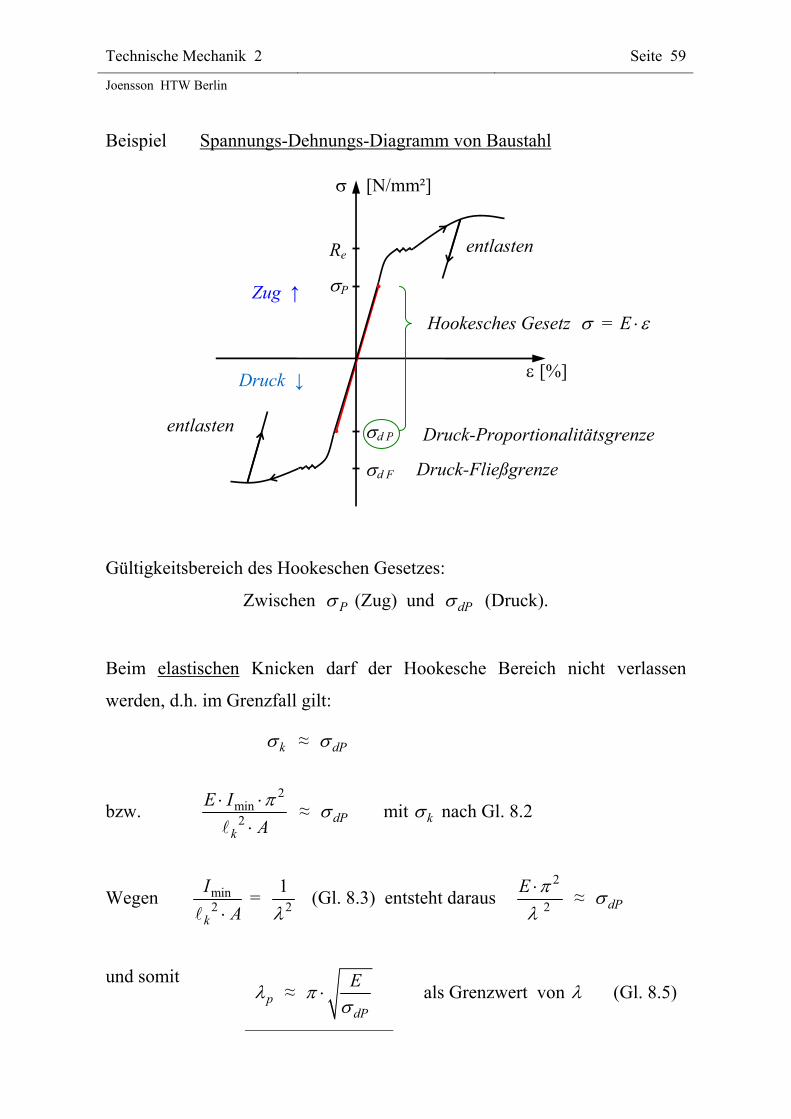
Technische Mechanik 2 Seite 59
Joensson HTW Berlin Beispiel Spannungs-Dehnungs-Diagramm von Baustahl
Gültigkeitsbereich des Hookeschen Gesetzes:
Zwischen P (Zug) und dP (Druck).
Beim elastischen Knicken darf der Hookesche Bereich nicht verlassen
werden, d.h. im Grenzfall gilt:
k ≈ dP
bzw. 2
min2
k
E I
A
≈ dP mit k nach Gl. 8.2
Wegen min2
k
I
A =
2
1
(Gl. 8.3) entsteht daraus
2
2
E
≈ dP
und somit p ≈
dP
E
als Grenzwert von (Gl. 8.5)
Re
P
d F
d P
[%]
[N/mm²]
Druck ↓
Druck-Fließgrenze
Zug ↑
entlasten
entlasten Druck-Proportionalitätsgrenze
Hookesches Gesetz = E
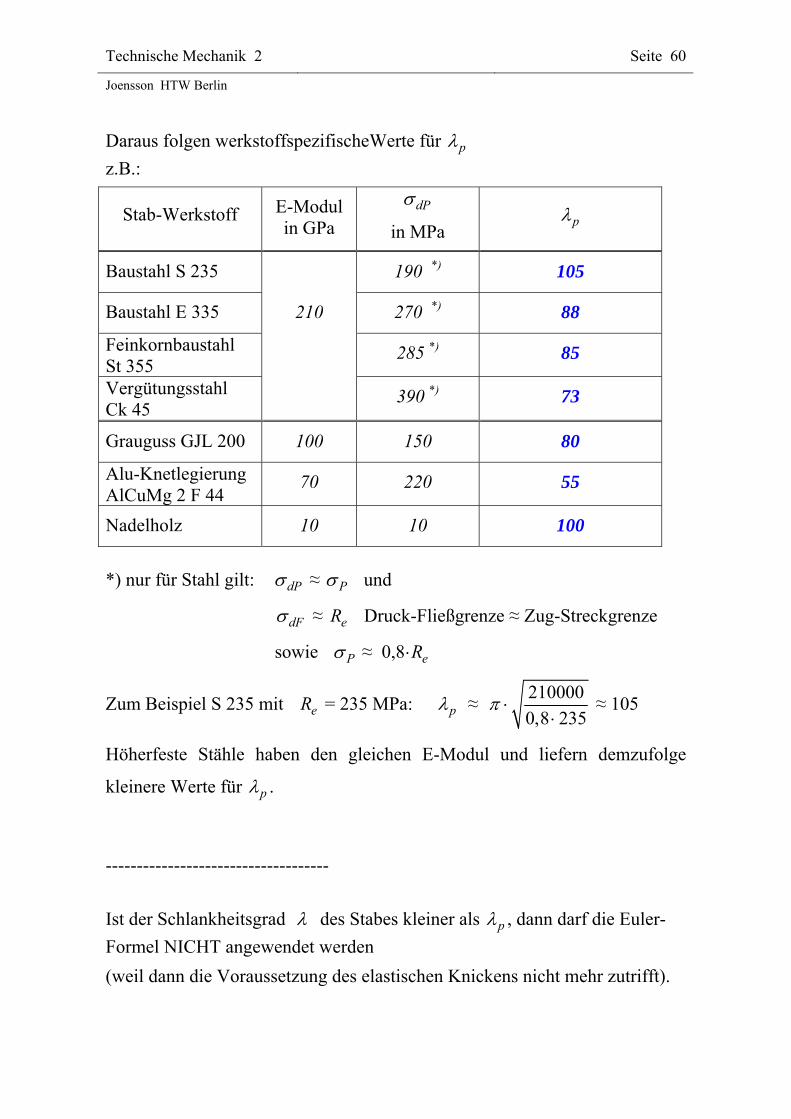
Technische Mechanik 2 Seite 60
Joensson HTW Berlin Daraus folgen werkstoffspezifischeWerte für p
z.B.:
Stab-Werkstoff E-Modul in GPa
dP
in MPa p
Baustahl S 235 190 *) 105
Baustahl E 335 210 270 *) 88
Feinkornbaustahl St 355
285 *) 85
Vergütungsstahl Ck 45
390 *) 73
Grauguss GJL 200 100 150 80
Alu-Knetlegierung AlCuMg 2 F 44
70 220 55
Nadelholz 10 10 100 *) nur für Stahl gilt: dP ≈ P und
dF ≈ eR Druck-Fließgrenze ≈ Zug-Streckgrenze
sowie P ≈ 0,8 eR
Zum Beispiel S 235 mit eR = 235 MPa: p ≈ 210000
0,8 235
≈ 105
Höherfeste Stähle haben den gleichen E-Modul und liefern demzufolge
kleinere Werte für p .
------------------------------------
Ist der Schlankheitsgrad des Stabes kleiner als p , dann darf die Euler-
Formel NICHT angewendet werden
(weil dann die Voraussetzung des elastischen Knickens nicht mehr zutrifft).
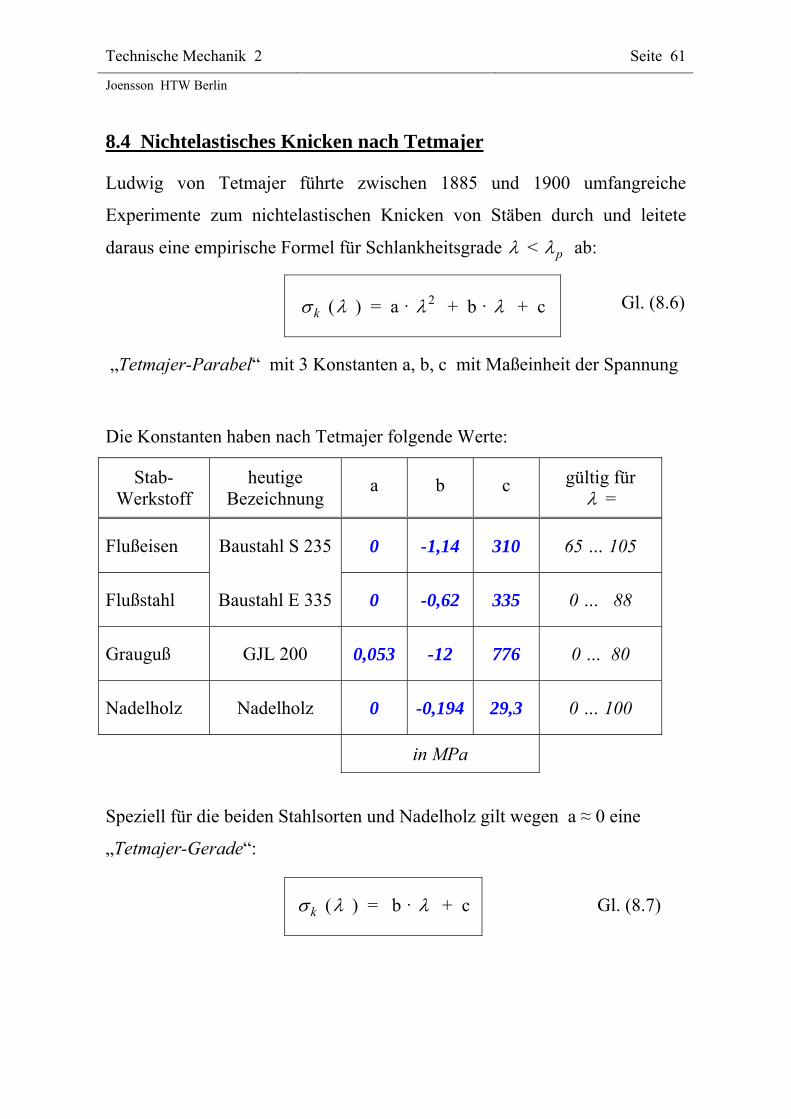
Technische Mechanik 2 Seite 61
Joensson HTW Berlin
8.4 Nichtelastisches Knicken nach Tetmajer
Ludwig von Tetmajer führte zwischen 1885 und 1900 umfangreiche
Experimente zum nichtelastischen Knicken von Stäben durch und leitete
daraus eine empirische Formel für Schlankheitsgrade < p ab:
k ( ) = a · 2 + b · + c Gl. (8.6)
„Tetmajer-Parabel“ mit 3 Konstanten a, b, c mit Maßeinheit der Spannung
Die Konstanten haben nach Tetmajer folgende Werte:
Stab-Werkstoff
heutige Bezeichnung
a b c gültig für =
Flußeisen Baustahl S 235 0 -1,14 310 65 … 105
Flußstahl Baustahl E 335 0 -0,62 335 0 … 88
Grauguß GJL 200 0,053 -12 776 0 … 80
Nadelholz Nadelholz 0 -0,194 29,3 0 … 100
in MPa
Speziell für die beiden Stahlsorten und Nadelholz gilt wegen a ≈ 0 eine
„Tetmajer-Gerade“:
k ( ) = b · + c Gl. (8.7)
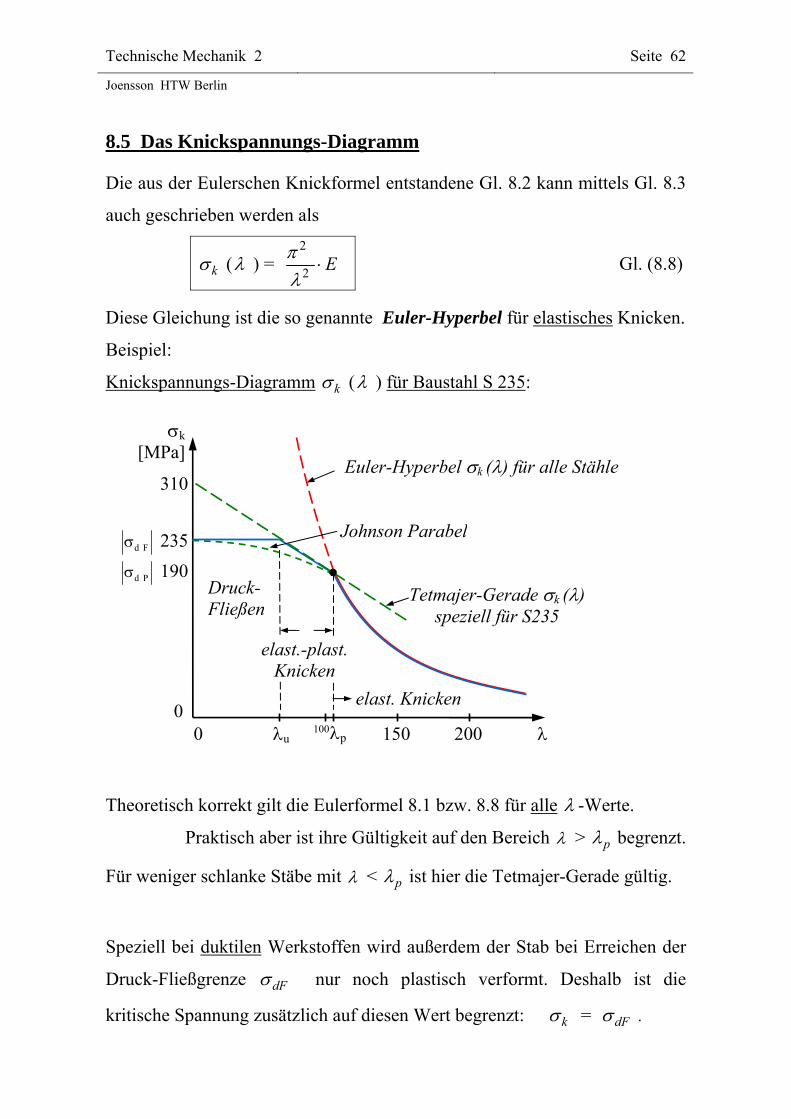
Technische Mechanik 2 Seite 62
Joensson HTW Berlin
8.5 Das Knickspannungs-Diagramm
Die aus der Eulerschen Knickformel entstandene Gl. 8.2 kann mittels Gl. 8.3
auch geschrieben werden als
k ( ) =
2
2
E
Gl. (8.8)
Diese Gleichung ist die so genannte Euler-Hyperbel für elastisches Knicken.
Beispiel:
Knickspannungs-Diagramm k ( ) für Baustahl S 235:
Theoretisch korrekt gilt die Eulerformel 8.1 bzw. 8.8 für alle -Werte.
Praktisch aber ist ihre Gültigkeit auf den Bereich > p begrenzt.
Für weniger schlanke Stäbe mit < p ist hier die Tetmajer-Gerade gültig.
Speziell bei duktilen Werkstoffen wird außerdem der Stab bei Erreichen der
Druck-Fließgrenze dF nur noch plastisch verformt. Deshalb ist die
kritische Spannung zusätzlich auf diesen Wert begrenzt: k = dF .
Euler-Hyperbel k () für alle Stähle
Johnson Parabel
Tetmajer-Gerade k () speziell für S235
Druck-Fließen
elast. Knicken
elast.-plast. Knicken
0
0
150 200 u p100
k
[MPa]
310
d F 235
d P 190
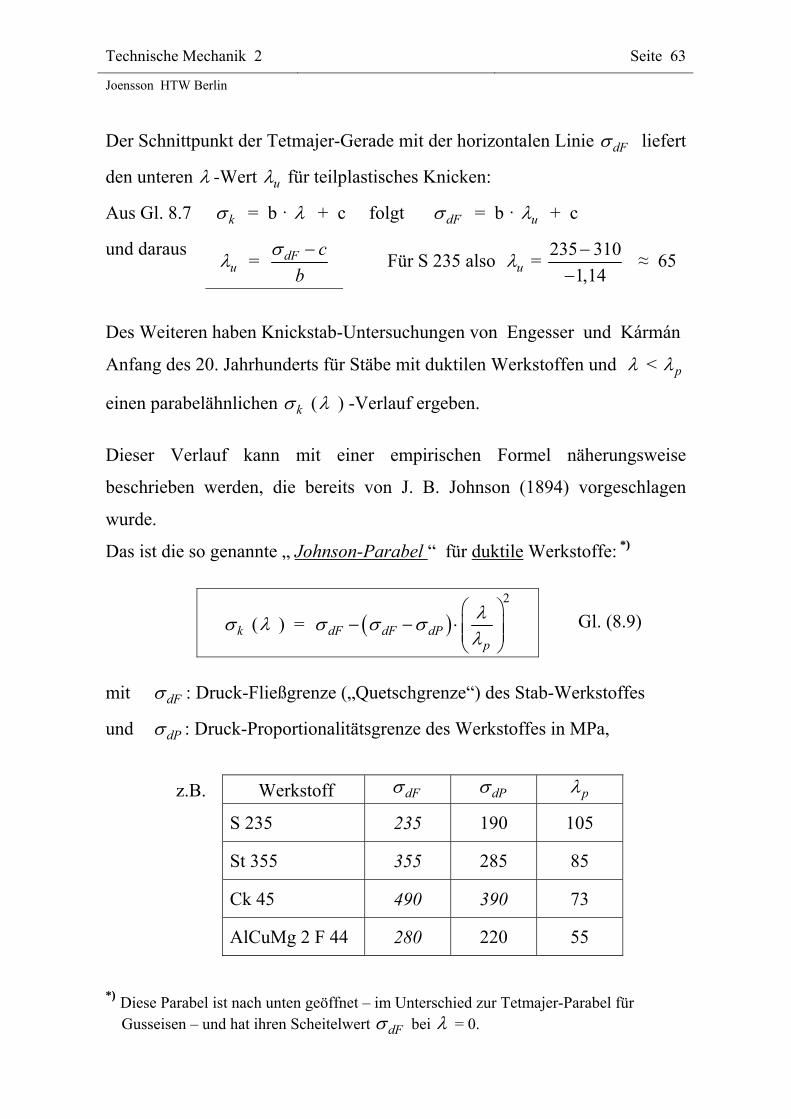
Technische Mechanik 2 Seite 63
Joensson HTW Berlin Der Schnittpunkt der Tetmajer-Gerade mit der horizontalen Linie dF liefert
den unteren -Wert u für teilplastisches Knicken:
Aus Gl. 8.7 k = b · + c folgt dF = b · u + c
und daraus u = dF c
b
Für S 235 also u =
235 310
1,14
≈ 65
Des Weiteren haben Knickstab-Untersuchungen von Engesser und Kármán
Anfang des 20. Jahrhunderts für Stäbe mit duktilen Werkstoffen und < p
einen parabelähnlichen k ( ) -Verlauf ergeben.
Dieser Verlauf kann mit einer empirischen Formel näherungsweise
beschrieben werden, die bereits von J. B. Johnson (1894) vorgeschlagen
wurde.
Das ist die so genannte „ Johnson-Parabel “ für duktile Werkstoffe: *)
k ( ) = 2
dF dF dPp
Gl. (8.9)
mit dF : Druck-Fließgrenze („Quetschgrenze“) des Stab-Werkstoffes
und dP : Druck-Proportionalitätsgrenze des Werkstoffes in MPa,
z.B. Werkstoff dF dP p
S 235 235 190 105
St 355 355 285 85
Ck 45 490 390 73
AlCuMg 2 F 44 280 220 55
*) Diese Parabel ist nach unten geöffnet – im Unterschied zur Tetmajer-Parabel für Gusseisen – und hat ihren Scheitelwert dF bei = 0.
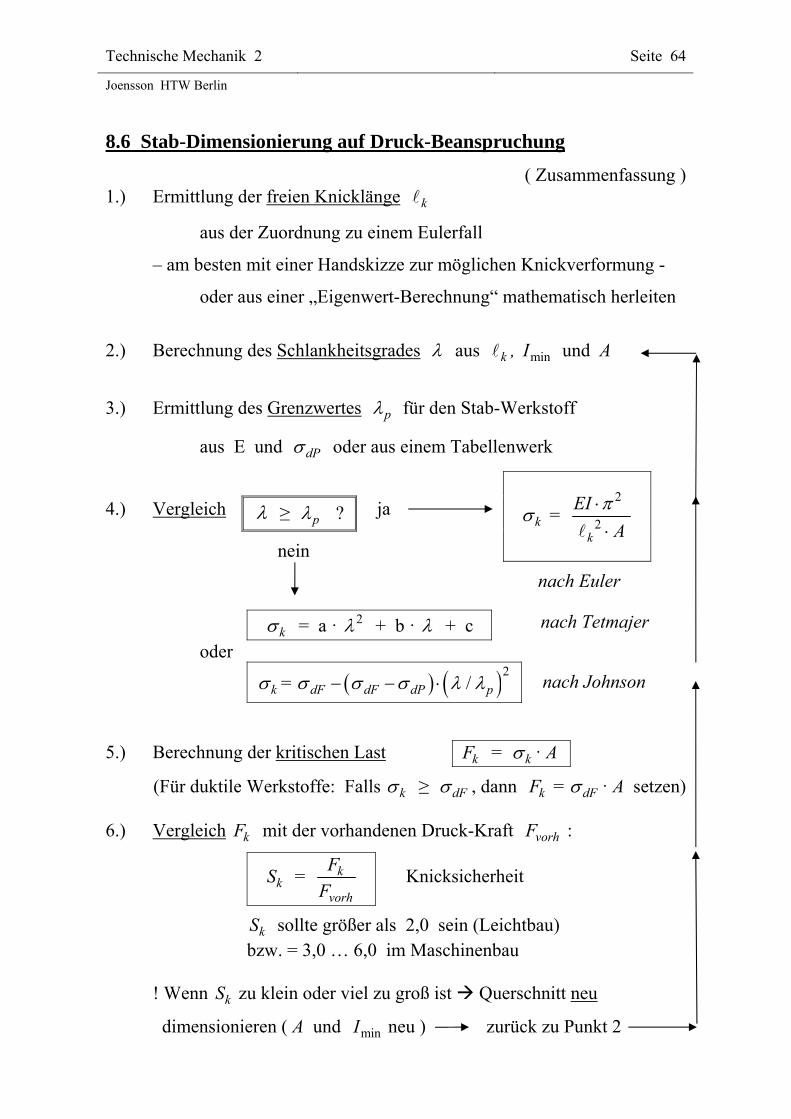
Technische Mechanik 2 Seite 64
Joensson HTW Berlin
8.6 Stab-Dimensionierung auf Druck-Beanspruchung
( Zusammenfassung ) 1.) Ermittlung der freien Knicklänge k
aus der Zuordnung zu einem Eulerfall
– am besten mit einer Handskizze zur möglichen Knickverformung -
oder aus einer „Eigenwert-Berechnung“ mathematisch herleiten
2.) Berechnung des Schlankheitsgrades aus k , minI und A
3.) Ermittlung des Grenzwertes p für den Stab-Werkstoff
aus E und dP oder aus einem Tabellenwerk
4.) Vergleich ≥ p ? ja
nein k =
2
2
k
EI
A
nach Euler
k = a · 2 + b · + c nach Tetmajer
oder
k = 2/dF dF dP p nach Johnson
5.) Berechnung der kritischen Last kF = k · A
(Für duktile Werkstoffe: Falls k ≥ dF , dann kF = dF · A setzen)
6.) Vergleich kF mit der vorhandenen Druck-Kraft vorhF :
kS = k
vorh
F
F Knicksicherheit
kS sollte größer als 2,0 sein (Leichtbau) bzw. = 3,0 … 6,0 im Maschinenbau
! Wenn kS zu klein oder viel zu groß ist Querschnitt neu
dimensionieren ( A und minI neu ) zurück zu Punkt 2
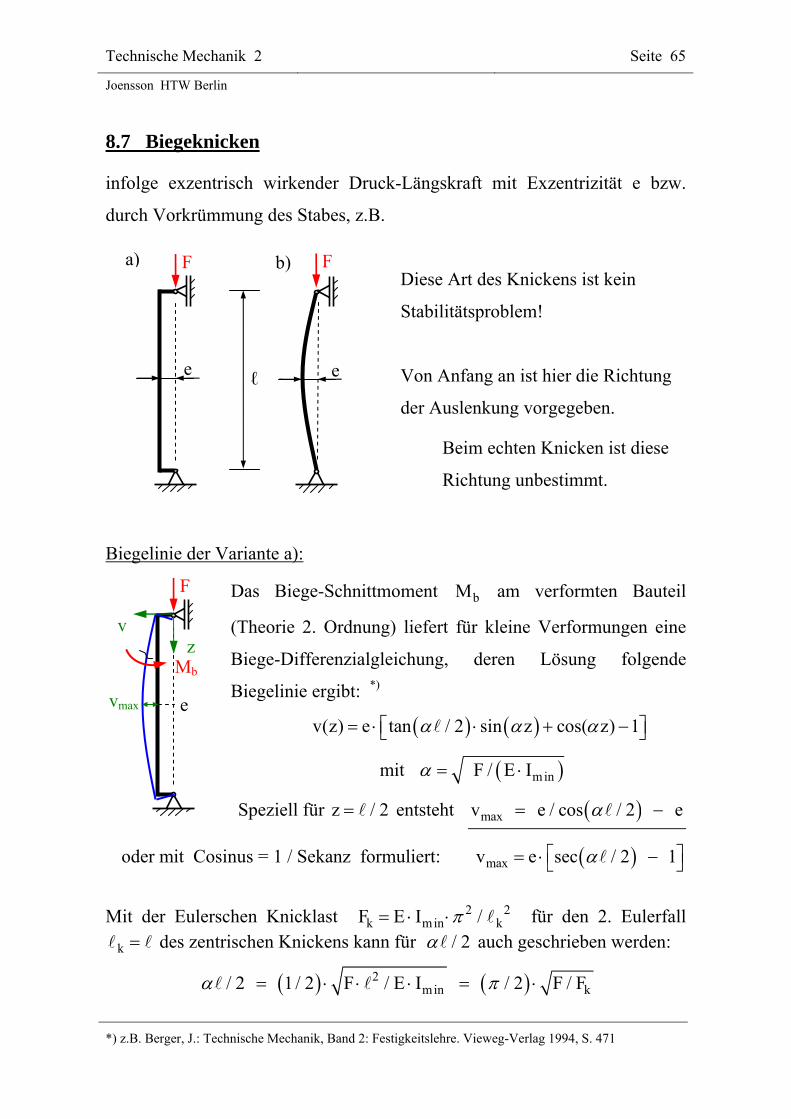
Technische Mechanik 2 Seite 65
Joensson HTW Berlin
*) z.B. Berger, J.: Technische Mechanik, Band 2: Festigkeitslehre. Vieweg-Verlag 1994, S. 471
8.7 Biegeknicken
infolge exzentrisch wirkender Druck-Längskraft mit Exzentrizität e bzw.
durch Vorkrümmung des Stabes, z.B.
Diese Art des Knickens ist kein
Stabilitätsproblem!
Von Anfang an ist hier die Richtung
der Auslenkung vorgegeben.
Beim echten Knicken ist diese
Richtung unbestimmt.
Biegelinie der Variante a):
Das Biege-Schnittmoment bM am verformten Bauteil
(Theorie 2. Ordnung) liefert für kleine Verformungen eine
Biege-Differenzialgleichung, deren Lösung folgende
Biegelinie ergibt: *)
v(z) e tan / 2 sin z cos( z) 1
mit minF / E I
Speziell für z / 2 entsteht maxv e / cos / 2 e
oder mit Cosinus = 1 / Sekanz formuliert: maxv e sec / 2 1
Mit der Eulerschen Knicklast 2 2k min kF E I / für den 2. Eulerfall
k des zentrischen Knickens kann für / 2 auch geschrieben werden:
2min k/ 2 1 / 2 F / E I / 2 F / F
F
v z
vmax
Mb
e
F
ℓ
F
e e
a) b)

Technische Mechanik 2 Seite 66
Joensson HTW Berlin
Daraus folgt max kv F e / cos / 2 F / F
bzw. F in Abhängigkeit von maxv geschrieben:
2
max kmax
2 eF v F arccos
v
Diese Formel zeigt, dass mit kleiner werdenden Exzentrizität e die
Verformung zur abrupten Auslenkung des zentrischen Knickens konvergiert:
Beim zentrischen Knicken mit e = 0 gibt es keine Auslenkung, so lange
F < kF ist. Für F = kF aber entsteht plötzlich maxv + ∞ mm oder - ∞ mm.
Wegen dieser Unbestimmtheit heißt die Eulersche Knickkraft kF auch
„Verzweigungslast“.
Spannungen beim Biegeknicken nach Variante a):
Infolge der Überlagerung der Druckspannung D F / A und der
zusätzlichen Biegespannung b max b max bM / W entsteht bei z / 2
am Querschnitts-Rand des gebogenen Balkens die max. Spannung:
b maxmax
b
MF
A W
e 5 mm
maxv in mm
e 0.1 mm
2 mm 0.5 mm
5 mm
k
F
F

Technische Mechanik 2 Seite 67
Joensson HTW Berlin
Mit b max maxM F e v und maxv e sec / 2 1 von Seite 65
folgt:
maxb
F e sec / 2F
A W
Den rechten Term erweitern mit A / A:
maxb b
F e A sec / 2F F e A1 sec / 2
A A W A W
Des Weiteren 2
min
1 F/ 2
2 E I
von Seite 65, erweitert mit A / A
liefert: 2
min min
1 F A A 1 F/ 2
2 E I A 2 I E A
Mit dem Schlankheitsgrad minA / I von Seite 58 entsteht nun
maxb
F e A 1 F1 sec
A W 2 E A
Die Kraft F wird beim Biegeknicken kritisch, wenn die Randspannung max
die Fließgrenze (Streckgrenze) des Materials erreicht.
Bei weiterer Erhöhung der Kraft F kommt es zur Plastifizierung des
gesamten Querschnittes und dadurch zu einem „Fließgelenk“ und das
Bauteil kollabiert dann ähnlich wie beim Eulerschen Knicken.
Deshalb wird der Quotient F /A als kritische Spannung kr interpretiert
(ähnlich wie k beim Eulerschen Knicken), wenn max F erreicht ist:
kr
krFb
e A1 sec
W 2 E
Das ist die so genannte Sekantenformel des Biegeknickens.*)
*) z.B. Hibbeler,.R.C.: Technische Mechanik 2: Festigkeitslehre. Pearson-Verlag 5. Auflage 2011, S. 822
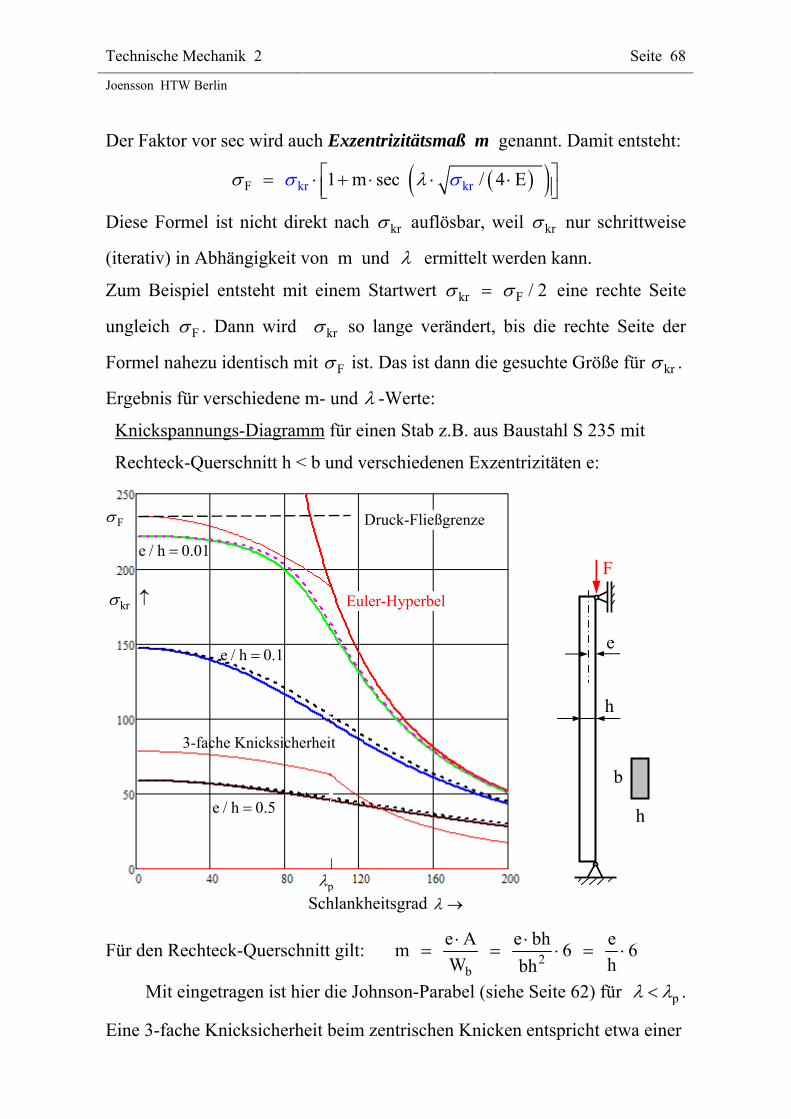
Technische Mechanik 2 Seite 68
Joensson HTW Berlin Der Faktor vor sec wird auch Exzentrizitätsmaß m genannt. Damit entsteht:
rF k kr1 m sec / 4 E
Diese Formel ist nicht direkt nach kr auflösbar, weil kr nur schrittweise
(iterativ) in Abhängigkeit von m und ermittelt werden kann.
Zum Beispiel entsteht mit einem Startwert kr F / 2 eine rechte Seite
ungleich F . Dann wird kr so lange verändert, bis die rechte Seite der
Formel nahezu identisch mit F ist. Das ist dann die gesuchte Größe für kr .
Ergebnis für verschiedene m- und -Werte:
Knickspannungs-Diagramm für einen Stab z.B. aus Baustahl S 235 mit
Rechteck-Querschnitt h < b und verschiedenen Exzentrizitäten e:
Für den Rechteck-Querschnitt gilt: 2
b
e A e bh em 6 6
W hbh
Mit eingetragen ist hier die Johnson-Parabel (siehe Seite 62) für p .
Eine 3-fache Knicksicherheit beim zentrischen Knicken entspricht etwa einer
F
e
h
h
b
e / h 0.1
e / h 0.5
3-fache Knicksicherheit
FF
Euler-Hyperbel
e / h 0.01
F
p
Druck-Fließgrenze
Schlankheitsgrad
kr
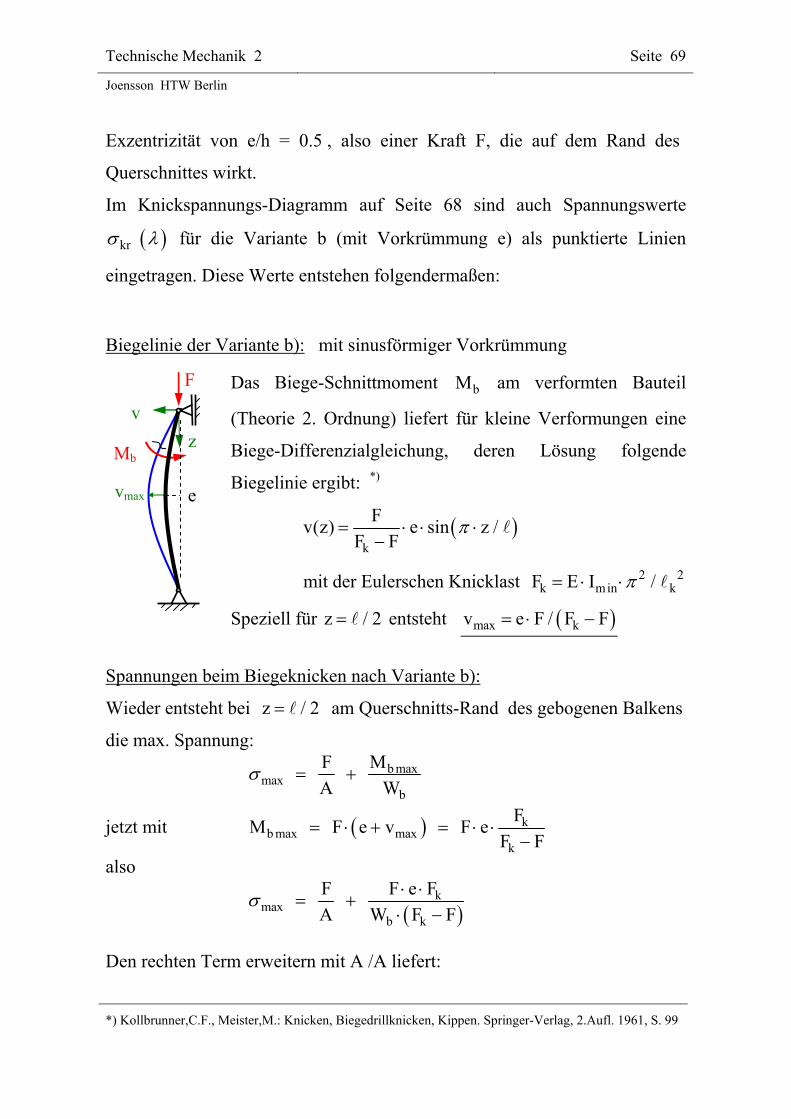
Technische Mechanik 2 Seite 69
Joensson HTW Berlin Exzentrizität von e/h = 0.5 , also einer Kraft F, die auf dem Rand des
Querschnittes wirkt.
Im Knickspannungs-Diagramm auf Seite 68 sind auch Spannungswerte
kr für die Variante b (mit Vorkrümmung e) als punktierte Linien
eingetragen. Diese Werte entstehen folgendermaßen:
Biegelinie der Variante b): mit sinusförmiger Vorkrümmung
Das Biege-Schnittmoment bM am verformten Bauteil
(Theorie 2. Ordnung) liefert für kleine Verformungen eine
Biege-Differenzialgleichung, deren Lösung folgende
Biegelinie ergibt: *)
k
Fv(z) e sin z /
F F
mit der Eulerschen Knicklast 2 2k min kF E I /
Speziell für z / 2 entsteht max kv e F / F F
Spannungen beim Biegeknicken nach Variante b):
Wieder entsteht bei z / 2 am Querschnitts-Rand des gebogenen Balkens
die max. Spannung:
b maxmax
b
MF
A W
jetzt mit kb max max
k
FM F e v F e
F F
also
k
maxb k
F F e F
A W F F
Den rechten Term erweitern mit A /A liefert:
*) Kollbrunner,C.F., Meister,M.: Knicken, Biegedrillknicken, Kippen. Springer-Verlag, 2.Aufl. 1961, S. 99
v
z
vmax
Mb
F
e

Technische Mechanik 2 Seite 70
Joensson HTW Berlin
k k
maxb k b k
F F e F A F e A F1
A W F F A A W F F
Den letzten Term nochmals erweitern mit A/A sowie mit E kF / A als
kritische Spannung nach Euler von Seite 62 2 2E k E / und mit
m = be A / W entsteht schließlich:
E
maxE
F1 m
A F / A
Wieder wird die Kraft F beim Biegeknicken kritisch, wenn die Rand-
spannung max die Fließgrenze (Streckgrenze) des Materials erreicht:
krE k
EF
r
1 m
Diese Formel ist zwar der Sekantenformel von Seite 67 ähnlich, führt aber
auf eine quadratische Gleichung für kr und lässt sich damit mittels p-q-
Formel direkt nach kr auflösen als Funktion von und m:
2kr F E F E F E
1 1,m 1 m) 1 m)
2 4
mit 2 2E E /
Die Auswertung dieser Formel ergibt die bereits erwähnten punktierten
Linien im Knickspannungs-Diagramm auf Seite 68.
Fazit: Exzentrisch wirkende Druck-Längskräfte liefern ähnlich kritische
Spannungen wie Druck-Längskräfte bei vorgekrümmten Balken.
Der Sicherheitsfaktor beim zentrischen Knicken deckt eine gewisse
Spanne der unvermeidlichen Exzentrizität und/oder Vorkrümmung ab.
Wesentlich weiter gehende Bewertungen zum Knicken von Stäben und
ganzen Stabwerken enthält z.B. die DIN 18800 Teil 2.
Inhaltsverzeichnis Technische Mechanik 3
Übersicht zur Dynamik Seite 1
1. Kinematik 3
1.1. Einleitung 3
1.2. Kinematik einer Punktmasse 4
1.2.1. Skalare Kinematik 4
1.2.2. Vektorielle Kinematik 11
2. Massenträgheit 18
2.1 Einleitung 18
2.2 Berechnung von Massenträgheitsmomenten 19
2.2.1. Massenträgheitsmoment einer Punktmasse 19
2.2.2. Drehträgheit bei Eigenrotation eines starren Körpers 20
2.2.3. Rotation um eine beliebige Drehachse bA (mit Steiner-Anteil) 24
2.3 Hauptmassenträgheitsmomente 26
2.4 Zentrifugalmomente 30
3. Kinetik 35
3.1 Einleitung 35
3.2 Dynamisches Grundgesetz 36
3.3 Dynamische Kräfte- und Momentengleichgewichte 38
3.4 Das Prinzip von d'Alembert 40
3.5 Freiheitsgrade und kinematische Zwangsbedingungen 41
3.6 Weitere Beispiele zum Prinzip von d'Alembert 44
3.7 Mehrkörpersysteme 57
3.7.1. Einleitung 57
3.7.2. Das Prinzip von d'Alembert für MKS 57
Inhaltsverzeichnis Technische Mechanik 3
4. Schwingungen 63
4.1 Einleitung 63
4.2 Freie Schwingung ohne Dämpfung mit 1 Freiheitsgrad 64
4.2.1. Einleitung 64
4.2.2. Eigenfrequenz-Berechnung 65
4.2.3. Amplituden-Berechnung 70
4.2.4. Mehrere Federn an einer Masse 72
4.3 Freie Schwingung mit Dämpfung 73
4.4 Freie gedämpfte Drehschwingung 77
4.5 Erzwungene Schwingungen mit 1 Freiheitsgrad 81
4.5.1. Einleitung 81
4.5.2. Harmonische Erregung 83
4.5.2.1. Harmonische Krafterregung 84
4.5.2.2. Harmonische Unwuchterregung 90
4.5.2.3. Harmonische Stützenerregung 92
4.5.2.e. Harmonische Erregung: Zusammenfassung 94
Inhaltsverzeichnis zu TM 1 (Statik) ab Seite 2
der vorliegenden Datei Skript_TM.pdf
Inhaltsverzeichnis zu TM 2 (Festigkeitslehre) ab Seite 84
Technische Mechanik 3 Seite 1
Joensson HTW Berlin
© Prof. Dr. Joensson HTW Berlin 2015
D y n a m i k
Bisher Statik: Gleichgewicht der Kräfte und Momente
an „ruhenden“ starren Körpern
(d.h. ohne Geschwindigkeits-Änderung des Körpers
bzw. ohne „Beschleunigung“)
und
Festigkeitslehre:
Spannungen und Verformungen
infolge
statischer Kräfte und statischer Momente.
Dynamik: Kraft = Masse mal Beschleunigung
und
Moment = Drehträgheit mal Winkelbeschleunigung
d.h.
Ermittlung von Kräften und Momenten infolge beschleunigter
Bewegung von Massen
(z.B. durch Geschwindigkeits-Änderung beim Anfahren und
Abbremsen von Fahrzeugen.)
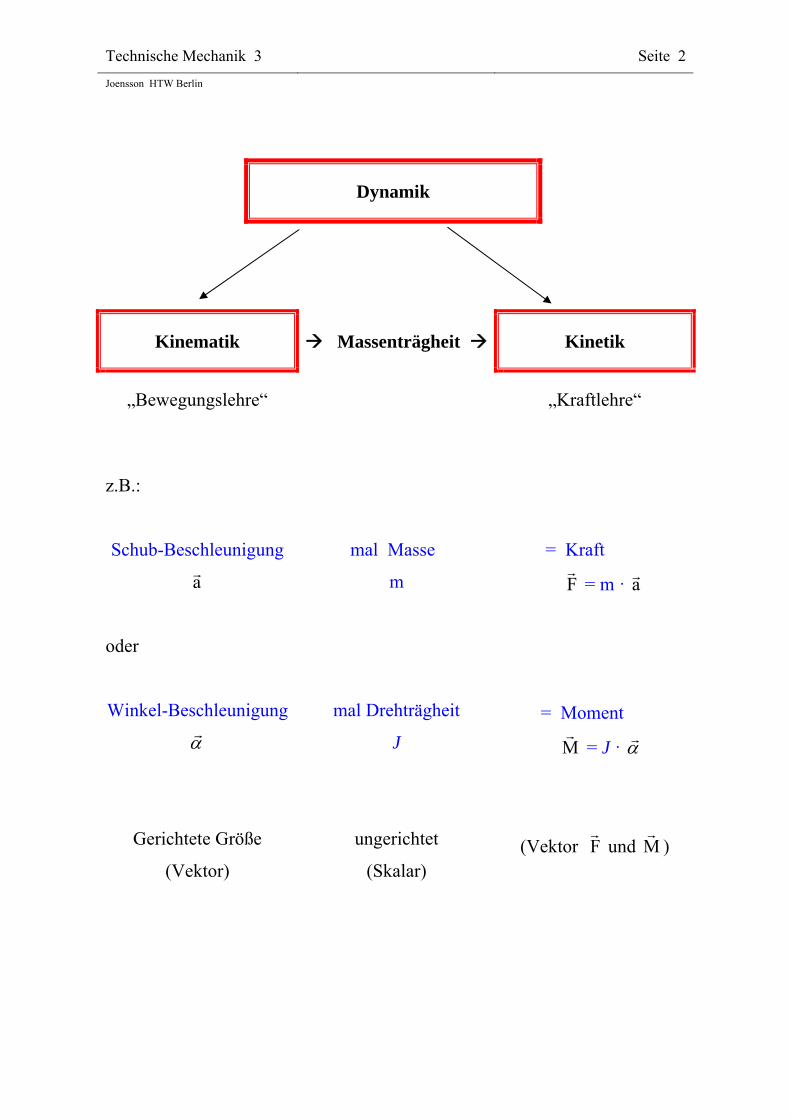
Technische Mechanik 3 Seite 2
Joensson HTW Berlin
Dynamik
Kinematik Massenträgheit Kinetik
„Bewegungslehre“ „Kraftlehre“
z.B.:
Schub-Beschleunigung
a
oder
Winkel-Beschleunigung
Gerichtete Größe
(Vektor)
mal Masse
m
mal Drehträgheit
J
ungerichtet
(Skalar)
= Kraft
F
= m · a
= Moment
M
= J ·
(Vektor F
und M
)
Technische Mechanik 3 Seite 3
Joensson HTW Berlin
1. Kinematik
1.1 Einleitung Definition der Bewegung: Zeitabhängige Orts- und Lage-Änderung
in Bezug auf ein Raum-Koordinatensystem.
Die Technische Mechanik gehört zur Klassischen (Newtonschen) Mechanik,
d.h. vorausgesetzt wird:
1.) Alle Geschwindigkeiten sind sehr viel kleiner als die Licht-
geschwindigkeit
2.) Die Zeit ist absolut (für alle Körper gleich)
Im Raum 3R hat ein starrer Körper maximal 6 Freiheitsgrade (Bewegungs-
möglichkeiten):
3 Translationen (Verschiebungen) in Richtung der
Koordinatenachsen x, y, z
und
3 Rotationen (Drehungen) um diese Achsen.
Allgemein gilt: Bewegung = Translation + Rotation
Die drei grundlegenden Größen der Kinematik sind:
Weg s (t)
Geschwindigkeit v (t)
Beschleunigung a (t) jeweils zeitabhängig mit dem Parameter t
Häufigste Zielgröße der Kinematik ist die Beschleunigung als Eingangs-
größe der Kinetik.
z y
x

Technische Mechanik 3 Seite 4
Joensson HTW Berlin
1.2 Kinematik einer Punktmasse
Wenn die Ausdehnung der Bahn sehr viel größer ist als die Ausdehnung des
bewegten Körpers, dann kann der Körper als Punkt bzw. als Punktmasse
idealisiert werden.
Damit sind nur noch 3 Translationen maßgebend.
Die Drehung der Punktmasse um
sich selbst ist vernachlässigbar.
1.2.1 Geradlinige Bewegung einer Punktmasse
(„Skalare Kinematik“)
z.B.
schräg zu den Achsen x, y und z:
Günstiger:
Das Koordinatensystem so wählen,
dass 1 Achse (z.B. x ) in Richtung der
Bewegung zeigt:
Dann nämlich gilt einfach nur
s (t) = x (t) für den zurückgelegten Weg s.
zy
x
z
y
x
z
y
x
m
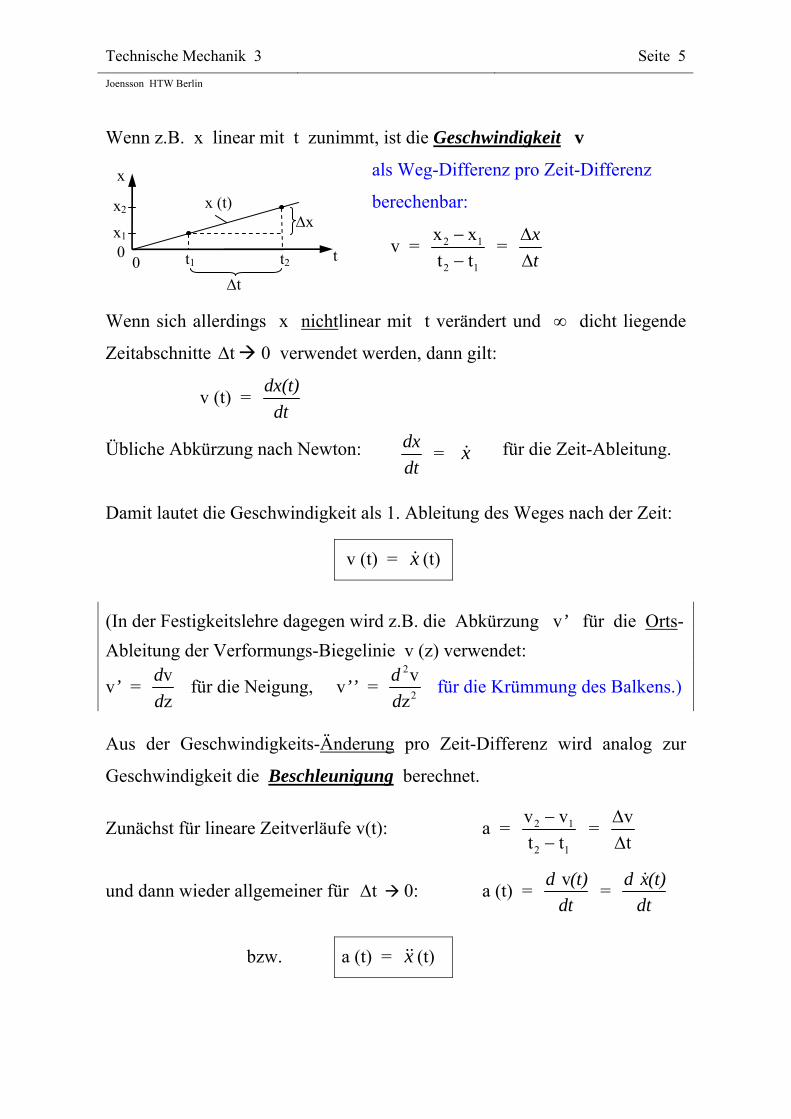
Technische Mechanik 3 Seite 5
Joensson HTW Berlin
Wenn z.B. x linear mit t zunimmt, ist die Geschwindigkeit v
als Weg-Differenz pro Zeit-Differenz
berechenbar:
v = 2 1
2 1
x x
t t
= x
t
Wenn sich allerdings x nichtlinear mit t verändert und ∞ dicht liegende
Zeitabschnitte t 0 verwendet werden, dann gilt:
v (t) = dx(t)
dt
Übliche Abkürzung nach Newton: dx
dt = x für die Zeit-Ableitung.
Damit lautet die Geschwindigkeit als 1. Ableitung des Weges nach der Zeit:
v (t) = x (t)
(In der Festigkeitslehre dagegen wird z.B. die Abkürzung v’ für die Orts-
Ableitung der Verformungs-Biegelinie v (z) verwendet:
v’ = v
z
d
d für die Neigung, v’’ =
2
2
v
z
d
d für die Krümmung des Balkens.)
Aus der Geschwindigkeits-Änderung pro Zeit-Differenz wird analog zur
Geschwindigkeit die Beschleunigung berechnet.
Zunächst für lineare Zeitverläufe v(t): a = 2 1
2 1
v v
t t
= v
t
und dann wieder allgemeiner für t 0: a (t) = vd (t)
dt =
d x(t)
dt
bzw. a (t) = x (t)
x
tt2 t1
x1
x2 x (t)
0 0
t
x
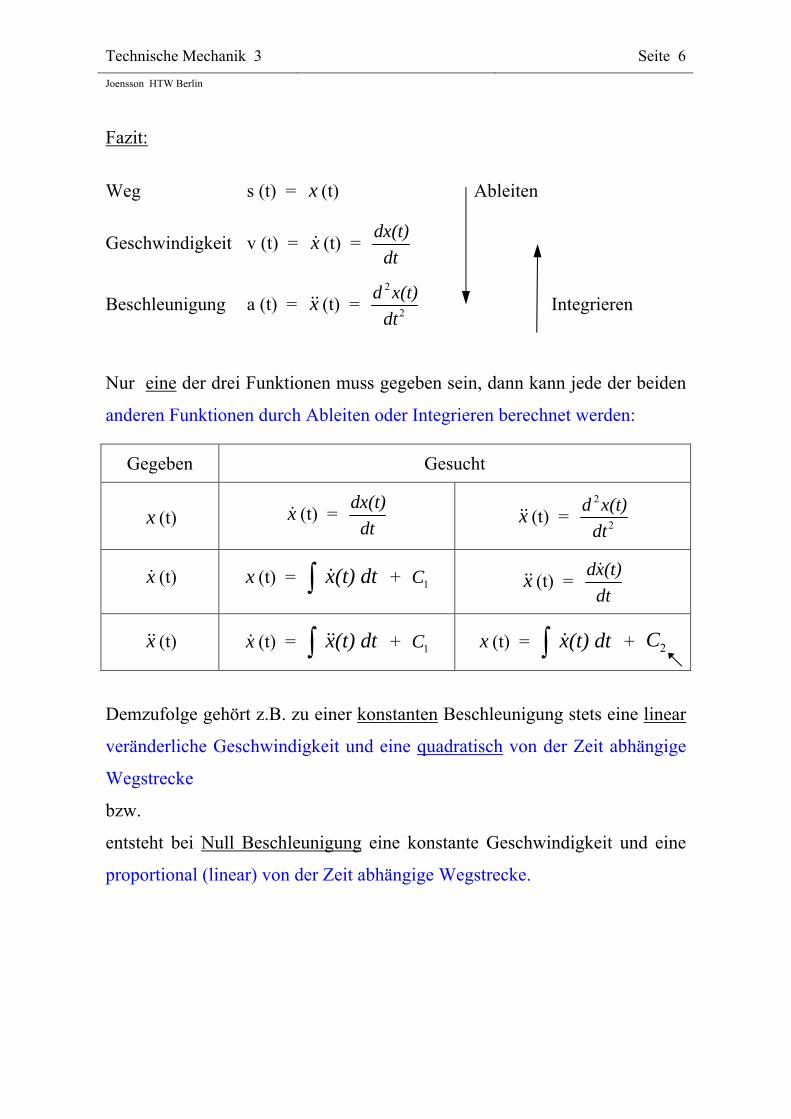
Technische Mechanik 3 Seite 6
Joensson HTW Berlin
Fazit:
Weg s (t) = x (t) Ableiten
Geschwindigkeit v (t) = x (t) = dx(t)
dt
Beschleunigung a (t) = x (t) = 2
2
d x(t)
dt Integrieren
Nur eine der drei Funktionen muss gegeben sein, dann kann jede der beiden
anderen Funktionen durch Ableiten oder Integrieren berechnet werden:
Gegeben Gesucht
x (t) x (t) = dx(t)
dt x (t) =
2
2
d x(t)
dt
x (t) x (t) = x(t) dt + 1C x (t) = dx(t)
dt
x (t) x (t) = x(t) dt + 1C x (t) = x(t) dt + 2C
Demzufolge gehört z.B. zu einer konstanten Beschleunigung stets eine linear
veränderliche Geschwindigkeit und eine quadratisch von der Zeit abhängige
Wegstrecke
bzw.
entsteht bei Null Beschleunigung eine konstante Geschwindigkeit und eine
proportional (linear) von der Zeit abhängige Wegstrecke.
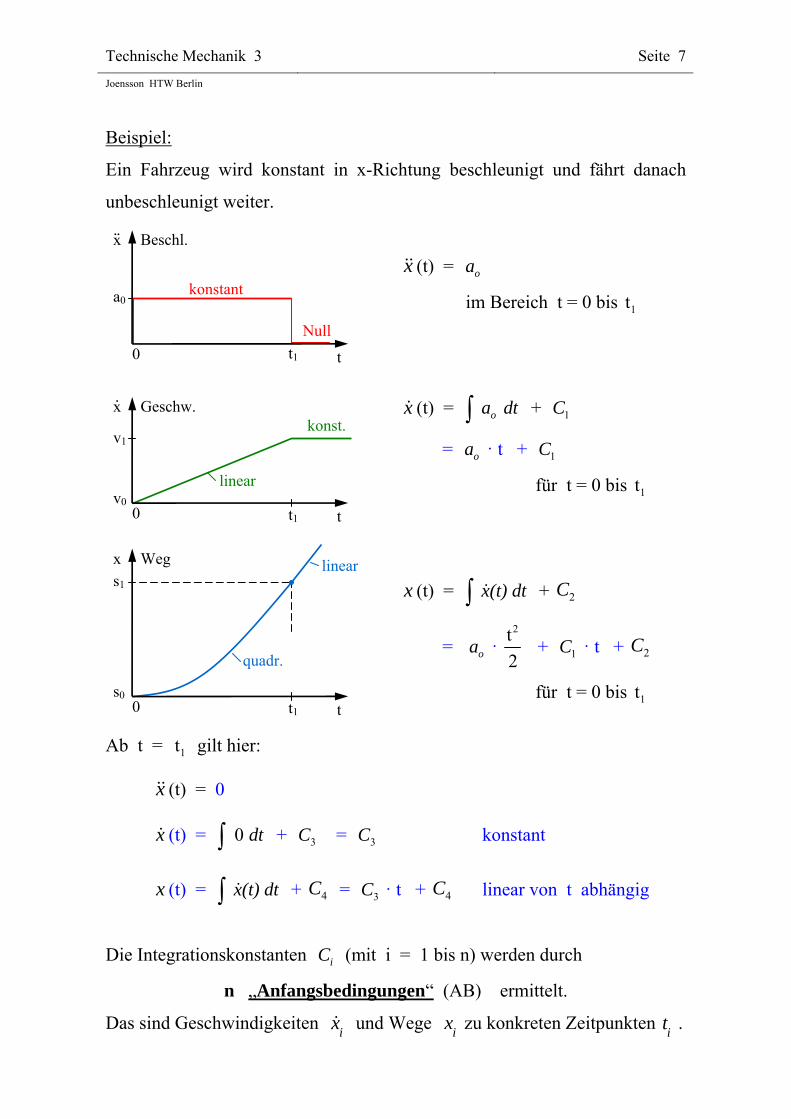
Technische Mechanik 3 Seite 7
Joensson HTW Berlin
Beispiel:
Ein Fahrzeug wird konstant in x-Richtung beschleunigt und fährt danach
unbeschleunigt weiter.
x (t) = oa
im Bereich t = 0 bis 1t
x (t) = oa dt + 1C
= oa · t + 1C
für t = 0 bis 1t
x (t) = x(t) dt + 2C
= oa · 2t
2 + 1C · t + 2C
für t = 0 bis 1t
Ab t = 1t gilt hier:
x (t) = 0
x (t) = 0 dt + 3C = 3C konstant
x (t) = x(t) dt + 4C = 3C · t + 4C linear von t abhängig
Die Integrationskonstanten iC (mit i = 1 bis n) werden durch
n „Anfangsbedingungen“ (AB) ermittelt.
Das sind Geschwindigkeiten i
x und Wege i
x zu konkreten Zeitpunkten it .
tt1 0
a0
Beschl.
konstant
Null
x
v1
tt1 0
t0 t1
Geschw. x
Weg x
v0
konst.
linear
s1
s0
linear
quadr.

Technische Mechanik 3 Seite 8
Joensson HTW Berlin
Berechnungs-Beispiel:
Ein Personenzug wird auf gerader Strecke plötzlich mit oa = - 5 m/ 2s
konstant gebremst und kommt nach 300 Metern zum Halten.
Ges.:
1.) Dauer des Bremsvorganges
2.) Geschwindigkeit des Zuges unmittelbar vor dem Bremsen
3.) Grafische Darstellung der Bewegung in den kinematischen
Diagrammen x (t) , x (t) und x (t)
Lösung:
Ansatz für konstante Beschleunigung in x- Richtung:
x (t) = oa (Gleichung 1)
Daraus folgt mittels Integration die „allgemeine Lösung“ der Differenzial-
gleichung (1):
x (t) = oa · t + 1C (2)
x (t) = oa · 2t
2 + 1C · t + 2C (3)
mit vorerst noch unbekannten Konstanten iC .
Die beiden Integrationskonstanten sind durch zwei Anfangsbedingungen AB
berechenbar:
1.) Die Geschwindigkeit am Anfang des Bremsvorganges ist ov :
x (t = 0) = ov AB Nr. 1
Einsetzen in Gl. (2) liefert:
ov = oa · 0 + 1C und damit 1C = ov

Technische Mechanik 3 Seite 9
Joensson HTW Berlin
2.) Die Wegstrecke am Anfang des Bremsvorganges ist Null :
x (t = 0) = 0 AB Nr. 2
Einsetzen in Gl. (3) liefert:
0 = oa · 20
2 + 1C · 0 + 2C also
2C = 0
Damit lautet die „spezielle Lösung“ der Differenzialgleichung (1):
x (t) = oa · t + ov (2a)
x (t) = oa · 2t
2 + ov · t (3a)
Weil hier die Geschwindigkeit ov noch unbekannt ist, muss 1 weitere
Gleichung gefunden werden - in Form einer weiteren Anfangsbedingung für
die Geschwindigkeit.
Nach einer bestimmten Zeit t = Bt (Bremsdauer) ist die
Geschwindigkeit des Zuges Null:
x (t = Bt ) = 0 AB Nr. 3 als „Endbedingung“
Einsetzen in Gl. (2a) liefert:
0 = oa · Bt + ov (4)
Damit entsteht 1 Gleichung mit 2 Unbekannten (rot markiert), so dass noch
eine weitere Gleichung fehlt.
Auch diese kann aus einer weiteren Anfangsbedingung ermittelt werden, weil
hier der Bremsweg Bs zur Zeit t = Bt mit 300 Metern vorgegeben ist:
x (t = Bt ) = Bs AB Nr. 4 als „Endbedingung“
Einsetzen in Gl. (3a) liefert:
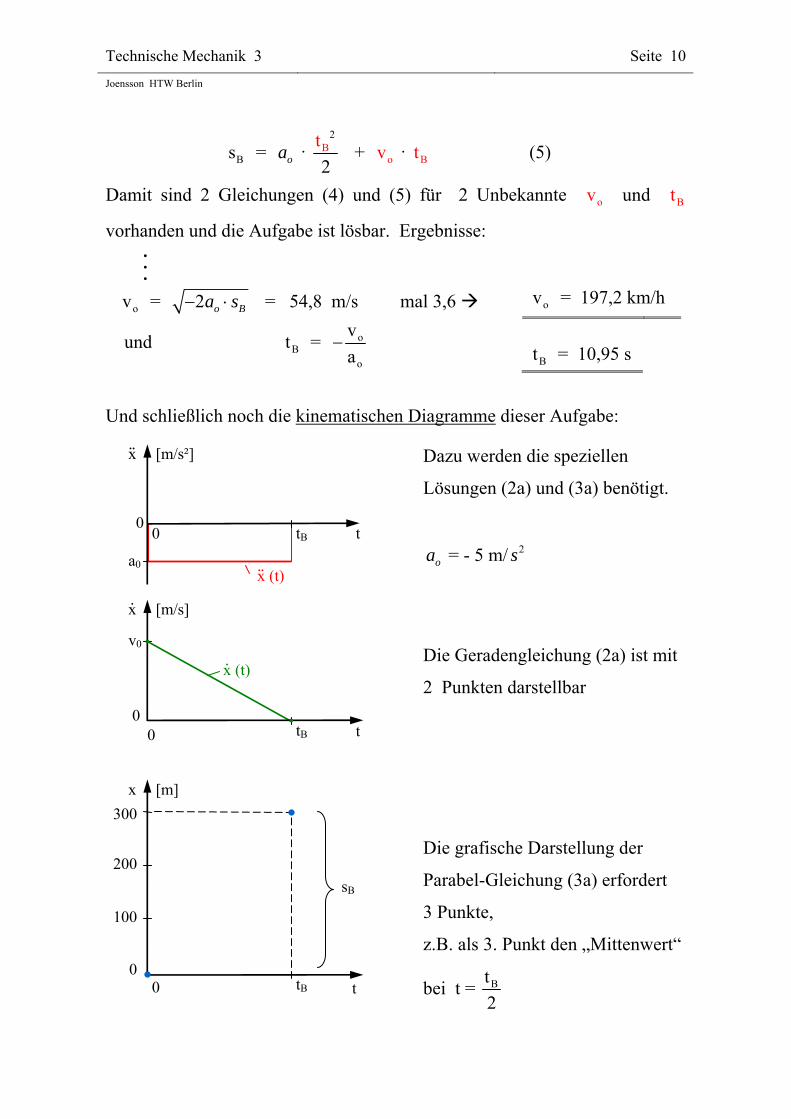
Technische Mechanik 3 Seite 10
Joensson HTW Berlin
Bs = oa · 2
Bt
2 + ov · Bt (5)
Damit sind 2 Gleichungen (4) und (5) für 2 Unbekannte ov und Bt
vorhanden und die Aufgabe ist lösbar. Ergebnisse:
ov = 2 o Ba s = 54,8 m/s mal 3,6 ov = 197,2 km/h
und Bt = o
o
v
a
Bt = 10,95 s
Und schließlich noch die kinematischen Diagramme dieser Aufgabe:
Dazu werden die speziellen
Lösungen (2a) und (3a) benötigt.
oa = - 5 m/ 2s
Die Geradengleichung (2a) ist mit
2 Punkten darstellbar
Die grafische Darstellung der
Parabel-Gleichung (3a) erfordert
3 Punkte,
z.B. als 3. Punkt den „Mittenwert“
bei t = Bt
2
ttB 0
a0
[m/s²] x
v0
t0
t0
[m/s] x
[m] x
0
300
0
0
x (t)
tB
x (t)
tB
200
100
sB
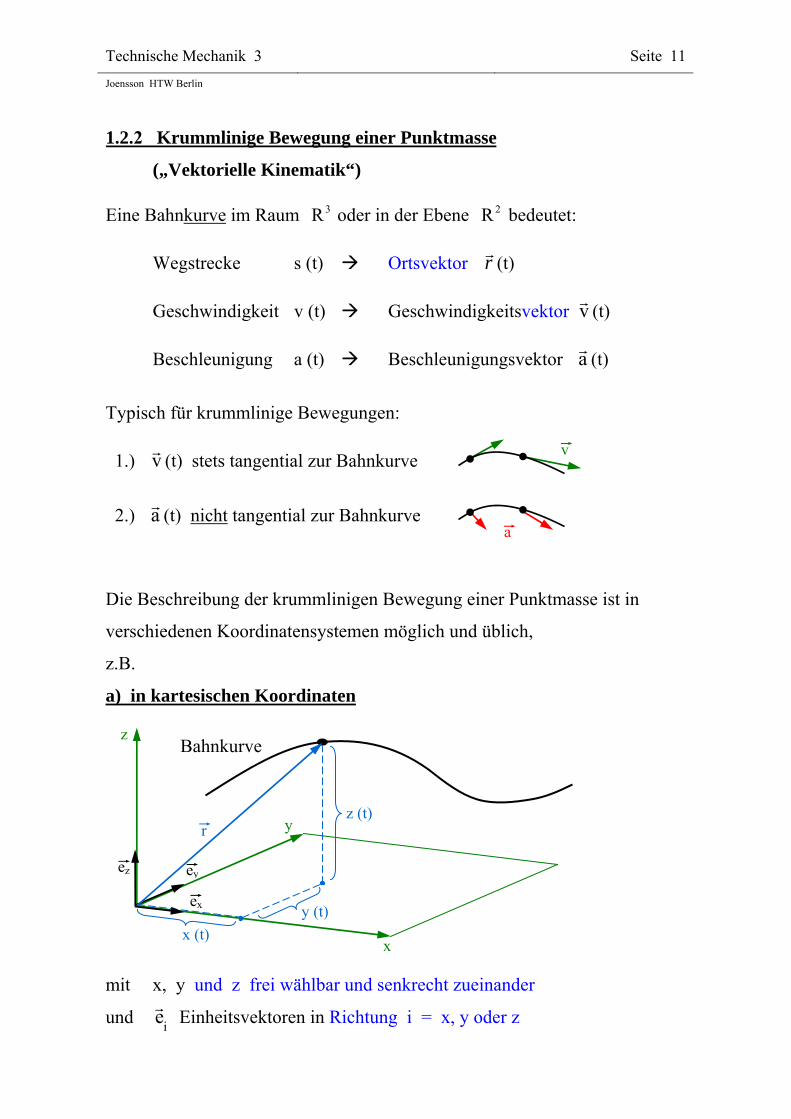
Technische Mechanik 3 Seite 11
Joensson HTW Berlin
1.2.2 Krummlinige Bewegung einer Punktmasse
(„Vektorielle Kinematik“)
Eine Bahnkurve im Raum 3R oder in der Ebene 2R bedeutet:
Wegstrecke s (t) Ortsvektor r
(t)
Geschwindigkeit v (t) Geschwindigkeitsvektor v
(t)
Beschleunigung a (t) Beschleunigungsvektor a
(t)
Typisch für krummlinige Bewegungen:
1.) v
(t) stets tangential zur Bahnkurve
2.) a
(t) nicht tangential zur Bahnkurve
Die Beschreibung der krummlinigen Bewegung einer Punktmasse ist in
verschiedenen Koordinatensystemen möglich und üblich,
z.B.
a) in kartesischen Koordinaten
mit x, y und z frei wählbar und senkrecht zueinander
und i
e
Einheitsvektoren in Richtung i = x, y oder z
z
ey
ex
ez
r y
x
Bahnkurve
z (t)
y (t)
x (t)
a
v
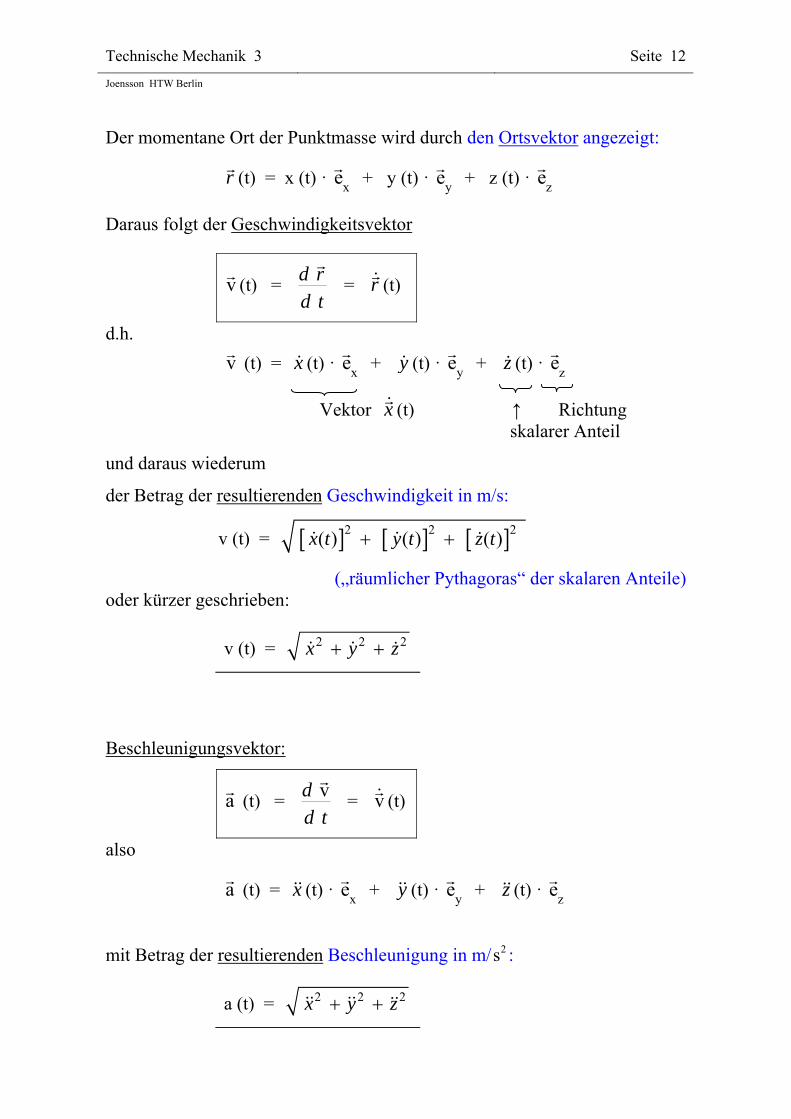
Technische Mechanik 3 Seite 12
Joensson HTW Berlin
Der momentane Ort der Punktmasse wird durch den Ortsvektor angezeigt:
r
(t) = x (t) · x
e
+ y (t) · y
e
+ z (t) · z
e
Daraus folgt der Geschwindigkeitsvektor
v
(t) = d rd t
= r
(t)
d.h.
v
(t) = x (t) · x
e
+ y (t) · y
e
+ z (t) · z
e
Vektor x (t) ↑ Richtung
skalarer Anteil
und daraus wiederum
der Betrag der resultierenden Geschwindigkeit in m/s:
v (t) = 2 2 2( ) ( ) ( ) x t y t z t
(„räumlicher Pythagoras“ der skalaren Anteile) oder kürzer geschrieben:
v (t) = 2 2 2 x y z
Beschleunigungsvektor:
a
(t) = v
dd t
= v
(t)
also
a
(t) = x (t) · x
e
+ y (t) · y
e
+ z(t) · z
e
mit Betrag der resultierenden Beschleunigung in m/ 2s :
a (t) = 2 2 2 x y z
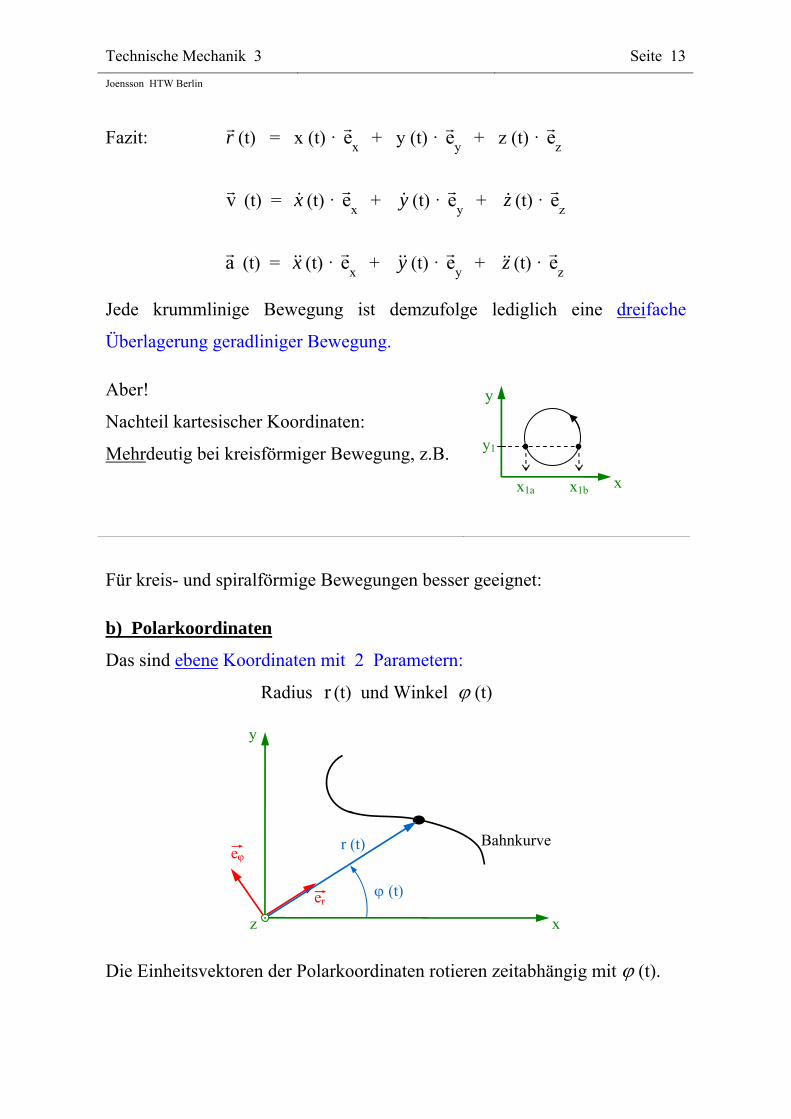
Technische Mechanik 3 Seite 13
Joensson HTW Berlin
Fazit: r
(t) = x (t) ·
xe
+ y (t) · y
e
+ z (t) · z
e
v
(t) = x (t) · x
e
+ y (t) · y
e
+ z (t) · z
e
a
(t) = x (t) · x
e
+ y (t) · y
e
+ z(t) · z
e
Jede krummlinige Bewegung ist demzufolge lediglich eine dreifache
Überlagerung geradliniger Bewegung.
Aber!
Nachteil kartesischer Koordinaten:
Mehrdeutig bei kreisförmiger Bewegung, z.B.
Für kreis- und spiralförmige Bewegungen besser geeignet:
b) Polarkoordinaten
Das sind ebene Koordinaten mit 2 Parametern:
Radius r (t) und Winkel (t)
Die Einheitsvektoren der Polarkoordinaten rotieren zeitabhängig mit (t).
x
y
er
er (t)
(t)
z
Bahnkurve
x
y
y1
x1a x1b
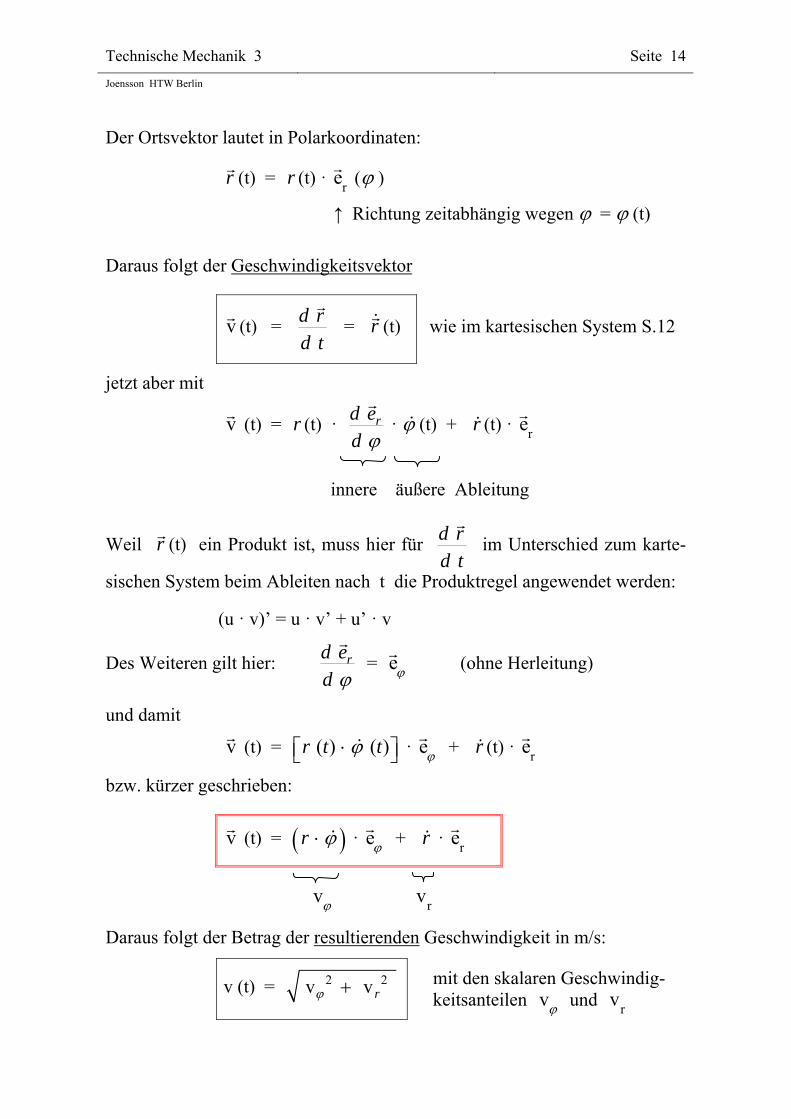
Technische Mechanik 3 Seite 14
Joensson HTW Berlin
Der Ortsvektor lautet in Polarkoordinaten:
r
(t) = r (t) · r
e
( )
↑ Richtung zeitabhängig wegen = (t)
Daraus folgt der Geschwindigkeitsvektor
v
(t) = d rd t
= r
(t) wie im kartesischen System S.12
jetzt aber mit
v
(t) = r (t) · rd ed
· (t) + r (t) ·
re
innere äußere Ableitung
Weil r
(t) ein Produkt ist, muss hier für d rd t
im Unterschied zum karte-
sischen System beim Ableiten nach t die Produktregel angewendet werden:
(u · v)’ = u · v’ + u’ · v
Des Weiteren gilt hier: rd ed
= e
(ohne Herleitung)
und damit
v
(t) = ( ) ( )r t t · e
+ r (t) · r
e
bzw. kürzer geschrieben:
v
(t) = r · e
+ r · r
e
v
rv
Daraus folgt der Betrag der resultierenden Geschwindigkeit in m/s:
v (t) = 2 2 v v r mit den skalaren Geschwindig- keitsanteilen v und
rv
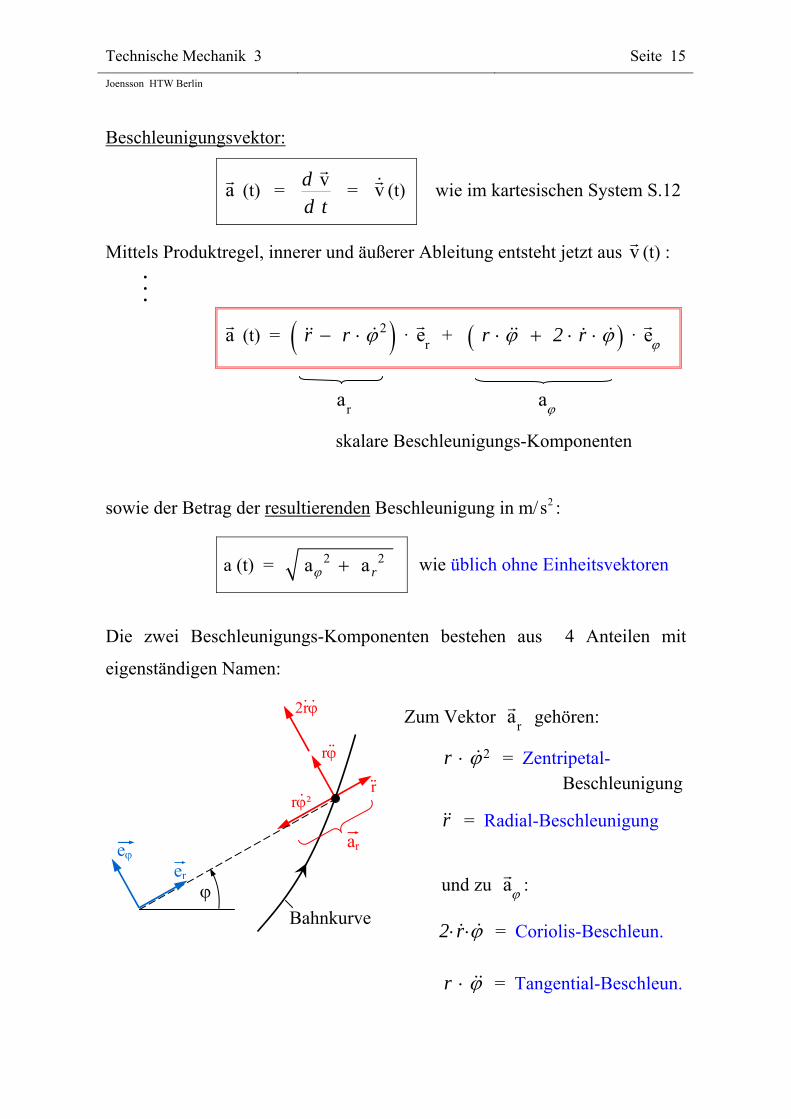
Technische Mechanik 3 Seite 15
Joensson HTW Berlin
Beschleunigungsvektor:
a
(t) = v
dd t
= v
(t) wie im kartesischen System S.12
Mittels Produktregel, innerer und äußerer Ableitung entsteht jetzt aus v
(t) :
a
(t) = 2 r r · r
e
+ r 2 r · e
r
a a
skalare Beschleunigungs-Komponenten
sowie der Betrag der resultierenden Beschleunigung in m/ 2s :
a (t) = 2 2 a a r wie üblich ohne Einheitsvektoren
Die zwei Beschleunigungs-Komponenten bestehen aus 4 Anteilen mit
eigenständigen Namen:
Zum Vektor r
a
gehören:
2r = Zentripetal- Beschleunigung
r = Radial-Beschleunigung
und zu a
:
2 r = Coriolis-Beschleun.
r = Tangential-Beschleun.
er e
Bahnkurve
r
r
r²
2r
ar
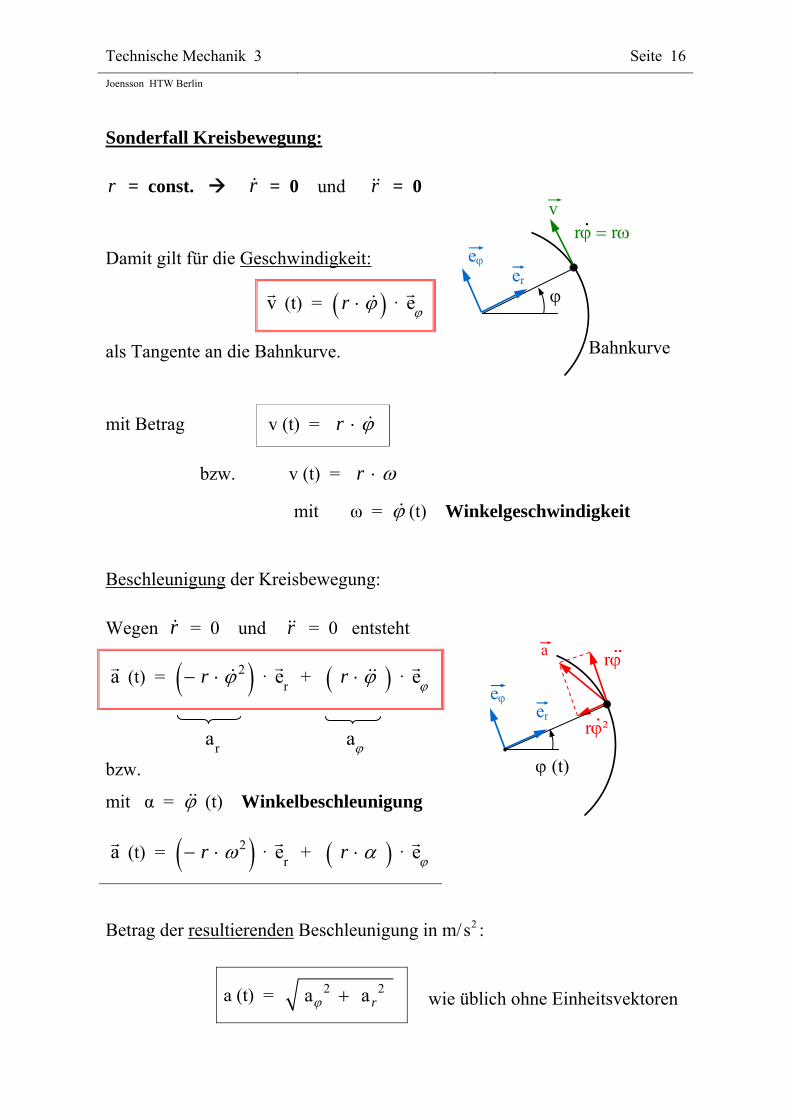
Technische Mechanik 3 Seite 16
Joensson HTW Berlin
Sonderfall Kreisbewegung:
r = const. r = 0 und r = 0
Damit gilt für die Geschwindigkeit:
v
(t) = r · e
als Tangente an die Bahnkurve.
mit Betrag v (t) = r
bzw. v (t) = r
mit ω = (t) Winkelgeschwindigkeit
Beschleunigung der Kreisbewegung:
Wegen r = 0 und r = 0 entsteht
a
(t) = 2 r · r
e
+ r · e
ra a
bzw.
mit α = (t) Winkelbeschleunigung
a
(t) = 2 r · r
e
+ r · e
Betrag der resultierenden Beschleunigung in m/ 2s :
a (t) = 2 2 a a r wie üblich ohne Einheitsvektoren
(t)
a r
r² er
e
er
e
Bahnkurve
v rr
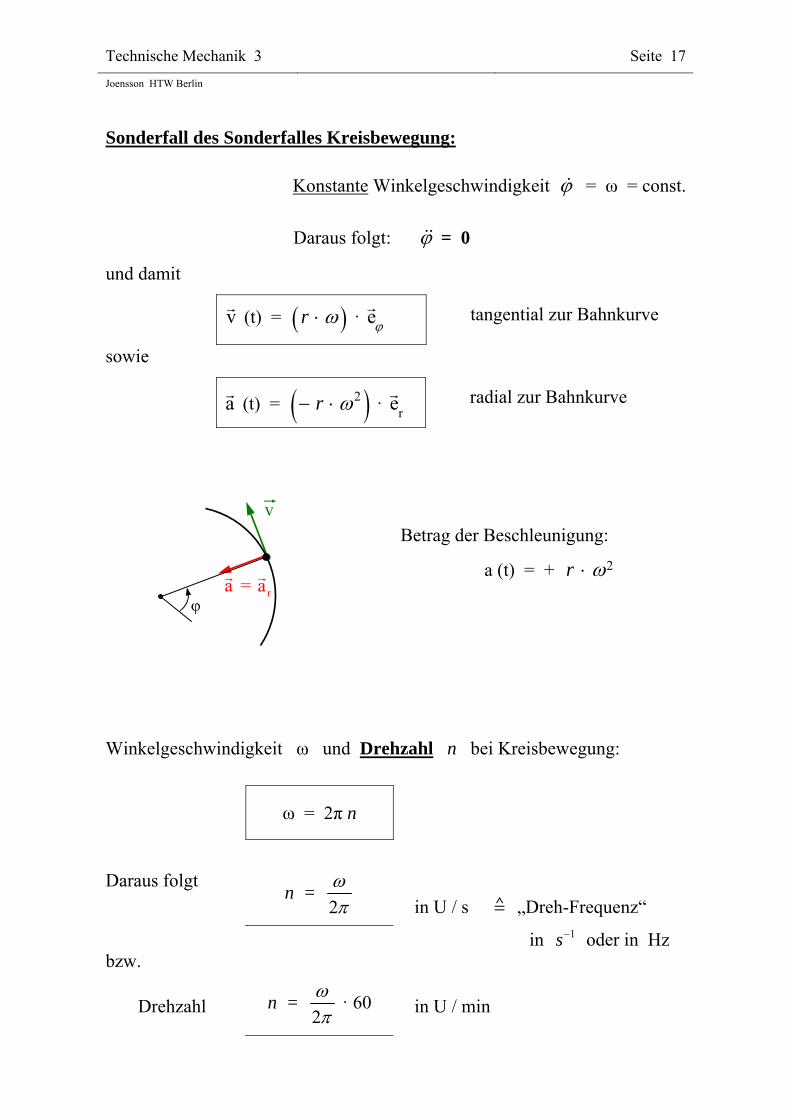
Technische Mechanik 3 Seite 17
Joensson HTW Berlin
Sonderfall des Sonderfalles Kreisbewegung:
Konstante Winkelgeschwindigkeit = ω = const.
Daraus folgt: = 0
und damit
v
(t) = r · e
tangential zur Bahnkurve
sowie
a
(t) = 2 r · r
e
radial zur Bahnkurve
Betrag der Beschleunigung:
a (t) = + 2r
Winkelgeschwindigkeit ω und Drehzahl n bei Kreisbewegung:
ω = 2π n
Daraus folgt n =
2
in U / s „Dreh-Frequenz“
in 1s oder in Hz bzw.
Drehzahl n = 2
· 60 in U / min
v
a
= ra
Technische Mechanik 3 Seite 18
Joensson HTW Berlin
© Prof. Dr. Joensson HTW Berlin 2015
2. Massenträgheit
Widerstand gegen Geschwindigkeits-Änderung (Beschleunigung).
2.1 Einleitung
Massenträgheit ist nur bei Beschleunigung wirksam!
Zwei typische Beschleunigungen:
1.) Bei translatorischer Beschleunigung fungiert die Masse m in kg als
„Schubträgheit“.
Dabei entsteht eine Trägheits-Rückstellkraft, z.B.
F = m · x entgegen der Beschleunigungsrichtung x
mit m als Proportionalitätsfaktor.
2.) Bei Rotations-Beschleunigung (um eine Drehachse k) jedoch wird die
Massenträgheit durch das „Massenträgheitsmoment“ kJ
repräsentiert.
kJ fungiert dabei als „Drehträgheit“.
D.h. bei Drehbeschleunigung des Körpers in 2s um die
Drehachse k entsteht ein Trägheits-Rückstellmoment
kM = kJ · in N·m entgegen der Beschleun.richtung
mit kJ als Proportionalitätsfaktor in 2kgm
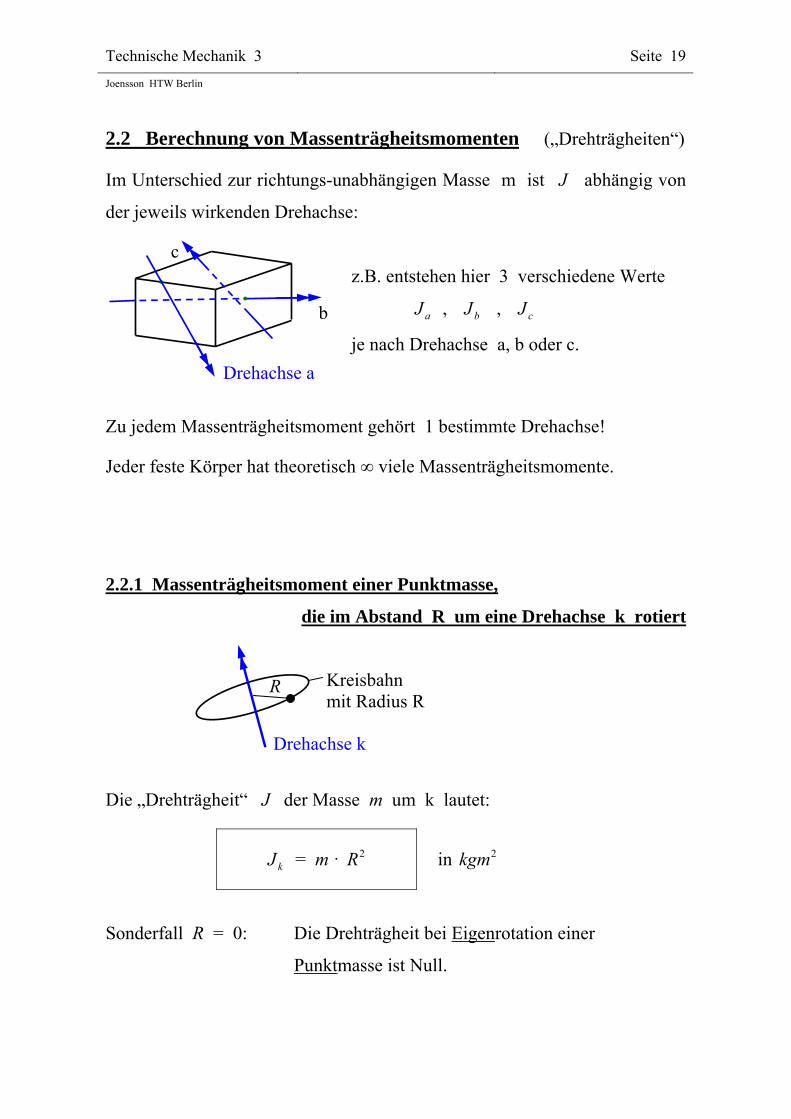
Technische Mechanik 3 Seite 19
Joensson HTW Berlin
2.2 Berechnung von Massenträgheitsmomenten („Drehträgheiten“)
Im Unterschied zur richtungs-unabhängigen Masse m ist J abhängig von
der jeweils wirkenden Drehachse:
z.B. entstehen hier 3 verschiedene Werte
aJ , bJ , cJ
je nach Drehachse a, b oder c.
Zu jedem Massenträgheitsmoment gehört 1 bestimmte Drehachse!
Jeder feste Körper hat theoretisch ∞ viele Massenträgheitsmomente.
2.2.1 Massenträgheitsmoment einer Punktmasse,
die im Abstand R um eine Drehachse k rotiert
Die „Drehträgheit“ J der Masse m um k lautet:
kJ = m · 2R in 2kgm
Sonderfall R = 0: Die Drehträgheit bei Eigenrotation einer
Punktmasse ist Null.
Drehachse k
Kreisbahn mit Radius R
R
Drehachse a
c
b
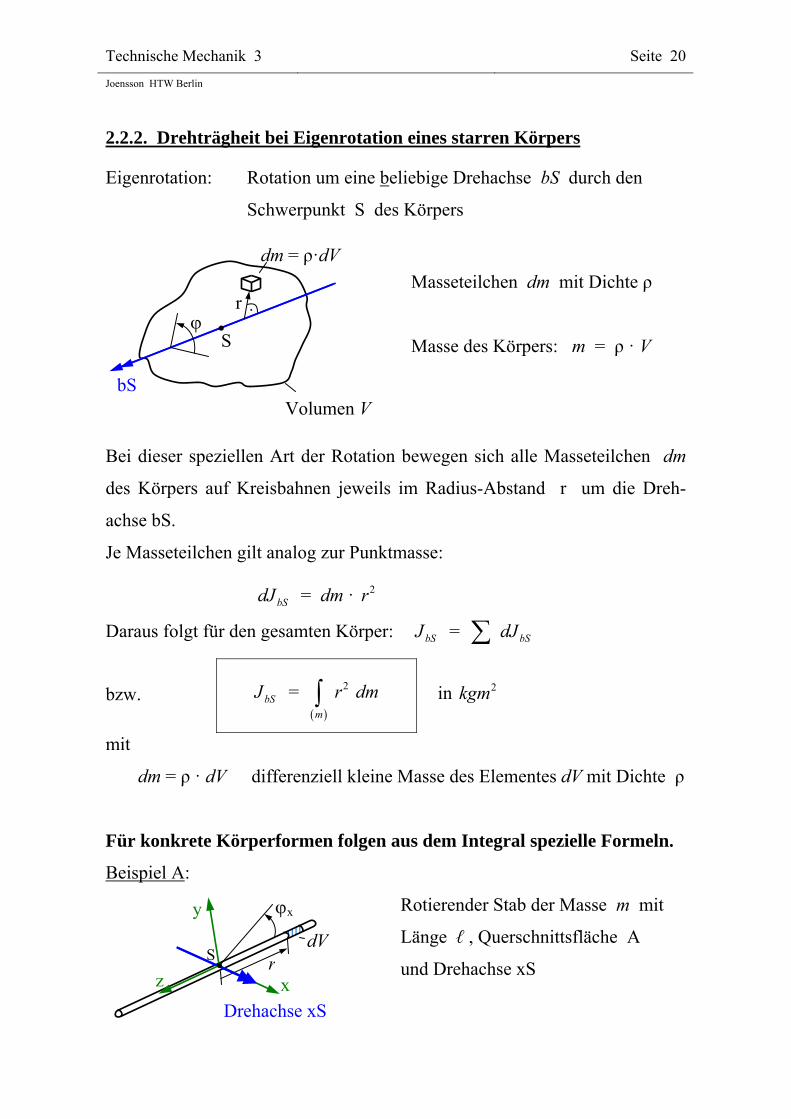
Technische Mechanik 3 Seite 20
Joensson HTW Berlin
2.2.2. Drehträgheit bei Eigenrotation eines starren Körpers
Eigenrotation: Rotation um eine beliebige Drehachse bS durch den
Schwerpunkt S des Körpers
Masseteilchen dm mit Dichte ρ
Masse des Körpers: m = ρ · V
Bei dieser speziellen Art der Rotation bewegen sich alle Masseteilchen dm
des Körpers auf Kreisbahnen jeweils im Radius-Abstand r um die Dreh-
achse bS.
Je Masseteilchen gilt analog zur Punktmasse:
bSdJ = dm · 2r
Daraus folgt für den gesamten Körper: bSJ = bSdJ
bzw. bSJ =
2 m
r dm in 2kgm
mit
dm = ρ · dV differenziell kleine Masse des Elementes dV mit Dichte ρ
Für konkrete Körperformen folgen aus dem Integral spezielle Formeln.
Beispiel A:
Rotierender Stab der Masse m mit
Länge ℓ , Querschnittsfläche A
und Drehachse xS
dVr
x
y
z
Drehachse xS
S
bS
r
dm = ρ·dV
Volumen V
S
x

Technische Mechanik 3 Seite 21
Joensson HTW Berlin
Allgemeiner Ansatz für das Massenträgheitsmoment beliebiger Körper-
formen:
xSJ =
2 m
r dm mit dm = ρ · dV
Hier gilt speziell
dV = A · dr
also xSJ =
2 r
r A dr
bzw. xSJ = 2 22
0 r A dr
Lösung xSJ = 2 A 22
0 r dr
= 2 A · 3
3
r 2
0
xSJ =
332
03 2
A
=
32
3 8A
xSJ = 31
12
A
Noch unbekannt: A
Mit m = ρ · V gilt hier m = A · ℓ und damit A = m
Daraus folgt xSJ = 31
12
m
bzw.
xSJ = 21
12m
als Drehträgheit des Balkens der Masse m und Länge ℓ bei Eigenrotation
um die x-Achse.
dV
A dr

Technische Mechanik 3 Seite 22
Joensson HTW Berlin
Beispiel B: Kreisscheibe
Radius R und Dicke D
Rotation um die „polare“ Achse p
Allgemein gilt: pJ =
2 m
r dm mit dm = ρ · dV
Jetzt mit dV = dA · D
und dA = dr · r · d
wegen r · sin(d≈ r · d
Daraus folgt pJ = 2 r dr r d D
zwei differentielle Anteile Doppelintegral erforderlich
also pJ =
23
0 0
R
D r d dr
… inneres Integral mit dzuerst, dann äußeres Integral …
… Ergebnis pJ = 4 2
D R
Die Anwendung der Masse-Formel m = ρ · V mit V = 2R D liefert
2 D R = m
und damit pJ = 2
2
mR
bzw. pJ = 21
2m R
für die Rotation der Kreisscheibe
um die Achse p
rddr
dAr·d
Dreh- achse p D
R
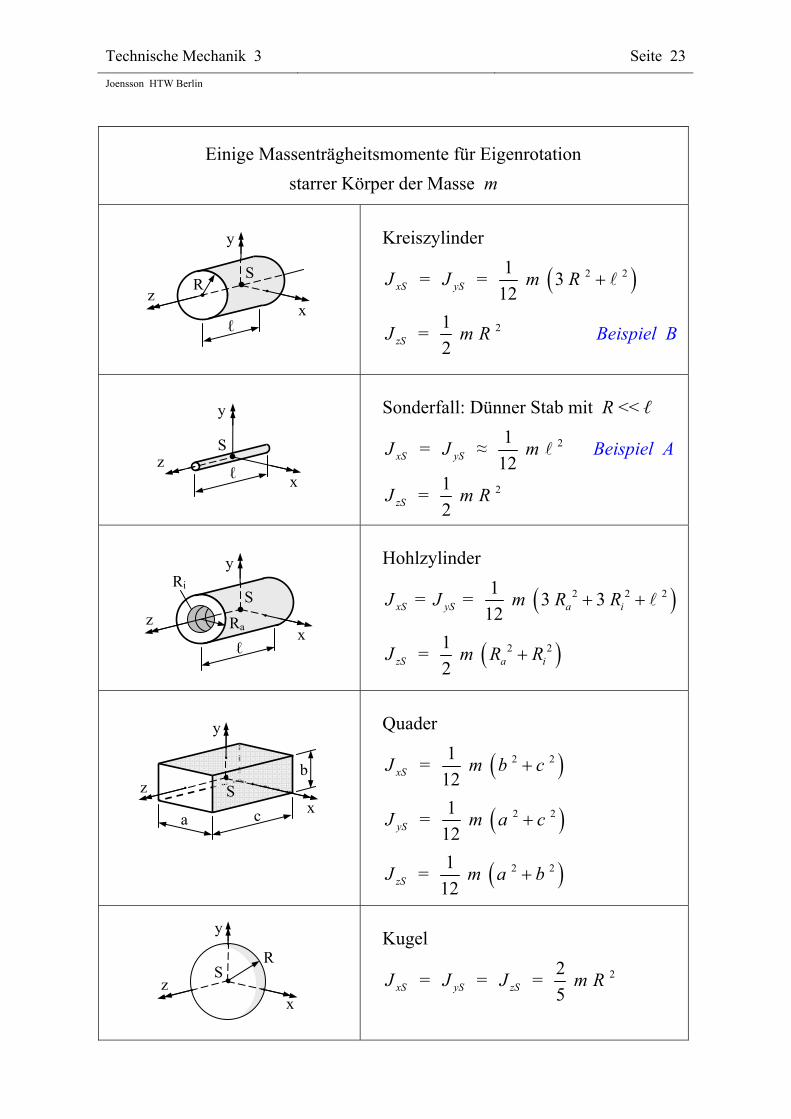
Technische Mechanik 3 Seite 23
Joensson HTW Berlin
Einige Massenträgheitsmomente für Eigenrotation
starrer Körper der Masse m
Kreiszylinder
xSJ = ySJ = 2 21 3
12m R
zSJ = 21
2m R Beispiel B
Sonderfall: Dünner Stab mit R << ℓ
xSJ = ySJ ≈ 21
12m Beispiel A
zSJ = 21
2m R
Hohlzylinder
xSJ = ySJ = 2 2 21 3 3
12 a im R R
zSJ = 2 21
2 a im R R
Quader
xSJ = 2 21
12m b c
ySJ = 2 21
12m a c
zSJ = 2 21
12m a b
Kugel
xSJ = ySJ = zSJ = 22
5m R
c
y
z x
a
b S
y
z x
ℓ
S
Ra
Ri
y
z x
S R
y
z x ℓ
S
y
z x
ℓ
S R
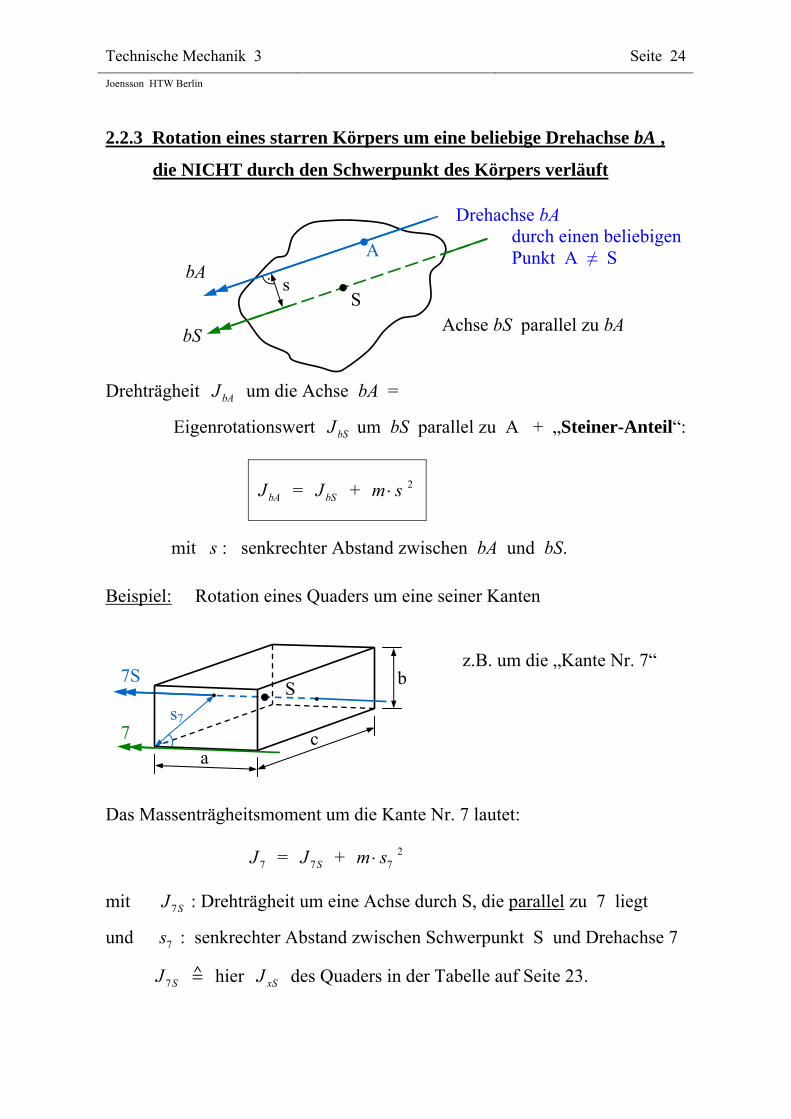
Technische Mechanik 3 Seite 24
Joensson HTW Berlin
2.2.3 Rotation eines starren Körpers um eine beliebige Drehachse bA ,
die NICHT durch den Schwerpunkt des Körpers verläuft
Drehträgheit bAJ um die Achse bA =
Eigenrotationswert bSJ um bS parallel zu A + „Steiner-Anteil“:
bAJ = bSJ + 2m s
mit s : senkrechter Abstand zwischen bA und bS.
Beispiel: Rotation eines Quaders um eine seiner Kanten
z.B. um die „Kante Nr. 7“
Das Massenträgheitsmoment um die Kante Nr. 7 lautet:
7J = 7SJ + 27m s
mit 7SJ : Drehträgheit um eine Achse durch S, die parallel zu 7 liegt
und 7s : senkrechter Abstand zwischen Schwerpunkt S und Drehachse 7
7SJ hier xSJ des Quaders in der Tabelle auf Seite 23.
S
a c
b7S
7 s7
A
Ss
bA
Drehachse bA durch einen beliebigen Punkt A ≠ S
Achse bS parallel zu bA bS

Technische Mechanik 3 Seite 25
Joensson HTW Berlin
Des Weiteren gilt hier
7s = 2 2
2 2
b c
Damit entsteht 7J = 2 21
12m b c + 2 21
4
m b c
xSJ 27s
Ergebnis: 7J = 2 21
3m b c
Weiteres Beispiel: Ein Stab, der um einen seiner Endpunkte rotiert
Geg.: Masse m und Länge ℓ
Ges.: xAJ yAJ zAJ
Für die x-Rotation um A gilt: xAJ = xSJ + 2m s
mit xSJ aus der Tabelle auf S. 23 und s = ½ ℓ , also
xAJ = 21
12m +
2
4m
= 2 1 1 3
12 4 3m
= 24
12
m
xAJ = 21
3m 4 mal größer als xSJ !
Rotation um y:
yAJ = xAJ
Rotation um z: zAJ = zSJ
wegen s = 0, also zAJ = 21
2m R
S z
AzA
S
y
A
yA
S
y
x z A
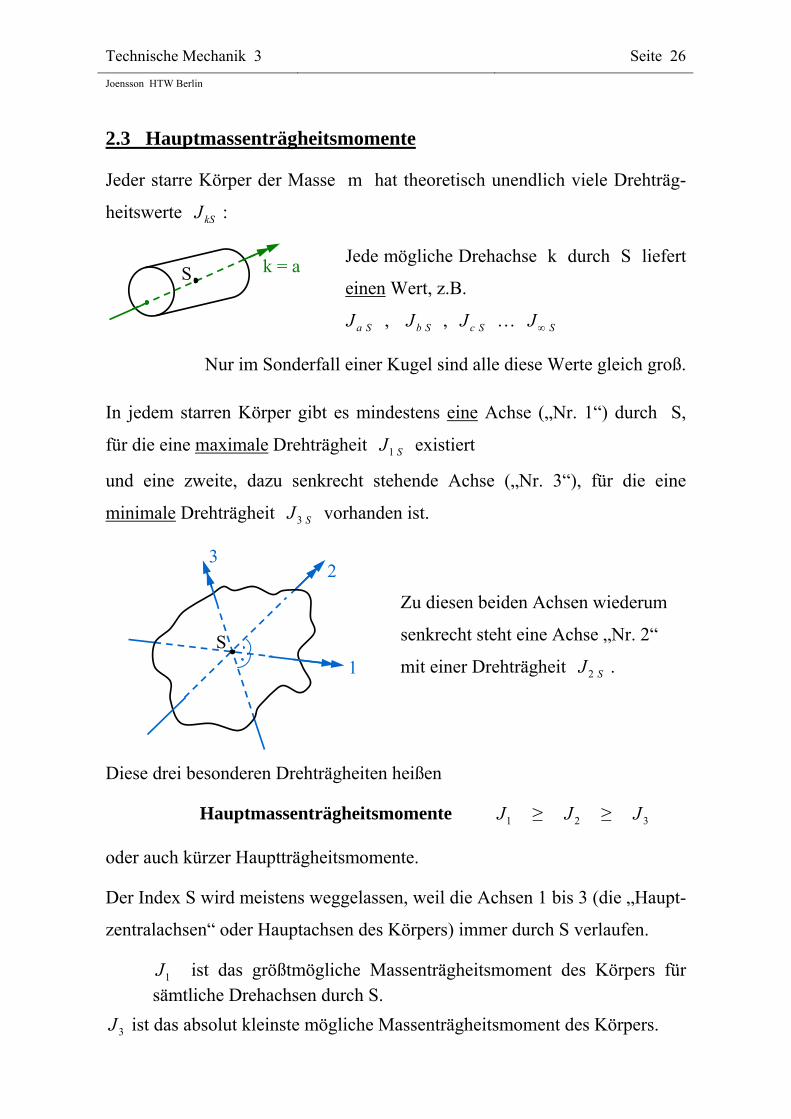
Technische Mechanik 3 Seite 26
Joensson HTW Berlin
2.3 Hauptmassenträgheitsmomente
Jeder starre Körper der Masse m hat theoretisch unendlich viele Drehträg-
heitswerte kSJ :
Jede mögliche Drehachse k durch S liefert
einen Wert, z.B.
a SJ , b SJ , c SJ … SJ
Nur im Sonderfall einer Kugel sind alle diese Werte gleich groß.
In jedem starren Körper gibt es mindestens eine Achse („Nr. 1“) durch S,
für die eine maximale Drehträgheit 1 SJ existiert
und eine zweite, dazu senkrecht stehende Achse („Nr. 3“), für die eine
minimale Drehträgheit 3 SJ vorhanden ist.
Zu diesen beiden Achsen wiederum
senkrecht steht eine Achse „Nr. 2“
mit einer Drehträgheit 2 SJ .
Diese drei besonderen Drehträgheiten heißen
Hauptmassenträgheitsmomente 1J ≥ 2J ≥ 3J
oder auch kürzer Hauptträgheitsmomente.
Der Index S wird meistens weggelassen, weil die Achsen 1 bis 3 (die „Haupt-
zentralachsen“ oder Hauptachsen des Körpers) immer durch S verlaufen.
1J ist das größtmögliche Massenträgheitsmoment des Körpers für sämtliche Drehachsen durch S.
3J ist das absolut kleinste mögliche Massenträgheitsmoment des Körpers.
S
2
1
3
S k = a
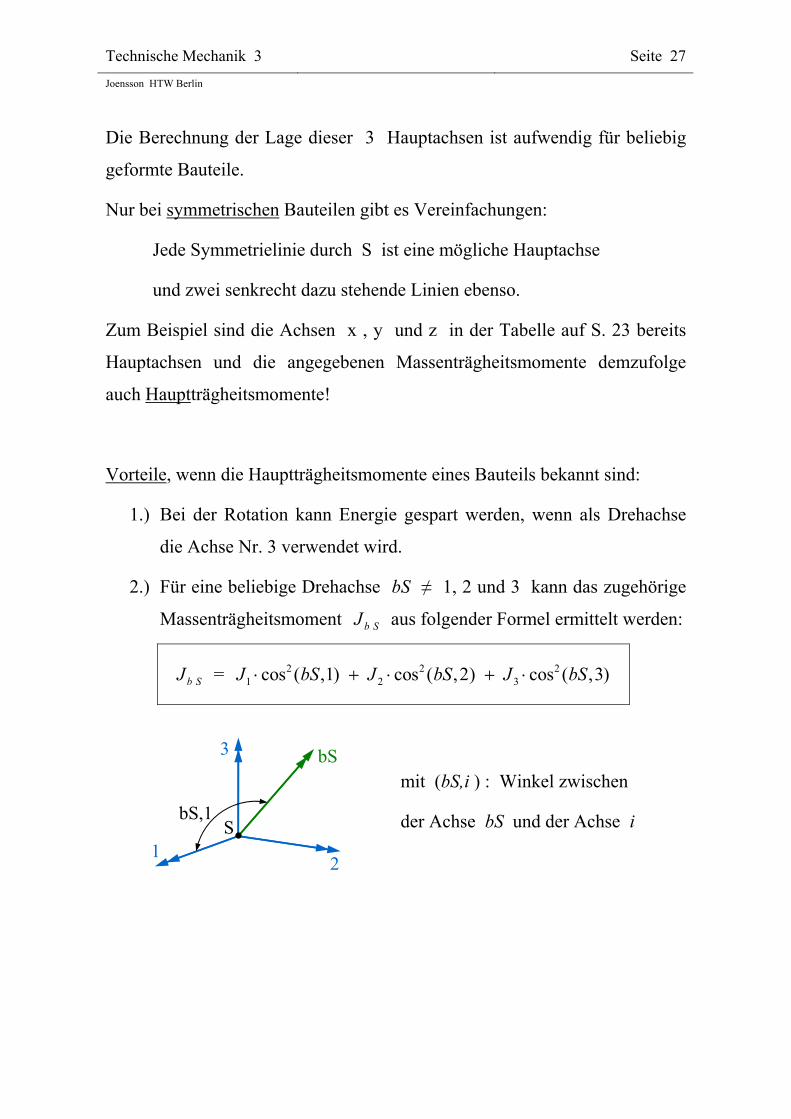
Technische Mechanik 3 Seite 27
Joensson HTW Berlin
Die Berechnung der Lage dieser 3 Hauptachsen ist aufwendig für beliebig
geformte Bauteile.
Nur bei symmetrischen Bauteilen gibt es Vereinfachungen:
Jede Symmetrielinie durch S ist eine mögliche Hauptachse
und zwei senkrecht dazu stehende Linien ebenso.
Zum Beispiel sind die Achsen x , y und z in der Tabelle auf S. 23 bereits
Hauptachsen und die angegebenen Massenträgheitsmomente demzufolge
auch Hauptträgheitsmomente!
Vorteile, wenn die Hauptträgheitsmomente eines Bauteils bekannt sind:
1.) Bei der Rotation kann Energie gespart werden, wenn als Drehachse
die Achse Nr. 3 verwendet wird.
2.) Für eine beliebige Drehachse bS ≠ 1, 2 und 3 kann das zugehörige
Massenträgheitsmoment b SJ aus folgender Formel ermittelt werden:
b SJ = 2 2 2
1 2 3cos ( ,1) cos ( ,2) cos ( ,3)J bS J bS J bS
mit (bS,i ) : Winkel zwischen
der Achse bS und der Achse i
SbS,1
bS
21
3
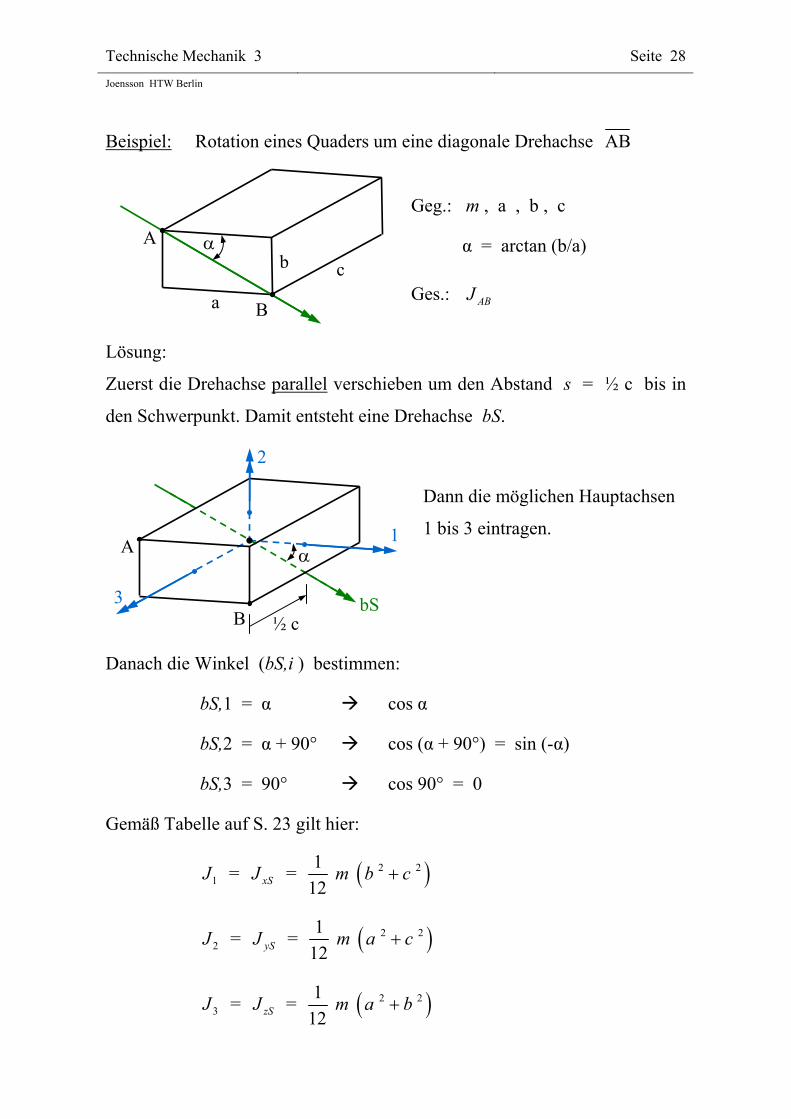
Technische Mechanik 3 Seite 28
Joensson HTW Berlin
Beispiel: Rotation eines Quaders um eine diagonale Drehachse AB
Geg.: m , a , b , c
α = arctan (b/a)
Ges.: ABJ
Lösung:
Zuerst die Drehachse parallel verschieben um den Abstand s = ½ c bis in
den Schwerpunkt. Damit entsteht eine Drehachse bS.
Dann die möglichen Hauptachsen
1 bis 3 eintragen.
Danach die Winkel (bS,i ) bestimmen:
bS,1 = α cos α
bS,2 = α + 90° cos (α + 90°) = sin (-α)
bS,3 = 90° cos 90° = 0
Gemäß Tabelle auf S. 23 gilt hier:
1J = xSJ = 2 21
12m b c
2J = ySJ = 2 21
12m a c
3J = zSJ = 2 21
12m a b
A
B ½ c
bS
1
2
3
A
B a
cb

Technische Mechanik 3 Seite 29
Joensson HTW Berlin
Berechnung der Drehträgheit für die Drehachse AB:
ABJ = bSJ + Steiner-Anteil
Mit bSJ = 2 2 2cos sin ( ) cos 90xS yS zSJ J J
und Steiner-Anteil 2
1
2m c
= 21
4m c
entsteht hier schließlich:
ABJ = 2 2 2 2 2 2 21 1
cos sin ( ) 12 4
m b c a c m c
Nachteil einer Drehachse bS , die keine Hauptachse ist:
Zusätzlich zur Drehträgheit bSJ (um die schiefe Achse bS ) wirken
„zentrifugale“ Trägheitsmomente um zwei weitere Achsen senkrecht
zu bS ,
die zusätzlich Taumelbewegungen auslösen.
Bei dauerhaft rotierenden Bauteilen sollte deshalb die Drehachse möglichst
eine der drei Hauptachsen sein – am besten die Achse Nr. 3.
Nur dann rotiert das Bauteil „dynamisch ausgewuchtet“.
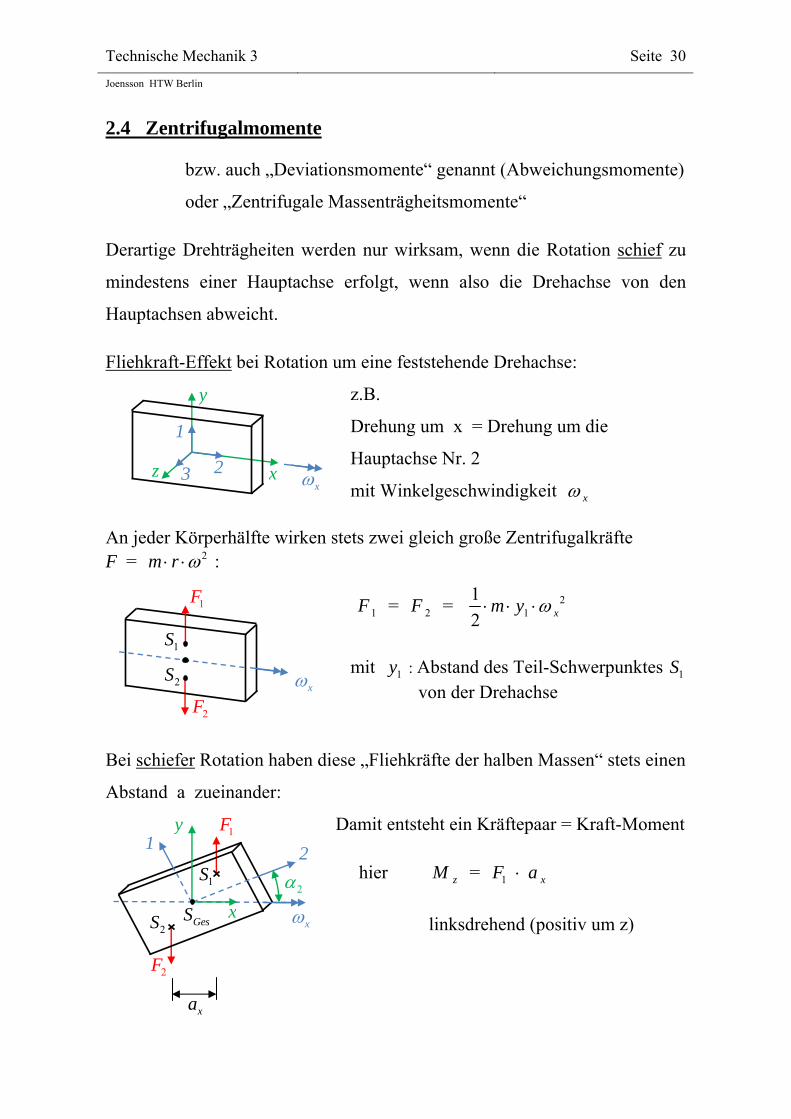
Technische Mechanik 3 Seite 30
Joensson HTW Berlin
2.4 Zentrifugalmomente
bzw. auch „Deviationsmomente“ genannt (Abweichungsmomente)
oder „Zentrifugale Massenträgheitsmomente“
Derartige Drehträgheiten werden nur wirksam, wenn die Rotation schief zu
mindestens einer Hauptachse erfolgt, wenn also die Drehachse von den
Hauptachsen abweicht.
Fliehkraft-Effekt bei Rotation um eine feststehende Drehachse:
z.B.
Drehung um x = Drehung um die
Hauptachse Nr. 2
mit Winkelgeschwindigkeit x
An jeder Körperhälfte wirken stets zwei gleich große Zentrifugalkräfte F = 2m r :
1F = 2F = 21
1
2 xm y
mit 1y : Abstand des Teil-Schwerpunktes 1S
von der Drehachse
Bei schiefer Rotation haben diese „Fliehkräfte der halben Massen“ stets einen
Abstand a zueinander:
Damit entsteht ein Kräftepaar = Kraft-Moment
hier zM = 1 xF a
linksdrehend (positiv um z)
x
y 1
2
x
2
xa
2S
1S
GesS
1F
2F
x
1F
2F
1S
2S
y
z x
1
2 3 x

Technische Mechanik 3 Seite 31
Joensson HTW Berlin
Während der Drehbewegung um x wird hier also permanent zusätzlich ein
Drehmoment um z erzeugt:
zM = 21
1
2 x xm y a
xyJ
Der Faktor vor 2 x ist das zentrifugale Massenträgheitsmoment xyJ
in 2kg m und 1y ist nicht identisch mit 1y bei Hauptachsen-Rotation.
Jeder Körper hat bei schiefer Rotation maximal 6 Zentrifugalmomente,
von denen jeweils 2 gleich groß sind.
An Stelle von 1
1
2 xm y a gilt allgemein für beliebige Körperformen:
xyJ = yxJ =
m
x y dm
sowie xzJ = zxJ =
m
x z dm
yzJ = zyJ =
m
y z dm
Alternativ zu diesen mathematisch allgemein gültigen Integralen können die
Zentrifugalmomente auch aus den drei Hauptträgheitsmomenten berechnet
werden (siehe z.B. J. Berger: Technische Mechanik, Band 3, S. 214):
xyJ = 1 1 1 2 2 2 3 3 3cos cos cos cos cos cos )J J J
xzJ = 1 1 2 2 3 3
yzJ = 1 1 2 2 3 3
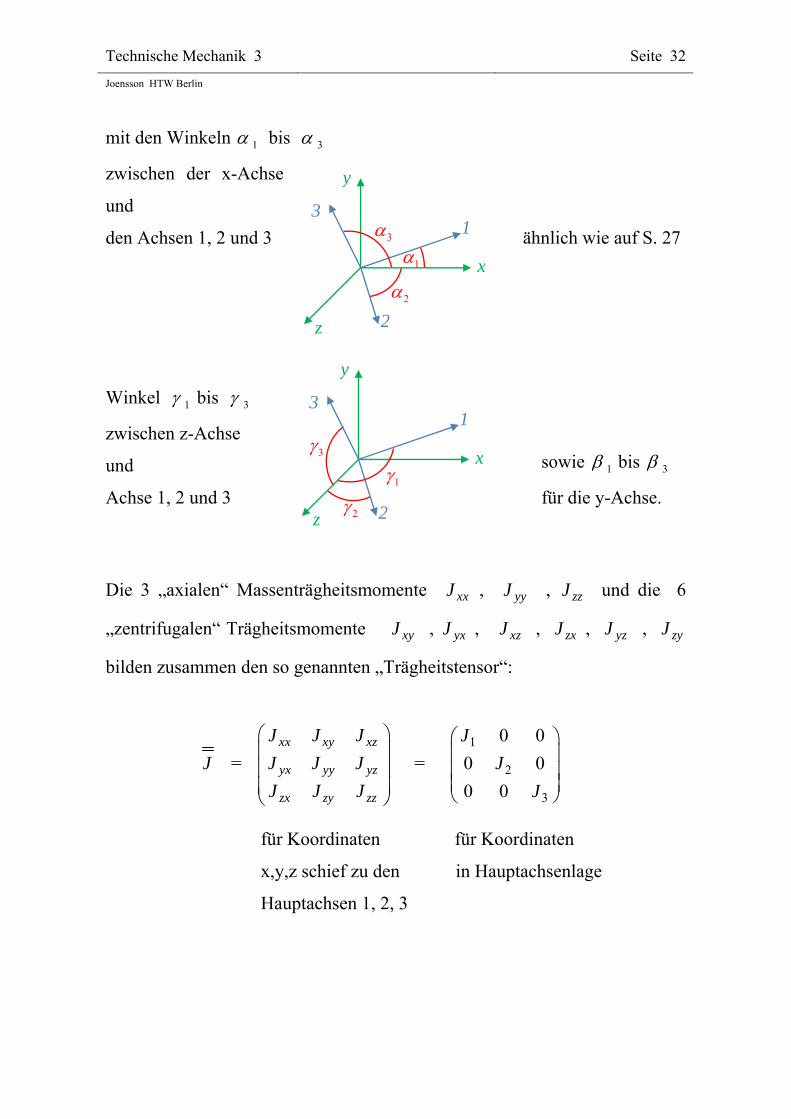
Technische Mechanik 3 Seite 32
Joensson HTW Berlin
mit den Winkeln 1 bis 3
zwischen der x-Achse
und
den Achsen 1, 2 und 3
ähnlich wie auf S. 27
Winkel 1 bis 3
zwischen z-Achse
und
Achse 1, 2 und 3
sowie 1 bis 3
für die y-Achse.
Die 3 „axialen“ Massenträgheitsmomente xxJ , yyJ , zzJ und die 6
„zentrifugalen“ Trägheitsmomente xyJ , yxJ , xzJ , zxJ , yzJ , zyJ
bilden zusammen den so genannten „Trägheitstensor“:
J = xx xy xz
yx yy yz
zx zy zz
J J J
J J J
J J J
= 1
2
3
0 0
0 0
0 0
J
J
J
für Koordinaten für Koordinaten
x,y,z schief zu den in Hauptachsenlage
Hauptachsen 1, 2, 3
1
2
3
x
y
z
1
2
3
1
2
3
x
y
z
3
1
2
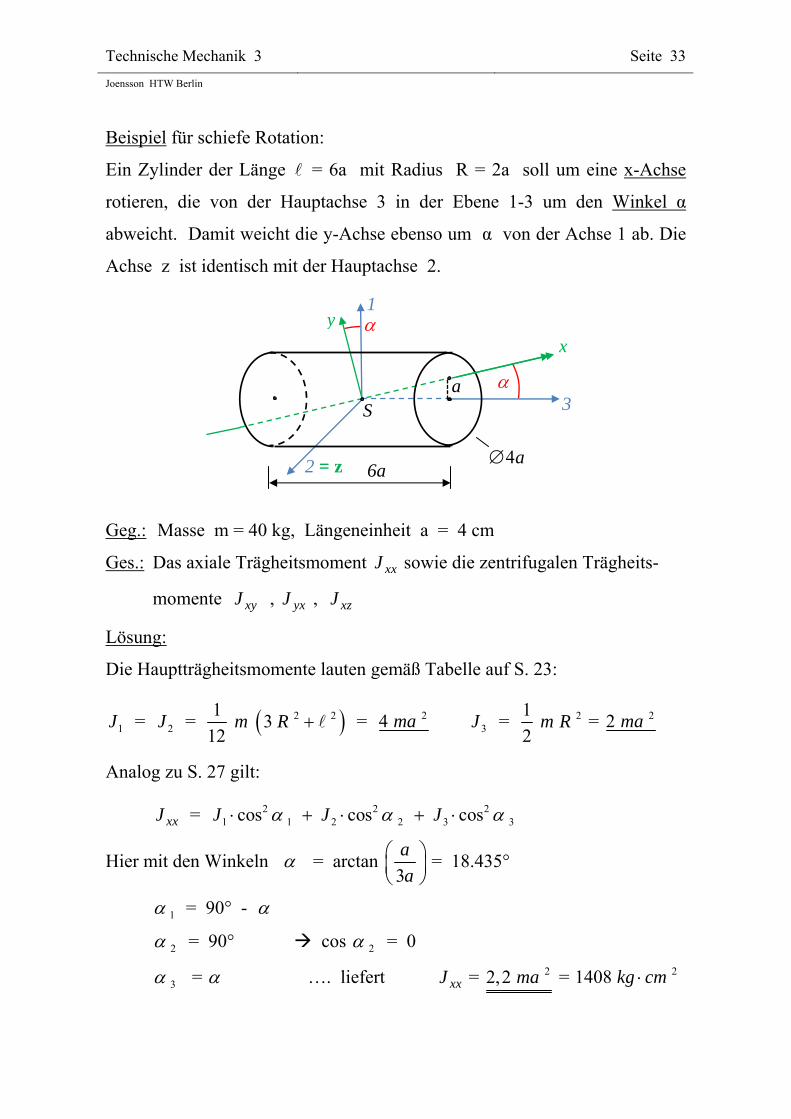
Technische Mechanik 3 Seite 33
Joensson HTW Berlin
Beispiel für schiefe Rotation:
Ein Zylinder der Länge = 6a mit Radius R = 2a soll um eine x-Achse
rotieren, die von der Hauptachse 3 in der Ebene 1-3 um den Winkel α
abweicht. Damit weicht die y-Achse ebenso um α von der Achse 1 ab. Die
Achse z ist identisch mit der Hauptachse 2.
Geg.: Masse m = 40 kg, Längeneinheit a = 4 cm
Ges.: Das axiale Trägheitsmoment xxJ sowie die zentrifugalen Trägheits-
momente xyJ , yxJ , xzJ
Lösung:
Die Hauptträgheitsmomente lauten gemäß Tabelle auf S. 23:
1J = 2J = 2 21 3
12m R = 24 ma 3J = 21
2
m R = 22 ma
Analog zu S. 27 gilt:
xxJ = 2 2 21 1 2 2 3 3cos cos cosJ J J
Hier mit den Winkeln = arctan 3
a
a
= 18.435°
1 = 90° -
2 = 90° cos 2 = 0
3 = …. liefert xxJ = 22,2 ma = 21408 kg cm
1
2 = z
3
6a4a
y
x
S a

Technische Mechanik 3 Seite 34
Joensson HTW Berlin
Für die Zentrifugalmomente gemäß den Hauptspannungs-Formeln auf S. 31
werden außerdem noch die anderen Winkel benötigt.
Zwischen der y-Achse und Zwischen der z-Achse und
den Achsen 1 bis 3: den Achsen 1 bis 3:
1 = 1 = 90°
2 = 90° 2 = 0°
3 = 90° + 3 = 90°
Mit diesen Winkeln wird
xyJ = 1 1 1 2 2 2 3 3 3cos cos cos cos cos cos J J J
…. xyJ = 20,6 ma = 2384 kg cm
…. xzJ = 0
…. yzJ = 0
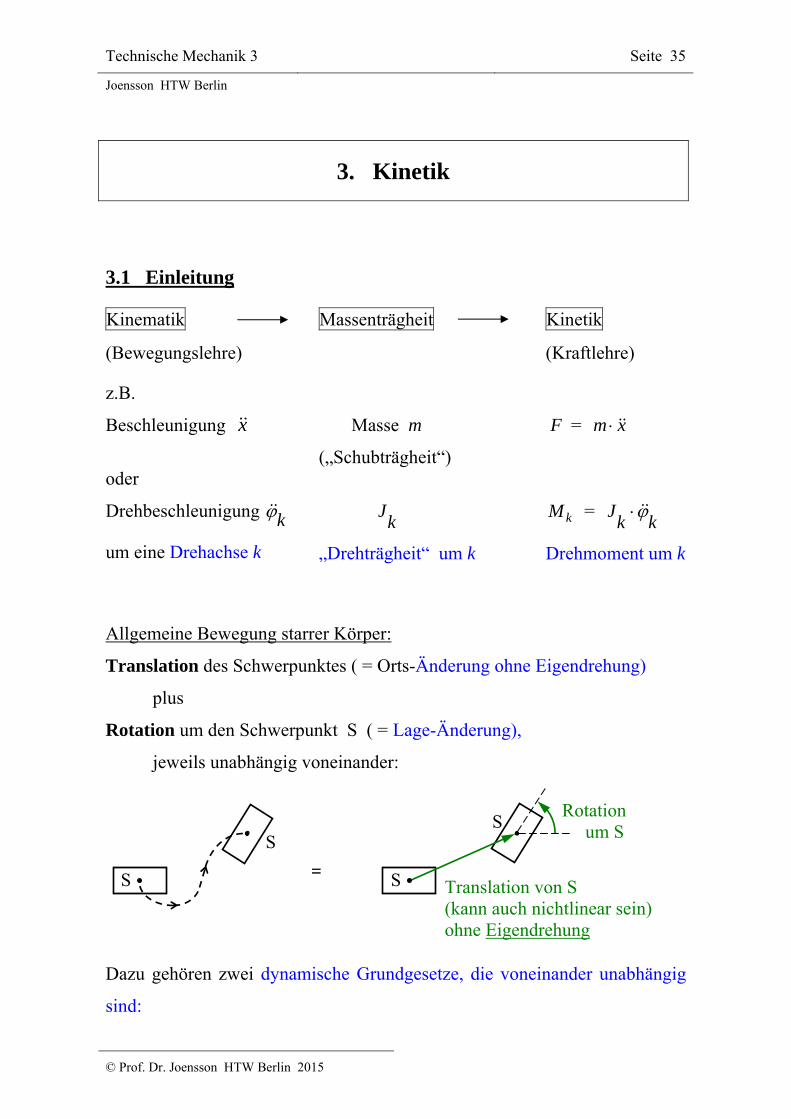
Technische Mechanik 3 Seite 35
Joensson HTW Berlin
© Prof. Dr. Joensson HTW Berlin 2015
3. Kinetik
3.1 Einleitung
Kinematik
(Bewegungslehre)
Massenträgheit Kinetik
(Kraftlehre)
z.B.
Beschleunigung x
Masse m
(„Schubträgheit“)
F = m x
oder
Drehbeschleunigung k
um eine Drehachse k
Jk
„Drehträgheit“ um k
kM = Jk k
Drehmoment um k
Allgemeine Bewegung starrer Körper:
Translation des Schwerpunktes ( = Orts-Änderung ohne Eigendrehung)
plus
Rotation um den Schwerpunkt S ( = Lage-Änderung),
jeweils unabhängig voneinander:
Dazu gehören zwei dynamische Grundgesetze, die voneinander unabhängig
sind:
SS
S S
=
Rotation um S
Translation von S (kann auch nichtlinear sein) ohne Eigendrehung
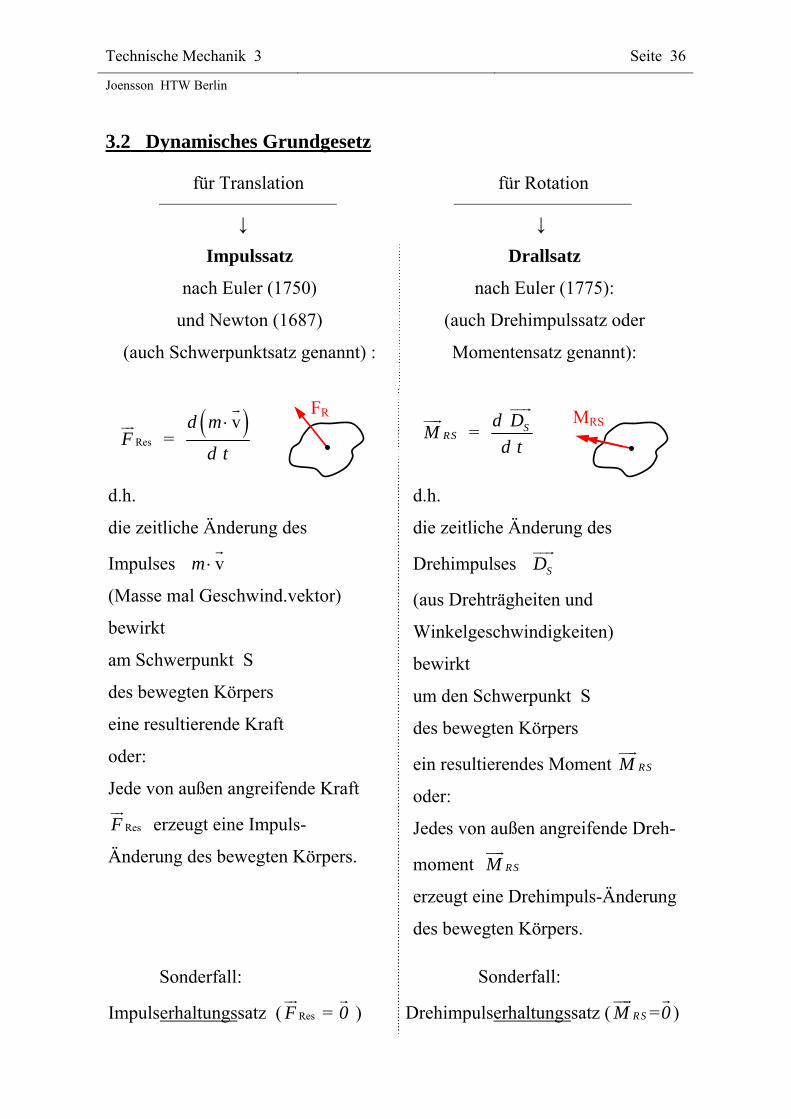
Technische Mechanik 3 Seite 36
Joensson HTW Berlin
3.2 Dynamisches Grundgesetz
für Translation für Rotation
↓ ↓
Impulssatz
nach Euler (1750)
und Newton (1687)
(auch Schwerpunktsatz genannt) :
Drallsatz
nach Euler (1775):
(auch Drehimpulssatz oder
Momentensatz genannt):
ResF
= vd m
d t
RSM
= Sd D
d t
d.h.
die zeitliche Änderung des
Impulses vm
(Masse mal Geschwind.vektor)
bewirkt
am Schwerpunkt S
des bewegten Körpers
eine resultierende Kraft
oder:
Jede von außen angreifende Kraft
ResF
erzeugt eine Impuls-
Änderung des bewegten Körpers.
Sonderfall:
Impulserhaltungssatz ( ResF
= 0
)
d.h.
die zeitliche Änderung des
Drehimpulses SD
(aus Drehträgheiten und
Winkelgeschwindigkeiten)
bewirkt
um den Schwerpunkt S
des bewegten Körpers
ein resultierendes Moment RSM
oder:
Jedes von außen angreifende Dreh-
moment RSM
erzeugt eine Drehimpuls-Änderung
des bewegten Körpers.
Sonderfall:
Drehimpulserhaltungssatz ( RSM
=0
)
MRS FR
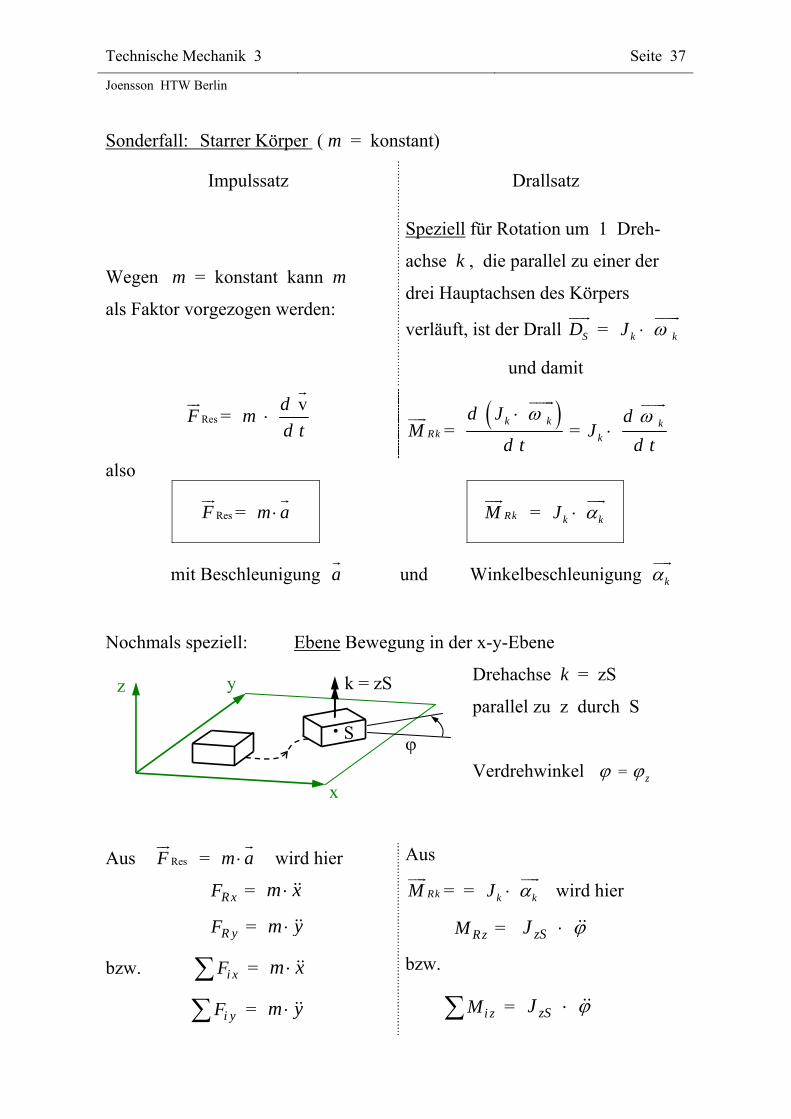
Technische Mechanik 3 Seite 37
Joensson HTW Berlin Sonderfall: Starrer Körper ( m = konstant)
Impulssatz
Wegen m = konstant kann m
als Faktor vorgezogen werden:
Drallsatz
Speziell für Rotation um 1 Dreh-
achse k , die parallel zu einer der
drei Hauptachsen des Körpers
verläuft, ist der Drall SD
= k kJ
und damit
ResF
= vd
md t
RkM
=
k kd J
d t
= kk
dJ
d t
also
ResF
= m a
RkM
= k kJ
mit Beschleunigung a
und Winkelbeschleunigung k
Nochmals speziell: Ebene Bewegung in der x-y-Ebene
Drehachse k = zS
parallel zu z durch S
Verdrehwinkel = z
Aus ResF
= m a
wird hier
R xF = m x
R yF = m y
bzw. i xF = m x
i yF = m y
Aus
RkM
= = k kJ
wird hier
RzM = zSJ
bzw.
i zM = zSJ
S
k = zS
x
yz
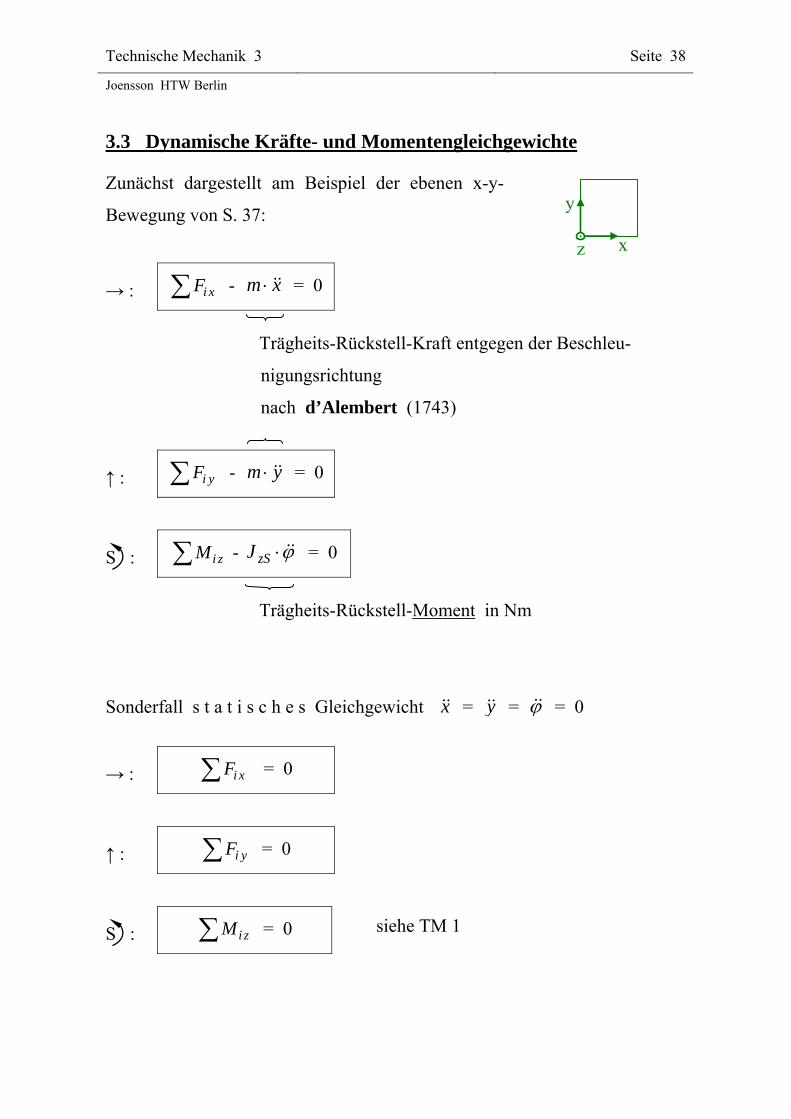
Technische Mechanik 3 Seite 38
Joensson HTW Berlin
3.3 Dynamische Kräfte- und Momentengleichgewichte
Zunächst dargestellt am Beispiel der ebenen x-y-
Bewegung von S. 37:
→ : i xF - m x = 0
Trägheits-Rückstell-Kraft entgegen der Beschleu-
nigungsrichtung
nach d’Alembert (1743)
↑ : i yF - m y = 0
S : i zM - zSJ = 0
Trägheits-Rückstell-Moment in Nm
Sonderfall s t a t i s c h e s Gleichgewicht x = y = = 0
→ : i xF = 0
↑ : i yF = 0
S : i zM = 0 siehe TM 1
y
x z

Technische Mechanik 3 Seite 39
Joensson HTW Berlin
Das dynamische Grundgesetz ResF
= m a
für Translation kann also auch
geschrieben werden als:
ResF
- m a
= 0
mit Nullvektor 0
, weil diese Vektorgleichung aus mehreren Gleichungen mit
jeweils 0 als rechter Seite besteht.
Dabei wird die negative Kraft -m a
als „Trägheits-Rückstell-Kraft“ TF
interpretiert (auch d’Alembertsche Hilfskraft genannt).
Somit entsteht
ResF
+ TF
= 0
Allgemeines dynamisches Kräfte-gleichgewicht
Sonderfall Statik:
Wegen nicht vorhandener Bewegungsbeschleunigung gilt TF
= 0
und damit ResF
= 0
bzw. i xF = 0
i yF = 0
i zF = 0
als statisches Kräftegleichgewicht komplett.
Des Weiteren folgt aus der Interpretation von Trägheits-Rückstell-Momenten
in ähnlicher Weise
ResM
+ TM
= 0
Allgemeines dynamisches Momentengleichgewicht
mit dem Sonderfall Statik ResM
= 0
wegen TM
= 0
.
Technische Mechanik 3 Seite 40
Joensson HTW Berlin
3.4 Das Prinzip von d’Alembert
(in Kombination mit dem Eulerschen Schnittprinzip)
1.) Der bewegte Körper wird freigeschnitten (wie in der Statik) mit
Skizze.
Jetzt aber zuerst freie Koordinate(n) antragen, dann alle wirkenden
Kräfte und Momente
2.) Zusätzlich werden in die Skizze eingetragen: Die d’Alembertschen
Trägheits-Rückstell-Kräfte und/oder -Rückstell-Momente
(den freien Koordinaten entgegengesetzt gerichtet)
3.) Kräfte- und Momentenbilanzen wie in der Statik
Daraus lassen sich sämtliche Bewegungsgrößen (Wege, Winkel,
Geschwindigkeiten und Beschleunigungen)
sowie alle möglichen Kraftgrößen ermitteln, z.B. dynamische Lagerkräfte
und -momente, Gelenkkräfte zwischen gekoppelten Bauteilen, Feder-
kräfte, Dämpferkräfte, Antriebsmomente, Bremsmomente usw.
Beispiel: Aufgabe D 30
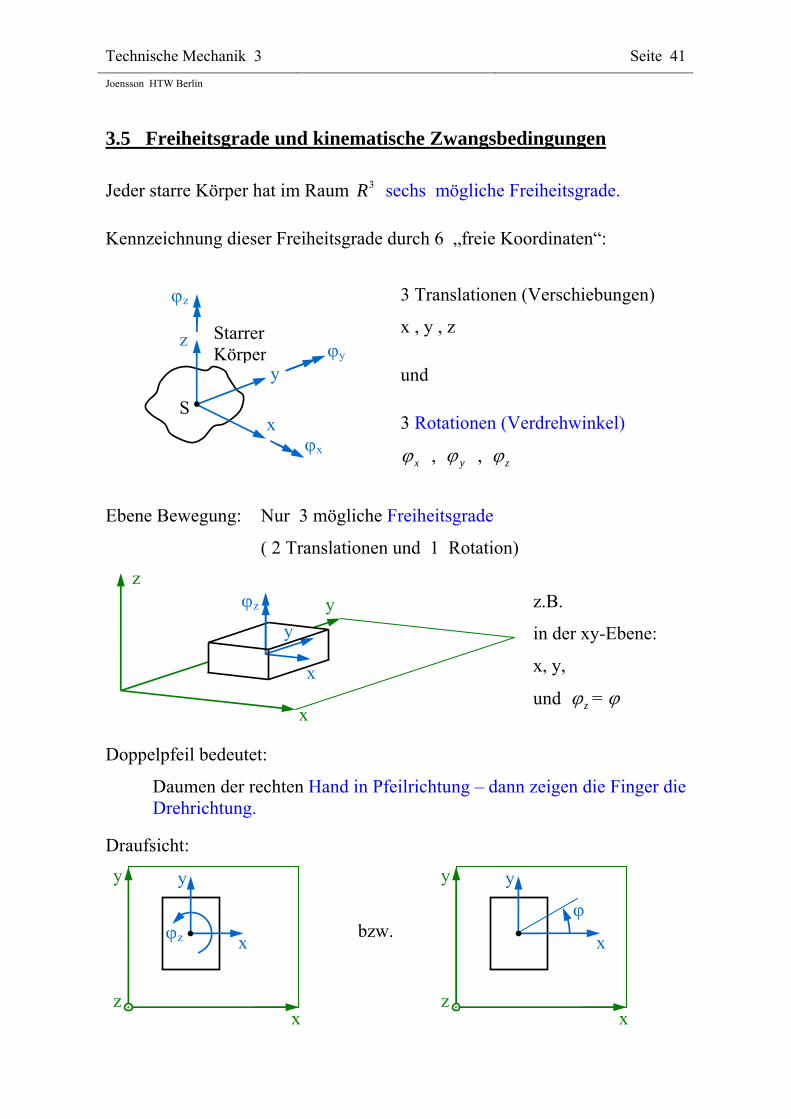
Technische Mechanik 3 Seite 41
Joensson HTW Berlin
3.5 Freiheitsgrade und kinematische Zwangsbedingungen
Jeder starre Körper hat im Raum 3R sechs mögliche Freiheitsgrade.
Kennzeichnung dieser Freiheitsgrade durch 6 „freie Koordinaten“:
3 Translationen (Verschiebungen)
x , y , z
und
3 Rotationen (Verdrehwinkel)
x , y , z
Ebene Bewegung: Nur 3 mögliche Freiheitsgrade
( 2 Translationen und 1 Rotation)
z.B.
in der xy-Ebene:
x, y,
und z =
Doppelpfeil bedeutet:
Daumen der rechten Hand in Pfeilrichtung – dann zeigen die Finger die Drehrichtung.
Draufsicht:
bzw.
y
x z
y
x
y
x z
z
y
x
x
y
z
y
x
z
y
z
x
y
x
z
S
Starrer Körper
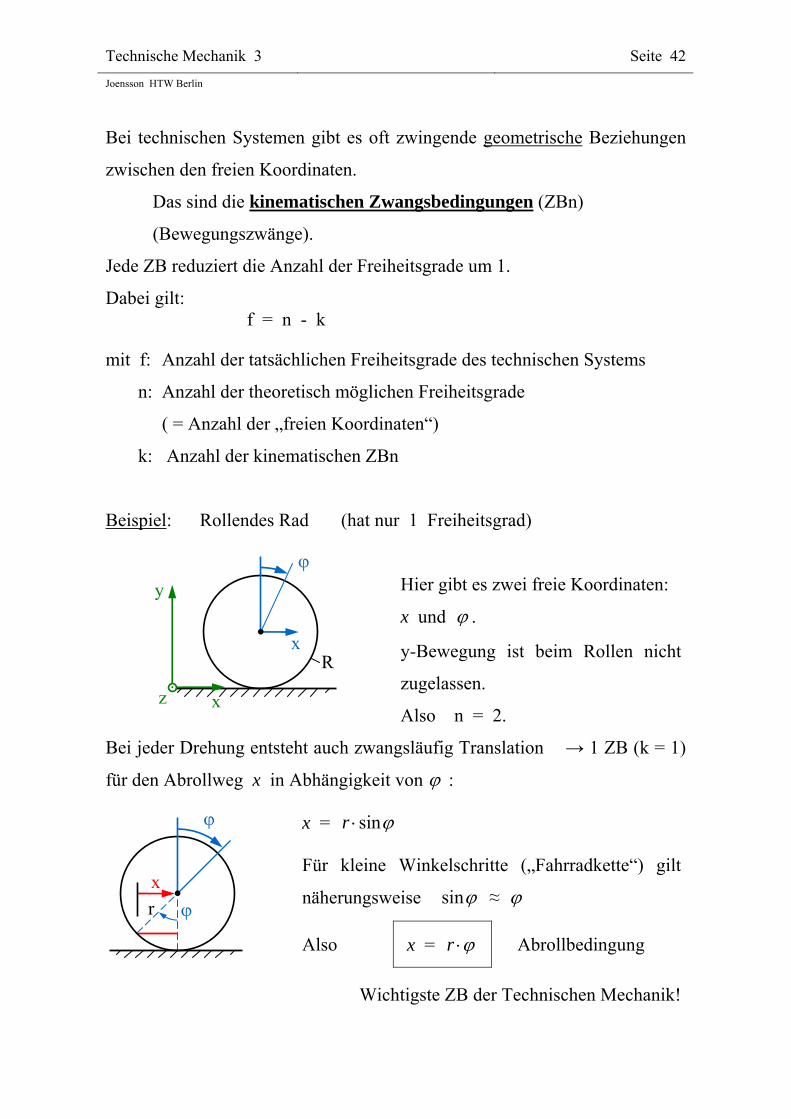
Technische Mechanik 3 Seite 42
Joensson HTW Berlin
Bei technischen Systemen gibt es oft zwingende geometrische Beziehungen
zwischen den freien Koordinaten.
Das sind die kinematischen Zwangsbedingungen (ZBn)
(Bewegungszwänge).
Jede ZB reduziert die Anzahl der Freiheitsgrade um 1.
Dabei gilt: f = n - k
mit f: Anzahl der tatsächlichen Freiheitsgrade des technischen Systems
n: Anzahl der theoretisch möglichen Freiheitsgrade
( = Anzahl der „freien Koordinaten“)
k: Anzahl der kinematischen ZBn
Beispiel: Rollendes Rad (hat nur 1 Freiheitsgrad)
Hier gibt es zwei freie Koordinaten:
x und .
y-Bewegung ist beim Rollen nicht
zugelassen.
Also n = 2.
Bei jeder Drehung entsteht auch zwangsläufig Translation → 1 ZB (k = 1)
für den Abrollweg x in Abhängigkeit von :
x = sinr
Für kleine Winkelschritte („Fahrradkette“) gilt
näherungsweise sin ≈
Also x = r Abrollbedingung
Wichtigste ZB der Technischen Mechanik!
r x
x
R
z x
y
Technische Mechanik 3 Seite 43
Joensson HTW Berlin
Kontrolle:
Eine volle Umdrehung des Rades mit = 2π liefert als Abrollweg den
kompletten Rad-Umfang x = 2π r.
Aus der einen ZB x = r folgt hier
f = n - k = 1 Freiheitsgrad
( = Anzahl der erforderlichen Festhaltungen, um das rollende Rad zu
arretieren).
Aus x = r folgt außerdem
x = r sowie x = r
↑ ↑
Translations- Translations-
Geschwindigkeit Beschleunigung
der Radachse der Radachse
und und
= =
Winkelgeschwindigkeit Winkelbeschleunigung
des Rades (= 2π n) des Rades
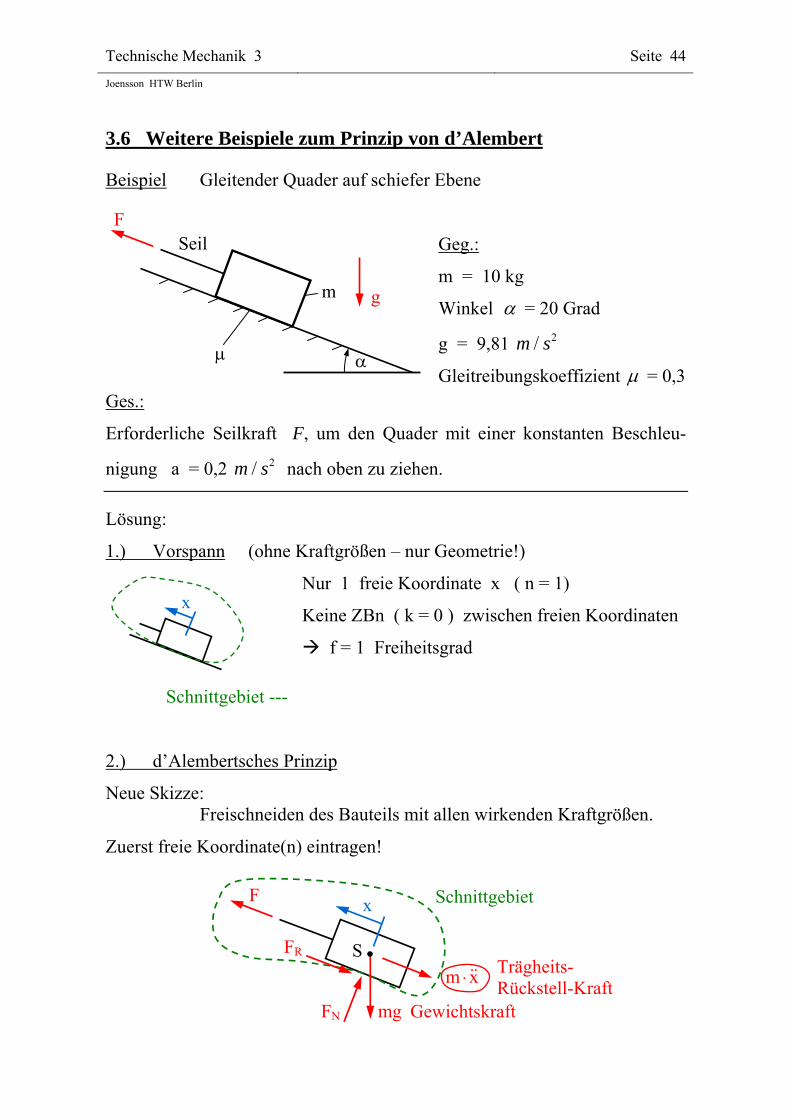
Technische Mechanik 3 Seite 44
Joensson HTW Berlin
3.6 Weitere Beispiele zum Prinzip von d’Alembert
Beispiel Gleitender Quader auf schiefer Ebene
Geg.:
m = 10 kg
Winkel = 20 Grad
g = 9,81 2/m s
Gleitreibungskoeffizient = 0,3Ges.:
Erforderliche Seilkraft F, um den Quader mit einer konstanten Beschleu-
nigung a = 0,2 2/m s nach oben zu ziehen.
Lösung:
1.) Vorspann (ohne Kraftgrößen – nur Geometrie!)
Nur 1 freie Koordinate x ( n = 1)
Keine ZBn ( k = 0 ) zwischen freien Koordinaten
f = 1 Freiheitsgrad
Schnittgebiet ---
2.) d’Alembertsches Prinzip
Neue Skizze: Freischneiden des Bauteils mit allen wirkenden Kraftgrößen.
Zuerst freie Koordinate(n) eintragen!
mgFN
FR
F x
m x
S
x
m
Seil F
g
Schnittgebiet
Gewichtskraft
Trägheits- Rückstell-Kraft
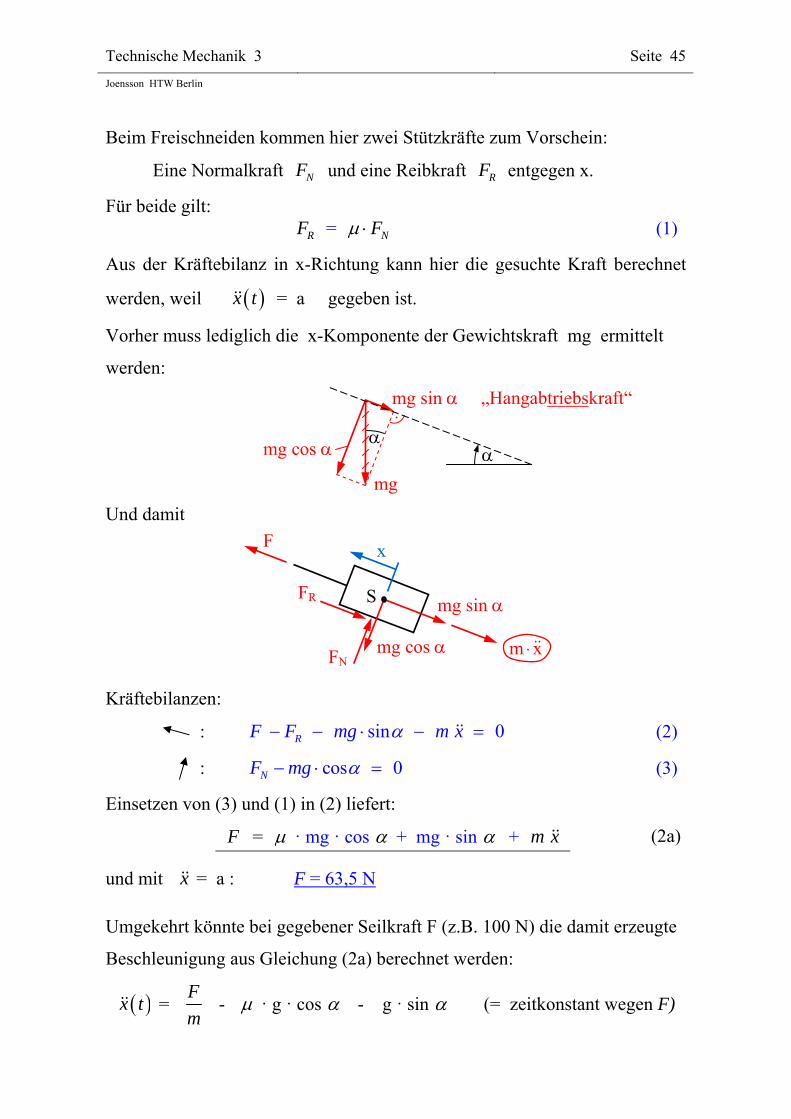
Technische Mechanik 3 Seite 45
Joensson HTW Berlin
Beim Freischneiden kommen hier zwei Stützkräfte zum Vorschein:
Eine Normalkraft NF und eine Reibkraft RF entgegen x.
Für beide gilt: RF = NF (1)
Aus der Kräftebilanz in x-Richtung kann hier die gesuchte Kraft berechnet
werden, weil x t = a gegeben ist.
Vorher muss lediglich die x-Komponente der Gewichtskraft mg ermittelt
werden:
Und damit
Kräftebilanzen:
: sin 0 RF F mg m x (2)
: cos 0 NF mg (3)
Einsetzen von (3) und (1) in (2) liefert:
F = · mg · cos + mg · sin + m x (2a)
und mit x = a : F = 63,5 N
Umgekehrt könnte bei gegebener Seilkraft F (z.B. 100 N) die damit erzeugte
Beschleunigung aus Gleichung (2a) berechnet werden:
x t = F
m - · g · cos - g · sin (= zeitkonstant wegen F)
FN
FR
F x
m x
S mg sin
mg cos
mg
mg sin
mg cos
„Hangabtriebskraft“
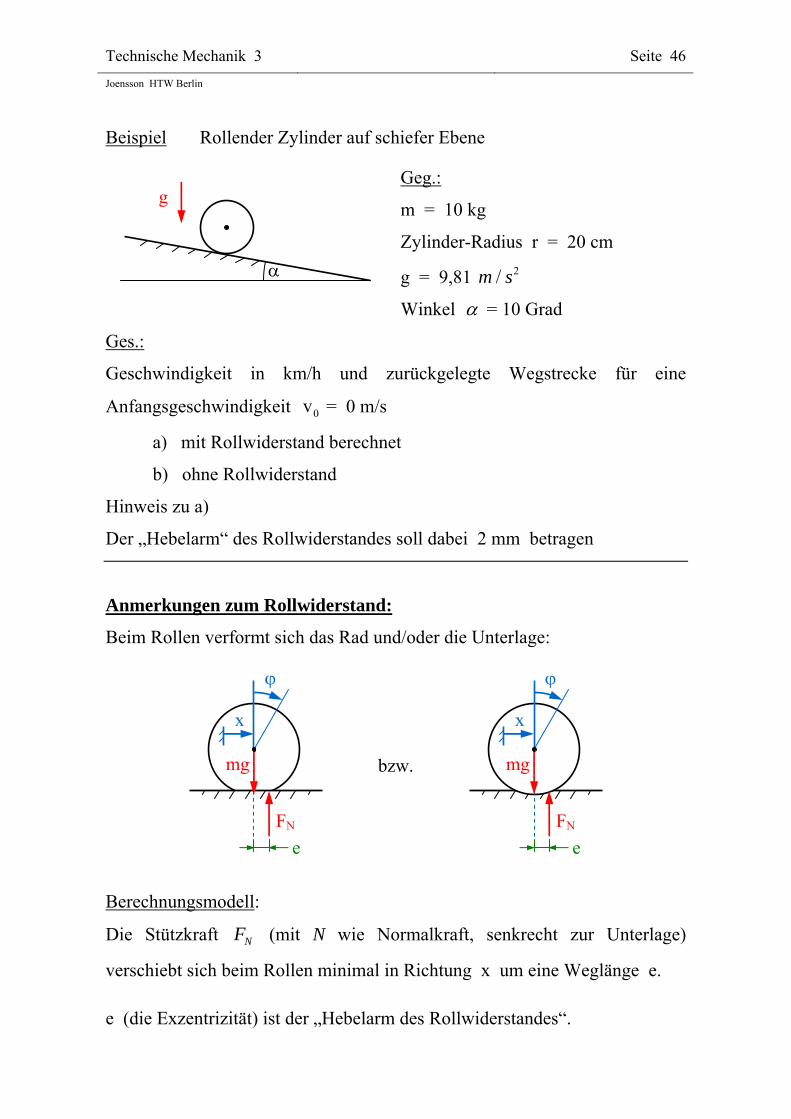
Technische Mechanik 3 Seite 46
Joensson HTW Berlin
Beispiel Rollender Zylinder auf schiefer Ebene
Geg.:
m = 10 kg
Zylinder-Radius r = 20 cm
g = 9,81 2/m s
Winkel = 10 Grad
Ges.:
Geschwindigkeit in km/h und zurückgelegte Wegstrecke für eine
Anfangsgeschwindigkeit 0v = 0 m/s
a) mit Rollwiderstand berechnet
b) ohne Rollwiderstand
Hinweis zu a)
Der „Hebelarm“ des Rollwiderstandes soll dabei 2 mm betragen
Anmerkungen zum Rollwiderstand:
Beim Rollen verformt sich das Rad und/oder die Unterlage:
bzw.
Berechnungsmodell:
Die Stützkraft NF (mit N wie Normalkraft, senkrecht zur Unterlage)
verschiebt sich beim Rollen minimal in Richtung x um eine Weglänge e.
e (die Exzentrizität) ist der „Hebelarm des Rollwiderstandes“.
mg
FN
e
x
mg
FN
e
x
g

Technische Mechanik 3 Seite 47
Joensson HTW Berlin
Die Verschiebung von NF bewirkt bei jedem Rollen ein permanentes Brems-
moment BM = eNF um S entgegen dem Drehwinkel .
Diese Bremswirkung kann alternativ auch ohne NF -Verschiebung durch ein
horizontales Kräftepaar mit „Rollwiderstandskraft“ R WF als Bremskraft im
Schwerpunkt des Rades beschrieben werden:
Dabei gilt:
A : eNF = R WF r = BM
Daraus folgt die Rollwiderstandskraft: R WF = e NF
r
Der Faktor e
r heißt mitunter auch „Rollwiderstandszahl“ R =
e
r
Und damit
R WF = R NF
R ist trotz der Ähnlichkeit dieser Formel mit dem Coulombschen Reibungs-
gesetz KEIN Reibkoeffizient!
Die Exzentrizität e kann nur experimentell ermittelt werden, z.B. durch die
Messung der notwendigen Zugkraft, um das Rad zum Rollen zu bringen:
mg
FN
x S
A
^ =
e
mg
FN
xS
A
FRW
FRW
r
mg
FN
xS
A
MB
=^
ohne e !

Technische Mechanik 3 Seite 48
Joensson HTW Berlin
Rollbeginn bedeutet Kippen um A:
A : 0 Zug R WF r F r
liefert ZugF e
RW NF Fr
und damit e Zug
N
Fr
F mit NF = mg
Einige Werte:
Eisenbahnräder auf Schienen:
Wälzlager:
Autoreifen auf Asphalt:
e = 0,5 … 1,5 mm
0,005 … 0,1 mm
3 … 5 mm
Nun zur Lösung der Aufgabe
von S. 46
Um Geschwindigkeiten und Wege berechnen zu können, muss zunächst die
Beschleunigung x t ermittelt werden, z.B. mit dem d’Alembertschen
Prinzip.
Vorspann: (ohne Kraftgrößen!)
Nur Koordinaten und Schnittgebiete.
Hier:
n = 2 freie Koordinaten x und
1 Zwangsbedingung (k = 1) :
Abrollbedingung x = r (1)
Damit ist die Anzahl der Freiheitsgrade f = n - k = 1
g
x
x
FRW FZug ≥ FRW
r A
Schnittgebiet
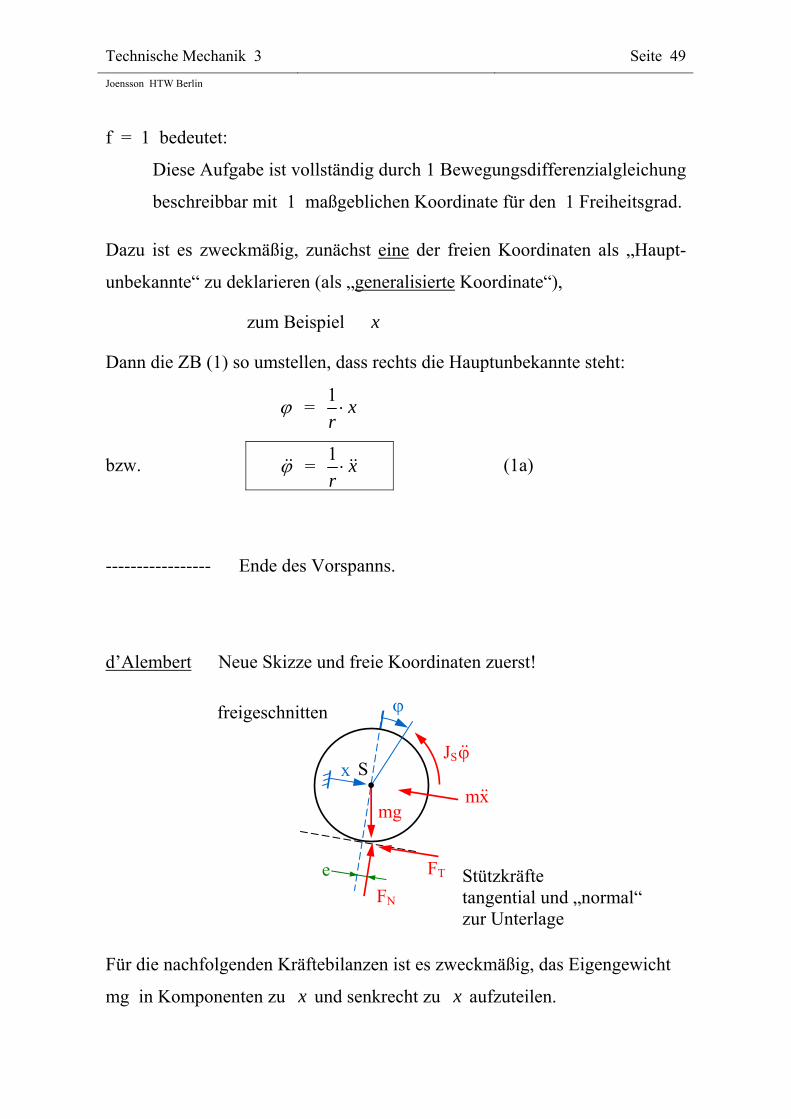
Technische Mechanik 3 Seite 49
Joensson HTW Berlin
f = 1 bedeutet:
Diese Aufgabe ist vollständig durch 1 Bewegungsdifferenzialgleichung
beschreibbar mit 1 maßgeblichen Koordinate für den 1 Freiheitsgrad.
Dazu ist es zweckmäßig, zunächst eine der freien Koordinaten als „Haupt-
unbekannte“ zu deklarieren (als „generalisierte Koordinate“),
zum Beispiel x
Dann die ZB (1) so umstellen, dass rechts die Hauptunbekannte steht:
= 1
xr
bzw. = 1
xr (1a)
----------------- Ende des Vorspanns.
d’Alembert Neue Skizze und freie Koordinaten zuerst!
Für die nachfolgenden Kräftebilanzen ist es zweckmäßig, das Eigengewicht
mg in Komponenten zu x und senkrecht zu x aufzuteilen.
x
mg
FT
FN
mx
JS
e
S
Stützkräfte tangential und „normal“ zur Unterlage
freigeschnitten

Technische Mechanik 3 Seite 50
Joensson HTW Berlin
Dynamisches Gleichgewicht:
: NF - mg · cos = 0 (2)
: m x - mg · sin + TF = 0 (3)
S : SJ - TF r + eNF = 0 (4)
Zielgröße ist x.
Aus (2) folgt: NF = mg · cos
Aus (4): TF = SJ
r + R NF wegen
e R r von S. 47
Mit SJ = 21
2m r für den Zylinder und der ZB (1a) =
1x
r entsteht:
TF =
1
2 R Nm x F
Einsetzen in (3):
m x - mg · sin + 1
2
R Nm x F = 0
liefert: 3
2m x = mg · sin - R NF mg · sin - R WF
x
FT
FN
mx
JS
r
mg cos mg sin
e
S

Technische Mechanik 3 Seite 51
Joensson HTW Berlin
also x = 2sin
3 R Nmg F
m
antreibend bremsend
Mit NF = mg · cos folgt schließlich daraus:
x t = 2sin cos
3 Rg
Nun zur Kinematik dieser Aufgabe:
Rechte Seite zeit-konstant, also:
x t = a
x t = 1a t C (5)
x t = 2
1 22
ta C t C (6)
Zwei Anfangsbedingungen:
0 0x t einsetzen in (5) liefert 1 0C
0 0x t einsetzen in (6) liefert 2 0C
Damit lautet die spezielle Lösung:
x t = a t
x t = 2
2
ta
(7) (8)
Mit R = e
r =
2
200
mm
mm = 0,01
hat zunächst die Beschleunigung mit Rollwiderstand den Wert
a = 229,81 / sin10 0,01 cos 10
3m s = 21,071 /m s

Technische Mechanik 3 Seite 52
Joensson HTW Berlin
Berechnung der Geschwindigkeit und Wegstrecke nach 1t = 10 s :
1 1vx t t einsetzen in (7) liefert 1v = 1a t
und damit 1v = 10,71 m/s
bzw. 1v 38,6 /km h
1 1sx t t einsetzen in (8) liefert 1s = 2
1
2
ta
1s 53,6 m
Und schließlich
b) Ohne Rollwiderstand berechnet:
Wegen R = 0 gilt
*a = 2
sin3
g = …. = 21,136 /m s > a !
Daraus folgen:
*1v 40,9 /km h
und *1s 56,8 m
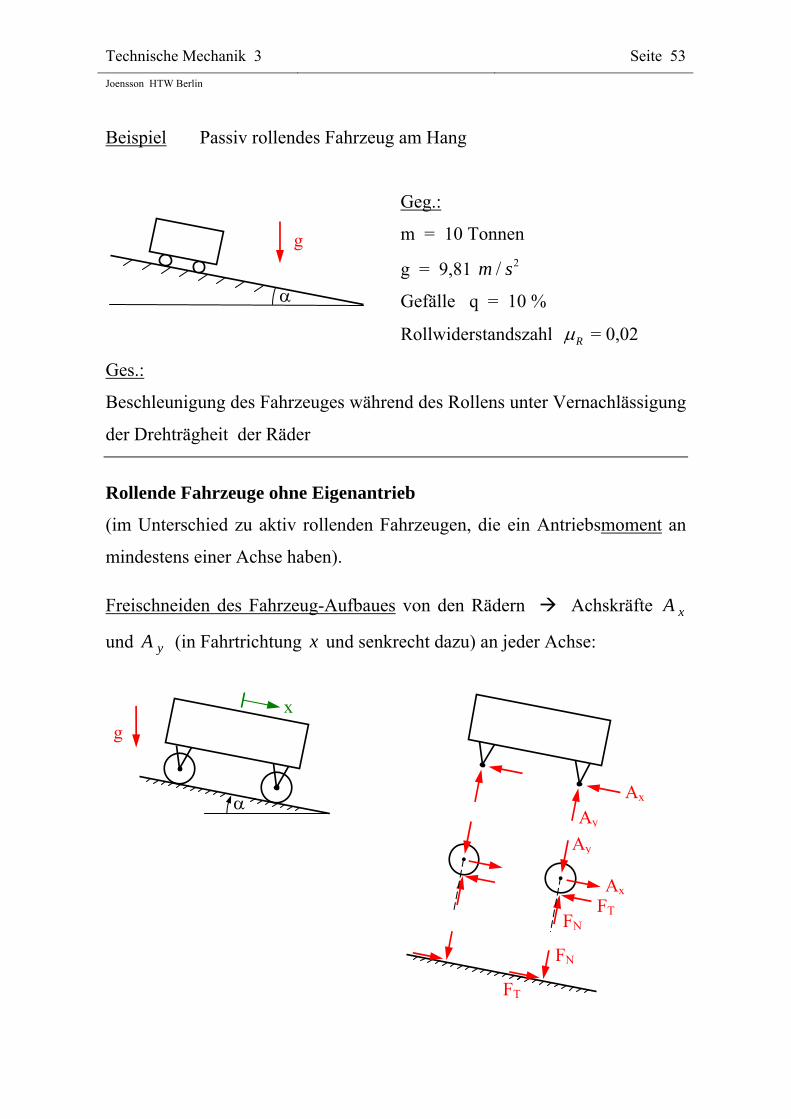
Technische Mechanik 3 Seite 53
Joensson HTW Berlin
Beispiel Passiv rollendes Fahrzeug am Hang
Geg.:
m = 10 Tonnen
g = 9,81 2/m s
Gefälle q = 10 %
Rollwiderstandszahl R = 0,02
Ges.:
Beschleunigung des Fahrzeuges während des Rollens unter Vernachlässigung
der Drehträgheit der Räder
Rollende Fahrzeuge ohne Eigenantrieb
(im Unterschied zu aktiv rollenden Fahrzeugen, die ein Antriebsmoment an
mindestens einer Achse haben).
Freischneiden des Fahrzeug-Aufbaues von den Rädern Achskräfte xA
und yA (in Fahrtrichtung x und senkrecht dazu) an jeder Achse:
Ay
Ay
Ax
Ax FT
FT
FN
FN
x g
g

Technische Mechanik 3 Seite 54
Joensson HTW Berlin
Kräfte und Momente am einzelnen Rad - mit Radmasse Rm :
: NF - cosRm g - yA = 0 (1)
: Rm x + TF - sinRm g - xA = 0 (2)
S : SJ - TF r + eNF = 0 (3)
Aus (1) folgt: cosy N RA F m g
Des Weiteren folgt aus (3): TF = SJ
r + R NF
und eingesetzt in (2): sin Sx R R N R
JA m x F m g
r
Mit der Zwangsbedingung = 1
xr für das Abrollen des Rades (von
S. 49 und 50) sowie mit SJ = 21
2 Rm r für das zylinderförmige Rad mit
Rad-Radius r entsteht:
1sin
2
x R R R N RA m m x F m g
Die Achskräfte xA und yA wirken am Fahrzeug-Aufbau entgegengesetzt:
x
FT
FN
Rm x
JS mRg sin
mRg cos
Ay
Ax
e
S
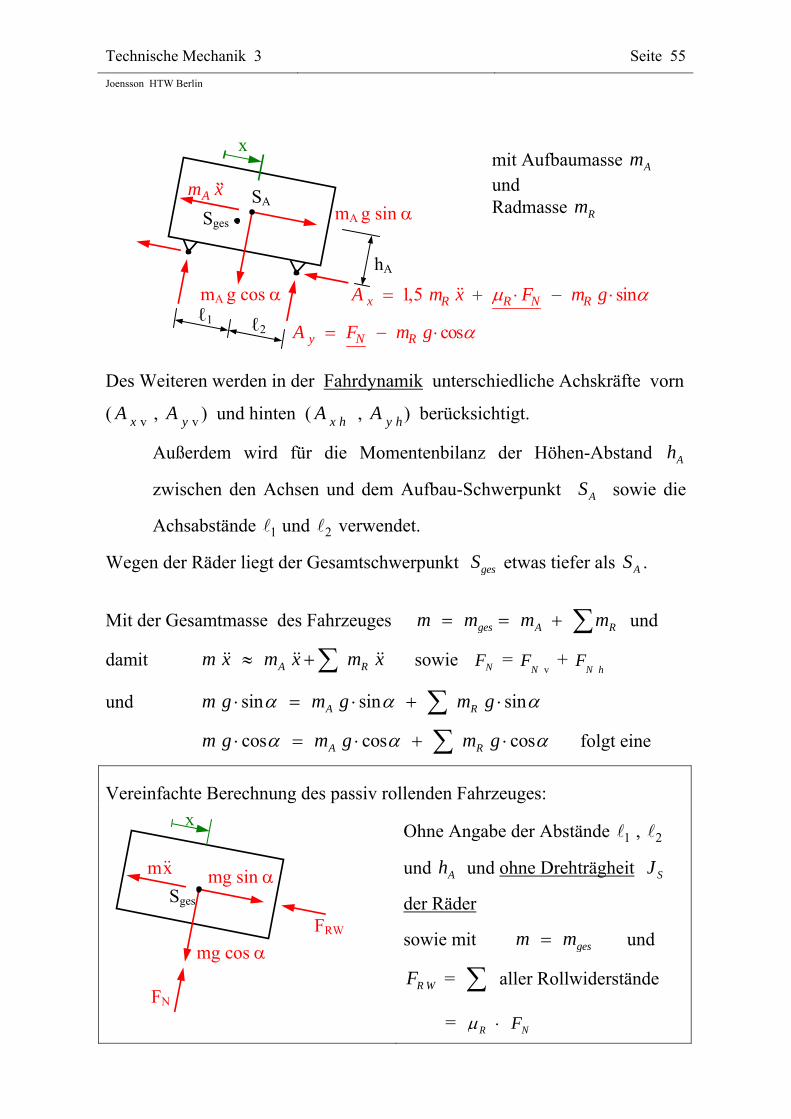
Technische Mechanik 3 Seite 55
Joensson HTW Berlin
mit Aufbaumasse Am und Radmasse Rm
Des Weiteren werden in der Fahrdynamik unterschiedliche Achskräfte vorn
( vxA , vyA ) und hinten ( x hA , y hA ) berücksichtigt.
Außerdem wird für die Momentenbilanz der Höhen-Abstand Ah
zwischen den Achsen und dem Aufbau-Schwerpunkt AS sowie die
Achsabstände 1 und 2 verwendet.
Wegen der Räder liegt der Gesamtschwerpunkt gesS etwas tiefer als AS .
Mit der Gesamtmasse des Fahrzeuges ges A Rm m m m und
damit A Rm x m x m x sowie NF = vN
F + N h
F
und sin sin sinA Rm g m g m g
cos cos cosA Rm g m g m g folgt eine
Vereinfachte Berechnung des passiv rollenden Fahrzeuges:
Ohne Angabe der Abstände 1 , 2
und Ah und ohne Drehträgheit SJ
der Räder
sowie mit gesm m und
R WF = aller Rollwiderstände
= R NF
m x
FRW
mg sin
mg cos
FN
x
Sges
Am x mA g sin
mA g cos
x
SA
ℓ2 ℓ1
hA
Sges
1,5 sin x R R N RA m x F m g
cosy N RA F m g
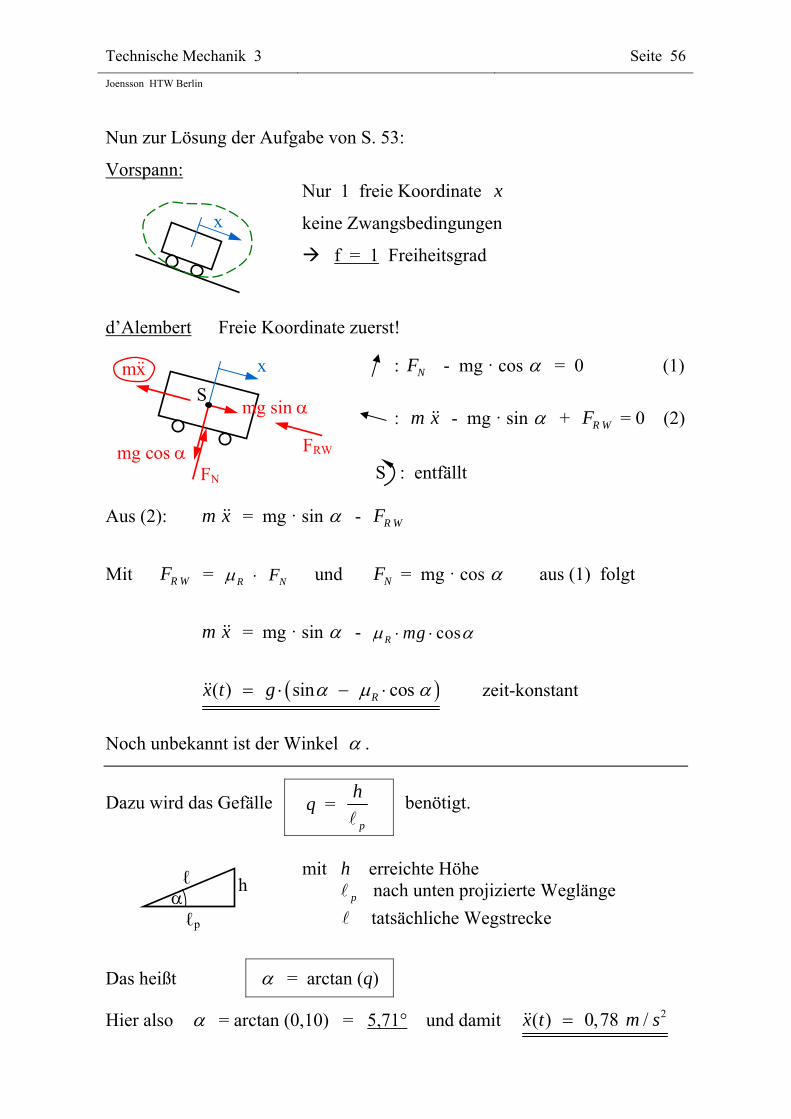
Technische Mechanik 3 Seite 56
Joensson HTW Berlin
Nun zur Lösung der Aufgabe von S. 53:
Vorspann:
Nur 1 freie Koordinate x
keine Zwangsbedingungen
f = 1 Freiheitsgrad
d’Alembert Freie Koordinate zuerst!
: NF - mg · cos = 0 (1)
: m x - mg · sin + R WF = 0 (2)
S : entfällt
Aus (2): m x = mg · sin - R WF
Mit R WF = R NF und NF = mg · cos aus (1) folgt
m x = mg · sin - cosR mg
( ) sin cos Rx t g zeit-konstant
Noch unbekannt ist der Winkel .
Dazu wird das Gefälle q = p
h
benötigt.
mit h erreichte Höhe p nach unten projizierte Weglänge
tatsächliche Wegstrecke
Das heißt = arctan (q)
Hier also = arctan (0,10) = 5,71° und damit 2( ) 0,78 /x t m s
h
ℓp
ℓ
mx
mg cos
mg sin
FRW
FN
x
S
x
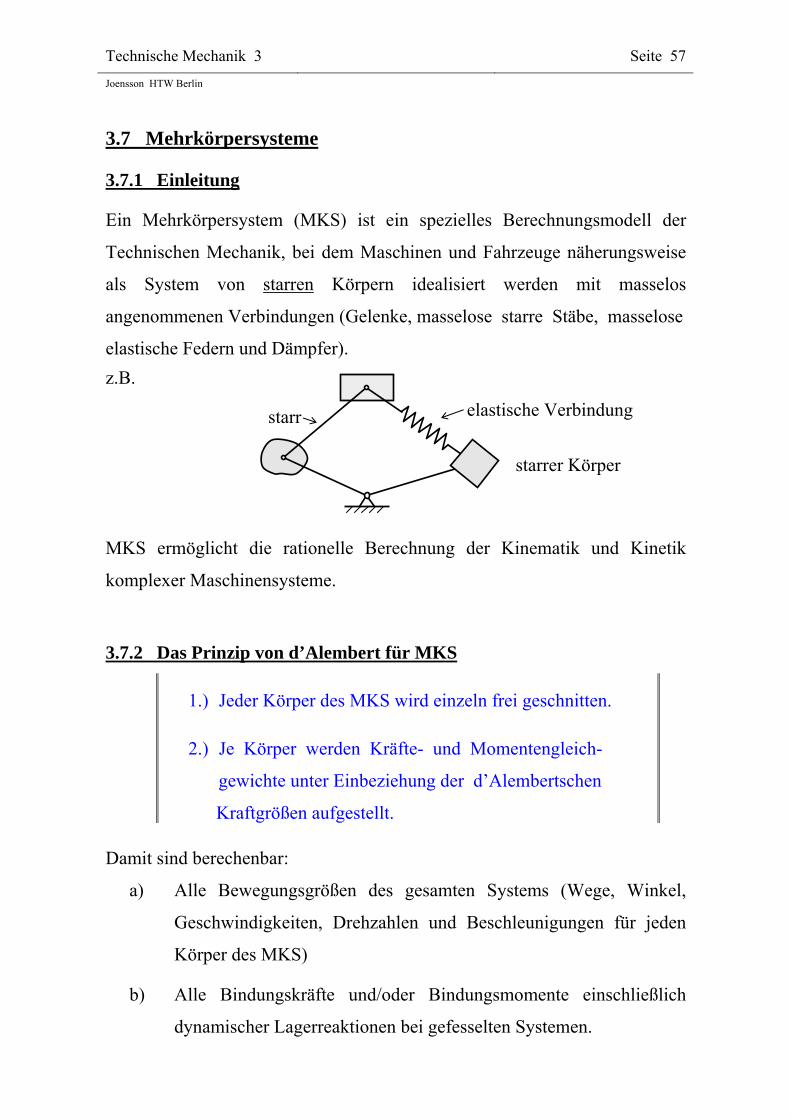
Technische Mechanik 3 Seite 57
Joensson HTW Berlin
3.7 Mehrkörpersysteme
3.7.1 Einleitung
Ein Mehrkörpersystem (MKS) ist ein spezielles Berechnungsmodell der
Technischen Mechanik, bei dem Maschinen und Fahrzeuge näherungsweise
als System von starren Körpern idealisiert werden mit masselos
angenommenen Verbindungen (Gelenke, masselose starre Stäbe, masselose
elastische Federn und Dämpfer).
z.B.
MKS ermöglicht die rationelle Berechnung der Kinematik und Kinetik
komplexer Maschinensysteme.
3.7.2 Das Prinzip von d’Alembert für MKS
1.) Jeder Körper des MKS wird einzeln frei geschnitten.
2.) Je Körper werden Kräfte- und Momentengleich-
gewichte unter Einbeziehung der d’Alembertschen
Kraftgrößen aufgestellt.
Damit sind berechenbar:
a) Alle Bewegungsgrößen des gesamten Systems (Wege, Winkel,
Geschwindigkeiten, Drehzahlen und Beschleunigungen für jeden
Körper des MKS)
b) Alle Bindungskräfte und/oder Bindungsmomente einschließlich
dynamischer Lagerreaktionen bei gefesselten Systemen.
starr elastische Verbindung
starrer Körper
Technische Mechanik 3 Seite 58
Joensson HTW Berlin
Der Lösungsweg für MKS nach d’Alembert in Stichpunkten:
1.) Skizze ohne Kraftgrößen (nur freie Koordinaten) → Anzahl n
2.) Anzahl der Freiheitsgrade f des Systems ermitteln
(= Anzahl der erforderlichen Festhaltungen, um das System zu arretieren)
= Anzahl f der Bewegungs-Differenzialgleichungen zur vollständigen
Beschreibung der MKS-Bewegungen
3.) Auswahl von f Koordinaten als hauptunbekannte Koordinaten
(„generalisierte Koordinaten“ der Dynamik)
4.) Anzahl der Zwangsbedingungen mit k = n - f ermitteln
Dann Aufstellen der k Zwangsbedingungen und diese so umstellen,
dass alle rechten Seiten nur noch generalisierte Koordinaten enthalten
--------------- Ende des „Vorspanns“ ------------------
5.) Freischneiden des Systems
(wenn Bindungs-Kraftgrößen zwischen den Körpern des MKS gesucht
sind, ist jeder betroffene Körper einzeln frei zuschneiden)
a) Neue Skizze zu jedem Schnittgebiet mit freien Koordinaten und allen
Kraftgrößen
b) Je Schnittgebiet 3 Gleichgewichtsbedingungen (im ebenen Fall)
bzw. 6 im räumlichen Fall
6.) Umstellen der Bewegungs-Differenzialgleichungen so, dass nur noch
die generalisierten Koordinaten enthalten sind
7.) Je nach Aufgabenstellung
a) Lösen der Bewegungs-Differenzialgleichung(en) → Geschwindig-
keits- und Weg-Größen
b) Bindungs-Kraftgrößen und dynamische Lagerreaktionen berechnen
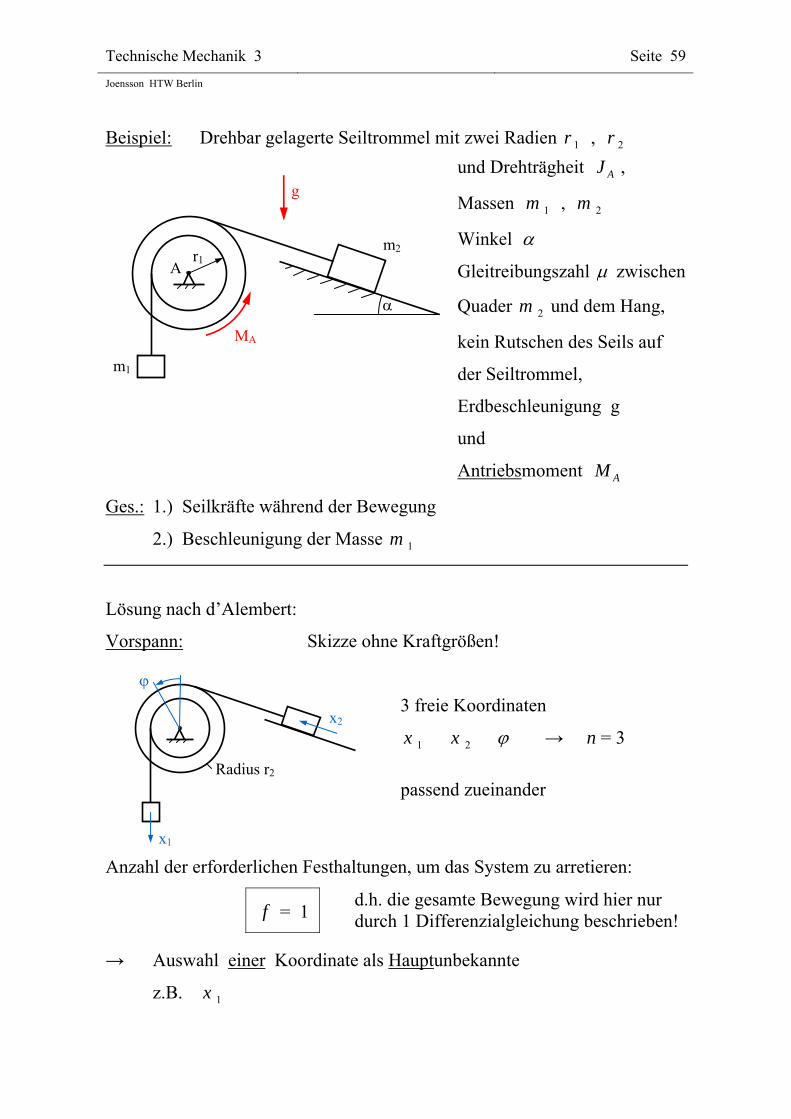
Technische Mechanik 3 Seite 59
Joensson HTW Berlin
Beispiel: Drehbar gelagerte Seiltrommel mit zwei Radien 1r , 2r
und Drehträgheit AJ ,
Massen 1m , 2m
Winkel
Gleitreibungszahl zwischen
Quader 2m und dem Hang,
kein Rutschen des Seils auf
der Seiltrommel,
Erdbeschleunigung g
und
Antriebsmoment AM
Ges.: 1.) Seilkräfte während der Bewegung
2.) Beschleunigung der Masse 1m
Lösung nach d’Alembert:
Vorspann: Skizze ohne Kraftgrößen!
3 freie Koordinaten
1x 2x → n = 3
passend zueinander
Anzahl der erforderlichen Festhaltungen, um das System zu arretieren:
f = 1 d.h. die gesamte Bewegung wird hier nur durch 1 Differenzialgleichung beschrieben!
→ Auswahl einer Koordinate als Hauptunbekannte
z.B. 1x
x1
Radius r2
x2
g
MA
r1 A
m1
m2

Technische Mechanik 3 Seite 60
Joensson HTW Berlin
Aus n und f folgt: k = 3 - 1 = 2
Hier müssen also 2 Zwangsbedingungen gesucht (und gefunden) werden.
Das sind hier die Seil-Abrollwege:
1 1x r (1)
2 2x r (2)
Weil 1x als generalisierte Koordinate gewählt wurde, sind beide
Gleichungen so umzustellen, dass 1x jeweils rechts steht:
Aus (1) folgt:
11
1x
r bzw. 1
1
1x
r (1a)
Einsetzen von in (2) liefert:
22 1
1
rx x
r bzw. 2
2 11
rx x
r (2a)
--------------- Ende des Vorspanns ------------------
d’Alembert 3 Körper → 3 Schnittgebiete
Weil hier keine Lagerkräfte gesucht sind, wird
das Lager A nicht freigeschnitten.
A
I
II
III
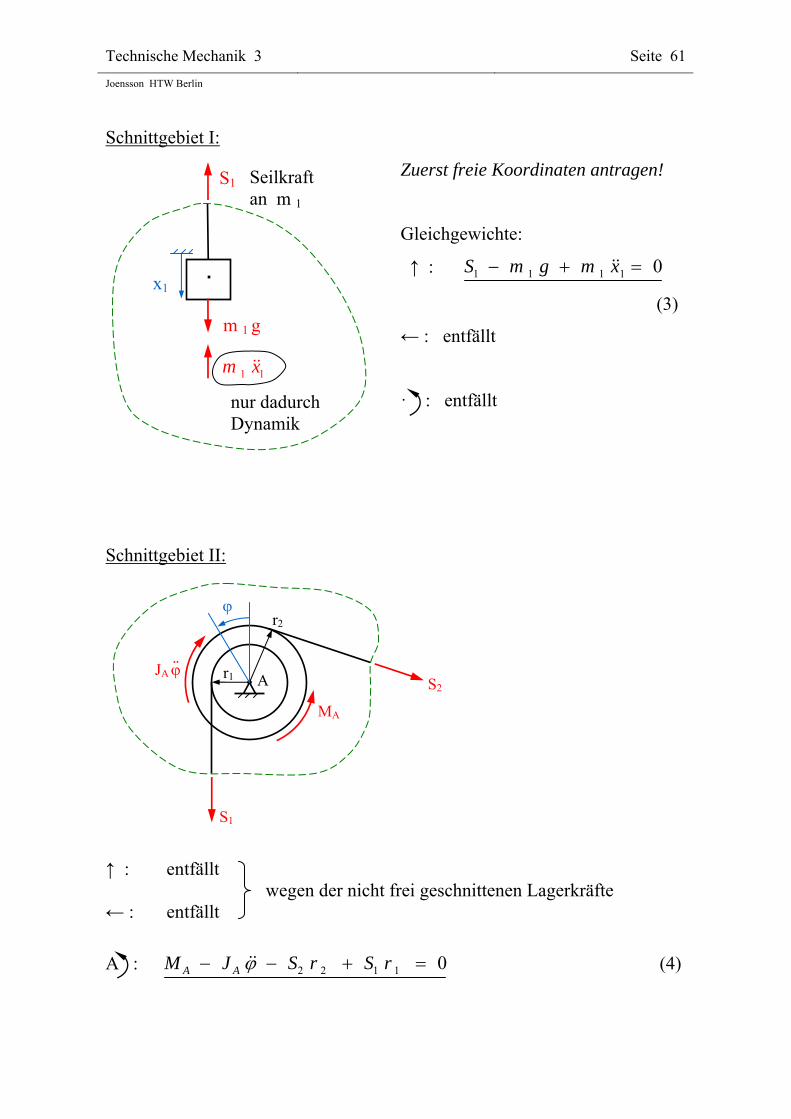
Technische Mechanik 3 Seite 61
Joensson HTW Berlin
Schnittgebiet I:
Zuerst freie Koordinaten antragen!
Gleichgewichte:
↑ : 1 1 1 1 0S m g m x
(3)
← : entfällt
· : entfällt
Schnittgebiet II:
↑ : entfällt wegen der nicht frei geschnittenen Lagerkräfte
← : entfällt
A : 2 2 1 1 0A AM J S r S r (4)
MA
r1 A
S1
S2
r2
JA
m 1 g
S1
nur dadurch Dynamik
Seilkraft an m 1
x1
1 1m x
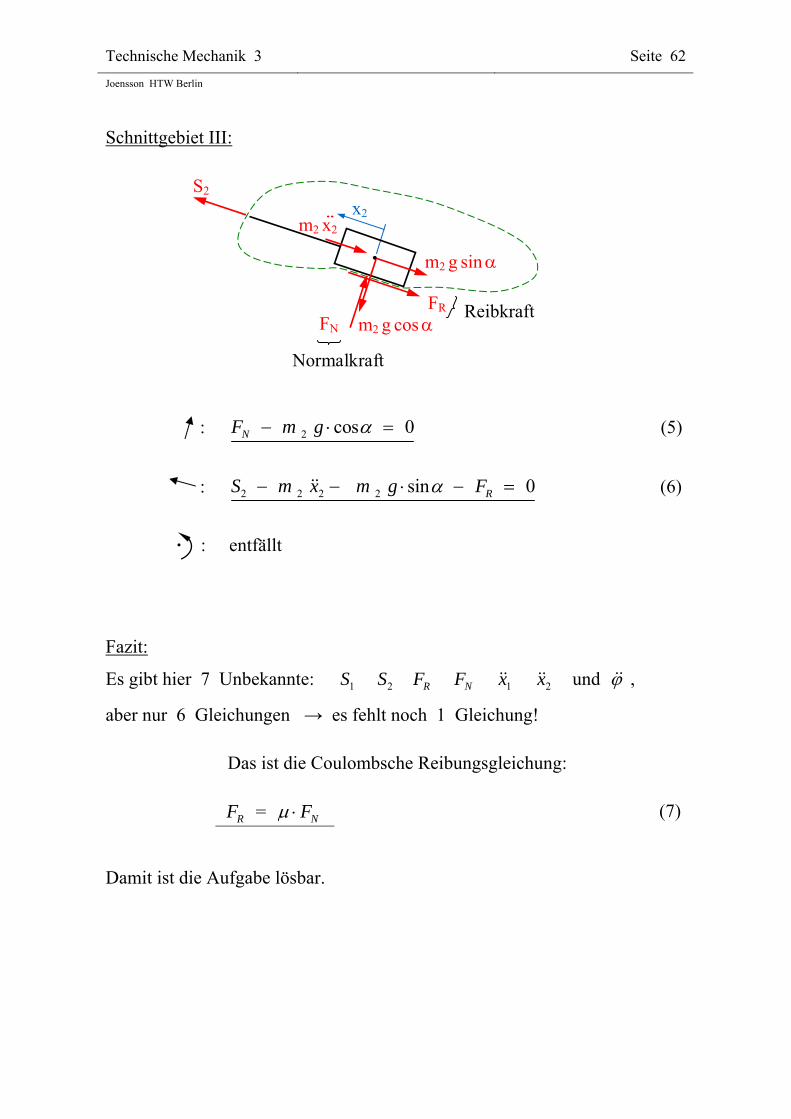
Technische Mechanik 3 Seite 62
Joensson HTW Berlin
Schnittgebiet III:
: 2 cos 0NF m g (5)
: 2 2 2 2 sin 0RS m x m g F (6)
· : entfällt
Fazit:
Es gibt hier 7 Unbekannte: 1S 2S RF NF 1x 2x und ,
aber nur 6 Gleichungen → es fehlt noch 1 Gleichung!
Das ist die Coulombsche Reibungsgleichung:
RF = NF (7)
Damit ist die Aufgabe lösbar.
m2 g sin
m2 g cos FR
FN
S2 x2
m2 x2
Normalkraft
Reibkraft
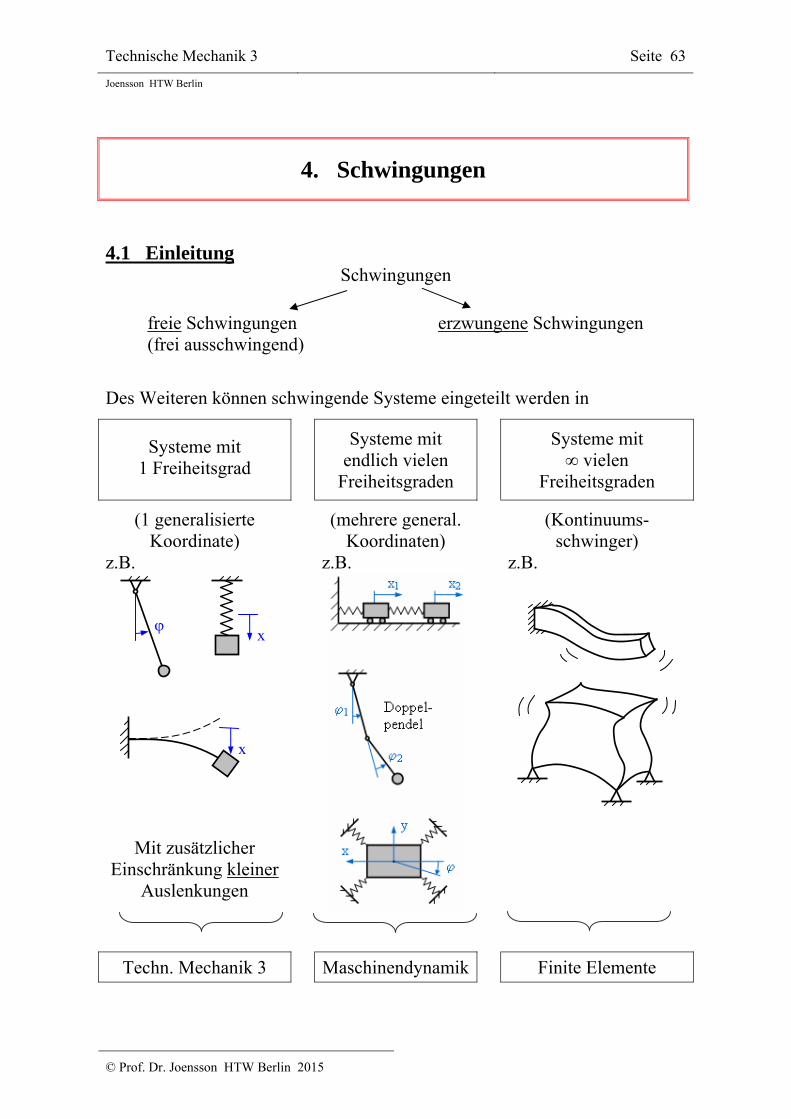
Technische Mechanik 3 Seite 63
Joensson HTW Berlin
© Prof. Dr. Joensson HTW Berlin 2015
4. Schwingungen
4.1 Einleitung Schwingungen
freie Schwingungen (frei ausschwingend)
erzwungene Schwingungen
Des Weiteren können schwingende Systeme eingeteilt werden in
Systeme mit 1 Freiheitsgrad
Systeme mit endlich vielen
Freiheitsgraden
Systeme mit ∞ vielen
Freiheitsgraden
(1 generalisierte Koordinate)
z.B.
Mit zusätzlicher Einschränkung kleiner
Auslenkungen
(mehrere general. Koordinaten)
z.B.
(Kontinuums-schwinger)
z.B.
Techn. Mechanik 3 Maschinendynamik Finite Elemente
x
x
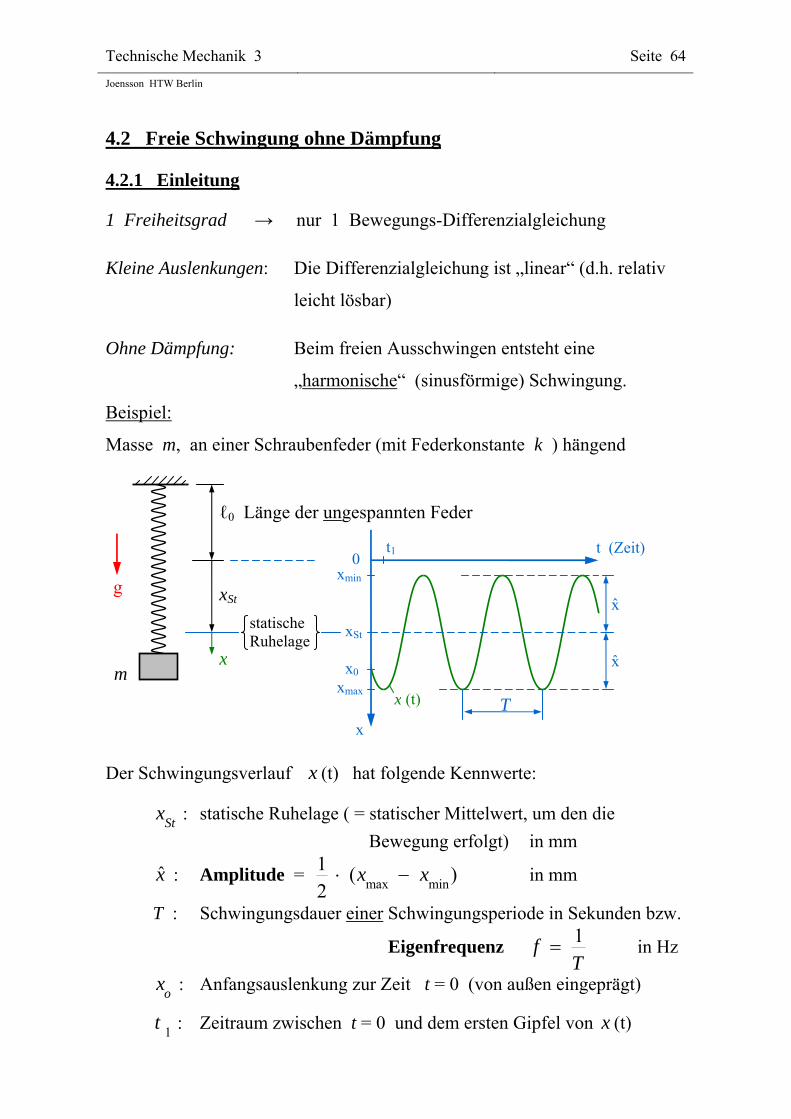
Technische Mechanik 3 Seite 64
Joensson HTW Berlin
4.2 Freie Schwingung ohne Dämpfung
4.2.1 Einleitung
1 Freiheitsgrad → nur 1 Bewegungs-Differenzialgleichung
Kleine Auslenkungen: Die Differenzialgleichung ist „linear“ (d.h. relativ
leicht lösbar)
Ohne Dämpfung: Beim freien Ausschwingen entsteht eine
„harmonische“ (sinusförmige) Schwingung.
Beispiel:
Masse m, an einer Schraubenfeder (mit Federkonstante k ) hängend
Der Schwingungsverlauf x (t) hat folgende Kennwerte:
Stx : statische Ruhelage ( = statischer Mittelwert, um den die
Bewegung erfolgt) in mm
x : Amplitude = max min
1 ( )2
x x in mm
T : Schwingungsdauer einer Schwingungsperiode in Sekunden bzw.
Eigenfrequenz 1fT
in Hz
ox : Anfangsauslenkung zur Zeit t = 0 (von außen eingeprägt)
1t : Zeitraum zwischen t = 0 und dem ersten Gipfel von x (t)
x
xSt
m
g
ℓ0 Länge der ungespannten Feder
statische Ruhelage
t1
T
0xmin
xSt
xmax
x0
x
t (Zeit)
x (t)
x ˆ
x ˆ
Technische Mechanik 3 Seite 65
Joensson HTW Berlin
Die wichtigste Kenngröße der freien Schwingung ist die Eigenfrequenz.
Sie wird rechnerisch aus der Bewegungs-Differenzialgleichung des konkre-
ten schwingenden Systems ermittelt,
d.h. aus einer kinetischen Gleichung.
Im Unterschied dazu ist die Amplitude x aus allgemein gültigen kinema-
tischen Gleichungen für gegebene Anfangswerte o
x und vo
(Anfangs-
geschwindigkeit) ermittelbar.
4.2.2 Eigenfrequenz-Berechnung
für Systeme mit 1 Freiheitsgrad
Z.B. nach d’Alembert in drei Lösungsschritten:
1.) Vorspann
2.) Statische Ruhelage (nur bei Schwingungen relevant)
3.) Anwendung des d’Alembertschen Prinzips
Zu 1.) Vorspann wie bisher
und: Anzahl der Freiheitsgrade = Anzahl der Eigenfrequenzen!
Zu 2.) Statische Ruhelage
Vor der Schwingungsberechnung sollte geprüft werden, ob das
Eigengewicht der beteiligten Massen im ausgelenkten Zustand
statisch kompensiert wird oder nicht.
Wenn ja: Die Gewichtskraft mg sollte dann nicht in der Bewegungs-
Differenzialgleichung erscheinen.
Wenn das Eigengewicht nicht kompensiert wird, muss es bei den kinetischen
Gleichungen mit angesetzt werden.
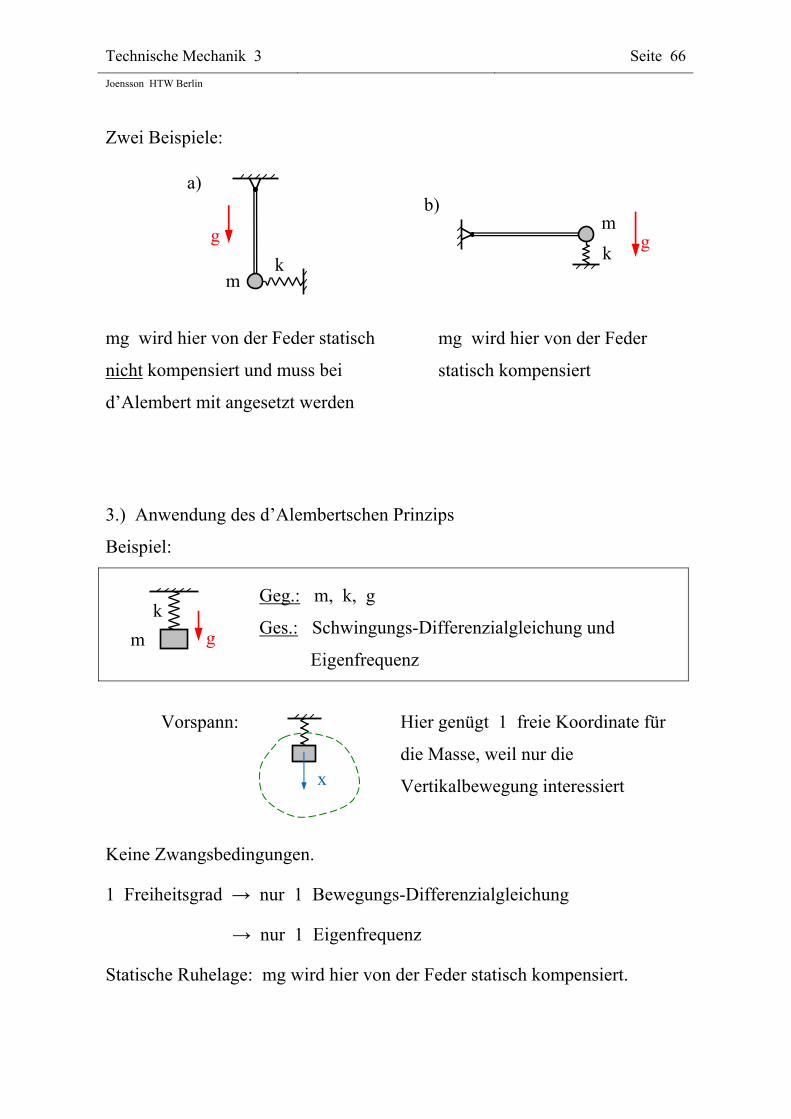
Technische Mechanik 3 Seite 66
Joensson HTW Berlin
Zwei Beispiele:
mg wird hier von der Feder statisch
nicht kompensiert und muss bei
d’Alembert mit angesetzt werden
mg wird hier von der Feder
statisch kompensiert
3.) Anwendung des d’Alembertschen Prinzips
Beispiel:
Geg.: m, k, g
Ges.: Schwingungs-Differenzialgleichung und
Eigenfrequenz
Vorspann:
Hier genügt 1 freie Koordinate für
die Masse, weil nur die
Vertikalbewegung interessiert
Keine Zwangsbedingungen.
1 Freiheitsgrad → nur 1 Bewegungs-Differenzialgleichung
→ nur 1 Eigenfrequenz
Statische Ruhelage: mg wird hier von der Feder statisch kompensiert.
x
m
k
g
m
k g
b)
mk
g
a)

Technische Mechanik 3 Seite 67
Joensson HTW Berlin
d’Alembert: zuerst freie Koordinate!
mit x : Bewegungskoordinate,
ab der statischen Ruhelage
beginnend
Dynamisches Gleichgewicht:
→ : entfällt
S : entfällt
↑ : 0m x k x 0k
x xm
Schwingungs- Differenzialgleichung
in normierter Form
(d.h. höchste Ableitung mit Faktor 1) Nur dann gilt:
Der Faktor vor x hierk
m
ist stets die „Eigenkreisfrequenz“ zum
Quadrat.
Für gilt: 2 f in 1s Daraus folgt die Eigenfrequenz
1
2f
in Hz
Hier also:
k
m und daraus folgend
1
2
kf
m
Zum Beispiel entsteht für m = 10 kg und k = 5 N/mm: 3,56 Hzf
x S
mx
k x k x Feder-Rückstellkraft
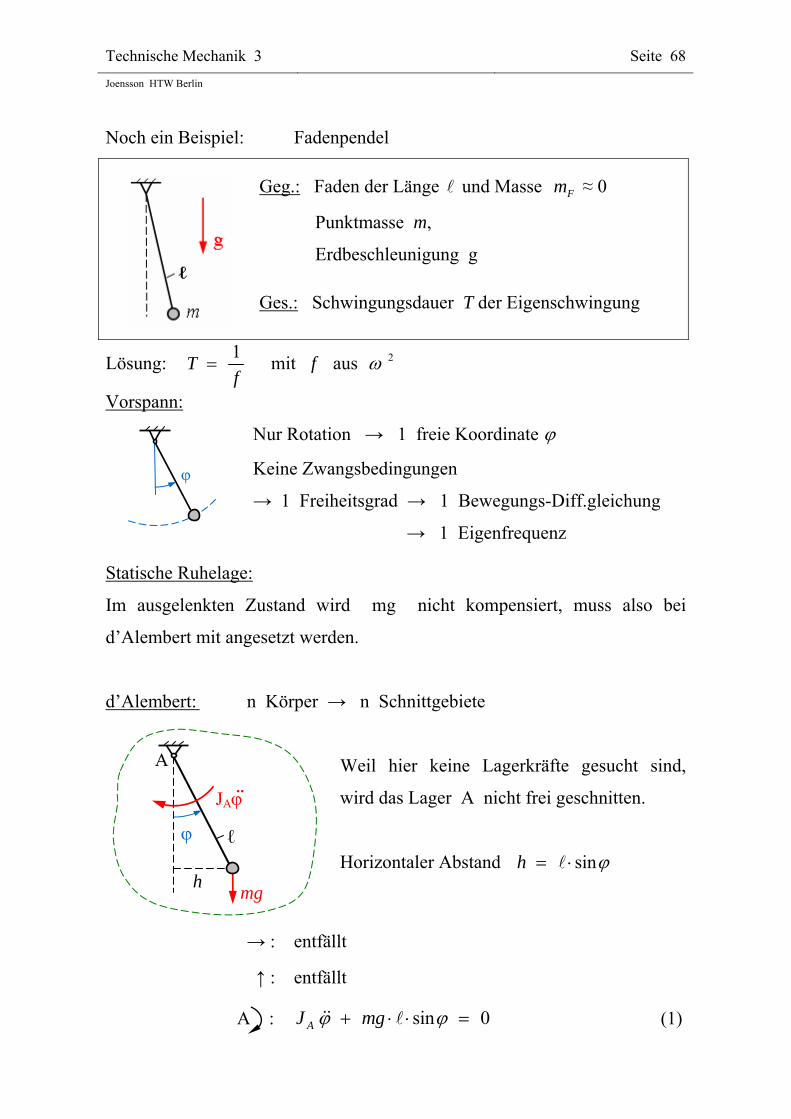
Technische Mechanik 3 Seite 68
Joensson HTW Berlin
Noch ein Beispiel: Fadenpendel
Geg.: Faden der Länge und Masse Fm ≈ 0
Punktmasse m,
Erdbeschleunigung g
Ges.: Schwingungsdauer T der Eigenschwingung
Lösung: 1
Tf
mit f aus 2
Vorspann:
Nur Rotation → 1 freie Koordinate
Keine Zwangsbedingungen
→ 1 Freiheitsgrad → 1 Bewegungs-Diff.gleichung
→ 1 Eigenfrequenz
Statische Ruhelage:
Im ausgelenkten Zustand wird mg nicht kompensiert, muss also bei
d’Alembert mit angesetzt werden.
d’Alembert: n Körper → n Schnittgebiete
Weil hier keine Lagerkräfte gesucht sind,
wird das Lager A nicht frei geschnitten.
Horizontaler Abstand sinh
→ : entfällt
↑ : entfällt
A : sin 0AJ mg (1)
mg
A
JA
ℓ
h

Technische Mechanik 3 Seite 69
Joensson HTW Berlin
Gleichung (1) normiert: sin 0A
mg
J
(1a)
Allerdings ist damit eine NICHT-lineare Differenzialgleichung entstanden.
Diese kann für kleine Auslenkungen „linearisiert“ werden wegen
sin mit in Bogenmaß
Gilt etwa für ≤ 6° = 6180
≈ 0,1 rad
(am Taschenrechner ausprobieren!)
Des Weiteren ist für kleine Auslenkungen cos 1
Mit sin entsteht eine „lineare“ Schwingungs-Differenzialgleichung ähnlich wie auf Seite 67:
0A
mg
J
Auch hier kann 2 als Faktor vor der Koordinate „abgelesen“ werden:
A
mg
J
bzw. mit 2AJ m für die Punktmasse:
g
und damit 1
2
gf
(2)
Die Eigenfrequenz bei diesem Pendelschwinger ist also nur abhängig von g
und , nicht aber von der Masse m ! Das hatte bereits Galilei entdeckt.
Aus (2) folgt schließlich 2Tg
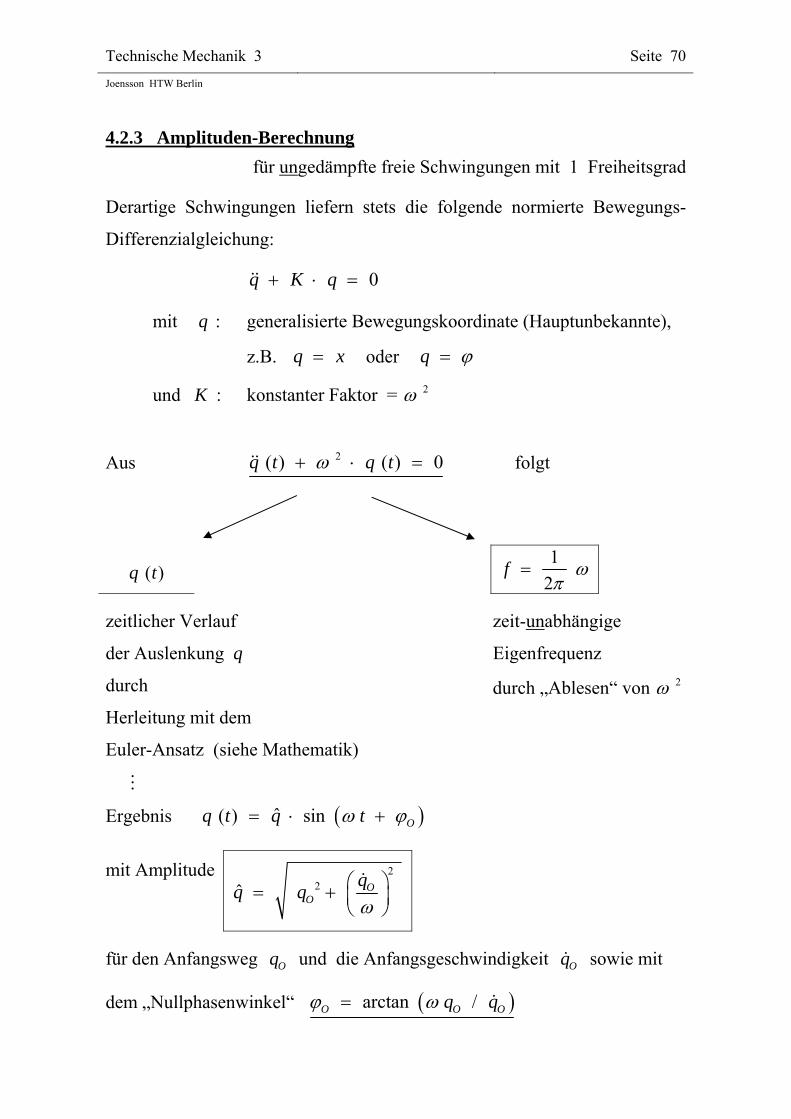
Technische Mechanik 3 Seite 70
Joensson HTW Berlin
4.2.3 Amplituden-Berechnung
für ungedämpfte freie Schwingungen mit 1 Freiheitsgrad
Derartige Schwingungen liefern stets die folgende normierte Bewegungs-
Differenzialgleichung:
0q K q
mit q : generalisierte Bewegungskoordinate (Hauptunbekannte),
z.B. q x oder q
und K : konstanter Faktor = 2
Aus 2( ) ( ) 0q t q t folgt
( )q t 1
2f
zeitlicher Verlauf
der Auslenkung q
durch
Herleitung mit dem
Euler-Ansatz (siehe Mathematik)
zeit-unabhängige
Eigenfrequenz
durch „Ablesen“ von 2
Ergebnis ˆ( ) sin Oq t q t
mit Amplitude 22ˆ O
O
qq q
für den Anfangsweg Oq und die Anfangsgeschwindigkeit Oq sowie mit
dem „Nullphasenwinkel“ arctan /O O Oq q
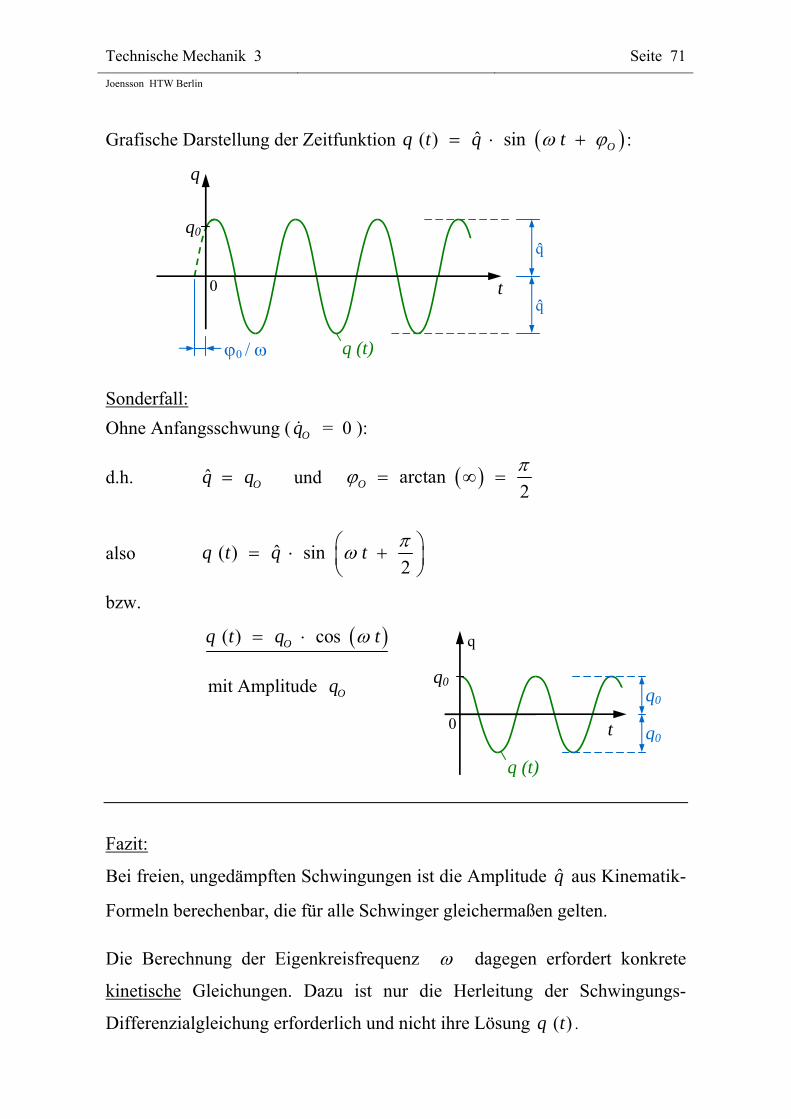
Technische Mechanik 3 Seite 71
Joensson HTW Berlin
Grafische Darstellung der Zeitfunktion ˆ( ) sin Oq t q t :
Sonderfall:
Ohne Anfangsschwung ( Oq = 0 ):
d.h. ˆ Oq q und arctan2O
also ˆ( ) sin2
q t q t
bzw.
( ) cosOq t q t
mit Amplitude Oq
Fazit:
Bei freien, ungedämpften Schwingungen ist die Amplitude q aus Kinematik-
Formeln berechenbar, die für alle Schwinger gleichermaßen gelten.
Die Berechnung der Eigenkreisfrequenz dagegen erfordert konkrete
kinetische Gleichungen. Dazu ist nur die Herleitung der Schwingungs-
Differenzialgleichung erforderlich und nicht ihre Lösung ( )q t .
q0
q
t 0
q (t)
q0
q0
q
q
q (t)
q0
q
t
0 /
0
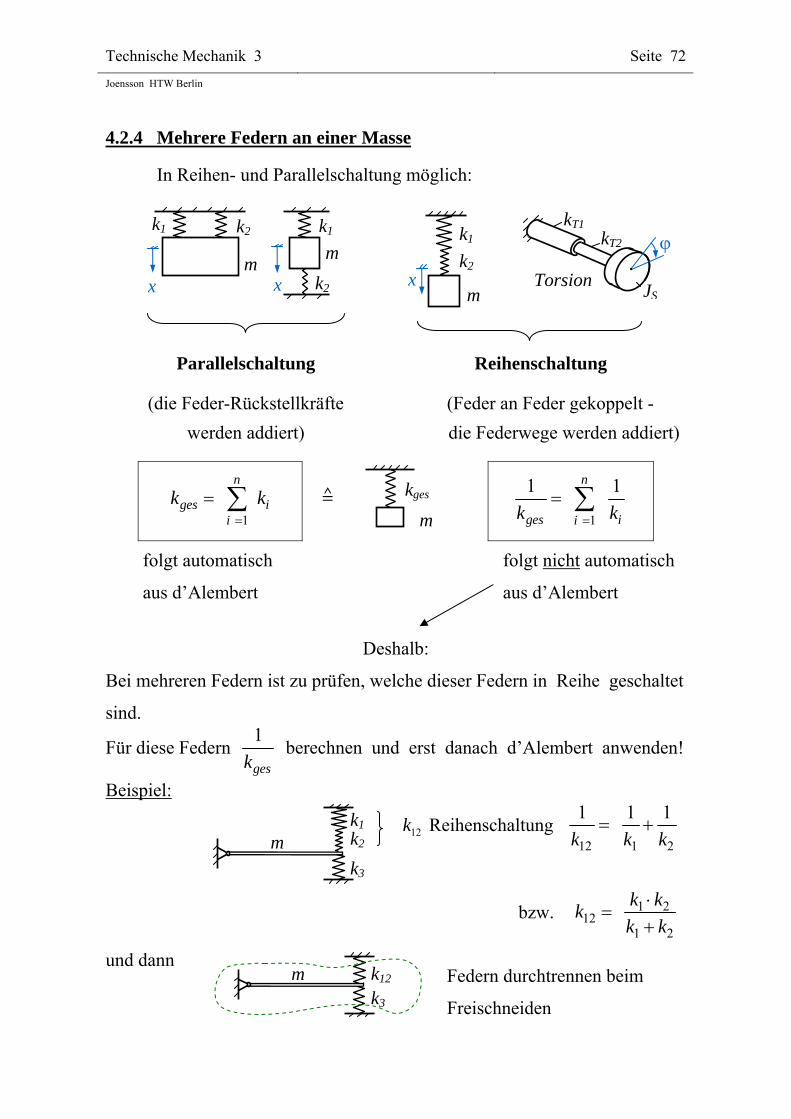
Technische Mechanik 3 Seite 72
Joensson HTW Berlin
4.2.4 Mehrere Federn an einer Masse
In Reihen- und Parallelschaltung möglich:
Parallelschaltung
(die Feder-Rückstellkräfte
werden addiert)
Reihenschaltung
(Feder an Feder gekoppelt -
die Federwege werden addiert)
1
n
ges ii
k k
1
1 1n
ges iik k
folgt automatisch
aus d’Alembert
folgt nicht automatisch
aus d’Alembert
Deshalb:
Bei mehreren Federn ist zu prüfen, welche dieser Federn in Reihe geschaltet
sind.
Für diese Federn 1
gesk berechnen und erst danach d’Alembert anwenden!
Beispiel:
12k Reihenschaltung 12 1 2
1 1 1
k k k
bzw. 1 212
1 2
k kk
k k
und dann
Federn durchtrennen beim
Freischneiden
k12m k3
m
kges
k1k2m
k3
kT1
kT2
JSTorsion
k1
k2x
m
k1 k2
m x x
m
k2
k1
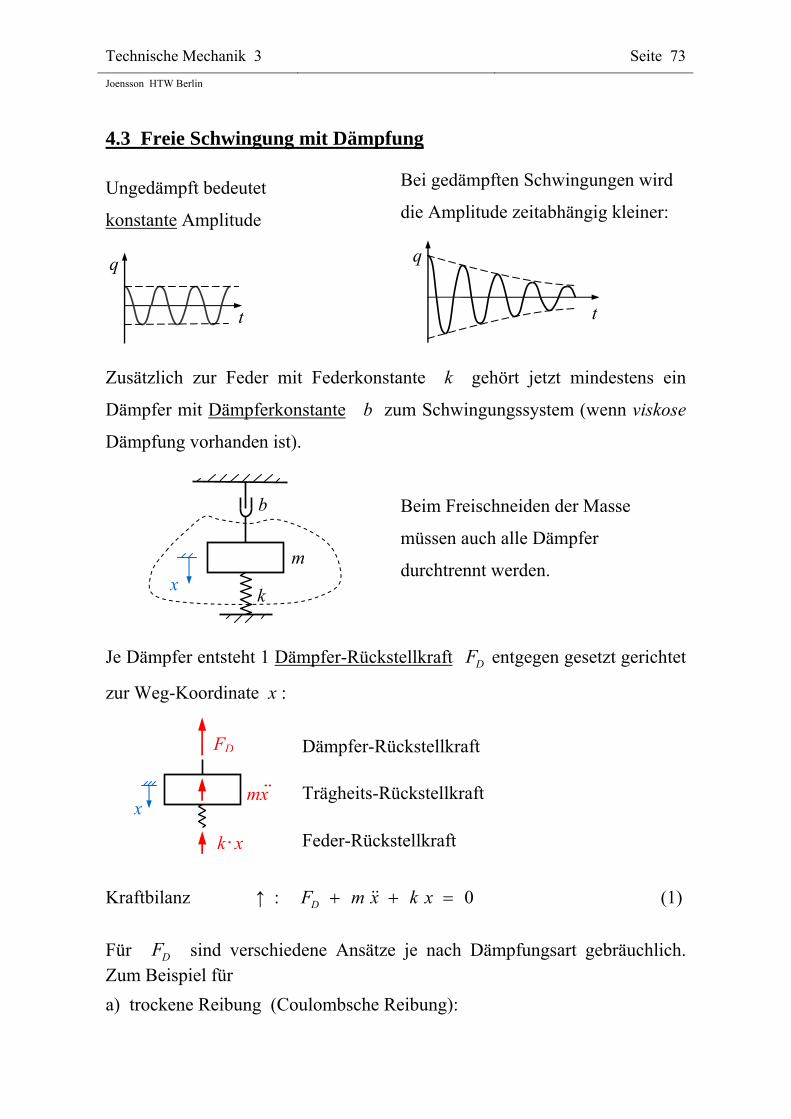
Technische Mechanik 3 Seite 73
Joensson HTW Berlin
4.3 Freie Schwingung mit Dämpfung
Ungedämpft bedeutet
konstante Amplitude
Bei gedämpften Schwingungen wird
die Amplitude zeitabhängig kleiner:
Zusätzlich zur Feder mit Federkonstante k gehört jetzt mindestens ein
Dämpfer mit Dämpferkonstante b zum Schwingungssystem (wenn viskose
Dämpfung vorhanden ist).
Beim Freischneiden der Masse
müssen auch alle Dämpfer
durchtrennt werden.
Je Dämpfer entsteht 1 Dämpfer-Rückstellkraft DF entgegen gesetzt gerichtet
zur Weg-Koordinate x :
Dämpfer-Rückstellkraft Trägheits-Rückstellkraft
Feder-Rückstellkraft
Kraftbilanz ↑ : 0DF m x k x (1)
Für DF sind verschiedene Ansätze je nach Dämpfungsart gebräuchlich. Zum Beispiel für
a) trockene Reibung (Coulombsche Reibung):
b
m
k x
t
q
t
q
mx
k x
FD
x
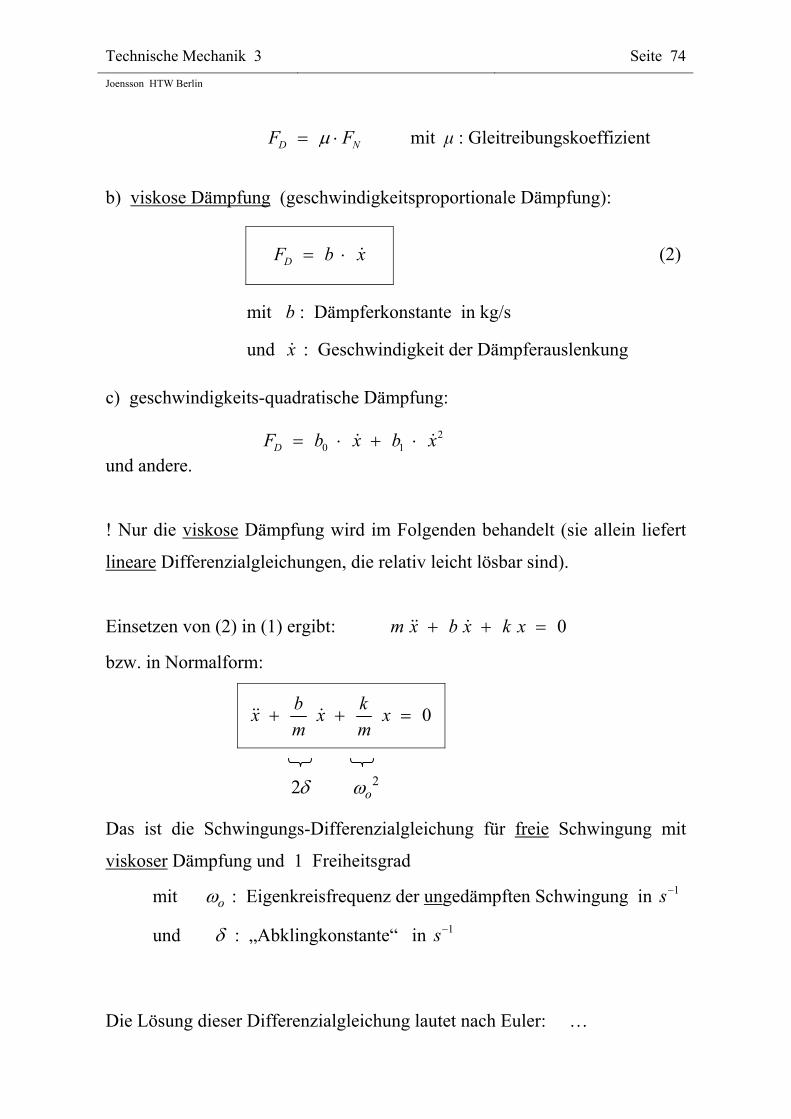
Technische Mechanik 3 Seite 74
Joensson HTW Berlin
D NF F mit μ : Gleitreibungskoeffizient
b) viskose Dämpfung (geschwindigkeitsproportionale Dämpfung):
DF b x (2)
mit b : Dämpferkonstante in kg/s
und x : Geschwindigkeit der Dämpferauslenkung
c) geschwindigkeits-quadratische Dämpfung:
20 1DF b x b x
und andere.
! Nur die viskose Dämpfung wird im Folgenden behandelt (sie allein liefert
lineare Differenzialgleichungen, die relativ leicht lösbar sind).
Einsetzen von (2) in (1) ergibt: 0m x b x k x
bzw. in Normalform:
0
b kx x x
m m
2 2o
Das ist die Schwingungs-Differenzialgleichung für freie Schwingung mit
viskoser Dämpfung und 1 Freiheitsgrad
mit o : Eigenkreisfrequenz der ungedämpften Schwingung in 1s
und : „Abklingkonstante“ in 1s
Die Lösung dieser Differenzialgleichung lautet nach Euler: …
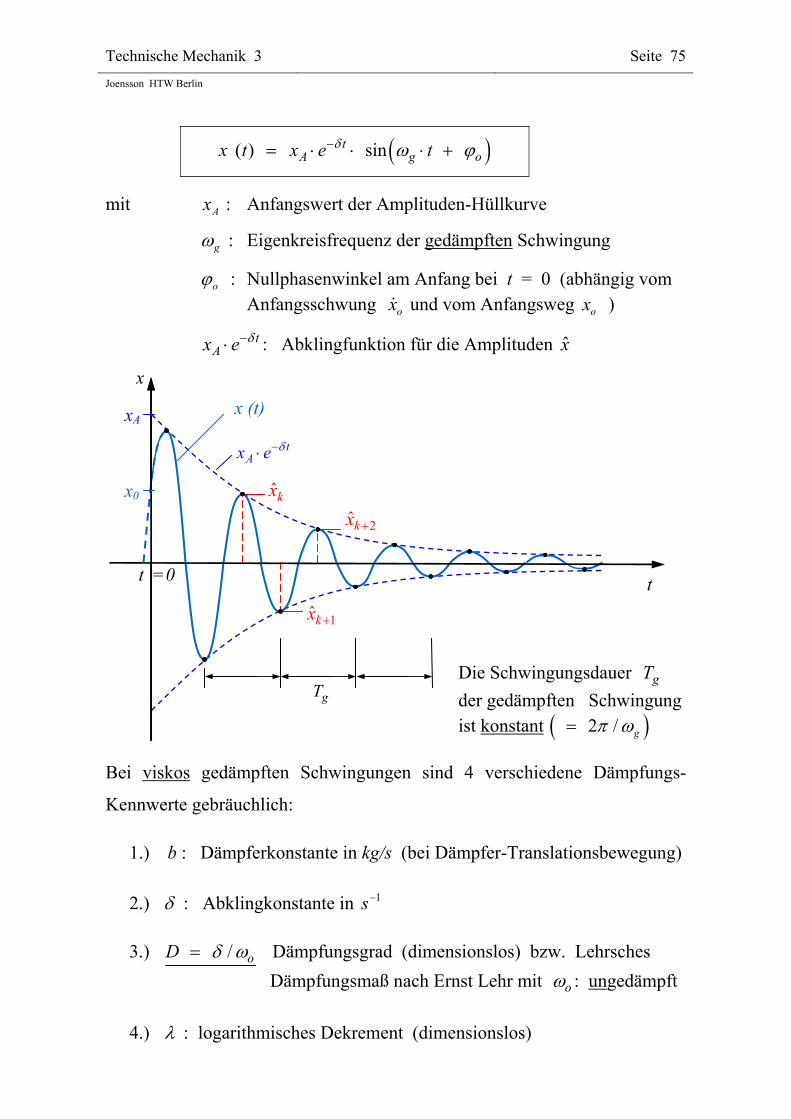
Technische Mechanik 3 Seite 75
Joensson HTW Berlin
( ) sintA g ox t x e t
mit Ax : Anfangswert der Amplituden-Hüllkurve
g : Eigenkreisfrequenz der gedämpften Schwingung
o : Nullphasenwinkel am Anfang bei t = 0 (abhängig vom Anfangsschwung ox und vom Anfangsweg ox )
tAx e : Abklingfunktion für die Amplituden x
Bei viskos gedämpften Schwingungen sind 4 verschiedene Dämpfungs-
Kennwerte gebräuchlich:
1.) b : Dämpferkonstante in kg/s (bei Dämpfer-Translationsbewegung)
2.) : Abklingkonstante in 1s
3.) / oD Dämpfungsgrad (dimensionslos) bzw. Lehrsches
Dämpfungsmaß nach Ernst Lehr mit o : ungedämpft
4.) : logarithmisches Dekrement (dimensionslos)
x (t) xA
x0 Xk ˆ
gT
t
x
tAx e
ˆkx
2ˆkx
1ˆkx
Die Schwingungsdauer gT
der gedämpften Schwingung ist konstant 2 / g
t =0
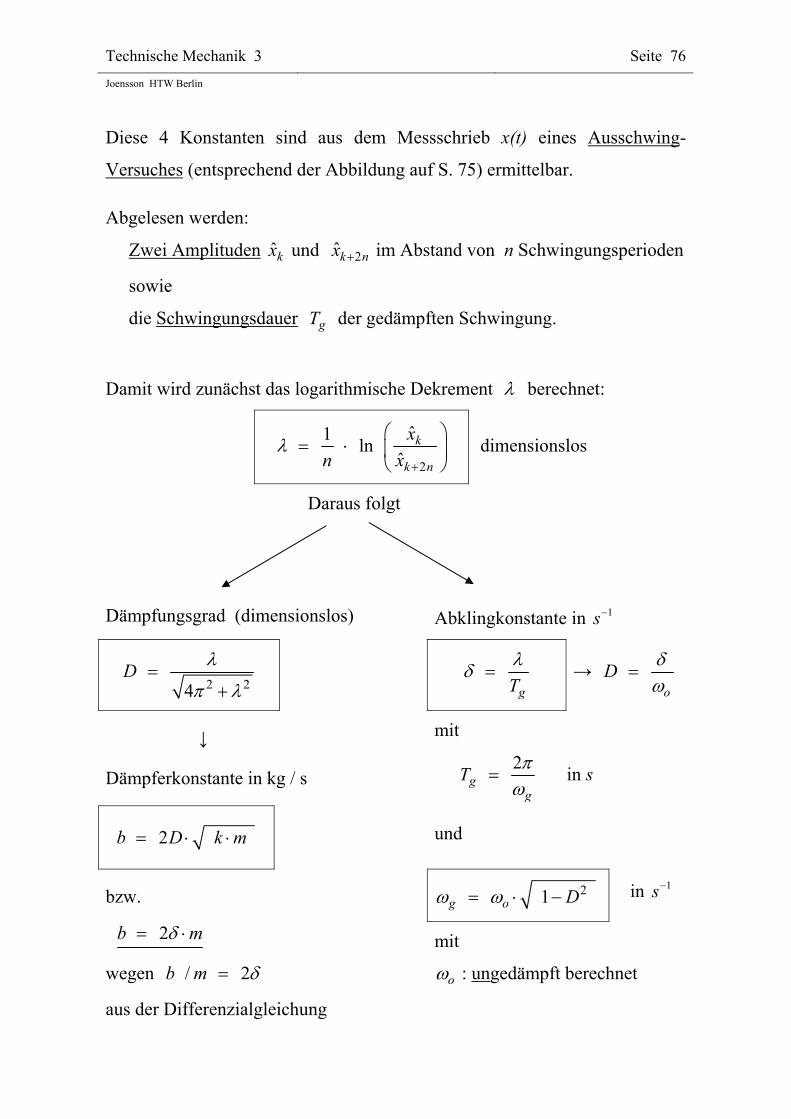
Technische Mechanik 3 Seite 76
Joensson HTW Berlin
Diese 4 Konstanten sind aus dem Messschrieb x(t) eines Ausschwing-
Versuches (entsprechend der Abbildung auf S. 75) ermittelbar.
Abgelesen werden:
Zwei Amplituden ˆkx und 2ˆ k nx im Abstand von n Schwingungsperioden
sowie
die Schwingungsdauer gT der gedämpften Schwingung.
Damit wird zunächst das logarithmische Dekrement berechnet:
2
ˆ1ln
ˆk
k n
x
n x
dimensionslos
Daraus folgt
Dämpfungsgrad (dimensionslos) Abklingkonstante in 1s
2 24D
gT
→ o
D
↓ mit
Dämpferkonstante in kg / s
2
gg
T
in s
2b D k m und
bzw. 21g o D in 1s
2b m mit
wegen / 2b m
aus der Differenzialgleichung
o : ungedämpft berechnet
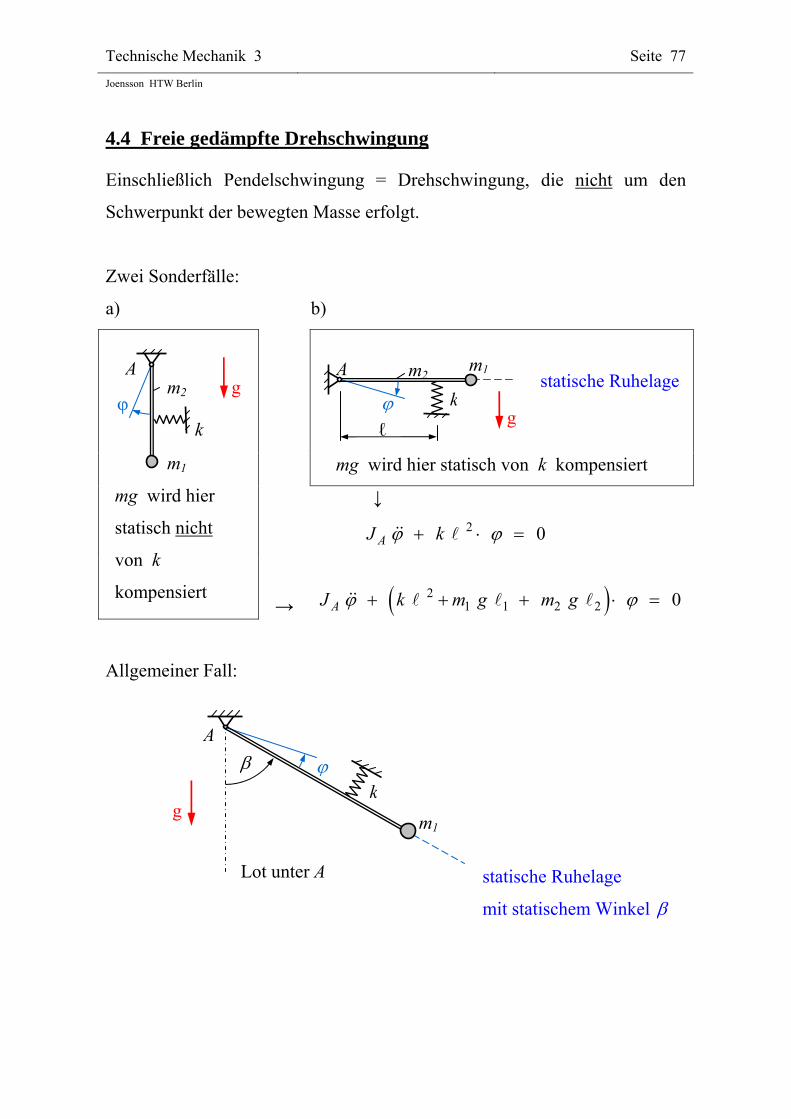
Technische Mechanik 3 Seite 77
Joensson HTW Berlin
4.4 Freie gedämpfte Drehschwingung
Einschließlich Pendelschwingung = Drehschwingung, die nicht um den
Schwerpunkt der bewegten Masse erfolgt.
Zwei Sonderfälle:
a) b)
statische Ruhelage
mg wird hier statisch von k kompensiert
↓
2 0AJ k
mg wird hier
statisch nicht
von k
kompensiert
→ 21 1 2 2 0AJ k m g m g
Allgemeiner Fall:
statische Ruhelage
mit statischem Winkel
g k
A
m1
Lot unter A
gk
ℓ
A m1m2
g
A
k
m1
m2
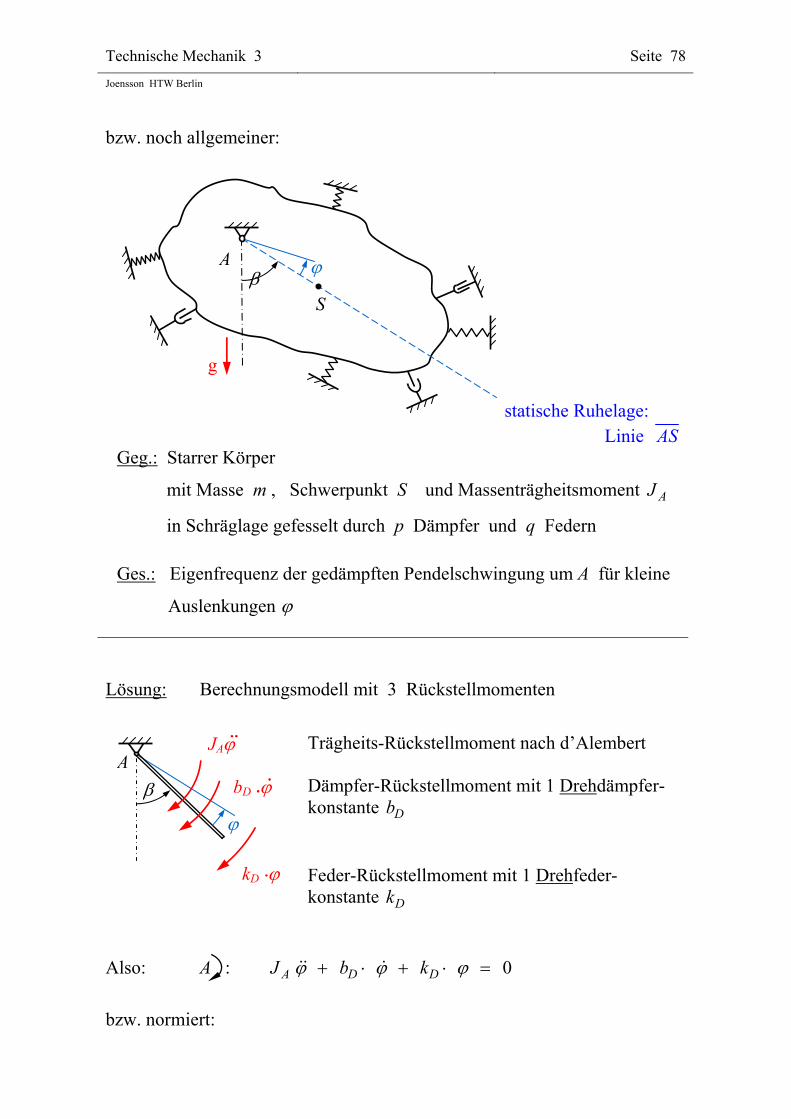
Technische Mechanik 3 Seite 78
Joensson HTW Berlin
bzw. noch allgemeiner:
statische Ruhelage: Linie AS
Geg.: Starrer Körper
mit Masse m , Schwerpunkt S und Massenträgheitsmoment AJ
in Schräglage gefesselt durch p Dämpfer und q Federn
Ges.: Eigenfrequenz der gedämpften Pendelschwingung um A für kleine
Auslenkungen
Lösung: Berechnungsmodell mit 3 Rückstellmomenten
Trägheits-Rückstellmoment nach d’Alembert Dämpfer-Rückstellmoment mit 1 Drehdämpfer- konstante Db Feder-Rückstellmoment mit 1 Drehfeder- konstante Dk
Also: A : 0A D DJ b k
bzw. normiert:
A
S
g
A
bD
kD
JA
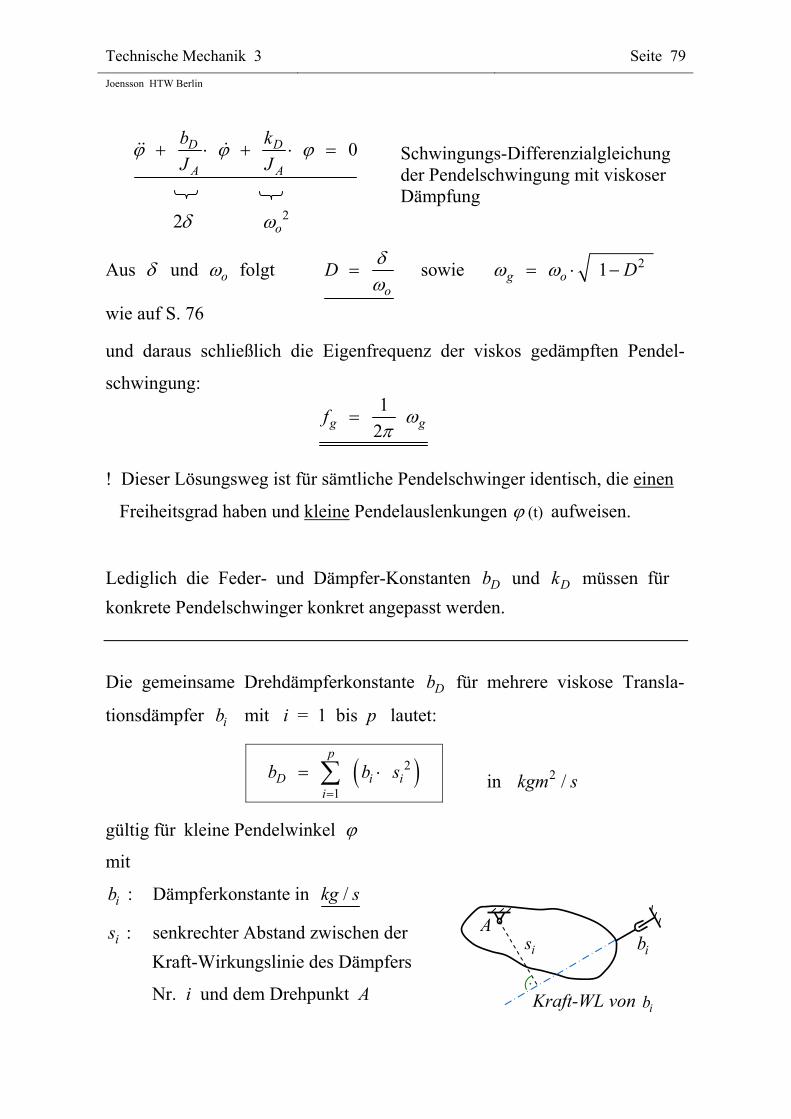
Technische Mechanik 3 Seite 79
Joensson HTW Berlin
0D D
A A
b k
J J Schwingungs-Differenzialgleichung
der Pendelschwingung mit viskoser Dämpfung
2 2o
Aus und o folgt o
D
sowie 21g o D
wie auf S. 76
und daraus schließlich die Eigenfrequenz der viskos gedämpften Pendel-
schwingung:
1
2g gf
! Dieser Lösungsweg ist für sämtliche Pendelschwinger identisch, die einen
Freiheitsgrad haben und kleine Pendelauslenkungen (t) aufweisen.
Lediglich die Feder- und Dämpfer-Konstanten Db und Dk müssen für
konkrete Pendelschwinger konkret angepasst werden.
Die gemeinsame Drehdämpferkonstante Db für mehrere viskose Transla-
tionsdämpfer ib mit i = 1 bis p lautet:
2
1
p
D i ii
b b s
in 2 /kgm s
gültig für kleine Pendelwinkel
mit
ib : Dämpferkonstante in /kg s
is : senkrechter Abstand zwischen der
Kraft-Wirkungslinie des Dämpfers
Nr. i und dem Drehpunkt A
Ais
Kraft-WL von ib
ib
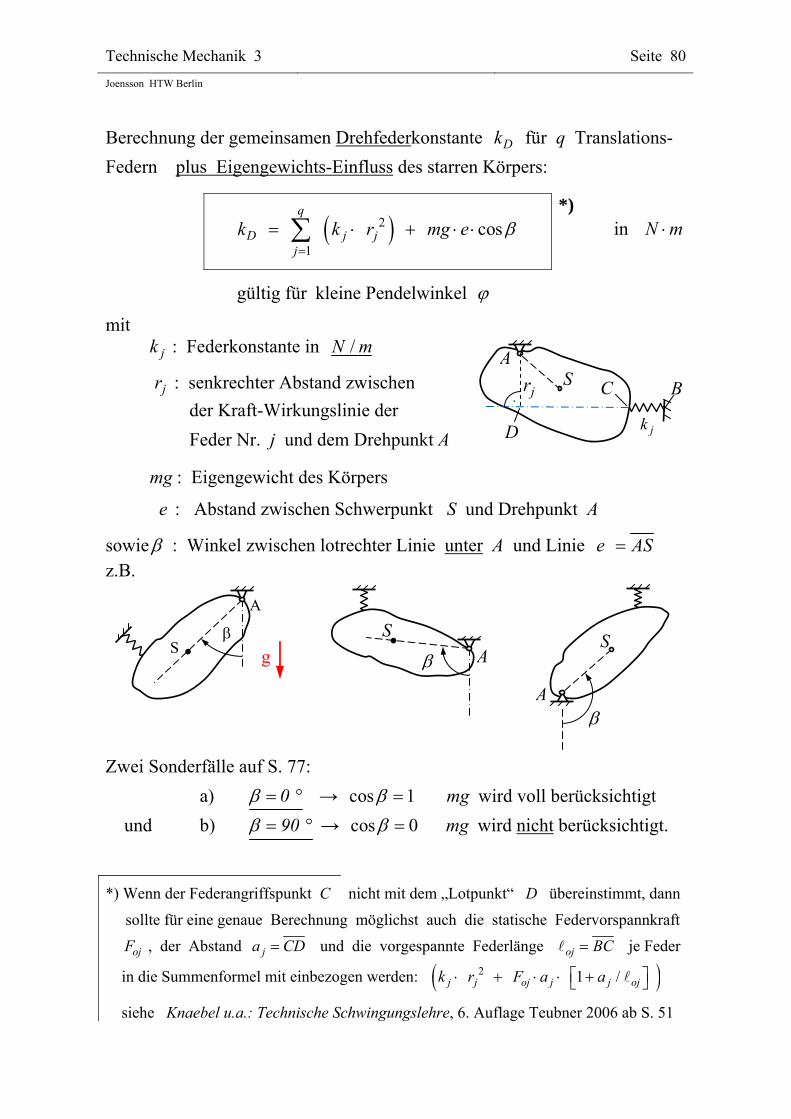
Technische Mechanik 3 Seite 80
Joensson HTW Berlin
Berechnung der gemeinsamen Drehfederkonstante Dk für q Translations-
Federn plus Eigengewichts-Einfluss des starren Körpers:
2
1
cosq
D j jj
k k r mg e
*)
in N m
gültig für kleine Pendelwinkel
mit jk : Federkonstante in /N m
jr : senkrechter Abstand zwischen
der Kraft-Wirkungslinie der
Feder Nr. j und dem Drehpunkt A
mg : Eigengewicht des Körpers
e : Abstand zwischen Schwerpunkt S und Drehpunkt A
sowie : Winkel zwischen lotrechter Linie unter A und Linie e AS z.B.
Zwei Sonderfälle auf S. 77:
a) 0 → cos 1 mg wird voll berücksichtigt
und b) 90 → cos 0 mg wird nicht berücksichtigt.
*) Wenn der Federangriffspunkt C nicht mit dem „Lotpunkt“ D übereinstimmt, dann
sollte für eine genaue Berechnung möglichst auch die statische Federvorspannkraft
ojF , der Abstand ja CD und die vorgespannte Federlänge oj BC je Feder
in die Summenformel mit einbezogen werden: 2 1 /j j oj j j ojk r F a a
siehe Knaebel u.a.: Technische Schwingungslehre, 6. Auflage Teubner 2006 ab S. 51
A
S
A
S A
S
A
jk
jr BC
D
S
g
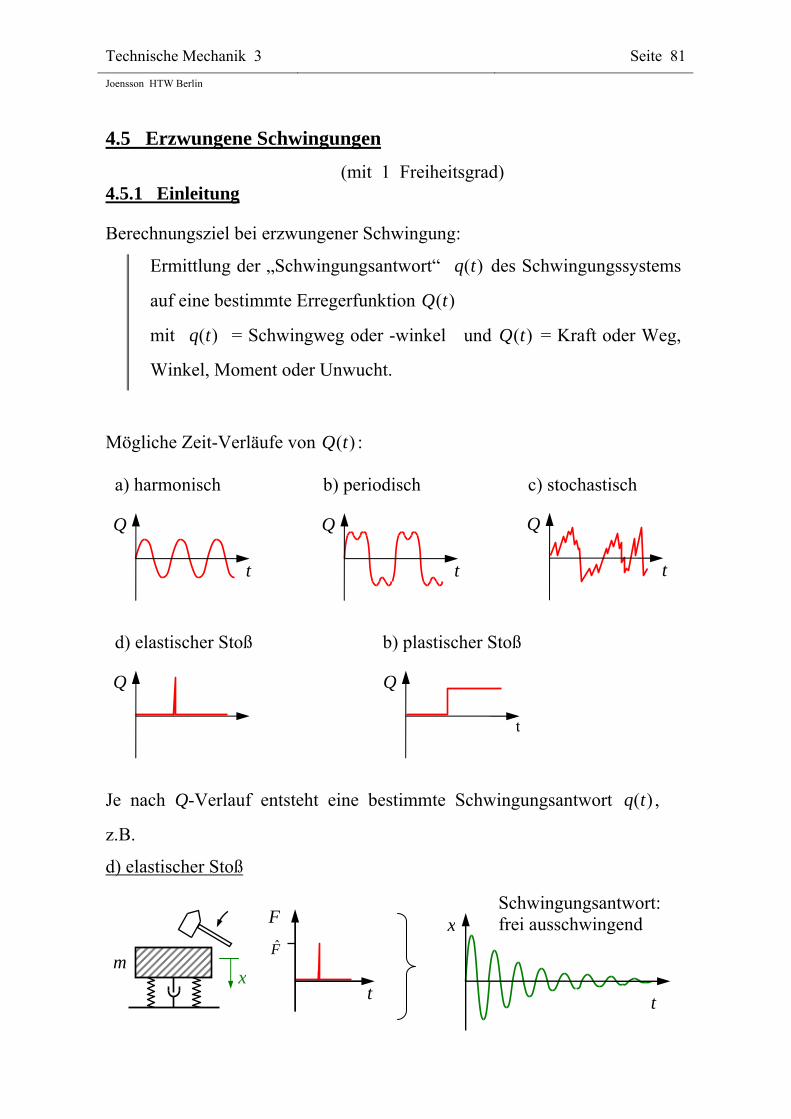
Technische Mechanik 3 Seite 81
Joensson HTW Berlin
4.5 Erzwungene Schwingungen
(mit 1 Freiheitsgrad) 4.5.1 Einleitung
Berechnungsziel bei erzwungener Schwingung:
Ermittlung der „Schwingungsantwort“ ( )q t des Schwingungssystems
auf eine bestimmte Erregerfunktion ( )Q t
mit ( )q t = Schwingweg oder -winkel und ( )Q t = Kraft oder Weg,
Winkel, Moment oder Unwucht.
Mögliche Zeit-Verläufe von ( )Q t :
a) harmonisch b) periodisch c) stochastisch
d) elastischer Stoß b) plastischer Stoß
Je nach Q-Verlauf entsteht eine bestimmte Schwingungsantwort ( )q t ,
z.B.
d) elastischer Stoß
m
F
t
F
xt
xSchwingungsantwort: frei ausschwingend
Q Q
t
Q
t
Q
t
Q
t
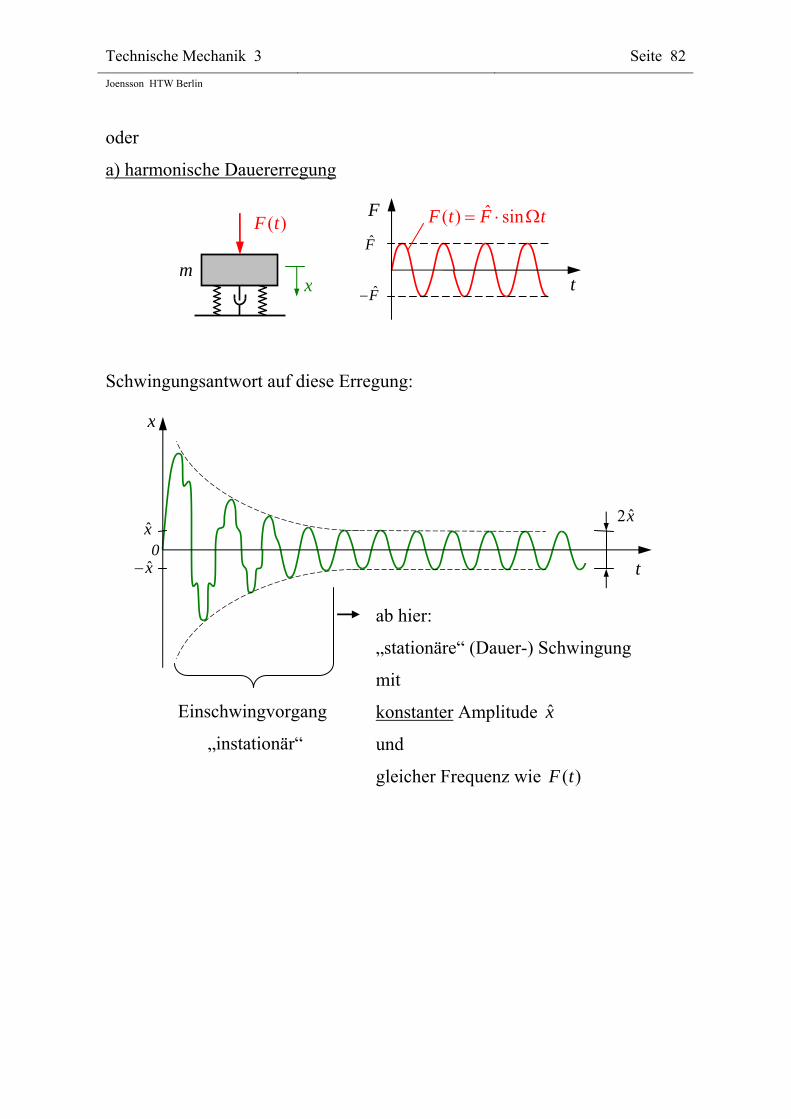
Technische Mechanik 3 Seite 82
Joensson HTW Berlin
oder
a) harmonische Dauererregung
Schwingungsantwort auf diese Erregung:
t
x
0
ˆ2x x
x
ab hier:
„stationäre“ (Dauer-) Schwingung
mit
konstanter Amplitude x
und
gleicher Frequenz wie ( )F t
Einschwingvorgang
„instationär“
m
F
x
( )F t
t
F
F
ˆ( ) sinF t F t
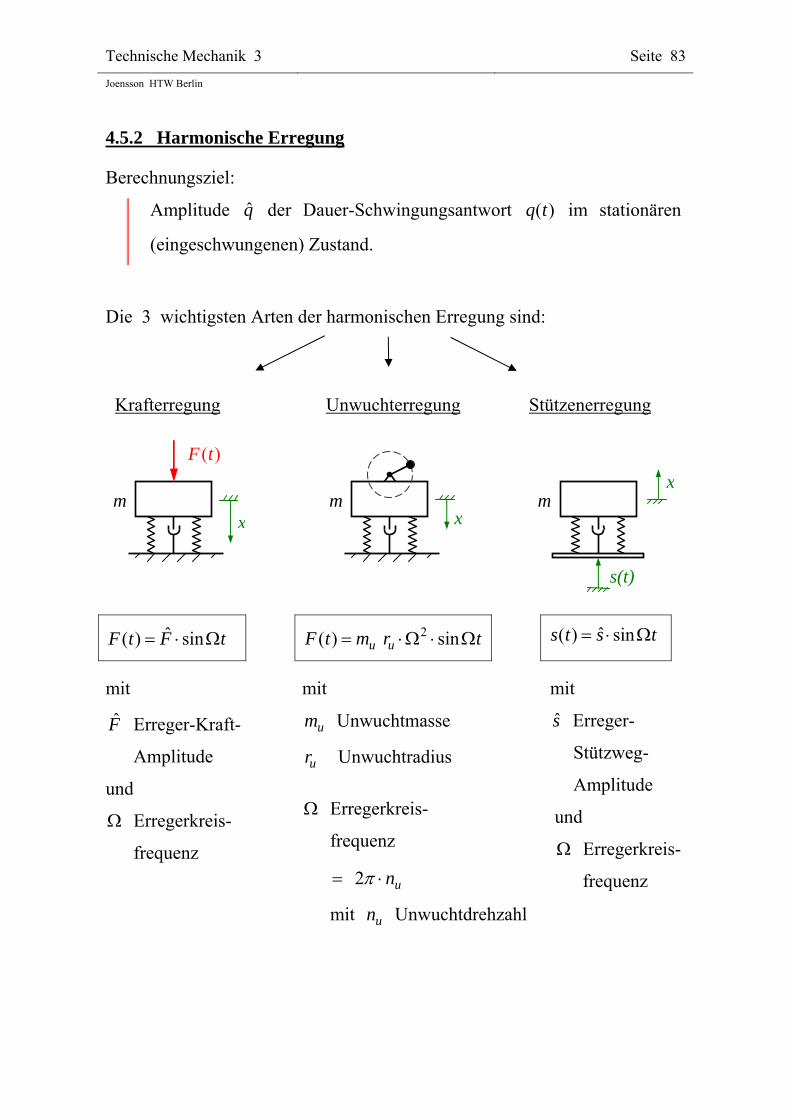
Technische Mechanik 3 Seite 83
Joensson HTW Berlin
4.5.2 Harmonische Erregung
Berechnungsziel:
Amplitude q der Dauer-Schwingungsantwort ( )q t im stationären
(eingeschwungenen) Zustand.
Die 3 wichtigsten Arten der harmonischen Erregung sind:
Krafterregung Unwuchterregung Stützenerregung
ˆ( ) sinF t F t 2( ) sinu uF t m r t ˆ( ) sins t s t
mit
F Erreger-Kraft-
Amplitude
und
Erregerkreis-
frequenz
mit
um Unwuchtmasse
ur Unwuchtradius
Erregerkreis-
frequenz
2 un
mit
s Erreger-
Stützweg-
Amplitude
und
Erregerkreis-
frequenz
mit un Unwuchtdrehzahl
m
( )F t
xm
xm
x
s(t)
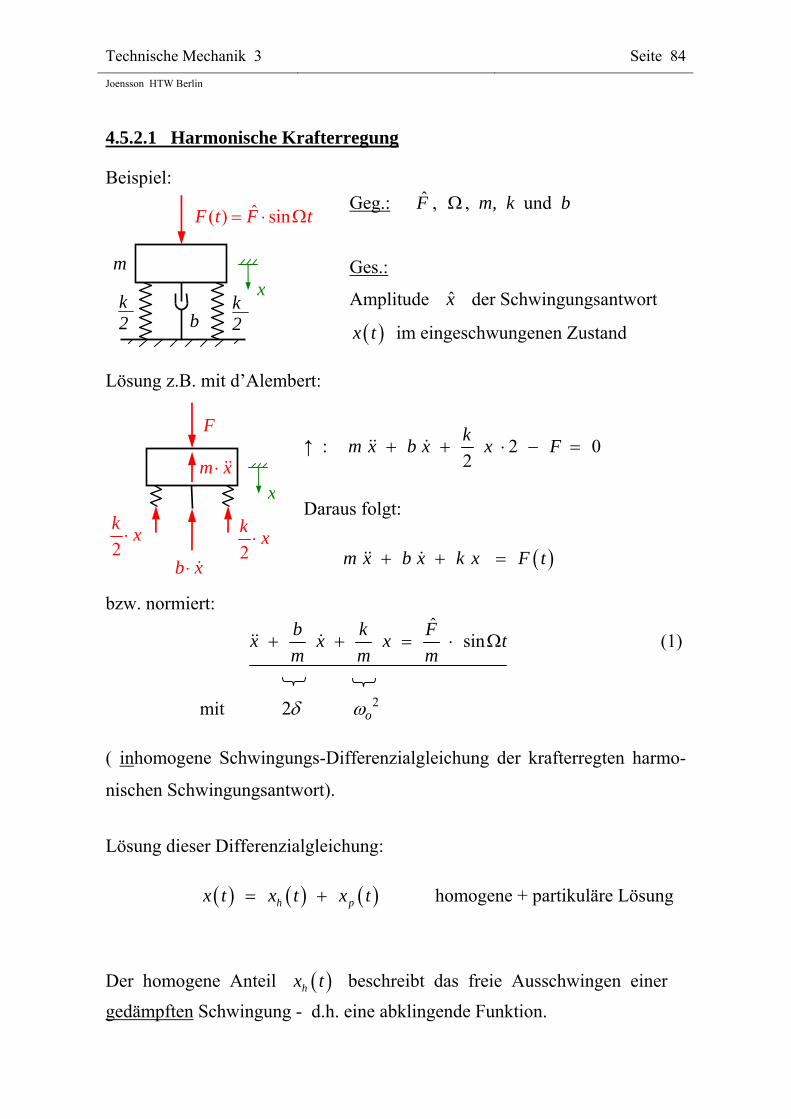
Technische Mechanik 3 Seite 84
Joensson HTW Berlin
4.5.2.1 Harmonische Krafterregung
Beispiel:
Geg.: F , , m, k und b
Ges.:
Amplitude x der Schwingungsantwort
x t im eingeschwungenen Zustand
Lösung z.B. mit d’Alembert:
↑ : 2 02
km x b x x F
Daraus folgt:
m x b x k x F t
bzw. normiert:
ˆ
sinb k F
x x x tm m m
(1)
mit 2 2o
( inhomogene Schwingungs-Differenzialgleichung der krafterregten harmo-
nischen Schwingungsantwort).
Lösung dieser Differenzialgleichung:
h px t x t x t homogene + partikuläre Lösung
Der homogene Anteil hx t beschreibt das freie Ausschwingen einer
gedämpften Schwingung - d.h. eine abklingende Funktion.
x
F
2
kx
2
kx
b x
m x
m x
k 2
k2b
ˆ( ) sinF t F t

Technische Mechanik 3 Seite 85
Joensson HTW Berlin
Dadurch ist im eingeschwungenen (stationären) Zustand nur noch die parti-
kuläre Lösung übrig:
px t x t
Mathematischer Lösungsansatz dazu bei harmonischer Schwingung:
cos sinpx t A t B t
mit zwei freien Konstanten A und B.
Einsetzen dieser Formel und deren 1. und 2. Zeitableitung in die
Differenzialgleichung (1) sowie Koeffizientenvergleich der Cos- und Sin-
Terme liefert …
2
2
1
DA B
und
2
22 2 2
ˆ 1
1 4
FB
k D
mit o
D
Lehrsches Dämpfungsmaß
und o
„Abstimmungsverhältnis“ eta
zwischen Erregerkreisfrequenz und ungedämpfter
Eigenkreisfrequenz o
Die so berechnete Schwingungsantwort cos sinx t A t B t
kann auch geschrieben werden als:
2 2 sin Nx t A B t
mit Amplitude x der Schwingungsantwort
und „Nacheilwinkel“ arctan /N A B
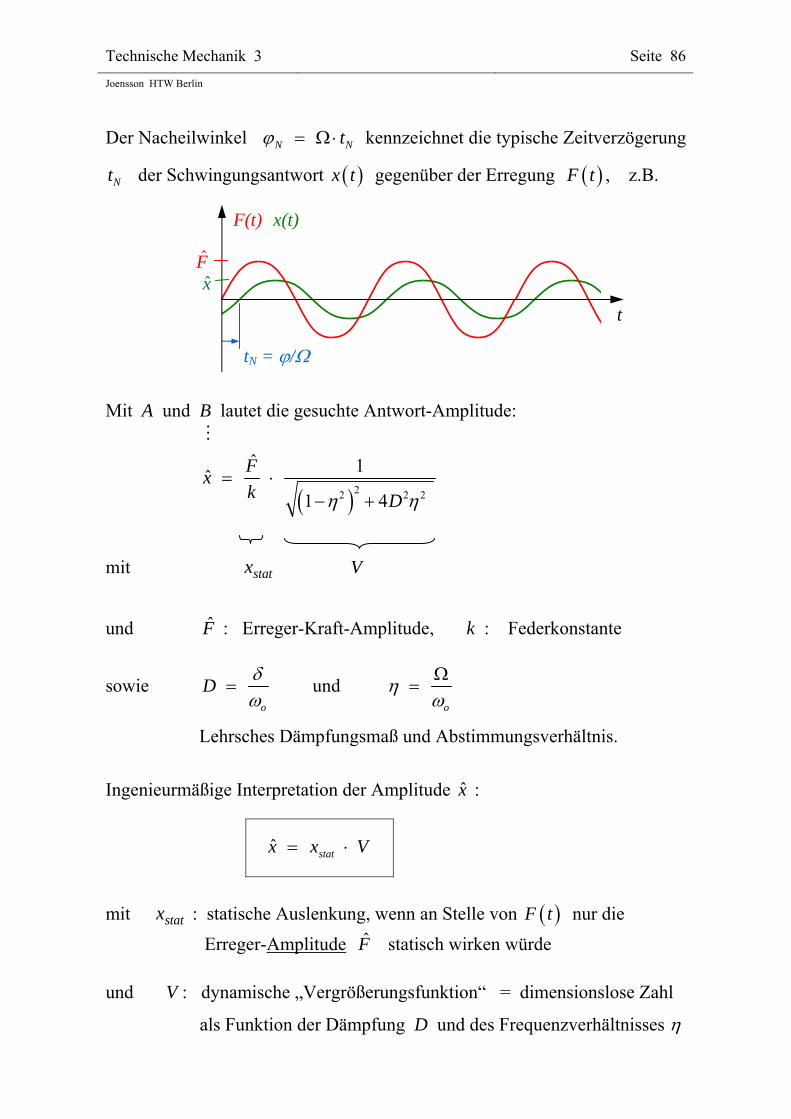
Technische Mechanik 3 Seite 86
Joensson HTW Berlin
Der Nacheilwinkel N Nt kennzeichnet die typische Zeitverzögerung
Nt der Schwingungsantwort x t gegenüber der Erregung F t , z.B.
Mit A und B lautet die gesuchte Antwort-Amplitude:
22 2 2
ˆ 1ˆ
1 4
Fx
k D
mit statx V
und F : Erreger-Kraft-Amplitude, k : Federkonstante
sowie o
D
und o
Lehrsches Dämpfungsmaß und Abstimmungsverhältnis.
Ingenieurmäßige Interpretation der Amplitude x :
ˆ statx x V
mit statx : statische Auslenkung, wenn an Stelle von F t nur die
Erreger-Amplitude F statisch wirken würde
und V : dynamische „Vergrößerungsfunktion“ = dimensionslose Zahl
als Funktion der Dämpfung D und des Frequenzverhältnisses
F(t) x(t)
t
tN = /
F x
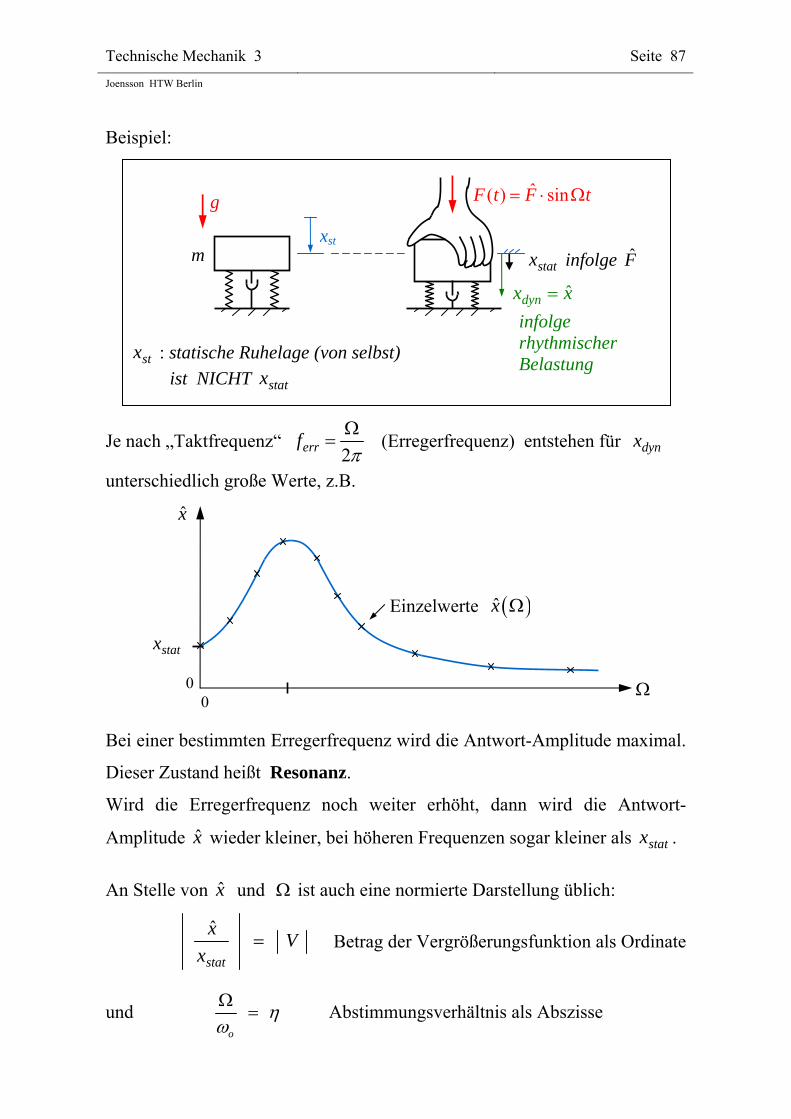
Technische Mechanik 3 Seite 87
Joensson HTW Berlin
Beispiel:
Je nach „Taktfrequenz“ 2errf
(Erregerfrequenz) entstehen für dynx
unterschiedlich große Werte, z.B.
Bei einer bestimmten Erregerfrequenz wird die Antwort-Amplitude maximal.
Dieser Zustand heißt Resonanz.
Wird die Erregerfrequenz noch weiter erhöht, dann wird die Antwort-
Amplitude x wieder kleiner, bei höheren Frequenzen sogar kleiner als statx .
An Stelle von x und ist auch eine normierte Darstellung üblich:
ˆ
stat
xV
x Betrag der Vergrößerungsfunktion als Ordinate
und o
Abstimmungsverhältnis als Abszisse
Einzelwerte x
x
statx
0 0
m
g
xst
ˆ( ) sinF t F t
statx infolge F
ˆdynx x
infolge rhythmischer Belastung stx : statische Ruhelage (von selbst)
ist NICHT statx
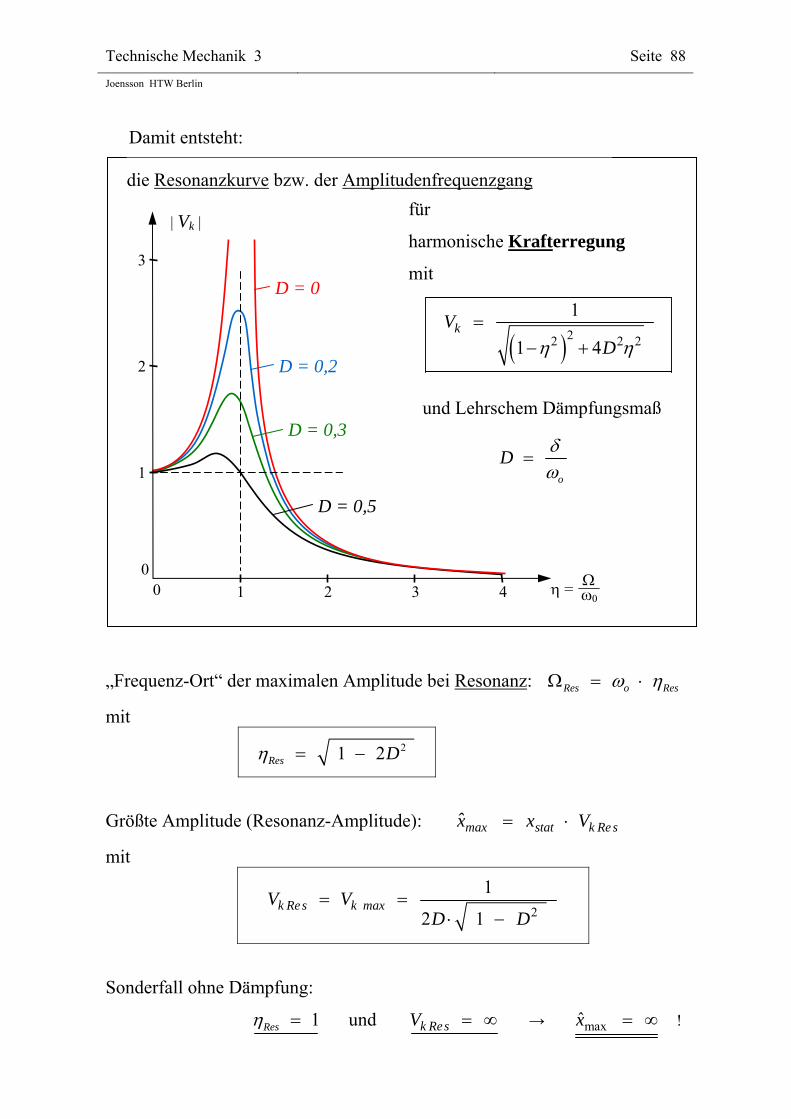
Technische Mechanik 3 Seite 88
Joensson HTW Berlin
Damit entsteht:
„Frequenz-Ort“ der maximalen Amplitude bei Resonanz: Res o Res
mit
21 2Res D
Größte Amplitude (Resonanz-Amplitude): max stat k Re sx x V
mit
2
1
2 1k Re s k maxV V
D D
Sonderfall ohne Dämpfung:
1Res und k Re sV → maxx !
0 0 1 2 3 4
2
1
3
| Vk |
=
D = 0
D = 0,2
D = 0,3
D = 0,5
für
harmonische Krafterregung
mit
22 2 2
1
1 4kV
D
und Lehrschem Dämpfungsmaß
o
D
die Resonanzkurve bzw. der Amplitudenfrequenzgang
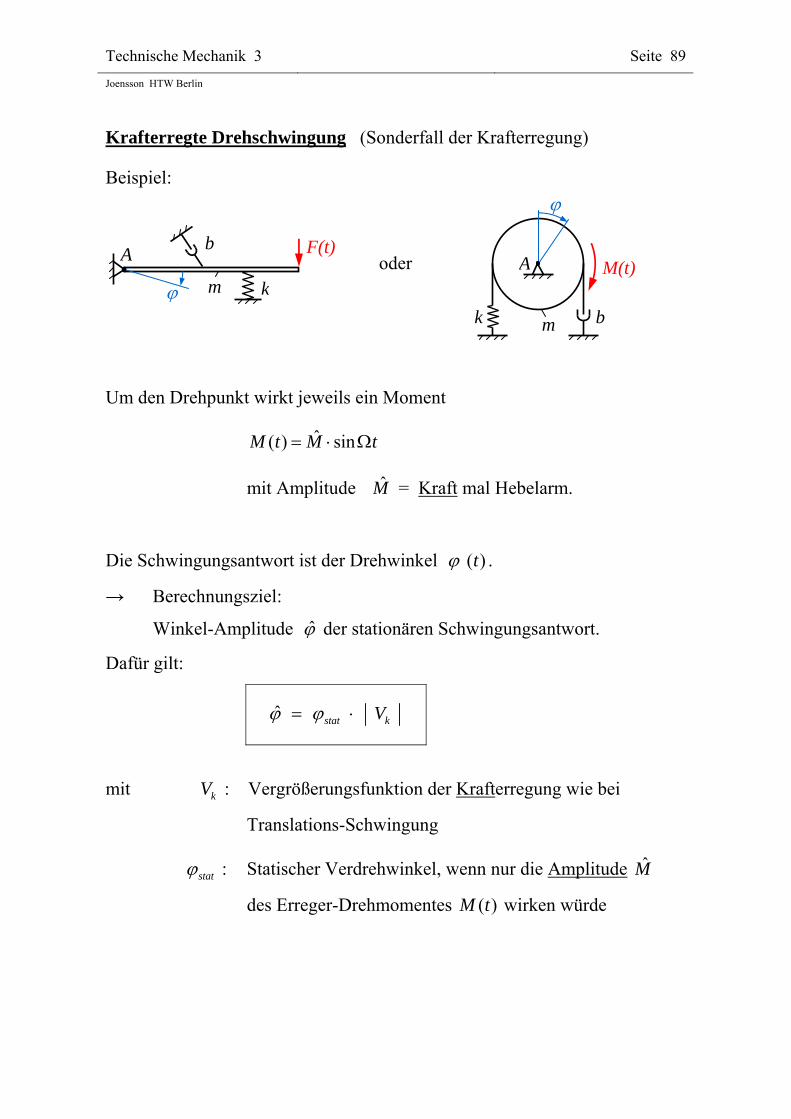
Technische Mechanik 3 Seite 89
Joensson HTW Berlin
Krafterregte Drehschwingung (Sonderfall der Krafterregung)
Beispiel:
oder
Um den Drehpunkt wirkt jeweils ein Moment
ˆ( ) sinM t M t
mit Amplitude M = Kraft mal Hebelarm.
Die Schwingungsantwort ist der Drehwinkel ( )t .
→ Berechnungsziel:
Winkel-Amplitude der stationären Schwingungsantwort.
Dafür gilt:
ˆ stat kV
mit kV : Vergrößerungsfunktion der Krafterregung wie bei
Translations-Schwingung
stat : Statischer Verdrehwinkel, wenn nur die Amplitude M
des Erreger-Drehmomentes ( )M t wirken würde
k
A
b m
M(t) F(t)A
m k
b
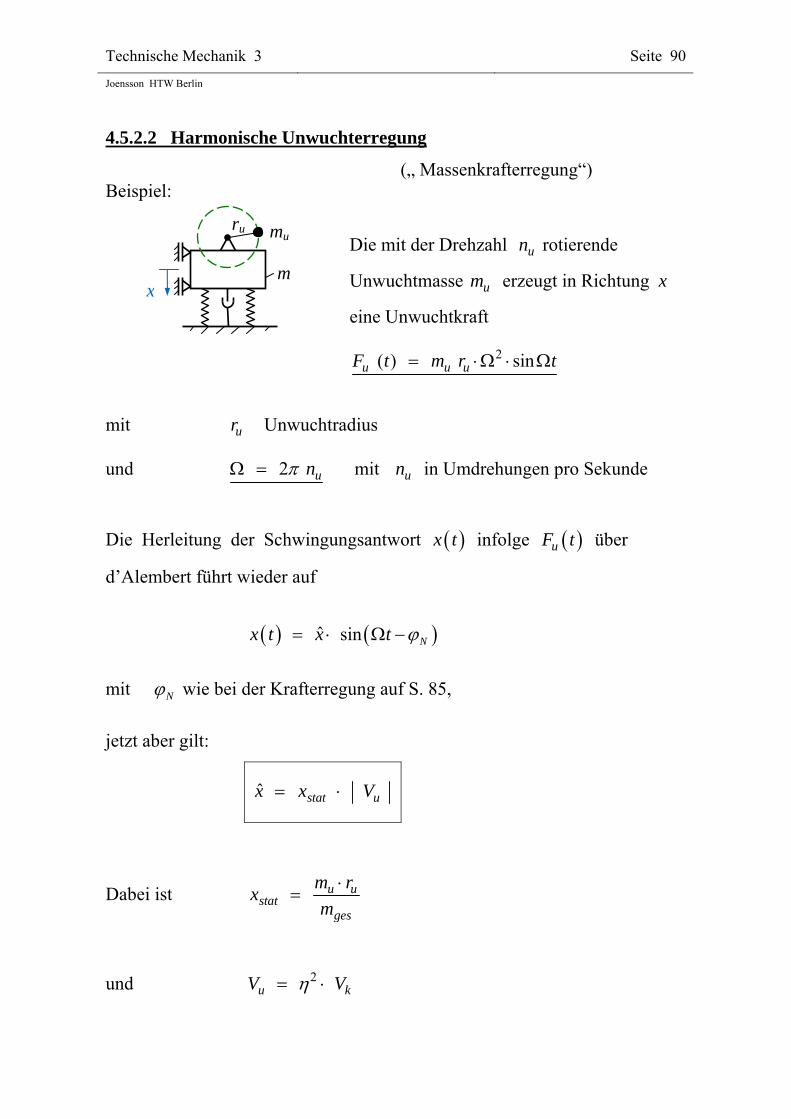
Technische Mechanik 3 Seite 90
Joensson HTW Berlin
4.5.2.2 Harmonische Unwuchterregung
(„ Massenkrafterregung“) Beispiel:
Die mit der Drehzahl un rotierende
Unwuchtmasse um erzeugt in Richtung x
eine Unwuchtkraft
2( ) sinu u uF t m r t
mit ur Unwuchtradius
und 2 un mit un in Umdrehungen pro Sekunde
Die Herleitung der Schwingungsantwort x t infolge uF t über
d’Alembert führt wieder auf
ˆ sin Nx t x t
mit N wie bei der Krafterregung auf S. 85,
jetzt aber gilt:
ˆ stat ux x V
Dabei ist u ustat
ges
m rx
m
und 2u kV V
m x
mu ru
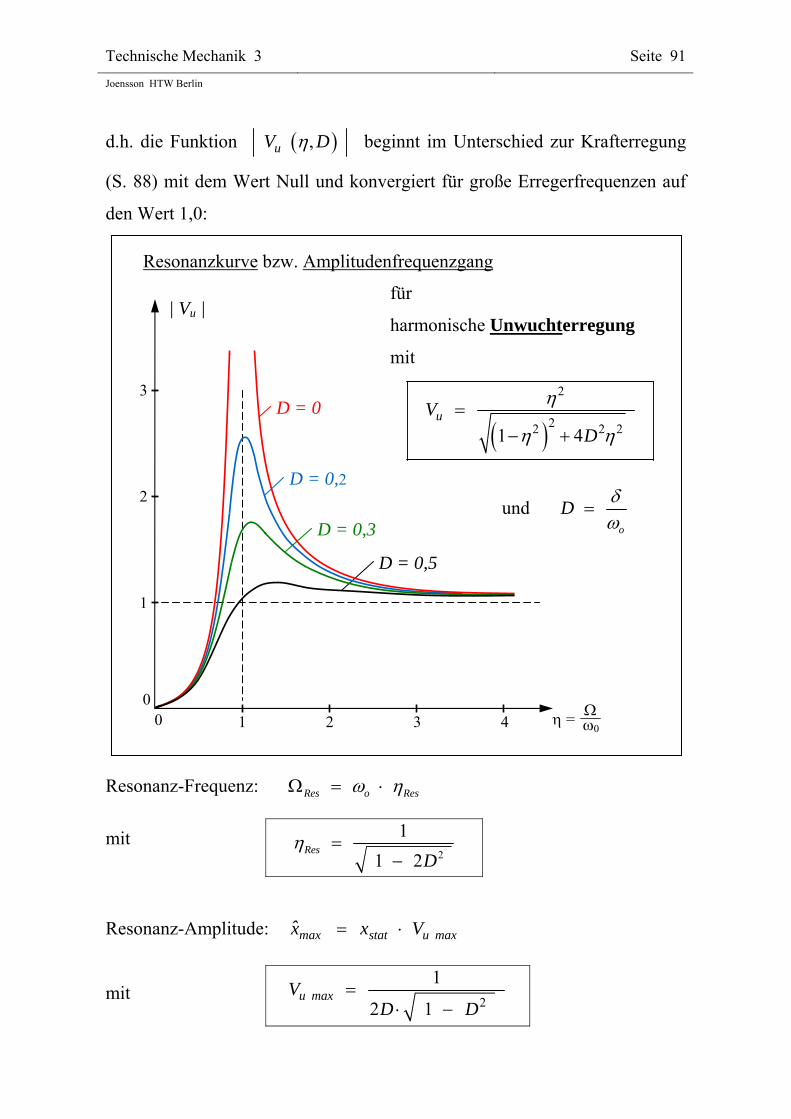
Technische Mechanik 3 Seite 91
Joensson HTW Berlin
d.h. die Funktion ,uV D beginnt im Unterschied zur Krafterregung
(S. 88) mit dem Wert Null und konvergiert für große Erregerfrequenzen auf
den Wert 1,0:
Resonanz-Frequenz: Res o Res
mit 2
1
1 2Res
D
Resonanz-Amplitude: max stat u maxx x V
mit
2
1
2 1u maxV
D D
0 0 1 2 3 4
2
1
3
| Vu |
=
D = 0,5
D = 0,3
D = 0,2
D = 0
Resonanzkurve bzw. Amplitudenfrequenzgang
für
harmonische Unwuchterregung
mit
2
22 2 21 4uV
D
und o
D
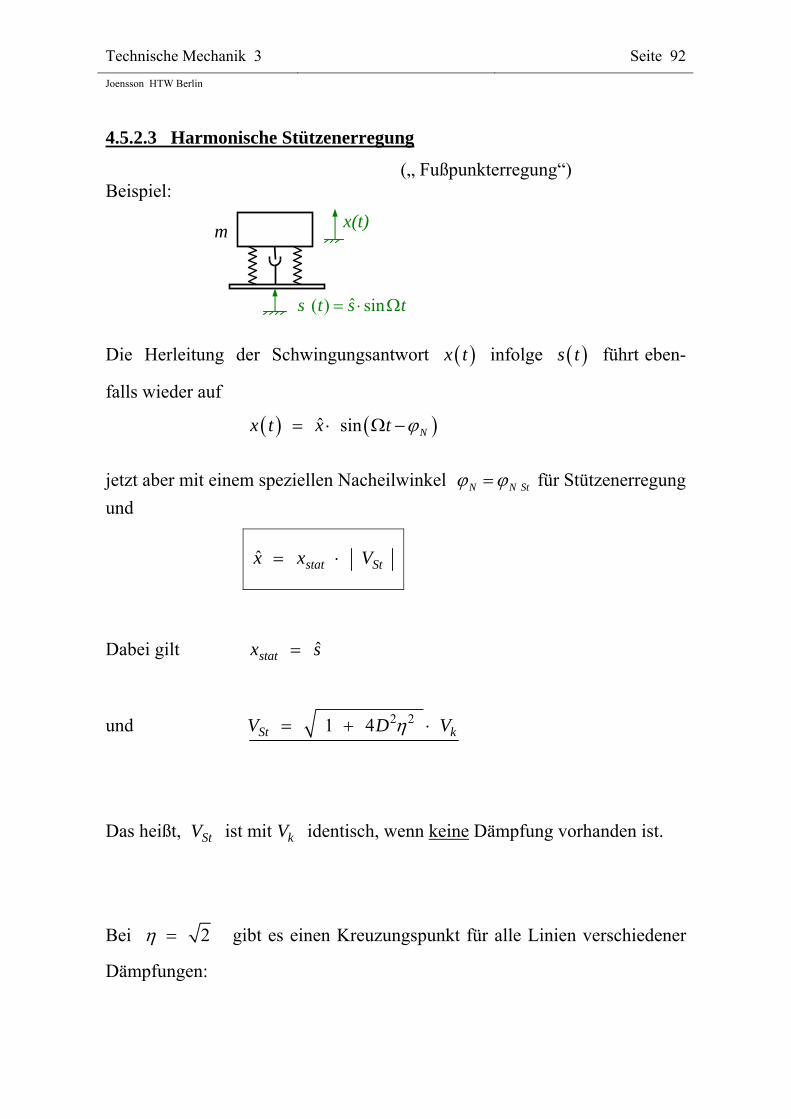
Technische Mechanik 3 Seite 92
Joensson HTW Berlin
4.5.2.3 Harmonische Stützenerregung
(„ Fußpunkterregung“) Beispiel:
Die Herleitung der Schwingungsantwort x t infolge s t führt eben-
falls wieder auf
ˆ sin Nx t x t
jetzt aber mit einem speziellen Nacheilwinkel N N St für Stützenerregung
und
ˆ stat Stx x V
Dabei gilt ˆstatx s
und 2 21 4St kV D V
Das heißt, StV ist mit kV identisch, wenn keine Dämpfung vorhanden ist.
Bei 2 gibt es einen Kreuzungspunkt für alle Linien verschiedener
Dämpfungen:
m x(t)
ˆ( ) sins t s t
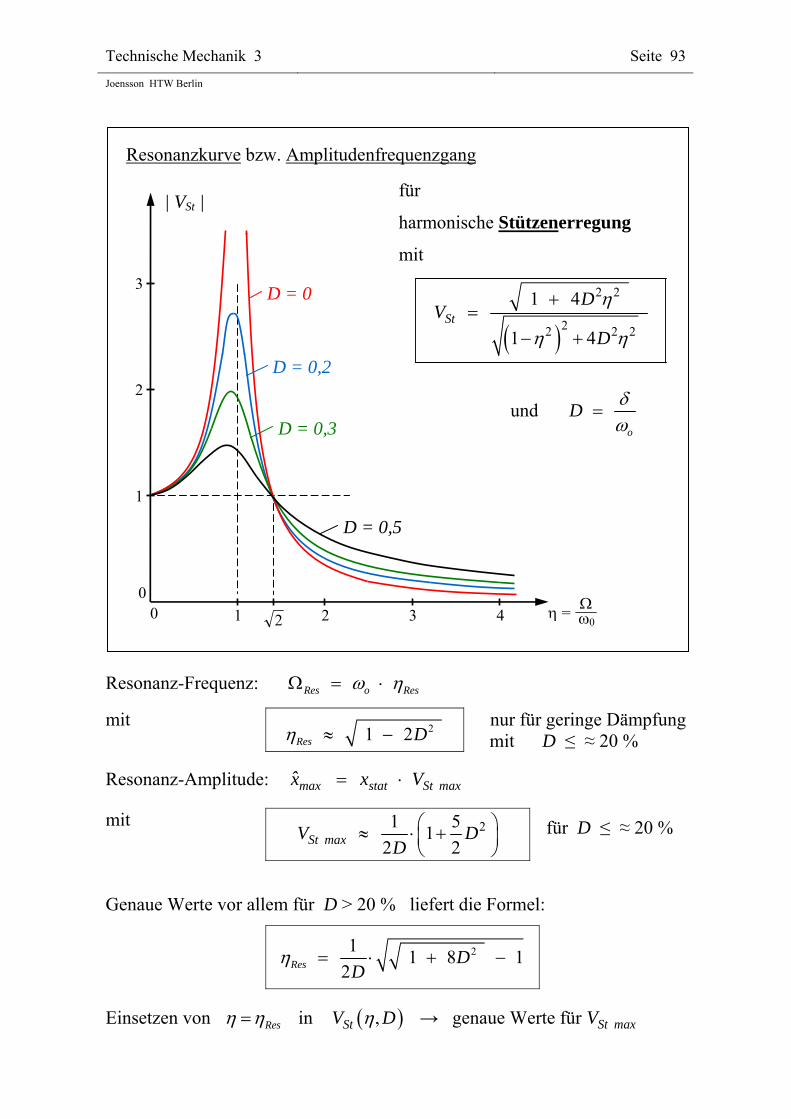
Technische Mechanik 3 Seite 93
Joensson HTW Berlin
Resonanz-Frequenz: Res o Res
mit
21 2Res D nur für geringe Dämpfung
mit D ≤ ≈ 20 %
Resonanz-Amplitude: max stat St maxx x V
mit
21 51
2 2St maxV DD
für D ≤ ≈ 20 %
Genaue Werte vor allem für D > 20 % liefert die Formel:
21
1 8 12Res D
D
Einsetzen von Res in ,StV D → genaue Werte für St maxV
0 0 1 2 3 4
2
1
3
| VSt |
=
D = 0,3
2
D = 0,5
D = 0,2
D = 0
Resonanzkurve bzw. Amplitudenfrequenzgang
für
harmonische Stützenerregung
mit
2 2
22 2 2
1 4
1 4St
DV
D
und o
D
Technische Mechanik 3 Seite 94
Joensson HTW Berlin
4.5.2.4 Harmonische Erregung: Zusammenfassung
1.) Bewegungs-Differenzialgleichung aufstellen wie bei freien Schwin-
gungen (rechte Seite jetzt 0 )
2.) Berechnung der ungedämpften Eigenkreisfrequenz o („ablesen“ von
der Differenzialgleichung wie bisher)
3.) Dämpfungsgrad D: 2 „ablesen“, dann o
D
4.) Abstimmungsverhältnis o
5.) Vergrößerungsfunktion V je nach Erreger-Art:
22 2 2
1
1 4kV
D
bei Krafterregung
oder 2u kV V bei Unwuchterregung
bzw. 2 21 4St kV D V bei Stützenerregung
6.) Statische Auslenkung statq je nach Erreger-Art:
a) Krafterregung
aus dem statischen Gleichgewicht infolge F oder M
oder in der Diff.gleichung alle Punktgrößen streichen,
sin t = 1 setzen und q als statq schreiben
Technische Mechanik 3 Seite 95
Joensson HTW Berlin
6. b) Unwuchterregung
u ustat
ges
m rq
m
für Translation, z.B. q x
oder
u u ustat
A
m r e
J
für unwuchterregte Drehschwingung
mit
ue Abstand zwischen dem Unwucht- schwerpunkt und dem Drehpunkt A
AJ Massenträgheitsmoment für die Drehachse durch A
c) Stützenerregung
ˆstatq s bei Wegerregung s t
bzw.
ˆstatq bei Drehwinkel-Erregung t
7.) Amplitude q der stationären Schwingungsantwort q t infolge
Erregerfunktion Q t :
ˆ stat kq q V für Krafterregung
bzw. mit uV oder StV an Stelle von kV
bei Unwucht- oder Stützenerregung.
Literatur-Empfehlung zur Technischen Mechanik
Dankert, J, Dankert, H.: Technische Mechanik. Springer Vieweg Verlag, 7.Auflage 2013 Hibbeler, R. C.: Technische Mechanik in 3 Bänden. Pearson Verlag 2012 und 2013 Berger, J. Technische Mechanik für Ingenieure in 4 Bänden. Vieweg Verlag 1991 bis 1994 Issler, L.; Ruoß, H., Häfele, P.: Festigkeitslehre. Springer-Verlag 2005 Knaebel, M.; Jäger, H., Mastel, R.: Technische Schwingungslehre. Springer Vieweg Verlag, 9. Auflage 2016 Assmann, B., Selke, P.: Technische Mechanik in 3 Bänden. Oldenbourg Wissenschaftsverlag 2009 bis 2013 Balke, H.: Einführung in die Technische Mechanik, 3 Bände. Springer-Verlag 2010 bis 2014 Gross, D., Hauger, W. u.a.: Technische Mechanik, 4 Bände. Springer Vieweg Verlag 2012 bis 2016





























