Embed Size (px)
Citation preview
JOT 3|200250
Lackieren, dadurch geringere Farb-wechselverluste und Betriebs-kosten,
◆ durchgängige Technik bei Vollauto-matisierung,
◆ höhere Verfügbarkeit, Realisierbar-keit von Notstrategien.
Auf die Festlegung des Automati-sierungskonzeptes folgte eine detail-lierte Roboterbewertung. Die Aufgabebestand darin, einen Roboterherstellerals Systemlieferanten auszuwählen,mit dem eine langfristige Partnerschafteingegangen werden kann, um Syner-gien für die einzelnen Projekte nutzenzu können.
Die Kriterien der Roboterbewer-tung betrafen nicht nur den Roboterselbst mit seinem mechanischen Auf-bau, der Applikationstechnik und derSteuerungstechnik, sondern auch zahl-reiche übergeordnete Punkte wie:◆ Robotersimulation
und Programmierung,◆ Wartung, ◆ Serviceangebot (Servicestützpunkt
in Werksnähe), ◆ Möglichkeit zur Durchführung von
Technikumsversuchen,◆ Bereitschaft zur Entwicklung
kundenspezifischer Lösungen,◆ Anlagenreferenzen.
Nach der Roboterbewertung wurdedas Projekt „Füllerapplikation BMWWerk München“ ausgeschrieben undmit den Roboterherstellern verhandelt.
Entscheidungen für Neuinvestitio-nen im Bereich der Oberflächen-
technik sind häufig verbunden mitEntscheidungen für neue Prozesse undAnlagenkonzepte. Schließlich werdenZielvorgaben formuliert, die mit derbisherigen Technologie kaum oder garnicht zu erreichen sind. So geschehenauch im Hause BMW, wo im Rahmeneiner Investitionsoffensive zum Bei-spiel die Erneuerung der Lackieranla-gen und der Bau eines neuen Werkesin Leipzig erfolgt.
In der Lackapplikation setzt BMWjetzt auf die Vollautomatisierung mitRobotern, unabhängig davon, ob essich um Füller, Basislack oder Pulver-klarlack handelt.
Roboter für die Innen- und Außenlackierung
Nach einer intensiven Betrachtungunterschiedlichster Automatisierungs-konzepte in der Vorplanungsphase wur-de ein werkübergreifendes Lackier-konzept festgelegt. Sowohl für dieInnen- als auch für die Außenlackie-rung werden Lackierroboter im Stop-and-go-Betrieb eingesetzt. Damit wird
der sich vor einiger Zeit bereitsabzeichnende Trend zur Roboter-Außenlackierung von BMW konse-quent umgesetzt. Die generellen Vor-teile dieses Konzeptes verglichen mitder bisherigen Maschinentechnik sindnicht von der Hand zu weisen:◆ hohe Flexibilität bezüglich
Karosserie-Design,◆ präzise und dynamische Karosserie-
konturfahrt, Erhöhung des Auf-tragswirkungsgrades,
◆ parallele Lackierbahnen (auch inRichtung der Karosserielängsachsemöglich), reduzierte Wolkigkeitund Streifenbildung,
◆ Reduzierung der Anzahl vonLackierparametern durch Bahn-flexibilität,
◆ kein Lackierstopp über der zulackierenden Fläche bei Förderer-stopp; Programm-Modul kann fertiglackiert werden,
◆ Möglichkeit der Applikation im Taktbetrieb
◆ konstante Lackiergeschwindigkeitam Farbauftreffpunkt (TCP), unabhängig von der Förderer-geschwindigkeit,
◆ geringere Anzahl von Zerstäubernerforderlich durch kontinuierliches
Vollautomatische Füller-Applikationmit LackierroboternDer Einsatz von Robotern zur Außenlackieung von Karosserien bietetzahlreiche Vorteile gegenüber Lackiermaschinen. Bei BMW in Münchenund Dingolfing wird der Füller auf die Karosserien nun innen undaußen von Lackierrobotern im Stop-and-go-Betrieb aufgetragen.
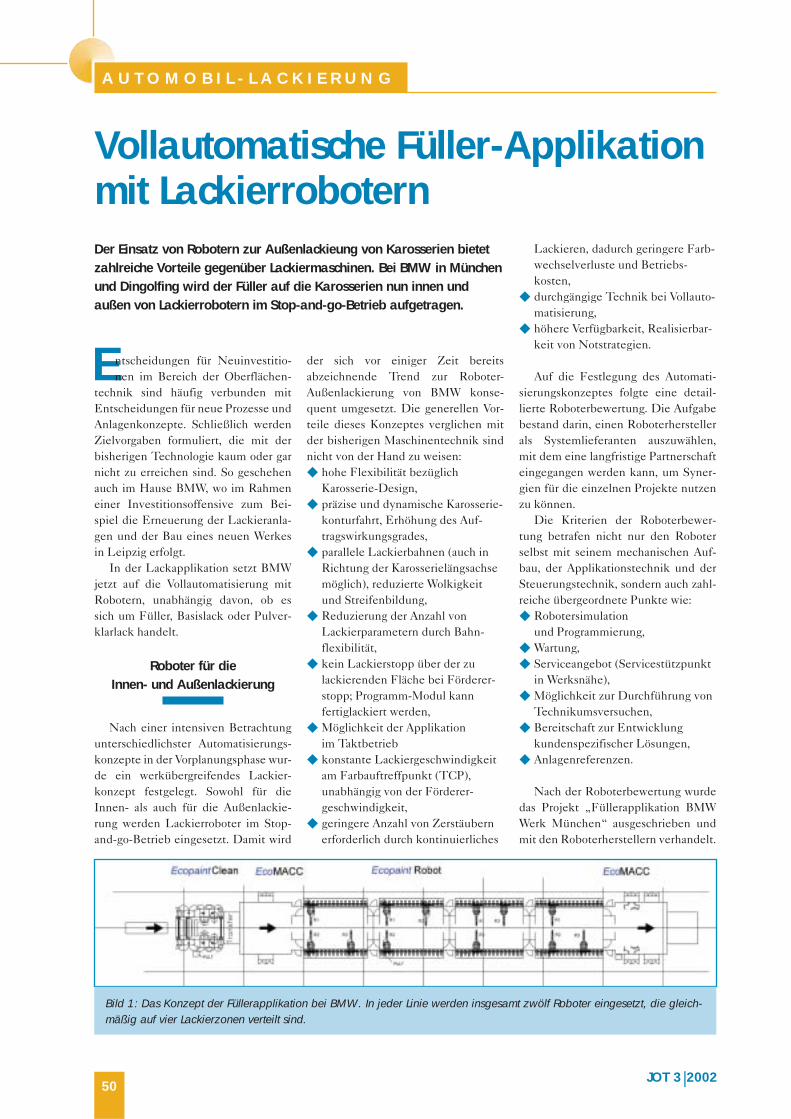
Bild 1: Das Konzept der Füllerapplikation bei BMW. In jeder Linie werden insgesamt zwölf Roboter eingesetzt, die gleich-mäßig auf vier Lackierzonen verteilt sind.
A U T O M O B I L - L A C K I E R U N G
JOT 3|200251
Die Entscheidung fiel für den „Eco-paintRobot“ von Dürr. Im März 2001wurde zwischen BMW und Dürr einRahmenvertrag geschlossen, der dieLieferung von 150 Lackierroboternauch für die zukünftigen Projektebeinhaltet.
Neue Füllerlinien in München und Dingolfing
In den BMW Werken München undDingolfing werden derzeit die Füller-linien erneuert. Das Anlagenkonzeptist in beiden Werken gleich, es unter-scheidet sich nur durch die Anzahl derLinien aufgrund der unterschiedlichenKapazität der Werke.
Die Füllerapplikation erfolgt, wiebereits erwähnt, mit Lackierroboternim Stop-and-go-Betrieb. Je Linie kom-men insgesamt zwölf Roboter zumEinsatz, die gleichmäßig auf vierLackierzonen aufgeteilt sind (Bild 1).Zunächst erfolgt in zwei nacheinanderfolgenden Zonen die Außenlackierungdes Hydrofüllers mit Hochrotationszer-stäubern und elektrostatischer Aufla-dung des Lackmaterials. Danach wer-den die Innenbereiche (Türeinstiege,Motor- und Kofferraum) der Karosseri-en pneumatisch appliziert.
Neben der Lackapplikation über-nehmen hier die Lackierroboter auchdas Handling der Karosserieteile. DerGrund für die Anordnung der Innen-lackierung nach der Außenapplikation
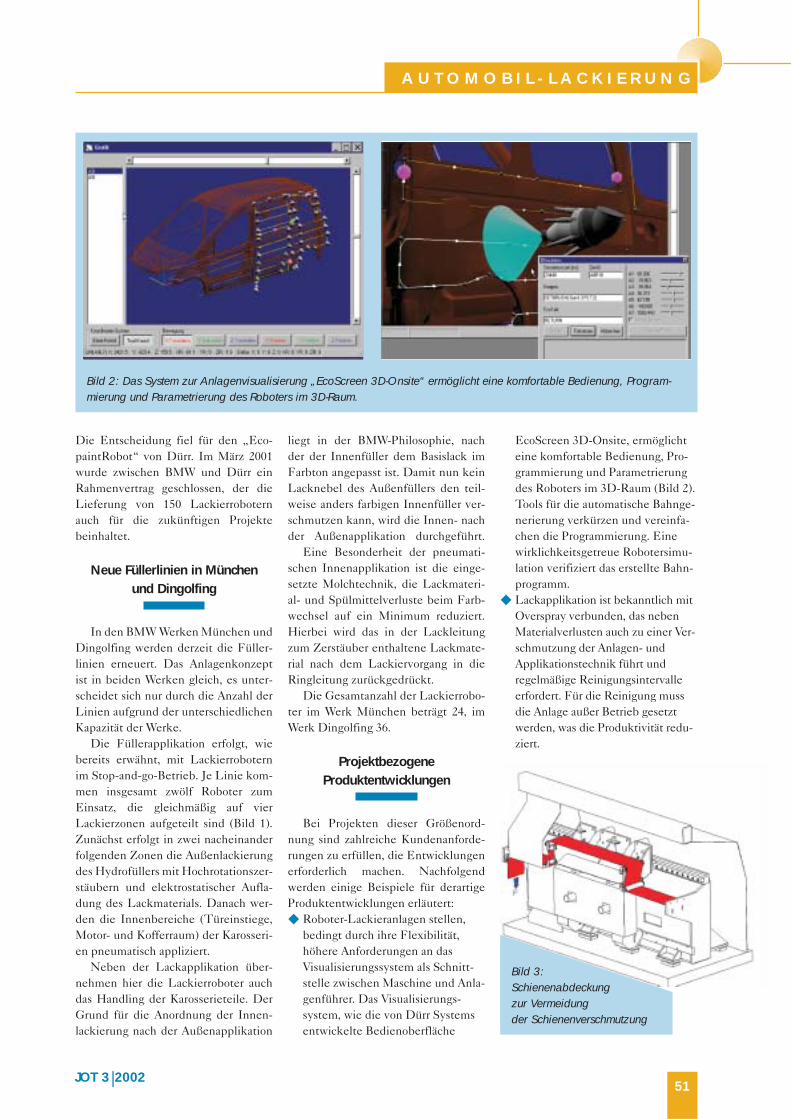
EcoScreen 3D-Onsite, ermöglichteine komfortable Bedienung, Pro-grammierung und Parametrierungdes Roboters im 3D-Raum (Bild 2).Tools für die automatische Bahnge-nerierung verkürzen und vereinfa-chen die Programmierung. Einewirklichkeitsgetreue Robotersimu-lation verifiziert das erstellte Bahn-programm.
◆ Lackapplikation ist bekanntlich mitOverspray verbunden, das nebenMaterialverlusten auch zu einer Ver-schmutzung der Anlagen- undApplikationstechnik führt undregelmäßige Reinigungsintervalleerfordert. Für die Reinigung mussdie Anlage außer Betrieb gesetztwerden, was die Produktivität redu-ziert.
liegt in der BMW-Philosophie, nachder der Innenfüller dem Basislack imFarbton angepasst ist. Damit nun keinLacknebel des Außenfüllers den teil-weise anders farbigen Innenfüller ver-schmutzen kann, wird die Innen- nachder Außenapplikation durchgeführt.
Eine Besonderheit der pneumati-schen Innenapplikation ist die einge-setzte Molchtechnik, die Lackmateri-al- und Spülmittelverluste beim Farb-wechsel auf ein Minimum reduziert.Hierbei wird das in der Lackleitungzum Zerstäuber enthaltene Lackmate-rial nach dem Lackiervorgang in dieRingleitung zurückgedrückt.
Die Gesamtanzahl der Lackierrobo-ter im Werk München beträgt 24, imWerk Dingolfing 36.
Projektbezogene Produktentwicklungen
Bei Projekten dieser Größenord-nung sind zahlreiche Kundenanforde-rungen zu erfüllen, die Entwicklungenerforderlich machen. Nachfolgendwerden einige Beispiele für derartigeProduktentwicklungen erläutert:◆ Roboter-Lackieranlagen stellen,
bedingt durch ihre Flexibilität,höhere Anforderungen an dasVisualisierungssystem als Schnitt-stelle zwischen Maschine und Anla-genführer. Das Visualisierungs-system, wie die von Dürr Systemsentwickelte Bedienoberfläche
Bild 2: Das System zur Anlagenvisualisierung „EcoScreen 3D-Onsite“ ermöglicht eine komfortable Bedienung, Program-mierung und Parametrierung des Roboters im 3D-Raum.
Bild 3:Schienenabdeckungzur Vermeidung der Schienenverschmutzung
A U T O M O B I L - L A C K I E R U N G
JOT 3|200252
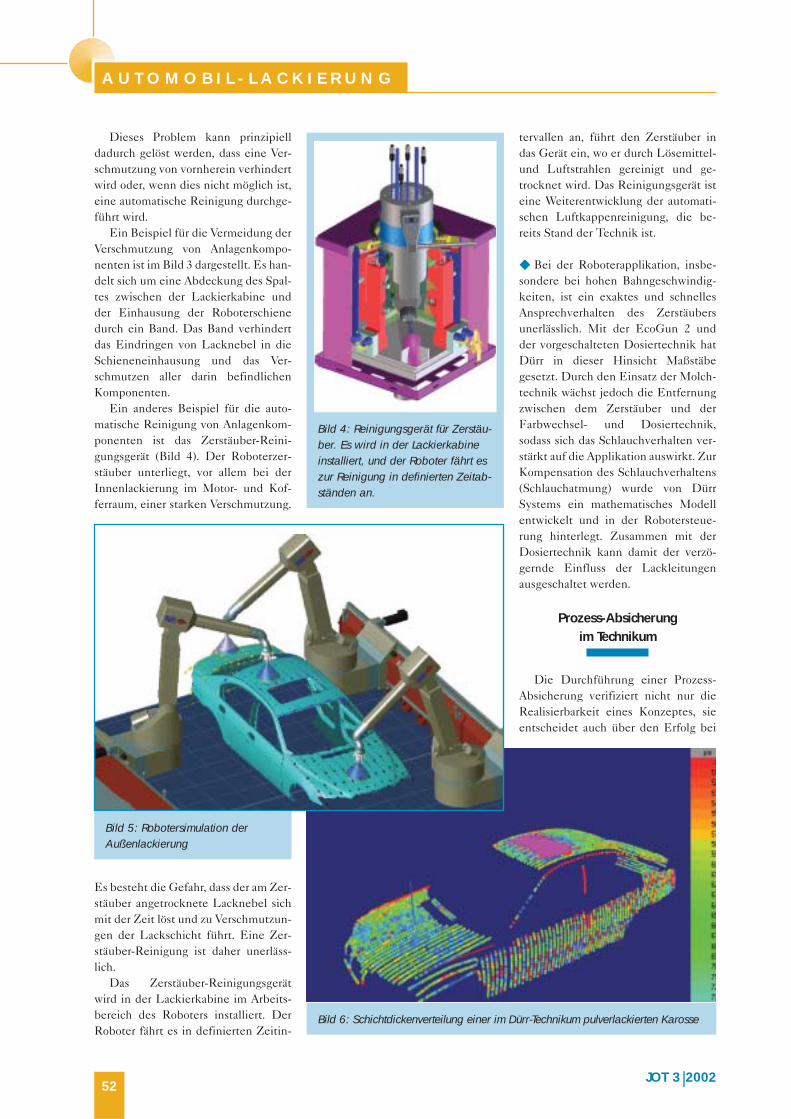
tervallen an, führt den Zerstäuber indas Gerät ein, wo er durch Lösemittel-und Luftstrahlen gereinigt und ge-trocknet wird. Das Reinigungsgerät isteine Weiterentwicklung der automati-schen Luftkappenreinigung, die be-reits Stand der Technik ist.
◆ Bei der Roboterapplikation, insbe-sondere bei hohen Bahngeschwindig-keiten, ist ein exaktes und schnellesAnsprechverhalten des Zerstäubersunerlässlich. Mit der EcoGun 2 undder vorgeschalteten Dosiertechnik hatDürr in dieser Hinsicht Maßstäbegesetzt. Durch den Einsatz der Molch-technik wächst jedoch die Entfernungzwischen dem Zerstäuber und derFarbwechsel- und Dosiertechnik,sodass sich das Schlauchverhalten ver-stärkt auf die Applikation auswirkt. ZurKompensation des Schlauchverhaltens(Schlauchatmung) wurde von DürrSystems ein mathematisches Modellentwickelt und in der Robotersteue-rung hinterlegt. Zusammen mit derDosiertechnik kann damit der verzö-gernde Einfluss der Lackleitungenausgeschaltet werden.
Prozess-Absicherung im Technikum
Die Durchführung einer Prozess-Absicherung verifiziert nicht nur dieRealisierbarkeit eines Konzeptes, sieentscheidet auch über den Erfolg bei
Dieses Problem kann prinzipielldadurch gelöst werden, dass eine Ver-schmutzung von vornherein verhindertwird oder, wenn dies nicht möglich ist,eine automatische Reinigung durchge-führt wird.
Ein Beispiel für die Vermeidung derVerschmutzung von Anlagenkompo-nenten ist im Bild 3 dargestellt. Es han-delt sich um eine Abdeckung des Spal-tes zwischen der Lackierkabine undder Einhausung der Roboterschienedurch ein Band. Das Band verhindertdas Eindringen von Lacknebel in dieSchieneneinhausung und das Ver-schmutzen aller darin befindlichenKomponenten.
Ein anderes Beispiel für die auto-matische Reinigung von Anlagenkom-ponenten ist das Zerstäuber-Reini-gungsgerät (Bild 4). Der Roboterzer-stäuber unterliegt, vor allem bei derInnenlackierung im Motor- und Kof-ferraum, einer starken Verschmutzung.
Es besteht die Gefahr, dass der am Zer-stäuber angetrocknete Lacknebel sichmit der Zeit löst und zu Verschmutzun-gen der Lackschicht führt. Eine Zer-stäuber-Reinigung ist daher unerläss-lich.
Das Zerstäuber-Reinigungsgerätwird in der Lackierkabine im Arbeits-bereich des Roboters installiert. DerRoboter fährt es in definierten Zeitin-
A U T O M O B I L - L A C K I E R U N G
Bild 4: Reinigungsgerät für Zerstäu-ber. Es wird in der Lackierkabineinstalliert, und der Roboter fährt eszur Reinigung in definierten Zeitab-ständen an.
Bild 5: Robotersimulation derAußenlackierung
Bild 6: Schichtdickenverteilung einer im Dürr-Technikum pulverlackierten Karosse

JOT 3|200253
der Umsetzung. Die Prozess-Absiche-rung bedient sich unterschiedlicherMethoden. Robotersimulationen (Bild5) zeigen, ob Anzahl und Aufstellungder Roboter richtig gewählt wurden. Eslassen sich Taktzeiten für das Gesamt-programm und einzelne Module ermit-teln, Kollisionsbetrachtungen anstellenund Notstrategien erproben. DieSimulationen basieren jedoch aufbestimmten Annahmen hinsichtlichÜberlappung der Spritzbahnen, Auf-tragswirkungsgrad und Schichtdicken-verteilung. Diese Annahmen müssenim Technikum unter produktionsna-hen Bedingungen überprüft werden.Dies gilt vor allem für die Innenlackie-rung, da in diesen Bereichen Voraussa-gen des Lackierergebnisses kaummöglich sind.
Die Prozess-Absicherung im Techni-kum wurde sowohl für die hierbeschriebene Füllerapplikation wieauch für die von BMW geplanten Deck-lackanlagen bei Dürr Systems durchge-führt. Um einserseits die Lackierkon-zepte nachstellen zu können, anderer-seits das Lackierergebnis (Schicht-dickenverteilung, siehe Bild 6) effektivund exakt ermitteln zu können, wurdedas Technikum durch umfangreicheMaßnahmen erweitert und bietet damitweltweit einzigartige Möglichkeiten derproduktionsnahen Prozesssimulation.
Fazit
Die BMW Group hat mit der Ent-scheidung zur Vollautomatisierung mitLackierrobotern den bisherigen Trendbestätigt und zum neuen Stand derTechnik gemacht. Das Roboterkon-zept bietet zahlreiche Vorteile gegen-über dem Einsatz von Lackiermaschi-nen; dies bedeutet aber nicht, dass sieausgedient haben. Ihre Vorteile liegennach wie vor dort, wo einfachere Geo-metrien zu beschichten sind undgleichzeitig hohe Flächenleistungengefordert werden. ■
Literatur
Svejda, P.: Die vollautomatische Karosse-rie-Lackierung. JOT Journal für Ober-
flächentechnik, Nr. 9, September 2001, Vie-weg VerlagSchumacher, H.: Ein aktueller Konzeptver-gleich von Lackiermaschinen mit Lackierro-botern sowohl im Taktbetrieb wie auch imDurchlaufbetrieb. 18. Arbeitstagung „Aktu-elle Fragen der Karosserielackierung“.Automotive Circle International, 15/2001.
A U T O M O B I L - L A C K I E R U N G
P R O Z E S S - A B S I C H E R U N G I M T E S T C E N T E R
In der Automobillackierung sind ganzheitliche Lösungen gefordert. Die ent-scheidenden Kriterien bei der Produktion wie Qualität, Stückzahl, Automatisie-rung, Flexibilität, Inbetriebnahmezeiten und Verfügbarkeit müssen mit den For-derungen nach Kostenreduzierung und mit ökologischen Gesichtspunkten ver-bunden werden.
Mit dem nun umneue Roboterzonenerweiterten „Eco-paint-Testcenter“ hatDürr bereits vor Jah-ren eine wichtigeVoraussetzunggeschaffen, um diegenannten Anforde-rungen noch bessererfüllen zu können.Individuelle System-lösungen werdendort in partner-schaftlicher Zusam-menarbeit mit derAutomobil-, Zuliefer-und Lackindustrie ent-wickelt und erprobt.
Das Testcenter ist mitder modernsten Anla-gen- und Applikations-technik ausgestattet.Alle Nass- und Pulver-lacksysteme können mit unterschiedlichenApplikationsverfahren aufgetragen werden.
Ein Schichtdickenmessroboter steht für dieexakte und effektive Vermessung der lackier-ten Karossen im getrockneten oder nassenZustand zur Verfügung. Anbauteile können ineiner separaten Roboterkabine lackiert werden.
Zwei Trockner, mit denen unterschiedlichsteTemperaturkurven gefahren werden können,ermöglichen die Einhaltung der Prozesszeitenentsprechend den Vorgaben der Produktion.Sowohl die Nass- wie auch die Pulverlack-applikation kann mit Robotern oder Maschinenerfolgen. Damit lassen sich verschiedene Auto-matisierungskonzepte direkt unter gleichenBedingungen vergleichen.
Das Testcentervon Dürr in Bietig-heim-Bissingenwurde erweitertund verfügt nunüber neue Robo-terzonen
Die Autoren: Siegfried Klemm, DürrSystems GmbH, Bietigheim-Bissingen
Tel. 07142-78-2159; e-mail: [email protected]. Pavel Svejda, Dürr Systems
GmbH, Bietigheim-BissingenTel. 07142-78-2290;
e-mail: [email protected]
Alle Nass- und Pulverlack-systeme können mit unter-schiedlichen Applikations-verfahren aufgetragen wer-den. Auch ein System zurberührungslosen Schicht-dickenmessung steht zurVerfügung.





























