Embed Size (px)
Citation preview
UNIVERSITÄT KASSEL
FB 15 MASCHINENBAU
DIPLOMARBEIT 1
STUDIUM: MECHATRONIK
Thema: Entwicklung und Konstruktion einer
mechatronischen Schuss- und Dribbel-
Vorrichtung für einen Fußball-Roboter
Angefertigt von:
Matrikelnummer:
Fachgebiet:
Erstprüfer:
Zweitprüfer:
Betreuer:
Zweitbetreuer:
Nils Kubitza
25211476
Institut für Maschinenelemente und Tribologie
Prof. Dr.-Ing. Adrian Rienäcker
Prof. Dr Kurt Geihs
Dipl.-Ing. Christian Skaley
M. Sc. Stephan Opfer

Eidesstattliche Erklärung
Hiermit versichere ich, dass diese Diplomarbeit „Entwicklung und Konstruktion einer
mechatronischen Schuss- und Dribbel-Vorrichtung für einen Fußball-Roboter“
selbstständig verfasst habe und keine anderen als die angegebenen Quellen und
Hilfsmittel benutzt habe, alle Ausführungen, die anderen Schriften wörtlich oder
sinngemäß entnommen wurden, kenntlich gemacht sind und die Arbeit in gleicher oder
ähnlicher Fassung noch nicht Bestandteil einer Studien- Prüfungsleistung war.
Ort, Datum:___________________ Unterschrift:_____________________
Kurzzusammenfassung:
Gegenstand dieser Diplomarbeit ist die Weiterentwicklung der mechanischen Schuss- und
Dribbel-Vorrichtung eines Robocup Middle-Size-League Fußball-Roboters (Feldspieler).
Dabei wird ein Konzept entwickelt und in eine Konstruktion umgesetzt. Bauraum und
Komponenten werden zu diesem Zweck angepasst. Erfahrungswerte von Turnieren und
Stand-der-Technik Analysen in dieser Liga bilden die Grundlage für die Aufgabe. Sowohl
kinematische Konzepte als auch eine Komponenten-Recherche bilden die
Gegenkomponente um die Möglichkeiten gegeneinander abzugleichen. Kräfte in einer
dynamischen Umgebung werden abgeschätzt und fließen in eine robuste und agile
Konstruktion ein. Die Konstruktion wird dabei so ausgelegt, dass sie den Anforderungen
des Maschinenbaus, als auch der informationstechnischen Weiterverarbeitung und der
elektronischen Integrierbarkeit gerecht wird.
Inhaltsverzeichnis
1 Einleitung.............................................................................................................................1
1.1 Vorwort.........................................................................................................................1
1.2 Motivation.....................................................................................................................2
1.3 Robocup.......................................................................................................................3
1.4 Middle Size Robot League..........................................................................................4
1.5 Carpe Noctem Cassel..................................................................................................6
2 Roboter ...............................................................................................................................7
2.1 Ist-Zustand...................................................................................................................7
2.2 Bauraum......................................................................................................................9
2.3 Elektrischer Schuss...................................................................................................11
2.4 Schuss-Kraft..............................................................................................................12
2.5 Schuss-Geschwindigkeit............................................................................................13
2.6 Schuss-Mechanismus................................................................................................14
2.7 Dribbel-Mechanismus................................................................................................15
2.8 Bewertung Ist-Zustand...............................................................................................17
3 Stand der Technik.............................................................................................................19
3.1 MSL-Roboter von Tech United..................................................................................20
3.2 MSL-Roboter von Cambada......................................................................................23
3.3 MSL-Roboter von NuBot............................................................................................25
3.4 Bewertung - Stand der Technik.................................................................................27
4 Lastenheft.........................................................................................................................29
5 Konzeptphase...................................................................................................................30
5.1 Vorbereitung des Bauraums......................................................................................30
5.2 Design Schuss-Spitze................................................................................................31
5.3 Schuss-Kinematik Entwurf 1......................................................................................32
5.4 Schuss-Kinematik Entwurf 2......................................................................................33
5.5 Schuss-Kinematik Entwurf 3......................................................................................34
5.6 Schuss-Kinematik Entwurf 4......................................................................................35
5.7 Schuss-Kinematik Entwurf 5......................................................................................37
5.8 Antriebseinheit Dribbel-Mechanismus.......................................................................38
5.9 Vormodellierung Dribbel-Mechanismus.....................................................................41
5.10 Bewertung der Konzepte.........................................................................................42
6 Kräfteberechnung..............................................................................................................43
6.1 Kräfte Schuss-Mechanismus.....................................................................................43
6.2 Kräfte Dribbel-Mechanismus.....................................................................................46
7 Design Schuss-Mechanismus...........................................................................................48
7.1 Anpassung auf Liga-Regeln......................................................................................48
7.2 Vollständiges Konzept Schuss-Mechanismus...........................................................49
7.3 Antrieb........................................................................................................................50
7.4 Bremse.......................................................................................................................51
7.5 Kugelgewindetrieb.....................................................................................................52
7.6 Zahnriemen................................................................................................................56
7.7 Sensor........................................................................................................................59
7.8 Limitierung des Schuss-Mechanismus......................................................................60
8 Design Dribbel-Mechanismus...........................................................................................61
8.1 Vollständiges Konzept Dribbel-Mechanismus...........................................................61
8.2 Antrieb........................................................................................................................63
8.3 Rad............................................................................................................................63
8.4 Zahnriemen................................................................................................................66
8.5 Dämpfer.....................................................................................................................67
8.6 Federn........................................................................................................................69
8.7 Sensor........................................................................................................................72
9 Bauraum............................................................................................................................74
10 Schlussteil.......................................................................................................................76
10.1 Zusammenfassung..................................................................................................76
10.2 Ausblick....................................................................................................................77
11 Literaturverzeichnis:........................................................................................................78
Abbildungsverzeichnis
Abbildung 1.3.1: Robocup – Logo [Quelle: Robocup.org].....................................................3
Abbildung 1.4.1: Zulässige Ballfixierung [Quelle: [2] ]...........................................................4
Abbildung 1.4.2: Robocup WM 2013.....................................................................................5
Abbildung 1.5.1: Carpe Noctem Logo [Quelle: das-lab.net] .................................................6
Abbildung 2.1.1: CN Roboter komplett..................................................................................7
Abbildung 2.1.2: CN Roboter Front........................................................................................8
Abbildung 2.2.1: CN Roboter Bauraum Übersicht.................................................................9
Abbildung 2.2.2: CN Roboter Bauraum komplett................................................................10
Abbildung 2.3.1: Mechanismus Spule [Quelle: [3] ].............................................................11
Abbildung 2.4.1: Schuss-Kraft-Kurve [Quelle: [3] ]..............................................................12
Abbildung 2.6.1: CN Roboter Schuss-Mechanismus..........................................................14
Abbildung 2.7.1: CN Roboter Dribbel-Mechanismus...........................................................15
Abbildung 2.7.2: CN Roboter Übersicht Dribbel-Mechanismus..........................................16
Abbildung 3.1.1: Tech United Roboter komplett [Quelle: [4] ]..............................................20
Abbildung 3.1.2: Tech United Dribbel-Mechanismus [Quelle: [4] ]......................................21
Abbildung 3.1.3: Tech United Schuss-Mechanismus [Quelle [4] ].......................................22
Abbildung 3.2.1: Cambada Roboter komplett [Quelle: [5] ].................................................23
Abbildung 3.2.2: Cambada Roboter Schuss Mechanismus [Quelle: [5] ]...........................24
Abbildung 3.2.3: Cambada Dribbel-Mechanismus [Quelle: [5] ]..........................................24
Abbildung 3.3.1: NuBot Roboter komplett [Quelle: [6] ].......................................................25
Abbildung 3.3.2: NuBot Schuss-Mechanismus [Quelle: [6] ]...............................................26
Abbildung 3.3.3: NuBot Dribbel-Mechanismus [Quelle: [6] ]...............................................26
Abbildung 3.4.1: Gegenüberstellung Anordnung Dribbel-Räder.........................................28
Abbildung 3.4.2: Designvarianten Ballannahme..................................................................28
Abbildung 5.1.1: Vorbereitung Bauraum Grundplatte..........................................................30
Abbildung 5.1.2: Vorbereitung Bauraum Queransicht.........................................................31
Abbildung 5.1.3: Vorbereitung Bauraum Seitenansicht.......................................................31
Abbildung 5.3.1: Kinematik Entwurf 1 flach.........................................................................32
Abbildung 5.3.2: Kinematik Entwurf 1 hoch.........................................................................32
Abbildung 5.4.1: Kinematik Entwurf 2 hoch.........................................................................33
Abbildung 5.4.2: Kinematik Entwurf 2 flach.........................................................................33
Abbildung 5.5.1: Kinematik Entwurf 3 schräg-flach.............................................................34
Abbildung 5.5.2: Kinematik Entwurf 4 schräg-hoch.............................................................34
Abbildung 5.6.1: Kinematik Entwurf 4 schräg-flach.............................................................35
Abbildung 5.6.2: Kinematik Entwurf 4 schräg-hoch.............................................................35
Abbildung 5.6.3: Kinematik Entwurf 4 Detaillierung.............................................................36
Abbildung 5.7.1: Kinematik Entwurf 5 schräg-flach.............................................................37
Abbildung 5.7.2: Kinematik Entwurf 5 schräg-hoch.............................................................37
Abbildung 5.8.1: Maxon EC 45 flat 70 Watt [Quelle: maxonmotor.com].............................38
Abbildung 5.8.2: Maxon EC 32 flat 15 Watt [Quelle: maxonmotor.com]........................38
Abbildung 5.8.3: Maxon GP 42 C [Quelle: maxonmotor.com].............................................39
Abbildung 5.8.4: Maxon GP 32 C [Quelle: maxonmotor.com].............................................39
Abbildung 5.9.1: Vormodellierung Dribbel-Mechanismus....................................................41
Abbildung 6.1.1: Kräfte Spule..............................................................................................43
Abbildung 6.1.2: Kräfte Spule X-Richtung...........................................................................44
Abbildung 6.1.3: Kräfte Spule Z-Richtung...........................................................................45
Abbildung 6.2.1: Kraft-System Dribbel-Mechanismus.........................................................46
Abbildung 7.1.1: Designvarianten........................................................................................48
Abbildung 7.2.1: Komponenten Schuss-Mechanismus.......................................................49
Abbildung 7.3.1: Maxon GP 32 C [Quelle: maxonmotor.com].............................................50
Abbildung 7.3.2: Maxon RE 25 [Quelle: maxonmotor.com].................................................50
Abbildung 7.4.1: Bremse Maxon AB 28 [Quelle: maxonmotor.com]....................................51
Abbildung 7.5.1: Linear-Antrieb .........................................................................................53
Abbildung 7.5.2: Beispieldarstellung Flanschmutter [Quelle: maedler.de].........................53
Abbildung 7.5.3: Linearkugellager KB-ISO Serie 3 [Quelle: maedler.de]............................53
Abbildung 7.5.4: Kenndaten für SBN Miniaturkugellager [Quelle: sbn.de]..........................54
Abbildung 7.5.5: Kenndaten für SBN Miniatur-Schrägkugellagerpaar [Quelle: sbn.de]......54
Abbildung 7.5.6: Lagerung der Spindel...............................................................................55
Abbildung 7.6.1: Beispieldarstellung Spannsatz BAR [Quelle: maedler.de].......................56
Abbildung 7.6.2: Zahnriemenrad [Quelle: maedler.de]......................................................56
Abbildung 7.6.3: Feder zur Riemen-Vorspannung [Quelle: febcrotec.de]...........................57
Abbildung 7.6.4: Vorgespannter Riemen.............................................................................58
Abbildung 7.7.1: Sensor LFP [Quelle: novotechnik.de].......................................................59
Abbildung 7.7.2: Sensorposition des Linear-Antriebs..........................................................59
Abbildung 7.8.1: Limitierung Schuss-Mechanismus............................................................60
Abbildung 8.1.1: Komponenten Dribbel-Mechanismus Seitenansicht.................................61
Abbildung 8.1.2: Komponenten Dribbel-Mechanismus Draufsicht......................................62
Abbildung 8.3.1: Modellbaurad „Reely Straßenmodell Slick breit“ [Quelle: conrad.de]......63
Abbildung 8.3.2: SKF doppelreihiges Schrägkugellager [Quelle: skf.com].........................63
Abbildung 8.3.3: Schnitt Lagerung Dribbelrad.....................................................................64
Abbildung 8.3.4: Kenndaten Lager SKF 3200-A-2RS1TN9-MT33.....................................64
Abbildung 8.3.5: Auflagerreaktion Dribbelrad......................................................................65
Abbildung 8.4.1: Dribbel Riemenmontage...........................................................................66
Abbildung 8.5.1: Kleinstossdämpfer [Quelle: maedler.de]...................................................67
Abbildung 8.6.1: Federblock Feder......................................................................................69
Abbildung 8.6.2: Feder Dribbelarm Rückstellfeder [Quelle: febrotec.de]............................70
Abbildung 8.6.3: Feder Dribbelarmspanner [Quelle: febrotec.de].......................................71
Abbildung 8.7.1: Sensor Megatron ENA 22 [Quelle: megatron.de].....................................72
Abbildung 8.7.2: Sensor Novotechnik TX2 [Quelle: novotechnik.de]..................................73
Abbildung 9.1: Bauraum Vorderansicht...............................................................................74
Abbildung 9.2: Bauraum Hinteransicht................................................................................75
Abbildung 10.1.1: Roboter hat den Ball...............................................................................76
Abbildung 10.2.1: Roboter hat nicht den Ball......................................................................77
1 Einleitung 1
1 Einleitung
1.1 Vorwort
Diese Arbeit bildet einen Entwicklungsprozess einer mechatronischen Vorrichtung ab.
Dabei werden verschiedene Abwägungen getroffen und Gedankengänge abgebildet. Der
Prozess gliedert sich in eine ergebnisoffene Konzeptphase und eine zielgerichtete
Konstruktionsphase. Ziel ist es die bestmögliche Konstruktion mit effizienten schnellen
Entscheidungen anzustreben und die Möglichkeiten umfangreich zu erfassen.
1 Einleitung 2
1.2 Motivation
Durch mein langjähriges Engagement im Team von Carpe Noctem war es die logische
Konsequenz, mit dieser Arbeit einen Beitrag für das Team zu leisten. Das Team hat mir
geholfen mich in meiner Vertiefung der robotisch/mechatronischen Konstruktion erstmals
zu orientieren. Die offene Team-Struktur lud immer wieder zu spannendem Austausch und
interdisziplinärer Arbeit ein. Die fordernden Aufgaben im Team und die internationalen
Roboter-Turniere bedingten eine vertiefte Grundlagen-Studie und praxisnahes Arbeiten.
Ich halte das Team für eine sehr wertvolle Einrichtung in der studentischen selbst
orientierten Lehre.
Fachlich bedient diese Arbeit die immer komplexer werdende Konstruktion, die in dem hier
vorliegenden Umfang die Gebiete des Maschinenbaus, der Mess- und Regelungstechnik,
der Informationstechnik und der Elektrotechnik berücksichtigt. Robotische Helfer werden
zunehmend mehr von Bedeutung für die Welt von morgen und eine entsprechend
angepasster Konstruktions-Stil wird tragend für einen Spezial-Roboterbau der den
geforderten Aufgaben gerecht wird.
Diese Arbeit soll die Forschung des Fachbereichs Verteilte Systeme voran bringen,
insbesondere die Software-Komponenten des Fußball-Roboter-Teams sind auf eine agile
und stabile Mechanik der Roboter angewiesen, um das volle Potential der über lange
Jahre entwickelten Software zu entfalten.
Hervorzuheben ist die am Fachgebiet entwickelte Software-Komponente ALICA (A
Language for Interactive Cooperative Agents). ALICA ist eine Spezial-Programmiersprache
welche es ermöglicht Roboter-Teams in ihrem Verhalten strategisch zu organisieren und
auf ein sich dynamisch wechselndes Umfeld zu reagieren.
Multi-Agenten Software ist zukunftsweisend und wird schon bald in industriellen
Anwendungen eine neue Aufgabe finden. Fußball-Roboter sind eine ideale
Entwicklungsplattform, um so eine Software auf einen Reifestand zu bringen und einen
Technologie-Transfer in andere Anwendungsbereiche zu ermöglichen.
Anwendungsfelder in der Agrar-Robotik, der zivilen Dronen-Technik, der logistischen
Robotik oder der autonomen Mobilität sind denkbare Beispiele.
1 Einleitung 3
1.3 Robocup
Die Idee Roboter Fußball spielen zu lassen wurde erstmals 1992 von Professor Alan
Mackworth (University of British Columbia, Canada) in einem Papier mit dem Namen „On
Seeing Robots“ erwähnt. Im Oktober 1992 diskutierten Wissenschaftler auf einem
Workshop in Tokyo über die möglichen großen Herausforderungen von künstlicher
Intelligenz und es entstand eine ernsthafte Diskussion über die Möglichkeit Fußball als
Förderplattform von Wissenschaft und Technologie zu erwägen. Eine Initiative wurde ins
Leben gerufen und eine technologische Machbarkeitsstudie, eine Beurteilung über soziale
Auswirkungen und eine finanzielle Machbarkeitsstudie in Auftrag gegeben. Die Ergebnisse
dieser Studie zeigten, dass die Idee umsetzbar ist und so wurde im Juni 1993 eine
Veranstaltung namens „Robot J-League“ von japanischen Wissenschaftlern ins Leben
gerufen. Die internationale Resonanz war überwältigend und so nannten sie das Projekt
von nun an „Robot World Cup“, kurz: „RoboCup“. Nach einigen Jahren der Vorbereitung
wurden die ersten offizielle Robocup Spiele mit Konferenz 1997 veranstaltet, mit dabei
waren über 40 Teams und 5000 Zuschauer. [1]
Seitdem wird jährlich die Weltmeisterschaft im Robocup in wechselnden Nationen
veranstaltet. Hinzu kommen nationale Robocup Events wie z.B. die German Open, Dutch
Open, Portugese Open, China Open oder Iran Open. Der Robocup beherbergt die
verschiedensten Liegen. Die größte Sparte sind die Fußball-Roboter mit den Unterligen:
Humanoid, Simulation, Middle Size und Standard Platform. Hinzu kommen die Ligen der
Robocup @Home, Robocup Rescue, Robocup Junior und diverse andere in der
Sponsored League.
Abbildung 1.3.1: Robocup – Logo [Quelle: Robocup.org]
1 Einleitung 4
1.4 Middle Size Robot League
In der Robocup Middle-Size Liga spielen Roboter-Teams mit einem Fußball der FIFA
völlig autonom Fußball gegeneinander. Die nachfolgend beschriebenen Regelungen
beziehen sich auf die Spielregeln aus dem Jahr 2015 und sind entwicklungsrelevant für
diese Diplomarbeit. Die vollständigen Regeln sind den aktuellen „Middle Size Robot
League Rules and Regulations“ des aktuellen Jahrgangs zu entnehmen (siehe: URL:
http://wiki.robocup.org/wiki/Middle_Size_League). Die nachfolgende Beschreibung soll nur
einen ersten Eindruck des Spiels vermitteln.
Jedes Team besteht aus 5 Spielen, darunter jeweils 4 Feldspieler und ein Torwart. Das
Spielfeld ist 18 Meter lang und 12 Meter breit. Die Tore sind ein Meter hoch und 2 Meter
breit. Die Roboter sind auf einen Konstruktionsbauraum von mindestens 30 x 30 cm und
höchstens 52 x 52 cm im Grundriss und 80cm in der Höhe limitiert. Der Torwart darf für
eine Sekunde seine Grundfläche auf 60 x 60 cm und seine Höhe auf 90 cm vergrößern,
diese Regelung ist dafür ausgelegt um Torschüsse mit mechanischen Aktuatoren zu
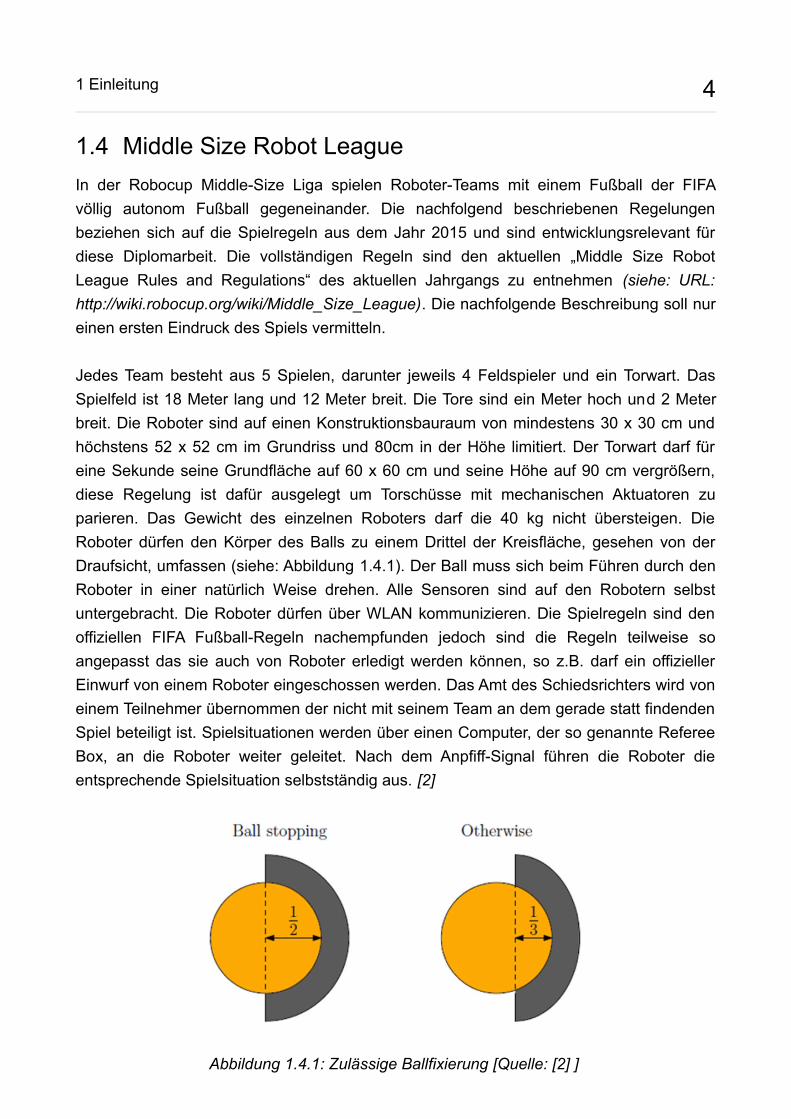
parieren. Das Gewicht des einzelnen Roboters darf die 40 kg nicht übersteigen. Die
Roboter dürfen den Körper des Balls zu einem Drittel der Kreisfläche, gesehen von der
Draufsicht, umfassen (siehe: Abbildung 1.4.1). Der Ball muss sich beim Führen durch den
Roboter in einer natürlich Weise drehen. Alle Sensoren sind auf den Robotern selbst
untergebracht. Die Roboter dürfen über WLAN kommunizieren. Die Spielregeln sind den
offiziellen FIFA Fußball-Regeln nachempfunden jedoch sind die Regeln teilweise so
angepasst das sie auch von Roboter erledigt werden können, so z.B. darf ein offizieller
Einwurf von einem Roboter eingeschossen werden. Das Amt des Schiedsrichters wird von
einem Teilnehmer übernommen der nicht mit seinem Team an dem gerade statt findenden
Spiel beteiligt ist. Spielsituationen werden über einen Computer, der so genannte Referee
Box, an die Roboter weiter geleitet. Nach dem Anpfiff-Signal führen die Roboter die
entsprechende Spielsituation selbstständig aus. [2]
Abbildung 1.4.1: Zulässige Ballfixierung [Quelle: [2] ]

1 Einleitung 5
Die Middle-Size Liga hat sich zu einer sehr dynamische Liga entwickelt. Die Roboter
fahren mit Geschwindigkeiten von bis zu 4 m/s und können teilweise den Ball mit über 7
m/s schießen. Die meisten Teams entwerfen und konstruieren ihre Roboter selbst.
Mittlerweile gibt es MSL-Roboter, die frei erwerblich sind, wie z.B. den Turtle-5K, der vom
Team Tech Unied der TU Eindhoven entwickelt wurde (siehe: URL: www.turtle5k.org). Die
Programmierung wird von jedem Team selbst vorgenommen.
Die Liga verschärft von Jahr zu Jahr ihre Regeln, um das Spiel anspruchsvoll zu gestalten
und die Teams immer wieder vor neue Herausforderungen zu stellen. In der aktuellen
Regelung dürfen Roboter nachdem sie den Ball aufgenommen haben in einem Radius von
zwei Metern dribbeln und maximal ein Meter Rückwärts dribbeln. Torschüsse zählen nur
wenn sich der Roboter bereits in der gegnerischen Spielhälfte befindet. Diese Umstände
erfordern ein agiles und stabiles Dribbeln der Roboter. Präzise Pässe der Roboter auf ihre
Roboter- Mitspieler werden zunehmend spielentscheidend. Ebenso ist ein ausgeklügeltes
und taktisches Verhalten der Roboter-Teams, welches sich automatisch an die bestehende
Spielsituation anpasst, ausschlaggebend. Der Anspruch an die Künstliche Intelligenz ist in
dieser Liga sehr hoch und entsprechend hoch sind auch die Anforderungen an die
mechanischen Komponenten, die entsprechend die Anweisungen der Software umsetzen
müssen.
Abbildung 1.4.2: Robocup WM 2013
1 Einleitung 6
Die Middle-Size Liga bietet durch seine unvorhersehbaren und dynamisch wechselnden
Spielsituation ein umfangreiches Testfeld für Multi-Agenten Software. Dazu kommen eine
Fülle von Einflussfaktoren und robotische Disziplinen wie z.B. die Kommunikation der
Roboter, Kamera-Technik und Sensorik, ein hoher Anspruch an die Software-Stabilität, ein
real physikalisches Umfeld sowie eine komplexe Elektronik und Mechanik.
1.5 Carpe Noctem Cassel
Das Robocup Middle-Size Fußball-Roboter-Team „Carpe Noctem Cassel“ wurde im Jahr
2005 von einer studentischen Initiative zusammen mit dem Fachgebiet Verteile Systeme
an der Universität Kassel ins Leben gerufen. Das Team ist seit dem Jahr 2006 regelmäßig
auf international ausgetragenen Turnieren des RoboCup vertreten und misst sich mit den
besten Teams in seiner Liga. Das Team zeichnet sich durch eine offene Struktur aus, in
der Studierende niedriger und hoher Semester als auch wissenschaftliche Mitarbeiter eng
zusammen arbeiten. Eigenverantwortung und eine hohe Motivation sind Resultate dieser
Konstellation, die sich immer wieder von selbst einstellen. Sowohl die internationalen
Turniere und der Zustrom neuer Team-Mitglieder geben hierfür neue Impulse. Hervor zu
heben ist ebenfalls der Wissenstransfer zwischen den Team-Mitgliedern und das sehr
praktisch orientierte wissenschaftliche Arbeiten an einem komplexen Roboter-System.
Eigeninitiative wird begünstigt und der schnelle Kontakt zu forschungsrelevanten Themen
hergestellt. Ebenso ist der interdisziplinäre Austausch zwischen den Bereichen des
Maschinenbau, Mechatronik, Informatik und Elektrotechnik Kern der robotischen
Entwicklung.
Abbildung 1.5.1: Carpe Noctem Logo
[Quelle: das-lab.net]

2 Roboter 7
2 Roboter In diesem Kapitel wird der aktuelle Aufbau des Roboters beschrieben. Insbesondere wird
der Aufbau und die Funktion des Schuss- und Dribbel-Mechanismus beschrieben. Der
Aufbau des Bauraums wird dargestellt und zum Ende des Kapitels wird der Ist-Zustand
insgesamt bewertet.
2.1 Ist-Zustand
Die Abbildung 2.1.1 zeigt den aktuellen Roboter im kompletten Design. Der Roboter
verfügt über eine Umrandung aus einem Kohlefaser-Verbundstoff und eines 1cm dicken
Gummistreifens um Stöße bei Kollisionen aufzunehmen.
Der Roboter hat einen omnidirektionalen Antrieb. Durch eine spezielle Anordnung der
Räder (siehe Abbildung 2.2.1, S. 9) und den Einsatz von sogenannten Omni-Rädern
(Allseitenrädern) wird ein Fahrverhalten ermöglicht, das es dem Roboter erlaubt, sich in
eine beliebige Himmelsrichtung zu bewegen. Bei diesen Manövern sind auch gleichzeitige
Drehungen und Kurvenfahrten möglich, ebenfalls ist der Roboter in der Lage sich auf der
Stelle um 360° drehen.
Abbildung 2.1.1: CN Roboter komplett
2 Roboter 8
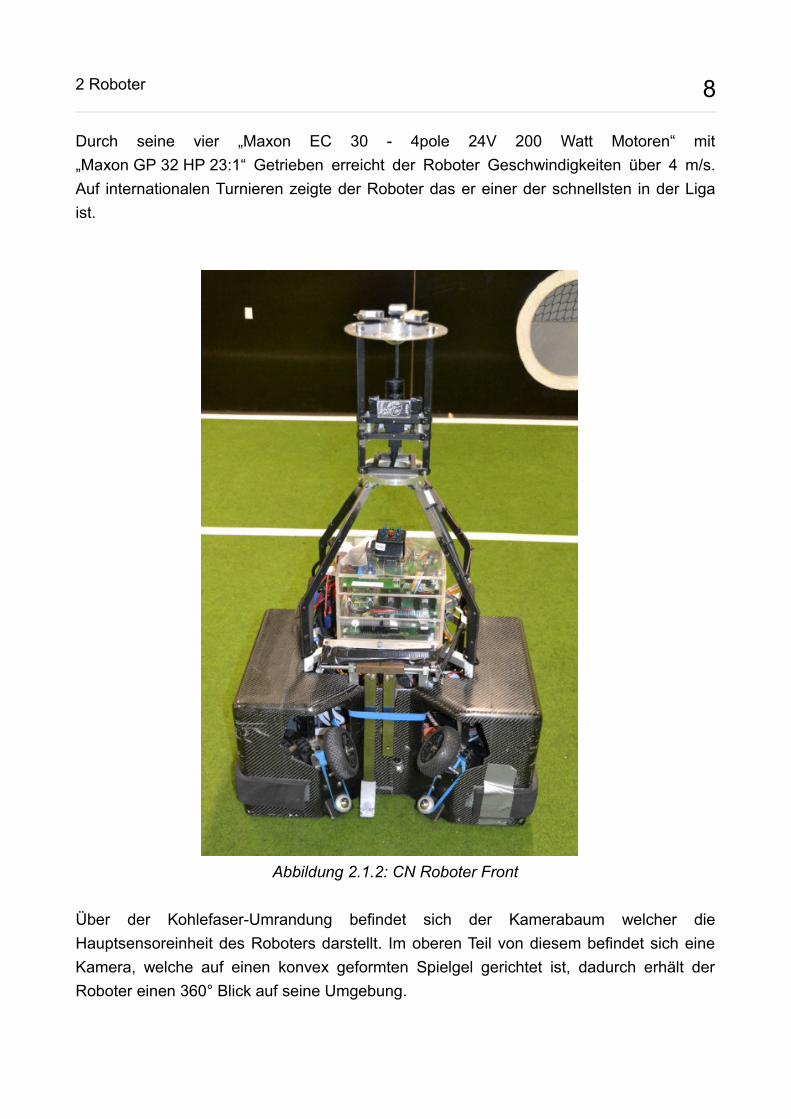
Durch seine vier „Maxon EC 30 - 4pole 24V 200 Watt Motoren“ mit
„Maxon GP 32 HP 23:1“ Getrieben erreicht der Roboter Geschwindigkeiten über 4 m/s.
Auf internationalen Turnieren zeigte der Roboter das er einer der schnellsten in der Liga
ist.
Über der Kohlefaser-Umrandung befindet sich der Kamerabaum welcher die
Hauptsensoreinheit des Roboters darstellt. Im oberen Teil von diesem befindet sich eine
Kamera, welche auf einen konvex geformten Spielgel gerichtet ist, dadurch erhält der
Roboter einen 360° Blick auf seine Umgebung.
Abbildung 2.1.2: CN Roboter Front
2 Roboter 9
2.2 Bauraum
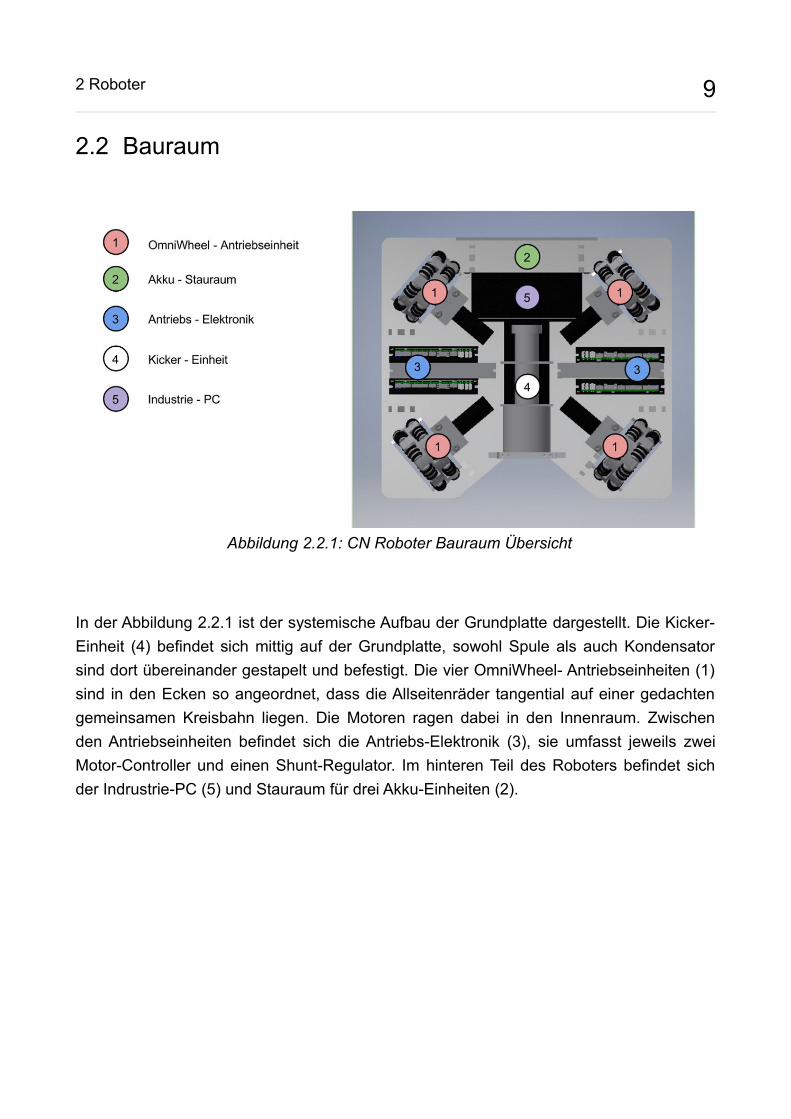
In der Abbildung 2.2.1 ist der systemische Aufbau der Grundplatte dargestellt. Die Kicker-
Einheit (4) befindet sich mittig auf der Grundplatte, sowohl Spule als auch Kondensator
sind dort übereinander gestapelt und befestigt. Die vier OmniWheel- Antriebseinheiten (1)
sind in den Ecken so angeordnet, dass die Allseitenräder tangential auf einer gedachten
gemeinsamen Kreisbahn liegen. Die Motoren ragen dabei in den Innenraum. Zwischen
den Antriebseinheiten befindet sich die Antriebs-Elektronik (3), sie umfasst jeweils zwei
Motor-Controller und einen Shunt-Regulator. Im hinteren Teil des Roboters befindet sich
der Indrustrie-PC (5) und Stauraum für drei Akku-Einheiten (2).
Abbildung 2.2.1: CN Roboter Bauraum Übersicht
2 Roboter 10
In der Abbildung 2.2.2 ist der gesamte Aufbau ohne Gehäuse zu sehen. Im unteren Teil
des Kamerabaums befindet zusätzlicher Bauraum in dem weitere Elektronik-Komponenten
untergebracht sind. Die Elektronik-Komponenten-Box ist durch eine Verstrebung am
Kamera-Baum befestigt.
Abbildung 2.2.2: CN Roboter Bauraum
komplett
2 Roboter 11
2.3 Elektrischer Schuss
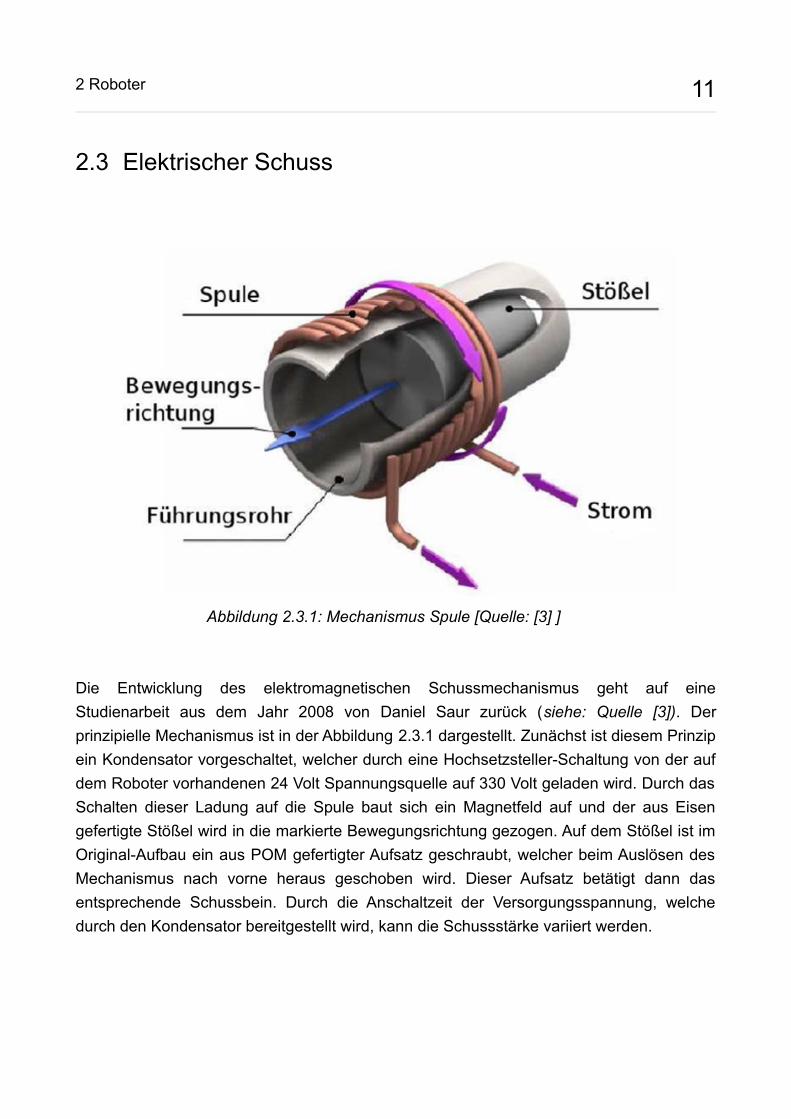
Die Entwicklung des elektromagnetischen Schussmechanismus geht auf eine
Studienarbeit aus dem Jahr 2008 von Daniel Saur zurück (siehe: Quelle [3]). Der
prinzipielle Mechanismus ist in der Abbildung 2.3.1 dargestellt. Zunächst ist diesem Prinzip
ein Kondensator vorgeschaltet, welcher durch eine Hochsetzsteller-Schaltung von der auf
dem Roboter vorhandenen 24 Volt Spannungsquelle auf 330 Volt geladen wird. Durch das
Schalten dieser Ladung auf die Spule baut sich ein Magnetfeld auf und der aus Eisen
gefertigte Stößel wird in die markierte Bewegungsrichtung gezogen. Auf dem Stößel ist im
Original-Aufbau ein aus POM gefertigter Aufsatz geschraubt, welcher beim Auslösen des
Mechanismus nach vorne heraus geschoben wird. Dieser Aufsatz betätigt dann das
entsprechende Schussbein. Durch die Anschaltzeit der Versorgungsspannung, welche
durch den Kondensator bereitgestellt wird, kann die Schussstärke variiert werden.
Abbildung 2.3.1: Mechanismus Spule [Quelle: [3] ]
2 Roboter 12
2.4 Schuss-Kraft
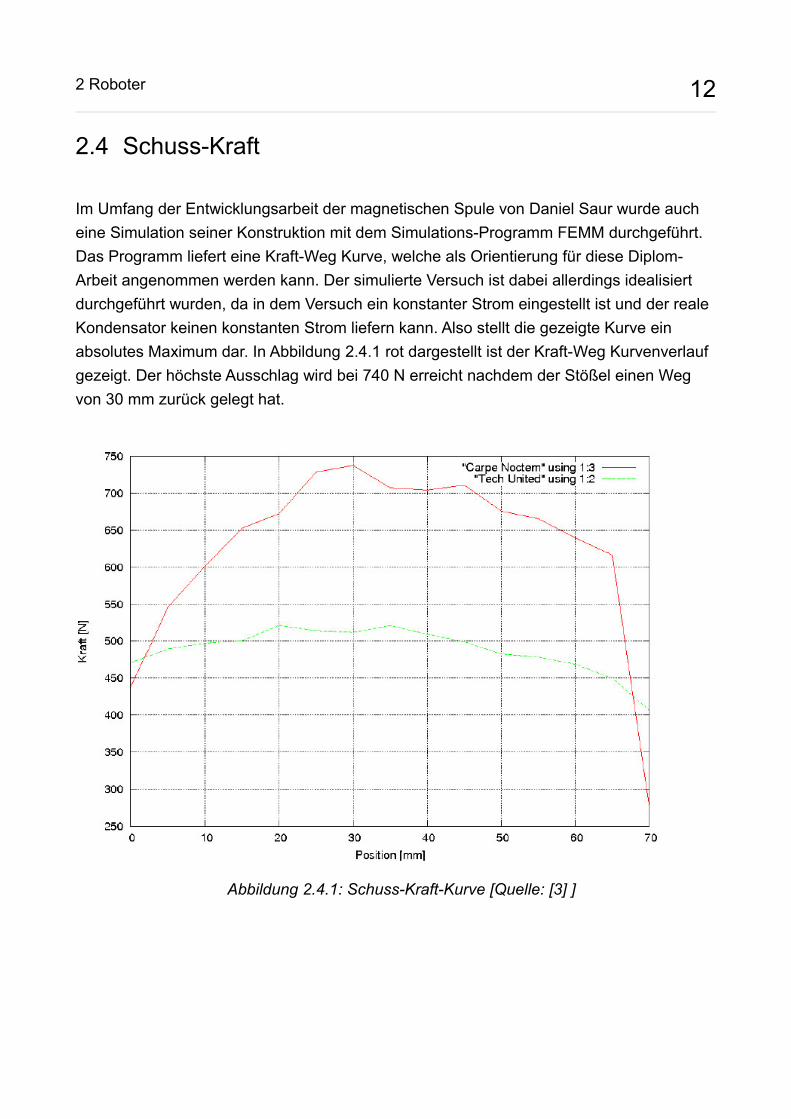
Im Umfang der Entwicklungsarbeit der magnetischen Spule von Daniel Saur wurde auch
eine Simulation seiner Konstruktion mit dem Simulations-Programm FEMM durchgeführt.
Das Programm liefert eine Kraft-Weg Kurve, welche als Orientierung für diese Diplom-
Arbeit angenommen werden kann. Der simulierte Versuch ist dabei allerdings idealisiert
durchgeführt wurden, da in dem Versuch ein konstanter Strom eingestellt ist und der reale
Kondensator keinen konstanten Strom liefern kann. Also stellt die gezeigte Kurve ein
absolutes Maximum dar. In Abbildung 2.4.1 rot dargestellt ist der Kraft-Weg Kurvenverlauf
gezeigt. Der höchste Ausschlag wird bei 740 N erreicht nachdem der Stößel einen Weg
von 30 mm zurück gelegt hat.
Abbildung 2.4.1: Schuss-Kraft-Kurve [Quelle: [3] ]
2 Roboter 13
2.5 Schuss-Geschwindigkeit
Um die maximale Schuss-Geschwindigkeit des Balls zu ermitteln, wurde ein Experiment
mit einem aktuellen Roboter-Modell durchgeführt. Dabei wurde im Versuchsaufbau die
Freeware Audio-Software Audacity (siehe: URL: http://audacityteam.org/) verwendet, um
eine Audio-Spur aufzunehmen. Der Roboter wurde im Abstand von 4,5 Metern vor eine
Schusswand gestellt. Ein Ball wurde mit voller Kraft geschossen und schlug gegen die
Wand. Mit dem Audioprogramm konnten die beiden Geräuschspitzen beim Abschuss und
beim Einschlagen identifiziert werden und auf der Zeitleiste auf die 100stel Sekunde
genau abgelesen werden. Bei 4 Messversuchen ergaben sich folgende Messzeiten:
Versuch 1: Δ t1=0,58 s
Versuch 2: Δ t2=0,58 s
Versuch 3: Δ t3=0,615 s
Versuch 4: Δ t 4=0,685 s
Bestimmung des Mittelwerts:
Δ t ges=Δ t1+Δ t 2+Δ t3+Δ t 4
4=0,58 s+0,58 s+0,615 s+0,685 s
4=0,608 s≈0,6 s (Gl. 2.5.1)
Bestimmung der resultierenden maximalen Schuss-Geschwindigkeit:
v Ball=s
Δ t ges=4,5m
0,6 s=7,5
m
s(Gl. 2.5.2)
2 Roboter 14
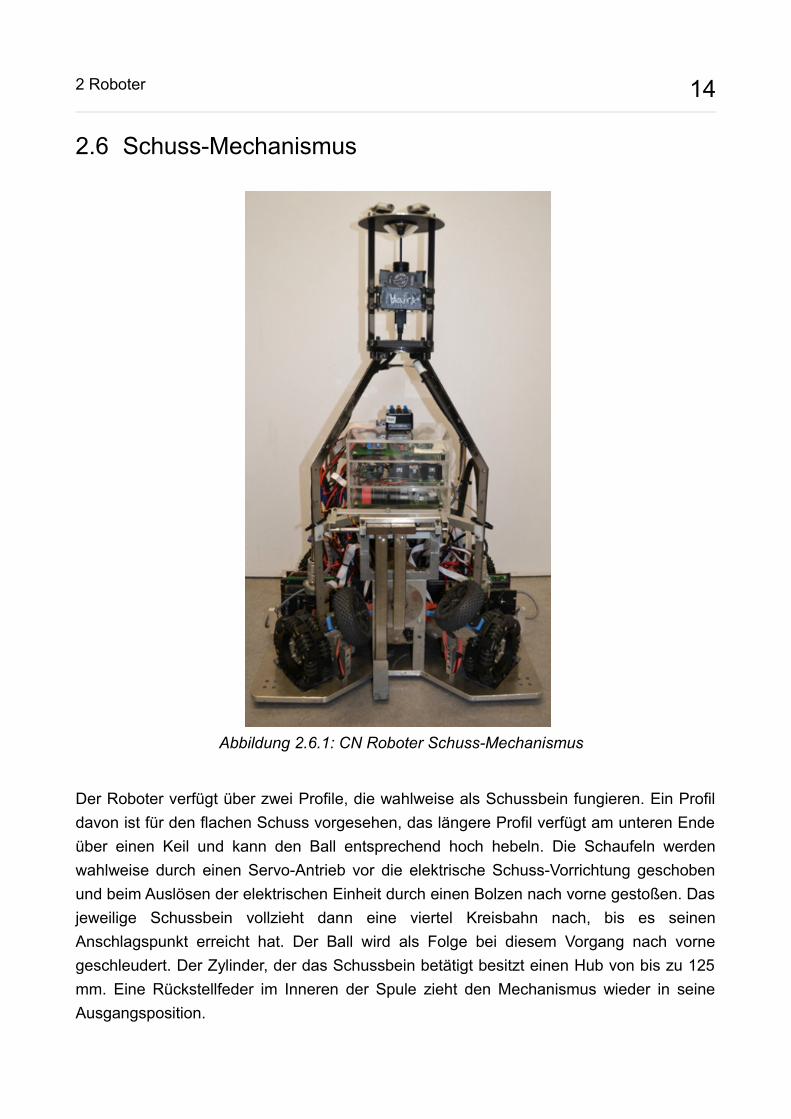
2.6 Schuss-Mechanismus
Der Roboter verfügt über zwei Profile, die wahlweise als Schussbein fungieren. Ein Profil
davon ist für den flachen Schuss vorgesehen, das längere Profil verfügt am unteren Ende
über einen Keil und kann den Ball entsprechend hoch hebeln. Die Schaufeln werden
wahlweise durch einen Servo-Antrieb vor die elektrische Schuss-Vorrichtung geschoben
und beim Auslösen der elektrischen Einheit durch einen Bolzen nach vorne gestoßen. Das
jeweilige Schussbein vollzieht dann eine viertel Kreisbahn nach, bis es seinen
Anschlagspunkt erreicht hat. Der Ball wird als Folge bei diesem Vorgang nach vorne
geschleudert. Der Zylinder, der das Schussbein betätigt besitzt einen Hub von bis zu 125
mm. Eine Rückstellfeder im Inneren der Spule zieht den Mechanismus wieder in seine
Ausgangsposition.
Abbildung 2.6.1: CN Roboter Schuss-Mechanismus
2 Roboter 15
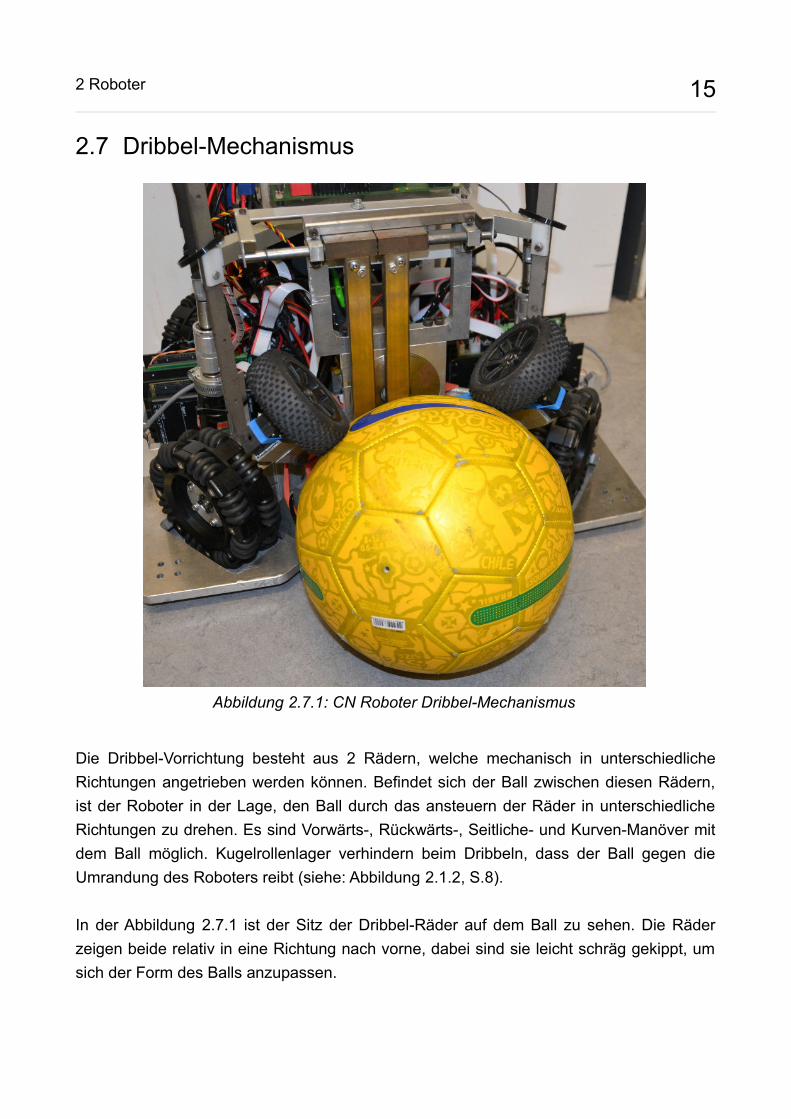
2.7 Dribbel-Mechanismus
Die Dribbel-Vorrichtung besteht aus 2 Rädern, welche mechanisch in unterschiedliche
Richtungen angetrieben werden können. Befindet sich der Ball zwischen diesen Rädern,
ist der Roboter in der Lage, den Ball durch das ansteuern der Räder in unterschiedliche
Richtungen zu drehen. Es sind Vorwärts-, Rückwärts-, Seitliche- und Kurven-Manöver mit
dem Ball möglich. Kugelrollenlager verhindern beim Dribbeln, dass der Ball gegen die
Umrandung des Roboters reibt (siehe: Abbildung 2.1.2, S.8).
In der Abbildung 2.7.1 ist der Sitz der Dribbel-Räder auf dem Ball zu sehen. Die Räder
zeigen beide relativ in eine Richtung nach vorne, dabei sind sie leicht schräg gekippt, um
sich der Form des Balls anzupassen.
Abbildung 2.7.1: CN Roboter Dribbel-Mechanismus
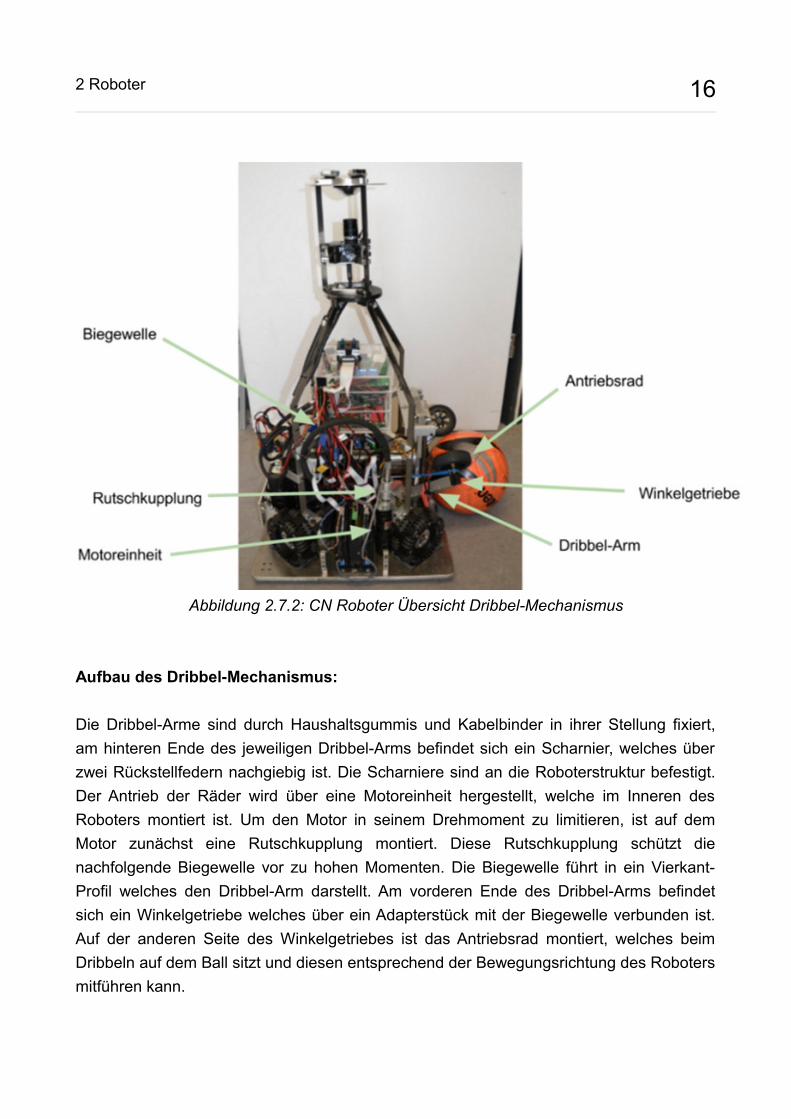
2 Roboter 16
Aufbau des Dribbel-Mechanismus:
Die Dribbel-Arme sind durch Haushaltsgummis und Kabelbinder in ihrer Stellung fixiert,
am hinteren Ende des jeweiligen Dribbel-Arms befindet sich ein Scharnier, welches über
zwei Rückstellfedern nachgiebig ist. Die Scharniere sind an die Roboterstruktur befestigt.
Der Antrieb der Räder wird über eine Motoreinheit hergestellt, welche im Inneren des
Roboters montiert ist. Um den Motor in seinem Drehmoment zu limitieren, ist auf dem
Motor zunächst eine Rutschkupplung montiert. Diese Rutschkupplung schützt die
nachfolgende Biegewelle vor zu hohen Momenten. Die Biegewelle führt in ein Vierkant-
Profil welches den Dribbel-Arm darstellt. Am vorderen Ende des Dribbel-Arms befindet
sich ein Winkelgetriebe welches über ein Adapterstück mit der Biegewelle verbunden ist.
Auf der anderen Seite des Winkelgetriebes ist das Antriebsrad montiert, welches beim
Dribbeln auf dem Ball sitzt und diesen entsprechend der Bewegungsrichtung des Roboters
mitführen kann.
Abbildung 2.7.2: CN Roboter Übersicht Dribbel-Mechanismus
2 Roboter 17
2.8 Bewertung Ist-Zustand
Bauraum
Negativ:: Der Bauraum lässt bei der derzeitigen Anordnung der Komponenten nur wenig
Raum für Veränderungen. Der Schuss-Mechanismus ist bis an die Roboter-Front gerückt
und Industrie-PC und Akkus reihen sich direkt dahinter auf bis zur Rückseite. Die Antriebs-
Elektronik ragt durch die flache Montage weit in den Innenraum bis zum Schuss-
Mechanismus und nutzt nicht den Raum bis oberhalb der Kohlefaser-Umrandung aus. Die
Elektronik-Komponenten-Box im Kamera-Baum ist übergroß dimensioniert und lässt
durch die halbhohe Montage wenig Platz.
Schuss-Mechanismus
Negativ: Die Aufhängung der Schuss-Beine weißt Verschleiß-Erscheinungen auf und sorgt
dafür, dass die Schuss-Beine wackeln und somit keinen garantiert geraden Schuss mehr
ausführen können. Besonders der Bereich, in dem das Schussprofil mit Schrauben und
Muttern an der Aufhängung befestigt neigt dazu sich zu lösen. Das Schussverhalten ist
von dem Dribbel-Mechanismus abhängig, welcher dafür zuständig ist den Ball zentrisch
vor den Schuss-Mechanismus zu platzieren. Die beiden Schuss-Beine limitieren den
Roboter auf zwei mögliche Abschusswinkel. Lediglich die einstellbare Schusskraft geben
noch Variationsmöglichkeit in der Schussweite.
Positiv: Die Schaufelauswahl ist eine einfache Lösung, welche im gut konstruierten
Zustand gute Schuss-Ergebnisse liefern kann.
2 Roboter 18
Dribbel-Mechanismus
Negativ: Der aktuelle Dribbel-Mechanismus befindet sich in einem prototypischen Aufbau.
Dieser Aufbau kann keine konstanten Dribbel-Eigenschaften garantieren. Meist muss vor
jedem Spiel die Stellung der Dribbel-Arme per Hand nachjustiert werden. Der Dribbel-
Mechanismus kann nur bedingt den Ball zentrisch vor dem Schuss-Mechanismus
platzieren. Es gibt keine Sensorik um die Platzierung des Balls sicher zu erfassen.
Winkelgetriebe und Biegewelle sind für die herrschenden Momente unterdimensioniert
bzw. nicht geeignet. Im Turnierverlauf müssen diese Komponenten oft ersetzt werden. Die
Antriebseinheit des Mechanismus ist überdimensioniert und kann seine volle Leistung
nicht übertragen. Die Motoren waren ursprünglich für den Roboter-Fahrantrieb eines
befreundeten MSL-Teams aus Stuttgart ausgelegt.
Positiv: Die Nachgiebigkeit der Dribbel-Arme geben der Konstruktion eine gute Haltbarkeit.
Durch die gleichgerichtete Anordnung arbeiten die beiden Antriebsräder immer zusammen
und können eine hohe Kraft auf den Ball erzeugen. Auf Turnieren hat sich diese
Anordnungsvariante in Zwei-Kämpfen bewährt, wenn zwei Roboter gleichzeitig auf den
Ball gefahren sind und beide versuchten den Ball mit ihren Dribbel-Rädern zu sich zu
ziehen. Bei Kurvenfahrten dreht der Mechanismus den Ball um seine Z-Achse und kann
so den Ball gut am Roboter halten.
3 Stand der Technik 19
3 Stand der TechnikExemplarisch für den Stand der Technik werden 3 unterschiedliche Roboter-Modelle des
aktuellen Jahres 2015 betrachtet. Die Roboter der Teams Tech United (Niederlande),
Cambada (Portugal) und NuBot (China) befinden sich in einem weit entwickelten Aufbau
und werden nachfolgend beschrieben. Das erfolgreichste unter diesen drei Teams ist
Tech United. Sie geben seit Jahren den Maßstab in der Liga durch ihre sehr aufwendig
konstruierten Roboter vor. Andere erfolgreiche Teams wie z.B. Water (China) oder MRL
(Iran) orientieren sich stark an dem Roboter-Design aus Holland. Eine volle
Dokumentation des Roboters aus den Niederlanden ist im Internet zu finden
(siehe: Quelle [4]). Zu den beiden anderen Modellen aus Portugal und China liegt keine
genaue Dokumentation vor und der jeweilige Abschnitt betrachtet daher nur den
technische Aufbau.

3 Stand der Technik 20
3.1 MSL-Roboter von Tech United
Das Team Tech United von der Technischen Universität in Eindhoven wurde 2014
Weltmeister und erlangte 2013 als auch 2015 die Vizeweltmeisterschaft. Ihr aktuelles
Roboter-Modell namens „Turtle“ stammt aus der Jahr 2009 und wird regelmäßig weiter
entwickelt. Der Roboter verfügt über einen 3-rädrigen Omni-Antrieb und neben der Liga
üblichen Kamera-Spiegel-Kombination zusätzlich über eine nach vorne gerichtete RGB-D
Kamera, welche eine Tiefenerkennung ermöglicht. Das Modell erreicht eine
Spitzengeschwindigkeit von 3,6 m/s und verwendet dabei 3 Maxon RE 40 12V 150 Watt
Motoren mit Maxon GP 42 C 12:1 Getrieben und HEDS 5540 Drehgebern. [4]
Abbildung 3.1.1: Tech United Roboter komplett [Quelle: [4] ]
3 Stand der Technik 21
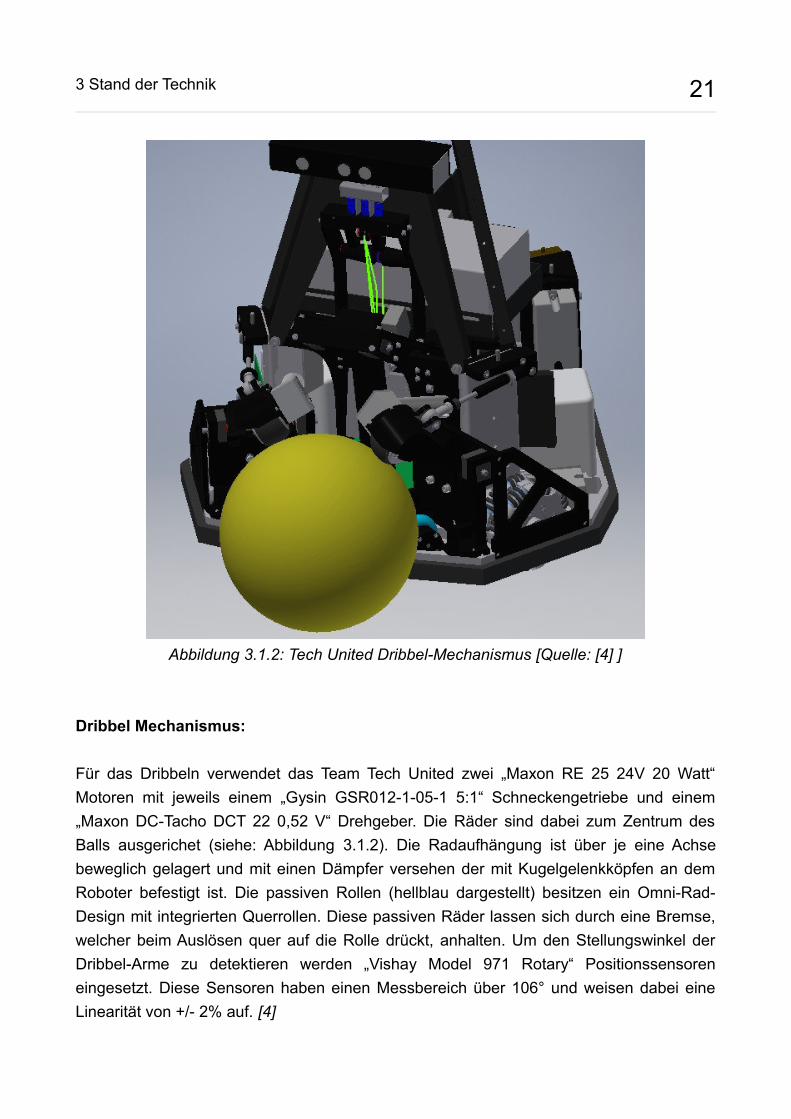
Dribbel Mechanismus:
Für das Dribbeln verwendet das Team Tech United zwei „Maxon RE 25 24V 20 Watt“
Motoren mit jeweils einem „Gysin GSR012-1-05-1 5:1“ Schneckengetriebe und einem
„Maxon DC-Tacho DCT 22 0,52 V“ Drehgeber. Die Räder sind dabei zum Zentrum des
Balls ausgerichet (siehe: Abbildung 3.1.2). Die Radaufhängung ist über je eine Achse
beweglich gelagert und mit einen Dämpfer versehen der mit Kugelgelenkköpfen an dem
Roboter befestigt ist. Die passiven Rollen (hellblau dargestellt) besitzen ein Omni-Rad-
Design mit integrierten Querrollen. Diese passiven Räder lassen sich durch eine Bremse,
welcher beim Auslösen quer auf die Rolle drückt, anhalten. Um den Stellungswinkel der
Dribbel-Arme zu detektieren werden „Vishay Model 971 Rotary“ Positionssensoren
eingesetzt. Diese Sensoren haben einen Messbereich über 106° und weisen dabei eine
Linearität von +/- 2% auf. [4]
Abbildung 3.1.2: Tech United Dribbel-Mechanismus [Quelle: [4] ]

3 Stand der Technik 22
Schuss-Mechanismus:
Der Schuss wird durch eine elektromagnetische Spule betätigt welche über einen
Kondensator mit maximal 450 V und 4700 μF versorgt wird. Das Schuss-Bein verfügt über
einen stiftförmiges Druckstück, welches sich beim Schuss in den Ball presst und durch die
Verformung des Balls einen stark beschleunigten Schuss auslöst. Die Aufhängung des
Schussbeins ist über einen Seilzug-Mechanismus stufenlos höhenverstellbar. Hierfür wird
ein „Maxon RE 25 18 V 20 Watt“ Motor mit einem „Maxon GP 32 C 18:1“ Planetengetriebe
und ein „Maxon HEDL 5540“ Drehgeber verwendet, welcher das Seil mittels einer Winde
ab- oder aufwickelt. Der Seilzug ist durch einen Federblock (dunkelblau dargestellt) vor zu
hohen Kräften gesichert. Der Schussmechanismus kann ohne Gegengewicht
Geschwindigkeiten bis 11 m/s erreichen und eine Beschleunigung bis 1000 m/s². [4]
Abbildung 3.1.3: Tech United Schuss-Mechanismus [Quelle [4] ]
3 Stand der Technik 23
3.2 MSL-Roboter von Cambada
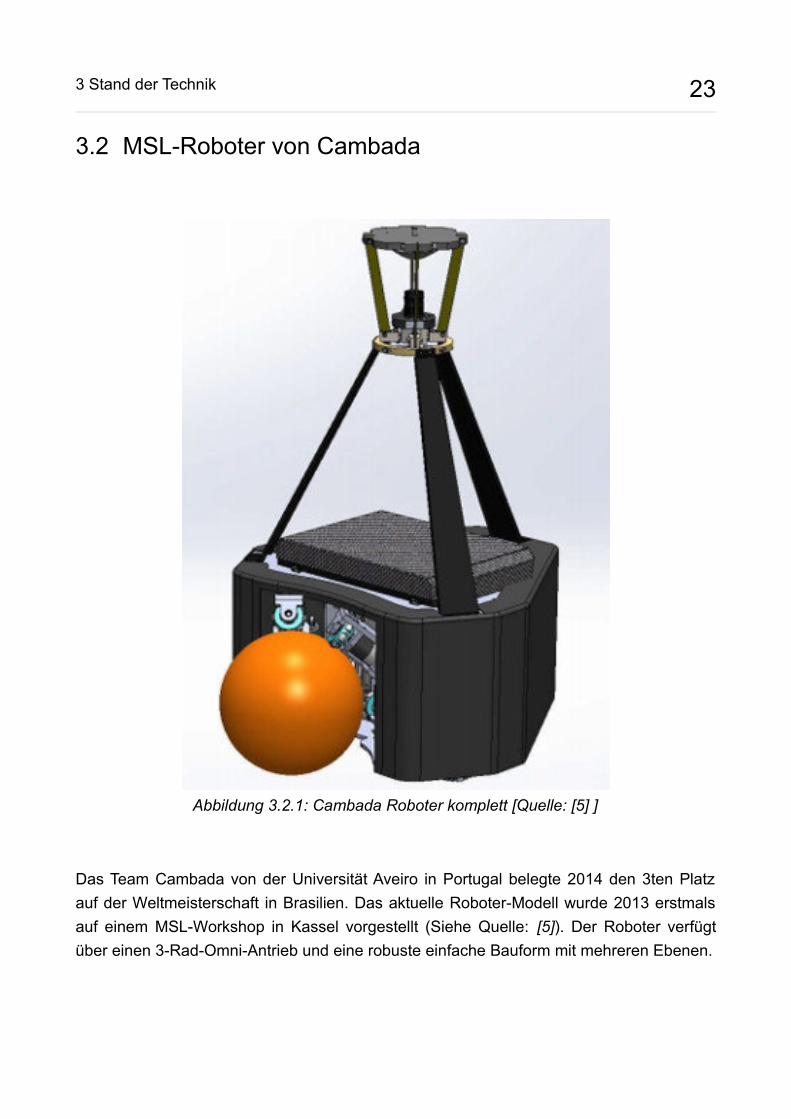
Das Team Cambada von der Universität Aveiro in Portugal belegte 2014 den 3ten Platz
auf der Weltmeisterschaft in Brasilien. Das aktuelle Roboter-Modell wurde 2013 erstmals
auf einem MSL-Workshop in Kassel vorgestellt (Siehe Quelle: [5]). Der Roboter verfügt
über einen 3-Rad-Omni-Antrieb und eine robuste einfache Bauform mit mehreren Ebenen.
Abbildung 3.2.1: Cambada Roboter komplett [Quelle: [5] ]
3 Stand der Technik 24
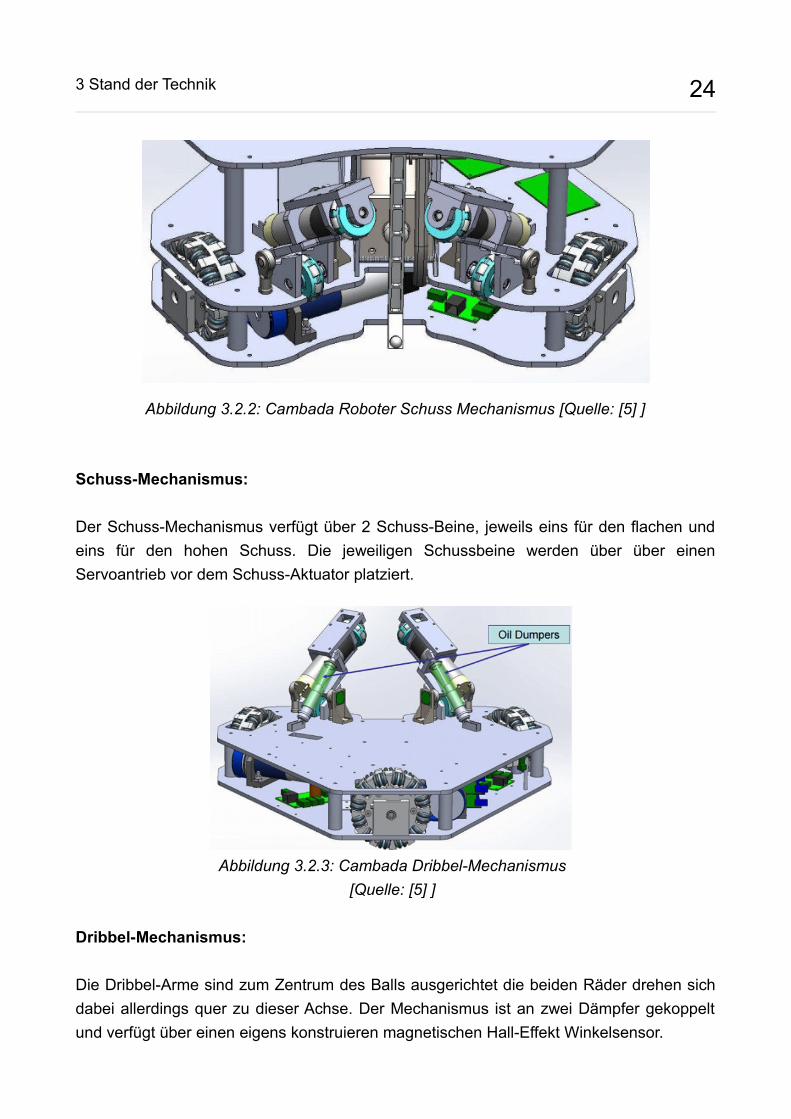
Schuss-Mechanismus:
Der Schuss-Mechanismus verfügt über 2 Schuss-Beine, jeweils eins für den flachen und
eins für den hohen Schuss. Die jeweiligen Schussbeine werden über über einen
Servoantrieb vor dem Schuss-Aktuator platziert.
Dribbel-Mechanismus:
Die Dribbel-Arme sind zum Zentrum des Balls ausgerichtet die beiden Räder drehen sich
dabei allerdings quer zu dieser Achse. Der Mechanismus ist an zwei Dämpfer gekoppelt
und verfügt über einen eigens konstruieren magnetischen Hall-Effekt Winkelsensor.
Abbildung 3.2.2: Cambada Roboter Schuss Mechanismus [Quelle: [5] ]
Abbildung 3.2.3: Cambada Dribbel-Mechanismus
[Quelle: [5] ]
3 Stand der Technik 25
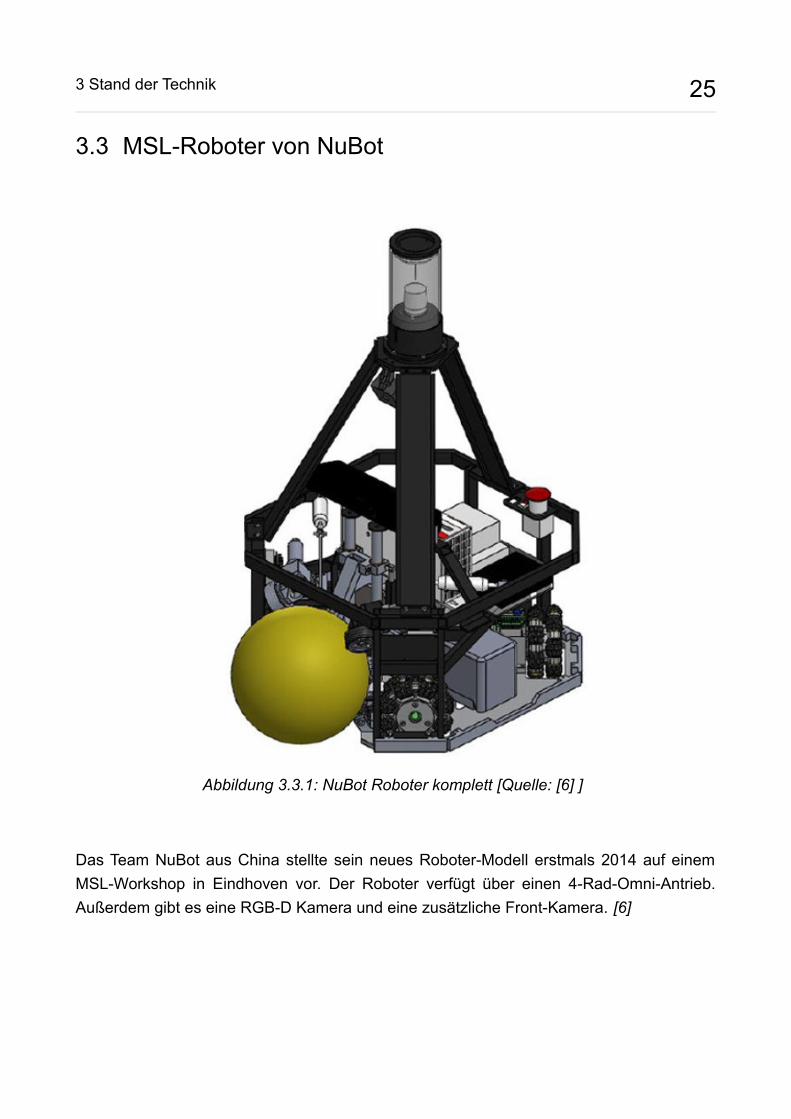
3.3 MSL-Roboter von NuBot
Das Team NuBot aus China stellte sein neues Roboter-Modell erstmals 2014 auf einem
MSL-Workshop in Eindhoven vor. Der Roboter verfügt über einen 4-Rad-Omni-Antrieb.
Außerdem gibt es eine RGB-D Kamera und eine zusätzliche Front-Kamera. [6]
Abbildung 3.3.1: NuBot Roboter komplett [Quelle: [6] ]
3 Stand der Technik 26
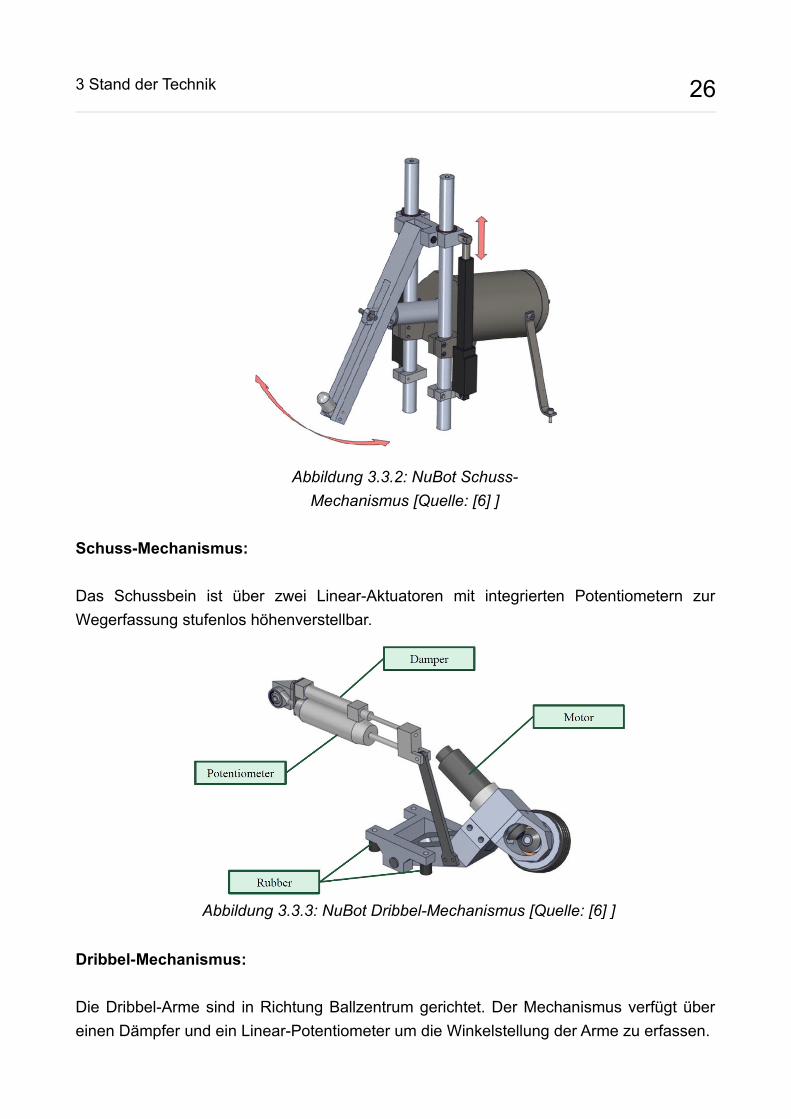
Schuss-Mechanismus:
Das Schussbein ist über zwei Linear-Aktuatoren mit integrierten Potentiometern zur
Wegerfassung stufenlos höhenverstellbar.
Dribbel-Mechanismus:
Die Dribbel-Arme sind in Richtung Ballzentrum gerichtet. Der Mechanismus verfügt über
einen Dämpfer und ein Linear-Potentiometer um die Winkelstellung der Arme zu erfassen.
Abbildung 3.3.2: NuBot Schuss-
Mechanismus [Quelle: [6] ]
Abbildung 3.3.3: NuBot Dribbel-Mechanismus [Quelle: [6] ]
3 Stand der Technik 27
3.4 Bewertung - Stand der Technik
Trotz der unterschiedlichen Design-Ansätze sieht man einige Gemeinsamkeiten der
betrachteten Roboter. So wie sich der Kamera-Turm in der Vergangenheit als Standard
Hauptsensor in der Liga durchgesetzt hat, so kann man neue Vermutungen anstellen
welche Designs sich wohl durchsetzen werden. Tech United und NuBot setzen beide ein
zusätzliches RGB-D Kamera-System ein, Carpe Noctem benutzt diesen Sensor auch
schon auf seinem Torwart-Roboter. Es ist davon auszugehen das sich dieser Sensor auch
bei den Feldspielern durchsetzen wird. Durch die Geschwindigkeitszunahme in der Liga
werden sich 4-Rad-Omni-Antriebe auf lange Sicht ebenso durchsetzen, auch wenn einige
Teams noch auf die 3-Rad-Variante setzen.
Schuss-Mechanismus:
Alle Teams setzten Schuss-Systeme ein, die mehrere Schuss-Varianten bieten. Der Trend
geht dahin diese Varianten noch zu steigern, beispielsweise durch stufenlose
Höhenverstellung. Der Schuss-Kopf hat bei allen drei betrachteten Robotern ein schmales
Stift-förmiges Design, um möglichst viel Energie durch Verformung auf den Ball zu
übertragen.
Dribbel-Mechanismus:
Alle betrachteten Roboter setzen auf Dämpfungs-Systeme und Sensoren, um die
Armstellung zu erfassen. Durch die Sensoren lassen sich Regelungsalgorithmen
implementieren welches ein stabiles Dribbeln ermöglichen. Die Dämpfer bremsen den Ball
bei der Annahme ab.
Weitere Potentiale:
Die Stellung der Dribbel-Räder ist bei den betrachteten Designs nicht optimal gewählt. Die
Motoren arbeiten teilweise gegeneinander und können so nicht das volle Drehmoment auf
den Ball übertragen. In der Abbildung 3.4.1 (Seite 28) ist dies am Beispiel des vorwärts
fahren mit Ball zu sehen. Grün dargestellt sind dabei die Kraftvektoren welcher über die
Dribbel-Motoren auf den Ball übertragen wird. Rot dargestellt sind die Kraftvektoren die
durch Gegenkräfte verloren gehen und Gelb die resultierenden übrigen Kräfte. Carpe
Noctem erreicht durch seine Designvariante die bessere Krafteinleitung.

3 Stand der Technik 28
Ein weiterer Kritikpunkt für alle betrachteten Designs ist die Anordnung der Dribbel-Arm-
Gelenke, welche bei den gezeigten Modellen wie in Abbildung 3.4.2 im Modell rechts
schräg zur Front hin angeordnet sind. Weiß dargestellt sind die Dribbel-Arme welche an
der Front über die Antriebsräder verfügen. Die Roten Pfeile zeigen die Kipprichtung über
das Gelenk an. Durch diese Anordnung kann die Annahme von Bällen, die nicht genau
zentrisch auf den Roboter gespielt werden, behindert werden. Eine bessere Variante ist in
der Abbildung 3.4.2 im Modell links dargestellt. Durch das geradlinige Kippen nach hinten
können alle Bälle angenommen werden.
Abbildung 3.4.1: Gegenüberstellung Anordnung Dribbel-Räder
Abbildung 3.4.2: Designvarianten Ballannahme
4 Lastenheft 29
4 LastenheftEine Neukonstruktion der Schuss- und Dribbel-Vorrichtung muss folgende Bedingungen
erfüllen:
– Die Konstruktion muss sich in den zur Verfügung stehenden Bauraum integrieren
und genug Platz für alle anderen Komponenten lassen.
– Die Konstruktion sollte modular und leicht zerlegbar sein.
– Der Schuss-Mechanismus muss mindestens zwei Schussvarianten bieten und
konstante Schussergebnisse produzieren.
– Der Dribbel-Mechanismus sollte den Ball gut annehmen können.
– Der Dribbel-Mechanismus sollte den Ball konstant führen können.
– Der Dribbel-Mechanismus muss über Sensoren verfügen um einen
Regelungsalgorithmus implementieren zu können.
– Der Dribbel-Mechanismus muss bei Unsicherheiten bezüglich des resultierenden
Dribbel- und Ball-Annahme-Verhaltens nachträglich justierbar oder einstellbar sein.
– Die Konstruktion muss den herrschenden Kräften standhalten.
– Die Zusammenstellung der nötigen Komponenten müssen der Aufgabe gerecht
werden.
– Die elektronischen Bauteile müssen sich in die bestehende Elektronik und
Kommunikation integrieren lassen.
– Die Konstruktion muss sich an die Regeln der Liga halten.
5 Konzeptphase 30
5 KonzeptphaseIn diesem Kapitel wird dargelegt, wie der Bauraum neu zu gestalten und eine
Neukonstruktion in diesem einzupassen ist. Dabei werden verschiedene kinematische
Konzepte zunächst in einfachen Geometrien modelliert. Eine Vorauswahl der nötigen
Komponenten wird getroffen und der benötigte Bauraum bei dem Entwurf berücksichtigt.
Final findet eine Bewertung statt und der am besten geeignete Entwurf wird für die
Konstruktion bestimmt. Die Entwürfe werden mit dem Konstruktionsprogramm
„Autodesk Inventor 2016“ ausgearbeitet. Begonnen wird mit einer Studie für einen Schuss-
Mechanismus, anschließend wird ein neuer Dribbel-Mechanismus in diesen Entwurf
integriert um Rückschlüsse auf Funktion und den Bauraum festzustellen.
5.1 Vorbereitung des Bauraums
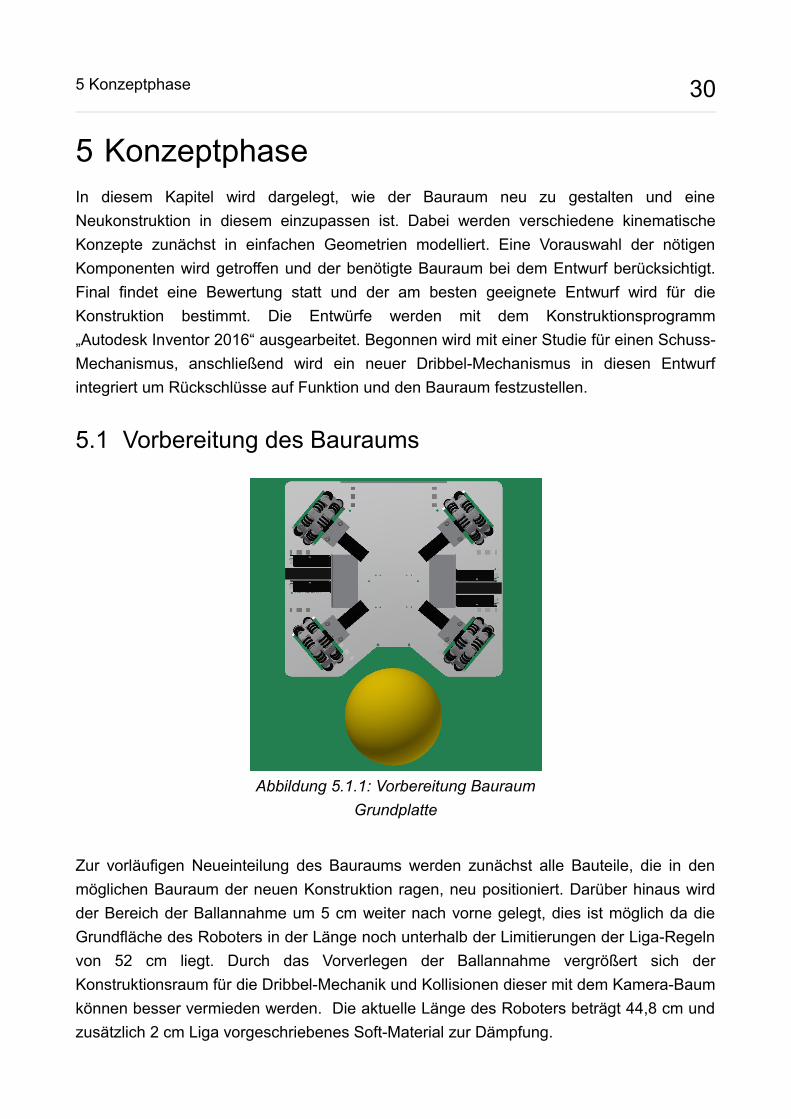
Zur vorläufigen Neueinteilung des Bauraums werden zunächst alle Bauteile, die in den
möglichen Bauraum der neuen Konstruktion ragen, neu positioniert. Darüber hinaus wird
der Bereich der Ballannahme um 5 cm weiter nach vorne gelegt, dies ist möglich da die
Grundfläche des Roboters in der Länge noch unterhalb der Limitierungen der Liga-Regeln
von 52 cm liegt. Durch das Vorverlegen der Ballannahme vergrößert sich der
Konstruktionsraum für die Dribbel-Mechanik und Kollisionen dieser mit dem Kamera-Baum
können besser vermieden werden. Die aktuelle Länge des Roboters beträgt 44,8 cm und
zusätzlich 2 cm Liga vorgeschriebenes Soft-Material zur Dämpfung.
Abbildung 5.1.1: Vorbereitung Bauraum
Grundplatte
5 Konzeptphase 31
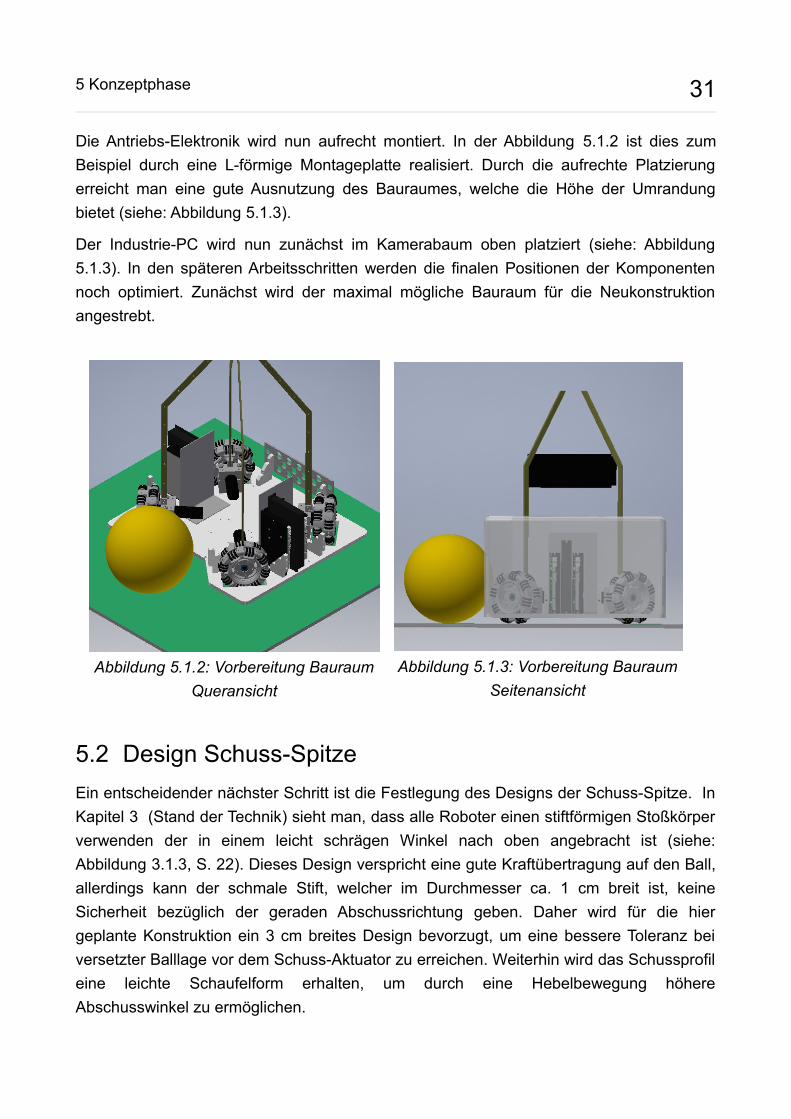
Die Antriebs-Elektronik wird nun aufrecht montiert. In der Abbildung 5.1.2 ist dies zum
Beispiel durch eine L-förmige Montageplatte realisiert. Durch die aufrechte Platzierung
erreicht man eine gute Ausnutzung des Bauraumes, welche die Höhe der Umrandung
bietet (siehe: Abbildung 5.1.3).
Der Industrie-PC wird nun zunächst im Kamerabaum oben platziert (siehe: Abbildung
5.1.3). In den späteren Arbeitsschritten werden die finalen Positionen der Komponenten
noch optimiert. Zunächst wird der maximal mögliche Bauraum für die Neukonstruktion
angestrebt.
5.2 Design Schuss-Spitze
Ein entscheidender nächster Schritt ist die Festlegung des Designs der Schuss-Spitze. In
Kapitel 3 (Stand der Technik) sieht man, dass alle Roboter einen stiftförmigen Stoßkörper
verwenden der in einem leicht schrägen Winkel nach oben angebracht ist (siehe:
Abbildung 3.1.3, S. 22). Dieses Design verspricht eine gute Kraftübertragung auf den Ball,
allerdings kann der schmale Stift, welcher im Durchmesser ca. 1 cm breit ist, keine
Sicherheit bezüglich der geraden Abschussrichtung geben. Daher wird für die hier
geplante Konstruktion ein 3 cm breites Design bevorzugt, um eine bessere Toleranz bei
versetzter Balllage vor dem Schuss-Aktuator zu erreichen. Weiterhin wird das Schussprofil
eine leichte Schaufelform erhalten, um durch eine Hebelbewegung höhere
Abschusswinkel zu ermöglichen.
Abbildung 5.1.2: Vorbereitung Bauraum
Queransicht
Abbildung 5.1.3: Vorbereitung Bauraum
Seitenansicht

5 Konzeptphase 32
5.3 Schuss-Kinematik Entwurf 1
Die Aktuator-Spule wird zunächst in einem 25° Winkel angeordnet, um eine bessere
Krafteinleitung in die kreisförmige Schussbeinbewegung zu erzielen. Im ersten Entwurf
wird zunächst eine Kreisbahn der Schussspitze in 1 cm Entfernung über der
Balloberfläche in Kombination mit der Anknüpfung an den Schuss-Aktuator ermittelt.
Anschließend wird dieser Bahnverlauf durch die Bewegung über einen
Hebelmechanismus nachempfunden. Durch die Montage am Hebel und gleichzeitig dem
Anknüpfen an den Schuss-Aktuator wird eine geführte Bewegung erreicht ohne den Ball
zu touchieren. Dadurch wird eine stufenlose Höhenverstellung der Schuss-Kinematik
umgesetzt. Sowohl flache als auch hohe Schüsse sind möglich.
Bewertung:
Bei hohen Schüssen versperrt die Gelenk-Aufhängung dem Ball die Schuss-Bahn. Der
Entwurf wird daher als nicht tauglich eingestuft.
Abbildung 5.3.1: Kinematik Entwurf 1 flach Abbildung 5.3.2: Kinematik Entwurf 1 hoch
5 Konzeptphase 33
5.4 Schuss-Kinematik Entwurf 2
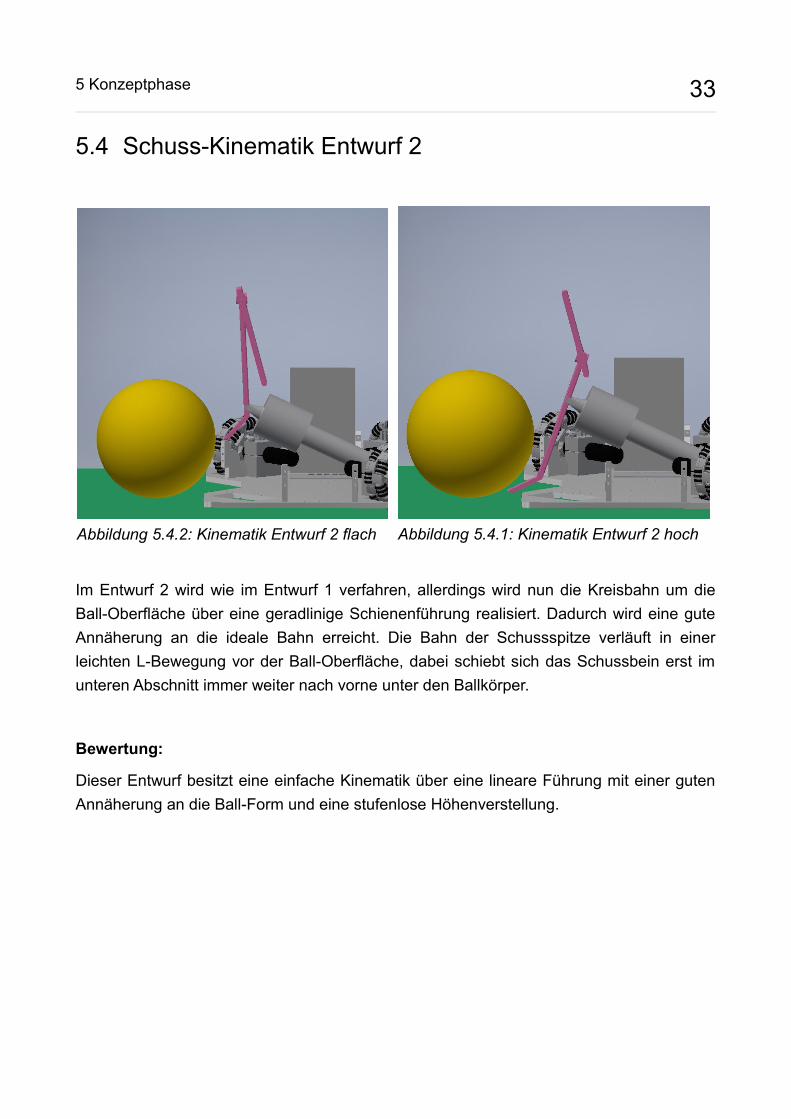
Im Entwurf 2 wird wie im Entwurf 1 verfahren, allerdings wird nun die Kreisbahn um die
Ball-Oberfläche über eine geradlinige Schienenführung realisiert. Dadurch wird eine gute
Annäherung an die ideale Bahn erreicht. Die Bahn der Schussspitze verläuft in einer
leichten L-Bewegung vor der Ball-Oberfläche, dabei schiebt sich das Schussbein erst im
unteren Abschnitt immer weiter nach vorne unter den Ballkörper.
Bewertung:
Dieser Entwurf besitzt eine einfache Kinematik über eine lineare Führung mit einer guten
Annäherung an die Ball-Form und eine stufenlose Höhenverstellung.
Abbildung 5.4.1: Kinematik Entwurf 2 hochAbbildung 5.4.2: Kinematik Entwurf 2 flach

5 Konzeptphase 34
5.5 Schuss-Kinematik Entwurf 3
Der Entwurf 3 basiert auf dem Grundaufbau des Entwurfs 2 und besitzt die gleichen
Eigenschaften bei der eindimensionalen Höhenverstellung. Zusätzlich wird nun noch eine
zweite seitliche Verstellung realisiert über das Verrücken der Kickeraufhängung auf einer
gekoppelten seitlichen Schiene. Die Aufhängung des Schussbeins ist dabei mit einem
Kugelgelenkkopf versehen, welcher auf einem Kardangelenk montiert ist. Die
Verschiebung auf den gekoppelten Bahnen kann dabei über zwei Linear-Antriebe realisiert
werden. Diese wären beidseitig mit Kugelköpfen versehen und mit einem Ende auf der
Grundplatte montiert und mit dem anderen jeweils links und rechts an dem Schlitten
welcher das Schussbein in Position führt. Durch eine kombinierte Ansteuerung der
Aktuatoren kann dann der Schlitten in zwei Dimensionen stufenlos verschoben werden.
Bewertung:
Die seitliche Verstellung des flachen Schusses findet durch die etwa gleich hohe
Anbindung an den Schuss-Aktuator praktisch nicht statt. Außerdem ist der Bauraum für
das Einbringen von linearen Antrieben zu klein. Der Entwurf ist daher ungeeignet.
Abbildung 5.5.1: Kinematik Entwurf 3 schräg-flach
Abbildung 5.5.2: Kinematik Entwurf 4 schräg-hoch
5 Konzeptphase 35
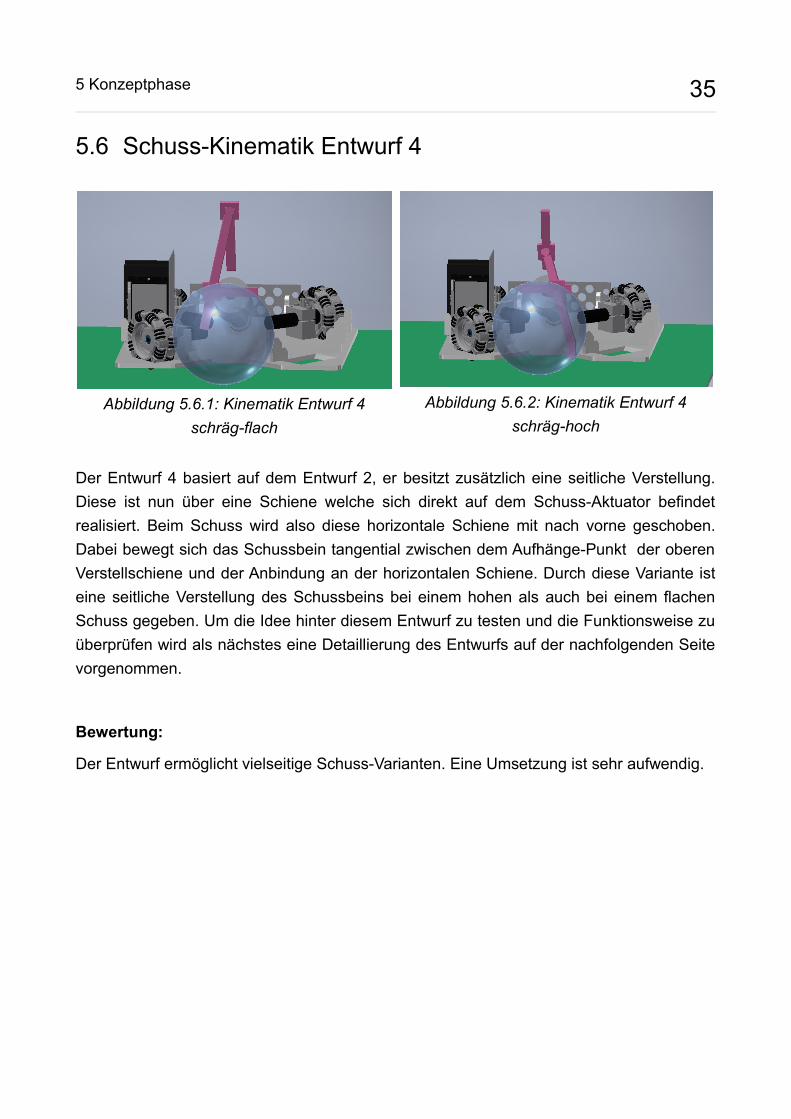
5.6 Schuss-Kinematik Entwurf 4
Der Entwurf 4 basiert auf dem Entwurf 2, er besitzt zusätzlich eine seitliche Verstellung.
Diese ist nun über eine Schiene welche sich direkt auf dem Schuss-Aktuator befindet
realisiert. Beim Schuss wird also diese horizontale Schiene mit nach vorne geschoben.
Dabei bewegt sich das Schussbein tangential zwischen dem Aufhänge-Punkt der oberen
Verstellschiene und der Anbindung an der horizontalen Schiene. Durch diese Variante ist
eine seitliche Verstellung des Schussbeins bei einem hohen als auch bei einem flachen
Schuss gegeben. Um die Idee hinter diesem Entwurf zu testen und die Funktionsweise zu
überprüfen wird als nächstes eine Detaillierung des Entwurfs auf der nachfolgenden Seite
vorgenommen.
Bewertung:
Der Entwurf ermöglicht vielseitige Schuss-Varianten. Eine Umsetzung ist sehr aufwendig.
Abbildung 5.6.1: Kinematik Entwurf 4
schräg-flach
Abbildung 5.6.2: Kinematik Entwurf 4
schräg-hoch
5 Konzeptphase 36
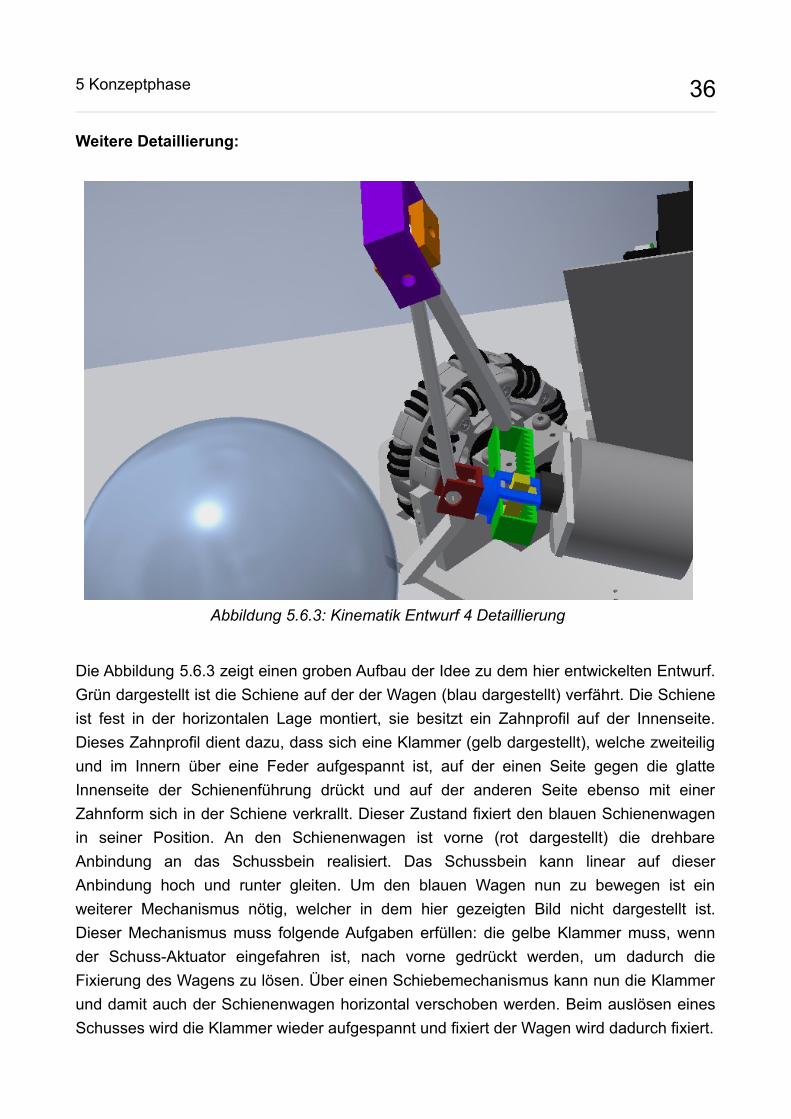
Weitere Detaillierung:
Die Abbildung 5.6.3 zeigt einen groben Aufbau der Idee zu dem hier entwickelten Entwurf.
Grün dargestellt ist die Schiene auf der der Wagen (blau dargestellt) verfährt. Die Schiene
ist fest in der horizontalen Lage montiert, sie besitzt ein Zahnprofil auf der Innenseite.
Dieses Zahnprofil dient dazu, dass sich eine Klammer (gelb dargestellt), welche zweiteilig
und im Innern über eine Feder aufgespannt ist, auf der einen Seite gegen die glatte
Innenseite der Schienenführung drückt und auf der anderen Seite ebenso mit einer
Zahnform sich in der Schiene verkrallt. Dieser Zustand fixiert den blauen Schienenwagen
in seiner Position. An den Schienenwagen ist vorne (rot dargestellt) die drehbare
Anbindung an das Schussbein realisiert. Das Schussbein kann linear auf dieser
Anbindung hoch und runter gleiten. Um den blauen Wagen nun zu bewegen ist ein
weiterer Mechanismus nötig, welcher in dem hier gezeigten Bild nicht dargestellt ist.
Dieser Mechanismus muss folgende Aufgaben erfüllen: die gelbe Klammer muss, wenn
der Schuss-Aktuator eingefahren ist, nach vorne gedrückt werden, um dadurch die
Fixierung des Wagens zu lösen. Über einen Schiebemechanismus kann nun die Klammer
und damit auch der Schienenwagen horizontal verschoben werden. Beim auslösen eines
Schusses wird die Klammer wieder aufgespannt und fixiert der Wagen wird dadurch fixiert.
Abbildung 5.6.3: Kinematik Entwurf 4 Detaillierung
5 Konzeptphase 37
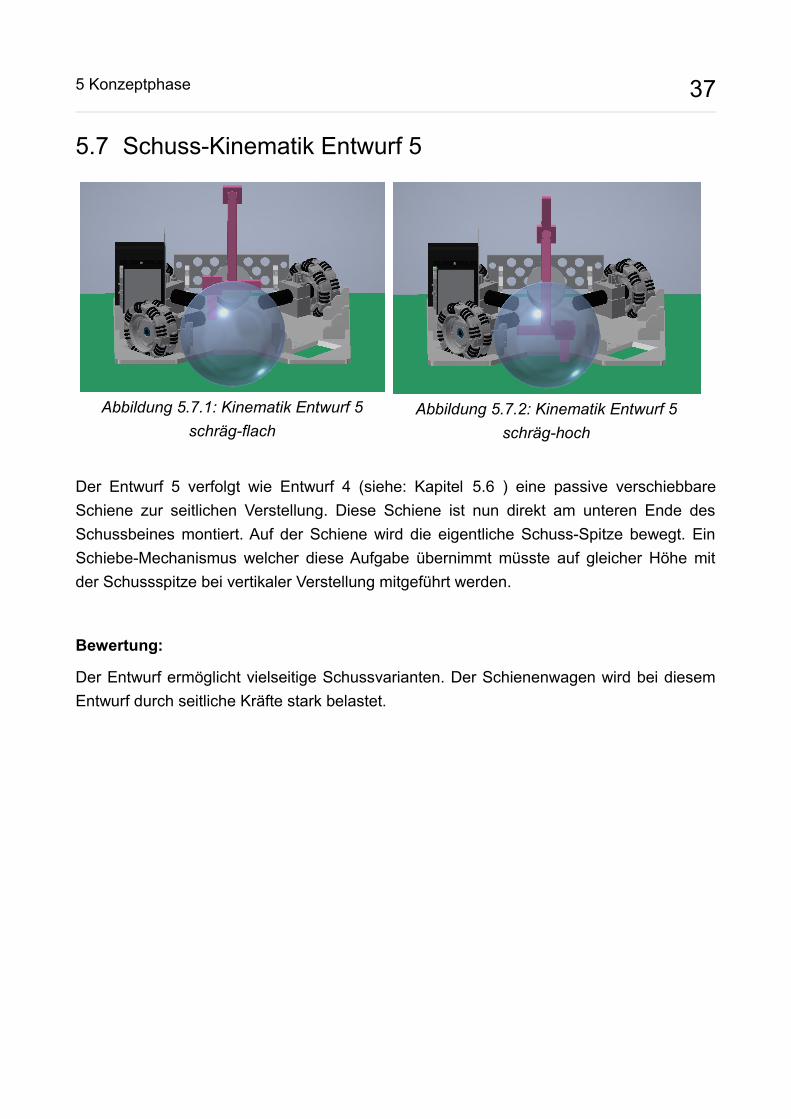
5.7 Schuss-Kinematik Entwurf 5
Der Entwurf 5 verfolgt wie Entwurf 4 (siehe: Kapitel 5.6 ) eine passive verschiebbare
Schiene zur seitlichen Verstellung. Diese Schiene ist nun direkt am unteren Ende des
Schussbeines montiert. Auf der Schiene wird die eigentliche Schuss-Spitze bewegt. Ein
Schiebe-Mechanismus welcher diese Aufgabe übernimmt müsste auf gleicher Höhe mit
der Schussspitze bei vertikaler Verstellung mitgeführt werden.
Bewertung:
Der Entwurf ermöglicht vielseitige Schussvarianten. Der Schienenwagen wird bei diesem
Entwurf durch seitliche Kräfte stark belastet.
Abbildung 5.7.2: Kinematik Entwurf 5
schräg-hoch
Abbildung 5.7.1: Kinematik Entwurf 5
schräg-flach

5 Konzeptphase 38
5.8 Antriebseinheit Dribbel-Mechanismus
Um einen direkten Antrieb am Dribbel-Arm zu ermöglichen werden kompakte
Motoreinheiten der Firma Maxon zusammengestellt und verglichen (siehe: Quelle [11]).
Dabei eignet sich besonders die Baureihe Maxon EC flat. Die Motoren erreichen im
Verhältnis große Drehmomente bei niedrigen Umdrehungen und haben einen kurzen
breiten Bauraum. Zwei verschiedene Motorgrößen kommen in Betracht. Um das
Drehmoment optimal auszunutzen wird zusätzlich ein Baugrößen zugehöriges Planeten-
Getriebe ausgewählt. Ein Getriebe wird außerdem vorgesehen um eine höhere Haltbarkeit
des Flansches bei radialen Lasten zu erzielen. Nachfolgend werden die Kenndaten der
beiden Versionen a) und b) gegenübergestellt.
Version a) Version b)
Motor: Maxon EC 45 flat 70 Watt 24 V Maxon EC 32 flat 15 Watt 24 V, mit
integrierter Elektronik
Gewicht: 141 g 91 g
Nennmoment
M nenn :
128 mNm 18,8 mNm
Nenndrehzahl
nnenn :
4860 1/min 3000 1/min
Abbildung 5.8.1: Maxon EC 45
flat 70 Watt [Quelle:
maxonmotor.com]
Abbildung 5.8.2: Maxon EC 32 flat
15 Watt [Quelle: maxonmotor.com]
5 Konzeptphase 39
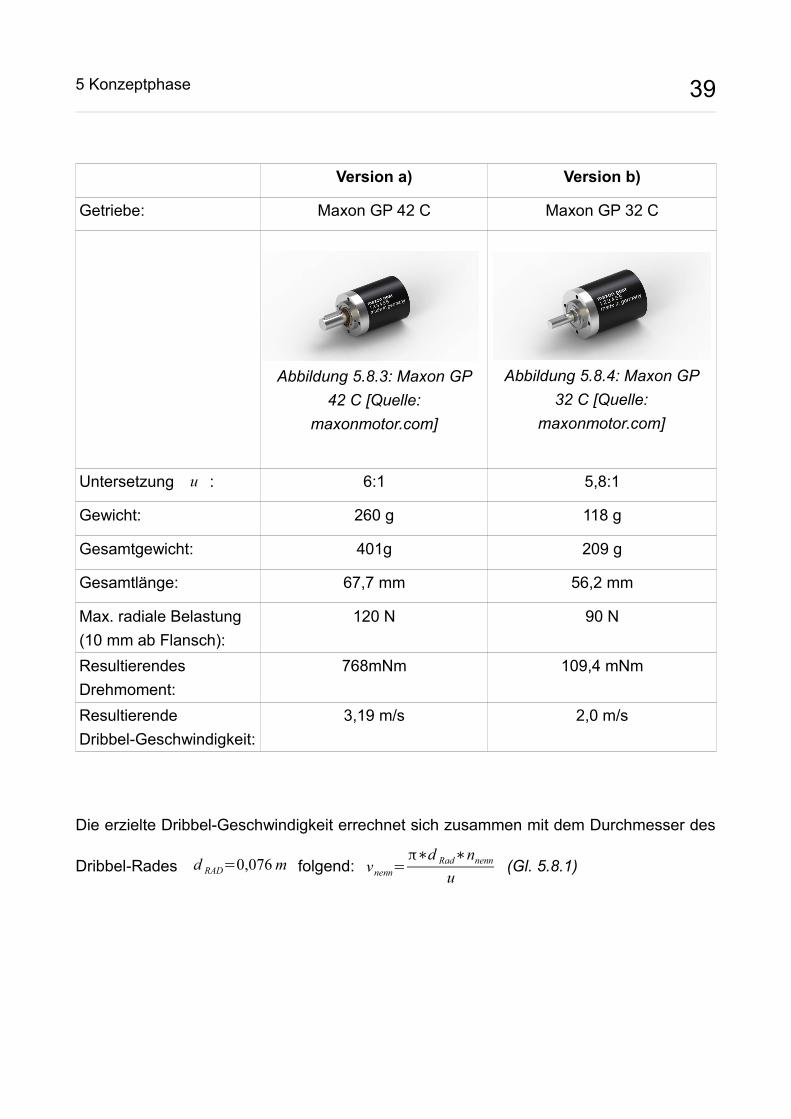
Version a) Version b)
Getriebe: Maxon GP 42 C Maxon GP 32 C
Untersetzung u : 6:1 5,8:1
Gewicht: 260 g 118 g
Gesamtgewicht: 401g 209 g
Gesamtlänge: 67,7 mm 56,2 mm
Max. radiale Belastung
(10 mm ab Flansch):
120 N 90 N
Resultierendes
Drehmoment:
768mNm 109,4 mNm
Resultierende
Dribbel-Geschwindigkeit:
3,19 m/s 2,0 m/s
Die erzielte Dribbel-Geschwindigkeit errechnet sich zusammen mit dem Durchmesser des
Dribbel-Rades d RAD=0,076m folgend: vnenn=π∗d Rad∗nnenn
u(Gl. 5.8.1)
Abbildung 5.8.3: Maxon GP
42 C [Quelle:
maxonmotor.com]
Abbildung 5.8.4: Maxon GP
32 C [Quelle:
maxonmotor.com]
5 Konzeptphase 40
Bewertung:
Die Version b) bietet gegenüber der Version a) eine leichte und kleine Lösung an, mit einer
ausreichenden Dribbel-Geschwindigkeit. Um das Drehmoment einzuschätzen, wird der
Motorsatz mit dem konkurrierenden Roboter von Tech United verglichen. Die Holländer
nutzen „Maxon RE 25 Motor 24V 20 Watt“ Motoren in Kombination mit „Gysin GSR012-1-
05-1 5:1“ Schneckengetrieben. Die Motoren erreichen ein Nennmoment von 26,3 mNm,
zusammen mit dem Getriebe ergibt sich ein erzieltes Drehmoment von 131,5 mNm. Die
Motoren liegen somit in ihrem erzielten Drehmoment nahe beieinander, durch die direkte
Anordnung der Dribbel-Räder sollte sich das Carpe Noctem Cassel-Team in den
Zweikämpfen weiterhin behaupten können.
Mit der nun ausgewählten Motor-Einheit kann eine erste Modellierung des Bauraumes
vorgenommen werde. Da auf die Dribbel-Räder bei Stößen große Kräfte wirken, wird für
das Dribbel-Rad eine eigene Lagerung vorgesehen. Die Anbindung der Motoren wird mit
Zahnriemen vorgenommen. Diese werden in einem späteren Abschnitt beschrieben und
ausgelegt.
Die Datenblätter des gewählten Motors und Getriebes sind im Anhang dieser Arbeit
eingefügt.
5 Konzeptphase 41
5.9 Vormodellierung Dribbel-Mechanismus
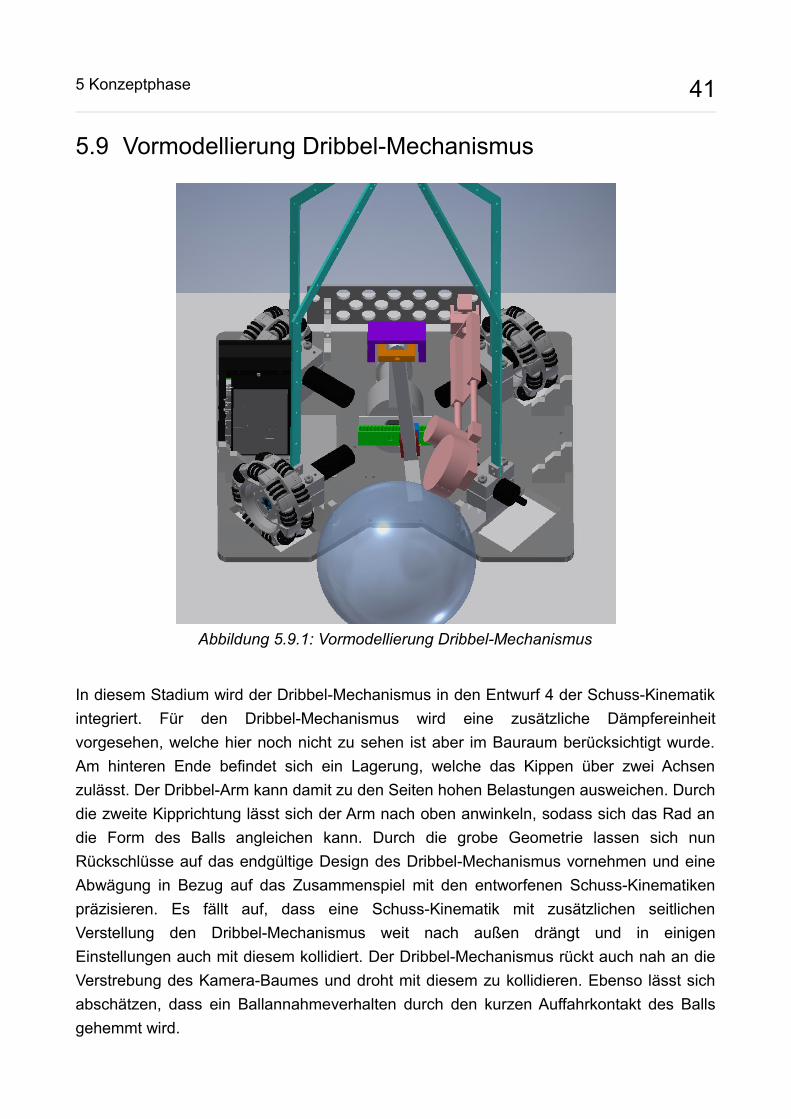
In diesem Stadium wird der Dribbel-Mechanismus in den Entwurf 4 der Schuss-Kinematik
integriert. Für den Dribbel-Mechanismus wird eine zusätzliche Dämpfereinheit
vorgesehen, welche hier noch nicht zu sehen ist aber im Bauraum berücksichtigt wurde.
Am hinteren Ende befindet sich ein Lagerung, welche das Kippen über zwei Achsen
zulässt. Der Dribbel-Arm kann damit zu den Seiten hohen Belastungen ausweichen. Durch
die zweite Kipprichtung lässt sich der Arm nach oben anwinkeln, sodass sich das Rad an
die Form des Balls angleichen kann. Durch die grobe Geometrie lassen sich nun
Rückschlüsse auf das endgültige Design des Dribbel-Mechanismus vornehmen und eine
Abwägung in Bezug auf das Zusammenspiel mit den entworfenen Schuss-Kinematiken
präzisieren. Es fällt auf, dass eine Schuss-Kinematik mit zusätzlichen seitlichen
Verstellung den Dribbel-Mechanismus weit nach außen drängt und in einigen
Einstellungen auch mit diesem kollidiert. Der Dribbel-Mechanismus rückt auch nah an die
Verstrebung des Kamera-Baumes und droht mit diesem zu kollidieren. Ebenso lässt sich
abschätzen, dass ein Ballannahmeverhalten durch den kurzen Auffahrkontakt des Balls
gehemmt wird.
Abbildung 5.9.1: Vormodellierung Dribbel-Mechanismus
5 Konzeptphase 42
5.10 Bewertung der Konzepte
Die vorläufige Modellierung des Dribbel-Mechanismus hat entscheidende Erkenntnisse für
die Schuss-Kinematik Entwürfe eingebracht. Die Funktion des Dribblings und der
Ballannahme sind für das Spiel von größerem Gewicht als ein zusätzliches seitliches
Anspielen des Balls. Die Entwürfe mit dieser Funktion scheiden damit für die nachfolgende
Konstruktion aus. Der Entwurf 2 bietet hingegen einen funktionalen und einfachen Aufbau.
Dieser Entwurf kann am besten für beständige Schussergebnisse sorgen. Durch die
stufenlose Verstellbarkeit ist eine ausreichende Variabilität gegeben.
Der Dribbel-Mechanismus muss weiterhin in seiner Bauform optimiert werden. Die
Konstruktion sollte möglichst nah neben dem Schuss-Mechanismus positionieren werden.
Ein Gelenk zum seitlichen Ausschlag sollte möglichst weit nach innen angebracht werden
um einen weiten Weg bis zum Rand des Kamerabaums zu erreichen und bei frontalen
Kollisionen ebenso eine Ausweichbewegung zu ermöglichen. Die Dribbel-Räder sollten
weiter nach innen gebracht werden um die Funktion des Dämpfers durch den längeren
Auffahrweg des Balls zu begünstigen und um den Ball mit den Rädern in einem
angeglichenen 45° Winkel nach innen gut fixieren zu können.
6 Kräfteberechnung 43
6 KräfteberechnungIn diesem Abschnitt werden zur Vorauslegung die nötigen Stützkräfte der Konstruktion
berechnet. Dabei sind die Geometrien im Verhältnis stimmig zur späteren Konstruktion.
Die dynamischen Kräfte werden überschlägig bestimmt. Bei der späteren Konstruktion
wird zusätzlich ein Sicherheitsfaktor gewählt um einen guten Schutz gegen Bruch zu
erreichen.
6.1 Kräfte Schuss-Mechanismus
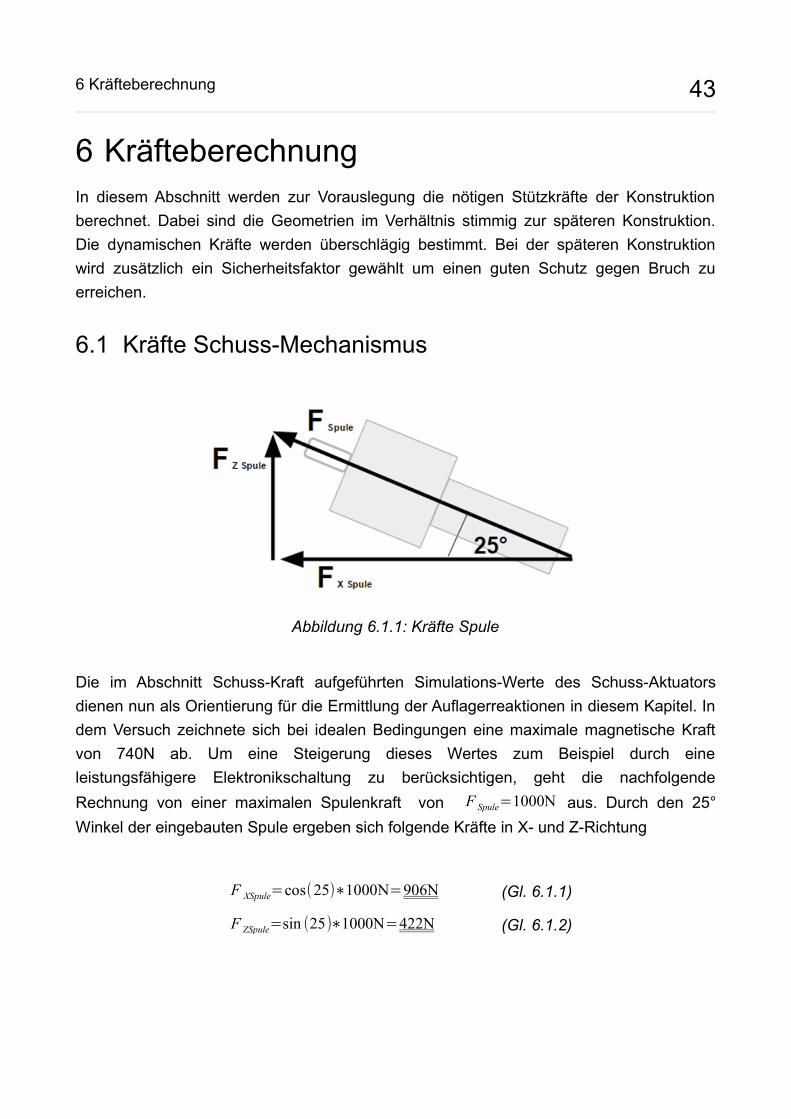
Die im Abschnitt Schuss-Kraft aufgeführten Simulations-Werte des Schuss-Aktuators
dienen nun als Orientierung für die Ermittlung der Auflagerreaktionen in diesem Kapitel. In
dem Versuch zeichnete sich bei idealen Bedingungen eine maximale magnetische Kraft
von 740N ab. Um eine Steigerung dieses Wertes zum Beispiel durch eine
leistungsfähigere Elektronikschaltung zu berücksichtigen, geht die nachfolgende
Rechnung von einer maximalen Spulenkraft von F Spule=1000N aus. Durch den 25°
Winkel der eingebauten Spule ergeben sich folgende Kräfte in X- und Z-Richtung
F XSpule=cos(25)∗1000N=906N (Gl. 6.1.1)
F ZSpule=sin (25)∗1000N=422N (Gl. 6.1.2)
Abbildung 6.1.1: Kräfte Spule
6 Kräfteberechnung 44
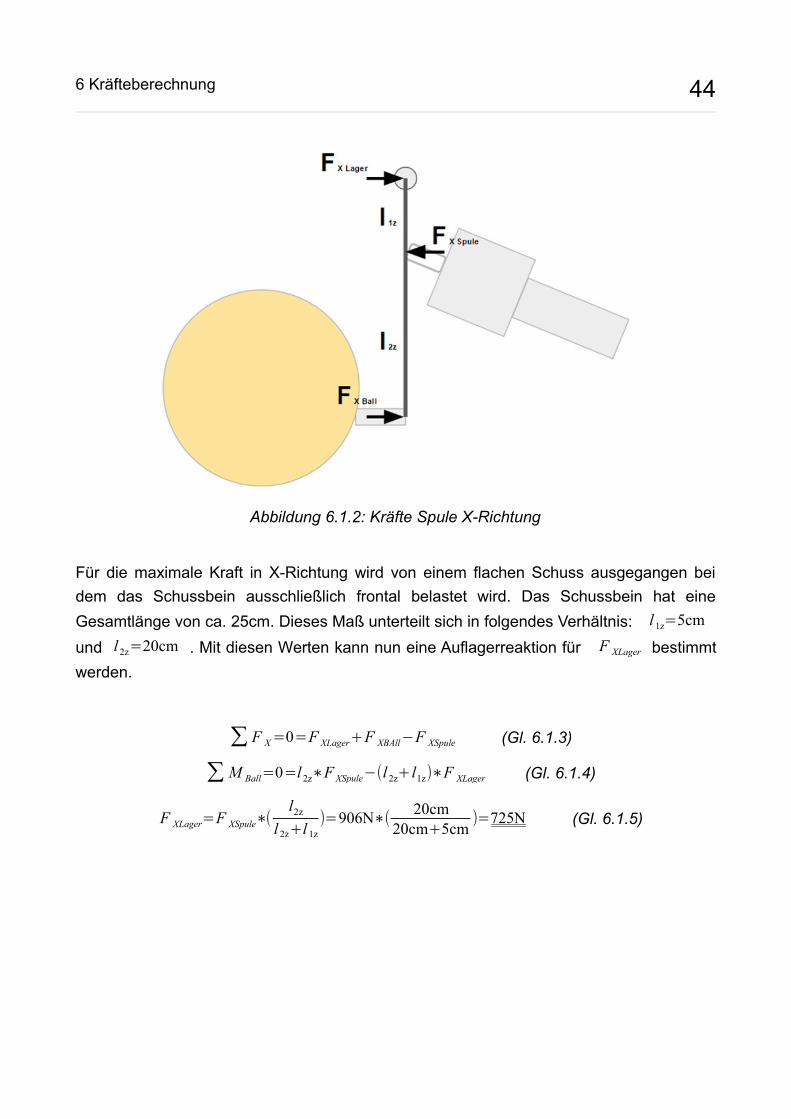
Für die maximale Kraft in X-Richtung wird von einem flachen Schuss ausgegangen bei
dem das Schussbein ausschließlich frontal belastet wird. Das Schussbein hat eine
Gesamtlänge von ca. 25cm. Dieses Maß unterteilt sich in folgendes Verhältnis: l 1z=5cm
und l 2z=20cm . Mit diesen Werten kann nun eine Auflagerreaktion für F XLager bestimmt
werden.
∑ F X=0=F XLager+F XBAll−F XSpule (Gl. 6.1.3)
∑M Ball=0=l 2z∗F XSpule−(l 2z+l1z)∗F XLager (Gl. 6.1.4)
F XLager=F XSpule∗(l2z
l 2z+l 1z)=906N∗(
20cm
20cm+5cm)=725N (Gl. 6.1.5)
Abbildung 6.1.2: Kräfte Spule X-Richtung
6 Kräfteberechnung 45
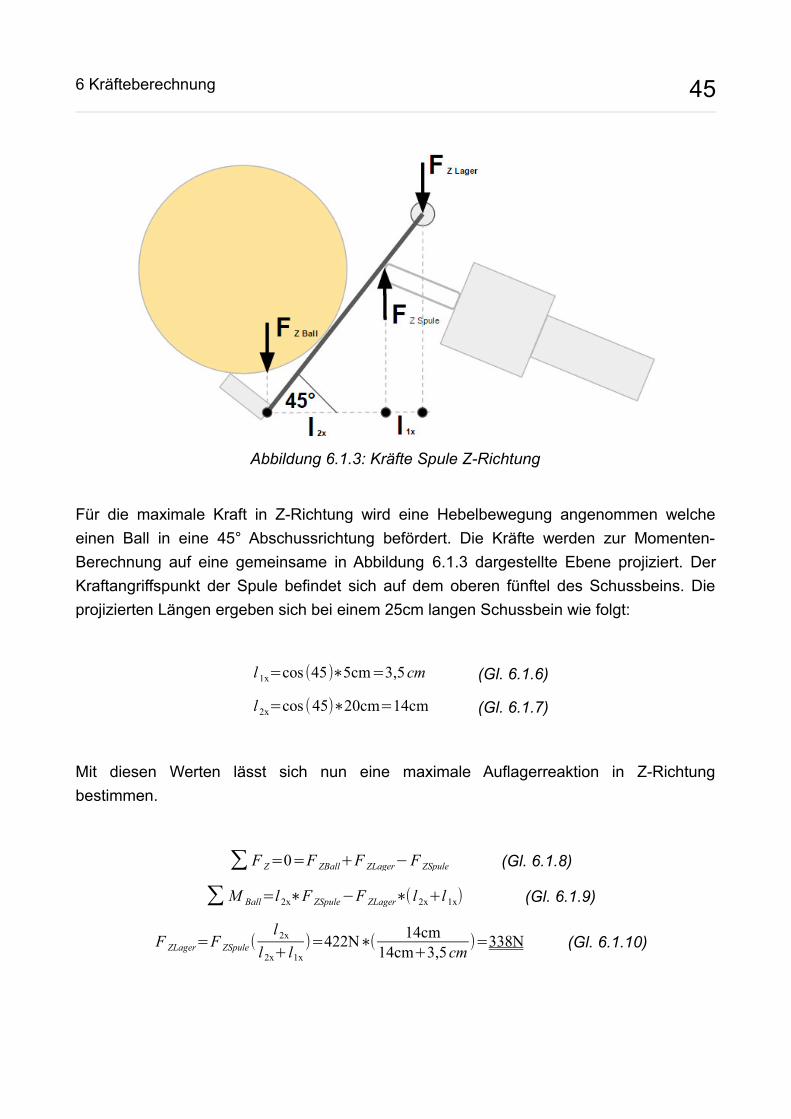
Für die maximale Kraft in Z-Richtung wird eine Hebelbewegung angenommen welche
einen Ball in eine 45° Abschussrichtung befördert. Die Kräfte werden zur Momenten-
Berechnung auf eine gemeinsame in Abbildung 6.1.3 dargestellte Ebene projiziert. Der
Kraftangriffspunkt der Spule befindet sich auf dem oberen fünftel des Schussbeins. Die
projizierten Längen ergeben sich bei einem 25cm langen Schussbein wie folgt:
l 1x=cos (45)∗5cm=3,5cm (Gl. 6.1.6)
l 2x=cos (45)∗20cm=14cm (Gl. 6.1.7)
Mit diesen Werten lässt sich nun eine maximale Auflagerreaktion in Z-Richtung
bestimmen.
∑ F Z=0=F ZBall+F ZLager−F ZSpule (Gl. 6.1.8)
∑M Ball=l 2x∗F ZSpule−F ZLager∗( l2x+l 1x) (Gl. 6.1.9)
F ZLager=F ZSpule(l 2x
l 2x+l1x)=422N∗(
14cm
14cm+3,5cm)=338N (Gl. 6.1.10)
Abbildung 6.1.3: Kräfte Spule Z-Richtung
6 Kräfteberechnung 46
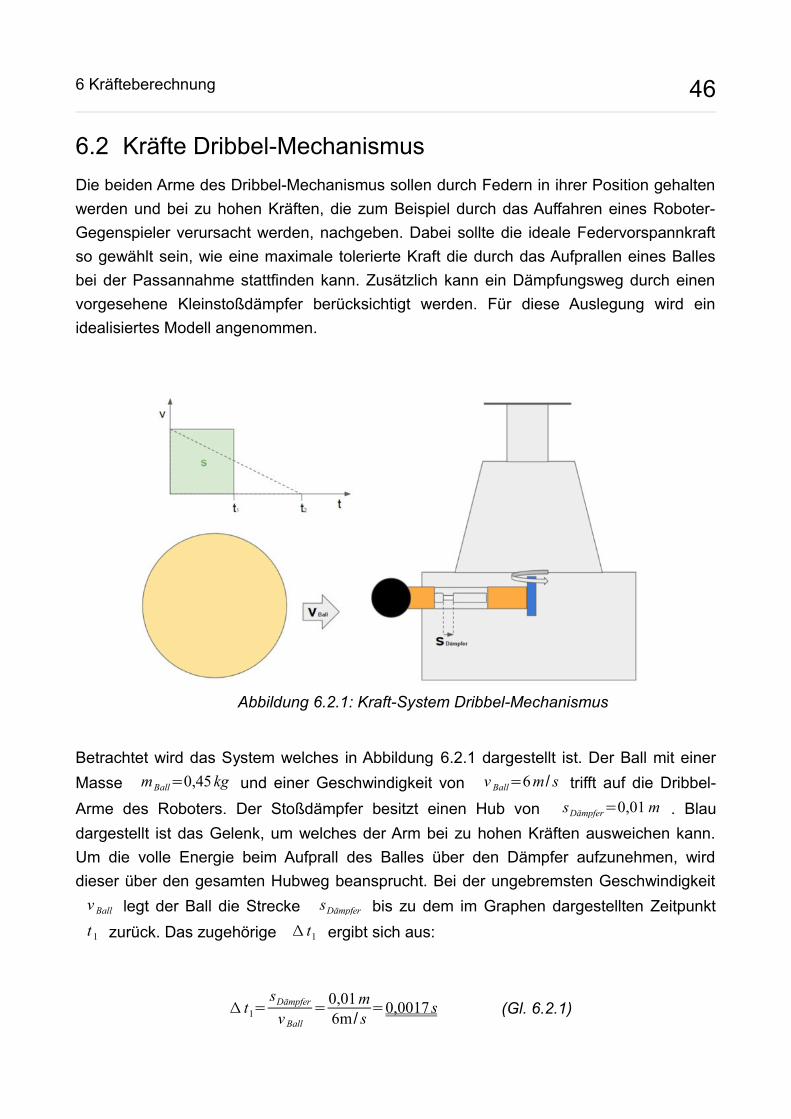
6.2 Kräfte Dribbel-Mechanismus
Die beiden Arme des Dribbel-Mechanismus sollen durch Federn in ihrer Position gehalten
werden und bei zu hohen Kräften, die zum Beispiel durch das Auffahren eines Roboter-
Gegenspieler verursacht werden, nachgeben. Dabei sollte die ideale Federvorspannkraft
so gewählt sein, wie eine maximale tolerierte Kraft die durch das Aufprallen eines Balles
bei der Passannahme stattfinden kann. Zusätzlich kann ein Dämpfungsweg durch einen
vorgesehene Kleinstoßdämpfer berücksichtigt werden. Für diese Auslegung wird ein
idealisiertes Modell angenommen.
Betrachtet wird das System welches in Abbildung 6.2.1 dargestellt ist. Der Ball mit einer
Masse mBall=0,45 kg und einer Geschwindigkeit von v Ball=6m / s trifft auf die Dribbel-
Arme des Roboters. Der Stoßdämpfer besitzt einen Hub von sDämpfer=0,01m . Blau
dargestellt ist das Gelenk, um welches der Arm bei zu hohen Kräften ausweichen kann.
Um die volle Energie beim Aufprall des Balles über den Dämpfer aufzunehmen, wird
dieser über den gesamten Hubweg beansprucht. Bei der ungebremsten Geschwindigkeit
v Ball legt der Ball die Strecke sDämpfer bis zu dem im Graphen dargestellten Zeitpunkt
t 1 zurück. Das zugehörige Δ t1 ergibt sich aus:
Δ t1=sDämpfer
v Ball=0,01m
6m / s=0,0017 s (Gl. 6.2.1)
Abbildung 6.2.1: Kraft-System Dribbel-Mechanismus
6 Kräfteberechnung 47
Geht man nun von einer gleichmäßig abgebremsten Bewegung aus, so ergibt sich die
Zeitspanne Δ t2=2∗Δ t 1 bis der Ball den Weg sDämpfer zurück gelegt hat. In der
Abbildung 6.2.1 ist der gedämpfte Verlauf durch die gestrichelte Linie dargestellt. Aus
diesem Modell ergibt sich folgende negative Beschleunigung für den Ball bis dieser zum
Stillstand kommt:
v Ball (t 2)=0=v0+a∗Δ t 2 (Gl. 6.2.2)
a=−v0Δ t 2
=−v02∗Δ t 1
=−6
m
s
2∗0,0017 s=−1764
m
s2
(Gl. 6.2.3)
Aus dieser Beschleunigung lässt sich nun ein Wert für die Kraft errechnen, welche die
Federung dem Ball entgegen setzen muss, um den Arm in Position zu halten. Ausgehend
davon, dass die Kraft sich gleichmäßig auf beide Arme verteilt, lässt sich herrschende
Kraft am Arm F Arm bestimmen:
F Arm=mBall∗∣a∣
2=
0,45 kg∗1764m
s2
2=397N
(Gl. 6.2.4)
Für den Schutz gegen dynamische Kräfte wird für die anschließende Konstruktion
überschlägig eine maximale angreifende Kraft von F maxArm=1000N angenommen.
7 Design Schuss-Mechanismus 48
7 Design Schuss-MechanismusIn diesem Kapitel wird das fertig entwickelte Design des Schuss-Mechanimus zunächst
vorgestellt und anschließend die Auslegung der verwendeten Komponenten beschrieben.
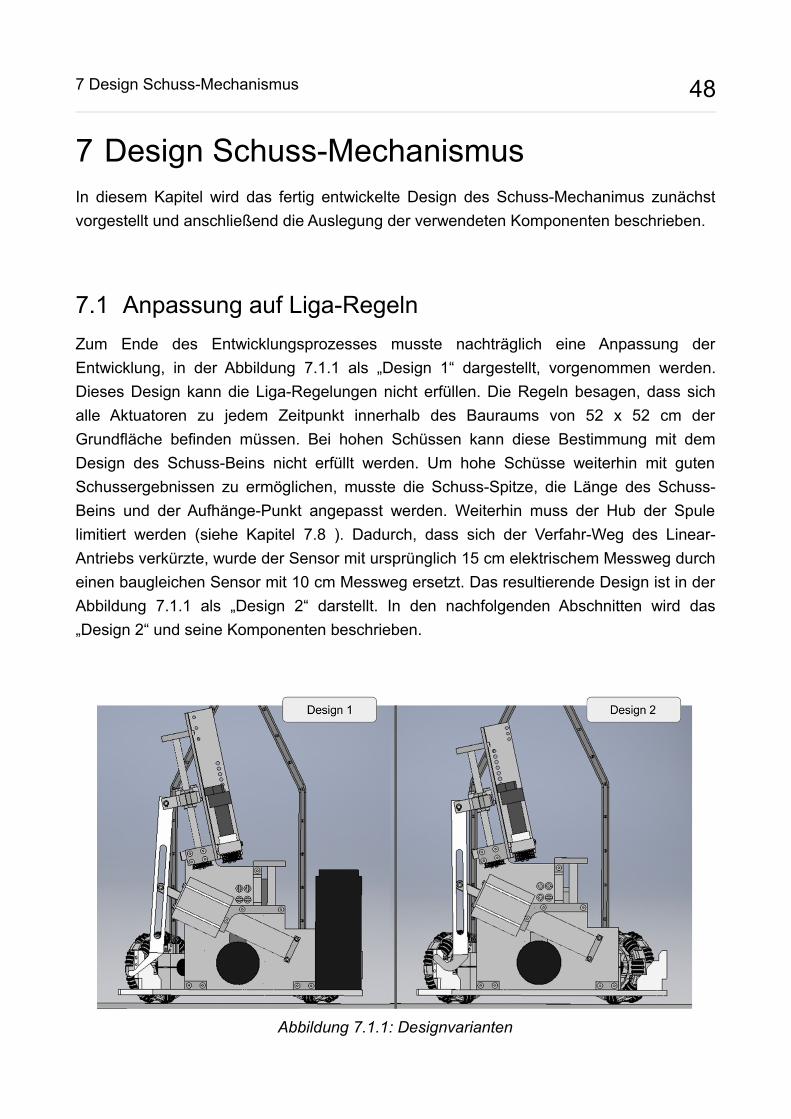
7.1 Anpassung auf Liga-Regeln
Zum Ende des Entwicklungsprozesses musste nachträglich eine Anpassung der
Entwicklung, in der Abbildung 7.1.1 als „Design 1“ dargestellt, vorgenommen werden.
Dieses Design kann die Liga-Regelungen nicht erfüllen. Die Regeln besagen, dass sich
alle Aktuatoren zu jedem Zeitpunkt innerhalb des Bauraums von 52 x 52 cm der
Grundfläche befinden müssen. Bei hohen Schüssen kann diese Bestimmung mit dem
Design des Schuss-Beins nicht erfüllt werden. Um hohe Schüsse weiterhin mit guten
Schussergebnissen zu ermöglichen, musste die Schuss-Spitze, die Länge des Schuss-
Beins und der Aufhänge-Punkt angepasst werden. Weiterhin muss der Hub der Spule
limitiert werden (siehe Kapitel 7.8 ). Dadurch, dass sich der Verfahr-Weg des Linear-
Antriebs verkürzte, wurde der Sensor mit ursprünglich 15 cm elektrischem Messweg durch
einen baugleichen Sensor mit 10 cm Messweg ersetzt. Das resultierende Design ist in der
Abbildung 7.1.1 als „Design 2“ darstellt. In den nachfolgenden Abschnitten wird das
„Design 2“ und seine Komponenten beschrieben.
Abbildung 7.1.1: Designvarianten
7 Design Schuss-Mechanismus 49
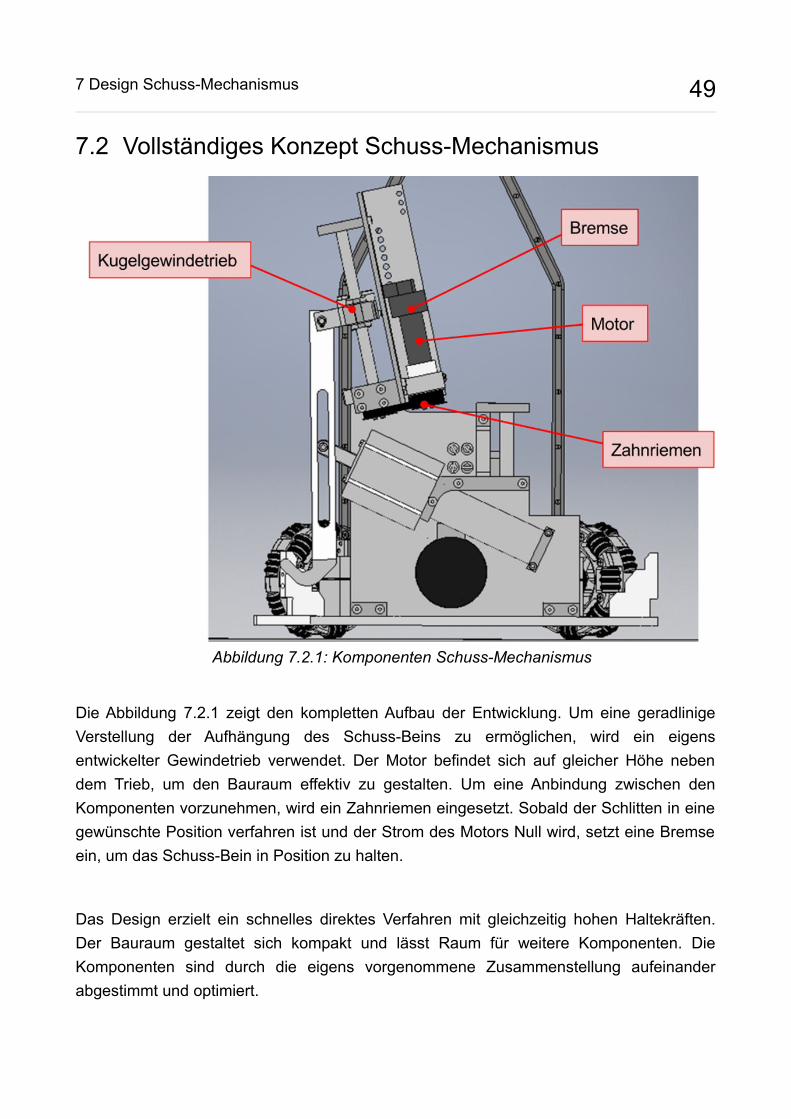
7.2 Vollständiges Konzept Schuss-Mechanismus
Die Abbildung 7.2.1 zeigt den kompletten Aufbau der Entwicklung. Um eine geradlinige
Verstellung der Aufhängung des Schuss-Beins zu ermöglichen, wird ein eigens
entwickelter Gewindetrieb verwendet. Der Motor befindet sich auf gleicher Höhe neben
dem Trieb, um den Bauraum effektiv zu gestalten. Um eine Anbindung zwischen den
Komponenten vorzunehmen, wird ein Zahnriemen eingesetzt. Sobald der Schlitten in eine
gewünschte Position verfahren ist und der Strom des Motors Null wird, setzt eine Bremse
ein, um das Schuss-Bein in Position zu halten.
Das Design erzielt ein schnelles direktes Verfahren mit gleichzeitig hohen Haltekräften.
Der Bauraum gestaltet sich kompakt und lässt Raum für weitere Komponenten. Die
Komponenten sind durch die eigens vorgenommene Zusammenstellung aufeinander
abgestimmt und optimiert.
Abbildung 7.2.1: Komponenten Schuss-Mechanismus
7 Design Schuss-Mechanismus 50
7.3 Antrieb
Der Antrieb ist aus dem Motorenkatalog des Herstellers Maxon ausgewählt (siehe: Quelle
[11]). Entscheidend für die Motor-Auswahl ist die Option eine zusätzliche Bremse auf dem
Motor anzubringen. Der kleinste Motor, bei dem diese zusätzliche Option besteht, ist der
„Maxon RE 25“ mit 20 Watt. Gewählt wird eine Variante mit 24 Volt, so dass die
Spannungs-Quelle des Roboters unverändert genutzt werden kann. Um die
Leistungsfähigkeit des Motors zu überprüfen wird eine überschlägige Rechnung
aufgestellt. Gefordert wird, dass der Motor in der Lage ist eine Schlittenlast von 2 kg in
0,5 s um 0,2 m zu verrücken.
Lmin=F∗v=2∗9,81 N∗0,2m
0,5 s=7,85W (Gl. 7.3.1)
Dieser Wert liegt deutlich unter der Watt-Zahl des Motors von 20 Watt, der Motor bietet
genug Leistung für diese Aufgabe. Für den Motor wird ein zusätzliches Getriebe
vorgesehen. Das Getriebe schont den Zahnriemen und das Spindel-Getriebe durch
niedrigere Drehzahlen. Zusätzlich besitzt das Getriebe eine höhere Stabilität bei radialen
Belastungen auf seinem Flansch. Solche Lasten fallen an wenn der Riemen vorgespannt
wird. Das einstufige Planetengetriebe „GP 32 C“ der Firma Maxon kann im Betrieb mit bis
zu 90 N (10 mm ab Flansch) radial belastet werden. Zu beachten ist, dass das Getriebe
mit einer maximalen Eingangsdrehzahl von 8000 1/min (bzw. 133,33 1/s) belastet werden
darf. Der verwendete Motor kann eine Grenzdrehzahl von 14000 1/min erreichen. Die
gewählte Untersetzung ist mit 3,7:1 die kleinste mögliche Untersetzung in dieser
Getriebereihe. Damit ist die Drehzahl ausreichend begrenzt und bietet trotzdem genug
Umdrehungen, um einen schnellen Linear-Antrieb zu realisieren. Die vollständige
Dimensionierung wird in Kombination mit dem Spindel-Trieb vorgenommen (siehe
Kapitel 7.5 ). Die Datenblätter des Motors und des Getriebes sind im Anhang dieser Arbeit
enthalten.
Abbildung 7.3.2: Maxon RE 25
[Quelle: maxonmotor.com]
Abbildung 7.3.1: Maxon GP 32 C
[Quelle: maxonmotor.com]
7 Design Schuss-Mechanismus 51
7.4 Bremse
Die Permanentmagnet Einflächenbremse „AB 28“ des Herstellers Maxon liefert ein
Haltemoment von 0,4 Nm. In Kombination mit dem Getriebe MAXON GP 32 C, welches
eine Untersetzung von 3,7 : 1 besitzt, ergibt sich ein Haltemoment von 1,48 Nm. Dabei ist
zu beachten, dass das Getriebe mit einem maximalen kurzzeitigen Drehmoment von
1,25 Nm im Datenblatt angegeben ist. Diese Begrenzung des Getriebes ist also das
maximal zulässige Haltemoment. Das Datenblatt der Bremse Maxon AB 28 ist im Anhang
dieser Arbeit enthalten. [11]
Abbildung 7.4.1: Bremse Maxon AB 28 [Quelle: maxonmotor.com]
7 Design Schuss-Mechanismus 52
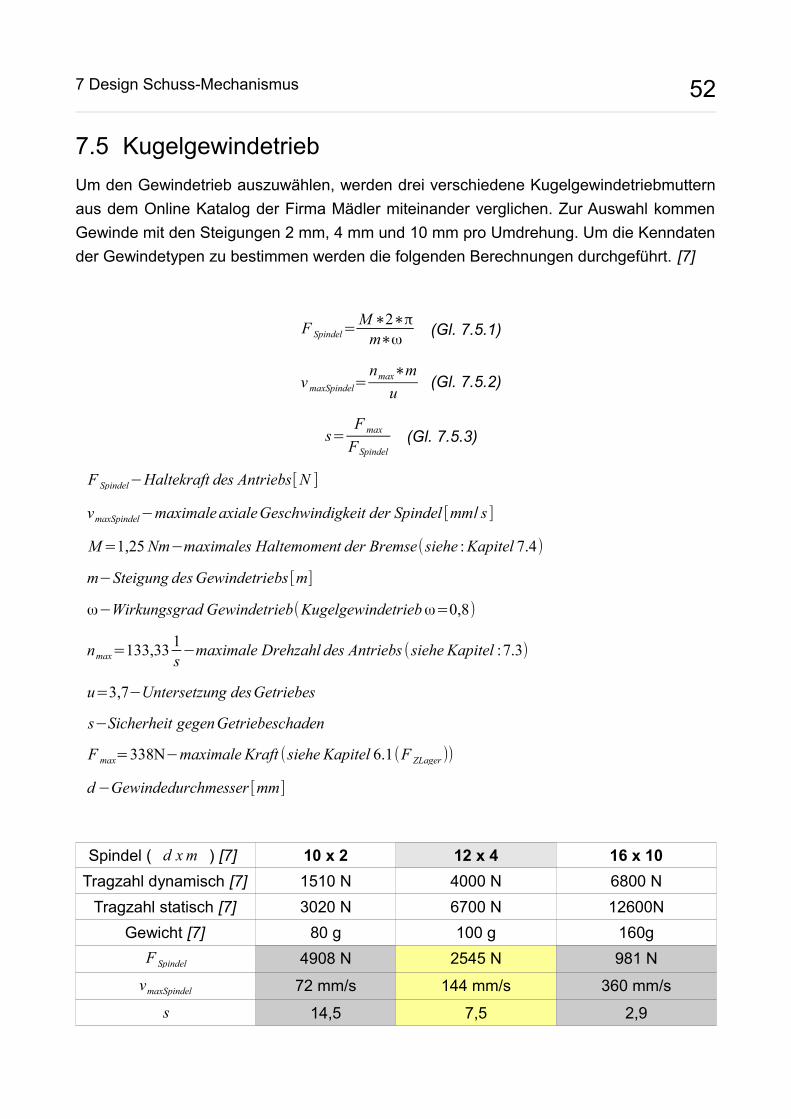
7.5 Kugelgewindetrieb
Um den Gewindetrieb auszuwählen, werden drei verschiedene Kugelgewindetriebmuttern
aus dem Online Katalog der Firma Mädler miteinander verglichen. Zur Auswahl kommen
Gewinde mit den Steigungen 2 mm, 4 mm und 10 mm pro Umdrehung. Um die Kenndaten
der Gewindetypen zu bestimmen werden die folgenden Berechnungen durchgeführt. [7]
F Spindel=M∗2∗πm∗ω
(Gl. 7.5.1)
vmaxSpindel=nmax∗m
u(Gl. 7.5.2)
s=F max
FSpindel (Gl. 7.5.3)
F Spindel−Haltekraft des Antriebs[N ]
vmaxSpindel−maximaleaxialeGeschwindigkeit der Spindel [mm/ s ]
M=1,25Nm−maximales Haltemoment der Bremse(siehe :Kapitel 7.4)
m−Steigung desGewindetriebs [m]
ω−Wirkungsgrad Gewindetrieb(Kugelgewindetriebω=0,8)
nmax=133,331
s−maximale Drehzahl des Antriebs (siehe Kapitel :7.3)
u=3,7−Untersetzung desGetriebes
s−Sicherheit gegenGetriebeschaden
F max=338N−maximale Kraft (siehe Kapitel 6.1(F ZLager ))
d−Gewindedurchmesser [mm]
Spindel ( d x m ) [7] 10 x 2 12 x 4 16 x 10
Tragzahl dynamisch [7] 1510 N 4000 N 6800 N
Tragzahl statisch [7] 3020 N 6700 N 12600N
Gewicht [7] 80 g 100 g 160g
F Spindel 4908 N 2545 N 981 N
vmaxSpindel 72 mm/s 144 mm/s 360 mm/s
s 14,5 7,5 2,9
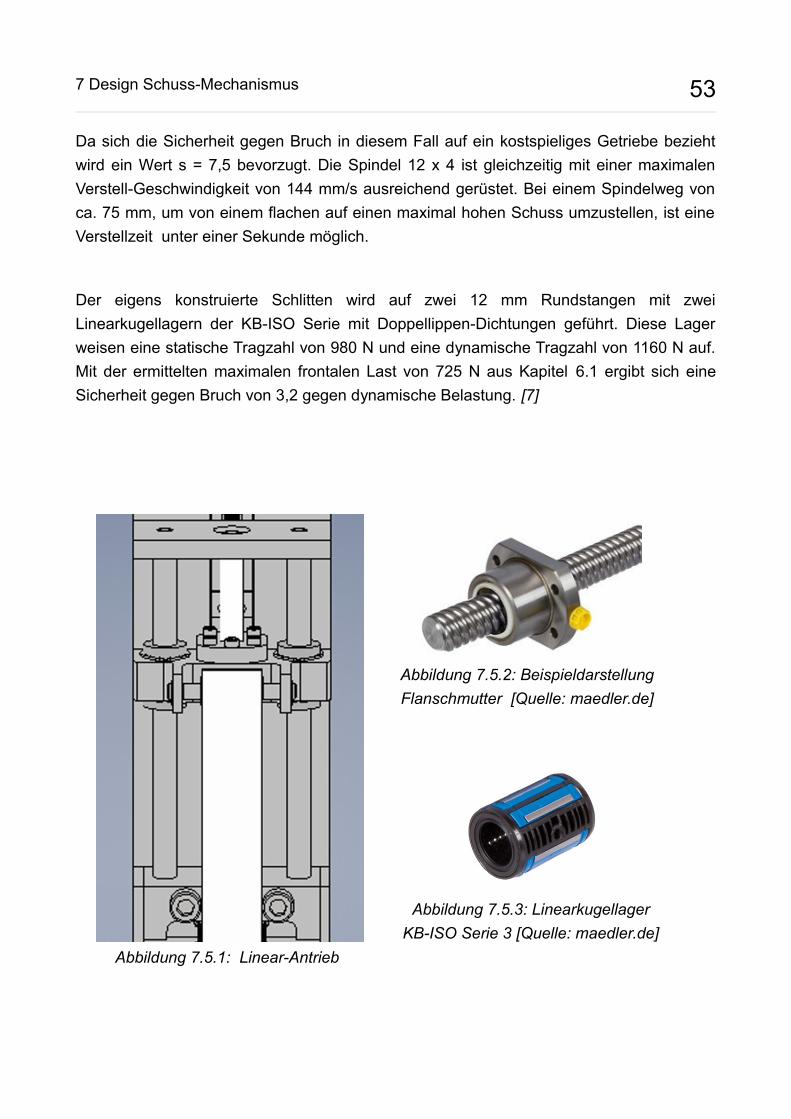
7 Design Schuss-Mechanismus 53
Da sich die Sicherheit gegen Bruch in diesem Fall auf ein kostspieliges Getriebe bezieht
wird ein Wert s = 7,5 bevorzugt. Die Spindel 12 x 4 ist gleichzeitig mit einer maximalen
Verstell-Geschwindigkeit von 144 mm/s ausreichend gerüstet. Bei einem Spindelweg von
ca. 75 mm, um von einem flachen auf einen maximal hohen Schuss umzustellen, ist eine
Verstellzeit unter einer Sekunde möglich.
Der eigens konstruierte Schlitten wird auf zwei 12 mm Rundstangen mit zwei
Linearkugellagern der KB-ISO Serie mit Doppellippen-Dichtungen geführt. Diese Lager
weisen eine statische Tragzahl von 980 N und eine dynamische Tragzahl von 1160 N auf.
Mit der ermittelten maximalen frontalen Last von 725 N aus Kapitel 6.1 ergibt sich eine
Sicherheit gegen Bruch von 3,2 gegen dynamische Belastung. [7]
Abbildung 7.5.2: Beispieldarstellung
Flanschmutter [Quelle: maedler.de]
Abbildung 7.5.1: Linear-Antrieb
Abbildung 7.5.3: Linearkugellager
KB-ISO Serie 3 [Quelle: maedler.de]
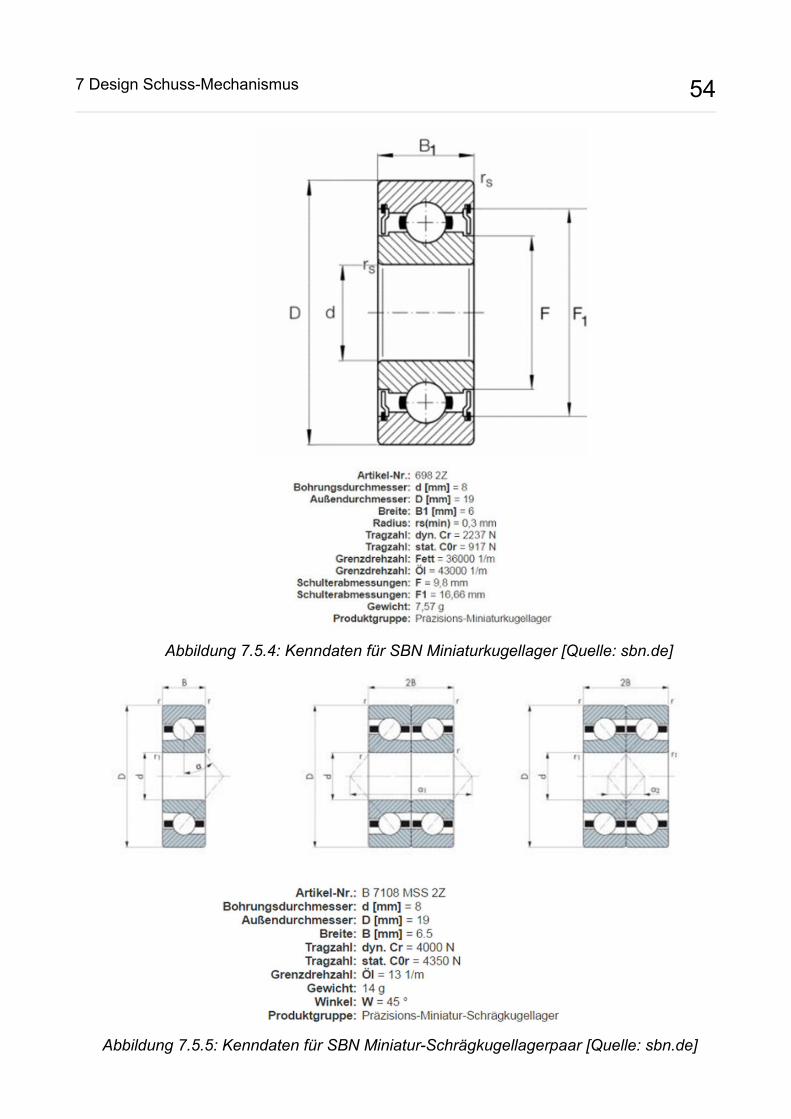
7 Design Schuss-Mechanismus 54
Abbildung 7.5.5: Kenndaten für SBN Miniatur-Schrägkugellagerpaar [Quelle: sbn.de]
Abbildung 7.5.4: Kenndaten für SBN Miniaturkugellager [Quelle: sbn.de]
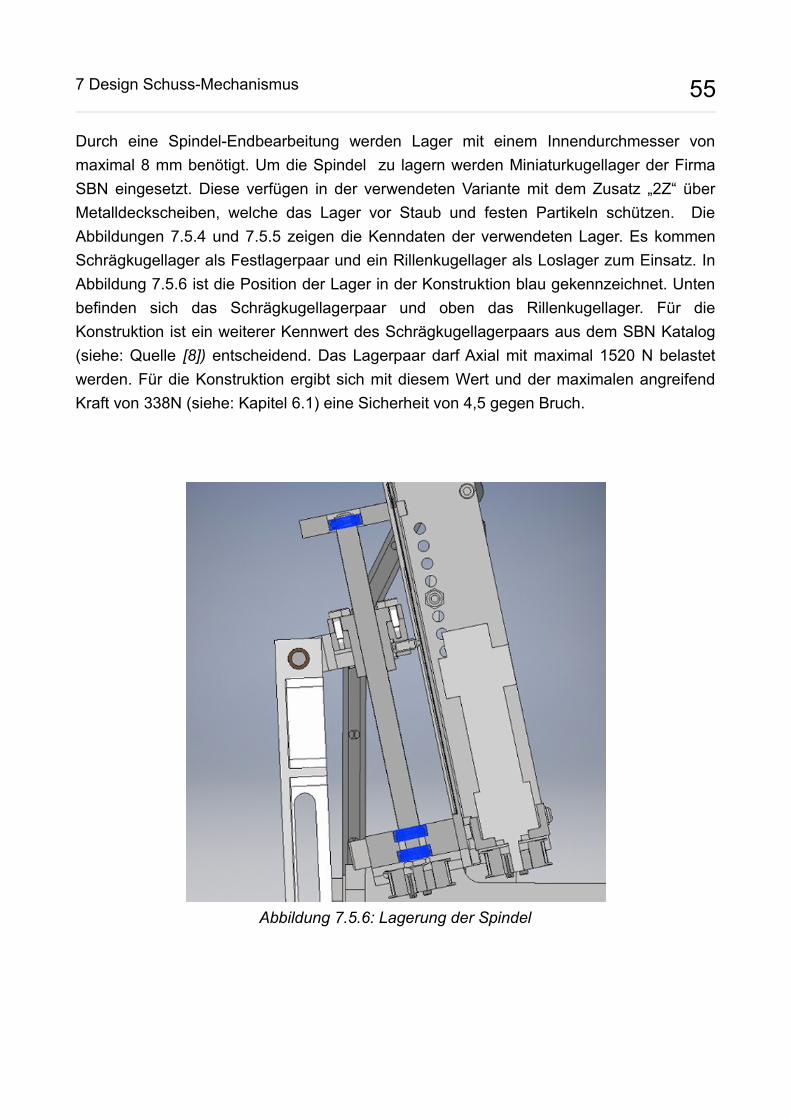
7 Design Schuss-Mechanismus 55
Durch eine Spindel-Endbearbeitung werden Lager mit einem Innendurchmesser von
maximal 8 mm benötigt. Um die Spindel zu lagern werden Miniaturkugellager der Firma
SBN eingesetzt. Diese verfügen in der verwendeten Variante mit dem Zusatz „2Z“ über
Metalldeckscheiben, welche das Lager vor Staub und festen Partikeln schützen. Die
Abbildungen 7.5.4 und 7.5.5 zeigen die Kenndaten der verwendeten Lager. Es kommen
Schrägkugellager als Festlagerpaar und ein Rillenkugellager als Loslager zum Einsatz. In
Abbildung 7.5.6 ist die Position der Lager in der Konstruktion blau gekennzeichnet. Unten
befinden sich das Schrägkugellagerpaar und oben das Rillenkugellager. Für die
Konstruktion ist ein weiterer Kennwert des Schrägkugellagerpaars aus dem SBN Katalog
(siehe: Quelle [8]) entscheidend. Das Lagerpaar darf Axial mit maximal 1520 N belastet
werden. Für die Konstruktion ergibt sich mit diesem Wert und der maximalen angreifend
Kraft von 338N (siehe: Kapitel 6.1) eine Sicherheit von 4,5 gegen Bruch.
Abbildung 7.5.6: Lagerung der Spindel
7 Design Schuss-Mechanismus 56
7.6 Zahnriemen
Um eine Welle-Nabe-Verbindung sowohl zwischen Motor und Zahnriemenrad, als auch
zwischen Spindel und Zahnriemenrad, herzustellen, werden Spannsätze der Baureihe
„BAR“ des Lieferanten Mädler verwendet. Die Spannsätze in der Ausführung für
Wellendurchmesser von 6 mm weisen ein übertragbares Drehmoment von 9 Nm und ein
übertragbare Axialkraft von 3 kN auf. Die Spannsätze sind damit für den Anwendungsfall
geeignet. Das Zahnriemenrad wird aufgebohrt um den Spannsatz einzusetzen. Im
nächsten Schritt wird der Riemen ausgelegt. [7]
Nach Kapitel 6.1 (Kräfte Schuss-Mechanismus) ist gefordert, dass der Linear-Antrieb einer
Kraft von F ZLager=338N Stand halten muss. Um eine zusätzliche Sicherheit größer 2 zu
erlangen, wird der Zahnriementrieb mit einer angreifenden Kraft von F RiemenK=800N
ausgelegt. Durch den Spindeltrieb ergibt sich damit folgendes Drehmoment M RiemenK für
den Riemen:
M RiemenK=F RiemenK∗m∗ω
2∗π=800N∗0,004m∗0,8
2∗π=0,407Nm (Gl. 7.6.1)
ω−WirkungsgradGewindetrieb (Kugelgewindetriebω=0,8)
m−Steigung desGewindetriebs [m](siehe :Kapitel 7.5, gewählter Spindeltrieb)
Abbildung 7.6.1:
Beispieldarstellung Spannsatz
BAR [Quelle: maedler.de]Abbildung 7.6.2: Zahnriemenrad
[Quelle: maedler.de]
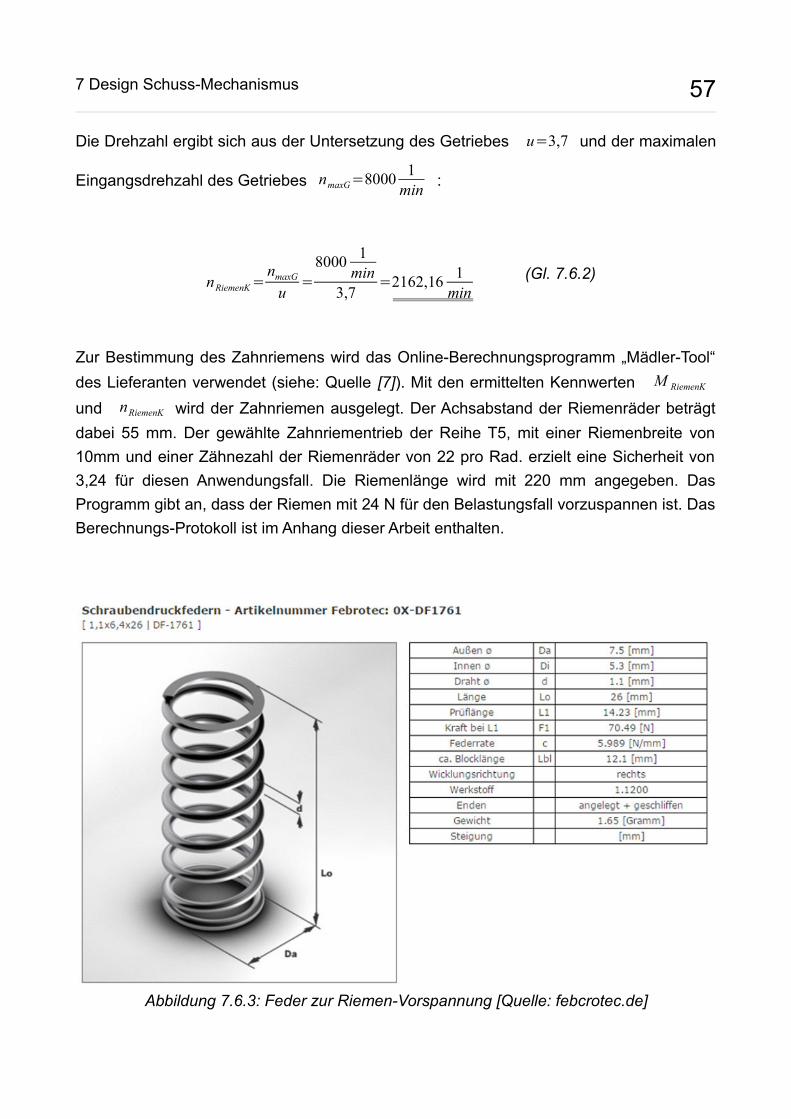
7 Design Schuss-Mechanismus 57
Die Drehzahl ergibt sich aus der Untersetzung des Getriebes u=3,7 und der maximalen
Eingangsdrehzahl des Getriebes nmaxG=80001
min:
nRiemenK=nmaxGu
=8000
1
min
3,7=2162,16
1
min
(Gl. 7.6.2)
Zur Bestimmung des Zahnriemens wird das Online-Berechnungsprogramm „Mädler-Tool“
des Lieferanten verwendet (siehe: Quelle [7]). Mit den ermittelten Kennwerten M RiemenK
und nRiemenK wird der Zahnriemen ausgelegt. Der Achsabstand der Riemenräder beträgt
dabei 55 mm. Der gewählte Zahnriementrieb der Reihe T5, mit einer Riemenbreite von
10mm und einer Zähnezahl der Riemenräder von 22 pro Rad. erzielt eine Sicherheit von
3,24 für diesen Anwendungsfall. Die Riemenlänge wird mit 220 mm angegeben. Das
Programm gibt an, dass der Riemen mit 24 N für den Belastungsfall vorzuspannen ist. Das
Berechnungs-Protokoll ist im Anhang dieser Arbeit enthalten.
Abbildung 7.6.3: Feder zur Riemen-Vorspannung [Quelle: febcrotec.de]
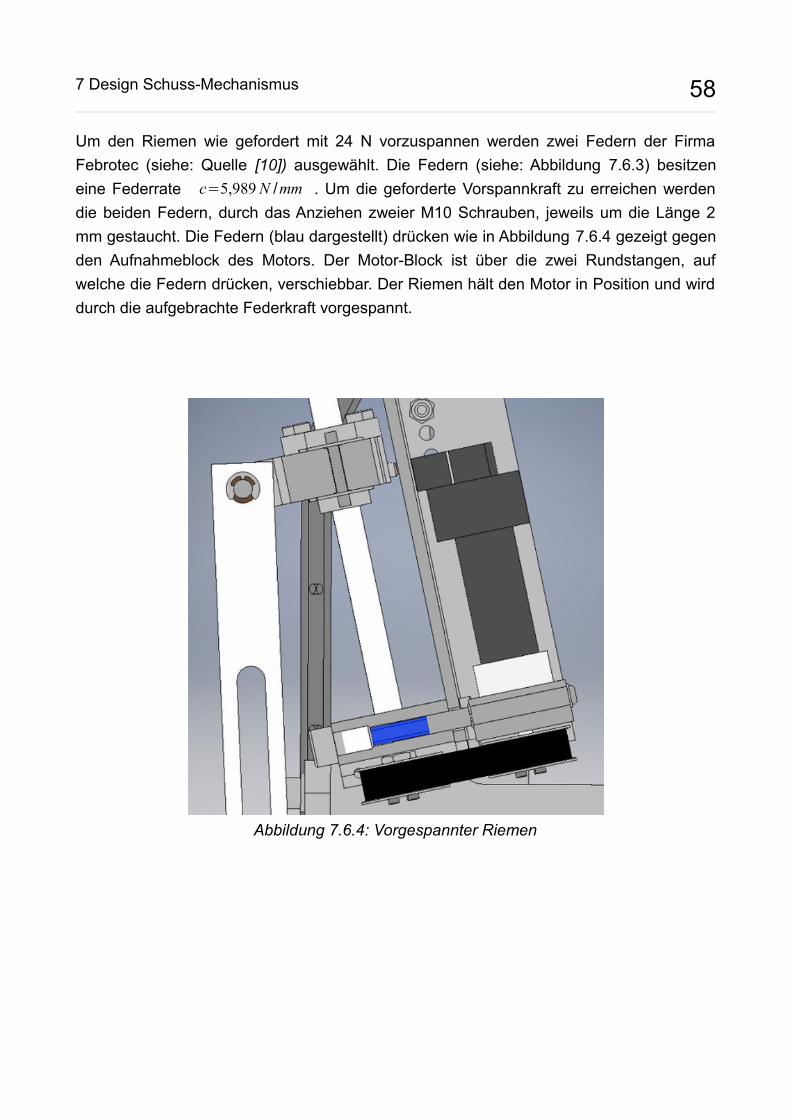
7 Design Schuss-Mechanismus 58
Um den Riemen wie gefordert mit 24 N vorzuspannen werden zwei Federn der Firma
Febrotec (siehe: Quelle [10]) ausgewählt. Die Federn (siehe: Abbildung 7.6.3) besitzen
eine Federrate c=5,989N /mm . Um die geforderte Vorspannkraft zu erreichen werden
die beiden Federn, durch das Anziehen zweier M10 Schrauben, jeweils um die Länge 2
mm gestaucht. Die Federn (blau dargestellt) drücken wie in Abbildung 7.6.4 gezeigt gegen
den Aufnahmeblock des Motors. Der Motor-Block ist über die zwei Rundstangen, auf
welche die Federn drücken, verschiebbar. Der Riemen hält den Motor in Position und wird
durch die aufgebrachte Federkraft vorgespannt.
Abbildung 7.6.4: Vorgespannter Riemen
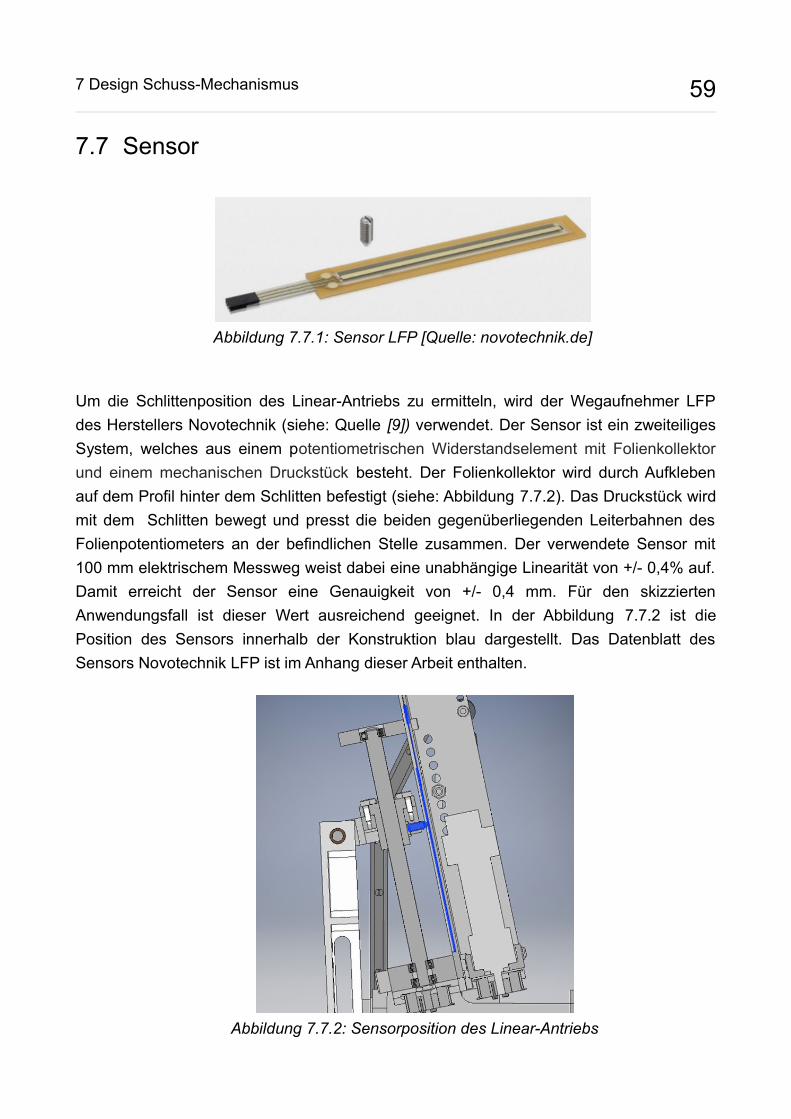
7 Design Schuss-Mechanismus 59
7.7 Sensor
Um die Schlittenposition des Linear-Antriebs zu ermitteln, wird der Wegaufnehmer LFP
des Herstellers Novotechnik (siehe: Quelle [9]) verwendet. Der Sensor ist ein zweiteiliges
System, welches aus einem potentiometrischen Widerstandselement mit Folienkollektor
und einem mechanischen Druckstück besteht. Der Folienkollektor wird durch Aufkleben
auf dem Profil hinter dem Schlitten befestigt (siehe: Abbildung 7.7.2). Das Druckstück wird
mit dem Schlitten bewegt und presst die beiden gegenüberliegenden Leiterbahnen des
Folienpotentiometers an der befindlichen Stelle zusammen. Der verwendete Sensor mit
100 mm elektrischem Messweg weist dabei eine unabhängige Linearität von +/- 0,4% auf.
Damit erreicht der Sensor eine Genauigkeit von +/- 0,4 mm. Für den skizzierten
Anwendungsfall ist dieser Wert ausreichend geeignet. In der Abbildung 7.7.2 ist die
Position des Sensors innerhalb der Konstruktion blau dargestellt. Das Datenblatt des
Sensors Novotechnik LFP ist im Anhang dieser Arbeit enthalten.
Abbildung 7.7.1: Sensor LFP [Quelle: novotechnik.de]
Abbildung 7.7.2: Sensorposition des Linear-Antriebs
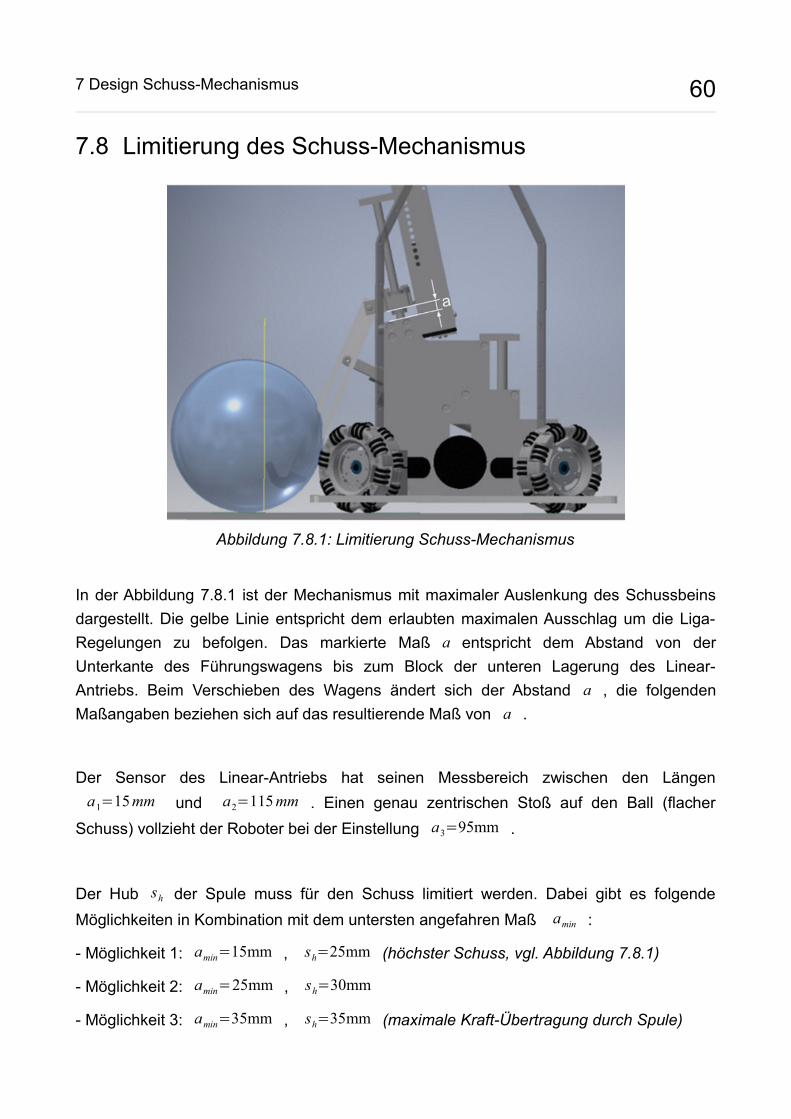
7 Design Schuss-Mechanismus 60
7.8 Limitierung des Schuss-Mechanismus
In der Abbildung 7.8.1 ist der Mechanismus mit maximaler Auslenkung des Schussbeins
dargestellt. Die gelbe Linie entspricht dem erlaubten maximalen Ausschlag um die Liga-
Regelungen zu befolgen. Das markierte Maß a entspricht dem Abstand von der
Unterkante des Führungswagens bis zum Block der unteren Lagerung des Linear-
Antriebs. Beim Verschieben des Wagens ändert sich der Abstand a , die folgenden
Maßangaben beziehen sich auf das resultierende Maß von a .
Der Sensor des Linear-Antriebs hat seinen Messbereich zwischen den Längen
a1=15mm und a2=115mm . Einen genau zentrischen Stoß auf den Ball (flacher
Schuss) vollzieht der Roboter bei der Einstellung a3=95mm .
Der Hub sh der Spule muss für den Schuss limitiert werden. Dabei gibt es folgende
Möglichkeiten in Kombination mit dem untersten angefahren Maß amin :
- Möglichkeit 1: amin=15mm , sh=25mm (höchster Schuss, vgl. Abbildung 7.8.1)
- Möglichkeit 2: amin=25mm , sh=30mm
- Möglichkeit 3: amin=35mm , sh=35mm (maximale Kraft-Übertragung durch Spule)
Abbildung 7.8.1: Limitierung Schuss-Mechanismus
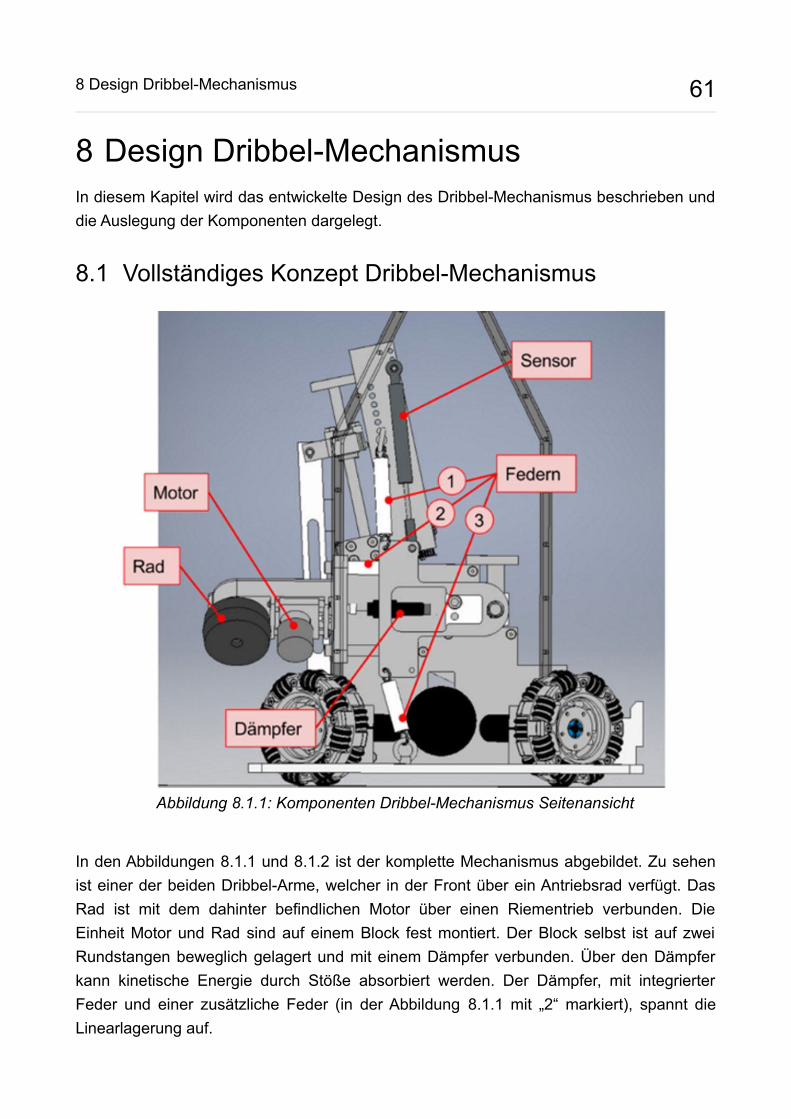
8 Design Dribbel-Mechanismus 61
8 Design Dribbel-MechanismusIn diesem Kapitel wird das entwickelte Design des Dribbel-Mechanismus beschrieben und
die Auslegung der Komponenten dargelegt.
8.1 Vollständiges Konzept Dribbel-Mechanismus
In den Abbildungen 8.1.1 und 8.1.2 ist der komplette Mechanismus abgebildet. Zu sehen
ist einer der beiden Dribbel-Arme, welcher in der Front über ein Antriebsrad verfügt. Das
Rad ist mit dem dahinter befindlichen Motor über einen Riementrieb verbunden. Die
Einheit Motor und Rad sind auf einem Block fest montiert. Der Block selbst ist auf zwei
Rundstangen beweglich gelagert und mit einem Dämpfer verbunden. Über den Dämpfer
kann kinetische Energie durch Stöße absorbiert werden. Der Dämpfer, mit integrierter
Feder und einer zusätzliche Feder (in der Abbildung 8.1.1 mit „2“ markiert), spannt die
Linearlagerung auf.
Abbildung 8.1.1: Komponenten Dribbel-Mechanismus Seitenansicht
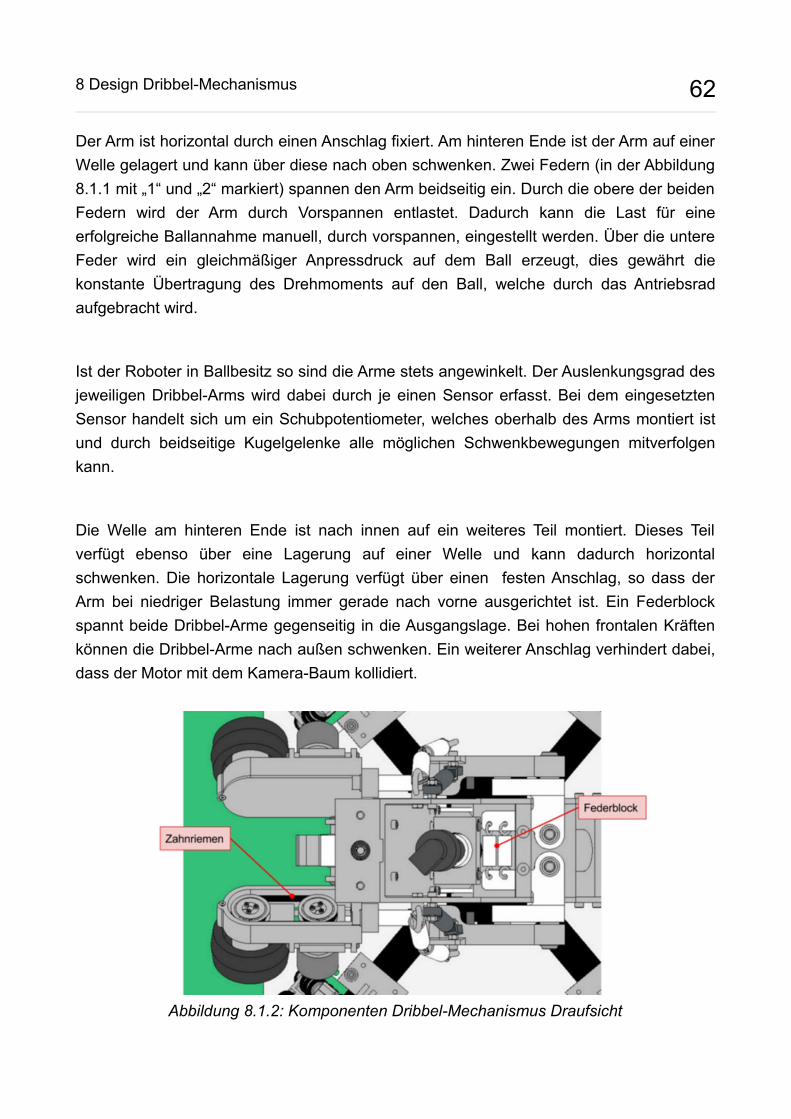
8 Design Dribbel-Mechanismus 62
Der Arm ist horizontal durch einen Anschlag fixiert. Am hinteren Ende ist der Arm auf einer
Welle gelagert und kann über diese nach oben schwenken. Zwei Federn (in der Abbildung
8.1.1 mit „1“ und „2“ markiert) spannen den Arm beidseitig ein. Durch die obere der beiden
Federn wird der Arm durch Vorspannen entlastet. Dadurch kann die Last für eine
erfolgreiche Ballannahme manuell, durch vorspannen, eingestellt werden. Über die untere
Feder wird ein gleichmäßiger Anpressdruck auf dem Ball erzeugt, dies gewährt die
konstante Übertragung des Drehmoments auf den Ball, welche durch das Antriebsrad
aufgebracht wird.
Ist der Roboter in Ballbesitz so sind die Arme stets angewinkelt. Der Auslenkungsgrad des
jeweiligen Dribbel-Arms wird dabei durch je einen Sensor erfasst. Bei dem eingesetzten
Sensor handelt sich um ein Schubpotentiometer, welches oberhalb des Arms montiert ist
und durch beidseitige Kugelgelenke alle möglichen Schwenkbewegungen mitverfolgen
kann.
Die Welle am hinteren Ende ist nach innen auf ein weiteres Teil montiert. Dieses Teil
verfügt ebenso über eine Lagerung auf einer Welle und kann dadurch horizontal
schwenken. Die horizontale Lagerung verfügt über einen festen Anschlag, so dass der
Arm bei niedriger Belastung immer gerade nach vorne ausgerichtet ist. Ein Federblock
spannt beide Dribbel-Arme gegenseitig in die Ausgangslage. Bei hohen frontalen Kräften
können die Dribbel-Arme nach außen schwenken. Ein weiterer Anschlag verhindert dabei,
dass der Motor mit dem Kamera-Baum kollidiert.
Abbildung 8.1.2: Komponenten Dribbel-Mechanismus Draufsicht

8 Design Dribbel-Mechanismus 63
8.2 Antrieb
Die Dimensionierung der Antriebseinheit wird im Kapitel 5.8 „Antriebseinheit Dribbel-
Mechanismus“ innerhalb der Entwurfsphase vorgenommen und beschrieben. Gewählt
wurde ein „Maxon EC 32 flat“ Motor mit 24 Volt und einem „Maxon GP 32 C“ Getriebe mit
einer Untersetzung von 5,8 : 1. [11]
8.3 Rad
Als Abtriebsrad dient ein Rad aus dem RC-Modellautobau in dem Maßstab 1:10
(siehe: Quelle [15]). Diese Räder haben sich bereits auf der aktuellen Roboter-Plattform
bewährt. Sie sind leicht und ausreichend stabil. Das neu gewählte Rad in der Ausführung
„Reely Straßenmodell Slick breit“ ist breiter als das aktuelle und besitzt eine glatte
Oberfläche, um eine hohe Haftreibung (Grip) zwischen Ball und Rad zu erlangen.
Das Rad ist auf eine Welle montiert und gesondert von dem Antrieb gelagert (siehe
Abbildung 8.3.3). Die Lagerung ist mit einem doppelreihigen Schrägkugelllager realisiert.
Dieses Lager der Marke SKF mit der Bezeichnung „3200-A-2RS1TN9-MT33“ besitzt
beidseitige Dichtscheiben. Die Welle ist mittels einer Nutmutter nach DIN 981 axial auf
dem Lager fixiert. Das Lager ist zwischen einem Sicherungsring nach DIN 472 für
Bohrungen und einer Anschlagfläche am äußeren Ring eingespannt. [14]
Abbildung 8.3.1: Modellbaurad „Reely
Straßenmodell Slick breit“ [Quelle: conrad.de]
Abbildung 8.3.2: SKF
doppelreihiges Schrägkugellager
[Quelle: skf.com]
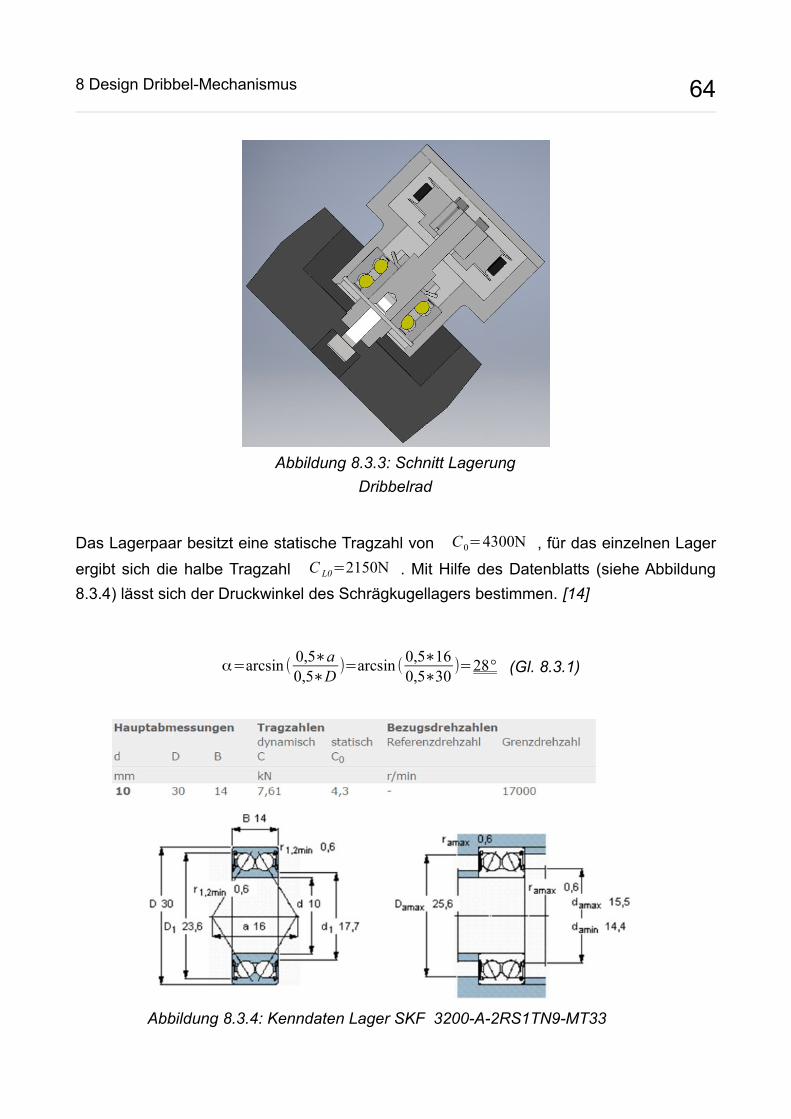
8 Design Dribbel-Mechanismus 64
Das Lagerpaar besitzt eine statische Tragzahl von C0=4300N , für das einzelnen Lager
ergibt sich die halbe Tragzahl C L0=2150N . Mit Hilfe des Datenblatts (siehe Abbildung
8.3.4) lässt sich der Druckwinkel des Schrägkugellagers bestimmen. [14]
α=arcsin (0,5∗a0,5∗D
)=arcsin (0,5∗160,5∗30
)=28° (Gl. 8.3.1)
Abbildung 8.3.3: Schnitt Lagerung
Dribbelrad
Abbildung 8.3.4: Kenndaten Lager SKF 3200-A-2RS1TN9-MT33
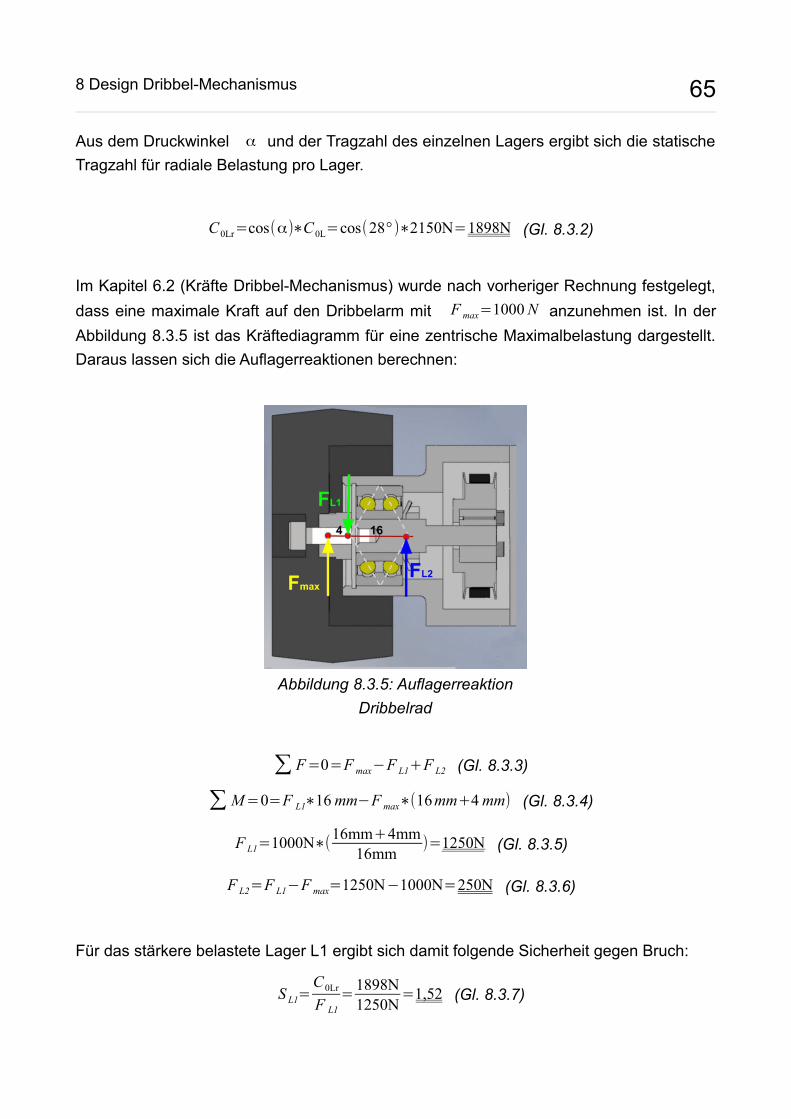
8 Design Dribbel-Mechanismus 65
Aus dem Druckwinkel α und der Tragzahl des einzelnen Lagers ergibt sich die statische
Tragzahl für radiale Belastung pro Lager.
C0Lr=cos(α)∗C0L=cos(28°)∗2150N=1898N (Gl. 8.3.2)
Im Kapitel 6.2 (Kräfte Dribbel-Mechanismus) wurde nach vorheriger Rechnung festgelegt,
dass eine maximale Kraft auf den Dribbelarm mit F max=1000N anzunehmen ist. In der
Abbildung 8.3.5 ist das Kräftediagramm für eine zentrische Maximalbelastung dargestellt.
Daraus lassen sich die Auflagerreaktionen berechnen:
∑ F=0=F max−F L1+F L2 (Gl. 8.3.3)
∑M=0=F L1∗16mm−F max∗(16mm+4mm) (Gl. 8.3.4)
F L1=1000N∗(16mm+4mm16mm
)=1250N (Gl. 8.3.5)
F L2=F L1−F max=1250N−1000N=250N (Gl. 8.3.6)
Für das stärkere belastete Lager L1 ergibt sich damit folgende Sicherheit gegen Bruch:
S L1=C0Lr
F L1
=1898N
1250N=1,52 (Gl. 8.3.7)
Abbildung 8.3.5: Auflagerreaktion
Dribbelrad
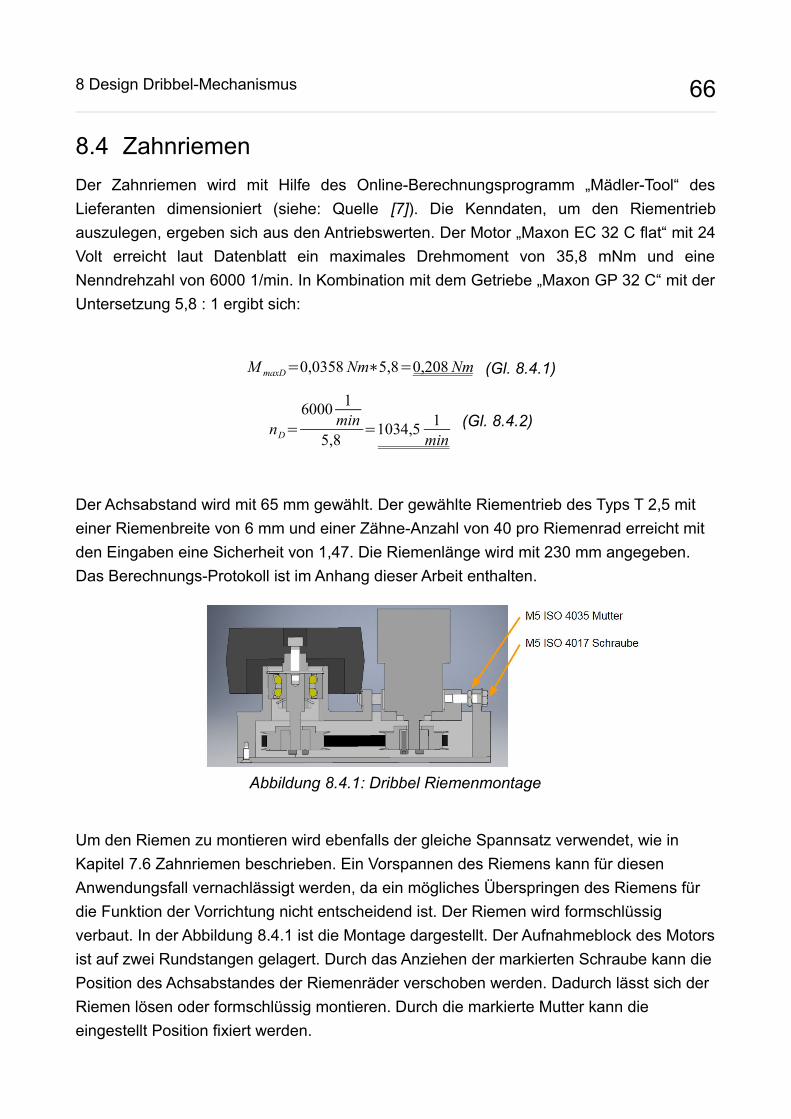
8 Design Dribbel-Mechanismus 66
8.4 Zahnriemen
Der Zahnriemen wird mit Hilfe des Online-Berechnungsprogramm „Mädler-Tool“ des
Lieferanten dimensioniert (siehe: Quelle [7]). Die Kenndaten, um den Riementrieb
auszulegen, ergeben sich aus den Antriebswerten. Der Motor „Maxon EC 32 C flat“ mit 24
Volt erreicht laut Datenblatt ein maximales Drehmoment von 35,8 mNm und eine
Nenndrehzahl von 6000 1/min. In Kombination mit dem Getriebe „Maxon GP 32 C“ mit der
Untersetzung 5,8 : 1 ergibt sich:
M maxD=0,0358Nm∗5,8=0,208Nm (Gl. 8.4.1)
nD=6000
1
min
5,8=1034,5
1
min
(Gl. 8.4.2)
Der Achsabstand wird mit 65 mm gewählt. Der gewählte Riementrieb des Typs T 2,5 mit
einer Riemenbreite von 6 mm und einer Zähne-Anzahl von 40 pro Riemenrad erreicht mit
den Eingaben eine Sicherheit von 1,47. Die Riemenlänge wird mit 230 mm angegeben.
Das Berechnungs-Protokoll ist im Anhang dieser Arbeit enthalten.
Um den Riemen zu montieren wird ebenfalls der gleiche Spannsatz verwendet, wie in
Kapitel 7.6 Zahnriemen beschrieben. Ein Vorspannen des Riemens kann für diesen
Anwendungsfall vernachlässigt werden, da ein mögliches Überspringen des Riemens für
die Funktion der Vorrichtung nicht entscheidend ist. Der Riemen wird formschlüssig
verbaut. In der Abbildung 8.4.1 ist die Montage dargestellt. Der Aufnahmeblock des Motors
ist auf zwei Rundstangen gelagert. Durch das Anziehen der markierten Schraube kann die
Position des Achsabstandes der Riemenräder verschoben werden. Dadurch lässt sich der
Riemen lösen oder formschlüssig montieren. Durch die markierte Mutter kann die
eingestellt Position fixiert werden.
Abbildung 8.4.1: Dribbel Riemenmontage
8 Design Dribbel-Mechanismus 67
8.5 Dämpfer
Der gewählte Dämpfer ist aus dem Sortiment des Lieferanten Mädler gewählt. Aus dem
Datenblatt kann man entnehmen, dass der Dämpfer von dem Hersteller ACE stammt
(siehe Quelle: [12]). Um zu ermitteln welches Dämpfer-Modell geeignet ist, wird der
physikalische Vorgang betrachtet. Der Ball soll bei der Annahme durch den Dämpfer
abgebremst werden. Die effektive Masse me entspricht in diesem Fall der
abzubremsenden Masse des Balls und der Masse der vorderen Dribbel-Arms, welcher
sich nach dem Stoß durch den Ball mitbewegt. Die Aufprall-Geschwindigkeit v2 auf den
Stoßdämpfer lässt sich mit dem Impulssatz für unelastischen Stöße abschätzen. Dazu
werden zunächst die Massen der einzelnen Körper ermittelt.
Masse Ball: m1=450g
Masse Vorderer Dribbel-Arm: m2=725g
- (Bauteil) Dribbel_Winkel: 106 g
- (Bauteil) Dribbel_Arm_eins: 197 g
- (Bauteil) Dribbel_Vorspann_Motoraufnahme: 56 g
- (Bauteil) Dribbel_Arm_Deckel: 56 g
- Zahnriemenräder: 2x 40g
- Motor: 91 g
- Getriebe: 118 g
- Sonstiges: ≈ 21g
Abbildung 8.5.1: Kleinstossdämpfer
[Quelle: maedler.de]
8 Design Dribbel-Mechanismus 68
Für den Impulssatz wird die halbe Masse des Balls eingesetzt, da sich die Masse auf die
beiden Dribbel-Arme mit jeweils einem Dämpfer verteilt. Die Ball-Geschwindigkeit v1
beträgt in dem betrachteten Fall 6 m/s.
Impulssatz (unelastischer Stoß): v1∗m1=v2(m1+m2) (Gl. 8.5.1)
v2=v1∗(m1
m1+m2)=6
m
s∗(
225g
225g+725g)=1,4
m
s(Gl. 8.5.2)
Die übertragene kinetische Energie und die effektive Masse beträgt dabei pro Dribbel-Arm:
E kin=0,5∗m1∗(v1) ²=0,5∗0,25∗(6m
s) ²=4,5 J (Gl. 8.5.3)
me=0,5∗m1+m2=0,5∗450g+725g=950g ≈1kg (Gl. 8.5.4)
Diese Daten können nun mit den Daten der Dämpfer-Modelle verglichen werden. Der
gewählte Dämpfer aus der Mädler-Katalog mit der Artikel-Nummer 69015000 besitzt
folgende Eigenschaften:
- maximale Energieaufnahme pro Hub: 22 J
- effektive Masse (einstellbar): 1 bis 109 kg
- Auffahrgeschwindigkeit: 0,3 bis 3,6 m/s
Die Werte decken sich mit den zuvor ermittelten Bedingungen. Der Dämpfer ist für die
Anwendung geeignet. Über einen Drehknopf lässt sich das Bauteil für den Betrieb manuell
einstellen.
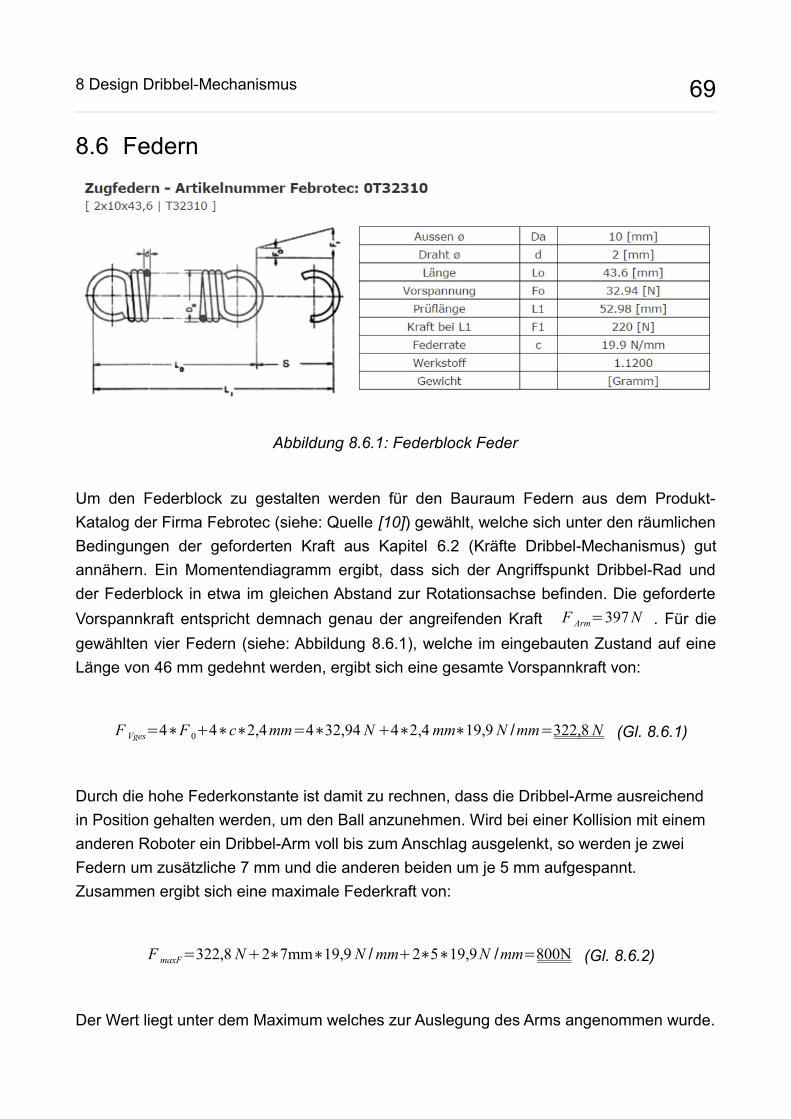
8 Design Dribbel-Mechanismus 69
8.6 Federn
Um den Federblock zu gestalten werden für den Bauraum Federn aus dem Produkt-
Katalog der Firma Febrotec (siehe: Quelle [10]) gewählt, welche sich unter den räumlichen
Bedingungen der geforderten Kraft aus Kapitel 6.2 (Kräfte Dribbel-Mechanismus) gut
annähern. Ein Momentendiagramm ergibt, dass sich der Angriffspunkt Dribbel-Rad und
der Federblock in etwa im gleichen Abstand zur Rotationsachse befinden. Die geforderte
Vorspannkraft entspricht demnach genau der angreifenden Kraft F Arm=397N . Für die
gewählten vier Federn (siehe: Abbildung 8.6.1), welche im eingebauten Zustand auf eine
Länge von 46 mm gedehnt werden, ergibt sich eine gesamte Vorspannkraft von:
F Vges=4∗F 0+4∗c∗2,4mm=4∗32,94N+4∗2,4mm∗19,9N /mm=322,8N (Gl. 8.6.1)
Durch die hohe Federkonstante ist damit zu rechnen, dass die Dribbel-Arme ausreichend
in Position gehalten werden, um den Ball anzunehmen. Wird bei einer Kollision mit einem
anderen Roboter ein Dribbel-Arm voll bis zum Anschlag ausgelenkt, so werden je zwei
Federn um zusätzliche 7 mm und die anderen beiden um je 5 mm aufgespannt.
Zusammen ergibt sich eine maximale Federkraft von:
F maxF=322,8N+2∗7mm∗19,9N /mm+2∗5∗19,9N /mm=800N (Gl. 8.6.2)
Der Wert liegt unter dem Maximum welches zur Auslegung des Arms angenommen wurde.
Abbildung 8.6.1: Federblock Feder
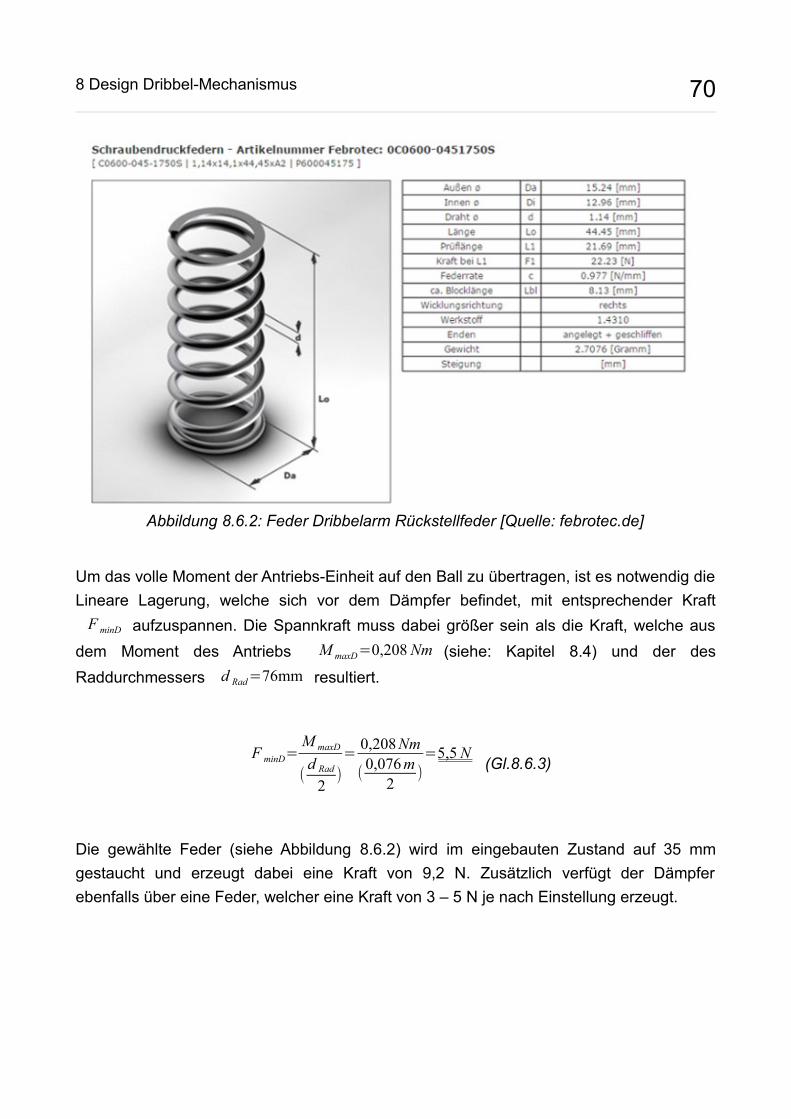
8 Design Dribbel-Mechanismus 70
Um das volle Moment der Antriebs-Einheit auf den Ball zu übertragen, ist es notwendig die
Lineare Lagerung, welche sich vor dem Dämpfer befindet, mit entsprechender Kraft
F minD aufzuspannen. Die Spannkraft muss dabei größer sein als die Kraft, welche aus
dem Moment des Antriebs M maxD=0,208Nm (siehe: Kapitel 8.4) und der des
Raddurchmessers d Rad=76mm resultiert.
F minD=M maxD
(d Rad
2)
=0,208Nm
(0,076m
2)=5,5N
(Gl.8.6.3)
Die gewählte Feder (siehe Abbildung 8.6.2) wird im eingebauten Zustand auf 35 mm
gestaucht und erzeugt dabei eine Kraft von 9,2 N. Zusätzlich verfügt der Dämpfer
ebenfalls über eine Feder, welcher eine Kraft von 3 – 5 N je nach Einstellung erzeugt.
Abbildung 8.6.2: Feder Dribbelarm Rückstellfeder [Quelle: febrotec.de]
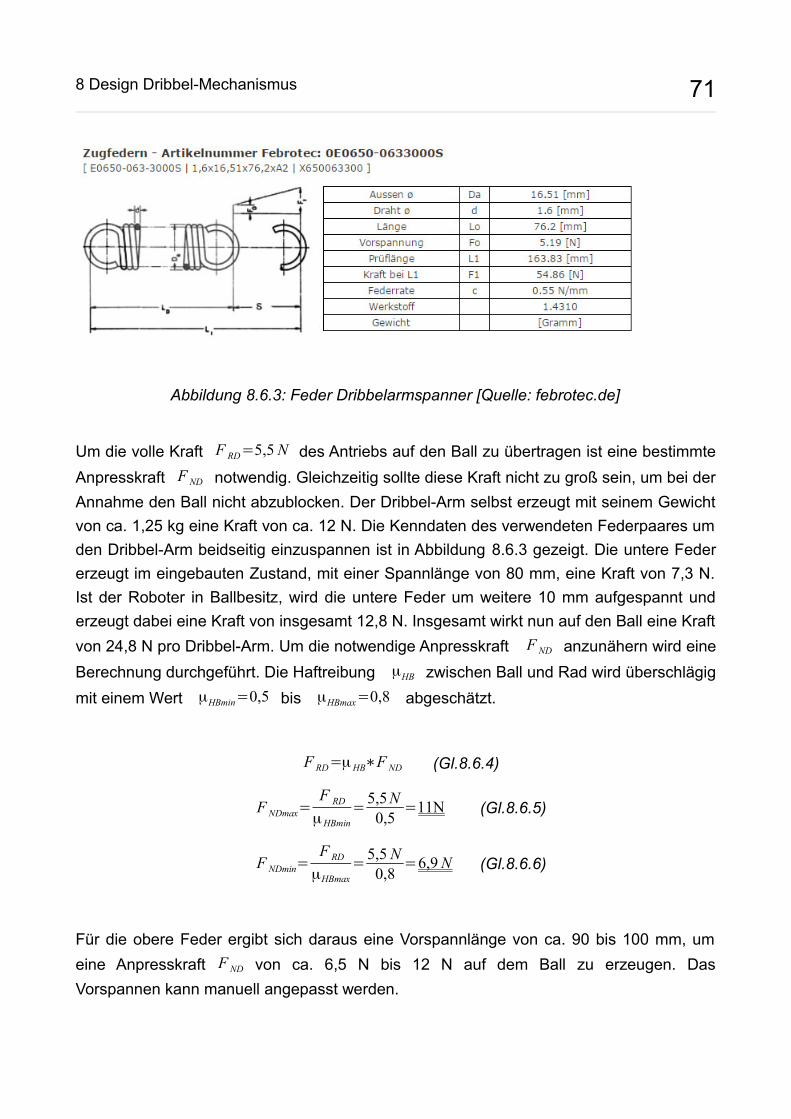
8 Design Dribbel-Mechanismus 71
Um die volle Kraft F RD=5,5N des Antriebs auf den Ball zu übertragen ist eine bestimmte
Anpresskraft F ND notwendig. Gleichzeitig sollte diese Kraft nicht zu groß sein, um bei der
Annahme den Ball nicht abzublocken. Der Dribbel-Arm selbst erzeugt mit seinem Gewicht
von ca. 1,25 kg eine Kraft von ca. 12 N. Die Kenndaten des verwendeten Federpaares um
den Dribbel-Arm beidseitig einzuspannen ist in Abbildung 8.6.3 gezeigt. Die untere Feder
erzeugt im eingebauten Zustand, mit einer Spannlänge von 80 mm, eine Kraft von 7,3 N.
Ist der Roboter in Ballbesitz, wird die untere Feder um weitere 10 mm aufgespannt und
erzeugt dabei eine Kraft von insgesamt 12,8 N. Insgesamt wirkt nun auf den Ball eine Kraft
von 24,8 N pro Dribbel-Arm. Um die notwendige Anpresskraft F ND anzunähern wird eine
Berechnung durchgeführt. Die Haftreibung μHB zwischen Ball und Rad wird überschlägig
mit einem Wert μHBmin=0,5 bis μHBmax=0,8 abgeschätzt.
F RD=μHB∗F ND (Gl.8.6.4)
F NDmax=F RD
μHBmin
=5,5N
0,5=11N (Gl.8.6.5)
F NDmin=F RD
μHBmax=5,5N
0,8=6,9N (Gl.8.6.6)
Für die obere Feder ergibt sich daraus eine Vorspannlänge von ca. 90 bis 100 mm, um
eine Anpresskraft F ND von ca. 6,5 N bis 12 N auf dem Ball zu erzeugen. Das
Vorspannen kann manuell angepasst werden.
Abbildung 8.6.3: Feder Dribbelarmspanner [Quelle: febrotec.de]
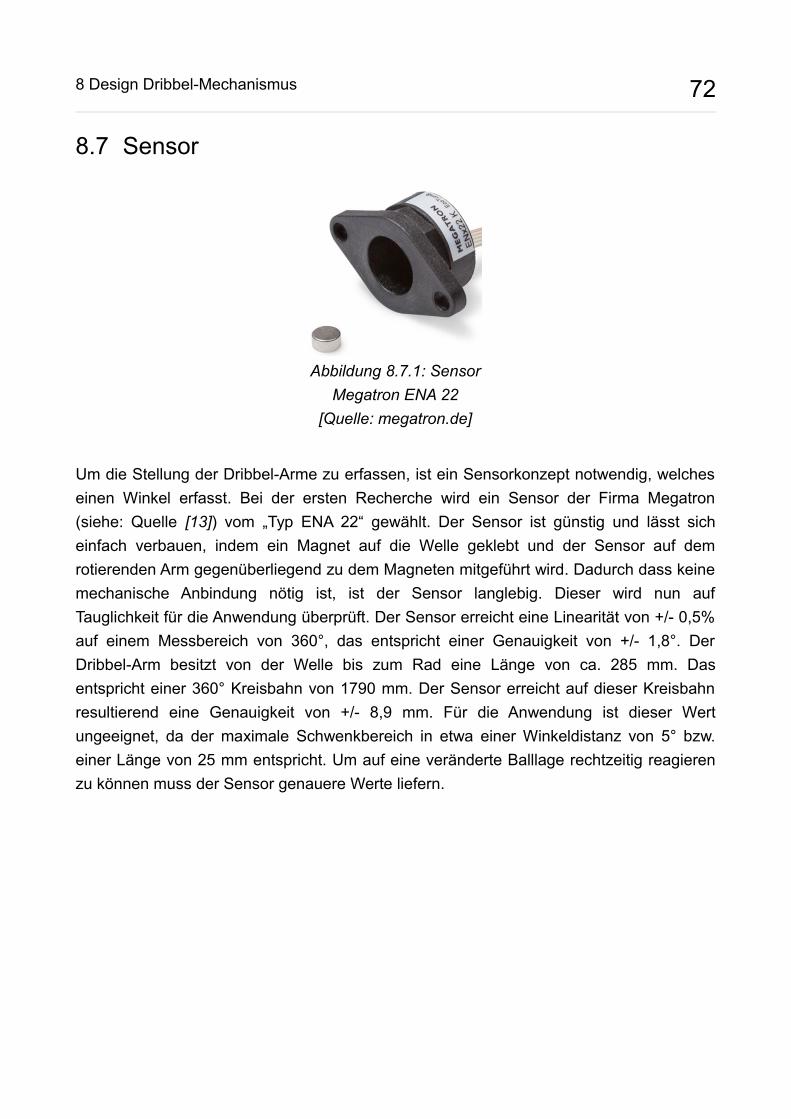
8 Design Dribbel-Mechanismus 72
8.7 Sensor
Um die Stellung der Dribbel-Arme zu erfassen, ist ein Sensorkonzept notwendig, welches
einen Winkel erfasst. Bei der ersten Recherche wird ein Sensor der Firma Megatron
(siehe: Quelle [13]) vom „Typ ENA 22“ gewählt. Der Sensor ist günstig und lässt sich
einfach verbauen, indem ein Magnet auf die Welle geklebt und der Sensor auf dem
rotierenden Arm gegenüberliegend zu dem Magneten mitgeführt wird. Dadurch dass keine
mechanische Anbindung nötig ist, ist der Sensor langlebig. Dieser wird nun auf
Tauglichkeit für die Anwendung überprüft. Der Sensor erreicht eine Linearität von +/- 0,5%
auf einem Messbereich von 360°, das entspricht einer Genauigkeit von +/- 1,8°. Der
Dribbel-Arm besitzt von der Welle bis zum Rad eine Länge von ca. 285 mm. Das
entspricht einer 360° Kreisbahn von 1790 mm. Der Sensor erreicht auf dieser Kreisbahn
resultierend eine Genauigkeit von +/- 8,9 mm. Für die Anwendung ist dieser Wert
ungeeignet, da der maximale Schwenkbereich in etwa einer Winkeldistanz von 5° bzw.
einer Länge von 25 mm entspricht. Um auf eine veränderte Balllage rechtzeitig reagieren
zu können muss der Sensor genauere Werte liefern.
Abbildung 8.7.1: Sensor
Megatron ENA 22
[Quelle: megatron.de]
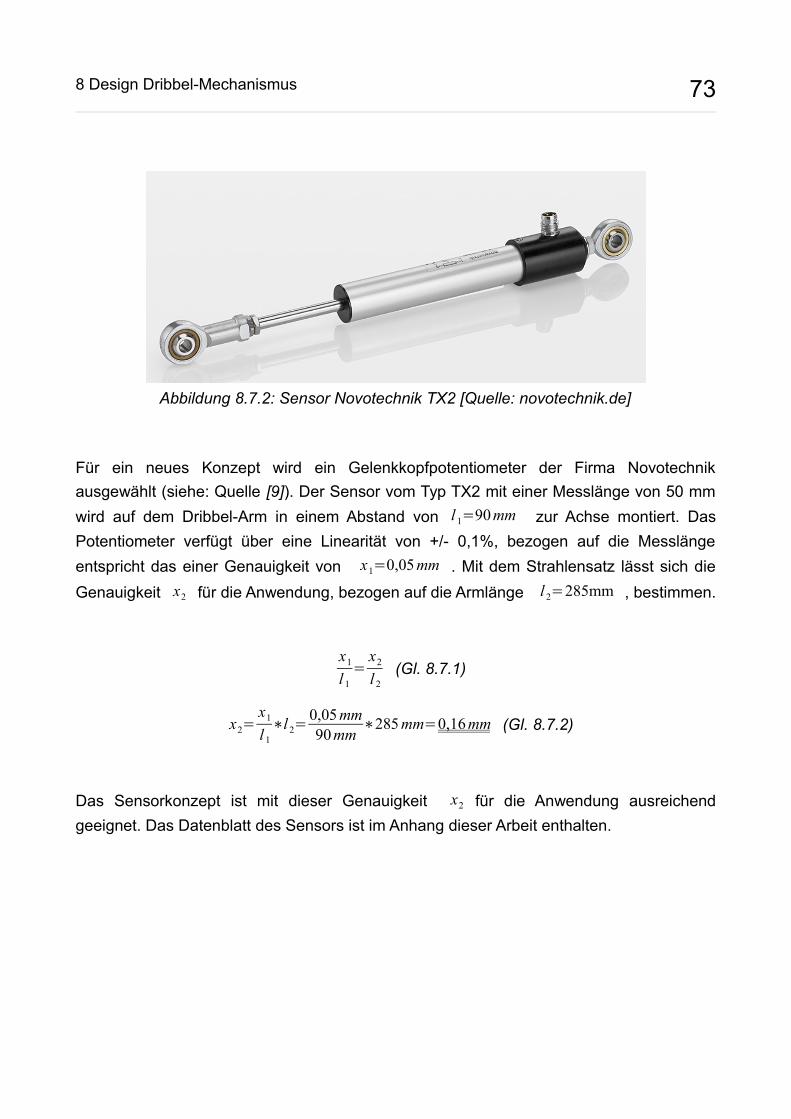
8 Design Dribbel-Mechanismus 73
Für ein neues Konzept wird ein Gelenkkopfpotentiometer der Firma Novotechnik
ausgewählt (siehe: Quelle [9]). Der Sensor vom Typ TX2 mit einer Messlänge von 50 mm
wird auf dem Dribbel-Arm in einem Abstand von l 1=90mm zur Achse montiert. Das
Potentiometer verfügt über eine Linearität von +/- 0,1%, bezogen auf die Messlänge
entspricht das einer Genauigkeit von x1=0,05mm . Mit dem Strahlensatz lässt sich die
Genauigkeit x2 für die Anwendung, bezogen auf die Armlänge l 2=285mm , bestimmen.
x1
l 1=x2
l 2(Gl. 8.7.1)
x2=x1
l 1∗l 2=
0,05mm
90mm∗285mm=0,16mm (Gl. 8.7.2)
Das Sensorkonzept ist mit dieser Genauigkeit x2 für die Anwendung ausreichend
geeignet. Das Datenblatt des Sensors ist im Anhang dieser Arbeit enthalten.
Abbildung 8.7.2: Sensor Novotechnik TX2 [Quelle: novotechnik.de]
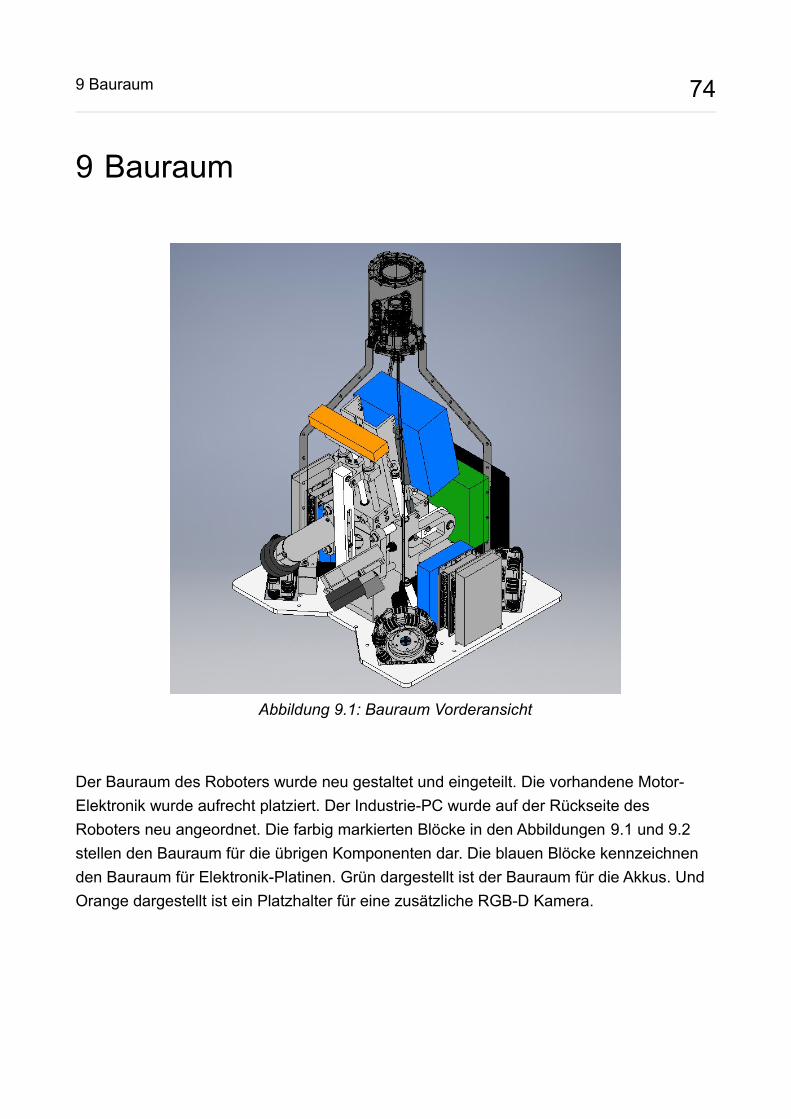
9 Bauraum 74
9 Bauraum
Der Bauraum des Roboters wurde neu gestaltet und eingeteilt. Die vorhandene Motor-
Elektronik wurde aufrecht platziert. Der Industrie-PC wurde auf der Rückseite des
Roboters neu angeordnet. Die farbig markierten Blöcke in den Abbildungen 9.1 und 9.2
stellen den Bauraum für die übrigen Komponenten dar. Die blauen Blöcke kennzeichnen
den Bauraum für Elektronik-Platinen. Grün dargestellt ist der Bauraum für die Akkus. Und
Orange dargestellt ist ein Platzhalter für eine zusätzliche RGB-D Kamera.
Abbildung 9.1: Bauraum Vorderansicht
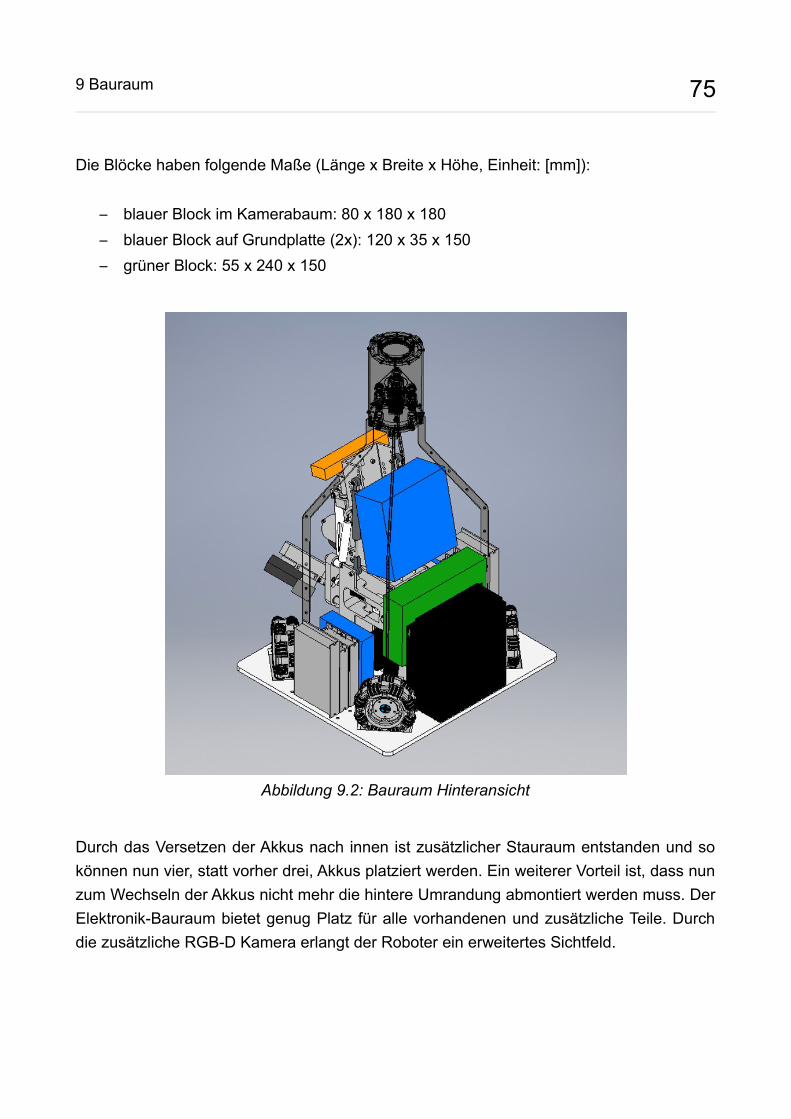
9 Bauraum 75
Die Blöcke haben folgende Maße (Länge x Breite x Höhe, Einheit: [mm]):
– blauer Block im Kamerabaum: 80 x 180 x 180
– blauer Block auf Grundplatte (2x): 120 x 35 x 150
– grüner Block: 55 x 240 x 150
Durch das Versetzen der Akkus nach innen ist zusätzlicher Stauraum entstanden und so
können nun vier, statt vorher drei, Akkus platziert werden. Ein weiterer Vorteil ist, dass nun
zum Wechseln der Akkus nicht mehr die hintere Umrandung abmontiert werden muss. Der
Elektronik-Bauraum bietet genug Platz für alle vorhandenen und zusätzliche Teile. Durch
die zusätzliche RGB-D Kamera erlangt der Roboter ein erweitertes Sichtfeld.
Abbildung 9.2: Bauraum Hinteransicht
10 Schlussteil 76
10 Schlussteil
10.1 Zusammenfassung
In dieser Arbeit wurde ein vollständiges Konzept für die Modernisierung der Dribbel- und
Schuss-Mechanik einer bestehenden Fußball-Roboter-Plattform ausgearbeitet. Dazu
wurde der Bauraum neu gestaltet und zwei mechanische Vorrichtung als modulare Einheit
eingepasst. Die mechanischen Komponenten wurden für die Anwendung ausgelegt. Ein
Sensorkonzept wurde ausgearbeitet und Antriebseinheiten dimensioniert und ausgewählt.
Neue Bauteile wurden mit dem CAD-Programm „Autodesk Inventor 2016“ erstellt und
Technische Zeichnungen daraus angefertigt. Stücklisten der einzelnen Baugruppen
wurden zusammengetragen. Die Funktion der Vorrichtung wurde mit Hilfe von
Datenblättern, Berechnungen und grafischen Darstellungen dargelegt. Um das Konzept zu
entwickeln wurde eine Stand-der-Technik Analyse durchgeführt und eine ergebnisoffene
Konzeptphase durchlaufen. Die Erkenntnisse und Schlüsse daraus wurden beschrieben
und dargestellt. Herrschende Kräfte wurden hergeleitet und die Konstruktion unter diesen
Bedingungen angepasst. Ein Lastenheft wurde aufgestellt und darauf geachtet, dass die
Bestimmungen eingehalten werden. Hinweise für aufbauende Arbeiten wurden
dokumentiert.
Abbildung 10.1.1: Roboter hat den Ball
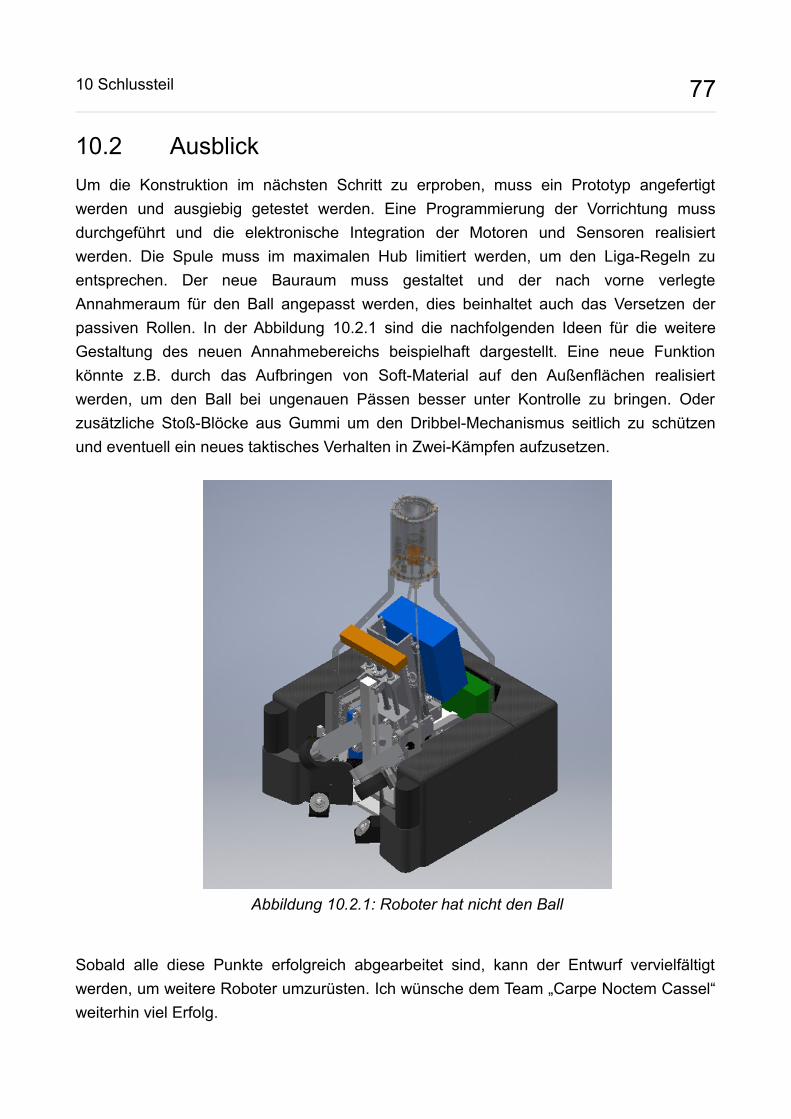
10 Schlussteil 77
10.2 Ausblick
Um die Konstruktion im nächsten Schritt zu erproben, muss ein Prototyp angefertigt
werden und ausgiebig getestet werden. Eine Programmierung der Vorrichtung muss
durchgeführt und die elektronische Integration der Motoren und Sensoren realisiert
werden. Die Spule muss im maximalen Hub limitiert werden, um den Liga-Regeln zu
entsprechen. Der neue Bauraum muss gestaltet und der nach vorne verlegte
Annahmeraum für den Ball angepasst werden, dies beinhaltet auch das Versetzen der
passiven Rollen. In der Abbildung 10.2.1 sind die nachfolgenden Ideen für die weitere
Gestaltung des neuen Annahmebereichs beispielhaft dargestellt. Eine neue Funktion
könnte z.B. durch das Aufbringen von Soft-Material auf den Außenflächen realisiert
werden, um den Ball bei ungenauen Pässen besser unter Kontrolle zu bringen. Oder
zusätzliche Stoß-Blöcke aus Gummi um den Dribbel-Mechanismus seitlich zu schützen
und eventuell ein neues taktisches Verhalten in Zwei-Kämpfen aufzusetzen.
Sobald alle diese Punkte erfolgreich abgearbeitet sind, kann der Entwurf vervielfältigt
werden, um weitere Roboter umzurüsten. Ich wünsche dem Team „Carpe Noctem Cassel“
weiterhin viel Erfolg.
Abbildung 10.2.1: Roboter hat nicht den Ball
11 Literaturverzeichnis: 78
11 Literaturverzeichnis:
[1] The Robocup Federation (2015): A Brief History of Robocup,
URL: http://www.robocup.org/about-robocup/a-brief-history-of-robocup/ (letzter Zugriff:
02.09.2015)
[2] MSL Technical Comittee (2015): Middle Size Robot League Rules and Regulations for
2015, URL: http://wiki.robocup.org/images/3/3f/Msl-rules_2015.pdf (letzter Zugriff:
28.07.2015)
[3] Saur, Daniel (2008): Projektarbeit: Entwicklung eines elektromagnetischen
Schussmechanismusses für autonome mobile Fußballroboter; 2008 - FG Verteilte
Systeme, Universität Kassel
[4] Eindhoven University of Technologie (2015): Turtle (CAD-Dateien),
URL: http://www.roboticopenplatform.org/wiki/TURTLE (letzter Zugriff: 01.09.2015)
[5] Cambada – University of Aveiro (2013): „new Platform“ (pdf), 3rd Intl. RoboCup MSL
Workshop 2013, URL: http://carpenoctem.das-lab.net/mslworkshop3 (letzter Zugriff:
01.08.2015)
[6] Kaihong Huang, NuBot, National University of Defense Technology, China (2014): New
Robot Platform (pdf),
URL: http://wiki.robocup.org/wiki/Middle_Size_League/Workshop/4th_Edition,_Eindhoven_
2014 (letzter Zugriff: 01.08.2015)
[7] Mädler GmbH (2015): Mädler Webshop, URL: http://www.maedler.de/ (letzter Zugriff:
20.11.2015)
[8] SBN Wälzlager (2015): SBN Wälzlager Katalog, Auflage 2015/2016,
URL: http://www.sbn.de/upload/files/katalog_de.pdf (letzter Zugriff: 01.10.2015)
[9] Novotechnik, Siedel Gruppe (2015): Wegaufnehmer, Wegsensoren, Winkelsensoren,
Automative Sensoren, URL: http://www.novotechnik.de/ (letzter Zugriff: 09.11.2015)
[10] Febrotec Federn (2015): Technische Federn, URL: http://www.febrotec.de/, (letzter
Zugriff: 18.10.2015)
11 Literaturverzeichnis: 79
[11] Maxon Motor (2015): Hochpräzise Antriebe und Systeme,
URL: http://www.maxonmotor.de/, (letzter Zugriff: 15.10.2015)
[12] ACE Stoßdämpfer GmbH (2015): Stoßdämpfer , URL: http://www.ace-ace.de/ (letzter
Zugriff: 01.11.2015)
[13] Firma Megatron (2015): Winkelsensoren, Wegsensoren, Joysticks, Kraftsensoren,
URL: http://www.megatron.de/ (letzter Zugriff: 10.11.2015)
[14] SKF Gruppe (2015), Lager und Lagereinheiten, URL: http://www.skf.com/ (letzter
Zugriff: 20.11.2015)
[15] Conrad (2015): Reely 1:10 Straßenmodell Kompletträder Slick breit 5-Speichen
Schwarz, URL: www.conrad.de/de/reely-110-strassenmodell-komplettraeder-slick-breit-5-
speichen-schwarz-2-st-227789.html (letzter Zugriff: 25.11.2015)
[16] Fischer, Ulrich (2005): Tabellenbuch Metall, 43. überarbeitete Auflage, Verlag Europa
Lehrmittel
[17] Hoischen, Hans (2005): Technisches Zeichnen, 30. überarbeitete Auflage, Cornelsen
Verlag
[18] Wittel, Herbert (2013): Roloff/Matek Maschinenelemente, 21. überarbeitete Auflage,
Springer Vieweg
[19] Perinorm (2015): Referenz Datenbank, URL: http://www.perinorm.com (letzter Zugriff:
25.11.2015)
Anhang
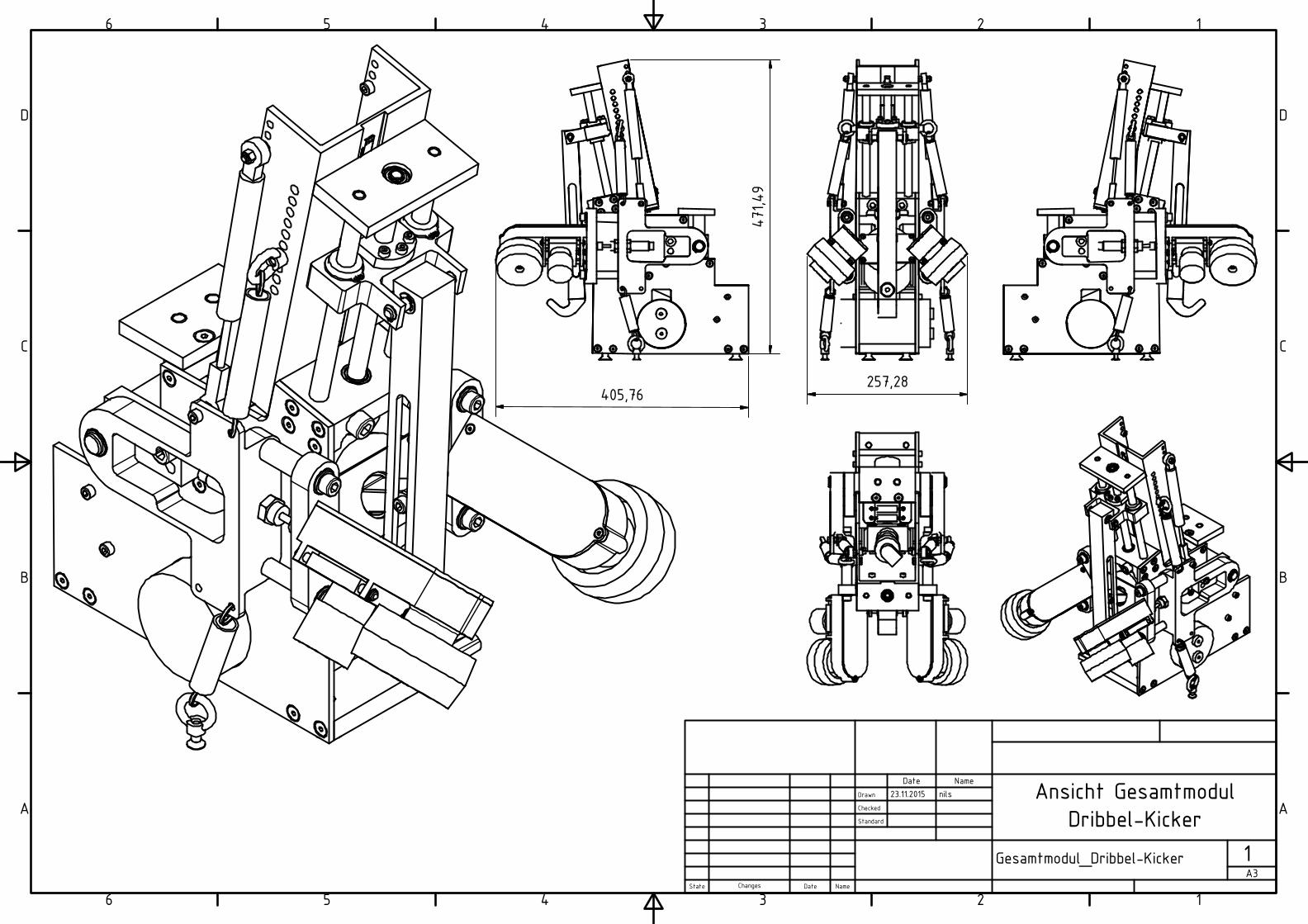
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Gesamtmodul_Dribbel-Kicker
State Changes Date Name
Drawn
Checked
Standard
Date Name
23.11.2015 nils Ansicht Gesamtmodul
Dribbel-Kicker
471,49
405,76257,28
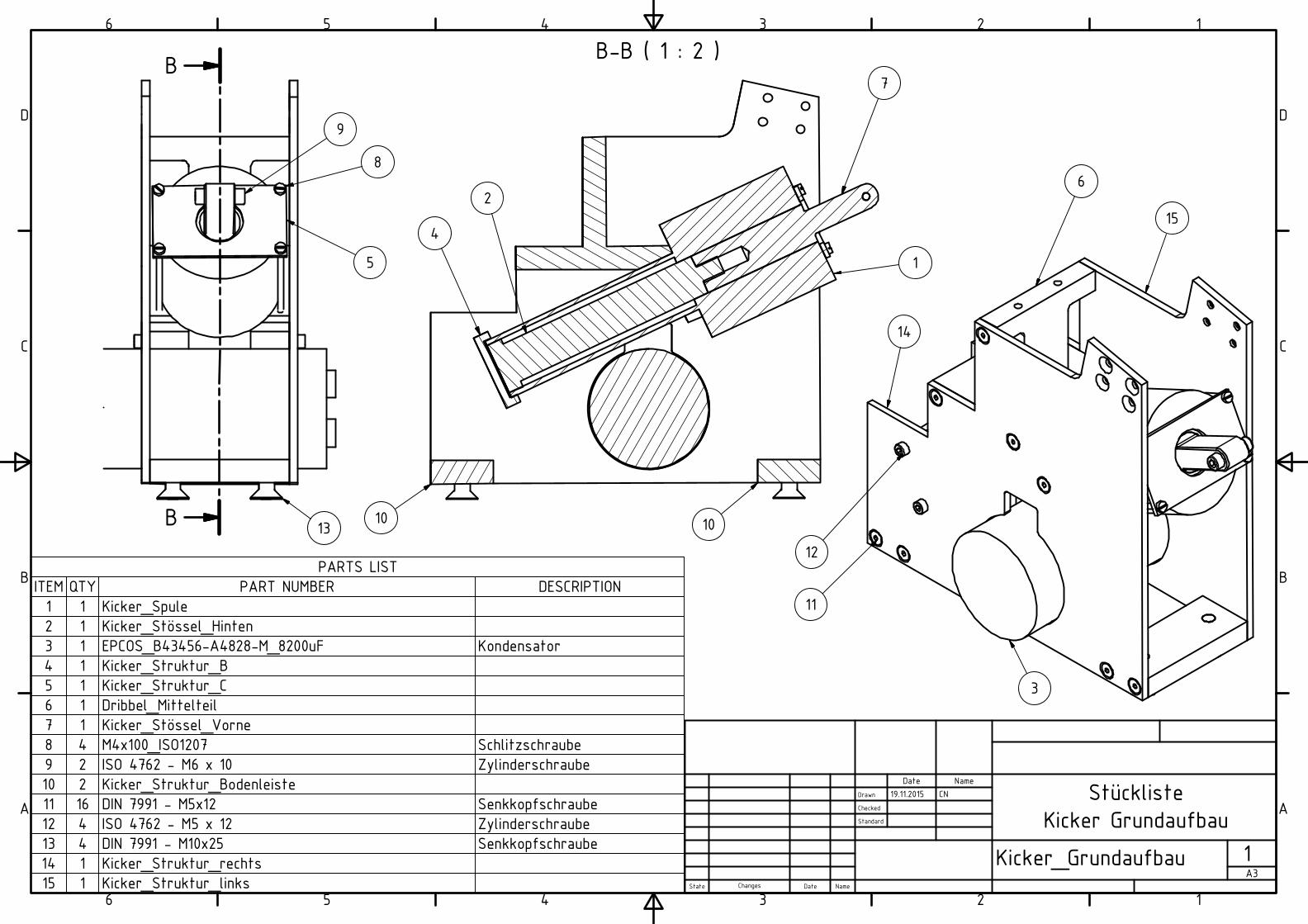
B-B ( 1 : 2 )
PARTS LIST
DESCRIPTIONPART NUMBERQTYITEM
Kicker_Spule11
Kicker_St ssel_Hinten12
KondensatorEPCOS_B43456-A4828-M_8200uF13
Kicker_Struktur_B14
Kicker_Struktur_C15
Dribbel_Mittelteil16
Kicker_St ssel_Vorne17
SchlitzschraubeM4x100_ISO120748
ZylinderschraubeISO 4762 - M6 x 1029
Kicker_Struktur_Bodenleiste210
SenkkopfschraubeDIN 7991 - M5x121611
ZylinderschraubeISO 4762 - M5 x 12412
SenkkopfschraubeDIN 7991 - M10x25413
Kicker_Struktur_rechts114
Kicker_Struktur_links115
B
B
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_GrundaufbauState Changes Date Name
Drawn
Checked
Standard
Date Name
19.11.2015 CN
11
12
3
6
14
15
5
9
8
7
2
4
10 1013
1
St ckliste
Kicker Grundaufbau
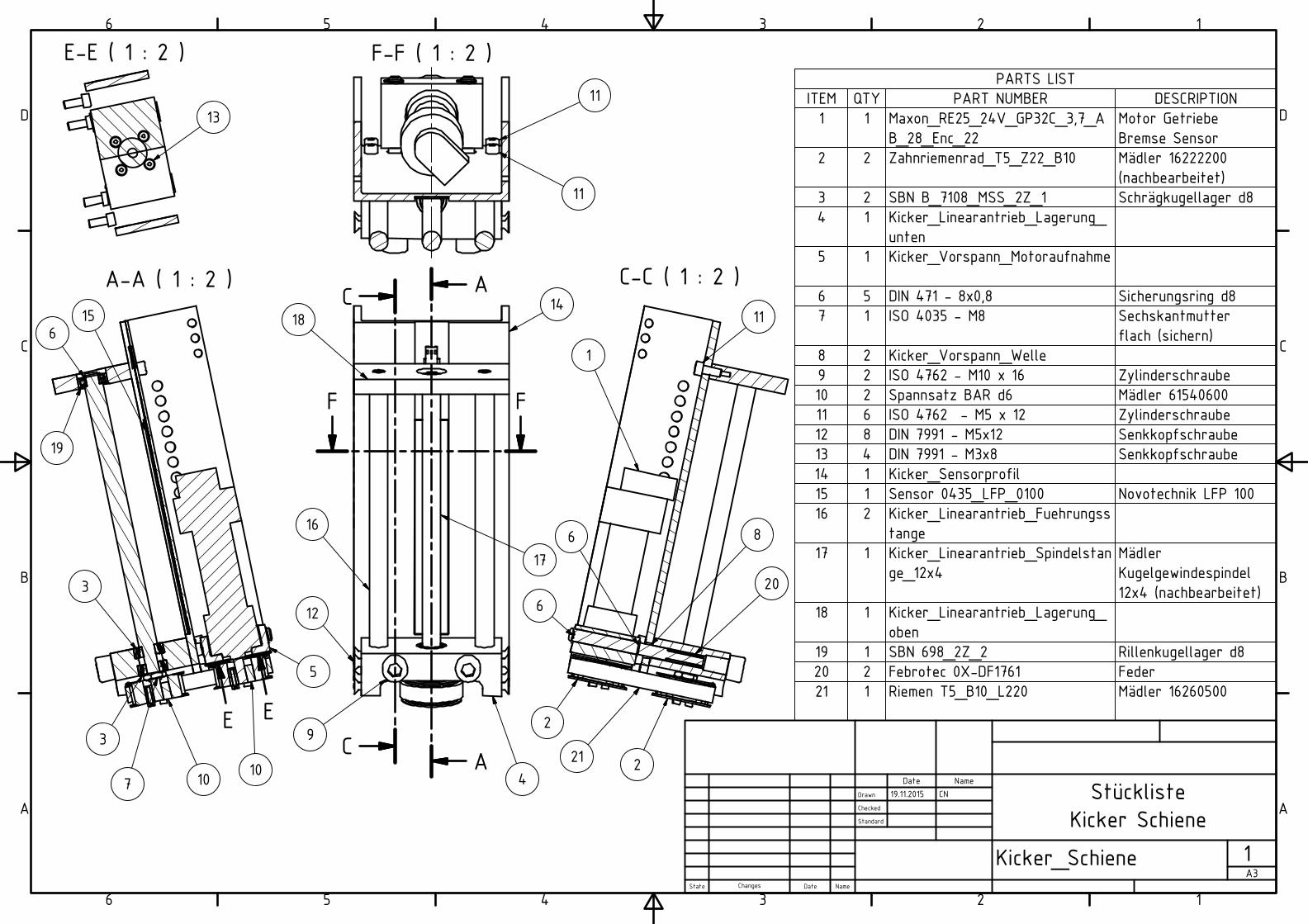
A-A ( 1 : 2 ) C-C ( 1 : 2 )
E-E ( 1 : 2 ) F-F ( 1 : 2 )
A
A
PARTS LIST
DESCRIPTIONPART NUMBERQTYITEM
Motor Getriebe
Bremse Sensor
Maxon_RE25_24V_GP32C_3,7_A
B_28_Enc_22
11
M dler 16222200
(nachbearbeitet)
Zahnriemenrad_T5_Z22_B1022
Schr gkugellager d8SBN B_7108_MSS_2Z_123
Kicker_Linearantrieb_Lagerung_
unten
14
Kicker_Vorspann_Motoraufnahme15
Sicherungsring d8DIN 471 - 8x0,856
Sechskantmutter
flach (sichern)
ISO 4035 - M817
Kicker_Vorspann_Welle28
ZylinderschraubeISO 4762 - M10 x 1629
M dler 61540600Spannsatz BAR d6210
ZylinderschraubeISO 4762 - M5 x 12611
SenkkopfschraubeDIN 7991 - M5x12812
SenkkopfschraubeDIN 7991 - M3x8413
Kicker_Sensorprofil114
Novotechnik LFP 100Sensor 0435_LFP_0100115
Kicker_Linearantrieb_Fuehrungss
tange
216
M dler
Kugelgewindespindel
12x4 (nachbearbeitet)
Kicker_Linearantrieb_Spindelstan
ge_12x4
117
Kicker_Linearantrieb_Lagerung_
oben
118
Rillenkugellager d8SBN 698_2Z_2119
FederFebrotec 0X-DF1761220
M dler 16260500Riemen T5_B10_L220121
C
C
EE
F F
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_SchieneState Changes Date Name
Drawn
Checked
Standard
Date Name
19.11.2015 CN
1
14
221
1010
9
12
16
17
19
618
4
3
3
7
2
20
6
6
5
11
11
11
8
13
15
St ckliste
Kicker Schiene
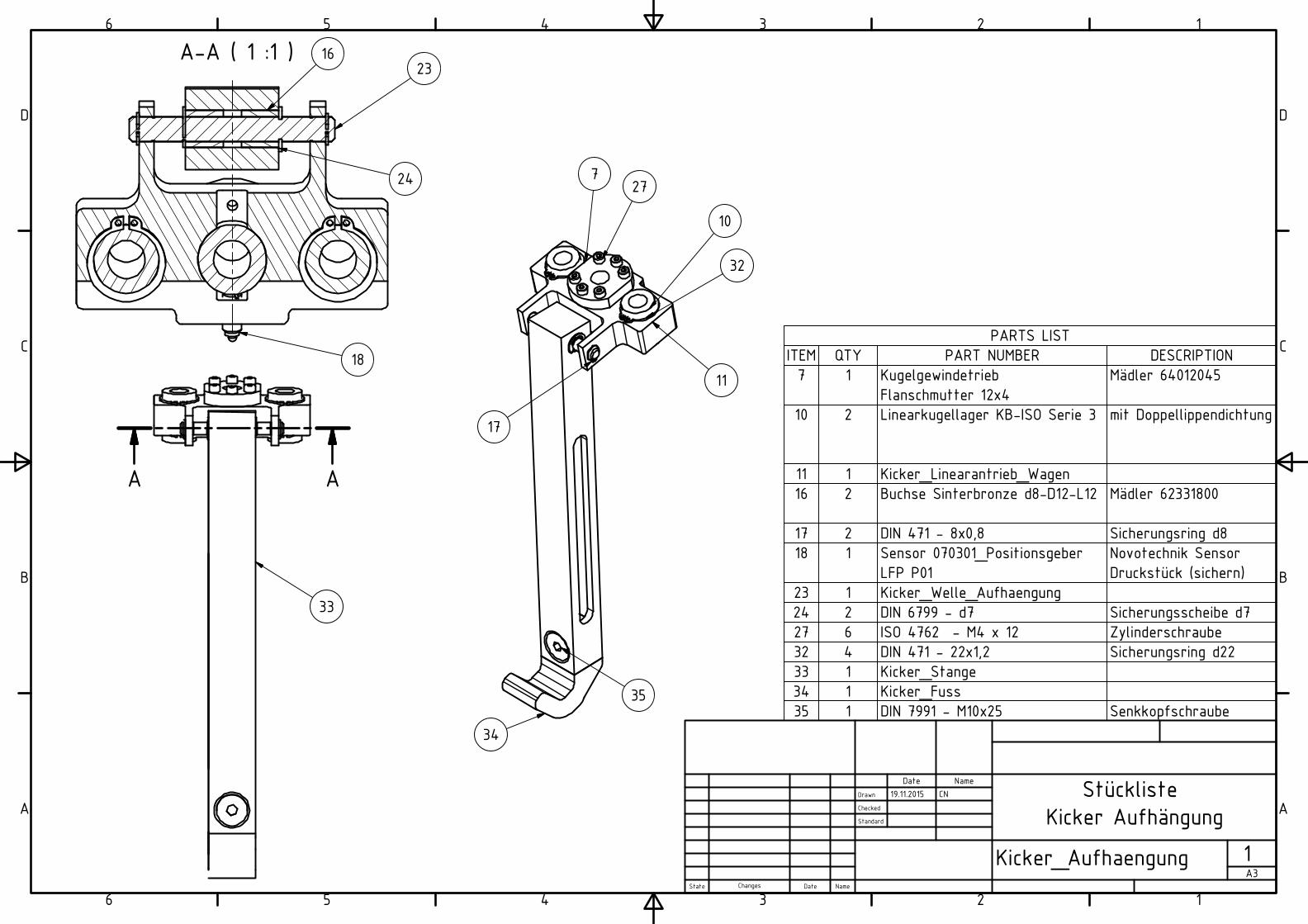
A-A ( 1 :1 )
PARTS LIST
DESCRIPTIONPART NUMBERQTYITEM
M dler 64012045Kugelgewindetrieb
Flanschmutter 12x4
17
mit DoppellippendichtungLinearkugellager KB-ISO Serie 3210
Kicker_Linearantrieb_Wagen111
M dler 62331800Buchse Sinterbronze d8-D12-L12216
Sicherungsring d8DIN 471 - 8x0,8217
Novotechnik Sensor
Druckst ck (sichern)
Sensor 070301_Positionsgeber
LFP P01
118
Kicker_Welle_Aufhaengung123
Sicherungsscheibe d7DIN 6799 - d7224
ZylinderschraubeISO 4762 - M4 x 12627
Sicherungsring d22DIN 471 - 22x1,2432
Kicker_Stange133
Kicker_Fuss134
SenkkopfschraubeDIN 7991 - M10x25135
A A
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_AufhaengungState Changes Date Name
Drawn
Checked
Standard
Date Name
19.11.2015 CN
10
32
11
277
35
34
16
18
23
17
33
24
St ckliste
Kicker Aufh ngung
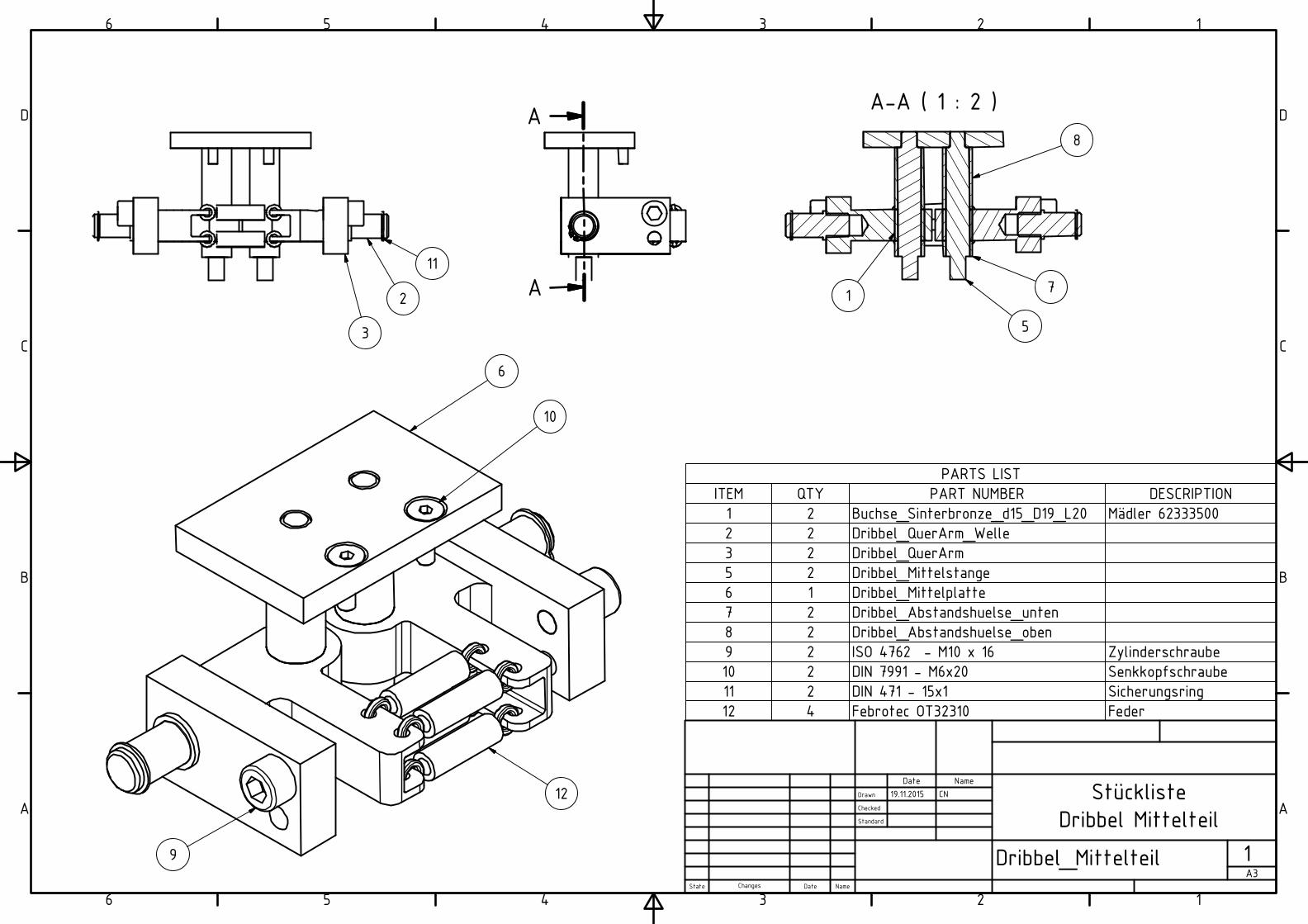
A-A ( 1 : 2 )
PARTS LIST
DESCRIPTIONPART NUMBERQTYITEM
M dler 62333500Buchse_Sinterbronze_d15_D19_L2021
Dribbel_QuerArm_Welle22
Dribbel_QuerArm23
Dribbel_Mittelstange25
Dribbel_Mittelplatte16
Dribbel_Abstandshuelse_unten27
Dribbel_Abstandshuelse_oben28
ZylinderschraubeISO 4762 - M10 x 1629
SenkkopfschraubeDIN 7991 - M6x20210
SicherungsringDIN 471 - 15x1211
FederFebrotec OT32310412
A
A
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Dribbel_MittelteilState Changes Date Name
Drawn
Checked
Standard
Date Name
19.11.2015 CN
8
72
11
9
3
10
5
6
St ckliste
Dribbel Mittelteil
1
12
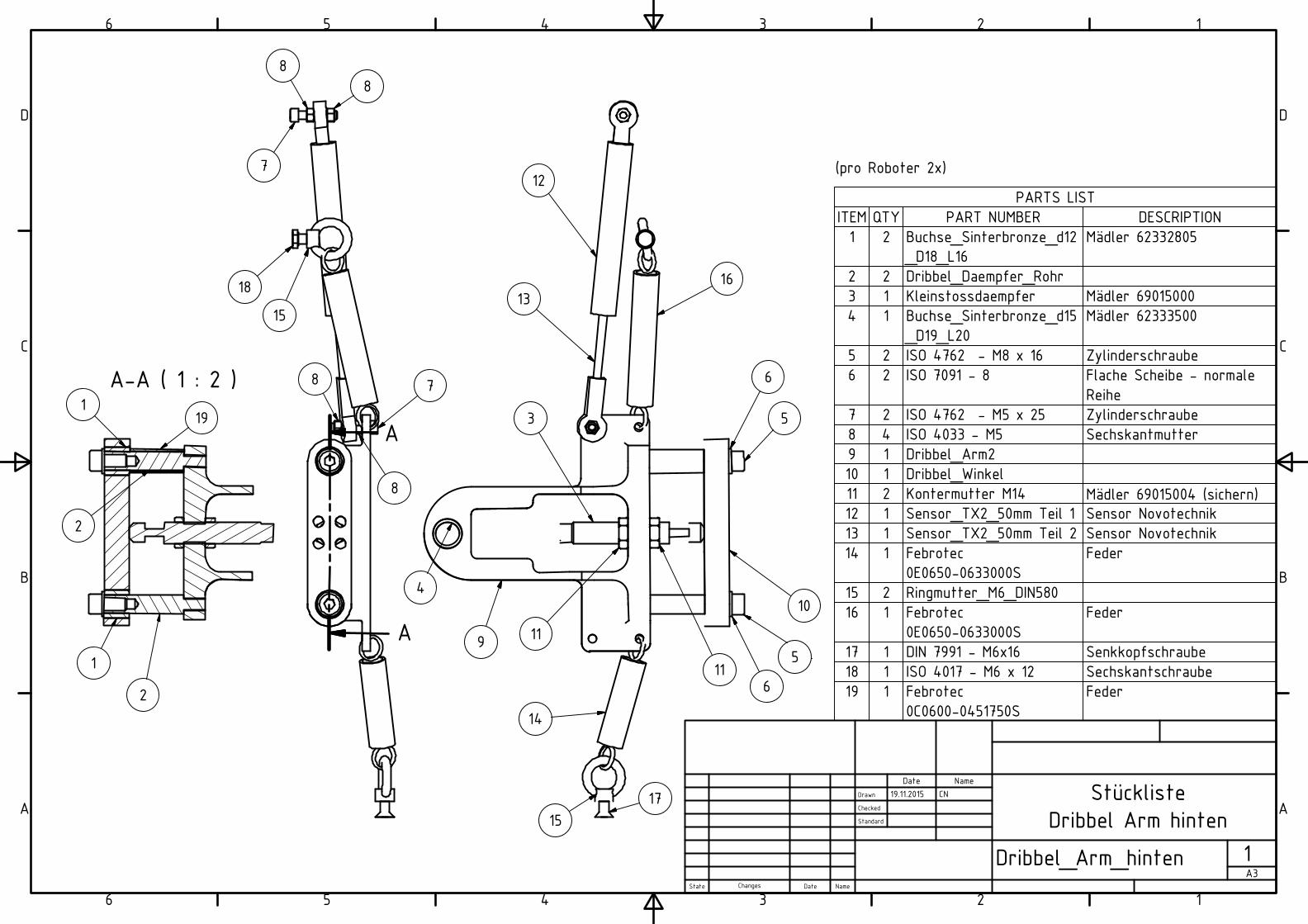
A-A ( 1 : 2 )
A
A
PARTS LIST
DESCRIPTIONPART NUMBERQTYITEM
M dler 62332805Buchse_Sinterbronze_d12
_D18_L16
21
Dribbel_Daempfer_Rohr22
M dler 69015000Kleinstossdaempfer13
M dler 62333500Buchse_Sinterbronze_d15
_D19_L20
14
ZylinderschraubeISO 4762 - M8 x 1625
Flache Scheibe - normale
Reihe
ISO 7091 - 826
ZylinderschraubeISO 4762 - M5 x 2527
SechskantmutterISO 4033 - M548
Dribbel_Arm219
Dribbel_Winkel110
M dler 69015004 (sichern)Kontermutter M14211
Sensor NovotechnikSensor_TX2_50mm Teil 1112
Sensor NovotechnikSensor_TX2_50mm Teil 2113
FederFebrotec
0E0650-0633000S
114
Ringmutter_M6_DIN580215
FederFebrotec
0E0650-0633000S
116
SenkkopfschraubeDIN 7991 - M6x16117
SechskantschraubeISO 4017 - M6 x 12118
FederFebrotec
0C0600-0451750S
119
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Dribbel_Arm_hintenState Changes Date Name
Drawn
Checked
Standard
Date Name
19.11.2015 CN
4
9
14
15
17
3
11
11
10
5
6
5
6
16
13
12
8
8
7
15
18
8 7
19
2
2
1
1
8
St ckliste
Dribbel Arm hinten
(pro Roboter 2x)
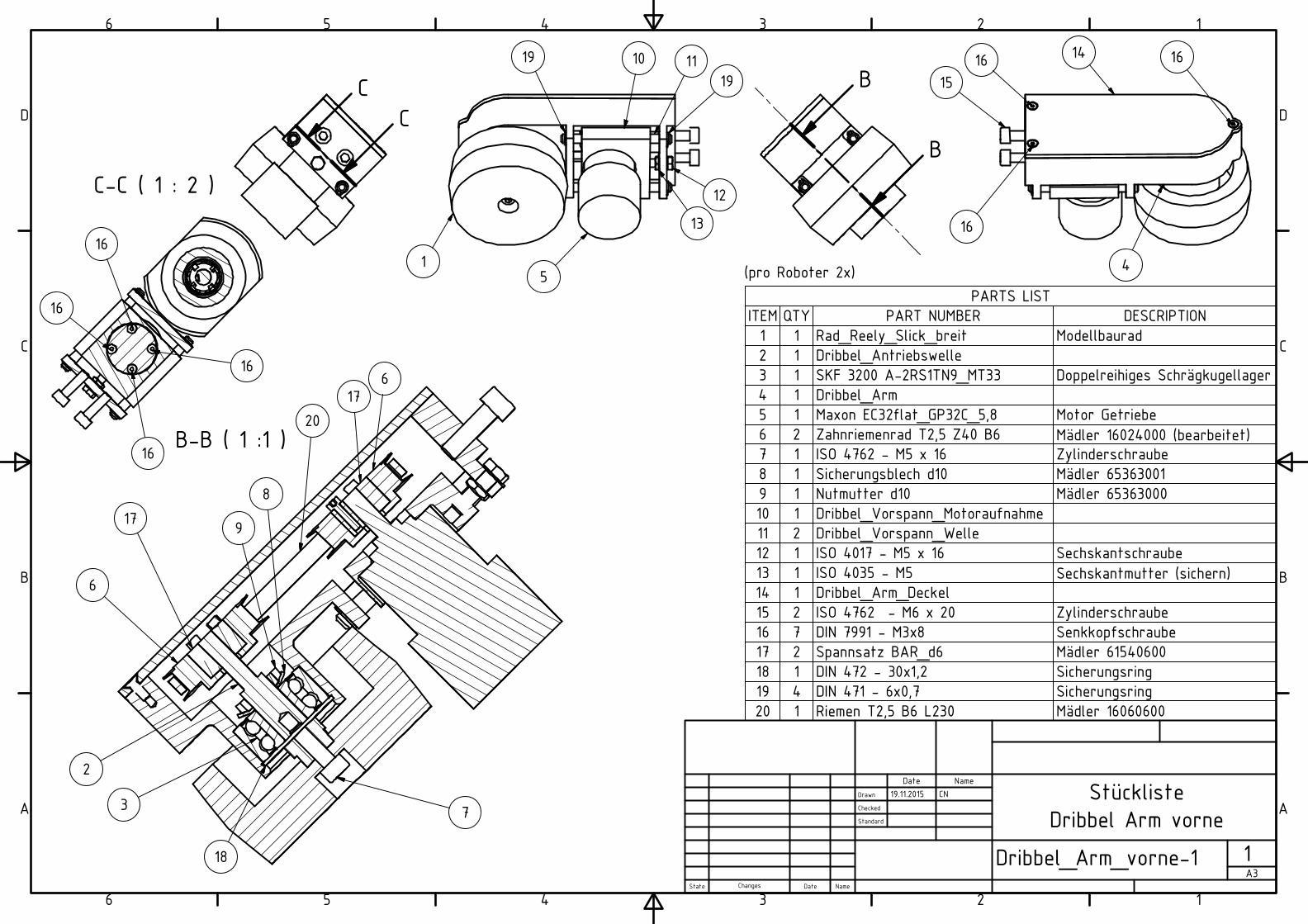
B-B ( 1 :1 )
C-C ( 1 : 2 )
PARTS LIST
DESCRIPTIONPART NUMBERQTYITEM
ModellbauradRad_Reely_Slick_breit11
Dribbel_Antriebswelle12
Doppelreihiges Schr gkugellagerSKF 3200 A-2RS1TN9_MT3313
Dribbel_Arm14
Motor GetriebeMaxon EC32flat_GP32C_5,815
M dler 16024000 (bearbeitet)Zahnriemenrad T2,5 Z40 B626
ZylinderschraubeISO 4762 - M5 x 1617
M dler 65363001Sicherungsblech d1018
M dler 65363000Nutmutter d1019
Dribbel_Vorspann_Motoraufnahme110
Dribbel_Vorspann_Welle211
SechskantschraubeISO 4017 - M5 x 16112
Sechskantmutter (sichern)ISO 4035 - M5113
Dribbel_Arm_Deckel114
ZylinderschraubeISO 4762 - M6 x 20215
SenkkopfschraubeDIN 7991 - M3x8716
M dler 61540600Spannsatz BAR_d6217
SicherungsringDIN 472 - 30x1,2118
SicherungsringDIN 471 - 6x0,7419
M dler 16060600Riemen T2,5 B6 L230120
B
BC
C
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Dribbel_Arm_vorne-1State Changes Date Name
Drawn
Checked
Standard
Date Name
19.11.2015 CN
16
15
14
15
10 11
19
19
12
13
7
18
9
8
17
6
20
617
2
3
16
16
16
16
16
16
4
St ckliste
Dribbel Arm vorne
(pro Roboter 2x)
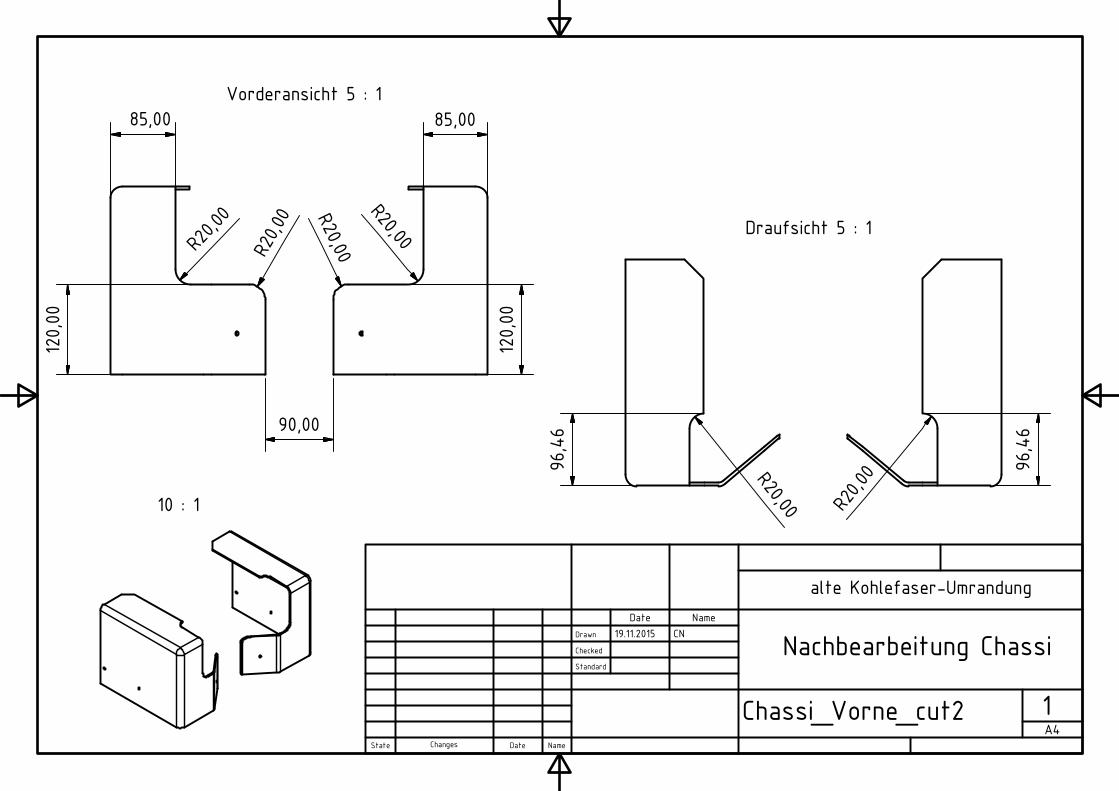
1 A4
Chassi_Vorne_cut2State Changes Date Name
Drawn
Checked
Standard
Date Name
19.11.2015 CN
90,00
R20,00
120,00
85,00
R20,00
R20,00
96,46
R20,00
R20,00
85,00
120,00
96,46
R20,00
Draufsicht 5 : 1
Vorderansicht 5 : 1
10 : 1
Nachbearbeitung Chassi
alte Kohlefaser-Umrandung
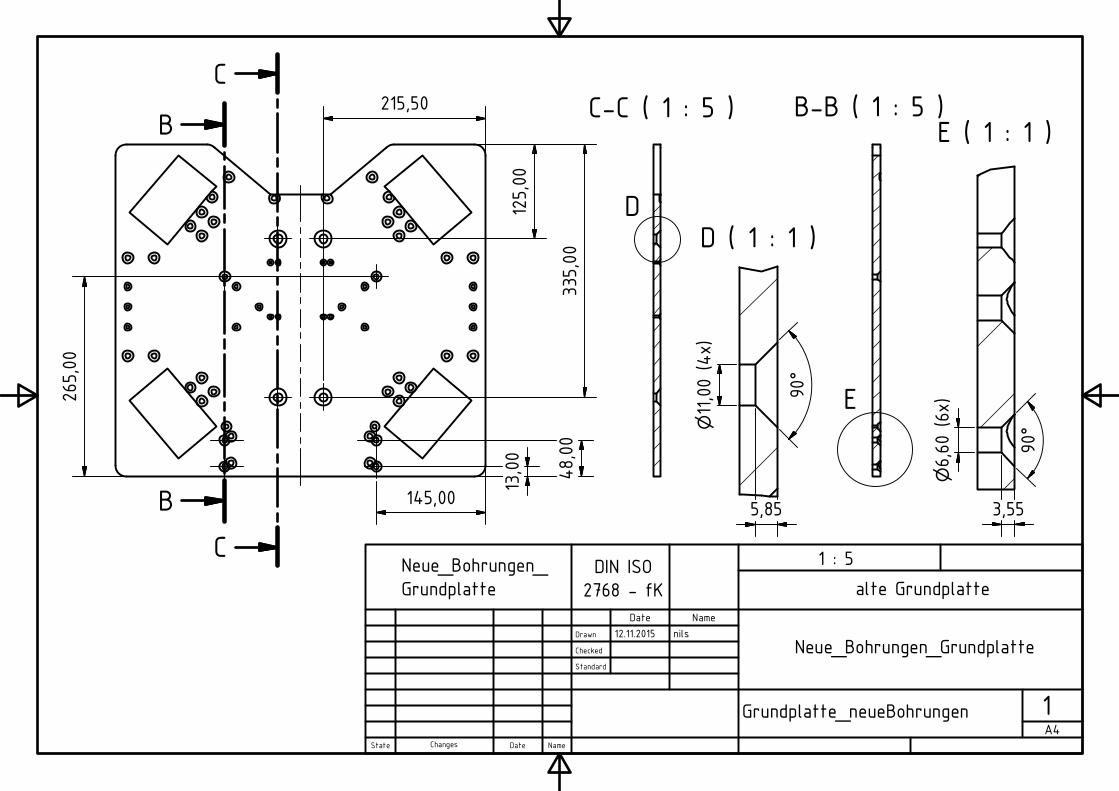
B-B ( 1 : 5 )C-C ( 1 : 5 )
D ( 1 : 1 )
E ( 1 : 1 )
B
B
C
C
D
E
1 A4
Grundplatte_neueBohrungen
State Changes Date Name
Drawn
Checked
Standard
Date Name
12.11.2015 nils
145,0013,00
48,00
215,50
125,00
335,00
11,00
(4x)
5,85
90
90
3,55
6,60
(6x
)
Neue_Bohrungen_
Grundplatte
Neue_Bohrungen_Grundplatte
1 : 5DIN ISO
2768 - fK
265,00
alte Grundplatte
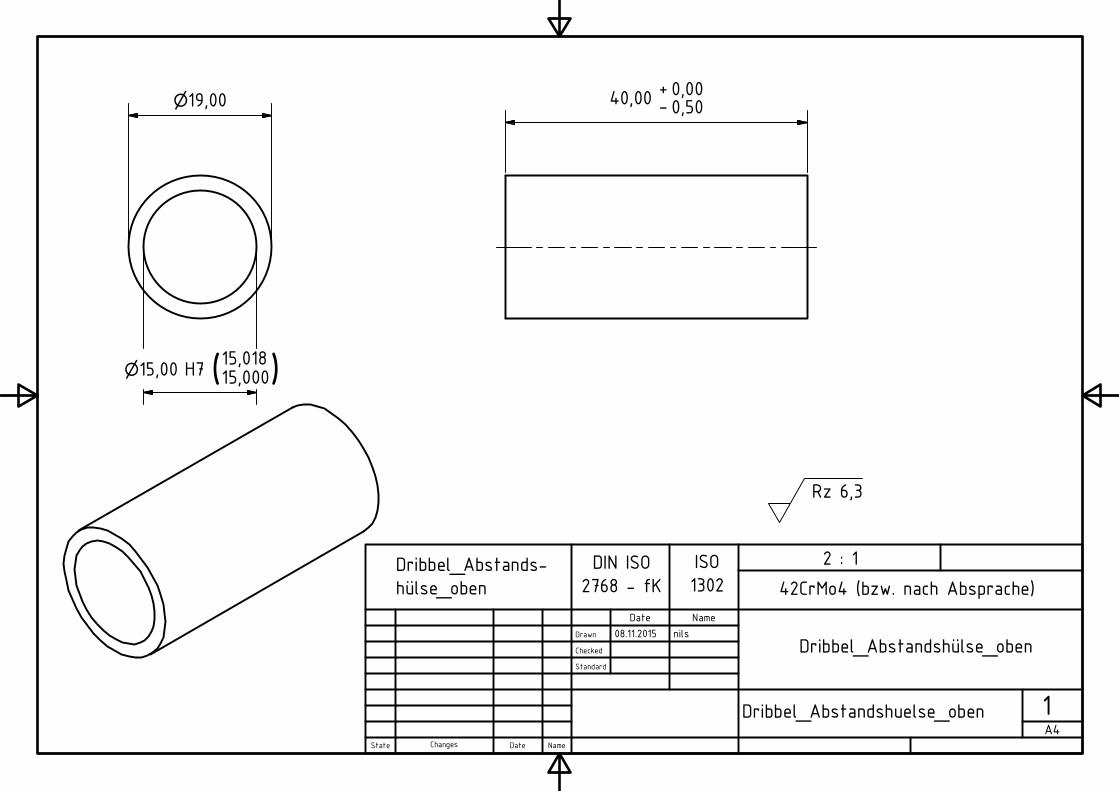
1 A4
Dribbel_Abstandshuelse_oben
State Changes Date Name
Drawn
Checked
Standard
Date Name
08.11.2015 nils
15,00 H7 (15,00015,018)
40,00 - 0,500,00+
Dribbel_Abstands-
h lse_oben
DIN ISO
2768 - fK
2 : 1
42CrMo4 (bzw. nach Absprache)
Rz 6,3
ISO
1302
Dribbel_Abstandsh lse_oben
19,00
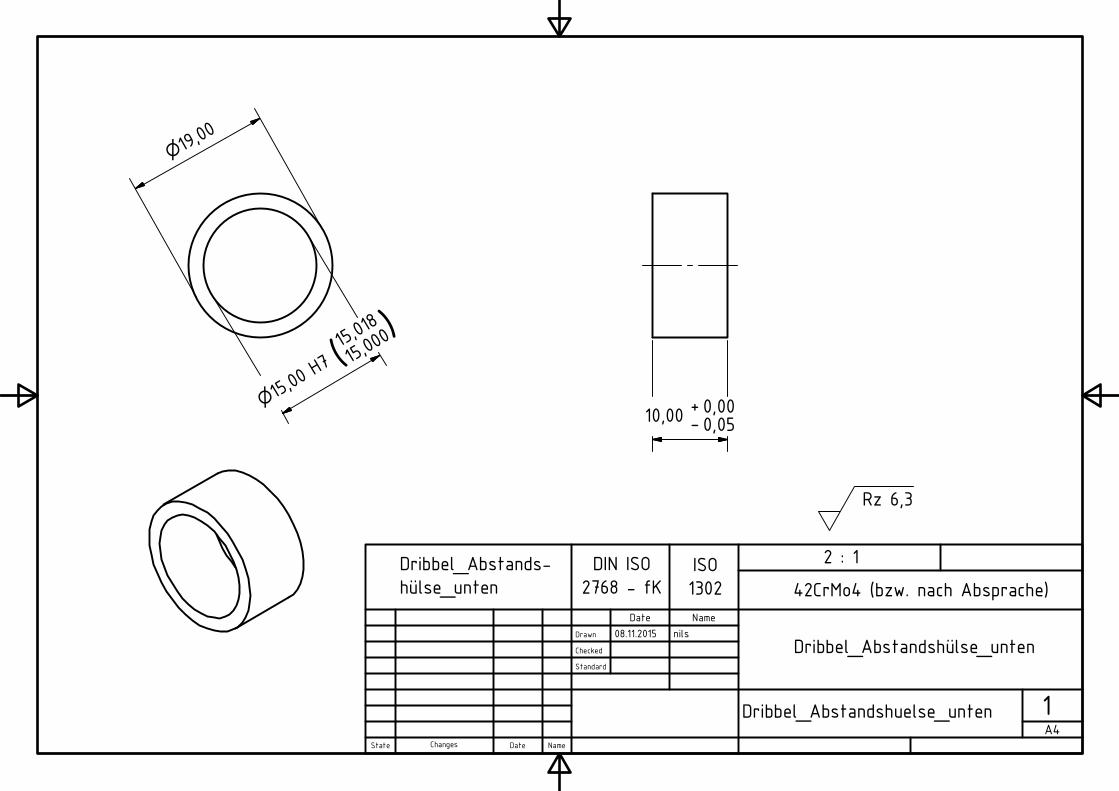
1 A4
Dribbel_Abstandshuelse_unten
State Changes Date Name
Drawn
Checked
Standard
Date Name
08.11.2015 nils
10,00 - 0,050,00+
15,00
H7 (15,00
015,018 )
2 : 1Dribbel_Abstands-
h lse_unten
DIN ISO
2768 - fKISO
1302 42CrMo4 (bzw. nach Absprache)
Rz 6,3
Dribbel_Abstandsh lse_unten
19,00
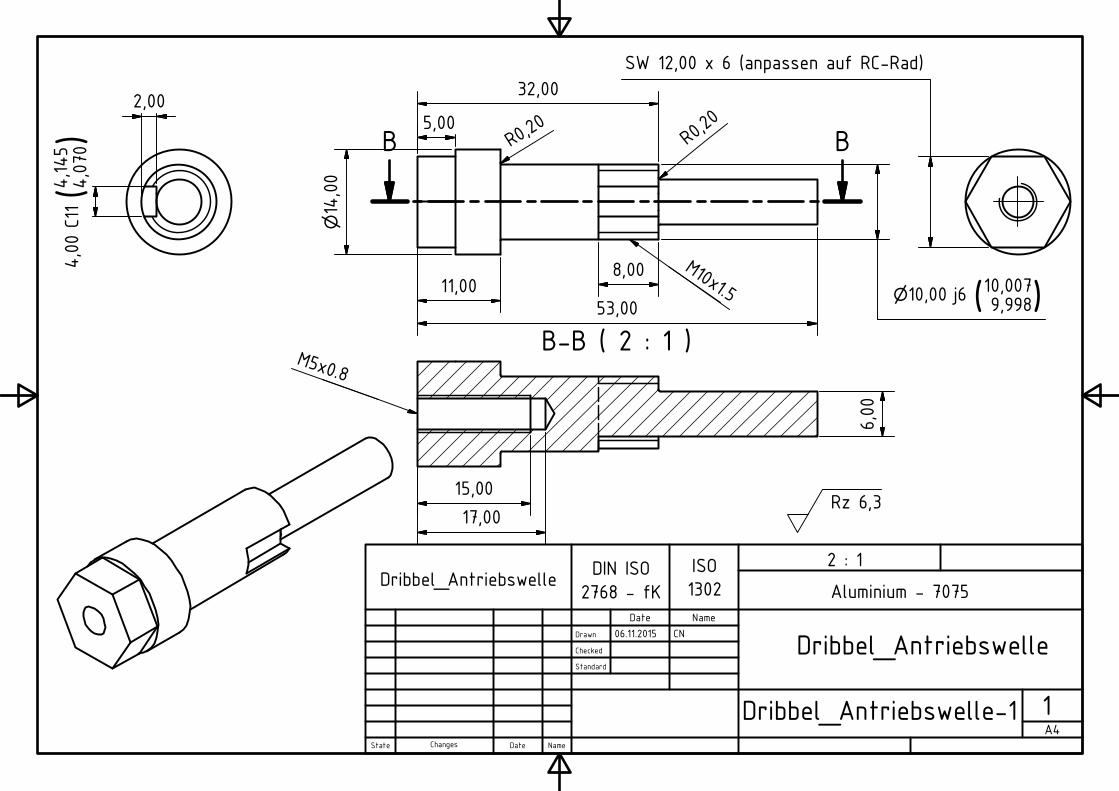
B-B ( 2 : 1 )
B B
1 A4
Dribbel_Antriebswelle-1State Changes Date Name
Drawn
Checked
Standard
Date Name
06.11.2015 CN
53,00
5,00
11,00
32,00
12,00SW x 6 (anpassen auf RC-Rad)
2,00
4,00C11( 4
,070
4,145)
M10x1.58,00
15,00
17,00
M5x0.8
10,00 j6 ( 9,99810,007)
6,00
14,00
Dribbel_AntriebswelleDIN ISO
2768 - fK
2 : 1
Aluminium - 7075
Rz 6,3
ISO
1302
Dribbel_Antriebswelle
R0,20
R0,20
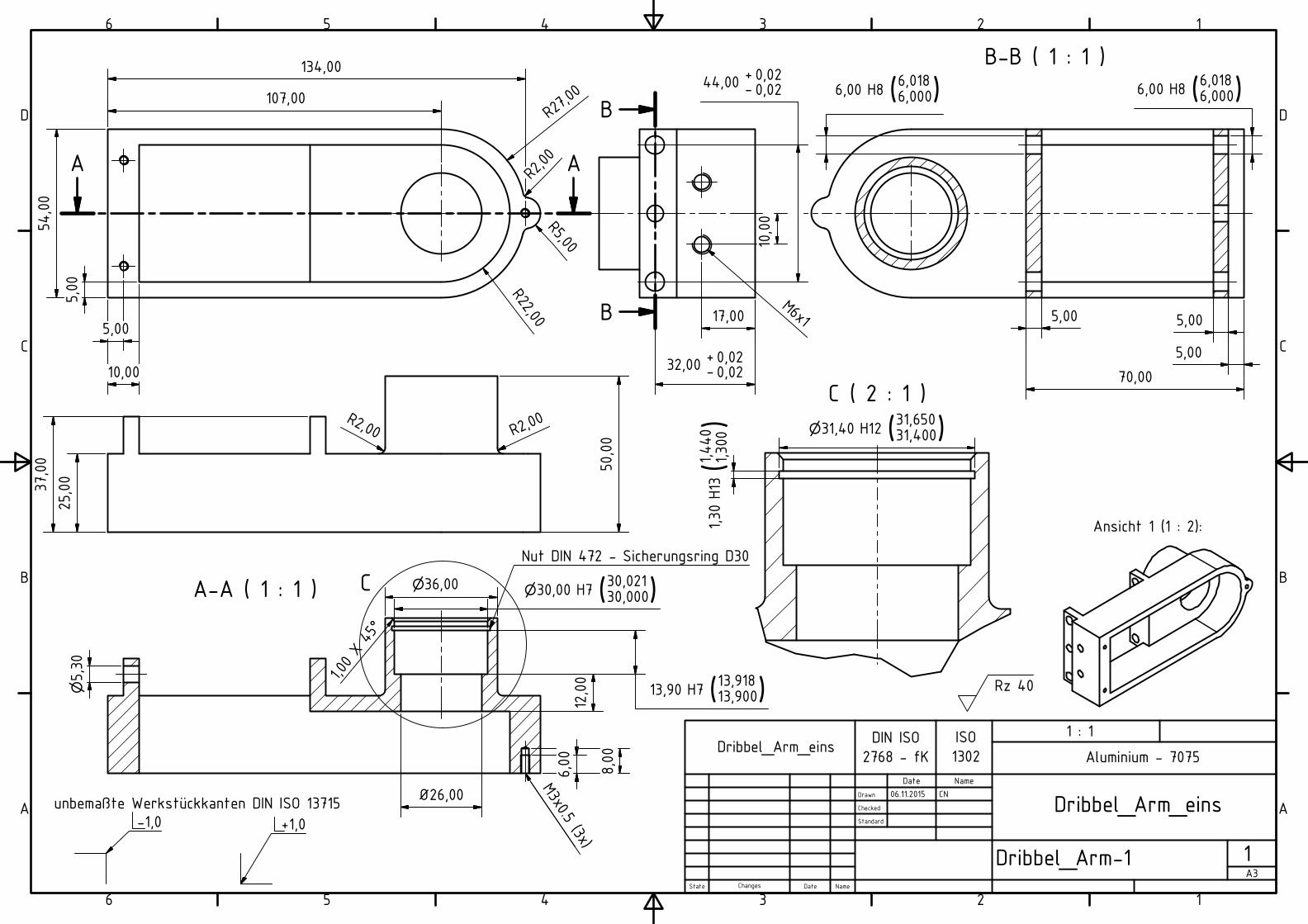
A-A ( 1 : 1 )
B-B ( 1 : 1 )
C ( 2 : 1 )
AA
B
B
C
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Dribbel_Arm-1State Changes Date Name
Drawn
Checked
Standard
Date Name
06.11.2015 CN
134,00
54,00
10,00
5,00
5,00
26,00
12,00
25,00
37,00
5,30
6,00 H8 (6,0006,018)6,00 H8 (6,000
6,018)
32,00 - 0,020,02+
17,00
10,00
5,00 5,00
5,00
70,00
R5,00
R2,00
R22,00
R27,0
0
R2,00R2,00
13,90 H7 (13,90013,918)
1,00 X 45
30,00 H7 (30,00030,021)
6,00
8,00
M3x0.5 (3x)
M6x1
Nut DIN 472 - Sicherungsring D30
50,00
107,00
DIN ISO
2768 - fKDribbel_Arm_eins
Aluminium - 7075
1 : 1
36,00
unbema te Werkst ckkanten DIN ISO 13715-1,0 +1,0
Ansicht 1 (1 : 2):1,30
H13( 1,
300
1,440 ) 31,40 H12 (31,400
31,650)
Rz 40
ISO
1302
Dribbel_Arm_eins
44,00 - 0,020,02+
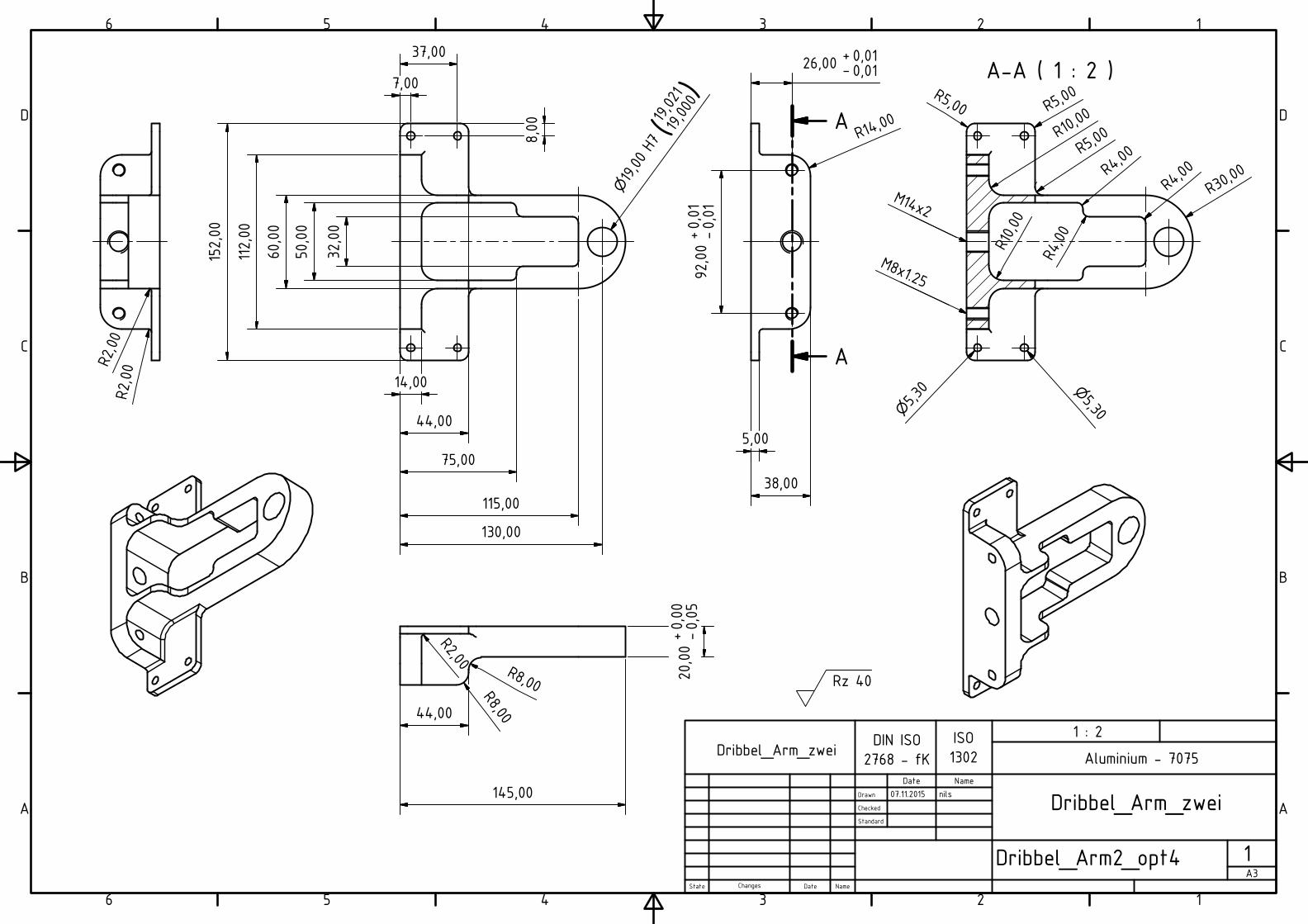
A-A ( 1 : 2 )
A
A
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Dribbel_Arm2_opt4State Changes Date Name
Drawn
Checked
Standard
Date Name
07.11.2015 nils
130,00
152,00
112,00
14,00
44,00
115,00
75,00
19,00H7( 19
,000
19,021 )
60,00
50,00
32,00
5,00
38,00
R14,00
R2,00
R8,00
R8,00
44,00
145,00
R5,00 R5,00
R5,00
R4,00
R4,00
R10,00
R4,00
R10,00
5,30 5,30
M8x1.25
M14x2
R30,0
0
R2,00
DIN ISO
2768 - fK Aluminium - 7075Dribbel_Arm_zwei
R2,00
1 : 2
7,00
37,00
8,00
26,00 - 0,010,01+
92,00-0,01
0,01
+20
,00-0,05
0,00
+
ISO
1302
Rz 40
Dribbel_Arm_zwei
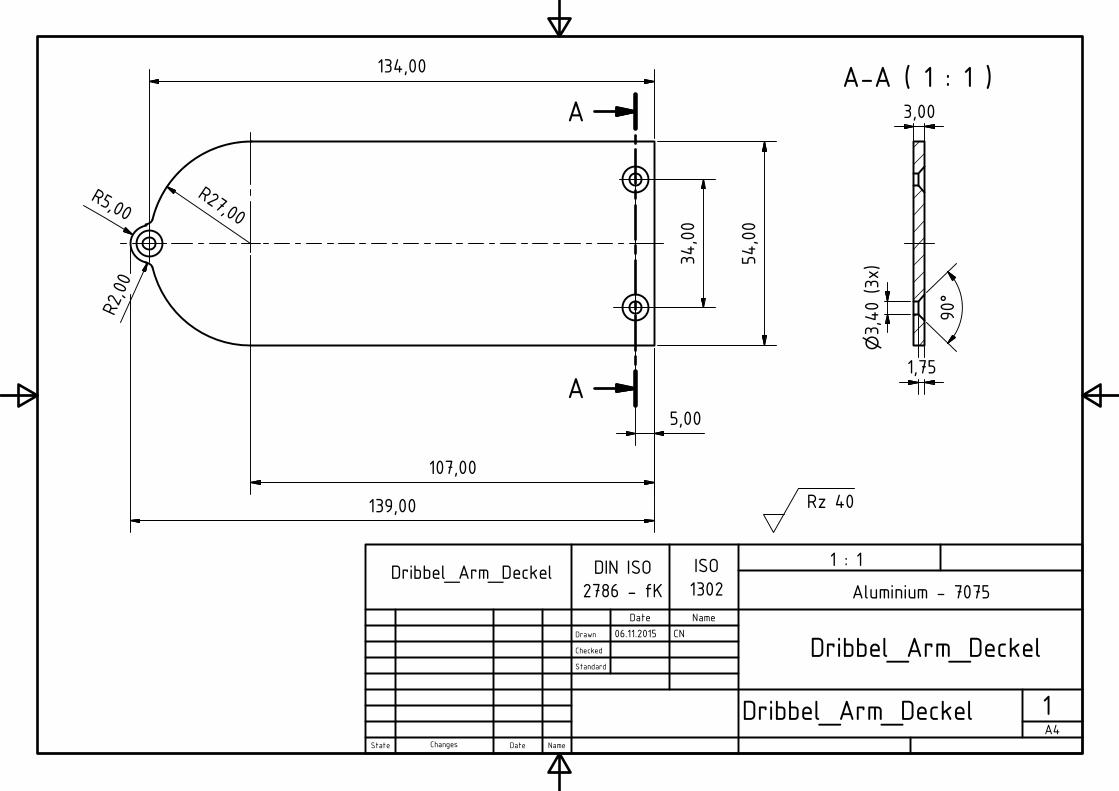
A-A ( 1 : 1 )A
A
1 A4
Dribbel_Arm_DeckelState Changes Date Name
Drawn
Checked
Standard
Date Name
06.11.2015 CN
3,00
54,00
107,00
34,00
134,00
R5,00
R2,00
3,40
(3x)
1,75
R27,00
Aluminium - 7075
DIN ISO
2786 - fKDribbel_Arm_Deckel
1 : 1
90
ISO
1302
Rz 40
Dribbel_Arm_Deckel
5,00
139,00
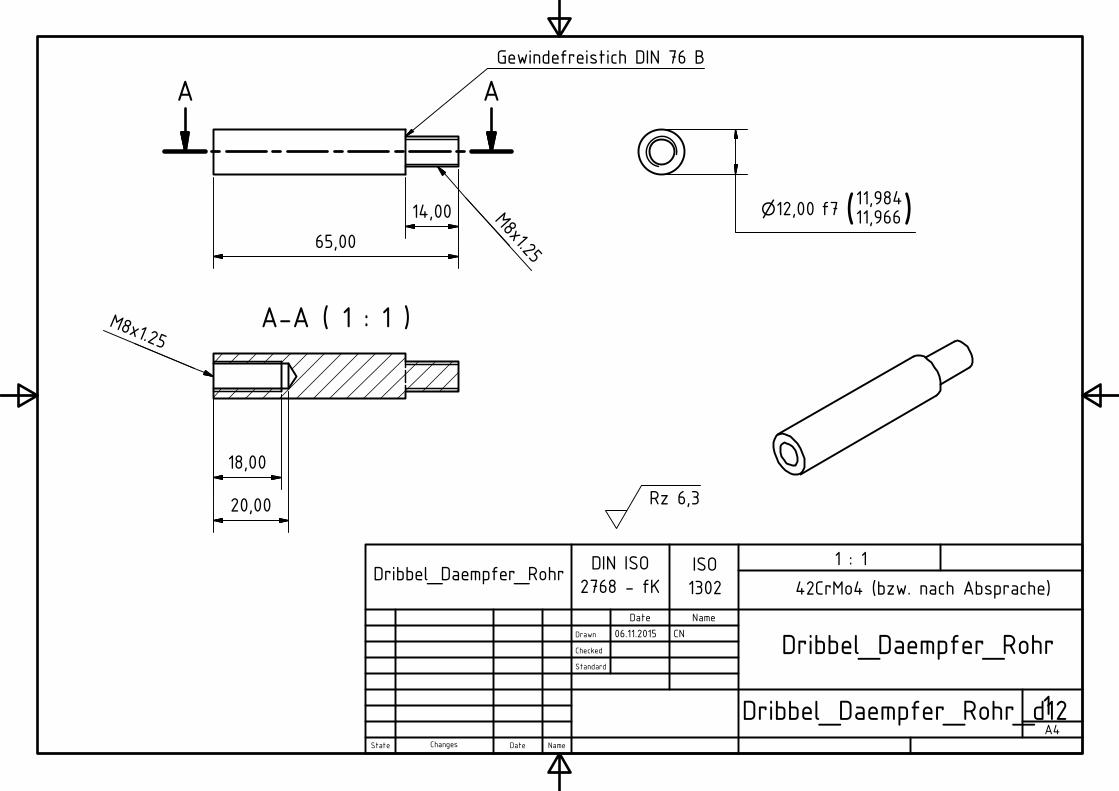
A-A ( 1 : 1 )
A A
1 A4
Dribbel_Daempfer_Rohr_d12State Changes Date Name
Drawn
Checked
Standard
Date Name
06.11.2015 CN
18,00
20,00
M8x1.25
Gewindefreistich DIN 76 B
12,00 f7 (11,96611,984)14,00
65,00
Dribbel_Daempfer_Rohr42CrMo4 (bzw. nach Absprache)
1 : 1DIN ISO
2768 - fK
M8x1.25
Rz 6,3
ISO
1302
Dribbel_Daempfer_Rohr
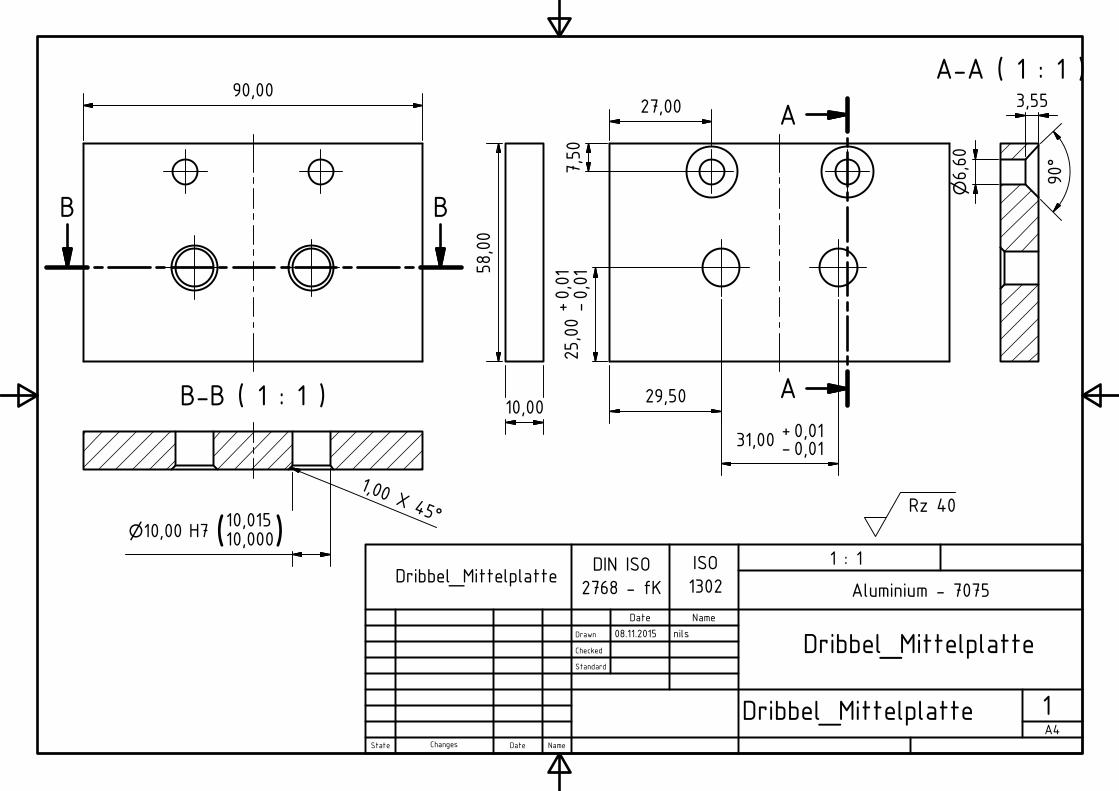
A-A ( 1 : 1 )
B-B ( 1 : 1 )
A
A
B B
1 A4
Dribbel_MittelplatteState Changes Date Name
Drawn
Checked
Standard
Date Name
08.11.2015 nils
90,00
10,00
27,00
7,50
25,00-0,01
0,01
+
6,60
58,00
Dribbel_MittelplatteDIN ISO
2768 - fK Aluminium - 7075
1 : 1
90
3,55
10,00 H7 (10,00010,015)
1,00 X 45
ISO
1302
Rz 40
31,00 - 0,010,01+
29,50
Dribbel_Mittelplatte
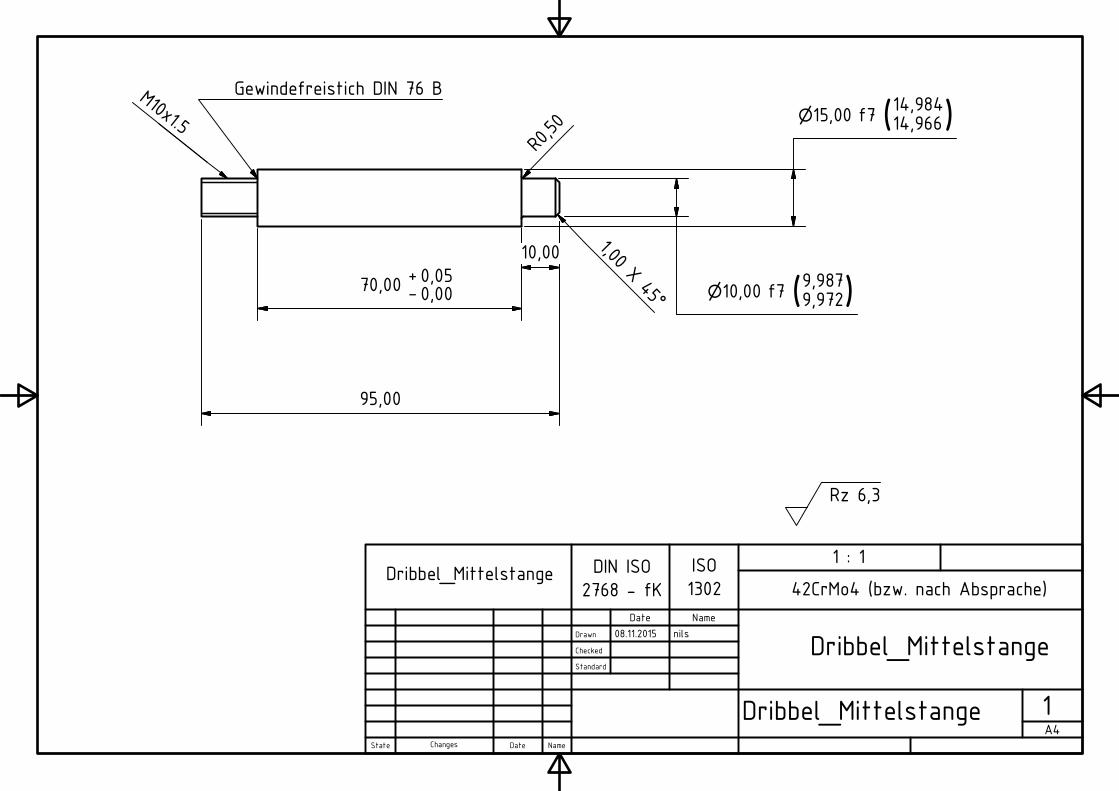
1 A4
Dribbel_MittelstangeState Changes Date Name
Drawn
Checked
Standard
Date Name
08.11.2015 nils
15,00 f7 (14,96614,984)
10,00 f7 (9,9729,987)
1,00 X 45
R0,50
10,00
95,00
M10x1.5
Gewindefreistich DIN 76 B
Dribbel_Mittelstange1 : 1
DIN ISO
2768 - fK
70,00 - 0,000,05+
ISO
1302
Rz 6,3
42CrMo4 (bzw. nach Absprache)
Dribbel_Mittelstange
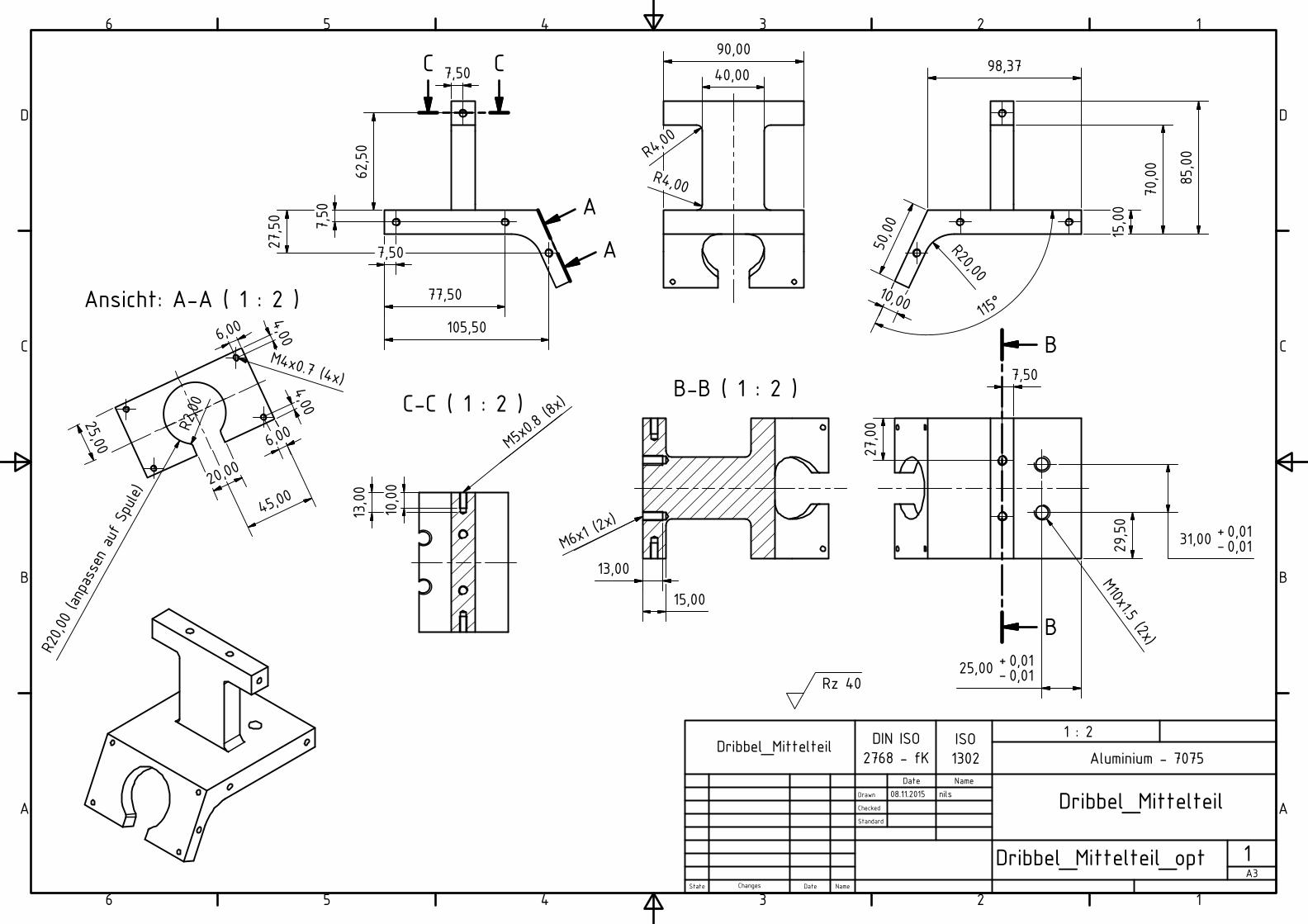
Ansicht: A-A ( 1 : 2 )
B-B ( 1 : 2 )C-C ( 1 : 2 )
A
A
B
B
C C
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Dribbel_Mittelteil_optState Changes Date Name
Drawn
Checked
Standard
Date Name
08.11.2015 nils
85,00
70,00
15,00
90,00
50,00
11510,00
98,37
R20,00
7,50
77,50
105,507,50
27,50
7,50
62,50 R4
,00
R4,00
25,00 - 0,010,01+
7,50
27,00
6,00
4,00
4,00
6,00
45,00
25,00
20,00
R2,00
29,50
13,00
15,00
M6x1 (2
x)
M10x1.5 (2x)
M4x0.7 (4x)10,00
13,00
40,00
Dribbel_Mittelteil1 : 2DIN ISO
2768 - fK Aluminium - 7075
ISO
1302
M5x0.8
(8x)
Rz 40
R20,00 (anpass
en auf Spule)
31,00 - 0,010,01+
Dribbel_Mittelteil
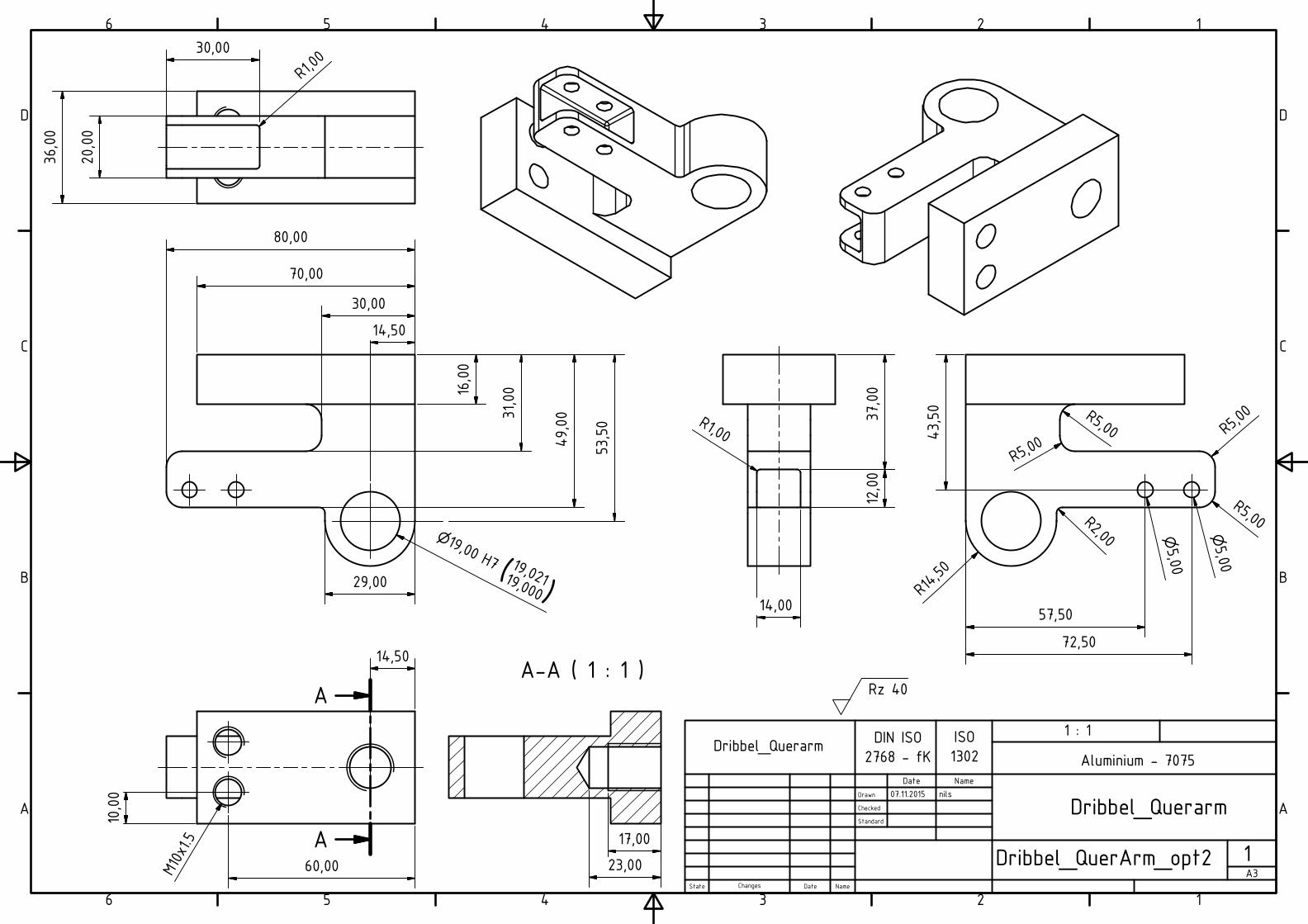
A-A ( 1 : 1 )A
A
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Dribbel_QuerArm_opt2State Changes Date Name
Drawn
Checked
Standard
Date Name
07.11.2015 nils
36,00
70,00
16,00
80,00
31,00
49,00
53,50
30,00
20,00
12,00
14,00
37,00
14,50
60,00
10,00
19,00 H7(19,00019,021
)
17,00
23,00
30,00
29,00
14,50
R14,50
R5,00
R5,00
R2,00
R5,00
R5,00
1 : 1
Aluminium - 7075
DIN ISO
2768 - fKDribbel_Querarm
R1,00
R1,00
ISO
1302
Rz 40
Dribbel_Querarm
M10x1.5
57,50
72,50
43,50
5,00
5,00
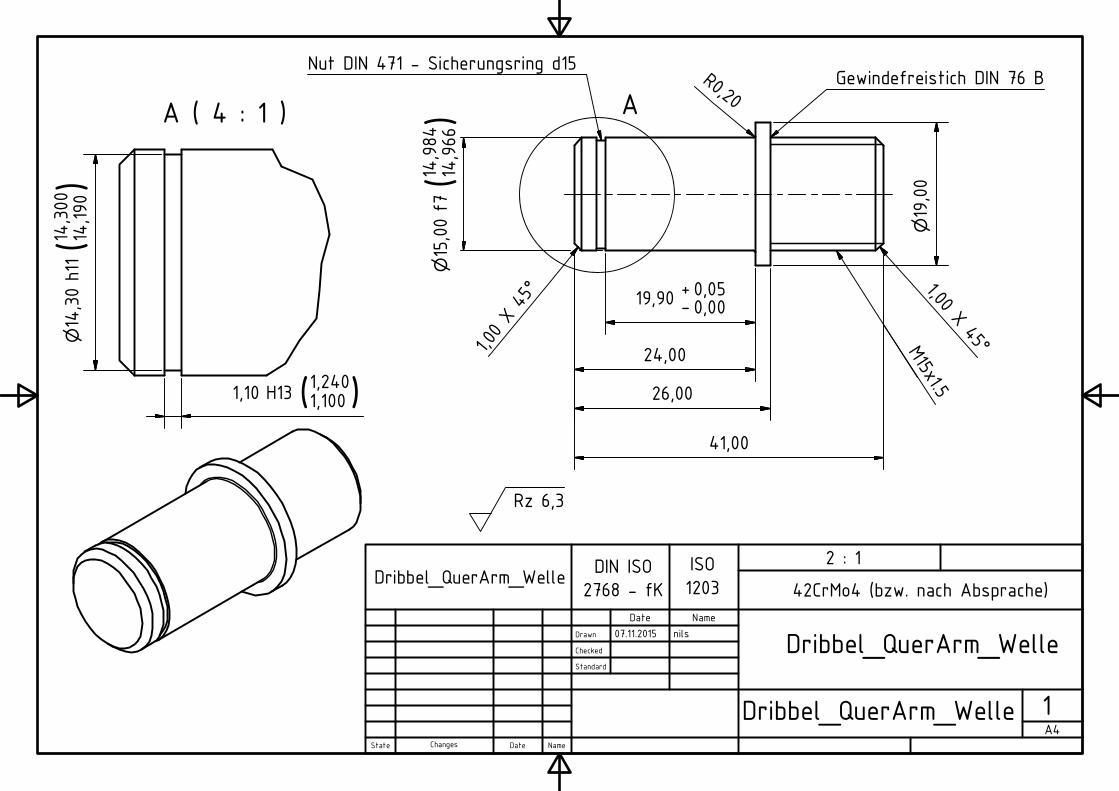
A ( 4 : 1 ) A
1 A4
Dribbel_QuerArm_WelleState Changes Date Name
Drawn
Checked
Standard
Date Name
07.11.2015 nils
2 : 1
24,00
41,00
26,00
15,00f7( 14
,966
14,984)
19,00
M15x1.5
1,00 X 45
Gewindefreistich DIN 76 B
1,00 X 45
DIN ISO
2768 - fK
Nut DIN 471 - Sicherungsring d15
Dribbel_QuerArm_Welle42CrMo4 (bzw. nach Absprache)
ISO
1203
R0,20
19,90 - 0,000,05+
14,30h11( 14
,190
14,300)
1,10 H13 (1,1001,240)
Dribbel_QuerArm_Welle
Rz 6,3
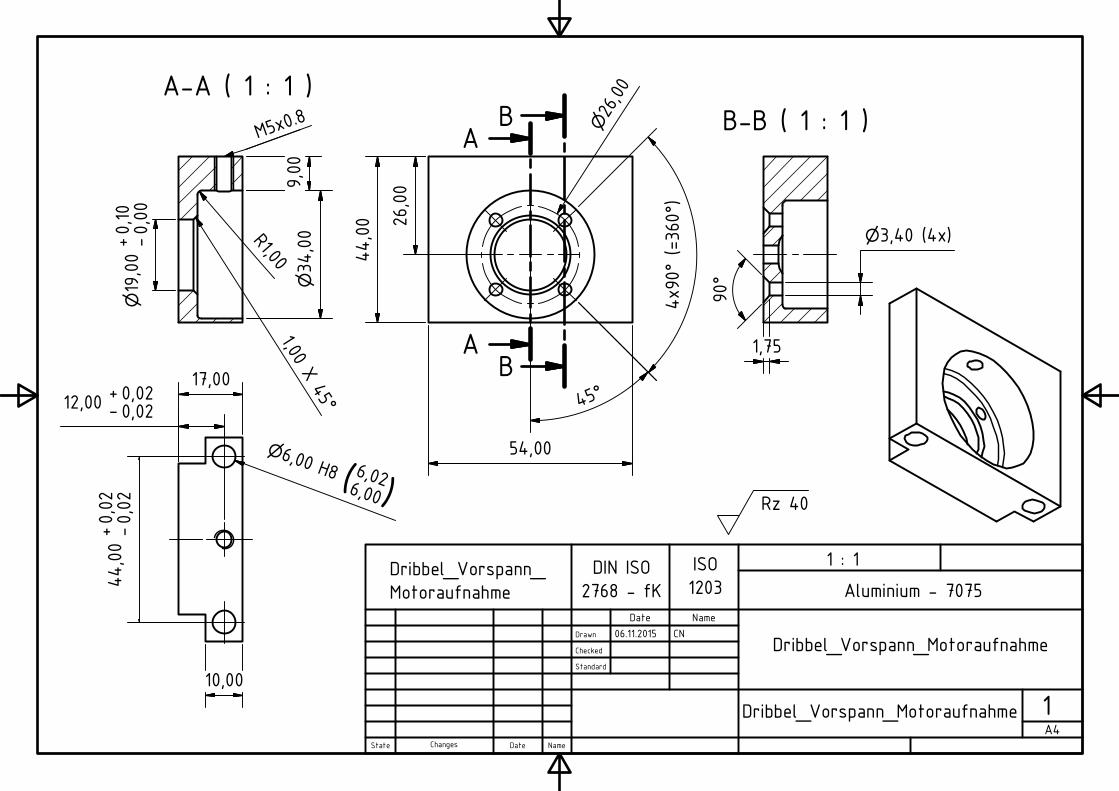
A-A ( 1 : 1 )B-B ( 1 : 1 )
A
A
B
B
1 A4
Dribbel_Vorspann_Motoraufnahme
State Changes Date Name
Drawn
Checked
Standard
Date Name
06.11.2015 CN
54,00
44,00
34,00
19,00-0,00
0,10
+M5x
0.8
6,00 H8 (6,006,02)
17,0012,00 - 0,02
0,02+
10,00
Dribbel_Vorspann_
Motoraufnahme
DIN ISO
2768 - fK
1 : 1
3,40 (4x)
Aluminium - 7075
90
1,75
9,00
R1,00
26,00
45
904x
(=3
60)
ISO
1203
Rz 40
Dribbel_Vorspann_Motoraufnahme
26,00
1,00 X 45
44,00-0,02
0,02
+
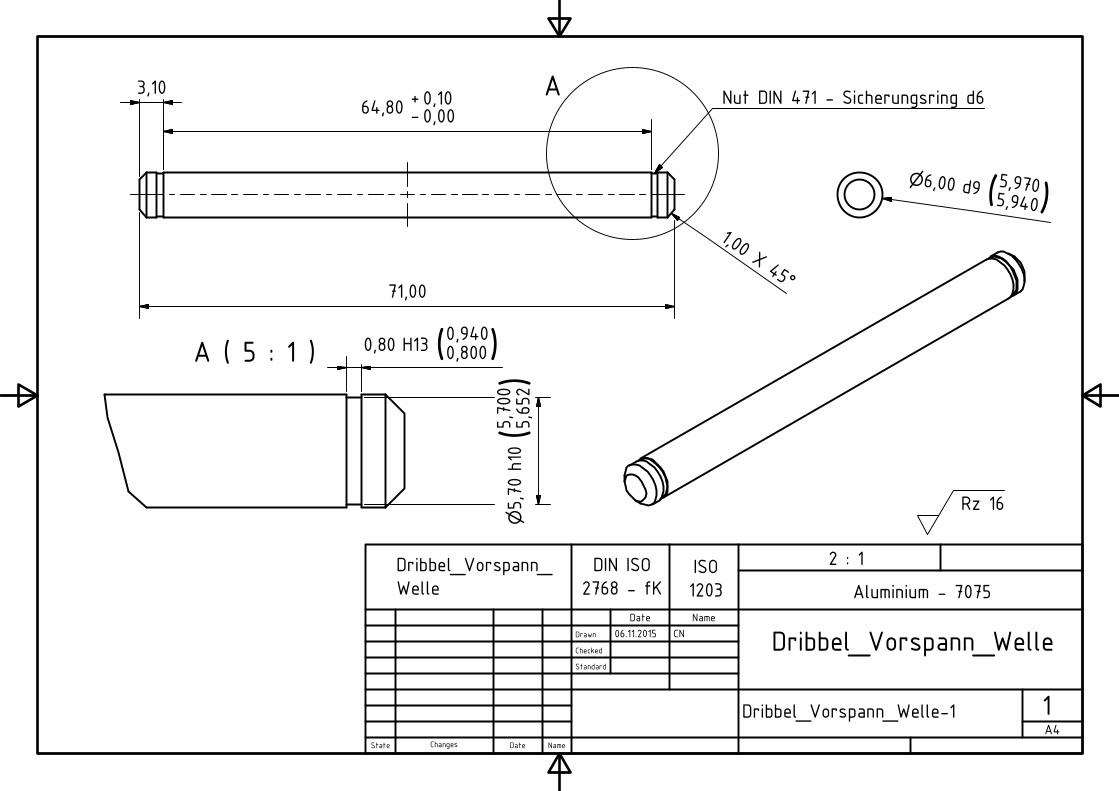
A ( 5 : 1 )
A
1 A4
Dribbel_Vorspann_Welle-1
State Changes Date Name
Drawn
Checked
Standard
Date Name
06.11.2015 CN
6,00 d9 (5,9405,970
)
71,00
64,80 - 0,000,10+
3,10Nut DIN 471 - Sicherungsring d6
1,00 X 45
Dribbel_Vorspann_
Welle
DIN ISO
2768 - fK
2 : 1
Aluminium - 7075
5,70
h10( 5
,652
5,70
0 )
0,80 H13 (0,8000,940)
ISO
1203
Rz 16
Dribbel_Vorspann_Welle
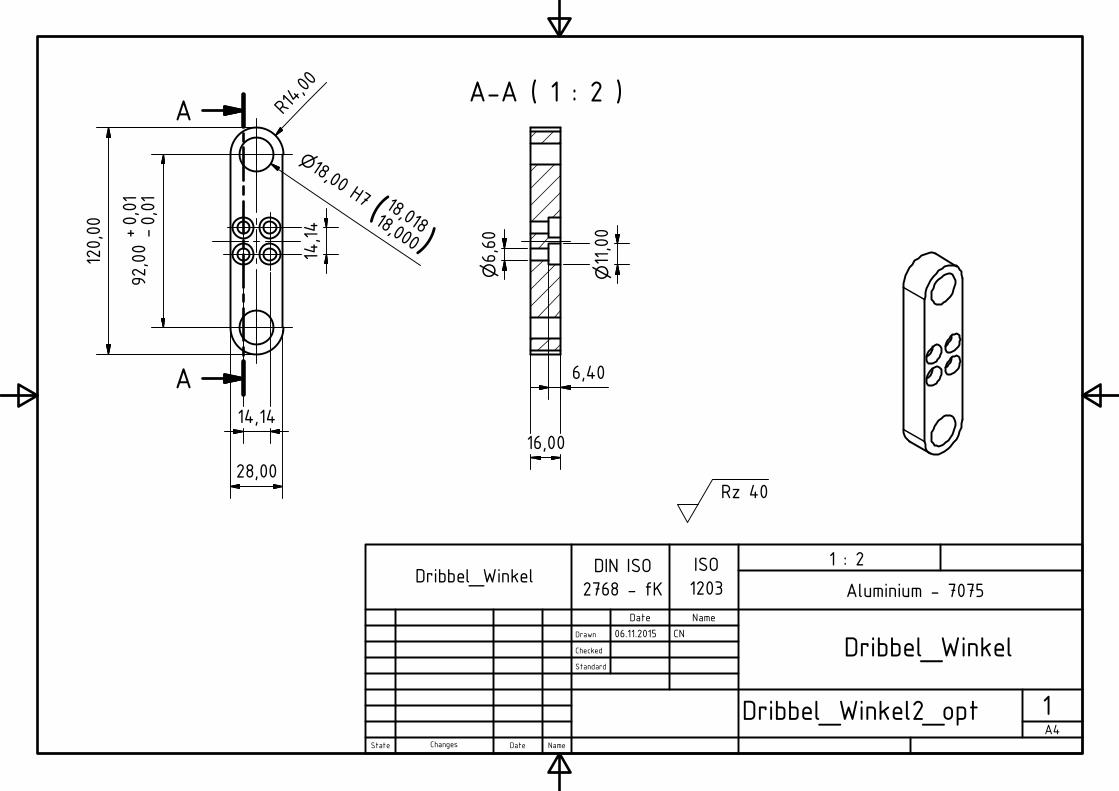
A-A ( 1 : 2 )A
A
1 A4
Dribbel_Winkel2_optState Changes Date Name
Drawn
Checked
Standard
Date Name
06.11.2015 CN
28,00
16,00
92,00-0,01
0,01
+
18,00 H7(18,00018,018)
R14,00
6,40
6,60
11,00
120,00
Dribbel_WinkelDIN ISO
2768 - fK Aluminium - 7075
1 : 2ISO
1203
Rz 40
Dribbel_Winkel
14,14
14,14
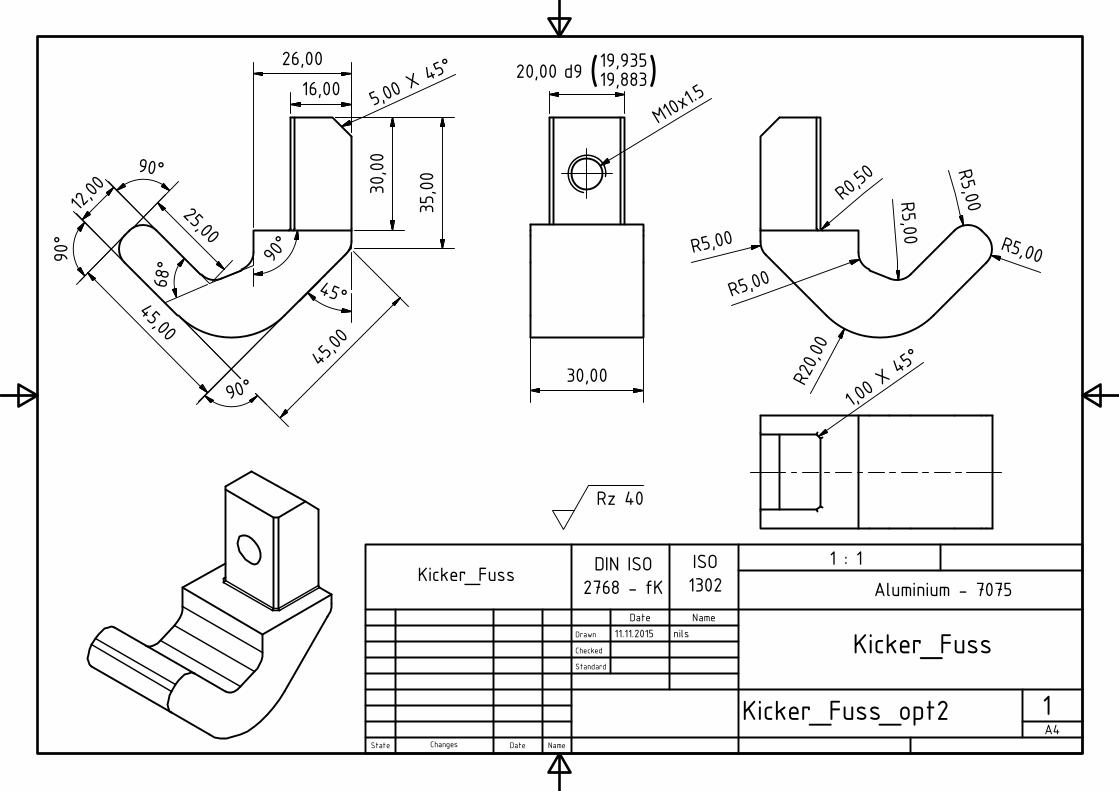
1 A4
Kicker_Fuss_opt2State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
12,00
90
45,00
26,00
5,00 X
4516,00
30,00
20,00 d9 (19,88319,935)
45,00
35,00
45
30,00
25,00
90
90
68
90
R5,00
R20,00
R5,00
R5,00R
5,00
R5,00
M10x1.5
1,00 X
45
R0,50
Kicker_FussDIN ISO
2768 - fK
Kicker_Fuss
1 : 1ISO
1302 Aluminium - 7075
Rz 40
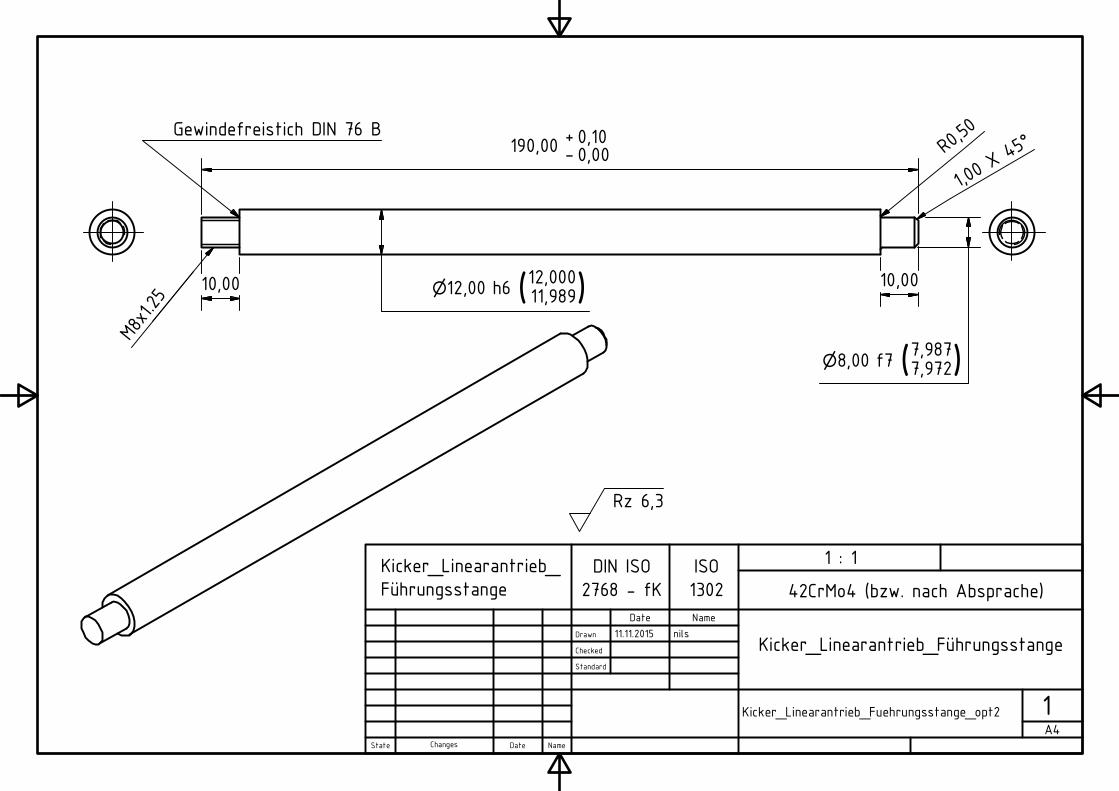
1 A4
Kicker_Linearantrieb_Fuehrungsstange_opt2
State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
10,00
M8x1.25
190,00 - 0,000,10+
10,00
1,00 X
45Gewindefreistich DIN 76 B
8,00 f7 (7,9727,987)
12,00 h6 ( 11,98912,000)
Rz 6,3
DIN ISO
2768 - fK
ISO
1302
1 : 1
42CrMo4 (bzw. nach Absprache)
Kicker_Linearantrieb_
F hrungsstange
Kicker_Linearantrieb_F hrungsstange
R0,50
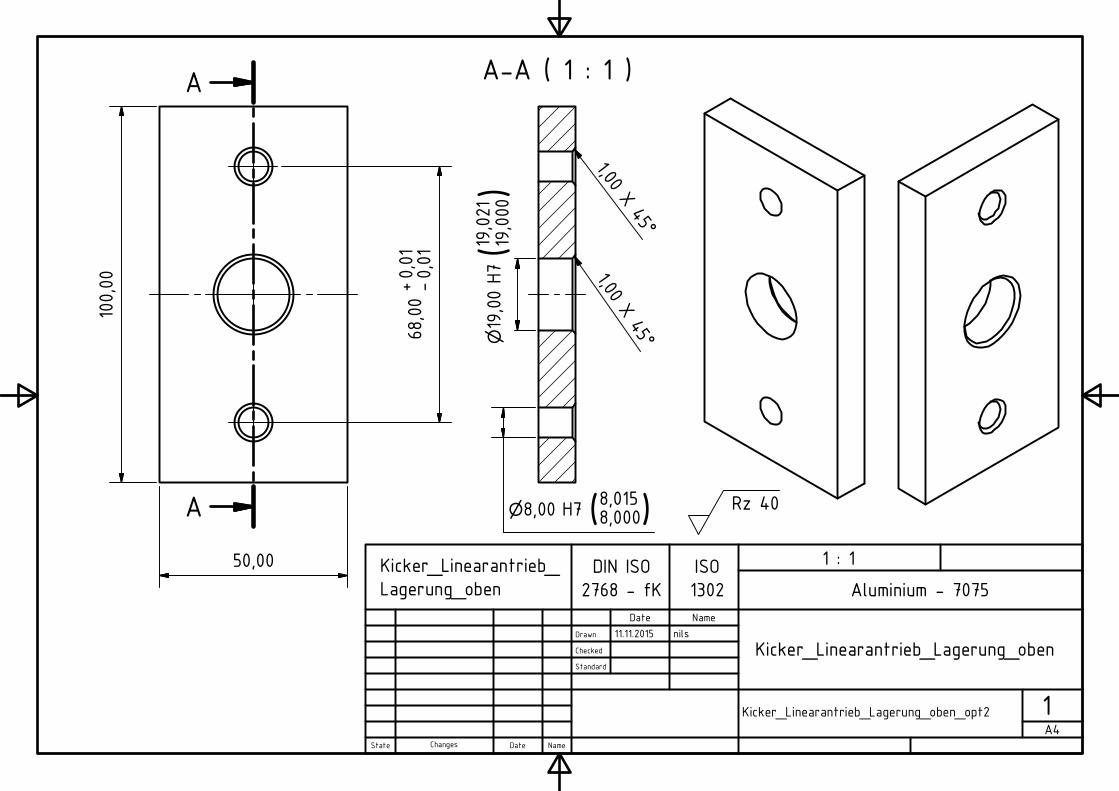
A-A ( 1 : 1 )A
A
1 A4
Kicker_Linearantrieb_Lagerung_oben_opt2
State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
100,00
50,00
68,00-0,01
0,01
+
1,00 X 45
1,00 X 45
8,00 H7 (8,0008,015)
19,00H7( 19
,000
19,021)
Kicker_Linearantrieb_
Lagerung_oben
Kicker_Linearantrieb_Lagerung_oben
Aluminium - 7075
ISO
1302
DIN ISO
2768 - fK
Rz 40
1 : 1
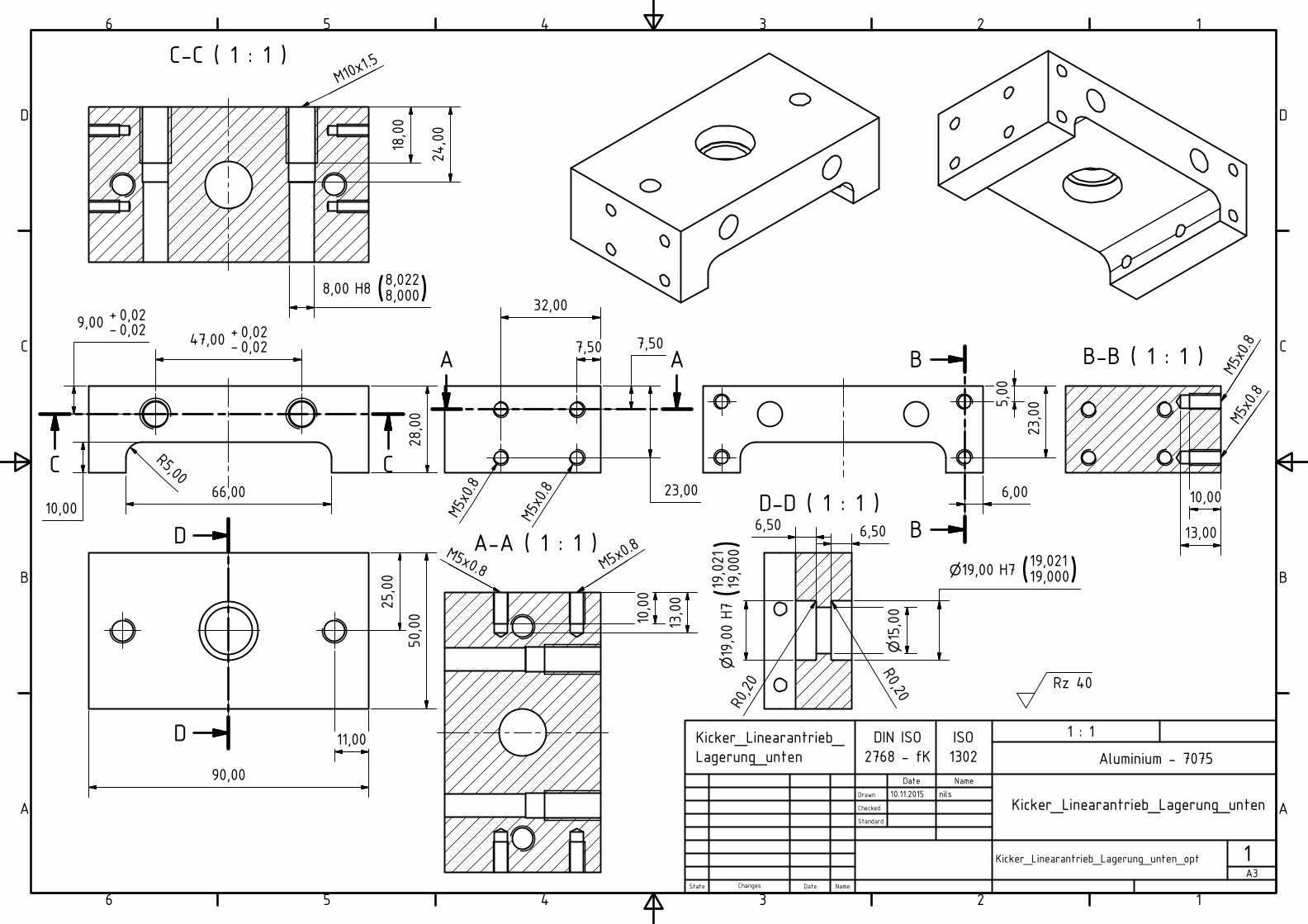
A-A ( 1 : 1 )
B-B ( 1 : 1 )
C-C ( 1 : 1 )
D-D ( 1 : 1 )
AA B
B
C C
D
D
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_Linearantrieb_Lagerung_unten_opt
State Changes Date Name
Drawn
Checked
Standard
Date Name
10.11.2015 nils
23,00
7,50
6,00
23,005,00
9,00 - 0,020,02+
66,00
R5,00
M5x0.8
M5x0.8
32,00
7,50
10,00
13,00
M5x0.8M5x0.8
13,00
10,00
M5x0.8
M5x0.8
18,00
M10x1.5
8,00 H8 (8,0008,022)
24,00
19,00 H7 (19,00019,021)
19,00H7( 19
,000
19,021)
15,00
6,506,50
28,00
10,00
90,00
50,00
25,00
11,00 Kicker_Linearantrieb_
Lagerung_unten
DIN ISO
2768 - fK
ISO
1302
1 : 1
Rz 40
Aluminium - 7075
Kicker_Linearantrieb_Lagerung_unten
R0,20
R0,20
47,00 - 0,020,02+
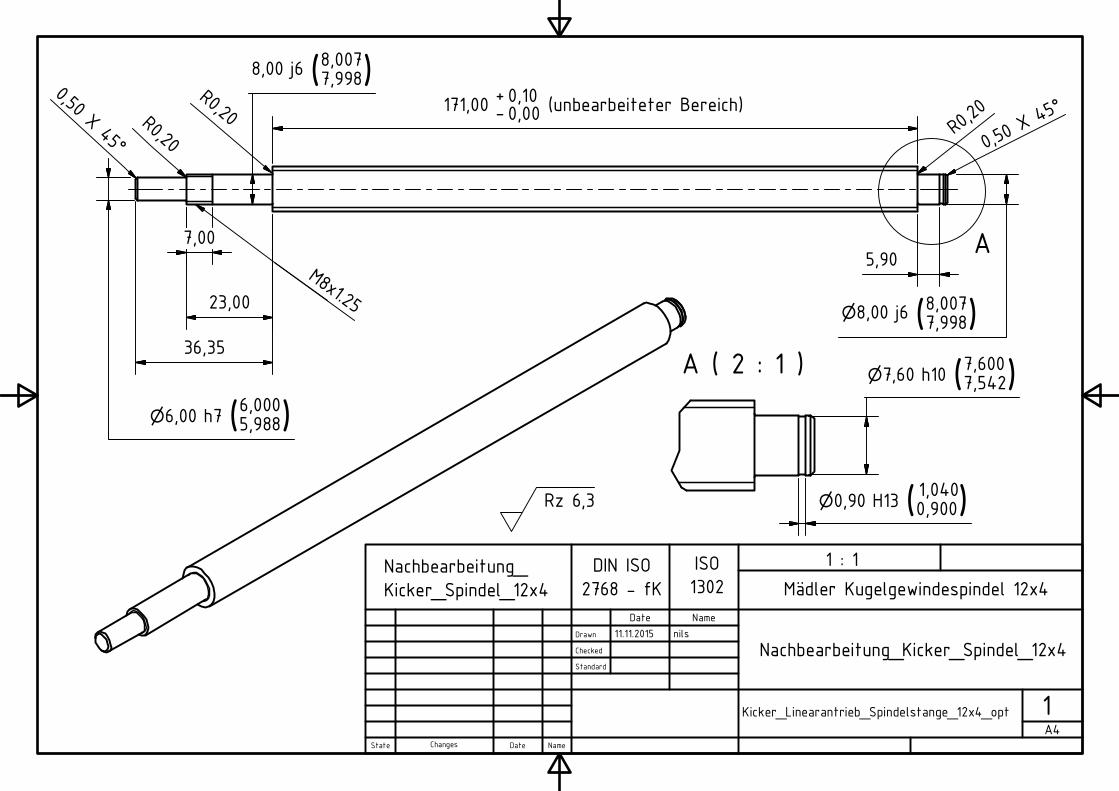
A ( 2 : 1 )
A
1 A4
Kicker_Linearantrieb_Spindelstange_12x4_opt
State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
5,90
8,00 j6 (7,9988,007)
6,00 h7 (5,9886,000)
R0,20
R0,20R0,20
171,00 - 0,000,10+
(unbearbeiteter Bereich)
7,00
23,00
8,00 j6 (7,9988,007)
M8x1.25
36,35
7,60 h10 (7,5427,600)
0,90 H13 (0,9001,040)
0,50 X
450,50 X 45
ISO
1302DIN ISO
2768 - fK
1 : 1Nachbearbeitung_
Kicker_Spindel_12x4
Nachbearbeitung_Kicker_Spindel_12x4
Rz 6,3
M dler Kugelgewindespindel 12x4
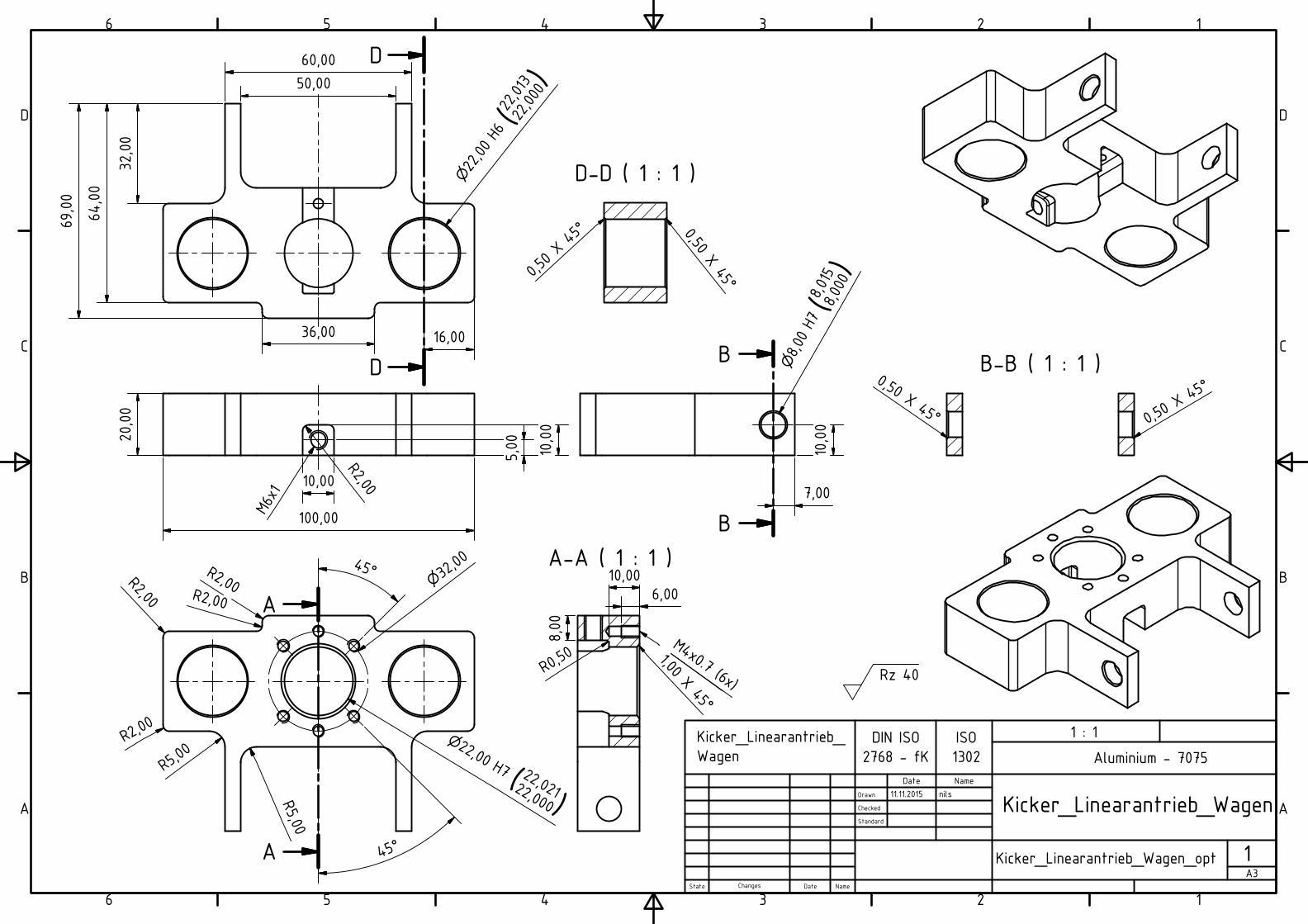
A-A ( 1 : 1 )
B-B ( 1 : 1 )
D-D ( 1 : 1 )
A
A
B
B
D
D
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_Linearantrieb_Wagen_opt
State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
10,006,00
M4x0.7 (6x)
100,00
20,00
32,00
64,00
69,00
50,00
60,00
8,00
5,00
M6x1
R2,0010,00
10,00
R0,50
7,00
10,00
8,00
H7(8,
000
8,015 )
36,00
R2,00R2,00
R2,00
R2,00
R5,00
R5,00
0,50 X 450,5
0 X 45
Rz 40
22,00H6(22
,000
22,013 )
32,00
22,00 H7(22,00022,021
)
45
45
16,00
1,00 X 45
0,50 X 45
0,50 X 45
Kicker_Linearantrieb_
Wagen
Kicker_Linearantrieb_Wagen
1 : 1
Aluminium - 7075
ISO
1302
DIN ISO
2768 - fK
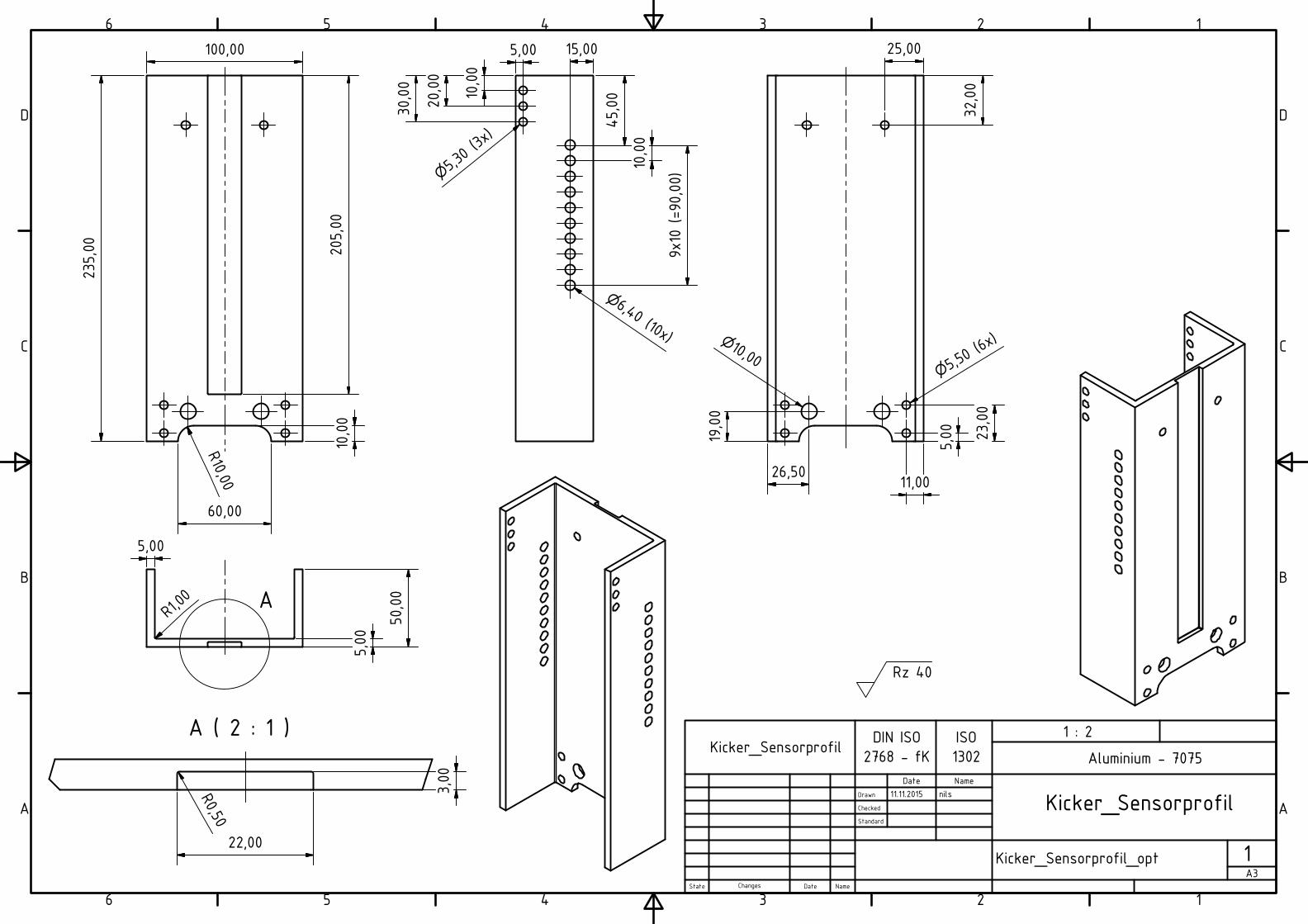
A ( 2 : 1 )
A
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_Sensorprofil_opt
State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
235,00
100,00
205,00
5,00
5,00
50,00
3,00
22,00
R0,50
R1,00
R10,00
60,00
10,00
10,00
20,00
30,00
45,00
10,00
90,00
9x10 (=
)
6,40 (10x)
5,30 (3x
)
15,005,00
32,00
25,00
11,00
5,00 23
,00
5,50 (
6x)
19,00
26,50
10,00
Kicker_Sensorprofil
Kicker_Sensorprofil
ISO
1302
DIN ISO
2768 - fK Aluminium - 7075
1 : 2
Rz 40
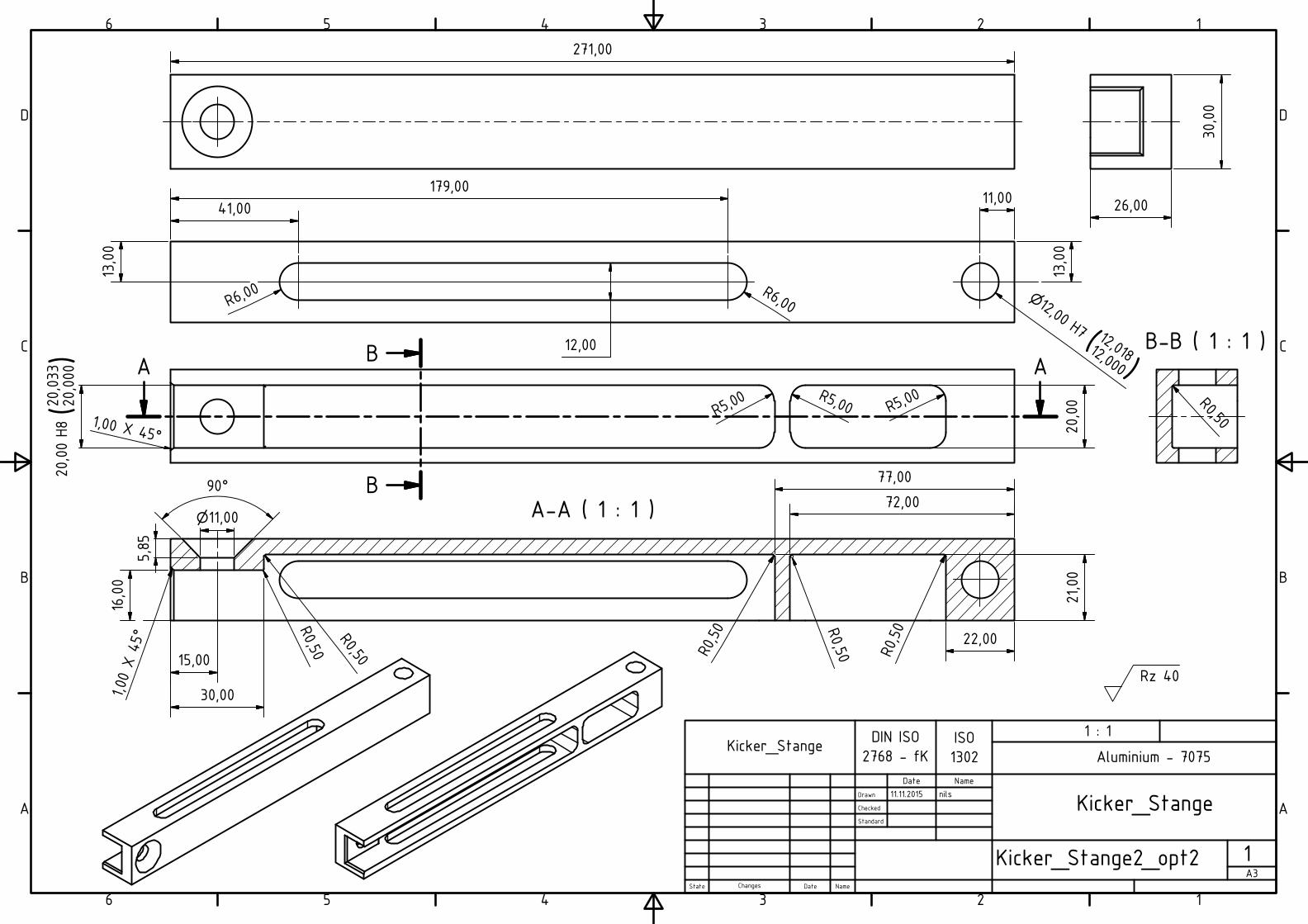
A-A ( 1 : 1 )
B-B ( 1 : 1 )A A
B
B
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_Stange2_opt2State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
90
5,85
11,00
15,00
41,00
179,00
R6,00 R6,00
11,00
13,00
13,00
16,00
21,00
22,00
72,00
77,00
30,001,00
X 4
5
R0,50
R0,50 R0,50 R
0,50 R0,50
12,00 H7(12,00012,018)
1,00 X 45
12,00
271,00
30,00
26,00
R5,00 R5,00
R5,00
20,00
20,00H8( 2
0,00
020
,033)
R0,50
Kicker_Stange
Kicker_Stange
Aluminium - 7075
1 : 1ISO
1302
DIN ISO
2768 - fK
Rz 40
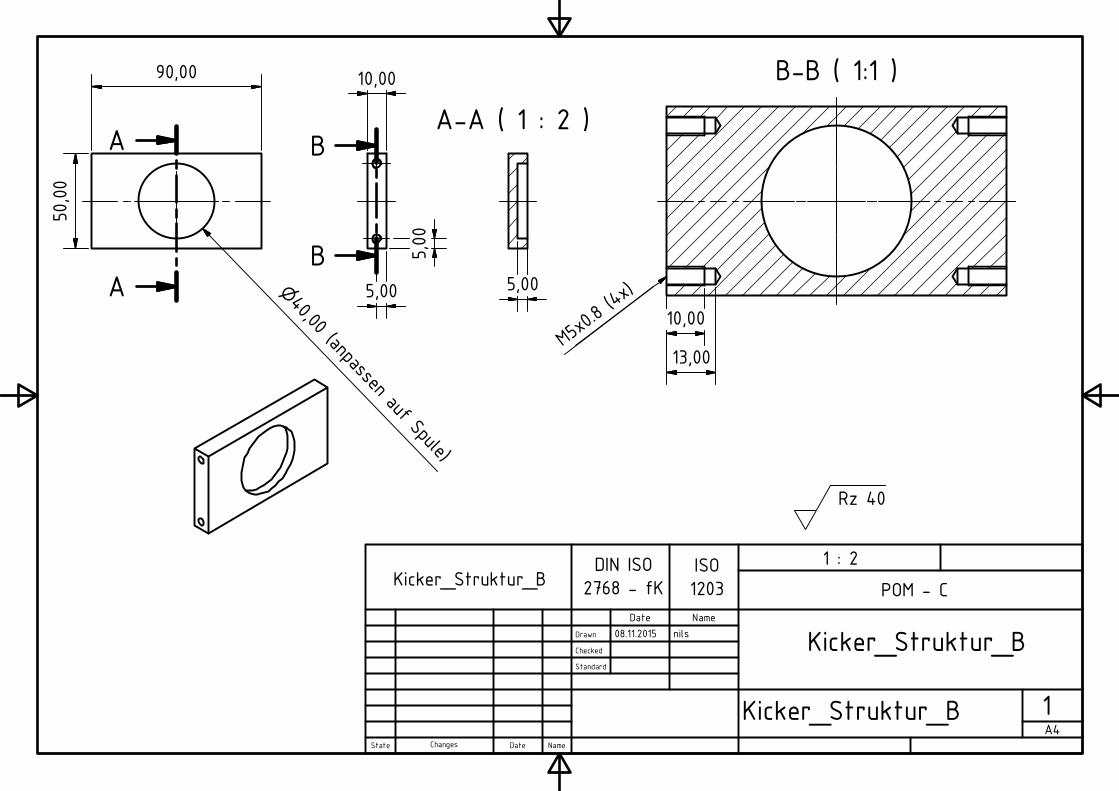
A-A ( 1 : 2 )
B-B ( 1:1 )
A
A
B
B
1 A4
Kicker_Struktur_BState Changes Date Name
Drawn
Checked
Standard
Date Name
08.11.2015 nils
10,00
13,00
5,00
10,0090,0050
,00
40,00 (anpassen auf Spule)
M5x0.8
(4x)5,00
5,00
1 : 2DIN ISO
2768 - fK POM - CKicker_Struktur_B
ISO
1203
Rz 40
Kicker_Struktur_B
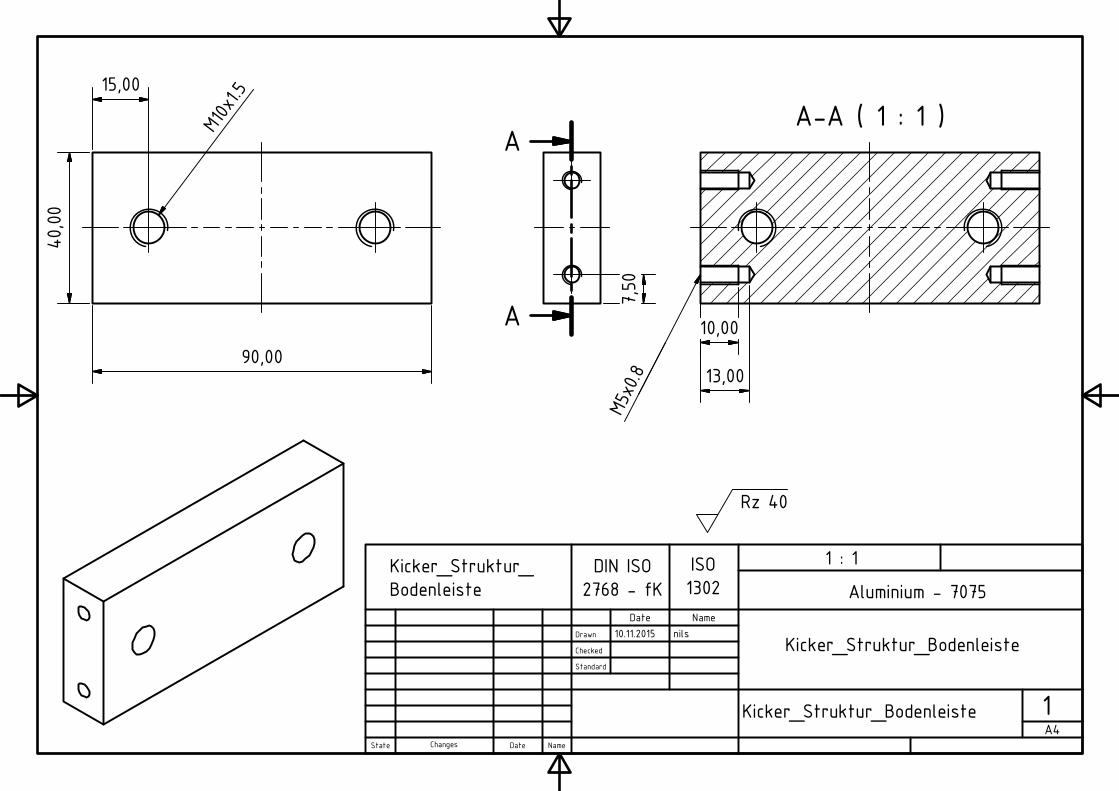
A-A ( 1 : 1 )A
A
1 A4
Kicker_Struktur_Bodenleiste
State Changes Date Name
Drawn
Checked
Standard
Date Name
10.11.2015 nils
90,00
40,00
15,00
10,00
13,00
M5x
0.8
7,50
M10x1.5
ISO
1302 Aluminium - 7075
DIN ISO
2768 - fK
1 : 1
Rz 40
Kicker_Struktur_
Bodenleiste
Kicker_Struktur_Bodenleiste
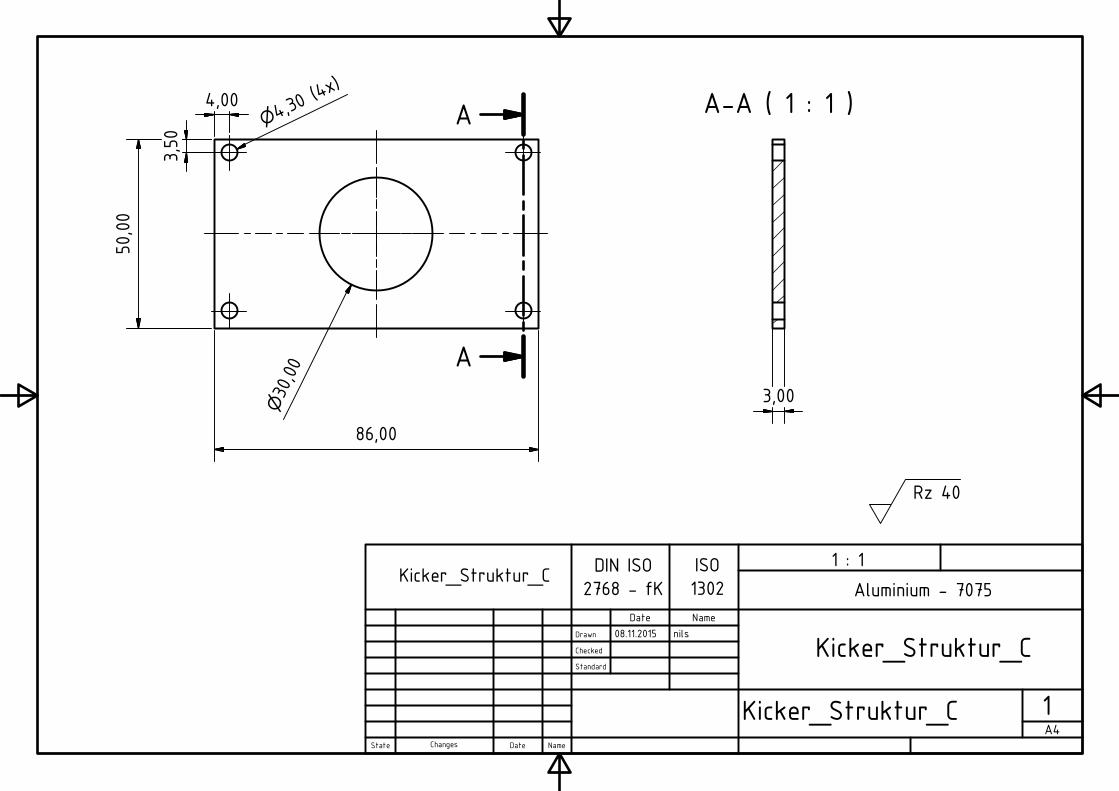
A-A ( 1 : 1 )A
A
1 A4
Kicker_Struktur_CState Changes Date Name
Drawn
Checked
Standard
Date Name
08.11.2015 nils
50,00
86,00
3,50
4,004,3
0 (4x)
30,00
3,00
Kicker_Struktur_CDIN ISO
2768 - fK
1 : 1
Aluminium - 7075
ISO
1302
Rz 40
Kicker_Struktur_C
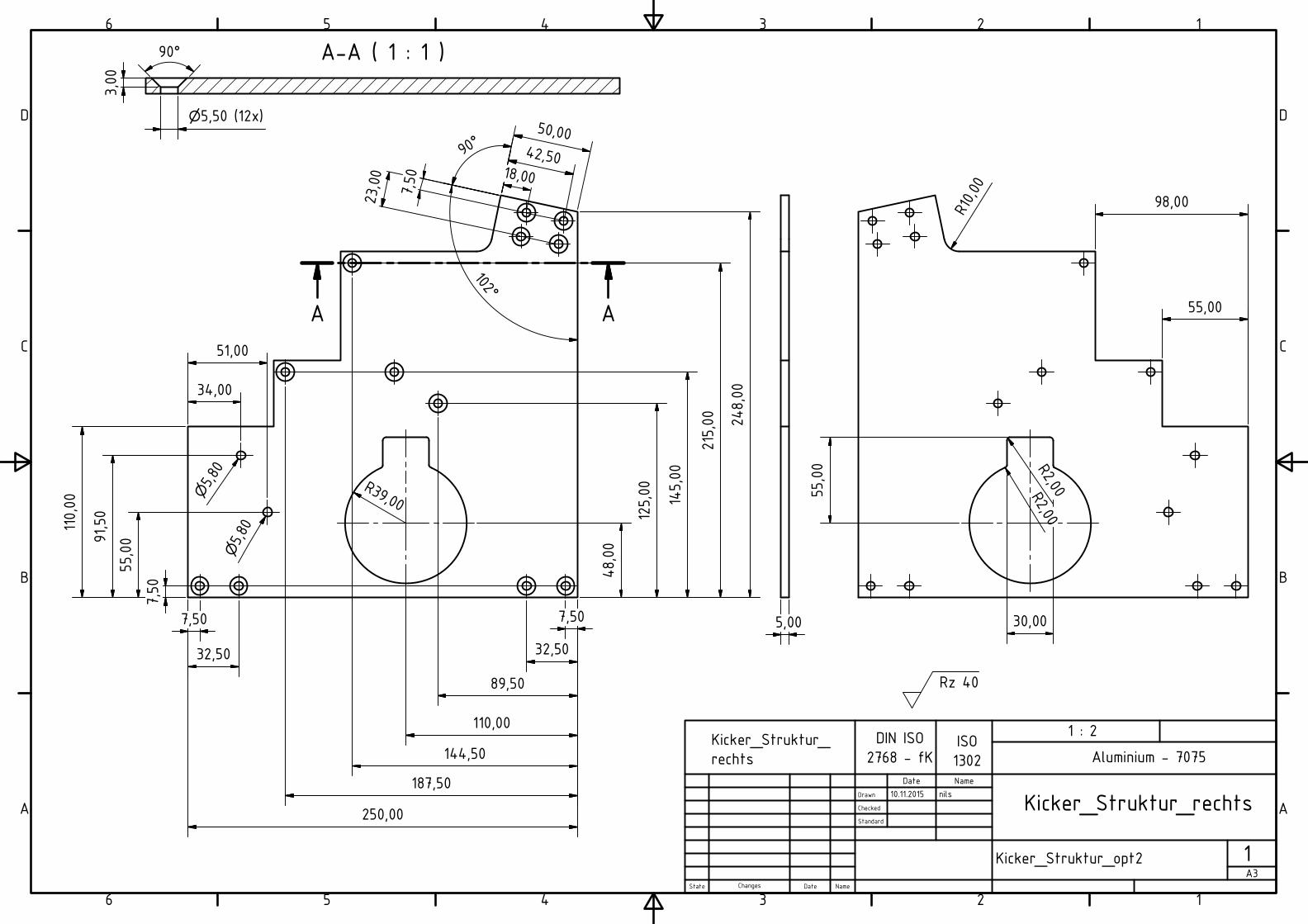
A-A ( 1 : 1 )
A A
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_Struktur_opt2
State Changes Date Name
Drawn
Checked
Standard
Date Name
10.11.2015 nils
5,00
7,50
7,50
32,50
7,50
32,50
110,00
48,00
55,0091
,50
110,00
51,00
34,00
125,00
145,00
215,00
250,00
89,50
187,50
144,50
102
50,00
18,00
90 42,50
7,50
23,00
90
3,00
5,50 (12x)
R10,00
R39,00
R2,00R2,00
30,00
55,00
55,00
98,00
248,00
5,80
5,80
DIN ISO
2768 - fKISO
1302
Rz 40
Kicker_Struktur_
rechts
1 : 2
Aluminium - 7075
Kicker_Struktur_rechts
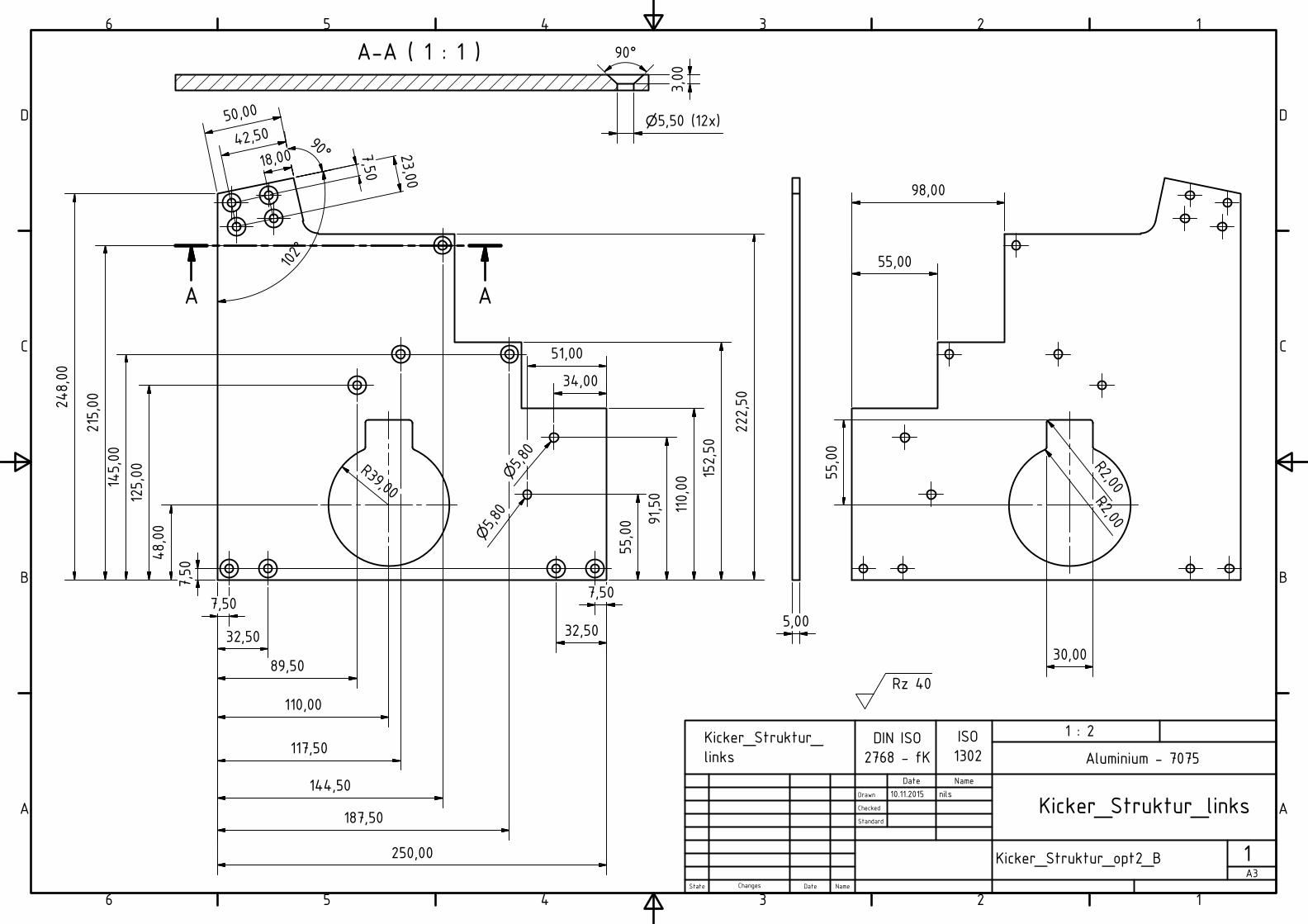
A-A ( 1 : 1 )
A A
1
1
2
2
3
3
4
4
5
5
6
6
A A
B B
C C
D D
1 A3
Kicker_Struktur_opt2_B
State Changes Date Name
Drawn
Checked
Standard
Date Name
10.11.2015 nils
5,00
250,00
248,00
102
50,00
222,50
110,00
152,50
7,50
48,00
55,00 91
,50
34,00
51,00
5,80
5,80
7,507,50
32,5032,50
125,00
145,00
89,50
117,50
187,50
215,00
144,50
110,00
7,50
23,00
18,0042,50
90
3,00
5,50 (12x)
R39,00
30,00
55,00
R2,00R2,00
DIN ISO
2768 - fK
ISO
1302
1 : 2Kicker_Struktur_
links
Rz 40
55,00
98,00
90
Aluminium - 7075
Kicker_Struktur_links
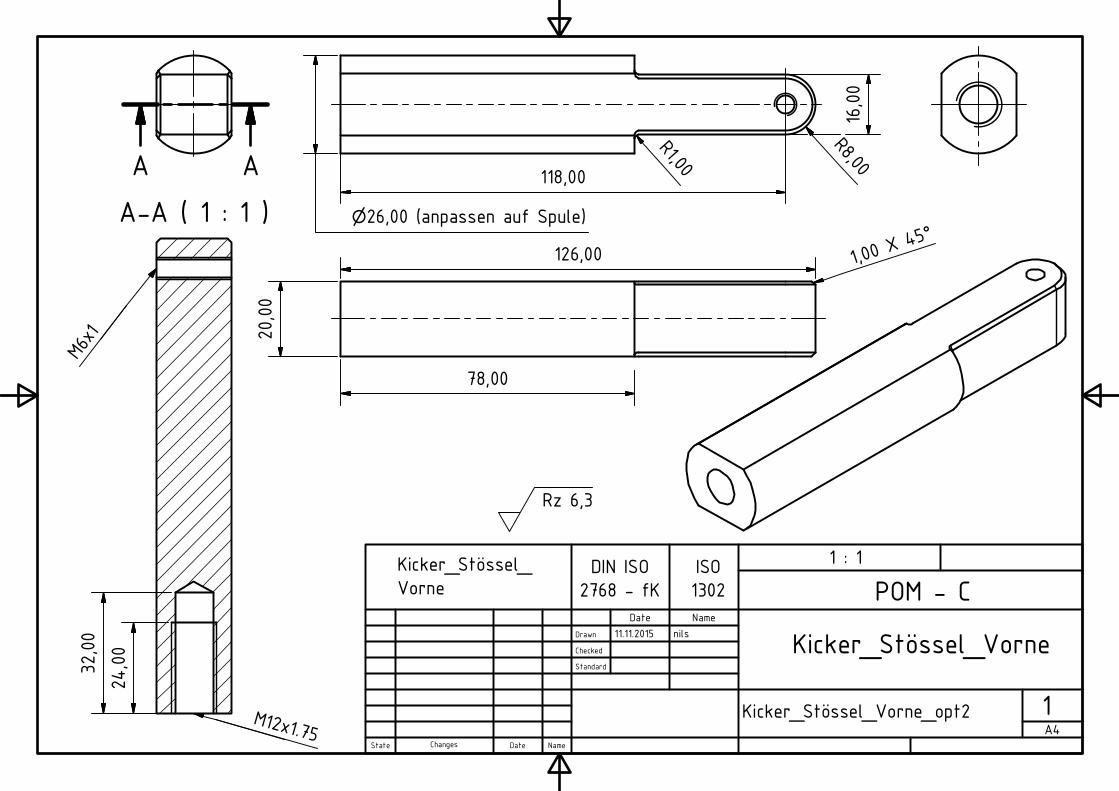
A-A ( 1 : 1 )
A A
1 A4
Kicker_St ssel_Vorne_opt2
State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
118,00
R8,00
16,00
20,00
26,00 (anpassen auf Spule)
M6x1
126,00 1,00 X 45
78,00
24,00
32,00
M12x1.75
R1,00
DIN ISO
2768 - fK
ISO
1302 POM - C
1 : 1Kicker_St ssel_
Vorne
Kicker_St ssel_Vorne
Rz 6,3
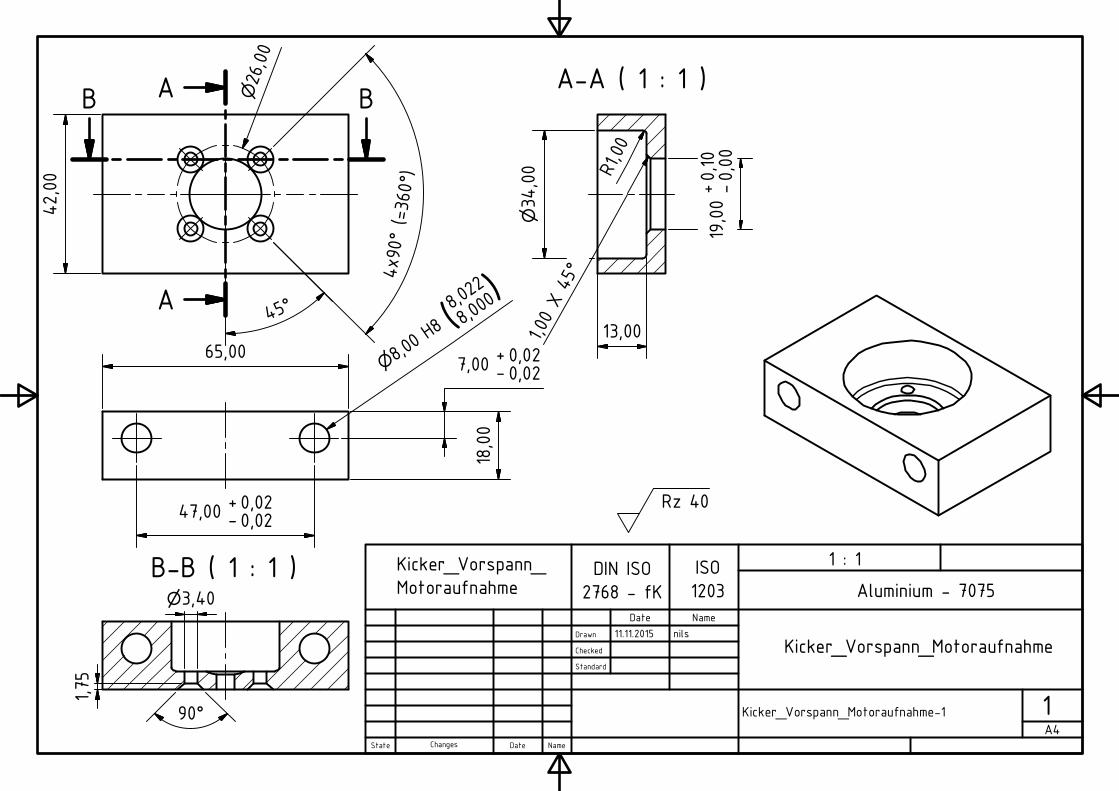
A-A ( 1 : 1 )
B-B ( 1 : 1 )
A
A
B B
1 A4
Kicker_Vorspann_Motoraufnahme-1
State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
18,00
7,00 - 0,020,02+
13,00
34,00
19,00-0,00
0,10
+
42,00
26,00
45
904x
(=3
60)
65,00
90
1,75
3,40
8,00 H8
(8,0008,0
22 )
DIN ISO
2768 - fK
ISO
1203
1 : 1
Aluminium - 7075
Kicker_Vorspann_
Motoraufnahme
Rz 40
R1,00
Kicker_Vorspann_Motoraufnahme
1,00
X 45
47,00 - 0,020,02+
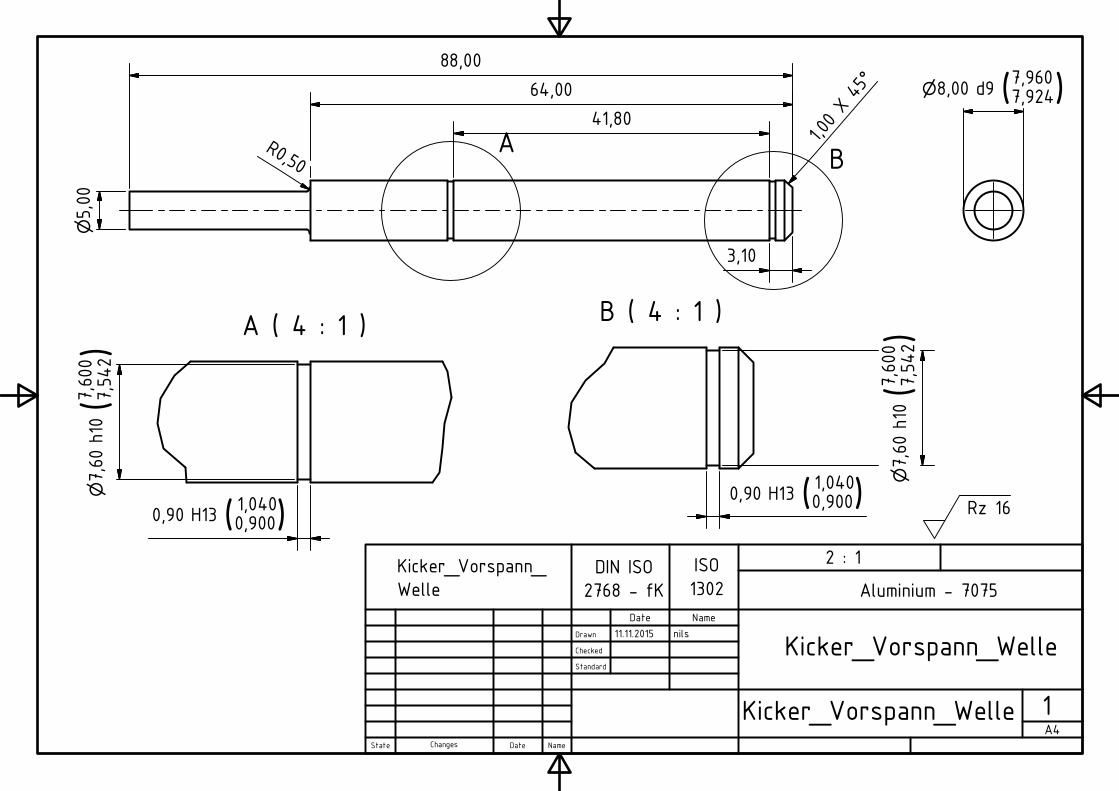
A ( 4 : 1 )B ( 4 : 1 )
AB
1 A4
Kicker_Vorspann_WelleState Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
R0,50
5,00
8,00 d9 (7,9247,960)
7,60
h10( 7
,542
7,60
0)
7,60
h10( 7
,542
7,60
0)
0,90 H13 (0,9001,040)
0,90 H13 (0,9001,040)
64,00
41,80
3,10
1,00 X 45
2 : 1
88,00
Kicker_Vorspann_
WelleDIN ISO
2768 - fK Aluminium - 7075
ISO
1302
Rz 16
Kicker_Vorspann_Welle
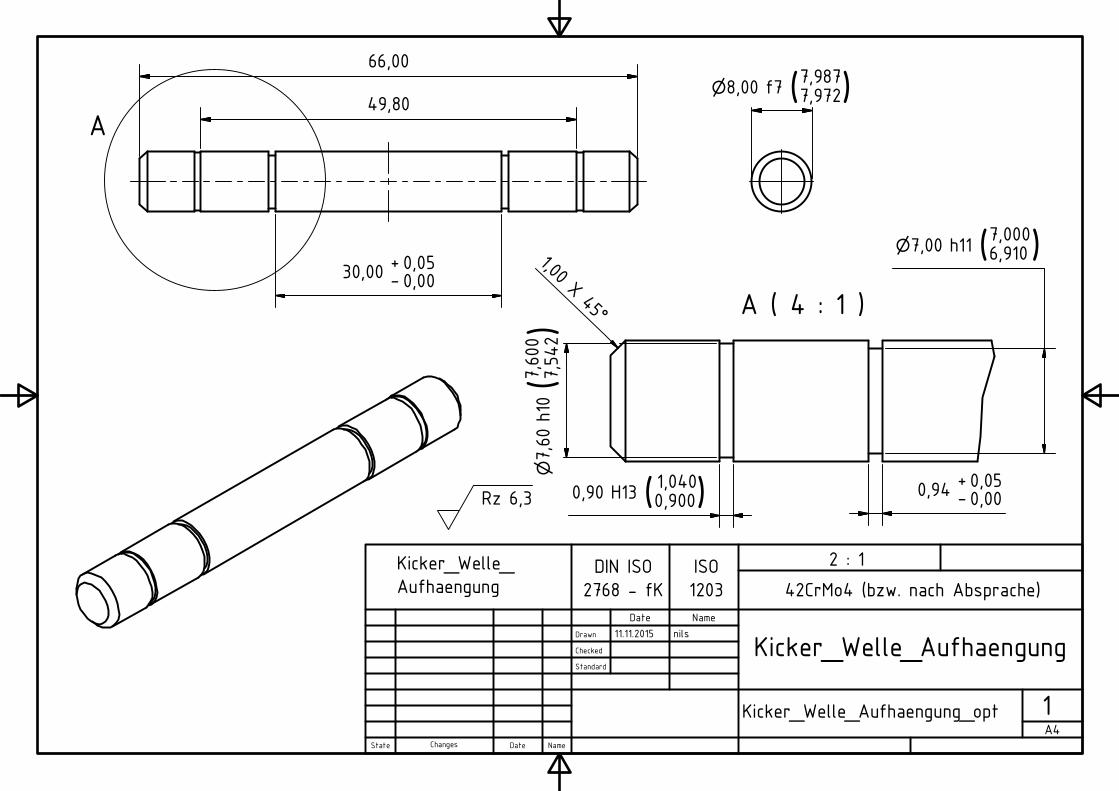
A ( 4 : 1 )
A
1 A4
Kicker_Welle_Aufhaengung_opt
State Changes Date Name
Drawn
Checked
Standard
Date Name
11.11.2015 nils
30,00 - 0,000,05+
49,80
66,00
8,00 f7 (7,9727,987)
0,90 H13 (0,9001,040) 0,94 - 0,00
0,05+
7,00 h11 (6,9107,000)
7,60
h10( 7
,542
7,60
0)
Kicker_Welle_
Aufhaengung
Kicker_Welle_Aufhaengung
2 : 1
42CrMo4 (bzw. nach Absprache)
ISO
1203
DIN ISO
2768 - fK
Rz 6,3
1,00 X 45
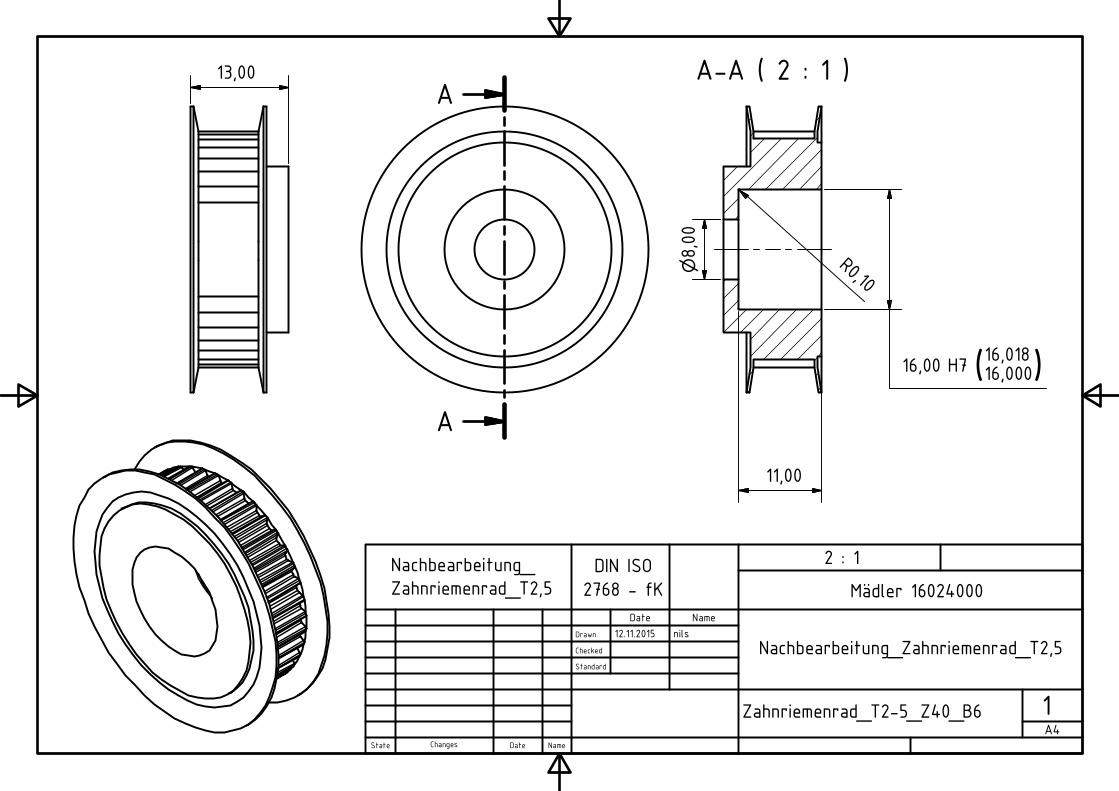
A-A ( 2 : 1 )A
A
1 A4
Zahnriemenrad_T2-5_Z40_B6
State Changes Date Name
Drawn
Checked
Standard
Date Name
12.11.2015 nils
13,00
11,00
16,00 H7 (16,00016,018)
R0,10
8,00
Nachbearbeitung_
Zahnriemenrad_T2,5
Nachbearbeitung_Zahnriemenrad_T2,5
2 : 1DIN ISO
2768 - fK M dler 16024000
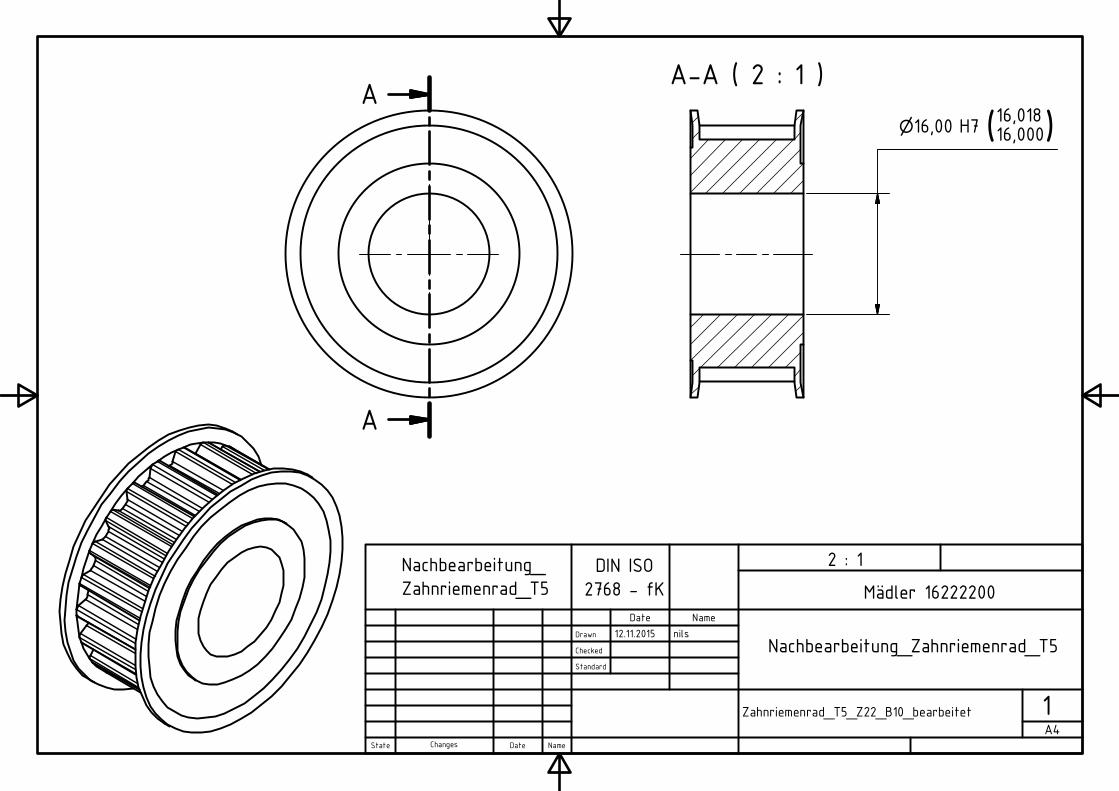
A-A ( 2 : 1 )A
A
1 A4
Zahnriemenrad_T5_Z22_B10_bearbeitet
State Changes Date Name
Drawn
Checked
Standard
Date Name
12.11.2015 nils
16,00 H7 (16,00016,018)
Nachbearbeitung_
Zahnriemenrad_T5
Nachbearbeitung_Zahnriemenrad_T5
2 : 1DIN ISO
2768 - fK M dler 16222200
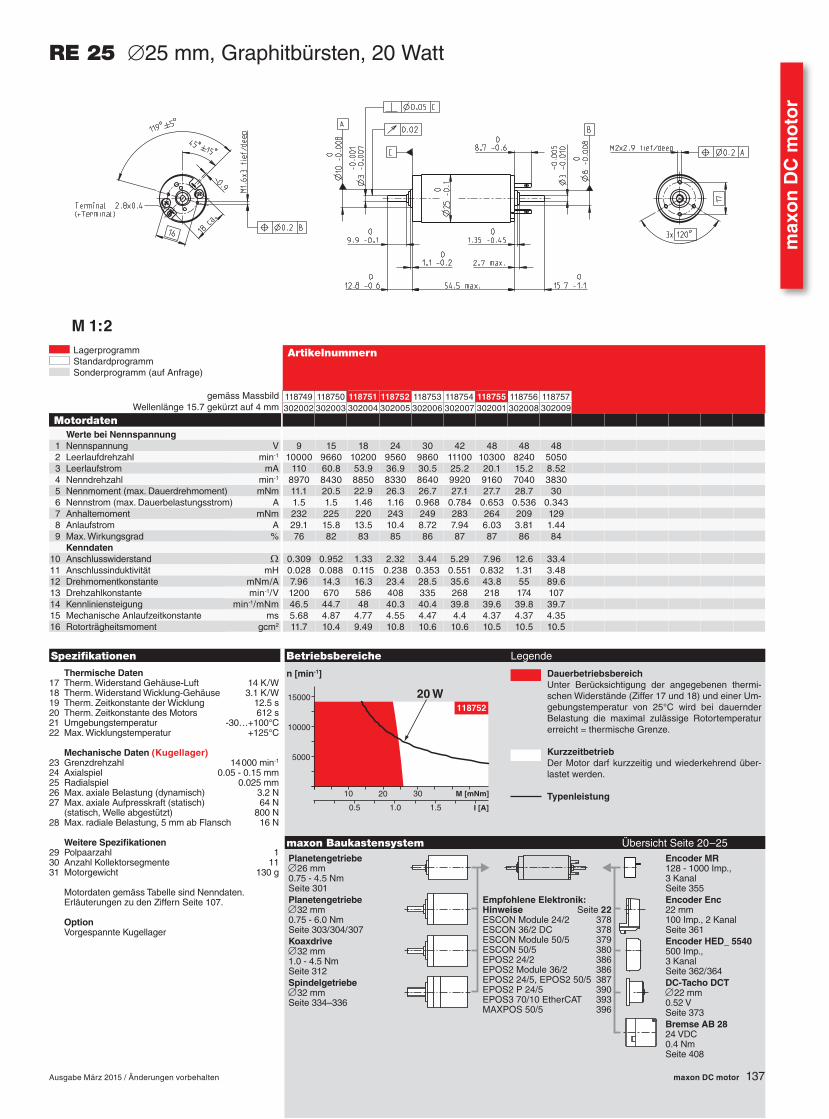
137137
max
on
DC
mo
tor
118749 118750 118751 118752 118753 118754 118755 118756 118757302002 302003 302004 302005 302006 302007 302001 302008 302009
9 15 18 24 30 42 48 48 4810000 9660 10200 9560 9860 11100 10300 8240 5050
110 60.8 53.9 36.9 30.5 25.2 20.1 15.2 8.528970 8430 8850 8330 8640 9920 9160 7040 383011.1 20.5 22.9 26.3 26.7 27.1 27.7 28.7 301.5 1.5 1.46 1.16 0.968 0.784 0.653 0.536 0.343232 225 220 243 249 283 264 209 12929.1 15.8 13.5 10.4 8.72 7.94 6.03 3.81 1.4476 82 83 85 86 87 87 86 84
0.309 0.952 1.33 2.32 3.44 5.29 7.96 12.6 33.40.028 0.088 0.115 0.238 0.353 0.551 0.832 1.31 3.487.96 14.3 16.3 23.4 28.5 35.6 43.8 55 89.61200 670 586 408 335 268 218 174 10746.5 44.7 48 40.3 40.4 39.8 39.6 39.8 39.75.68 4.87 4.77 4.55 4.47 4.4 4.37 4.37 4.3511.7 10.4 9.49 10.8 10.6 10.6 10.5 10.5 10.5
M 1:2
14 K/W 3.1 K/W 12.5 s 612 s -30…+100°C +125°C
0.05 - 0.15 mm 0.025 mm 3.2 N 64 N
800 N 16 N
1 11 130 g
ESCON Module 24/2 378ESCON 36/2 DC 378ESCON Module 50/5 379ESCON 50/5 380EPOS2 24/2 386EPOS2 Module 36/2 386EPOS2 24/5, EPOS2 50/5 387EPOS2 P 24/5 390EPOS3 70/10 EtherCAT 393MAXPOS 50/5 396
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
Artikelnummern
Spezifikationen Betriebsbereiche Legende
n [min-1] DauerbetriebsbereichUnter Berücksichtigung der angegebenen thermi-schen Widerstände (Ziffer 17 und 18) und einer Um-gebungstemperatur von 25°C wird bei dauernder Belastung die maximal zulässige Rotortemperatur erreicht = thermische Grenze.
KurzzeitbetriebDer Motor darf kurzzeitig und wiederkehrend über-lastet werden.
Typenleistung
maxon Baukastensystem Übersicht Seite 20–25
Ausgabe März 2015 / Änderungen vorbehalten maxon DC motor
gemäss MassbildWellenlänge 15.7 gekürzt auf 4 mm
RE 25 ∅25 mm, Graphitbürsten, 20 Watt
Werte bei Nennspannung1 Nennspannung V2 Leerlaufdrehzahl min-1
3 Leerlaufstrom mA4 Nenndrehzahl min-1
5 Nennmoment (max. Dauerdrehmoment) mNm6 Nennstrom (max. Dauerbelastungsstrom) A7 Anhaltemoment mNm8 Anlaufstrom A9 Max. Wirkungsgrad %
Kenndaten10 Anschlusswiderstand W11 Anschlussinduktivität mH12 Drehmomentkonstante mNm/A13 Drehzahlkonstante min-1/V14 Kennliniensteigung min-1/mNm15 Mechanische Anlaufzeitkonstante ms16 Rotorträgheitsmoment gcm2
Thermische Daten17 Therm. Widerstand Gehäuse-Luft18 Therm. Widerstand Wicklung-Gehäuse19 Therm. Zeitkonstante der Wicklung20 Therm. Zeitkonstante des Motors21 Umgebungstemperatur22 Max. Wicklungstemperatur
Mechanische Daten (Kugellager)23 Grenzdrehzahl 14 000 min-1
24 Axialspiel25 Radialspiel26 Max. axiale Belastung (dynamisch)27 Max. axiale Aufpresskraft (statisch)
(statisch, Welle abgestützt)28 Max. radiale Belastung, 5 mm ab Flansch
Weitere Spezifikationen29 Polpaarzahl30 Anzahl Kollektorsegmente31 Motorgewicht
Motordaten gemäss Tabelle sind Nenndaten. Erläuterungen zu den Ziffern Seite 107.
Option Vorgespannte Kugellager
Motordaten
Planetengetriebe∅26 mm0.75 - 4.5 NmSeite 301
Empfohlene Elektronik:Hinweise Seite 22
Planetengetriebe∅32 mm0.75 - 6.0 NmSeite 303/304/307Koaxdrive∅32 mm1.0 - 4.5 NmSeite 312Spindelgetriebe∅32 mmSeite 334–336
Encoder MR128 - 1000 Imp.,3 KanalSeite 355Encoder Enc22 mm100 Imp., 2 KanalSeite 361Encoder HED_ 5540500 Imp.,3 KanalSeite 362/364DC-Tacho DCT∅22 mm0.52 VSeite 373Bremse AB 2824 VDC0.4 NmSeite 408
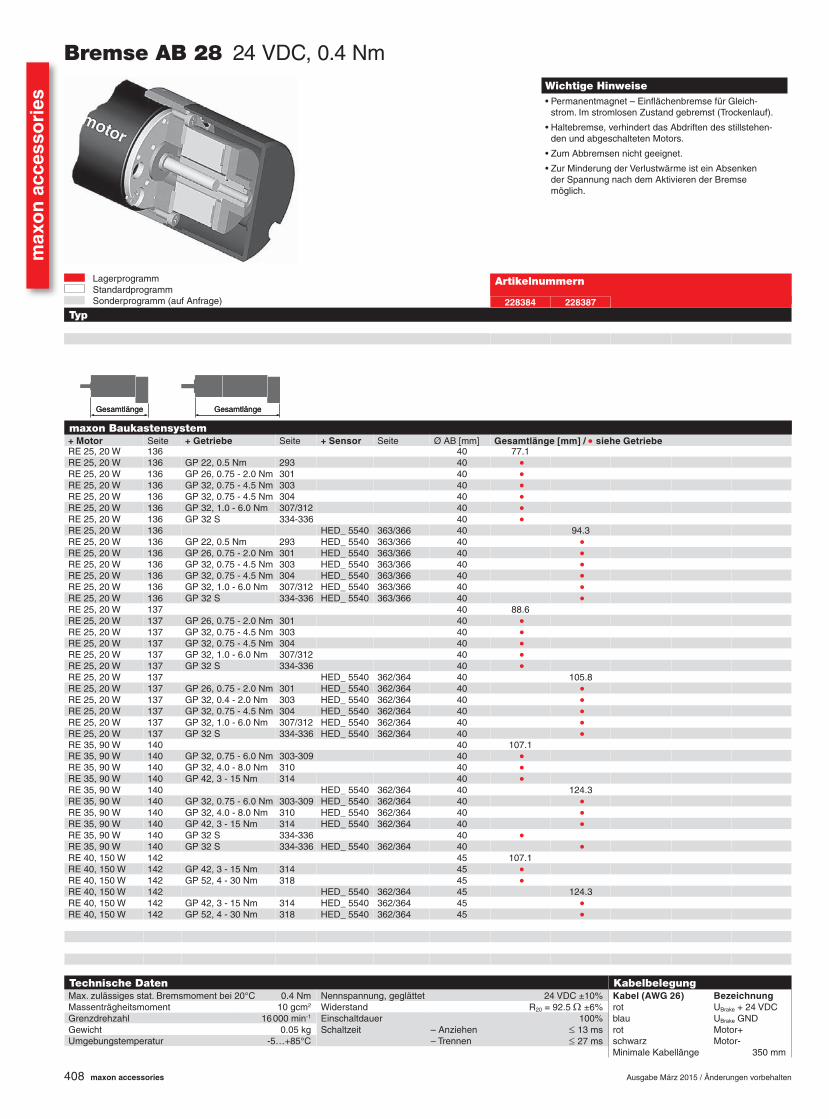
408
maxo
n a
ccesso
ries
Gesamtlänge Gesamtlänge
RE 25, 20 W 136 40 77.1RE 25, 20 W 136 GP 22, 0.5 Nm 293 40 •RE 25, 20 W 136 GP 26, 0.75 - 2.0 Nm 301 40 •RE 25, 20 W 136 GP 32, 0.75 - 4.5 Nm 303 40 •RE 25, 20 W 136 GP 32, 0.75 - 4.5 Nm 304 40 •RE 25, 20 W 136 GP 32, 1.0 - 6.0 Nm 307/312 40 •RE 25, 20 W 136 GP 32 S 334-336 40 •RE 25, 20 W 136 HED_ 5540 363/366 40 94.3RE 25, 20 W 136 GP 22, 0.5 Nm 293 HED_ 5540 363/366 40 •RE 25, 20 W 136 GP 26, 0.75 - 2.0 Nm 301 HED_ 5540 363/366 40 •RE 25, 20 W 136 GP 32, 0.75 - 4.5 Nm 303 HED_ 5540 363/366 40 •RE 25, 20 W 136 GP 32, 0.75 - 4.5 Nm 304 HED_ 5540 363/366 40 •RE 25, 20 W 136 GP 32, 1.0 - 6.0 Nm 307/312 HED_ 5540 363/366 40 •RE 25, 20 W 136 GP 32 S 334-336 HED_ 5540 363/366 40 •RE 25, 20 W 137 40 88.6RE 25, 20 W 137 GP 26, 0.75 - 2.0 Nm 301 40 •RE 25, 20 W 137 GP 32, 0.75 - 4.5 Nm 303 40 •RE 25, 20 W 137 GP 32, 0.75 - 4.5 Nm 304 40 •RE 25, 20 W 137 GP 32, 1.0 - 6.0 Nm 307/312 40 •RE 25, 20 W 137 GP 32 S 334-336 40 •RE 25, 20 W 137 HED_ 5540 362/364 40 105.8RE 25, 20 W 137 GP 26, 0.75 - 2.0 Nm 301 HED_ 5540 362/364 40 •RE 25, 20 W 137 GP 32, 0.4 - 2.0 Nm 303 HED_ 5540 362/364 40 •RE 25, 20 W 137 GP 32, 0.75 - 4.5 Nm 304 HED_ 5540 362/364 40 •RE 25, 20 W 137 GP 32, 1.0 - 6.0 Nm 307/312 HED_ 5540 362/364 40 •RE 25, 20 W 137 GP 32 S 334-336 HED_ 5540 362/364 40 •RE 35, 90 W 140 40 107.1RE 35, 90 W 140 GP 32, 0.75 - 6.0 Nm 303-309 40 •RE 35, 90 W 140 GP 32, 4.0 - 8.0 Nm 310 40 •RE 35, 90 W 140 GP 42, 3 - 15 Nm 314 40 •RE 35, 90 W 140 HED_ 5540 362/364 40 124.3RE 35, 90 W 140 GP 32, 0.75 - 6.0 Nm 303-309 HED_ 5540 362/364 40 •RE 35, 90 W 140 GP 32, 4.0 - 8.0 Nm 310 HED_ 5540 362/364 40 •RE 35, 90 W 140 GP 42, 3 - 15 Nm 314 HED_ 5540 362/364 40 •RE 35, 90 W 140 GP 32 S 334-336 40 •RE 35, 90 W 140 GP 32 S 334-336 HED_ 5540 362/364 40 •RE 40, 150 W 142 45 107.1RE 40, 150 W 142 GP 42, 3 - 15 Nm 314 45 •RE 40, 150 W 142 GP 52, 4 - 30 Nm 318 45 •RE 40, 150 W 142 HED_ 5540 362/364 45 124.3RE 40, 150 W 142 GP 42, 3 - 15 Nm 314 HED_ 5540 362/364 45 •RE 40, 150 W 142 GP 52, 4 - 30 Nm 318 HED_ 5540 362/364 45 •
228384 228387
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
maxon accessories Ausgabe März 2015 / Änderungen vorbehalten
Gesamtlänge Gesamtlänge
Artikelnummern
Bremse AB 28 24 VDC, 0.4 NmWichtige Hinweise
• Permanentmagnet – Einflächenbremse für Gleich- strom. Im stromlosen Zustand gebremst (Trockenlauf).
• Haltebremse, verhindert das Abdriften des stillstehen- den und abgeschalteten Motors.
• Zum Abbremsen nicht geeignet.
• Zur Minderung der Verlustwärme ist ein Absenken der Spannung nach dem Aktivieren der Bremse möglich.
Technische Daten Kabelbelegung
Max. zulässiges stat. Bremsmoment bei 20°C 0.4 Nm Nennspannung, geglättet 24 VDC ±10% Kabel (AWG 26) Bezeichnung
Massenträgheitsmoment 10 gcm2 Widerstand R20 = 92.5 W ±6% rot UBrake + 24 VDCGrenzdrehzahl 16 000 min-1 Einschaltdauer 100% blau UBrake GNDGewicht 0.05 kg Schaltzeit – Anziehen ≤ 13 ms rot Motor+Umgebungstemperatur -5…+85°C – Trennen ≤ 27 ms schwarz Motor-
Minimale Kabellänge 350 mm
maxon Baukastensystem
+ Motor Seite + Getriebe Seite + Sensor Seite Ø AB [mm] Gesamtlänge [mm] / • siehe Getriebe
Typ
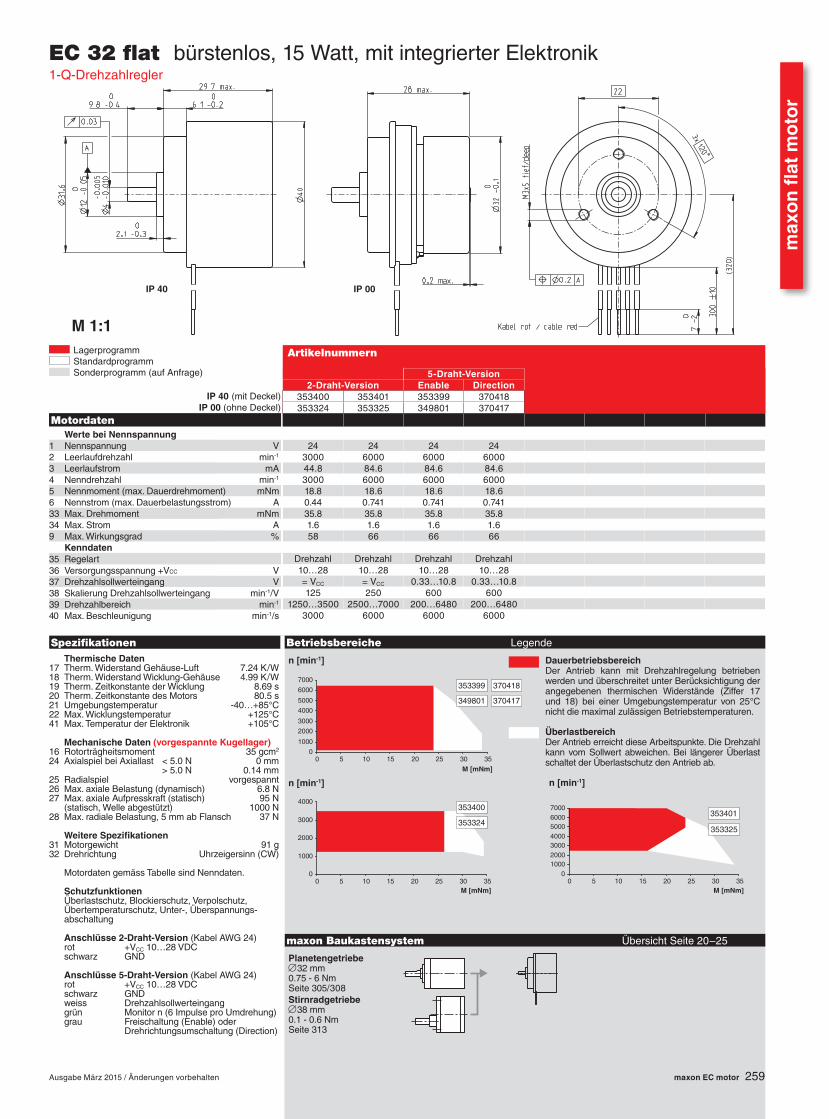
max
on
EC
mo
tor
259259
maxo
n fl
at
mo
tor
24 24 24 243000 6000 6000 600044.8 84.6 84.6 84.63000 6000 6000 600018.8 18.6 18.6 18.60.44 0.741 0.741 0.74135.8 35.8 35.8 35.81.6 1.6 1.6 1.658 66 66 66
10…28 10…28 10…28 10…28= VCC = VCC 0.33…10.8 0.33…10.8125 250 600 600
1250…3500 2500…7000 200…6480 200…64803000 6000 6000 6000
M 1:1
IP 40 IP 00
353400 353401 353399 370418353324 353325 349801 370417
353399
0
1000
2000
3000
4000
5000
6000
7000
0 5 10 15 20 25 30 35
349801
353400
0
1000
2000
3000
4000
0 5 10 15 20 25 30 35
353324
353401
0
1000
2000
3000
4000
5000
6000
7000
0 5 10 15 20 25 30 35
353325
7.24 K/W 4.99 K/W 8.69 s 80.5 s -40…+85°C +125°C +105°C
35 gcm2
< 5.0 N 0 mm > 5.0 N 0.14 mm
6.8 N 95 N
1000 N 37 N
91 g
Ausgabe März 2015 / Änderungen vorbehalten maxon EC motor
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
Artikelnummern
Spezifikationen Betriebsbereiche Legende
n [min-1]
n [min-1]
DauerbetriebsbereichDer Antrieb kann mit Drehzahlregelung betrieben werden und überschreitet unter Berücksichtigung der angegebenen thermischen Widerstände (Ziffer 17 und 18) bei einer Umgebungstemperatur von 25°C nicht die maximal zulässigen Betriebstemperaturen.
ÜberlastbereichDer Antrieb erreicht diese Arbeitspunkte. Die Drehzahl kann vom Sollwert abweichen. Bei längerer Überlast schaltet der Überlastschutz den Antrieb ab.
n [min-1]
maxon Baukastensystem Übersicht Seite 20–25
EC 32 flat bürstenlos, 15 Watt, mit integrierter Elektronik1-Q-Drehzahlregler
Motordaten
Werte bei Nennspannung1 Nennspannung V2 Leerlaufdrehzahl min-1
3 Leerlaufstrom mA4 Nenndrehzahl min-1
5 Nennmoment (max. Dauerdrehmoment) mNm6 Nennstrom (max. Dauerbelastungsstrom) A33 Max. Drehmoment mNm34 Max. Strom A9 Max. Wirkungsgrad %
Kenndaten35 Regelart36 Versorgungsspannung +VCC V37 Drehzahlsollwerteingang V38 Skalierung Drehzahlsollwerteingang min-1/V39 Drehzahlbereich min-1
40 Max. Beschleunigung min-1/s
Thermische Daten17 Therm. Widerstand Gehäuse-Luft 18 Therm. Widerstand Wicklung-Gehäuse 19 Therm. Zeitkonstante der Wicklung 20 Therm. Zeitkonstante des Motors 21 Umgebungstemperatur 22 Max. Wicklungstemperatur 41 Max. Temperatur der Elektronik
Mechanische Daten (vorgespannte Kugellager)16 Rotorträgheitsmoment 24 Axialspiel bei Axiallast
25 Radialspiel vorgespannt26 Max. axiale Belastung (dynamisch) 27 Max. axiale Aufpresskraft (statisch)
(statisch, Welle abgestützt) 28 Max. radiale Belastung, 5 mm ab Flansch
Weitere Spezifikationen31 Motorgewicht 32 Drehrichtung Uhrzeigersinn (CW)
Motordaten gemäss Tabelle sind Nenndaten.
Schutzfunktionen Überlastschutz, Blockierschutz, Verpolschutz, Übertemperaturschutz, Unter-, Überspannungs-abschaltung
Anschlüsse 2-Draht-Version (Kabel AWG 24) rot +VCC 10…28 VDC schwarz GND
Anschlüsse 5-Draht-Version (Kabel AWG 24) rot +VCC 10…28 VDC schwarz GND weiss Drehzahlsollwerteingang grün Monitor n (6 Impulse pro Umdrehung) grau Freischaltung (Enable) oder
Drehrichtungsumschaltung (Direction)
IP 40 (mit Deckel) IP 00 (ohne Deckel)
Planetengetriebe∅32 mm0.75 - 6 NmSeite 305/308Stirnradgetriebe∅38 mm0.1 - 0.6 NmSeite 313
Drehzahl Drehzahl Drehzahl Drehzahl
5-Draht-Version2-Draht-Version Enable Direction
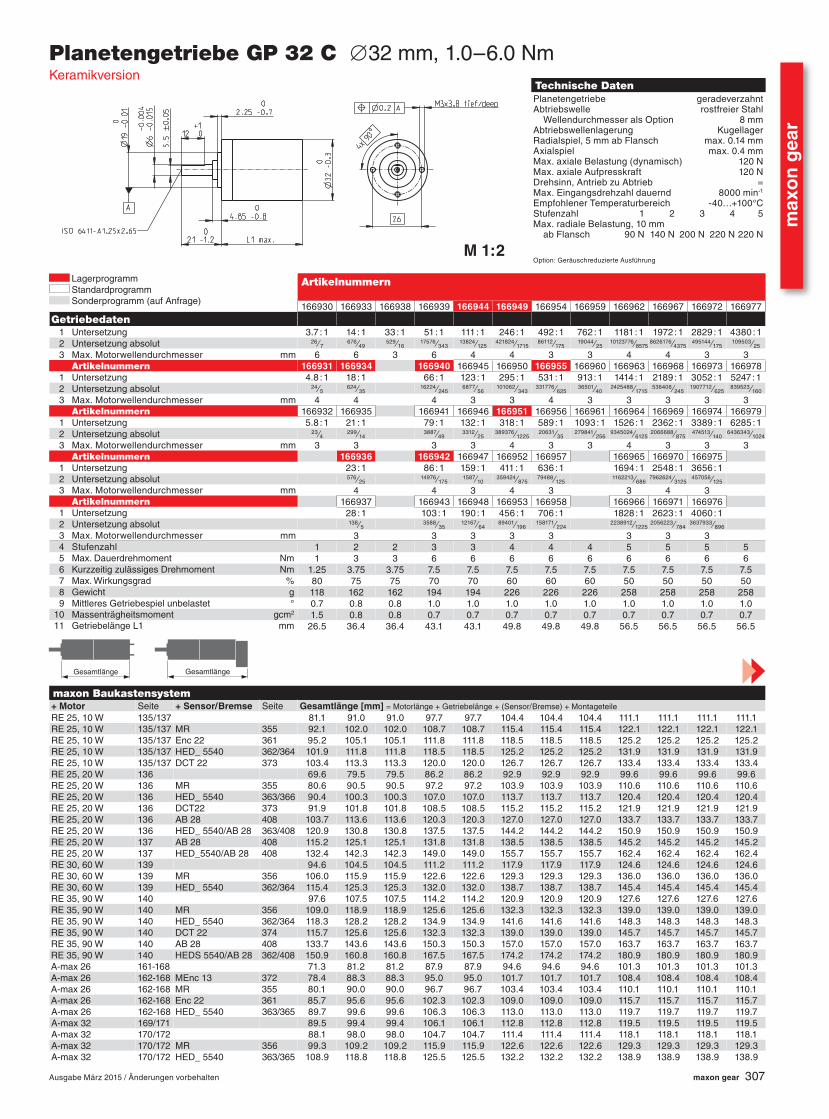
maxo
n g
ear
307
RE 25, 10 W 135/137 81.1 91.0 91.0 97.7 97.7 104.4 104.4 104.4 111.1 111.1 111.1 111.1RE 25, 10 W 135/137 MR 355 92.1 102.0 102.0 108.7 108.7 115.4 115.4 115.4 122.1 122.1 122.1 122.1RE 25, 10 W 135/137 Enc 22 361 95.2 105.1 105.1 111.8 111.8 118.5 118.5 118.5 125.2 125.2 125.2 125.2RE 25, 10 W 135/137 HED_ 5540 362/364 101.9 111.8 111.8 118.5 118.5 125.2 125.2 125.2 131.9 131.9 131.9 131.9RE 25, 10 W 135/137 DCT 22 373 103.4 113.3 113.3 120.0 120.0 126.7 126.7 126.7 133.4 133.4 133.4 133.4RE 25, 20 W 136 69.6 79.5 79.5 86.2 86.2 92.9 92.9 92.9 99.6 99.6 99.6 99.6RE 25, 20 W 136 MR 355 80.6 90.5 90.5 97.2 97.2 103.9 103.9 103.9 110.6 110.6 110.6 110.6RE 25, 20 W 136 HED_ 5540 363/366 90.4 100.3 100.3 107.0 107.0 113.7 113.7 113.7 120.4 120.4 120.4 120.4RE 25, 20 W 136 DCT22 373 91.9 101.8 101.8 108.5 108.5 115.2 115.2 115.2 121.9 121.9 121.9 121.9RE 25, 20 W 136 AB 28 408 103.7 113.6 113.6 120.3 120.3 127.0 127.0 127.0 133.7 133.7 133.7 133.7RE 25, 20 W 136 HED_ 5540/AB 28 363/408 120.9 130.8 130.8 137.5 137.5 144.2 144.2 144.2 150.9 150.9 150.9 150.9RE 25, 20 W 137 AB 28 408 115.2 125.1 125.1 131.8 131.8 138.5 138.5 138.5 145.2 145.2 145.2 145.2RE 25, 20 W 137 HED_5540/AB 28 408 132.4 142.3 142.3 149.0 149.0 155.7 155.7 155.7 162.4 162.4 162.4 162.4RE 30, 60 W 139 94.6 104.5 104.5 111.2 111.2 117.9 117.9 117.9 124.6 124.6 124.6 124.6RE 30, 60 W 139 MR 356 106.0 115.9 115.9 122.6 122.6 129.3 129.3 129.3 136.0 136.0 136.0 136.0RE 30, 60 W 139 HED_ 5540 362/364 115.4 125.3 125.3 132.0 132.0 138.7 138.7 138.7 145.4 145.4 145.4 145.4RE 35, 90 W 140 97.6 107.5 107.5 114.2 114.2 120.9 120.9 120.9 127.6 127.6 127.6 127.6RE 35, 90 W 140 MR 356 109.0 118.9 118.9 125.6 125.6 132.3 132.3 132.3 139.0 139.0 139.0 139.0RE 35, 90 W 140 HED_ 5540 362/364 118.3 128.2 128.2 134.9 134.9 141.6 141.6 141.6 148.3 148.3 148.3 148.3RE 35, 90 W 140 DCT 22 374 115.7 125.6 125.6 132.3 132.3 139.0 139.0 139.0 145.7 145.7 145.7 145.7RE 35, 90 W 140 AB 28 408 133.7 143.6 143.6 150.3 150.3 157.0 157.0 157.0 163.7 163.7 163.7 163.7RE 35, 90 W 140 HEDS 5540/AB 28 362/408 150.9 160.8 160.8 167.5 167.5 174.2 174.2 174.2 180.9 180.9 180.9 180.9A-max 26 161-168 71.3 81.2 81.2 87.9 87.9 94.6 94.6 94.6 101.3 101.3 101.3 101.3A-max 26 162-168 MEnc 13 372 78.4 88.3 88.3 95.0 95.0 101.7 101.7 101.7 108.4 108.4 108.4 108.4A-max 26 162-168 MR 355 80.1 90.0 90.0 96.7 96.7 103.4 103.4 103.4 110.1 110.1 110.1 110.1A-max 26 162-168 Enc 22 361 85.7 95.6 95.6 102.3 102.3 109.0 109.0 109.0 115.7 115.7 115.7 115.7A-max 26 162-168 HED_ 5540 363/365 89.7 99.6 99.6 106.3 106.3 113.0 113.0 113.0 119.7 119.7 119.7 119.7A-max 32 169/171 89.5 99.4 99.4 106.1 106.1 112.8 112.8 112.8 119.5 119.5 119.5 119.5A-max 32 170/172 88.1 98.0 98.0 104.7 104.7 111.4 111.4 111.4 118.1 118.1 118.1 118.1A-max 32 170/172 MR 356 99.3 109.2 109.2 115.9 115.9 122.6 122.6 122.6 129.3 129.3 129.3 129.3A-max 32 170/172 HED_ 5540 363/365 108.9 118.8 118.8 125.5 125.5 132.2 132.2 132.2 138.9 138.9 138.9 138.9
166930 166933 166938 166939 166944 166949 166954 166959 166962 166967 166972 166977
3.7 : 1 14 : 1 33 : 1 51 : 1 111 : 1 246 : 1 492 : 1 762 : 1 1181 : 1 1972 : 1 2829 : 1 4380 : 126⁄ 7
676⁄49529⁄16
17576⁄34313824⁄125
421824⁄171586112 ⁄175
19044⁄2510123776⁄8575
8626176⁄4375495144⁄175
109503⁄25
6 6 3 6 4 4 3 3 4 4 3 3166931 166934 166940 166945 166950 166955 166960 166963 166968 166973 1669784.8 : 1 18 : 1 66 : 1 123 : 1 295 : 1 531 : 1 913 : 1 1414 : 1 2189 : 1 3052 : 1 5247 : 1
24⁄5 624⁄3516224⁄245
6877⁄56101062 ⁄343
331776⁄62536501⁄40
2425488⁄1715536406⁄245
1907712 ⁄625839523⁄160
4 4 4 3 3 4 3 3 3 3 3166932 166935 166941 166946 166951 166956 166961 166964 166969 166974 1669795.8 : 1 21 : 1 79 : 1 132 : 1 318 : 1 589 : 1 1093 : 1 1526 : 1 2362 : 1 3389 : 1 6285 : 1
23⁄4 299⁄143887⁄49
3312 ⁄25389376⁄1225
20631⁄35279841⁄256
9345024⁄61252066688⁄875
474513⁄1406436343⁄1024
3 3 3 3 4 3 3 4 3 3 3166936 166942 166947 166952 166957 166965 166970 166975
23 : 1 86 : 1 159 : 1 411 : 1 636 : 1 1694 : 1 2548 : 1 3656 : 1576⁄25
14976⁄1751587⁄10
359424⁄87579488⁄125
1162213⁄6867962624⁄3125
457056⁄125
4 4 3 4 3 3 4 3166937 166943 166948 166953 166958 166966 166971 166976
28 : 1 103 : 1 190 : 1 456 : 1 706 : 1 1828 : 1 2623 : 1 4060 : 1138⁄5 3588⁄35
12167⁄6489401⁄196
158171⁄2242238912 ⁄1225
2056223⁄ 7843637933⁄896
3 3 3 3 3 3 3 31 2 2 3 3 4 4 4 5 5 5 51 3 3 6 6 6 6 6 6 6 6 6
1.25 3.75 3.75 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.5 7.580 75 75 70 70 60 60 60 50 50 50 50118 162 162 194 194 226 226 226 258 258 258 2580.7 0.8 0.8 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.01.5 0.8 0.8 0.7 0.7 0.7 0.7 0.7 0.7 0.7 0.7 0.7
26.5 36.4 36.4 43.1 43.1 49.8 49.8 49.8 56.5 56.5 56.5 56.5
M 1:2
LagerprogrammStandardprogrammSonderprogramm (auf Anfrage)
Ausgabe März 2015 / Änderungen vorbehalten maxon gear
Gesamtlänge Gesamtlänge
maxon Baukastensystem
+ Motor Seite + Sensor/Bremse Seite Gesamtlänge [mm] = Motorlänge + Getriebelänge + (Sensor/Bremse) + Montageteile
Technische Daten
Planetengetriebe geradeverzahntAbtriebswelle rostfreier Stahl Wellendurchmesser als Option 8 mmAbtriebswellenlagerung KugellagerRadialspiel, 5 mm ab Flansch max. 0.14 mmAxialspiel max. 0.4 mmMax. axiale Belastung (dynamisch) 120 NMax. axiale Aufpresskraft 120 NDrehsinn, Antrieb zu Abtrieb =Max. Eingangsdrehzahl dauernd 8000 min-1
Empfohlener Temperaturbereich -40…+100°CStufenzahl 1 2 3 4 5Max. radiale Belastung, 10 mm ab Flansch 90 N 140 N 200 N 220 N 220 N
Option: Geräuschreduzierte Ausführung
Planetengetriebe GP 32 C ∅32 mm, 1.0–6.0 NmKeramikversion
Artikelnummern
Getriebedaten
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm
Artikelnummern
1 Untersetzung 2 Untersetzung absolut 3 Max. Motorwellendurchmesser mm 4 Stufenzahl 5 Max. Dauerdrehmoment Nm 6 Kurzzeitig zulässiges Drehmoment Nm 7 Max. Wirkungsgrad % 8 Gewicht g 9 Mittleres Getriebespiel unbelastet ° 10 Massenträgheitsmoment gcm2
11 Getriebelänge L1 mm
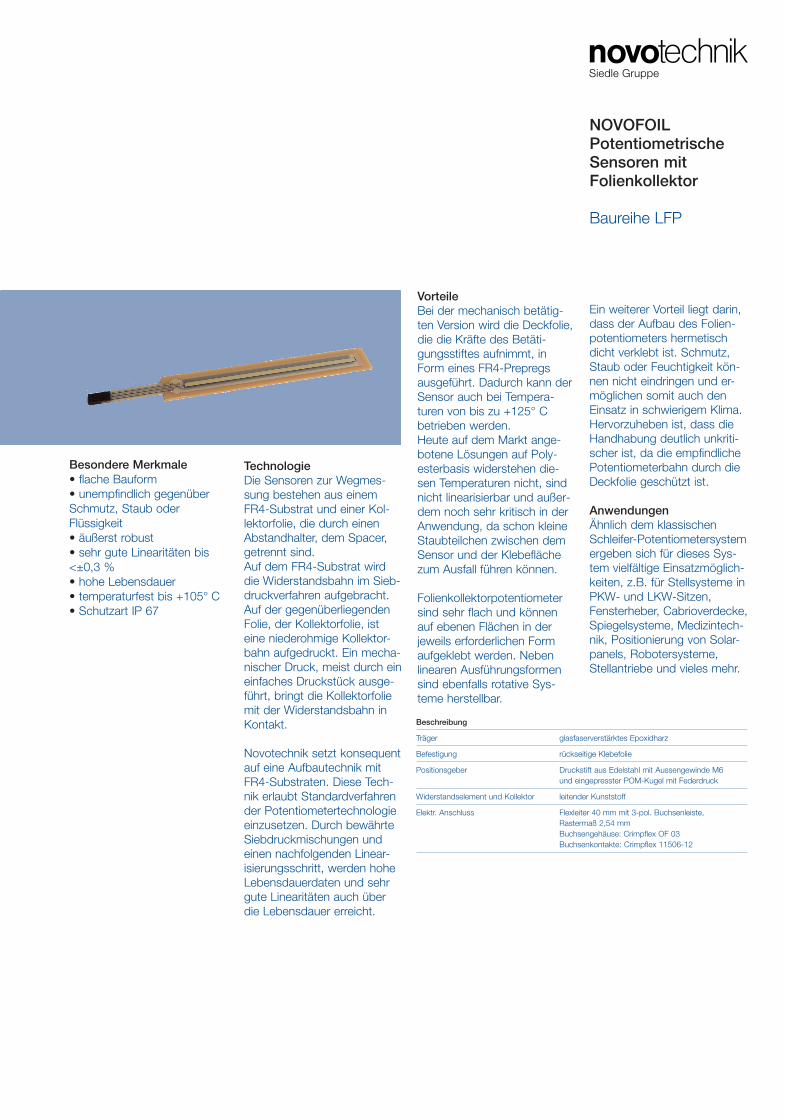
NOVOFOILPotentiometrischeSensoren mitFolienkollektor
Baureihe LFP
Ein weiterer Vorteil liegt darin,dass der Aufbau des Folien-potentiometers hermetischdicht verklebt ist. Schmutz,Staub oder Feuchtigkeit kön-nen nicht eindringen und er-möglichen somit auch denEinsatz in schwierigem Klima. Hervorzuheben ist, dass dieHandhabung deutlich unkriti-scher ist, da die empfindlichePotentiometerbahn durch dieDeckfolie geschützt ist.
Anwendungen
Ähnlich dem klassischenSchleifer-Potentiometersystemergeben sich für dieses Sys-tem vielfältige Einsatzmöglich-keiten, z.B. für Stellsysteme inPKW- und LKW-Sitzen,Fensterheber, Cabrioverdecke,Spiegelsysteme, Medizintech-nik, Positionierung von Solar-panels, Robotersysteme,Stellantriebe und vieles mehr.
Vorteile
Bei der mechanisch betätig-ten Version wird die Deckfolie,die die Kräfte des Betäti-gungsstiftes aufnimmt, inForm eines FR4-Prepregsausgeführt. Dadurch kann derSensor auch bei Tempera-turen von bis zu +125° Cbetrieben werden. Heute auf dem Markt ange-botene Lösungen auf Poly-esterbasis widerstehen die-sen Temperaturen nicht, sindnicht linearisierbar und außer-dem noch sehr kritisch in derAnwendung, da schon kleineStaubteilchen zwischen demSensor und der Klebeflächezum Ausfall führen können.
Folienkollektorpotentiometersind sehr flach und könnenauf ebenen Flächen in derjeweils erforderlichen Formaufgeklebt werden. Nebenlinearen Ausführungsformensind ebenfalls rotative Sys-teme herstellbar.
Technologie
Die Sensoren zur Wegmes-sung bestehen aus einemFR4-Substrat und einer Kol-lektorfolie, die durch einenAbstandhalter, dem Spacer,getrennt sind. Auf dem FR4-Substrat wirddie Widerstandsbahn im Sieb-druckverfahren aufgebracht.Auf der gegenüberliegendenFolie, der Kollektorfolie, isteine niederohmige Kollektor-bahn aufgedruckt. Ein mecha-nischer Druck, meist durch eineinfaches Druckstück ausge-führt, bringt die Kollektorfoliemit der Widerstandsbahn inKontakt.
Novotechnik setzt konsequentauf eine Aufbautechnik mitFR4-Substraten. Diese Tech-nik erlaubt Standardverfahrender Potentiometertechnologieeinzusetzen. Durch bewährteSiebdruckmischungen undeinen nachfolgenden Linear-isierungsschritt, werden hoheLebensdauerdaten und sehrgute Linearitäten auch überdie Lebensdauer erreicht.
Besondere Merkmale
• flache Bauform • unempfindlich gegenüberSchmutz, Staub oderFlüssigkeit• äußerst robust • sehr gute Linearitäten bis<±0,3 % • hohe Lebensdauer• temperaturfest bis +105° C • Schutzart IP 67
Beschreibung
Träger glasfaserverstärktes Epoxidharz
Befestigung rückseitige Klebefolie
Positionsgeber Druckstift aus Edelstahl mit Aussengewinde M6und eingepresster POM-Kugel mit Federdruck
Widerstandselement und Kollektor leitender Kunststoff
Elektr. Anschluss Flexleiter 40 mm mit 3-pol. Buchsenleiste,Rastermaß 2,54 mmBuchsengehäuse: Crimpflex OF 03Buchsenkontakte: Crimpflex 11506-12
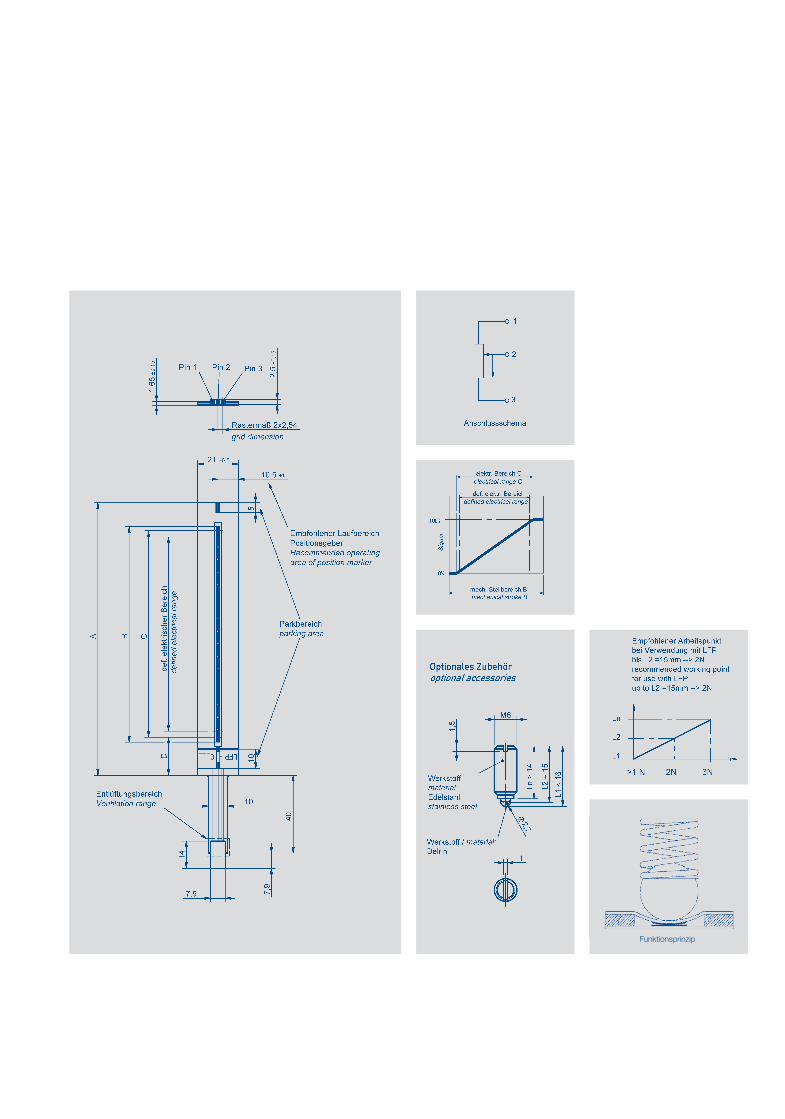
Funktionsprinzip
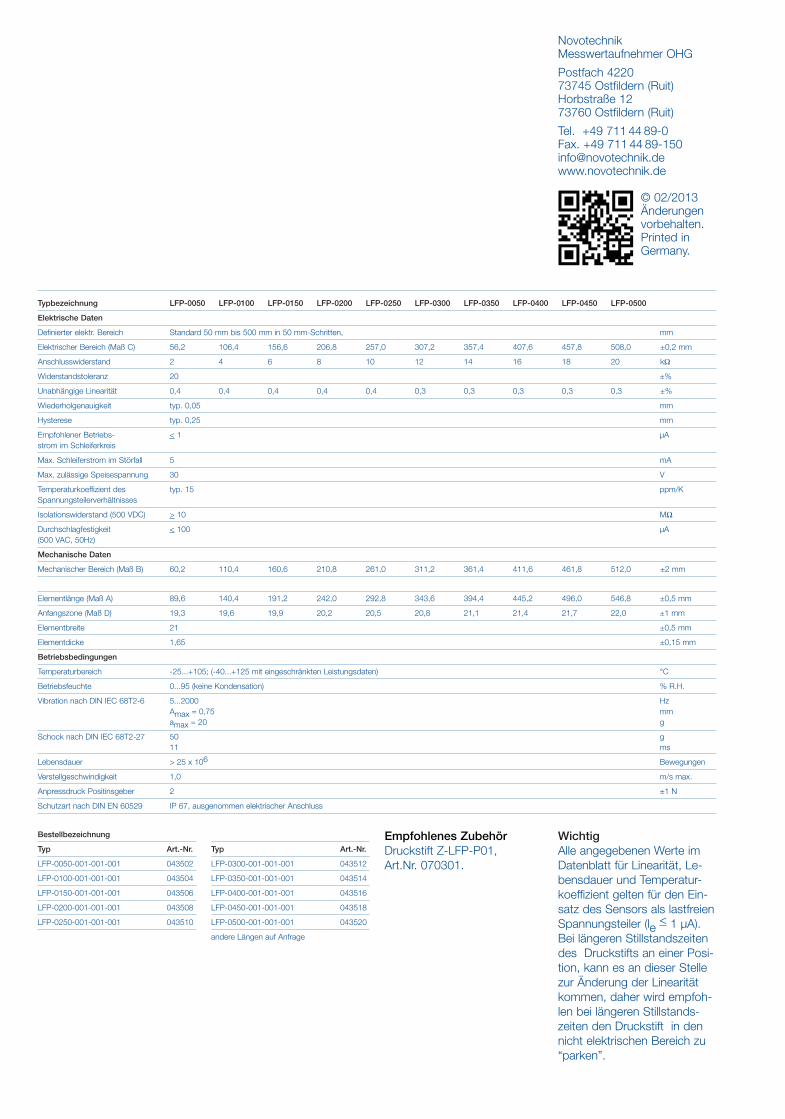
Novotechnik Messwertaufnehmer OHG
Postfach 422073745 Ostfildern (Ruit)Horbstraße 1273760 Ostfildern (Ruit)
Tel. +49 711 44 89-0Fax. +49 711 44 [email protected]
© 02/2013Änderungenvorbehalten.Printed inGermany.
Typbezeichnung LFP-0050 LFP-0100 LFP-0150 LFP-0200 LFP-0250 LFP-0300 LFP-0350 LFP-0400 LFP-0450 LFP-0500
Elektrische Daten
Definierter elektr. Bereich Standard 50 mm bis 500 mm in 50 mm-Schritten, mm
Elektrischer Bereich (Maß C) 56,2 106,4 156,6 206,8 257,0 307,2 357,4 407,6 457,8 508,0 ±0,2 mm
Anschlusswiderstand 2 4 6 8 10 12 14 16 18 20 kΩ
Widerstandstoleranz 20 ±%
Unabhängige Linearität 0,4 0,4 0,4 0,4 0,4 0,3 0,3 0,3 0,3 0,3 ±%
Wiederholgenauigkeit typ. 0,05 mm
Hysterese typ. 0,25 mm
Empfohlener Betriebs- < 1 µAstrom im Schleiferkreis
Max. Schleiferstrom im Störfall 5 mA
Max. zulässige Speisespannung 30 V
Temperaturkoeffizient des typ. 15 ppm/KSpannungsteilerverhältnisses
Isolationswiderstand (500 VDC) > 10 MΩ
Durchschlagfestigkeit < 100 µA(500 VAC, 50Hz)
Mechanische Daten
Mechanischer Bereich (Maß B) 60,2 110,4 160,6 210,8 261,0 311,2 361,4 411,6 461,8 512,0 ±2 mm
Elementlänge (Maß A) 89,6 140,4 191,2 242,0 292,8 343,6 394,4 445,2 496,0 546,8 ±0,5 mm
Anfangszone (Maß D) 19,3 19,6 19,9 20,2 20,5 20,8 21,1 21,4 21,7 22,0 ±1 mm
Elementbreite 21 ±0,5 mm
Elementdicke 1,65 ±0,15 mm
Betriebsbedingungen
Temperaturbereich -25...+105; (-40...+125 mit eingeschränkten Leistungsdaten) °C
Betriebsfeuchte 0...95 (keine Kondensation) % R.H.
Vibration nach DIN IEC 68T2-6 5...2000 HzAmax = 0,75 mm amax = 20 g
Schock nach DIN IEC 68T2-27 50 g11 ms
Lebensdauer > 25 x 106 Bewegungen
Verstellgeschwindigkeit 1,0 m/s max.
Anpressdruck Positinsgeber 2 ±1 N
Schutzart nach DIN EN 60529 IP 67, ausgenommen elektrischer Anschluss
Wichtig
Alle angegebenen Werte imDatenblatt für Linearität, Le-bensdauer und Temperatur-koeffizient gelten für den Ein-satz des Sensors als lastfreienSpannungsteiler (le
< 1 µA).Bei längeren Stillstandszeitendes Druckstifts an einer Posi-tion, kann es an dieser Stellezur Änderung der Linearitätkommen, daher wird empfoh-len bei längeren Stillstands-zeiten den Druckstift in dennicht elektrischen Bereich zu“parken”.
Bestellbezeichnung
Typ Art.-Nr.
LFP-0050-001-001-001 043502
LFP-0100-001-001-001 043504
LFP-0150-001-001-001 043506
LFP-0200-001-001-001 043508
LFP-0250-001-001-001 043510
Typ Art.-Nr.
LFP-0300-001-001-001 043512
LFP-0350-001-001-001 043514
LFP-0400-001-001-001 043516
LFP-0450-001-001-001 043518
LFP-0500-001-001-001 043520
andere Längen auf Anfrage
Empfohlenes Zubehör
Druckstift Z-LFP-P01, Art.Nr. 070301.
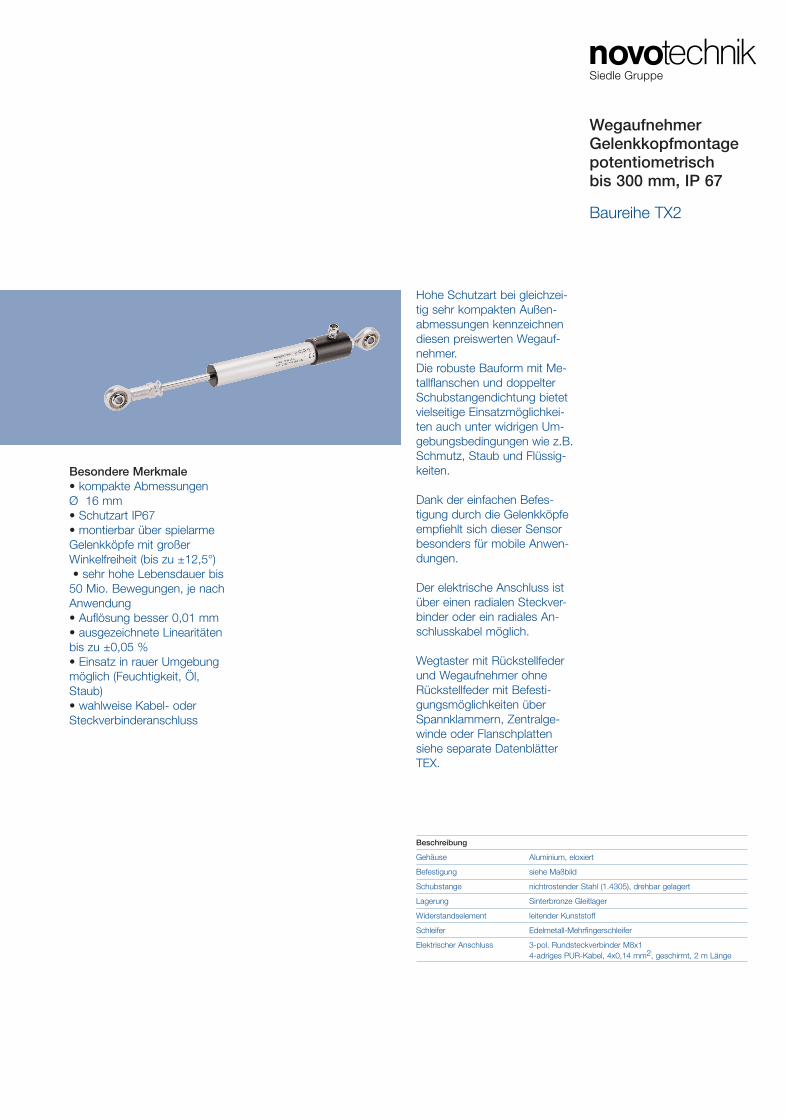
Wegaufnehmer Gelenkkopfmontagepotentiometrischbis 300 mm, IP 67
Baureihe TX2
Hohe Schutzart bei gleichzei-tig sehr kompakten Außen-abmessungen kennzeichnendiesen preiswerten Wegauf-nehmer.Die robuste Bauform mit Me-tallflanschen und doppelterSchubstangendichtung bietetvielseitige Einsatzmöglichkei-ten auch unter widrigen Um-gebungsbedingungen wie z.B.Schmutz, Staub und Flüssig-keiten.
Dank der einfachen Befes-tigung durch die Gelenkköpfeempfiehlt sich dieser Sensorbesonders für mobile Anwen-dungen.
Der elektrische Anschluss istüber einen radialen Steckver-binder oder ein radiales An-schlusskabel möglich.
Wegtaster mit Rückstellfederund Wegaufnehmer ohneRückstellfeder mit Befesti-gungsmöglichkeiten überSpannklammern, Zentralge-winde oder Flanschplattensiehe separate DatenblätterTEX.
Besondere Merkmale
• kompakte Abmessungen Ø 16 mm• Schutzart IP67• montierbar über spielarmeGelenkköpfe mit großerWinkelfreiheit (bis zu ±12,5°)• sehr hohe Lebensdauer bis
50 Mio. Bewegungen, je nachAnwendung• Auflösung besser 0,01 mm• ausgezeichnete Linearitätenbis zu ±0,05 %• Einsatz in rauer Umgebungmöglich (Feuchtigkeit, Öl,Staub)• wahlweise Kabel- oderSteckverbinderanschluss
Beschreibung
Gehäuse Aluminium, eloxiert
Befestigung siehe Maßbild
Schubstange nichtrostender Stahl (1.4305), drehbar gelagert
Lagerung Sinterbronze Gleitlager
Widerstandselement leitender Kunststoff
Schleifer Edelmetall-Mehrfingerschleifer
Elektrischer Anschluss 3-pol. Rundsteckverbinder M8x14-adriges PUR-Kabel, 4x0,14 mm2, geschirmt, 2 m Länge
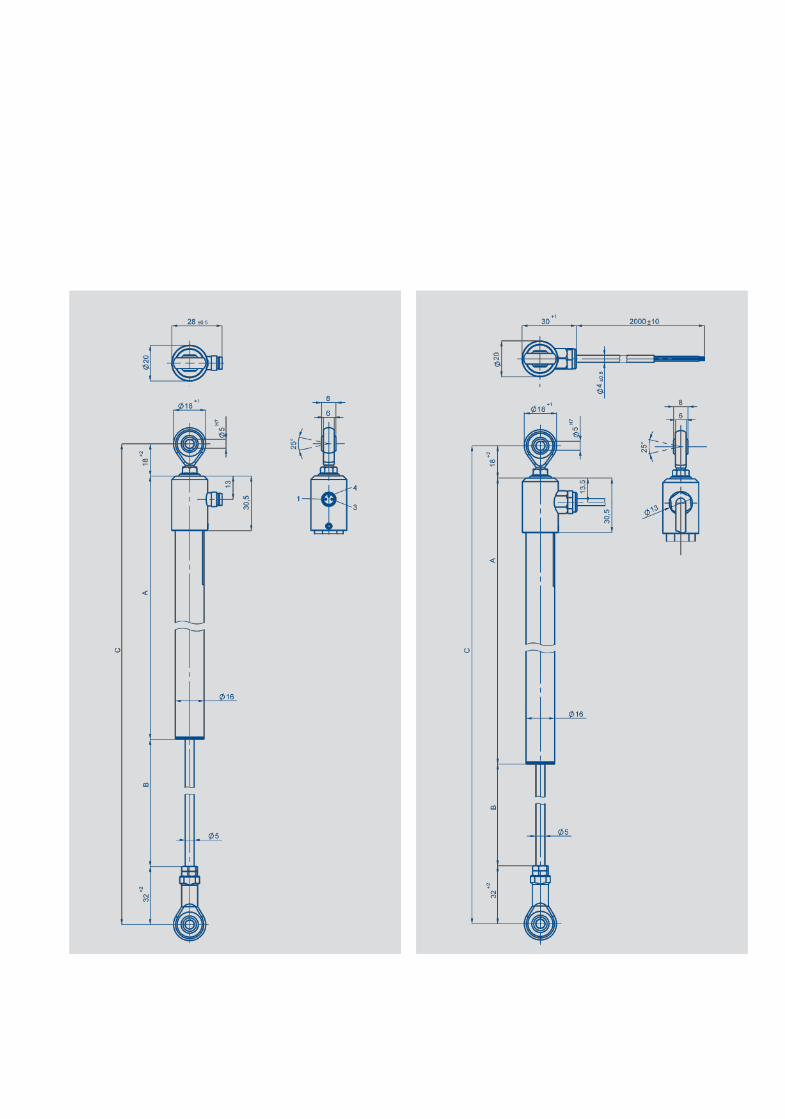
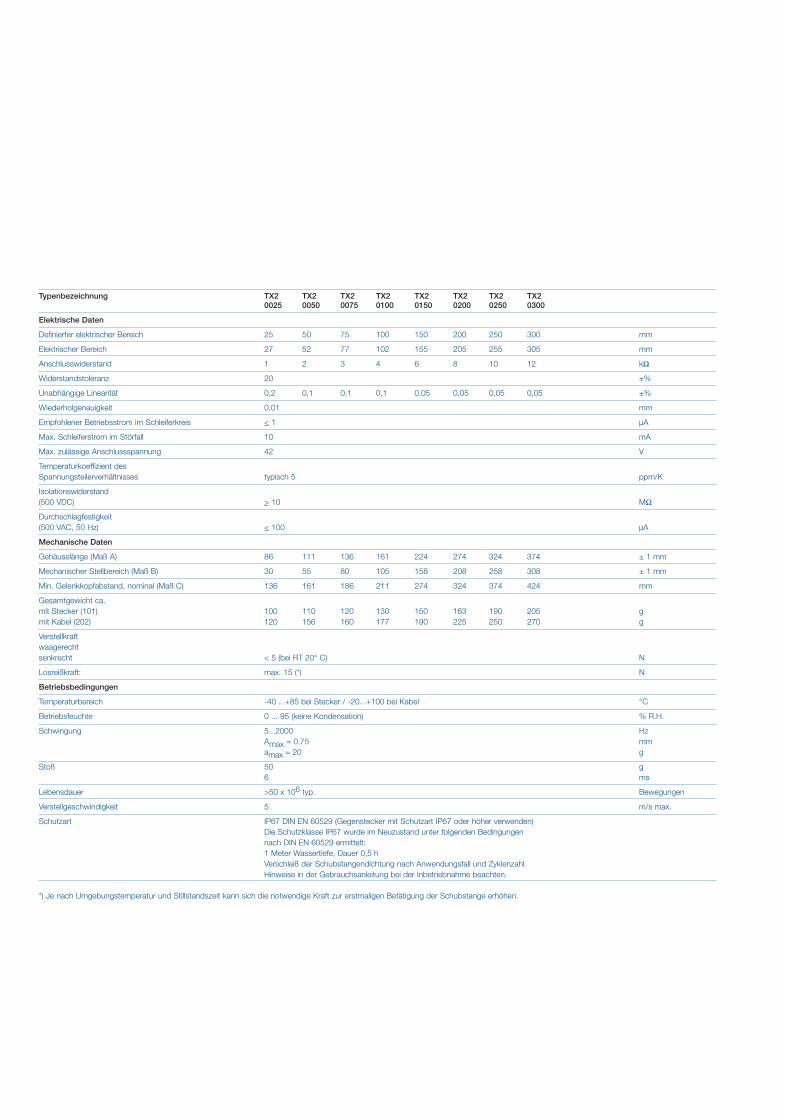
Typenbezeichnung TX2 TX2 TX2 TX2 TX2 TX2 TX2 TX20025 0050 0075 0100 0150 0200 0250 0300
Elektrische Daten
Definierter elektrischer Bereich 25 50 75 100 150 200 250 300 mm
Elektrischer Bereich 27 52 77 102 155 205 255 305 mm
Anschlusswiderstand 1 2 3 4 6 8 10 12 kΩ
Widerstandstoleranz 20 ±%
Unabhängige Linearität 0,2 0,1 0,1 0,1 0,05 0,05 0,05 0,05 ±%
Wiederholgenauigkeit 0,01 mm
Empfohlener Betriebsstrom im Schleiferkreis < 1 µA
Max. Schleiferstrom im Störfall 10 mA
Max. zulässige Anschlussspannung 42 V
Temperaturkoeffizient desSpannungsteilerverhältnisses typisch 5 ppm/K
Isolationswiderstand(500 VDC) > 10 MΩ
Durchschlagfestigkeit(500 VAC, 50 Hz) < 100 µA
Mechanische Daten
Gehäuselänge (Maß A) 86 111 136 161 224 274 324 374 ± 1 mm
Mechanischer Stellbereich (Maß B) 30 55 80 105 158 208 258 308 ± 1 mm
Min. Gelenkkopfabstand, nominal (Maß C) 136 161 186 211 274 324 374 424 mm
Gesamtgewicht ca.mit Stecker (101) 100 110 120 130 150 163 190 205 gmit Kabel (202) 120 156 160 177 190 225 250 270 g
Verstellkraftwaagerechtsenkrecht < 5 (bei RT 20° C) N
Losreißkraft: max. 15 (*) N
Betriebsbedingungen
Temperaturbereich -40 ...+85 bei Stecker / -20...+100 bei Kabel °C
Betriebsfeuchte 0 ... 95 (keine Kondensation) % R.H.
Schwingung 5...2000 HzAmax = 0.75 mmamax = 20 g
Stoß 50 g6 ms
Lebensdauer >50 x 106 typ. Bewegungen
Verstellgeschwindigkeit 5 m/s max.
Schutzart IP67 DIN EN 60529 (Gegenstecker mit Schutzart IP67 oder höher verwenden)Die Schutzklasse IP67 wurde im Neuzustand unter folgenden Bedingungen nach DIN EN 60529 ermittelt:1 Meter Wassertiefe, Dauer 0,5 hVerschleiß der Schubstangendichtung nach Anwendungsfall und Zyklenzahl.Hinweise in der Gebrauchsanleitung bei der Inbetriebnahme beachten.
*) Je nach Umgebungstemperatur und Stillstandszeit kann sich die notwendige Kraft zur erstmaligen Betätigung der Schubstange erhöhen.
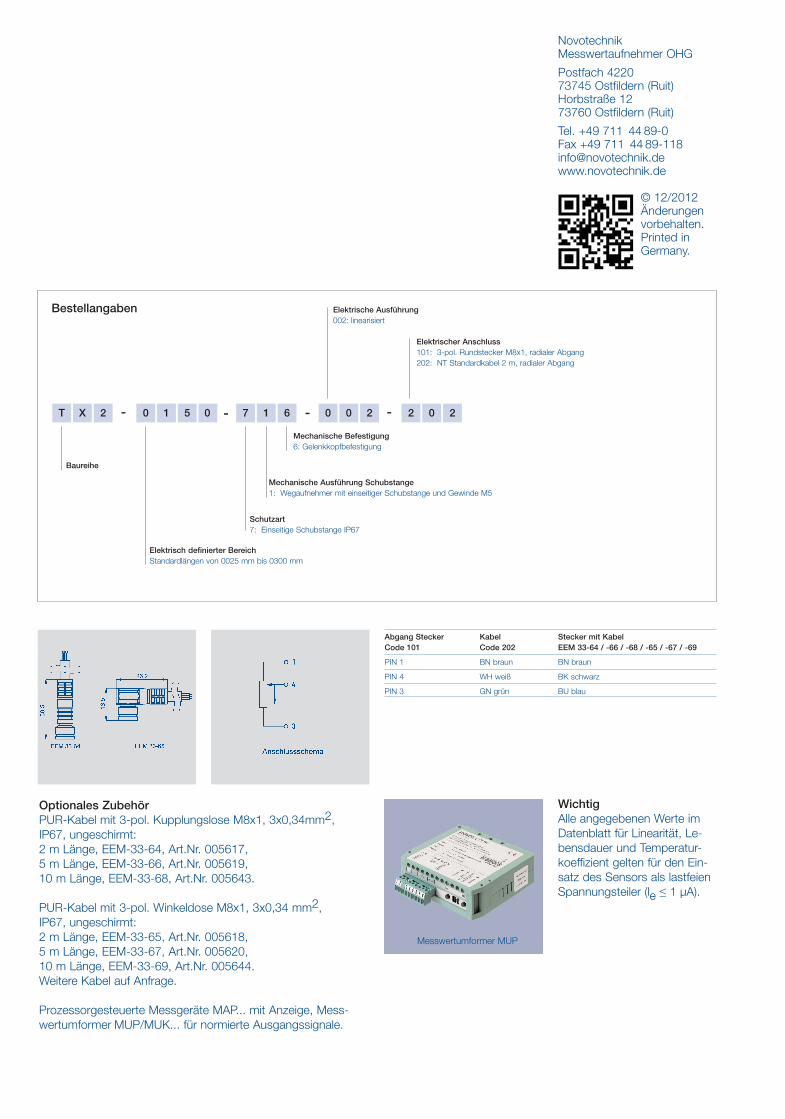
NovotechnikMesswertaufnehmer OHG
Postfach 422073745 Ostfildern (Ruit)Horbstraße 1273760 Ostfildern (Ruit)
Tel. +49 711 44 89-0Fax +49 711 44 [email protected]
© 12/2012Änderungenvorbehalten.Printed inGermany.
Elektrische Ausführung
002: linearisiert
XT 2 10 5 0 00 2 02 2
Elektrischer Anschluss
101: 3-pol. Rundstecker M8x1, radialer Abgang 202: NT Standardkabel 2 m, radialer Abgang
Schutzart
7: Einseitige Schubstange IP67
Mechanische Ausführung Schubstange
1: Wegaufnehmer mit einseitiger Schubstange und Gewinde M5
Mechanische Befestigung
6: Gelenkkopfbefestigung
Elektrisch definierter Bereich
Standardlängen von 0025 mm bis 0300 mm
Baureihe
17 6
Bestellangaben
Wichtig
Alle angegebenen Werte imDatenblatt für Linearität, Le-bensdauer und Temperatur-koeffizient gelten für den Ein-satz des Sensors als lastfeienSpannungsteiler (le ≤ 1 µA).
Abgang Stecker Kabel Stecker mit Kabel
Code 101 Code 202 EEM 33-64 / -66 / -68 / -65 / -67 / -69
PIN 1 BN braun BN braun
PIN 4 WH weiß BK schwarz
PIN 3 GN grün BU blau
----
Optionales Zubehör
PUR-Kabel mit 3-pol. Kupplungslose M8x1, 3x0,34mm2,IP67, ungeschirmt:2 m Länge, EEM-33-64, Art.Nr. 005617,5 m Länge, EEM-33-66, Art.Nr. 005619,10 m Länge, EEM-33-68, Art.Nr. 005643.
PUR-Kabel mit 3-pol. Winkeldose M8x1, 3x0,34 mm2,IP67, ungeschirmt:2 m Länge, EEM-33-65, Art.Nr. 005618,5 m Länge, EEM-33-67, Art.Nr. 005620,10 m Länge, EEM-33-69, Art.Nr. 005644.Weitere Kabel auf Anfrage.
Prozessorgesteuerte Messgeräte MAP... mit Anzeige, Mess-wertumformer MUP/MUK... für normierte Ausgangssignale.
Messwertumformer MUP
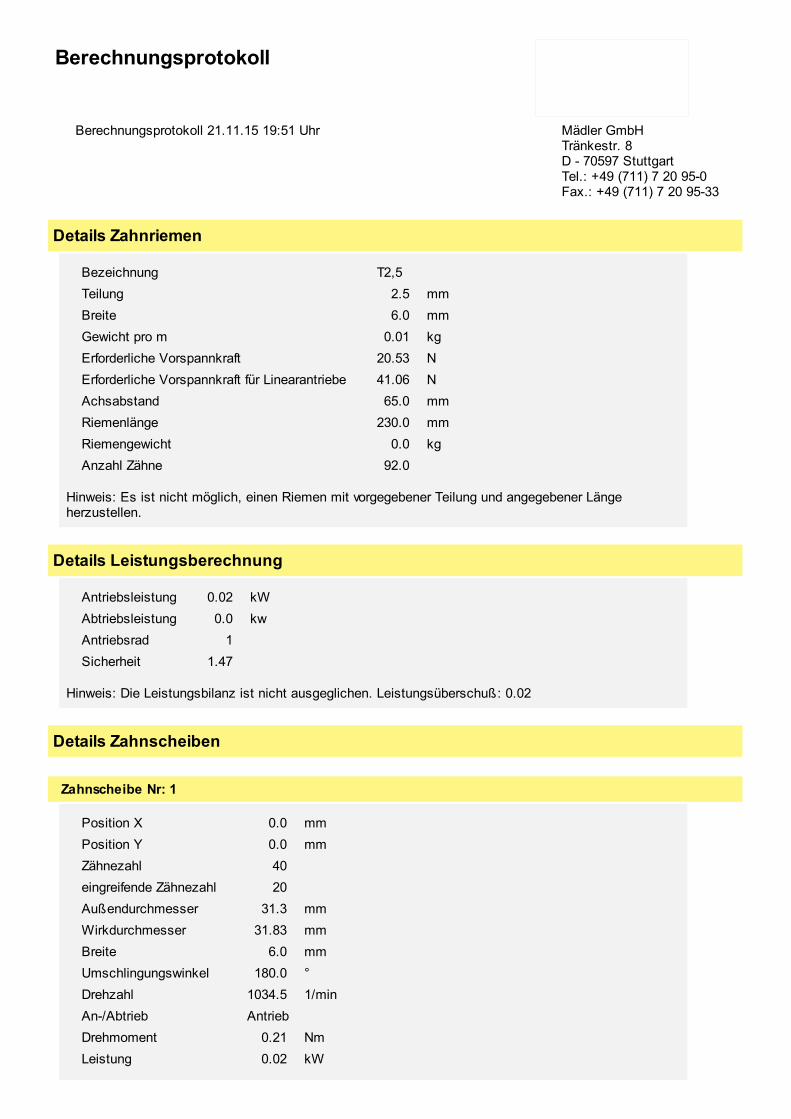
Berechnungsprotokoll
Berechnungsprotokoll 21.11.15 19:51 Uhr Mädler GmbHTränkestr. 8D - 70597 StuttgartTel.: +49 (711) 7 20 95-0Fax.: +49 (711) 7 20 95-33
Details Zahnriemen
Bezeichnung T2,5
Teilung 2.5 mm
Breite 6.0 mm
Gewicht pro m 0.01 kg
Erforderliche Vorspannkraft 20.53 N
Erforderliche Vorspannkraft für Linearantriebe 41.06 N
Achsabstand 65.0 mm
Riemenlänge 230.0 mm
Riemengewicht 0.0 kg
Anzahl Zähne 92.0
Hinweis: Es ist nicht möglich, einen Riemen mit vorgegebener Teilung und angegebener Längeherzustellen.
Details Leistungsberechnung
Antriebsleistung 0.02 kW
Abtriebsleistung 0.0 kw
Antriebsrad 1
Sicherheit 1.47
Hinweis: Die Leistungsbilanz ist nicht ausgeglichen. Leistungsüberschuß: 0.02
Details Zahnscheiben
Zahnscheibe Nr: 1
Position X 0.0 mm
Position Y 0.0 mm
Zähnezahl 40
eingreifende Zähnezahl 20
Außendurchmesser 31.3 mm
Wirkdurchmesser 31.83 mm
Breite 6.0 mm
Umschlingungswinkel 180.0 °
Drehzahl 1034.5 1/min
An-/Abtrieb Antrieb
Drehmoment 0.21 Nm
Leistung 0.02 kW
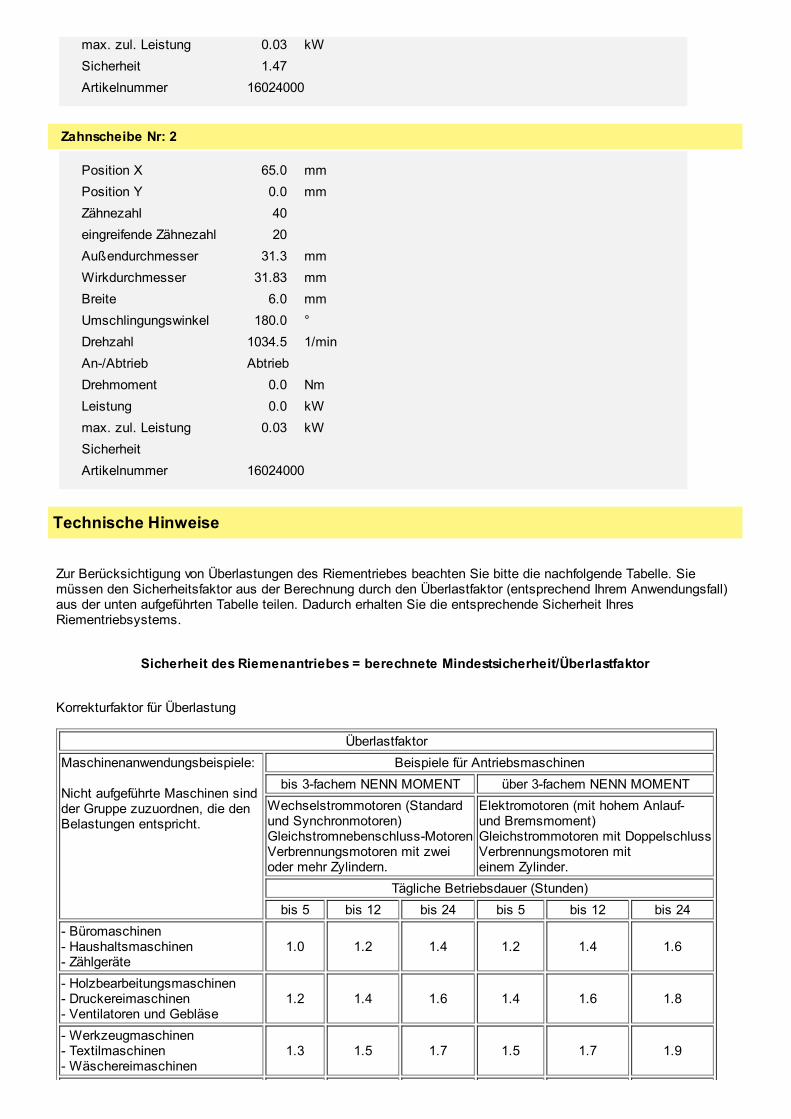
max. zul. Leistung 0.03 kW
Sicherheit 1.47
Artikelnummer 16024000
Zahnscheibe Nr: 2
Position X 65.0 mm
Position Y 0.0 mm
Zähnezahl 40
eingreifende Zähnezahl 20
Außendurchmesser 31.3 mm
Wirkdurchmesser 31.83 mm
Breite 6.0 mm
Umschlingungswinkel 180.0 °
Drehzahl 1034.5 1/min
An-/Abtrieb Abtrieb
Drehmoment 0.0 Nm
Leistung 0.0 kW
max. zul. Leistung 0.03 kW
Sicherheit
Artikelnummer 16024000
Technische Hinweise
Zur Berücksichtigung von Überlastungen des Riementriebes beachten Sie bitte die nachfolgende Tabelle. Siemüssen den Sicherheitsfaktor aus der Berechnung durch den Überlastfaktor (entsprechend Ihrem Anwendungsfall)aus der unten aufgeführten Tabelle teilen. Dadurch erhalten Sie die entsprechende Sicherheit IhresRiementriebsystems.
Sicherheit des Riemenantriebes = berechnete Mindestsicherheit/Überlastfaktor
Korrekturfaktor für Überlastung
Überlastfaktor
Maschinenanwendungsbeispiele:
Nicht aufgeführte Maschinen sind der Gruppe zuzuordnen, die den Belastungen entspricht.
Beispiele für Antriebsmaschinen
bis 3-fachem NENN MOMENT über 3-fachem NENN MOMENT
Wechselstrommotoren (Standard und Synchronmotoren)Gleichstromnebenschluss-MotorenVerbrennungsmotoren mit zweioder mehr Zylindern.
Elektromotoren (mit hohem Anlauf-und Bremsmoment)Gleichstrommotoren mit DoppelschlussVerbrennungsmotoren miteinem Zylinder.
Tägliche Betriebsdauer (Stunden)
bis 5 bis 12 bis 24 bis 5 bis 12 bis 24
- Büromaschinen - Haushaltsmaschinen - Zählgeräte
1.0 1.2 1.4 1.2 1.4 1.6
- Holzbearbeitungsmaschinen - Druckereimaschinen - Ventilatoren und Gebläse
1.2 1.4 1.6 1.4 1.6 1.8
- Werkzeugmaschinen - Textilmaschinen - Wäschereimaschinen
1.3 1.5 1.7 1.5 1.7 1.9
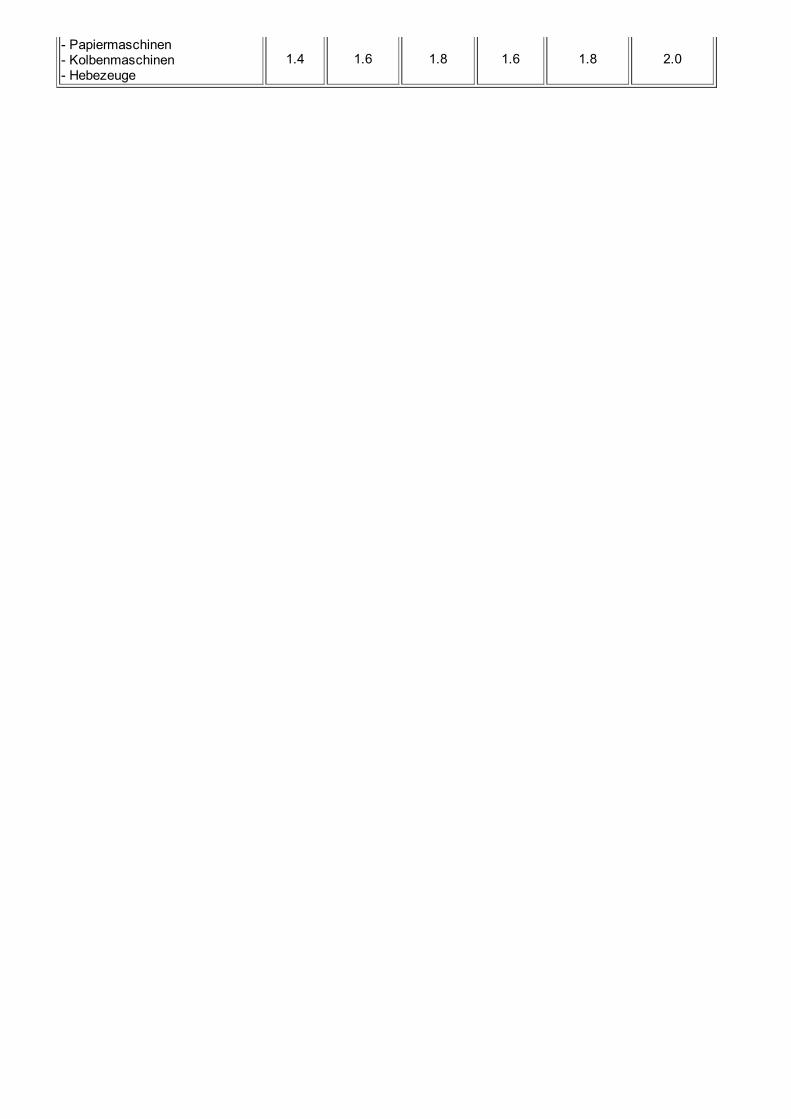
- Papiermaschinen - Kolbenmaschinen - Hebezeuge
1.4 1.6 1.8 1.6 1.8 2.0
Berechnungsprotokoll
Berechnungsprotokoll 17.11.15 20:11 Uhr Mädler GmbHTränkestr. 8D - 70597 StuttgartTel.: +49 (711) 7 20 95-0Fax.: +49 (711) 7 20 95-33
Details Zahnriemen
Bezeichnung T5
Teilung 5.0 mm
Breite 10.0 mm
Gewicht pro m 0.03 kg
Erforderliche Vorspannkraft 23.78 N
Erforderliche Vorspannkraft für Linearantriebe 71.34 N
Achsabstand 55.0 mm
Riemenlänge 219.99 mm
Riemengewicht 0.01 kg
Anzahl Zähne 44.0
Hinweis: Es ist nicht möglich, einen Riemen mit vorgegebener Teilung und angegebener Längeherzustellen.
Details Leistungsberechnung
Antriebsleistung 0.09 kW
Abtriebsleistung 0.0 kw
Antriebsrad 1
Sicherheit 3.24
Hinweis: Die Leistungsbilanz ist nicht ausgeglichen. Leistungsüberschuß: 0.09
Details Zahnscheiben
Zahnscheibe Nr: 1
Position X 0.0 mm
Position Y 0.0 mm
Zähnezahl 22
eingreifende Zähnezahl 11
Außendurchmesser 34.15 mm
Wirkdurchmesser 35.01 mm
Breite 10.0 mm
Umschlingungswinkel 180.0 °
Drehzahl 2162.16 1/min
An-/Abtrieb Antrieb
Drehmoment 0.4 Nm
Leistung 0.09 kW
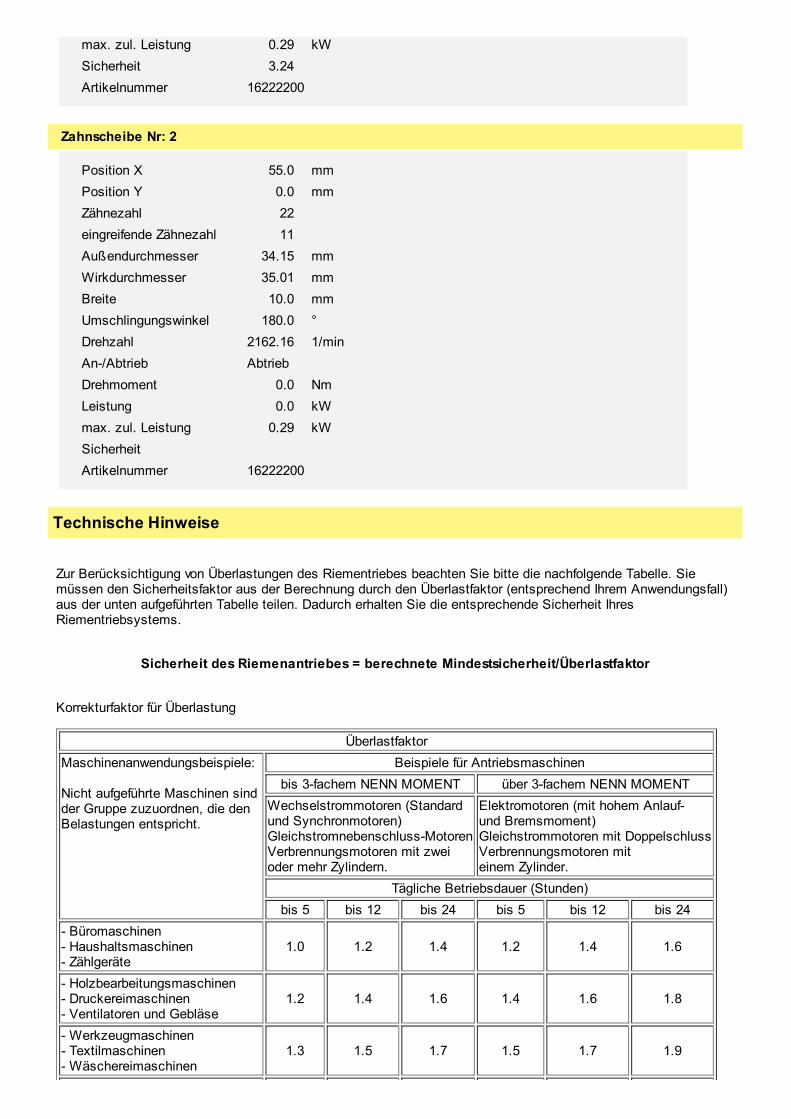
max. zul. Leistung 0.29 kW
Sicherheit 3.24
Artikelnummer 16222200
Zahnscheibe Nr: 2
Position X 55.0 mm
Position Y 0.0 mm
Zähnezahl 22
eingreifende Zähnezahl 11
Außendurchmesser 34.15 mm
Wirkdurchmesser 35.01 mm
Breite 10.0 mm
Umschlingungswinkel 180.0 °
Drehzahl 2162.16 1/min
An-/Abtrieb Abtrieb
Drehmoment 0.0 Nm
Leistung 0.0 kW
max. zul. Leistung 0.29 kW
Sicherheit
Artikelnummer 16222200
Technische Hinweise
Zur Berücksichtigung von Überlastungen des Riementriebes beachten Sie bitte die nachfolgende Tabelle. Siemüssen den Sicherheitsfaktor aus der Berechnung durch den Überlastfaktor (entsprechend Ihrem Anwendungsfall)aus der unten aufgeführten Tabelle teilen. Dadurch erhalten Sie die entsprechende Sicherheit IhresRiementriebsystems.
Sicherheit des Riemenantriebes = berechnete Mindestsicherheit/Überlastfaktor
Korrekturfaktor für Überlastung
Überlastfaktor
Maschinenanwendungsbeispiele:
Nicht aufgeführte Maschinen sind der Gruppe zuzuordnen, die den Belastungen entspricht.
Beispiele für Antriebsmaschinen
bis 3-fachem NENN MOMENT über 3-fachem NENN MOMENT
Wechselstrommotoren (Standard und Synchronmotoren)Gleichstromnebenschluss-MotorenVerbrennungsmotoren mit zweioder mehr Zylindern.
Elektromotoren (mit hohem Anlauf-und Bremsmoment)Gleichstrommotoren mit DoppelschlussVerbrennungsmotoren miteinem Zylinder.
Tägliche Betriebsdauer (Stunden)
bis 5 bis 12 bis 24 bis 5 bis 12 bis 24
- Büromaschinen - Haushaltsmaschinen - Zählgeräte
1.0 1.2 1.4 1.2 1.4 1.6
- Holzbearbeitungsmaschinen - Druckereimaschinen - Ventilatoren und Gebläse
1.2 1.4 1.6 1.4 1.6 1.8
- Werkzeugmaschinen - Textilmaschinen - Wäschereimaschinen
1.3 1.5 1.7 1.5 1.7 1.9

- Papiermaschinen - Kolbenmaschinen - Hebezeuge
1.4 1.6 1.8 1.6 1.8 2.0














![Modulhandbuch Fakultat fur Architektur 7048196 20181213154147 · [AR20022] Städtische Architektur (Urban Architecture) [WP21] [AR20061] Robot Oriented Design (Robot Oriented Design)](https://img.pdfslide.org/doc/110x75/5d49e7bb88c9934c608b4732/modulhandbuch-fakultat-fur-architektur-7048196-20181213154147-ar20022-staedtische.jpg)













