Embed Size (px)
Citation preview
Zeitschrift fur angewandte Mathematik und Mechanik Band 3 406 -
Um gleich eine Berechnung der Gleitlinien anmschliehn, benntzen wir die Gleichnng
a,-& i h T a t g 2 9 = - - - --- 2 z U
and erhalten darane fiir die eine Schar
. . . . . . . (41,
was fiir die Gleitlinie die Gleichnng - x = h arc sin + i h a - ya+ c ,
h
d. h. eine gemeine Zykloide ergibt. gebene Radienbedingang erfiillt let. (31. (4) zu
Es wfre nun nachzuweisen, dat3 die in Ql. (1) ge- Der Radius reohnet sich nnter Berucksichtigung von
d us und es ist damit, da d sp = d ylcos ~p an setaen ist,
Es ware zu wiinsohen, dai3 auch far andere Bereiche als fiir den einfachen Streifen die zugehtrigen Oleitliniensysteme gefunden wiirden. Das Gleitliniensystem fiir den Keilraum z. B. wurde das Studium der Vorgiinge beim Auspressen yon plastischem Material aus Oeffnungen wenigstens qnalitativ ermoglichen. Wichtig wtire natiirlich anch der Uebergang vom ebenen Problem zum achsensymmetrischeq, doch fiirchte ich, da% die mathematischen Schwierigkeiten hier sehr grofl sein werden. Die Art, wie H e n c k y das achensymmetrische Problem der Eindringungsfestigkeit behandelt, zeigt ubrigens, wie man zn uberschlllglichen Ergebnissen schon durch verhiiltnismEt6ig eintache Absohatzungen gelangen kann. Ich glaube allerdings, daB man, um eine bessere Amfierung an die Erfabrung zu hekommen, die gewil nicht geringe Reibung ~wischen Stempel und plasti- schem KBrper wird beriicksichtigen mussen; das Gleitlinienbild wird dabei wohl von dem von H e n a k y angegebeneu stark verschieden sein und sich wahrscheinlich dem von mir fir das ebene Problem angegebenen einigermaBen niihern. 3 4 8
Uber die Stabilitatsprobleme der Elaslizitatstheorie. Von R. v. MISES In Berlin.1)
owohl die klassische Elastizitfftstheorie wie die sogenannte techniscbe Mechanik be- schfiftigen sich fast ansschliefllich mit den Bedingungen des Gleicbgewichtes, das an S ekem elastischen K6rper zwiachen inneren und iiu%eren Kriiiten moglich ist,. Nur
gelegentllch und in vereinzelten Fallen wird die Frage gestellt und beantwortet, ob der bereohnete Gleicbgewichtsrustand ein s t a b i l e r ist, d. h. die Eigenschaft besitzt, sich nach kleinen Sttrungen van selbst wieder herzustellen. . Als erster hat E n l e r (1744), lange bevor es eine vollstfndige Elastizittitstheorie gab, die Stabilitiltsbedingung fur eine gerade, in ihrer Achse belastete Silule berechnet. Der Ausdruck
(1, J, E Lfnge, Querschnittsmoment und Elastizitiitszahl der Sfule , P Belastnng an der StabilittLtsgrenze) ist hente jedem Techniker unter dem Namen der BEulerschen Knick-
'1 Der folgende Aufsatz stellt in1 weseiitlichen den Inhalt eines auf der Marburger Versammluug am 24. September 1923 g haltenen Vortrages dar. Die Einzelausflihrungen und Ableitungen der hler mitgeteilten Ergebnisse sollen in drei besonderen Aufslititr.en Uber die alhicksicherheit von Fachwerkena, die SStabilitllt von Rahmentragwerken= und nQrundslltzliehe Fragen der Stabilitltsthgoriea sp%ter ver- Offentlicht werden.
Heft 6 v. Mis 0 8 . Ueber die StabilitBtssrobleme der Elastizitiltstheorie 407
formela gelilufig. Eine g r o h Zahl verschiedener Einzelftllle ist im Anschlufi an das Eulersche Problem, namentlich in neuerer Zeit, behandelt worden. Ich hebe mir zu- nlchst die Aufgabe gefitdt, ganz allgemein die StabilitWbedingungen f i i r solohe elastische K6rper aufzusuchen, die &us endl ich v ie len oder abzghlbar unendl ich v ie len g e r a d e n Sttlben bestehen, diem mogen nun gelenkig oder biegungssteif aneinander geschlossen sein. Dabei bin ich vor allem aut eine sehr einfache Erscheinnng geetoben, die bisher, wie 8s soheint, unbekannt geblieben ist, obwohl pie gewii3 schon an sich einiges technische Interesse in Anspruch nehmen darf. Es ist das die Tatsache, da% auch der gelaufige, alltgglioh betraohtete Qleichgewichtszustand eines einfachen Faoh- w e r k s rnit i d e a l e n Gelenken unstabil sein kann, und zwar nnter besonders leicht realisierbaren und in der Technik oft realisierten Umstlnden. Ich nenne diem Erschei- nnng die s r e i n e Fachwerkknickungcc und stelle ihr sodann a h einen zweiten Qrenz- fall den der .reinen Bahmenkniokunga gegenuber, bei der die Stlbe als b iegungs- s te i f , a b e r k e i n e r D e h n u n g filhig angesehen werden. Aus der Zusammenfassung beider Anstltze ergibt elch ohne weiteres die Stabilitiltstheorie des a l lgemeins ten S t a b - w e r k e s rnit steifen oder gelengigen Knoten, eine Theorie, die zahlreiche Fragen der praktischen Banstatik zu beantworten gestattet.
Der Gedankengang meiner Untersuchnng hat aber, gerade von dem Ausgangspunkt der reinen Fachwerkknicknng aus, noch in andere Richtuog gefiihrt. Bekanntlich wird in den Anfangsgriinden der mathematischen Elastizittltstheorie ein Satz bewiesen iiber die BEindeut igkei t des e las t i schen Gleichgewichtsproblems x , der mit dem Vor- handensein unstabiler Gleichge~ichtsaust~nde, oder jedenfalls mit dem Uebergang von stabilen m unstabilen Zusttlnden, in einem gewissen Widerspruch steht. Denn Eindeutig- keit der Losung vertrggt sich nicht mlt dem Auftreten von ,Verzweigllllgsetellen(< des Qleichgewichts. Die iibliche Erkltlrnng, daO es sich in den Filllen, in denen InstabilitPt in Frage kommt, um Verschiebungen oder Formilnderungen von grundstltzlioh anderer Grolenordnung handelt, tritt nicht zu. Dagegen gelangt meine Betrachtnngsweiee zn einer, wie ich glaube, befriedigenden Aufklilrung der VerhNtnieee und zu einer allge- meinen widerspruchsfreien Formulierung, die a n d ie S t e l l e des Kirchhoff s c h e n E i n d e u t i g k e i t s s a t z e s zu treten hat.
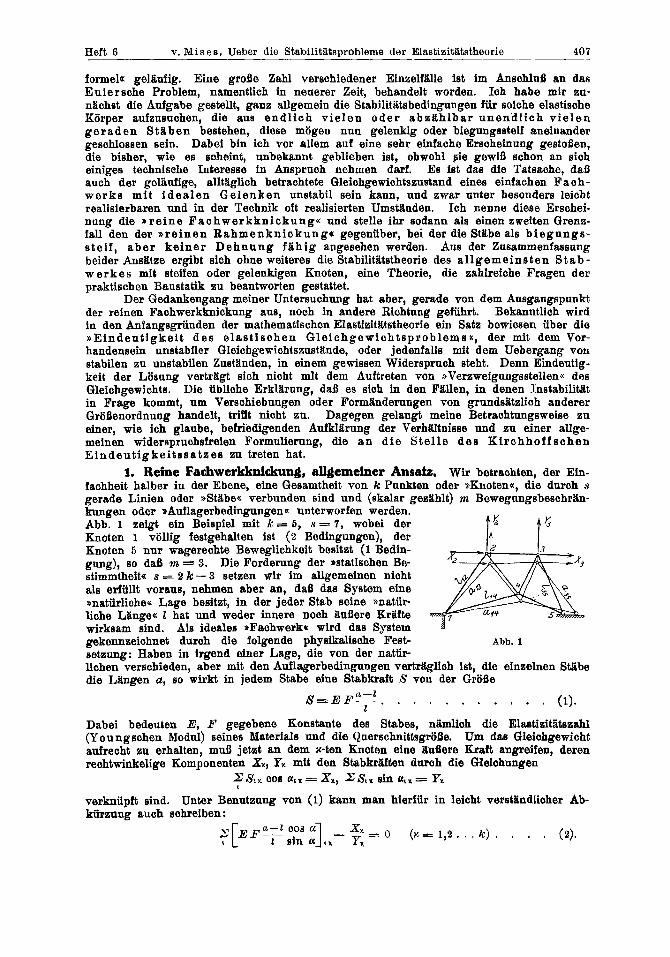
1. Reine Fachwerkknidsun& allgemeiner Ansafi. Wir betrachten, der Ein- fachheit halber in der Ebene, eine Qeeamtheit von k Punkten oder rKnotencc, die durch s gerade Linien oder &%be< verbunden sind und (skalar geelhlt) m Bewegungsbeschrtln- kungen oder *Auflagerbedingungenu unterworfen werden. Abb. 1 zeigk ein Beispiel rnit k = 6, s = 7, wobei der Knoten 1 vallig festgehalten ist (2 Bedbgungen), der Knoten 5 nur wagerechte Beweglichkeit besitzt (1 Bedin- gung), so dai3 m = 3. Die Forderung der netatisohen Be- stimmtheita s = 2 k- 3 setzen wir im allgemeinen nicht als erfiillt voraus, nehmen ab6r an, dal das System eine Bnatiirlicheu Lage besitzt, in der jeder Stab seine matur- liohe Lilngw 1 hat und weder innere noch iiu5ere Krtlfte wirksam sind. Als ideales BFachwerka wird das System gekennzeichnet durch die folgende phyeikalisohe Fest- Abb. 1 setzung: Haben in irgend einer Lage, die von der natiir- lichen versohieden, aber rnit den Auflagerbedingungen vertrtlglich ist, die einzelnen &&be die Liingen a, so wirkt in jedem Stabe eine Stabkraft S vou der Grobe
a--2 1
S = E F - . . . . . . . . . . . (1).
Dabei bedeuten E, F gegebene Konstante des Stabes, ntlmlich die ElastiziVatezahl (Y oungschen Modul) seines Materials nnd die QuerschnittsgrGBe. Um dae Gleiohgewicht anfreoht zu erhalten, mui3 jetzt an dem x-ten Knoten eine tluSere Kraft anpeifen, deren rechtwinkelige Komponenten X x , Y, mit den Stabkrilften durch die Gleiohungen
BAS,, con acx= X,, 8Sl, sin a,,= Y, 1
verkniipft sind. Unter Benutzung von (1) kann man hierfur in leicht verstslndlicher Ab- kiirzuna auch schreiben : -
0-1 006 a =, - 0 ( % = 1 , 2 . . . k ) , , * . (2). ?[EFT sin all.- Yx -
408 Zeitechrift fiir anpewandte Mathematik und Mechanik Band 3
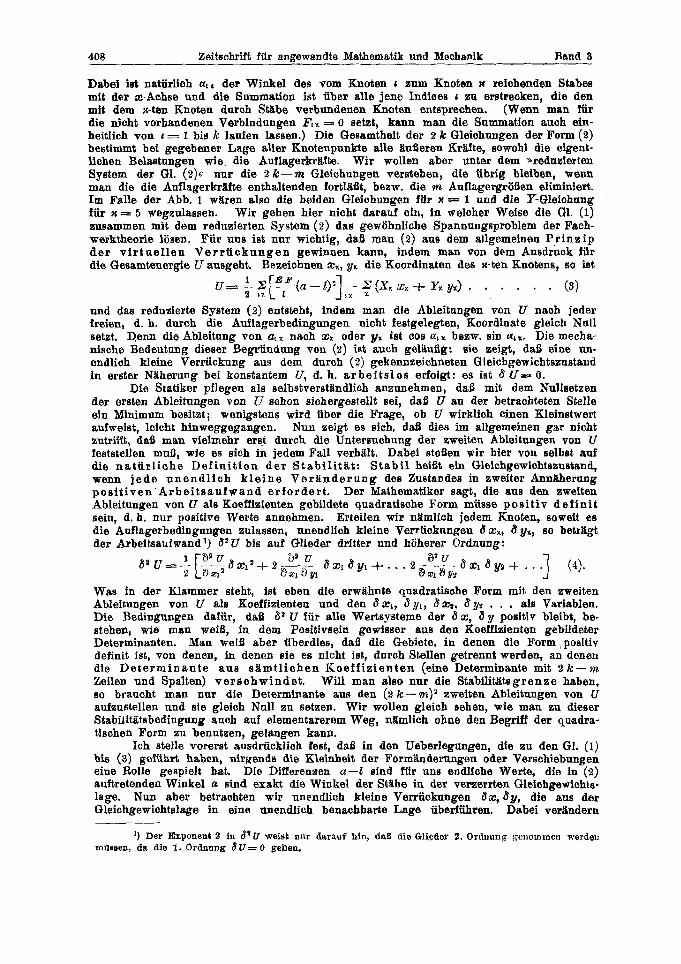
Dabei ist natiirlich arr der Winkel des vom Knoten L zum Knoten x reichenden Stabes mit der 3c-Aohse und die Summation ist uber alle jene Indices I zu erstrecken, die den mit dern x-ten Knoten dnrch &&be verbundenen Knoten entspreechen. (Wenn man fiir die nicht vorhandenen Verbindungen FIX = 0 setzt, Berm man die Summation anoh ein- heitlioh von i = 1 bis k laufen lassen.) Die Qesamtheit der 2 k Qleichungen der Form (2) bestimmt bei gegebener Lage aller Knotenpnnkte alle iiuBeren Krtilte, sowohl die eigent- lichen Belastungen wie, die AuflagerkrWe. Wir wollen aber unter dem wednzierten System der Ql. (2). nnr die 2 k-m Qleichungen verstehen, die ubrig bleiben, wenn man die die Auflagerkriifte enthaltenden fortltiflt, bezw. die m AuilagergrZiDen eliminiert. Im Falle der Abb. 1 wtiren also die beiden Gleichungen fiir x = 1 und die p-G)leichmg fur x = 5 wegzulassen. Wir gehen hier nicht daranf ein, in welcher Weise die (31. (1) msammen mit dem reduzferten System (2) das gewohnliohe Spannungsproblem der Fach- werktheorie losen. Fur uns ist nnr wichtig, daB man (2) aus dem allgemeineu Prinzllp d e r v i r t u e l l e n V e r r u c k n n g e n gewinnen kann, indem man von dem Ansdrnok fiir die Geeamtenergie U ansgeht. Bezeiohnen xz, yx die Koordinaten des x-ten Knotens, so ist
und das redurierte System (2) entsteht, indem man die Ableitungen von U nach jeder freien, d. h. dnrch die Auflagerbedingungen nicht festgelegten, Koordinate gleich Null setzt. Denn die Ableitnng von naoh zCr oder yx ist COB (xcx bezw. sin alX. Die mecha- nische Bedeutung dieser Begrandung von (2) ist auch gelgufig: sis zeigt, daB eine un- endlioh kleine Verriickung aus den durch (2) gekennzeichneten Gtleiohgewichtszustand in erster N%herung bei konstantern V, d. h. a r b e i t s l o s erfolgt: es ist 8 U = 0.
Die Statiker pflegen als selbstversttindlich anzunehmen, daS mit dem Nullsetzen der ersten Ableitnngen von U sahon siohergestellt sei, daf) U an der betrachteten Stelle ein Minimum besitzt; wenigstens wird uber die Frage, ob U wirkUch einen Eleinstwert aufweist, lelcht hinweggegangen. N u n zeigt es eich, da5 dies im allgemeinen gar nicht zutxifit, da0 man vielmehr erst dnrch die Untersnohung der zweiten Ableitungen von U feststellen mu& wie 6 s sich in jedem Fall verhtilt. Dabei stofien wir hier von selbst auf die natur l iohe Defini t ion d e r S tab i l i t a t : S t a b i l heiBt ein Qleiohgewlchtszustand, wenn jede n n e n d l i c h k l e i n e V e r l n d e r u n g des Znstandes in zweiter bntiherung pos i t iven Arbei t sanfwand erforder t . Der Mathematiker sagt, die &OLE den %weiten Ableitungen von U als Koeffigienten gebildete quadratische Form miisse posi t iv d e f in i t sein, d. h. nur positive Werte annehmen. Erteilen wir nllmlich jedem Knoten, soweit es die Annagerbedingungen zulassen, unendlich kleine Verruckungen 8 xx, 6 yx, so betrtlgt der Arbeitsaufwand') aaU bis auf @lieder dritter und hiiherer Ordnuog:
Was in der Elammer steht, iBt eben die erwahnte qnadratisohe Form rnit den zweiten Ahleitungen von U a18 Koeffizienten und den 8x1, 6y1, 8x8, by3 . . . a16 Variablen. Die Bedingungen dafiir, daB iY U fur alle Wertsysteme der 8 x, 8 y positiv bleibt, be- stehen, Wi8 man weifl, in dem POSitiVBeiU gewieser aus den Koeffizienten gebildeter Determinanten. Man weid aber uberdies, daD die Qebiete, in denen die Form, positiv definit jst, von denen, in denen sie es nicht ist, durch Stellen getrennt werden, an densn dle Determinante a u s st imtlichen Koeff iz ienten (eine Determinante mit 2 k- n2 Zeilen und Spalten) vereohwindet. Will man also nnr die Stabilitltsgrenze haben, 80 braucht man nur die Determinante aus den c2 k - m ) a zweiten Ableitnngen Ton U aufzustellen und sie gleich Null zu setzen. Wir wollen gleich eehen, wie man zn dieser Stabilitatsbedingong auch auf elementarerem Weg, n w i c h ohne den Begriff der quadra- tlsohen Form zu benutzen, gelangen kann.
Ich stelle vorerst ausdrucklich feat, dab in den Ueberlegungen, die zu den GI. (1) bis (3) gefiihrt haben, nizgende die Kleinheit der Formtnderungen oder Verschiebungen eine Rolle gmpielt hat. Die DifEerenzen a 4 sind fiir nns endliehe Werte, die in (2) auftretenden Winkel a sind exakt die Winkel der 8tllbe in der vereerrten Qleichgewichts- lage. Nun aber betrachten wir nnendlich kleine Verriicknngen ax, 6y, die ans der Cfleichgewichtslage in eine unendlioh benachbarte Lage uberfiihren. Dabei vergndern
I) Der Exponent 2 in B9U weist nur darauf Mn, dafl die Glieder 2. Ordnung gcnomtnen werdgn mdssen, da die 1. Ordnung 8 U = 0 geben,
Heft 6 v. Mis e s , Ueber die StabilitLtsprobleme der Elastizitittstheorie 409
sich die Lstngen a nm 6a und die Winkel a nm 8a, und zwar gilt, wie man leicht einsieht :
. . . . ( 5 ) . 6arx = 8 (Xx-xt) COB cLlx + 8 (yx-yt) sin a!x,
a l x B a L x = - 8 ( x x - x r ) s i n atx+8(yx-y1) O O S C C , ~ 1 . ' Vzriiert man dle (31. (2) und nimmt dabei an, daf3 dX, = 8 Px = 0, d. h. da% die
iiul3eren Lasten an GrBBe und Richtung unverstndert mit ihren Angriilspunkten mitgehen, so erhstlt man neue 2 k-m-Qleichungen:
a-1 sin a E R c ? s a 6 u ] = O . . . . . (6). E F ~ 008 aaa + I sin a lx
Hier hat man fiir 6a und 8u die Ausdriicke (5) einzusetzen und erhiilt damit 2 k-m lineare, hcmogene Gleichungen fur die 2 k-m unabhfngigen Verruoknngen ax, By. Die 1.Ssbarkeitsbedingungen dieses Qleichungsystems, die in dem Ver schwinden d e r Koeff iz ien ten-Determinante zum Ausdruck kommt, ist, wie aus dem Zusammenhaug von (2) mit (3) hervcrgeht, nichts anderes als die gesuchte Stabilitftsbedingung. Man kann ja die Stabilitgtsgrenze auoh defioieren als einen Qleichgewichtszustand, in dessen unmittelbarer Ntihe sich wieder ein solcher befindet. Stellt man sich etwa vcr, die iiuOeren Belastungen seien bis auf einen Zahlenfaktor 1 gegeben, und dieses 1 wachse allmtihlich von 0 an, so durchltiuft mau zuerst eine Reihe von ~leichgewiohtszustinden, die sicher stabil sind, bis man zu einem 1-Wert kommt, der die fragliuhe Determinante zu Nnll rnacht. Hier ,verzweigt* sich das Qleiahgewicht, d. h. es gibt zuntlohst zwei unendlich benachbarte Gleiohgewichtslagen, die SpLter, nstmlich bei groBerem 1, um ein endliches Stuck auseinander lisgen. Es kann nicht mit Sicherheit behauptet werden, daO einer der beiden Ql~chgewichtszustSnde, die dann bei gleicher Belastung m6glfoh sind, unstabil ist. Sicher iet nur, da% man vor E r r e i c h e n des k r i t i s c h e n 1-Wer tes nur mit s t a b i l e n Zuststnden z u t u n hat.
ES sol1 hier nicht ntiher auf die allgemeine Erorterung der Stabilitftsverhtlltnisse eingegangen werden, ebensowenig wie auf verschiedene Vercinfachungen, die bei der expliziten Autstellung der Stabilitiitsbedingnng moglich sind. Besondere im Falle statisch bestimmter Fachwerke liidt sich anf einem anderen, den in der Baumechanik ublichen Qedankengiingen besser angepafitem Wege ein Satz von s Qleichnngen finden, demen Determinante ebenfalls die Stabilitiitsbediogung liefert. Auf den dreidimensicnalen Fall sind die Ueberlegungen ohne weiteres ubertragbar. Von besonderem Interesse erscheint dabei das Ausknicken eines an sich ebenen Fachwerkes &us seiner Ebene, wie dies bei Bruckentrtigern becbachtet wird. Ich gehe jetzt dazu
spielen darzulegen. 2. Befspiele zur reinen, Fachwerkknickung.
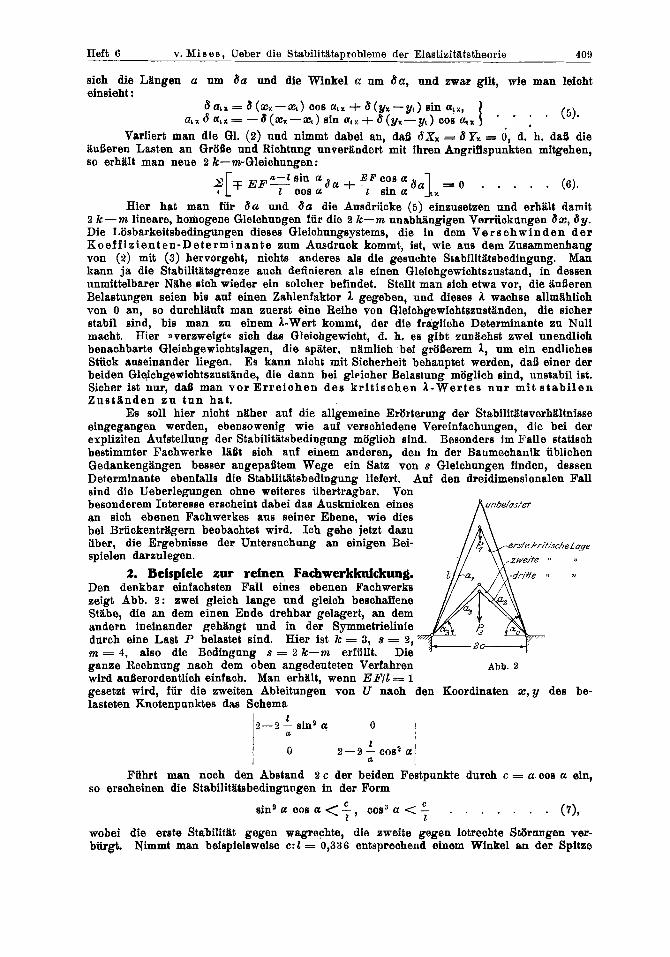
Den denkbar einfachsten Fall eines ebenen Fachwerks zeigt Abb. 2 : zwei gleich lange und gleich beechaffene SttLbe, die an dem einen Ende drehbar gelagert, an dem andern ineinander gehtlngt und in der Symmetrielinie dnrch eine Last P belastet sind. Hier ist k = 3, s = 2, m = 4, also die Bedingung s = 2 k-m erfiillt. Die
wird au%erordentlich einfaoh. Man erhglt, wenn E F / l = 1 gesetzt wird, fiir die zweiten Ableitungen von U nach den Koordinaten x, y des be- lasteten Knotenpunktes das Schema
uber, die Ergebnisse der Untersuchung an einigen Bei- ersfe hnt/scheL oge
game Reohnung nach dem oben angedeuteten Verfahren Abb. 2
1 (2-2 a sin2 a
Fiihrt man noch den Abstand 2 c der beiden Festpunkte durch c = a. cos a ein, so erscheinen die Stabilitiitsbedingungen in der Form
s i n a a c o s a < e , c o e s a < C . . , t 1
. . . . wobei die erste StabiliMt gegen wagrechte, die zweite gegen lotrechte St6rungen ver- biirgt. Nimmt man beiepielsweise c : l = 0,336 entsprechend einem Winkel an der Spitze
41 0 Zeitschrift fiir aneewandte Mathematik und hlechanik Band 3
im unbelasteten Zustand von rund 40°, so wird zonilchst bei einer Zasammendruckung der Stlbe .von rund 10 vH wagrechte Unstabilitat erreicht, die bei weiterer VergrofJerung des Winkele an der Spitse auf rund 95O wieder authirt. Vorher aber hat bei einem Spitzen-Winkel vou etwa 88O vertikale Instabilitiit eingesetzt. Beginnt man im un- belasteten Zustand schon mit einem genfigend flachen Dreieck (oberer Winkel > 45O), so gibt es kein Gebiet wagrechter Unstabilitat, sondern der stabile Zustand geht unmittelbar in den vertial-unstabilen uber. An einem einfachen Versuchsmodell, in dem an Stelle der Stabe geRignete Spiralfedern verwendet ,werden, konnte man die Perhaltnisse in an- sohaulicher Weise erlautern. Die vollstlndige Diskussion der (31. (7) sol1 an anderer
Stelle mitgeteilt werden, jetzt gehe ich von dem 7 3 272-7 sSchulbeispielc der Abb. 2 gleich zu dem prak-
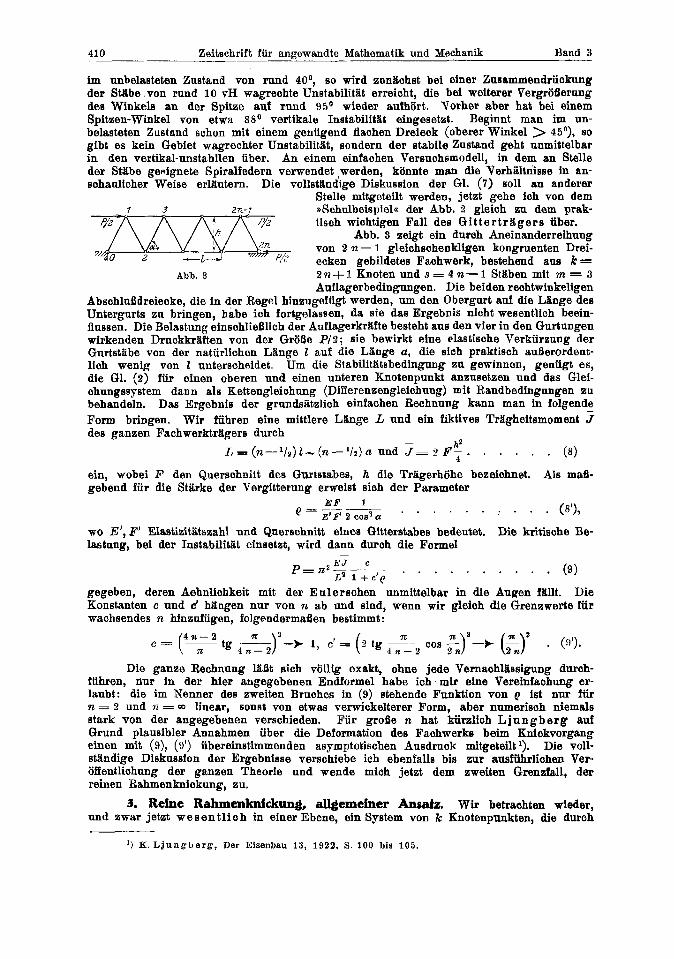
tisch wichtigen Fall des Git ter t r i igers iiber. Abb. 3 zeigt ein duroh Aneinanderreihung
von 2 n - 1 gleichschenkligen kongruenten Drei- ecken gebildetes Fachwerk, bestehend aue k = 2n+ l Knoten und s = 4 n-1 Stiiben mit m = 3 Aaflagerbedingungen. Die beiden rechtwinkeligen
AbschlnMreiecke, die in der Regel hinzugefugt werden, nm den Obergurt auf die LBnge des Untergurts eu bringen, habe ich fortgelassen, da sie dae Ergebnis nicht wesentlich beein- flussen. Die Belastung einschlie~lich der Auflagerkrlfte besteht aus den vier in den Gurtungen wirkenden Drnckkraften von der Gr6Be P/2; sie bewirkt eine elastische Verkiiriung der Gurtstiibe von der naturlichen Liinge I auf die L%nge a, die sich praktisch auderordent- lich wenig von I unterscheidet. Um die StabilitKtebedingung za gewinnen, geniigt es, die (31. (2) fiir einen oberen und einen unteren Knotenpunkt anznseteen und das Glei- chungseystem dann ale Kettengleichung (Differenzengleichung) mit Randbedingungen zu behandeln. Das Ergebnis der grnndsatzlich einfachen Rechnung kann man in folgende Form bringen. Wir fuhren eine mittlere Lgnge L und ein fiktives Tragheitsmoment des ganzen Fachwerktriigers durch
L = ( n - - ’ / , ) I - ( n - l / a ) a u n d J = 2 F - . . . . . . (8)
VZZT
Abb. 3
ha -
4
ein, wobei F den Querschnitt dea Ourtstabes, h die Tragerhiihe bezeichnet. Ale ma%- gebend fiir die Starke der Vergitterung erweist sich der Parameter
wo E’, F’ Elaetizitiitszahl nnd Querschnitt einee Gitterstabes bedeutet. lastnng, bei der Instabilitgt einsetet, wird dann durch die Formel
Die kritische Be- -
EJ c P=na-- . . . . f . I . . . (9) L’ 1 + c’p gegeben, deren Aehnlichkeit mit der Eulerschen unmittelbar in die Angen fallt. Die Konstanten c und c’ hhtagen nur von n ab und siud, wenn wir gleich die Grenzwerte fur wachsendes n hinzufiigen, folgendermaden bestimmt:
Die ganze Rechnung l&St sich v611ig exakt, ohne jede Vernachlilssigmg durch- fuhren, nur in der hier angegebeneu Endformel habe ich mir eine Vereinfachung er- lanbt: die im Nenner des zweiten Bruches in (9) stehende Funktion von e ist nnr fiir n = 2 und n = 00 linear, sonst von etwas verwickelterer Form, aber numerisch niemals stark von der angegebenen verschieden. Fur grof3e n hat kiirzlich L j u n g b e r g auf Grund plausibler Annahmen uber die Deformation des Fachwerks beim Knickvorgang einen rnit (9), (9’) ubereinstimmenden asymptotischen Ausdruck mitgeteilt I). Die voll- stgndige Diskussion der Ergebnisse verschiebe ich ebenfalls bis zur ausfiihrlichen Ver- offentlichung der gauzen Theorie und wende mich jetzt dem zweiten Grenzfall, der reinen Rahmenknickung, zu.
3. Reine Rahmenknickung, al lgeneher Ansdz. Wir betraohten wieder, und zwar jetzt wesent l ioh in einer Ebene, ein System von k Knotenpunkten, die durch
’) K. L j u n g b e r g , Der Eisenbau 13, 1923, S. 100 bis 106.
Heft 6 Y. Mise 6 . Ueber die Stabilitiitsarobleme der Elastizitatstheorie 411
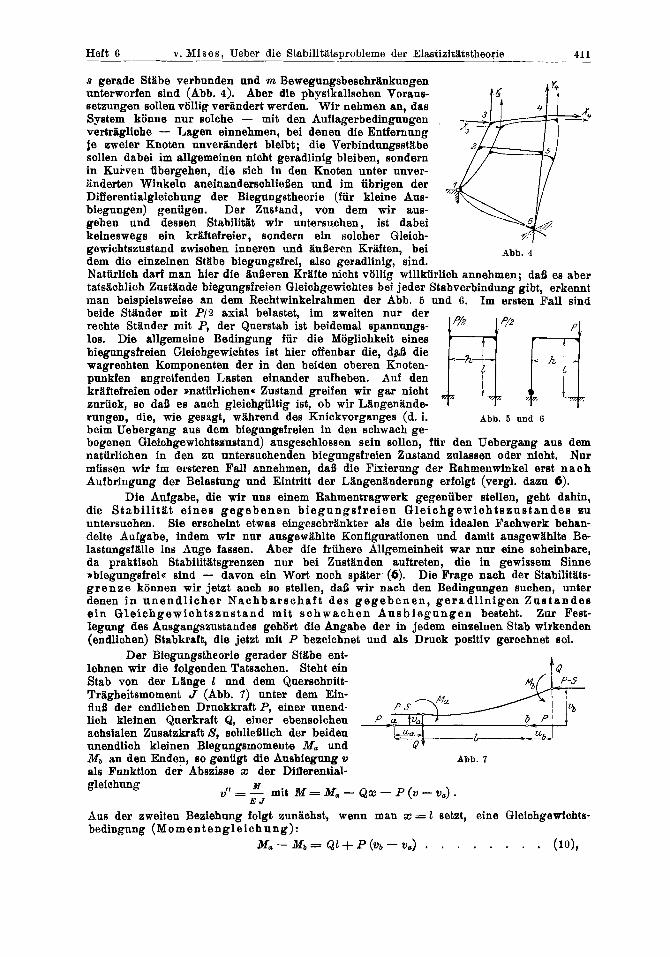
s gerade Sttibe verbunden und m Bewegungsbeschrtlnkungen unterworfen sind (Abb. 4). Aber die pbysikalischen Voraus- setzungen sollen vollig veriindert werden. Wir nehmen an, das
Differentialgleichung der Biegungstheorie (fur kleine AUS- '
System kiinne nur solche - rnit den Auflagerbedingungen vertrggliche - Lagen einnehmen, bei denen die Entfernung je zweier Knoten unverhdert bleibt; die Verbindungsstabe sollen dabei im allgemeinen nicht geradlinig bleiben, sondern in Kurven iibergehen, die sich in den Knoten unter unver- anderten Winkeln aneinandewchlieden und im iibrigen der
biegungen) geniigen. Der Zustand, von dem wir aus- gehen und dessen StsbilitPt wir untersuchen, ist dabei keineswegs ein krtiftefreier , sondern ein solcher Gleich-
dem die einzelnen Stilbe biegungsfrei, also geradlinig, sind. Natiirlich darf man hier die giu%eren KrPfte nicht vollig willkiirlich annehmen; da% es aber tatstichlich Zusthde biegungsfreien Gleichgewichtes bei jeder Stabverbindung gibt, erkennt man beispielsweise an dem Rechtwinkelrahmen der Abb. 5 und 6. Im ersten Fall sind beide Stilnder rnit PI2 axial belastet, im zweiten nur der rechte StBnder mit P, der Qnerstab ist beidemal spannungs- lcs. Die allgemeine Bedingung fur die Maglichkeit eines biegungsfreien Gleichgewichtes iet hier offenbar die, d& die wagrechten Romponenten der in den beiden oberen Knoten- punkfen angreifenden Lasten einander aufheben. Auf den krilftefreien oder matiirlichene Zustand greifen wir gar nicht zuruck, 80 daD es auch gleichgiiltig ist, ob wir LtingenSnde- mngen, die, wie gesagt, wiihrend des Knickvorganges (d. i. beim Uebergang aus dem biegungsfreien in den schwach ge- bogenen Gleichgewichtszustand) ausgeschlossen seiu sollen, fur den Uebergang aus dem naturlichen in den zu untersuchenden biegungsfreien Zustand zulaesen oder nicht. Nur miissen wir im ersteren Fall annehmen, da% die Fixierung der Bahmenwinkel erst n a c h Auf bringung der Belastung und Eintritt der LangenLnderung erfolgt (vergl. dazu 6).
Die Aufgabe, die wir uns einem Rahmentragwerk gegeniiber stellen, geht dahin, die S t a b i l i t ii t ein e s g e g e b en en b ie g u n g s f r e i en a1 e i c h g e w i c h t 8 z u s t a n d e s zu untersuchen. Sie erecheint etwas eingescbrlnkter als die beim idealen Fachwerk behan- delte Aufgabe, indem wir nur ausgewahlte Konfigurationen und damit ansgewiihlte Be- 1astungsfPlle ins Auge fassen. Aber die friihere Allgemeinheit war nur eine scheinbare, da praktisch Stabilittltsgrenzen nur bei Zustilnden auftreten, die in gewissem Sinne abiegungsfreicr sind - davon ein Wort noch spiiter (6). Die Frage nach der StabifitPts- g r e n z e konnen wir jetzt auch so stellen, da% wir nach den Bedingungen suchen, unter denen in u n e n d l i c h e r Nachbarschaf t des g e g e b e n e n , geradl in igen Zns tandes ein Cfleichgewichtszustand rnit s c h w a c h e n Ausbiegungen besteht. Zur Fest- legung des Ausgangszustandes gehart die Angabe der in jedem einzelnen Stab wirkenden (endlichen) Stabkraft, die jetzt mit P bezeichnet und als Druck positiv gerechnet eei.
Der Biegungstheorie gerader Sttlbe ent- lehnen wir die folgenden Tatsachen. Steht ein Stab von der L h g e 1 und dem Querschnitt- Tragheitsmoment J (Abb. 7) unter dem Ein- flu6 der endlichen Drnckkraft P, einer unend-
4 1 1 \/
6 p gewichtszustand zwischen inneren und ilu%eren Krilften, bei e-+ Abb. B 4
17
.aF;u-$Q 4%
. Abb. 5 und 6
lich kleinen Querkraft Q, einer ebensolchen 6 P
unendlioh kleinen Biegungsmomente Ma und Q
gleiohnng M
achsialen Zusatzkraft 8, schlieDlich der beiden LA 7 2 %
Ma an den Enden, SO geniigt die Ausbiegung v Abb. 7 als Funktion der Absdsse x der Differential-
d' = - mit M= M. - Qe - P (v - v,) . E J
Ans der zweiten Beziehung folgt zunachst, wenn man P = 2 setzt, eine Gleichgewichts- bedingung (Mom en t e n g l e i c h u n g ) :
Ma - Ma = QZ + P ( ~ b - v,) . . . . . . . . (lo),
412 Zeitschrift far angewandte Mnthematik und Mechanik Band 3
die immer erliillt sein mu5. h r c h Integration unter Beriicksichtigung der Grenzbedin- gnngen gewinnt man, wie hier nicht nlher ausgefiihrt werden soll, die b e i d e n H a n p t - g le iohnngen des Problems, die sich mit den Abkarzungen
(11) E J ’ z sin 21 ssioz 21 * * . a *
P. 1 - C08 e 1 + GO8 21 2 B L - t (z)=- , s(z)=-----
wie folgt sohreiben lassen.
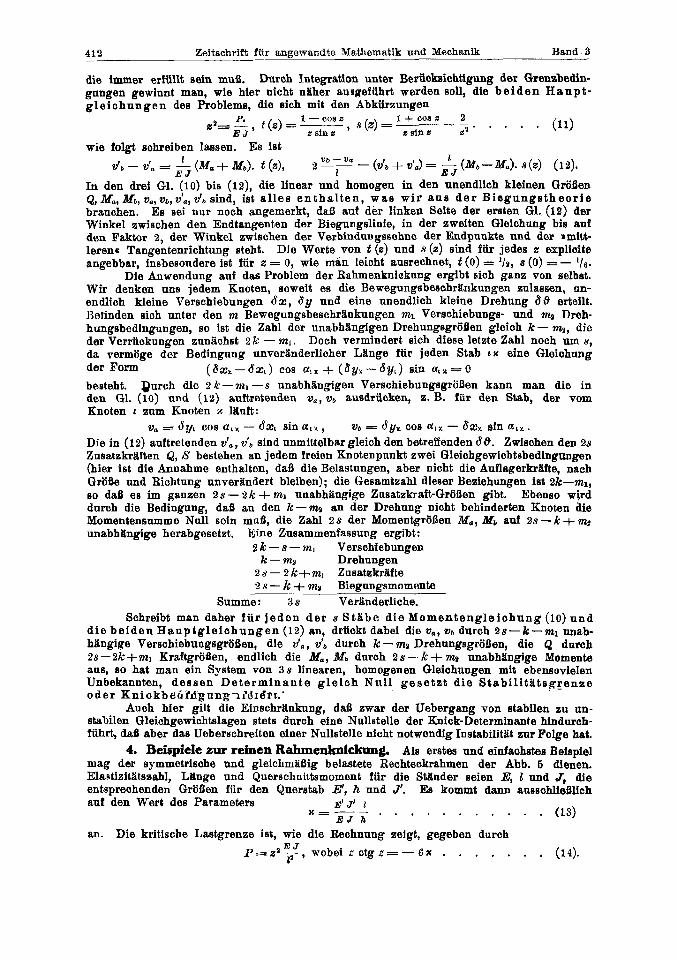
In den drei Q1. (10) bis (12), die linear und homogen in den nnendlich kleinen (froBen &,Ma, Ma, va,va, da, db sind, ist a l l e s e n t h a l t e n , was w i r a u s d e r Biegungetheor ie branahen. Es sei nur noch angemerkt, daB auf der linken Seite der ersten Gl. (12) der Winkel zwischen den Endtangenten der Biegungslinie, in der zweiten Qleichung bis anf den Faktor 2, der Winkel zwischen der Verbindungssehne der Endpnukte und der amitt- lerenc. Tangentenrichtung steht. Die Werte von t (2) und s (2) sind fiir jedes z explioite angebbar, insbesondere iet fiir z = 0, wie man leioht ansrechnet, t (0) = I / # , s (0) = - ‘Is.
Die Anwendung auf das Problem der Rahmenknickung ergibt sich ganz von selbet. Wir denken uns jedem Knoten, soweit es die Bewegun,osbesohr~nkungen znlassen, nn- endlich kleine Versohiebungen b x , 6 y nnd eine nnendlich kleine Drehung 84 erteilt. Befinden sich unter den m Bewegungsbeschrankungen ml Verschiebungs- und m:, Dreh- hungsbedingungen, so ist die Zahl der nnabhangigen DrehungsgrSlen gleich k - ma, die der Verriickungen zunachst 2k - ml. Docb vermindert sich diese letzte Zahl noch um S, da vermoge der Bedingung unvergnderlicher L h g e fur jeden Stab 6 % eine Gleichnng der Form ( s x , - b x t ) cos or,,+ (6yx--dyl) sin a , , = o bestebt. Qurch die 2 k - m, - s unabhiingigen VerscbiebungsgroDen kann man die in den Ul. (10) und (12) anftretenden v,, 2)b ausdriicken, B. B. fiir den Stab, der vom Knoten I zum Knoten x ltluft:
Die in (12) anftretenden da, v ’ ~ sind nnmittelbar gleich den betreffenden 64. Zwischen den 2.9 ZasatzkriLften Q, S bestehen an jedem freien Knotenpunkt zwei Qleiohgewichtabedingangen (hier ist die Annahme enthalten, da5 die Belastungen, aber nicht die Auflagerkretfte, nach GroBe und Richtnng nnvertindert bleiben); die Gesamtzahl dfeser Beziehungen ist 2k--ml, so dal es im genzen 2 s - 2k + mi nnabhtingige Zusatzkraft-QroSen gibt. Ebenso wkd dnroh die Bedingong, da0 an den k-m an der Drehung nicht behinderten Knoten hie Momentensnmme Null sein mu& die Zahl 2s der Momentgr66en Ma, &fb anf 2s-k+mma unabhbgige herabgesetzt. Eine Zusammenfassung ergibt:
Es ist I V b - V a 1
E J 1 E J db - v’a = - ( M a + Ma). t (z), 2 ~ - (v ’b + v’a) = - (Mb-MtZ). s(z) (12).
v, = byl cos a,, - ax, sin a,%, vb = byx COB c l l w - &ex sin a,, .
2 k - s - ml k-ma Drehungen
2 s - 2k+ml Zusatzkrtlfte 2 s - k + m4
Versohiebungen
Biegnngsmomente Summe: 3s Verfinderliche.
Schreibt man daher fur jeden der s Stetbe d ie Momentengle iohung (10) nnd d i e be iden H a u p t g l e i o h u n g e n (12) an, druckt dabei die va, v b dnrch zs-k-ml unab- hangige Verschiebungsgrijlen, die v‘. , v’b durch k - ma DrehnngsgrSben, die Q durch Ss-2k+ml KraftgrMen, endlich die Ma, i K b duroh 2s- k + m:, unabhetngige Momente ans, so hat man ein System von 38 linearen, homogenen Qleichnngen mit ebensovielen Unbekannten, dessen D e t e r m i n a n t e g l e i c h Nul l g e s e t z t die StiLbilitiLtsgrenze oder K n i c k b b u ~ g n n g ~ l d r 8 r c . ’
Auch hier gilt die Einschrtlnknng, d d zwar der Uebergang von etabilen zu un- stabilen Gleichgewichtslagen stet6 duroh eine Nullstelle der Knick-Determinante bhdnrch- fiihrt, da0 aber das Ueberschreiten einer Nullstelle nicht notwendig InstabilitBt zur Folge hat,
4. Beirpiele zur rehen Rahmenknickung. Als erstes und einfachstes Beispiel mag der symmetrisohe und gleichmti6ig belrtstete Rechteckrahmen der Abb. 5 dienen. Ela~tizitB;tszahl, Llnge nnd Querschnittsmoment fur die Stlnder mien E, I und J, die entsprechenden Cfr6len fur den Qnerstab El, h und J’. Es kommt dann ausechlie%lich ani den Wert des Parameters E’ J’ 1
E J h % = - - . . . . . . . . . . . (13)
an. Die kritische Lastgrenze ist, wie die Reohnnng zeigt, gegeben durch E J p = z = - Ia , wobei z otg z = - 6% . . . . . . . (14).
Heft 6 v. M i s e 8 , Ueber die Stabilitiltsprobleme der Elastinitgtetheorie 413
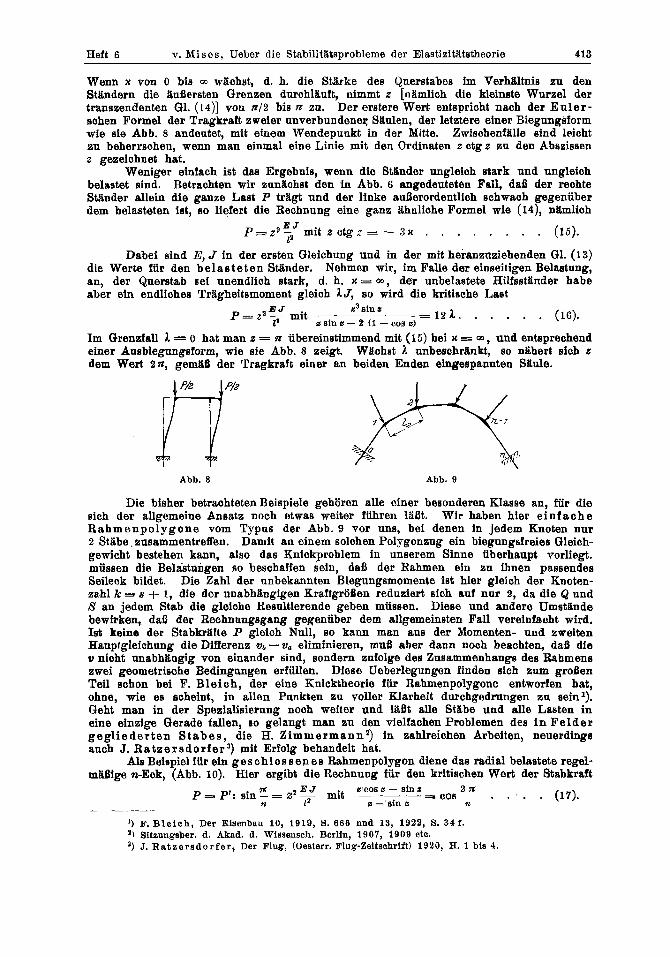
Wenn x von 0 bis 00 wiichst, d. h. die Starke des Querstabes im Verhllltnis zu den Standern die Budersten Grenzen durchllluft, nimmt z [namlich die kleinste Wurzel der tansZendenten Gl. (14)] von w / 2 bis Der erstere Wert entspricht nach der E u l e r - schen Formel der Tragkraft zweier unverbundeneq Sllulen, der letztere einer Biegungsforrn wie sie Abb. 8 andeutet, mit einem Wendepunkt in der Mitte. Zwischenflllle Mind leicht zu beherrschen, wenn man einmal eine Linie rnit den Ordinaten z otg z eu den Abszissen z gezeichnet hat.
Weniger eintach ist das Ergebnis, wenn die Stllnder ungleioh stark nnd ungleich belastet sind. Betrachten wir zunllchst den in Abb. 6 angedeuteten Fall, daO der reohte Stander Jlein die game Last P tragt und der linke aufhrordentlich schwaoh gegeniiber dem belasteten ist, so liefart die Rechnung eine ganz ahnliche Formel wie (14), ngmlich
zu.
E J P P = i - mit z ctgz = - 3 % . . . . . . .
Dabei sind E, J in der ersten aleichung and in der mit heranznziehenaen 01. (13) die Werte fur den be las te ten Stllnder. Nehmen wir, im Falle der einseitigen Belastung, an, der Qnerstab seI unendlich stark, d. h. x = Q,, der unbelastete Hiifsstander habe aber ein endliches Tragheitsmoment gleioh IJ, so wird die kritische Last
z3 s in z z sin z - 2 (1 - 00s d
p = z a c mit = 1 2 1 . . . . . . (16). 1s
Im Qrenzfall A = 0 hat man z = IC iibereinstimmend mit (15) bei x = m, und entspreohend einer Ausbiegnngsform, wie sie Abb. 8 migt. Wbhst unbeschrilnkt, so nllhert sich z dem Wert Zm, gernllB der Tragkraft einer an beiden Enden eingespannten Sllule.
Abb. 8 Abb. 9
Die bisher betraohteten Beispiele gehijren alle einer besonderen Klasse an, fur die sich der allgemeine Ansatz noch etwas weiter fiihren la&. Wir haben hier e i n f a c h e Rahmenpolygone vom Typus der Abb. 9 vor nns, bei denen in jedem Knoten nur 2 StPbe , zusammentreffen. Damit an einem solchen Polygonzug ein biegungsfreies Gleich- gewicht bestehen kann, also das Knickproblem in unserern Sinne iiberhaupt vorliegt. miissen die Belastnngen so besohaffen sein, daO der Rahmen ein en ihnen passendes Seileck bildet. Die Zahl der unbekannten Biegungsmomente ist hier gleich der Knoten- zahl k = s + 1, die der unabhhgigen Kraftgroflen rednziert sich auf nur a, da die Q und X an jedem Stab die gleiche Resultierende geben miissen. Diese und andere Umstande bewirken, daO der Rechnnngsgang gegeniiber dem allgemeineten Fall vereinfitcht wird. 1st keine der Stabkrllfte P gleioh Null, so kann man aus der Momenten- und zweiten Hauprgleichung die Difeerenz v b - v. eliminieren, mub aber denn noch beachten, daB die v nioht unabhllngig von einander sind, sondern zufolge des Zusammenhangs des Rahmens zwei geometrische Bedingungen erfiillen. Diese Ueberlegungen finden sich zum groden Teil sohon bei F. Bleich, der eine Knicktheorie fur Rahmenpolygone entworfen hat, ohne, wie es scheint, in allen Pnnkten zu voller Klarheit darcbgedrungen zu sein'). (feht man in der Spezialisierung nooh weiter und 1&6t alle StEtbe und alle Lasten in eine einzige Gerade fallen, RO gelangt man zu den vielfaohen Problemen des in F e l d e r gegl ieder ten S t a b e s , die H. Zimmermanna) in zahlreiohen Arbeiten, neuerdings auch J. R a t ~ e r s d o r f e r ~ ) mit Erfolg behandelt hat.
Als Bebpiel fiir ein gesohlossepes Rahmenpolygon diene das radial belastete regel- mildige n-Eck, (Abb. 10). Hier ergibt die Rechnung fiir den kritischen Wert der Stabkraft
') F. B l e i c h , Der Eisenbau 10, 1919, S. 666 nnd 13, 1922, S. 34 f. a) Sitzungsber. d. Akad. d. Wissensch. Berlin, 1907, 1909 etc. a) J. R a t z e r s d o r f e r , Der Flng, (Oesterr. Flug-Zeitschrift) 1920, H. 1 bia 4.
414 Zeitschrift fIir anaewandte Mathematilt und Mechanik Band 3
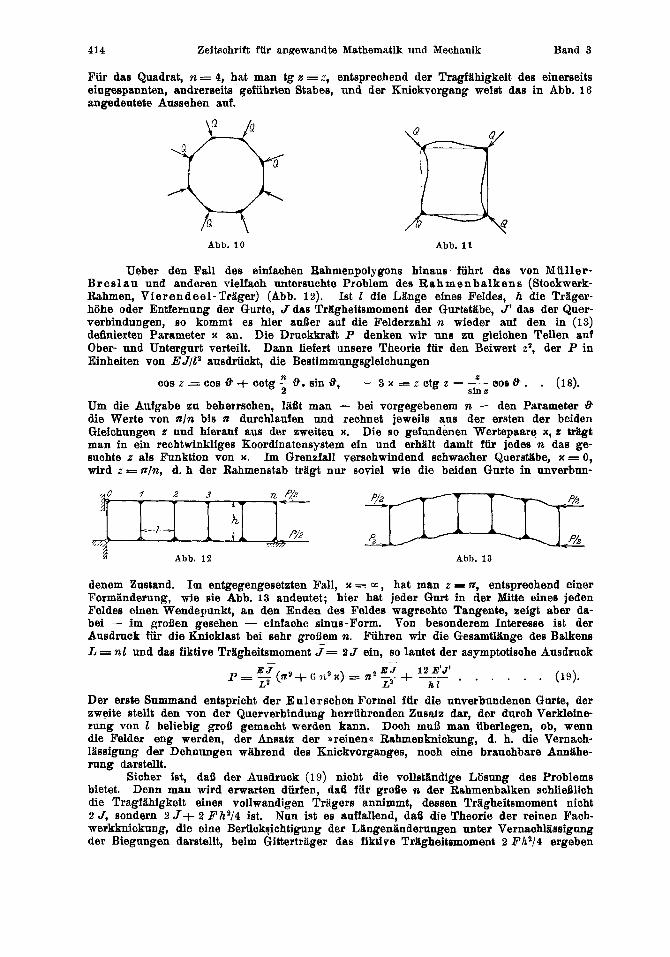
Fiir das Quadrat, n = 4, hat man tg z = 2, entsprechend der Tragfiihigkeit des einerseits eingespannten, andrerseits gefiihrten Stabes, und der Knickvorgang weist das in Abb. 16 angedeutete Aussehen auf.
Abb. 10 Abb. 11
Ueber den Fall des einfachen Rahmenpolygons hinaus riihrt das von Miiller- B r e s l a n und anderen vielfach untersuchte Problem des Rahmenbalkens (Stockwerk- Rahmen, Vierendeel-Trtiger) (Abb. 12). 1st 1 die Ltinge eines Feldes, h die Trtiger- hahe oder Entfernung der Gnrte, J d a e Tr&gheitsmoment der Qurtstlbe, J’ das der Quer- verbindungen, so kommt es hier auDer auf die Felderzahl n wieder ant den in (13) definierten Parameter x an. Die Druckkraft P denken wir nns zu gleichen Teilen auf Ober- nnd Untergurt verteilt. Dann liefert unsere Theorie fiir den Beiwert za, der P in Einheiten von EJ/P ausdriiokt, die Bestimmnngsgleichnngen
. (18). 00s z = COB 6 + octg 4. sin 6, - 3 x = z etg z - 5 00s 8. 2 S b 5
Um die Anfgabe zn beherrschen, lalt man - bei vorgegebenem n - den Parameter 8 die Werte von n/n bis II durchlanfen nnd rechnet jeweils aus der ersten der beiden Gleichungen z und hierauf aus dsr zweiten x. Die 80 gefundenen Wertepaare x , I trQt man in ein rechtwinkliges Koordinatensystem ein nnd erhiilt damit fiir jedes n das ge- suchte z als Funktion von x . Im Orenzfall verschwindend schwacher Querstllbe, x = 0, wird z = 12/12, d. h der Rahmenstab triigt nur soviel wie die beiden Gnrte in unverbun-
Abb. 12 Abb. 13
denem Znstand. Im entgegengesetzten Fall, x = 00, hat man z -- I, entsprechend einer Formiinderung, wie sie Abb. 13 andeutet; hier hat jeder Gurt in der Mitte eines jeden Feldes einen Wendepunkt, an den Enden des Feldes wagrechte Tangente, zeigt aber da- bei - im groijen gesehen - einfache sinus-Form. Von besonderem Interesse ist der Ausdruck fiir die Knicklast bei sehr groiiem n. Fuhren wir die Gesamtlhge des Balkens L = nl und das fiktive Trtigheitsmoment .?= 2 J ein, so lantet der asymptotieahe Ausdruck
- - E J 1EJ 1 2 B ’ J ’ La La h l
P = - ( ( n p + G n a x ) = m a - + __ . . . . Der erste Summand entspricht der Eulerschen Formel fi ir die unverbundenen Qnrte, der zweite stellt den von der Querverbindung herriihrenden Znsatz dar, der durch Verkleine- rung von 1 beliebig gro% gemacht werden kann. Doch muB man uberlegen, ob, wenn die Felder eng werden, der Ansatz der meinen<< Rahmenknicknng, d. h. die Vernach- liissigmg der Dehnnngen wiihrend des Knickvorganges, noch eine branchbare Anntihe- rung darstellt.
Sicher ist, da l der Ausdruck (19) nicht die vollsthdige Lijsnng des Problems bietet. Denn man wird erwarten diirfen, daS fur grole n der Rahmenbalken scblie%lich die Tragftihigkeit eines vollwandigen Tragers annimmt, dessen Triigheitsmoment nicht 2 J, soudern 2 J + 2 Fha/4 ist. Nun ist es auffabnd, dai3 die Theorie der reinen Fach- werklmicknng, die eine Beriicksichtignng der Liingenlndernngen nnter Vernachliissfgnng der Biegungen darstellt, beim Gittertrgger das fiktive Trggheitsmoment 2 Fh2/4 ergeben
416 Heft 6 v. Mises , Ueber die StabilitBtsprobleme der Elastizitatstheorie
hat, wilhrend wir jetzt, bei Beriicksiohtigung der Biegungsteifigkeit und Vernachliissignng der Dehnungen nur den andern Bestandteil 2 J auffinden. DemgemP0 mu5 man vermuten, daO eine Theorie, die sowohl die Liingenlnderangen wie die Biegungsteifigkeit in Rech- nung stellt, das vollstiindige Resultat liefern wird.
5. Mgemeine Sfabwerklcnfckung. En bedarf jetzt nnr einer kleinen Ergllnzung zu der oben ausgefiihrten Theorie der reinen Rahmenknickung. Wir fassen wieder das- selbe System von k Knoten und s Stiiben ins Auge, das etwa durch Abb. 4 dargestellt war. Die physikalisohen Voranssetznngen sollen nur dahin abgehdert werden, dai3 die Entfernung zweier Knotenpunkte, die durch einen Stab verbunden sind, nicht unveriinder- lich sein, sondern bei der unendlich kleinen Formiinderung wiihrend des Knickvorganges der Bedinguug
-
U b - U a = - S I . . . . . . . . . . (20) E F
geniigen soll. Dabei sind 'ub nnd u, die in Abb. 7 angedeuteten Verschiebungskompo- nenten der Endpunkte eines Stabes in der Stabrichtung. Die Biegnng denken wir uns der Dehnung unabhiingig iiberlagert. Untersucht wird wieder nnr die Stabilitat eines biegungsfreien Oleichgewlchtsznstandes, wobei wir die Stabkrilfte P fiir jeden Stab als gegeben ansehen. Die den P entsprechenden (endlichen) Liingeniindernngen sollen schon in der Angabe der Stabliingen I beriicksichtigt sein und ferner SOU erst nach Eintritt dieser LIngenllnderungen die Fixierung der Rahmenwinkel erfolgen (vergl. 6). Unter diesen Voranssetzungen gelingt die Aufstellung der Stabilitiitsbedingung sofort, wenn wir fiir jeden Stab a d e r der Momentengleichung (10) and den beiden Hauptgleichungen (12) auch die Dehnungsgleichung (20) anschreiben. Denn die Abztlhlung der unabhiiogigen Verilnderlichen, die wir oben vorgenommen haben, iindert sioh nur in e inem Punkt: da nicht mehr Unverlnderlichkeit der Stablllngen vorausgesetzt ist, sind die wa, vb, u., ' u b
duroh 2 k - rnl (atatt 2 k - s - ml) unabhangige VerschiebungsgrB5en ausdriickbar. Wir haben somit 4 s Gleichungen mit 4 s Variablen, und deren Koeffizienten - Determinante gleich Null gesetzt, liefert die Knickbedingung.
Wird eln oder der andere Stab als nndehnbar betrachtet, so hat mau f i i r ihn EF unendlich zu setzen oder, was auf dasselbe hinauskommt, u b - ua = 0 zu nehmen und die betreffende Dehnungsgleichnng (20) wegzulassen. 1st ein Stab an einen Knoten ge- lenkig angeschlossen, so fallen f i b ihn die drei G1. (10) und (12) fort, dafiir acheiden Q, Ma, Ma als Verllnderliche aus. Da5 auch die beiden v' wegfallen, vermindert nicht die Zahl der Variablen, solange jeder Knoten wenigstens zwei biegungssteife Anschliisse be- sizt. 1st das nicht mehr der Fall, so entspricht das Ausscheiden des 68 dem Umstand, da l das letzte M an jedem Knoten nicht zu den unabhtlngigen Verllnderlichen gehSrt. Bei ausnahmslos gelenkigen Verbindungen kommt man auf diem W e b zu dern Ansatz der reinen Fachwerkknicknng zuriick.
Zwei Beispiele mogen geniigen, nm die Ergebnisse der Untersuchung der allge- meinen Stabwerkknicknng zu erliiutern. Nehmen wir wieder den symmetrischen und aymmetrisch belasteten Rechteckrahmen der Abb. 5, so miissen wir, wie die Rechnung ergibt, jetzt au0er dem schon friiher verwendeten Parameter x ((31. (13)), der das Stiirke- verhiiltnis zwischen den Stiindern und dem Querstab zum Ausdrnck bringt, noch einen weiteren einfiihren:
ha
4 @ = J : P - . . . . . . . . . . . .
d. i. also das Verhilltnis des StInder-Trllgheitsmomentes .7 zu dem dnroh die Vereinigung der beiden Sthder entstehenden ZusatEglied Fh'/4. Fiir die Belastung an der Stabilitilts- grenze liefert die Rechnnng
E J ' 6 % P = e a - mit z c t g z = - ~ . . . 12 1 + 6 x g
Mit @ = 0 geht dies in die friihere G1. (14) uber und man ersieht daraus, da5 der Ansate der reinen Rahmenknickung mit Anniiherung dann zutrifft, wenn Fha groS gegen J, also der Abstand der Stiinder gro% gegen ihre Querschnittsabmessungen ist.
Von griiflerem Interesse ist das Problem des Rahmenbalkens mit n Feldern (Abb. 12). Die Knicklast hiingt, abgesehen von der Felderzahl n, wieder von den beiden Para- metern x und @ ab, Gl. (13) and (21), wobei die Gr6Den in (21) sich natiirlich auf die Gnrtstiibe beziehen. Fiihren wir jetzt als fiktives Triigheilsmoment, entsprechend den
416 Zeitschrift flir anmwandte Mathematik und Mechanik Band 3
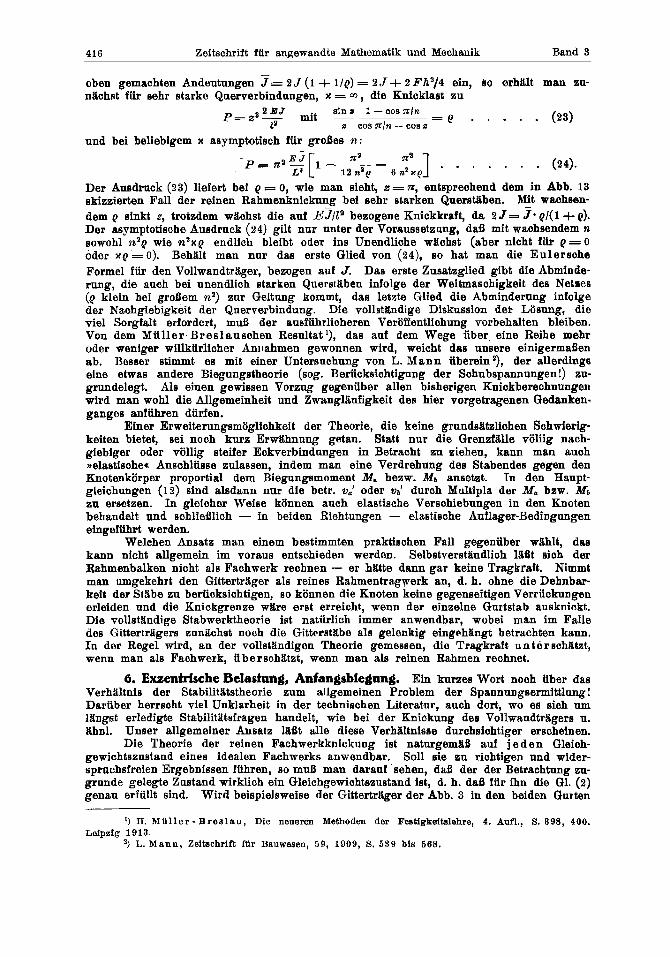
oben gemachten Andeutungen T= 2 J (1 + l /q) = 2 J+ 2 Fha/4 ein, 80 erhBlt man zu- nllchst fur sehr starke Qnerverbindungen, x = Q), die Knicklast BU
sins 1 - COB .n/n = Q . . . . . (23) 2 1 5 P = z a - - mit ~
La z COB n/?a - cog z
und bei beliebigem x asymptotisch fiir groBes n:
Der Ausdruck (23) liefert bei 4 = 0, wie man sieht, z = m, entapreohend dem in Abb. 13 skizzierten Fall der reinen Rahmenknickung bei sehr starken Querstiiben. Mit wachsen- dem e sinkt z, trotzdem wiiohst die aui E>Ila bezogene Knickkraft, da 2 1 - 5. e / ( l+ 4). Der asymptotische Ausdruck (24) gilt nur unter der Voraussetznng, dafi mit waohsendem n sowohl nap wie n a x e endlich bleibt oder ins Unendliche wlchst (aber nioht fiiF Q = 0 oder x e = O ) . Behat man nur das erste Glied von (24), so hat man die Eulersche Formel fiir den Vollwandtrager, bezogen auf J. Das erste Zusatzglied gibt die Abminde- mng, die auch bei unendlich starken QnerstELben infolge der Weitmasohigkeit des Neties (e klein bei groSem na) zur Qeltung kommt, das letzte Glied die Abmindemng infolge der Naohgiebigkeit der Qnerverbindung. Die volktllndige Diskuseion det Ldsnng, die viel Sorgfalt erfordert, mug der ausfuhrlicheren Ver6ff entlichung vorbehalten bleiben. Von dem Miiller Breslausohen Rasultat’), das auf dem Wege uber eine Reihe mehr oder weniger willkiirlioher Aniiahmen gewonnen wird, weicht dse unsere einigermalen ab. Besser etimmt es mit einer Untersuohung von L. Mann fiberein*), der allerdings eine etwas andere Biegungstheorie (sog. Beruckeiohtignng der Sohubspannungen!) zu- grundelegt. Als einen gewissen Vorzug gegenuber allen bisherigen Kniokberechnungen wird man wohl die Allgemeinheit und Zwanglllufigkeit des hier vorgetragenen Qedanken- ganges anfiihren diirfen.
Einer Erweiterungsmoglichkeit der Theorie, die keine grundsiltzlichen Schwierig- keiten bietet, sei nooh kurz Erwlhnung getan. Statt nur die Qrenzfalle valiig nach- giebiger oder viillig steifer Eckverbindnngen in Betracht zu ziehen, kann man such nelastisohea Anschliisse zulassen, indem man eine Verdrehung des Stabendes gegen den Knotenkiirper proportid aem Biegungsmcment M, bezw. Ma ansetzt. In den Hanpt- gleichungen (12) s h d alsdann nur die betr. v.) oder vb’ durch Multipla der Ma bzw. Ma zu ersetzen. In gleioher Weise k6nnen auch elastische Verschiebungen in den Knoten behandelt und SchlieDlioh - in beiden Riehtungen - elastische Auflager-Bedingungen eingefiihrt werden.
Welchen Ansatz man einem bestimmten praktischen Fall gegeniiber wllhlt, dae kann nicht allgemein im voraus entschieden werden. Selbstverstiindlich lB6t sich der Rahmenbalken nicht a le Fachwerk rechnen - er hlitte dann gar keine Tragkraft. Nimmt man umgekehrt den Qittertrager als reines Rahmentragwerk an, d. h. ohne die Debnbar- keit der StLbe zu beriicksichtigen, 80 BSnnen die Knoten keine gegenseitigen Verruckungen erleiden und die Knickgrenze wlire erst erreicht, wenn der einzelne Gurtstab auskniokt. Die vollstiindige Stsbwerktheorie ist natiirlich immer anwendbar, wobei man im Falle des Gittertriigers zuniichst noch die GitterstBbe als gelenkig eingshBngt betrachten kann. 10 der Regel wird, an der vollstandigen Theorie gemessen, die Tragkraft u n t e r schltzt, wenn man als Fachwerk, uberschatzt, wenn man als reinen Bahmen rechnet.
6. Exzentrische Belastung, Anfangsbiegung. Ein kurzes Wort noch uber das Verhaltnis der StabilitBtstheorie zum allgemeinen Problem der Spannungsermittlung ! Daruber herrscht viel Unklarheit in der technischen Literatur, auch dort, wo es sich um ILlngst erledigte StabilitBtsfragen handelt, wie bei der Knickung des Vollwaudtrtigers n. $ibnl. Unser allgemeiner Ansatz ll3t alle diese Verhllltnisse durchsichtiger erscheinen.
Die Theorie der reinen Fachwerkkniokung ist naturgem8S auf j e d en Qleioh- gewichtszustand eines idealen Fachwerks anwendbar., Soll sie zu riohtigen nnd wider- sprnchsfreien Ergebnissen fuhren, so muB man darauf sehen, dab der der Betrachtnng zn- grunde gelegte Zustand wirklich ein Gleichgewiohtszustand ist, d. h. da3 fur ihu die Ql. (2) genan erfullt sind. Wird beispielsweise der Gittertriiger der Abb. 3 in den beiden Qurten
H. Mt l l le r - Breslau, Die neneren Methoden der Festigkeftslehre, 4. Aufl., 5. 898, 400. Lefpzig 1913.
a) L. Mann, Zeitachrift fllr Bauweeen, 59, 1909, 8. 539 bis 568.
Heft 6 v. M i se s, Ueber die StabilitSltsprohleme der Elastixitiltstheorie 41 7
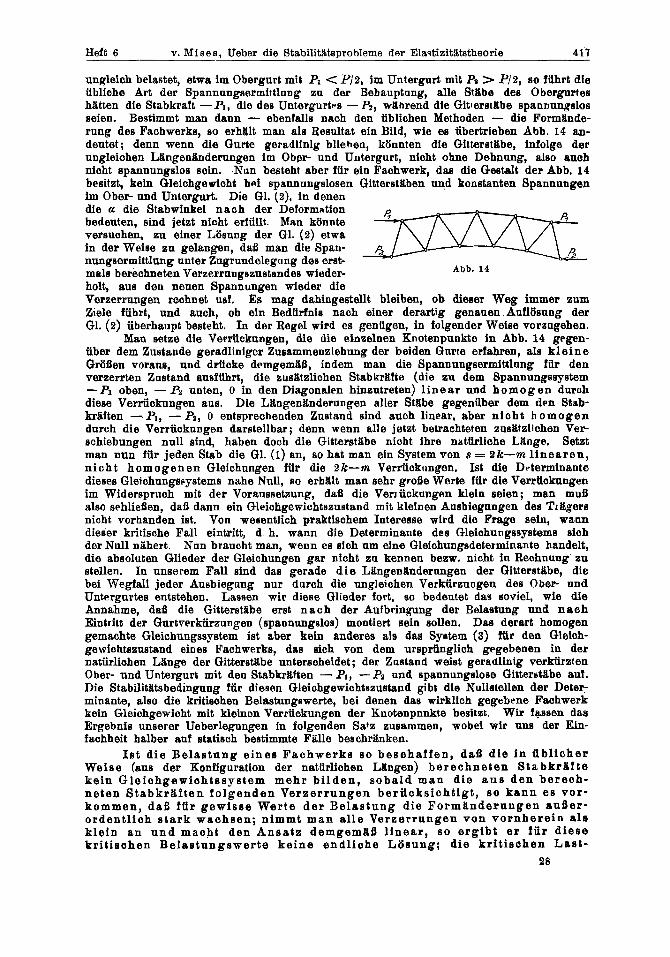
ungleich belastet, etwa im Obergurt mit PI < P/Z, im Untergurt mit PS > Pl2, so fhhrt die ubliche Art der Spannongserrnittlung zu der Bebauptung, alle Stllbe des Obergurtes hatten die Stabkraft - P I , die des Untergurtps - Pa, wllhrend die Gitlerstllbe spannungslos seien. Bestimmt man d a m - ebenfalls nach den ublichen Methoden - die Formtlnde- rung des Fachwerks, so erhlllt man ale Resultat ein Bild, wie es abertrieben Abb. 14 an- deutet; denn wenn die Cfurte geradlinig bliehen, kdnnten die Gitterstllbe, infolge der ungleichen Lllngentlnderungen im Obgr- und Untergurt, nicht ohne Dehnnng, also anch nicht spannungslos sein. Nun besteht aber fur ein Fachwerk, das die Qeetalt der Abb. 14 besitzt, kein Oleichgewicht b d spaunungslosen Gitterstllben und konstanten Spannungen im Ober- und Untergurt. Die Gl. (Z), in denen die a die Stabwinkel nach der Deformation bedeuten, sind jetzt nicht erfiillt. Man kiinnte versuchen, zu einer Losung der G1. (2) etwa in der Weise zu gelangen, da3 man die Span- nungsermittlnng unter Zugrundelegtmg dee erst- mals berechneten Verzerrungszustandes wieder- holt, aus den neuen Spannungen wieder die Verzerrungen rechnet us!. Es mag dahingestellt bleiben, ob dieser Weg immer zum Ziele fubrt, und auch, ob ein Bediirfnis nach einer derartig genauen Aufltisung der Gl. (2) uberhaupt besteht. In der Regel wird es genugen, in folgender Weise vorzugehen.
Man setze die Verriickungen, die die einzelnen Knotenpunkte in Abb. 14 grgen- uber dem Zustande geradliniger Zusammenziehung der beiden Qurte erfahren, als k l e i n e Gr6Den voraus, und drucke d~mgernal, indem man die Spannungsermittlung far den verzerrten Zustand ausfiihrt, die zustitzlichen Stab krtifte (die zu dem Spannungssystem -PI oben, -Pa unten, 0 in den Diagonalen hinzutreten) l i n e a r und homogen durch diem Verriickungen aus. Die Lllngenfnderungen aller Stllbe gegeniiber dem den Stab- kraften - PI, - Pp, 0 entsprechenden Zustand sind anch linear, aber nicht h omogen dnrch die Verriickungen darstellbar; denn wenn alle jetzt betrachteten zasltzlichen Ver- schiebnngen null sind, haben doch die Gitterstabe niaht ihre nlrtiirliche Lllnge. Setzt man nun fiir jeden Stab die Gl. (1) an, so hat man ein System von s = 2k-m l i n e a r e n , nioht homogenen Gleichungen fur die 2k-m Verriickungen. 1st die Drterminante dieses Gleichungssystems nahe Null, so erhltlt man sehr gro0e Werte ftir die Verrfickungen im Widerspruch mit der Voraussetzung, da% die Venuckungen klein seien; man muB also sehlieden, da0 dann ein aleichgewichtszustand mit kleinen Ausbiegungen des Ti llgers nicht vorhanden ist. Von wesentlich praktischem Interesse wird die Frage sein, wann dieser kritische Fall eintritt, d h. wann die Determinante des Gleichungssystems sich der Null nahert. Nun braucht man, wenn es sich um eine Gleichungsdeterminante handelt, die absoluten Glieder der Gleichungen gar nicht zu kennen bezw. nicht in Rechnung 5u stellen. In unserem Fall sind das gerade d i e Ltlngenllnderungen der Gittersttibe, die bei Wegfall jeder Ausbiegung nur durch die ungleichen Verkurzuogen des Ober- nnd Untergurtes entstehen. Laesen wir diem Glieder fort, so bedeutet das soviel, wie die Annahme, da% die Gittersttlbe erst n a c h der Aufbringung der Belastung und n a c h Eintritt der Gnrtverkiirzungen (spaonungslos) montiert sein sollen. Dee derart homogen gemachte Gleichungssystem ist aber kein anderes ale das System (3) fiir den (fleich- gewichtszustand eioes Fachwerks, das sich von dem ursprfinglich gegebenen in der natiirliohen Lange der Gitterstllbe unterscheidet ; der Zustand weist geradlinig verkiirzten Ober- und Untergurt mit den Stabkrlften - A, - Py und spannungslose Gitterattibe aut. Die Stabilittltsbedingung fiir diesen O18ichgewichtezustand gi bt die Nullstellen der Deter- minante, also die kritisahen Belastungswerte, bei denen das wirklich gegebene Fachwerk kein Gleichgewicht mit kleinen Verriickungen der Kuotenpnnkte besitzt. Wir !+seen das Ergebnis unserer Ueberlemngen in folgenden Satz zusammen, wobei wir uns der Ein- fachheit halber anf statisoh bestimmte Ftllle beschrilnken.
1s t d i e B e l a s t u n g eines F a c h w e r k s so besehaf fen , da0 die i n i ib l icher Weise (am der Konfiguration der naturlichen Lllngen) berechneten S t a bkrtlfte kein Gle ichgewichtssys tem mehr b i l d e n , soba ld m a n die aus d e n berech- ne ten S tabkr t i f ten fo lgenden Verzer rungen b e r a c k s i o h t i g t , so k a n n 8 s vor- kommen, dab f u r gewisee Werte de r B e l a s t u n g die F o r m f n d e r u n g e n a u % e r - ordent l ich s t a r k wachsen; nimmt m a n a l l e Verzerrungen von vornherein a h klein a n und macht den A n s a t z demgemltf3 l i n e a r , so e r g i b t er filr d i m e kr i t i schen Belas tungswer te k e i n e endl iohe L a s u n g ; d ie kr i t i schen Las t -
5-2 Abb. 1 4
28
418 Zeitschrift itir angewandte Mathematik und Mechanik Band 3
werte eind dabei ident isch mit de r S tab i l i t l t sg renze fiir e inen Gleich- gewichtszustand, den man mit den ursprungl ich bereohneten S t a b k r i i t e n dadurch bildet, d a l man die nat i i r l ichen Stab lgngen d e s gegebenen Fach- werkes passend a b i n d e r t .
In jedem konkreten Falle gibt BE versohiedene Miiglichkeiten, den Gleichgewichts- instand an definieren, dessen Stabilitgtsgrenze die kritischen Belaetungen fiir dae gegebene Fachwerk liefert. Bei dem mit PI und Pa belasteten Gittertrgger kann man entweder, wie oben, annehmen, die Ltlngen der Gittersttlbe mien erst naoh der Verkurzung der Gurte festgestellt worden, oder die Gurtstlbe hgtten vor Aufbringen der Belastung oben und unten verschiedene LIngen gehabt. Das Resnltat mu5 bei beiden Annahmen rnit der Anntihernng ubereinstimmen, mit der die elastischen Dehnungen den nrspriinglichen Ltlngen gegeniiber vernachltlssigt werden kSnnen.
AuSer der Kenntnis der kritischen Belastnngswerte wird mitunter auch die genauere Spannungsermittlung, unter Beriicksichtigung der Formltnderungen, gefordert werden'). Sie wird geleistet dnrch die Auflisung des oben angegebenen nicht-homogenen linearen Cfteicbungsaysteme, dessen Determinante gleich Null gesetit, die kritisohen Werte ltefert; die Qleichungen selbst Bind wesentlich unsere Q1. (3), nur da5 beim Einseteen der da anf die absoluten, von den ax, b y unabhtlngigen Qlieder eu achten ist. Die ganze Rechnung entspricht im Falle des Vollwandtrtlgers der iiblichen Berechnung *auf ex- zentrisohen Drucke unter Benutzung der linearen Biegungsgleichung. Die vollstlndfge LSsung" des (Xleirhungssystems (2), wie wir sie znerst andenteten, wiirde der Benutzung der genanen Difterentialgleichung der Biegung entsprechen. DaI der N&hernngsweg in der Regel ausreichende Ergebnisse liefert, liegt daran, dal man es rnit Materialien von grofler Elassieitiitseahl E zu tun hat, bei denen unter normalen Verh<nissen zn end- lichen Krlften sehr kleine FormSinderungen gehiiren.
A d Rahmentragwerke sind die vorstehenden Ueberlegungen einngernllfl en iiber- tragen. Dabei beschrlnken wir nns nach wie vor aai Belastnngen, die in gewisaem Sinn biegungsfreien ~leichgewichtsznstlnden entsprechen. Eln Beispiel hierzn ist der oben in 4 besprochene Rechteokrahmen mit einseitiger Belastmg, Abb. 6. Wir kiinnen gleich den allgemeinen Satz formnlieren:
1st ein Rahmentragwerk de ra r t belastet , dad ein biegnngsfreier Qleiohgewiohtezustand dann und nur dann mtiglich ist , wenn von den L ingengnderungen der Sttlbe abgeeehen wird, so t r i t t e in Qleichgewicht mit Ansbiegungen ein nnd d iese kBnnen bei best immten Belastnngswerten au le ro rden t l i ch s t a rk wachsen; d ie kr i t i sohen Belastnngen s ind ident i sch mit de r Stabi l i t t l tsgrenze fiir den biegnngefreien Zus tand , den man dnrch Au I e r a oh t 1 a s s n n g d er L tln g e n l n d e r un g e n e r h l 1 t. Bei den Vernachllssigungen, von denen hier die Red8 ist, handelt 8s sich, anders als in 3, nm die Dehnungen oder Verkiirzungen, welche von den ursprhglioh berechneten, endlichen Stabkrlften herriihren und nicht um die beim Kniokvorgang auftretenden, verschwindend kletnen Lltngen- inderungen. Dal man praktisoh rnit dem ausgeeprochenen Satz etwas anlangen kann, liegt wieder nnr an der in der Regel bedeatenden GrSBe der Elastizitltszahl E.
1. Die so&. Eindeutigkeif des elastlschen Gleich&ewichter. G. Kirchhof t hat im Jahre 1859 einen seither in alle Darstellungen der Elastizittltstheorie fiber- gegangenen Satz aufgestellt, den er eelbst in Kiirze dahin ausspricht: nDa8 Cfleich- gewichtsproblem (des elastisohen Kiirpers) hat nur e in e Losung.<< 3. Gemeint ist, daI unter der Voraussetzung scg. nkleinera Formlnderungen ein einfach eusammenhtlngender elastisober Kiirper sich nur in einem bestimmten Spannnngs- und Zerrungszustand im Qleichgewicht befinden kann. Gewi5 war es weder Kir chhoff noch seinen Naohfolgern unbekannt, da% in dem schon von En le r behandelten Fall der auf Druck beanspruohten Sgule bei geniigender QroEe der Last zwei verschiedene Gleichgewichtszustinde neben- einander bestehen, der der biegungsfreien Znsammendriiokung und der der sinusformigen Ausbiegung. Um den Widerspruch m beseitigen, pflegt man zweierlei anszufiihren, zn- nlchst, da5 der zweite Qleicbgewiohtsznstand der Slnle )) endliohec Versohiebungen auf- weise, gegeniiber den mnendlich kleinene, welche die Elastlzittltstheorie vorauseetzt. Dazu iet zu sagen, da5, wenn die Belastung der Sinle den Wert der Eulerechen Knick-
~~
') Vergl. H. Mti l ler-Brealan, Der Bsuingenieur, 4, 1923, 9. 2 bis 9. ') G. R i r o h h o f f , Vorles. lib. mathem. Physik, Mechanik. 3. Aufl. Leipzig 1 8 8 3 9. 3 8 8 .
Heft 6 v. Mi 8 8 8 , Ueber die StabilitStsprobleme der Elaatizitlltetheorie 419
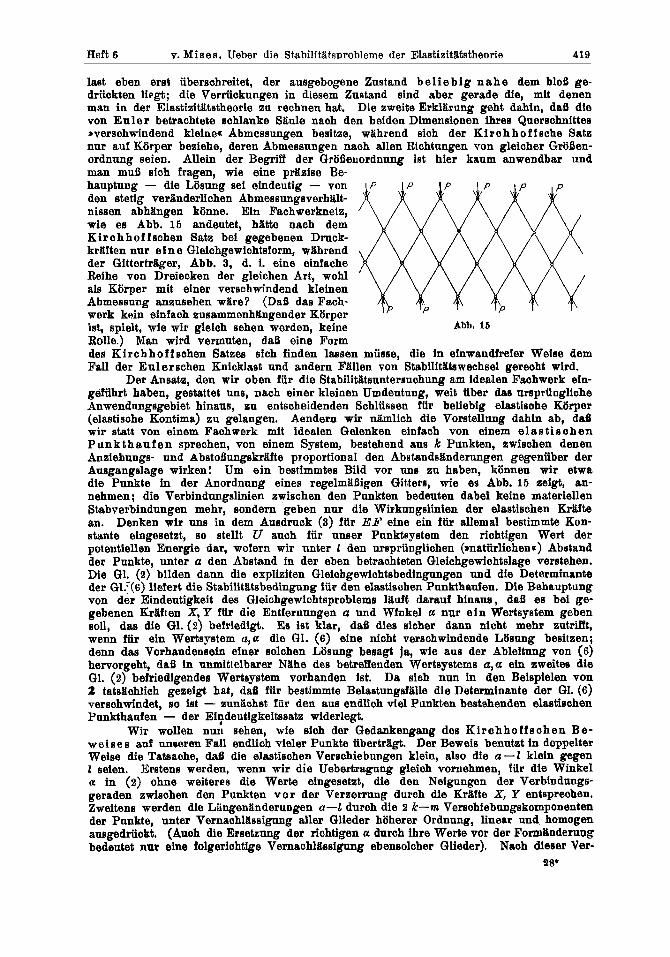
last eben erst ubersohreitet, der ausgebogene Zustand be l ieb ig n a h e dem bloB ge- driiokten liegt; die Verriiokungen in diesem Zustand sind aber gerade die, mit denen man in der ElastizitiLtstheorie zu rechnen hat. Die zweite Erklirung geht dahin, da0 die von Eu le r betrachtete eohlauke Sfule naoh den beiden Dimensionen ihres Quersohnittes verschwindend kleinea Abmessungen besitze, wtlhrend sich der Kiroh hoff sche Satz nur auf Kiirper beeiehe, deren Abmessungen naoh allen Riohtungen von gleicher QroSen- ordnnng mien. Allein der Begrife der Qriibenordnung ist hier kaum anwendbar und man muf3 sich fragen, wie eine prllzise Be- hauptung - die Lbsung sei eindeutig - von den etetig vertlnderlichen Abmessungsverhitlt- nissen abhingen kiinne. Ein Faohwerknetz, wie es Abb. 15 andeutet, htltte naoh dem Kirohhof feohen Satz bei gegebenen Druck- kritften nur ein e Gleiohgewiohtsform, wtlhrend der Gittertritger, Abb. 3, d. i. eine einfache Reihe von Dreieoken der gleichen Art, wohl als Kijrper mit einer verschwindend kleinen Abmessung anznsehen wfre? (Da0 das Fach- werk kein einfach eusammenhllngender Kiirper
Rolle.) Man wird vermnten, da6 eine Form des Kirohhoffsohen Satzes sioh finden lassen muase, die in einwandfreier Weise dem Fall der Euler echen Knicklast und andern Flillen von StabilitEltawechsel gereoht wird.
Der Ansatz, den wir oben far die StabilitBtsuntersuohung am idealen Fsohwerk ein- gdfiihrt haben, feetattet une, naoh einer kleinen Umdeutnng, weit iiber das urspriiogliohe Anwendnngsgebiet hinaus, zu entsoheidenden Schliissen fur beliebig elastisohe Kirper (elastisohe Kontima) zu gelangen. Aendern wir nlimlioh die Voratellung dahin ab, daB wir statt von einem Faohwerk d t idealen Gelenken einfaoh von einem elaEtiEOh8n Punk thauf en sprechen, von einem System, bestehend aus k Punkten, zwisohen denen heiebungs- nnd Abstohngskrtlfte proportional den Abstandsfnderungeu gegeniiber der Ausgangslage wirken! Um ein bestimmtes Bild vor uns zu haben, kbnneu wir etwa die Punkte in der Anordnung eines regelmtlI3ige.n Qitters, wie 0s Abb. 1 6 zeigt, an- nehmen; die Verbindungsliden zwisohen den Punkten bedeuten dabei keine materiellen Stabverbindungen mehr, sondern geben nur die Wirknngslinien der elastisohen Krifte an. Denken wir WE in dem Ausdruok (3) fiir EF eine ein fiir allemal bestimmte Kon- stante eingesetzt, so stellt u auoh fiir nnser Pnnkteystem den richtigen Wert der potentiellen Energie dar, wotern wir unter I den urspriingliohen (wnatiirlichena) Abetand der Punkte, unter u den Abetand in der eben betraohteten Qleiohgewiohtslage verstehen. Die Q1. (2) bilden daun die expliziten Gleiohgewichtsbedingungen nnd die Determinante der Q1.:(6) liefert die Stabilitftsbedigung fur den elastisohen Punkthaufen. Die Behauptung von der Eindeutigkeit des Qleichgewiohtsproblems lit& darauf hinaus, dafJ 8 s bei ge- gebenen Krfften X,Y fur die Entfernungen u und Winkel a nur ein Wertsystem geben 8011, das die Ql. (2) befriedigt. EE ist klar, dab dies sicher dann nicht mehr zutrifft, wenn fur ein Wertsystem a,a die Q1. (6) eine nioht versohwindende L6sung beeilzen; denn das Vorhandeneein einer solohen LBsung beeagt ja, wie &us der Ableitnng von (6) hervorgeht, dal in nnmitlelbarer Nfhe des betreffenden Wertsystems a, a ein zweites dle 01. (2) befrieagendes Wertsystem vorhanden ist. Da sioh nun in den Beispielen von 2 tatsgohlich gezeigt hat, daB f ir bestimmte Belastungsfflle die Determinante der Ql. (6) versohdndet, so ist - zunLoh8t fur den am endlich vie1 Punkten bestehenden elastisohen Punkthanfen - der Ei9deutigkeitssatz widerlegt.
Wir wollen nun sehen, wie sioh der Gtedankengang des Kirohhoifsohen Be- weises a d uneeren Fall endlich vieler Punkte iibertrfgt. Der Beweis benutzt in doppelter Weise die Tatsache, dal die elastieohen Versohiebungen klein, also die a - 1 klein gegen 7, mien. Erstens werden, wenn wir die Uebertragung gleioh vornehmen, fur die Winkel a in (2) ohne weiteres die Werte eingesetrt, die den Neigungen der Verbindangs- geraden zwisohen den Punkten vor der Verzerrung duroh die Krtltte X, Y entspreohen. Zweitene werden die L8ngenfnderungen a--l duroh die 2 k--m Vereohiebungskomponenten der Pnnkte, unter Vernachlllesignng aller Qlbder hiiherer Ordnung, linear und homogen auegedriiokt. (Auoh die Ersetznng der riohtigen a duroh ihre Werte vor der FormElnderaog bedeutet nur eine folgeriohtige Vernachlllssigang ebensoloher Qlieder). Naoh dieeer Ver-
28,
ist, spielt, wie wir gleich when werden, keine Abb, 15
420 Zeitschrift fur angewandte Mathematik und Mechanik Band 3
einfaohung stellt (2) ein System l inearer , nicht homogener Gleichnngen dar, dessen Liisung, wenn sie fur beliebige X, Y uberhaupt miiglich ist, gewiJ3 eindeutig sein mu%. Unmoglichkeit der allgemeinen LSsuug beeteht nur in dem sog. .Ausnahmefalla der Fach- werktheorie, der in keinem der Beispiele von 2 vorllegt und den wir rnit Sicherheit ans- echlie%en, wenn wir ein regelmHi3iges Punktgitter wie Abb. 15 voraussetzen. Also haben die 01. (2) immer eine und nur eine Lasung! Bpi Kirohhoff sieht die Sache nur deshalb etwas anders aus, weil im Falle des Kontinuums die linear gemachten Qleioh- gewichtsbedingungen ein System linearer pa r t i e l le r Di f fe r en t i a lg le ic hunge n fIir die Verschiebungskomponenten bilden. Von allem nebensachlichen Beiwerk entkleidet, liegt folgender FehlschlaD vor uns. Es wird bewiesen: Wenn man die #leichgewiohtsbedin- gungen durch Vernachlgssigung hiiherer Potenzen der Verschiebnngen zu linearen Glei- chnngen macht, so haben diese immer eine und nur eine Liisung. Das aber, was zu beweisen wPre, wenn man die 5Eindeutigkeit des elastieohen Qleichgewichtsproblemes~( rnit Recht behaupten wollte, ist: Wenn man die Gleiohgewichtebedingungen in der ge- nannten Weise zn linearen Gleichungen macht, 6 0 geht dabe i ke ine Liisnng d e r ursprungl ich nicht l inearen Qleichungen verloren. Da6 dieeer Beweis 6iCh nioht erbriogen l l l t , geht aus den Beispielen, in denen das Vorhandeneein einer Stabili- ttttsgrenze sich pezeigt hat, hervor. Im ubrigen ist die Behandlungsweise, die Kirohhoff den elastisohen Gleiohge~ohtsbedingungen zuteil werden la&, inhaltlioh ubereinstimmend mit dem, wan man - viillig mit Reoht - bei der ublichen Facbwerkberechnnng immer tut, wobei man ia auch zn einer eindeutigeo L h n g des Spannungsprobleme gelangt. Aber so berechtigt das Vorgehen an eeinem Platze auoh ist, darf man nioht Sohlusse daraus eiehen, fur die seine Grundlagen nicht ausreichen.
Ragen wir uns nun, welches der offenbar vorhandene richtige Kern in dem Kirchhoftschen Satz ist und suchen wir eine widerspmchsfrele Aussage iiber Ein- oder Mehrdentigkeit dee Gleiohgewichtsproblems en finden, so muasen wir vor allem auf un- bestimmte Nllherungsbegriffe wie skleingu Versohiebungen, *gro%ea; Elastizitattszahlen, verziohten. Zunlchst erkennt man, daS der matiirlichea oder krgt tefreie Gleioh- gewichtszustand unseres Punkthanfens ein s t ab i l e r zustand ist. Denn wenn alle X, Y verschwinden, kann U nach (3) niemals negativ werden, also stellt der Wert U = 0, den das Potential f i i r a I I erreicht, wirklioh ein Minimum dar. Nun wissen wir weiter, dal unstabile Zustande von stabilen immer dnrch Nullstellen der Determinante von (6) getrenut werden. Denken wir uns, wie schon am SohlnD von 1 angedeutet, die ilu0eren Be- lastangen X, Y bis aut einen gemeinsamen Multiplikator 1 gegeben uud dieses 1 alle poeitiven nnd negativen Werte durchlaufend. Setzen wir die Knickgleiohung an, d. h. die Determinante von (6) gleich Null, so enthalt diese Gleichung den Parameter 1, weil die a-Z, die in (6) auftreten, ebenso wie die a, von den ttuDeren Krsltten abhilngen. Diese Qleiohung wird nun fu r b = 0 nicht erful l t : das ist der Hauptteil dessen, was an dem Kirchhoffschen Satz uberhaupt zu retten ist. Ware 1 = 0 eine Wurzel der Knickgleiohung, so kSnnte nioht das Potential 27, was eben festgestellt wurde, an dieeer Stelle ein wirkliches Minimum besitzen. Wir kSnnen nun weiter schlieben: Wenn die Gleichung rnit I = 0 nicht erfiillt wird, so gibt 013 eine Wurzel 1, vom kleinsten absoluten Betrag und fur alle L-WerrLe, die kleiner ale & sind, ist das Gleichgewioht stabil. So gelangen wir zu folgendem Ergebnis, das den riohtigen Teil der Kirchhoff- sohen Auesage einschliedt und gleichzeilig der Maglichkeit des Stabilitatsweohsels, der Verzweigungsstellen, Rechnung trilgt.
Sind die Belastungen, die an dem elast isohen Pnnktsystem angre i fen , nnr bis auf e inen Zahlenfaktor 1 gegeben , 6 0 gib t e s einen von Null ver- sohiedenen Bet rag 10 (der auch m sein kann), 6 0 d a l fu r a l le 1-Werte, die absolu t genommen k le ine r a l s 2.0 sind, e indeut ige, s tab j le Qleichgewichts- l agen beatehen, d i e sioh, wenn 1 gegen Null geht , stetig' an den na tur l ichen Zuetand ansohliei3en; fur 1-Werte , die uber 10 l iegen, kann . dae Gleich- gewiohteproblem mehrere Losungen besitzen.
Es ist anschaulich klar, da l der Wert der kritischen Grenze lo von der Gestalt den Kiirpers, der Art der Belastung nnd der QriiBe der Eiastizit%tszahl in der Weis abhllngen wird, da% schlankeren Korpern und griihrer H3irte kleinere l o entsprechen nst. Bedenkt man, da5 die in der Natur vorkommenden Stoffe alle nur begrenzt elastisch sind, d. h. bei Anwaohsen der Spannungen in den FlieEzustand geraten oder zu Bruoh gehen, so versteht man, wie es niSglich war, den Eindeutigkeitssata far KBrper von wllseits gleichen Dimensioneue nnd .grofler. ElastizitPtszahl fiir wahr anzunehmen. Unsere ver-
Heft 6 v. M i 888, Ueber die Stabilitstsprobleme der Elastizitiitstheorie 421
vollst&ndigte Formulierung hat denn auch weniger praktiache Folgernngen a16 begriffliehe 3ltlrung zum Ziele.
Die letzten Betrachtungen waren an ein mechanisches System angeknupft ;worden, das aus einer endlichen Anzahl in elastisoher Wechselwirkung befindlicher Pankie be- steht. Es bleibt noch iibrig, zu zeigen, dai3 die von uns gezogenen Schlusee auch fiir beliebige, kontinuierlich ausgedehnte elastisohe Korper Geltung behalten. Nun kann man znntlchst, wenn wir, wie bisher, von einem Dreieckanetz (im Baum TetraGdernetz) nach Abb. 15 ausgehen, die Maschenweite des Gitters mehr und mehr verkleinern, dabei die Punktezahl k entspreohend vergroaern. Geht man zur Grenze uber, 80 nimmt der erste, elastisohe Teil des Potentials LT die Form eines uber den ganzen Ktirper eretreckten Raumintegrals an und aus dem einfachen Minimumproblem, das die Gleicbgewichtsbe. dingangen lieferte, wird ein Variationsproblem. Die G1. (2) werden zu Differential- gleichungen und die Gl. (16) entsprechen der zweiten Variation des Integrals U. Es kann hier dahingestellt bleiben, ob man auf diesem Wege, d. b. ohne Einftihrung anderer Krllfte ah der in den Verblndungsgeraden der Einzelpunkte wirkenden, wirklich zu den Anslitmen gelangt, die man far die Untersuchung elastisoher K6rper zn verwenden pflegt. Sicher ist, dafl die ftir unsere SchluiJfolgerungen entscheidenden Eigenechaften von U: bei Abwesenheit von gufleren Krtlften nur positiver Werte fghhlg zn sein und dabei den Charakter einer positiven qoadratischen Form anfzuweisen - bei ieder Art von Ansate fur einfach zueammenhtlngende elastisohe Kontinua vorhanden sein milesen. Man weii3 auch heute, dai3 der Uebergitng vom algebraisohen Problem mit endlich vielen Verander- lichen zu dem tranezendenten mit unendlich vielen Freiheitsgraden in aller Strenge aue- gefiihrt werden kann und bei Beschrtlnkung auf die phyaikalisuh zulElssige Allgemeinheit zu den erwarteten Ergebnissen fuhrt. Wenn wir oben in unseren Beispielen dee Cfitter- triigers und Rahmenbalkens gesehen haben, wie unnere Stabilittltebediogang bei dichter werdendem Maschennetz in die Eulersche Formel iibergeht, 5 0 loBert sich darin nur eine, im ganzen Verlauf der Rechnung zu verfolgende, besondere Dnrchftihrnng eines derartigen Grenzubergangee. Wir diirfen somit schliekn: Der oben fur das elastieche PunktGstem ~ n s g e s p ~ c h & Satz gilt a u c h fur jeden be l ieb igen e las t i schen KGrper, der bei Abwesenhei t tlui3erer Belastungen e inen e tndeut ig best immten wnatiirlichena Zustand besitzt .
Eine letate Frage mu8 hier noch kurz gestreift werden, die auf unser urspriingliches Problem, die Entscheidung, ob ein Gleichgewichts- znstand s tab i l oder nicht s tab i l iet, zuruckfuhrt. Wir hsben in unseren Beispielen (abgesehen vom ersten, dem einfachsten Faohwerk- Beispiel) immer e i n e BelastungsgroSe schlechthin a h .die< kritische Last bezeichnet, obwohl e8 sich nnr urn eine, und zwar die kleinete, von unendlich vielen Wmzeln der Knickeleichunp handelte. Dies ist zu
dbb. 16 ntlcbst in naheliegender Analogie zu &m gewijhnlichen, Eulersohen Fall der Knickung geschehen. Man weii3, da% beispielsweise fur die nnten eingespannte, oben freie Siiule der Abb. 16 die vollsttlndige LBsung der Knick- gleichung - -
~ ~ = ( n z - l / 2 ) 2 n " , m,=1 , 2, 3 . . . . . Iautet. Jeder der 0~ vie1 Werte PI, Ps, P3 . . . . . ist eine Verzweigungsetelle des Gleioh- gewichtes, d. h. es zweigt jedesmal von der gestreckten Qleichgewichtsform aine neue gebogene FQrm ab: bei PI der in Abb. 16b dargestellte Halbsinosbogen, bei Ps die Form 16c mit einem Wendepunkt im Innern usw. (die Eigenltieungen von y"= - P y / E J bei y (0) = ~'(2) = 0). Nach dem eben Auseinandergesetzten weif3 man nur, dlt6 fur P < PI die geatreckte Lage stabil sein mufl; was eigentlich oberhalb PI, dann oberhalb Ps nsw. geschieht, bedarf erst noch der Uuterauchnng. Die bisherige Behandlung dieeer Frage hat zn widerspreohenden Ergebnissen gefiihrt, L. Saalschi i tz behaoptet l), da% die wendepunktfreie Form b nur zwischen PI und Pa stabil sei, d a m gehe die Stabilitgt auf die Form o uber. H. B r y a n b d mit ihm A. E. H. Lovea) snchen nachzuwetsen, da8 fiir jede PI iiberschreitende Belastung die Form b die stabile ist. Von den Ab- leitungen ist aber keine einwsndtrei. Saalachiitz betraohtet nicht die Wirkung einer vorubergehenden kleinen Storung, sondern die einer kleinen, aber danernden Aendernng
') L. S a a l s c h U t z , Der belaatete Stab, Leipzig 1880, S . 133. a) A. E. H. Love , Lehrbach der ElsstizitJJt, deutsoh von Timpe , Leipdg 1907, S. 471.
422 Zeitaohrift far angewandte Mathematik und Meohanik Band 3
der Belastung. Bryan and L o v e vergleiohen die Werte, die das Potential U bei einem gegebenen groDen Werte von P f i r die verschiedenen bei diesem P magliohen Uleich- gewiobtsformen annimmt, und finden, da6 es im Falle b immer am kleinaten ist. Die Sohlnf3weise beruht wohl suf der ansobauliohen Analogie zn dem Qleicbgewiohtsproblem Im Schwerefeld: die tiefete Lage ist immer die stabilste. Allein 8s kann doch wohl auoh vorkommen, dai3 hSher gelsgene Muldenpunkte existieren und dad gerade der tiefste ein Sattelpunkt ist. Ioh habe fcir den Fall der eingespannten SIule die allein mafjgebende Untersnohnng der b we it en Variation von U - entsprechend der in 1 erwxhnten quadrati- sohen Form in dz, d y far den Faohwerkfall - dorchgefiihrt nnd bin 5u einem Ergebnis gelangt, das fur Bryan-Love und gegen Saalschi i tz entscheidet: Ea 1st n n t e r h a l b der ers ten Eolerschen Las t PI nur d i e g e s t r e o k t e , oberha lb PI nnr d i e wendepnnkt f re ie Ausbiegungsform stabi l . Damit erhalten: die friiher mitgeteilten Einzelresultate einen gewissen systematisohen Absohlu6. Die - im tibrigen gang ele- mentare - Rechnung 6011 im Zusammenhang mit der ngheren Begrundung der in diesem Absohnitt ausgesproohenen SBtze spBter veroffentlicht werden. 350
nber die Knicksicherheit ebener Ble&e bei exzenhischer Randbelastung.
Von E. SCHWERIN in Cherloftenburg. l)
ie nioht nur fur den Hooh- und Briiokenban, sondern auoh fiir den. Schiffbau prak- tiech wichtige Frage der Knicksioherheit ebener, achsial belaateter Bleche ist zuerst D von Bryana) nntersucht und auch fur den Fall freier Auflagernng des unbelaateten
Randes gelSst worden, wobei er das Energiekriterinm zur Aufstellung der Stabilitgts- bedingang benutzte. Spgter hat dann Reifinera), von der Bryansohen Urundgleiohung aasgehend, fur die hauptsiiohliobsten, praktisoh wiohtigen Ftllle der Urenzbedingungen am unbelasteten Rande die Knicksicherheit bestimmt nnd anoh eahlenmtl%ig ansgewertet.
Sowohl die Bryanschen wie die Rei%nerschen Untersuohungdn be~ogen sioh jedoch nur auf eine gleidhformige Verteilung der Belastung iiber die Randlinie - wenn man von der zwar strengen, aber praktisch wegen ungeniigender Reiheokonvergenz ver- sagenden Lasung ReiBners fur den Fall reiner Bi,egungsbelastung absieht -, nnd es entsteht daher die Frage nach der Knioksicherheit eines ebenen Bleches, dessen Rand- belsstnng diese Uleichformigkeit nicht mehr aufweiet.
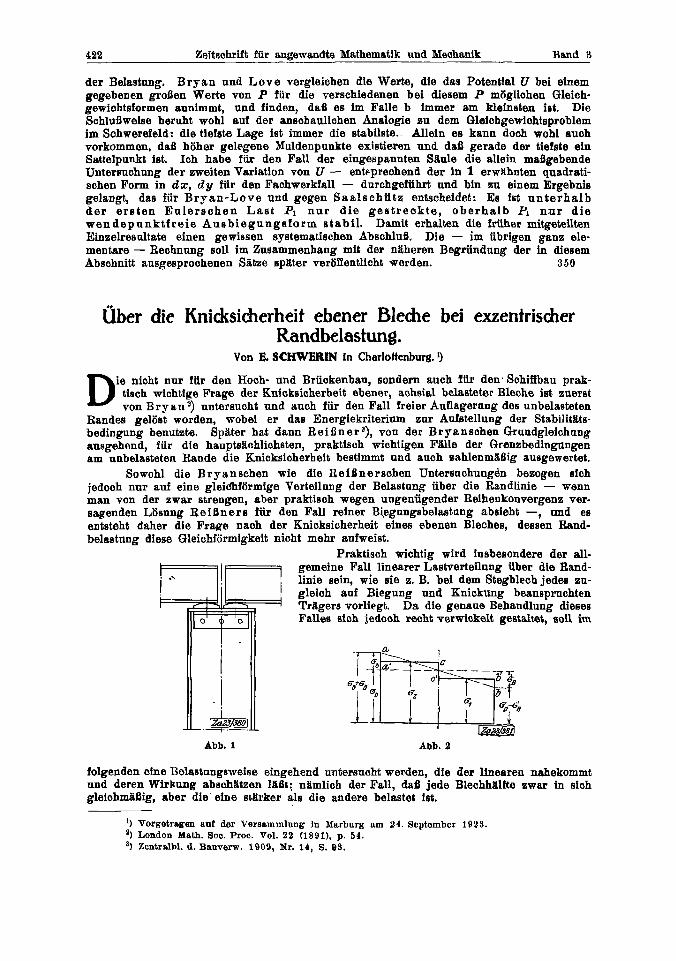
Praktisch wiohtig wird insbesondere der all- gemeine Fall linearer Lastverteilung iiber die Rand- linie seh, wie sie z. B. bei dem Stegblech jedes 5o- gleioh auf Biegung und Kniokung beanspruohten Trtlgers vorliegt. Da die genaue Behandlung dieses Falles sioh jedooh reoht verwickelt gestaltet, SOU im
Abb. 1 Abb. 2
folgenden sine Belastnngeweise eingehend untersncht werden, die der linearen nahekommt und deren Wirkung abschlltzen 11I6t: ntimlich der Fall, dad jede Blechh&lfte 5war in sioh gleichmUig, aber die' eine starker als die andere belastet ist.
'1 Vorgetragen anf der Versammlung in Marburg am 24. September 1923. a) London Math. SOC. Proc. Vol. 22 (1891), p. 54. 3Y Zentralbl. d. Banvenv. 1909, Nr. 14, S. 93.